Embed Size (px)
Citation preview
ITS, Logistics & self-organization
Outcomes of challenge at TNO19-21 November 2012
Participants: Tariq van Rooijen (Mob), Laura Daniele (ICT), Jacueline de Putter (LOG), Tjerk Bijlsma (ITS), Teije Gorris (Mob), Lori Tavasszy , Zoltan Papp, Albert Veenstra, Egbert Guis, Maarten Oonk, Nico Zornig. Several external people were interviewed.
• Freight management• ERP/WMS integratie• Ketensynchronisatie
• Van TMS naar MTMS• Synchromodaliteit• Empty container trips
• Gekoppelde TMS / FMS• Capaciteitsveiling• Dynamische ritplanning
• Cooperatief VM• Cooperatief rijden• Verkeersinfo sourcing/productie
Org
aniza
tion
arch
itect
ure
Busi
ness
mod
els
Busi
ness
pro
cess
es
Dat
a Se
ts
IT S
oluti
ons
Secu
rity
Inte
rope
rabi
lity
Gov
erna
nce
ITS & Logistiek“anatomie”
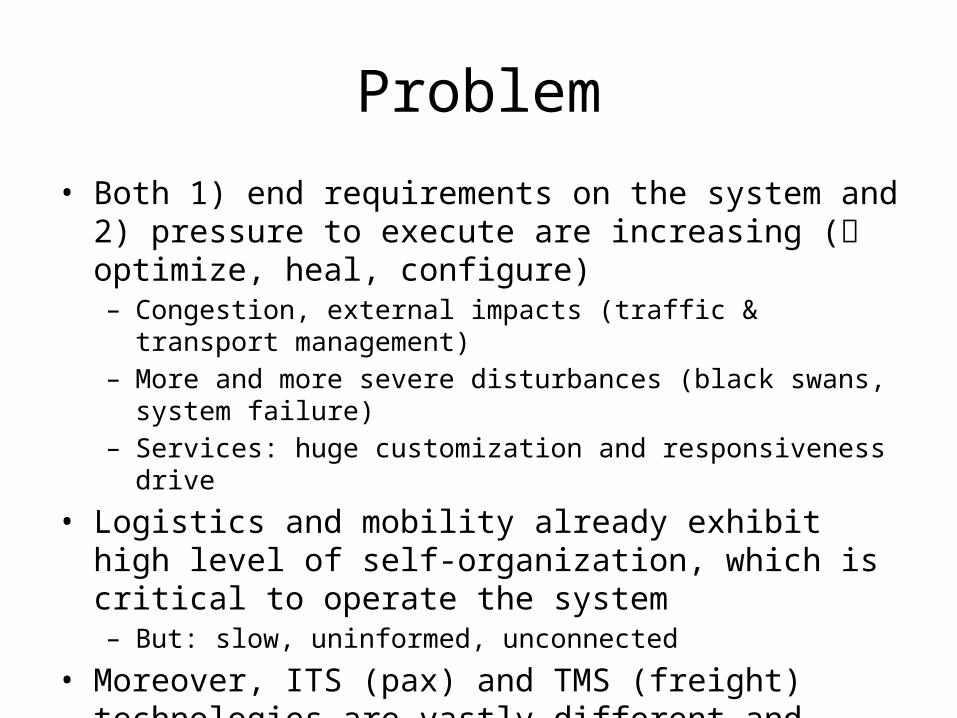
Problem
• Both 1) end requirements on the system and 2) pressure to execute are increasing ( optimize, heal, configure)– Congestion, external impacts (traffic & transport management)– More and more severe disturbances (black swans, system failure)– Services: huge customization and responsiveness drive
• Logistics and mobility already exhibit high level of self-organization, which is critical to operate the system– But: slow, uninformed, unconnected
• Moreover, ITS (pax) and TMS (freight) technologies are vastly different and central integration at a systems level is difficult if not undoable
Self-organizing capabilities need to improve
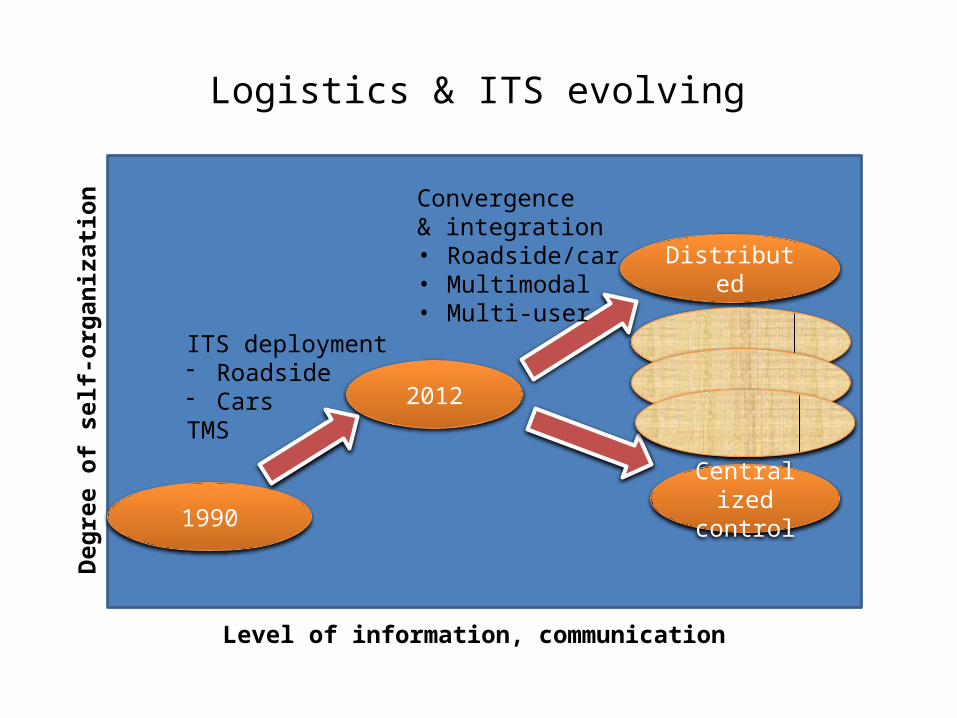
Logistics & ITS evolving
2012
Level of information, communication
Distributed
Deg
ree
of s
elf-o
rgan
izati
on
Centralizedcontrol1990
?ITS deployment- Roadside- CarsTMS
Convergence& integration• Roadside/car• Multimodal• Multi-user
Links between cooperative traffic systems and self-organization
Cooperative systems (make vehicles and infra cooperate):• Implement cooperation at the level of an acting entity
– Enable (local) system users to act• Relies on data streams from their environment• Are not necessarily decentralized• There is not necessarily a global order defined (e.g. CACC)
Opportunity:• CS can be a means to realize self-organization• CS can be part of a bottom-up approach for self-organization in
cooperative mobility/Intelligent traffic systems
Links between logistics systemsand self-organization
• SO already functions, albeit in “analogous” mode• Megatrend: automation and connection of transport and
warehouse management systems– Collaborative traffic information (e.g. GOFER)– Dynamic (synchromodal) transport management– Sharing/auctioning of transport capacity– Chain synchronization: from TMS/WMS links to 4C
• Opportunities & threats– Logistics IT may empower decentral agents – Centralization tendencies in IT are dominant on the short term!
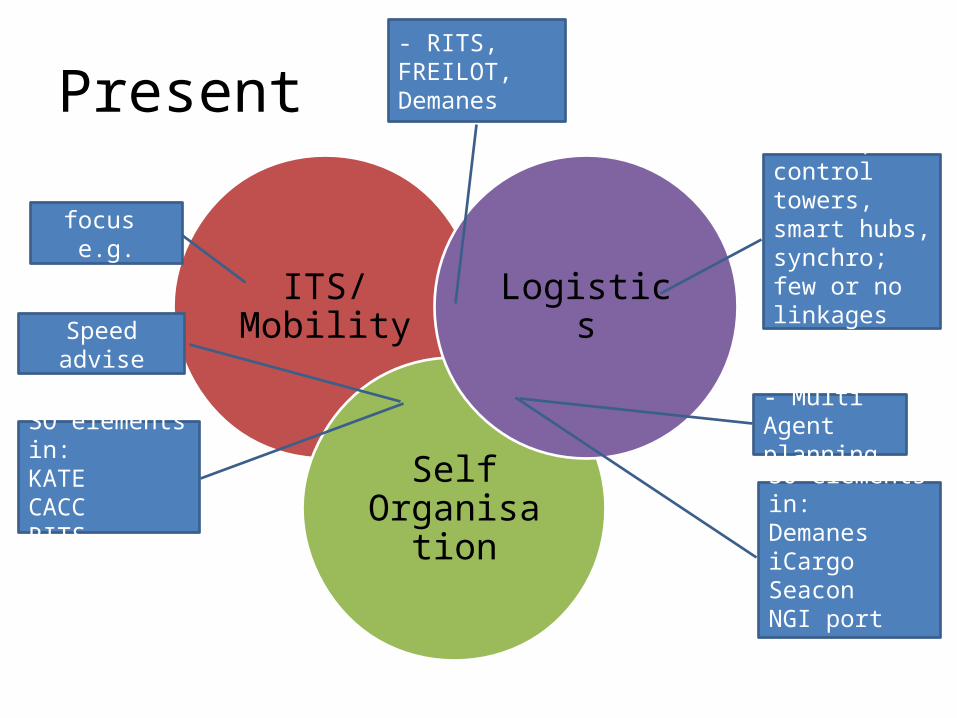
Present
ITS/Mobility
Self Organisation
Logistics
SO elements in:KATECACCRITS
- Multi Agent planning
ITS: car focus e.g.
modeller
- NLIP, control towers, smart hubs, synchro; few or no linkages with ITS
Speed advise
SO elements in: DemanesiCargoSeaconNGI port apps
- RITS, FREILOT, Demanes
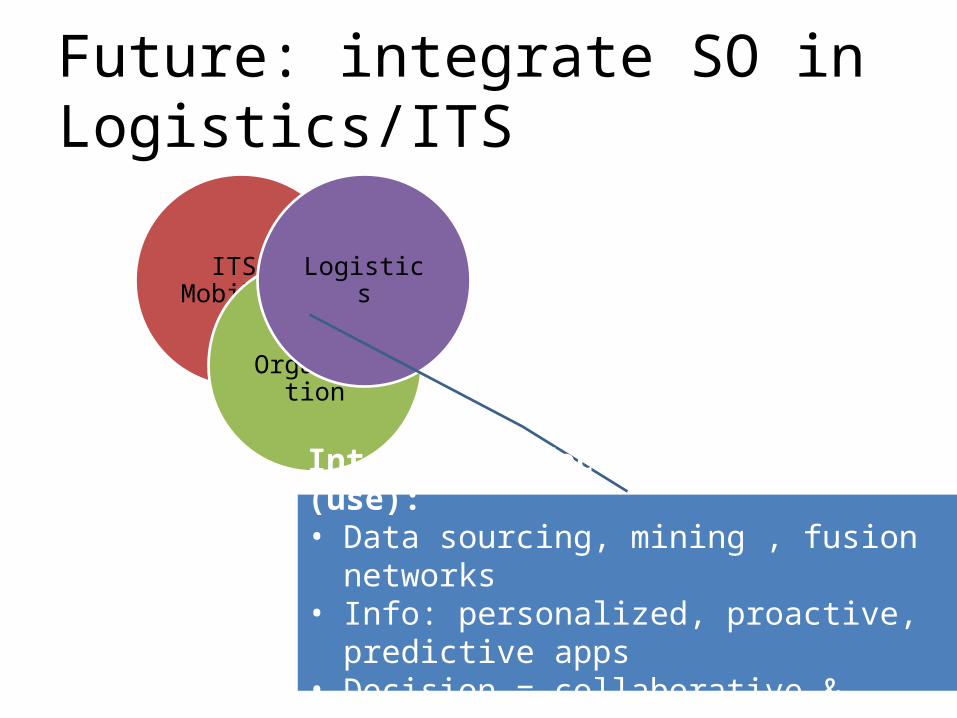
Future: integrate SO in Logistics/ITS
ITS/Mobility
Self Organisation
Logistics
Integration focus of technology (use):• Data sourcing, mining , fusion networks• Info: personalized, proactive, predictive apps • Decision = collaborative & agent based
Promising areas for SO in LOG/ITS
1. Urban area traffic optimisation2. Smart truck parking3. Platoon formation4. Travel prediction/re-routing (esp. after incidents)5. Terminal/road capacity management
• These problem areas are well known and many R&D projects have tried to tackle them.
• Focus has been very much on either passengers or trucks, however, and often from a centralized paradigm
• Suggested test areas for SO
1. Urban area traffic optimisationProblem:• Congestion related to amount of traffic and blockades• Freight and passenger actions are unconnected• Inflexible roundtrip planning for freight• Max emission levels exceeded frequently
Solutions: connected multimodal, multi-user traffic management based on joint “smart city” objectives. Automated, autonomous, objective led, route and parking guidance.
Prerequisites:• For freight: adaptive and collaborative tour planning
– Information sharing of routes and deliveries
• Customised traffic management based on individual needs (trucks, cars)• Traffic management based on KPI’s (priority, emissions)

2. Smart truck parkingProblem:• Drivers need to comply with driving time regulations• Trucks cannot find a suitable parking spot (=> safety, social issues)
Solutions: trucks inform each other on availability and quality. Slot management combined with routing and fleet management.
Prerequisites:• Dynamic information on supply and demand of parking space• High enough penetration rate (ubiquitous information devices)
• Barriers and gaps: Freedom of truck drivers, Investments in IT and enforcement, Data sourcing (sensoring)
3. Platoon formationProblem:• Trucks do not know how to set up a platoon
– Inefficient fuel use– Reduced throughput network
Solutions: trucks communicate their own position/destination and find each other in space and time to group and create platoons.
Prerequisites:• Mechanism to find trucks with same travel direction and dimensions at strategic locations• Reroute possible based upon platooning optimisation (dynamic planning)
Barriers & gaps • Splitting and (de-)merging assistant for platooning• Behaviour of other traffic• Willingness driver to be part of platoon
Case: 2-truck platoon• Evolution path: Single truck LHV (“1,5 truck, fixed”) 2-truck platoon
multiple truck platoon mixed platoon • NBT after LHV (LHV 10-15% lower costs; but acceptance in Europe limited)• Why 2TP
• more flexible than LHV in international use (decouple at border)• One truck unmanned: save driver time (share cabin) or…• …save driver if transports door2door by same carrier
• Platooning technology is there, but• Platoon preferably to be kept constant in traffic, thus…• …early formation and late brake up needed• Relatively easily organized within-company• (self-organizing) formation support needed for public system
port border
LHV Uniform platoon Mixed platoon
4. Travel prediction/responsivenessProblem:• Need for reliable, customised and predictive travel time• Need for more responsiveness in case of irregular situations
Solutions: dynamic truck route planning linked to customized travel prediction and state analysis.
Prerequisites:• Tool adapted to different transport types of users (LogiKate for logistic
companies and truck drivers)• Platform for handling information flows on traffic data• Customised advice depending on profiles• Data on OD’s, travel planning, characteristics, irregular situations
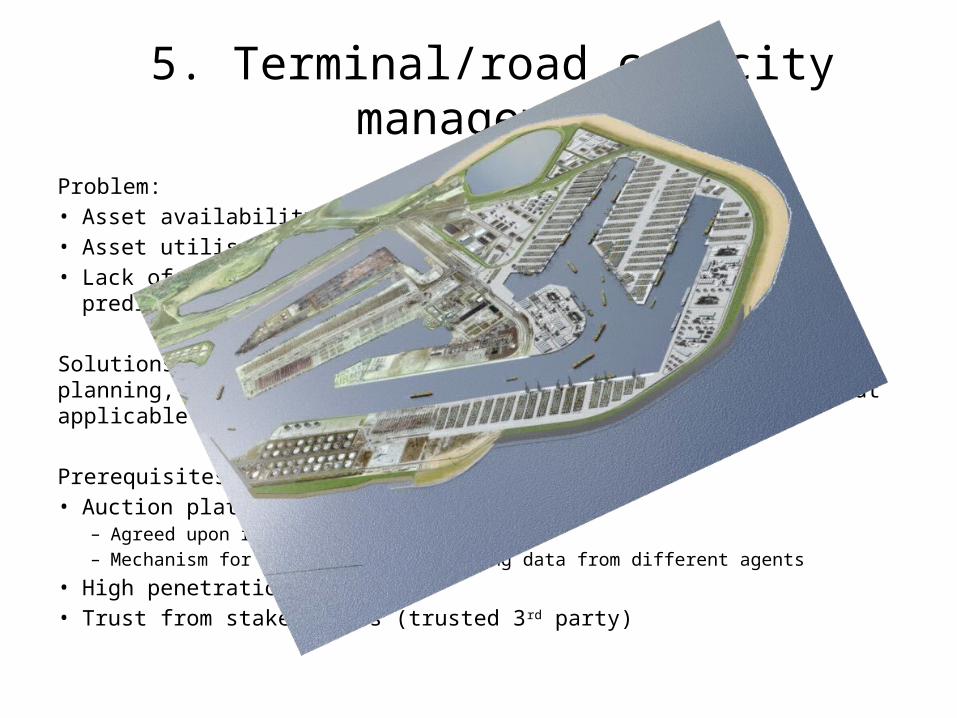
5. Terminal/road capacity management
Problem:• Asset availability not known at system level• Asset utilisation not optimal, not evenly distributed• Lack of reliability queuing, loading and arrival time prediction
Solutions: automated and dynamic matching of individual planning, booking and capacity. Example: PAT (inland wways, but applicable to trucks as well).
Prerequisites:• Auction platform for agents
– Agreed upon rules– Mechanism for sharing and integrating data from different agents
• High penetration rate • Trust from stakeholders (trusted 3rd party)
Follow-up activities
Investigate opportunities for co-financing project for Smart truck parking
Specific efforts on self-organization in living labs:• Travel prediction/responsiveness system• terminal capacity management in smart corridor and when
making ‘apps for the port’ • freight in new sensor city demonstration
Develop platoon formation within CS roadmap: new technology, longer term
ConclusionsCritical success factors- Decentralized decision making
- Scalable approach- Pave the road for using smart
agents/automation
- Information sharing- Via trusted 3rd party (human or bot),
parties dare to share information- Interface that does not require too
much competitive information
- Deployment- Current roadmaps fragmented- Thinking not based on SO ideas- Poor investment capability- Stepwise approach needed
• Merger of Co-operative driving and Logistics systems is near
• Search for decentralized solutions level, not centralized ones
• Self-organization requires specific architecture and apps
Five promising technologies1. Urban area traffic optimization2. Smart truck parking3. Platoon formation4. Travel prediction/responsiveness5. Terminal/road capacity
management





























