Embed Size (px)
DESCRIPTION
Low Altitude Balloon Experiment in Technology ( LABET). Group Members Mike Svendsen – Computer Engineer Steve Towey – Computer Engineer Brian Walker – Architect Richard George – Industrial Technology Client – ISU Space Systems and Control Lab (SSCL) Advisor – Matt Nelson. Overview. - PowerPoint PPT Presentation
Citation preview
Low Altitude Balloon Experiment in Technology (LABET)
Group Members Mike Svendsen – Computer EngineerSteve Towey – Computer EngineerBrian Walker – ArchitectRichard George – Industrial Technology
Client – ISU Space Systems and Control Lab (SSCL)
Advisor – Matt Nelson
OverviewClient Statement of NeedProject Requirements and DeliverablesProject PlanSubsystem Designs & ImplementationsTestingLessons Learned
Client Statement of NeedThe SSCL desires a blimp platform for
research and outreach events. The need is to have an outdoor blimp
platform capable of carrying a small payload and able to navigate in calm to light winds.
Requirements
Non-FunctionalDurable and reusable designControlled via computer interfacePositional data displayed on computer
Operating EnvironmentOutdoorsWinds up to 10mphHumidity up to 90%
Functional RequirementsVertical lift - 500 feetWireless control - 1500 feetCarry 7 ounce payloadFly time of 20+ minutesSensor to determine position
Project DeliverablesComplete balloon system meeting
requirementsOperating manualsDetailed design documentation
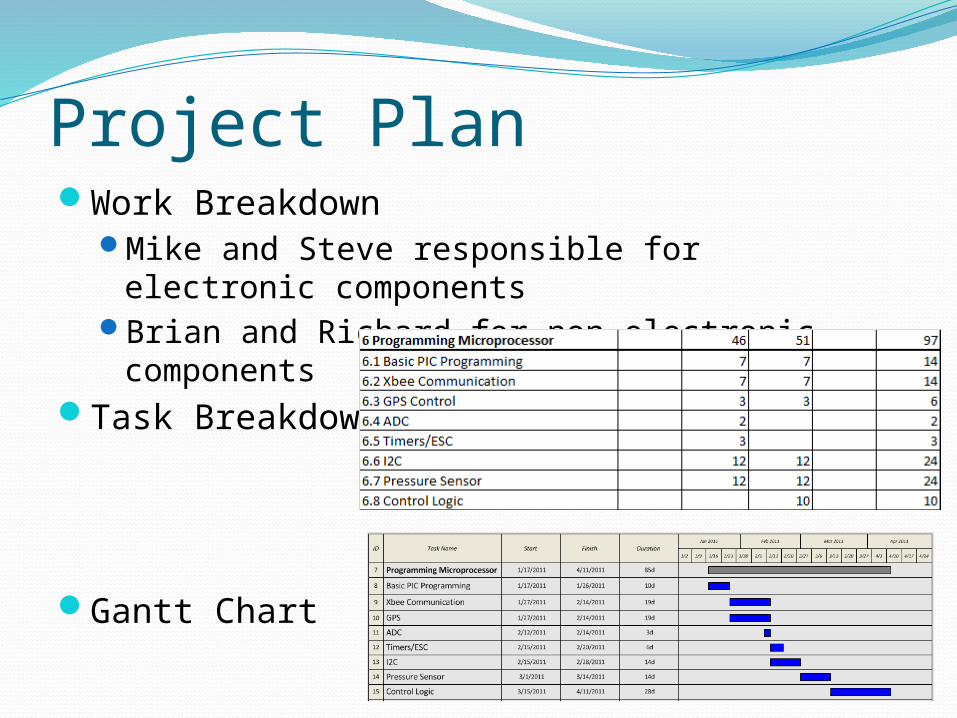
Project PlanWork Breakdown
Mike and Steve responsible for electronic components
Brian and Richard for non electronic components
Task Breakdown
Gantt Chart
Communication / CollaborationWeekly meetings with team and advisor
(client)At least a weekly meeting with just
electronics teamFrequent meetings in lab for implementationUsed Dropbox to facilitate SVN like roleUsed GoogleDocs to facilitate sharing of
information
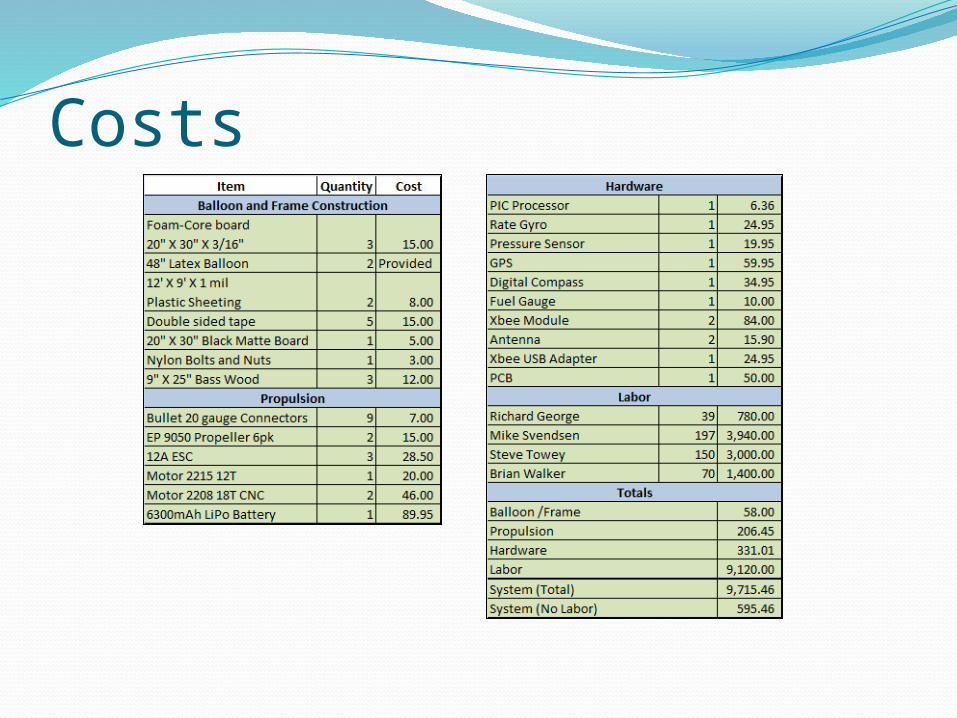
Costs
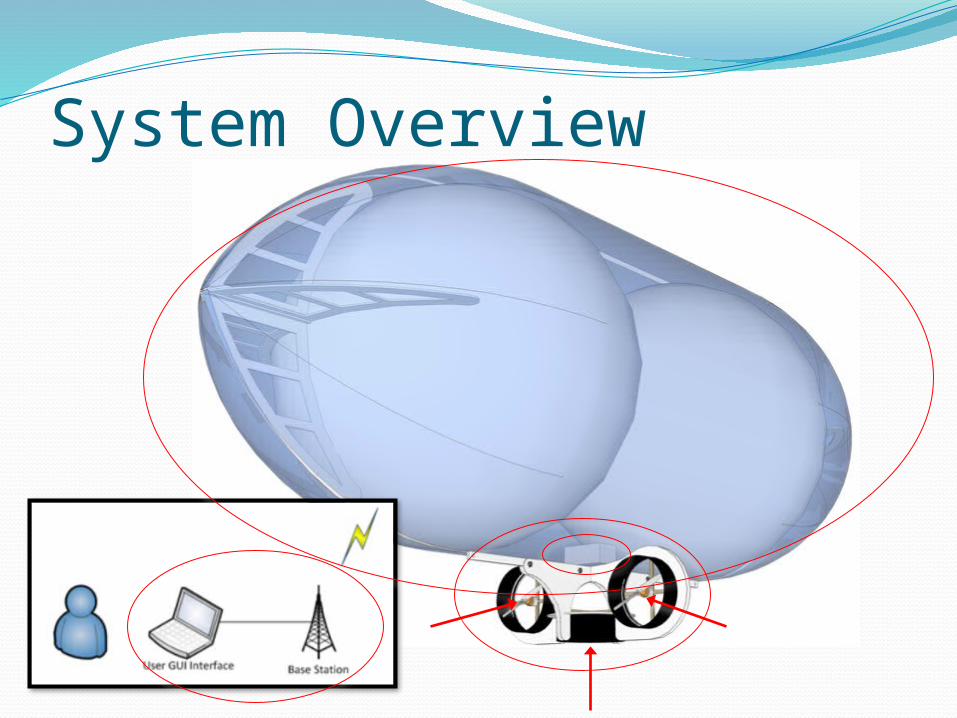
System Overview
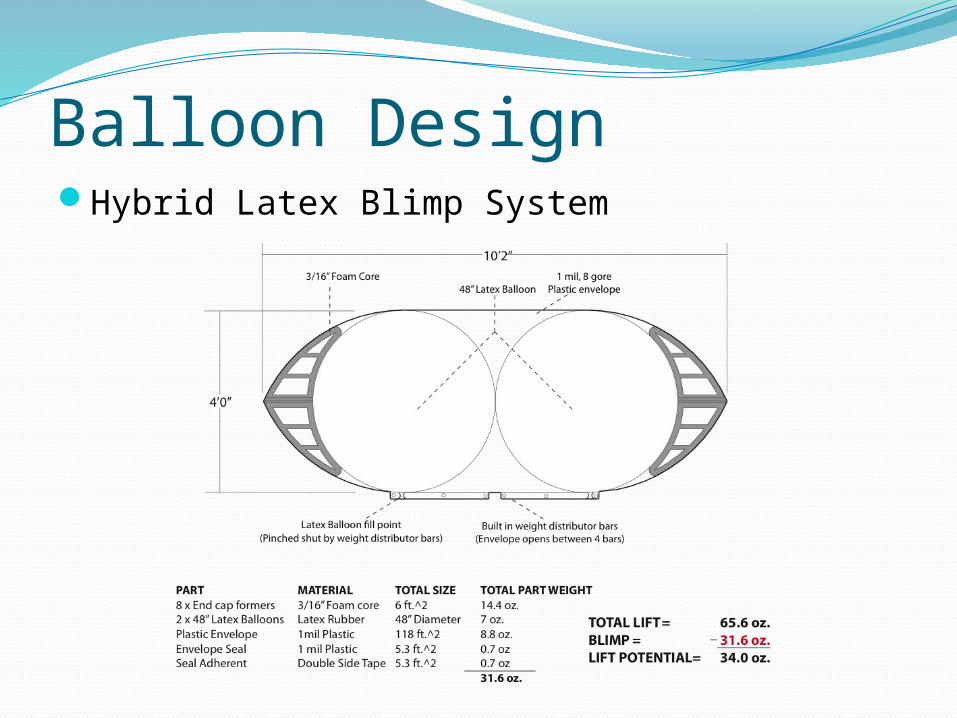
Balloon DesignHybrid Latex Blimp System
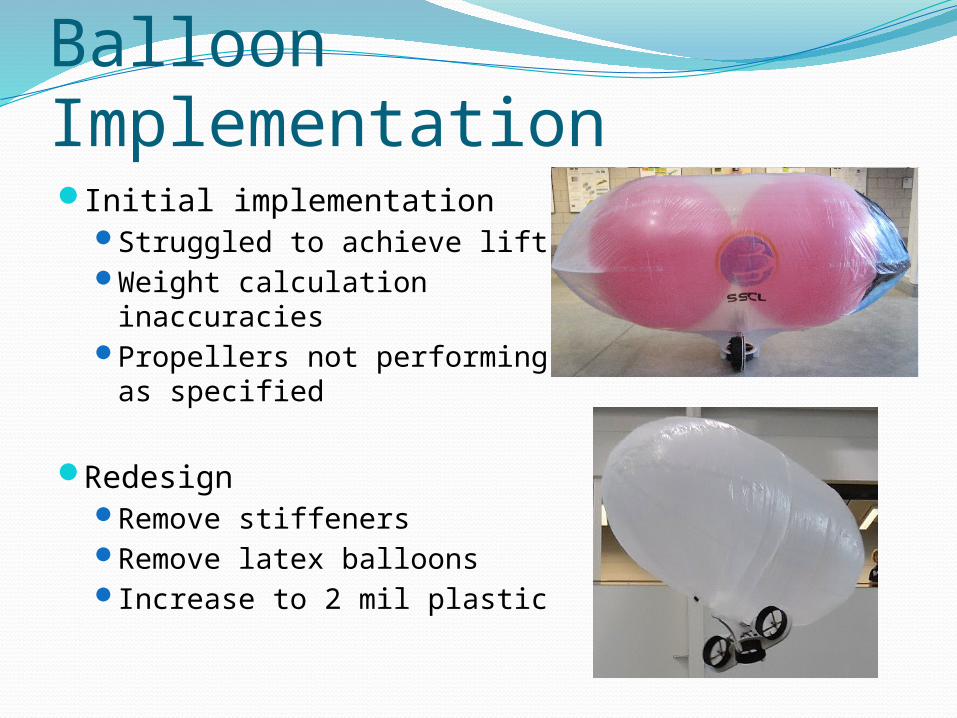
Balloon ImplementationInitial implementation
Struggled to achieve liftWeight calculation
inaccuraciesPropellers not performing
as specified
RedesignRemove stiffenersRemove latex balloonsIncrease to 2 mil plastic
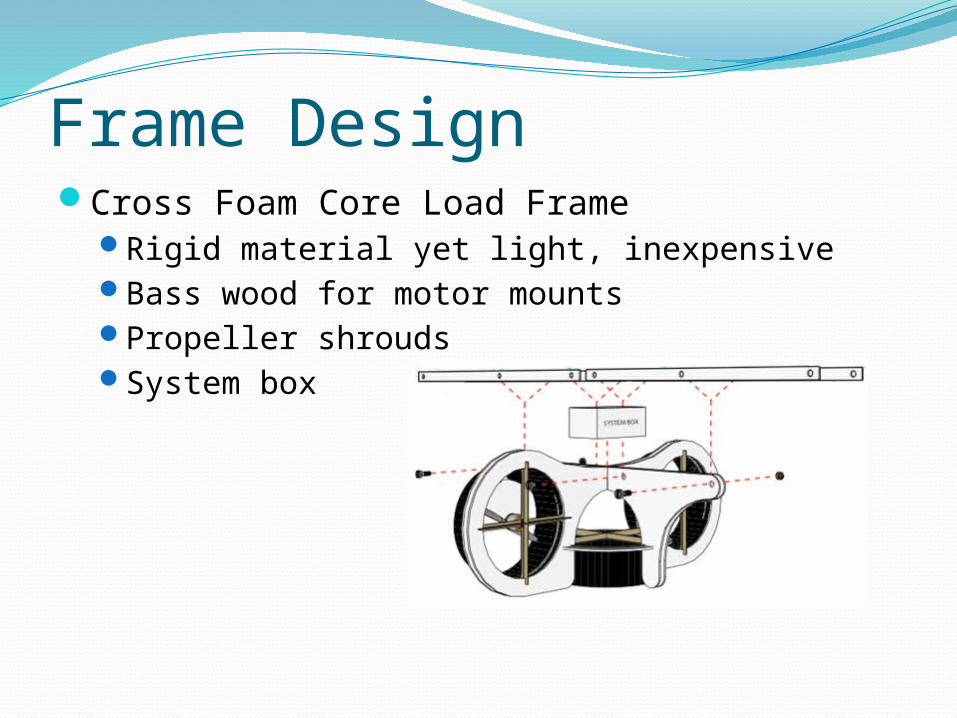
Frame DesignCross Foam Core Load Frame
Rigid material yet light, inexpensiveBass wood for motor mountsPropeller shroudsSystem box
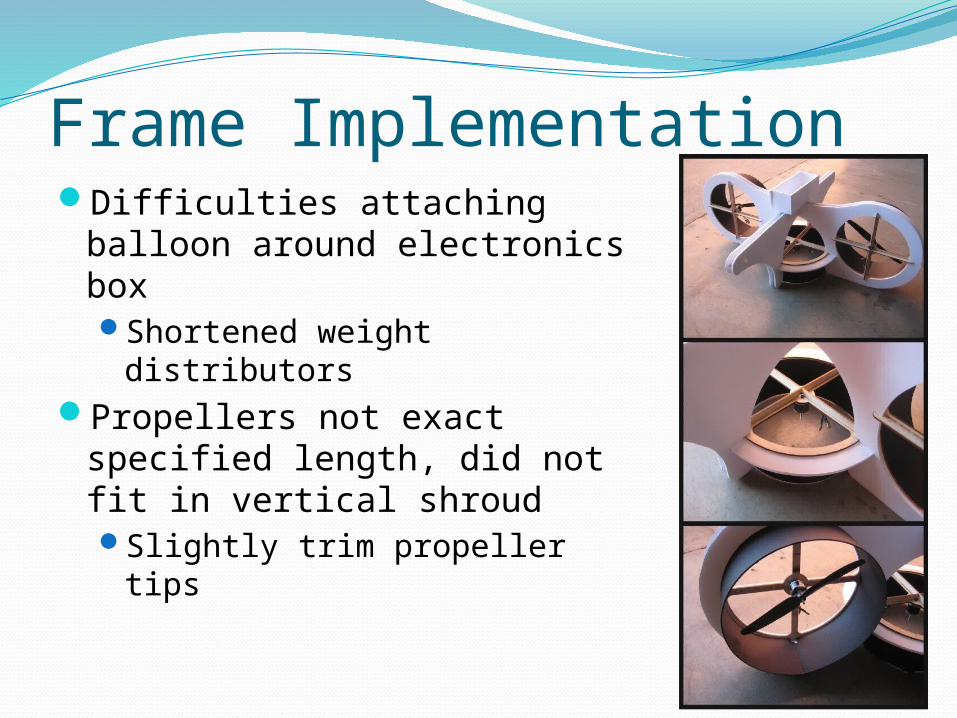
Frame ImplementationDifficulties attaching balloon
around electronics boxShortened weight distributors
Propellers not exact specified length, did not fit in vertical shroudSlightly trim propeller tips
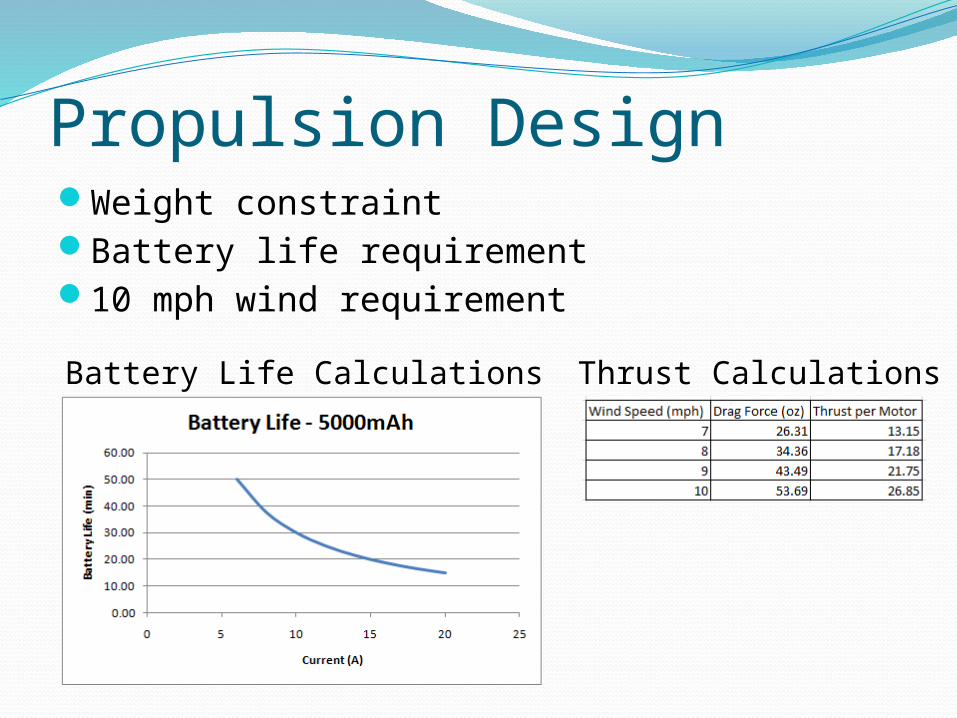
Propulsion DesignWeight constraintBattery life requirement10 mph wind requirement
Thrust CalculationsBattery Life Calculations
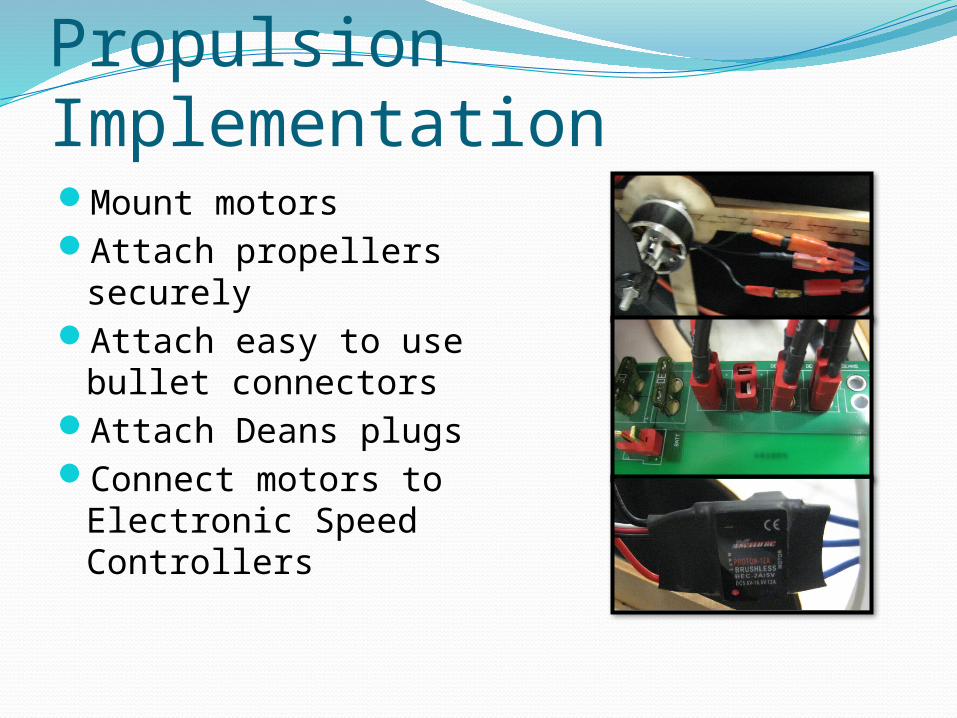
Propulsion ImplementationMount motorsAttach propellers securelyAttach easy to use bullet
connectorsAttach Deans plugsConnect motors to
Electronic Speed Controllers
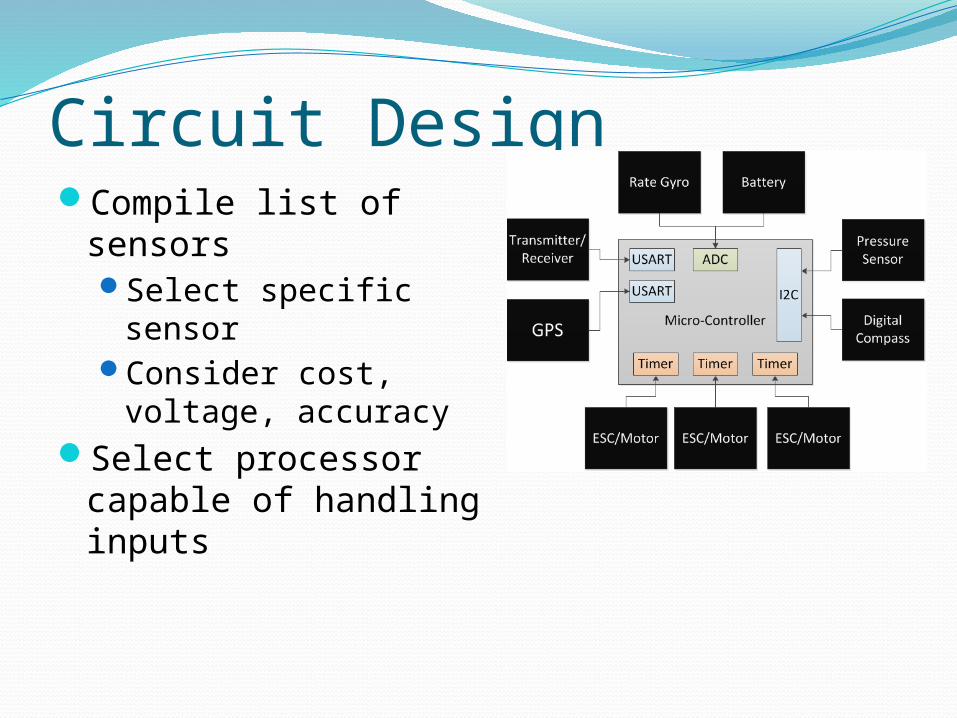
Circuit DesignCompile list of sensors
Select specific sensorConsider cost,
voltage, accuracySelect processor
capable of handling inputs
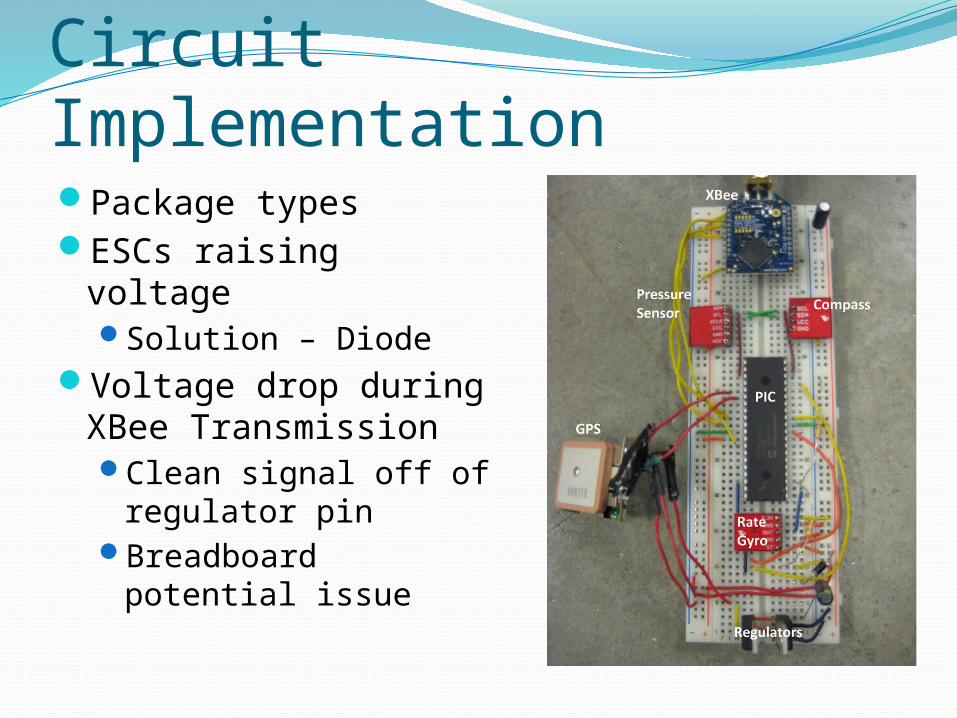
Circuit ImplementationPackage typesESCs raising voltage
Solution – DiodeVoltage drop during
XBee TransmissionClean signal off of
regulator pinBreadboard potential
issue
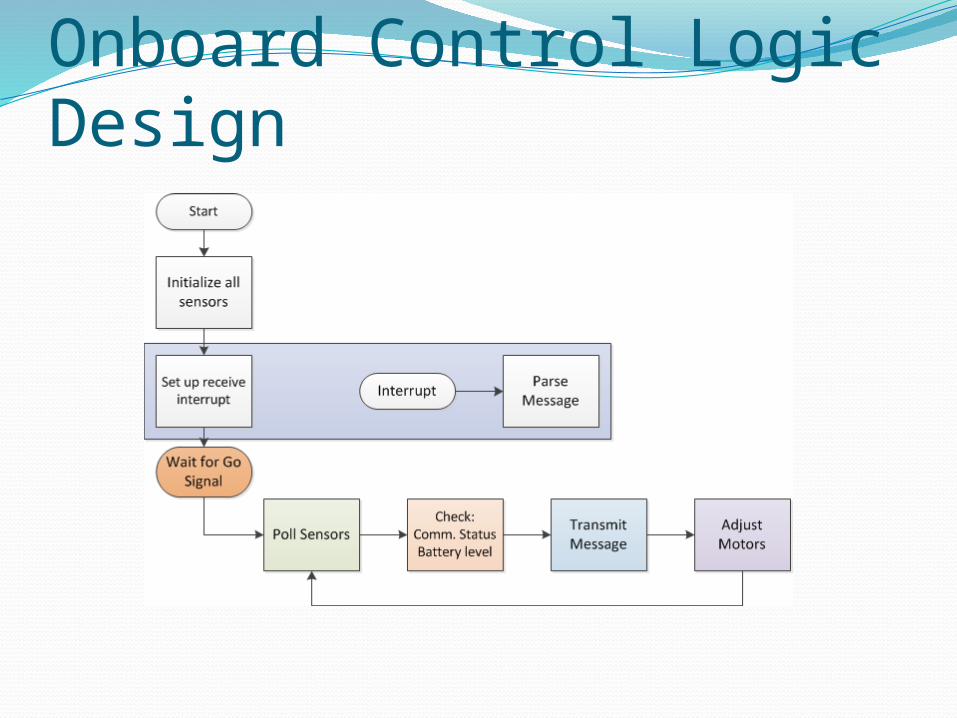
Onboard Control Logic Design
Onboard Control ImplementationImplemented each sensor separately
XbeeADC (gyro)I2C (compass, pressure)GPSTimers (ESCs)
Simple, flexible message formatDealing with limited program space
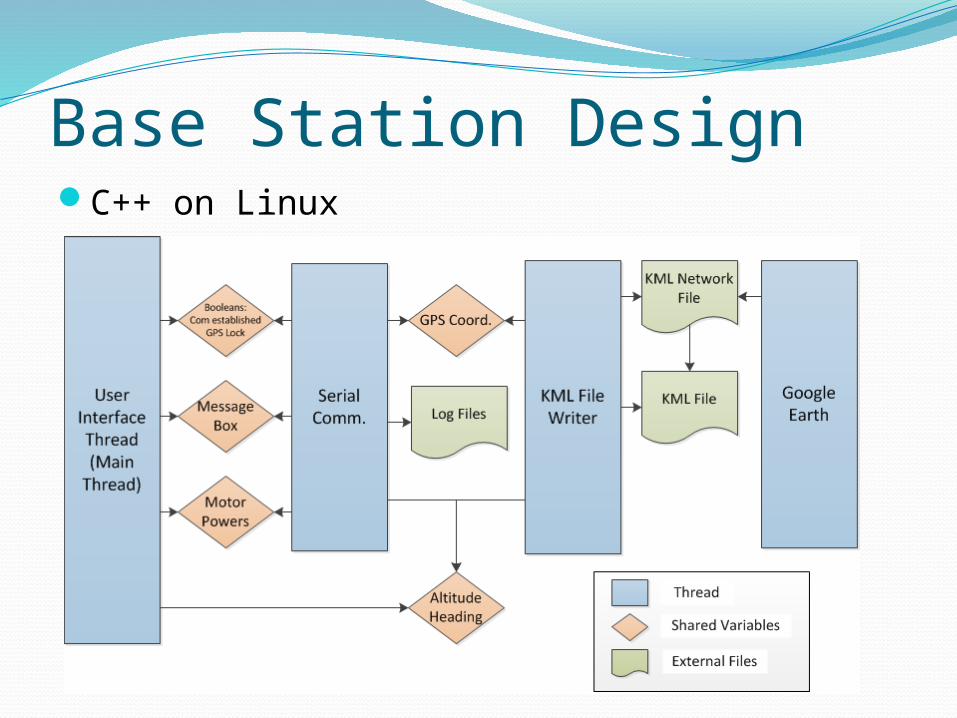
Base Station DesignC++ on Linux
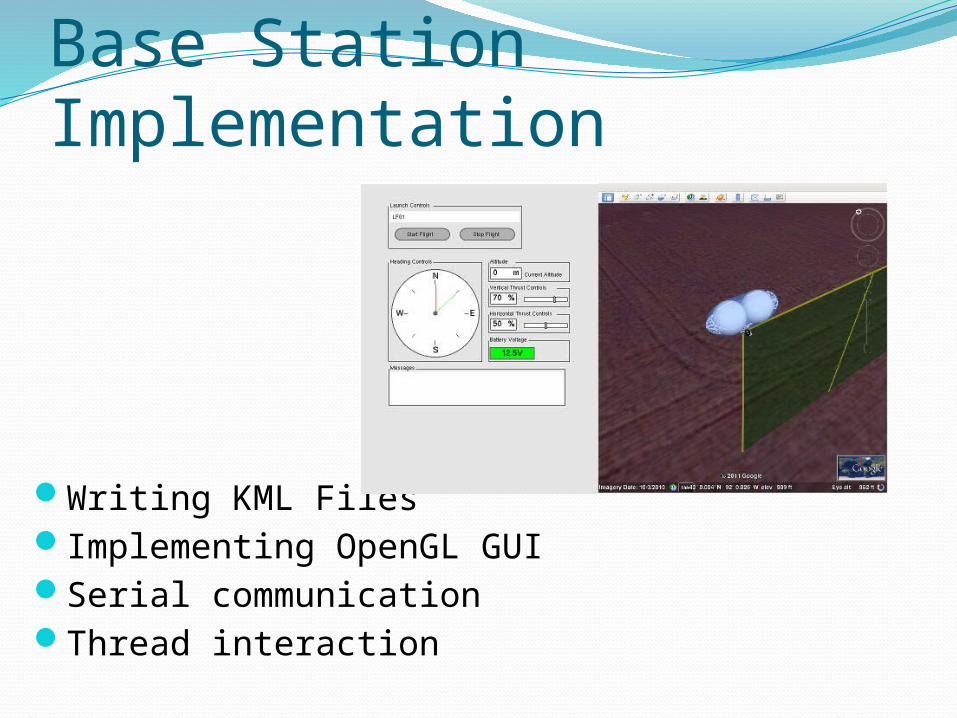
Base Station Implementation
Writing KML FilesImplementing OpenGL GUISerial communicationThread interaction

Testing Approach

Important TestsIndividual module testsSystem liftBase station and onboard system interactionAssembly testsBattery LifeCommunication RangeIndoor test flights (Uncooperative weather recently)
Tests not carried outOutdoor tests – Fight winds

Lessons LearnedSkills
Basics of constructing practical circuitsBasics of PIC Programming
Be flexible - hold up in one area, work on another
Test changes one at a time to isolate unknowns
Budget enough time for documentationInterdisciplinary team

Questions?



























