Embed Size (px)
Citation preview

LPV control of an active vibration isolation system
W.H.T.M. Aangenent, C.H.A. Criens, M.J.G. van de Molengraft, M. Heertjes, and M. SteinbuchDepartment of Mechanical Engineering, Technische Universiteit Eindhoven
Abstract— The closed-loop performance of motion systemsthat suffer from non-stationary disturbances could benefit fromknowledge of these disturbances. Indeed, if the disturbancecould be measured, this measurement could be used to enable alinear parameter varying (LPV) controller to adapt itself to thecurrent operating condition, resulting in a closed-loop systemwith an overall increased performance. In this paper, this ideais applied to an active vibration isolation system which suffersfrom non-stationary disturbances.
Index Terms— LPV, vibration isolation, frequency estimator
I. INTRODUCTION
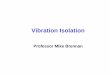
In high-precision motion systems, vibrations of unknownfrequency and amplitude can limit the performance. Thesevibrations can for instance be induced by floor vibrationsthat are transferred to the system or by forces that directlyact on the system such as airflow from the air condi-tioning. Examples of processes where this occurs includehigh-resolution measurement equipment such as scanningelectron microscopes [1] used for sub-micron imaging, andphotolithographic wafer steppers and scanners [2] used tofabricate integrated circuits. For these systems, the typicalamplitudes of the induced vibrations are of the same mag-nitude as the dimensions of the measured or manufacturedobjects, and therefore these vibrations limit the performance.To provide such systems with a vibration free platform,vibration isolation systems are used, where disturbance iso-lation is achieved passively, actively, or both. Figure 1 showsa schematic representation of such a vibration isolationsystem. Herein, k, b are the isolator stiffness and damping,respectively, d represents the floor vibrations and fd denotesthe disturbance forces that act directly on the payload. Thepayload displacement in vertical direction is denoted by y,and fa is the force generated by the actuator. The goal ofa vibration isolation system is to minimize the effect of theenvironmental disturbances d and fd on the vertical velocityv = y of the payload. The passive part of the vibrationisolation system consists of a heavy payload supported byelastic springs and damping units, resulting in a mechanicallow-pass system with typical resonance frequencies between2 and 5 Hertz. Since the passive system is generally weaklydamped, disturbance amplification at the natural frequencyis often observed. Increasing the structural damping of thesystem may offer a solution, however, a major disadvantageof passive damping is that the disturbance rejection prop-erties deteriorate. This is illustrated in Figure 2, where atypical frequency response of the transfer from fd to y isdepicted. Moreover, the passive type is, in principle, unableto attenuate disturbances fd that directly act on the payload
ii
“plant˙temp” — 2008/8/12 — 15:42 — page 1 — #1 ii
ii
ii
payload
k b fa
fd
d
y
Fig. 1. Schematic representation of a vibration isolation system.
10−1
100
101
102
−40
−20
0
20
Gai
n[d
B]
Frequency [Hz]
Fig. 2. Mechanical low-pass characteristic of a passive isolation systemwith low (black) and high (grey) structural damping.
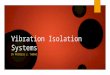
such as an exiting force generated in a mounted operatingmachine, airflow from the air conditioning, and acousticexcitations. By applying active damping near the naturalfrequency of the passive system, i.e., by active vibrationisolation, a significant benefit in vibration isolation can beobtained.In the active vibration isolation system (AVIS) we consider,active vibration isolation is achieved by controlled actuationof the payload, based on feedback of its absolute velocity.The absolute velocity is obtained via geophones while theactuation is performed by means of Lorentz actuators. Apicture of the AVIS is shown in Figure 3. The schematicof one of the controlled vibration isolators is depicted inFigure 4, where u=fa is the controller output, v = y is thepayload velocity in vertical direction, G denotes the transferfunction of an isolator module, and C is the controller. Afourth-order model of an isolator of the AVIS is given bythe transfer function [3]
G(s) =m2s
2 + b12s + k12
m1m2s4 + (m1 + m2)(b12s3 + k12), (1)

Fig. 3. Active Vibration Isolation System (AVIS).
ii
“plant˙temp” — 2008/8/12 — 15:47 — page 1 — #1 ii
ii
ii
�
�
G
C
ΣΣd
u
y
fd
vsbs + k
Fig. 4. schematic of the controlled isolation system.
with m1 = 950 kg, m2 = 50 kg, b12 = 3 · 102 Nsm−1, andk12 = 1.75 · 106 Nm−1. The isolator’s passive stiffness anddamping are k = 4.25 · 105 Nm−1 and b = 2 · 103 Nsm−1,respectively. To reduce the effect of disturbances near theresonance frequency, controller C is designed as the complexvalued damper [3]
C(s) = kd
(s
s + ωhp
)2 (ωlp
s + ωlp
)2
, (2)
which consists of a gain kd, combined with a low-pass filterwith cut-off frequency ωlp, and a high-pass filter with cut-off frequency ωhp. The choices for ωhp and ωlp are relatedto the limitations of the sensors and actuators, respectively.Since the geophones produce unreliable output below 0.1Hz, and since actuator limitations occur beyond 100 Hz,the cut-off frequencies are chosen as ωhp =0.2π rad/s andωlp =200π rad/s, and the gain is kd =3 · 104 Nsm−1. Thiscontroller is designed to preserve the desirable properties athigh frequencies of the passive isolator, while it significantlyreduces the effect of disturbances around the resonancefrequency. In Figure 5 the Bode diagram of the uncontrolledplant (i.e., of the passive vibration isolation system)
Pp(s) =v(s)fd(s)
=sG(s)
1 + (bs + k)G(s), (3)
is compared with that of the the controlled plant (i.e., of theactive vibration isolation system)
Pa(s) =v(s)fd(s)
=sG(s)
1 + (bs + k)G(s) + sC(s)G(s). (4)
The maximum amplitude occurs around the resonance fre-quency, which implies that the plant still is most sensitive todisturbances in this frequency region. However, the sensitiv-ity in this region is reduced by about a factor 17. The pricepaid is a slightly increased amplitude between 10 and 20 Hz.
−120
−100
−80
−60
Gai
n[d
B]
10−1
100
101
102
−100
−50
0
50
100
Frequency [Hz]
Phas
e[d
eg]
Fig. 5. The Bode diagram of the transfer function from the environmentaldisturbance fd to the measured output v of the passive isolation system(black) and of the active isolation system (grey).
II. PROBLEM SETTING AND PROPOSED APPROACH
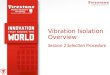
In this paper, the payload of the AVIS is used as anexperimental benchmark representing a metrology frame thatneeds to be isolated from environmental disturbances. Thismeans that the amplitude of the vertical velocity v should becontrolled to be as low as possible. A machine is mountedto this metrology frame that performs periodic tasks, whichresult in non-stationary environmental disturbances fd withfrequency content between 4 and 10 Hz, depending on thespecific task that is performed. This machine is representedby a rotational imbalance, depicted in Figure 6. The induceddisturbances fd are not known beforehand and cannot bemeasured directly. As a consequence, direct disturbancecompensation via feedforward cannot be applied. Althoughother disturbance sources are present as well, the periodicdisturbance generated by the mounted machine is expectedto dominate the measured output. All that is known aboutthe induced disturbance is that it consists of a single,time-varying frequency in the range 4 to 10 Hz. Althoughcontroller (2) reduces the effect of disturbances in this range,the achieved isolation performance is considered not to beadequate. To improve the isolation performance, controller(2) will be adjusted in order to provide additional disturbancereduction.A classical solution to reduce disturbances at specific fre-quencies is the use of an inverted notch filter in the controllerto increase the gain at that frequency. Such a notch filterresults in a decreased sensitivity for disturbances in a smallfrequency range around the center frequency of the notch.Unfortunately, a classical notch filter cannot be applied to theposed problem for two reasons. Firstly, the frequency of theexpected periodic disturbance varies in an interval between4 and 10 Hz, while a fixed notch is only effective around asingle frequency. Secondly, even if the disturbance signalwould be stationary instead of time-varying (for instancewhen the mounted machine is operating in a stationary con-dition), the actual disturbance frequency, and hence the target

(a)
(b)
Fig. 6. (a) The active vibration isolator platform including the mountedrotating imbalance, (b) a close-up of the rotating imbalance.
center frequency of the notch, is not known beforehand.In this paper, we propose a solution to improve the iso-lation performance that circumvents these two problems.The problem of the unknown frequency will be tackledby devising an algorithm that identifies the dominatingdisturbance frequency from available measured data from theAVIS. The problem of frequency variation can be solved byextending controller (2) with a notch of which the centerfrequency can be varied. This way, the controller can adaptthe center frequency of the notch to the identified disturbancefrequency, resulting in an improved isolation performanceat that frequency. The problem requires a frequency iden-tifier that is able to determine the actual frequency of thedisturbance from the measured signals of the AVIS. Sincethe proposed LPV controller is required to adapt itself tothe disturbance that acts on the system, ideally the exactdisturbance frequency at the current time instant should beavailable. Unfortunately, the Heisenberg uncertainty princi-ple [4] implies that it is not possible to have both a hightime resolution ∆t (accuracy with which the moment intime where the frequency is present can be determined),and a high frequency resolution ∆f (accuracy with whichthe frequency can be determined). The uncertainty principlestates that the product of ∆t and ∆f is lower bounded. Thismeans that it is possible to identify a frequency componentfa with either a high frequency resolution and a low timeresolution, or with a high time resolution and a low frequencyresolution, but not with both. Since in practical applicationslow frequency components often last a long period of time,
while high frequency components often appear as shortbursts, a so-called multiresolution spectrum is desirable.Such a multiresolution spectrum combines a high frequencyresolution (with a corresponding low time resolution) forlow frequencies with a high time resolution (and hence alow frequency resolution) for high frequencies. To obtain thefrequency spectrum of a measured signal, various methodsare available, of which the Fourier transform (FT) [4] isprobably the most widely used. Unfortunately, the FT offersonly the global frequency content of the signal without anytime information. An adapted version of the FT, called theshort time Fourier transform (STFT) [5], is able to retrieveboth frequency and time information of the signal. The majordisadvantage of the STFT, however, is that is has a fixedresolution, i.e., the desired multiresolution spectrum cannotbe obtained by this transform. The wavelet transform [4] wasdeveloped as an alternative approach to the short time Fouriertransform to make a multiresolution analysis possible.
III. CONTROLLER DESIGN
The frequency of the dominating disturbance that acts onthe system can be identified by using a wavelet-based algo-rithm as discussed in the previous section. This informationcan be used to adapt controller (2) in order to improve theisolation performance at that frequency. Such a controllercan be designed via the LPV synthesis framework [6] usingfrequency and parameter dependent weightings expressingthe desired performance. For this specific application how-ever, it is expected that the desired performance can beachieved by extending controller (2) with an LPV notch filter,the center frequency of which is adapted to the identifieddisturbance frequency. Therefore, in this section we willdesign the controller by hand and analyze the closed-loopstability afterwards.An LTI notch filter is described by the transfer function
Hn(s) =s2 + 2β1(2πfn)s + (2πfn)2
s2 + 2β2(2πfn)s + (2πfn)2, (5)
where fn is the center frequency in Hz, and β1 and β2 are pa-rameters that can be used to alter the reduction factor and thewidth of the notch. Although ideally all three parameters fn,β1, and β2 should be adapted depending on the disturbancecharacteristic, in this paper we only consider the adaptationof the center frequency fn. Several factors play a role inthe determination of the constant reduction factor and widthof the notch filter. If only steady-state disturbance rejectionaround the center frequency fn is considered, a wide notchwith a large reduction factor is desirable. Indeed, a widenotch will not only reduce disturbances at fn, but has alsogood disturbance rejection properties for frequencies near fn,while a larger reduction factor results in a higher reduction.Unfortunately, there are also downsides to using such anotch filter. Widening the filter reduces the disturbances in alarger area around the center frequency, but at the same timeresults in amplification of disturbances in another, larger,frequency region. This is illustrated in Figure 7(a), wherethe frequency response of the original actively controlled

plant (4) is compared to that of the same controlled plantincluding a notch filter of different widths. The same holdsif the reduction factor of the notch is increased. Another
10−1
100
101
102
−120
−110
−100
−90
−80G
ain
[dB]
Frequency [Hz]
(a)
0 0.5 1 1.5 2−2
−1
0
1
2x 10
−5
Time [s]
y
(b)
Fig. 7. Bode diagram of the original controlled plant (4) (dashed) and twonotches of different widths (solid black and grey). (a) Effect of wideningthe notch on the frequency response, (b) effect of widening the notch onthe transient response time.
issue related to the width and reduction factor of a notch isits transient response time. A short transient response time ofthe notch filter is desirable since it allows a fast adaptationof the controller to the current disturbance frequency. Awide notch filter has a shorter transient response time thana narrow one, just as a filter with a smaller reduction factorhas a shorter transient response time than one with a higherreduction factor. The effect on the transient response causedby widening the notch filter is illustrated in Figure 7(b),where the response of the controlled plant to a sinusoidaldisturbance of 10 Hz is depicted with the same notch filtersof different width.The transient response time of the notch filter depends onthe center frequency similarly as the frequency identificationtime of the real-time frequency analyzer. Therefore, in a goodoverall controller design, the transient response time of thenotch filter for a certain frequency, and the time it takes toidentify that frequency should be matched. We will use anotch that reduces the amplitude of a sinusoidal disturbancewith a frequency corresponding to the center frequency fn
to approximately half of the final reduction in 3 periods.
Furthermore, we choose a reduction factor of 30. The abovediscussion results in β1 =0.6 and β2 =0.02.
IV. STATE-SPACE REALIZATION AND STABILITY
To arrive at a closed-loop state-space system from distur-bance input fd to measured output v, we start by representingthe uncontrolled AVIS (the passive vibration isolation sys-tem) (3) in state-space form as
x = Ax + Bfd
v = Cx,(6)
where x ∈R4 is the state vector, and A,B, C are matricesof appropriate dimensions. The state-space description of theoriginal controller (2) is given by
xco = Ac
oxco + Bc
ov
u = Ccoxc
o,(7)
where xco ∈ R4 is the original controller state vector, and
Aco, B
co, C
co are matrices of appropriate dimensions. This con-
troller will be augmented with a notch filter that adapts itselfto the dominating disturbance. The LTI notch filter (5) canbe changed to an LPV notch by using the center frequencyas the scheduling variable, i.e., δ := 2πfn. This LPV notchcan be represented by various state-space realizations. Itis well-known that the complexity and conservatism of thestability and performance analysis of LPV systems dependson the type of parameter dependence of that system [?].For instance, systems that are affinely parameterized allowa quadratic stability analysis without a relaxation gap, andhence we aim for an affinely parameterized closed-loop sys-tem. Since the state-space description of the controlled AVISis affine in the controller state-space matrices, an affinelyparameterized state-space description of the controller resultsin an affinely parameterized state-space description of thecontrolled AVIS.The LPV notch will be described by the modal canonicalstate-space representation[
xcδ
u
]=
[Ac
δ(δ) Bcδ(δ)
Ccδ(δ) Dc
δ(δ)
] [xc
δ
v
], (8)
where xcδ∈R2 is the notch state vector and where[
Acδ(δ) Bc
δ(δ)Cc
δ(δ) Dcδ(δ)
]=
−δβ2 −δ√−β2
2 +1 δ
δ√−β2
2 +1 −δβ2 δ(β1−β2)
(β22−β2
√−β2
2+1−1)
β22−1
(β1−β2)(
β22+β2
√−β2
2+1−1)
β22−1
1
,
(9)
which is indeed affine in δ. The series connection of (8)and the original controller (7) results in the affine parameterdependent controller[
xc
u
]=
[Ac(δ) Bc(δ)Cc(δ) Dc(δ)
] [xc
v
], (10)

where xTc = [xcT
δ xcTo ]T and[
Ac(δ) Bc(δ)Cc(δ) Dc(δ)
]=
Acδ(δ) 0 Bc
δ(δ)Bc
oCcδ(δ) Ac
o BcoD
cδ(δ)
0 Cco 0
.
(11)The closed-loop state-space system from disturbance inputfd to measured output v is then given by[
xcl
v
]=
[A(δ) B(δ)C(δ) D(δ)
] [xcl
fd
], (12)
where xTcl = [xT xT
c ]T and[A(δ) B(δ)C(δ) D(δ)
]=
A −BCc(δ) BBc(δ)C Ac(δ) 0
C 0 0
. (13)
Note that (12) is affine in the scheduling parameter δ.Stability of affine parameter dependent systems such as (12)can be assessed by solving a set of LMIs. The complexityof this set depends on the allowed rate of variation ofthe scheduling parameter. In our application, the operatingcondition of the mounted machine may be changed arbitrarilyand hence the scheduling parameter may vary arbitrary fast.The following sufficient condition for the stability of affinedependent systems with an arbitrary fast rate of variation iswell-known.
Theorem IV.1 ( [?]) Affinely parameterized system (12)with an arbitrary fast varying parameter δ ∈ [δ, δ] isquadratically stable if and only if there exists K =KT � 0such that
A(δ)T K + KA(δ) ≺ 0 for all δ ∈ {δ, δ}. (14)
Our application aims at reducing sinusoidal disturbanceswithin the frequency range 4 to 10 Hz and therefore thescheduling parameter will be restricted to lie within theinterval δ ∈ [2π4,2π10]. The LMI solver SeDuMi [7] issuccessfully used to find a positive definite matrix K ∈R10×10, which satisfies (14). Based on Theorem IV.1, wenow have that system (12) is stable for arbitrarily fastparameter variations in the range δ∈ [2π4,2π10].
V. INTERCONNECTION OF THE SIGNAL ANALYZER ANDTHE CONTROLLER
Since both the real-time spectrum analyzer and the LPVcontroller (10) have been designed, they can be intercon-nected to obtain the complete control setup as was proposedin Figure ??. Several measured signals could be used toidentify the dominating disturbance frequency. A logicalfirst choice would be to use the vertical velocity v of theAVIS since the goal of the controller is to minimize thisvelocity. However, a direct consequence of this goal is thatthe amplitude of the disturbing frequency is largely reduced,and therefore it is difficult to recognize this frequency withthe spectrum analyzer. A better alternative is to use thecontroller output u as the input to the spectrum analyzer. Incontrast to the vertical velocity of the AVIS, the amplitude
of the disturbance frequency will not decrease due to thesuppression of the controller in this signal. As long asthe disturbance is acting on the AVIS, its frequency ispresent in the controller output. A schematic overview ofthe complete control system as it will be implemented isshown in Figure 8.
ii
“plant˙temp” — 2008/7/9 — 16:15 — page 1 — #1 ii
ii
ii
AVIS
SpectrumAnalyzer
Controller
δ
u v
Fig. 8. Schematic representation of the implementation of the controllerand the spectrum analyzer.
VI. EXPERIMENTAL RESULTS
In this section, experiments will be performed on theexperimental setup as depicted in Figure 6. The rotatingimbalance is used to generate disturbance forces fd thatdirectly act on the payload. The imbalance is represented by amass md located at a distance ed from the center of rotation.For constant angular velocities ωd, the induced disturbanceforce on the payload equals
fd = mdedω2d sin(ωdt). (15)
These disturbance forces are sinusoids with frequency ωd/2π
Hz and an amplitude that is proportional to ω2d. The rotational
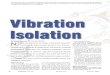
velocity of the mass can vary in time, but is restrictedbetween 4 and 10 revolutions per second. As mentionedbefore, environmental disturbances are present as well, butdisturbances from the rotating mass dominate the disturbancespectrum.During this experiment, the rotational velocity ωd of theimbalance is controlled to vary continuously between 4 and10 revolutions per second. The variation is obtained by usinga sinusoidal reference velocity profile for the imbalance witha frequency of 0.02 Hz. The first half of the experiment, upto 50 seconds, the original LTI controller (2) is applied to beable to quantify the performance improvement of the LPVcontroller. After 50 seconds the LPV controller (10) is usedtogether with the real-time spectrum analyzer. In Figure ??the results from this experiment can be seen. Figure 9 showsthe estimated frequency of the dominating disturbance by thereal-time spectrum analyzer. The measured vertical velocityv of the AVIS and the off-line computed time-frequencyspectrum are depicted in Figure 10. Several observations canbe made from this figure. The overall error is decreasedbetween a factor 3 to 5, depending on the disturbancefrequency. When the LPV controller is scheduled to increasethe performance around 10 Hz an increase in the error levelin the frequency range 10 to 15 Hz can be observed. Thisis in agreement with Figure 7, where it was shown that theapplication of a notch around 10 Hz results in amplification

of the environmental disturbances in that range. As a finalobservation we note that there is a frequency componentaround 130 Hz in the vertical velocity of the payload.Although this cannot be explained from the first principlesmodel of the isolator (1), frequency response measurementsshow that indeed a resonance frequency is present in thisrange. It is clear from this experiment that the LPV controllercan offer a major increase in performance.
0 20 40 60 80 1000
2
4
6
8
10
12
Fre
quen
cy[H
z]
Time [s]
Fig. 9. Estimated frequency.
Fig. 10. Measured signal v and its spectrum. Dark red indicates nofrequency content while blue indicates maximum frequency content.
VII. CONCLUSIONS
In this paper we proposed a nonlinear controller setup forthe active control of a vibration isolation system. This setupconsists of two parts: (i) a real-time multiresolution spectrumanalyzer that is able to identify the currently dominatingdisturbance, and (ii) an LPV controller that adapts itselfto the available disturbance information. This resulted ina control system that is able to adapt itself to the currentoperating condition resulting in a closed-loop system withan overall increased performance when compared to an LTIcontroller.The part of the controller that was scheduled according tothe identified disturbance frequency was a notch filter. Such
a notch filter has a certain width and reduction factor. Thesedesign parameters should be chosen with the applicationand expected disturbance variation in mind. A wide notchwith a large reduction factor results in good disturbancereduction properties around the center frequency of the notch.However, at the same time environmental disturbances inother frequency regions will be amplified by such a notch.A too narrow notch with a small reduction factor on theother hand may not be adequate to reduce the dominatingdisturbance at the center frequency.The proposed control system was validated by experimentsthat were performed on an active vibration isolation system.Compared to the originally designed LTI controller, the LPVcontrol system was able to decrease the error by a factor 3to 5 in case the disturbance spectrum is dominated by asingle sinusoid with varying frequency. If the disturbancefrequency varies very fast, the LPV control system is notable to adapt itself to the disturbance. This is both caused bythe real-time spectrum analyzer as well as by the controlleritself. The desired accuracy of the analyzer and the width andamplification factor of the notch may be altered to match thechanged disturbance properties.Although ideally the center frequency, the width, and thereduction factor of the notch filter should all three beadapted conform to the disturbance, in this paper we onlyconsidered the adaptation of the center frequency. The real-time spectrum analyzer not only offers the frequency ofthe dominating disturbance, but also its amplitude. Thisestimated amplitude can be used in conjunction with thegiven performance specifications to additionally schedule thereduction factor of the notch filter. The spectral analysis ofpast data can be used to estimate the rate of change of thedisturbance spectrum and this information can also be usedto schedule the width and amplification factor of the notchfilter. All this will be subject of future research.
REFERENCES
[1] C. Julian Chen, Introduction to Scanning Tunneling Microscopy. Ox-ford University Press, 2007.
[2] H. Yoshioka, Y. Takahashi, K. Katayama, T. Imazawa, and N. Murai,“An active microvibration isolation system for hi-tech manufacturingfacilities,” Journal of Vibration and Acoustics, vol. 123, no. 2, pp. 269–275, 2001.
[3] M. Heertjes, N. van de Wouw, and W. Heemels, “Switching controlin active vibration isolation,” in Proceedings of the 6th EUROMECHNonlinear Oscillations Conference (ENOC), Saint Petersburg, Russia,2008.
[4] P. Flandrin, Time-Frequency/Time-scale analysis. London, UK: Aca-demic Press, 1999.
[5] G. Strang and T. Nguyen, Wavelets and Filter Banks. Wellesley-Cambridge Press, 1996.
[6] C. Scherer, “Robust mixed control and LPV control with full blockscalings,” in Advances in linear matrix inequality methods in control,L. Ghaoui and S. Niculescu, Eds. Philadelphia: Siam, 1999.
[7] J. Sturm, “Using SeDuMi 1.02, a Matlab toolbox for optimization oversymmetric cones,” Optimization methods and software, vol. 11-12, pp.625–653, 1999.