Embed Size (px)
Citation preview

4 Versión: 30 de abril de 2018
Interpolación e integración numérica
4.1 Introducción a la interpolación
En muchas aplicaciones con frecuencia es necesario trabajar con conjuntos discretos de pares de valores querepresentan dependencia de alguna magnitud respecto de la otra variable. Pueden proceder de muestreos, deexperimentos o incluso de cálculos numéricos previos. En ocasiones, para utilizar estos valores en cálculosposteriores es preciso «darles forma» de función, es decir: es preciso disponer de una función dada por unaexpresión matemática que represente a dichos valores. Existen básicamente dos enfoques para conseguir esto:
Interpolación es el proceso de determinar una función que tomeexactamente los pares de valores dados. Por ejemplo, deter-minar un polinomio de grado 4 que pase por 5 puntos dados,como en la figura de la derecha.
Este enfoque tiene el siguiente inconveniente: sucede con fre-cuencia que los datos vienen afectados de algún error, porejemplo porque provienen de mediciones. No tiene muchosentido, pues, obligar a la función que se quiere construir a«pasar» por unos puntos que ya de por sí no son exactos.
Ajuste de datos es el proceso de determinar la función, de untipo determinado, que mejor se aproxime a los datos («mejorse ajuste»), es decir tal que la distancia a los puntos (medidade alguna manera) sea lo menor posible. Esta función nopasará necesariamente por los puntos dados. Por ejemplo,determinar un polinomio de grado 1 que aproxime lo mejorposible unos datos, como se muestra en la figura adjunta.
El problema de ajuste de datos se va a considerar el curso que viene en la asignatura «Cálculo Numérico II».El problema de interpolación es el que abordamos aquí. Si la función que queremos construir es un polinomiode un determinado grado, se habla de interpolación polinómica.
Mencionemos que existen otras posibles interpolaciones, como por ejemplo, interpolación con funciones raciona-les, trigonométricas, logarítmicas, exponenciales, etc. cuyo análisis se escapa de nuestros objetivos. La razón deinterpolar con polinomios es que son funciones fáciles de manejar (son sencillas las operaciones con polinomios,el cálculo de sus derivadas e integrales, etc. . . ) y, por otra parte, proporcionan una amplia gama de métodos deintegración numérica (se verán más adelante en la Sección 4.2).
Como referencia bibliográfica, se recomienda consultar [3].
1

4. Interpolación e integración numérica 2
4.1.1 Interpolación global de Lagrange
Si la función que queremos construir es un polinomio de un determinado grado, se habla de interpolaciónpolinómica.
Interpolación lineal. Dados dos puntos en el plano (x0, y0) y (x1, y1), con x0 6= x1 se trata de determinaruna función polinómica de grado 1 (una recta)
y = a0 + a1x
que tome el valor y0 para x = x0 y el valor y1 para x = x1,es decir
{y0 = a0 + a1x0y1 = a0 + a1x1
⇔[
1 x01 x1
] [a0a1
]=
[y0y1
]La solución de este sistema lineal de dos ecuaciones con dosincógnitas proporciona los valores adecuados de los coefi-cientes a0 y a1.
(x0, y0)
(x1, y1)
x
y
Interpolación cuadrática. Dados (x0, y0), (x1, y1) y (x2, y2) con x0, x1 y x2, todos distintos, se trata dedeterminar una función polinómica de grado 2 (una parábola) de la forma
y = a0 + a1x+ a2x2
que pase por dichos puntos, es decir tal que
y0 = a0 + a1x0 + a2x
20
y1 = a0 + a1x1 + a2x21
y2 = a0 + a1x2 + a2x22
⇔
1 x0 x201 x1 x211 x2 x22
a0a1a2
=
y0y1y2
y su solución proporciona los coeficientes que determinanla función interpolante.
(x0, y0)
(x1, y1)
(x2, y2)
x
y
Interpolación global. En general, dados n+ 1 puntos (xi, yi), i = 0, . . . , n, con xi todos distintos, buscamosun polinomio de grado menor o igual que n que pasa exactamente por estos puntos.
Este polinomio se puede expresar de la forma
p(x) = a0 + a1x+ · · · an−1xn−1 + anxn
y verifica que p(xi) = yi para i = 0, 1, . . . , n, es decir:
y0 = a0 + a1x0 + · · · an−1xn−10 + anx
n0
y1 = a0 + a1x1 + · · · an−1xn−11 + anxn1
. . .yn = a0 + a1xn + · · · an−1xn−1n + anx
nn
(4.1)
(x0, y0)
(x1, y1)
(x2, y2)
(xn, yn)
x
y
Este procedimiento se conoce como interpolación global de Lagrange.1
1Joseph Louis Lagrange (1736–1813), fue un matemático, físico y astrónomo italiano nacido en Turín.
Anna Doubova - Dpto. EDAN - U. de Sevilla Cálculo Numérico I - Grado en Matemáticas

4. Interpolación e integración numérica 3
4.1.2 Existencia y unicidad del polinomio de interpolación de Lagrange
Teorema 4.1 Existencia y unicidad del polinomio de interpolación de Lagrange
Dados n+1 puntos (xi, yi), i = 0, . . . , n, con xi todos distintos, existe un único polinomio de interpolaciónde Lagrange asociado a estos valores, es decir, existe un único p ∈ Pn[x] tal que
p(xi) = yi, i = 0, . . . , n,
donde Pn[x] denota el espacio vectorial de los polinomios de grado menor o igual que n.
Demostración: Se divide en tres etapas.
Etapa 1: Reducción del problema a un sistema lineal algebraico. Se busca p ∈ Pn[x] de la forma
p(x) = a0 + a1x+ · · ·+ anxn , (4.2)
con coeficientes ai ∈ R, i = 0, . . . , n que tenemos que determinar. Las condiciones de interpolaciónp(xi) = yi , i = 0, . . . , n, conducen al sistema lineal de dimensión n + 1 de la forma (4.1) que, usando lanotación matricial se escribe:
1 x0 · · · xn01 x1 · · · xn1...
.... . .
...1 xn · · · xnn
a0a1...an
=
y0y1...yn
. (4.3)
Etapa 2: Unicidad. Supongamos que existen p, q ∈ Pn[x] tales que
p(xi) = q(xi) = yi , i = 0, . . . , n.
Sea r = p− q. Entonces, r ∈ Pn[x] y verifica
r(xi) = 0 , i = 0, . . . , n.
Al ser r un polinomio de grado a lo más n, con n + 1 raíces distintas, deducimos que r ≡ 0, de dondep ≡ q y se tiene la unicidad.
Etapa 3: Existencia. La existencia se obtiene, como consecuencia de las dos etapas anteriores, ya que unsistema lineal cuadrado que tiene unicidad de solución entonces también tiene existencia de solución,gracias al siguiente resultado de Álgebra Lineal:
“Sea A una matriz real cuadrada de dimensión N . La única solución del sistema lineal homogéneoAx = 0 es la solución trivial x = 0 si y sólo si A es no singular (su determinante es distinto decero). En consecuencia, todo sistema lineal asociado a la matriz A tiene solución única.”
Esto termina la demostración del teorema
�
Observación:La matriz obtenida en el sistema lineal (4.3) es de tipo Vandermonde. Además, el determinante de la matriz deVandermonde es distinto de cero, pues los (xi)
ni=0 son distintos entre sí. Luego, para el problema de interpolación
de Lagrange, sería suficiente realizar tan sólo la Etapa 1 para concluir la demostración del Teorema 4.1 (de hecholas Etapas 2 y 3 es una forma indirecta de demostrar que la matriz del sistema lineal es no singular). No obstante,se realizan también las Etapas 2 y 3, con el objetivo de presentar un argumento más general, que servirá paraprobar la existencia y unicidad de otros problemas de interpolación, por ejemplo, para interpolaciones de tipoHermite que usan derivadas (que se analizarán en el curso que viene en la asignatura «Cálculo Numérico II»).
Anna Doubova - Dpto. EDAN - U. de Sevilla Cálculo Numérico I - Grado en Matemáticas

4. Interpolación e integración numérica 4
4.1.3 Algoritmos de construcción del polinomio de interpolación
Un primer algoritmo posible para construir el polinomio de interpolación es el que proporciona la Etapa 1 dela demostración del Teorema 4.1. Se trata de calcular los coeficientes ai , i = 0, . . . , n, en la expresión (4.2)resolviendo el sistema lineal (4.3) con matriz de Vandermonde.
En esta sección vamos a presentar los algoritmos de Newton y de Lagrange, que son de naturaleza distinta,comparando las ventajas e inconvenientes en cada caso. No presentamos en este texto otros algoritmos queexisten en la literatura, como por ejemplo el de diferencias divididas (véase [2, 1]), que se puede interpretarcomo una variante del algoritmo de Newton.
Algoritmo de Lagrange
Fijados un soporte de n + 1 puntos distintos S = {x0, · · · , xn} y unos valores reales (yi)ni=0 cualesquiera,
el algoritmo de Lagrange de construcción del polinomio de interpolación global consiste en buscar dichopolinomio pn ∈ Pn[x] de la forma:
pn(x) = y0L0(x) + y1L1(x) + · · ·+ ynLn(x) =
n∑i=0
yi Li(x) (4.4)
donde
Li(x) =(x− x0) · · · (x− xi−1)(x− xi+1) · · · (x− xn)
(xi − x0) · · · (xi − xi−1)(xi − xi+1) · · · (xi − xn)=
n∏j=0,j 6=i
x− xjxi − xj
, i = 0, 1 . . . , n (4.5)
Se observa que cada función Li, i = 0, 1 . . . , n es tal que:
y = Li(x) es un polinomio de grado n
Li(xi) = 1
Li(xj) = 0 para cada j 6= i
es decir, Li es el polinomio de interpolación asociado al soporte S = {x0, · · · , xn} y a los n+ 1 valores
{0, · · · ,i)
1, · · · , 0}.
Gracias a esta elección particular de los Li, tenemos que pn dado por (4.4) es el polinomio de interpolaciónbuscado, pues pn ∈ Pn[x] y
pn(xi) = yi , i = 0, 1 . . . , n.
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1−0.2
0
0.2
0.4
0.6
0.8
L0(x)
L1(x)
L2(x)
Figura 4.1: Base de Lagrange de P2[x] asociada a lospuntos {−1, 0, 1}, representada en [−1, 1].
−1 0 1 2 3 4−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
x0 x1x2 x3
L0(x)
L1(x)
L2(x)
L3(x)
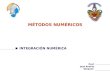
Figura 4.2: Base de Lagrange de P3[x] asociada a losnodos {x0, x1, x2, x3} = {2, 3,−1, 4} del Ejemplo 4.3.
Anna Doubova - Dpto. EDAN - U. de Sevilla Cálculo Numérico I - Grado en Matemáticas

4. Interpolación e integración numérica 5
Observaciones:
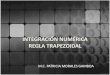
1. El conjunto de polinomios {L0, L1, . . . , Ln} se denomina la base de Lagrange (ver Figuras 4.1 y 4.2)asociada a los puntos (xi)
ni=0 .
Se trata de una base del espacio vectorial Pn[x], puesto que L0, L1, . . . , Ln son polinomios de grado n,linealmente independientes. En efecto, si α0, α1 . . . , αn son (n+ 1) números reales tales que
n∑i=0
αiLi(x) = 0, ∀x ∈ R
entonces para x = xj , obtenemos:
0 =
n∑i=0
αiLi(xj) = αj , ∀ j = 0, 1 . . . , n ⇒ αj ≡ 0, ∀ j = 0, 1 . . . , n.
2. Una ventaja del algoritmo de Lagrange es que para el mismo soporte S = (xi)ni=0 y distintos valores
(yi)ni=0 , basta calcular la base de Lagrange una sola vez (los Li dependen sólo de S). Esto permitiría
calcular varios polinomios de interpolación asociados al mismo soporte S y a distintos valores (yi)ni=0 .
3. El inconveniente de este algoritmo es si añadimos un punto más al soporte hay que calcular nuevamentela base de Lagrange asociada.
Ejemplo 4.2 Usando el algoritmo de Lagrange, calcular el polinomio de interpolación asociadoa los valores (x0, y0) = (1, 1), (x1, y1) = (2, 3).
Buscamos p1 ∈ P1[x] de la forma
p1(x) = y0L0(x) + y1L1(x) = L0(x) + 3L1(x),
donde los Li , i = 0, . . . , 3 se calculan usando la fórmula (4.5):
L0(x) =
x− x1x0 − x1
=x− 2
1− 2= −(x− 2),
L1(x) =x− x0x1 − x0
=x− 1
2− 1= x− 1,
⇒ p1(x) = −(x−2) + 3(x−1) = −x+ 2 + 3x−3 = 2x−1.
En las figuras adjuntas se representan los polinomios de la base de Lagrange de P1[x] asociados a los nodos{x0, x1} = {1, 2} (izquierda) y el polinomio de interpolación p1 de los valores (x0, y0) = (1, 1), (x1, y1) = (2, 3)(derecha).
0 0.5 1 1.5 2 2.5 3−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
x0 x1
L0(x)
L1(x)
0 0.5 1 1.5 2 2.5 3−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
x0 x1
y0
y1
Polinomio de interpolación
Anna Doubova - Dpto. EDAN - U. de Sevilla Cálculo Numérico I - Grado en Matemáticas

4. Interpolación e integración numérica 6
Ejemplo 4.3 Usando el algoritmo de Lagrange, calcular el polinomio de interpolación asociadoa los valores (x0, y0) = (2, 1), (x1, y1) = (3, 2), (x2, y2) = (−1, 3), (x3, y3) = (4, 4).
Se busca p3 ∈ P3[x] de la forma
p3(x) =
3∑i=0
yiLi(x) = L0(x) + 2L1(x) + 3L2(x) + 4L3(x),
donde los Li , i = 0, . . . , 3 se calculan usando la fórmula (4.5), es decir vienen dados por (ver la Figura 4.2):
L0(x) =(x− 3)(x+ 1)(x− 4)
6
L1(x) = − (x− 2)(x+ 1)(x− 4)
4
L2(x) = − (x− 2)(x− 3)(x− 4)
60
L3(x) =(x− 2)(x− 3)(x+ 1)
10
−2 −1 0 1 2 3 4 5−1
0
1
2
3
4
5
6
7
x0 x1x2 x3
Polinomio de interpolación
Operando llegamos a que
p3(x) = L0(x) + 2L1(x) + 3L2(x) + 4L3(x) =1
60(x3 + 21x2 − 64x+ 96).
Algoritmo de Newton
Fijados un soporte de n + 1 puntos distintos S = {x0, . . . , xn} y unos valores reales (yi)ni=0 cualesquiera, el
algoritmo de Newton de construcción del polinomio de interpolación, pn, consiste en buscar pn ∈ Pn[x] dela forma:
pn(x) = c0 + c1(x− x0) + · · ·+ cn(x− x0)(x− x1) · · · (x− xn−1) (4.6)
Se trata de ir calculando los coeficientes (ci)ni=0 , de forma iterativa. Más precisamente, tomamos
p0(x) = c0 con c0 ∈ R tal que p0(x0) = y0 , es decir, c0 = y0 .
p1(x) = p0(x) + c1(x− x0) con c1 ∈ R tal que p1(x1) = y1 , es decir
c1 =p1(x1)− p0(x1)
x1 − x0=y1 − y0x1 − x0
Además, por construcción, p1(x0) = p0(x0) = y0 .
p2(x) = p1(x) + c2(x− x0)(x− x1) con c2 ∈ R tal que p2(x2) = y2 , es decir
c2 =p2(x2)− p1(x2)
(x2 − x1)(x2 − x0)=
y2 − p1(x2)
(x2 − x1)(x2 − x0)
Además, por construcción, p2(x0) = p1(x0) = y0, p2(x1) = y1, p2(x2) = y2.
. . .
pn(x) = pn−1(x) + cn(x− x0)(x− x1) · · · (x− xn−1) con cn ∈ R tal que pn(xn) = yn , es decir
cn =yn − pn−1(xn)
(xn − x0)(xn − x1) · · · (xn − xn−1)
Por construcción, para cada i = 0, . . . , n− 1, pn(xi) = pn−1(xi) = yi y pn(xn) = yn.
Anna Doubova - Dpto. EDAN - U. de Sevilla Cálculo Numérico I - Grado en Matemáticas

4. Interpolación e integración numérica 7
Entonces, pn obtenido en la última etapa de este método es el polinomio de interpolación buscado: pn(xi) = yi,i = 0, . . . , n.
Ejemplo 4.4 Usando el algoritmo de Newton, calcular el polinomio de interpolación asociadoa los valores (x0, y0) = (1, 1), (x1, y1) = (2, 3) del Ejemplo 4.2
Buscamos p1 ∈ P1[x] de la forma
p1(x) = c0 + c1(x− x0),
donde los coeficientes c0 y c1 se calculan de manera recursiva:
p0(x) = c0, c0 ∈ R tal que p0(x0) = y0 ⇒ c0 = y0 = 1
p1(x) = p0(x)+c1(x−x0) con c1 ∈ R tal que p1(x1) = y1 ,es decir
c1 =p1(x1)− p0(x1)
x1 − x0=y1 − y0x1 − x0
=3− 1
2− 1= 2 ⇒ c1 = 2 0 0.5 1 1.5 2 2.5 3
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
x0 x1
y0
y1
Polinomio de interpolación
Luego,p1(x) = c0 + c1(x− x0) = 1 + 2(x− 1) = 1 + 2x− 2 = 2x− 1
El polinomio de interpolación obtenido coincide con el polinomio del Ejemplo 4.3, lo que era de esperar, envirtud de la unicidad del polinomio de interpolación.
Ejemplo 4.5 Usando el algoritmo de Newton, calcular el polinomio de interpolación asociadoa los valores (x0, y0) = (1, 5), (x1, y1) = (3, 1), (x2, y2) = (4, 0.5).
El algoritmo de Newton para calcular el polinomio de interpolación asociado a estos puntos consiste en buscarp2 ∈ P2[x] de la forma
p2(x) = c0 + c1(x− x0) + c2(x− x0)(x− x1) = c0 + c1(x− 1) + c2(x− 1)(x− 3),
donde los coeficientes ci , i = 0, 1, 2 se calculan como sigue:
p0(x) = c0 con c0 = y0 = 5.
p1(x) = p0(x) + c1(x− x0) con
c1 =y1 − y0x1 − x0
=1− 5
3− 1= −2.
p2(x) = p1(x) + c2(x− x0)(x− x1) con
c2 =y2 − p1(x2)
(x2 − x0)(x2 − x1)=
0.5− (5− 2(4− 1))
(4− 1)(4− 3)=
1
2.
Luego, el polinomio de interpolación buscado es
p2(x) = 5− 2(x− 1) +1
2(x− 1)(x− 3)
0 1 2 3 4 5 6−1
0
1
2
3
4
5
6
x0 x1 x2
Polinomio de interpolación
Observaciones:
1. Una ventaja del algoritmo de Newton es que si añadimos nuevos puntos, nos sirven los cálculos anteriores.Por ejemplo, al añadir un nuevo par de datos (xn+1, yn+1), tan sólo hay que realizar una etapa más delmétodo de Newton (ver el Ejemplo 4.6).
2. El inconveniente del método de Newton es si queremos calcular varios polinomios con el mismo soporte(xi)
ni=0 asociado a valores distintos (yi)
ni=0 , los cálculos son completamente independientes.
Anna Doubova - Dpto. EDAN - U. de Sevilla Cálculo Numérico I - Grado en Matemáticas

4. Interpolación e integración numérica 8
Ejemplo 4.6 En la situación del Ejemplo 4.5 añadimos un punto más (x3, y3) = (5, 2). Construirel polinomio de interpolación asociado a (xi, yi)
3i=0.
El polinomio de interpolación p3 ∈ P3[x] asociado a los valores(xi, yi)
3i=0 viene dado por
p3(x) = p2(x) + c3(x− 1)(x− 3)(x− 4), con
c3 =y3 − p2(x3)
(x3 − x0)(x3 − x1)(x3 − x2)=
1
8.
Luego,
p3(x) = 5−2(x−1) +1
2(x−1)(x−3) +
1
8(x−1)(x−3)(x−4).
0 1 2 3 4 5 6−1
0
1
2
3
4
5
6
x0 x1 x2 x3
Polinomio de interpolación
Uso de diferencias divididas en el método de Newton
En la fórmula de Newton (4.6) del polinomio de interpolación de los valores (xi, yi)ni=0, los coeficientes ci pueden
ser también calculados usando diferencias divididas2:
c0 = y0 , c1 = f [x1, x0] , c2 = f [x2, x1, x0] , . . . cn = f [xn, xn−1, . . . , x1, x0] (4.7)
donde las partes derechas de estas igualdades representan diferencias divididas. Más concretamente, la primeradiferencia dividida (o diferencia dividida de orden 1) se define como
f [xi, xj ] :=yi − yjxi − xj
,(por ejemplo, f [x1, x0] =
y1 − y0x1 − x0
, f [x2, x1] =y2 − y1x2 − x1
)La segunda diferencia dividida (o diferencia dividida de orden 2), que representa la diferencia de las dosprimeras diferencias divididas, se expresa en forma general como
f [xi, xj , xk] :=f [xi, xj ]− f [xj , xk]
xi − xk
(por ejemplo, f [x2, x1, x0] =
f [x2, x1]− f [x1, x0]
x2 − x0
)De forma similar, la n-ésima diferencia dividida (o diferencia dividida de orden n) es
f [xn, xn−1, . . . , x1, x0] :=f [xn, xn−1, . . . , x1]− f [xn−1, . . . , x1, x0]
xn − x0
Se observa que las fórmulas para calcular las diferencias divididas son recursivas (es decir, las diferencias deorden superior se calculan tomando diferencias de orden inferior) y es habitual representar su cálculo en formade una tabla, como la Tabla 4.1.
i xi yi Primera Segunda Tercera0 x0 y0 −→ f [x1, x0] −→ f [x2, x1, x0] −→ f [x3, x2, x1, x0]
1 x1 y1↗−→ f [x2, x1]
↗−→ f [x3, x2, x1] ↗
2 x2 y2↗−→ f [x3, x2] ↗
3 x3 y3 ↗
Tabla 4.1: Representación del cálculo de las diferencias divididas para un soporte de 4 puntos.
2La demostración de este hecho es laboriosa y no se presenta aquí.
Anna Doubova - Dpto. EDAN - U. de Sevilla Cálculo Numérico I - Grado en Matemáticas

4. Interpolación e integración numérica 9
Ejemplo 4.7 Calcular, usando diferencias divididas el polinomio de interpolación de los datosdel Ejemplo 4.5.Según el algoritmo de Newton, buscamos p2 ∈ P2[x] de la forma
p2(x) = c0 + c1(x− 1) + c2(x− 1)(x− 3) = y0 + f [x1, x0](x− 1) + f [x2, x1, x0](x− 1)(x− 3),
donde los coeficientes se pueden calcular usando las diferencias divididas: c0 = 5
i xi yi Primera Segunda
0 1 5 −→ c1 = f [x1, x0] =1− 5
3− 1= −2 −→ c2 = f [x2, x1, x0] =
−0.5 + 2
4− 1= 0.5
1 3 1↗−→ f [x2, x1] =
0.5− 1
4− 3= −0.5 ↗
2 4 0.5 ↗
Ejemplo 4.8 Calcular el polinomio de interpolación asociado a la siguiente tabla de valores:xi 0 1 2 7yi 51 3 1 201
Según el algoritmo de Newton, buscamos p3 ∈ P3[x] de la forma
p3(x) = c0 + c1(x− x0) + c2(x− x0)(x− x1) + c3(x− x0)(x− x1)(x− x2)
donde los coeficientes se pueden calcular usando las diferencias divididas: c0 = 51,
i xi yi Primera Segunda Tercera
0 0 51 c1 = f [x1, x0] =3− 51
1− 0= −48 c2 = f [x2, x1, x0] =
−2 + 48
2− 0= 23 c3 =
7− 23
7− 0= −16
7
1 1 3 f [x2, x1] =1− 3
2− 1= −2 f [x3, x2, x1] =
40 + 2
7− 1= 7
2 2 1 f [x3, x2] =201− 1
7− 2= 40
3 7 201
Luego, el polinomio de interpolación buscado es
p3(x) = 51− 48x+ 23x(x− 1)− 16
7x(x− 1)(x− 2)
4.1.4 Aproximación de una función continua por un polinomio de interpolación
Dada una función continua f : [a, b] ⊂ R 7→ R, se plantea el problema de aproximar esta función por unpolinomio de interpolación asociado a los puntos (xi, f(xi)). Dicha aproximación tiene interés práctico, puestoque, como ya hemos mencionado, los polinomios son más fáciles de manejar por su sencillez y operatividad. Porejemplo, una vez calculado el polinomio de interpolación, podríamos usarlo para estimar el valor de la funciónen otros puntos del intervalo [a, b].Más concretamente, dado un soporte de n+ 1 puntos distintos S = {x0, x1, . . . , xn} ⊂ [a, b], queremos calcularp ∈ Pn[x] tal que
p(xi) = f(xi), i = 0, 1, . . . , n.
Si f es una función continua dada, la existencia y unicidad de este polinomio y los algoritmos de construcciónanalizados hasta ahora siguen siendo ciertos, basta tomar
yi := f(xi), i = 0, 1, . . . , n.
Anna Doubova - Dpto. EDAN - U. de Sevilla Cálculo Numérico I - Grado en Matemáticas

4. Interpolación e integración numérica 10
Diremos en este caso que p es el polinomio de interpolación de f en los puntos S = {x0, x1, . . . , xn}.
Ejemplo 4.9 Sea f(x) = ex. Calcular el polinomio de interpolación de f en {−1, 0, 1}.Usando la fórmula (4.4), buscamos p2 ∈ P2[x] de la forma
p2(x) = f(−1)L0(x) + f(0)L1(x) + f(1)L2(x) = e−1L0(x) + e0L1(x) + e1L2(x)
donde la bese de Lagrange viene dada por (ver Figura 4.1):
L0(x) =(x− x1)(x− x2)
(x0 − x1)(x0 − x2)=
1
2x(x− 1)
L1(x) =(x− x0)(x− x2)
(x1 − x0)(x1 − x2)= −(x+ 1)(x− 1) = 1− x2
L2(x) =(x− x0)(x− x1)
(x2 − x0)(x2 − x1)=
1
2(x+ 1)x
p2(x) =1
e
(1
2x(x− 1)
)+ (1− x2) + e
(1
2(x+ 1)x
)=
( 1
2e− 1 +
e
2
)x2 +
(e2− 1
2e
)x+ 1 −1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1
0
0.5
1
1.5
2
2.5
3
Polinomio de interpolación
y = ex
Ejemplo 4.10 Calcular el polinomio que interpola a la función f(x) = 2x−1 en los nodos{x0, x1, x2, x3} = {0, 1, 2, 3}. Usando el polinomio obtenido, aproximar los valores f(4.2) y f(−2).
Buscamos p3 ∈ P3[x] tal que p(xi) = f(xi) := yi, i = 0, 1, 2, 3, es decir
y0 = f(x0) = 0.5, y1 = f(x1) = 1, y2 = f(x2) = 2, y3 = f(x3) = 4.
El algoritmo de Newton para calcular el polinomio de interpolación asociado a estos puntos consiste en buscarp3 ∈ P3[x] de la forma
p3(x) = c0+c1(x−x0)+c2(x−x0)(x−x1)+c3(x−x0)(x−x1)(x−x2) = c0+c1x+c2x(x−1)+c3x(x−1)(x−2),
donde los coeficientes ci , i = 0, 1, 2 se calculan como sigue:
p0(x) = c0, con c0 = y0 = 0.5.
p1(x) = p0(x) + c1(x− x0) = p0(x) + c1x,
c1 =y1 − y0x1 − x0
=1− 0.5
1= 0.5 ⇒ p1(x) = 0.5 + 0.5x
p2(x) = p1(x) + c2(x− x0)(x− x1) = p1(x) + c2x(x− 1),
c2 =y2 − p1(x2)
(x2 − x0)(x2 − x1)=
2− 1.5
(2− 0)(2− 1)=
1
4. −3 −2 −1 0 1 2 3 4 5
−2
0
2
4
6
8
10
x0 x1 x2 x3
Polinomio de interpolación
y = 2x−1
p3(x) = p2(x) + c3(x− x0)(x− x1)(x− x2) = p2(x) + c2x(x− 1)(x− 2),
c3 =y3 − p2(x3)
(x3 − x0)(x3 − x1)(x3 − x2)=
4− 3.5
(3− 0)(3− 1)(3− 2)=
0.5
6=
1
12.
Luego, el polinomio de interpolación que buscamos es
p3(x) = p2(x) +1
12x(x− 1)(x− 2) = 0.5 + 0.5x+
1
4x(x− 1) +
1
12x(x− 1)(x− 2)
Calculamos p3(4.2) = 8.4240 ≈ f(4.2) = 24.2−1 = 23.2 = 9.1896 y p3(−2) = −1 ≈ f(−2) = 2−3 = 0.125.Es claro que, al aproximar f por p3 se comete un error: |p3(4.2)−f(4.2)| = 0.7656 y |p3(−2)−f(−2)| = 1.1250.
Anna Doubova - Dpto. EDAN - U. de Sevilla Cálculo Numérico I - Grado en Matemáticas

4. Interpolación e integración numérica 11
Es obvio que al aproximar f por un polinomio de interpolación se comete un error. La cuestión que debemosanalizar, pues, es:
¿cuál es el error (f(x) − p(x)) que se comete al aproximar la función f ∈ C0([a, b]) por el polinomio deinterpolación global p ∈ Pn[x] asociado a un soporte de n+ 1 puntos?
En este sentido es el resultado que sigue que permite precisar el error de interpolación en términos de lasderivadas de f :
Teorema 4.11 Expresión del error de interpolación
Sea f ∈ Cn+1([a, b]). Fijados un soporte de n + 1 puntos distintos S = (xi)ni=0 del intervalo [a, b], los valores
asociados (f(xi))ni=0 y el polinomio de interpolación p ∈ Pn[x] tal que p(xi) = f(xi), i = 0, . . . , n, entonces
para todo x ∈ [a, b] existe ξx ∈ (a, b) tal que
f(x)− p(x) =fn+1)(ξx)
(n+ 1)!wS(x), (4.8)
donde wS(x) = (x− x0)(x− x1) · · · (x− xn) se llama el el polinomio soporte.
Observación: El Teorema 4.11 puede considerarse como una extensión del Teorema del Valor Medio para másde un punto. En efecto, para n = 0 y S = {x0} y (4.8) se reduce a f(x)− f(x0) = f ′(ξx)(x− x0)
Demostración:Se observa que wS(x) es mónico de grado igual a n+ 1 tal que wS(xi) = 0, i = 0, . . . , n.
Si x = xi para algún i, el resultado del Teorema 4.11 es evidente (0 = 0).
Supongamos que x 6= xi , i = 0, . . . , n. Consideramos la función auxiliar
φ(t) = f(t)− p(t)− λwS(t), t ∈ R,
con λ ∈ R tal que φ(x) = 0. Entonces,
λ =f(x)− p(x)
wS(x).
Además, se verifica que φ(xi) = 0, i = 0, . . . , n (pues x 6= xi ). Como φ ∈ Cn+1([a, b]) y se anula enn + 2 puntos distintos, por el Teorema de Rolle, deducimos que φ′ ∈ Cn([a, b]) se anula (al menos) enn + 1 puntos distintos del intervalo (a, b). Aplicando el Teorema de Rolle sucesivamente, llegamos a queφn+1) ∈ C0([a, b]) se anula (al menos) en un punto de (a, b). Sea ξx ∈ (a, b) tal que φn+1)(ξx) = 0. Comopn+1) = 0 y wn+1)
S = (n+ 1)! se tiene que
0 = φn+1)(ξx) = fn+1)(ξx)− pn+1)(ξx)− λ(n+ 1)!
= fn+1)(ξx)− f(x)− p(x)
wS(x)(n+ 1)!
de donde se deduce la igualdad (4.8), despejando el error f(x)− p(x).
�
Del Teorema 4.11 obtenemos una cota del error de interpolación de la norma uniforme de una función continua.
Cota en norma uniforme del error de interpolación
En las hipótesis de Teorema 4.11, se verifica:
maxx∈[a,b]
|f(x)− p(x)| ≤ Mn+1
(n+ 1)!maxx∈[a,b]
|wS(x)|, donde Mn+1 = maxx∈[a,b]
|fn+1)(x)| (4.9)
Anna Doubova - Dpto. EDAN - U. de Sevilla Cálculo Numérico I - Grado en Matemáticas

4. Interpolación e integración numérica 12
Ejemplo 4.12 Sean f(x) = ex y p ∈ Pn[x] el polinomio de interpolación de f en (n + 1) nodosdistintos del intervalo [a, b] ⊂ R. Obtener una cota del error de interpolación en norma uniforme.
La función f es infinitamente derivable en [a, b] ⊂ R y, en particular, f ∈ Cn+1([a, b]). Gracias a (4.9), tenemos
maxx∈[a,b]
|f(x)− p(x)| ≤ Mn+1
(n+ 1)!maxx∈[a,b]
|wS(x)|,
donde
Mn+1 = maxx∈[a,b]
|fn+1)(x)| = maxx∈[a,b]
|ex| = eb
y
maxx∈[a,b]
|wS(x)| = maxx∈[a,b]
|(x− x0)(x− x1) · · · (x− xn)| ≤ (b− a)n+1.
Luego
maxx∈[a,b]
|f(x)− p(x)| ≤ (b− a)n+1
(n+ 1)!eb
4.1.5 Interpolación global y convergencia uniforme
Sean f ∈ C0([a, b]), Sn = {x0, x1, · · · , xn} ⊆ [a, b] un soporte de n + 1 puntos distintos y pn el polinomio deinterpolación global asociado a f y Sn.Se plantea la siguiente cuestión: ¿Existe lım
n→∞pn(x) = f(x), para cada x ∈ [a, b] ?
La respuesta, en general es negativa. Un ejemplo importante debido a Runge (véase, por ejemplo [5]) muestraque para la función
f(x) =1
1 + x2, x ∈ [−5, 5]
y una sucesión de soportes equidistantes Sn ⊆ [−5, 5], se tiene que
lımn→∞
maxx∈[−5,5]
|f(x)− pn(x)| =∞.
Se observan grandes oscilaciones del error f − pn cerca de los extremos del intervalo. Estas oscilaciones sonconocidas como el fenómeno de Runge (ver la Figura 4.3).
−5 −4 −3 −2 −1 0 1 2 3 4 5−0.5
0
0.5
1
1.5
2
2.5
f(x)
Polinomio de interpolación
Puntos del soporte
Figura 4.3: Fenómeno de Runge.
Anna Doubova - Dpto. EDAN - U. de Sevilla Cálculo Numérico I - Grado en Matemáticas

4. Interpolación e integración numérica 13
4.1.6 Interpolación lineal a trozos y convergencia uniforme
El procedimiento de aproximar una función f ∈ C0([a, b]) mediante polinomio, pn, de interpolación globalasociado a un soporte de n+ 1 puntos cuando n es grande, tiene los siguientes inconvenientes:
No siempre se tiene convergencia en norma uniforme.
El cálculo y manejo de pn es costoso para n grande.
El problema de interpolación global, en general es inestable en el siguiente sentido: una pequeña pertur-bación en el valor asociado a un nodo, tiene un efecto global en el polinomio de interpolación, es decirpuede repercutir de forma considerable en todo el intervalo [a, b] (véase la Figura 4.4).
−5 −4 −3 −2 −1 0 1 2 3 4 5−4
−3
−2
−1
0
1
2
exacto
perturbado
Figura 4.4: Línea discontinua: el polinomio y = L3(x) de la base de Lagrangeasociado al tercer nodo de un soporte de 11 nodos equidistantes en [−5, 5].Línea continua: un polinomio de interpolación similar, pero con una pequeñaperturbación en el valor que toma en el tercer nodo.
Para evitar estos inconvenientes, en la práctica se usan procedimientos de interpolación a trozos. Parasimplificar, en este curso se considera sólo la interpolación lineal a trozos, que se explica a continuación.Consideramos n + 1 puntos (xi, yi), i = 0, 1, . . . , n con los valores de xi todos diferentes y ordenados en ordencreciente o decreciente, contenidos en un intervalo [a, b].Se llama interpolante lineal a trozos a la poligonal que sobre cada intervalo formado por dos valores de xconsecutivos: Ii = [xi−1, xi], i = 1, . . . , n está definida por el segmento que une los puntos (xi−1, yi−1) y (xi, yi)como en la Figura (4.12).
0 5 10 15−350
−300
−250
−200
−150
−100
−50
0
50
100
150
Polinomio de interpolación a trozos
Polinomio de interpolación global
Puntos del soporte
Figura 4.5: Interpolante lineal a trozos y el polinomio de interpolación globalasociados a 11 pares de puntos representados con marcadores.
Anna Doubova - Dpto. EDAN - U. de Sevilla Cálculo Numérico I - Grado en Matemáticas

4. Interpolación e integración numérica 14
Se dice que los puntos xi, forman una partición del intervalo [a, b], que se suele denotar por
P = {a = x0 < x1 < · · · < xn = b} y h = max1≤i≤n
(xi − xi−1)
es el diámetro de la partición.Es claro que la función interpolante lineal a trozos así construida, que vamos a denotar por ph, es única, puesTeorema 4.1 da la existencia y unicidad de la interpolante lineal en cada subintervalo Ii = [xi−1, xi]. Además,dicha función es globalmente continua en [a, b]: es un polinomio de grado 1 en cada Ii y, en los extremos de xide los intervalos Ii vale yi: ph(xi) = yi.
Se suele escribir que ph ∈ Vh es tal que
ph(xi) = yi, i = 0, 1, . . . , n
donde
Vh = {qh ∈ C0([a, b]) : qh|Ii ∈ P1[x], i = 1, . . . , n}
es un espacio formado por funciones continuas en todo el intervalo [a, b], cuya restricción a cada subintervalo Iies un polinomio de grado menor o igual que uno.
En el caso en el que yi = f(xi), i = 0, 1, . . . , n, para una f ∈ C0([a, b]), se trata de aproximar f en [a, b] por lainterpolante lineal a trozos, ph, haciendo h→ 0 (en particular n→ +∞).Se tiene el siguiente resultado de estimación del error de interpolación y convergencia en norma uniforme.
Teorema 4.13 Estimación del error de interpolación lineal a trozos y convergencia uniforme
Si f ∈ C2([a, b]), entonces
maxx∈[a,b]
|f(x)− ph(x)| ≤ M2
8h2, donde M2 = max
x∈[a,b]|f ′′(x)| (4.10)
En consecuencia,lımh→0
maxx∈[a,b]
|f(x)− ph(x)| = 0.
Demostración:Dado x ∈ [a, b], existe i = 1, . . . , n tal que x ∈ Ii = [xi−1, xi] . Luego, ph(x) = pi1(x), siendo pi1 ∈ P1[x] elpolinomio de interpolación lineal asociado al soporte {xi−1, xi}.Como f ∈ C2([a, b]), podemos usar el Teorema 4.11 sobre el error de interpolación de Lagrange en cadasubintervalo Ii , i = 1, . . . , n y afirmar que para todo x ∈ Ii, existe ξx ∈ (xi−1, xi) tal que
f(x)− ph(x) =f ′′(ξx)
2(x− xi−1)(x− xi)
De donde,
maxx∈Ii|f(x)− ph(x)| ≤ M2
2maxx∈Ii|(x− xi−1)(x− xi)| =
M2
2
(xi − xi−1)2
4≤ M2
8h2.
Como esta cota es cierta en cada uno de los subintervalos Ii, obtenemos la estimación (4.10) del teorema yterminamos la demostración.
�
Observación: Gracias a la estimación (4.10) podemos deducir que la convergencia es cuadrática, en parti-cular si se duplica el número de puntos (es decir si h se divide por dos aproximadamente), entonces el error deinterpolación lineal a trozos maxx∈[a,b] |f(x)− ph(x)| se divide por 4, aproximadamente.
Anna Doubova - Dpto. EDAN - U. de Sevilla Cálculo Numérico I - Grado en Matemáticas

4. Interpolación e integración numérica 15
4.2 Introducción a la integración numérica
El objetivo de esta sección es aproximar numéricamente la integral definida de una función f : [a, b] ⊂ R 7→ R
en un intervalo [a, b]:
I(f) =
∫ b
a
f(x) dx. (4.11)
Geométricamente, (si f ≥ 0) la integral definida es el área de la región del plano delimitada por la gráfica de lafunción f , el eje de abscisas y las rectas verticales x = a y x = b (ver Figura 4.6).
a b
Figura 4.6: Área encerrada entre la gráfica de la función f , el eje de abscisas ylas rectas x = a y x = b.
Si se conoce una primitiva F de la función f , se puede calcular el valor de I(f) mediante la Regla de Barrow:
I(f) =
∫ b
a
f(x) dx = F (b)− F (a).
En la mayoría de los casos, sin embargo, no se puede utilizar esta fórmula, ya que no se conoce dicha primitiva.Es posible, por ejemplo, que no se conozca la expresión matemática de la función f , sino sólo sus valores endeterminados puntos, recogidos de un experimento. Pero también hay funciones (de apariencia sencilla) paralas que se puede demostrar que no tienen ninguna primitiva que pueda escribirse en términos de funcioneselementales (por ejemplo f(x) = e−x
2
).
La integración numérica es una herramienta de las matemáticas que proporciona fórmulas y técnicas paracalcular aproximaciones de integrales definidas. Gracias a ella se pueden calcular, bien es cierto que de formaaproximada, valores de integrales definidas que no pueden calcularse analíticamente y, sobre todo, se puederealizar ese cálculo en un ordenador.
4.2.1 Fórmulas de cuadratura. Orden
Las fórmulas que proporcionan una aproximación del valor de una integral definida se conocen con el nombrede fórmulas de cuadratura o fórmulas de integración numérica.
En sus versiones más sencillas, estas fórmulas aproximan el área bajo la curva por el área, «parecida», de unparalelogramo. Esto sólo proporciona una buena aproximación si la base del paralelogramo es pequeña. Porello, las fórmulas verdaderamente útiles aproximan la integral definida mediante una suma finita de áreas deparalelogramos de «base pequeña», conocidas como fórmulas de cuadratura compuestas que se consideraránen la Sección 4.2.6 (véanse las Figuras 4.7 y 4.8).
Anna Doubova - Dpto. EDAN - U. de Sevilla Cálculo Numérico I - Grado en Matemáticas

4. Interpolación e integración numérica 16
a b
Figura 4.7: El área bajo la curva se aproxima porel área del rectángulo de base el segmento [a, b] yaltura f(a).
a b
Figura 4.8: El área se aproxima mediante una su-ma finita de áreas de rectángulos similares al dela Figura 4.7, pero de base «pequeña».
Fórmulas de cuadratura
Sean f ∈ C0([a, b]) y {x0 < x1 < · · · < xn} ⊆ [a, b] . Se denomina fórmula de integración numérica a laexpresión
I∗(f) =
n∑k=0
αkf(xk). (4.12)
Los valores αk ∈ R y xk ∈ [a, b], k = 0, . . . , n son los pesos y los nodos asociados a I∗(f), respectivamente.
Las fórmulas de cuadratura varían unas unas de otras en la forma de elegir los puntos {x0 < x1 < · · · < xn} enel intervalo [a, b] y los coeficientes αk , k = 0, 1, . . . , n.
Para medir el grado de exactitud con que una fórmula de integración numérica aproxima la integra definida, seintroducen los conceptos del orden y del error.
Error y orden
Llamaremos error en una fórmula de cuadratura a
E(f) = I(f)− I∗(f) =
∫ b
a
f(x) dx−n∑k=0
αkf(xk).
Diremos que una fórmula de cuadratura es de orden m ∈ N∪ {0} (o que es exacta para polinomios de gradom) si {
E(p) = 0, para cada p ∈ Pm[x]
E(q) 6= 0, para algún q ∈ Pm+1[x]⇔
{E(xk) = 0, para k = 0, 1, . . . ,m
E(xm+1) 6= 0,(4.13)
lo cual significa que la fórmula en cuestión proporciona el valor exacto de la integral definida cuando se utilizacon una función f que es un polinomio de grado menor o igual que m y no proporciona, en general, el valorexacto para polinomios de grado mayor que m.
Anna Doubova - Dpto. EDAN - U. de Sevilla Cálculo Numérico I - Grado en Matemáticas

4. Interpolación e integración numérica 17
4.2.2 Fórmulas de cuadratura elementales
1. Fórmulas de los rectángulos son las fórmulas más sencillas:
∫ b
a
f(x) dx ≈ I1(f) = (b− a)f(a),
∫ b
a
f(x) dx ≈ I2(f) = (b− a)f(b). (4.14)
En el primer caso se aproxima la integral por el área del rectángulo de base [a, b] y altura f(a) y en elsegundo por el de altura f(b) (ver Figuras 4.9 y 4.10).
Es obvio que ambas son de orden cero, es decir, exactas para polinomios constantes.
a b
Figura 4.9: Fórmula del rectángulo de altura f(a).
a b
Figura 4.10: Fórmula del rectángulo de altura f(b).
2. Fórmula del punto medio es similar a las anteriores pero tomando como altura del rectángulo el valorde f en el punto medio del intervalo (ver la Figura 4.11):∫ b
a
f(x) dx ≈ I3(f) = (b− a)f(a+ b
2
). (4.15)
Esta fórmula es de orden 1 (exacta para polinomios de grado menor igual que 1):
E(1) =
∫ b
a
dx− I3(1) = (b− a)− (b− a) = 0
E(x) =
∫ b
a
x dx− I3(x) =
[1
2(b2 − a2)
]−[(b− a)
(a+ b)
2
]= 0
E(x2) =
∫ b
a
x2 dx− I3(x2) =
[1
3(b3 − a3)
]−[
1
4(b− a)(a+ b)2
]6= 0
(a + b)/2a b
Figura 4.11: Fórmula del punto medio.
a b
Figura 4.12: Fórmula del trapecio.
Anna Doubova - Dpto. EDAN - U. de Sevilla Cálculo Numérico I - Grado en Matemáticas

4. Interpolación e integración numérica 18
3. Fórmula del trapecio aproxima la integral por el área del trapecio mostrado en la Figura 4.12:∫ b
a
f(x) dx ≈ I4(f) =b− a
2( f(a) + f(b) ). (4.16)
Esta fórmula también es de orden 1:
E(1) =
∫ b
a
dx− I4(1) = (b− a)−[b− a
22
]= 0
E(x) =
∫ b
a
x dx− I4(x) =
[1
2(b2 − a2)
]−[b− a
2(a+ b)
]= 0
E(x2) =
∫ b
a
x2 dx− I4(x2) =
[1
3(b3 − a3)
]−[b− a
2(a2 + b2)
]6= 0
4. Fórmula de Simpson aproxima la integral de f por el área encerrada bajo un arco de parábola que coincidecon f en tres puntos: los extremos del intervalo [a, b] y su punto medio (ver la Figura 4.13).∫ b
a
f(x) dx ≈ I5(f) =b− a
6
(f(a) + 4f
(a+ b
2
)+ f(b)
). (4.17)
Razonando como antes, es posible comprobar, que la fórmula de cuadratura de Simpson es de orden 3, esdecir es exacta para polinomios de grado 3.La fórmula de Simpson es la de mayor orden, de entre todas las fórmulas simples arriba consideradas.
(a + b)/2a b
Figura 4.13: Fórmula de Simpson.
Ejemplo 4.14 Usando las fórmulas de cuadratura elementales, calcular el valor aproximado
del la integral I(f) =
∫ 1
0
cos(2x) dx
Se observa que el valor exacto es I(f) =
∫ 1
0
cos(2x) dx =1
2sen(2) = 0.4546
1. Fórmulas de los rectángulos:
I1(f) = cos(0) = 1, I2(f) = cos(2) = −0.4161
2. Fórmula del punto medio: I3(f) = cos(1) = 0.5403
3. Fórmula del trapecio:
I4(f) =1
2(cos(0) + cos(2)) = 0.2919,
4. Fórmula de Simpson:
I5(f) =1
6(cos(0) + 4 cos(1) + cos(2)) = 0.4575.
Anna Doubova - Dpto. EDAN - U. de Sevilla Cálculo Numérico I - Grado en Matemáticas

4. Interpolación e integración numérica 19
El Ejemplo 4.14 muestra que la aproximación proporcionada por las fórmulas simples, no es muy satisfactoria, engeneral, de hecho en la práctica las que se usan, son fórmulas compuestas que se consideran en la Sección 4.2.6.
Es posible proponer otras fórmulas de cuadratura del estilo de las anteriores, por ejemplo utilizando el valor dela función en más puntos, o también, eligiendo los puntos de manera óptima para conseguir que la fórmula decuadratura asociada sea del mayor orden posible. Pero ese estudio queda fuera del ámbito de estas notas. Paramás detalles se pueden consultar, por ejemplo las referencias [3] y [6].
Consideramos en la siguiente sección fórmulas de cuadratura que provienen de integrar un polinomio de inter-polación, dichas fórmulas son conocidas como fórmulas de integración numérica de tipo interpolatorio.
4.2.3 Fórmulas de cuadratura de tipo interpolatorio (f.c.t.i)
Fórmulas de cuadratura de tipo interpolatorio
Sean f ∈ C0([a, b]), S = {x0 < x1 < · · · < xn} ⊆ [a, b] y pn(x) el polinomio de interpolación asociado a f y aS. Diremos que una fórmula de cuadratura I∗(f) con n+ 1 nodos, es de tipo interpolatorio (f.c.t.i.) si
I∗(f) =
∫ b
a
pn(x) dx. (4.18)
Los puntos del soporte xk, k = 0, 1, . . . , n del polinomio de interpolación son los nodos de la f.c.t.i.Veamos cómo se pueden calcular los pesos. En virtud de (4.4) el polinomio de interpolación pn se expresarespecto de la base de Lagrange (Lk)nk=0 como
pn(x) =
n∑k=0
f(xk)Lk(x), (4.19)
donde los Lk vienen dados mediante (4.5). Luego, sustituyendo (4.19) en (4.18), se tiene
I∗(f) =
n∑k=0
f(xk)
∫ b
a
Lk(x) dx.
En consecuencia, una f.c.t.i. es un caso particular de fórmula de cuadratura asociada a los nodos de interpolacióncuyos pesos son
αk =
∫ b
a
Lk(x) dx, k = 0, . . . , n. (4.20)
Se observa que los pesos αk son independientes de la función f , luego una vez calculados, proporcionan unafórmula que se puede aplicar a cualquier función f .
Ejemplo 4.15 Determinar los pesos α0 y α1 para que la fórmula de cuadraturaI∗(f) = α0f(a) + α1f(b) sea del tipo interpolatorio.
Sean x0 = a y x1 = b. Usando (4.20) y que
L0(x) =x− x1x0 − x1
=x− ba− b
, L1(x) =x− x0x1 − x0
=x− ab− a
,
tenemos
α0 =
∫ b
a
x− ba− b
dx =b− a
2, α1 =
∫ b
a
x− ab− a
dx =b− a
2,
de donde obtenemos la fórmula del trapecio:
I∗(f) =(b− a)
2(f(a) + f(b))
Anna Doubova - Dpto. EDAN - U. de Sevilla Cálculo Numérico I - Grado en Matemáticas

4. Interpolación e integración numérica 20
Es claro que una f.c.t.i con n+ 1 nodos es siempre de orden ≥ n. En efecto, tenemos para todo q ∈ Pn[x]
E(q) = I(q)− I∗(q) =
∫ b
a
q(x) dx−∫ b
a
pn(x) dx = 0,
puesto que pn ∈ Pn[x] es el polinomio de interpolación de q ∈ Pn[x] asociado a n+1 puntos {x0 < x1 . . . < xn},es decir pn ∈ Pn[x] es tal que pn(xi) = q(xi), luego necesariamente pn(x) ≡ q(x).De hecho se tiene el siguiente resultado:
Teorema 4.16 Existencia y unicidad de una f.c.t.i de orden ≥ n
Fijados cualesquiera n + 1 nodos distintos {x0 < x1 < · · · < xn} ⊆ [a, b], existe una única fórmula decuadratura de orden ≥ n, que es la correspondiente f.c.t.i.
Demostración:
Sea I∗(f) =
n∑k=0
αkf(xk) una fórmula de cuadratura cualquiera, con n+ 1 nodos, de orden ≥ n.
Usando (4.13), y observando la siguiente equivalencia:
E(1) = 0 ⇐⇒ α0 + α1 + · · ·+ αn = b− a,
E(x) = 0 ⇐⇒ α0x0 + α1x1 + · · ·+ αnxn =b2 − a2
2,
. . . ⇐⇒ . . .
E(xn) = 0 ⇐⇒ α0xn0 + α1x
n1 + · · ·+ αnx
nn =
bn+1 − an+1
n+ 1,
(4.21)
se obtiene un sistema lineal de n + 1 ecuaciones con n + 1 incógnitas, que son los pesos α0 , α1 , . . . , αn . Lamatriz del sistema es de tipo Vandermonde, luego es regular, pues los xk , k = 0, . . . , n, son distintos entre sí.Entonces, existe una única solución de este sistema lineal que proporciona los pesos αk, luego existe una únicafórmula de cuadratura de orden ≥ n asociada a los nodos {x0 < x1 < · · · < xn}, que debe coincidir con laf.c.t.i., puesto que ésta ya sabemos que es de orden ≥ n.
�
Observaciones:
1. Hemos visto que una fórmula de cuadratura con (n+ 1) nodos es una f.c.t.i. ⇔ tiene ordende precisión ≥ n.
2. Las fórmulas (4.20) son un método de calcular los pesos de una f.c.t.i. La demostración anterior proporcionaotra forma de calcular los pesos de una f.c.t.i., una vez fijados los nodos, que consiste en resolver el sistemalineal (4.21). Este método es conocido como el método de los coeficientes indeterminados.
Ejemplo 4.17 Determinar los pesos α0 y α1 para que la fórmula de cuadraturaI∗(f) = α0f(a) + α1f(b) sea de orden máximo.
Buscamos los pesos α0 y α1 tales que la fórmula de cuadratura I∗(f) = α0f(a)+α1f(b) sea de orden máximo.Las primeras ecuaciones de (4.21) se escriben como{
α0 + α1 = b− a,α0 a+ α1 b =
1
2(b2 − a2),
de donde obtenemos que α0 = α1 = (b− a)/2 , es decir se trata de la fórmula del trapecio.Además α0 a
2 +α1 b2 6= (b3− a3)/3, luego la fórmula del trapecio es exactamente de orden 1, por tanto es una
f.c.t.i. (n = 1, 2 nodos).
Anna Doubova - Dpto. EDAN - U. de Sevilla Cálculo Numérico I - Grado en Matemáticas

4. Interpolación e integración numérica 21
El análisis del orden de las fórmulas de cuadratura elementales hecho en la Sección 4.2.2 justifica que las fórmulaselementales consideradas hasta ahora son todas del tipo interpolatorio.
4.2.4 Análisis del error en las f.c.t.i
Usando la expresión del Teorema 4.11 sobre el error de interpolación (es decir, para todo x ∈ [a, b], existeξx ∈ (a, b) tal que se verifica (4.8)), podemos escribir
E(f) =
∫ b
a
f(x) dx−∫ b
a
pn(x) dx
=
∫ b
a
(f − pn)(x) dx =
∫ b
a
f (n+1)(ξx)
(n+ 1)!wS(x) dx,
(4.22)
luego el error de integración es la integral del error de interpolación. De aquí, tenemos una cota del error.
Proposición 4.18 Una cota del errorSea f ∈ Cn+1([a, b]), entonces
|E(f)| ≤ Mn+1
(n+ 1)!
∫ b
a
|wS(x)| dx, donde Mn+1 = maxx∈[a,b]
|fn+1)(x)|.
Para obtener una expresión más explícita para el error de integración que (4.22), se necesitan dos resultadosauxiliares de tipo valor intermedio que presentamos a continuación.
Lema 4.19 (Versión continua)
Sean f, g ∈ C0([a, b]) con g ≥ 0 en [a, b] y∫ b
a
g(x) dx > 0 (o bien g ≤ 0 en [a, b] y∫ b
a
g(x) dx < 0). Entonces,
existe η ∈ [a, b] tal que ∫ b
a
f(x)g(x) dx = f(η)
∫ b
a
g(x) dx.
Demostración:
Supongamos, por ejemplo, que g ≥ 0 en [a, b] y∫ b
a
g(x) dx > 0. Como f ∈ C0([a, b]), existen m1 = mınx∈[a,b]
f(x)
y m2 = maxx∈[a,b]
f(x). Entonces tenemos
m1 g(x) ≤ f(x)g(x) ≤ m2 g(x), ∀x ∈ [a, b]
Entonces, integrando en [a, b] obtenemos
m1 ≤
∫ b
a
f(x)g(x) dx∫ b
a
g(x) dx
≤ m2 .
A partir de aquí, se deduce el resultado del lema aplicando el Teorema del Valor Intermedio a f(x), es decir porser f continua, alcanza todos los valores comprendidos entre m1 y m2: existe η ∈ [a, b] tal que
f(η) =
∫ b
a
f(x)g(x) dx∫ b
a
g(x) dx
.
�
Anna Doubova - Dpto. EDAN - U. de Sevilla Cálculo Numérico I - Grado en Matemáticas

4. Interpolación e integración numérica 22
Lema 4.20 (Versión discreta)Sean f ∈ C0([a, b]), x1, . . . , xp ∈ [a, b] y b1, . . . , bp > 0 (o bien b1, . . . , bp < 0). Entonces, existe ξ ∈ [a, b] tal que
p∑k=1
bkf(xk) = f(ξ)
p∑k=1
bk .
La demostración de este resultado es análoga a la demostración del resultado anterior.
Las formulas de cuadratura elementales consideradas en la Sección 4.2.2 son f.c.t.i. con nodos equidistantes. Estetipo de fórmulas son conocidas como fórmulas de cuadratura de Newton-Côtes. Existe un resultado generalque muestra la expresión explícita del error para las fórmulas de Newton-Côtes (cerradas y abiertas) con (n+1)nodos. El enunciado y la demostración de este resultado son algo complicados y se escapan del objetivo de estecurso. Para más detalles, se recomienda consultar [3] y[5].
Para simplificar el análisis del error, vamos a presentar su expresión explícita sólo para algunas formulas decuadratura elementales consideradas hasta ahora, haciendo su demostración directamente en cada caso.
4.2.5 Error en las fórmulas de cuadratura elementales
1. Fórmulas de los rectángulos Si f ∈ C1([a, b]), existe un punto ξ ∈ [a, b] tal que
∫ b
a
f(x) dx = (b− a)f(a) + Era con Era =f ′(ξ)
2(b− a)2
∫ b
a
f(x) dx = (b− a)f(b) + Erb con Erb = −f′(ξ)
2(b− a)2
(4.23)
En efecto, integrando por partes, tenemos la siguiente igualdad:
∫ b
a
f ′(x)(x−a) dx = f(b)(b−a)−∫ b
a
f(x) dx ⇒∫ b
a
f(x) dx = f(b)(b−a)−∫ b
a
f ′(x)(x−a) dx. (4.24)
Tenemos que f ′ ∈ C0([a, b]) y la función (x − a) ≥ 0 en [a, b] y∫ b
a
(x − a) dx > 0, luego aplicando el
Lema 4.19 del tipo valor intermedio en la versión integral, deducimos que existe ξ ∈ [a, b] tal que
∫ b
a
f ′(x)(x− a) dx = f ′(ξ)
∫ b
a
(x− a) dx = f ′(ξ)(x− a)2
2
∣∣∣∣ba
=f ′(ξ)
2(b− a)2
Luego sustituyendo la expresión obtenida en (4.24), llegamos a
∫ b
a
f(x) dx = f(b)(b− a)−∫ b
a
f ′(x)(x− a) dx = f(b)(b− a)− f ′(ξ)
2(b− a)2
que es la segunda relación de (4.23). La primera se demuestra de manera análoga.
Anna Doubova - Dpto. EDAN - U. de Sevilla Cálculo Numérico I - Grado en Matemáticas

4. Interpolación e integración numérica 23
2. Fórmula del punto medio Si f ∈ C2([a, b]), existe un punto ξ ∈ [a, b] tal que
∫ b
a
f(x) dx = (b− a)f(a+ b
2
)+ Epm con Epm =
f ′′(ξ)
24(b− a)3 (4.25)
En efecto, sea c = (a + b)/2. Haciendo el desarrollo de Taylor hasta el orden 2 de la función f en unentorno del punto c, tenemos: para todo x ∈ [a, b], existe ξx ∈ (a, b) tal que
f(x) = f(c) + f ′(c)(x− c) +1
2f ′′(ξx)(x− c)2.
Integrando entre a y b ambos miembros de esta igualdad y usando que∫ b
a
(x− c) dx = 0, se llega a
∫ b
a
f(x) dx = f(c)(b− a) + f ′(c)
∫ b
a
(x− c) dx+1
2
∫ b
a
f ′′(ξx)(x− c)2 dx
= f(c)(b− a) +1
2
∫ b
a
f ′′(ξx)(x− c)2 dx.(4.26)
Ahora bien, observemos que no podemos aplicar directamente el Lema 4.20, como antes, puesto que nosabemos si la función x 7→ f ′′(ξx) es continua o no, pero sí reproducir el argumento que se hace en lademostración del Lema 4.19.
Más concretamente, la función (x − c)2 ≥ 0 y∫ b
a
(x − c)2 dx > 0. Como f ′′ ∈ C0([a, b]), existen
m = mınx∈[a,b]
f ′′(x) y M = maxx∈[a,b]
f ′′(x). Entonces tenemos
m ≤ f ′′(ξx) ≤M ⇒ m(x− c)2 ≤ f ′′(ξx)(x− c)2 ≤M(x− c)2.
De donde, integrando, se tiene
m ≤
∫ b
a
f ′′(ξx)(x− c)2 dx∫ b
a
(x− c)2 dx≤M.
Aplicando el Teorema del Valor Intermedio a f ′′(x) (f ′′ continua, alcanza todos los valores comprendidosentre m y M): existe ξ ∈ [a, b] tal que
f ′′(ξ) =
∫ b
a
f ′′(ξx)(x− c)2 dx∫ b
a
(x− c)2 dx⇒
∫ b
a
f ′′(ξx)(x− c)2 dx = f ′′(ξ)
∫ b
a
(x− c)2 dx.
En consecuencia, (4.26) implica
∫ b
a
f(x) dx = f(c)(b− a) +1
2f ′′(ξ)
∫ b
a
(x− c)2 dx = f(c)(b− a) +1
2f ′′(ξ)
(x− c)3
3
∣∣∣∣ba
= f(a+ b
2
)(b− a) +
1
24f ′′(ξ)(b− a)3,
que es lo que queríamos demostrar.
Anna Doubova - Dpto. EDAN - U. de Sevilla Cálculo Numérico I - Grado en Matemáticas

4. Interpolación e integración numérica 24
3. Fórmula del trapecio Si f ∈ C2([a, b]), existe un punto ξ ∈ [a, b] tal que∫ b
a
f(x) dx =b− a
2(f(a) + f(b)) + Et con Et = −f
′′(ξ)
12(b− a)3 (4.27)
En efecto, razonando de manera similar a la fórmula de los rectángulos, integrando dos veces por partes:∫ b
a
f ′′(x)(x− a)(x− b) dx = −(b− a)(f(a) + f(b)) + 2
∫ b
a
f(x) dx
⇒∫ b
a
f(x) dx =b− a
2(f(a) + f(b)) +
1
2
∫ b
a
f ′′(x)(x− a)(x− b) dx. (4.28)
Se tiene que f ′′ ∈ C0([a, b]) y la función (x− a)(x− b) ≤ 0 en [a, b] y∫ b
a
(x− a)(x− b) dx < 0. Por tanto,
aplicando de nuevo el Lema 4.19, obtenemos que existe ξ ∈ [a, b] tal que
∫ b
a
f ′′(x)(x−a)(x−b) dx = f ′′(ξ)
∫ b
a
(x−a)(x−b) dx = f ′′(ξ)
(x3
3− ax2
2− bx2
2+ abx
)∣∣∣∣ba
= −f′′(ξ)
6(b−a)3
Luego, de (4.28) de obtiene∫ b
a
f(x) dx =b− a
2(f(a) + f(b))− f ′′(ξ)
12(b− a)3
4. Fórmula de Simpson Si f ∈ C4([a, b]), existe un punto ξ ∈ [a, b] tal que
∫ b
a
f(x) dx =b− a
6
(f(a) + 4f
(a+ b
2
)+ f(b)
)+ Es con Es = −f
iv)(ξ)
2880(b− a)5 (4.29)
La deducción del error en este caso es bastante más laboriosa (ver Ejercicio 3.43 en [3]) que en los casosanteriores y no se va a hacer aquí.
Observemos que en el caso de las fórmulas de integración numérica simples, conocer la expresión explícita delerror no sirve de mucho, ya que la longitud del intervalo (b − a) no es un valor pequeño, en general. Estainformación es de utilidad en las fórmulas de integración compuestas que pasamos a explicar a continuación.
4.2.6 Integración a trozos y fórmulas compuestas
Las f.c.t.i. simples con n+1 nodos, para n grande implican la realización de muchas operaciones y, en particular,el cálculo de los pesos es muy costoso. Además, en general no se tiene garantizada convergencia, es decirI∗n(f) 6→ I(f) cuando n→∞ (véase Sección 4.1.5).Por esta razón, en la práctica, se usa la integración a trozos (o integración compuesta), cuya idea de basees descomponer la integral definida en una suma de integrales sobre subintervalos «pequeños» y aplicar lasfórmulas anteriores sobre cada uno de ellos. Más concretamente,
Se fija una partición P = {a = x0 < x1 < . . . < xn = b} de n+ 1 puntos del intervalo [a, b]
Se descompone la integral en [a, b] en suma de integrales en los subintervalos Ii = [xi−1, xi]:
I(f) =
∫ b
a
f(x) dx =
n∑i=1
∫ xi
xi−1
f(x) dx. (4.30)
En en cada subintervalo Ii , i = 1, . . . , n se utilizan algunas de las fórmulas elementales junto con el error:∫ b
a
f(x) dx =
n∑i=1
∫ xi
xi−1
f(x) dx =
n∑i=1
(FC|Ii + Error|Ii) (4.31)
Anna Doubova - Dpto. EDAN - U. de Sevilla Cálculo Numérico I - Grado en Matemáticas

4. Interpolación e integración numérica 25
Llamando h = max1≤i≤n
(xi−xi−1) al diámetro de la partición P, se trata de aproximar I(f) haciendo h→ 0.
Las fórmulas mostradas en la Sección 4.2.2 dan lugar, así, a las siguientes fórmulas compuestas.
1. Fórmulas de los rectángulos compuestas: (ver las Figuras 4.14 y 4.15):∫ b
a
f(x) dx ≈ Ic1(f) =
n∑i=1
I1(f)|[xi−1,xi] =
n∑i=1
(xi − xi−1)f(xi−1)
Si f ∈ C1([a, b]), existe ξ ∈ [a, b] tal que el error viene dado por
Ecra =
n∑i=1
f ′(ξi)
2(xi − xi−1)2 =
f ′(ξ)
2
n∑i=1
(xi − xi−1)2.
Aquí, hemos aplicado el Lema 4.20 del tipo valor medio en su versión discreta.
Análogamente, obtenemos
∫ b
a
f(x) dx ≈ Ic2(f) =
n∑i=1
I2(f)|[xi−1,xi] =
n∑i=1
(xi − xi−1)f(xi)
siendo la expresión del error de la forma
Ecrb =
n∑i=1
−f′(ξi)
2(xi − xi−1)2 = −f
′(ξ)
2
n∑i=1
(xi − xi−1)2.
En el caso particular en que todos los sub-intervalos tienen la misma longitud, h, como en la Figura 4.15,las fórmulas anteriores se simplifican, tomando la forma:
Ic1(f) =
n∑i=1
(xi − xi−1)f(xi−1) =
n∑i=1
h f(xi−1) = h
n∑i=1
f(xi−1), Ecra =f(ξ)
2
n∑i=1
h2 =f ′(ξ)
2h(b− a)
Ic2(f) =
n∑i=1
(xi − xi−1)f(xi) =
n∑i=1
h f(xi) = h
n∑i=1
f(xi), Ecrb = −f(ξ)
2
n∑i=1
h2 = −f′(ξ)
2h(b− a)
x0 x1 x2 xn
Figura 4.14: Fórmula de los rectángulos compues-ta (Ic1).
h hx0 xn
Figura 4.15: Fórmula de los rectángulos compues-ta (Ic2). Subintervalos de igual longitud.
Anna Doubova - Dpto. EDAN - U. de Sevilla Cálculo Numérico I - Grado en Matemáticas

4. Interpolación e integración numérica 26
2. Fórmula del punto medio compuesta (ver la Figura 4.16). Si f ∈ C2([a, b]), existe ξ ∈ [a, b] tal que
∫ b
a
f(x) dx ≈ Ic3(f) =
n∑i=1
I3(f)|[xi−1,xi] =
n∑i=1
(xi − xi−1)f(xi−1 + xi
2
), Ecpm =
f ′′(ξ)
24
n∑i=1
(xi − xi−1)3
que, en el caso en que todos los subintervalos son de igual longitud se escribe:
∫ b
a
f(x) dx ≈ Ic3(f) =
n∑i=1
h f(xi−1 + xi
2
)= h
n∑i=1
f(xi−1 + xi
2
), Ecpm =
f ′′(ξ)
24h2(b− a)
h hx0 xn
Figura 4.16: Fórmula del punto medio compuesta.
h hx0 xn
Figura 4.17: Fórmula de los trapecios compuesta.
3. Fórmula de los trapecios compuesta se construye de igual forma (ver la Figura 4.17): Si f ∈ C2([a, b]),existe ξ ∈ [a, b] tal que
∫ b
a
f(x) dx ≈ Ic4(f) =
n∑i=1
I4(f)|[xi−1,xi] =
n∑i=1
(xi − xi−1)f(xi−1) + f(xi)
2, Ect = −f
′′(ξ)
12
n∑i=1
(xi − xi−1)3
y, en el caso de subintervalos de igual longitud,
Ic4(f) =
n∑i=1
(xi − xi−1)f(xi−1) + f(xi)
2=
n∑i=1
hf(xi−1) + f(xi)
2
=h
2
n∑i=1
(f(xi−1) + f(xi)) =h
2
(f(x0) + 2
n−1∑i=1
f(xi) + f(xn)
), Ect = −f
′′(ξ)
12h2(b− a)
4. Fórmula de Simpson compuesta se escribe:
∫ b
a
f(x) dx ≈ Ic5(f) =
n∑i=1
I5(f)|[xi−1,xi]
=
n∑i=1
(xi − xi−1)
6
(f(xi−1) + 4 f
(xi−1 + xi
2
)+ f(xi)
),
Si f ∈ C4([a, b]), existe ξ ∈ [a, b] tal que el error viene dado por
Ecs = −fiv)(ξ)
2880
n∑i=1
(xi − xi−1)5
Anna Doubova - Dpto. EDAN - U. de Sevilla Cálculo Numérico I - Grado en Matemáticas

4. Interpolación e integración numérica 27
En el caso de sub-intervalos de igual longitud, se transforma en:
Ic5(f) =
n∑i=1
h
6
(f(xi−1) + 4 f
(xi−1 + xi
2
)+ f(xi)
)
=h
6
n∑i=1
(f(xi−1) + 4 f
(xi−1 + xi
2
)+ f(xi)
)
=h
6
{f(x0) + f(xn) + 2
n−1∑i=1
f(xi) + 4
n∑i=1
f
(xi−1 + xi
2
)},
siendo el error de la forma
Ecs = −fiv)(ξ)
2880h4(b− a)
Ejemplo 4.21 Aproximar∫ 1
0
cos(2x) dx del Ejemplo 4.14 usando las fórmulas del punto medio,
del trapecio y de Simpson compuestas con 6 nodos igualmente espaciados.
Consideramos una partición uniforme del intervalo [0, 1] con 5 subintervalos de igual longitud h = 1/5 = 0.2y {xi}5i=0 = {0, 0.2, 0.4, 0.6, 0.8, 1}.
Usando la fórmula del puntos medio compuesta con 5 subintervalos, se obtiene:∫ 1
0
cos(2x) dx ≈ h
5∑i=1
cos
(2xi−1 + xi
2
)= 0.2
5∑i=1
cos(xi−1 + xi)
= 0.2 (cos(0.2) + cos(0.6) + cos(1) + cos(1.4) + cos(1.8)) = 0.4577
Utilizando ahora la fórmula del trapecio compuesta también con 5 subintervalos de igual longitud se llega a :∫ 1
0
cos(2x) dx ≈ h
2
5∑i=1
(cos(2xi−1) + cos(2xi))
= 0.1(
cos(0) + 2(
cos(0.4) + cos(0.8) + cos(1.2) + cos(1.6))
+ cos(2))
= 0.4486
Finalmente, con la fórmula de Simpson compuesta con los mismos subintervalos se obtiene∫ 1
0
cos(2x) dx ≈ h
6
5∑i=1
(cos(2xi−1) + 4 cos
(2xi−1 + xi
2
)+ cos(2xi)
)= 0.0333 {cos(0) + 2(cos(0.4) + cos(0.8) + cos(1.2) + cos(1.6)) + cos(2)
+ 4(cos(0.2) + cos(0.6) + cos(1) + cos(1.4) + cos(1.8))} = 0.4546
Mirando a las expresiones del error en las fórmulas de integración numérica compuestas observamos que el errortiende a cero como las potencias de h: cuánto mayor sea la potencia de h, más rápidamente se va cero el errory, por tanto, la fórmula correspondiente aproxima mejor (con mayor precisión) la integral definida. Es claro quepara hacer tender h a cero lo que hay que hacer es aumentar el número de subintervalos. Es posible, utilizandola expresión del error, determinar el número de subintervalos necesarios para calcular un valor aproximado de laintegral con un error con cierta precisión. Para mostrar este hecho se presentan a continuación algunos ejemplos.
Anna Doubova - Dpto. EDAN - U. de Sevilla Cálculo Numérico I - Grado en Matemáticas

4. Interpolación e integración numérica 28
Ejemplo 4.22 Determinar el número de subintervalos necesarios para calcular un valor apro-
ximado de∫ 1
0
cos(2x) dx con un error menor o igual que 10−4 aplicando la fórmula compuesta
del trapecio y de Simpson con intervalos igualmente espaciados.
Es claro que cuanto más pequeño es el error, más se parece el valor aproximado al exacto.
Tenemos que [a, b] = [0, 1], h =b− an
=2− 1
n=
1
n, f(x) = cos(2x) y f ′′(x) = −4 cos(2x). La expresión del
error para la fórmula del trapecio compuesta es
Ect = −f′′(ξ)
12h2(b− a) para algún ξ ∈ (0, 1),
⇒ |Ect | =∣∣∣∣−4 cos(2ξ)
12h2(b− a)
∣∣∣∣ =
∣∣∣∣cos(2ξ)
3
(1− 0)
n2
∣∣∣∣ =
∣∣∣∣cos(2ξ)
3n2
∣∣∣∣ ≤ 1
3n2maxx∈[0,1]
| cos(2x)| ≤ 1
3n2,
pues | cos(x)| ≤ 1 para todo x. Para asegurar que |Ect | ≤ 10−4, basta tomar n tal que
1
3n2≤ 10−4 ⇒ n2 ≥ 104
3≈ 3333 ⇒ n ≥
√3333 ≈ 57.7321,
es decir hacen falta al menos 58 subintervalos.
En el caso de la fórmula compuesta de Simpson, tenemos f ′′′(x) = 8 sen(2x), f iv(x) = 16 cos(2x) y el errorviene dado por
|Ecs | =∣∣∣∣f iv(ξ)2880
h4(b− a)
∣∣∣∣ =
∣∣∣∣16 cos(2ξ)
2880
1
n4
∣∣∣∣ =
∣∣∣∣cos(2ξ)
180n4
∣∣∣∣ para algún ξ ∈ (0, 1).
Para conseguir una precisión de 10−4 en la fórmula de Simpson, basta tomar n tal que
1
180n4≤ 10−4 ⇒ n4 ≥ 104
180≈ 55.56 ⇒ n ≥ (55.56)1/4 ≈ 2.7302,
es decir hacen falta al menos 3 subintervalos. Se observa que el valor de n que se obtiene en este caso es muchomenor que en el caso de la fórmula del trapecio compuesta. Este hecho confirma que la fórmula de Simpson esde mayor orden que la del trapecio y, en consecuencia aproxima mejor la integral.
Ejemplo 4.23 Determinar el número de subintervalos necesarios para calcular un valor
aproximado de∫ 2
1
ex dx con un error menor o igual que 10−2 aplicando la fórmula compuesta
del punto medio con intervalos igualmente espaciados.
Tenemos que [a, b] = [1, 2], h =b− an
=2− 1
n=
1
ny f ′′(x) = ex para todo x. Usando la expresión del error
en la fórmula del punto medio compuesta:
Ecpm =f ′′(ξ)
24h2(b− a) para algún ξ ∈ (1, 2)
⇒ |Ecpm| =∣∣∣∣f ′′(ξ)24
h2(b− a)
∣∣∣∣ =eξ
24
(2− 1)
n2=
eξ
24n2≤ 1
24n2maxx∈[1,2]
ex ≤ e2
24n2,
ya que ex es una función creciente y positiva y eξ < e2 para todo x ∈ [1, 2]. Buscamos n tal que
∣∣Ecpm∣∣ ≤ 10−2 ⇒ e2
24n2≤ 10−2 ⇒ n2 ≥ 102e2
24= 30.7877 ⇒ n ≥
√30.7877 ≈ 5.55
es decir hacen falta al menos 6 subintervalos. Se observa que la precisión de aproximación que hemos buscadoen este ejemplo es peor que en el Ejemplo 4.22.
Anna Doubova - Dpto. EDAN - U. de Sevilla Cálculo Numérico I - Grado en Matemáticas

Bibliografía
[1] A. Aubanell, A. Benseny, A. Delshams, Útiles básicos de Cálculo Numérico, Labor, Barcelona, 1993.
[2] R.L. Burden, J.D. Faires, Análisis Numérico, Grupo Editorial Iberoamérica, México, Madrid, 2011.
[3] A. Doubova, F. Guillén González, Un Curso de Cálculo Numérico: Interpolación, Aproximación, Integracióny Resolución de Ecuaciones Diferenciales, Secretariado de Publicaciones de la Universidad de Sevilla, 2007.
[4] J.A. Infante del Río, J.M. Rey Cabezas, Métodos Numéricos. Teoría, problemas y prácticas con MATLAB,Ediciones Pirámide, Madrid, 1999.
[5] E. Isaacson, H.B. Keller, Analysis of Numerical Methods, John Wiley and Sons, New York, 1966.
[6] J.H. Mathews, K.D. Fink, Métodos Numéricos con MATLAB, Prentice Hall, Madrid, 2000.
[7] J. Rappaz, M. Picasso, Introduction à l’analyse numérique, Presses polytechniques et universitaires roman-des, Lausanne, 2004.
29

Índice general
4. Interpolación e integración numérica 14.1. Introducción a la interpolación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
4.1.1. Interpolación global de Lagrange . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24.1.2. Existencia y unicidad del polinomio de interpolación de Lagrange . . . . . . . . . . . . . . 34.1.3. Algoritmos de construcción del polinomio de interpolación . . . . . . . . . . . . . . . . . 44.1.4. Aproximación de una función continua por un polinomio de interpolación . . . . . . . . . 94.1.5. Interpolación global y convergencia uniforme . . . . . . . . . . . . . . . . . . . . . . . . . 124.1.6. Interpolación lineal a trozos y convergencia uniforme . . . . . . . . . . . . . . . . . . . . . 13
4.2. Introducción a la integración numérica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154.2.1. Fórmulas de cuadratura. Orden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154.2.2. Fórmulas de cuadratura elementales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174.2.3. Fórmulas de cuadratura de tipo interpolatorio (f.c.t.i) . . . . . . . . . . . . . . . . . . . . 194.2.4. Análisis del error en las f.c.t.i . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 214.2.5. Error en las fórmulas de cuadratura elementales . . . . . . . . . . . . . . . . . . . . . . . 224.2.6. Integración a trozos y fórmulas compuestas . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Bibliografía 28
30