Embed Size (px)
Citation preview
Le moteur pas à pas et son circuit de commande
Le moteur pas à pas et son circuit de commande
Le Club d'Astronomie de la Région Lilloise organise chaque mercredi soir une soirée à thème au profit de ses adhérents. Je me suis proposé d'animer une de ces soirées afin d'expliquer le fonctionnement du moteur pas à pas et de décortiquer l'électronique qui pilote un tel moteur. Voici le contenu de mon exposé.
IntroductionLes types de moteursL'alimentation des bobinagesLa conception des moteursCouple et vitesse
L'électroniqueL'électronique de puissanceLe séquenceurL'horloge
Réalisations de ces fonctionsLa démultiplicationCas de la planche existanteCas d'un secteur lisse à construire
Introduction
Le moteur pas à pas est un moteur qui tourne en fonction des impulsions électriques reçues dans ses bobinages. L'angle de rotation minimal entre deux modifications des impulsions électriques s'appelle un pas. On caractérise un moteur par le nombre de pas par tour (c'est à dire pour 360°). Les valeurs courantes sont 48, 100 ou 200 pas par tour.
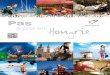
Analyse d'un moteur théorique composé d'un aimant permanent (boussole) et de 2 bobinages constitués chacun de 2 bobines.
Le passage d'un courant, successivement dans chaque bobinage, fait tourner l'aimant.
Nous avons créé un moteur de 4 pas par tour.
Les impulsions électriques sont du type tout ou rien c'est à dire passage de courant ou pas de passage de courant. Les tensions d'utilisation des moteurs sont de 3,3V à 48V continues. La consommation est de 0,2 A à 1,5 A. Le couple du moteur est de l'ordre de 5 N. Cm à 64 N. Cm.
L'électronique actuelle permet de piloter la chronologie de ces impulsions avec beaucoup de précision et d'en comptabiliser le nombre.
Le moteur pas à pas et son circuit de commande permettent donc la rotation d'un axe avec beaucoup de précision en vitesse et en amplitude.La précision en vitesse est utilisée pour suivre la rotation apparente des étoiles (un tour en 23H56mn)La précision en amplitude est utilisée pour passer d'une étoile à l'autre.
Les types de moteurs
L'alimentation des bobinages
http://asso.nordnet.fr/carl/moteurpas2.htm (1 of 10)15/03/2005 11:12:53
Le moteur pas à pas et son circuit de commande
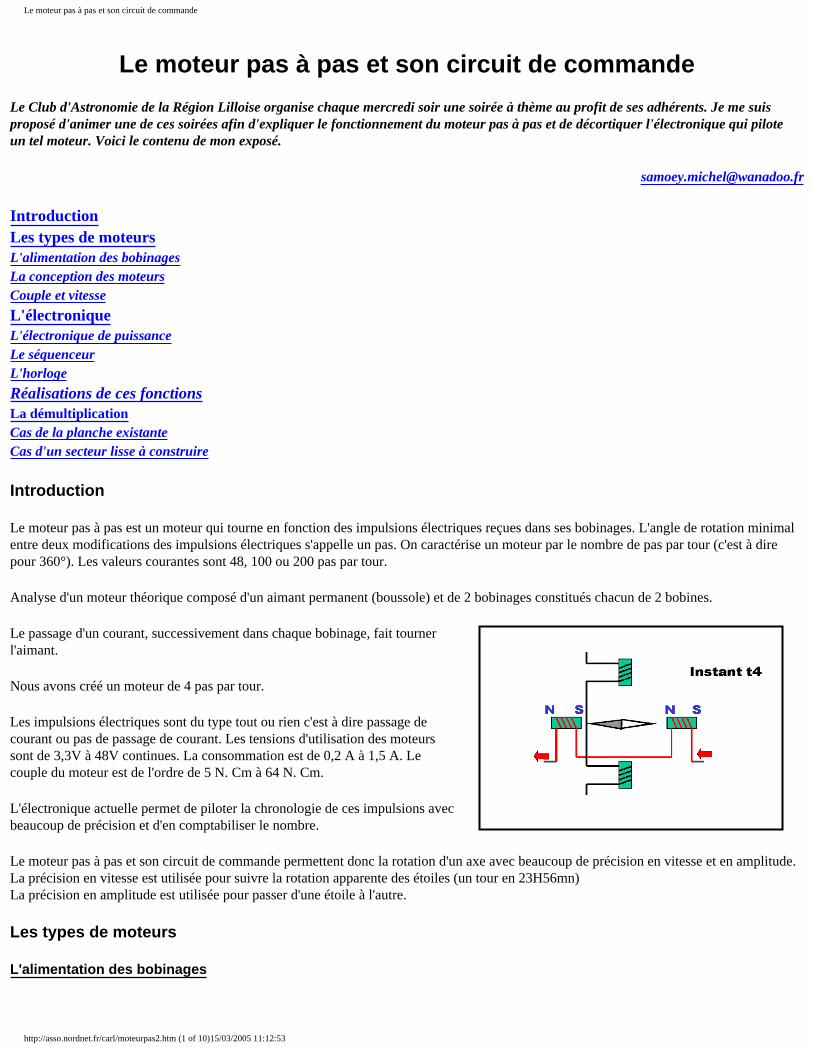
>Le moteur bipolaire
Les bobinages d'un moteur bipolaire sont alimentés une fois dans un sens, une fois dans l'autre sens. Ils créent une fois un pôle nord, une fois un pôle sud d'où le nom de bipolaire.
Le moteur unipolaire
Les bobinages d'un moteur unipolaire sont alimentés toujours dans le même sens par une tension unique d'où le nom d'unipolaire.
Les phases
Les phases correspondent aux différentes sources d'énergies alimentant les bobinages. Généralement un moteur bipolaire est un moteur 2 phases, un moteur unipolaire est un moteur 4 phases.
Nota : on parle de fonctionnement biphasé quand 2 bobinages sont alimentés en même temps.
La conception des moteurs
Il existe 3 technologies :
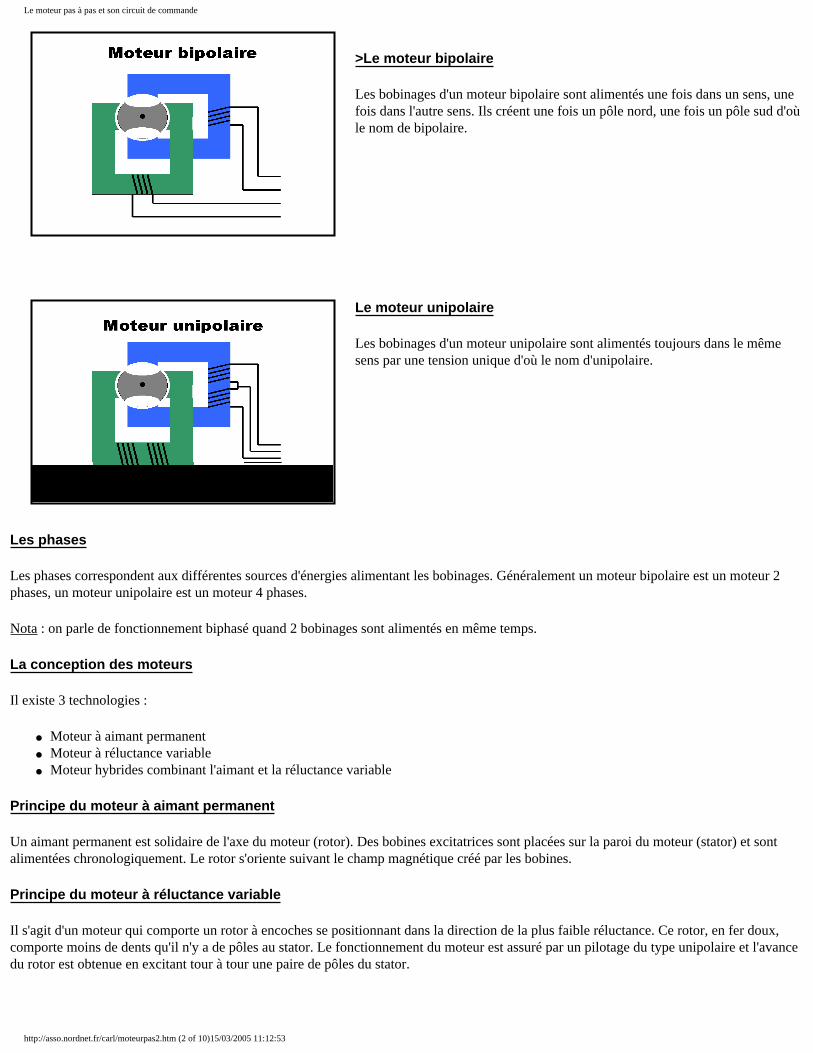
● Moteur à aimant permanent ● Moteur à réluctance variable ● Moteur hybrides combinant l'aimant et la réluctance variable
Principe du moteur à aimant permanent
Un aimant permanent est solidaire de l'axe du moteur (rotor). Des bobines excitatrices sont placées sur la paroi du moteur (stator) et sont alimentées chronologiquement. Le rotor s'oriente suivant le champ magnétique créé par les bobines.
Principe du moteur à réluctance variable
Il s'agit d'un moteur qui comporte un rotor à encoches se positionnant dans la direction de la plus faible réluctance. Ce rotor, en fer doux, comporte moins de dents qu'il n'y a de pôles au stator. Le fonctionnement du moteur est assuré par un pilotage du type unipolaire et l'avance du rotor est obtenue en excitant tour à tour une paire de pôles du stator.
http://asso.nordnet.fr/carl/moteurpas2.htm (2 of 10)15/03/2005 11:12:53
Le moteur pas à pas et son circuit de commande
Couple et vitesse
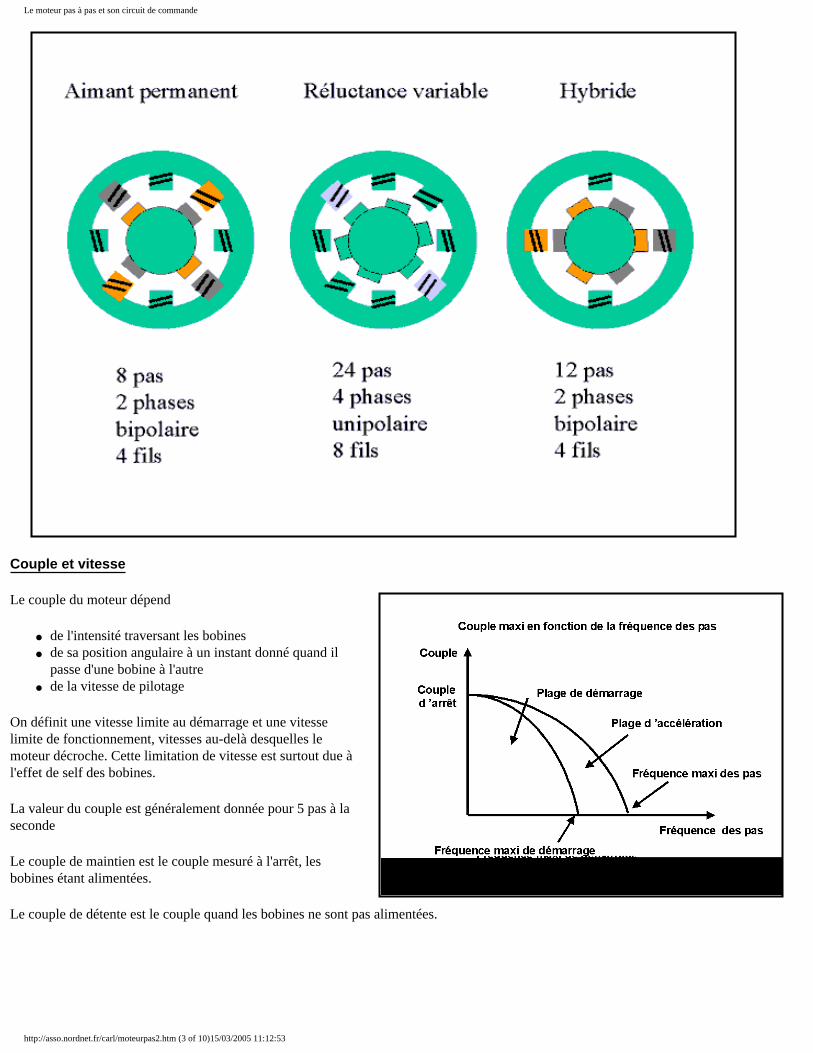
Le couple du moteur dépend
● de l'intensité traversant les bobines ● de sa position angulaire à un instant donné quand il
passe d'une bobine à l'autre ● de la vitesse de pilotage
On définit une vitesse limite au démarrage et une vitesse limite de fonctionnement, vitesses au-delà desquelles le moteur décroche. Cette limitation de vitesse est surtout due à l'effet de self des bobines.
La valeur du couple est généralement donnée pour 5 pas à la seconde
Le couple de maintien est le couple mesuré à l'arrêt, les bobines étant alimentées.
Le couple de détente est le couple quand les bobines ne sont pas alimentées.
http://asso.nordnet.fr/carl/moteurpas2.htm (3 of 10)15/03/2005 11:12:53
Le moteur pas à pas et son circuit de commande
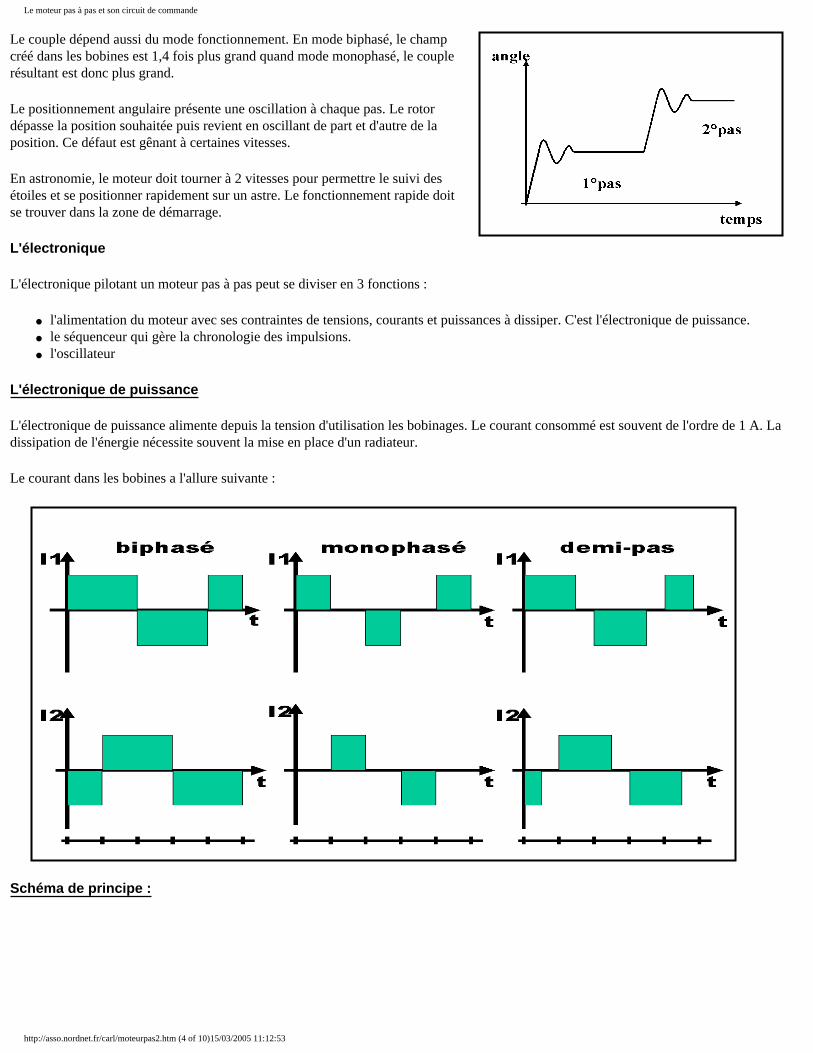
Le couple dépend aussi du mode fonctionnement. En mode biphasé, le champ créé dans les bobines est 1,4 fois plus grand quand mode monophasé, le couple résultant est donc plus grand.
Le positionnement angulaire présente une oscillation à chaque pas. Le rotor dépasse la position souhaitée puis revient en oscillant de part et d'autre de la position. Ce défaut est gênant à certaines vitesses.
En astronomie, le moteur doit tourner à 2 vitesses pour permettre le suivi des étoiles et se positionner rapidement sur un astre. Le fonctionnement rapide doit se trouver dans la zone de démarrage.
L'électronique
L'électronique pilotant un moteur pas à pas peut se diviser en 3 fonctions :
● l'alimentation du moteur avec ses contraintes de tensions, courants et puissances à dissiper. C'est l'électronique de puissance. ● le séquenceur qui gère la chronologie des impulsions. ● l'oscillateur
L'électronique de puissance
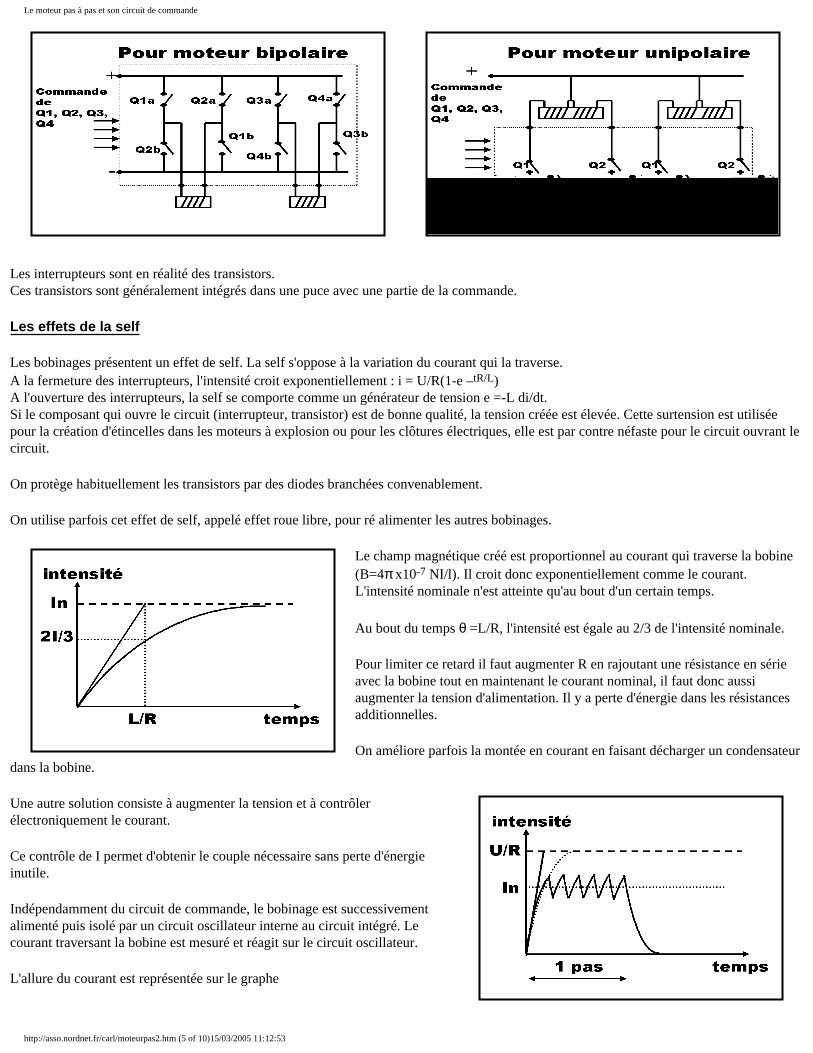
L'électronique de puissance alimente depuis la tension d'utilisation les bobinages. Le courant consommé est souvent de l'ordre de 1 A. La dissipation de l'énergie nécessite souvent la mise en place d'un radiateur.
Le courant dans les bobines a l'allure suivante :
Schéma de principe :
http://asso.nordnet.fr/carl/moteurpas2.htm (4 of 10)15/03/2005 11:12:53
Le moteur pas à pas et son circuit de commande
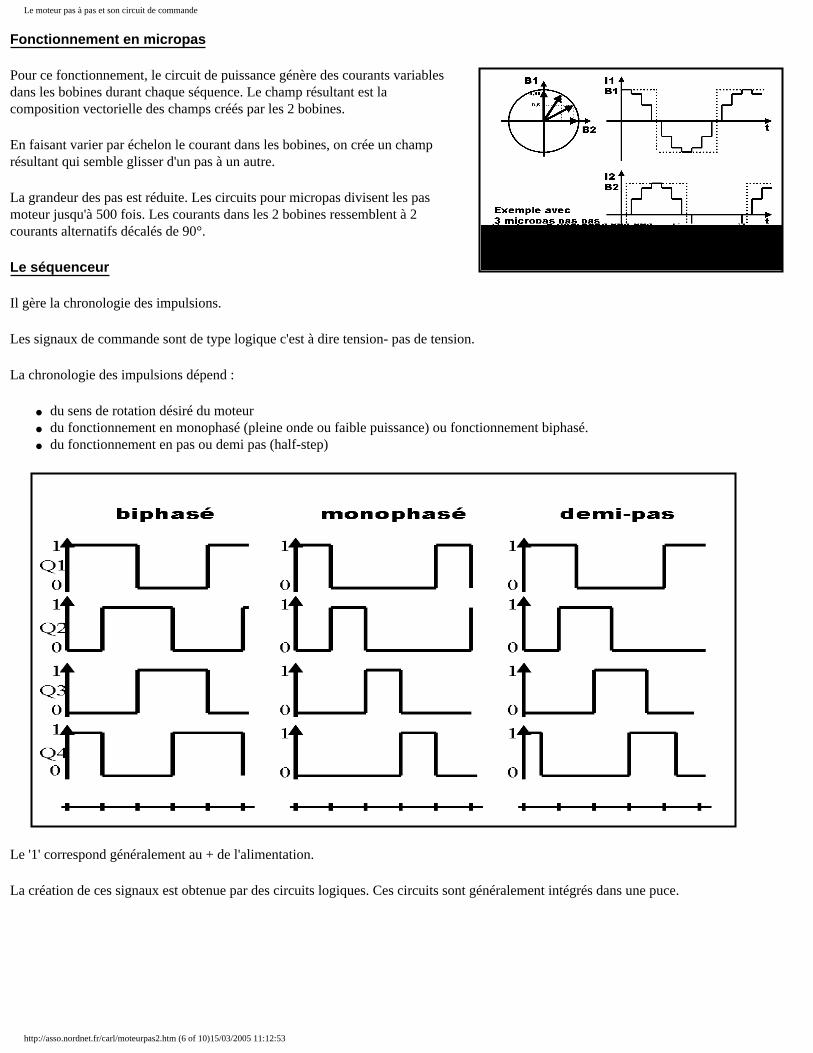
Les interrupteurs sont en réalité des transistors.Ces transistors sont généralement intégrés dans une puce avec une partie de la commande.
Les effets de la self
Les bobinages présentent un effet de self. La self s'oppose à la variation du courant qui la traverse.A la fermeture des interrupteurs, l'intensité croit exponentiellement : i = U/R(1-e –tR/L)A l'ouverture des interrupteurs, la self se comporte comme un générateur de tension e =-L di/dt.Si le composant qui ouvre le circuit (interrupteur, transistor) est de bonne qualité, la tension créée est élevée. Cette surtension est utilisée pour la création d'étincelles dans les moteurs à explosion ou pour les clôtures électriques, elle est par contre néfaste pour le circuit ouvrant le circuit.
On protège habituellement les transistors par des diodes branchées convenablement.
On utilise parfois cet effet de self, appelé effet roue libre, pour ré alimenter les autres bobinages.
Le champ magnétique créé est proportionnel au courant qui traverse la bobine (B=4π x10-7 NI/l). Il croit donc exponentiellement comme le courant. L'intensité nominale n'est atteinte qu'au bout d'un certain temps.
Au bout du temps θ =L/R, l'intensité est égale au 2/3 de l'intensité nominale.
Pour limiter ce retard il faut augmenter R en rajoutant une résistance en série avec la bobine tout en maintenant le courant nominal, il faut donc aussi augmenter la tension d'alimentation. Il y a perte d'énergie dans les résistances additionnelles.
On améliore parfois la montée en courant en faisant décharger un condensateur dans la bobine.
Une autre solution consiste à augmenter la tension et à contrôler électroniquement le courant.
Ce contrôle de I permet d'obtenir le couple nécessaire sans perte d'énergie inutile.
Indépendamment du circuit de commande, le bobinage est successivement alimenté puis isolé par un circuit oscillateur interne au circuit intégré. Le courant traversant la bobine est mesuré et réagit sur le circuit oscillateur.
L'allure du courant est représentée sur le graphe
http://asso.nordnet.fr/carl/moteurpas2.htm (5 of 10)15/03/2005 11:12:53
Le moteur pas à pas et son circuit de commande
Fonctionnement en micropas
Pour ce fonctionnement, le circuit de puissance génère des courants variables dans les bobines durant chaque séquence. Le champ résultant est la composition vectorielle des champs créés par les 2 bobines.
En faisant varier par échelon le courant dans les bobines, on crée un champ résultant qui semble glisser d'un pas à un autre.
La grandeur des pas est réduite. Les circuits pour micropas divisent les pas moteur jusqu'à 500 fois. Les courants dans les 2 bobines ressemblent à 2 courants alternatifs décalés de 90°.
Le séquenceur
Il gère la chronologie des impulsions.
Les signaux de commande sont de type logique c'est à dire tension- pas de tension.
La chronologie des impulsions dépend :
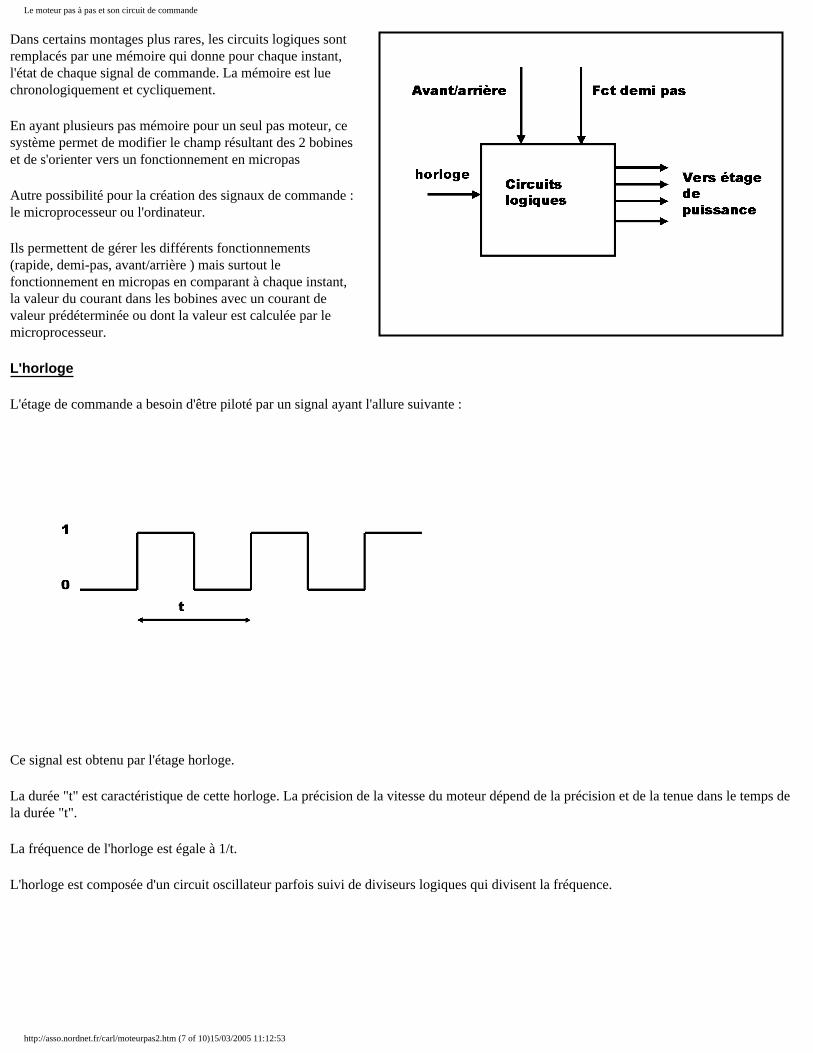
● du sens de rotation désiré du moteur ● du fonctionnement en monophasé (pleine onde ou faible puissance) ou fonctionnement biphasé. ● du fonctionnement en pas ou demi pas (half-step)
Le '1' correspond généralement au + de l'alimentation.
La création de ces signaux est obtenue par des circuits logiques. Ces circuits sont généralement intégrés dans une puce.
http://asso.nordnet.fr/carl/moteurpas2.htm (6 of 10)15/03/2005 11:12:53
Le moteur pas à pas et son circuit de commande
Dans certains montages plus rares, les circuits logiques sont remplacés par une mémoire qui donne pour chaque instant, l'état de chaque signal de commande. La mémoire est lue chronologiquement et cycliquement.
En ayant plusieurs pas mémoire pour un seul pas moteur, ce système permet de modifier le champ résultant des 2 bobines et de s'orienter vers un fonctionnement en micropas
Autre possibilité pour la création des signaux de commande : le microprocesseur ou l'ordinateur.
Ils permettent de gérer les différents fonctionnements (rapide, demi-pas, avant/arrière ) mais surtout le fonctionnement en micropas en comparant à chaque instant, la valeur du courant dans les bobines avec un courant de valeur prédéterminée ou dont la valeur est calculée par le microprocesseur.
L'horloge
L'étage de commande a besoin d'être piloté par un signal ayant l'allure suivante :
Ce signal est obtenu par l'étage horloge.
La durée "t" est caractéristique de cette horloge. La précision de la vitesse du moteur dépend de la précision et de la tenue dans le temps de la durée "t".
La fréquence de l'horloge est égale à 1/t.
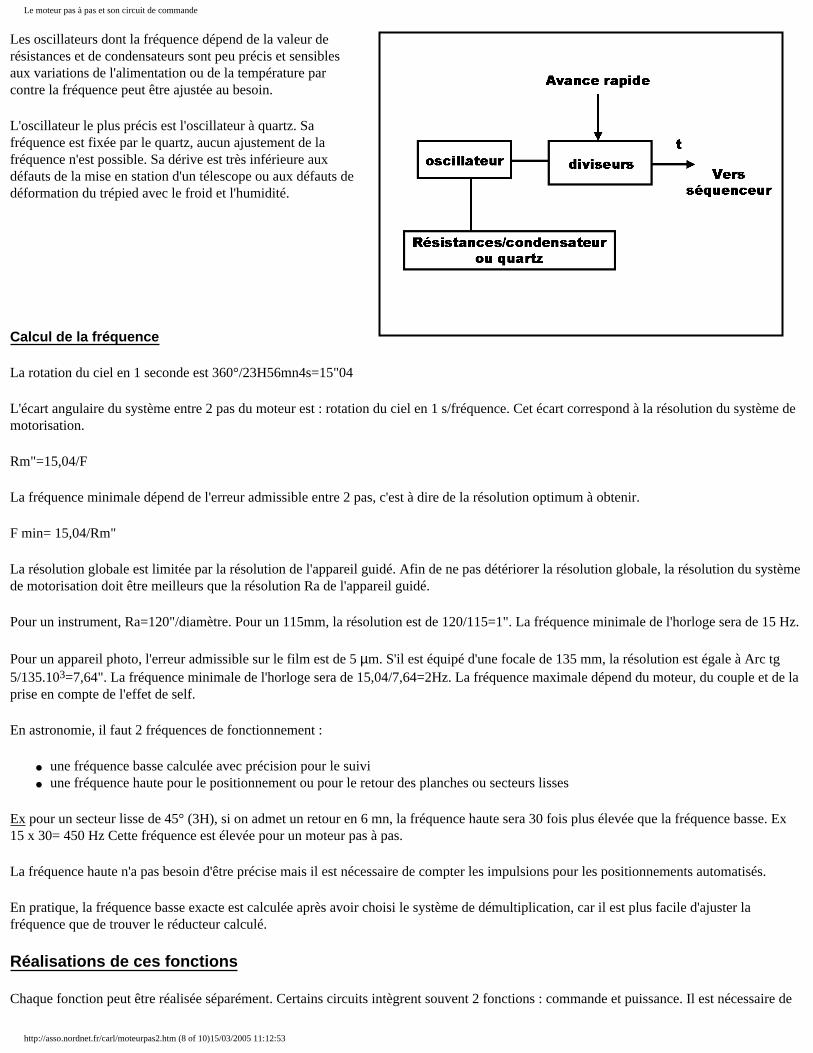
L'horloge est composée d'un circuit oscillateur parfois suivi de diviseurs logiques qui divisent la fréquence.
http://asso.nordnet.fr/carl/moteurpas2.htm (7 of 10)15/03/2005 11:12:53
Le moteur pas à pas et son circuit de commande
Les oscillateurs dont la fréquence dépend de la valeur de résistances et de condensateurs sont peu précis et sensibles aux variations de l'alimentation ou de la température par contre la fréquence peut être ajustée au besoin.
L'oscillateur le plus précis est l'oscillateur à quartz. Sa fréquence est fixée par le quartz, aucun ajustement de la fréquence n'est possible. Sa dérive est très inférieure aux défauts de la mise en station d'un télescope ou aux défauts de déformation du trépied avec le froid et l'humidité.
Calcul de la fréquence
La rotation du ciel en 1 seconde est 360°/23H56mn4s=15"04
L'écart angulaire du système entre 2 pas du moteur est : rotation du ciel en 1 s/fréquence. Cet écart correspond à la résolution du système de motorisation.
Rm"=15,04/F
La fréquence minimale dépend de l'erreur admissible entre 2 pas, c'est à dire de la résolution optimum à obtenir.
F min= 15,04/Rm"
La résolution globale est limitée par la résolution de l'appareil guidé. Afin de ne pas détériorer la résolution globale, la résolution du système de motorisation doit être meilleurs que la résolution Ra de l'appareil guidé.
Pour un instrument, Ra=120"/diamètre. Pour un 115mm, la résolution est de 120/115=1". La fréquence minimale de l'horloge sera de 15 Hz.
Pour un appareil photo, l'erreur admissible sur le film est de 5 µm. S'il est équipé d'une focale de 135 mm, la résolution est égale à Arc tg 5/135.103=7,64". La fréquence minimale de l'horloge sera de 15,04/7,64=2Hz. La fréquence maximale dépend du moteur, du couple et de la prise en compte de l'effet de self.
En astronomie, il faut 2 fréquences de fonctionnement :
● une fréquence basse calculée avec précision pour le suivi ● une fréquence haute pour le positionnement ou pour le retour des planches ou secteurs lisses
Ex pour un secteur lisse de 45° (3H), si on admet un retour en 6 mn, la fréquence haute sera 30 fois plus élevée que la fréquence basse. Ex 15 x 30= 450 Hz Cette fréquence est élevée pour un moteur pas à pas.
La fréquence haute n'a pas besoin d'être précise mais il est nécessaire de compter les impulsions pour les positionnements automatisés.
En pratique, la fréquence basse exacte est calculée après avoir choisi le système de démultiplication, car il est plus facile d'ajuster la fréquence que de trouver le réducteur calculé.
Réalisations de ces fonctions
Chaque fonction peut être réalisée séparément. Certains circuits intègrent souvent 2 fonctions : commande et puissance. Il est nécessaire de
http://asso.nordnet.fr/carl/moteurpas2.htm (8 of 10)15/03/2005 11:12:53
Le moteur pas à pas et son circuit de commande
leur adjoindre une horloge. Les microcontrôleurs eux réalisent la partie horloge et commande. Il faut leur adjoindre un circuit de puissance.
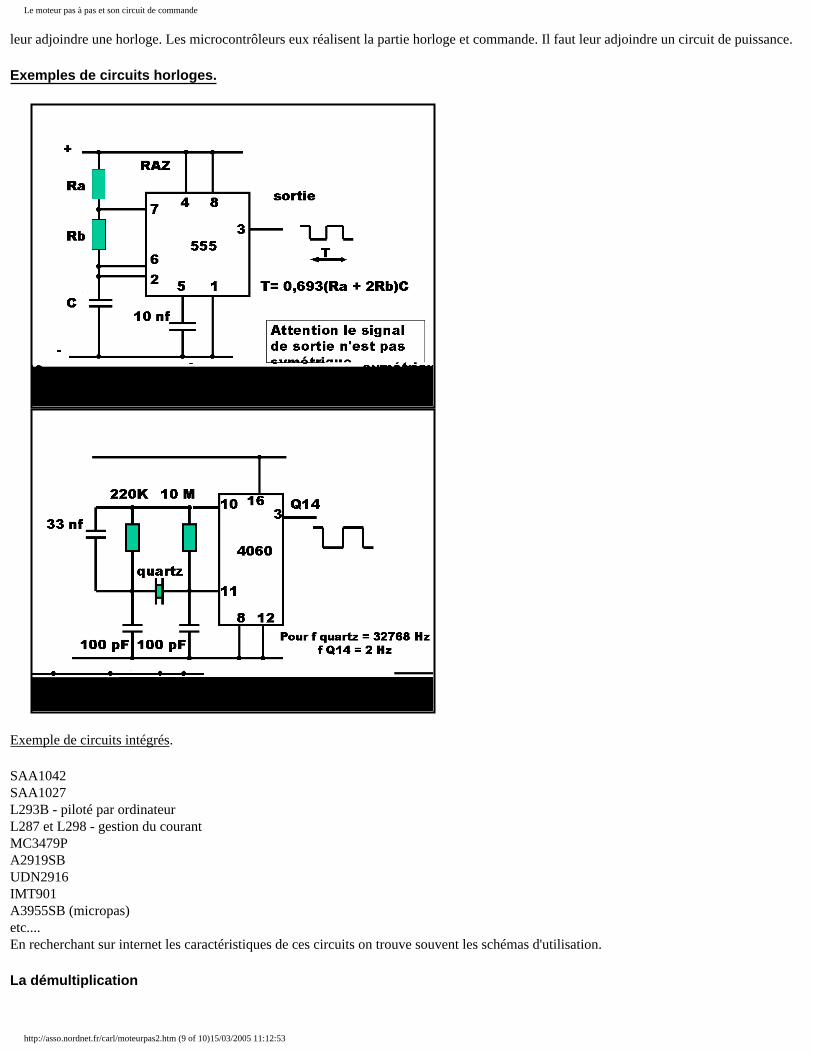
Exemples de circuits horloges.
Exemple de circuits intégrés.
SAA1042SAA1027L293B - piloté par ordinateurL287 et L298 - gestion du courantMC3479PA2919SBUDN2916IMT901A3955SB (micropas)etc....En recherchant sur internet les caractéristiques de ces circuits on trouve souvent les schémas d'utilisation.
La démultiplication
http://asso.nordnet.fr/carl/moteurpas2.htm (9 of 10)15/03/2005 11:12:53

Le moteur pas à pas et son circuit de commande
Dans les équations ci-dessous, le pas du moteur Pm° est exprimé en degré et la résolution Rm" en seconde.
La démultiplication η et la fréquence de l'horloge dépendent de la résolution souhaitée et du pas du moteur.η=rotation du moteur en 1 seconde/rotation du ciel en 1 secondeη=Pm° x 3600 x fréquence/15,04 Ex : pour Pm°=7°5 et F=15 Hz......... η = 26928,19
On peut aussi exprimer la démultiplication en fonction de la résolution souhaitée : η=Pm° x 3600/Rm"
Nota : on en déduit Rm"= Pm° x 3600/ηLa résolution est meilleure (plus petite) quand Pm est petit ou quand η est grand.Ce calcul englobe la démultiplication ηi créée par la vis de l'équatorial ou du secteur lisse et la démultiplication sortie moteur ηr .
η= ηr x ηi
Cas de la planche équatoriale existante conçue pour un tour de vis par minute.
La démultiplication ηi de cette planche est : rotation de la vis en 1s/rotation du ciel = 6° x 60 x 60/15,04 =1436,17.
η=ηr x 1436,17= Pm° x 3600 x F/15,04 = Pm° x 3600/Rm"
En tenant compte de la résolution souhaitée, on obtient ηr = Pm° x 3600/Rm" x 1436,17 = 15,04 x Pm°/6 x Rm"
ηr = 2,5 x Pm°/Rm"
Après avoir choisit un système de démultiplication supérieur ou égal, on calcule la fréquence et on en déduit aussi la résolution du système de motorisationF=ηr x 6/ Pm°
Rm"=15,04 x Pm°/6 x ηr
Rm" =2,50 x Pm° /ηr
Nota : Pour une liaison sans réducteur η r =1, .................. F=6/ Pm° , ............. Rm"=2,5 x Pm°
Exemple : Pour un pas de 7°30 , ........... F=0,8 Hz, ............... Rm"=18,8"
Cas de la planche équatoriale ou d'un secteur lisse à construire
Pour un tour de vis, le décalage angulaire est α°, la portion de circonférence est égale au pas de la vis Pv2 x π x R x α°/360°= PvLa réduction est un tour (de vis)/écart angulaire.ηi = 360°/α°
On en déduit ηi = 2 x π x R/Pv
η=ηr x ηi= Pm° x 3600/Rm" =ηr x 2 x π x R/Pv d'où
ηr =1800 x Pm° x Pv /π x R x Rm" Pv et R étant exprimés avec la même unité
Après avoir choisit un système de démultiplication supérieur ou égal, on calcule la fréquence et on en déduit aussi la résolution du système de motorisationF= ηr x 2 x π x R x 15,04/Pv x Pm° x 3600
soit F= ηr x R/Pv x Pm° x 38,096
Rm"=1800 x Pm° x Pv/ π x R x ηr
http://asso.nordnet.fr/carl/moteurpas2.htm (10 of 10)15/03/2005 11:12:53