Embed Size (px)
Citation preview

235
INSTRUMENTACIÓN PARA CONTROL DE MOVIMIENTOS DE LADERA: SISTEMA GPS Y OTROS
José A. Gili Ripoll*
RESUMEN
En esta contribución se presenta una panorámica de los distintos métodos para la monitorización de movimientos del terreno, especialmente adecuados para el control de deslizamientos. A continuación, se dan algunos detalles de la aplicación del Sistema de Posicionamiento Global (GPS), y de un tipo de extensómetro de cable especial para estos fines. Finalmente, se comentan brevemente las crecientes posibilidades de las técnicas basadas en RADAR (SAR, InSAR) para obtener información del terreno. En concreto, la técnica conocida como D-InSAR permite obtener, en condiciones favorables, deformaciones precisas de amplias áreas del territorio afectadas, por ejemplo, por subsidencia, consolidación o por movimien-tos sísmicos.
Palabras clave
Control de movimientos; deslizamientos de ladera; GPS; RADAR.
* Ver relación de autores en índice
ABSTRACT
In the first part of this contribution, an overview of the different methods for landslide monitoring is presented. Then, several details of the application of GPS system and the wire extensometer to the measurement of displacements are given. Finally, some RADAR techniques (SAR, InSAR, D-InSAR) used to obtain features of the terrain (DTM, displacements, subsidence) are briefly described, along with several examples.
Key words
Monitoring; displacement; landslides; GPS; RADAR.
OPERATIVIDAD DE LA INSTRUMENTACIÓN EN AGUAS SUBTERRÁNEAS, SUELOS CONTAMINADOS Y RIESGOS GEOLÓGICOS.IGME. MADRID 2003. ISBN: 84-7840-485-6
236
INSTRUMENTACIÓN PARA CONTROL DE MOVIMIENTOS DE LADERA: SISTEMA GPS Y OTROS, J. A. Gili Ripoll
INTRODUCCIÓN
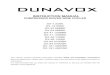
En el estudio de diversos riesgos geológicos, el seguimiento del comporta-miento del terreno es fundamental tanto para controlar la evolución del riesgo como para establecer las causas del fenómeno base. En muchos escenarios, cuando la escala espacial y temporal de los movimientos lo hace factible, la determinación de las deformaciones de los materiales y estructu-ras a lo largo del tiempo constituye una medida muy efectiva.
En la Figura 1 (Oteo, 1978) se da una visión conjunta de las técnicas más habituales para la monitorización de movimientos en taludes y laderas inestables.
En la Tabla 1, adaptada de Mikkelsen (1996) y de Gili et al. (2000), se detallan algunas características de los métodos desarrollados para el control de movimien-tos de laderas “en superficie”. La mayoría de ellos, obviamente, pueden ser usados para otros casos de medida de movimientos (estructuras, edificación, etc).
Los anteriores métodos trabajan desde el exterior de la ladera o talud inestable, obteniendo desplazamientos de puntos de su superficie. Adicionalmente (Tabla 2), existen otras técnicas que realizan determinaciones mediante sensores o sondas introducidas a lo largo de sondeos perforados en el terreno.
Los métodos incluidos en las tablas anteriores no deben considerarse como un catálogo de técnicas disponibles, ni tampoco
Figura 1. Algunas técnicas para medida de movimientos en taludes (Oteo, 1978)
Tabla 1. Métodos para medida desplazamientos laderas “en superficie” y su precisión
Nota: 1 ppm significa una parte por millón, es decir, un mm de error adicional por km de línea medida.
Cintas metálicas
Extensómetros cable
Reglas apertura grietas
Desviación de 1 visual
Triangulación
Poligonación
Nivelación geométrica
Nivel. Geom.Precisión
Med.Electrón. Distancias
Fotogrametría Terrestre
Fotogrametría Aérea
Clinómetros
GPS
Ddistancia
Ddistancia
Ddistancia
DH, DV
DX, DY, DZ
DX, DY, DZ
DZ
DZ
Ddistancia
DX, DY, DZ
DX, DY, DZ
a
DX, DY, DZ
< 30 m
<10-80 m
< 5 m
< 100 m
<300-1000 m
Variable
Variable
Variable
Variable(usual 1 a 14 Km)
Idealmente < 100 m
H vuelo < 500 m
+ 10º
Variable (usual < 20 Km)
0,5 mm/30m
0,3 mm/30 m
0,5 mm
0,5-3 mm
5-20 mm
5-20 mm
2-5 mm/ Km
0,2-1 mm/Km
(1 a 5 mm) + (1 a 5 ppm)
20 mm desde 100 m
10 cm
0,01º - 0,1 º
(5 a 10 mm)+(1 a 2 ppm)
Método Resultado Rango típico Precisión típica
237
como excluyentes. En un caso real no podrán aplicarse todos ellos. Por otro lado, si es posible, es conveniente usar más de una técnica, para poder complementar y contrastar sus resultados. Los condicionantes de emplazamiento, de tiempo, técnicos y económicos, son los que van a dictar cuál o cuáles se podrán emplear.
La mayoría de los sistemas anteriores son, hasta cierto punto, clásicos y conocidos. Pueden encontrarse detalles de su aplicación en las referencias. Por su relativa novedad, a continuación, se dan algunos detalles del Sistema de Posicionamiento Global (GPS), de un tipo especial de extensómetro de cable muy indicado para deslizamientos de ladera, y de las técnicas basadas en Teledetección Activa RADAR para obtener deformaciones precisas de amplias áreas del territorio.
EL SISTEMA GPS
El GPS es un sistema de posicionamiento global, radionavegación y medida de tiempo basado en satélites, puesto en funcionamien-to por los Estados Unidos a partir de los años ochenta. Aunque el sistema europeo GALILEO está en fase de desarrollo y el GLONASS de la URSS ha estado parcialmen-te implementado, el GPS es el único que se encuentra plenamente operativo desde 1994.
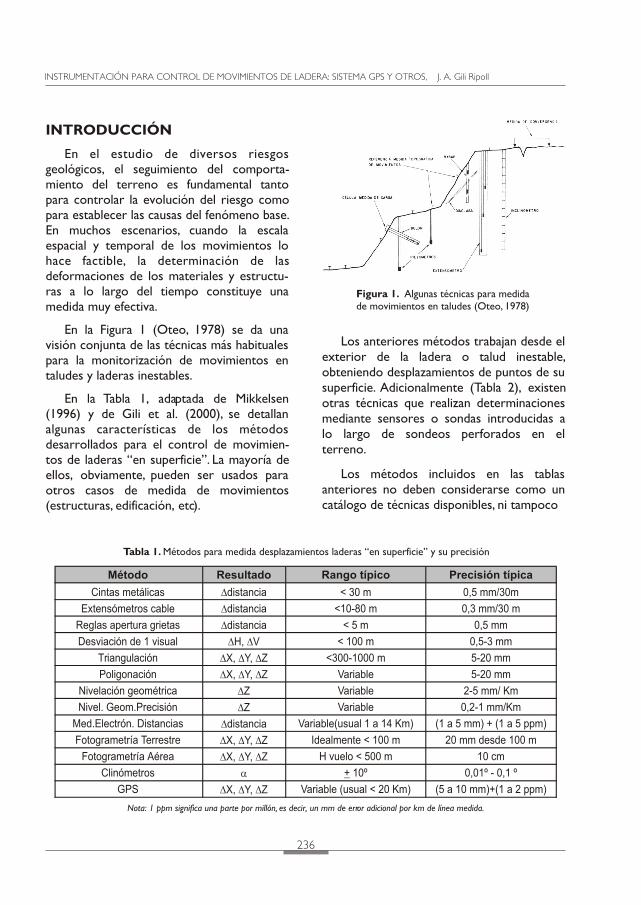
La constelación básica de satélites, denominada NAVSTAR, está constituida por un mínimo de 24 unidades orbitando la Tierra a unos 20200 Km de altura (Segmen-to Espacial, Figura 2). Están continuamente supervisados por el Segmento de Control, operado también por el Departamento de Defensa de los E.U.A. El sistema GPS puede ser empleado, sin embargo, por usuarios civiles para una diversidad de aplicaciones científicas y técnicas (no militares) que abarcan desde la navegación de vehículos
Otros: Combinación de sondas: “TRIVEC” (microm.deslizante + inclinómetro), Extenso-deflectómetro…Detectores de rotura, Péndulos invertidos, Emisión acústica, Células de carga en anclajes…
Figura 2. Constelación nominal del Sistema GPS: 24 satélites orbitando a 20200 Km (Dana, 1998). El posiciona-miento GPS más sencillo es el “absoluto”: en un instante dado, un solo receptor, a partir del código de la señal que recibe de los distintos satélites (4 como mínimo), calcula las distancias. Esto permite obtener la posición 3D del punto (longitud, latitud y altura, por ejemplo), mediante una multilateración espacial. La precisión es relativamente baja.
Extensómetro de hilo, de varilla, simples, múltiples…
Micrómetro deslizante
Inclinómetro (móvil)
Inclinómetro (fijo)
Deflectómetros
Piezómetros
L
Li
X,Y
X,Y
curvatura
Pw Hw
D
D
D
D
D D
Profund.< 50m
Profund.< 50m
Profund. < 50m
i <20º, opcional 90º
Profund.< 50 m
10 a 50 m profundidad
0,1 a 2 mm
3 m / m
1 mm /10 m
0,05 mm en 3 m
0,01º en 1 m
30 mm
Resultado típico Rango típico Precisión típicaMétodo
Tabla 2. Algunos métodos para monitorización de laderas a partir de determinaciones en sondeo
OPERATIVIDAD DE LA INSTRUMENTACIÓN EN AGUAS SUBTERRÁNEAS, SUELOS CONTAMINADOS Y RIESGOS GEOLÓGICOS.IGME. MADRID 2003. ISBN: 84-7840-485-6
238
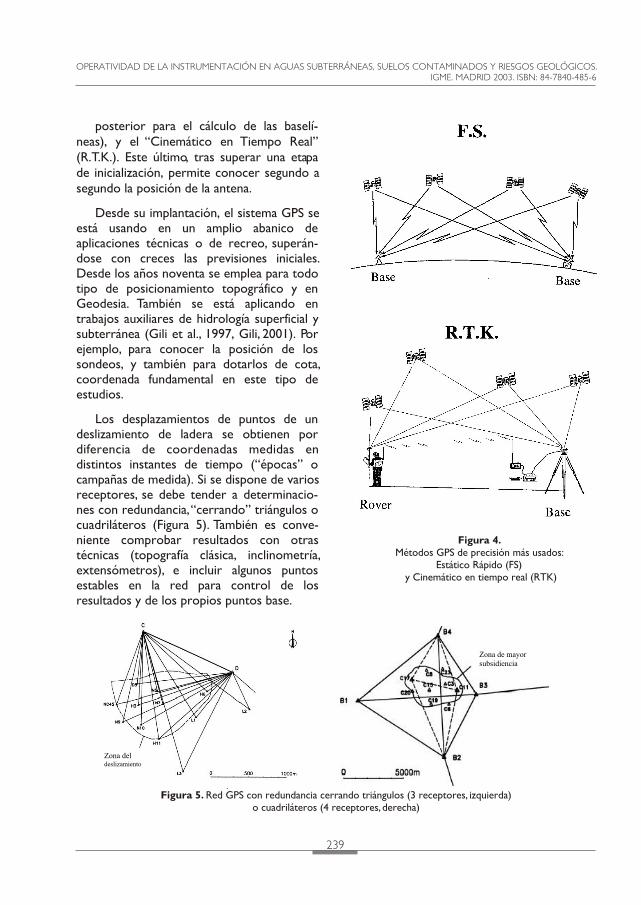
Los métodos para Topografía y Geodesia se basan en la fase de la portadora. Los más usados por su productividad y precisión son dos (Figura 4): el “Estático Rápido” (F.S., de 8 a 20 minutos de registro, con post-proceso
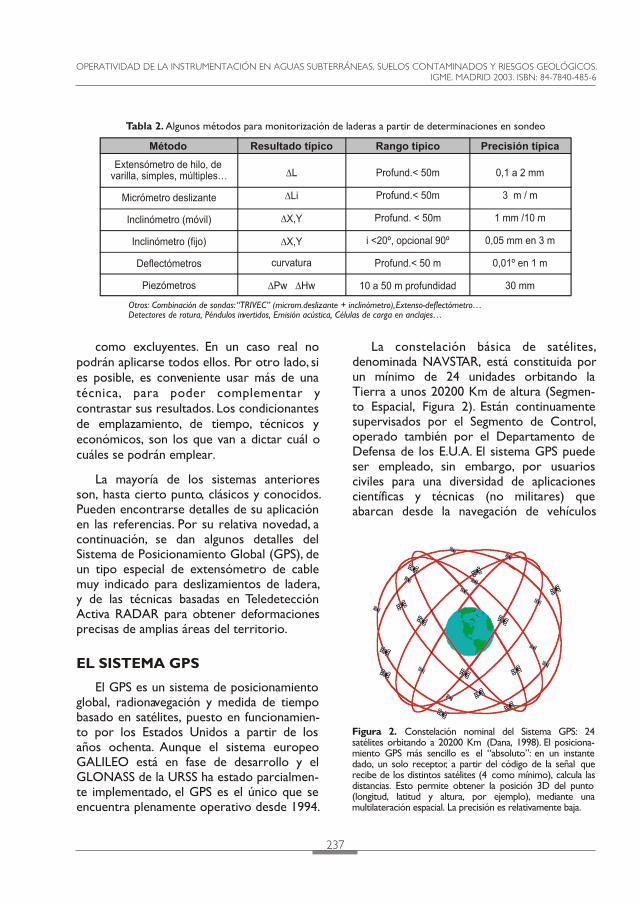
hasta otras de gran precisión, menos conocidas. El operador sólo debe contar con uno o más receptores GPS, de muy diversa índole (Segmento Usuario, Figura 3), y tener a la vista 4 o más satélites de la constelación. No es imprescindible la intervisibilidad entre diferentes posiciones de los receptores GPS, aunque sí es necesaria una buena recepción de la señal que llega de los satélites. Así, el sistema no funciona bien cerca de edificios altos o bajo arbolado espeso, y no funciona en absoluto bajo tejado o en el interior de túneles, por ejemplo.
En la Tabla 3 se presentan las aplicaciones GPS clasificadas en 3 niveles, según aplicación y precisión típica. Para aplicaciones de precisión es imprescindible trabajar con GPS relativo (con 2 ó más equipos operando coordinadamente), pudiéndose alcanzar fácilmente precisiones desde un metro (nivel 2) hasta pocos milímetros (nivel 3) para líneas base de varios km. El aumento de precisión se debe a que, al estar los puntos extremos de las “baselíneas” relativamente cercanos, los principales errores de posicio-namiento son bastante parecidos (comporta-miento sistemático) y, al calcular diferencias de posición (vector incremento de coorde-nadas) estos errores se filtran o compensan.
Figura 3. Distintos tipos de receptores GPS. Arriba: receptor compacto, para llevar en la mano, también denominados “navegadores”. Derecha: GPS de gama alta para aplicaciones de precisión. Receptor doble frecuencia en la mochila, antena sobre jalón telescópico y accesorios.
INSTRUMENTACIÓN PARA CONTROL DE MOVIMIENTOS DE LADERA: SISTEMA GPS Y OTROS, J. A. Gili Ripoll
3. Topografía y Geodesia
1. “Navegación”
Aplicación o “nivel” Principio de medida y número de unidades Precisión típica
Código (1 equipo)C/A code, SA off: 20 mC/A code, SA on: 100 m(P code, militar: 1 a 10 m)
0.8 a 5 m
RTK: (10 mm) + (2ppm)FS: (5mm) + (1ppm)
2. Topografía a pequeña escala, navegación de precisión, o GIS
Código (2 ó más equipos)
Fase (2 ó más equipos)
Tabla 3. Niveles típicos de aplicación del GPS, según precisión y número de equipos
Notas: 1 ppm significa una parte por millón, es decir, un milímetro adicional por kilómetro de baselíneaLos valores de error son aproximados, y dependen en parte del equipo, del nº y posición relativa de los satélites y de las longitudes de las baselíneas. En principio son estimaciones para el error “planimétrico”; el error altimétrico es del mismo orden, aunque mayor (aproximadamente el doble).Desde 1.05.2000 la SA (Selective Availability, degradación de la señal) está desactivada (off)
Zona del deslizamiento
Zona de mayor subsidiencia
239
posterior para el cálculo de las baselí-neas), y el “Cinemático en Tiempo Real” (R.T.K.). Este último, tras superar una etapa de inicialización, permite conocer segundo a segundo la posición de la antena.
Desde su implantación, el sistema GPS se está usando en un amplio abanico de aplicaciones técnicas o de recreo, superán-dose con creces las previsiones iniciales. Desde los años noventa se emplea para todo tipo de posicionamiento topográfico y en Geodesia. También se está aplicando en trabajos auxiliares de hidrología superficial y subterránea (Gili et al., 1997, Gili, 2001). Por ejemplo, para conocer la posición de los sondeos, y también para dotarlos de cota, coordenada fundamental en este tipo de estudios.
Los desplazamientos de puntos de un deslizamiento de ladera se obtienen por diferencia de coordenadas medidas en distintos instantes de tiempo (“épocas” o campañas de medida). Si se dispone de varios receptores, se debe tender a determinacio-nes con redundancia, “cerrando” triángulos o cuadriláteros (Figura 5). También es conve-niente comprobar resultados con otras técnicas (topografía clásica, inclinometría, extensómetros), e incluir algunos puntos estables en la red para control de los resultados y de los propios puntos base.
Figura 4. Métodos GPS de precisión más usados:
Estático Rápido (FS) y Cinemático en tiempo real (RTK)
Figura 5. Red GPS con redundancia cerrando triángulos (3 receptores, izquierda) o cuadriláteros (4 receptores, derecha)
OPERATIVIDAD DE LA INSTRUMENTACIÓN EN AGUAS SUBTERRÁNEAS, SUELOS CONTAMINADOS Y RIESGOS GEOLÓGICOS.IGME. MADRID 2003. ISBN: 84-7840-485-6
240
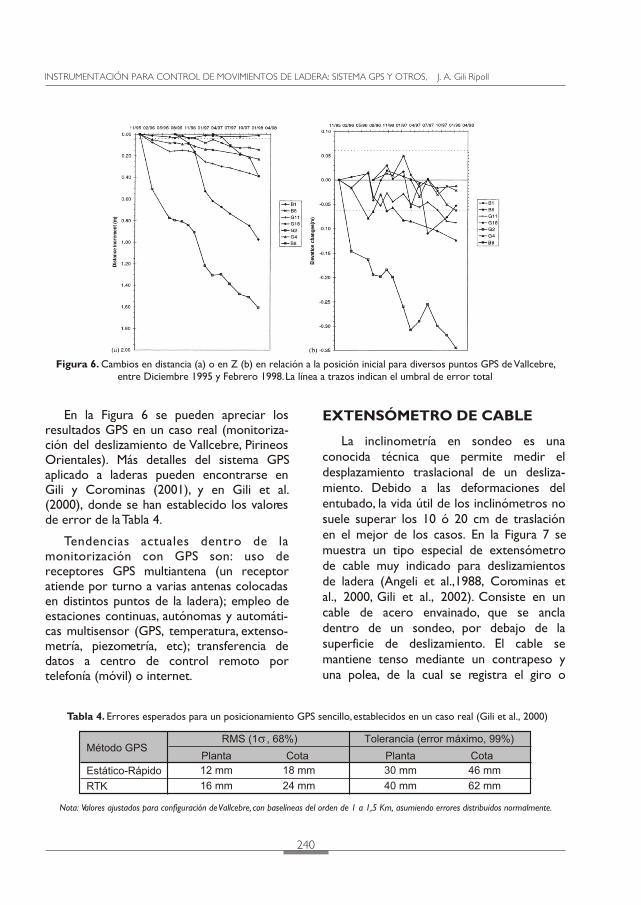
Figura 6. Cambios en distancia (a) o en Z (b) en relación a la posición inicial para diversos puntos GPS de Vallcebre, entre Diciembre 1995 y Febrero 1998. La línea a trazos indican el umbral de error total
En la Figura 6 se pueden apreciar los resultados GPS en un caso real (monitoriza-ción del deslizamiento de Vallcebre, Pirineos Orientales). Más detalles del sistema GPS aplicado a laderas pueden encontrarse en Gili y Corominas (2001), y en Gili et al. (2000), donde se han establecido los valores de error de la Tabla 4.
Tendencias actuales dentro de la monitorización con GPS son: uso de receptores GPS multiantena (un receptor atiende por turno a varias antenas colocadas en distintos puntos de la ladera); empleo de estaciones continuas, autónomas y automáti-cas multisensor (GPS, temperatura, extenso-metría, piezometría, etc); transferencia de datos a centro de control remoto por telefonía (móvil) o internet.
EXTENSÓMETRO DE CABLE
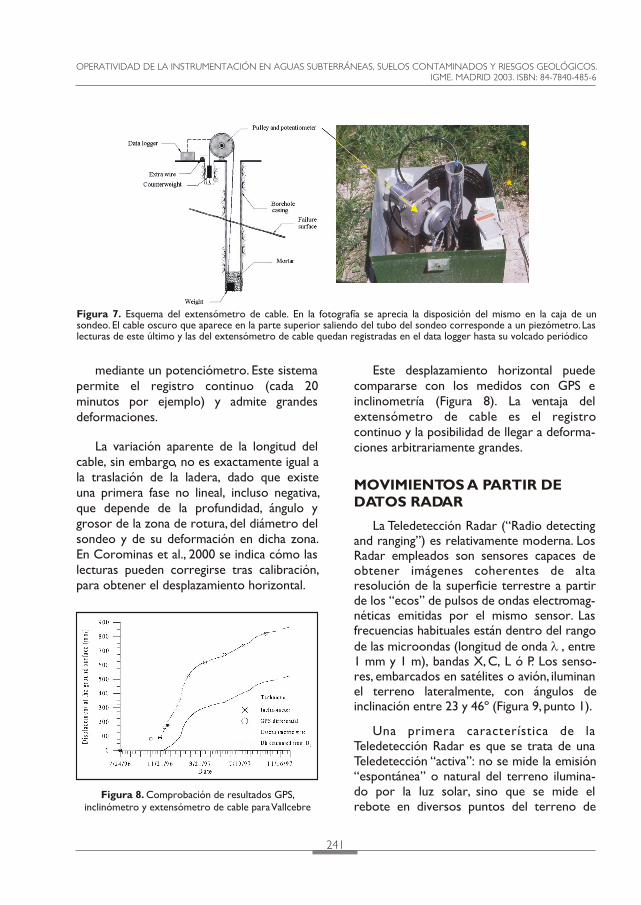
La inclinometría en sondeo es una conocida técnica que permite medir el desplazamiento traslacional de un desliza-miento. Debido a las deformaciones del entubado, la vida útil de los inclinómetros no suele superar los 10 ó 20 cm de traslación en el mejor de los casos. En la Figura 7 se muestra un tipo especial de extensómetro de cable muy indicado para deslizamientos de ladera (Angeli et al.,1988, Corominas et al., 2000, Gili et al., 2002). Consiste en un cable de acero envainado, que se ancla dentro de un sondeo, por debajo de la superficie de deslizamiento. El cable se mantiene tenso mediante un contrapeso y una polea, de la cual se registra el giro o
INSTRUMENTACIÓN PARA CONTROL DE MOVIMIENTOS DE LADERA: SISTEMA GPS Y OTROS, J. A. Gili Ripoll
Tabla 4. Errores esperados para un posicionamiento GPS sencillo, establecidos en un caso real (Gili et al., 2000)
Nota: Valores ajustados para configuración de Vallcebre, con baselíneas del orden de 1 a 1,5 Km, asumiendo errores distribuidos normalmente.
Estático-Rápido
RTK
Método GPS
30 mm
40 mm
Planta
Tolerancia (error máximo, 99%)
Cota
12 mm
16 mm
18 mm
24 mm
46 mm
62 mm
Planta Cota
RMS (1 , 68%)
241
mediante un potenciómetro. Este sistema permite el registro continuo (cada 20 minutos por ejemplo) y admite grandes deformaciones.
La variación aparente de la longitud del cable, sin embargo, no es exactamente igual a la traslación de la ladera, dado que existe una primera fase no lineal, incluso negativa, que depende de la profundidad, ángulo y grosor de la zona de rotura, del diámetro del sondeo y de su deformación en dicha zona. En Corominas et al., 2000 se indica cómo las lecturas pueden corregirse tras calibración, para obtener el desplazamiento horizontal.
Este desplazamiento horizontal puede compararse con los medidos con GPS e inclinometría (Figura 8). La ventaja del extensómetro de cable es el registro continuo y la posibilidad de llegar a deforma-ciones arbitrariamente grandes.
MOVIMIENTOS A PARTIR DE DATOS RADAR
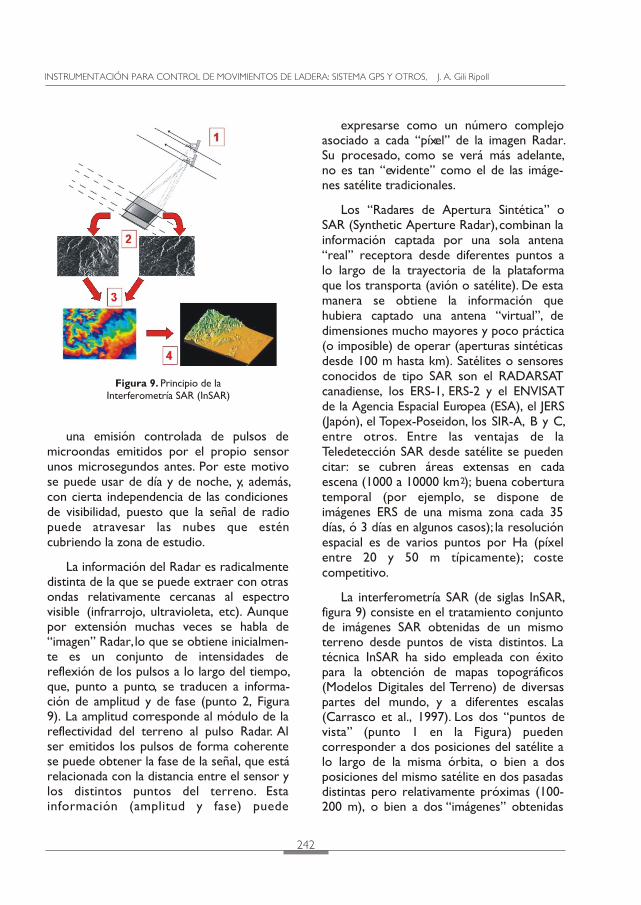
La Teledetección Radar (“Radio detecting and ranging”) es relativamente moderna. Los Radar empleados son sensores capaces de obtener imágenes coherentes de alta resolución de la superficie terrestre a partir de los “ecos” de pulsos de ondas electromag-néticas emitidas por el mismo sensor. Las frecuencias habituales están dentro del rango de las microondas (longitud de onda l , entre 1 mm y 1 m), bandas X, C, L ó P. Los senso-res, embarcados en satélites o avión, iluminan el terreno lateralmente, con ángulos de inclinación entre 23 y 46º (Figura 9, punto 1).
Una primera característica de la Teledetección Radar es que se trata de una Teledetección “activa”: no se mide la emisión “espontánea” o natural del terreno ilumina-do por la luz solar, sino que se mide el rebote en diversos puntos del terreno de
Figura 7. Esquema del extensómetro de cable. En la fotografía se aprecia la disposición del mismo en la caja de un sondeo. El cable oscuro que aparece en la parte superior saliendo del tubo del sondeo corresponde a un piezómetro. Las lecturas de este último y las del extensómetro de cable quedan registradas en el data logger hasta su volcado periódico
Figura 8. Comprobación de resultados GPS, inclinómetro y extensómetro de cable para Vallcebre
OPERATIVIDAD DE LA INSTRUMENTACIÓN EN AGUAS SUBTERRÁNEAS, SUELOS CONTAMINADOS Y RIESGOS GEOLÓGICOS.IGME. MADRID 2003. ISBN: 84-7840-485-6
242
una emisión controlada de pulsos de microondas emitidos por el propio sensor unos microsegundos antes. Por este motivo se puede usar de día y de noche, y, además, con cierta independencia de las condiciones de visibilidad, puesto que la señal de radio puede atravesar las nubes que estén cubriendo la zona de estudio.
La información del Radar es radicalmente distinta de la que se puede extraer con otras ondas relativamente cercanas al espectro visible (infrarrojo, ultravioleta, etc). Aunque por extensión muchas veces se habla de “imagen” Radar, lo que se obtiene inicialmen-te es un conjunto de intensidades de reflexión de los pulsos a lo largo del tiempo, que, punto a punto, se traducen a informa-ción de amplitud y de fase (punto 2, Figura 9). La amplitud corresponde al módulo de la reflectividad del terreno al pulso Radar. Al ser emitidos los pulsos de forma coherente se puede obtener la fase de la señal, que está relacionada con la distancia entre el sensor y los distintos puntos del terreno. Esta información (amplitud y fase) puede
expresarse como un número complejo asociado a cada “píxel” de la imagen Radar. Su procesado, como se verá más adelante, no es tan “evidente” como el de las imáge-nes satélite tradicionales.
Los “Radares de Apertura Sintética” o SAR (Synthetic Aperture Radar), combinan la información captada por una sola antena “real” receptora desde diferentes puntos a lo largo de la trayectoria de la plataforma que los transporta (avión o satélite). De esta manera se obtiene la información que hubiera captado una antena “virtual”, de dimensiones mucho mayores y poco práctica (o imposible) de operar (aperturas sintéticas desde 100 m hasta km). Satélites o sensores conocidos de tipo SAR son el RADARSAT canadiense, los ERS-1, ERS-2 y el ENVISAT de la Agencia Espacial Europea (ESA), el JERS (Japón), el Topex-Poseidon, los SIR-A, B y C, entre otros. Entre las ventajas de la Teledetección SAR desde satélite se pueden citar: se cubren áreas extensas en cada
2escena (1000 a 10000 km ); buena cobertura temporal (por ejemplo, se dispone de imágenes ERS de una misma zona cada 35 días, ó 3 días en algunos casos); la resolución espacial es de varios puntos por Ha (píxel entre 20 y 50 m típicamente); coste competitivo.
La interferometría SAR (de siglas InSAR, figura 9) consiste en el tratamiento conjunto de imágenes SAR obtenidas de un mismo terreno desde puntos de vista distintos. La técnica InSAR ha sido empleada con éxito para la obtención de mapas topográficos (Modelos Digitales del Terreno) de diversas partes del mundo, y a diferentes escalas (Carrasco et al., 1997). Los dos “puntos de vista” (punto 1 en la Figura) pueden corresponder a dos posiciones del satélite a lo largo de la misma órbita, o bien a dos posiciones del mismo satélite en dos pasadas distintas pero relativamente próximas (100-200 m), o bien a dos “imágenes” obtenidas
Figura 9. Principio de la Interferometría SAR (InSAR)
INSTRUMENTACIÓN PARA CONTROL DE MOVIMIENTOS DE LADERA: SISTEMA GPS Y OTROS, J. A. Gili Ripoll
243
por dos satélites parecidos trabajando en “tándem” (durante los años 1995 y 1996 los citados ERS-1 y ERS-2 estuvieron trabajando en tal configuración, con decalaje entre imágenes de tan solo un día).
También puede captarse el eco de la señal Radar simultáneamente desde dos antenas receptoras colocadas en los extremos de una base o mástil fijo (de 60 m desde el Discovery, durante la misión NASA-DLR de Marzo de 2000 denominada SRTM). Los sensores InSAR aerotransportados en avión también usan dos antenas receptoras (separadas unos 50-70 cm), y han sido recientemente usados con éxito para obtener mapas topográficos de zonas de muy difícil acceso y visibilidad (Arbiol y González, 2000). Para cualquiera de las disposiciones citadas anteriormente, la técnica InSAR (Figura 9), a partir de la información de las dos imágenes (muy parecidas entre sí, punto 2), obtiene, por interferometría (multiplicando una por el complejo conjugado de la otra), el interfero-grama (punto 3). Su fase es la resta de fases de las dos imágenes originales, y es función:
de la geometría de la escena (puntos orbitales de toma);
de la topografía del terreno (diferencia de elevaciones entre puntos);
de los posibles cambios geométricos acaecidos al terreno entre tomas (desplazamientos);
de otra serie de factores perturbadores, que se pueden englobar dentro del “error” (cambios de reflectividad, cambios en la atmósfera que ha atravesa-do la señal, etc).
Conocidos los puntos orbitales de toma, si se supone que los cambios (desplazamien-tos y perturbaciones) son nulos o muy pequeños (al ser las imágenes simultáneas o casi-simultáneas, por ejemplo), entonces la topografía del terreno es la principal
responsable del interferograma. Las franjas del interferograma no son, por supuesto, líneas de nivel del terreno, sino que corresponden a puntos a la misma diferencia de distancia (inclinada) a las posiciones del satélite (cada franja equivale, aproximadamente, a una diferencia de recorrido de l/2 en la dirección de la emisión Radar). Los pasos principales en el postproceso son:
la “corrección de Tierra plana” (elipsoide de referencia), ya efectuada en el interferograma de ejemplo del punto 3 de la figura;
filtrado de la fase para mejorar el interferograma
“desenrollado” (unwrapping) de la fase, para eliminar la ambigüedad del ciclo: se van acumulando ciclos completos (l/2) obteniendo diferencias totales (reales) de distancia.
Finalmente se pasa a convertir las fases en diferencias de alturas (verticales) y se geo-referencia la información, obtenién-dose la topografía del terreno (MDT, punto 4, Figura 9).
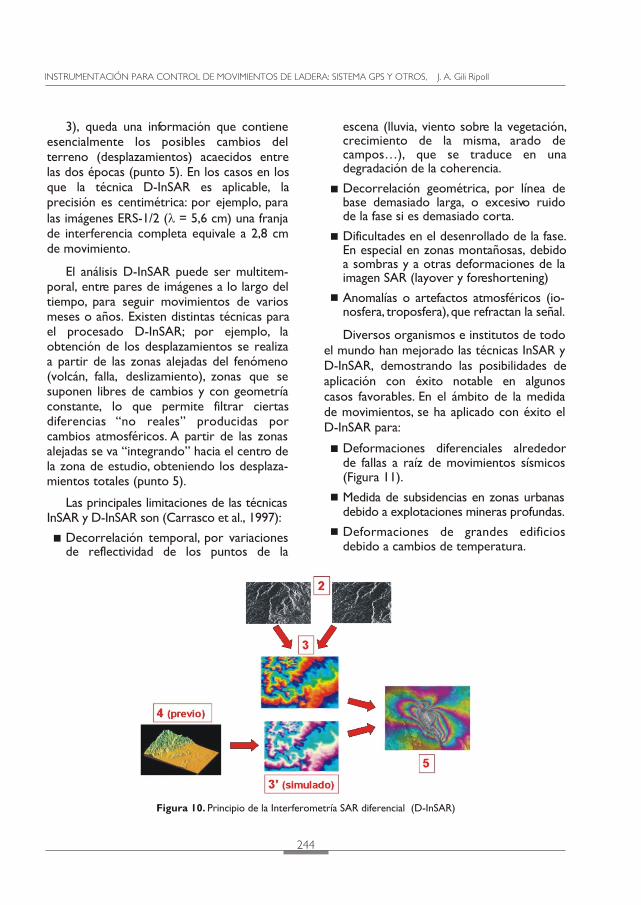
La interferometría SAR diferencial (de siglas D-InSAR), es una técnica muy prome-tedora para la monitorización de pequeñas deformaciones del terreno sobre áreas extensas, por ejemplo en movimientos de glaciares, debidos a terremotos, volcanes y en áreas urbanas (Massonnet, 1997). Se procesan de manera conjunta datos correspondientes a varios instantes de tiempo (o épocas, mínimo dos). La idea intuitiva es la siguiente (figura 10): si las 2 imágenes han sido obtenidas en distintos instantes de tiempo, el interferograma (punto 3 de la figura) incluye también los posibles cambios en la topografía del terreno. Si se conoce de manera previa o independiente el MDT (punto 4), y los puntos orbitales de toma, se puede construir un interferograma simulado (punto 3').
OPERATIVIDAD DE LA INSTRUMENTACIÓN EN AGUAS SUBTERRÁNEAS, SUELOS CONTAMINADOS Y RIESGOS GEOLÓGICOS.IGME. MADRID 2003. ISBN: 84-7840-485-6
escena (lluvia, viento sobre la vegetación, crecimiento de la misma, arado de campos…), que se traduce en una degradación de la coherencia.
Decorrelación geométrica, por línea de base demasiado larga, o excesivo ruido de la fase si es demasiado corta.
Dificultades en el desenrollado de la fase. En especial en zonas montañosas, debido a sombras y a otras deformaciones de la imagen SAR (layover y foreshortening)
Anomalías o artefactos atmosféricos (io-nosfera, troposfera), que refractan la señal.
Diversos organismos e institutos de todo el mundo han mejorado las técnicas InSAR y D-InSAR, demostrando las posibilidades de aplicación con éxito notable en algunos casos favorables. En el ámbito de la medida de movimientos, se ha aplicado con éxito el D-InSAR para:
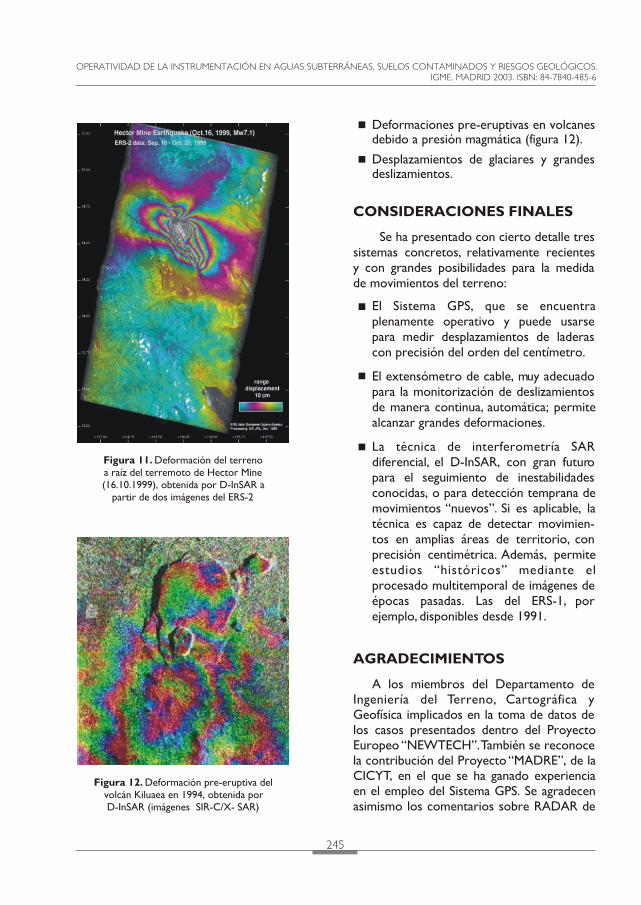
Deformaciones diferenciales alrededor de fallas a raíz de movimientos sísmicos (Figura 11).
Medida de subsidencias en zonas urbanas debido a explotaciones mineras profundas.
Deformaciones de grandes edificios debido a cambios de temperatura.
244
3), queda una información que contiene esencialmente los posibles cambios del terreno (desplazamientos) acaecidos entre las dos épocas (punto 5). En los casos en los que la técnica D-InSAR es aplicable, la precisión es centimétrica: por ejemplo, para las imágenes ERS-1/2 (l = 5,6 cm) una franja de interferencia completa equivale a 2,8 cm de movimiento.
El análisis D-InSAR puede ser multitem-poral, entre pares de imágenes a lo largo del tiempo, para seguir movimientos de varios meses o años. Existen distintas técnicas para el procesado D-InSAR; por ejemplo, la obtención de los desplazamientos se realiza a partir de las zonas alejadas del fenómeno (volcán, falla, deslizamiento), zonas que se suponen libres de cambios y con geometría constante, lo que permite filtrar ciertas diferencias “no reales” producidas por cambios atmosféricos. A partir de las zonas alejadas se va “integrando” hacia el centro de la zona de estudio, obteniendo los desplaza-mientos totales (punto 5).
Las principales limitaciones de las técnicas InSAR y D-InSAR son (Carrasco et al., 1997):
Decorrelación temporal, por variaciones de reflectividad de los puntos de la
INSTRUMENTACIÓN PARA CONTROL DE MOVIMIENTOS DE LADERA: SISTEMA GPS Y OTROS, J. A. Gili Ripoll
Figura 10. Principio de la Interferometría SAR diferencial (D-InSAR)
245
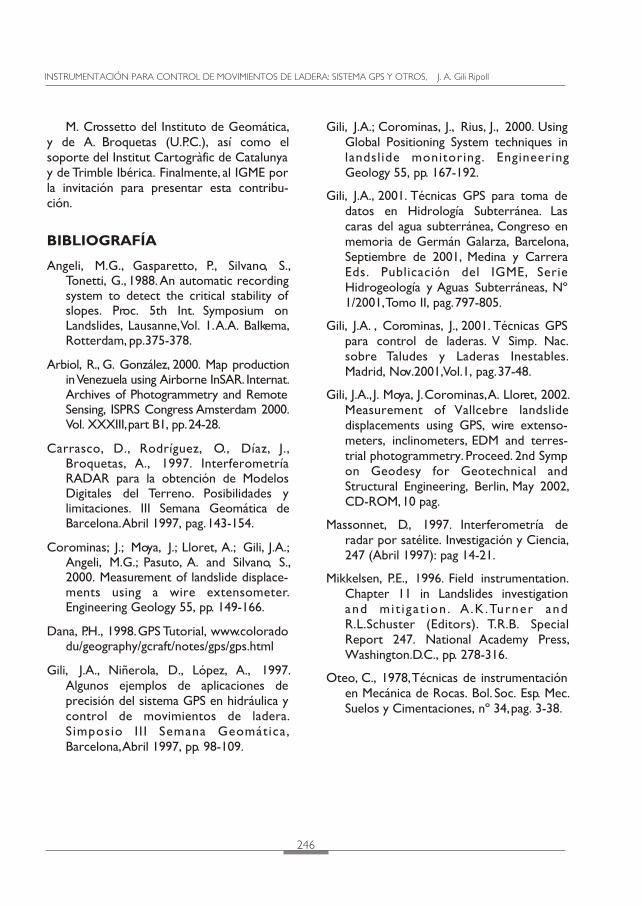
Deformaciones pre-eruptivas en volcanes debido a presión magmática (figura 12).
Desplazamientos de glaciares y grandes deslizamientos.
CONSIDERACIONES FINALES
Se ha presentado con cierto detalle tres sistemas concretos, relativamente recientes y con grandes posibilidades para la medida de movimientos del terreno:
El Sistema GPS, que se encuentra plenamente operativo y puede usarse para medir desplazamientos de laderas con precisión del orden del centímetro.
El extensómetro de cable, muy adecuado para la monitorización de deslizamientos de manera continua, automática; permite alcanzar grandes deformaciones.
La técnica de interferometría SAR diferencial, el D-InSAR, con gran futuro para el seguimiento de inestabilidades conocidas, o para detección temprana de movimientos “nuevos”. Si es aplicable, la técnica es capaz de detectar movimien-tos en amplias áreas de territorio, con precisión centimétrica. Además, permite estudios “históricos” mediante el procesado multitemporal de imágenes de épocas pasadas. Las del ERS-1, por ejemplo, disponibles desde 1991.
AGRADECIMIENTOS
A los miembros del Departamento de Ingeniería del Terreno, Cartográfica y Geofísica implicados en la toma de datos de los casos presentados dentro del Proyecto Europeo “NEWTECH”. También se reconoce la contribución del Proyecto “MADRE”, de la CICYT, en el que se ha ganado experiencia en el empleo del Sistema GPS. Se agradecen asimismo los comentarios sobre RADAR de
Figura 11. Deformación del terreno a raíz del terremoto de Hector Mine (16.10.1999), obtenida por D-InSAR a
partir de dos imágenes del ERS-2
Figura 12. Deformación pre-eruptiva del volcán Kiluaea en 1994, obtenida por D-InSAR (imágenes SIR-C/X- SAR)
OPERATIVIDAD DE LA INSTRUMENTACIÓN EN AGUAS SUBTERRÁNEAS, SUELOS CONTAMINADOS Y RIESGOS GEOLÓGICOS.IGME. MADRID 2003. ISBN: 84-7840-485-6
246
M. Crossetto del Instituto de Geomática, y de A. Broquetas (U.P.C.), así como el soporte del Institut Cartogràfic de Catalunya y de Trimble Ibérica. Finalmente, al IGME por la invitación para presentar esta contribu-ción.
BIBLIOGRAFÍA
Angeli, M.G., Gasparetto, P., Silvano, S., Tonetti, G., 1988. An automatic recording system to detect the critical stability of slopes. Proc. 5th Int. Symposium on Landslides, Lausanne, Vol. 1. A.A. Balkema, Rotterdam, pp.375-378.
Arbiol, R., G. González, 2000. Map production in Venezuela using Airborne InSAR. Internat. Archives of Photogrammetry and Remote Sensing, ISPRS Congress Amsterdam 2000. Vol. XXXIII, part B1, pp. 24-28.
Carrasco, D., Rodríguez, O., Díaz, J., Broquetas, A., 1997. Interferometría RADAR para la obtención de Modelos Digitales del Terreno. Posibilidades y limitaciones. III Semana Geomática de Barcelona. Abril 1997, pag. 143-154.
Corominas; J.; Moya, J.; Lloret, A.; Gili, J.A.; Angeli, M.G.; Pasuto, A. and Silvano, S., 2000. Measurement of landslide displace-ments using a wire extensometer. Engineering Geology 55, pp. 149-166.
Dana, P.H., 1998. GPS Tutorial, www.colorado du/geography/gcraft/notes/gps/gps.html
Gili, J.A., Niñerola, D., López, A., 1997. Algunos ejemplos de aplicaciones de precisión del sistema GPS en hidráulica y control de movimientos de ladera. Simposio I I I Semana Geomática, Barcelona, Abril 1997, pp. 98-109.
Gili, J.A.; Corominas, J., Rius, J., 2000. Using Global Positioning System techniques in landslide monitoring. Engineering Geology 55, pp. 167-192.
Gili, J.A., 2001. Técnicas GPS para toma de datos en Hidrología Subterránea. Las caras del agua subterránea, Congreso en memoria de Germán Galarza, Barcelona, Septiembre de 2001, Medina y Carrera Eds. Publicación del IGME, Serie Hidrogeología y Aguas Subterráneas, Nº 1/2001, Tomo II, pag. 797-805.
Gili, J.A. , Corominas, J., 2001. Técnicas GPS para control de laderas. V Simp. Nac. sobre Taludes y Laderas Inestables. Madrid, Nov.2001, Vol.1, pag. 37-48.
Gili, J.A., J. Moya, J. Corominas, A. Lloret, 2002. Measurement of Vallcebre landslide displacements using GPS, wire extenso-meters, inclinometers, EDM and terres-trial photogrammetry. Proceed. 2nd Symp on Geodesy for Geotechnical and Structural Engineering, Berlin, May 2002, CD-ROM, 10 pag.
Massonnet, D., 1997. Interferometría de radar por satélite. Investigación y Ciencia, 247 (Abril 1997): pag 14-21.
Mikkelsen, P.E., 1996. Field instrumentation. Chapter 11 in Landslides investigation and mit i ga t ion . A .K .Turner and R.L.Schuster (Editors). T.R.B. Special Report 247. National Academy Press, Washington.D.C., pp. 278-316.
Oteo, C., 1978, Técnicas de instrumentación en Mecánica de Rocas. Bol. Soc. Esp. Mec. Suelos y Cimentaciones, nº 34, pag. 3-38.
INSTRUMENTACIÓN PARA CONTROL DE MOVIMIENTOS DE LADERA: SISTEMA GPS Y OTROS, J. A. Gili Ripoll