Embed Size (px)
Citation preview

Autonomous Robots 11, 195–200, 2001c© 2001 Kluwer Academic Publishers. Manufactured in The Netherlands.
Introduction to the Special Issue on Biomorphic Robotics
CHRISTOPHER ASSAD AND MITRA J. HARTMANNJet Propulsion Laboratory, California Institute of Technology, MS 303-300, 4800 Oak Grove Drive,
Pasadena, CA 91109, USA
M. ANTHONY LEWISIguana Robotics, Inc., P.O. Box 628, Mahomet, IL 61853, USA
1. Introduction
This special issue of Autonomous Robots is based onpresentations given at the NASA workshop on Biomor-phic Robotics1 hosted in August 2000 by the Jet Propul-sion Laboratory at the California Institute of Technol-ogy. The purpose of the workshop was to bring togethera representative sample of work in biomorphic roboticslikely to have an impact in future NASA missions.
Biomorphic robotics can be broadly defined as thetransfer of biological principles to robotics and the useof robots to evaluate and test computational modelsin biology. Robotics has historically been grounded incontrol theory, generally meant for the precise controlof machines in well-defined, predictable environments.In contrast, biological systems are uniquely competentat interactions with unpredictable and dynamic envi-ronments. Thus, a primary goal of biomorphic roboticsis to imbue robotic systems with the capabilities of bi-ological organisms, to successfully maneuver withinand explore unpredictable environments.
This body of work is of great interest to NASA andthe Jet Propulsion Laboratory. In particular, the sur-faces of other planets are not well characterized, arelikely to be environmentally hostile, and will demand ahigh degree of autonomy. Robots for space explorationare thus faced with unique challenges, and a biomor-phic approach may be particularly appropriate.
2. NASA Motivation
Two of NASA’s prime areas of interest, the searchfor life beyond Earth and the human exploration of
space, are linked by a common objective—the searchfor extraterrestrial water. Life as we know it dependsupon the availability of water, and two planetary bodieswithin our solar system stand out as prime candidatesin the search: Mars and Europa. These two targets werehighlighted in opening-session talks by Dan McCleese,the chief scientist for the Mars Exploration Program,and Torrence Johnson, project scientist for the EuropaOrbiter mission.
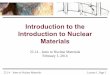
McCleese explained that a significant challenge forMars exploration is to determine whether water existsin accessible forms near the surface. Recent imagesfrom the Mars Global Surveyor have suggested thatwater may be trapped in channels only a few hundredmeters below the surface, as evidenced by geologicallyyoung gullies and debris fans emanating from the steepwalls of craters near the southern pole (Fig. 1; Malinand Edgett, 2000). To deliver sensors to these sites tosearch for groundwater more closely will require roversthat can negotiate the martian cliffs. The crater wallsare typically several hundred meters high, and havesteep slopes of 30 to 90 degrees. Robots built withadvanced mobility to function in extreme environmentswill be necessary for the exploration of such difficultterrain.
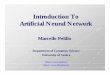
Johnson described the challenges in exploringEuropa, a moon of Jupiter and the other leading candi-date in the search for extraterrestrial water. The Galileospacecraft in orbit around Jupiter has provided intrigu-ing evidence to support the hypothesis that Europa has aliquid ocean (Fig. 2). The surface geology and fracturepatterns suggest a frozen ice field churned by Jupiter’sgreat tidal forces, and magnetic field fluctuations

196 Assad, Hartmann and Lewis
Figure 1. Gullies formed on the walls of martian craters (left) have features (right) that suggest that water flowed from the cliff face.
Figure 2. (Left) Fracture patterns on Europa’s surface, showing crustal plates ranging up to 13 km across, suggest an icy surface with anunderlying ocean. (Right) Artist’s conception of an autonomous hydrobot exploring Europa’s ocean. Such a submersible could be augmentedwith biomorphic solutions.
indicate the presence of a large liquid conductor, suchas salt water, beneath Europa’s surface (Kivelson et al.,2000). Goals of future missions will be to character-ize the frozen crust of the ocean, to drill through thatcrust, and to characterize the global ocean. This for-bidding terrain will require advanced robotic systemsto explore the geophysical, geochemical and biolog-ical aspects of the ocean—its organic chemistry andpotential biomarkers.
3. Technology Requirementsand Biomorphic Solutions
Whether negotiating a steep precipice on Mars or dan-gerous ice fissures on Europa, future robotic rovers far
from Earth must carry a range of autonomous capabili-ties and built-in intelligence, and NASA is now lookingfor biological inspirations. Leon Alkalai, head of theCenter for Integrated Space Microsystems (CISM),spoke about the requirements for these new technolo-gies for deep space missions: the autonomous and in-telligent systems must also be long term, reliable, andlow power. Deep space exploration will not only re-quire revolutionary computing, but also tolerance fortemperature and radiation extremes.
Closer to Earth, the human exploration of space alsorequires more capable robotics, and shares many ofthe technology challenges of the deep space explo-ration missions. For example, Neville Marzwell of theAdvanced Concepts office at JPL presented a movieof Robonaut, a humanoid robot under development

Introduction 197
at Johnson Space Center to meet NASA’s increasingrequirements for extravehicular activities (e.g., space-walks). Robonaut and other similar telerobotic or au-tonomous robotic assistants may benefit from biomor-phically inspired advances in sensing, manipulation,and intelligent control.
The examples above illustrate that successful ex-ploratory systems for future NASA missions must in-clude the following attributes:
• Functionality—perform critical scientific measure-ments about life, climate, geology.
• Performance—incorporate capable methods forlanding, deployment and navigation in extremeenvironments.
• Reliability—operate safely in hazardous terrain.
The challenge for biomorphic robotics research is todemonstrate that biologically-inspired solutions canincorporate these attributes and contribute significantnew advantages for space exploration.
4. Overview of Workshop Presentations
This special issue features short papers by more than20 speakers at the workshop. The sessions representedin this issue are: (1) Biomorphic Locomotion, (2)Neuromorphic Sensory Systems, (3) Biomorphic Ac-tuation, (4) Bio-Inspired Sensory-Motor control, (5)Learning and Navigation. A sixth session, Learningand Control of Robot Behaviors, is not representedhere because work in that session has been (or soonwill be) published elsewhere. The reader is referredto work by Arkin (ICRA 2001 proceedings), and pa-pers by Mataric and Stoica that will be presented ina special issue of Autonomous Robots on the topicof humanoid robotics. Below, we briefly describe thepotential contributions of biomorphic robots for eachsession included here.
4.1. Locomotion in Biomorphic Robotic Systems
Given the success of the Mars Sojourner rover, futuremissions are likely to employ increasingly sophisti-cated rovers. Both wheeled and legged locomotionoffer distinct advantages, but we would like to pointout certain unique capabilities of limbed (biomorphic)systems.
For enhanced mobility, space applications will re-quire a transition from wheeled based technology,
useful in environments with full gravity, to brachi-ating robots, which may excel in microgravity forin-space operations. Limbed locomotion naturally sug-gests multiple use capability: most primates use theirforelimbs not only for locomotion, but also for ma-nipulation of small objects. Kennedy and colleaguesdescribe such a multilimbed robot with legs that canconvert into tool-using manipulators. In contrast, amanipulator on a wheeled system may be used onlysporadically, and thus becomes a payload during lo-comotion. By capitalizing on the dual-use strategy ofprimate forelimbs, this inherent inefficiency is avoidedin Kennedy’s work.
The article by Altendorfer et al. demonstrates an au-tonomous 6-legged robot made to run with dynamicsthat resemble a pogo stick. Their work suggests thatwith the proper design, many seemingly complex ar-ticulate systems will exhibit such dynamics, and thusbe simpler to control. The resulting robot can quicklymove over terrain that would challenge most wheeledvehicles.
Quinn and colleagues expand the discussion ofbiologically-inspired legged robots. They present anoverview of a series of robots inspired by the me-chanical architecture and neural circuitry of one of theworld’s most successful insects: the cockroach. Eachof the robots in the series represents a potential im-provement in agility, strength, and/or autonomy.
For legged robots to locomote most effectively, theymust anticipate interactions with the environment. Hu-mans and many animals rely principally on vision asthe most important distal sense, but a key problem isthe quick acquisition of relevant information about theenvironment and the integration of visual input with lo-comotion to achieve smooth modulations of gait. Lewisand Simo describe perceptual components needed forfast visually-guided locomotion, including learning toanticipate and step over obstacles, as well as an inno-vative biologically inspired custom aVLSI locomotorcontroller chip.
4.2. Neuromorphic Sensory Systems
Because vision is such an important distal sense, visualprocessing dominates current missions. In additionto vision, however, animals rely heavily on comple-mentary senses to establish an awareness of the en-vironment. Presentations in the neuromorphic sensorysystems session included work not only on vision, butalso on audition, tactile sensing, and echolocation.

198 Assad, Hartmann and Lewis
High-speed visual processing of images using con-ventional technology is computationally intensive andrequires relatively large amounts of power. Two papersin this issue examine biologically-inspired approachesto the design of more efficient visual sensor systems.Etienne-Cummings et al. present several different2D visual processing chips that perform flexibly-programmed image processing functions as an image isserially read from the chip. This can provide significantsavings in pixel density and accumulated mismatcherror in the processing while using very low power.Landolt and Mitros present a 2D vision sensor that cantake advantage of measurable mechanical vibrationsto estimate image intensity at a single pixel with mul-tiple photoreceptors. This technique not only reducescomponent mismatch error, it can produce higher reso-lution images than the photoreceptor density normallysupports.
In the auditory domain, Horiuchi and Hynna presenta VLSI-based implementation of the neural circuitrysupporting echolocation in bats. This work includes thedevelopment of high-frequency silicon cochleae chipsand a generally applicable sound-localization architec-ture. In tactile sensing, Hartmann presents an investi-gation of the rat whisker system and its use for activesensing in environmental conditions where vision islimited. In particular, the paper discusses several typesof information that rats can extract with their whiskers,and the scanning strategies that rats use with their dif-ferent types of whiskers.
Related to both auditory and tactile sensing, thelateral line system in fish was presented in the con-text of fluid-flow measurement. Coombs presents aninvestigation of the neuromast system (hair-cell-likestructures) to measure tiny fluid-flows produced byprey animals in the water. Open, fluid-filled canals inthe skin were shown to measure pressure-gradient (oracceleration), while superficial neuromasts on the sur-face of the skin were shown to be sensitive to the velo-city of the fluid. These two measurements are usedto localize prey movements. In another talk at theworkshop, Anderson et al. found evidence that fish ac-tively control the boundary flow around the skin (seeAnderson et al., 2001).
In dark murky waters, certain fish have devel-oped active electroreception abilities. This enableslocalization of potential prey using electric fields.MacIver and Nelson describe a robotic implementa-tion of this electrosense, and investigate the strate-gies that the black ghost knifefish uses to actively
control the sensory information it receives about itsprey.
The presentations in the sensory systems sessionall suggested that sensory strategies found in animalsmight provide excellent guidance in producing vi-able planetary explorers. Multiple sensory systems willclearly be needed to explore environments as disparateas the dry, rocky surface of Mars and the icy oceans ofEuropa.
4.3. Biomorphic Actuation
Biological muscle and associated tissue provides manyof the wonderful properties associated with animalmechanics. These include a high strength to actuatorweight ratio, compliance, high speed, and energy stor-age and recovery. Hannaford and colleagues describeprogress in creating physical models of biological mus-cle and muscle spindle sensors. Their system includesa braided pneumatic (McKibben) actuator with me-chanical dampening that mimics muscle tissue. In thenext talk, Bar-Cohen described a competing technol-ogy for artificial muscle—electroactive polymers (seeBar-Cohen, 2001). Biologically inspired muscles willlikely be one of the most important aspects of therobotics mechanical embodiment.
4.4. Bio-Inspired Sensory-Motor Control
The cerebellum plays a key role in the control of agilemovements, and thus many of the talks in the sensory-motor control session concerned models of cerebellarfunction. Spoelstra and Arbib present a computationalmodel of how the cerebellum may adaptively adjustmovement commands generated elsewhere in the ner-vous system. The model results match experimentalevidence, which implies that the cerebellum adjustsmotor output rather than representations of movementgoals.
Paulin and colleagues present a computational modelof cerebellum as a dynamical state estimator by analyz-ing spike activity in vestibular neurons. The model isbased on the observation that individual sensory spikescan be treated as measurements of sensory state, andthat conventional statistical and dynamical methodscan be adapted to construct computational neural mod-els that have spikes as operands. The result illustratesthe potential for using this approach to analyze andmodel computation by spiking neurons.

Introduction 199
Models of cerebellar function and learning remainstrongly influenced by the early theoretical work ofMarr and Albus, and Ito’s subsequent experimental pro-gram which focused on the nature of plasticity at paral-lel fiber—Purkinje cell synapses. Assad points out thatbecause the ascending branches of granule cell axonsmake numerous synaptic contacts with Purkinje cells,the functional organization of cerebellar cortex is com-putationally richer and more dynamic than the basiccircuit assumed in the Marr-Albus-Ito paradigm.
Marr originally suggested that cerebellar granulecells separate incoming sensory signals into more read-ily distinguishable patterns. Coenen and colleagues in-vestigated the implications of synaptic plasticity in thegranular layer. Their work shows how unsupervisedlearning in the granular layer could lead to sparse,statistically independent coding of input signals. Thiswould enhance learning in subsequent cerebellar cir-cuits by minimizing destructive interference betweeninput signals.
The work presented in this area represents only aportion of the range of ideas and methods used to inves-tigate and model cerebellar function. Cerebellar mod-eling is an active research area, and there is an excitingsense that realistic computational models are now pos-sible with today’s tools.
In other sensory-motor control research areas, Hartyet al. describe a collective control strategy for point-ing and reaching behavior in the presence of obstacles.Their work shows that simple rules that control onlythe local movements of individual arm segments canproduce a coordinated group behavior. This type ofcomputation may provide more flexible control for un-predictable and dynamic environments.
DeMarse and colleagues describe research that usesthe activity from living neurons to directly control thebehavior of a computer “animat,” which interacts with asimulated environment. Sensory feedback from the en-vironment is then used to directly stimulate the neurons,thus closing the loop between neurons and simulation.Understanding of how feedback changes the activityand connectivity within networks of neurons will al-most certainly shed light on the codes within thesecontrol networks.
4.5. Learning for Navigation
Uncertainty is the only certainty about the environ-ments of other planets. Successful navigation acrossuncertain terrain will require robots to adapt to the
circumstances of the environment, and make choicesconsistent with changing goals, destinations, and sur-face conditions. The talks in the navigation session of-fered a wide variety of solutions for these problems.
Evolutionary robotics offers a way to fundamentallyalter the computations a robot performs to achieve aspecified goal, without explicit models of the environ-ment or robot. Floreano and Urzelai present progress inevolutionary robotics that promises to speed the processof artificial evolution. The algorithm does not encode aparticular strategy that suits a particular environment,but rather forces the generation of individuals capa-ble of developing a strategy to cope with their localenvironments.
GPS is a well-known system for navigation on earth,but such systems require calculations involving abso-lute coordinates, and installing such systems on remoteplanets would be extremely expensive. Payton et al.demonstrate a multi-robot navigation system based on“virtual pheromones,” which are symbolic messagestied to the collective of robots, rather than to fixed lo-cations in the environment. This allows the robot col-lective to function as a distributed computing mesh,and may prove a cost-effective way to do navigationon distant planets.
Animals and humans navigate very effectively withthe aid of cognitive maps. Kuipers compares cogni-tive map-making in ants and humans with his SpatialSemantic Hierarchy for representing knowledge of theenvironment. He presents a computationally efficientand robust bio-inspired spatial behavior using cognitivemap learning that allows robots to move autonomouslyin unknown environments.
Active research at JPL is demonstrating bio-inspirednavigational strategies on flight-ready wheeled rovers.Tunstel describes an ethologically-motivated controlapproach that uses fuzzy logic to establish behavioralhierarchies for successful navigation. He employs ablend of local path planning and hierarchical action se-lection to solve local navigation problems. Huntsbergeralso uses both fuzzy logic and a map-making memorysimilar to the Spatial Semantic Hierarchy in his im-plementation of the BISMARC system. BISMARC’sadditional action-selection mechanisms give it abroad system-wide scope that can be used to con-trol multiple robots performing cooperative navigationtasks.
The papers presented in this session show that nav-igation mechanisms inspired from biology can defini-tively be used to build adaptive, cost effective and

200 Assad, Hartmann and Lewis
robust navigation systems for future robotic explo-ration of unknown planetary environments.
5. Summary and Conclusions
Biological systems have attributes that are desirable inuncertain, potentially hostile worlds and in space. Thesix workshop sessions covered major issues in con-structing capable autonomous systems. Recent workin these fields indicates that strong and steady progresshas been made over the last decade. Undoubtedly,biomorphic robotics will become part of NASA’s reper-toire of technology aimed at understanding the solarsystem, and ultimately more about our origins andourselves.
Acknowledgments
We would like to thank all of the authors for their pa-tience during the review process and the preparation ofthis issue. We acknowledge their sometimes monumen-tal efforts in summarizing and distilling large bodies ofwork into the space provided. We are especially grate-ful for the excellent suggestions from the numerousanonymous reviewers who took time to carefully re-view the submitted articles. We also thank the editor-
in-chief, Professor George Bekey, for his encourage-ment, advice and assistance in preparing this issue.This workshop was sponsored by NASA and hostedby the Center for Integrated Space Microsystems andthe Office of Advanced Concepts and Technology In-novations at the Jet Propulsion Laboratory, CaliforniaInstitute of Technology. Student support was providedby Iguana Robotics, Inc.
Note
1. http://cism.jpl.nasa.gov/biocomputing/workshop
References
Anderson, E.J., McGillis, W.R., and Grosenbaugh, M.A. 2001.The boundary layer of swimming fish. Journal of ExperimentalBiology, 204:81–102.
Bar-Cohen, Y. (Ed.) 2001. Electroactive polymer (EAP) activators asartificial muscles: Reality, potential, and challenges, SPIE Press:Bellingham, Washington.
Kivelson, M.G., Khurana, K.K., Russell, C.T., Volwerk, M., Walker,R.J., and Zimmer, C. 2000. Galileo magnetometer measurements:A stronger case for a subsurface ocean at Europa. Science,289:1340–1343.
Malin, M.C. and Edgett, K.S. 2000. Evidence for recent ground-water seepage and surface runoff on Mars. Science, 288:2330–2335.