Embed Size (px)
Citation preview

TECNOLOGIAS MOTION TRACKING E MOTION CAPTURE: POÉTICAS E CIBERNÉTICAS
Profa. Dra. Ludmila Pimentel, Escola de Dança da UFBA, Brasil
Resumo -‐ Entre os anos de 1986 a 1990, o artista David Rokeby pioneiramente desenvolveu o Very Nervous System (VNS), plataforma essa que permitia que os movimentos e dados obtidos a partir do corpo do performer pudessem, através de câmeras e de sensores de movimento, alimentar a programação do software e produzir outputs gráficos ou sonoros. O VNS foi o primeiro sistema a nos oferecer a possibilidade de produzirmos performances de dança e instalações artísticas de qualidade interativa em tempo real, e esse estado da arte muito nos interessa pois propomos aqui que a História e surgimento da tecnologia Motion tracking se entrelaça e faz derivar a também contemporânea tecnologia chamada Motion capture (Mocap), propondo-‐as aqui como protocolos derivados da mesma família cibernética. Considerando que o sistema criado por Rokeby se fundamenta na Teoria da Ciência Cibernética, ou a chamada Primeira Cibernética de Norbert Wiener, publicada por primeira vez em 1948, e que ainda nos influencia contemporaneamente, já que o performer gera dados que alimentam ao sistema, através de inputs, e que após processamento no sistema esses dados geram outputs diversos, também podemos afirmar que o experimento/sistema de Rokeby é coerente com a Cibernética de 2a. ordem, ou Cibernética da Cibernética de Heinz von Foerster (1960), em sua proposição quanto à circularidade, autonomia e auto-‐referencia do sistema, já que com o VNS o performer produzia novas respostas ao software a partir dos outputs gerados, estabelecendo a circularidade e retroalimentação do sistema, que também possui protocolos de auto-‐organização regulando eventos que o perturbem. Refletindo que as tecnologias Motion tracking e Motion capture são ainda recentes na História da Media Art, assim que propomos tecer interfaces e intercessões entre as especificidades técnicas dessas tecnologias, apresentando-‐as como tecnologias cibernéticas, e observando alguns exemplos, aqui usados como rastros, para delinearmos esse panorama instaurado na Contemporaneidade, apreciando também suas aplicações no campo da Performance de Dança. Em última instância nos interessa observar essas tecnologias cibernéticas para refletirmos sobre a poética gerada pelas mesmas, traçando algumas primeiras variáveis de observação sobre o fenômeno. Palavras chaves — Media Art, Tecnologia, Motion capture, Motion tracking, Cibernética.

2
Abstract -‐ Between the years 1986-‐1990, the artist David Rokeby innovatively developed the Very Nervous System (VNS), this platform that allowed data obtained from the body´s movement of the performer could feed, through cameras and motion sensors, the programming of the software and produce graphics or sound outputs. The VNS was the first system to offer us the possibility of producing dance performances and art installations with interactive quality in real time, and this state of the art really interests us because we are proposing here that the History and the emergence of Motion tracking technology intertwines and also derives the contemporary technology called Motion capture (mocap), we are also proposing them as protocols derived from the same Cybernetics family. Considering the system created by Rokeby is based on the Theory of Cybernetics Science, the First Cybernetics of Norbert Wiener, this theory was published for the first time in 1948, and still influences us, since the performer generates data that feeds the system through inputs, and after processing data, the system generates different outputs, we can also say that the Rokeby´s experiment / system is consistent with the Second Cybernetics, or Cybernetics of Cybernetics proposed by Heinz von Foerster (1960), in his proposition as to circularity, autonomy and self-‐reference system, because the performer in the VNS system produced also new answers to the software from the generated outputs by setting the circularity and feedback of the system, which also has protocols for self-‐organizing that regulate disturb events. Reflecting about the Motion tracking and Motion capture technologies is still recent in the History of Media Art, in this way we are porposing to weave interfaces and intersections between the technical specificities of these technologies, presenting them as cybernetic technologies, and observing some examples, here used as tracks for delimited this contemporary scenery, also enjoying their applications in the field of Dance Performance. Ultimately we are interested in observing these cybernetic technologies to reflect on the poetic generated by them, tracing some first observation variables about the phenomenon.
keywords — Media Art, Tecnology, Motion capture, Motion tracking, Cybernetics.

3
I. Introdução O Elétrico – Grupo de Pesquisa em Ciberdança do Programa de Pós-‐graduação em Dança da Escola de Dança da Universidade Federal da Bahia (UFBA, Brasil), desde 2000 investiga as interfaces entre a linguagem da dança contemporânea e as tecnologias digitais, visando produzir conhecimentos específicos nessa área ainda recente de pesquisa, observando, mas também produzindo essas novas formas híbridas contemporâneas; inserindo e contextualizando a Escola de Dança da UFBA no ambiente tecnológico e digitalizado que vivemos contemporaneamente. O Elétrico tem como objetivo principal fomentar a produção teórica e artística relacionada à questões emergentes da Cibercultura e Ciberdança. Com esse objetivo no ano de 2009 a Professora Doutora Ludmila Pimentel, líder do Elétrico, apresentou o Projeto de Pesquisa Digitalização e Animação do Movimento com o software Lifeforms à Pró-‐Reitoria de Pesquisa e Pós-‐graduação da UFBA (PRPPG/UFBA); a pesquisa gerou diversos experimentos coreográficos digitalizados e também recebeu o Prêmio PUBLIC/Fapex 2010 por ter produzido um tutorial em português do software Lifeforms. Já no edital PIBIC/UFBA 2010/2011 foi apresentado o Projeto de Pesquisa Interfaces e softwares para a Performance Interativa, e em 2011 a Professora Pimentel ampliando o projeto de 2010, propôs o a pesquisa Interfaces e softwares para a Performance Interativa: as tecnologias Motion capture e Motion tracking, em ambos os projetos os integrantes do Elétrico puderam conhecer e aprofundar conhecimento sobre essas duas tecnologias contemporâneas possíveis de serem aplicadas à Dança: a tecnologia Motion tracking e a tecnologia Motion capture (Mocap). Como ação complementar e complexificadora ao projeto, no ano de 2012, a Professora Pimentel realizou seus estudos de pós-‐ doutoramento intitulado Interfaces e Diálogos entre as tecnologias Motion Tracking e Motion Capture: Estética Coreográfica e Biomecânica do Movimento, na Hochschule der Bildenden Künste (HBK), em Saarbrücken, Alemanha, com apoio da CAPES.
Nesse estudo pós-‐doutoral, além de ter realizado e acompanhado sessões de captura de movimento com o sistema Optitracking Arena, em um ambiente especializado para esse fim, e analisado as possibilidades técnicas da tecnologia Mocap, foram também realizados estudos comparativos entre as tecnologias Mocap e Motion tracking, e foi nesse momento que se iniciaram as primeiras reflexões da Professora Pimentel junto ao Elétrico quanto a proposição de que essas tecnologias possam ser consideradas como emergência poética contemporânea para a Dança. Iniciando-‐se com a primeira indagação de como poderíamos classificar a poética na dança em interface com as tecnologias digitais em esses novos ambientes derivou-‐se uma primeira reflexão de que se faz necessário ampliarmos o conceito de poética no seu sentido clássico, encontrado na referência histórica da obra Poética de Aristóteles, já que as manifestações e formatos artísticos vêm sofrendo constantes modificações, há novas formas de se fazer arte, e portanto há novas formas de se fazer Dança.

4
Considerando a mediação tecnológica como emergência poética (LOUPPE, 2000) estabelecida na Contemporaneidade, a poética da Dança digital apresenta suas particularidades e especificidades, pois trata-‐se aqui da construção de uma poética digital, mas fundamentalmente uma poética de corpo. Dessa maneira, e em concordância com cibernética, as tecnologias do Mocap e Motion tracking aqui abordadas são entendidas aqui como inputs poéticos para a Dança, se inserem no contexto da criação em Dança, ou seja, na ideia contemporânea de “um corpo que não está pronto, que está a se descobrir, que está prestes a se inventar”(LOUPPE, 2000, p.64), e em nossa proposição, a partir das novas tecnologias digitais. Louppe nos ajuda a estabelecer as tecnologias digitais, em especial, as de Mocap e Motion tracking como dinamizadores do pensamento em Dança, e que contribuem para um campo fértil de novas interfaces entre dois campos científicos anteriormente tratados equivocadamente como polos não complementares, a Dança e as Tecnologias. Em nossa proposição e investigação sobre a poética da Dança em interface com as tecnologias digitais, o que alguns autores já consideram sob o termo de Dança Digital, as tecnologias digitais são mediadoras de informação, sendo que a informação de Dança é mediada pela tecnologia digital e a poética da Dança, nessa complexidade, assume uma nova “emergência” como nos apregoa Louppe (2000, op.cit.). Cabe ressaltar que devido as transformações conceituais e estéticas que as tecnologias digitais da imagem têm impulsionado na cultura, elegemos a Teoria da Ciência Cibernética, e sua atualização através da Cibernética da Segunda ordem, para nos conduzir ao entendimento de que tais relações, só se tornaram pertinentes devido a formalização de trocas de informações entre humanos (corpos humanos) e máquinas, e quando culturalmente o nosso corpo passou a construir relações em interface com os artefatos eletrônicos, o que resultou em última instância na modificação da natureza das relações físicas, pessoais e interpessoais, inspirando uma nova cultura, a Cibercultura. II. sobre as Cibernéticas: Wiener e Foerster
O processo de consolidação da Cibernética como campo de experimento com os humanos está dividido em dois períodos distintos e complementares: o primeiro foi estruturado em 1948 por Norbert Wiener, e ficou conhecido como Cibernética de Primeira Ordem; e o segundo, a Cibernética de Segunda Ordem, em 1960, idealizada por Heinz von Foerster.
A palavra “cibernética” foi cunhada por Norbert Wiener em 1948 na tentativa de que um único termo compreendesse o complexo de idéias que abarcavam “o estudo das mensagens como meios de dirigir a maquinaria e a sociedade, o desenvolvimento de máquinas computadoras e outros autômatos que tais, certas reflexões acerca da psicologia e do sistema nervoso, e uma nova teoria conjectural do método científico” (WIENER, 1954, p.15). Ele nos explica em esse livro que criou a palavra “cibernética” a

5
partir da derivação da palavra grega kubernetes, que significa “piloto”, mas ressalta que foi Ampère, nos primórdios do século XIX, o primeiro a utilizar o conceito dentro de um outro contexto: com referência à ciência política.
Apontamos que Wiener foi brilhante em sua antevisão dos fatos, construindo os fundamentos da Cibernética como a teoria do controle de informaçao aplicada à sistemas complexos, o que em nossas reflexoes abrangeriam o corpo humano, já que o nosso corpo é um hierarquizado e sofisticado sistema complexo. Não seria portanto o corpo humano o mais sofisticado aparato cibernético?
Em plena década de 50, Wiener acreditava que “as mensagens entre o homem e as máquinas, entre as máquinas e o homem, e entre a máquina e a máquina, estão destinadas a desempenhar papel cada vez mais importante” (WIENER, op.cit.) e nos oferece um recorrido histórico sobre a evolução dos mecanismos maquínicos: as máquinas mais antigas funcionam a base de um mecanismo do tipo relógio; as modernas, como o abridor de portas automáticos, possuem órgãos sensórios. Portanto neste estágio, a máquina torna-‐se condicionada em sua relação com o mundo exterior, funcionando com os dados introduzidos (input), que provocam um determinado efeito (output). A partir dos acontecimentos, há registros que são armazenados na “memória”. Wiener assim propoe que a forma de funcionar das máquinas tem paralelo com a do homem, já que ele também está sujeito às alterações externas através de sua sensibilidade cinestésica e, igualmente como as máquinas, o corpo humano utiliza-‐se de mecanismos de retroalimentação. A tese de Wiener mostra que ambos, máquinas e humanos, têm receptores sensórios, em ambos existe um instrumento especial para coligir informação do mundo exterior, e também em ambos os casos, tais mensagens externas não são acolhidas em estado puro, mas por via dos poderes internos de transformação do aparelho, seja ele animado ou inanimado (WIENER, 1954, p.16).
Assim que a Primeira Cibernética se dedicou a entender os processos operacionais na organização dos sistemas, isto é, suas metas, propósitos e funcionamento. Buscava-‐se melhores resultados nos procedimentos de regulação e controle entre corpo e máquina, proporcionando a comunicação de sistemas de naturezas diferentes. Tal teoria preconizava que algumas funções no controle e processamento de informações entre máquinas e humanos – e na sociedade em geral – podem ser equivalentes e formalizadas sob os mesmos modelos e leis matemáticas. Dessa maneira, a Cibernética se tornaria uma ciência sobre a troca de mensagens dentro de “um campo mais vasto que inclui não apenas o estudo da linguagem, mas também o estudo das mensagens como meios de dirigir a maquinaria e a sociedade, o desenvolvimento de máquinas computadores e outros autômatos” (WIENER,1954, p.15). Atualizando a Cibernética de Wiener temos a proposição da Cibernética da cibernética, ou Cibernética da Segunda Ordem de Heinz von Foerster.
Heinz von Foerster, criador da Cibernética de Segunda Ordem passou a incluir a lógica recursiva, e a auto-‐referência na teoria, agregando o observador externo do sistema à análise da pesquisa, propondo verificar a ocorrência de fenômenos que incluem aspectos subjetivos em circuitos fechados. O observador não é passivo aos

6
acontecimentos do mundo, está imerso no sistema observado, incluindo suas experiências e suas impressões ao perceber o mundo. É um observador participante que percebe a si, no momento em que “percebe” o sistema trocar informações. O sistema observado é também toda a subjetividade que faz parte do observador. Informações exteriores ao sistema e interiores ao corpo participam sem hierarquização da mesma observação, operando sob a condição de executar trocas de informações o tempo todo e simultaneamente; não é possível separar as partes do sistema, o observador é responsável por sua observação. Von Foerster ampliou o conceito de circularidade proposto na Primeira Cibernética, passando a atribuir a esse processo a capacidade auto-‐organizativa de determinados sistemas, pois, ele reage aos desvios externos, alterando sua própria estrutura, para retornar ao equilíbrio. Isso significa que o sistema é autônomo e busca a estabilidade. Quando o sistema é desestabilizado deve-‐se levar em conta que a partir das crises irão ocorrer processos de crescimento e aprendizagem em toda estrutura envolvida. A organização de Von Foerster propõe uma autonomia no sistema, baseada na auto-‐referência do observador; este produz para si mesmo um tipo de comunicação específica, envolvendo as dimensões sensoriais do corpo, em uma linguagem que conecta o orgânico e o não orgânico. Só se aplica o conceito de circularidade nos sistemas cibernéticos de segunda ordem quando o observador interfere no sistema e vice-‐versa. Isso implica em uma atividade auto-‐organizativa própria do sistema, em que a comunicação acontece de forma cíclica: se o sistema não receber uma resposta do observador, para o que foi comunicado, o sistema se autorregula, se reorganiza e estimula o observador para que este, através de uma ação corporal, envie uma nova resposta ao sistema. A dança em interface com as tecnologias digitais de Mocap e Motion tracking é aqui proposta no contexto da Ciência cibernética, e precisa ser entendida como um processo que se organiza enquanto um sistema sofisticado e complexo. Essa noção coloca os elementos que a estruturam – como luz, cenografia, figurino, musica, vídeo – em relação uns com os outros e não em hierarquia. Quando entendida enquanto sistema produz comunicação que gera uma linguagem corporal abstrata, e faz comunicar singularidades quando se instaura nas particularidades do movimento corporal humano. III. Especificidades técnicas das tecnologias Motion capture (Mocap) e Motion tracking Entre os anos de 1986 a 1990, o artista David Rokeby1 pioneiramente desenvolveu o Very Nervous System (VNS), nessa interface configurada tecnicamente por Rokeby, o performer fornece dados ao software para a criação de outputs, para isso são utilizados câmeras de vídeo, processadores de imagem, computadores e sintetizadores criando um espaço sensível aos movimentos do performer, o performer além de criar outputs
1 Ver a homepage do artista In: http://homepage.mac.com/davidrokeby/vns (acesso em 31/05/2012).

7
sonoros e visuais, também faz gerar outros corpos (outputs visuais) a partir do seu, considerados como duplos digitais, dançando em um espaço interativo e assim exemplificando um primeiro sistema da tecnologia Motion tracking na área da Performance, que em nossa proposição é um protocolo da mesma família cibernética e que faz derivar a tecnologia Mocap. Precisamos entretanto evidenciar algumas diferenças estruturais e técnicas entre a tecnologia Mocap e Motion tracking. Um primeiro esclarecimento sobre as diferenças entre as tecnologias Mocap e Motion tracking nos foi dado em 2007 pelo diretor do Palindrome Intermedia Performance Group, Robert Wechsler, que nos revelou pela primeira vez a questão de que a tecnologia Motion tracking frequentemente é confundida com Mocap, mas seguindo as proposições de Wechsler há uma primeira distinção fundamental: a tecnologia Mocap geralmente não é utilizada em eventos que necessitam interatividade em tempo real (como performances ao vivo), pois requer após captura dos dados sua posterior limpeza e tratamento dos mesmos, e ainda sua utilização final em outros softwares de animação 3D. Somando-‐se a essa diferenciação Wechsler evidencia que a tecnologia Mocap é extremamente sofisticada e exige pré e pós-‐produção; já a tecnologia Motion tracking que frequentemente vem sendo utilizada em performances que requisitam interatividade em tempo real, é mais imediata em gerar produtos finais, ou seja, os dados após captura são utilizados e geram outputs após seu rápido processamento pelo software, sem sequer apresentar delays visuais. Outra diferença entre essas tecnologias é quanto ao custo delas. A tecnologia Mocap é extremamente cara, podendo ser encontrada de versões mais sofisticadas como o software Vicon na faixa de 250.000 até 900.000 dólares, até versões mais económicas e recentemente desenvolvidos como o OptiTrack Arena na faixa de 20.000 dólares, e o Kinect que em suas versões atuais necessita do sensor XBox 360°, que custa em torno de 100 dólares, mas que ainda não traz a excelência técnica dos outros softwares citados, e que considerando o contexto extremamente exigente da indústria do cinema e entretenimento, ainda não vem sendo considerado um software profissional para realizar sessões de Mocap. A vantagem do Kinect Xbox é que pode ser utilizado em associação com o software Processing sendo esse um software de plataforma livre, se torna dentro do contexto político e económico atual um pequeno mas potente concorrente aos softwares profissionais de Mocap. Já a tecnologia Motion tracking sempre possuiu preços extremamente acessíveis, e além do software, que variam de 300 a 350 dólares, apenas nos é requerido uma câmera digital, e por essa razão a tecnologia Motion tracking foi e continua sendo mais frequentemente utilizada pelos artistas para instalações, performances ou qualquer outro tipo de objeto artístico que necessite interatividade em tempo real. Assim chegamos a terceira diferença entre essas tecnologias, suas funções e produtos finais; enquanto a tecnologia Motion tracking se destina a produtos finais que necessitam de interatividade em tempo real, a tecnologia Mocap se destina a coleta de dados para sua posterior utilização em outros softwares de animação 3D, como o Maya ou Motion Builder, pela animação de avatares ou personagens dos filmes, como o famoso leão Alex dançando breakdance do filme Madagascar (2009), e seus produtos finais não serão interativos e sim produtos finalizados, não abertos a interferência do público.

8
Essa etapa subsequente de aplicação dos dados capturados na sessão de Mocap é o que Alberto Menache (2011) nos propõe que seja intitulado de Performance Animation e não mais apenas de Mocap, porque o personagem recebe os dados (inputs) e esses dados fazem gerar uma performance de animação em seus corpos construídos digitalmente; Menache com esse argumento evidencia as diferenças entre a fase de captura e armazenamento de dados e a fase posterior de transferência desses dados ao corpo digital dos personagens dos filmes. IV. História da tecnologia Mocap Devido as transformações recentes na História das Interfaces digitais contemporaneamente já existe um grupo de professores investigadores e artistas da Coventry University (Inglaterra) se utilizando contemporaneamente da tecnologia Mocap com o conceito inovador de Live-‐Mocap, o que significaria realizar sistemas de Mocap e aplicá-‐lo em tempo real com finalidade artística ou de análise biomecânica, e esse novo patamar nos faz refletir sobre futuras intersecções ainda maiores que os atuais para distinguirmos técnica e estruturalmente esses dois tipos de tecnologias. Reportando-‐nos a História da tecnologia Mocap, e tendo como referencias teóricas Alberto Menache (2011), Midori Kitagawa e Brian Windsor (2008) registramos que o desenvolvimento e a realização de pesquisas utilizando a tecnologia Mocap começaram em torno do ano de 1970, com finalidade médica e aplicações militares. Contemporaneamente além da indústria do cinema, do exército e da medicina, poucas pessoas saberiam descrever o que é a tecnologia Mocap, entretanto muitas delas, inclusive as crianças, quotidianamente se utilizam dela quando assistem a filmes, animações, comerciais de TV, e participam de jogos (wii sports) nos quais são utilizados essa tecnologia. Podemos considerar pioneiros do sistema Mocap algumas tecnologias e aparatos criados no século XIX e XX, como o zoopraxiscópio inventado por Muybridge e o esfigmógrafo inventado por Etiene-‐Jules Marey. Marey, inspirado nos estudos fotográficos de Muybridge, realizou e inventou também a câmera cronofotográfica, tecnologia fundamental para a realização de diversos dos seus estudos. Marey pode ser considerado um grande revolucionário e mentor pré-‐histórico na história do Mocap, inclusive pelos trajes especiais que criou ainda em 1884, bastante semelhante aos atuais trajes utilizados pelos sistemas de Mocap. Outro aparato precedente e que contribuiu ao aparecimento da tecnologia Mocap pode ser listado, o rotoscópio criado por Max Fleischer em 1915, que possibilitou após um ano de trabalho a realização de uma pequena animação caseira, e em 1918 a finalização por Fleischer de sua primeira animação comercial chamada Out of the Inkwell. Como já registrado, as pesquisas mais específicas com a tecnologia Mocap começaram com finalidade médica e para aplicações militares nos anos 70, mas o seu grande ¨boom¨ foi a partir da década de 80 quando a indústria da computação gráfica e do cinema a descobriu em seus efeitos e possibilidades. Naquele momento histórico era necessário a utilização de muitos computadores e de muitos dias para a renderização

9
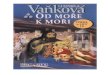
final dos filmes. Robert Abel criou em 1985 a animação Brilliance utilizando um método de Mocap criado por ele mesmo em associação com a National Canned Food Information Council Associates, que se configurava de maneira bastante artesanal e experimental, no qual eles pintaram bolas pretas em 18 articulações de um modelo feminina e fotografaram a ação dela em diversos ângulos, sendo as imagens posteriormente importadas para uma estação de trabalho da Silicon Graphics, e um grande número de aplicações foram empregadas para extrair os dados necessários para animar finalmente a um robô. Apenas em 1995, com o FX Fighter que tivemos a criação do primeiro jogo utilizando interatividade em tempo real com personagens em 3D, e também foi a partir desse momento que pudemos interagir com os ambientes em 3D em nossas salas de estar, e assim nos foi dado um novo patamar na história da tecnologia Mocap, a interação em tempo real de forma quotidiana, e que possui derivados contemporâneos como a plataforma Wii e Playstation. Os sistemas de Mocap disponíveis atualmente podem ser categorizados em 3 grupos principais: sistemas ópticos, sistemas magnéticos e sistemas mecânicos. Os sistemas ópticos (Fig.1) de Mocap foram desenvolvidos primeiramente para aplicações médicas, e o primeiro deles e ainda hoje muito conhecido é o Vicon 8. Um sistema óptico típico consiste na utilização de 4 a 32 câmeras e um computador que controla as câmeras. Como a maioria dos sistemas ópticos eles capturam as marcas colocadas nos objetos, e essas marcas podem ser entendidas como ou reflexivas (passivas) ou marcas emissoras de luz (ativas). Os sistemas com marcas passivas são feitas de materiais reflexivos e suas formas são geralmente esféricas, semiesféricas ou circulares. As marcas passivas são diretamente colocadas na superfície do objeto a ser capturado, ou também podem ser fixadas através de velcros na roupa Mocap (Mocap suit). As câmeras no sistema passivo são equipadas de emissores de luz diódicas, os famosos LEDs, e são as luzes emitidas pelos LEDs que são refletidas nos marcadores corporais, e que finalmente são capturados pela câmera. As marcas do sistema de marcadores ativos também são LEDs, e alguns dos mais recentes sistemas de marcas ativas funcionam em condições de luz natural e não se torna mais necessário o uso de traje especial de Mocap, e nem estúdios.
Fig. 1. Exemplo de um sistema óptico de Mocap, software OptiTrack Arena, capturando dados de 2 alunos (Valéria Palmieri e Valentin Glaser) na green room da Hochschule der Bildenden Kunste, Saar,
Alemanha

10
Os sistemas eletromagnéticos de Mocap também são chamados de rastreadores magnéticos, e foi derivado do sistema de simulação de treinamento de pilotos de avião, os sensores colocados nos capacetes dos pilotos rastreavam a posição do piloto e sua orientação dentro do display de treinamento. Com o sistema magnético é necessário se utilizar de 12 a 20 sensores que são colocados no objeto a ser capturado, esses sensores de rastreamento geram dados de saída (output) das traduções e orientações geradas pelo objeto. Os sensores de rastreamento podem sofrer interferências por outros elementos magnéticos ou elétricos e geram amostras acima de 144 até 220 frames/por segundo e portanto são sistemas menos eficientes que os sistemas ópticos e tampouco podem ter suas configurações modificadas tão livremente como os sistemas ópticos, mas a vantagem é que esse sistema pode capturar vários performers simultaneamente em múltiplos setups, e também são muito mais baratos que os sistemas ópticos. E por últimos temos ao sistemas mecânicos de Mocap. Os sistemas mecânicos de Mocap, também são chamados de exoesqueleto e medem diretamente os ângulos das articulações do sujeito a ser capturado, sendo necessário usar um aparato articulado que consiste de diversos potenciómetros e hastes nas articulações do corpo e hastes, que possuem a função de medir os ângulos entre as articulações quando o objeto/sujeito se move. O aparato se assemelha a um exoesqueleto, e há alguns tipos de sistemas mecânicos que incluem também data gloves e armaduras digitais. Em relação aos outros tipos de sistemas, o sistema mecânico funciona em tempo real, é relativamente barato, livre de interferências magnéticas ou elétricas e portável, mas uma notável desvantagem é que o sistema não consegue medir o movimento de translação global do objeto/sujeito de maneira eficaz. Evidente que este tipo de sistema de Mocap somente pode ser usado com objetos/sujeitos que possuam movimentos realizados por suas articulações como o corpo humano.
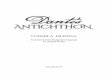
Fig. 2. Videodança Constelaciones (2011) de Mariana Carranza, utilizando o Xbox sensor com o software Processing, sistema que consideramos como um híbrido das tecnologias Mocap e Motion
tracking, já que funciona como um sistema eletromagnético de Mocap (controle wii e seus 3 acelerómetros), e também como sistema de Motion tracking se utilizando apenas o sensor Xbox 360o
para fazer rastreamento do movimento através da câmera.

11
V. Interfaces entre a tecnologia Mocap e a linguagem da Dança Destacamos historicamente algumas interfaces entre a linguagem das tecnologias Mocap e a linguagem da Dança. Da parceria entre o Grupo OpenEnded2 formado por Marc Downie, Paul Kaiser Shelley Eshkar com o coreógrafo Bill T. Jones surgiu a coreografia GhostCatching (1999) e sua atualização em After GhostCatching (2010), que a partir da improvisação de um performer solista apresentava como resultado visual a projeção de múltiplos personagens virtuais. Ghostcatching está baseado na captura óptica do movimento, é um sistema óptico de Mocap e se utilizando de câmeras infravermelhas e computadores com hardware e software capazes de realizar uma representação 3D dos corpos que bailam. Capturar dados, em esse processo, implica na colocação de marcas reflexivas em posições estratégicas, inclusive na parte de cima do corpo do performer. Existem câmeras ao redor do performer, capturando o rastro do movimento no ambiente, alimentando assim com o sistema cibernético. Os dados da captura do movimento subsequentemente dirigem os movimentos das figuras simuladas no ordenador, onde eles podem ser transferidos para outras anatomias em um software de animação. Essa ferramenta de animação pode desenhar e reconfigurar os movimentos capturados e as trajetórias da dança. Ghostcatching, entre outros obras artísticas, aponta algumas novas direções para que possamos refletir sobre a autonomia, circularidade, e auto-‐referencia dos sistemas, baseados na Segunda Cibernética de Forster, já que os dados capturados derivam-‐se em outros que novamente são introduzidos ao sistema. Em colaboração com a Merce Cunningham Dance Company, o grupo OpenEnded criou Hand Drawn Spaces que foi apresentado na Association for Computing Machinery´s Special Interest Group on Computer Graphic (SIGGRAPH, 1998), que assim como GhostCatching teve atualizações até 2009. Nesse trabalho Cunningham e o OpenEnded usaram a combinação complexa de sensores sensíveis a luz, câmeras ópticas e Mocap, além de técnicas de projeção com imagens em tamanho real dos performers, para criar assim uma dança impossível de ser feita no palco. Criado em 2002, e recriado em 2005 para o Ars Electrónica (Áustria) e atualizado em 2007, também desenvolvida na parceria de Cunningham com o OpenEnded, a obra Loops foi derivada dos movimentos das mãos de Cunningham, utilizando tecnologia Mocap para criar assim um porta-‐retrato desse famoso coreógrafo, e registrando não a aparência visual dele, mas uma ilustração gráfica e animada da sua particular e complexa forma de dançar. Os movimentos capturados através de marcadores nas articulações de Cunningham, formavam uma rede de inúmeros nós, como um rizoma, e através do sistema travavam entre si relações instáveis e complexas, como mais uma possibilidade de exemplificarmos as qualidades de auto-‐referencia e circularidade, além de retroalimentação que um sistema cibernético possui.
2 Ver a homepage do grupo OpenEnded In: http://openendedgroup.com (acesso em 21/03/2012).

12
Conclusões Contemporaneamente, a dança pode se atualizar e se redimensionar em seus suportes, mídias, metodologias e formatos através das tecnologias digitais de Mocap e Motion tracking, que aqui são considerados como protocolos da mesma família cibernética e que provocam a construção de novas poéticas no atual estado da arte. Ao Elétrico – Grupo de Pesquisa em Ciberdança nos interessa investigar em nossos projetos de pesquisa sobre estas novas tecnologias produzindo novos conhecimentos artísticos e científicos nessa área de interface, ainda pioneira e recente, entre dança e novas tecnologias digitais. As tecnologias Motion tracking e Mocap se entrelaçam e se ramificam em possibilidades e formas, configurando-‐as como artefatos tecnológicos contemporâneos que dialogam e que ciberneticamente se retroalimentam já que o desenvolvimento de novas técnicas e softwares em uma dessas linguagens tecnológicas subsequentemente contamina e influencia o estado da arte da outra. Diversos artistas e investigadores se utilizam dessas tecnologias para seus estudos e obras, portanto não seria diferente no campo da Dança, que em interface com essas recentes tecnologias se redimensiona e se atualiza na Contemporaneidade, ampliando estrategicamente seus territórios. Nossa intenção é de registrar e de anotar historicamente esses fatos refletindo sobre eles embasados na Teoria Cibernética de Wiener (1948) e de Foerster (1995) e ainda contar com a contribuição de autores contemporâneos como Louppe (2000) que se dedicam a analisar poéticas contemporâneas e emergentes, aplicando em nosso caso específico a Dança Digital. Na área da Dança em interface com as tecnologias digitais, a poética emergente das tecnologias Mocap e Motion tracking assumem uma possibilidade contemporânea e inovadora que ao utilizar os recursos digitais e criar relações cibernéticas também com o corpo humano, esse mais complexo sistema cibernético, numa última instância criar novas formas de arte, atualizando e redimensionando os fazeres da dança e estrategicamente amplia os territórios da Dança. Agradecimentos Os autores agradecem ao apoio da Capes (Capacitação e Aperfeiçoamento de Pessoal do Ensino Superior), ao Programa de Pós-‐graduação em Dança da Escola de Dança da UFBA, ao Dr. Soenke Zehle (xm:Lab/HBK Saar), Jan Tretschok (xm:Lab/HBK Saar), Janosh Obernauer, Valéria Palmieri, Valentin Glaser, Mirella Misi do Slash Laboratório de Arte e Tecnologia (Holanda), Robert Wechsler (Palindrome Intermedia Performance Group), Mariana Carranza, Prof. Dr. Sarah Whatley (Coventry University) e aos integrantes do Elétrico -‐ Grupo de Pesquisa em Ciberdança (CNPq/UFBA).

13
Bibliografia KITAGAWA, M. WINDSOR B., Mocap for Artists: workflow and Techniques for Motion Capture, USA: Elsevier Inc, 2008. LOUPPE, Laurence, Poetique de la Danse contemporaine, Paris: Deuxième Edition, 2000. MENACHE, Alberto, Understanding Motion capture for Computer Animation, USA: Elsevier Inc., 2011. von FOERSTER, Heinz. Understanding Understanding: Essays on Cybernetics and Cognition, New York: Spring-‐Verlag, 2003. von FOERSTER, Heinz. Cybernetics of Cybernetics: The control of control and the communication of communication, Mineapolis: Future Systems Inc., 1995. WECHSLER, R. “Motion Trackings: a pratical guide for performing arts”, In: http://www.palindrome.de (Consulta em 12/07/2011). WIENER, Norbert, Cibernética e sociedade: o uso humano de seres humanos, São Paulo: Editora Cultrix, 1954.