Embed Size (px)
Citation preview
Izbrana poglavja iz matematikeBF – Biologija
Matjaz Zeljko
Zapiski ob predavanjih v solskem letu 2009/2010
Izpis: 19. januar 2010
KAZALO 2
Kazalo
1 Stevila 51.1 Naravna stevila . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2 Cela stevila . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.3 Racionalna stevila . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.4 Realna stevila . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.5 Urejenost realnih stevil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.6 Omejene mnozice realnih stevil . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2 Mnozice 132.1 Mnozice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.2 Operacije z mnozicami . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.3 Preslikave med mnozicami . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.4 Moc mnozic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3 Kombinatorika 213.1 Prestevanja . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
4 Verjetnost 274.1 Osnovni pojmi in racunanje z dogodki . . . . . . . . . . . . . . . . . . . . . . . . 274.2 Osnovne lastnosti verjetnosti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 294.3 Algebra dogodkov . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 304.4 Lastnosti verjetnosti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 304.5 Pogojna verjetnost . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 324.6 Zaporedje neodvisnih dogodkov . . . . . . . . . . . . . . . . . . . . . . . . . . . . 354.7 Hardy-Weinbergov zakon . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
5 Matrike 385.1 Operacije z matrikami . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 385.2 Permutacije . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 435.3 Determinante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 445.4 Racunanje determinant . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 465.5 Razvoj po vrstici ali stolpcu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 485.6 Cramerjevo pravilo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 505.7 Gaussova metoda . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 535.8 Inverz matrike . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 605.9 Vektorski prostor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 655.10 Lastne vrednosti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 685.11 Leslijev model populacijske rasti . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
6 Zaporedja 756.1 Zaporedja . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 756.2 Rekurzivno podana zaporedja . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 896.3 Beverton–Holtov model populacijske rasti . . . . . . . . . . . . . . . . . . . . . . 92
7 Funkcije 937.1 Splosni pojem funkcije . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 937.2 Limita funkcije . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 987.3 Zveznost . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1037.4 Lastnosti zveznih funkcij . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
KAZALO 3
7.5 Zveznost elementarnih funkcij . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
8 Diferencialni racun 1148.1 Definicija odvoda . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1148.2 Geometricni pomen odvoda . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1188.3 Pravila za odvajanje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1188.4 Odvodi elementarnih funkcij . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1208.5 Diferencial funkcije . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1268.6 Lastnosti odvedljivih funkcij . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1288.7 Konveksnost, konkavnost, prevoji . . . . . . . . . . . . . . . . . . . . . . . . . . . 1348.8 Ekstremi funkcij . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1368.9 Risanje grafov funkcij . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1438.10 L’Hopitalovo pravilo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
9 Integralski racun 1519.1 Nedoloceni integral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1519.2 Pravila za integriranje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1529.3 Doloceni integral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1579.4 Geometrijski pomen integrala . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1599.5 Lastnosti dolocenega integrala . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1609.6 Zveza med dolocenim in nedolocenim integralom . . . . . . . . . . . . . . . . . . 1619.7 Racunanje dolocenega integrala . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1639.8 Posploseni integral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1679.9 Uporaba integrala . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
10 Vrste 18210.1 Stevilske vrste . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18210.2 Taylorjeva vrsta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193
11 Funkcije vec spremenljivk 20011.1 Splosni pojem funkcije . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20011.2 Odprte mnozice in okolice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20311.3 Zveznost . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20411.4 Parcialni odvodi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20711.5 Verizno pravilo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21411.6 Lokalni ekstremi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21611.7 Metoda najmanjsih kvadratov . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22111.8 Vezani ekstremi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222
12 Diferencialne enacbe 22712.1 Splosen pojem diferencialne enacbe . . . . . . . . . . . . . . . . . . . . . . . . . . 22712.2 Diferencialne enacbe prvega reda . . . . . . . . . . . . . . . . . . . . . . . . . . . 228
12.2.1 Enacba z locljivima spremenljivkama . . . . . . . . . . . . . . . . . . . . . 22912.3 Radioaktivni razpad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23112.4 Problem mesanja raztopin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23212.5 Linearna diferencialna enacba I. reda . . . . . . . . . . . . . . . . . . . . . . . . . 23312.6 Bernoullijeva enacba . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23412.7 Diferencialne enacbe visjih redov . . . . . . . . . . . . . . . . . . . . . . . . . . . 23512.8 Homogene linearne diferencialne enacbe II. reda . . . . . . . . . . . . . . . . . . . 236
12.8.1 Enacbe s konstantnimi koeficienti . . . . . . . . . . . . . . . . . . . . . . . 23712.9 Nehomogene linearne diferencialne enacbe II. reda . . . . . . . . . . . . . . . . . 238

KAZALO 4
12.10Nihanje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24212.11Sistemi diferencialnih enacb . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24512.12Sistem dveh diferencialnih enacb s konstantnimi koeficienti . . . . . . . . . . . . 24612.13Naravna rast . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24912.14Bartalanffyev model rasti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25012.15Verhulstov model rasti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 251
13 Primeri vprasanj za teoreticni del izpita 252

1 STEVILA 5
1 Stevila
1.1 Naravna stevila
Naravna stevila so stevila, s katerimi stejemo:
1, 2, 3, 4, . . .
Mnozico naravnih stevil {1, 2, 3, . . .} oznacimo z N. Naravna stevila lahko med seboj sestevamoin mnozimo. Vrstni red pri sestevanju in mnozenju ni pomemben, clene (pri sestevanju) alifaktorje (pri mnozenju) lahko poljubno zdruzujemo. Torej za vsaka tri naravna stevila a, b in cvelja
a+ b = b+ a,
ab = ba,
(a+ b) + c = a+ (b+ c),
(ab)c = a(bc).
Prvi dve lastnosti imenujemo komutativnost sestevanja oz. mnozenja, drugi dve lastnosti paimenujemo asociativnost sestevanja oz. mnozenja.
Ce naravna stevila sestevamo in mnozimo, se moramo drzati dogovora o vrstnem redu ope-racij. Ker ima mnozenje prednost pred sestevanjem, je
a+ b · c = a+ (b · c),a · b+ c = (a · b) + c.
Ce zelimo najprej izracunati a+b in nato rezultat pomnoziti s c, zapisemo (a+b) ·c. V splosnemvelja pravilo o distributivnosti mnozenja:
(a+ b)c = ac+ bc,
a(b+ c) = ab+ ac.
Nacelo matematicne indukcijeNaravna stevila so induktivna mnozica: ce je S ⊆ N taka podmnozica, da je 1 ∈ S in velja
sklep: ce n ∈ S, potem n+ 1 ∈ S, je S = N. Tej lastnosti pravimo tudi nacelo matematicneindukcije.
Zgled 1.1. Za vsako naravno stevilo n velja
1 + 2 + . . .+ n =n(n+ 1)
2. (1)
Resitev. Oznacimo S = {n ∈ N; 1 + 2 + . . .+ n = n(n+1)2 }. Mnozica S je torej mnozica tistih
naravnih stevil, za katera drzi enakost (1). (Induktivna hipoteza je, da formula (1) drzi zadano stevilo n.)
Najprej preverimo, da je 1 ∈ S.Privzemimo sedaj, da je n ∈ S. Tedaj je 1 + 2 + . . . + n = n(n+1)
2 . Torej je (1 + 2 + . . . +
n) + (n + 1) = n(n+1)2 + (n + 1) = (n+1)(n+2)
2 , kar pomeni, da je tudi n + 1 ∈ S. Po nacelu
matematicne indukcije je S = N. Torej velja formula 1 + 2 + . . .+ n = n(n+1)2 za vsako naravno
stevilo n.Matematicno indukcijo lahko uporabimo tudi na mnozici N ∪ {0}.

1 STEVILA 6
Zgled 1.2. Naj bo q 6= 1. Za vsako stevilo n ∈ N ∪ {0} velja
a+ aq + . . .+ aqn = aqn+1 − 1
q − 1.
Resitev. Za n = 0 seveda velja a = a q0+1−1q−1 = a.
V dokazu induktivnega koraka pa opazimo, da je
a+ aq + . . . + aqn + aqn+1 = aqn+1 − 1
q − 1+ aqn+1 =
= aqn+1 − 1 + (q − 1)qn+1
q − 1=
= aqn+2 − 1
q − 1.
Peanovi aksiomiNaravna stevila aksiomaticno vpeljemo s pomocjo Peanovih aksiomov:
• 1 je naravno stevilo.
• Vsakemu naravnemu stevilu n pripada natancno doloceno naravno stevilo n+, ki ga ime-nujemo naslednik stevila n.
• Stevilo 1 ni naslednik nobenega naravnega stevila.
• [Nacelo indukcije] Ce je S ⊆ N taka podmnozica, da je 1 ∈ S in velja sklep: ce n ∈ S,potem n+ ∈ S, je S = N.
S Peanovimi aksiomi lahko v mnozico naravnih stevil vpeljemo tudi sestevanje in mnozenje.
1.2 Cela stevila
V mnozici naravnih stevil lahko sestevamo in mnozimo, ne moremo pa odstevati. Da bi lahkonaravna stevila odstevali, vpeljemo stevilo 0 in negativna stevila. Stevilo 0 je tako stevilo, dazanj velja
a+ 0 = a
za vsako naravno stevilo a. K naravnemu stevilu a pa pridruzimo tako nasprotno stevilo −a,da zanj velja
a+ (−a) = 0.
Mnozico celih stevil oznacimo z
Z = N ∪ {0} ∪ {−n; n ∈ N}.
To je “najmanjsa” mnozica stevil, v kateri je za vsaki naravni stevili a in b resljiva enacbaa = b+ x.
1.3 Racionalna stevila
V mnozici celih stevil ne moremo deliti. Ce zelimo stevilo a razdeliti na b, b 6= 0, enakih delov,bo vsak del velik a
b . Racionalno stevilo ab je torej tako stevilo, za katero velja a
b · b = a.
Mnozico racionalnih stevil oznacimo z Q = {ab ; a, b ∈ Z, b 6= 0}. To je “najmanjsa”
mnozica stevil, v kateri je za vsaki celi stevili a in b, b 6= 0, resljiva enacba a = bx.

1 STEVILA 7
Pri racunanju s stevilom 0 je potrebno biti previden. Jasno je
a+ 0 = a,
a− 0 = a,
a · 0 = 0.
Racionalno stevilo a0 , a 6= 0, pa ne obstaja (oz. deljenje z 0 ni dopustno), saj ne obstaja tako
stevilo x, za katerega bi bilo x · 0 = a.
1.4 Realna stevila
Stevilska premicaRacionalna stevila si lahko ponazorimo s tockami na stevilski premici. Stevilska premica
je poljubna premica, na kateri smo si izbrali dve razlicni tocki, ki predstavljata O in E. TockoO imenujemo koordinatno izhodisce in upodablja stevilo 0. Tocka E upodablja stevilo 1.
O E0 1bc bc
Z nanasanjem daljice OE v eno ali v drugo stran od koordinatnega izhodisca dobimo slike celihstevil.
0 1 2 3 4−1−2bc bc bc bc bcbcbc
Z enostavno geometrijsko konstrukcijo (razmerja) lahko upodobimo racionalna stevila.
0 1 2 3−1−235
bc bc bc bc bcbcbc b
Izkaze se, da na premici obstajajo stevila, ki niso upodobitve racionalnih stevil.
0 1√
2bc bc b
Pojem stevila zato se enkrat razsirimo in recemo, da so realna stevila vsa stevila, ki jihlahko upodobimo na stevilski premici. Mnozico realnih stevil oznacimo z R.
Med mnozicami naravnih, celih, racionalnih in realnih stevil velja zveza
N ⊂ Z ⊂ Q ⊂ R,
kjer so vse inkluzije prave.

1 STEVILA 8
Decimalni zapis realnega stevilaNaj bo X tocka na stevilski premici. Stevilu X bomo priredili decimalno stevilo x.Ker cela stevila razdelijo stevilsko premico na enotske intervale, obstaja celo stevilo a0, da
lezi tocka X med a0 in a0+1. (Ce X ne upodablja celega stevila, je stevilo a0 doloceno enolicno.)Interval med a0 in a0 + 1 razdelimo na deset enako dolgih delov. Potem obstaja stevilo
a1 ∈ {0, 1, . . . , 9}, da lezi tocka X med a0 + 110 in a0 + 1
10a1 + 110 .
Postopek ponavljamo. Tocki X na stevilski premici smo tako priredili neskoncno zaporedjestevk a0, a1, . . . . Pravimo, da je
x = a0.a1a2a3 . . .
decimalni zapis stevila x.
a0 a0 + 1
a0 + a110 a0 + a1+1
10
a0 + a110 + a2
100 a0 + a110 + a2+1
100
b
b
b
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b
b
b
bx
bx
bx
• Decimalni zapis ni nujno enolicen. Stevilo 54 lahko zapisemo kot 1.25000 . . . = 1.250 ali
1.249999 . . . = 1.249.
• Cela stevila in racionalna stevila oblike a2m5n imajo koncen decimalni zapis.
• Vsa druga racionalna stevila imajo neskoncen periodicen decimalni zapis.
5
3= 1.666 . . . = 1.6,
1
7= 0.142857142857 . . . = 0.142857.
• Iracionalna stevila imajo neskoncen neperiodicen decimalni zapis.
π = 3.1415926535897932384626433832795 . . .√2 = 1.4142135623730950488016887242097 . . .
1.5 Urejenost realnih stevil
Realna stevila lahko primerjamo po velikosti. Pravimo, da je stevilo a na stevilski premicipozitivno, ce lezi desno od tocke 0 (torej na istem poltraku kot tocka 1). Pravimo, da je steviloa na stevilski premici negativno, ce lezi levo od tocke 0 (torej na drugem poltraku kot tocka1).
01
negativna stevila
pozitivna stevila
bc bc

1 STEVILA 9
Pravimo, da je stevilo a manjse od b in oznacimo a < b, ce je stevilo b− a pozitivno (tj. b lezidesno od a). Pravimo, da je stevilo a vecje od b in oznacimo a > b, ce je stevilo b−a negativno(tj. b lezi levo od a).
Stevilo 0 ni ne pozitivno ne negativno.
Simbol < lahko tudi obrnemo. Pravimo, da je stevilo a vecje od b, oznaka a > b, ce jeb < a.
Ce je a < b ali a = b, na kratko oznacimo a ≤ b in pravimo, da je a manjse ali enako b.
Ce je a > b ali a = b, na kratko oznacimo a ≥ b in pravimo, da je a vecje ali enako bPri racunanju s pozitivnimi oz. negativnimi stevili moramo biti nadvse pazljivi.
• iz a < b sledi a+ c < b+ c za vsak c ∈ R,
• iz a < b in c > 0 sledi ac < bc,
• iz a < b in c < 0 pa sledi ac > bc.
Zadnja lastnost enostavno pove, da se pri mnozenju z negativnim stevilom neenakost obrne.
Absolutna vrednostVsakemu realnemu stevilu x lahko priredimo nenegativno realno stevilo |x| s predpisom
|x| =
{x, ce je x ≥ 0
−x, ce je x < 0.
Stevilo |x| imenujemo absolutna vrednost stevila x. Velja
|x · y| = |x| · |y|∣∣∣∣x
y
∣∣∣∣ =|x||y|
|x+ y| ≤ |x| + |y| trikotniska neenakost
Geometrijsko pomeni |x| razdaljo od tocke X, ki upodablja stevilo x, do tocke O na stevilskipremici. Ce sta x, y realni stevili, je |y−x| razdalja med njunima slikama na stevilski premici.
Intervali in okoliceNaj bosta a in b, a ≤ b, poljubni realni stevili. Definirajmo:
[a, b] = {x ∈ R; a ≤ x ≤ b} zaprt interval od a do b(a, b] = {x ∈ R; a < x ≤ b} polodprt interval od a do b[a, b) = {x ∈ R; a ≤ x < b} polodprt interval od a do b(a, b) = {x ∈ R; a < x < b} odprt interval od a do b
a b[a, b]
a b(a, b]
a b[a, b)
a b(a, b)

1 STEVILA 10
Pri a = b je [a, a] = {a} in (a, a] = [a, a) = (a, a) = ∅.Definiramo lahko tudi neskoncne intervale, ki so pri ∞ vedno odprti, saj ∞ sploh ni stevilo:
(−∞, b] = {x ∈ R; x ≤ b}(−∞, b) = {x ∈ R; x < b}
[a,∞) = {x ∈ R; a ≤ x}(a,∞) = {x ∈ R; a < x}
(−∞,∞) = R
Za vsak a ∈ R in ε > 0 imenujemo interval
(a− ε, a+ ε) = {x ∈ R; a− ε < x < a+ ε}
ε-okolica tocke a.
a a+ εa− εbcbc bc
Zgled 1.3. Poisci vsa realna stevila x, za katera je x+2 > |2x−1|. Rezultat zapisi z intervalom.
Resitev. Ker je |2x− 1| = 0 za x = 12 , locimo dva primera.
Ce je x < 12 , je |2x − 1| = −2x + 1. Neenakost postane x + 2 > −2x + 1, kar lahko
preoblikujemo v 3x > −1 oz. x > −13 . Torej x ∈ (−1
3 ,12).
Ce pa je x ≥ 12 , je |2x−1| = 2x−1. Neenakost postane x+2 > 2x−1, kar lahko preoblikujemo
v x < 3. Torej x ∈ [12 , 3).Resitev je x ∈ (−1
3 ,12) ∪ [12 , 3), kar lahko krajse zapisemo kot x ∈ (−1
3 , 3).
xO
1
y
1
x+
2
|2x−
1|
bc
bc
bc
bc
bc
3bc
bc
−13
Zgled 1.4. Poisci vsa realna stevila x, za katera je
|x− 2| ≥ |3x− 1| − 2.
Resitev. Ker je |x− 2| = 0 za x = 2 in |3x− 1| = 0 za x = 13 , locimo 3 primere.
Ce je x < 13 , neenakost preoblikujemo v 2 − x ≥ 1 − 3x − 2, kar nam da x ≥ −3
2 . Torejx ∈ [−3
2 ,13).
Ce je x > 2, neenakost preoblikujemo v x− 2 ≥ 3x− 1 − 2, kar nam da x ≤ 12 . Torej v tem
primeru ni resitev.Ce pa je 1
3 ≤ x ≤ 2, velja 2 − x ≥ 3x− 1 − 2 in x ≤ 54 . Torej x ∈ [13 ,
54 ].
Resitev je x ∈ [−32 ,
13) ∪ [13 ,
54 ], kar lahko krajse zapisemo kot x ∈ [−3
2 ,54 ].

1 STEVILA 11
xO
1
y
1
|x−2||3x
−1|−
2
bc
bc
bc
bc
bc
54
bc
bc
−32
Zgled 1.5. Poisci vsa realna stevila x, za katera je
|x2 − 2| < x+ 2.
Resitev. Ker je |x2 − 2| = 0 za x = ±√
2, locimo 3 primere, ki pa ji lahko zdruzimo v 2:|x| ≤
√2 in |x| >
√2.
Ce je |x| ≤√
2, velja 2−x2 < x+2. Torej x2 +x > 0. Ker je x2 +x = 0 za x = 0 in x = −1,mora biti x > 0 ali x < −1. Ob pogoju |x| ≤
√2 to pomeni x ∈ [−
√2,−1) ∪ (0,
√2].
Ce pa je |x| >√
2, velja x2 − 2 < x + 2. Torej x2 − x − 4 < 0. Ker je x2 − x − 4 = 0 za
x1,2 = 1±√
172 , ob pogoju |x| >
√2 to pomeni x ∈ (1−
√17
2 ,−√
2) ∪ (√
2, 1+√
172 ).
Resitev je torej x ∈ (1−√
172 ,−1) ∪ (0, 1+
√17
2 ).
xO
1
y
x+
2
bc
bc
bc
bc
bcbc
bc
bc
bc
|x2 − 2|
bc
1+√
172
bc
−1bc
1−√
172
1.6 Omejene mnozice realnih stevil
Naj bo A neprazna mnozica realnih stevil. Ce obstaja stevilo M , da je a ≤ M za vsak a ∈ A,pravimo, da je M zgornja meja mnozice A. Pravimo, da je mnozica A navzgor omejena,ce obstaja kaksna zgornja meja mnozice A.
Ce obstaja stevilo m, da je m ≤ a za vsak a ∈ A, pravimo, da je m spodnja meja mnoziceA. Pravimo, da je mnozica A navzdol omejena, ce obstaja kaksna spodnja meja mnozice A.
Mm aAbc bcbc

1 STEVILA 12
Mnozica A je omejena, ce je omejena navzgor in navzdol.Stevilo M je natancna zgornja meja mnozice A, ce je zgornja meja mnozice A in ce za vsak
ε > 0 obstaja a ∈ A, da je a > M − ε. (Natancna zgornja meja je torej najmanjsa zgornja mejamnozice A.)
MM − ε aAbc bcbc
Natancno zgornjo mejo mnozice A oznacimo s supA in poimenujemo supremum mnozice A.
• Natancna zgornja meja vsakega (odprtega, zaprtega, polodprtega) intervala med a in b jestevilo b.
Stevilo m je natancna spodnja meja mnozice A, ce je spodnja meja mnozice A in ce za vsakε > 0 obstaja a ∈ A, da je a < m+ ε. (Natancna spodnja meja je torej najvecja spodnja mejamnozice A.)
m m+ εa Abcbc bc
Natancno spodnjo mejo mnozice A oznacimo z inf A in poimenujemo infimum mnozice A.
• Natancna spodnja meja vsakega (odprtega, zaprtega, polodprtega) intervala med a in b jestevilo a.
Zgled 1.6. Doloci natancno spodnjo in zgornjo mejo mnozic
A = {n2 + 1; n ∈ Z}B = { 1
n ; n ∈ N},C = {x ∈ R; 2 < x2 ≤ 3}.
inf(A) = 1, sup(A) = ∞.inf(B) = 0, sup(B) = 1.inf(C) = −
√3, sup(C) =
√3.
• Dedekindov aksiom Vsaka neprazna navzdol omejena podmnozica realnih stevil imanatancno spodnjo mejo.
Dedekindov aksiom je ekvivalenten trditvi, da ima vsaka neprazna navzgor omejena pod-mnozica realnih stevil natancno zgornjo mejo.
Ta aksiom razloci med realnimi in racionalnimi stevili. Mnozica A = {x; x2 > 2 in x > 0}v mnozici racionalnih stevil namrec nima natancne spodnje meje, v mnozici realnih stevil pa jenatancna spodnja meja (iracionalno) stevilo
√2.
Zgled 1.7. Stevilo√
2 je iracionalno.
Resitev. Dokaz s protislovjem.Recimo, da je
√2 = p
q , kjer je pq okrajsan ulomek. Potem je p2 = 2q2. Torej p = 2p1 in
2p21 = q2. Sledi q = 2q1 in p
q = 2p1
2q1v resnici ni okrajsan ulomek.

2 MNOZICE 13
2 Mnozice
2.1 Mnozice
Mnozica A je dolocena, ce obstaja pravilo, po katerem je mogoce za vsako rec odlociti ali je v Aali ne. Ce a spada v mnozico A, pravimo, da je a element mnozice A in oznacimo a ∈ A. Ce ani element mnozice A, oznacimo a /∈ A.
Mnozico lahko podamo tako, da zapisemo njene elemente:
A = {1, 2, 3} , B = {“modra”, “zelena”}.
Mnozico lahko podamo tudi tako, da povemo lastnost L, ki jo imajo natanko vsi njeni elementi.Torej A = {a; L(a)}.
C = {x; |2x− 1| < 1} , D = {n; n deli stevilo 12}.
Mozno je, da noben element nima lastnosti L; tedaj je A prazna mnozica, kar zapisemo A = ∅.
2.2 Operacije z mnozicami
A
B
Mnozica A je podmnozica mnozice B, z oznako A ⊆ B, ce vsak element mnoziceA lezi tudi v mnozici B. Ce je A ⊆ B in B ⊆ A, imata mnozici A in B isteelemente in sta enaki. Oznaka: A = B.
A B
A ∪B
Unija mnozic A in B je mnozica A ∪B, definirana z
A ∪B = {x; x ∈ A ali x ∈ B}.
A B
A ∩B
Presek mnozic A in B je mnozica A ∩B, definirana z
A ∩B = {x; x ∈ A in x ∈ B}.
Za poljubne mnozice A, B in C velja
• Komutativnost ∪ in ∩ A ∪B = B ∪A, A ∩B = B ∩A
• Asociativnost ∪ in ∩ (A ∪B) ∪ C = A ∪ (B ∪ C), (A ∩B) ∩ C = A ∩ (B ∩ C)
• Idempotentnost ∪ in ∩ A ∪A = A, A ∩A = A
•
A B
AbsorbcijaA ∪ (A ∩B) = A, A ∩ (A ∪B) = A
• Lastnost ∅ A ∪ ∅ = A, A ∩ ∅ = ∅

2 MNOZICE 14
Izrek 2.1 (Distributivnostna zakona). Za poljubne mnozice A, B in C velja
A ∩ (B ∪ C) = (A ∩B) ∪ (A ∩ C)A ∪ (B ∩ C) = (A ∪B) ∩ (A ∪ C)
B C
A
A ∩ (B ∪ C)
B C
A
A ∪ (B ∩ C)
A \B
A B
Razlika mnozic A in B je mnozica A \B, definirana z
A \B = {x; x ∈ A in x /∈ B}.
Mnozici A \B pravimo tudi komplement mnozice B glede na A.
Vcasih obravnavamo le podmnozice neke fiksne, dovolj velike mnozice U , ki jo v tem primeruimenujemo univerzalna mnozica. Komplement mnozice A (glede na univerzalno mnozicoU) je mnozica Ac, definirana z Ac = U \A.
• A ∪ U = U , A ∩ U = A lastnost univerzalne mnozice U
• A ∪Ac = U , A ∩Ac = ∅ lastnost komplementa
• (Ac)c = A involutivnost komplementa
• U c = ∅, ∅c = U komplementarnost U in ∅
Izrek 2.2 (De Morganova zakona). Za poljubne mnozice A, B in C velja
(A ∪B)c = Ac ∩Bc
(A ∩B)c = Ac ∪Bc
A B
(A ∪B)c
A B(A ∩B)c
Zgled 2.3. Izracunaj A∪B, A∩B in A\B za A = {2n−1; n = 1, 2, . . . , 7} in B = {3n−2; n =1, 2, . . . , 7}.Resitev. Ker je A = {1, 3, 5, 7, 9, 11, 13} in B = {1, 4, 7, 10, 13, 16, 19}, je
A ∪B = {1, 3, 4, 5, 7, 9, 10, 11, 13, 16, 19},A ∩B = {1, 7, 13} in
A \B = {3, 5, 9, 11}.

2 MNOZICE 15
Naj bo x ∈ A in y ∈ B. Urejeni par elementov x in y je mnozica
{{x}, {x, y}},
ki jo krajse oznacimo z (x, y).
• Iz (x, y) = (x′, y′) sledi, da je x = x′ in y = y′. V urejenem paru je vrstni red zapisapomemben.
• Za x 6= y je (x, y) 6= (y, x), vendar pa {x, y} = {y, x}
Kartezicni produkt mnozic A in B je mnozica urejenih parov
A×B = {(x, y); x ∈ A, y ∈ B}.
• A×B = ∅ natanko tedaj, ko je vsaj ena izmed mnozic A in B prazna.
• Za razlicni neprazni mnozici A in B velja A×B 6= B ×A.
• Ce je A = B, pisemo namesto A×A kar A2.
Potencna mnozica mnozice A je mnozica vseh podmnizic mnozice A in jo oznacimo s P(A).Torej
P(A) = {X; X ⊆ A}.
• P(∅) = {∅}
• P(P(∅)) = {∅, {∅}}
• P({1, 2, 3}) = {∅, {1}, {2}, {3}, {1, 2}, {1, 3}, {2, 3}, {1, 2, 3}}
• Za koncno mnozico A z n elementi velja, da ima potencna mnozica P(A) natanko 2n
elementov.
2.3 Preslikave med mnozicami
Preslikave med mnozicamiNaj bosta A in B mnozici. Preslikava f : A → B je pravilo f , ki vsakemu elementu a
mnozice A priredi natancno dolocen element f(a) mnozice B. (Preslikavo pogosto imenujemotudi funkcija, zlasti, ce je A ⊆ R in B ⊆ R.)
f
a f(a)
A B
b
b
Mnozica A je lahko tudi prazna, saj za vsako mnozico B obstaja “prazna” preslikava ∅ → B.Ce pa je mnozica B prazna, obstaja preslikava A→ ∅, le ce je tudi mnozica A prazna.
Mnozico A imenujemo definicijsko obmocje ali domena, mnozico f(A) = {f(a); a ∈A} ⊆ B pa zaloga vrednosti ali kodomena preslikave f . Definicijsko obmocje funkcije foznacimo tudi z Df , zalogo vrednosti pa z Zf .

2 MNOZICE 16
f
A = DfB
Zf
Zgled 2.4. Ali sta funkciji f1(x) = xx in f2(x) = 1 enaki? Ali sta funkciji g1(x) =
√x2 in
g2(x) = x enaki?
Preslikava f : A → B je injektivna, ce za vsaka a1, a2 ∈ A, a1 6= a2, velja f(a1) 6= f(a2).(Ekvivalentno: f je injektivna, ce za vsaka a1, a2 ∈ A iz f(a1) = f(a2) sledi a1 = a2.)
a1f(a1)
a2 f(a2)
A B
f
fb
b
b
b
Preslikava f : A → B je surjektivna, ce je Zf = B. (Ekvivalentno: f je surjektivna, ce zavsak b ∈ B obstaja tak a ∈ A, da je f(a) = b.)
a b
A B
f
b b
Preslikava f je bijektivna, ce je injektivna in surjektivna.Graf preslikave f : A→ B je mnozica
Γ(f) = {(a, f(a)); a ∈ A} ⊂ A×B.
A
B
Γ(f)
A×Ba
f(a) bc
bc
bc
Funkcija f je injektivna, ce vsaka vodoravna premica v A × B seka graf Γ(f) najvec enkrat.Funkcija f je surjektivna, ce vsaka vodoravna premica v A×B seka graf Γ(f) vsaj enkrat.
Zgled 2.5. Narisi graf funkcije f : [−1, 2] → [−1, 4], podane s predpisom f(x) = x2. Ali jefunkcija injektivna oz. surjektivna?
Resitev.

2 MNOZICE 17
xO
4
−1
y
−1 2
bc
bc
bc
bc
bc
Funkcija ni ne injektivna ne surjektivna.
Zgled 2.6. • Funkcija f : R → R, definirana s predpisom f(x) = x3, je bijektivna.
• Funkcija f : R → R, definirana s predpisom f(x) = x3 − x, je surjektivna, a ni injektivna.
• Funkcija f : R → R, definirana s predpisom f(x) = x2, ni injektivna in ni surjektivna.
• Funkcija f : R → R × R, definirana s predpisom f(x) = (x, x2), je injektivna.
• Funkcija f : R × R → R, definirana s predpisom f(x, y) = xy, je surjektivna.
Naj bosta f : A→ B in g : B → C preslikavi. Kompozitum preslikav f in g je preslikavag ◦ f : A→ C, definirana z (g ◦ f)(a) = g(f(a)).
f
a f(a)
A B
g
g(f(a))
C
g ◦ f
b
b
b
Zgled 2.7. Naj bo f : A→ B in g : B → C.
• Ce sta f , g injektivni, je g ◦ f injektivna.
• Ce sta f , g surjektivni, je g ◦ f surjektivna.
• Ce je g ◦ f injektivna, je f injektivna.
• Ce je g ◦ f surjektivna, je g surjektivna.
Resitev. Ce a1 6= a2, potem f(a1) 6= f(a2) in g(f(a1)) 6= g(f(a2)).
Za c ∈ C obstaja b ∈ B, da g(b) = c. Obstaja a ∈ A, da f(a) = b. Torej g(f(a)) = c.
Ce a1 6= a2, potem g(f(a1)) 6= g(f(a2)) in zato f(a1) 6= f(a2).
Za c ∈ C obstaja a ∈ A, da je g(f(a)) = c. Torej je g(b) = c za b = f(a) ∈ B.Preslikavo f : A → A, definirano z f(a) = a, imenujemo identicna preslikava mnozice A
in oznacimo idA.
Naj bo f : A → B preslikava. Ce obstaja taka preslikava g : B → A, da je g ◦ f = idA inf ◦ g = idB , pravimo, da je g inverz preslikave f in oznacimo f−1 = g.

2 MNOZICE 18
f
a f(a)
A Bg
b
b
Trditev 2.8. Preslikava f : A→ B je bijektivna natanko tedaj, ko ima inverz.
Zgled 2.9. Naj bo A = {1, 2, 3, 4} in f(n) = 2n − 1 za n ∈ A. Doloci mnozico B in preslikavog : B → A, ki je inverz preslikave f .
Resitev. Po vrsti izracunamo f(1) = 1, f(2) = 3, f(3) = 5 in f(4) = 7. Torej je mnozicaB = {1, 3, 5, 7} zaloga vrednosti preslikave f .
Ker iz f(n) = 2n − 1 = m sledi n = m+12 , je preslikava g : B → A, podana z g(m) = m+1
2 ,inverz preslikave f .
f : n 7→ 2n− 1
g : m 7→ m+12
1 2 3 4 1 3 5 7b b b b b b b b
Naj bo f : A → B poljubna preslikava in A ⊂ A podmnozica. Zozitev preslikave f napodmnozico A je preslikava f |A : A→ B, definirana z f |A(a) = f(a).
Zgled 2.10. Funkcija f : R → R, podana s predpisom f(x) = x2 + 1, ni bijektivna. Za A ={x; x ≥ 0} in B = {x; x ≥ 1} je zozitev f |A : A→ B funkcije f bijektivna.
Resitev. Funkcija f ni injektivna, saj je f(x) = f(−x) za vsak x ∈ R. Funkcija f ni surjektivna,saj je f(x) ≥ 1 za vsak x ∈ R.
Injektivnost zozitve Ce je f |A(x1) = f |A(x2), je x21 + 1 = x2
2 + 1, od koder sledi x21 = x2
2
oz. (x1 − x2)(x1 + x2) = 0. Ce je x1 + x2 = 0, je zaradi x1 ≥ 0 in x2 ≥ 0 lahko le x1 = x2 = 0.Ce je x1 + x2 6= 0, mora biti x1 − x2 = 0 oz. x1 = x2.
Surjektivnost zozitve Vzemimo poljuben y ≥ 1. Tedaj za x =√y − 1 velja f |A(x) = y.
2.4 Moc mnozic
Moc mnozicPravimo, da sta mnozici A in B ekvipolentni, ce obstaja bijektivna preslikava f : A→ B.
Oznacimo A ∼ B.
Ekvipolenca mnozic je ekvivalencna relacija, saj velja
• refleksivnost: A ∼ A
• simetricnost: iz A ∼ B sledi B ∼ A
• tranzitivnost: iz A ∼ B in B ∼ C sledi A ∼ C
Zgled 2.11. Mnozici N in 2N (soda stevila) sta ekvipolentni.
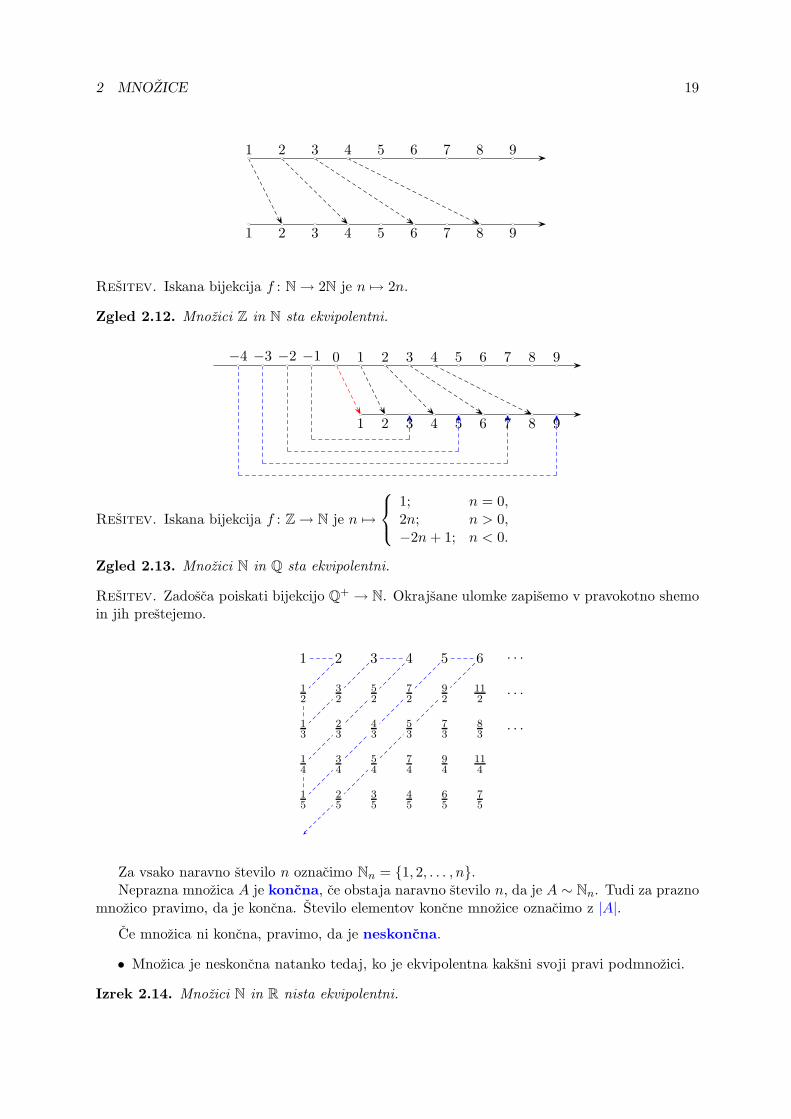
2 MNOZICE 19
1 2 3 4 5 6 7 8
1 2 3 4 5 6 7 8 9
9bc bc bc bc bc bc bcbc
bc bc bc bc bc bc bcbc
bc
bc
Resitev. Iskana bijekcija f : N → 2N je n 7→ 2n.
Zgled 2.12. Mnozici Z in N sta ekvipolentni.
1 2 3 4 5 6 7 8
1 2 3 4 5 6 7 80−1−2−3−4 9
9bc bc bc bc bc bc bcbc
bc bc bc bc bc bc bcbcbcbcbcbcbc
bc
bc
Resitev. Iskana bijekcija f : Z → N je n 7→
1; n = 0,2n; n > 0,−2n+ 1; n < 0.
Zgled 2.13. Mnozici N in Q sta ekvipolentni.
Resitev. Zadosca poiskati bijekcijo Q+ → N. Okrajsane ulomke zapisemo v pravokotno shemoin jih prestejemo.
1 2 3 4 5 6 . . .
12
32
52
72
92
112
. . .
13
23
43
53
73
83
. . .
14
34
54
74
94
114
15
25
35
45
65
75
Za vsako naravno stevilo n oznacimo Nn = {1, 2, . . . , n}.Neprazna mnozica A je koncna, ce obstaja naravno stevilo n, da je A ∼ Nn. Tudi za prazno
mnozico pravimo, da je koncna. Stevilo elementov koncne mnozice oznacimo z |A|.Ce mnozica ni koncna, pravimo, da je neskoncna.
• Mnozica je neskoncna natanko tedaj, ko je ekvipolentna kaksni svoji pravi podmnozici.
Izrek 2.14. Mnozici N in R nista ekvipolentni.

2 MNOZICE 20
Dokaz. Dokazali bomo, da ne obstaja surjektivna preslikava N → (0, 1].
f(1) = 0.3812374 . . .
f(2) = 0.3061814 . . .
f(3) = 0.0240923 . . .
f(4) = 0.0076641 . . .
f(5) = 0.9056188 . . .
f(6) = 0.2983420 . . .
f(7) = 0.7082137 . . .
...
f(?) = 0.8591672 . . .
Vsa stevila na intervalu lahko enolicno zapisemo z neskoncnim decimalnim zapisom. (Koncnidecimalni zapis, ki se konca s samimi 0, spremenimo v neskoncni decimalni zapis, ki se konca ssamimi 9.)
Recimo torej, da obstaja surjektivna preslikava f : N → (0, 1]. Oglejmo si decimalno stevilo0.x1x2x3 . . ., za katerega velja: stevka xk na k-tem decimalnem mestu ni enaka stevki yk nak-tem decimalnem mestu stevila f(k). Torej stevilo 0.x1x2x3 . . . ni slika nobenega stevila iz N.(Ker realna stevila nimajo enolicnega decimalnega zapisa, se mora stevka xk dovolj razlikovatiod yk; npr. xk = (yk + 5) mod 10.)
Izrek 2.15. Za vsako mnozico je A 6∼ P(A).
Dokaz. Dokazimo trditev s protislovjem. Recimo, da obstaja bijekcija f : A→ P(A). Oglejmosi mnozico
X = {a ∈ A; a /∈ f(a)}.Ker je f surjekcija, obstaja neki x ∈ A, da je X = f(x).
Ce je x ∈ X, potem x /∈ f(x). Protislovje, saj je f(x) = X.Ce pa x /∈ X, potem x ∈ f(x) po sami definiciji X. Protislovje, saj je f(x) = X.
Izrek 2.16 (Cantor-Bernsteinov izrek). Ce obstajata injektivni preslikavi A→ B in B → A, jeA ∼ B.
Koncne mnozice in preslikaveNaj bosta A in B koncni mnozici.
• Ce obstaja injektivna preslikava f : A→ B, velja |A| ≤ |B|.
• Ce obstaja surjektivna preslikava f : A→ B, velja |A| ≥ |B|.
• Ce obstaja bijektivna preslikava f : A→ B, velja |A| = |B|.

3 KOMBINATORIKA 21
3 Kombinatorika
3.1 Prestevanja
Osnovni izrek kombinatorike
Izrek 3.1 (Pravilo produkta). Ce lahko izbiranje opravimo v dveh zaporednih neodvisnih korakih,dobimo stevilo vseh izborov tako, da pomnozimo stevilo izborov v prvem koraku s stevilom izborovv drugem koraku.
V jeziku teorije mnozic zapisemo, da za koncni mnozici A in B velja
|A×B| = |A| · |B|.
Pravilo lahko posplosimo na poljubno stevilo neodvisnih faz.
Izrek 3.2 (Pravilo vsote). Ce lahko izbiranje opravimo na dva neodvisna nacina, dobimo stevilovseh izborov tako, da sestejemo stevilo izborov na prvi nacin in tistih na drugi nacin.
V jeziku teorije mnozic zapisemo, da za koncni disjunktni mnozici A in B velja
|A ∪B| = |A| + |B|.
Pravilo lahko posplosimo na poljubno stevilo disjunktnih koncnih mnozic.
Zgled 3.3. V restavraciji nudijo 7 vrst sokov in 5 vrst mineralne vode. Na koliko nacinov lahkogost izbere eno pijaco? Na koliko nacinov lahko gost izbere pijaco, ce bo sok mesal z vodo?
Resitev. V prvem primeru sta izbiri soka ali mineralne vode med seboj izkljucujoci, zato lahkogost izbere pijaco na 7+5 = 12 nacinov. V drugem primeru pa gre za pripravo mesanice v dvehneodvisnih korakih, zato je vseh nacinov enako 7 · 5 = 35.
Zgled 3.4. Poslovni kovcek ima dve loceni kljucavnici s trimestnima stevilkama. Koliko kom-binacij za zaklepanje nudita ti dve kljucavnici skupaj? V najvec koliko poskusih lahko odpremokovcek?
9 0 6 4 3 0
Resitev. Na vsaki kljucavnici so stevila od 000 do 999; torej 103 moznosti. Skupaj imamo103 · 103 = 106 moznosti (tj. vsa stevila od 000 000 do 999 999). Stevilo poskusov, potrebnih zaodpiranje kovcka, pa je bistveno manjse. Zakaj?
Ker sta kljucavnici loceni, bomo prvo odprli najkasneje v 103 poskusih. In ko bo prvakljucavnica odprta, bomo tudi drugo odprli v najvec 103 poskusih. Torej potrebujemo najvec2 · 103 poskusov.

3 KOMBINATORIKA 22
Nacelo vkljucitev in izkljucitevPri izbiranju iz vec mnozic moramo paziti, da je vsak element izbran natanko enkrat. Kadar
torej izbiramo med elementi ene ali druge mnozice, pa se nekateri elementi lahko pojavijo v obehmnozicah (presek mnozic ni prazen), dobimo stevilo vseh elementov tako, da sestejemo steviloelementov v prvi mnozici s stevilom tistih v drugi in odstejemo stevilo elementov v preseku (tesmo upostevali dvakrat).
V jeziku teorije mnozic zapisemo, da za poljubni koncni mnozici A in B velja
|A ∪B| = |A| + |B| − |A ∩B|.
Ce izbiramo med elementi treh mnozic, moramo najprej sesteti stevila elementov vseh posa-meznih mnozic, odsteti stevilo elementov v presekih po dveh mnozic in pristeti stevilo elementov,ki nastopajo v preseku vseh treh mnozic (te smo najprej trikrat pristeli, nato trikrat odsteli injih moramo torej se enkrat vkljuciti).
V jeziku teorije mnozic zapisemo, da za poljubne koncne mnozice A, B in C velja
|A ∪B ∪ C| = |A| + |B| + |C| − |A ∩B| − |A ∩C| − |B ∩ C| + |A ∩B ∩ C|.
Analogno ravnamo, ce se stevilo mnozic se povecuje.
Zgled 3.5. V restavraciji je 5 gostov narocilo sok, 7 mineralno vodo, 3 pa so narocili oboje.Koliko gostov je sploh narocilo kaksno pijaco?
Resitev. Ce z A oznacimo mnozico gostov, ki so narocili sok, z B pa tiste, ki so narocilimineralno vodo, velja |A| = 5, |B| = 7 in |A ∩B| = 3. Torej je |A ∪B| = |A| + |B| − |A ∩B| =5 + 7 − 3 = 9.
PermutacijePermutacija pomeni spremembo vrstnega reda. (Npr. pri igri s kartami karte na zacetku
premesamo.)
Permutacija mnozice A je bijektivna preslikava σ : A→ A.
Naj bo A = {a1, . . . , an} koncna mnozica. Torej lahko σ(1) zavzame enega izmed n moznihelementov. Potem pa lahko σ(2) zavzame enega izmed preostalih n− 1 elementov. Ker so izbirena vsakem koraku med seboj neodvisne, je vseh permutacij natanko
Pn = n · (n − 1) · · · 2 · 1 = n! .
Permutacija s ponavljanjem je taka permutacija, pri kateri nekaterih elementov medseboj ne locimo. Ce ima torej mnozica z n elementi nekaj skupin enakih elementov (s po n1,n2, . . . , nk enakimi elementi v vsaki skupini, kjer je n1 + . . . + nk = n), je stevilo permutacij sponavljanjem enako
Pn1,n2,...,nkn =
n!
n1! · n2! · · · nk!.
Obicajno zapis poenostavimo tako, da izpustimo tiste ni, ki so enaki 1. Tako je P 1,1,...,1n = Pn.
Zgled 3.6. Koliko razlicnih besed lahko sestavimo iz crk besede KEMIJA? (Vsako crko upo-rabimo natanko enkrat.)

3 KOMBINATORIKA 23
Resitev. V besedi so vse crke razlicne. To so permutacije: P6 = 6! = 720.
Zgled 3.7. Koliko razlicnih besed lahko sestavimo iz crk besede MATEMATIKA? (Vsakocrko uporabimo natanko enkrat, enakih crk med seboj ne locimo.)
Resitev. V besedi se crki M in T ponovita dvakrat, A pa trikrat. To so permutacije sponavljanjem: P 3,2,2,1...,1
10 = 10!3!·2!·2! = 151 200.
VariacijeZ elementi koncne mnozice z n elementi tvorimo zaporedje r elementov. Pri variacijah s po-
navljanjem lahko vsak element izberemo tudi veckrat. Torej je stevilo variacij s ponavljanjemenako
Vrn = nr.
• Stevilo vseh preslikav iz koncne mnozice A, |A| = r, v koncno mnozico B, |B| = n, jeenako V
rn. Res: Vzamemo lahko, da je A = Nr in B = Nn. Dani preslikavi f : Nr → Nn
priredimo r-terico (f(1), . . . , f(r)) ∈ (Nn)r.
Pri variacijah brez ponavljanja pa sme biti vsak element izbran najvec enkrat. Torej jestevilo variacij brez ponavljanja enako
n(n− 1)(n − 2) . . . (n− r + 1)︸ ︷︷ ︸r faktorjev
,
kar lahko zapisemo kot
V rn =
{n!
(n−r)! , ce je r ≤ n
0, ce je r > n.
• Stevilo vseh injektivnih preslikav iz koncne mnozice A, |A| = r, v koncno mnozico B,|B| = n, je enako V r
n . Res: Vzamemo lahko, da je A = Nr in B = Nn. Dani injektivni
preslikavi f : Nr → Nn priredimo r-terico (f(1), . . . , f(r)) ∈ (Nn)r razlicnih stevil.
Zgled 3.8. Koliko razlicnih besed iz treh crk lahko sestavimo iz crk besede KEMIJA? (Posa-mezno crko lahko uporabimo najvec enkrat.)
Resitev. To so variacije brez ponavljanja: V 36 = 6 · 5 · 4 = 120.
Zgled 3.9. Koliko razlicnih besed iz treh crk lahko sestavimo iz crk besede KEMIJA? (Posa-mezno crko lahko uporabimo tudi veckrat.)
Resitev. To so variacije s ponavljanjem V36 = 63 = 216.
KombinacijeKombinacija je izbira r-elementne podmnozice iz mnozice z n elementi. Iz mnozice z n
elementi lahko tvorimo V rn zaporedij dolzine r, a ker pri podmnozici vrstni red ni pomemben, je
razlicnih podmnozic le V rn
r! = n!r!·(n−r)! . Stevilo kombinacij je torej enako
Crn =
(n
r
)=
n!
r! · (n− r)!.

3 KOMBINATORIKA 24
Kombinacija s ponavljanjem je izbira r-elementne podmnozice iz mnozice z n elementi,kjer lahko kaksen element nastopa v tej r-elementni podmnozici tudi veckrat.
Kombinacijo s ponavljanjem reda r si lahko predstavljamo kot razporeditev r kroglic v nskatel, kjer lahko damo v neko skatlo tudi vec kroglic.
• • • • •B1 B2 Bn
Gornjo razporeditev lahko shematicno opisemo kot
• • •|| • | • |||,
kjer ta zapis pomeni, da razporejamo r = 5 kroglic (oznacenih s •) v n = 7 skatel (s | je oznacenihn− 1 = 6 predelcnikov med njimi).
To pa pomeni, da imamo v shemi n+ r− 1 znakov (tj. • in |) in lahko spreminjamo polozajr (tj. •) izmed njih. Stevilo kombinacij s ponavljanjem je tako enako
Crn = Cr
n+r−1 =
(n+ r − 1
r
)=
(n+ r − 1)!
r! · (n− 1)!.
• Stevilo vseh strogo narascajocih preslikav iz koncne mnozice A ⊂ R, |A| = r, v koncnomnozico B ⊂ R, |B| = n, je enako Cr
n. Res: Vzamemo lahko, da je A = Nr in B = Nn.
Dani strogo narascajoci preslikavi f : Nr → Nn priredimo r-terico (f(1), . . . , f(r)) ∈ (Nn)r
stevil, ki tvorijo strogo narascajoce zaporedje. Obrat: Vsaki podmnozici z r elementimnozice Nn lahko priredimo narascajoce zaporedje r stevil, ki nam potem doloca strogonarascajoco preslikavo Nr → Nn.
• Stevilo vseh nepadajocih preslikav iz koncne mnozice A ⊂ R, |A| = r, v koncno mnozicoB ⊂ R, |B| = n, je enako Cr
n. Res: Vzamemo lahko, da je A = Nr in B = Nn. Dani
nepadajoci preslikavi f : Nr → Nn priredimo r-terico (f(1), . . . , f(r)) ∈ (Nn)r stevil, ki tvo-rijo nepadajoce zaporedje. Vsakemu naboru z r (ne nujno razlicnimi) elementi mnozice Nn
lahko priredimo nepadajoce zaporedje r stevil, ki nam potem doloca nepadajoco preslikavoNr → Nn.
Zgled 3.10. Koliko razlicnih sopkov iz 4 razlicnih vrst roz lahko sestavimo, ce imamo na voljo7 razlicnih vrst roz?
Resitev. Ker vrstni red ni pomemben, gre za kombinacije C47 =
(74
)= 35.
Zgled 3.11. Koliko razlicnih sopkov iz 4 vrst roz lahko sestavimo, ce imamo na voljo 7 razlicnihvrst roz?
Resitev. V sopku se lahko roze tudi ponavljajo, vrstni red pa ni pomemben. Torej gre za
kombinacije s ponavljanjem: C47 =
(7+4−14
)=(10
4
)= 210.

3 KOMBINATORIKA 25
Brez ponavljanja S ponavljanjem
Permutacije Pn = n!, P3 = 6 Pn1,...,nkn = n!
n1!···nk! , P2,24 = 6
abc bca cabacb cba abc
aabb abab abbabaab baba bbaa
Variacije V rn = n!
(n−r)! , V24 = 12 V
rn = nr, V
24 = 16
ab ac adba bc bdca cb cdda db dc
aa ab ac adba bb bc bdca cb cc cdda db dc dd
Kombinacije Crn =
(nr
), C2
4 = 6 Crn =
(n+r−1r
), C
24 = 10
ab ac adbc bd
cd
aa ab ac adbb bc bd
cc cddd
Vezane kombinacijeKoncna mnozica A z n elementi naj bo razdeljena na disjunktne mnozice Ai z mocmi |Ai| =
ni. TorejA = A1 ∪A2 ∪ . . . ∪Am in n1 + n2 + . . .+ nm = n.
Stevilo nacinov, na katere lahko iz mnozice A izberemo r = r1 + r2 + . . . + rm elementov tako,da za vsak i iz mnozice Ai izberemo ri, ri ≤ ni elementov, je enako
Cr1,r2,...,rmn1,n2,...,nm
=
(n1
r1
)(n2
r2
)· · ·(nm
rm
).
Tak nacin izbiranja elementov pogosto imenujemo vezane kombinacije.
PorazdelitvePri izracunu vezanih porazdelitev smo koncno mnozico z n elementi razdelili na m mnozic
Ai tako, da je bilo v mnozici Ai natanko ni elementov. Stevilo takih porazdelitev je enako(n
n1
)(n− n1
n2
)(n− n1 − n2
n3
)· · ·(n− n1 − n2 − . . .− nm−1
nm
),
kar lahko preoblikujemo vn!
n1! · n2! · · ·nm!.
Do slednje formule hitreje pridemo tako, da opazimo, da lahko vsako porazdelitev mnozice z nelementi opisemo z besedo iz n znakov, kjer je n1 znakov enakih 1, n2 znakov enakih 2, . . . , nm
znakov enakih m.
Stevilo podmnozic dane mnoziceStevilo vseh podmnozic dane mnozice z n elementi je enako
n∑
r=0
(n
r
)= 2n.
Do enakega rezultata lahko pridemo tudi po drugacni poti. Vsaki podmnozici X ⊆ A danekoncne mnozice A = {a0, . . . , an−1} z n elementi lahko priredimo stevilo
∑n−1i=0 ni2
i, kjer jeni = 1, ce ai ∈ X in ni = 0, ce ai /∈ X. Ta preslikava predstavlja bijekcijo na mnozico vseh celihstevil od vkljucno 0 do vkljucno
∑n−1i=0 2i = 2n − 1; takih stevil pa je ravno 2n.

3 KOMBINATORIKA 26
Zgled 3.12. Koliko razlicnih sopkov iz razlicnih vrst roz lahko sestavimo, ce imamo na voljo 7razlicnih vrst roz?
Resitev. Tu gre za stevilo vseh nepraznih podmnozic mnozice s 7 elementi: 27 − 1 = 127.Stevilo 1 je potrebno odsteti, ker ne dopustimo prazne podmnozice.
Binomska formulaPri razvoju potence binoma
(a+ b)n = (a+ b)(a+ b) · · · (a+ b)︸ ︷︷ ︸n faktorjev
nastane vsota produktov oblike an−rbr. Tak produkt nastane, ko iz katerihkoli k faktorjev vzgornjem produktu izberemo clen b (kar gre na
(nr
)nacinov), pri preostalih pa a. Torej je
(a+ b)n =n∑
r=0
(n
r
)an−rbr.
•(n0
)=(nn
)= 1,
(n1
)=(
nn−1
)= n
•(n
r
)=( nn−r
)
•( nr−1
)+(n
r
)=(n+1
n
)
Pascalov trikotnik
n = 0 1n = 1 1 1n = 2 1 2 1n = 3 1 3 3 1n = 4 1 4 6 4 1n = 5 1 5 10 10 5 1n = 6 1 6 15 20 15 6 1
Zgled 3.13. Iz kupa 32 igralnih kart stirikrat izvlecemo po 1 karto, jo pogledamo in vrnemo vkup. Koliko razlicnih cetveric je moznih? Koliko pa jih je, ce karte ne vracamo?
Resitev. V prvem primeru imamo V432 = 324 = 1048 576 moznosti, v drugem pa V 4
32 =32 · 31 · 30 · 29 = 863 040 moznosti.
Zgled 3.14. V skatli imamo 5 belih in 7 crnih kroglic. Iz skatle hkrati izvlecemo 3 kroglice.Koliko razlicnih trojic je moznih, ce kroglic iste barve med seboj ne razlikujemo? Koliko pa jihje, ce kroglice med seboj razlikujemo?
Resitev. Potegnemo lahko 0, 1, 2 ali 3 bele kroglice, torej 4 razlicne trojice.Ce pa kroglice iste barve med seboj razlikujemo, je takih trojic
(5
0
)(7
3
)
︸ ︷︷ ︸=1·35
+
(5
1
)(7
2
)
︸ ︷︷ ︸=5·21
+
(5
2
)(7
1
)
︸ ︷︷ ︸=10·7
+
(5
3
)(7
0
)
︸ ︷︷ ︸=10·1
= 220.
Razmislimo lahko tudi drugace. Ker kroglice iste barve med seboj razlikujemo, imamo pravza-prav 5 + 7 = 12 razlicnih kroglic in takih trojic je
(123
)= 220.

4 VERJETNOST 27
4 Verjetnost
4.1 Osnovni pojmi in racunanje z dogodki
PoskusPoskus je dejanje, ki ga opravimo v natanko dolocenih pogojih. Za poskuse bomo privzeli,
da jih lahko neomejeno velikokrat ponovimo. Primeri:
• met igralne kocke,
• iz sopa 52 igralnih kart izberemo eno karto,
• iz mnozice rastlin izberemo neko rastlino.
Poskuse oznacujemo z velikimi crkami s konca abecede, npr. X, Y , X1.
DogodekPojav, ki v mnozico skupaj nastopajocih dejstev ne spada in se lahko v posameznem poskusu
zgodi ali pa ne, imenujemo dogodek. Primeri:
• v poskusu meta igralne kocke je na primer dogodek, da vrzemo 1 piko;
• v poskusu, ko vlecemo igralno karto iz kupa 52 kart, je dogodek, da izvlecemo pikovodamo,
• v poskusu, ko iz mnozice rastlin izberemo neko rastlino, ima ta bel cvet.
Dogodki se bodo nanasali na isti poskus. Dogodke oznacujemo z velikimi crkami z zacetkaabecede, npr. A, B, A1.
Dogodek je lahko:
• gotov (oznaka G): ob vsaki ponovitvi poskusa se zgodi. Primer: dogodek, da vrzemo
najvec 6 pik pri metu igralne kocke;
• nemogoc (oznaka N): nikoli se ne zgodi. Primer: dogodek, da vrzemo 7 pik pri metu
igralne kocke;
• slucajen: vcasih se zgodi, vcasih ne. Primer: dogodek, da vrzemo 1 piko pri metu igralne
kocke.
Racunanje z dogodkiDogodek A je nacin dogodka B, kar zapisemo A ⊆ B, ce se vsakic, ko se zgodi dogodek A,
zagotovo zgodi tudi dogodek B.
Primer: Pri metu kocke je dogodek A, da pade ena pika, nacin dogodka B, da pade lihostevilo pik.
Ce je dogodek A nacin dogodka B in hkrati dogodek B nacin dogodka A, sta dogodka enaka:Iz A ⊆ B in B ⊆ A sledi A = B.Vsota dogodkov A in B je dogodek, oznacimo ga z A ∪ B (ali tudi A + B), ki se zgodi, ce sezgodi vsaj eden od dogodkov A in B.
Primer: Vsota dogodka A, da vrzemo sodo stevilo pik, in dogodka B, da vrzemo liho stevilopik, je gotov dogodek: A+B = G.

4 VERJETNOST 28
Izrek 4.1. Za vsoto dogodkov velja:
A ⊆ A ∪BA ∪B = B ∪AA ∪N = AA ∪G = GA ∪A = A
A ∪ (B ∪C) = (A ∪B) ∪C.
Produkt dogodkov A in B, oznacimo ga z A ∩B (ali tudi AB), se zgodi, ce se zgodita A in Bhkrati.
Primer: Produkt dogodka A, da vrzemo sodo stevilo pik, in dogodka B, da vrzemo manj kot3 pike, je dogodek, da vrzemo tocno 2 piki.
Izrek 4.2. Za produkt dogodkov velja:
A ∩B ⊆ AA ∩B = B ∩AA ∩N = NA ∩G = AA ∩A = A
A ∩ (B ∩ C) = (A ∩B) ∩ CA ∩ (B ∪ C) = (A ∩B) ∪ (A ∩ C).
Dogodku A nasproten dogodek A imenujemo negacija dogodka A. Primer: Nasproten dogodek
dogodku, da vrzemo sodo stevilo pik, je dogodek, da vrzemo liho stevilo pik.
Izrek 4.3. Za negacijo dogodka velja:
A ∩A = NA ∪A = G
N = GA = A
A ∩B = A ∪BA ∪B = A ∩B.
Pravimo, da sta dogodka A in B nezdruzljiva, ce je njun produkt nemogoc dogodek. Pri-
mer: Produkt dogodka A, da vrzemo sodo stevilo pik, in dogodka B, da vrzemo liho stevilo pik,je nemogoc dogodek.
• Poljuben dogodek in njegov nasprotni dogodek sta vedno nezdruzljiva.
Ce lahko dogodek A izrazimo kot vsoto nezdruzljivih in mogocih dogodkov, recemo, da jeA sestavljen dogodek. Dogodek, ki ni sestavljen, imenujemo elementaren dogodek ali izid.
Primer: Pri metu kocke je sest izidov: E1, da pade 1 pika, E2, da padeta 2 piki, . . . , E6, dapade 6 pik. Dogodek, da pade sodo stevilo pik, je sestavljen dogodek iz treh osnovnih dogodkov(E2, E4 in E6).
Mnozico dogodkov S = {A1, A2, . . . , An} imenujemo popoln sistem dogodkov, ce se vvsaki ponovitvi poskusa zgodi natanko eden od dogodkov iz mnozice S. To pomeni, da so vsidogodki mogoci
Ai 6= N,

4 VERJETNOST 29
paroma nezdruzljiviAi ∩Aj = N za i 6= j
in njihova vsota je gotov dogodek
A1 ∪A2 ∪ . . . ∪An = G.
Primer: Popoln sistem dogodkov pri metu kocke sestavljajo na primer osnovni dogodki ali patudi dva dogodka: dogodek, da vrzemo sodo stevilo pik, in dogodek, da vrzemo liho stevilo pik.
Statisticna definicija verjetnostiDenimo, da smo n-krat ponovili dan poskus in da se je k-krat zgodil dogodek A. Ponovitve
poskusa, v katerih se A zgodi, imenujemo ugodne za dogodek A, stevilo
f(A) =k
n
pa je relativna frekvenca (pogostost) dogodka A v opravljenih poskusih.
Statisticni zakon, ki ga kaze izkusnja, je: Ce poskus X dolgo ponavljamo, se relativnafrekvenca slucajnega dogodka ustali in sicer skoraj zmeraj toliko bolj, kolikor vec ponovitevposkusa napravimo.
Definicija 4.4 (Statisticna definicija verjetnosti). Verjetnost dogodka A v danem poskusu jestevilo P (A), pri katerem se navadno ustali relativna frekvenca dogodka A v dovolj velikemstevilu ponovitev tega poskusa.
Iz zgodovine so znani primeri, ko so s poskusom dolocali statisticno verjetnost za pojavitevgrba pri metu kovanca. Ko so met opravili vec kot 20000 krat, se je verjetnost le malo razlikovalaod 0.5.
4.2 Osnovne lastnosti verjetnosti
Osnovne lastnosti verjetnosti
• Ker je relativna frekvenca vedno nenegativna, je verjetnost P (A) ≥ 0.
• P (G) = 1, P (N) = 0 in iz A ⊆ B sledi P (A) ≤ P (B).
• Naj bosta dogodka A in B nezdruzljiva. Tedaj ne moreta nastopiti v isti ponovitvi poskusaoba hkrati in je relativna frekvenca vsote dogodkov enaka vsoti relativnih frekvenc. Torejje P (A ∪B) = P (A) + P (B).
Klasicna definicija verjetnostiPri dolocitvi verjetnosti si pri nekaterih poskusih in dogodkih lahko pomagamo s klasicno
definicijo verjetnosti: Vzemimo, da so dogodki iz popolnega sistema dogodkov {E1, E2, . . . , En}enako verjetni:
P (E1) = P (E2) = . . . = P (Es) = p.
Tedaj je verjetnost vsakega izmed dogodkov Ei enaka P (Ei) = 1n , i = 1, . . . , n.
Definicija 4.5 (Klasicna definicija verjetnosti). Ce je dogodek A sestavljen iz k dogodkov izpopolnega sistema n enako verjetnih dogodkov, je njegova verjetnost enaka P (A) = k
n .

4 VERJETNOST 30
Zgled 4.6. Izracunaj verjetnost dogodka A, da pri metu kocke padejo manj kot 3 pike.
Resitev. Popolni sistem sestavlja 6 enako verjetnih dogodkov. Od teh sta le dva ugodna zadogodek A (1 in 2 piki). Zato je P (A) = 2
6 = 13 .
Zgled 4.7. Izracunaj verjetnost dogodka A, da pri socasnem metu dveh kock pade skupaj natanko5 pik.
Resitev. Popolni sistem sestavlja 6 · 6 = 36 enako verjetnih dogodkov. Od teh so za dogodekugodni stirje: (1, 4), (2, 3), (3, 2), (4, 1). Zato je P (A) = 4
36 = 19 .
4.3 Algebra dogodkov
Naj bo G dana mnozica. Neprazna druzina D ⊂ P(G) je algebra dogodkov, ce velja
• Za A ∈ D velja A ∈ D
• Za A,B ∈ D velja A ∪B ∈ D
(Ce je mnozica G neskoncna, moramo zahtevati:⋃∞
k=1Ak ∈ D, ce Ak ∈ D.)
Elemente mnozice G imenujemo elementarni dogodki. Podmnozice X ⊆ G z vec kot enimelementom pa imenujemo sestavljeni dogodki.
Aksiomaticna definicija verjetnostiNaj bo D algebra dogodkov. Verjetnost na algebri dogodkov D je preslikava P : D → R, ki
zadosca aksiomom Kolmogorova:
• Nenegativnost: P (A) ≥ 0 za vsak A ∈ D.
• Normiranost: P (G) = 1.
• Aditivnost: P (A) + P (B) = P (A ∪B), ce sta dogodka A in B nezdruzljiva.
(Ce je mnozica D neskoncna, moramo zahtevati:∑∞
k=1 P (Ak) = P (⋃∞
k=1Ak), ce so dogodkiAk ∈ D paroma nezdruzljivi.)
4.4 Lastnosti verjetnosti
Izrek 4.8. Za verjetnostno funkcijo P na algebri dogodkov D velja:
• P (N) = 0.
• P (A) + P (A) = 1.
• Ce je A ⊆ B, je P (A) ≤ P (B).
• Za poljubna dogodka A in B je P (A ∪B) = P (A) + P (B) − P (A ∩B).
A
G
A
G
AB
A B
G

4 VERJETNOST 31
• Ker sta dogodka N in N nezdruzljiva, je P (N ∪ N) = P (N) + P (N), od koder slediP (N) = 0.
• Ker sta dogodka A in A nezdruzljiva, je P (A) + P (A) = P (A ∪A) = P (G) = 1.
• Ker sta dogodka A in A∩B nezdruzljiva, je P (B) = P (A∪ (A∩B)) = P (A)+P (A∩B) ≥P (A).
• Ker sta dogodka A ∩B in A ∩B nezdruzljiva, velja
P (A ∩B) + P (A ∩B) = P ((A ∩B) ∪ (A ∩B)) = P (A).
Ker sta dogodka A ∩B in B nezdruzljiva, velja
P (A ∩B) + P (B) = P ((A ∩B) ∪B) = P (A ∪B).
Sledi
P (A) + P (B) =(P (A ∩B) + P (A ∩B)
)+ P (B) =
= P (A ∩B) +(P (A ∩B) + P (B)
)=
= P (A ∩B) + P (A ∪B).
Zgled 4.9. Naj bo G = {E1, E2, E3}. Za sestavljena dogodka A = {E1, E2} in B = {E2, E3}velja P (A) = 5
6 in P (B) = 12 . Doloci verjetnosti elementarnih dogodkov.
Resitev. Ker je
P (A) = P (E1 ∪ E2) = P (E1) + P (E2) =5
6,
P (B) = P (E2 ∪ E3) = P (E2) + P (E3) =1
2,
P (G) = P (E1) + P (E2) + P (E3) = 1,
od tod sledi P (E3) = P (G) − P (A) = 1 − 56 = 1
6 . Torej P (E1) = P (G) − P (B) = 1 − 12 = 1
2 inP (E2) = P (G) − P (E1) − P (E3) = 1 − 1
2 − 16 = 1
3 .
Zgled 4.10. Verjetnost, da student naredi izpit iz Anglescine, je P (A) = 2/3. Verjetnost, danaredi izpit iz Botanike, je P (B) = 5/9. Verjetnost, da naredi vsaj enega od obeh izpitov, jeP (A ∪B) = 4/5. Koliksna je verjetnost, da naredi oba izpita?
Resitev. Racunajmo
P (A ∩B) = P (A) + P (B) − P (A ∪B) =2
3+
5
9− 4
5=
19
45≈ 0.42 .
Zgled 4.11. Iz kupa 32 kart slucajno povlecemo 3 karte. Koliksna je verjetnost, da je med tremikartami vsaj en as (dogodek A)?
Resitev. Nasprotni dogodek A dogodka A je, da med tremi kartami ni asa. Njegova verjetnostje dolocena s kvocientom stevila vseh ugodnih dogodkov v popolnem sistemu dogodkov s stevilomvseh dogodkov v tem sistemu dogodkov. Vseh dogodkov v popolnem sistemu dogodkov je(32
3
), ugodni pa so tisti, ko izbiramo 3 karte izmed 28 kart, ki niso asi. Torej
(283
). Sledi
P (A) =(28
3 )(32
3 )= 819
1240 in
P (A) = 1 − P (A) = 1 − 819
1240=
421
1240≈ 0.34 .

4 VERJETNOST 32
Tudi slepa kura zrno najde . . .
Zgled 4.12. Po dvoriscu tava slepa kura in nakljucno kljuva na tla. Naj bo P (A) = p, verjetnost,da pri enem poskusu najde zrno. Koliksna je verjetnost, da bo kura scasoma zrno nasla?
Resitev. Verjetnost, da ga najde v prvem poskusu je p, verjetnost, da ga najde v drugem, je(1 − p)p, . . . , verjetnost, da ga najde v n-tem poskusu, je pn = (1 − p)n−1p. Verjetnost, da gasploh kdaj najde, je
p =
∞∑
n=1
pn =
∞∑
n=1
(1 − p)n−1p = p · 1
1 − (1 − p)= 1.
Ali bo kokos zrno zagotovo nasla? Ne. To ni gotov dogodek, je le dogodek z verjetnostjo 1.
4.5 Pogojna verjetnost
Opazujemo dogodka A in B, kjer je B mogoc dogodek, tj. P (B) > 0.
Verjetnost, da se zgodi dogodek A ob pogoju, da se je zgodil dogodek B, imenujemo pogojnaverjetnost dogodka A glede na dogodek B in oznacimo s P (A|B)
Podobno lahko v primeru P (A) > 0 s P (B|A) oznacimo pogojno verjetnost dogodka B gledena dogodek A.
Denimo, da smo n-krat ponovili poskus X in da se je ob tem kB-krat zgodil dogodek B. Topomeni, da smo v n ponovitvah poskusa X napravili kB-krat poskus X ′. Dogodek A se je zgodilob poskusu X ′ le, ce se je zgodil tudi B, t.j. A ∩B.
Denimo, da se je dogodek A∩B zgodil ob ponovitvi poskusa kA∩B-krat. Potem je relativnafrekvenca dogodka A v opravljenih ponovitvah poskusa X ′ enaka: fB(A) = f(A|B) = kA∩B
kB=
kA∩Bn
kBn
= f(A∩B)f(B) oziroma
P (A|B) =P (A ∩B)
P (B).
Neodvisni dogodkiKer je P (A|B) = P (A∩B)
P (B) , sledi od tod
P (A ∩B) = P (B)P (A|B).
Podobno iz P (B|A) = P (A∩B)P (A) sledi P (A ∩B) = P (A)P (B|A). Torej je
P (A)P (B|A) = P (B)P (A|B).
Dogodka A in B sta neodvisna, ce velja
P (A|B) = P (A).
• Za neodvisna dogodka A in B velja P (A ∩B) = P (A)P (B).
• Za nezdruzljiva dogodka A in B velja P (A|B) = 0.
Zgled 4.13. Iz posode, v kateri imamo 8 modrih in 2 rdeci krogli, dvakrat na slepo izberemopo eno kroglo. Koliksna je verjetnost dogodka, da je prva krogla modra (dogodek M1) in drugardeca (dogodek R2)?

4 VERJETNOST 33
1 2
Resitev. Ne glede na to, ali prvo izvleceno kroglo vrnemo v posodo ali ne, velja
P (M1 ∩R2) = P (M1)P (R2|M1).
• Ce prve izvlecene krogle ne vrnemo v posodo, sta dogodka M1 in R2 odvisna. Torej jeP (R2|M1) = 2
9 , saj sta med preostalimi 9 kroglicami 2 rdeci. Sledi
P (M1 ∩R2) = P (M1)P (R2|M1) =8
10· 2
9=
16
90≈ 0.18 .
• Ce prvo izvleceno kroglo vrnemo v posodo, sta dogodka M1 in R2 neodvisna. Torej jeP (R2|M1) = P (R2) = 2
10 , saj sta med vsemi 10 kroglicami 2 rdeci. Sledi
P (M1 ∩R2) = P (M1)P (R2|M1) =8
10· 2
10=
16
100= 0.16 .
Formula za popolno verjetnostVcasih poskusi potekajo v vec fazah in sele izidi na prejsnjih fazah dolocijo, kako bo potekal
poskus naprej. Takim poskusom pravimo relejni poskusi.
Naj poskus poteka v dveh fazah in naj bo {H1, . . . ,Hn} popoln sistem dogodkov v prvi fazi.Dogodke Hi imenujemo hipoteze. Poznamo tudi verjetnosti hipotez P (H1), . . . , P (Hn).
V drugi fazi opazujemo dogodek A. Njegova verjetnost naj bo odvisna od tega, kaj se jezgodilo v prvi fazi, tj. poznamo verjetnosti P (A|H1), . . . , P (A|Hn).
Izracunajmo verjetnost dogodka A. Ker je
H1 ∪ . . . ∪Hn = G,
je(A ∩H1) ∪ . . . ∪ (A ∩Hn) = A
in od todP (A ∩H1) + . . .+ P (A ∩Hn) = P (A).
Sledi formula za popolno verjetnost
P (A) = P (H1)P (A|H1) + . . .+ P (Hn)P (A|Hn) =
=
n∑
i=1
P (Hi)P (A|Hi).
Zgled 4.14. V prvi posodi imamo 3 modre in 2 rdeci kroglici, v drugi pa 1 modro in 3 rdece. Naslepo izberemo eno kroglico iz prve posode in jo damo v drugo, nato pa iz druge posode izberemokroglico. Koliksna je verjetnost, da je ta modra?
?

4 VERJETNOST 34
Resitev. Oznacimo s HM in HR dogodka, da je smo najprej izbrali modro oz. rdeco kroglico.Potem je
P (A) = P (HM )P (A|HM ) + P (HR)P (A|HR) =3
5· 2
5+
2
5· 1
5=
8
25= 0.32 .
Bayesova formulaVprasanje pa lahko sedaj obrnemo. Recimo, da se je dogodek A zgodil. Koliksna je verje-
tnost, da se je zgodila ravno hipoteza Hk? Iz formule za produkt dogodkov dobimo
P (A ∩Hk) = P (Hk)P (A|Hk) = P (A)P (Hk|A),
od koder sledi P (Hk|A) = P (Hk)P (A|Hk)P (A) , kar lahko zapisemo kot Bayesovo formulo
P (Hk|A) =P (Hk)P (A|Hk)∑ni=1 P (Hi)P (A|Hi)
.
Zgled 4.15. V prvi posodi imamo 3 modre in 2 rdeci kroglici, v drugi pa 1 modro in 3 rdece. Naslepo izberemo eno kroglico iz prve posode in jo damo v drugo, nato pa iz druge posode izberemokroglico. Koliksna je verjetnost, da smo v prvem koraku prenesli modro kroglico, ce smo nakoncu izvlekli modro kroglico?
?
Resitev. Ker je P (HM ) = 35 , P (A|HM ) = 2
5 in P (A) = 825 , velja
P (HM |A) =P (HM )P (A|HM )
P (A)=
35 · 2
5825
=3
4= 0.75 .
Lazni pozitiviOpazujmo dvofazni poskus, pri katerem imamo v prvi fazi le hipotezi B in B. Tedaj se
Bayesova formula glasi
P (B|A) =P (B)P (A|B)
P (B)P (A|B) + P (B)P (A|B).
Z A oznacimo dogodek, da je test pokazal prisotnost bolezni, B pa da je oseba obolela. Re-cimo, da imamo “precej” zanesljiv test, ki pri 99 % obolelih oseb pokaze prisotnost bolezni(tj. P (A|B) = 0.99), in pri 99 % zdravih osebah ne pokaze obolelosti (tj. P (A|B) = 0.99).Recimo, da je bolezen precej redka – prizadane le 1 osebo na vsakih 10 000 prebivalcev (tj.P (B) = 0.0001). Koliksna je verjetnost za prisotnost bolezni, ce jo je test zaznal (tj. koliko jeP (B|A))?
4 VERJETNOST 35
Iz podatkov razberemo P (B) = 1 − P (B) = 0.9999 in P (A|B) = 1 − P (A|B) = 0.01. Sledi
P (B|A) =P (B)P (A|B)
P (B)P (A|B) + P (B)P (A|B)=
=0.0001 · 0.99
0.0001 · 0.99 + 0.9999 · 0.01 =0.000099
0.010098=
1
102,
P (B|A) = 1 − 1
102=
101
102≈ 99.02 %.
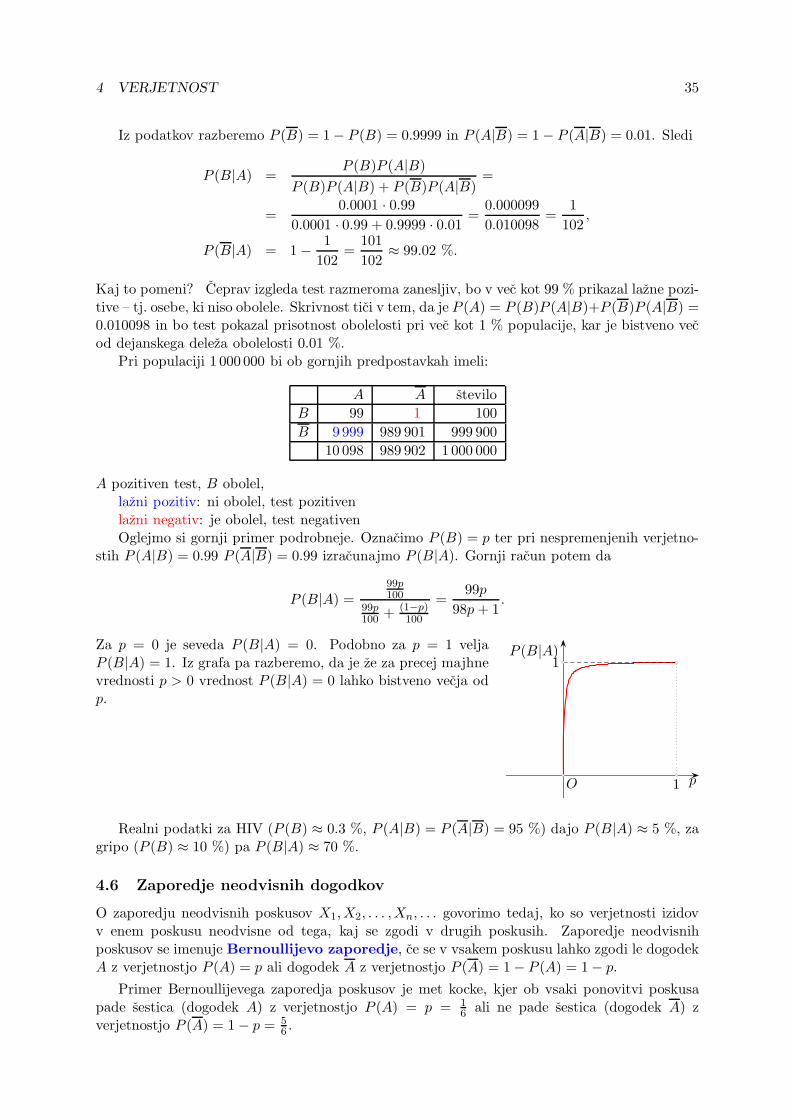
Kaj to pomeni? Ceprav izgleda test razmeroma zanesljiv, bo v vec kot 99 % prikazal lazne pozi-tive – tj. osebe, ki niso obolele. Skrivnost tici v tem, da je P (A) = P (B)P (A|B)+P (B)P (A|B) =0.010098 in bo test pokazal prisotnost obolelosti pri vec kot 1 % populacije, kar je bistveno vecod dejanskega deleza obolelosti 0.01 %.
Pri populaciji 1 000 000 bi ob gornjih predpostavkah imeli:
A A stevilo
B 99 1 100
B 9 999 989 901 999 900
10 098 989 902 1 000 000
A pozitiven test, B obolel,lazni pozitiv: ni obolel, test pozitivenlazni negativ: je obolel, test negativenOglejmo si gornji primer podrobneje. Oznacimo P (B) = p ter pri nespremenjenih verjetno-
stih P (A|B) = 0.99 P (A|B) = 0.99 izracunajmo P (B|A). Gornji racun potem da
P (B|A) =99p100
99p100 + (1−p)
100
=99p
98p + 1.
p
P (B|A)
bc
O
bc1
bc
1
bc
Za p = 0 je seveda P (B|A) = 0. Podobno za p = 1 veljaP (B|A) = 1. Iz grafa pa razberemo, da je ze za precej majhnevrednosti p > 0 vrednost P (B|A) = 0 lahko bistveno vecja odp.
Realni podatki za HIV (P (B) ≈ 0.3 %, P (A|B) = P (A|B) = 95 %) dajo P (B|A) ≈ 5 %, zagripo (P (B) ≈ 10 %) pa P (B|A) ≈ 70 %.
4.6 Zaporedje neodvisnih dogodkov
O zaporedju neodvisnih poskusov X1,X2, . . . ,Xn, . . . govorimo tedaj, ko so verjetnosti izidovv enem poskusu neodvisne od tega, kaj se zgodi v drugih poskusih. Zaporedje neodvisnihposkusov se imenuje Bernoullijevo zaporedje, ce se v vsakem poskusu lahko zgodi le dogodekA z verjetnostjo P (A) = p ali dogodek A z verjetnostjo P (A) = 1 − P (A) = 1 − p.
Primer Bernoullijevega zaporedja poskusov je met kocke, kjer ob vsaki ponovitvi poskusapade sestica (dogodek A) z verjetnostjo P (A) = p = 1
6 ali ne pade sestica (dogodek A) zverjetnostjo P (A) = 1 − p = 5
6 .

4 VERJETNOST 36
V Bernoullijevem zaporedju neodvisnih poskusov nas zanima, koliksna je verjetnost, da se vn zaporednih poskusih zgodi dogodek A natanko k-krat. To se lahko zgodi na primer tako, dase najprej zgodi k-krat dogodek A in nato v preostalih n− k poskusih zgodi nasprotni dogodekA. Slednje se zgodi z verjetnostjo pk(1 − p)n−k.
Dogodek A, ki se v n zaporednih poskusih zgodi natanko k-krat, se lahko zgodi tudi na drugenacine in sicer je teh toliko, na kolikor nacinov lahko izberemo k poskusov iz n poskusov (tj.(nk
)). Torej je
Pn(k) =
(n
k
)pk(1 − p)n−k.
Zgled 4.16. Iz posode, v kateri imamo 8 modrih in 2 rdeci kroglici, na slepo izberemo po enokroglico in po izbiranju izvleceno kroglico vrnemo v posodo. Koliksna je verjetnost, da v petihposkusih izberemo 3-krat modro kroglico?
Resitev. Dogodek A je, da izvlecemo modro kroglo. Potem je p = P (A) = 810 = 0.8. Verje-
tnost, da v petih poskusih izberemo 3-krat modro kroglico, je:
P5(3) =
(5
3
)0.83(1 − 0.8)5−3 ≈ 0.205 .
Recimo, da imamo v posodi N kroglic, od katerih je K modrih. Verjetnost, da bomo v nposkusih (z vracanjem) k-krat izvlekli modro kroglico, je enaka
Pn(k) =
(n
k
)(N
K
)k (1 − N
K
)n−k
.
Ce pa kroglic ne vracamo, lahko n kroglic izberemo na(N
n
)nacinov, med katerimi je
(Kk
)·(N−K
n−k
)
ugodnih. Verjetnost, da bomo pri pri n poskusih (brez vracanja) izvlekli modro kroglico, je torejenaka
P ∗n(k) =
(Kk
)·(N−K
n−k
)(Nn
) .
Dokazati je mozno, da pri velikih N in K = pN velja
Pn(k) ≈ P ∗n(k).
V praksi to torej pomeni, da je pri jemanju vzorca iz velike serije nepomembno, ce vzorecvracamo ali ne.
Ocenjevanje stevila osebkov v populaciji
Zgled 4.17. V posodi je (neznano stevilo) N kroglic. Iz posode vzamemo K kroglic, jih oznacimomodro in vrnemo v posodo. Ko iz posode nakljucno vzamemo n kroglic, je med njimi k modrih.Pri katerem N je verjetnost P ∗
n(k) najvecja?

4 VERJETNOST 37
Resitev. Oznacimo s pN = P ∗n(k) pri N kroglicah in izracunajmo kvocient
pN+1
pN=
(Kk )·(N+1−K
n−k )(N+1
n )
(Kk )·(N−K
n−k )(N
n)
=
(N+1−K
n−k
)(Nn
)(N+1
n
)(N−Kn−k
) =(N + 1 −K)(N + 1 − n)
(N + 1 −K − n+ k)(N + 1)= τ.
Pricakovati je, da v okolici ekstremne vrednosti τ ≈ 1. Iz gornjega kvocienta vidimo, da jeτ ≈ 1 natanko tedaj, ko
(N + 1 −K) ((N + 1) − n) ≈ ((N + 1 −K) − n+ k) (N + 1)
Sledi−n(N + 1 −K) ≈ (−n+ k)(N + 1)
inN ≈ n
kK − 1.
Ker gre tu le za oceno (in praviloma velik K), lahko zapisemo
N ≈ n
kK.
Dobljena ocena je v resnici pricakovana, saj je KN ≈ k
n po statisticni definiciji verjetnosti.
Zgled 4.18. V ribnik smo spustili 20 oznacenih rib. Cez nekaj casa smo iz ribnika potegnili 5rib in le ena izmed njih je bila oznacena. Priblizno koliko rib je v ribniku?
Resitev. Po gornji formuli dobimo N ≈ 51 · 20 = 100. Narisimo se, kako se spreminja pN =
P ∗n(k) pri fiksnih K = 20, n = 5 in k = 1.
N
PN
bc
O
bcbcPmax
bc
100
bc1
Oglejmo si se enkrat Bernoullijevo zaporedje n poskusov z verjetnostjo p. Zanima nas, katerostevilo k ugodnih izidov je najbolj verjetno. Podobno kot zgoraj si ogledamo kvocient
Pn(k + 1)
Pn(k)=
( nk+1
)pk+1(1 − p)n−k−1
(nk
)pk(1 − p)n−k
=(n − k)p
(k + 1)(1 − p)= τ.
Izpeljemo lahko, da je τ ≈ 1 natanko tedaj, ko je
k ≈ np+ 1 − p.
(Za velike n je torej kn ≈ p+ 1−p
n ≈ p, kar je po statisticni definiciji verjetnosti tudi pricakovano.)

5 MATRIKE 38
4.7 Hardy-Weinbergov zakon
Opazujmo krvne grupe A, B in 0. Verjetnost razdvojenih kromosomov po posameznih grupahnaj bo P (A) = p, P (B) = q, P (0) = r. Verjetnosti genotipov so P (AA) = p2, P (AB) = 2pq,P (A0) = 2pr, P (BB) = q2, P (B0) = 2qr in P (00) = r2.
V naslednji generaciji so verjetnosti enake
P (A) = P (AA) · 1 + P (AB) · 1
2+ P (A0) · 1
2=
= p2 + 12 · 2pq + 1
2 · 2pr = p(p+ q + r) = p,
P (B) = P (BB) · 1 + P (BA) · 1
2+ P (B0) · 1
2=
= q2 + 12 · 2pq + 1
2 · 2qr = q(p + q + r) = q,
P (0) = P (00) · 1 + P (A0) · 1
2+ P (B0) · 1
2=
= r2 + 12 · 2pr + 1
2 · 2qr = r(p+ q + r) = r.
Opazujmo populacijo, v kateri je verjetnost za dominantni alel A enaka p = 80 %, za recesivnialel a pa q = 20 %, p+ q = 1. Pri nakljucnem parjenju bo v generaciji p2 homozigotov AA, q2
homozigotov aa in 2pq heterozigotov Aa. Glede na dominantni alel A bo imelo 1− q2 = 0.96 %generacije fenotip A, preostali pa a. Ali bodo scasoma osebki s fenotipom a izumrli?
Ne, alel A bomo nasli pri vseh gametah homozigotov AA, torej pri p2, in pri 12 gamet
heterozgotov, torej pri 12 · 2pq = pq. Skupaj pri p(p+ q) = p delu populacije.
Podobno najdemo alel a pri vseh gametah homozigotov aa, torej pri q2, in pri 12 gamet
heterozgotov, torej pri 12 · 2pq = pq. Skupaj pri q(p+ q) = q delu populacije.
Deleza alelov A in a se ohranjata.
5 Matrike
5.1 Operacije z matrikami
Matrika je pravokotna tabela (shema) realnih stevil, sestavljena iz vrstic in stolpcev:
[−4 2 −2 2
0 −3 1 12
]ali
−3√
5 22 0 14 −3 −1
.
Mnozico vseh realnih matrik z m vrsticami in n stolpci oznacimo z Rm×n. V splosnem oznacimo
A =
a11 a12 . . . a1n
a21 a22 . . . a2n...
......
am1 am2 . . . amn
ali krajse A = [aij] ∈ Rm×n. (Torej i = 1, . . . ,m in j = 1, . . . , n.) Stevilo aij imenujemo (i, j)-tielement matrike A.
Matrika A = [aij ] ∈ Rm×n je kvadratna, ce je m = n. Kvadratna matrika A = [aij ] ∈ Rn×n
je diagonalna, ce je aij = 0 za i 6= j.
A =
a11 0 . . . 00 a22 . . . 0...
......
0 0 . . . ann

5 MATRIKE 39
Zgled 5.1. Zapisi matriko A = [aij ] ∈ R2×3, kjer je aij = (−1)i + 2j .
Resitev.
A =
[(−1)1 + 21 (−1)1 + 22 (−1)1 + 23
(−1)2 + 21 (−1)2 + 22 (−1)2 + 23
]=
[1 3 73 5 9
].
Enakost matrikMatriki A ∈ Rm×n in A′ ∈ Rm′×n′
sta enaki, ce je m = m′, n = n′ ter aij = a′ij zai = 1, . . . ,m in j = 1, . . . , n.
Enostavno povedano: matriki sta enaki, ce sta enakih razseznosti in se ujemata v istoleznihelementih.
Vsota matrikZa matriki A,B ∈ Rm×n definiramo vsoto matrik A+B. Ce je
A =
a11 a12 . . . a1n
a21 a22 . . . a2n...
......
am1 am2 . . . amn
in B =
b11 b12 . . . b1n
b21 b22 . . . b2n...
......
bm1 bm2 . . . bmn
,
je
A+B =
a11 + b11 a12 + b12 . . . a1n + b1n
a21 + b21 a22 + b22 . . . a2n + b2n...
......
am1 + bm1 am2 + bm2 . . . amn + bmn
.
Produkt matrike s skalarjemZa matriko A ∈ Rm×n in stevilo λ ∈ R definiramo produkt s skalarjem λ. Ce je
A =
a11 a12 . . . a1n
a21 a22 . . . a2n...
......
am1 am2 . . . amn
,
je
λA =
λa11 λa12 . . . λa1n
λa21 λa22 . . . λa2n...
......
λam1 λam2 . . . λamn
.
Zgled 5.2. Izracunaj 5A− 3B za matriki A =
[1 −22 4
]in B =
[−1 02 −3
].
Resitev. Racunajmo
5A− 3B = 5 ·[
1 −22 4
]− 3
[−1 02 −3
]=
=
[5 −1010 20
]−[−3 06 −9
]=
[8 −104 29
].
Navedimo glavne lastnosti sestevanja in mnozenja matrik s skalarjem.

5 MATRIKE 40
• asociativnost sestevanja (A+B) + C = A+ (B + C) za vse A,B,C ∈ Rm×n
• obstoj nevtralnega elementa za sestevanje Za nicelno matriko
0 =
0 . . . 0...
...0 . . . 0
∈ Rm×n
velja A+ 0 = 0 +A = A za vsak A ∈ Rm×n.
• obstoj nasprotnega elementa za sestevanje Za matriko A ∈ Rm×n ima nasprotnamatrika −A = (−1)A lastnost A+ (−A) = 0.
• komutativnost sestevanja A+B = B +A za vse A,B ∈ Rm×n
• distributivnost v skalarnem faktorju (λ + µ)A = λA + µA za vse A ∈ Rm×n inλ, µ ∈ R,
• distributivnost v matricnem faktorju λ(A + B) = λA + λB za vse A,B ∈ Rm×n inλ ∈ R,
• multiplikativnost v skalarnem faktorju (λµ)A = λ(µA) za vse A ∈ Rm×n in λ, µ ∈ R,
• mnozenje s skalarjem 1 1 ·A = A za vse A ∈ Rm×n.
Produkt matrikCe ima matrika A toliko stolpcev kot ima matrika B vrstic, lahko matriki A in B zmnozimo.
Produkt matrik A ∈ Rm×n in B ∈ Rn×p oznacimo z AB in je matrika C = [cij ] z elementi
cij =
n∑
k=1
aikbkj = ai1b1j + ai2b2j + . . .+ ainbnj
za i = 1, . . . ,m, j = 1, . . . , p. Skratka
a11 . . . a1n...
...am1 . . . amn
︸ ︷︷ ︸A
·
b11 . . . b1p...
...bn1 . . . bnp
︸ ︷︷ ︸B
=
n∑
k=1
a1kbk1 . . .n∑
k=1
a1kbkp
......
n∑
k=1
amkbk1 . . .
n∑
k=1
amkbkp
︸ ︷︷ ︸AB
.
Element v i-ti vrstici in j-tem stolpcu matrike C = AB ∈ Rm×p je skalarni produkt i-tevrstice matrike A ∈ Rm×n in j-tega stolpca matrike B ∈ Rn×p:
cij = ai1b1j + ai2b2j + . . .+ ainbnj.
· =i
j
i
j
A B AB
b b b
b
b
b
b

5 MATRIKE 41
Zgled 5.3. Izracunaj produkt matrik A =
2 −1−3 2
0 1
in B =
[2 0
−3 1
].
Resitev.
AB =
2 −1−3 2
0 1
·[
2 0−3 1
]=
=
2 · 2 + (−1) · (−3) 2 · 0 + (−1) · 1(−3) · 2 + 2 · (−3) (−3) · 0 + 2 · 1
0 · 2 + 1 · (−3) 0 · 0 + 1 · 1
=
=
7 −1−12 2−3 1
.
Zgled 5.4. Izracunaj AB in BA za A =
[1 −22 4
]in B =
[−1 0
2 −3
].
Resitev. Racunajmo
AB =
[1 −22 4
]·[−1 0
2 −3
]=
=
[1 · (−1) + (−2) · 2 1 · 0 + (−2) · (−3)
2 · (−1) + 4 · 2 2 · 0 + 4 · (−3)
]=
[−5 6
6 −12
],
BA =
[−1 0
2 −3
]·[
1 −22 4
]=
=
[(−1) · 1 + 0 · 2 (−1) · (−2) + 0 · 42 · 1 + (−3) · 2 2 · (−2) + (−3) · 4
]=
[−1 2−4 −16
].
Racun torej kaze, da je AB 6= BA. Pravimo, da je mnozenje matrik nekomutativno. (Se vec,razseznosti matrik A in B so lahko take, da obstaja le eden od produktov AB in BA.)
Mnozenje matrik zadosca pogojem
• asociativnost (AB)C = A(BC) za vse A ∈ Rm×n, B ∈ Rn×p in C ∈ Rp×q,
• obstoj enote za mnozenje
In =
1 0 0 . . . 00 1 0 . . . 00 0 1 0...
.... . . 0
0 0 0 . . . 1
.
Za vsako matriko A ∈ Rm×n velja ImA = AIn = A. Kvadratno matriko In imenujemoidenticna matrika. Pogosto namesto In pisemo kar I, ko je iz besedila razvidno, kaksnerazseznosti je matrika I.
• leva distributivnost (A+B)C = AC +BC za vse A,B ∈ Rm×n in C ∈ Rn×p,
• desna distributivnost A(B + C) = AB +AC za vse A ∈ Rm×n in B,C ∈ Rn×p,
• homogenost λ(AB) = (λA)B = A(λB) za vse A ∈ Rm×n, B ∈ Rn×p in λ ∈ R.

5 MATRIKE 42
Izrek 5.5. Za matrike A ∈ Rm×n, B ∈ Rn×p in C ∈ Rp×q velja (AB)C = A(BC).
Dokaz. Oznacimo A = [aij], B = [bij ] in C = [cij ]. Izracunajmo (i, j)-ti element matrike(AB)C:
((AB)C)ij =
p∑
l=1
(AB)ilclj =
p∑
l=1
(n∑
k=1
aikbkl)clj =
=
p∑
l=1
n∑
k=1
aikbklclj =n∑
k=1
p∑
l=1
aikbklclj =
=
n∑
k=1
aik(
p∑
l=1
bklclj) =
n∑
k=1
aik(BC)kj = (A(BC))ij .
Transponirana matrikaZa matriko
A =
a11 a12 . . . a1n
a21 a22 . . . a2n...
......
am1 am2 . . . amn
definiramo transponirano matriko k A
AT =
a11 a21 . . . am1
a12 a22 . . . am2...
......
a1n a2n . . . amn
.
Za A ∈ Rm×n je torej AT ∈ Rn×m.
Zgled 5.6. Zapisi transponirano matriko k matriki A =
2 1 −1 3−1 0 1 2
0 2 4 −2
.
Resitev. Velja
AT =
2 −1 01 0 2
−1 1 43 2 −2
.
Za transponiranje matrik velja
• (AT )T = A za vse A ∈ Rm×n
• (A+B)T = AT +BT za vse A,B ∈ Rm×n
• (λA)T = λAT za vse A ∈ Rm×n in λ ∈ R
• (AB)T = BTAT za vse A ∈ Rm×n in B ∈ Rn×p
Izrek 5.7. Za A ∈ Rm×n in B ∈ Rn×p velja (AB)T = BTAT .

5 MATRIKE 43
Dokaz. Oznacimo A = [aij ] in B = [bij ]. Izracunajmo (i, j)-ti element matrike (AB)T :
((AB)T )ij = (AB)ji =
n∑
k=1
ajkbki.
Ker pa je
(BTAT )ij =n∑
k=1
BTikA
Tkj =
n∑
k=1
bkiajk =n∑
k=1
ajkbki,
res velja (AB)T = BTAT .
5.2 Permutacije
Permutacija reda n je bijektivna preslikava σ : {1, 2, 3, . . . , n} → {1, 2, 3, . . . , n}. Mnozicovseh permutacij reda n oznacimo z Sn. Permutacijo obicajno zapisemo v obliki
σ =
(1 2 . . . na1 a2 . . . an
),
kjer gornja oznaka pomeni, da je σ(1) = a1, σ(2) = a2, . . . , σ(n) = an.
Zgled 5.8. Zapisi permutacijo σ ∈ S4, ki preslika 1 7→ 3, 2 7→ 1 in 4 7→ 2.
Resitev. Ker je preslikava σ bijekcija, mora veljati se σ : 3 7→ 4. Torej je
σ =
(1 2 3 43 1 4 2
).
Permutacija ι je identicna permutacija, ce je ι(i) = i za vsak i. (To je pravzapravidenticna preslikava.)
Permutacija τ je transpozicija, ce za neka i in j, i 6= j, velja τ(i) = j, τ(j) = i in τ(k) = kza vsak k /∈ {i, j}.
Zgled 5.9. Zapisi transpozicijo σ ∈ S4, ki zamenja stevili 2 in 4.
Resitev. Iskana transpozicija je
σ =
(1 2 3 41 4 3 2
).
Dokazati je mozno, da za vsako permutacijo σ obstajajo transpozicije τ1, τ2, . . . , τm, da je
τm ◦ τm−1 ◦ . . . ◦ τ1 ◦ σ = ι.
Stevilo transpozicij, ki uredijo σ v identicno permutacijo, ni enolicno doloceno. Dokazati jemozno, da iz
τm ◦ τm−1 ◦ . . . ◦ τ1 ◦ σ = ι
inτm′ ◦ τm′−1 ◦ . . . ◦ τ1 ◦ σ = ι
sledi, da je m ≡ m′ (mod 2) (tj. stevili m in m′ sta iste parnosti), kar pomeni, da je (−1)m =(−1)m
′. Stevilo (−1)m imenujemo predznak permutacije in ga oznacimo s sign(σ). Permu-
tacije s predznakom 1 so sode, permutacije s predznakom −1 pa lihe.

5 MATRIKE 44
5.3 Determinante
Naj bo A ∈ Rn×n kvadratna matrika:
A =
a11 a12 . . . a1n
a21 a22 . . . a2n...
......
an1 an2 . . . ann
.
Determinanta matrike A je stevilo det(A), ki je vsota vseh moznih produktov po enegastevila iz vsake vrstice in stolpca z upostevanjem ustreznih predznakov. Natancneje:
det(A) =∑
σ∈Sn
sign(σ)a1σ(1)a2σ(2) . . . anσ(n), (2)
kjer Sn oznacuje mnozico vseh permutacij reda n, stevilo sign(σ) pa predznak permutacije σ.Obicajno pisemo
det(A) =
∣∣∣∣∣∣∣∣∣
a11 a12 . . . a1n
a21 a22 . . . a2n...
......
an1 an2 . . . ann
∣∣∣∣∣∣∣∣∣
.
Opozoriti velja, da je za velike n izracun vrednosti determinante po definiciji zelo zamuden, sajima mnozica Sn natancno n! = 1 · 2 · · · n elementov. Torej je potrebno za izracun determinantereda n sesteti n! clenov in pri vsakem od njih je potrebno pravilno dolociti predznak ustreznepermutacije.
Oglejmo si sedaj vrednost det(A) za majhne razseznosti matrike A.
Pri n = 1 jeA = [a11].
V vsoti (2) imamo je en clen, torej je
det(A) = a11.
Pri n = 2 je
A =
[a11 a12
a21 a22
].
V mnozici S2 imamo le dve permutaciji ι =
(1 21 2
)in τ =
(1 22 1
). Permutacija ι je
identicna in ima predznak (−1)0 = 1, permutacija τ pa je transpozicija in ima predznak (−1)1 =−1. Torej je
det(A) = sign(ι)a1ι(1)a2ι(2) + sign(τ)a1τ(1)a2τ(2) = a11a22 − a12a21
ali krajse ∣∣∣∣a11 a12
a21 a22
∣∣∣∣ = a11a22 − a12a21.
Zgled 5.10. Izracunaj vrednost determinante
∣∣∣∣3 5
−2 −1
∣∣∣∣.

5 MATRIKE 45
Resitev. Po pravilu za izracun determinante reda 2 × 2 je
∣∣∣∣3 5
−2 −1
∣∣∣∣ = 3 · (−1) − 5 · (−2) = −3 + 10 = 7.
Pri n = 3 je
A =
a11 a12 a13
a21 a22 a23
a31 a32 a33
.
V mnozici S3 je natancno 3! = 1 · 2 · 3 = 6 permutacij. Te so
σ1 =
(1 2 31 2 3
)
σ2 =
(1 2 31 3 2
)
σ3 =
(1 2 32 1 3
)
σ4 =
(1 2 32 3 1
)
σ5 =
(1 2 33 1 2
)
σ6 =
(1 2 33 2 1
)
Hitro se vidi, da imajo permutacije σ1, σ4 in σ5 predznak 1, ostale pa predznak −1.Torej je det(A) = a11a22a33 + a12a23a31 + a13a21a32 − a13a22a31 − a11a23a32 − a12a21a33. To
formulo si lahko enostavno zapomnimo tako, da k matriki A na desni pripisemo prva dva stolpcamatrike A
matrika A︷ ︸︸ ︷∣∣∣∣∣∣
a11 a12 a13
a21 a22 a23
a31 a32 a33
∣∣∣∣∣∣
a11 a12
a21 a22
a31 a32
ter sestejemo produkte na glavnih diagonalah (polne crte) in odstejemo produkte na stranskih(crtkane crte).
Opozorilo. Zgoraj opisani prijem s pripisovanjem dveh stolpcev na desni (Sarrusovo pravilo)velja samo za izracun determinant razseznosti 3 × 3. Metoda za splosen n, n 6= 3, ne drzi inje tudi ni mozno ustrezno prirediti.
Zgled 5.11. Izracunaj vrednost determinante
∣∣∣∣∣∣
3 −1 −22 1 1
−2 0 1
∣∣∣∣∣∣.
Resitev. Po Sarrusovem pravilu je
3 −1 −2 3 −12 1 1 2 1
−2 0 1 −2 0= 3 · 1 · 1 + (−1) · 1 · (−2) + (−2) · 2 · 0 −
(−2) · 1 · (−2) − 3 · 1 · 0 − (−1) · 2 · 1 =
3 + 2 + 0 − 4 − 0 + 2 = 3.
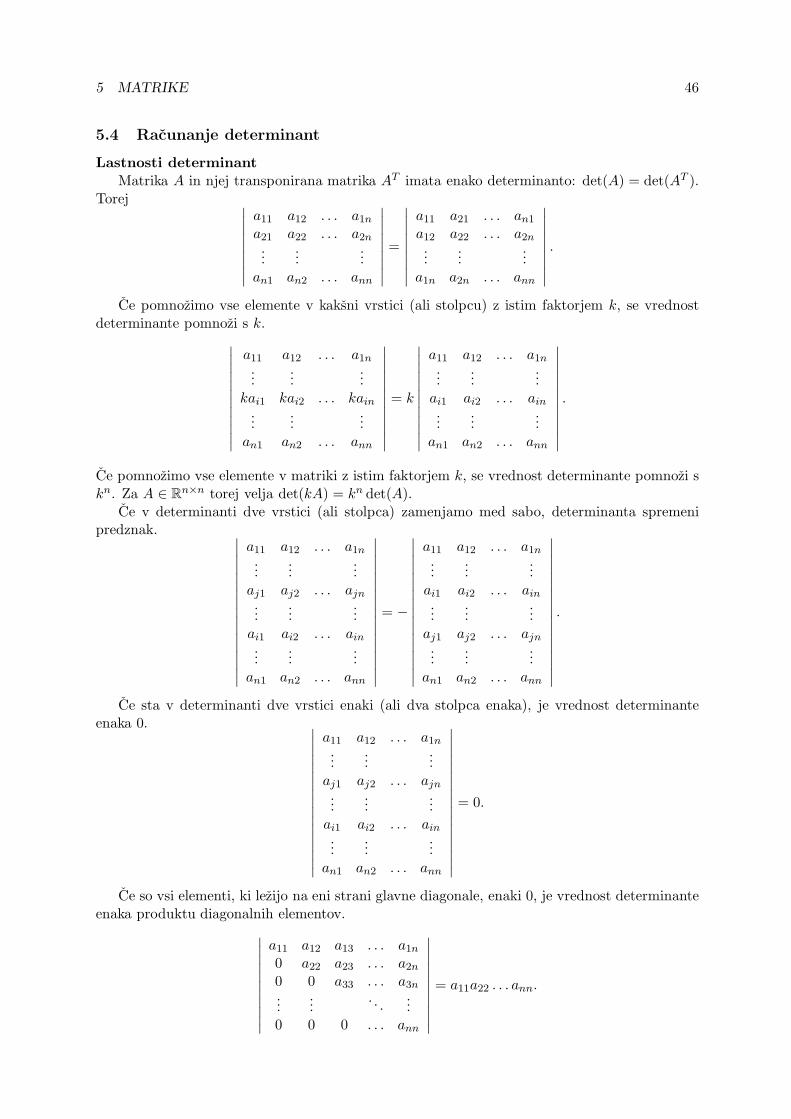
5 MATRIKE 46
5.4 Racunanje determinant
Lastnosti determinantMatrika A in njej transponirana matrika AT imata enako determinanto: det(A) = det(AT ).
Torej ∣∣∣∣∣∣∣∣∣
a11 a12 . . . a1n
a21 a22 . . . a2n...
......
an1 an2 . . . ann
∣∣∣∣∣∣∣∣∣
=
∣∣∣∣∣∣∣∣∣
a11 a21 . . . an1
a12 a22 . . . a2n...
......
a1n a2n . . . ann
∣∣∣∣∣∣∣∣∣
.
Ce pomnozimo vse elemente v kaksni vrstici (ali stolpcu) z istim faktorjem k, se vrednostdeterminante pomnozi s k.
∣∣∣∣∣∣∣∣∣∣∣∣
a11 a12 . . . a1n...
......
kai1 kai2 . . . kain...
......
an1 an2 . . . ann
∣∣∣∣∣∣∣∣∣∣∣∣
= k
∣∣∣∣∣∣∣∣∣∣∣∣
a11 a12 . . . a1n...
......
ai1 ai2 . . . ain...
......
an1 an2 . . . ann
∣∣∣∣∣∣∣∣∣∣∣∣
.
Ce pomnozimo vse elemente v matriki z istim faktorjem k, se vrednost determinante pomnozi skn. Za A ∈ Rn×n torej velja det(kA) = kn det(A).
Ce v determinanti dve vrstici (ali stolpca) zamenjamo med sabo, determinanta spremenipredznak. ∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
a11 a12 . . . a1n...
......
aj1 aj2 . . . ajn...
......
ai1 ai2 . . . ain...
......
an1 an2 . . . ann
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
= −
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
a11 a12 . . . a1n...
......
ai1 ai2 . . . ain...
......
aj1 aj2 . . . ajn...
......
an1 an2 . . . ann
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
.
Ce sta v determinanti dve vrstici enaki (ali dva stolpca enaka), je vrednost determinanteenaka 0. ∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
a11 a12 . . . a1n...
......
aj1 aj2 . . . ajn...
......
ai1 ai2 . . . ain...
......
an1 an2 . . . ann
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
= 0.
Ce so vsi elementi, ki lezijo na eni strani glavne diagonale, enaki 0, je vrednost determinanteenaka produktu diagonalnih elementov.
∣∣∣∣∣∣∣∣∣∣∣
a11 a12 a13 . . . a1n
0 a22 a23 . . . a2n
0 0 a33 . . . a3n...
.... . .
...0 0 0 . . . ann
∣∣∣∣∣∣∣∣∣∣∣
= a11a22 . . . ann.

5 MATRIKE 47
Vrednost determinante se ne spremeni, ce k eni vrstici pristejemo veckratnik druge vrstice(ali ce k enemu stolpcu pristejemo veckratnik drugega stolpca).
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
a11 a12 . . . a1n...
......
ai1 + kaj1 ai2 + kaj2 . . . ain + kajn...
......
aj1 aj2 . . . ajn...
......
an1 an2 . . . ann
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
=
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
a11 a12 . . . a1n...
......
ai1 ai2 . . . ain...
......
aj1 aj2 . . . ajn...
......
an1 an2 . . . ann
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
.
Zgled 5.12. Izracunaj vrednost determinante
∣∣∣∣∣∣
2 1 −11 3 00 −5 −1
∣∣∣∣∣∣.
Resitev. Resimo nalogo na 2 nacina. Po Sarrusovem pravilu je
2 1 −1 2 11 3 0 1 30 −5 −1 0 −5
= −6 + 0 + 5 − 0 − 0 − (−1) = 0.
Z vrsticnimi operacijami izracunamo
∣∣∣∣∣∣
2 1 −11 3 00 −5 −1
∣∣∣∣∣∣= −
∣∣∣∣∣∣
1 3 02 1 −10 −5 −1
∣∣∣∣∣∣= −
∣∣∣∣∣∣
1 3 00 −5 −10 −5 −1
∣∣∣∣∣∣=
= −
∣∣∣∣∣∣
1 3 00 −5 −10 0 0
∣∣∣∣∣∣= 0.
Zgled 5.13. Izracunaj vrednost determinante
∣∣∣∣∣∣
−1 1 −22 −1 32 1 −1
∣∣∣∣∣∣.
Resitev. Z vrsticnimi operacijami izracunamo
∣∣∣∣∣∣
−1 1 −22 −1 32 1 −1
∣∣∣∣∣∣=
∣∣∣∣∣∣
−1 1 −20 1 −10 3 −5
∣∣∣∣∣∣=
=
∣∣∣∣∣∣
−1 1 −20 1 −10 0 −2
∣∣∣∣∣∣= (−1) · 1 · (−2) = 2.
Zgled 5.14. Izracunaj vrednost determinante
∣∣∣∣∣∣∣∣
1 −1 2 00 1 −2 1
−1 2 1 −12 0 −1 3
∣∣∣∣∣∣∣∣.

5 MATRIKE 48
Resitev. Z vrsticnimi operacijami izracunamo∣∣∣∣∣∣∣∣
1 −1 2 00 1 −2 1
−1 2 1 −12 0 −1 3
∣∣∣∣∣∣∣∣=
∣∣∣∣∣∣∣∣
1 −1 2 00 1 −2 10 1 3 −10 2 −5 3
∣∣∣∣∣∣∣∣=
∣∣∣∣∣∣∣∣
1 −1 2 00 1 −2 10 0 5 −20 0 −1 1
∣∣∣∣∣∣∣∣=
=
∣∣∣∣∣∣∣∣
1 −1 2 00 1 −2 10 0 5 −20 0 0 3
5
∣∣∣∣∣∣∣∣= 1 · 1 · 5 · 3
5= 3.
Zgled 5.15. Izracunaj vrednost determinante
∣∣∣∣∣∣∣∣
1 2 0 −12 3 −1 00 −1 2 4
−1 0 4 1
∣∣∣∣∣∣∣∣.
Resitev. Z vrsticnimi operacijami izracunamo∣∣∣∣∣∣∣∣
1 2 0 −12 3 −1 00 −1 2 4
−1 0 4 1
∣∣∣∣∣∣∣∣=
∣∣∣∣∣∣∣∣
1 2 0 −10 −1 −1 20 −1 2 40 2 4 0
∣∣∣∣∣∣∣∣=
∣∣∣∣∣∣∣∣
1 2 0 −10 −1 −1 20 0 3 20 0 2 4
∣∣∣∣∣∣∣∣=
=
∣∣∣∣∣∣∣∣
1 2 0 −10 −1 −1 20 0 3 20 0 0 8
3
∣∣∣∣∣∣∣∣= 1 · (−1) · 3 · 8
3= −8.
Zgled 5.16. Doloci vrednost parametra x tako, da bo vrednost determinante
∣∣∣∣∣∣
1 x 22 1 −1
−x x 2
∣∣∣∣∣∣enaka 0.
Resitev. Po Sarrusovem pravilu izracunamo
1 x 22 1 −1
−x x 2=
1 x 2 1 x2 1 −1 2 1
−x x 2 −x x=
= 2 + x2 + 4x− (−2x) − (−x) − 4x = x2 + 3x+ 2.
Ker je x2 + 3x+ 2 = (x+ 1)(x+ 2), je vrednost determinante enaka 0 le za x = −1 in x = −2.
5.5 Razvoj po vrstici ali stolpcu
PoddeterminantaFiksirajmo indeksa i, j ∈ {1, 2, . . . , n} in iz primernih (n− 1)! clenov v izrazu
det(A) =∑
σ∈Sn
sign(σ)a1σ(1)a2σ(2) . . . anσ(n), (3)
izpostavimo aij . Izraz, ki nam ostane (torej vsota (n − 1)! clenov, od katerih je vsak produktn− 1 elementov determinante), oznacimo z Aij in imenujemo poddeterminanta elementa aij
v determinanti det(A).

5 MATRIKE 49
Poddeterminanto Aij izracunamo tako, da iz matrike
A =
a11 a12 . . . a1n
a21 a22 . . . a2n...
......
an1 an2 . . . ann
pobrisemo i-to vrstico in j-ti stolpec in izracunamo determinanto dobljene matrike razseznosti(n− 1) × (n− 1).
Razvoj po vrstici ali stolpcuNaj bo i katerakoli vrstica determinante A. Ker je v vsakem clenu v (3) po en faktor iz i-te
vrstice, je mozno zapisati
det(A) = (−1)i+1ai1Ai1 + (−1)i+2ai2Ai2 + . . .+ (−1)i+nainAin. (4)
Tej formuli pravimo razvoj determinante po i-ti vrstici.
Naj bo j katerikoli stolpec determinante A. Ker je v vsakem clenu v (3) po en faktor izj-tega stolpca, je mozno zapisati tudi
det(A) = (−1)1+ja1jA1j + (−1)2+ja2jA2j + . . . + (−1)n+janjAnj. (5)
Tej formuli pravimo razvoj determinante po j-tem stolpcu.
Zgled 5.17. Izracunaj
∣∣∣∣∣∣
1 2 30 1 23 2 1
∣∣∣∣∣∣s pomocjo razvoja po drugi vrstici.
Resitev. Racunajmo
∣∣∣∣∣∣
1 2 30 1 23 2 1
∣∣∣∣∣∣= (−1)2+1 · 0 ·
∣∣∣∣2 32 1
∣∣∣∣︸ ︷︷ ︸
−4
+(−1)2+2 · 1 ·∣∣∣∣
1 33 1
∣∣∣∣︸ ︷︷ ︸
−8
+
+(−1)2+3 · 2 ·∣∣∣∣
1 23 2
∣∣∣∣︸ ︷︷ ︸
−4
= 0 + (−8) + 8 = 0.
Zgled 5.18. Izracunaj
∣∣∣∣∣∣∣∣
1 2 1 3−2 1 0 3
1 −1 2 1−1 3 0 1
∣∣∣∣∣∣∣∣s pomocjo razvoja po tretjem stolpcu.
Resitev. Zaradi dveh nicel v tretjem stolpcu je potrebno izracunati le
det(A13) =
∣∣∣∣∣∣
−2 1 31 −1 1
−1 3 1
∣∣∣∣∣∣= (−2) · (−4) − 1 · 2 + 3 · 2 = 12,
det(A33) =
∣∣∣∣∣∣
1 2 3−2 1 3−1 3 1
∣∣∣∣∣∣= 1 · (−8) − 2 · 1 + 3 · (−5) = −25.
Torej je det(A) = (−1)1+31 · 12 + (−1)3+32 · (−25) = −38.

5 MATRIKE 50
Oznacimo Aij = (−1)i+jAij . Ce v formuli (4) zamenjamo koeficiente ai1, . . . , ain z ak1, . . . ,akn, kjer je i 6= k, dobimo
det(A′) = ak1Ai1 + ak2Ai2 + . . .+ aknAin. (6)
To je ravno determinanta matrike A′, v kateri smo vse elemente v i-ti vrstici nadomestili zelementi k-te vrstice in nato izracunali vrednost det(A′) s pomocjo razvoja po i-ti vrstici. Kersta v matriki A′ i-ta in k-ta vrstica enaki, je det(A′) = 0. Torej za vsak k 6= i velja
ak1Ai1 + ak2Ai2 + . . .+ aknAin = 0. (7)
Podobno sklepamo, da tudi za vsak k 6= j velja
a1kA1j + a2kA2j + . . .+ ankAnj = 0. (8)
5.6 Cramerjevo pravilo
Oglejmo si sistem n linearnih enacb z n neznankami
a11x1 + a12x2 + . . . + a1nxn = b1,
a21x1 + a22x2 + . . . + a2nxn = b2,...
an1x1 + an2x2 + . . .+ annxn = bn.
Koeficieti sistema so lahko poljubna realna stevila. Smiselno je predpostaviti, da je v vsakivrstici in vsakem stolpcu vsaj en koeficient neniceln, saj sicer ne bi imeli sistema n enacb z nneznankami.
Ce je b1 = b2 = . . . = bn = 0, pravimo, da je sistem homogen, sicer pa je nehomogen.Resitev gornjega sistema je taka n-terica (X1, . . . ,Xn), da je
a11X1 + a12X2 + . . .+ a1nXn = b1,
a21X1 + a22X2 + . . .+ a2nXn = b2,...
an1X1 + an2X2 + . . . + annXn = bn.
Privzemimo sedaj, da je (X1, . . . ,Xn) resitev gornjega sistema. Ce pomnozimo prvo enacbosistema z A11, drugo z A21, . . . , in n-to z An1, dobimo
a11A11X1 + a12A11X2 + . . . + a1nA11Xn = b1A11,
a21A21X1 + a22A21X2 + . . . + a2nA21Xn = b2A21,...
an1An1X1 + an2An1X2 + . . . + annAn1Xn = bnAn1.
Ko dobljene enacbe sestejemo in izpostavimo X1, X2, . . . , oziroma Xn, dobimo
X1(a11A11 + a21A21 + . . . + an1An1) +
X2(a12A11 + a22A21 + . . . + an2An1) +
...
Xn(a1nA11 + a2nA21 + . . .+ annAn1) = b1A11 + b2A21 + . . .+ bnAn1.

5 MATRIKE 51
Izraz a11A11 +a21A21 + . . .+an1An1 je enak det(A), saj gre za razvoj determinante po prvemstolpcu (glej formulo (5) za j = 1). Vsi izrazi a1kA11 + a2kA21 + . . . + ankAn1, k 6= 1, pa soenaki 0, saj gre za razvoj matrike po prvem stolpcu, v kateri je k-ti stolpec enak prvemu (glejformulo (8) za j = 1). Torej dobimo
X1 · det(A) = b1A11 + b2A21 + . . .+ bnAn1.
Ce oznacimo
A1 =
b1 a12 . . . a1n
b2 a22 . . . a2n...
......
bn an2 . . . ann
,
opazimo, da je det(A1) = b1A11 + b2A21 + . . .+ bnAn1, saj je to ravno razvoj po prvem stolpcumatrike A1.
Torej je
X1 =det(A1)
det(A),
kjer smo privzeli, da je det(A) 6= 0. V splosnem torej ugotovimo, da je
Xj =det(Aj)
det(A),
kjer je Aj matrika, ki jo dobimo iz matrike A tako, da v njej j-ti stolpec zamenjamo s stolpcemdesnih strani; torej s stolpcem [b1, . . . , bn]T .
Gornja izpeljava je temeljila na predpostavki, da je sistem sploh resljiv. Dokazati pa jemozno, da je ob predpostavki det(A) 6= 0 sistem vedno resljiv. Velja namrec
Izrek 5.19 (Cramerjevo pravilo). Ce ima sistem n linearnih enacb z n neznankami determinantokoeficientov razlicno od 0, je sistem enolicno resljiv in resitve so
x1 =det(A1)
det(A), . . . , xn =
det(An)
det(A),
kjer je det(A) determinanta sistema, det(Aj) pa determinanta matrike Aj , ki jo dobimo tako,da v matriki A zamenjamo j-ti stolpec s stolpcem desnih strani.
Zgled 5.20. Resi sistem
x1 − x2 + x3 = −1
4x1 − x2 + 2x3 = −2
2x1 + x2 + x3 = −4
s pomocjo Cramerjevega pravila.
Resitev. Determinanta sistema je
det(A) =
∣∣∣∣∣∣
1 −1 14 −1 22 1 1
∣∣∣∣∣∣= 3,
zato res smemo uporabiti Cramerjevo pravilo.
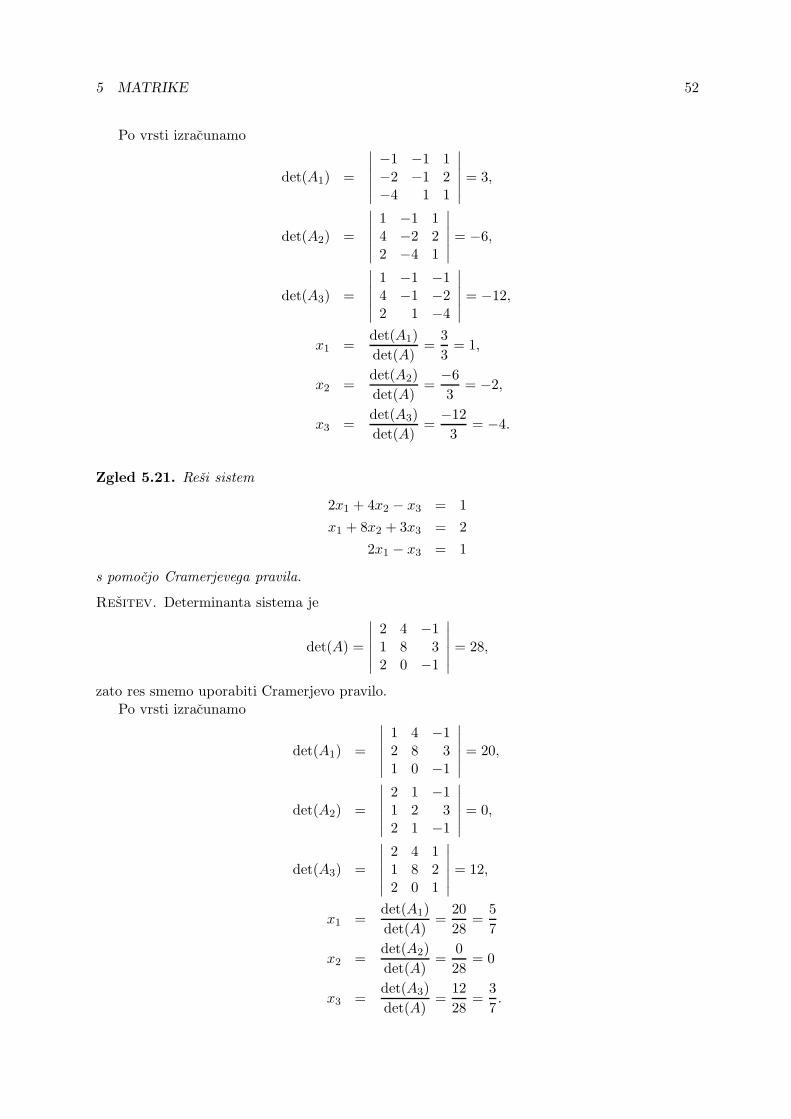
5 MATRIKE 52
Po vrsti izracunamo
det(A1) =
∣∣∣∣∣∣
−1 −1 1−2 −1 2−4 1 1
∣∣∣∣∣∣= 3,
det(A2) =
∣∣∣∣∣∣
1 −1 14 −2 22 −4 1
∣∣∣∣∣∣= −6,
det(A3) =
∣∣∣∣∣∣
1 −1 −14 −1 −22 1 −4
∣∣∣∣∣∣= −12,
x1 =det(A1)
det(A)=
3
3= 1,
x2 =det(A2)
det(A)=
−6
3= −2,
x3 =det(A3)
det(A)=
−12
3= −4.
Zgled 5.21. Resi sistem
2x1 + 4x2 − x3 = 1
x1 + 8x2 + 3x3 = 2
2x1 − x3 = 1
s pomocjo Cramerjevega pravila.
Resitev. Determinanta sistema je
det(A) =
∣∣∣∣∣∣
2 4 −11 8 32 0 −1
∣∣∣∣∣∣= 28,
zato res smemo uporabiti Cramerjevo pravilo.Po vrsti izracunamo
det(A1) =
∣∣∣∣∣∣
1 4 −12 8 31 0 −1
∣∣∣∣∣∣= 20,
det(A2) =
∣∣∣∣∣∣
2 1 −11 2 32 1 −1
∣∣∣∣∣∣= 0,
det(A3) =
∣∣∣∣∣∣
2 4 11 8 22 0 1
∣∣∣∣∣∣= 12,
x1 =det(A1)
det(A)=
20
28=
5
7
x2 =det(A2)
det(A)=
0
28= 0
x3 =det(A3)
det(A)=
12
28=
3
7.
5 MATRIKE 53
5.7 Gaussova metoda
Iscemo vse resitve sistema m linearnih enacb z n neznankami.
a11x1 + a12x2 + . . . + a1nxn = b1
a21x1 + a22x2 + . . . + a2nxn = b2...
am1x1 + am2x2 + . . .+ amnxn = bm
V tem sistemu so aij, bi dana realna stevila, x1, . . . , xn pa neznanke.Obicajno zapisemo koeficiente tega sistema v matriko sistema
A =
a11 a12 . . . a1n
a21 a22 . . . a2n...
......
am1 am2 . . . amn
z m vrsticami in n stolpci.Stolpcu desnih strani lahko priredimo matriko
b =
b1b2...bm
,
neznankam pa matriko
x =
x1
x2...xn
.
V matricni obliki lahko sistem enacb zapisemo kratko kot
Ax = b.
Ce matriki A dodamo se stolpec b, dobimo matriko reda m×(n+1), ki ji pravimo razsirjenamatrika sistema:
A =
a11 a12 . . . a1n b1a21 a22 . . . a2n b2...
......
...am1 am2 . . . amn bm
Razsirjena matrika sistema popolnoma popise sistem, zato lahko pri resevanju sistema racunamosamo z matriko A.
Sistem linearnih enacb resujemo tako, da s pomocjo operacij, ki na resitve sistema ne vplivajo,spreminjamo enacbe, dokler niso zapisane v taksni obliki, iz katere lahko resitev kar preberemo.Taksne operacije so:
• Enacbo lahko pomnozimo z nenicelnim stevilom.
• Eno enacbo lahko pristejemo drugi enacbi.

5 MATRIKE 54
• Dve enacbi lahko med seboj zamenjamo.
Na matriki A se te operacije odrazajo takole:
• Vrstico lahko pomnozimo z nenicelnim stevilom.
• Eno vrstico lahko pristejemo drugi vrstici.
• Dve vrstici lahko med seboj zamenjamo.
Gornje operacije imenujemo elementarne vrsticne operacije. Pravimo, da sta matriki A inA′ vrsticno ekvivalentni, ce lahko eno preoblikujemo v drugo z zaporednjem elementarnihvrsticnih operacij. Dve vrsticno ekvivalentni razsirjeni matriki predstavljata sistema z enakimamnozicama resitev.
Izrek 5.22 (Gaussova eliminacija). Vsaka matrika A je vrsticno ekvivalentna matriki A′, kiima na prvem mestu neniceln element kvecjemu v prvi vrstici, v vsaki naslednji vrstici pa imana zacetku vsaj eno niclo vec kot v prejsnji.
Dokaz. V matriki A najprej poiscemo vrstico, ki ima na skrajni levi neniceln element (lahko sezgodi, da ima matrika v prvih i− 1 stolpcih same nicle in je ta element sele v i-tem stolpcu) injo z zamenjavo vrstic postavimo na vrh. Ce ima druga vrstica pod tem nenicelnim elementomniclo, jo pustimo, sicer pa od nje odstejmo prvo vrstico, pomnozemo s kvocientom obeh prvihclenov. S tem dosezemo, da bo na tem mestu v drugi vrstici nicla. Na podoben nacin naredimonicle na preostalih mestih v i-tem stolpcu. Prva vrstica in prvih i stolpcev so tako v pravi obliki,na preostalem delu matrike pa postopek ponovimo.
Ce je npr. a11 6= 0, se korak Gaussove eliminacije glasi
a11 a12 . . . a1n...
......
ak1 ak2 . . . akn...
......
∼
a11 a12 . . . a1n...
......
0 a′k2 . . . a′kn...
......
,
kjer je
a′kj = akj − a1j ·ak1
a11za j = 1, 2, . . . , n.
Celo prvo vrstico pomnozimo z −ak1
a11in pristejemo h k-ti vrstici. Koeficient −ak1
a11je izbran
ravno tako, da je a′k1 = ak1 − a11 · ak1a11
= 0.
Zgled 5.23. Resi sistem enacb:
x + 2y − 3z = 142x + 3y + 2z = 93x + 4y + z = 16
Resitev. Razsirjena matrika sistema je
A =
1 2 −3 142 3 2 93 4 1 16

5 MATRIKE 55
Racunajmo:
A =
1 2 −3 142 3 2 93 4 1 16
∼
1 2 −3 140 −1 8 −190 −2 10 −26
∼
∼
1 0 13 −240 1 −8 190 0 −6 12
∼
1 0 0 20 1 0 30 0 1 −2
.
Dobljena razsirjena matrika ustreza sistemu enacb
x = 2, y = 3, z = −2.
Zgled 5.24. Poisci vse resitve sistema
2y + 3z = 1,
2x− 6y + 7z = 0,
x− 2y + 5z = −1.
Resitev. Razsirjena matrika sistema je
A =
0 2 3 12 −6 7 01 −2 5 −1
.
Racunajmo:
A =
0 2 3 12 −6 7 01 −2 5 −1
∼
1 −2 5 −12 −6 7 00 2 3 1
∼
=
1 −2 5 −10 −2 −3 20 2 3 1
∼
1 −2 5 −10 −2 −3 20 0 0 3
.
Zadnja vrstica dobljene razsirjene matrike ustreza enacbi 0x+ 0y + 0z = 3, kar pomeni, dasistem ni resljiv.
Zgled 5.25. Resi sistem enacb
x+ 2y − z = 1
x− y + 2z = 2.
Resitev. Razsirjena matrika sistema je
A =
[1 2 −1 11 −1 2 2
].
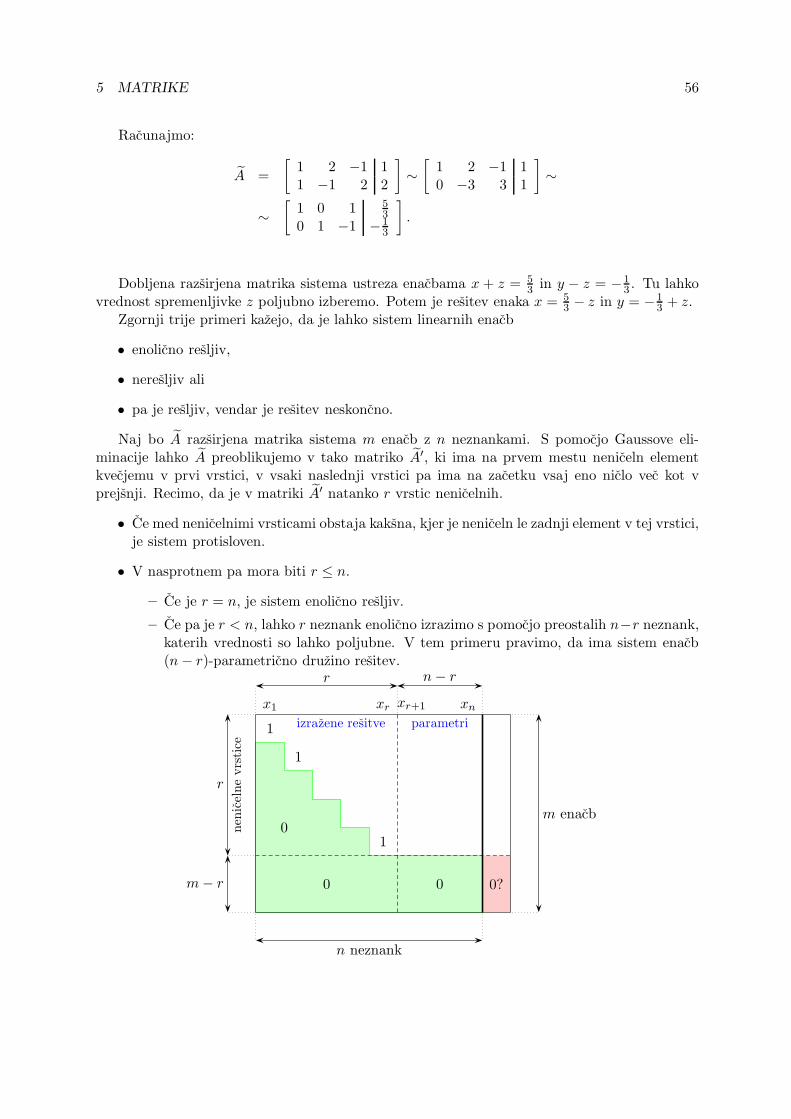
5 MATRIKE 56
Racunajmo:
A =
[1 2 −1 11 −1 2 2
]∼[
1 2 −1 10 −3 3 1
]∼
∼[
1 0 1 53
0 1 −1 −13
].
Dobljena razsirjena matrika sistema ustreza enacbama x+ z = 53 in y − z = −1
3 . Tu lahkovrednost spremenljivke z poljubno izberemo. Potem je resitev enaka x = 5
3 − z in y = −13 + z.
Zgornji trije primeri kazejo, da je lahko sistem linearnih enacb
• enolicno resljiv,
• neresljiv ali
• pa je resljiv, vendar je resitev neskoncno.
Naj bo A razsirjena matrika sistema m enacb z n neznankami. S pomocjo Gaussove eli-minacije lahko A preoblikujemo v tako matriko A′, ki ima na prvem mestu neniceln elementkvecjemu v prvi vrstici, v vsaki naslednji vrstici pa ima na zacetku vsaj eno niclo vec kot vprejsnji. Recimo, da je v matriki A′ natanko r vrstic nenicelnih.
• Ce med nenicelnimi vrsticami obstaja kaksna, kjer je neniceln le zadnji element v tej vrstici,je sistem protisloven.
• V nasprotnem pa mora biti r ≤ n.
– Ce je r = n, je sistem enolicno resljiv.
– Ce pa je r < n, lahko r neznank enolicno izrazimo s pomocjo preostalih n−r neznank,katerih vrednosti so lahko poljubne. V tem primeru pravimo, da ima sistem enacb(n− r)-parametricno druzino resitev.
1
1
1
nen
icel
ne
vrs
tice
r
r n− r
m− r
izrazene resitve parametri
0 0
0
0?
n neznank
m enacb
x1 xr xnxr+1

5 MATRIKE 57
1
1
1
1
1rnen
icel
ne
vrs
tice
m− r 0
0
n neznank
m enacb
x1 x2 x3 x4 xnxn−1
parametri
izrazene resitve
b
b b
Rang matrikeRang matrike je red najvecje kvadratne matrike v pravokotni matriki A, ki ima determi-
nanto razlicno od 0. Ce je A matrika razseznosti m × n, je rang(A) ≤ min{m,n}. Ce je Akvadratna matrika razseznosti n× n, je rang(A) = n natanko tedaj, ko je det(A) 6= 0.
Rang matrike se pri elementarnih vrsticnih operacijah ohranja.
Zgled 5.26. Doloci rang matrike
A =
1 1 −3 1 02 −1 1 −1 11 4 −10 4 −1
Resitev. Po vrsti izvajamo elementarne vrsticne operacije:
1 1 −3 1 02 −1 1 −1 11 4 −10 4 −1
∼
1 1 −3 1 00 −3 7 −3 10 3 −7 3 −1
∼
∼
1 1 −3 1 00 −3 7 −3 10 0 0 0 0
.
Ker so vse determinante razseznosti 3× 3 nicelne, je rang(A) ≤ 2. Ker je oznacena determi-
nanta
∣∣∣∣1 10 −3
∣∣∣∣ nenicelna, je rang(A) ≥ 2. Torej je rang(A) = 2.
Izrek 5.27 (Izrek o resljivosti sistema linarnih enacb). Sistem m linearnih enacb z n neznankami
Ax = b
z razsirjeno matriko sistema A je resljiv natanko tedaj, ko imata matriki A in A enaka ranga;tj. rang(A) = rang A = r. Ce je r = n, je sistem enolicno resljiv. Ce je r < n, lahko za n − rneznank izberemo poljubne vrednosti, ostalih r pa je z njimi natanko dolocenih.
5 MATRIKE 58
Zgled 5.28. Poisci vse resitve sistema enacb
x1 +3x2 +5x3 +7x4 +9x5 = 1,x1 −2x2 +3x3 −4x4 +5x5 = 2,
2x1 +11x2 +12x3 +25x4 +22x5 = 4.
Resitev. Razsirjena matrika sistema je
A =
1 3 5 7 9 11 −2 3 −4 5 22 11 12 25 22 4
.
S pomocjo Gaussove eliminacije jo preoblikujemo v
A =
1 3 5 7 9 11 −2 3 −4 5 22 11 12 25 22 4
∼
∼
1 3 5 7 9 10 −5 −2 −11 −4 10 5 2 11 4 2
∼
∼
1 3 5 7 9 10 −5 −2 −11 −4 10 0 0 0 0 3
.
Ker je rang matrike A sistema enak 2, rang razsirjene matrike A pa 3, sistem ni resljiv.
Zgled 5.29. Poisci vse resitve sistema enacb
x1 +5x2 +4x3 +3x4 = 1,2x1 −x2 +2x3 −x4 = 0,5x1 +3x2 +8x3 −x4 = 1.
Resitev. Razsirjena matrika sistema je
A =
1 5 4 3 12 −1 2 −1 05 3 8 −1 1
.
S pomocjo Gaussove eliminacije jo preoblikujemo v
A =
1 5 4 3 12 −1 2 −1 05 3 8 −1 1
∼
1 5 4 3 10 −11 −6 −7 −20 −22 −12 −16 −4
∼
∼
1 5 4 3 10 −11 −6 −7 −20 0 0 −2 0
∼
1 5 4 3 10 1 6
11711
211
0 0 0 1 0
∼
∼
1 5 4 0 10 1 6
11 0 211
0 0 0 1 0
∼
1 0 1411 0 1
110 1 6
11 0 211
0 0 0 1 0
.

5 MATRIKE 59
Torej je
A =
1 0 1411 0 1
110 1 6
11 0 211
0 0 0 1 0
.
Iz 3. vrste razberemo, da je x4 = 0. Iz 2. vrste razberemo, da je x2 + 611x3 = 2
11 . Torej lahkoizrazimo x2 = − 6
11x3 + 211 . Podobmo lahko zapisemo, da je x1 = −14
11x3 + 111 . Resitve sistema
so torej
x1 = −14
11x3 +
1
11,
x2 = − 6
11x3 +
2
11,
x4 = 0,
kjer je x3 poljubno realno stevilo.
Rang matrike A je enak r = 3 in je enak rangu razsirjene matrike A. Ker imamo n = 4neznanke, smo lahko r = 3 med njimi izrazili s pomocjo n− r = 1 parametrov.
Zgled 5.30. Poisci vse resitve sistema enacb
2x1 +3x2 +4x3 = 2,x1 +4x2 +5x3 = −3,
−3x1 +3x2 −7x3 = 5.
Resitev. Razsirjena matrika sistema je
A =
2 3 4 21 4 5 −3
−3 3 −7 5
∼
1 4 5 −32 3 4 2
−3 3 −7 5
,
kjer smo zaradi racunske ugodnosti zamenjali 1. in 2. vrstico.S pomocjo Gaussove eliminacije jo preoblikujemo v
A =
1 4 5 −32 3 4 2
−3 3 −7 5
∼
1 4 5 −30 −5 −6 80 15 8 −4
∼
∼
1 4 5 −30 −5 −6 80 0 −10 20
∼
1 4 5 −30 1 6
5 −85
0 0 1 −2
∼
∼
1 4 0 70 1 0 4
50 0 1 −2
∼
1 0 0 195
0 1 0 45
0 0 1 −2
.
Sistem je torej enolicno resljiv, resitve pa so
x1 =19
5,
x2 =4
5,
x3 = −2.

5 MATRIKE 60
5.8 Inverz matrike
Ce za matriko A ∈ Rn×n obstaja taka matrika B ∈ Rn×n, da je AB = BA = In, pravimo, da jematrika A obrnljiva, matrika B pa inverz matrike A. Inverz matrike A oznacimo z A−1.
• Matrika A ∈ Rn×n je obrnljva natanko tedaj, ko je det(A) 6= 0.
• Ce je matrika A ∈ Rn×n obrnljiva, je obrnljiva tudi matrika A−1 in velja
(A−1)−1 = A.
• Ce sta matriki A,B ∈ Rn×n obrnljivi, je obrnljiva tudi matrika AB ∈ Rn×n in velja
(AB)−1 = B−1A−1.
• Za poljubni matriki A,B ∈ Rn×n velja produktna formula za determinante
det(AB) = det(A) det(B).
• Ce je A obrnljiva matrika, velja
det(A−1) =1
det(A).
Racunanje inverza s pomocjo Gaussove eliminacijeNaj bo A ∈ Rn×n dana matrika. Iscemo matriko X ∈ Rn×n, da bo AX = I. Skratka
a11 . . . a1n...
...an1 . . . ann
︸ ︷︷ ︸A
·
x11 . . . x1n...
...xn1 . . . xnn
︸ ︷︷ ︸X
=
1 . . . 0...
. . ....
0 . . . 1
︸ ︷︷ ︸I
.
Ce z xj oznacimo j-ti stolpec matrike X, z bj pa j-ti stolpec matrike I, vidimo, da je v gornjimatricni enacbi pravzaprav skritih n sistemov enacb:
Axj = bj , j = 1, 2, . . . , n.
Ker imajo sistemi enacb Axj = bj , j = 1, 2, . . . , n, isto matriko koeficientov, jih lahkoresujemo hkrati. Ce torej matriko A razsirimo desno z identicno matriko I, tj.
[A|I] =
a11 a12 . . . a1n 1 0 . . . 0a21 a22 . . . a2n 0 1 . . . 0...
......
......
. . ....
an1 an2 . . . ann 0 0 . . . 1
,
in s pomocjo Gaussove eliminacije preoblikujemo to matriko v
[I|B] =
1 0 . . . 0 b11 b12 . . . b1n
0 1 . . . 0 b21 b22 . . . b2n...
.... . .
......
......
0 0 . . . 1 bn1 bn2 . . . bnn
,
je B = A−1.

5 MATRIKE 61
Zgled 5.31. Izracunaj inverz matrike A =
[1 42 3
].
Resitev. Razsirjena matrika je
[A|I] =
[1 4 1 02 3 0 1
].
Sledi
[A|I] ∼[
1 4 1 00 −5 −2 1
]∼[
1 4 1 00 1 2
5 −15
]∼[
1 0 −35
45
0 1 25 −1
5
].
Torej je
A−1 =
[−3
545
25 −1
5
].
Zgled 5.32. Izracunaj inverz matrike A =
1 0 1−1 2 −1
2 −3 1
.
Resitev. Racunajmo
[A|I] ∼
1 0 1 1 0 00 2 0 1 1 00 −3 −1 −2 0 1
∼
1 0 1 1 0 00 1 0 1
212 0
0 0 −1 −12
32 1
∼
∼
1 0 1 1 0 00 1 0 1
212 0
0 0 1 12 −3
2 −1
∼
1 0 0 12
32 1
0 1 0 12
12 0
0 0 1 12 −3
2 −1
.
Torej je
A−1 =
12
32 1
12
12 0
12 −3
2 −1
.
Racunanje inverza s pomocjo Cramerjevega pravilaVrnimo se se enkrat k sistemu enacb Axj = bj, j = 1, 2, . . . , n. Ce pisemo
xj =
x1j
x2j...xnj
,
lahko po Cramerjevem pravilu zapisemo
xij =det(Bij)
det(A),
kjer je matrika Bij enaka matriki A, v kateri smo i-ti stolpec zamenjali s stolpcem bj. Torej jedet(Bij) = (−1)i+j detAji, kjer je Aji poddeterminanta elementa aji v matriki A.
Izrek 5.33. Ce je det(A) 6= 0, je
A−1 =1
detA(A)T ,
kjer je A prirejenka matrike A, torej matrika z elementi A = [(−1)i+j detAij], kjer je Aij
matrika, ki jo dobimo iz matrike A, tako, da v njej odstranimo i-to vrstico in j-ti stolpec.

5 MATRIKE 62
Opomba. V racunski praksi skoraj vedno racunamo inverz matrike s pomocjo Gaussoveeliminacije, saj bi morali pri racunanju inverza s pomocjo prirejenke izracunati n2+1 determinantreda (n− 1) × (n− 1).
Zgled 5.34. Izracunaj inverz matrike A =
[1 42 3
].
Resitev. Za matriko A je det(A) = −5 in
A =
[3 −2
−4 1
].
Torej je
A−1 =1
−5
[3 −2
−4 1
]T
=1
−5
[3 −4
−2 1
]=
[−3
545
25 −1
5
].
Zgled 5.35. Izracunaj inverz matrike A =
1 0 1−1 2 −1
2 −3 1
.
Resitev. Za matriko A je
det(A) =
∣∣∣∣∣∣
1 0 1−1 2 −1
2 −3 1
∣∣∣∣∣∣= 1
∣∣∣∣2 −1−3 1
∣∣∣∣+ 1
∣∣∣∣−1 22 −3
∣∣∣∣ =
= 1 · (−1) + 1 · (−1) = −2.
A=
∣∣∣∣2 −1−3 1
∣∣∣∣ −∣∣∣∣−1 −12 1
∣∣∣∣∣∣∣∣−1 22 −3
∣∣∣∣
−∣∣∣∣
0 1−3 1
∣∣∣∣∣∣∣∣
1 12 1
∣∣∣∣ −∣∣∣∣
1 02 −3
∣∣∣∣∣∣∣∣0 12 −1
∣∣∣∣ −∣∣∣∣
1 1−1 −1
∣∣∣∣ −∣∣∣∣
1 0−1 2
∣∣∣∣
=
−1 −1 −1−3 −1 3−2 0 −2
.
Torej je
A−1 =1
−2
−1 −1 −1−3 −1 3−2 0 −2
T
=1
−2
−1 −3 −2−1 −1 0−1 3 −2
=
=
12
32 1
12
12 0
12 −3
2 −1
.
Inverz matrike je tesno povezan z resevanjem sistemov enacb. Recimo, da imamo linearensistem n enacb z n neznankami, ki ga v matricni obliki zapisemo kot
Ax = b.
Ce je detA 6= 0, obstaja A−1. Torej je A−1Ax = A−1b oziroma
x = A−1b.
Sistem je torej enolicno resljiv. Njegovo resitev izracunamo tako, da najprej izracunamo A−1,nato pa matriko A−1 ∈ Rn×n pomnozimo z matriko b ∈ Rn×1 in dobimo x ∈ Rn×1.

5 MATRIKE 63
Zgled 5.36. Naj bo A =
[2 −5
−1 3
]in B =
[3 21 −1
]. Resi matricno enacbo
AX +B2 = 7I.
Resitev. 1. nacin Enacbo najprej preoblikujemo
AX +B2 = 7I,
AX = 7I −B2,
X = A−1(7I −B2).
Po vrsti izracunamo
B2 =
[3 21 −1
]·[
3 21 −1
]=
[11 42 3
],
7I −B2 = 7 ·[
1 00 1
]−[
11 42 3
]=
[−4 −4−2 4
],
det(A) =
∣∣∣∣2 −5
−1 3
∣∣∣∣ = 1,
A−1 =
[2 −5
−1 3
]−1
=
[3 51 2
].
Torej je
X = A−1(7I −B2) =
[3 51 2
]·[−4 −4−2 4
]=
[−22 8−8 4
].
2. nacin Matrika X je razseznosti 2 × 2. Oznacimo jo z X =
[a bc d
]. Ker je AX =
[2a− 5c 2b− 5d−a+ 3c −b+ 3d
], lahko enacbo AX = 7I −B2 zapisemo v obliki
[2a− 5c 2b− 5d−a+ 3c −b+ 3d
]=
[−4 −4−2 4
].
Iz enakosti gornjih matrik razberemo dva sistema enacb:
2a− 5c = −4,
−a+ 3c = −2;
2b− 5d = −4,
−b+ 3d = 4.
Iz prvih dveh enacb sledi c = −8 in a = −22, iz drugih dveh pa d = 4 in b = 8. Torej je
X =
[−22 8−8 4
].
Zgled 5.37. Naj bo A =
[1 −23 1
]in B =
[5 05 −1
]. Resi matricno enacbo
AX +XA = B.

5 MATRIKE 64
Resitev. Ker matricno mnozenje ni komutativno, iz izraza AX+XA ne moremo izpostaviti
matrike X. Torej nam preostane le, da zapisemo X =
[a bc d
]in iz enakosti AX +XA = B
razberemo sistem 4 linearnih enacb s 4 neznankami.Racunajmo
AX +XA =
[1 −23 1
] [a bc d
]+
[a bc d
] [1 −23 1
]=
=
[a− 2c b− 2d3a+ c 3b+ d
]+
[a+ 3b −2a+ bc+ 3d −2c+ d
]=
=
[2a+ 3b− 2c −2a+ 2b− 2d3a+ 2c+ 3d 3b− 2c+ 2d
]=
[5 05 −1
],
od koder sledi
2a+ 3b− 2c = 5
−2a+ 2b− 2d = 0
3a+ 2c+ 3d = 5
3b− 2c+ 2d = −1.
Uporabimo Gaussovo eliminacijo na razsirjeni matriki sistema:
A =
2 3 −2 0 5−2 2 0 −2 0
3 0 2 3 50 3 −2 2 −1
∼
1 32 −1 0 5
20 5 −2 −2 50 −9
2 5 3 −52
0 3 −2 2 −1
∼
∼
1 0 −25 −3
5 10 1 −2
5 −25 1
0 0 165
65 2
0 0 −45
165 −4
∼
1 0 0 −34
54
0 1 0 −14
54
0 0 1 38
58
0 0 0 72 −7
2
∼
∼
1 0 0 0 20 1 0 0 10 0 1 0 10 0 0 1 −1
.
Torej je
X =
[2 11 −1
].
Simultano resevanje sistemovMatricna enacba AX = B, kjer sta A,B ∈ Rn×n dani matriki, det(A) 6= 0, ima resitev
X = A−1B. Ali lahko do te resitve pridemo brez mnozenja matrik A−1 in B?
Matrika B sestoji iz n stolpcev b1, . . . , bn in le neznanke iz prvega stolpca matrike X so zajetev tistih enacbah iz AX = B, ki vsebujejo elemente prvega stolpca matrike B. Torej lahko sistemAX = B obravnavamo kot n sistemov oblike Axi = bi, kjer je xi ravno i-ti stolpec matrike X,bi pa i-ti stolpec matrike X. Gaussov postopek lahko v tem primeru shematicno zapisemo kot
[A|bi] ∼ [I|xi].
Ker pa pri vseh sistemih na levi strani nastopa ista matrika, lahko resitve zdruzimo in dobimo
[A|B] ∼ [I|X].

5 MATRIKE 65
Zgled 5.38. Naj bo A =
−1 1 22 −1 3
−3 2 1
in B =
0 3 −47 13 −5
−5 −4 −3
. Resi matricno enacbo
AX = B.
Uporabimo prijem [A|B] ∼ [I|X].
[A|B] =
−1 1 2 0 3 −42 −1 3 7 13 −5
−3 2 1 −5 −4 −3
∼
∼
1 −1 −2 0 −3 40 1 7 7 19 −130 −1 −5 −5 −13 9
∼
∼
1 0 5 7 16 −90 1 7 7 19 −130 0 2 2 6 −4
∼
∼
1 0 0 2 1 10 1 0 0 −2 10 0 1 1 3 −2
= [I|X].
Torej je X =
2 1 10 −2 11 3 −2
.
5.9 Vektorski prostor
Vektorski prostor nad mnozico realnih stevil R je mnozica X opremljena z operacijamasestevanja +: X ×X → X in mnozenja s skalarjem · : R ×X → X, za kateri velja.
• komutativnost sestevanja a+ b = b+ a za vsaka a, b ∈ X
• asociativnost sestevanja (a+ b) + c = a+ (b+ c) za vsake a, b, c ∈ X
• obstoj nevtralnega elementa za sestevanje Obstaja 0 ∈ X, da je a + 0 = 0 + a = aza vsak a ∈ X
• obstoj nasprotnega elementa za sestevanja Za vsak a ∈ X obstaja b ∈ X, da jea+ b = b+ a = 0. Vektor b imenujeno nasprotni vektor in oznacimo z −a.
• distributivnost v vektorskem faktorju λ(a+ b) = λa+ λb za vsake a, b ∈ X in λ ∈ R
• distributivnost v skalarnem faktorju (λ+ µ)a = λa+ µa za vsake a ∈ X in λ, µ ∈ R
• homogenost v skalarnem faktorju λ(µa) = (λµ)a za vsake a ∈ X in λ, µ ∈ R
• lastnost enote za mnozenje 1a = a za vsak a ∈ X
• Vektorski prostor Rn. Za a = (a1, . . . , an) ∈ Rn, b = (b1, . . . , bn) ∈ Rn in λ ∈ R
definiramo operacije po komponentah
(a1, . . . , an) + (b1, . . . , bn) = (a1 + b1, . . . , an + bn),
λ(a1, . . . , an) = (λa1, . . . , λan).

5 MATRIKE 66
• Vektorski prostor Rm×n. Obicajni matricni operaciji sestevanja in mnozenja s skalarjemustrezata vsem aksiomom za vektorski prostor.
V posebnem primeru lahko prostor matrik Rn×1 obravnavamo kot vektorski prostor.
Linearna neodvisnostNaj bodo ai ∈ X poljubni vektorji ter λi ∈ R poljubni skalarji. Izraz
λ1a1 + λ2a2 + . . .+ λnan =
n∑
i=1
λiai
imenujemo linearna kombinacija vektorjev a1, . . . , an, stevila λ1, . . . , λn pa imenujemokoeficiente te linearne kombinacije.
Pravimo, da so vektorji ai ∈ X linearno neodvisni, ce iz
λ1a1 + λ2a2 + . . . + λnan = 0
sledi, da je λ1 = λ2 = . . . = λn = 0. Vektorji so linearno odvisni, ce niso linearno neodvisni.
• Vektor 0 je linearno odvisen.
Zgled 5.39. Ali so vektorji a1 = (1, 3, 1), a2 = (2, 1,−1), a3 = (1, 5, 3) linearno neodvisni?
Zapisimo linearno kombinacijo vektorjev:
λ1(1, 3, 1) + λ2(2, 1,−1) + λ3(1, 5, 3) = (0, 0, 0),
kar nam da sistem
λ1 + 2λ2 + λ3 = 0
3λ1 + λ2 + 5λ3 = 0
λ1 − λ2 + 3λ3 = 0.
Matrika tega sistema je A =
1 2 13 1 51 −1 3
in sestavljajo jo ravno vektorji a1, a2 in a3, zlozeni
v stolpce.Ce oznacimo se x = (λ1, λ2, λ3)
T , lahko gornji homogen sistem linearnih enacb zapisemo vmatricni obliki kot
Ax = 0.
Ker je
det(A) =
∣∣∣∣∣∣
1 2 13 1 51 −1 3
∣∣∣∣∣∣= −4,
premore sistem le nicelno resitev. Torej x = (0, 0, 0)T oziroma
λ1 = λ2 = λ3 = 0.
Izrek 5.40. Naj bodo a1, . . . , an ∈ Rn poljubni vektorji. Vektorji a1, . . . , an so linearno neodvisninatanko tedaj, ko je matrika A, katere stolpci so aT
1 , aT2 , . . . , aT
n , obrnljiva.

5 MATRIKE 67
Videli smo ze, da enacbi a1λ1 + a2λ2 + . . .+ anλn = 0 ustreza homogeni sistem Ax = 0, kjerso stolpci matrike A ravno aT
1 , aT2 , . . . , aT
n , neznani vektor pa je x = (λ1, λ2, . . . , λn).
Vemo, da premore sistem Ax = 0 nenicelno resitev natanko tedaj, ko je det(A) = 0.Nenicelna resitev sistema pa pomeni, da so vektorji a1, . . . , an linearno odvisni.
Naj bodo a1, . . . , an ∈ Rm poljubni vektorji. V splosnem lahko recemo, da so ti vektorjilinearno neodvisni natanko tedaj, ko ima matrika A = [aT
1 , aT2 , . . . , a
Tn ] rang n.
1
10
r
m
n
1
10m
r
n
00
?
Ker je r = rang(A) ≤ min{m,n}, v primeru n > m vektorji ne morejo biti linearno neodvisni.Ce pa je n ≤ m, mora za linearno neodvisnost veljati r = n.
Zgled 5.41. Ali so vektorji a1 = (1, 3, 1, 3), a2 = (0, 2, 1,−1), a3 = (2, 4, 1, 7) linearno neodvi-sni?
Vektorje a1, a2, a3 zapisemo v matriko A po stolpcih in matriko A preoblikujemo s pomocjoGaussove eliminacije:
A =
1 0 23 2 41 1 13 −1 7
∼
1 0 20 2 −20 1 −10 −1 1
∼
1 0 20 1 −10 0 00 0 0
.
Ker ima dobljena matrika rang 2, so vektorji a1, a2, a3 linearno odvisni. Se vec, iz dobljenematrike na koncu razberemo, da sta vektorja a1 in a2 (ki jima pripadata neznanki v prvih dvehstolpcih) linearno neodvisna.
Ker sta vektorja a1 in a2 linearno neodvisna, skupaj z a3 pa so linearno odvisni, lahko a3
izrazimo kot linearno kombinacijo vektorjev a1 in a2. Kako? Ce je taka izrazava mozna, moraveljati λ1a1 + λ2a2 = a3. Torej
λ1(1, 3, 1, 3) + λ2(0, 2, 1,−1) = (2, 4, 1, 7).
Ko slednje zapisemo z razsirjeno matriko in uporabimo Gaussovo metodo, dobimo:
A =
1 0 23 2 41 1 13 −1 7
∼
1 0 20 1 −10 0 00 0 0
.
Torej je λ1 = 2 in λ2 = −1. Opomba. Opazimo, da gre tu za isto matriko, kot smo jozapisali pri ugotavljanju linearne neodvisnosti. Matriki je potrebno dodati le locevalno crto medlinearno neodvisnimi vektorji in vektorji, ki jih zelimo izraziti kot linearne kombinacije.

5 MATRIKE 68
5.10 Lastne vrednosti
Podobnost matrikMatrika A ∈ Rn×n je podobna matriki B ∈ Rn×n, ce obstaja obrnljiva matrika P , da je
B = P−1AP .
• Vsaka matrika je podobna sama sebi.
• Ce je matrika A podobna matriki B, je tudi B podobna matriki A. Res: Iz B = P−1APsledi A = PBP−1.
• Ce je matrika A podobna matriki B in matrika B podobna matriki C, je tudi A podobnaC. Res: Ce je B = P−1AP in C = Q−1BQ, je C = Q−1P−1APQ = (QP )−1A(QP ).
• Ce je B = P−1AP , za vsak m ∈ N velja
Bm = P−1AP · P−1AP · · ·P−1AP = P−1AmP.
Dana je matrika A ∈ Rn×n. Zelimo hitro izracunati Am za velik m ∈ N.
Ce je A diagonalna matrika, je izracun enostaven:
A =
λ1 0 . . . 00 λ2 . . . 0...
......
0 0 . . . λn
= diag(λ1, λ2, . . . , λn),
Am =
λm1 0 . . . 00 λm
2 . . . 0...
......
0 0 . . . λmn
= diag(λm
1 , λm2 , . . . , λ
mn ).
Diagonalizacija matrikMatrika A je diagonalizabilna, ce je podobna kaksni diagonalni matriki.
Zgled 5.42. Matrika A =
[−2 3
0 1
]je diagonalizabilna.
Res: za P =
[1 10 1
]je P−1 =
[1 −10 1
]. Sledi
P−1AP =
[1 −10 1
] [−2 3
0 1
] [1 10 1
]=
=
[−2 2
0 1
] [1 10 1
]=
[−2 0
0 1
]= D.
Matrika A je podobna diagonalni matriki D =
[−2 0
0 1
].
Ce je A diagonalizabilna matrika, velja D = P−1AP . Za vsako naravno stevilo m veljaDm = P−1AmP in od tod Am = PDmP−1.
Zgled 5.43. Izracunaj A7 za matriko A =
[−2 3
0 1
].

5 MATRIKE 69
Resitev. Kot smo ze prej videli, je matrika A diagonalizabilna, tj. P−1AP = D za P =[1 10 1
]in D =
[−2 0
0 1
]. Sledi
A7 = PD7P−1 =
[1 10 1
] [(−2)7 0
0 17
] [1 −10 1
]=
=
[1 10 1
] [−128 0
0 1
] [1 −10 1
]=
=
[−128 1
0 1
] [1 −10 1
]=
[−128 129
0 1
].
Zgled 5.44. Dokazi, da matrika A =
[0 10 0
]ni diagonalizabilna.
Resitev. Opazimo, da za matriko A velja A2 = 0.Ce bi A bila diagonalizabilna, bi veljalo D = P−1AP in D2 = P−1A2P = 0. Ker pa od tod
sledi D = 0, dobimo tudi A = PDP−1 = 0. Protislovje.
Poglejmo si lastnost diagonalizabilnosti podrobneje. Naj torej velja P−1AP = D = diag(λ1, . . . , λn).Oznacimo z ek = (0, . . . , 1, . . . , 0)T ∈ Rn×1 matriko–stolpec, ki ima v k-ti vrstici stevilo 1, vsaostala stevila pa so enaka 0. Torej je
Dek =
λ1 0 . . . 00 λ2 . . . 0...
......
0 0 . . . λn
0...1...0
=
0...λk...0
= λkek.
Iz AP = PD sledi APek = PDek = Pλkek = λkPek. Ce oznacimo k-ti stolpec matrike P spk, velja pk = Pek in
Apk = λkpk.
Ker je matrika P obrnljiva, so stolpci p1, . . . , pn linearno neodvisni.
Lastne vrednosti in lastni vektorjiStevilo λ je lastna vrednost matrike A ∈ Rn×n, ce obstaja kaksen neniceln vektor (stolpec)
x ∈ Rn×1, da jeAx = λx.
Vektor x imenujemo lastni vektor, ki pripada lastni vrednosti λ.
Lastni vektor ni enolicno dolocen. Ce je x lastni vektor, ki pripada lastni vrednosti λ, je tudikx lastni vektor k isti lastni vrednosti za poljuben k ∈ R \ {0}. Res: A(kx) = kAx = kλx =λ(kx).
Kot bomo kasneje videli, je mozno, da k neki lastni vrednosti obstaja vec linearno neodvisnihlastnih vektorjev.
Matricno enacbo Ax = λx lahko zapisemo v obliki Ax = λIx oz. v obliki homogenega sistemalinearnih enacb
(A− λI)x = 0.

5 MATRIKE 70
Gornji homogen sistem ima netrivialno resitev, ce je determinanta tega sistema enaka 0, tj.det(A− λI) = 0.
Matrika
A− λI =
a11 − λ a12 . . . a1n
a21 a22 − λ . . . a2n...
......
an1 an2 . . . ann − λ
se imenuje karakteristicna matrika matrike A, njena determinanta det(A− λI) pa karakte-risticni polinom matrike A.
Karatkeristicni polinom matrike A ∈ Rn×n je polinom stopnje n z realnimi koeficienti, nje-gove nicle pa so lastne vrednosti matrike A.
Polinom det(A− λI) ima n nicel, ki pa niso nujno realna stevila.
Zgled 5.45. Doloci vse lastne vrednosti matrike A =
[cosϕ − sinϕsinϕ cosϕ
].
Resitev. Karakteristicni polinom se glasi
det(A− λI) =
∣∣∣∣cosϕ− λ − sinϕ
sinϕ cosϕ− λ
∣∣∣∣ = λ2 − 2λ cosϕ+ 1
in ima nicli
λ1,2 =2cosϕ±
√(2 cosϕ)2 − 4
2= cosϕ± i sinϕ.
Zgled 5.46. Doloci vse lastne vrednosti in lastne vektorje matrike A =
[−2 3
0 1
].
Resitev. Karakteristicni polinom matrike A je
det(A− λI) =
∣∣∣∣−2 − λ 3
0 1 − λ
∣∣∣∣ = (−2 − λ)(1 − λ)
in ima nicli λ1 = −2, λ2 = 1.
Lastne vektorje k lastnima vrednostima λ1 in λ2 dolocimo tako, da poiscemo vse resitvehomogenega sistema
(A− λI)x = 0,
za λ = λ1 in λ = λ2.Za λ = λ1 = −2 imamo homogeni sistem
(A− λ1I)x = 0,
kjer je x = (x1, x2)T neznani vektor. Ta sistem lahko v popolnosti popisemo z razsirjeno matriko
[A− λ1I|0] =
[−2 − (−2) 3 0
0 1 − (−2) 0
]=
[0 3 00 3 0
]∼
∼[
0 1 00 0 0
].
Od tod sledi, da je x2 = 0. Ker je x1 poljuben, so vsi lastni vektorji, ki pripadajo lastnivrednosti λ1, oblike x = (x1, 0)
T = x1(1, 0)T , kjer je x1 ∈ R. Ker nas pri lastnih vektorjih

5 MATRIKE 71
obicajno zanimajo le linearno neodvisni lastni vektorji, izmed vseh vektojev izberemo le tistega,ki ga najenostavneje zapisemo. V nasem primeru je to vektor (1, 0)T .
Poglejmo si metodo se enkrat. Ker je sistem (A − λ1I)x = 0 homogen, desnih strani nipotrebno pisati. Gornji racun za λ1 = −2 zato na kratko zapisemo kot
A− λ1I =
[−2 − (−2) 3
0 1 − (−2)
]=
[0 30 3
]∼[
0 10 0
].
Ta matricni sistem ima rang 1, izrazljiva neznanka pa je v drugem stolpcu. Sledi x2 = 0, x1 paje (prost) parameter.
Torej x = (x1, 0)T , kjer je x1 ∈ R poljuben. Vsi lastni vektorji k λ1 = −2 so torej oblike
x1(1, 0)T .
Za λ2 = 1 naredimo podobno. Ker gre ponovno za homogeni sistem, desnih strani ne pisemo.Skratka
A− λ2I =
[−2 − 1 3
0 1 − 1
]=
[−3 3
0 0
]∼[
1 −10 0
].
Tudi ta sistem ima rang 1, izrazljiva neznanka pa je v prvem stolpcu. Sledi x1 = x2.
Resitev je torej oblike x = (x2, x2)T , kjer je x2 ∈ R poljuben. Vsi lastni vektorji k λ2 = 1 so
torej oblike x2(1, 1)T .
Izrek 5.47. Matrika A ∈ Rn×n je diagonalizabilna natanko tedaj, ko ima n linearno neodvisnihlastnih vektorjev.
Dokaz. Ce je matrika A diagonalizabilna, veljaD = P−1AP . Obrnljiva matrika P je sestavljenaiz linearno neodvisnih vektorjev pk = Pek, ki imajo lastnost Apk = λkpk. Torej so pk lastnivektorji k lastnim vrednostim λk.
Za dokaz v drugo smer pa vzemimo, da so p1, . . . , pn linearno neodvisni lastni vekorji.Matrika, sestavljena iz stolpcev p1, . . . , pn, je obrnljiva. Iz zveze Apk = λkpk izpeljemo APek =DPek za D = diag(λ1, . . . , λn). Ker APek = DPek velja za vsak k (tj. k-ta stolpca se ujemata),je AP = DP oz.
P−1AP = D.
Zgled 5.48. Diagonaliziraj matriko A =
[−2 3
0 1
].
Resitev. Videli smo ze, da ima matrika lastni vrednosti λ1 = −2 in λ2 = 1 ter pripadajoca(linearno neodvisna) lastna vektorja p1 = (1, 0)T in p2 = (1, 1)T . Ce zapisemo
P = [p1 p2] =
[1 10 1
],
bo diagonalizirana matrika enaka
D = P−1AP =
[λ1 00 λ2
]=
[−2 0
0 1
].
Opozorilo. Lastne vrednosti lahko nastejemo tudi v drugem vrstnem redu. Pomembno je le,da v matriko D in matriko P zlozimo lastne vrednosti in pripadajoce lastne vektorje v enakemvrstnem redu.

5 MATRIKE 72
Zgled 5.49. Diagonaliziraj matriko A =
2 −2 1−1 1 −1−4 4 −3
.
Resitev. Najprej moramo izracunati karakteristicni polinom det(A− λI).
det(A− λI) =2 − λ −2 1−1 1 − λ −1−4 4 −3 − λ
=
=2 − λ −2 1 2 − λ −2−1 1 − λ −1 −1 1 − λ−4 4 −3 − λ −4 4
=
= (2 − λ)(1 − λ)(−3 − λ) − 8 − 4 −−(−4)(1 − λ) − (−4)(2 − λ) − 2(−3 − λ) =
= (2 − λ)(1 − λ)(−3 − λ) + 6 − 6λ =
= (1 − λ) ((2 − λ)(−3 − λ) + 6) = (1 − λ)(λ+ λ2).
Karakteristicni polinomdet(A− λI) = (1 − λ)λ(1 + λ)
ima torej nicle λ1 = 1, λ2 = 0 in λ3 = −1.Pri λ1 = 1 imamo
det(A− λ1I) =
2 − 1 −2 1−1 1 − 1 −1−4 4 −3 − 1
=
1 −2 1−1 0 −1−4 4 −4
∼
∼
1 −2 10 −2 00 −4 0
∼
1 0 10 1 00 0 0
.
Resitev tega sistema je x2 = 0 in x1 = −x3, torej vsi vektorji oblike (−x3, 0, x3) = −x3(1, 0,−1).Pripadajoci lastni vektor k λ1 = 1 je npr. p1 = (1, 0,−1). Izrazljivi neznaki pripadata prvemu in
drugemu stolpcu.
Pri λ2 = 0 imamo
det(A− λ2I) =
2 − 0 −2 1−1 1 − 0 −1−4 4 −3 − 0
=
=
2 −2 1−1 1 −1−4 4 −3
∼
1 −1 12 −2 1
−4 4 −3
∼
∼
1 −1 10 0 −10 0 1
∼
1 −1 00 0 10 0 0
.
Resitev tega sistema je x3 = 0 in x1 = x2, torej vsi vektorji oblike (x2, x2, 0) = x2(1, 1, 0).Pripadajoci lastni vektor k λ2 = 0 je npr. p2 = (1, 1, 0). Izrazljivi neznaki pripadata prvemu in
tretjemu stolpcu.
5 MATRIKE 73
Pri λ3 = −1 imamo
A− λ3I =
2 − (−1) −2 1−1 1 − (−1) −1−4 4 −3 − (−1)
=
=
3 −2 1−1 2 −1−4 4 −2
∼
1 −2 13 −2 1
−4 4 −2
∼
∼
1 −2 10 4 −20 −4 2
∼
1 0 00 1 −1
20 0 0
.
Resitev tega sistema je x1 = 0 in x2 = 12x3, torej vsi vektorji oblike (0, 1
2x3, x3) = 12x3(0, 1, 2).
Pripadajoci lastni vektor k λ3 = −1 je npr. p3 = (0, 1, 2). Izrazljivi neznaki pripadata prvemu in
drugemu stolpcu.
Videli smo, da ima matrika lastne vrednosti λ1 = 1, λ2 = 0 in λ3 = −1 ter pripadajoce(linearno neodvisne) lastne vektorje p1 = (1, 0,−1)T , p2 = (1, 1, 0)T in p3 = (0, 1, 2)T . Cezapisemo
P = [p1 p2 p3] =
1 1 00 1 1
−1 0 2
,
bo diagonalizirana matrika enaka
D = P−1AP =
λ1 0 00 λ2 00 0 λ3
=
1 0 00 0 00 0 −1
.
Zgled 5.50. Diagonaliziraj matriko A =
−1 1 1−2 −2 −3
2 1 2
.
Resitev. Najprej moramo izracunati karakteristicni polinom det(A− λI).
det(A− λI) =−1 − λ 1 1 −1 − λ 1−2 −2 − λ −3 −2 −2 − λ2 1 2 − λ 2 1
=
= (−1 − λ)(−2 − λ)(2 − λ) − 6 − 2 −−2(−2 − λ) − (−3)(−1 − λ) − (−2)(2 − λ) =
= (−1 − λ)(−2 − λ)(2 − λ) − 3 − 3λ =
= (−1 − λ) ((−2 − λ)(2 − λ) + 3) =
= (−1 − λ)(−1 + λ2) = −(λ+ 1)2(λ− 1).
Karakteristicni polinom ima lastne vrednosti λ1,2 = −1 in λ3 = 1. Oglejemo si A − λ1,2I.Matrika homogenega sistema je
A− λ1,2I =
−1 − (−1) 1 1−2 −2 − (−1) −3
2 1 2 − (−1)
=
=
0 1 1−2 −1 −3
2 1 3
∼
2 1 30 1 10 0 0
∼
1 0 10 1 10 0 0
.

5 MATRIKE 74
Resitev tega sistema je x1 = −x3 in x2 = −x3, torej vsi vektorji oblike (−x3,−x3, x3) =−x3(1, 1,−1). Opazimo, da imamo le enoparametricno druzino resitev, ceprav je bila λ =−1 dvojna nicla polinoma. Kot bomo kasneje videli, je ze to zadostna ovira, da matrika nidiagonalizabilna.
Za vajo dolocimo se lastne vektorje, ki pripadajo lastni vrednosti λ3 = 1.Za λ3 = 1 je matrika homogenega sistema enaka
A− λ3I =
−1 − 1 1 1−2 −2 − 1 −3
2 1 2 − 1
=
=
−2 1 1−2 −3 −3
2 1 1
∼
1 −12 −1
20 −2 −20 2 2
∼
1 0 00 1 10 0 0
.
Resitev tega sistema je x1 = 0 in x2 = −x3, torej vsi vektorji oblike (0,−x3, x3) = −x3(0, 1,−1).
Sedaj lahko tudi na drug nacin utemeljimo, da matrika ni diagonalizabilna. Kot je racunpokazal, smo dobili le dva linearno neodvisna lastna vektorja, in sicer (1, 1,−1) in (0, 1,−1), zadiagonalizabilnost pa bi potrebovali 3.
Izrek 5.51. Razlicnim lastnim vrednostim pripadajo linearno neodvisni lastni vektorji.
Dokaz. Naj bodo λ1, . . . , λm razlicne lastne vrednosti in x1, . . . , xm pripadajoci lastni vektorjimatrike A. Z indukcijo bomo pokazali, da je za vsak k vektor xk linearno neodvisen od x1, . . . ,xk−1.
Ce je k = 1, ni kaj dokazovati. Vektor x1 je neniceln in je linearno neodvisen.
V dokazu indukcijskega koraka pa za hip privzemimo, da je
xk = µ1x1 + µ2x2 + . . .+ µk−1xk−1. (9)
Ce to enakost (matricno) pomnozimo z A, dobimo
Axk = µ1Ax1 + µ2Ax2 + . . .+ µk−1Axk−1
oziromaλkxk = µ1λ1x1 + µ2λ2x2 + . . . + µk−1λk−1xk−1. (10)
Ce pa enakost (9) pomnozimo z λk, dobimo
λkxk = µ1λkx1 + µ2λkx2 + . . .+ µk−1λkxk−1. (11)
Iz (10) in (11) sledi protislovna enakost
µ1(λ1 − λk)x1 + µ2(λ2 − λk)x2 + . . .+ µk−1(λk−1 − λk)xk−1 = 0.
Slednje pa ne drzi, saj je µi 6= 0 za neki i < k in λi 6= λk, vektorji x1, . . . , xk−1 pa so pravzapravlinearno neodvisni.
Posledica 5.52. Matrika, ki ima same razlicne lastne vrednosti, je diagonalizabilna.
Ce je λ nicla reda r karakteristicnega polinoma det(A−λI), pravimo, da ima lastna vrednostλ algebraicno veckratnost r. Ce lahko k lastni vrednosti λ poiscemo m linearno neodvisnihlastnih vektorjev, pravimo, da ima λ geometricno veckratnost m.
Vedno je 1 ≤ m ≤ r in matrika je diagonalizabilna natanko tedaj, ko je algebaricnaveckratnost vsake lastne vrednosti enaka njeni geometricni veckratnosti.

6 ZAPOREDJA 75
5.11 Leslijev model populacijske rasti
Razdelimo vse zenske osebke v populaciji v m (enakih) starostnih razredov in oznacimo z n(t)k
stevilo osebkov v k-tem starostnem razredu ob (diskretnem) casu t. Oznacimo s pk ∈ (0, 1)verjetnost, da osebek prezivi k-ti starostni razred in ob naslednjem diskretnem casu vstopi vrazred k + 1. Torej je
n(t+1)k+1 = pkn
(t)k .
Oznacimo z rk povprecno rodnost v starostnem razredu k. Torej je
n(t+1)1 = r1n
(t)1 + r2n
(t)2 + . . .+ rmn
(t)m .
Skupno stevilo osebkov v casu t lahko opisemo z vektorjem N (t) = (n(t)1 , n
(t)2 , . . . , n
(t)m )T .
Zgornje enacbe lahko potem enostavno zapisemo v matricni obliki s pomocjo Leslijeve matrike
L =
r1 r2 . . . rm−1 rmp1 0 . . . 0 00 p2 . . . 0 0...
. . ....
0 0 . . . pm−1 0
,
in sicer kot
N (t+1) =
n(t+1)1
n(t+1)2
n(t+1)3...
n(t+1)m
=
r1 r2 . . . rm−1 rmp1 0 . . . 0 00 p2 . . . 0 0...
. . ....
0 0 . . . pm−1 0
n(t)1
n(t)2
n(t)3...
n(t)m
= LN (t).
• Zanima nas, kako bi lahko cimbolj enostavno dolocili N (t), ce je podan N (0).
• Zanima nas, ali obstaja kaksna “stabilna” porazdelitev populacije, tj. kaksen vektor N instevilo λ, da je N (t) ≈ λtN . (Izkaze se, da je λ ravno dominantna lastna vrednost, N paustrezni lastni vektor.)
6 Zaporedja
6.1 Zaporedja
Zaporedje realnih stevil je preslikava a : N → R. Obicajno namesto a(n) pisemo an. Steviloan imenujemo n-ti clen zaporedja, stevilo n pa indeks clena an. Zaporedje s splosnim clenoman oznacimo z (an).
Zaporedje je lahko podano
• eksplicitno: s pomocjo funkcijskega predpisa an = f(n)
• implicitno oz. rekurzivno: zapisemo prvih nekaj clenov zaporedja in pravilo, kakoizracunamo naslednji clen s pomocjo prejsnjih.
Zaporedje lahko ponazorimo
• s sliko mnozice tock {an; n ∈ N} na realni osi ali
• z grafom Γ(a) ⊂ N × R funkcije a : N → R.
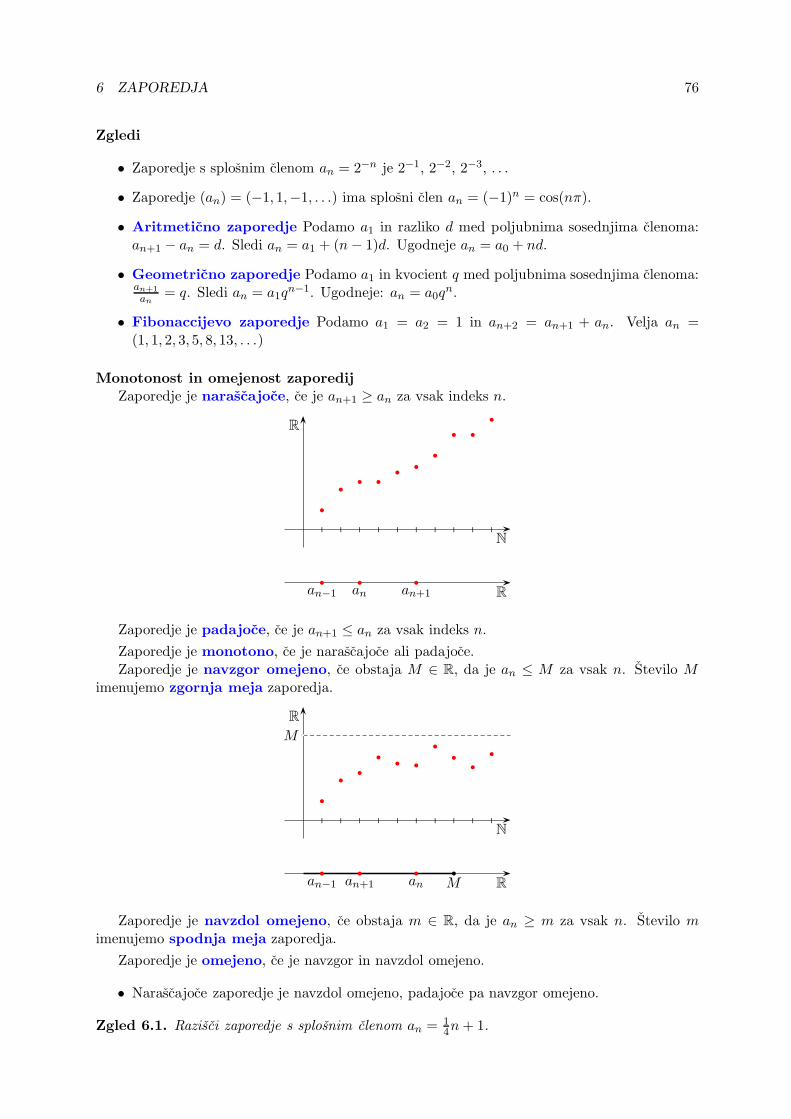
6 ZAPOREDJA 76
Zgledi
• Zaporedje s splosnim clenom an = 2−n je 2−1, 2−2, 2−3, . . .
• Zaporedje (an) = (−1, 1,−1, . . .) ima splosni clen an = (−1)n = cos(nπ).
• Aritmeticno zaporedje Podamo a1 in razliko d med poljubnima sosednjima clenoma:an+1 − an = d. Sledi an = a1 + (n− 1)d. Ugodneje an = a0 + nd.
• Geometricno zaporedje Podamo a1 in kvocient q med poljubnima sosednjima clenoma:an+1
an= q. Sledi an = a1q
n−1. Ugodneje: an = a0qn.
• Fibonaccijevo zaporedje Podamo a1 = a2 = 1 in an+2 = an+1 + an. Velja an =(1, 1, 2, 3, 5, 8, 13, . . .)
Monotonost in omejenost zaporedijZaporedje je narascajoce, ce je an+1 ≥ an za vsak indeks n.
N
R
b
b
b b
b
b
b
b b
b
| | | | | | | | | |
Ran−1 an an+1
b bb
Zaporedje je padajoce, ce je an+1 ≤ an za vsak indeks n.
Zaporedje je monotono, ce je narascajoce ali padajoce.Zaporedje je navzgor omejeno, ce obstaja M ∈ R, da je an ≤ M za vsak n. Stevilo M
imenujemo zgornja meja zaporedja.
N
R
M
b
b
b
b
b b
b
b
b
b
bc
| | | | | | | | | |
Ran−1 an+1 an Mbb bb
Zaporedje je navzdol omejeno, ce obstaja m ∈ R, da je an ≥ m za vsak n. Stevilo mimenujemo spodnja meja zaporedja.
Zaporedje je omejeno, ce je navzgor in navzdol omejeno.
• Narascajoce zaporedje je navzdol omejeno, padajoce pa navzgor omejeno.
Zgled 6.1. Razisci zaporedje s splosnim clenom an = 14n+ 1.

6 ZAPOREDJA 77
Resitev.
N
R
1
an = 14n+ 1
bb
bb
bb
bb
bb
bc
| | | | | | | | | |
Zaporedje ima clene a1 = 54 , a2 = 6
4 , a3 = 74 , . . . . Ker je an+1 − an = 1
4 > 0, je zaporedjenarascajoce. Torej je navzdol omejeno. Zaporedje ni navzgor omejeno.
Zgled 6.2. Razisci zaporedje s splosnim clenom an = 1n .
Resitev.
N
R
1
an = 1n
b
b
bb b b b b b b
bc
| | | | | | | | | |
Zaporedje ima clene a1 = 1, a2 = 12 , a3 = 1
3 , . . . . Ker je an+1 − an = − 1n(n+1) < 0, je zaporedje
padajoce. Torej je navzgor omejeno. Ker je an > 0 za vsak n ∈ N, je zaporedje tudi navzdolomejeno. Torej je zaporedje omejeno.
Natancna zgornja in spodnja mejaStevilo M je natancna zgornja meja zaporedja (an), z oznako M = supn∈N an, ce je
an ≤M za vsak n in ce za vsak ε > 0 obstaja indeks k, da je ak > M − ε.
k N
R
M
M − ε bc
bc
b
b
b
bb
b
b
b
b
b
| | | | | | | | | |
Rakan MM − εbbb
Stevilo M je natancna spodnja meja zaporedja (an), z oznako M = infn∈N an, ce jean ≥M za vsak n in ce za vsak ε > 0 obstaja indeks k, da je ak < M + ε.
Nk
R
M
M + ε bc
bc
b
b
b
b
b
b
b
b
b
b
| | | | | | | | | |

6 ZAPOREDJA 78
Rak anM + εMb b b
Izrek 6.3. Vsako omejeno zaporedje ima natancno zgornjo in spodnjo mejo.
Dokaz. Naj bo A = {an; n ∈ N} mnozica vseh clenov zaporedja (an). Ker je zaporedje (an)omejeno, je mnozica A ⊂ R omejena in zaradi znanih lastnosti omejenih podmnozic realnihstevil obstajata natancna zgornja in spodnja meja mnozice A.
Trditev je tako dokazana, saj je stevilo M natancna zgornja meja mnozice A, ce je M zgornjameja mnozice A in ce za vsak ε > 0 obstaja a ∈ A, da je a > M − ε.
Najvecji in najmanjsi clen zaporedjaOpozoriti velja, da inf an ne pomeni najmanjsi clen zaporedja. Tudi ce inf an obstaja, ni
nujno, da je inf an = aN za neki N ∈ N.
Podobno tudi supan ne pomeni najvecji clen zaporedja. Tudi ce supan obstaja, ni nujno,da je supan = aN za neki N ∈ N.
Obratna trditev pa drzi. Ce najmanjsi clen zaporedja obstaja (oznacimo ga z min an), jeseveda inf an = min an.
Podobno je tudi supan = max an, ce le najvecji clen zaporedja obstaja (oznacimo ga zmax an).
Zgled 6.4. Doloci natancno zgornjo in spodnjo mejo zaporedja s splosnim clenom an = (n+1)(−1)n
n .
Resitev.
N
R
1
−1
an = (n+1)(−1)n
n
b
b
b
b
b
b
b
b
b
bbc
bc
| | | | | | | | | |
Zaporedje s cleni |an| = n+1n = 1 + 1
n je padajoce k 1. Torej je (pod)zaporedje s sodimi indeksipadajoce k 1, (pod)zaporedje z lihimi pa narascajoce k −1. Torej je supan = max an = a2 = 3
2in inf an = min an = a1 = −2.
Stekalisce zaporedjaStevilo a je stekalisce zaporedja (an), ce za vsak ε > 0 in obstaja neskoncno indeksov m,
da je |a−am| < ε. Drugace povedano, stevilo a je stekalisce zaporedja (an), ce je v vsaki njegoviokolici neskoncno clenov tega zaporedja.
N
R
a+ εa
a− ε bc
bc
bc
b
b
b
b
b
b
b
b
b
b
| | | | | | | | | |
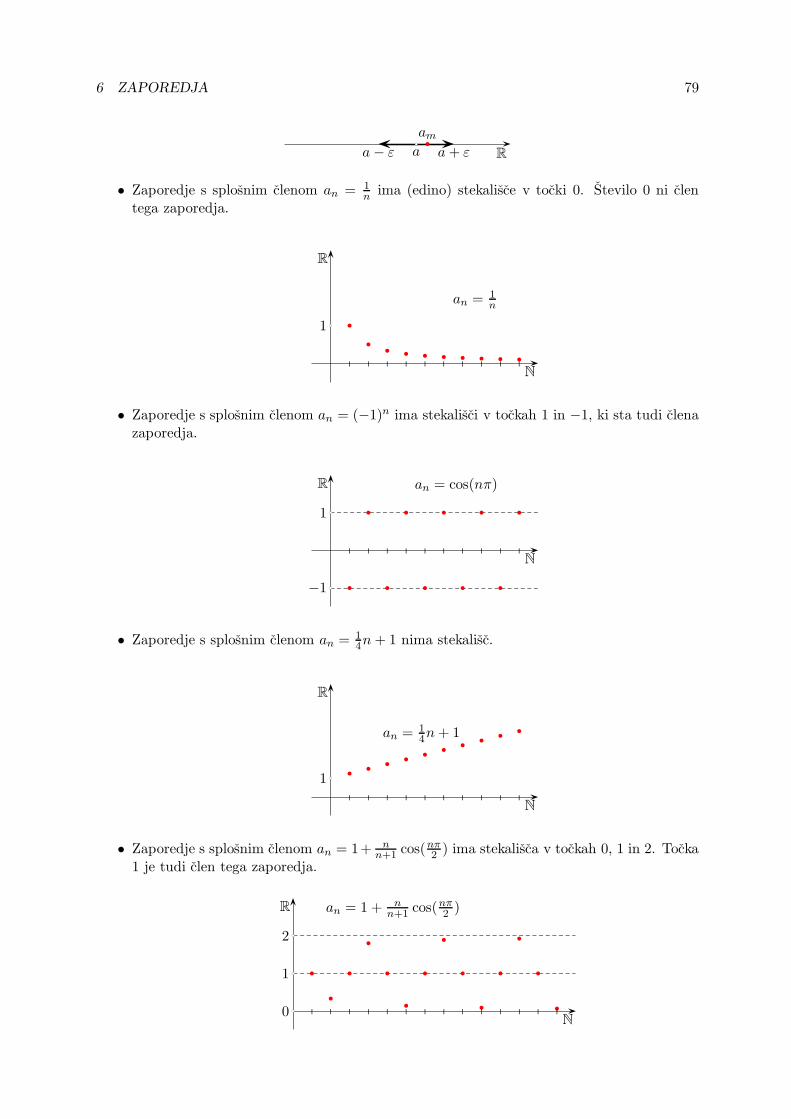
6 ZAPOREDJA 79
Ra
am
a+ εa− εbc b
• Zaporedje s splosnim clenom an = 1n ima (edino) stekalisce v tocki 0. Stevilo 0 ni clen
tega zaporedja.
N
R
1
an = 1n
b
b
bb b b b b b b
bc
| | | | | | | | | |
• Zaporedje s splosnim clenom an = (−1)n ima stekalisci v tockah 1 in −1, ki sta tudi clenazaporedja.
N
R
1
−1
an = cos(nπ)
b
b
b
b
b
b
b
b
b
bbc
bc
| | | | | | | | | |
• Zaporedje s splosnim clenom an = 14n+ 1 nima stekalisc.
N
R
1
an = 14n+ 1
bb
bb
bb
bb
bb
bc
| | | | | | | | | |
• Zaporedje s splosnim clenom an = 1+ nn+1 cos(nπ
2 ) ima stekalisca v tockah 0, 1 in 2. Tocka1 je tudi clen tega zaporedja.
N
R
0
1
2
an = 1 + nn+1 cos(nπ
2 )
b
b
b
b
b
b
b
b
b
b
b
b
b
b
bc
bc
bc | | | | | | | | | | | | | |

6 ZAPOREDJA 80
Za n = 4k ± 1 velja an = 1 + 4k±14k±1+1 · 0 = 1.
Za n = 4k velja an = 1 + 4k4k+1 · 1 → 2.
Za n = 4k + 2 velja an = 1 + 4k+24k+3 · (−1) → 0.
Izrek 6.5. Vsako omejeno zaporedje ima stekalisce.
Dokaz. Naj bo m = inf an in M = sup an. Mnozica
A = {x ∈ R; an < x za najvec koncno n}
je neprazna, saj je m ∈ A. Je omejena, saj x < M za vsak x ∈ A. Torej ima natancno zgornjomejo a = supA.
Rkoncno clenov
neskoncno clenov
aa− ε a+ εbcbc bc
Stevilo a je stekalisce zaporedja. Za ε > 0 je a− ε ∈ A in a + ε /∈ A. Levo od a− ε je koncnomnogo clenov zaporedja, levo od a + ε pa neskoncno. Torej jih je na intervalu (a − ε, a + ε)neskoncno.
Limita zaporedjaStevilo a je limita zaporedja an, z oznako a = lim
n→∞an, ce za vsak ε > 0 obstaja N ∈ N,
da je |an − a| < ε za vsak n ≥ N .
N
R
a+ εa
a− ε
N
bc
bc
bc
b
b
b
b
b
b
b
b
bb
| | | | | | | | | |
Ra
anaN
a+ εa− εbc bb
Drugace povedano, a je limita zaporedja an, ce v vsaki njegovi okolici lezijo vsi cleni odnekega clena dalje.
Stevilo N , ki nastopa v definiciji limite zaporedja, je odvisno od ε. Pri manjsem ε je steviloN = N(ε) vecje.
N1 N2
a+ ε1a+ ε2
a
a− ε2a− ε1
N
R
| | | | | | | | | | | |
b
b
b
b
b
b
b
b
b
b
b
b
bc
bc
bc
bc
bc

6 ZAPOREDJA 81
Na gornji sliki imamo ε2 < ε1. Za pripadajoca N1 = N(ε1) in N2 = N(ε2) velja N2 > N1.
• Vsaka limita je tudi stekalisce, obrat pa ne drzi, saj ima lahko zaporedje vec stekalisc.
Zaporedje je konvergentno, ce obstaja limita tega zaporedja. Zaporedje je divergentno,ce ni konvergentno.
Zgled 6.6. Dokazi, da za zaporedje an = 1n velja lim
n→∞an = 0. Od katerega clena dalje lezijo vsi
cleni v ε-okolici limitne tocke za ε = 1100?
Za dani ε > 0 oznacimo N = [1ε ] + 1. Torej je 1N < ε in je zato an ≤ aN = 1
N < ε za vsakn ≥ N . Posebej, pri ε = 1
100 lezijo v ε-okolici limitne tocke vsi cleni od vkljucno clena a101
dalje.
Zgled 6.7. Izracunaj limito zaporedja s splosnim clenom an = n+1n+3 .
Resitev. Ker je n+1n+3 = 1 − 2
n+3 , domnevamo, da bo limn→∞
n+1n+3 = 1.
N
R
1
an = n+1n+3
bb
b b b b b b b b
bc
| | | | | | | | | |
Naj bo ε > 0. Da bi vsi cleni od N -tega dalje lezali v ε-okolici tocke 1, mora veljati |an − 1| < εza n ≥ N . Torej mora biti | 2
n+3 | < ε oz. n > 2ε − 1. Ce torej izberemo poljubno tako naravno
stevilo N , da je N > 2ε − 1, bo za vsak n ≥ N veljalo |an − 1| < ε.
Zgled 6.8. Doloci limito ter najvecji in najmanjsi clen zaporedja s splosnim clenom an = 2n3−2n .
Resitev. Ker je 2n3−2n = −1 + 3
3−2n , je limn→∞
2n3−2n = −1.
N
R
1
−1
2
−4
an = 2n3−2nb
b
b
bb b b b b b
bc
bc
bc
bc
| | | | | | | | | |
Ker je za n ≥ 2 vrednost izraza 33−2n negativna in s narascajocim n priblizuje 0, bosta najvecji
in najmanjsi clen kar a1 = 2 in a2 = −4.
Izrek 6.9. Naj bo a ∈ R. Tedaj za |a| < 1 zaporedje s splosnim clenom an = an konvergira k 0,za a = 1 zaporedje (an) konvergira k 1, v vseh ostalih primerih pa je zaporedje (an) divergentno.
Dokaz. Ce je a = 0, je limn→∞
an = 0.
Ce je 0 < a < 1, je zaporedje an padajoce in navzdol omejeno. Torej je konvergentno inoznacimo njegovo limito z α. Ker se zaporedje an+1 razlikuje od zaporedja an le v prvem clenu,je tudi ima enako limito kot an. Sledi
α = limn→∞
an+1 = limn→∞
a · an = limn→∞
a · limn→∞
an = aα,

6 ZAPOREDJA 82
od koder zaradi a 6= 0 sledi α = 0.
Ce je a = 1, je limn→∞
an = 1.
Ce je a > 1 in ce je zaporedje an omejeno, je konvergentno. Oznacimo njegovo limito z β.Torej je β ≥ a > 1. Sedaj podobno kot v primeru 0 < a < 1 dokazemo, da je β = aβ. Ker pa jeβ > 1 in a > 1, ta enacba ni smiselna. Torej an ni omejeno.
Ce je −1 < a < 0, velja limn→∞
|a|n = 0, od koder izpeljemo, da je tudi limn→∞
an = 0.
Za a ≤ −1 pa ima zaporedje neskoncno clenov na intervalu (−∞,−1] in neskoncno clenovna intervalu [1,∞), zato ni konvergentno.
Izrek 6.10 (Bernoullijeva neenakost). Za vsako pozitivno stevilo x in naravno stevilo n > 1velja
(1 + x)n > 1 + nx.
Dokaz. Trditev bomo dokazali z indukcijo. Za n = 2 ni kaj dokazovati. V dokazu indukcijskegakoraka pa privzemimo, da je (1 + x)n > 1 + nx. Tedaj velja
(1 + x)n+1 = (1 + x)n(1 + x) > (1 + nx)(1 + x) =
= 1 + (n + 1)x+ nx2 > 1 + (n+ 1)x,
saj je nx2 > 0.
Izrek 6.11. Naj bo a pozitivno realno stevilo. Potem je limn→∞
n√a = 1.
Dokaz. Za a = 1 ni kaj dokazovati. Ce je a > 1, lahko pri fiksnem n > 1 zapisemo a = 1 + nx,kjer je x = a−1
n > 0. Tedaj po Bernoullijevi neenakosti velja
(1 +
a− 1
n
)n
> 1 + na− 1
n= a,
od koder sledi 1 + a−1n > n
√a > 1. Ker je lim
n→∞(1 + a−1
n ) = 1, iz gornje ocene sledi, da je tudi
limn→∞
n√a = 1. Ce pa je 0 < a < 1, pisemo b = 1
a in po ze dokazanem velja limn→∞
n√b = 1. Torej
je tudi
limn→∞
n√a = lim
n→∞1n√b
=1
limn→∞
n√b
= 1.
Lastnosti konvergentnih zaporedij
Izrek 6.12. Vsako konvergentno zaporedje je omejeno.
Dokaz. Naj bo a = limn→∞
an. Torej lezi izven intervala (a − 1, a + 1) le koncno mnogo clenov
zaporedja an. Mnozica
A = {a− 1, a+ 1} ∪ {an; an /∈ (a− 1, a+ 1)}
je koncna in ima natancno spodnjo in zgornjo mejo: m in M . Sledi m ≤ an ≤M za vsak n.Zaporedje, ki ni omejeno, ne more biti konvergentno. Prav tako ne more biti konvergentno
zaporedje, ki ima vec kot eno stekalisce.
Izrek 6.13. Zaporedje je konvergentno natanko tedaj, ko je omejeno in ima natanko eno ste-kalisce.

6 ZAPOREDJA 83
Rs1
s1 − ε s1 + εs2
s2 − ε s2 + εb bbc bc
Dokaz. Recimo, da je zaporedje konvergentno in oznacimo njegovo limito z s1. Po ze dokazanemje omejeno. V skladu z definicijo je limita zaporedja tudi njegovo stekalisce. Recimo, da imazaporedje se eno stekalisce, ki ga oznacimo z s2. Oznacimo ε = 1
2 |s2−s1|. Potem znotraj ε-okolicza s1 in s2 lezi neskoncno clenov tega zaporedja, kar pomeni, da nobena izmed tock s1 in s2 nilimita tega zaporedja.
Cauchyjevo zaporedjeZaporedje je Cauchyjevo, ce za vsak ε > 0 obstaja N ∈ N, da je |an − am| < ε za vsaka
m,n ≥ N .
Izrek 6.14. Zaporedje je konvergentno natanko tedaj, ko je Cauchyjevo.
Dokaz. Privzemimo najprej, da je zaporedje an konvergentno. Oznacimo z a njegovo limito.Naj bo ε > 0. Ker je zaporedje konvergentno, obstaja N ∈ N, da je |a− an| < ε
2 za vse n ≥ N .Ce sta torej m,n ≥ N , je
|am − an| ≤ |am − a| + |a− an| ≤ε
2+ε
2= ε.
Za dokaz v drugo smer pa privzemimo, da je zaporedje Cauchyevo. Potem obstaja N0, daje |am − an| < 1 za vse m,n ≥ N0. Posebej to pomeni, da je |am − aN0 | < 1 za vse n ≥ N0
in je zaporedje omejeno. Torej ima vsaj eno stekalisce, ki ga oznacimo z a. Dokazimo, da je alimita zaporedja (an). Izberimo in fiksirajmo ε > 0. Obstaja nek N , da je |am − an| < ε
2 za vsem,n ≥ N . Vzemimo sedaj poljuben n ≥ N . Potem lezi an na intervalu (aN − ε
2 , aN + ε2) in zato
lezi stekalisce a na intervalu [aN − ε2 , aN + ε
2 ]. Sledi
|an − a| ≤ |an − aN | + |aN − a| ≤ ε
2+ε
2= ε.
Torej je a limita zaporedja (an).
Izrek 6.15. Vsako monotono in omejeno zaporedje je konvergentno.
Dokaz. Naj bo (an) npr. narascajoce zaporedje. Ker je zaporedje omejeno, obstaja njegovanatancna zgornja meja, ki jo oznacimo z a. Potem za vsak ε > 0 obstaja N , da je a−ε < aN ≤ a.Ker je zaporedje monotono in navzgor omejeno z a, je a − ε < an ≤ a za vsak n ≥ N . Torejlezijo v ε-okolici stevila a vsi cleni od N -tega dalje in je zato a = lim
n→∞an.
Operacije z zaporedji
Izrek 6.16. Ce sta zaporedji (an) in (bn) konvergentni, so tudi zaporedja (an + bn), (an − bn)in (anbn) konvergentna ter velja
limn→∞
(an + bn) = limn→∞
an + limn→∞
bn,
limn→∞
(an − bn) = limn→∞
an − limn→∞
bn,
limn→∞
(anbn) = limn→∞
an · limn→∞
bn.
Ce velja se bn 6= 0 za vsak n in limn→∞
bn 6= 0, je konvergentno tudi zaporedje (an
bn) in velja
limn→∞
an
bn=
limn→∞
an
limn→∞
bn.

6 ZAPOREDJA 84
Dokaz. Naj bo a = limn→∞
an in b = limn→∞
bn. Ce je |an − a| < ε2 in |bn − b| < ε
2 , je
|(an + bn) − (a+ b)| ≤ |an − a| + |bn − b| < 2ε
2= ε.
Torej je limn→∞
(an + bn) = limn→∞
an + limn→∞
bn.
Podobno dokazemo, da je tudi limn→∞
(an − bn) = limn→∞
an − limn→∞
bn.
Za dokaz konvergentnosti zaporedja anbn ocenimo
|anbn − ab| = |(an − a)(bn − b) + (an − a)b+ (bn − b)a| =
≤ |(an − a)(bn − b)| + |(an − a)b| + |(bn − b)a| << ε2 + (|a| + |b|)ε,
kjer smo privzeli, da je |an − a| < ε in |bn − b| < ε. Torej lahko izberemo tak ε > 0, da jevrednost izraza |anbn − ab| poljubno majhna in je zato res lim
n→∞(anbn) = lim
n→∞an · lim
n→∞bn.
Za dokaz cetrte formule pa najprej dokazimo, da je limn→∞
1bn
= 1b . Ocenimo
∣∣∣∣1
bn− 1
b
∣∣∣∣ =|b− bn||bbn|
<ε
|b|(|b| − ε)<
2ε
|b|2
za ε < |b|2 . Po ze dokazanem pa je lim
n→∞an
bn= lim
n→∞an · 1
bn= a · 1
b = ab .
Opomba. Predpostavka o konvergentnosti zaporedij an in bn je bistvena. Ce npr. postavimoan = (−1)n in bn = (−1)n+1, je seveda an +bn = 0 za vsak n in lim
n→∞(an +bn) = 0, lim
n→∞(anbn) =
−1, zaporedji an in bn pa seveda nista konvergentni.
Zgled 6.17. Izracunaj limn→∞
(n− 1)2
3n2 + n+ 1.
Resitev. Ker je (n−1)2
3n2+n+1= n2−2n+1
3n2+n+1, delimo stevec in imenovalec tega ulomka z najvisjo
potenco; torej z n2. Dobimo (n−1)2
3n2+n+1 = n2−2n+13n2+n+1 =
1− 2n
+ 1n2
3+ 1n
+ 1n2
. Ker je limn→∞
1n = 0, je
limn→∞
(1 − 2
n + 1n2
)= lim
n→∞1 − lim
n→∞2n + lim
n→∞1n2 = 1 − 0 − 0 = 1,
saj vse limite na desni obstajajo. Podobno je tudi
limn→∞
(3 + 1
n + 1n2
)= lim
n→∞3 + lim
n→∞1n + lim
n→∞1n2 = 3 + 0 + 0 = 3.
Sledi
limn→∞
(n− 1)2
3n2 + n+ 1= lim
n→∞1 − 2
n + 1n2
3 + 1n + 1
n2
=lim
n→∞(1 − 2
n + 1n2 )
limn→∞
(3 + 1n + 1
n2 )=
1
3.
Zgled 6.18. Izracunaj limn→∞
3n + 1
3n+1 − 1.
Resitev. Ce stevec in imenovalec delimo s 3n, dobimo
limn→∞
3n + 1
3n+1 − 1= lim
n→∞1 + 1
3n
3 − 13n
=1
3.
Do enakega sklepa bi prisli tudi, ce bi delili s 3n+1.

6 ZAPOREDJA 85
Zgled 6.19. Izracunaj limn→∞
3n+1 + 5n
3n − 5n+1.
Resitev. Podobno kot v prejsnjem primeru delimo z izrazom, ki najhitreje narasca, tj. s 5n.Dobimo
limn→∞
3n+1 + 5n
3n − 5n+1lim
n→∞3 · (3
5 )n + 1
(35 )n − 5
= −1
5,
kjer smo upostevali, da je limn→∞
(35 )n = 0. Do enakega sklepa bi prisli tudi, ce bi delili s 5n+1.
Deljenje s 3n ali s 3n+1 pa ne vodi k resitvi, saj je limn→∞
(53 )n = ∞.
Zgled 6.20. Izracunaj limn→∞
5n+√n2 + 1
5n −√
4n2 + 1.
Resitev. Ce stevec in imenovalec delimo z n, dobimo
limn→∞
5n+√n2 + 1
5n−√
4n2 + 1= lim
n→∞
5 +√
1 + 1n2
5 −√
4 + 1n2
=5 + 1
5 − 2= 2.
Zgled 6.21. Izracunaj limn→∞
2 + 6√
2n3√
3 +√n.
Resitev. Ce stevec in imenovalec delimo s 6√n = 3
√√n, dobimo
limn→∞
2 + 6√
2n3√
3 +√n
= limn→∞
26√
n+ 6
√2
3
√3√n
+ 1=
6√
2.
Zgled 6.22. Izracunaj limn→∞
(√n2 + n− n).
Resitev. Racunajmo:√n2 + n−n =
(√n2 + n− n)(
√n2 + n+ n)√
n2 + n+ n=
n√n2 + n+ n
=1√
1 + 1n + 1
.
Sledi limn→∞
(√n2 + n− n) = lim
n→∞1√
1 + 1n + 1
=1
2.
Zgled 6.23. Izracunaj limn→∞
1√n2 + 2n + 2 −
√n2 + n+ 1
.
Resitev. Podobno kot prej lahko izracunamo
1√n2 + 2n+ 2 −
√n2 + n+ 1
=
√n2 + 2n + 2 +
√n2 + n+ 1
(n2 + 2n+ 2) − (n2 + n+ 1)=
=
√n2 + 2n + 2 +
√n2 + n+ 1
n+ 1=
=
√1 + 2
n + 2n2 +
√1 + 1
n + 1n2
1 + 1n
,
od koder sledi
limn→∞
√1 + 2
n + 2n2 +
√1 + 1
n + 1n2
1 + 1n
= 2.

6 ZAPOREDJA 86
Zgled 6.24. Izracunaj limn→∞
1 + 2 + . . .+ n
n2.
Resitev. Ceprav je 1+2+...+nn2 = 1
n2 + 2n2 + . . . + n
n2 in limn→∞
kn2 = 0 za vsak k, ne smemo
sklepati, da je limn→∞
1+2+...+nn2 = 0 + 0 + . . . + 0 = 0. Izrek lim
n→∞(an + bn) = lim
n→∞an + lim
n→∞bn
lahko sicer razsirimo na poljubno, vendar fiksno stevilo clenov, v izrazu 1+2+...+nn2 pa stevilo
clenov ni fiksno, ampak se spreminja hkrati z n.
Ker je 1 + 2 + . . .+ n = n(n+1)2 , lahko zapisemo
1+2+...+nn2 = n(n+1)
2n2 = n+12n =
1+ 1n
2 .
Torej je
limn→∞
1 + 2 + . . . + n
n2= lim
n→∞1 + 1
n
2=
1
2.
Izrek 6.25 (Izrek o sendvicu). Ce sta zaporedji (an) in (bn) konvergentni in imata enaki limititer je an ≤ cn ≤ bn za vsak n ≥ N , je tudi zaporedje (cn) konvergentno in velja lim
n→∞(an) =
limn→∞
(bn) = limn→∞
(cn).
N
R
Abc
b
b
b
b
b bb
b
b
b
b
b
b
b
b
b
b
b
b b
b
b
b
b
b
bb
bb b
| | | | | | | | | |
Dokaz. Oznacimo limn→∞
(an) = limn→∞
(bn) = A. Naj bo ε > 0. Potem obstaja n1, da je
an > A− ε za n ≥ n1. Potem obstaja n2, da je bn < A+ ε za n ≥ n2. Sledi limn→∞
cn = A, saj za
n ≥ n0 = max{n1, n2, N} velja
A− ε < an ≤ cn ≤ bn < A+ ε.
Zgled 6.26. Izracunaj limito zaporedja s splosnim clenom
an =1√
n2 + 1+
1√n2 + 2
+ . . . +1√
n2 + n.
Resitev. Ocitno jen√
n2 + n≤ an ≤ n√
n2 + 1. Ker za vsak k ∈ {1, 2, . . . , n} velja
limn→∞
n√n2 + k
= limn→∞
1√1 + k
n2
= 1,
je tudi limn→∞
an = 1.

6 ZAPOREDJA 87
Stevilo eOglejmo si zaporedji an =
(1 + 1
n
)nin bn =
(1 − 1
n
)−n.
N
R
e
bn = (1 − 1n)−n
an = (1 + 1n)n
bb
b b b b b b b b
b
bb
b b b b b bbc
| | | | | | | | | |
Zaporedje an je narascajoce in navzgor omejeno, zaporedje bn pa padajoce in navzdol omejeno.Torej sta obe zaporedji konvergentni.
Iz zveze
bn+1 =(1 − 1
n+1
)−(n+1)=(
n+1n
)n+1=(1 + 1
n
)n ·(1 + 1
n
)= an
(1 + 1
n
)
pa sledi, da je
limn→∞
bn = limn→∞
bn+1 = limn→∞
an
(1 +
1
n
)= lim
n→∞an · lim
n→∞
(1 +
1
n
)= lim
n→∞an,
kar pomeni, da imata zaporedji an in bn isto limito, ki jo oznacimo z e. Skratka
e = limn→∞
(1 +
1
n
)n
= limn→∞
(1 − 1
n
)−n
= limn→−∞
(1 +
1
n
)n
.
Stevilo e je iracionalno in velja e ≈ 2.7182.Dokazati je mozno, da je
e = limx→∞
(1 +
1
x
)x
= limx→−∞
(1 +
1
x
)x
,
ce x tece po realnih stevilih. Ce sedaj pisemo t = 1x , gornji dve limiti skupaj dasta se
limt→0
(1 + t)1t = e.
Zgled 6.27. Izracunaj limn→∞
(1 − 1
3n
)n.
Resitev.
Racunajmo
limn→∞
(1 − 1
3n
)n
= limn→∞
(1 − 1
3n
)−3n·(− 13)
=
= limn→∞
((1 − 1
3n
)−3n)− 1
3
.
Ker je limn→∞
13n = 0, je lim
n→∞
(1 − 1
3n
)−3n= e. Torej je
limn→∞
(1 − 1
3n
)n
= limn→∞
((1 − 1
3n
)−3n)− 1
3
= e−13 .
Pri izracunu prejsnje limite smo uporabili spodnjo trditev za zaporedji an =(1 − 1
3n
)−3nin
bn = −13 .

6 ZAPOREDJA 88
Izrek 6.28. Ce sta zaporedji (an) in (bn) konvergentni, an > 0 za vsak n ter limn→∞
an > 0, je
tudi zaporedje (abnn ) konvergentno in velja
limn→∞
abnn = ( lim
n→∞an)
limn→∞
bn.
Zgled 6.29. Izracunaj limn→∞
(n+1n+2
)n.
Resitev. Ker je limn→∞
n+1n+2 = 1, zelimo limito preoblikovati na limito za e. Zaradi n+1
n+2 =
n+2−1n+2 = 1 − 1
n+2 lahko zapisemo
limn→∞
(n+ 1
n+ 2
)n
= limn→∞
(1 − 1
n+ 2
)−(n+2)· n−(n+2)
=
= limn→∞
(1 − 1
n+ 2
)−(n+2)
︸ ︷︷ ︸an→e
bn→−1︷ ︸︸ ︷n
−(n+ 2)
= e−1.
Zgled 6.30. Izracunaj limn→∞
(n2+2nn2+1
)n.
Resitev.
Z deljenjem polinomov ugotovimo n2+2nn2+1
= 1 + 2n−1n2+1
.
limn→∞
(n2 + 2n
n2 + 1
)n
= limn→∞
(1 +
2n− 1
n2 + 1
)n2+12n−1
·�
2n−1n2+1
·n�
=
= limn→∞
(1 +
2n − 1
n2 + 1
)n2+12n−1
︸ ︷︷ ︸an→e
bn→2︷ ︸︸ ︷2n2 − n
n2 + 1
= e2.
Limite, ki jih lahko spretno preoblikujemo na limito za e, lahko enostavno izracunamo tudiz uporabo izreka:
Izrek 6.31. Naj bo limn→∞
an = 1 in an 6= 1 za vsak n. Ce za zaporedje (bn) obstaja limita
L = limn→∞
bn(an − 1),
je tudi zaporedje (abnn ) konvergentno in velja
limn→∞
abnn = eL.
Zgled 6.32. Izracunaj limn→∞
(n2+2nn2+1
)n.

6 ZAPOREDJA 89
Resitev. Oznacimo an = n2+2nn2+1
. Ker je limn→∞
an = 1 in
L = limn→∞
n
(n2 + 2n
n2 + 1− 1
)=
2n2 − n
n2 + 1= 2,
sledi limn→∞
(n2+2nn2+1
)n= eL = e2.
Zgled 6.33. Izracunaj limn→∞
(2n−12n+3
)3n+1.
Resitev. Oznacimo an = 2n−12n+3 . Ker je lim
n→∞an = 1 in
L = limn→∞
(3n + 1)
(2n − 1
2n + 3− 1
)=
−4(3n+ 1)
2n+ 3= −6,
sledi limn→∞
(2n−12n+3
)3n+1= eL = e−6.
Zgled 6.34. Izracunaj limn→∞
2n+ 1n√
n2+1.
Resitev. Racunajmo
limn→∞
2n+ 1n√
n2 + 1= lim
n→∞2 + 1
n2√1 + 1
n2
= 2.
Zgled 6.35. Izracunaj limn→∞
1+√
nqn+
√n2+
√n.
Resitev. Racunajmo
limn→∞
1 +√n√
n+√n2 +
√n
= limn→∞
1√n
+ 1√
1 +
√1 +
√n
n2
=1√2.
6.2 Rekurzivno podana zaporedja
Zaporedje je podano z rekurzivno zvezo reda k, ce so podani cleni a1, . . . , ak in pravilo, kakoza vsak n s pomocjo clenov an, . . . , an+k−1 dolocino an+k, tj. an+k = f(an, an+1, . . . , an+k−1).
Zgled 6.36. Zapisi nekaj clenov rekurzivno podanega zaporedja a1 = 12 , an+1 = 1
2(an + 4an
). Alije zaporedje konvergentno?
Resitev. a1 = 0.5, a2 = 174 = 4.25, a3 ≈ 2.5956, a4 ≈ 2.0683, a5 ≈ 2.0011, . . .
Raziscimo konvergenco pri rekurzivno podanem zaporedju a1 = 12 , an+1 = f(an), kjer je
f(x) = 12(x+ 4
x).

6 ZAPOREDJA 90
R
R
1
1
y = f(x)
y = x
bc
bc
a1
bc
a2
bc
a3
bc
a4
b
b b
bb
bbbb
Kot kaze slika, lahko domnevamo, da je od clena a2 dalje zaporedje padajoce in navzdolomejeno z 2.
• Zaporedje je padajoce: an+1 − an = 4−a2n
2an< 0, ce je an > 2.
• Zaporedje je navzdol omejeno z 2: an+1 − 2 = (an−2)2
2an> 0.
• Ker je zaporedje padajoce in navzdol omejeno, je konvergentno.
Oznacimo a = limn→∞
an. Sledi a = 12(a+ 4
a), od koder sledi a2 = 4 in a = 2, ker je a > 0.
Zgled 6.37. Izracunaj limito zaporedja s cleni an =
√2 +
√2 + · · · +
√2
︸ ︷︷ ︸n korenov
.
Resitev. Oznacimo f(x) =√
2 + x. Zaporedje lahko podamo rekurzivno z zacetnim clenoma1 =
√2 in zvezo an+1 = f(an).
R
R
1
1
y = f(x)
y = x
bc
bc
a1
bc
a2
bc
a3b
b bb
b bb
Privzemimo, da limita zaporedja obstaja. Oznacimo a = limn→∞
an. Sledi a =√a+ 2, od koder
izpeljemo a2 − a − 2 = 0 in a = 2. (Resitev a = −1 odpade, saj je√
2 + a ≥ 0.) Z grafadomnevamo, da je zaporedje (an) narascajoce in navzgor omejeno z 2.
• Dokazimo z indukcijo, da je navzgor omejeno z 2. Ocitno je a1 =√
2 ≤ 2. Ce je an ≤ 2,je 2 + an ≤ 4 in an+1 =
√2 + an ≤ 2.
• Dokazimo, da je zaporedje narascajoce. Dokazati, je potrebno, da je an+1 −an ≥ 0. Pogojje ekvivalenten z
√2 + an ≥ an, kar lahko preoblikujemo v 2+an ≥ a2
n oz. (an−2)(an+1) ≤0. Slednje drzi, saj je 0 ≤ an ≤ 2 za vsak indeks n.
Dokazali smo, da je zaporedje (an) narascajoce in navzgor omejeno, torej konvergentno.Limita a = lim
n→∞an res obstaja in po ze dokazanem je a = 2.

6 ZAPOREDJA 91
Eksponentna rastPricakovano stevilo osebkov v populaciji se v vsaki casovni enoti pomnozi s faktorjem q > 1.
Torej nt+1 = qnt. Sledint = n0 q
t.
Ker je limt→∞
nt = ∞, model pravzaprav ne ustreza nobeni realni populaciji.
(Za majhne t sicer raste stevilo bakerij eksponentno s faktorjem q = 2, a kmalu pride donasicenja, ko se rast upocasni. Po dlje casa se zacne stevilo bakterij celo manjsati.)
Fibonaccijevo zaporedjeLeonardo Fibonacci je opisal stevilo parov zajcev s pravili
• prvi mesec se rodi samo en nov par,
• novorojeni pari so plodni od svojega drugega meseca naprej,
• vsak mesec vsak ploden par zaplodi nov par in
• zajci nikoli ne umrejo.
Model matematicno opisemo z enacbami a0 = 0, a1 = 1 in an+2 = an+1 + an za n ≥ 0. Izpeljatije mozno, da je
an =1√5
((1 +
√5
2
)n
−(
1 −√
5
2
)n).
Ker je 1+√
52 = τ ≈ 1.618 > 1 in |1−
√5
2 | < 1, za velike n velja (nerealisticni model) an ≈ τn.Poglejmo si podrobneje rekurzivno zvezo, ki opisuje Fibonaccijevo zaporedje. V splosnem jo
lahko zapisemo kotan+2 = pan+1 + qan.
Ocitno je, da je s podanima a0 in a1 zaporedje (an) enolicno doloceno.Recimo, da lahko zapisemo an = kτn za nek τ 6= 0. Tedaj mora veljati kτn+2 = pkτn+1 +
qkτn, kar nam da τn+2 = pτn+1 + qτn oz.
τ2 = pτ + q.
Oznacimo nicli gornjega karakteristicnega polinoma z α in β. Ce je α 6= β, bo splosnaresitev oblike an = Aαn + Bβn, ce pa je α = β, bo splosna resitev oblike an = Aαn + nBαn.Opomba. Stevili α in β sta lahko kompleksni.
Trditev preverimo z indukcijo. Za α 6= β velja
pan+1 + qan = p(Aαn+1 +Bβn+1) + q(Aαn +Bβn) =
= A(pαn+1 + qαn) +B(pβn+1 + qβn) =
= Aαn+2 +Bβn+2 = an+2.
V drugem primeru pa je α dvojna nicla polinoma t2 = pt+ q, zato je p = 2α. Sledi
pan+1 + qan = p(Aαn+1 + (n+ 1)Bαn+1) + q(Aαn + nBαn) =
= A(pαn+1 + qαn) +B(n(pαn+1 + qαn) + pαn+1) =
= Aαn+2 +B(nαn+2 + 2αn+2) = an+2.
Nazadnje dolocimo stevili A in B tako, da upostevamo podana clena a0 in a1.

6 ZAPOREDJA 92
Pri Fibonaccijevem zaporedju dobimo karakteristicni polinom τ2 − τ − 1 = 0, kar nam da
τ1,2 = 1±√
52 . Sledi
an = A
(1 +
√5
2
)n
+B
(1 −
√5
2
)n
,
vrednosti konstant A in B pa nazadnje dolocimo iz zacetnih pogojev:
a0 = 0 = A+B
a1 = 1 = A 1+√
52 +B 1−
√5
2 = 12 (A+B) +
√5
2 (A−B).
Ker je B = −A, sledi A = 1√5
in B = − 1√5. Torej je res
an =1√5
((1 +
√5
2
)n
−(
1 −√
5
2
)n).
6.3 Beverton–Holtov model populacijske rasti
Beverton–Holtov model populacijske rasti podaja pricakovano stevilo osebkov v populaciji vgeneraciji t + 1 (tj. nt+1) kot funkcijo stevila osebkov v generaciji t (tj. nt) ter parametrov R(rast) in K (kapaciteta oz. maksimalno stevilo osebkov v populaciji), in sicer kot
nt+1 =Rnt
1 + R−1K nt
. (12)
Ob casu t = 0 imamo n0 osebkov. V nadaljevanju bomo izpeljali, da je
nt =Kn0
n0 + (K − n0)R−t,
od koder po pricakovanju sledi limt→∞
nt = K.
Vpeljimo mt = 1nt
in preoblikujmo enacbo (12):
mt +R− 1
K= Rmt+1.
Ker je tudi
mt+1 +R− 1
K= Rmt+2,
od tod sledi mt+1 −mt = Rmt+2 −Rmt+1 oz.
Rmt+2 − (R + 1)mt+1 + 1 = 0.
Karakteristicni polinom jeRτ2 − (R+ 1)τ + 1 = 0
ter ima nicli α = 1 in β = R−1. Torej je
mt = A+BR−t.

7 FUNKCIJE 93
Sledi
A+B = m0 =1
n0
A+BR−1 = m1 =1
R
(1
n0+R− 1
K
),
kar nam da
A =1
K, B =
1
n0− 1
K.
Torej
mt =1
K+ (
1
n0− 1
K)R−t
in od tod
nt =1
1K + ( 1
n0− 1
K )R−t=
Kn0
n0 + (K − n0)R−t.
t
K
12K
t
n0
nt =Kn0
n0 + (K − n0)R−t
b
b
b
b
b
b
b
b
b
b
b
b
bb
b b b
b
bc
bc
bc| | | | | | | | | | | | | | | |
Ce je K > 2n0, je polovicna kapaciteta dosezena ob casu t = logRK−n0
n0.
Graf je konveksen za t < t in konkaven za t > t.
7 Funkcije
7.1 Splosni pojem funkcije
Naj bosta X in Y mnozici. Funkcija ali preslikava f : X → Y je pravilo f , ki vsakemuelementu x mnozice X priredi natancno dolocen element f(x) mnozice Y . Oznacimo lahko tudix 7→ f(x).
Mnozico X imenujemo definicijsko obmocje ali domena, mnozico f(X) = {f(x); x ∈ X}pa zaloga vrednosti funkcije f . Definicijsko obmocje funkcije f oznacimo tudi z Df , zalogovrednosti pa z Zf .
Graf funkcije f : X → Y je mnozica
Γ(f) = {(x, f(x)) ∈ X × Y ; x ∈ X} ⊂ X × Y.
Funkcija f je tako dolocena, ce je podano definicijsko obmocje Df in funkcijski predpis,ki vsakemu x ∈ Df priredi natancno dolocen element f(x). Funkcijski predpis podamo lahkos tabelo, besedilom, diagramom, ali pa, kot je v matematiki obicajno, analiticno. Analiticnolahko podamo funkcijo
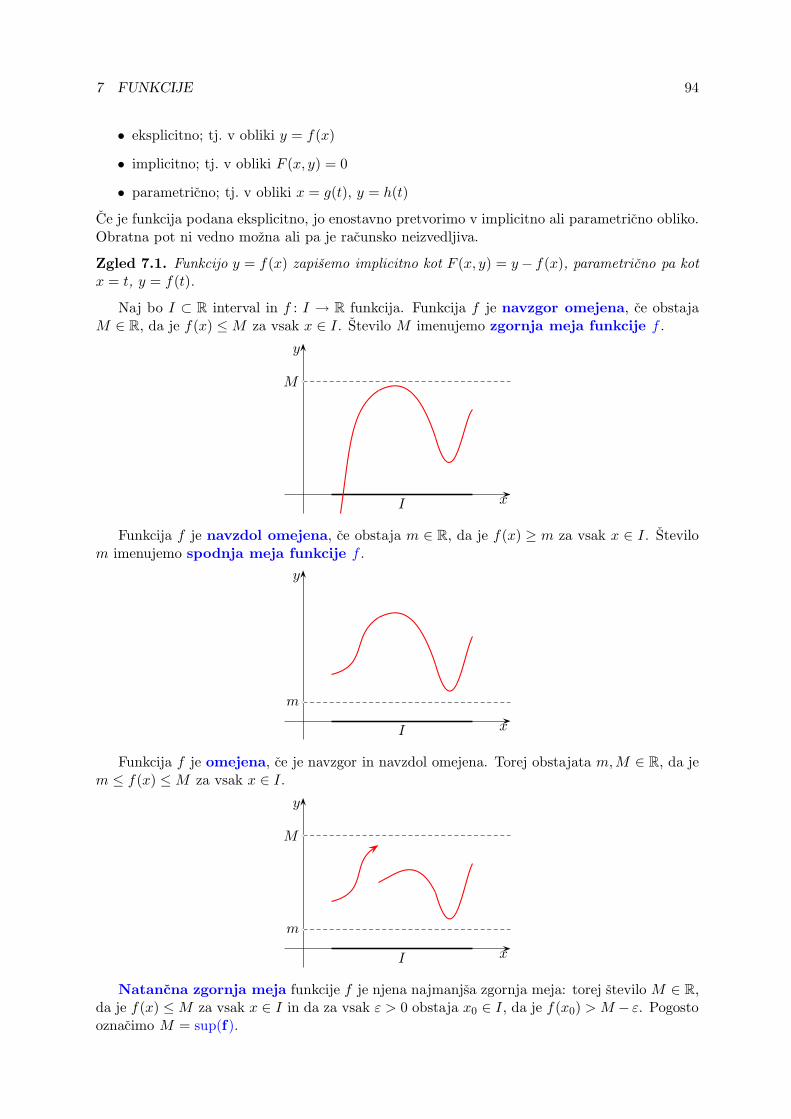
7 FUNKCIJE 94
• eksplicitno; tj. v obliki y = f(x)
• implicitno; tj. v obliki F (x, y) = 0
• parametricno; tj. v obliki x = g(t), y = h(t)
Ce je funkcija podana eksplicitno, jo enostavno pretvorimo v implicitno ali parametricno obliko.Obratna pot ni vedno mozna ali pa je racunsko neizvedljiva.
Zgled 7.1. Funkcijo y = f(x) zapisemo implicitno kot F (x, y) = y− f(x), parametricno pa kotx = t, y = f(t).
Naj bo I ⊂ R interval in f : I → R funkcija. Funkcija f je navzgor omejena, ce obstajaM ∈ R, da je f(x) ≤M za vsak x ∈ I. Stevilo M imenujemo zgornja meja funkcije f .
y
xI
M bc
Funkcija f je navzdol omejena, ce obstaja m ∈ R, da je f(x) ≥ m za vsak x ∈ I. Stevilom imenujemo spodnja meja funkcije f .
y
xI
m bc
Funkcija f je omejena, ce je navzgor in navzdol omejena. Torej obstajata m,M ∈ R, da jem ≤ f(x) ≤M za vsak x ∈ I.
y
xI
M
m
bc
bc
Natancna zgornja meja funkcije f je njena najmanjsa zgornja meja: torej stevilo M ∈ R,da je f(x) ≤M za vsak x ∈ I in da za vsak ε > 0 obstaja x0 ∈ I, da je f(x0) > M − ε. Pogostooznacimo M = sup(f).
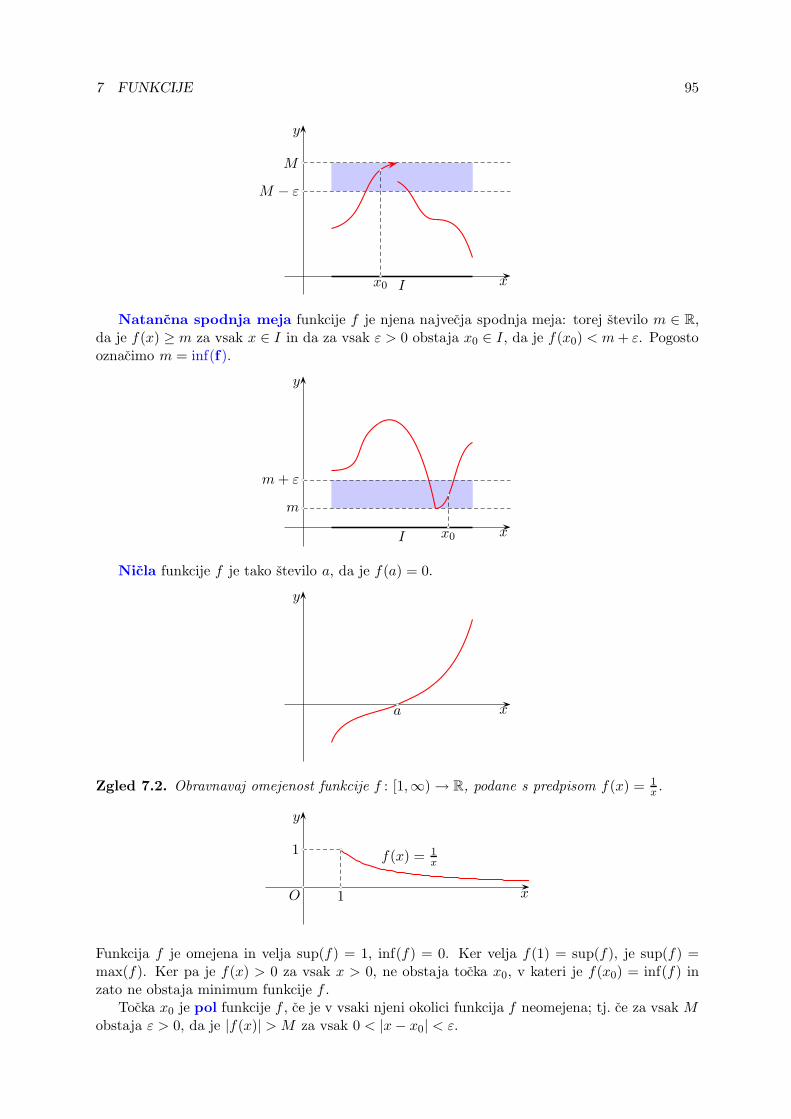
7 FUNKCIJE 95
y
xI
M − ε
M
x0
bc
bc
bc
bc
Natancna spodnja meja funkcije f je njena najvecja spodnja meja: torej stevilo m ∈ R,da je f(x) ≥ m za vsak x ∈ I in da za vsak ε > 0 obstaja x0 ∈ I, da je f(x0) < m+ ε. Pogostooznacimo m = inf(f).
y
xI
m
m+ ε
x0
bc
bc
bc
bc
Nicla funkcije f je tako stevilo a, da je f(a) = 0.
y
xabcbc
Zgled 7.2. Obravnavaj omejenost funkcije f : [1,∞) → R, podane s predpisom f(x) = 1x .
x
y
f(x) = 1x
bc
O
bc1
bc
1
bc
Funkcija f je omejena in velja sup(f) = 1, inf(f) = 0. Ker velja f(1) = sup(f), je sup(f) =max(f). Ker pa je f(x) > 0 za vsak x > 0, ne obstaja tocka x0, v kateri je f(x0) = inf(f) inzato ne obstaja minimum funkcije f .
Tocka x0 je pol funkcije f , ce je v vsaki njeni okolici funkcija f neomejena; tj. ce za vsak Mobstaja ε > 0, da je |f(x)| > M za vsak 0 < |x− x0| < ε.
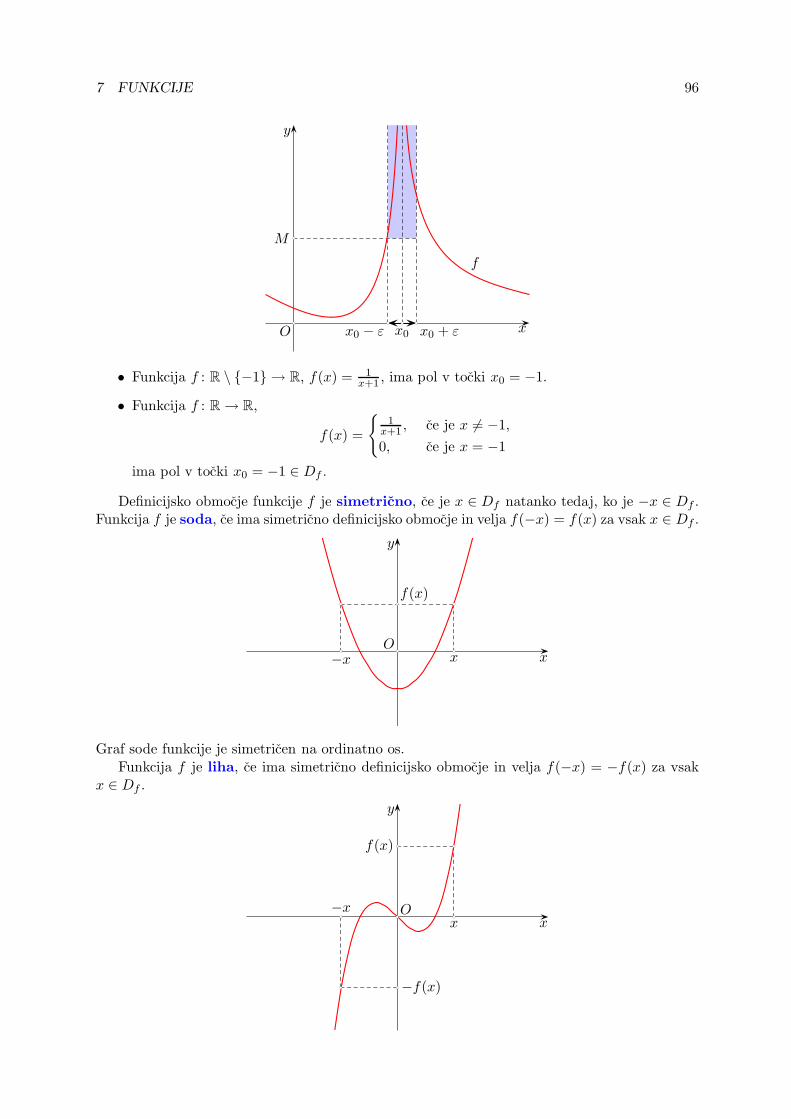
7 FUNKCIJE 96
x0 − ε x0 + εx0 x
y
M
f
Obcbc
bc
bc bc
• Funkcija f : R \ {−1} → R, f(x) = 1x+1 , ima pol v tocki x0 = −1.
• Funkcija f : R → R,
f(x) =
{1
x+1 , ce je x 6= −1,
0, ce je x = −1
ima pol v tocki x0 = −1 ∈ Df .
Definicijsko obmocje funkcije f je simetricno, ce je x ∈ Df natanko tedaj, ko je −x ∈ Df .Funkcija f je soda, ce ima simetricno definicijsko obmocje in velja f(−x) = f(x) za vsak x ∈ Df .
x
y
bcO
bc
f(x)
bc
xbc
−x
bc bc
Graf sode funkcije je simetricen na ordinatno os.Funkcija f je liha, ce ima simetricno definicijsko obmocje in velja f(−x) = −f(x) za vsak
x ∈ Df .
x
y
bcO
bcf(x)
bc−f(x)
bc
xbc
−x
bc
bc

7 FUNKCIJE 97
Graf lihe funkcije je simetricen na koordinatno izhodisce.Enostavno je videti, da je
• Vsota, razlika, produkt in kvocient dveh sodih funkcij je soda funkcija.
• Vsota in razlika dveh lihih funkcij je liha funkcija, produkt in kvocient dveh lihih pa jesoda funkcija.
• Produkt in kvocient sode in lihe funkcije je liha funkcija.
Zgled 7.3. Funkcija xf7→ ex+e−x
2 je soda, xh7→ ex−e−x
2 liha, xg7→ ex
2 pa ni ne soda ne liha.
x
y
f
h
gbc
O
bc
1
bc−1
bc
1bc
−1
Funkcija f : I → R je narascajoca na intervalu I, ce je f(x1) ≤ f(x2) za vsaka x1, x2 ∈ I,x1 < x2. Funkcija f : I → R je strogo narascajoca na intervalu I, ce je f(x1) < f(x2) zavsaka x1, x2 ∈ I, x1 < x2.
y
xIx1 x2
f(x1)
f(x2) bc
bc bc
bc bc
bc
Funkcija f : I → R je padajoca na intervalu I, ce je f(x1) ≥ f(x2) za vsaka x1, x2 ∈ I,x1 < x2. Funkcija f : I → R je strogo padajoca na intervalu I, ce je f(x1) > f(x2) za vsakax1, x2 ∈ I, x1 < x2.
y
xIx1 x2
f(x1)
f(x2) bc
bc bc
bc bc
bc
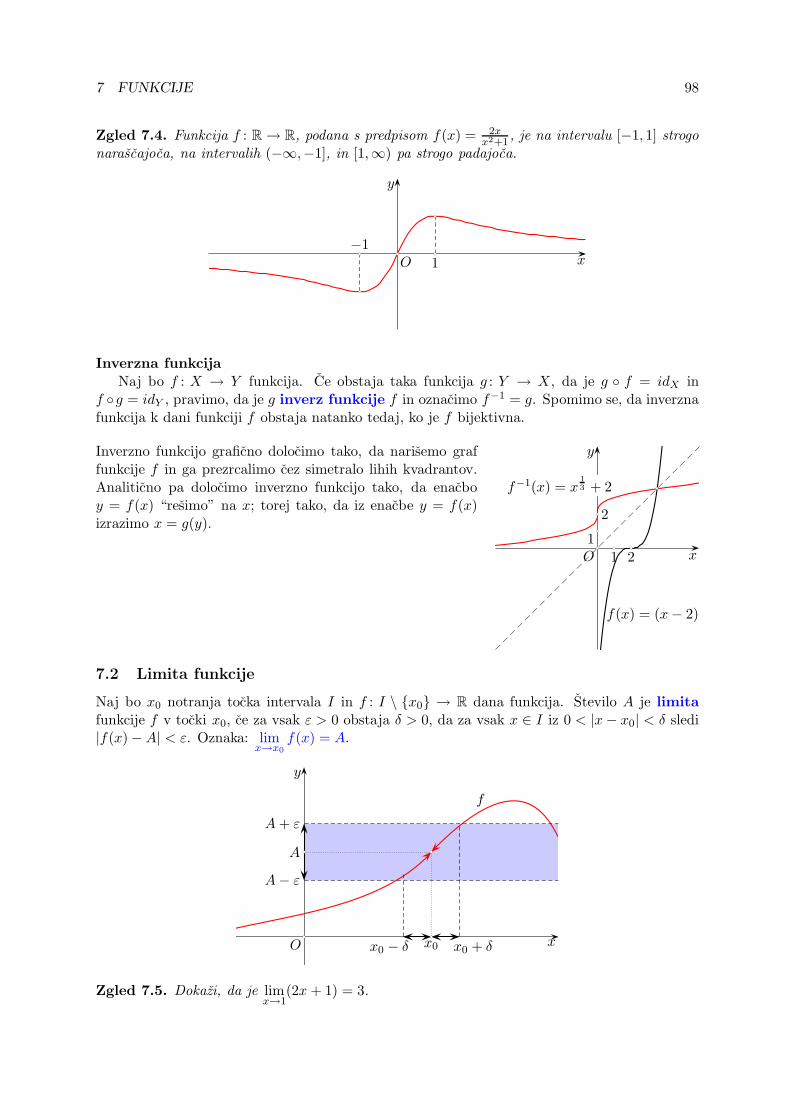
7 FUNKCIJE 98
Zgled 7.4. Funkcija f : R → R, podana s predpisom f(x) = 2xx2+1
, je na intervalu [−1, 1] strogonarascajoca, na intervalih (−∞,−1], in [1,∞) pa strogo padajoca.
x
y
bc
O
bc
bc
bc
1bc
−1
Inverzna funkcijaNaj bo f : X → Y funkcija. Ce obstaja taka funkcija g : Y → X, da je g ◦ f = idX in
f ◦g = idY , pravimo, da je g inverz funkcije f in oznacimo f−1 = g. Spomimo se, da inverznafunkcija k dani funkciji f obstaja natanko tedaj, ko je f bijektivna.
y
x
f(x) = (x− 2)3
f−1(x) = x13 + 2
O 1 21
2
bc bc bc
bc
bc
bc
Inverzno funkcijo graficno dolocimo tako, da narisemo graffunkcije f in ga prezrcalimo cez simetralo lihih kvadrantov.Analiticno pa dolocimo inverzno funkcijo tako, da enacboy = f(x) “resimo” na x; torej tako, da iz enacbe y = f(x)izrazimo x = g(y).
7.2 Limita funkcije
Naj bo x0 notranja tocka intervala I in f : I \ {x0} → R dana funkcija. Stevilo A je limitafunkcije f v tocki x0, ce za vsak ε > 0 obstaja δ > 0, da za vsak x ∈ I iz 0 < |x− x0| < δ sledi|f(x) −A| < ε. Oznaka: lim
x→x0
f(x) = A.
y
xO x0x0 − δ x0 + δ
A
A+ ε
A− ε
f
bc
bc
bc
bc
Zgled 7.5. Dokazi, da je limx→1
(2x+ 1) = 3.
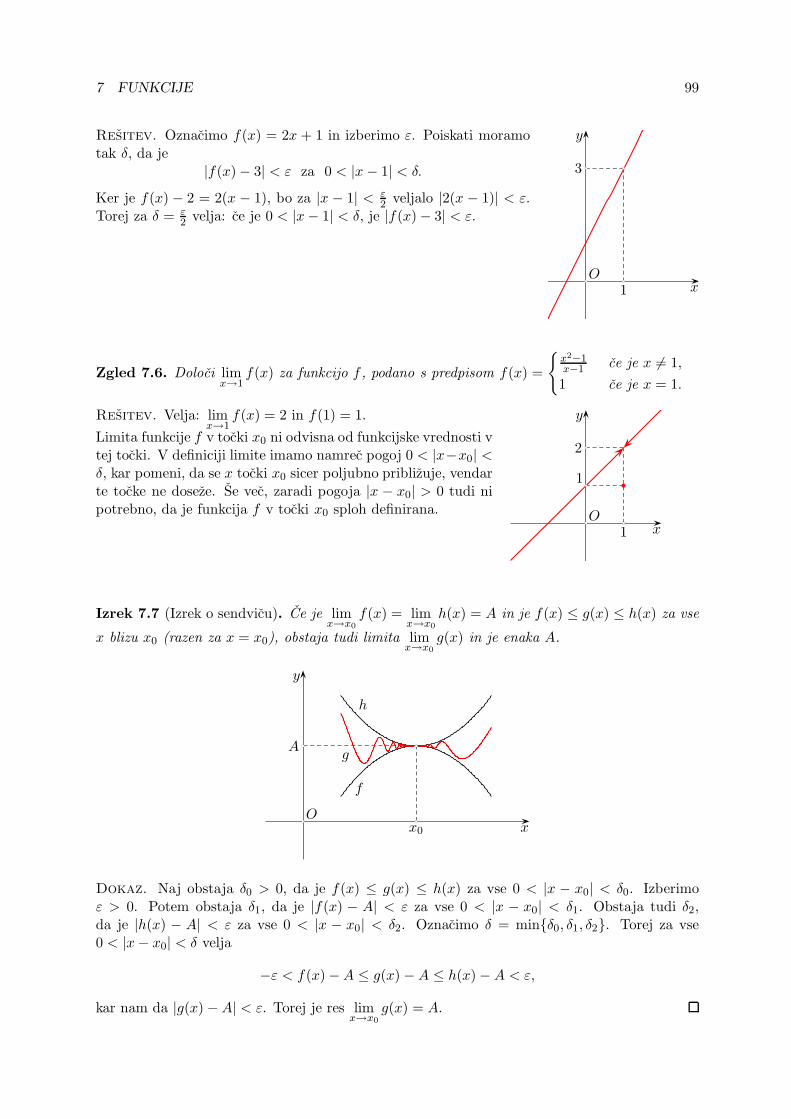
7 FUNKCIJE 99
x
y
bcO
bc
bc
1
bc3
Resitev. Oznacimo f(x) = 2x + 1 in izberimo ε. Poiskati moramotak δ, da je
|f(x) − 3| < ε za 0 < |x− 1| < δ.
Ker je f(x) − 2 = 2(x − 1), bo za |x − 1| < ε2 veljalo |2(x − 1)| < ε.
Torej za δ = ε2 velja: ce je 0 < |x− 1| < δ, je |f(x) − 3| < ε.
Zgled 7.6. Doloci limx→1
f(x) za funkcijo f , podano s predpisom f(x) =
{x2−1x−1 ce je x 6= 1,
1 ce je x = 1.
x
y
bcO
bc2
bc1
bc
1
b
Resitev. Velja: limx→1
f(x) = 2 in f(1) = 1.
Limita funkcije f v tocki x0 ni odvisna od funkcijske vrednosti vtej tocki. V definiciji limite imamo namrec pogoj 0 < |x−x0| <δ, kar pomeni, da se x tocki x0 sicer poljubno priblizuje, vendarte tocke ne doseze. Se vec, zaradi pogoja |x − x0| > 0 tudi nipotrebno, da je funkcija f v tocki x0 sploh definirana.
Izrek 7.7 (Izrek o sendvicu). Ce je limx→x0
f(x) = limx→x0
h(x) = A in je f(x) ≤ g(x) ≤ h(x) za vse
x blizu x0 (razen za x = x0), obstaja tudi limita limx→x0
g(x) in je enaka A.
x
y
h
g
f
bcO
bcbcA
bc
x0
Dokaz. Naj obstaja δ0 > 0, da je f(x) ≤ g(x) ≤ h(x) za vse 0 < |x − x0| < δ0. Izberimoε > 0. Potem obstaja δ1, da je |f(x) − A| < ε za vse 0 < |x − x0| < δ1. Obstaja tudi δ2,da je |h(x) − A| < ε za vse 0 < |x − x0| < δ2. Oznacimo δ = min{δ0, δ1, δ2}. Torej za vse0 < |x− x0| < δ velja
−ε < f(x) −A ≤ g(x) −A ≤ h(x) −A < ε,
kar nam da |g(x) −A| < ε. Torej je res limx→x0
g(x) = A.
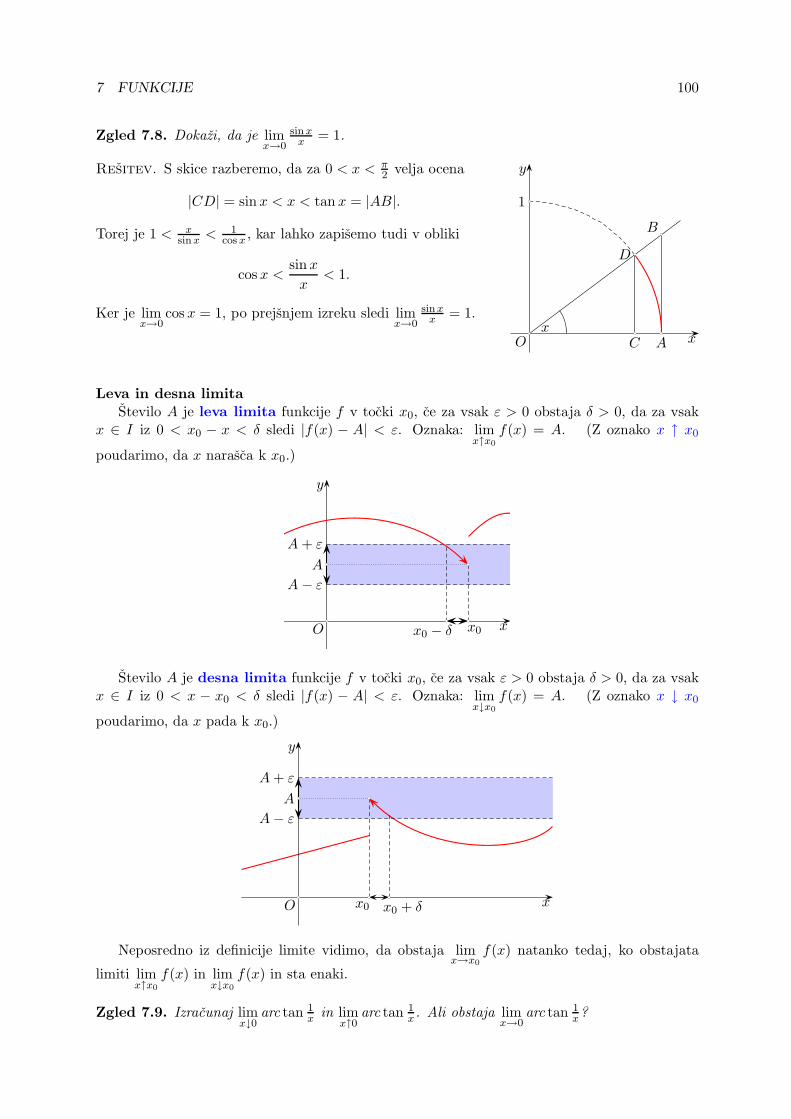
7 FUNKCIJE 100
Zgled 7.8. Dokazi, da je limx→0
sin xx = 1.
Ox
C A
D
B
1
x
y
bc
bc
bc bc
bc
bc
Resitev. S skice razberemo, da za 0 < x < π2 velja ocena
|CD| = sinx < x < tan x = |AB|.
Torej je 1 < xsinx <
1cos x , kar lahko zapisemo tudi v obliki
cos x <sinx
x< 1.
Ker je limx→0
cos x = 1, po prejsnjem izreku sledi limx→0
sinxx = 1.
Leva in desna limitaStevilo A je leva limita funkcije f v tocki x0, ce za vsak ε > 0 obstaja δ > 0, da za vsak
x ∈ I iz 0 < x0 − x < δ sledi |f(x) − A| < ε. Oznaka: limx↑x0
f(x) = A. (Z oznako x ↑ x0
poudarimo, da x narasca k x0.)
A
A+ ε
A− ε
x0x0 − δ x
y
Obcbc
bcbc
bc
Stevilo A je desna limita funkcije f v tocki x0, ce za vsak ε > 0 obstaja δ > 0, da za vsakx ∈ I iz 0 < x − x0 < δ sledi |f(x) − A| < ε. Oznaka: lim
x↓x0
f(x) = A. (Z oznako x ↓ x0
poudarimo, da x pada k x0.)
A
x0 x
y
O x0 + δ
A+ ε
A− ε
bc
bc bc
bc bc
Neposredno iz definicije limite vidimo, da obstaja limx→x0
f(x) natanko tedaj, ko obstajata
limiti limx↑x0
f(x) in limx↓x0
f(x) in sta enaki.
Zgled 7.9. Izracunaj limx↓0
arc tan 1x in lim
x↑0arc tan 1
x . Ali obstaja limx→0
arc tan 1x?
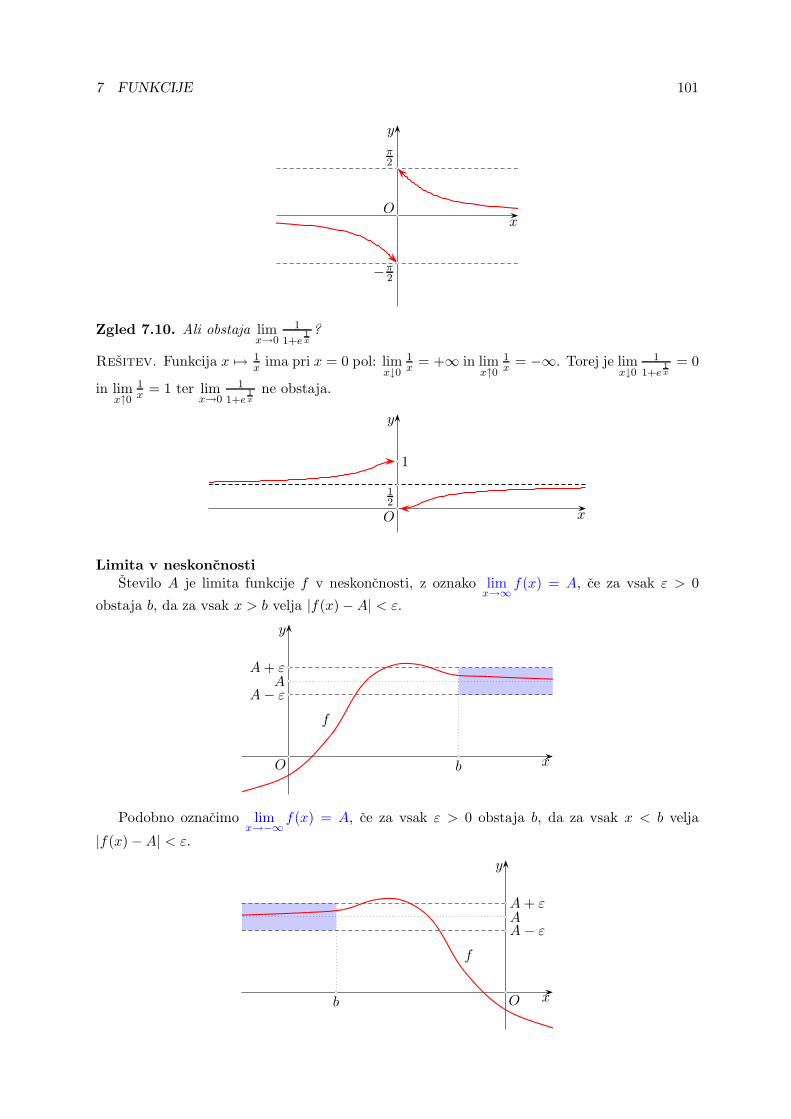
7 FUNKCIJE 101
x
y
bcO
bc
π2
bc
−π2
Zgled 7.10. Ali obstaja limx→0
1
1+e1x?
Resitev. Funkcija x 7→ 1x ima pri x = 0 pol: lim
x↓01x = +∞ in lim
x↑01x = −∞. Torej je lim
x↓01
1+e1x
= 0
in limx↑0
1x = 1 ter lim
x→0
1
1+e1x
ne obstaja.
x
y
bc
O
bc1
bc
12
Limita v neskoncnostiStevilo A je limita funkcije f v neskoncnosti, z oznako lim
x→∞f(x) = A, ce za vsak ε > 0
obstaja b, da za vsak x > b velja |f(x) −A| < ε.
b x
y
AA+ ε
A− ε
f
Obc
bc
bc
bc
bc
Podobno oznacimo limx→−∞
f(x) = A, ce za vsak ε > 0 obstaja b, da za vsak x < b velja
|f(x) −A| < ε.
b x
y
AA+ ε
A− ε
f
Obc
bc
bc
bc
bc
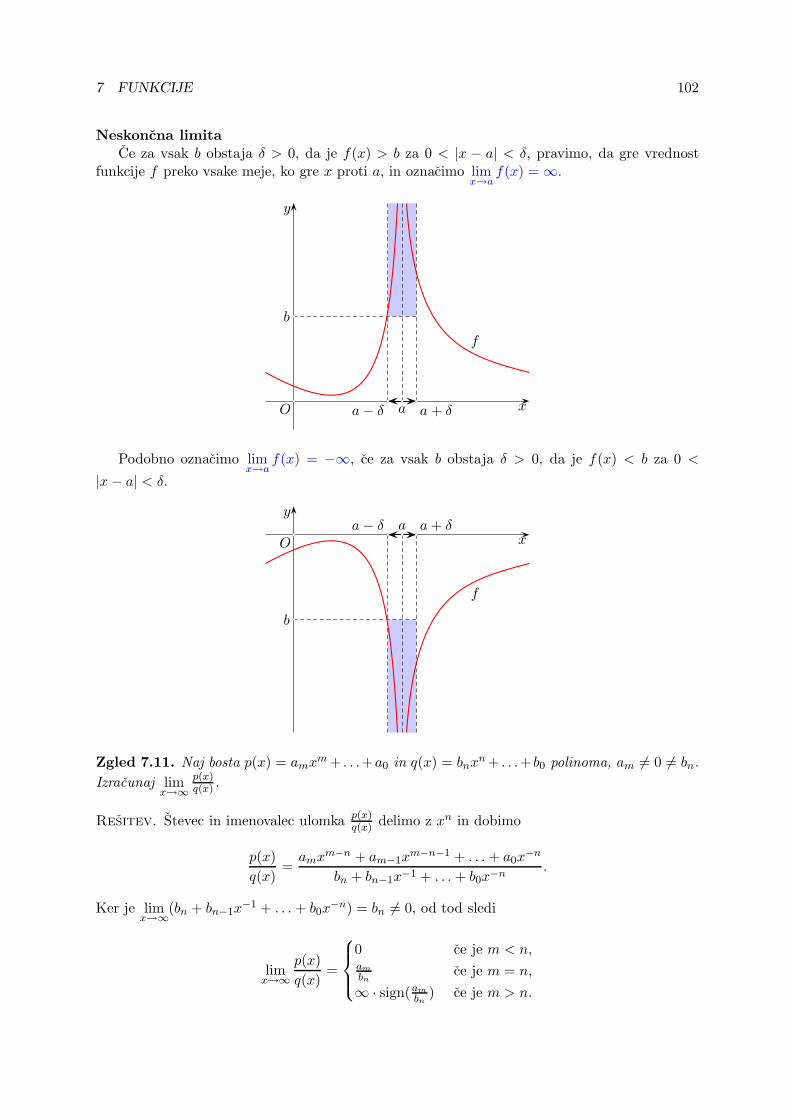
7 FUNKCIJE 102
Neskoncna limitaCe za vsak b obstaja δ > 0, da je f(x) > b za 0 < |x − a| < δ, pravimo, da gre vrednost
funkcije f preko vsake meje, ko gre x proti a, in oznacimo limx→a
f(x) = ∞.
a− δ a+ δa x
y
b
f
Obcbc
bc
bc bc
Podobno oznacimo limx→a
f(x) = −∞, ce za vsak b obstaja δ > 0, da je f(x) < b za 0 <
|x− a| < δ.
a− δ a+ δax
y
b
f
Obcbc
bc
bc bc
Zgled 7.11. Naj bosta p(x) = amxm + . . .+a0 in q(x) = bnx
n + . . .+ b0 polinoma, am 6= 0 6= bn.
Izracunaj limx→∞
p(x)q(x) .
Resitev. Stevec in imenovalec ulomka p(x)q(x) delimo z xn in dobimo
p(x)
q(x)=amx
m−n + am−1xm−n−1 + . . .+ a0x
−n
bn + bn−1x−1 + . . .+ b0x−n.
Ker je limx→∞
(bn + bn−1x−1 + . . . + b0x
−n) = bn 6= 0, od tod sledi
limx→∞
p(x)
q(x)=
0 ce je m < n,am
bnce je m = n,
∞ · sign(am
bn) ce je m > n.

7 FUNKCIJE 103
Zgled 7.12. Izracunaj limx→∞
(√x2 + x−
√x2 − x) in lim
x→−∞(√x2 + x−
√x2 − x).
Resitev. Pri izracunih limit v neskoncnosti si pogosto pomagamo z enakimi prijemi kot priracunanju limit zaporedij. Torej
√x2 + x−
√x2 − x =
(x2 + x) − (x2 − x)√x2 + x+
√x2 − x
=2x√
x2 + x+√x2 − x
.
Pri limiti x→ ∞ lahko predpostavimo, da je x > 0 in zato
limx→∞
2x√x2 + x+
√x2 − x
= limx→∞
2√1 + 1
x +√
1 − 1x
= 1.
Pri limiti x→ −∞ lahko predpostavimo, da je x < 0 in zato
limx→−∞
2x√x2 + x+
√x2 − x
= limx→−∞
2
−√
1 + 1x −
√1 − 1
x
= −1,
kjer smo upostevali, da je√x2 = |x| = −x za x < 0.
7.3 Zveznost
Naj bo x0 poljubna tocka intervala I in f : I → R dana funkcija. Funkcija f je zvezna v tockix0, ce za vsak ε > 0 obstaja δ > 0, da za vsak x ∈ I iz |x− x0| < δ sledi |f(x) − f(x0)| < ε.
y
xO x0x0 − δ x0 + δ
f(x0)
f(x0) + ε
f(x0) − ε
f
bc
bc
bc
bc
Pravimo, da je funkcija f zvezna na intervalu I, ce je zvezna v vsaki njegovi tocki.Funkcija je zvezna z leve v tocki x0, ce za vsak ε > 0 obstaja δ > 0, da za vsak x ∈ I iz
0 ≤ x0 − x < δ sledi |f(x) − f(x0)| < ε.
f(x0)
f(x0) + ε
f(x0) − ε
x0x0 − δ x
y
Obcbc
bcbc
bc
Funkcija je zvezna z desne v tocki x0, ce za vsak ε > 0 obstaja δ > 0, da za vsak x ∈ Iiz 0 ≤ x− x0 < δ sledi |f(x) − f(x0)| < ε.
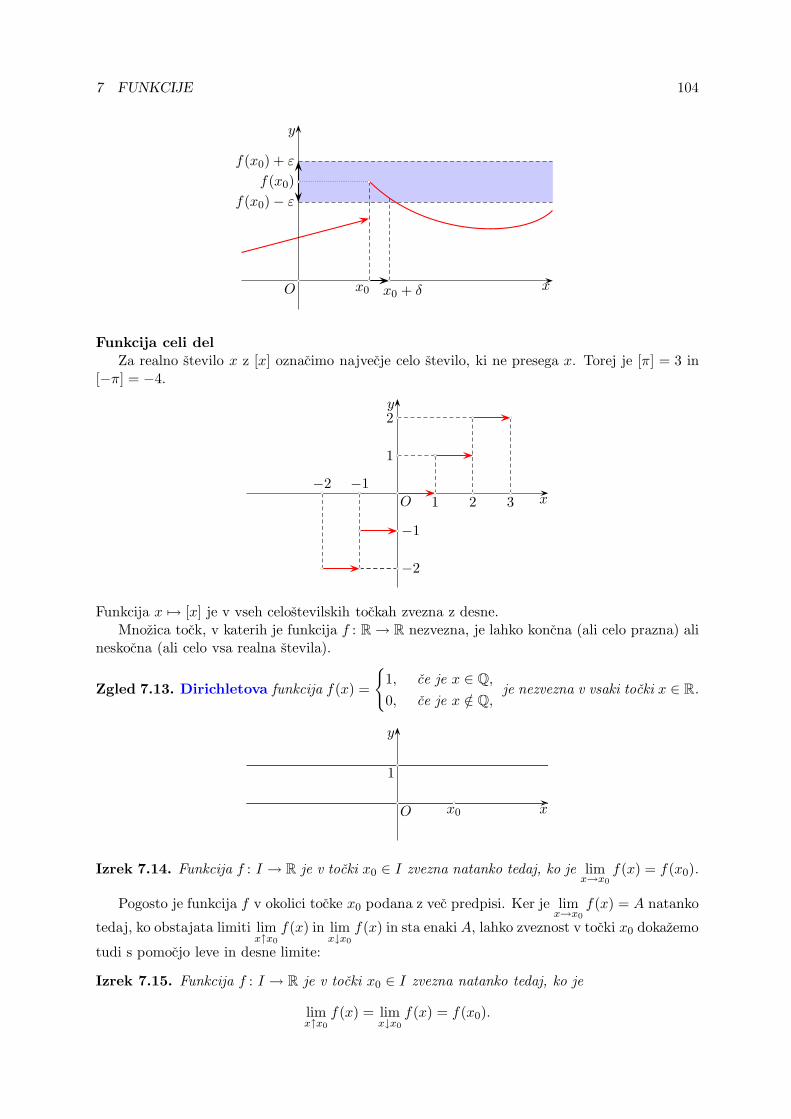
7 FUNKCIJE 104
f(x0)
x0 x
y
O x0 + δ
f(x0) + ε
f(x0) − ε
bc
bc bc
bc bc
Funkcija celi delZa realno stevilo x z [x] oznacimo najvecje celo stevilo, ki ne presega x. Torej je [π] = 3 in
[−π] = −4.
x
y
bc
O
bc
bc
bc
bc
bc
bc
bc
bc1
bc−1
bc2
bc−2
bc
3bc
2bc
1bc
−1bc
−2
Funkcija x 7→ [x] je v vseh celostevilskih tockah zvezna z desne.Mnozica tock, v katerih je funkcija f : R → R nezvezna, je lahko koncna (ali celo prazna) ali
neskocna (ali celo vsa realna stevila).
Zgled 7.13. Dirichletova funkcija f(x) =
{1, ce je x ∈ Q,
0, ce je x /∈ Q,je nezvezna v vsaki tocki x ∈ R.
x
y
bc
O
bc
1
bc
x0
Izrek 7.14. Funkcija f : I → R je v tocki x0 ∈ I zvezna natanko tedaj, ko je limx→x0
f(x) = f(x0).
Pogosto je funkcija f v okolici tocke x0 podana z vec predpisi. Ker je limx→x0
f(x) = A natanko
tedaj, ko obstajata limiti limx↑x0
f(x) in limx↓x0
f(x) in sta enaki A, lahko zveznost v tocki x0 dokazemo
tudi s pomocjo leve in desne limite:
Izrek 7.15. Funkcija f : I → R je v tocki x0 ∈ I zvezna natanko tedaj, ko je
limx↑x0
f(x) = limx↓x0
f(x) = f(x0).

7 FUNKCIJE 105
Zgled 7.16. Doloci vrednosti konstant a in b tako, da bo funkcija f : R → R,
f(x) =
ax+ b, ce je x > 2,
5, ce je x = 2,
bx− a, ce je x < 2,
zvezna v tocki x = 2.
Resitev. Da bi bila funkcija zvezna v tocki 2, mora veljati limx↑2
f(x) = limx↓2
f(x) = f(2). Ker je
limx↑2
f(x) = 2b− a, limx↓2
f(x) = 2a+ b in f(2) = 5, mora veljati
2b− a = 5
2a+ b = 5
Ce enacbi odstejemo, dobimo b− 3a = 0, oz. b = 3a in od tod 2a+ 3a = 5. Sledi a = 1 in b = 3.
Izrek 7.17. Naj bosta f, g : I → R funkciji in naj obstajata limiti limx→x0
f(x) in limx→x0
g(x). Potem
obstajata tudi limiti limx→x0
(f(x) + g(x)) in limx→x0
(f(x) · g(x)) in velja
limx→x0
(f(x) + g(x)) = limx→x0
f(x) + limx→x0
g(x)
limx→x0
(f(x) · g(x)) = limx→x0
f(x) · limx→x0
g(x)
Ce je g(x) 6= 0 za vse x blizu x0 in limx→x0
g(x) 6= 0, obstaja tudi limita limx→x0
f(x)g(x) in velja[-2ex]
limx→x0
f(x)
g(x)=
limx→x0
f(x)
limx→x0
g(x).
Dokaz. Oznacimo limx→x0
f(x) = A in limx→x0
g(x) = B. Izberimo ε > 0. Potem obstajata δ1 in δ2,
da je |f(x) − A| < ε2 za 0 < |x − x0| < δ1 in |g(x) − B| < ε
2 za 0 < |x − x0| < δ2. Oznacimoδ = min{δ1, δ2}. Torej za 0 < |x− x0| < δ velja
|(f(x) + g(x)) − (A+B)| ≤ |f(x) −A| + |g(x) −B| < ε
2+ε
2= ε.
Za dokaz druge trditve zapisimo
f(x)g(x) −AB = (f(x) −A)g(x) +A(g(x) −B). (13)
Izberimo ε > 0. Potem obstajata δ1 in δ2, da je |f(x) − A| < ε2(|B|+1) za 0 < |x − x0| < δ1 in
|g(x)−B| < ε2(|A|+1) za 0 < |x−x0| < δ2. Ker je lim
x→x0
g(x) = B, obstaja δ3, da je |g(x)| ≤ |B|+1
za 0 < |x− x0| < δ3. Oznacimo δ = min{δ1, δ2, δ3}.Torej lahko za 0 < |x− x0| < δ v (13) ocenimo
|f(x)g(x) −AB| = |(f(x) −A)g(x) +A(g(x) −B)| ≤≤ |(f(x) −A)g(x)| + |A(g(x) −B)|= |(f(x) −A)| · |g(x)| + |A| · |(g(x) −B)| ≤≤ |(f(x) −A)| · |g(x)| + (|A| + 1) · |(g(x) −B)| << ε
2(|B|+1) (|B| + 1) + (|A| + 1) ε2(|A|+1) = ε.

7 FUNKCIJE 106
Za dokaz tretje trditve pa zapisimo
f(x)g(x) − A
B = f(x)B−g(x)Ag(x)B = (f(x)−A)B+A(B−g(x))
Bg(x) . (14)
Izberimo ε > 0. Potem obstajata δ1 in δ2, da je |f(x) − A| < ε4 |B| za 0 < |x − x0| < δ1 in
|g(x)−B| < ε4
B2
|A|+1 za 0 < |x−x0| < δ2. Ker je limx→x0
g(x) = B 6= 0, obstaja δ3, da je |g(x)| ≥ |B|2
za 0 < |x − x0| < δ3. Oznacimo δ = min{δ1, δ2, δ3}. Torej lahko za 0 < |x − x0| < δ v (14)ocenimo
∣∣∣f(x)g(x) − A
B
∣∣∣ =∣∣∣f(x)B−g(x)A
Bg(x)
∣∣∣ ≤
≤ |f(x)−A|·|B|+|A|·|B−g(x)||B|·|g(x)| ≤
≤ε4|B|·|B|+|A|· ε
4B2
|A|+1
|B|· |B|2
=
= ε2 + ε
2|A|
|A|+1 <ε2 + ε
2 = ε.
Posledica 7.18. Ce sta funkciji f in g zvezni v tocki x0, sta v tej tocki zvezni tudi funkcijix 7→ (f(x) + g(x)) in x 7→ (f(x) · g(x)). Ce je g(x0) 6= 0, je v tocki x0 zvezna tudi funkcija
x 7→ f(x)g(x) .
Kompozitum zveznih funkcij
Izrek 7.19. Ce obstaja limita limx→x0
f(x) (oznacimo jo z A) in je funkcija g zvezna v tocki A,
obstaja tudi limita limx→x0
g(f(x)) in velja limx→x0
g(f(x)) = g(A).
Dokaz. Naj bo ε > 0. Ker je g zvezna v tocki A, obstaja δ1 > 0, da je |g(y) − g(A)| < ε za|y − A| < δ1. Ker je lim
x→x0
f(x) = A, obstaja δ > 0, da je |f(x) − A| < δ1 za 0 < |x − x0| < δ.
Za f(x) = y od tod sledi |g(f(x)) − g(A)| = |g(y) − g(A)| < ε. Torej za 0 < |x− x0| < δ velja|g(f(x)) − g(A)| < ε in lim
x→x0
g(f(x)) = g(A).
Posledica 7.20. Ce je funkcija f zvezna v tocki x0 in funkcija g zvezna v tocki f(x0), je tudifunkcija g ◦ f zvezna v tocki x0.
Zgled 7.21. Izracunaj limito limx→x0
x2−5x+6x2−6x+8
za x0 = 2 in x0 = 3.
Resitev. Ker je x2−5x+6x2−6x+8
= (x−2)(x−3)(x−2)(x−4) , lahko za x 6= 2 ulomek okrajsmo v x−3
x−4 . Ker je funkcija
x 7→ x−3x−4 v tocki x = 2 zvezna, tako velja
limx→2
x2 − 5x+ 6
x2 − 6x+ 8= lim
x→2
x− 3
x− 4=x− 3
x− 4
∣∣∣∣x=2
=2 − 3
2 − 4=
1
2.
Izracun limite limx→3
x2−5x+6x2−6x+8
pa ni problematicen, saj je funkcija x 7→ x2−5x+6x2−6x+8
v tocki x = 3
zvezna in zato velja
limx→3
x2 − 5x+ 6
x2 − 6x+ 8=x2 − 5x+ 6
x2 − 6x+ 8
∣∣∣∣x=3
=0
−1= 0.

7 FUNKCIJE 107
Zgled 7.22. Izracunaj limx→−1
√x2+3−2x+1 .
Resitev. Racunajmo√x2 + 3 − 2
x+ 1=
(√x2 + 3 − 2)(
√x2 + 3 + 2)
(x+ 1)(√x2 + 3 + 2)
=
=(√x2 + 3)2 − 22
(x+ 1)(√x2 + 3 + 2)
=(x2 + 3) − 4
(x+ 1)(√x2 + 3 + 2)
=
=(x− 1)(x+ 1)
(x+ 1)(√x2 + 3 + 2)
=x− 1√
x2 + 3 + 2.
Torej je
limx→−1
√x2 + 3 − 2
x+ 1= lim
x→−1
x− 1√x2 + 3 + 2
=−2√4 + 2
= −1
2.
Zgled 7.23. Izracunaj limx→0
sin 3xsin 5x in lim
x→π
sin 3xsin 5x .
Resitev. Iz limx→0
sinxx = 1 sledi, da je za vsak a 6= 0 tudi lim
x→0
sinaxax = 1.
Ker jesin 3x
sin 5x=
sin 3x3x
sin 5x5x
· 3x
5x,
je
limx→0
sin 3x
sin 5x=
limx→0
sin 3x3x
limx→0
sin 5x5x
· limx→0
3x
5x=
3
5.
Opisanega prijema pa pri drugi limiti ne moremo uporabiti, saj je limx→π
sin 3x3x = lim
x→0
sin 5x5x = 0.
Pisimo t = x− π oz. x = t+ π. Ce gre x→ π, gre t→ 0. Ker je
sin(3x) = sin 3(t+ π) = sin(3t+ 3π) =
= sin 3t cos 3π + cos 3t sin 3π = − sin 3t
in podobno sin(5x) = − sin 5t, sledi
limx→π
sin 3x
sin 5x= lim
t→0
− sin 3t
− sin 5t=
3
5.
Zgled 7.24. Naj bosta m,n ∈ N. Izracunaj limx→∞
xm−1xn−1 .
Resitev.
limx→∞
xm − 1
xn − 1=
1, ce je m = n,
0, ce je m < n,
∞, ce je m > n,
Zgled 7.25. Naj bosta m,n ∈ N. Izracunaj limx→1
xm−1xn−1 .
Resitev.
limx→1
xm − 1
xn − 1= lim
x→1
(x− 1)(xm−1 + xm−2 + · · · + 1)
(x− 1)(xn−1 + xn−2 + · · · + 1)=
= limx→1
xm−1 + xm−2 + · · · + 1
xn−1 + xn−2 + · · · + 1=m
n.

7 FUNKCIJE 108
Zgled 7.26. Izracunaj limito limx→−1
x2−1x3+1
.
Resitev.
limx→−1
x2 − 1
x3 + 1= lim
x→−1
(x− 1)(x+ 1)
(x+ 1)(x2 − x+ 1)= lim
x→−1
x− 1
x2 − x+ 1= −2
3.
Zgled 7.27. Izracunaj limito limx→2
(2−x)√
x+7x2−4
.
Resitev.
limx→2
(2 − x)√x+ 7
x2 − 4= lim
x→2
−(x− 2)√x+ 7
(x− 2)(x + 2)= lim
x→2
−√x+ 7
x+ 2= −3
4.
Zgled 7.28. Izracunaj limito limx→0
1−cos xx2 .
Resitev.
limx→0
1 − cosx
x2= lim
x→0
(1 − cos x)(1 + cos x)
x2(1 + cos x)=
= limx→0
sin2 x
x2· 1
1 + cos x=
1
2,
kjer smo upostevali limx→0
sinxx = 1.
Zgled 7.29. Izracunaj limito limx→1
x2−√x√
x−1.
Resitev. Izraza x2 −√x in
√x− 1 zavzameta vrednost 0 pri x = 1, vendar iz njiju ne moremo
izpostaviti faktorja x − 1. Ker pa je (x2 − √x)(x2 +
√x) = x4 − x = x(x − 1)(x2 + x + 1) in
(√x− 1)(
√x+ 1) = x− 1, lahko zapisemo
limx→1
x2 −√x√
x− 1= lim
x→1
(x2 −√x)(x2 +
√x)(
√x+ 1)
(x2 +√x)(
√x− 1)(
√x+ 1)
=
= limx→1
x(x− 1)(x2 + x+ 1)(√x+ 1)
(x2 +√x)(x− 1)
=
= limx→1
x(x2 + x+ 1)(√x+ 1)
x2 +√x
=1 · 3 · 2
2= 3.
Zgled 7.30. Doloci vrednost parametra a tako, da bo obstajala limita limx→1
( 1x−1 − a
x2−1) in jo
izracunaj.
Resitev. Ocitno je a 6= 0. Izreka o razliki limit ne smemo uporabiti, ker nobena od limitlimx→1
1x−1 in lim
x→1
ax2−1 ne obstaja. Ker pa je
1
x− 1− a
x2 − 1=x+ 1 − a
x2 − 1,
bo limita limx→1
x+1−ax2−1
obstajala le, ce je limx→1
(x+ 1 − a) = 0. Ker je limx→1
(x+ 1 − a) = 2 − a, sledi
a = 2. Torej je
limx→1
x− 1
x2 − 1= lim
x→1
1
x+ 1=
1
2.

7 FUNKCIJE 109
Izrek 7.31. Naj bosta f, g : I → R funkciji in naj obstajata limiti limx→x0
f(x) in limx→x0
g(x). Ce je
f(x) > 0 v okolici tocke x0 in limx→x0
f(x) > 0, obstaja tudi limita limx→x0
(f(x))g(x) in velja
limx→x0
(f(x))g(x) =
(lim
x→x0
f(x)
) limx→x0
g(x)
.
Dokaz. Najprej opazimo, da je (f(x))g(x) = eg(x) ln f(x). Ker je limx→x0
f(x) > 0, je limx→x0
ln f(x) =
ln( limx→x0
f(x)). Potem pa je limx→x0
g(x) ln f(x) = limx→x0
g(x) · ln( limx→x0
f(x)) in zato
limx→x0
(f(x))g(x) = limx→x0
eg(x) ln f(x) = elim
x→x0g(x)·ln( lim
x→x0f(x))
=
=
(lim
x→x0
f(x)
) limx→x0
g(x)
.
Zgled 7.32. Izracunaj limito limx→1
(2x+13−x
)x+1.
Resitev. Uporabimo izrek za izracun limite limx→x0
(f(x))g(x) za f(x) = 2x+13−x in g(x) = x+ 1.
Ker je limx→1
2x+13−x = 3
2 in limx→1
(x+ 1) = 2, sledi
limx→1
(2x+ 1
3 − x
)x+1
=
(3
2
)2
=9
4.
Izrek 7.33. Naj bosta f, g : I → R funkciji in naj obstajata limiti limx→x0
f(x) = 1 in limx→x0
g(x)(f(x)−1). Ce je f(x) 6= 1 v okolici tocke x0, obstaja tudi limita lim
x→x0
(f(x))g(x) in velja
limx→x0
(f(x))g(x) = elim
x→x0g(x)(f(x)−1)
.
Dokaz. Najprej opazimo, da je
(f(x))g(x) = (1 + (f(x) − 1))1
f(x)−1·g(x)(f(x)−1)
=
=((1 + (f(x) − 1))
1f(x)−1
)g(x)(f(x)−1).
Ker pa je limx→x0
(1 + (f(x) − 1)))1
f(x)−1 = e, sledi
limx→x0
(f(x))g(x) = elim
x→x0g(x)(f(x)−1)
.
Zgled 7.34. Izracunaj limito limx→1
(2x+14−x
) 1x−1
.
Resitev. Uporabimo izrek za izracun limite limx→x0
(f(x))g(x) za f(x) = 2x+14−x in g(x) = 1
x−1 .
Najprej opazimo, da limita limx→1
1x−1 ne obstaja, velja pa lim
x→1
2x+14−x = 1. Ker je
limx→1
1
x− 1
(2x+ 1
4 − x− 1
)= lim
x→1
3x− 3
(x− 1)(4 − x)= lim
x→1
3
4 − x= 1,
sledi
limx→1
(2x+ 1
4 − x
) 1x−1
= e1 = e.
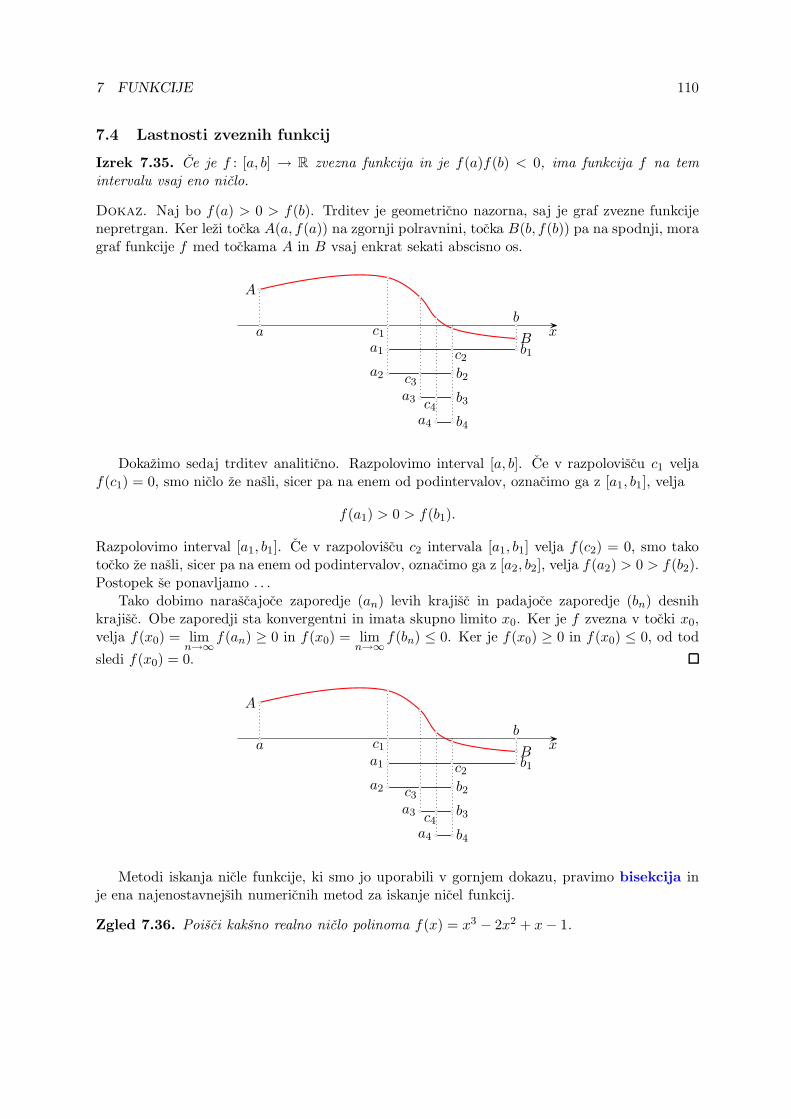
7 FUNKCIJE 110
7.4 Lastnosti zveznih funkcij
Izrek 7.35. Ce je f : [a, b] → R zvezna funkcija in je f(a)f(b) < 0, ima funkcija f na temintervalu vsaj eno niclo.
Dokaz. Naj bo f(a) > 0 > f(b). Trditev je geometricno nazorna, saj je graf zvezne funkcijenepretrgan. Ker lezi tocka A(a, f(a)) na zgornji polravnini, tocka B(b, f(b)) pa na spodnji, moragraf funkcije f med tockama A in B vsaj enkrat sekati abscisno os.
xbc
a
bcA
bca2
bca1
bc
c1
bc
bca3
bc
c3
bc
bca4
bc
c4
bc
bcb4
bcb3
bcb2
bc
c2
bc
bcBbcb1
bc
b
Dokazimo sedaj trditev analiticno. Razpolovimo interval [a, b]. Ce v razpoloviscu c1 veljaf(c1) = 0, smo niclo ze nasli, sicer pa na enem od podintervalov, oznacimo ga z [a1, b1], velja
f(a1) > 0 > f(b1).
Razpolovimo interval [a1, b1]. Ce v razpoloviscu c2 intervala [a1, b1] velja f(c2) = 0, smo takotocko ze nasli, sicer pa na enem od podintervalov, oznacimo ga z [a2, b2], velja f(a2) > 0 > f(b2).Postopek se ponavljamo . . .
Tako dobimo narascajoce zaporedje (an) levih krajisc in padajoce zaporedje (bn) desnihkrajisc. Obe zaporedji sta konvergentni in imata skupno limito x0. Ker je f zvezna v tocki x0,velja f(x0) = lim
n→∞f(an) ≥ 0 in f(x0) = lim
n→∞f(bn) ≤ 0. Ker je f(x0) ≥ 0 in f(x0) ≤ 0, od tod
sledi f(x0) = 0.
xbc
a
bcA
bca2
bca1
bc
c1
bc
bca3
bc
c3
bc
bca4
bc
c4
bc
bcb4
bcb3
bcb2
bc
c2
bc
bcBbcb1
bc
b
Metodi iskanja nicle funkcije, ki smo jo uporabili v gornjem dokazu, pravimo bisekcija inje ena najenostavnejsih numericnih metod za iskanje nicel funkcij.
Zgled 7.36. Poisci kaksno realno niclo polinoma f(x) = x3 − 2x2 + x− 1.
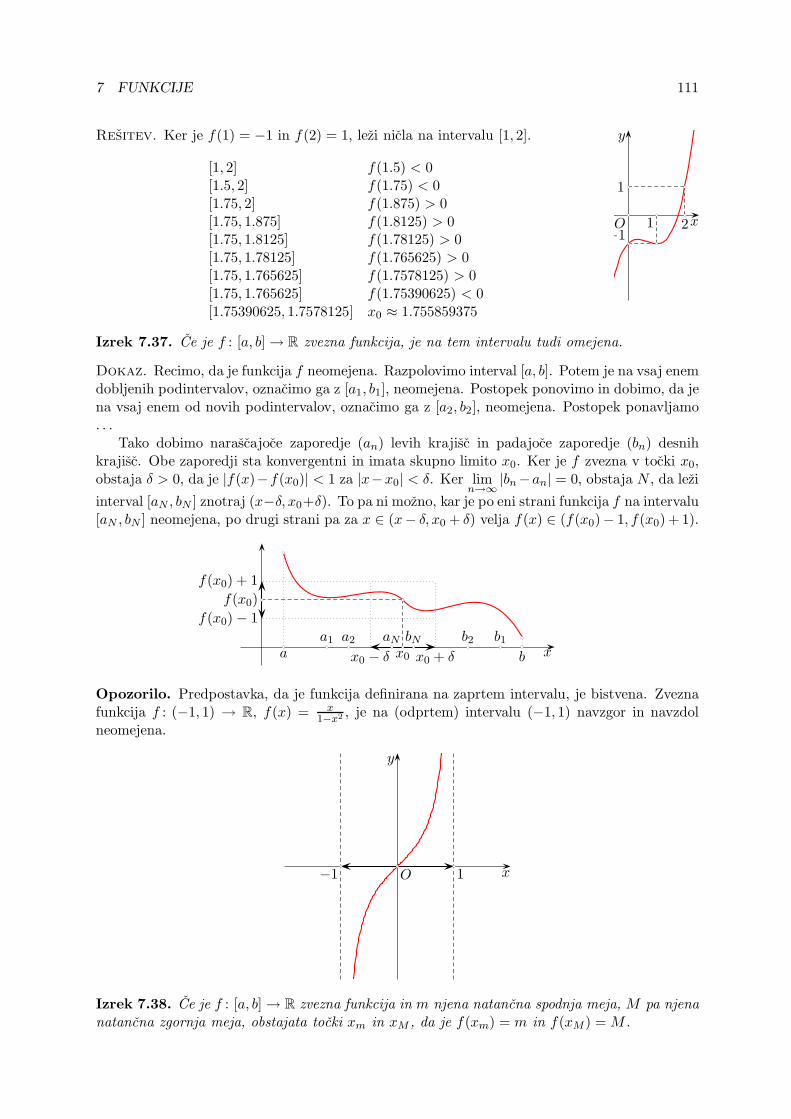
7 FUNKCIJE 111
x
y
bc
O
bc1
bc
−1
bc
1bc
2bc
bc
Resitev. Ker je f(1) = −1 in f(2) = 1, lezi nicla na intervalu [1, 2].
[1, 2] f(1.5) < 0[1.5, 2] f(1.75) < 0[1.75, 2] f(1.875) > 0[1.75, 1.875] f(1.8125) > 0[1.75, 1.8125] f(1.78125) > 0[1.75, 1.78125] f(1.765625) > 0[1.75, 1.765625] f(1.7578125) > 0[1.75, 1.765625] f(1.75390625) < 0[1.75390625, 1.7578125] x0 ≈ 1.755859375
Izrek 7.37. Ce je f : [a, b] → R zvezna funkcija, je na tem intervalu tudi omejena.
Dokaz. Recimo, da je funkcija f neomejena. Razpolovimo interval [a, b]. Potem je na vsaj enemdobljenih podintervalov, oznacimo ga z [a1, b1], neomejena. Postopek ponovimo in dobimo, da jena vsaj enem od novih podintervalov, oznacimo ga z [a2, b2], neomejena. Postopek ponavljamo. . .
Tako dobimo narascajoce zaporedje (an) levih krajisc in padajoce zaporedje (bn) desnihkrajisc. Obe zaporedji sta konvergentni in imata skupno limito x0. Ker je f zvezna v tocki x0,obstaja δ > 0, da je |f(x)−f(x0)| < 1 za |x−x0| < δ. Ker lim
n→∞|bn−an| = 0, obstaja N , da lezi
interval [aN , bN ] znotraj (x−δ, x0+δ). To pa ni mozno, kar je po eni strani funkcija f na intervalu[aN , bN ] neomejena, po drugi strani pa za x ∈ (x− δ, x0 + δ) velja f(x) ∈ (f(x0)− 1, f(x0) + 1).
xbaa1 a2 b1b2
x0
f(x0)
f(x0) + 1
f(x0) − 1
x0 − δ x0 + δ
aN bNbc bc
bc
bc bc bcbcbcbc bc
bc
bc
bc
Opozorilo. Predpostavka, da je funkcija definirana na zaprtem intervalu, je bistvena. Zveznafunkcija f : (−1, 1) → R, f(x) = x
1−x2 , je na (odprtem) intervalu (−1, 1) navzgor in navzdolneomejena.
x
y
bc
Obc
1bc
−1
Izrek 7.38. Ce je f : [a, b] → R zvezna funkcija in m njena natancna spodnja meja, M pa njenanatancna zgornja meja, obstajata tocki xm in xM , da je f(xm) = m in f(xM) = M .
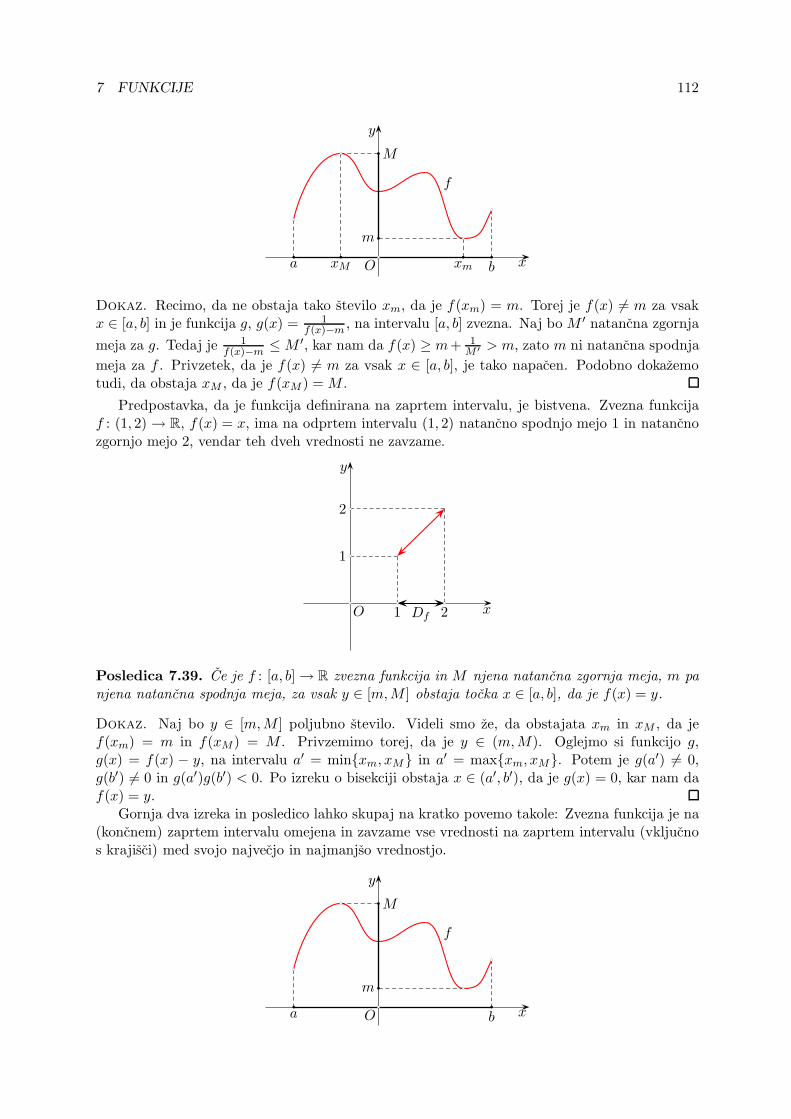
7 FUNKCIJE 112
x
y
Oa b
m
M
f
xM xmb b
b
b
b bbc
bc
bc
bc
bc
Dokaz. Recimo, da ne obstaja tako stevilo xm, da je f(xm) = m. Torej je f(x) 6= m za vsakx ∈ [a, b] in je funkcija g, g(x) = 1
f(x)−m , na intervalu [a, b] zvezna. Naj bo M ′ natancna zgornja
meja za g. Tedaj je 1f(x)−m ≤M ′, kar nam da f(x) ≥ m+ 1
M ′ > m, zato m ni natancna spodnja
meja za f . Privzetek, da je f(x) 6= m za vsak x ∈ [a, b], je tako napacen. Podobno dokazemotudi, da obstaja xM , da je f(xM ) = M .
Predpostavka, da je funkcija definirana na zaprtem intervalu, je bistvena. Zvezna funkcijaf : (1, 2) → R, f(x) = x, ima na odprtem intervalu (1, 2) natancno spodnjo mejo 1 in natancnozgornjo mejo 2, vendar teh dveh vrednosti ne zavzame.
x
y
Df
bc
O
bc1
bc2
bc
1bc
2
Posledica 7.39. Ce je f : [a, b] → R zvezna funkcija in M njena natancna zgornja meja, m panjena natancna spodnja meja, za vsak y ∈ [m,M ] obstaja tocka x ∈ [a, b], da je f(x) = y.
Dokaz. Naj bo y ∈ [m,M ] poljubno stevilo. Videli smo ze, da obstajata xm in xM , da jef(xm) = m in f(xM) = M . Privzemimo torej, da je y ∈ (m,M). Oglejmo si funkcijo g,g(x) = f(x) − y, na intervalu a′ = min{xm, xM} in a′ = max{xm, xM}. Potem je g(a′) 6= 0,g(b′) 6= 0 in g(a′)g(b′) < 0. Po izreku o bisekciji obstaja x ∈ (a′, b′), da je g(x) = 0, kar nam daf(x) = y.
Gornja dva izreka in posledico lahko skupaj na kratko povemo takole: Zvezna funkcija je na(koncnem) zaprtem intervalu omejena in zavzame vse vrednosti na zaprtem intervalu (vkljucnos krajisci) med svojo najvecjo in najmanjso vrednostjo.
x
y
Oa b
m
M
f
b b
b
b
bc
bc
bc
bc
bc
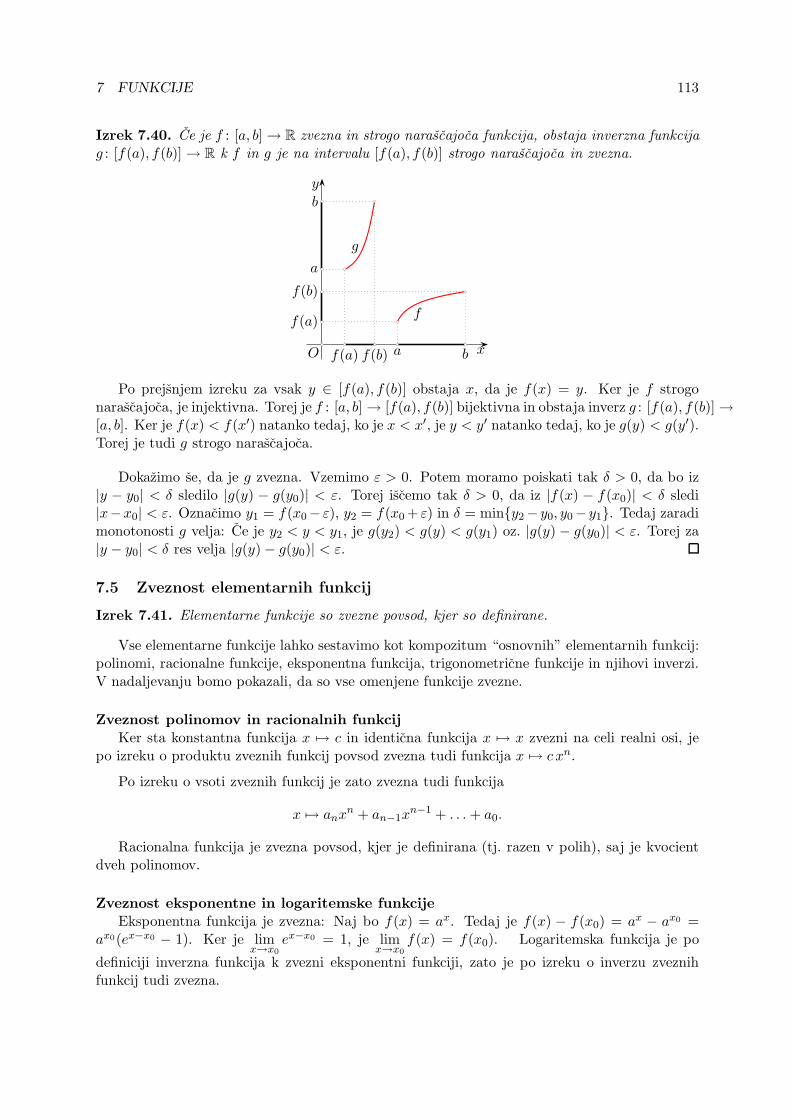
7 FUNKCIJE 113
Izrek 7.40. Ce je f : [a, b] → R zvezna in strogo narascajoca funkcija, obstaja inverzna funkcijag : [f(a), f(b)] → R k f in g je na intervalu [f(a), f(b)] strogo narascajoca in zvezna.
x
y
a b
f(a)
f(b)
f(a) f(b)
a
b
f
g
Obc bc bc bc
bc
bc
bc
bc
bc
bc
bc
bc
bc
Po prejsnjem izreku za vsak y ∈ [f(a), f(b)] obstaja x, da je f(x) = y. Ker je f strogonarascajoca, je injektivna. Torej je f : [a, b] → [f(a), f(b)] bijektivna in obstaja inverz g : [f(a), f(b)] →[a, b]. Ker je f(x) < f(x′) natanko tedaj, ko je x < x′, je y < y′ natanko tedaj, ko je g(y) < g(y′).Torej je tudi g strogo narascajoca.
Dokazimo se, da je g zvezna. Vzemimo ε > 0. Potem moramo poiskati tak δ > 0, da bo iz|y − y0| < δ sledilo |g(y) − g(y0)| < ε. Torej iscemo tak δ > 0, da iz |f(x) − f(x0)| < δ sledi|x−x0| < ε. Oznacimo y1 = f(x0− ε), y2 = f(x0 + ε) in δ = min{y2 −y0, y0−y1}. Tedaj zaradimonotonosti g velja: Ce je y2 < y < y1, je g(y2) < g(y) < g(y1) oz. |g(y) − g(y0)| < ε. Torej za|y − y0| < δ res velja |g(y) − g(y0)| < ε.
7.5 Zveznost elementarnih funkcij
Izrek 7.41. Elementarne funkcije so zvezne povsod, kjer so definirane.
Vse elementarne funkcije lahko sestavimo kot kompozitum “osnovnih” elementarnih funkcij:polinomi, racionalne funkcije, eksponentna funkcija, trigonometricne funkcije in njihovi inverzi.V nadaljevanju bomo pokazali, da so vse omenjene funkcije zvezne.
Zveznost polinomov in racionalnih funkcijKer sta konstantna funkcija x 7→ c in identicna funkcija x 7→ x zvezni na celi realni osi, je
po izreku o produktu zveznih funkcij povsod zvezna tudi funkcija x 7→ c xn.
Po izreku o vsoti zveznih funkcij je zato zvezna tudi funkcija
x 7→ anxn + an−1x
n−1 + . . .+ a0.
Racionalna funkcija je zvezna povsod, kjer je definirana (tj. razen v polih), saj je kvocientdveh polinomov.
Zveznost eksponentne in logaritemske funkcijeEksponentna funkcija je zvezna: Naj bo f(x) = ax. Tedaj je f(x) − f(x0) = ax − ax0 =
ax0(ex−x0 − 1). Ker je limx→x0
ex−x0 = 1, je limx→x0
f(x) = f(x0). Logaritemska funkcija je po
definiciji inverzna funkcija k zvezni eksponentni funkciji, zato je po izreku o inverzu zveznihfunkcij tudi zvezna.

8 DIFERENCIALNI RACUN 114
Zveznost trigonometricnih in ciklometricnih funkcijKotne funkcije so zvezne, kjer so definirane. Dokazimo zveznost za funkcijo sin. Ker je
sinx− sinx0 = 2 sinx− x0
2cos
x+ x0
2,
je[-3ex]
| sinx− sinx0| = |2 sinx− x0
2cos
x+ x0
2| ≤
≤ 2| sin x− x0
2| ≤ |2 · x− x0
2| = |x− x0|.
(Upostevali smo, da za vsak t velja | sin t| ≤ |t|.) Torej lahko pri danem ε > 0 postavimo δ = εin bo za |x− x0| < δ veljalo | sinx− sinx0| < ε.
Ker je cos(x) = sin(π2 − x), po izreku o kompozitumu zveznih funkcij od tod sledi, da je
zvezna tudi funkcija cos. Iz zveze tan(x) = sinxcos x potem sledi, da je zvezna tudi funkcija tan
povsod, kjer je definirana; torej na mnozici R \ {π2 + kπ; k ∈ Z}.
Ciklometricne funkcije so po definiciji inverzne funkcije k zveznim kotnim funkcijam, zato sopo izreku o inverzu zveznih funkcij tudi zvezne.
8 Diferencialni racun
8.1 Definicija odvoda
Naj bo I interval. Dana je funkcija f : I → R. Zanima nas, kako hitro se funkcijska vrednostf(x) spreminja v odvisnosti od x.
Izrazf(x+ h) − f(x)
h
imenujemo diferencni kvocient in je enak naklonskemu koeficientu premice skozi tocki (x, f(x))in (x+ h, f(x+ h)).
seka
nta
x
y f
f(x)
f(x+ h)
x x+ h
h
f(x+ h) − f(x)
Obc
bc
bc
bc
bc
bc bc
Naj bo x notranja tocka intervala I. Funkcija f : I → R je odvedljiva v tocki x, ce obstajalimita
limh→0
f(x+ h) − f(x)
h.
Vrednost te limite oznacimo z f ′(x) in imenujemo odvod funkcije f v tocki x. Pravimo, daje funkcija f odvedljiva na intervalu I, ce je odvedljiva v vsaki tocki na tem intervalu.
Definicijo lahko povemo tudi drugace. Stevilo f ′(x) je odvod funkcije f v tocki x, ce za vsakε > 0 obstaja δ > 0, da iz 0 < |h| < δ sledi
∣∣∣∣f(x+ h) − f(x)
h− f ′(x)
∣∣∣∣ < ε.
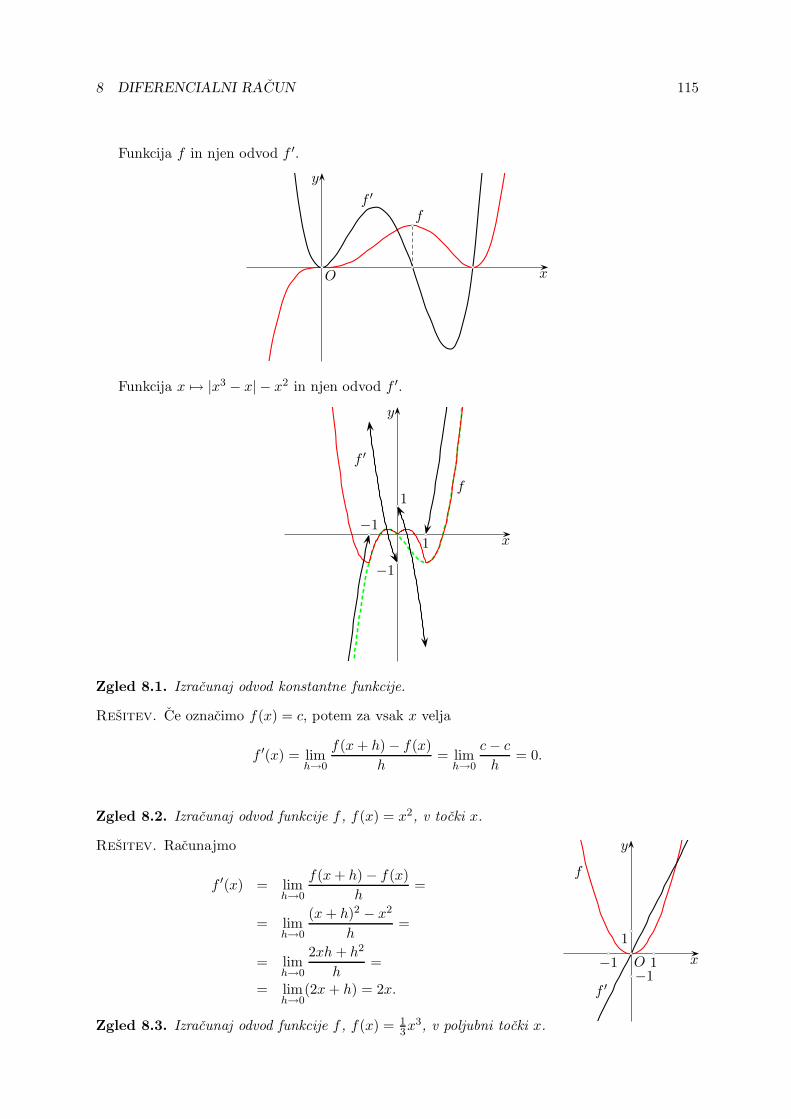
8 DIFERENCIALNI RACUN 115
Funkcija f in njen odvod f ′.
x
y
ff ′
bc
Obcbc
bc
Funkcija x 7→ |x3 − x| − x2 in njen odvod f ′.
x
y
f
f ′
bc
1
bc1
bc
−1
bc
−1
Zgled 8.1. Izracunaj odvod konstantne funkcije.
Resitev. Ce oznacimo f(x) = c, potem za vsak x velja
f ′(x) = limh→0
f(x+ h) − f(x)
h= lim
h→0
c− c
h= 0.
Zgled 8.2. Izracunaj odvod funkcije f , f(x) = x2, v tocki x.
x
y
f
f ′
bc
O
bc
1
bc−1
bc
1bc
−1
Resitev. Racunajmo
f ′(x) = limh→0
f(x+ h) − f(x)
h=
= limh→0
(x+ h)2 − x2
h=
= limh→0
2xh+ h2
h=
= limh→0
(2x+ h) = 2x.
Zgled 8.3. Izracunaj odvod funkcije f , f(x) = 13x
3, v poljubni tocki x.
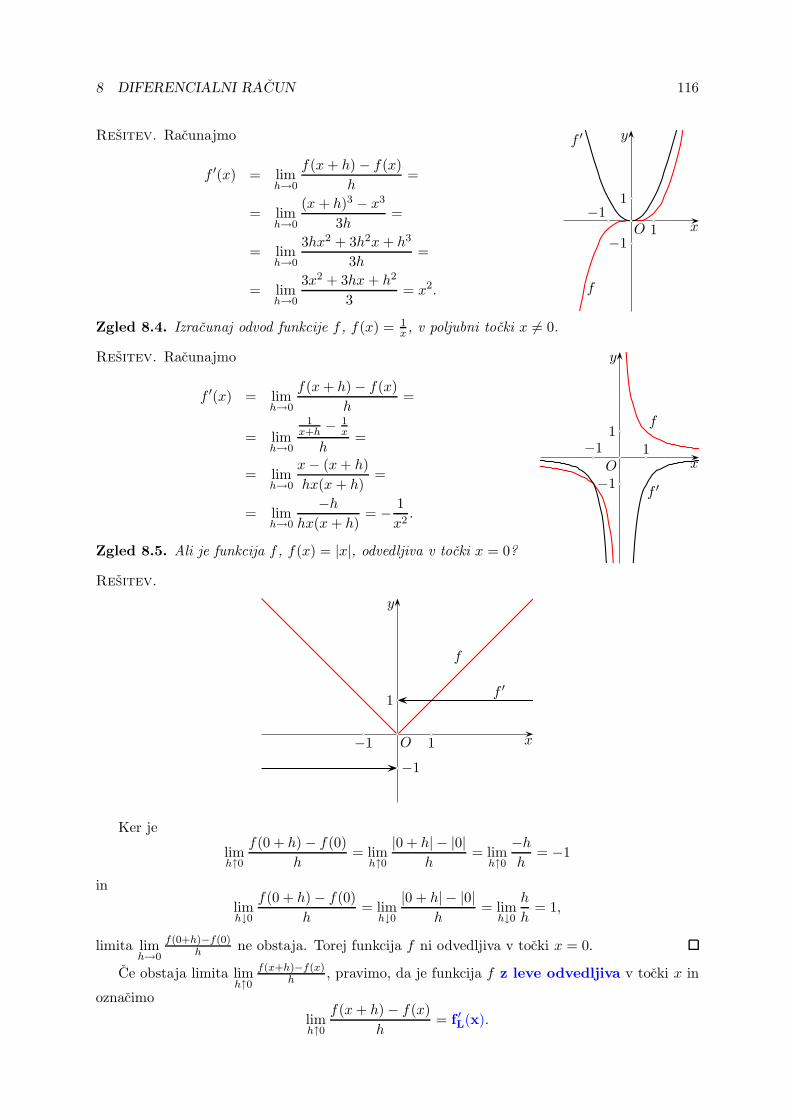
8 DIFERENCIALNI RACUN 116
x
yf ′
f
bc
O
bc1
bc−1
bc
1bc
−1
Resitev. Racunajmo
f ′(x) = limh→0
f(x+ h) − f(x)
h=
= limh→0
(x+ h)3 − x3
3h=
= limh→0
3hx2 + 3h2x+ h3
3h=
= limh→0
3x2 + 3hx+ h2
3= x2.
Zgled 8.4. Izracunaj odvod funkcije f , f(x) = 1x , v poljubni tocki x 6= 0.
x
y
f
f ′
bc
O
bc1
bc−1
bc
1bc
−1
Resitev. Racunajmo
f ′(x) = limh→0
f(x+ h) − f(x)
h=
= limh→0
1x+h − 1
x
h=
= limh→0
x− (x+ h)
hx(x+ h)=
= limh→0
−hhx(x+ h)
= − 1
x2.
Zgled 8.5. Ali je funkcija f , f(x) = |x|, odvedljiva v tocki x = 0?
Resitev.
x
y
f
f ′
bc
O
bc1
bc−1
bc
1bc
−1
Ker je
limh↑0
f(0 + h) − f(0)
h= lim
h↑0|0 + h| − |0|
h= lim
h↑0−hh
= −1
in
limh↓0
f(0 + h) − f(0)
h= lim
h↓0|0 + h| − |0|
h= lim
h↓0h
h= 1,
limita limh→0
f(0+h)−f(0)h ne obstaja. Torej funkcija f ni odvedljiva v tocki x = 0.
Ce obstaja limita limh↑0
f(x+h)−f(x)h , pravimo, da je funkcija f z leve odvedljiva v tocki x in
oznacimo
limh↑0
f(x+ h) − f(x)
h= f ′L(x).

8 DIFERENCIALNI RACUN 117
Ce obstaja limita limh↓0
f(x+h)−f(x)h , pravimo, da je funkcija f z desne odvedljiva v tocki x
in oznacimo
limh↓0
f(x+ h) − f(x)
h= f ′D(x).
Izrek 8.6. Funkcija f : I → R je odvedljiva v tocki x ∈ I natanko tedaj, ko je v tej tockiodvedljiva z leve in z desne in sta levi in desni odvod v tej tocki enaka.
Zgled 8.7. Doloci vrednosti parametrov a in b tako, da bo funkcija f ,
f(x) =
{x2, ce je x > 1,
ax+ b, ce je x ≤ 1,
odvedljiva v tocki x = 1.
Resitev. Vrednosti parametrov a in bmoramo izbrati tako, da bo obstajala limita limh→0
f(1+h)−f(1)h .
Ker sta za funkcijo uporabljena dva predpisa, si bomo pomagali z levim in desnim odvodom vtocki x = 1.
f ′L(1) = limh↑0
f(1+h)−f(1)h = lim
h↑0a(1+h)+b−(a+b)
h = limh↑0
ahh = a.
f ′D(1) = limh↓0
f(1+h)−f(1)h = lim
h↓0(1+h)2−(a+b)
h = limh↓0
(1−a−b)+2h+h2
h .
Ce naj gornja limita obstaja, mora biti a+ b = 1. Sledi
f ′D(1) = limh↓0
(1−a−b)+2h+h2
h = limh↓0
2h+h2
h = limh↓0
(2 + h) = 2.
Torej bo funkcija v tocki x = 1 odvedljiva, ce bo f ′L(1) = f ′D(1) oz. a = 2. Skupaj s pogojema+ b = 1 izracunamo se b = −1.
Cemu pogoj a + b = 1 pri gornji nalogi? Ker je limx↑1
f(x) = a + b in limx↓1
f(x) = 1 = f(1),
lahko pogoj a+ b = 1 zapisemo tudi v obliki
limx↑1
f(x) = limx↓1
f(x) = f(1),
kar pomeni, da je funkcija f zvezna v tocki 1. Slednje velja tudi v splosnem:
Izrek 8.8. Ce je funkcija f : I → R v tocki x odvedljiva, je v tej tocki tudi zvezna.
Dokaz. Spomnimo se, da je stevilo f ′(x) odvod funkcije f v tocki x, ce za vsak ε > 0 obstajaδ > 0, da iz 0 < |h| < δ sledi
∣∣∣∣f(x+ h) − f(x)
h− f ′(x)
∣∣∣∣ < ε,
kar lahko zapisemo tudi kot
|f(x+ h) − f(x) − hf ′(x)| < ε|h|.
Slednje lahko preoblikujemo v
|f(x+ h) − f(x)| < |h|(ε + |f ′(x)|).
Torej velja limh→0
f(x+ h) = f(x), kar je ravno pogoj zveznosti v tocki x.

8 DIFERENCIALNI RACUN 118
8.2 Geometricni pomen odvoda
Naj bo f : I → R zvezna funkcija. Kot smo ze videli, je diferencni kvocient f(x+h)−f(x)h enak
naklonskemu koeficientu premice skozi tocki T (x, f(x)) in T1(x + h, f(x + h)), ki jo imenujenosekanta. Ko se h priblizuje vrednosti 0, se tocka T1 priblizuje tocki T . Ce sekanta limitira protineki koncni legi, imenujemo sekanto v limitni legi tangenta na krivuljo v tocki (x, f(x)).
tangen
ta
x
y
O
f
x x+ h
f(x)
f(x+ h)
bc
bcT
bc
bc bc
bc
T1bc
Smerni koeficient sekante preide v smerni koeficient tangente. Tangenta na graf funkcije f vtocki (x, f(x)) oklepa s pozitivno smerjo abscisne osi kot α, ki zadosca zvezi
tanα = f ′(x) = limh→0
f(x+ h) − f(x)
h.
tang
enta
normala
O x
y
x
f(x)
α
f
bc
bcbc
bc
Enacba tangente na graf funkcije f v tocki x se glasi
Y − f(x) = f ′(x)(X − x),
enacba normale (tj. pravokotnice na tangento) v tej tockipa
Y − f(x) = − 1
f ′(x)(X − x).
8.3 Pravila za odvajanje
Izrek 8.9. Ce sta funkciji f in g odvedljivi v tocki x, je v tej tocki odvedljiva tudi funkcija f + gin velja (f + g)′(x) = f ′(x) + g′(x).
Dokaz. Racunajmo
(f + g)′(x) = limh→0
(f + g)(x + h) − (f + g)(x)
h=
= limh→0
f(x+ h) + g(x+ h) − f(x) − g(x)
h=
= limh→0
f(x+ h) − f(x)
h+ lim
h→0
g(x+ h) − g(x)
h=
= f ′(x) + g′(x).
Posledica 8.10. Ce so funkcije f1, f2, . . . , fn odvedljive v tocki x, je v tej tocki odvedljiva tudifunkcija f1 + f2 + . . . + fn in velja (f1 + f2 + . . .+ fn)′ = f ′1 + f ′2 + . . .+ f ′n.

8 DIFERENCIALNI RACUN 119
Dokaz. Dokazimo trditev z indukcijo. Za n = 1 ni kaj dokazovati. Za n > 1 pa lahko zapisemo
(f1 + f2 + . . .+ fn−1 + fn)′ = (f1 + f2 + . . .+ fn−1)′ + f ′n =
= (f ′1 + f2 + . . .+ f ′n−1) + f ′n,
kjer smo v prvi enakosti upostevali indukcijsko predpostavko za 2 clena, v drugi pa indukcijskopredpostavko za n− 1 clenov.
Izrek 8.11. Ce sta funkciji f in g odvedljivi v tocki x, je v tej tocki odvedljiva tudi funkcija fgin velja (fg)′(x) = f ′(x)g(x) + f(x)g′(x).
Dokaz. Racunajmo
(fg)′(x) = limh→0
(fg)(x+h)−(fg)(x)h = lim
h→0
f(x+h)g(x+h)−f(x)g(x)h =
= limh→0
(f(x+h)−f(x))g(x+h)+f(x)(g(x+h)−g(x))h =
= limh→0
(f(x+h)−f(x))g(x+h)h + lim
h→0
f(x)(g(x+h)−g(x))h =
= limh→0
(f(x+h)−f(x))h · lim
h→0g(x+ h) + f(x) lim
h→0
(g(x+h)−g(x))h =
= f ′(x)g(x) + f(x)g′(x),
kjer smo zaradi zveznosti g zapisali limh→0
g(x+ h) = g(x).
Posledica 8.12. Ce so funkcije f1, f2, . . . , fn odvedljive v tocki x, je v tej tocki odvedljiva tudifunkcija f1f2 · · · fn in velja
(f1f2 · · · fn)′ = f ′1f2f3 · · · fn + f1f′2f3 · · · fn + . . .+ f1f2 · · · fn−1f
′n.
Dokaz. Dokazimo trditev z indukcijo. Za n = 1 ni kaj dokazovati. Za n > 1 pa lahko zapisemo
(f1f2 · · · fn)′ = (f1f2 · · · fn−1)′fn + (f1f2 · · · fn−1)f
′n =
= f ′1f2f3 · · · fn + f1f′2f3 · · · fn + . . .+ f1f2 · · · fn−1f
′n
kjer smo v prvi enakosti upostevali indukcijsko predpostavko za 2 faktorja, v drugi pa indukcijskopredpostavko za n− 1 faktorjev.
Posledica 8.13. Ce je f odvedljiva funkcija v tocki x in c poljubna konstanta, je v tocki xodvedljiva tudi funkcija cf in velja (cf)′(x) = cf ′(x).
Dokaz. Velja (cf)′(x) = c′f(x) + cf ′(x) = cf ′(x), saj je c′ = 0.
Izrek 8.14. Ce sta funkciji f in g odvedljivi v tocki x in g(x) 6= 0, je v tej tocki odvedljiva tudi
funkcija fg in velja (f
g )′(x) = f ′(x)g(x)−f(x)g′(x)g2(x) .
Dokaz. Racunajmo
(fg
)′(x) = lim
h→0
( fg)(x+h)−( f
g)(x)
h = limh→0
f(x+h)g(x+h)
− f(x)g(x)
h =
= limh→0
f(x+h)g(x)−f(x)g(x+h)hg(x)g(x+h) =
= limh→0
(f(x+h)−f(x))g(x)−f(x)(g(x+h)−g(x))hg(x)g(x+h) =
=limh→0
f(x+h)−f(x)h
g(x)−f(x) limh→0
g(x+h)−g(x)h
limh→0
g(x)g(x+h) =
= f ′(x)g(x)−f(x)g′(x)g2(x)
,
kjer smo zaradi zveznosti g zapisali limh→0
g(x+ h) = g(x).

8 DIFERENCIALNI RACUN 120
Izrek 8.15 (Verizno pravilo). Ce je f odvedljiva funkcija v tocki x in g odvedljiva funkcija vtocki f(x), je tudi funkcija g ◦ f odvedljiva v tocki x in velja g(f(x))′ = g′(f(x))f ′(x).
Dokaz. Ker je g odvedljiva v tocki t = f(x), velja g(t+k)−g(t)k = g′(t)+η(k), kjer je lim
k→0η(k) = 0.
Torej je g(t + k) − g(t) = kg′(t) + kη(k) za majhne k. Ker je f zvezna v tocki x, bo zak(h) = f(x+ h) − f(x) veljalo lim
h→0k(h) = 0. Racunajmo
g(f(x+ h)) − g(f(x))
h=
g(f(x) + k(h)) − g(f(x))
h=
= g(f(x)+k(h))−g(f(x))k(h) · k(h)
h =
= g′(f(x))f(x+h)−f(x)h + η(h)f(x+h)−f(x)
h
Od tod sledi
g(f(x))′ = limh→0
g(f(x+ h)) − g(f(x))
h=
= limh→0
(g′(f(x))f(x+h)−f(x)
h + η(h)f(x+h)−f(x)h
)=
= g′(f(x))f ′(x).
Posledica 8.16. Ce je g inverzna funkcija k f in f ′(x) 6= 0, je g odvedljiva v tocki f(x), invelja g′(f(x)) = 1
f ′(x) .
Dokaz. Ce je g inverzna funkcija k f , velja g(f(x)) = x. Torej je g′(f(x))f ′(x) = x′ = 1, odkoder sledi g′(f(x)) = 1
f ′(x) .
Opomba. Ce pisemo y = f(x), lahko pravilo o odvodu inverzne funkcije zapisemo tudi kotg′(y) = 1
f ′(g(y)) .
Zgled 8.17. Izracunaj odvod funkcije x 7→ √x.
Resitev. Naj bo funkcija f : [0,∞) → R definirana s predpisom f(x) = x2. Potem je funkcijag : [0,∞) → R, definirana z g(x) =
√x, inverzna funkcija k f .
Ker je f ′(x) = 2x, po zgoraj dokazanem velja g′(f(x)) = 1f ′(x) = 1
2x za vsak x > 0. Ce sedaj
pisemo y = x2, izpeljemo g′(y) = 12√
y .
8.4 Odvodi elementarnih funkcij
Polinomi in racionalne funkcijeNaj bo f(x) = xn, kjer je n ∈ N. Tedaj je
f ′(x) = limh→0
f(x+ h) − f(x)
h= lim
h→0
(x+ h)n − xn
h=
= limh→0
∑ni=0
(ni
)xn−ihi − xn
h= lim
h→0(
n∑
i=1
(n
i
)xn−ihi−1) =
=
(n
1
)xn−1 = nxn−1.
Ce je f(x) = x−n = 1xn , racunamo f ′(x) = 1′·xn−1·(xn)′
(xn)2= −nxn−1
x2n = −nx−n−1. Torej je
(xn)′ = nxn−1 za n ∈ Z.

8 DIFERENCIALNI RACUN 121
Za polinomf(x) = anx
n + an−1xn−1 + . . . + a1x+ a0
je takof ′(x) = nanx
n−1 + (n− 1)an−1xn−2 + . . .+ a1.
Racionalne funkcije odvajamo po pravilu za odvajanje kvocienta dveh funkcij.
Zgled 8.18. Izracunaj odvod funkcije x 7→ (x2 + x+ 1)9.
Resitev. Naj bo f(x) = (x2 + x + 1) in g(x) = x9. Tedaj je h(x) = g(f(x)) = (x2 + x + 1)9.Ker je f ′(x) = 2x+ 1 in g(x) = 9x8, po veriznem pravilu sledi
h′(x) = g′(f(x)) · f ′(x) = 9(x2 + x+ 1)8 · (2x+ 1).
Zgled 8.19. Izracunaj odvod funkcije x 7→ xx2+1
.
Resitev. Oznacimo f(x) = xx2+1
. Tedaj je
f ′(x) =x′(x2 + 1) − x(x2 + 1)′
(x2 + 1)2=
1(x2 + 1) − x (2x)
(x2 + 1)2=
1 − x2
(x2 + 1)2.
Eksponentna funkcijaOznacimo f(x) = ex. Tedaj je
f ′(x) = limh→0
f(x+ h) − f(x)
h= lim
h→0
ex+h − ex
h= ex lim
h→0
eh − 1
h.
Ce postavimo t = eh − 1, velja limh→0
eh − 1 = 0. Torej lahko zapisemo
limh→0
eh − 1
h= lim
t→0
t
ln(1 + t)= lim
t→0
1
ln(1 + t)1/t=
1
ln e= 1,
kjer smo upostevali, da je limt→0
(1 + t)1/t = e. Torej je
(ex)′ = ex.
Za splosno eksponentno funkcijo pa lahko zapisemo ax = ex ln a. Ce oznacimo g(x) = ex inf(x) = x ln a, velja ax = ex lna = g(f(x)). Izracunajmo odvod po pravilu za odvod sestavljenefunkcije: Ker je g′(x) = (ex)′ = ex in f ′(x) = (x ln a)′ = ln a, je
(ax)′ = g(f(x))′ = g′(f(x))f ′(x) = ex lna ln a = ax ln a.
Torej je(ax)′ = ax ln a.
Zgled 8.20. Izracunaj odvod funkcije x 7→ x e−x.
Resitev. Naj bo f(x) = x e−x. Tedaj je
f ′(x) = x′ e−x + x (e−x)′ = e−x + x e−x(−x)′ =
= e−x + x e−x(−1) = (1 − x)e−x.
Zgled 8.21. Izracunaj odvod funkcije x 7→ x2 + 2x.
Resitev. Naj bo f(x) = x2 + 2x. Tedaj je
f ′(x) = 2x+ 2x ln 2.

8 DIFERENCIALNI RACUN 122
Logaritemska funkcijaNaj bo f(x) = ax. Potem je funkcija g, g(x) = loga x, inverzna funkcija k f in velja
g′(x) =1
f ′(g(x))=
1
aloga x ln a=
1
x ln a.
Torej je
(loga x)′ =1
x ln a
in
(lnx)′ =1
x.
Zgled 8.22. Izracunaj odvod funkcije x 7→ x lnx.
Resitev. Naj bo f(x) = x lnx. Tedaj je
f ′(x) = x′ lnx+ x(ln x)′ = lnx+ x1
x= 1 + lnx.
Zgled 8.23. Izracunaj odvod funkcije x 7→ 1+ln x1−ln x .
Resitev. Naj bo f(x) = 1+ln x1−ln x . Tedaj je
f ′(x) =(1 + lnx)′ · (1 − lnx) − (1 + lnx) · (1 − lnx)′
(1 − lnx)2=
=1x(1 − lnx) − (1 + lnx)(− 1
x)
(1 − lnx)2=
2x
(1 − lnx)2=
2
x(1 − lnx)2.
Splosna potencna funkcijaIzracunali smo ze odvod funkcije f , f(x) = xn, kjer je eksponent n celo stevilo. Ce pa je n
poljubno realno stevilo, pisemo f(x) = en ln x, od koder sledi
f ′(x) = en ln x(n lnx)′ = en ln x(n1
x) = nxn 1
x= nxn−1.
Zgled 8.24. Izracunaj odvod funkcije x 7→ 2x√
2.
Resitev. Naj bo f(x) = 2x√
2. Ker za dvojne potence velja abc
= a(bc), po veriznem pravilusledi
f ′(x) = 2x√
2 · ln 2 · (x√
2)′ = 2x√
2(ln 2)(
√2x
√2−1) =
= 2x√
2x√
2−1√
2 ln 2.
Zgled 8.25. Izracunaj odvod funkcije x 7→ xx.
Resitev. Naj bo f(x) = xx. Tedaj je f(x) = ex ln x. Torej lahko odvajamo po veriznem pravilu:f ′(x) = ex ln x(x lnx)′ = xx(lnx+ 1).

8 DIFERENCIALNI RACUN 123
Kotne funkcijeNaj bo f(x) = sinx. Racunajmo
(sinx)′ = limh→0
f(x+ h) − f(x)
h= lim
h→0
sin(x+ h) − sinx
h=
= limh→0
2 cos(x+ h2 ) sin h
2
h= lim
h→0cos(x+
h
2) · lim
h→0
sin h2
h2
=
= cosx,
saj je limh→0
sin h2
h2
= 1. Ker je cos x = sin(π2 − x), je
(cosx)′ = sin(π
2− x)′ = sin′(
π
2− x) · (π
2− x)′ =
= cos(π
2− x) · (−1) = − sinx.
Iz tanx = sin xcos x pa izpeljemo se
(tan x)′ =
(sinx
cos x
)′=
sin′ x cos x− sinx cos′ xcos2 x
=
=cos x cos x− sinx(− sinx)
cos2 x=
1
cos2 x.
Zgled 8.26. Izracunaj odvod funkcije x 7→ sin(x2).
Resitev. Naj bo f(x) = sin(x2). Tedaj je f ′(x) = sin′(x2) · (x2)′ = cos(x2)2x.
Zgled 8.27. Izracunaj odvod funkcije x 7→ cos2(x).
Resitev. Naj bo f(x) = cos2(x). Tedaj je f ′(x) = 2 cos(x)(− sin(x)) = − sin(2x).
Zgled 8.28. Izracunaj odvod funkcije x 7→ tan( 1x).
Resitev. Naj bo f(x) = tan( 1x). Tedaj je f ′(x) = 1
cos2( 1x)( 1
x)′ = 1cos2( 1
x)(− 1
x2 ) = − 1x2 cos2( 1
x).
Ciklometricne funkcijeKer so te funkcije po definiciji inverzne h kotnim funkcijam, si pri izracunu odvodov poma-
gamo s pravilom o odvodu inverza. Racunajmo
(arc sinx)′ =1
sin′(arc sinx)=
1
cos(arc sinx)=
1√1− x2
,
saj je cos(arc sinx) =√
1 − x2 (pisemo t = arc sinx in upostevamo, da je sin2 t + cos2 t = 1).Podobno izpeljemo se
(arc cosx)′ =1
cos′(arc cosx)=
1
− sin(arc cos x)= − 1√
1 − x2,
(arc tanx)′ =1
tan′(arc tan x)= cos2(arc tan x) =
=1
tan2(arc tan x) + 1=
1
x2 + 1.

8 DIFERENCIALNI RACUN 124
Zgled 8.29. Izracunaj odvod funkcije x 7→ x arc sin(x).
Resitev. Naj bo f(x) = x arc sin(x). Tedaj je f ′(x) = arc sin(x) + x 1√1−x2
.
Zgled 8.30. Izracunaj odvod funkcije x 7→ arc tan( 1x2+1
).
Resitev. Naj bo f(x) = arc tan( 1x2+1
). Tedaj je
f ′(x) =1
1 + ( 1x2+1
)2·(
1
x2 + 1
)′=
=1
(x2+1)2+1(x2+1)2
· −2x
(x2 + 1)2=
−2x
x4 + 2x2 + 2.
Zberimo odvode elementarnih funkcij v eno preglednico:
(c)′ = 0, c konstanta (xr)′ = rxr−1, r ∈R (ex)′ = ex (ax)′ = ax ln a, a > 0
(lnx)′ =1
x(loga x)
′ =1
x ln a, a > 0, a 6= 1
(sinx)′ = cosx (cos x)′ = − sinx (tan x)′ =
1
cos2 x(arc sinx)′ =
1√1 − x2
(arc cosx)′ =
− 1√1 − x2
(arc tan x)′ =1
x2 + 1
Zgled 8.31. Izracunaj odvod funkcije f , podane s predpisom f(x) = ln x+1x−1 .
Resitev. Racunajmo
(lnx+ 1
x− 1
)′=
1x+1x−1
·(x+ 1
x− 1
)′=
=x− 1
x+ 1· (x+ 1)′(x− 1) − (x+ 1)(x− 1)′
(x− 1)2=
=x− 1
x+ 1· 1 · (x− 1) − (x+ 1) · 1
(x− 1)2=
=x− 1
x+ 1· −2
(x− 1)2= − 2
x2 − 1=
2
1 − x2.
Do enakega rezultata pa pridemo nekoliko hitreje, ce opazimo, da je
lnx+ 1
x− 1= ln(x+ 1) − ln(x− 1)
in od tod (lnx+ 1
x− 1
)′=
1
x+ 1− 1
x− 1= − 2
x2 − 1=
2
1 − x2.
Zgled 8.32. Izracunaj odvod funkcije x 7→ ln x+√
1−x2
x .
8 DIFERENCIALNI RACUN 125
Resitev. Racunajmo
f ′(x) =1
x+√
1−x2
x
·(x+
√1 − x2
x
)′
=
=x
x+√
1 − x2· (x+
√1 − x2)′x− (x+
√1 − x2)x′
x2=
=x
x+√
1 − x2·(1 + −2x
2√
1−x2)x− (x+
√1 − x2)
x2=
=x
x+√
1 − x2· (
√1 − x2 − x)x− x
√1 − x2 − (1 − x2)
x2√
1 − x2=
=x
x+√
1 − x2· −1
x2√
1 − x2= − 1
x(x+√
1 − x2)√
1 − x2.
Zgled 8.33. Izracunaj odvod funkcije x 7→ arc tan ex − ln√
e2x
e2x+1.
Resitev.
f ′(x) =1
1 + (ex)2· (ex)′ +
1√e2x
e2x+1
(√e2x
e2x + 1
)′
=
=ex
1 + e2x+
1√e2x
e2x+1
· 1
2√
e2x
e2x+1
·(
e2x
e2x + 1
)′=
=ex
1 + e2x+
12e2x
e2x+1
· 2e2x(e2x + 1) − e2x(2e2x)
(e2x + 1)2=
=ex
1 + e2x+e2x + 1
2e2x· 2e2x
(e2x + 1)2=
ex
1 + e2x+
1
e2x + 1=
ex + 1
1 + e2x.
Zgled 8.34. Izracunaj odvod funkcije x 7→ 2 arc tanx+ arc sin 2x1+x2 .
Resitev. Racunajmo
f ′(x) =2
1 + x2+
1√1 − ( 2x
1+x2 )2·(
2x
1 + x2
)′=
=2
1 + x2+
1√(x2+1)2−4x2
(1+x2)2
· 2(1 + x2) − 2x · 2x(1 + x2)2
=
=2
1 + x2+
1√x4 + 2x2 + 1 − 4x2
· 2(1 − x2)
1 + x2=
=2
1 + x2+
1√(x2 − 1)2
· 2(1 − x2)
1 + x2=
=2
1 + x2+
1
|x2 − 1| ·2(1 − x2)
1 + x2.
Torej je
f ′(x) =2
1 + x2+
1
|x2 − 1| ·2(1 − x2)
1 + x2,

8 DIFERENCIALNI RACUN 126
kar med drugim pomeni, da v tockah x = ±1 funkcija ni odvedljiva. Ce je |x| < 1, je |x2 − 1| =1 − x2, zato je f ′(x) = 4
1+x2 . Ce je |x| > 1, je |x2 − 1| = x2 − 1, zato je f ′(x) = 0.
x
y
bc
O
fbcπ
bc−π
bc
1bc
−1
bc
bc
8.5 Diferencial funkcije
Naj bo f odvedljiva funkcija, y = f(x). Spremembo vrednosti funkcije f pogosto oznacimo z∆y. Podobno oznacimo spremembo vrednosti spremenljivke x z ∆x.
x
y
O x x+ h
f ′(x)∆x
∆x
∆y
t f
bc bc bc
bcbc
bc
bc
bc
S temi oznakami lahko zapisemo
f ′(x) = limh→0
f(x+ h) − f(x)
h= lim
∆x→0
∆y
∆x.
Torej velja f ′(x) − ∆y∆x = η, kjer gre pri ∆x→ 0 tudi η → 0. Gornjo enacbo preoblikujemo v
∆y = f ′(x)∆x+ η∆x.
Hkrati z ∆x gre tudi η k 0, zato je ∆y ≈ f ′(x)∆x.
Diferencial funkcije f v tocki x je enak produktu iz odvoda funkcije in diferenciala neod-visne spremenljivke. Torej
dy = f ′(x) ∆x.
Za funkcijo f : x 7→ x je df(x) = dx = 1 ·∆x = ∆x. Torej je dx = ∆x in zato diferencial pogostozapisemo v obliki dy = f ′(x) dx ali
f ′(x) =dy
dx.
Ce je y posredna funkcija spremenljivke x, tj. y = f(u) in u = g(x), je dy = (f(g(x)))′ dx =f ′(u)g′(x) dx. Ker je f ′(u) = dy
du in g′(x) = dudx , lahko verizno pravilo za odvajanje zapisemo z
diferenciali kotdy
dx=dy
du
du
dx.

8 DIFERENCIALNI RACUN 127
Diferenciale pogosto uporabljamo pri racunanju pribliznih vrednosti funkcije, saj je f(x +dx) = f(x) + ∆y. Torej je
f(x+ dx) ≈ f(x) + ∆y = f(x) + f ′(x) dx.
Graficno to pomeni, da smo v okolici dotikalisca funkcijo aproksimirali s tangento.
x
y
O x x+ dx
f(x) + f ′(x)dxf(x+ dx)
f(x)f ′(x) dx
t f
bc bc bc
bcbc
bc bc
bcbc
Zgled 8.35. Priblizno izracunaj√
17.
Resitev. Ker je 17 = 16 + 1, lahko zapisemo√
17 = 4√
1 + 116 . Oznacimo f(x) = 4
√1 + x.
Torej moramo priblizno izracunati f(x+dx) za x = 0 in dx = 116 . Ker je f ′(x) = 4 1
2√
1+x= 2√
1+x,
jef( 1
16 ) ≈ f(0) + f ′(0) 116 = 4 + 2 · 1
16 = 4.125 .
Dobljen rezultat je natancen na dve decimalni mesti, saj je√
17 ≈ 4.1231056 . Omenjena metodaracunanja pribliznih vrednosti funkcije je enostavna, zal pa iz metode same ni razvidno, kakonatancen je dobljen rezultat. Kasneje si bomo pogledali, kako lahko s pomocjo Taylorjeve vrsteocenimo, kako velika je napaka, ce nadomestimo f(x+ dx) z f(x) + f ′(x) dx.
Visji odvodiNaj bo funkcija f na intervalu (a, b) odvedljiva in g = f ′ njen odvod. Ce je funkcija g
odvedljiva v tocki x, pravimo, da je funkcija f dvakrat odvedljiva v tocki x in oznacimof ′′(x) = g′(x). Funkcijo f ′′ imenujemo drugi odvod funkcije f .
Ce je drugi odvod odvedljiva funkcija, oznacimo odvod drugega odvoda z f ′′′ in imenujemotretji odvod funkcije f .
Splosno velja: ce se da funkcija f n-krat zaporedoma odvajati, dobimo po n korakih n-tiodvod, ki ga oznacimo z f (n).
Visji odvodi elementarnih funkcijZa f(x) = xm po vrsti izracunamo
(xm)′ = mxm−1
(xm)′′ = m(m− 1)xm−2
...
(xm)(n) = m(m− 1) . . . (m− n+ 1)xm−n.
Ce je m naravno stevilo, bo (m+ 1)-vi in vsi visji odvod enak 0. (tj. (xm)(n) = 0 za n ≥ m+ 1).Ce pa je m negativno celo stevilo ali m ∈ R \ Z, pa noben odvod ne bo 0.

8 DIFERENCIALNI RACUN 128
Za f(x) = sinx po vrsti izracunamo
(sinx)′ = cos x = sin(x+ π2 ),
(sinx)′′ = − sinx = sin(x+ 2 · π2 ),
(sin x)′′′ = − cos x = sin(x+ 3 · π2 ),
(sinx)(4) = sinx = sin(x+ 4 · π2 ).
Torej za vsak k velja (sinx)(k)(x) = sin(x+ k · π2 ).
Za f(x) = cosx po vrsti izracunamo
(cos x)′ = − sinx = cos(x+ π2 ),
(cos x)′′ = − cos x = cos(x+ 2 · π2 ),
(cos x)′′′ = sinx = cos(x+ 3 · π2 ),
(cos x)(4) = cos x = cos(x+ 4 · π2 ).
Torej za vsak k velja (cos x)(k)(x) = cos(x+ k · π2 ).
Za f(x) = lnx po vrsti izracunamo
(lnx)′ =1
x= x−1
(lnx)′′ = −x−2
(lnx)′′′ = (−1)(−2)x−3 = 2x−3
...
(lnx)(k) = (−1)k−1(k − 1)!(1 + x)−k.
Zaporedne visje odvode izracunamo enako kot pri visjih odvodih potencne funkcije.
Za f(x) = ax pa je f ′(x) = ax ln a, od koder v splosnem sledi f (k)(x) = ax(ln a)k.
Za visje odvode ciklometricnih funkcij v splosnem ne obstajajo lepe formule.
8.6 Lastnosti odvedljivih funkcij
Naj bo f odvedljiva funkcija v tocki x0. Iz
limh→0
f(x0 + h) − f(x0)
h= f ′(x0)
sledi, da lahko zapisemo f(x0+h)−f(x0)h = f ′(x0) + η(h), kjer za funkcijo η velja lim
h→0η(h) = 0.
Ce je f ′(x0) 6= 0, je v enakosti
f(x0 + h) − f(x0) = h(f ′(x0) + η(h))
predznak vsote f ′(x0)+η(h) dolocen s predznakom stevila f ′(x0) in se za majhne h ne spreminja.(Obstaja namrec tak δ > 0, da je |f ′(x0)| > |η(h)| za vse |h| < δ.)
Ce je f ′(x0) > 0, izf(x0 + h) − f(x0) = h(f ′(x0) + η(h))
sledi, da za majhne h veljaf(x0 + h) > f(x0) ⇐⇒ h > 0.
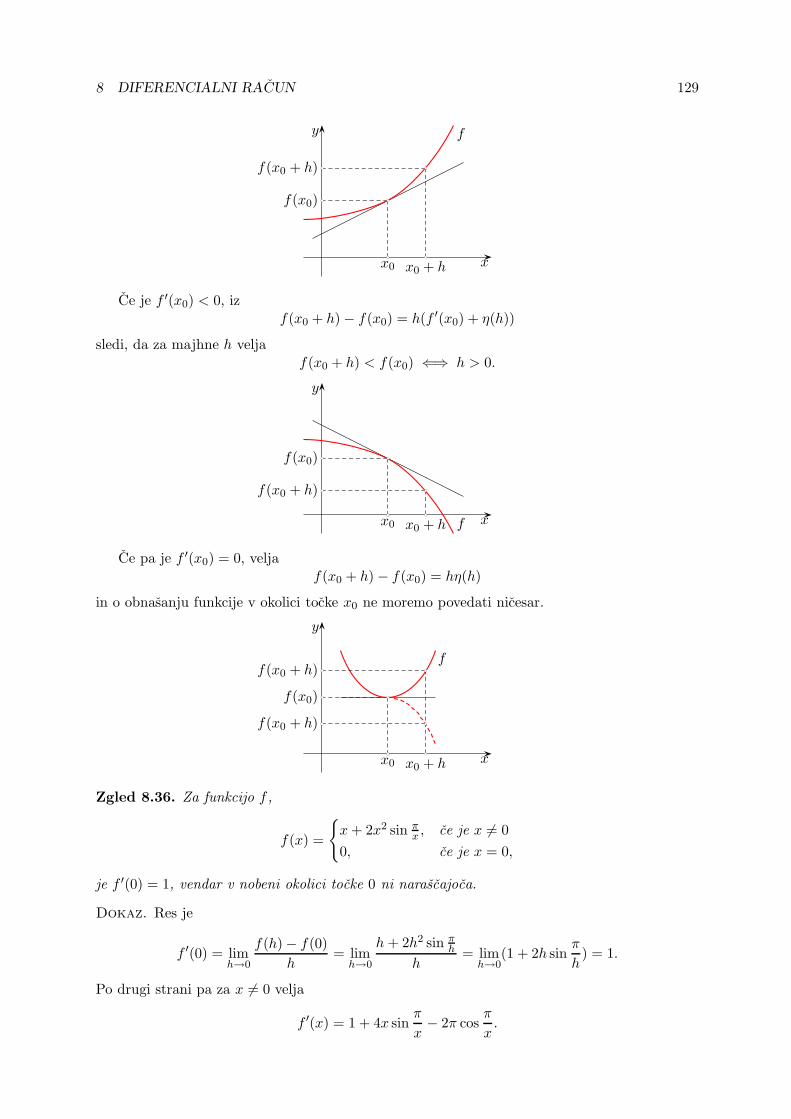
8 DIFERENCIALNI RACUN 129
x0
f(x0)
x0 + h
f(x0 + h)
x
y f
bcbc
bcbc
bc
bc bc
Ce je f ′(x0) < 0, izf(x0 + h) − f(x0) = h(f ′(x0) + η(h))
sledi, da za majhne h veljaf(x0 + h) < f(x0) ⇐⇒ h > 0.
x0
f(x0)
x0 + h
f(x0 + h)
x
y
fbcbc
bcbc
bc
bc bc
Ce pa je f ′(x0) = 0, veljaf(x0 + h) − f(x0) = hη(h)
in o obnasanju funkcije v okolici tocke x0 ne moremo povedati nicesar.
x0
f(x0)
x0 + h x
y
f(x0 + h)
f(x0 + h)
f
bcbc
bcbc
bc
bc
bc
bc
bc
Zgled 8.36. Za funkcijo f ,
f(x) =
{x+ 2x2 sin π
x , ce je x 6= 0
0, ce je x = 0,
je f ′(0) = 1, vendar v nobeni okolici tocke 0 ni narascajoca.
Dokaz. Res je
f ′(0) = limh→0
f(h) − f(0)
h= lim
h→0
h+ 2h2 sin πh
h= lim
h→0(1 + 2h sin
π
h) = 1.
Po drugi strani pa za x 6= 0 velja
f ′(x) = 1 + 4x sinπ
x− 2π cos
π
x.
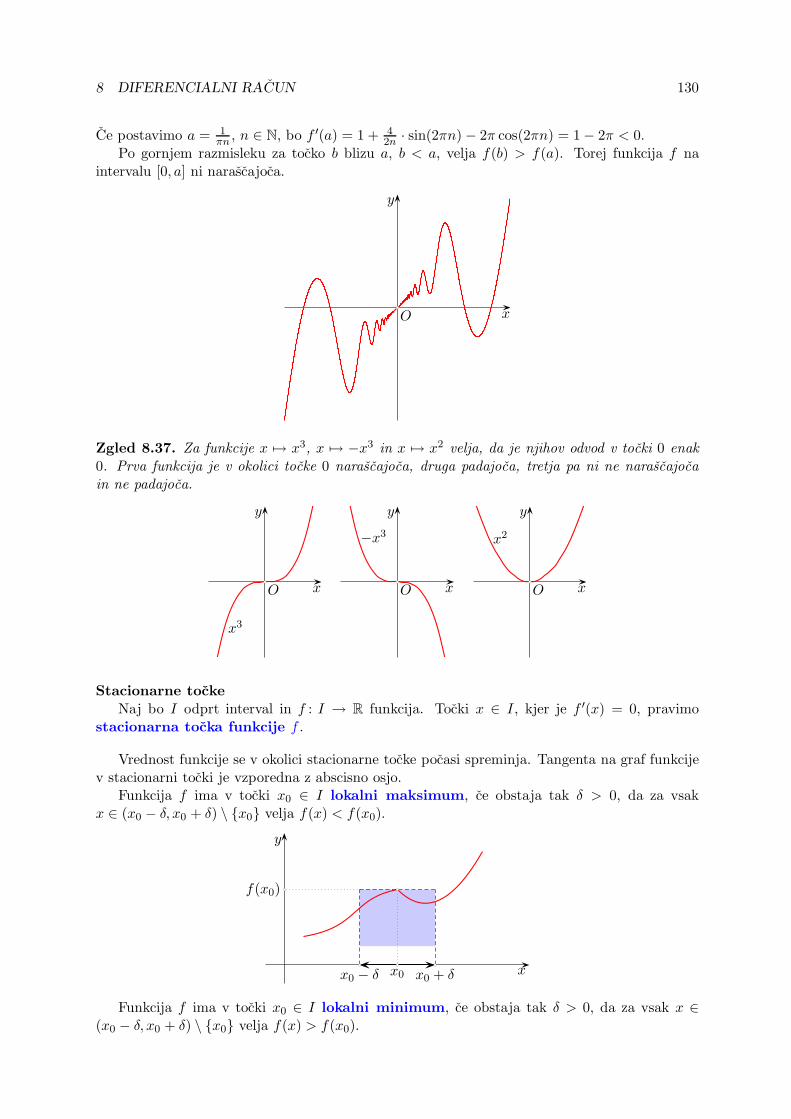
8 DIFERENCIALNI RACUN 130
Ce postavimo a = 1πn , n ∈ N, bo f ′(a) = 1 + 4
2n · sin(2πn) − 2π cos(2πn) = 1 − 2π < 0.Po gornjem razmisleku za tocko b blizu a, b < a, velja f(b) > f(a). Torej funkcija f na
intervalu [0, a] ni narascajoca.
x
y
bc
O
Zgled 8.37. Za funkcije x 7→ x3, x 7→ −x3 in x 7→ x2 velja, da je njihov odvod v tocki 0 enak0. Prva funkcija je v okolici tocke 0 narascajoca, druga padajoca, tretja pa ni ne narascajocain ne padajoca.
x
y
x3
bc
O x
y
−x3
bc
O x
y
x2
bc
O
Stacionarne tockeNaj bo I odprt interval in f : I → R funkcija. Tocki x ∈ I, kjer je f ′(x) = 0, pravimo
stacionarna tocka funkcije f .
Vrednost funkcije se v okolici stacionarne tocke pocasi spreminja. Tangenta na graf funkcijev stacionarni tocki je vzporedna z abscisno osjo.
Funkcija f ima v tocki x0 ∈ I lokalni maksimum, ce obstaja tak δ > 0, da za vsakx ∈ (x0 − δ, x0 + δ) \ {x0} velja f(x) < f(x0).
x0 − δ x0 + δx0
f(x0)
x
y
bc bc
bc
bc
bc
Funkcija f ima v tocki x0 ∈ I lokalni minimum, ce obstaja tak δ > 0, da za vsak x ∈(x0 − δ, x0 + δ) \ {x0} velja f(x) > f(x0).

8 DIFERENCIALNI RACUN 131
x0 − δ x0 + δx0
f(x0)
x
y
bc bc
bc
bc
bc
Ce ima funkcija f v tocki x0 lokalni maksimum ali lokalni minimum, pravimo, da ima f vtocki x0 lokalni ekstrem.
Izrek 8.38. Ce ima odvedljiva funkcija f v tocki x0 lokalni ekstrem, je f ′(x0) = 0.
Dokaz. Naj ima f v tocki x0 lokalni maksimum. Ce ima lokalni minimum, dokazemo trditevpodobno.
Naj bo torej f(x0 + h) < f(x0) za vse h blizu 0. Za h < 0 torej velja
f(x0+h)−f(x0)h > 0
in zato f ′L(x0) = limh↑0
f(x0+h)−f(x0)h ≥ 0. Za h > 0 pa velja
f(x0+h)−f(x0)h < 0
in zato f ′D(x0) = limh↓0
f(x0+h)−f(x0)h ≤ 0. Ker je f ′(x0) = f ′L(x0) ≥ 0 in f ′(x0) = f ′D(x0) ≤ 0, od
tod sledi f ′(x0) = 0.Odvedljiva funkcija ima lahko ekstreme le v stacionarnih tockah. Kot kaze funkcija x 7→ x3,
pa obrat ne drzi. Tocka x = 0 je stacionarna, vendar je v okolici te tocke funkcija narascajoca.
xO
1
−1
y
1
−1x3
bc
bc
bc
bcbc
V gornjem izreku predpostavke o odvedljivosti ne smemo izpustiti. Funkcija x 7→ 3√x2 ima v
tocki x = 0 lokalni minimum, a ni odvedljiva. Prav tako ima tudi funkcija x 7→√
4 − x2 lokalnaminima v tockah x = ±2, a sta ti dve tocki na robu definicijskega obmocja in zato funkcija vteh dveh tockah ni odvedljiva.
xO
1
y
1−1
3√x2
bc
bc
bc
bcbc
xO
2y
2−2
√4 − x2
bc
bc
bb
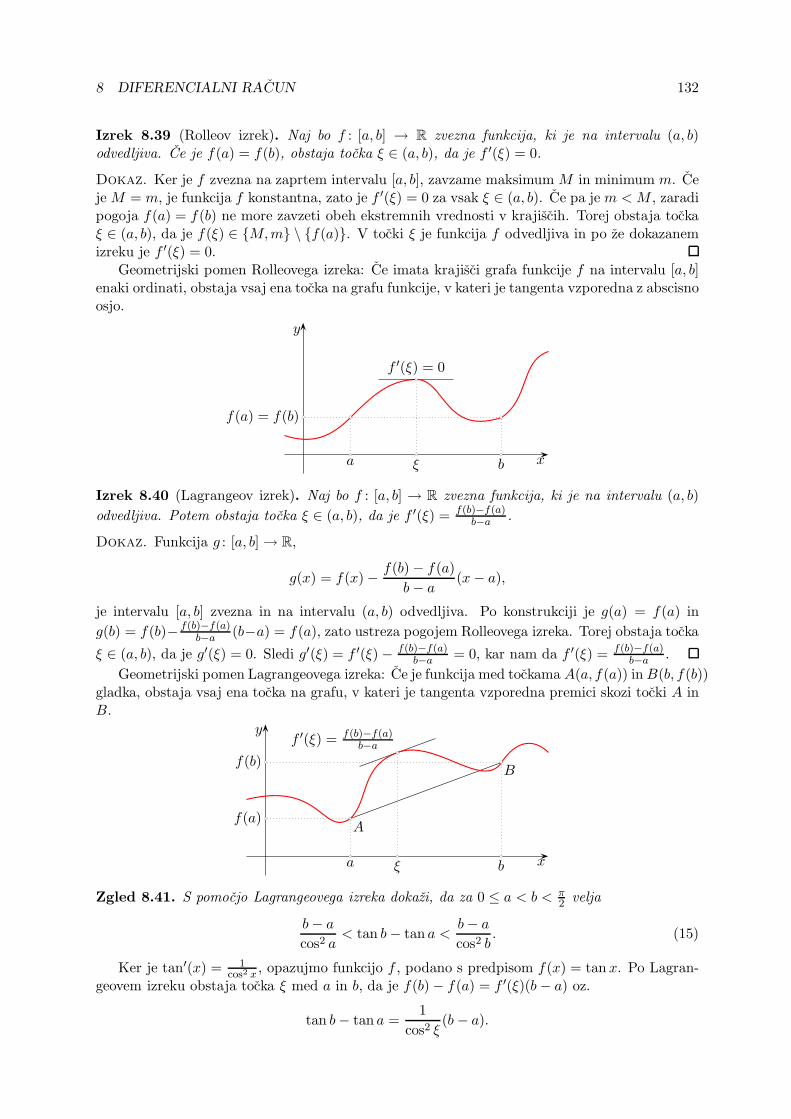
8 DIFERENCIALNI RACUN 132
Izrek 8.39 (Rolleov izrek). Naj bo f : [a, b] → R zvezna funkcija, ki je na intervalu (a, b)odvedljiva. Ce je f(a) = f(b), obstaja tocka ξ ∈ (a, b), da je f ′(ξ) = 0.
Dokaz. Ker je f zvezna na zaprtem intervalu [a, b], zavzame maksimum M in minimum m. Ceje M = m, je funkcija f konstantna, zato je f ′(ξ) = 0 za vsak ξ ∈ (a, b). Ce pa je m <M , zaradipogoja f(a) = f(b) ne more zavzeti obeh ekstremnih vrednosti v krajiscih. Torej obstaja tockaξ ∈ (a, b), da je f(ξ) ∈ {M,m} \ {f(a)}. V tocki ξ je funkcija f odvedljiva in po ze dokazanemizreku je f ′(ξ) = 0.
Geometrijski pomen Rolleovega izreka: Ce imata krajisci grafa funkcije f na intervalu [a, b]enaki ordinati, obstaja vsaj ena tocka na grafu funkcije, v kateri je tangenta vzporedna z abscisnoosjo.
a bξ
f ′(ξ) = 0
f(a) = f(b)
x
y
bc bc
bc
bc
bc bc bc
Izrek 8.40 (Lagrangeov izrek). Naj bo f : [a, b] → R zvezna funkcija, ki je na intervalu (a, b)
odvedljiva. Potem obstaja tocka ξ ∈ (a, b), da je f ′(ξ) = f(b)−f(a)b−a .
Dokaz. Funkcija g : [a, b] → R,
g(x) = f(x) − f(b) − f(a)
b− a(x− a),
je intervalu [a, b] zvezna in na intervalu (a, b) odvedljiva. Po konstrukciji je g(a) = f(a) in
g(b) = f(b)− f(b)−f(a)b−a (b−a) = f(a), zato ustreza pogojem Rolleovega izreka. Torej obstaja tocka
ξ ∈ (a, b), da je g′(ξ) = 0. Sledi g′(ξ) = f ′(ξ) − f(b)−f(a)b−a = 0, kar nam da f ′(ξ) = f(b)−f(a)
b−a .
Geometrijski pomen Lagrangeovega izreka: Ce je funkcija med tockama A(a, f(a)) inB(b, f(b))gladka, obstaja vsaj ena tocka na grafu, v kateri je tangenta vzporedna premici skozi tocki A inB.
a bξ
f ′(ξ) = f(b)−f(a)b−a
f(a)
f(b)
x
y
A
B
bc
bc
bc
bc
bc
bc
bc
bc
Zgled 8.41. S pomocjo Lagrangeovega izreka dokazi, da za 0 ≤ a < b < π2 velja
b− a
cos2 a< tan b− tan a <
b− a
cos2 b. (15)
Ker je tan′(x) = 1cos2 x , opazujmo funkcijo f , podano s predpisom f(x) = tan x. Po Lagran-
geovem izreku obstaja tocka ξ med a in b, da je f(b) − f(a) = f ′(ξ)(b− a) oz.
tan b− tan a =1
cos2 ξ(b− a).

8 DIFERENCIALNI RACUN 133
Ker je funkcija cos na intervalu [0, π2 ) pozitivna in padajoca, je funkcija x 7→ 1
cos2 xnarascajoca,
zato za a < ξ < b velja1
cos2 a<
1
cos2 ξ<
1
cos2 b.
Ko slednje pomozimo z b− a, dobimo zeleno neenakost (15).
Posledica 8.42. Ce je funkcija f na intervalu [a, b] zvezna, na intervalu (a, b) odvedljiva in jef ′(x) = 0 za vsak x ∈ (a, b), je f konstantna.
Dokaz. Vzemimo poljuben x ∈ (a, b). Po Lagrangeovem izreku za funkcijo f na intervalu [a, x],
obstaja ξ ∈ (a, x), da je f ′(ξ) = f(x)−f(a)x−a . Ker je f ′(ξ) = 0, je f(x) = f(a). Zaradi zveznosti je
f(b) = limx↑b
f(x) = f(a). Torej je res funkcija na intervalu [a, b] konstantna.
Posledica 8.43. Ce sta funkciji f in g na intervalu [a, b] zvezni, na intervalu (a, b) odvedljivi inje f ′(x) = g′(x) za vsak x ∈ (a, b), obstaja konstanta c, da je g(x) = f(x) + c za vsak x ∈ [a, b].
Dokaz. Funkcija h = g − f ustreza pogojem prejsnje trditve, zato je g − f konstanta, recimoc. Torej je g(x) − f(x) = c oz. g(x) = f(x) + c za vsak x ∈ [a, b].
Gornjo trditev lahko enostavno povemo tudi takole: ce imata funkciji enaka odvoda, se raz-likujeta le za konstanto. Pri uporabi gornje trditve pa je potrebno paziti, da sta funkciji resdefinirani na intervalih.
Zgled 8.44. Zapisi zvezo med arc cos x in arc sinx.
Resitev. Oznacimo f(x) = arc cos x in g(x) = arc sinx. Ker je f ′(x) = − 1√1−x2
in g′(x) =1√
1−x2, se odvoda funkcij x 7→ −f(x) in x 7→ g(x) ujemata. Po zgornji trditvi je zato g(x) =
−f(x) + c oz.arc sinx = − arc cos x+ c. (16)
Ko vstavimo primeren x, npr. x = 0, dobimo arc sin 0 = − arc cos 0+c in od tod c = arc cos 0 = π2 .
Slediarc cos x+ arc sinx =
π
2.
Zgled 8.45. Skiciraj grafe funkcij, podane s predpisi f(x) = arc tan x, g(x) = 12 arc tan 2x
1−x2 in
h(x) = − arc tan x+1x−1 .
Resitev. Najprej opazimo, da je Df = R, Dg = R \ {−1, 1} in Dh = R \ {1}. Ker jef ′(x) = 1
x2+1= g′(x) = h′(x), se funkcije na intervalih, ki so v presekih definicijskih obmocij,
razlikujejo za konstante.
F (x) F (0) limx→−∞
F (x) limx→∞
F (x)
f(x) = arc tan x 0 −π2
π2
g(x) = 12 arc tan 2x
1−x2 0 0 0
h(x) = − arc tan x+1x−1
π4 −π
4 −π4
Iz tabele torej vidimo, da dobimo grafa funkcij g in h tako, da vzporedno premaknemoposamezne dele grafov funkcije f .
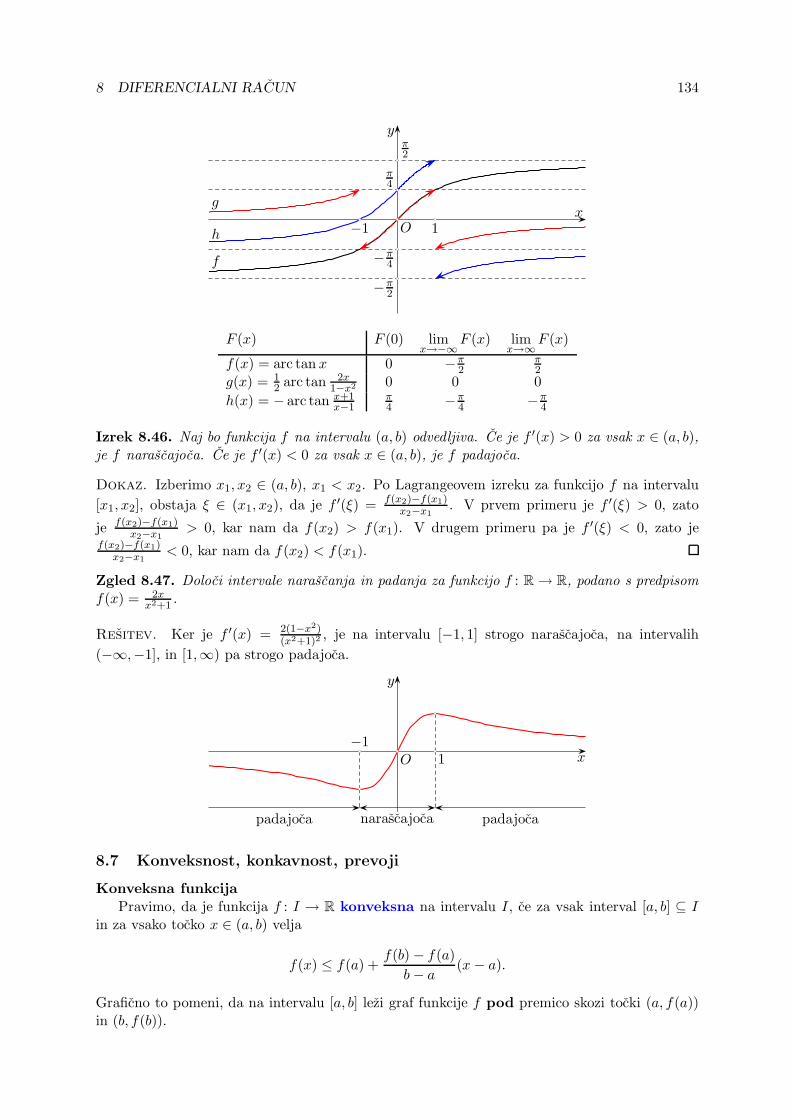
8 DIFERENCIALNI RACUN 134
x
y
bc
O
f
h
g
bc
π2
bc
−π2
bc
π4
bc
−π4
bc
1bc
−1
F (x) F (0) limx→−∞
F (x) limx→∞
F (x)
f(x) = arc tan x 0 −π2
π2
g(x) = 12 arc tan 2x
1−x2 0 0 0
h(x) = − arc tan x+1x−1
π4 −π
4 −π4
Izrek 8.46. Naj bo funkcija f na intervalu (a, b) odvedljiva. Ce je f ′(x) > 0 za vsak x ∈ (a, b),je f narascajoca. Ce je f ′(x) < 0 za vsak x ∈ (a, b), je f padajoca.
Dokaz. Izberimo x1, x2 ∈ (a, b), x1 < x2. Po Lagrangeovem izreku za funkcijo f na intervalu
[x1, x2], obstaja ξ ∈ (x1, x2), da je f ′(ξ) = f(x2)−f(x1)x2−x1
. V prvem primeru je f ′(ξ) > 0, zato
je f(x2)−f(x1)x2−x1
> 0, kar nam da f(x2) > f(x1). V drugem primeru pa je f ′(ξ) < 0, zato jef(x2)−f(x1)
x2−x1< 0, kar nam da f(x2) < f(x1).
Zgled 8.47. Doloci intervale narascanja in padanja za funkcijo f : R → R, podano s predpisomf(x) = 2x
x2+1.
Resitev. Ker je f ′(x) = 2(1−x2)(x2+1)2
, je na intervalu [−1, 1] strogo narascajoca, na intervalih
(−∞,−1], in [1,∞) pa strogo padajoca.
x
y
bc
O
bc
bc
padajocanarascajocapadajoca
bc
1bc
−1
8.7 Konveksnost, konkavnost, prevoji
Konveksna funkcijaPravimo, da je funkcija f : I → R konveksna na intervalu I, ce za vsak interval [a, b] ⊆ I
in za vsako tocko x ∈ (a, b) velja
f(x) ≤ f(a) +f(b) − f(a)
b− a(x− a).
Graficno to pomeni, da na intervalu [a, b] lezi graf funkcije f pod premico skozi tocki (a, f(a))in (b, f(b)).
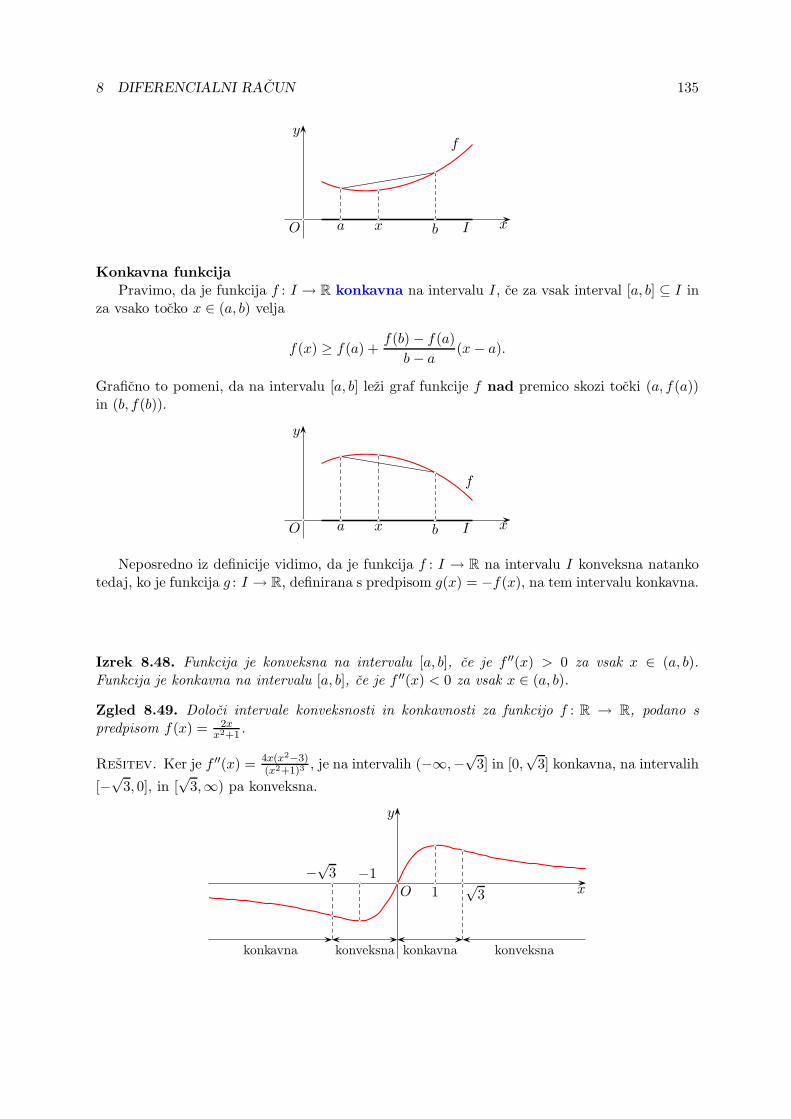
8 DIFERENCIALNI RACUN 135
xa b
f
x I
y
Obc
bc
bc
bcbc
bc
bc
Konkavna funkcijaPravimo, da je funkcija f : I → R konkavna na intervalu I, ce za vsak interval [a, b] ⊆ I in
za vsako tocko x ∈ (a, b) velja
f(x) ≥ f(a) +f(b) − f(a)
b− a(x− a).
Graficno to pomeni, da na intervalu [a, b] lezi graf funkcije f nad premico skozi tocki (a, f(a))in (b, f(b)).
xa b
f
Ix
y
Obc
bc
bc
bcbc
bc
bc
Neposredno iz definicije vidimo, da je funkcija f : I → R na intervalu I konveksna natankotedaj, ko je funkcija g : I → R, definirana s predpisom g(x) = −f(x), na tem intervalu konkavna.
Izrek 8.48. Funkcija je konveksna na intervalu [a, b], ce je f ′′(x) > 0 za vsak x ∈ (a, b).Funkcija je konkavna na intervalu [a, b], ce je f ′′(x) < 0 za vsak x ∈ (a, b).
Zgled 8.49. Doloci intervale konveksnosti in konkavnosti za funkcijo f : R → R, podano spredpisom f(x) = 2x
x2+1 .
Resitev. Ker je f ′′(x) = 4x(x2−3)(x2+1)3 , je na intervalih (−∞,−
√3] in [0,
√3] konkavna, na intervalih
[−√
3, 0], in [√
3,∞) pa konveksna.
x
y
bc
O
bc
bc
bc
bc
konkavna konveksna konkavna konveksna
bc
1bc
−1bc√
3bc
−√
3

8 DIFERENCIALNI RACUN 136
Prevoj funkcijeNaj bo f : I → R funkcija. Tocka x ∈ I je prevoj funkcije f , ce se funkcija v njej spremeni
iz konveksne v konkavno ali obratno.
xx
y
O
f
konkavna konveksnabcbc
bc
Izrek 8.50. Naj bo f : I → R dvakrat odvedljiva funkcija. Ce je f ′′(x) = 0 in f ′′ spremenipredznak pri prehodu cez tocko x, je tocka x prevoj funkcije f .
Torej v prevojni tocki graf funkcije seka tangento na graf funkcije v tej tocki.
xx
y
O
f
bcbc
bc
Zgled 8.51. Doloci obmocje konveksnosti, konkavnosti in prevoje za funkcijo f , podano s pred-pisom f(x) = 1
4(x2 − 9)(x2 − 1).
xO
y
94
−119
√53−
√53
1−1 3−3
konveksna konveksnakonkavna
bc
bc
bc
bcbc bcbc bc bc
bc bc
Resitev. Po vrsti izracunamo
f(x) = 14(x4 − 10x2 + 1),
f ′(x) = x3 − 5x,
f ′′(x) = 3x2 − 5.
Torej sta prevoja v tockah x = ±√
53 . Funkcija konveksna
na intervalih (−∞,−√
53 ) in (
√53 ,∞), konkavna pa na
intervalu (−√
53 ,√
53).
8.8 Ekstremi funkcij
Spomnimo se, da za odvedljivo funkcijo f v lokalnem ekstremu x0 velja f ′(x0) = 0. Ali veljaobrat, tj. ali lahko iz pogoja f ′(x0) = 0 sklepamo, da ima funkcija f je v tocki x0 lokalni ekstrem?
Izrek 8.52. Naj bo x0 stacionarna tocka funkcije f .
1. Ce obstaja δ > 0, da je f ′(x) > 0 za x ∈ (x0 − δ, x0) in f ′(x) < 0 za x ∈ (x0, x0 + δ), imafunkcija f v tocki x0 lokalni maksimum.
2. Ce obstaja δ > 0, da je f ′(x) < 0 za x ∈ (x0 − δ, x0) in f ′(x) > 0 za x ∈ (x0, x0 + δ), imafunkcija f v tocki x0 lokalni minimum.
3. Ce obstaja δ > 0, da je f ′(x) enakega predznaka za vse x ∈ (x0 − δ, x0 + δ) \ {x0}, funkcijaf v tocki x0 nima lokalnega ekstrema.

8 DIFERENCIALNI RACUN 137
Po izreku 8.46 je funkcija narascajoca, ce je f ′ > 0 in padajoca, ce je f ′ < 0.
V prvem primeru je f na intervalu (x0 − δ, x0) narascajoca, zato je f(x) < f(x0) za x0 − δ <x < x0. Podobno je f na intervalu (x0, x0+δ) padajoca, zato je f(x0) > f(x) za x0 < x < x0+δ.Torej je f(x) > f(x0) za vsak x ∈ (x0 − δ, x0 + δ) \ {x0} in je x0 lokalni maksimum.
Drugi primer dokazemo podobno kot prvi.
V tretjem primeru pa npr. vzemimo, da je f ′(x) > 0 za x ∈ (x0 − δ, x0 + δ) \ {x0}. Potem jena intervalih (x0 − δ, x0) in (x0, x0 + δ) funkcija f narascajoca, kar pomeni, da je
f(x1) < f(x0) < f(x2)
za vsak x1 ∈ (x0−δ, x0) in vsak x2 ∈ (x0, x0 +δ). Torej v tocki x0 funkcija f nima ekstrema.Pri prehodu preko stacionarne tocke so mozne stiri kombinacije predznakov odvoda in dve
od teh nam dasta lokalni ekstrem, v drugih dveh primerih pa ekstrema ni.
f ′ se spremeni:+−→ x0
−−→ lokalni maksimum
f ′ se spremeni:−−→ x0
+−→ lokalni minimum
f ′ se spremeni:+−→ x0
+−→ ni ekstrema
f ′ se spremeni:−−→ x0
−−→ ni ekstrema
+−→ x0−−→ −−→ x0
+−→ +−→ x0+−→ −−→ x0
−−→
bc bc bc bc
Zgled 8.53. Karakteriziraj vse stacionarne tocke funkcije, podane s predpisom f(x) = x2+4x+1.
xO
−3
y
−2bc
bcbc
bc
Resitev. Ker jef ′(x) = 2x+ 4,
je edina stacionarna tocka pri x0 = −2. Iz zapisa f ′(x) = 2(x + 2)sledi, da je f ′(x) < 0 za x < −2 in f ′(x) > 0 za x > −2. Torej imamoprehod oblike
−−→ x0+−→,
ki nam da lokalni minimum.
Zgled 8.54. Poisci vse ekstreme funkcije, podane s predpisom f(x) = x3 − x2 − x+ 1.
xO
3227
y
1−13
bc bc
bc
bc
Resitev. Izracunajmo odvod:
f ′(x) = 3x2 − 2x− 1.
Ker je 3x2 − 2x− 1 = (3x+ 1)(x− 1), vidimo od tod, da je f ′(x) = 0za x1 = −1
3 in x2 = 1.Ce je x < x1, je f ′(x) > 0. Ce je x1 < x < x2, je f ′(x) < 0. Ce paje x2 < x, je spet f ′(x) > 0. Pri stacionarni tocki x1 = −1
3 imamo
torej prehod oblike+−→ x1
−−→, ki nam da lokalni maksimum. Pri
stacionarni tocki x2 = 1 pa imamo prehod oblike−−→ x2
+−→, ki nam da lokalni minimum.
Zgled 8.55. Poisci vse ekstreme funkcije, podane s predpisom f(x) = (2x+ 1)5.
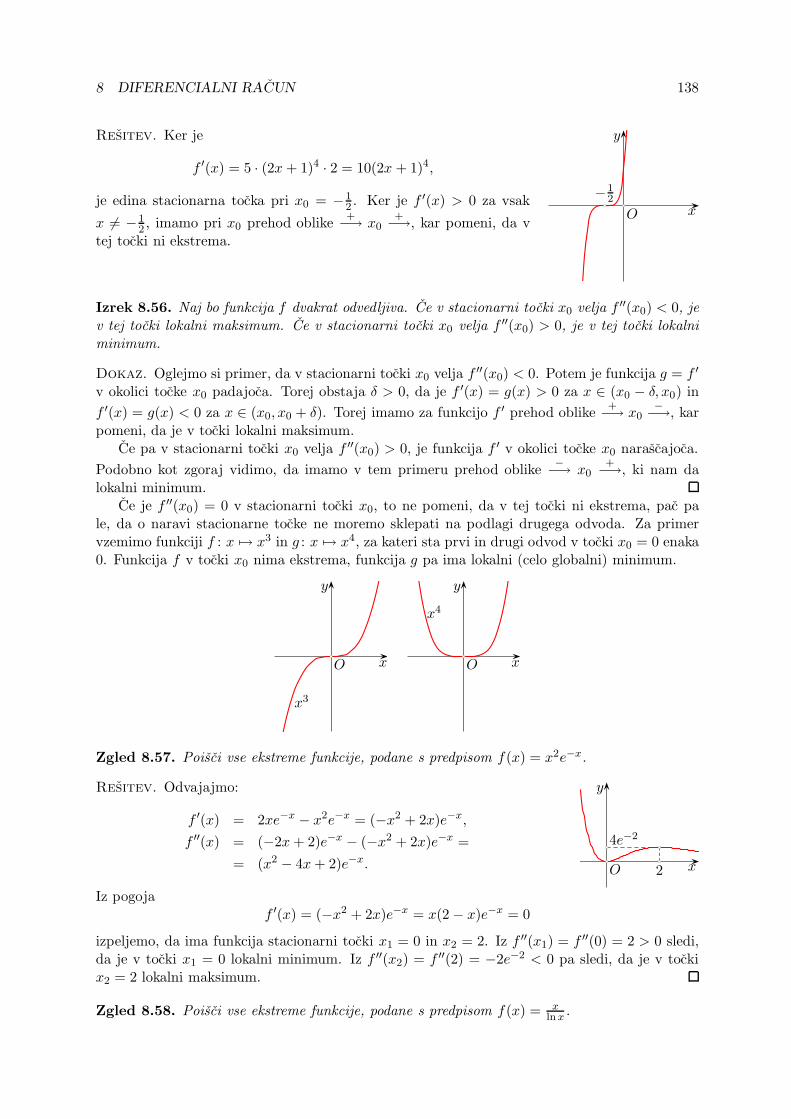
8 DIFERENCIALNI RACUN 138
xO
y
−12
bcbc
Resitev. Ker je
f ′(x) = 5 · (2x+ 1)4 · 2 = 10(2x + 1)4,
je edina stacionarna tocka pri x0 = −12 . Ker je f ′(x) > 0 za vsak
x 6= −12 , imamo pri x0 prehod oblike
+−→ x0+−→, kar pomeni, da v
tej tocki ni ekstrema.
Izrek 8.56. Naj bo funkcija f dvakrat odvedljiva. Ce v stacionarni tocki x0 velja f ′′(x0) < 0, jev tej tocki lokalni maksimum. Ce v stacionarni tocki x0 velja f ′′(x0) > 0, je v tej tocki lokalniminimum.
Dokaz. Oglejmo si primer, da v stacionarni tocki x0 velja f ′′(x0) < 0. Potem je funkcija g = f ′
v okolici tocke x0 padajoca. Torej obstaja δ > 0, da je f ′(x) = g(x) > 0 za x ∈ (x0 − δ, x0) in
f ′(x) = g(x) < 0 za x ∈ (x0, x0 + δ). Torej imamo za funkcijo f ′ prehod oblike+−→ x0
−−→, karpomeni, da je v tocki lokalni maksimum.
Ce pa v stacionarni tocki x0 velja f ′′(x0) > 0, je funkcija f ′ v okolici tocke x0 narascajoca.
Podobno kot zgoraj vidimo, da imamo v tem primeru prehod oblike−−→ x0
+−→, ki nam dalokalni minimum.
Ce je f ′′(x0) = 0 v stacionarni tocki x0, to ne pomeni, da v tej tocki ni ekstrema, pac pale, da o naravi stacionarne tocke ne moremo sklepati na podlagi drugega odvoda. Za primervzemimo funkciji f : x 7→ x3 in g : x 7→ x4, za kateri sta prvi in drugi odvod v tocki x0 = 0 enaka0. Funkcija f v tocki x0 nima ekstrema, funkcija g pa ima lokalni (celo globalni) minimum.
x
y
x3
bc
O x
y
x4
bc
O
Zgled 8.57. Poisci vse ekstreme funkcije, podane s predpisom f(x) = x2e−x.
xO
y
2
4e−2
bc
bc
bc
bc
Resitev. Odvajajmo:
f ′(x) = 2xe−x − x2e−x = (−x2 + 2x)e−x,
f ′′(x) = (−2x+ 2)e−x − (−x2 + 2x)e−x =
= (x2 − 4x+ 2)e−x.
Iz pogojaf ′(x) = (−x2 + 2x)e−x = x(2 − x)e−x = 0
izpeljemo, da ima funkcija stacionarni tocki x1 = 0 in x2 = 2. Iz f ′′(x1) = f ′′(0) = 2 > 0 sledi,da je v tocki x1 = 0 lokalni minimum. Iz f ′′(x2) = f ′′(2) = −2e−2 < 0 pa sledi, da je v tockix2 = 2 lokalni maksimum.
Zgled 8.58. Poisci vse ekstreme funkcije, podane s predpisom f(x) = xln x .
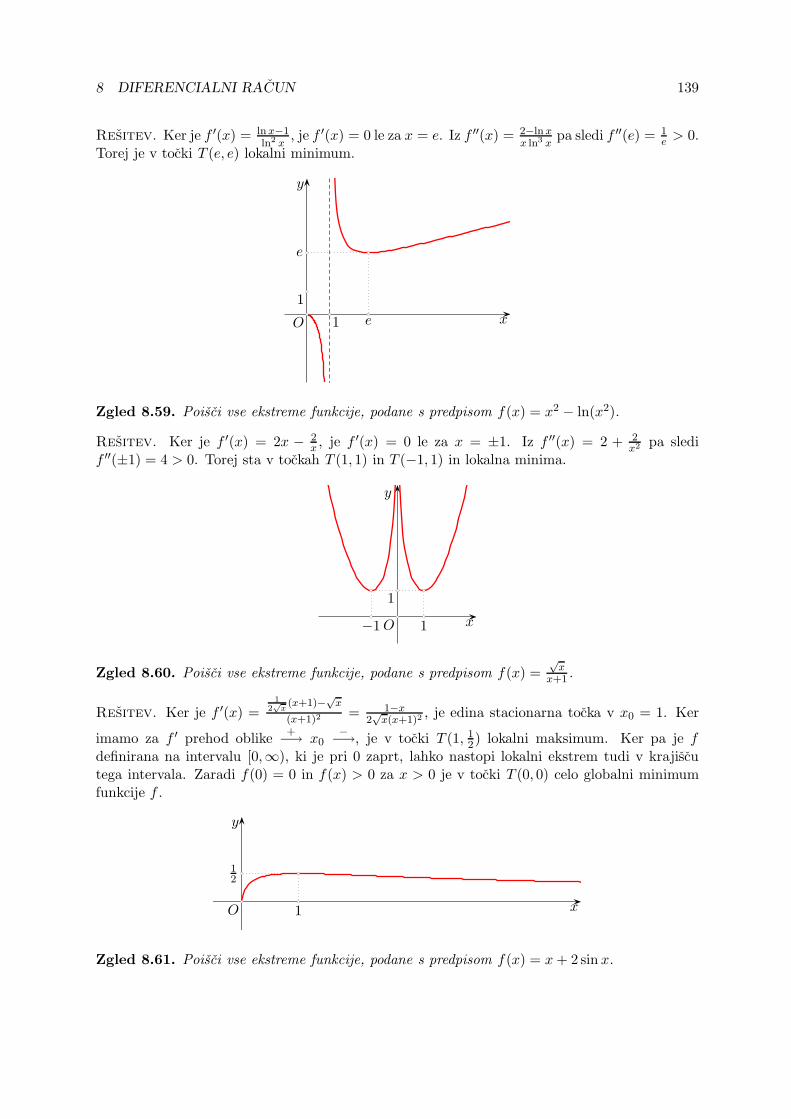
8 DIFERENCIALNI RACUN 139
Resitev. Ker je f ′(x) = ln x−1ln2 x
, je f ′(x) = 0 le za x = e. Iz f ′′(x) = 2−ln xx ln3 x
pa sledi f ′′(e) = 1e > 0.
Torej je v tocki T (e, e) lokalni minimum.
xO
1
y
1 e
e bc
bc
bc
bc
bc
bc
Zgled 8.59. Poisci vse ekstreme funkcije, podane s predpisom f(x) = x2 − ln(x2).
Resitev. Ker je f ′(x) = 2x − 2x , je f ′(x) = 0 le za x = ±1. Iz f ′′(x) = 2 + 2
x2 pa sledif ′′(±1) = 4 > 0. Torej sta v tockah T (1, 1) in T (−1, 1) in lokalna minima.
xO
1
y
1−1
bcbc
bc
bc
bcbc
Zgled 8.60. Poisci vse ekstreme funkcije, podane s predpisom f(x) =√
xx+1 .
Resitev. Ker je f ′(x) =1
2√
x(x+1)−√
x
(x+1)2= 1−x
2√
x(x+1)2, je edina stacionarna tocka v x0 = 1. Ker
imamo za f ′ prehod oblike+−→ x0
−−→, je v tocki T (1, 12) lokalni maksimum. Ker pa je f
definirana na intervalu [0,∞), ki je pri 0 zaprt, lahko nastopi lokalni ekstrem tudi v krajiscutega intervala. Zaradi f(0) = 0 in f(x) > 0 za x > 0 je v tocki T (0, 0) celo globalni minimumfunkcije f .
xO
12
y
1
bc
bc
bc
bc
Zgled 8.61. Poisci vse ekstreme funkcije, podane s predpisom f(x) = x+ 2 sin x.

8 DIFERENCIALNI RACUN 140
xO
y
2π3
4π3
−2π3−4π
3
8π3
−8π3
bc bcbcbc bcbc
bc
bc
bc
bc
bc
bc
bc
Resitev. Ker je f ′(x) = 1+2 cos x = 0 le za cos x = −12 ,
sledi
xk = 2π3 + 2kπ,
xk = 4π3 + 2kπ.
Velja f ′′(x) = −2 sinx. Ker je f ′′(xk) =√
32 > 0, je v teh
tockah lokalni maksimum. Ker je f ′′(xk) = −√
32 < 0, je
v teh tockah lokalni minimum.
Ekstrem zvezne funkcije na zaprtem intervaluNaj bo f : [a, b] → R zvezna funkcija. Potem funkcija f na zaprtem intervalu zavzame
najvecjo in najmanjso vrednst. Ce je funkcija f na odprtem intervalu (a, b) odvedljiva, jeekstremna tocka stacionarna. Ekstrem pa lahko doseze tudi v krajiscu intervala ali pa v tocki,kjer funkcija f sploh ni odvedljiva.
Povzemimo: Ce zavzame funkcija f v tocki x ∈ [a, b] ekstremno vrednost, je tocka x
• stacionarna tocka funkcije f ali
• krajisce intervala ali
• tocka, v kateri funkcija f ni odvedljiva.
Zgled 8.62. Poisci najvecjo in najmanjso vrednost funkcije f : [−1, 2] → R, podane s predpisomf(x) = x2.
xO
1
4
y
−1 2bc
bc
bc
bc
bc
bc
bc
Resitev. Stacionarna tocka je le ena sama: f ′(x) = 2x in f ′(x) = 0 leza x = 0. Ker je f ′′(0) = 2 > 0, je v tocki x = 0 lokalni minimum. Kerje f(x) ≥ 0 za vsak x, je v tocki x = 0 tudi globalni minimum. Kerje f na intervalu (−1, 2) povsod odvedljiva, si moramo ogledati le sevrednost v krajiscih: f(−1) = 1, f(2) = 4. Torej je najvecja vrednostfunkcije f enaka 4, funkcija pa to vrednost zavzame v tocki 2.
Zgled 8.63. Poisci najvecjo in najmanjso vrednost funkcije f : [0, 4] → R, podane s predpisomf(x) = x− 2
√x.
xO
y
−1
41bc
bc
bc
bc
bc
Resitev. Ker je f ′(x) = 1− 1√x, je x = 1 edina stacionarna
tocka. Velja f ′′(x) = 1
2√
x3in zaradi f ′′(1) = 1
2 > 0 je v tocki
T (1,−1) lokalni minimum.Vrednosti funkcije v krajiscu definicijskega obmocja staf(0) = 0 in f(4) = 0 in ker ni drugih moznosti za lokalneekstreme, sta to tudi edina lokalna maksima.Najvecja vrednost funkcije f je torej 0, najmanjsa pa −1.

8 DIFERENCIALNI RACUN 141
Zgled 8.64. Poisci najvecjo in najmanjso vrednost funkcije f : (0, 12 ] → R, podane s predpisom
f(x) = xx.
xO
y1
1e
12
1√2
1e√
e
bc
bc
bc
bcbc
bcbc
Resitev. Ker je f(x) = ex ln x, je
f ′(x) = ex ln x(lnx+ 1) = xx(lnx+ 1).
Torej je f ′(x) = 0 za x = e−1. Ker je
f ′′(x) = xx
(1
x+ (lnx+ 1)2
),
je zaradi f ′′(1e ) > 0 v tocki x = 1
e lokalni minimum. Lokalni maksimum
je v desnem krajiscu. Zaradi (12 )
12 = 1√
2< 1 in lim
x↓0xx = 1, pa funkcija ne
zavzame najvecje vrednosti.
Zgled 8.65. Ali ima funkcija f : [0, 1] → R, podana s predpisom
f(x) =
{x2 sin π
x , ce je 0 < x ≤ 1
0, ce je x = 0,
lokalna ekstrema v tockah x = 0 in x = 1?
Resitev. Za x > 0 velja
f ′(x) = 2x sinπ
x+ x2 cos
π
x·(− π
x2
)= x2 sin
π
x− π cos
π
x,
zato je f ′L(1) = π in je v tocki x = 1 lokalni maksimum. Zaradi
f ′D(0) = limh↓0
f(h) − f(0)
h= lim
h↓0
h2 sin πh
h= 0
je funkcija f z desne odvedljiva v 0 in x = 0 je njena stacionarna tocka. Ker pa funkcija fzavzame pozitivne in negative vrednosti poljubno blizu tocke x = 0, v tej tocki ni lokalnegaekstrema.
x
y
bc
Obc
1
Povzemimo: Funkcija f : [0, 1] → R, podana s predpisom
f(x) =
{x2 sin π
x , ce je 0 < x ≤ 1
0, ce je x = 0,
ima lokalni maksimum v tocki x = 1, v tocki x = 0 pa nima ekstrema, ceprav je f ′D(0) = 0.
Zgled 8.66. Kateri pravokotnik z obsegom s ima najvecjo ploscino?
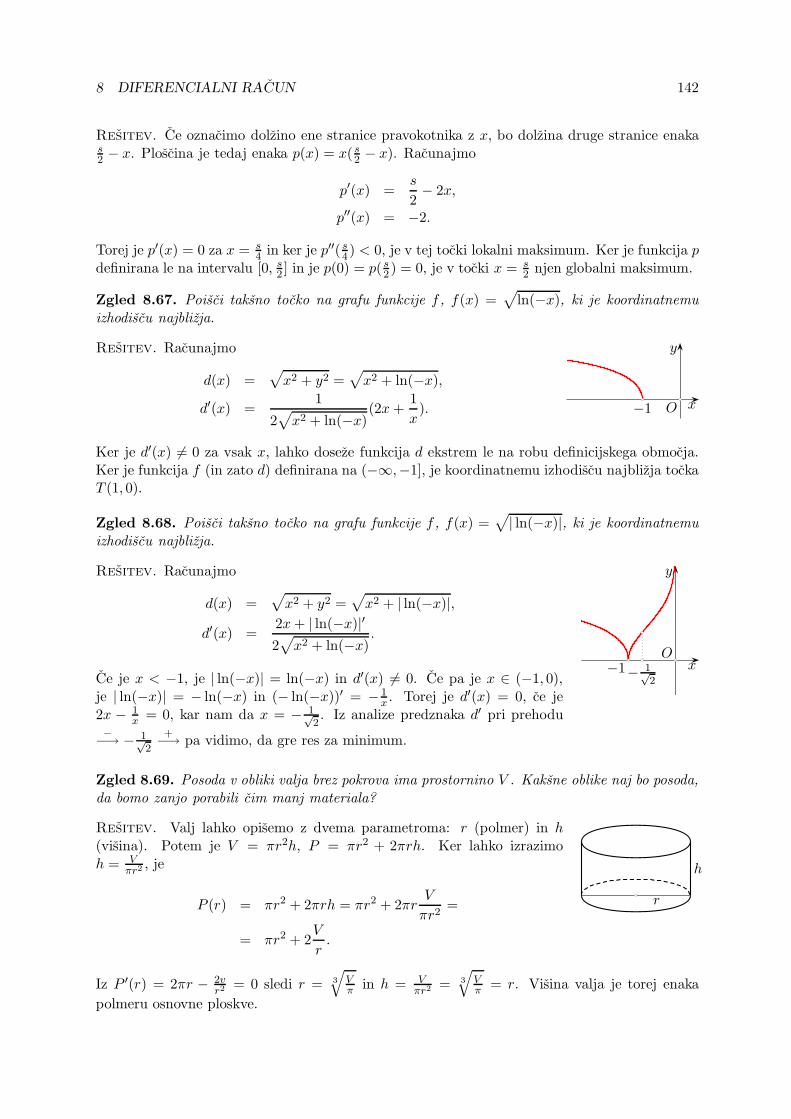
8 DIFERENCIALNI RACUN 142
Resitev. Ce oznacimo dolzino ene stranice pravokotnika z x, bo dolzina druge stranice enakas2 − x. Ploscina je tedaj enaka p(x) = x( s
2 − x). Racunajmo
p′(x) =s
2− 2x,
p′′(x) = −2.
Torej je p′(x) = 0 za x = s4 in ker je p′′( s
4 ) < 0, je v tej tocki lokalni maksimum. Ker je funkcija pdefinirana le na intervalu [0, s
2 ] in je p(0) = p( s2 ) = 0, je v tocki x = s
2 njen globalni maksimum.
Zgled 8.67. Poisci taksno tocko na grafu funkcije f , f(x) =√
ln(−x), ki je koordinatnemuizhodiscu najblizja.
xO
y
−1bcbc
Resitev. Racunajmo
d(x) =√x2 + y2 =
√x2 + ln(−x),
d′(x) =1
2√x2 + ln(−x)
(2x+1
x).
Ker je d′(x) 6= 0 za vsak x, lahko doseze funkcija d ekstrem le na robu definicijskega obmocja.Ker je funkcija f (in zato d) definirana na (−∞,−1], je koordinatnemu izhodiscu najblizja tockaT (1, 0).
Zgled 8.68. Poisci taksno tocko na grafu funkcije f , f(x) =√
| ln(−x)|, ki je koordinatnemuizhodiscu najblizja.
xO
y
−1− 1√2
bcbc bc
bc
Resitev. Racunajmo
d(x) =√x2 + y2 =
√x2 + | ln(−x)|,
d′(x) =2x+ | ln(−x)|′2√x2 + ln(−x)
.
Ce je x < −1, je | ln(−x)| = ln(−x) in d′(x) 6= 0. Ce pa je x ∈ (−1, 0),je | ln(−x)| = − ln(−x) in (− ln(−x))′ = − 1
x . Torej je d′(x) = 0, ce je2x − 1
x = 0, kar nam da x = − 1√2. Iz analize predznaka d′ pri prehodu
−−→ − 1√2
+−→ pa vidimo, da gre res za minimum.
Zgled 8.69. Posoda v obliki valja brez pokrova ima prostornino V . Kaksne oblike naj bo posoda,da bomo zanjo porabili cim manj materiala?
h
rbc
Resitev. Valj lahko opisemo z dvema parametroma: r (polmer) in h(visina). Potem je V = πr2h, P = πr2 + 2πrh. Ker lahko izrazimoh = V
πr2 , je
P (r) = πr2 + 2πrh = πr2 + 2πrV
πr2=
= πr2 + 2V
r.
Iz P ′(r) = 2πr − 2vr2 = 0 sledi r = 3
√Vπ in h = V
πr2 = 3
√Vπ = r. Visina valja je torej enaka
polmeru osnovne ploskve.

8 DIFERENCIALNI RACUN 143
Zgled 8.70. Kmet zeli ograditi svojo njivo v obliki pravokotnika. Ker je njiva ob ravni reki,jo je potrebno ograditi le s treh strani. Koliko lahko najvec meri povrsina njive, ce je porabil ametrov ograje?
Resitev.
x
a− 2x
Povrsina njive je enaka P (x) = x(a−2x) = ax−2x2. Torej je P ′(x) = 0 za a−4x = 0 in x = a4 .
Povrsina je tedaj enaka
P (a
4) =
a
4(a− 2 · a
4) =
1
8a2.
Zgled 8.71. Kanal sirine a se pravokotno stika s kanalom sirine b. Doloci dolzino najdaljse(tanke) palice, ki lahko priplava iz enega v drugi kanal.
b
a
d
ϕ
Resitev. Pri danem kotu ϕ je dolzina najdaljse palice, ki lahkopriplava iz enega v drugi kanal, enaka
d(ϕ) =a
cosϕ+
b
sinϕ.
Iscemo minimum te funkcije. Velja d′(ϕ) = asinϕ
cos2 ϕ− b
cosϕ
sin2 ϕ.
Ce je d′(ϕ) = 0, sledi tanϕ = 3
√ba . Potem je 1
cos ϕ =
√1 +
3
√(ba
)2
in 1sinϕ =
√1 + 3
√(ab
)2, od koder sledi d =
√(3√a2 +
3√b2)3
=
(a
23 + b
23
) 32. Tocka je res minimum, saj imamo pri d′(ϕ) =
a sin3 ϕ−b cos3 ϕcos2 ϕ sin2 ϕ
premeno tipa−−→ ϕ
+−→.
8.9 Risanje grafov funkcij
AsimptoteFunkcija g je asimptota funkcije f , ko gre x proti ∞, ce velja
limx→∞
(f(x) − g(x)) = 0.
Najpogosteje obravnamo linearne asimptote, tj. premice. Da bi bila premica z enacbo y =kx+ n asimptota, mora veljati
limx→∞
(f(x) − kx− n) = 0.
Torej je n = limx→∞
(f(x) − kx) = limx→∞
x(f(x)x − k). Ker limita lim
x→∞x(f(x)
x − k) obstaja, od tod
sledi, da je limx→∞
(f(x)x − k) = 0. Torej smo dokazali, da je
k = limx→∞
f(x)
x, n = lim
x→∞(f(x) − kx).

8 DIFERENCIALNI RACUN 144
Zgled 8.72. Zapisi enacbo posevne asimptote funkcije f , podane s predpisom f(x) = x2+1x−1 .
xO
1
y
−11
bc
bc
bcbc
Resitev. Racunajmo
k = limx→∞
f(x)
x= lim
x→∞x2 + 1
x(x− 1)= 1,
n = limx→∞
(f(x) − kx) = limx→∞
(x2 + 1
x− 1− x
)=
= limx→∞
x+ 1
x− 1= 1.
Enacba posevne asimptote se torej glasi y = kx + n = x + 1 in jeenaka tudi, ko gre x proti −∞.
Pri racionalnih funkcijah do posevne asimptote pridemo hitreje z deljenjem polinomov. Kerje x2 + 1 = (x− 1)(x+ 1) + 2, lahko v gornjem primeru zapisemo
x2 + 1
x− 1= (x+ 1) +
2
x− 1.
Ker je limx→∞
2x−1 = 0, velja lim
x→∞(f(x) − (x+ 1)) = 0 in je zato y = x+ 1 res posevna asimptota
funkcije f .
Z opisano metodo lahko pri racionalnih funkcijah poiscemo tudi polinomsko asimptoto.
Zgled 8.73. Dana je racionalna funkcija f , f(x) = x4
x2−1. Poisci polinom g, da bo lim
x→∞(f(x)−
g(x)) = 0.
xO1
y
−1 1bc
bc
bcbc
Resitev. Z deljenjem polinomov dobimo
x4 = (x2 + 1)(x2 − 1) + 1.
Torej je
f(x) = (x2 + 1) +1
x2 − 1.
Iskana polinomska asimptota je
g(x) = x2 + 1.
Risanje grafov funkcijPri risanju grafov funkcij obravnavamo naslednje elemente:
• definicijsko obmocje, nicle in pole funkcije,
• ekstreme funkcije,
• asimptote
• in po potrebi prevoje.

8 DIFERENCIALNI RACUN 145
Zgled 8.74. Narisi graf funkcije f , podane s predpisom f(x) = (1−x)3
(1+x)2.
Resitev. Definicijsko obmocje: Df = R \ {−1}, nicle: {1}, poli: {−1}. Ker je
f ′(x) =−3(1 − x)2(1 + x)2 − 2(1 − x)3(1 + x)
(1 + x)4=
= −(1 − x)2(x+ 5)
(1 + x)3,
sta x = −5 in x = 1 stacionarni tocki. Z analizo spremembe predznaka odvoda pri prehodupreko stacionarne tocke ugotovimo, da je pri x = −5 lokalni minimum, v tocki x = 1 pa niekstrema. Ker je
f ′′(x) =24(1 − x)
(1 + x)4,
je v tocki x = 1 prevoj.Z deljenjem ugotovimo:
−x3 + 3x2 − 3x+ 1 = (x2 + 2x+ 1)(−x+ 5) + (−12x− 4),
torej je
f(x) = (−x+ 5) − 12x+ 4
(x+ 1)2
in je y = −x+5 linearna asimptota. Ker je 12x+4 = 0 za x = −13 , seka funkcija svojo asimptoto
v tocki T (−13 ,
163 ).
xO
1
5
y
13.5
1−1
−55
bc
bc
bc
bcbc
bc bcbcbc
bc
T (−13 ,
163 )
Zgled 8.75. Narisi graf funkcije f , podane s predpisom f(x) =√
x3
x−2 .
Resitev. Definicijsko obmocje Df = (−∞, 0] ∪ (2,∞), nicle: {0}, poli: {2}. Z odvajanjem
dobimo f ′(x) = (x − 3)√
x(x−2)3
. Z analizo spremembe predznaka pri prehodu cez tocko x = 3
oz. pri x ↑ 0 ugotovimo, da ima f lokalna minima pri v tockah (0, 0) in (3, 3√
3). Opazimo, dase pri x = 0 graf dotika abscisne osi. Ker je f ′′(x) = 3√
x(x−2)5, funkcija nima prevojev.
Pokazimo, da ima funkcija ima dve linearni asimptoti:
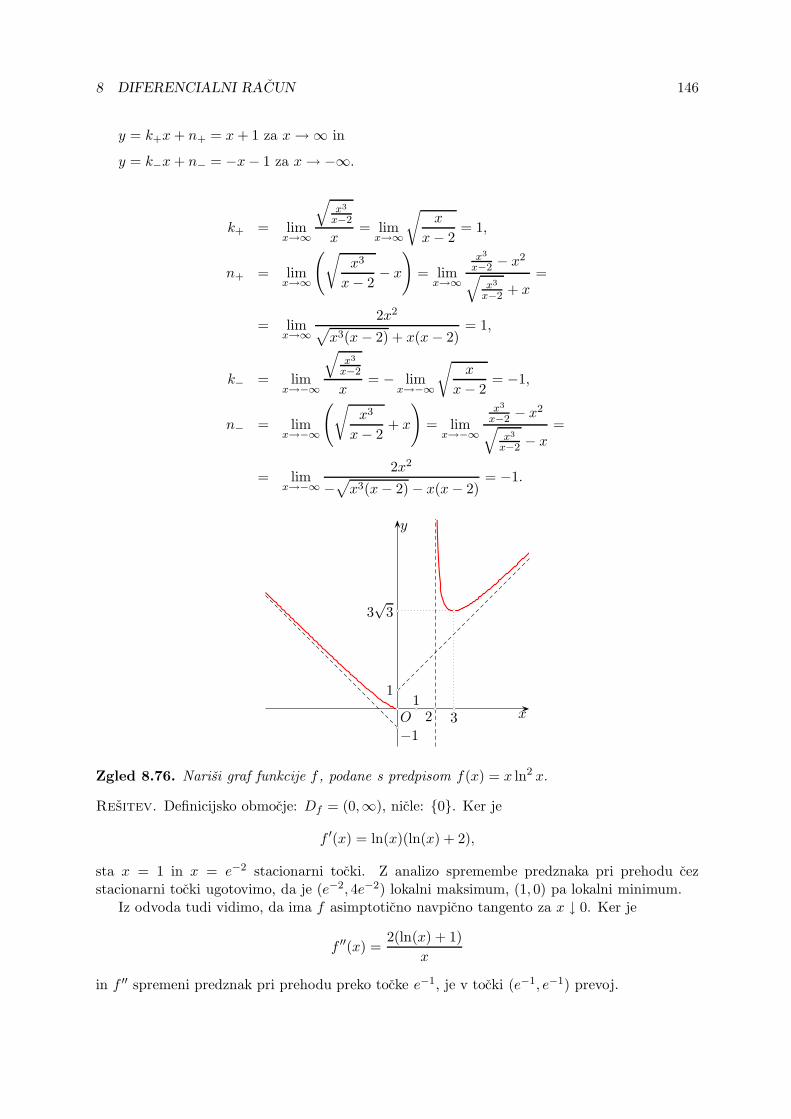
8 DIFERENCIALNI RACUN 146
y = k+x+ n+ = x+ 1 za x→ ∞ in
y = k−x+ n− = −x− 1 za x→ −∞.
k+ = limx→∞
√x3
x−2
x= lim
x→∞
√x
x− 2= 1,
n+ = limx→∞
(√x3
x− 2− x
)= lim
x→∞
x3
x−2 − x2
√x3
x−2 + x=
= limx→∞
2x2
√x3(x− 2) + x(x− 2)
= 1,
k− = limx→−∞
√x3
x−2
x= − lim
x→−∞
√x
x− 2= −1,
n− = limx→−∞
(√x3
x− 2+ x
)= lim
x→−∞
x3
x−2 − x2
√x3
x−2 − x=
= limx→−∞
2x2
−√x3(x− 2) − x(x− 2)
= −1.
xO
1
3√
3
−1
y
12 3
bcbc
bc
bc
bc
bc bc
bc
bc
bc
Zgled 8.76. Narisi graf funkcije f , podane s predpisom f(x) = x ln2 x.
Resitev. Definicijsko obmocje: Df = (0,∞), nicle: {0}. Ker je
f ′(x) = ln(x)(ln(x) + 2),
sta x = 1 in x = e−2 stacionarni tocki. Z analizo spremembe predznaka pri prehodu cezstacionarni tocki ugotovimo, da je (e−2, 4e−2) lokalni maksimum, (1, 0) pa lokalni minimum.
Iz odvoda tudi vidimo, da ima f asimptoticno navpicno tangento za x ↓ 0. Ker je
f ′′(x) =2(ln(x) + 1)
x
in f ′′ spremeni predznak pri prehodu preko tocke e−1, je v tocki (e−1, e−1) prevoj.
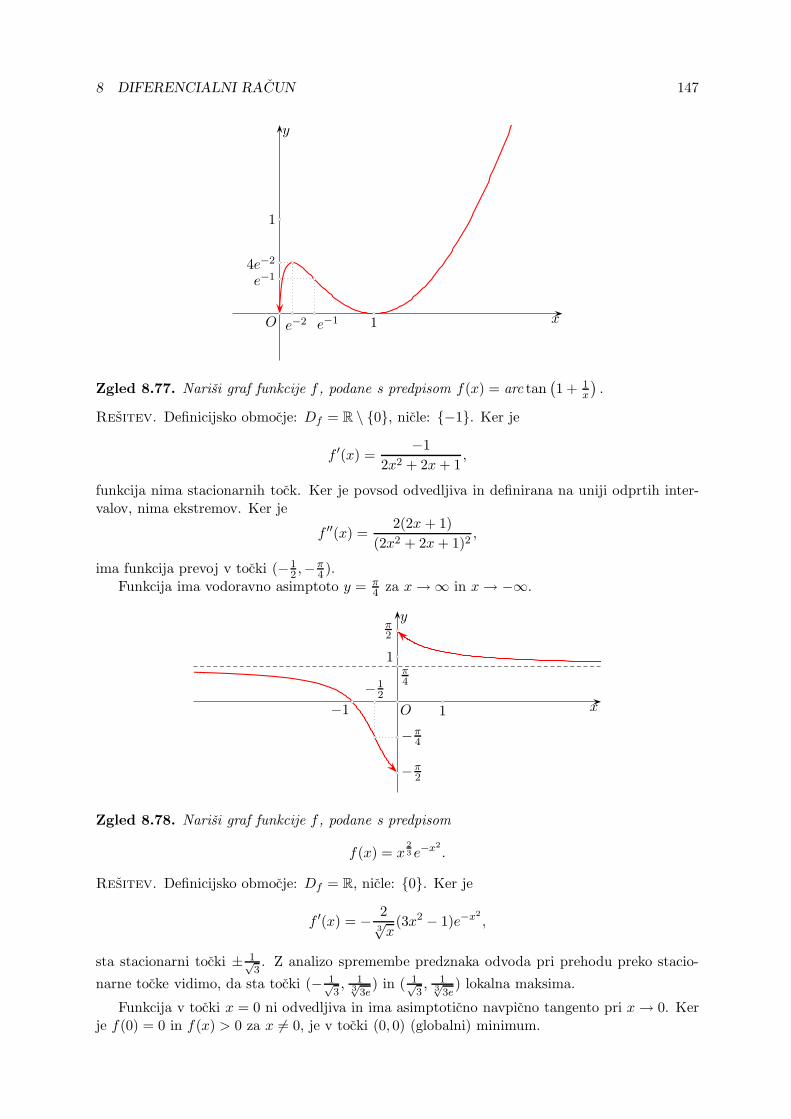
8 DIFERENCIALNI RACUN 147
xO
1
y
1e−1
e−1
e−2
4e−2
bc
bc
bc
bc
bc
bc
bc
bc
bc
Zgled 8.77. Narisi graf funkcije f , podane s predpisom f(x) = arc tan(1 + 1
x
).
Resitev. Definicijsko obmocje: Df = R \ {0}, nicle: {−1}. Ker je
f ′(x) =−1
2x2 + 2x+ 1,
funkcija nima stacionarnih tock. Ker je povsod odvedljiva in definirana na uniji odprtih inter-valov, nima ekstremov. Ker je
f ′′(x) =2(2x + 1)
(2x2 + 2x+ 1)2,
ima funkcija prevoj v tocki (−12 ,−π
4 ).Funkcija ima vodoravno asimptoto y = π
4 za x→ ∞ in x→ −∞.
xO
1
y
1−1
−12
π4
−π4
π2
−π2
bcbc
bc
bc
bcbc
bc
bc
bc
bc
bc
bc
Zgled 8.78. Narisi graf funkcije f , podane s predpisom
f(x) = x23 e−x2
.
Resitev. Definicijsko obmocje: Df = R, nicle: {0}. Ker je
f ′(x) = − 23√x
(3x2 − 1)e−x2,
sta stacionarni tocki ± 1√3. Z analizo spremembe predznaka odvoda pri prehodu preko stacio-
narne tocke vidimo, da sta tocki (− 1√3, 1
3√3e) in ( 1√
3, 1
3√3e) lokalna maksima.
Funkcija v tocki x = 0 ni odvedljiva in ima asimptoticno navpicno tangento pri x→ 0. Kerje f(0) = 0 in f(x) > 0 za x 6= 0, je v tocki (0, 0) (globalni) minimum.

8 DIFERENCIALNI RACUN 148
xO
1
y
11√3
− 1√3
13√3e
bcbc
bc
bc
bc
bcbc
bcbc
bc
8.10 L’Hopitalovo pravilo
Ce imata pri funkciji F , F (x) = f(x)g(x) , stevec in imenovalec v kaksni tocki a skupno niclo, pravimo,
da ima funkcija v tocki a nedolocenost oblike 00 . Kljub temu pa je mozno, da obstaja limita
limx→a
f(x)g(x) . Ce sta npr. f in g polinoma, x = a pa enostavna nicla za f in g, lahko zapisemo
f(x) = (x− a)f1(x) in g(x) = (x− a)g1(x), kjer je f1(a) 6= 0 6= g1(a). Tedaj je
limx→a
f(x)
g(x)= lim
x→a
(x− a)f1(x)
(x− a)g1(x)= lim
x→a
f1(x)
g1(x)=f1(a)
g1(a).
Zgled 8.79. Izracunaj limx→1
x3−1x2−1
.
Resitev. Racunajmo limx→1
x3−1x2−1 = lim
x→1
(x−1)(x2+x+1)(x−1)(x+1) = lim
x→1
x2+x+1x+1 = 3
2 .
Izrek 8.80 (L’Hopitalovo pravilo). Naj bosta funkciji f in g odvedljivi v okolici tocke a inf(a) = g(a) = 0. Obstaja naj δ > 0, da je g(x) 6= 0 in g′(x) 6= 0 za vsak x, za katerega je
0 < |x− a| < δ. Ce obstaja limx→a
f ′(x)g′(x) , obstaja tudi lim
x→a
f(x)g(x) in sta enaki.
Dokaz. Vzemimo poljubno tocko x ∈ (a − δ, a + δ) \ {a} in definirajmo A = f(x)g(x) . Vpeljimo
funkcijo F , F (t) = f(t) − Ag(t), definirano na intervalu med a in x. Tedaj je F (a) = f(a) −Ag(a) = 0 in F (x) = f(x) − f(x)
g(x) · g(x) = 0. Po Rolleovem izreku obstaja tocka ξ = ξ(x) med
a in x, da je F ′(ξ) = 0. Torej je F ′(ξ) = f ′(ξ) − Ag′(ξ) = 0, kar nam da A = f ′(ξ)g′(ξ) . Sedaj pa
lahko izracunamo limx→a
f(x)g(x) = lim
x→a
f ′(ξ)g′(ξ) = lim
x→a
f ′(x)g′(x) , saj lezi ξ med x in a in je lim
x→aξ(x) = a.
Odpravljanje nedolocenosti tipa 00
Zgled 8.81. Izracunaj limito limx→1
x3−1x2−1
.
Resitev. Racunajmo
limx→1
x3 − 1
x2 − 1= lim
x→1
3x2
2x=
3
2.
Zgled 8.82. Izracunaj limx→0
ex−1ln(x+1) .
Resitev. Racunajmo
limx→0
ex − 1
ln(x+ 1)= lim
x→0
ex
1x+1
= 1.

8 DIFERENCIALNI RACUN 149
Zgled 8.83. Izracunaj limx→0
xtan x − 1
x2.
Resitev. Pred uporabo L’Hopitalovega pravila je izraz koristno preoblikovati. Torejx
tan x−1
x2 =x−tan xx2 tan x
. Potem pa je
limx→0
x− tan x
x2 tanx= lim
x→0
1 − 1cos2 x
2x tan x+ x2 1cos2 x
=
= limx→0
− sin2 x
2x sinx cos x+ x2=
= − limx→0
sinx
x· 1
2 cos x+ xsinx
= −1
3.
Zgled 8.84. Izracunaj limx→0
arc sin(2x)−2xarc tan(3x)−3x .
Resitev. Uporabimo L’Hopitalovo pravilo
limx→0
arc sin(2x) − 2x
arc tan(3x) − 3x= lim
x→0
2√1−4x2
− 2
31+9x2 − 3
=
=2
3limx→0
1 −√
1 − 4x2
1 − (1 + 9x2)· 1 + 9x2
√1 − 4x2
︸ ︷︷ ︸→1
.
Ker obstaja limita drugega faktorja, zadosca posebej izracunati limito prvega faktorja in upo-rabiti izrek o produktu limit.
Sledi
limx→0
1 −√
1 − 4x2
1 − (1 + 9x2)= lim
x→0
1 − (1 − 4x2)
−9x2(1 +√
1 − 4x2)=
= limx→0
4x2
−9x2(1 +√
1 − 4x2)=
4
−9 · 2 = −2
9,
zato je celotna limita enaka 23 · (−2
9) = − 427 . Skratka
limx→0
arc sin(2x) − 2x
arc tan(3x) − 3x= − 4
27.
Opozorilo. Na tem mestu velja opomniti, da bi z dvakratno uporabo L’Hopitalovega pravilalimito hitreje izracunali:
limx→0
arc sin(2x) − 2x
arc tan(3x) − 3x= lim
x→0
2√1−4x2
− 2
31+9x2 − 3
= limx→0
8x√(1−4x2)3
− 54x(1+9x2)2
= − 4
27.
Odpravljanje nedolocenosti tipa ∞∞ .
Izrek 8.85. Naj bosta funkciji f in g odvedljivi v okolici tocke a in limx→a
f(a) = limx→a
g(a) = ∞.
Ce obstaja limx→a
f ′(x)g′(x) , obstaja tudi lim
x→a
f(x)g(x) in sta enaki.
Zgled 8.86. Izracunaj limito limx→∞
x2+1(x+1)2 .
Resitev. Z dvakratno uporabo L’Hopitalovega pravila izpeljemo
limx→∞
x2 + 1
(x+ 1)2= lim
x→∞2x
2(x+ 1)= lim
x→∞2
2= 1.

8 DIFERENCIALNI RACUN 150
Odpravljanje nedolocenosti tipa 0 · ∞ ali ∞ · 0.Izraz f(x)·g(x) preoblikujemo v tistega izmed ekvivalentnih izrazov f(x)
1g(x)
ali g(x)1
f(x)
, pri katerem
je imenovalec lazje odvajati.
Zgled 8.87. Izracunaj limx↓0
x ln2 x.
Resitev. Gre za nedolocenost tipa 0 · ∞, zato je smiselno zapisati x ln2 x = ln2 xx−1 . Sledi
limx↓0
ln2 x
x−1= lim
x↓0
2 ln x · 1x
−x−2= −2 lim
x↓0lnx
x−1= −2 lim
x↓0
1x
−x−2= 2 lim
x↓0x = 0.
Opomba. Z enakim prijemom je mozno dokazati, da je
limx↓0
xa lnx = 0 za vsak a > 0.
Zgled 8.88. Izracunaj limx→∞
x2e−x.
Resitev. Tokrat je smiselno zapisati x2e−x = x2
ex . Sledi
limx→∞
x2
ex= lim
x→∞2x
ex= lim
x→∞2
ex= 0.
Opomba. Z enakim prijemom je mozno dokazati, da je
limx→∞
xbe−x = 0 za vsak b ∈ R.
(Ce je b ≤ 0, ni kaj dokazovati. Ce je b > 0, pa zaporedoma uporabljamo L’Hopitalovo pravilo.)
Odpravljanje nedolocenosti tipa ∞−∞.
Zgled 8.89. Izracunaj limx→0
( 1x sinx − 1
x2 ).
Resitev. Racunajmo
limx→0
(1
x sinx− 1
x2
)= lim
x→0
x− sinx
x2 sinx= lim
x→0
1 − cos x
2x sin x+ x2 cos x=
= limx→0
sinx
2 sinx+ 4x cos x− x2 sinx=
= limx→0
cos x
6 cos x− 6x sinx− x2 cos x=
1
6.
Opazimo lahko, da je bilo zadnje odvajanje odvec, saj je
sinx
2 sin x+ 4x cos x− x2 sinx=
1
2 + 4 xsin x cos x− x2
,
od koder sledi, da limita res 16 .

9 INTEGRALSKI RACUN 151
Odpravljanje nedolocenosti tipa 1∞, ∞0 in 00.Pri vseh treh nedolocenostih uporabimo enak prijem: izraz logaritmiramo in prevedemo na
nedolocenost tipa 0 ·∞ ali ∞·0. Natancneje: ce zelimo izracunati limx→a
f(x)g(x) = L, izracunamo
raje K = limx→a
g(x) ln f(x), od koder potem sledi L = eK .
Zgled 8.90. Izracunaj limx↓0
xx.
Resitev. Gre za nedolocenost tipa 00. Ko logaritmiramo, dobimo ln(xx) = x lnx. Po zeizracunanem je lim
x↓0x lnx = 0, od koder sledi, da je iskana limita enaka e0 = 1.
Zgled 8.91. Izracunaj limx→0
(e2x + x)1x .
Resitev. Gre za nedolocenost tipa 1∞, zato izraz logaritmiramo;
limx→0
ln((e2x + x)1x ) = lim
x→0
ln(e2x + x)
x= lim
x→0
2e2x+1e2x+x
1= 3
in od tod limx→0
(e2x + x)1x = e3.
Zgled 8.92. Izracunaj limx↓0
(cot x)1
lnx .
Resitev. Gre za nedolocenost tipa ∞0. Ko logaritmiramo, dobimo ln((cot x)1
ln x ) = ln(cot x)lnx .
Torej je
limx↓0
ln(cot x)
lnx= lim
x↓0
1cot x · −1
sin2 x1x
= limx↓0
−1sin x cos x
1x
= limx↓0
−xsinx cos x
= −1,
od koder sledi limx↓0
(cot x)1
ln x = e−1.
9 Integralski racun
9.1 Nedoloceni integral
Naj bo f : I → R dana funkcija, kjer je I ⊂ R odprti interval. Funkcijo F , za katero jeF ′(x) = f(x) za vsak x ∈ I, imenujemo nedoloceni integral oz. primitivna funkcija funkcijef in oznacimo F (x) =
∫f(x) dx.
Izrek 9.1. Ce je F nedoloceni integral funkcije f : I → R, je njen nedoloceni integral tudifunkcija G, G(x) = F (x) + c, kjer je c ∈ R poljubna konstanta, in vsak nedoloceni integralfunkcije f ima obliko F (x) + c.
Dokaz. Po definiciji nedolocenega integrala je F ′(x) = f(x), zato je tudi (F (x)+ c)′ = F ′(x)+c′ = F ′(x)+0 = f(x). Za drugi del dokaza pa vzemimo neko funkcijoG, za katero jeG′(x) = f(x)za vsak x ∈ I. Ker je poleg tega se F ′(x) = f(x) za vsak x ∈ I, velja F ′(x) = G′(x) za vsak x zintervala I. Po posledici Lagrangeovega izreka obstaja c ∈ R, da je G(x) = F (x) + c.
Zgled 9.2. Izracunaj integral∫x2 dx.
Resitev. Ker je (x3)′ = 3x2, je (13x
3)′ = x2. Torej je∫x2 dx = 1
3x3 + c, kjer je c ∈ R poljubna
konstanta.
Zgled 9.3. Izracunaj integral∫
1(1+x)2 dx.

9 INTEGRALSKI RACUN 152
Resitev. Spomnimo se, da je ( 1x)′ = − 1
x2 . Torej je ( 1x+1 )′ = − 1
(x+1)2in zato
∫1
(1+x)2dx =
− 1x+1 + c.
Zgled 9.4. Izracunaj integral∫
1x dx.
Resitev. Spomnimo se, da je (lnx)′ = 1x za x > 0. Za x < 0 pa velja (ln(−x))′ = 1
−x ·(−1) = 1x .
Torej je ∫1
xdx =
{ln(x) + c1, ce x > 0,
ln(−x) + c2, ce x < 0.
Pogosto pisemo, da je∫
1x dx = ln |x| + c, kjer je
c = c(x) =
{c1, ce x > 0,
c2, ce x < 0.
funkcija, ki ni konstantna po vsej realni osi, je pa konstantna na pozitivnem in negativnempoltraku posebej.
Integrali elementarnih funkcijTabelo integralov nekaterih elementarnih funkcij dobimo iz tabele odvodov elementarnih
funkcij. Torej je
∫xr dx = 1
r+1xr+1 + c, r 6= −1∫
1x dx = ln |x| + c∫ex dx = ex + c∫ax dx = 1
ln aax + c, a > 0, a 6= 1∫
sinx dx = − cos x+ c∫cos x dx = sinx+ c
∫1
cos2 xdx = tan x+ c∫
1sin2 x
dx = − cot x+ c∫1√
1−x2dx = arc sinx+ c = − arc cos x+ c1∫
1x2+1
dx = arc tanx+ c∫1√
1+x2dx = ln(x+
√1 + x2) + c
9.2 Pravila za integriranje
Izrek 9.5. Ce imata funkciji f in g nedolocena integrala, ga ima tudi njuna vsota in velja∫(f(x) + g(x)) dx =
∫f(x) dx+
∫g(x) dx.
Dokaz. Naj bo F (x) =∫f(x)dx inG(x) =
∫g(x)dx. Tedaj je (F (x)+G(x))′ = F ′(x)+G′(x) =
f(x) + g(x) in zato∫(f(x) + g(x)) dx = F (x) +G(x).
Izrek 9.6. Ce ima funkcija f nedolocen integral, ga ima za vsak k ∈ R tudi funkcija g, g(x) =
kf(x), in velja
∫(kf(x)) dx = k
∫f(x) dx.
Dokaz. Naj bo F (x) =∫f(x)dx. Tedaj je (kF (x))′ = k F ′(x)) = k f(x) in zato
∫(k f(x))dx =
k F (x).
Zgled 9.7. Izracunaj∫
(x5 + 3x−2 + 1) dx.
Resitev.∫
(x5 + 3x−2 + 1) dx =
∫x5 dx+
∫3x−2 dx+
∫1 dx =
=1
6x6 + 3 · 1
−1x−1 + x+ c =
=1
6x6 − 3x−1 + x+ c.

9 INTEGRALSKI RACUN 153
Zgled 9.8. Izracunaj∫
5x3−x dx.
Resitev. ∫5x3−x dx =
∫ (5
3
)x
dx =1
ln 53
(5
3
)x
+ c.
Integral polinomaS pomocjo gornjih dveh izrekov vidimo, da vsak polinom z realnimi koeficienti premore
nedoloceni integral. Za polinom
f(x) = anxn + an−1x
n−1 + . . . + a1x+ a0
tako velja∫f(x) dx =
∫(anx
n + an−1xn−1 + . . . + a1x+ a0) dx =
=
∫anx
n dx+
∫an−1x
n−1 dx+ . . .+
∫a1x dx+
∫a0 dx =
=an
n+ 1xn+1 +
an−1
nxn + . . .+
a1
2x2 + a0x+ c.
Zgled 9.9. Izracunaj integral∫
(6x3 − 4x2 − x) dx.
Resitev.
∫(6x3 − 4x2 − x) dx = 6 · 1
4x4 − 4 · 1
3x3 − 1
2x2 + c =
=3
2x4 − 4
3x3 − 1
2x2 + c.
Zgled 9.10. Izracunaj integral∫
(x+ 1)2(x− 1) dx.
Resitev. Ker je (x+ 1)2(x− 1) = (x2 − 1)(x + 1) = x3 + x2 − x− 1, je∫
(x+ 1)2(x− 1) dx =
∫(x3 + x2 − x− 1) dx =
1
4x4 +
1
3x3 − 1
2x2 − x+ c.
Izrek 9.11 (Pravilo zamenjave). Ce ima funkcija f nedoloceni integral in je g odvedljiva
funkcija, ima nedoloceni integral tudi funkcija h, h(t) = f(g(t)) · g′(t), in velja
∫f(x) dx =
∫f(g(t)) · g′(t) dt.
Dokaz. Naj bo F (x) =∫f(x) dx. Ce pisemo x = g(t), dobimo F (g(t)) = G(t) in G′(t) =
F ′(g(t))g′(t) = f(g(t))g′(t). Sledi F (x) = F (g(t)) = G(t) =∫f(g(t))g′(t) dt in od tod∫
f(x) dx =∫f(g(t))g′(t) dt.
Zgled 9.12. Izracunaj integral∫
(3 + 2x)42 dx.
Resitev. Ce oznacimo 3 + 2x = t, lahko izrazimo x = t−32 = g(t). Sledi
∫f(x) dx =
∫f(g(t))g′(t) dt =
∫t42
1
2dt =
= 12 · 1
43t43 = 1
86 t43 = 1
86 (3 + 2x)43 + c.
Obicajno uporabljamo metodo zamenjave v nekoliko drugacni obliki. Ce izraz 3 + 2x = tdiferenciramo, dobimo dt = d(3 + 2x) = 2dx, od koder izrazimo dx = 1
2dt. Torej je∫(3 +
2x)42 dx =∫t42 1
2dt = 186 t
43 = 186 (3 + 2x)43 + c.

9 INTEGRALSKI RACUN 154
Zgled 9.13. Izracunaj integral∫
1x−7 dx.
Resitev. Pisimo x−7 = t. Torej je dt = d(x−7) = dx in∫
1x−7 dx =
∫1t dt = ln t = ln(x−7)+c.
Zgled 9.14. Izracunaj integral∫ √
2x− 1 dx.
Resitev. Pisimo 2x− 1 = t. Torej je dt = 2dx in
∫ √2x− 1 dx =
∫ √t · 1
2dt =
1
2
∫t
12 dt =
1
2· 2
3t
32 =
1
3(2x− 1)
32 + c.
Zgled 9.15. Izracunaj integral∫
1x2+a2 dx.
Resitev. Vemo∫
1x2+1
dx = arc tanx. Pisimo x = at in dx = a dt. Sledi
∫1
x2 + a2dx =
∫a
a2t2 + a2dt =
1
a
∫1
t2 + 1dt =
=1
aarc tan t+ c =
1
aarc tan
x
a+ c.
Zgled 9.16. Izracunaj integral∫
1a2x2+1 dx.
Resitev. Pisimo ax = t in a dx = dt. Sledi
∫1
a2x2 + 1dx =
∫ 1a
t2 + 1dt =
1
aarc tan t+ c =
1
aarc tan ax+ c.
Zgled 9.17. Izracunaj integral∫
1√a2−x2
dx.
Resitev. Pisimo x = at in dx = a dt. Sledi∫
1√a2 − x2
dx =
∫a√
a2 − a2t2dt =
∫1√
1 − t2dt =
= arc sin t+ c = arc sinx
a+ c.
Zgled 9.18. Izracunaj integral∫
x√x2+1
dx.
Resitev. Pisimo t = x2 + 1 in dt = 2x dx. Sledi∫
x√x2 + 1
dx =1
2
∫1√tdt =
1
2
∫t−
12 dt = t
12 + c =
√x2 + 1 + c.
Izrek 9.19. Ce je g odvedljiva funkcija, velja
∫g′(x)g(x)
dx = ln(g(x)) + c.
Dokaz. Pisimo t = g(x). Tedaj je dt = g′(x)dx in∫ g′(x)
g(x) dx =∫
1t dt = ln t+c = ln g(x)+c.
Zgled 9.20. Izracunaj integral∫
tan x dx.

9 INTEGRALSKI RACUN 155
Resitev. Ker je tan x = sinxcos x in (cos x)′ = − sinx, pisemo cos x = t. Tedaj je dt = − sinx dx in
∫sinx
cosxdx = −
∫1
tdt = − ln t+ c = − ln(cos x) + c.
Izrek 9.21 (Integracija po delih). Ce obstaja eden od integralov∫f(x)g′(x)dx in
∫g(x)f ′(x)dx,
obstaja tudi drugi in velja
∫f(x)g′(x) dx+
∫g(x)f ′(x) dx = f(x)g(x).
Dokaz. Recimo, da obstaja integral∫f(x)g′(x) dx. Pisimo F (x) =
∫f(x)g′(x) dx. Tedaj je
F ′(x) = f(x)g′(x). Ker je (f(x)g(x) − F (x))′ = f ′(x)g(x) + f(x)g′(x) − F ′(x) = f ′(x)g(x), podefiniciji nedolocenega integrala velja f(x)g(x) − F (x) =
∫f ′(x)g(x) dx oz.
∫f(x)g′(x) dx +∫
g(x)f ′(x) dx = f(x)g(x).
Opomba. Pogosto pisemo pravilo za integracijo po delih (integracija per partes) v obliki
∫u dv = uv −
∫v du ali
∫v du = uv −
∫u dv.
Zgled 9.22. Izracunaj integral∫x lnx dx.
Resitev. Bistvo integracije po delih je v tem, da integrand spretno zapisemo v obliki f(x)g′(x).Torej v obliki produkta dveh funkcij, od katerih bo potrebno eno odvajati, drugo pa integrirati.Ker naceloma znamo odvajati vsako funkcijo, je potrebno spretno izbrati tisto funkcijo, ki jobomo integrirali. V danem primeru lahko zapisemo u = lnx in dv = x dx. Tedaj je du = 1
x dx,v = 1
2x2 in lahko zapisemo
∫x lnx dx =
∫lnx︸︷︷︸
u
· x dx︸︷︷︸dv
= lnx︸︷︷︸u
· 1
2x2
︸︷︷︸v
−∫
1
2x2
︸︷︷︸v
· 1
xdx
︸ ︷︷ ︸du
=
=1
2x2 lnx− 1
2
∫x dx =
1
2x2 lnx− 1
4x2 + c.
Zgled 9.23. Izracunaj integral∫
lnx dx.
Resitev. Ker funkcije ln ne znamo neposredno integrirati, jo bomo odvajali. Integrirali pabomo tisto, kar je poleg nje. Skratka u = lnx, dv = dx in du = 1
x dx, v = x. Torej lahkozapisemo ∫
lnx dx = x lnx−∫x
1
xdx = x lnx− x+ c.
Opomba. Opisana metoda je uporabna tudi v splosnem za izracun integralov oblike∫f(x) lnxdx,
kjer je f polinom. V tem primeru funkcijo ln odvajamo, polinom poleg nje pa integriramo. Priintegraciji po delih nam v drugem clenu ostane tako le se integral, ki je enostavno izracunljiv.Skratka, ce je F (x) =
∫f(x) dx, velja
∫f(x) lnx dx = F (x) ln(x) −
∫F (x)
xdx.
Zgled 9.24. Izracunaj integral∫x2ex dx.
9 INTEGRALSKI RACUN 156
Resitev. Ker je (ex)′ = ex, je vseeno, ali bomo eksponentno funkcijo integrirali ali odvajali.Ker je izraz poleg nje polinom (tj. x2), ga je koristno odvajati in znizati njegovo stopnjo. Skratkadu = ex dx, v = x2 in u = ex, dv = 2x dx. Torej je
∫x2ex dx = x2ex −
∫2xex dx.
V preostalem integralu je polinom nizje stopnje kot prej, zato postopek ponovimo: du = ex dx,v = x in u = ex, dv = dx. Torej je
∫xex dx = xex −
∫ex dx = xex − ex in
∫x2ex dx = x2ex − 2(xex − ex) = (x2 − 2x+ 2)ex.
Opisana metoda je uporabna tudi v splosnem za izracun integralov oblike∫f(x)ex dx, kjer
je f polinom. V tem primeru funkcijo x 7→ ex integriramo, polinom poleg nje pa odvajamo. Priintegraciji po delih nam v drugem clenu ostane tako le se integral podobne oblike, kjer pa jestopnja polinoma za 1 manjsa kot prej. Skratka:
∫f(x)ex dx = f(x)ex −
∫f ′(x)ex dx.
Integrala oblike∫f(x) sinxdx ali
∫f(x) cos xdx, kjer je f polinom, izracunamo podobno. V
tem primeru funkcijo sin ali cos integriramo, polinom poleg nje pa odvajamo. Pri integraciji podelih nam v drugem clenu ostane tako le se integral podobne oblike, kjer pa je stopnja polinomaza 1 manjsa kot prej. Skratka
∫f(x) sinx dx = −f(x) cos x+
∫f ′(x) cos x dx,
∫f(x) cos x dx = f(x) sinx−
∫f ′(x) sinx dx.
Zgled 9.25. Izracunaj integral∫
(4x+ 2) sin 2x dx.
Resitev. Pisimo u = 4x+ 2 in dv = sin 2x dx. Tedaj je du = 4dx, v = −12 cos 2x in
∫(4x+ 2) sin 2x dx = (4x+ 2)(−1
2 cos 2x) + 12
∫4 cos 2x dx =
= −(2x+ 1) cos 2x+ sin 2x.
Zgled 9.26. Izracunaj integral∫x2 cos x dx.
Resitev. Pisimo u = x2 in dv = cos x dx. Tedaj je du = 2x dx, v = sinx in∫x2 cos x dx = x2 sinx−
∫2x sinx dx.
Integral∫x sinx dx izracunamo enako kot v prejsnjem zgledu. Pisimo u = x in dv = sinx dx.
Tedaj je du = dx, v = − cos x in∫x sinx dx = −x cos x+
∫cos x dx = −x cos x+ sinx.
Sledi∫x2 cos x dx = x2 sinx− 2(−x cos x+ sinx) = (x2 − 2) sinx+ 2x cos x.

9 INTEGRALSKI RACUN 157
Zgled 9.27. Izracunaj integrala∫eax sin bx dx in
∫eax cos bx dx, kjer je a 6= 0 6= b.
Resitev. Uporabimo metodo integracije po delih. Poskusimo s prijemom u = eax in dv =sin bx dx. Tedaj je du = aeax dx in v = −1
b cos bx. Sledi
∫eax sin bx dx = −1
beax cos bx+
a
b
∫eax cos bx dx. (17)
Integral∫eax cos bx poskusimo izracunati s podobnim prijemom: u = eax in dv = cos bx dx.
Tedaj je du = aeax dx in v = 1b sin bx. Sledi
∫eax cos bx dx =
1
beax sin bx− a
b
∫eax sin bx dx. (18)
Ce sedaj upostevamo (18) v (17), dobimo
∫eax sin bx dx = −1
beax cos bx+
a
b
(1
beax sin bx− a
b
∫eax sin bx dx
).
Opazimo, da integral, ki ga zelimo izracunati, nastopa v gornji enacbi tudi na desni strani.Pisimo
∫eax sin bx dx = I. Tedaj iz gornje enacbe sledi I = −1
beax cos x+ a
b
(1be
ax sin bx− ab I),
od koder izracunamo I(1 + a2
b2
)= −1
beax cos bx+ a
b2eax sin bx in nazadnje I = eax
a2+b2(a sin bx−
b cos bx). Sledi ∫eax sin bx dx =
eax
a2 + b2(a sin bx− b cos bx)
in podobno se ∫eax cos bx dx =
eax
a2 + b2(a cos bx+ b sin bx).
Opomba. Pri integralu smo dvakrat zaporedoma uporabili integracijo po delih. Vseeno je,katero izmed funkcij bomo na zacetku integrirali, katero pa odvajali. Pomembno pa je, da istitip funkcije (eksponentno ali trigonometricno) tudi v drugem koraku integriramo.
9.3 Doloceni integral
Naj bo [a, b] poljuben zaprt interval in f : [a, b] → R omejena funkcija. Radi bi izracunaliploscino lika med abscisno osjo in grafom funkcije f na intervalu [a, b]. Priblizno lahko ploscinolika izracunamo tako, da ga razrezemo na navpicne trakove. Cim ozji so trakovi, tem boljsa jeaproksimacija za ploscino. Pricakovati je, da bomo najbolj natancen rezultat dobili v limiti, kogredo sirine trakov proti 0.
a = x0 b = xnξkx
y
xk−1 xk
f(ξk)
bc bcbc
bc
bc bc
bc

9 INTEGRALSKI RACUN 158
Vzemimo na intervalu [a, b] koncno zaporedje tock
a = x0 < x1 < x2 < . . . < xn = b.
Te tocke razdelijo interval na n podintervalov. Njihove dolzine ∆k = xk−xk−1 so lahko razlicne.Dolzino najdaljsega med njimi oznacimo z ∆. Torej je
∆ = max{∆1,∆2, . . . ,∆k}.Nadalje naj bo ξk ∈ [xk−1, xk] poljubna tocka. Izraz
σ =
n∑
k=1
f(ξk)(xk − xk−1)
imenujemo Riemannova oz. integralska vsota funkcije f pri dani delitvi D intervala [a, b] napodintervale.
Stevilo I imenujemo doloceni integral funkcije f na intervalu [a, b], ce za vsak ε > 0obstaja δ > 0, da iz ∆ < δ sledi |I − σ| < ε. Ce tako stevilo I obstaja, pravimo, da je
f integrabilna na intervalu [a, b] in oznacimo I =∫ ba f(x) dx. Interval [a, b] imenujemo
integracijski interval, stevili a in b spodnja in zgornja meja integracije, x pa integracijskaspremenljivka.
Definicijo dolocenega integrala lahko povemo tudi drugace. Stevilo I je doloceni integralfunkcije f na intervalu [a, b], ce se od njega locijo integralske vsote funkcije f za vse zadostidrobne delitve intervala [a, b] tako malo, kot hocemo. Zapisati smemo tudi
∫ b
af(x) dx = lim
∆→0
n∑
k=1
f(ξk)(xk − xk−1).
Dokazati je mozno, da vse dovolj “lepe” funkcije premorejo doloceni integral. Natancneje:
Izrek 9.28. Ce je f : [a, b] → R zvezna funkcija, je tudi integrabilna na intervalu [a, b].
Zgled 9.29. Izracunaj∫ ba x dx.
Resitev. Razdelimo interval [a, b] na n podintervalov z delilnimi tockami
a = x0 < x1 < x2 < . . . < xn = b.
Za tocko ξk ∈ [xk−1, xk] vzemimo kar sredino ustreznega intervala: ξk = 12 (xk−1 + xk). Tedaj je
σ =n∑
k=1
f(ξk)(xk − xk−1) =n∑
k=1
1
2(xk−1 + xk)(xk − xk−1) =
=1
2
n∑
k=1
(x2k − x2
k−1) =1
2(b2 − a2),
saj se v tej vsoti vsi vmesni cleni odstejejo.Ker je funkcija f zvezna, je integrabilna, zato je limita
lim∆→0
n∑
k=1
f(ξk)(xk − xk−1)
neodvisna od izbire delilnih tock ξk ∈ [xk−1, xk]. Sledi∫ b
ax dx =
1
2(b2 − a2).

9 INTEGRALSKI RACUN 159
9.4 Geometrijski pomen integrala
Naj bo f na intervalu [a, b] zvezna in nikjer negativna. Graf funkcije f , abscisna os ter premicix = a in x = b, omejujeta lik T , ki ga imenujemo krivocrtni trazpez. Dolocimo njegovoploscino.
Razdelimo interval [a, b] na podintervale z delilnimi tockami a = x0 < x1 < x2 < . . . < xn = bin oznacimo ∆ = max{xk − xk−1; k = 1, 2, . . . , n}. Za vsak k oznacimo z mk in Mk natancnospodnjo in natancno zgornjo mejo funkcije f na intervalu [xk−1, xk].
a = x0 b = xnx
y
xk−1 xk
mk
Mk
bc bc
bc
bc bc
bc
Narisimo nad vsakim intervalom [xk−1, xk] pravokotnik z visino mk. Tedaj je
S(T ) =
n∑
k=1
mk(xk − xk−1) ≤ S(T ).
Stevilo S(T ) imenujemo spodnja integralska vsota za f na intervalu [a, b]. Podobno lahkonarisemo nad vsakim intervalom [xk−1, xk] pravokotnik z visino Mk. Tedaj je
S(T ) =n∑
k=1
Mk(xk − xk−1) ≥ S(T ).
Stevilo S(T ) imenujemo zgornja integralska vsota za f na intervalu [a, b]. Ker je funkcijaf zvezna na intervalu [a, b], je integrabilna in je zato
lim∆→0
S(T ) = lim∆→0
S(T ) =
∫ b
af(x) dx.
Ker pa je S(T ) ≤ S(T ) ≤ S(T ), od tod sledi S(T ) =∫ ba f(x) dx in je stevilo S(T ) neodvisno od
delitve intervala [a, b] na podintervale.
Izrek 9.30. Ce je f : [a, b] → R zvezna in nenegativna, je ploscina lika, ki ga omejujejo graf
funkcije f , abscisna os ter premici x = a in x = b, enaka
∫ b
af(x) dx.
a b x
y
∫ b
af(x) dx
bc bc

9 INTEGRALSKI RACUN 160
Posledica 9.31. Ploscina lika med grafoma zveznih funkcij f in g na intervalu [a, b] je enaka∫ ba |g(x) − f(x)| dx.
a b x
y
f
g
∫ b
a|g(x) − f(x)| dx
bc bc
9.5 Lastnosti dolocenega integrala
Izrek 9.32. Ce sta funkciji f in g integrabilni na intervalu [a, b], α in β pa poljubni realnistevili, je funkcija h, h(x) = αf(x) + βg(x), tudi integrabilna na intervalu [a, b] in velja
∫ b
a(αf(x) + βg(x)) dx = α
∫ b
af(x) dx+ β
∫ b
ag(x) dx.
Dokaz. Naj bo D katerakoli delitev intervala [a, b]. Potem je integralska vsota za funkcijo henaka
σ(h) =
n∑
k=1
h(ξk)(xk − xk−1) =
n∑
k=1
(αf(ξk) + βg(ξk))(xk − xk−1).
Ce je delitev intervala dovolj drobna, je vrednost desne strani poljubno blizu stevila α∫ ba f(x)dx+
β∫ ba g(x) dx, leva pa blizu
∫ ba (αf(x) + βg(x)) dx. Torej je res
∫ ba (αf(x) + βg(x)) dx = α
∫ ba f(x) dx+ β
∫ ba g(x) dx.
Izrek 9.33. Ce je f na intervalu [a, b] zvezna in c ∈ (a, b) poljubno stevilo, je
∫ b
af(x) dx =
∫ c
af(x) dx+
∫ b
cf(x) dx.
Dokaz. Ker je funkcija f zvezna na [a, b], je zvezna tudi na intervalih [a, c] in [c, b], zato integrala∫ ca f(x)dx in
∫ bc f(x)dx obstajata. Vzemimo sedaj tako delitev a = x0 < x1 < x2 < . . . < xn = b
intervala [a, b], da je v njej c delilna tocka – torej c = xm za neki m, 1 < m < n. Tedaj je
n∑
k=1
f(ξk)(xk − xk−1) =
m∑
k=1
f(ξk)(xk − xk−1) +
n∑
k=m+1
f(ξk)(xk − xk−1).
Od tod sledi gornja zveza, ko gredo dolzine vseh delilnih podintervalov k 0.
Izrek 9.34. Ce v integralu zamenjamo meji, spremeni predznak:
∫ a
bf(x) dx = −
∫ b
af(x) dx.
Dokaz. Ce zamenjamo meji, je treba vse razlike xk −xk−1 nadomestiti z razlikami xk−1−xk =−(xk − xk−1), zato dobi vsak clen v integralski vsoti nasproten predznak.
Posledica 9.35. Velja
∫ a
af(x) dx = 0.
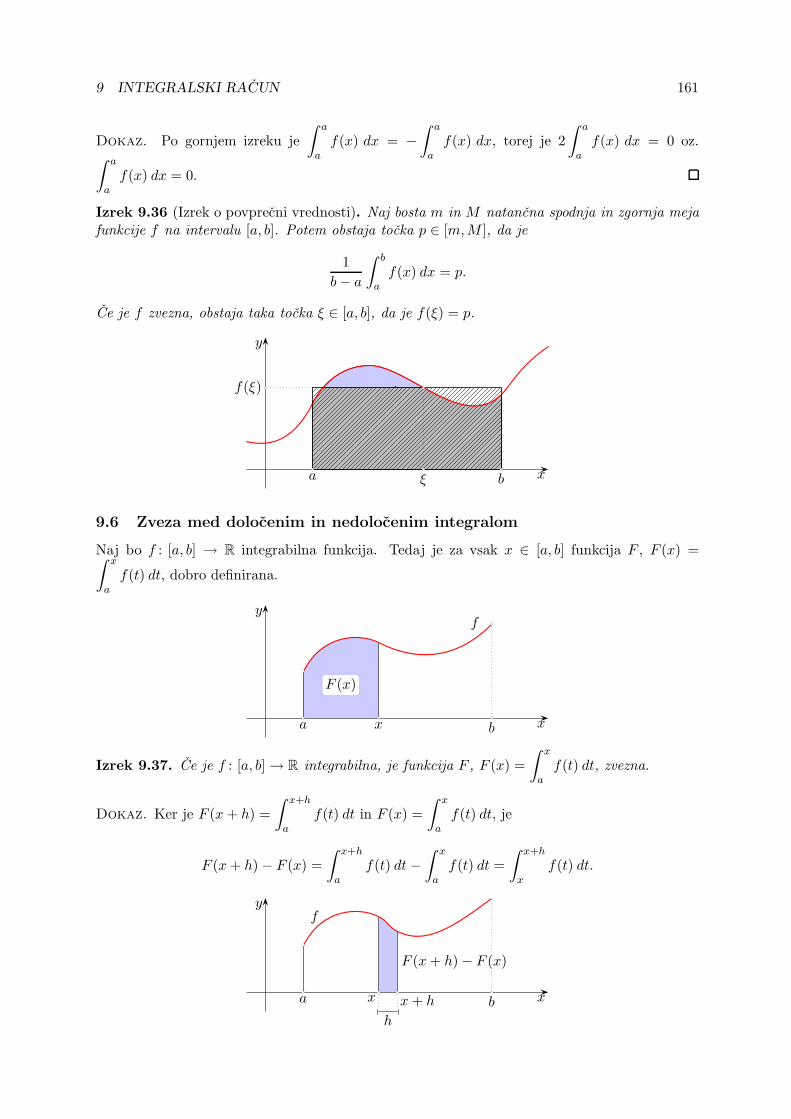
9 INTEGRALSKI RACUN 161
Dokaz. Po gornjem izreku je
∫ a
af(x) dx = −
∫ a
af(x) dx, torej je 2
∫ a
af(x) dx = 0 oz.
∫ a
af(x) dx = 0.
Izrek 9.36 (Izrek o povprecni vrednosti). Naj bosta m in M natancna spodnja in zgornja mejafunkcije f na intervalu [a, b]. Potem obstaja tocka p ∈ [m,M ], da je
1
b− a
∫ b
af(x) dx = p.
Ce je f zvezna, obstaja taka tocka ξ ∈ [a, b], da je f(ξ) = p.
a bξ x
y
f(ξ)
bc bcbc
bc bc
9.6 Zveza med dolocenim in nedolocenim integralom
Naj bo f : [a, b] → R integrabilna funkcija. Tedaj je za vsak x ∈ [a, b] funkcija F , F (x) =∫ x
af(t) dt, dobro definirana.
y
xba
f
x
F (x)
bc
bc
bc
bc
bc
Izrek 9.37. Ce je f : [a, b] → R integrabilna, je funkcija F , F (x) =
∫ x
af(t) dt, zvezna.
Dokaz. Ker je F (x+ h) =
∫ x+h
af(t) dt in F (x) =
∫ x
af(t) dt, je
F (x+ h) − F (x) =
∫ x+h
af(t) dt −
∫ x
af(t) dt =
∫ x+h
xf(t) dt.
y
xba
f
x
F (x+ h) − F (x)
x+ h
h
bc
bc
bc
bc
bc bc

9 INTEGRALSKI RACUN 162
Po izreku o povprecni vrednosti je
∫ x+h
xf(t) dt = f(ξ)h
za neko stevilo ξ med x in x+ h. Stevilo f(ξ) lezi med m in M , kjer sta m in M najmanjsa innajvecja vrednost funkcije f na intervalu [a, b]. Torej je
|F (x+ h) − F (x)| = |f(ξ)h| ≤ |h|max{|m|, |M |}.
Torej je za majhne h sprememba F (x+ h) − F (x) poljubno majhna.
Izrek 9.38. Ce je f : [a, b] → R zvezna funkcija, je funkcija F , F (x) =
∫ x
af(t) dt, odvedljiva
in velja F ′(x) = f(x) za vsak x ∈ (a, b).
Dokaz. Ker je f zvezna, obstaja tocka ξ med x in x+ h, da je
F (x+ h) − F (x) =
∫ x+h
af(t) dt −
∫ x
af(t) dt =
∫ x+h
xf(t) dt = f(ξ)h.
Torej je f(ξ) = F (x+h)−F (x)h . Ko gre h → 0, gre tudi ξ → x, zato je lim
h→0
F (x+h)−F (x)h =
limh→0
f(ξ)hh = f(x). Sledi F ′(x) = f(x).
Izrek 9.39 (Osnovni izrek infinitezimalnega racuna). Doloceni integral zvezne funkcije je kotfunkcija zgornje meje nedoloceni integral funkcije pod integralskim znakom.
Dokaz. Ker je F ′(x) = f(x), se funkciji F (x) in
∫ x
af(t) dt razlikujeta za konstanto. Torej
F (x) =
∫ x
af(t) dt + C. Ker je
∫ a
af(t) dt = 0, je C = F (a). Sledi
∫ x
af(t) dt = F (x) − C =
F (x) − F (a).Gornji izrek lahko povemo tudi drugace. Ce je F katerikoli nedoloceni integral funkcije f ,
torej
F (x) =
∫f(x) dx,
za doloceni integral velja ∫b
a
f(x) dx = F(b) − F(a).
Pogosto pisemo tudi ∫b
a
f(x) dx = F(x)
∣∣∣∣b
a
= F(b) − F(a)
ali celo ∫ b
af(x) dx = F (x)
∣∣∣∣b
x=a
= F (b) − F (a),
ce v integralu nastopa vec parametrov.

9 INTEGRALSKI RACUN 163
9.7 Racunanje dolocenega integrala
Pri racunanju dolocenega integrala si najpogosteje pomagamo s prejsnjim izrekom in najprejizracunamo nedoloceni intagral.
Zgled 9.40. Izracunaj
∫ 2
−1x2 dx.
Resitev. Nedoloceni integral je ∫x2 dx =
1
3x3.
Torej je ∫ 2
−1x2 dx =
(1
3x3
)∣∣∣∣2
−1
=1
3
(23 − (−1)3
)= 3.
Zgled 9.41. Izracunaj
∫ 4
1(x2 − 2x) dx.
Resitev. Racunajmo
∫ 4
1(x2 − 2x) dx =
(1
3x3 − x2
)∣∣∣∣4
1
= (1
3· 43 − 42) − (
1
3· 13 − 12) = 6.
Zgled 9.42. Izracunaj
∫ π/2
0sin2 x dx.
Resitev. Ker je sin2 x = 12(1 − cos 2x), zapisemo
∫sin2 x dx =
∫1
2(1 − cos 2x) dx =
x
2−
1
4sin(2x) in od tod
∫ π/2
0sin2 x dx =
(x
2− 1
4sin(2x)
)∣∣∣∣π/2
0
=π
4.
Opozorilo. Pri uporabi osnovnega izreka infinitezimalnega racuna moramo biti pazljivi. Za∫f(x)dx = F (x) res velja
∫ b
af(x)dx = F (x)
∣∣∣∣b
a
= F (b)−F (a), a ne smemo spregledati pogoja,
da mora biti funkcija f na intervalu [a, b] integrabilna. Tako je npr. racun
∫ 2
−1
1
x2dx =
(−1
x
)∣∣∣∣2
−1
= −1
2− 1 = −3
2
ocitno napacen, saj je podintegralska funkcija pozitivna, integral pa negativen. Tezava se skrivav tem, da funkcija F , F (x) = − 1
x , ni nedoloceni integral funkcije f , f(x) = 1x2 , na intervalu
[−1, 2], saj na tem intervalu povsod niti definirana ni.
Zgled 9.43. Doloci ploscino obmocja, ki ga graf polinoma f(x) = 14(x + 1)(x − 2)2 oklepa z
abscisno osjo.
xO
y
2−1
bc bcbc
Resitev. Obmocje je omejeno z grafom funkcije f na inter-valu [−1, 2] in odsekom abscisne osi. Torej je

9 INTEGRALSKI RACUN 164
S =
∫ 2
−1f(x) dx =
∫ 2
−1
1
4(x3 − 3x2 + 4) dx =
1
4
(1
4x4 − x3 + 4x
)∣∣∣∣2
−1
=
=1
4
((1
4· 24 − 23 + 4 · 2
)−(
1
4· (−1)4 − (−1)3 + 4 · (−1)
))=
=1
4
(4 −
(−11
4
))=
27
16.
Zgled 9.44. Doloci ploscino obmocja, ki ga omejujeta grafa funkcij, podanih s predpisomaf(x) = x2 + x− 1 in g(x) = −x2 + x+ 1.
y
x
g
f
O 1
−1
1
−1
bc bcbc
bc
bc
bc
bc
Resitev. Dolocimo najprej presecisca krivulj: x2 + x − 1 =−x2 + x+ 1, kar nam da 2x2 = 2 oz. x = ±1. Sledi
S =
∫ 1
−1(g(x) − f(x)) dx
=
∫ 1
−1(2 − 2x2) dx =
=
(2x− 2
3x3
)∣∣∣∣1
−1
=4
3− (−4
3) =
8
3.
Zgled 9.45. Naj bo f(x) = x2 + 1. Doloci ploscino obmocja, ki ga dolocajo graf funkcije f ,tangenta na graf funkcije f v tocki (0, 1) in normala na graf funkcije v tocki (1, 2).
Resitev.
y = 1
y = − 12 x+ 5
2
y
xO 1 3
1
2
bc bc bc
bcbc
bc bc
Ker je f(x) = x2 +1, je f ′(x) = 2x. Torej je f ′(0) = 0 in f ′(1) = 2. Enacba tangente v tocki(0, 0) je y = 0, saj je ta tocka stacionarna. Enacba normale v tocki (1, 2) je y − 1 = −1
2(x− 1),kar lahko zapisemo kot y = −1
2x+ 52 .
Premici y = 1 in y = −12x+ 5
2 se sekata v tocki (3, 1). Torej je iskana ploscina enaka
S =
∫ 1
0((x2 + 1) − 1) dx+
∫ 3
1((−1
2x+
5
2) − 1) dx =
=
(1
3x3
)∣∣∣∣1
0
+
(−1
4x2 +
3
2x
)∣∣∣∣3
1
=1
3+
9
4− 5
4=
4
3.

9 INTEGRALSKI RACUN 165
Pri racunanju nedolocenega integrala si pogosto pomagamo s pravilom zamenjave. Ce pisemox = g(t), velja ∫
f(x) dx =
∫f(g(t)) · g′(t) dt = G(t) = F (x),
kjer smo v funkciji G zamenjali t = g−1(x). Ravno ta korak pa je pogosto v praksi tezko izvedljivali pa vsaj racunsko neugoden, saj to pomeni, da moramo izracunati tudi inverz g−1.
Izrek 9.46 (Pravilo zamenjave v doloceni integral). Naj bo g : [α, β] → R zvezna, monotona inodvedljiva funkcija na intervalu [α, β]. Tedaj je
∫ b
af(x) dx =
∫ β
αf(g(t)) · g′(t) dt,
kjer smo oznacili a = g(α) in b = g(β).
Dokaz. Naj bo F (x) =∫f(x) dx. Tedaj je
∫ β
αf(g(t)) · g′(t) dt = F (g(t))
∣∣∣∣β
α
= F (g(β)) − F (g(α)) =
= F (b) − F (a) =
∫ b
af(x) dx,
kjer potrebujemo monotonost funkcije g zato, da je g : [α, β] → [a, b] bijekcija.
Zgled 9.47. Izracunaj
∫ 1
0
1
ex + e−xdx.
Resitev. Uporabimo zamenjavo t = ex, dt = ex dx. Sledi dx = t−1 dt. Tedaj je
∫ 1
0
1
ex + e−xdx =
∫ e
1
1
t+ t−1t−1dt =
∫ e
1
1
t2 + 1dt =
= (arc tan t)
∣∣∣∣e
1
= arc tan e− π
4,
kjer smo upostevali, da se pri zamenjavi t = ex spremenijo tudi meje: 0 7→ e0 = 1, 1 7→ e1 = e.
Zgled 9.48. Izracunaj∫ a0
√a2 − x2 dx.
Resitev. S pomocjo izreka o zamenjavi v nedoloceni integral smo izracunali∫ √
a2 − x2 dx =a2
2 arc sin xa + x2
2
√a2 − x2, torej je
∫ a
0
√a2 − x2 dx =
(a2
2arc sin
x
a+x2
2
√a2 − x2
)∣∣∣∣a
0
=a2
2arc sin 1 =
π
4a2.
S pomocjo izreka o zamenjavi v doloceni integral pa pri zamenjavi x = a sin t izracunamo
∫ a
0
√a2 − x2 dx =
∫ π/2
0a2 cos2 t dt =
∫ π/2
0
a2
2(1 + cos 2t) dt =
=a2
2
(t+
1
2sin 2t
)∣∣∣∣π/2
0
=π
4a2.
Opozorilo. Pri uporabi pravila zamenjave v doloceni integral moramo biti nadvse previdni.Najpomembneje je, da za zamenjavo uporabimo bijektivno funkcijo.

9 INTEGRALSKI RACUN 166
Zgled 9.49. Ali lahko uporabimo zamenjavo t = sinx v integralu
∫ π
0sin2 x dx?
Resitev. Pri t = sinx imamo dt = cos x dx in
dx =1
cos xdt =
1√1 − sin2 x
dt =1√
1 − t2dt.
Sledi ∫ π
0sin2 x dx =
∫ 0
0
t2√1 − t2
dt = 0,
kar pa ne drzi, saj je sin2 x > 0 na intervalu (0, π) in zato
∫ π
0sin2 x dx > 0. Zamenjave torej ne
smemo uporabiti.
Izrek 9.50 (Integracija po delih). Ce sta f in g odvedljivi funkciji na intervalu [a, b], velja
∫ b
af(x)g′(x) dx = (f(b)g(b) − f(a)g(a)) −
∫ b
ag(x)f ′(x) dx.
Dokaz. Ker za H(x) = f(x)g(x) velja H ′(x) = f ′(x)g(x)+f(x)g′(x), je H(x) =
∫(f(x)g′(x)+
g(x)f ′(x)) dx. Torej je
H(b) −H(a) =
∫ b
a(f(x)g′(x) + g(x)f ′(x)) dx =
=
∫ b
af(x)g′(x) dx+
∫ b
ag(x)f ′(x) dx in zato
∫ b
af(x)g′(x) = H(b) −H(a) −
∫ b
ag(x)f ′(x) dx =
= (f(b)g(b) − f(a)g(a)) −∫ b
ag(x)f ′(x) dx.
Zgled 9.51. Izracunaj
∫ π
0x sinx dx.
Resitev. Ker gre za integral oblike
∫p(x) sinx dx, kjer je p(x) = x polinom, je pri integraciji
po delih ugodno polinom odvajati, trigonometricno funkcijo poleg njega pa integrirati. Torej∫ π
0x sinx dx = −x cosx
∣∣∣∣π
0
+
∫ π
0cos x dx = π + sinx
∣∣∣∣π
0
= π,
kjer smo v prvi enakosti upostevali u = x, dv = sinx dx in du = dx, v = − cos x.
Zgled 9.52. Izracunaj
∫ 1
−1x ex dx.
Resitev. Ker gre za integral oblike
∫p(x)ex dx, kjer je p(x) = x polinom, je pri integraciji po
delih ugodno polinom odvajati, eksponentno funkcijo poleg njega pa integrirati. Torej∫ 1
−1x ex dx = (x ex)
∣∣1−1
−∫ 1
−1ex dx = (e+ e−1) − ex|1−1 =
= (e+ e−1) − (e− e−1) = 2e−1,
kjer smo v prvi enakosti upostevali u = x, dv = ex dx in du = dx, v = ex.
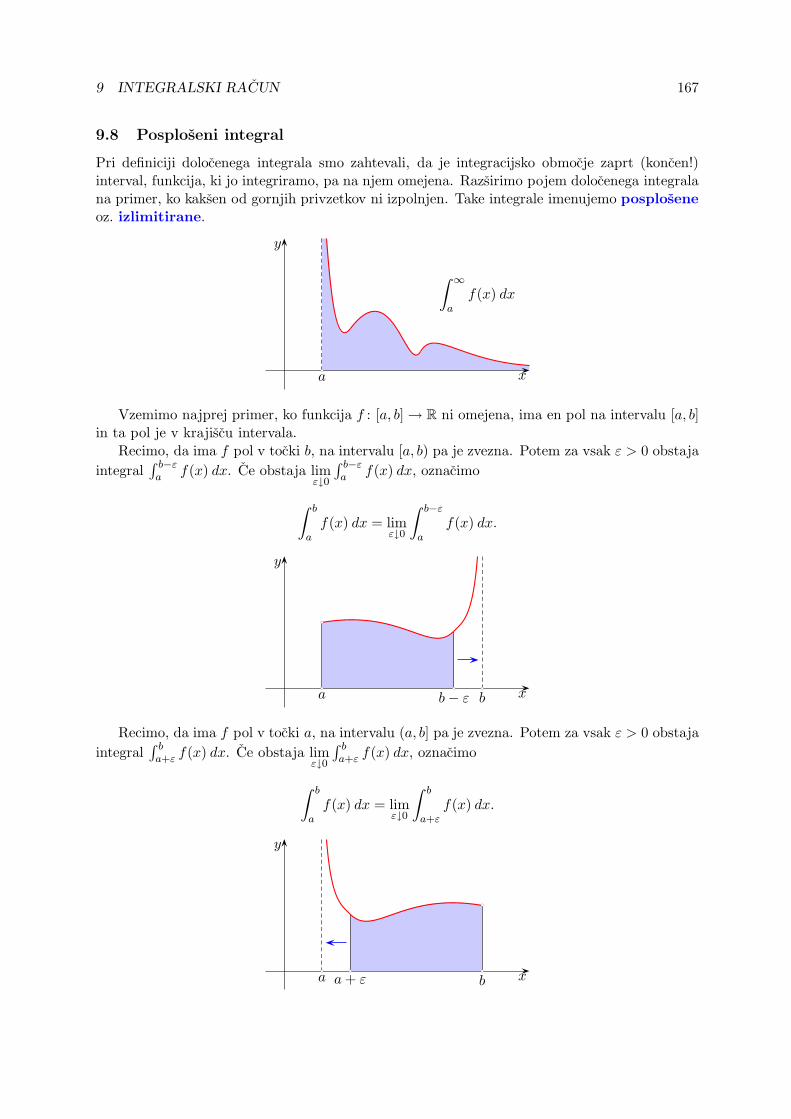
9 INTEGRALSKI RACUN 167
9.8 Posploseni integral
Pri definiciji dolocenega integrala smo zahtevali, da je integracijsko obmocje zaprt (koncen!)interval, funkcija, ki jo integriramo, pa na njem omejena. Razsirimo pojem dolocenega integralana primer, ko kaksen od gornjih privzetkov ni izpolnjen. Take integrale imenujemo posploseneoz. izlimitirane.
x
y
a
∫ ∞
af(x) dx
bc
Vzemimo najprej primer, ko funkcija f : [a, b] → R ni omejena, ima en pol na intervalu [a, b]in ta pol je v krajiscu intervala.
Recimo, da ima f pol v tocki b, na intervalu [a, b) pa je zvezna. Potem za vsak ε > 0 obstaja
integral∫ b−εa f(x) dx. Ce obstaja lim
ε↓0
∫ b−εa f(x) dx, oznacimo
∫ b
af(x) dx = lim
ε↓0
∫ b−ε
af(x) dx.
x
y
a bb− εbc
bc
bcbc
Recimo, da ima f pol v tocki a, na intervalu (a, b] pa je zvezna. Potem za vsak ε > 0 obstaja
integral∫ ba+ε f(x) dx. Ce obstaja lim
ε↓0
∫ ba+ε f(x) dx, oznacimo
∫ b
af(x) dx = lim
ε↓0
∫ b
a+εf(x) dx.
x
y
ba a+ εbc
bc
bc bc

9 INTEGRALSKI RACUN 168
Ce ima funkcija f pol v kaksni tocki c ∈ (a, b), integracijsko obmocje razdelimo na dva dela.
Ce obstajata (posplosena) integrala∫ ca f(x) dx in
∫ bc f(x) dx, izracunamo
∫ b
af(x) dx =
∫ c
af(x) dx+
∫ b
cf(x) dx =
= limε↓0
∫ c−ε
af(x) dx+ lim
ε↓0
∫ b
c+εf(x) dx.
x
y
a bcc− ε c+ εbc bc
bc
bc
bc bcbc
Opozorilo. Limiti limε↓0
∫ c−εa f(x) dx in lim
ε↓0
∫ bc+ε f(x) dx ne smemo zdruziti v eno limito, tj. v
limε↓0
(∫ c−ε
af(x) dx+
∫ b
c+εf(x) dx
), (19)
saj sta limiti med seboj neodvisni.
Zgled 9.53. Ali obstaja posploseni integral∫ 1−2
1x3 dx?
Resitev. Ker funkcija f , f(x) = 1x3 , ni definirana v tocki 0, moramo zapisati
∫ 1
−2
1
x3dx =
∫ 0
−2
1
x3dx+
∫ 1
0
1
x3dx,
kjer zahtevamo, da oba integrala na desni strani obstajata. Po definiciji je∫ 0
−2
1
x3dx = lim
ε↓0
∫ 0−ε
−2
1
x3dx,
ce ta integral sploh obstaja. Racunajmo∫ 0−ε
−2
1
x3dx = − 1
2x2
∣∣∣∣−ε
−2
= − 1
2ε2+
1
8.
Ker limita limε↓0
(− 12ε2 + 1
8) ne obstaja, funkcija f ni integrabilna na intervalu [−2, 0], torej tudi
ne na vecjem intervalu [−2, 1].Pripomniti velja, da bi s pomocjo limite (19) prisli do napacne ugotovitve. Velja namrec
∫ 1
0+ε
1
x3dx = − 1
2x2
∣∣∣∣1
0+ε
= −1 +1
2ε2
in od tod dobimo
limε↓0
(∫ 0−ε
−2
1
x2dx+
∫ 1
0+ε
1
x2dx
)=
= limε↓0
((−1 +
1
2ε2
)+
(− 1
2ε2+
1
8
))= −7
8.
Slednje seveda ni enako vrednosti integrala∫ 1−2
1x3 dx, saj le-ta ne obstaja.

9 INTEGRALSKI RACUN 169
Cauchyjeva glavna vrednostGornji primer torej kaze, da lahko obstaja limita
limε↓0
(∫ c−ε
af(x) dx+
∫ b
c+εf(x) dx
),
ceprav ne obstaja izlimirani integral∫ ba f(x)dx. V tem primeru pravimo, da obstaja Cauchyjeva
glavna vrednost integrala∫ ba f(x) dx.
Zgled 9.54. Izracunaj Cauchyevo glavno vrednost integrala∫ 1−2
1x3 dx.
Resitev. Kot smo ze videli, je
limε↓0
(∫ 0−ε
−2
1
x2dx+
∫ 1
0+ε
1
x2dx
)= −7
8.
Zgled 9.55. Izracunaj∫ 20
1√2−x
dx.
Resitev. Ker funkcija f , f(x) = 1√2−x
, ni definirana v tocki x = 2, je
∫ 2
0
1√2 − x
dx = limε↓0
∫ 2−ε
0
1√2 − x
dx,
ce limita na desni obstaja. Ker je∫ 2−ε
0
1√2 − x
dx = −2√
2 − x∣∣2−ε
0= −2
√ε+ 2
√2,
velja ∫ 2
0
1√2 − x
dx = limε↓0
∫ 2−ε
0
1√2 − x
dx = limε↓0
(−2√ε+ 2
√2) = 2
√2.
Zgled 9.56. Izracunaj∫ 10
1xα dx za razlicne vrednosti parametra α.
Resitev. Po definiciji je ∫ 1
0
1
xαdx = lim
ε↓0
∫ 1
ε
1
xαdx.
Ce je α = 1, imamo∫ 1ε
1x dx = lnx|1ε = − ln ε, vendar v tem primeru
limε↓0
∫ 1
ε
1
xαdx = lim
ε↓0(− ln ε)
ne obstaja.Ce je α 6= 1, ∫ 1
ε
1
xαdx =
1
1 − αx1−α
∣∣∣∣1
ε
=1
1 − α(1 − ε1−α).
Ker limita limε↓0
ε1−α obstaja le za α < 1, obstaja integral le za α < 1 in v tem primeru velja
∫ 1
0
1
xαdx = lim
ε↓0
∫ 1
ε
1
xαdx = lim
ε↓01
1 − α(1 − ε1−α) =
1
1 − α.
Torej integral ∫ 1
0
1
xαdx
obstaja natanko tedaj, ko je α < 1.

9 INTEGRALSKI RACUN 170
Zgled 9.57. Izracunaj∫ 8−1 x
− 23 dx.
Resitev. Ker funkcija f , f(x) = x−23 , ni definirana v tocki x = 0, pisemo
∫ 8
−1x−
23 dx =
∫ −ε
−1x−
23 dx+
∫ 8
εx−
23 dx.
Oba integrala na desni strani obstajata, saj ustrezata pogojem prejsnje naloge pri α = 23 .
Racunajmo
∫ 8
−1x−
23 dx =
∫ −ε
−1x−
23 dx+
∫ 8
εx−
23 dx =
= limε↓0
∫ −ε
−1x−
23 dx+ lim
ε↓0
∫ 8
εx−
23 dx =
= limε↓0
3x13
∣∣∣−ε
−1+ lim
ε↓03x
13
∣∣∣8
ε=
= limε↓0
3(−ε 13 + 1) + lim
ε↓03(2 − ε
13 ) = 3 + 6 = 9.
Zgled 9.58. Izracunaj∫ 10
1√1−x2
dx.
Resitev. Po definiciji je
∫ 1
0
1√1 − x2
dx = limε↓0
∫ 1−ε
0
1√1 − x2
dx.
Ker je∫
1√1−x2
dx = arc sinx, lahko izracunamo:
∫ 1
0
1√1 − x2
dx = limε↓0
(arc sinx|1−ε
0
)= lim
ε↓0arc sin(1 − ε) =
π
2.
Doslej smo se ukvarjali le z integrali neomejenih funkcij na koncnih intervalih. Predpostavimosedaj, da je integracijski interval neomejen, funkcija pa naj bo na vsakem koncnem podintervaluintegrabilna (v pravem ali posplosenem smislu).
Ce za vsak b > a obstaja integral∫ ba f(x) dx in ce obstaja lim
b→∞
∫ ba f(x) dx, pravimo, da je f
integrabilna na intervalu [a,∞) in oznacimo
∫ ∞
af(x) dx = lim
b→∞
∫ b
af(x) dx.
Podobno definiramo integrabilnost na intervalu (−∞, b]. Ce za vsak a < b obstaja integral∫ ba f(x)dx in ce obstaja lim
a→−∞
∫ ba f(x)dx, pravimo, da je f integrabilna na intervalu (−∞, b]
in oznacimo ∫ b
−∞f(x) dx = lim
a→−∞
∫ b
af(x) dx.
Nazadnje definiramo se integral∫∞−∞ f(x) dx. Ce je funkcija f integrabilna na vsakem
koncnem zaprtem intervalu v (−∞,∞) in ce obstaja limita
lima→−∞b→∞
∫ b
af(x) dx,

9 INTEGRALSKI RACUN 171
pravimo, da je f integrabilna na intervalu (−∞,∞) in oznacimo
∫ ∞
−∞f(x) dx = lim
a→−∞b→∞
∫ b
af(x) dx.
Opozorilo. V lima→−∞b→∞
∫ ba f(x) dx moramo izracunati limiti po a in b neodvisno in si racuna ne
smemo poenostaviti v
lima→∞
∫ a
−af(x) dx =
∫ ∞
−∞f(x) dx.
Res pa je, da je∫∞−∞ f(x) dx = lim
a→∞
∫ a−a f(x) dx, ce integral
∫∞−∞ f(x) dx obstaja.
Zgled 9.59. Izracunaj∫∞1
1xα dx za razlicne vrednosti parametra α.
Resitev. Po definiciji je∫∞1
1xα dx = lim
b→∞
∫ b1
1xα dx. Ce je α = 1, imamo
∫ b1
1x dx = lnx|b1 = ln b,
vendar v tem primeru limb→∞
∫ b1
1xα dx = lim
b→∞ln b ne obstaja.
Ce je α 6= 1, velja
∫ b
1
1
xαdx =
1
1 − αx1−α
∣∣∣∣b
1
=1
1 − α(b1−α − 1).
Ker limita limb→∞
b1−α obstaja le za α > 1, obstaja integral le za α > 1 in v tem primeru velja
∫ b
1
1
xαdx = lim
b→∞
∫ b
1
1
xαdx = lim
b→∞1
1 − α(b1−α − 1) =
1
α− 1.
Iz gornjih zgledov vidimo, da integral ∫ ∞
0xα dx
ne obstaja za noben α ∈ R.
Zgled 9.60. Izracunaj∫ 0−∞ ex dx.
Resitev. Racunajmo
∫ 0
−∞ex dx = lim
a→−∞
∫ 0
aex dx = lim
a→−∞ex|0a = lim
a→−∞(1 − ea) = 1.
Zgled 9.61. Ali obstaja∫∞0
x+1x2+1
dx?
Resitev. Izracunajmo najprej nedoloceni integral:∫
x+ 1
x2 + 1dx =
1
2
∫2x
x2 + 1dx+
∫1
x2 + 1dx =
=1
2ln(x2 + 1) + arc tanx.
Torej dani integral ne obstaja, saj je
∫ ∞
0
x+ 1
x2 + 1dx = lim
b→∞
∫ b
0
x+ 1
x2 + 1dx =
= limb→∞
(1
2ln(1 + b2) + arc tan b
)= ∞.

9 INTEGRALSKI RACUN 172
Zgled 9.62. Izracunaj∫ 1/20
1x ln2 x
dx.
Resitev. Izracunajmo najprej nedoloceni integral, tako da vpeljemo t = lnx, dt = 1x dx. Tedaj
je ∫1
x ln2 xdx =
∫1
t2dt = −1
t= − 1
lnx.
∫ 1/2
0
1
x ln2 xdx = lim
ε↓0
∫ 12
ε
1
x ln2 xdt = − lim
ε↓01
lnx
∣∣∣∣
12
ε
=
= − limε↓0
(1
ln 12
− 1
ln ε
)= − 1
ln 12
=1
ln 2.
Zgled 9.63. Izracunaj∫ 10 x lnx dx.
Resitev. Videli smo ze, da je∫x lnx dx = x2
2 lnx− x2
4 . Torej je
∫ 1
0x lnx dx = lim
ε↓0
∫ 1
εx lnx dx = lim
ε↓0
(x2
2lnx− x2
4
)∣∣∣∣1
ε
=
= limε↓0
(−1
4− ε2
2ln ε+
ε2
4
)∣∣∣∣1
ε
= −1
4,
saj je limε↓0
ε2 ln ε = 0.
Zgled 9.64. Izracunaj∫ 2π0
14−3 cos x dx.
Resitev. Uporabimo zamenjavo t = tan x2 . Potem je dx = 2dt
1+t2in cos x = 1−t2
1+t2. Sledi
∫1
4 − 3 cos xdx =
∫1
4 − 31−t2
1+t2
· 2
1 + t2dt =
∫2
1 + 7t2dt.
Ker funkcija x 7→ tan x2 ni injektivna na intervalu [0, 2π] (pravzaprav ni niti definirana za x =
π), ne moremo napraviti zamenjave na celem integracijskem intervalu, ampak moramo najprejinterval razdeliti na dva dela. Torej
∫ 2π
0
1
4 − 3 cos xdx =
∫ π
0
1
4 − 3 cos xdx+
∫ 2π
π
1
4 − 3 cos xdx.
Ce sedaj upostevamo, da je limx↑π
tan x2 = ∞ in lim
x↓πtan x
2 = −∞, lahko zapisemo
∫ 2π
0
1
4 − 3 cos xdx =
∫ π
0
1
4 − 3 cos xdx+
∫ 2π
π
1
4 − 3 cos xdx =
=
∫ ∞
0
2
1 + 7t2dt+
∫ 0
−∞
2
1 + 7t2dt =
∫ ∞
−∞
2
1 + 7t2dt =
=2√7
arc tan(t√
7)
∣∣∣∣∞
−∞=
2√7
(π2− (−π
2))
=2π√
7.
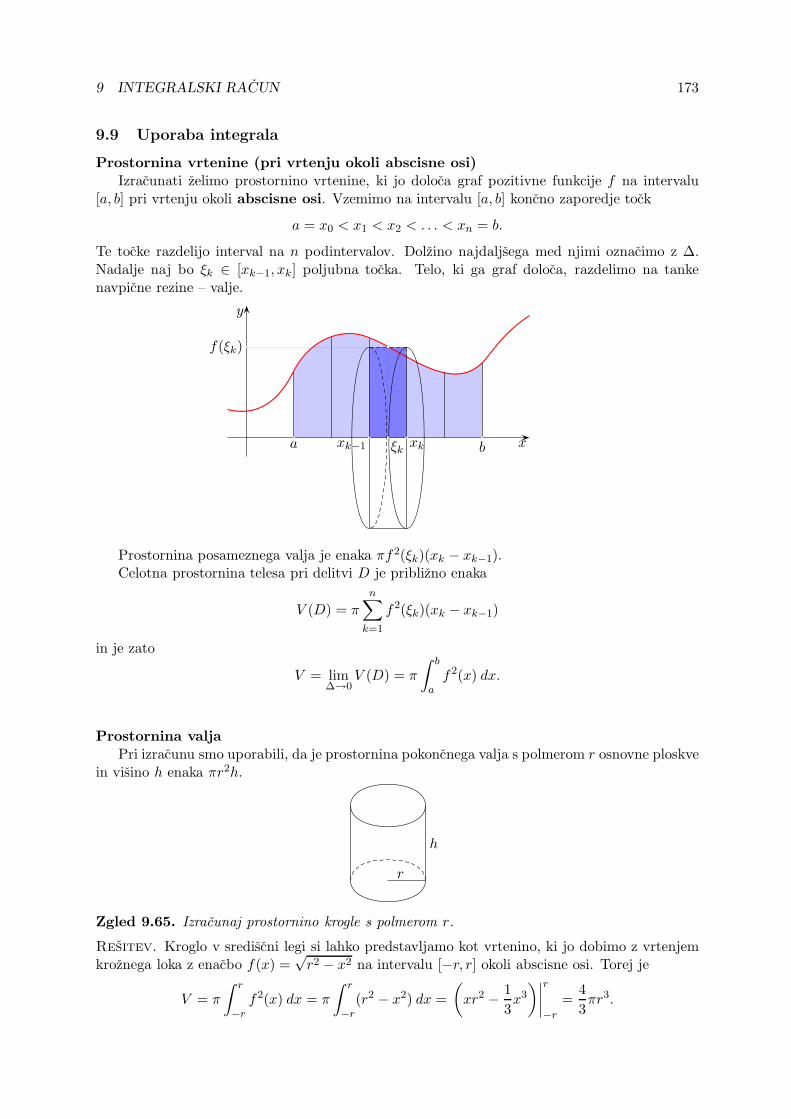
9 INTEGRALSKI RACUN 173
9.9 Uporaba integrala
Prostornina vrtenine (pri vrtenju okoli abscisne osi)Izracunati zelimo prostornino vrtenine, ki jo doloca graf pozitivne funkcije f na intervalu
[a, b] pri vrtenju okoli abscisne osi. Vzemimo na intervalu [a, b] koncno zaporedje tock
a = x0 < x1 < x2 < . . . < xn = b.
Te tocke razdelijo interval na n podintervalov. Dolzino najdaljsega med njimi oznacimo z ∆.Nadalje naj bo ξk ∈ [xk−1, xk] poljubna tocka. Telo, ki ga graf doloca, razdelimo na tankenavpicne rezine – valje.
a bξk x
y
xk−1 xk
f(ξk)
bc bcbc
bc
bc bc
bc
Prostornina posameznega valja je enaka πf2(ξk)(xk − xk−1).Celotna prostornina telesa pri delitvi D je priblizno enaka
V (D) = π
n∑
k=1
f2(ξk)(xk − xk−1)
in je zato
V = lim∆→0
V (D) = π
∫ b
af2(x) dx.
Prostornina valjaPri izracunu smo uporabili, da je prostornina pokoncnega valja s polmerom r osnovne ploskve
in visino h enaka πr2h.
r
h
Zgled 9.65. Izracunaj prostornino krogle s polmerom r.
Resitev. Kroglo v srediscni legi si lahko predstavljamo kot vrtenino, ki jo dobimo z vrtenjemkroznega loka z enacbo f(x) =
√r2 − x2 na intervalu [−r, r] okoli abscisne osi. Torej je
V = π
∫ r
−rf2(x) dx = π
∫ r
−r(r2 − x2) dx =
(xr2 − 1
3x3
)∣∣∣∣r
−r
=4
3πr3.
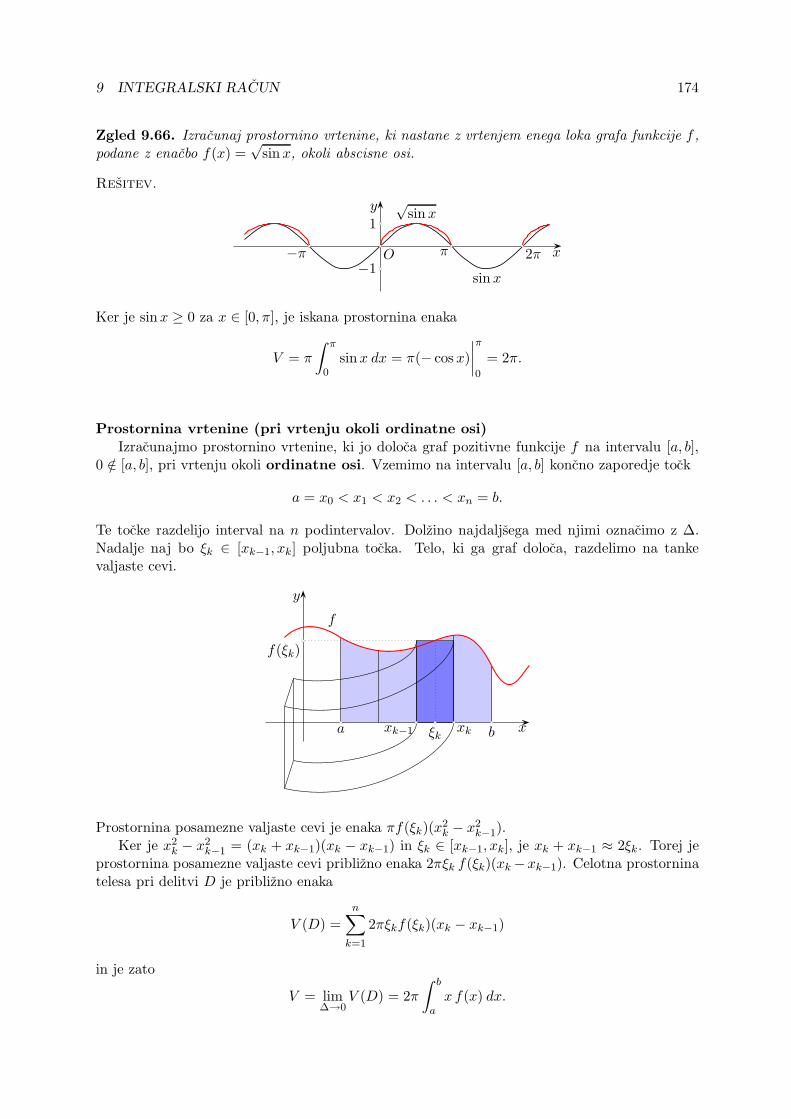
9 INTEGRALSKI RACUN 174
Zgled 9.66. Izracunaj prostornino vrtenine, ki nastane z vrtenjem enega loka grafa funkcije f ,podane z enacbo f(x) =
√sinx, okoli abscisne osi.
Resitev.
x
y √sinx
sinx
bc
Obc
2πbc
πbc
−π
bc1
bc−1
Ker je sinx ≥ 0 za x ∈ [0, π], je iskana prostornina enaka
V = π
∫ π
0sinx dx = π(− cos x)
∣∣∣∣π
0
= 2π.
Prostornina vrtenine (pri vrtenju okoli ordinatne osi)Izracunajmo prostornino vrtenine, ki jo doloca graf pozitivne funkcije f na intervalu [a, b],
0 /∈ [a, b], pri vrtenju okoli ordinatne osi. Vzemimo na intervalu [a, b] koncno zaporedje tock
a = x0 < x1 < x2 < . . . < xn = b.
Te tocke razdelijo interval na n podintervalov. Dolzino najdaljsega med njimi oznacimo z ∆.Nadalje naj bo ξk ∈ [xk−1, xk] poljubna tocka. Telo, ki ga graf doloca, razdelimo na tankevaljaste cevi.
a bxk−1 ξkxk
f(ξk)
x
y
f
bc bcbcbc bc
bc
Prostornina posamezne valjaste cevi je enaka πf(ξk)(x2k − x2
k−1).Ker je x2
k − x2k−1 = (xk + xk−1)(xk − xk−1) in ξk ∈ [xk−1, xk], je xk + xk−1 ≈ 2ξk. Torej je
prostornina posamezne valjaste cevi priblizno enaka 2πξk f(ξk)(xk −xk−1). Celotna prostorninatelesa pri delitvi D je priblizno enaka
V (D) =n∑
k=1
2πξkf(ξk)(xk − xk−1)
in je zato
V = lim∆→0
V (D) = 2π
∫ b
ax f(x) dx.

9 INTEGRALSKI RACUN 175
Prostornina pokoncne valjaste ceviPri izracunu smo uporabili, da je prostornina pokoncne valjaste cevi z zunanjim polmerom
R, notranjim polmerom r in h enaka π(R2 − r2)h.
r
h
R
Zgled 9.67. Koliksna je prostornina telesa, ki ga dobimo, ko graf funkcije f(x) = 1(x2+1)2 na
intervalu [0, 1] zavrtimo okoli ordinatne osi?
Resitev. Naj bo f(x) = 1(x2+1)2
. Potem je prostornina enaka
V = 2π
∫ 1
0
x
(x2 + 1)2dx.
Vpeljimo substitucijo t = x2 + 1, dt = 2x dx. Sledi
V = 2π
∫ 1
0
x
(x2 + 1)2dx = π
∫ 2
1
1
t2dt = − π
t
∣∣∣2
1= −π
2+ π =
π
2.
Zgled 9.68. Izracunaj prostornino torusa s polmeroma R in r.
Resitev. Torus nastane tako, da krog/kroznico s polmerom r, katere sredisce je od premice ℓoddaljeno R, zavrtimo okoli te premice.
bR
ℓ
r
Torej lahko nalogo resimo na dva nacina – z vrtenjem okoli abscisne ali vrtenjem okoli ordinatneosi.
Vrtenje okoli abscisne osi

9 INTEGRALSKI RACUN 176
x−r r
R
y
O
yz
ys
bc
bc
bc bc
Torus nastane tako, da kroznico z enacbo x2 +(y−R)2 = r2 zavrtimookoli abscisne osi. Sledi y = R ±
√r2 − x2 in yz = R +
√r2 − x2,
ys = R−√r2 − x2. Prostornina je tako enaka
V = Vz − Vs = π
∫ r
−r(y2
z − y2s) dx =
= π
∫ r
−r(yz + ys)(yz − ys) dx =
= π
∫ r
−r2R · 2
√r2 − x2 dx =
= 4πR · 1
2πr2 = 2π2Rr2.
Vrtenje okoli ordinatne osiy
−r
r
R xR+ rR− r
O
yz
ys
bc bcbc bcbc
bc
bc
Torus nastane tudi tako, da kroznico z enacbo
(x−R)2 + y2 = r2
zavrtimo okoli ordinatne osi. V tem primeru je
yz =√r2 − (x−R)2,
ys = −√r2 − (x−R)2.
Sledi
V = 2π
∫ R+r
R−rx(yz − ys) dx = 4π
∫ R+r
R−rx√r2 − (x−R)2 dx =
= . . . = 2π2Rr2.
Dolzina ravninske krivuljeNaj bo K krivulja v ravnini. Radi bi definirali dolzino krivulje K. Naj bosta A in B krajisci
te krivulje. Oznacimo z D delitev krivulje K z zaporednimi tockami A = T0, T1, . . . , B = Tn.
A = T0
B = Tn
Tn−1
Tn−2
T1
T2
T3
Kbc
bc
bc
bc
bc
bc
bc
Dobimo poligonalno crto, katere dolzino lahko izracunamo: L(D) =n∑
k=1
|Tk−1Tk|.
Poligonalna crta T0T1 . . . Tn se loci od krivulje K tem manj, cim krajse so vse daljice vpoligonalni crti. Se vec, krivuljo imamo lahko za limitno obliko poligonalnih crt, ko gredodolzine vseh daljic proti 0. Torej lahko vzamemo za dolzino L krivulje K kar limito dolzinL(D), ko gredo dolzine vseh daljic proti 0. Ce z ∆ oznacimo dolzino najkrajse med njimi, je
L = lim∆→0
L(D).
Ce gornja limita obstaja, pravimo, da je krivulja merljiva.

9 INTEGRALSKI RACUN 177
Naj bo sedaj krivulja podana z grafom zvezno odvedljive funkcije f na intervalu [a, b]. Raz-delimo interval z delilnimi tockami a = x0 < x1 < . . . < xn = b na podintervale. Dolzinonajdaljsega med njimi oznacimo z ∆. Tocka Tk ima koordinati (xk, f(xk)).
a = x0 b = xnx
y
xk−1 xk
f(xk)
f(xk−1)Tk−1
Tkbc
bc
bc bc
bc
bc
bc
bc
Dolzina posameznega odseka lomljenke je enaka |Tk−1Tk| =√
(xk − xk−1)2 + (f(xk) − f(xk−1))2.
Racunajmo
L(D) =
n∑
k=1
√(xk − xk−1)2 + (f(xk) − f(xk−1))2 =
=
n∑
k=1
√1 +
(f(xk)−f(xk−1)
xk−xk−1
)2· (xk − xk−1) =
=
n∑
k=1
√1 + (f ′(ξk))2 · (xk − xk−1),
kjer smo zapisali f ′(ξk) =f(xk)−f(xk−1)
xk−xk−1s pomocjo Lagrangeovega izreka. Torej je
L = lim∆→0
L(D) =
∫ b
a
√1 + (f ′(x))2 dx.
Zgled 9.69. Izracunaj obseg kroznice s polmerom r.
Resitev. Ker je kroznica simetricna, zadosca dolociti dolzino loka kroznice v I. kvadrantu. Kerje f(x) =
√r2 − x2, je f ′(x) = − x√
r2−x2. Torej je
ℓ =
∫ r
0
√1 + (f ′(x))2 dx =
∫ r
0
√1 +
x2
r2 − x2dx =
=
∫ r
0
√r2
r2 − x2dx = r
∫ r
0
1√r2 − x2
dx =
= r arc sin 1 =πr
2.
Obseg kroznice je torej enak 4 · πr2 = 2πr.
Zgled 9.70. Izracunaj dolzino loka grafa funkcije y = ln(1 − x2) med tockama x = 0 in x = 12 .
xO
y
ln 34
12
bc bcbc
bc
bcbc
Resitev. Naj bo f(x) = ln(1 − x2). Potem je
f ′(x) =−2x
1 − x2
in dolzina loka je enaka

9 INTEGRALSKI RACUN 178
∫ 12
0
√
1 +
( −2x
1 − x2
)2
dx =
∫ 12
0
√(1 − x2)2 + (−2x)2
(1 − x2)2dx =
=
∫ 12
0
√(1 + x2)2
(1 − x2)2dx =
∫ 12
0
1 + x2
1 − x2dx.
Izracunajmo najprej nedoloceni integral
∫1 + x2
1 − x2dx. Ker stopnja polinoma v stevcu ni
manjsa od stopnje polinoma v imenovalcu, najprej delno delimo:
(x2 + 1) = (−x2 + 1)(−1) + 2
in od tod1 + x2
1 − x2= −1 +
2
−x2 + 1= −1 +
−2
x2 − 1.
S pomocjo razcepa na parcialne ulomke
−2
x2 − 1=
A
x+ 1+
B
x− 1=A(x− 1) +B(x+ 1)
x2 − 1
dobimo A+B = 0 in −A+B = −2. Sledi A = 1 in B = −1. Torej je
1 + x2
1 − x2= −1 +
1
x+ 1− 1
x− 1.
Sledi
∫1 + x2
1 − x2dx =
∫ (−1 +
1
x+ 1− 1
x− 1
)dx =
= −x+ ln |x+ 1| − ln |x− 1| = −x+ ln
∣∣∣∣x+ 1
x− 1
∣∣∣∣
in
L =
(−x+ ln
∣∣∣∣x+ 1
x− 1
∣∣∣∣)∣∣∣∣
12
0
= −1
2+ ln 3.
Povrsina vrtenineIzracunati zelimo povrsino vrtenine, ki jo doloca graf pozitivne funkcije f na intervalu [a, b]
pri vrtenju okoli abscisne osi. Razdelimo interval z delilnimi tockami a = x0 < x1 < . . . < xn = bna podintervale. Dolzino najdaljsega med njimi oznacimo z ∆. Telo, ki ga graf doloca, razdelimona tanke navpicne rezine – prisekane stozce.
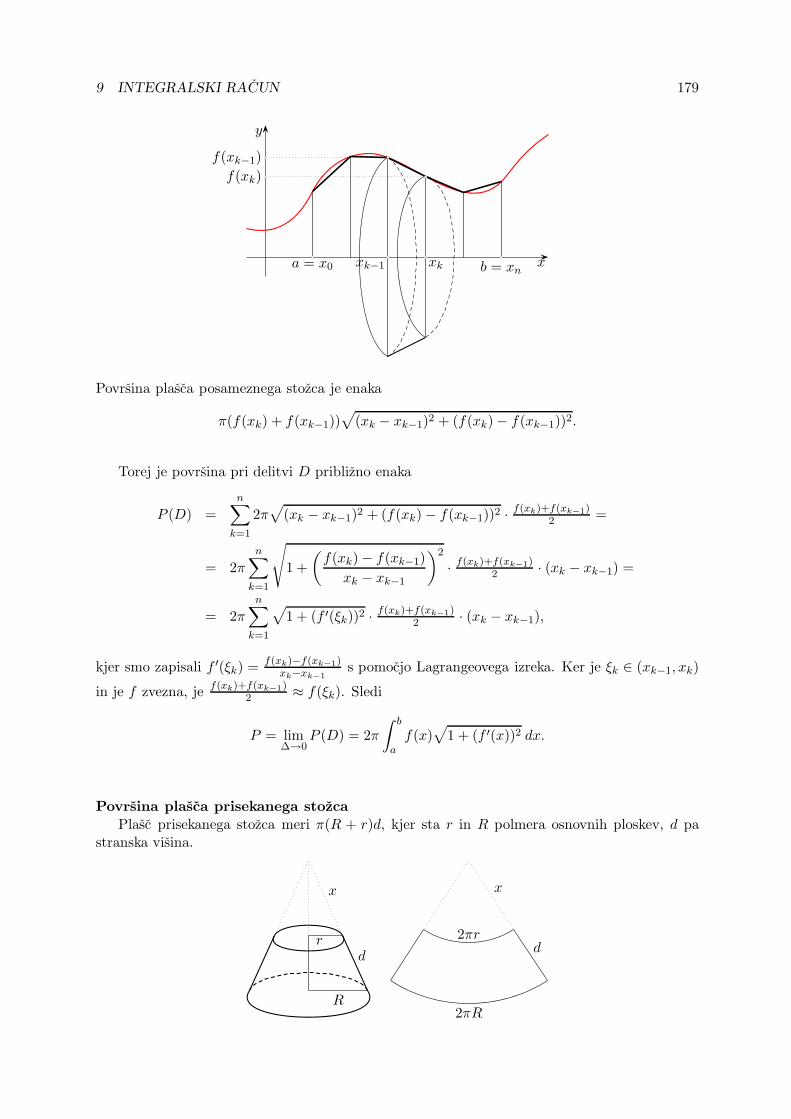
9 INTEGRALSKI RACUN 179
a = x0 b = xnx
y
xk−1 xk
f(xk)
f(xk−1)
bc bc
bc
bc bc
bc
bc
bc
Povrsina plasca posameznega stozca je enaka
π(f(xk) + f(xk−1))√
(xk − xk−1)2 + (f(xk) − f(xk−1))2.
Torej je povrsina pri delitvi D priblizno enaka
P (D) =n∑
k=1
2π√
(xk − xk−1)2 + (f(xk) − f(xk−1))2 · f(xk)+f(xk−1)2 =
= 2πn∑
k=1
√
1 +
(f(xk) − f(xk−1)
xk − xk−1
)2
· f(xk)+f(xk−1)2 · (xk − xk−1) =
= 2πn∑
k=1
√1 + (f ′(ξk))2 · f(xk)+f(xk−1)
2 · (xk − xk−1),
kjer smo zapisali f ′(ξk) =f(xk)−f(xk−1)
xk−xk−1s pomocjo Lagrangeovega izreka. Ker je ξk ∈ (xk−1, xk)
in je f zvezna, jef(xk)+f(xk−1)
2 ≈ f(ξk). Sledi
P = lim∆→0
P (D) = 2π
∫ b
af(x)
√1 + (f ′(x))2 dx.
Povrsina plasca prisekanega stozcaPlasc prisekanega stozca meri π(R + r)d, kjer sta r in R polmera osnovnih ploskev, d pa
stranska visina.
R
rd
d
2πR
2πr
x x

9 INTEGRALSKI RACUN 180
Iz podobnosti sledi x : r = d : (R − r) in x = rdR−r . Ploscina kolobarjevega izseka je p =
πR(x+ d) − πrx = π(Rd+ x(R − r)) = π(R+ r)d.
Zgled 9.71. Izracunaj povrsino krogle s polmerom r.
Resitev. Pri obicajni parametrizaciji je y =√r2 − x2 in y′ = −x√
r2−x2. Torej je
P = 2π
∫ r
−ry√
1 + y′2 dx = 2π
∫ r
−r
√r2 − x2
√1 +
x2
r2 − x2dx =
= 2πr
∫ r
−rdx = 4πr2.
Zgled 9.72. Izracunaj povrsino telesa, ki ga doloca graf funkcije f , f(x) = 13(3 − x)
√x, na
intervalu med njenima niclama pri vrtenju okoli abscisne osi.
Resitev.
xO
y
123
1 3bc bc bc
bc
bcbc
Ker je f(x) =1
3(3 − x)
√x = x
12 − 1
3x
32 , je f ′(x) =
1
2x−
12 − 1
2x
12 =
1 − x
2√x.
Sledi
1 + (f ′(x))2 = 1 +(1 − x)2
4x=
4x+ 1 − 2x+ x2
4x=
(1 + x)2
4x
in od tod
P = 2π
∫ 3
0y√
1 + y′2 dx = 2π
∫ 3
0
1
3(3 − x)
√x · x+ 1√
4xdx =
=π
3
∫ 3
0(3 − x)(x+ 1) dx =
π
3
∫ 3
0(−x2 + 2x+ 3) dx =
=π
3
(−1
3x3 + x2 + 3x
)∣∣∣∣3
0
= 3π
Prostornina geometrijskega telesaDano naj bo geometrijsko telo in stevilska premica x. Pri dani vrednosti x naj bo S(x)
ploscina preseka telesa z ravnino, ki je pravokotna na os x v tocki x. Vzemimo se, da je Szvezna funkcija.
ba
xx
S(x)bcbc bc

9 INTEGRALSKI RACUN 181
Razdelimo telo z ravninami, pravokotnimi na os x, na rezine. Ce je plast med sosednjimapresekoma tanka, je prostornina priblizno enaka S(ξk)(xk−xk−1), kjer je ξk ∈ [xk−1, xk] poljubnatocka. Torej je celotna prostornina priblizno enaka
V (D) =
n∑
k=1
S(ξk)(xk − xk−1).
Ta priblizek je tem boljsi, cim tanjse so rezine, tj. cim krajsi so delilni intervali. Torej je smiselnopostaviti V = lim
∆→0V (D), kjer je ∆ dolzina najdaljsega izmed delilnih intervalov. Ker je je S
zvezna funkcija, je integrabilna in
V = lim∆→0
V (D) =
∫ b
aS(x) dx.
Zgled 9.73. Izracunaj prostornino piramide s ploscino osnovne ploskve S in visino h.
Resitev.
x
h
S(x)
S
Na visini x je ploscina prereza enaka S(x). Torej je S(x) :
S = x2 : h2 in zato S(x) = Sx2
h2 . Sledi
V =
∫ h
0S(x) dx =
=
∫ h
0
Sx2
h2dx =
1
3Sh.
Guldinovi pravili za vrtenine
br∗
S
Prostornina telesa, ki ga dobimo pri vrtenju ploskve S okoli ravneosi, je enaka
V = 2πr∗p(S),
kjer je p(S) ploscina ploskve S, r∗ pa oddaljenost tezisca ploskve odosi vrtenja.
br∗
LPovrsina ploskve, ki jo dobimo pri vrtenju loka L okoli ravne osi, jeenaka
P = 2πr∗s(L),
kjer je s(L) dolzina loka L, r∗ pa oddaljenost tezisca loka od osivrtenja.
Zgled 9.74. Izracunaj prostornino in povrsino torusa s polmeroma R in r.
Resitev. Resitev. Torus nastane tako, da krog/kroznico s polmerom r, katere sredisce je odpremice ℓ oddaljeno R, zavrtimo okoli te premice.
bR
ℓ
r

10 VRSTE 182
Torej jeV = 2πr∗p(S) = 2πR · πr2 = 2π2r2R
inP = 2πr∗s(L) = 2πR · 2πr = 4π2rR.
10 Vrste
10.1 Stevilske vrste
Naj bo a1, a2, . . . zaporedje realnih stevil. Izraz
a1 + a2 + a3 + · · ·
imenujemo stevilska vrsta in ga oznacimo z
∞∑
k=1
ak, stevila a1, a2, . . . pa cleni te vrste.
Za vsak n definiramo sn =n∑
k=1
ak. Stevilo sn imenujemo n-ta delna vsota vrste∞∑
k=1
ak.
Vrsta je konvergentna, ce konvergira zaporedje delnih vsot. Ce vrsta ni konvergentna,pravimo, da je divergentna. Limito zaporedja delnih vsot imenujemo vsota vrste.
• Vrsta
∞∑
k=1
k s splosnim clenom ak = k je divergentna, ker je zaporedje delnih vsot sn =
a1 + . . .+ an = 1 + 2 + . . . + n = n(n+1)2 neomejeno.
• Vrsta∞∑
k=1
(−1)k s splosnim clenom ak = (−1)k je divergentna, ker ima zaporedje delnih
vsot
sn =
{−1, ce je n liho stevilo,
0, ce je n sodo stevilo,
dve stekalisci.
Zgled 10.1. Dokazi, da je vrsta
∞∑
k=1
1
k(k + 1)konvergentna in izracunaj njeno vsoto.
Resitev. Ker je 1k(k+1) = 1
k − 1k+1 , lahko izraz za n-to delno vsoto zapisemo kot
sn =n∑
k=1
1
k(k + 1)=
(1
1− 1
2
)+
(1
2− 1
3
)+ . . .+
(1
n− 1
n+ 1
)=
=1
1− 1
n+ 1.
Torej je sn = 1 − 1n+1 . Ker je lim
n→∞(1 − 1
n+1) = 1, je vrsta konvergentna in ima vsoto 1.
Zgled 10.2. Dokazi, da je vrsta
∞∑
k=1
ln(1 + 1k ) divergentna.

10 VRSTE 183
Resitev. Splosni clen je ak = ln(1 + 1k ). Izracunajmo delno vsoto:
sn =
n∑
k=1
ak =
n∑
k=1
ln(1 + 1k ) =
= ln(1 + 11) + ln(1 + 1
2 ) + · · · + ln(1 + 1n) =
= ln((1 + 1
1)(1 + 12 )(1 + 1
3) · · · (1 + 1n))
=
= ln(
21 · 3
2 · 43 · · · n+1
n
)= ln(n+ 1).
Vrsta je divergentna, ker je zaporedje delnih vsot neomejeno.
Geometrijska vrsta je vrsta
∞∑
k=0
aqk s splosnim clenom ak = a qk.
Ce je q 6= 1, velja
sn =n∑
k=0
a qk = a+ a q + a q2 + · · · + a qn = a qn+1−1q−1 .
Vemo, da za |q| < 1 zaporedje qn konvergira k 0 in tedaj je limn→∞
sn = a1−q .
Ce je q = 1, je sn =
n∑
k=0
a = (n+ 1)a in to zaporedje je neomejeno.
Torej geometrijska vrsta
∞∑
k=0
aqk konvergira natanko tedaj, ko je |q| < 1. Tedaj velja
∞∑
k=0
aqk =a
1 − q.
Zgled 10.3. Izracunaj
∞∑
k=1
4
3k−1.
Resitev. Najprej premaknimo sumacijski indeks:∞∑
k=1
4
3k−1=
∞∑
k=0
4
3k. Torej je a = 4 in q = 1
3 .
Sledi∞∑
k=0
4
3k=
4
1 − 13
= 6.
Legenda o sahu
Zgled 10.4. Legenda pravi, da je kralj Sahram zelel nagraditi modreca Sisa Ben Dahiro, ki gaje naucil sah. Modrec je bil skromen in mu je rekel, da naj mu da toliko zita, kot ga gre nasahovsko plosco, ce polozi na prvo polje 1 zrno, na drugo 2 zrni, na tretje 4, . . . .
Ali mu je kralj lahko izplacal zeleno nagrado?
Resitev. Na sahovnico bi bilo potrebno poloziti
1 + 2 + . . .+ 263 =264 − 1
2 − 1= 18 446 744 073 709 551 615 ≈ 1.8 · 1019
zrn zita. Ce vzamemo, da zrno zita tehta 20 mg (tj. 2 · 10−5 kg), bi vse zito skupaj tehtalo3.6 · 1014 kg oz. 3.6 · 1011 ton. (Svetovna letna proizvodnja zita je 6 · 108 ton.)
10 VRSTE 184
Konvergencni kriteriji
Izrek 10.5 (Cauchyjev kriterij). Vrsta∞∑
k=1
ak je konvergentna natanko tedaj, ko za vsak ε > 0
obstaja N ∈ N, da za vsaka m > n ≥ N velja
∣∣∣∣∣
m∑
k=n+1
ak
∣∣∣∣∣ < ε.
Dokaz. Po definiciji je vrsta konvergentna natanko tedaj, ko je konvergentno zaporedje delnihvsot. Zaporedje pa je konvergentno natanko tedaj, ko ustreza Cauchyjevemu pogoju: Za vsakε > 0 obstaja N ∈ N, da je |sm − sn| < ε za vsaka m,n ≥ N . Trditev je tako dokazana, saj je
sm − sn =
m∑
k=n+1
ak.
Zgled 10.6. Harmonicna vrsta∞∑
k=1
1
kje divergentna.
Resitev. Oglejmo si delne vsote:
s2n − sn =1
n+ 1+
1
n+ 2+ . . .+
1
n+ n≥ 1
n+ n+
1
n+ n+ . . .
1
n+ n=
1
2.
Zaporedje delnih vsot ne ustreza Cauchyjevemu pogoju.
1 +1
2+
1
3+
1
4︸ ︷︷ ︸≥ 1
2
+1
5+
1
6+
1
7+
1
8︸ ︷︷ ︸≥ 1
2
+1
9+
1
10+ · · · + 1
15+
1
16︸ ︷︷ ︸≥ 1
2
+ · · · .
Izrek 10.7. Ce je vrsta
∞∑
k=1
ak konvergentna, je limk→∞
ak = 0.
Dokaz. V Cauchyjevem pogoju pisemo m = n+ 1 in dobimo, da za vsak ε > 0 obstaja N ∈ N,da je |am| < ε za vsak m ≥ N . To pa ravno pomeni, da je lim
k→∞ak = 0.
Opozorilo. Velja limk→∞
1k = 0. Videli pa smo, da je harmonicna vrsta divergentna. Torej je
pogoj limk→∞
1k = 0 za konvergenco vrste potreben, a ni zadosten.
Izrek 10.8 (Primerjalni kriterij). Ce za vsak indeks k velja |ak| ≤ bk in je vrsta∞∑
k=1
bk konver-
gentna, je tudi vrsta∞∑
k=1
ak konvergentna.
Dokaz. Ker je vrsta
∞∑
k=1
bk konvergentna, po Cauchyjevem kriteriju za dani ε > 0 obstaja
N ∈ N, da je
m∑
k=n+1
bk < ε za vse m > n ≥ N . Torej je
∣∣∣∣∣
m∑
k=n+1
ak
∣∣∣∣∣ ≤m∑
k=n+1
|ak| ≤m∑
k=n+1
bk < ε
in je vrsta
∞∑
k=1
ak konvergentna, saj ustreza Cauchyjevemu kriteriju.

10 VRSTE 185
Zgled 10.9. Dokazi, da je vrsta∞∑
k=0
1
2ksin kx konvergentna za vsako realno stevilo x.
Resitev. Ker za vsako realno stevilo x velja | sin kx| ≤ 1, lahko ocenimo | 12k sin kx| ≤ 1
2k . Torej
smo clene vrste∞∑
k=0
1
2ksin kx navzgor ocenili s cleni konvergentne geometrijske vrste
∞∑
k=0
1
2k.
Pri primerjalnem kriteriju moramo vrsto∞∑
k=1
ak primerjati s kaksno znano vrsto. Najpogo-
steje uporabljamo geometrijsko vrsto ali pa vrsto∞∑
k=1
1
kαza primerno realno stevilo α.
Izrek 10.10. Naj bo α ∈ R poljubno stevilo. Vrsta
∞∑
k=1
1
kαkonvergira natanko tedaj, ko je α > 1.
Za α = 1 dobimo (divergentno) harmonicno vrsto
∞∑
k=1
1
k.
Ker za α < 1 velja 1kα > 1
k , je v tem primeru vrsta
∞∑
k=1
1
kαdivergentna.
Dokaz konvergentnosti vrste za α > 1 izpustimo.
Izrek 10.11 (Kvocientni oz. d’Alembertov kriterij). Naj bo∞∑
k=1
ak taka vrsta s pozitivnimi cleni,
za katero obstaja
limn→∞
an+1
an,
ki jo oznacimo s q.
• Ce je q < 1, je vrsta konvergentna.
• Ce je q > 1, je vrsta divergentna.
• Ce je q = 1, na podlagi kvocientnega kriterija o konvergenci ne moremo odlociti.
Dokaz. Oglejmo si najprej primer, ko je q < 1. Izberimo poljubno stevilo r, q < r < 1. Tedajobstaja stevilo N , da za vsak indeks n ≥ N velja an+1
an≤ r. Torej je an+1 ≤ ran za vsak n ≥ N .
Zapisimo
aN+1 ≤ raN ,
aN+2 ≤ raN+1 ≤ r2aN , . . .
aN+k ≤ rkaN .
Torej je vrsta∑∞
k=1 ak konvergentna, saj je lahko navzgor ocenimo s konvergentno vrsto:
∞∑
k=1
ak ≤ a1 + a2 + . . .+ aN−1︸ ︷︷ ︸koncno clenov
+ aN + raN + r2aN + . . .︸ ︷︷ ︸konvergentna vrsta
.

10 VRSTE 186
V drugem primeru pa naj bo q > 1. Izberimo poljubno stevilo r, 1 < r < q. Tedaj obstajastevilo N , da za vsak indeks n ≥ N velja an+1
an≥ r. Torej je an+1 ≥ ran za vsak n ≥ N in
podobno kot zgoraj velja
aN+1 ≥ raN ≥ aN ,
aN+2 ≥ raN+1 ≥ raN ≥ aN ,...
aN+k ≥ aN .
Sedaj pa vidimo, da pogoj limn→∞
an = 0, ki mu zadosca vsaka konvergentna vrsta, ne more biti
izpolnjen.
Zgled 10.12. Za vsako pozitivno realno stevilo x je vrsta
∞∑
k=1
xk
k!konvergentna.
Resitev. Pisimo an = xn
n! . Tedaj je
q = limn→∞
an+1
an= lim
n→∞
xn+1
(n+1)!xn
n!
= limn→∞
x
n+ 1= 0,
kar zaradi q < 1 pomeni, da vrsta konvergira za vsak x > 0.
Vrsta je v resnici konvergentna za vsako realno stevilo x, le da bomo to znali dokazati kasneje,ko bomo obranavali absolutno konvergenco vrst.
Zgled 10.13. Dokazali smo ze, da je vrsta
∞∑
k=1
1
k(k + 1)konvergentna. Kvocientni kriterij tega
ne ugotovi.
Resitev. Za an = 1n(n+1) imamo
q = limn→∞
an+1
an= lim
n→∞
1(n+1)(n+2)
1n(n+1)
= limn→∞
n
n+ 2= 1.
Zgled 10.14. Dokazali smo ze, da je vrsta
∞∑
k=1
1
kdivergentna. Kvocientni kriterij tega ne ugo-
tovi.
Resitev. Za an = 1n imamo
q = limn→∞
an+1
an= lim
n→∞
1n+1
1n
= limn→∞
n
n+ 1= 1.
Zgled 10.15. Razisci konvergenco vrste
∞∑
k=1
k!
kk.
Resitev. Za an = n!nn imamo
q = limn→∞
an+1
an= lim
n→∞
(n+1)!(n+1)n+1
n!nn
= limn→∞
nn
(n + 1)n= lim
n→∞1
(1 + 1n)n
=1
e.
Ker je 1e < 1, je vrsta konvergentna.

10 VRSTE 187
Zgled 10.16. Razisci konvergenco vrste∞∑
k=1
ak
(1 + a)(1 + a2) · · · (1 + ak)za a > 0.
Resitev. Za an = an
(1+a)(1+a2)···(1+an)imamo
q = limn→∞
an+1
an= lim
n→∞
an+1
(1+a)(1+a2)···(1+an)(1+an+1)an
(1+a)(1+a2)···(1+an)
= limn→∞
a
1 + an+1.
Ker je
q = limn→∞
a
1 + an+1=
a, ce je a < 1,12 , ce je a = 1,
0, ce je a > 1,
je za vsak a > 0 gornja vrsta konvergentna.
Izrek 10.17 (Korenski oz. Cauchyjev kriterij). Naj bo
∞∑
k=1
ak taka vrsta s pozitivnimi cleni, za
katero obstajalim
n→∞n√an,
ki jo oznacimo s q.
• Ce je q < 1, je vrsta konvergentna.
• Ce je q > 1, je vrsta divergentna.
• Ce je q = 1, na podlagi kvocientnega kriterija o konvergenci ne moremo odlociti.
Dokaz. Oglejmo si najprej primer, ko je q < 1. Izberimo poljubno stevilo r, q < r < 1. Tedajobstaja stevilo N , da za vsak indeks n ≥ N velja n
√an ≤ r. Torej je an ≤ rn za vsak n ≥ N .
Torej je vrsta
∞∑
k=1
ak konvergentna, saj je lahko navzgor ocenimo s konvergentno vrsto:
∞∑
k=1
ak ≤ a1 + a2 + . . .+ aN−1︸ ︷︷ ︸koncno clenov
+ rN + rN+1 + rN+2 + . . .︸ ︷︷ ︸konvergentna vrsta
.
V drugem primeru pa naj bo q > 1. Izberimo poljubno stevilo r, 1 < r < q. Tedajobstaja stevilo N , da za vsak indeks n ≥ N velja n
√an ≥ r. Torej je an ≥ rn za vsak n ≥ N .
Torej je vrsta∞∑
k=1
ak divergentna, saj je lahko navzdol ocenimo z divergentno geometrijsko vrsto
(tj. r > 1):∞∑
k=1
ak ≥ a1 + a2 + . . .+ aN−1︸ ︷︷ ︸koncno clenov
+ rN + rN+1 + rN+2 + . . .︸ ︷︷ ︸divergentna vrsta
.
Zgled 10.18. Razisci konvergenco vrste
∞∑
k=1
k
akza a > 0.

10 VRSTE 188
Resitev. Ker je limn→∞
n√n = 1, velja
q = limn→∞
n
√n
an= lim
n→∞
n√n
a=
1
a.
Torej je po korenskem kriteriju vrsta konvergentna za 1a < 1 (tj. a > 1) in divergentna za 1
a > 1(tj. a < 1).
Ce je a = 1, korenski kriterij ne odloca o konvergenci. Divergenco vrste pa lahko v tem
primeru uvidimo kar iz vrste same. Vrsta
∞∑
k=1
k
1k=
∞∑
k=1
k namrec divergira.
Zgled 10.19. Razisci konvergenco vrste
∞∑
k=1
(k − 1
k + 1
)k(k−1)
.
Resitev. Uporabimo korenski kriterij
q = limn→∞
n
√(n− 1
n+ 1
)n(n−1)
= limn→∞
(n− 1
n+ 1
)n−1
.
Pisimo n−1n+1 = 1 + 1
t , od koder izracunamo n = −1 − 2t. Torej je
q = limn→∞
(n− 1
n+ 1
)n−1
= limt→−∞
(1 +
1
t
)−2−2t
= e−2.
Ker je e−2 < 1, vrsta konvergira.
Korenski kriterij za ugotavljanje konvergence vrste
∞∑
k=1
ak uporabljamo najpogosteje tedaj,
ko je izraz n√an ’ugoden’ za limitiranje. Korenski kriterij pa ni izboljsava kvocientnega, saj velja:
Izrek 10.20. Naj bo (an) zaporedje s pozitivnimi cleni. Ce obstaja limita limn→∞
an+1
an, obstaja
tudi limita limn→∞
n√an in sta enaki.
Torej nima smisla poskusiti s korenskim kriterijem, ce smo pri kvocientnem kriteriju izracunalilim
n→∞an+1
an= 1, saj bomo izracunali tudi lim
n→∞n√an = 1.
Zgled 10.21. Razisci konvergenco vrste
∞∑
k=1
(k
3k + 1
)2k+1
.
Resitev. Uporabimo korenski kriterij. Za an =(
n3n+1
)2n+1imamo
q = limn→∞
((n
3n+ 1
)2n+1) 1
n
= limn→∞
(n
3n + 1
) 2n+1n
=1
9,
kjer smo upostevali, da je limn→∞
n3n+1 = 1
3 in limn→∞
2n+1n = 2. Torej je vrsta konvergentna.
Zgled 10.22. Razisci konvergenco vrste
∞∑
k=1
(2k)!
(3k)!.
10 VRSTE 189
Resitev. Uporabimo kvocientni kriterij. Za an = (2n)!(3n)! imamo
q = limn→∞
an+1
an= lim
n→∞
(2(n+1))!(3(n+1))!
(2n)!(3n)!
= limn→∞
(2n+ 2)! · (3n)!
(2n)! · (3n + 3)!=
= limn→∞
(2n)! · (2n + 1) · (2n + 2) · (3n)!
(2n)! · (3n)! · (3n+ 1) · (3n+ 2) · (3n + 3)=
= limn→∞
(2n + 1)(2n + 2)
(3n + 1)(3n + 2)(3n + 3)=
4n2 + . . .
27n3 + . . .= 0.
Torej je vrsta konvergentna.
Alternirajoce vrste
Vrsta
∞∑
k=1
ak je alternirajoca, ce je akak+1 < 0 za vsak k.
Izrek 10.23 (Leibnitzov kriterij). Ce v alternirajoci vrsti absolutne vrednosti clenov padajo inkonvergirajo k 0, je vrsta konvergentna.
Dokaz. Naj vrsta
∞∑
k=1
ak ustreza pogojem izreka. Oznacimo bk = |ak|. Privzeti smemo, da je
a1 > 0. Torej imamo vrsto
∞∑
k=1
(−1)k+1bk, kjer je bk ≥ bk+1 > 0 za vsak k in limk→∞
bk = 0.
Ker jes2n+2 = s2n + (b2n+1 − b2n+2)︸ ︷︷ ︸
≥0
≥ s2n,
je zaporedje (s2n)n sodih delnih vsot narascajoce.Zaradi
s2n = b1 − (b2 − b3)︸ ︷︷ ︸≥0
− (b4 − b5)︸ ︷︷ ︸≥0
− . . .− (b2n−2 − b2n−1)︸ ︷︷ ︸≥0
− b2n︸︷︷︸≥0
≤ b1,
je zaporedje navzgor omejeno. Torej je zaporedje sodih delnih vsot konvergentno.Oznacimo s = lim
n→∞s2n. Ker je s2n+1 = s2n + b2n+1 in je lim
n→∞b2n+1 = 0, je konvergentno
tudi zaporedje (s2n+1)n lihih delnih vsot in s = limn→∞
s2n+1. Torej je konvergentno tudi zaporedje
(sn) in velja s = limn→∞
sn.
Izrek 10.24. Delna vsota sn alternirajoce vrste∞∑
k=1
ak se od vsote vrste razlikuje za manj kot
|an+1|.
Dokaz. Oglejmo si dokaz Leibnitzovega izreka podrobneje. Ce je a1 > 0, smo dokazali, da jezaporedje sodih delnih vsot narascajoce. Ker je konvergentno, je navzgor omejeno s svojo limito.Podobno dokazemo, da je zaporedje lihih delnih vsot padajoce. Ker je konvergentno, je navzdolomejeno s svojo limito. Sledi s2n < s < s2n+1, od koder izpeljemo 0 < s − s2n < s2n+1 − s2n =a2n+1. Podobno je s2n+2 < s < s2n+1, od koder izpeljemo s2n+2−s2n+1 = a2n+2 < s−s2n+1 < 0.
Torej za vsak indeks n velja, da je |s− sn| < |an+1|.

10 VRSTE 190
Zgled 10.25. Dokazi, da je vrsta∞∑
k=1
(−1)k+1 1
kkonvergentna.
Resitev. Oznacimo ak = (−1)k+1 1k . Ker je ak · ak+1 = − 1
k(k+1) < 0 in |ak| = 1k+1 < |ak+1| =
1k+1 , po Leibnitzovem kriteriju vrsta konvergira.
Zgled 10.26. Dokazi, da je vrsta
∞∑
k=2
(−1)k1
ln kkonvergentna. Koliko clenov moramo sesteti,
da bi izracunali vsoto vrste na 1100 natancno?
Resitev. Vrsta je konvergentna, saj je zaporedje 1ln k padajoce. Ker se napaka delne vsote
razlikuje od vsote vrste za manj kot je absolutna vrednost prvega izpuscenega clena, moramopoiskati tak k, da je 1
ln k <1
100 . Slednje je ekvivalentno s k > e100 ≈ 1043. Torej smo ugotovili,da vrsta sicer konvergira, a je konvergenca precej ’pocasna’.
Zgled 10.27. Ali je vrsta 1√2−1
− 1√2+1
+ 1√3−1
− 1√3+1
+ 1√4−1
− 1√4+1
+ · · · konvergentna?
Resitev. Leibnitzovega kriterija ne smemo uporabiti, saj absolutne vrednosti clenov vrstekonvergirajo k 0, vendar ne monotono.
N
R
1
|an|
b
b
b
bb
b b b b b
bc
| | | | | | | | | |
Za vsak k ≥ 2 namrec velja 1√k−1
> 1√k+1
in 1√k+1
< 1√k+1−1
. (Slednje je ekvivalentno z√k + 1 −
√k < 2.)
Izracunajmo sode delne vsote gornje vrste:
s2n = 1√2−1
− 1√2+1
+ 1√3−1
− 1√3+1
+ · · · + 1√n−1
− 1√n+1
=
= 2(√
2−1)(√
2+1)+ 2
(√
3−1)(√
3+1)+ · · · + 2
(√
n−1)(√
n+1)=
= 22−1 + 2
3−1 + · · · + 2n−1 = 2
n−1∑
k=1
1
k.
Torej so sode delne vsote s2n neomejeno podzaporedje v zaporedju delnih vsot.
Absolutna in pogojna konvergenca
Vrsta
∞∑
k=1
ak je absolutno konvergentna, ce je konvergentna tudi vrsta
∞∑
k=1
|ak|.
Ce je vrsta konvergentna, a ni absolutno konvergentna, pravimo, da je pogojno konver-gentna.
Zgled 10.28. Vrsta
∞∑
k=1
(−1)k+1 1
kje pogojno konvergentna, saj je harmonicna vrsta
∞∑
k=1
1
kdi-
vergentna.

10 VRSTE 191
Izrek 10.29. Vsaka absolutno konvergentna vrsta je konvergentna.
Dokaz. Oglejmo si vrsto∞∑
k=1
ak. Ker je vrsta absolutno konvergentna (tj. vrsta∞∑
k=1
|ak| je
konvergentna), po Cauchyjevem kriteriju za ε > 0 obstaja N ∈ N, da za vsaka m > n ≥ N
velja
m∑
k=n+1
|ak| < ε. Ker zaradi trikotniske neenakosti velja se |m∑
k=n+1
ak| ≤m∑
k=n+1
|ak|, je tako
|m∑
k=n+1
ak| < ε in tudi vrsta
∞∑
k=1
ak je konvergentna.
Ena najpomembnejsih lastnosti absolutno konvergentnih vrst je, da se njena vsota ne spre-meni, ce sestejemo clene v drugacnem vrstnem redu.
Izrek 10.30. Ce je vrsta∞∑
k=1
ak absolutno konvergentna, je za vsako bijekcijo σ : N → N vrsta
∞∑
k=1
aσ(k) absolutno konvergentna in velja∞∑
k=1
aσ(k) =∞∑
k=1
ak.
Pri vsaki pogojno konvergentni vrsti pa lahko s primerno spremembo vrstnega reda sestevanjaclenov kot vsoto vrste dobimo vsako realno stevilo ali celo ∞ ali −∞.
Izrek 10.31. Ce je vrsta
∞∑
k=1
ak pogojno konvergentna, za vsak α ∈ R ∪ {−∞,∞} obstaja taka
bijekcija σ : N → N, da je
∞∑
k=1
aσ(k) = α.
Zgled 10.32. Razisci konvergenco vrste∞∑
k=1
(−1)k√k
.
Resitev. Ker zaporedje s splosnim clenom an = 1√n
monotono konvergira k 0, po Leibnitzovem
kriteriju vrsta konvergira. Konvergenca je le pogojna, saj je 1√n≥ 1
n , vrsta
∞∑
k=1
1
kpa divergira.
Zgled 10.33. Razisci konvergenco vrste
∞∑
k=1
(−1)k
k(k + 2).
Resitev. Dokazimo, da je vrsta∞∑
k=1
(−1)k
k(k + 2)absolutno konvergentna. Ker je
1
n(n+ 2)=
1
2
(1
n− 1
n+ 2
),
lahko zapisemo
∞∑
k=1
1
k(k + 2)=
1
2
((1
1− 1
3) + (
1
2− 1
4) + (
1
3− 1
4) + (
1
5− 1
6) + . . .
)
Torej je n-ta delna vsota gornje vrste enaka sn = 12
(1 + 1
2 − 1n+1 − 1
n+2
)< 3
4 .

10 VRSTE 192
Operacije z vrstami
Izrek 10.34. Ce sta vrsti∞∑
k=1
ak in∞∑
k=1
bk konvergentni, konvergira tudi vrsta∞∑
k=1
(ak + bk) in
velja∞∑
k=1
(ak + bk) =∞∑
k=1
ak +∞∑
k=1
bk.
Dokaz. Naj bo ε > 0. Po Cauchyjevem kriteriju za vrsto∞∑
k=1
ak obstaja N1 ∈ N, da za vsaka
m > n ≥ N1 velja |m∑
k=n+1
ak| <ε
2. Podobno po Cauchyjevem kriteriju za vrsto
∞∑
k=1
bk obstaja
N2 ∈ N, da za vsaka m > n ≥ N2 velja |m∑
k=n+1
bk| <ε
2.
Ce sedaj pisemo N = max{N1, N2}, velja ocena
∣∣∣∣∣
m∑
k=n+1
(ak + bk)
∣∣∣∣∣ ≤∣∣∣∣∣
m∑
k=n+1
ak
∣∣∣∣∣+∣∣∣∣∣
m∑
k=n+1
bk
∣∣∣∣∣ ≤ε
2+ε
2= ε
za vse m > n ≥ N .Zelena enakost nazadnje sledi iz izreka o vsoti limit zaporedij:
∞∑
k=1
(ak + bk) = limn→∞
n∑
k=1
(ak + bk) = limn→∞
(n∑
k=1
ak +
n∑
k=1
bk
)=
= limn→∞
n∑
k=1
ak + limn→∞
n∑
k=1
bk =
∞∑
k=1
ak +
∞∑
k=1
bk.
Izrek 10.35. Ce je vrsta
∞∑
k=1
ak konvergentna, je za vsako realno stevilo c konvergentna tudi
vrsta
∞∑
k=1
cak in velja
∞∑
k=1
cak = c
∞∑
k=1
ak.
Dokaz. Trditev ocitno drzi, ce je c = 0. Vzemimo sedaj c 6= 0. Naj bo ε > 0. Po Cauchyjevem
kriteriju za vrsto∞∑
k=1
ak obstaja N ∈ N, da za vsaka m > n ≥ N velja
∣∣∣∣∣
m∑
k=n+1
ak
∣∣∣∣∣ <ε|c| . Tedaj
velja ocena ∣∣∣∣∣
m∑
k=n+1
cak
∣∣∣∣∣ = |c| ·∣∣∣∣∣
m∑
k=n+1
cak
∣∣∣∣∣ ≤ |c| · ε|c| = ε.
Zelena enakost nazadnje sledi iz izreka o limiti produkta zaporedij:
∞∑
k=1
cak = limn→∞
n∑
k=1
cak = limn→∞
c
n∑
k=1
ak = c limn→∞
n∑
k=1
ak = c ·∞∑
k=1
ak.
Pri izreku o vsoti vrst je predpostavka, da obe vrsti konvergirata, bistvena. Prav tako izrekane moremo uporabiti v drugo smer: ce lahko konvergentno vrsto zapisemo kot vsoto dveh vrst,ni receno, da ti dve vrsti konvergirata.

10 VRSTE 193
Primer za to nam je ze znan. Ceprav velja
1
k(k + 1)=
1
k− 1
k + 1,
ne smemo zapisati∞∑
k=1
1
k(k + 1)=
∞∑
k=1
1
k−
∞∑
k=1
1
k + 1,
saj vrsti∞∑
k=1
1
kin
∞∑
k=1
1
k + 1nista konvergentni.
10.2 Taylorjeva vrsta
Videli smo ze, da lahko za funkcijo, ki je v tocki x odvedljiva, v okolici te tocke pa zvezna,zapisemo
f(x+ h) ≈ f(x) + f ′(x)h.
Ker je limh→0
(f(x)+f ′(x)h) = f(x) = limh→0
f(x+h), je gornja formula za majhne h precej natancna.
Tezava pa je v tem, da iz same formule ni razvidno, kako majhen h moramo izbrati, da bo pridanem ε > 0 veljalo
|f(x+ h) − (f(x) + f ′(x)h)| < ε.
V nadaljevanju si bomo ogledali, kako lahko funkcijo aproksimiramo z drugo, enostavnejso funk-cijo in ocenimo napako aproksimacije.
Ko vstavimo v polinom
f(x) = c0 + c1x+ c2x2 + . . .+ cnx
n
izraz x = a+ h, dobimo
f(a+ h) = c0 + c1(a+ h) + c2(a+ h)2 + . . . + cn(a+ h)n. (20)
Gornji izraz lahko preoblikujemo v
f(a+ h) = b0 + b1h+ b2h2 + . . .+ bnh
n, (21)
kjer je bk = bk(a). Po vrsti izracunamo
f ′(a+ h) = b1 + 2b2h+ . . . + nbnhn−1,
f ′′(a+ h) = 2b2 + 3 · 2b3h+ . . .+ n(n− 1)bnhn−2,
...f (n)(a+ h) = n(n− 1) · · · 1
f (n+1)(a+ h) = 0
Ce sedaj v gornjih enacbah postavimo h = 0, dobimo f(a) = b0, f′(a) = b1, f
′′(a) = 2b2,. . . , f (n+1)(a+ h) = n!bn; torej
bk =1
k!f (k)(a) za k = 0, 1, . . . , n,

10 VRSTE 194
kjer smo definirali 0! = 1 in k! = 1 · 2 · · · k za k ∈ N. Ce sedaj to upostevamo v (21), dobimo
f(a+ h) =
n∑
k=0
f (k)(a)
k!hk.
Ker je a+ h = x, lahko zapisemo Taylorjevo formulo za polinom f :
f(x) =n∑
k=0
f (k)(a)
k!(x− a)k. (22)
Ce je f poljubna funkcija, ki je v tocki x = a n-krat odvedljiva, lahko zapisemo polinom
Pn(x) =
n∑
k=0
f (k)(a)
k!(x− a)k. (23)
Za polinom Pn velja Pn(a) = f(a) in P(k)n (a) = f (k)(a) za k = 1, 2, . . . , n. V splosnem pa Pn(x)
ni enak f(x) za vsak x, ampak je le priblizek. Izraz
Rn(x) = f(x) − Pn(x) = f(x) −n∑
k=0
f (k)(a)
k!(x− a)k.
imenujemo ostanek v Taylorjevi formuli (in je odvisen od x, a in n.)Naj bo f : I → R (n+1)-krat odvedljiva funkcija in x ∈ I poljubna tocka z odprtega intervala
I. Postavimo
g(t) = −f(x) +
n∑
k=0
f (k)(t)
k!(x− t)k +Rn(x)
(x− t
x− a
)n+1
.
Potem je g(a) = g(x) = 0 in po Rolleovem izreku obstaja tocka ξ med a in x, da je g′(ξ) = 0.Sledi
g′(t) =f (n+1)(t)
n!(x− t)n −Rn(x)
(n+ 1)(x − t)n
(x− a)n+1.
Ker je g′(ξ) = 0, sledi f(n+1)(t)n! (x− ξ)n = Rn(x) (n+1)(x−ξ)n
(x−a)n+1 in od tod
Rn(x) =f (n+1)(ξ)
(n+ 1)!(x− a)n+1.
Gornji izraz imenujemo Lagrangeova oblika ostanka v Taylorjevi formuli.
Izrek 10.36. Naj bo n ∈ N in f zvezna funkcija, definirana na zaprtem intervalu med a in x,ki je na odprtem intervalu med a in x (n+ 1)-krat odvedljiva. Potem obstaja stevilo ξ med a inx, da je
f(x) =
n∑
k=0
f (k)(a)
k!(x− a)k +
f (n+1)(ξ)
(n + 1)!(x− a)n+1.
Pri fiksnem a je ostanek v Taylorjevi formuli odvisen se od x in n. Pri funkcijah, ki soneskoncnokrat odvedljive, se lahko zgodi, da je lim
n→∞Rn(x) = 0. Za take funkcije velja
f(x) =∞∑
k=0
f (k)(a)
k!(x− a)k.
Gornji izraz imenujemo Taylorjeva vrsta funkcije f v okolici tocke x = a.
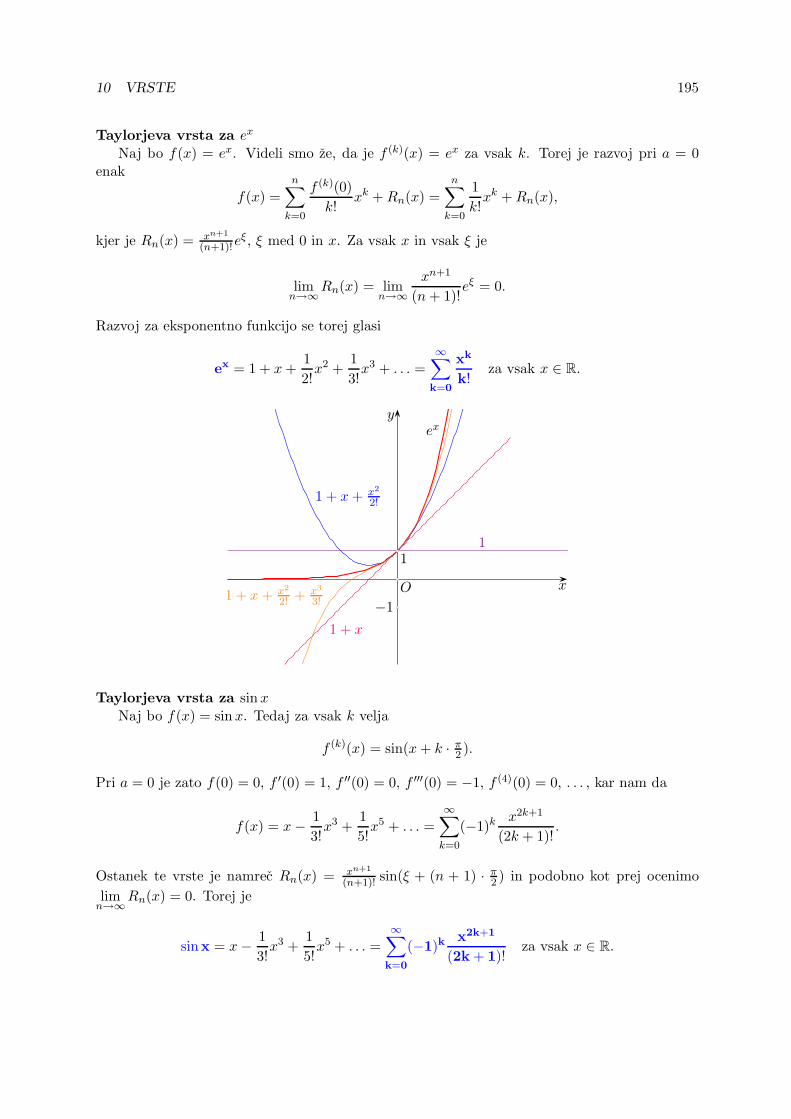
10 VRSTE 195
Taylorjeva vrsta za ex
Naj bo f(x) = ex. Videli smo ze, da je f (k)(x) = ex za vsak k. Torej je razvoj pri a = 0enak
f(x) =
n∑
k=0
f (k)(0)
k!xk +Rn(x) =
n∑
k=0
1
k!xk +Rn(x),
kjer je Rn(x) = xn+1
(n+1)!eξ, ξ med 0 in x. Za vsak x in vsak ξ je
limn→∞
Rn(x) = limn→∞
xn+1
(n+ 1)!eξ = 0.
Razvoj za eksponentno funkcijo se torej glasi
ex = 1 + x+1
2!x2 +
1
3!x3 + . . . =
∞∑
k=0
xk
k!za vsak x ∈ R.
x
yex
1
1 + x
1 + x+ x2
2!
1 + x+ x2
2! + x3
3!
bc
O
bc
1
bc−1
Taylorjeva vrsta za sinxNaj bo f(x) = sinx. Tedaj za vsak k velja
f (k)(x) = sin(x+ k · π2 ).
Pri a = 0 je zato f(0) = 0, f ′(0) = 1, f ′′(0) = 0, f ′′′(0) = −1, f (4)(0) = 0, . . . , kar nam da
f(x) = x− 1
3!x3 +
1
5!x5 + . . . =
∞∑
k=0
(−1)kx2k+1
(2k + 1)!.
Ostanek te vrste je namrec Rn(x) = xn+1
(n+1)! sin(ξ + (n + 1) · π2 ) in podobno kot prej ocenimo
limn→∞
Rn(x) = 0. Torej je
sinx = x− 1
3!x3 +
1
5!x5 + . . . =
∞∑
k=0
(−1)kx2k+1
(2k + 1)!za vsak x ∈ R.
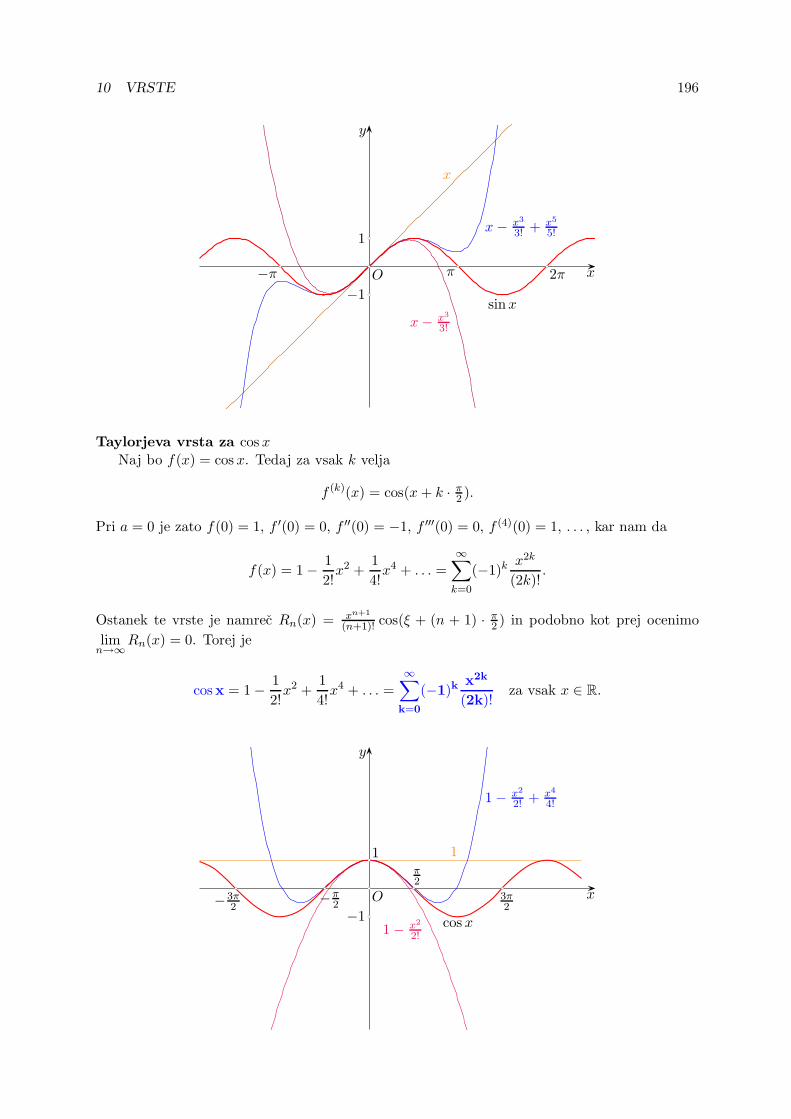
10 VRSTE 196
x
y
sinx
x
x− x3
3!
x− x3
3! + x5
5!
bc
Obc
2πbc
πbc
−π
bc1
bc−1
Taylorjeva vrsta za cos xNaj bo f(x) = cos x. Tedaj za vsak k velja
f (k)(x) = cos(x+ k · π2 ).
Pri a = 0 je zato f(0) = 1, f ′(0) = 0, f ′′(0) = −1, f ′′′(0) = 0, f (4)(0) = 1, . . . , kar nam da
f(x) = 1 − 1
2!x2 +
1
4!x4 + . . . =
∞∑
k=0
(−1)kx2k
(2k)!.
Ostanek te vrste je namrec Rn(x) = xn+1
(n+1)! cos(ξ + (n + 1) · π2 ) in podobno kot prej ocenimo
limn→∞
Rn(x) = 0. Torej je
cosx = 1 − 1
2!x2 +
1
4!x4 + . . . =
∞∑
k=0
(−1)kx2k
(2k)!za vsak x ∈ R.
x
y
cos x
1
1 − x2
2!
1 − x2
2! + x4
4!
bc
Obc
π2
bc
3π2
bc
−π2
bc
−3π2
bc1
bc−1

10 VRSTE 197
Taylorjeva vrsta za (1 + x)r
Naj bo f(x) = (1 + x)r. Potem je
f (k)(x) = r(r − 1) · · · (r − k + 1)(1 + x)r−k.
Za vsak k torej velja f (k)(0) = r(r − 1) · · · (r − k + 1) in lahko zapisemo
f(x) = 1 + rx+r(r − 1)
2!x2 + . . .+
r(r − 1) · · · (r − n+ 1)
n!xn +Rn(x).
Dokazati je mozno, da je limn→∞
Rn(x) = 0 za |x| < 1. Razvoj v potencno vrsto (za |x| < 1) se
torej glasi
(1 + x)r = 1 + rx+r(r − 1)
2!x2 +
r(r − 1)(r − 2)
3!x3 + . . . =
∞∑
k=0
(r
k
)xk,
kjer smo oznacili(r0
)= 1 in
(rk
)= r(r−1)(r−2)···(r−k+1)
k! .
Za r = 12 imamo f(x) = (1 + x)
12 =
√1 + x. Po vrsti izracunamo
( 121
)= 1
2 ,( 1
22
)=
12·( 1
2−1)
2 =
−18 ,( 1
23
)=
12·( 1
2−1)·( 1
2−2)
3! = 116 , . . . . Torej je
√1 + x = 1 +
1
2x− 1
8x2 +
1
16x3 + . . . za |x| < 1.
Za r = −12 imamo f(x) = (1 + x)−
12 = 1√
1+x. Po vrsti izracunamo
(− 12
1
)= −1
2 ,(− 1
22
)=
− 12·(− 1
2−1)
2 = 38 ,(− 1
23
)=
− 12·(− 1
2−1)·(− 1
2−2)
3! = − 516 , . . . . Torej je
1√1 + x
= 1 − 1
2x+
3
8x2 − 5
16x3 + . . . za |x| < 1.
x
y
√1 + x
1 + x2
1 + x2 − x2
8
1 + x2 − x2
8 + x3
16
1
bc
O
bc
1
bc
−1
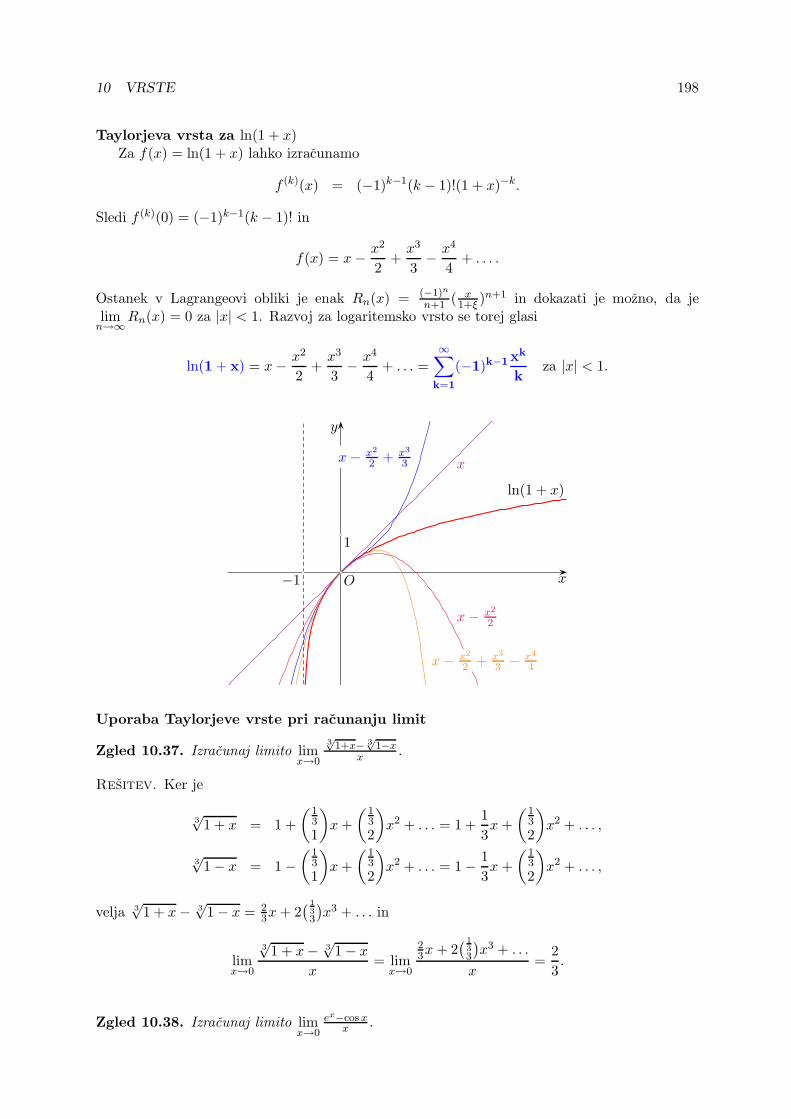
10 VRSTE 198
Taylorjeva vrsta za ln(1 + x)Za f(x) = ln(1 + x) lahko izracunamo
f (k)(x) = (−1)k−1(k − 1)!(1 + x)−k.
Sledi f (k)(0) = (−1)k−1(k − 1)! in
f(x) = x− x2
2+x3
3− x4
4+ . . . .
Ostanek v Lagrangeovi obliki je enak Rn(x) = (−1)n
n+1 ( x1+ξ )n+1 in dokazati je mozno, da je
limn→∞
Rn(x) = 0 za |x| < 1. Razvoj za logaritemsko vrsto se torej glasi
ln(1 + x) = x− x2
2+x3
3− x4
4+ . . . =
∞∑
k=1
(−1)k−1xk
kza |x| < 1.
x
y
ln(1 + x)
x
x− x2
2
x− x2
2 + x3
3
x− x2
2 + x3
3 − x4
4
bc
O
bc
1
bc
−1
Uporaba Taylorjeve vrste pri racunanju limit
Zgled 10.37. Izracunaj limito limx→0
3√1+x− 3√1−xx .
Resitev. Ker je
3√
1 + x = 1 +
(13
1
)x+
(13
2
)x2 + . . . = 1 +
1
3x+
(13
2
)x2 + . . . ,
3√
1 − x = 1 −(1
3
1
)x+
(13
2
)x2 + . . . = 1 − 1
3x+
(13
2
)x2 + . . . ,
velja 3√
1 + x− 3√
1 − x = 23x+ 2
( 133
)x3 + . . . in
limx→0
3√
1 + x− 3√
1 − x
x= lim
x→0
23x+ 2
( 133
)x3 + . . .
x=
2
3.
Zgled 10.38. Izracunaj limito limx→0
ex−cos xx .

10 VRSTE 199
Resitev. Ker je ex = 1 + x+ 12x
2 + . . . in cos x = 1 − 12x
2 + . . ., je
limx→0
ex − cos x
x= lim
x→0
(1 + x+ 12x
2 + . . .) − (1 − 12x
2 + . . .)
x=
= limx→0
x+ x2 + . . .
x= 1.
Zgled 10.39. Izracunaj limito limx→0
ln(1+x)x .
Resitev. Ker je ln(1 + x) = x− 12x
2 + 13x
3 + . . ., je
limx→0
ln(1 + x)
x= lim
x→0
x− 12x
2 + 13x
3 + . . .
x= 1.
Zgled 10.40. Razvij funkcijo f , f(x) = 11+x2 , v Taylorjevo vrsto okoli x = 0.
Resitev. Ker je 11+x2 = (1 + x2)−1, lahko uporabimo razvoj za f(t) = (1 + t)−1 = 1 − t+ t2 −
t3 + . . ., |t| < 1, okoli t = 0, v katerega pisemo t = x2. Sledi
f(x2) =1
1 + x2= 1 − x2 + x4 − x6 + . . . za |x| < 1.
Izrek 10.41. Naj bo funkcija f (n+ 1)-krat odvedljiva in naj v stacionarni tocki x0 velja
f ′(x0) = f ′′(x0) = . . . = f (n−1)(x0) = 0
inf (n)(x0) 6= 0.
Ce je n sodo stevilo, je v tej tocki ekstrem in sicer lokalni maksimum, ce je f (n)(x0) < 0 inlokalni minimum, ce je f (n)(x0) > 0.
Ce je n liho stevilo, v tej tocki ni ekstrema.
Dokaz. Zaradi Taylorjeve formule je
f(x0 + h) =
n−1∑
k=0
f (k)(x0)
k!hk +
f (n)(ξ)
n!hn+1 = f(x0) +
f (n)(ξ)
n!hn,
kjer je ξ tocka med x0 in x0 + h. Ce je n sodo stevilo in je npr. f (n)(x0) > 0, je f (n)(ξ) > 0
tudi za vsak ξ blizu x0 in je zato f(x0 + h) − f(x0) = f(n)(ξ)n! hn > 0 za vse h blizu 0. Torej je v
tocki x0 lokalni minimum. Podobno dokazemo, da je v primeru f (n)(x0) < 0 v tocki x0 lokalnimaksimum.
Ce pa je n liho stevilo, izraz hn nima konstantnega predznaka za majhne h. V tocki x0 ni
ekstrema, saj potem tudi f(x0 +h)−f(x0) = f(n)(ξ)n! hn nima konstantnega predznaka za majhne
h.
Zgled 10.42. Poisci vse ekstreme funkcije x 7→ arc tan(2x) − 2x.
Resitev. Oznacimo f(x) = arc tan(2x) − 2x. Iz
f ′(x) =2
1 + 4x2− 2 = − 8x2
1 + 4x2

11 FUNKCIJE VEC SPREMENLJIVK 200
vidimo, da je f ′(x) = 0 le za x = 0. Po vrsti izracunamo
f ′′(x) = −16x(1 + 4x2) − 8x2 · 8x(1 + 4x2)2
= − 16x
(1 + 4x2)2
∣∣∣∣x=0
= 0,
f ′′′(x) = −16(1 + 4x2)2 − 16x · 2(1 + 4x2) · 8x(1 + 4x2)4
=
=16(12x2 − 1)
(1 + 4x2)3
∣∣∣∣x=0
6= 0.
Torej je f ′(0) = f ′′(0) = 0 in f ′′′(0) 6= 0. Ker je prvi nenicelni odvod lihega reda, v tockix = 0 ni ekstrema. Ker funkcija nima drugih stacionarnih tock, je pa definirana in odvedljivapovsod na realni osi, sploh nima nobenega ekstrema.
x
y
O
π2 −
2x
−π2 −
2x
bc
bcπ2
bc−π2
bc
π4
bc
−π4
Za vajo dolocimo se linearni asimptoti funkcije f . Torej
k = limx→±∞
arc tan(2x) − 2x
x= −2,
n+ = limx→∞
(f(x) − kx) =π
2,
n− = limx→−∞
(f(x) − kx) = −π2.
Asimptoti sta y = π2 − 2x za x→ ∞ in y = −π
2 − 2x za x→ −∞.
11 Funkcije vec spremenljivk
11.1 Splosni pojem funkcije
Naj bo D ⊂ Rn poljubna (neprazna) mnozica. Realna funkcija vec spremenljivk je presli-kava f : D → R. Zaloga vrednosti funkcije f je mnozica
Zf = {f(x) ∈ R;x ∈ D}.
• Za tocko (x, y) v ravnini (tj. (x, y) ∈ R2) je s predpisom d(x, y) =√x2 + y2 podana
funkcija dveh spremenljivk d : R2 → R, ki podaja razdaljo te tocke do koordinatnegaizhodisca.
• Ploscina trikotnika je funkcija treh sprememljivk
h(x, y, z) =1
4
√(x+ y + z)(x+ y − z)(y + z − x)(z + x− y).
Definicijsko obmocje funkcije h je mnozica tock v R3, dolocena s pogoji: x > 0, y > 0,z > 0, x+ y − z > 0, y + z − x > 0 in z + x− y > 0.
Graf funkcije vec spremenljivkGraf funkcije vec spremenljivk f : D → R je mnozica
Γ(f) = {(x, y) ∈ Rn × R; x ∈ D in f(x) = y}.
• Graf funkcije dveh spremenljivk f : D → R, D ⊂ R2, je ploskev v prostoru, ki lezi naddefinicijskim obmocjem funkcije f .
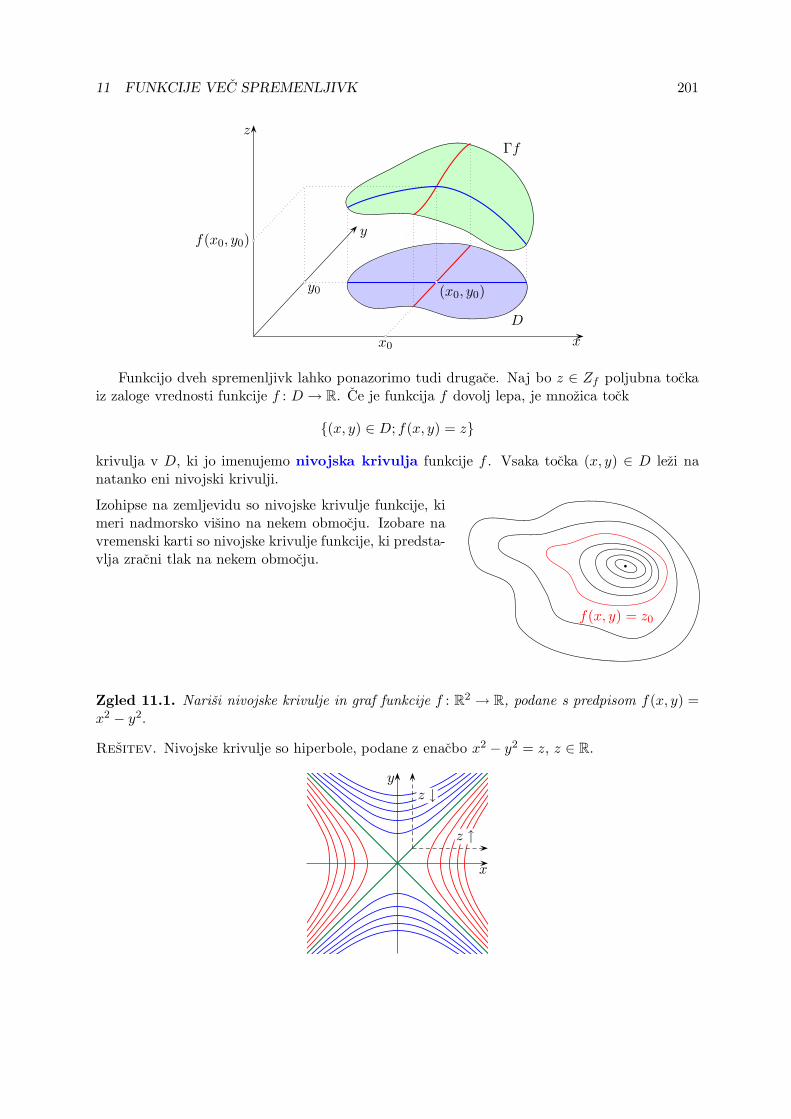
11 FUNKCIJE VEC SPREMENLJIVK 201
xx0
y0
y
z
D
Γf
f(x0, y0)
(x0, y0)bc
bc
bc
bc
Funkcijo dveh spremenljivk lahko ponazorimo tudi drugace. Naj bo z ∈ Zf poljubna tockaiz zaloge vrednosti funkcije f : D → R. Ce je funkcija f dovolj lepa, je mnozica tock
{(x, y) ∈ D; f(x, y) = z}
krivulja v D, ki jo imenujemo nivojska krivulja funkcije f . Vsaka tocka (x, y) ∈ D lezi nanatanko eni nivojski krivulji.
f(x, y) = z0
b
Izohipse na zemljevidu so nivojske krivulje funkcije, kimeri nadmorsko visino na nekem obmocju. Izobare navremenski karti so nivojske krivulje funkcije, ki predsta-vlja zracni tlak na nekem obmocju.
Zgled 11.1. Narisi nivojske krivulje in graf funkcije f : R2 → R, podane s predpisom f(x, y) =x2 − y2.
Resitev. Nivojske krivulje so hiperbole, podane z enacbo x2 − y2 = z, z ∈ R.
x
yz ↓
z ↑
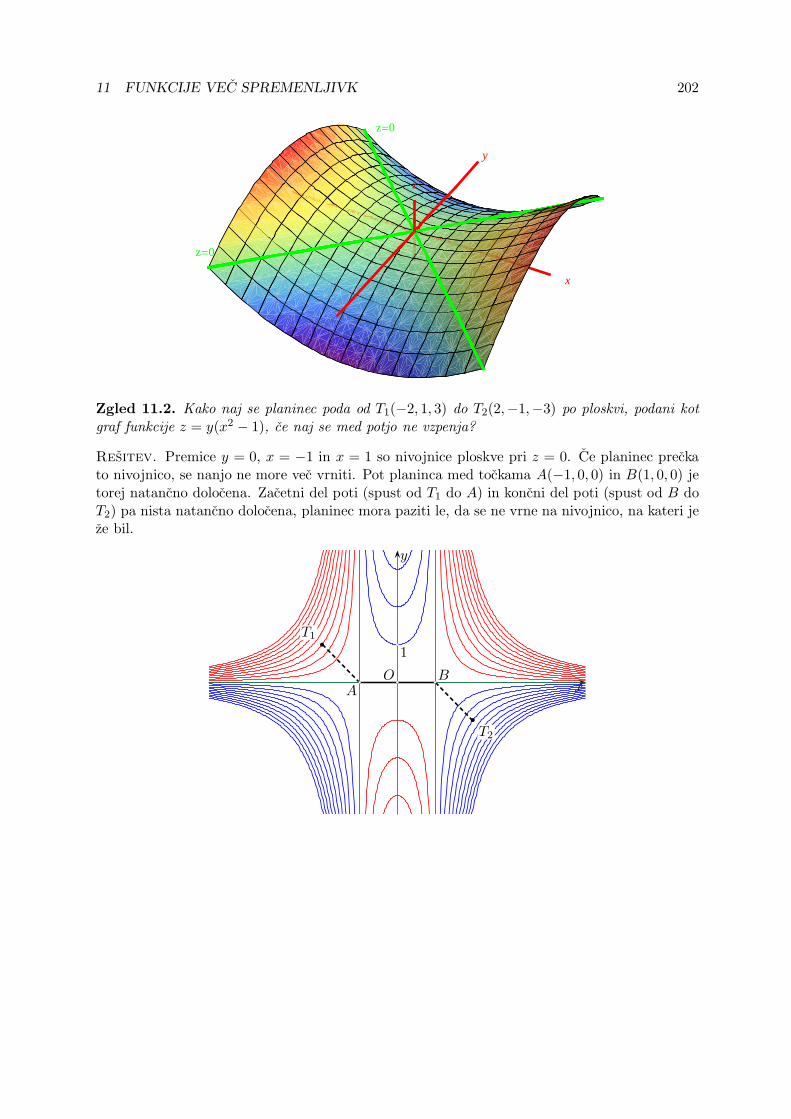
11 FUNKCIJE VEC SPREMENLJIVK 202
x
y
z
z=0
z=0
Zgled 11.2. Kako naj se planinec poda od T1(−2, 1, 3) do T2(2,−1,−3) po ploskvi, podani kotgraf funkcije z = y(x2 − 1), ce naj se med potjo ne vzpenja?
Resitev. Premice y = 0, x = −1 in x = 1 so nivojnice ploskve pri z = 0. Ce planinec preckato nivojnico, se nanjo ne more vec vrniti. Pot planinca med tockama A(−1, 0, 0) in B(1, 0, 0) jetorej natancno dolocena. Zacetni del poti (spust od T1 do A) in koncni del poti (spust od B doT2) pa nista natancno dolocena, planinec mora paziti le, da se ne vrne na nivojnico, na kateri jeze bil.
xO
1
y
AB
T2
T1
bcbc
bc
bcbc
b
b
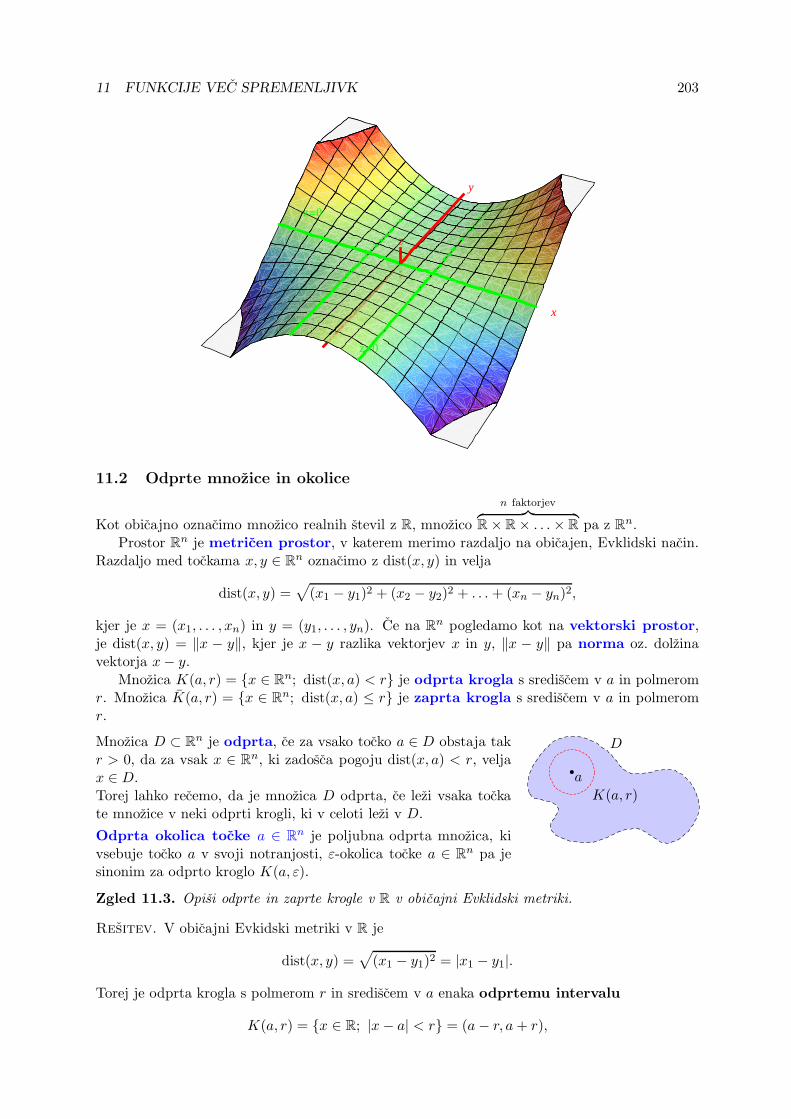
11 FUNKCIJE VEC SPREMENLJIVK 203
x
y
z
z=0
z=0
11.2 Odprte mnozice in okolice
Kot obicajno oznacimo mnozico realnih stevil z R, mnozico
n faktorjev︷ ︸︸ ︷R × R × . . .× R pa z Rn.
Prostor Rn je metricen prostor, v katerem merimo razdaljo na obicajen, Evklidski nacin.Razdaljo med tockama x, y ∈ Rn oznacimo z dist(x, y) in velja
dist(x, y) =√
(x1 − y1)2 + (x2 − y2)2 + . . . + (xn − yn)2,
kjer je x = (x1, . . . , xn) in y = (y1, . . . , yn). Ce na Rn pogledamo kot na vektorski prostor,je dist(x, y) = ‖x − y‖, kjer je x − y razlika vektorjev x in y, ‖x − y‖ pa norma oz. dolzinavektorja x− y.
Mnozica K(a, r) = {x ∈ Rn; dist(x, a) < r} je odprta krogla s srediscem v a in polmeromr. Mnozica K(a, r) = {x ∈ Rn; dist(x, a) ≤ r} je zaprta krogla s srediscem v a in polmeromr.
D
a
K(a, r)
b
Mnozica D ⊂ Rn je odprta, ce za vsako tocko a ∈ D obstaja takr > 0, da za vsak x ∈ Rn, ki zadosca pogoju dist(x, a) < r, veljax ∈ D.Torej lahko recemo, da je mnozica D odprta, ce lezi vsaka tockate mnozice v neki odprti krogli, ki v celoti lezi v D.
Odprta okolica tocke a ∈ Rn je poljubna odprta mnozica, kivsebuje tocko a v svoji notranjosti, ε-okolica tocke a ∈ Rn pa jesinonim za odprto kroglo K(a, ε).
Zgled 11.3. Opisi odprte in zaprte krogle v R v obicajni Evklidski metriki.
Resitev. V obicajni Evkidski metriki v R je
dist(x, y) =√
(x1 − y1)2 = |x1 − y1|.
Torej je odprta krogla s polmerom r in srediscem v a enaka odprtemu intervalu
K(a, r) = {x ∈ R; |x− a| < r} = (a− r, a+ r),

11 FUNKCIJE VEC SPREMENLJIVK 204
zaprta krogla s polmerom r in srediscem v a pa je enaka zaprtemu intervalu
K(a, r) = {x ∈ R; |x− a| ≤ r} = [a− r, a+ r].
Zgled 11.4. Opisi odprte in zaprte krogle v R2 v obicajni Evklidski metriki.
Resitev. V obicajni Evkidski metriki v R2 velja
dist(x, y) =√
(x1 − y1)2 + (x2 − y2)2.
Torej je odprta krogla s polmerom r in srediscem v a = (a1, a2) enaka odprtemu krogu
K(a, r) = {x ∈ R2;√
(x1 − a1)2 + (x2 − a2)2 < r} =
= {x ∈ R2; (x1 − a1)2 + (x2 − a2)
2 < r2},
zaprta krogla s polmerom r in srediscem v a = (a1, a2) pa je enaka zaprtemu krogu
K(a, r) = {x ∈ R2;√
(x1 − a1)2 + (x2 − a2)2 ≤ r} =
= {x ∈ R2; (x1 − a1)2 + (x2 − a2)
2 ≤ r2}.
Zgled 11.5. Naj bo X = {(x, y) ∈ R2; 1 ≤ x < 3; 1 ≤ y < 3}. Ali je mnozica X odprta v R2?Ali je mnozica R2 \X odprta v R2?
Resitev.
1 3
1
3
xO
y
a1
a2
bc
bc
bc
bc
bc
bc
Mnozica X ni odprta v R2, saj noben odprt krog s srediscem v tocki a1 ne lezi v celoti v X.Tudi mnozica R2 \X ni odprta v R2, saj noben odprt krog s srediscem v tocki a2 ne lezi v celotiv R2 \X.
11.3 Zveznost
Naj bo D ⊂ Rn odprta mnozica. Funkcija f : D → R je zvezna v tocki a ∈ D, ce za vsakε > 0 obstaja tak δ > 0, da za tocke, ki zadoscajo pogoju dist(x, a) < δ, velja |f(x)− f(a)| < ε.Funkcija f je zvezna na mnozici D, ce je za vsako tocko a ∈ D funkcija f zvezna v tocki a.
f(a)
f(x)
f(a) + εf(a) − ε
ax
K(a, δ)
D
f
Rb
b b b

11 FUNKCIJE VEC SPREMENLJIVK 205
Za D ⊂ R se ta definicija ujema z obicajno definicijo zveznosti za funkcije ene spremenljivke,saj v R velja dist(x, y) = |x− y|.
Naj bo i ∈ {1, 2, . . . , n}. S pi : Rn → R oznacimo projekcijo na i-to koordinato.
Zgled 11.6. Projekcija pi : Rn → R je zvezna funkcija.
Resitev. Za tocko a = (a1, . . . , an) in x = (x1, . . . , xn) velja pi(x) − pi(a) = xi − ai. Ker jed(x, a) =
√(x1 − a1)2 + . . .+ (xn − an)2, velja
|pi(x) − pi(a)| ≤ d(x, a).
Torej lahko pri izbranem ε > 0 postavimo δ = ε in bo iz d(x, a) < δ res sledilo |pi(x) − pi(a)| <ε.
Izrek 11.7. Naj bo D ⊂ Rn odprta mnozica in I ⊂ R odprt interval. Naj bo f : D → I zveznafunkcija in g : I → R zvezna funkcija. Potem je g ◦ f : D → R zvezna funcija.
RIb = f(a) g(b)ax f(x) y g(y)
D
f g
K(a, δ)
δ1-okolica ε-okolica
b b
b
b
b b b
Dokaz. Izberimo a ∈ D in postavimo b = f(a). Naj bo ε > 0. Potem obstaja δ1 > 0,da za |y − b| < δ1 velja |g(y) − g(b)| < ε. Torej obstaja δ > 0, da za dist(x, a) < δ velja|f(x) − f(a)| < δ1. Torej za dist(x, a) < δ res velja |g(f(x)) − g(f(a))| < ε.
Osnovne racunske operacije +, −, · lahko prepoznamo kot funkcije dveh spremenljivk, npr.sestevanje je funkcija s : R × R → R, s(x, y) = x + y. Tudi deljenje lahko prepoznamo kotfunkcijo dveh spremenljivk, le na definicijsko obmocje je potrebno paziti: g : R× (R \ {0}) → R,g(x, y) = x
y .
Izrek 11.8. Osnovne racunske operacije so kot funkcije dveh spremenljivk zvezne povsod, kjerso definirane.
Ce sedaj zdruzimo gornje izreke, lahko ugotovimo, da so tudi “elementarne” funkcije vecspremeljivk zvezne povsod, kjer so definirane.
Izrek 11.9. Sestevanje s : R × R → R, s(x, y) = x+ y, je zvezna funkcija.
Dokaz. Izberimo poljubno tocko (a, b) ∈ R2 in dokazimo, da je funkcija s zvezna v tocki (a, b).Naj bo ε > 0 in postavimo δ = 1
2ε. Ce je
‖(x, y) − (a, b)‖ =√
(x− a)2 + (y − b)2 < δ,
je tudi |x− a| < δ in |y − b| < δ. Torej je res
|s(x, y) − s(a, b)| = |x+ y − a− b| ≤ |x− a| + |y − b| < 2 · δ = ε.
Podobno dokazemo tudi zveznost odstevanja, torej zveznost funkcije (x, y) 7→ x− y.
Izrek 11.10. Mnozenje m : R × R → R, m(x, y) = xy, je zvezna funkcija.

11 FUNKCIJE VEC SPREMENLJIVK 206
Dokaz. Izberimo poljubno tocko (a, b) ∈ R2 in dokazimo, da je funkcija m zvezna v tocki (a, b).Naj bo ε > 0 in postavimo δ = min{ ε
|a|+|b|+1 , 1}. Podobno kot prej iz
‖(x, y) − (a, b)‖ =√
(x− a)2 + (y − b)2 < δ,
sledi |x− a| < δ in |y − b| < δ ≤ 1; torej je |y| < |b| + 1. Racunajmo
|m(x, y) −m(a, b)| = |xy − ab| = |(x− a)y + a(y − b)| ≤≤ |x− a| · |y| + |a| · |y − b| <<
ε
|a| + |b| + 1· (|b| + 1) + |a| · ε
|a| + |b| + 1= ε.
Izrek 11.11. Deljenje g : R × (R \ {0}) → R, g(x, y) = xy , je zvezna funkcija.
Dokaz. Izberimo poljubno tocko (a, b) ∈ R × (R \ {0}) in dokazimo, da je funkcija g zvezna v
tocki (a, b). Ce postavimo δ = min{ εb2
2(|a|+|b|) ,12 |b|}, velja
|g(x, y) − g(a, b)| =
∣∣∣∣x
y− a
b
∣∣∣∣ =|xb− ay|
|by| =|(x− a)b− a(y − b)|
|by| ≤
≤ |x− a| · |b| + |a| · |y − b||b| · |y| <
(|b| + |a|)δ|b| · |y| < ε,
saj je |y| > |b|2 in δ ≤ εb2
2(|a|+|b|) .
Zgled 11.12. Dokazi, da je f : R2 → R, f(x, y) = ln(x2 + y2 + 1), zvezna funkcija.
Resitev. Funkcijo f lahko predstavimo kot kompozitum nekaj zveznih funkcij.
x x2
(x, y) x2 + y2 ln(x2 + y2 + 1)y y2
p1
p2
q
q
s
s
g
Uporabljene so zvezne funkcije dveh spremenljivk: p1(x, y) = x, p2(x, y) = y, s(x, y) = x+ y terzvezni funkciji ene spremenljivke q(t) = t2, g(t) = ln(t+ 1).
Limita funkcije vec spremenljivkNaj bo D ⊂ Rn odprta mnozica. Stevilo A je limita funkcije f v tocki a, oznaka
limx→a
f(x) = A, ce za vsak ε > 0 obstaja δ > 0, da iz 0 < dist(x, a) < δ sledi |f(x) −A| < ε.
A
f(x)
A+ εA− ε
ax
K(a, δ)
D
f
Rb
b b b
Za D ⊂ R se ta definicija ujema z obicajno definicijo limite za funkcije ene spremenljivke,saj v R velja dist(x, y) = |x− y|.
Enako kot pri funkcijah ene spremeljivke velja, da funkcijska vrednost v tocki a ne vpliva navrednost lim
x→af(x). Potrebno ni niti, da je funkcija f sploh definirana v tocki a.
Izrek 11.13. Funkcija f : D → R je zvezna v tocki a ∈ D, natanko tedaj, ko je limx→a
f(x) = f(a).
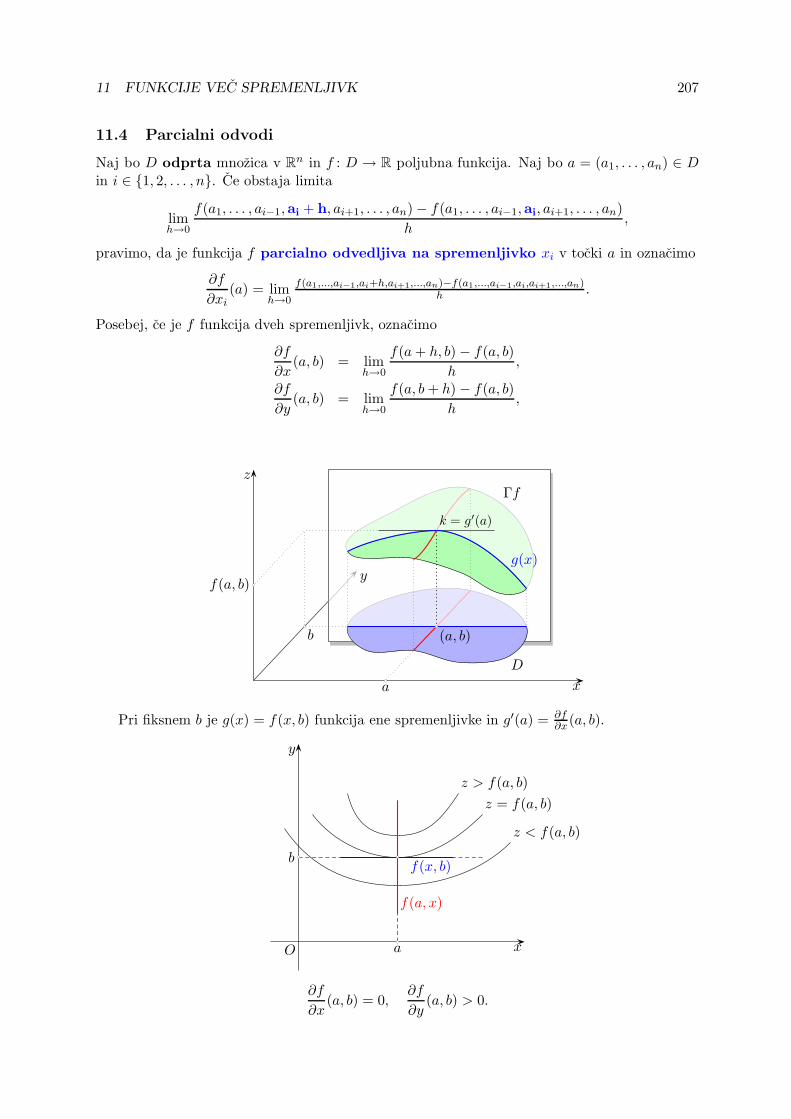
11 FUNKCIJE VEC SPREMENLJIVK 207
11.4 Parcialni odvodi
Naj bo D odprta mnozica v Rn in f : D → R poljubna funkcija. Naj bo a = (a1, . . . , an) ∈ Din i ∈ {1, 2, . . . , n}. Ce obstaja limita
limh→0
f(a1, . . . , ai−1,ai + h, ai+1, . . . , an) − f(a1, . . . , ai−1,ai, ai+1, . . . , an)
h,
pravimo, da je funkcija f parcialno odvedljiva na spremenljivko xi v tocki a in oznacimo
∂f
∂xi(a) = lim
h→0
f(a1,...,ai−1,ai+h,ai+1,...,an)−f(a1,...,ai−1,ai,ai+1,...,an)h .
Posebej, ce je f funkcija dveh spremenljivk, oznacimo
∂f
∂x(a, b) = lim
h→0
f(a+ h, b) − f(a, b)
h,
∂f
∂y(a, b) = lim
h→0
f(a, b+ h) − f(a, b)
h,
xa
b
y
z
D
Γf
f(a, b)
(a, b)
g(x)
k = g′(a)
bc
bc
bc
bc
Pri fiksnem b je g(x) = f(x, b) funkcija ene spremenljivke in g′(a) = ∂f∂x(a, b).
y
xO
b
a
f(x, b)
f(a, x)
z < f(a, b)
z = f(a, b)
z > f(a, b)
bc
bcbc
∂f
∂x(a, b) = 0,
∂f
∂y(a, b) > 0.

11 FUNKCIJE VEC SPREMENLJIVK 208
Visji parcialni odvodiNeposredno iz definicije sledi, da je ∂f
∂xispet funkcija iz D v R. Ce je ta funkcija parcialno
odvedljiva na xj, obstaja ∂∂xj
∂f∂xi
, kar lahko krajse zapisemo kot ∂2f∂xi∂xj
. Ce je i = j, oznacimo
kar ∂2f∂x2
i
.
Ce je funkcija ∂2f∂xi∂xj
zvezna, lahko vrstni red parcialnega odvajanja tudi zamenjamo. Torej
je ∂2f∂xi∂xj
= ∂2f∂xj∂xi
. V splosnem primeru, torej ko je funkcija f k-krat, k = (i1 + i2 + . . . + in),
zvezno odvedljiva, vrstni red odvajanja pri funkciji ∂i1+i2+...+inf
∂xi11 ...∂xin
n
ni pomemben.
Zgled 11.14. Izracunaj ∂f∂x in ∂f
∂y za f(x, y) = xy.
Resitev. Izracunamo ∂f∂x = yxy−1 in ∂f
∂y = xy lnx.
Zgled 11.15. Izracunaj ∂f∂x in ∂f
∂y za f(x, y) = x−yx+y .
Resitev. S pomocjo pravila za odvod kvocienta dveh funkcij izracunamo
∂f
∂x=
1 · (x+ y) − (x− y) · 1(x+ y)2
=2y
(x+ y)2,
∂f
∂y=
(−1) · (x+ y) − (x− y) · 1(x+ y)2
= − 2x
(x+ y)2.
Zgled 11.16. Izracunaj ∂f∂x in ∂f
∂y za f(x, y) = ln(tan xy ).
Resitev. Izracunamo
∂f
∂x=
1
tan xy
· 1
cos2 xy
· 1
y=
1
y sin xy cos x
y
=2
y sin 2xy
,
∂f
∂y=
1
tan xy
· 1
cos2 xy
·(− x
y2
)= − x
y2 sin xy cos x
y
= − 2x
y2 sin 2xy
.
Zgled 11.17. Izracunaj ∂f∂x in ∂f
∂y za f(x, y) = ln(x+√x2 + y2).
Resitev. Izracunamo
∂f
∂x=
1
x+√x2 + y2
·(
1 +2x
2√x2 + y2
)=
1√x2 + y2
,
∂f
∂y=
1
x+√x2 + y2
· 2y
2√x2 + y2
=y
x2 + y2 + x√x2 + y2
.
Zgled 11.18. Izracunaj ∂f∂x in ∂f
∂y za f(x, y) = arc sin√
x2−y2
x2+y2 .

11 FUNKCIJE VEC SPREMENLJIVK 209
Resitev. Izracunamo
∂f
∂x=
1√1 −
(√x2−y2
x2+y2
)2· 1
2√
x2−y2
x2+y2
· 2x · (x2 + y2) − (x2 − y2)2x
(x2 + y2)2=
=xy2
√2
|y|(x2 + y2)√x2 − y2
,
∂f
∂x=
1√1 −
(√x2−y2
x2+y2
)2· 1
2√
x2−y2
x2+y2
· −2y · (x2 + y2) − (x2 − y2)2y
(x2 + y2)2=
= − yx2√
2
|y|(x2 + y2)√x2 − y2
.
Zgled 11.19. Izracunaj vse druge parcialne odvode funkcije f , f(x, y) = x2−y2 +3xy−4x+2y.
Resitev. Velja
∂f
∂x= 2x+ 3y − 4
∂f
∂y= −2y + 3x+ 2
∂2f
∂x2=
∂
∂x(2x+ 3y − 4) = 2
∂2f
∂x∂y=
∂2f
∂y∂x=
∂
∂x(−2y + 3x+ 2) = 3
∂2f
∂y2=
∂
∂y(−2y + 3x+ 2) = −2
Zgled 11.20. Izracunaj vse druge parcialne odvode funkcije f , f(x, y) = ln(x+ y2).
Resitev. Velja
∂f
∂x=
1
x+ y2
∂f
∂y=
2y
x+ y2
∂2f
∂x2=
∂
∂x
(1
x+ y2
)= − 1
(x+ y2)2
∂2f
∂x∂y=
∂2f
∂y∂x=
∂
∂x
(2y
x+ y2
)= − 2y
(x+ y2)2
∂2f
∂y2=
∂
∂y
(2y
x+ y2
)=
2(x+ y2) − 2y · 2y(x+ y2)2
=2(x− y2)
(x+ y2)2

11 FUNKCIJE VEC SPREMENLJIVK 210
Zgled 11.21. Naj bo
f(x, y) =
{2xy
x2+y2 , ce je x2 + y2 6= 0,
0, sicer.
Izracunaj ∂f∂x(0, 0).
Resitev. Parcialni odvod izracunamo po definiciji:
∂f
∂x(0, 0) = lim
h→0
f(h, 0) − f(0, 0)
h= lim
h→0
0 − 0
h= 0.
Pri tem zgledu velja omeniti, da funkcija f ni zvezna v (0, 0) kot funkcija dveh spremenljivk, jepa zvezna v vsaki spremenljivki posebej.
Zgled 11.22. Naj bo
f(x, y) =
{exey−1
x+y , ce je x 6= −y,1, sicer.
Izracunaj ∂f∂x(0, 0).
Resitev. Parcialni odvod izracunamo po definiciji:
∂f
∂x(0, 0) = lim
h→0
f(h, 0) − f(0, 0)
h=
= limh→0
eh−1h − 1
h= lim
h→0
eh − 1 − h
h2=
= limh→0
eh − 1
2h= lim
h→0
eh
2=
1
2,
kjer smo si pri izracunu zadnjih dveh limit pomagali z L’Hospitalovim pravilom.
Zgled 11.23. Naj bo
f(x, y) =
{xy(x2−y2)
x2+y2 , ce je x2 + y2 6= 0
0, sicer.
Izracunaj ∂2f∂x∂y (0, 0) in ∂2f
∂y∂x(0, 0).
Resitev. Parcialna odvoda v tocki (x, y) 6= (0, 0) sta
∂f
∂x=
y(x4 + 4x2y2 − y4)
(x2 + y2)2,
∂f
∂y=
x(x4 − 4x2y2 − y4)
(x2 + y2)2.
Parcialna odvoda v (0, 0) izracunamo po definiciji:
∂f
∂x(0, 0) = lim
h→0
f(h, 0) − f(0, 0)
h= lim
h→0
0 − 0
h= 0
in podobno∂f
∂y(0, 0) = lim
h→0
f(0, h) − f(0, 0)
h= lim
h→0
0 − 0
h= 0.
Od tod sledi, da je ∂f∂x(0, y) = −y za vsak y in ∂f
∂y (x, 0) = x za vsak x. Torej je ∂2f∂x∂y (0, 0) = 1 in
∂2f∂y∂x(0, 0) = −1.

11 FUNKCIJE VEC SPREMENLJIVK 211
Totalni diferencialVideli smo ze, da lahko za funkcijo ene spremenljivke zapisemo
f(a+ h) ≈ f(a) + f ′(a)h.
Podobno velja tudi za funkcije vec spremenljivk.
Naj bo funkcija f : D → R zvezna v tocki (a, b) ∈ D. Potem je razlika f(a+h, b+k)−f(a, b)hkrati s h in k majhna. Ce obstajata taki stevili A,B ∈ R, da je
lim(h,k)→(0,0)
f(a+ h, b+ k) − f(a, b) − (Ah+Bk)√h2 + k2
= 0,
pravimo, da je f diferenciabilna v tocki (a, b).Ker velja
lim(h,k)→(0,0)
f(a+ h, b+ k) − f(a, b) − (Ah+Bk)√h2 + k2
= 0
kakorkoli gre (h, k) proti (0, 0), lahko postavimo k = 0 in h > 0. Tedaj je
lim(h,0)→(0,0)
f(a+ h, b) − f(a, b) −Ah
h= 0,
kar pomeni, da je
limh↓0
f(a+ h, b) − f(a, b)
h= A.
Ker pa je limh→0
f(a+h,b)−f(a,b)h = ∂f
∂x(a, b), smo tako dokazali, da je A = ∂f∂x(a, b). Podobno je
B = ∂f∂y (a, b).
Izraz∂f
∂x(a, b)h +
∂f
∂y(a, b)k
imenujemo totalni diferencial funkcije f v tocki (a, b). Totalni diferencial pove, kako hitrose spreminja funkcijska vrednost funkcije f v okolici tocke (a, b).
Iz definicije vidimo, da velja
f(a+ h, b+ k) ≈ f(a, b) +∂f
∂x(a, b)h +
∂f
∂y(a, b)k.
Pogosto totalni diferencial oznacimo krajse
df =∂f
∂xdx+
∂f
∂ydy.
xa
b
y
z
D
Γf
(a, b)
(a+ h, b+ k)
f(a, b)
f(a, b) + dff(a+ h, b+ k)
bc
bc
bc
bc
bc
bc
b
b
b
b

11 FUNKCIJE VEC SPREMENLJIVK 212
f(a+ h, b+ k) ≈ f(a, b) +∂f
∂x(a, b)h+
∂f
∂y(a, b)k
︸ ︷︷ ︸df
.
Zgled 11.24. Izracunaj totalni diferencial funkcije f , f(x, y) = xyx−y .
Resitev. Izracunamo df = − y2
(x−y)2dx+ x2
(x−y)2dy = 1
(x−y)2(−y2 dx+ x2 dy).
Zgled 11.25. Izracunaj totalni diferencial funkcije f , f(x, y) =√x2 + y2.
Resitev. Izracunamo df = x√x2+y2
dx+ y√x2+y2
dy = 1√x2+y2
(x dx+ y dy).
Zgled 11.26. Kako natancno lahko izracunamo ploscino pravokotnika, ce izmerimo dolzinistranic pravokotnika na α % in β % natancno?
Resitev. Ploscino pravokotnika lahko zapisemo kot funkcijo dveh spremenljivk. Torej f(x, y) =xy.
Totalni diferencial je enak df = y dx + x dy. Od tod dobimo priblizek za relativno napakoprodukta dveh izmerjenih kolicin, ce poznamo napaki pri merjenju dx in dy. Torej
df
f=ydx+ xdy
xy=dx
x+dy
y.
Ker je |dxx | ≤ α in |dy
y | ≤ β, od tod sledi
∣∣∣∣df
f
∣∣∣∣ ≤∣∣∣∣dx
x
∣∣∣∣+∣∣∣∣dy
y
∣∣∣∣ ≤ α+ β.
Ploscino lahko izracunamo na (α+ β) % natancno.
Zgled 11.27. Izracunaj priblizno√
4.052 + 2.932.
Resitev. Oznacimo f(x, y) =√x2 + y2. Izracunali smo ze df = 1√
x2+y2(x dx + y dy). Posta-
vimo x = 4, y = 3, dx = 0.05 in dy = −0.07, pa dobimo
df =1√
x2 + y2(x dx+ y dy) =
=1√
42 + 32(4 · 0.05 + 3 · (−0.07)) = −0.002 .
Ker je f(4, 3) = 5, je f(4.05, 2.93) ≈ 5 − 0.002 = 4.998. Pripomniti velja, da je bolj natancnavrednost enaka 4.99874.
Videli smo ze, da je diferenciabilna funkcija parcialno odvedljiva na obe spremenljivki. Obratpa drzi le ob dodatni predpostavki.
Izrek 11.28. Ce sta parcialna odvoda ∂f∂x in ∂f
∂y zvezna v tocki (a, b), je f diferenciabilna v tocki(a, b).
Dokaz. Zapisemo lahko f(a+h, b+k)−f(a, b) = f(a+h, b+k)−f(a, b+k)+f(a, b+k)−f(a, b).Po Lagrangeovem izreku je
f(a+ h, b+ k) − f(a, b+ k) =∂f
∂x(ξ1, b+ k)h

11 FUNKCIJE VEC SPREMENLJIVK 213
za neko tocko x1 med a in a+ h ter
f(a, b+ k) − f(a, b+ k) =∂f
∂x(a, ξ2)k
za neko tocko x2 med b in b+ k.Izraz
f(a+ h, b+ k) − f(a, b) − ∂f∂x (a, b)h− ∂f
∂y (a, b)k√h2 + k2
lahko potem zapisemo kot vsoto clenov
f(a+ h, b+ k) − f(a, b+ k) − ∂f∂x(a, b)h√
h2 + k2=
∂f∂x(ξ1, b+ k)h− ∂f
∂x(a, b)h√h2 + k2
inf(a, b+ k) − f(a, b) − ∂f
∂y (a, b)k√h2 + k2
=
∂f∂y (a, ξ2)k − ∂f
∂y (a, b)k√h2 + k2
.
Ker pa je ∣∣∣∣∣
∂f∂y (ξ1, b)h− ∂f
∂y (a, b)h√h2 + k2
∣∣∣∣∣ ≤∣∣∣∣∂f
∂x(ξ1, b) −
∂f
∂x(a, b)
∣∣∣∣
in ∣∣∣∣∣
∂f∂y (a, ξ2)k − ∂f
∂y (a, b)k√h2 + k2
∣∣∣∣∣ ≤∣∣∣∣∂f
∂y(a, ξ2) −
∂f
∂y(a, b)
∣∣∣∣ ,
lahko lahko zaradi zveznosti parcialnih odvodov v tocki (a, b) pri danem ε > 0 najdemo takδ > 0, da iz ‖(h, k)‖ < δ sledi
∣∣∣∣∂f
∂x(ξ1, b) −
∂f
∂x(a, b)
∣∣∣∣ <ε
2in
∣∣∣∣∂f
∂y(a, ξ2) −
∂f
∂y(a, b)
∣∣∣∣ <ε
2.
Torej je res ∣∣∣∣∣f(a+ h, b+ k) − f(a, b) − ∂f
∂x(a, b)h − ∂f∂y (a, b)k
√h2 + k2
∣∣∣∣∣ < ε.
Zgled 11.29. Dokazi, da je f , f(x, y) = arc tan yx , diferenciabilna funkcija na obmocju D =
R × (R \ {0}).
Resitev. Parcialna odvoda sta
∂f
∂x=
1
1 + ( yx)2
· (− y
x2) = − y
x2 + y2,
∂f
∂y=
1
1 + ( yx)2
· 1
x=
x
x2 + y2.
Ker sta funkciji (x, y) 7→ − yx2+y2 in (x, y) 7→ x
x2+y2 zvezni povsod na mnozici D, je f na mnoziciD tudi diferenciabilna.
Zgled 11.30. Izracunaj x∂f∂y + y ∂f
∂x za f(x, y) = arc sin(x2 − y2).
Resitev. Ker je ∂f∂x = 2x√
1−(x2−y2)2in ∂f
∂y = − 2y√1−(x2−y2)2
, je vrednost izraza enaka 0.

11 FUNKCIJE VEC SPREMENLJIVK 214
11.5 Verizno pravilo
Spomnimo se najprej veriznega pravila za funkcijo ene spremenljivke. Naj bosta I, J ⊂ R odprtaintervala ter g : J → I in f : I → R odvedljivi funkciji. Velja:
(f(g(x))′ = f ′(g(x)) g′(x).
J I R
xx+ h
g(x)
g′(x)h
f(g(x))
f ′(g(x))g′(x)h
g f
b b b b b b
Naj bo I ⊂ R odprt interval in D ⊂ R2 odprta mnozica. Naj bo funkcija f : D → R
diferenciabilna, funkciji x : I → R in y : I → R pa odvedljivi. Za vsak t ∈ I naj bo (x(t), y(t)) ∈D. Potem je funkcija F : I → R, podana s predpisom F (t) = f(x(t), y(t)), odvedljiva in velja
F ′(t) =∂f
∂x(x(t), y(t))x′(t) +
∂f
∂y(x(t), y(t))y′(t).
tt+ h
(x(t), y(t))
(x′(t)h, y′(t)h)
f(x(t), y(t))
∂f∂x(x(t), y(t))x′(t)h+ ∂f
∂y (x(t), y(t)) y′(t)h
(x, y) f
I
D
Rb b
b
b
b b
F ′(t) = limh→0
F (t+ h) − F (t)
h= lim
h→0
f(x(t+ h), y(t + h)) − f(x(t), y(t))
h.
Ker sta x in y zvezno odvedljivi, lahko po Lagrangeovem izreku zapisemo x(t+h) = x(t)+x′(ξ)hin y(t+ h) = y(t) + y′(ψ)h. Ker je f diferenciabilna, je
f(u+ ∆u, v + ∆v) − f(u, v) =∂f
∂u∆u+
∂f
∂v∆v + η
√∆2u+ ∆2v,
kjer gre η hkrati z ∆u in ∆v proti 0. Torej je
F ′(t) = limh→0
f(x(t+ h), y(t + h)) − f(x, y)
h=
= limh→0
∂f∂u (x, y)x′(ξ)h+ ∂f
∂v (x, y)y′(ψ)h + hη√x′(ξ)2 + y′(ψ)2
h=
=∂f
∂u(x, y)x′(t) +
∂f
∂v(x, y)y′(t),
saj gresta ξ in ψ proti t, ko gre h proti 0.Pravilo lahko zapisemo tudi v splosnem.

11 FUNKCIJE VEC SPREMENLJIVK 215
Izrek 11.31. Naj bo D ⊂ Rn odprta mnozica, f : D → R diferenciabilna, funkcije xi =xi(t), i = 1, . . . , n pa naj bodo zvezne in odvedljive funkcije parametra t. Potem je F (t) =f(x1(t), . . . , xn(t)) odvedljiva in velja
F ′(t) =
n∑
k=1
∂f
∂xk(x1(t), . . . , xn(t))x′k(t).
Ce je tudi t funkcija vec spremenljivk, lahko gornje pravilo se nekoliko posplosimo.
Izrek 11.32. Naj bo D ⊂ Rn odprta mnozica, f, x1, . . . , xn : D → R diferenciabilne funkcije.Potem je funkcija g : D → R, definirana s predpisom
g(t1, . . . , tn) = f(x1(t1, . . . , tn), x2(t1, . . . , tn), . . . , xn(t1, . . . , tn)),
diferenciabilna in za vsako tocko a ∈ D velja
∂g
∂tk(a) =
n∑
i=1
∂f
∂xk(b) · ∂xk
∂ti(a),
kjer smo oznacili b = (x1(a), . . . , xn(a)).
V posebnem primeru n = 2 za f = f(x, y), x = x(u, v) in y = y(u, v) enostavno zapisemo
∂f
∂u=
∂f
∂x
∂x
∂u+∂f
∂y
∂y
∂u,
∂f
∂v=
∂f
∂x
∂x
∂v+∂f
∂y
∂y
∂v.
Zgled 11.33. Izracunaj odvod funkcije f , podane s predpisom f(x) = xx.
Resitev. Oznacimo F (u, v) = uv, u(x) = x, v(x) = x in f(x) = F (u(x), v(x)). Potem je
∂F
∂u= vuv ,
∂F
∂v= uv lnu,
∂u
∂x= 1,
∂v
∂x= 1 in
d
dxf(x) =
∂
∂x(F (u(x), v(x))) =
∂F
∂u
∂u
∂x+∂F
∂v
∂v
∂x=
= xxx−1 + xx lnx = xx + xx lnx.
Zgled 11.34. Naj bo f dvakrat zvezno odvedljiva funkcija. Izracunaj vse parcialne odvode dru-gega reda za funkcijo F , podano s predpisom F (x, y) = f(x+ y, xy).
Resitev. Uporabili bomo verizno pravilo za funkcije f(u, v), u(x, y) = x + y in v(x, y) = xy.Po vrsti izracunamo
∂F
∂x=
∂f
∂u
∂u
∂x+∂f
∂v
∂v
∂x=∂f
∂u+∂f
∂vy,
∂F
∂y=
∂f
∂u
∂u
∂y+∂f
∂v
∂v
∂y=∂f
∂u+∂f
∂vx,

11 FUNKCIJE VEC SPREMENLJIVK 216
∂2F
∂x2=
∂
∂x
(∂f
∂u+∂f
∂vy
)=∂2f
∂u2+
∂2f
∂u∂vy +
∂2f
∂u∂vy +
∂2f
∂v2y2 =
=∂2f
∂u2+ 2y
∂2f
∂u∂v+ y2∂
2f
∂v2,
∂2F
∂y2=
∂
∂y
(∂f
∂u+∂f
∂vx
)=∂2f
∂u2+
∂2f
∂u∂vx+
∂2f
∂u∂vx+
∂2f
∂v2x2 =
=∂2f
∂u2+ 2x
∂2f
∂u∂v+ x2∂
2f
∂v2,
∂2F
∂x∂y=
∂
∂x
(∂f
∂u+∂f
∂vx
)=∂2f
∂u2+
∂2f
∂u∂vy +
∂2f
∂u∂vx+
∂2f
∂v2xy +
∂f
∂v=
=∂2f
∂u2+ (x+ y)
∂2f
∂u∂v+ xy
∂2f
∂v2+∂f
∂v.
11.6 Lokalni ekstremi
Naj bo D odprta mnozica v Rn in f : D → R poljubna funkcija.Funkcija f ima v tocki a ∈ D lokalni maksimum, ce obstaja tak δ > 0, da za vsak
x ∈ K(a, δ) \ {a} velja f(x) < f(a). Funkcija f ima v tocki a ∈ D lokalni minimum, ceobstaja tak δ > 0, da za vsak x ∈ K(a, δ) \ {a} velja f(x) > f(a). Ce ima funkcija f v tocki alokalni maksimum ali lokalni minimum, pravimo, da ima f v tocki a lokalni ekstrem.
Naj bo f : D → R odvedljiva funkcija. Tocka a ∈ D je stacionarna tocka funkcije f , ceje
∂f
∂x1(a) =
∂f
∂x2(a) = . . . =
∂f
∂xn(a) = 0.
Zgled 11.35. Doloci stacionarne tocke funkcije, podane s predpisom f(x, y) = e2x(x+y2 +2y).
Resitev. Ker je
∂f
∂x= 2e2x(x+ y2 + 2y) + e2x = e2x(2x+ 2y2 + 4y + 1),
∂f
∂y= e2x(2y + 2) = 2e2x(y + 1),
sta oba parcialna odvoda enaka 0 le za y = −1 in x = 12 . Stacionarna tocka je T (1
2 ,−1).
Zgled 11.36. Doloci stacionarne tocke funkcije, podane s predpisom f(x, y, z) = 3 lnx+2 ln y+5 ln z + ln(22 − x− y − z).
Resitev. Parcialni odvodi so ∂f∂x = 3
x − 122−x−y−z , ∂f
∂y = 2y − 1
22−x−y−z , ∂f∂z = 5
z − 122−x−y−z . Ker
mora biti ∂f∂x = ∂f
∂y = ∂f∂z = 0, sledi od tod, da je
3
x=
2
y=
5
z=
1
22 − x− y − z=
1
t.
Od tod izrazimo x = 3t, y = 2t in z = 5t. Z upostevanjem zadnje enakosti dobimo
t = 22 − x− y − z = 22 − 10t,
kar nam da 11t = 22 oziroma t = 2. Sledi x = 6, y = 4 in z = 10. Stacionarna tocka jeT (6, 4, 10).

11 FUNKCIJE VEC SPREMENLJIVK 217
Izrek 11.37. Ce ima odvedljiva funkcija f : D → R v tocki a ∈ D lokalni ekstrem, je a stacio-narna tocka.
Dokaz. Recimo, da ima funkcija f v tocki a = (a1, a2, . . . , an) lokalni minimum. Potemima tudi funkcija ene spremenljivke g, definirana z g(x) = f(x, a2, . . . , an), v tocki a1 lokalniminimum. Po ze dokazanem za funkcije ene spremenljivke to pomeni, da je g′(a1) = 0 oziroma
∂f
∂x1(a1, a2, . . . , an) = 0.
Podobno dokazemo se za ostale parcialne odvode.Gornji izrek seveda ne zagotavlja, da je v stacionarni tocki a ekstrem. Za podrobno analizo
je potrebno poseci po visjih parcialnih odvodih.
Zgled 11.38. Doloci stacionarne tocke funkcije, podane s predpisom f(x, y) = x2 + y2. Ali jev tej tocki ekstrem?
Resitev. Ker je ∂f∂x = 2x in ∂f
∂y = 2y, sta oba parcialna odvoda enaka 0 le v tocki (x, y) = (0, 0).Ocitno je f(0, 0) = 0 in f(x, y) > 0 za (x, y) 6= (0, 0). Torej je v tocki (0, 0) celo globalniminumum.
Zgled 11.39. Doloci stacionarne tocke funkcije, podane s predpisom f(x, y) = xy. Ali je v tejtocki ekstrem?
Resitev. Ker je ∂f∂x = y in ∂f
∂y = x, sta oba parcialna odvoda enaka 0 le v tocki (x, y) = (0, 0).Ocitno je f(0, 0) = 0, f(x, y) > 0 za x = y 6= 0 in f(x, y) < 0 za x = −y 6= 0. Torejzavzame funkcija poljubno blizu tocke (0, 0) pozitivne in negativne vrednosti, zato v tocki (0, 0)ni ekstrema.
Zgled 11.40. Doloci stacionarne tocke funkcije, podane s predpisom f(x, y) = (x− y)2. Ali jev tej tocki ekstrem?
Resitev. Ker je ∂f∂x = 2(x−y) in ∂f
∂y = −2(x−y), sta oba parcialna odvoda enaka 0 na premicix = y.
V vsaki tocki je f(x, y) ≥ 0, za x = y pa velja f(x, y) = 0. V skladu z gornjo definicijoekstrema v nobeni tocki na tej premici ni ekstrema, saj poljubno blizu te tocke funkcija fzavzame (enako) vrednost 0. Ker v okolici vsake tocke na premici zavzame le vecje ali enakevrednosti, tocke s te premice imenujemo nepopolni ekstremi.
Dana je dvakrat zvezno odvedljiva funkcija f : D → R, kjer je D ⊂ R2, ki ima stacionarnotocko (a, b) ∈ D. Oznacimo
A =∂2f
∂x2(a, b), B =
∂2f
∂x∂y(a, b), C =
∂2f
∂y2(a, b).
Izrek 11.41. Ce je AC−B2 > 0, nastopi v tocki (a, b) lokalni ekstrem, in sicer lokalni minimumza A > 0 in lokalni maksimum za A < 0. Ce je AC−B2 < 0, v tocki (a, b) ni lokalnega ekstrema.Ce je AC −B2 = 0, le s pomocjo drugih odvodov ne moremo odlociti, ali je v tocki (a, b) lokalniekstrem.
Zapisimo vse druge parcialne odvode in jih zapisimo v Hessejevo matriko:
Hf(a, b) =
[∂2f∂x2 (a, b) ∂2f
∂x∂y (a, b)∂2f∂y∂x(a, b) ∂2f
∂y2 (a, b)
]=
[A BB C
].

11 FUNKCIJE VEC SPREMENLJIVK 218
Opazimo, da je determinanta Hessejeve matrike ravno enaka
det(Hf(a, b)) = AC −B2.
Gornji izrek lahko sedaj povemo na kratko: Ce je determinanta Hessejeve matrike pozitivna,nastopi v stacionarni tocki ekstrem (lokalni maksimum, ce je A < 0 in lokalni minimum, ce jeA > 0). Ce je determinanta Hessejeve matrike negativna, v stacionarni tocki ni ekstrema. Ceje determinanta Hessejeve matrike enaka 0, pa s pomocjo drugih odvodov ne moremo ugotoviti,ali nastopi v stacionarni tocki ekstrem.
Zgled 11.42. Doloci ekstreme funkcije, podane s predpisom f(x, y) = x2 + y2 − 6x+ 4y + 13.
Resitev. Dolocimo najprej stacionarne tocke. Ker je ∂f∂x = 2x − 6 in ∂f
∂y = 2y + 4, mora zastacionarno tocko veljati 2x−6 = 0 in 2y+4 = 0. Torej je x = 3 in y = −2. Zapisimo Hessejevomatriko:
A = Hf(3,−2) =
[∂2f∂x2
∂2f∂x∂y
∂2f∂y∂x
∂2f∂y2
]=
[2 00 2
].
Ker je a11 = 2 > 0 in det(A) = 4 > 0, je v tocki (3,−2) lokalni minimum. V tej tocki je celo
globalni minimum, saj je
f(x, y) = x2 + y2 − 6x+ 4y + 13 = (x− 3)2 + (y + 2)2 ≥ 0
in f(x, y) = 0 le za x = 3 in y = −2.
Zgled 11.43. Doloci ekstreme funkcije, podane s predpisom f(x, y) = x3 + y3 − 3xy + 1.
Resitev. Ker je ∂f∂x = 3x2−3y in ∂f
∂y = 3y2−3x, mora za stacionarno tocko veljati 3x2−3y = 0
in 3y2 − 3x = 0. Sledi y = x2, kar nam da x4 − x = 0. Torej je x(x− 1)(x2 + x+ 1) = 0 in zatox = 0 ali x = 1. Stacionarni tocki sta T1(0, 0) in T2(1, 1). Zapisimo Hessejevo matriko:
Hf(x, y) =
[∂2f∂x2
∂2f∂x∂y
∂2f∂y∂x
∂2f∂y2
]=
[6x −3−3 6y
].
Determinanta Hessejeve matrike je enaka 36xy − 9 in je pozitivna le v tocki T2(1, 1). Glede navrednost elementa a11 tako sledi, da je v tocki T2 lokalni minimum. V tocki T1 pa ni ekstrema.
Zgled 11.44. Doloci ekstreme funkcije, podane s predpisom f(x, y) = x3 − 4x2 + 2xy − y2.
Resitev. Ker je ∂f∂x = 3x2 − 8x + 2y in ∂f
∂y = 2x − 2y, mora za stacionarno tocko veljati
3x2 − 8x + 2y = 0 in 2x − 2y = 0. Torej je y = x, kar nam da 3x2 − 6x = 0. Sledi x = 0(in y = 0) ali x = 2 (in y = 2). Stacionarni tocki sta T1(0, 0) in T2(2, 2). Zapisimo Hessejevomatriko:
Hf(x, y) =
[∂2f∂x2
∂2f∂x∂y
∂2f∂y∂x
∂2f∂y2
]=
[6x− 8 2
2 −2
].
Determinanta Hessejeve matrike je enaka −12x + 12 in je pozitivna le v tocki T1(0, 0). Gledena vrednost elementa a11 = −8 tako sledi, da je v tocki T1 lokalni maksimum, v tocki T2 pa jesedlo.
Zgled 11.45. Doloci ekstreme funkcije, podane s predpisom f(x, y) = 3x2y + 6xy2 + 4y3 − 3y.

11 FUNKCIJE VEC SPREMENLJIVK 219
Resitev. Izracunajmo parcialne odvode. ∂f∂x = 6xy + 6y2 in ∂f
∂y = 3x2 + 12xy + 12y2 − 3. Iz
prve enacbe sledi 6xy + 6y2 = 0, kar nam da y = 0 ali x = −y. Ce je y = 0, iz druge enacbesledi 3x2 − 3 = 0, kar nam da x = ±1. Ce pa je x = −y, iz druge enacbe sledi 3x2 − 3 = 0, karnam da x = ±1 in y = ∓1. Torej imamo 4 stacionarne tocke T1(1, 0), T2(−1, 0), T3(1,−1) inT4(−1, 1). Zapisimo Hessejevo matriko
Hf(x, y) =
[∂2f∂x2
∂2f∂x∂y
∂2f∂y∂x
∂2f∂y2
]=
[6y 6x+ 12y
6x+ 12y 12x+ 24y
].
Zapisimo Hessejevo matriko
Hf(x, y) =
[∂2f∂x2
∂2f∂x∂y
∂2f∂y∂x
∂2f∂y2
]=
[6y 6x+ 12y
6x+ 12y 12x+ 24y
].
Sedaj pa po vrsti izracunamoHf(1, 0) =
[0 66 12
],Hf(−1, 0) =
[0 −6−6 −12
], Hf(1,−1) =
[−6 −6−6 −12
], Hf(−1, 1) =
[6 66 12
], kar pomeni, da imamo v tocki T3(1,−1) lokalni maksi-
mum, v tocki T4(−1, 1) pa lokalni minimum. V tockah T1 in T2 ni ekstremov.
Zgled 11.46. Doloci absolutni minimum in absolutni maksimum funkcije, podane s predpisomf(x, y) = (3x2 + 2y2)e−x2−y2
.
Resitev. Dolocimo najprej stacionarne tocke:
∂f
∂x= (6x+ (3x2 + 2y2)(−2x))e−x2−y2
=
= −2x(3x2 + 2y2 − 3)e−x2−y2,
∂f
∂y= (4y + (3x2 + 2y2)(−2y))e−x2−y2
=
= −2y(3x2 + 2y2 − 2)e−x2−y2.
Najprej opazimo, da ne moreta biti x in y hkrati razlicna od 0, saj bi v nasprotnem moralo biti
3x2 + 2y2 − 3 = 3x2 + 2y2 − 2.
Pri x = 0 je lahko y = 0 ali pa y = ±1. Podobno je za y = 0 lahko x = 0 ali pa x = ±1. Torejimamo stacionarne tocke (0, 0), (0, 1), (0,−1), (1, 0) in (−1, 0). Po vrsti izracunamo f(0, 0) = 0,f(0, 1) = 2e−1 = f(0,−1) in f(1, 0) = 3e−1 = f(−1, 0).
Ker je ocitno f(x, y) ≥ 0 za vsak (x, y), je v tocki (0, 0) globalni minimum. V tockah (1, 0)in (−1, 0) pa zavzame globalni maksimum, saj je za velike (x, y) vrednost funkcije f poljubnomajhna. (Uporabimo limito lim
t→∞t2e−t2 = 0.)
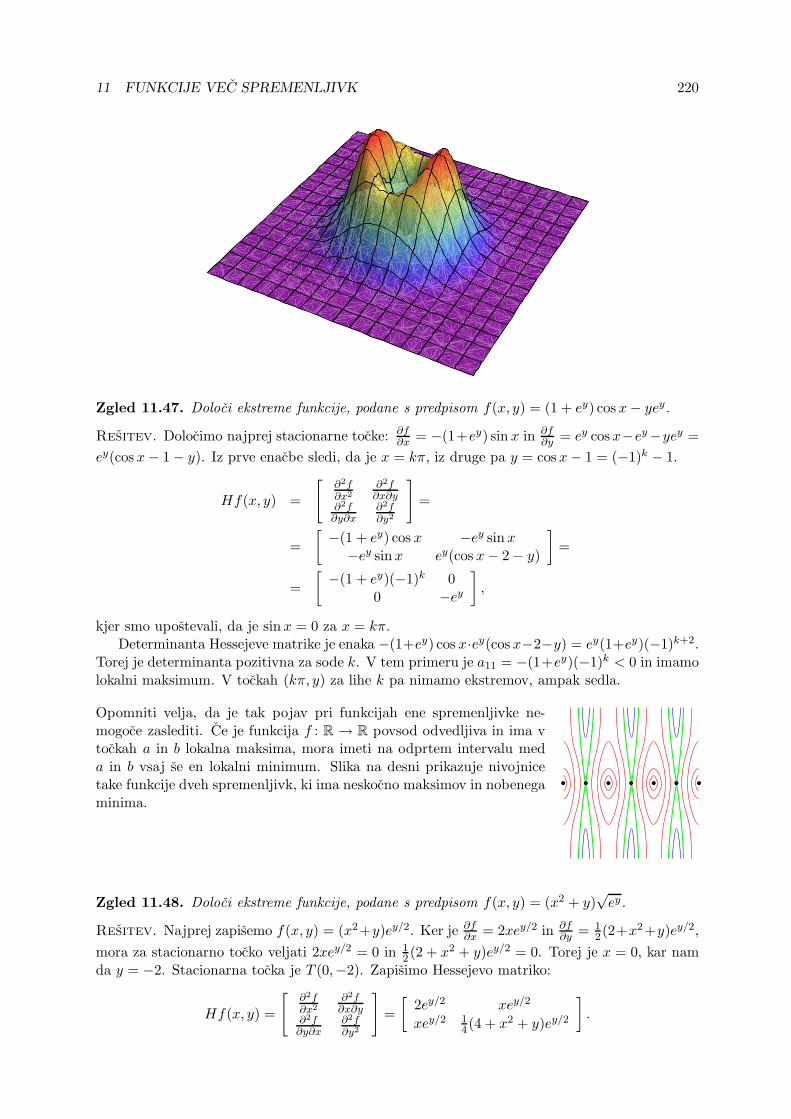
11 FUNKCIJE VEC SPREMENLJIVK 220
Zgled 11.47. Doloci ekstreme funkcije, podane s predpisom f(x, y) = (1 + ey) cos x− yey.
Resitev. Dolocimo najprej stacionarne tocke: ∂f∂x = −(1+ey) sin x in ∂f
∂y = ey cosx−ey −yey =
ey(cos x− 1 − y). Iz prve enacbe sledi, da je x = kπ, iz druge pa y = cos x− 1 = (−1)k − 1.
Hf(x, y) =
[∂2f∂x2
∂2f∂x∂y
∂2f∂y∂x
∂2f∂y2
]=
=
[−(1 + ey) cos x −ey sinx
−ey sinx ey(cos x− 2 − y)
]=
=
[−(1 + ey)(−1)k 0
0 −ey],
kjer smo upostevali, da je sinx = 0 za x = kπ.Determinanta Hessejeve matrike je enaka −(1+ey) cos x·ey(cos x−2−y) = ey(1+ey)(−1)k+2.
Torej je determinanta pozitivna za sode k. V tem primeru je a11 = −(1+ey)(−1)k < 0 in imamolokalni maksimum. V tockah (kπ, y) za lihe k pa nimamo ekstremov, ampak sedla.
b b b b b b b
Opomniti velja, da je tak pojav pri funkcijah ene spremenljivke ne-mogoce zaslediti. Ce je funkcija f : R → R povsod odvedljiva in ima vtockah a in b lokalna maksima, mora imeti na odprtem intervalu meda in b vsaj se en lokalni minimum. Slika na desni prikazuje nivojnicetake funkcije dveh spremenljivk, ki ima neskocno maksimov in nobenegaminima.
Zgled 11.48. Doloci ekstreme funkcije, podane s predpisom f(x, y) = (x2 + y)√ey.
Resitev. Najprej zapisemo f(x, y) = (x2+y)ey/2. Ker je ∂f∂x = 2xey/2 in ∂f
∂y = 12(2+x2+y)ey/2,
mora za stacionarno tocko veljati 2xey/2 = 0 in 12 (2 + x2 + y)ey/2 = 0. Torej je x = 0, kar nam
da y = −2. Stacionarna tocka je T (0,−2). Zapisimo Hessejevo matriko:
Hf(x, y) =
[∂2f∂x2
∂2f∂x∂y
∂2f∂y∂x
∂2f∂y2
]=
[2ey/2 xey/2
xey/2 14(4 + x2 + y)ey/2
].

11 FUNKCIJE VEC SPREMENLJIVK 221
Torej je Hf(0,−2) =
[2e−1 0
0 122e−1
]. Determinanta Hessejeve matrike je v tocki (0,−2)
enaka 4e−2 > 0. Glede na vrednost elementa a11 = 2e−1 tako sledi, da je v tocki T (0,−2)lokalni minimum.
Zgled 11.49. Doloci ekstreme funkcije, podane s predpisom f(x, y) = x3 + 8y3 − 6xy + 5.
Resitev. Ker je ∂f∂x = 3(x2−2y) in ∂f
∂y = −6(x−4y2), mora za stacionarno tocko veljati x2−2y =
0 in x− 4y2 = 0. Sledi 16y4 − 2y = 0, kar nam da 8y4 = y. Torej je y(2y− 1)(4y2 + 2y + 1) = 0in zato y = 0 ali y = 1
2 . Stacionarni tocki sta T1(0, 0) in T2(1,12 ). Zapisimo Hessejevo matriko:
Hf(x, y) =
[∂2f∂x2
∂2f∂x∂y
∂2f∂y∂x
∂2f∂y2
]=
[6x −6−6 48y
].
Determinanta Hessejeve matrike je enaka 36(8xy − 1) in je pozitivna le v tocki T2(1,12 ). Glede
na vrednost elementa a11 = 6 v tej tocki tako sledi, da je v tocki T2(1,12) lokalni minimum. V
tocki T1(0, 0) pa ni ekstrema.
11.7 Metoda najmanjsih kvadratov
Recimo, da je na podlagi meritev dano n tock (x1, y1), (x2, y2), . . . , (xn, yn). Poiskati zelimopremico (tj. funkcijo oblike y = αx+ β), ki se podatkom najbolje prilega.
1 2 300
1
2
3
4
x
y
4b
b
b
b
b
bc bc bc bc
bc
bc
bc
bc
Torej iscemo tako vrednosti parametrov α in β, da bo vrednostizraza
f(α, β) =
n∑
i=1
(yi − (αxi + β))2
minimalna.
Ce oznacimo
SX = x1 + x2 + . . . + xn,
SY = y1 + y2 + . . .+ yn,
SXX = x21 + x2
2 + . . . + x2n,
SY Y = y21 + y2
2 + . . .+ y2n,
SXY = x1y1 + x2y2 + . . . + xnyn,
lahko zapisemo
f(α, β) =n∑
i=1
(yi − (αxi + β))2 =
=
n∑
i=1
(y2i + α2x2
i + β2 − 2αxiyi − 2βyi + 2αβxi) =
= SXXα2 + 2αβSX + nβ2 − 2αSXY − 2βSY + SY Y .

11 FUNKCIJE VEC SPREMENLJIVK 222
Ker je
∂f
∂α= 2αSXX + 2βSX − 2SXY ,
∂f
∂β= 2αSX + 2nβ − 2SY ,
iz pogojev ∂f∂α = ∂f
∂β = 0 sledi sistem
αSXX + βSX = SXY ,
αSX + nβ = SY ,
ki ima resitev
α =nSXY − SXSY
nSXX − SXSX,
β =SXXSY − SXY SX
nSXX − SXSX=SY − αSX
n.
Dokazimo, da je v tej tocki res lokalni minimum. Velja
Hf(α, β) =
[2SXX 2SX
2SX 2n
].
Da bi bila aproksimacija sploh smiselna, ne smejo biti vsi xi enaki. Torej je SXX > 0 in moznoje dokazati, da velja se
nSXX > S2X .
Torej je v tej tocki res lokalni minimum.
Zgled 11.50. Poisci linearno funkcijo, ki se najbolje prilega tockam T1(0, 0), T2(1, 1), T3(2, 4),T4(3, 2) in T5(4, 3).
1 2 300
1
2
3
4
x
y
4b
b
b
b
b
bc bc bc bc
bc
bc
bc
bc
Resitev. Po vrsti izracunamo SX = 10, SY = 10, SXX = 30,SY Y = 30, SXY = 27 in
α =nSXY − SXSY
nSXX − SXSX=
=5 · 27 − 10 · 105 · 30 − 102
=7
10,
β =SY − αSX
n=
=10 − 7
1010
5=
3
5.
Iskana funkcija je y = 710x+ 3
5 .
11.8 Vezani ekstremi
Naj bo D odprta mnozica v Rn in f : D → R poljubna funkcija. Naj bo M ⊂ D poljubnapodmnozica. Zanima nas ekstrem funkcije f |M : M → R.
Pogosto je mnozica M podana z vezmi; torej v obliki:
M = {x ∈ D; g1(x) = 0, g2(x) = 0, . . . , gm(x) = 0},

11 FUNKCIJE VEC SPREMENLJIVK 223
kjer so g1, . . . , gm : D → R dane odvedljive funkcije.
Primer: Zamima nas, katera tocka na elipsi z enacbo x2+4y2 = 1 lezi najblizje koordinatnemuizhodiscu. Vez je ena sama: g(x, y) = x2 + 4y2 − 1, funkcija, katere ekstrem iscemo, pa jef(x, y) =
√x2 + y2.
x1 x2
y1
y2
f(x1, y1)
f(x2, y2)
Γf |M
x
y
z
M
D
Γf
bc
bc
bc
bc
bc bc
b
b
b
b
Funkcija f |M zavzame maksimum v tocki (x1, y1), minimum pa v tocki (x2, y2).Pri iskanju vezanih ekstremov si pomagamo z Lagrangeovo funkcijo
F (x1, . . . , xn, λ1, . . . , λm) = f(x) − λ1g1(x) − λ2g2(x) − . . . − λmgm(x).
Stevila λ1, . . . , λm imenujemo Lagrangeovi multiplikatorji.
Izrek 11.51. Ce ima funkcija f |M lokalni ekstrem v tocki a ∈ M , obstajajo realna stevila λ1,. . . , λm, da je ∂F
∂xi(a) = 0 za i = 1, 2, . . . , n in gj(a) = 0 za j = 1, 2, . . . ,m.
Opomba. Gornji izrek podaja le potreben pogoj za nastop ekstrema, ne pa tudi zado-stnega. Da je v neki tocki res ekstrem, obicajno sledi iz konteksta naloge.
Zgled 11.52. Poisci vse ekstreme funkcije f , podane s predpisom f(x, y) = 2x − 4y + 5, nakroznici, podani z enacbo x2 + y2 = 1.
Resitev. Zapisimo Lagrangeovo funkcijo
F (x, y, λ) = 2x− 4y + 5︸ ︷︷ ︸f(x,y)
−λ(x2 + y2 − 1︸ ︷︷ ︸g(x,y)
),
kjer je g(x, y) = x2 + y2 − 1 vez. Potem mora v stacionarni tocki veljati
∂F
∂x= 2 − 2xλ = 0,
∂F
∂y= −4 − 2yλ = 0,
g(x, y) = x2 + y2 − 1 = 0.

11 FUNKCIJE VEC SPREMENLJIVK 224
x
y
z
M
Γf |Mz =
2x−4y +
5
bc
bc
b
b
Iz prve enacbe izrazimo x = 1λ , iz druge pa y = − 2
λ . Torej je
x2 + y2 =5
λ2= 1,
kar nam da λ = ±√
5. Stacionarni tocki sta T1(1√5,− 2√
5) in
T2(− 1√5, 2√
5). V tocki T1 je lokalni maksimum, v T2 pa lokalni
minimum. Pripomniti velja, da je Γf |M krivulja, ki lezi na ploskviz enacbo z = f(x, y), torej elipsa, ki lezi na ravnini z enacbo
z = 2x− 4y + 5.
Zgled 11.53. Poisci vse ekstreme funkcije f , podane s predpisom f(x, y) = 3x2 − 2xy+3y2, nakrivulji, podani z enacbo x3 + y3 = 1.
Resitev. Zapisimo Lagrangeovo funkcijo
F (x, y, λ) = 3x2 − 2xy + 3y2 − λ(x3 + y3 − 1).
Potem mora v stacionarni tocki veljati
∂F
∂x= 6x− 2y − 3x2λ = 0,
∂F
∂y= −2x+ 6y − 3y2λ = 0,
g(x, y) = x3 + y3 − 1 = 0.
Najprej opazimo, da v x = 0 v prvi enacbi implicira y = 0, kar pa zaradi vezi ni mozno. Podobnotudi y = 0 v drugi enacbi implicira x = 0, kar spet zaradi vezi ni mozno.
Iz prve enacbe izrazimo λ = 6x−2y3x2 , iz druge pa λ = −2x+6y
3y2 . Torej je
6x− 2y
3x2=
−2x+ 6y
3y2,
kar lahko preoblikujemo v (3x − y)y2 = (−x + 3y)x2 oz. (x − y)3 = 0. Sledi x = y, kar namzaradi vezi da x = y = 1
3√2.
Analizirajmo vez. Iz x3 + y3 = 1 lahko izrazimo y = 3√
1 − x3 = x 3
√−1 + 1
x3 , kar je za velike
x priblizno enako −x. Torej za velike x velja f(x, y) ≈ 3x2 + 2xx + 3x2 = 8x2 in je funkcija fnavzgor neomejena. V tocki T ( 1
3√2, 1
3√2) je lokalni minimum.
Zgled 11.54. Poisci vse ekstreme funkcije f , podane s predpisom f(x, y) = 2x3+4x2+y2−2xy,na obmocju, omejenem z grafoma funkcij y = x2 in y = 4.
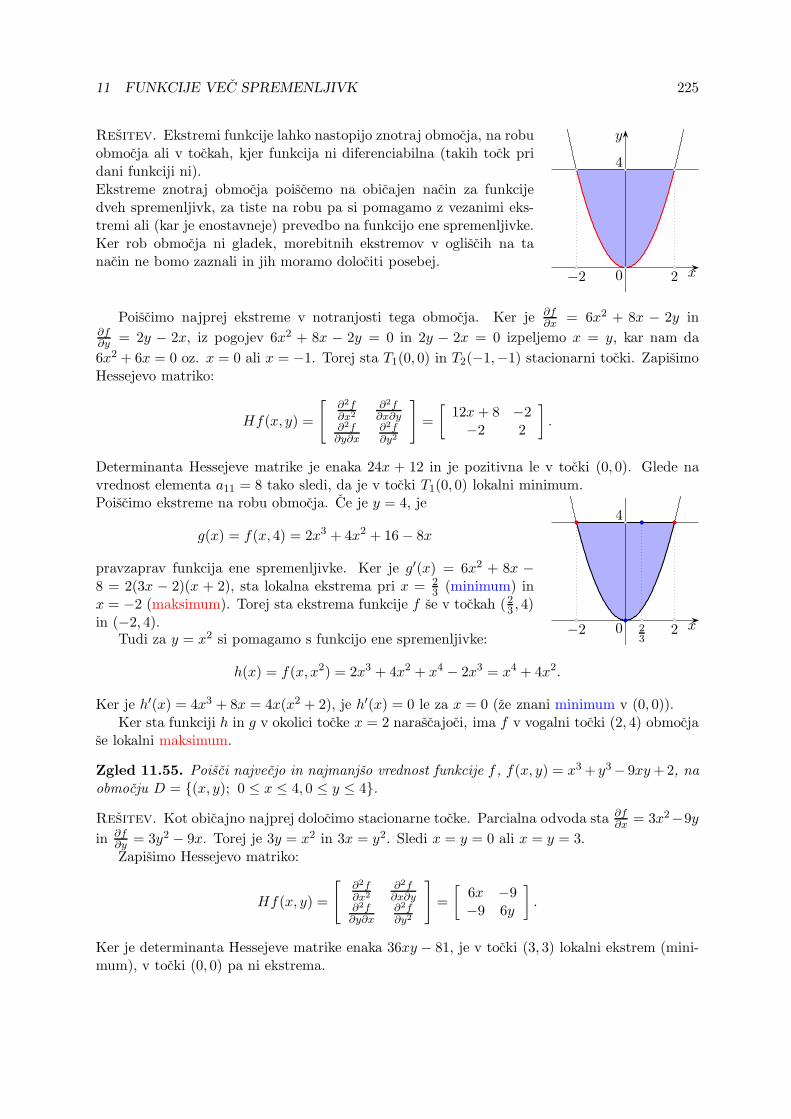
11 FUNKCIJE VEC SPREMENLJIVK 225
−2 2
4
0 x
y
bc
bc
bc
bc
bc
bc
Resitev. Ekstremi funkcije lahko nastopijo znotraj obmocja, na robuobmocja ali v tockah, kjer funkcija ni diferenciabilna (takih tock pridani funkciji ni).Ekstreme znotraj obmocja poiscemo na obicajen nacin za funkcijedveh spremenljivk, za tiste na robu pa si pomagamo z vezanimi eks-tremi ali (kar je enostavneje) prevedbo na funkcijo ene spremenljivke.Ker rob obmocja ni gladek, morebitnih ekstremov v ogliscih na tanacin ne bomo zaznali in jih moramo dolociti posebej.
Poiscimo najprej ekstreme v notranjosti tega obmocja. Ker je ∂f∂x = 6x2 + 8x − 2y in
∂f∂y = 2y − 2x, iz pogojev 6x2 + 8x − 2y = 0 in 2y − 2x = 0 izpeljemo x = y, kar nam da
6x2 + 6x = 0 oz. x = 0 ali x = −1. Torej sta T1(0, 0) in T2(−1,−1) stacionarni tocki. ZapisimoHessejevo matriko:
Hf(x, y) =
[∂2f∂x2
∂2f∂x∂y
∂2f∂y∂x
∂2f∂y2
]=
[12x+ 8 −2
−2 2
].
Determinanta Hessejeve matrike je enaka 24x + 12 in je pozitivna le v tocki (0, 0). Glede navrednost elementa a11 = 8 tako sledi, da je v tocki T1(0, 0) lokalni minimum.
−2 2
4
23
0 xbc
bc
bc bc
b b
b
b
Poiscimo ekstreme na robu obmocja. Ce je y = 4, je
g(x) = f(x, 4) = 2x3 + 4x2 + 16 − 8x
pravzaprav funkcija ene spremenljivke. Ker je g′(x) = 6x2 + 8x −8 = 2(3x − 2)(x + 2), sta lokalna ekstrema pri x = 2
3 (minimum) inx = −2 (maksimum). Torej sta ekstrema funkcije f se v tockah (2
3 , 4)in (−2, 4).
Tudi za y = x2 si pomagamo s funkcijo ene spremenljivke:
h(x) = f(x, x2) = 2x3 + 4x2 + x4 − 2x3 = x4 + 4x2.
Ker je h′(x) = 4x3 + 8x = 4x(x2 + 2), je h′(x) = 0 le za x = 0 (ze znani minimum v (0, 0)).Ker sta funkciji h in g v okolici tocke x = 2 narascajoci, ima f v vogalni tocki (2, 4) obmocja
se lokalni maksimum.
Zgled 11.55. Poisci najvecjo in najmanjso vrednost funkcije f , f(x, y) = x3 + y3 − 9xy+2, naobmocju D = {(x, y); 0 ≤ x ≤ 4, 0 ≤ y ≤ 4}.
Resitev. Kot obicajno najprej dolocimo stacionarne tocke. Parcialna odvoda sta ∂f∂x = 3x2−9y
in ∂f∂y = 3y2 − 9x. Torej je 3y = x2 in 3x = y2. Sledi x = y = 0 ali x = y = 3.Zapisimo Hessejevo matriko:
Hf(x, y) =
[∂2f∂x2
∂2f∂x∂y
∂2f∂y∂x
∂2f∂y2
]=
[6x −9−9 6y
].
Ker je determinanta Hessejeve matrike enaka 36xy − 81, je v tocki (3, 3) lokalni ekstrem (mini-mum), v tocki (0, 0) pa ni ekstrema.

11 FUNKCIJE VEC SPREMENLJIVK 226
2√
3
2√
3
4
4
0
y
x3
3
b b
bb
b
b
b
bc
bc
bc
bc
Za x = 0 imamo na robu funkcijo ene spremenljivke g(y) = y3 +2,ki ima v y = 0 minimum, v y = 4 pa maksimum. (Ustrezni tockista (0, 0) in (0, 4). ) Pri x = 4 imamo na robu funkcijo ene spre-menljivke g(y) = 64 + y3 − 36y + 2. Iz g′(y) = 3y2 − 36 = 0 sledi,da imamo v y = 2
√3 lokalni ekstrem (minimum). (Ustrezna tocka
je (4, 2√
3). Podobno z analizo funkcij x 7→ f(x, 0) in x 7→ f(x, 4)poiscemo se tocke (0, 0), (4, 0), (2
√3, 4).
Najvecjo in najmanjso vrednost funkcije f na danem obmocjudolocimo tako, da primerjamo funkcijske vrednosti: f(0, 0) = 0,f(0, 4) = f(4, 0) = 66 (maksimum), f(4, 4) = −16, f(2
√3, 4) =
f(4, 2√
3) = 66 − 48√
3 ≈ −17, f(3, 3) = −25 (minimum).
Zgled 11.56. V polkrog polmera r vcrtaj pravokotnik z najvecjo ploscino, katerega stranice sovzporedne koordinatnima osema.
Resitev.
(x, y)(−x, y)
−x x−r r
ybc
bcbc
bc
bc bc
bc
Recimo, da lezi njegovo oglisce (x, y) na delu loka v prvem kvadrantu. Potem ima pravokotnikoglisca v tockah (x, 0), (x, y), (−x, 0), (−x, y), njegova ploscina pa je enaka 2xy. Ker lezi tockana kroznici, velja x2 + y2 = r2. Torej iscemo maksimum funkcije f(x, y) = 2xy pri pogojux2 + y2 = r2.
Zapisimo Lagrangeovo funkcijo
F (x, y, λ) = 2xy − λ(x2 + y2 − r2).
Potem je
∂F
∂x= 2y − 2λx,
∂F
∂y= 2x− 2λy.
Ker iz x = 0 sledi y = 0 (oz. iz y = 0 sledi x = 0), je x 6= 0 6= y. Torej je yx = λ = x
y in x2 = y2.
Skupaj z x2 + y2 = r2 to pomeni x = 1√2r in y = 1√
2r. (Predpostavili smo namrec, da tocka
(x, y) lezi v prvem kvadrantu.) Najvecja ploscina je tako enaka 2 · 1√2r · 1√
2r = r2.
Zgled 11.57. Poisci najmanjso razdaljo od koordinatnega izhodisca do grafa funkcije y = x2 −x− 1.
Resitev. Razdalja od tocke (x, y) do koordinatnega izhodisca je enaka√x2 + y2. Torej iscemo
najmanjso vrednost funkcijef(x, y) =
√x2 + y2
pri pogojuy = x2 − x− 1.

12 DIFERENCIALNE ENACBE 227
Zaradi monotonosti korenske funkcije je dovolj poiskati najmanjso vrednost funkcije x2 + y2 priistem pogoju. Lagrangeova funkcija je zato
F (x, y, λ) = x2 + y2 − λ(x2 − x− 1 − y).
0
y
xbc
b
b
Potem je
∂F
∂x= 2x− (2x− 1)λ = 0,
∂F
∂y= 2y + λ = 0.
Sledi λ = 2x2x−1 = −2y in y = x
1−2x . Torej je x1−2x = x2 −x− 1, kar nam
da−2x3 + 3x2 − 1 = −(x− 1)2(2x+ 1) = 0.
Sledi x = 1 ali x = −12 . Pri x = 1 je y = −1 in razdalja je
√2. Pri x = −1
2 je y = −14 in
(najmanjsa) razdalja je√
54 .
Opomba. Lagrangeova funkcija ima po pricakovanju dva lokalna ekstrema. To sta tocki, vkaterih normala na krivuljo poteka skozi koordinatno izhodisce.
12 Diferencialne enacbe
12.1 Splosen pojem diferencialne enacbe
Naj bo n ∈ N, D ⊂ Rn+2 odprta mnozica in F : D → R zvezna funkcija. Navadna diferencialnaenacba je zveza med neodvisno spremenljivko x, odvisno spremenljivko y = y(x) in njenimiodvodi y′(x), . . . , y(n)(x), torej zveza
F (x, y(x), y′(x), . . . , y(n)(x)) = 0. (24)
Obicajno namesto y(x), y′(x), . . . pisemo y, y′, . . . .
Zgled 12.1. Za funkcijo F : R3 → R, podano s predpisom F (x1, x2, x3) = x3 + x1x2 − sinx1, jepripadajoca enacba enaka y′ + xy − sinx = 0.
Red diferencialne enacbe je red najvisjega odvoda v enacbi.
Zgled 12.2. Diferencialna nacba y′ = 2xy + x2 ima red 1, enacba y′′ + 3y′ − 7 = e−x cosx pared 2.
Resitev diferencialne enacbe (24) reda n na intervalu I = (a, b) je vsaka funkcija f : I →R, ki je na tem intervalu n-krat odvedljiva in za vsak x ∈ I zadosca enacbi
F (x, y(x), y′(x), . . . , y(n)(x)) = 0. (25)
Resiti diferencialno enacbo pomeni poiskati vse funkcije, ki tej enacbi zadoscajo. Obicajno je,da ima diferencialna enacba reda n vec resitev, ki so odvisne od n parametrov. Taki resitvi pra-vimo splosna resitev. Ce v splosni resitvi izberemo parametre, dobimo natanko eno dolocenoresitev iz te druzine, ki ji pravimo partikularna resitev. Precej pogosto dolocimo partikularnoresitev tako, da predpisemo zacetne vrednosti
y(x0) = a0, y′(x0) = a1, . . . , y
(n−1)(x0) = an−1.
Mozno je, da premore diferencialna enacba tudi resitve, ki jih ne moremo dobiti s primernoizbiro parametrov v splosni resitvi. Takim resitvam pravimo singularne resitve.

12 DIFERENCIALNE ENACBE 228
Zgled 12.3. Funkcija y(x) = sin(2x) je resitev diferencialne enacbe y′′ + 4y = 0 na celi realniosi.
Resitev. Ker je y′ = 2cos(2x) in y′′ = −4 sin(2x), res velja y′′ + 4y = 0 na celi realni osi.
To pa ni edina resitev. Gornja enacba ima splosno resitev
y(x) = A sin(2x) +B cos(2x),
kjer sta A,B ∈ R poljubni konstanti.
Racunajmo:
y′ = 2A cos(2x) − 2B sin(2x),
y′′ = −4A sin(2x) − 4B cos(2x).
Torej je resy′′ + 4y = 0.
Zgled 12.4. Poisci tako resitev diferencialne enacbe y′′ + 4y = 0, ki zadosca pogoju y(0) =y′(0) = 1.
Resitev. Partikularno resitev, ki ustreza pogoju y(0) = y′(0) = 1, dobimo tako, da resimosistem enacb y(0) = 1 in y′(0) = 1:
y(0) = A sin(2x) +B cos(2x)|x=0 = B = 1,
y′(0) = 2A cos(2x) − 2B sin(2x)|x=0 = 2A = 1.
Torej je iskana funkcija enaka
y(x) =1
2sin(2x) + cos(2x).
Zgled 12.5. Poisci vse funkcije, ki zadoscajo enacbi y′ = 0.
Resitev. Videli smo ze, da le konstantne funkcije zadoscajo gornjemu pogoju. Torej je za vsakc ∈ R funkcija y = f(x) = c resitev gornje enacbe.
Podobno je mozno videti, da so za dani n ∈ N vse funkcije, ki zadoscajo enacbi y(n) = 0,ravno polinomi stopnje n− 1, torej funkcije oblike
y(x) = an−1xn−1 + an−2x
n−2 + . . .+ a1x+ a0.
12.2 Diferencialne enacbe prvega reda
Splosno diferencialno enacbo prvega reda podamo v obliki
F (x, y, y′) = 0.
Njena resitev je enoparametricna druzina krivulj y = f(x,C), kjer je C ∈ R parameter. Parti-kularno resitev dobimo tako, da predpisemo pogoj, ki mu mora ta resitev zadoscati. Obicajnopodamo vrednost v neki tocki, torej y(x0) = y0.
Diferencialni enacbi skupaj z zacenim pogojem
F (x, y, y′) = 0, y(x0) = y0, (26)
pravimo zacetni problem.

12 DIFERENCIALNE ENACBE 229
Obstoj in enolicnost resitveCe je funkcija F dovolj lepa, lahko enacbo F (x, y, y′) = 0 preoblikujemo v diferencialno
enacbo y′ = f(x, y), ki premore (lokalno) enolicno resitev. Natancneje:
Izrek 12.6. Naj bo D ⊂ R2 odprta mnozica. Ce je funkcija f : D → R zvezna in zveznoparcialno odvedljiva na y, ima za vsako tocko (x0, y0) ∈ D v neki okolici tocke x0 diferencialnaenacba
y′ = f(x, y)
natanko eno resitev, ki ustreza pogoju y(x0) = y0.
D
x0
y0
x
y
bc
bc bc
V vsaki tocki (x, y) ∈ D je narisan vektor z naklonom y′ = f(x, y). Oznacena resitev y = y(x)zadosca zacetnemu pogoju y(x0) = y0.
12.2.1 Enacba z locljivima spremenljivkama
Ce lahko enacbo F (x, y, y′) = 0 zapisemo v obliki y′ = h(x)g(y), pravimo, da ima enacba locljivispremenljivki. Ker je y′ = dy
dx , lahko zapisemo dydx = h(x)g(y), kar nam da
dy
g(y)= h(x)dx.
Torej je splosna resitev enaka ∫dy
g(y)=
∫h(x) dx+ C,
ki jo lahko zapisemo v obliki G(y) = H(x) +C. Za partikularno resitev, ki npr. ustreza pogojuy(x0) = y0, pa velja G(y0) = H(x0) + C. Torej je
C = G(y0) −H(x0).
Zgled 12.7. Poisci splosno resitev enacbe xy + (x + 1)y′ = 0 in zapisi partikularno resitev, kizadosca pogoju y(0) = 1.
Resitev. To je enacba z locljivima spremenljivkama − xx+1 dx = 1
y dy. Sledi −∫
xx+1 dx =
∫1y dy,
kar nam skupaj z∫
x
x+ 1dx =
∫x+ 1 − 1
x+ 1dx =
∫(1 − 1
x+ 1) dx = x− ln(x+ 1)
da −x+ ln(x+ 1) + c = ln y oz. e−x+ln(x+1)+c = eln y. Sledi
y = e−x(x+ 1)ec = C(x+ 1)e−x,
kjer smo oznacili C = ec. Ker je y(0) = 1, sledi C = 1 in zato y = (x+ 1)e−x.

12 DIFERENCIALNE ENACBE 230
Zgled 12.8. Poisci splosno resitev enacbe√y2 + 1 = xyy′ in zapisi partikularno resitev, ki
zadosca pogoju y(1) = 1.
Resitev. To je enacba z locljivima spremenljivkama y√y2+1
dy = 1x dx, kar nam da
∫ y√y2+1
dy =∫
1x dx. Torej je
√y2 + 1 = lnx+ C in y2 = (lnx+ C)2 − 1.
Ce je torej y(1) = 1, velja C2−1 = 1 in C = ±√
2. Iskani funkciji sta dve y =√
(lnx±√
2)2 − 1.
Zgled 12.9. Poisci splosno resitev enacbe 2x2yy′ + y2 = 2 in zapisi partikularno resitev, kizadosca pogoju y(1) = −1.
Resitev. To je enacba z locljivima spremenljivkama 2y2−y2 dy = 1
x2 dx. Sledi − ln(2−y2) = − 1x+C
oz. ln(2 − y2) = 1x − C, kar nam da 2 − y2 = e
1x−C oz.
y2 = 2 − e1x−C .
Ker mora biti y(1) = −1, sledi 1 = 2 − e1−C in zato 1 − C = 0. Torej je C = 1. Iskana funkcijaje
y = −√
2 − e1x−1,
saj mora biti y(1) < 0.
Zgled 12.10. Poisci splosno resitev enacbe (1 + x2)y′ + (1 + y2) = 0 in zapisi partikularnoresitev, ki zadosca pogoju y(1) = 1.
Resitev. To je enacba z locljivima spremenljivkama 11+x2 dx = − 1
1+y2 dy. Sledi arc tan x =− arc tan y + C in
y = tan(C − arc tan x) =c− x
1 + cx,
kjer smo oznacili c = tanC. Ce sedaj zapisemo y(1) = 1, dobimo 1 = tan(C − π4 ). Sledi C = π
2 .To pa med drugim pomeni, da ne smemo resitve zapisati v obliki y = c−x
1+cx , kjer smo oznacili
c = tanC. Iskana resitev je potem kar y = tan(C − arc tanx) = cot(arc tanx) = 1x .
Zgled 12.11. Poisci splosno resitev enacbe ex+2y − e2x−yy′ = 0 in zapisi partikularno resitev,ki zadosca pogoju y(0) = 0.
Resitev. Ker lahko enacbo zapisemo v obliki exe2y = e2xe−yy′, je to enacba z locljivimaspremenljivkama e−x dx = e−3y dy. Sledi −e−x = −1
3e−3y + C, kar nam da
y = −1
3ln(3(C + e−x)).
Z upostevanjem pogoja y(0) = 0 pa dobimo 3(C + 1) = 1 in od tod C = −23 . Resitev je
y = −1
3ln(3e−x − 2).
Zgled 12.12. Poisci splosno resitev enacbe y′ cos x − y = 0 in zapisi partikularno resitev, kizadosca pogoju y(0) = 1.
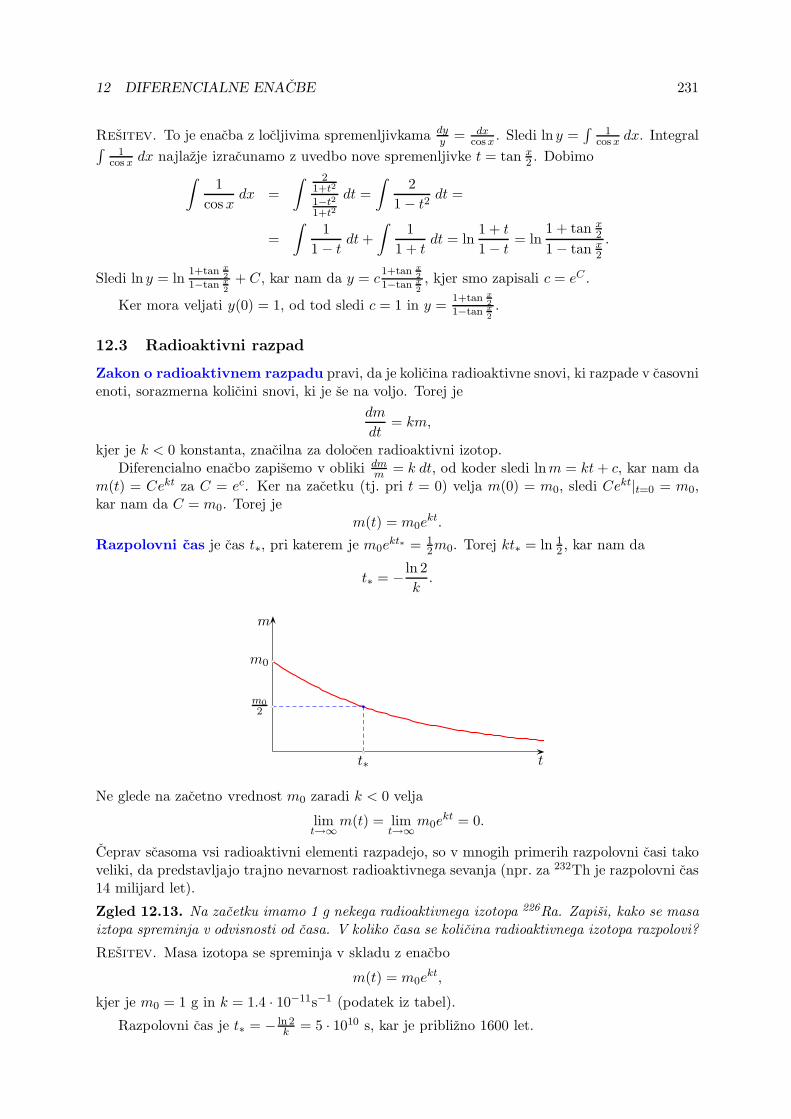
12 DIFERENCIALNE ENACBE 231
Resitev. To je enacba z locljivima spremenljivkama dyy = dx
cos x . Sledi ln y =∫
1cos x dx. Integral∫
1cos x dx najlazje izracunamo z uvedbo nove spremenljivke t = tan x
2 . Dobimo∫
1
cos xdx =
∫ 21+t2
1−t2
1+t2
dt =
∫2
1 − t2dt =
=
∫1
1 − tdt+
∫1
1 + tdt = ln
1 + t
1 − t= ln
1 + tan x2
1 − tan x2
.
Sledi ln y = ln1+tan x
21−tan x
2+ C, kar nam da y = c
1+tan x2
1−tan x2, kjer smo zapisali c = eC .
Ker mora veljati y(0) = 1, od tod sledi c = 1 in y =1+tan x
21−tan x
2.
12.3 Radioaktivni razpad
Zakon o radioaktivnem razpadu pravi, da je kolicina radioaktivne snovi, ki razpade v casovnienoti, sorazmerna kolicini snovi, ki je se na voljo. Torej je
dm
dt= km,
kjer je k < 0 konstanta, znacilna za dolocen radioaktivni izotop.Diferencialno enacbo zapisemo v obliki dm
m = k dt, od koder sledi lnm = kt+ c, kar nam dam(t) = Cekt za C = ec. Ker na zacetku (tj. pri t = 0) velja m(0) = m0, sledi Cekt|t=0 = m0,kar nam da C = m0. Torej je
m(t) = m0ekt.
Razpolovni cas je cas t∗, pri katerem je m0ekt∗ = 1
2m0. Torej kt∗ = ln 12 , kar nam da
t∗ = − ln 2
k.
t
m
t∗
m0
m02
bc
bc
b
bc
Ne glede na zacetno vrednost m0 zaradi k < 0 velja
limt→∞
m(t) = limt→∞
m0ekt = 0.
Ceprav scasoma vsi radioaktivni elementi razpadejo, so v mnogih primerih razpolovni casi takoveliki, da predstavljajo trajno nevarnost radioaktivnega sevanja (npr. za 232Th je razpolovni cas14 milijard let).
Zgled 12.13. Na zacetku imamo 1 g nekega radioaktivnega izotopa 226Ra. Zapisi, kako se masaiztopa spreminja v odvisnosti od casa. V koliko casa se kolicina radioaktivnega izotopa razpolovi?
Resitev. Masa izotopa se spreminja v skladu z enacbo
m(t) = m0ekt,
kjer je m0 = 1 g in k = 1.4 · 10−11s−1 (podatek iz tabel).
Razpolovni cas je t∗ = − ln 2k = 5 · 1010 s, kar je priblizno 1600 let.

12 DIFERENCIALNE ENACBE 232
Radiometricno datiranje z ogljikovimi izotopiZivi organizmi imajo enako razmerje 14C (nestabilni izotop!) in 14N kot atmosfera v tistem
casu. (Razmerje se skozi zgodovino ni bistveno spreminjalo.) Ko organizem odmre, 14C zacnerazpadati v 14N. Z merjenjem kolicine 14C lahko dolocimo, koliko casa je preteklo od smrtiorganizma. Ce torej poznamo razmerje m(t)
m0in razpolovni cas t∗, lahko t izracunamo: m(t)
m0= ekt
in
t =1
klnm(t)
m0= − 1
ln 2lnm(t)
m0.
Zaradi kratke razpolovne dobe 14C (priblizno 5 730 let), je metoda primerna samo za dolocanjestarosti do 70 000 let.
12.4 Problem mesanja raztopin
Φ, κ∗
Φ
V, κ0
V posodi imamo V litrov raztopine soli s koncentracijo κ0. Vposodo priteka s konstantim pritokom Φ tekocina s koncentracijoκ∗ in iz nje enako hitro odteka mesanica. Dolocimo, kako se scasom spreminja koncentracija raztopine.
Oznacimo z m = m(t) kolicino soli v posodi ob casu t. Potem je
dm
dt= κ∗Φ − m
VΦ.
To je enacba z locljivima spremenljivkama
dm
κ∗V −m=
Φ
Vdt,
ki ima resitev − ln(κ∗V −m) = ΦV t+ c, oziroma
m(t) = κ∗V + Ce−ΦV
t.
Ob casu t = 0 imamo m(0) = V κ0, kar nam da C = (κ0 − κ∗)V . Sledi
m(t) = (κ∗ + (κ0 − κ∗)e− Φ
Vt)V,
κ(t) =m(t)
V= κ∗ + (κ0 − κ∗)e
− ΦV
t.
Opaziti velja, da je po pricakovanju limt→∞
κ(t) = κ∗, saj se scasoma prvotna koncentracija izgubi.
t
κ
κ∗
κ0
κ0
bc
bc
bc
Ne glede na zacetno koncentracijo κ0 je limitna koncentracija enaka κ∗. Hitrost priblizevanja jeodvisna predvsem od razmerja Φ
V .

12 DIFERENCIALNE ENACBE 233
Zgled 12.14. V 100 litrsko posodo, v kateri je 2 % raztopina soli, s hitrostjo 5 ℓ na minutopriteka tekocina s 5 % koncentracijo soli. Cez koliko casa bo koncentracija soli v posodi enaka4 %.
Ker je
κ = κ(t) = κ∗ + (κ0 − κ∗)e− Φ
Vt,
lahko iz te enacbe izrazimo
t = −VΦ
lnκ− κ∗κ0 − κ∗
.
Pri danih podatkih V = 100 ℓ, Φ = 5 ℓ/s, κ0 = 0.02, κ∗ = 0.05, κ = 0.04 je
t = −100
5ln
0.04 − 0.05
0.02 − 0.05= 20 ln 3 ≈ 22 min.
12.5 Linearna diferencialna enacba I. reda
Enacbo oblikey′ + f(x)y = g(x) (27)
imenujemo Linearna diferencialna enacba I. reda. Ce je g(x) = 0, ima enacba
y′ + f(x)y = 0
locljivi spremenljivki in njena resitev je ln y +∫f(x) dx = lnC oziroma
y = Ce−R
f(x) dx.
Gornjo enacbo resujemo s pomocjo variacije konstante. Konstanto C nadomestimo zneznano funkcijo C = u(x). Sledi y = u(x)yh(x), kjer smo zapisali yh(x) = e−
Rf(x) dx. Ko
slednje vstavimo v enacbo (27), dobimo
u′(x)yh(x) + u(x)y′h(x) + f(x)u(x)yh(x)︸ ︷︷ ︸=u(x)(y′
h(x)+f(x)yh(x))=0
= g(x).
Torej je
u′(x) =g(x)
yh(x)
in od tod
u(x) =
∫g(x)
yh(x)dx+ C.
Torej je splosna resitev enacbe (27) enaka
y(x) = yh(x)
(∫g(x)
yh(x)dx+ C
),
kar pogosto zapisemo v oblikiy(x) = yp(x) + Cyh(x),
kjer je yh(x) = e−R
f(x) dx splosna resitev homogene enacbe,
yp(x) = e−R
f(x) dx
∫g(x)
yh(x)dx
pa partikularna resitev nehomogene enacbe.

12 DIFERENCIALNE ENACBE 234
Zgled 12.15. Poisci splosno resitev enacbe y′ + 2y = e2x in zapisi partikularno resitev, kizadosca pogoju y(0) = 1.
Resitev. Pridruzena homogena enacba se glasi y′ + 2y = 0. Torej je dydx = −2y, kar nam da
dyy = −2 dx. Torej je ln y = −2x+ lnC oziroma
yh = Ce−2x.
Resitev nehomogene enacbe dolocimo s pomocjo variacije konstante y = u(x)e−2x. Sledi y′ =u′(x)e−2x − 2u(x)e−2x in u′(x)e−2x − 2u(x)e−2x + 2u(x)e−2x = e2x. Torej je u′(x)e−2x = e2x
in u = 14e
4x. Sledi yp = 14e
4xe−2x = 14e
2x. Splosno resitev diferencialne enacbe zapisemo koty = yh + yp = Ce−2x + 1
4e2x.
Za partikularno resitev velja y(0) = C + 14 = 1, torej je C = 3
4 in y = 34e
−2x + 14e
2x.
Zgled 12.16. Poisci splosno resitev enacbe xy′ − 2y = 2x4 in zapisi partikularno resitev, kizadosca pogoju y(1) = 1.
Resitev. Pridruzena homogena enacba se glasi xy′ − 2y = 0. Torej je dydx = 2 y
x , kar nam dadyy = 2dx
x . Torej je ln y = 2 lnx+ lnC oziroma
yh = Cx2.
Resitev nehomogene enacbe dolocimo s pomocjo variacije konstante y = u(x)x2. Sledi y′ =u′(x)x2−2xu(x) in xu′(x)x2−2x2u(x)+2u(x)x2 = 2x4. Torej je u′(x)x3 = 2x4 in u = x2. Slediyp = x2x2 = x4. Splosno resitev diferencialne enacbe zapisemo kot y = yh + yp = Cx2 + x4.
Za partikularno resitev velja y(1) = C + 1 = 1, torej je C = 0 in y = x4.
Zgled 12.17. Poisci splosno resitev enacbe y′ + y tan x = 1cos x in zapisi partikularno resitev, ki
zadosca pogoju y(π4 ) = 0.
Resitev. Pridruzena homogena enacba se glasi y′ + y tanx = 0. Torej je dydx = −y tanx, kar
nam da dyy = − sinx
cos x dx. Torej je ln y = ln cos x+ lnC oziroma
yh = C cos x.
Resitev nehomogene enacbe dolocimo s pomocjo variacije konstante y = u(x) cos x. Sledi y′ =u′(x) cos x− u(x) sinx in u′(x) cos x− u(x) sinx+ u(x) cos x tanx = 1
cos x . Torej je u′(x) cos x =1
cos x in u = tanx. Sledi yp = cos x tanx = sinx. Splosno resitev diferencialne enacbe zapisemokot y = yh + yp = sinx+ C cos x.
Za partikularno resitev velja y(π4 ) =
√2
2 + C√
22 = 0, torej je C = −1 in y = sinx− cos x.
12.6 Bernoullijeva enacba
Naj bo α 6= 1, α 6= 0 realno stevilo, f in g pa zvezni funkciji. Diferencialna enacba oblike
y′ + f(x)y = g(x)yα (28)
se imenuje Bernoullijeva diferencialna enacba. Enacbo lahko s substitucijo z = y−α+1 prevedemona linearno diferencialno enacbo. Res: Ko enacbo (28) delimo z yα, dobimo
y−αy′ + f(x)y−α+1 = g(x).
Ker je z′ = (−α+ 1)y−αy′, tako sledi
1
−α+ 1z′ + f(x)z = g(x)

12 DIFERENCIALNE ENACBE 235
inz′ + (−α+ 1)f(x)z = (−α+ 1)g(x).
Dobljena enacba je obicajna linearna diferencialna enacba 1. reda.
Zgled 12.18. Resi enacbo y′ + 2xy = 2x3y3.
Resitev. Ker je α = 3, je primerna substitucija z = y−2. Nova enacba se glasi z′−4xz = −4x3.Pridruzena homogena enacba je z′ − 4xz = 0, ki jo lahko zapisemo kot dz
z = 4x dx. Torej je
ln z = 2x2 + lnC in z = ce2x2. Sedaj pisemo z = u(x)e2x2
in izracunamo u′e2x2+ ue2x2
(4x) −4xue2x2
= −4x3. Sledi u′ = −4x3e−2x2.
Integral u(x) =∫−4x3e−2x2
dx najlazje izracunamo s pomocjo substitucije t = x2, dt =2x dx. Sledi
u(x) =
∫−4x3e−2x2
dx = −2
∫te−2t dt = te−2t −
∫e−2t dt
= te−2t +1
2e−2t = x2e−2x2
+1
2e−2x2
,
kjer smo v izracunu uporabili metodo integracije po delih.Splosna resitev se tako glasi
z = Ce2x2+ e2x2
(x2e−2x2+
1
2e−2x2
) = Ce2x2+ x2 +
1
2.
Nazadnje zapisemo1
y2= Ce2x2
+ x2 +1
2.
Zgled 12.19. Resi enacbo xy′ − 4y = x2√y.
Resitev. Pri tej enacbi imamo α = 12 . Torej je z =
√y primerna zamenjava. Sledi y = z2 in
enacba postane x2zz′ − 4z2 = x2z oziroma
z′ − 2
xz =
x
2.
Homogeno enacbo z′ − 2xz = 0 preoblikujemo v dz
z = 2dxx . Torej je ln z = 2 ln x+ ln c in z = cx2.
Ko pisemo z = u(x)x2, dobimo enacbo u′x2 + 2xu − 2xux
2 = x2 , ki jo preoblikujemo v u′ = 1
2x .
Torej u = 12 lnx in z = cx2 + x2
2 lnx. Resitev gornje enacbe je tako
y = (cx2 +x2
2lnx)2.
12.7 Diferencialne enacbe visjih redov
Diferencialna enacba II. reda ima obliko
F (x, y, y′, y′′) = 0, (29)
njena splosna resitev pa je dvoparametricna druzina funkcij
y = y(x,C1, C2).
Da bi lahko dolocili njeno partikularno resitev, potrebujemo dva zacetna pogoja. Najpogostejepredpisemo
y0 = y(x0) in z0 = y′(x0). (30)

12 DIFERENCIALNE ENACBE 236
Enacbo (29) skupaj s pogojema (30) imenujemo zacetni problem. Ce namesto pogojev (30)predpisemo vrednosti funkcije y v dveh tockah, tj.
y0 = y(x0) in y1 = y(x1), (31)
imenujemo enacbo (29) skupaj s pogojema (31) robni problem.Splosna linearna diferencialna enacba II. reda je oblike
y′′ + f(x)y′ + g(x)y = r(x), (32)
kjer so f , g in r poljubne (zvezne) funkcije neodvisne spremenljivke x.Splosna linearna diferencialna enacba reda n je oblike
y(n) + an−1(x)y(n−1) + . . .+ a0(x)y = r(x), (33)
kjer so a0, . . . , an−1, in r poljubne (zvezne) funkcije neodvisne spremenljivke x.Ce je funkcija r na desni strani enacb (32) oz. (33) identicno enaka 0, imenujemo tako enacbo
homogena diferencialna enacba.
Zgled 12.20. Diferencialna enacba y′′ + xy′ + sin(x)y = x2e−x je nehomogena, enacba y′′′ −x2y′ +
√xy = 0 pa homogena.
12.8 Homogene linearne diferencialne enacbe II. reda
Homogena linearna diferencialna enacba II. reda je oblike
y′′ + f(x)y′ + g(x)y = 0. (34)
Take enacbe pogosto nastopajo v fiziki, npr. enacba nihanja utezi z maso m na vzmeti s koefi-cientom k je y + k
my = 0.
Izrek 12.21 (Obstoj in enolicnost resitve). Ce sta f , g zvezni funkciji na odprtem intervalu Iin x0 ∈ I, je zacetni problem
y′′ + f(x)y′ + g(x)y = 0, y(x0) = y0, y′(x0) = y1,
enolicno resljiv.
Hitro vidimo, da je za poljubni dve funkciji y1 in y2, ki sta resitvi enacbe (34), tudi funkcijay = αy1 +βy2, α, β ∈ R, resitev enacbe (34). Podobna trditev za nehomogene enacbe ne velja.
Pravimo, da sta funkciji y1 in y2 linearno odvisni, ce obstajata konstanti C1, C2, ne obe0, da je C1y1(x) + C2y2(x) = 0 za vsak x ∈ I. Ce funkciji nista linearno odvisni, sta linearnoneodvisni.
Naj bosta funkciji y1 in y2 resitvi enacbe (34). Izraz
W (y1(x), y2(x)) =
∣∣∣∣y1(x) y2(x)y′1(x) y′2(x)
∣∣∣∣ = y1(x)y′2(x) − y′1(x)y2(x)
imenujemo determinanta Wronskega.
Izrek 12.22. Naj bosta funkciji y1 in y2 resitvi enacbe (34). Funkciji y1 in y2 sta linearnoneodvisni natanko tedaj, ko je W (y1(x), y2(x)) 6= 0 za vsak x ∈ I. Ce je W (y1(x), y2(x)) = 0 zakaksen x ∈ I, je W (y1(x), y2(x)) = 0 za vsak x ∈ I in funkciji y1 in y2 sta linearno odvisni.

12 DIFERENCIALNE ENACBE 237
Izrek 12.23. Splosna resitev homogene linearne diferencialne enacbe II. reda (34) je oblike
y(x) = C1y1(x) + C2y2(x),
kjer sta C1, C2 poljubni konstanti, y1 in y2 pa linearno neodvisni partikularni resitvi enacbe (34).Za vsako resitev z = z(x) enacbe (34) obstajata konstanti C1 in C2, da je z(x) = C1y1(x) +C2y2(x).
Gornji izrek nam torej pove, da lahko zapisemo vse resitve homogene linearne diferencialneenacbe II. reda, ce le poznamo dve linearno neodvisni resitvi. V nadaljevanju si bomo pogledali,kako ju lahko poiscemo, ce ima enacba konstantne koeficiente.
12.8.1 Enacbe s konstantnimi koeficienti
Ce sta funkciji f in g v enacbi (34) konstanti, je enacba oblike
y′′ + py′ + qy = 0, (35)
kjer sta p, q ∈ R. Resitev enacbe (35) poiscemo z nastavkom y = eλx. Torej je y′ = λeλx iny′′ = λ2eλx. Ko slednje vstavimo v (35), dobimo
(λ2 + pλ+ q)eλx = 0.
Torej mora biti λ2 + pλ+ q = 0. Polinom
k(λ) = λ2 + pλ+ q (36)
se imenuje karakteristicni polinom diferencialne enacbe (35). Iz splosne teorije vemo, da imalahko polinom k ali dve realni razlicni nicli ali eno dvojno realno niclo ali dve razlicni konjugiranokompleksni nicli:
λ1 =−p+
√p2 − 4q
2in λ2 =
−p−√p2 − 4q
2.
• Ce sta nicli polinoma (36) realni in razlicni (tj. λ1 6= λ2), je splosna resitev enacbe (35)enaka
y(x) = C1eλ1x + C2e
λ2x.
• Ce sta nicli polinoma (36) realni in enaki(tj. λ1 = λ2), je splosna resitev enacbe (35) enaka
y(x) = C1eλ1x + C2xe
λ1x.
• Ce sta nicli polinoma (36) konjugirano kompleksni (tj. λ1 = λ2) in zato razlicni, je splosnaresitev enacbe (35) enaka y(x) = C1e
λ1x + C2eλ2x. Ker pa je λ1 = a + bi in λ2 = a− bi,
zapisemo splosno resitev enacbe (35) raje v obliki
y(x) = eax(C1 cos bx+ C2 sin bx).
Zgled 12.24. Zapisi splosno resitev enacbe y′′ − 5y′ + 6y = 0.
Resitev. Enacba y′′ − 5y′ + 6y = 0 ima karakteristicni polinom λ2 − 5λ + 6 = 0 z niclamaλ1 = 2 in λ2 = 3. Torej sta y1 = e2x in y2 = e3x linearno neodvisni resitvi gornje enacbe.Splosna resitev je oblike y(x) = C1e
2x + C2e3x.

12 DIFERENCIALNE ENACBE 238
Zgled 12.25. Zapisi splosno resitev enacbe y′′ + 6y′ + 9y = 0.
Resitev. Enacba y′′ + 6y′ + 9y = 0 ima karakteristicni polinom λ2 + 6λ + 9 = 0 z niclamaλ1,2 = −3. Torej sta y1 = e−3x in y2 = xe−3x linearno neodvisni resitvi gornje enacbe. Splosnaresitev je oblike y(x) = (C1 + C2x)e
−3x.
Zgled 12.26. Zapisi splosno resitev enacbe y′′ + 4y′ + 10y = 0.
Resitev. Enacba y′′ + 4y′ + 10y = 0 ima karakteristicni polinom λ2 + 4λ + 10 = 0 z niclamaλ1,2 = −2 ± i
√6. Splosna resitev je oblike y(x) = e−2x(C1 cos
√6x+ C2 sin
√6x).
Zgled 12.27. Resi zacetni problem y′′ − 2y′ + 10y = 0, y(0) = 4, y′(0) = 1.
Resitev. Karakteristicni polinom λ2 − 2λ+ 10 ima nicli λ1,2 = 1± 3i. Torej je splosna resitevy(x) = ex(A cos 3x+B sin 3x). Ker je
y′(x) = ex(A cos 3x+B sin 3x) + ex(−3A sin 3x+ 3B cos 3x) =
= ex((A+ 3B) cos 3x+ (B − 3A) sin 3x).
Z upostevanjem zacetnih pogojev dobimo y(0) = A = 4 in y′(0) = A + 3B = 1 oz. B = −1.Iskana resitev je y(x) = ex(4 cos 3x− sin 3x).
12.9 Nehomogene linearne diferencialne enacbe II. reda
Ce v enacbi (36) desna strani ni 0, zapisemo
y′′ + py′ + qy = r(x). (37)
Resitev diferencialne enacbe (37) tedaj zapisemo v obliki y = yh + yp, kjer je yh splosna resitevpripadajoce homogene enacbe
y′′ + py′ + qy = 0, (38)
yp pa katerakoli partikularna resitev enacbe (37). To resitev lahko enostavno poiscemo, ce jefunkcija r posebne oblike:
r(x) = eax(P (x) cos bx+Q(x) sin bx), (39)
kjer sta P in Q polinoma stopnje najvec n. (Ta stopnja mora biti dosezena pri vsaj enem odpolinomov.)
Tedaj poiscemo partikularno resitev enacbe z nastavkom
yp = xkeax(R(x) cos bx+ S(x) sin bx),
kjer sta R in S neznana polinoma stopnje n, stevilo k ∈ {0, 1, 2} pa red nicle λ = a+ bi kot niclekarakteristicnega polinoma (36). Ce λ = a+ bi ni njegova nicla, zapisemo k = 0.
Mozno je, da v izrazu (39) faktorja eax ni. Tedaj je pravzaprav a = 0 in λ = bi. Podobnopostavimo b = 0, ce v izrazu (39) ni nobenega izmed faktorjev cos bx ali sin bx. Ce pa je v izrazu(39) le polinom, imamo a = b = 0 in λ = 0.
Povzemimo. Iz oblike izraza (39) prepoznamo stevilo λ = a + bi in se vprasamo, ali jeto stevilo nicla karakteristicnega polinoma. In ce je nicla reda k ∈ {1, 2}, k nastavku dodamuustrezen faktor xk.
Zgled 12.28. Poisci splosno resitev enacbe y′′ + 9y = 81x2.

12 DIFERENCIALNE ENACBE 239
Resitev. Pridruzena homogena enacba y′′+9y = 0 ima karakteristicni polinom λ2+9 z niclamaλ1,2 = ±3i. Splosna resitev homogene enacbe je yh = C1 cos 3x+C2 sin 3x. Ker lahko zapisemo
r(x) = 81x2 = eax(P (x) cos bx+Q(x) sin bx)
za a = 0, b = 0 in P (x) = 81x2, je nastavek za nehomogeno enacbo oblike
yp = xke0x(R(x) cos 0x+ S(x) sin 0x) = R(x),
kjer je R(x) = Ax2 + Bx + C neznani polinom stopnje 2 (enake kot r) in k = 0, saj steviloλ = 0 + i0 ni nicla polinoma λ2 + 9.
Ker je
y′p(x) = 2Ax+B,
y′′p(x) = 2A,
dobimo
y′′p + 9yp = 2A+ 9(Ax2 +Bx+ C) =
= 9A︸︷︷︸=81
x2 + 9B︸︷︷︸=0
x+ (2A+ 9C)︸ ︷︷ ︸=0
= 81x2.
Torej je 9A = 81, 9B = 0 in 2A+ 9C = 0 oziroma A = 9, B = 0 in C = −2. Sledi yp = 9x2 − 2in
y = yh + yp = C1 cos 3x+ C2 sin 3x+ 9x2 − 2.
Nastavek za desno stran z vec cleniCe funkcija r ni oblike (39), a jo lahko zapisemo v obliki vsote dveh funkcij, ki sta oblike
(39), tj. r(x) = r1(x) + r2(x), lahko uporabimo opisano metodo za vsako izmed funkcij r1 in r2posebej, nato pa dobljeni partikularni resitvi zdruzimo. Natanceneje: ce je y′′1 +py′1+qy1 = r1(x)in y′′2 + py′2 + qy2 = r2(x), za y = y1 + y2 velja y′′ + py′ + qy = r(x), kjer je r = r1 + r2.
Zgled 12.29. Poisci splosno resitev enacbe y′′ + 2y′ + 5y = 16ex + sin 2x.
Resitev. Pridruzena homogena enacba y′′+2y′+5y = 0 ima karakteristicni polinom λ2+2λ+5z niclama λ1,2 = −1 ± 2i. Splosna resitev homogene enacbe je
yh = e−x(C1 cos 2x+ C2 sin 2x),
nastavek za nehomogeno enacbo pa je
yp = Aex︸︷︷︸k 16ex
+B cos 2x+ C sin 2x︸ ︷︷ ︸k sin 2x
.
Sledi
y′′p + 2y′p + 5yp = (Aex − 4B cos 2x− 4C sin 2x) +
+2(Aex − 2B sin 2x+ 2C cos 2x) +
+5(Aex +B cos 2x+ C sin 2x) =
= 8A︸︷︷︸=16
ex + (B + 4C)︸ ︷︷ ︸=0
cos 2x+ (C − 4B)︸ ︷︷ ︸=1
sin 2x.
Sistem enacb 8A = 16, B + 4C = 0, C − 4B = 1 ima resitev A = 2, B = − 417 in C = 1
17 . Sledi
y = e−x(C1 cos 2x+ C2 sin 2x) + 2ex − 4
17cos 2x+
1
17sin 2x.

12 DIFERENCIALNE ENACBE 240
Zgled 12.30. Poisci splosno resitev enacbe y′′ − 2y′ + y = 2ex + x− 1.
Resitev. Pridruzena homogena enacba y′′−2y′ +y = 0 ima karakteristicni polinom λ2−2λ+1z dvojno niclo λ1,2 = 1. Splosna resitev homogene enacbe je
yh = C1ex + C2xe
x.
Nastavek za nehomogeno enacbo je
yp = Ax2ex︸ ︷︷ ︸k 2ex
+Bx+ C︸ ︷︷ ︸k x−1
.
Opozorilo: v clenu Ax2ex je faktor x2 dodan zato, ker je λ = 1 nicla drugega reda karakteri-sticnega polinoma.
Sledi
y′′p − 2y′p + yp = (2Aex + 4Axex +Ax2ex) −−2(2Axex +Ax2ex +B) +
+(Ax2ex +Bx+ C) =
= 2Aex︸ ︷︷ ︸=2ex
+Bx+ (C − 2B)︸ ︷︷ ︸=x−1
Torej je A = B = C = 1 in
y = C1e2x + C2e
x + x2ex + x+ 1.
Zgled 12.31. Poisci splosno in partikularno resitev enacbe y′′ − 3y′ + 2y = 2e3x pri pogojihy(0) = 2 in y′(0) = 0.
Resitev. Pridruzena homogena enacba y′′−3y′+2y = 0 ima karakteristicni polinom λ2−3λ+2z niclama λ1 = 1 in λ2 = 2. Splosna resitev homogene enacbe je yh = C1e
2x + C2ex, nastavek
za nehomogeno enacbo pa je yp = Ae3x. Sledi
y′′p − 3y′p + 2yp = 9Ae3x − 3 · 3Ae3x + 2Ae3x = 2Ae3x = 2e3x,
kar nam da A = 1. Dobimo y = yh + yp = C1e2x +C2e
x + e3x. Ker je y(0) = C1 +C2 + 1 = 2 iny′(0) = 2C1 + C2 + 3 = 0, izracunamo C1 = −4 in C2 = 5. Iskana resitev, ki zadosca zacetnimpogojem, je torej
y = −4e2x + 5ex + e3x.
Zgled 12.32. Poisci splosno resitev enacbe y′′ + 4y = e−x.
Resitev. Pridruzena homogena enacba y′′ + 4y = 0 ima karakteristicni polinom λ2 + 4 zniclama λ1,2 = ±2i. Splosna resitev homogene enacbe je yh = C1 cos 2x + C2 sin 2x. Nastavekza partikularno resitev je yp = Ae−x, kar nam da Ae−x +4Ae−x = 5Ae−x = e−x in A = 1
5 . Sledi
y = yh + yp = C1 cos 2x+C2 sin 2x+1
5e−x.
Zgled 12.33. Poisci splosno resitev enacbe y′′ + y = sinx.
Resitev. Pridruzena homogena enacba y′′ +y = 0 ima karakteristicni polinom λ2 +1 z niclamaλ1,2 = ±i. Splosna resitev homogene enacbe je yh = C1 cos x+C2 sinx. Ker je sinx = e0x sin 1x,

12 DIFERENCIALNE ENACBE 241
ustreza desna stran nehomogene enacbe stevilu λ = 0 + 1i, ki je ravno nicla karakteristicnegapolinoma. Torej je nastavek za nehomogeno enacbo enak
yp = x(A cos x+B sinx).
Sledi
y′p = A cos x− xA sinx+B sinx+ xB cos x,
y′′p = −2A sinx− xA cos x+ 2B cos x−Bx sinx.
Ker je
y′′p + yp =
y′′p︷ ︸︸ ︷
(−2A sin x− xA cos x+ 2B cos x) +
+
yp︷ ︸︸ ︷(−Bx sinx+Ax cos x+Bx sinx) =
= −2A sinx+ 2B cos x = sinx,
sledi A = −12 in B = 0. Torej je yp = −1
2x cos x in
y = C1 cos x+ C2 sinx− 1
2x cos x.
Zgled 12.34. Poisci splosno resitev enacbe y′′ − 2y′ + 2y = 4ex sinx.
Resitev. Pridruzena homogena enacba y′′−2y′+2y = 0 ima karakteristicni polinom λ2−2λ+2z niclama λ1,2 = 1 ± i. Splosna resitev homogene enacbe je oblike yh = (C1 cos x+ C2 sinx)ex.Ker desna stran (tj. izraz 4ex sinx) ustreza nicli λ = 1 + i, je nastavek oblike
yp = x(A cos x+B sinx)ex.
Sledi
y′p = ((Ax+A+Bx) cos x+ (Bx+B −Ax) sinx)ex
y′′p = ((2Bx+ 2A+ 2B) cos x+ (−2Ax+ 2B − 2A) sin x)ex
in
y′′p − 2y′p + 2yp = ((2Bx+ 2A+ 2B) cos x+ (2Ax+ 2B − 2A) sin x)ex −−2((Ax+A+Bx) cos x+ (Bx+B −Ax) sinx)ex +
+2x(A cos x+B sinx)ex =
= (2B cos x− 2A sinx)ex.
Izracunamo A = −2 in B = 0, kar nam da
y = (C1 cos x+ C2 sinx− 2x cos x)ex.
Zgled 12.35. Poisci splosno resitev enacbe y′′ − 4y′ + 4y = e2x.

12 DIFERENCIALNE ENACBE 242
Resitev. Pridruzena homogena enacba y′′−4y′+4y = 0 ima karakteristicni polinom λ2−4λ+4z dvojno niclo λ1,2 = 2. Sledi yh = (C1 + C2x)e
2x. Nastavek za desno stran je yp = Ax2e2x.Sledi
y′p = 2A(x2 + x)e2x
y′′p = 2A(2x2 + 4x+ 1)e2x
in
y′′p − 4y′p + 4yp = 2A(2x2 + 4x+ 1)e2x − 4 · 2A(x2 + x)e2x +
+4 ·Ax2e2x = 2Ae2x = e2x.
Sledi A = 12 in
y = yh + yp = (C1 + C2x)e2x +
1
2x2e2x.
12.10 Nihanje
Neduseno nihanjeEnacba, ki opisuje nihanje (npr. kroglice na vzmeti) brez dusenja, se glasi
x′′ + ω20x = 0,
kjer je x = x(t) odmik od ravnovesne lega v casu t.Karakteristicni polinom λ2 +ω2
0 ima nicli ±iω0, zato lahko splosno resitev zapisemo v obliki
x(t) = C1 cosω0t+ C2 sinω0t.
Z upostevanjem zacetnih pogojev x(0) = x0 in x′(0) = 0 dobimo C1 = x0 in C2 = 0. Torej je
x(t) = x0 cosω0t.
t
x
bc
0
bcx0
bc−x0
Ker je nihanje neduseno, se amplituda nihanja ohranja. Ker je v naravi vedno prisotno dusenje(npr. trenje, zracni upor), v daljsem casovnem obdobju model ne ustreza realnemu stanju.

12 DIFERENCIALNE ENACBE 243
Duseno nihanjeEnacba, ki opisuje duseno nihanje, se glasi
x′′ + 2bx+ ω20x = 0,
kjer je b > 0 koeficient dusenja. Karakteristicni polinom λ2 + 2bλ+ ω20 ima nicli
λ1,2 = −b±√b2 − ω2
0 .
Sedaj locimo 3 primere:
• b > ω0
• b = ω0
• b < ω0
Ce je b > ω0, sta torej nicli stevili k1 = −b +√b2 − ω2
0 in k2 = −b −√b2 − ω2
0 , ki sta obenegativni. Splosna resitev je
x(t) = C1ek1t + C2e
k2t.
Z upostevanjem zacetnih pogojev x(0) = x0 in x′(0) = 0 dobimo C1+C2 = x0 in k1C1+k2C2 = 0.Sledi C1 = k2x0
k2−k1in C2 = k1x0
k1−k2ter nazadnje
x(t) =k2x0
k2 − k1ek1t +
k1x0
k1 − k2ek2t.
t
x
bc
0
bcx0
bc−x0
Ker je dusenje preveliko, se nihalo le vrne v zacetno lego. S primerno spremembo zacetnegapogoja x′(0) bi lahko dosegli, da nihalo se enkrat zaniha, preden se vrne v zacetno lego.
Ce je b = ω0, ima karakteristicni polinom dvojno niclo k1 = k2 = −b. Splosna resitev je
x(t) = C1e−bt + C2te
−bt.
Z upostevanjem zacetnih pogojev x(0) = x0 in x′(0) = 0 dobimo C1 = x0 in −bC1 + C2 = 0.Sledi C1 = x0 in C2 = bx0 ter nazadnje
x(t) = x0e−bt + bx0te
−bt.
t
x
bc
0
bcx0
bc−x0

12 DIFERENCIALNE ENACBE 244
Ker je dusenje preveliko, se nihalo le vrne v zacetno lego. S primerno spremembo zacetnegapogoja x′(0) bi lahko dosegli, da nihalo se enkrat zaniha, preden se vrne v zacetno lego.
Ce je b < ω0, oznacimo ω =√ω2
0 − b2. Karakteristicni polinom ima konjugirano kompleksninicli k1 = −b+ iω in k2 = −b− iω. Splosna resitev je
x(t) = C1e−bt cosωt+ C2e
−bt sinωt.
Z upostevanjem zacetnih pogojev x(0) = x0 in x′(0) = 0 dobimo C1 = x0 in −bC1 + ωC2 = 0.Sledi C1 = x0 in C2 = b
ωx0 ter nazadnje
x(t) = x0e−bt cosωt+
b
ωx0e
−bt sinωt.
t
x
bc
0
bcx0
bc−x0
Ker dusenje ni preveliko, se nihalo pocasi vraca v zacetno lego.
Vsiljeno nihanjeCe na nihalo deluje zunanja sila, je enacba nihanja nehomogena in ima obliko
x′′ + 2bx′ + ω20x = f(t).
Ogledali si bomo le enostaven primer, ko je b = 0, funkcija f pa oblike f(t) = α cosωt. Enacbaje tedaj
x′′ + ω20x = α cosωt.
Karakteristicni polinom homogene enacbe ima nicli λ1,2 = ±iω0, zato locimo dva primera:
• ω0 6= ω
• ω0 = ω
Ce je ω0 6= ω, ima homogena enacba splosno resitev
xh(t) = C1 cosω0t+ C2 sinω0t.
Partikularno resitev nehomogene enacbe poiscemo z nastavkom xp(t) = A cosωt + B sinωt indobimo xp(t) = α
ω20−ω2 cosωt. Splosna resitev diferencialne enacbe je
x(t) = C1 cosω0t+ C2 sinω0t+α
ω20 − ω2
cosωt.
Za upostevanjem zacetnih pogojev x(0) = x0 in x′(0) = 0 dobimo C1 + αω2
0−ω2 = x0 in C2 = 0,
kar nam dax(t) = (x0 −
α
ω20 − ω2
) cos ω0t+α
ω20 − ω2
cosωt.
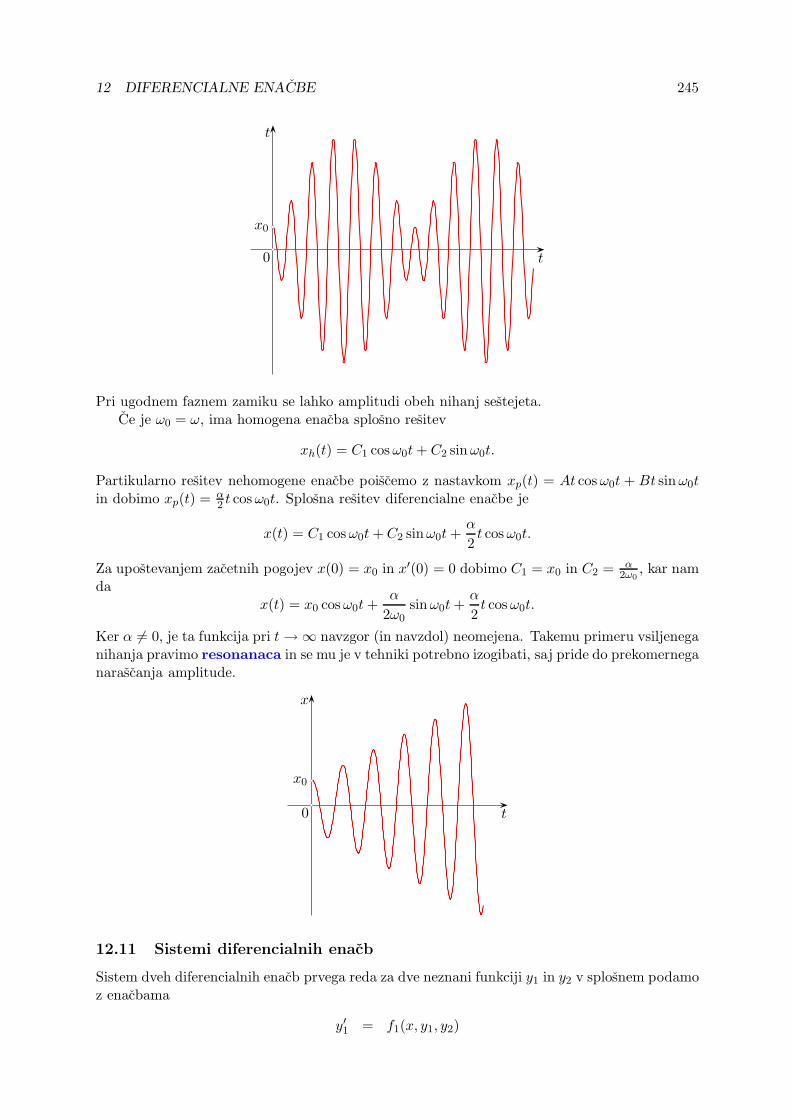
12 DIFERENCIALNE ENACBE 245
t
t
bc
0
bcx0
Pri ugodnem faznem zamiku se lahko amplitudi obeh nihanj sestejeta.Ce je ω0 = ω, ima homogena enacba splosno resitev
xh(t) = C1 cosω0t+ C2 sinω0t.
Partikularno resitev nehomogene enacbe poiscemo z nastavkom xp(t) = At cosω0t + Bt sinω0tin dobimo xp(t) = α
2 t cosω0t. Splosna resitev diferencialne enacbe je
x(t) = C1 cosω0t+C2 sinω0t+α
2t cosω0t.
Za upostevanjem zacetnih pogojev x(0) = x0 in x′(0) = 0 dobimo C1 = x0 in C2 = α2ω0
, kar namda
x(t) = x0 cosω0t+α
2ω0sinω0t+
α
2t cosω0t.
Ker α 6= 0, je ta funkcija pri t → ∞ navzgor (in navzdol) neomejena. Takemu primeru vsiljeneganihanja pravimo resonanaca in se mu je v tehniki potrebno izogibati, saj pride do prekomerneganarascanja amplitude.
t
x
bc
0
bcx0
12.11 Sistemi diferencialnih enacb
Sistem dveh diferencialnih enacb prvega reda za dve neznani funkciji y1 in y2 v splosnem podamoz enacbama
y′1 = f1(x, y1, y2)

12 DIFERENCIALNE ENACBE 246
y′2 = f2(x, y1, y2) (40)
Tak sistem je ekvivalenten eni sami enacbi drugega reda, ki jo dobimo tako, da prvo enacboodvajamo po neodvisni spremenljivki, potem pa v dobljeno enacbo vstavimo y′2 iz druge enacbein y2 iz prve enacbe. Na koncu dobimo y′′1 = F (x, y1, y
′1). Taka trditev velja tudi v splosnem.
Vsak sistem n diferencialnih enacb prvega reda je ekvivalenten diferencialni enacbi n-tega reda.Vsako diferencialno enacbo reda n, ki je zapisana v obliki
y(n) = f(x, y1, y2, . . . , yn),
lahko zapisemo v obliki sistema enacb:
y′1 = y2
y′2 = y3...
y′n−1 = yn
y′n = f(x, y1, y2, . . . , yn)
Opomniti velja, da je prevedba diferencialne enacbe visjega reda na sistem diferencialnih enacbprvega reda precej obicajen postopek pri numericnem resevanju diferencialnih enacb.
Splosna resitev sistema (40) je dvoparametricna druzina funkcij, ki jo obicajno zapisemo vobliki
y1 = y1(x,C1, C2), y2 = y2(x,C1, C2).
Partikularno resitev dobimo tako, da predpisemo zacetne vrednosti v dveh tockah; najpogostejey1(x0) = y∗1 , y2(x0) = y∗2 .
12.12 Sistem dveh diferencialnih enacb s konstantnimi koeficienti
Naj bodo a, b, c in d realna stevila, vsaj eno od stevil b ali c naj bo nenicelno, saj imamo prib = c = 0 dve neodvisni enacbi. Sistem
y′1 = ay1 + by2 + f1(x)y′2 = cy1 + dy2 + f2(x) (41)
resimo z metodo eliminacije. Ce je npr. b 6= 0, iz prve enacbe izrazimo y2 = 1b (y
′1 − ay1 − f1(x)).
Torej je y′2 = 1b (y
′′1 − ay′1 − f ′1(x)), kar upostevamo v drugi enacbi. Dobimo
1
b(y′′1 − ay′1 − f ′1(x)) = cy1 +
d
b(y′1 − ay1 − f1(x)) + f2(x),
kar uredimo v linearno diferencialno enacbo drugega reda s konstantnimi koeficienti:
y′′1 − (a+ d)y′1 + (ad− bc)y′1 = f ′1(x) − df1(x) + bf2(x).
Podobno postopamo, ce je c 6= 0.
Zgled 12.36. Poisci splosno resitev sistema:
y′ = y + z + x,z′ = −4y − 3z + 2x,
kjer sta y = y(x) in z = z(x) neznani funkciji. Zapisi se tisto resitev, za katero je y(0) = z(0) =0.

12 DIFERENCIALNE ENACBE 247
Resitev. Iz prve enacbe izrazimo z = y′ − y − x. Torej je z′ = y′′ − y′ − 1, kar nam day′′ − y′ − 1 = −4y − 3(y′ − y − x) + 2x. Slednje uredimo v
y′′ + 2y′ + y = 5x+ 1. (42)
Resimo enacbo (42). Pridruzena homogena enacba
y′′ + 2y′ + y = 0
ima karakteristicni polinom λ2 + 2λ+ 1 = 0, ki ima dvojno niclo λ1,2 = −1.Torej je
yh = (C1 + C2x)e−x
splosna resitev pridruzene homogene enacbe. Partikularno resitev dobimo z nastavkom. Kerje desna stran enacbe (42) oblike 5x + 1 = eax(P (x) cos bx + Q(x) sin bx), kjer je a = b = 0 inP (x) = 5x+ 1 (znan polinom stopnje 1), je ustrezen nastavek oblike
y = Ax+B. (43)
Ko (43) vstavimo v (42), dobimo
2A+Ax+B = 5x+ 1,
kar nam da A = 5 in B = −9. Sledi
y(x) = yh + yp =
= (C1 + C2x)e−x + 5x− 9,
z(x) = y′ − y − x =
= (C2 − 2C1 − 2C2x)e−x − 6x+ 14.
Nazadnje postavimo y(0) = 0 = C1 − 9 in z(0) = 0 = C2 − 2C1 + 14, kar nam da C1 = 9 inC2 = 4. Iskani resitvi sta
y(x) = (9 + 4x)e−x + 5x− 9,
z(x) = −(14 + 8x)e−x − 6x+ 14.
Diferencialne enacbe pogosto srecamo pri opisu fizikalnih problemov, ko je neka kolicina (npr.pot, hitrost, energija, . . . ) odvisna od casa.
Ce je torej x = x(t), namesto dxdt pisemo kar x, namesto d2x
dt2pisemo x, . . . .
Zgled 12.37. Poisci splosno resitev sistema:
x = x+ 2y + t,y = 2x+ y + t,
kjer sta x = x(t) in y = y(t) neznani funkciji. Poisci se tisto resitev, za katero je x(0) = 1,y(0) = 1.
Resitev. Iz prve enacbe sledi y = 12(x− x− t). Torej je y = 1
2 (x− x− 1) in
1
2(x− x− 1) = 2x+
1
2(x− x− t) + t.

12 DIFERENCIALNE ENACBE 248
Sledix− 2x− 3x = t+ 1 (44)
K tej enacbi pridruzena homogena diferencialna enacba
x− 2x− 3x = 0
ima karakteristicni polinom λ2 − 2λ− 3 = (λ− 3)(λ+ 1).Torej je xh = C1e
−t + C2e3t. Glede na obliko desne strani je nastavek oblike
x = At+B,
kar nam v (44) da−2A− 3(At+B) = t+ 1.
Sledi A = −13 , B = −1
9 in
x(t) = xh + xp =
= C1e−t + C2e
3t − 1
3t− 1
9,
y(t) =1
2(x− x− t) =
= −C1e−t + C2e
3t − 1
3t− 1
9.
Nazadnje postavimo x(0) = 1 = C1 +C2− 19 in y(0) = 1 = −C1 +C2− 1
9 , kar nam da C1 = 0in C2 = 10
9 . Iskani resitvi sta
x(t) =10
9e3t − 1
3t− 1
9,
y(t) =10
9e3t − 1
3t− 1
9.
Zgled 12.38. Poisci splosno resitev sistema:
x = y + 2et,y = x+ t2,
kjer sta x = x(t) in y = y(t) neznani funkciji.
Resitev. Iz prve enacbe sledi y = x− 2et. Torej y = x− 2et in
x− x = 2et + t2. (45)
Karakteristicni polinom λ2 − 1 pridruzene homogene enacbe
x− x = 0
ima nicli λ1,2 = ±1, zato je xh = C1et + C2e
−t.Desna stran nehomogene enacbe je vsota dveh funkcij oblike eat(P (t) cos bt + Q(t) sin bt).
Pri clenu 2et je a = 1 in b = 0, ustrezna nicla λ = a + bi = 1 je nicla reda 1 karakteristicnegapolinoma. Pri clenu t2 pa je a = b = 0 in ustrezna nicla λ = a+ bi = 0 ni nicla karakteristicnegapolinoma. Nastavek je torej
xp = Atet︸︷︷︸k 2e2
+Bt2 + Ct+D︸ ︷︷ ︸k t2
,

12 DIFERENCIALNE ENACBE 249
kar nam v (45) da
A(t+ 2)et + 2B︸ ︷︷ ︸=x
− (Atet +Bt2 + Ct+D)︸ ︷︷ ︸=x
= 2et + t2.
Sledi A = 1, B = −1, C = 0 in D = −2 ter
x(t) = xh + xp =
= C1et + C2e
−t + tet − t2 − 2,y(t) = x− 2et =
= C1et − C2e
−t + (t− 1)et − 2t.
Zgled 12.39. Poisci splosno resitev sistema:
x = y − 5 cos t,y = 2x+ y,
kjer sta x = x(t) in y = y(t) neznani funkciji.
Resitev. Iz prve enacbe izrazimo y = x + 5cos t. Torej je y = x − 5 sin t in x − 5 sin t =2x+ x+ 5cos t. Sledi
x− x− 2x = 5cos t+ 5 sin t. (46)
Karakteristicni polinom pridruzene homogene enacbe je λ2 − λ− 2 = (λ− 2)(λ+ 1).Torej je xh = C1e
2t + C2e−t. Nastavek za partikularno resitev nehomogene enacbe pa je
xp = A cos t + B sin t, kar nam v (46) da −A cos t − B sin t − (−A sin t + B cos t) − 2(A cos t +B sin t) = 5 cos t+ 5 sin t, oziroma
(−3A−B) cos t+ (−3B +A) sin t = 5cos t+ 5 sin t.
Torej je
−3A−B = 5,
−3B +A = 5.
Gornji sistem ima resitev A = −1 in B = −2. Torej je xp = − cos t− 2 sin t. Sledi
x(t) = xh + xp =
= C1e2t + C2e
−t − cos t− 2 sin t,y(t) = x+ 5cos t =
= 2C1e2t − C2e
−t + 3cos t+ sin t.
12.13 Naravna rast
Zakon naravne rasti pravi, da je hitrost spreminjanja kolicine sorazmerna s kolicino samo.Torej
dx = kx dt.
Ce ne bi bilo bioloskih ali fizikalnih omejitev, bi na tak nacin rastli mnogi organizmi (prirastlesa, razmnozevanje zajcev, ...).
Kot smo ze videli, ima gornja enacba resitev
x(t) = x0ekt,
kjer je x0 = x(0) zacetna kolicina.

12 DIFERENCIALNE ENACBE 250
t
x
x0 bc
Ne glede na zacetno vrednost x0 zaradi k > 0 velja
limt→∞
x(t) = limt→∞
x0ekt = ∞.
Zakon naravne rasti zato v daljsem casovnem obdobju ne ustreza nobenemu organizmu alineki kolicini v naravi.
Zgled 12.40. Kolicina lesa v deblu se je v dveh letih povecala za 15 %. Za koliko bi se (videalnem primeru) povecala v t letih?
Videli smo ze, da je x(t) = x0ekt. Ker je x(2) = 1.15x0 = x0e
2k, od tod sledi k = 12 ln(1.15).
Dobimox(t) = x0e
t 12
ln(1.15) = x0(1.15)t2 .
12.14 Bartalanffyev model rasti
Oznacimo z L(t) velikost organizma (npr. dolzino ribe) v casu t. Najvecna mozna velikostorganizma naj bo L∗. Zacetna velikost organizma naj bo L0. Bartalanffyev model pravi, daje prirast sorazmeren razliki med trenutno velikostjo in najvecjo mozno velikostjo. Torej
dL = k(L∗ − L) dt,
kjer je k > 0 konstanta.Ta enacba z locljivima spremenljivkama ima splosno resitev L(t) = L∗ +Ce−kt, kar nam ob
upostevanju zacetnega pogoja L(0) = L0 da
L(t) = L∗ + (L0 − L∗)e−kt.
t
L
L∗
L0bc
bc
Ne glede na zacetno velikost L0 je limitna velikost enaka
limt→∞
L(t) = limt→∞
(L∗ + (L0 − L∗)e
−kt)
= L∗,
saj je k > 0.

12 DIFERENCIALNE ENACBE 251
Zgled 12.41. Neka vrsta ribe doseze maksimalno dolzino 120 cm, po 20 mesecih pa dosezepolovico svoje maksimalne dolzine. Na zacetku opazovanja je riba velika 1 cm. Koliko je ribavelika po enem letu?
Ker jeL(t) = L∗ + (L0 − L∗)e
−kt,
lahko z upostevanjem L∗ = 120 cm, L0 = 1 cm, L(20) = 60 cm dolocimo
k = − 1
20ln
60 − 120
1 − 120= − 1
20ln
60
119.
Torej je
L(12) = 120 + (1 − 120)e1220
ln 60119 ≈ 58.9 cm.
12.15 Verhulstov model rasti
Model naravne rasti ne ustreza stanju v naravi, saj ni omejen. Namesto enacbe dxdt = kx, kjer
je k konstanta, zapisemo rajedx
dt= k(x)x,
kjer je k padajoca funkcija.Verhulstov model rasti pravi, da je rast populacije sorazmerna stevilu osebkov v populaciji
in razpolozljivim virom (ki omejuje rast). Ce z r > 0 oznacimo koeficient rasti in K > 0kapaciteto oz. maksimalno stevilo osebkov v populaciji, velja
dx
dt= r(1 − x
K)x.
Kot obicajno oznacimo z x0 = x(0) zacetno stanje populacije. (Verhulstov model rasti imenu-jemo tudi logisticni model rasti.)
Diferencialna enacba dxdt = r(1− x
K )x ima locljive spremenljivke in jo lahko zapisemo v obliki
dx
(1 − xK )x
= r dt.
Integral∫
dx(1− x
K)x izracunamo tako, da izraz 1
(1− xK
)x razstavimo na parcialne ulomke
1
(1 − xK )x
=1K
1 − xK
+1
x,
od koder sledidx
(1 − xK )x
= − ln(1 − x
K) + lnx = ln
x
1 − xK
.
Splosna resitev gornje diferencialne enacbe je ln x1− x
K= rt+ c oz.
x
1 − xK
= Cert. (47)
Iz enacbe (47) lahko izrazimo x = (1− xK )Cert = Cert− x
KCert in od tod x(1+ 1
KCert) = Cert.
Sledi
x =Cert
1 + 1KCe
rt=
11K + 1
C e−rt
.
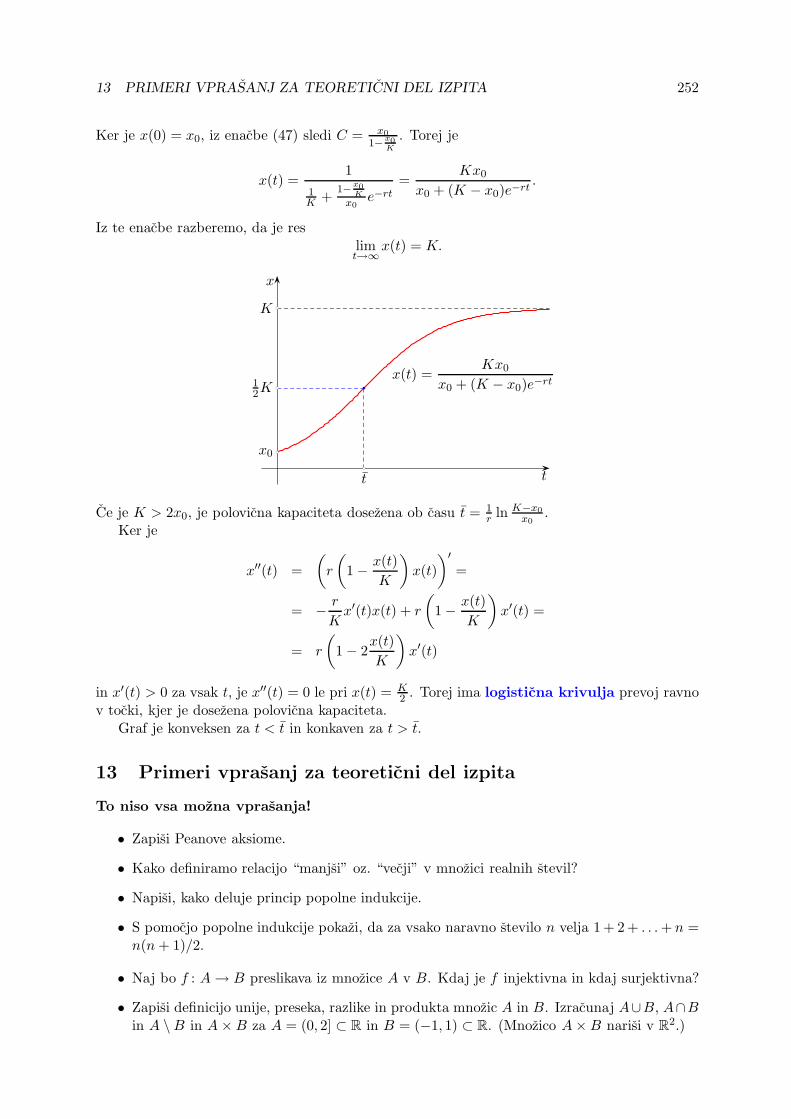
13 PRIMERI VPRASANJ ZA TEORETICNI DEL IZPITA 252
Ker je x(0) = x0, iz enacbe (47) sledi C = x0
1−x0K
. Torej je
x(t) =1
1K +
1−x0K
x0e−rt
=Kx0
x0 + (K − x0)e−rt.
Iz te enacbe razberemo, da je reslimt→∞
x(t) = K.
t
x
K
12K
t
x0
x(t) =Kx0
x0 + (K − x0)e−rtb
bc
bc
bc
bc
Ce je K > 2x0, je polovicna kapaciteta dosezena ob casu t = 1r ln K−x0
x0.
Ker je
x′′(t) =
(r
(1 − x(t)
K
)x(t)
)′=
= − r
Kx′(t)x(t) + r
(1 − x(t)
K
)x′(t) =
= r
(1 − 2
x(t)
K
)x′(t)
in x′(t) > 0 za vsak t, je x′′(t) = 0 le pri x(t) = K2 . Torej ima logisticna krivulja prevoj ravno
v tocki, kjer je dosezena polovicna kapaciteta.Graf je konveksen za t < t in konkaven za t > t.
13 Primeri vprasanj za teoreticni del izpita
To niso vsa mozna vprasanja!
• Zapisi Peanove aksiome.
• Kako definiramo relacijo “manjsi” oz. “vecji” v mnozici realnih stevil?
• Napisi, kako deluje princip popolne indukcije.
• S pomocjo popolne indukcije pokazi, da za vsako naravno stevilo n velja 1 + 2 + . . .+ n =n(n+ 1)/2.
• Naj bo f : A→ B preslikava iz mnozice A v B. Kdaj je f injektivna in kdaj surjektivna?
• Zapisi definicijo unije, preseka, razlike in produkta mnozic A in B. Izracunaj A∪B, A∩Bin A \B in A×B za A = (0, 2] ⊂ R in B = (−1, 1) ⊂ R. (Mnozico A×B narisi v R2.)

13 PRIMERI VPRASANJ ZA TEORETICNI DEL IZPITA 253
• Opisi pravilo produkta.
• Opisi pravilo vsote.
• Opisi nacelo vkljucitev in izkljucitev.
• Kaj so permutacije (s ponavljanjem)? Navedi primer.
• Kaj so kombinacije (s ponavljanjem)? Navedi primer.
• Kaj so variacije (s ponavljanjem)? Navedi primer.
• Koliko podmnozic ima mnozica s 7 elementi?
• Opisi osnovne pojme pri racunanju z dogodki: nacin, enakost, vsota, produkt, nasprotnidogodek, algebra dogodkov.
• Kaj je to pogojna verjetnost in navedi primer izracuna pogojne verjetnosti.
• Koliko je P (A/B), ce je dogodek A neodvisen od B?
• Zapisi formulo za popolno verjetnost in Bayesovo formulo.
• Zapisi klasicno definicijo verjetnosti.
• Zapisi statisticno definicijo verjetnosti.
• Zapisi aksiomaticno definicijo verjetnosti.
• Kaj je to pogojna verjetnost?
• Zapisi Bernoullijevo formulo za zaporedje neodvisnih poskusov. Kolika je verjetnost, dabomo v osmih metih kocke vrgli sestico petkrat?
• Kaj je matrika?
• Navedi glavne lastnosti sestevanja in mnozenja matrik s skalarjem.
• Definiraj produkt matrik.
• Navedi glavne lastnosti mnozenja matrik.
• Izracunaj A−B, AB, BA za A =
[1 2−2 3
]in A =
[−1 42 −1
].
• Kaj je transponirana matrika?
• Navedi glavne lastnosti transponiranja matrik.
• Kaj je determinanta?
• Po definiciji izracunaj determinanto matrike A ∈ R2×2 in A ∈ R3×3.
• Po definiciji determinante izracunaj
∣∣∣∣∣∣
0 0 21 0 10 3 0
∣∣∣∣∣∣.
• Kaj je Sarrusovo pravilo?
13 PRIMERI VPRASANJ ZA TEORETICNI DEL IZPITA 254
• Navedi lastnosti determinante (stolpcne in vrsticne operacije).
• Opisi Gaussov postopek izracuna determinante.
• Kaj je poddeterminanta?
• Opisi razvoj determinante po vrstici in po stolpcu.
• Opisi Cramerjev postopek za resevanje sistema linearnih enacb. Za katere sisteme linearnihenacb Ax = b je primeren?
• Opisi Gaussov postopek za resevanje sistema linearnih enacb.
• Kaj je rang matrike?
• Diskutiraj resitev sistema m linearnih enacb z n neznankami glede na rang r razsirjenematrike A sistema Ax = b.
• Kaj je inverzna matrika?
• Zapisi kaksen zadosten pogoj za obstoj inverza matrike.
• Izracunaj A2 in A−1 za A =
[2 13 2
].
• Navedi lastnosti invertiranja matrik.
• Opisi izracun inverza matrike s pomocjo Gaussovega postopka.
• Kaj je vektorski prostor? Navedi primer vektorskega prostora.
• Kaj je linearna odvisnost/neodvisnost vektorjev?
• Kdaj sta dve matriki podobni? Navedi primer podobnih matrik.
• Kaj je lastna vrednost/lastni vektor matrike? Kako jo/ga dolocimo?
• Kdaj je matrika diagonalizabilna?
• Napisi definicijo limite zaporedja (ak).
• Pokazi, da konvergentno zaporedje ne more imeti vec kot ene limite.
• Napisi definicijo stekalisca zaporedja (ak).
• Kaj je zaporedje? Pojasni pojme: narascajoce/padajoce zaporedje, omejeno zaporedje.
• Zapisi zaporedje, ki je padajoce in navzdol omejeno.
• Zapisi zaporedje, ki je narascajoce in navzgor neomejeno.
• Za vsak primer poisci in zapisi en zgled zaporedja: zaporedje ima eno samo stekalisce,zaporedje nima stekalisca, zaporedje ima vec kot eno stekalisce.
• Zapisi zaporedje, ki
– ima eno samo stekalisce;
– nima stekalisca;

13 PRIMERI VPRASANJ ZA TEORETICNI DEL IZPITA 255
– ima vec kot eno stekalisce.
• Ali je 0 stekalisce zaporedja s splosnim clenom ak = 1k? Odgovor utemelji!
• Napisi definicijo vsote neskoncne vrste
∞∑
k=1
ak.
• Podana je vrsta a+ aq + aq2 + aq3 + · · · + aqk + · · · Za katere q je ta vrsta konvergentnain za katere je divergentna? Izracunaj vsoto vrste za a = 1
3 in q = 14 .
• Zapisi kvocientni kriterij za konvergenco stevilske vrste
∞∑
k=1
ak.
• Kaksna je absolutno konvergentna vrsta in kaksna je pogojno konvergentna vrsta?
• Pokazi, da harmonicna vrsta
∞∑
k=1
1
kni konvergentna.
• Poisci vsa stekalisca zaporedja s splosnim clenom ak = k+13k + (−1)k
3 .
• Izracunaj limito limn→∞
√n−
√n−1√
n+1−√n.
• Ali obstaja limita limn→∞
(−1)n+1+2n+1
(−1)n+2n ?
• Izracunaj vsoti
∞∑
k=1
1
k(k + 2),
∞∑
k=1
3k
22k+1.
• Razisci konvergenco vrst
∞∑
k=1
2k+1
2k + 3k,
∞∑
k=1
3k+1
2k + 3k,
∞∑
k=1
(k + 1)3−k,
∞∑
k=1
cos(kπ)√k
.
• Pojasni osnovne lastnosti funkcij in jih opisi na grafu.
– Omejenost navzgor/navzdol, natancna zgornja/spodnja meja, narascanje/padanje.
– Injektivnost, surjektivnost, bijektivnost, inverzna funkcija.
– Soda/liha funkcija, pol funkcije, nicla funkcije.
• Limita funkcije.
– Kaj je limita funkcija? Leva limita, desna limita?
– Poisci primer funkcije, ko obstaja leva limita, desna pa ne.
– Poisci primer funkcije, ko obstajata leva in desna limita, a sta razlicni.
– Zapisi nekaj pomembnih izrekov o limitah: limita vsote, razlike, produkta, kvocientadveh funkcij.
• Zveznost.
– Zapisi defincijo zveznosti, zveznosti z leve, z desne. Ali so ti pojmi med seboj pove-zani?
– Navedi primer funkcije, ki je zvezna povsod na R. Navedi primer funkcije, ki imaeno tocko nezveznosti. Navedi primer funkcije, ki ima neskoncno tock nezveznosti.Navedi primer funkcije, ki je nezvezna v vsaki tocki iz R.
13 PRIMERI VPRASANJ ZA TEORETICNI DEL IZPITA 256
– Navedi izreke o vsoti, razliki, produku, kvocientu, kompozitumu zveznih funkcij.
• Kaj je to bisekcija?
• Kaksne lastnosti ima zvezna funkcija na zaprtem intervalu? Kaj pa, ce interval ni zaprt?
• Za vsako od skupin elemetarnih funkcij navedi osnovne lastnosti (definicija, graf, morebitneposebnosti).
– Potencna funkcija, polinom, koren.
– Racionalna funkcija, asimptote.
– Eksponentna in logaritenska funkcija.
– Trigonometricne in ciklometricne funkcije.
• Zapisi definicijo odvoda, odvoda z leve, odvoda z desne.
• Navedi primer funkcije, ki je v neki tocki odvedljiva z leve in desne, ni pa odvedljiva.
• Geometrijski pomen odvoda.
• Zapisi enacbo tangente in normale na dano krivuljo.
• Zapisi nekaj pomembnih izrekov o odvodih: odvod vsote, razlike, produkta, kvocientadveh funkcij.
• Zapisi verizno pravilo za odvajanje in odvod inverzne funkcije.
• Zapisi odvode elementarnih funkcij.
• Visji odvodi. Visji odvodi elementarnih funkcij.
• Lastnosti odvedljivih funkcij: narascanje, padanje, stacionarne tocke.
• Lokalni ekstremi, karakterizacija z odvodi.
• Rolleov, Lagrangeov izrek. Geometrijski pomen. Karakterizacija konstantne funkcije.
• Konveksna, konkavna funkcija, prevoj.
• Ekstrem zvezne funkcije na zaprtem intervalu.
• L’Hopitalovo pravilo.
• Taylorjeva vrsta. Taylorjeva vrsta za sinx, cosx, ln(1 + x), ex, (1 + x)r.
• Kaj je nedoloceni integral? Od kod izvira nedolocenost?
• Integrali elementarnih funkcij.
• Pravila za integriranje: integral vsote funkcij, integral produkta funkcije s konstanto,
• Pravilo zamenjave (substitucije). Univerzalna trigonometricna substitucija.
• Integracija po delih (per partes).
• Kaj je doloceni integral? Geometrijski pomen.

13 PRIMERI VPRASANJ ZA TEORETICNI DEL IZPITA 257
• Osnovni izreki o dolocenem integralu: integral vsote funkcij, integral produkta funkcije skonstanto, razcep integracijskega intervala,
• Zveza med dolocenim in nedolocenim integralom.
• Pravilo zamenjave (substitucije) za doloceni integral.
• Integracija po delih (per partes) za doloceni integral.
• Prostornina vrtenine pri vrtenju okoli abscisne osi.
• Prostornina vrtenine pri vrtenju okoli ordinatne osi.
• Dolzina ravninske krivulje.
• Povrsina vrtenine pri vrtenju okoli abscisne osi.
• Guldinovi pravili za vrtenine.
• Kdaj je funkcija vec spremenljivk zvezna?
• Dana je funkcija f : D → R, kjer je D ⊂ R2. Kaj so nivojske krivulje funkcije f?
• Opisi nivojske krivulje funkcije f(x, y) =√x2 + y2.
• Kaj je parcialni odvod funkcije vec spremenljivk?
• Kaj je totalni diferencial funkcije vec spremenljivk?
• Izracunaj df za f(x, y) = x2y3.
• Opisi potrebne in zadostne pogoje za ekstrem funkcije dveh spremenljivk.
• Doloci ekstreme funkcije, podane s predpisom f(x, y) = (x2 + y)√ey.
• Kaj so vezani ekstremi?
• Opisi metodo Lagrangeovih multiplikatorjev.
• Kaj je diferencialna enacba?
• Kaj je zacetni problem?
• Navedi primer diferencialne enacbe z locljivima spremenljivkama in jo resi.
• Opisi medodo resevanja diferencialne enacbe z locljivima spremenljivkama.
• Opisi metodo resevanja linearnih diferencialnih enacb drugega reda s konstantnimi koefi-cienti.
• Kako poiscemo partikularno resitev enacbe y′′+py′+qy = r(x), ce je r(x) = eax(P (x) cos bx+Q(x) sin bx)?