Embed Size (px)
Citation preview

Introduction Theory Algorithm Result Discussion and Improvements
InterDyMFoam coupled with forces and meshmotion in 6-DoF
Erik Ekedahl
Erik Ekedahl OpenFOAM 1/18
Introduction Theory Algorithm Result Discussion and Improvements
Outline
1 Introduction and motivation
2 Theory
3 AlgorithmUsagePossible Alterations
4 Result
5 Discussion and Improvements
Erik Ekedahl OpenFOAM 2/18
Introduction Theory Algorithm Result Discussion and Improvements
Motivation
Volume-of-Fluid method and dynamic mesh with 6-degreesof freedomMarine ApplicationsBase:interDyMFoam - Volume of Fluid.
Erik Ekedahl OpenFOAM 3/18
Introduction Theory Algorithm Result Discussion and Improvements
Motivation
Volume-of-Fluid method and dynamic mesh with 6-degreesof freedomMarine ApplicationsBase:interDyMFoam - Volume of Fluid.
Erik Ekedahl OpenFOAM 3/18
Introduction Theory Algorithm Result Discussion and Improvements
Motivation
Volume-of-Fluid method and dynamic mesh with 6-degreesof freedomMarine ApplicationsBase:interDyMFoam - Volume of Fluid.
Erik Ekedahl OpenFOAM 3/18
Introduction Theory Algorithm Result Discussion and Improvements
Theory
Two phases; gas and liquid in this case.Interface
γ =
1 if in the water0 < γ < 1 in the region around the surface0 if in the air
Under-relaxation
φnew = αφnew + (1− α)φold (1)
Erik Ekedahl OpenFOAM 4/18
Introduction Theory Algorithm Result Discussion and Improvements
Theory
Two phases; gas and liquid in this case.Interface
γ =
1 if in the water0 < γ < 1 in the region around the surface0 if in the air
Under-relaxation
φnew = αφnew + (1− α)φold (1)
Erik Ekedahl OpenFOAM 4/18

Introduction Theory Algorithm Result Discussion and Improvements
Theory
Two phases; gas and liquid in this case.Interface
γ =
1 if in the water0 < γ < 1 in the region around the surface0 if in the air
Under-relaxation
φnew = αφnew + (1− α)φold (1)
Erik Ekedahl OpenFOAM 4/18
Introduction Theory Algorithm Result Discussion and Improvements
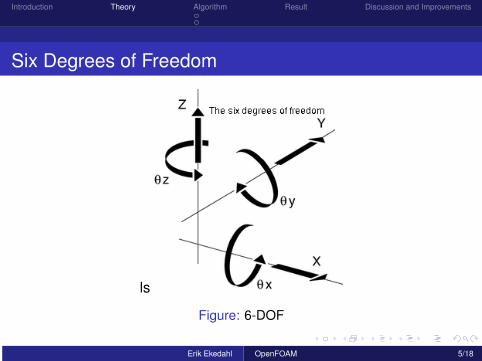
Six Degrees of Freedom
ls
Figure: 6-DOF
Erik Ekedahl OpenFOAM 5/18
Introduction Theory Algorithm Result Discussion and Improvements
Forces and Moments
F =
∫S
F ext + F flow (2)
M =
∫S
Mext + Mflow (3)
Forces from gravity, pressure and viscous effects
Erik Ekedahl OpenFOAM 6/18
Introduction Theory Algorithm Result Discussion and Improvements
Forces and Moments
F =
∫S
F ext + F flow (2)
M =
∫S
Mext + Mflow (3)
Forces from gravity, pressure and viscous effects
Erik Ekedahl OpenFOAM 6/18
Introduction Theory Algorithm Result Discussion and Improvements
Rotation and Translation
Quaternion - Hamilton 1843Base: {1, i , j , k} as a1 + bi + cj + dkWhere a, b,c and d are real numbers andi2 = j2 = k2 = ijk = −1Composed of one vector and one scalar in OF.Euler angles→ quaternion and back.
Erik Ekedahl OpenFOAM 7/18
Introduction Theory Algorithm Result Discussion and Improvements
Rotation and Translation
Quaternion - Hamilton 1843Base: {1, i , j , k} as a1 + bi + cj + dkWhere a, b,c and d are real numbers andi2 = j2 = k2 = ijk = −1Composed of one vector and one scalar in OF.Euler angles→ quaternion and back.
Erik Ekedahl OpenFOAM 7/18
Introduction Theory Algorithm Result Discussion and Improvements
Rotation and Translation
Quaternion - Hamilton 1843Base: {1, i , j , k} as a1 + bi + cj + dkWhere a, b,c and d are real numbers andi2 = j2 = k2 = ijk = −1Composed of one vector and one scalar in OF.Euler angles→ quaternion and back.
Erik Ekedahl OpenFOAM 7/18
Introduction Theory Algorithm Result Discussion and Improvements
Rotation and Translation
Quaternion - Hamilton 1843Base: {1, i , j , k} as a1 + bi + cj + dkWhere a, b,c and d are real numbers andi2 = j2 = k2 = ijk = −1Composed of one vector and one scalar in OF.Euler angles→ quaternion and back.
Erik Ekedahl OpenFOAM 7/18
Introduction Theory Algorithm Result Discussion and Improvements
Rotation and Translation
Quaternion - Hamilton 1843Base: {1, i , j , k} as a1 + bi + cj + dkWhere a, b,c and d are real numbers andi2 = j2 = k2 = ijk = −1Composed of one vector and one scalar in OF.Euler angles→ quaternion and back.
Erik Ekedahl OpenFOAM 7/18
Introduction Theory Algorithm Result Discussion and Improvements
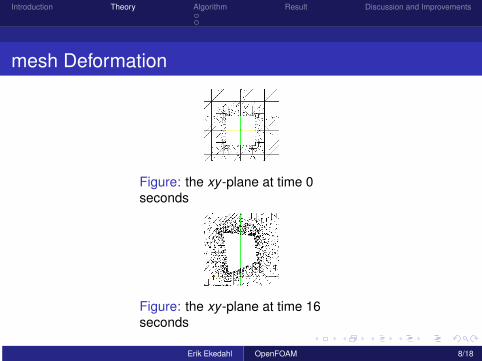
mesh Deformation
Figure: the xy -plane at time 0seconds
Figure: the xy -plane at time 16seconds
Erik Ekedahl OpenFOAM 8/18
Introduction Theory Algorithm Result Discussion and Improvements
Algorithm
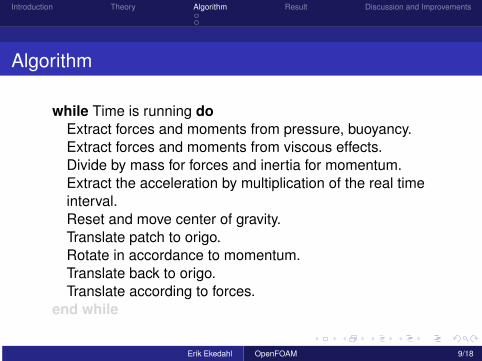
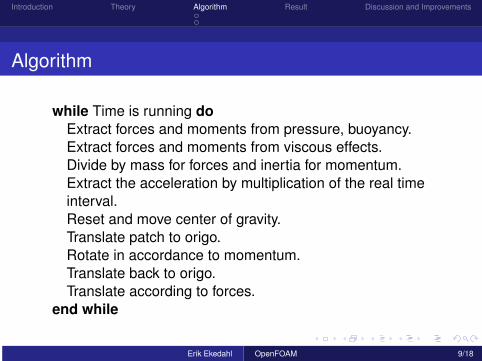
while Time is running doExtract forces and moments from pressure, buoyancy.Extract forces and moments from viscous effects.Divide by mass for forces and inertia for momentum.Extract the acceleration by multiplication of the real timeinterval.Reset and move center of gravity.Translate patch to origo.Rotate in accordance to momentum.Translate back to origo.Translate according to forces.
end while
Erik Ekedahl OpenFOAM 9/18
Introduction Theory Algorithm Result Discussion and Improvements
Algorithm
while Time is running doExtract forces and moments from pressure, buoyancy.Extract forces and moments from viscous effects.Divide by mass for forces and inertia for momentum.Extract the acceleration by multiplication of the real timeinterval.Reset and move center of gravity.Translate patch to origo.Rotate in accordance to momentum.Translate back to origo.Translate according to forces.
end while
Erik Ekedahl OpenFOAM 9/18
Introduction Theory Algorithm Result Discussion and Improvements
Algorithm
while Time is running doExtract forces and moments from pressure, buoyancy.Extract forces and moments from viscous effects.Divide by mass for forces and inertia for momentum.Extract the acceleration by multiplication of the real timeinterval.Reset and move center of gravity.Translate patch to origo.Rotate in accordance to momentum.Translate back to origo.Translate according to forces.
end while
Erik Ekedahl OpenFOAM 9/18
Introduction Theory Algorithm Result Discussion and Improvements
Algorithm
while Time is running doExtract forces and moments from pressure, buoyancy.Extract forces and moments from viscous effects.Divide by mass for forces and inertia for momentum.Extract the acceleration by multiplication of the real timeinterval.Reset and move center of gravity.Translate patch to origo.Rotate in accordance to momentum.Translate back to origo.Translate according to forces.
end while
Erik Ekedahl OpenFOAM 9/18
Introduction Theory Algorithm Result Discussion and Improvements
Algorithm
while Time is running doExtract forces and moments from pressure, buoyancy.Extract forces and moments from viscous effects.Divide by mass for forces and inertia for momentum.Extract the acceleration by multiplication of the real timeinterval.Reset and move center of gravity.Translate patch to origo.Rotate in accordance to momentum.Translate back to origo.Translate according to forces.
end while
Erik Ekedahl OpenFOAM 9/18
Introduction Theory Algorithm Result Discussion and Improvements
Algorithm
while Time is running doExtract forces and moments from pressure, buoyancy.Extract forces and moments from viscous effects.Divide by mass for forces and inertia for momentum.Extract the acceleration by multiplication of the real timeinterval.Reset and move center of gravity.Translate patch to origo.Rotate in accordance to momentum.Translate back to origo.Translate according to forces.
end while
Erik Ekedahl OpenFOAM 9/18
Introduction Theory Algorithm Result Discussion and Improvements
Algorithm
while Time is running doExtract forces and moments from pressure, buoyancy.Extract forces and moments from viscous effects.Divide by mass for forces and inertia for momentum.Extract the acceleration by multiplication of the real timeinterval.Reset and move center of gravity.Translate patch to origo.Rotate in accordance to momentum.Translate back to origo.Translate according to forces.
end while
Erik Ekedahl OpenFOAM 9/18
Introduction Theory Algorithm Result Discussion and Improvements
Algorithm
while Time is running doExtract forces and moments from pressure, buoyancy.Extract forces and moments from viscous effects.Divide by mass for forces and inertia for momentum.Extract the acceleration by multiplication of the real timeinterval.Reset and move center of gravity.Translate patch to origo.Rotate in accordance to momentum.Translate back to origo.Translate according to forces.
end while
Erik Ekedahl OpenFOAM 9/18
Introduction Theory Algorithm Result Discussion and Improvements
Algorithm
while Time is running doExtract forces and moments from pressure, buoyancy.Extract forces and moments from viscous effects.Divide by mass for forces and inertia for momentum.Extract the acceleration by multiplication of the real timeinterval.Reset and move center of gravity.Translate patch to origo.Rotate in accordance to momentum.Translate back to origo.Translate according to forces.
end while
Erik Ekedahl OpenFOAM 9/18
Introduction Theory Algorithm Result Discussion and Improvements
Algorithm
while Time is running doExtract forces and moments from pressure, buoyancy.Extract forces and moments from viscous effects.Divide by mass for forces and inertia for momentum.Extract the acceleration by multiplication of the real timeinterval.Reset and move center of gravity.Translate patch to origo.Rotate in accordance to momentum.Translate back to origo.Translate according to forces.
end while
Erik Ekedahl OpenFOAM 9/18
Introduction Theory Algorithm Result Discussion and Improvements
Algorithm
while Time is running doExtract forces and moments from pressure, buoyancy.Extract forces and moments from viscous effects.Divide by mass for forces and inertia for momentum.Extract the acceleration by multiplication of the real timeinterval.Reset and move center of gravity.Translate patch to origo.Rotate in accordance to momentum.Translate back to origo.Translate according to forces.
end while
Erik Ekedahl OpenFOAM 9/18
Introduction Theory Algorithm Result Discussion and Improvements
ForceFoamDict
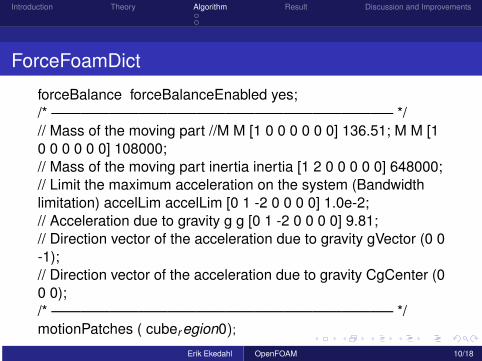
forceBalance forceBalanceEnabled yes;/* ———————————————————————– */// Mass of the moving part //M M [1 0 0 0 0 0 0] 136.51; M M [10 0 0 0 0 0] 108000;// Mass of the moving part inertia inertia [1 2 0 0 0 0 0] 648000;// Limit the maximum acceleration on the system (Bandwidthlimitation) accelLim accelLim [0 1 -2 0 0 0 0] 1.0e-2;// Acceleration due to gravity g g [0 1 -2 0 0 0 0] 9.81;// Direction vector of the acceleration due to gravity gVector (0 0-1);// Direction vector of the acceleration due to gravity CgCenter (00 0);/* ———————————————————————– */motionPatches ( cuber egion0);
Erik Ekedahl OpenFOAM 10/18
Introduction Theory Algorithm Result Discussion and Improvements
Usage
Alterations
Extract the archives.my6DOFFoam: run wclean then wmakekubtest: run application with ’my6DOFFoam’
Erik Ekedahl OpenFOAM 11/18
Introduction Theory Algorithm Result Discussion and Improvements
Usage
Alterations
Extract the archives.my6DOFFoam: run wclean then wmakekubtest: run application with ’my6DOFFoam’
Erik Ekedahl OpenFOAM 11/18
Introduction Theory Algorithm Result Discussion and Improvements
Usage
Alterations
Extract the archives.my6DOFFoam: run wclean then wmakekubtest: run application with ’my6DOFFoam’
Erik Ekedahl OpenFOAM 11/18
Introduction Theory Algorithm Result Discussion and Improvements
Possible Alterations
Alterations
Initial ValuesaccelLim - Limits the motion due to the Forces andMoments.Under-relaxation inMesh - blockMesh and snappyHexMesh
Erik Ekedahl OpenFOAM 12/18
Introduction Theory Algorithm Result Discussion and Improvements
Possible Alterations
Alterations
Initial ValuesaccelLim - Limits the motion due to the Forces andMoments.Under-relaxation inMesh - blockMesh and snappyHexMesh
Erik Ekedahl OpenFOAM 12/18
Introduction Theory Algorithm Result Discussion and Improvements
Possible Alterations
Alterations
Initial ValuesaccelLim - Limits the motion due to the Forces andMoments.Under-relaxation inMesh - blockMesh and snappyHexMesh
Erik Ekedahl OpenFOAM 12/18
Introduction Theory Algorithm Result Discussion and Improvements
Possible Alterations
Alterations
Initial ValuesaccelLim - Limits the motion due to the Forces andMoments.Under-relaxation inMesh - blockMesh and snappyHexMesh
Erik Ekedahl OpenFOAM 12/18
Introduction Theory Algorithm Result Discussion and Improvements
Set up
Domain - 40 meter kub with 6 meter cube in the origoBC’s - slip and reflecting walls, movingWallVelocity for thecubeInitial values
Erik Ekedahl OpenFOAM 13/18
Introduction Theory Algorithm Result Discussion and Improvements
Set up
Domain - 40 meter kub with 6 meter cube in the origoBC’s - slip and reflecting walls, movingWallVelocity for thecubeInitial values
Erik Ekedahl OpenFOAM 13/18
Introduction Theory Algorithm Result Discussion and Improvements
Set up
Domain - 40 meter kub with 6 meter cube in the origoBC’s - slip and reflecting walls, movingWallVelocity for thecubeInitial values
Erik Ekedahl OpenFOAM 13/18
Introduction Theory Algorithm Result Discussion and Improvements
Result: cube at initial timestep
Figure: Time 0
Erik Ekedahl OpenFOAM 14/18
Introduction Theory Algorithm Result Discussion and Improvements
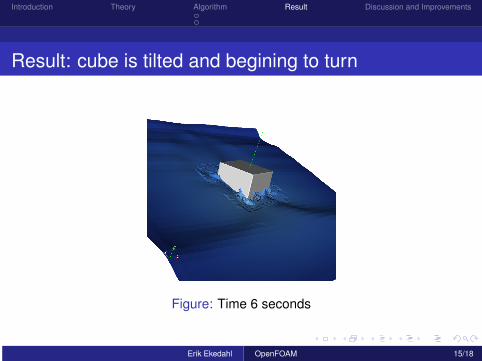
Result: cube is tilted and begining to turn
Figure: Time 6 seconds
Erik Ekedahl OpenFOAM 15/18
Introduction Theory Algorithm Result Discussion and Improvements
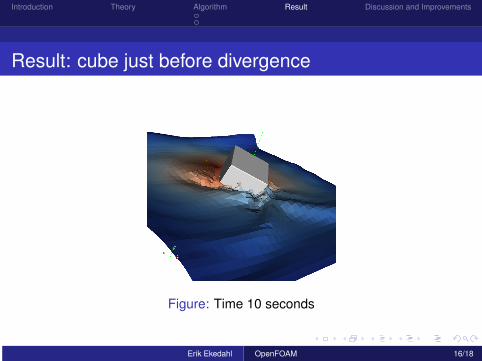
Result: cube just before divergence
Figure: Time 10 seconds
Erik Ekedahl OpenFOAM 16/18
Introduction Theory Algorithm Result Discussion and Improvements
Discussion
This is a first draftUnstable without proper dampingSkewed cells
Erik Ekedahl OpenFOAM 17/18
Introduction Theory Algorithm Result Discussion and Improvements
Discussion
This is a first draftUnstable without proper dampingSkewed cells
Erik Ekedahl OpenFOAM 17/18
Introduction Theory Algorithm Result Discussion and Improvements
Discussion
This is a first draftUnstable without proper dampingSkewed cells
Erik Ekedahl OpenFOAM 17/18
Introduction Theory Algorithm Result Discussion and Improvements
Improvements
Spring-dampingOptimize under-relaxationAutomate calculation of inertia and center of gravity
Erik Ekedahl OpenFOAM 18/18

Introduction Theory Algorithm Result Discussion and Improvements
Improvements
Spring-dampingOptimize under-relaxationAutomate calculation of inertia and center of gravity
Erik Ekedahl OpenFOAM 18/18
Introduction Theory Algorithm Result Discussion and Improvements
Improvements
Spring-dampingOptimize under-relaxationAutomate calculation of inertia and center of gravity
Erik Ekedahl OpenFOAM 18/18


![coupled DEM-SPH method - arXiv · using mesh-based methods, like Finite Volume or Finite Element Methods [15]. However, the application of mesh based methods for modelling of complex](https://img.pdfslide.net/doc/110x75/5f273d32568c6b7b0a04de39/coupled-dem-sph-method-arxiv-using-mesh-based-methods-like-finite-volume-or-finite.jpg)


























