Embed Size (px)
Citation preview

A projektív geometria alapjai
Kovács Zoltán
eloadásvázlat, 2003
Tartalomjegyzék
1. Bevezetés, homogén koordináták az euklidészi síkon 2
2. A projektív sík 5
3. Projektív transzformációk 8
4. Centrális kollineáció 11
5. A geomertriai transzformációk hierarchiája 14
6. Kettosviszony 16
7. Kúpszeletek projektív osztályozása 18
8. A geometriák projektív nézopontból 228.1. A Klein-féle részcsoport . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 238.2. A hiperbolikus részcsoport . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 248.3. Az elliptikus részcsoport . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
9. A hiperbolikus sík projektív modellje 269.1. A pólus-poláris kapcsolat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 269.2. A Cayley - Klein modell . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
10. APPENDIX: A projektív illeszkedési sík 29
1
1. Bevezetés, homogén koordináták az euklidészi síkon
A tér síkra történo leképezése nagyon sok területen eloforduló probléma, a képzomuvészetektol acomputergrafikáig. A tér síkra történo ábrázolásának egyik módszere a (vonal) perspektíva. Ezttudományos alapossággal a itáliai reneszánsz muvészek tanulmányozták a XV. századtól (Brune-leschi, Alberti). A cél az volt, hogy a tér valósághu illúzióját keltsék.
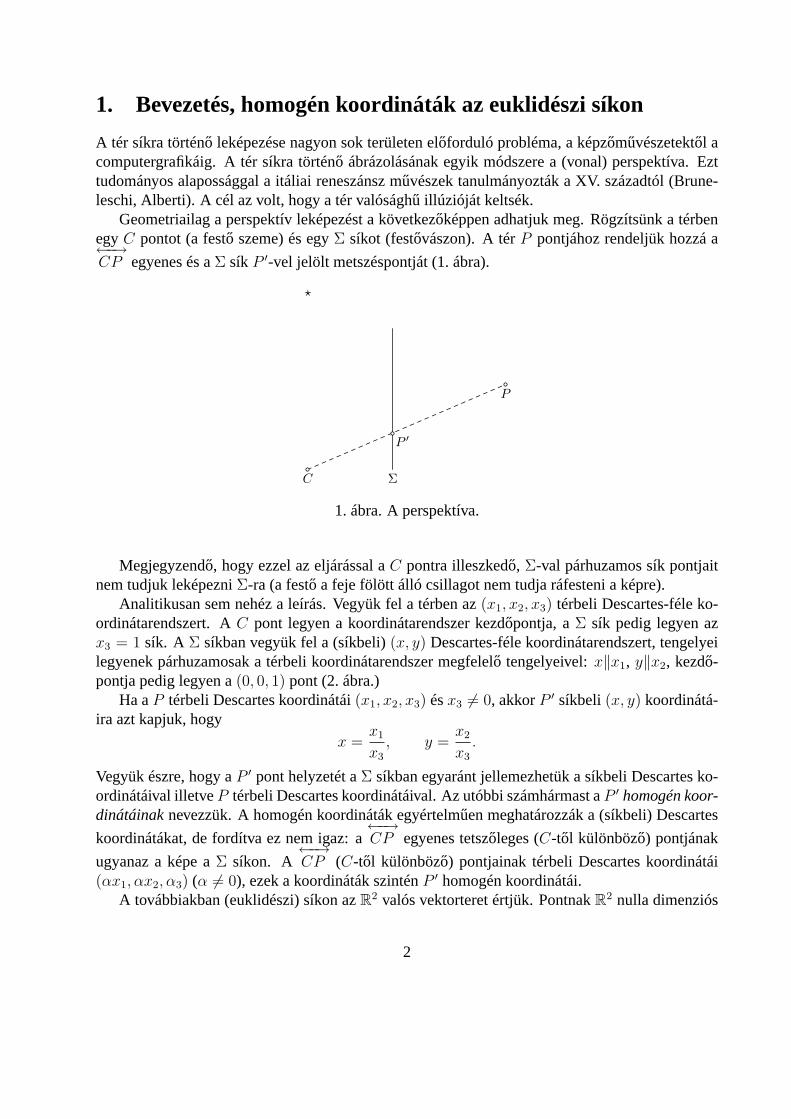
Geometriailag a perspektív leképezést a következoképpen adhatjuk meg. Rögzítsünk a térbenegyC pontot (a festo szeme) és egyΣ síkot (festovászon). A térP pontjához rendeljük hozzá a←−→CP egyenes és aΣ síkP ′-vel jelölt metszéspontját (1. ábra).
?
C Σ
P
P ′
1. ábra. A perspektíva.
Megjegyzendo, hogy ezzel az eljárással aC pontra illeszkedo, Σ-val párhuzamos sík pontjaitnem tudjuk leképezniΣ-ra (a festo a feje fölött álló csillagot nem tudja ráfesteni a képre).
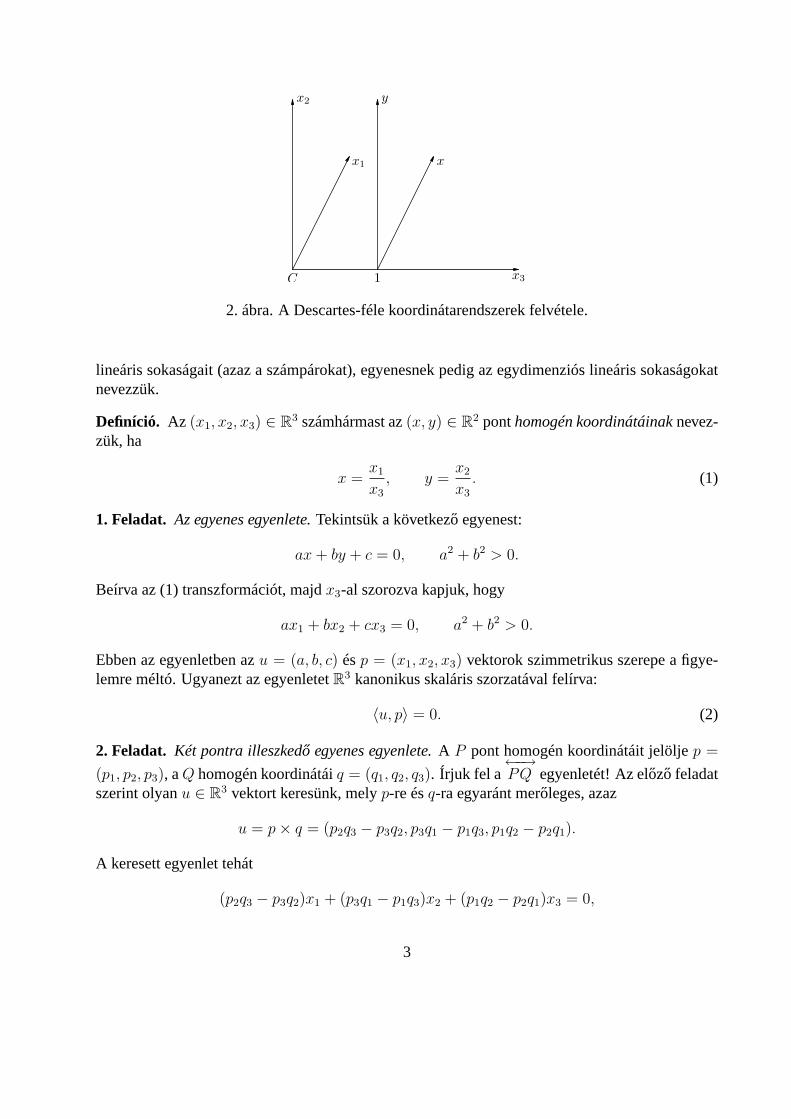
Analitikusan sem nehéz a leírás. Vegyük fel a térben az(x1, x2, x3) térbeli Descartes-féle ko-ordinátarendszert. AC pont legyen a koordinátarendszer kezdopontja, aΣ sík pedig legyen azx3 = 1 sík. A Σ síkban vegyük fel a (síkbeli)(x, y) Descartes-féle koordinátarendszert, tengelyeilegyenek párhuzamosak a térbeli koordinátarendszer megfelelo tengelyeivel:x‖x1, y‖x2, kezdo-pontja pedig legyen a(0, 0, 1) pont (2. ábra.)
Ha aP térbeli Descartes koordinátái(x1, x2, x3) ésx3 6= 0, akkorP ′ síkbeli(x, y) koordinátá-ira azt kapjuk, hogy
x =x1
x3
, y =x2
x3
.
Vegyük észre, hogy aP ′ pont helyzetét aΣ síkban egyaránt jellemezhetük a síkbeli Descartes ko-ordinátáival illetveP térbeli Descartes koordinátáival. Az utóbbi számhármast aP ′ homogén koor-dinátáinaknevezzük. A homogén koordináták egyértelmuen meghatározzák a (síkbeli) Descartes
koordinátákat, de fordítva ez nem igaz: a←−→CP egyenes tetszoleges (C-tol különbözo) pontjának
ugyanaz a képe aΣ síkon. A←−→CP (C-tol különbözo) pontjainak térbeli Descartes koordinátái
(αx1, αx2, α3) (α 6= 0), ezek a koordináták szinténP ′ homogén koordinátái.A továbbiakban (euklidészi) síkon azR2 valós vektorteret értjük. PontnakR2 nulla dimenziós
2
C 1 x3
x2 y
x1 x
2. ábra. A Descartes-féle koordinátarendszerek felvétele.
lineáris sokaságait (azaz a számpárokat), egyenesnek pedig az egydimenziós lineáris sokaságokatnevezzük.
Definíció. Az (x1, x2, x3) ∈ R3 számhármast az(x, y) ∈ R2 ponthomogén koordinátáinaknevez-zük, ha
x =x1
x3
, y =x2
x3
. (1)
1. Feladat. Az egyenes egyenlete.Tekintsük a következo egyenest:
ax + by + c = 0, a2 + b2 > 0.
Beírva az (1) transzformációt, majdx3-al szorozva kapjuk, hogy
ax1 + bx2 + cx3 = 0, a2 + b2 > 0.
Ebben az egyenletben azu = (a, b, c) ésp = (x1, x2, x3) vektorok szimmetrikus szerepe a figye-lemre méltó. Ugyanezt az egyenletetR3 kanonikus skaláris szorzatával felírva:
〈u, p〉 = 0. (2)
2. Feladat. Két pontra illeszkedo egyenes egyenlete.A P pont homogén koordinátáit jelöljep =
(p1, p2, p3), aQ homogén koordinátáiq = (q1, q2, q3). Írjuk fel a←−→PQ egyenletét! Az elozo feladat
szerint olyanu ∈ R3 vektort keresünk, melyp-re ésq-ra egyaránt meroleges, azaz
u = p× q = (p2q3 − p3q2, p3q1 − p1q3, p1q2 − p2q1).
A keresett egyenlet tehát
(p2q3 − p3q2)x1 + (p3q1 − p1q3)x2 + (p1q2 − p2q1)x3 = 0,
3
vagy más alakban ∣∣∣∣p2 p3
q2 q3
∣∣∣∣ · x1 −∣∣∣∣p1 p3
q1 q3
∣∣∣∣ · x2 +
∣∣∣∣p1 p2
q1 q2
∣∣∣∣ · x3 = 0.
Ellenoriznünk kell még aza2 + b2 > 0 feltételt. Tegyük fel indirekt, hogy egyrészt(p2, p3) és(q2, q3), másrészt(p1, p3) és (q1, q3) arányosak. Mivelq3 6= 0, ezért van olyanα skalár, hogyp3 = α · q3, tehát az elobbi két arányosság csak úgy teljesülhet, ha
p2 = α · q2, p1 = α · q1,
amibol (p1, p2) és(q1, q2) arányossága is következik, vagyis
(p1, p2, p3) = α · (q1, q2, q3).
Ez ellentmondás, mertP ésQ különbözo pontok.
3. Feladat. Két egyenes metszéspontja.Határozzuk meg az
a1x1 + b1x2 + c1x3 = 0, ésa2x1 + b2x2 + c2x3 = 0
nem párhuzamos egyenesek metszéspontját! A (2) egyenlet szerint olyanp vektort keresünk, melyazu1 = (a1, b1, c1) ésu2 = (a2, b2, c2) vektorok mindegyikére meroleges. Ilyen vektorp = u1×u2.A megoldás tehát
(b1c2 − b2c1, c1a2 − a1c2, a1b2 − a2b1).
Az euklidészi síkon használt homogén koordinátákrax3 6= 0-nak teljesülni kell.a1b2 − a2b1 = 0azt jelentené, hogy(a1, b1) és(a2, b2) arányosak, tehát a két egyenes párhuzamos lenne. Megjegy-zendo, hogy módszerünk párhuzamos (de különbözo) egyenesekre is ad megoldást, de a kapott
(b1c2 − b2c1, c1a2 − a1c2, 0)
„pont” nincs rajta az euklidészi síkon.
A fenti feladatokat elemezve néhány, a továbbiakban fontos észrevételt tehetünk az euklidészisíkon használt homogén koordinátákra:
- egy pont harmadik homogén koordinátája nem lehet zérus:x3 6= 0;
- egy egyenes egyenleteax1+bx2+cx3 = 0, ahola2+b2 > 0, azaz ax3 = 0 „tiltott” egyenlet;
- az euklidészi síkon párhuzamos egyenesek „metszéspontja” pontosan ax3 = 0 „tiltott” egye-nesre esik. (Ld. a 3. feladatot.)
A perspektíva elvezetett bennünket a síkon egy újfajta koordinátázáshoz, a homogén koordináták-hoz. A homogén koordinátákkal a sík analitikus geometriája meglepoen egyszeru, és a számítá-sokban kézenfekvo, ha azx3 = 0 koordinátákat is megengedjük. Ezek a pontok ugyan nincsenekrajta az euklidészi síkon, egy „tiltott” egyenesre illeszkednek, de ha ezzel az egyenessel kibovítjükaz euklidészi síkot, akkor egyrészt a három koordináta szerepe teljesen egyenrangú lesz, másrésztaz egyenesek és pontok szerepe a számításokban szimmetrikus. Ennek a lépésnek azonban vanegy következménye: ezen a kibovített síkon már nem léteznek párhuzamos egyenesek.
4
2. A projektív sík
A továbbiakban◦Rn = Rn \ {0}.
Definíció. Értelmezzük az◦R3 halmazon a következo,∼-al jelölt relációt:
u ∼ v, ha∃α ∈ R \ {0} : u = αv (u, v ∈◦R3).
Azaz két nemzéró számhármas relációban áll egymással, ha arányosak. Ez a reláció ekvivalenci-areláció, mely ekvivalenciaosztályait aprojektív síkpontjainak illetve egyeneseinek nevezzük. A
pontok halmazaP2 =◦R3/ ∼, az egyenesek halmazaL =
◦R3/ ∼.
Jelölje azx ∈◦R3 vektor által reprezentált ekvivalenciaosztályt[x]. Azt mondjuk, hogy az
[x] ∈ P2 pont illeszkedik az[u] ∈ L egyenesre, illetve az[u] egyenes illeszkedik az[x] pontra, ha〈x, u〉 = 0. Jelölésben:[x]I[u] vagy [u]I[x].
Az egy egyenesre illeszkedo pontok halmazátpontsornak, míg az egy pontra illeszkedo egye-nesek halmazátsugársornak nevezzük. Az egy egyenesre illeszkedo pontokatkollineárisaknak isnevezzük.
A projektív sík pontjait gyakran az ábécé nagy betuivel jelöljük.A projektív sík konstrukcióját tetszoleges dimenzióban analóg módon el lehet végezni, pl.
◦R2/ ∼ a projektív egyenes,
◦R4/ ∼ a projektív tér. Emellett a valós számok teste helyett kiindul-
hatnánk a komplex számok testébol is (komplex projektív egyenes/sík/tér).
Megjegyzés.A definíció alapján egyp = (p1, p2, p3) nemzéró számhármas által reprezentált pontvagy egyenes:
[p] = { (αp1, αp2, αp3) | α ∈ R \ {0} }.Két különbözo pontot/egyenest reprezentáló két vektor lineárisan független vektorrendszert alkot,mivel egymásnak nem skalárszorosai.
A skaláris szorzat homogenitása alapján könnyen látható, hogy az illeszkedés definíciója füg-getlen a pontot/egyenest reprezentáló ekvivalenciaosztály választásától. Ha〈x, u〉 = 0, akkor
〈αx, βu〉 = αβ 〈x, u〉 = 0.
Megjegyezzük, hogy az illeszkedési relációt (a Hilbert féle illeszkedési tértol eltéroen) nem azelemereláció szinonímájaként használjuk.
A {[p], [q], [r]} ponthármas akkor és csakis akkor kollineáris, ha|p, q, r| = 0. Tudniilik apontok akkor és csakis akkor lesznek kollineárisak, hap, q, r egy nemzéróu vektorra merolege-sek, vagyis azu által generált egy dimenziós altér két dimenziós ortogonális komplementerébenvannak. Két dimenziós vektortérben három vektor mindig lineárisan függo.
Mivel a pontoknak és egyeneseknek ugyanaz a definíciója, az illeszkedési reláció pedig szimmet-rikus, ezért a pontok és egyenesek illeszkedésére kimondott minden igaz állításban a „pont” és„egyenes” szavak felcserélésével is igaz állítást kapunk. Ez adualitási elv. A következo tétel kétállítása is egymás duálisa.
5
1. Tétel. A projektív síkon bármely két pontra egyértelmuen illeszkedik egy egyenes, bármely kétegyenesre egyértelmuen illeszkedik egy pont, melyet e két egyenesmetszéspontjának nevezünk.
Bizonyítás: A [p], [q] pontokra egyértelmuen illeszkedo egyenes[p× q], az[u], [v] egyenesekre il-leszkedo egyértelmu pont pedig[u×v]. Az illeszkedés onnan következik, hogy két vektor vektori-ális szorzata mindkét tényezore meroleges:〈p, p× q〉 = 〈q, p× q〉 = 0, 〈u, u× v〉 = 〈v, u× v〉 =0.
Az egyértelmuség a következoképpen látható be. A lineárisan függetlenx-re ésy vektorokmindegyikére meroleges vektorok azL(x, y) két dimenziós altér ortogonális komplementerét al-kotják, azaz egy egy dimenziós altérben vannak. Ez azt jelenti, hogy az ilyen (nemzéró) vektorokegymásnak skalárszorosai, tehát ugyanazt a pontot/egyenest reprezentálják.
A P ésQ pontokra illeszkedo egyenesre a←−→PQ jelölést alkalmazzuk. Nem okoz félreértést, ha az
elobbi egyenesre illeszkedo pontok halmazát is ugyanígy jelöljük.
Definíció. A [(p1, p2, 0)] ∈ P2 alakban felírható pontokatvégtelen távoli pontoknak, míg a[(0, 0, 1)]egyenestvégtelen távoli egyenesnek nevezzük. A nem végtelen távoli pontokat/egyeneseket gyak-ranközönségespontokként/egyenesekként említjük. Két egyenestaffin párhuzamosnak nevezünk,ha közös pontjuk végtelen távoli pont.
2. Tétel. A végtelen távoli pontok a végtelen távoli egyenesre illeszkednek, a végtelen távoli egye-nesre csak végtelen távoli pontok illeszkednek. A végtelen távoli egyenest kivéve minden egyenesrepontosan egy végtelen távoli pont illeszkedik.
Bizonyítás: Az elso állítás:p1 · 0 + p2 · 0 + 0 · 1 = 0.
Ha a[p] pont illeszkedik a végtelen távoli egyenesre, akkorp3 · 1 = 0, azazp3 = 0.Az [(u1, u2, u3)] egyenesre illeszkedo egyértelmu végtelen távoli pont[(−u2, u1, 0)], mint az a
definíció alapján könnyen látható.
Definíció. Egy nemkollineáris ponthármastP2-benháromszögnek nevezünk.
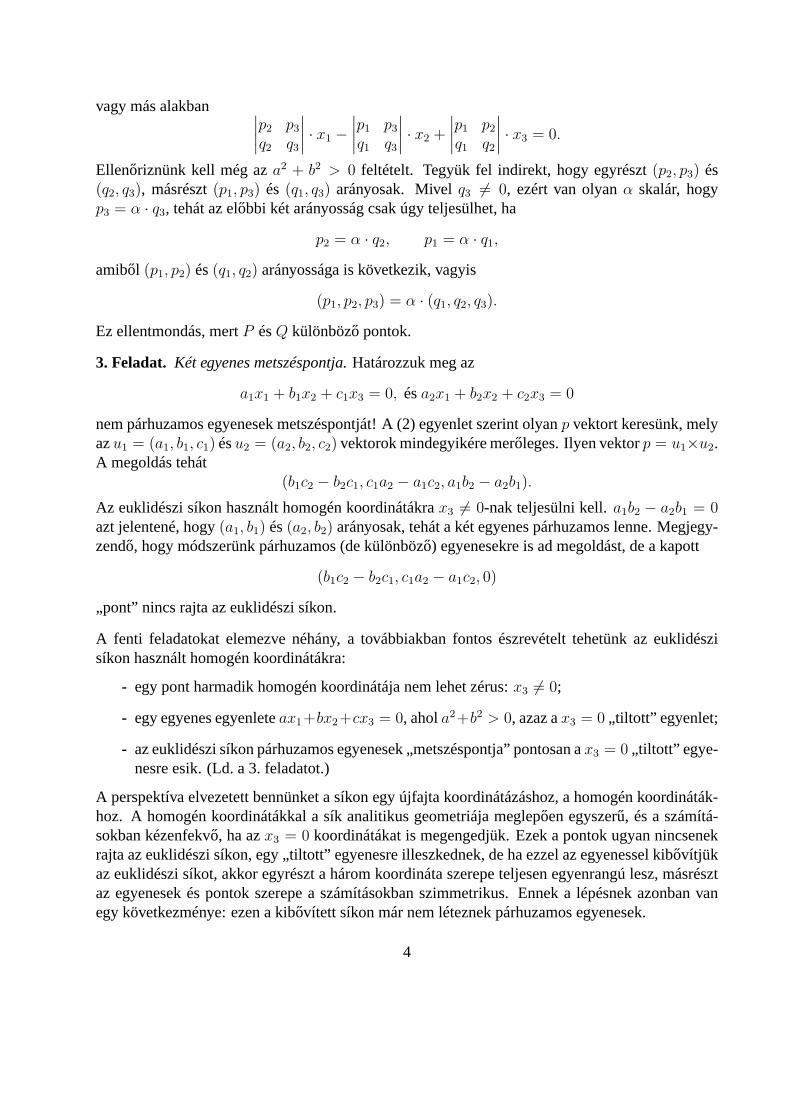
3. Tétel. (Desargues-tétel.)LegyenekABC és A′B′C ′ háromszögekP2-ben. Tegyük fel, hogy←−→AA′ ,
←−→BB′ és
←−→CC ′ különbözoek. Ezen egyenesek akkor és csakis illeszkednek egy pontra, ha az←−→
AB ∩←−−→A′B′ ,←−→BC ∩←−−→B′C ′ és
←−→CA ∩←−−→C ′A′ pontok egy egyenesre illeszkednek.
Bizonyítás: A tétel két állítása egymás duálisa, elegendo az egyiket bizonyítani. Jelölje tehát a←−→AA′ ,
←−→BB′ és
←−→CC ′ egyenesek közös pontjátP . Ha aP pont kollineáris lenneA,B, C közül
valamelyik kettovel, akkor a háromszögek egy-egy oldala egybeesne, tehát ellentmondásra jutnánka feltétellel.
Legyen←−→AB ∩ ←−−→A′B′ = {U}, ←−→BC ∩ ←−−→B′C ′ = {V } és
←−→CA ∩ ←−−→C ′A′ = {W}. Legyen a
továbbiakbanA = [a], B = [b], stb. A feltételek szerint valamelyα, α′, β, β′, γ, γ′ skalárokra:
αa + α′a′ = p, βb + β′b′ = p, γc + γ′c′ = p.
6
PA
C
A′
C ′
B′
W
V
B
U
3. ábra. Desargues tétele.
A megfelelo relációkat kivonva:
αa− βb + α′a′ − β′b′ = 0
βb− γc + β′b′ − γ′c′ = 0
γc− αa + γ′c′ − α′a′ = 0.
Rendezve:
αa− βb = β′b′ − α′a′ = u
βb− γc = γ′c′ − β′b′ = v
γc− αa = α′a′ − γ′c′ = w.
Ahonnanu + v + w = 0
adódik, tehátu, v, w lineárisan függoek,U, V, W egy egyenesre illeszkednek.
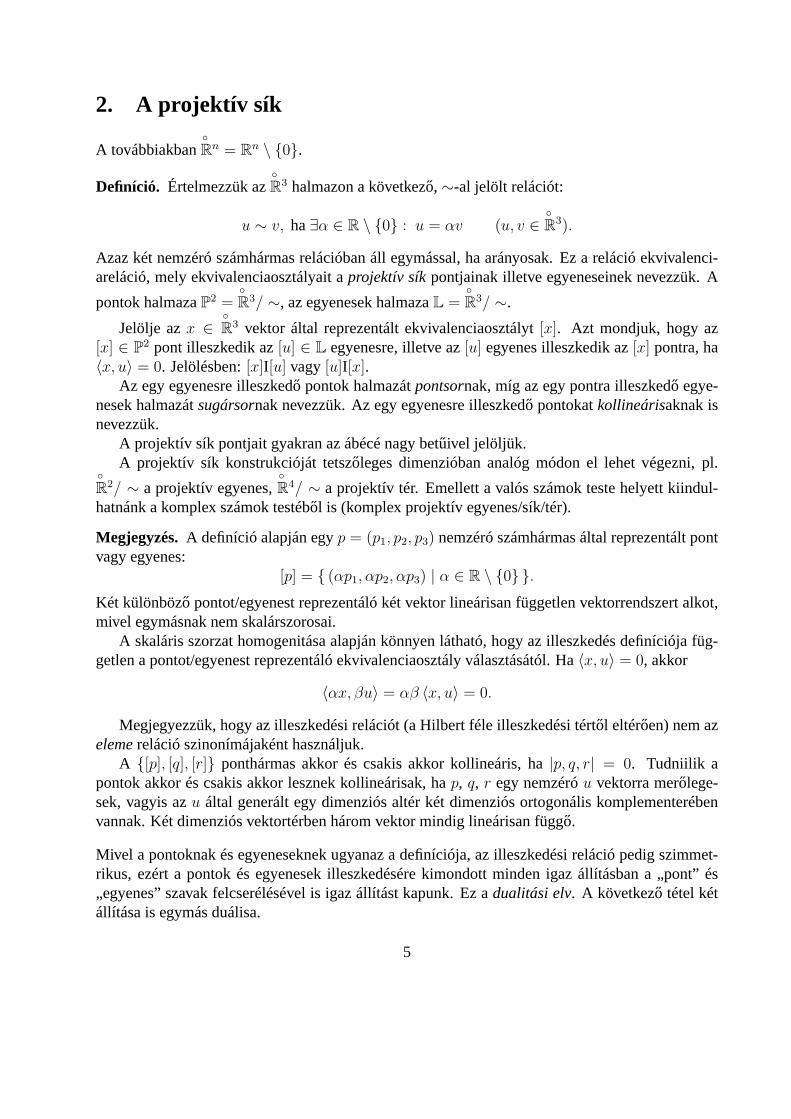
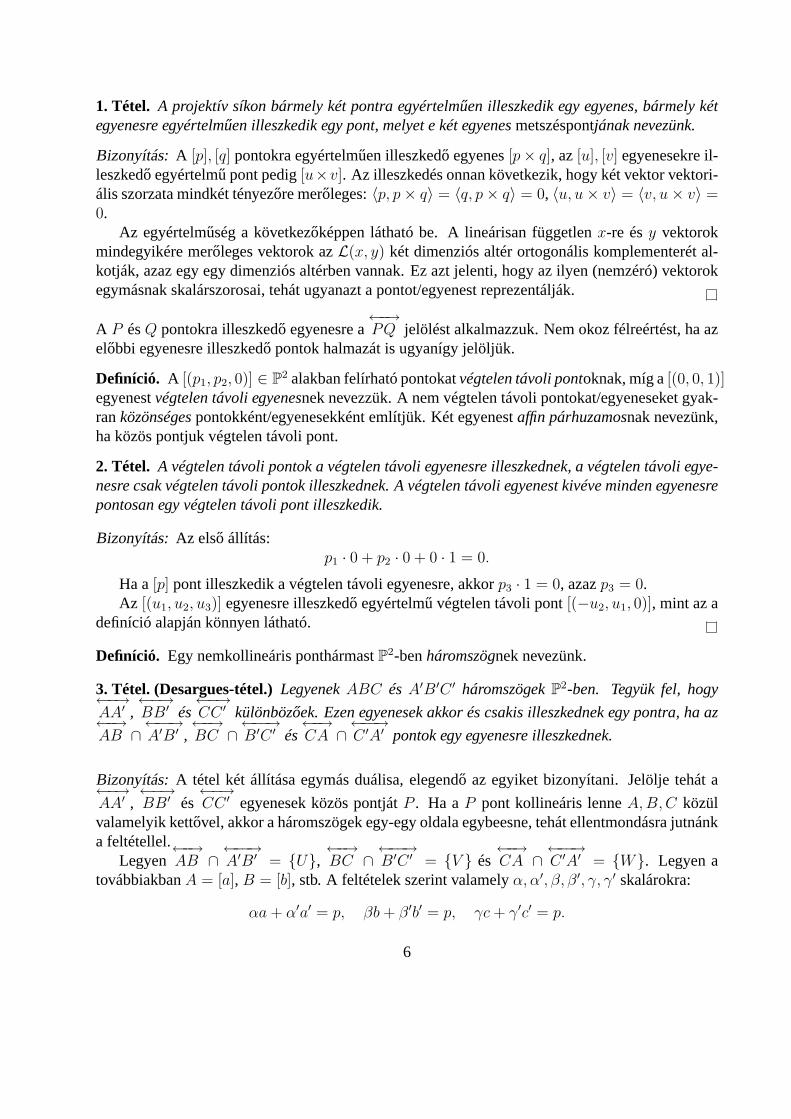
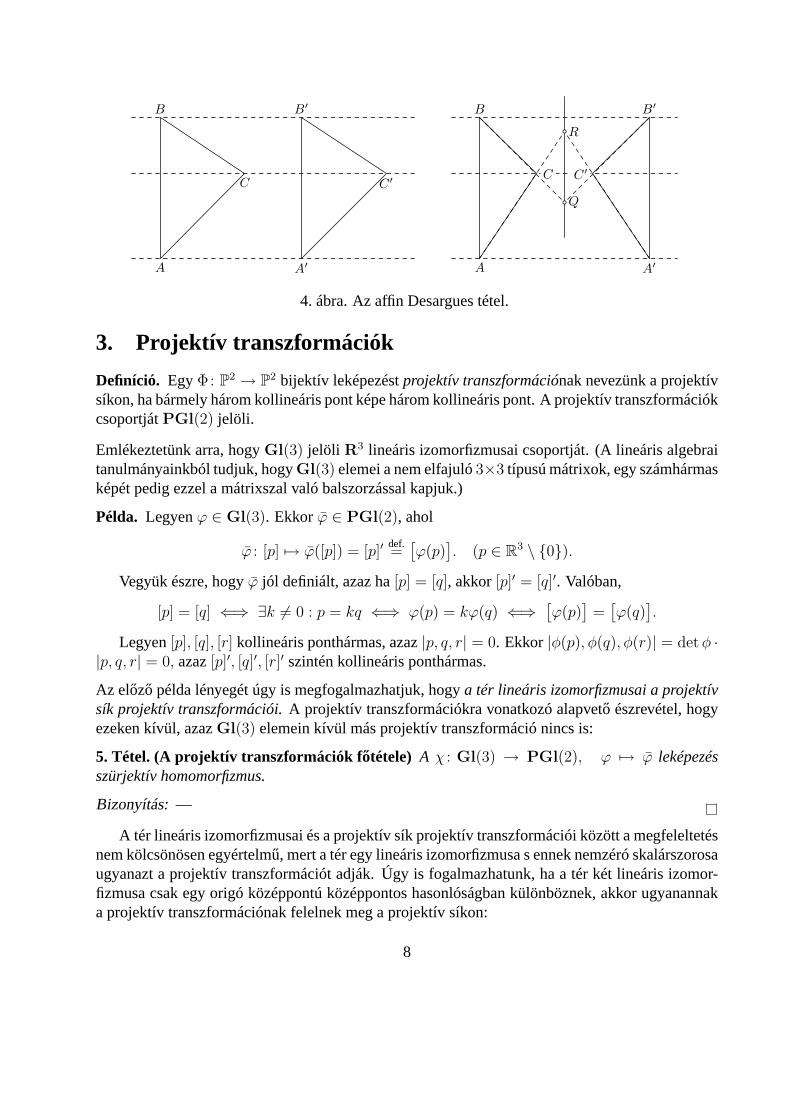
4. Tétel. (Affin Desargues-tétel.)LegyenekABC4 ésA′B′C ′4 háromszögek az euklidészi sí-
kon, továbbá teljesüljön←−→AA′ ‖←−→BB′ ‖←−→CC ′ .
1. Ha←−→AB ‖←−−→A′B′ és
←−→BC ‖←−−→B′C ′ , akkor
←−→AC ‖←−−→A′C ′
2. Ha←−→AB ‖←−−→A′B′ és
←−→BC ∩←−−→B′C ′ = {Q},←−→AC ∩←−−→A′C ′ = {R}, akkor
←−→QR ‖←−→AB .
7
A A′
C C ′
B B′
A A′
B B′
R
Q
C C ′
4. ábra. Az affin Desargues tétel.
3. Projektív transzformációk
Definíció. EgyΦ: P2 → P2 bijektív leképezéstprojektív transzformációnak nevezünk a projektívsíkon, ha bármely három kollineáris pont képe három kollineáris pont. A projektív transzformációkcsoportjátPGl(2) jelöli.
Emlékeztetünk arra, hogyGl(3) jelöli R3 lineáris izomorfizmusai csoportját. (A lineáris algebraitanulmányainkból tudjuk, hogyGl(3) elemei a nem elfajuló3×3 típusú mátrixok, egy számhármasképét pedig ezzel a mátrixszal való balszorzással kapjuk.)
Példa. Legyenϕ ∈ Gl(3). Ekkor ϕ ∈ PGl(2), ahol
ϕ : [p] 7→ ϕ([p]) = [p]′ def.=
[ϕ(p)
]. (p ∈ R3 \ {0}).
Vegyük észre, hogyϕ jól definiált, azaz ha[p] = [q], akkor[p]′ = [q]′. Valóban,
[p] = [q] ⇐⇒ ∃k 6= 0 : p = kq ⇐⇒ ϕ(p) = kϕ(q) ⇐⇒ [ϕ(p)
]=
[ϕ(q)
].
Legyen[p], [q], [r] kollineáris ponthármas, azaz|p, q, r| = 0. Ekkor |φ(p), φ(q), φ(r)| = det φ ·|p, q, r| = 0, azaz[p]′, [q]′, [r]′ szintén kollineáris ponthármas.
Az elozo példa lényegét úgy is megfogalmazhatjuk, hogya tér lineáris izomorfizmusai a projektívsík projektív transzformációi.A projektív transzformációkra vonatkozó alapveto észrevétel, hogyezeken kívül, azazGl(3) elemein kívül más projektív transzformáció nincs is:
5. Tétel. (A projektív transzformációk f otétele) A χ : Gl(3) → PGl(2), ϕ 7→ ϕ leképezésszürjektív homomorfizmus.
Bizonyítás: —
A tér lineáris izomorfizmusai és a projektív sík projektív transzformációi között a megfeleltetésnem kölcsönösen egyértelmu, mert a tér egy lineáris izomorfizmusa s ennek nemzéró skalárszorosaugyanazt a projektív transzformációt adják. Úgy is fogalmazhatunk, ha a tér két lineáris izomor-fizmusa csak egy origó középpontú középpontos hasonlóságban különböznek, akkor ugyanannaka projektív transzformációnak felelnek meg a projektív síkon:
8

6. Tétel. LegyenH(3) = {λid |λ ∈ R \ {0} } (id : R3 → R3). EkkorPGl(2) ∼= Gl(3)/H(3).
Bizonyítás: ker χ = {ϕ ∈ Gl(3)|ϕ = id P2}.
ϕ = id ⇐⇒ ∀p ∈ R3 \ {0} : [p] =[ϕ(p)
] ⇐⇒ ϕ(p) = kp (k 6= 0),
ami azt jelenti, hogyϕ-nek minden nemzéró vektor sajátvektora, tehátϕ = λid valamelyλ ∈ R-re. Tehátker χ = H(3). Az algebra homomorfiatételébol tudjuk, hogy ekkor:
PGl(2) ∼= Gl(3)/H(3).
7. Tétel. LegyenSl(3) = {ϕ ∈ Gl(3)| det ϕ = 1} EkkorPGl(2) ∼= Sl(3).
Bizonyítás: Legyenϕ ∈ SL(3)∩H(3). Haϕ = λid , akkordet ϕ = λ3 =⇒ λ3 = 1 =⇒ λ = 1.Tehát
Sl(3) ∩H(3) = {id }.Az algebrai ismereteink alapján, ekkor teljesülSl(3) ∼= PGl(2) is.
8. Tétel. A projektív síkon minden projektív transzformációnak van fixpontja és invariáns pontsora(azaz „fixegyenese”).
Bizonyítás: Tudjuk, hogy mindenΦ ∈ PGl(2) projektív transzformációra:Φ = φ, valamelyφ ∈ Gl(3) izomorfizmusra.φ-nek, mint páratlan dimenziós vektortéren ható lineáris transzformá-ciónak van egydimenziós invariáns altere, jelölje ezt[x].
Φ([x]) =[φ(x)
]= [x],
azaz[x] ∈ P2 a kívánt fixpont.A lineáris algebrából azt is tudjuk, hogyφ-nek van kétdimenziós invariáns altere is. Jelölje ez
L(p, q), (p, q ∈◦R3 lineárisan független vektorok).
L(p, q) = L(p′, q′), =⇒ [p× q] = [p′ × q′]
Definíció. Négy pontotáltalános helyzetunek nevezünk a projektív síkon, ha nincs közöttük há-rom egy egyenesre illeszkedo. Az általános helyzetu pontnégyest gyakrannégyszögként említjük.
9. Tétel. LegyenP1, P2, P3, P4 egy négyszög a projektív síkon. Ekkor léteznek olyanpi ∈◦R3,
(i = 1, . . . , 4) vektorok, hogy:
1. [pi] = Pi, (i = 1, . . . , 4),
2. p1 + p2 + p3 = p4.
9

Bizonyítás: Legyenp4 ∈◦R3 tetszoleges vektor, hogy[p4] = P4, továbbáe1, e2, e3 ∈
◦R3 szintén
tetszolegesek, hogy[ei] = Pi (i = 1, . . . , 4). Mivel a pontok között nincs három egy egyenesreilleszkedo, ezért(e1, e2, e3) aR3 vektortér egy bázisa, azazp4 eloáll lineáris kombinációjukként:
p4 = x1e1 + x2e2 + x3e3.
Legyenpi = xiei, (i = 1, 2, 3).
10. Tétel. (A projektív transzformációk alaptétele.) LegyenP1P2P3P4 ésQ1Q2Q3Q4 két négy-szög. Egyértelmuen létezik olyanΦ ∈ PGL(2) projektív transzformáció, melyre:
Φ(Pi) = Qi, i = 1, . . . , 4;
azaz négyszög és képe a projektív transzformációt egyértelmuen meghatározza a projektív síkon.
Bizonyítás: Eloször a létezést látjuk be. Legyen
Pi = [pi], Qi = [qi], . . . , pi, qi, . . . ∈◦R3,
s ráadásul teljesüljönp1 + p2 + p3 = p4, q1 + q2 + q3 = q4. A lineáris kiterjesztés tételétalkalmazva, egyértelmuen létezik olyanφ ∈ Gl(3), melyre:
φ(pi) = qi i = 1, 2, 3.
Ekkor φ([pi]) = [φ(pi)] = [qi], (i = 1 . . . 3), továbbá
φ([p4]) = [φ(p4)] = [φ(p1 + p2 + p3)] = [φ(p1) + φ(p2) + φ(p3)] = [q1 + q2 + q3] = [q4].
TehátΦ = φ a kívánt tulajdonságú transzformáció.Most belátjuk az egyértelmuséget. LegyenΦ1 ésΦ2 két projektív transzformáció a tételben
eloírt feltételekkel. Ekkor aΦ−12 ◦ Φ1 = φ projektív transzformációnakP1, P2, P3, P4 fixpontjai,
azazφ(pi) = ξipi valamelyξ1, ξ2, ξ3, ξ4 nemzéró skalárokra. Továbbá:
φ(p4) = φ(p1 + p2 + p3) = ξ1p1 + ξ2p2 + ξ3p3;
amibol az következik, hogyξ1p1 + ξ2p2 + ξ3p3 = ξ4p4.
Mindkét oldaltξ4-el osztva:ξ1
ξ4
p1 +ξ2
ξ4
p2 +ξ3
ξ4
p3 = ξ4p4.
Amibolξ1
ξ4
=ξ2
ξ4
=ξ3
ξ4
= 1
következik. Tehátφ = λ4id (azazφ origó középpontú hasonlóság), amibol Φ1 = Φ2 következik.
10

A projektív transzformációkat az eddigiek alapján könnyu analitikus formában is leírni:
Következmény. LegyenΦ ∈ PGl(2) projektív transzformáció. Ekkor létezik olyan(aij) ∈M3×3
3 rangú mátrix, hogy mindenP = [(x1, x2, x3)] ∈ P2 pontraΦ(P ) = [(x′1, x′2, x
′3)], ahol
x′1 = a11x1 + a12x2 + a13x3
x′2 = a21x1 + a22x2 + a23x3
x′3 = a31x1 + a32x2 + a33x3.
A fenti összefüggést tovább alakítva, az elso relációt elosztva a harmadikkal:
x′1x′3
=a11x1 + a12x2 + a13x3
a31x1 + a32x2 + a33x3
.
A jobb oldali törtet bovítve1/x3-mal, valamint felhasználva a Descartes és homogén koordinátákközötti kapcsolatot (x = x1/x3, y = x2/x3):
x′ =a11x + a12y + a13
a31x + a32y + a33
.
Hasonlóan:y′ =
a21x + a22y + a23
a31x + a32y + a33
.
A fenti eljárásnak természetesen nincs értelme, hax3 = 0 vagya31x1 + a32x2 + a33x3 = 0. Tehátminden projektív transzformáció az euklidészi síkon Descartes koordinátákkal megadható, mintlineáris tört transzformáció közös nevezovel.
Megjegyezzük, hogy más dimenzióban a projektív transzformációk leírása analóg,
PGl(n) ∼= Gl(n + 1)/H(n).
4. Centrális kollineáció
A következoekben egy egyszeru geometriai példát adunk projektív transzformációra.
Definíció. Ha egy projektív transzformációnak van egy pontonként fix egyenese, akkor aztcent-rális kollineációnak nevezzük, a pontonként fix egyenest pedigtengelynek.
A továbbiakban feltesszük, hogy a centrális kollineáció nem identitás.
12. Tétel. Centrális kollineációnál az egymásnak megfelelo egyenesek a tengelyen metszik egy-mást, a megfelelo pontokat összeköto egyenesek egy pontban metszik egymást. (A centrális kolli-neáció centruma.)
Bizonyítás: Az elso állítás nyilvánvaló, mert a tengely pontjai pontonként fixek.A második állítás Desargues-tétel következménye. LegyenekA,A′; B,B′; C,C ′ megfelelo
pontok. AzABC4 ésA′B′C ′4 háromszögekre alkalmazható a Desargues tétel: a megfelelooldalaik metszéspontjai egy egyenesre illeszkednek, tehát a megfelelo csúcsokra illeszkedo egye-nesek egy pontra illeszkednek.
11
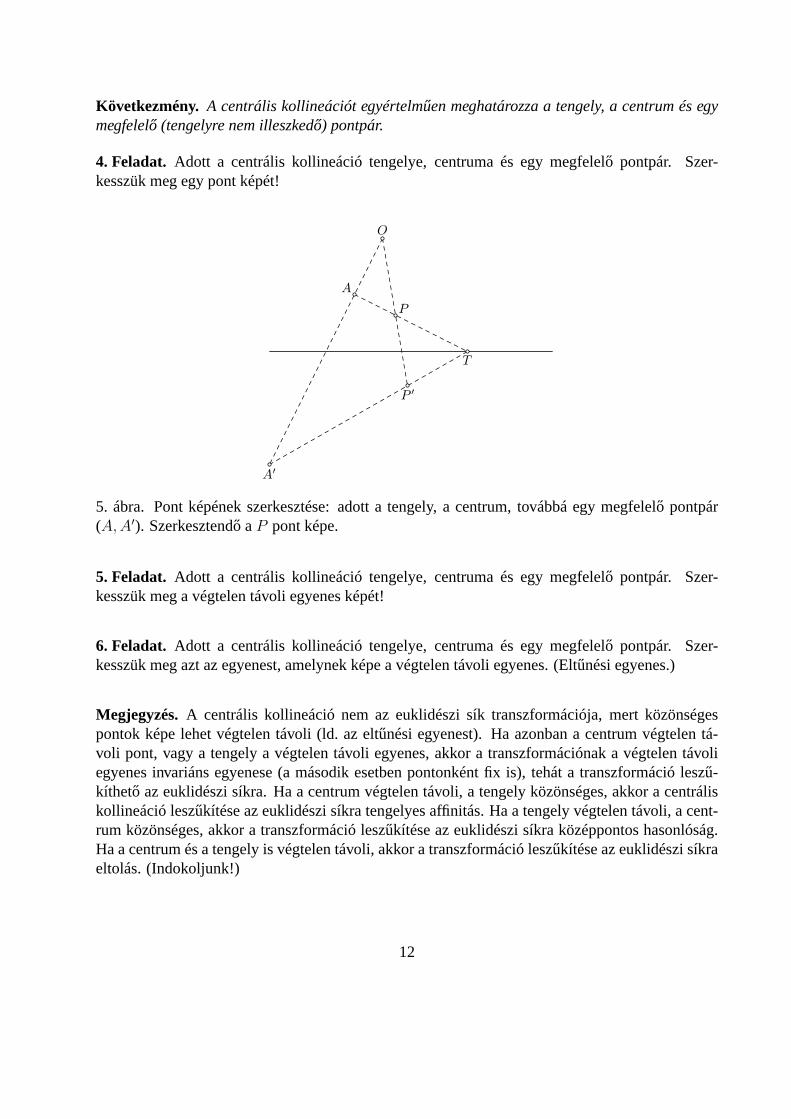
Következmény. A centrális kollineációt egyértelmuen meghatározza a tengely, a centrum és egymegfelelo (tengelyre nem illeszkedo) pontpár.
4. Feladat. Adott a centrális kollineáció tengelye, centruma és egy megfelelo pontpár. Szer-kesszük meg egy pont képét!
A′
P ′
O
T
A
P
5. ábra. Pont képének szerkesztése: adott a tengely, a centrum, továbbá egy megfelelo pontpár(A,A′). Szerkesztendo aP pont képe.
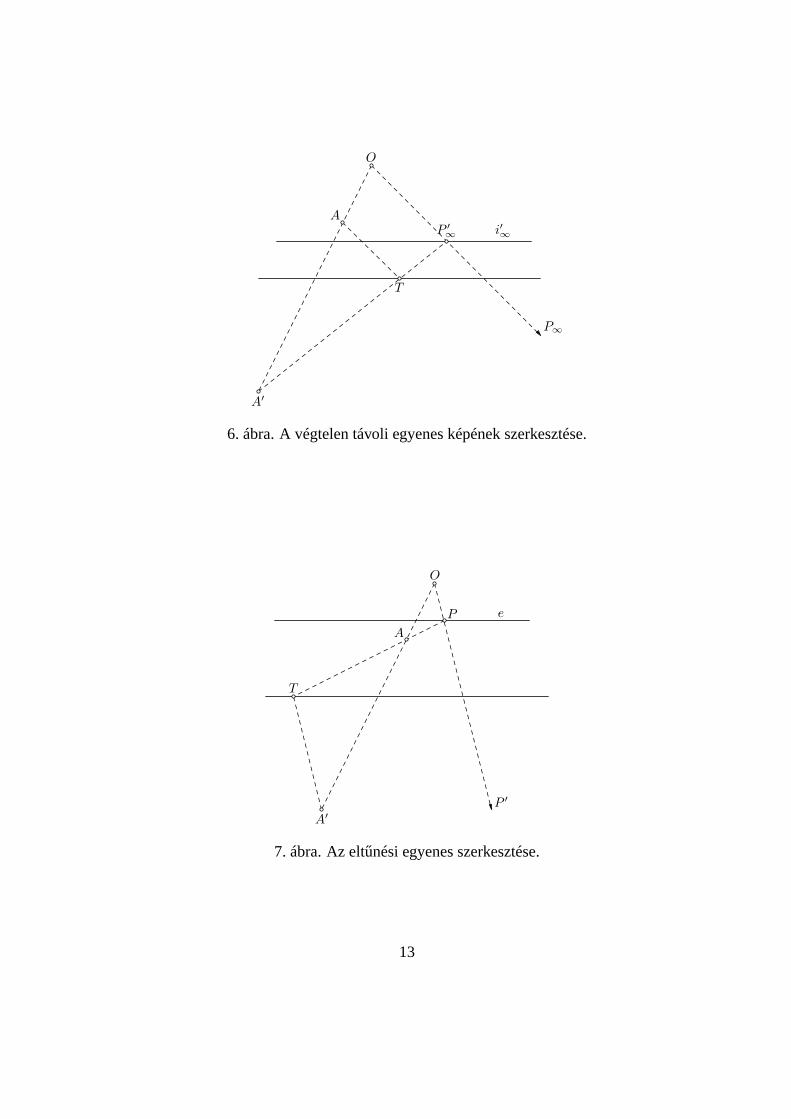
5. Feladat. Adott a centrális kollineáció tengelye, centruma és egy megfelelo pontpár. Szer-kesszük meg a végtelen távoli egyenes képét!
6. Feladat. Adott a centrális kollineáció tengelye, centruma és egy megfelelo pontpár. Szer-kesszük meg azt az egyenest, amelynek képe a végtelen távoli egyenes. (Eltunési egyenes.)
Megjegyzés.A centrális kollineáció nem az euklidészi sík transzformációja, mert közönségespontok képe lehet végtelen távoli (ld. az eltunési egyenest). Ha azonban a centrum végtelen tá-voli pont, vagy a tengely a végtelen távoli egyenes, akkor a transzformációnak a végtelen távoliegyenes invariáns egyenese (a második esetben pontonként fix is), tehát a transzformáció leszu-kítheto az euklidészi síkra. Ha a centrum végtelen távoli, a tengely közönséges, akkor a centráliskollineáció leszukítése az euklidészi síkra tengelyes affinitás. Ha a tengely végtelen távoli, a cent-rum közönséges, akkor a transzformáció leszukítése az euklidészi síkra középpontos hasonlóság.Ha a centrum és a tengely is végtelen távoli, akkor a transzformáció leszukítése az euklidészi síkraeltolás. (Indokoljunk!)
12
A′
P ′∞
O
T
A
P∞
i′∞
6. ábra. A végtelen távoli egyenes képének szerkesztése.
A′P ′
O
T
A
P e
7. ábra. Az eltunési egyenes szerkesztése.
13

5. A geomertriai transzformációk hierarchiája
Definíció. Egy projektív transzformációt a projektív síkonaffin-projektívnak nevezünk, ha mindenvégtelen távoli pont képe végtelen távoli pont. A projektív sík affin-projektív transzformációicsoportjátAffPGl(2) jelöli.
14. Tétel. Az affin-projektív transzformációk mátrixa a következo alakú:
a11 a12 a13
a21 a22 a23
0 0 a33
,
ahol
a33 6= 0,
∣∣∣∣a11 a12
a21 a22
∣∣∣∣ 6= 0.
Bizonyítás: Legyen(aij) ∈ Gl(3).
a11 a12 a13
a21 a22 a23
a31 a32 a33
αβ0
=
∗∗
a31α + a32β
.
Ha minden végtelen távoli pont képe végtelen távoli pont, akkor mindenα, β valós számra:
a31α + a32β = 0.
Ez csak úgy teljesülhet, haa31 = a32 = 0. AzazAffPGl(2) egy eleme:
k ·
a11 a12 a13
a21 a22 a23
0 0 a33
k 6= 0
alakú, aholdet(aij) 6= 0 is teljesül. Ez utóbbi feltétel:∣∣∣∣∣∣
a11 a12 a13
a21 a22 a23
0 0 a33
∣∣∣∣∣∣= a33 ·
∣∣∣∣a11 a12
a21 a22
∣∣∣∣ 6= 0,
tehát
a33 6= 0,
∣∣∣∣a11 a12
a21 a22
∣∣∣∣ 6= 0.
15. Tétel. A projektív sík affin-projektív transzformációi csoportja izomorf az euklidészi sík affintranszformációi csoportjával:AffPGl(2) ∼= Aff(2).
14

Bizonyítás: Az
x′1 = a11x1 + a12x2 + a13x3
x′2 = a21x1 + a22x2 + a23x3
x′3 = a33x3
affin projektív transzformációhoz rendeljük hozzá az
x′ =a11
a33
x +a12
a33
y +a13
a33
y′ =a21
a33
x +a22
a33
y +a23
a33
affin transzformációt. (Valóban affin transzformációt adtunk meg, mert∣∣∣∣a11/a33 a12/a33
a21/a33 a21/a33
∣∣∣∣ =1
(a33)2·∣∣∣∣a11 a12
a21 a22
∣∣∣∣ 6= 0.)
Az elobbi hozzárendelésAffPGl(2) ésAff(2) között injektív. Ugyanis, ha
1
a33
(a11 a12 a13
a21 a22 a23
)=
1
a′33
(a′11 a′12 a′13
a′21 a′22 a′23
),
akkor
a′ij =a′33
a33
aij, i = 1, 2; j = 1, 2, 3,
tehát
(a′ij) =a′33
a33
(aij).
(a′ij) és (aij) csak konstans szorzóban különböznek, tehát ugyanazt a projektív transzformációtírják le.
A megadott hozzárendelés szürjektív. Legyen ugyanis
x′ = a11x + a12y + a13
y′ = a21x + a22y + a23
affin transzformáció az euklidészi síkon, (a11a22 − a12a21 6= 0). Ennekosképe nyilvánvalóan:
x′1 = a11x1 + a12x2 + a13x3
x′2 = a21x1 + a22x2 + a23x3
x′3 = x3
A muvelettartást mátrixszorzással ellenorizzük önállóan!
A fenti izomorfizmussal a sík eddigiekben tanult geometriai transzformációcsoportjait beazo-nosíthatjuk a projektív sík egy-egy transzformációcsoportjával:
15
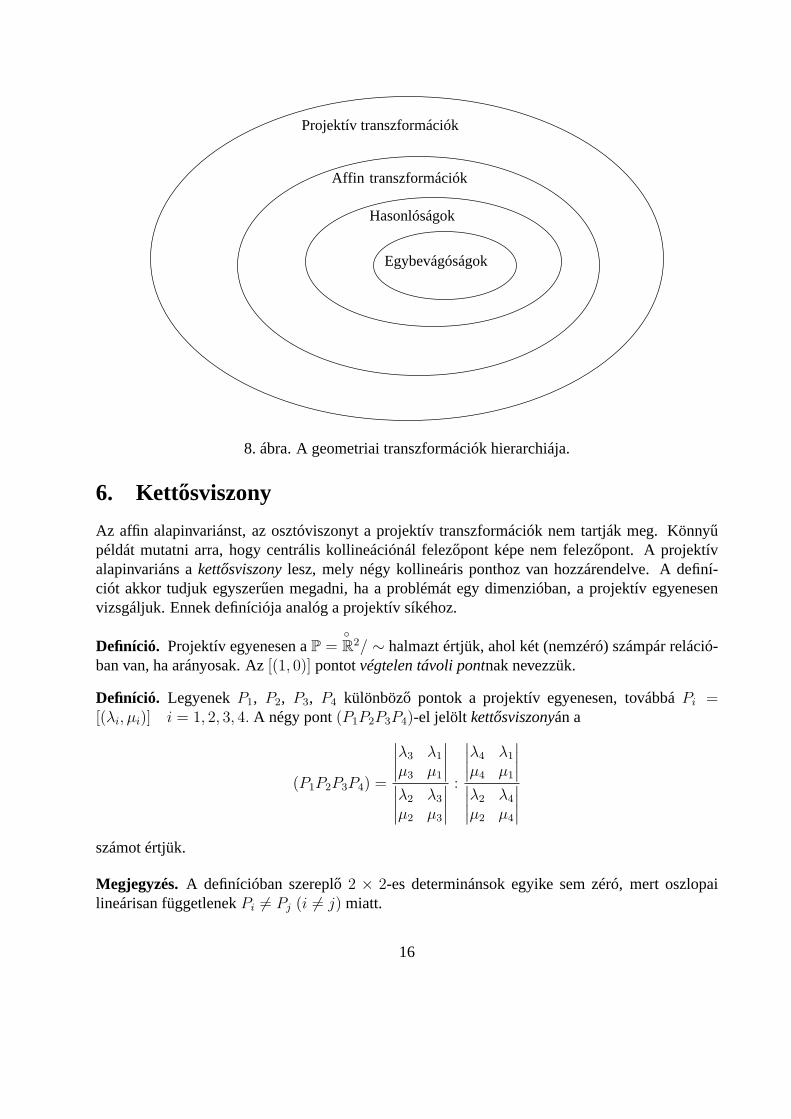
Affin
Projektív transzformációk
transzformációk
Hasonlóságok
Egybevágóságok
8. ábra. A geometriai transzformációk hierarchiája.
6. Kettosviszony
Az affin alapinvariánst, az osztóviszonyt a projektív transzformációk nem tartják meg. Könnyupéldát mutatni arra, hogy centrális kollineációnál felezopont képe nem felezopont. A projektívalapinvariáns akettosviszonylesz, mely négy kollineáris ponthoz van hozzárendelve. A definí-ciót akkor tudjuk egyszeruen megadni, ha a problémát egy dimenzióban, a projektív egyenesenvizsgáljuk. Ennek definíciója analóg a projektív síkéhoz.
Definíció. Projektív egyenesen aP =◦R2/ ∼ halmazt értjük, ahol két (nemzéró) számpár reláció-
ban van, ha arányosak. Az[(1, 0)] pontotvégtelen távoli pontnak nevezzük.
Definíció. LegyenekP1, P2, P3, P4 különbözo pontok a projektív egyenesen, továbbáPi =[(λi, µi)] i = 1, 2, 3, 4. A négy pont(P1P2P3P4)-el jelölt kettosviszonyán a
(P1P2P3P4) =
∣∣∣∣λ3 λ1
µ3 µ1
∣∣∣∣∣∣∣∣λ2 λ3
µ2 µ3
∣∣∣∣:
∣∣∣∣λ4 λ1
µ4 µ1
∣∣∣∣∣∣∣∣λ2 λ4
µ2 µ4
∣∣∣∣
számot értjük.
Megjegyzés.A definícióban szereplo 2 × 2-es determinánsok egyike sem zéró, mert oszlopailineárisan függetlenekPi 6= Pj (i 6= j) miatt.
16

Az is könnyen látható, hogy a definíció független a pontok reprezentánsainak választásától.Jelöljük ugyanis a(λi, µi)
t oszlopotpi-vel és legyenekki 6= 0 valós számok. Ekkor
(P1P2P3P4) =
∣∣k3 · p3, k1 · p1
∣∣∣∣k2 · p2, k3 · p3
∣∣ ·∣∣k2 · p2, k4 · p4
∣∣∣∣k4 · p4, k1 · p1
∣∣ =
=k3k1
∣∣p3, p1
∣∣k2k3
∣∣p2, p3
∣∣ ·k2k4
∣∣p2, p4
∣∣k4k1
∣∣p4, p1
∣∣ =
=
∣∣p3, p1
∣∣∣∣p2, p3
∣∣ ·∣∣p2, p4
∣∣∣∣p4, p1
∣∣ .
A következoekben a kettosviszony kiszámítását visszavezetjük osztóviszonyok hányadosánakkiszámítására, (ha mind a négy pont közönséges) vagy osztóviszonyra (ha van a pontok közöttvégtelen távoli). Ez utóbbi esetben eloször azt az esetet vizsgáljuk, amikor a negyedik pont vég-telen távoli, majd megadjuk, hogy a pontok (bizonyos) permutálásával hogyan változik meg akettosviszony érteke.
16. Tétel. Ha P1, P2, P3, P4 négy különbözo közönséges pont a projektív egyenesen, akkor
(P1P2P3P4) =(P1P2P3)
(P1P2P4);
haP1, P2, P3 különbözo közönséges pontok,P4 végtelen távoli, akkor
(P1P2P3P4) = −(P1P2P3).
Bizonyítás: Legyen eloszörPi = [(λi, 1)], (i = 1, 2, 3, 4).
(P1P2P3P4) =
∣∣∣∣λ3 λ1
1 1
∣∣∣∣∣∣∣∣λ2 λ3
1 1
∣∣∣∣:
∣∣∣∣λ4 λ1
1 1
∣∣∣∣∣∣∣∣λ2 λ4
1 1
∣∣∣∣=
λ3 − λ1
λ2 − λ3
:λ4 − λ1
λ2 − λ4
=(P1P2P3)
(P1P2P4).
Másodjára,Pi = [(λi, 1)], (i = 1, 2, 3), P4 = [(1, 0)].
(P1P2P3P4) =
∣∣∣∣λ3 λ1
1 1
∣∣∣∣∣∣∣∣λ2 λ3
1 1
∣∣∣∣:
∣∣∣∣1 λ1
0 1
∣∣∣∣∣∣∣∣λ2 11 0
∣∣∣∣=
λ3 − λ1
λ2 − λ3
:1
−1= −(P1P2P3).
17. Tétel.
(P1P2P3P4) =1
(P2P1P3P4)=
1
(P1P2P4P3)=
= (P3P4P1P2) =1
P3P4P2P1
=1
P4P3P1P2
.
17
Bizonyítás: Helyettesítsünk be a definícióba, s alkalmazzuk a determinánsfüggvény azon tulaj-donságát, hogy oszlopcserekor elojelet vált.
18. Tétel. A kettosviszony projektív transzformációkkal szemben invariáns.
Bizonyítás: A projektív egyenes egy projektív transzformációját adjuk meg a következoképpen.
LegyenC ∈ Gl(2), (azaz2 × 2-es nem zéró determinánsú mátrix).X ∈ P1, X = [x], (x ∈◦R2).
EkkorX ′ = [Cx]. LegyenPi = [pi], aholpi ∈◦R2. Vegyük észre, hogy|Cpi, Cpj| = |C·(pi, pj)| =
det C · |pi, pj|, a determinánsok szorzástétele miatt. Tehát:
(P ′1P
′2P
′3P
′4) =
|Cp3, Cp1||Cp2, Cp3| :
|Cp4, Cp1||Cp2, Cp4| =
det C · |p3, p1|det C · |p2, p3| :
det C · |p4, p1|det C · |p2, p4| =
|p3, p1||p2, p3| :
|p4, p1||p2, p4| == (P1P2P3P4).
Következmény. Az affin-projektív transzformációk megorzik az osztóviszonyt.
7. Kúpszeletek projektív osztályozása
Lineáris algebrai tanulmányainkból ismerjük a másodrendu görbe fogalmát. Egy másodrendugörbe egyenleteR2-ben
a11x2 + 2a12xy + a22y
2 + 2a13x + 2a23y + a33 = 0,
ahol aza11, a12, a22 együtthatók egyszerre nem nullák. A másodrendu görbék euklideszi osztá-lyozásánál két másodrendu görbe akkor tartozik egy osztályba, ha izometriával egyik a másikbaátviheto. Analitikusan ez azt jelenti, hogy
x′ = cos αx∓ sin αy + c1
y′ = sin αx± cos αy + c2
alakú transzformációval elérheto, hogy a két másodrendu görbe azonos egyenletu legyen. Tudjuk,hogy az osztályok száma itt végtelen, (9 nagyobb csoport).
A másodrendu görbék affin osztályozásánál két másodrendu görbe akkor tartozik ugyanabbaaz osztályba, ha affin transzformációval egyik a másikba átviheto. Analitikusan ez az
x′ = a11x + a12y + c1
y′ = a21x + a22y + c2
alakú transzformációkat engedi meg, ahol az(aij) matrix reguláris. Ekkor az osztályok száma 9(ellipszis, parabola, hiperbola, üreshalmaz (képzetes ellipszis), üreshalmaz (képzetes párhuzamosegyenespár), pont, egybeeso egyenespár, párhuzamos egyenespár, metszo egyenespár).
18

Végezetül a projektív osztályozásnál azt vizsgáljuk, hogy projektív transzformációval mikorviheto két másodrendu görbe egymásba. Ezt a kérdést azonban nem az euklideszi, hanem a pro-jektív síkon érdemes vizsgálni, a másodrendu görbéket pedig esetleg végtelen távoli pontokkalbovíteni. A másodrendu görbék elobbi képletébe írjuk be az
x =x1
x3
, y =x2
x3
kifejezéseket, majd szorozzunkx23-tel. Az így kapott egyenletet már végtelen távoli pontok koor-
dinátái is kielégíthetik, a végtelen távoli ponttól vagy pontoktól eltekintve pedig az euklideszi síkmár megismert másodrendu görbéit kapjuk. Ezek után természetes az alábbi definíció:
Definíció. Másodrendu görbéna projektív síkon egy
q =
{[(x1, x2, x3)] |
3∑i,j=1
aikxixk = 0
}
halmazt értünk, ahol az
A =
a11 a12 a13
a21 a22 a23
a31 a32 a33
mátrix szimmetrikus, és benne nem minden elem nulla.
A másodrendu görbe egyenletét mátrixalakban is egyszeruen megadhatjuk:
[p] ∈ q ⇐⇒ pt · A · p = 0 p ∈M3×1.
20. Tétel. Egy projektív transzformáció másodrendu görbét másodrendu görbébe visz át.
Bizonyítás: LegyenT ∈ Gl(3), a projektív transzformáció pedig[p] 7→ [T · p]. JelöljeT inverzétS.
[p] ∈ q′ ⇐⇒ [S · p] ∈ q ⇐⇒ (S · p)t · A · (S · p) = 0 ⇐⇒ pt · (St · A · S) · p = 0.
(St · A · S) ismét egy szimmetrikus mátrix, mely rangja megegyezikA rangjával.
Definíció. Két másodrendu görbétprojektív ekvivalensnek mondunk, ha egyik a másikba projektívtranszformációval átviheto. (Ez ekvivalenciareláció.)
21. Tétel. (A másodrendu görbék projektív osztályozása.)Minden másodrendu görbe projek-tív ekvivalens az alábbi másodrendu görbék valamelyikével:
Elfajuló másodrendu görbék: egyenespárok
x21 = 0 valós kettos egyenespár
x21 + x2
2 = 0 képzetes metszo egyenespár (pont)
x12 − x2
2 = 0 valós metszo egyenespár
19
Nem elfajuló másodrendu görbék: körök
x21 + x2
2 + x23 = 0 képzetes kör (üreshalmaz)
x21 + x2
2 − x23 = 0. valós kör
Azaz a másodrendu görbéknek 5 projektív osztálya van.
Bizonyítás: A probléma jól ismert a lineáris algebrából: azA szimmetrikus négyzetes mátrixhozmindig létezik olyanS reguláris mátrix, hogy(St · A · S) diagonális, a foátlóban0,±1 együttha-tókkal (kvadratikus formák négyzetösszegre transzformálása).
A következoekben a nem elfajuló másodrendu görbék néhány tulajdonságát fogalmazzuk meg.
Definíció. A nem elfajuló valós másodrendu görbebelsejeilletve külsejeaz
x21 + x2
2 − x23 < 0 ill. x2
1 + x22 − x2
3 > 0
egyenletu ponthalmaz.
A nem elfajuló valós másodrendu görbe a projektív sík rá nem illeszkedo pontjait két osztálybasorolja, a külsejébe ill. a belsejébe.
22. Tétel. Egy nem elfajuló valós másodrendu görbének és egy egyenesnek legfeljebb két közöspontja van. Ha az egyenes belso pontra illeszkedik, akkor pontosan 2.
Bizonyítás: Legyen az egyenes egyenlete:Ax1 + Bx2 + Cx3 = 0, ahol az együtthatók közöttvan nullától különbözo, pl. C. Ekkor az egyenest a paraméteres alakban a következoképpen lehetmegadni:
x1 = u
x2 = v
x3 = −A
Cu− B
Cv,
ahol u ésv egyszerre nem nulla, egyébként tetszoleges valósak. Írjuk be ezeket a formulákat avalós, nem elfajuló másodrendu görbe egyenletébe:
u2
(1− A2
C2
)+ v2
(1− B2
C2
)− 2AB
C2uv = 0.
v 6= 0, mert ellenkezo esetbenu = 0 is következne, ami nem lehet. Oszthatunk tehátv2-el:
(u
v
)2(
1− A2
C2
)− 2AB
C2
u
v+
(1− B2
C2
)= 0.
A kapott egyenletu/v-re másodfokú, azaz legfeljebb két megoldása van. A metszéspontok számais legfeljebb 2.
A második állítás bizonyításakor azt kellene ellenorizni, hogy a feltételek mellett a kapott má-sodfokú egyenlet diszkriminánsa pozitív.
20

Mivel az elfajuló valós másodrendu görbék (esetleg egybeeso) egyenespárok, ezért kimondhat-juk az elozo tétel alábbi következményét:
23. Tétel. Egy nem elfajuló valós és egy elfajuló valós másodrendu görbe metszéspontjainak számalegfeljebb 4.
Végezetül a két nem elfajuló valós görbe esete:
24. Tétel. Két nem elfajuló valós másodrendu görbe metszéspontjainak száma legfeljebb 4.
Bizonyítás: Eloször projektív transzformációval az egyik másodrendu görbét transzformáljuk azx2
1 + x22 − x2
3 = 0 görbébe, majd tekintsük az alábbi transzformációt:
x′1 = x3 − x1
x′2 = x2
x′3 = x3 + x1.
A transzformáció matrixának determinánsa
det
−1 0 10 1 01 0 1
= −1 6= 0,
azaz ez a transzformáció projektív transzformáció. A transzformált görbe egyenletex22 = x1x3.
Paraméterezzük ezt a görbét az alábbi módon:
x1 = u2
x2 = uv
x3 = v2,
ahol engedjünk meg komplex paramétereket is (ígyx1 ésx3 negatívak is lehetnek). Az elobbikifejezéseket helyettesítsük be a másik görbe (nem feltétlenül kanonikus) egyenletébe. Egy ne-gyedfokú, kétváltozós homogén polinomot kapunk. Osszunkv4-el, ekkoru/v-re egy negyedfokúegyenletet kapunk, mely gyökei száma legfeljebb 4. (A komplex gyökök száma multiplicitássalegyütt 4, azaz a valós gyökök száma legfeljebb 4.)
Összefoglalva:
25. Tétel. Ha két valós másodrendu görbe metszete nem tartalmaz egyenest, akkor a közös pontokszáma legfeljebb 4.
26. Tétel. Ha adott 5 olyan pont, hogy közöttük nincs kollineáris pontnégyes, akkor pontosan 1valós másodrendu görbe van amely illeszkedik az 5 pontra.
21
Bizonyítás: Az, hogy egynél több ilyen másodrendu görbe nincs, következik az elozoekbol. Be-látjuk, hogy legalább 1 másodrendu görbe illeszkedik az 5 pontra. A másodrendu görbe homogénkoordinátás egyenletében 6 konstans van:
a11x21 + 2a12x1x2 + 2a13x1x3 + a22x
22 + a23x2x3 + a33x
23 = 0.
Helyettesítsük be a megadott 5 pont homogén koordinátáit az elobbi egyenletbe, a 6 konstansra,mint 6 ismeretlenre 5 egyenletet kapunk, azaz egy 6 ismeretlenes 5 egyenletes homogén lineárisegyenletrendszert. Az ilyen típusú egyenletrendszernek azonban van triviálistól különbözo megol-dása: a megoldáshalmaz legalább 1 dimenziós altér.
A másodrendu görbe és egyenes kölcsönös helyzetének egy érdekes speciális esetét vizsgáljukmeg: határozzuk meg azx2
1 + x22 + εx2
3 = 0 (ε = 0,±1) másodrendu görbe és a végtelen távoliegyenes metszéspontjait. A metszéspontokra teljesül, hogyx2
1 + x22 = 0, vagyis valós megoldást
nem kapunk. Komplex koordinátákat is megengedve azI = [(1, i, 0)] és aJ = [(1,−i, 0)]pontokat kapjuk megoldásként.
Definíció. Az I = [(1, i, 0)] és aJ = [(1,−i, 0)] pontokatabszolút képzetes körpontoknak ne-vezzük.
Az elnevezés azt a tényt fejezi ki, hogy az abszolút képzetes körpontok minden körre illeszkednek,azaz(1, i, 0) és(1,−i, 0) minden kör (homogén koordinátákkal felírt) egyenletét kielégítik.
8. A geometriák projektív nézopontból
Legyenq a projektív sík egy rögzített részhalmaza,T ⊂ PGl(2) pedig mindazon projektív transz-formációk részcsoportja, melyekq-t invariánsan hagyják:
φ ∈ T ⇐⇒ φ(q) = q.
Felix Klein az ún.Erlangeni programbana különbözo geometriákat mint egy(q, T ) párt definiálta.A korábbiakban már láttuk, hogy haq megegyezik azi végtelen távoli egyenessel,T pedig azaffin projektív transzformációk csoportja, akkor(i,AffPGl(2)) az affin geometriát adja. Ennekmetrikus invariánsa az osztóviszony.
A továbbiakban a projektív transzformációcsoport további nevezetes részcsoportjait írjuk le,mindegyikben megadva egy-egy metrikus invariánst.
Definíció. Legyenq azx21 +x2
2−x23 = 0 egyenletu nem elfajuló valós másodrendu görbe a projek-
tív síkon. Azon projektív transzformációk halmazát, melyekq-t invariánsan hagyják, a projektívtranszformációcsoporthiperbolikus részcsoportjának nevezzük.
Legyenq azx21 + x2
2 + x23 = 0 egyenletu nem elfajuló képzetes másodrendu görbét a projek-
tív síkon. Azon projektív transzformációk halmazát, melyekq-t invariánsan hagyják a projektívtranszformációcsoportelliptikus részcsoportjának nevezzük.
Legyenq = {I,J } (I,J az abszolút képzetes körpontok). Azon projektív transzformációkhalmazát, melyek aq halmazt invariánsan hagyják a projektív transzformációcsoportKlein-félerészcsoportjának nevezzük.
22

8.1. A Klein-féle részcsoport
27. Tétel. A Klein féle részcsoport az affin-projektív csoport részcsoportja.
Bizonyítás: Azt kell belátni, hogy a Klein féle részcsoport bármely eleme a végtelen távoli egye-nest invariánsan hagyja. Ez azonban igaz, hisz az abszolút képzetes körpontok rajta vannak avégtelen távoli egyenesen (a koordinátáik kielégítik azx3 = 0 egyenletet).
28. Tétel. A Klein-féle részcsoport tetszoleges elemeT , ahol:
T =
cos α ∓ sin α t13
sin α ± cos α t23
0 0 t33
,
azaz a Klein féle részcsoport elemei a hasonlósági transzformációk.
Bizonyítás: Behelyettesítéssel ellenorizheto, hogy a megadott transzformációk valóban a Klein-csoport elemei:
cos α ∓ sin α t13
sin α ± cos α t23
0 0 t33
·
1i0
= (cos α∓ i sin α)
1±i0
;
hasonlóanJ -re.Azt kell belátni, hogy a Klein-csoport minden eleme a tételben megadott alakú. Azt már tisz-
táztuk, hogy a Klein-féle részcsoport elemei affin-projektív transzformációk. Ezt kihasználva:
t11 t12 t13
t21 t22 t23
0 0 t31
·
1i0
=
t11 + it12
t21 + it22
0
.
Ha a transzformációnálI 7→ I, akkor
t21 + it22
t11 + it12
= i
t21 + it22 = −t12 + it11,
a képzetes és a valós rész összehasonlításából:
t21 = −t12, t22 = t11.
Tehát aT mátrix a következo alakú:
T =
t11 t12 t13
−t12 t11 t23
0 0 t33
.
23

Legyenk =√
t211 + t212 6= 0. k-t mindegyik mátrixelembol kiemelve:
T =1
k
t11/k t12/k t13/k−t12/k t11/k t23/k
0 0 t33/k
.
A jobb felso 2× 2-es részmátrix+1 determinánsú ortogonális mátrix, azaz(
cos α − sin αsin α cos α
)
alakú valamelyα számra. Ez a tételben megadott egyik alak.Ha I 7→ J , akkor ugyanígy járunk el, de a bal felso 2 × 2-es részmátrix−1 determinánsú
ortogonális mátrix lesz, s ebbol a tételben megadott másik alak következik.
Következmény. Egy projektív transzformáció akkor és csakis akkor hasonlóság, ha az abszolútképzetes körpontok halmaza invariáns.
Úgy is fogalmazhatunk, hogy a Klein-féle geometria az euklidészi geometria, hiszen az euklidészigeometriában általában az alakzatok azon tulajdonságai „fontosak”, melyek hasonlósági transz-formációval szemben invariánsak. (A távolság az egység megválasztásától függ, de a távolságokaránya már attól független.)
8.2. A hiperbolikus részcsoport
A projektív transzformációknak általános invariánsa a kettosviszony. Ez 4 ponttal kapcsolatosfogalom. A hiperbolikus részcsoportnak van olyan invariánsa, amely pontpárokhoz van rendelve.
30. Tétel. Legyenq azx21 + x2
2 − x23 = 0 másodrendu görbe. Ha egy projektív transzformációq-t
invariánsan hagyja, akkorq belseje is invariáns.
Bizonyítás: —
31. Tétel. Vegyünk fel aq belsejében két pontot,P -t ésQ-t. A←−→PQ metszéspontjaiq-val legyenek
U ésV . A d(P,Q) = | log(PQUV )| kifejezés függetlenU ésV sorrendjétol, továbbád(P, Q)-tegy tetszoleges hiperbolikus transzformáció megorzi.
Bizonyítás: A feltételek mellett a kettosviszony érték pozitív, lehet a logaritmusát képezni. Mivel(PQUV ) = 1/(PQV U) ezért log(PQUV ), log(PQV U) csak elojelben különböznek, vagyismind a két kifejezés abszolút értéke megegyezik. Az utolsó állítás nyilvánvaló, mert a hiperbolikustranszformáció projektív transzformáció, tehát kettosviszonytartó.
Definíció. Legyen
d : int q × int q → R, d(P,Q) =
{0 haP = Q
| log(PQUV )| haP 6= Q.
32. Tétel. (int q, d) metrikus tér.
Bizonyítás: —
24

8.3. Az elliptikus részcsoport
Vázlatosan tárgyaljuk az elliptikus részcsoportot. A pontos leíráshoz komplex függvénytani is-meretek is kellenek (nevezetesen a komplex exponenciális és logaritmus függvény és tulajdonsá-gai). A hiperbolikus részcsoportnál megismert felépítést analóg módon el lehet végezni, de közbenkomplex homogén koordináták is elofordulnak, továbbá a komplex logaritmus függvényt kell al-kalmazni. A fo cél az, hogy megadjunk itt is egy pontpárokhoz rendelheto invariánst, ami betölti atávolságfüggvény szerepét.
Legyen tehátq azx21 + x2
2 + x23 = 0 nem elfajuló képzetes kör,P ésQ két pont a projektív
síkon. Határozzuk meg a←−→PQ ésq metszéspontjait: azaz keressük meg a
←−→PQ ésq egyenletébol
álló egyenletrendszer nem triviális megoldásait:
u1x1 + u2x2 + u3x3 = 0
x21 + x2
2 + x23 = 0.
Bár az egyenletrendszerben minden együttható valós, csak komplex megoldásokat kapunk, mul-tiplicitással együtt kettot. Jelöljük ezeket a pontokatU -val ésV -vel (ezek tehát komplex koordiná-tájú pontok.) A kettosviszonyt definiáló képletbe behelyettesítve a koordinátákat kiszámolhatjuk(PQUV )-t, tehát ennek a kettosviszonynak van értelme.
33. Tétel. Legyenq az origó középpontú képzetes egységkör,P Q két tetszoleges pont a projektív
síkon. A←−→PQ és q (komplex) metszéspontjait jelöljeU és V . A (PQUV ) kettosviszonyérték
abszolút értéke 1, azaz egyértelmuen létezik olyanϕ ∈ [−π, π), hogy
(PQUV ) = cos ϕ + i sin ϕ = exp(iϕ).
A d(P, Q) = |ϕ| = | log(PQUV )| kifejezés metrikát definiál a projektív síkon (ad(P, P ) = 0kiegészítéssel.) Ezt a távolságot az elliptikus részcsoport elemei megorzik.
25
9. A hiperbolikus sík projektív modellje
9.1. A pólus-poláris kapcsolat
Definíció. Legyenq a∑3
i,j=1 aijxixj = 0 egyenletu nem elfajuló kúpszelet. Azt mondjuk, hogy
[u] = [(u1, u2, u3)] ∈ P2 és[v] = [(v1, v2, v3)] ∈ P2 konjugáltakq-ra nézve, ha∑3
i,j=1 aijuivj = 0(azaz〈u,Av〉 = 0) teljesül.
Megjegyzés.A q nem elfajuló kúpszelet ezek szerint azon pontok halmaza, melyekq-ra nézveönmagukhoz konjugáltak.
34. Tétel. A konjugáltság szimmetrikus reláció.
Bizonyítás: A szimmetrikus (önadjungált), tehát
∀u, v ∈◦R3 : 〈v, Au〉 = 〈Au, v〉 = 〈u,Av〉 = 0.
35. Tétel. A konjugáltság projektív transzformációval szemben invariáns reláció.
Bizonyítás: Teljesüljön, hogy〈u,Av〉 = 0, legyenT ∈ Gl(3), inverzeS.⟨Tu, StASTv
⟩=
⟨u, T tStASTv
⟩=
⟨u, (ST )tA(ST )v
⟩= 〈u,Av〉 = 0.
Definíció. Egy rögzítettP ponthoz konjugált pontok halmazát aP polárisánaknevezzük, melynekpólusaP .
36. Tétel. Az [u] pont polárisa az[Au] egyenesre illeszkedo pontsor.
Bizonyítás: A rögzített [u] ponthoz konjugált pontok halmaza:{ v | 〈Au, v〉 = 0 }, amely azilleszkedés definíciója miatt valóban azAu egyenesre illeszkedo pontsor.
1. Példa. Legyenq azx21 +x2
2−x23 = 0 egyenletu kör. Egy külso pont polárisa a pontból a körhöz
húzott érintok érintési pontjait összeköto pontsor. A körvonal egy pontjának polárisa a kör adottpontbeli érintoje. (9. ábra.)
37. Tétel. Egy [u] pont polárisa akkor és csakis akkor tartalmazza a[v] pontot, ha a[v] pontpolárisa tartalmazza az[u] pontot.
Bizonyítás: A [v] akkor és csakis akkor van rajta az[u] polárisán, ha〈v, Au〉 = 0 ⇐⇒ 〈Av, u〉 =0, ami akkor és csakis akkor teljesül, ha[u] rajta van a[v] polárisán. (10. ábra.)
26
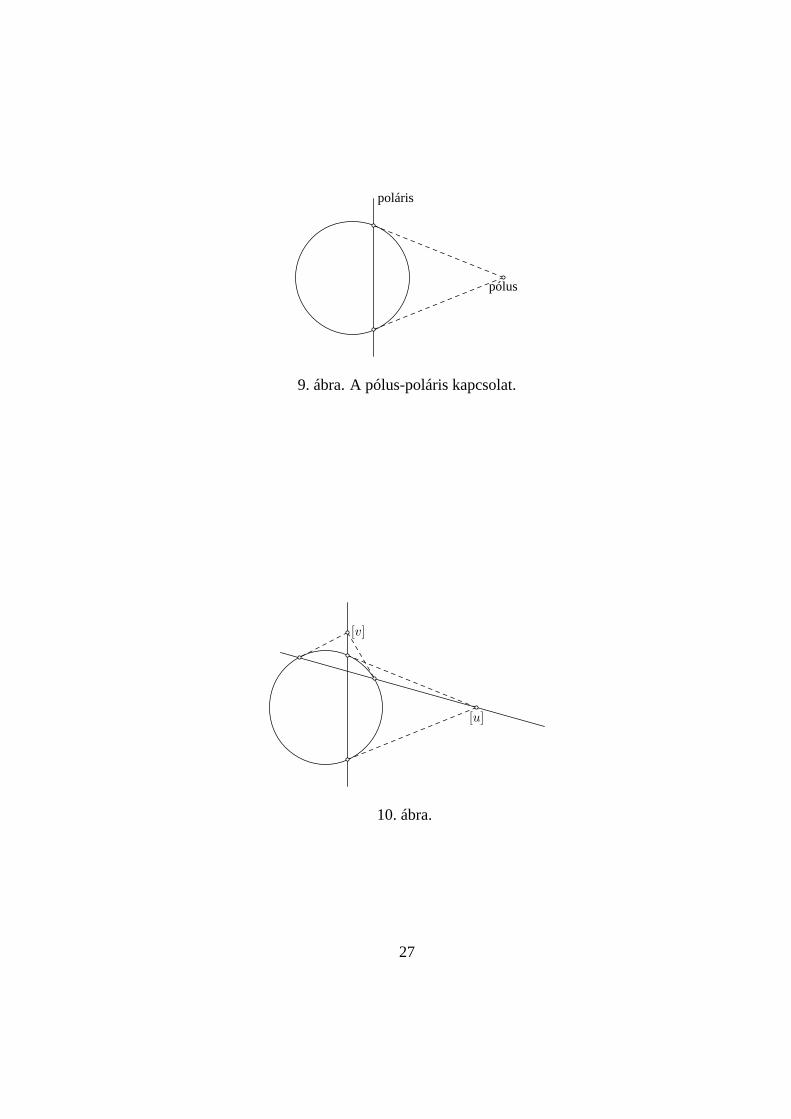
pólus
poláris
9. ábra. A pólus-poláris kapcsolat.
[u]
[v]
10. ábra.
27
9.2. A Cayley - Klein modell
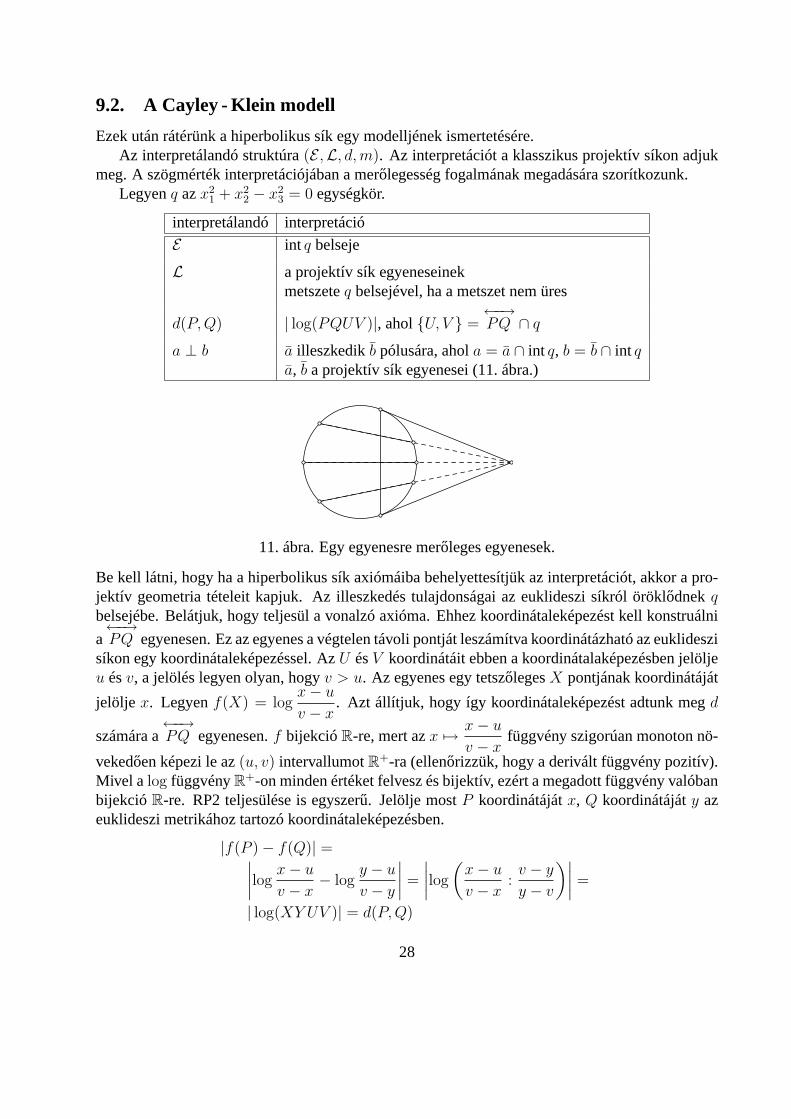
Ezek után rátérünk a hiperbolikus sík egy modelljének ismertetésére.Az interpretálandó struktúra(E ,L, d, m). Az interpretációt a klasszikus projektív síkon adjuk
meg. A szögmérték interpretációjában a merolegesség fogalmának megadására szorítkozunk.Legyenq azx2
1 + x22 − x2
3 = 0 egységkör.
interpretálandó interpretáció
E int q belseje
L a projektív sík egyeneseinekmetszeteq belsejével, ha a metszet nem üres
d(P,Q) | log(PQUV )|, ahol{U, V } =←−→PQ ∩ q
a ⊥ b a illeszkedikb pólusára, ahola = a ∩ int q, b = b ∩ int qa, b a projektív sík egyenesei (11. ábra.)
11. ábra. Egy egyenesre meroleges egyenesek.
Be kell látni, hogy ha a hiperbolikus sík axiómáiba behelyettesítjük az interpretációt, akkor a pro-jektív geometria tételeit kapjuk. Az illeszkedés tulajdonságai az euklideszi síkról öröklodnekqbelsejébe. Belátjuk, hogy teljesül a vonalzó axióma. Ehhez koordinátaleképezést kell konstruálni
a←−→PQ egyenesen. Ez az egyenes a végtelen távoli pontját leszámítva koordinátázható az euklideszi
síkon egy koordinátaleképezéssel. AzU ésV koordinátáit ebben a koordinátalaképezésben jelöljeu ésv, a jelölés legyen olyan, hogyv > u. Az egyenes egy tetszolegesX pontjának koordinátáját
jelölje x. Legyenf(X) = logx− u
v − x. Azt állítjuk, hogy így koordinátaleképezést adtunk megd
számára a←−→PQ egyenesen.f bijekcióR-re, mert azx 7→ x− u
v − xfüggvény szigorúan monoton nö-
vekedoen képezi le az(u, v) intervallumotR+-ra (ellenorizzük, hogy a derivált függvény pozitív).Mivel a log függvényR+-on minden értéket felvesz és bijektív, ezért a megadott függvény valóbanbijekcióR-re. RP2 teljesülése is egyszeru. Jelölje mostP koordinátájátx, Q koordinátájáty azeuklideszi metrikához tartozó koordinátaleképezésben.
|f(P )− f(Q)| =∣∣∣∣logx− u
v − x− log
y − u
v − y
∣∣∣∣ =
∣∣∣∣log
(x− u
v − x:v − y
y − v
)∣∣∣∣ =
| log(XY UV )| = d(P, Q)
28
A félsík axióma (PSP) teljesüléséhez elegendo azt belátni, hogyq belsejében az euklidészi módondefiniált között van reláció ugyanaz, mint az elobbid-val definiált között van reláció, így a PSP isaz euklideszi síkból öröklodik. Teljesüljön az euklideszi metrikára, hogyA−B−C aholA, B, Caz elobbi egyenes 3 pontja aza, b, c d-hez tartozó koordinátákkal. A Cantor-Dedekind tulajdonságmiatt ez a reláció akkor és csakis akkor áll fenn, ha
u < a < b < c < v ∨ u > a > b > c > v.
Teljesüljön az elso eset. (A második esetet erre visszavezethetjük a vonalzó átfordításával.) Ekkora kettosviszony definíciójából könnyen ellenorizheto, hogy ekkor
(ABUV ) > 1, (BCUV ) > 1, (ACUV ) > 1.
Szintén a kettosviszony tulajdonsága, hogy(ABUV ) · (BCUV ) = (ACUV ). Mindkét oldallogaritmusát véve
log(ACUV ) = log(ABUV ) + log(BCUV ).
Mivel valamennyi logaritmusérték pozitív, ezért
| log(ACUV )| = | log(ABUV )|+ | log(BCUV )|,
ami a bizonyítandó állítás.A merolegesség és a távolság definiálása lehetové teszi, hogy a tengelyes tükrözést az abszo-
lút geometriában tanult módon definiáljuk. A tengelyes tükrözések pontosan aq-t fixen hagyócentrális kollineációk lesznek.
A SAS axióma ezek után abból következik, hogy két egybevágó szöget hiperbolikus transzfor-mációval egymásba tudunk úgy vinni, hogy az egybevágó oldalak is fedésbe kerüljenek.
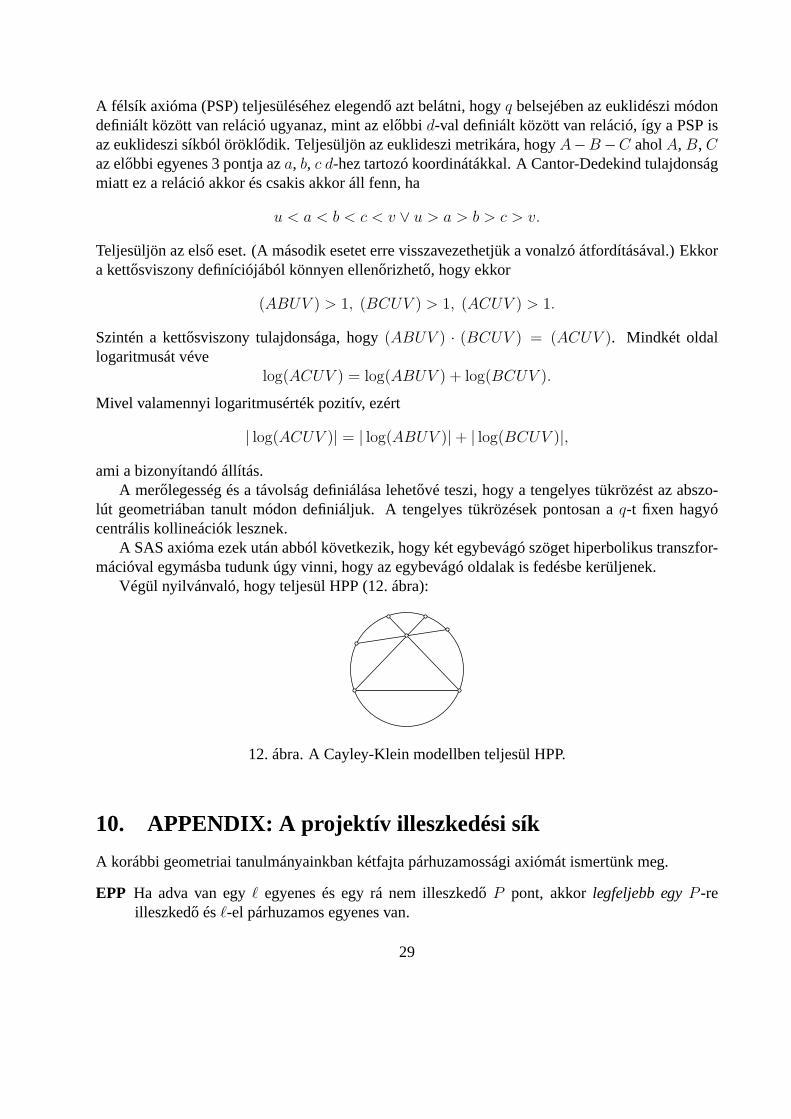
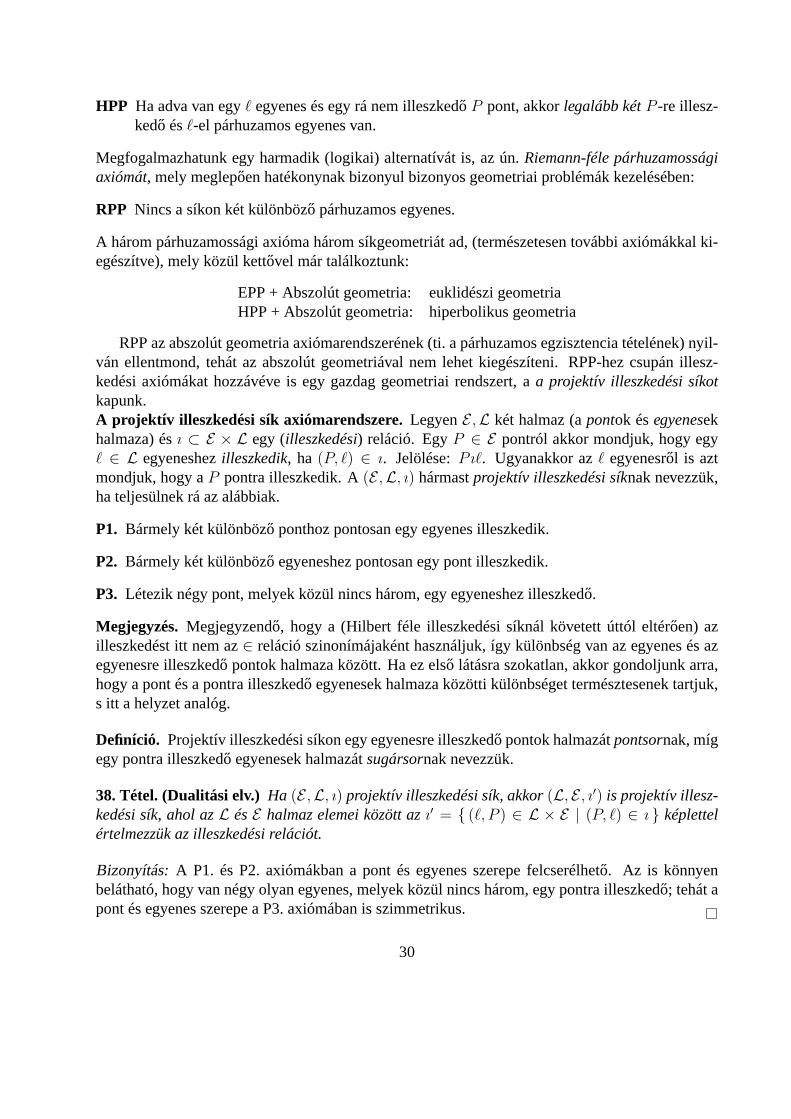
Végül nyilvánvaló, hogy teljesül HPP (12. ábra):
12. ábra. A Cayley-Klein modellben teljesül HPP.
10. APPENDIX: A projektív illeszkedési sík
A korábbi geometriai tanulmányainkban kétfajta párhuzamossági axiómát ismertünk meg.
EPP Ha adva van egy egyenes és egy rá nem illeszkedo P pont, akkorlegfeljebb egyP -reilleszkedo és`-el párhuzamos egyenes van.
29
HPP Ha adva van egy egyenes és egy rá nem illeszkedo P pont, akkorlegalább kétP -re illesz-kedo és`-el párhuzamos egyenes van.
Megfogalmazhatunk egy harmadik (logikai) alternatívát is, az ún.Riemann-féle párhuzamosságiaxiómát, mely meglepoen hatékonynak bizonyul bizonyos geometriai problémák kezelésében:
RPP Nincs a síkon két különbözo párhuzamos egyenes.
A három párhuzamossági axióma három síkgeometriát ad, (természetesen további axiómákkal ki-egészítve), mely közül kettovel már találkoztunk:
EPP + Abszolút geometria: euklidészi geometriaHPP + Abszolút geometria: hiperbolikus geometria
RPP az abszolút geometria axiómarendszerének (ti. a párhuzamos egzisztencia tételének) nyil-ván ellentmond, tehát az abszolút geometriával nem lehet kiegészíteni. RPP-hez csupán illesz-kedési axiómákat hozzávéve is egy gazdag geometriai rendszert, aa projektív illeszkedési síkotkapunk.A projektív illeszkedési sík axiómarendszere.LegyenE ,L két halmaz (apontok ésegyenesekhalmaza) ésı ⊂ E × L egy (illeszkedési) reláció. EgyP ∈ E pontról akkor mondjuk, hogy egy` ∈ L egyeneshezilleszkedik, ha (P, `) ∈ ı. Jelölése:Pı`. Ugyanakkor az egyenesrol is aztmondjuk, hogy aP pontra illeszkedik. A(E ,L, ı) hármastprojektív illeszkedési síknak nevezzük,ha teljesülnek rá az alábbiak.
P1. Bármely két különbözo ponthoz pontosan egy egyenes illeszkedik.
P2. Bármely két különbözo egyeneshez pontosan egy pont illeszkedik.
P3. Létezik négy pont, melyek közül nincs három, egy egyeneshez illeszkedo.
Megjegyzés.Megjegyzendo, hogy a (Hilbert féle illeszkedési síknál követett úttól eltéroen) azilleszkedést itt nem az∈ reláció szinonímájaként használjuk, így különbség van az egyenes és azegyenesre illeszkedo pontok halmaza között. Ha ez elso látásra szokatlan, akkor gondoljunk arra,hogy a pont és a pontra illeszkedo egyenesek halmaza közötti különbséget természtesenek tartjuk,s itt a helyzet analóg.
Definíció. Projektív illeszkedési síkon egy egyenesre illeszkedo pontok halmazátpontsornak, mígegy pontra illeszkedo egyenesek halmazátsugársornak nevezzük.
38. Tétel. (Dualitási elv.) Ha (E ,L, ı) projektív illeszkedési sík, akkor(L, E , ı′) is projektív illesz-kedési sík, ahol azL ésE halmaz elemei között azı′ = { (`, P ) ∈ L × E | (P, `) ∈ ı } képlettelértelmezzük az illeszkedési relációt.
Bizonyítás: A P1. és P2. axiómákban a pont és egyenes szerepe felcserélheto. Az is könnyenbelátható, hogy van négy olyan egyenes, melyek közül nincs három, egy pontra illeszkedo; tehát apont és egyenes szerepe a P3. axiómában is szimmetrikus.
30
A következoekben négy modellt adunk projektív illeszkedési síkra.
1. Példa. (Koordinátamodell.) A projektív sík, vagy koordinátamodell. Ezt a modellt a megelozofejezetekben részleteiben is tárgyaltuk.
2. Példa. (A klasszikus projektív sík.)LegyenS a klasszikus euklidészi tér egy síkja, pontjairólmint közönséges pontokról is beszélünk.S egyenesei halmazát jelölje mostLS, ezeket közönségesegyeneseknek is hívjuk. Tudjuk, hogy azS síkbeli egyenesek párhuzamossága ekvivalenciareláció.Ezen ekvivalenciareláció ekvivalenciaosztályaitvégtelen távolipontoknak nevezzük, a végtelentávoli pontok összességét pedigvégtelen távoli egyenesnek, melyeti∞-nel jelölünk. Az` ∈ LS
egyenes által reprezentált ekvivalenciaosztályt (végtelen távoli pontot)[`] jelöli, részletesen kiírva:[`] = { g ∈ LS | g‖` }.
LegyenE = S ∪ i∞, L = LS ∪ i∞. Azaz a projektív illeszkedési sík pontját, mint közönségespontot vagy mint végtelen távoli pontot interpretáljuk. A projektív illeszkedési sík egyenesét pedigvagy mint közönséges egyenest vagy mint a végtelen távoli egyenest interpretáljuk.
Az illeszkedést a következoképpen interpretáljuk. AP ∈ S közönséges pont illeszkedik az` ∈LS közönséges egyenesre, haP ∈ `. (Közönséges elemekre az illeszkedési reláció az euklidészisíkról öröklodik.) Az [`] végtelen távoli pont pedig az-el párhuzamos valamennyi egyeneshez, éscsakis ezekhez illeszkedik.
P3. nyilvánvalóan teljesül (márS-ben is). P1. két közönséges pontra a Hilbert féle elso illeszke-dési axióma miatt igaz. Két végtelen távoli ponthoz egyedül a végtelen távoli egyenes illeszkedik.Egy közönségesP pontra és egy[`] végtelen távoli pontra illeszkedo egyenest pedig úgy kapjukmeg, hogy vesszük az[`] halmazP -re illeszkedo reprezentánsát.
Legyen most 1 és`2 két egyenes. Ha1 és`2 S-en metszok, akkor P2. nyilván teljesül. Ha azegyenesekS-en párhuzamosak, akkor[`1] = [`2], s erre a végtelen távoli pontra mindkét egyenesilleszkedik. Ha az egyenesek egyike a végtelen távoli egyenes, akkor P2. ismét teljesül, mertminden egyenes pontosan egy végtelen távoli pontra illeszkedik.
3. Példa. (Gömbi geometria.)LegyenS2 = { x ∈ R3 | ‖x‖ = 1 }, azR3 egységgömbje. Hax ∈ S2, akkor{x,−x} egyátellenes pontpár. Legyen
E ={ {x,−x} | x ∈ S2
}.
Egyenes alatt értsünk gömbi foköröket. Egy(x,−x) ∈ S2 pont illeszkedjen egy egyenesre, hax ∈ `. Ekkor természetesen−x ∈ ` is teljesül. (Ha egy átellenes pontpár egyike rajta van egyfokörön, akkor a másik pont is.)
Mivel a gömbön két nem átellenes pontra egyértelmuen illeszkedik fokör, ezért P1. teljesül. Kétgömbi fokör mindig két átellenes pontban metszi egymást, ezért P2. is teljesül. P3. nyilvánvaló.
4. Példa. (Origó középpontú nyaláb.)LegyenE azR3 halmaz egydimenziós altereinek halmaza,L pedigR3 kétdimenziós alterei halmaza. Egy pont (egydimenziós altér) illeszkedik egy egyenesre(kétdimenziós altérre), ha utóbbi tartalmazza az elobbit.
Mivel az origón átmeno bármely két egyenesre illeszkedik egy origón átmeno sík, továbbábármely két origón átmeno sík origón átmeno egyenesben metszi egymást, ezért P1. és P2. teljesül.P3. ismét triviális.
31
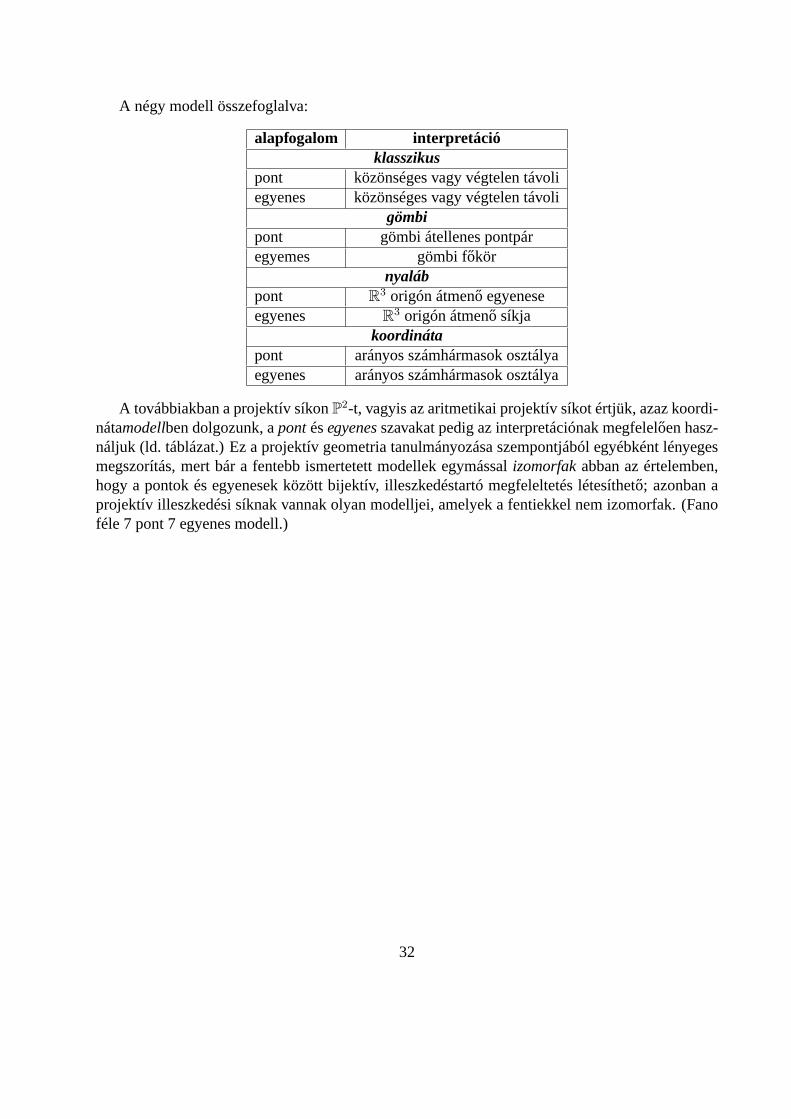
A négy modell összefoglalva:
alapfogalom interpretációklasszikus
pont közönséges vagy végtelen távoliegyenes közönséges vagy végtelen távoli
gömbipont gömbi átellenes pontpáregyemes gömbi fokör
nyalábpont R3 origón átmeno egyeneseegyenes R3 origón átmeno síkja
koordinátapont arányos számhármasok osztályaegyenes arányos számhármasok osztálya
A továbbiakban a projektív síkonP2-t, vagyis az aritmetikai projektív síkot értjük, azaz koordi-nátamodellben dolgozunk, apontésegyenesszavakat pedig az interpretációnak megfeleloen hasz-náljuk (ld. táblázat.) Ez a projektív geometria tanulmányozása szempontjából egyébként lényegesmegszorítás, mert bár a fentebb ismertetett modellek egymássalizomorfakabban az értelemben,hogy a pontok és egyenesek között bijektív, illeszkedéstartó megfeleltetés létesítheto; azonban aprojektív illeszkedési síknak vannak olyan modelljei, amelyek a fentiekkel nem izomorfak. (Fanoféle 7 pont 7 egyenes modell.)
32