Embed Size (px)
Citation preview
Cuprins GENERALITATI .....................................................................................................................7
CAPITOLUL 1. TRANSFORMATORUL ELECTRIC...........................................................9
1.1. Elemente constructive ale transformatorului electric .................................................10
1.2. Transformatorul monofazat ........................................................................................15
1.3. Transformatorul trifazat ..............................................................................................29
1.4. Functionarea în paralel a transformatoarelor ..............................................................34
1.5. Autotransformatorul ...................................................................................................36
1.6. Transformatoare cu trei înfasurari ..............................................................................37
1.7. Transformatoare pentru transformarea numarului de faze ..........................................39
1.8. Transformatorul de masura .........................................................................................40
1.9. Transformatoare de sudura .........................................................................................42
1.10 Regimurile dinamice ale transformatoarelor electrice ...............................................44
1.11 Aplicatii .....................................................................................................................46
CAPITOLUL 2. ASPECTE GENERALE ALE MASINILOR DE C.A.. ................................51
2.1. Câmpurile magnetice si înfasurarile masinii de c.a. ...................................................52
2.2. T.e.m. în masinile de c.a. ............................................................................................70
2.3. Reactia magnetica a indusului la masinile de c.a. ......................................................75
2.4. Expresia cuplului electromagnetic la masinile de c.a. ................................................78
CAPITOLUL 3. MASINA ASINCRONA ..............................................................................79
3.1. Elemente constructive ale masinii asincrone ..............................................................80
3.2. Motorul asincron trifazat ............................................................................................83
3.3. Regimurile dinamice ale motorului asincron trifazat ................................................101
3.4. Motorul asincron monofazat .......................................................................................111
3.5. Cuplaje electromagnetice cu alunecare ......................................................................113
3.6. Transmisii sincrone cu masini asincrone ....................................................................114
3.7 Aplicatii .......................................................................................................................117
CAPITOLUL 4. MASINA SINCRONA .................................................................................123
4.1. Elementele constructive ale masinii sincrone .............................................................124
4.2. Generatorul sincron ....................................................................................................128
4.3. Motorul sincron ..........................................................................................................140
4.4. Aplicatii ......................................................................................................................146
Cuprins
6
CAPITOLUL 5. Modelul matematic al masinii de c.a. în regim dinamic ...............................152
5.1. Fazori spatiali .............................................................................................................153
5.2. Ecuatiile generale ale masinii asincrone trifazate ......................................................161
CAPITOLUL 6. MASINA DE CURENT CONTINUU .........................................................167
6.1. Elemente constructive ................................................................................................167
6.2. Câmpul magnetic inductor .........................................................................................169
6.3. Înfasurarile rotorice de c.c. .........................................................................................171
6.4. T.e.m. indusa în masina de c.c.....................................................................................173
6.5. Cuplul electromagnetic dezvoltat de masina de c.c. ...................................................175
6.6. Reactia indusului si comutatia la masina de c.c. ........................................................176
6.7. Regimurile energetice de functionare ale masinii de c.c. ...........................................179
6.8. Ecuatiile în regim stationar ale masinii de c.c. dupa tipul excitatiei ..........................184
6.9. Caracteristicile generatorului de c.c. ..........................................................................186
6.10. Caracteristicile motorului de c.c. ..............................................................................190
6.11. Reglarea vitezei motoarelor de c.c. ...........................................................................197
6.12. Frânarea masinii de c.c. ............................................................................................201
6.13. Regimul dinamic al masinii de c.c. ..........................................................................204
6.14 Aplicatii ......................................................................................................................216
CAPITOLUL 7. MASINA DE C.A. CU COLECTOR ...........................................................221
7.1. T.e.m. induse în masina de c.a. cu colector ................................................................222
7.2. Expresia cuplului electromagnetic la masina de c.a. cu colector ...............................226
7.3. Motoare monofazate de c.a. cu colector .....................................................................226
CAPITOLUL 8. MASINI ELECTRICE SPECIALE...............................................................232
8.1 Introducere....................................................................................................................232
8.2 Masini electrice speciale de curent continuu................................................................233
8.3 Servomotoare asincrone bifazate..................................................................................249
8.4 Masini electrice speciale sincrone ................................................................................262
ANEXA 1. TIPURI DE ÎNFASURARI DE CURENT CONTINUU .......................................275
ANEXA 2. TIPURI DE ÎNFASURARI DE CURENT ALTERNATIV ..................................293
Bibliografie ...........................................................................................................................312
Prefata
În urma unei experiente îndelungate în predarea cursului de „Electrotehnica si Masini
Electrice”, la specializarile Facultatii de Mecanica (Nave, Masini Termice, UTS, TCM) si apoi la
specializarea Electromecanica din cadrul Facultatii de Nave si Inginerie Electrica, a rezultat
prezenta lucrare care speram ca va fi utila pentru studenti în primul rând, dar si pentru ingineri si
alti specialisti care lucreaza mai ales în domenii interdisciplinare din profilul mecanic si electric.
Principiul de baza la elaborarea acestui curs a fost prezentarea în modul cel mai riguros cu
putinta a principiilor fundamentale ale masinilor electrice renuntând la descrieri de amanunt
referitoare la constructia si tehnologia de constructie a acestora, ca si la cunostinte care s-ar fi putut
suprapune cu alte discipline (Bazele Electrotehnicii, Actionari Electrice, Automatizari etc.).
O grija deosebita am avut în prezentarea cât mai completa a realizarilor teoretice si practice
de ultima ora (modele matematice ale regimurilor dinamice, teoria fazorilor spatiali etc,).
Pentru o concretizare a cunostintelor la fiecare capitol s-au prezentat si aplicatii tipice.
La elaborarea lucrarii s-a consultat o bibliografie vasta care ne-a ajutat în realizarea unui
curs cu o plaja completa de cunostinte în acest domeniu.
Multumim tuturor celor care prin observatii critice sau prin activitati tehnice au contribuit la
definitivarea lucrarii noastre.
Prof. dr. ing. Dumitru CALUEANU
Generalitati
Masina electrica este un sistem de conversie electromecanica a energiei mecanice în energie
electrica sau invers.
Masinile electrice se pot clasifica dupa urmatoarele criterii:
a) Dupa principiul de functionare:
o Transformatorul electric1;
o Masina asincrona;
o Masina sincrona;
o Masina de curent continuu;
o Masina de curent alternativ cu colector.
b) Dupa felul miscarii:
o Masini electrice de rotatie;
o Masini electrice liniare.
c) Dupa felul curentului pe la bornele principale:
o Masini de c.a. (transformatorul, masina asincrona, masina sincrona, masina de c.a. cu
colector);
o Masini de c.c.
d) Dupa sensul conversiei energiei:
o Generatoare electrice
- convertesc energia mecanica primita pe la ax în energie electrica pe la
bornele principale;
o Motoare electrice
- convertesc energia electrica primita pe la bornele principale în energie
mecanica la ax.
1 Transformatorul electric nu poate fi considerat o masina electrica în sensul definitiei generale (sistem care transforma o forma de energie în alta forma de energie); acesta transforma parametrii (în general, tensiunea si curentul, numarul de faze) energiei electrice. Totusi transformatorul electric este inclus în categoria masinilor electrice teoria sa având multe analogii cu cea a masinilor de curent alternativ
Generalitati 8
Masinile electrice sunt reversibile putând functiona atât ca motoare cât si ca generatoare
electrice. Ele au capatat o mare raspândire în tehnica si în alte ramuri ale vietii sociale, reprezentând
elemente indispensabile în procesul producerii energiei electrice (generatoarele electrice din
electrocentrale) si în actionarile electrice de toate tipurile (motoarele electrice).
Principalele probleme care se pun în momentul de fata în industria noastra electrotehnica
constructoare de masini electrice sunt:
o Marirea puterii generatoarelor electrice, legata de realizarea de unitati producatoare de
energie electrica din ce în ce mai mari (de exemplu pentru centralele nucleare). Aceasta
problema implica aspecte de tehnica de vârf legate de racirea generatoarelor, comanda,
reglarea si automatizarea lor;
o Micsorarea greutatii pe unitatea de putere a motoarelor electrice prin utilizarea de materiale
magnetice cu proprietati îmbunatatite ca si prin obtinerea de turatii cât mai ridicate;
o Conceperea si realizarea de noi sisteme de comanda electronica a motoarelor electrice (cu
tiristori si tranzistori de putere), etc. care modifica si conceptia de proiectare a motoarelor
electrice;
o Realizarea de noi tipuri de motoare electrice utilizate ca elemente de executie în diverse
sisteme automate (servomotoarele sincrone fara perii, etc.).
În afara acestor probleme cu aspect tehnic se impune o restructurare si retehnologizare a
societatilor comerciale constructoare de masini electrice în paralel cu introducerea unor sisteme
moderne de management si marketing.
Capitolul 1
TRANSFORMATORUL ELECTRIC
Transformatorul electric este un aparat electromagnetic static, având doua sau mai multe
înfasurari electrice cuplate magnetic care transforma parametrii (uzual curentul si tensiunea dar si
numarul de faze) energiei electrice de curent alternativ.
Deci, atât la intrare cât si la iesire întâlnim aceeasi forma de energie (electrica) dar cu
parametri diferiti.
Transformatoarele electrice se pot clasifica dupa urmatoarele criterii:
Ø Dupa destinatie:
o transformatoare de putere mono sau trifazate, utilizate în transportul si distributia energiei
electrice ca ridicatoare sau coborâtoare de tensiune;
o autotransformatoare, utilizate pentru interconectarea retelelor de tensiuni diferite sau pentru
reglajul tensiunii;
o transformatoare de masura de curent sau de tensiune, utilizate pentru adaptarea diverselor
aparate de masura (ampermetre, voltmetre, wattmetre, etc.) la marimile pe care trebuie sa le
masoare;
o transformatoare cu destinatie speciala (transformatoare de sudura, pentru cuptoare electrice,
pentru modificarea numarului de faze, etc).
Ø Dupa felul marimii transformate:
o transformatoare de tensiune;
o transformatoare de curent.
Ø Dupa sensul transformarii:
o transformatoare ridicatoare;
o transformatoare coborâtoare.
Transformatorul electric 10
1.1 Elemente constructive ale transformatorului electric
La baza functionarii transformatorului electric sta fenomenul inductiei electromagnetice; din
acest motiv este necesara obtinerea câmpurilor magnetice intense cu ajutorul miezurilor din fier, pe
care se afla înfasurarile electrice realizate din conductoare de cupru, aluminiu sau aliaje.
Principalele elemente constructive ale transformatorului electric sunt:
− miezul de fier;
− înfasurarile;
− carcasa;
− rezervorul de ulei;
− releul de gaze;
− izolatorii de trecere.
Miezul de fier reprezinta circuitul magnetic al transformatorului prin care se închid cu
usurinta liniile câmpului magnetic produs de curentii electrici alternativi care strabat înfasurarile.
Miezul de fier se realizeaza din foi de tabla din otel de transformator1 izolate între ele cu lac
izolant sau cu oxizi ceramici. Aceste foi de tabla poarta denumirea de tole. Pentru a obtine miezul
de fier aceste tole se împacheteaza în sistemul tesut pentru a micsora spatiile de aer, deci pentru a
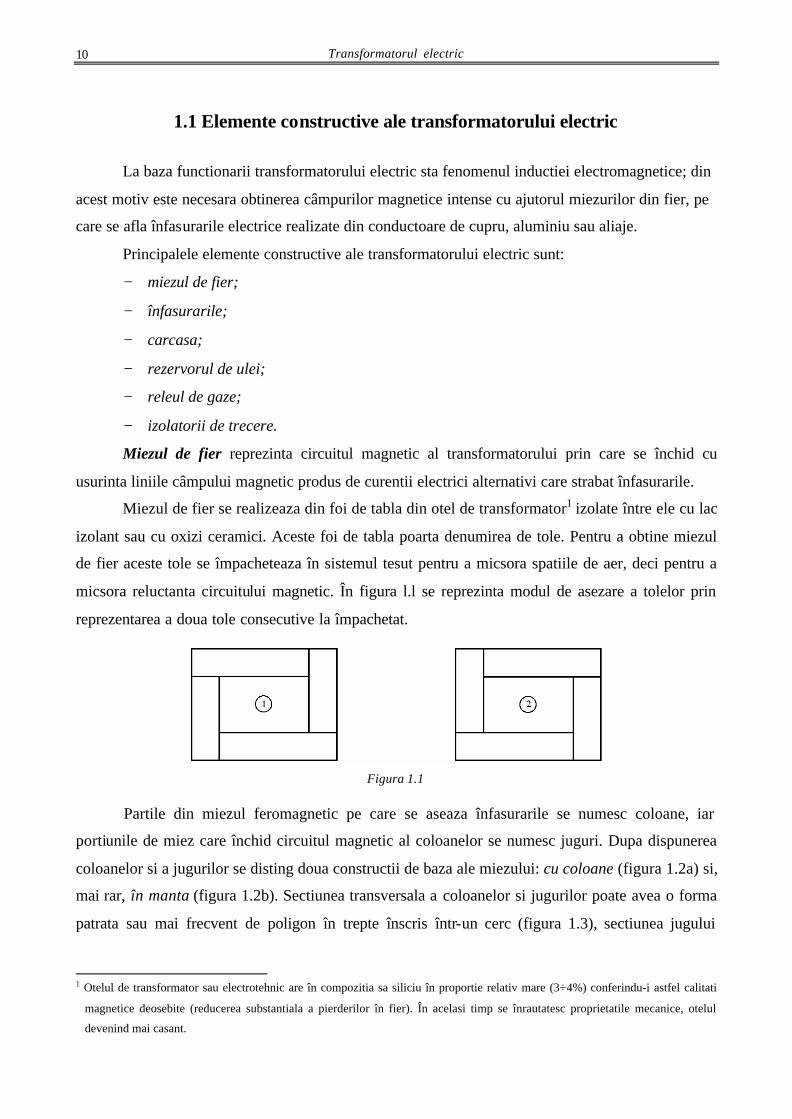
micsora reluctanta circuitului magnetic. În figura l.l se reprezinta modul de asezare a tolelor prin
reprezentarea a doua tole consecutive la împachetat.
Figura 1.1
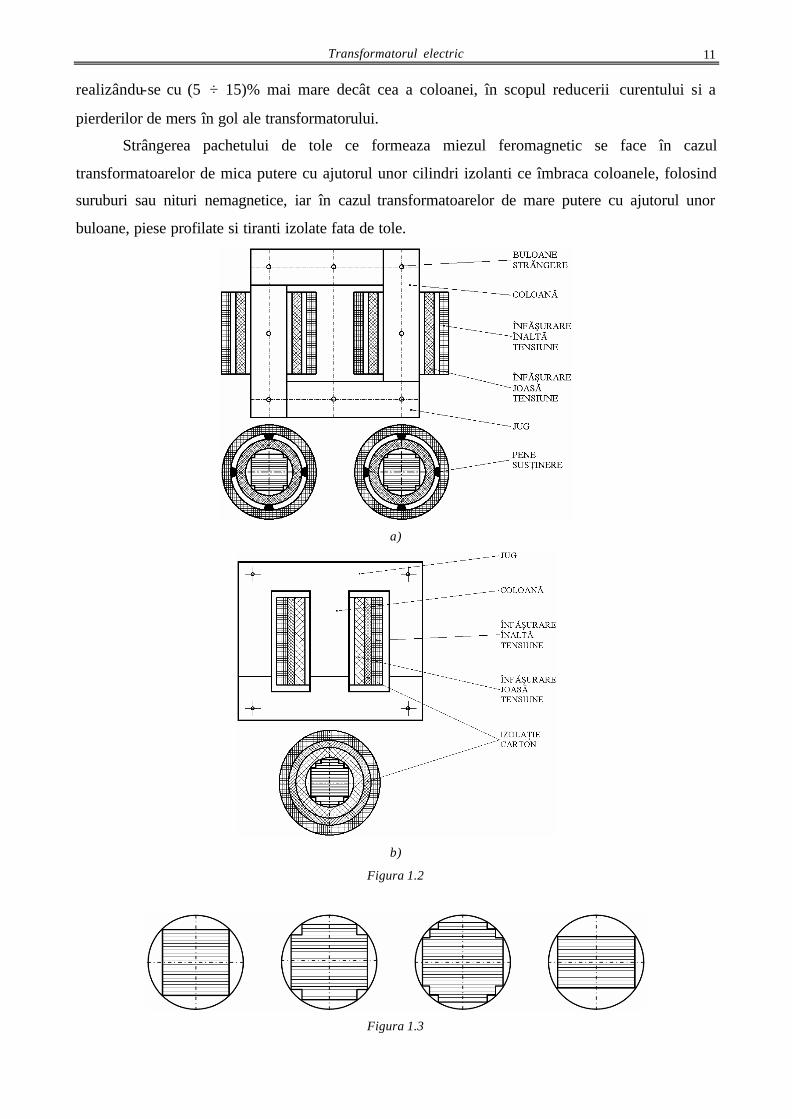
Partile din miezul feromagnetic pe care se aseaza înfasurarile se numesc coloane, iar
portiunile de miez care închid circuitul magnetic al coloanelor se numesc juguri. Dupa dispunerea
coloanelor si a jugurilor se disting doua constructii de baza ale miezului: cu coloane (figura 1.2a) si,
mai rar, în manta (figura 1.2b). Sectiunea transversala a coloanelor si jugurilor poate avea o forma
patrata sau mai frecvent de poligon în trepte înscris într-un cerc (figura 1.3), sectiunea jugului
1 Otelul de transformator sau electrotehnic are în compozitia sa siliciu în proportie relativ mare (3÷4%) conferindu-i astfel calitati
magnetice deosebite (reducerea substantiala a pierderilor în fier). În acelasi timp se înrautatesc proprietatile mecanice, otelul
devenind mai casant.
Transformatorul electric
11
realizându-se cu (5 ÷ 15)% mai mare decât cea a coloanei, în scopul reducerii curentului si a
pierderilor de mers în gol ale transformatorului.
Strângerea pachetului de tole ce formeaza miezul feromagnetic se face în cazul
transformatoarelor de mica putere cu ajutorul unor cilindri izolanti ce îmbraca coloanele, folosind
suruburi sau nituri nemagnetice, iar în cazul transformatoarelor de mare putere cu ajutorul unor
buloane, piese profilate si tiranti izolate fata de tole.
a)
b)
Figura 1.2
Figura 1.3
Transformatorul electric 12
La transformatoarele de mare putere se practica în coloane canale de racire paralele sau
perpendiculare pe planul tolelor, prin care va circula agentul de racire (aer, ulei de transformator),
facilitând astfel eliminarea caldurii dezvoltate ca urmare a pierderilor în fier. Izolarea tolelor cu lac
izolant sau oxizi ceramici conduce la diminuarea curentilor turbionari ce se induc în miez, si care,
dupa cum se stie, transforma energia electrica în energie termica dezvoltata în miezul feromagnetic.
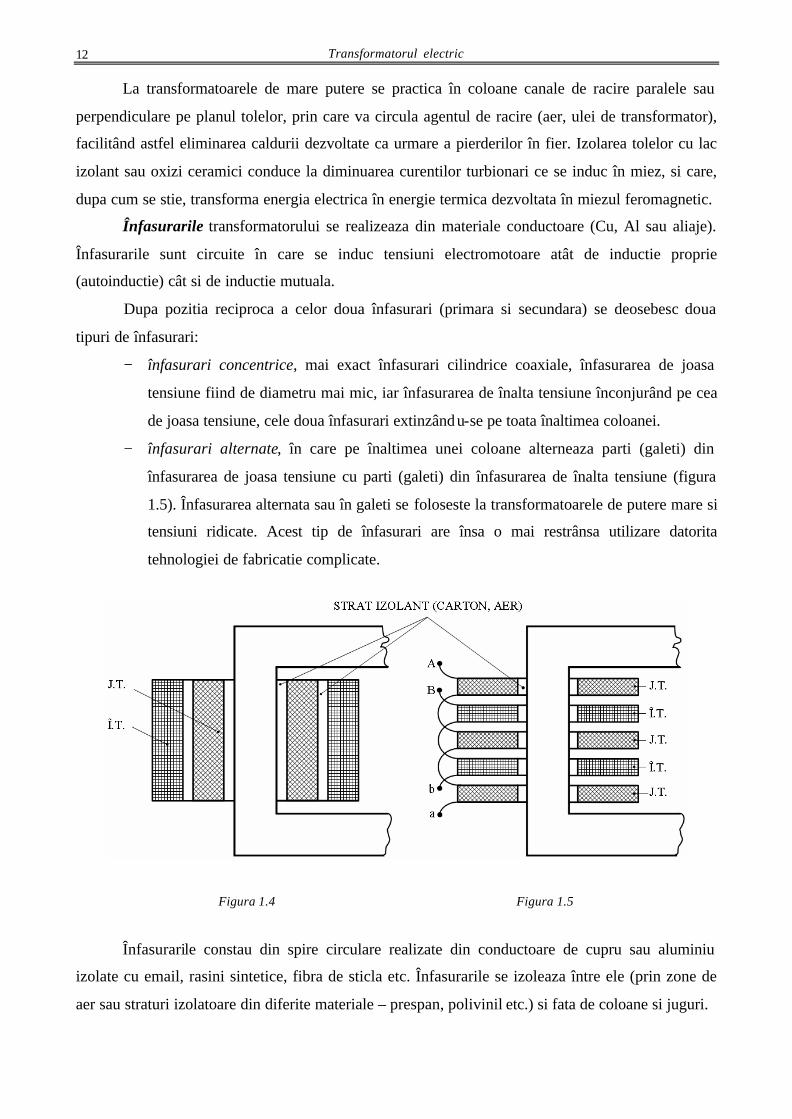
Înfasurarile transformatorului se realizeaza din materiale conductoare (Cu, Al sau aliaje).
Înfasurarile sunt circuite în care se induc tensiuni electromotoare atât de inductie proprie
(autoinductie) cât si de inductie mutuala.
Dupa pozitia reciproca a celor doua înfasurari (primara si secundara) se deosebesc doua
tipuri de înfasurari:
− înfasurari concentrice, mai exact înfasurari cilindrice coaxiale, înfasurarea de joasa
tensiune fiind de diametru mai mic, iar înfasurarea de înalta tensiune înconjurând pe cea
de joasa tensiune, cele doua înfasurari extinzându-se pe toata înaltimea coloanei.
− înfasurari alternate, în care pe înaltimea unei coloane alterneaza parti (galeti) din
înfasurarea de joasa tensiune cu parti (galeti) din înfasurarea de înalta tensiune (figura
1.5). Înfasurarea alternata sau în galeti se foloseste la transformatoarele de putere mare si
tensiuni ridicate. Acest tip de înfasurari are însa o mai restrânsa utilizare datorita
tehnologiei de fabricatie complicate.
Figura 1.4 Figura 1.5
Înfasurarile constau din spire circulare realizate din conductoare de cupru sau aluminiu
izolate cu email, rasini sintetice, fibra de sticla etc. Înfasurarile se izoleaza între ele (prin zone de
aer sau straturi izolatoare din diferite materiale – prespan, polivinil etc.) si fata de coloane si juguri.
Transformatorul electric
13
Carcasa sau cuva transformatorului. Din punctul de vedere al modului de racire,
transformatoarele se împart în urmatoarele categorii:
− transformatoare uscate, cu racire naturala sau artificiala la care înfasurarile se afla în aer
liber (pentru puteri sub 1 kVA);
− transformatoare în ulei cu racire naturala, la care miezul magnetic si înfasurarile sunt
scufundate într-o cuva umpluta cu ulei (pentru puteri uzuale 1÷1000 kVA);
− transformatoare în ulei cu racire artificiala în exterior cu aer sau cu circulatie artificiala
si racire a uleiului (pentru puteri foarte mari);
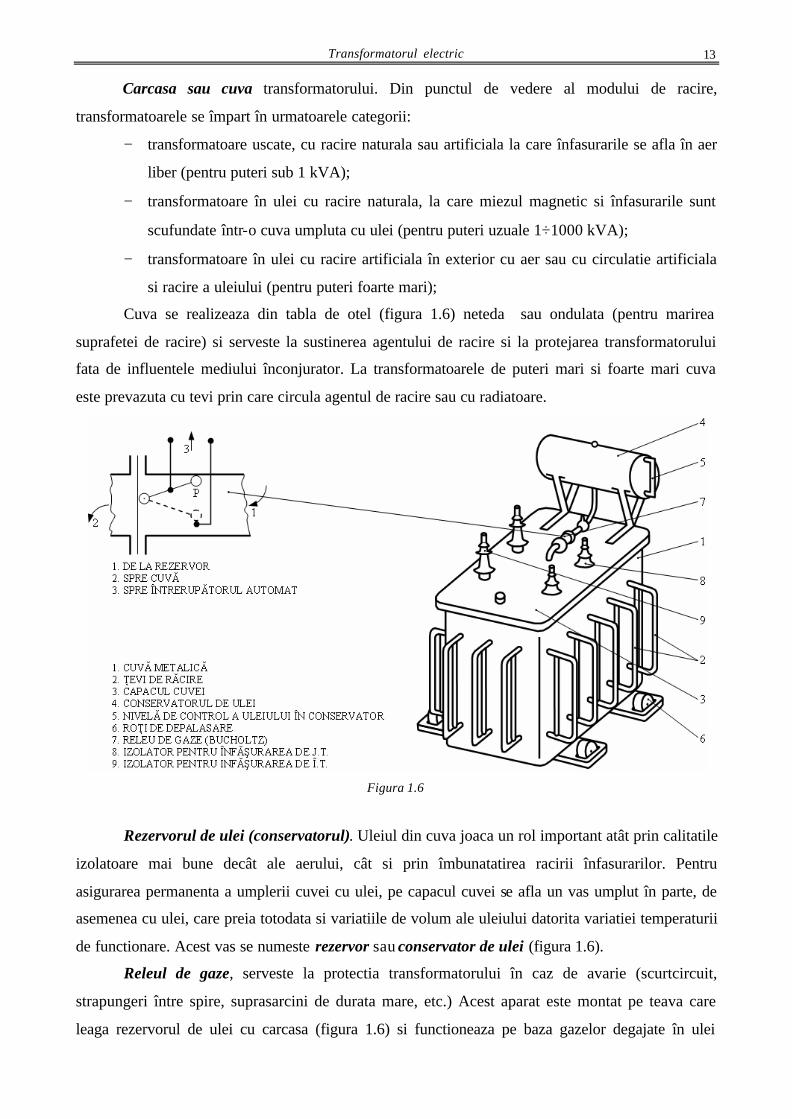
Cuva se realizeaza din tabla de otel (figura 1.6) neteda sau ondulata (pentru marirea
suprafetei de racire) si serveste la sustinerea agentului de racire si la protejarea transformatorului
fata de influentele mediului înconjurator. La transformatoarele de puteri mari si foarte mari cuva
este prevazuta cu tevi prin care circula agentul de racire sau cu radiatoare.
Figura 1.6
Rezervorul de ulei (conservatorul). Uleiul din cuva joaca un rol important atât prin calitatile
izolatoare mai bune decât ale aerului, cât si prin îmbunatatirea racirii înfasurarilor. Pentru
asigurarea permanenta a umplerii cuvei cu ulei, pe capacul cuvei se afla un vas umplut în parte, de
asemenea cu ulei, care preia totodata si variatiile de volum ale uleiului datorita variatiei temperaturii
de functionare. Acest vas se numeste rezervor sau conservator de ulei (figura 1.6).
Releul de gaze, serveste la protectia transformatorului în caz de avarie (scurtcircuit,
strapungeri între spire, suprasarcini de durata mare, etc.) Acest aparat este montat pe teava care
leaga rezervorul de ulei cu carcasa (figura 1.6) si functioneaza pe baza gazelor degajate în ulei
Transformatorul electric 14
atunci când apare o energie termica importanta (ca urmare a unor situatii anormale de functionare).
Dupa cum se vede (figura 1.6) plutitorul P coboara atunci când nivelul fluidului scade sub actiunea
presiunii gazelor. Astfel se închide circuitul de comanda a întrerupatorului automat care la rândul
sau decupleaza transformatorul de la reteaua de alimentare.
Izolatorii de trecere, servesc la izolarea electrica a înfasurarilor si a retelei exterioare fata de
cuva transformatorului (figura 1.6). Acestia se realizeaza din portelan, având forme si dimensiuni
care depind de tensiunea de functionare a înfasurarii pe care o deserveste.
Regim nominal, marimi nominale, semne conventionale,
marcarea bornelor
Regimul de functionare pentru care este proiectat transformatorul si în care nu se depasesc
limitele admisibile de încalzire ale elementelor sale, în conditii normale de lucru se numeste regim
nominal de functionare. El este caracterizat prin marimile nominale, înscrise pe placuta indicatoare
a transformatorului: puterea nominala, definita ca puterea aparenta la bornele înfasurarii secundare,
tensiunea nominala de linie primara respectiv secundara, curentul nominal de linie primar si
secundar, frecventa nominala, numarul de faze, schema si grupa de conexiuni, regimul de
functionare (continuu sau intermitent), felul racirii.
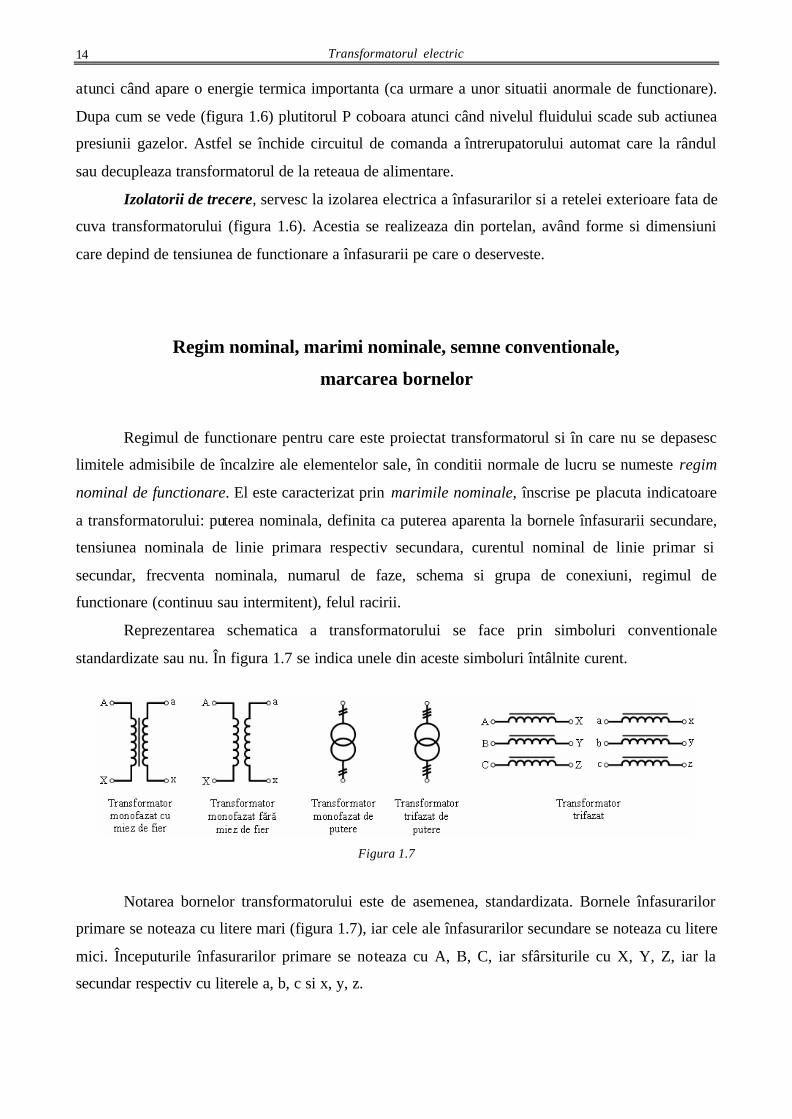
Reprezentarea schematica a transformatorului se face prin simboluri conventionale
standardizate sau nu. În figura 1.7 se indica unele din aceste simboluri întâlnite curent.
Figura 1.7
Notarea bornelor transformatorului este de asemenea, standardizata. Bornele înfasurarilor
primare se noteaza cu litere mari (figura 1.7), iar cele ale înfasurarilor secundare se noteaza cu litere
mici. Începuturile înfasurarilor primare se noteaza cu A, B, C, iar sfârsiturile cu X, Y, Z, iar la
secundar respectiv cu literele a, b, c si x, y, z.
Transformatorul electric
15
1.2 Transformatorul monofazat
Pentru prezentarea teoriei transformatorului este necesara stabilirea conventiei de asociere a
sensurilor de referinta a curentilor si tensiunilor la borne. Pentru aceasta consideram un
transformator cu doua înfasurari (reprezentate pe coloane diferite pentru claritatea expunerii - figura
1.9): o înfasurare care primeste energie electrica de curent alternativ, numita înfasurare primara, ale
carei marimi, purtând indicele "1" se numesc marimi primare si o înfasurare care cedeaza energie de
curent alternativ transformata, numita înfasurare secundara, ale carei marimi purtând indicele "2"
se numesc marimi secundare.
Prezentarea functionarii si a teoriei transformatorului monofazat este structurata pe cele trei
regimuri de functionare: mers în gol, sarcina si scurtcircuit.
Teoria transformatorului real se prezinta în mod gradual introducându-se unele ipoteze
simplificatoare la care apoi se poate renunta pentru a ne putea apropia de cazul real. Astfel se
introduce notiunea de transformator ideal care se refera la un transformator ce are un cuplaj
magnetic perfect (fara câmp magnetic de dispersie) rezistentele termice ale celor doua înfasurari se
considera nule ( )0RR 21 == deci, nu avem pierderi Joule si de asemenea, pierderile în fierul
transformatorului (datorita curentilor turbionari si histerezisului) se considera nule.
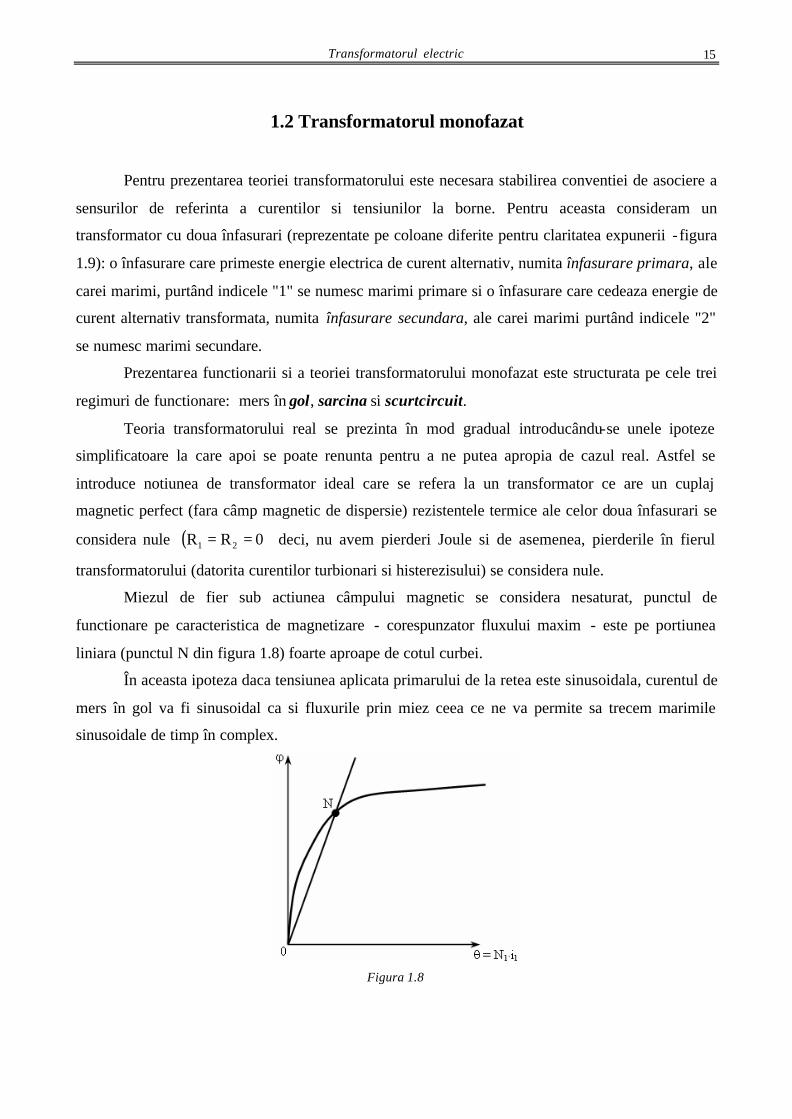
Miezul de fier sub actiunea câmpului magnetic se considera nesaturat, punctul de
functionare pe caracteristica de magnetizare - corespunzator fluxului maxim - este pe portiunea
liniara (punctul N din figura 1.8) foarte aproape de cotul curbei.
În aceasta ipoteza daca tensiunea aplicata primarului de la retea este sinusoidala, curentul de
mers în gol va fi sinusoidal ca si fluxurile prin miez ceea ce ne va permite sa trecem marimile
sinusoidale de timp în complex.
Figura 1.8
Transformatorul electric 16
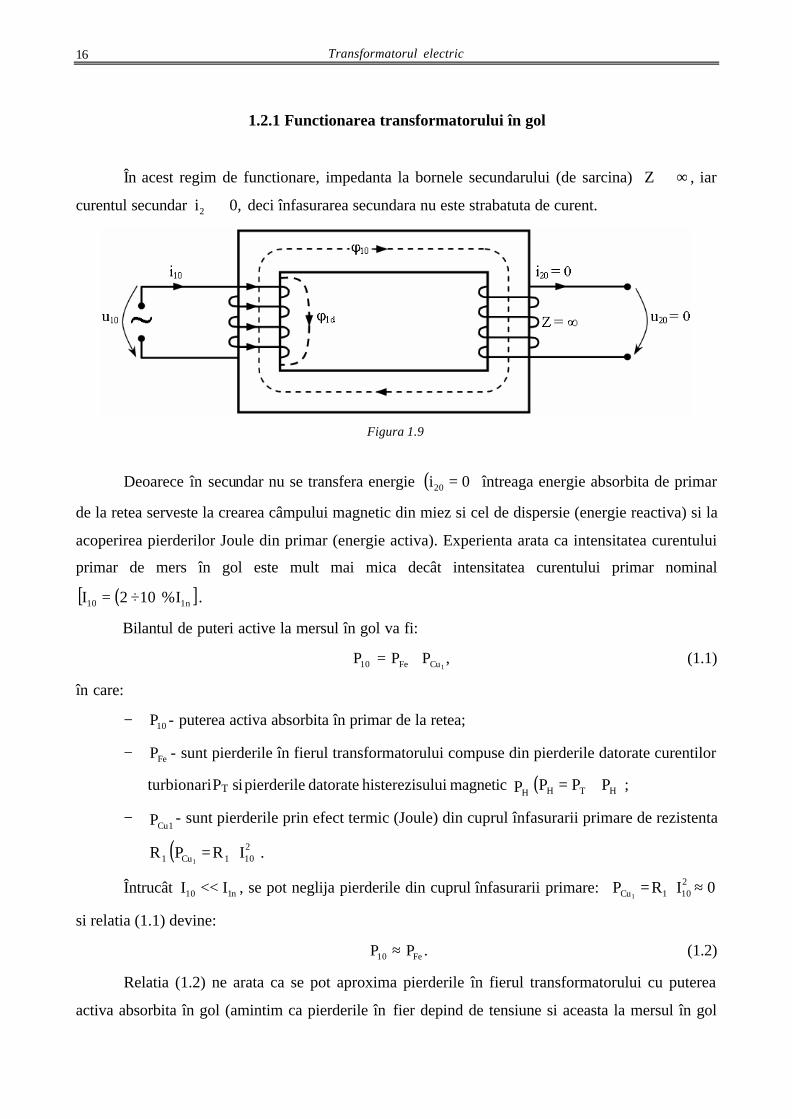
1.2.1 Functionarea transformatorului în gol
În acest regim de functionare, impedanta la bornele secundarului (de sarcina) ∞⇒Z , iar
curentul secundar ,0i2 ⇒ deci înfasurarea secundara nu este strabatuta de curent.
Figura 1.9
Deoarece în secundar nu se transfera energie ( )0i20 = întreaga energie absorbita de primar
de la retea serveste la crearea câmpului magnetic din miez si cel de dispersie (energie reactiva) si la
acoperirea pierderilor Joule din primar (energie activa). Experienta arata ca intensitatea curentului
primar de mers în gol este mult mai mica decât intensitatea curentului primar nominal
( )[ ]n110 I%102I ÷= .
Bilantul de puteri active la mersul în gol va fi:
,PPP1CuFe10 += (1.1)
în care:
− 10P - puterea activa absorbita în primar de la retea;
− FeP - sunt pierderile în fierul transformatorului compuse din pierderile datorate curentilor
turbionari PT si pierderile datorate histerezisului magnetic HP ( )HTH PPP += ;
− 1CuP - sunt pierderile prin efect termic (Joule) din cuprul înfasurarii primare de rezistenta
1R ( ).IRP 2101Cu1
⋅=
Întrucât n110 II << , se pot neglija pierderile din cuprul înfasurarii primare: 0IRP 2101Cu1
≈⋅=
si relatia (1.1) devine:
.PP Fe10 ≈ (1.2)
Relatia (1.2) ne arata ca se pot aproxima pierderile în fierul transformatorului cu puterea
activa absorbita în gol (amintim ca pierderile în fier depind de tensiune si aceasta la mersul în gol

Transformatorul electric
17
este cea nominala). Rezulta, de aici, ca printr-o încercare de mers în gol, la tensiunea nominala, se
pot determina experimental pierderile nominale în fierul transformatorului.
1.2.2 Ecuatiile transformatorului la mers în gol. Diagrama de fazori.
Schema echivalenta
Curentul tcos2Ii 1010 ⋅ω⋅⋅= produce un câmp magnetic ale carui linii de câmp se închid
prin miezul de fier strabatând ambele înfasurari si care produc fluxul principal 10ϕ prin sectiunea
miezului (figura 1.9). Acelasi curent produce si fluxul magnetic de dispersie d1ϕ care se închide
prin aer. Daca consideram miezul magnetic nesaturat, atunci aceste fluxuri au aceeasi variatie în
timp ca si curentul care le-a produs deci:
.tcos;tcos
dm1d1
m1010
⋅ω⋅Φ=ϕ⋅ω⋅Φ=ϕ
(1.3)
Fluxul ϕ10 strabatând ambele înfasurari induce în acestea tensiunile electromotoare:
.tsinEtsinNdt
dNe
;tsinEtsinNdt
dNe
m2m10210
22
m1m10110
11
⋅ω⋅=⋅ω⋅Φ⋅ω⋅=ϕ
⋅−=
⋅ω⋅=⋅ω⋅Φ⋅ω⋅=ϕ
⋅−= (1.4)
Valorile efective ale t.e.m. se pot scrie:
.fN44,4N2
f22
EE
;fN44,4N2
f22
EE
m102m102m2
2
m101m101m1
1
Φ⋅⋅⋅=Φ⋅⋅⋅π⋅
==
Φ⋅⋅⋅=Φ⋅⋅⋅π⋅
== (1.5)
Daca se face raportul:
;NN
EE
EE
ee
k2
1
2
1
m2
m1
2
1u ==== (1.6)
observam ca aceste tensiuni electromotoare au valori efective direct proportionale cu numarul de
spire ale înfasurarilor, proprietate fundamentala a transformatorului.
Fluxul magnetic de dispersie d1ϕ va induce în primar tensiunea electromotoare:
.tsinEtsinNdt
dNe dm1dm11
d11d1 ⋅ω⋅=⋅ω⋅Φ⋅ω⋅=
ϕ⋅−= (1.7)
Cunoscând aceste t.e.m. induse se pot scrie ecuatiile de tensiuni (teorema a II-a a lui
Kirchhoff) pe cele doua circuite electrice ale transformatorului, obtinând:
.ue
;uiRee
202
10101d11
=
−⋅=+ (1.8)
Transformatorul electric 18
T.e.m. d1e se poate scrie tinând cont de inductivitatea circuitului magnetic d1L
corespunzatoare câmpului magnetic de dispersie:
.dt
diL
dtd
Ne 10d1
d11d1 ⋅−=
ϕ⋅−= (1. 9)
Tinând cont de relatia (1.9), ecuatiile (1.8) se pot scrie în complex:
( ).EU
;XjRIEU
220
d1110110
=
⋅+⋅+−= (1.10)
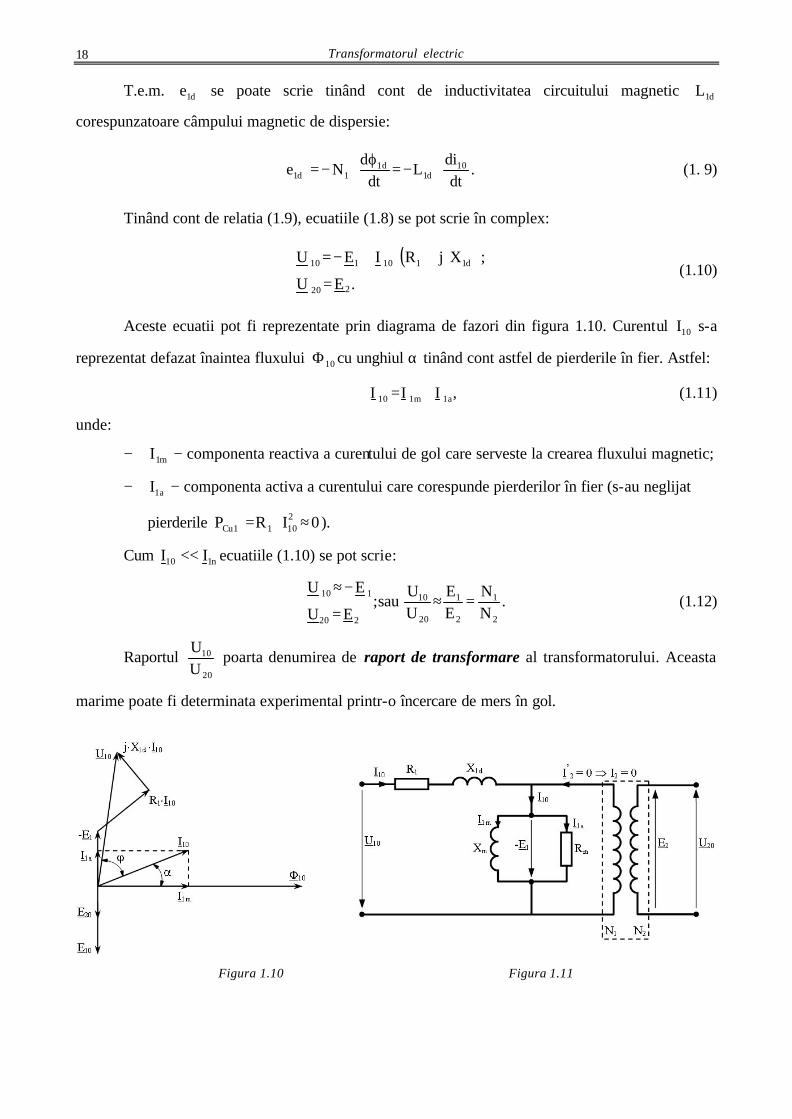
Aceste ecuatii pot fi reprezentate prin diagrama de fazori din figura 1.10. Curentul 10I s-a
reprezentat defazat înaintea fluxului 10Φ cu unghiul α tinând cont astfel de pierderile în fier. Astfel:
,III a1m110 += (1.11)
unde:
− m1I − componenta reactiva a curentului de gol care serveste la crearea fluxului magnetic;
− a1I − componenta activa a curentului care corespunde pierderilor în fier (s-au neglijat
pierderile 0IRP 21011Cu ≈⋅= ).
Cum n110 II << ecuatiile (1.10) se pot scrie:
.NN
EE
UU
sau;EU
EU
2
1
2
1
20
10
220
110=≈
=
−≈ (1.12)
Raportul 20
10
UU
poarta denumirea de raport de transformare al transformatorului. Aceasta
marime poate fi determinata experimental printr-o încercare de mers în gol.
Figura 1.10 Figura 1.11
Transformatorul electric
19
Ecuatiile functionarii în gol a transformatorului (l.10) ne permit sa reprezentam cele doua
circuite electrice ale transformatorului (separate galvanic), unite într-un singur circuit sub forma
unei scheme echivalente. Aceasta schema echivalenta este reprezentata în figura 1.11, ecuatiile
(1.10) putându-se usor verifica pe aceasta schema. În schema s-au folosit notatiile:
mR – rezistenta echivalenta pierderilor în fier:
;IP
RIRP 210
10m
210m10 =⇒⋅= (1.13)
mX − reactanta magnetica corespunzatoare fluxului principal 10Φ , si se determina din
puterea reactiva consumata de la retea pentru formarea acestui câmp magnetic:
.I
QXIXQ 2
10
10m
210m10 =⇒⋅= (1.14)
Schema echivalenta, serveste prin urmare la calculul parametrilor transformatorului. Schema
echivalenta se termina cu un transformator ideal cu 1N si 2N spire fara dispersii de câmp magnetic
si fara pierderi.
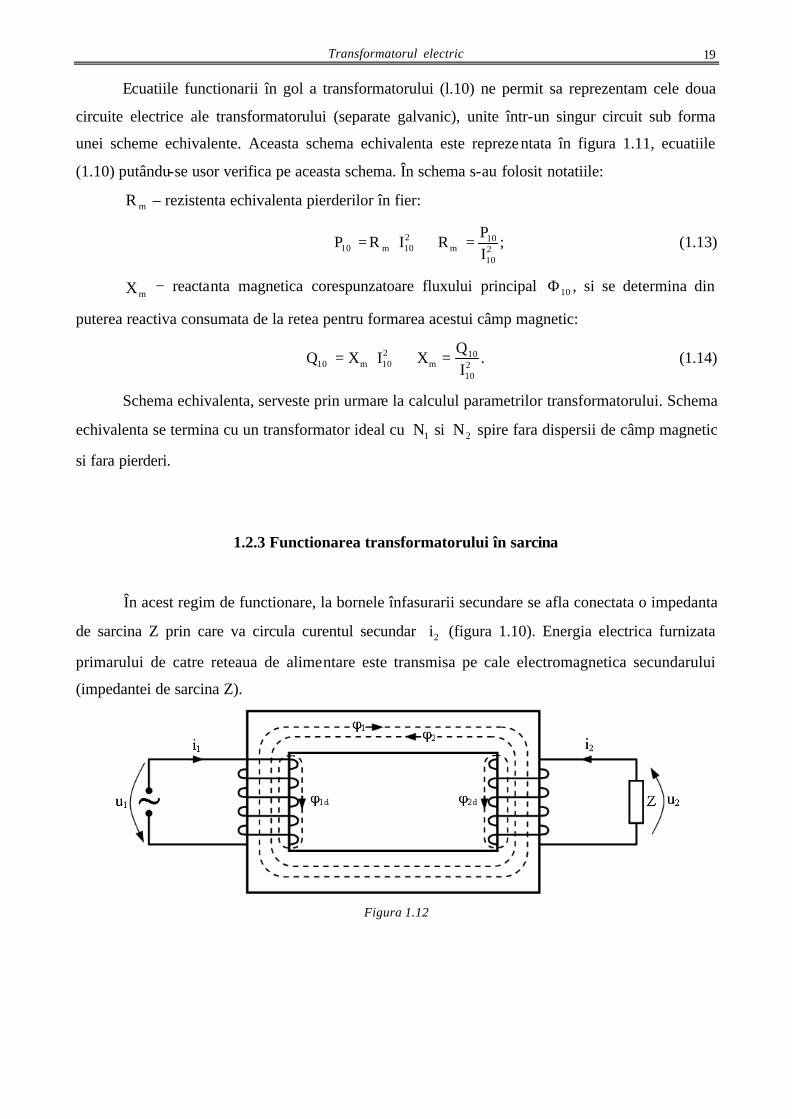
1.2.3 Functionarea transformatorului în sarcina
În acest regim de functionare, la bornele înfasurarii secundare se afla conectata o impedanta
de sarcina Z prin care va circula curentul secundar 2i (figura 1.10). Energia electrica furnizata
primarului de catre reteaua de alimentare este transmisa pe cale electromagnetica secundarului
(impedantei de sarcina Z).
Figura 1.12

Transformatorul electric 20
1.2.4 Ecuatiile transformatorului în sarcina
Fluxul magnetic 1ϕ produs de curentul primar ,i1 induce în secundar curentul .i2 Acest
curent produce fluxul magnetic de reactie .2ϕ Presupunând miezul de fier nesaturat se poate afirma
ca rezultanta celor doua fluxuri:
,1021 Φ=Φ+Φ (1.15)
este chiar fluxul magnetic de mers în gol produs în primar.
Înlocuind în relatia (1.15) fluxurile cu expresiile lor din legea lui Ohm pentru circuite
magnetice obtinem:
;INININ
1012211
ℜ⋅
=ℜ⋅
+ℜ
⋅ (1.16)
unde:
− 21 N,N - numarul de spire al înfasurarilor primara, secundara;
− ℜ - reluctanta magnetica a miezului de fier.
Relatia (1.16) se mai poate scrie:
,IIIIINN
I 10211021
21
' =+⇔=⋅+ (1.17)
în care, u
22 k
II' = este curentul secundar raportat la primar.
Ecuatiile de tensiuni pe circuitul primar si secundar vor fi:
.uiRee;uiRee
222d22
111d11
+⋅=+−⋅=+
(1.18)
unde: d2d1 e,e - tensiunile electromotoare induse de fluxul primar de dispersie d1ϕ , respectiv de
fluxul secundar de dispersie d2ϕ , si au expresiile:
.dtdi
Ldt
dNe
;dtdi
Ldt
dNe
2d2
d22d2
1d1
d11d1
⋅−=ϕ
⋅−=
⋅−=ϕ
⋅−= (1.19)
Se pot scrie astfel ecuatiile (1.18) în complex:
( )( ).XjRIEU
;XjRIEU
d22222
d11111
⋅+⋅−=⋅+⋅+−=
(1.20)
în care: d2d2d2d1 LXsi,LX ⋅ω=⋅ω= sunt reactantele de dispersie primara, respectiv secundara.

Transformatorul electric
21
Ecuatia de tensiuni în secundar (1.20) se mai poate scrie (înmultind ambii membri cu
termenul 2
1
NN
):
.XNN
jRNN
INN
ENN
UNN
d2
2
2
12
2
2
12
1
22
2
12
2
1
⋅
⋅+⋅
⋅⋅−⋅=⋅ (1.21)
Notând:
;IIkIk1
INN
;EEkENN
;UUkUNN '''
22i2u
21
222u2
2
122u2
2
1 =⋅=⋅=⋅=⋅=⋅=⋅=⋅
;XXkXNN
;RRkRNN ''
d2d22ud2
2
2
122
2u2
2
2
1 =⋅=⋅
=⋅=⋅
si înlocuind în (1.21) se obtine ecuatia de tensiuni din secundar cu marimile raportate la primar:
.XjRIEU '''''d22222
⋅+⋅−= (1.22)
Tinând cont si de relatiile (1.5) se remarca faptul ca tensiunea electromotoare utila
secundara 2E prin raportare la primar se identifica cu tensiunea electromotoare primara 12 EE ' = .
De asemenea prin raportarea marimilor secundare la primar puterea electrica (atât activa cât si cea
reactiva) se conserva. Într-adevar se poate verifica usor ca:
.IEIE;IXIX;IRIR;IUIU 22222
d2d22d2d2
222
2222222
'''''''' ⋅=⋅⋅=⋅⋅=⋅⋅=⋅
Mentionam ca la aceleasi rezultate s-ar fi ajuns daca marimile primare s-ar fi raportat la
secundar, în care caz ar fi fost valabile legile de raportare (1.21), cu conditia de a se fi schimbat
indicii "1" si "2" între ei.
În acest fel, tinând cont de ecuatia curentilor (1.17), de ecuatia tensiunilor din primar (1.20)
si din secundar raportata la primar (1.22), precum si de corectia adusa datorita pierderilor în fier
(1.11), se poate scrie sistemul de ecuatii care caracterizeaza functionarea transformatorului în
sarcina:
;IXjIREU
;IXjIREU
'''''2d22212
1d11111
⋅⋅−−=
⋅⋅+⋅+−=
;IIIII a1m11021' +==+ (1.23)
;IRIXjE a1mm1m1 ⋅−=⋅⋅−=
;IXjIRU '''''222 ⋅⋅+⋅=
'' XsiR fiind parametrii sarcinii raportati la primar conform relatiilor (1.21).
Transformatorul electric 22
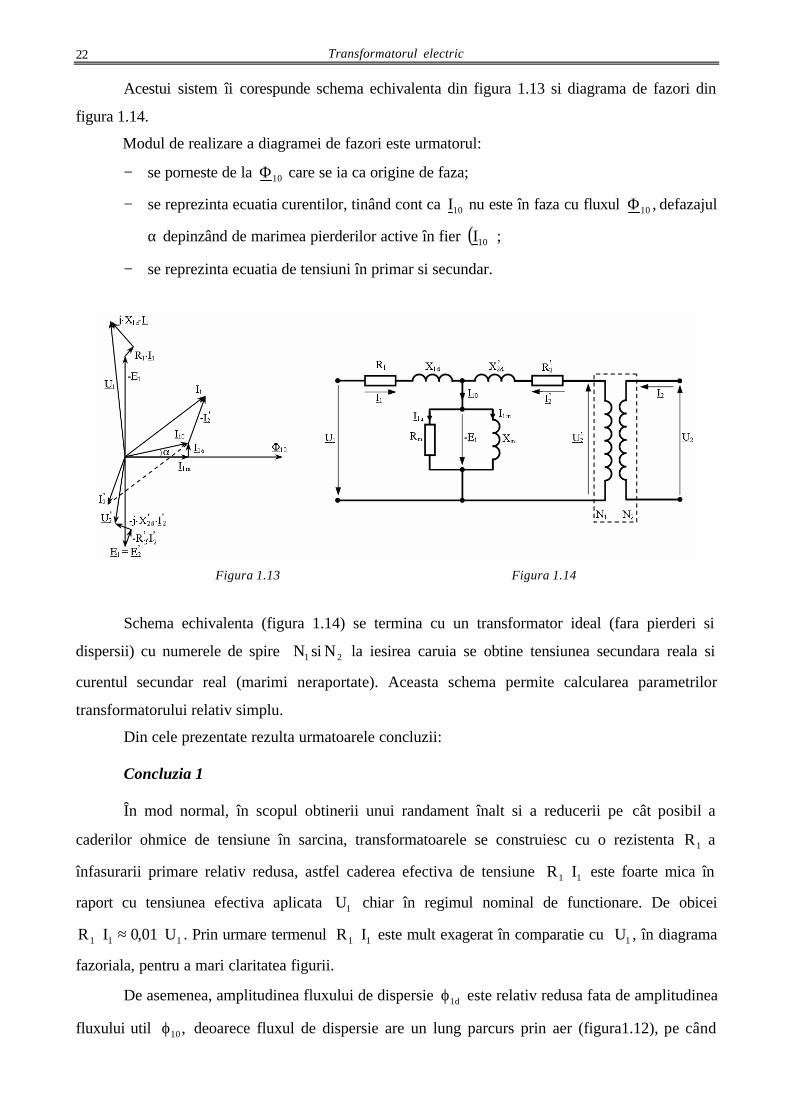
Acestui sistem îi corespunde schema echivalenta din figura 1.13 si diagrama de fazori din
figura 1.14.
Modul de realizare a diagramei de fazori este urmatorul:
− se porneste de la 10Φ care se ia ca origine de faza;
− se reprezinta ecuatia curentilor, tinând cont ca 10I nu este în faza cu fluxul 10Φ , defazajul
α depinzând de marimea pierderilor active în fier ( )10I ;
− se reprezinta ecuatia de tensiuni în primar si secundar.
Figura 1.13 Figura 1.14
Schema echivalenta (figura 1.14) se termina cu un transformator ideal (fara pierderi si
dispersii) cu numerele de spire 1N si 2N la iesirea caruia se obtine tensiunea secundara reala si
curentul secundar real (marimi neraportate). Aceasta schema permite calcularea parametrilor
transformatorului relativ simplu.
Din cele prezentate rezulta urmatoarele concluzii:
Concluzia 1
În mod normal, în scopul obtinerii unui randament înalt si a reducerii pe cât posibil a
caderilor ohmice de tensiune în sarcina, transformatoarele se construiesc cu o rezistenta 1R a
înfasurarii primare relativ redusa, astfel caderea efectiva de tensiune 11 IR ⋅ este foarte mica în
raport cu tensiunea efectiva aplicata 1U chiar în regimul nominal de functionare. De obicei
111 U01,0IR ⋅≈⋅ . Prin urmare termenul 11 IR ⋅ este mult exagerat în comparatie cu 1U , în diagrama
fazoriala, pentru a mari claritatea figurii.
De asemenea, amplitudinea fluxului de dispersie d1ϕ este relativ redusa fata de amplitudinea
fluxului util ,10ϕ deoarece fluxul de dispersie are un lung parcurs prin aer (figura1.12), pe când

Transformatorul electric
23
fluxul util se închide prin miezul foarte permeabil al circuitului feromagnetic. În consecinta, si
termenul 1d1 IXj ⋅⋅ este relativ foarte redus în comparatie cu 1E , fiind mult exagerat în diagrama
fazoriala (figura 1.13). De obicei, în regim nominal, .E05,0IX 11d1 ⋅=⋅
Asadar, cu foarte buna aproximatie, putem spune ca fazorii 1U si 1E , practic se confunda,
indiferent de încarcare. Deci:
.Nf2
2EU;NjEU m10111m10111 Φ⋅⋅⋅
π⋅=≈Φ⋅⋅ω⋅=−≈
Daca se considera .ctrezult a.,ctfsi.ctU m101 =Φ==
Fluxul uti1 în miezul feromagnetic al unui transformator este dictat ca amplitudine de
tensiunea primara si de frecventa retelei de alimentare, indiferent de gradul de încarcare al sau.
Putem astfel considera: .ctP.;ctI.;ctI;.ctE Fea1m11 ≈≈≈≈
Concluzia 2
Rezistenta '2R a secundarului raportata la primar este aproximativ egala cu rezistenta R1 a
primarului. Într-adevar, considerând: densitatile de curent 21 JJ ≈ ; lungimile înfasurarilor 21 ll ≈ si
neglijând curentul 10I se poate considera 2211 ININ ⋅≈⋅ , deci:
.RI
JlNNN
IJlN
NN
RR 11
111
2
2
1
2
222
2
2
122
' =⋅⋅
⋅ρ≈
⋅
⋅⋅⋅ρ=
⋅=
Se poate arata ca, în conditiile acelorasi aproximatii, d1d2 XX' ≅ . Prin urmare, prin
raportare, parametrii celor doua înfasurari au aproximativ aceleasi valori numerice.
1.2.5 Functionarea transformatorului în scurtcircuit
În acest regim înfasurarea secundara este scurtcircuitata 0Z → . Daca s-ar alimenta primarul
la tensiunea nominala, curentii prin cele doua înfasurari ar capata valori mari care ar duce la arderea
înfasurarilor. De aceea, pentru a putea realiza acest regim de functionare se alimenteaza primarul la
o tensiune redusa în asa fel încât curentii prin cele doua înfasurari sa aiba valorile lor nominale.
Aceasta tensiune poarta denumirea de tensiune de scurtcircuit a transformatorului u1sc, fiind un
parametru important al acestuia (doua sau mai multe transformatoare nu pot functiona în paralel
daca nu au aceeasi tensiune de scurtcircuit).
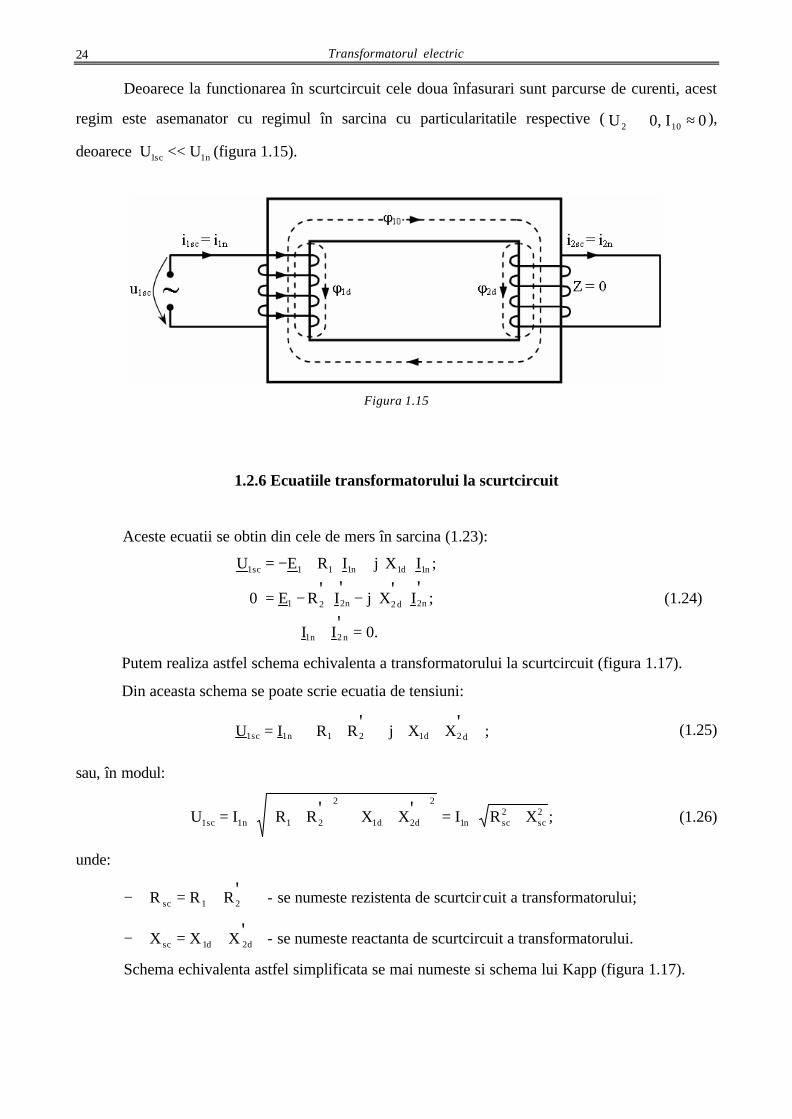
Transformatorul electric 24
Deoarece la functionarea în scurtcircuit cele doua înfasurari sunt parcurse de curenti, acest
regim este asemanator cu regimul în sarcina cu particularitatile respective ( 0I,0U 102 ≈⇒ ),
deoarece n1sc1 UU << (figura 1.15).
Figura 1.15
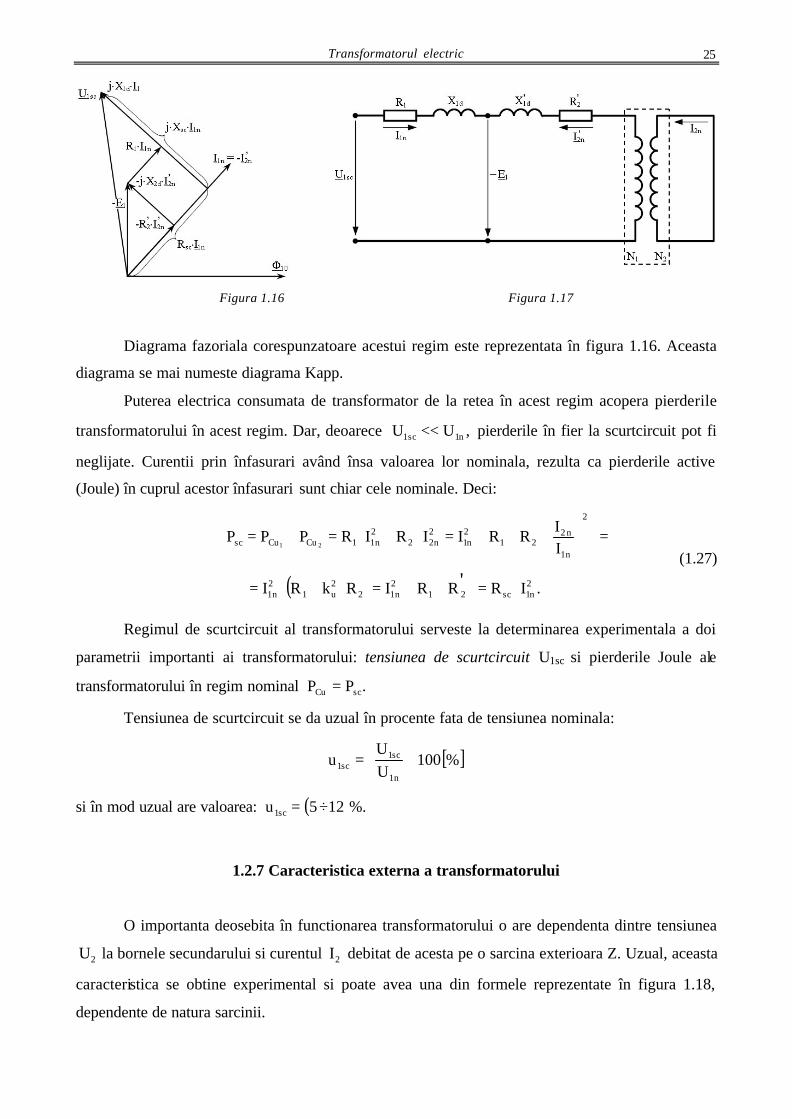
1.2.6 Ecuatiile transformatorului la scurtcircuit
Aceste ecuatii se obtin din cele de mers în sarcina (1.23):
.0II
;IXjIRE0
;IXjIREU
'
''''
n2n1
n2d2n221
n1d1n111sc1
=+
⋅⋅−⋅−=
⋅⋅+⋅+−=
(1.24)
Putem realiza astfel schema echivalenta a transformatorului la scurtcircuit (figura 1.17).
Din aceasta schema se poate scrie ecuatia de tensiuni:
;XXjRRIU d2d121n1sc1''
+⋅+
+⋅= (1.25)
sau, în modul:
;XRIXXRRIU 2sc
2scn1
2
d2d1
2
21n1sc1'' +⋅=
++
+⋅= (1.26)
unde:
− '21sc RRR += - se numeste rezistenta de scurtcircuit a transformatorului;
− 'd2d1sc XXX += - se numeste reactanta de scurtcircuit a transformatorului.
Schema echivalenta astfel simplificata se mai numeste si schema lui Kapp (figura 1.17).
Transformatorul electric
25
Figura 1.16 Figura 1.17
Diagrama fazoriala corespunzatoare acestui regim este reprezentata în figura 1.16. Aceasta
diagrama se mai numeste diagrama Kapp.
Puterea electrica consumata de transformator de la retea în acest regim acopera pierderile
transformatorului în acest regim. Dar, deoarece ,UU n1sc1 << pierderile în fier la scurtcircuit pot fi
neglijate. Curentii prin înfasurari având însa valoarea lor nominala, rezulta ca pierderile active
(Joule) în cuprul acestor înfasurari sunt chiar cele nominale. Deci:
( ) .IRRRIRkRI
II
RRIIRIRPPP
2n1sc21
2n12
2u1
2n1
2
n1
n221
2n1
2n22
2n11CuCusc
'
21
⋅=
+⋅=⋅+⋅=
=
⋅+⋅=⋅+⋅=+=
(1.27)
Regimul de scurtcircuit al transformatorului serveste la determinarea experimentala a doi
parametrii importanti ai transformatorului: tensiunea de scurtcircuit U1sc si pierderile Joule ale
transformatorului în regim nominal .PP scCu =
Tensiunea de scurtcircuit se da uzual în procente fata de tensiunea nominala:
[ ]%100UU
un1
sc1sc1 ⋅
=
si în mod uzual are valoarea: ( )%.125u sc1 ÷=
1.2.7 Caracteristica externa a transformatorului
O importanta deosebita în functionarea transformatorului o are dependenta dintre tensiunea
2U la bornele secundarului si curentul 2I debitat de acesta pe o sarcina exterioara Z. Uzual, aceasta
caracteristica se obtine experimental si poate avea una din formele reprezentate în figura 1.18,
dependente de natura sarcinii.
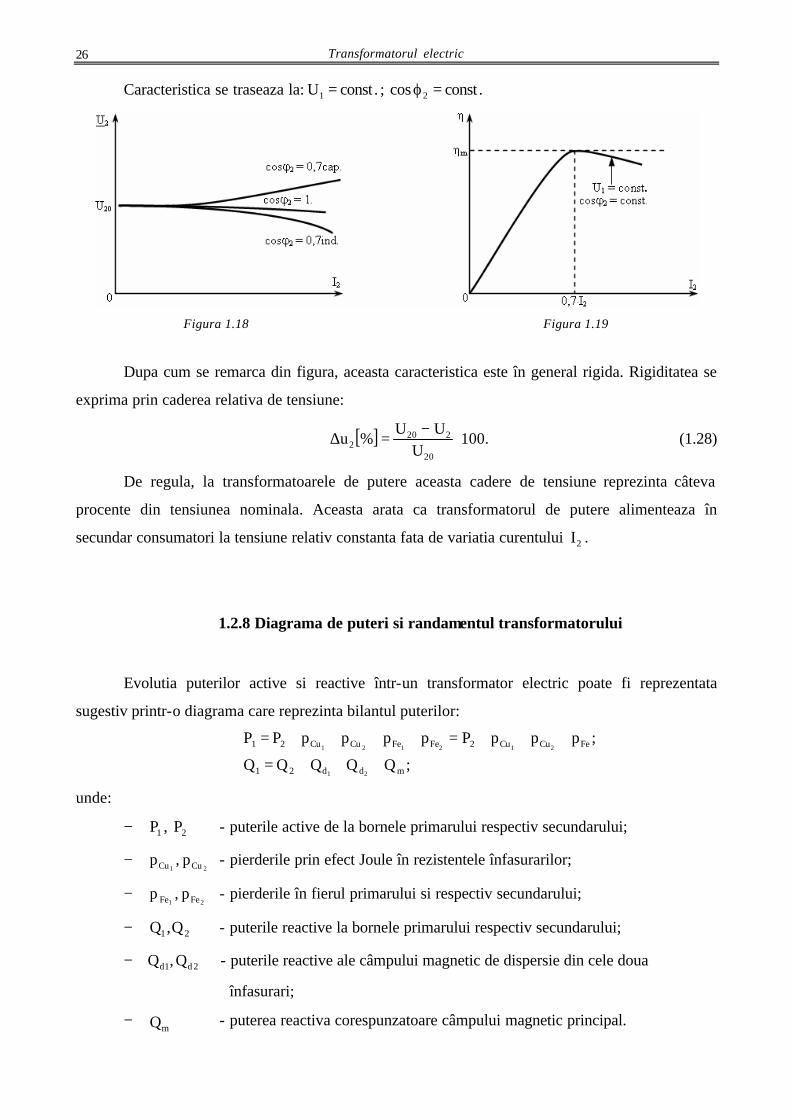
Transformatorul electric 26
Caracteristica se traseaza la: .constU1 = ; .constcos 2 =ϕ
Figura 1.18 Figura 1.19
Dupa cum se remarca din figura, aceasta caracteristica este în general rigida. Rigiditatea se
exprima prin caderea relativa de tensiune:
[ ] .100U
UU%u
20
2202 ⋅
−=∆ (1.28)
De regula, la transformatoarele de putere aceasta cadere de tensiune reprezinta câteva
procente din tensiunea nominala. Aceasta arata ca transformatorul de putere alimenteaza în
secundar consumatori la tensiune relativ constanta fata de variatia curentului 2I .
1.2.8 Diagrama de puteri si randamentul transformatorului
Evolutia puterilor active si reactive într-un transformator electric poate fi reprezentata
sugestiv printr-o diagrama care reprezinta bilantul puterilor:
;QQQQQ
;pppPppppPP
mdd21
FeCuCu2FeFeCuCu21
21
212121
+++=
+++=++++=
unde:
− 1P , 2P - puterile active de la bornele primarului respectiv secundarului;
− 21 CuCu p ,p - pierderile prin efect Joule în rezistentele înfasurarilor;
− 21 eFeF p ,p - pierderile în fierul primarului si respectiv secundarului;
− 21 Q,Q - puterile reactive la bornele primarului respectiv secundarului;
− 2d1d Q,Q - puterile reactive ale câmpului magnetic de dispersie din cele doua
înfasurari;
− mQ - puterea reactiva corespunzatoare câmpului magnetic principal.
Transformatorul electric
27
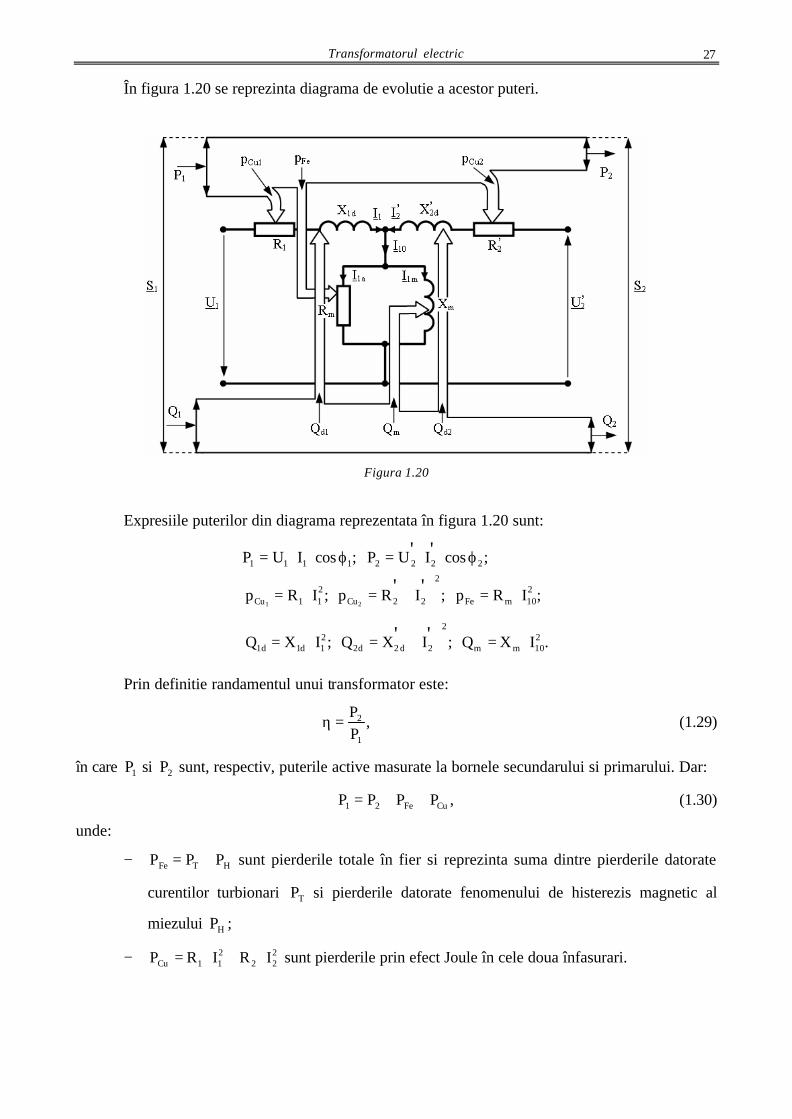
În figura 1.20 se reprezinta diagrama de evolutie a acestor puteri.
Figura 1.20
Expresiile puterilor din diagrama reprezentata în figura 1.20 sunt:
.IXQ;IXQ;IXQ
;IRp;IRp;IRp
;cosIUP;cosIUP
210mm
2
2d2d221d1d1
210mFe
2
22Cu211Cu
22221111
''
''
''
21
⋅=
⋅=⋅=
⋅=
⋅=⋅=
ϕ⋅⋅=ϕ⋅⋅=
Prin definitie randamentul unui transformator este:
,PP
1
2=η (1.29)
în care 1P si 2P sunt, respectiv, puterile active masurate la bornele secundarului si primarului. Dar:
,PPPP CuFe21 ++= (1.30)
unde:
− HTFe PPP += sunt pierderile totale în fier si reprezinta suma dintre pierderile datorate
curentilor turbionari TP si pierderile datorate fenomenului de histerezis magnetic al
miezului HP ;
− 222
211Cu IRIRP ⋅+⋅= sunt pierderile prin efect Joule în cele doua înfasurari.
Transformatorul electric 28
Se poate rescrie astfel expresia randamentului:
.IRIRPcosIU
cosIUPPP
P222
211Fe222
222
CuFe2
2
⋅+⋅++ϕ⋅⋅ϕ⋅⋅
=++
=η (1.31)
Dar cum raportul dintre cei doi curenti este constant, se poate înlocui curentul primar 1I cu
expresia .IkI 2i1 ⋅= Considerând tensiunea de alimentare .ctU1 = deci si .ctkU
Uu
12 == , rezulta ca
si pierderile în fier care depind de amplitudinea tensiunii si de frecventa ei sunt constante .ctPFe =
Se obtine astfel o expresie ( )2If=η care la factor de putere al sarcinii dat ( ).ctcos 2 =ϕ are
ca singura variabila curentul .I2
Valoarea maxima mη a randamentului la factor de putere dat, al sarcinii conectata la
secundar are loc pentru curentul 2I determinat de ecuatia:
.0dId
2
=η
(1.32)
Rezolvând ecuatia se gaseste:
,PP CuFe = (1.33)
adica, randamentul atinge valoarea maxima la acea încarcare (I2) pentru care pierderile în fier
sunt egale cu pierderile în înfasurarile transformatorului.
În mod uzual, caracteristica randamentului se traseaza grafic pe baza datelor obtinute prin
încercari experimentale, si are forma celei reprezentate în figura 1.19.
Practica a aratat ca valoarea maxima a randamentului se obtine în jurul valorii curentului
,I7,0I n22 ⋅= valori pentru care se îndeplineste conditia (1.33).
În general, randamentul transformatorului este mai ridicat decât cel al masinilor rotative
neintervenind pierderile mecanice. La transformatoarele de putere medie si mare ( )kVA100010 ÷ ,
randamentul este de ;97,095,0 ÷ la transformatoarele de foarte mare putere randamentul poate
depasi 0,99, iar la transformatoare foarte mici randamentul scade chiar sub 0,70.
Transformatorul electric
29
1.3 Transformatorul trifazat
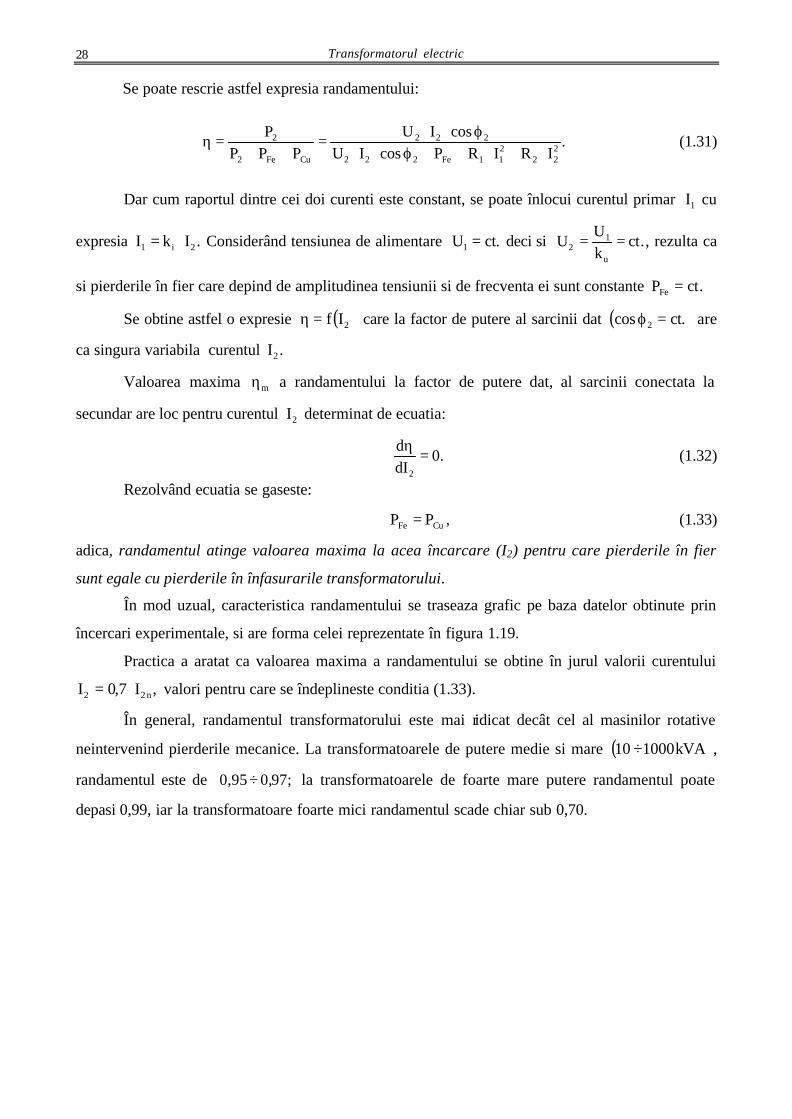
În principiu un transformator trifazat se poate obtine cu ajutorul a trei transformatoare
monofazate identice, ale caror înfasurari primare sunt conectate în stea (Y), sau triunghi (D) si ale
caror înfasurari secundare sunt conectate în stea (y), triunghi (d) sau zig-zag (z).
Figura 1.21
Obtinerea transformatorului trifazat cu ajutorul a trei transformatoare monofazate nu este
folosita în practica decât la unitatile de foarte mare putere, unde, din motive de gabarit nu se poate
construi un miez de fier unic care sa poata fi transportat la locul de montaj. Constructia curenta a
transformatoarelor trifazate se realizeaza cu ajutorul unui singur miez de fier cu trei coloane. La
aceasta solutie constructiva s-a ajuns facând urmatorul rationament: daca cele trei transformatoare
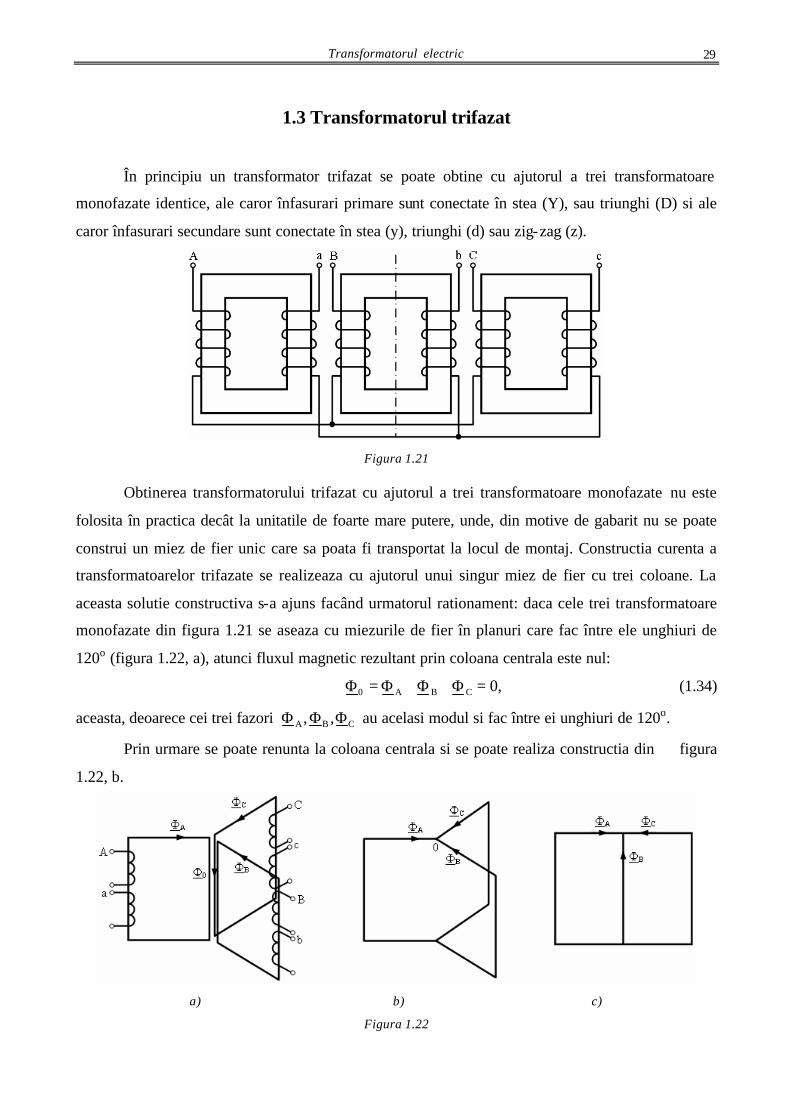
monofazate din figura 1.21 se aseaza cu miezurile de fier în planuri care fac între ele unghiuri de
120o (figura 1.22, a), atunci fluxul magnetic rezultant prin coloana centrala este nul:
,0CBA0 =Φ+Φ+Φ=Φ (1.34)
aceasta, deoarece cei trei fazori CBA ,, ΦΦΦ au acelasi modul si fac între ei unghiuri de 120o.
Prin urmare se poate renunta la coloana centrala si se poate realiza constructia din figura
1.22, b.
a) b) c)
Figura 1.22
Transformatorul electric 30
Realizarea practica a miezului de fier din figura l.22, b este dificila, mai ales, din cauza
îmbinarii din punctul 0, si rezulta astfel un miez care ocupa un spatiu mare datorita amplasarii celor
trei coloane în planuri diferite. Tinând seama de aceste consideratii, în practica, se aseaza cele trei
coloane în acelasi plan obtinându-se forma constructiva curenta (figura 1.22, c).
În acest mod se obtine o nesimetrie magnetica care conduce la o nesimetrie a fluxurilor si
curentilor pe cele trei faze, nesimetrie care în majoritatea cazurilor nu este importanta.
Se poate, astfel, concluziona ca teoria transformatorului trifazat pe o faza este aceeasi cu cea
a transformatorului monofazat.
1.3.1 Grupe de conexiuni ale transformatorului trifazat
În cele ce urmeaza vom nota cu: A, B, C începuturile si cu X, Y, Z respectiv, sfârsiturile
înfasurarilor de faza din primar; a, b, c începuturile si x, y, z sfârsiturile înfasurarilor de faza din
secundar asa cum sunt notate în standarde. Înfasurarile trifazate primare sau secundare se pot
conecta în trei moduri diferite dupa cum urmeaza:
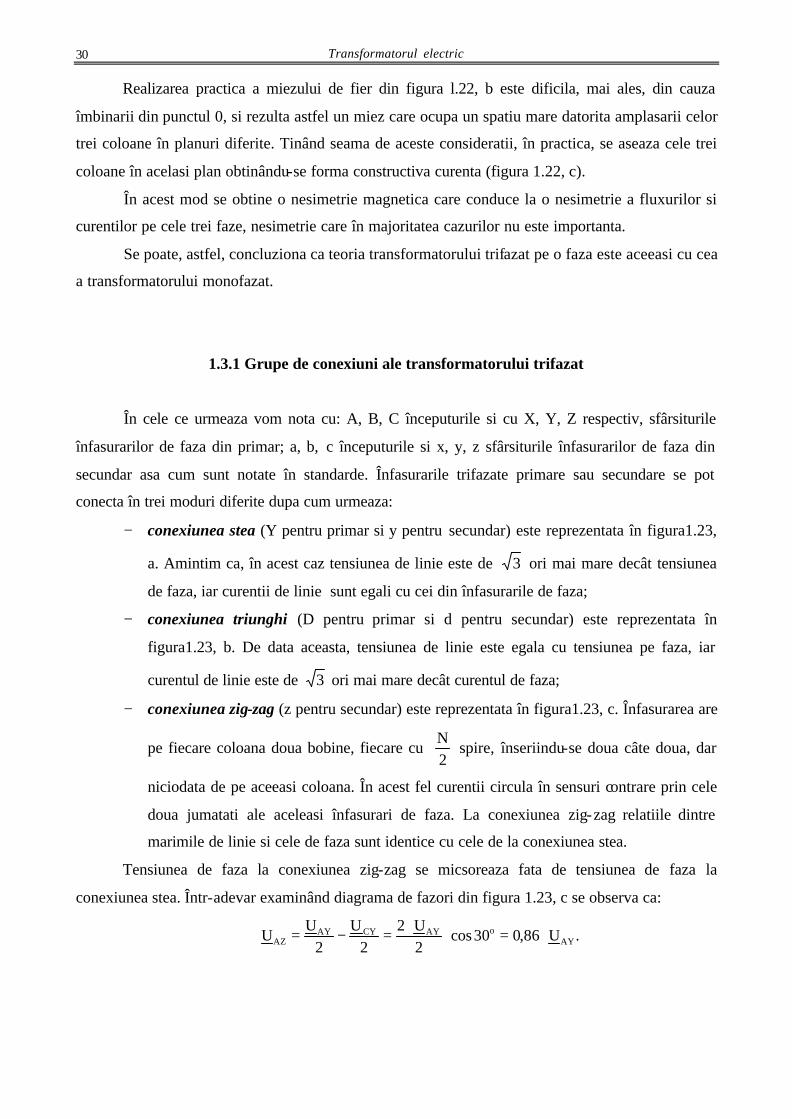
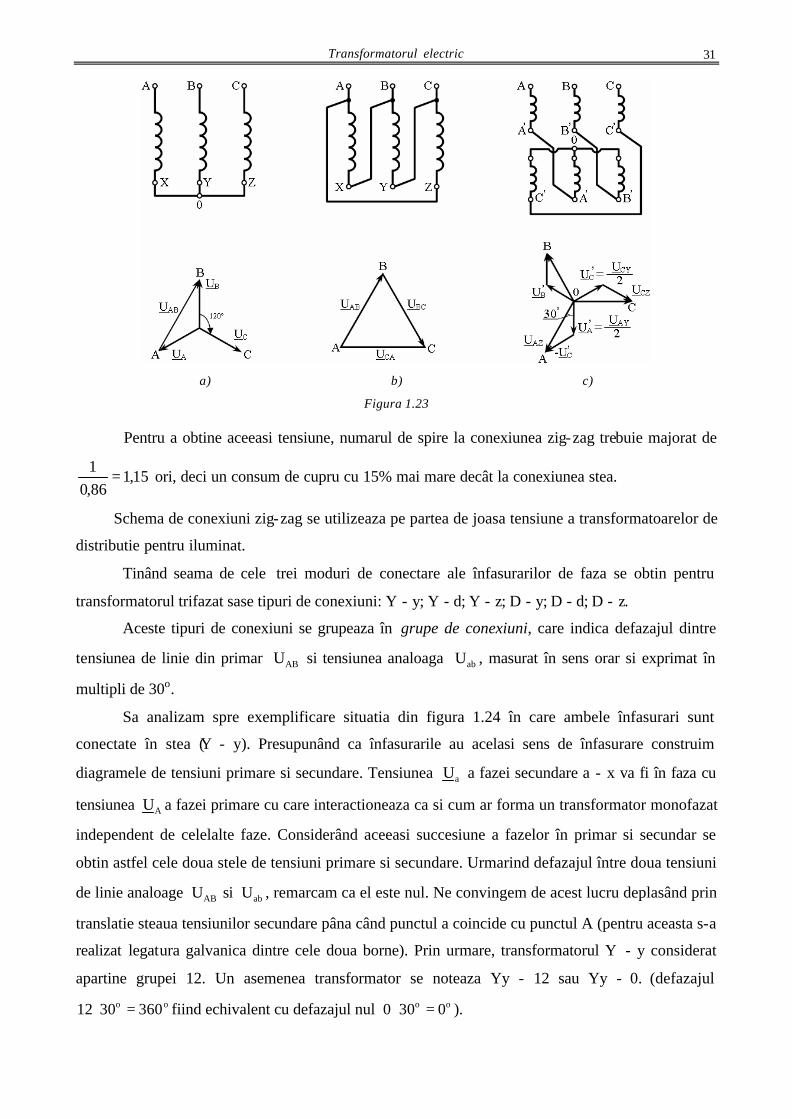
− conexiunea stea (Y pentru primar si y pentru secundar) este reprezentata în figura1.23,
a. Amintim ca, în acest caz tensiunea de linie este de 3 ori mai mare decât tensiunea
de faza, iar curentii de linie sunt egali cu cei din înfasurarile de faza;
− conexiunea triunghi (D pentru primar si d pentru secundar) este reprezentata în
figura1.23, b. De data aceasta, tensiunea de linie este egala cu tensiunea pe faza, iar
curentul de linie este de 3 ori mai mare decât curentul de faza;
− conexiunea zig-zag (z pentru secundar) este reprezentata în figura1.23, c. Înfasurarea are
pe fiecare coloana doua bobine, fiecare cu 2N
spire, înseriindu-se doua câte doua, dar
niciodata de pe aceeasi coloana. În acest fel curentii circula în sensuri contrare prin cele
doua jumatati ale aceleasi înfasurari de faza. La conexiunea zig-zag relatiile dintre
marimile de linie si cele de faza sunt identice cu cele de la conexiunea stea.
Tensiunea de faza la conexiunea zig-zag se micsoreaza fata de tensiunea de faza la
conexiunea stea. Într-adevar examinând diagrama de fazori din figura 1.23, c se observa ca:
.U86,030cos2U2
2U
2U
U AYoAYCYAY
AZ ⋅=⋅⋅
=−=
Transformatorul electric
31
a) b) c)
Figura 1.23
Pentru a obtine aceeasi tensiune, numarul de spire la conexiunea zig-zag trebuie majorat de
15,186,01
= ori, deci un consum de cupru cu 15% mai mare decât la conexiunea stea.
Schema de conexiuni zig-zag se utilizeaza pe partea de joasa tensiune a transformatoarelor de
distributie pentru iluminat.
Tinând seama de cele trei moduri de conectare ale înfasurarilor de faza se obtin pentru
transformatorul trifazat sase tipuri de conexiuni: Y - y; Y - d; Y - z; D - y; D - d; D - z.
Aceste tipuri de conexiuni se grupeaza în grupe de conexiuni, care indica defazajul dintre
tensiunea de linie din primar ABU si tensiunea analoaga abU , masurat în sens orar si exprimat în
multipli de 30o.
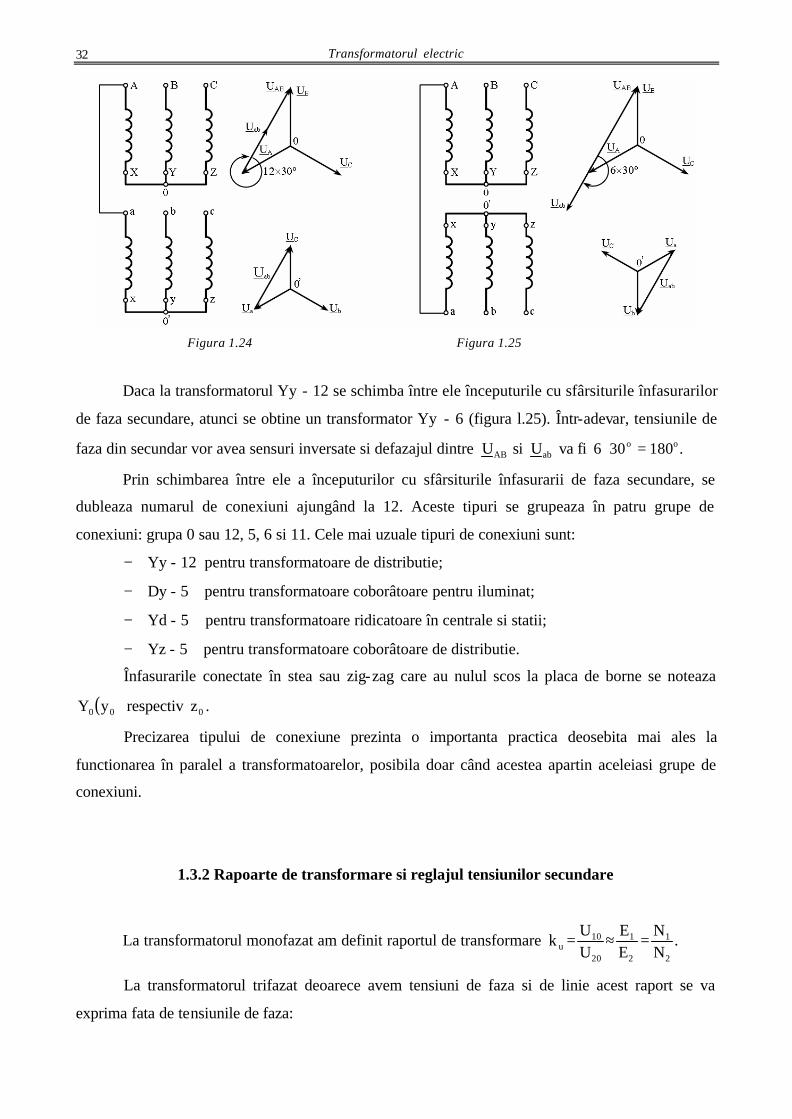
Sa analizam spre exemplificare situatia din figura 1.24 în care ambele înfasurari sunt
conectate în stea (Y - y). Presupunând ca înfasurarile au acelasi sens de înfasurare construim
diagramele de tensiuni primare si secundare. Tensiunea aU a fazei secundare a - x va fi în faza cu
tensiunea AU a fazei primare cu care interactioneaza ca si cum ar forma un transformator monofazat
independent de celelalte faze. Considerând aceeasi succesiune a fazelor în primar si secundar se
obtin astfel cele doua stele de tensiuni primare si secundare. Urmarind defazajul între doua tensiuni
de linie analoage ABU si abU , remarcam ca el este nul. Ne convingem de acest lucru deplasând prin
translatie steaua tensiunilor secundare pâna când punctul a coincide cu punctul A (pentru aceasta s-a
realizat legatura galvanica dintre cele doua borne). Prin urmare, transformatorul Y - y considerat
apartine grupei 12. Un asemenea transformator se noteaza Yy - 12 sau Yy - 0. (defazajul oo 3603012 =⋅ fiind echivalent cu defazajul nul oo 0300 =⋅ ).
Transformatorul electric 32
Figura 1.24 Figura 1.25
Daca la transformatorul Yy - 12 se schimba între ele începuturile cu sfârsiturile înfasurarilor
de faza secundare, atunci se obtine un transformator Yy - 6 (figura l.25). Într-adevar, tensiunile de
faza din secundar vor avea sensuri inversate si defazajul dintre ABU si abU va fi .180306 oo =⋅
Prin schimbarea între ele a începuturilor cu sfârsiturile înfasurarii de faza secundare, se
dubleaza numarul de conexiuni ajungând la 12. Aceste tipuri se grupeaza în patru grupe de
conexiuni: grupa 0 sau 12, 5, 6 si 11. Cele mai uzuale tipuri de conexiuni sunt:
− Yy - 12 pentru transformatoare de distributie;
− Dy - 5 pentru transformatoare coborâtoare pentru iluminat;
− Yd - 5 pentru transformatoare ridicatoare în centrale si statii;
− Yz - 5 pentru transformatoare coborâtoare de distributie.
Înfasurarile conectate în stea sau zig-zag care au nulul scos la placa de borne se noteaza
( )00 yY respectiv 0z .
Precizarea tipului de conexiune prezinta o importanta practica deosebita mai ales la
functionarea în paralel a transformatoarelor, posibila doar când acestea apartin aceleiasi grupe de
conexiuni.
1.3.2 Rapoarte de transformare si reglajul tensiunilor secundare
La transformatorul monofazat am definit raportul de transformare .NN
EE
UU
k2
1
2
1
20
10u =≈=
La transformatorul trifazat deoarece avem tensiuni de faza si de linie acest raport se va
exprima fata de tensiunile de faza:
Transformatorul electric
33
.NN
EE
U
Uk
2
1
2
1
f
ff
20
10 =≈=
În raport cu tensiunile de linie se poate defini un alt raport de transformare 2
1l U
Uk = , unde
1U si 2U sunt tensiuni de linie. Între fk si lk se poate stabili o relatie pentru fiecare tip de
conexiune, astfel spre exemplu:
o la conexiunea stea – stea (Y - y):
;kNN
UU
U3U3
UU
k f2
1
f2
f1
f2
f1
2
1l ===
⋅⋅
== (1.35)
o la conexiunea triunghi – stea (D - y):
;k3
1NN
31
U3U
UU
k f2
1
f2
f1
2
1l ⋅=⋅=
⋅== (1.36)
o la conexiunea stea – zig-zag (Y - z):
;k3
2
2N
3
NU3
UU3U3
UU
k f2
1
bob
f1
f2
f1
2
1l ⋅=
⋅
=⋅
=⋅⋅
== (1.37)
deoarece pentru bobU corespunde 2
N 2 spire.
Relatiile 1.35, 1.36 si 1.37 ne arata ca se poate verifica raportul de transformare al
transformatorului
=
2
1f N
Nk daca se masoara tensiunile de linie, deci, se afla .k1
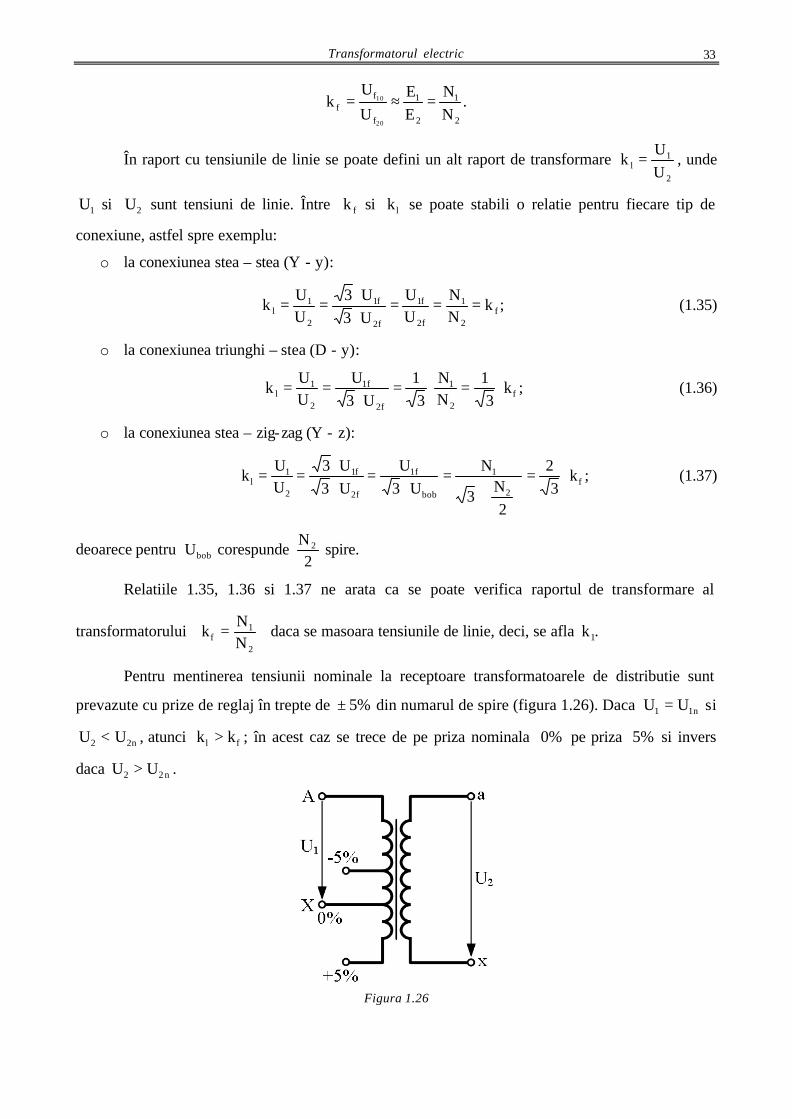
Pentru mentinerea tensiunii nominale la receptoare transformatoarele de distributie sunt
prevazute cu prize de reglaj în trepte de %5± din numarul de spire (figura 1.26). Daca n11 UU = si
n22 UU < , atunci fl kk > ; în acest caz se trece de pe priza nominala %0 pe priza %5 si invers
daca n22 UU > .
Figura 1.26
Transformatorul electric 34
1.4 Functionarea în paralel a transformatoarelor
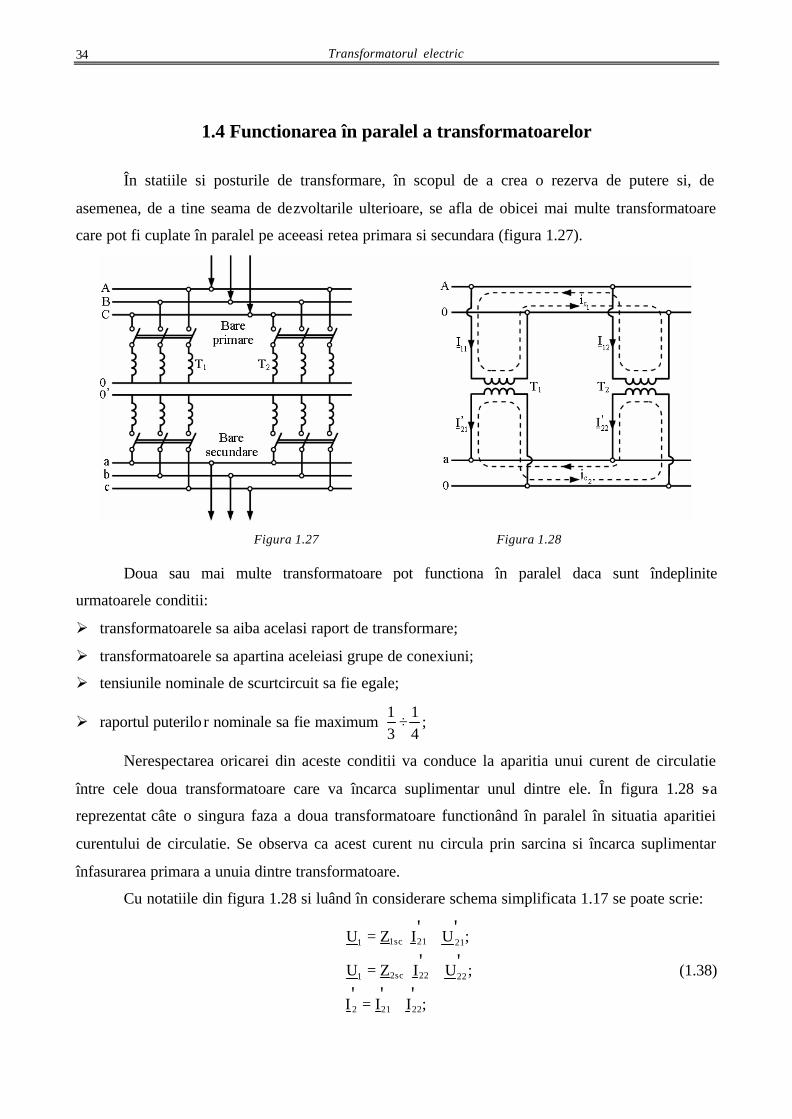
În statiile si posturile de transformare, în scopul de a crea o rezerva de putere si, de
asemenea, de a tine seama de dezvoltarile ulterioare, se afla de obicei mai multe transformatoare
care pot fi cuplate în paralel pe aceeasi retea primara si secundara (figura 1.27).
Figura 1.27 Figura 1.28
Doua sau mai multe transformatoare pot functiona în paralel daca sunt îndeplinite
urmatoarele conditii:
Ø transformatoarele sa aiba acelasi raport de transformare;
Ø transformatoarele sa apartina aceleiasi grupe de conexiuni;
Ø tensiunile nominale de scurtcircuit sa fie egale;
Ø raportul puterilo r nominale sa fie maximum ;41
31
÷
Nerespectarea oricarei din aceste conditii va conduce la aparitia unui curent de circulatie
între cele doua transformatoare care va încarca suplimentar unul dintre ele. În figura 1.28 s-a
reprezentat câte o singura faza a doua transformatoare functionând în paralel în situatia aparitiei
curentului de circulatie. Se observa ca acest curent nu circula prin sarcina si încarca suplimentar
înfasurarea primara a unuia dintre transformatoare.
Cu notatiile din figura 1.28 si luând în considerare schema simplificata 1.17 se poate scrie:
;III
;UIZU
;UIZU
'''
''
''
22212
2222sc21
2121sc11
+=
+⋅=
+⋅=
(1.38)
Transformatorul electric
35
unde:
− 1U - tensiunea de linie comuna din primarul celor doua transformatoare;
− ''2221 I,I - curentii din înfasurarile secundare raportate la primar;
− sc2sc1 Z,Z - impedantele de scurtcircuit;
;RRR;RRR
;XXX;XXX
;XjRZ;XjRZ
''
''
2112sc22111sc1
d21d22sc2d21d11sc1
sc2sc2sc2sc1sc1sc1
+=+=
+=+=
⋅+=⋅+=
− ''2221 U,U - tensiunile de faza din înfasurarile secundare.
Daca se scad primele relatii din (1.38) si apoi se înlocuiesc pe rând ''2221 IsiI din a treia relatie
în diferenta obtinuta, avem:
.ZZUUI
ZZZI
;ZZUU
IZZ
ZI
sc2sc1
22212
sc2sc1
sc122
sc2sc1
22212
sc2sc1
sc221
''''
''''
+−+⋅
+=
+−
−⋅+
= (1.39)
În expresia celor doi curenti din 1.39 apare componenta:
;ZZUUI
sc2sc1
2221c
'''+−= (1.40)
care este curentul de circulatie din înfasurarile secundare. Acest curent se scade din '21I si se aduna
la '22I , deci descarca un transformator si îl încarca pe celalalt limitând posibilitatea de încarcare a
ansamblului. Pentru a avea 0I'c = trebuie ca '21U si '
22U sa aiba acelasi modul si sa fie în faza.
Din egalitatea modulelor 2l1l2221 UkUkUU21
'' ⋅=⋅== rezulta necesitatea ca rapoartele de
transformare sa fie egale 21 ll kk = .
Din conditia ca cele doua tensiuni sa fie în faza rezulta necesitatea ca cele doua
transformatoare sa aiba aceeasi grupa de conexiuni, adica aceleasi defazaje fata de tensiunea de
linie primara 1U .
Deoarece din cauza tolerantelor de executie, apar abateri de la valorile de calcul ale
raportului de transformare si ale tensiunii de scurtcircuit, conform STAS 1703-65 se admit abateri
pentru rapoartele de transformare în limitele ± 0,5% la diferente ale tensiunii de scurtcircuit de
± 10%.
Transformatorul electric 36
1.5 Autotransformatorul
Autotransformatorul, numit si transformator în constructie economica are utilizari multiple
acolo unde se cere modificarea tensiunii în limite mai înguste (±10 ÷ ±50)%, când este preferat
transformatorului din punct de vedere economic.
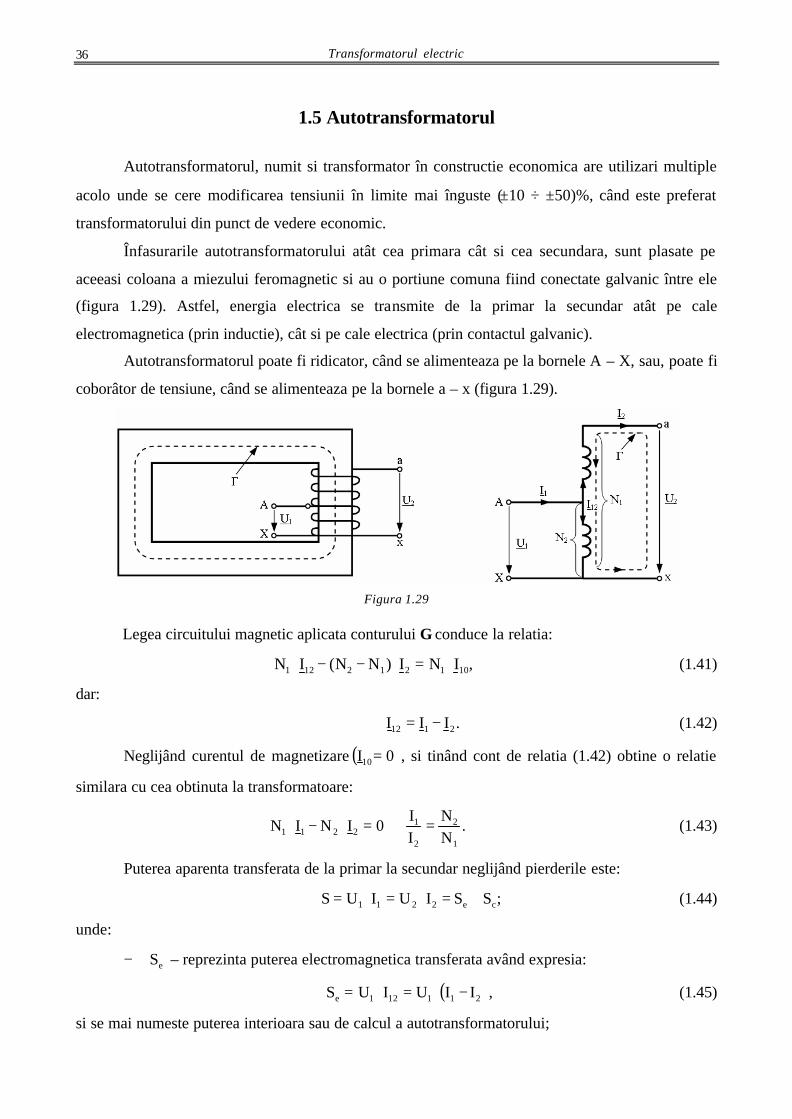
Înfasurarile autotransformatorului atât cea primara cât si cea secundara, sunt plasate pe
aceeasi coloana a miezului feromagnetic si au o portiune comuna fiind conectate galvanic între ele
(figura 1.29). Astfel, energia electrica se transmite de la primar la secundar atât pe cale
electromagnetica (prin inductie), cât si pe cale electrica (prin contactul galvanic).
Autotransformatorul poate fi ridicator, când se alimenteaza pe la bornele A – X, sau, poate fi
coborâtor de tensiune, când se alimenteaza pe la bornele a – x (figura 1.29).
Figura 1.29
Legea circuitului magnetic aplicata conturului Γ conduce la relatia:
,INI)NN(IN 101212121 ⋅=⋅−−⋅ (1.41)
dar:
.III 2112 −= (1.42)
Neglijând curentul de magnetizare ( )0I10= , si tinând cont de relatia (1.42) obtine o relatie
similara cu cea obtinuta la transformatoare:
.NN
II
0ININ1
2
2
12211 =⇔=⋅−⋅ (1.43)
Puterea aparenta transferata de la primar la secundar neglijând pierderile este:
;SSIUIUS ce2211 +=⋅=⋅= (1.44)
unde:
− eS – reprezinta puterea electromagnetica transferata având expresia:
( )211121e IIUIUS −⋅=⋅= , (1.45)
si se mai numeste puterea interioara sau de calcul a autotransformatorului;
Transformatorul electric
37
− cS – puterea transmisa pe cale conductiva Sc:
,IUSSS 21ec ⋅=−= (1.46)
nu afecteaza calculul si dimensiunile autotransformatorului, ceea ce constituie, în esenta, avantajul
acestuia fata de transformator.
Calculând raportul dintre puterea de calcul si puterea transferata se obtine:
.UU
1II
1IUIU
SS
2
1
1
2
11
121e −=−=⋅⋅
= (1.47)
Relatia (1.47) ne arata ca utilizarea autotransformatorului este cu atât mai convenabila
(consum redus de materiale active - cupru si otel electrotehnic) cu cât raportul 2
1
UU
este mai
apropiat de unitate, adica cu cât tensiunea retelei de alimentare este schimbata mai putin. De
exemplu pentru 8,0UU
2
1 = , puterea de calcul a unui autotransformator este 20% din puterea unui
transformator obisnuit pentru aceeasi putere totala transmisa.
În plus, micsorarea greutatii materialelor active conduce, desigur, si la micsorarea
pierderilor electrice si magnetice. De aceea, la aceeasi putere totala transmisa, randamentul
autotransformatorului este superior totdeauna randamentului transformatorului obisnuit.
Un alt avantaj al autotransformatorului este ca la aceeasi încarcare si acelasi factor de putere
al sarcinii, variatia tensiunii secundare este mai mica decât la transformatorul obisnuit.
Printre dezavantaje se numara:
• curentul de scurtcircuit mult mai mare decât al transformatorului echivalent;
• necesitatea realizarii unei izolatii a înfasurarii de joasa tensiune fata de masa dimensionata la
tensiunea înalta (fiind legata galvanic cu înfasurarea de înalta tensiune).
Un domeniu larg de aplicatii pentru autotransformatoare este acela al reglarii tensiunii.
Aceasta se realizeaza prin variatia numarului de spire secundare fie cu ajutorul unor comutatoare
speciale, fie cu ajutorul unui contact mobil care calca direct pe înfasurarea secundara dezizolata în
lungul unei fâsii exterioare.
Aceste regulatoare se utilizeaza la puteri: .kVA5S <
1.6 Transformatorul cu trei înfasurari
La aceste transformatoare se obtin doua tensiuni distincte în secundar, ca urmare acesta se
compune din doua înfasurari care pot alimenta doua retele distincte ca valoare a tensiunii (exemplu:
doua linii de înalta tensiune alimentate de la un singur generator conectat în primar).
Transformatoarele cu trei înfasurari se utilizeaza si la puteri mici.
Transformatorul electric 38
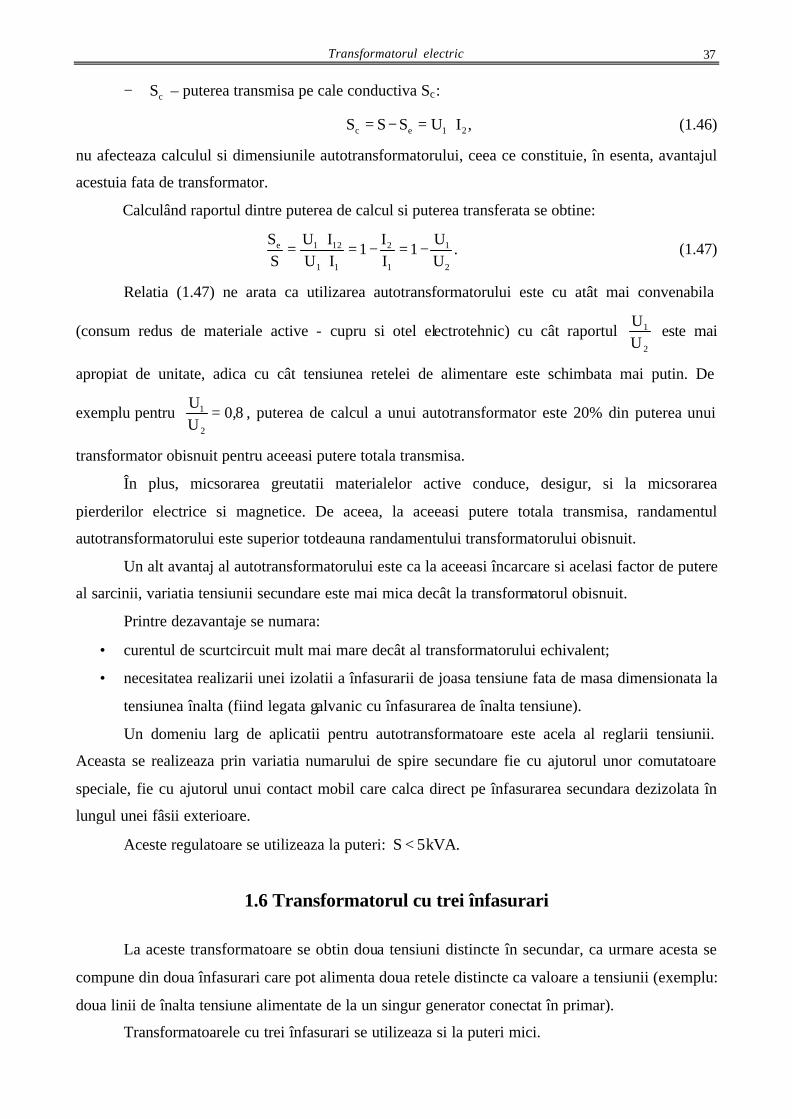
În figura 1.30 se reprezinta schematic un transformator cu trei înfasurari. Teorema
circuitului magnetic scrisa pe un contur, ce reprezinta o linie de câmp, ne da:
;ININININ 101332211 ⋅=⋅−⋅−⋅
sau: ;IINN
INN
I 1031
32
1
21 =⋅−⋅−
si: .IIIIII m10a1010321'' +==−− (1.48)
Figura 1.30
Ecuatiile de tensiuni pe cele trei circuite ne dau:
.EIXjIRU
;EIXjIRU
;EIXjIRU
13d3333
12d2222
11d1111
'''''
'''''
+⋅⋅+⋅=−
+⋅⋅+⋅=−
−⋅⋅+⋅=
(1.49)
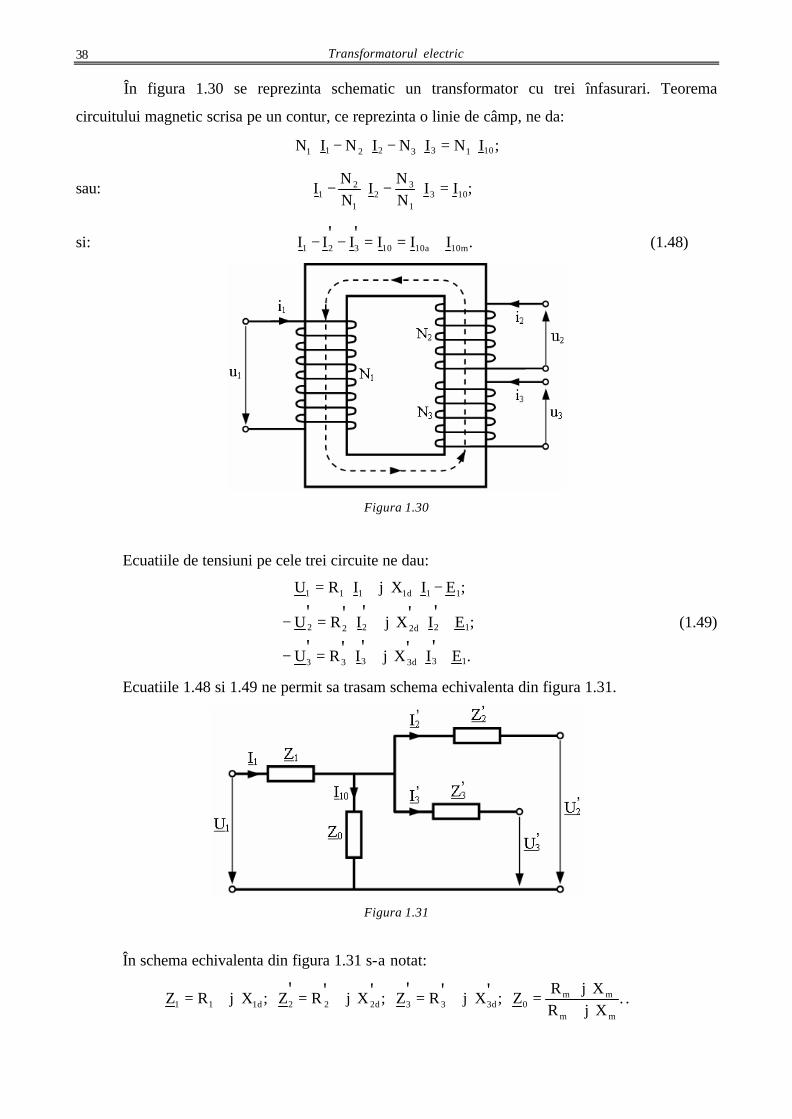
Ecuatiile 1.48 si 1.49 ne permit sa trasam schema echivalenta din figura 1.31.
Figura 1.31
În schema echivalenta din figura 1.31 s-a notat:
.XjRXjR
Z;XjRZ;XjRZ;XjRZmm
mm0d333d222d111
''''''⋅+⋅⋅
=⋅+=⋅+=⋅+= .
Transformatorul electric
39
Schema echivalenta ne arata ca tensiunile din înfasurarile secundare sunt dependente prin
caderea de tensiune din primar.
Puterea nominala a transformatorului cu trei înfasurari se considera a înfasurarii care asigura
transferul maxim de putere. Daca puterea din prima înfasurare se considera maxima 1S (se alege ca
unitate (100%)), celelalte înfasurari pot avea puterile:
S1 % 100 100 100 100 S2 % 67 67 67 100 S3 % 33 67 100 100
Schemele de conexiuni la transformatoarele trifazate cu trei înfasurari utilizate sunt:
Y0 – Y0 – d – 12 – 1; Y0 – d – d – 11 – 12.
1.7 Transformatoare pentru transformarea numarului de faze
Exista situatii, în practica, când alimentarea receptoarelor necesita un numar de faze diferit
ca cel al retelei de alimentare.
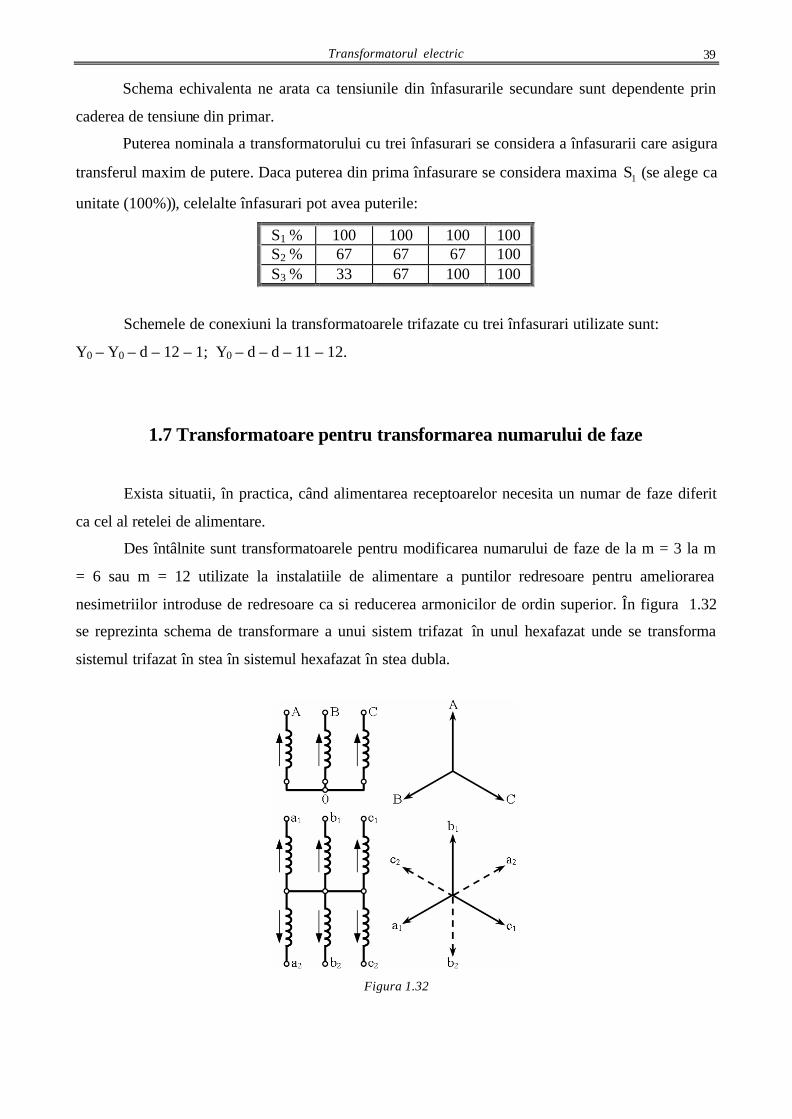
Des întâlnite sunt transformatoarele pentru modificarea numarului de faze de la m = 3 la m
= 6 sau m = 12 utilizate la instalatiile de alimentare a puntilor redresoare pentru ameliorarea
nesimetriilor introduse de redresoare ca si reducerea armonicilor de ordin superior. În figura 1.32
se reprezinta schema de transformare a unui sistem trifazat în unul hexafazat unde se transforma
sistemul trifazat în stea în sistemul hexafazat în stea dubla.
Figura 1.32
Transformatorul electric 40
1.8 Transformatoare de masura
Transformatoarele de masura sunt destinate alimentarii unor aparate de masura
(ampermetre, voltmetre, wattmetre), în scopul adaptarii lor la marimile de masurat (tensiuni înalte,
curenti intensi, puteri mari). Ele se construiesc la puteri mici si pot fi de curent sau de tensiune.
Transformatoarele de curent, se folosesc pentru extinderea domeniului de masura al
ampermetrelor, wattmetrelor, contoarelor de energie electrica, etc. Ele sunt formate dintr-un miez
feromagnetic pe care sunt dispuse doua înfasurari: una cu spire putine de sectiune mare conectata în
serie cu circuitul al carui curent se masoara (uneori chiar conductorul circuitului joaca rolul acestei
înfasurari), reprezentând înfasurarea primara, cealalta cu spire multe, de sectiune mica conectata în
serie cu aparatul de masura, reprezentând înfasurarea secundara.
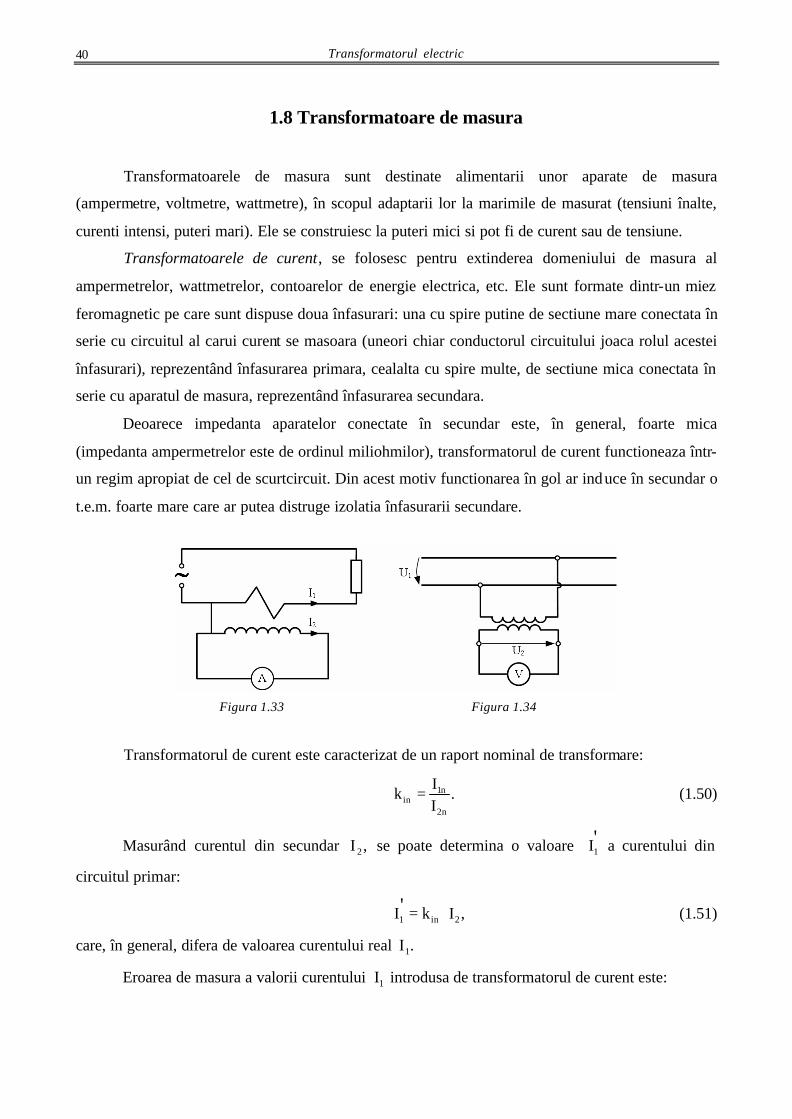
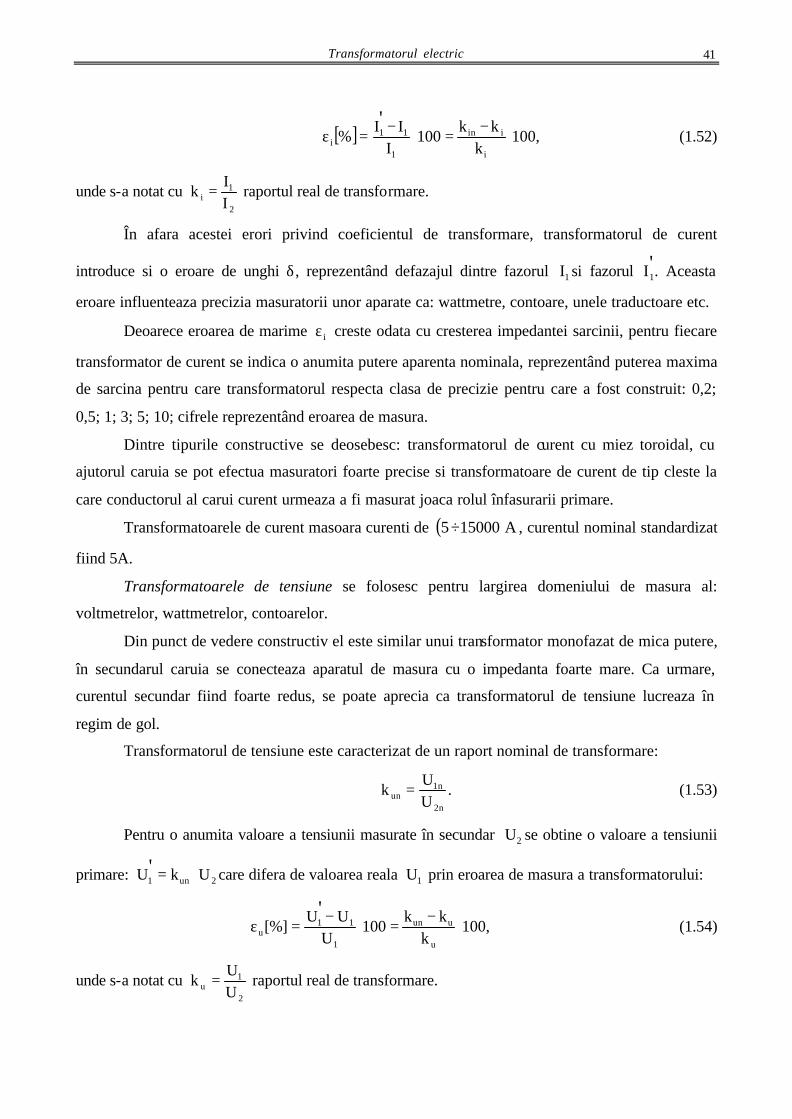
Deoarece impedanta aparatelor conectate în secundar este, în general, foarte mica
(impedanta ampermetrelor este de ordinul miliohmilor), transformatorul de curent functioneaza într-
un regim apropiat de cel de scurtcircuit. Din acest motiv functionarea în gol ar induce în secundar o
t.e.m. foarte mare care ar putea distruge izolatia înfasurarii secundare.
Figura 1.33 Figura 1.34
Transformatorul de curent este caracterizat de un raport nominal de transformare:
.II
kn2
n1in = (1.50)
Masurând curentul din secundar ,I 2 se poate determina o valoare '1I a curentului din
circuitul primar:
,IkI 2in1' ⋅= (1.51)
care, în general, difera de valoarea curentului real .I1
Eroarea de masura a valorii curentului 1I introdusa de transformatorul de curent este:
Transformatorul electric
41
[ ] ,100k
kk100
III
%i
iin
1
11i
'⋅
−=⋅
−=ε (1.52)
unde s-a notat cu 2
1i I
Ik = raportul real de transformare.
În afara acestei erori privind coeficientul de transformare, transformatorul de curent
introduce si o eroare de unghi δ, reprezentând defazajul dintre fazorul 1I si fazorul .I'1 Aceasta
eroare influenteaza precizia masuratorii unor aparate ca: wattmetre, contoare, unele traductoare etc.
Deoarece eroarea de marime iε creste odata cu cresterea impedantei sarcinii, pentru fiecare
transformator de curent se indica o anumita putere aparenta nominala, reprezentând puterea maxima
de sarcina pentru care transformatorul respecta clasa de precizie pentru care a fost construit: 0,2;
0,5; 1; 3; 5; 10; cifrele reprezentând eroarea de masura.
Dintre tipurile constructive se deosebesc: transformatorul de curent cu miez toroidal, cu
ajutorul caruia se pot efectua masuratori foarte precise si transformatoare de curent de tip cleste la
care conductorul al carui curent urmeaza a fi masurat joaca rolul înfasurarii primare.
Transformatoarele de curent masoara curenti de ( )A150005÷ , curentul nominal standardizat
fiind 5A.
Transformatoarele de tensiune se folosesc pentru largirea domeniului de masura al:
voltmetrelor, wattmetrelor, contoarelor.
Din punct de vedere constructiv el este similar unui transformator monofazat de mica putere,
în secundarul caruia se conecteaza aparatul de masura cu o impedanta foarte mare. Ca urmare,
curentul secundar fiind foarte redus, se poate aprecia ca transformatorul de tensiune lucreaza în
regim de gol.
Transformatorul de tensiune este caracterizat de un raport nominal de transformare:
.UU
kn2
n1un = (1.53)
Pentru o anumita valoare a tensiunii masurate în secundar 2U se obtine o valoare a tensiunii
primare: 2un1 UkU' ⋅= care difera de valoarea reala 1U prin eroarea de masura a transformatorului:
,100k
kk100
UUU
[%]u
uun
1
11u
'⋅
−=⋅
−=ε (1.54)
unde s-a notat cu 2
1u U
Uk = raportul real de transformare.
Transformatorul electric 42
Pentru micsorarea erorilor se urmareste micsorarea pierderilor din înfasurari prin utilizarea
unor densitati de curent reduse, si micsorarea dispersiilor prin asezarea relativa a înfasurarilor
precum si utilizarea de tole de calitate superioara în vederea reducerii curentului de magnetizare si a
pierderilor în fier.
Pe placuta transformatorului se înscrie puterea nominala a acestuia, reprezentând puterea
aparenta maxima la care poate fi încarcat transformatorul de tensiune fara ca erorile sale sa
depaseasca limitele claselor de precizie. Acestea pot fi: 0,2; 0,5; 1; 3; cifrele referindu-se la eroarea
de masura.
Tensiunea secundara nominala a acestor transformatoare este standardizata la 100V.
1.9 Transformatoare de sudura
Transformatoarele de sudura sunt destinate alimentarii instalatiilor de sudura prin arc
electric si prin contact. Atât la amorsarea arcului electric cât si la stabilirea contactului metalelor ce
se sudeaza rezulta o importanta cadere de tensiune fata de regimul de mers în gol al
transformatorului.
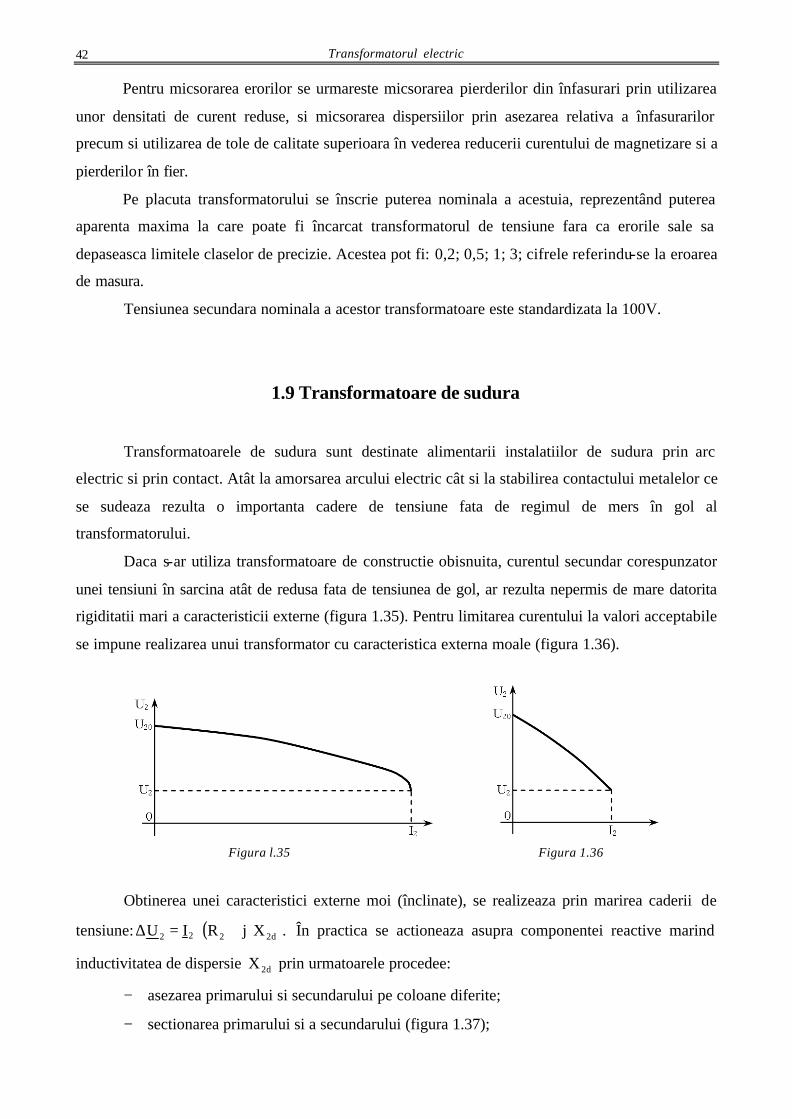
Daca s-ar utiliza transformatoare de constructie obisnuita, curentul secundar corespunzator
unei tensiuni în sarcina atât de redusa fata de tensiunea de gol, ar rezulta nepermis de mare datorita
rigiditatii mari a caracteristicii externe (figura 1.35). Pentru limitarea curentului la valori acceptabile
se impune realizarea unui transformator cu caracteristica externa moale (figura 1.36).
Figura l.35 Figura 1.36
Obtinerea unei caracteristici externe moi (înclinate), se realizeaza prin marirea caderii de
tensiune: ( ).XjRIU d2222 ⋅+⋅=∆ În practica se actioneaza asupra componentei reactive marind
inductivitatea de dispersie d2X prin urmatoarele procedee:
− asezarea primarului si secundarului pe coloane diferite;
− sectionarea primarului si a secundarului (figura 1.37);
Transformatorul electric
43
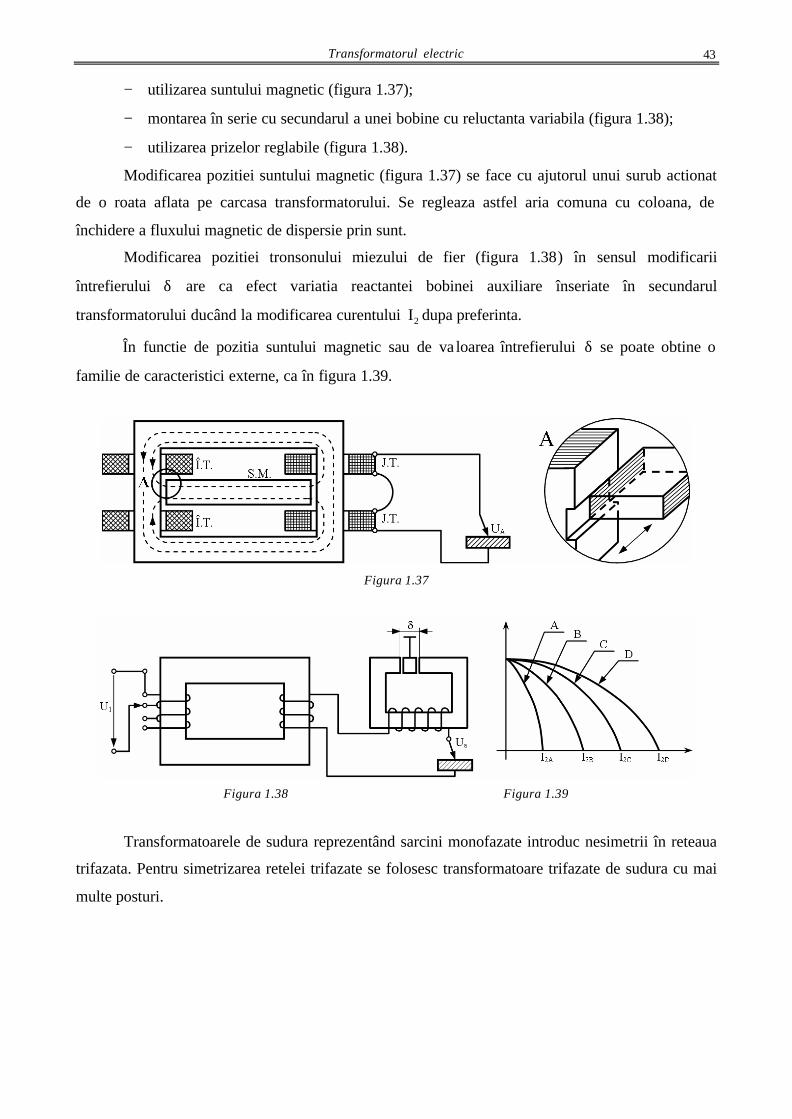
− utilizarea suntului magnetic (figura 1.37);
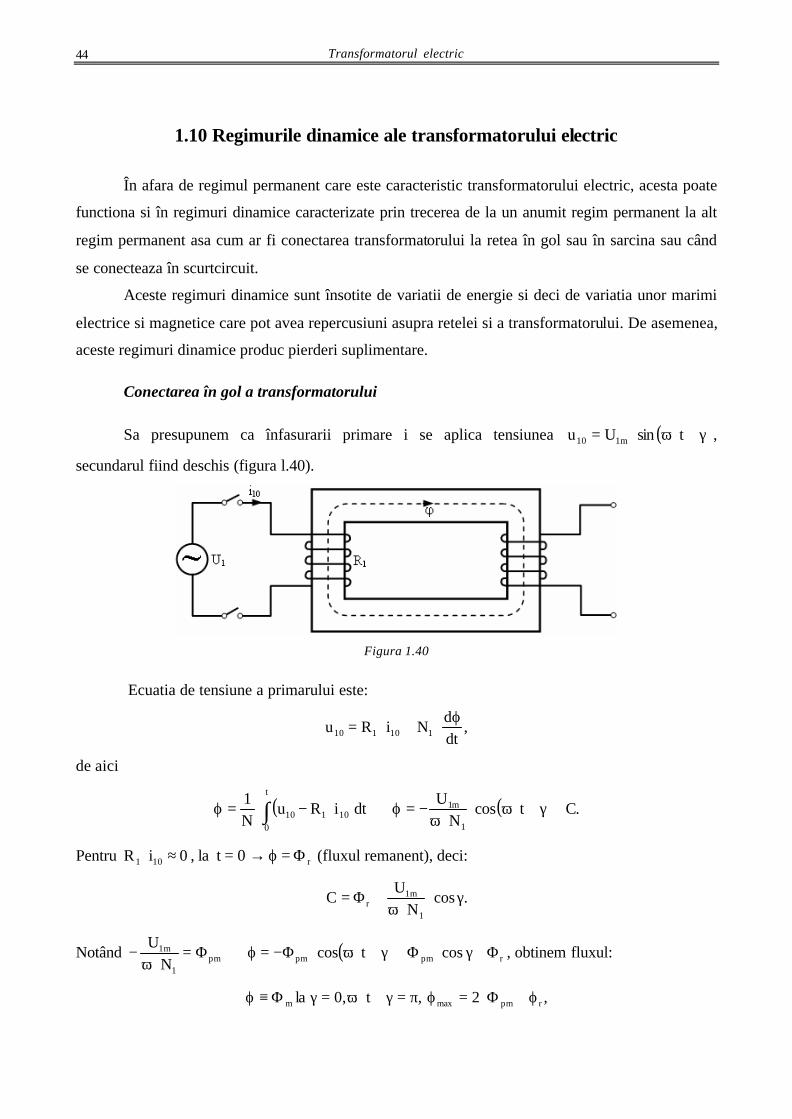
− montarea în serie cu secundarul a unei bobine cu reluctanta variabila (figura 1.38);
− utilizarea prizelor reglabile (figura 1.38).
Modificarea pozitiei suntului magnetic (figura 1.37) se face cu ajutorul unui surub actionat
de o roata aflata pe carcasa transformatorului. Se regleaza astfel aria comuna cu coloana, de
închidere a fluxului magnetic de dispersie prin sunt.
Modificarea pozitiei tronsonului miezului de fier (figura 1.38) în sensul modificarii
întrefierului δ are ca efect variatia reactantei bobinei auxiliare înseriate în secundarul
transformatorului ducând la modificarea curentului 2I dupa preferinta.
În functie de pozitia suntului magnetic sau de va loarea întrefierului δ se poate obtine o
familie de caracteristici externe, ca în figura 1.39.
Figura 1.37
Figura 1.38 Figura 1.39
Transformatoarele de sudura reprezentând sarcini monofazate introduc nesimetrii în reteaua
trifazata. Pentru simetrizarea retelei trifazate se folosesc transformatoare trifazate de sudura cu mai
multe posturi.
Transformatorul electric 44
1.10 Regimurile dinamice ale transformatorului electric
În afara de regimul permanent care este caracteristic transformatorului electric, acesta poate
functiona si în regimuri dinamice caracterizate prin trecerea de la un anumit regim permanent la alt
regim permanent asa cum ar fi conectarea transformatorului la retea în gol sau în sarcina sau când
se conecteaza în scurtcircuit.
Aceste regimuri dinamice sunt însotite de variatii de energie si deci de variatia unor marimi
electrice si magnetice care pot avea repercusiuni asupra retelei si a transformatorului. De asemenea,
aceste regimuri dinamice produc pierderi suplimentare.
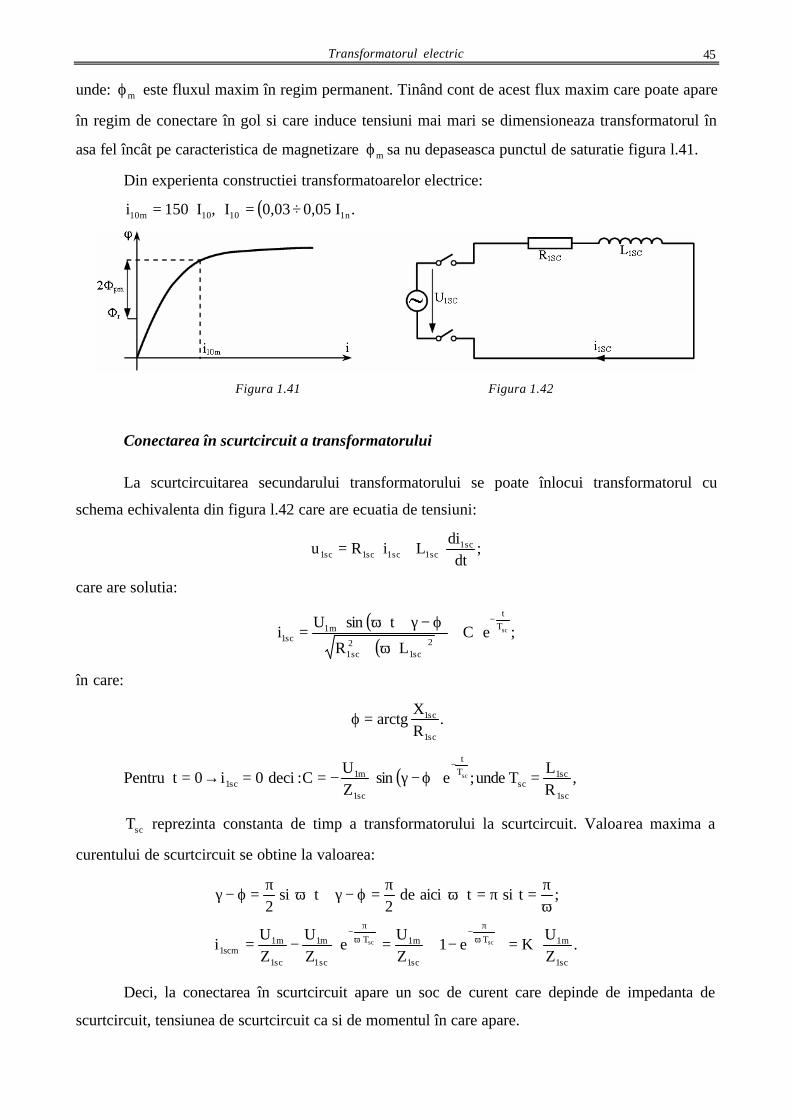
Conectarea în gol a transformatorului
Sa presupunem ca înfasurarii primare i se aplica tensiunea ( )γ+⋅ω⋅= tsinUu m110 ,
secundarul fiind deschis (figura l.40).
Figura 1.40
Ecuatia de tensiune a primarului este:
,dtd
NiRu 110110ϕ
⋅+⋅=
de aici
( ) ( ) .CtcosN
UdtiRu
N1
1
m1t
010110 +γ+⋅ω⋅
⋅ω−=ϕ⇒⋅−⋅=ϕ ∫
Pentru 0iR 101 ≈⋅ , la r0t Φ=ϕ→= (fluxul remanent), deci:
.cosN
UC
1
m1r γ⋅
⋅ω+Φ=
Notând ( ) rpmpmpm1
m1 costcosN
UΦ+γ⋅Φ+γ+⋅ω⋅Φ−=ϕ⇒Φ=
⋅ω− , obtinem fluxul:
,2,t,0la rpmmaxm ϕ+Φ⋅=ϕπ=γ+⋅ω=γΦ≡ϕ
Transformatorul electric
45
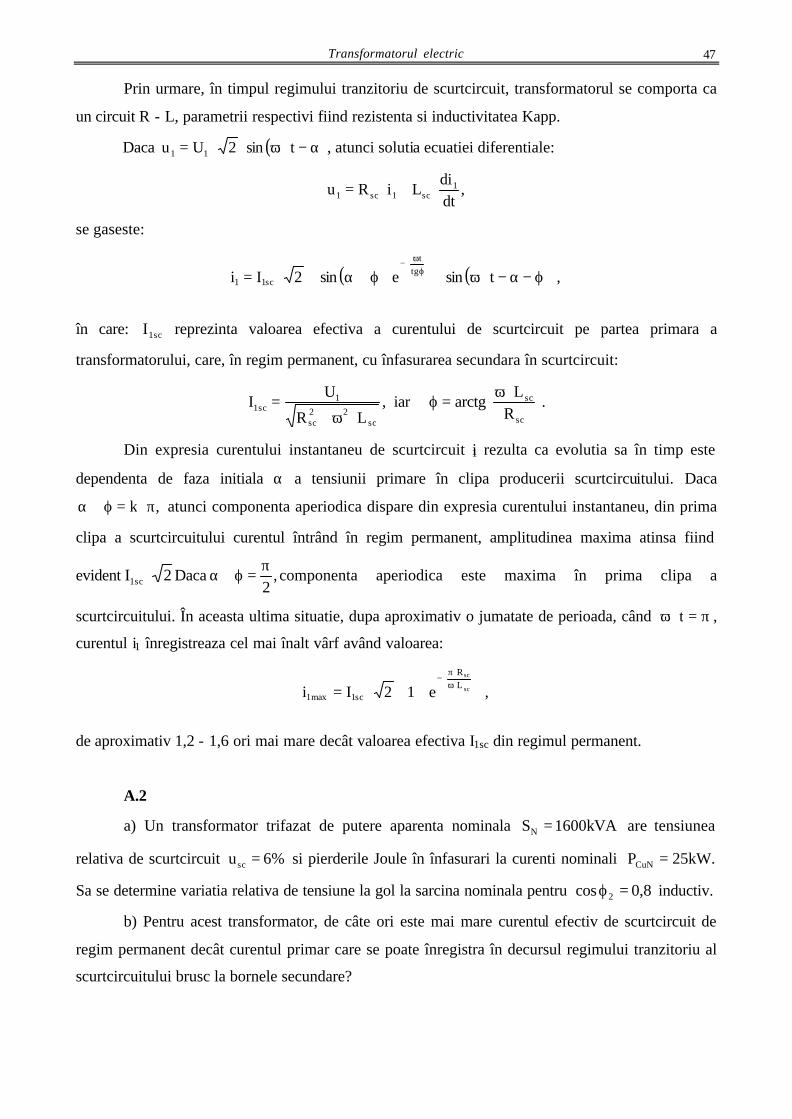
unde: mϕ este fluxul maxim în regim permanent. Tinând cont de acest flux maxim care poate apare
în regim de conectare în gol si care induce tensiuni mai mari se dimensioneaza transformatorul în
asa fel încât pe caracteristica de magnetizare mϕ sa nu depaseasca punctul de saturatie figura l.41.
Din experienta constructiei transformatoarelor electrice:
,I150i 10m10 ⋅= ( ) .I05,003,0I n110 ÷=
Figura 1.41 Figura 1.42
Conectarea în scurtcircuit a transformatorului
La scurtcircuitarea secundarului transformatorului se poate înlocui transformatorul cu
schema echivalenta din figura l.42 care are ecuatia de tensiuni:
;dt
diLiRu sc1
sc1sc1sc1sc1 ⋅+⋅=
care are solutia:
( )( )
;eCLR
tsinUi scT
t
2sc1
2sc1
m1sc1
−
⋅+⋅ω+
ϕ−γ+⋅ω⋅=
în care:
.RX
arctgsc1
sc1=ϕ
Pentru ( ) ,RL
Tunde;esinZU
C:deci0i0tsc1
sc1sc
Tt
sc1
m1sc1
sc =⋅ϕ−γ⋅−==→=−
scT reprezinta constanta de timp a transformatorului la scurtcircuit. Valoarea maxima a
curentului de scurtcircuit se obtine la valoarea:
.ZU
Ke1ZU
eZU
ZU
i
;tsitaicide2
tsi2
sc1
m1T
sc1
m1T
sc1
m1
sc1
m1scm1
scsc ⋅=
−⋅=⋅−=
ωπ
=π=⋅ωπ
=ϕ−γ+⋅ωπ
=ϕ−γ
⋅ωπ
−⋅ωπ
−
Deci, la conectarea în scurtcircuit apare un soc de curent care depinde de impedanta de
scurtcircuit, tensiunea de scurtcircuit ca si de momentul în care apare.

Transformatorul electric 46
1.11. APLICATII
A.1
a) Un transformator monofazat se afla sub tensiunea ( )α−⋅ω⋅= tsin2Uu 11 si cu
înfasurarea secundara functionând în gol, când la momentul 0t = se produce un scurtcircut la
bornele secundare. Cum variaza în timp curentul i1 absorbit de la retea? Se vor neglija curentul de
magnetizare si pierderile în fier.
b) Pentru ce valoare a fazei initiale α a tensiunii primare se înregistreaza cel mai mare vârf
de curent?
Rezolvare:
a) Fiind vorba de un regim tranzitoriu, ecuatiile functionale în marimi instantanee valabile în
acest caz sunt urmatoarele:
.0iNiN
;dt
dN
dtdi
LiR0
;dt
dN
dtdi
LiRu
2211
102
2d222
101
1d1111
=⋅+⋅
Φ⋅+⋅+⋅=
Φ⋅+⋅+⋅=
în care dt
dN 10
1Φ
⋅ , respectiv dt
dN 10
2Φ
⋅ reprezinta t.e.m. induse în cele doua înfasurari de catre
fluxul rezultant, iar în ultima ecuatie s-a considerat neglijabil curentul de magnetizare si curentul
corespunzator pierderilor în fier [a se vedea sistemul (1.23) de ecuatii, transpus însa pentru marimi
instantanee si fara raportarea marimilor secundare la primar].
Înmultind ecuatia a doua cu raportul 2
1
NN
, tinând seama de ecuatia a treia si scazând ecuatia
a doua din prima se obtine:
;dtdi
LLiRRu 1d2d11211
'' ⋅
++⋅
+=
unde:
.NN
LL;NN
RR2
2
1d2d2
2
2
122
''
⋅=
⋅=
Dar scscscd2d1sc21 L,R;LLL;RRR '' =+=+ fiind, respectiv, rezistenta si inductivitatea de
dispersii Kapp ale transformatorului.
Transformatorul electric
47
Prin urmare, în timpul regimului tranzitoriu de scurtcircuit, transformatorul se comporta ca
un circuit R - L, parametrii respectivi fiind rezistenta si inductivitatea Kapp.
Daca ( )α−⋅ω⋅⋅= tsin2Uu 11 , atunci solutia ecuatiei diferentiale:
,dtdi
LiRu 1sc1sc1 ⋅+⋅=
se gaseste:
( ) ( ) ,tsinesin2Ii tgt
sc11
ϕ−α−⋅ω+⋅ϕ+α⋅⋅=
ϕ
ω−
în care: sc1I reprezinta valoarea efectiva a curentului de scurtcircuit pe partea primara a
transformatorului, care, în regim permanent, cu înfasurarea secundara în scurtcircuit:
sc22
sc
1sc1
LR
UI
⋅ω+= , iar .
RL
arctgsc
sc
⋅ω=ϕ
Din expresia curentului instantaneu de scurtcircuit i1 rezulta ca evolutia sa în timp este
dependenta de faza initiala α a tensiunii primare în clipa producerii scurtcircuitului. Daca
,k π⋅=ϕ+α atunci componenta aperiodica dispare din expresia curentului instantaneu, din prima
clipa a scurtcircuitului curentul întrând în regim permanent, amplitudinea maxima atinsa fiind
evident 2I sc1 ⋅ Daca ,2π
=ϕ+α componenta aperiodica este maxima în prima clipa a
scurtcircuitului. În aceasta ultima situatie, dupa aproximativ o jumatate de perioada, când π=⋅ω t ,
curentul i1 înregistreaza cel mai înalt vârf având valoarea:
,e12Ii sc
sc
LR
sc1max1
+⋅⋅=
⋅ω⋅π
−
de aproximativ 1,2 - 1,6 ori mai mare decât valoarea efectiva I1sc din regimul permanent.
A.2
a) Un transformator trifazat de putere aparenta nominala kVA1600SN = are tensiunea
relativa de scurtcircuit %6usc = si pierderile Joule în înfasurari la curenti nominali .kW25PCuN =
Sa se determine variatia relativa de tensiune la gol la sarcina nominala pentru 8,0cos 2 =ϕ inductiv.
b) Pentru acest transformator, de câte ori este mai mare curentul efectiv de scurtcircuit de
regim permanent decât curentul primar care se poate înregistra în decursul regimului tranzitoriu al
scurtcircuitului brusc la bornele secundare?

Transformatorul electric 48
Rezolvare:
a) Variatia relativa a tensiunii secundare exprimata în fractiuni din tensiunea secundara la
mersul în gol, la .ctU1 = are expresia:
[ ];cosucosuU
U2r2a
20
2 ϕ⋅+ϕ⋅⋅β=⋅δ
în care marimile:
− au - caderea ohmica relativa;
− ru - caderea inductiva relativa;
− β - gradul de încarcare al transformatorului;
au expresiile:
;II
;U
IXu;
UIR
uN2
2
N1
N1scr
N1
N1sca =β
⋅=
⋅=
tensiunea relativa de scurtcircuit putându-se exprima si ca functie de au si ru :
.U
IZuuu
N1
N1sc2r
2asc
⋅=+=
În enunt se dau pierderile Joule nominale CuNP , care se pot corela cu caderea ohmica relativa
au . Într-adevar, sa înmultim expresia lui au cu N1I3⋅ atât la numarator cât si la numitor se obtine:
.0156,01600
25SP
IU3IR3
uN
CuN
N1N1
2N1sc
a ===⋅⋅⋅⋅
=
În consecinta, variatia relativa de tensiune la bornele secundare de la gol la sarcina nominala
( )1=β cu factor de putere 8,0cos 2 =ϕ inductiv ( 6,0sin 2 =ϕ ) va fi:
.0472,06,00579,08,00156,0cosucosuU
U2r2a
20
2 =⋅+⋅=ϕ⋅+ϕ⋅=⋅δ
Tensiunea secundara se va micsora cu 4,72%.
b) Curentul efectiv de scurtcircuit corespunzator regimului permanent va fi, conform
problemei precedente. Daca împartim ambii termeni ai egalitatii de mai sus cu, curentul primar
nominal, se obtine:
;U1
IZU
II
;ZU
XR
UI
scN1sc
N1
N1
sc1
sc
N12sc
2sc
N1sc1 =
⋅==
+=
cu alte cuvinte, inversul tensiunii relative de scurtcircuit arata de câte ori depaseste curentul efectiv
la scurtcircuit curentul nominal.
Transformatorul electric
49
În cazul concret al problemei de fata,
.67,1606,01
u1
II
scN1
sc1 ===
Pentru a gasi socul cel mai mare de curent la scurtcircuit, vom utiliza formula stabilita în
problema precedenta:
.e12Ii sc
sc
XR
sc1max1
+⋅⋅=
⋅π−
Cum ,71,30156,00579,0
uu
RX
a
r
sc
sc === se gaseste:
.I68,33I02,2e12Ii N1sc171,3
sc1max1 ⋅=⋅=
+⋅⋅=
π−
Prin urmare, la transformatorul dat, în decursul unui scurtcircuit, dupa aproximativ jumatate
de perioada (10ms) de la producerea scurtcircuitului, înfasurarile sunt solicitate la un curent de
peste 30 de ori curentul nominal.
Solicitarea termica nu este în general periculoasa, deoarece va interveni imediat protectia la
supracurenti a transformatorului, care va deconecta transformatorul de la reteaua de alimentare. În
schimb este periculoasa solicitarea mecanica a înfasurarilor datorita fortelor electrodinamice care
depind de patratul curentilor din înfasurari, aceste forte fiind în cazul analizat de 1000 ori mai mari
decât în functionarea normala.
Transformatorul trebuie sa fie consolidat corespunzator pentru a face fata acestor solicitari
deosebite.
A.3
Doua transformatoare trifazate având puterile aparente nominale kVA250SNI = si respectiv
kVA160SNII = sunt conectate în paralel. Ele au acelasi raport de transformare, aceeasi grupa de
conexiuni, acelasi unghi intern al impedantelor Kapp, dar tensiuni relative de scurtcircuit diferite,
%6uscI = , respectiv, %.4u scII =
a) Sa se determine puterea aparenta debitata de fiecare transformator în cazul unei sarcini
comune .kVA350S =
b) Care este capacitatea maxima de încarcare în kVA a ansamblului celor doua
transformatoare, cu conditia ca nici unul din ele sa nu fie încarcat peste capacitatea nominala?
Transformatorul electric 50
Rezolvare:
a) Dupa cum se cunoaste din literatura, la transformatoarele cu tensiuni relative de
scurtcircuit diferite care functioneaza în paralel, puterea aparenta totala reclamata de sarcina se
repartizeaza invers proportional cu tensiunile relative de scurtcircuit si direct proportional cu
puterile aparente nominale. Prin urmare, daca puterea aparenta debitata de primul transformator este
,SI iar cel de-al doilea IIS atunci:
.uu
SS
SS
;SSSscI
scII
NII
NI
II
IIII
⋅
=+=
Numeric, sistemul devine:
;04,164
160250
SS
;350SSII
IIII =⋅==+
solutiile lui fiind:
;kVA6,171S;kVA4,178S III ==
Deoarece cel de-al doilea transformator este supraîncarcat cu 7,25% peste capacitatea
nominala de 160 kVA, dupa un timp de functionare va interveni protectia care va deconecta
transformatorul în mod automat de la retea. Întreaga sarcina de 350 kVA revine acum primului
transformator, care va fi si el suprasolicitat peste capacitatea nominala de 250 kVA cu 40%, ceea ce
va provoca deconectarea automata de la reteaua de alimentare si a acestui transformator dupa un
timp de functionare. În consecinta, cele doua transformatoare nu pot face fata împreuna sarcinii de
350 kVA, desi capacitatea lor însumata este de 410 kVA din cauza tensiunilor relative de
scurtcircuit diferite.
b) Dat fiind faptul ca:
;04,1SS
;kVA4,166S;kVA04,1SII
IIII ===
daca cel de-al doilea transformator functioneaza la sarcina nominala, adica NIIII SkVA160S == ,
rezulta. Prin urmare, puterea aparenta totala ce se poate extrage de la retea prin cele doua
transformatoare în paralel, fara ca nici unul sa nu fie supraîncarcat, este:
;kVA4,3261604,166SS III =+=+
cu mult sub capacitatea însumata de 410 kVA, ceea ce înseamna o exploatare nerationala si
cheltuieli de investitii necorespunzatoare.
Capitolul 2
ASPECTE GENERALE ALE MASINILOR
DE CURENT ALTERNATIV
Masinile electrice de curent alternativ, se împart în functie de principiul de functionare în
doua clase principale:
Ø masini asincrone;
Ø masini sincrone.
La baza functionarii masinilor electrice se afla legea inductiei electromagnetice. Pentru a
crea conditii de existenta acestei legi, în masinile electrice trebuie sa existe miezuri magnetice si
înfasurari. În general, masinile electrice rotative sunt realizate din doua parti principale numite
armaturi, între care exista o viteza relativa de rotatie. Aceste armaturi sunt realizate din miezuri
feromagnetice pe care exista înfasurari. Una dintre armaturi este fixa si se numeste stator, iar
cealalta aflata în miscare de rotatie se numeste rotor. De asemenea, una dintre armaturi joaca rolul
de inductor, iar cealalta de indus, rolurile putând fi inversate în functie de solutia constructiva
aleasa.
În ambele armaturi circula curenti prin înfasurari, care creeaza câmpuri magnetice printr-un
anumit procedeu. Câmpurile magnetice create în cele doua armaturi se compun într-un câmp unic
rezultant pe care îl gasim în întrefierul masinii.
Câmpurile magnetice produse sunt variabile în timp (deoarece curentii care le creeaza sunt
alternativi, deci, variabili în timp), si produc fluxuri magnetice variabile prin întrefier. Aceste
fluxuri magnetice strabat înfasurari electrice si induc în acestea tensiuni electromotoare. Totodata,
între fluxul magnetic al unei înfasurari si curentul electric din cealalta înfasurare apar interactiuni
electromagnetice care dau nastere la cupluri electromagnetice între armaturi.
Toate aceste aspecte legate de producerea câmpurilor magnetice, de constructia înfasurarilor
de c.a. si de producerea cuplurilor electromagnetice sunt comune ambelor clase de masini electrice
si le vom prezenta în cele ce urmeaza.
Aspecte generale ale masinilor de curent alternativ 52
2.1 Câmpurile magnetice si înfasurarile
masinilor de curent alternativ
Câmpurile magnetice produse în masinile electrice de c.a. dupa cum s-a aratat sunt variabile
în timp. La masinile trifazate, prin dispunerea în spatiu a fazelor înfasurarilor se obtin câmpuri
magnetice variabile în timp si spatiu. Dupa modul de variatie în timp si spatiu a inductiei magnetice,
aceste câmpuri se împart în doua categorii principale:
o câmpuri magnetice pulsatorii;
o câmpuri magnetice rotitoare (învârtitoare).
2.1.1 Câmpuri magnetice pulsatorii
Aceste câmpuri se obtin de regula în înfasurari fixe de tip stator, în crestaturile carora exista
o înfasurare monofazata parcursa de un curent alternativ. În functie de caracteristicile armaturii
întâlnim urmatoarele situatii:
Ø armaturi cu: ;y;2p2;1q;0;1m τ====Ω=
Ø armaturi cu: ;y;2p2;1q;0;1m τ=>==Ω=
Ø armaturi cu: ;y;2p2;1q;0;1m τ=>>=Ω=
Ø armaturi cu: ;y;2p2;1q;0;1m τ<>>=Ω=
în care s-au notat:
o m - numarul de faze;
o Ω - viteza unghiulara a armaturii;
o q - numarul de crestaturi pe pol si faza;
o p – numarul de perechi de poli;
o y - pasul înfasurarii;
o τ - pasul polar, qm ⋅=τ (crestaturi).
Înainte de a prezenta detaliat aceste patru cazuri, prezentam câteva elemente ale înfasurarilor
de c.a. aflate în crestaturile acestor armaturi.
În constructia înfasurarilor de c.a. se deosebesc urmatoarele elemente:
• conductorul;
• spira;
• bobina;
• grupa de bobine.
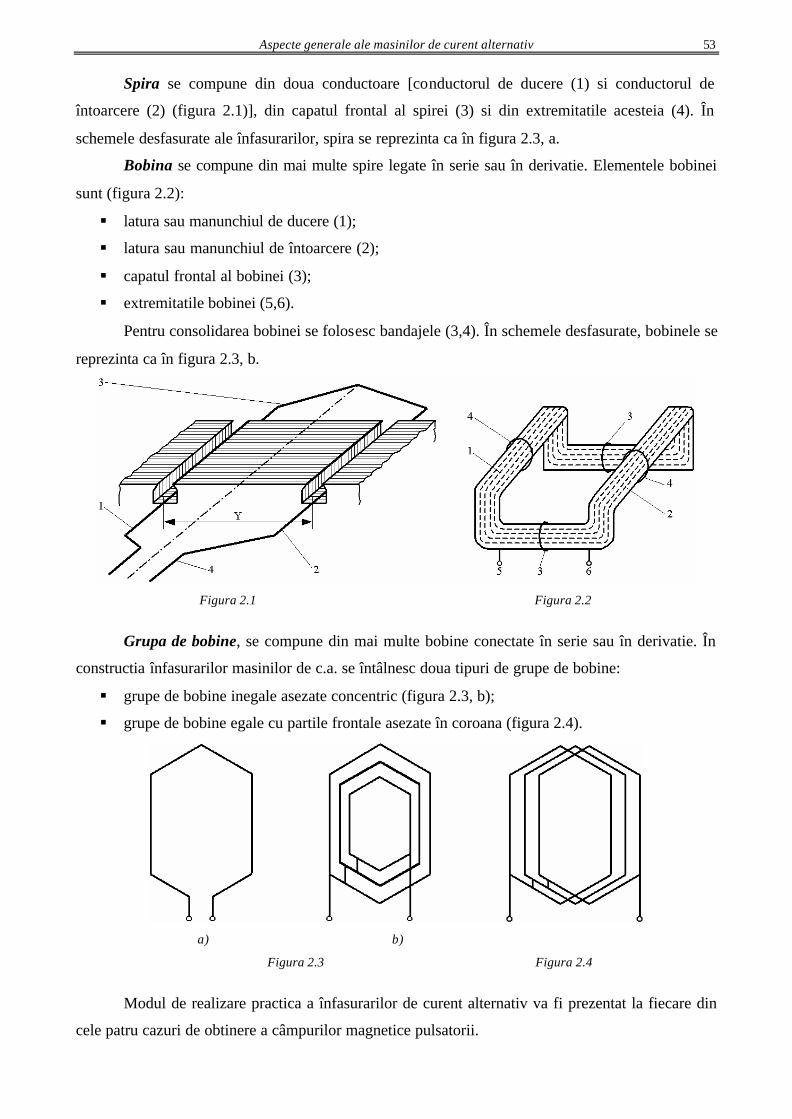
Aspecte generale ale masinilor de curent alternativ
53
Spira se compune din doua conductoare [conductorul de ducere (1) si conductorul de
întoarcere (2) (figura 2.1)], din capatul frontal al spirei (3) si din extremitatile acesteia (4). În
schemele desfasurate ale înfasurarilor, spira se reprezinta ca în figura 2.3, a.
Bobina se compune din mai multe spire legate în serie sau în derivatie. Elementele bobinei
sunt (figura 2.2):
§ latura sau manunchiul de ducere (1);
§ latura sau manunchiul de întoarcere (2);
§ capatul frontal al bobinei (3);
§ extremitatile bobinei (5,6).
Pentru consolidarea bobinei se folosesc bandajele (3,4). În schemele desfasurate, bobinele se
reprezinta ca în figura 2.3, b.
Figura 2.1 Figura 2.2
Grupa de bobine, se compune din mai multe bobine conectate în serie sau în derivatie. În
constructia înfasurarilor masinilor de c.a. se întâlnesc doua tipuri de grupe de bobine:
§ grupe de bobine inegale asezate concentric (figura 2.3, b);
§ grupe de bobine egale cu partile frontale asezate în coroana (figura 2.4).
a) b)
Figura 2.3 Figura 2.4
Modul de realizare practica a înfasurarilor de curent alternativ va fi prezentat la fiecare din
cele patru cazuri de obtinere a câmpurilor magnetice pulsatorii.
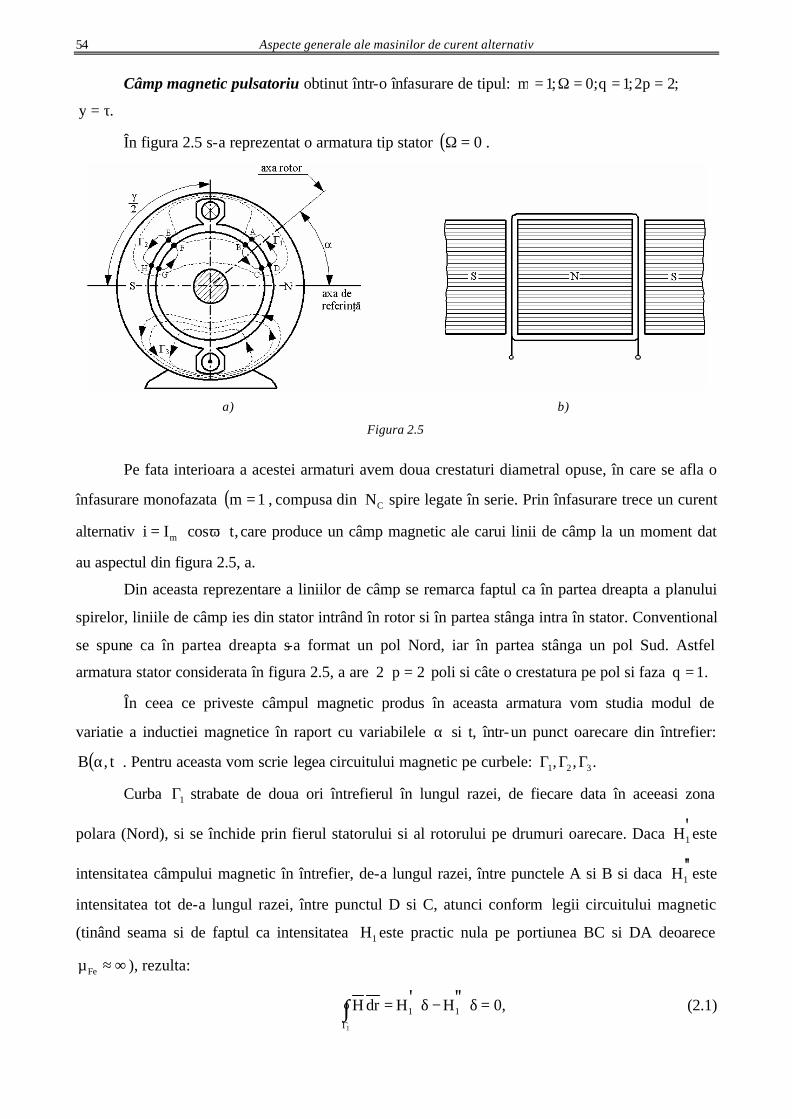
Aspecte generale ale masinilor de curent alternativ 54
Câmp magnetic pulsatoriu obtinut într-o înfasurare de tipul: ;2p2;1q;0;1m ===Ω=
.y τ=
În figura 2.5 s-a reprezentat o armatura tip stator ( ).0=Ω
a) b)
Figura 2.5
Pe fata interioara a acestei armaturi avem doua crestaturi diametral opuse, în care se afla o
înfasurare monofazata ( ),1m = compusa din CN spire legate în serie. Prin înfasurare trece un curent
alternativ ,tcosIi m ⋅ω⋅= care produce un câmp magnetic ale carui linii de câmp la un moment dat
au aspectul din figura 2.5, a.
Din aceasta reprezentare a liniilor de câmp se remarca faptul ca în partea dreapta a planului
spirelor, liniile de câmp ies din stator intrând în rotor si în partea stânga intra în stator. Conventional
se spune ca în partea dreapta s-a format un pol Nord, iar în partea stânga un pol Sud. Astfel
armatura stator considerata în figura 2.5, a are 2p2 =⋅ poli si câte o crestatura pe pol si faza .1q =
În ceea ce priveste câmpul magnetic produs în aceasta armatura vom studia modul de
variatie a inductiei magnetice în raport cu variabilele α si t, într-un punct oarecare din întrefier:
( )t,B α . Pentru aceasta vom scrie legea circuitului magnetic pe curbele: .,, 321 ΓΓΓ
Curba 1Γ strabate de doua ori întrefierul în lungul razei, de fiecare data în aceeasi zona
polara (Nord), si se închide prin fierul statorului si al rotorului pe drumuri oarecare. Daca '1H este
intensitatea câmpului magnetic în întrefier, de-a lungul razei, între punctele A si B si daca ''1H este
intensitatea tot de-a lungul razei, între punctul D si C, atunci conform legii circuitului magnetic
(tinând seama si de faptul ca intensitatea 1H este practic nula pe portiunea BC si DA deoarece
∞≈µFe ), rezulta:
,0HHdrH '''11
1
=δ⋅−δ⋅=∫Γ
(2.1)
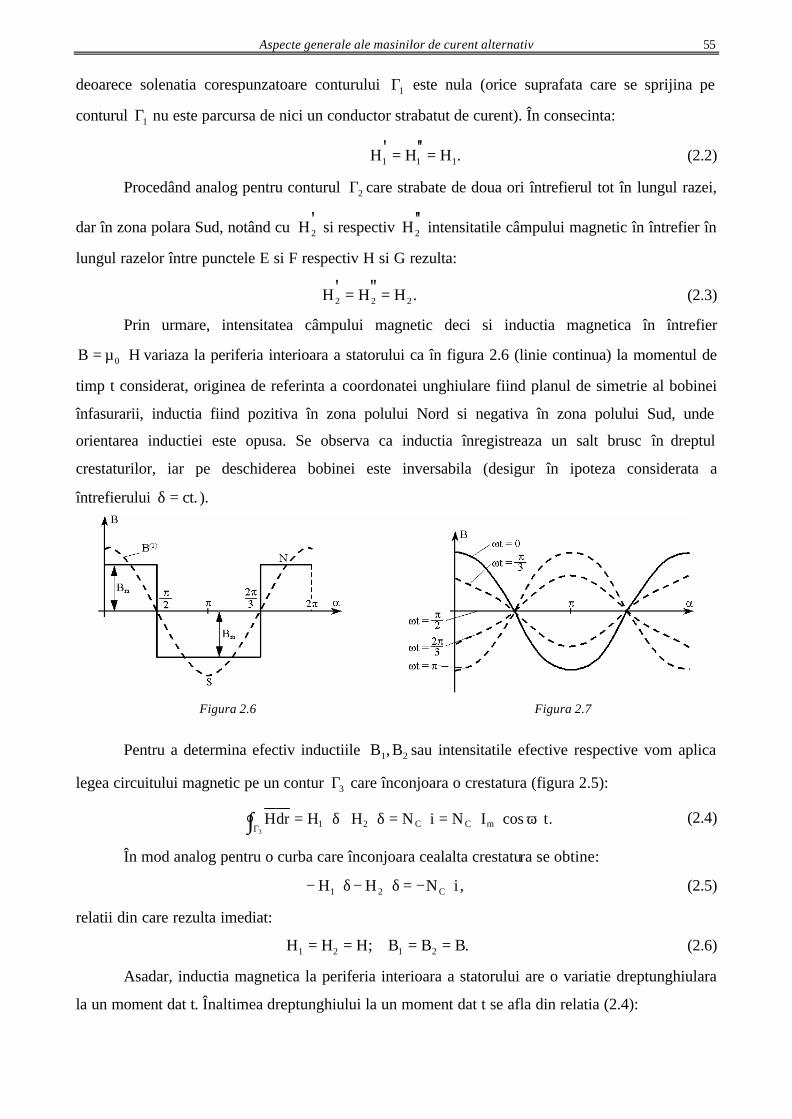
Aspecte generale ale masinilor de curent alternativ
55
deoarece solenatia corespunzatoare conturului 1Γ este nula (orice suprafata care se sprijina pe
conturul 1Γ nu este parcursa de nici un conductor strabatut de curent). În consecinta:
.HHH 111''' == (2.2)
Procedând analog pentru conturul 2Γ care strabate de doua ori întrefierul tot în lungul razei,
dar în zona polara Sud, notând cu '2H si respectiv ''
2H intensitatile câmpului magnetic în întrefier în
lungul razelor între punctele E si F respectiv H si G rezulta:
.HHH 222''' == (2.3)
Prin urmare, intensitatea câmpului magnetic deci si inductia magnetica în întrefier
HB 0 ⋅µ= variaza la periferia interioara a statorului ca în figura 2.6 (linie continua) la momentul de
timp t considerat, originea de referinta a coordonatei unghiulare fiind planul de simetrie al bobinei
înfasurarii, inductia fiind pozitiva în zona polului Nord si negativa în zona polului Sud, unde
orientarea inductiei este opusa. Se observa ca inductia înregistreaza un salt brusc în dreptul
crestaturilor, iar pe deschiderea bobinei este inversabila (desigur în ipoteza considerata a
întrefierului .ct=δ ).
Figura 2.6 Figura 2.7
Pentru a determina efectiv inductiile 21 B,B sau intensitatile efective respective vom aplica
legea circuitului magnetic pe un contur 3Γ care înconjoara o crestatura (figura 2.5):
.tcosINiNHHdrH mCC213
⋅ω⋅⋅=⋅=δ⋅+δ⋅=∫Γ (2.4)
În mod analog pentru o curba care înconjoara cealalta crestatura se obtine:
,iNHH C21 ⋅−=δ⋅−δ⋅− (2.5)
relatii din care rezulta imediat:
.BBB;HHH 2121 ==== (2.6)
Asadar, inductia magnetica la periferia interioara a statorului are o variatie dreptunghiulara
la un moment dat t. Înaltimea dreptunghiului la un moment dat t se afla din relatia (2.4):

Aspecte generale ale masinilor de curent alternativ 56
( ) .tcosBtcosIN21
tB mmC0 ⋅ω⋅=⋅ω⋅⋅⋅⋅
δµ
= (2.7)
În teoria masinilor electrice se prefera descompunerea undei dreptunghiulare a inductiei în
unde armonice conform seriei Fourier.
Dat fiind faptul ca functia ( )t,B α îndeplineste conditiile:
( ) ( )( ) ( );t,Bt,B
;t,Bt,Bα−=α
π+α−=α (2.8)
rezulta conform proprietatilor seriei Fourier ca aceasta nu va contine armonici pare, si nici
respectiv, armonici în sinus. Deci descompunerea în serie Fourier va avea forma:
( ) ( ) ....5,3,1;costcosBt,B1
m∑∞
=ν
ν =να⋅ν⋅⋅ω⋅=α (2.9)
Amplitudinea armonicii de ordin ν se calculeaza cu relatia:
( ) ( ) .B4
dcosB2
B2
2
mm ∫π
π−
ν ⋅ν⋅π
=αα⋅ν⋅α⋅π
= (2.10)
Luând în consideratie din seria infinita de armonici numai armonica fundamentala (de ord.1)
si tinând seama de relatiile (2.9) si (2.10) se obtine:
( ) ( ) .costcosBt,B 1m
)1( α⋅⋅ω⋅=α (2.11)
Examinând expresia (2.11) se poate trage concluzia ca într-o astfel de înfasurare se obtine
un câmp magnetic pulsatoriu sinusoidal în timp si spatiu. La periferia statorului exista puncte în
care inductia magnetica este în permanenta nula, în celelalte puncte inductia variind sinusoidal în
timp, cu o amplitudine variabila de la punct la punct. O asemenea variatie în timp si spatiu este
analoga undelor stationare, dupa cum s-a reprezentat în figura 2.7.
Câmp magnetic pulsatoriu obtinut într-o înfasurare de tipul ;2p2;1q;0;1m >==Ω= .y τ=
În practica se întâlnesc masini de c.a. care au mai multe perechi de poli. În figura 2.8 s-a
reprezentat o masina tetrapolara cu 4p2 = poli.
Numarul de crestaturi din stator se calculeaza cu relatia:
4.qpm2Z =⋅⋅⋅=
Pentru a obtine cei 4p2 =⋅ poli este necesar ca în crestaturi sa se afle doua bobine, câte o
bobina pentru fiecare pereche de poli, bobinele fiind legate în serie.
Înfasurarea de pe stator poate fi realizata într-un singur strat, caz în care într-o crestatura se
afla o singura latura de bobina, sau în dublu strat, caz în care într-o crestatura se afla doua laturi de
bobine apartinând la doua bobine diferite, o latura fiind plasata în stratul inferior, iar cealalta în
stratul superior (figura 2.9).
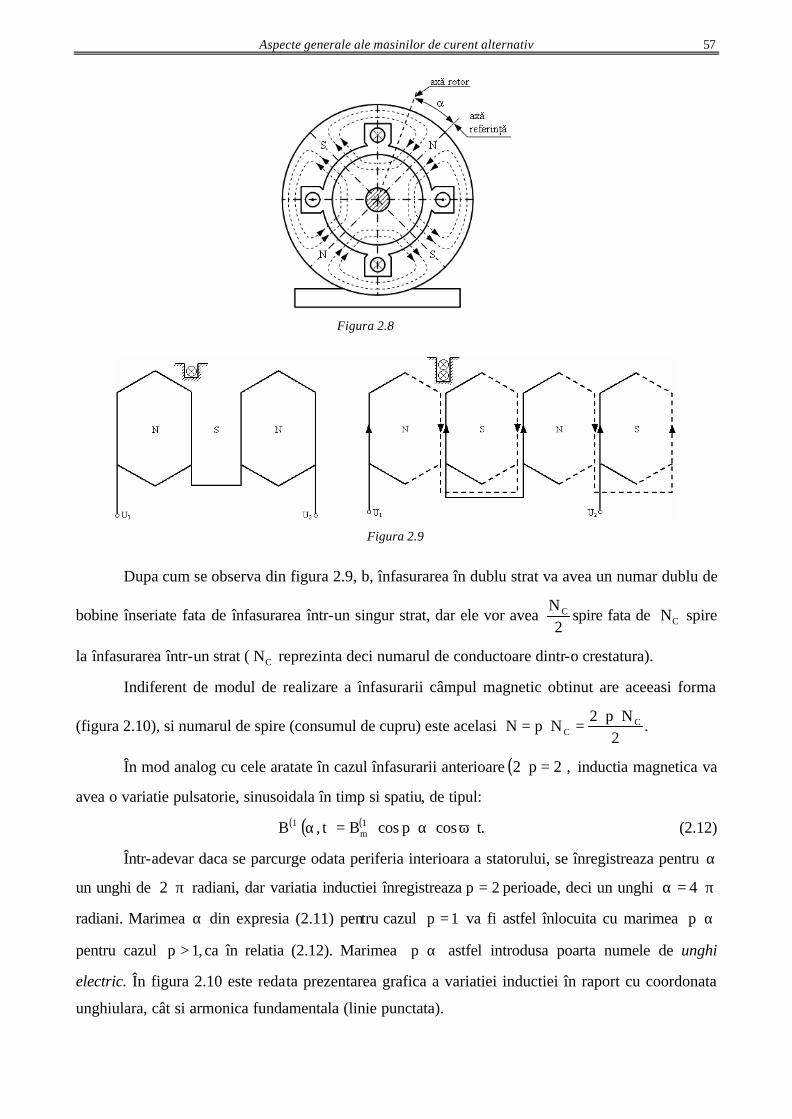
Aspecte generale ale masinilor de curent alternativ
57
Figura 2.8
Figura 2.9
Dupa cum se observa din figura 2.9, b, înfasurarea în dublu strat va avea un numar dublu de
bobine înseriate fata de înfasurarea într-un singur strat, dar ele vor avea 2
NC spire fata de CN spire
la înfasurarea într-un strat ( CN reprezinta deci numarul de conductoare dintr-o crestatura).
Indiferent de modul de realizare a înfasurarii câmpul magnetic obtinut are aceeasi forma
(figura 2.10), si numarul de spire (consumul de cupru) este acelasi .2
Np2NpN C
C⋅⋅
=⋅=
În mod analog cu cele aratate în cazul înfasurarii anterioare ( ),2p2 =⋅ inductia magnetica va
avea o variatie pulsatorie, sinusoidala în timp si spatiu, de tipul:
( ) ( ) ( ) .tcospcosBt,B 1m
1 ⋅ω⋅α⋅⋅=α (2.12)
Într-adevar daca se parcurge odata periferia interioara a statorului, se înregistreaza pentru α
un unghi de π⋅2 radiani, dar variatia inductiei înregistreaza 2p = perioade, deci un unghi π⋅=α 4
radiani. Marimea α din expresia (2.11) pentru cazul 1p = va fi astfel înlocuita cu marimea α⋅p
pentru cazul ,1p > ca în relatia (2.12). Marimea α⋅p astfel introdusa poarta numele de unghi
electric. În figura 2.10 este redata prezentarea grafica a variatiei inductiei în raport cu coordonata
unghiulara, cât si armonica fundamentala (linie punctata).
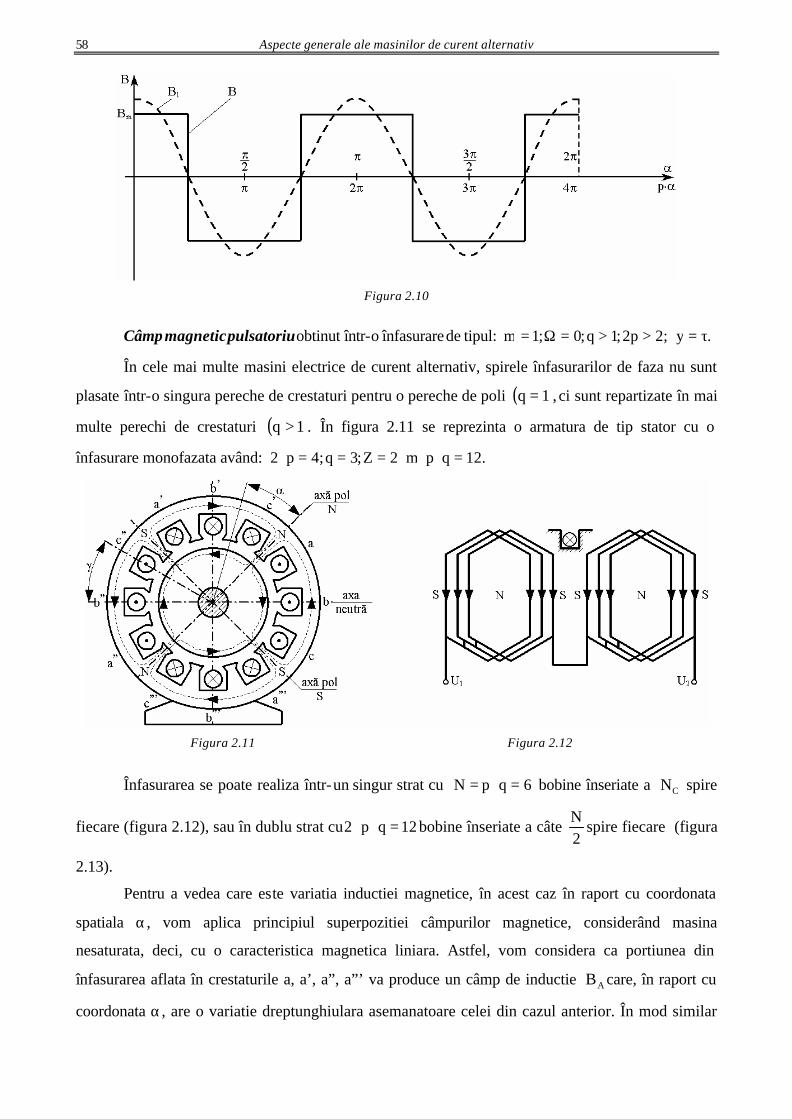
Aspecte generale ale masinilor de curent alternativ 58
Figura 2.10
Câmp magnetic pulsatoriu obtinut într-o înfasurare de tipul: ;2p2;1q;0;1m >>=Ω= .y τ=
În cele mai multe masini electrice de curent alternativ, spirele înfasurarilor de faza nu sunt
plasate într-o singura pereche de crestaturi pentru o pereche de poli ( ),1q = ci sunt repartizate în mai
multe perechi de crestaturi ( ).1q > În figura 2.11 se reprezinta o armatura de tip stator cu o
înfasurare monofazata având: .12qpm2Z;3q;4p2 =⋅⋅⋅===⋅
Figura 2.11 Figura 2.12
Înfasurarea se poate realiza într-un singur strat cu 6qpN =⋅= bobine înseriate a CN spire
fiecare (figura 2.12), sau în dublu strat cu 12qp2 =⋅⋅ bobine înseriate a câte 2N
spire fiecare (figura
2.13).
Pentru a vedea care este variatia inductiei magnetice, în acest caz în raport cu coordonata
spatiala α, vom aplica principiul superpozitiei câmpurilor magnetice, considerând masina
nesaturata, deci, cu o caracteristica magnetica liniara. Astfel, vom considera ca portiunea din
înfasurarea aflata în crestaturile a, a’, a”, a”’ va produce un câmp de inductie AB care, în raport cu
coordonata α, are o variatie dreptunghiulara asemanatoare celei din cazul anterior. În mod similar
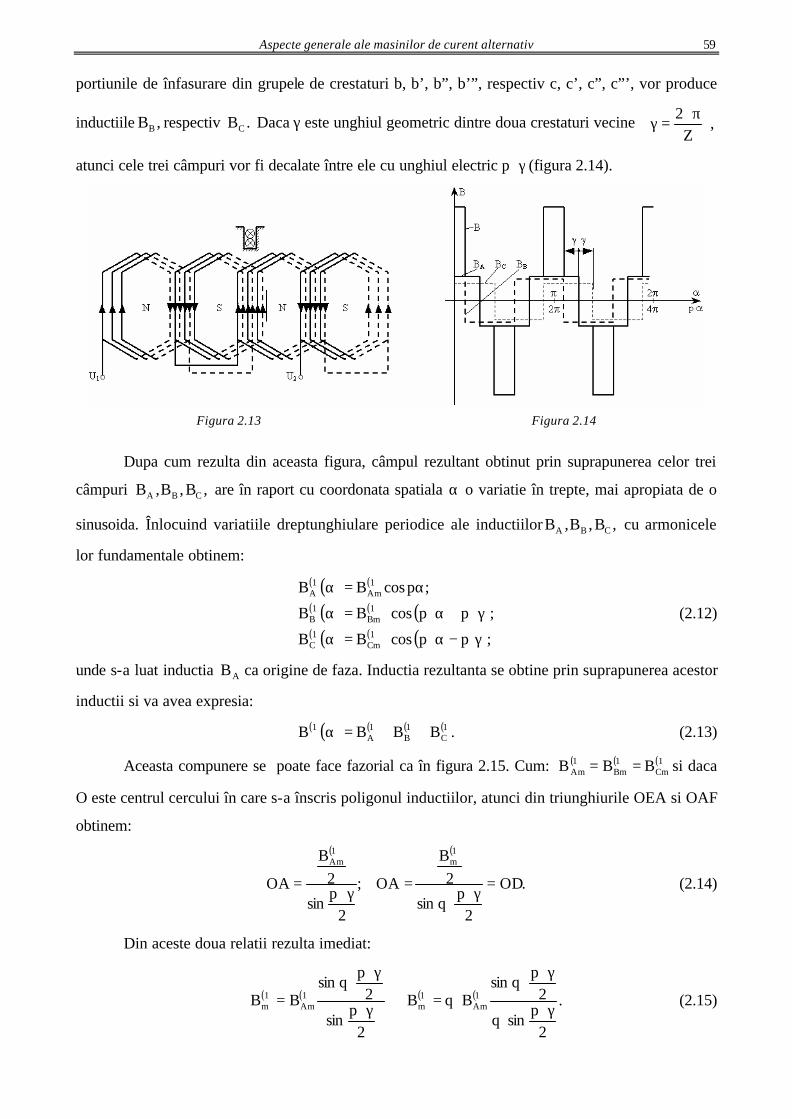
Aspecte generale ale masinilor de curent alternativ
59
portiunile de înfasurare din grupele de crestaturi b, b’, b”, b’”, respectiv c, c’, c”, c”’, vor produce
inductiile ,BB respectiv .BC Daca γ este unghiul geometric dintre doua crestaturi vecine ,Z
2
π⋅
=γ
atunci cele trei câmpuri vor fi decalate între ele cu unghiul electric γ⋅p (figura 2.14).
Figura 2.13 Figura 2.14
Dupa cum rezulta din aceasta figura, câmpul rezultant obtinut prin suprapunerea celor trei
câmpuri ,B,B,B CBA are în raport cu coordonata spatiala α o variatie în trepte, mai apropiata de o
sinusoida. Înlocuind variatiile dreptunghiulare periodice ale inductiilor ,B,B,B CBA cu armonicele
lor fundamentale obtinem:
( )( ) ( )
( )( ) ( ) ( )( )( ) ( ) ( );ppcosBB
;ppcosBB
;pcosBB
1Cm
1C
1Bm
1B
1Am
1A
γ⋅−α⋅⋅=α
γ⋅+α⋅⋅=α
α=α
(2.12)
unde s-a luat inductia AB ca origine de faza. Inductia rezultanta se obtine prin suprapunerea acestor
inductii si va avea expresia: ( )( ) ( ) ( ) ( ).BBBB 1
C1B
1A
1 ++=α (2.13)
Aceasta compunere se poate face fazorial ca în figura 2.15. Cum: ( ) ( ) ( )1Cm
1Bm
1Am BBB == si daca
O este centrul cercului în care s-a înscris poligonul inductiilor, atunci din triunghiurile OEA si OAF
obtinem: ( ) ( )
.OD
2p
qsin
2B
OA;
2p
sin
2B
OA
1m
1Am
=γ⋅
⋅=
γ⋅= (2.14)
Din aceste doua relatii rezulta imediat:
( ) ( ) ( ) ( ) .
2p
sinq
2p
qsinBqB
2p
sin
2p
qsinBB 1
Am1m
1Am
1m γ⋅
⋅
γ⋅⋅
⋅=⇒γ⋅
γ⋅⋅
= (2.15)
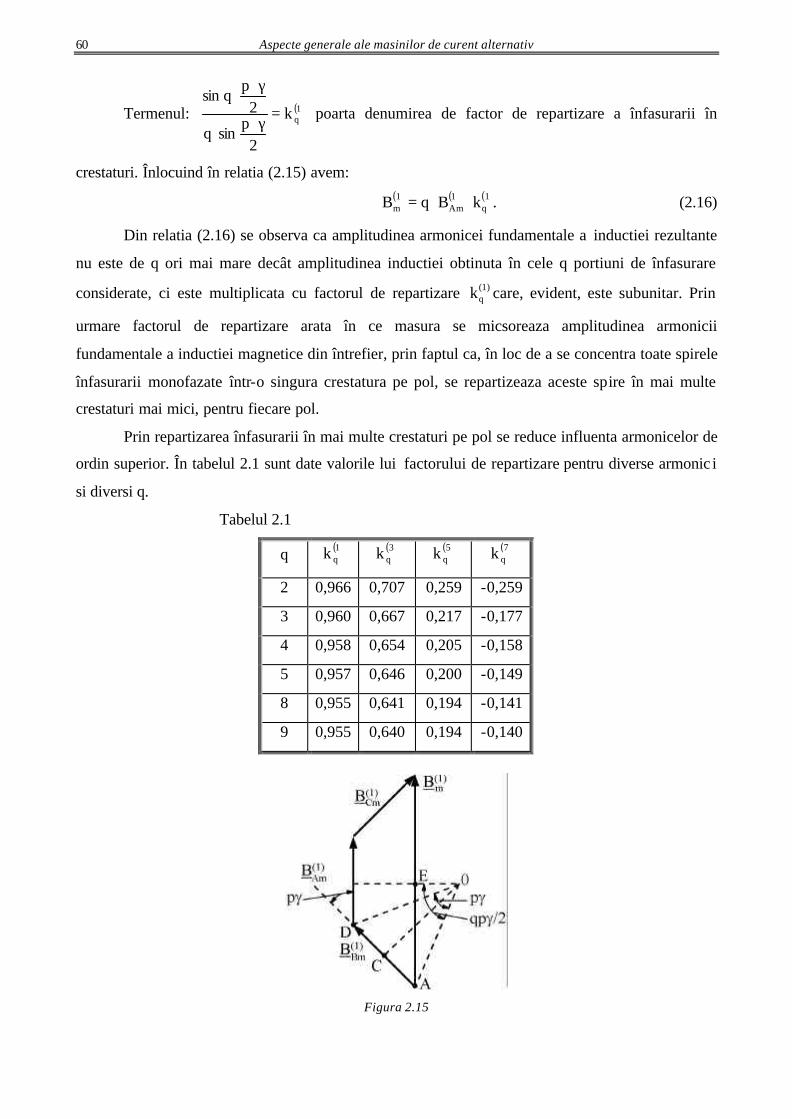
Aspecte generale ale masinilor de curent alternativ 60
Termenul: ( )1qk
2p
sinq
2p
qsin=
γ⋅⋅
γ⋅⋅
poarta denumirea de factor de repartizare a înfasurarii în
crestaturi. Înlocuind în relatia (2.15) avem: ( ) ( ) ( ).kBqB 1
q1Am
1m ⋅⋅= (2.16)
Din relatia (2.16) se observa ca amplitudinea armonicei fundamentale a inductiei rezultante
nu este de q ori mai mare decât amplitudinea inductiei obtinuta în cele q portiuni de înfasurare
considerate, ci este multiplicata cu factorul de repartizare )1(qk care, evident, este subunitar. Prin
urmare factorul de repartizare arata în ce masura se micsoreaza amplitudinea armonicii
fundamentale a inductiei magnetice din întrefier, prin faptul ca, în loc de a se concentra toate spirele
înfasurarii monofazate într-o singura crestatura pe pol, se repartizeaza aceste spire în mai multe
crestaturi mai mici, pentru fiecare pol.
Prin repartizarea înfasurarii în mai multe crestaturi pe pol se reduce influenta armonicelor de
ordin superior. În tabelul 2.1 sunt date valorile lui factorului de repartizare pentru diverse armonic i
si diversi q.
Tabelul 2.1
q ( )1qk ( )3
qk ( )5qk ( )7
qk
2 0,966 0,707 0,259 -0,259
3 0,960 0,667 0,217 -0,177
4 0,958 0,654 0,205 -0,158
5 0,957 0,646 0,200 -0,149
8 0,955 0,641 0,194 -0,141
9 0,955 0,640 0,194 -0,140
Figura 2.15
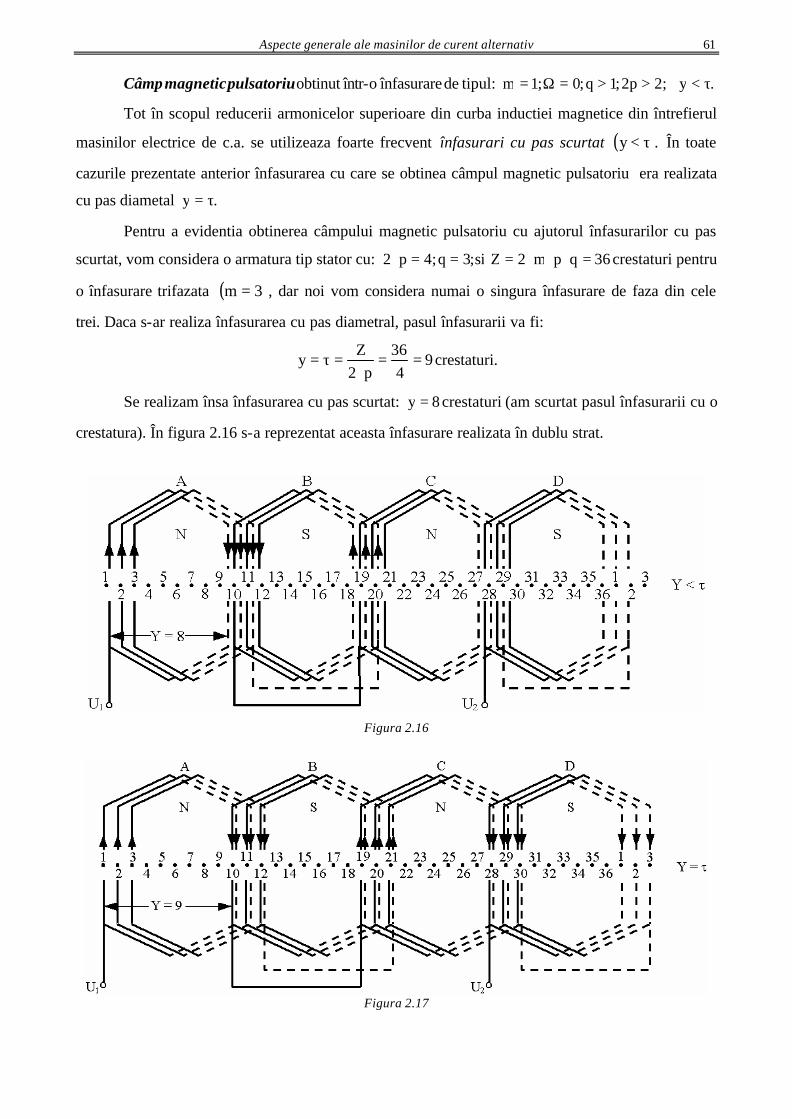
Aspecte generale ale masinilor de curent alternativ
61
Câmp magnetic pulsatoriu obtinut într-o înfasurare de tipul: ;2p2;1q;0;1m >>=Ω= .y τ<
Tot în scopul reducerii armonicelor superioare din curba inductiei magnetice din întrefierul
masinilor electrice de c.a. se utilizeaza foarte frecvent înfasurari cu pas scurtat ( ).y τ< În toate
cazurile prezentate anterior înfasurarea cu care se obtinea câmpul magnetic pulsatoriu era realizata
cu pas diametal .y τ=
Pentru a evidentia obtinerea câmpului magnetic pulsatoriu cu ajutorul înfasurarilor cu pas
scurtat, vom considera o armatura tip stator cu: 36qpm2Zsi;3q;4p2 =⋅⋅⋅===⋅ crestaturi pentru
o înfasurare trifazata ( )3m = , dar noi vom considera numai o singura înfasurare de faza din cele
trei. Daca s-ar realiza înfasurarea cu pas diametral, pasul înfasurarii va fi:
94
36p2
Zy ==
⋅=τ= crestaturi.
Se realizam însa înfasurarea cu pas scurtat: 8y = crestaturi (am scurtat pasul înfasurarii cu o
crestatura). În figura 2.16 s-a reprezentat aceasta înfasurare realizata în dublu strat.
Figura 2.16
Figura 2.17
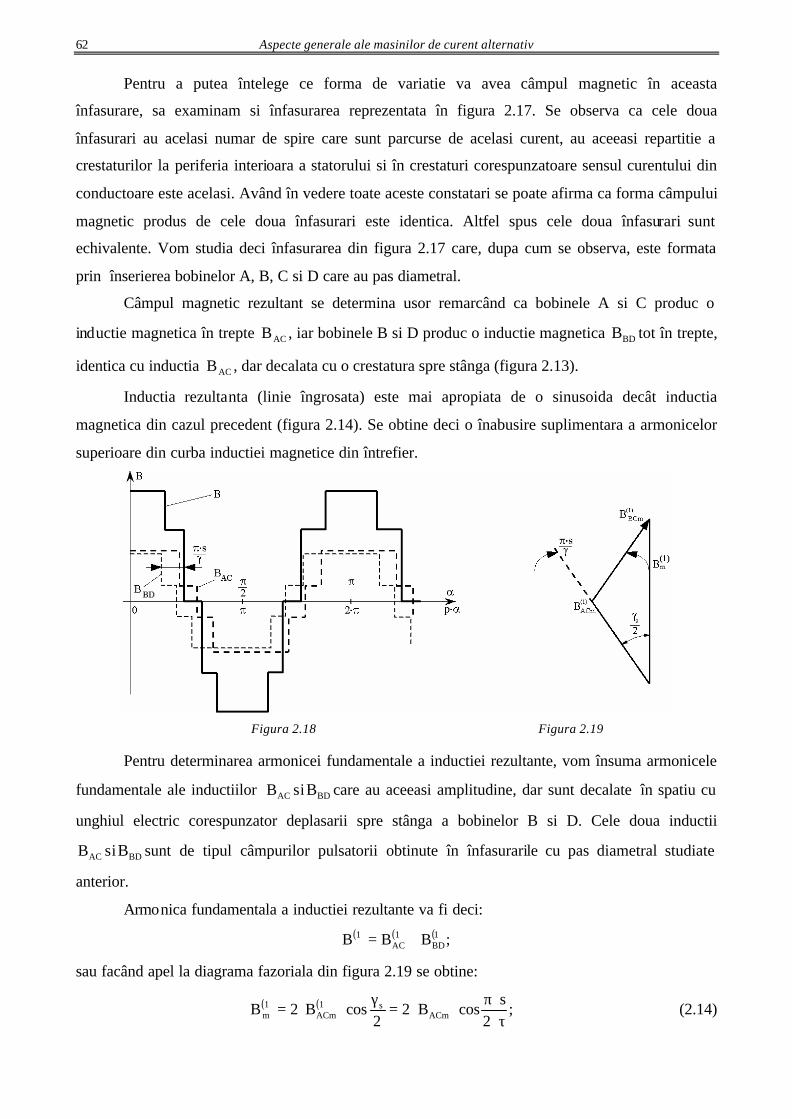
Aspecte generale ale masinilor de curent alternativ 62
Pentru a putea întelege ce forma de variatie va avea câmpul magnetic în aceasta
înfasurare, sa examinam si înfasurarea reprezentata în figura 2.17. Se observa ca cele doua
înfasurari au acelasi numar de spire care sunt parcurse de acelasi curent, au aceeasi repartitie a
crestaturilor la periferia interioara a statorului si în crestaturi corespunzatoare sensul curentului din
conductoare este acelasi. Având în vedere toate aceste constatari se poate afirma ca forma câmpului
magnetic produs de cele doua înfasurari este identica. Altfel spus cele doua înfasurari sunt
echivalente. Vom studia deci înfasurarea din figura 2.17 care, dupa cum se observa, este formata
prin înserierea bobinelor A, B, C si D care au pas diametral.
Câmpul magnetic rezultant se determina usor remarcând ca bobinele A si C produc o
inductie magnetica în trepte ACB , iar bobinele B si D produc o inductie magnetica BDB tot în trepte,
identica cu inductia ACB , dar decalata cu o crestatura spre stânga (figura 2.13).
Inductia rezultanta (linie îngrosata) este mai apropiata de o sinusoida decât inductia
magnetica din cazul precedent (figura 2.14). Se obtine deci o înabusire suplimentara a armonicelor
superioare din curba inductiei magnetice din întrefier.
Figura 2.18 Figura 2.19
Pentru determinarea armonicei fundamentale a inductiei rezultante, vom însuma armonicele
fundamentale ale inductiilor ACB si BDB care au aceeasi amplitudine, dar sunt decalate în spatiu cu
unghiul electric corespunzator deplasarii spre stânga a bobinelor B si D. Cele doua inductii
ACB si BDB sunt de tipul câmpurilor pulsatorii obtinute în înfasurarile cu pas diametral studiate
anterior.
Armonica fundamentala a inductiei rezultante va fi deci: ( ) ( ) ( ) ;BBB 1
BD1
AC1 +=
sau facând apel la diagrama fazoriala din figura 2.19 se obtine:
( ) ( ) ;2
scosB2
2cosB2B ACm
s1ACm
1m τ⋅
⋅π⋅⋅=
γ⋅⋅= (2.14)

Aspecte generale ale masinilor de curent alternativ
63
unde unghiul sγ corespunzator unei scurtari “s” este evident τ⋅π
=γs
s Se noteaza:
( ) ,2
scosk 1
s τ⋅⋅π
= (2.15)
numit factor de scurtare a pasului înfasurarii si relatia (2.14) se mai poate scrie: ( ).kB2B 1sACm
)1(m ⋅⋅= (2.16)
Relatia (2.16) ne arata ca prin scurtarea pasului, se reduce amplitudinea inductiei rezultante
(factorul de scurtare sk fiind tot timpul subunitar) dar se obtine totodata o reducere substantiala a
armonicelor de ordin superior. Expresia armonicei fundamentale a inductiei magnetice rezultante în
raport cu amplitudinea sa va fi:
( ) ( ) ( ) ( ) .pcostcoskBt,B 1s
1m
1 α⋅⋅⋅ω⋅⋅=α (2.17)
Pentru armonicele superioare, expresia factorului de scurtare va fi:
( ) .2
scosks τ⋅
⋅π⋅ν=ν (2.18)
În tabelul 2.2 se indica valorile factorului de scurtare pentru diversi ν si pentru diverse valori
ale raportului :sτ
Tabelul 2.2
γs
( )1sk ( )3
sk ( )5sk ( )9
sk
0 1 1 1 1
0,112 0,985 0,866 0,643 0,342
0,17 0,966 0,707 0,259 0,259
0,22 0,940 0,5 0,173 0,766
0,28 0,906 0,259 0,574 0,996
0,33 0,866 0 0,866 0,866
Combinând scurtarea pasului înfasurarii cu repartizarea înfasurarii în mai multe crestaturi pe
pol se obtine o inductie magnetica mult mai apropiata de o sinusoida, deci o reducere masiva a
armonicelor superioare.
Totodata, înfasurarile cu pas scurtat duc si la o economie de material activ (cupru),
deschiderea bobinelor fiind mai mica.
Nu trebuie uitat, însa, faptul ca odata cu reducerea armonicelor se reduce într-o mica masura
si amplitudinea armonicei fundamentale utile.
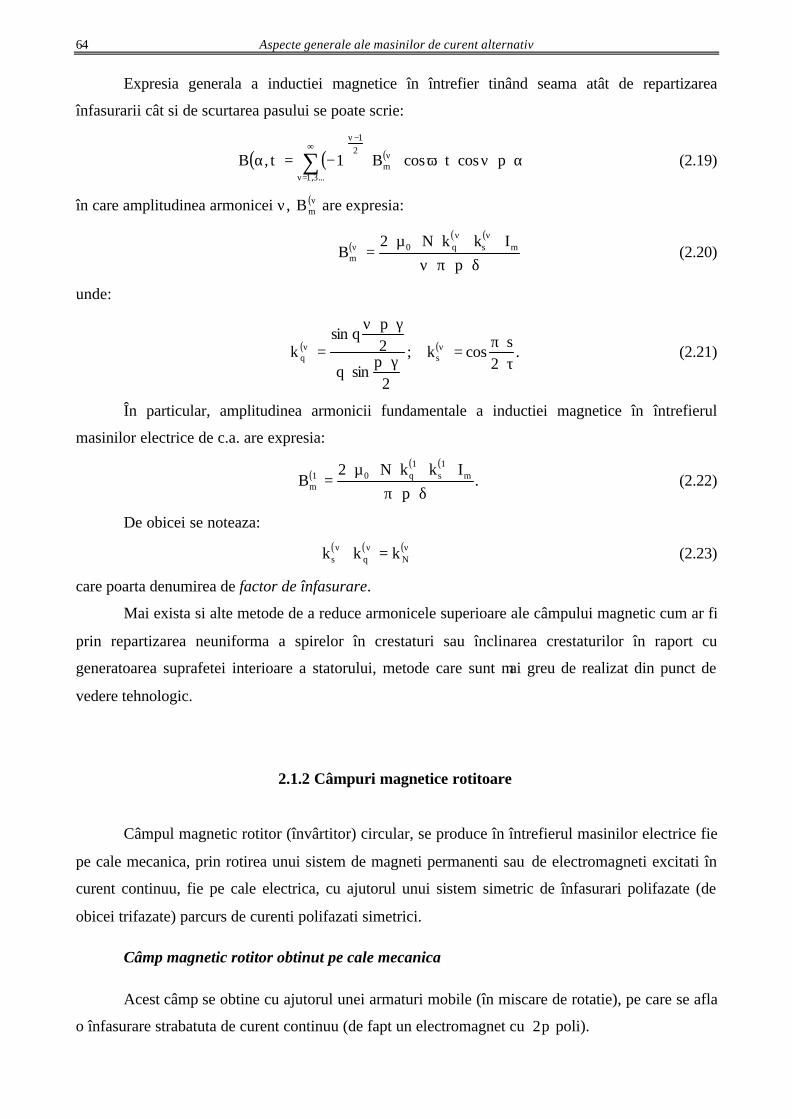
Aspecte generale ale masinilor de curent alternativ 64
Expresia generala a inductiei magnetice în întrefier tinând seama atât de repartizarea
înfasurarii cât si de scurtarea pasului se poate scrie:
( ) ( ) ( ) α⋅⋅ν⋅⋅ω⋅⋅−=α ν
−ν∞
=ν∑ pcostcosB1t,B m
21
...3,1
(2.19)
în care amplitudinea armonicei ν, ( )νmB are expresia:
( )( ) ( )
δ⋅⋅π⋅ν⋅⋅⋅⋅µ⋅
=νν
ν
pIkkN2
B msq0m (2.20)
unde:
( ) ( ) .2
scosk;
2p
sinq
2p
qsink sq τ⋅
⋅π=
γ⋅⋅
γ⋅⋅ν
= νν (2.21)
În particular, amplitudinea armonicii fundamentale a inductiei magnetice în întrefierul
masinilor electrice de c.a. are expresia:
( )( ) ( )
.p
IkkN2B m
1s
1q01
m δ⋅⋅π⋅⋅⋅⋅µ⋅
= (2.22)
De obicei se noteaza:
( ) ( ) ( )ννν =⋅ Nqs kkk (2.23)
care poarta denumirea de factor de înfasurare.
Mai exista si alte metode de a reduce armonicele superioare ale câmpului magnetic cum ar fi
prin repartizarea neuniforma a spirelor în crestaturi sau înclinarea crestaturilor în raport cu
generatoarea suprafetei interioare a statorului, metode care sunt mai greu de realizat din punct de
vedere tehnologic.
2.1.2 Câmpuri magnetice rotitoare
Câmpul magnetic rotitor (învârtitor) circular, se produce în întrefierul masinilor electrice fie
pe cale mecanica, prin rotirea unui sistem de magneti permanenti sau de electromagneti excitati în
curent continuu, fie pe cale electrica, cu ajutorul unui sistem simetric de înfasurari polifazate (de
obicei trifazate) parcurs de curenti polifazati simetrici.
Câmp magnetic rotitor obtinut pe cale mecanica
Acest câmp se obtine cu ajutorul unei armaturi mobile (în miscare de rotatie), pe care se afla
o înfasurare strabatuta de curent continuu (de fapt un electromagnet cu p2 poli).
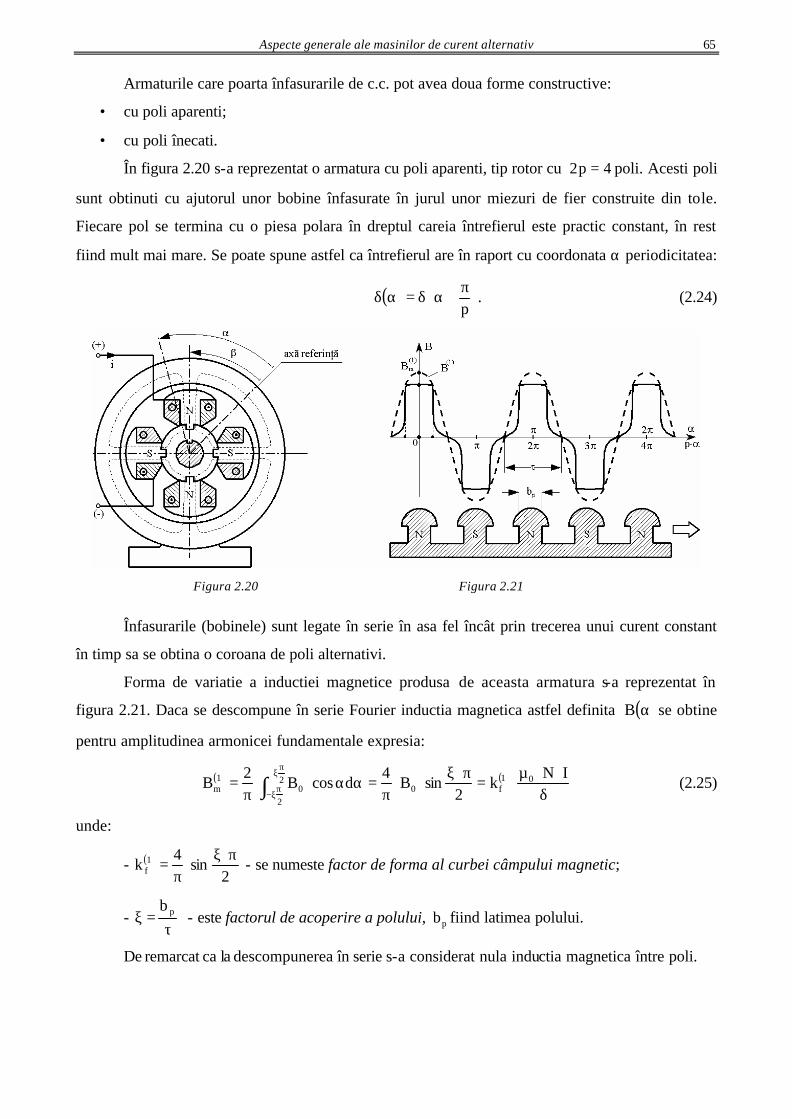
Aspecte generale ale masinilor de curent alternativ
65
Armaturile care poarta înfasurarile de c.c. pot avea doua forme constructive:
• cu poli aparenti;
• cu poli înecati.
În figura 2.20 s-a reprezentat o armatura cu poli aparenti, tip rotor cu 4p2 = poli. Acesti poli
sunt obtinuti cu ajutorul unor bobine înfasurate în jurul unor miezuri de fier construite din tole.
Fiecare pol se termina cu o piesa polara în dreptul careia întrefierul este practic constant, în rest
fiind mult mai mare. Se poate spune astfel ca întrefierul are în raport cu coordonata α periodicitatea:
( ) .p
π+αδ=αδ (2.24)
Figura 2.20 Figura 2.21
Înfasurarile (bobinele) sunt legate în serie în asa fel încât prin trecerea unui curent constant
în timp sa se obtina o coroana de poli alternativi.
Forma de variatie a inductiei magnetice produsa de aceasta armatura s-a reprezentat în
figura 2.21. Daca se descompune în serie Fourier inductia magnetica astfel definita ( )αB se obtine
pentru amplitudinea armonicei fundamentale expresia:
( ) ( )
δ⋅⋅µ
⋅=π⋅ξ
⋅⋅π
=αα⋅⋅π
= ∫π
ξ+
πξ−
INk
2sinB
4dcosB
2B 01
f02
20
1m (2.25)
unde:
- ( )
2sin
4k 1
fπ⋅ξ
⋅π
= - se numeste factor de forma al curbei câmpului magnetic;
- τ
=ξ pb - este factorul de acoperire a polului, pb fiind latimea polului.
De remarcat ca la descompunerea în serie s-a considerat nula inductia magnetica între poli.

Aspecte generale ale masinilor de curent alternativ 66
În mod analog se pot calcula si amplitudinile armonicelor superioare, dar în practica ele se
neglijeaza deoarece se cauta ca prin marirea treptata a întrefierului spre capetele pieselor polare sa
se ajunga la o repartitie a inductiei la periferia armaturii cât mai aproape de o sinusoida.
Daca armatura de tip rotor din figura 2.20 o rotim cu o viteza unghiulara Ω (îi furnizam
energie mecanica din afara), atunci unghiul β facut de axa polului Nord cu o axa oarecare de
referinta fixa devine o functie de timp, astfel inductia B va depinde de timp: ( ) ( ) ( ) ( ) ( ) ( ).tppcosBpcosBt,B 1
m1m
1 ⋅Ω⋅−α⋅=β−α⋅⋅=α (2.26)
Daca se noteaza: ω=Ω⋅p - pulsatia inductiei, atunci relatia (2.26) devine:
( ) ( ) ( ) ( )tpcosBt,B 1m
1 ⋅ω−α⋅=α (2.27)
(pentru β=α punctul se afla în axa polului Nord, ( ) ( )1mBt,B =α ).
Expresia (2.27) pune în evidenta un câmp magnetic de inductie rotitor. Într-adevar, valoarea
maxima a inductiei, ocupa la momente succesive toate punctele întrefierului, deplasându-se în
spatiu cu viteza unghiulara Ω (figura 2.22). Se poate asocia astfel câmpul magnetic rotitor unei
unde progresive.
Armonica de ordin ν a inductiei rotitoare are expresia:
( ) ( ) ( ) ( )( )
( )tpcosINk
tpcosBt,B 0fm ⋅ω⋅ν−α⋅⋅ν⋅
δ⋅⋅µ⋅
=⋅ω⋅ν−α⋅⋅ν=αν
νν
(2.28)
si se roteste în spatiu cu aceeasi viteza unghiulara Ω dar are de ν ori mai multi poli fata de armonica
fundamentala si un pas polar .ντ
=τν
Un câmp magnetic rotitor asemanator obtinem si cu ajutorul unei armaturi de tip rotor cu
poli înecati (figura 2.23). În acest caz la periferia armaturii se afla crestaturi în care se introduc
înfasurari de curent continuu.
Figura 2.22
Aspecte generale ale masinilor de curent alternativ
67
Forma de variatie a câmpului de inductie în spatiu s-a reprezentat în figura 2.24. Se observa
în acest caz o mai mare apropiere de o sinusoida, si deci un continut mai sarac de armonici
superioare.
Toate relatiile stabilite la armatura cu poli aparenti ramân valabile si la cea cu poli înecati,
modificându-se doar ( ).k 1f
Armaturile cu poli aparenti se folosesc la masini sincrone cu viteze mici de rotatie (sub
1000 rot/min) cum ar fi hidrogeneratoarele sincrone, datorita pericolului de smulgere a pieselor
polare sub actiunea fortelor centrifuge.
Armaturile cu poli înecati se folosesc la masini sincrone cu viteze mari de rotatie (peste
1000 rot/min) cum ar fi turbogeneratoarele sincrone.
Figura 2.23 Figura 2.24
Câmp magnetic rotitor obtinut pe cale electrica
Câmpul magnetic rotitor poate fi obtinut si cu ajutorul unei armaturi tip stator pe care se afla
o înfasurare polifazata (în practica trifazata sau bifazata) strabatuta de un sistem simetric polifazat
de curenti alternativi. În practica acest procedeu este des întâlnit la masinile de c.a. cum ar fi masina
asincrona si masina sincrona.
Pentru a vedea cum se produce un astfel de câmp vom considera o armatura statorica pe care
se afla o înfasurare de tipul: .y;1q;2p2;0;3m τ===⋅=Ω= Aceasta armatura este reprezentata în
figura 2.25 si este strabatuta de un sistem trifazat simetric de curenti alternativi:
.3
4tcosIi
;3
2tcosIi
;tcosIi
mW
mV
mU
π⋅
−⋅ω⋅=
π⋅
−⋅ω⋅=
⋅ω⋅=
(2.29)
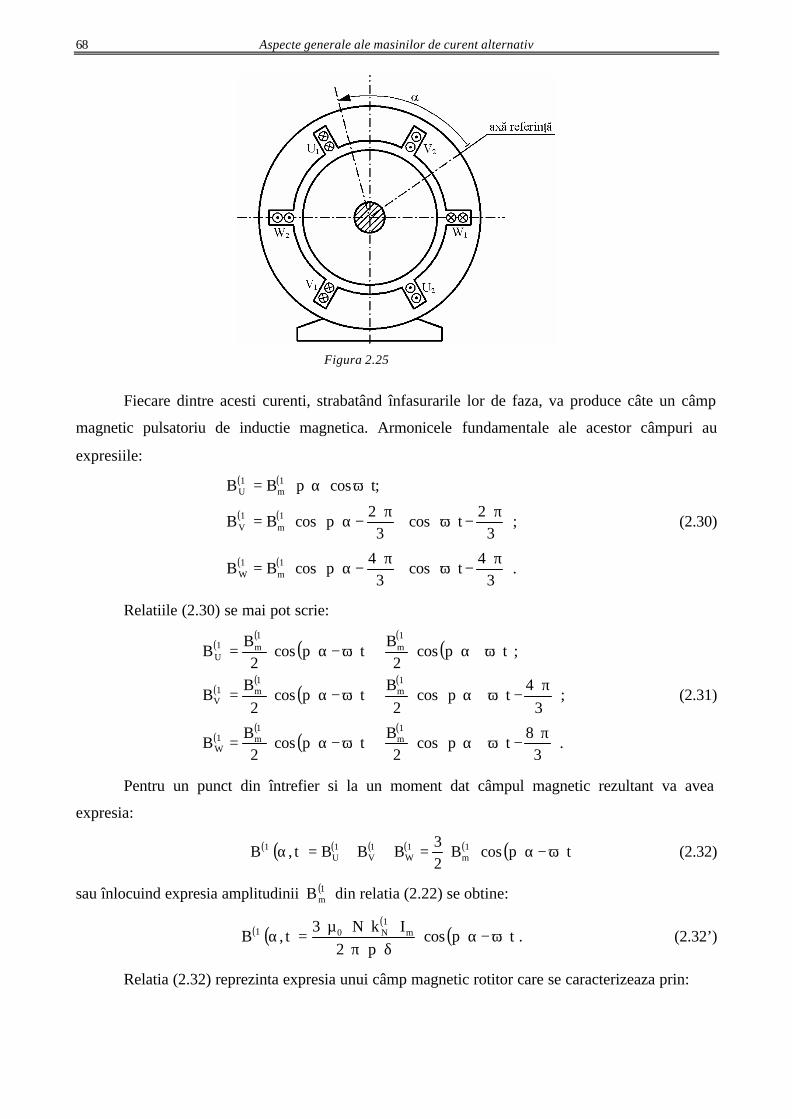
Aspecte generale ale masinilor de curent alternativ 68
Figura 2.25
Fiecare dintre acesti curenti, strabatând înfasurarile lor de faza, va produce câte un câmp
magnetic pulsatoriu de inductie magnetica. Armonicele fundamentale ale acestor câmpuri au
expresiile:
( ) ( )
( ) ( )
( ) ( ) .3
4tcos
34
pcosBB
;3
2tcos
32
pcosBB
;tcospBB
1m
1W
1m
1V
1m
1U
π⋅
−⋅ω⋅
π⋅
−α⋅⋅=
π⋅
−⋅ω⋅
π⋅
−α⋅⋅=
⋅ω⋅α⋅⋅=
(2.30)
Relatiile (2.30) se mai pot scrie:
( )( )
( )( )
( )
( )( )
( )( )
( )( )
( )( )
.3
8tpcos
2B
tpcos2
BB
;3
4tpcos
2B
tpcos2
BB
;tpcos2
Btpcos
2B
B
1m
1m1
W
1m
1m1
V
1m
1m1
U
π⋅
−⋅ω+α⋅⋅+⋅ω−α⋅⋅=
π⋅
−⋅ω+α⋅⋅+⋅ω−α⋅⋅=
⋅ω+α⋅⋅+⋅ω−α⋅⋅=
(2.31)
Pentru un punct din întrefier si la un moment dat câmpul magnetic rezultant va avea
expresia:
( ) ( ) ( ) ( ) ( ) ( ) ( )tpcosB23
BBBt,B 1m
1W
1V
1U
1 ⋅ω−α⋅⋅⋅=++=α (2.32)
sau înlocuind expresia amplitudinii ( )1mB din relatia (2.22) se obtine:
( ) ( )( )
( ).tpcosp2
IkN3t,B m
1N01 ⋅ω−α⋅⋅δ⋅⋅π⋅
⋅⋅⋅µ⋅=α (2.32’)
Relatia (2.32) reprezinta expresia unui câmp magnetic rotitor care se caracterizeaza prin:

Aspecte generale ale masinilor de curent alternativ
69
− viteza unghiulara Ω sau turatia π⋅
Ω=
2n a câmpului depinde de pulsatia (frecventa)
curentilor alternativi care circula prin înfasurare:
;p
f2p
⋅π⋅=
ω=Ω ; [ ];min/rot
pf60
n⋅
= (2.33)
unde Ω sau n se numesc viteza unghiulara, respectiv, turatie de sincronism si depind de frecventa si
de numarul de poli. La frecventa industriala ,Hz50f = relatia (2.33) se scrie:
[ ].min/rotp
3000n =
Având în vedere ca numarul de perechi de poli p nu poate avea decât o variatie discreta
(p=1, 2, 3, …) rezulta ca se obtin, pentru turatia de sincronism, urmatoarele valori posibile (tabelul
2.3):
Tabelul 2.3
p 1 2 3 4 5 6 8 10
n[rot/min] 3000 1500 1000 730 600 500 375 300
− amplitudinea inductiei rotitoare este mai mare de 23
ori decât amplitudinea inductiei pe o
faza; (în cazul general m-fazat va fi de 2m
ori mai mare decât amplitudinea inductiei pe faza).
− inductia rezultanta rotitoare se suprapune peste inductia unei faze, când aceasta este
maxima. Într-adevar la momentul ( ) ( ) ( ) α⋅⋅⋅=α⋅⋅=== pcosB23
B;pcosBB;Ii;0t 1m
1m
1UmA ,
deci ( )1UB si ( )1B au aceeasi pozitie în spatiu.
− sensul de rotatie al inductiei rezultante coincide cu sensul succesiunii fazelor. Aceasta
proprietate rezulta din proprietatea precedenta.
Daca se procedeaza în mod analog si pentru armonicele de ordin superior, se obtine pentru
armonica ν a inductiei magnetice rezultante expresia:
( ) ( ) ( ) ( ) ( )
( ) ( )
( ) ( ) .3
41ptcos
32
1ptcos
ptcos3
41ptcos
32
1ptcosptcosBt,B m
π⋅
⋅+ν−α⋅⋅ν+⋅ω+
π⋅
⋅+ν−α⋅⋅ν+⋅ω+
+α⋅⋅ν+⋅ω+
π⋅
⋅−ν+α⋅⋅ν−⋅ω+
+
π⋅
⋅−ν+α⋅⋅ν−⋅ω+α⋅⋅ν−⋅ω=α νν
(2.34)

Aspecte generale ale masinilor de curent alternativ 70
Dupa cum se poate observa la armonicele de ordin ,3k6...,15,9,3 +⋅=ν câmpul magnetic
rezultant este nul. Asadar câmpul magnetic rotitor nu contine armonica 3 care este cea mai
importanta ca marime dupa armonica fundamentala. Variatia în spatiu a câmpului magnetic
rezultant este, deci, mai aproape de sinusoida decât câmpul magnetic al unei înfasurari de faza.
Armonicele 1k6...,19,13,7 +⋅=ν ale câmpului rezultant au expresia:
( ) ( ) ( ) ( ) 1k6;ptcosB23
t,B m +⋅=να⋅⋅ν−⋅ω⋅⋅=α νν (2.35)
si sunt, deci, câmpuri învârtitoare de acelasi sens cu armonica fundamentala având viteza
unghiulara ( ) .p ν⋅ω
=Ω ν
Armonicele 1k6...,16,11,5 −⋅=ν ale câmpului rezultant au expresia:
( ) ( ) ( ) ( ) 1k6;ptcosB23
t,B m −⋅=να⋅⋅ν+⋅ω⋅⋅=α νν (2.36)
si sunt, deci, câmpuri învârtitoare cu sens de rotatie contrar armonicei fundamentale având viteza
unghiulara ( ) .p ν⋅ω
−=Ω ν
Câmpuri magnetice rotitoare se pot obtine si cu ajutorul unei înfasurari monofazate
strabatute de curent alternativ. Asa cum s-a vazut într-o astfel de înfasurare se obtine un câmp
magnetic pulsatoriu a carei armonica fundamentala este:
( ) ( ) ( ) ( ) ( ) ( )tpcosB21
tpcosB21
tcospcosBB 1m
1m
1m
1 ⋅ω+α⋅⋅⋅+⋅ω−α⋅⋅⋅=⋅ω⋅α⋅⋅=
expresia fiind obtinuta cu ajutorul unei identitati din trigonometrie. Se obtin astfel doua câmpuri
rotitoare de amplitudini egale care se rotesc în sensuri opuse cu aceeasi viteza.
Deci un câmp magnetic pulsatoriu este echivalent cu doua câmpuri rotitoare ce au
amplitudinea egala cu jumatate din amplitudinea câmpului pulsatoriu, si care se rotesc cu aceeasi
viteza în sensuri contrare.
2.2 Tensiuni electromotoare în masinile de curent alternativ
Câmpurile magnetice rotitoare pot produce fata de înfasurari fixe sau mobile fluxuri
magnetice variabile în timp. În acest fel, în aceste înfasurari se vor induce t.e.m. Vom prezenta acest
fenomen considerând cazurile:
Ø T.e.m. induse în înfasurari monofazate fixe;
Ø T.e.m. induse în înfasurari monofazate mobile;
Ø T.e.m. induse în înfasurari trifazate fixe;
Ø T.e.m. induse în înfasurari trifazate mobile.
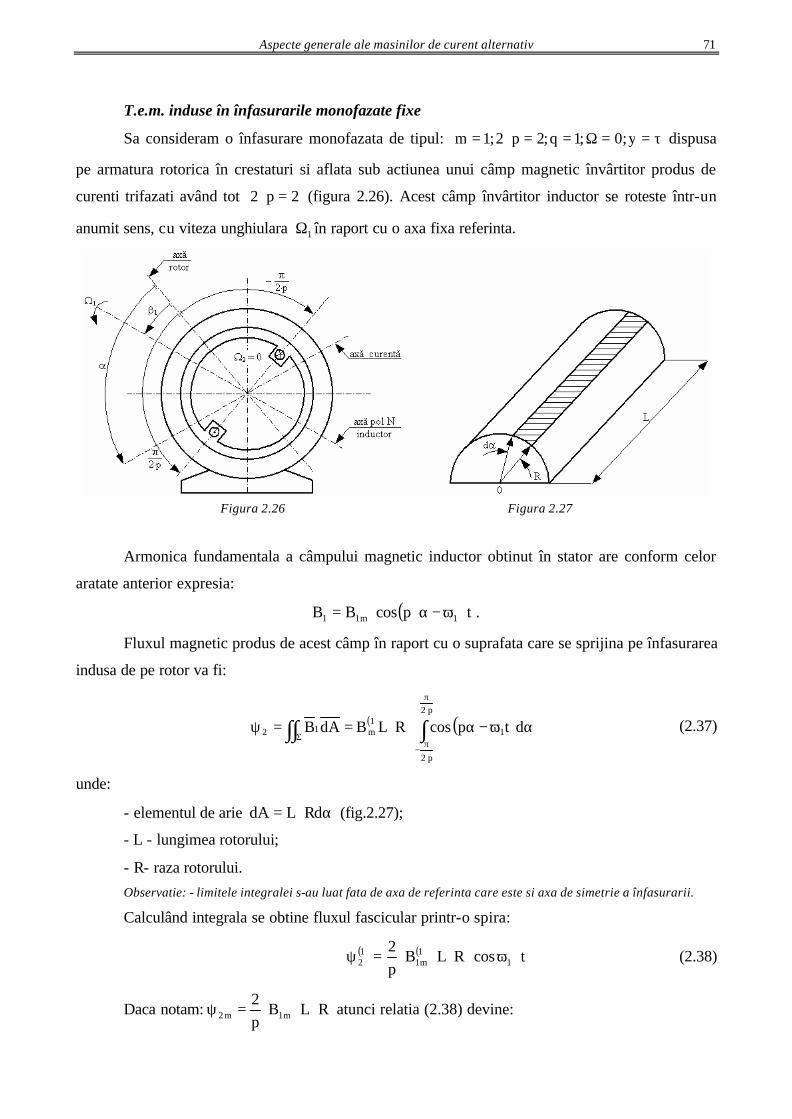
Aspecte generale ale masinilor de curent alternativ
71
T.e.m. induse în înfasurarile monofazate fixe
Sa consideram o înfasurare monofazata de tipul: τ==Ω==⋅= y;0;1q;2p2;1m dispusa
pe armatura rotorica în crestaturi si aflata sub actiunea unui câmp magnetic învârtitor produs de
curenti trifazati având tot 2p2 =⋅ (figura 2.26). Acest câmp învârtitor inductor se roteste într-un
anumit sens, cu viteza unghiulara 1Ω în raport cu o axa fixa referinta.
Figura 2.26 Figura 2.27
Armonica fundamentala a câmpului magnetic inductor obtinut în stator are conform celor
aratate anterior expresia:
( ).tpcosBB 1m11 ⋅ω−α⋅⋅=
Fluxul magnetic produs de acest câmp în raport cu o suprafata care se sprijina pe înfasurarea
indusa de pe rotor va fi:
( ) ( )∫∫ ∫Σ
⋅π
+
⋅π
−
αω−α⋅⋅==ψp2
p2
11m12 dtpcosRLBdAB (2.37)
unde:
- elementul de arie α⋅= RdLdA (fig.2.27);
- L - lungimea rotorului;
- R- raza rotorului.
Observatie: - limitele integralei s-au luat fata de axa de referinta care este si axa de simetrie a înfasurarii.
Calculând integrala se obtine fluxul fascicular printr-o spira:
( ) ( ) tcosRLBp2
11m1
12 ⋅ω⋅⋅⋅⋅=ψ (2.38)
Daca notam: RLBp2
m1m2 ⋅⋅⋅=ψ atunci relatia (2.38) devine:

Aspecte generale ale masinilor de curent alternativ 72
.tcos 1m22 ⋅ω⋅ψ=ψ (2.39)
Folosind relatiile: ;pR⋅π
=τ ;B2
B m1med1 ⋅π
= ,LA τ⋅= se obtine pentru amplitudinea
fluxului expresia:
.BA med1m2 ⋅=ψ (2.40)
Relatia (2.39) ne arata ca un câmp învârtitor având viteza de rotatie 1Ω produce fata de o
înfasurare fixa un flux magnetic variabil în timp cu pulsatia ,p 11 Ω⋅=ω sau frecventa
.np2
f 11
1 ⋅=π⋅
ω=
Frecventa fluxului va depinde, deci, de turatia câmpului învârtitor si de numarul de perechi
de poli ai înfasurarii.
Fluxul total care va strabate toate spirele înfasurarii plasate în cele doua crestaturi va fi:
tcosNtcosNp 1m221m2C2 ⋅ω⋅ψ⋅=⋅ω⋅ψ⋅⋅=ψ (2.41)
unde: - 2C NNp =⋅ pentru 1q = ;
- 2N – numarul de spire;
T.e.m. indusa în înfasurare de fluxul 2Φ va fi:
tsinEtsinNdt
de 1m21m212
22 ⋅ω=⋅ω⋅ψ⋅ω⋅=
ψ−= (2.42)
unde s-a notat amplitudinea t.e.m.: .NE m212m2 ψ⋅ω⋅=
Valoarea efectiva a t.e.m. induse va fi:
.fN44,4Nf2
22
EE m212m221
m22 ψ⋅⋅⋅=ψ⋅⋅⋅
π⋅== (2.43)
Relatia obtinuta este asemanatoare cu cea obtinuta pentru t.e.m. induse în secundarul
transformatoarelor (1.5).
Expresia (2.42) ne arata ca un câmp magnetic învârtitor induce într-o înfasurare monofazata
fixa o t.e.m. alternativa având aceeasi pulsatie ca si cea a câmpului inductor.
T.e.m. se induc si de catre armonicele superioare ale câmpului învârtitor inductor; astfel
pentru armonica ν obtinem relatia:
( ) ( ) .fN2
2E m2122
νν ψ⋅⋅ν⋅⋅π⋅
= (2.44)
Considerând cazul general al înfasurarilor monofazate ( )τ<>>⋅ y;1q;2p2 valoarea
efectiva a t.e.m. induse va fi efectuata de factorul de înfasurare ( )νNk (2.23), deci:
( ) ( ) ( ) .fNk44,4E m212N2ννν ψ⋅⋅⋅⋅= (2.45)
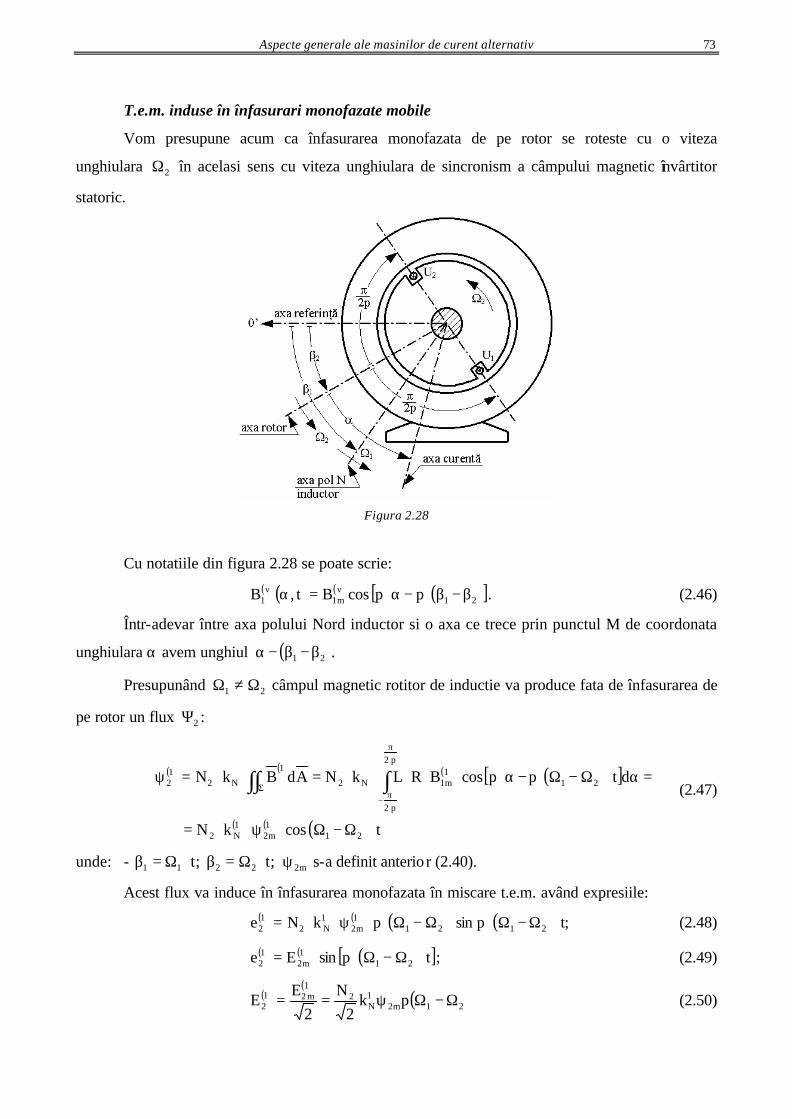
Aspecte generale ale masinilor de curent alternativ
73
T.e.m. induse în înfasurari monofazate mobile
Vom presupune acum ca înfasurarea monofazata de pe rotor se roteste cu o viteza
unghiulara 2Ω în acelasi sens cu viteza unghiulara de sincronism a câmpului magnetic învârtitor
statoric.
Figura 2.28
Cu notatiile din figura 2.28 se poate scrie:
( ) ( ) ( ) ( )[ ].ppcosBt,B 21m11 β−β⋅−α⋅=α νν (2.46)
Într-adevar între axa polului Nord inductor si o axa ce trece prin punctul M de coordonata
unghiulara α avem unghiul ( ).21 β−β−α
Presupunând 21 Ω≠Ω câmpul magnetic rotitor de inductie va produce fata de înfasurarea de
pe rotor un flux 2Ψ :
( ) ( ) ( ) ( )[ ]
( ) ( ) ( ) tcoskN
dtppcosBRLkNAdBkN
211m2
1N2
p2
p2
211m1N2
1
N212
⋅Ω−Ω⋅ψ⋅⋅=
=α⋅Ω−Ω⋅−α⋅⋅⋅⋅⋅⋅=⋅⋅=ψ ∫∫ ∫Σ
⋅π
+
⋅π
− (2.47)
unde: - m22211 ;t;t ψ⋅Ω=β⋅Ω=β s-a definit anterio r (2.40).
Acest flux va induce în înfasurarea monofazata în miscare t.e.m. având expresiile:
( ) ( ) ( ) ( ) ;tpsinpkNe 21211m2
1N2
12 ⋅Ω−Ω⋅⋅Ω−Ω⋅⋅ψ⋅⋅= (2.48)
( ) ( ) ( )[ ];tpsinEe 211m2
12 ⋅Ω−Ω⋅⋅= (2.49)
( )( )
( )21m21N
21m21
2 pk2
N2
EE Ω−Ωψ== (2.50)

Aspecte generale ale masinilor de curent alternativ 74
Din expresiile (2.49) se vede ca pulsatia t.e.m. induse într-o înfasurare monofazata aflata
în miscare depinde de diferenta vitezelor unghiulare, când se roteste în acelasi sens cu câmpul
învârtitor, sau de suma acestora când se roteste în sens contrar. Deci:
( );p 21 Ω+Ω⋅=ω (2.51)
( ) ( ) .tsinEe 1m2
12 ⋅ω⋅= (2.52)
Din relatia (2.50) se vede ca si valoarea efectiva a t.e.m. induse depinde de viteza relativa
dintre câmpul rotitor si înfasurare. Modificând viteza de rotatie a înfasurarii în care se induce t.e.m.
putem obtine o t.e.m. de frecventa si amplitudine variabile.
În teoria masinilor electrice de c.a. se introduce notiunea de alunecare, definita ca fiind:
1
21
1
21
nnn
s−
=Ω
Ω−Ω= sau în procente [ ] 100
nnn
%s1
21 ⋅−
= (2.53)
Alunecarea s reprezinta diferenta relativa dintre viteza de sincronism si viteza rotorului.
− Daca rotorul este fix: 1s = si regasim cazul înfasurarii fixe în care se induce o t.e.m.
de aceeasi pulsatie ca si cea a câmpului învârtitor.
− Daca 0s21 =⇒Ω=Ω rotorul se învârte sincron cu câmpul învârtitor, fluxul
magnetic devine invariabil în timp fata de rotor si deci t.e.m. indusa va fi nula.
Expresiile (2.49) si (2.50) se pot scrie si în functie de alunecare:
( ) ( ) ( ) ( ) ( );tssinEtpssinEe 11m21
1m2
12 ⋅ω⋅⋅=⋅Ω⋅⋅⋅= (2.54)
( ) ( ) ( ) .psk2
NE 1
1m2
1N
12 Ω⋅⋅⋅ψ⋅⋅= (2.55)
T.e.m. induse în înfasurari trifazate fixe
Consideram ca pe armatura tip rotor din figura 2.29 se afla o înfasurare trifazata de tipul:
;y;1q;0;2p2;3m 2 τ===Ω=⋅= înfasurare aflata în câmpul învârtitor inductor din stator a carei
armonica fundamentala are expresia:
( ) ( ) ( ).tpcosBB 11m1
11 ⋅ω−α⋅⋅= (2.56)
Acest câmp va produce fata de cele trei înfasurari de faza sistemul trifazat simetric de
fluxuri:
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( ) .3
4tcoskN
;3
2tcoskN
;tcoskN
11m2
1N2
1W2
11m2
1N2
1V2
11m2
1N2
1U2
π⋅
−⋅ω⋅ψ⋅⋅=ψ
π⋅
−⋅ω⋅ψ⋅⋅=ψ
⋅ω⋅ψ⋅⋅=ψ
(2.57)
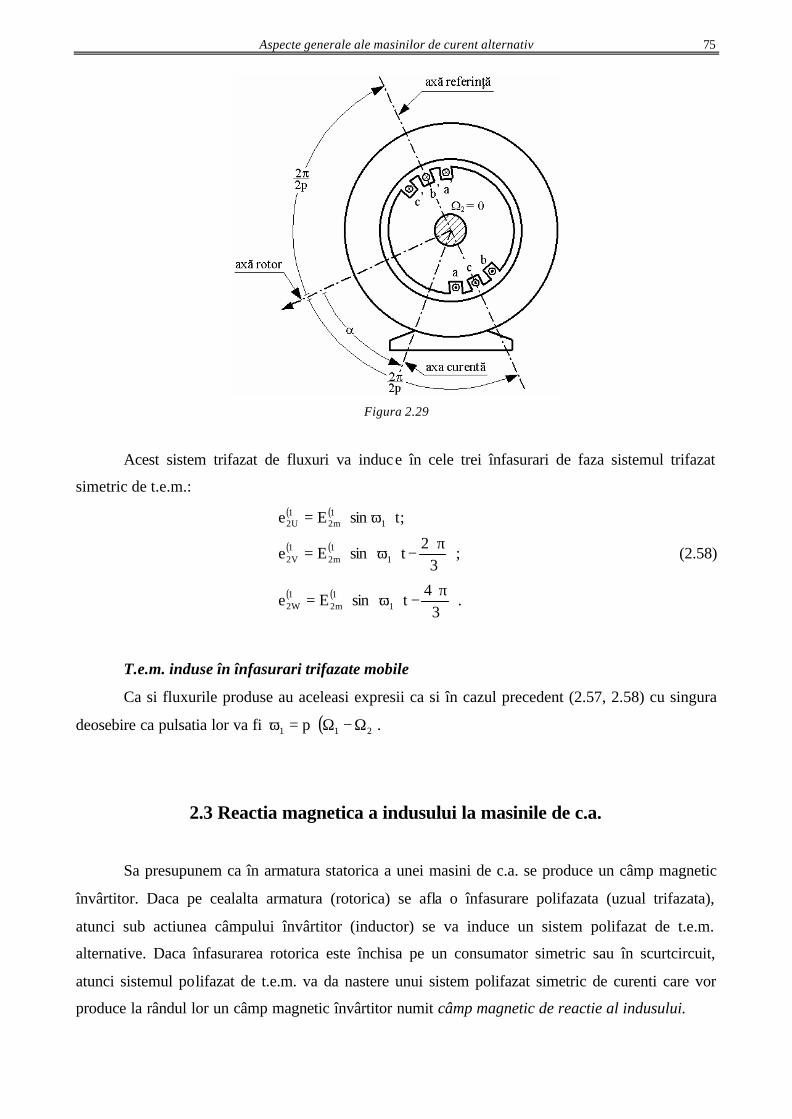
Aspecte generale ale masinilor de curent alternativ
75
Figura 2.29
Acest sistem trifazat de fluxuri va induce în cele trei înfasurari de faza sistemul trifazat
simetric de t.e.m.: ( ) ( )
( ) ( )
( ) ( ) .3
4tsinEe
;3
2tsinEe
;tsinEe
11m2
1W2
11m2
1V2
11m2
1U2
π⋅
−⋅ω⋅=
π⋅
−⋅ω⋅=
⋅ω⋅=
(2.58)
T.e.m. induse în înfasurari trifazate mobile
Ca si fluxurile produse au aceleasi expresii ca si în cazul precedent (2.57, 2.58) cu singura
deosebire ca pulsatia lor va fi ( ).p 211 Ω−Ω⋅=ω
2.3 Reactia magnetica a indusului la masinile de c.a.
Sa presupunem ca în armatura statorica a unei masini de c.a. se produce un câmp magnetic
învârtitor. Daca pe cealalta armatura (rotorica) se afla o înfasurare polifazata (uzual trifazata),
atunci sub actiunea câmpului învârtitor (inductor) se va induce un sistem polifazat de t.e.m.
alternative. Daca înfasurarea rotorica este închisa pe un consumator simetric sau în scurtcircuit,
atunci sistemul polifazat de t.e.m. va da nastere unui sistem polifazat simetric de curenti care vor
produce la rândul lor un câmp magnetic învârtitor numit câmp magnetic de reactie al indusului.

Aspecte generale ale masinilor de curent alternativ 76
Cele doua câmpuri magnetice învârtitoare: inductor si indus se compun într-un câmp
magnetic rezultant pe care îl întâlnim în întrefierul masinii.
Sa studiem, în continuare, cazul unei înfasurari induse trifazate care se roteste cu viteza
unghiulara 2Ω într-un câmp învârtitor inductor având viteza unghiulara de sincronism 2Ω (ambele
viteze unghiulare sunt luate fata de un sistem de referinta fix legat la stator) (figura 2.30).
În aceste conditii câmpul magnetic învârtitor inductor va avea expresia:
( ) ( )[ ].tppcosBt,B 21m11 ⋅Ω−Ω⋅−α⋅⋅=α (2.59)
Acest câmp produce fata de o suprafata ce se sprijina pe înfasurarea indusa sistemul trifazat
de fluxuri fasciculare:
( ) ( )[ ]
( ) ( )
( ) ( ) ;3
4tpcoskNt
;3
2tpcoskNt
;tpcoskNt
21m2N2M2
21m2N2L2
21m2N2K2
π⋅
−⋅Ω−Ω⋅⋅ψ⋅⋅=ψ
π⋅
−⋅Ω−Ω⋅⋅ψ⋅⋅=ψ
⋅Ω−Ω⋅⋅ψ⋅⋅=ψ
(2.60)
(toate marimile valabile se refera la armonica fundamentala desi nu s-a mai precizat acest lucru prin
indice de armonica).
Sistemul (2.60) va induce în înfasurarea indusa trifazata sistemul de t.e.m.:
( )[ ]
( ) ;3
2tpsinEe
;tpsinEe
21m2L2
21m2K2
π⋅
−⋅Ω−Ω⋅⋅=
⋅Ω−Ω⋅⋅=
( ) .3
4tpsinEe 21m2M2
π⋅
−⋅Ω−Ω⋅⋅= (2.61)
Presupunând înfasurarea indusa închisa pe un consumator simetric sau în scurtcircuit, atunci
sistemul de t.e.m. (2.61) va da nastere sistemului trifazat de curenti:
( )[ ]
( )
( ) ;3
4tpsinIi
;3
2tpsinIi
;tpsinIi
21m2C2
21m2L2
21m2K2
π⋅
−ϕ−⋅Ω−Ω⋅⋅=
π⋅
−ϕ−⋅Ω−Ω⋅⋅=
ϕ−⋅Ω−Ω⋅⋅=
(2.62)
unde ϕ este unghiul de defazaj dintre t.e.m. si curent pe o faza.
Sistemul trifazat de curenti (2.62) vor produce la rândul lor un câmp magnetic învârtitor de
reactie care va avea expresia:
( ) ( )
ϕ−
π−Ω−Ω−α=α
2tppcosBt,B 21m22 (2.63)

Aspecte generale ale masinilor de curent alternativ
77
Comparând expresiile celor doua câmpuri învârtitoare 1B si 2B , se constata ca ele se rotesc
cu aceeasi viteza unghiulara 21 Ω−Ω fata de armatura indusa.
Comparând fazorial cele doua câmpuri pentru mai multe cazuri ale unghiului de defazaj
dependent de natura sarcinii se obtin diagramele din figura 2.30.
Figura 2.30
− Daca 0=ϕ respectiv cazul unei sarcini pur rezistive, atunci conform relatiilor (2.59) si
(2.63) cele doua câmpuri sunt în cvadratura, polii câmpului de reactie gasindu-se exact între polii
câmpului inductor. O astfel de reactie a indusului este numita reactie transversala.
− Daca ,2π
=ϕ respectiv, cazul unei sarcini pur inductive, atunci cele doua câmpuri sunt în
opozitie, câmpul de reactie având o actiune exact contrara (demagnetizanta) câmpului inductor. O
astfel de reactie se mai numeste reactie longitudinala demagnetizanta.
− Daca ,2π
−=ϕ respectiv, cazul unei sarcini pur capacitive, atunci cele doua câmpuri sunt
perfect în faza, câmpul de reactie având o actiune întaritoare asupra câmpului inductor. O astfel de
reactie se mai numeste reactie longitudinala magnetizanta.
− Daca ,2
,0
π
∈ϕ atunci câmpul de reactie se descompune în cele doua componente:
longitudinala d2B si transversala .B q2

Aspecte generale ale masinilor de curent alternativ 78
2.4 Expresia cuplului electromagnetic la masinile de c.a.
Între fluxul inductiei magnetice 2Ψ produs de câmpul inductor în raport cu înfasurarea
indusa si curentii care circula prin aceasta înfasurare apar interactiuni electromagnetice. Energia de
interactiune conform teoremei fortelor generalizate pentru faza K va avea expresia:
K2K2K2 iW ⋅ψ= (2.64)
unde fluxul K2Ψ si K2i daca ne referim la cazul prezentat în figura 2.28 vor avea expresiile:
( ) ( );pcoskNtpcoskN 21m2N221m2N2K2 β−β⋅⋅ψ⋅⋅=⋅Ω−Ω⋅⋅ψ⋅⋅=ψ
( )[ ].tpsinIi 21m2K2 ϕ−⋅Ω−Ω⋅⋅= (2.65)
Cuplul electromagnetic k2m dezvoltat de aceasta înfasurare si transmis indusului (rotorului)
se va afla aplicând teorema fortelor generalizate, coordonata generalizata fiind evident unghiul care
fixeaza la un moment dat pozitia rotorului fata de axa de referinta (figura 2.28). Deci:
.constiW
m K22
K2K2 =⋅
β∂
∂= (2.66)
Facându-se calculele atât pentru faza K cât si pentru fazele L si M se obtine pentru cuplul
rezultant din masina expresia:
π
+ϕ⋅⋅ψ⋅⋅⋅⋅=++=2
sinIkNp23
mmmM m2m2N2M2L2K22 (2.67)
dar cum: ( ) m2N2212 kNp2
1E ψ⋅⋅⋅Ω−Ω⋅⋅= relatia (2.67) devine:
( )21
22222
I,EcosIE3M
Ω−Ω⋅⋅⋅
= (2.68)
unde s-a folosit: ( )21 I,Ecos2
sin =
π
+ϕ si 2
II m2
2 = .
Examinând relatia (2.68) se observa ca în regim stationar, adica .;ctI.;ctE.;ct 222 ===Ω
.,ct=ϕ cuplul dezvoltat de masina este constant în timp.
Daca acest cuplu este pozitiv, atunci el are sensul câmpului învârtitor inductor si regimul de
functionare se numeste motor, iar daca este negativ atunci are sens contrar si regimul de functionare
se numeste generator.
Capitolul 3
MASINA ASINCRONA
Masina asincrona este cea mai raspândita masina electrica. Ea se întâlneste pe scara larga în
actionarile electrice din toate sectoarele industriale si sociale, îndeosebi în regimul de motor trifazat,
pentru actionarea masinilor unelte, a pompelor, a compresoarelor, a morilor cu bile, a macaralelor
electrice, a podurilor rulante, a aparaturii medicale, a aparaturii electrocasnice etc.
Motoarele asincrone se construiesc pentru o gama foarte larga de puteri (de la ordinul
unitatilor de W pâna la ordinul zecilor de MW), pentru tensiuni joase (sub 500V) si tensiuni medii
(3 kV, 6 kV sau 10 kV) si având turatia sincrona la frecventa Hz50f = egala în mod uzual cu n =
500, 600, 750, 1000, 1500 sau 3000 rot/min, în functie de numarul de perechi de poli.
Principalele avantaje ale motoarelor asincrone fata de alte tipuri de motoare electrice sunt:
Ø simplitate constructiva;
Ø pret de cost redus;
Ø siguranta mare în exploatare;
Ø performante tehnice ridicate (cuplu mare de pornire, randament ridicat);
Ø stabilitate în functionare, exploatare, manevrare si întretinere simpla;
Ø alimentare direct de la reteaua trifazata de c.a.;
Dintre principalele dezavantaje putem enumera:
Ø soc mare de curent la pornire;
Ø factor de putere relativ scazut;
Ø caracteristica mecanica dura;
Regimul de generator al masinii asincrone este mai rar folosit datorita puterii reactive (de
magnetizare) relativ mare pe care masina trebuie s-o ia de la retea.
În actionarile electrice, în cazuri speciale, masina asincrona poate functiona pentru scurta
durata si în regimul de frâna electrica.
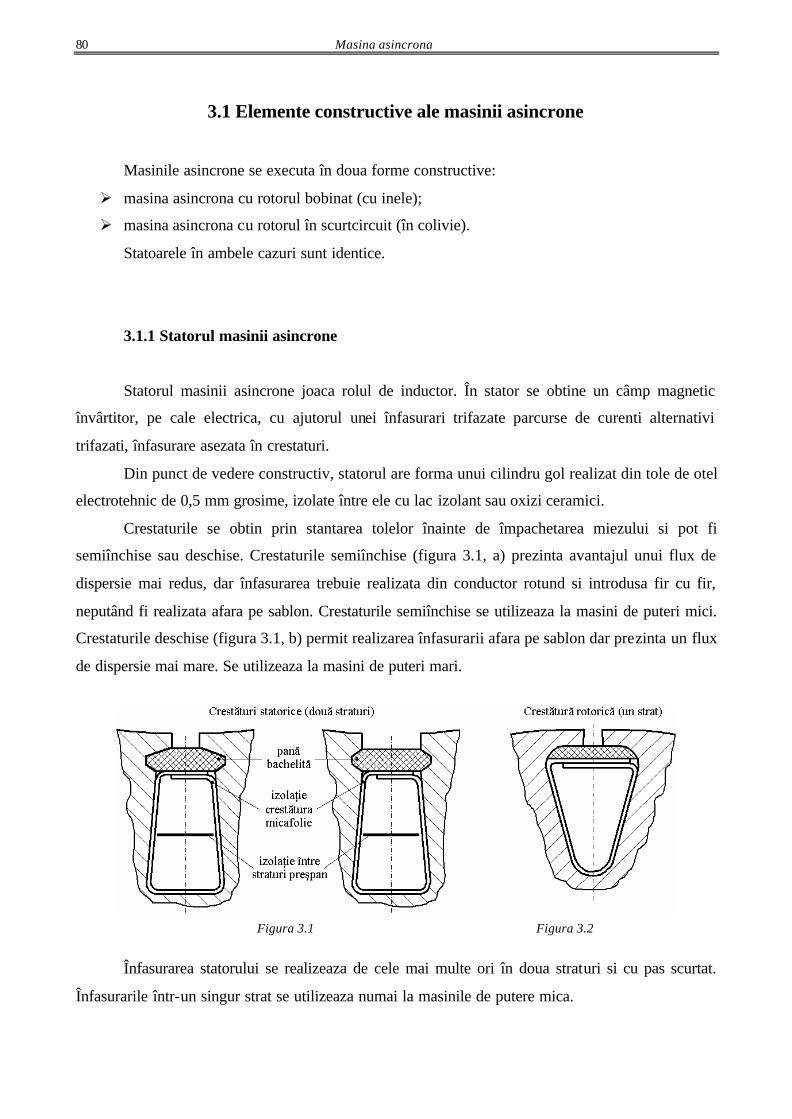
Masina asincrona 80
3.1 Elemente constructive ale masinii asincrone
Masinile asincrone se executa în doua forme constructive:
Ø masina asincrona cu rotorul bobinat (cu inele);
Ø masina asincrona cu rotorul în scurtcircuit (în colivie).
Statoarele în ambele cazuri sunt identice.
3.1.1 Statorul masinii asincrone
Statorul masinii asincrone joaca rolul de inductor. În stator se obtine un câmp magnetic
învârtitor, pe cale electrica, cu ajutorul unei înfasurari trifazate parcurse de curenti alternativi
trifazati, înfasurare asezata în crestaturi.
Din punct de vedere constructiv, statorul are forma unui cilindru gol realizat din tole de otel
electrotehnic de 0,5 mm grosime, izolate între ele cu lac izolant sau oxizi ceramici.
Crestaturile se obtin prin stantarea tolelor înainte de împachetarea miezului si pot fi
semiînchise sau deschise. Crestaturile semiînchise (figura 3.1, a) prezinta avantajul unui flux de
dispersie mai redus, dar înfasurarea trebuie realizata din conductor rotund si introdusa fir cu fir,
neputând fi realizata afara pe sablon. Crestaturile semiînchise se utilizeaza la masini de puteri mici.
Crestaturile deschise (figura 3.1, b) permit realizarea înfasurarii afara pe sablon dar prezinta un flux
de dispersie mai mare. Se utilizeaza la masini de puteri mari.
Figura 3.1 Figura 3.2
Înfasurarea statorului se realizeaza de cele mai multe ori în doua straturi si cu pas scurtat.
Înfasurarile într-un singur strat se utilizeaza numai la masinile de putere mica.
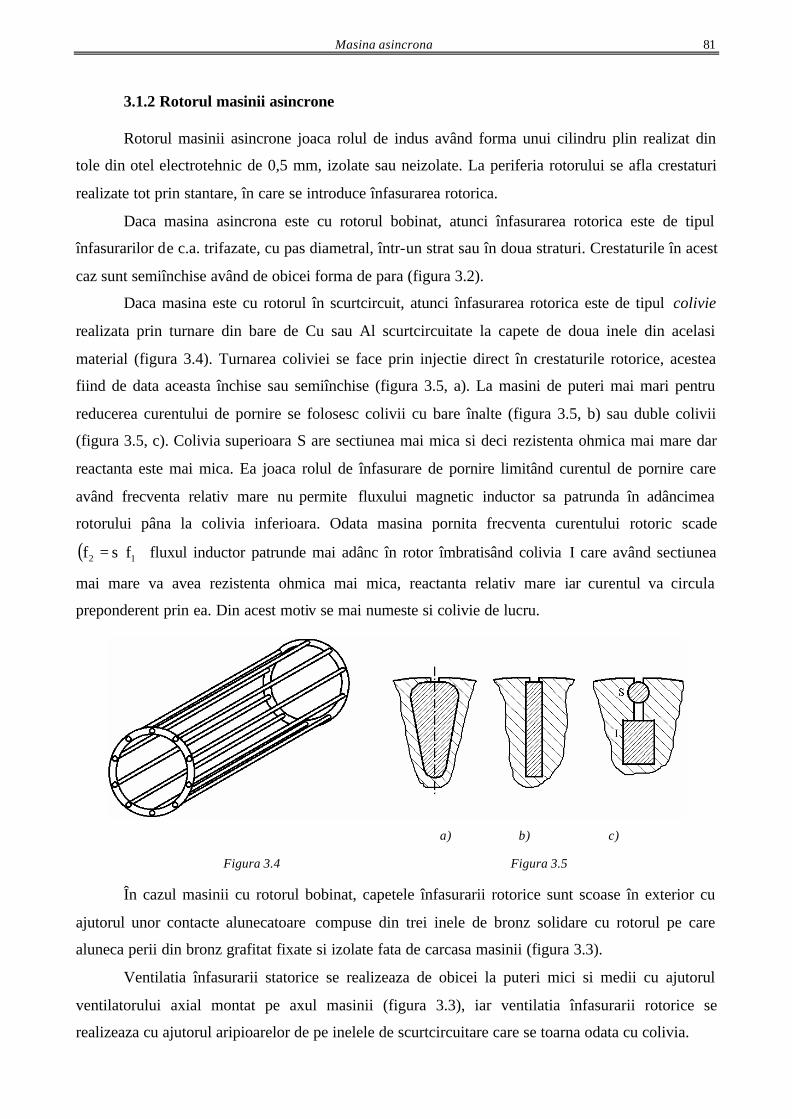
Masina asincrona
81
3.1.2 Rotorul masinii asincrone
Rotorul masinii asincrone joaca rolul de indus având forma unui cilindru plin realizat din
tole din otel electrotehnic de 0,5 mm, izolate sau neizolate. La periferia rotorului se afla crestaturi
realizate tot prin stantare, în care se introduce înfasurarea rotorica.
Daca masina asincrona este cu rotorul bobinat, atunci înfasurarea rotorica este de tipul
înfasurarilor de c.a. trifazate, cu pas diametral, într-un strat sau în doua straturi. Crestaturile în acest
caz sunt semiînchise având de obicei forma de para (figura 3.2).
Daca masina este cu rotorul în scurtcircuit, atunci înfasurarea rotorica este de tipul colivie
realizata prin turnare din bare de Cu sau Al scurtcircuitate la capete de doua inele din acelasi
material (figura 3.4). Turnarea coliviei se face prin injectie direct în crestaturile rotorice, acestea
fiind de data aceasta închise sau semiînchise (figura 3.5, a). La masini de puteri mai mari pentru
reducerea curentului de pornire se folosesc colivii cu bare înalte (figura 3.5, b) sau duble colivii
(figura 3.5, c). Colivia superioara S are sectiunea mai mica si deci rezistenta ohmica mai mare dar
reactanta este mai mica. Ea joaca rolul de înfasurare de pornire limitând curentul de pornire care
având frecventa relativ mare nu permite fluxului magnetic inductor sa patrunda în adâncimea
rotorului pâna la colivia inferioara. Odata masina pornita frecventa curentului rotoric scade
( )12 fsf ⋅= fluxul inductor patrunde mai adânc în rotor îmbratisând colivia I care având sectiunea
mai mare va avea rezistenta ohmica mai mica, reactanta relativ mare iar curentul va circula
preponderent prin ea. Din acest motiv se mai numeste si colivie de lucru.
a) b) c)
Figura 3.4 Figura 3.5
În cazul masinii cu rotorul bobinat, capetele înfasurarii rotorice sunt scoase în exterior cu
ajutorul unor contacte alunecatoare compuse din trei inele de bronz solidare cu rotorul pe care
aluneca perii din bronz grafitat fixate si izolate fata de carcasa masinii (figura 3.3).
Ventilatia înfasurarii statorice se realizeaza de obicei la puteri mici si medii cu ajutorul
ventilatorului axial montat pe axul masinii (figura 3.3), iar ventilatia înfasurarii rotorice se
realizeaza cu ajutorul aripioarelor de pe inelele de scurtcircuitare care se toarna odata cu colivia.
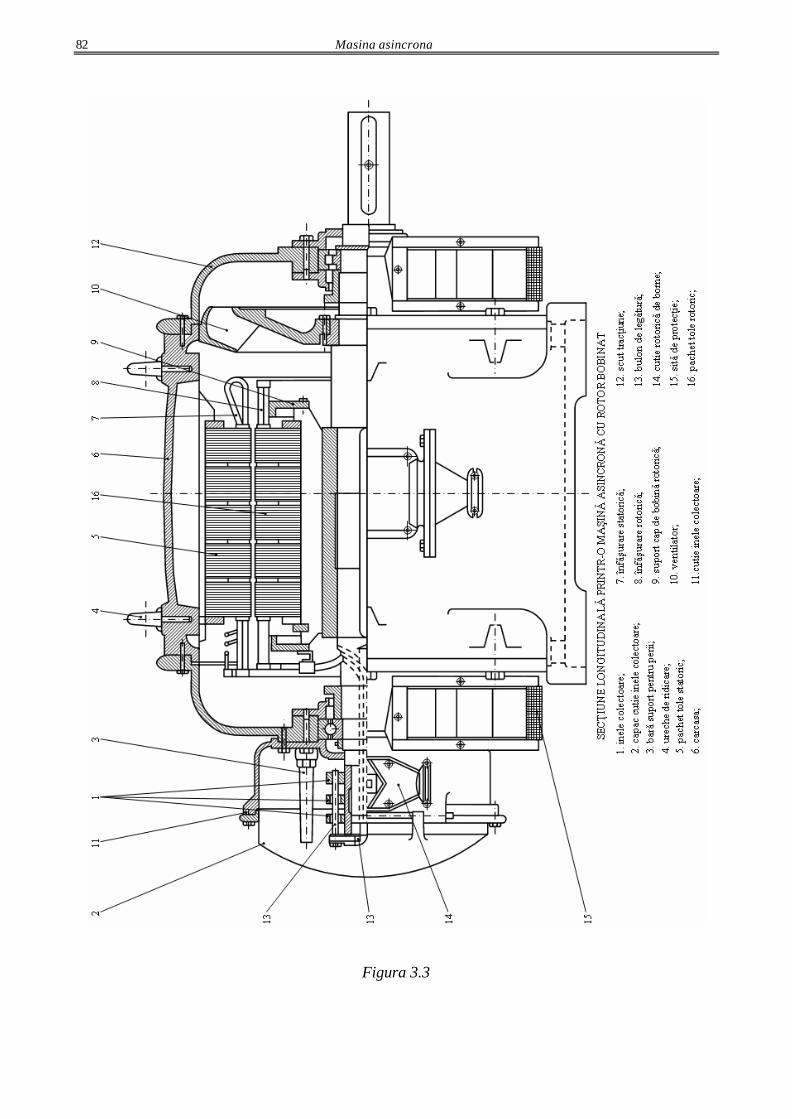
Masina asincrona 82
Figura 3.3
Masina asincrona
83
3.1.3 Carcasa masinii asincrone
Carcasa se executa din aluminiu sau fonta prin turnare. Carcasa poarta talpile de fixare ale
masinii, inelul de ridicare, cutia de borne, placuta indicatoare si scuturile frontale. În scuturi se
monteaza lagarele (rulmentii) pe care se sprijina axul masinii (figura 3.3).
La masina asincrona cu inele, unul din scuturile frontale sustine portperiile, împreuna cu
periile de contact si dispozitivul de ridicare a periilor si scurtcircuitare a inelelor (daca exista).
Carcasa sustine miezul statorului împreuna cu înfasurarea sa si asigura posibilitatea de
centrare fata de rotor.
3.1.4 Întrefierul masinii asincrone
Întrefierul este spatiul liber ramas între miezul feromagnetic al rotorului si miezul statoric.
Latimea întrefierului la masina asincrona se considera constanta (se neglijeaza deschiderea
crestaturilor) si are o valoare foarte mica (0,1…2mm) în vederea obtinerii unui curent de
magnetizare cât mai redus, respectiv a unui factor de putere ridicat.
În figura 3.3 s-a reprezentat o sectiune longitudinala printr-o masina asincrona cu rotorul
bobinat, pe care se pot evidentia cele mai multe din elementele constructive ale masinii asincrone
prezentate mai sus.
3.2 Motorul asincron trifazat
Masina asincrona poate functiona stabil în trei regimuri:
Ø regimul de motor;
Ø regimul de generator;
Ø regimul de frâna electrica.
În practica, însa, masina asincrona este utilizata aproape în totalitatea cazurilor în regimul de
motor, regim care va constitui obiectul studiului nostru în continuare. De multe ori regimul de
functionare al masinii de lucru antrenate de motorul asincron impune acestuia functionarea în regim
de generator sau de frâna electromagnetica.

Masina asincrona 84
3.2.1 Principiul de functionare al motorului asincron
Motorul asincron trifazat primeste energie electrica de la reteaua de c.a. prin conectarea
statorului la aceasta, energie pe care o converteste în energie mecanica furnizata la axul rotorului.
Sistemul de curenti trifazati simetrici absorbiti de stator de la retea produce un câmp magnetic
învârtitor care pentru armonica fundamentala are forma:
( ).tpcosBB 1m11 ⋅ω−α⋅⋅= (3.1)
Acest câmp produce în raport cu înfasurarea rotorica (care în momentul pornirii este fixa) un
flux magnetic de forma:
tcos 1m22 ⋅ω⋅Ψ=Ψ (3.2)
pentru una din fazele înfasurarii conform (2.41).
La rândul sau acest flux induce în faza respectiva a înfasurarii rotorice o t.e.m. de aceeasi
pulsatie. Cum înfasurarea rotorica este închisa (în scurtcircuit sau pe un consumator echilibrat)
t.e.m. va da nastere unui curent prin faza rotorica respectiva. Sistemul trifazat simetric de curenti
din înfasurarea rotorica trifazata interactioneaza cu sistemul trifazat de fluxuri 2Ψ dând nastere unui
cuplu rezultant de forte care va pune în miscare rotorul. Rotorul capata astfel viteza si în final se
stabileste la valoarea 12 Ω<Ω ( 1Ω fiind viteza unghiulara de sincronism a câmpului învârtitor
inductor).
Acum fluxul magnetic creat de câmpul inductor va avea fata de înfasurarea rotorica în
miscare expresia:
( )[ ] tspcostpcos 1m221m2s2 ⋅Ω⋅⋅⋅Ψ=⋅Ω−Ω⋅⋅Ψ=Ψ (3.3)
unde s-a notat:
- ( )
1
21sΩ
Ω−Ω= - alunecarea dintre câmpul inductor si rotor conform (2.47) si (2.53).
Evident când ,21 Ω=Ω fluxul s2Ψ devine invariabil în timp si, prin urmare, nu se mai induc
t.e.m. în rotor, cuplul electromagnetic al motorului devenind nul. Deci, rotorul are tendinta de a se
apropia de viteza de sincronism dar pe care nu o poate atinge.
Astfel câmpul magnetic învârtitor inductor si rotorul nu pot fi niciodata în sincronism. De
aici si denumirea de masina asincrona.
Considerând ca rotorul se învârte în regim stationar cu viteza unghiulara 2Ω
corespunzatoare alunecarii s, atunci frecventa fluxului 2Ψ , a t.e.m. induse în rotor si a curentilor
rotorici va fi:
( ) .fsf;sspp 1211212 ⋅=ω⋅=Ω⋅⋅=Ω−Ω⋅=ω (3.4)

Masina asincrona
85
Alunecarea s a motorului asincron se mai poate scrie si în procente:
%100n
nns
1
21 −= (3.5)
unde [ ] [ ]min/rot260
n;min/rot260
n 2211 Ω⋅π⋅
=Ω⋅π⋅
= sunt turatiile câmpului învârtitor, respectiv
rotorului în rot/min.
Motoarele asincrone de constructie normala au în mod uzual alunecari nominale cuprinse
între ( )%.51÷ Acest lucru arata ca la frecventa statorica industriala ,Hz50f1 = frecventa curentilor
rotorici va fi conform relatiei (3.4):
( ) ( ) ,Hz5,25,05005,001,0f2 −=⋅−=
deci, o frecventa foarte joasa, ceea ce ne permite sa consideram pierderile în fier din rotor practic
nule. De asemenea valoarea efectiva a t.e.m. indusa în rotor depinde de alunecare. Astfel la pornire
( )1s = ea are expresia:
m2N22 fkN44,4E2
Ψ⋅⋅⋅⋅= (3.6)
iar în regim stationar corespunzator alunecarii s:
2m1N2s2 sEsfkN44,4E2
=Ψ= (3.7)
De exemplu daca o masina asincrona are la pornire o t.e.m. indusa rotorica
( ),1sV100E2 == atunci la o valoare uzuala a alunecarii nominale cum ar fi %,2s = ea va avea
valoarea:
.V210002,0E s2 =⋅=
3.2.2 Ecuatiile masinii asincrone trifazate
Se considera o masina asincrona trifazata simetrica, alimentata la o sursa trifazata simetrica
de frecventa 1f si valoarea efectiva a tensiunii .U1 Se presupune ca masina functioneaza într-un
regim electromagnetic stationar, nu are pierderi în miezul feromagnetic, circuitul magnetic este
liniar, iar înfasurarile sunt dispuse sinusoidal, astfel încât curba câmpului magnetic din întrefier este
o unda sinusoidala. Circuitul rotoric se considera scurtcircuitat sau închis pe un reostat simetric
(figura 3.6) unde s-au facut notatiile:
- 21 R,R – rezistentele pe faza ale înfasurarii primare (stator), respectiv, secundare (rotor)
( 2R include si rezistenta de faza a reostatului);
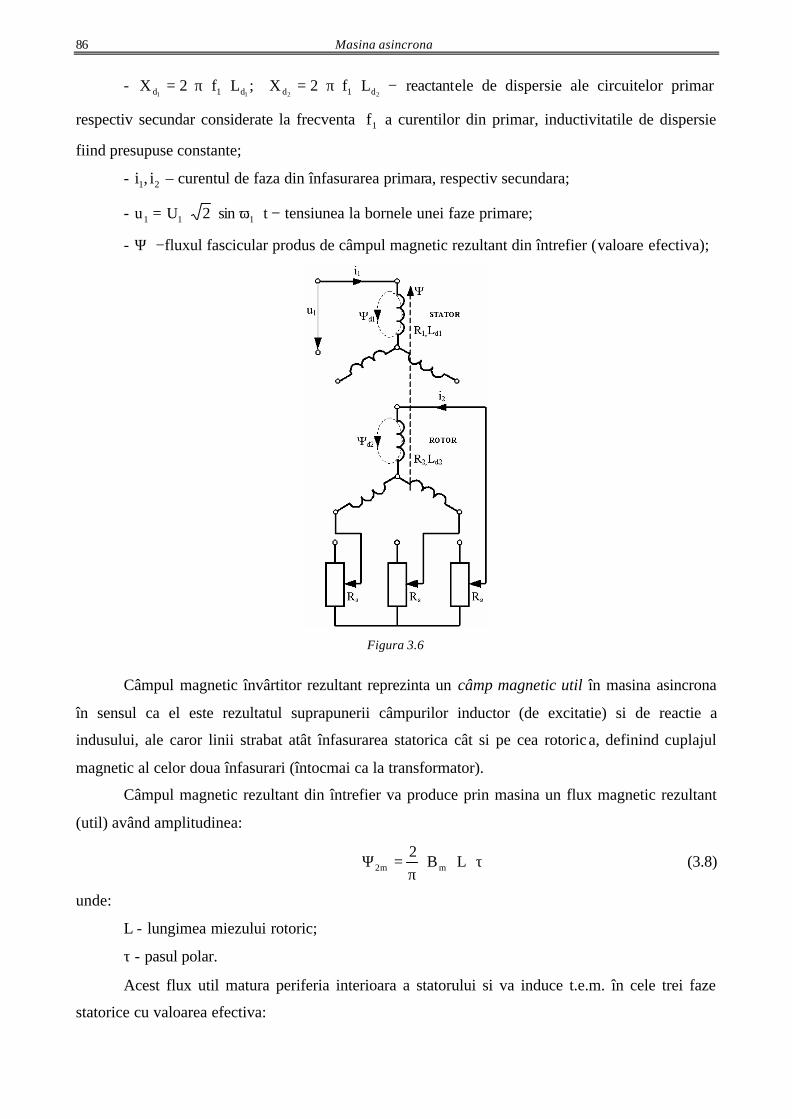
Masina asincrona 86
- 2211 d1dd1d Lf2X;Lf2X ⋅⋅π⋅=⋅⋅π⋅= − reactantele de dispersie ale circuitelor primar
respectiv secundar considerate la frecventa 1f a curentilor din primar, inductivitatile de dispersie
fiind presupuse constante;
- 21 i,i – curentul de faza din înfasurarea primara, respectiv secundara;
- tsin2Uu 111 ⋅ω⋅⋅= − tensiunea la bornele unei faze primare;
- Ψ −fluxul fascicular produs de câmpul magnetic rezultant din întrefier (valoare efectiva);
Figura 3.6
Câmpul magnetic învârtitor rezultant reprezinta un câmp magnetic util în masina asincrona
în sensul ca el este rezultatul suprapunerii câmpurilor inductor (de excitatie) si de reactie a
indusului, ale caror linii strabat atât înfasurarea statorica cât si pe cea rotorica, definind cuplajul
magnetic al celor doua înfasurari (întocmai ca la transformator).
Câmpul magnetic rezultant din întrefier va produce prin masina un flux magnetic rezultant
(util) având amplitudinea:
τ⋅⋅⋅π
=Ψ LB2
mm2 (3.8)
unde:
L - lungimea miezului rotoric;
τ - pasul polar.
Acest flux util matura periferia interioara a statorului si va induce t.e.m. în cele trei faze
statorice cu valoarea efectiva:

Masina asincrona
87
.kNf2
2E mN111 1
Ψ⋅⋅⋅⋅π⋅
= (3.9)
Fazorial expresia t.e.m. utile statorice se va scrie:
mmmN111 IXjkNjE1
⋅⋅−=Ψ⋅⋅⋅ω⋅−= (3.10)
unde: - reactanta mX a fost denumita reactanta de magnetizare, iar curentul mI curent de
magnetizare.
Acest flux magnetic util va matura si periferia rotorica si va induce t.e.m. în fazele rotorice
având valoarea efectiva:
.kNf2
2E mN22s2 2
Ψ⋅⋅⋅⋅π⋅
= (3.11)
Valoarea efectiva a t.e.m. utile rezultanta rotorice este prin urmare proportionala cu
frecventa ,fsf 12 ⋅= deci cu alunecarea s, ceea ce ne permite sa scriem:
mN2122s2 2kNf
22
E;EsE Ψ⋅⋅⋅⋅π⋅
=⋅= (3.12)
unde marimea 2E astfel definita este chiar t.e.m. rotorica indusa de câmpul magnetic învârtitor
rezultant mB daca rotorul ar sta pe loc ( ).1s =
Expresia t.e.m. rotorice efective se poate scrie fazorial:
⋅Ψ⋅⋅⋅ω⋅−=⋅= mN212s2 2kNjEsE (3.13)
Câmpul magnetic de dispersie statoric1dΨ este acel câmp ale carui linii de câmp se înlantuie
numai cu spirele proprii, fara sa se înlantuie cu spirele rotorice. Aceste linii se închid fie prin
întrefierul masinii fie prin aer în jurul capetelor frontale ale bobinelor statorice. Fluxul de dispersie
corespunzator acestui câmp va induce în fazele statorice t.e.m. de valoare efectiva complexa :
.IXjEILjE 1dd1d1d 1111⋅⋅−=⇒⋅⋅ω⋅−= (3.14)
Cu totul analog se defineste fluxul magnetic de dispersie al rotorului în raport cu statorul
2dΨ care va induce în fazele rotorice t.e.m. de valori efective:
2d2d12d2d IXsILsILE2222⋅⋅=⋅⋅ω⋅=⋅⋅ω= (3.15)
sau fazorial:
2dd IXsjE22
⋅⋅⋅−= (3.16)
fazorii implicati fiind de frecventa .f2
Pe baza celor stabilite mai sus rezulta ca ecuatiile fazoriale de tensiuni pentru stator si rotor
vor fi:
22d22
11d111
EsIXsjIR0
EIXjIRU
2
1
⋅−⋅⋅⋅+⋅=
−⋅⋅+⋅= (3.17)

Masina asincrona 88
conform teoremei lui Kirchhoff pentru tensiuni aplicata pe o faza statorica respectiv rotorica.
Împartind ecuatia tensiunilor rotorice la s obtinem:
.EIXjIs
R0 22d2
22
−⋅⋅+⋅= (3.18)
Sa remarcam faptul ca motorul asincron echivalent definit ca având rotorul imobil este
identic cu un transformator trifazat, înfasurarea statorica reprezentând primarul, iar înfasurarea
rotorica secundarul. Prin urmare acestui motor asincron echivalent i se pot aplica ecuatiile
transformatorului. Pentru stator (primar) este în continuare valabila ecuatia de tensiuni (3.17), iar
pentru secundar (rotor) ecuatia (3.18), fazorii fiind toti de frecventa .f1
Întocmai ca la transformator vom raporta marimile rotorice (secundare) la stator (primar) în
scopul de a ajunge la o schema echivalenta si la o diagrama de fazori statorici si rotorici
comparabili ca marime.
Daca înmultim toti termenii ecuatiei (3.18) cu ,kN
kN
2
1
N2
N1
⋅
⋅ atunci se obtine în locul lui 2E
chiar 1E conform (3.11), termen care se regaseste si în ecuatia statorica (3.17). În felul acesta cele
doua ecuatii au un termen comun 1E , ceea ce sugereaza o schema echivalenta cu doua ochiuri
independente, dar cu o latura comuna.
Utilizând notatiile proprii raportarii:
;kNkN
XX;kNkN
RR2
N2
N1dd
2
N2
N122
2
1
22
2
1 ''
⋅⋅
⋅=
⋅⋅
⋅=
(3.19)
m1N2
N122
N1
N222 EE
kN
kNEE;
kN
kNII
2
1
1
2 '' ==⋅
⋅⋅=
⋅
⋅⋅=
se obtine urmatorul sistem de ecuatii ce caracterizeaza motorul asincron în regim stationar, cu
neglijarea pierderilor în fier:
⋅⋅−==+
−⋅⋅+⋅=
−⋅⋅+⋅=
.IXjE;III
;EIXjIs
R0
;EIXjIRU
mmm
m21
m2d22
m1d111
'
''''2
1
(3.20)
Ecuatia a 3-a, respectiv, a curentilor, s-a obtinut din ecuatia solenatiilor corespunzatoare
compunerii câmpurilor magnetice inductor si de reactie în câmpul magnetic rezultant util:
mN12N21N1 IkNIkNIkN121
⋅⋅=⋅⋅+⋅⋅ (3.21)
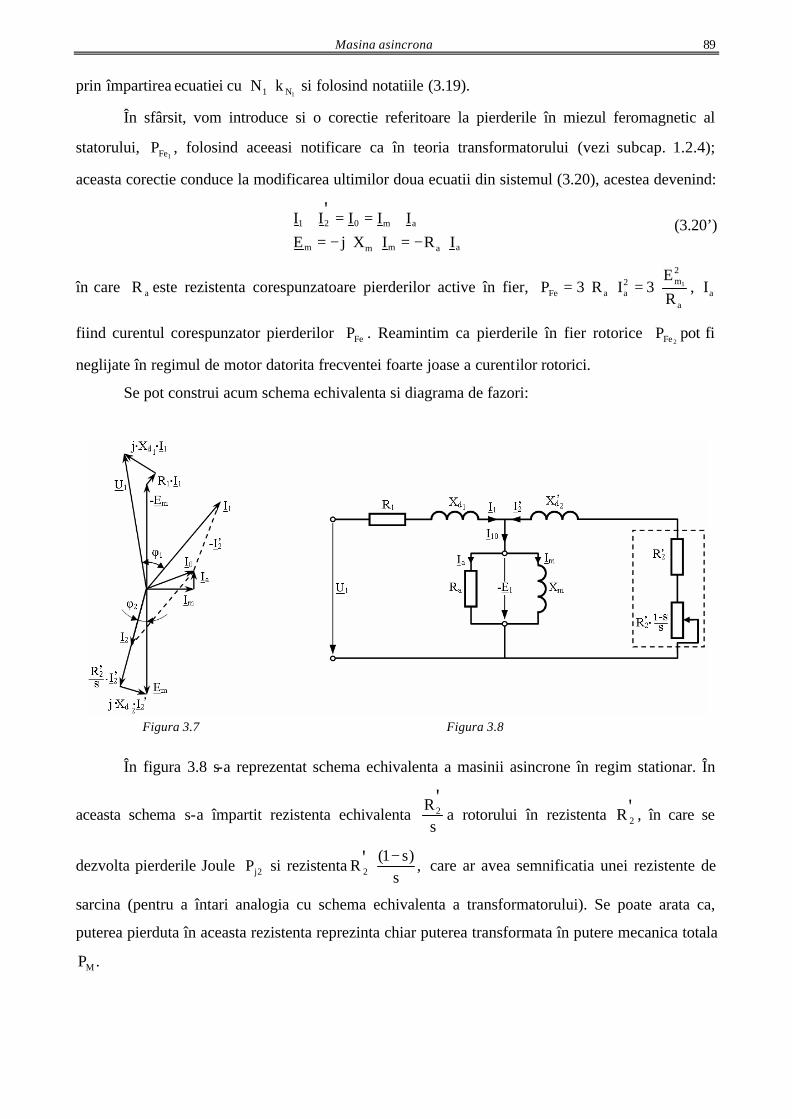
Masina asincrona
89
prin împartirea ecuatiei cu 1N1 kN ⋅ si folosind notatiile (3.19).
În sfârsit, vom introduce si o corectie referitoare la pierderile în miezul feromagnetic al
statorului, 1FeP , folosind aceeasi notificare ca în teoria transformatorului (vezi subcap. 1.2.4);
aceasta corectie conduce la modificarea ultimilor doua ecuatii din sistemul (3.20), acestea devenind:
aammm
am021
IRIXjEIIIII '
⋅−=⋅⋅−=+==+ (3.20’)
în care aR este rezistenta corespunzatoare pierderilor active în fier, a
2m2
aaFe RE
3IR3P 1⋅=⋅⋅= , aI
fiind curentul corespunzator pierderilor FeP . Reamintim ca pierderile în fier rotorice 2FeP pot fi
neglijate în regimul de motor datorita frecventei foarte joase a curentilor rotorici.
Se pot construi acum schema echivalenta si diagrama de fazori:
Figura 3.7 Figura 3.8
În figura 3.8 s-a reprezentat schema echivalenta a masinii asincrone în regim stationar. În
aceasta schema s-a împartit rezistenta echivalenta s
R '2 a rotorului în rezistenta '
2R , în care se
dezvolta pierderile Joule 2jP si rezistenta ,s
)s1(R '
2−
⋅ care ar avea semnificatia unei rezistente de
sarcina (pentru a întari analogia cu schema echivalenta a transformatorului). Se poate arata ca,
puterea pierduta în aceasta rezistenta reprezinta chiar puterea transformata în putere mecanica totala
.PM
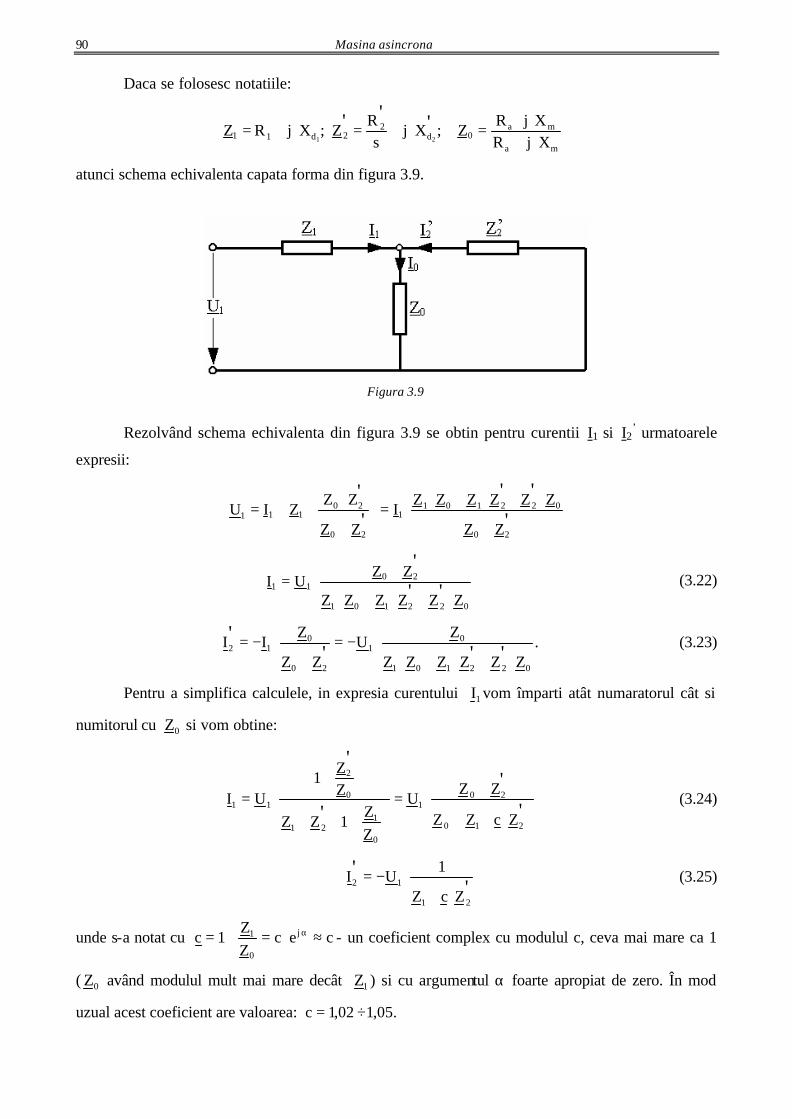
Masina asincrona 90
Daca se folosesc notatiile:
ma
ma0d
22d11 XjR
XjRZ;Xj
sR
Z;XjRZ '''21 ⋅+
⋅⋅=⋅+=⋅+=
atunci schema echivalenta capata forma din figura 3.9.
Figura 3.9
Rezolvând schema echivalenta din figura 3.9 se obtin pentru curentii I1 si I2
’ urmatoarele
expresii:
'''
''
20
0221011
20
20111
ZZ
ZZZZZZI
ZZ
ZZZIU
+
⋅+⋅+⋅⋅=
+
⋅+⋅=
022101
2011
ZZZZZZ
ZZUI ''
'
⋅+⋅+⋅
+⋅= (3.22)
.ZZZZZZ
ZU
ZZ
ZII
022101
01
20
012 '''
'⋅+⋅+⋅
⋅−=+
⋅−= (3.23)
Pentru a simplifica calculele, in expresia curentului 1I vom împarti atât numaratorul cât si
numitorul cu 0Z si vom obtine:
⋅+⋅
+⋅=
+⋅+
+⋅=
'
'
'
'
210
201
0
121
0
2
11
ZcZZ
ZZU
ZZ
1ZZ
ZZ
1UI (3.24)
''
21
12
ZcZ
1UI
⋅+⋅−= (3.25)
unde s-a notat cu cecZZ
1c j
0
1 ≈⋅=+= α⋅ - un coeficient complex cu modulul c, ceva mai mare ca 1
( 0Z având modulul mult mai mare decât 1Z ) si cu argumentul α foarte apropiat de zero. În mod
uzual acest coeficient are valoarea: .05,102,1c ÷=

Masina asincrona
91
Observatii:
• Ca si la transformator, caderea de tensiune în rezistenta 1R a înfasurarii statorice este foarte
mica în comparatie cu tensiunea la borne 1U pentru toate regimurile de functionare ale motorului
asincron. Pe de alta parte si caderea inductiva de tensiune pe reactanta de dispersie 1dX reprezinta în
mod uzual doar câteva procente din t.e.m. utila .Em Prin urmare din prima ecuatie a sistemului
(3.20) se deduce:
.kNf2
2EU
EU
mN11m1
m1
1Ψ⋅⋅⋅⋅
π⋅=≈
−≈
Cu alte cuvinte, daca tensiunea de faza aplicata statorului este constanta ca marime
efectiva, iar frecventa sa de asemenea constanta, atunci amplitudinea fluxului rezultant este practic
constanta, independenta de sarcina motorului. De asemenea si curentul de mers în gol I0 ca si
componentele sale mI si aI vor fi constante.
• Curentul de magnetizare mI ca si curentul de mers în gol au valori mult mai ridicate la
motorul asincron în comparatie cu marimile corespunzatoare la transformator, ele atingând uzual
valori de (30 ÷ 50)% din curentul nominal statoric. Explicatia consta în faptul ca la acelasi flux,
motorul asincron ofera o reluctanta mult mai mare din cauza existentei întrefierului foarte putin
permeabil care solicita o solenatie de magnetizare mult sporita.
• Dat fiind faptul ca în regimurile normale alunecarea s este foarte redusa
( ),05,001,0s ÷= rezulta ,Xs
R2
''d
2 >> ceea ce înseamna ca factorul de putere rotoric:
2
d
2
2
2
2
''
'
2X
sR
sR
cos
+
=ϕ (3.26)
este foarte apropiat de unitate, adica defazajul dintre t.e.m. utila rotorica '2E si curentul rotoric
'2I este foarte mic, practic nul dupa cum se poate observa pe diagrama de fazori.
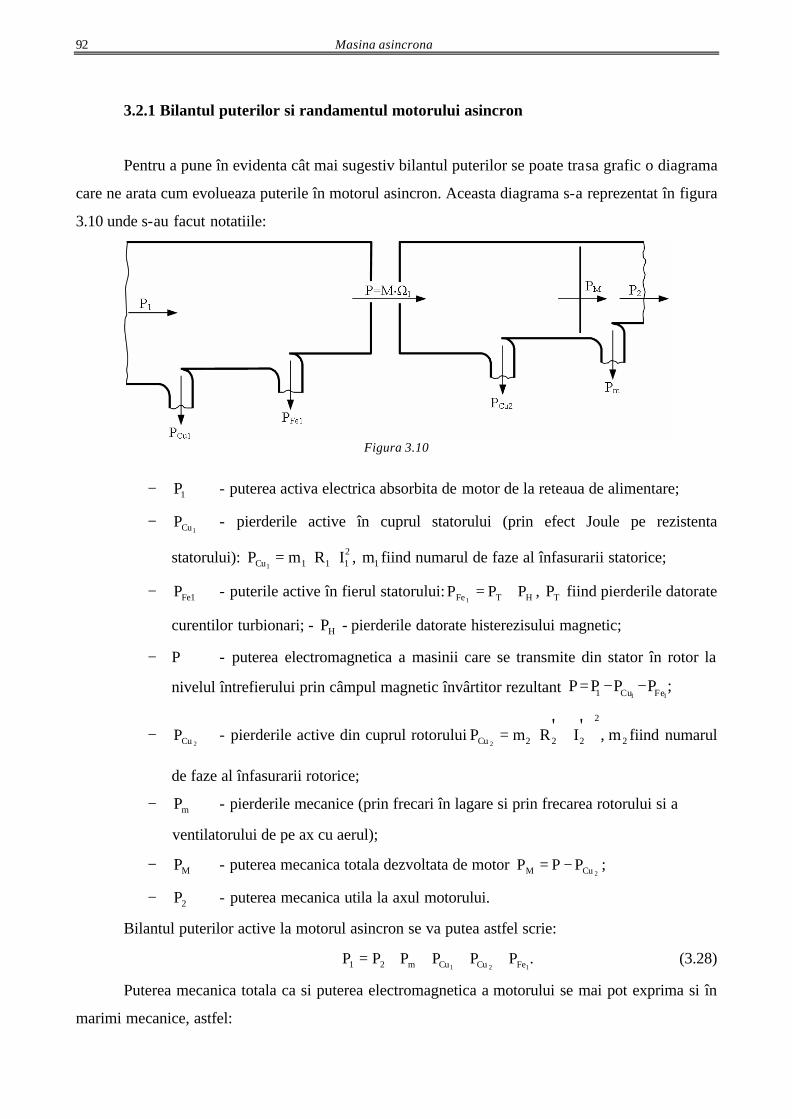
Masina asincrona 92
3.2.1 Bilantul puterilor si randamentul motorului asincron
Pentru a pune în evidenta cât mai sugestiv bilantul puterilor se poate trasa grafic o diagrama
care ne arata cum evolueaza puterile în motorul asincron. Aceasta diagrama s-a reprezentat în figura
3.10 unde s-au facut notatiile:
Figura 3.10
− 1P - puterea activa electrica absorbita de motor de la reteaua de alimentare;
− 1CuP - pierderile active în cuprul statorului (prin efect Joule pe rezistenta
statorului): 2111Cu IRmP
1⋅⋅= , 1m fiind numarul de faze al înfasurarii statorice;
− 1FeP - puterile active în fierul statorului: HTFe PPP1
+= , TP fiind pierderile datorate
curentilor turbionari; - HP - pierderile datorate histerezisului magnetic;
− P - puterea electromagnetica a masinii care se transmite din stator în rotor la
nivelul întrefierului prin câmpul magnetic învârtitor rezultant ;PPPP11 FeCu1 −−=
− 2CuP - pierderile active din cuprul rotorului ,IRmP
2
222Cu''
2
⋅⋅= 2m fiind numarul
de faze al înfasurarii rotorice;
− mP - pierderile mecanice (prin frecari în lagare si prin frecarea rotorului si a
ventilatorului de pe ax cu aerul);
− MP - puterea mecanica totala dezvoltata de motor 2CuM PPP −= ;
− 2P - puterea mecanica utila la axul motorului.
Bilantul puterilor active la motorul asincron se va putea astfel scrie:
.PPPPPP121 FeCuCum21 ++++= (3.28)
Puterea mecanica totala ca si puterea electromagnetica a motorului se mai pot exprima si în
marimi mecanice, astfel:
Masina asincrona
93
M60
n2MP 2
2M ⋅⋅π⋅
=Ω⋅= (3.29)
M60
n2MP 1
1 ⋅⋅π⋅
=Ω⋅= (3.30)
unde:
− M – cuplul electromagnetic al masinii;
− 1Ω – viteza unghiulara a câmpului magnetic învârtitor statoric;
− 1n – turatia câmpului magnetic învârtitor statoric [rot/min];
− 2Ω – viteza unghiulara a rotorului;
− 2n – turatia rotorului [rot/min].
Înlocuind aceste relatii în expresiile pierderilor în cuprul statoric si în expresia puterii
mecanice totale se obtine:
( ) PsMsMPPP 121MCu 2⋅=⋅Ω⋅=Ω−Ω⋅=−= (3.31)
( ) ( ) .Ps1s1MPPP 1CuM 2⋅−=−⋅Ω⋅=−= (3.32)
Adica pierderile în cuprul înfasurarilor rotorice reprezinta fractiunea s din puterea magnetica
P transmisa de stator rotorului în timp ce puterea mecanica totala reprezinta fractiunea ( )s1− din
puterea P. Altfel spus relatia (3.31) ne arata ca valoarea alunecarii unui motor asincron se stabileste
în functie de valoarea pierderilor în cuprul rotoric. La pierderi 2CuP mari vom avea alunecari mari. În
scopul obtinerii unui randament sporit masina se proiecteaza pentru alunecari nominale mici
( ).05,001,0s ÷= La asemenea alunecari mici pierderile în fierul rotoric se pot neglija (vezi
subcapitolul 3.2.1), motiv pentru care aceste pierderi 2FeP nu figureaza în acest bilant al puterilor
active.
Din punct de vedere al bilantului de puteri reactive motorul asincron este un receptor ohmic-
inductiv. Motorul preia puterea reactiva relativ importanta de la retea necesara magnetizarii
miezului feromagnetic, deci crearii câmpului magnetic din masina. Factorul de putere al motorului
asincron, 1cosϕ , este totdeauna inductiv. Motorul asincron este excitat de la aceeasi retea care îi
furnizeaza si puterea activa.
Randamentul motorului asincron va avea expresia:
.PPPPP
PPP
PPP
121 FeCuCum2
2
2
2
1
2
++++=
+==η
∑ (3.33)
Puterea mecanica la ax 22 MP Ω⋅= se calculeaza masurând cuplul dezvoltat la ax 2M si
turatia rotorului π⋅Ω⋅
=2
60n 2
2 sau prin separarea pierderilor din puterea absorbita .P1 Randamentul

Masina asincrona 94
nominal al masinilor asincrone are valori mari ( )%,9575n ÷=η valorile mici pentru puteri mici, iar
valorile mari pentru puteri mari (>10kW).
3.2.4 Expresia cuplului electromagnetic
Ca urmare a interactiunii dintre fluxul inductor fata de rotor si curentii indusi de acesta în
înfasurarea rotorica, apar forte electromagnetice care vor produce un cuplu rezultant de forte
electromagnetice. Aplicat asupra rotorului acest cuplu produce miscarea de rotatie de la masina
asincrona.
Expresia cuplului electromagnetic al motorului asincron trifazat în regim stationar de
functionare se poate face explicit pornind de la expresia generala a cuplului electromagnetic la
masinile de curent alternativ (vezi subcapitolul 2.4 relatia (2.68)):
( )
.E,IcosIE3
M21
2222
Ω−Ω⋅⋅⋅
= (3.34)
Expresia de la numarator are o semnificatie bine precizata. Ea reprezinta puterea activa
consumata în înfasurarea rotorica adica chiar pierderile din cuprul rotoric. Deci:
.s
IR3
sPP
M1
2
22
1
Cu
21
Cu
''22
Ω⋅
⋅⋅
=Ω⋅
=Ω−Ω
= (3.35)
Expresia curentului rotoric a fost determinata cu ajutorul schemei echivalente (vezi
subcapitolul 3.2.2 relatia (3.25)):
⋅+⋅+
⋅+
−=⋅+
−='''
'
21 dd2
1
1
21
12
XcXjs
RcR
U
ZcZ
UI (3.36)
sau în valoare efectiva:
2
dd
2
21
12
'''
21XcX
sR
cR
UI
⋅++
⋅+
= (3.37)
Înlocuind în relatia (3.35) expresia cuplului devine:
⋅++
⋅+⋅Ω⋅
⋅⋅=
2
dd
2
21
212
''
'
21XcX
sR
cRs
UR3M (3.38)
Masina asincrona
95
Cuplul electromagnetic dezvoltat de motorul asincron este, deci, functie de alunecarea s
pentru un motor dat si pentru o tensiune 1U si frecventa 1f date ale retelei de alimentare.
Pentru a determina valorile s ale alunecarii pentru care cuplul electromagnetic atinge valori
extreme, se calculeaza derivata ds
dMsi se rezolva ecuatia:
.0ds
dM=
Efectuând calculul se gaseste ecuatia:
0s
Rc
sR
cRs2XcXs
RcR
''''22
1dd2
1 21=⋅⋅
⋅+⋅⋅−
⋅++
⋅+ (3.39)
de unde rezulta:
.
XsXR
Rcs
2
dd21
2m
'
'
21
2,1
⋅++
⋅±= (3.40)
Alunecarea pozitiva ms corespunzatoare regimului de motor va genera un maxim al cuplului
mM iar alunecarea negativa sm corespunzatoare regimului de generator va genera un minim mM al
curbei ( ).sfM = Cele doua valori extreme 2,1mM se determina introducând valorile
2,1ms în expresia
cuplului (3.38) obtinându-se:
.
XcXRRc2
U3M
'21
2,1
dd2111
21
m
⋅+++Ω⋅⋅
⋅±= (3.41)
Alunecarea ms din regimul de motor careia îi corespunde cuplul maxim electromagnetic
,M1m posibil a fi dezvoltat de motor la 1U dat, se numeste alunecare critica, si dupa cum se observa
din relatia (3.40) este direct proportionala cu rezistenta rotorica de faza.
Cuplul electromagnetic maxim dat de relatia (3.41) se mai numeste si cuplu critic, si dupa
cum se observa este direct proportional cu patratul tensiunii de alimentare ,U1 este invers
proportional cu frecventa tensiunii de alimentare ,p
f2 11
⋅π⋅=Ω si nu depinde de rezistenta
rotorica de faza .R '2

Masina asincrona 96
3.2.5 Caracteristica cuplu-alunecare
Aprecierea posibilitatilor de utilizare a motorului asincron în actionari electrice se poate face
si utilizând caracteristica mecanica ( ),Mfn 2 = care reprezinta dependenta dintre turatia motorului
si cuplul electromagnetic dezvoltat de acesta, considerând restul marimilor din expresia cuplului
(3.38) constante.
Caracteristica mecanica ( ),Mfn 2 = rezulta din caracteristica cuplu-alunecare ( ),sfM =
tinând seama de relatia liniara dintre turatia 2n si alunecarea s (obtinuta din definitia alunecarii):
( ),s1nn 12 −⋅= (3.42)
În mod exact caracteristica cuplu-alunecare ( )sfM = se obtine pe cale experimentala.
Deducerea pe cale experimentala la bancul de încercari nu se poate face decât într-un domeniu
restrâns. Forma caracteristicii ( )sfM = în tot domeniul de variatie a lui s ( )[ ]+∞∞−∈ ;s se poate
deduce pe cale analitica exprimând relatia (3.38) într-o forma aproximativa, simplificata. Pentru
aceasta vom exprima mai întâi raportul :MM
1m
''
'
''
21m
2
22
2
dd21
dd2112
m
RRc2s
RcXcXRs
XcXRRRc2
MM
1
21
21
1
⋅⋅⋅+
⋅
+
⋅++⋅
⋅+++⋅⋅
= (3.43)
Daca înmultim si numaratorul si numitorul cu:
XcXR
1
Rc
s2
dd21
2
m
''21
1
⋅++
=⋅
(3.44)
se ajunge, dupa calcule simple, la expresia:
( )
λ⋅++
λ+⋅=
2s
s
ss
12MM
1
1
1m
m
m
(3.45)
în care s-a notat: .
XcXR
R2
dd21
1
'21
⋅++
=λ (3.46)
În mod uzual ,1<<λ îndeosebi la masinile de putere mai mare si prin urmare coeficientul se
poate neglija si expresia (3.45) se poate scrie:
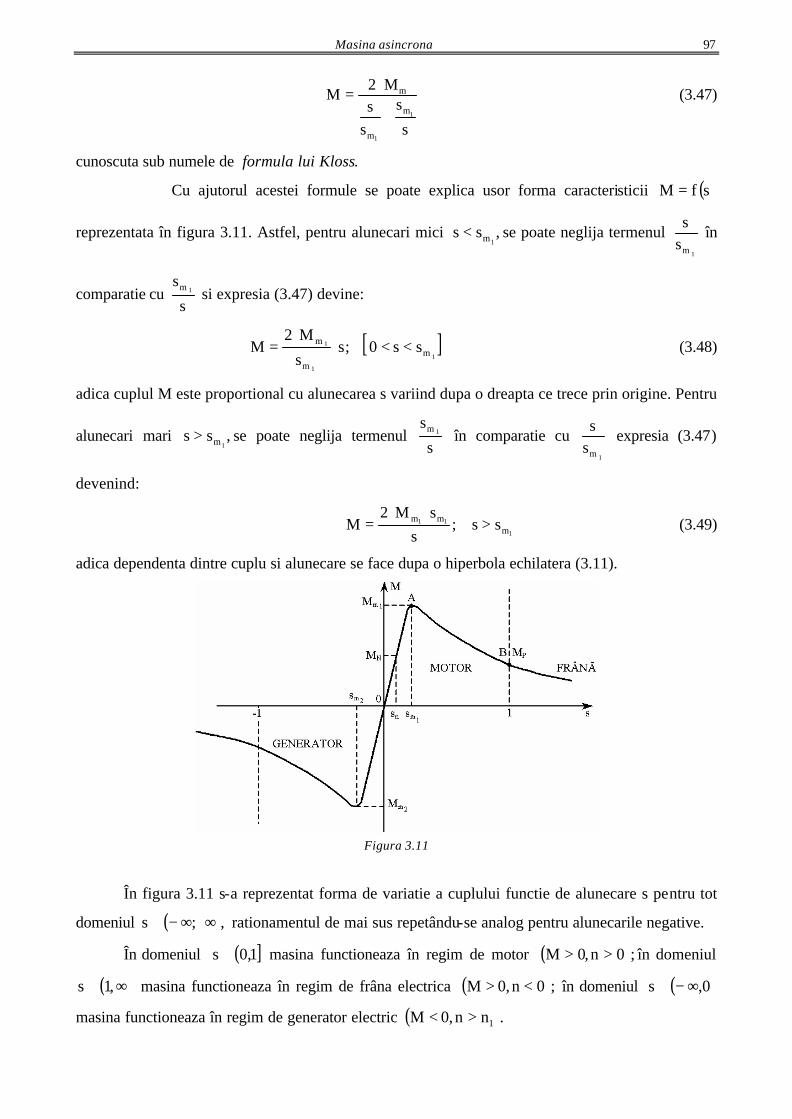
Masina asincrona
97
s
s
ss
M2M
1
1
m
m
m
+
⋅= (3.47)
cunoscuta sub numele de formula lui Kloss.
Cu ajutorul acestei formule se poate explica usor forma caracteristicii ( )sfM =
reprezentata în figura 3.11. Astfel, pentru alunecari mici ,ss1m< se poate neglija termenul
1mss
în
comparatie cu s
s1m si expresia (3.47) devine:
[ ]1
1
1m
m
m ss0;ss
M2M <<⋅
⋅= (3.48)
adica cuplul M este proportional cu alunecarea s variind dupa o dreapta ce trece prin origine. Pentru
alunecari mari ,ss1m> se poate neglija termenul
s
s1m în comparatie cu
1mss
expresia (3.47)
devenind:
1
11m
mm ss;s
sM2M >
⋅⋅= (3.49)
adica dependenta dintre cuplu si alunecare se face dupa o hiperbola echilatera (3.11).
Figura 3.11
În figura 3.11 s-a reprezentat forma de variatie a cuplului functie de alunecare s pentru tot
domeniul ( ),;s +∞∞−∈ rationamentul de mai sus repetându-se analog pentru alunecarile negative.
În domeniul ( ]1,0s ∈ masina functioneaza în regim de motor ( );0n,0M >> în domeniul
( )∞∈ ,1s masina functioneaza în regim de frâna electrica ( );0n,0M <> în domeniul ( )0,s ∞−∈
masina functioneaza în regim de generator electric ( ).nn,0M 1><
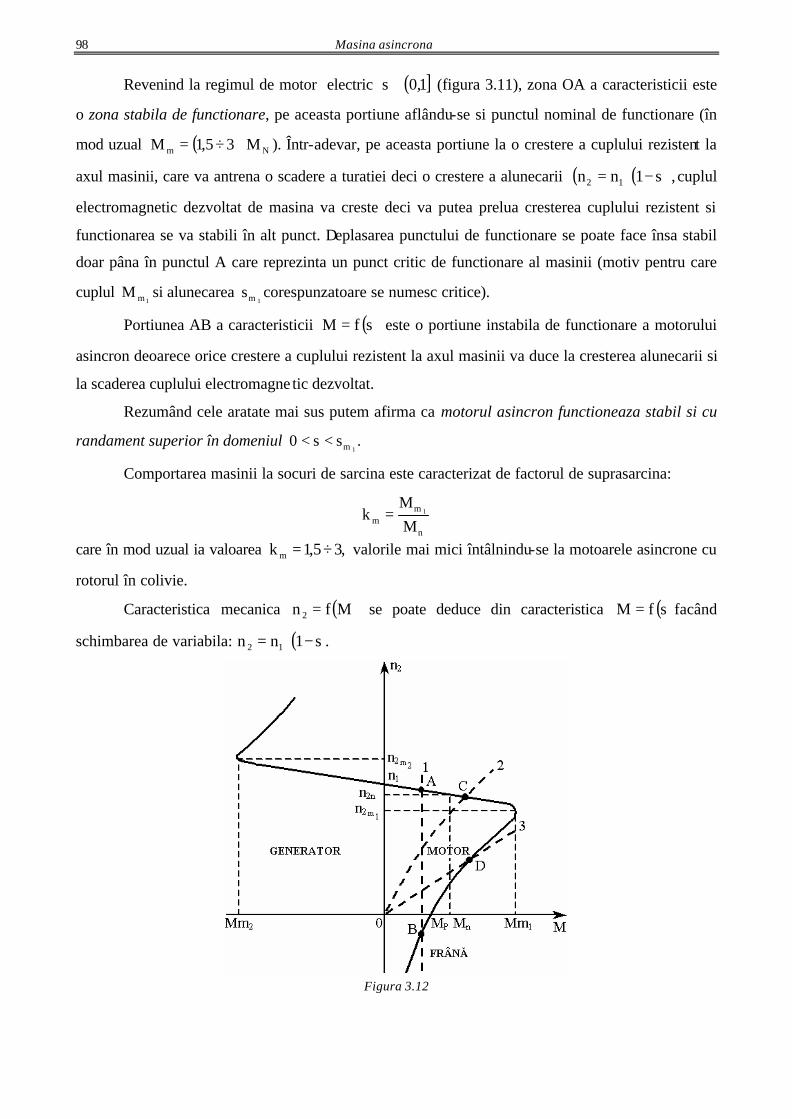
Masina asincrona 98
Revenind la regimul de motor electric ( ]1,0s ∈ (figura 3.11), zona OA a caracteristicii este
o zona stabila de functionare, pe aceasta portiune aflându-se si punctul nominal de functionare (în
mod uzual ( ) Nm M35,1M ⋅÷= ). Într-adevar, pe aceasta portiune la o crestere a cuplului rezistent la
axul masinii, care va antrena o scadere a turatiei deci o crestere a alunecarii ( )( ),s1nn 12 −⋅= cuplul
electromagnetic dezvoltat de masina va creste deci va putea prelua cresterea cuplului rezistent si
functionarea se va stabili în alt punct. Deplasarea punctului de functionare se poate face însa stabil
doar pâna în punctul A care reprezinta un punct critic de functionare al masinii (motiv pentru care
cuplul 1mM si alunecarea
1ms corespunzatoare se numesc critice).
Portiunea AB a caracteristicii ( )sfM = este o portiune instabila de functionare a motorului
asincron deoarece orice crestere a cuplului rezistent la axul masinii va duce la cresterea alunecarii si
la scaderea cuplului electromagne tic dezvoltat.
Rezumând cele aratate mai sus putem afirma ca motorul asincron functioneaza stabil si cu
randament superior în domeniul .ss01m<<
Comportarea masinii la socuri de sarcina este caracterizat de factorul de suprasarcina:
n
mm M
Mk 1=
care în mod uzual ia valoarea ,35,1k m ÷= valorile mai mici întâlnindu-se la motoarele asincrone cu
rotorul în colivie.
Caracteristica mecanica ( )Mfn 2 = se poate deduce din caracteristica ( )sfM = facând
schimbarea de variabila: ( ).s1nn 12 −⋅=
Figura 3.12

Masina asincrona
99
În figura 3.12 s-a reprezentat caracteristica mecanica astfel obtinuta. Ordonata la origine
( )0s,0M == corespunde sincronismului ( ).nn,0M 1== Taietura absciselor ( )0n,MM p ==
corespunde cuplului de pornire ( ).1s,MM p ==
Examinând expresia cuplului electromagnetic functie de alunecare (3.38):
⋅++
⋅+⋅⋅⋅π⋅
⋅⋅⋅=
2
dd
2
21
212
''
'
21XcX
sR
cRfs2
URp3M (3.50)
în care s-a înlocuit ;p
f2p
111
⋅π⋅=
Ω=ω se observa ca se poate schimba aliura caracteristicii ( )sfM =
prin modificarea parametrilor:
− 1U - valoarea efectiva a tensiunii de alimentare;
− 1f - frecventa tensiunii de alimentare;
− '2R - rezistenta rotorica raportata la stator (la masinile cu rotorul bobinat prin
înserierea unor rezistente suplimentare exterioare).
Daca toate marimile din expresia (3.50) se mentin constante si se regleaza una dintre cele
trei marimi mentionate mai sus se obtin trei familii de caracteristici ( ),sfM = familii care ne dau
informatii pretioase privind functionarea motorului asincron la ,U1 1f sau '2R variabile.
Pentru trasarea cu usurinta a acestor familii de caracteristici s-a întocmit tabelul 3.1 care ne
arata dependenta cuplului critic cmM si alunecarii critice cms de aceste trei marimi.
Tabelul 3.1
1U 1f '2R
mM 21U~
1f1
~
ms 1f
1~ '
2R~
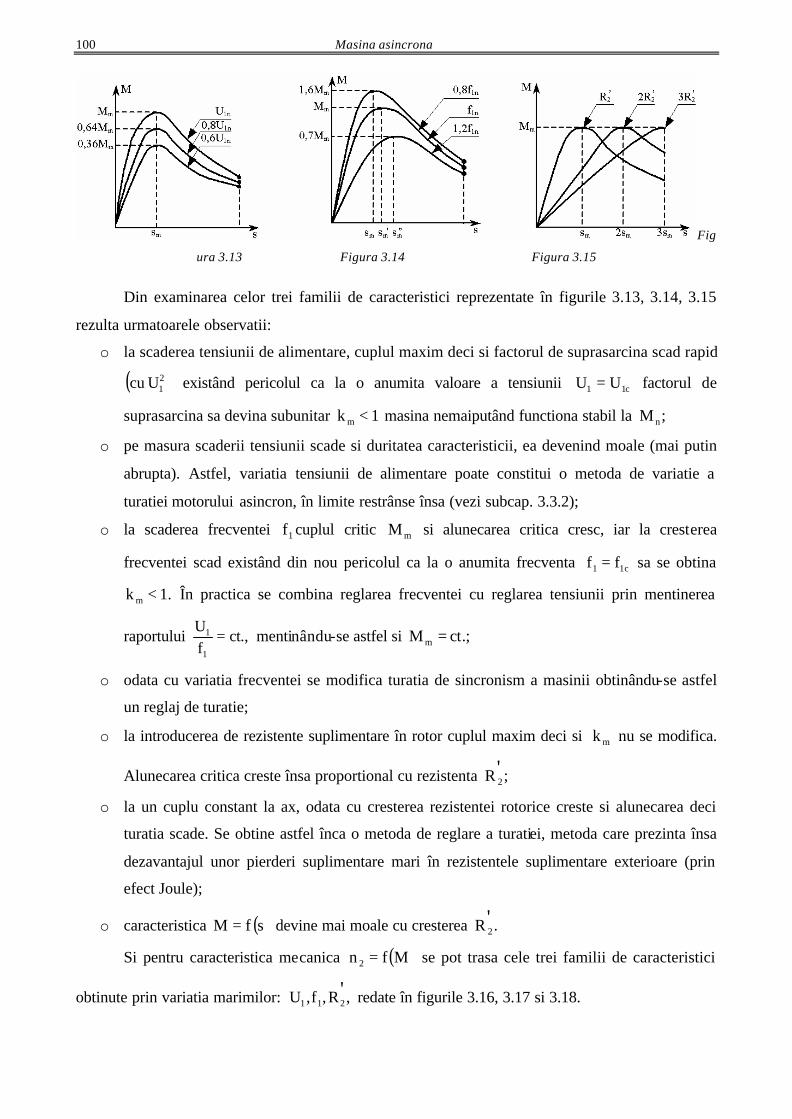
Masina asincrona 100
Fig
ura 3.13 Figura 3.14 Figura 3.15
Din examinarea celor trei familii de caracteristici reprezentate în figurile 3.13, 3.14, 3.15
rezulta urmatoarele observatii:
o la scaderea tensiunii de alimentare, cuplul maxim deci si factorul de suprasarcina scad rapid
( )21Ucu existând pericolul ca la o anumita valoare a tensiunii c11 UU = factorul de
suprasarcina sa devina subunitar 1k m < masina nemaiputând functiona stabil la ;M n
o pe masura scaderii tensiunii scade si duritatea caracteristicii, ea devenind moale (mai putin
abrupta). Astfel, variatia tensiunii de alimentare poate constitui o metoda de variatie a
turatiei motorului asincron, în limite restrânse însa (vezi subcap. 3.3.2);
o la scaderea frecventei 1f cuplul critic mM si alunecarea critica cresc, iar la cresterea
frecventei scad existând din nou pericolul ca la o anumita frecventa c11 ff = sa se obtina
.1k m < În practica se combina reglarea frecventei cu reglarea tensiunii prin mentinerea
raportului .,ctfU
1
1 = mentinându-se astfel si .;ctMm =
o odata cu variatia frecventei se modifica turatia de sincronism a masinii obtinându-se astfel
un reglaj de turatie;
o la introducerea de rezistente suplimentare în rotor cuplul maxim deci si mk nu se modifica.
Alunecarea critica creste însa proportional cu rezistenta ;R '2
o la un cuplu constant la ax, odata cu cresterea rezistentei rotorice creste si alunecarea deci
turatia scade. Se obtine astfel înca o metoda de reglare a turatiei, metoda care prezinta însa
dezavantajul unor pierderi suplimentare mari în rezistentele suplimentare exterioare (prin
efect Joule);
o caracteristica ( )sfM = devine mai moale cu cresterea .R '2
Si pentru caracteristica mecanica ( )Mfn 2 = se pot trasa cele trei familii de caracteristici
obtinute prin variatia marimilor: ,R,f,U '211 redate în figurile 3.16, 3.17 si 3.18.

Masina asincrona
101
Figura 3.16 Figura 3.17 Figura 3.18
3.3 Regimurile dinamice ale motorului asincron trifazat
Regimurile dinamice sunt legate de variatia energiei la axul motorului, motorul fiind supus
unei viteze variabile în timp, deci unei acceleratii. Dintre regimurile dinamice importante amintim:
Ø pornirea;
Ø reglarea turatiei;
Ø frânarea;
Ø schimbarea sensului de rotatie.
Variatia energiei în timpul regimurilor dinamice antreneaza variatia unor marimi electrice si
neelectrice ale motorului asincron, variatii ce trebuiesc cunoscute datorita implicatiilor ce le pot
avea asupra functionarii motorului.
În acest capitol se vor prezenta aceste regimuri dinamice la nivel calitativ, urmând ca în
capitolul 5 sa se prezinte modelul matematic al masinii în regim dinamic adecvat conducerii
sistemelor de actionare cu motoare asincrone.
3.3.1 Pornirea motorului asincron
Acest regim dinamic începe în momentul când se conecteaza statorul la retea (turatia
motorului fiind nula) si se termina când motorul ajunge în regim stationar (când turatia motorului se
stabilizeaza). Curentul absorbit de la retea în momentul pornirii depaseste de 6 ÷ 8 ori curentul
nominal ,)I86I(np 11 ÷= dupa care scade exponential la valoarea stabilizata de regim stationar.
Valoarea mare a curentului de pornire rezulta din schema echivalenta (fig. 3.7), în care se
remarca faptul ca la ,1s = rezistenta echivalenta rotorica s
R '2 ia cea mai mica valoare, ceea ce face
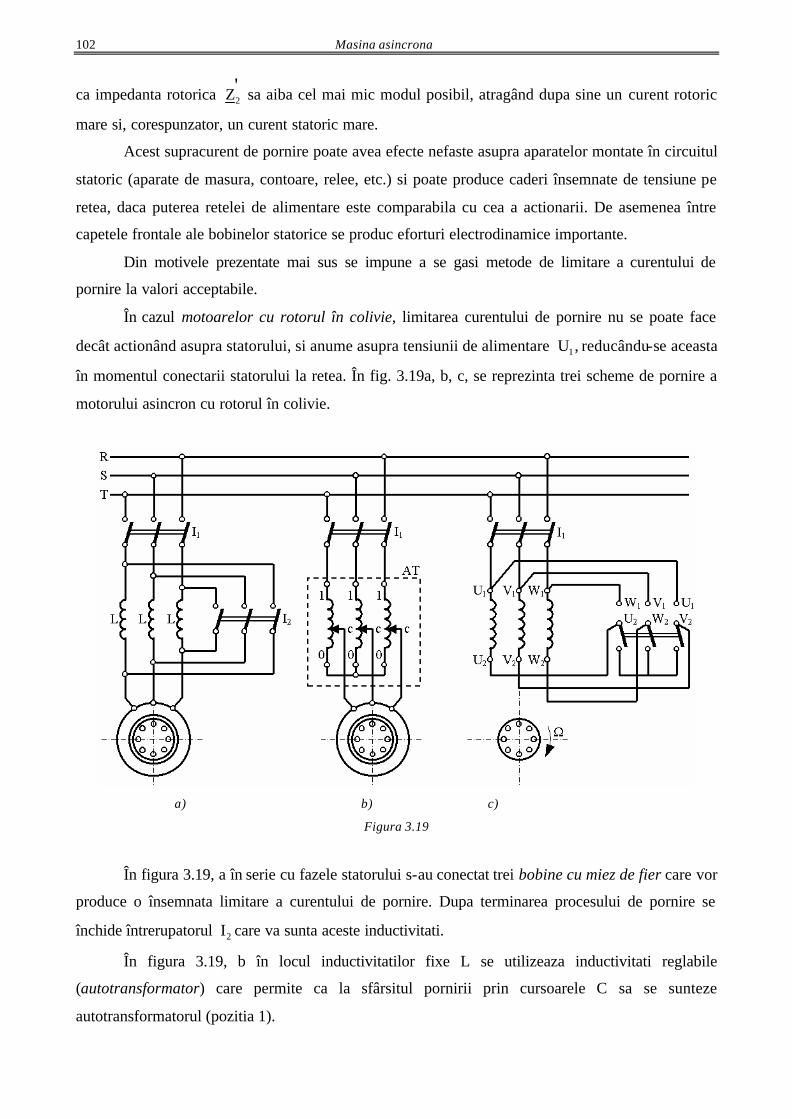
Masina asincrona 102
ca impedanta rotorica '2Z sa aiba cel mai mic modul posibil, atragând dupa sine un curent rotoric
mare si, corespunzator, un curent statoric mare.
Acest supracurent de pornire poate avea efecte nefaste asupra aparatelor montate în circuitul
statoric (aparate de masura, contoare, relee, etc.) si poate produce caderi însemnate de tensiune pe
retea, daca puterea retelei de alimentare este comparabila cu cea a actionarii. De asemenea între
capetele frontale ale bobinelor statorice se produc eforturi electrodinamice importante.
Din motivele prezentate mai sus se impune a se gasi metode de limitare a curentului de
pornire la valori acceptabile.
În cazul motoarelor cu rotorul în colivie, limitarea curentului de pornire nu se poate face
decât actionând asupra statorului, si anume asupra tensiunii de alimentare ,U1 reducându-se aceasta
în momentul conectarii statorului la retea. În fig. 3.19a, b, c, se reprezinta trei scheme de pornire a
motorului asincron cu rotorul în colivie.
a) b) c)
Figura 3.19
În figura 3.19, a în serie cu fazele statorului s-au conectat trei bobine cu miez de fier care vor
produce o însemnata limitare a curentului de pornire. Dupa terminarea procesului de pornire se
închide întrerupatorul 2I care va sunta aceste inductivitati.
În figura 3.19, b în locul inductivitatilor fixe L se utilizeaza inductivitati reglabile
(autotransformator) care permite ca la sfârsitul pornirii prin cursoarele C sa se sunteze
autotransformatorul (pozitia 1).
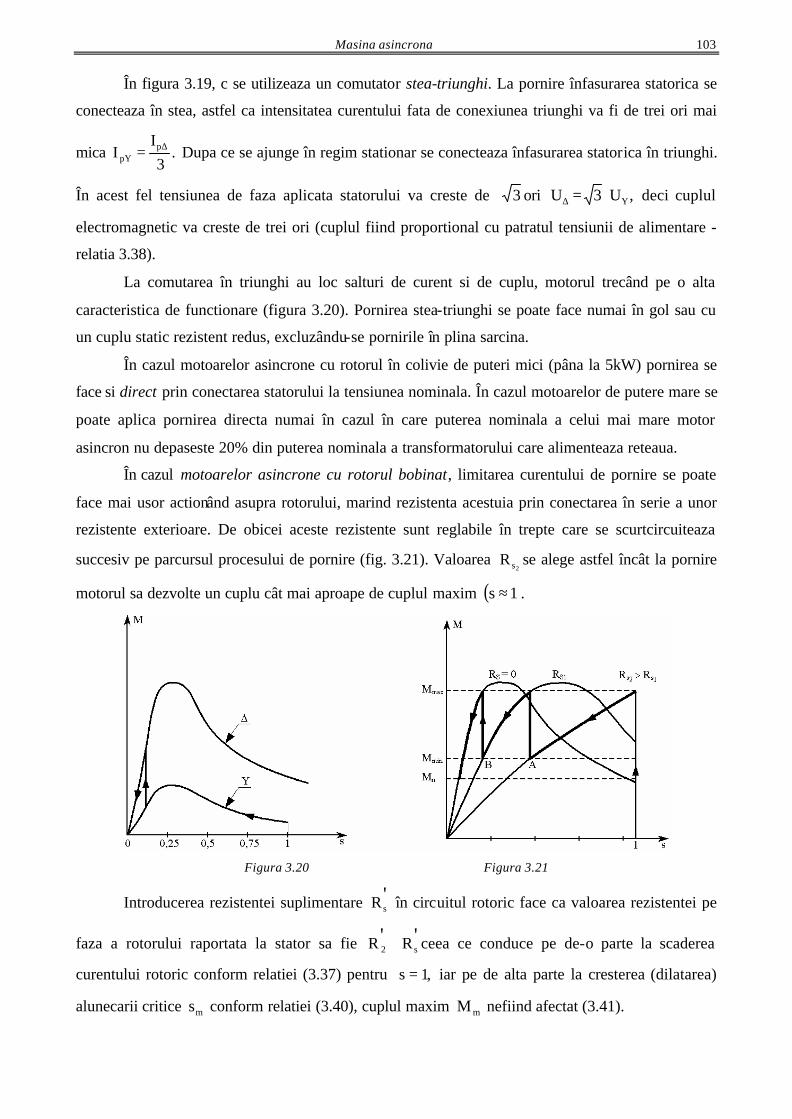
Masina asincrona
103
În figura 3.19, c se utilizeaza un comutator stea-triunghi. La pornire înfasurarea statorica se
conecteaza în stea, astfel ca intensitatea curentului fata de conexiunea triunghi va fi de trei ori mai
mica .3
II p
pY∆= Dupa ce se ajunge în regim stationar se conecteaza înfasurarea statorica în triunghi.
În acest fel tensiunea de faza aplicata statorului va creste de 3 ori ,U3U Y⋅=∆ deci cuplul
electromagnetic va creste de trei ori (cuplul fiind proportional cu patratul tensiunii de alimentare -
relatia 3.38).
La comutarea în triunghi au loc salturi de curent si de cuplu, motorul trecând pe o alta
caracteristica de functionare (figura 3.20). Pornirea stea-triunghi se poate face numai în gol sau cu
un cuplu static rezistent redus, excluzându-se pornirile în plina sarcina.
În cazul motoarelor asincrone cu rotorul în colivie de puteri mici (pâna la 5kW) pornirea se
face si direct prin conectarea statorului la tensiunea nominala. În cazul motoarelor de putere mare se
poate aplica pornirea directa numai în cazul în care puterea nominala a celui mai mare motor
asincron nu depaseste 20% din puterea nominala a transformatorului care alimenteaza reteaua.
În cazul motoarelor asincrone cu rotorul bobinat, limitarea curentului de pornire se poate
face mai usor actionând asupra rotorului, marind rezistenta acestuia prin conectarea în serie a unor
rezistente exterioare. De obicei aceste rezistente sunt reglabile în trepte care se scurtcircuiteaza
succesiv pe parcursul procesului de pornire (fig. 3.21). Valoarea 2sR se alege astfel încât la pornire
motorul sa dezvolte un cuplu cât mai aproape de cuplul maxim ( ).1s ≈
Figura 3.20 Figura 3.21
Introducerea rezistentei suplimentare 'sR în circuitul rotoric face ca valoarea rezistentei pe
faza a rotorului raportata la stator sa fie ''s2 RR + ceea ce conduce pe de-o parte la scaderea
curentului rotoric conform relatiei (3.37) pentru ,1s = iar pe de alta parte la cresterea (dilatarea)
alunecarii critice ms conform relatiei (3.40), cuplul maxim mM nefiind afectat (3.41).
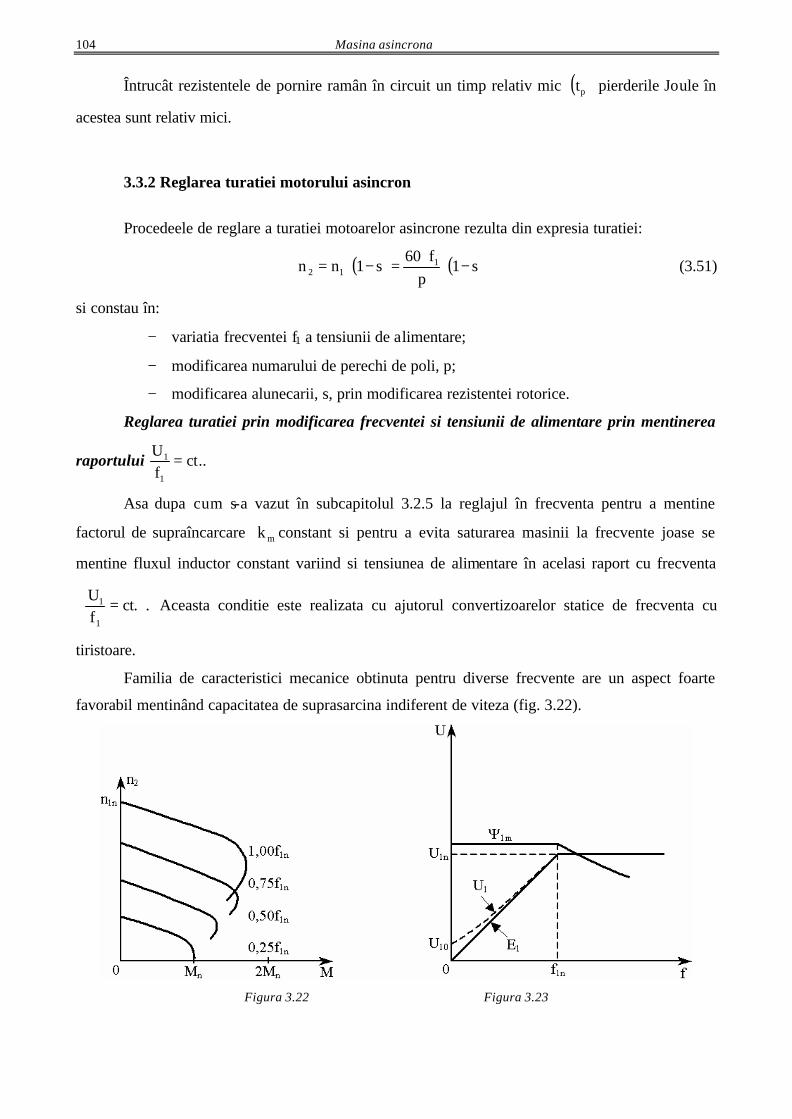
Masina asincrona 104
Întrucât rezistentele de pornire ramân în circuit un timp relativ mic ( )pt pierderile Joule în
acestea sunt relativ mici.
3.3.2 Reglarea turatiei motorului asincron
Procedeele de reglare a turatiei motoarelor asincrone rezulta din expresia turatiei:
( ) ( )s1p
f60s1nn 1
12 −⋅⋅
=−⋅= (3.51)
si constau în:
− variatia frecventei f1 a tensiunii de alimentare;
− modificarea numarului de perechi de poli, p;
− modificarea alunecarii, s, prin modificarea rezistentei rotorice.
Reglarea turatiei prin modificarea frecventei si tensiunii de alimentare prin mentinerea
raportului ..ctfU
1
1 =
Asa dupa cum s-a vazut în subcapitolul 3.2.5 la reglajul în frecventa pentru a mentine
factorul de supraîncarcare mk constant si pentru a evita saturarea masinii la frecvente joase se
mentine fluxul inductor constant variind si tensiunea de alimentare în acelasi raport cu frecventa
..ctfU
1
1
= Aceasta conditie este realizata cu ajutorul convertizoarelor statice de frecventa cu
tiristoare.
Familia de caracteristici mecanice obtinuta pentru diverse frecvente are un aspect foarte
favorabil mentinând capacitatea de suprasarcina indiferent de viteza (fig. 3.22).
Figura 3.22 Figura 3.23
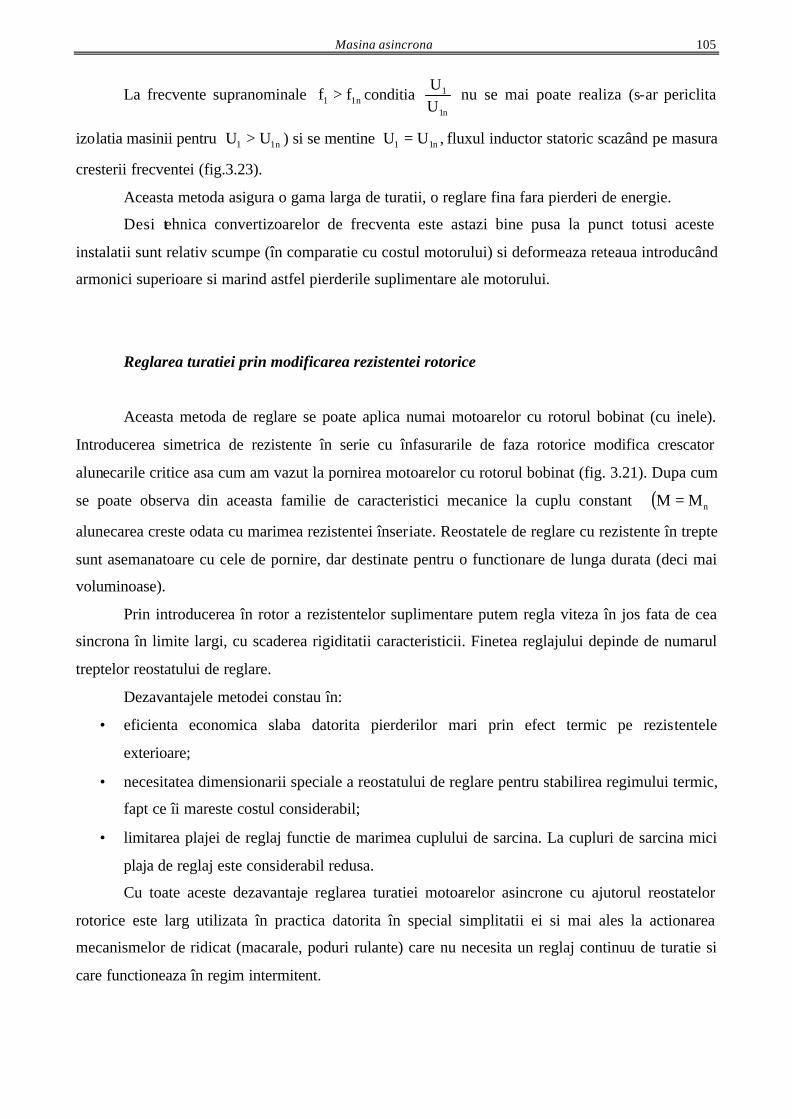
Masina asincrona
105
La frecvente supranominale n11 ff > conditia n1
1
UU
nu se mai poate realiza (s-ar periclita
izolatia masinii pentru n11 UU > ) si se mentine ,UU n11 = fluxul inductor statoric scazând pe masura
cresterii frecventei (fig.3.23).
Aceasta metoda asigura o gama larga de turatii, o reglare fina fara pierderi de energie.
Desi tehnica convertizoarelor de frecventa este astazi bine pusa la punct totusi aceste
instalatii sunt relativ scumpe (în comparatie cu costul motorului) si deformeaza reteaua introducând
armonici superioare si marind astfel pierderile suplimentare ale motorului.
Reglarea turatiei prin modificarea rezistentei rotorice
Aceasta metoda de reglare se poate aplica numai motoarelor cu rotorul bobinat (cu inele).
Introducerea simetrica de rezistente în serie cu înfasurarile de faza rotorice modifica crescator
alunecarile critice asa cum am vazut la pornirea motoarelor cu rotorul bobinat (fig. 3.21). Dupa cum
se poate observa din aceasta familie de caracteristici mecanice la cuplu constant ( )nMM =
alunecarea creste odata cu marimea rezistentei înseriate. Reostatele de reglare cu rezistente în trepte
sunt asemanatoare cu cele de pornire, dar destinate pentru o functionare de lunga durata (deci mai
voluminoase).
Prin introducerea în rotor a rezistentelor suplimentare putem regla viteza în jos fata de cea
sincrona în limite largi, cu scaderea rigiditatii caracteristicii. Finetea reglajului depinde de numarul
treptelor reostatului de reglare.
Dezavantajele metodei constau în:
• eficienta economica slaba datorita pierderilor mari prin efect termic pe rezistentele
exterioare;
• necesitatea dimensionarii speciale a reostatului de reglare pentru stabilirea regimului termic,
fapt ce îi mareste costul considerabil;
• limitarea plajei de reglaj functie de marimea cuplului de sarcina. La cupluri de sarcina mici
plaja de reglaj este considerabil redusa.
Cu toate aceste dezavantaje reglarea turatiei motoarelor asincrone cu ajutorul reostatelor
rotorice este larg utilizata în practica datorita în special simplitatii ei si mai ales la actionarea
mecanismelor de ridicat (macarale, poduri rulante) care nu necesita un reglaj continuu de turatie si
care functioneaza în regim intermitent.
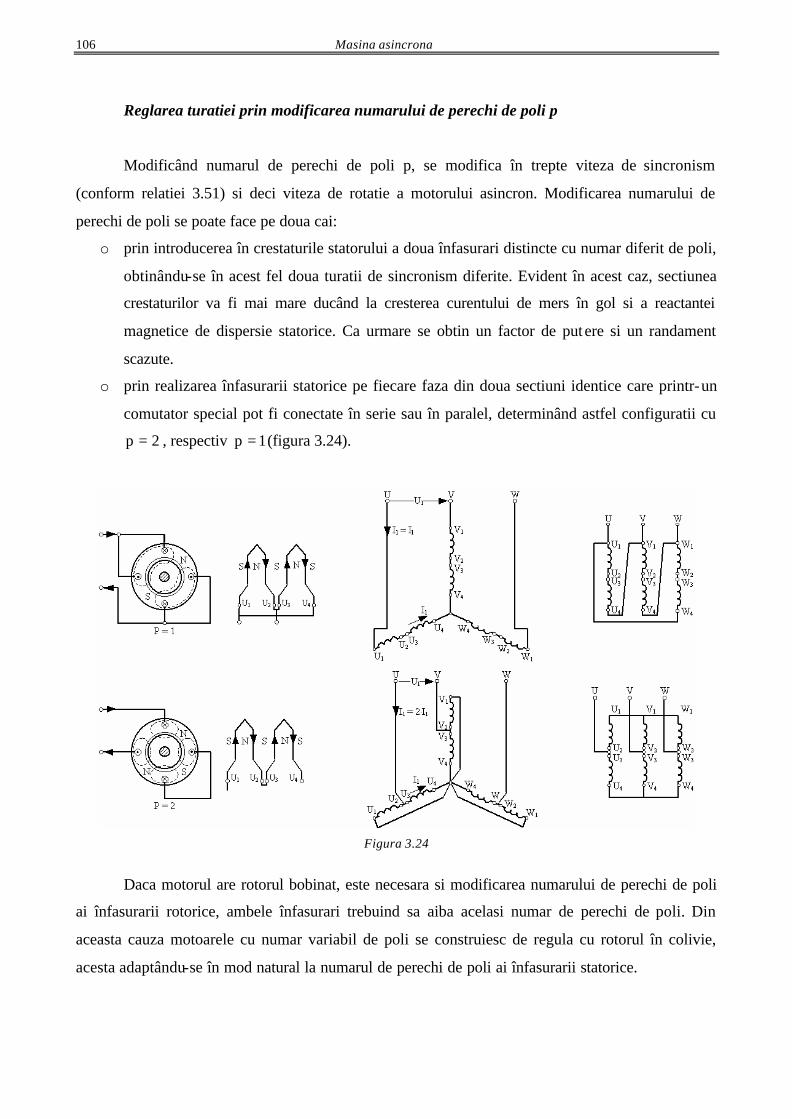
Masina asincrona 106
Reglarea turatiei prin modificarea numarului de perechi de poli p
Modificând numarul de perechi de poli p, se modifica în trepte viteza de sincronism
(conform relatiei 3.51) si deci viteza de rotatie a motorului asincron. Modificarea numarului de
perechi de poli se poate face pe doua cai:
o prin introducerea în crestaturile statorului a doua înfasurari distincte cu numar diferit de poli,
obtinându-se în acest fel doua turatii de sincronism diferite. Evident în acest caz, sectiunea
crestaturilor va fi mai mare ducând la cresterea curentului de mers în gol si a reactantei
magnetice de dispersie statorice. Ca urmare se obtin un factor de putere si un randament
scazute.
o prin realizarea înfasurarii statorice pe fiecare faza din doua sectiuni identice care printr-un
comutator special pot fi conectate în serie sau în paralel, determinând astfel configuratii cu
2p = , respectiv 1p = (figura 3.24).
Figura 3.24
Daca motorul are rotorul bobinat, este necesara si modificarea numarului de perechi de poli
ai înfasurarii rotorice, ambele înfasurari trebuind sa aiba acelasi numar de perechi de poli. Din
aceasta cauza motoarele cu numar variabil de poli se construiesc de regula cu rotorul în colivie,
acesta adaptându-se în mod natural la numarul de perechi de poli ai înfasurarii statorice.
Masina asincrona
107
3.3.3 Frânarea motoarelor asincrone trifazate
Masina asincrona intra în regim de frânare atunci când cuplul electromagnetic dezvoltat este
de sens opus sensului sau de rotatie. În acest caz alunecarea devine supraunitara:
1n
nns
1
21 >+
= (3.52)
si masina primeste energie mecanica pe la arbore si energie electrica din retea pe care le transforma
în caldura prin efect Joule îndeosebi în circuitul rotoric.
Frânarea electrica este superioara din toate punctele de vedere frânarii mecanice (prin
frecarile unor saboti pe un tambur) si se realizeaza prin metodele:
• frânarea propriu-zisa (prin înserierea de rezistente în circuitul rotoric si prin inversarea
sensului succesiunii fazelor);
• frânarea în regim de generator cu recuperarea energiei;
• frânarea în regim de generator fara recuperarea energiei (dinamica).
Frânarea propriu-zisa
În actionarile electrice, regimul de frâna propriu-zisa se utilizeaza în doua variante, pornind
de la regimul de baza de motor:
− prin variatia unor rezistente înseriate în circuitul rotoric trecerea la regimul de frâna
facându-se prin inversarea sensului de rotatie la aceeasi succesiune a fazelor
statorice;
− prin inversarea sensului succesiunii fazelor statorului si înserierea în circuitul rotoric
a unei rezistente convenabile.
Frânarea propriu-zisa prin înserierea de rezistente în circuitul rotoric are caracteristic
faptul ca masina îsi pastreaza sensul de rotatie al câmpului învârtitor dar îsi schimba sensul de
rotatie a rotorului. Din acest punct de vedere se mai numeste si frânare contracurent.
Schimbarea sensului de rotatie a rotorului poate fi facuta fortat de catre masina de lucru cu
care este cuplat motorul (ca în cazul mecanismului de ridicare la macarale când la ridicarea unei
sarcini prea mari se poate inversa sensul de rotatie al rotorului, sarcina începând sa coboare), sau
lucrând pe o caracteristica mecanica artificiala corespunzatoare rezistentei suplimentare înseriate în
rotor (figura 3.25).
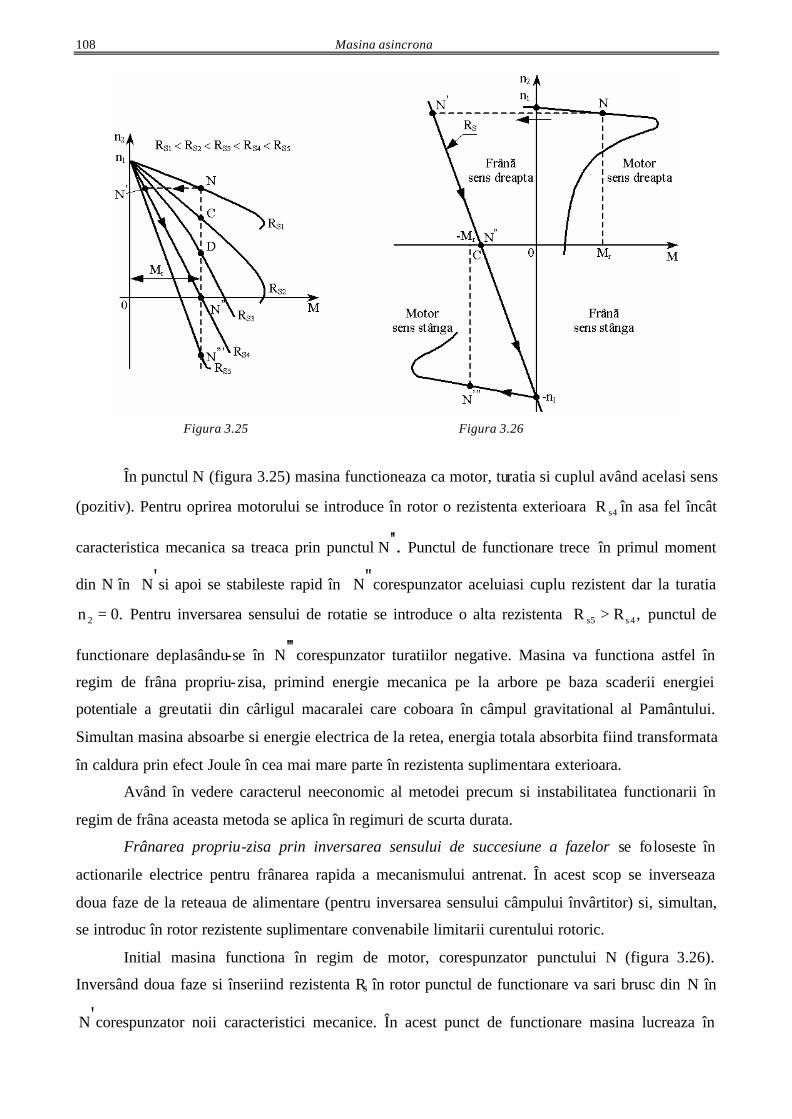
Masina asincrona 108
Figura 3.25 Figura 3.26
În punctul N (figura 3.25) masina functioneaza ca motor, turatia si cuplul având acelasi sens
(pozitiv). Pentru oprirea motorului se introduce în rotor o rezistenta exterioara 4sR în asa fel încât
caracteristica mecanica sa treaca prin punctul .''N Punctul de functionare trece în primul moment
din N în 'N si apoi se stabileste rapid în ''N corespunzator aceluiasi cuplu rezistent dar la turatia
.0n 2 = Pentru inversarea sensului de rotatie se introduce o alta rezistenta ,RR 4s5s > punctul de
functionare deplasându-se în '''N corespunzator turatiilor negative. Masina va functiona astfel în
regim de frâna propriu-zisa, primind energie mecanica pe la arbore pe baza scaderii energiei
potentiale a greutatii din cârligul macaralei care coboara în câmpul gravitational al Pamântului.
Simultan masina absoarbe si energie electrica de la retea, energia totala absorbita fiind transformata
în caldura prin efect Joule în cea mai mare parte în rezistenta suplimentara exterioara.
Având în vedere caracterul neeconomic al metodei precum si instabilitatea functionarii în
regim de frâna aceasta metoda se aplica în regimuri de scurta durata.
Frânarea propriu-zisa prin inversarea sensului de succesiune a fazelor se foloseste în
actionarile electrice pentru frânarea rapida a mecanismului antrenat. În acest scop se inverseaza
doua faze de la reteaua de alimentare (pentru inversarea sensului câmpului învârtitor) si, simultan,
se introduc în rotor rezistente suplimentare convenabile limitarii curentului rotoric.
Initial masina functiona în regim de motor, corespunzator punctului N (figura 3.26).
Inversând doua faze si înseriind rezistenta Rs în rotor punctul de functionare va sari brusc din N în
'N corespunzator noii caracteristici mecanice. În acest punct de functionare masina lucreaza în
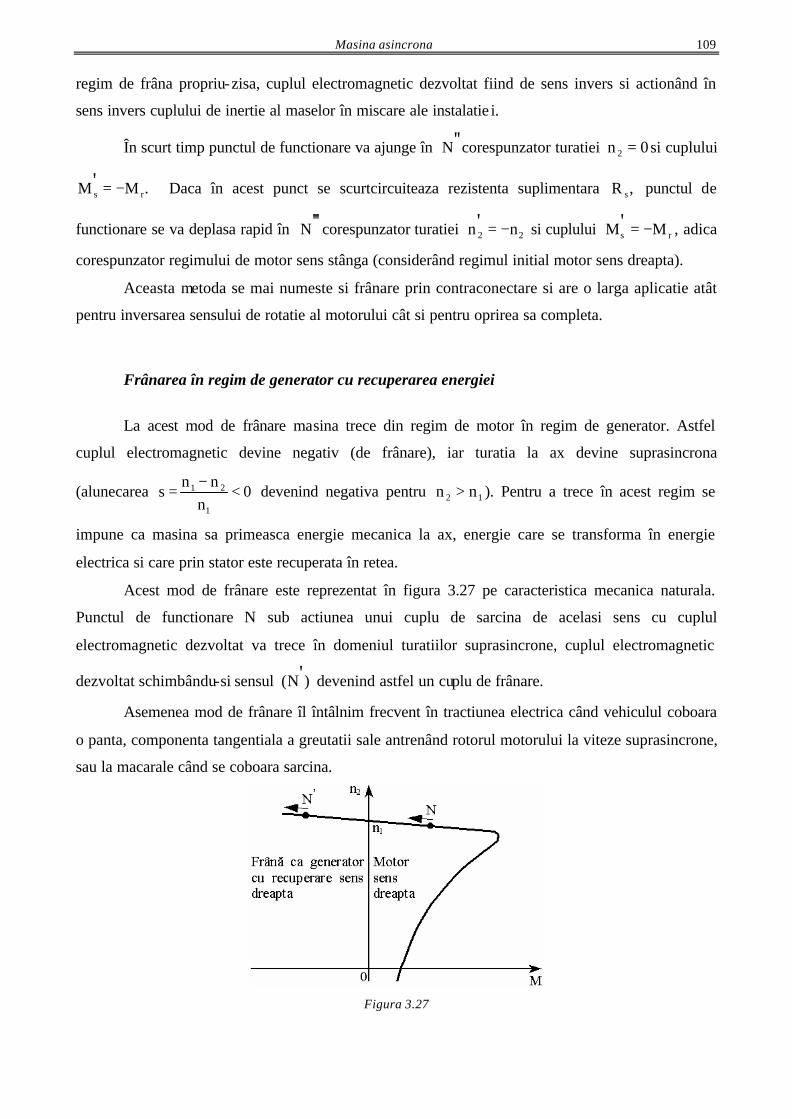
Masina asincrona
109
regim de frâna propriu-zisa, cuplul electromagnetic dezvoltat fiind de sens invers si actionând în
sens invers cuplului de inertie al maselor în miscare ale instalatie i.
În scurt timp punctul de functionare va ajunge în ''N corespunzator turatiei 0n 2 = si cuplului
.MM rs' −= Daca în acest punct se scurtcircuiteaza rezistenta suplimentara ,R s punctul de
functionare se va deplasa rapid în '''N corespunzator turatiei 22 nn' −= si cuplului rs MM' −= , adica
corespunzator regimului de motor sens stânga (considerând regimul initial motor sens dreapta).
Aceasta metoda se mai numeste si frânare prin contraconectare si are o larga aplicatie atât
pentru inversarea sensului de rotatie al motorului cât si pentru oprirea sa completa.
Frânarea în regim de generator cu recuperarea energiei
La acest mod de frânare masina trece din regim de motor în regim de generator. Astfel
cuplul electromagnetic devine negativ (de frânare), iar turatia la ax devine suprasincrona
(alunecarea 0n
nns
1
21 <−
= devenind negativa pentru 12 nn > ). Pentru a trece în acest regim se
impune ca masina sa primeasca energie mecanica la ax, energie care se transforma în energie
electrica si care prin stator este recuperata în retea.
Acest mod de frânare este reprezentat în figura 3.27 pe caracteristica mecanica naturala.
Punctul de functionare N sub actiunea unui cuplu de sarcina de acelasi sens cu cuplul
electromagnetic dezvoltat va trece în domeniul turatiilor suprasincrone, cuplul electromagnetic
dezvoltat schimbându-si sensul )N( ' devenind astfel un cuplu de frânare.
Asemenea mod de frânare îl întâlnim frecvent în tractiunea electrica când vehiculul coboara
o panta, componenta tangentiala a greutatii sale antrenând rotorul motorului la viteze suprasincrone,
sau la macarale când se coboara sarcina.
Figura 3.27
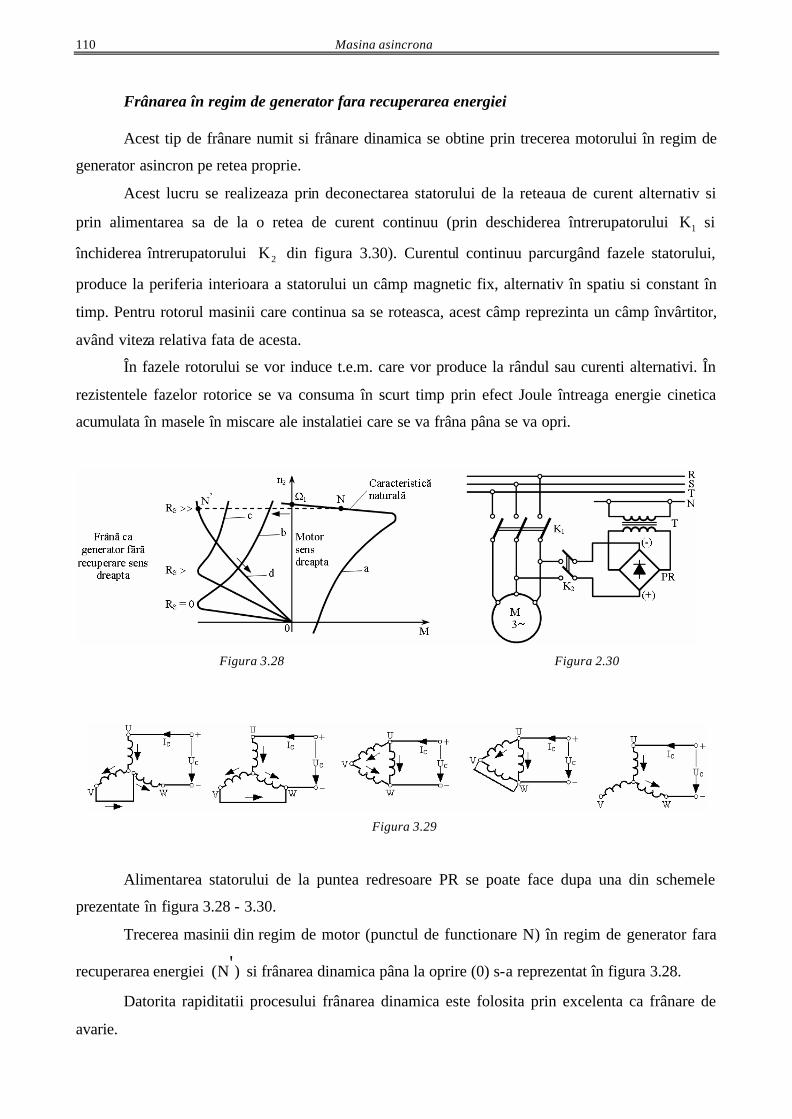
Masina asincrona 110
Frânarea în regim de generator fara recuperarea energiei
Acest tip de frânare numit si frânare dinamica se obtine prin trecerea motorului în regim de
generator asincron pe retea proprie.
Acest lucru se realizeaza prin deconectarea statorului de la reteaua de curent alternativ si
prin alimentarea sa de la o retea de curent continuu (prin deschiderea întrerupatorului 1K si
închiderea întrerupatorului 2K din figura 3.30). Curentul continuu parcurgând fazele statorului,
produce la periferia interioara a statorului un câmp magnetic fix, alternativ în spatiu si constant în
timp. Pentru rotorul masinii care continua sa se roteasca, acest câmp reprezinta un câmp învârtitor,
având viteza relativa fata de acesta.
În fazele rotorului se vor induce t.e.m. care vor produce la rândul sau curenti alternativi. În
rezistentele fazelor rotorice se va consuma în scurt timp prin efect Joule întreaga energie cinetica
acumulata în masele în miscare ale instalatiei care se va frâna pâna se va opri.
Figura 3.28 Figura 2.30
Figura 3.29
Alimentarea statorului de la puntea redresoare PR se poate face dupa una din schemele
prezentate în figura 3.28 - 3.30.
Trecerea masinii din regim de motor (punctul de functionare N) în regim de generator fara
recuperarea energiei )N( ' si frânarea dinamica pâna la oprire (0) s-a reprezentat în figura 3.28.
Datorita rapiditatii procesului frânarea dinamica este folosita prin excelenta ca frânare de
avarie.

Masina asincrona
111
3.4 Motorul asincron monofazat
Motorul asincron monofazat este asemanator din punct de vedere constructiv cu motorul
asincron trifazat cu deosebirea ca statorul sau este echipat cu o înfasurare de c.a. monofazata,
conectata la o retea monofazata de c.a. Înfasurarea rotorica este de obicei în colivie (figura 3.31).
Curentul 1i absorbit de stator produce un câmp sinusoidal în timp si spatiu care se poate
descompune în doua câmpuri învârtitoare care se rotesc în sensuri opuse, cu aceeasi viteza si cu
amplitudini egale cu jumatate din amplitudinea câmpului sinusoidal:
( ) ( ) ( )
( ) ( ).ptcosBptcosB
ptcosB21
ptcosB21
pcostcosBt,B
1Bm11Am1
1m11m11m11
α⋅+⋅ω+α⋅−⋅ω⋅=
=α⋅+⋅ω⋅+α⋅−⋅ω⋅⋅=α⋅⋅⋅ω⋅=α
Figura 3.31 Figura 3.32
Cele doua câmpuri învârtitoare A1B si B1B vor interactiona cu curentul rotoric si vor produce
asupra rotorului cuplurile electromagnetice egale si de sens contrar A2M si .M B2 Cuplul rezultant
asupra rotorului va fi evident nul si rotorul nu se poate pune în miscare. Daca, însa, dam un impuls
rotorului într-un anumit sens, de exemplu în sensul câmpului învârtitor B1A si rotorul se învârteste
cu o viteza unghiulara 2Ω , atunci câmpul învârtitor A1B are o viteza relativa fata de rotor 21 Ω−Ω si
frecventa curentilor indusi în înfasurarea rotorica de acest câmp va fi:
( ).fs
2p
2p
f 11
1
21212 ⋅=
π⋅Ω⋅
⋅Ω
Ω−Ω=
π⋅Ω−Ω⋅
= (3.53)
Câmpul învârtitor B1B va avea fata de rotor o viteza relativa 21 Ω+Ω , iar frecventa
curentilor indusi de acesta va fi:
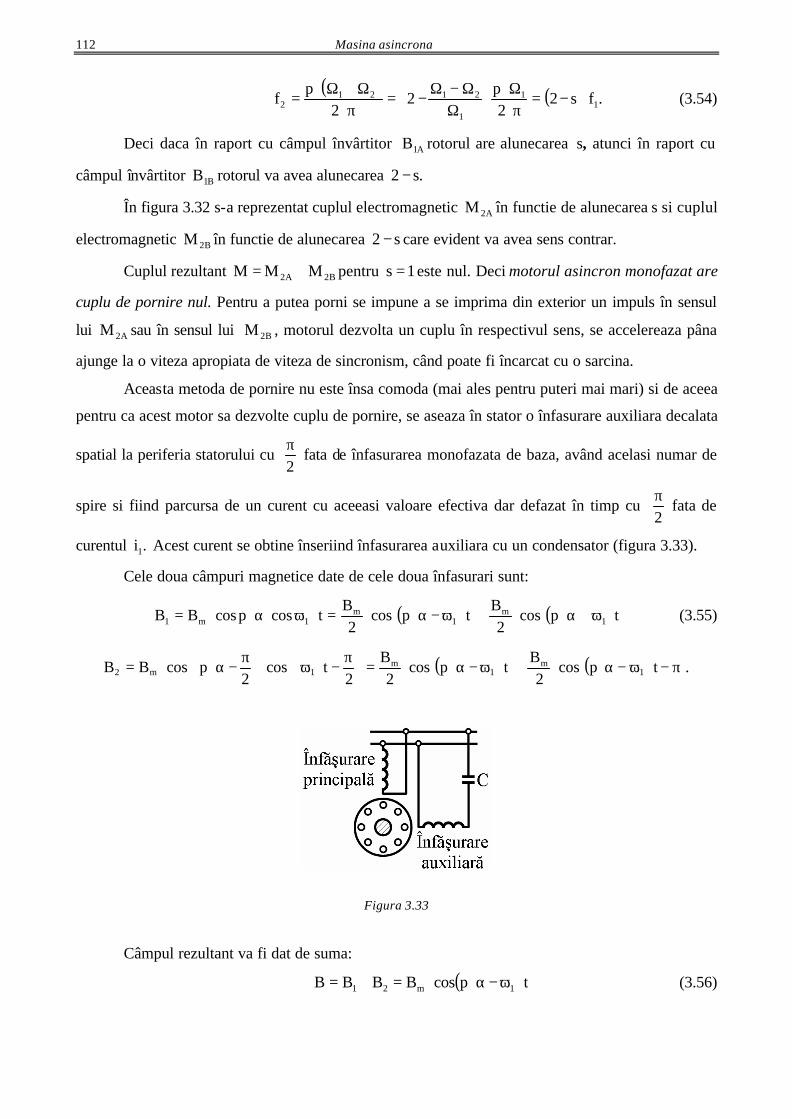
Masina asincrona 112
( ) ( ) .fs22
p2
2p
f 11
1
21212 ⋅−=
π⋅Ω⋅
Ω
Ω−Ω−=
π⋅Ω+Ω⋅
= (3.54)
Deci daca în raport cu câmpul învârtitor A1B rotorul are alunecarea s, atunci în raport cu
câmpul învârtitor B1B rotorul va avea alunecarea .s2 −
În figura 3.32 s-a reprezentat cuplul electromagnetic A2M în functie de alunecarea s si cuplul
electromagnetic B2M în functie de alunecarea s2 − care evident va avea sens contrar.
Cuplul rezultant B2A2 MMM += pentru 1s = este nul. Deci motorul asincron monofazat are
cuplu de pornire nul. Pentru a putea porni se impune a se imprima din exterior un impuls în sensul
lui A2M sau în sensul lui B2M , motorul dezvolta un cuplu în respectivul sens, se accelereaza pâna
ajunge la o viteza apropiata de viteza de sincronism, când poate fi încarcat cu o sarcina.
Aceasta metoda de pornire nu este însa comoda (mai ales pentru puteri mai mari) si de aceea
pentru ca acest motor sa dezvolte cuplu de pornire, se aseaza în stator o înfasurare auxiliara decalata
spatial la periferia statorului cu 2π
fata de înfasurarea monofazata de baza, având acelasi numar de
spire si fiind parcursa de un curent cu aceeasi valoare efectiva dar defazat în timp cu 2π
fata de
curentul .i1 Acest curent se obtine înseriind înfasurarea auxiliara cu un condensator (figura 3.33).
Cele doua câmpuri magnetice date de cele doua înfasurari sunt:
( ) ( )tpcos2
Btpcos
2B
tcospcosBB 1m
1m
1m1 ⋅ω+α⋅⋅+⋅ω−α⋅⋅=⋅ω⋅α⋅⋅= (3.55)
( ) ( ).tpcos2
Btpcos
2B
2tcos
2pcosBB 1
m1
m1m2 π−⋅ω−α⋅⋅+⋅ω−α⋅⋅=
π
−⋅ω⋅
π
−α⋅⋅=
Figura 3.33
Câmpul rezultant va fi dat de suma:
( )tpcosBBBB 1m21 ⋅ω−α⋅⋅=+= (3.56)
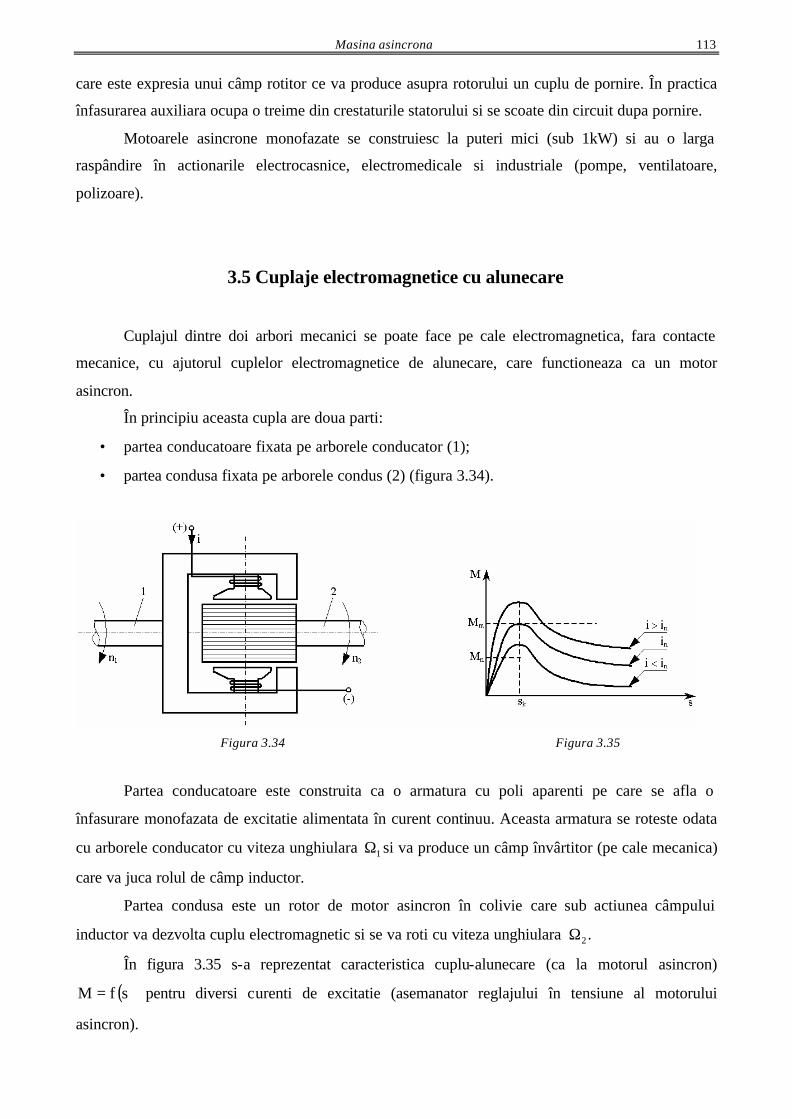
Masina asincrona
113
care este expresia unui câmp rotitor ce va produce asupra rotorului un cuplu de pornire. În practica
înfasurarea auxiliara ocupa o treime din crestaturile statorului si se scoate din circuit dupa pornire.
Motoarele asincrone monofazate se construiesc la puteri mici (sub 1kW) si au o larga
raspândire în actionarile electrocasnice, electromedicale si industriale (pompe, ventilatoare,
polizoare).
3.5 Cuplaje electromagnetice cu alunecare
Cuplajul dintre doi arbori mecanici se poate face pe cale electromagnetica, fara contacte
mecanice, cu ajutorul cuplelor electromagnetice de alunecare, care functioneaza ca un motor
asincron.
În principiu aceasta cupla are doua parti:
• partea conducatoare fixata pe arborele conducator (1);
• partea condusa fixata pe arborele condus (2) (figura 3.34).
Figura 3.34 Figura 3.35
Partea conducatoare este construita ca o armatura cu poli aparenti pe care se afla o
înfasurare monofazata de excitatie alimentata în curent continuu. Aceasta armatura se roteste odata
cu arborele conducator cu viteza unghiulara 1Ω si va produce un câmp învârtitor (pe cale mecanica)
care va juca rolul de câmp inductor.
Partea condusa este un rotor de motor asincron în colivie care sub actiunea câmpului
inductor va dezvolta cuplu electromagnetic si se va roti cu viteza unghiulara .2Ω
În figura 3.35 s-a reprezentat caracteristica cuplu-alunecare (ca la motorul asincron)
( )sfM = pentru diversi curenti de excitatie (asemanator reglajului în tensiune al motorului
asincron).
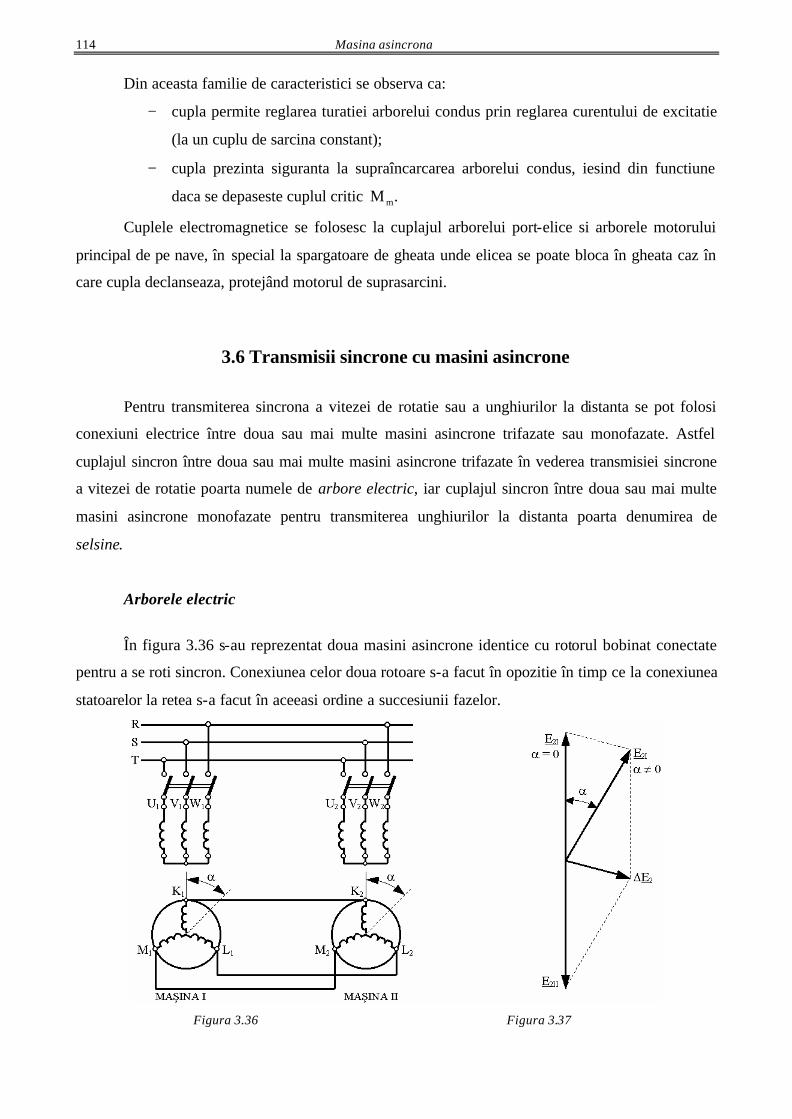
Masina asincrona 114
Din aceasta familie de caracteristici se observa ca:
− cupla permite reglarea turatiei arborelui condus prin reglarea curentului de excitatie
(la un cuplu de sarcina constant);
− cupla prezinta siguranta la supraîncarcarea arborelui condus, iesind din functiune
daca se depaseste cuplul critic .Mm
Cuplele electromagnetice se folosesc la cuplajul arborelui port-elice si arborele motorului
principal de pe nave, în special la spargatoare de gheata unde elicea se poate bloca în gheata caz în
care cupla declanseaza, protejând motorul de suprasarcini.
3.6 Transmisii sincrone cu masini asincrone
Pentru transmiterea sincrona a vitezei de rotatie sau a unghiurilor la distanta se pot folosi
conexiuni electrice între doua sau mai multe masini asincrone trifazate sau monofazate. Astfel
cuplajul sincron între doua sau mai multe masini asincrone trifazate în vederea transmisiei sincrone
a vitezei de rotatie poarta numele de arbore electric, iar cuplajul sincron între doua sau mai multe
masini asincrone monofazate pentru transmiterea unghiurilor la distanta poarta denumirea de
selsine.
Arborele electric
În figura 3.36 s-au reprezentat doua masini asincrone identice cu rotorul bobinat conectate
pentru a se roti sincron. Conexiunea celor doua rotoare s-a facut în opozitie în timp ce la conexiunea
statoarelor la retea s-a facut în aceeasi ordine a succesiunii fazelor.
Figura 3.36 Figura 3.37
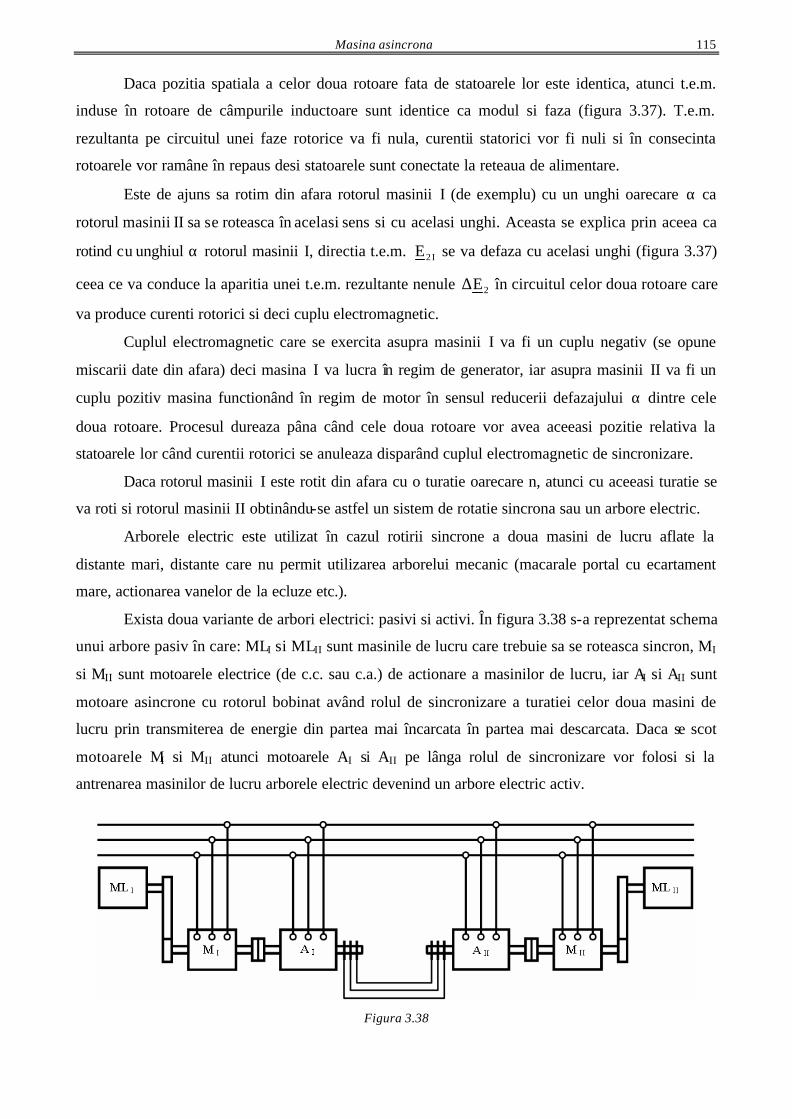
Masina asincrona
115
Daca pozitia spatiala a celor doua rotoare fata de statoarele lor este identica, atunci t.e.m.
induse în rotoare de câmpurile inductoare sunt identice ca modul si faza (figura 3.37). T.e.m.
rezultanta pe circuitul unei faze rotorice va fi nula, curentii statorici vor fi nuli si în consecinta
rotoarele vor ramâne în repaus desi statoarele sunt conectate la reteaua de alimentare.
Este de ajuns sa rotim din afara rotorul masinii I (de exemplu) cu un unghi oarecare α ca
rotorul masinii II sa se roteasca în acelasi sens si cu acelasi unghi. Aceasta se explica prin aceea ca
rotind cu unghiul α rotorul masinii I, directia t.e.m. I2E se va defaza cu acelasi unghi (figura 3.37)
ceea ce va conduce la aparitia unei t.e.m. rezultante nenule 2E∆ în circuitul celor doua rotoare care
va produce curenti rotorici si deci cuplu electromagnetic.
Cuplul electromagnetic care se exercita asupra masinii I va fi un cuplu negativ (se opune
miscarii date din afara) deci masina I va lucra în regim de generator, iar asupra masinii II va fi un
cuplu pozitiv masina functionând în regim de motor în sensul reducerii defazajului α dintre cele
doua rotoare. Procesul dureaza pâna când cele doua rotoare vor avea aceeasi pozitie relativa la
statoarele lor când curentii rotorici se anuleaza disparând cuplul electromagnetic de sincronizare.
Daca rotorul masinii I este rotit din afara cu o turatie oarecare n, atunci cu aceeasi turatie se
va roti si rotorul masinii II obtinându-se astfel un sistem de rotatie sincrona sau un arbore electric.
Arborele electric este utilizat în cazul rotirii sincrone a doua masini de lucru aflate la
distante mari, distante care nu permit utilizarea arborelui mecanic (macarale portal cu ecartament
mare, actionarea vanelor de la ecluze etc.).
Exista doua variante de arbori electrici: pasivi si activi. În figura 3.38 s-a reprezentat schema
unui arbore pasiv în care: MLI si MLII sunt masinile de lucru care trebuie sa se roteasca sincron, MI
si MII sunt motoarele electrice (de c.c. sau c.a.) de actionare a masinilor de lucru, iar AI si AII sunt
motoare asincrone cu rotorul bobinat având rolul de sincronizare a turatiei celor doua masini de
lucru prin transmiterea de energie din partea mai încarcata în partea mai descarcata. Daca se scot
motoarele MI si MII atunci motoarele AI si AII pe lânga rolul de sincronizare vor folosi si la
antrenarea masinilor de lucru arborele electric devenind un arbore electric activ.
Figura 3.38
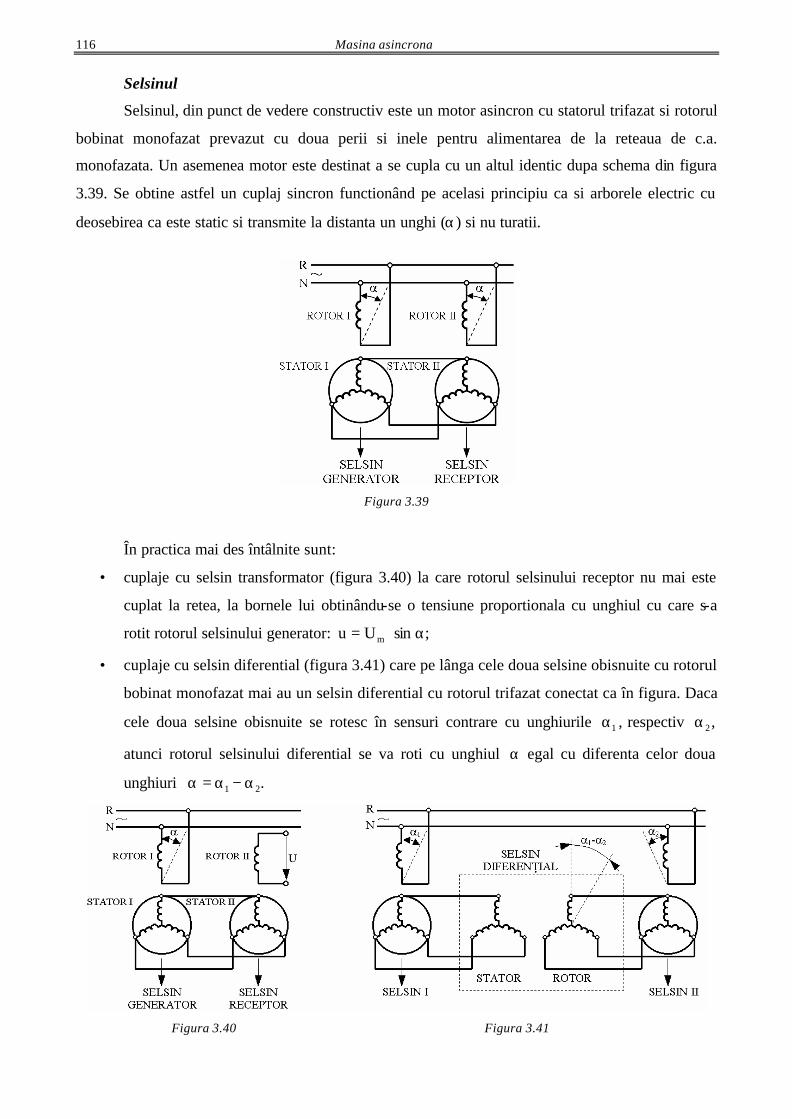
Masina asincrona 116
Selsinul
Selsinul, din punct de vedere constructiv este un motor asincron cu statorul trifazat si rotorul
bobinat monofazat prevazut cu doua perii si inele pentru alimentarea de la reteaua de c.a.
monofazata. Un asemenea motor este destinat a se cupla cu un altul identic dupa schema din figura
3.39. Se obtine astfel un cuplaj sincron functionând pe acelasi principiu ca si arborele electric cu
deosebirea ca este static si transmite la distanta un unghi (α) si nu turatii.
Figura 3.39
În practica mai des întâlnite sunt:
• cuplaje cu selsin transformator (figura 3.40) la care rotorul selsinului receptor nu mai este
cuplat la retea, la bornele lui obtinându-se o tensiune proportionala cu unghiul cu care s-a
rotit rotorul selsinului generator: ;sinUu m α⋅=
• cuplaje cu selsin diferential (figura 3.41) care pe lânga cele doua selsine obisnuite cu rotorul
bobinat monofazat mai au un selsin diferential cu rotorul trifazat conectat ca în figura. Daca
cele doua selsine obisnuite se rotesc în sensuri contrare cu unghiurile 1α , respectiv ,2α
atunci rotorul selsinului diferential se va roti cu unghiul α egal cu diferenta celor doua
unghiuri .21 α−α=α
Figura 3.40 Figura 3.41
Masina asincrona
117
Selsinul transformator este utilizat ca traductor de unghi, iar selsinul diferential este utilizat
în sistemele de comanda numite “de urmarire” cum ar fi comanda cârmei la nave.
3.7 Aplicatii
1. Un motor asincron trifazat are urmatoarele date: V220U n1 = (tensiune pe faza);
A10I n1 = (curent de faza); ;85,0n =η ;9,0cos n1 =ϕ ;Hz50f1 = ;W200P1Fe = Pm=200W (pierderi
mecanice); .2p2;8,0R1 =⋅Ω=
Sa se determine urmatoarele marimi: puterea utila ,P2 puterea mecanica totala dezvoltata
,PM pierderile Joule în stator si în rotor, alunecarea nominala ,sn cuplul electromagnetic si turatia
nominala .n n2
REZOLVARE:
Puterea utila nominala n2P rezulta din puterea activa n1P absorbita de motor de la retea.
W59409,0102203cosIU3P n1n1n1n1 =⋅⋅⋅=ϕ⋅⋅⋅=
si din cunoasterea randamentului nominal ,85l,0n =η
.W5049594085,0PP n1nn2 =⋅=⋅η=
Aceasta putere utila este de natura mecanica. Daca adaugam la aceasta putere
pierderile mecanice ,Pm se obtine puterea totala mecanica MP dezvoltata de motor:
.W52492005049PPP mn2M =+=+=
Pierderile Joule în stator vor fi:
.W240108,03IR3P 22n11J1
=⋅⋅=⋅⋅=
În ceea ce priveste pierderile Joule în rotor, acestea se pot deduce din puterea
electromagnetica nominala nP , întrucât puterea mecanica totala dezvoltata este cunoscuta. Puterea
electromagnetica nP provine din puterea activa absorbita n1P , dupa ce s-au scazut pierderile Joule
statorice 1JP si pierderile în fier în stator
1FeP :
W55002002405940PPPP11 FeJn1n =−−=−−=
în consecinta, pierderile Joule rotorice vor fi:
.W25152405500PPP MnJ2=−=−=
Alunecarea nominala ns se obtine din raportul pierderilor Joule rotorice si puterea
electromagnetica (vezi relatia 3.31).

Masina asincrona 118
.0456,05500251
PP
sn
Jn
2 ===
Masina având 2p2 =⋅ poli si functionând la frecventa ,Hz50f1 = are o turatie de sincronism
.min/rot3000n1 = La alunecarea de mai sus turatia rotorului va fi:
( ) ( ) .min/rot28620456,013000s1nn N1n2 =−⋅=−⋅=
Cuplul electromagnetic nominal dezvoltat la arbore rezulta din puterea electromagnetica:
mN5,175014,32
5500PM
1
nn ⋅=
⋅⋅=
Ω=
sau din puterea mecanica totala PM:
.mN5,17286214,32605249P
M2
Mn ⋅=
⋅⋅⋅
=Ω
=
Cuplul util la arbore rezulta însa din puterea mecanica utila :P n2
mN85,16286214,32605049P
M2
n2s ⋅=
⋅⋅⋅
=Ω
=
diferenta fata de cuplul electromagnetic constând în cuplul de frecari mecanice ale arborelui în
lagarele de sustinere si de frecari cu aerul.
2. Se da un motor asincron trifazat cu conexiune stea cu urmatoarele date:
.05,0s;3X;1R;27X;22,2X;78,0R nd22md11' =Ω=Ω=Ω=Ω=Ω=
a) Sa se determine valoarea efectiva a curentului statoric absorbit la tensiune de linie a
retelei de 380V.
b) Care este puterea activa absorbita si factorul de putere?
c) Care este puterea mecanica dezvoltata si cuplul electromagnetic, daca
3p,Hz50f1 == perechi de poli?
Toate întrebarile se refera la regimul nominal. Se vor neglija pierderile în fier.
REZOLVARE:
a) Se apeleaza la schema echivalenta din figura 3.8.
Curentul statoric absorbit la tensiunea de faza V220U1 = (tensiunea de linie a retelei este
380V, iar conexiunea înfasurarilor statorului este stea) va fi:
.
XXjsR
XjsR
Xj
XjR
UI
''
''
2
2
1
dmn
2
dn
2m
d1
11
+⋅+
⋅+⋅⋅
+⋅+
=

Masina asincrona
119
Numeric, cu datele din enunt si ,2005,01
sR
n
2'
Ω== expresia de mai sus devine (tensiunea
1U este luata ca marime de referinta pentru faza:
( )( ) ( ) ( )
.16,9j87,83j2027j30j2022,2j78,0
30j20220I1 ⋅−=
⋅+⋅⋅+⋅+⋅⋅+⋅+⋅
=
.IjIsinIjcosII m1s1111 ⋅+=ϕ⋅⋅+ϕ⋅=
Valoarea efectiva a curentului statoric este deci:
.A75,1216,987,8I 221 =+=
b) Puterea activa absorbita rezulta din cunoasterea componentei active a curentului statoric
si a tensiunii de faza:
.W2,585487,822033cosIU3P 111 =⋅⋅=ϕ⋅⋅⋅=
Factorul de putere al motorului în regimul studiat va fi:
696,075,12
87,8II
cos1
s1 ===ϕ
un factor de putere destul de slab (valoarea uzuala însa pentru motoare asincrone cu viteza de
sincronism de pâna la 1000 rot/min si putere relativ mica).
c) Pentru a determina puterea mecanica dezvoltata MP trebuie mai întâi calculata puterea
electromagnetica P cu ajutorul relatiei: 2111j1 IR3PPPP
1⋅⋅−=−=
pierderile în miezul fieromagnetic statoric, fiind neglijate. Asadar,
.W8,547375,1278,032,5824P 2 =⋅⋅−=
Conform celor stabilite în aplicatia A.1
( ) ( ) ,W1,52008,547305,01Ps1PM =⋅−=⋅−=
iar pierderile Joule în rotor vor fi:
.W7,2738,547305,0PsP nJ2=⋅=⋅=
Cuplul electromagnetic se calculeaza usor, odata cunoscute puterea electromagnetica si
turatia sincrona,
.mN27,52100014,32
608,5473n2
60PPM
11
⋅=⋅⋅
⋅=
⋅π⋅⋅
=Ω
=
3. Un motor asincron trifazat are urmatoarele date: conexiunea stea,
;60,0XX;23,0R;25,0Rmin;/rot1425n;Hz50f ''21 dd21n21 Ω==Ω=Ω=== curentul de mers în gol

Masina asincrona 120
;A1,7I0 = pierderile în fier ;W250P1Fe = raportul numerelor de spire .67,1
kN
kN
2
1
N2
N1 =⋅
⋅ Inertia
motorului si a sarcinii este ,mfkg8,0DG 22 ⋅⋅=⋅ iar cuplul rezistent total este
mfkg5,6Ms ⋅⋅= independent de viteza.
a) Rotorul fiind scurtcircuitat si aplicându-se tensiunea nominala V220U n1 = (tensiunea de
faza), sa se determine cuplul electromagnetic de pornire.
b) Sarcina fiind cuplata, sa se determine acceleratia unghiulara initiala a motorului la
pornire.
c) Care este cuplul electromagnetic maxim al motorului?
d) Ce valoare are rezistenta ce trebuie inclusa pe fiecare faza a rotorului, pentru ca la pornire
motorul sa dezvolte cuplul electromagnetic maxim?
REZOLVARE:
a) Expresia cuplului de pornire pM rezulta din formula (3.38) în care facem :1s =
( ).
XcXRcR
UR3M
1
2
dd
2
21
2n12
p''
'
21Ω⋅
⋅++
⋅+
⋅⋅=
Pentru a putea aplica aceasta formula trebuie cunoscute marimile 1Ω si c. Daca turatia
nominala este min/rot1425n n2 = si frecventa statorica ,Hz50f1 = atunci turatia de sincronism este
min,/rot1500n1 = iar motorul are 4p2 =⋅ poli, astfel încât:
[ ].s/rad1,15760
150014,3260
n2 11 =
⋅⋅=
⋅π⋅=Ω
Pentru calculul marimii c utilizam expresia:
,ZZ
1c0
1+=
în care ,XjRZ1d11 ⋅+= iar ,
XjRXjR
Zma
ma0 ⋅+
⋅⋅= aR fiind rezistenta corespunzatoare pierderilor în fier,
iar mX – reactanta de magnetizare. Acesti ultimi parametri pot fi calculati din datele enuntului
problemei, presupunând .V220UE 11 =≈
Ω=⋅
=⋅
= 8,5802502203
RE3
R2
Fe
21
a
1
curentul corespunzator pierderilor în fier fiind:
A379,08,580
220RE
Ia
1a ===

Masina asincrona
121
iar curentul de magnetizare:
A09,7379,01,7III 222a
20m =−=−=
reactanta de magnetizare:
Ω=== 03,3109,7
220IE
Xm
1m
.94,30j65,103,31j8,58003,31j8,580
XjRXjR
Zma
maa ⋅+=
⋅+⋅⋅
=⋅+⋅⋅
=
Prin urmare
02,194,30j65,154,31j90,1
94,30j65,160,0j25,0
1ZZ
1c0
1 =⋅+⋅+
=⋅+⋅+
+=+=
cuplul de pornire fiind:
( )[ ] .mN8,124212,1485,01,15702,12
22023,03
XcXRcR
UR3M 22
2
2
dd
2
211
2n12
p''
'
21
⋅=+⋅⋅⋅
⋅⋅=
⋅++
⋅+⋅Ω
⋅⋅=
b) Ecuatia de miscare fiind:
Ω
⋅=−dt
dJMM 2
s
acceleratia initiala la pornire cu sarcina mN76,6381,95,6mfkg5,6Ms ⋅=⋅=⋅⋅= si momentul total
de inertie:
22
mkg2,081,9481,98,0
g4DG
J ⋅=⋅⋅
=⋅⋅
=
.s/rad2,3052,0
76,638,124J
MMdt
ds 2sp
p
2p =
−=
−=
Ω
=
c) Cuplul electromagnetic maxim se calculeaza cu ajutorul formulei 3.41:
.mN55,309
)212,125,025,0(1,15702,12
2203
XcXRRc2
U3M
22
2
2
dd2111
2n1
m
'22
⋅=
=++⋅⋅⋅
⋅=
⋅+++⋅Ω⋅⋅
⋅=
d) Alunecarea critica sm trebuie sa fie egala cu unitatea, daca se cere ca la pornire cuplul
dezvoltat sa fie cel maxim posibil. Alunecarea critica naturala în cazul motorului studiat este:
( ).19,0
6,002,16,025,0
23,002,1
XcXR
Rcs
222
dd21
2m
'
'
21
=⋅++
⋅=
⋅++
⋅=

Masina asincrona 122
Pentru a deveni egala cu unitatea trebuie trebuie intercalata în fiecare faza a rotorului o
rezistenta suplimentara raportata la stator '2R dedusa din raportul:
'''
2
s2
m R
RRs1 +
=
adica
.98,0119,01
23,01s1
RRm
2s'' Ω=
−⋅=
−⋅=
Capitolul 4
MASINA SINCRONA
Masina sincrona este tipul de masina electrica rotativa de curent alternativ care, pentru o
tensiune la borne de frecventa data, functioneaza cu o turatie riguros constanta.
Regimul de baza în functionarea masinii sincrone este regimul de generator electric, la fel
cum regimul de motor este cel de baza pentru masina asincrona. Masina sincrona în regim de
generator reprezinta baza economica a producerii energiei electrice în toate centralele electrice
actuale. În acest regim de functionare masinile sincrone ating cele mai mari puteri nominale fiind
cele mai mari masini electrice construite de om.
Consideratii economice pledeaza pentru cresterea neîncetata a puterii nominale a
generatoarelor sincrone (scad investitiile specifice în lei/kW, creste randamentul). Cele mai mari
masini sincrone actuale au atins puteri de 1200MW ca turbogeneratoare si 700MW ca
hidrogeneratoare.
Regimul de motor sincron se foloseste mai cu seama datorita avantajelor fata de motoarele
asincrone (randament mai ridicat, factor de putere mergând pâna la unitate, cuplu invariabil cu
turatia, întrefier mai mare). Lucrul acesta a fost cu putinta numai dupa ce tehnica a putut rezolva cu
succes doua deficiente grave ale motorului sincron: absenta cuplului de pornire si posibilitatea de
pendulare cu pericolul desprinderii din sincronism (pierderea stabilitatii). În acest regim de
functionare masina sincrona se foloseste în toate actionarile ce necesita o turatie constanta
(compresoare, mori cu bile, pompe de irigatii, etc.) înlocuind din ce în ce mai mult motoarele
asincrone (în special la puteri mari unde primeaza considerentele economice: randament, factor de
putere).
Un alt regim de functionare particular masinii sincrone este compensatorul sincron, regim în
care axul masinii se învârte în gol masina servind la îmbunatatirea factorului de putere al retelei,
compensând energia reactiva consumata în special de motoarele asincrone alimentate din retea.
Regimul de frâna este mai rar întâlnit la masina sincrona.
Masina sincrona 124
4.1 Elemente constructive ale masinii sincrone
În constructia uzuala, masina sincrona se compune din doua parti principale:
− statorul, reprezentat de partea fixa, exterioara;
− rotorul, asezat concentric în interiorul statorului si care constituie partea mobila.
Statorul la masina sincrona de constructie obisnuita reprezinta indusul masinii si este format
dintr-un miez feromagnetic care poarta în crestaturi o înfasurare de curent alternativ trifazat fiind
foarte asemanator din punct de vedere constructiv cu statorul masinii asincrone trifazate.
Miezul feromagnetic se realizeaza din tole sau segmente de tole stantate din otel
electrotehnic de 0,5 mm grosime izolate între ele cu lac izolant sau oxizi ceramici împachetate în
pachete de cca. 5 cm grosime, între pachete prevazându-se canale radiale de racire (figura 4.1).
Miezul se consolideaza cu tole marginale de (1 ÷ 3)mm grosime si se preseaza cu ajutorul unor
placi frontale pentru a evita aparitia vibratiilor în timpul functionarii.
Înfasurarea statorica este repartizata ( )1q > si se conecteaza la reteaua trifazata de c.a.
Înfasurarea se realizeaza din conductor (bare) de cupru izolat cu fibre de sticla, micanita sau rasini
sintetice în functie de clasa de izolatie si de tensiunea nominala. La masina sincrona trifazata,
înfasurarea statorului se conecteaza în stea pentru a se evita închiderea armonicilor curentului de
ordinul 3 si multipli de 3, precum si aparitia unor armonici de acelasi ordin în curba tensiunii de
faza.
Carcasa masinii se realizeaza din otel turnat (la masinile mici) sau din tabla sudata de otel
(la masinile de puteri mari si foarte mari) si poarta dispozitivele de fixare pe fundatie (talpi), inelele
de ridicare, cutia de borne a indusului si a inductorului, placuta indicatoare si scuturile frontale
(figura 4.1).
La masinile mijlocii scuturile pe lânga rolul de protectie sunt prevazute si cu lagare, iar unul
dintre scuturi sustine port-periile cu periile de contact (figura 4.1).
Placuta indicatoare contine de obicei principalele date nominale ale masinii: puterea
nominala aparenta (kVA sau MVA) si activa (kW sau MW), factorul de putere nominal ( ),cos nϕ
tensiunea si curentul nominal de linie (V; kV; A; kA), tensiunea si curentul nominal de excitatie (V;
A), randamentul nominal ,nη turatia nominala (rot/min), frecventa nominala (Hz), numarul de faze
si conexiunea lor.
Rotorul masinii sincrone cuprinde miezul feromagnetic rotoric, înfasurarea rotorica, inelele
colectoare, ventilatorul (figura 4.1).
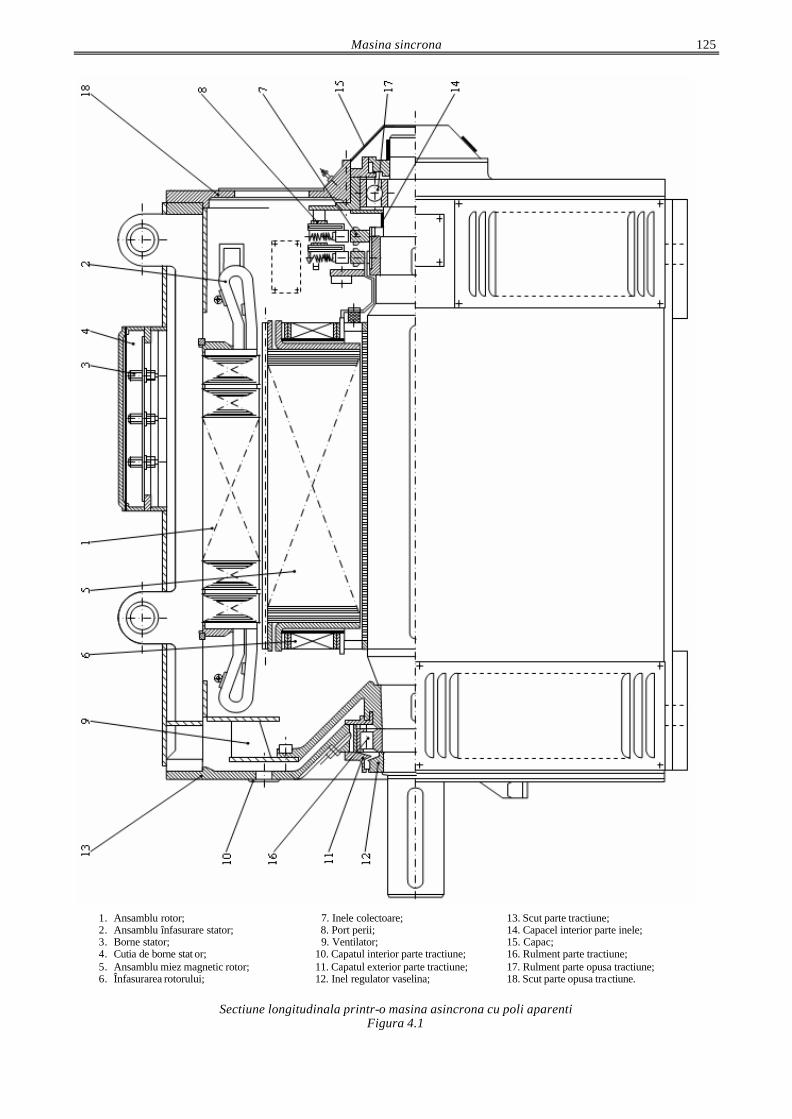
Masina sincrona
125
1. Ansamblu rotor; 7. Inele colectoare; 13. Scut parte tractiune; 2. Ansamblu înfasurare stator; 8. Port perii; 14. Capacel interior parte inele; 3. Borne stator; 9. Ventilator; 15. Capac; 4. Cutia de borne stat or; 10. Capatul interior parte tractiune; 16. Rulment parte tractiune; 5. Ansamblu miez magnetic rotor; 11. Capatul exterior parte tractiune; 17. Rulment parte opusa tractiune; 6. Înfasurarea rotorului; 12. Inel regulator vaselina; 18. Scut parte opusa tractiune.
Sectiune longitudinala printr-o masina asincrona cu poli aparenti
Figura 4.1
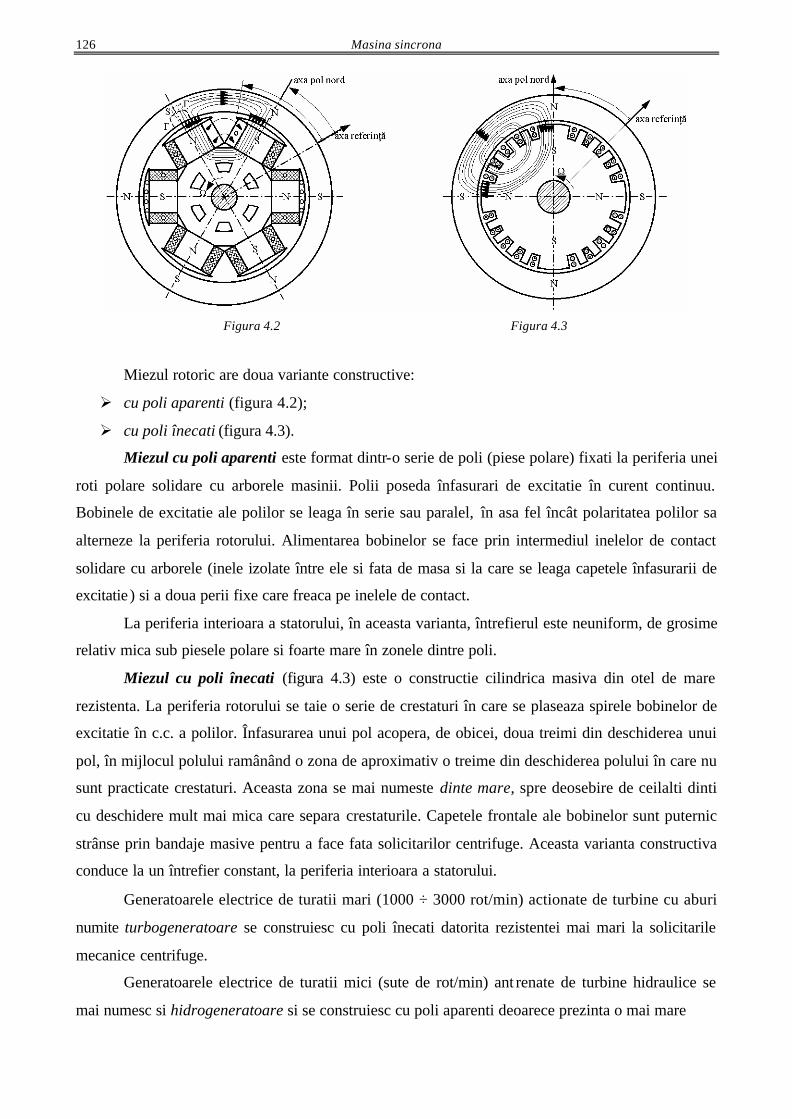
Masina sincrona 126
Figura 4.2 Figura 4.3
Miezul rotoric are doua variante constructive:
Ø cu poli aparenti (figura 4.2);
Ø cu poli înecati (figura 4.3).
Miezul cu poli aparenti este format dintr-o serie de poli (piese polare) fixati la periferia unei
roti polare solidare cu arborele masinii. Polii poseda înfasurari de excitatie în curent continuu.
Bobinele de excitatie ale polilor se leaga în serie sau paralel, în asa fel încât polaritatea polilor sa
alterneze la periferia rotorului. Alimentarea bobinelor se face prin intermediul inelelor de contact
solidare cu arborele (inele izolate între ele si fata de masa si la care se leaga capetele înfasurarii de
excitatie ) si a doua perii fixe care freaca pe inelele de contact.
La periferia interioara a statorului, în aceasta varianta, întrefierul este neuniform, de grosime
relativ mica sub piesele polare si foarte mare în zonele dintre poli.
Miezul cu poli înecati (figura 4.3) este o constructie cilindrica masiva din otel de mare
rezistenta. La periferia rotorului se taie o serie de crestaturi în care se plaseaza spirele bobinelor de
excitatie în c.c. a polilor. Înfasurarea unui pol acopera, de obicei, doua treimi din deschiderea unui
pol, în mijlocul polului ramânând o zona de aproximativ o treime din deschiderea polului în care nu
sunt practicate crestaturi. Aceasta zona se mai numeste dinte mare, spre deosebire de ceilalti dinti
cu deschidere mult mai mica care separa crestaturile. Capetele frontale ale bobinelor sunt puternic
strânse prin bandaje masive pentru a face fata solicitarilor centrifuge. Aceasta varianta constructiva
conduce la un întrefier constant, la periferia interioara a statorului.
Generatoarele electrice de turatii mari (1000 ÷ 3000 rot/min) actionate de turbine cu aburi
numite turbogeneratoare se construiesc cu poli înecati datorita rezistentei mai mari la solicitarile
mecanice centrifuge.
Generatoarele electrice de turatii mici (sute de rot/min) ant renate de turbine hidraulice se
mai numesc si hidrogeneratoare si se construiesc cu poli aparenti deoarece prezinta o mai mare
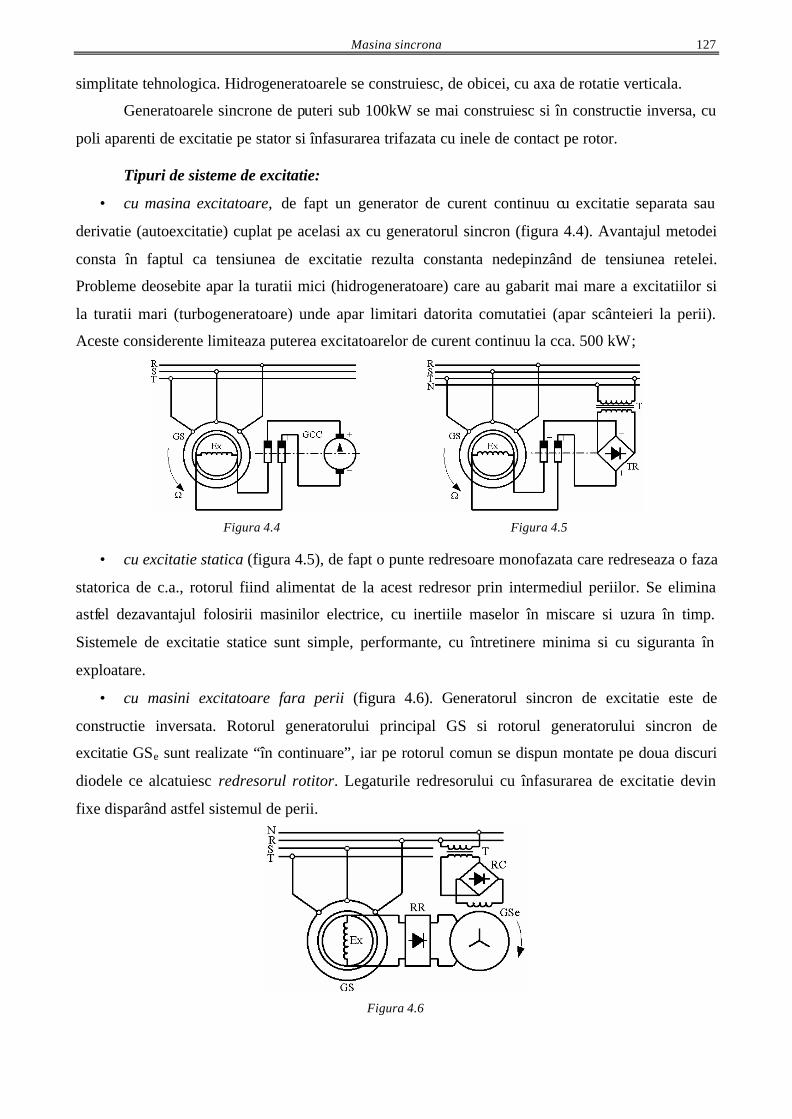
Masina sincrona
127
simplitate tehnologica. Hidrogeneratoarele se construiesc, de obicei, cu axa de rotatie verticala.
Generatoarele sincrone de puteri sub 100kW se mai construiesc si în constructie inversa, cu
poli aparenti de excitatie pe stator si înfasurarea trifazata cu inele de contact pe rotor.
Tipuri de sisteme de excitatie:
• cu masina excitatoare, de fapt un generator de curent continuu cu excitatie separata sau
derivatie (autoexcitatie) cuplat pe acelasi ax cu generatorul sincron (figura 4.4). Avantajul metodei
consta în faptul ca tensiunea de excitatie rezulta constanta nedepinzând de tensiunea retelei.
Probleme deosebite apar la turatii mici (hidrogeneratoare) care au gabarit mai mare a excitatiilor si
la turatii mari (turbogeneratoare) unde apar limitari datorita comutatiei (apar scânteieri la perii).
Aceste considerente limiteaza puterea excitatoarelor de curent continuu la cca. 500 kW;
Figura 4.4 Figura 4.5
• cu excitatie statica (figura 4.5), de fapt o punte redresoare monofazata care redreseaza o faza
statorica de c.a., rotorul fiind alimentat de la acest redresor prin intermediul periilor. Se elimina
astfel dezavantajul folosirii masinilor electrice, cu inertiile maselor în miscare si uzura în timp.
Sistemele de excitatie statice sunt simple, performante, cu întretinere minima si cu siguranta în
exploatare.
• cu masini excitatoare fara perii (figura 4.6). Generatorul sincron de excitatie este de
constructie inversata. Rotorul generatorului principal GS si rotorul generatorului sincron de
excitatie GSe sunt realizate “în continuare”, iar pe rotorul comun se dispun montate pe doua discuri
diodele ce alcatuiesc redresorul rotitor. Legaturile redresorului cu înfasurarea de excitatie devin
fixe disparând astfel sistemul de perii.
Figura 4.6

Masina sincrona 128
4.2 Generatorul sincron
Generatorul sincron trifazat prezinta caracteristici extrem de convenabile pentru producerea
energiei electrice de curent alternativ si reprezinta unica solutie general acceptata de constructorii
de centrale electrice si de sisteme electro-energetice.
Ansamblul format din motorul primar si generatorul sincron poarta denumirea de grup
electrogen. Dupa natura masinii primare care furnizeaza energie mecanica întâlnim: diesel-
generatoarele, turbogeneratoare, hidrogeneratoare.
4.2.1 Principiul de functionare al generatorului sincron cu poli înecati
În regim de generator masina sincrona transforma energia mecanica primita pe la ax de la un
motor primar în energie electrica debitata prin stator într-o retea de curent alternativ.
Sa presupunem o masina sincrona cu poli înecati (figura 4.3) al carei rotor este excitat cu un
curent continuu ,I1 si este rotit din exterior cu viteza unghiulara .1Ω Se obtine astfel un câmp
magnetic învârtitor inductor (vezi subcap. 2.1.2) pe cale mecanica, al carei armonica fundamentala
are expresia:
( )δ
⋅⋅⋅µ=⋅ω−α⋅⋅= 1f10
m1m11IkN
B;tpcosBB (4.1)
unde pulsatia câmpului învârtitor ,p 11 Ω⋅=ω indicele „1” referindu-se la faptul ca desi este produs
în rotor acest câmp învârtitor are functie de „câmp inductor ”.
Fata de înfasurarea statorica acest câmp învârtitor va produce sistemul trifazat simetric de
fluxuri:
.3
4tcos
32
tcos
tcos
1m0W0
1m0V0
1m0U0
π⋅
−⋅ω⋅Φ=ϕ
π⋅
−⋅ω⋅Φ=ϕ
⋅ω⋅Φ=ϕ
(4.2)
Sistemul trifazat simetric de fluxuri (4.2) va induce în înfasurarea statorica un sistem trifazat
simetric de t.e.m.:
.3
4tsinEe
32
tsinEe
tsinEe
1omW0
1omV0
1m0U0
π⋅
−⋅ω⋅=
π⋅
−⋅ω⋅=
⋅ω⋅=
(4.3)

Masina sincrona
129
Daca înfasurarea statorica este conectata pe o retea trifazata echilibrata sau pe un
consumator trifazat echilibrat, atunci sistemul de t.e.m. (4.3) va produce un sistem simetric de
curenti:
( )
.3
4tsinIi
32
tsinIi
tsinIi
1m2W2
1m2V2
1m2U2
π⋅
−ϕ−⋅ω⋅=
π⋅
−ϕ−⋅ω⋅=
ϕ−⋅ω⋅=
(4.4)
Sistemul de curenti trifazati simetrici (4.4) va produce la rândul sau un câmp magnetic
învârtitor de reactie al carei fundamentala (armonica de ordinul 1) va avea expresia:
.2
tpcosBB 1rmr
ϕ−
π−⋅ω−α⋅⋅= (4.5)
Comparând relatia (4.1) cu (4.5) se constata ca cele doua câmpuri învârtitoare (inductor si
de reactie) au aceeasi pulsatie si viteza unghiulara ,p1ω
=Ω deci se rotesc sincron, de unde si
denumirea de masina sincrona.
Cele doua câmpuri, de excitatie si de reactie se compun pentru a produce câmpul magnetic
învârtitor rezultant al masinii, care este câmpul util, prin intermediul lui având loc cuplajul magnetic
al celor doua armaturi.
Câmpul învârtitor de reactie rB exprimat prin relatia (4.5) va produce la rândul sau fata de
înfasurarea statorica un sistem trifazat simetric de fluxuri:
.3
42
tcos
32
2tcos
2tcos
1mrrW
1mrrV
1mrrU
π⋅
−ϕ−π
−⋅ω⋅Φ=ϕ
π⋅
−ϕ−π
−⋅ω⋅Φ=ϕ
ϕ−
π−⋅ω⋅Φ=ϕ
(4.6)
care va induce în stator sistemul trifazat de t.e.m.:
.3
42
tsinEe
32
2tsinEe
2tsinEe
1mrWr
1mrVr
1mrUr
π⋅
−ϕ−π
−⋅ω⋅=
π⋅
−ϕ−π
−⋅ω⋅=
ϕ−
π−⋅ω⋅=
(4.7)
În realitate, în masina sincrona nu exista doua câmpuri învârtitoare ( ),B,B r1 doua
fluxuri ( )r0 ,ϕϕ sau doua t.e.m. ( )r0 e,e ci aceste marimi se compun într-o singura marime.

Masina sincrona 130
Astfel, în figura 4.7 se reprezinta compunerea fazoriala a acestor marimi considerând
reteaua pe care debiteaza generatorul inductiva: .2
,0
π
∈ϕ
Figura 4.7
Dupa cum se vede din figura 4.7, a câmpul rezultant mB pe care îl gasim în întrefierul
masinii face unghiul θ fata de axa câmpului inductor ;B1 acelasi unghi îl face si fluxul rezultant
mΦ fata de fluxul inductor 0Φ ca si t.e.m. rezultanta mE fata de .E0 Unghiul electric θ este numit si
unghi intern al masinii.
4.2.2 Ecuatiile de functionare ale generatorului sincron cu poli înecati
Vom considera o masina sincrona trifazata în urmatoarele ipoteze simplificatoare: circuitul
magnetic al masinii este liniar (nu se satureaza si nu prezinta fenomenul de histerezis); pierderile în
fier sunt neglijate (ulterior vom face corectia necesara); masina are o simetrie perfecta constructiva,
magnetica si electrica, ceea ce include ipoteza unui întrefier constant la periferia rotorului, adica se
considera o masina cu poli înecati; nu vom lua în consideratie decât armonicele fundamentale ale
câmpurilor de excitatie si de reactie; înfasurarea statorica este conectata la o retea trifazata
echilibrata cu caracter inductiv; rotorul masinii este rotit din exterior cu turatia constanta
[ ]min/rot2
60n 1
1 π⋅Ω⋅
= ; înfasurarea de excitatie este alimentata la tensiunea constanta nominala .Uen
De asemenea, în cele ce urmeaza, vom considera doar regimul stationar de functionare,
regim în care viteza unghiulara a rotorului 1Ω si tensiunea de excitatie ramân constante.
Procedând în mod analog ca la masina asincrona (sau ca la transformator), vom introduce
asa-numitul curent de magnetizare, care are toate atributele câmpului rezultant .Bm

Masina sincrona
131
În ceea ce priveste câmpul de excitatie, vom înlocui rotorul real cu un rotor fictiv imobil,
posedând o înfasurare trifazata simetrica, cu acelasi numar de spire pe faza si acelasi coeficient de
înfasurare ca si statorul masinii.
Valoarea efectiva '1I a curentului ce va strabate aceasta înfasurare rotorica trifazata fictiva
rezulta din egalitatea amplitudinii câmpului magnetic de excitatie real, produs pe cale mecanica de
înfasurarea monofazata, si a amplitudinii câmpului magnetic învârtitor obtinut pe cale electrica de
înfasurarea fictiva: (conform subcap. 2.1.2 relatiile 2.25 si 2.32’):
δ⋅⋅µ⋅
=δ⋅⋅π
⋅⋅⋅µ⋅110f1N20 INk
p
IkN3 '2
de unde rezulta:
.kN3
kNpII
2N2
f111
'⋅⋅
π⋅⋅⋅⋅=
Curentul '1I se numeste curent de excitatie raportat la stator.
Prin acest artificiu de calcul compunerea fazoriala a celor doua câmpuri învârtitoare (de
excitatie si de reactie) din figura 4.7, a se poate înlocui prin compunerea curentilor din figura 4.9,
curenti având aceeasi pulsatie si defazaje reciproce cu câmpurile.
Se obtine astfel prima ecuatie functionala în regim stationar a generatorului sincron:
m12 III ' =+ (4.10)
ecuatie pusa în evidenta în diagrama de fazori din figura 4.10.
Daca se iau în consideratie si pierderile în fierul statoric, atunci ecuatia 4.10 sufera o
corectie uzuala folosita si la transformator si la motorul asincron:
am0
012
IIIIII '
+==+ (4.11)
mI fiind componenta de magnetizare, iar aI componenta corespunzatoare pierderilor în fier ale
curentului rezultant 0I numit si curent de mers în gol.
Pentru gasirea celei de-a doua ecuatii (de tensiuni) a generatorului sincron vom aplica cea
de-a doua teorema a lui Kirchhoff pe un ochi de circuit ce cuprinde o faza statorica ce se închide
prin nul (figura 4.8):
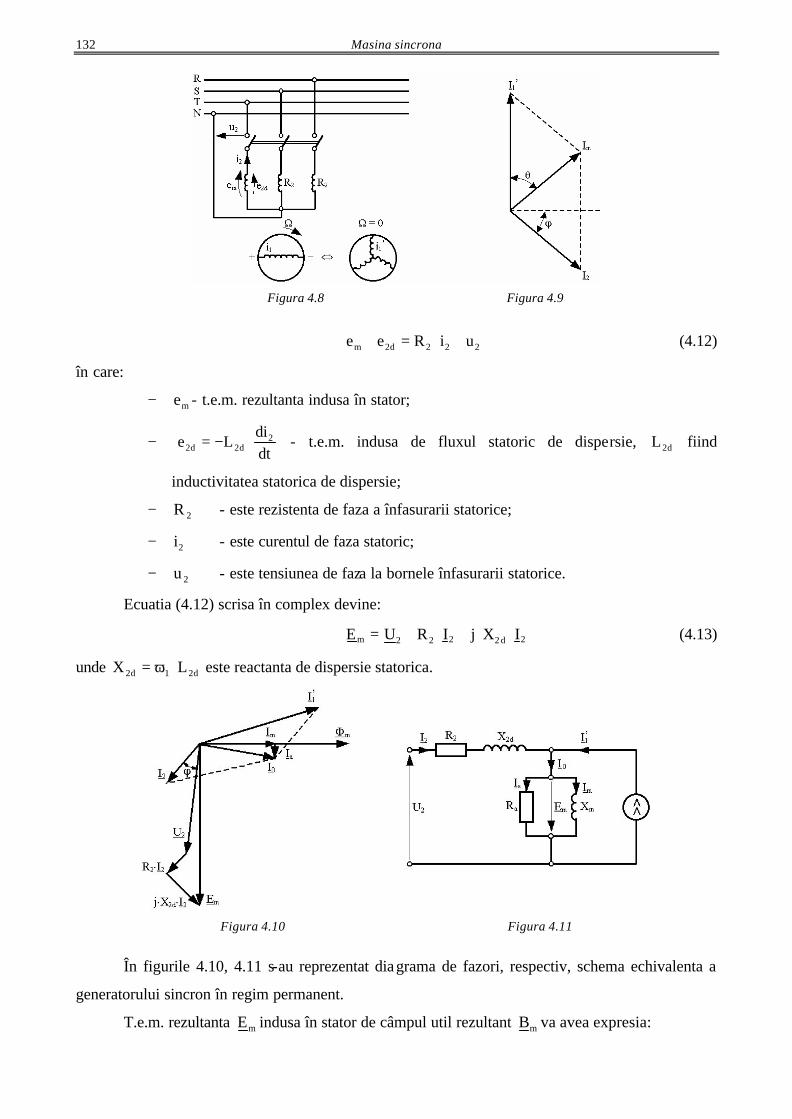
Masina sincrona 132
Figura 4.8 Figura 4.9
222d2m uiRee +⋅=+ (4.12)
în care:
− me - t.e.m. rezultanta indusa în stator;
− dtdi
Le 2d2d2 ⋅−= - t.e.m. indusa de fluxul statoric de dispersie, d2L fiind
inductivitatea statorica de dispersie;
− 2R - este rezistenta de faza a înfasurarii statorice;
− 2i - este curentul de faza statoric;
− 2u - este tensiunea de faza la bornele înfasurarii statorice.
Ecuatia (4.12) scrisa în complex devine:
2d2222m IXjIRUE ⋅⋅+⋅+= (4.13)
unde d21d2 LX ⋅ω= este reactanta de dispersie statorica.
Figura 4.10 Figura 4.11
În figurile 4.10, 4.11 s-au reprezentat diagrama de fazori, respectiv, schema echivalenta a
generatorului sincron în regim permanent.
T.e.m. rezultanta mE indusa în stator de câmpul util rezultant mB va avea expresia:

Masina sincrona
133
mmm IjXE −=
Introducând expresia curentului mI din relatia (4.10) în relatia (4.14) obtinem:
02m21mm EIXjIIXjE ' +⋅⋅−=
+⋅⋅−=
în care marimea '1m0 IXjE ⋅⋅−= reprezinta chiar t.e.m. indusa în stator de câmpul învârtitor de
excitatie, iar marimea 2mr IXjE ⋅⋅−= este t.e.m. indusa în stator de câmpul învârtitor de reactie.
Înlocuind pe mE în relatia (4.13) obtinem o noua forma a ecuatiei de tensiuni a
generatorului sincron:
( ) 2md22220 IXXjIRUE ⋅+⋅+⋅+= (4.16)
sau daca se noteaza md2s XXX ' += numita reactanta sincrona:
2s2220 IXjIRUE ⋅⋅+⋅+= (4.17)
ecuatie pusa în evidenta de diagrama de fazori din figura 4.12, a unde se poate observa ca unghiul
dintre t.e.m. mE si 0E este chiar unghiul intern θ al masinii.
a) b)
Figura 4.12 Figura 4.13
De multe ori datorita valorii foarte mici a rezistentei 2R se poate neglija termenul 22 IR ⋅ în
raport cu 2U diagrama de fazori capatând forma simplificata din figura 4.12, b cu schema
echivalenta 4.13.
Ecuatia curentilor (4.11) împreuna cu ecuatia tensiunilor (4.17) si cu ecuatia (4.14) formeaza
sistemul ecuatiilor de functionare a generatorului sincron trifazat cu poli înecati în regim stationar.
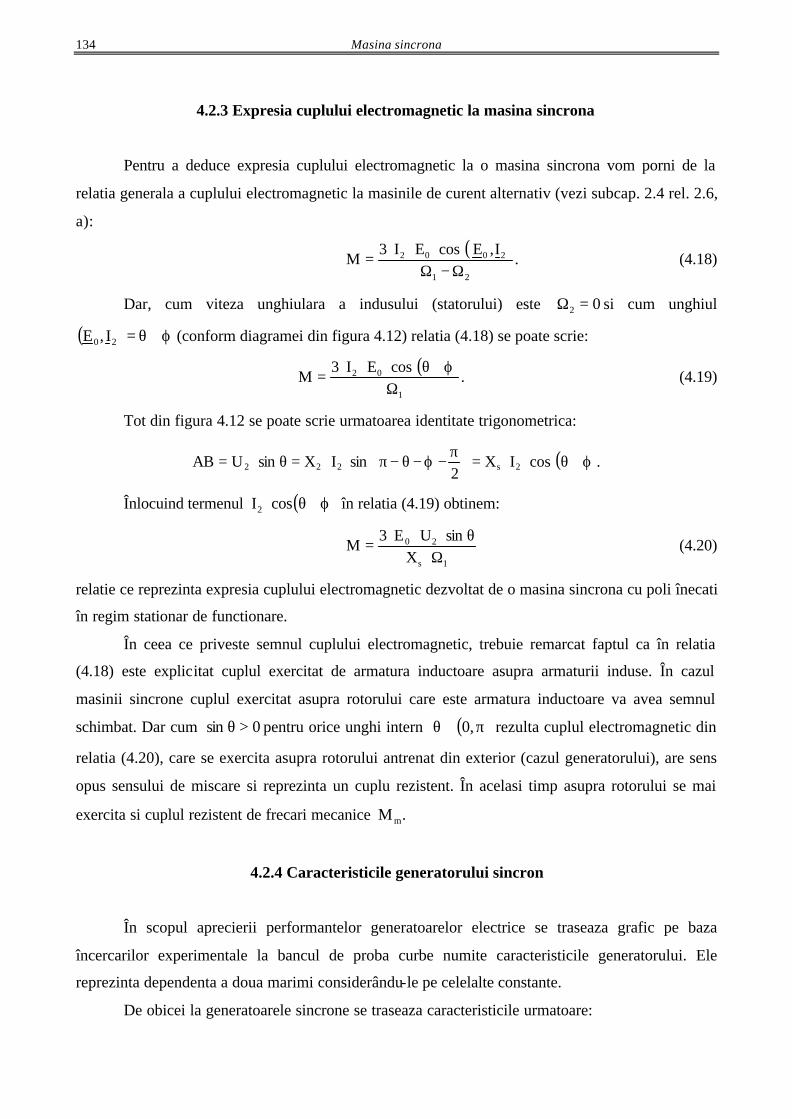
Masina sincrona 134
4.2.3 Expresia cuplului electromagnetic la masina sincrona
Pentru a deduce expresia cuplului electromagnetic la o masina sincrona vom porni de la
relatia generala a cuplului electromagnetic la masinile de curent alternativ (vezi subcap. 2.4 rel. 2.6,
a):
( )
.I,EcosEI3
M21
2002
Ω−Ω⋅⋅⋅
= (4.18)
Dar, cum viteza unghiulara a indusului (statorului) este 02 =Ω si cum unghiul
( ) ϕ+θ=20 I,E (conform diagramei din figura 4.12) relatia (4.18) se poate scrie:
( )
.cosEI3
M1
02
Ωϕ+θ⋅⋅⋅
= (4.19)
Tot din figura 4.12 se poate scrie urmatoarea identitate trigonometrica:
( ).cosIX2
sinIXsinUAB 2s222 ϕ+θ⋅⋅=
π
−ϕ−θ−π⋅⋅=θ⋅=
Înlocuind termenul ( )ϕ+θ⋅cosI2 în relatia (4.19) obtinem:
1s
20
XsinUE3
MΩ⋅
θ⋅⋅⋅= (4.20)
relatie ce reprezinta expresia cuplului electromagnetic dezvoltat de o masina sincrona cu poli înecati
în regim stationar de functionare.
În ceea ce priveste semnul cuplului electromagnetic, trebuie remarcat faptul ca în relatia
(4.18) este explicitat cuplul exercitat de armatura inductoare asupra armaturii induse. În cazul
masinii sincrone cuplul exercitat asupra rotorului care este armatura inductoare va avea semnul
schimbat. Dar cum 0sin >θ pentru orice unghi intern ( )π∈θ ,0 rezulta cuplul electromagnetic din
relatia (4.20), care se exercita asupra rotorului antrenat din exterior (cazul generatorului), are sens
opus sensului de miscare si reprezinta un cuplu rezistent. În acelasi timp asupra rotorului se mai
exercita si cuplul rezistent de frecari mecanice .Mm
4.2.4 Caracteristicile generatorului sincron
În scopul aprecierii performantelor generatoarelor electrice se traseaza grafic pe baza
încercarilor experimentale la bancul de proba curbe numite caracteristicile generatorului. Ele
reprezinta dependenta a doua marimi considerându-le pe celelalte constante.
De obicei la generatoarele sincrone se traseaza caracteristicile urmatoare:
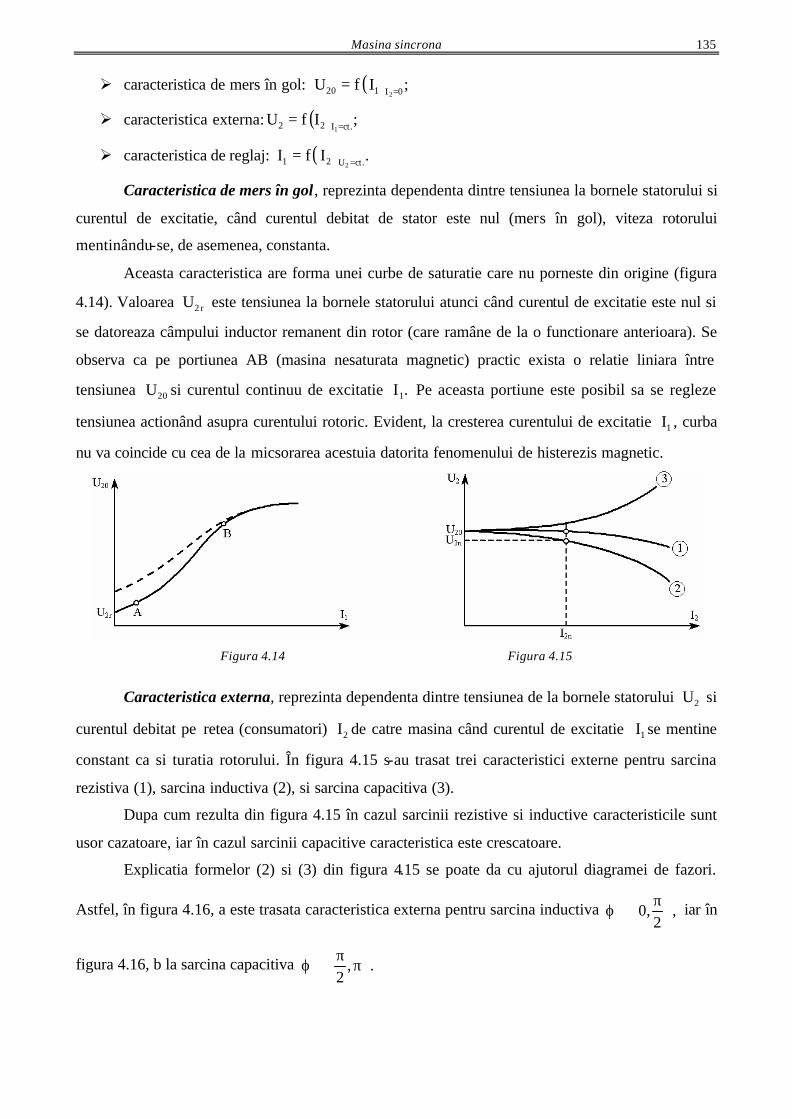
Masina sincrona
135
Ø caracteristica de mers în gol: ( ) ;IfU 0I120 2==
Ø caracteristica externa: ( ) ;IfU .ctI22 1==
Ø caracteristica de reglaj: ( ) .IfI .ctU21 2 ==
Caracteristica de mers în gol, reprezinta dependenta dintre tensiunea la bornele statorului si
curentul de excitatie, când curentul debitat de stator este nul (mers în gol), viteza rotorului
mentinându-se, de asemenea, constanta.
Aceasta caracteristica are forma unei curbe de saturatie care nu porneste din origine (figura
4.14). Valoarea r2U este tensiunea la bornele statorului atunci când curentul de excitatie este nul si
se datoreaza câmpului inductor remanent din rotor (care ramâne de la o functionare anterioara). Se
observa ca pe portiunea AB (masina nesaturata magnetic) practic exista o relatie liniara între
tensiunea 20U si curentul continuu de excitatie .I1 Pe aceasta portiune este posibil sa se regleze
tensiunea actionând asupra curentului rotoric. Evident, la cresterea curentului de excitatie 1I , curba
nu va coincide cu cea de la micsorarea acestuia datorita fenomenului de histerezis magnetic.
Figura 4.14 Figura 4.15
Caracteristica externa, reprezinta dependenta dintre tensiunea de la bornele statorului 2U si
curentul debitat pe retea (consumatori) 2I de catre masina când curentul de excitatie 1I se mentine
constant ca si turatia rotorului. În figura 4.15 s-au trasat trei caracteristici externe pentru sarcina
rezistiva (1), sarcina inductiva (2), si sarcina capacitiva (3).
Dupa cum rezulta din figura 4.15 în cazul sarcinii rezistive si inductive caracteristicile sunt
usor cazatoare, iar în cazul sarcinii capacitive caracteristica este crescatoare.
Explicatia formelor (2) si (3) din figura 4.15 se poate da cu ajutorul diagramei de fazori.
Astfel, în figura 4.16, a este trasata caracteristica externa pentru sarcina inductiva ,2
,0
π
∈ϕ iar în
figura 4.16, b la sarcina capacitiva .,2
π
π∈ϕ
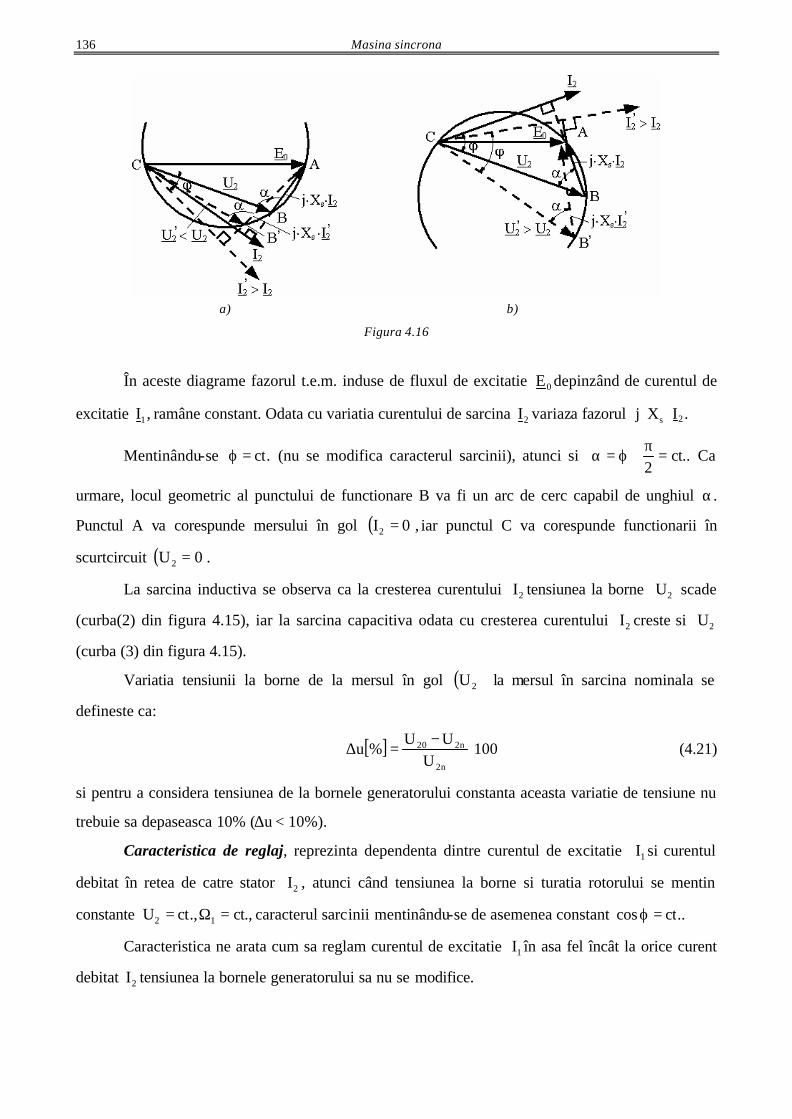
Masina sincrona 136
a) b)
Figura 4.16
În aceste diagrame fazorul t.e.m. induse de fluxul de excitatie 0E depinzând de curentul de
excitatie ,I1 ramâne constant. Odata cu variatia curentului de sarcina 2I variaza fazorul .IXj 2s ⋅⋅
Mentinându-se .ct=ϕ (nu se modifica caracterul sarcinii), atunci si ..ct2
=π
+ϕ=α Ca
urmare, locul geometric al punctului de functionare B va fi un arc de cerc capabil de unghiul α.
Punctul A va corespunde mersului în gol ( ),0I2 = iar punctul C va corespunde functionarii în
scurtcircuit ( ).0U2 =
La sarcina inductiva se observa ca la cresterea curentului 2I tensiunea la borne 2U scade
(curba(2) din figura 4.15), iar la sarcina capacitiva odata cu cresterea curentului 2I creste si 2U
(curba (3) din figura 4.15).
Variatia tensiunii la borne de la mersul în gol ( )2U la mersul în sarcina nominala se
defineste ca:
[ ] 100U
UU%u
n2
n220 ⋅−
=∆ (4.21)
si pentru a considera tensiunea de la bornele generatorului constanta aceasta variatie de tensiune nu
trebuie sa depaseasca 10% (∆u < 10%).
Caracteristica de reglaj, reprezinta dependenta dintre curentul de excitatie 1I si curentul
debitat în retea de catre stator 2I , atunci când tensiunea la borne si turatia rotorului se mentin
constante .,ct.,ctU 12 =Ω= caracterul sarcinii mentinându-se de asemenea constant ..ctcos =ϕ
Caracteristica ne arata cum sa reglam curentul de excitatie 1I în asa fel încât la orice curent
debitat 2I tensiunea la bornele generatorului sa nu se modifice.
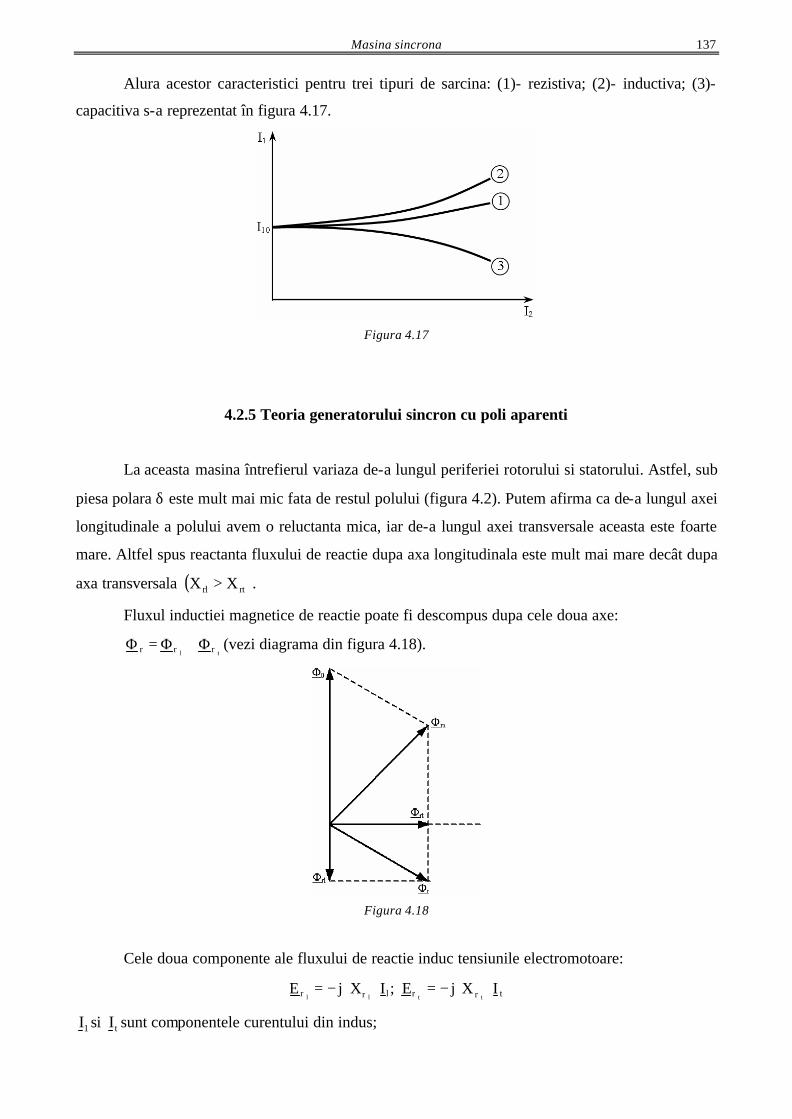
Masina sincrona
137
Alura acestor caracteristici pentru trei tipuri de sarcina: (1)- rezistiva; (2)- inductiva; (3)-
capacitiva s-a reprezentat în figura 4.17.
Figura 4.17
4.2.5 Teoria generatorului sincron cu poli aparenti
La aceasta masina întrefierul variaza de-a lungul periferiei rotorului si statorului. Astfel, sub
piesa polara δ este mult mai mic fata de restul polului (figura 4.2). Putem afirma ca de-a lungul axei
longitudinale a polului avem o reluctanta mica, iar de-a lungul axei transversale aceasta este foarte
mare. Altfel spus reactanta fluxului de reactie dupa axa longitudinala este mult mai mare decât dupa
axa transversala ( ).XX rtrl >
Fluxul inductiei magnetice de reactie poate fi descompus dupa cele doua axe:
tl rrr Φ+Φ=Φ (vezi diagrama din figura 4.18).
Figura 4.18
Cele doua componente ale fluxului de reactie induc tensiunile electromotoare:
trrlrr IXjE;IXjEttll⋅⋅−=⋅⋅−=
1I si tI sunt componentele curentului din indus;
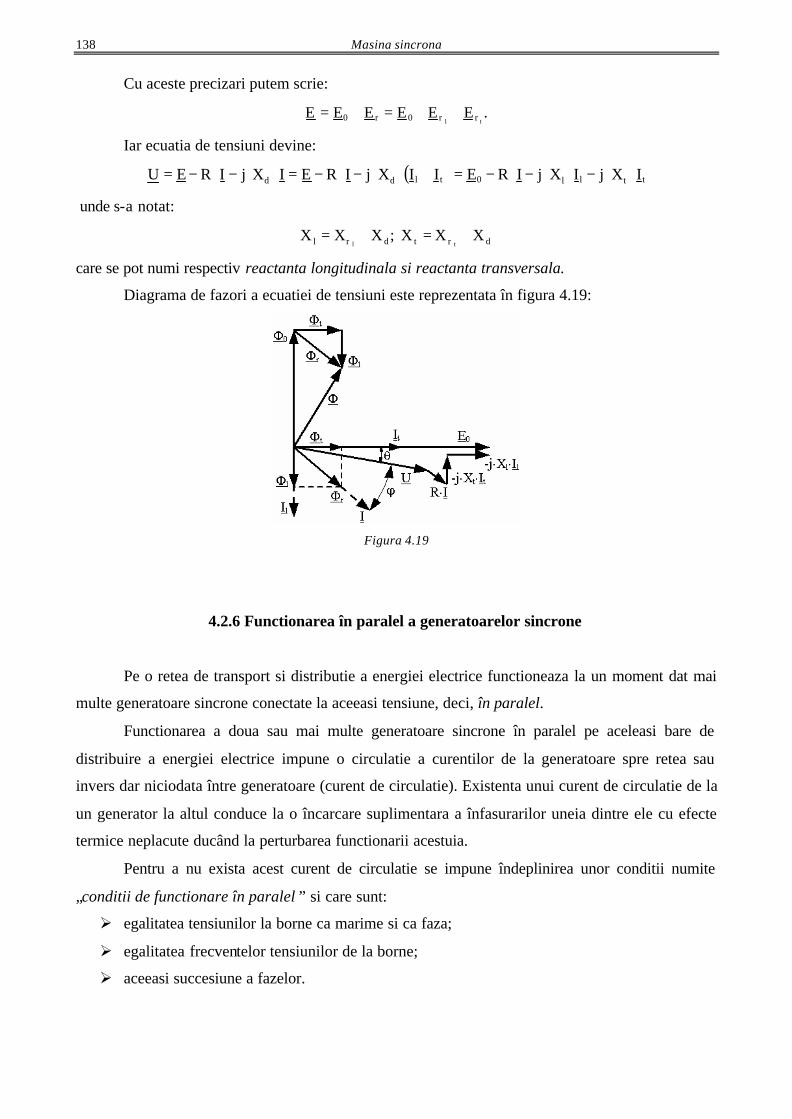
Masina sincrona 138
Cu aceste precizari putem scrie:
.EEEEEEtl rr0r0 ++=+=
Iar ecuatia de tensiuni devine:
( ) ttll0tldd IXjIXjIREIIXjIREIXjIREU ⋅⋅−⋅⋅−⋅−=+⋅⋅−⋅−=⋅⋅−⋅−=
unde s-a notat:
drtdrl XXX;XXXtl+=+=
care se pot numi respectiv reactanta longitudinala si reactanta transversala.
Diagrama de fazori a ecuatiei de tensiuni este reprezentata în figura 4.19:
Figura 4.19
4.2.6 Functionarea în paralel a generatoarelor sincrone
Pe o retea de transport si distributie a energiei electrice functioneaza la un moment dat mai
multe generatoare sincrone conectate la aceeasi tensiune, deci, în paralel.
Functionarea a doua sau mai multe generatoare sincrone în paralel pe aceleasi bare de
distribuire a energiei electrice impune o circulatie a curentilor de la generatoare spre retea sau
invers dar niciodata între generatoare (curent de circulatie). Existenta unui curent de circulatie de la
un generator la altul conduce la o încarcare suplimentara a înfasurarilor uneia dintre ele cu efecte
termice neplacute ducând la perturbarea functionarii acestuia.
Pentru a nu exista acest curent de circulatie se impune îndeplinirea unor conditii numite
„conditii de functionare în paralel ” si care sunt:
Ø egalitatea tensiunilor la borne ca marime si ca faza;
Ø egalitatea frecventelor tensiunilor de la borne;
Ø aceeasi succesiune a fazelor.
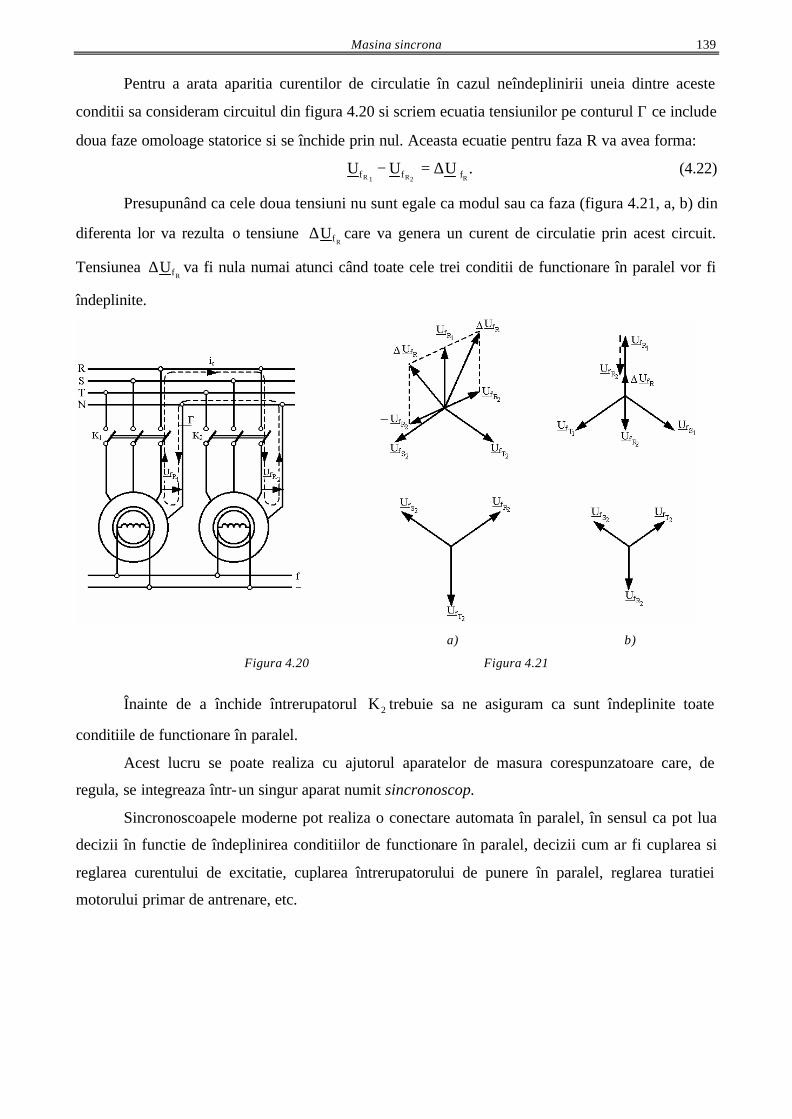
Masina sincrona
139
Pentru a arata aparitia curentilor de circulatie în cazul neîndeplinirii uneia dintre aceste
conditii sa consideram circuitul din figura 4.20 si scriem ecuatia tensiunilor pe conturul Γ ce include
doua faze omoloage statorice si se închide prin nul. Aceasta ecuatie pentru faza R va avea forma:
.UUUR2R1R fff ∆=− (4.22)
Presupunând ca cele doua tensiuni nu sunt egale ca modul sau ca faza (figura 4.21, a, b) din
diferenta lor va rezulta o tensiune RfU∆ care va genera un curent de circulatie prin acest circuit.
Tensiunea RfU∆ va fi nula numai atunci când toate cele trei conditii de functionare în paralel vor fi
îndeplinite.
a) b)
Figura 4.20 Figura 4.21
Înainte de a închide întrerupatorul 2K trebuie sa ne asiguram ca sunt îndeplinite toate
conditiile de functionare în paralel.
Acest lucru se poate realiza cu ajutorul aparatelor de masura corespunzatoare care, de
regula, se integreaza într-un singur aparat numit sincronoscop.
Sincronoscoapele moderne pot realiza o conectare automata în paralel, în sensul ca pot lua
decizii în functie de îndeplinirea conditiilor de functionare în paralel, decizii cum ar fi cuplarea si
reglarea curentului de excitatie, cuplarea întrerupatorului de punere în paralel, reglarea turatiei
motorului primar de antrenare, etc.

Masina sincrona 140
4.3 Motorul sincron
În regim de motor masina sincrona primeste energie electrica de la reteaua de c.a. trifazata
prin stator pe care o transforma în energie mecanica furnizata axului motorului.
4.3.1 Ecuatiile de functionare ale motorului sincron
Procedând în mod analog ca în cazul regimului de generator (vezi subcap. 4.2.2) ecuatia
tensiunilor pe o faza statorica corespunzator circuitului din figura 4.22 va avea forma:
.uiRee 222d2m −⋅=+ (4.23)
Figura 4.22
Ecuatia tensiunilor (4.23) scrisa în complex si tinând cont de expresia reactantei de dispersie
statorice va deveni:
2d222m2 IXjIREU ⋅⋅+⋅+−= (4.24)
sau în functie de t.e.m. indusa de fluxul de excitatie ecuatia (4.24) devine:
2s2202 IXjIREU ⋅⋅+⋅+−= (4.25)
în care: md2s XXX += - reactanta sincrona.
Ecuatia curentilor va avea aceeasi forma ca la generator:
m12 III ' =+
în care s-au neglijat pierderile în fier ( ),0Ia = iar '1I este curentul de excitatie raportat la stator (vezi
rel. 4.9).
Diagrama de fazori a motorului sincron în regim stationar s-a reprezentat în figura 4.23, a si
forma simplificata ( )0IR 22 ≈⋅ în figura 4.23, b.
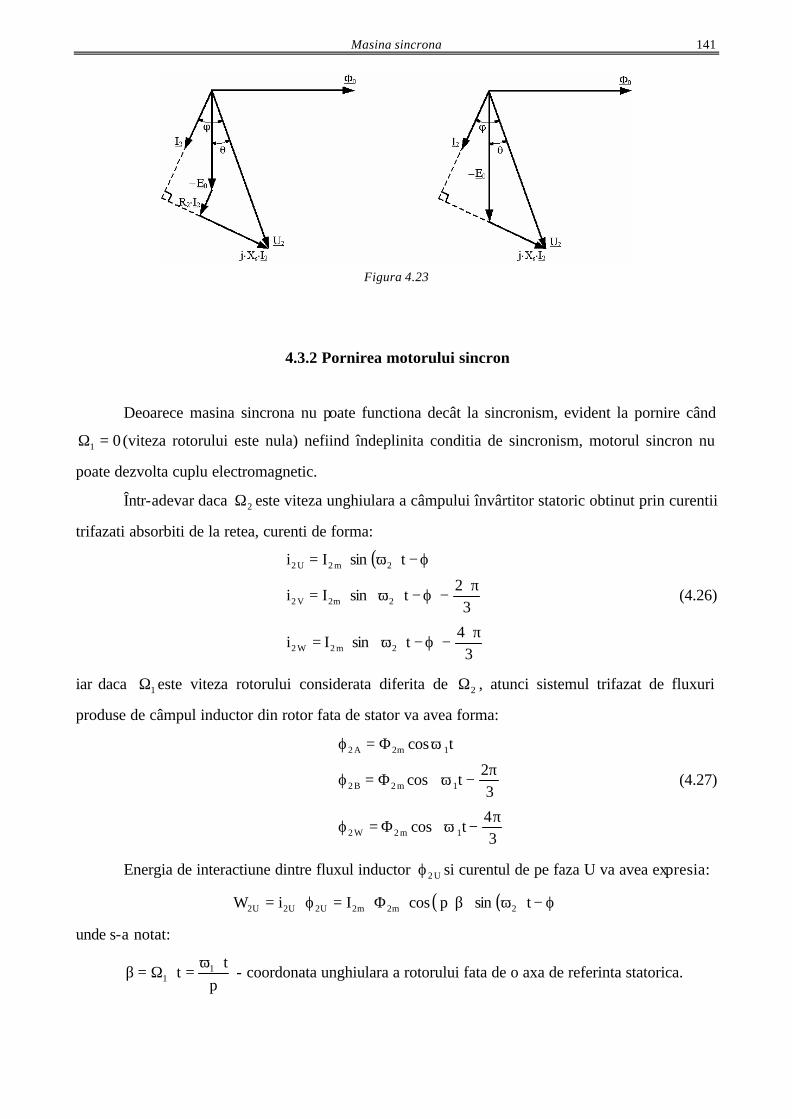
Masina sincrona
141
Figura 4.23
4.3.2 Pornirea motorului sincron
Deoarece masina sincrona nu poate functiona decât la sincronism, evident la pornire când
01 =Ω (viteza rotorului este nula) nefiind îndeplinita conditia de sincronism, motorul sincron nu
poate dezvolta cuplu electromagnetic.
Într-adevar daca 2Ω este viteza unghiulara a câmpului învârtitor statoric obtinut prin curentii
trifazati absorbiti de la retea, curenti de forma:
( )
π⋅
−ϕ−⋅ω⋅=
π⋅
−ϕ−⋅ω⋅=
ϕ−⋅ω⋅=
34
tsinIi
32
tsinIi
tsinIi
2m2W2
2m2V2
2m2U2
(4.26)
iar daca 1Ω este viteza rotorului considerata diferita de 2Ω , atunci sistemul trifazat de fluxuri
produse de câmpul inductor din rotor fata de stator va avea forma:
π
−ωΦ=ϕ
π
−ωΦ=ϕ
ωΦ=ϕ
34
tcos
32
tcos
tcos
1m2W2
1m2B2
1m2A2
(4.27)
Energia de interactiune dintre fluxul inductor U2ϕ si curentul de pe faza U va avea expresia:
( ) ( )ϕ−⋅ω⋅β⋅⋅Φ⋅=ϕ⋅= tsinpcosIiW 2m2m2U2U2U2
unde s-a notat:
p
tt 1
1⋅ω
=⋅Ω=β - coordonata unghiulara a rotorului fata de o axa de referinta statorica.

Masina sincrona 142
Cuplul electromagnetic dezvoltat de faza U a înfasurarii statorice si transmis rotorului se
poate afla aplicând teorema fortelor generalizate:
( ) ( )
( ) ..cti
tsintsinIpd
dWm
2
21m2m2.cti
U2U2
2
=β
ϕ−⋅ω⋅ω⋅Φ⋅⋅=
β
==
Procedând analog pentru fazele V si W se obtine pentru cuplul electromagnetic instantaneu
total dezvoltat asupra rotorului:
( ).ttcosIp23
mmmm 21m2m2W2V2U22 ϕ−⋅ω−⋅ω⋅Φ⋅⋅⋅=++=
Cuplul mediu dezvoltat pe o perioada T va fi:
( ) .dtttcosIp23
T1
dtmT1
MT
021m2m2
T
022 ∫∫ ϕ−⋅ω−⋅ω⋅Φ⋅⋅⋅⋅=⋅= (4.28)
Examinând expresia (4.28) se constata ca pe un numar oarecare de perioade ale functiei
sinusoidale
π⋅
=k2
T cuplul electromagnetic mediu în timp este nul exceptând cazul .21 ω=ω
Deci motorul sincron nu poate dezvolta cuplu electromagnetic decât daca este îndeplinita
conditia de sincronism .21 Ω=Ω
Pentru a putea porni motorul sincron se poate aplica una din metodele:
• pornirea cu ajutorul unui motor auxiliar;
• pornirea în asincron.
Pornirea cu ajutorul unui motor auxiliar, mai rar folosita în practica, consta în antrenarea
cu ajutorul unui motor auxiliar a rotorului motorului sincron pâna la turatia de sincronism, moment
în care se conecteaza statorul la retea. Motorul sincron va dezvolta cuplu electromagnetic si deci
motorul auxiliar se poate decupla.
Metoda este neeconomica deoarece mai necesita un motor, care, chiar daca este de putere
mai mica (pornirea este recomandabil sa se faca în gol) ridica totusi pretul instalatiei.
Pornirea în asincron, este posibila numai atunci când polii rotorici sunt prevazuti cu o
înfasurare suplimentara în scurtcircuit care joaca rolul coliviei la motorul asincron. Barele coliviei
sunt plasate în crestaturi practicate în piesele polare (figura 4.2) si sunt din alama sau aluminiu. În
aceste bare se induc curenti atunci când câmpul învârtitor al statorului are o anumita viteza relativa
fata de rotor, asa cum este cazul la pornire. Interactiunea dintre acesti curenti si fluxul inductor va
da nastere unui cuplu electromagnetic asincron de pornire.
Dupa ce motorul a pornit (înfasurarea de excitatie fiind scurtcircuitata la perii pentru a ajuta
pornirea) motorul se tureaza atingând turatia subsincrona de regim stationar. În acest moment se

Masina sincrona
143
injecteaza curent continuu în înfasurarea de excitatie, obtinându-se un câmp învârtitor care initial
are aceeasi turatie subsincrona, dar care, apoi, într-un proces tranzitoriu capata viteza de sincronism.
Si aceasta metoda este dificila continând multe manevre.
În general se poate afirma ca motorul sincron are o pornire dificila.
4.3.3 Caracteristicile motorului sincron
Pentru aprecierea performantelor motorului sincron de obicei se traseaza experimental la
bancul de proba urmatoarele caracteristici:
− caracteris tica mecanica: ( );Mfn1 =
− caracteristica unghiulara: ( );fM θ=
− caracteristica în “V”: ( ).IfI 12 =
Caracteristica mecanica
Întrucât motorul sincron nu poate functiona decât la sincronism, caracteristica mecanica
( )Mfn1 = va fi o dreapta paralela cu axa cuplului (figura 4.24). Cuplul electromagnetic poate creste
pâna la valoarea CM (cuplul critic) dupa care masina se opreste.
Caracteristica mecanica ne poate arata ca în domeniul ( )CM,0M ∈ motorul sincron dezvolta
o viteza riguros constanta. Pentru acest motiv se utilizeaza la actionarea masinilor de lucru care
trebuie sa aiba o viteza constanta odata cu cresterea cuplului rezistent (de ex. actionarea
compresoarelor în industria frigului).
Figura 4.24 Figura 4.25

Masina sincrona 144
Caracteristica unghiulara
Reprezinta dependenta dintre cuplul electromagnetic M si unghiul intern θ, si se traseaza la
..ctI.,ctU 12 == Din expresia cuplului electromagnetic:
θ⋅=θ⋅Ω⋅⋅⋅
= sinMsinX
UE3M C
s
20 (4.29)
unde Ω⋅⋅⋅
=s
20C X
UE3M este cuplul maxim (critic) dezvoltat de motor rezulta forma acestei
caracteristici reprezentata în figura 4.25.
Punctul nominal de functionare se afla pe portiunea OA pentru care: 2
0π
<θ< si care,
reprezinta portiunea stabila de functionare a motorului. Într-adevar, pe aceasta portiune orice
crestere a cuplului rezistent la axul motorului nu poate duce la micsorarea vitezei ci la cresterea
unghiului intern θ, ceea ce înseamna o crestere a cuplului electromagnetic dezvoltat care va putea
prelua cresterea cuplului rezistent. O crestere a cuplului rezistent peste valoarea CM conduce la
cresterea valorii lui θ peste 2π
, deci, la scaderea cuplului dezvoltat ducând la oprirea motorului.
Portiunea AB este considerata deci o portiune instabila de functionare.
Caracteristica în „V”
Reprezinta dependenta dintre curentul absorbit de la retea în stator 2I si curentul de excitatie
din rotor 1I în situatia mentinerii constante a tensiunii la borne .ctU2 = si a cuplului rezistent
..ctM =
Din expresia:
.ctsinX
UE3M
s
20 =θ⋅Ω⋅⋅⋅
=
rezulta: ..ctsinE0 =θ⋅ (4.30)
Expresia (4.30) ne arata ca locul geometric al punctului de functionare A (din diagrama de
fazori din figura 4.26) este o dreapta paralela cu fazorul .U2
În figura 4.26 sunt reprezentate trei pozitii ale punctului de functionare:
− 1A când motorul se comporta fata de retea ca un receptor rezistiv − inductiv;
− 2A când motorul se comporta fata de retea ca un receptor pur rezistiv;
− 3A când motorul se comporta fata de retea ca un receptor rezistiv - capacitiv.
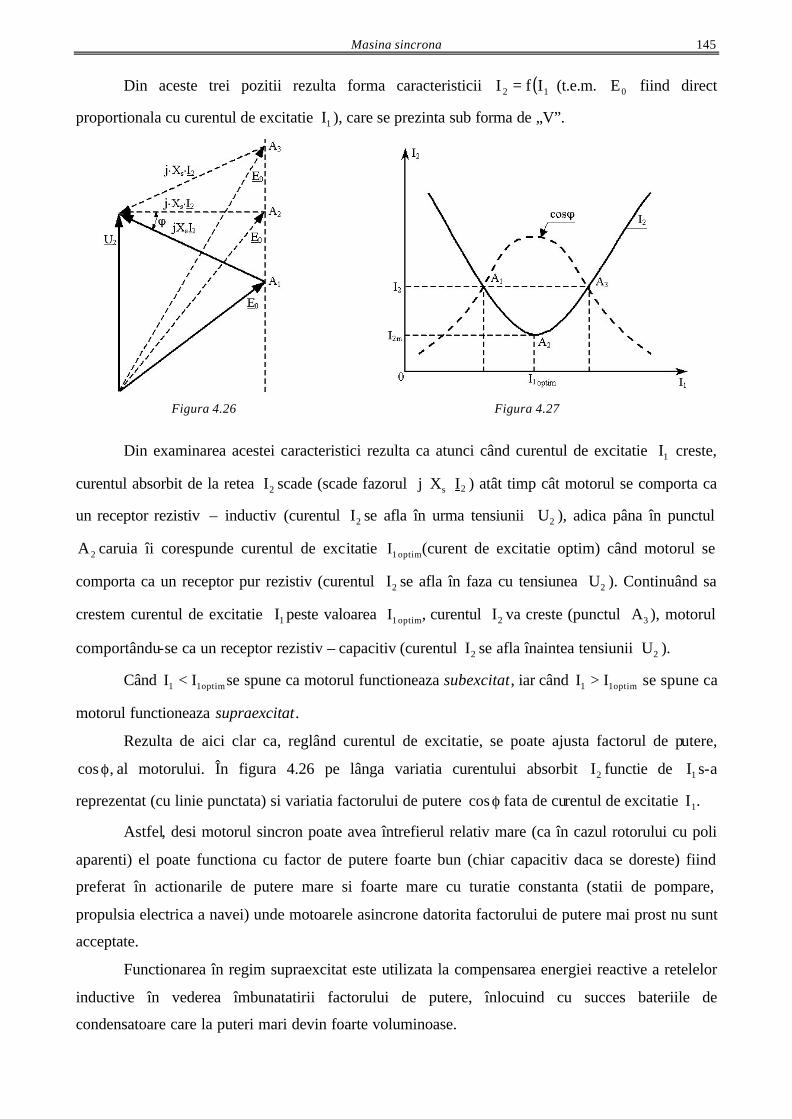
Masina sincrona
145
Din aceste trei pozitii rezulta forma caracteristicii ( )12 IfI = (t.e.m. 0E fiind direct
proportionala cu curentul de excitatie 1I ), care se prezinta sub forma de „V”.
Figura 4.26 Figura 4.27
Din examinarea acestei caracteristici rezulta ca atunci când curentul de excitatie 1I creste,
curentul absorbit de la retea 2I scade (scade fazorul 2s IXj ⋅⋅ ) atât timp cât motorul se comporta ca
un receptor rezistiv – inductiv (curentul 2I se afla în urma tensiunii 2U ), adica pâna în punctul
2A caruia îi corespunde curentul de excitatie optim1I (curent de excitatie optim) când motorul se
comporta ca un receptor pur rezistiv (curentul 2I se afla în faza cu tensiunea 2U ). Continuând sa
crestem curentul de excitatie 1I peste valoarea optim1I , curentul 2I va creste (punctul 3A ), motorul
comportându-se ca un receptor rezistiv – capacitiv (curentul 2I se afla înaintea tensiunii 2U ).
Când optim11 II < se spune ca motorul functioneaza subexcitat, iar când optim11 II > se spune ca
motorul functioneaza supraexcitat.
Rezulta de aici clar ca, reglând curentul de excitatie, se poate ajusta factorul de putere,
,cos ϕ al motorului. În figura 4.26 pe lânga variatia curentului absorbit 2I functie de 1I s-a
reprezentat (cu linie punctata) si variatia factorului de putere ϕcos fata de curentul de excitatie .I1
Astfel, desi motorul sincron poate avea întrefierul relativ mare (ca în cazul rotorului cu poli
aparenti) el poate functiona cu factor de putere foarte bun (chiar capacitiv daca se doreste) fiind
preferat în actionarile de putere mare si foarte mare cu turatie constanta (statii de pompare,
propulsia electrica a navei) unde motoarele asincrone datorita factorului de putere mai prost nu sunt
acceptate.
Functionarea în regim supraexcitat este utilizata la compensarea energiei reactive a retelelor
inductive în vederea îmbunatatirii factorului de putere, înlocuind cu succes bateriile de
condensatoare care la puteri mari devin foarte voluminoase.
Masina sincrona 146
Folosit la îmbunatatirea factorului de putere în retele inductive (ca motor în gol supraexcitat)
motorul sincron poarta denumirea de compensator sincron.
4.4 Aplicatii
1. Un motor sincron trifazat cu poli înecati are urmatoarele date nominale: ,kW2000Pn =
9,0cos,Hz50f,V6000U n1 =ϕ== , conexiunea stea.
Rezistenta înfasurarilor statorice de faza este neglijabila, iar reactanta sincrona este
.r.u0,1X s = (unitati relative). Motorul are pierderi în fier si pierderi mecanice neglijabile. El
functioneaza în sarcina, absorbind o putere activa kW1500P = si are o tensiune electromotoare
indusa de excitatie V4682E0 = pe faza, tensiunea de alimentare fiind cea nominala.
a) Sa se determine unghiul intern θ, curentul absorbit 2I si factorul de putere ϕcos în
regimul de sarcina de mai sus;
b) Pentru aceeasi putere activa absorbita si aceeasi tensiune la borne, exista vreo alta valoare
a t.e.m. 0E care conduce la aceeasi valoare a curentului absorbit ? Daca da, care este aceasta
valoare si unghiul intern respectiv θ ?
c) Care din cele doua valori precedente ale lui 0E este de dorit si din ce motiv ?
REZOLVARE
a) Pentru început, trebuie calculata valoarea absorbita sX a reactantei sincrone, cunoscând
valoarea relativa egala cu unitatea. Marimea de referinta în cazul reactantelor este asa-numita
impedanta nominala ,IU
Zn
nn = Un si In fiind respectiv valorile nominale ale tensiunii de faza si ale
curentului absorbit. Tensiunea nominala pe faza a motorului este data, conexiunea fiind stea si
cunoscând tensiunea de linie U1 = 6000V a retelei:
.V1,34643
60003
UU 1
f ===
Curentul nominal se obtine din puterea nominala activa absorbita, egala cu puterea utila de
2000 kW (deoarece pierderile de orice fel s-au neglijat) si din factorul de putere nominal:
.A83,2139,01,34643
102cosU3
PI
6
nf
n2 =
⋅⋅⋅
=ϕ⋅⋅
=
Impedanta nominala va fi deci:

Masina sincrona
147
Ω=== 2,1683,213
1,3464IU
Z2
fn
iar reactanta sincrona rezulta:
.2,16ZX ns Ω==
Pentru a determina marimile cerute, vom apela la ecuatia (4.25) în care se omite termenul
22 IR ⋅ (neglijabil),
2s0 IXjEU ' ⋅⋅+=
t.e.m. indusa de excitatie V4682E '0 = fiind mai mare decât tensiunea fU de faza, situatie pentru
care este valabila diagrama fazoriala din figura 4.28, a:
a) b)
Figura 4.28
Sa notam cu 'θ unghiul intern si cu cu 'ϕ unghiul de defazaj dintre tensiunea fU si curentul
.I2 Defazajul 'ϕ corespunde unei functionari în regim capacitiv. Pe baza acestei diagrame se pot
scrie urmatoarele doua ecuatii:
.UcosEsinIX
sinEcosIX
f02s
02s
''';'''
−θ⋅=ϕ⋅⋅
θ⋅=ϕ⋅⋅
În acest sistem de ecuatii, necunoscutele sunt: ,,,I ''2 θϕ fiind necesara înca o ecuatie. Într-
adevar, în enunt se mai precizeaza puterea absorbita de motor în acest caz, deci:
.PcosIU3 '2f =ϕ⋅⋅⋅
Din aceasta ultima ecuatie rezulta componenta activa a curentului absorbit:
A38,1441,34643
105,1U3
PcosI
6
2' =
⋅⋅
=⋅
=ϕ⋅ (1)
iar apoi: .5,04682
38,1442,16
E
cosIXsin '
''0
2s =⋅
=θ⋅⋅
=θ
Prin urmare, unghiul intern este .300' =θ Ridicând la patrat relatiile (1) si (2), se gaseste:

Masina sincrona 148
A46,362,16
1,3464866,04682X
UcosEsinI
s
f02
''' =−⋅
=−θ⋅
=ϕ⋅ (2)
si apoi factorul de putere:
( ).capacitiv67,083,21338,144
IcosI
cos2
2'' ==
ϕ⋅=ϕ
b) Pentru aceeasi putere activa absorbita si aceeasi tensiune la borne, deci pentru aceeasi
valoare a componentei active 'cosI2 ϕ⋅ a curentului si pentru acelasi curent 2I absorbit, mai este
posibil un punct de functionare asa cum se vede în figura 4.25, b. De data aceasta regimul de
functionare este inductiv si t.e.m. indusa de excitatie are alta valoare. Sa o notam ,E ''0 noul unghi
intern fiind ,''θ ambele marimi fiind necunoscute. În vederea determinarii acestor necunoscute,
diagrama fazoriala furnizeaza urmatoarele relatii:
;V96,233838,1442,16cosIXsinE '""2s0 =⋅=ϕ⋅⋅=θ⋅
.IXsinEcosEU 22s
22
0
2
0f 2"""" ⋅=θ⋅
+
θ⋅−
Din a doua relatie se deduce:
( ) .V63,387363,233891,1482,161,3464sinEIXUcosE 220
22
2sf0
"""" =−⋅−=θ⋅−⋅−=θ⋅
În consecinta,
.14,39;813,0tg
V2,370563,287396,2338E
o"
220
"
"
=θ=θ
=+=
c) Este preferabila functionarea cu un factor de putere capacitiv, adica cu ,V4682E '0 =
deoarece în acest caz motorul sincron poate pune la dispozitia retelei o anumita putere reactiva,
kVAR3,376243,091,1481,34643sinIU3Q 2f =⋅⋅⋅=ϕ⋅⋅⋅=
care poate fi utilizat pentru îmbunatatirea factorului de putere al întregii instalatii. În plus,
functionarea cu t.e.m. de excitatie mai mare asigura o mai buna stabilitate dinamica, cuplul
electromagnetic maxim,
Ω⋅⋅⋅
=s
f00 X
UE3M
fiind mai mare în cazul a) în comparatie cu cazul b) cu 26,4%.

Masina sincrona
149
2. Puterea aparenta nominala a unui motor asincron trifazat cu poli înecati este
,kVA400Sn = tensiunea de faza fiind ,V3470Un = reactanta sincrona ,50X s Ω= ,0R2 ≈
,Hz50f1 = 6p2 =⋅ poli.
a) Sa se determine curentul absorbit, daca motorul functioneaza la puterea nominala sub
factor de putere unitar.
b) Care este cuplul electromagnetic dezvoltat în acest caz ?
c) Daca cuplul electromagnetic ramâne acelasi, dar dorim ca motorul sa functioneze cu
factorul de putere 9,0cos =ϕ capacitiv, care este curentul absorbit si t.e.m. 0E ?
REZOLVARE
a) Curentul absorbit pe fiecare faza rezulta imediat:
.A42,38134703
104cosU3
SI
5
n
nn2 =
⋅⋅⋅
=ϕ⋅⋅
=
b) Deoarece ,0R 2 ≈ se pot neglija pierderile Joule ale motorului. Neglijând si pierderile în
fier si cele mecanice, puterea activa absorbita este egala cu puterea electromagnetica,
ϕ⋅⋅⋅=Ω⋅= cosIU3MP 2n
Ω fiind viteza unghiulara de sincronism,
.s/rad72,1043
5014,32p
=⋅⋅
=ω
=Ω
Deci: .mN7,381972,104
104cosIU3M
52n ⋅=
⋅=
Ωϕ⋅⋅⋅
=
Pentru determinarea t.e.m. 0E induse de câmpul învârtitor de excitatie, vom observa ca
triunghiul format de fazorii 02s E,IXj,U −⋅⋅ este dreptunghic, deoarece curentul 2I este în faza cuU
si prin urmare,
( ) .V2,396642,38503470IXUE 2222s
20 =⋅+=⋅+=
c) Sa notam noul curent absorbit '2I si noua t.e.m. .E '
0 Întrucât tensiunea pe faza si cuplul
electromagnetic dezvoltat ramân acelasi, rezulta:
A42,38IcosI 22'' ==ϕ⋅
si deci
.A69,429,042,38
I'2 ==
Pe de alta parte, din diagrama de fazori (vezi figura 4.25, a) rezulta:

Masina sincrona 150
UsinIXcosE
cosIXsinE
''''
''''
2s0
2s0
+ϕ⋅⋅=θ⋅
ϕ⋅⋅=θ⋅
ceea ce conduce la urmatoarea expresie a t.e.m. '0E
.cosIXsinIXUE2
2s
2
2s0'''''
θ⋅⋅+
ϕ⋅⋅+=
Numeric,
( ) ( ) .V7,47999,069,4250435,069,42503470E 22'0 =⋅⋅+⋅⋅+=
Pentru a trece motorul în regim capacitiv este deci necesara supraexcitarea masinii.
3. Un motor sincron trifazat cu poli înecati functioneaza în gol. Pierderile sale de orice
natura sunt neglijabile. Se cunosc reactanta mX de magnetizare si reactanta sincrona, precum si
tensiunea U pe faza. Sa se determine expresia analitica a caracteristicii în „V” ,IfI '12
= 2I fiind
curentul absorbit, iar '1I curentul de excitatie raportat la stator.
REZOLVARE
Deoarece cuplul electromagnetic este nul,
0X
UE3M
s
0 =Ω⋅⋅⋅
=
rezulta ,0=θ în care caz fazorii: 2s0 IXjsiE,U ⋅⋅− se suprapun, iar fazorul 2I este în cvadratura de
faza cu tensiunea U, ceea ce înseamna .0cos =ϕ
În cazul când UE0 > este valabila situatia din figura 4.29, a masina functionând capacitiv,
între marimile functionale existând relatia
.IXUE 2s0 ⋅=−
Cum '1m0 IXE ⋅= , se obtine, deci, urmatoarea dependenta între curentul absorbit si curentul
de excitatie raportat:
.XU
IXX
Is
1s
m2
' −⋅= (1)
În cazul când ,UE0 < masina functioneaza inductiv, diagrama corespunzatoare fazoriala
fiind data în figura 4.29, b, din care rezulta:
2s0 IXEU ⋅=−
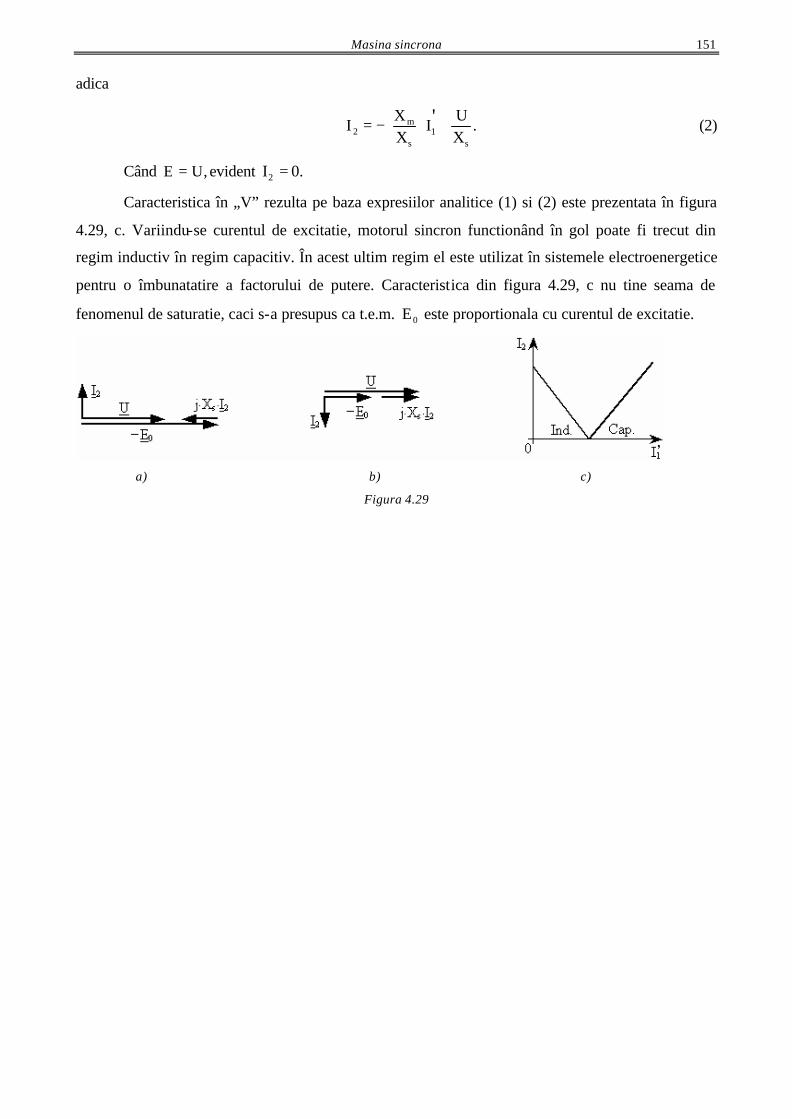
Masina sincrona
151
adica
.XU
IXX
Is
1s
m2
' +
−= (2)
Când ,UE = evident .0I2 =
Caracteristica în „V” rezulta pe baza expresiilor analitice (1) si (2) este prezentata în figura
4.29, c. Variindu-se curentul de excitatie, motorul sincron functionând în gol poate fi trecut din
regim inductiv în regim capacitiv. În acest ultim regim el este utilizat în sistemele electroenergetice
pentru o îmbunatatire a factorului de putere. Caracteristica din figura 4.29, c nu tine seama de
fenomenul de saturatie, caci s-a presupus ca t.e.m. 0E este proportionala cu curentul de excitatie.
a) b) c)
Figura 4.29
Capitolul 5
MODELUL MATEMATIC AL MASINII DE CURENT
ALTERNATIV ÎN REGIM DINAMIC
Modelul matematic al masinii de curent alternativ trifazat în regim dinamic poate fi tratat cu
ajutorul unui sistem de ecuatii diferentiale neliniare, ecuatii ce prezinta dificultati de solutionare
chiar daca se utilizeaza metodele numerice. Este nevoie de calculatoare electronice rapide si cu
memorii foarte mari.
Aceste cerinte nu pot fi satisfacute în sistemele de comanda sau reglare automata rapide din
actionarile electrice datorita volumului mare de prelucrare a datelor în timp scurt.
În ultimul timp a fost pusa la punct modelarea masinii de c.a. cu ajutorul fazorilor spatiali.
Acestia ofera un model general si simplu al functionarii, cuprinzând atât regimul trazitoriu cât si
regimul stabilizat.
Modelul masinilor electrice de c.a. bazat pe teoria fazorilor spatiali este mai simplu decât
modelul clasic în sistem trifazat, deoarece fiecare marime trifazata (curent, flux, tensiune, etc.) se
reduce la un singur vector plan (fazor spatial), care matematic poate fi tratat ca o marime complexa,
permitând o scriere compacta a ecuatiilor de stare. De asemenea, sistemul de ecuatii de functionare
devine un sistem de ecuatii diferentiale liniare care pot fi integrate relativ usor prin metode
numerice cu ajutorul microcalculatoarelor tip PC.
S-a creat un model bifazat ( )qd − al masinilor de c.a. trifazate cu proprietati asemanatoare
masinilor de c.c., creindu-se astfel suportul fizic pentru teoria unitara a masinilor electrice.
Astfel, s-au pus bazele conceptiei generale a sistemelor de reglare a masinilor electrice cu
orientare dupa câmp. Progresele actuale în acest domeniu sunt conditionate de introducerea tehnicii
microprocesoarelor care ridica performantele actionarilor reglabile de c.a. la nivelul celor de c.c. Se
observa deja tendinta de înlocuire treptata a actionarilor de c.c. cu cele de c.a. cu performante
ridicate, cu robustete mai mare si cu pret mai redus.
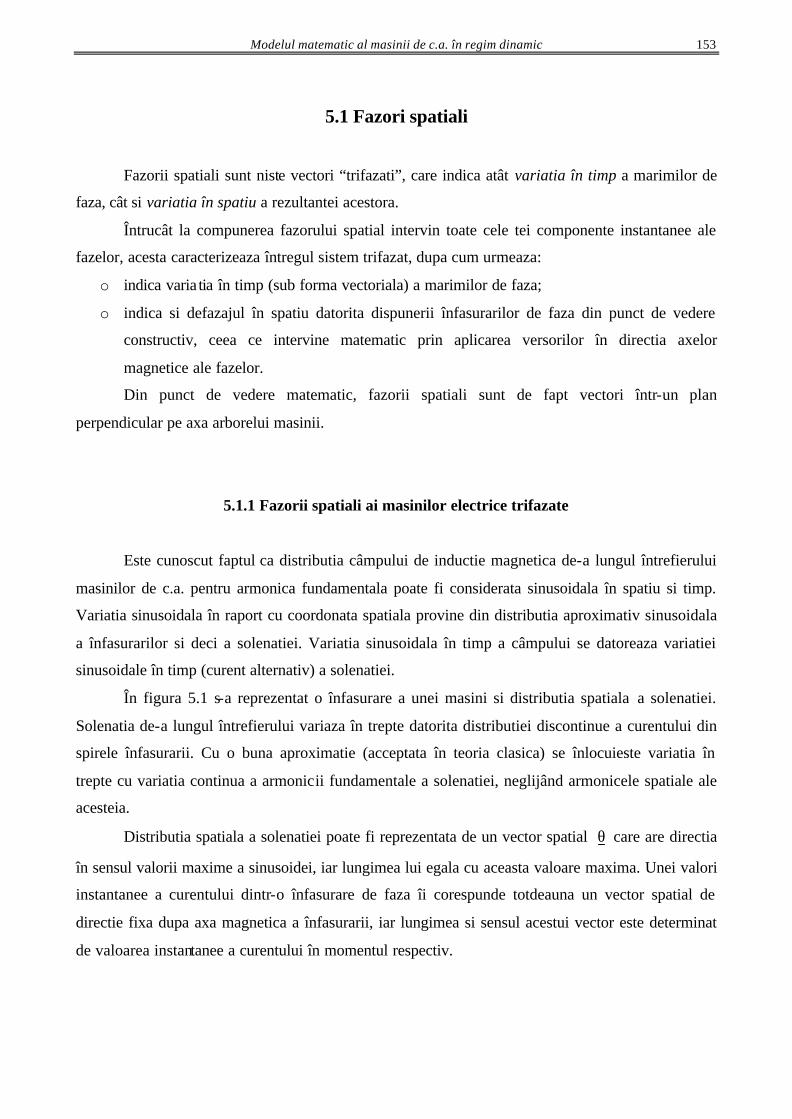
Modelul matematic al masinii de c.a. în regim dinamic
153
5.1 Fazori spatiali
Fazorii spatiali sunt niste vectori “trifazati”, care indica atât variatia în timp a marimilor de
faza, cât si variatia în spatiu a rezultantei acestora.
Întrucât la compunerea fazorului spatial intervin toate cele tei componente instantanee ale
fazelor, acesta caracterizeaza întregul sistem trifazat, dupa cum urmeaza:
o indica varia tia în timp (sub forma vectoriala) a marimilor de faza;
o indica si defazajul în spatiu datorita dispunerii înfasurarilor de faza din punct de vedere
constructiv, ceea ce intervine matematic prin aplicarea versorilor în directia axelor
magnetice ale fazelor.
Din punct de vedere matematic, fazorii spatiali sunt de fapt vectori într-un plan
perpendicular pe axa arborelui masinii.
5.1.1 Fazorii spatiali ai masinilor electrice trifazate
Este cunoscut faptul ca distributia câmpului de inductie magnetica de-a lungul întrefierului
masinilor de c.a. pentru armonica fundamentala poate fi considerata sinusoidala în spatiu si timp.
Variatia sinusoidala în raport cu coordonata spatiala provine din distributia aproximativ sinusoidala
a înfasurarilor si deci a solenatiei. Variatia sinusoidala în timp a câmpului se datoreaza variatiei
sinusoidale în timp (curent alternativ) a solenatiei.
În figura 5.1 s-a reprezentat o înfasurare a unei masini si distributia spatiala a solenatiei.
Solenatia de-a lungul întrefierului variaza în trepte datorita distributiei discontinue a curentului din
spirele înfasurarii. Cu o buna aproximatie (acceptata în teoria clasica) se înlocuieste variatia în
trepte cu variatia continua a armonicii fundamentale a solenatiei, neglijând armonicele spatiale ale
acesteia.
Distributia spatiala a solenatiei poate fi reprezentata de un vector spatial θ care are directia
în sensul valorii maxime a sinusoidei, iar lungimea lui egala cu aceasta valoare maxima. Unei valori
instantanee a curentului dintr-o înfasurare de faza îi corespunde totdeauna un vector spatial de
directie fixa dupa axa magnetica a înfasurarii, iar lungimea si sensul acestui vector este determinat
de valoarea instantanee a curentului în momentul respectiv.
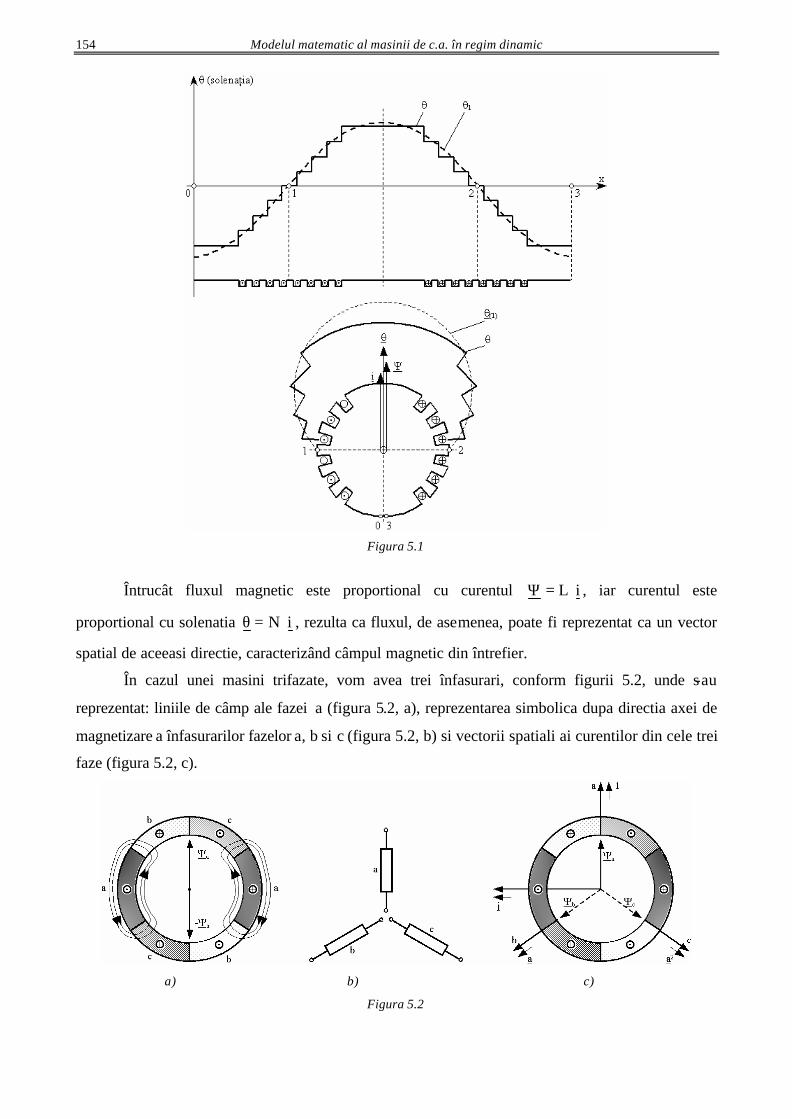
Modelul matematic al masinii de c.a. în regim dinamic 154
Figura 5.1
Întrucât fluxul magnetic este proportional cu curentul iL⋅=Ψ , iar curentul este
proportional cu solenatia iN ⋅=θ , rezulta ca fluxul, de asemenea, poate fi reprezentat ca un vector
spatial de aceeasi directie, caracterizând câmpul magnetic din întrefier.
În cazul unei masini trifazate, vom avea trei înfasurari, conform figurii 5.2, unde s-au
reprezentat: liniile de câmp ale fazei a (figura 5.2, a), reprezentarea simbolica dupa directia axei de
magnetizare a înfasurarilor fazelor a, b si c (figura 5.2, b) si vectorii spatiali ai curentilor din cele trei
faze (figura 5.2, c).
a) b) c)
Figura 5.2

Modelul matematic al masinii de c.a. în regim dinamic
155
Apar astfel vectorii spatiali ai curentilor, ba i,i si ci defazati în spatiu cu unghiurile ,3
2 π⋅
respectiv ,3
4 π⋅ iar lungimea si sensul fiecaruia corespunde valorii instantanee a curentului din faza
respectiva.
Directia în spatiu a vectorilor spatiali de curent este data de pozitia în spatiu a înfasurarilor.
La variatia în timp a curentilor ba i,i si ci nu s-a pus nici o conditie, deci ei pot sa varieze
dupa orice lege (cu valori constante variabile periodic, sinusoidala, aperiodica sau combinatia
acestora).
Cunoscând axa reala a sistemului de coordonate ca fiind axa de magnetizare a fazei a, atunci
vectorii spatiali de curent ai celor trei faze se vor putea scrie cu ajutorul operatorului complex
cunoscut 32
jea
π⋅
= si vor avea forma:
.iai;iai;ii c2
cbbaa ⋅=⋅== (5.1)
Fazorul spatial de curent se defineste ca fiind suma vectoriala:
( )c2
ba iaiai32
i ⋅+⋅+⋅= (5.2)
în care factorul 32
(în general m2
la masina m-fazata) provine de la faptul ca solenatia rezultanta la
masina trifazata este 23
din solenatia unei faze. Pornind în sens invers, daca din solenatia rezultanta
dorim sa obtinem solenatia unei faze, atunci existenta factorului 32
este evidenta.
a) b)
Figura 5.3

Modelul matematic al masinii de c.a. în regim dinamic 156
În figura. 5.3, a s-a reprezentat fazorul spatial de curent la un moment dat, tinând seama de
sensul si valoarea vectorilor spatiali din cele trei faze la acel moment.
Din relatia (5.2) rezulta ca daca nu se pune nici o conditie pentru variatia în timp a curentilor
,i,i ba si ,ic atunci fazorul spatial al curentului i are o valoare si directie în spatiu determinate de
variatia curentilor din cele trei faze.
În mod similar se defineste fazorul spatial al fluxului magnetic dat de cele trei faze:
( ).aa32
c2
ba Ψ⋅+Ψ⋅+Ψ⋅=Ψ (5.3)
Daca fazorii spatiali dati de relatiile (5.2) si (5.3) sunt produsi într-o înfasurare statorica,
atunci marimile vor avea indicele “s”:
( )( ).aa
32
;iaiai32
i
cs2
bsass
cs2
bsass
Ψ⋅+Ψ⋅+Ψ⋅=Ψ
⋅+⋅+⋅= (5.4)
În mod cu totul analog, acesti fazori se pot scrie si pentru înfasurarea rotorica, folosind
indicele “r”:
( )( ) .aa
32
;iaiai32
i
cr2
brarr
cr2
brarr
Ψ⋅+Ψ⋅+Ψ⋅=Ψ
⋅+⋅+⋅= (5.5)
Din cele de mai sus, rezulta ca cele trei marimi instantanee de faza ale curentului si fluxului
se pot descrie cu ajutorul unei singure marimi, fazorul spatial de curent sau de flux care la rândul
sau poate fi descompus în planul complex în doua componente, cea reala, respectiv cea imaginara,
conform figurii 5.3, b:
qsdssqsdss j;ijii Ψ⋅+Ψ=Ψ⋅+= (5.6)
axa reala având directia axei de magnetizare a fazei a.
Fazorul spatial are o proprietate specifica si anume, daca sistemul de marimi instantanee nu
are componenta homopolara, atunci proiectia lui pe cele trei axe ale fazorilor ne da valoarea
instantanee a marimii considerate în faza respectiva. Proprietatea se pastreaza si când exista
componenta homopolara, cu restrictia ca din aceasta proiectie pe o faza, trebuie scazuta componenta
homopolara pentru a obtine valoarea instantanee a marimii considerate din acea faza (figura 5.3, a).
Modelul matematic al masinii de c.a. în regim dinamic
157
5.1.2 Interpretarea matriciala a fazorilor spatiali
Consideram fazorul spatial al curentului:
( )c2
ba iaiai32
i ⋅+⋅+⋅= (5.7)
care se poate descompune dupa cele doua axe ale planului complex:
.ijii qd ⋅+= (5.8)
Relatiile (5.7) si (5.8) ne arata posibilitatea trecerii de la sistemul trifazat de marimi
instantanee ale unei masini trifazate, la sistemul bifazat de componente în planul complex, adica
masina trifazata se înlocuieste cu o masina echivalenta bifazata la care trebuie sa se tina seama si de
componenta homopolara (daca exista):
( ).iii31
i cba0 ++⋅= (5.9)
Relatiile (5.7), (5.8), (5.9) se pot scrie si matricial, definind matricile componentelor
sistemelor trifazate [i] si bifazate [i]⊥:
[ ] [ ] .
i
i
i
i;ii
i
i
0
q
d
c
b
a
=
= ⊥ (5.10)
Legatura dintre cele doua matrici o va face chiar matricea fazorului spatial:
[ ] [ ] [ ];iaii
i
21
21
21
aa1
aa1
32
i*i
ii
c
b
a2
2
0
⋅=
⋅
⋅=
= (5.11)
[ ] [ ] [ ] .iJ
i
i
i
1000j10j1
i*i
ii
0
q
d
0
⊥⋅=
⋅
−=
= (5.12)
Din identificarea relatiilor (5.11) si (5.12), rezulta o relatie de legatura:
[ ] [ ] [ ] [ ] [ ]⊥⋅=⋅= iJiai (5.13)
din care se pot obtine matricele de transformare din sistemul trifazat în sistemul bifazat de
coordonate si invers:
[ ] [ ] [ ] [ ] [ ] [ ]iAiaJi 1 ⋅=⋅⋅= −⊥ (5.14)
unde:
Modelul matematic al masinii de c.a. în regim dinamic 158
[ ]
−
−
⋅=
21
21
21
23
23
0
21
21
1
32
A (5.15)
respectiv:
[ ] [ ] [ ] [ ] [ ] [ ]⊥−
⊥− ⋅=⋅⋅= iAiJai 11 (5.16)
unde:
[ ] .
121
21
123
21
101
A 1
−=− (5.17)
Efectuând operatiile matriciale în relatiile (5.14) si (5.16), se obtin:
( )
++⋅=
−=
−=
;iii31
i
;3
iii
;iii
cba0
cbq
cad
(5.18)
respectiv:
+⋅−−=
+⋅+−=
+=
;ii23
2i
i
;ii23
2i
i
;iii
0qd
c
0qd
b
0da
(5.19)
sau daca componenta homopolara este nula:
⋅−−=
⋅+−=
=
.i23
2i
i
;i23
2i
i
;ii
qd
c
qd
b
da
(5.20)
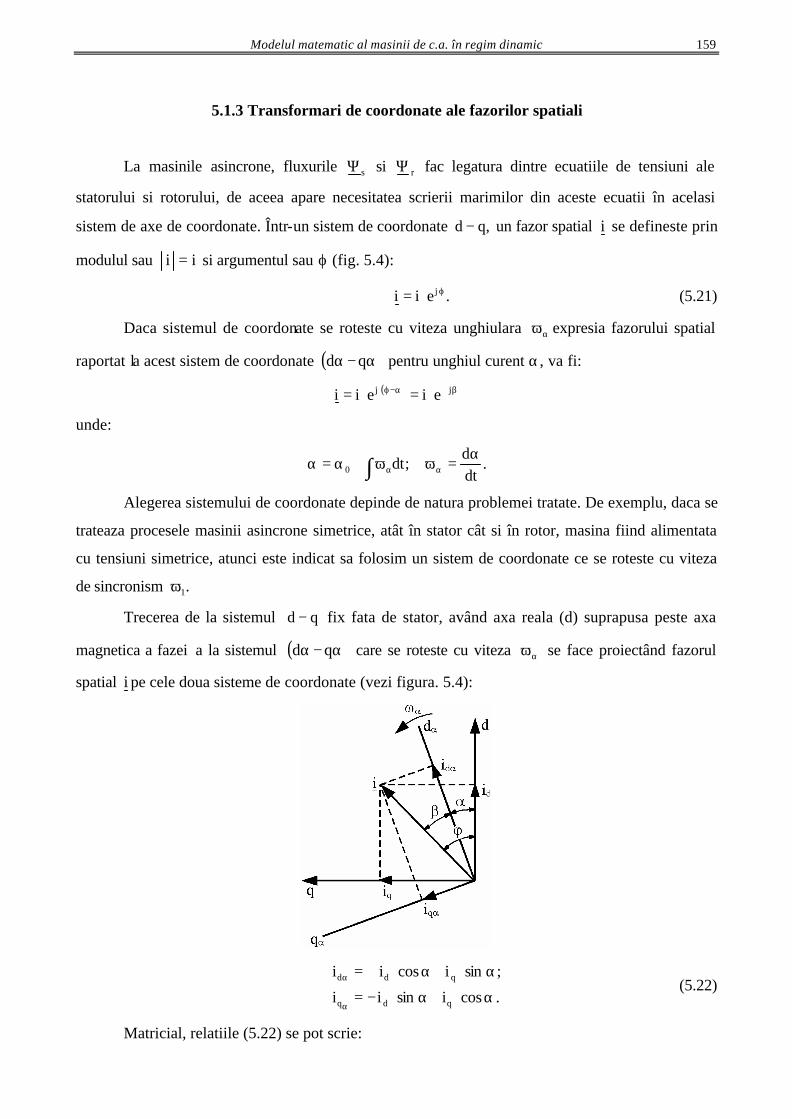
Modelul matematic al masinii de c.a. în regim dinamic
159
5.1.3 Transformari de coordonate ale fazorilor spatiali
La masinile asincrone, fluxurile sΨ si rΨ fac legatura dintre ecuatiile de tensiuni ale
statorului si rotorului, de aceea apare necesitatea scrierii marimilor din aceste ecuatii în acelasi
sistem de axe de coordonate. Într-un sistem de coordonate ,qd − un fazor spatial i se defineste prin
modulul sau ii = si argumentul sau ϕ (fig. 5.4):
.eii j ϕ⋅⋅= (5.21)
Daca sistemul de coordonate se roteste cu viteza unghiulara αω expresia fazorului spatial
raportat la acest sistem de coordonate ( )α−α qd pentru unghiul curent α, va fi:
( ) β⋅+α−ϕ⋅ ⋅=⋅= jj eieii
unde:
∫α
=ωω+α=α αα .dtd
;dt0
Alegerea sistemului de coordonate depinde de natura problemei tratate. De exemplu, daca se
trateaza procesele masinii asincrone simetrice, atât în stator cât si în rotor, masina fiind alimentata
cu tensiuni simetrice, atunci este indicat sa folosim un sistem de coordonate ce se roteste cu viteza
de sincronism .1ω
Trecerea de la sistemul qd − fix fata de stator, având axa reala (d) suprapusa peste axa
magnetica a fazei a la sistemul ( )α−α qd care se roteste cu viteza αω se face proiectând fazorul
spatial i pe cele doua sisteme de coordonate (vezi figura. 5.4):
α⋅+α⋅−=
α⋅+α⋅=
α
α
.cosisinii
;sinicosii
qdq
qdd (5.22)
Matricial, relatiile (5.22) se pot scrie:

Modelul matematic al masinii de c.a. în regim dinamic 160
⋅
αα−αα
=
α
α
0
q
d
0
q
d
i
ii
1000cossin0sincos
i
i
i
(5.23)
sau:
[ ] ( )[ ] [ ] .iDi ⊥⊥ ⋅α= (5.24)
Sintetizând, trecerea de la sistemul de coordonate trifazat, fix fata de stator, la sistemul de
coordonate ( )α−α qd ce se roteste cu viteza unghiulara αω se va face prin matricea de
transformare ( )[ ]:T α
[ ] ( )[ ] [ ] ( )[ ] [ ] [ ] ( )[ ] [ ]iTiADiDi ⋅α=⋅⋅α=⋅α= ⊥⊥ (5.25)
unde:
( )[ ] ( )[ ] [ ]
π⋅
−α−
π⋅
−α−α−
π⋅
−α
π⋅
−αα
⋅=⋅α=α
21
21
21
32
sin3
2sinsin
32
cos3
2coscos
32
ADT (5.26)
iar transformarea inversa prin matricea ( )[ ] 1T −α
[ ] [ ] [ ] [ ] ( )[ ] [ ] ( )[ ] [ ]⊥−
⊥−−
⊥− ⋅α=⋅α⋅=⋅= iTiDAiAi 1111 (5.27)
unde:
( )[ ]
π⋅+α−
π⋅+α
π⋅
−α−
π⋅
−α
α−α
=α −
13
2sin3
2cos
13
2sin
32
cos
1sincos
T 1 (5.28)
iar, .t⋅ω=α α
Consideram componenta homopolara nula ( )0i0 = , ecuatiile de transformare devin:
π⋅
+α⋅+
π⋅
−α⋅+α⋅⋅−=
π⋅
+α⋅+
π⋅
−α⋅+α⋅⋅=
;3
2sini
32
sinisini32
i
;3
2cosi
32
cosicosi32
i
cbaq
cbad
(5.29)
respectiv:
Modelul matematic al masinii de c.a. în regim dinamic
161
π⋅+α⋅−
π⋅+α⋅=
π⋅
−α⋅−
π⋅
−α⋅=
α⋅−α⋅=
;3
2sini3
2cosii
;3
2sini
32
cosii
;sinicosii
qdc
qdb
qda
(5.30)
unde marimile instantanee ba i,i si ci pot avea orice tip de variatie în timp (sinusoidala,
dreptunghiulara, etc.), cu conditia:
( ) .0iii31
i cba0 =++⋅=
5.2 Ecuatiile generale ale masinii asincrone trifazate
Masinile electrice, ca elemente de executie în sistemele de reglare automata, necesita un
model matematic, care sa descrie regimul dinamic al masinii.
Modelul cel mai potrivit, care este capabil de a solutiona atât problemele masinii cât si ale
reglarii, este bazat pe teoria fazorilor spatiali. Acest model ofera ideea sistemului de reglare cel mai
fizic si simplu structurat, conceput pe baza principiului orientarii dupa câmp.
Principiul orientarii dupa câmp, consta matematic din raportarea ecuatiilor masinii la un
sistem legat de fazorul spatial al fluxului statoric, rotoric, sau din întrefier.
La sistemele de reglare bazate pe acest principiu, marimile de reglare rezulta direct din
componentele fazorului spatial de curent raportat la sistemul de axe orientat dupa câmp.
Asadar, atât modelul cât si reglarea masinii de curent alternativ, devine structural
asemanatoare celei ale masinii de curent continuu compensata, cu excitatie separata, care are cel
mai simplu sistem de reglare.
Întrucât la definirea fazorului spatial nu s-a pus nici o restrictie în ceea ce priveste variatia
în timp a marimilor de faza, care determina acest fazor, modelul este astfel valabil pentru orice
regim de functionare tranzitoriu sau stabilizat.
Pentru a pastra generalitatea si din punct de vedere matematic, s-a ales în mod arbitrar un
sistem comun de axe ortogonale ( )α−α qd ce se roteste cu viteza .dtd
,
α
=ωω αα

Modelul matematic al masinii de c.a. în regim dinamic 162
Figura 5.5
În figura 5.5, s-a reprezentat schematic o masina asincrona trifazata cu înfasurari simetrice si
cu rotor bobinat, ( )1p = indicându-se sensurile de referinta pentru tensiunile si curentii din stator si
rotor si pozitia relativa a rotorului fata de stator, caracterizata prin unghiul .dtd
θ
=ωθ
De asemenea, se considera repartitia sinusoidala a înfasurarilor pe periferia întrefierului si se
neglijeaza pierderile în fier.
Ecuatiile de tensiuni statorice si rotorice în marimi instantanee pot fi scrise:
[ ] [ ] [ ]
[ ] [ ] [ ]rrrr
ssss
dtd
iRu
dtd
iRu
Ψ+⋅=
Ψ+⋅= (5.31)
unde:
Rs – rezistenta unei faze statorice;
Rr – rezistenta unei faze rotorice raportate la stator.
Într-un sistem unic de coordonate ( )α−α qd ce se roteste cu viteza unghiulara ,αω ecuatiile
(5.31), scrie cu fazori spatiali devin:
( ) ααα
αα
ααα
αα
Ψ⋅ω−ω⋅+Ψ
+⋅=
Ψ⋅ω⋅+Ψ
+⋅=
rr
rrr
rs
sss
jdt
diRu
jdt
diRu
(5.32)
Modelul matematic al masinii de c.a. în regim dinamic
163
ααα
ααα
⋅+⋅=ψ
⋅+⋅=ψ
smrrr
rmsss
iLiL
iLiL (5.33)
unde:
sL − inductivitatea totala statorica: sssds LLL +=
rL − inductivitatea totala rotorica raportata la stator: ;LLL ''rr rdr +=
sdL − inductivitatea statorica de dispersie: 1
sdsd
XL
ω= ;
rdL − inductivitatea rotorica de dispersie raportata la stator: ;X
L1
dd
'' r
r ω=
SsL − inductivitatea ciclica proprie statorica: ;
XL
1
mss ω
=
rrL − inductivitatea ciclica proprie rotorica raportata la stator: ;k
XkL
L1
2T
m
T
mr'
r ω⋅==
mL − inductivitatea mutuala stator-rotor, raportata la stator: 1T
mm k
XL
ω⋅= ;
iar:
SdX − reactanta de dispersie statorica;
'rdX − reactanta de dispersie rotorica raportata la stator: 2
Trdrd kXX ' ⋅= ;
mX − reactanta de magnetizare;
Tk − raportul de transformare: ;kNkN
k2N2
1N1T ⋅
⋅=
se obtin din schema echivalenta a masinii asincrone în regim stationar. (vezi paragraful 3.2.2).
Sistemului de ecuatii (5.32) i se adauga ecuatia de miscare binecunoscuta:
;p
;dtd
Jmm rω
=ΩΩ
⋅=− (5.34)
unde cuplul electromagnetic dezvoltat, are expresia:
( ).iIp23
m *rrm αα ⋅Ψ⋅⋅⋅= (5.35)
Explicitând ecuatiile (5.32) si (5.33) pe cele doua componente dα si qα se obtine sistemul:
Modelul matematic al masinii de c.a. în regim dinamic 164
( )
( )
( )
ω⋅=−⋅Ψ−⋅Ψ⋅⋅
Ψ⋅ω−ω+Ψ
+⋅=−
Ψ⋅ω−ω−Ψ
+⋅=−
Ψ⋅ω+Ψ
+⋅=
Ψ⋅ω−Ψ
+⋅=
αααα
ααα
αα
ααα
αα
αα
αα
αα
αα
.dtd
pJ
miip23
;dt
diRu
;dt
diRu
;dt
diRu
;dt
diRu
rqrdrdrqr
drqr
qrrqr
qrdr
drrdr
dsqs
qssqs
qsds
dssds
(5.36)
sau daca descompunem fluxurile totale, conform relatiilor (5.33), se obtine sistemul:
( )
( )
( ) ( )
( ) ( )
( )
ω⋅=−⋅−⋅⋅⋅⋅
⋅+⋅⋅ω−ω+⋅+⋅+⋅=−
⋅+⋅⋅ω−ω−⋅+⋅+⋅=−
⋅+⋅⋅ω+⋅+⋅+⋅=
⋅+⋅⋅ω−⋅+⋅+⋅=
αααα
ααααα
αα
ααααα
αα
αααα
αα
αααα
αα
.dtd
pJ
miiiiLp23
;iLiLdt
idL
dt
idLiRu
;iLiLdtid
Ldtid
LiRu
;iLiLdt
idL
dt
idLiRu
;iLiLdtid
Ldtid
LiRu
rqrdsdrqsm
dsmdrrqs
mqr
rqrrqr
qsmqrrds
mdr
rdrsdr
drmdssqr
mqs
sqssqs
qrmqssdr
mds
sdssds
(5.37)
care reprezinta sistemul de ecuatii generale ale masinii asincrone.
Este adevarat ca studiul regimului stationar al masinii asincrone alimentate de la surse
sinusoidale, se poate face în mod traditional mai simplu, utilizând ecuatiile cu fazori Fresnell [2],
precum si caracteristicile mecanice ale masinii de inductie si ale masinii de lucru.
Dar studiul regimului dinamic este greoi pe cale traditionala, cu ecuatii scrise pentru toate
fazele masinii în caz general.
Studiul regimului dinamic al masinii asincrone devine considerabil usurat utilizând modelul
cu fazori spatiali, deci sistemul de ecuatii (5.37).
Acest studiu se face în trei etape:
• transformarea marimilor trifazate prin intermediul fazorilor spatiali, în marimi de calcul
corespunzatoare proiectiilor pe axele ;qd α−α
• rezolvarea sistemului de ecuatii (5.37) prin metode numerice;
• revenirea la marimile trifazate masurabile, prin intermediul transformarii inverse.
Pentru prima etapa, se considera, în mod convenabil, un sistem de coordonate α−α qd ce
se roteste cu viteza de sincronism
α
=ωωdtd
11 si pe care îl vom denumi generic .qd −

Modelul matematic al masinii de c.a. în regim dinamic
165
Consideram de asemenea, un sistem de tensiuni statorice de alimentare sinusoidale simetrice
sub forma:
( )
γ−π⋅+⋅ω⋅⋅=
γ−
π⋅−⋅ω⋅⋅=
γ−⋅ω⋅⋅=
.3
2tcos2Uu
;3
2tcos2Uu
;tcos2Uu
1sc
1sb
1sa
(5.38)
unde γ reprezinta faza conectarii în grade electrice.
Componentele qd − ale fazorului tensiunii statorice su în planul qd − mai sus definit, se
obtin aplicând matricea de transformare ( )[ ]αT (vezi relatia 5.26), unde :t1 ⋅ω=α
( )
( )
⋅
π⋅
+⋅ω⋅−⋅
π⋅
−⋅ω⋅−⋅⋅ω⋅−=
⋅
π⋅
+⋅ω⋅+⋅
π⋅
−⋅ω⋅+⋅⋅ω⋅=
.u3
2tsin
32
u3
2tsin
32
utsin32
u
;u3
2tcos
32
u3
2tcos
32
utcos32
u
c1b1a1qs
c1b1a1ds
(5.39)
Înlocuind relatiile (5.38) în (5.39), dupa calcule trigonometrice, se obtine:
γ⋅⋅=
γ⋅⋅=
.sin2Uu
;cos2Uu
sqs
sds (5.40)
Se obtine astfel, în sistemul de coordonate considerat, doua tensiuni constante, invariabile în
timp, depinzând doar de faza conectarii. Acest lucru va duce la usurarea considerabila a calculului
ulterior.
Etapa a doua a studiului − rezolvarea sistemului de ecuatii (5.37) se realizeaza prin metode
numerice (Runge−Kutta, Transfomata Z etc.), cu ajutorul calculatoarelor electronice tip PC.
Pentru a usura rezolvarea acestui sistem diferential de ordinul 5, profund neliniar, se aduce
la forma:
[ ] [ ]LTXdtd
⋅= (5.41)
unde variabilele vor fi:
[ ] [ ]Tqrdrqsds ,i,i,i,iX ω=
iar termenul liber:
[ ] [ ]T54321 F,F,F,F,FLT =⋅
unde: ,Fi i = 1…5 sunt functii de necunoscute.
Sistemul (5.37), dupa prelucrari simple devine:

Modelul matematic al masinii de c.a. în regim dinamic 166
( )
−⋅−⋅⋅⋅⋅⋅=
ω
−⋅⋅−⋅
=
−⋅⋅−⋅
=
−⋅⋅−⋅
=
−⋅⋅−⋅
=
;miiiiLp23
JP
dtd
;LLL
LBLBdt
id
;LLL
LBLBdtid
;LLL
LBLBdt
id
;LLL
LBLBdtid
rqrdsdrqsm
2msr
m2s4qr
2msr
m103dr
2mrs
m4r2qs
2mrs
m3r1ds
(5.42)
unde:
( )( )
( ) ( )( ) ( )
⋅+⋅⋅ω−ω−⋅−=
⋅+⋅⋅ω−ω+⋅−=
⋅+⋅⋅ω−⋅−=
⋅+⋅⋅ω+⋅−=
.iLiLiRB
;iLiLiRB
;iLiLiRuB
;iLiLiRuB
dsmdrr1qrr4
qsmqrr1drr3
drmdssqssqs2
qrmqssdssds1
(5.43)
Sistemul astfel definit, poate fi scris cu diferente finite cu ajutorul unei metode de integrare
numerica (transformata Z, Runge – Kutta, etc.).
Pasul de integrare se va alege cu deosebita grija, tinând cont de frecventa maxima si
constanta de timp cea mai mica. Se recomanda o prima estimare la cca. 101
51
÷ din constanta de
timp minima.
Algoritmul etapei a treia, se obtine punând problema inversa: se cer curentii isa, isb, isc,
cunoscând curentii .i,i sqsd
Aplicând matricea transformatei inverse ( )[ ] 1T −α (vezi relatia 5.28), se obtine:
π−ω+
π+ω=
π
−ω−
π
−ω=
ω−ω=
.3
2tsini3
2tcosii
;3
2tsini
32
tcosii
;tsinitcosii
1qs1dscs
1qs1dsbs
1qs1dsas
(5.44)
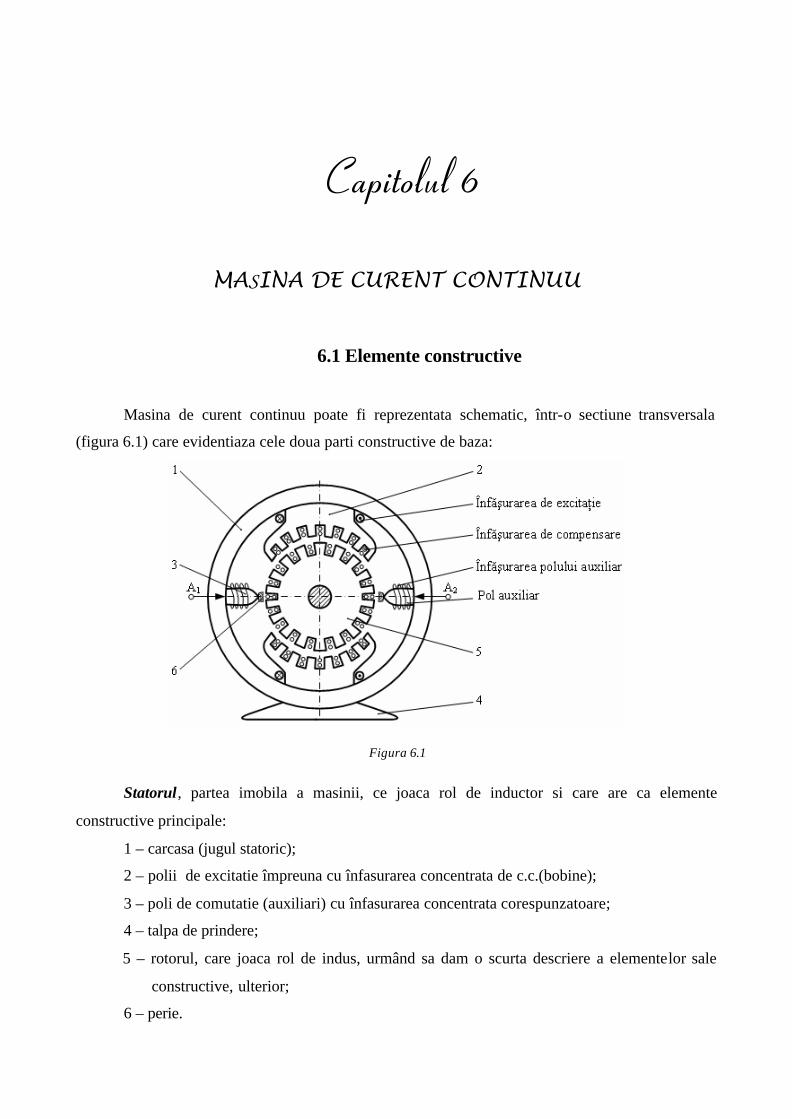
Capitolul 6
MASINA DE CURENT CONTINUU
6.1 Elemente constructive
Masina de curent continuu poate fi reprezentata schematic, într-o sectiune transversala
(figura 6.1) care evidentiaza cele doua parti constructive de baza:
Figura 6.1
Statorul, partea imobila a masinii, ce joaca rol de inductor si care are ca elemente
constructive principale:
1 – carcasa (jugul statoric);
2 – polii de excitatie împreuna cu înfasurarea concentrata de c.c.(bobine);
3 – poli de comutatie (auxiliari) cu înfasurarea concentrata corespunzatoare;
4 – talpa de prindere;
5 – rotorul, care joaca rol de indus, urmând sa dam o scurta descriere a elementelor sale
constructive, ulterior;
6 – perie.
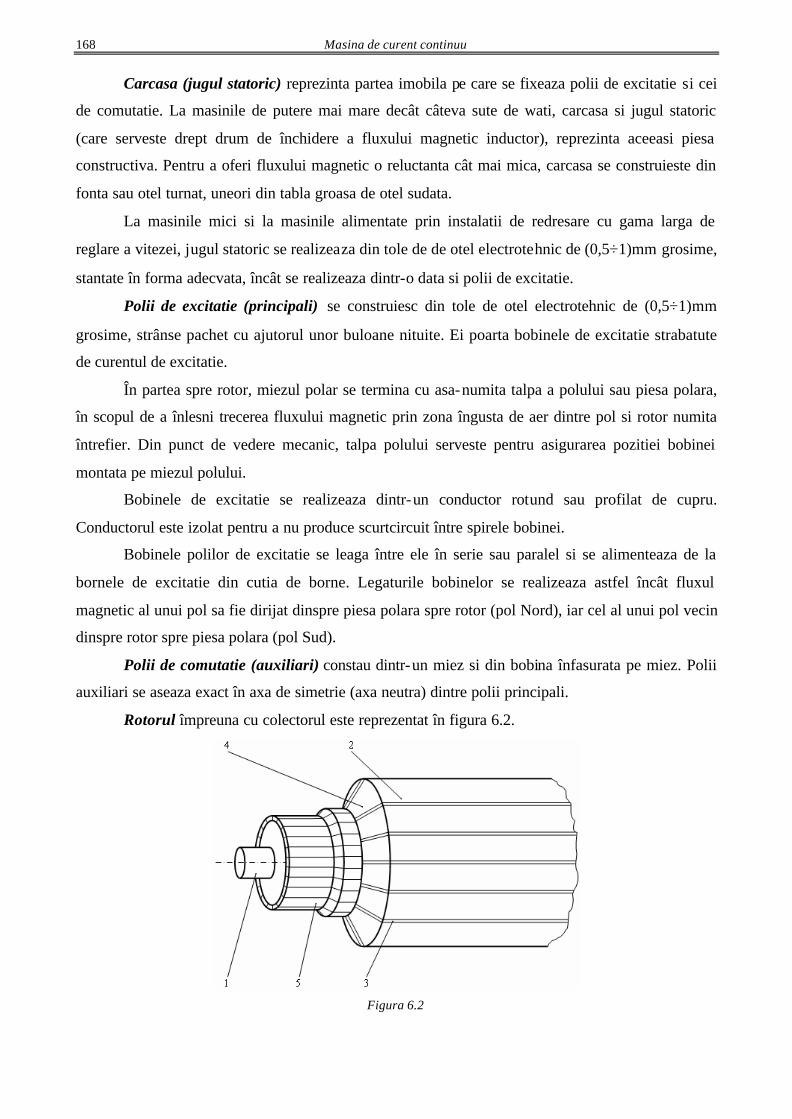
Masina de curent continuu 168
Carcasa (jugul statoric) reprezinta partea imobila pe care se fixeaza polii de excitatie si cei
de comutatie. La masinile de putere mai mare decât câteva sute de wati, carcasa si jugul statoric
(care serveste drept drum de închidere a fluxului magnetic inductor), reprezinta aceeasi piesa
constructiva. Pentru a oferi fluxului magnetic o reluctanta cât mai mica, carcasa se construieste din
fonta sau otel turnat, uneori din tabla groasa de otel sudata.
La masinile mici si la masinile alimentate prin instalatii de redresare cu gama larga de
reglare a vitezei, jugul statoric se realizeaza din tole de de otel electrotehnic de (0,5÷1)mm grosime,
stantate în forma adecvata, încât se realizeaza dintr-o data si polii de excitatie.
Polii de excitatie (principali) se construiesc din tole de otel electrotehnic de (0,5÷1)mm
grosime, strânse pachet cu ajutorul unor buloane nituite. Ei poarta bobinele de excitatie strabatute
de curentul de excitatie.
În partea spre rotor, miezul polar se termina cu asa-numita talpa a polului sau piesa polara,
în scopul de a înlesni trecerea fluxului magnetic prin zona îngusta de aer dintre pol si rotor numita
întrefier. Din punct de vedere mecanic, talpa polului serveste pentru asigurarea pozitiei bobinei
montata pe miezul polului.
Bobinele de excitatie se realizeaza dintr-un conductor rotund sau profilat de cupru.
Conductorul este izolat pentru a nu produce scurtcircuit între spirele bobinei.
Bobinele polilor de excitatie se leaga între ele în serie sau paralel si se alimenteaza de la
bornele de excitatie din cutia de borne. Legaturile bobinelor se realizeaza astfel încât fluxul
magnetic al unui pol sa fie dirijat dinspre piesa polara spre rotor (pol Nord), iar cel al unui pol vecin
dinspre rotor spre piesa polara (pol Sud).
Polii de comutatie (auxiliari) constau dintr-un miez si din bobina înfasurata pe miez. Polii
auxiliari se aseaza exact în axa de simetrie (axa neutra) dintre polii principali.
Rotorul împreuna cu colectorul este reprezentat în figura 6.2.
Figura 6.2
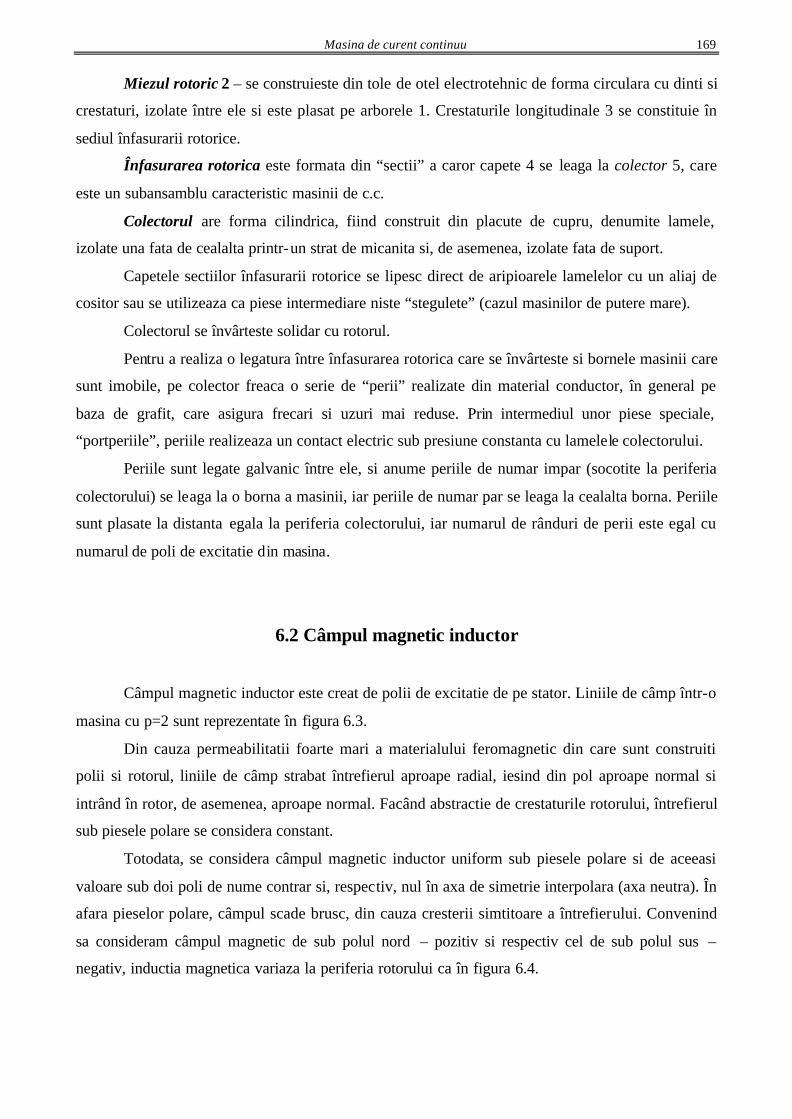
Masina de curent continuu
169
Miezul rotoric 2 – se construieste din tole de otel electrotehnic de forma circulara cu dinti si
crestaturi, izolate între ele si este plasat pe arborele 1. Crestaturile longitudinale 3 se constituie în
sediul înfasurarii rotorice.
Înfasurarea rotorica este formata din “sectii” a caror capete 4 se leaga la colector 5, care
este un subansamblu caracteristic masinii de c.c.
Colectorul are forma cilindrica, fiind construit din placute de cupru, denumite lamele,
izolate una fata de cealalta printr-un strat de micanita si, de asemenea, izolate fata de suport.
Capetele sectiilor înfasurarii rotorice se lipesc direct de aripioarele lamelelor cu un aliaj de
cositor sau se utilizeaza ca piese intermediare niste “stegulete” (cazul masinilor de putere mare).
Colectorul se învârteste solidar cu rotorul.
Pentru a realiza o legatura între înfasurarea rotorica care se învârteste si bornele masinii care
sunt imobile, pe colector freaca o serie de “perii” realizate din material conductor, în general pe
baza de grafit, care asigura frecari si uzuri mai reduse. Prin intermediul unor piese speciale,
“portperiile”, periile realizeaza un contact electric sub presiune constanta cu lamelele colectorului.
Periile sunt legate galvanic între ele, si anume periile de numar impar (socotite la periferia
colectorului) se leaga la o borna a masinii, iar periile de numar par se leaga la cealalta borna. Periile
sunt plasate la distanta egala la periferia colectorului, iar numarul de rânduri de perii este egal cu
numarul de poli de excitatie din masina.
6.2 Câmpul magnetic inductor
Câmpul magnetic inductor este creat de polii de excitatie de pe stator. Liniile de câmp într-o
masina cu p=2 sunt reprezentate în figura 6.3.
Din cauza permeabilitatii foarte mari a materialului feromagnetic din care sunt construiti
polii si rotorul, liniile de câmp strabat întrefierul aproape radial, iesind din pol aproape normal si
intrând în rotor, de asemenea, aproape normal. Facând abstractie de crestaturile rotorului, întrefierul
sub piesele polare se considera constant.
Totodata, se considera câmpul magnetic inductor uniform sub piesele polare si de aceeasi
valoare sub doi poli de nume contrar si, respectiv, nul în axa de simetrie interpolara (axa neutra). În
afara pieselor polare, câmpul scade brusc, din cauza cresterii simtitoare a întrefierului. Convenind
sa consideram câmpul magnetic de sub polul nord – pozitiv si respectiv cel de sub polul sus –
negativ, inductia magnetica variaza la periferia rotorului ca în figura 6.4.
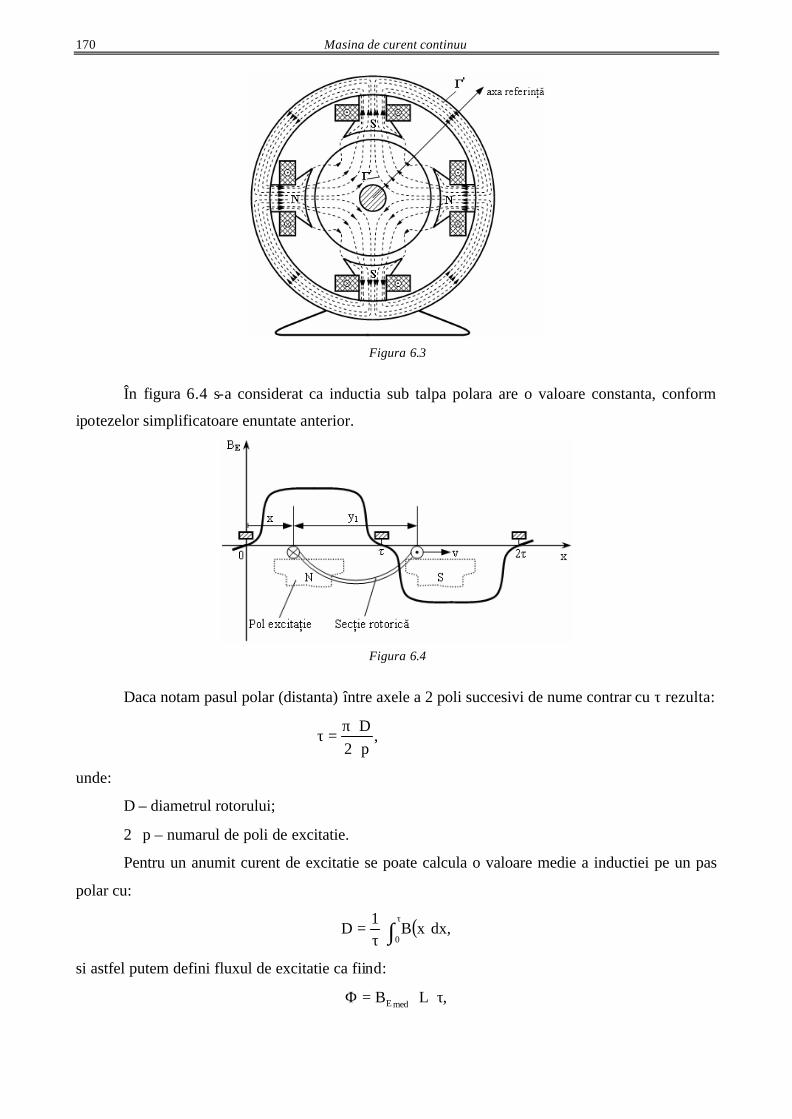
Masina de curent continuu 170
Figura 6.3
În figura 6.4 s-a considerat ca inductia sub talpa polara are o valoare constanta, conform
ipotezelor simplificatoare enuntate anterior.
Figura 6.4
Daca notam pasul polar (distanta) între axele a 2 poli succesivi de nume contrar cu τ rezulta:
,p2D
⋅⋅π
=τ
unde:
D – diametrul rotorului;
2 ⋅ p – numarul de poli de excitatie.
Pentru un anumit curent de excitatie se poate calcula o valoare medie a inductiei pe un pas
polar cu:
( ) ,dxxB1
D0∫τ
⋅τ
=
si astfel putem defini fluxul de excitatie ca fiind:
,LB medE τ⋅⋅=Φ
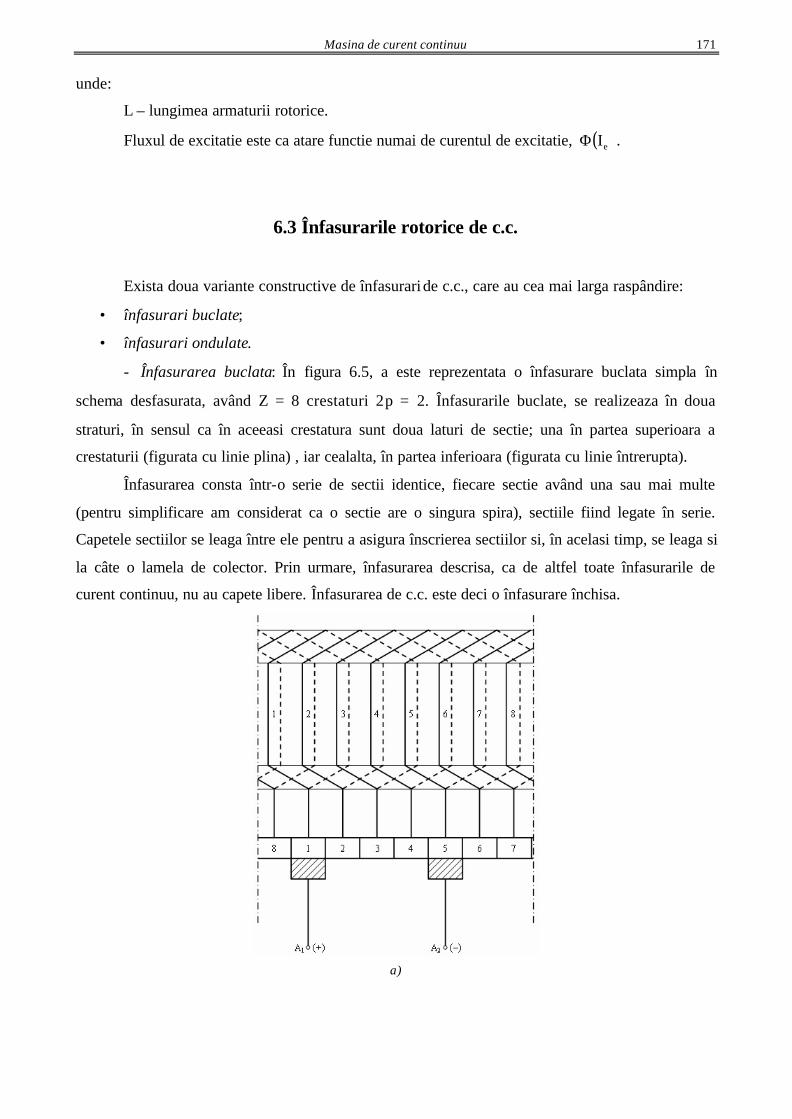
Masina de curent continuu
171
unde:
L – lungimea armaturii rotorice.
Fluxul de excitatie este ca atare functie numai de curentul de excitatie, ( )eIΦ .
6.3 Înfasurarile rotorice de c.c.
Exista doua variante constructive de înfasurari de c.c., care au cea mai larga raspândire:
• înfasurari buclate;
• înfasurari ondulate.
− Înfasurarea buclata: În figura 6.5, a este reprezentata o înfasurare buclata simpla în
schema desfasurata, având Z = 8 crestaturi 2⋅p = 2. Înfasurarile buclate, se realizeaza în doua
straturi, în sensul ca în aceeasi crestatura sunt doua laturi de sectie; una în partea superioara a
crestaturii (figurata cu linie plina) , iar cealalta, în partea inferioara (figurata cu linie întrerupta).
Înfasurarea consta într-o serie de sectii identice, fiecare sectie având una sau mai multe
(pentru simplificare am considerat ca o sectie are o singura spira), sectiile fiind legate în serie.
Capetele sectiilor se leaga între ele pentru a asigura înscrierea sectiilor si, în acelasi timp, se leaga si
la câte o lamela de colector. Prin urmare, înfasurarea descrisa, ca de altfel toate înfasurarile de
curent continuu, nu au capete libere. Înfasurarea de c.c. este deci o înfasurare închisa.
a)
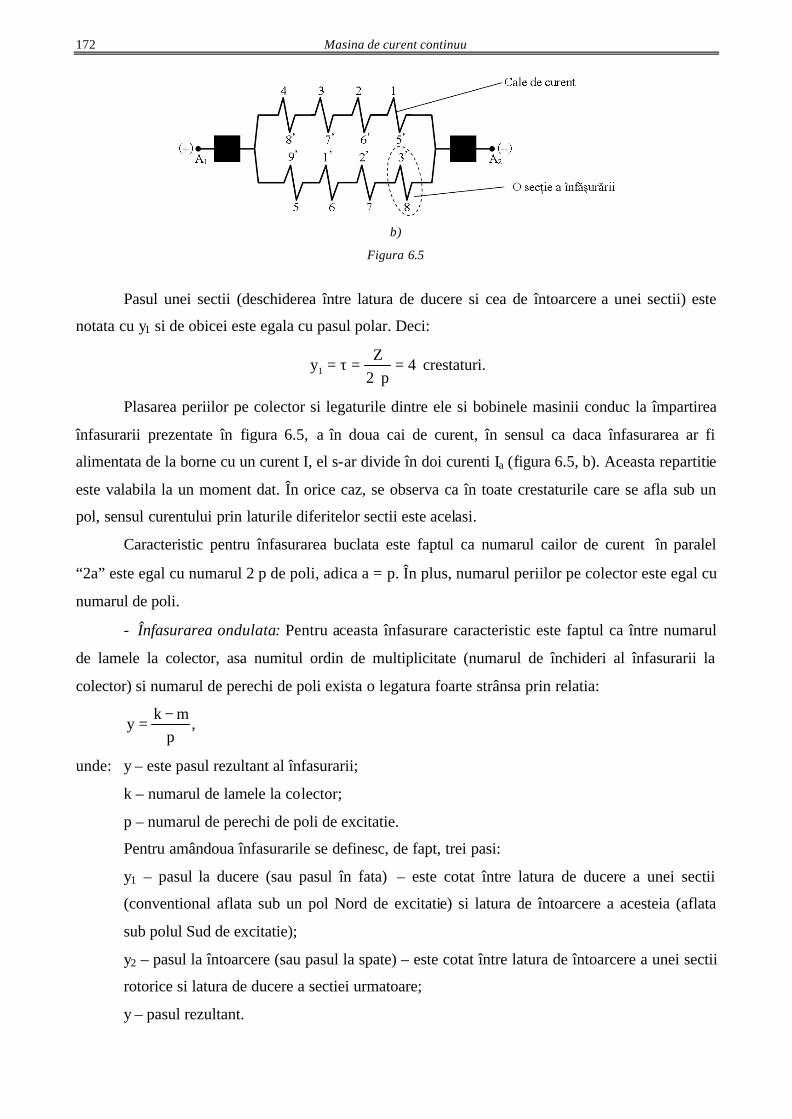
Masina de curent continuu 172
b)
Figura 6.5
Pasul unei sectii (deschiderea între latura de ducere si cea de întoarcere a unei sectii) este
notata cu y1 si de obicei este egala cu pasul polar. Deci:
4p2
Zy1 =
⋅=τ= crestaturi.
Plasarea periilor pe colector si legaturile dintre ele si bobinele masinii conduc la împartirea
înfasurarii prezentate în figura 6.5, a în doua cai de curent, în sensul ca daca înfasurarea ar fi
alimentata de la borne cu un curent I, el s-ar divide în doi curenti Ia (figura 6.5, b). Aceasta repartitie
este valabila la un moment dat. În orice caz, se observa ca în toate crestaturile care se afla sub un
pol, sensul curentului prin laturile diferitelor sectii este acelasi.
Caracteristic pentru înfasurarea buclata este faptul ca numarul cailor de curent în paralel
“2a” este egal cu numarul 2⋅p de poli, adica a = p. În plus, numarul periilor pe colector este egal cu
numarul de poli.
− Înfasurarea ondulata: Pentru aceasta înfasurare caracteristic este faptul ca între numarul
de lamele la colector, asa numitul ordin de multiplicitate (numarul de închideri al înfasurarii la
colector) si numarul de perechi de poli exista o legatura foarte strânsa prin relatia:
,p
mky
−=
unde: y – este pasul rezultant al înfasurarii;
k – numarul de lamele la colector;
p – numarul de perechi de poli de excitatie.
Pentru amândoua înfasurarile se definesc, de fapt, trei pasi:
y1 – pasul la ducere (sau pasul în fata) – este cotat între latura de ducere a unei sectii
(conventional aflata sub un pol Nord de excitatie) si latura de întoarcere a acesteia (aflata
sub polul Sud de excitatie);
y2 – pasul la întoarcere (sau pasul la spate) – este cotat între latura de întoarcere a unei sectii
rotorice si latura de ducere a sectiei urmatoare;
y – pasul rezultant.
Masina de curent continuu
173
La înfasurarile buclate între cei trei pasi exista legatura:
.yyy 21 −=
La înfasurarile ondulate, legatura între pasi este urmatoarea:
.yyy 21 +=
În general, în ambele tipuri de înfasurare, numarul de lamele de colector este egal cu
numarul de sectii si de crestaturi.
În practica, ambele tipuri de înfasurari sunt utilizate pe scara larga. Înfasurarea ondulata,
prezinta avantajul de a permite a < p, utilizat în conductia unor masini cu numar mare de poli
(viteza mica) si intensitati mici (numar de cai de curent în paralel putine).
6.4 T.e.m. indusa în masina de c.c.
Sa presupunem ca rotorul masinii este rotit în câmpul magnetic inductor al polilor de
excitatie si ca în doua crestaturi ale rotorului, situate la periferia rotorului, la distanta y1 una de alta
(în exemplul nostru y1 = τ) se afla latura de ducere si, respectiv, de întoarcere a unei sectii de
înfasurare (figura 6.6). Fie Ω viteza unghiulara de rotatie a rotorului presupusa constanta. Evident
ca atunci când sectia se roteste odata cu rotorul, fluxul printr-o spira oarecare variaza în timp.
Astfel, atunci când sectia se afla sub polul nord de excitatie, fluxul are un anumit sens, iar când
sectia se afla sub polul sud, fluxul schimba de sens, fiind evident, totodata, faptul ca, într-o pozitie
intermediara fluxul devine nul.
Daca consideram axa polului nord drept axa de referinta, la un moment oarecare t, latura de
ducere se gaseste la o distanta periferica x fata de axa de referinta, iar latura de întoarere la distanta
x + y1.
Conform legii inductiei electromagnetice, deoarece latura de ducere taie liniile de câmp
magnetic inductor cu o anumita viteza v , se poate calcula expresia t.e.m. induse într-o spira cu:
( )[ ] ( ) ,LxBvdlxBxveL
0s ∫ ⋅⋅==
unde:
L – lungimea laturii active a spirei.
Daca se calculeaza valoarea medie a inductiei sub un pas polar ca fiind:
( ) ,dxxB1
B0med ∫τ
⋅τ
=
expresia mediata a t.e.m. devine:
.LvBE medmeds ⋅⋅=

Masina de curent continuu 174
Se stie ca 2D
v ⋅Ω= si prin definitie pasul polar p2D⋅⋅π
=τ . Deci π
τ⋅⋅Ω=
pv sau:
.LBp
E medmeds τ⋅⋅⋅Ω⋅π
=
Considerând produsul dintre Bmed si aria L⋅τ ca fiind un flux magnetic mediu de excitatie.
τ⋅⋅=Φ LBmedmed ; medmedsp
e Φ⋅Ω⋅π
= .
Tinând cont ca înfasurarea este formata dina2
N⋅
spire înseriate (unde “2a”numarul cai în
paralel), rezulta ca t.e.m. totala este:
medsea2
NE ⋅
⋅= adica .
2N
ap
E medΦ⋅Ω⋅π⋅
⋅= (6.1)
T.e.m. indusa în înfasurarea rotorului datorita rotatiei rotorului în câmpul polilor de excitatie
depinde ca atare de unele marimi constructive p, a, N, si de unele marimi functionale: Φmed si Ω.
Ca atare expresia (6.1) se mai poate scrie:
,KE Ω⋅Φ⋅=
unde: π⋅
⋅=2N
ap
K se mai numeste si constanta masinii de c.c.
Deoarece pe eticheta masinii viteza este exprimata în rotatii pe minut se poate face
conversia:
30n⋅π
=Ω si deci medn60N
ap
E Φ⋅⋅⋅= (6.2)
sau: medE nKE Φ⋅⋅= , unde .60N
ap
KE ⋅=
Fluxul magnetic depinde la rândul lui de curentul de excitatie.
Daca circuitul magnetic al masinii nu este saturat, atunci fluxul de excitatie depinde liniar de
curentul de excitatie si, deci, ecuatia (6.1) mai poate fi:
.InKE exE' ⋅⋅= (6.3)
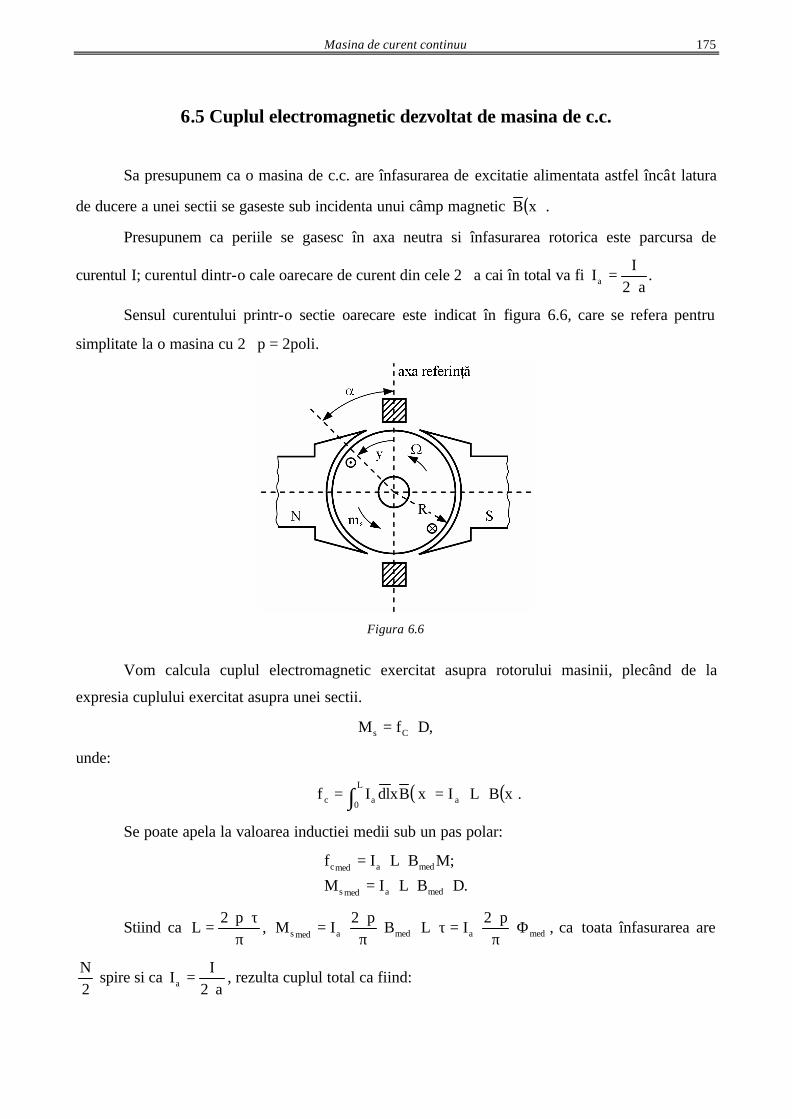
Masina de curent continuu
175
6.5 Cuplul electromagnetic dezvoltat de masina de c.c.
Sa presupunem ca o masina de c.c. are înfasurarea de excitatie alimentata astfel încât latura
de ducere a unei sectii se gaseste sub incidenta unui câmp magnetic ( )xB .
Presupunem ca periile se gasesc în axa neutra si înfasurarea rotorica este parcursa de
curentul I; curentul dintr-o cale oarecare de curent din cele 2 ⋅ a cai în total va fi .a2
IIa ⋅
=
Sensul curentului printr-o sectie oarecare este indicat în figura 6.6, care se refera pentru
simplitate la o masina cu 2 ⋅ p = 2poli.
Figura 6.6
Vom calcula cuplul electromagnetic exercitat asupra rotorului masinii, plecând de la
expresia cuplului exercitat asupra unei sectii.
,DfM Cs ⋅=
unde:
( ) ( ).xBLIxBxdlIf a
L
0 ac ⋅⋅== ∫
Se poate apela la valoarea inductiei medii sub un pas polar:
.DBLIM
;MBLIf
medameds
medamedc
⋅⋅⋅=
⋅⋅=
Stiind ca π
τ⋅⋅=
p2L , medamedameds
p2ILB
p2IM Φ⋅
π⋅
⋅=τ⋅⋅⋅π⋅
⋅= , ca toata înfasurarea are
2N
spire si ca a2
IIa ⋅
= , rezulta cuplul total ca fiind:
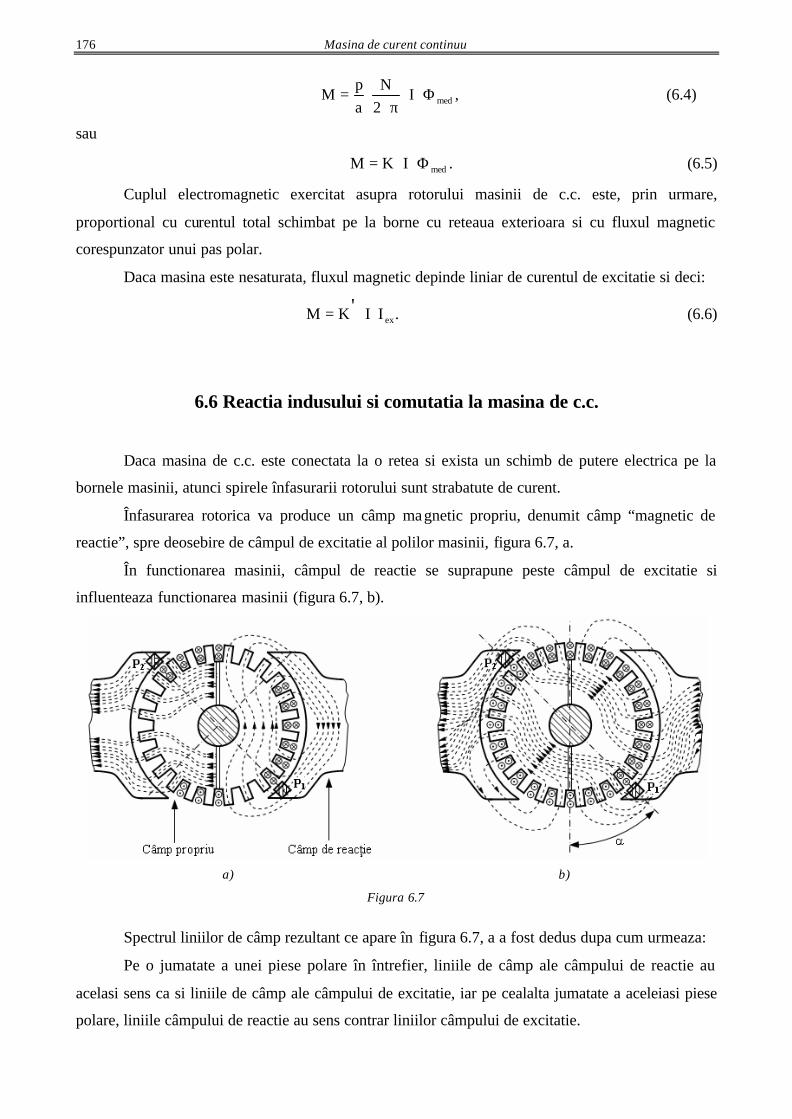
Masina de curent continuu 176
,I2N
ap
M medΦ⋅⋅π⋅
⋅= (6.4)
sau
.IKM medΦ⋅⋅= (6.5)
Cuplul electromagnetic exercitat asupra rotorului masinii de c.c. este, prin urmare,
proportional cu curentul total schimbat pe la borne cu reteaua exterioara si cu fluxul magnetic
corespunzator unui pas polar.
Daca masina este nesaturata, fluxul magnetic depinde liniar de curentul de excitatie si deci:
.IIKM ex' ⋅= ⋅ (6.6)
6.6 Reactia indusului si comutatia la masina de c.c.
Daca masina de c.c. este conectata la o retea si exista un schimb de putere electrica pe la
bornele masinii, atunci spirele înfasurarii rotorului sunt strabatute de curent.
Înfasurarea rotorica va produce un câmp magnetic propriu, denumit câmp “magnetic de
reactie”, spre deosebire de câmpul de excitatie al polilor masinii, figura 6.7, a.
În functionarea masinii, câmpul de reactie se suprapune peste câmpul de excitatie si
influenteaza functionarea masinii (figura 6.7, b).
a) b)
Figura 6.7
Spectrul liniilor de câmp rezultant ce apare în figura 6.7, a a fost dedus dupa cum urmeaza:
Pe o jumatate a unei piese polare în întrefier, liniile de câmp ale câmpului de reactie au
acelasi sens ca si liniile de câmp ale câmpului de excitatie, iar pe cealalta jumatate a aceleiasi piese
polare, liniile câmpului de reactie au sens contrar liniilor câmpului de excitatie.

Masina de curent continuu
177
Deci, câmpul de reactie întareste câmpul de excitatie pe o jumatate a piesei polare si îl
slabeste pe cealalta jumatate a piesei polare. În ipoteza admisibila ca circuitul magnetic nu este
saturat, prezentând liniaritate, se poate deduce câmpul rezultant B din suprapunerea câmpului de
excitatie BE si câmpului de reactie BA, figura 6.8. Fluxul Φ al unui pas polar nu este schimbat fata
de Φmed corespunzator câmpului mediu de excitatie si, ca atare, nici t.e.m. indusa nu este afectata.
Figura 6.8
Daca se tine seama, însa, de saturatia magnetica a pieselor polare si a dintilor rotorici,
slabirea câmpului sub o jumatate a piesei polare nu este pe deplin compensata în calculul unui flux
magnetic pe un pas polar, de cresterea câmpului în cealalta jumatate a piesei polare. Prin urmare,
variatia câmpului rezultant este în aceasta situatie prin diferenta (Bs) si fluxul Φ este cu câteva
procente mai mic decât Φmed si ca atare si t.e.m. este putin afectata.
Se mai remarca faptul ca în axa interpolara (axa neutra) câmpul rezultant nu mai este nul.
Pentru reducerea apreciabila a acestor efecte, se utilizeaza o înfasurare de compensare a
reactiei indusului, care sa compenseze câmpul de reactie sub polii de excitatie. Înfasurarea de
compensare se introduce în crestaturi practicate în piesele polare ale polilor de excitatie (figura 6.1)
si se leaga în serie cu înfasurarea rotorica, sensul curentului prin conductoarele înfasurarii de
compensare situate într-o crestatura oarecare a unui pol este invers sensului curentului în
conductoarele din crestatura rotorului exact în fata.
În timpul functionarii masinii de c.c. diferitele sectii ale înfasurarii rotorice trec dintr-o cale
de curent în alta, odata cu trecerea periei de pe o lamela de colector pe cea vecina.
În mod inevitabil, trecerea sectiei dintr-o cale de curent în alta este legata de scurtcircuitarea,
pentru o anumita durata a sectiei respective, de catre perii si la inversarea în acest timp a sensului
curentului în sectie.
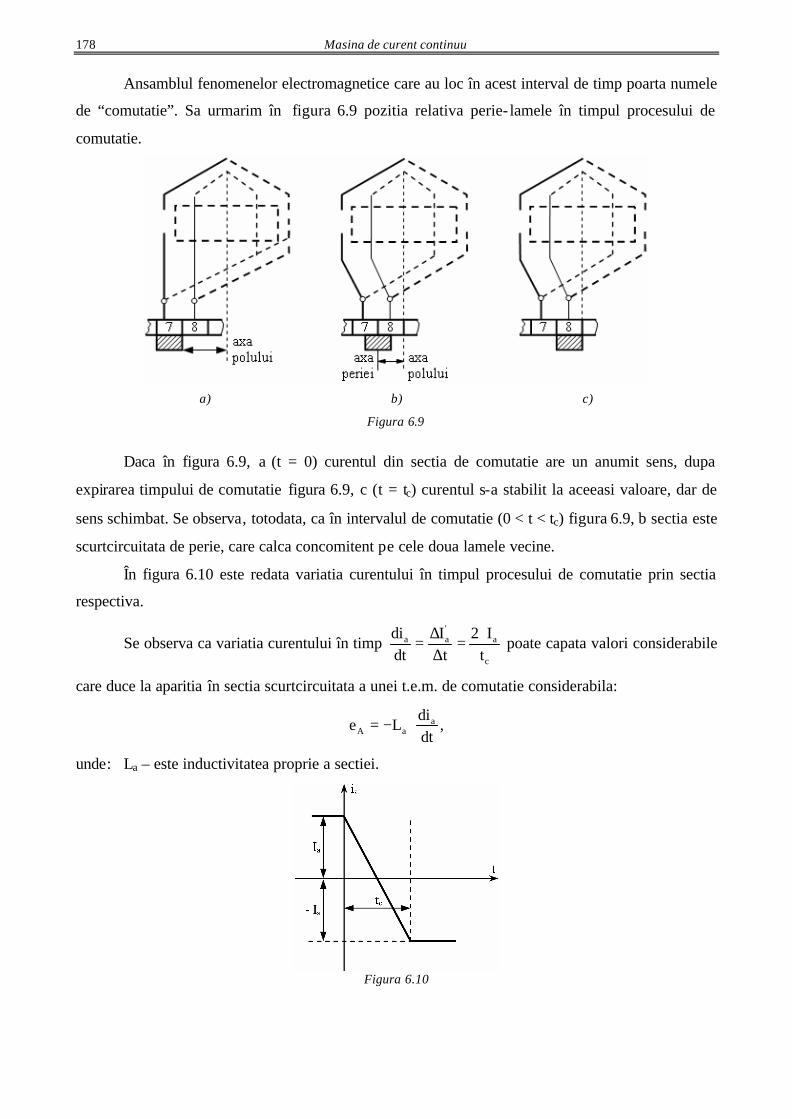
Masina de curent continuu 178
Ansamblul fenomenelor electromagnetice care au loc în acest interval de timp poarta numele
de “comutatie”. Sa urmarim în figura 6.9 pozitia relativa perie- lamele în timpul procesului de
comutatie.
a) b) c)
Figura 6.9
Daca în figura 6.9, a (t = 0) curentul din sectia de comutatie are un anumit sens, dupa
expirarea timpului de comutatie figura 6.9, c (t = tc) curentul s-a stabilit la aceeasi valoare, dar de
sens schimbat. Se observa, totodata, ca în intervalul de comutatie (0 < t < tc) figura 6.9, b sectia este
scurtcircuitata de perie, care calca concomitent pe cele doua lamele vecine.
În figura 6.10 este redata variatia curentului în timpul procesului de comutatie prin sectia
respectiva.
Se observa ca variatia curentului în timp c
a'aa
tI2
tI
dtdi ⋅
=∆∆
= poate capata valori considerabile
care duce la aparitia în sectia scurtcircuitata a unei t.e.m. de comutatie considerabila:
,dtdi
Le aaA ⋅−=
unde: La – este inductivitatea proprie a sectiei.
Figura 6.10
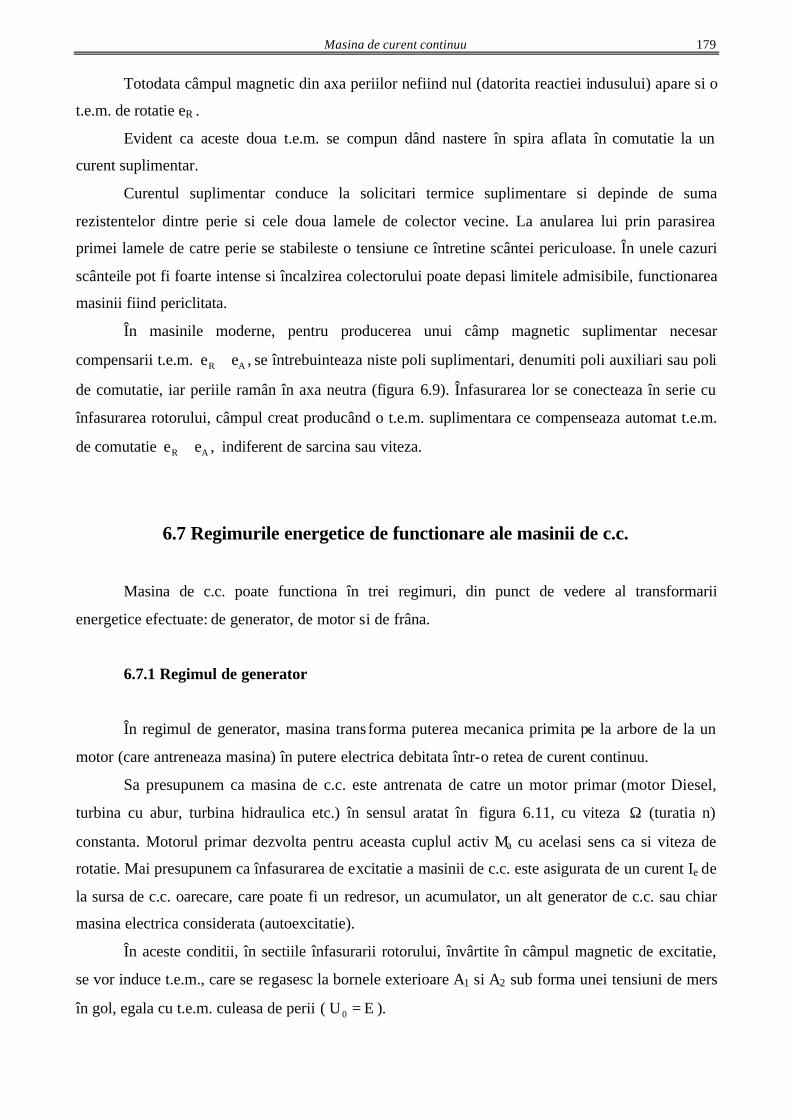
Masina de curent continuu
179
Totodata câmpul magnetic din axa periilor nefiind nul (datorita reactiei indusului) apare si o
t.e.m. de rotatie eR .
Evident ca aceste doua t.e.m. se compun dând nastere în spira aflata în comutatie la un
curent suplimentar.
Curentul suplimentar conduce la solicitari termice suplimentare si depinde de suma
rezistentelor dintre perie si cele doua lamele de colector vecine. La anularea lui prin parasirea
primei lamele de catre perie se stabileste o tensiune ce întretine scântei periculoase. În unele cazuri
scânteile pot fi foarte intense si încalzirea colectorului poate depasi limitele admisibile, functionarea
masinii fiind periclitata.
În masinile moderne, pentru producerea unui câmp magnetic suplimentar necesar
compensarii t.e.m. ,ee AR + se întrebuinteaza niste poli suplimentari, denumiti poli auxiliari sau poli
de comutatie, iar periile ramân în axa neutra (figura 6.9). Înfasurarea lor se conecteaza în serie cu
înfasurarea rotorului, câmpul creat producând o t.e.m. suplimentara ce compenseaza automat t.e.m.
de comutatie ,ee AR + indiferent de sarcina sau viteza.
6.7 Regimurile energetice de functionare ale masinii de c.c.
Masina de c.c. poate functiona în trei regimuri, din punct de vedere al transformarii
energetice efectuate: de generator, de motor si de frâna.
6.7.1 Regimul de generator
În regimul de generator, masina trans forma puterea mecanica primita pe la arbore de la un
motor (care antreneaza masina) în putere electrica debitata într-o retea de curent continuu.
Sa presupunem ca masina de c.c. este antrenata de catre un motor primar (motor Diesel,
turbina cu abur, turbina hidraulica etc.) în sensul aratat în figura 6.11, cu viteza Ω (turatia n)
constanta. Motorul primar dezvolta pentru aceasta cuplul activ Ma cu acelasi sens ca si viteza de
rotatie. Mai presupunem ca înfasurarea de excitatie a masinii de c.c. este asigurata de un curent Ie de
la sursa de c.c. oarecare, care poate fi un redresor, un acumulator, un alt generator de c.c. sau chiar
masina electrica considerata (autoexcitatie).
În aceste conditii, în sectiile înfasurarii rotorului, învârtite în câmpul magnetic de excitatie,
se vor induce t.e.m., care se regasesc la bornele exterioare A1 si A2 sub forma unei tensiuni de mers
în gol, egala cu t.e.m. culeasa de perii ( EU 0 = ).
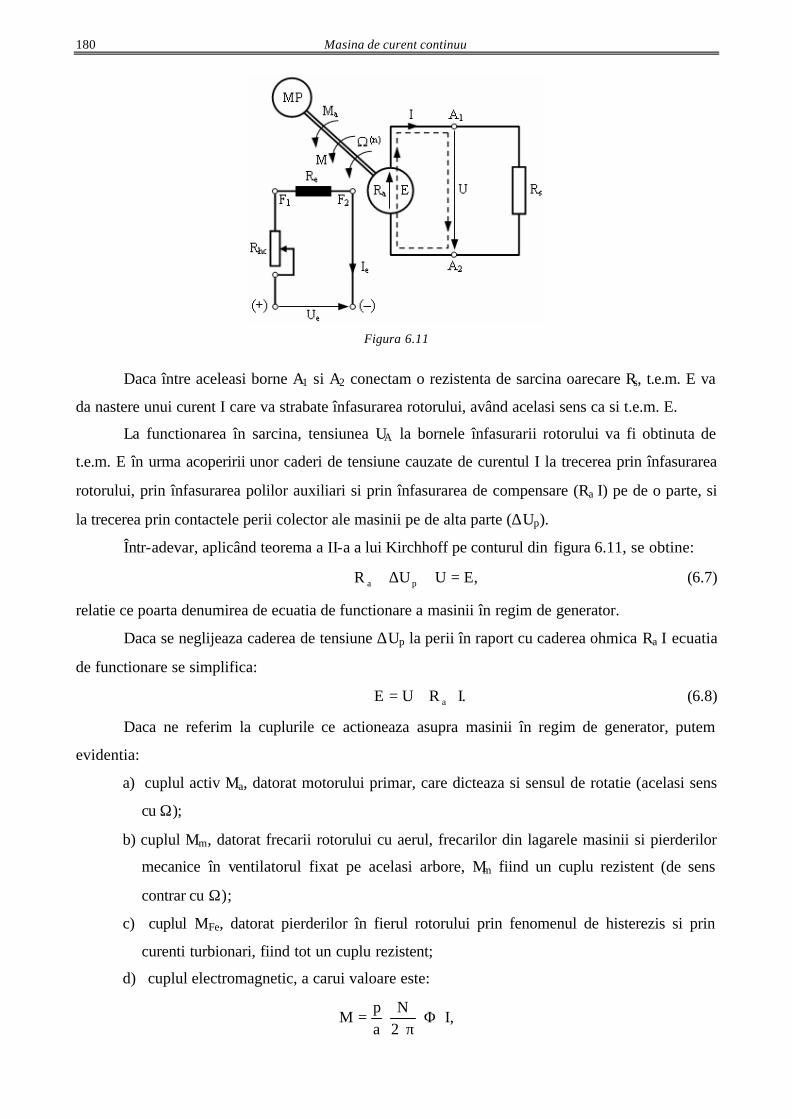
Masina de curent continuu 180
Figura 6.11
Daca între aceleasi borne A1 si A2 conectam o rezistenta de sarcina oarecare Rs, t.e.m. E va
da nastere unui curent I care va strabate înfasurarea rotorului, având acelasi sens ca si t.e.m. E.
La functionarea în sarcina, tensiunea UA la bornele înfasurarii rotorului va fi obtinuta de
t.e.m. E în urma acoperirii unor caderi de tensiune cauzate de curentul I la trecerea prin înfasurarea
rotorului, prin înfasurarea polilor auxiliari si prin înfasurarea de compensare (Ra⋅I) pe de o parte, si
la trecerea prin contactele perii colector ale masinii pe de alta parte (∆Up).
Într-adevar, aplicând teorema a II-a a lui Kirchhoff pe conturul din figura 6.11, se obtine:
,EUUR pa =+∆+ (6.7)
relatie ce poarta denumirea de ecuatia de functionare a masinii în regim de generator.
Daca se neglijeaza caderea de tensiune ∆Up la perii în raport cu caderea ohmica Ra⋅I ecuatia
de functionare se simplifica:
.IRUE a ⋅+= (6.8)
Daca ne referim la cuplurile ce actioneaza asupra masinii în regim de generator, putem
evidentia:
a) cuplul activ Ma, datorat motorului primar, care dicteaza si sensul de rotatie (acelasi sens
cu Ω);
b) cuplul Mm, datorat frecarii rotorului cu aerul, frecarilor din lagarele masinii si pierderilor
mecanice în ventilatorul fixat pe acelasi arbore, Mm fiind un cuplu rezistent (de sens
contrar cu Ω);
c) cuplul MFe, datorat pierderilor în fierul rotorului prin fenomenul de histerezis si prin
curenti turbionari, fiind tot un cuplu rezistent;
d) cuplul electromagnetic, a carui valoare este:
,I2N
ap
M ⋅Φ⋅π⋅
⋅=
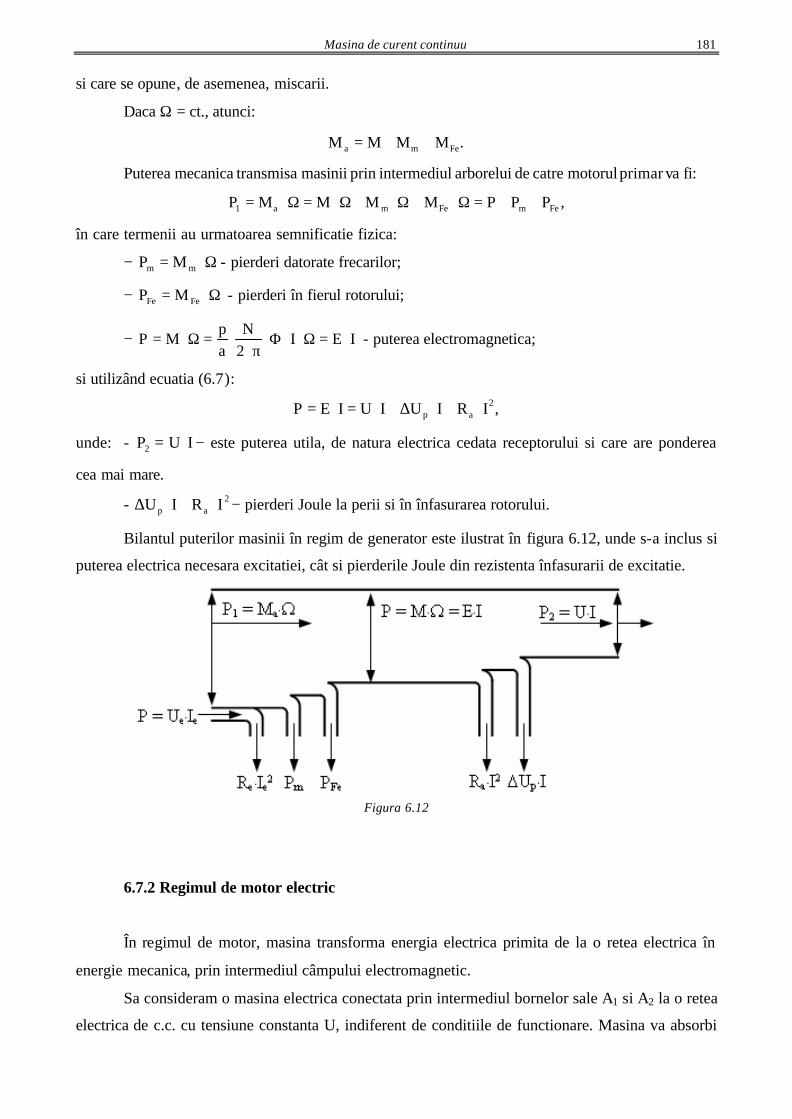
Masina de curent continuu
181
si care se opune, de asemenea, miscarii.
Daca Ω = ct., atunci:
.MMMM Fema ++=
Puterea mecanica transmisa masinii prin intermediul arborelui de catre motorul primar va fi:
,PPPMMMMP FemFema1 ++=Ω⋅+Ω⋅+Ω⋅=Ω⋅=
în care termenii au urmatoarea semnificatie fizica:
− Ω⋅= mm MP - pierderi datorate frecarilor;
− Ω⋅= FeFe MP - pierderi în fierul rotorului;
− IEI2N
ap
MP ⋅=Ω⋅⋅Φ⋅π⋅
⋅=Ω⋅= - puterea electromagnetica;
si utilizând ecuatia (6.7):
,IRIUIUIEP 2ap ⋅+⋅∆+⋅=⋅=
unde: - IUP2 ⋅= − este puterea utila, de natura electrica cedata receptorului si care are ponderea
cea mai mare.
- 2ap IRIU ⋅+⋅∆ − pierderi Joule la perii si în înfasurarea rotorului.
Bilantul puterilor masinii în regim de generator este ilustrat în figura 6.12, unde s-a inclus si
puterea electrica necesara excitatiei, cât si pierderile Joule din rezistenta înfasurarii de excitatie.
Figura 6.12
6.7.2 Regimul de motor electric
În regimul de motor, masina transforma energia electrica primita de la o retea electrica în
energie mecanica, prin intermediul câmpului electromagnetic.
Sa consideram o masina electrica conectata prin intermediul bornelor sale A1 si A2 la o retea
electrica de c.c. cu tensiune constanta U, indiferent de conditiile de functionare. Masina va absorbi
Masina de curent continuu 182
un curent I în înfasurarea rotorului, a polilor auxiliari si eventual în cea de compensare. Sa
presupunem ca înfasurarea de excitatie este strabatuta de un curent Ie provenit de la o sursa oarecare
sau chiar de la aceeasi retea de la care se alimenteaza si înfasurarea rotorului (autoexcitatie). Sa
consideram sensurile celor doi curenti I si Ie în cele doua circuite ale masinii, precum cele din figura
6.13.
Figura 6.13
Conductoarele înfasurarii rotorice, fiind strabatute de curent si aflându-se în câmpul
magnetic al polilor de excitatie, vor fi solicitate de forte electromagnetice, care vor da nastere unui
cuplu de forma:
.I2N
ap
M ⋅Φ⋅π⋅
⋅=
Daca acest cuplu este mai mare decât cel static, opus la ax (cuplul de ferecari si cel al
masinii de lucru cuplate mecanic), atunci rotorul accelereaza pâna când cuplul sau egaleaza cuplul
static. Dupa aceasta, masina se misca uniform (Ω = ct.).
Datorita miscarii conductoarelor înfasurarii rotorice în câmpul magnetic de excitatie, ei
devin sediul unei t.e.m. care are sens contrar sensului curentului din înfasurare:
.2N
ap
E Φ⋅Ω⋅π⋅
⋅=
Daca se aplica teorema a II-a a lui Kirchhoff pe traseul punctat din figura 6.13, se obtine:
,UIREU pa ∆+⋅+= (6.9)
sau ecuatia de functionare a masinii în regim de motor, care în cazul neglijarii caderi de tensiune la
perii devine:
.IREU a ⋅+= (6.10)

Masina de curent continuu
183
Sa presupunem ca motorul tracteaza o masina de lucru care are un cuplu rezistent Mr si
luând în considerare si cuplurile rezistente proprii definite anterior, putem scrie ecuatia cuplurilor
când miscarea este uniforma (Ω = ct.).
.MMMM Femr ++=
Daca se multiplica ecuatia prin Ω se obtine un bilant de puteri, dupa cum urmeaza:
,PPPMP Fem2 ++=Ω⋅=
unde: IEMP ⋅=Ω⋅= - poate fi considerata puterea mecanica totala dezvoltata de catre motor, dar
si puterea electrica, rezultând ca diferenta între puterea electrica de alimentare IUP1 ⋅= si respectiv
pierderile prin efect Joule în înfasurari si la perii.
.IUIRPP p2
a1 ⋅∆−⋅−=
Ca atare, bilantul puterilor masinii în regim de motor, se poate ilustra ca în figura 6.14.
Figura 6.14
6.7.3 Masina de c.c. în regim de frâna
În regim de frâna electrica, masina primeste putere mecanica pe la arbore si putere electrica
de la retea de c.c. si le transforma ireversibil, în timp, în caldura, dezvoltând, totodata, un cuplu
necesar frânarii unei instalatii mecanice.
Pentru a întelege functionarea masinii într-un astfel de regim, sa presupunem ca
functioneaza initial în regim de motor, dezvoltând un anumit cuplu activ la o viteza de rotatie,
sensul vitezei fiind acelasi cu al cuplului.
În aceasta situatie se inverseaza sensul tensiunii U la bornele înfasurarii rotorului, se adauga
o rezistenta suplimentara RF în serie cu înfasurarea rotorica, pastrând sensul initial al curentului de
excitatie.
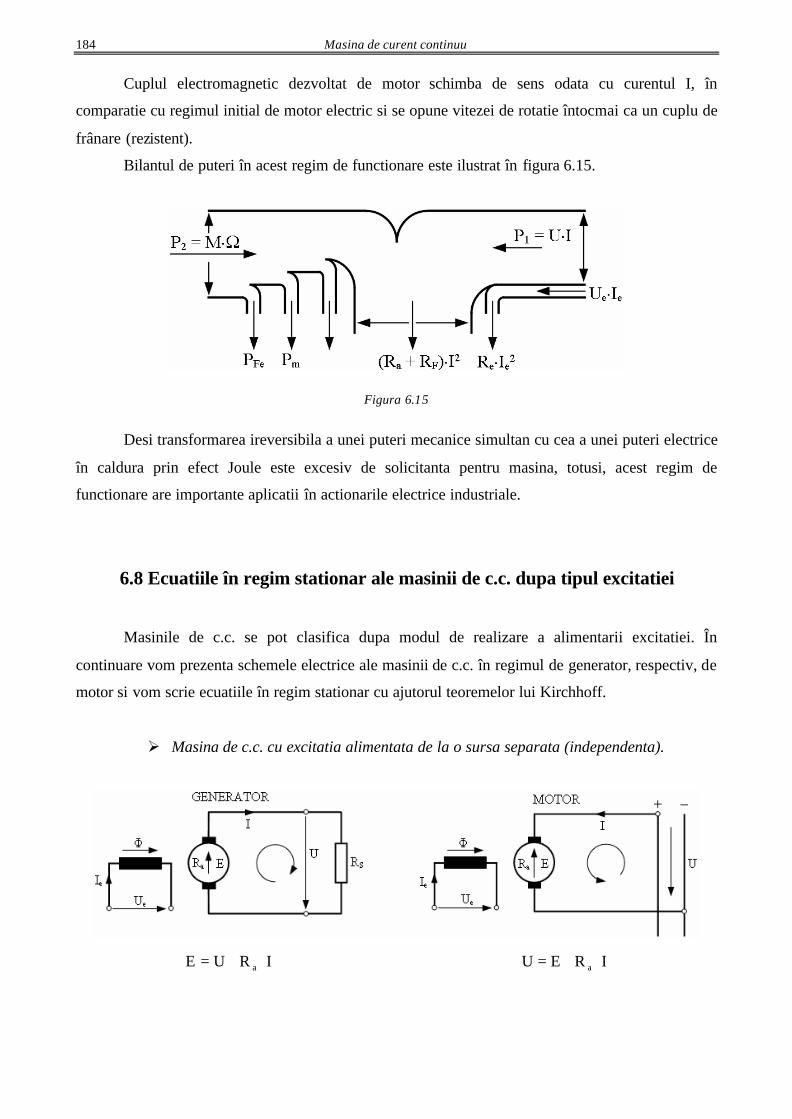
Masina de curent continuu 184
Cuplul electromagnetic dezvoltat de motor schimba de sens odata cu curentul I, în
comparatie cu regimul initial de motor electric si se opune vitezei de rotatie întocmai ca un cuplu de
frânare (rezistent).
Bilantul de puteri în acest regim de functionare este ilustrat în figura 6.15.
Figura 6.15
Desi transformarea ireversibila a unei puteri mecanice simultan cu cea a unei puteri electrice
în caldura prin efect Joule este excesiv de solicitanta pentru masina, totusi, acest regim de
functionare are importante aplicatii în actionarile electrice industriale.
6.8 Ecuatiile în regim stationar ale masinii de c.c. dupa tipul excitatiei
Masinile de c.c. se pot clasifica dupa modul de realizare a alimentarii excitatiei. În
continuare vom prezenta schemele electrice ale masinii de c.c. în regimul de generator, respectiv, de
motor si vom scrie ecuatiile în regim stationar cu ajutorul teoremelor lui Kirchhoff.
Ø Masina de c.c. cu excitatia alimentata de la o sursa separata (independenta).
IRUE a ⋅+= IREU a ⋅+=
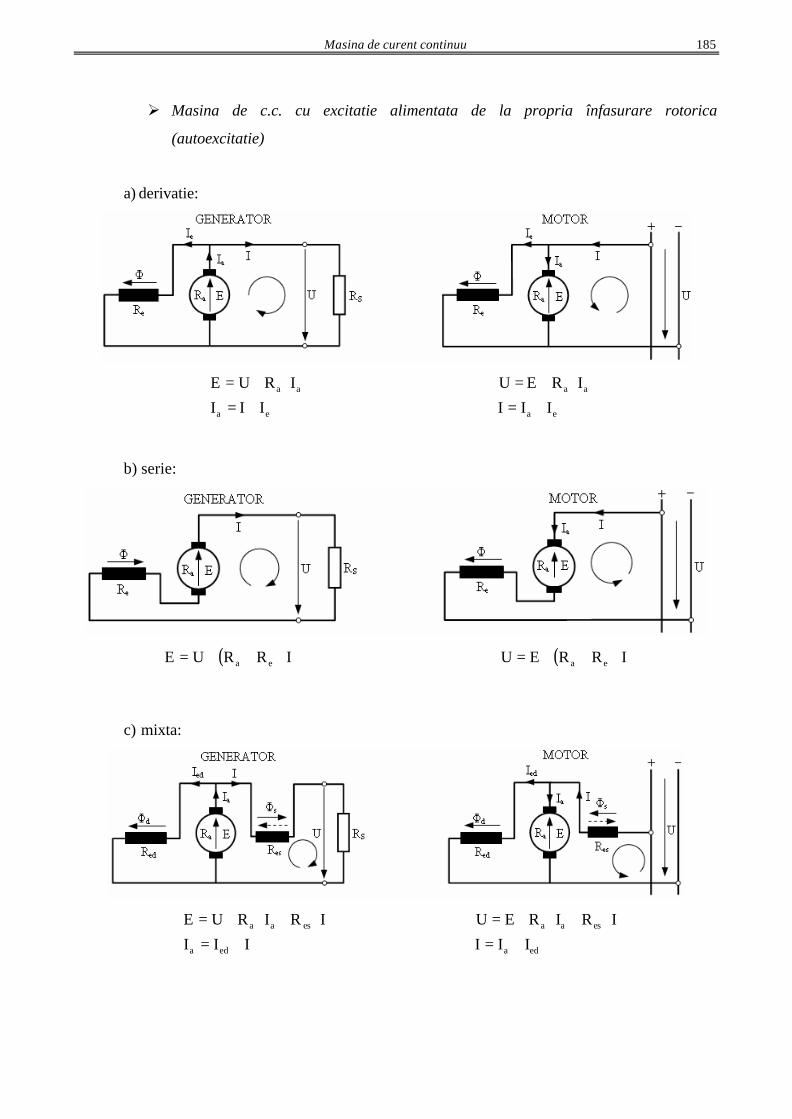
Masina de curent continuu
185
Ø Masina de c.c. cu excitatie alimentata de la propria înfasurare rotorica
(autoexcitatie)
a) derivatie:
+=
⋅+=
ea
aa
III
IRUE
+=
⋅+=
ea
aa
III
IREU
b) serie:
( ) IRRUE ea ⋅++= ( ) IRREU ea ⋅++=
c) mixta:
+=
⋅+⋅+=
III
IRIRUE
eda
esaa
+=
⋅+⋅+=
eda
esaa
III
IRIREU

Masina de curent continuu 186
6.9 Caracteristicile generatorului de c.c.
Functionarea în regim stationar a unui generator de c.c. depinde de o serie de marimi, cum
ar fi: t.e.m. E, tensiunea la borne U, curentul din înfasurarea rotorica I, curentul de excitatie Ie,
viteza de rotatie Ω (turatia n). Aceste marimi nu sunt independente, ele fiind legate de ecuatiile
deduse în capitolele anterioare.
Dependenta dintre doua din marimile enuntate mai sus, în ipoteza ca celelalte sunt
constante, poarta numele de caracteristica.
Din punctul de vedere al importantei în exploatare, cât si pentru evaluarea performantelor
unui generator, ne vor interesa urmatoarele lui caracteristici:
a) Caracteristica de mers în gol ( )e0 IfU = când I = 0 si n = ct.;
b) Caracteristica externa ( )IfU = când Ie = ct. si n = ct.;
c) Caracteristica de reglaj ( )IfIe = când U = ct. si n = ct..
6.9.1 Generatorul cu excitatie alimentata separat
a) Conditia de mers în gol înseamna o valoare infinita a rezistentei de sarcina Rs = ∞ astfel
încât curentul debitat sa se anuleze I = 0 si deci U0 = E.
Daca turatia este constanta, din expresia t.e.m. se observa ca unica marime dependenta de
curentul de excitatie este fluxul magnetic.
Este evident ca aliura caracteristicii ( )e0 IfU = este de fapt Φ(Ie) adica curba de magnetizare,
ca în figura 6.16.
Figura 6.16
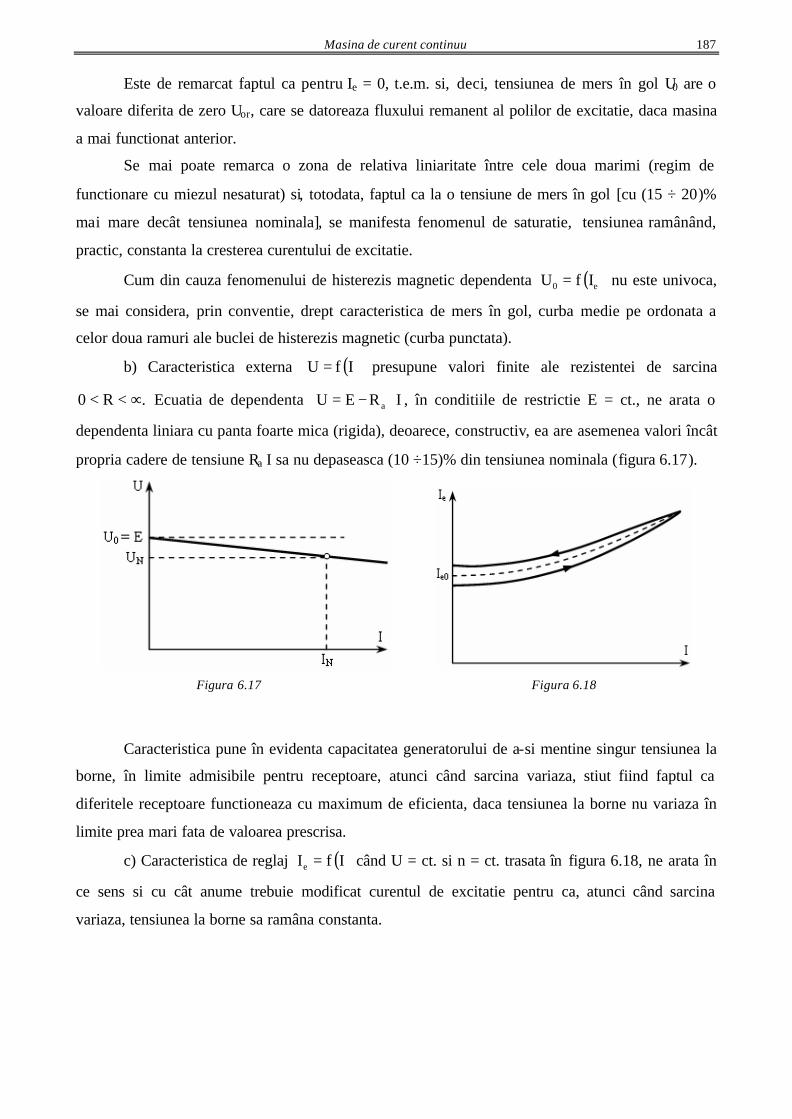
Masina de curent continuu
187
Este de remarcat faptul ca pentru Ie = 0, t.e.m. si, deci, tensiunea de mers în gol U0 are o
valoare diferita de zero Uor, care se datoreaza fluxului remanent al polilor de excitatie, daca masina
a mai functionat anterior.
Se mai poate remarca o zona de relativa liniaritate între cele doua marimi (regim de
functionare cu miezul nesaturat) si, totodata, faptul ca la o tensiune de mers în gol [cu (15 ÷ 20)%
mai mare decât tensiunea nominala], se manifesta fenomenul de saturatie, tensiunea ramânând,
practic, constanta la cresterea curentului de excitatie.
Cum din cauza fenomenului de histerezis magnetic dependenta ( )e0 IfU = nu este univoca,
se mai considera, prin conventie, drept caracteristica de mers în gol, curba medie pe ordonata a
celor doua ramuri ale buclei de histerezis magnetic (curba punctata).
b) Caracteristica externa ( )IfU = presupune valori finite ale rezistentei de sarcina
.R0 ∞<< Ecuatia de dependenta IREU a ⋅−= , în conditiile de restrictie E = ct., ne arata o
dependenta liniara cu panta foarte mica (rigida), deoarece, constructiv, ea are asemenea valori încât
propria cadere de tensiune Ra⋅I sa nu depaseasca (10 ÷15)% din tensiunea nominala (figura 6.17).
Figura 6.17 Figura 6.18
Caracteristica pune în evidenta capacitatea generatorului de a-si mentine singur tensiunea la
borne, în limite admisibile pentru receptoare, atunci când sarcina variaza, stiut fiind faptul ca
diferitele receptoare functioneaza cu maximum de eficienta, daca tensiunea la borne nu variaza în
limite prea mari fata de valoarea prescrisa.
c) Caracteristica de reglaj ( )IfIe = când U = ct. si n = ct. trasata în figura 6.18, ne arata în
ce sens si cu cât anume trebuie modificat curentul de excitatie pentru ca, atunci când sarcina
variaza, tensiunea la borne sa ramâna constanta.
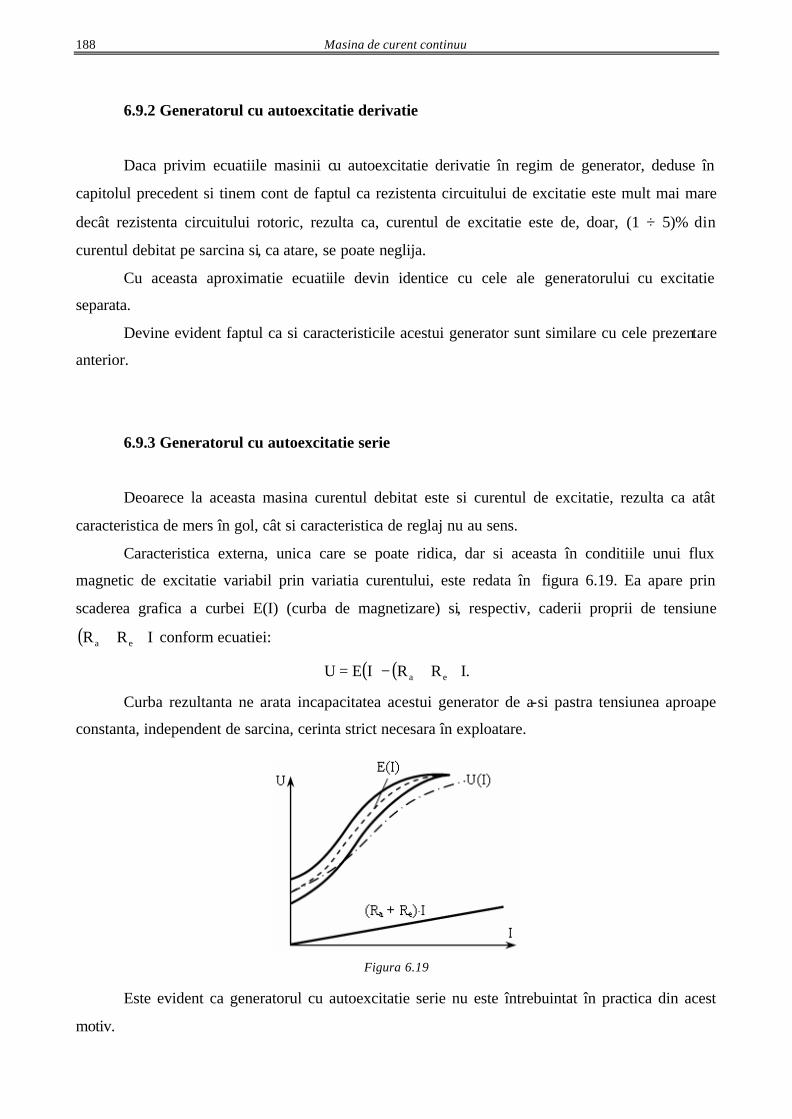
Masina de curent continuu 188
6.9.2 Generatorul cu autoexcitatie derivatie
Daca privim ecuatiile masinii cu autoexcitatie derivatie în regim de generator, deduse în
capitolul precedent si tinem cont de faptul ca rezistenta circuitului de excitatie este mult mai mare
decât rezistenta circuitului rotoric, rezulta ca, curentul de excitatie este de, doar, (1 ÷ 5)% din
curentul debitat pe sarcina si, ca atare, se poate neglija.
Cu aceasta aproximatie ecuatiile devin identice cu cele ale generatorului cu excitatie
separata.
Devine evident faptul ca si caracteristicile acestui generator sunt similare cu cele prezentare
anterior.
6.9.3 Generatorul cu autoexcitatie serie
Deoarece la aceasta masina curentul debitat este si curentul de excitatie, rezulta ca atât
caracteristica de mers în gol, cât si caracteristica de reglaj nu au sens.
Caracteristica externa, unica care se poate ridica, dar si aceasta în conditiile unui flux
magnetic de excitatie variabil prin variatia curentului, este redata în figura 6.19. Ea apare prin
scaderea grafica a curbei E(I) (curba de magnetizare) si, respectiv, caderii proprii de tensiune
( ) IRR ea ⋅+ conform ecuatiei:
( ) ( ) .IRRIEU ea ⋅+−=
Curba rezultanta ne arata incapacitatea acestui generator de a-si pastra tensiunea aproape
constanta, independent de sarcina, cerinta strict necesara în exploatare.
Figura 6.19
Este evident ca generatorul cu autoexcitatie serie nu este întrebuintat în practica din acest
motiv.
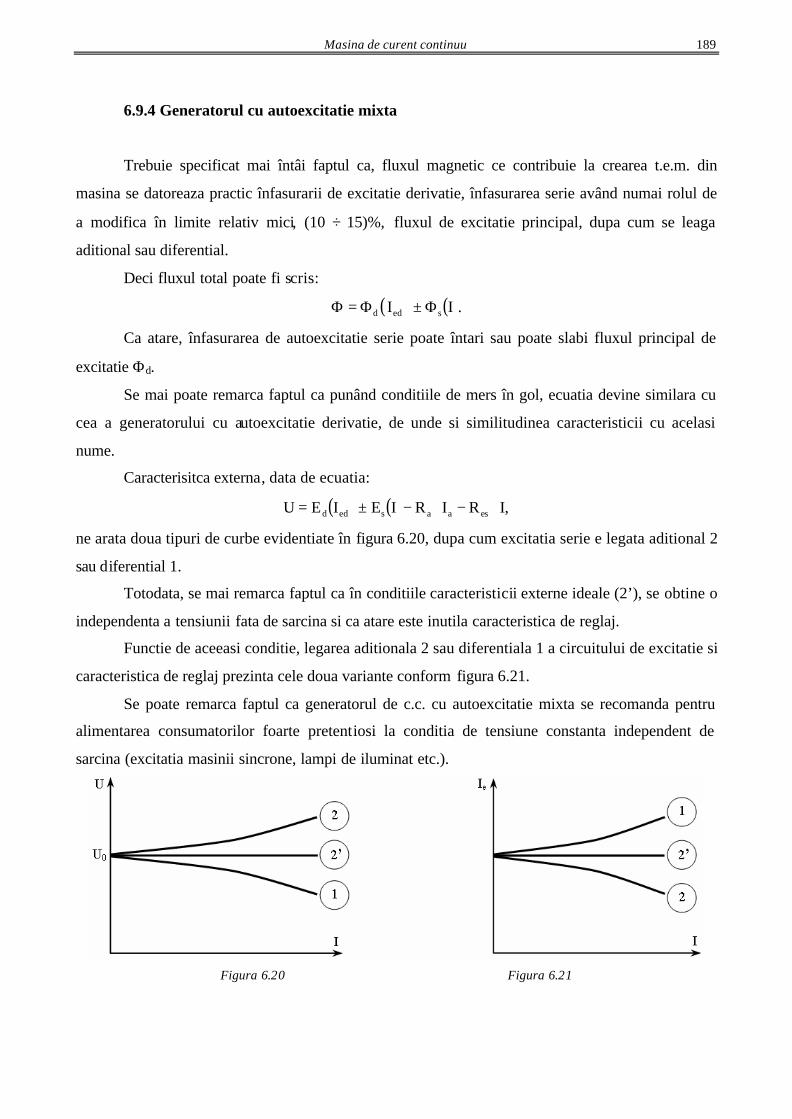
Masina de curent continuu
189
6.9.4 Generatorul cu autoexcitatie mixta
Trebuie specificat mai întâi faptul ca, fluxul magnetic ce contribuie la crearea t.e.m. din
masina se datoreaza practic înfasurarii de excitatie derivatie, înfasurarea serie având numai rolul de
a modifica în limite relativ mici, (10 ÷ 15)%, fluxul de excitatie principal, dupa cum se leaga
aditional sau diferential.
Deci fluxul total poate fi scris:
( ) ( ).II sedd Φ±Φ=Φ
Ca atare, înfasurarea de autoexcitatie serie poate întari sau poate slabi fluxul principal de
excitatie Φd.
Se mai poate remarca faptul ca punând conditiile de mers în gol, ecuatia devine similara cu
cea a generatorului cu autoexcitatie derivatie, de unde si similitudinea caracteristicii cu acelasi
nume.
Caracterisitca externa, data de ecuatia:
( ) ( ) ,IRIRIEIEU esaasedd ⋅−⋅−±=
ne arata doua tipuri de curbe evidentiate în figura 6.20, dupa cum excitatia serie e legata aditional 2
sau diferential 1.
Totodata, se mai remarca faptul ca în conditiile caracteristicii externe ideale (2’), se obtine o
independenta a tensiunii fata de sarcina si ca atare este inutila caracteristica de reglaj.
Functie de aceeasi conditie, legarea aditionala 2 sau diferentiala 1 a circuitului de excitatie si
caracteristica de reglaj prezinta cele doua variante conform figura 6.21.
Se poate remarca faptul ca generatorul de c.c. cu autoexcitatie mixta se recomanda pentru
alimentarea consumatorilor foarte pretentiosi la conditia de tensiune constanta independent de
sarcina (excitatia masinii sincrone, lampi de iluminat etc.).
Figura 6.20 Figura 6.21

Masina de curent continuu 190
6.10 Caracteristicile motorului de c.c.
Pentru o masina de c.c. care functioneaza în regim de motor, pot varia în timpul functionarii
urmatoarele marimi: U, I, Ie, Ω, M, P2.
Vom prezenta în cele ce urmeaza doua caracteristici, capabile sa ilustreze performantele
masinii în comparatie cu cele studiate anterior, cât si posibilitatea modificarii lor (familii) prin
variatia celorlalte marimi ce prezinta interes în utilizare.
Acestea sunt:
• Caracteristica de mers în gol ( )e0 Ifn = ridicata în conditiile U = ct., M = 0, ceea ce implica
I = 0;
• Caracteristica mecanica ( )Mfn = ridicata în conditiile Ie = ct., U = ct.
De la bun început trebuie sa precizam ca între motorul cu excitatie separata si cel cu
autoexcitatie derivatie nu exista nici o deosebire în functionare.
Ca atare, vom prezenta – în acest paragraf – numai caracteristicile motorului de c.c. cu
excitatie separata.
Conform celor aratate în paragrafele anterioare, ecuatiile motorului cu excitatie separata
sunt:
( )ee InKE Φ⋅⋅= si în regim nesaturat ;InKE ee' ⋅⋅=
( ) IIKM e ⋅Φ⋅= si în regim nesaturat IIKM e' ⋅⋅= , .IREU a ⋅+=
6.10.1 Caracteristica de mers în gol
Notiunea de mers în gol presupune absenta cuplului rezistent, lucru imposibil de realizat,
datorita necesitatii dezvoltarii de catre motor a unui cuplu pentru acoperirea în regim stationar a
cuplului de frecari în lagare si cu aerul (datorita existentei ventilatorului).
,MM f0 =
Valoarea cuplului de frecari este data de relatia:
( ),IIKP
M eam0
f0 0
Φ⋅⋅=Ω
=
unde:
0aNf IUP ⋅= − puterea absorbita de motor la mersul în gol;
Ω0 – viteza unghiulara a motorului la mersul în gol;
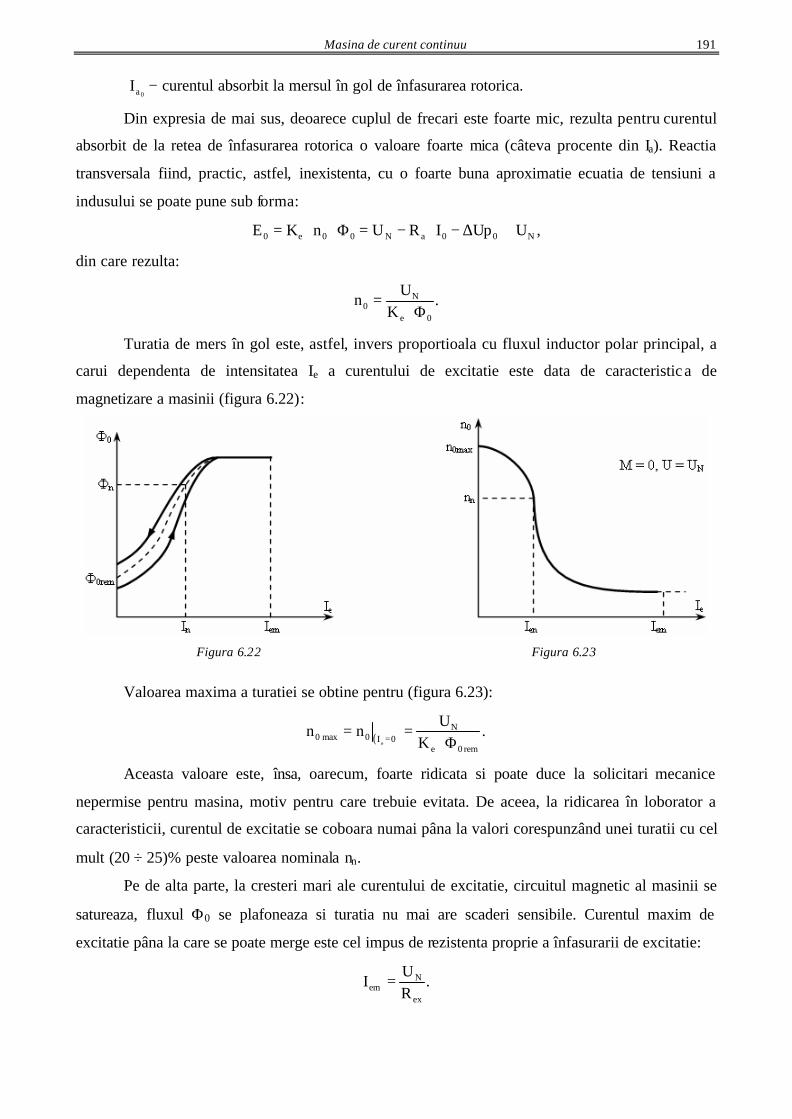
Masina de curent continuu
191
0aI − curentul absorbit la mersul în gol de înfasurarea rotorica.
Din expresia de mai sus, deoarece cuplul de frecari este foarte mic, rezulta pentru curentul
absorbit de la retea de înfasurarea rotorica o valoare foarte mica (câteva procente din Ia). Reactia
transversala fiind, practic, astfel, inexistenta, cu o foarte buna aproximatie ecuatia de tensiuni a
indusului se poate pune sub forma:
,UUpIRUnKE N00aN00e0 ≅∆−⋅−=Φ⋅⋅=
din care rezulta:
.K
Un
0e
N0 Φ⋅
=
Turatia de mers în gol este, astfel, invers proportioala cu fluxul inductor polar principal, a
carui dependenta de intensitatea Ie a curentului de excitatie este data de caracteristic a de
magnetizare a masinii (figura 6.22):
Figura 6.22 Figura 6.23
Valoarea maxima a turatiei se obtine pentru (figura 6.23):
( ) .K
Unn
rem0e
N0I0max0
e Φ⋅==
=
Aceasta valoare este, însa, oarecum, foarte ridicata si poate duce la solicitari mecanice
nepermise pentru masina, motiv pentru care trebuie evitata. De aceea, la ridicarea în loborator a
caracteristicii, curentul de excitatie se coboara numai pâna la valori corespunzând unei turatii cu cel
mult (20 ÷ 25)% peste valoarea nominala nn.
Pe de alta parte, la cresteri mari ale curentului de excitatie, circuitul magnetic al masinii se
satureaza, fluxul Φ0 se plafoneaza si turatia nu mai are scaderi sensibile. Curentul maxim de
excitatie pâna la care se poate merge este cel impus de rezistenta proprie a înfasurarii de excitatie:
.RU
Iex
Nem =

Masina de curent continuu 192
Acesta valoare se obtine, practic, la scurtcircuitarea completa a reostatului de câmp, plasat în
circuitul de excitatie al motorului.
Forma acestei caracteristici evidentiaza un mare avantaj al motorului de c.c. cu excitatie
independenta (derivatie) si anume faptul ca printr-un reglaj corespunzator al curentului de excitatie,
turatia poate fi reglata între limite foarte largi.
Pentru motorul de c.c. cu excitatie serie, deoarece Ie = Ia = 0 caracteristica de mers în gol nu
are sens.
6.10.2 Caracteristica mecanica
Caracteristica mecanica defineste dependenta ( )Mfn = în conditiile Ie = ct., U = ct.
Pentru determinarea ei vom defini, mai întâi, caracteristicile:
− de sarcina, numita si caracteristica externa a motorului ( )Ifn = în conditiile .ctI e = ,
.ctU = ;
− caracteristica cuplului electromagnetic ( )IfM = în conditiile Ie = ct, U = ct.
a) Caracteristica de sarcina a motorului de c.c. cu excitatie independenta (derivatie).
Schema simbolica asociata motorului de c.c. cu excitatie independenta a fost prezentata în
capitolul 6.8, având ecuatiile:
Figura 6.24
,UIREU paN ∆+⋅+=
neglijând ∆Up − caderea de tensiune la perii, obtinem:
,IREU aN ⋅+=
dar
,nKE e Φ⋅⋅=
rezulta:
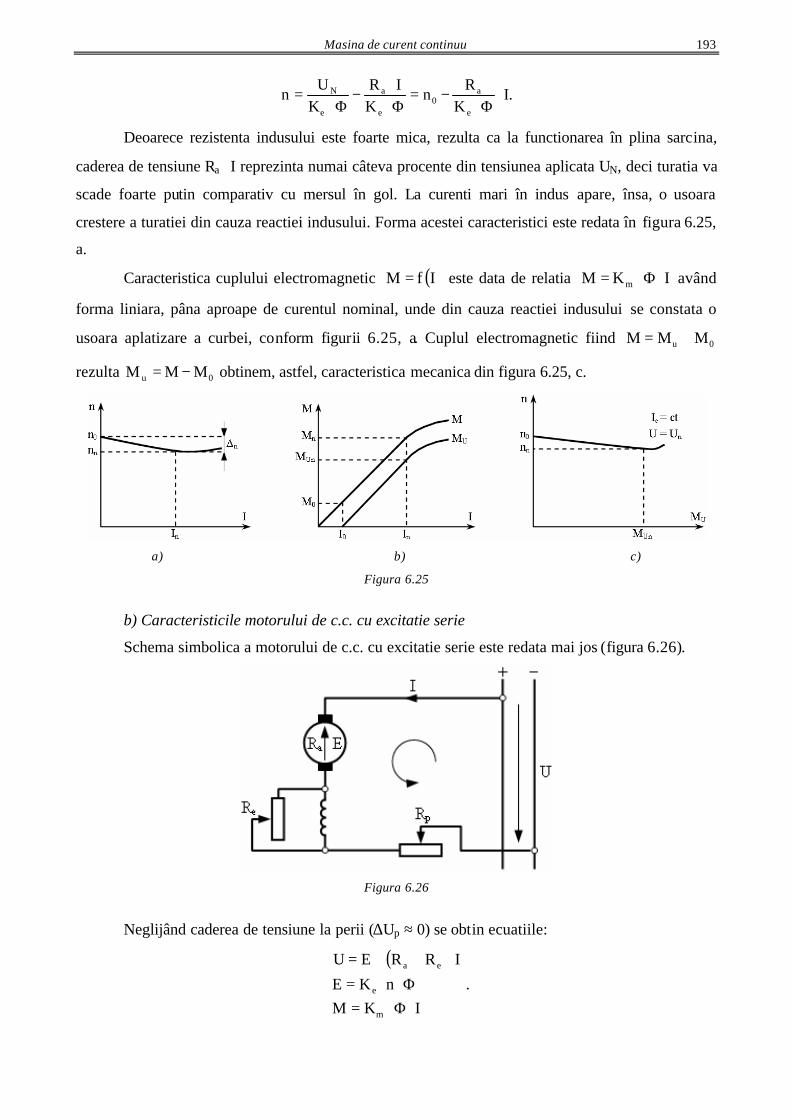
Masina de curent continuu
193
.IK
Rn
KIR
KU
ne
a0
e
a
e
N ⋅Φ⋅
−=Φ⋅⋅
−Φ⋅
=
Deoarece rezistenta indusului este foarte mica, rezulta ca la functionarea în plina sarcina,
caderea de tensiune Ra ⋅ I reprezinta numai câteva procente din tensiunea aplicata UN, deci turatia va
scade foarte putin comparativ cu mersul în gol. La curenti mari în indus apare, însa, o usoara
crestere a turatiei din cauza reactiei indusului. Forma acestei caracteristici este redata în figura 6.25,
a.
Caracteristica cuplului electromagnetic ( )IfM = este data de relatia IKM m ⋅Φ⋅= având
forma liniara, pâna aproape de curentul nominal, unde din cauza reactiei indusului se constata o
usoara aplatizare a curbei, conform figurii 6.25, a. Cuplul electromagnetic fiind 0u MMM +=
rezulta 0u MMM −= obtinem, astfel, caracteristica mecanica din figura 6.25, c.
a) b) c)
Figura 6.25
b) Caracteristicile motorului de c.c. cu excitatie serie
Schema simbolica a motorului de c.c. cu excitatie serie este redata mai jos (figura 6.26).
Figura 6.26
Neglijând caderea de tensiune la perii (∆Up ≈ 0) se obtin ecuatiile:
( )
⋅Φ⋅=Φ⋅⋅=
⋅++=
IKMnKE
IRREU
m
e
ea
.
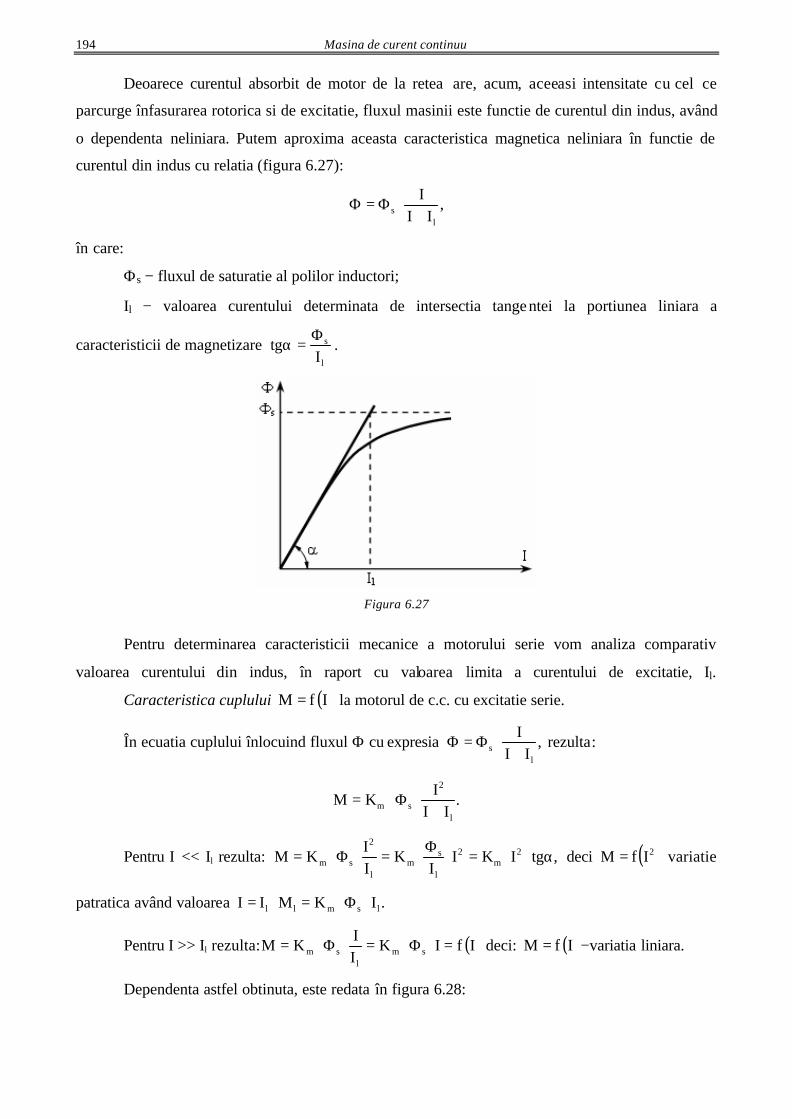
Masina de curent continuu 194
Deoarece curentul absorbit de motor de la retea are, acum, aceeasi intensitate cu cel ce
parcurge înfasurarea rotorica si de excitatie, fluxul masinii este functie de curentul din indus, având
o dependenta neliniara. Putem aproxima aceasta caracteristica magnetica neliniara în functie de
curentul din indus cu relatia (figura 6.27):
,II
I
ls +
⋅Φ=Φ
în care:
Φs − fluxul de saturatie al polilor inductori;
Il − valoarea curentului determinata de intersectia tangentei la portiunea liniara a
caracteristicii de magnetizare l
s
Itg
Φ=α .
Figura 6.27
Pentru determinarea caracteristicii mecanice a motorului serie vom analiza comparativ
valoarea curentului din indus, în raport cu valoarea limita a curentului de excitatie, Il.
Caracteristica cuplului ( )IfM = la motorul de c.c. cu excitatie serie.
În ecuatia cuplului înlocuind fluxul Φ cu expresia ,II
I
ls +
⋅Φ=Φ rezulta:
.II
IKM
l
2
sm +⋅Φ⋅=
Pentru I << Il rezulta: ,tgIKII
KII
KM 2m
2
l
sm
l
2
sm α⋅⋅=⋅Φ
⋅=⋅Φ⋅= deci ( )2IfM = variatie
patratica având valoarea .IKMII lsmll ⋅Φ⋅=⋅=
Pentru I >> Il rezulta: ( )IfIKII
KM sml
sm =⋅Φ⋅=⋅Φ⋅= deci: ( )IfM = −variatia liniara.
Dependenta astfel obtinuta, este redata în figura 6.28:

Masina de curent continuu
195
Figura 6.28
Caracteristica de sarcina (externa) ( )Ifn = se obtine din ecuatia de tensiuni:
( ) ,IRREU eaN ⋅++=
unde:
Φ⋅⋅= nKE e obtinând: .II
I
ls +⋅Φ=Φ
( )
lse
ea
lse
N
II1
K
RR
III
K
Un
+⋅Φ⋅
+−
+⋅Φ⋅
= sau ( ) .K
RRIK
UIIn
se
ea
se
Nl
Φ⋅
+−
⋅Φ⋅⋅+=
La valori mici ale curentului din indus I << Il rezulta:
,K
RRIK
UIn
se
ea
se
Nl
Φ⋅
+−
⋅Φ⋅⋅= deci, .
I1
~n,I1
fn
=
Pentru valoarea curentului din indus I >> Il:
,IK
RRK
Un
se
ea
se
⋅Φ⋅
+−
Φ⋅=
caracteristica liniara asemanatoare cu cea a motorului derivatie dar de panta mult mai mare datorata
prezentei rezistentei înfasurarii de excitatie. În figura 6.29 este redata variatia ( ).Ifn =
Figura 6.29
Caracteristica mecanica ( )Mfn = se obtine înlocuind expresia cuplului în relatia turatiei:
.II
IKM
l
2
sm +⋅Φ⋅=

Masina de curent continuu 196
Obtinem astfel:
( ).
MIRR
MIU
KK
n2
aeN
e
m
⋅+−
⋅⋅=
Pentru I << Il expresia cuplului este:
2
l
sm I
IKM ⋅
Φ⋅= sau ,M
KI
Ims
l ⋅⋅Φ
=
si, respectiv, ( ) ( )
,IK
RRM
UK
KIRR
MU
KIK
n lse
eaN
se
laeN
s2e
Lm ⋅Φ⋅
+−⋅=
Φ⋅⋅+
−⋅Φ⋅⋅
= deci, .M1
~n
La valori mari ale curentului din indus, I >> Il avem:
,MKK
RRK
Un 2
sme
ea
se
⋅Φ⋅⋅
+−
Φ⋅=
caracteristica identica cu cea a motorului cu excitatie derivatie, dar de panta pronuntata datorita
înserierii cu indusul a înfasurarii de excitatie (figura 6.30).
Figura 6.30
Din examinarea caracteristicii, rezulta ca la cupluri mici motorul se ambaleaza, deci trebuie
evitata functionarea în gol. Datorita caracteristicii mecanice cazatoare, motorul cu excitatie serie
este utilizat la tractiunea electrica urbana si feroviara.
c) Caracteristica mecanica a motorului cu excitatie mixta
Motoarele cu excitatie mixta prezinta doua înfasurari: una serie, iar cealalta derivatie, care
functie de modul de parcurgere a curentilor, fluxurile lor pot fi aditionale sau diferentiale.
În cazul conexiunii aditionale înfasurarea serie este principala si magnetizeaza masina în
acelasi sens cu sensul în care magnetizeaza solenatia produsa de înfasurarea derivatie. Odata cu
cresterea curentului de sarcina creste si fluxul magnetic inductor, ceea ce produce scaderea turatiei
motorului.
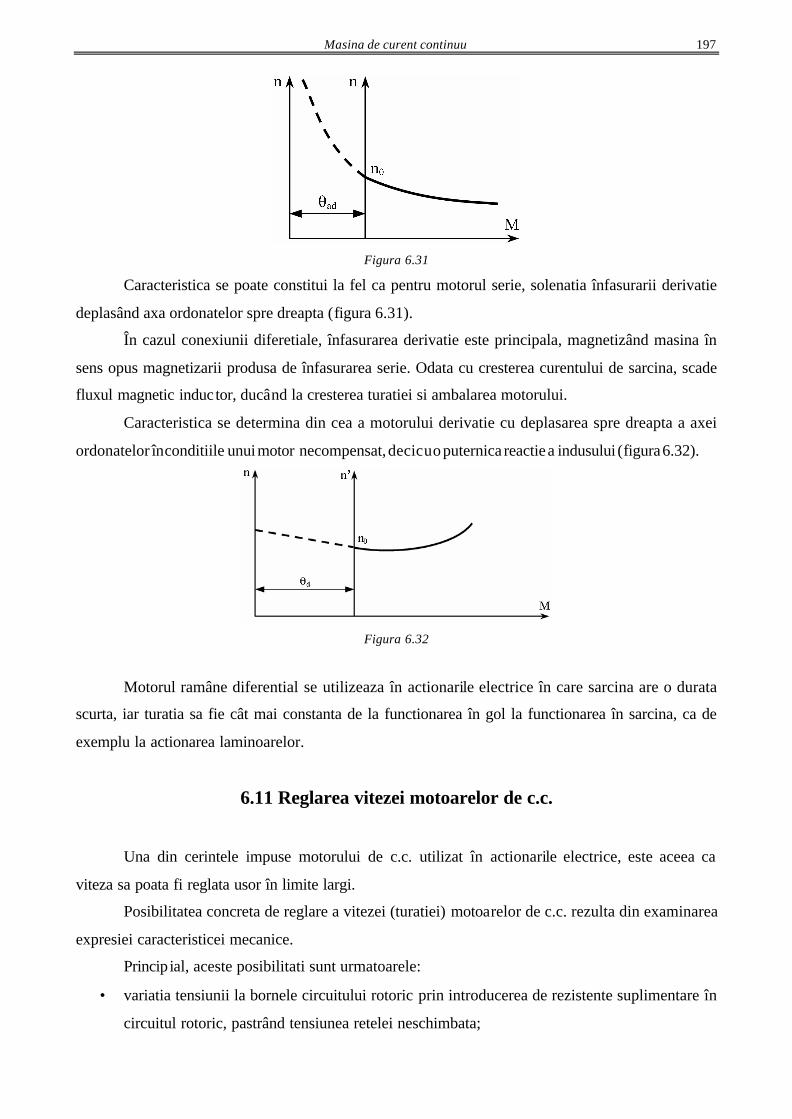
Masina de curent continuu
197
Figura 6.31
Caracteristica se poate constitui la fel ca pentru motorul serie, solenatia înfasurarii derivatie
deplasând axa ordonatelor spre dreapta (figura 6.31).
În cazul conexiunii diferetiale, înfasurarea derivatie este principala, magnetizând masina în
sens opus magnetizarii produsa de înfasurarea serie. Odata cu cresterea curentului de sarcina, scade
fluxul magnetic inductor, ducând la cresterea turatiei si ambalarea motorului.
Caracteristica se determina din cea a motorului derivatie cu deplasarea spre dreapta a axei
ordonatelor în conditiile unui motor necompensat, deci cu o puternica reactie a indusului (figura 6.32).
Figura 6.32
Motorul ramâne diferential se utilizeaza în actionarile electrice în care sarcina are o durata
scurta, iar turatia sa fie cât mai constanta de la functionarea în gol la functionarea în sarcina, ca de
exemplu la actionarea laminoarelor.
6.11 Reglarea vitezei motoarelor de c.c.
Una din cerintele impuse motorului de c.c. utilizat în actionarile electrice, este aceea ca
viteza sa poata fi reglata usor în limite largi.
Posibilitatea concreta de reglare a vitezei (turatiei) motoarelor de c.c. rezulta din examinarea
expresiei caracteristicei mecanice.
Principial, aceste posibilitati sunt urmatoarele:
• variatia tensiunii la bornele circuitului rotoric prin introducerea de rezistente suplimentare în
circuitul rotoric, pastrând tensiunea retelei neschimbata;
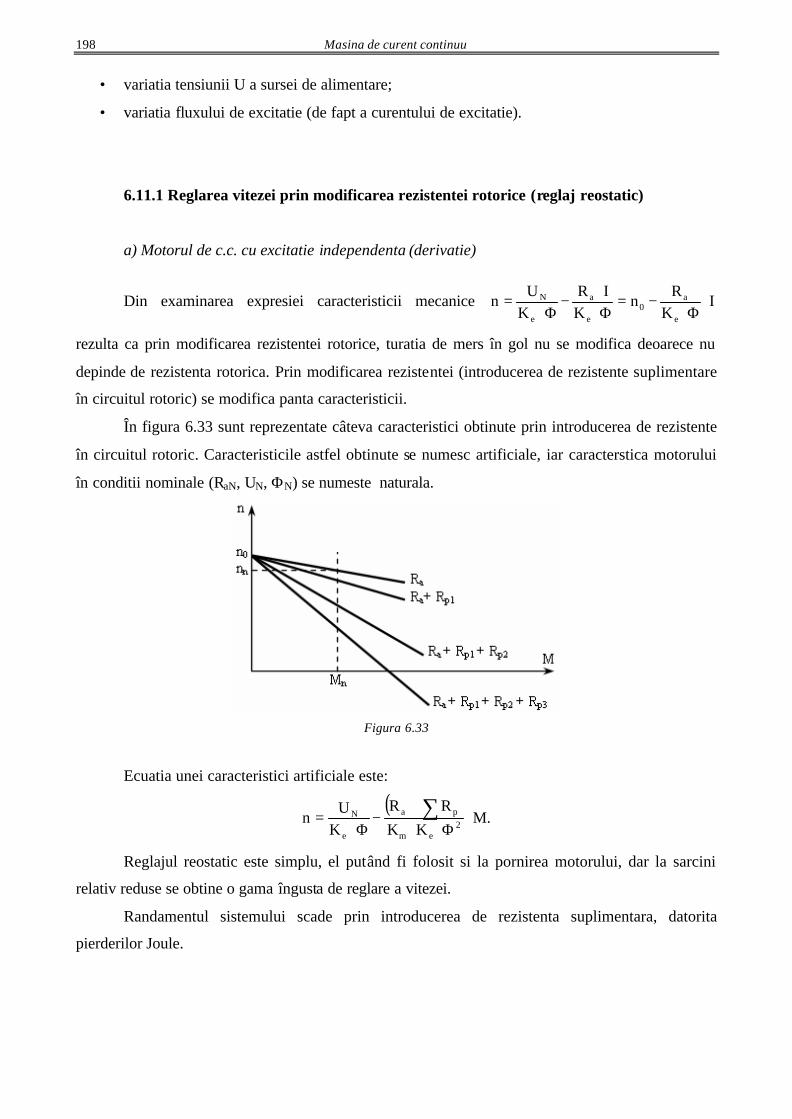
Masina de curent continuu 198
• variatia tensiunii U a sursei de alimentare;
• variatia fluxului de excitatie (de fapt a curentului de excitatie).
6.11.1 Reglarea vitezei prin modificarea rezistentei rotorice (reglaj reostatic)
a) Motorul de c.c. cu excitatie independenta (derivatie)
Din examinarea expresiei caracteristicii mecanice IK
Rn
KIR
KU
ne
a0
e
a
e
N ⋅Φ⋅
−=Φ⋅⋅
−Φ⋅
=
rezulta ca prin modificarea rezistentei rotorice, turatia de mers în gol nu se modifica deoarece nu
depinde de rezistenta rotorica. Prin modificarea rezistentei (introducerea de rezistente suplimentare
în circuitul rotoric) se modifica panta caracteristicii.
În figura 6.33 sunt reprezentate câteva caracteristici obtinute prin introducerea de rezistente
în circuitul rotoric. Caracteristicile astfel obtinute se numesc artificiale, iar caracterstica motorului
în conditii nominale (RaN, UN, ΦN) se numeste naturala.
Figura 6.33
Ecuatia unei caracteristici artificiale este:
( ).M
KKRR
KU
n 2em
pa
e
N ⋅Φ⋅⋅
+−
Φ⋅= ∑
Reglajul reostatic este simplu, el putând fi folosit si la pornirea motorului, dar la sarcini
relativ reduse se obtine o gama îngusta de reglare a vitezei.
Randamentul sistemului scade prin introducerea de rezistenta suplimentara, datorita
pierderilor Joule.
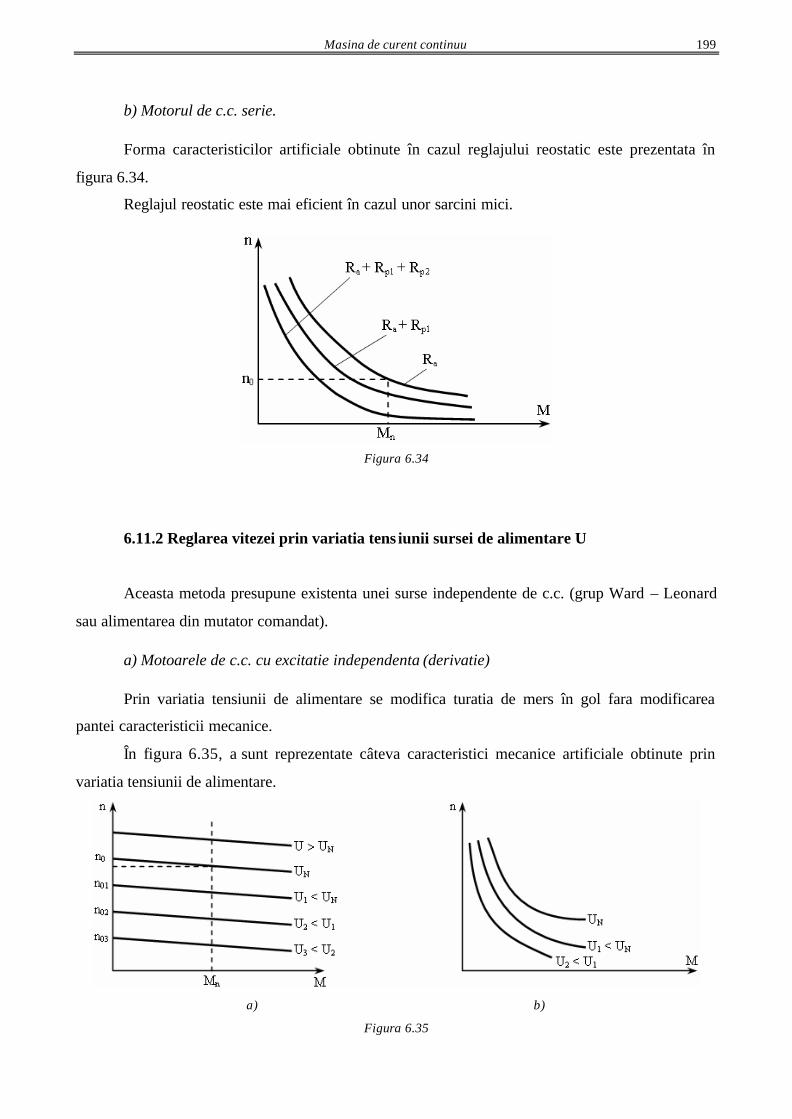
Masina de curent continuu
199
b) Motorul de c.c. serie.
Forma caracteristicilor artificiale obtinute în cazul reglajului reostatic este prezentata în
figura 6.34.
Reglajul reostatic este mai eficient în cazul unor sarcini mici.
Figura 6.34
6.11.2 Reglarea vitezei prin variatia tens iunii sursei de alimentare U
Aceasta metoda presupune existenta unei surse independente de c.c. (grup Ward – Leonard
sau alimentarea din mutator comandat).
a) Motoarele de c.c. cu excitatie independenta (derivatie)
Prin variatia tensiunii de alimentare se modifica turatia de mers în gol fara modificarea
pantei caracteristicii mecanice.
În figura 6.35, a sunt reprezentate câteva caracteristici mecanice artificiale obtinute prin
variatia tensiunii de alimentare.
a) b)
Figura 6.35

Masina de curent continuu 200
Procedeul este eficient la orice sarcina a masinii, observându-se ca aceste caracteristici sunt
paralele.
b) Motorul serie
Familiile de caracteristici artificiale obtinute prin reglajul tensiunii de alimentare sunt
prezentate în figura 6. 35, b.
6.11.3 Reglajul turatiei prin variatia fluxului de excitatie
Metoda se bazeaza pe variatia fluxului de excitatie prin introducerea unui reostat în circuitul
de excitatie. Prin reducerea fluxului de excitatie se modifica atât turatia de mers în go l cât si panta
caracteristicii mecanice. Familia de caracteristici artificiale obtinuta prin reducerea fluxului, este
data în figura 6.35.
Figura 6.36
Trebuie remarcat ca pastrarea unui cuplu electromagnetic constant din .ctIKM m =⋅Φ⋅=
produce, prin reducerea fluxului, o crestere a curentului rotoric absorbit de masina, crestere invers
proportionala cu fluxul, deci, direct proportionala cu turatia. Dar cresterea curentului rotoric peste
valoarea nominala pe o durata mare conduce la spuraîncalzirea excesiva a masinii.
Pentru a evita supraîncalzirea, trebuie pastrata puterea constanta si din relatiile:
.ctMPN =Ω⋅=
rezulta ca prin reducerea fluxului, crescând turatia, cuplul masinii trebuie redus. Reducerea cuplului
se face dupa o lege exponentiala, iar în figura 6.36, este reprezentata hasurat portiunea unde este
depasita puterea nominala.
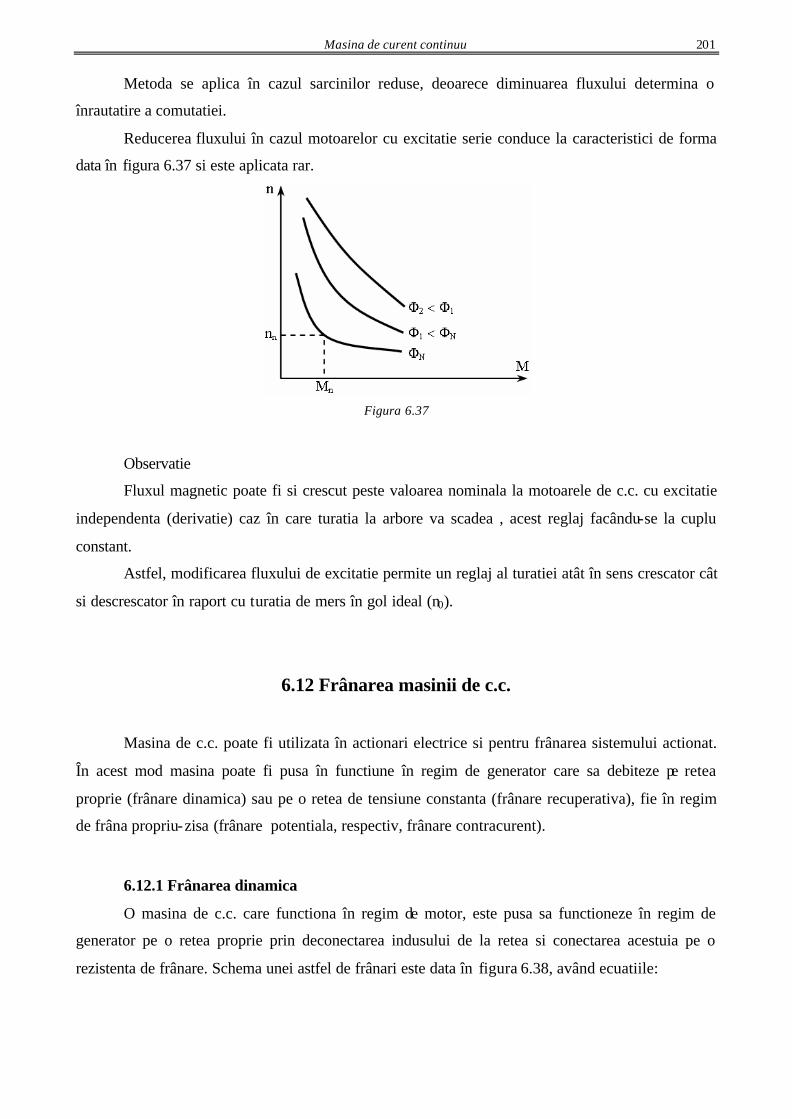
Masina de curent continuu
201
Metoda se aplica în cazul sarcinilor reduse, deoarece diminuarea fluxului determina o
înrautatire a comutatiei.
Reducerea fluxului în cazul motoarelor cu excitatie serie conduce la caracteristici de forma
data în figura 6.37 si este aplicata rar.
Figura 6.37
Observatie
Fluxul magnetic poate fi si crescut peste valoarea nominala la motoarele de c.c. cu excitatie
independenta (derivatie) caz în care turatia la arbore va scadea , acest reglaj facându-se la cuplu
constant.
Astfel, modificarea fluxului de excitatie permite un reglaj al turatiei atât în sens crescator cât
si descrescator în raport cu turatia de mers în gol ideal (n0).
6.12 Frânarea masinii de c.c.
Masina de c.c. poate fi utilizata în actionari electrice si pentru frânarea sistemului actionat.
În acest mod masina poate fi pusa în functiune în regim de generator care sa debiteze pe retea
proprie (frânare dinamica) sau pe o retea de tensiune constanta (frânare recuperativa), fie în regim
de frâna propriu-zisa (frânare potentiala, respectiv, frânare contracurent).
6.12.1 Frânarea dinamica
O masina de c.c. care functiona în regim de motor, este pusa sa functioneze în regim de
generator pe o retea proprie prin deconectarea indusului de la retea si conectarea acestuia pe o
rezistenta de frânare. Schema unei astfel de frânari este data în figura 6.38, având ecuatiile:
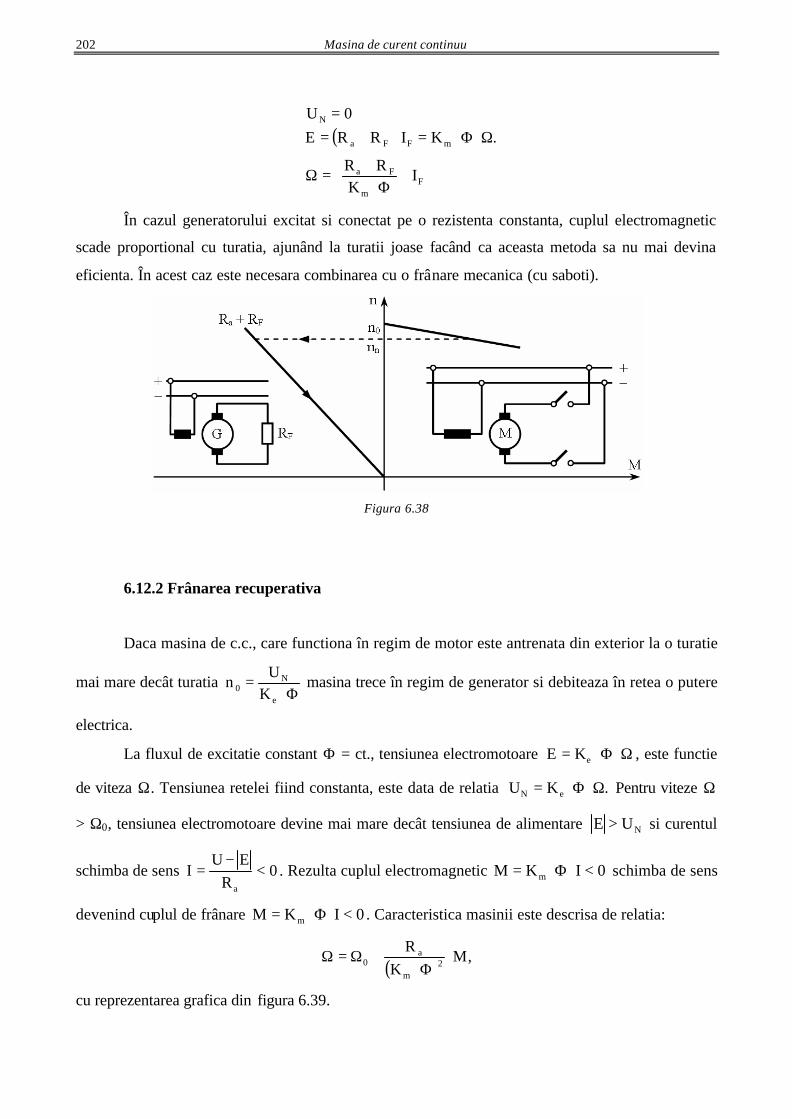
Masina de curent continuu 202
( )
⋅
Φ⋅
+=Ω
Ω⋅Φ⋅=⋅+==
Fm
Fa
mFFa
N
IK
RR
.KIRRE0U
În cazul generatorului excitat si conectat pe o rezistenta constanta, cuplul electromagnetic
scade proportional cu turatia, ajunând la turatii joase facând ca aceasta metoda sa nu mai devina
eficienta. În acest caz este necesara combinarea cu o frânare mecanica (cu saboti).
Figura 6.38
6.12.2 Frânarea recuperativa
Daca masina de c.c., care functiona în regim de motor este antrenata din exterior la o turatie
mai mare decât turatia Φ⋅
=e
N0 K
Un masina trece în regim de generator si debiteaza în retea o putere
electrica.
La fluxul de excitatie constant Φ = ct., tensiunea electromotoare Ω⋅Φ⋅= eKE , este functie
de viteza Ω. Tensiunea retelei fiind constanta, este data de relatia .KU eN Ω⋅Φ⋅= Pentru viteze Ω
> Ω0, tensiunea electromotoare devine mai mare decât tensiunea de alimentare NUE > si curentul
schimba de sens 0R
EUI
a
<−
= . Rezulta cuplul electromagnetic 0IKM m <⋅Φ⋅= schimba de sens
devenind cuplul de frânare 0IKM m <⋅Φ⋅= . Caracteristica masinii este descrisa de relatia:
( ),M
KR
2m
a0 ⋅
Φ⋅+Ω=Ω
cu reprezentarea grafica din figura 6.39.
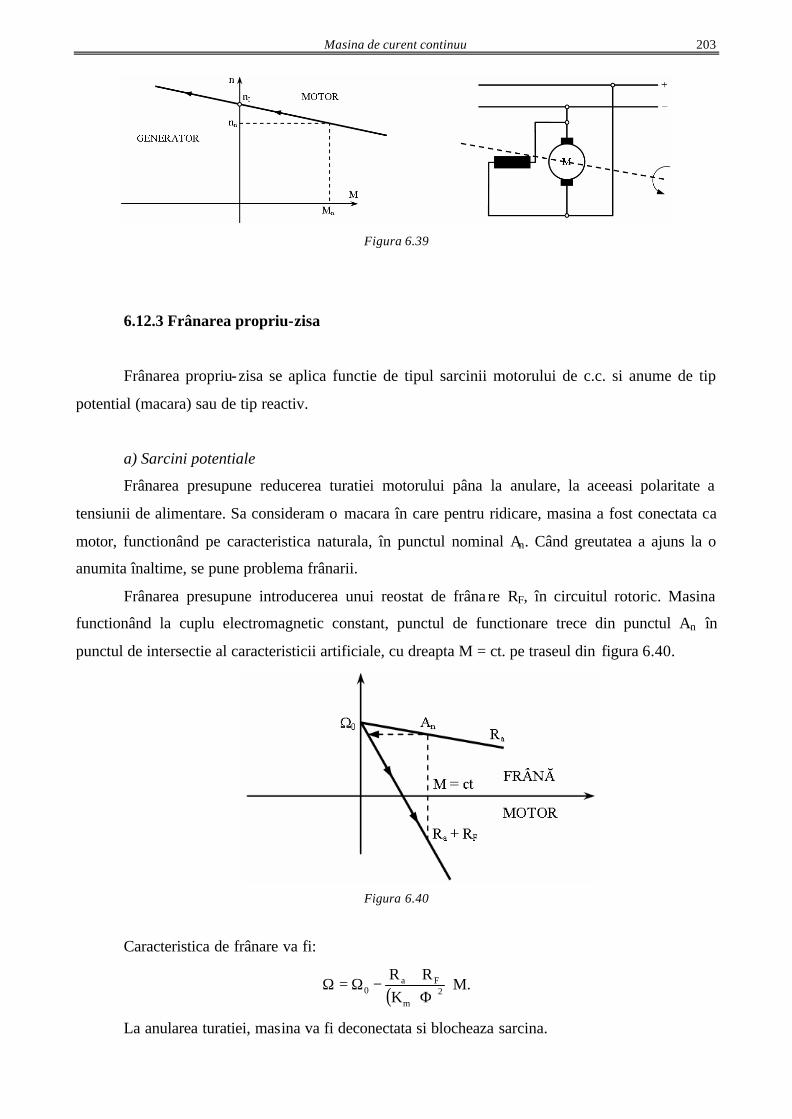
Masina de curent continuu
203
Figura 6.39
6.12.3 Frânarea propriu-zisa
Frânarea propriu-zisa se aplica functie de tipul sarcinii motorului de c.c. si anume de tip
potential (macara) sau de tip reactiv.
a) Sarcini potentiale
Frânarea presupune reducerea turatiei motorului pâna la anulare, la aceeasi polaritate a
tensiunii de alimentare. Sa consideram o macara în care pentru ridicare, masina a fost conectata ca
motor, functionând pe caracteristica naturala, în punctul nominal An. Când greutatea a ajuns la o
anumita înaltime, se pune problema frânarii.
Frânarea presupune introducerea unui reostat de frâna re RF, în circuitul rotoric. Masina
functionând la cuplu electromagnetic constant, punctul de functionare trece din punctul An în
punctul de intersectie al caracteristicii artificiale, cu dreapta M = ct. pe traseul din figura 6.40.
Figura 6.40
Caracteristica de frânare va fi:
( ).M
KRR
2m
Fa0 ⋅
Φ⋅+
−Ω=Ω
La anularea turatiei, masina va fi deconectata si blocheaza sarcina.
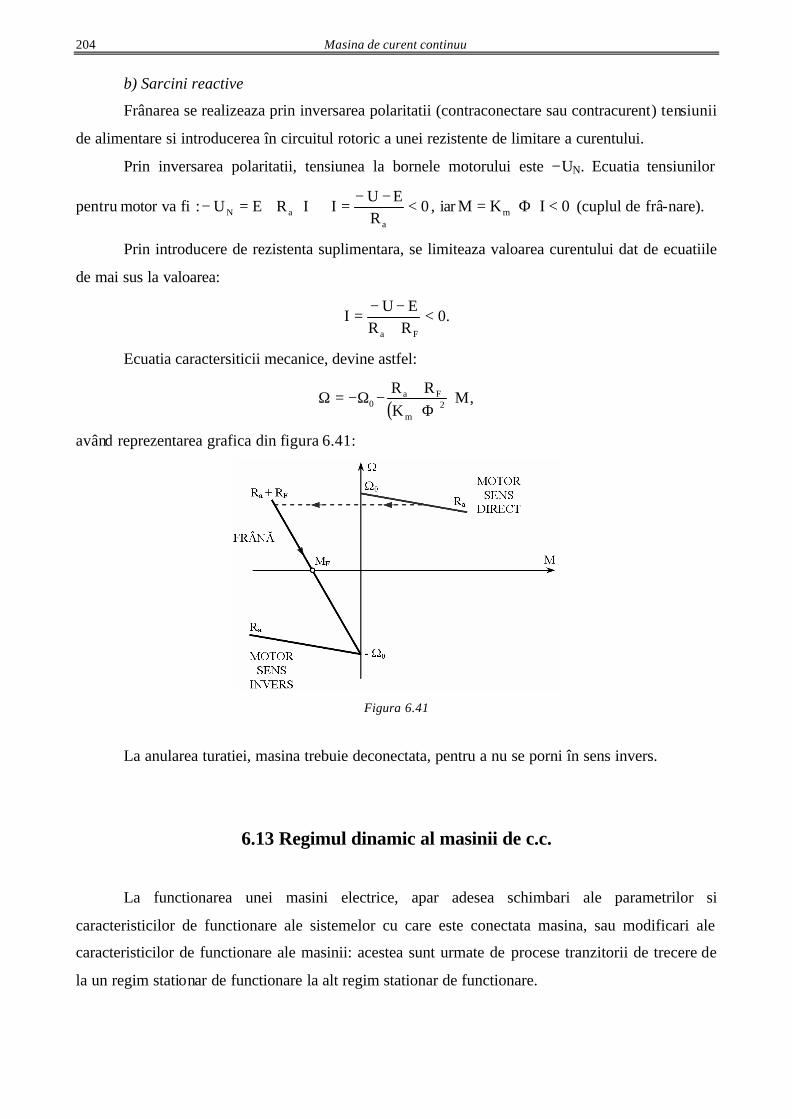
Masina de curent continuu 204
b) Sarcini reactive
Frânarea se realizeaza prin inversarea polaritatii (contraconectare sau contracurent) tensiunii
de alimentare si introducerea în circuitul rotoric a unei rezistente de limitare a curentului.
Prin inversarea polaritatii, tensiunea la bornele motorului este −UN. Ecuatia tensiunilor
pentru motor va fi : 0R
EUIIREU
aaN <
−−=⇒⋅+=− , iar 0IKM m <⋅Φ⋅= (cuplul de frâ-nare).
Prin introducere de rezistenta suplimentara, se limiteaza valoarea curentului dat de ecuatiile
de mai sus la valoarea:
.0RREU
IFa
<+−−
=
Ecuatia caractersiticii mecanice, devine astfel:
( ),M
KRR
2m
Fa0 ⋅
Φ⋅+
−Ω−=Ω
având reprezentarea grafica din figura 6.41:
Figura 6.41
La anularea turatiei, masina trebuie deconectata, pentru a nu se porni în sens invers.
6.13 Regimul dinamic al masinii de c.c.
La functionarea unei masini electrice, apar adesea schimbari ale parametrilor si
caracteristicilor de functionare ale sistemelor cu care este conectata masina, sau modificari ale
caracteristicilor de functionare ale masinii: acestea sunt urmate de procese tranzitorii de trecere de
la un regim stationar de functionare la alt regim stationar de functionare.
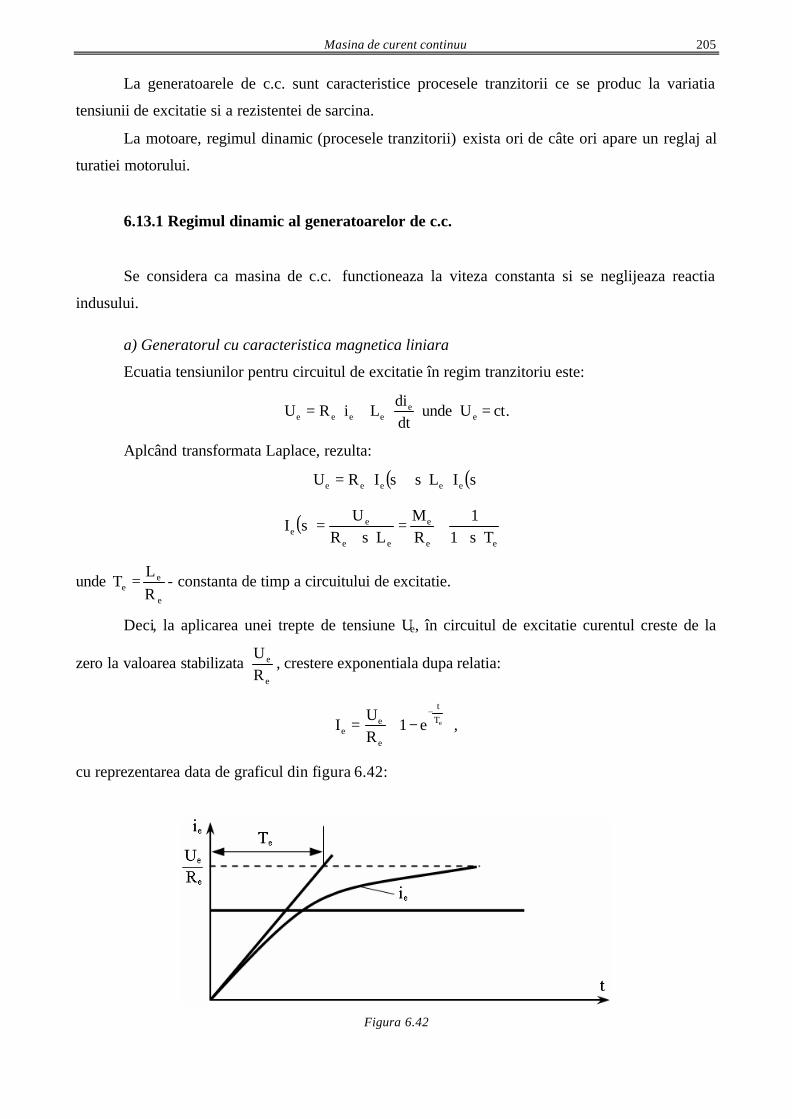
Masina de curent continuu
205
La generatoarele de c.c. sunt caracteristice procesele tranzitorii ce se produc la variatia
tensiunii de excitatie si a rezistentei de sarcina.
La motoare, regimul dinamic (procesele tranzitorii) exista ori de câte ori apare un reglaj al
turatiei motorului.
6.13.1 Regimul dinamic al generatoarelor de c.c.
Se considera ca masina de c.c. functioneaza la viteza constanta si se neglijeaza reactia
indusului.
a) Generatorul cu caracteristica magnetica liniara
Ecuatia tensiunilor pentru circuitul de excitatie în regim tranzitoriu este:
dtdi
LiRU eeeee ⋅+⋅= unde .ctU e =
Aplcând transformata Laplace, rezulta:
( ) ( )sILssIRU eeeee ⋅⋅+⋅=
( )
⋅+
⋅=⋅+
=ee
e
ee
ee Ts1
1RM
LsRU
sI
unde e
ee R
LT = - constanta de timp a circuitului de excitatie.
Deci, la aplicarea unei trepte de tensiune Ue, în circuitul de excitatie curentul creste de la
zero la valoarea stabilizata e
e
RU
, crestere exponentiala dupa relatia:
,e1RU
I eTt
e
ee
−⋅=
−
cu reprezentarea data de graficul din figura 6.42:
Figura 6.42

Masina de curent continuu 206
La generatorul autoexcitat (derivatie), ecuatia caracteristicii de functionare în gol poate fi
exprimata de relatia:
,iKUU ere ⋅+=
unde:
Ur − tensiunea remanenta;
K − panta caracteristicii de functionare în gol.
Ecuatia tensiunilor pe circuitul de excitatie va fi:
dtdi
LiRiKU eeeeer ⋅+⋅=⋅+ sau ( ) ,
dtdi
LiKRU eeeer ⋅+⋅−=
cu solutia:
;e1KR
Ui T
t
e
re
−⋅
−=
−
a11
RL
KRL
Te
e
e
e
−⋅=
−= , unde .
RK
ae
=
Se observa ca a1
1TT e −
⋅= , deci T > Te, deoarece tensiunea de excitatie creste odata cu
tensiunea de la bornele indusului. Reprezentarea grafica a curentului de excitatie este data în figura
6.43:
Figura 6.43
b) Generatorul cu caracteristica neliniara
Ecuatia tensiunilor pentru generatorul cu excitatie independenta corespunzatoare circuitului
de excitatie este:
,dt
dNiRU e
eeeeϕ
⋅+⋅=

Masina de curent continuu
207
iar a caracteristicii magnetice ( )ee if=ϕ în care:
Ne − numarul de spire al înfasurarii de excitatie;
ϕe − fluxul magnetic inductor.
se obtine prin aproximarea urbei medii a acestei caracterisitici cu relatia :
,Ii
i
0ee
ese
+⋅Φ=ϕ
unde:
Φs − valoarea de saturatie a fluxului magnetic;
0eI − curentul de excitatie corespunzator fluxului de saturatie.
Pentru 0ee Ii << rezulta
⋅Φ=ϕ
0e
ese I
I, iar .di
Id e
e
se
0
⋅
Φ=ϕ Înlocuind în ecuatia
tensiunilor, rezulta:
.dtdi
INiRU e
e
seeee
0
⋅Φ
⋅+⋅=
Aplicând transformata Laplace, obtinem:
( ) ,T1
1RU
sI
NR
UsI
1e
e
e
see
ee
0
+⋅=
⋅Φ
⋅+=
unde: ee
se1 R
1I
NT0
⋅Φ
⋅= − constanta de timp a circuitului de excitatie pentru .II0ee <<
Pentru 0ee Ii >> , rezulta se Φ=ϕ , iar 0d e =ϕ . Înlocuind în ecuatia tensiunilor, rezulta:
,iRU eee ⋅= sau .IRU
i0e
e
ee ==
Punând conditia pentru 0eI , rezulta
e
ee R
UI
0= .
În figura 6.44 este prezentata variatia ( )tfIe = .
Figura 6.44
Masina de curent continuu 208
Timpul necesar cresterii curentului de excitatie pâna la valoarea limita ,I0e este obtinuta din
ecuatia:
,dt
dNiRU e
eeeeϕ
⋅+⋅=
.iRU
dNdt
eee
ee ⋅−
ϕ⋅=
Înlocuind ,diI
d ee
se
0
⋅
Φ=ϕ obtinem:
,i
RU
diIR
NiRU
diI
Nt0e
0
0e
0
I
0e
e
e
e
e
s
e
e
I
0 eee
e
e
se1 ∫∫
−⋅
Φ⋅=
⋅−⋅
Φ⋅=
( ) ,iRUlnI
Nt
0e
0
I
0eee
e
se1 ⋅+−⋅
Φ⋅=
.Ii
1lnI
Nt
00 e
e
e
se1
−⋅
Φ⋅=
Pentru generatorul autoexcitat ere KUU ϕ⋅+= , iar ecuatia tensiunilor devine:
.dt
dNiRKU e
eeeerϕ
⋅+⋅=ϕ⋅+
Pentru ,II0ee << e
e
se i
I0
⋅
Φ=ϕ , iar e
e
se di
Id
0
⋅
Φ=ϕ . Prin aplicarea trans formatei Laplace
rezulta:
( ) ,Ts1
1
IK
R
UsI
0e
se
re ⋅+
⋅Φ⋅
−=
unde:
0
0
0
0
ee
see
se
e
se
e
se
IRK1
1IR
N
IKR
IK
T
⋅Φ⋅−
⋅⋅Φ⋅
=Φ⋅−
Φ⋅
= sau .e1
IKR
UI T
t
e
se
re
0
−⋅
Φ⋅−=
−
Comparând cele doua rezultate, rezulta:
b1
1TT 1 −
⋅= cu 0ee
s
IRK
b⋅Φ⋅
= sau b1
1TT
1 −= deci T este mai mare decât T1 de
b11−
ori.

Masina de curent continuu
209
6.13.2 Regimul dinamic al motoarelor de c.c.
În functionarea motoarelor de c.c. se pot modifica urmatorii parametri:
§ tensiunea la bornele indusului;
§ rezistenta circuitului indusului;
§ rezistenta circuitului de excitatie;
§ cuplul aplicat la axul masinii.
Regimul dinamic reprezinta trecerea dintr-un regim stabilizat în alt regim stabilizat, la
modificarea unui parametru enuntat mai sus.
Ecuatiile de functionare ale motoarelor de c.c. cu excitatie independenta, în regim dinamic,
sunt:
o ecuatia circuitului de excitatie de rezistenta Re si inductivitate Le este:
,dtdi
LiRu eeeee ⋅+⋅=
având schema electrica echivalenta în figura 6.45:
Figura 6.45
o ecuatia circuitului indusului (rotor) de rezis tenta Ra si inductivitate La, ce se misca cu viteza
unghiulara Ω este:
,Kdtdi
LiRu ma
aaaa Ω⋅Φ⋅+⋅+⋅=
cu schema electrica echivalenta prezentata în figura 6.46:
Figura 6.46
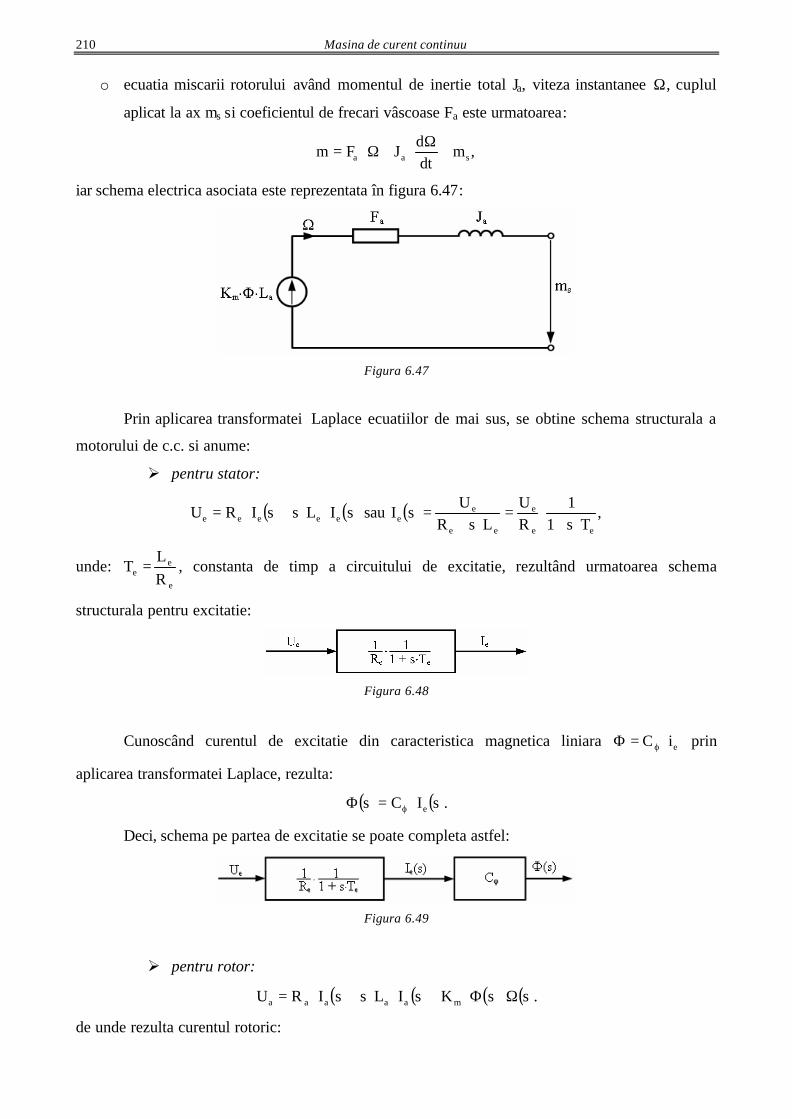
Masina de curent continuu 210
o ecuatia miscarii rotorului având momentul de inertie total Ja, viteza instantanee Ω, cuplul
aplicat la ax ms si coeficientul de frecari vâscoase Fa este urmatoarea:
,mdt
dJFm saa +
Ω⋅+Ω⋅=
iar schema electrica asociata este reprezentata în figura 6.47:
Figura 6.47
Prin aplicarea transformatei Laplace ecuatiilor de mai sus, se obtine schema structurala a
motorului de c.c. si anume:
Ø pentru stator:
( ) ( )sILssIRU eeeee ⋅⋅+⋅= sau ( ) ,Ts1
1RU
LsRU
sIee
e
ee
ee ⋅+
⋅=⋅+
=
unde: e
ee R
LT = , constanta de timp a circuitului de excitatie, rezultând urmatoarea schema
structurala pentru excitatie:
Figura 6.48
Cunoscând curentul de excitatie din caracteristica magnetica liniara eiC ⋅=Φ ϕ prin
aplicarea transformatei Laplace, rezulta:
( ) ( ).sICs e⋅=Φ ϕ
Deci, schema pe partea de excitatie se poate completa astfel:
Figura 6.49
Ø pentru rotor:
( ) ( ) ( ) ( ).ssKsILssIRU maaaaa Ω⋅Φ⋅+⋅⋅+⋅=
de unde rezulta curentul rotoric:
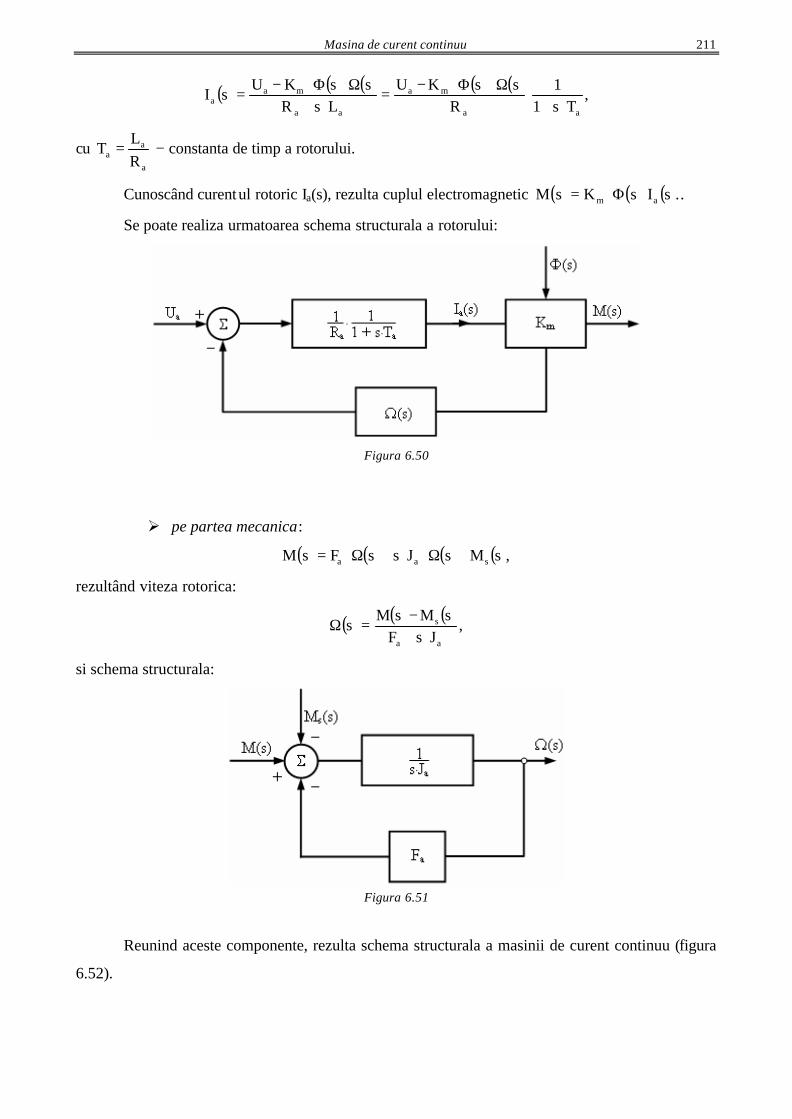
Masina de curent continuu
211
( ) ( ) ( ) ( ) ( ),
Ts11
RssKU
LsRssKU
sIaa
ma
aa
maa ⋅+
⋅Ω⋅Φ⋅−
=⋅+
Ω⋅Φ⋅−=
cu a
aa R
LT = − constanta de timp a rotorului.
Cunoscând curentul rotoric Ia(s), rezulta cuplul electromagnetic ( ) ( ) ( ).sIsKsM am ⋅Φ⋅= .
Se poate realiza urmatoarea schema structurala a rotorului:
Figura 6.50
Ø pe partea mecanica:
( ) ( ) ( ) ( ),sMsJssFsM saa +Ω⋅⋅+Ω⋅=
rezultând viteza rotorica:
( ) ( ) ( ),
JsFsMsM
saa
s
⋅+−
=Ω
si schema structurala:
Figura 6.51
Reunind aceste componente, rezulta schema structurala a masinii de curent continuu (figura
6.52).
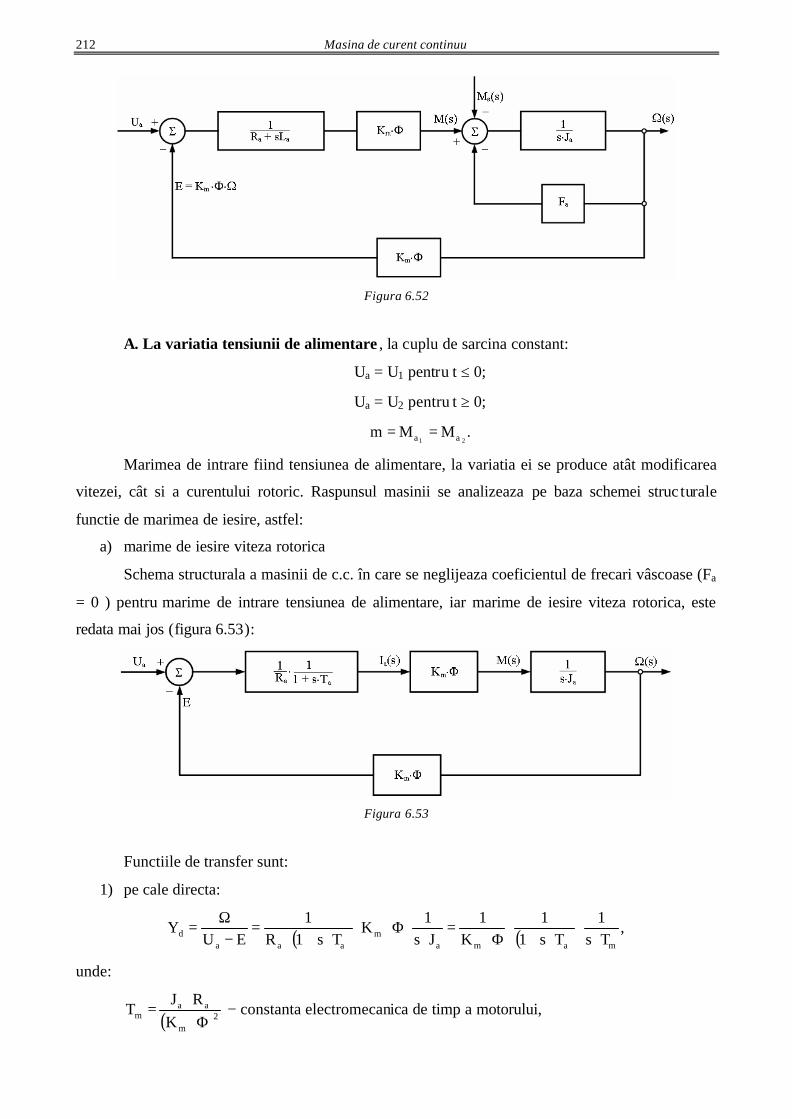
Masina de curent continuu 212
Figura 6.52
A. La variatia tensiunii de alimentare , la cuplu de sarcina constant:
Ua = U1 pentru t ≤ 0;
Ua = U2 pentru t ≥ 0;
.MMm21 aa ==
Marimea de intrare fiind tensiunea de alimentare, la variatia ei se produce atât modificarea
vitezei, cât si a curentului rotoric. Raspunsul masinii se analizeaza pe baza schemei struc turale
functie de marimea de iesire, astfel:
a) marime de iesire viteza rotorica
Schema structurala a masinii de c.c. în care se neglijeaza coeficientul de frecari vâscoase (Fa
= 0 ) pentru marime de intrare tensiunea de alimentare, iar marime de iesire viteza rotorica, este
redata mai jos (figura 6.53):
Figura 6.53
Functiile de transfer sunt:
1) pe cale directa:
( ) ( ) ,Ts1
Ts11
K1
Js1
KTs1R
1EU
Ymama
maaa
d ⋅⋅
⋅+⋅
Φ⋅=
⋅⋅Φ⋅⋅
⋅+⋅=
−Ω
=
unde:
( )2m
aam K
RJT
Φ⋅⋅
= − constanta electromecanica de timp a motorului,
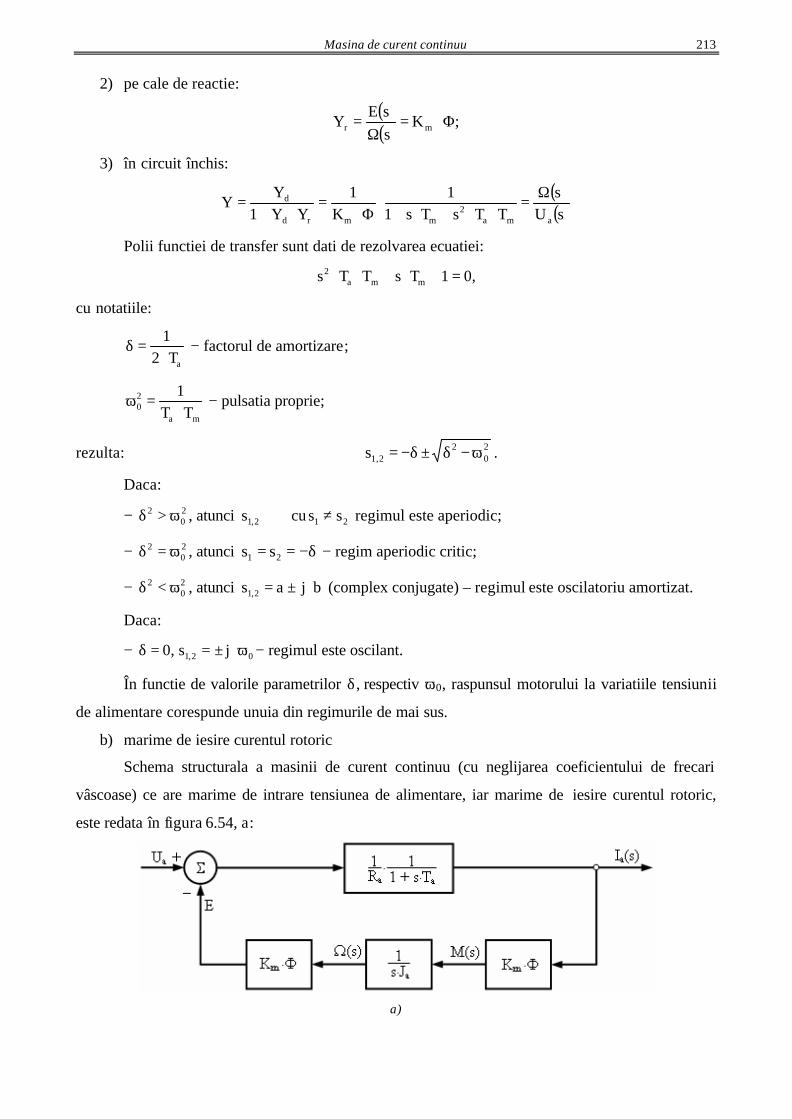
Masina de curent continuu
213
2) pe cale de reactie:
( )( )
;KssE
Y mr Φ⋅=Ω
=
3) în circuit închis:
( )( )sUs
TTsTs11
K1
YY1Y
Yama
2mmrd
d Ω=
⋅⋅+⋅+⋅
Φ⋅=
⋅+=
Polii functiei de transfer sunt dati de rezolvarea ecuatiei:
,01TsTTs mma2 =+⋅+⋅⋅
cu notatiile:
aT2
1⋅
=δ − factorul de amortizare;
ma
20 TT
1⋅
=ω − pulsatia proprie;
rezulta: 20
22,1s ω−δ±δ−= .
Daca:
− 20
2 ω>δ , atunci 212,1 sscus ≠ℜ∈ regimul este aperiodic;
− 20
2 ω=δ , atunci δ−== 21 ss − regim aperiodic critic;
− 20
2 ω<δ , atunci bjas 2,1 ⋅±= (complex conjugate) – regimul este oscilatoriu amortizat.
Daca:
− 02,1 js,0 ω⋅±==δ − regimul este oscilant.
În functie de valorile parametrilor δ, respectiv ω0, raspunsul motorului la variatiile tensiunii
de alimentare corespunde unuia din regimurile de mai sus.
b) marime de iesire curentul rotoric
Schema structurala a masinii de curent continuu (cu neglijarea coeficientului de frecari
vâscoase) ce are marime de intrare tensiunea de alimentare, iar marime de iesire curentul rotoric,
este redata în figura 6.54, a:
a)
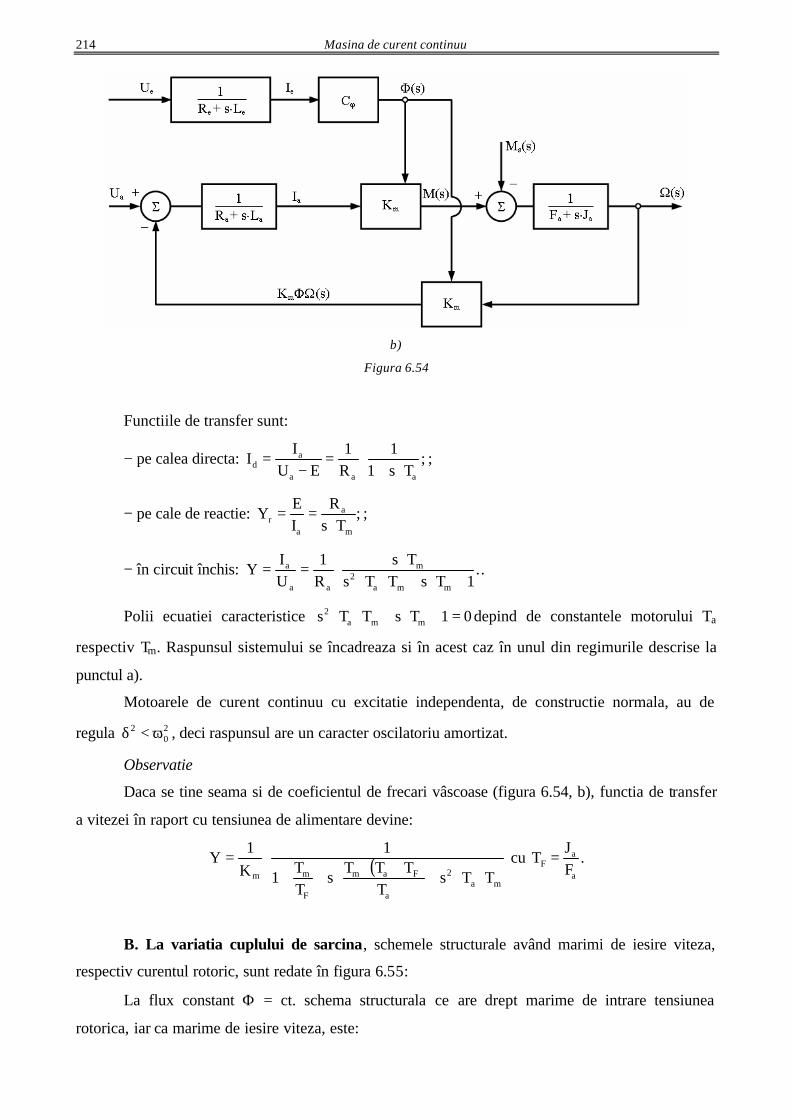
Masina de curent continuu 214
b)
Figura 6.54
Functiile de transfer sunt:
− pe calea directa: ;Ts1
1R1
EUI
Iaaa
ad ⋅+
⋅=−
= ;
− pe cale de reactie: ;Ts
RIE
Ym
a
ar ⋅
== ;
− în circuit închis: .1TsTTs
TsR1
UI
Ymma
2m
aa
a
+⋅+⋅⋅⋅
⋅== .
Polii ecuatiei caracteristice 01TsTTs mma2 =+⋅+⋅⋅ depind de constantele motorului Ta
respectiv Tm. Raspunsul sistemului se încadreaza si în acest caz în unul din regimurile descrise la
punctul a).
Motoarele de curent continuu cu excitatie independenta, de constructie normala, au de
regula 20
2 ω<δ , deci raspunsul are un caracter oscilatoriu amortizat.
Observatie
Daca se tine seama si de coeficientul de frecari vâscoase (figura 6.54, b), functia de transfer
a vitezei în raport cu tensiunea de alimentare devine:
( )ma
2
a
Fam
F
mm TTsT
TTTs
TT
1
1K1
Y⋅⋅+
+⋅⋅++
⋅= cu .FJ
Ta
aF =
B. La variatia cuplului de sarcina, schemele structurale având marimi de iesire viteza,
respectiv curentul rotoric, sunt redate în figura 6.55:
La flux constant Φ = ct. schema structurala ce are drept marime de intrare tensiunea
rotorica, iar ca marime de iesire viteza, este:
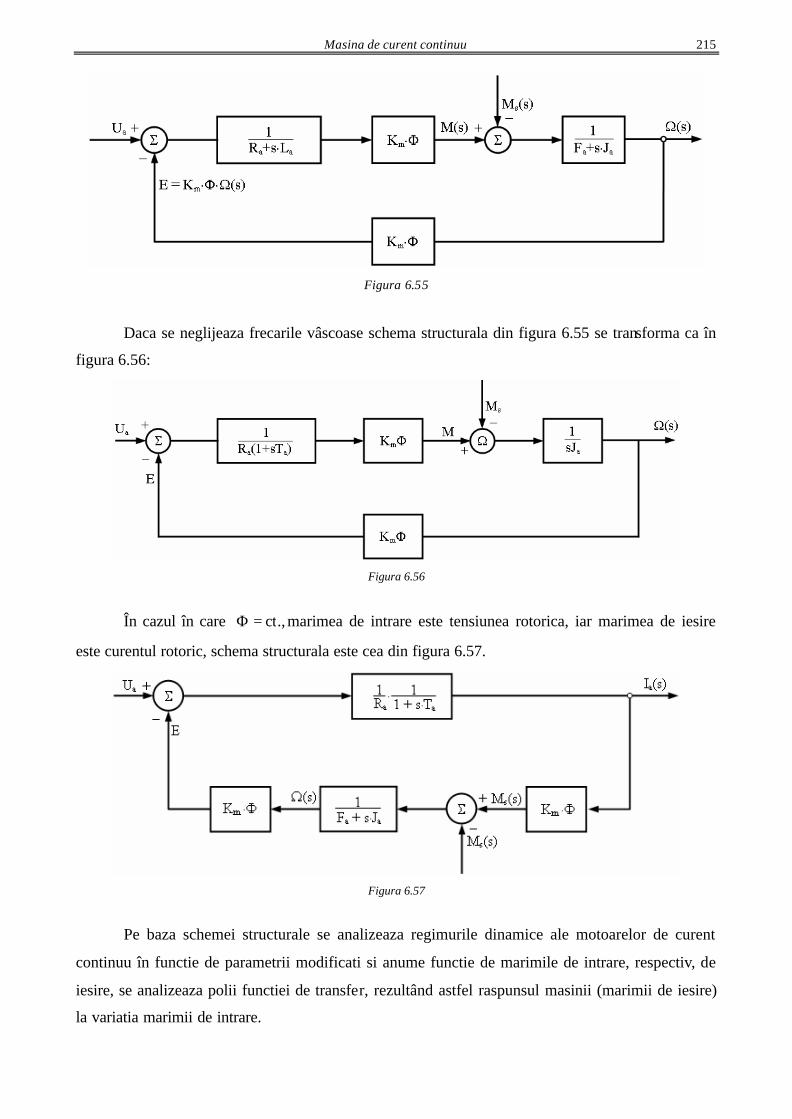
Masina de curent continuu
215
Figura 6.55
Daca se neglijeaza frecarile vâscoase schema structurala din figura 6.55 se transforma ca în
figura 6.56:
Figura 6.56
În cazul în care .,ct=Φ marimea de intrare este tensiunea rotorica, iar marimea de iesire
este curentul rotoric, schema structurala este cea din figura 6.57.
Figura 6.57
Pe baza schemei structurale se analizeaza regimurile dinamice ale motoarelor de curent
continuu în functie de parametrii modificati si anume functie de marimile de intrare, respectiv, de
iesire, se analizeaza polii functiei de transfer, rezultând astfel raspunsul masinii (marimii de iesire)
la variatia marimii de intrare.

Masina de curent continuu 216
APLICATII
1. Un motor serie de curent continuu cu caracteristica magnetica liniara are urmatoarele date
nominale: cuplul electromagnetic Mn = 500Nm, tensiunea la borne Un = 500V, turatia n = 1800
rot/min. Rezistenta totala a circuitului format de înfasurarea de excitatie este R = 0,2 Ω.
Se cere sa se determine caracteristica mecanica a motorului.
REZOLVARE:
Caracteristica magnetica fiind liniara rezulta expresia cuplului electromagnetic:
,I2k
M 2e ⋅π⋅
=
si expresia tensiunii electromotoare:
.InkU ee ⋅⋅=
Din ecuatia tensiunilor IRUInk ne ⋅−=⋅⋅ se obtine expresia curentului:
.Rnk
UI
e
n
+⋅=
Înlocuind aceasta expresie în relatia cuplului se determina ecuatia caracteristicii mecanice:
( ).
RnkU
2k
M 2e
2ne
+⋅⋅
π⋅=
Cunoscând punctul nominal de functionare se determina constanta ke:
,
2,060
1800k
5002k
480 2
e
2e
⋅⋅
⋅π⋅
=
obtinându-se valoarea ke = 0,0778.
Deci ecuatia caracteristicii mecanice pentru pentru motorul dat este:
( )⋅
+⋅= 22,0n0778,0
3090M
2. Un motor derivatie de curent continuu are urmatoarele date nominale: Pn = 20kW,
Un = 220V.
Se cere sa se determine rezistenta reostatului de pornire din indus pentru regimul de pornire
caracterizat de .I2,1I np ⋅=
Se neglijeaza rezistenta indusului. Randamentul motorului în regim nominal este η = 0,85.

Masina de curent continuu
217
REZOLVARE:
Curentul absorbit de motor în regimul nominal are valoarea:
.A10722085,0
1020U
PI
3
n
nn =
⋅⋅
=⋅η
=
Valoarea curentului din indus este data de relatia:
.R
UUI '
1
en −=
La pornire, n = 0, deci tensiunea electromotoare indusa în masina este nula, rezultând:
.RU
I '1
n'p =
Pentru a se limita valoarea curentului de pornire se introduce în serie cu indusul un reostat
de pornire astfel încât:
.RR
UI2,1I
p1
nnp +
=⋅=
Daca se neglijeaza rezistenta indusului rezulta valoarea rezistentei reostatului:
.71,11072,1
220I2,1
UR
n
np Ω=
⋅=
⋅=
3. Un motor derivatie de curent continuu are urmatoarele date nominale: puterea
,kW15Pn = tensiunea Un = 220V, randamentul ηn = 0,5Ω, iar rezistenta înfasurarii de excitatie
.400R e Ω= Turatia nominala a motorului este nn = 1200 rot/min., iar rezistenta indusului este
.5,0R i Ω=
Se cere sa se determine valorile raportate ale cuplului de pornire si ale curentului de pornire
în urmatoarele cazuri:
1. motorul este pornit prin cuplare directa la retea;
2. motorul este pornit cu ajutorul unui reostat de pornire de valoare Ω= 5,1R p , înfasurarea de
excitatie fiind conectata direct în retea;
3. motorul este pornit cu ajutorul aceluiasi reostat de pornire, însa înfasurarea de excitatie este
conectata la bornele indusului.
Se neglijeaza pierderile mecanice si în fier si se considera ca motorul are o caracteristica
magnetica liniara.

Masina de curent continuu 218
REZOLVARE:
Curentul nominal al motorului are valoarea:
,A1,79220862,0
1015U
PI
3
nn
nn =
⋅⋅
=⋅η
=
iar cuplul nominal al motorului este:
.Nm5,119
601200
2
1015
60n2
PM
3
n
nn =
⋅π⋅
⋅=
⋅π⋅=
1. În cazul pornirii directe curentul de pornire are valoarea:
,A4405,0
220RU
Ii
ni1
===
iar curentul absorbit de înfasurarea de excitatie are valoarea:
,A5,4455,5440III11 ei1 =+=+=
sau în unitati relative
..r.u632,51,795,445
II
in
11 ===
Considerând caracteristica magnetica liniara, cuplul electromagnetic al motorului are
expresia:
.IICIIkkIkM iemieemim ⋅⋅=⋅⋅⋅=⋅Φ⋅=
Presupunând acelasi curent de excitatie la functionarea nominala, ca si la pornirea directa
(întreaga tensiune la borne se aplica circuitului de excitatie) rezulta cuplul de pornire calculat în
unitati relative:
.,r.u978,55,51,79
440I
I
IIC
IIC
MM
mn
1
nn
11
1i
i
iem
iem
n
1p =
−==
⋅⋅
⋅⋅==
unde: nn eni III −= este curentul prin indus la functionarea în sarcina nominala a motorului.
Se observa ca, în cazul acestei porniri motorul este solicitat puternic din punct de vedere
electric (curentul prin indus este mai mare) si mecanic (cuplul de pornire are o valoare mare fata de
cuplul nominal).
2. Curentul de pornire absorbit de indus în cazul pornirii cu reostat de pornire este:
,A5,1155,5110III22 ei2 =+=+=
sau în unitati relative:
..r.u46,191,7
5,115II
in
22 ===
Cuplul de pornire este:

Masina de curent continuu
219
.495,15,51,79
110I
I
IIC
IIC
MM
mn
2
nn
22
2i
i
iem
iem
n
2p =
−==
⋅⋅
⋅⋅==
Pornirea cu reostat de pornire conectat în serie cu indusul este avantajoasa, solicitarile
mecanice si electrice ale motorului fiind reduse.
3. Curentul absorbit de motor în cazul în care înfasurarea de excitatie este conectata în paralel
cu indusul are valoarea:
( ),A109
5,0405,405,15,040220
RRRR
R
URU
I
ie
iep
n
echiv
n3 =
⋅+⋅+⋅
=
+⋅
+==
iar curentul de înfasurarea de excitatie este:
.A3,11093,110III33 i3e =−=−=
Valoarea relativa a cuplului de va fi:
( ) ..r.u35,05,51,795,5
1093,1II
II
IIC
IIC
MM
mnn
33
nn
33
3ie
ie
iem
iem
n
3p =
−⋅⋅
=⋅
⋅=
⋅⋅
⋅⋅==
Se observa ca în cazul pornirii cu reostat si având înfasurarea de excitatie conectate în
paralel cu indusul, cuplul de pornire are o valoare redusa.
4. Un motor serie de curent continuu având puterea nominala Pn = 60kW si tensiunea
nominala Un = 440V, are rezistenta circuitului serie Rs = 0,4Ω.
Sa se determine rezistenta reostatului de pornire pentru ca masina sa dezvolte la pornire un
cuplu np M5,1M = . Se presupune masina nesaturata. Randamentul motorului la sarcina nominala
este ηn = 0,9.
REZOLVARE:
Curentul absorbit de motor în regimul nominal are valoarea:
.A5,1514409,01060
UP
I3
nn
nn =
⋅⋅
=⋅η
=
Cuplul electromagnetic al masinii de curent continuu se calculeaza cu expresia:
.INap
21
M ⋅Φ⋅⋅⋅π⋅
= (1)
La motorul studiat, cu excitatie serie, fluxul magnetic este produs de curentul I; în cazul
masinii nesaturate se poate scrie:
,Ik1 ⋅=Φ
iar expresia (1) devine:

Masina de curent continuu 220
.IkIkNap
21
M 22
21 ⋅=⋅⋅⋅⋅
π⋅=
Curentul absorbit de motor la pornire este:
,RR
UI
sp
np +
=
unde Rp este rezistenta reostatului de pornire.
Din conditia ca la pornire cuplul Mp sa fie 1,5 Mm rezulta ecuatia:
2n2
2p2 Ik5,1Ik ⋅⋅=⋅ sau ,I5,1
RRU 2
n
2
sp
n =
+
cu solutia:
.97,15,1515,1
5,1514,05,1440I5,1
IR5,1UR
n
nsp Ω=
⋅⋅⋅−
=⋅
⋅⋅−=
Capitolul 7
MASINA DE CURENT ALTERNATIV
CU COLECTOR
Principiul care sta la baza realizarii acestor masini este transferul colectorului de la masina
de curent continuu la masina de curent alternativ, în vederea obtinerii unor caracteristici de reglaj
asemanatoare cu cele de la masina de curent continuu.
Dupa cum am vazut în subcapitolul [3.3], reglajul vitezei motorului se face fie prin pierderi
de energie care cresc odata cu cresterea alunecarii (pierderi prin efect Joule), fie cu ajutorul unor
instalatii exterioare relativ scumpe în comparatie cu pretul masinii reglate. De asemenea motoarele
asincrone de viteza mica sau cele care functioneaza încarcate cu sarcina mica au un factor de putere
scazut. Aceste inconveniente pot fi înlaturate folosind colectorul la masina asincrona.
Masina de c.a. cu colector este folosita, în practica, numai în regim de motor, atât ca motor
monofazat cât si ca motor trifazat. Dintre motoarele de c.a. cu colector mai des întâlnite în practica,
mentionam, motorul monofazat serie, motorul monofazat derivatie (cu repulsie), motorul trifazat
derivatie etc.
Inductorul masinilor de c.a. cu colector poate fi monofazat sau trifazat, iar indusul este
prevazut cu o înfasurare de c.a. si colector. Aceste masini, de obicei, se construiesc cu poli înecati,
deci, au întrefier constant.
În masinile de c.a. cu colector, inductorul (monofazat sau trifazat) este alimentat de la o
retea de c.a., obtinându-se un câmp magnetic pulsatoriu sau rotitor, care va induce în înfasurarea de
c.c. de pe indus doua feluri de t.e.m.: statice (es) ca la transformator si de rotatie (er) ca la masina de
c.c.
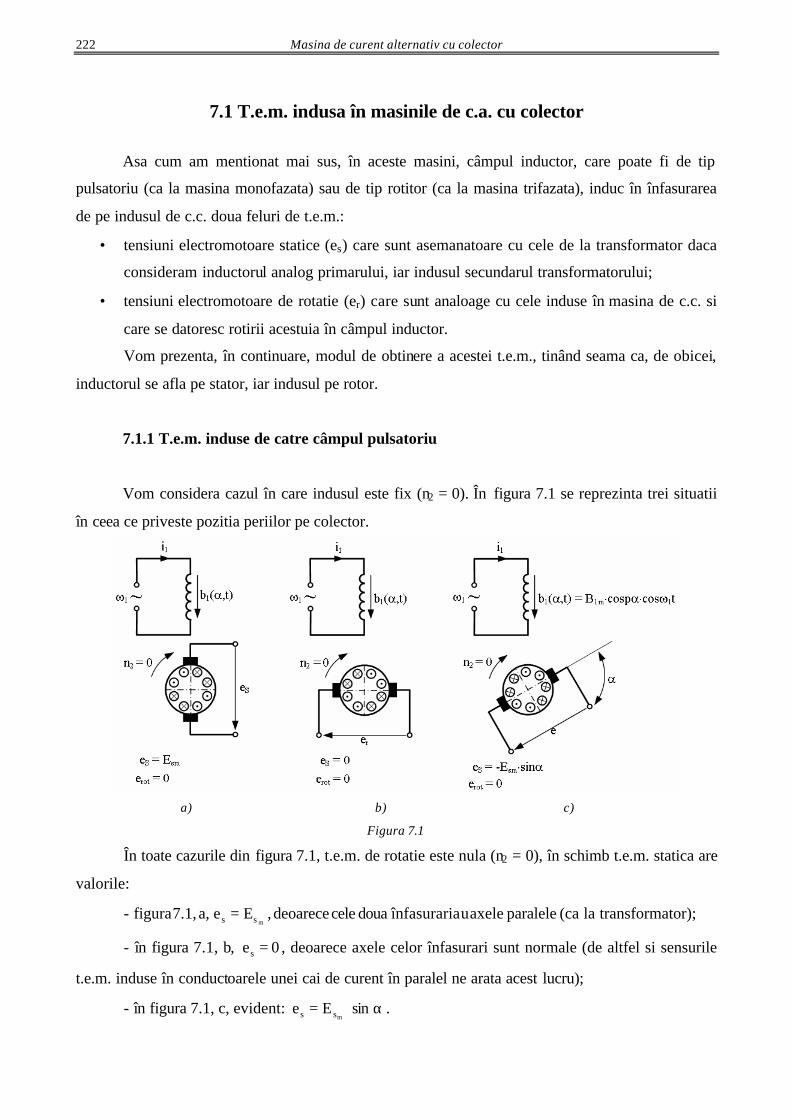
Masina de curent alternativ cu colector 222
7.1 T.e.m. indusa în masinile de c.a. cu colector
Asa cum am mentionat mai sus, în aceste masini, câmpul inductor, care poate fi de tip
pulsatoriu (ca la masina monofazata) sau de tip rotitor (ca la masina trifazata), induc în înfasurarea
de pe indusul de c.c. doua feluri de t.e.m.:
• tensiuni electromotoare statice (es) care sunt asemanatoare cu cele de la transformator daca
consideram inductorul analog primarului, iar indusul secundarul transformatorului;
• tensiuni electromotoare de rotatie (er) care sunt analoage cu cele induse în masina de c.c. si
care se datoresc rotirii acestuia în câmpul inductor.
Vom prezenta, în continuare, modul de obtinere a acestei t.e.m., tinând seama ca, de obicei,
inductorul se afla pe stator, iar indusul pe rotor.
7.1.1 T.e.m. induse de catre câmpul pulsatoriu
Vom considera cazul în care indusul este fix (n2 = 0). În figura 7.1 se reprezinta trei situatii
în ceea ce priveste pozitia periilor pe colector.
a) b) c) Figura 7.1
În toate cazurile din figura 7.1, t.e.m. de rotatie este nula (n2 = 0), în schimb t.e.m. statica are
valorile:
- figura 7.1, a,
mss Ee = , deoarece cele doua înfasurari au axele paralele (ca la transformator);
- în figura 7.1, b, 0es = , deoarece axele celor înfasurari sunt normale (de altfel si sensurile
t.e.m. induse în conductoarele unei cai de curent în paralel ne arata acest lucru);
- în figura 7.1, c, evident: α⋅= sinEemss .

Masina de curent alternativ cu colector
223
Din cele de mai sus, rezulta ca valoarea t.e.m. statice depinde de pozitia periilor pe colector.
Expresia t.e.m. statice pentru un unghi oarecare α de înclinare a periilor, fata de axa neutra, este
data de relatia:
,sinEemss α⋅= (7.1)
în care: ,kNf2
2E m2Na21s 2m
Φ⋅⋅⋅⋅π⋅
= (7.2)
unde s-a notat:
2N − numarul de conductoare ale înfasurarii induse;
a2 − numarul de cai de curent în paralel ale indusului;
a2N − numarul de spire pe o cale de curent: a22
NN 2
a2 ⋅= ;
2Nk − factorul de înfasurare
π2
cuegal ;
m2Φ − valoarea maxima a fluxului fascicular fata de înfasurarea indusa.
Relatia 7.2 se mai poate scrie:
;2a
NfE m22
1sm
Φ⋅⋅= (7.3)
Trebuie precizat ca frecventa t.e.m. statice este aceeasi cu frecventa câmpului magnetic
inductor (ω1).
Se considera acum cazul când rotorul (indusul) se roteste cu o viteza oarecare 0n 2 ≠ .
a) b) c)
Figura 7.2
În figura 7.2 sunt reprezentate trei situatii privind pozitia axei periilor pe colector:
- în figura 7.2, a, când axa periilor este paralela cu axa câmpului inductor se induce numai
t.e.m. statica;

Masina de curent alternativ cu colector 224
- în figura 7.2, b, t.e.m. statica este nula, în schimb t.e.m. de rotatie are valoarea maxima (ca
la masina de c.c.) ;Eemrotrot =
- în figura 7.2, c, se induc atât t.e.m. statica cât si de rotatie:
α⋅= sinEemss , .cosEe
mm rotrot α⋅= (7.4)
Cele doua t.e.m. pot fi reprezentate fazorial fata de fluxul inductor ca în figura 7.3: astfel,
t.e.m. statica este în cuadratura cu fluxul inductor (în urma), iar t.e.m. de rotatie este în faza sau în
opozitie cu acesta dupa sensul de rotatie al rotorului (n2).
Figura 7.3
Valoarea efectiva a t.e.m. de rotatie este data de relatia:
.kNf2
2E m2Na2rotrot 2
Φ⋅⋅⋅⋅π⋅
=
Cum: 60
npf 2
rot⋅
= si a22
NN 2
a2 ⋅= ;
π=
2k
2N , atunci:
.2a
N60np
E m222rot
Φ⋅⋅
⋅= (7.5)
T.e.m. rezultanta la periile masinii pentru un unghi oarecare se calculeaza cu relatia:
( ) ( ) .cosEsinEE 2rot
2s mm
α⋅+α⋅=α (7.6)
7.1.2 Tensiunea indusa de catre câmpul rotitor
Sa presupunem ca statorul joaca rol de inductor, în care se obtine un câmp rotitor, care se
roteste cu viteza de sincronism p
f60n 1
1⋅
= . Acest câmp poate fi considerat ca fiind obtinut din doua
câmpuri pulsatorii de forma:
,tcospcosBB 1xm1x1 ⋅ω⋅α⋅⋅=
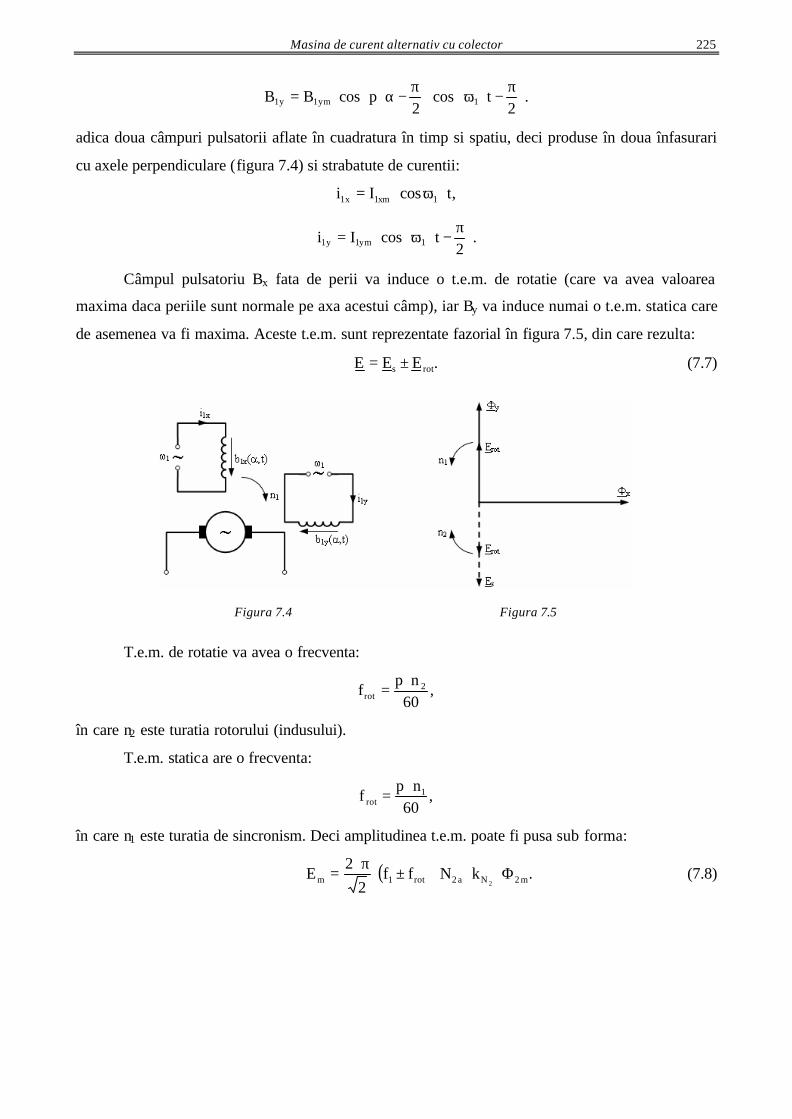
Masina de curent alternativ cu colector
225
.2
tcos2
pcosBB 1ym1y1
π
−⋅ω
π
−α⋅⋅=
adica doua câmpuri pulsatorii aflate în cuadratura în timp si spatiu, deci produse în doua înfasurari
cu axele perpendiculare (figura 7.4) si strabatute de curentii:
,tcosIi 1xm1x1 ⋅ω⋅=
.2
tcosIi 1ym1y1
π
−⋅ω⋅=
Câmpul pulsatoriu Bx fata de perii va induce o t.e.m. de rotatie (care va avea valoarea
maxima daca periile sunt normale pe axa acestui câmp), iar By va induce numai o t.e.m. statica care
de asemenea va fi maxima. Aceste t.e.m. sunt reprezentate fazorial în figura 7.5, din care rezulta:
.EEE rots ±= (7.7)
Figura 7.4 Figura 7.5
T.e.m. de rotatie va avea o frecventa:
,60
npf 2
rot⋅
=
în care n2 este turatia rotorului (indusului).
T.e.m. statica are o frecventa:
,60
npf 1
rot⋅
=
în care n1 este turatia de sincronism. Deci amplitudinea t.e.m. poate fi pusa sub forma:
( ) .kNff2
2E m2Na2rot1m 2
Φ⋅⋅⋅±⋅π⋅
= (7.8)
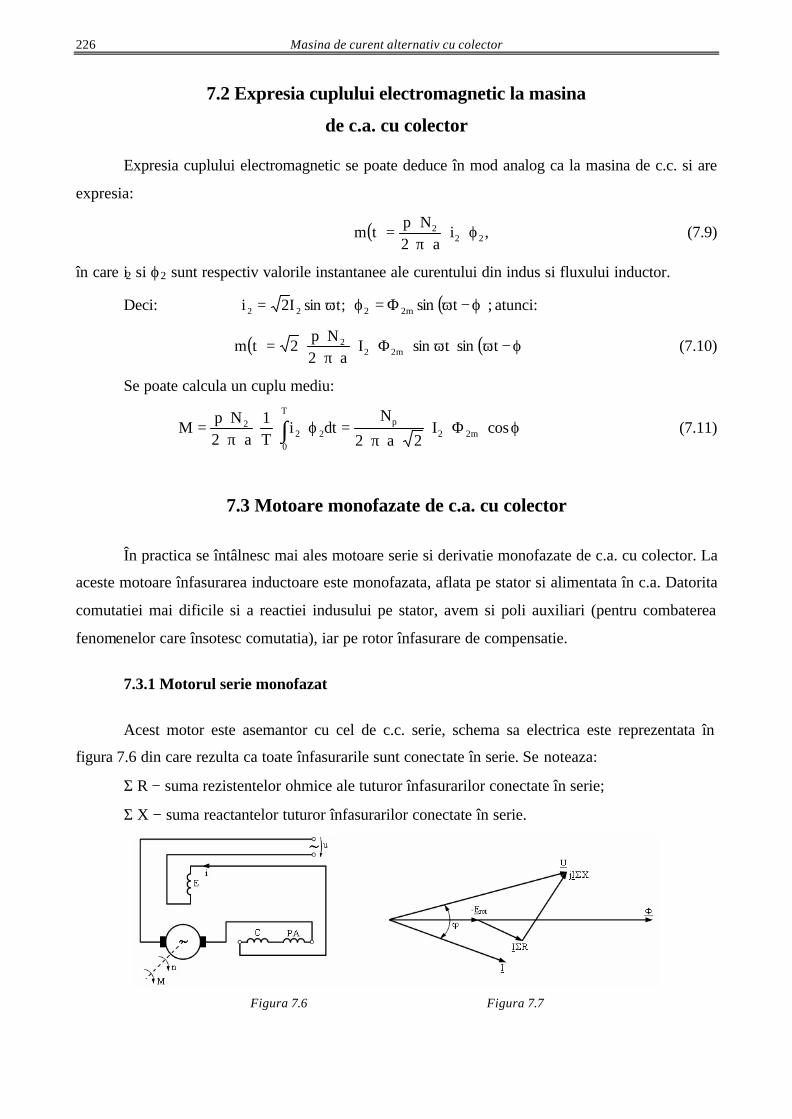
Masina de curent alternativ cu colector 226
7.2 Expresia cuplului electromagnetic la masina
de c.a. cu colector
Expresia cuplului electromagnetic se poate deduce în mod analog ca la masina de c.c. si are
expresia:
( ) ,ia2
Nptm 22
2 ϕ⋅⋅⋅π⋅
⋅= (7.9)
în care i2 si ϕ2 sunt respectiv valorile instantanee ale curentului din indus si fluxului inductor.
Deci: ;tsinI2i 22 ω= ( );tsinm22 ϕ−ωΦ=ϕ atunci:
( ) ( )ϕ−ω⋅ω⋅Φ⋅⋅⋅π⋅
⋅⋅= tsintsinI
a2Np
2tm m222 (7.10)
Se poate calcula un cuplu mediu:
∫ ϕ⋅Φ⋅⋅⋅⋅π⋅
=ϕ⋅⋅⋅⋅π⋅
⋅=
T
0m22
p22
2 cosI2a2
Ndti
T1
a2Np
M (7.11)
7.3 Motoare monofazate de c.a. cu colector
În practica se întâlnesc mai ales motoare serie si derivatie monofazate de c.a. cu colector. La
aceste motoare înfasurarea inductoare este monofazata, aflata pe stator si alimentata în c.a. Datorita
comutatiei mai dificile si a reactiei indusului pe stator, avem si poli auxiliari (pentru combaterea
fenomenelor care însotesc comutatia), iar pe rotor înfasurare de compensatie.
7.3.1 Motorul serie monofazat
Acest motor este asemantor cu cel de c.c. serie, schema sa electrica este reprezentata în
figura 7.6 din care rezulta ca toate înfasurarile sunt conectate în serie. Se noteaza:
Σ R − suma rezistentelor ohmice ale tuturor înfasurarilor conectate în serie;
Σ X − suma reactantelor tuturor înfasurarilor conectate în serie.
Figura 7.6 Figura 7.7

Masina de curent alternativ cu colector
227
Se tine seama ca în rotor fluxul inductor induce numai t.e.m. de rotatie (axa periilor este
la2π
fata de axa fluxului inductor).
Cu aceste notatii si precizari, se poate scrie:
( ).XjRIEU rot ∑∑ ⋅+⋅+−= (7.12)
Ecuatia (7.12) este reprezentata prin fazori în figura 7.7. Din aceasta diagrama rezulta ca la o
tensiune de alimentare constanta si la o sarcina la ax constanta (I = constant), unghiul ϕ, deci si
factorul de putere al motorului, va depinde de t.e.m. de rotatie (Erot). Cum Erot depinde de viteza de
rotatie n2 este evident ca factorul de putere va depinde de aceasta (la turatii mari, factorul de putere
este mai bun).
Caracteristica mecanica a acestui motor este asemanatoare cu cea a motorului de c.c. cu
excitatie în serie. În figura 7.8 este reprezentata familia de caracteristici mecanice obtinute prin
micsorarea tensiunii de alimentare, lucru posibil de obtinut practic cu ajutorul unui transformator.
Figura 7.8
Din alura acestei caracteristici, rezulta ca motorul monofazat serie de c.a. cu colector, este
un motor de putere aproximativ constanta, deoarece produsul M⋅n=constant, de aceea acest motor
poate fi utilizat în actionarile electrice din tractiune sau la masinile de ridicat.
7.3.2 Motorul cu excitatie independenta monofazat de c.a. cu colector
Motorul cu repulsie. La acest motor (figura 7.9) înfasurarea inductoare este conectata în
serie cu înfasurarea de compensatie si alimentata de la o sursa de c.a., iar periile de pe rotor sunt
conectate în scurtcircuit.
Principiul de functionare se aseamana cu comportarea unei spire în scurtcircuit, aflata într-
un câmp magnetic alternativ (figura 7.10). Daca aceasta spira se roteste în jurul unui ax în sensul
sagetii pline si se lasa libera, ea se va roti în sens contrar (sageata punctata) pâna când planul sau va
deveni paralel cu al liniilor de câmp, pozitie în care curentul indus este nul (cuplul de rotatie se va
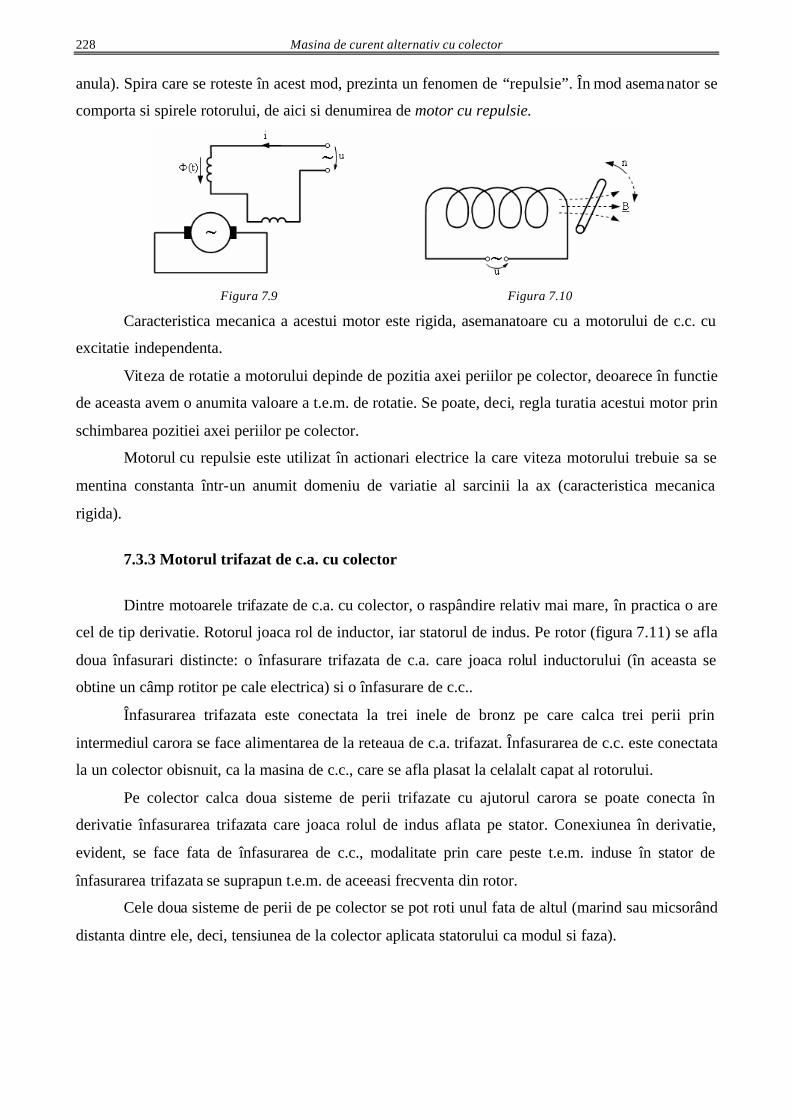
Masina de curent alternativ cu colector 228
anula). Spira care se roteste în acest mod, prezinta un fenomen de “repulsie”. În mod asemanator se
comporta si spirele rotorului, de aici si denumirea de motor cu repulsie.
Figura 7.9 Figura 7.10
Caracteristica mecanica a acestui motor este rigida, asemanatoare cu a motorului de c.c. cu
excitatie independenta.
Viteza de rotatie a motorului depinde de pozitia axei periilor pe colector, deoarece în functie
de aceasta avem o anumita valoare a t.e.m. de rotatie. Se poate, deci, regla turatia acestui motor prin
schimbarea pozitiei axei periilor pe colector.
Motorul cu repulsie este utilizat în actionari electrice la care viteza motorului trebuie sa se
mentina constanta într-un anumit domeniu de variatie al sarcinii la ax (caracteristica mecanica
rigida).
7.3.3 Motorul trifazat de c.a. cu colector
Dintre motoarele trifazate de c.a. cu colector, o raspândire relativ mai mare, în practica o are
cel de tip derivatie. Rotorul joaca rol de inductor, iar statorul de indus. Pe rotor (figura 7.11) se afla
doua înfasurari distincte: o înfasurare trifazata de c.a. care joaca rolul inductorului (în aceasta se
obtine un câmp rotitor pe cale electrica) si o înfasurare de c.c..
Înfasurarea trifazata este conectata la trei inele de bronz pe care calca trei perii prin
intermediul carora se face alimentarea de la reteaua de c.a. trifazat. Înfasurarea de c.c. este conectata
la un colector obisnuit, ca la masina de c.c., care se afla plasat la celalalt capat al rotorului.
Pe colector calca doua sisteme de perii trifazate cu ajutorul carora se poate conecta în
derivatie înfasurarea trifazata care joaca rolul de indus aflata pe stator. Conexiunea în derivatie,
evident, se face fata de înfasurarea de c.c., modalitate prin care peste t.e.m. induse în stator de
înfasurarea trifazata se suprapun t.e.m. de aceeasi frecventa din rotor.
Cele doua sisteme de perii de pe colector se pot roti unul fata de altul (marind sau micsorând
distanta dintre ele, deci, tensiunea de la colector aplicata statorului ca modul si faza).
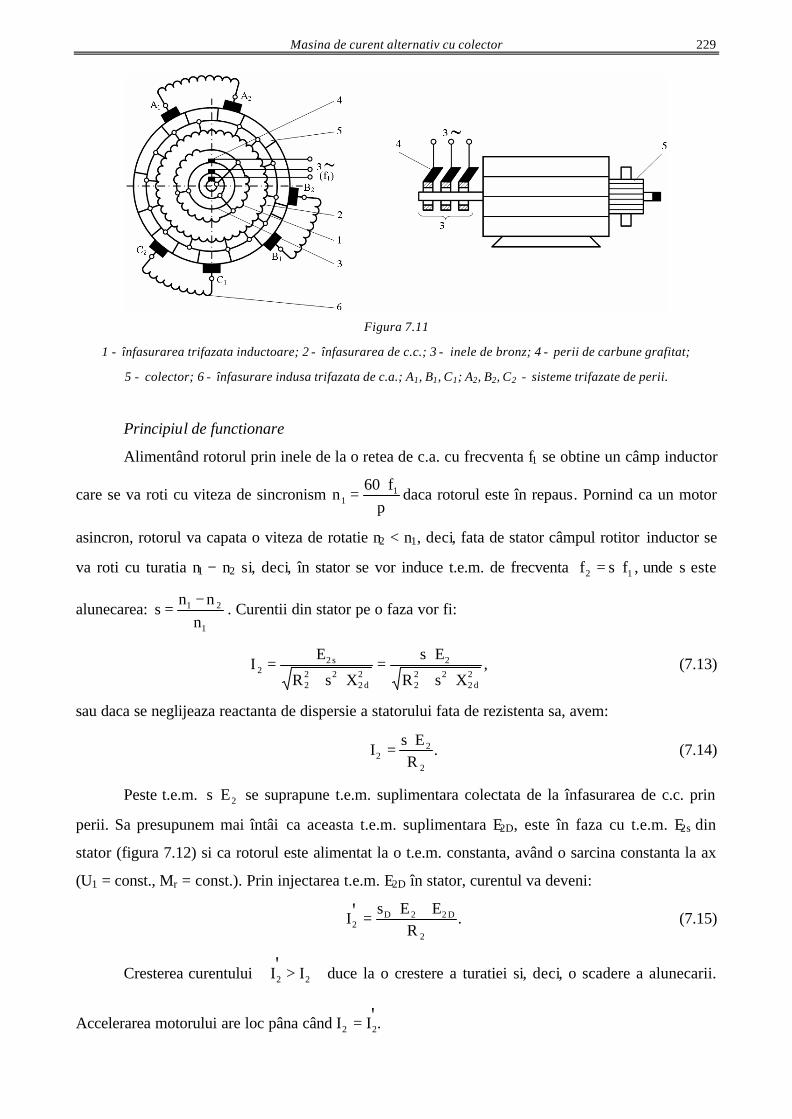
Masina de curent alternativ cu colector
229
Figura 7.11
1 − înfasurarea trifazata inductoare; 2 − înfasurarea de c.c.; 3 − inele de bronz; 4 − perii de carbune grafitat;
5 − colector; 6 − înfasurare indusa trifazata de c.a.; A1, B1, C1; A2, B2, C2 − sisteme trifazate de perii.
Principiul de functionare
Alimentând rotorul prin inele de la o retea de c.a. cu frecventa f1 se obtine un câmp inductor
care se va roti cu viteza de sincronism p
f60n 1
1⋅
= daca rotorul este în repaus. Pornind ca un motor
asincron, rotorul va capata o viteza de rotatie n2 < n1, deci, fata de stator câmpul rotitor inductor se
va roti cu turatia n1 − n2 si, deci, în stator se vor induce t.e.m. de frecventa 12 fsf ⋅= , unde s este
alunecarea: 1
21
nnn
s−
= . Curentii din stator pe o faza vor fi:
,XsR
Es
XsR
EI
2d2
222
22
d222
2
s22
⋅+
⋅=
⋅+= (7.13)
sau daca se neglijeaza reactanta de dispersie a statorului fata de rezistenta sa, avem:
.R
EsI
2
22
⋅= (7.14)
Peste t.e.m. 2Es ⋅ se suprapune t.e.m. suplimentara colectata de la înfasurarea de c.c. prin
perii. Sa presupunem mai întâi ca aceasta t.e.m. suplimentara E2D, este în faza cu t.e.m. E2s din
stator (figura 7.12) si ca rotorul este alimentat la o t.e.m. constanta, având o sarcina constanta la ax
(U1 = const., Mr = const.). Prin injectarea t.e.m. E2D în stator, curentul va deveni:
.R
EEsI
2
D22D2' +⋅
= (7.15)
Cresterea curentului
> 22 II' duce la o crestere a turatiei si, deci, o scadere a alunecarii.
Accelerarea motorului are loc pâna când .II '22 =

Masina de curent alternativ cu colector 230
.EEsEs D22D2 +⋅=⋅ (7.16)
De aici:
.E
Ess
2
D2D −= (7.17)
Introducerea în stator a unei t.e.m. suplimentare de aceeasi frecventa, duce la modificarea
turatiei. T.e.m. E2D poate fi introdusa si în opozitie (figura 7.12), în acest caz:
,E
Ess
2
D2D += (7.18)
în felul acesta putându-se obtine turatii suprasincrone.
Figura 7.12 Figura 7.13
Daca t.e.m. E2D se injecteaza sub o anumita faza de E2s, atunci va avea doua componente
(una în faza cu E2s si alta în cuadratura). Componenta în faza va duce la modificarea turatiei, iar cea
în cuadratura, la modificarea factorului de putere (figura 7.13).
În figura 7.13, E2D este aplicata în cuadratura. Notând marimile raportate la indus, se va
scrie:
,III '''D2s22 += (7.19)
unde: '2I − curentul rezultant pe o faza din stator;
's2I − curentul pe faza din stator produs de '
s2E ;
'D2I − curentul de faza din stator produs de '
D2E .
Cum: 1021 III ' =+ (relatia dintre solenatii de la motorul asincron), atunci:
10D2s21 IIII ''' =++ sau .IIII ''D210s21 −=+ (7.20)
Relatia (7.20) ne arata ca 'D2I micsoreaza curentul de mers în gol, deci mareste factorul de
putere. Motorul trifazat de c.a. cu colector are proprietatea de a functiona la un factor de putere

Masina de curent alternativ cu colector
231
ridicat si, totodata, i se poate regla turatia în limite largi. Practic reglajul turatiei si a factorului de
putere se poate face prin deplasarea celor doua sisteme de perii. Daca se efectueaza deplsarea
simultana a celor doua sisteme de perii se obtine numai o variatie a modulului lui E2D, deci, se
modifica numai turatia; daca se deplaseaza numai un sistem de perii, iar unul se mentine fix, atunci
se modifica atât modulul cât si faza, deci, se regleaza atât turatia cât si factorul de putere.
Capitolul 8
MASINI ELECTRICE SPECIALE
8.1 Introducere
Masinile electrice speciale constituie componente de o deosebita importanta pentru
sistemele automate îndeplinind functii diverse: elemente de executie, traductoare, amplificatoare,
etc. O data cu dezvoltarea productiei de instalatii automate complexe, care implica producerea
componentelor discrete de putere la frecvente ridicate, a circuitelor larg integrate, a
microprocesoarelor, a minicalculatoarelor de proces, a interfetelor si traductoarelor, s-a trecut la
realizarea unor serii de masini electrice speciale având posibilitati de adaptare eficienta în asemenea
scopuri. In ultimii ani s-a acordat o deosebita atentie proiectarii si realizarii în tara noastra a
diverselor tipuri de masini electrice speciale, dintre care enumeram: servomotoare de curent
continuu cu excitatie electromagnetica si, respectiv, excitate cu magneti permanenti, servomotoare
asincrone bifazate, motoare sincrone cu reluctanta variabila, motoare cu histerezis, motoare pas cu
pas, servomotoare sincrone fara perii (cu comutatie statica), selsine, inductosine, transformatoare
rotative, tahogeneratoare de c.c. si de curent alternativ.
Spre deosebire de masinile electrice clasice, care au la baza functionarii lor principiile
generale ale conversiei electromecanice ale energiei (cel mai important fiind cel al inductiei
electromagnetice), la masinile electrice speciale se mai utilizeaza si alte efecte cum ar fi cel al
histerezisului magnetic, al inductiei unipolare, al anizotropiei de forma.
Combinarea diverselor principii conduce la obtinerea unor masini speciale care, desi, în
general, au o constructie similara cu masinile clasice, pot avea caracteristici de functionare adecvate
scopului urmarit. Ca exemple, în acest sens, pot fi date masinile cu comutatie statica, masinile
amplificatoare, motoarele cicloidale (cu rotor rulant), traductoarele de pozitie.
Datorita spatiului limitat al lucrarii de fata, în acest capitol, vor fi prezentate doar o parte din
masinile speciale utilizate în practica, insistându-se pe acelea care au o arie mai mare de raspândire.
Masini electrice speciale
233
Trebuie precizat, totodata, ca realizarea acestor masini speciale nu ar fi fost posibila fara
aparitia, pe plan mondial, a unor noi tehnologii si a unor noi materiale. Revolutia produsa, în cadrul
masinilor electrice speciale, este, în acelasi timp, rezultatul atât al aparitiei de noi magneti
permanenti (magneti permanenti pe baza de pamânturi - rare) cât si al dezvoltarii impetuoase a
electronicii.
8.2 Masini electrice speciale de curent continuu
În categoria masinilor speciale de curent continuu, întâlnite frecvent în componenta
sistemelor automate, intra servomotoarele si tahogeneratoarele de curent continuu.
Servomotoarele de curent continuu sunt destinate sa converteasca semnalul electric, de
forma unei tensiuni amplificate venita de la un traductor, într-o miscare de rotatie a unui arbore.
Mecanismul, cuplat mecanic la arbore, executa, astfel, operatia comandata.
Un servomotor trebuie sa prezinte o serie de caracteristici deosebite, cum ar fi:
Ø reglaj de viteza în limite foarte largi, prin procedee simple;
Ø caracteristici de reglare si mecanice, pe cât posibil, liniare;
Ø cuplu de pornire mare;
Ø capacitate de suprasarcina ridicata;
Ø gabarit si greutate specifica mica;
Ø constanta electromecanica de timp redusa;
Ø absenta autopornirii, etc.
Dezavantajele servomotoarelor de curent continuu – prezenta colectorului si a fenomenelor de
comutatie, zgomotul mare, fiabilitatea scazuta – limiteaza utilizarea acestora în medii explozive sau
cu mult praf.
Constructia servomotoarelor de curent continuu
Din punct de vedere constructiv, servomotoarele cuprind aceleasi elemente ca si masinile
clasice de curent continuu, particularitatile constructive fiind dictate de gabaritele mici, constantele
de timp reduse, gama de viteza impusa etc.
Se disting urmatoarele tipuri constructive de servomotoare:
- cu rotor cilindric cu crestaturi;
o cu rotor disc (întrefier axial);
Masini electrice speciale 234
o cu rotor în forma de pahar;
- cu rotor cilindric fara crestaturi.
În ceea ce priveste tipul de excitatie folosit, exista variantele:
o cu excitatie electromagnetica (separata, serie);
o cu excitatie cu magneti permanenti;
o cu excitatie hibrida (electromagnetica si cu magneti permanenti).
Servomotoarele cu excitatie electromagnetica se construiesc, în general, pentru puteri mari,
dar, în ultimul timp, se utilizeaza, tot mai frecvent, magnetii permanenti, datorita unor avantaje:
dimensiuni mai mici, randamente mai bune, probleme de racire mai simple.
Servomotorul cu rotor cilindric cu crestaturi
Din punct de vedere constructiv se apropie mult de masinile de c.c. clasice. Statorul,
cilindric, constituie un jug înconjurat de carcasa, iar înspre interior cuprinde inductorul, sub forma
clasica a polilor de excitatie care prezinta înfasurari, respectiv, a magnetilor permanenti, iar, în
unele cazuri, atât înfasurari cât si magneti permanenti.
Servomotoarele cu excitatie electromagnetica se folosesc, în general, la puteri mari.
Circuitul magnetic se realizeaza din tole si prezinta, la puteri mari, înfasurari de compensatie
precum si poli auxiliari. Îmbunatatirea continua a caracteristicilor magnetilor permanenti a dus la
înlocuirea treptata a excitatiilor electromagnetice cu excitatii cu magneti permanenti chiar si la
puteri mai mari. Astfel, de-a lungul anilor s-au utilizat: magneti din Alnico, magneti din ferita,
magneti pe baza de pamânturi – rare (SmCo5, Sm2Co17, NdFeB). Caracteristicile diferite ale
magnetilor permanenti au impus si adoptarea unor variante constructive deosebite.
Astfel, în cazul magnetilor din Alnico, datorita valorii scazute a intensitatii câmpului
magnetic coercitiv, pentru a împiedica demagnetizarea rapida a acestora în cazul unor câmpuri de
reactie puternice, s-a adoptat o varianta constructiva la care magnetii sunt dispusi pe coarda [1]. La
o astfel de varianta constructiva, carcasa nu mai joaca un rol activ (de închidere a liniilor de câmp
magnetic) putând fi realizata din aluminiu. În cazul utilizarii magnetilor din ferita, datorita inductiei
remanente mici a acesteia, numarul de poli din masina este mult sporit, ajungând la o valoare,
aproape, dubla fata de varianta utilizarii magnetilor din Alnico (uzual pentru ferita se utilizeaza
10÷12 poli, în timp ce pentru Alnico numarul de poli este limitat la 4÷8) [1], [2], [3].
În cazul utilizarii magnetilor permanenti din pamânturi – rare, datorita valorilor ridicate atât
ale inductiei remanente cât si ale intensitatii câmpului magnetic coercitiv (si, totodata, al energiilor
specifice maxime), numarul de poli are valori mici si, în acelasi timp, sunt diminuate si
dimensiunile magnetilor; pe ansamblu, dimensiunile de gabarit ale servomotorului sunt reduse fata
de cazurile anterioare.
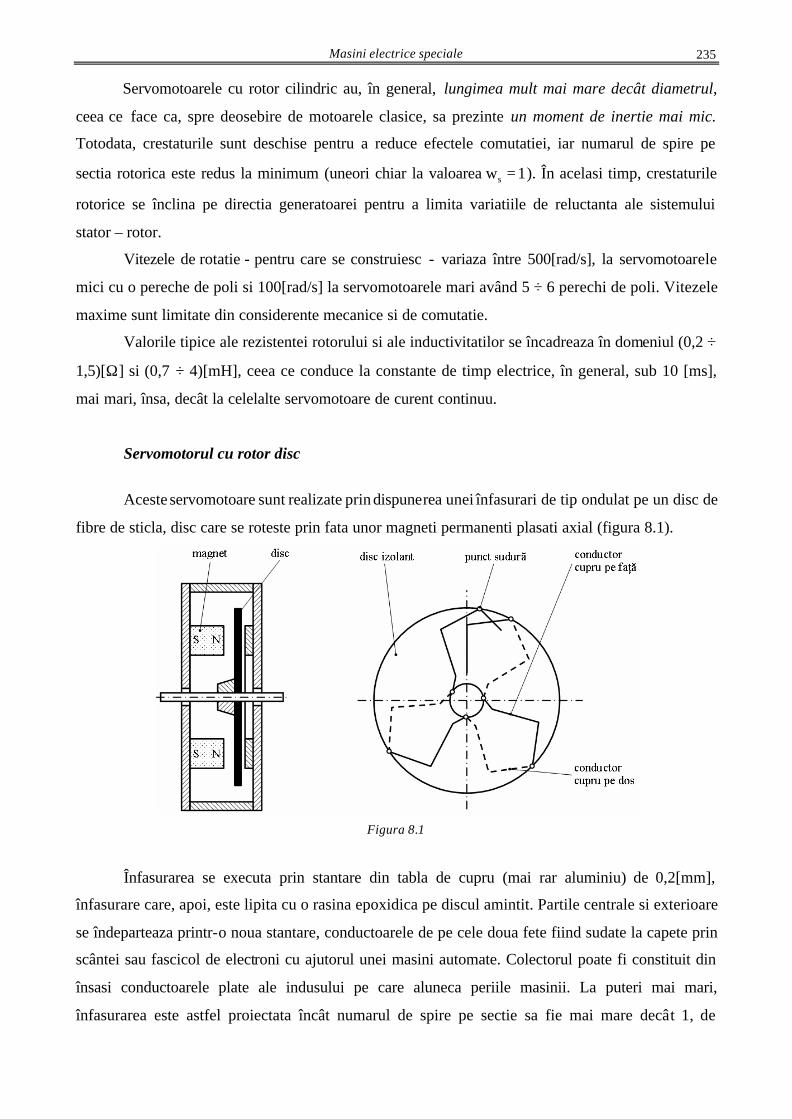
Masini electrice speciale
235
Servomotoarele cu rotor cilindric au, în general, lungimea mult mai mare decât diametrul,
ceea ce face ca, spre deosebire de motoarele clasice, sa prezinte un moment de inertie mai mic.
Totodata, crestaturile sunt deschise pentru a reduce efectele comutatiei, iar numarul de spire pe
sectia rotorica este redus la minimum (uneori chiar la valoarea 1ws = ). În acelasi timp, crestaturile
rotorice se înclina pe directia generatoarei pentru a limita variatiile de reluctanta ale sistemului
stator – rotor.
Vitezele de rotatie - pentru care se construiesc - variaza între 500[rad/s], la servomotoarele
mici cu o pereche de poli si 100[rad/s] la servomotoarele mari având 5 ÷ 6 perechi de poli. Vitezele
maxime sunt limitate din considerente mecanice si de comutatie.
Valorile tipice ale rezistentei rotorului si ale inductivitatilor se încadreaza în domeniul (0,2 ÷
1,5)[Ω] si (0,7 ÷ 4)[mH], ceea ce conduce la constante de timp electrice, în general, sub 10 [ms],
mai mari, însa, decât la celelalte servomotoare de curent continuu.
Servomotorul cu rotor disc
Aceste servomotoare sunt realizate prin dispunerea unei înfasurari de tip ondulat pe un disc de
fibre de sticla, disc care se roteste prin fata unor magneti permanenti plasati axial (figura 8.1).
Figura 8.1
Înfasurarea se executa prin stantare din tabla de cupru (mai rar aluminiu) de 0,2[mm],
înfasurare care, apoi, este lipita cu o rasina epoxidica pe discul amintit. Partile centrale si exterioare
se îndeparteaza printr-o noua stantare, conductoarele de pe cele doua fete fiind sudate la capete prin
scântei sau fascicol de electroni cu ajutorul unei masini automate. Colectorul poate fi constituit din
însasi conductoarele plate ale indusului pe care aluneca periile masinii. La puteri mai mari,
înfasurarea este astfel proiectata încât numarul de spire pe sectie sa fie mai mare decât 1, de
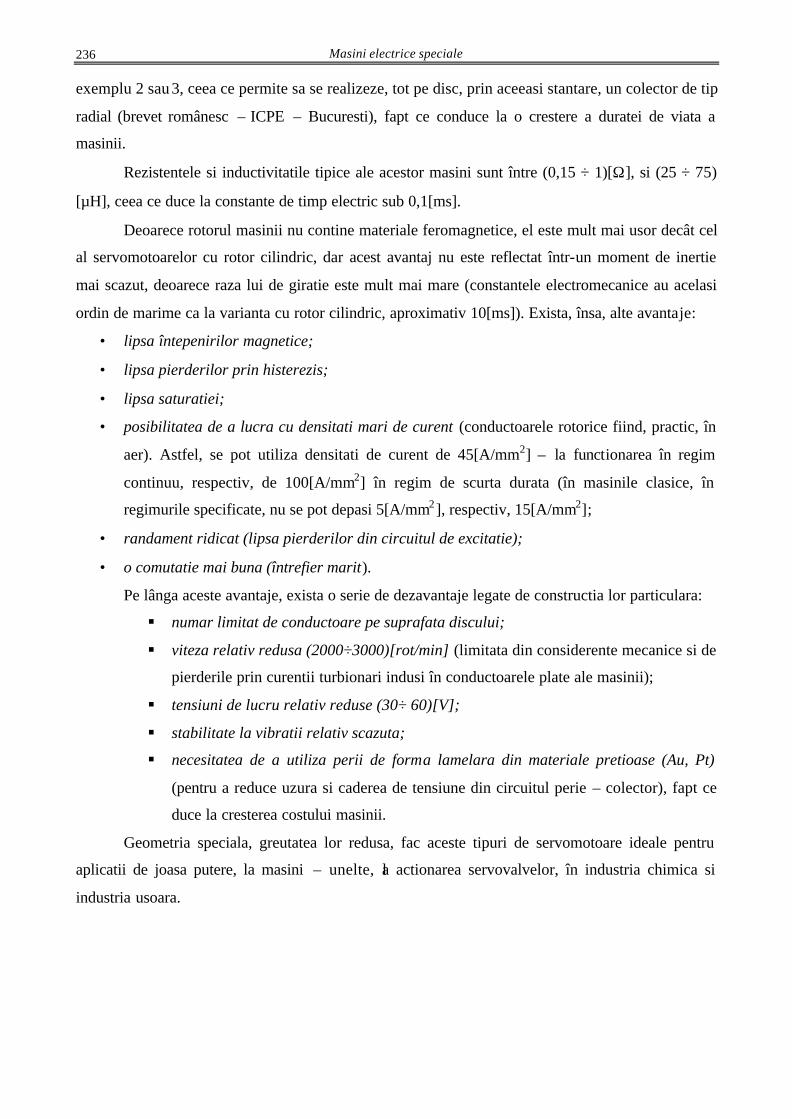
Masini electrice speciale 236
exemplu 2 sau 3, ceea ce permite sa se realizeze, tot pe disc, prin aceeasi stantare, un colector de tip
radial (brevet românesc – ICPE – Bucuresti), fapt ce conduce la o crestere a duratei de viata a
masinii.
Rezistentele si inductivitatile tipice ale acestor masini sunt între (0,15 ÷ 1)[Ω], si (25 ÷ 75)
[µH], ceea ce duce la constante de timp electric sub 0,1[ms].
Deoarece rotorul masinii nu contine materiale feromagnetice, el este mult mai usor decât cel
al servomotoarelor cu rotor cilindric, dar acest avantaj nu este reflectat într-un moment de inertie
mai scazut, deoarece raza lui de giratie este mult mai mare (constantele electromecanice au acelasi
ordin de marime ca la varianta cu rotor cilindric, aproximativ 10[ms]). Exista, însa, alte avantaje:
• lipsa întepenirilor magnetice;
• lipsa pierderilor prin histerezis;
• lipsa saturatiei;
• posibilitatea de a lucra cu densitati mari de curent (conductoarele rotorice fiind, practic, în
aer). Astfel, se pot utiliza densitati de curent de 45[A/mm2] – la functionarea în regim
continuu, respectiv, de 100[A/mm2] în regim de scurta durata (în masinile clasice, în
regimurile specificate, nu se pot depasi 5[A/mm2], respectiv, 15[A/mm2];
• randament ridicat (lipsa pierderilor din circuitul de excitatie);
• o comutatie mai buna (întrefier marit).
Pe lânga aceste avantaje, exista o serie de dezavantaje legate de constructia lor particulara:
§ numar limitat de conductoare pe suprafata discului;
§ viteza relativ redusa (2000÷3000)[rot/min] (limitata din considerente mecanice si de
pierderile prin curentii turbionari indusi în conductoarele plate ale masinii);
§ tensiuni de lucru relativ reduse (30÷ 60)[V];
§ stabilitate la vibratii relativ scazuta;
§ necesitatea de a utiliza perii de forma lamelara din materiale pretioase (Au, Pt)
(pentru a reduce uzura si caderea de tensiune din circuitul perie – colector), fapt ce
duce la cresterea costului masinii.
Geometria speciala, greutatea lor redusa, fac aceste tipuri de servomotoare ideale pentru
aplicatii de joasa putere, la masini – unelte, la actionarea servovalvelor, în industria chimica si
industria usoara.
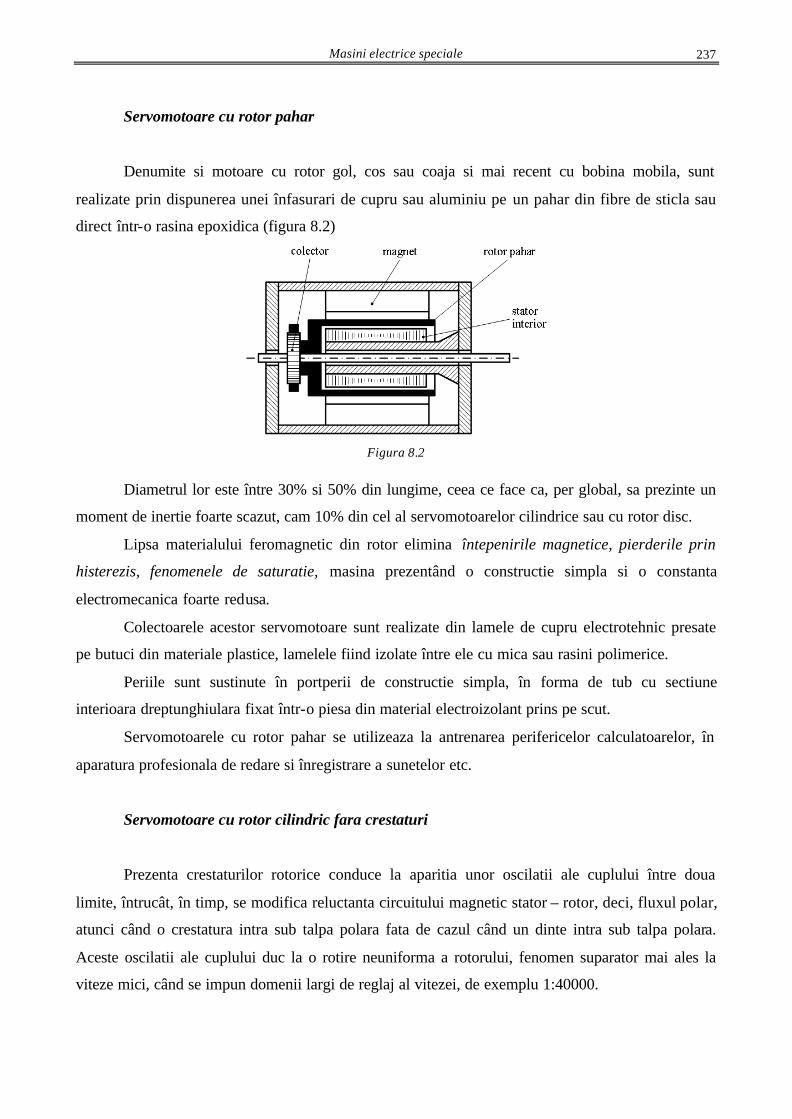
Masini electrice speciale
237
Servomotoare cu rotor pahar
Denumite si motoare cu rotor gol, cos sau coaja si mai recent cu bobina mobila, sunt
realizate prin dispunerea unei înfasurari de cupru sau aluminiu pe un pahar din fibre de sticla sau
direct într-o rasina epoxidica (figura 8.2)
Figura 8.2
Diametrul lor este între 30% si 50% din lungime, ceea ce face ca, per global, sa prezinte un
moment de inertie foarte scazut, cam 10% din cel al servomotoarelor cilindrice sau cu rotor disc.
Lipsa materialului feromagnetic din rotor elimina întepenirile magnetice, pierderile prin
histerezis, fenomenele de saturatie, masina prezentând o constructie simpla si o constanta
electromecanica foarte redusa.
Colectoarele acestor servomotoare sunt realizate din lamele de cupru electrotehnic presate
pe butuci din materiale plastice, lamelele fiind izolate între ele cu mica sau rasini polimerice.
Periile sunt sustinute în portperii de constructie simpla, în forma de tub cu sectiune
interioara dreptunghiulara fixat într-o piesa din material electroizolant prins pe scut.
Servomotoarele cu rotor pahar se utilizeaza la antrenarea perifericelor calculatoarelor, în
aparatura profesionala de redare si înregistrare a sunetelor etc.
Servomotoare cu rotor cilindric fara crestaturi
Prezenta crestaturilor rotorice conduce la aparitia unor oscilatii ale cuplului între doua
limite, întrucât, în timp, se modifica reluctanta circuitului magnetic stator – rotor, deci, fluxul polar,
atunci când o crestatura intra sub talpa polara fata de cazul când un dinte intra sub talpa polara.
Aceste oscilatii ale cuplului duc la o rotire neuniforma a rotorului, fenomen suparator mai ales la
viteze mici, când se impun domenii largi de reglaj al vitezei, de exemplu 1:40000.
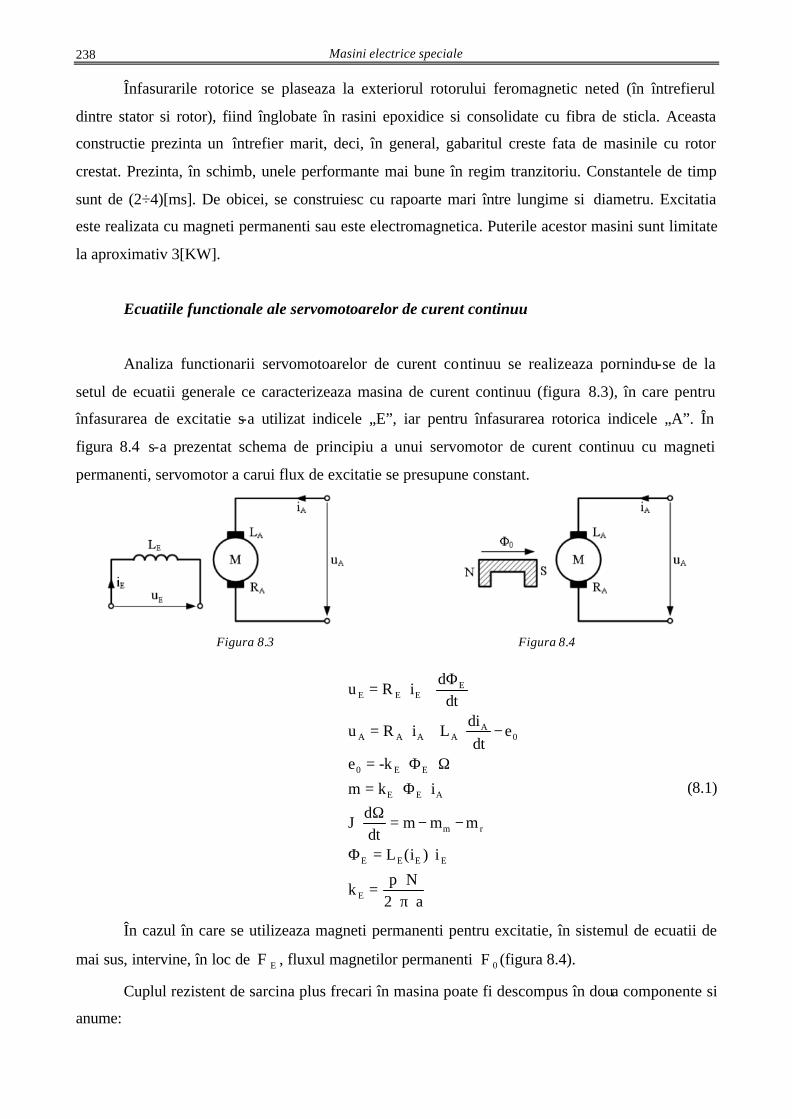
Masini electrice speciale 238
Înfasurarile rotorice se plaseaza la exteriorul rotorului feromagnetic neted (în întrefierul
dintre stator si rotor), fiind înglobate în rasini epoxidice si consolidate cu fibra de sticla. Aceasta
constructie prezinta un întrefier marit, deci, în general, gabaritul creste fata de masinile cu rotor
crestat. Prezinta, în schimb, unele performante mai bune în regim tranzitoriu. Constantele de timp
sunt de (2÷4)[ms]. De obicei, se construiesc cu rapoarte mari între lungime si diametru. Excitatia
este realizata cu magneti permanenti sau este electromagnetica. Puterile acestor masini sunt limitate
la aproximativ 3[KW].
Ecuatiile functionale ale servomotoarelor de curent continuu
Analiza functionarii servomotoarelor de curent continuu se realizeaza pornindu-se de la
setul de ecuatii generale ce caracterizeaza masina de curent continuu (figura 8.3), în care pentru
înfasurarea de excitatie s-a utilizat indicele „E”, iar pentru înfasurarea rotorica indicele „A”. În
figura 8.4 s-a prezentat schema de principiu a unui servomotor de curent continuu cu magneti
permanenti, servomotor a carui flux de excitatie se presupune constant.
Figura 8.3 Figura 8.4
⋅π⋅⋅
=
⋅=Φ
−−=Ω
⋅
⋅Φ⋅=
Ω⋅Φ⋅=
−⋅+⋅=
Φ+⋅=
a2Np
k
i)i(L
mmmdt
dJ
ikm
k-e
edt
diLiRu
dtd
iRu
E
EEEE
rm
AEE
EE0
0A
AAAA
EEEE
(8.1)
În cazul în care se utilizeaza magneti permanenti pentru excitatie, în sistemul de ecuatii de
mai sus, intervine, în loc de EF , fluxul magnetilor permanenti 0F (figura 8.4).
Cuplul rezistent de sarcina plus frecari în masina poate fi descompus în doua componente si
anume:

Masini electrice speciale
239
• un cuplu ce înglobeaza toate frecarile vâscoase în ansamblul servomotor – reductor - sarcina
si care poate fi considerat ca egal cu OFm ⋅ , unde mF reprezinta coeficientul total de frecari
vâscoase;
• un cuplu static sm independent de viteza.
Ca urmare ecuatia de echilibru dinamic poate fi rescrisa sub forma:
.mFmdt
dJ sm −Ω⋅−=
Ω⋅ (8.2)
Ecuatia de mai sus reprezinta o dependenta liniara doar în domeniul vitezelor unghiulare
mici, termenul liniar OFm ⋅ transformându-se, la viteze mari, într-un termen neliniar, deoarece
cuplurile de frecari sunt proportionale cu viteza la o putere superioara (în general, la puterea a treia).
Exista trei posibilitati de comanda a servomotorului de curent continuu: prin circuitul
indusului, prin circuitul de excitatie si pe ambele cai în cazul excitatiei serie. Cea mai performanta,
sub raportul caracteristicilor obtinute, este comanda prin circuitul indusului.
Servomotorul de curent continuu – cu flux constant de excitatie – comandat prin circuitul
indusului
Tensiunea de comanda care se aplica circuitului indusului (care joaca rolul de marime de
intrare si este, de obicei, tensiunea de iesire a unui amplificator de putere) este variabila, în timp ce
fluxul de excitatie este constant.
În cazul regimului stationar de functionare, ecuatiile ce caracterizeaza sistemul (8.1) devin:
⋅=⋅+−=
⋅−=
A1
AA0A
10
IkMIREU
OkE
(8.3)
unde: 0EEE1 FkFkk ⋅=⋅= .
Eliminând marimile 0E si AI , setul de relatii (8.3) se transforma:
1A1A k
MROkU ⋅+⋅= (8.4)
sau
OFUkORk
URk
M eAMA
21
AA
1 ⋅−⋅=⋅−⋅= (8.5)

Masini electrice speciale 240
în care A
1M R
kk = este asa-numitul coeficient de amplificare tensiune – cuplu al servomotorului, iar
,kkRk
F 1MA
21
e ⋅== coeficientul de frecari vâscoase al servomotorului (frecare vâscoasa artificiala
introdusa pe cale electrica de servomotor). Ultima relatie permite deducerea caracteristicii
mecanice a servomotorului ctU A
)O(fM=
= (figura 8.5).
0 20 40 60 80 100 120 1400
100
200
300
400
500
600
omega
M
U=UAm=180V
U=0,75UAm=135V
U=0,5UAm=90V
U=0,25UAm=45V
Figura 8.5 Familia de caracteristici mecanice ale unui servomotor de c.c. cu rotor cilindric
din seria SMU – C fabricat de Electromotor Timisoara
Se observa ca aceste caracteristici sunt drepte paralele de panta A
21
e Rk
F = . Pentru un semnal
maxim admis de comanda ,UAm servomotorul poate dezvolta un cuplu de pornire maxim:
AmA
1AmMpm U
Rk
UkM ⋅=⋅= (8.6)
si o viteza de mers în gol ( 0M = ) maxima:
.k
UkkkU
UFk
1
Am
1M
MAmAm
e
Mm0 =
⋅⋅
=⋅=Ω (8.7)
Aceste doua marimi, cuplul de pornire si viteza maxima de mers în gol, permit deducerea
caracteristicilor mecanice, panta acestor drepte fiind ,OM
Fm0
pme = iar taieturile direct proportionale cu
tensiunea aplicata.
Liniaritatea acestor caracteristici mecanice este deosebit de importanta pentru functionarea,
în ansamblu, a sistemului de reglare automata în care este inclus servomotorul. Caracteristic pentru
aceste servomotoare este existenta unei valori minime a semnalului de comanda, smU , care trebuie
depasita pentru ca servomotorul sa se puna în miscare, în cazul unui cuplu de sarcina egal cu zero.

Masini electrice speciale
241
Aceasta valoare minima a tensiunii de comanda este necesara pentru producerea unui cuplu
electromagnetic care sa învinga cuplul static provocat de întepenirea bilelor de rulment, de pozitia
preferentiala a rotorului ca urmare a nesimetriei electrice sau mecanice a masinii etc.. Zona valorilor
tensiunii de comanda cuprinsa între zero si valoarea limita smU se numeste zona moarta,
caracterizata prin lipsa de raspuns a servomotorului la aparitia unui semnal de comanda. Pentru
servomotoarele de buna calitate, valoarea limita smU se afla sub 3% din tensiunea maxima de
comanda.
Relatia (8.5) permite, de asemenea, determinarea si a altor caracteristici deosebit de
importante: caracteristicile de reglare ctOA )U(fM
== (figura 8.6).
Figura 8.6 Familia de caracteristici de reglare ale unui servomotor de c.c. cu rotor cilindric
din seria SMU – C fabricat de Electromotor Timisoara
Ca si în cazul caracteristicii mecanice, liniaritatea caracteristicii de reglaj conduce la
avantaje importante în utilizarea servomotoarelor de curent continuu comandate prin rotor.
Puterea utila la arborele servomotorului, ,Pu se poate scrie ca:
O)OFUk(OMP eAMu ⋅⋅−⋅=⋅= . (8.8)
Se observa ca puterea utila este nula la pornire ( 0O = ) si la mersul în gol ( 0M = ) si atinge
o valoare maxima pentru viteza unghiulara mO , dedusa din:
0OF2UkOd
dPumeAM
u =⋅⋅−⋅= , (8.9)
adica pentru jumatate din viteza de mers în gol:
2O
UF2
kO m0
Ae
Mum =⋅
⋅= . (8.10)
0 50 100 150 200 250 300 350 4000
100
200
300
400
500
600
omega
M
omega=omega0m=138rad/s
omega=0,75omega0m=104rad/s
omega=0,5omega0m=69rad/s
omega=0,25omega0m=35rad/s
UA
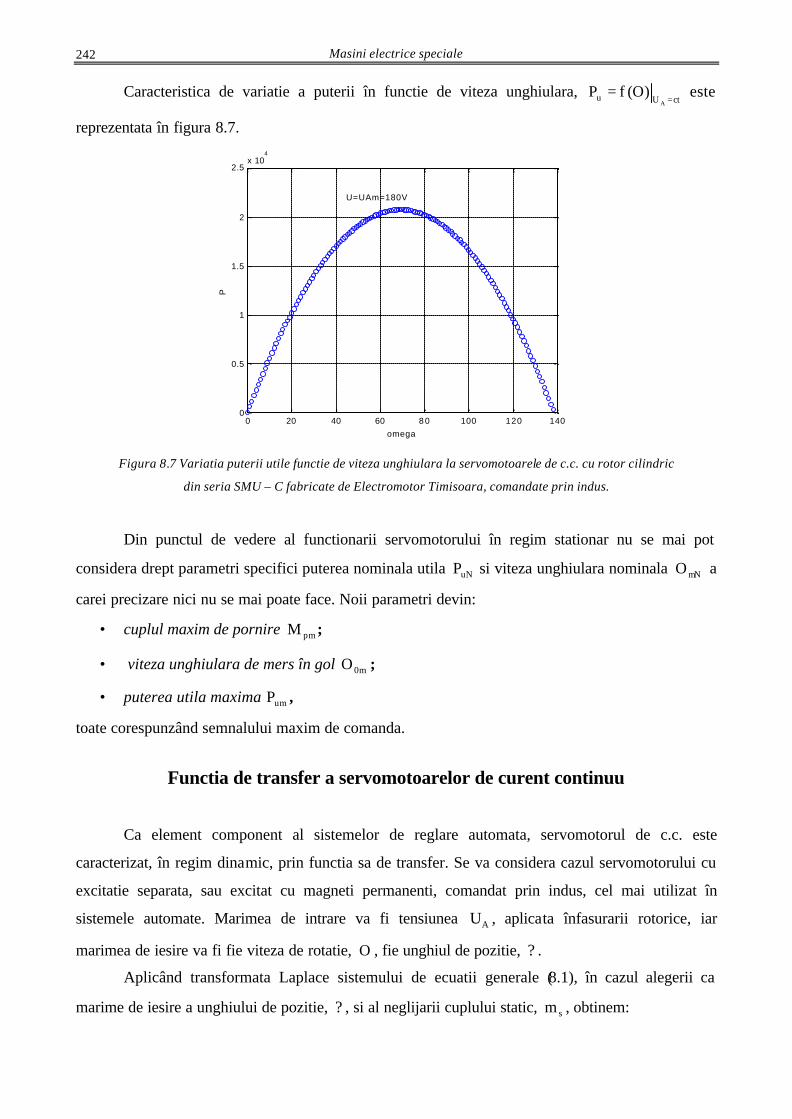
Masini electrice speciale 242
Caracteristica de variatie a puterii în functie de viteza unghiulara, ctUu
A)O(fP
== este
reprezentata în figura 8.7.
0 20 40 60 8 0 100 120 1400
0.5
1
1.5
2
2.5x 10
4
omega
P
U=UAm=180V
Figura 8.7 Variatia puterii utile functie de viteza unghiulara la servomotoarele de c.c. cu rotor cilindric
din seria SMU – C fabricate de Electromotor Timisoara, comandate prin indus.
Din punctul de vedere al functionarii servomotorului în regim stationar nu se mai pot
considera drept parametri specifici puterea nominala utila uNP si viteza unghiulara nominala mNO a
carei precizare nici nu se mai poate face. Noii parametri devin:
• cuplul maxim de pornire pmM ;
• viteza unghiulara de mers în gol m0O ;
• puterea utila maxima umP ,
toate corespunzând semnalului maxim de comanda.
Functia de transfer a servomotoarelor de curent continuu
Ca element component al sistemelor de reglare automata, servomotorul de c.c. este
caracterizat, în regim dinamic, prin functia sa de transfer. Se va considera cazul servomotorului cu
excitatie separata, sau excitat cu magneti permanenti, comandat prin indus, cel mai utilizat în
sistemele automate. Marimea de intrare va fi tensiunea AU , aplicata înfasurarii rotorice, iar
marimea de iesire va fi fie viteza de rotatie, O , fie unghiul de pozitie, ? .
Aplicând transformata Laplace sistemului de ecuatii generale (8.1), în cazul alegerii ca
marime de iesire a unghiului de pozitie, ? , si al neglijarii cuplului static, sm , obtinem:

Masini electrice speciale
243
( ) ( )( ) ( ) ( ) ( )
( ) ( )( ) ( ) ( )
θ⋅⋅⋅+⋅=⋅=
⋅⋅+⋅+θ⋅⋅=
θ⋅⋅−=
ssTs1Fsmsiksm
siTs1Rssksu
sskse
mm
A1
AAA1A
10
(8.11)
unde s-a notat cu: A
AA R
LT = constanta de timp a circuitului rotoric, iar
mm F
JT = constanta mecanica
de timp a motorului plus a sarcinii. Eliminând curentul )s(iA din primele trei relatii, din sistemul
(8.11), putem scrie:
( ) ( ) ( ) ( ) ( )s?sTs1
Fsu
Ts1k
Ts1s?s
Rk
suTs1
1Rk
smA
eA
A
M
AA
21
AAA
1 ⋅⋅⋅+
−⋅⋅+
=⋅+
⋅⋅−⋅
⋅+⋅= (8.12)
respectiv,
( ) ( ) ( ) ( )s?sTs1Fs?sTs1
Fsu
Ts1k
mmA
eA
A
M ⋅⋅⋅+⋅+⋅⋅⋅+
=⋅⋅+
. (8.13)
Relatia (8.13) poate fi adusa si la forma:
( ) ( ) ( ) ( )ssTs1Ts1FF
1Ts1
Fsu
Ts1k
mme
m
A
eA
A
M θ⋅⋅
⋅+⋅⋅+⋅+⋅
⋅+=⋅
⋅+ (8.14)
caz în care se poate defini o functie de transfer a servomotorului, ( ) ( )( )sus?
sFA
= .
Aceasta functie de transfer se simplifica în cazul în care constanta de timp electrica, AT , este
mult mai mica decât constanta de timp mecanica, mT , si ea capata forma exprimata de relatia:
( ) ( )( ) ( ).
Ts1sFF
k
sus
sFem
me
M
A ⋅+⋅+
=θ
= (8.15)
Noua forma ne conduce la concluzia ca servomotorul de curent continuu cu exc itatie
separata, comandat prin înfasurarea rotorica, se comporta, din punct de vedere dinamic, ca un
ansamblu de doua elemente:
• unul integrator s1
;
• altul inertial aperiodic emTs1
1⋅+
,
în care me
em FFJ
T+
= ar reprezenta constanta electromecanica efectiva de timp a sistemului
servomotor – sarcina, mult mai mica decât cea mecanica servomotor – sarcina, mT , deoarece, în
general, me FF > .

Masini electrice speciale 244
Introducerea unei frecari vâscoase artificiale de catre servomotor reprezinta un aspect
favorabil din punct de vedere al stabilitatii sistemului de reglare automata, servomotorul contribuind
la amortizarea oscilatiilor care ar putea interveni în functionarea sistemului. Trebuie precizat, de
asemenea, ca în deducerea functiei de transfer s-au facut o serie de ipoteze simplificatoare,
neglijându-se o serie de fenomene secundare sau neliniaritati si, ca urmare, raspunsul real al
sistemului poate diferi, într-o oarecare masura, de cel obtinut pe cale teoretica.
În figura 8.8 este indicata schema bloc simplificata a servomotorului de curent continuu
obtinuta în mediul de programare MATLAB/SIMULINK, iar în figura 8.9 rezultatele functionarii în
regim dinamic ale unui servomotor având urmatoarele caracteristici:
• Viteza maxima în gol min/rot4000n 0 = ;
• Puterea utila maxima în regim continuu W270Pn = ;
• Cuplul maxim la arbore Nm6,3M k = ;
• Domeniul de reglare 1000:1;
• Constanta cuplului %10A
Nm10147k 3
m ±⋅= − ;
• Constanta t.e.m. %10krmp
V12k e ±= ;
• Rezistenta indusului Ω= 15,1R a la 25°C si 1,8Ω la 155°C;
• Cuplul frecarii vâscoase krmp/Nm107 3−⋅ ;
• Cuplul frecarii statice Nm1049 3−⋅ ;
• Inductivitatea indusului mH4La = ;
• Rezistenta termica indus-mediu W/C8,2R th °= ;
• Temperatura maxima a indusului C155maxa °=τ ;
• Gradientul tahogeneratorului krmp/V2,14k tg = .
Pentru servomotorul ales, pentru ]Kgm[101,2JJ 24m
−⋅== si em FF = , se obtin urmatoarele
valori ale coeficientilor:
0816,08,1
147,0Rk
ka
mM === ;
( )012,0
8,1147,0
Rk
F2
a
2m
e === ;
00875,0024,0101,2
FFJ
T4
mem =
⋅=
+=
−
.
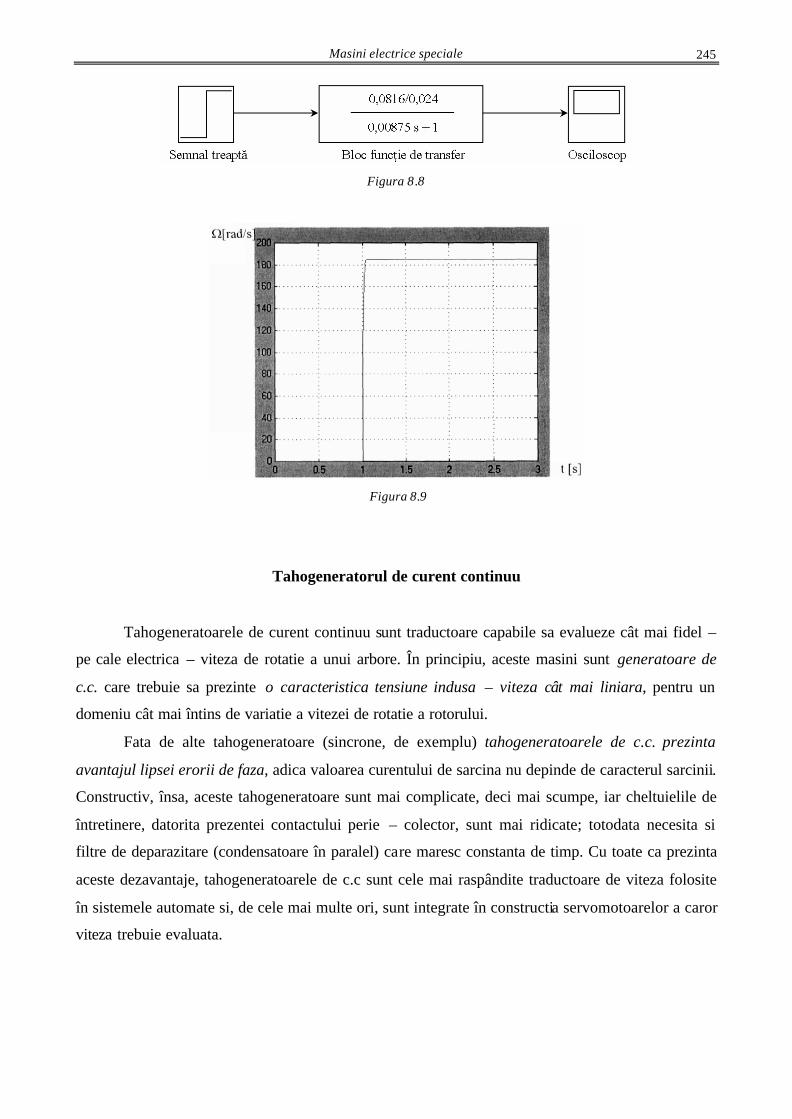
Masini electrice speciale
245
Figura 8.8
Figura 8.9
Tahogeneratorul de curent continuu
Tahogeneratoarele de curent continuu sunt traductoare capabile sa evalueze cât mai fidel –
pe cale electrica – viteza de rotatie a unui arbore. În principiu, aceste masini sunt generatoare de
c.c. care trebuie sa prezinte o caracteristica tensiune indusa – viteza cât mai liniara, pentru un
domeniu cât mai întins de variatie a vitezei de rotatie a rotorului.
Fata de alte tahogeneratoare (sincrone, de exemplu) tahogeneratoarele de c.c. prezinta
avantajul lipsei erorii de faza, adica valoarea curentului de sarcina nu depinde de caracterul sarcinii.
Constructiv, însa, aceste tahogeneratoare sunt mai complicate, deci mai scumpe, iar cheltuielile de
întretinere, datorita prezentei contactului perie – colector, sunt mai ridicate; totodata necesita si
filtre de deparazitare (condensatoare în paralel) care maresc constanta de timp. Cu toate ca prezinta
aceste dezavantaje, tahogeneratoarele de c.c sunt cele mai raspândite traductoare de viteza folosite
în sistemele automate si, de cele mai multe ori, sunt integrate în constructia servomotoarelor a caror
viteza trebuie evaluata.

Masini electrice speciale 246
Caracteristicile tahogeneratoarelor de curent continuu
În conditiile în care tahogeneratorul functioneaza în gol, tensiunea la borne este data de:
;FnkFN60n
ap
E 0e00 ⋅⋅=⋅⋅⋅= p
O30n
⋅= (8.16)
ceea ce înseamna ca între viteza unghiulara de rotatie, Ω, si tensiunea indusa exista o dependenta
perfect liniara, daca fluxul de excitatie, 0F , este constant.
La functionarea în sarcina, ecuatia de tensiuni a tahogeneratorului se scrie:
pAAA U?IREU −⋅−= (8.17)
unde:
E – tensiunea indusa la mersul în sarcina;
AR – rezistenta înfasurarii rotorice;
AI – intensitatea curentului în sarcina;
pU? – este caderea de tensiune la perii.
Tensiunea indusa în sarcina se poate exprima astfel:
nIkEE A0' ⋅⋅−= (8.18)
unde caderea de tensiune nIk A' ⋅⋅ se datoreaza reactiei indusului (proportionala cu intensitatea
curentului de sarcina si cu viteza de rotatie).
Eroarea relativa a tahogeneratorului, în sarcina fata de mersul în gol, pentru o anumita viteza
de rotatie, n, se scrie astfel:
.UIRInkU
UIRInkE
UE
pAAAA
pAAA
0
A0r '
'
∆+⋅+⋅⋅+
∆+⋅+⋅⋅=
−=ε (8.19)
Tinând seama de faptul ca AsA IRU ⋅= , sR fiind rezistenta de sarcina, rezulta:
.
IU
RnkR
IU
Rnk
A
pAs
A
pA
r '
'
∆++⋅+
∆++⋅
=ε (20)
De asemenea, se deduce si dependenta ( ),nfUA = anume:
( ) ( ).UnknkRR
RE1U p0e'
As
s0rA ∆−⋅Φ⋅⋅
⋅++=⋅ε−= (21)

Masini electrice speciale
247
În figura 8.10, dreapta 1 reprezinta dependenta ideala, nknkE '10e0 ⋅=⋅Φ⋅= , a tensiunii la
mersul în gol al tahogeneratorului functie de viteza de rotatie, iar curba 2 reprezinta variatia
( )nfUA = , în sarcina, data de relatia (8.21). Se constata existenta unei zone de insensibilitate a
tahogeneratorului, adica pentru
∆∈ '
1
p
k
U,0n tensiunea la perii este nula („zona moarta”).
Micsorarea acestei zone se realizeaza daca pU? este redusa la minimum; de aceea se utilizeaza
contacte perie – colector aproape perfecte, periile se confectioneaza din otel inoxidabil, de
asemenea si colectorul ( mai mult, periile metalice se arginteaza în zona de lucru sau se utilizeaza
perii din bronz fosforos).
Figura 8.10
Prezenta la numitorul expresiei (8.21) a termenului în n, face ca la cresterea vitezei, AU sa
se diminueze, ceea ce înseamna ca dependenta ( )nfUA = devine neliniara, asa cum se vede în
figura 8.10, curba 2. Influenta termenului nk'1 ⋅ este cu atât mai mica cu cât sR este mai mare.
Acest fapt se deduce daca în relatia (8.20) neglijam pU? si împartim prin A1 Rnk' +⋅ , adica
.
Rnk
R1
1
A
sr
' +⋅+
=ε (8.22)
Din cele de mai sus rezulta ca liniaritatea dependentei ( )nfUA = se mentine cu atât mai
mult cu cât sarcina tahogeneratorului este mai mica sau rezistenta sR este mai mare. De aceea
solicitarile electromagnetice (densitate de curent în indus mai ales), în calculele de proiectare, se iau
mai mici decât în masinile obisnuite. Tot din relatia (8.22) se mai deduc urmatoarele: eroarea este
cu atât mai mica cu cât rezistenta indusului, AR , este mai mica; de asemenea termenul nk'1 ⋅ ,
Masini electrice speciale 248
corespunzator reactiei indusului, trebuie sa fie cât mai redus (este recomandata functionarea la
viteze mici).
O alta categorie de erori a tahogeneratorului de c.c. se datoreste variatiei în timp a tensiunii
de iesire, tensiune care, dupa cum se stie, are o forma pulsatorie. Aceasta tensiune se poate
descompune într-o componenta continua, AmedU , si una alternativa. Curentul de sarcina va avea, de
asemenea, o componenta continua si una alternativa. Componenta alternativa a curentului poate fi
defazata de cea a tensiunii; daca sarcina nu este pur activa, poate aparea, deci, o eroare de faza,
similara cu cea din tahogeneratoarele de curent alternativ. Reducerea acestor erori se face prin
marirea numarului de lamele la colector si, implicit, micsorarea latimii lor. Coeficientul de
ondulatie al tensiunii se defineste ca:
minAmaxA
minAmaxA0 UU
UUk
+−
= (8.23)
si atinge valori de 4,89% pentru cinci lamele de colector, scazând la 0,73% când numarul de lamele
este 13. Pentru reducerea acestui coeficient se mai utilizeaza filtre RC montate în paralel cu sarcina,
dar care influenteaza negativ raspunsul sistemului, în regim dinamic.
Variatiile de temperatura în timpul functionarii conduc la aparitia unor erori ale
tahogeneratorului. Daca excitatia este electromagnetica, atunci modificarea temperaturii conduce la
modificarea rezistentei înfasurarii, deci a curentului si, implicit, a fluxului din masina, în conditiile
când sursa de excitatie are tensiune constanta. De aceea, în anumite cazuri, este preferabil ca
tahogeneratorul sa lucreze în regim saturat, când variatiile curentului de excitatie nu produc variatii
importante ale fluxului din masina. Mentinerea constanta a fluxului se mai poate realiza daca
alimentarea excitatiei se face la curent constant.
Când tahogeneratorul este excitat cu magneti permanenti se utilizeaza materiale cu
stabilitate mare în timp si cu temperatura (de exemplu, Alnico). De asemenea, pentru diminuarea
erorilor de temperatura se prevad punti de termocompensare montate între polii principali, punti
realizate din materiale magnetice care îsi micsoreaza permeabilitatea magnetica cu cresterea
temperaturii, în asa fel încât fluxul principal, 0F , sa se mentina constant. Aliajele folosite în acest
scop sunt: calmalloy, termalloy, sau compensator.
Pentru mentinerea stabilitatii în timp a magnetilor (compensarea magnetizarilor inerente)
unele tahogeneratoare folosesc sunturi reglabile (plasate între polii principali), a caror pozitie este
modificata cu ocazia etalonarii periodice a tahogeneratorului.
Masini electrice speciale
249
8.3 Servomotoare asincrone bifazate
Servomotoarele asincrone bifazate (SAB) se utilizeaza ca elemente de executie în sistemele
de automatizare, datorita unor avantaje pe care le prezinta în raport cu alte tipuri de servomotoare
(de c.c., de exemplu), si anume:
• constructie simpla si robusta;
• absenta parazitilor radiofonici (nu prezinta contacte electrice alunecatoare);
• stabilitate buna în timp a caracteristicilor de functionare;
• prezenta autofrânarii.
Principalele dezavantaje ale SAB – ului sunt:
• dimensiuni de gabarit mai mari pentru o putere egala cu a altor tipuri de servomotoare (de
c.c. , sincrone);
• randament si factor de putere scazute;
• cuplul de pornire relativ mic (comparativ cu servomotoarele de c.c.).
Particularitati constructive ale servomotoarelor asincrone bifazate
Din punct de vedere constructiv, statorul este realizat din tole, cu crestaturi, în care se
introduc doua înfasurari decalate la 90 grade electrice. Una din înfasurari, numita de excitatie, E,
este conectata la reteaua monofazata, iar, cealalta, numita de comanda, C, se alimenteaza de la
aceeasi sursa sau de la o sursa separata, tensiunea aplicata fiind reglabila ca amplitudine sau (si) ca
faza, în raport cu tensiunea aplicata înfasurarii de excitatie. Cele doua surse sunt de aceeasi
frecventa, dar pot fi si de frecvente diferite, daca se cere o comanda reversibila. La motoarele de
foarte mica putere, statorul poseda o înfasurare continua, iar din patru puncte, situate la periferie, la
unghiul electric de2π
rad se scot prize – doua pentru înfasurarea de excitatie (la π rad între ele),
respectiv, alte doua pentru înfasurarea de comanda.
Rotorul se întâlneste în variantele (figura 8.11):
• cu colivie (de rezistenta echivalenta marita) – figura 8.11, a;
• în forma de pahar neferomagnetic (Al sau aliaje) – figura 8.11, b;
• sub forma de cilindru gol feromagnetic - figura 8.11, c.
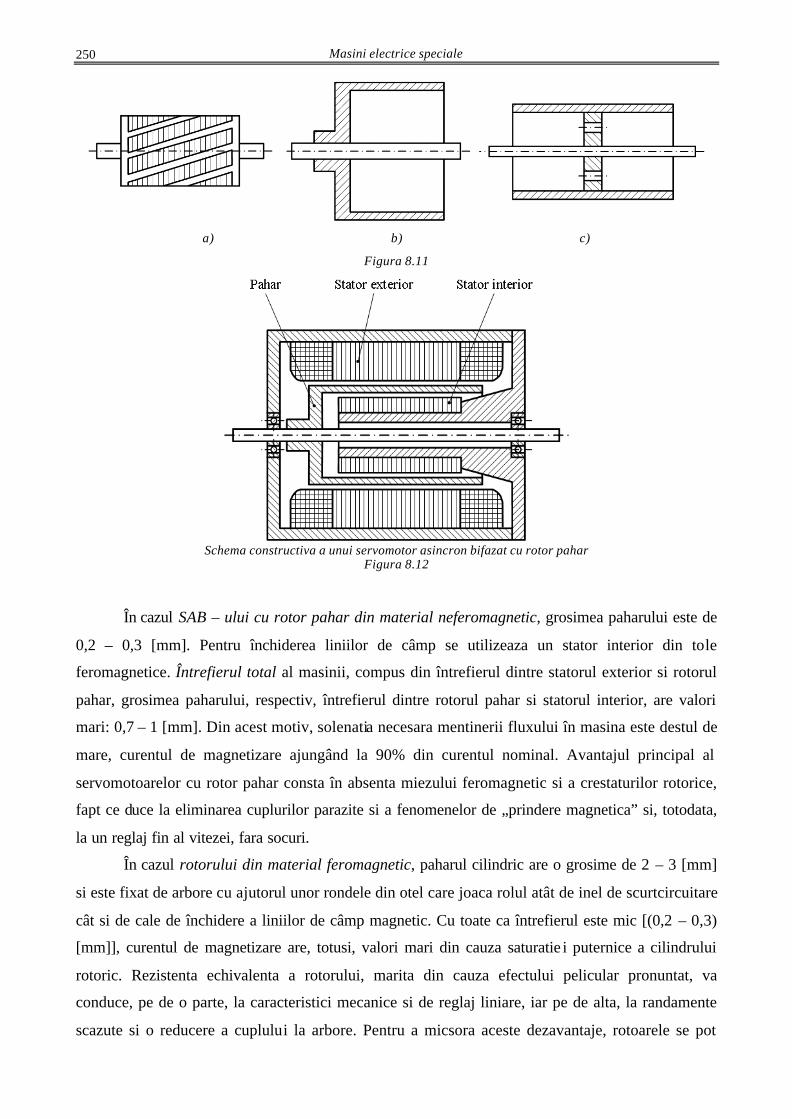
Masini electrice speciale 250
a) b) c)
Figura 8.11
Schema constructiva a unui servomotor asincron bifazat cu rotor pahar
Figura 8.12
În cazul SAB – ului cu rotor pahar din material neferomagnetic, grosimea paharului este de
0,2 – 0,3 [mm]. Pentru închiderea liniilor de câmp se utilizeaza un stator interior din tole
feromagnetice. Întrefierul total al masinii, compus din întrefierul dintre statorul exterior si rotorul
pahar, grosimea paharului, respectiv, întrefierul dintre rotorul pahar si statorul interior, are valori
mari: 0,7 – 1 [mm]. Din acest motiv, solenatia necesara mentinerii fluxului în masina este destul de
mare, curentul de magnetizare ajungând la 90% din curentul nominal. Avantajul principal al
servomotoarelor cu rotor pahar consta în absenta miezului feromagnetic si a crestaturilor rotorice,
fapt ce duce la eliminarea cuplurilor parazite si a fenomenelor de „prindere magnetica” si, totodata,
la un reglaj fin al vitezei, fara socuri.
În cazul rotorului din material feromagnetic, paharul cilindric are o grosime de 2 – 3 [mm]
si este fixat de arbore cu ajutorul unor rondele din otel care joaca rolul atât de inel de scurtcircuitare
cât si de cale de închidere a liniilor de câmp magnetic. Cu toate ca întrefierul este mic [(0,2 – 0,3)
[mm]], curentul de magnetizare are, totusi, valori mari din cauza saturatie i puternice a cilindrului
rotoric. Rezistenta echivalenta a rotorului, marita din cauza efectului pelicular pronuntat, va
conduce, pe de o parte, la caracteristici mecanice si de reglaj liniare, iar pe de alta, la randamente
scazute si o reducere a cuplului la arbore. Pentru a micsora aceste dezavantaje, rotoarele se pot
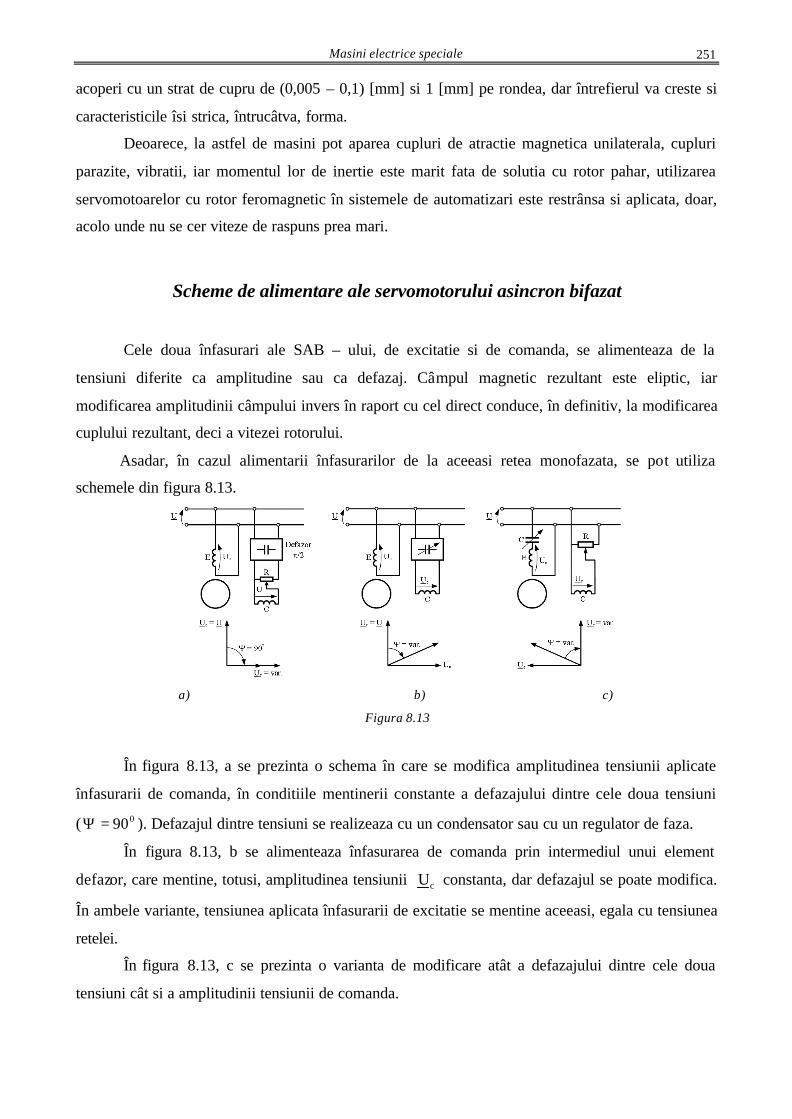
Masini electrice speciale
251
acoperi cu un strat de cupru de (0,005 – 0,1) [mm] si 1 [mm] pe rondea, dar întrefierul va creste si
caracteristicile îsi strica, întrucâtva, forma.
Deoarece, la astfel de masini pot aparea cupluri de atractie magnetica unilaterala, cupluri
parazite, vibratii, iar momentul lor de inertie este marit fata de solutia cu rotor pahar, utilizarea
servomotoarelor cu rotor feromagnetic în sistemele de automatizari este restrânsa si aplicata, doar,
acolo unde nu se cer viteze de raspuns prea mari.
Scheme de alimentare ale servomotorului asincron bifazat
Cele doua înfasurari ale SAB – ului, de excitatie si de comanda, se alimenteaza de la
tensiuni diferite ca amplitudine sau ca defazaj. Câmpul magnetic rezultant este eliptic, iar
modificarea amplitudinii câmpului invers în raport cu cel direct conduce, în definitiv, la modificarea
cuplului rezultant, deci a vitezei rotorului.
Asadar, în cazul alimentarii înfasurarilor de la aceeasi retea monofazata, se pot utiliza
schemele din figura 8.13.
a) b) c)
Figura 8.13
În figura 8.13, a se prezinta o schema în care se modifica amplitudinea tensiunii aplicate
înfasurarii de comanda, în conditiile mentinerii constante a defazajului dintre cele doua tensiuni
( 090=Ψ ). Defazajul dintre tensiuni se realizeaza cu un condensator sau cu un regulator de faza.
În figura 8.13, b se alimenteaza înfasurarea de comanda prin intermediul unui element
defazor, care mentine, totusi, amplitudinea tensiunii cU constanta, dar defazajul se poate modifica.
În ambele variante, tensiunea aplicata înfasurarii de excitatie se mentine aceeasi, egala cu tensiunea
retelei.
În figura 8.13, c se prezinta o varianta de modificare atât a defazajului dintre cele doua
tensiuni cât si a amplitudinii tensiunii de comanda.
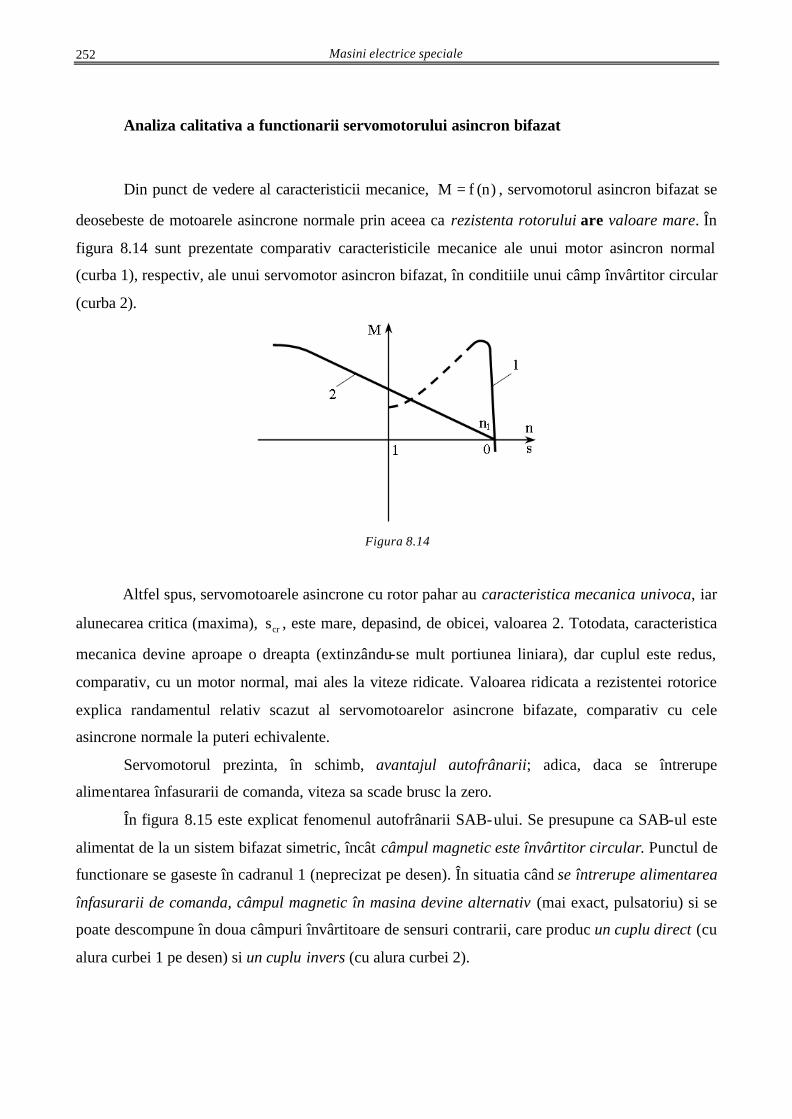
Masini electrice speciale 252
Analiza calitativa a functionarii servomotorului asincron bifazat
Din punct de vedere al caracteristicii mecanice, )n(fM = , servomotorul asincron bifazat se
deosebeste de motoarele asincrone normale prin aceea ca rezistenta rotorului are valoare mare. În
figura 8.14 sunt prezentate comparativ caracteristicile mecanice ale unui motor asincron normal
(curba 1), respectiv, ale unui servomotor asincron bifazat, în conditiile unui câmp învârtitor circular
(curba 2).
Figura 8.14
Altfel spus, servomotoarele asincrone cu rotor pahar au caracteristica mecanica univoca, iar
alunecarea critica (maxima), crs , este mare, depasind, de obicei, valoarea 2. Totodata, caracteristica
mecanica devine aproape o dreapta (extinzându-se mult portiunea liniara), dar cuplul este redus,
comparativ, cu un motor normal, mai ales la viteze ridicate. Valoarea ridicata a rezistentei rotorice
explica randamentul relativ scazut al servomotoarelor asincrone bifazate, comparativ cu cele
asincrone normale la puteri echivalente.
Servomotorul prezinta, în schimb, avantajul autofrânarii; adica, daca se întrerupe
alimentarea înfasurarii de comanda, viteza sa scade brusc la zero.
În figura 8.15 este explicat fenomenul autofrânarii SAB-ului. Se presupune ca SAB-ul este
alimentat de la un sistem bifazat simetric, încât câmpul magnetic este învârtitor circular. Punctul de
functionare se gaseste în cadranul 1 (neprecizat pe desen). În situatia când se întrerupe alimentarea
înfasurarii de comanda, câmpul magnetic în masina devine alternativ (mai exact, pulsatoriu) si se
poate descompune în doua câmpuri învârtitoare de sensuri contrarii, care produc un cuplu direct (cu
alura curbei 1 pe desen) si un cuplu invers (cu alura curbei 2).
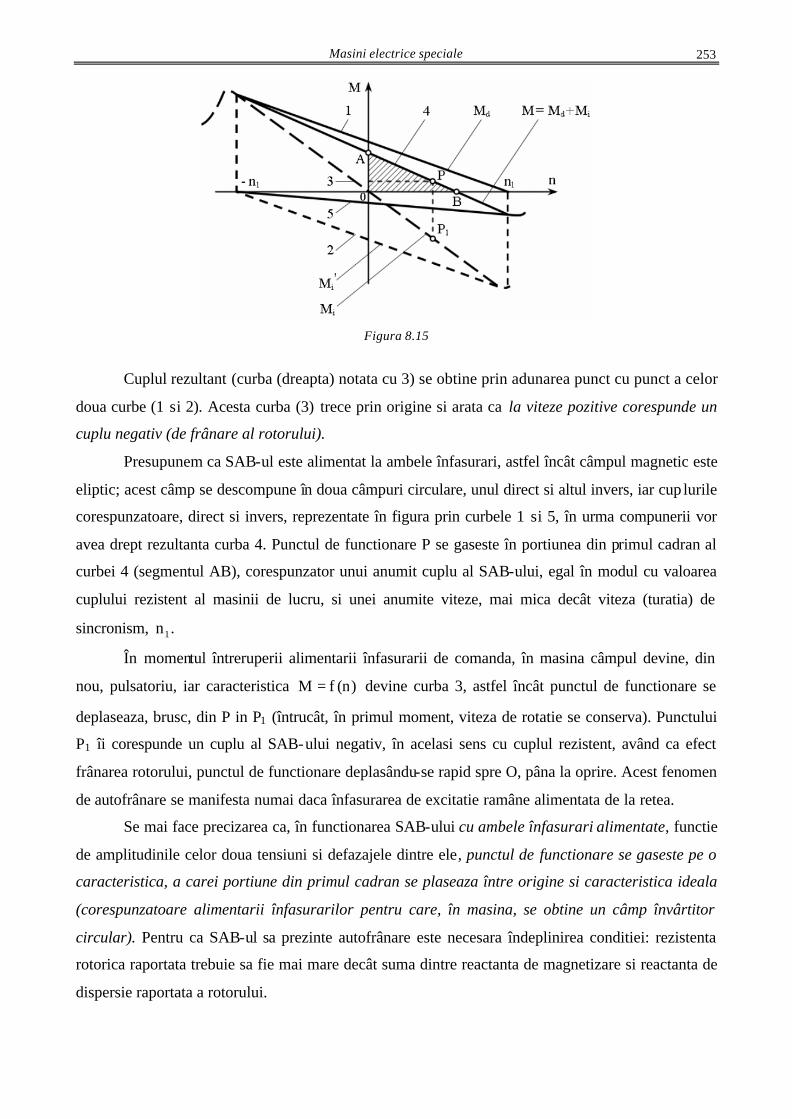
Masini electrice speciale
253
Figura 8.15
Cuplul rezultant (curba (dreapta) notata cu 3) se obtine prin adunarea punct cu punct a celor
doua curbe (1 si 2). Acesta curba (3) trece prin origine si arata ca la viteze pozitive corespunde un
cuplu negativ (de frânare al rotorului).
Presupunem ca SAB-ul este alimentat la ambele înfasurari, astfel încât câmpul magnetic este
eliptic; acest câmp se descompune în doua câmpuri circulare, unul direct si altul invers, iar cup lurile
corespunzatoare, direct si invers, reprezentate în figura prin curbele 1 si 5, în urma compunerii vor
avea drept rezultanta curba 4. Punctul de functionare P se gaseste în portiunea din primul cadran al
curbei 4 (segmentul AB), corespunzator unui anumit cuplu al SAB-ului, egal în modul cu valoarea
cuplului rezistent al masinii de lucru, si unei anumite viteze, mai mica decât viteza (turatia) de
sincronism, 1n .
În momentul întreruperii alimentarii înfasurarii de comanda, în masina câmpul devine, din
nou, pulsatoriu, iar caracteristica )n(fM = devine curba 3, astfel încât punctul de functionare se
deplaseaza, brusc, din P in P1 (întrucât, în primul moment, viteza de rotatie se conserva). Punctului
P1 îi corespunde un cuplu al SAB-ului negativ, în acelasi sens cu cuplul rezistent, având ca efect
frânarea rotorului, punctul de functionare deplasându-se rapid spre O, pâna la oprire. Acest fenomen
de autofrânare se manifesta numai daca înfasurarea de excitatie ramâne alimentata de la retea.
Se mai face precizarea ca, în functionarea SAB-ului cu ambele înfasurari alimentate, functie
de amplitudinile celor doua tensiuni si defazajele dintre ele, punctul de functionare se gaseste pe o
caracteristica, a carei portiune din primul cadran se plaseaza între origine si caracteristica ideala
(corespunzatoare alimentarii înfasurarilor pentru care, în masina, se obtine un câmp învârtitor
circular). Pentru ca SAB-ul sa prezinte autofrânare este necesara îndeplinirea conditiei: rezistenta
rotorica raportata trebuie sa fie mai mare decât suma dintre reactanta de magnetizare si reactanta de
dispersie raportata a rotorului.

Masini electrice speciale 254
Comanda servomotoarelor asincrone bifazate
Cuplul electromagnetic, respectiv viteza de rotatie a SAB-ului, se modifica prin:
• comanda amplitudinii tensiunii aplicate înfasurarii de comanda, .varUc = ;
• comanda fazei tensiunii cU , .var=Ψ ;
• comanda mixta, atât a amplitudinii cU cât si a fazei Ψ .
Se vor analiza, doar, primele doua tipuri de comenzi, rezultatele obtinute putând
furniza informatii privitoare si la comanda mixta.
Expresia tensiunii aplicate înfasurarii de excitatie este:
0jee eUU ⋅= . (8.24)
Tensiunea aplicata înfasurarii de comanda se scrie:
,eUU jec
Ψ−⋅⋅λ= (8.25)
unde e
c
UU
=λ este coeficientul de semnal (raportul dintre valorile efective ale tensiunii de comanda
si de excitatie), iar Ψ este defazajul dintre aceste tensiuni. În aceste conditii, conform [7], cuplul
mediu devine:
],eUjeUjRe[R
p)1(
RUp
M j2e
j2e
s
2
s
ee
ΨΨ− ⋅⋅λ⋅−⋅⋅λ⋅⋅⋅ω
+λ+⋅⋅ω⋅ν⋅
−= (8.26)
în care, suplimentar, fata de marimile definite mai sus, mai intervin:
p - numarul de perechi de poli;
s
r
ωω
=ν - viteza relativa,
rω si sω fiind vitezele arborelui rotoric, respectiv, a câmpului învârtitor statoric;
R - rezistenta înfasurarii rotorice.
Daca se tine seama de formulele lui Euler, Ψ⋅⋅−=− ΨΨ− sinj2ee jj , rezulta expresia
cuplului mediu:
).1(R
Upsin
RUp2
M 2
s
2e
s
2e
e λ+⋅ω
⋅⋅ν−Ψ⋅
⋅ω⋅λ⋅⋅
= (8.27)
Cuplul de pornire va corespunde situatiei 0=ν , adica:
.sinR
Up2M
s
2e
ep Ψ⋅⋅ω⋅λ⋅⋅
= (8.28)
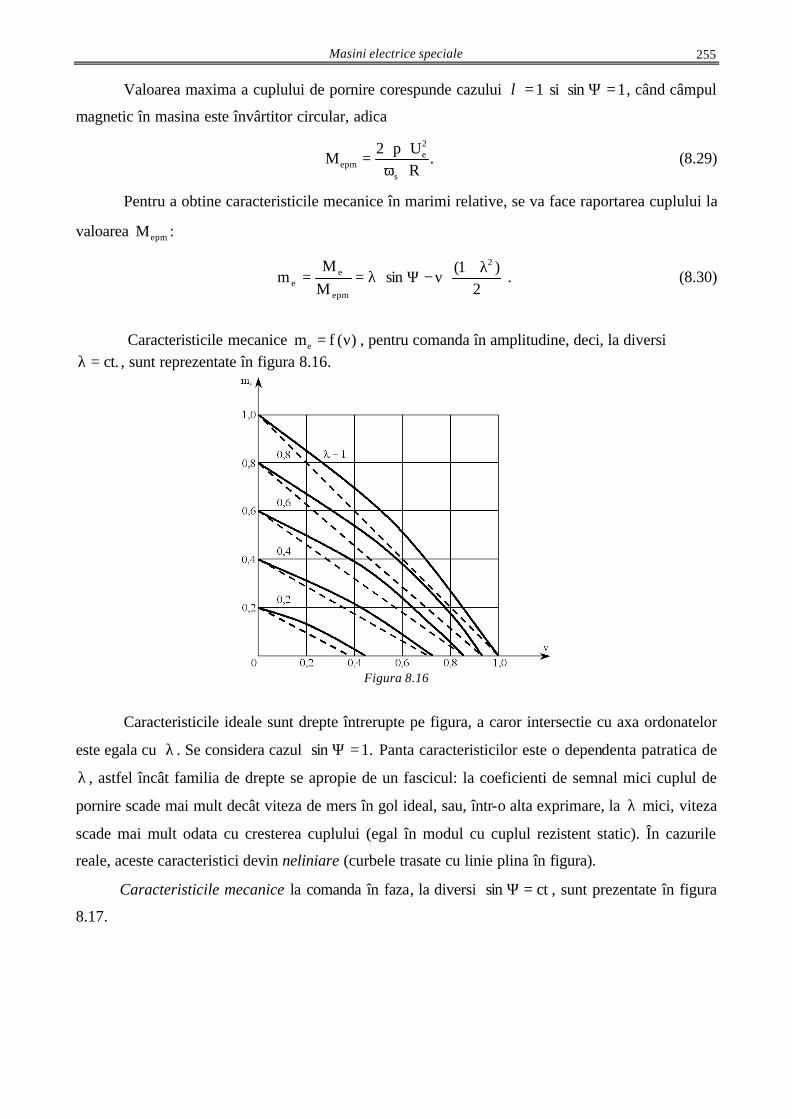
Masini electrice speciale
255
Valoarea maxima a cuplului de pornire corespunde cazului 1=λ si 1sin =Ψ , când câmpul
magnetic în masina este învârtitor circular, adica
.RUp2
Ms
2e
epm ⋅ω⋅⋅
= (8.29)
Pentru a obtine caracteristicile mecanice în marimi relative, se va face raportarea cuplului la
valoarea epmM :
2)1(
sinMM
m2
epm
ee
λ+⋅ν−Ψ⋅λ== . (8.30)
Caracteristicile mecanice )(fme ν= , pentru comanda în amplitudine, deci, la diversi .ct=λ , sunt reprezentate în figura 8.16.
Figura 8.16
Caracteristicile ideale sunt drepte întrerupte pe figura, a caror intersectie cu axa ordonatelor
este egala cu λ . Se considera cazul .1sin =Ψ Panta caracteristicilor este o dependenta patratica de
λ , astfel încât familia de drepte se apropie de un fascicul: la coeficienti de semnal mici cuplul de
pornire scade mai mult decât viteza de mers în gol ideal, sau, într-o alta exprimare, la λ mici, viteza
scade mai mult odata cu cresterea cuplului (egal în modul cu cuplul rezistent static). În cazurile
reale, aceste caracteristici devin neliniare (curbele trasate cu linie plina în figura).
Caracteristicile mecanice la comanda în faza, la diversi ctsin =Ψ , sunt prezentate în figura
8.17.
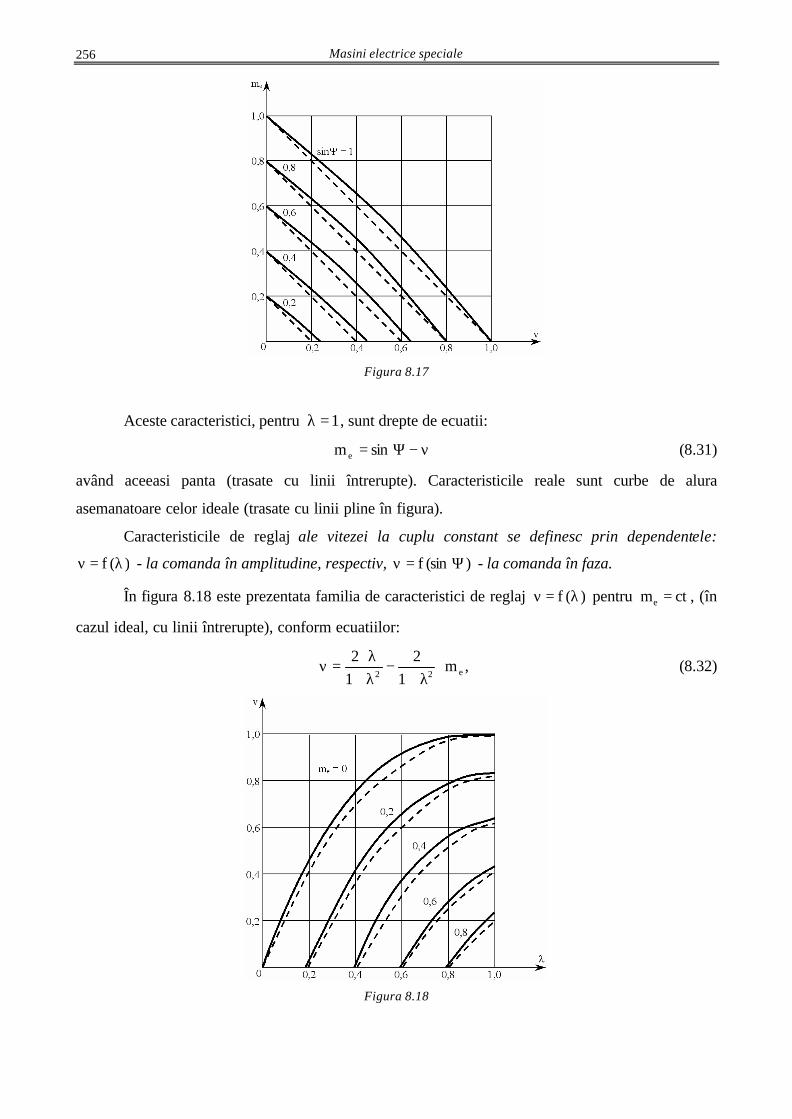
Masini electrice speciale 256
Figura 8.17
Aceste caracteristici, pentru 1=λ , sunt drepte de ecuatii:
ν−Ψ= sinm e (8.31)
având aceeasi panta (trasate cu linii întrerupte). Caracteristicile reale sunt curbe de alura
asemanatoare celor ideale (trasate cu linii pline în figura).
Caracteristicile de reglaj ale vitezei la cuplu constant se definesc prin dependentele:
)(f λ=ν - la comanda în amplitudine, respectiv, )(sinf Ψ=ν - la comanda în faza.
În figura 8.18 este prezentata familia de caracteristici de reglaj )(f λ=ν pentru ctme = , (în
cazul ideal, cu linii întrerupte), conform ecuatiilor:
,m1
212
e22⋅
λ+−
λ+λ⋅
=ν (8.32)
Figura 8.18

Masini electrice speciale
257
adica în cazul .1sin =Ψ Aceste dependente sunt neliniare, în sensul ca la tensiuni de comanda mici,
viteza motorului creste mai mult, stabilizându-se, oarecum, la comenzi ridicate (în figura,
caracteristicile reale sunt prezentate, tot, cu linie plina).
În figura 8.19 este trasata familia de caracteristici de reglaj la comanda în faza,
),(sinf Ψ=ν la ..ctm e = Caracteristicile ideale (cu linie întrerupta) sunt drepte, iar în cazul real
(linie plina) prezinta o usoara neliniaritate. S-a considerat 1=ν .
Figura 8.19
Din cele expuse mai sus, rezulta urmatoarele:
• la comanda în amplitudine caracteristicile mecanice sunt, aproximativ, drepte de pante
diferite, dependente de patratul coeficientului de semnal, mai dezavantajoase, din acest
punct de vedere, decât cele ale servomotoarelor de curent continuu;
• la comanda în faza se obtin caracteristici mecanice de panta constanta, asemanatoare cu
cele ale servomotoarelor de curent continuu; de aceea, în sistemele automate liniare, se
prefera acest mod de comanda. În schimb, realizarea practica este mai costisitoare,
implicând utilizarea unui regulator de faza.
Functia de transfer a servomotorului asincron bifazat
Functia de transfer a SAB-ului se poate deduce în conditiile în care se presupune influenta
regimului tranzitoriu electromagnetic neglijabila în raport cu regimul tranzitoriu electromecanic. Se
considera sarcina caracterizata printr-un coeficient de frecare vâscoasa SF , iar momentul de inertie
al sarcinii SJ se adauga celui propiu MJ , astfel încât momentul de inertie rezutant este MS JJJ += .
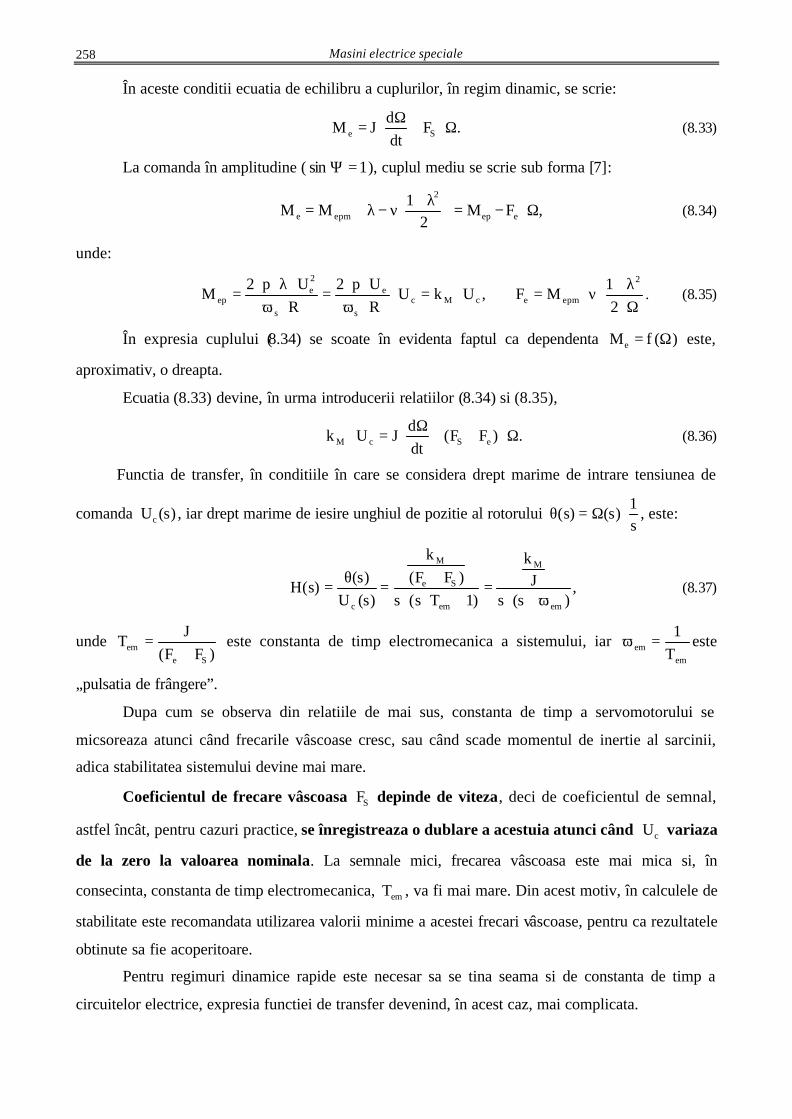
Masini electrice speciale 258
În aceste conditii ecuatia de echilibru a cuplurilor, în regim dinamic, se scrie:
.Fdt
dJM Se Ω⋅+
Ω⋅= (8.33)
La comanda în amplitudine ( 1sin =Ψ ), cuplul mediu se scrie sub forma [7]:
,FM2
1MM eep
2
epme Ω⋅−=
λ+⋅ν−λ⋅= (8.34)
unde:
,UkURUp2
RUp2
M cMcs
e
s
2e
ep ⋅=⋅⋅ω⋅⋅
=⋅ω⋅λ⋅⋅
= Ω⋅λ+
⋅ν⋅=2
1MF
2
epme . (8.35)
În expresia cuplului (8.34) se scoate în evidenta faptul ca dependenta )(fMe Ω= este,
aproximativ, o dreapta.
Ecuatia (8.33) devine, în urma introducerii relatiilor (8.34) si (8.35),
.)FF(dtd
JUk eScM Ω⋅++Ω
⋅=⋅ (8.36)
Functia de transfer, în conditiile în care se considera drept marime de intrare tensiunea de
comanda )s(Uc , iar drept marime de iesire unghiul de pozitie al rotorului s1
)s()s( ⋅Ω=θ , este:
,)s(s
Jk
)1Ts(s)FF(
k
)s(U)s(
)s(Hem
M
em
Se
M
c ω+⋅=
+⋅⋅+
=θ
= (8.37)
unde )FF(
JT
Seem +
= este constanta de timp electromecanica a sistemului, iar em
em T1
=ω este
„pulsatia de frângere”.
Dupa cum se observa din relatiile de mai sus, constanta de timp a servomotorului se
micsoreaza atunci când frecarile vâscoase cresc, sau când scade momentul de inertie al sarcinii,
adica stabilitatea sistemului devine mai mare.
Coeficientul de frecare vâscoasa SF depinde de viteza, deci de coeficientul de semnal,
astfel încât, pentru cazuri practice, se înregistreaza o dublare a acestuia atunci când cU variaza
de la zero la valoarea nominala. La semnale mici, frecarea vâscoasa este mai mica si, în
consecinta, constanta de timp electromecanica, emT , va fi mai mare. Din acest motiv, în calculele de
stabilitate este recomandata utilizarea valorii minime a acestei frecari vâscoase, pentru ca rezultatele
obtinute sa fie acoperitoare.
Pentru regimuri dinamice rapide este necesar sa se tina seama si de constanta de timp a
circuitelor electrice, expresia functiei de transfer devenind, în acest caz, mai complicata.
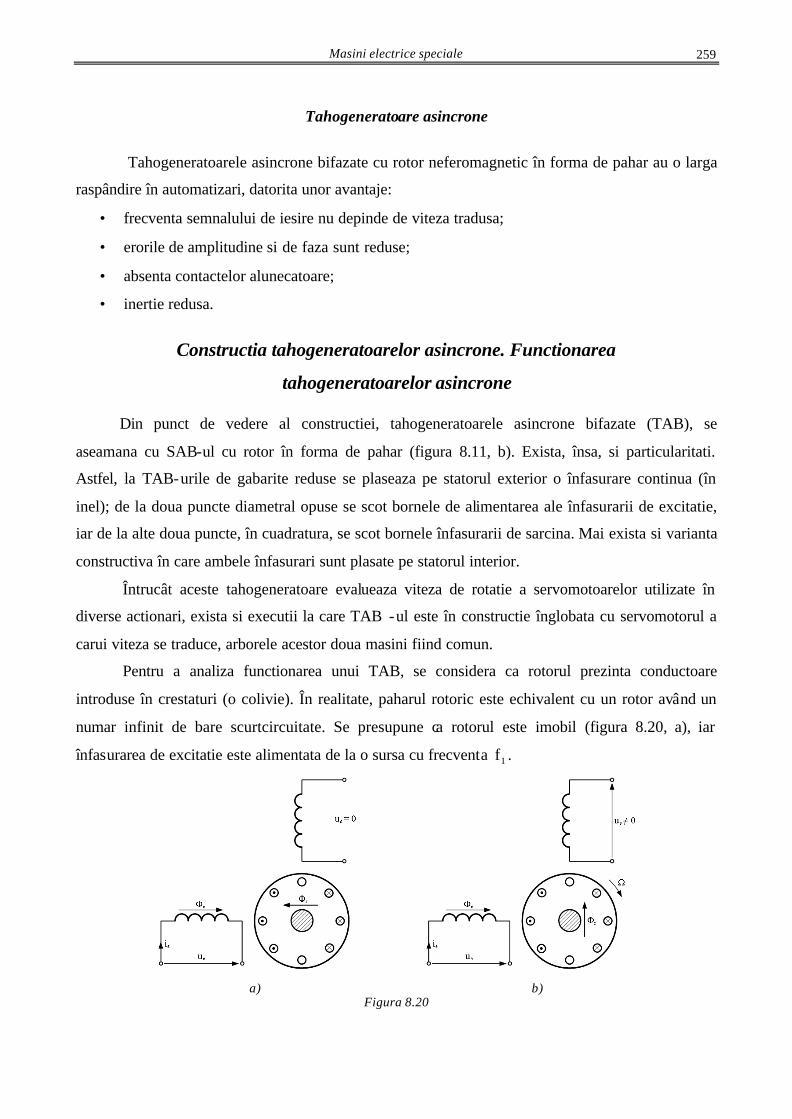
Masini electrice speciale
259
Tahogeneratoare asincrone
Tahogeneratoarele asincrone bifazate cu rotor neferomagnetic în forma de pahar au o larga
raspândire în automatizari, datorita unor avantaje:
• frecventa semnalului de iesire nu depinde de viteza tradusa;
• erorile de amplitudine si de faza sunt reduse;
• absenta contactelor alunecatoare;
• inertie redusa.
Constructia tahogeneratoarelor asincrone. Functionarea
tahogeneratoarelor asincrone
Din punct de vedere al constructiei, tahogeneratoarele asincrone bifazate (TAB), se
aseamana cu SAB-ul cu rotor în forma de pahar (figura 8.11, b). Exista, însa, si particularitati.
Astfel, la TAB-urile de gabarite reduse se plaseaza pe statorul exterior o înfasurare continua (în
inel); de la doua puncte diametral opuse se scot bornele de alimentarea ale înfasurarii de excitatie,
iar de la alte doua puncte, în cuadratura, se scot bornele înfasurarii de sarcina. Mai exista si varianta
constructiva în care ambele înfasurari sunt plasate pe statorul interior.
Întrucât aceste tahogeneratoare evalueaza viteza de rotatie a servomotoarelor utilizate în
diverse actionari, exista si executii la care TAB -ul este în constructie înglobata cu servomotorul a
carui viteza se traduce, arborele acestor doua masini fiind comun.
Pentru a analiza functionarea unui TAB, se considera ca rotorul prezinta conductoare
introduse în crestaturi (o colivie). În realitate, paharul rotoric este echivalent cu un rotor având un
numar infinit de bare scurtcircuitate. Se presupune ca rotorul este imobil (figura 8.20, a), iar
înfasurarea de excitatie este alimentata de la o sursa cu frecventa 1f .
a) b)
Figura 8.20
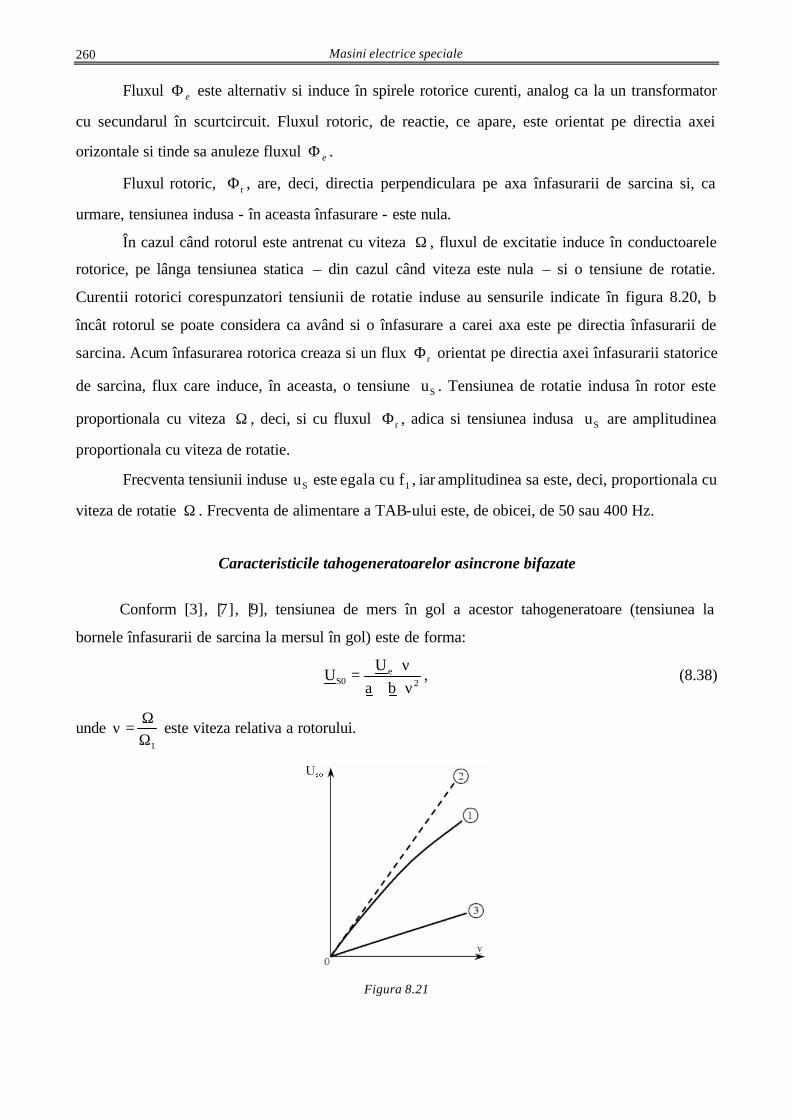
Masini electrice speciale 260
Fluxul eΦ este alternativ si induce în spirele rotorice curenti, analog ca la un transformator
cu secundarul în scurtcircuit. Fluxul rotoric, de reactie, ce apare, este orientat pe directia axei
orizontale si tinde sa anuleze fluxul eΦ .
Fluxul rotoric, rΦ , are, deci, directia perpendiculara pe axa înfasurarii de sarcina si, ca
urmare, tensiunea indusa - în aceasta înfasurare - este nula.
În cazul când rotorul este antrenat cu viteza Ω , fluxul de excitatie induce în conductoarele
rotorice, pe lânga tensiunea statica – din cazul când viteza este nula – si o tensiune de rotatie.
Curentii rotorici corespunzatori tensiunii de rotatie induse au sensurile indicate în figura 8.20, b
încât rotorul se poate considera ca având si o înfasurare a carei axa este pe directia înfasurarii de
sarcina. Acum înfasurarea rotorica creaza si un flux rΦ orientat pe directia axei înfasurarii statorice
de sarcina, flux care induce, în aceasta, o tensiune Su . Tensiunea de rotatie indusa în rotor este
proportionala cu viteza Ω , deci, si cu fluxul rΦ , adica si tensiunea indusa Su are amplitudinea
proportionala cu viteza de rotatie.
Frecventa tensiunii induse Su este egala cu 1f , iar amplitudinea sa este, deci, proportionala cu
viteza de rotatie Ω . Frecventa de alimentare a TAB-ului este, de obicei, de 50 sau 400 Hz.
Caracteristicile tahogeneratoarelor asincrone bifazate
Conform [3], [7], [9], tensiunea de mers în gol a acestor tahogeneratoare (tensiunea la
bornele înfasurarii de sarcina la mersul în gol) este de forma:
2e
0S baU
Uν⋅+ν⋅
= , (8.38)
unde 1Ω
Ω=ν este viteza relativa a rotorului.
Figura 8.21
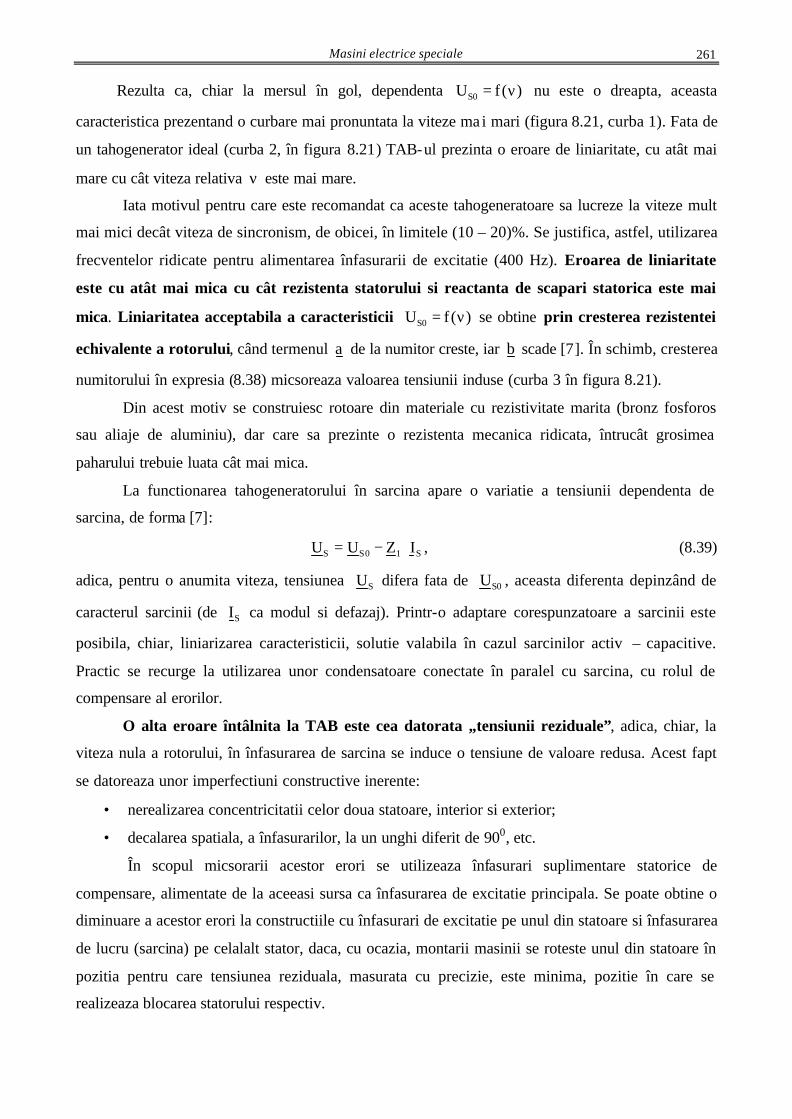
Masini electrice speciale
261
Rezulta ca, chiar la mersul în gol, dependenta )(fU 0S ν= nu este o dreapta, aceasta
caracteristica prezentand o curbare mai pronuntata la viteze ma i mari (figura 8.21, curba 1). Fata de
un tahogenerator ideal (curba 2, în figura 8.21) TAB-ul prezinta o eroare de liniaritate, cu atât mai
mare cu cât viteza relativa ν este mai mare.
Iata motivul pentru care este recomandat ca aceste tahogeneratoare sa lucreze la viteze mult
mai mici decât viteza de sincronism, de obicei, în limitele (10 – 20)%. Se justifica, astfel, utilizarea
frecventelor ridicate pentru alimentarea înfasurarii de excitatie (400 Hz). Eroarea de liniaritate
este cu atât mai mica cu cât rezistenta statorului si reactanta de scapari statorica este mai
mica. Liniaritatea acceptabila a caracteristicii )(fU 0S ν= se obtine prin cresterea rezistentei
echivalente a rotorului, când termenul a de la numitor creste, iar b scade [7]. În schimb, cresterea
numitorului în expresia (8.38) micsoreaza valoarea tensiunii induse (curba 3 în figura 8.21).
Din acest motiv se construiesc rotoare din materiale cu rezistivitate marita (bronz fosforos
sau aliaje de aluminiu), dar care sa prezinte o rezistenta mecanica ridicata, întrucât grosimea
paharului trebuie luata cât mai mica.
La functionarea tahogeneratorului în sarcina apare o variatie a tensiunii dependenta de
sarcina, de forma [7]:
S10SS IZUU ⋅−= , (8.39)
adica, pentru o anumita viteza, tensiunea SU difera fata de 0SU , aceasta diferenta depinzând de
caracterul sarcinii (de SI ca modul si defazaj). Printr-o adaptare corespunzatoare a sarcinii este
posibila, chiar, liniarizarea caracteristicii, solutie valabila în cazul sarcinilor activ – capacitive.
Practic se recurge la utilizarea unor condensatoare conectate în paralel cu sarcina, cu rolul de
compensare al erorilor.
O alta eroare întâlnita la TAB este cea datorata „tensiunii reziduale”, adica, chiar, la
viteza nula a rotorului, în înfasurarea de sarcina se induce o tensiune de valoare redusa. Acest fapt
se datoreaza unor imperfectiuni constructive inerente:
• nerealizarea concentricitatii celor doua statoare, interior si exterior;
• decalarea spatiala, a înfasurarilor, la un unghi diferit de 900, etc.
În scopul micsorarii acestor erori se utilizeaza înfasurari suplimentare statorice de
compensare, alimentate de la aceeasi sursa ca înfasurarea de excitatie principala. Se poate obtine o
diminuare a acestor erori la constructiile cu înfasurari de excitatie pe unul din statoare si înfasurarea
de lucru (sarcina) pe celalalt stator, daca, cu ocazia, montarii masinii se roteste unul din statoare în
pozitia pentru care tensiunea reziduala, masurata cu precizie, este minima, pozitie în care se
realizeaza blocarea statorului respectiv.
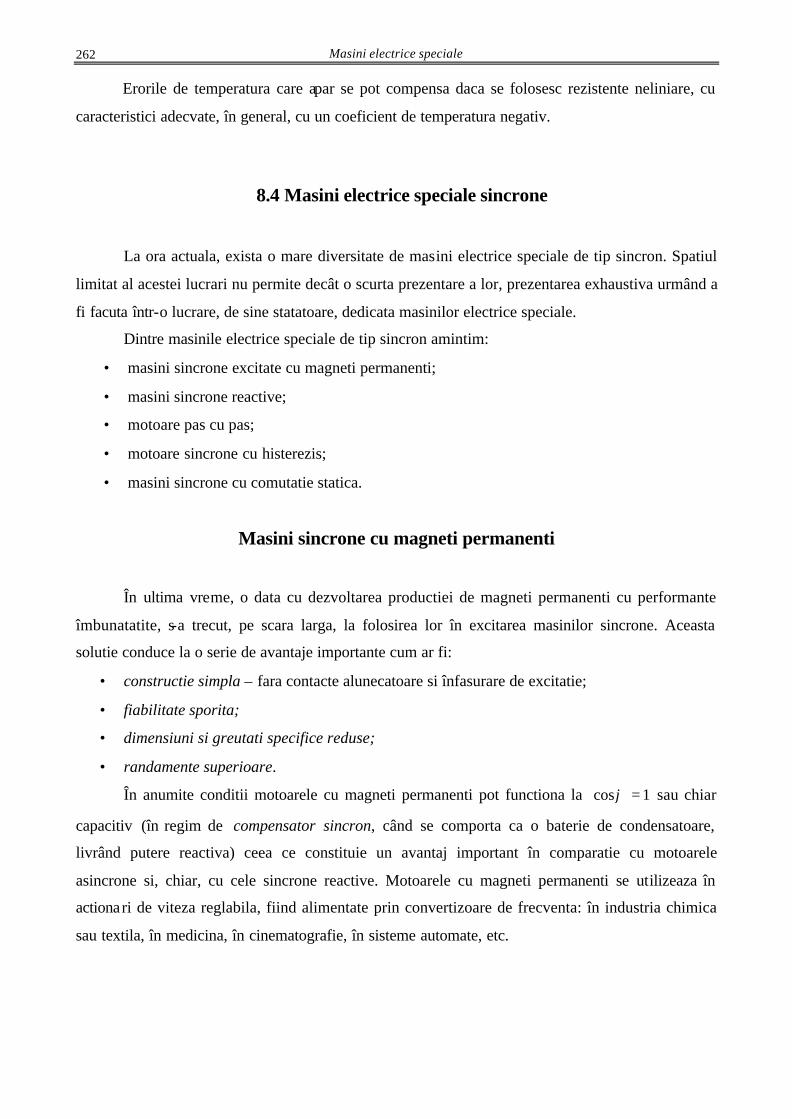
Masini electrice speciale 262
Erorile de temperatura care apar se pot compensa daca se folosesc rezistente neliniare, cu
caracteristici adecvate, în general, cu un coeficient de temperatura negativ.
8.4 Masini electrice speciale sincrone
La ora actuala, exista o mare diversitate de masini electrice speciale de tip sincron. Spatiul
limitat al acestei lucrari nu permite decât o scurta prezentare a lor, prezentarea exhaustiva urmând a
fi facuta într-o lucrare, de sine statatoare, dedicata masinilor electrice speciale.
Dintre masinile electrice speciale de tip sincron amintim:
• masini sincrone excitate cu magneti permanenti;
• masini sincrone reactive;
• motoare pas cu pas;
• motoare sincrone cu histerezis;
• masini sincrone cu comutatie statica.
Masini sincrone cu magneti permanenti
În ultima vreme, o data cu dezvoltarea productiei de magneti permanenti cu performante
îmbunatatite, s-a trecut, pe scara larga, la folosirea lor în excitarea masinilor sincrone. Aceasta
solutie conduce la o serie de avantaje importante cum ar fi:
• constructie simpla – fara contacte alunecatoare si înfasurare de excitatie;
• fiabilitate sporita;
• dimensiuni si greutati specifice reduse;
• randamente superioare.
În anumite conditii motoarele cu magneti permanenti pot functiona la 1cos =ϕ sau chiar
capacitiv (în regim de compensator sincron, când se comporta ca o baterie de condensatoare,
livrând putere reactiva) ceea ce constituie un avantaj important în comparatie cu motoarele
asincrone si, chiar, cu cele sincrone reactive. Motoarele cu magneti permanenti se utilizeaza în
actionari de viteza reglabila, fiind alimentate prin convertizoare de frecventa: în industria chimica
sau textila, în medicina, în cinematografie, în sisteme automate, etc.
Masini electrice speciale
263
Constructia masinilor sincrone cu magneti permanenti
Statorul masinilor sincrone cu magneti permanenti este similar cu al masinilor asincrone,
posedând o înfasurare mono, bi, sau trifazata. Aceasta înfasurare este introdusa în crestaturi sau
poate fi concentrata în jurul unor poli aparenti, mai ales la generatoarele sincrone.
Rotorul prezinta o mare diversitate constructiva, din care se pot distinge variantele:
• în constructie normala (cu poli aparenti si colivie de pornire) – figura 8.22;
• cu poli gheara – figura 8.23.
Figura 8.22 Figura 8.23
În figura 8.22, roata polara – magnet permanent plasata pe un butuc neferomagnetic poarta
la exterior o coroana lamelara, în care sunt turnate bare din aluminiu, cupru sau aliaje ale acestuia,
bare ce sunt scurtcircuitate prin inele frontale.
În figura 8.23, magnetul permanent are o forma de coroana cilindrica, magnetizata axial.
Cele doua saibe feromagnetice prezinta gheare care constituie polii masinii. Câmpul magnetic iese
dintr-o gheara N, traverseaza întrefierul, o portiune a statorului, alt întrefier si se închide prin gheara
vecina S.
Prezenta magnetului axial exclude posibilitatea demagnetizarii sale de catre câmpul de
reactie al statorului. Ghearele masive permit pornirea acestor motoare, datorita curentilor turbionari
indusi, întocmai ca la motoarele asincrone cu rotor masiv.
Constructia în forma de gheare este adoptata si la unele alternatoare de autovehicule, cu
diferenta ca în locul magnetului permanent se foloseste o înfasurare concentrata, cu spire realizate
concentric cu butucul, înfasurarea respectiva fiind alimentata prin intermediul unui sistem de inele
si perii de la un acumulator. Curentul de excitatie este reglat, mentinut între anumite limite, functie
de turatie si de sarcina, de catre un regula tor automat.

Masini electrice speciale 264
Caracteristicile masinilor sincrone cu magneti permanenti
Spre deosebire de masinile sincrone clasice, care sunt utilizate, prin excelenta, în regim de
generator, masinile sincrone excitate cu magneti permanenti sunt utilizate, cu preponderenta, ca
motoare. Cea mai importanta caracteristica a acestor masini este reprezentata de caracteristica
unghiulara, )(fM θ= . La fel ca la masinile sincrone clasice (pentru simplitate, în analiza,
consideram cazul masinilor sincrone cu poli înecati), daca 00 ≤θ ( 0θ - unghiul initial de pozitie al
rotorului, legat de unghiul intern al masinii, δ , conform [7], prin relatia δ−π
−=θ20 ), si neglijând
rezistenta înfasurarii statorice ( 0R = ), pentru cuplul electromagnetic dezvoltat de motor
(considerat trifazat) se obtine [9]:
0s
0fe sin
XEU3
M θ⋅⋅ω⋅⋅
= , (8.40)
unde:
U − este tensiunea pe faza în stator;
0fE − este tensiunea indusa prin miscare de catre magnetul permanent;
ω − este pulsatia curentilor statorici;
sX − reactanta sincrona.
Pe baza relatiei (8.40) se pot trasa caracteristicile unghiulare ale motorului. În realitate,
valoarea maxima a cuplului sincron (exprimat de relatia (8.40)) depinde, într-o masura importanta,
de valoarea rezistentei statorice. Notând cu:
max
e
MM
m = , s
2N
max XU3
M⋅ω⋅
= (obtinut pentru 0=δ si N0f UE = ) si sX
Rb = , (8.41)
considerând expresia exacta a cuplului electromagnetic [9] (când nu se neglijeaza R ),
22
s
20f0s00f
e RXER)sinXcosR(EU3
M+
⋅−θ⋅−θ⋅⋅⋅⋅
ω= , (8.42)
obtinem, pentru cuplul specific:
2
00
b1
bsincosbm
+
−θ+θ⋅= . (8.43)
Valoarea maxima a cuplului se obtine pentru 0ctgb θ= , si are expresia:
2
2
maxb1
b1
b1
m+
+−
= . (8.44)
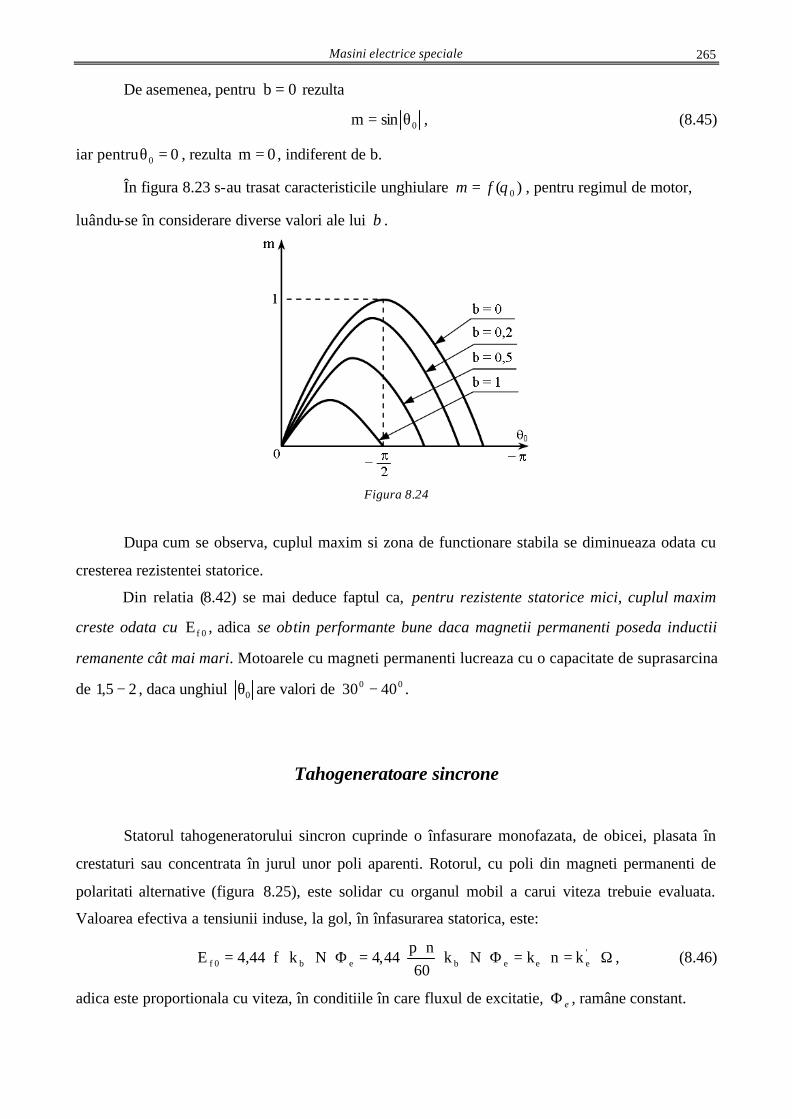
Masini electrice speciale
265
De asemenea, pentru 0b = rezulta
0sinm θ= , (8.45)
iar pentru 00 =θ , rezulta 0m = , indiferent de b.
În figura 8.23 s-au trasat caracteristicile unghiulare )( 0θfm = , pentru regimul de motor,
luându-se în considerare diverse valori ale lui b .
Figura 8.24
Dupa cum se observa, cuplul maxim si zona de functionare stabila se diminueaza odata cu
cresterea rezistentei statorice.
Din relatia (8.42) se mai deduce faptul ca, pentru rezistente statorice mici, cuplul maxim
creste odata cu 0fE , adica se obtin performante bune daca magnetii permanenti poseda inductii
remanente cât mai mari. Motoarele cu magneti permanenti lucreaza cu o capacitate de suprasarcina
de 25,1 − , daca unghiul 0θ are valori de 00 4030 − .
Tahogeneratoare sincrone
Statorul tahogeneratorului sincron cuprinde o înfasurare monofazata, de obicei, plasata în
crestaturi sau concentrata în jurul unor poli aparenti. Rotorul, cu poli din magneti permanenti de
polaritati alternative (figura 8.25), este solidar cu organul mobil a carui viteza trebuie evaluata.
Valoarea efectiva a tensiunii induse, la gol, în înfasurarea statorica, este:
Ω⋅=⋅=Φ⋅⋅⋅⋅
⋅=Φ⋅⋅⋅⋅= 'eeebeb0f knkNk
60np
44,4Nkf44,4E , (8.46)
adica este proportionala cu viteza, în conditiile în care fluxul de excitatie, eΦ , ramâne constant.
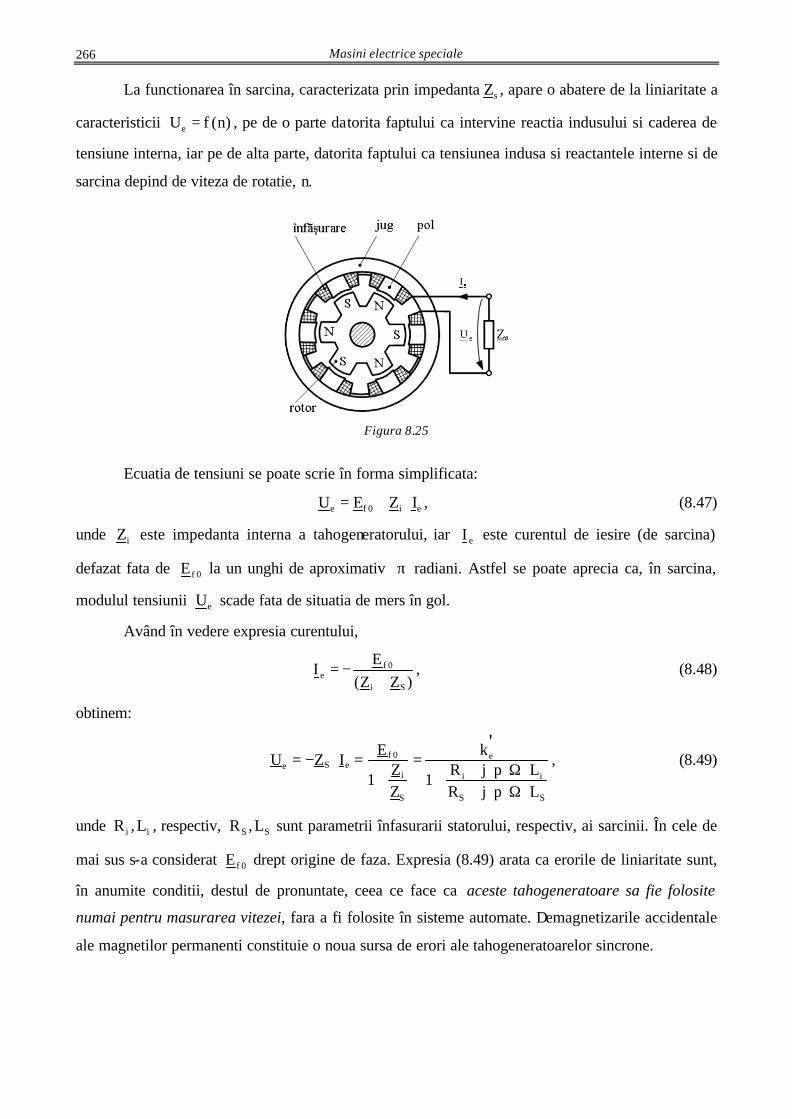
Masini electrice speciale 266
La functionarea în sarcina, caracterizata prin impedanta sZ , apare o abatere de la liniaritate a
caracteristicii )n(fUe = , pe de o parte datorita faptului ca intervine reactia indusului si caderea de
tensiune interna, iar pe de alta parte, datorita faptului ca tensiunea indusa si reactantele interne si de
sarcina depind de viteza de rotatie, n.
Figura 8.25
Ecuatia de tensiuni se poate scrie în forma simplificata:
ei0fe IZEU ⋅+= , (8.47)
unde iZ este impedanta interna a tahogeneratorului, iar eI este curentul de iesire (de sarcina)
defazat fata de 0fE la un unghi de aproximativ π radiani. Astfel se poate aprecia ca, în sarcina,
modulul tensiunii eU scade fata de situatia de mers în gol.
Având în vedere expresia curentului,
)ZZ(
EI
Si
0fe +
−= , (8.48)
obtinem:
SS
ii
e
S
i
0feSe
LpjRLpjR
1
k
ZZ
1
EIZU
'
⋅Ω⋅⋅+⋅Ω⋅⋅+
+=
+=⋅−= , (8.49)
unde ii L,R , respectiv, SS L,R sunt parametrii înfasurarii statorului, respectiv, ai sarcinii. În cele de
mai sus s-a considerat 0fE drept origine de faza. Expresia (8.49) arata ca erorile de liniaritate sunt,
în anumite conditii, destul de pronuntate, ceea ce face ca aceste tahogeneratoare sa fie folosite
numai pentru masurarea vitezei, fara a fi folosite în sisteme automate. Demagnetizarile accidentale
ale magnetilor permanenti constituie o noua sursa de erori ale tahogeneratoarelor sincrone.
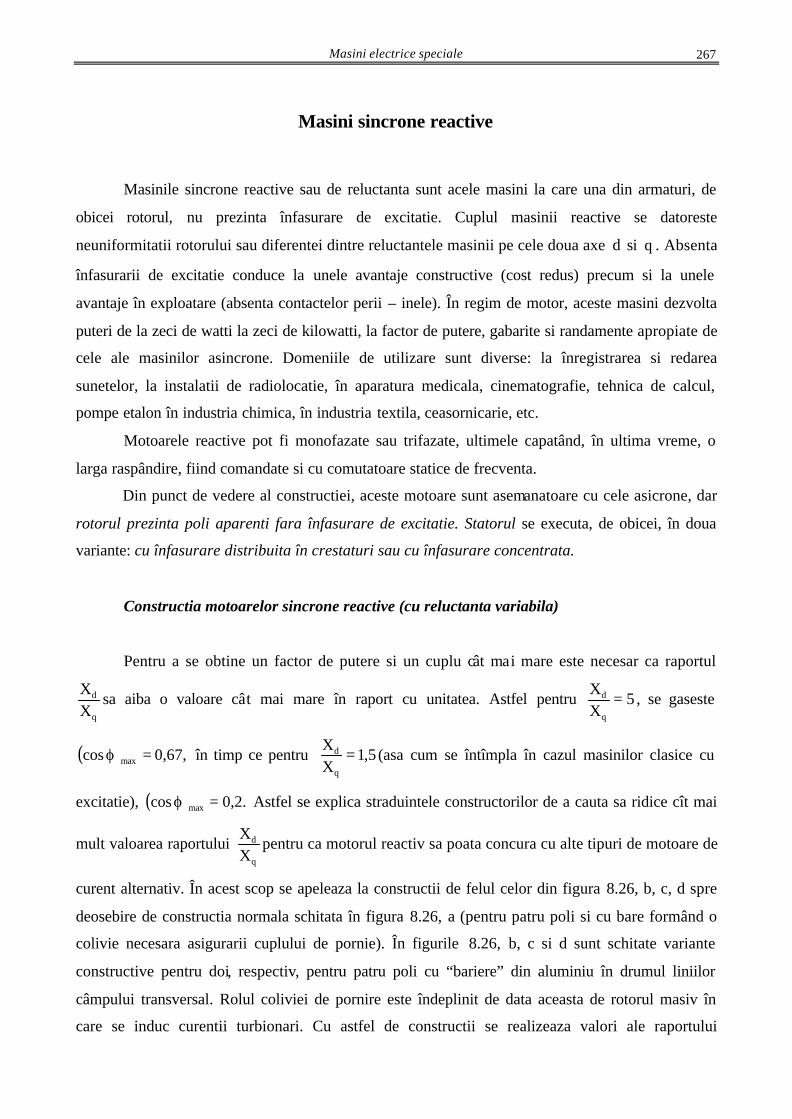
Masini electrice speciale
267
Masini sincrone reactive
Masinile sincrone reactive sau de reluctanta sunt acele masini la care una din armaturi, de
obicei rotorul, nu prezinta înfasurare de excitatie. Cuplul masinii reactive se datoreste
neuniformitatii rotorului sau diferentei dintre reluctantele masinii pe cele doua axe d si q . Absenta
înfasurarii de excitatie conduce la unele avantaje constructive (cost redus) precum si la unele
avantaje în exploatare (absenta contactelor perii – inele). În regim de motor, aceste masini dezvolta
puteri de la zeci de watti la zeci de kilowatti, la factor de putere, gabarite si randamente apropiate de
cele ale masinilor asincrone. Domeniile de utilizare sunt diverse: la înregistrarea si redarea
sunetelor, la instalatii de radiolocatie, în aparatura medicala, cinematografie, tehnica de calcul,
pompe etalon în industria chimica, în industria textila, ceasornicarie, etc.
Motoarele reactive pot fi monofazate sau trifazate, ultimele capatând, în ultima vreme, o
larga raspândire, fiind comandate si cu comutatoare statice de frecventa.
Din punct de vedere al constructiei, aceste motoare sunt asemanatoare cu cele asicrone, dar
rotorul prezinta poli aparenti fara înfasurare de excitatie. Statorul se executa, de obicei, în doua
variante: cu înfasurare distribuita în crestaturi sau cu înfasurare concentrata.
Constructia motoarelor sincrone reactive (cu reluctanta variabila)
Pentru a se obtine un factor de putere si un cuplu cât mai mare este necesar ca raportul
q
d
XX
sa aiba o valoare cât mai mare în raport cu unitatea. Astfel pentru 5XX
q
d = , se gaseste
( ) ,67,0cos max =ϕ în timp ce pentru 5,1XX
q
d = (asa cum se întîmpla în cazul masinilor clasice cu
excitatie), ( ) .2,0cos max =ϕ Astfel se explica straduintele constructorilor de a cauta sa ridice cît mai
mult valoarea raportului q
d
XX
pentru ca motorul reactiv sa poata concura cu alte tipuri de motoare de
curent alternativ. În acest scop se apeleaza la constructii de felul celor din figura 8.26, b, c, d spre
deosebire de constructia normala schitata în figura 8.26, a (pentru patru poli si cu bare formând o
colivie necesara asigurarii cuplului de pornie). În figurile 8.26, b, c si d sunt schitate variante
constructive pentru doi, respectiv, pentru patru poli cu “bariere” din aluminiu în drumul liniilor
câmpului transversal. Rolul coliviei de pornire este îndeplinit de data aceasta de rotorul masiv în
care se induc curentii turbionari. Cu astfel de constructii se realizeaza valori ale raportului
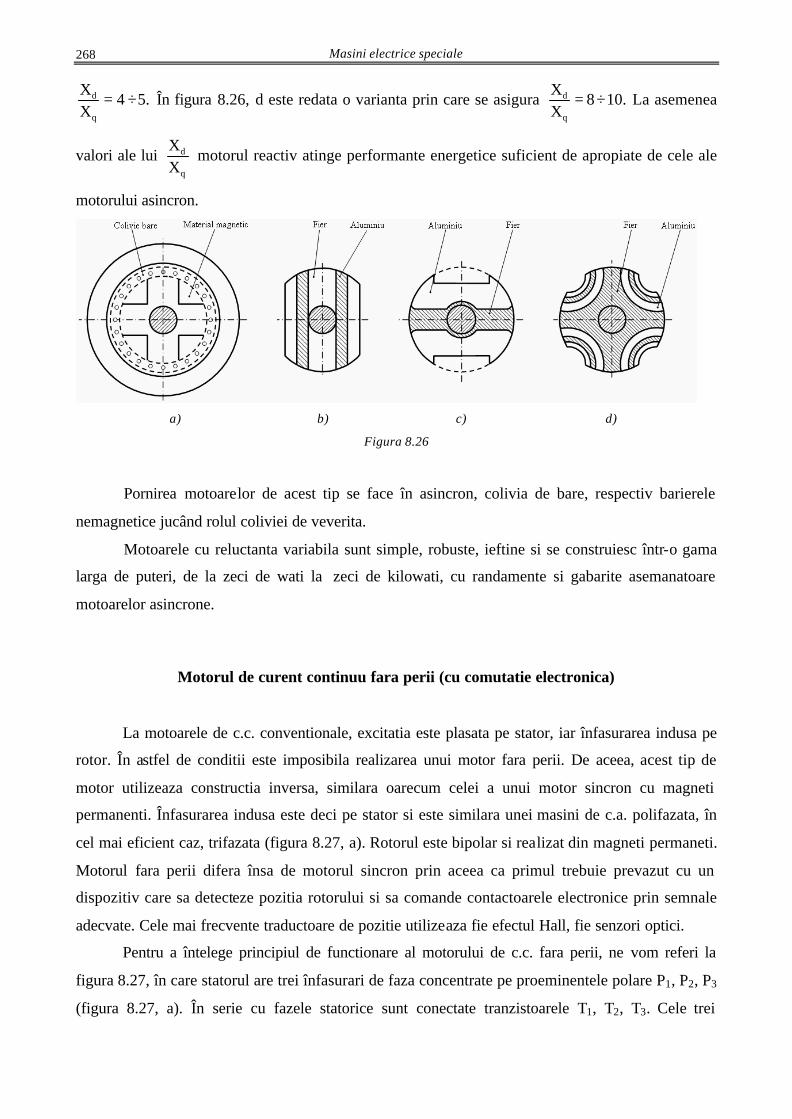
Masini electrice speciale 268
.54XX
q
d ÷= În figura 8.26, d este redata o varianta prin care se asigura .108XX
q
d ÷= La asemenea
valori ale lui q
d
XX
motorul reactiv atinge performante energetice suficient de apropiate de cele ale
motorului asincron.
a) b) c) d)
Figura 8.26
Pornirea motoarelor de acest tip se face în asincron, colivia de bare, respectiv barierele
nemagnetice jucând rolul coliviei de veverita.
Motoarele cu reluctanta variabila sunt simple, robuste, ieftine si se construiesc într-o gama
larga de puteri, de la zeci de wati la zeci de kilowati, cu randamente si gabarite asemanatoare
motoarelor asincrone.
Motorul de curent continuu fara perii (cu comutatie electronica)
La motoarele de c.c. conventionale, excitatia este plasata pe stator, iar înfasurarea indusa pe
rotor. În astfel de conditii este imposibila realizarea unui motor fara perii. De aceea, acest tip de
motor utilizeaza constructia inversa, similara oarecum celei a unui motor sincron cu magneti
permanenti. Înfasurarea indusa este deci pe stator si este similara unei masini de c.a. polifazata, în
cel mai eficient caz, trifazata (figura 8.27, a). Rotorul este bipolar si realizat din magneti permaneti.
Motorul fara perii difera însa de motorul sincron prin aceea ca primul trebuie prevazut cu un
dispozitiv care sa detecteze pozitia rotorului si sa comande contactoarele electronice prin semnale
adecvate. Cele mai frecvente traductoare de pozitie utilizeaza fie efectul Hall, fie senzori optici.
Pentru a întelege principiul de functionare al motorului de c.c. fara perii, ne vom referi la
figura 8.27, în care statorul are trei înfasurari de faza concentrate pe proeminentele polare P1, P2, P3
(figura 8.27, a). În serie cu fazele statorice sunt conectate tranzistoarele T1, T2, T3. Cele trei
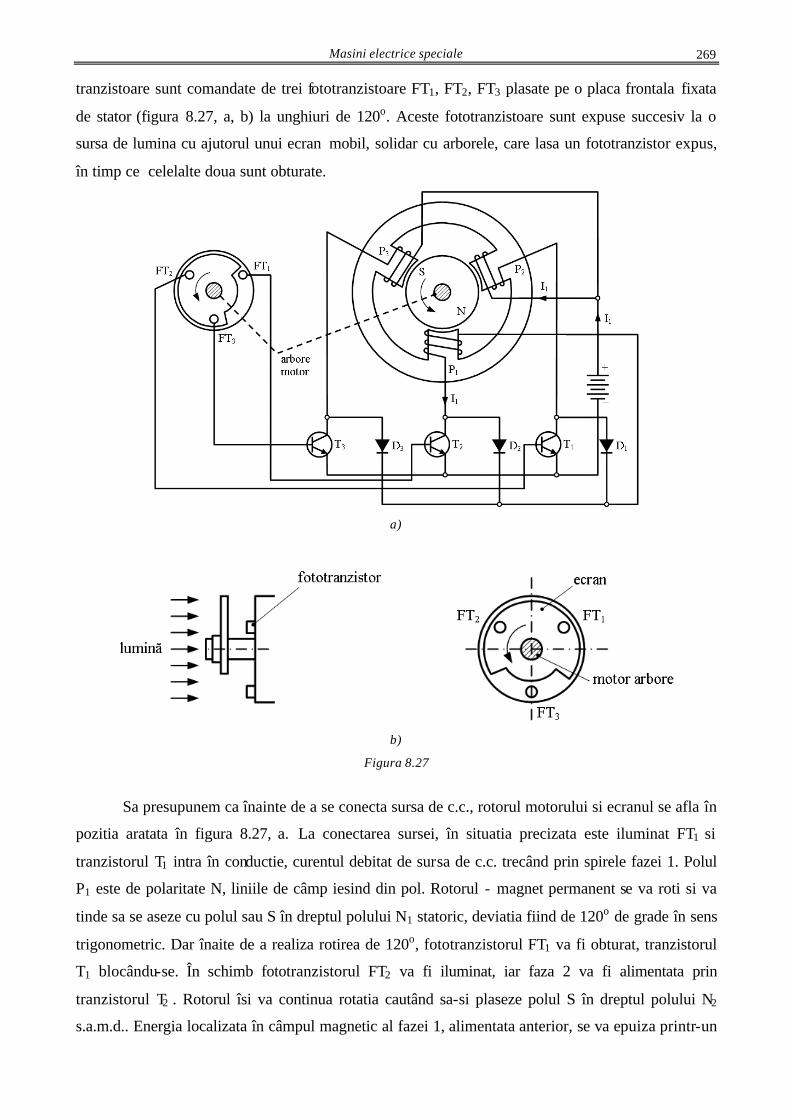
Masini electrice speciale
269
tranzistoare sunt comandate de trei fototranzistoare FT1, FT2, FT3 plasate pe o placa frontala fixata
de stator (figura 8.27, a, b) la unghiuri de 120o. Aceste fototranzistoare sunt expuse succesiv la o
sursa de lumina cu ajutorul unui ecran mobil, solidar cu arborele, care lasa un fototranzistor expus,
în timp ce celelalte doua sunt obturate.
a)
b)
Figura 8.27
Sa presupunem ca înainte de a se conecta sursa de c.c., rotorul motorului si ecranul se afla în
pozitia aratata în figura 8.27, a. La conectarea sursei, în situatia precizata este iluminat FT1 si
tranzistorul T1 intra în conductie, curentul debitat de sursa de c.c. trecând prin spirele fazei 1. Polul
P1 este de polaritate N, liniile de câmp iesind din pol. Rotorul - magnet permanent se va roti si va
tinde sa se aseze cu polul sau S în dreptul polului N1 statoric, deviatia fiind de 120o de grade în sens
trigonometric. Dar înaite de a realiza rotirea de 120o, fototranzistorul FT1 va fi obturat, tranzistorul
T1 blocându-se. În schimb fototranzistorul FT2 va fi iluminat, iar faza 2 va fi alimentata prin
tranzistorul T2 . Rotorul îsi va continua rotatia cautând sa-si plaseze polul S în dreptul polului N2
s.a.m.d.. Energia localizata în câmpul magnetic al fazei 1, alimentata anterior, se va epuiza printr-un
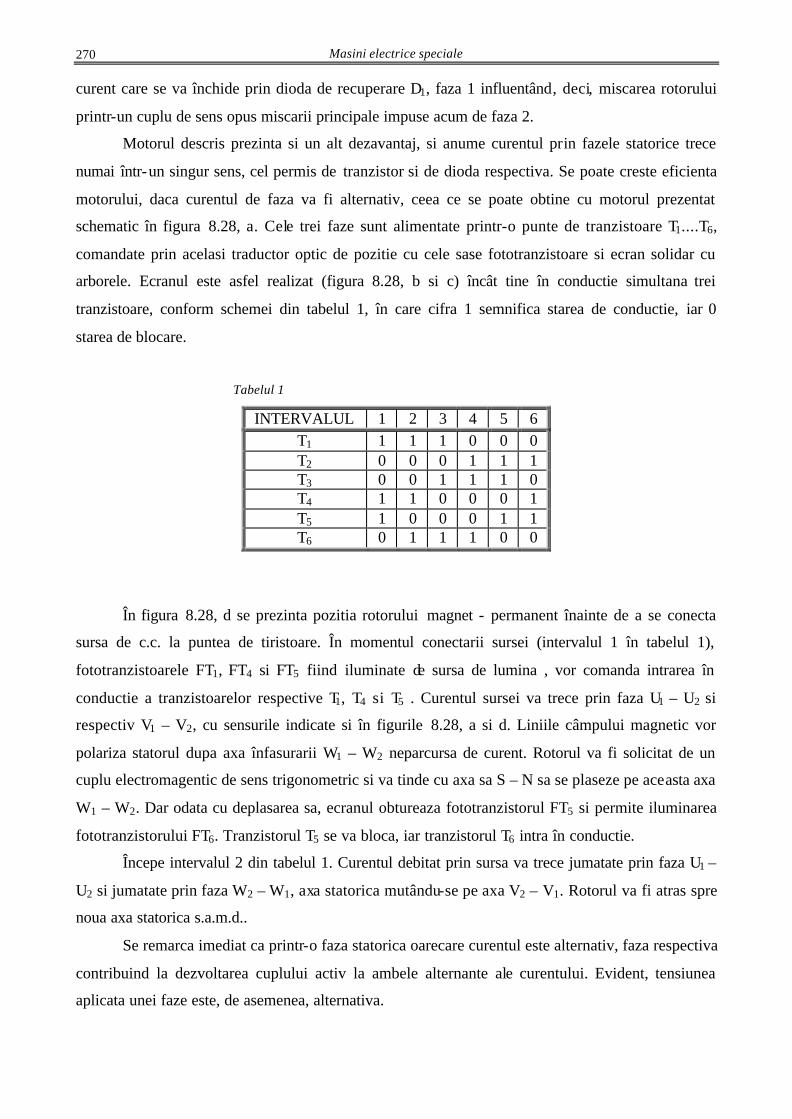
Masini electrice speciale 270
curent care se va închide prin dioda de recuperare D1, faza 1 influentând, deci, miscarea rotorului
printr-un cuplu de sens opus miscarii principale impuse acum de faza 2.
Motorul descris prezinta si un alt dezavantaj, si anume curentul prin fazele statorice trece
numai într-un singur sens, cel permis de tranzistor si de dioda respectiva. Se poate creste eficienta
motorului, daca curentul de faza va fi alternativ, ceea ce se poate obtine cu motorul prezentat
schematic în figura 8.28, a. Cele trei faze sunt alimentate printr-o punte de tranzistoare T1....T6,
comandate prin acelasi traductor optic de pozitie cu cele sase fototranzistoare si ecran solidar cu
arborele. Ecranul este asfel realizat (figura 8.28, b si c) încât tine în conductie simultana trei
tranzistoare, conform schemei din tabelul 1, în care cifra 1 semnifica starea de conductie, iar 0
starea de blocare.
Tabelul 1
INTERVALUL 1 2 3 4 5 6 T1 1 1 1 0 0 0 T2 0 0 0 1 1 1 T3 0 0 1 1 1 0 T4 1 1 0 0 0 1 T5 1 0 0 0 1 1 T6 0 1 1 1 0 0
În figura 8.28, d se prezinta pozitia rotorului magnet - permanent înainte de a se conecta
sursa de c.c. la puntea de tiristoare. În momentul conectarii sursei (intervalul 1 în tabelul 1),
fototranzistoarele FT1, FT4 si FT5 fiind iluminate de sursa de lumina , vor comanda intrarea în
conductie a tranzistoarelor respective T1, T4 si T5 . Curentul sursei va trece prin faza U1 – U2 si
respectiv V1 – V2, cu sensurile indicate si în figurile 8.28, a si d. Liniile câmpului magnetic vor
polariza statorul dupa axa înfasurarii W1 – W2 neparcursa de curent. Rotorul va fi solicitat de un
cuplu electromagentic de sens trigonometric si va tinde cu axa sa S – N sa se plaseze pe aceasta axa
W1 – W2. Dar odata cu deplasarea sa, ecranul obtureaza fototranzistorul FT5 si permite iluminarea
fototranzistorului FT6. Tranzistorul T5 se va bloca, iar tranzistorul T6 intra în conductie.
Începe intervalul 2 din tabelul 1. Curentul debitat prin sursa va trece jumatate prin faza U1 –
U2 si jumatate prin faza W2 – W1, axa statorica mutându-se pe axa V2 – V1. Rotorul va fi atras spre
noua axa statorica s.a.m.d..
Se remarca imediat ca printr-o faza statorica oarecare curentul este alternativ, faza respectiva
contribuind la dezvoltarea cuplului activ la ambele alternante ale curentului. Evident, tensiunea
aplicata unei faze este, de asemenea, alternativa.
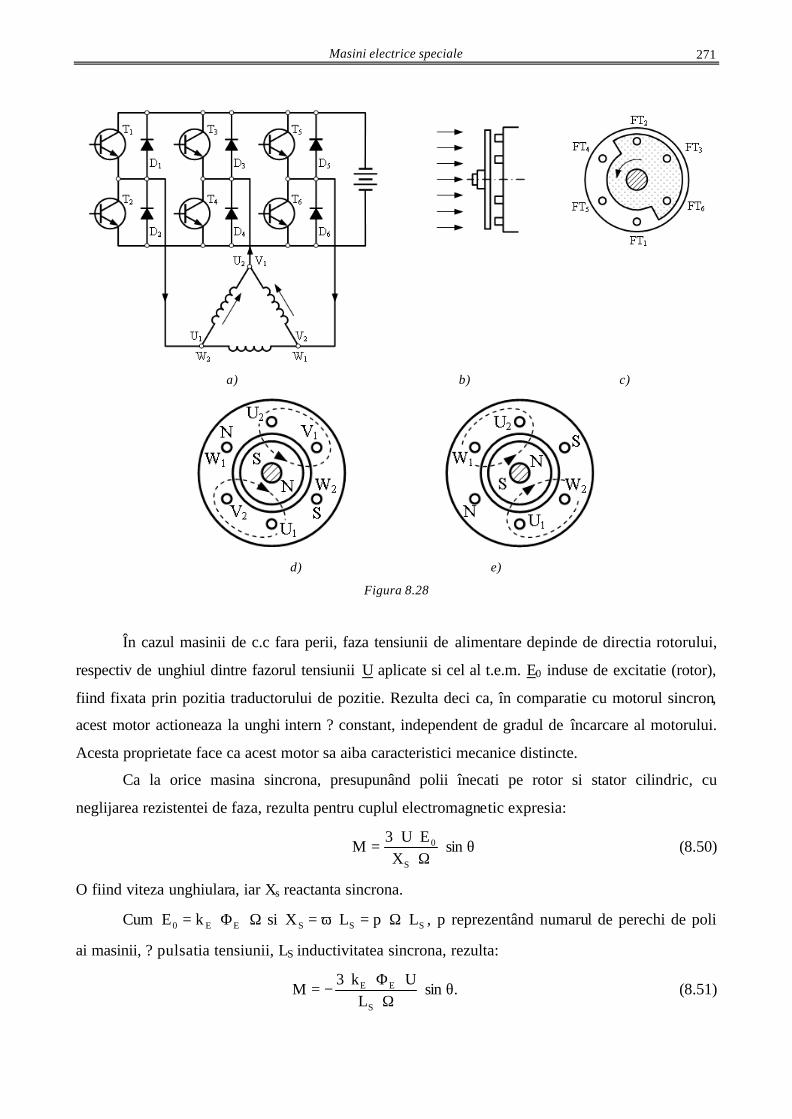
Masini electrice speciale
271
a) b) c)
d) e)
Figura 8.28
În cazul masinii de c.c fara perii, faza tensiunii de alimentare depinde de directia rotorului,
respectiv de unghiul dintre fazorul tensiunii U aplicate si cel al t.e.m. E0 induse de excitatie (rotor),
fiind fixata prin pozitia traductorului de pozitie. Rezulta deci ca, în comparatie cu motorul sincron,
acest motor actioneaza la unghi intern ? constant, independent de gradul de încarcare al motorului.
Acesta proprietate face ca acest motor sa aiba caracteristici mecanice distincte.
Ca la orice masina sincrona, presupunând polii înecati pe rotor si stator cilindric, cu
neglijarea rezistentei de faza, rezulta pentru cuplul electromagnetic expresia:
θ⋅Ω⋅
⋅⋅= sin
XEU3
MS
0 (8.50)
O fiind viteza unghiulara, iar Xs reactanta sincrona.
Cum Ω⋅Φ⋅= EE0 kE si SSS LpLX ⋅Ω⋅=⋅ω= , p reprezentând numarul de perechi de poli
ai masinii, ? pulsatia tensiunii, LS inductivitatea sincrona, rezulta:
.sinL
Uk3M
S
EE θ⋅Ω⋅
⋅Φ⋅⋅−= (8.51)
Masini electrice speciale 272
Dar .ct=θ si, deci, dependenta ( ),Mf=Ω adica chiar caracteristica mecanica, este o
hiperbola echilatera, deci o caracteristica foarte apropiata de cea a motorului serie de c.c..
Avantajele motorului de c.c. fara perii sunt importante: disparitia colectorului si a periilor
(lipsa uzurii si a întretinerii); reducerea dimensiunilor (prin disparitia colectorului si a polilor
auxiliari); sursa de caldura cea mai importanta, adica înfasurarile de faza, sunt plasate pe stator,
facilitând transmiterea caldurii spre exterior; viteze ridicate pîna la 30.000 rot/min, cât permit
comutatia tranzistoarelor; functionare silentioasa.
Ca dezavantaje, citam: necesitatea unei instalatii electronice relativ complexe; pret de cost
ridicat; sensibilitate la suprasarcini si scurtcircuit.
Motorul de c.c. fara perii (cu comutatie electronica) se aplica la puteri foarte mici si mici cu
deosebit succes la imprimantele cu raza laser, actionarea floppy-discurilor, sonare, pick-upuri, etc.,
precum si la puteri medii la actionarea avansurilor masinilor unelte cu comanda prin calculator si a
robotilor industriali.
Motorul pas-cu-pas
Acest tip de motor, denumit uneori si motor sincron cu pulsuri, transforma pulsurile electrice
de tensiune în deplasari unghiulare discrete. La primirea unui puls rotorul motorului îsi schimba
pozitia cu un unghi bine precizat, functie de puls. Unghiul minim de deplasare a rotorului este de-
numit pas. Motoarele pas-cu-pas si-au gasit o larga aplicare în sistemele de comanda automata pe
baza de program a actionarilor masinilor-unelte, a unor mecanisme si dispozitive, în tehnica
rachetelor. Ele îndeplinesc deci functia unor elemente decodificatoare, transformând informatia
primita sub forma unor pulsuri electrice în pasi unghiulari de pozitie.
Motoarele pas-cu-pas permit realizarea unor sisteme automate de tip discret care nu au
nevoie de legaturi inverse (reactii), deoarece stabilesc o corespondenta directa riguros univoca între
informatia primita si deplasarea unghiulara realizata.
În practica motoarele pas-cu-pas se construiesc în multe variante: motoare cu unul sau mai
multe statoare, cu înfasurari de comanda distribuite sau concentrate, cu rotor cu poli aparenti fara
înfasurare de excitatie (motor reactiv) sau cu magneti permanenti.
Un prim tip de motor reactiv utilizat deseori în actionarea masinilor-unelte, are statorul cu
poli aparenti cu înfasurari de comanda concentrate în numar de sase (figura 8.29). Bobinele polilor
diametral opusi se conecteaza în serie si cele trei circuite astfel realizate pentru cei sase poli se
alimenteaza de la o sursa de curent continuu prin intermediul unui comutator electronic.
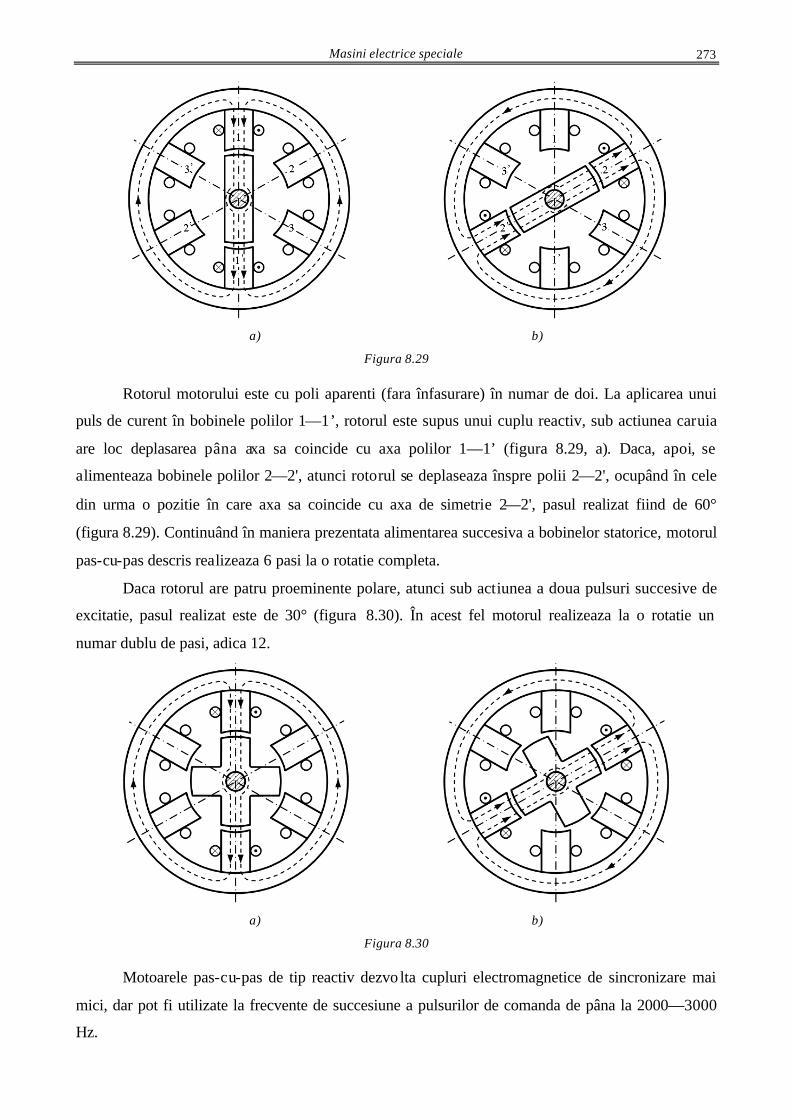
Masini electrice speciale
273
a) b)
Figura 8.29
Rotorul motorului este cu poli aparenti (fara înfasurare) în numar de doi. La aplicarea unui
puls de curent în bobinele polilor 1—1’, rotorul este supus unui cuplu reactiv, sub actiunea caruia
are loc deplasarea pâna axa sa coincide cu axa polilor 1—1’ (figura 8.29, a). Daca, apoi, se
alimenteaza bobinele polilor 2—2', atunci rotorul se deplaseaza înspre polii 2—2', ocupând în cele
din urma o pozitie în care axa sa coincide cu axa de simetrie 2—2', pasul realizat fiind de 60°
(figura 8.29). Continuând în maniera prezentata alimentarea succesiva a bobinelor statorice, motorul
pas-cu-pas descris realizeaza 6 pasi la o rotatie completa.
Daca rotorul are patru proeminente polare, atunci sub actiunea a doua pulsuri succesive de
excitatie, pasul realizat este de 30° (figura 8.30). În acest fel motorul realizeaza la o rotatie un
numar dublu de pasi, adica 12.
a) b)
Figura 8.30
Motoarele pas-cu-pas de tip reactiv dezvo lta cupluri electromagnetice de sincronizare mai
mici, dar pot fi utilizate la frecvente de succesiune a pulsurilor de comanda de pâna la 2000—3000
Hz.
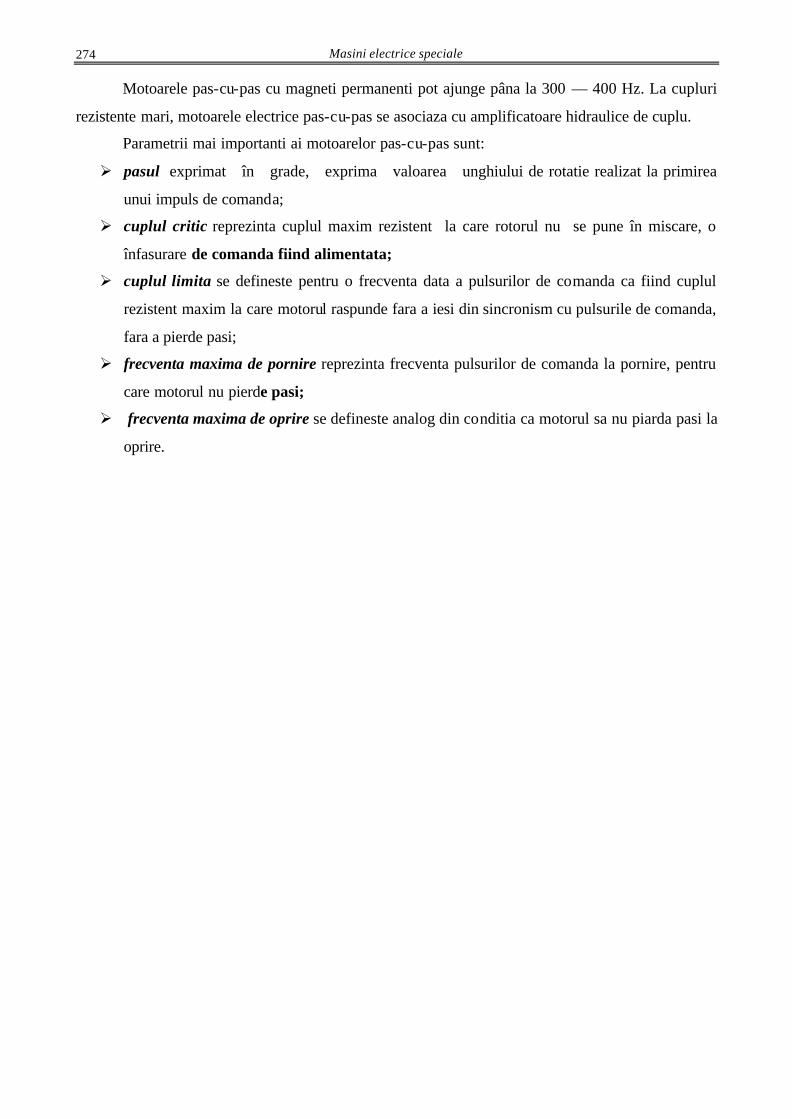
Masini electrice speciale 274
Motoarele pas-cu-pas cu magneti permanenti pot ajunge pâna la 300 — 400 Hz. La cupluri
rezistente mari, motoarele electrice pas-cu-pas se asociaza cu amplificatoare hidraulice de cuplu.
Parametrii mai importanti ai motoarelor pas-cu-pas sunt:
Ø pasul exprimat în grade, exprima valoarea unghiului de rotatie realizat la primirea
unui impuls de comanda;
Ø cuplul critic reprezinta cuplul maxim rezistent la care rotorul nu se pune în miscare, o
înfasurare de comanda fiind alimentata;
Ø cuplul limita se defineste pentru o frecventa data a pulsurilor de comanda ca fiind cuplul
rezistent maxim la care motorul raspunde fara a iesi din sincronism cu pulsurile de comanda,
fara a pierde pasi;
Ø frecventa maxima de pornire reprezinta frecventa pulsurilor de comanda la pornire, pentru
care motorul nu pierde pasi;
Ø frecventa maxima de oprire se defineste analog din conditia ca motorul sa nu piarda pasi la
oprire.
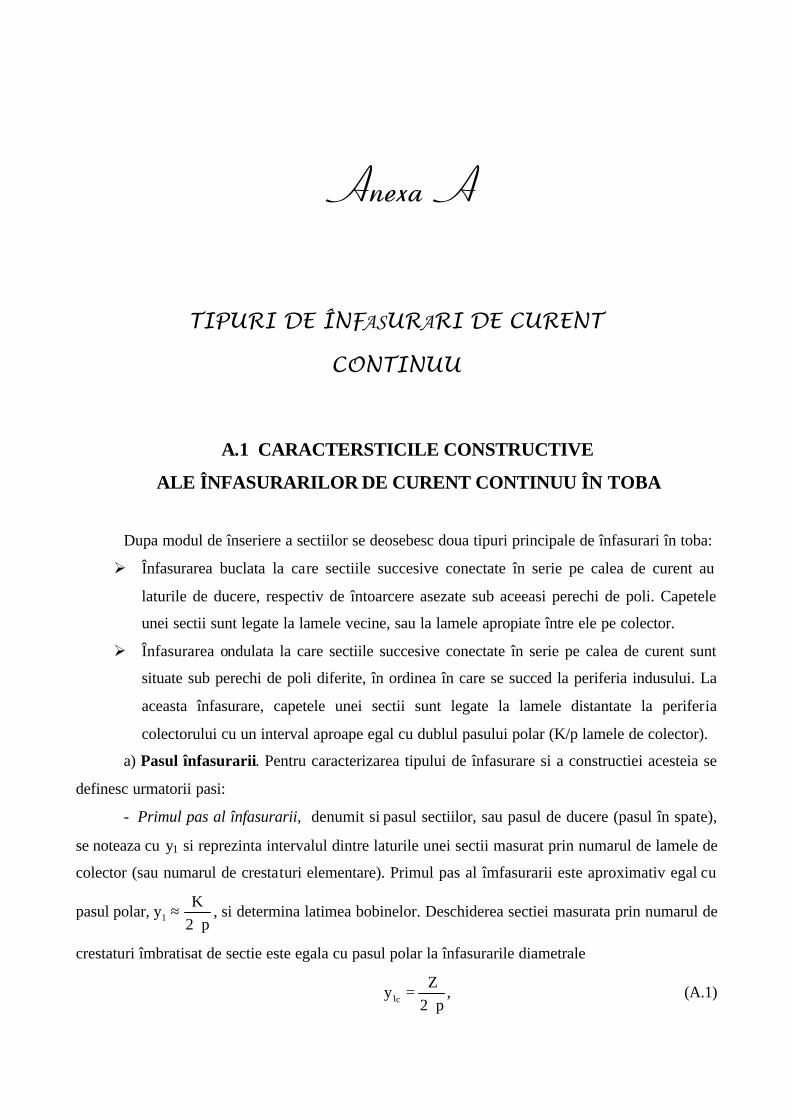
Anexa A
TIPURI DE ÎNFASURARI DE CURENT
CONTINUU
A.1 CARACTERSTICILE CONSTRUCTIVE
ALE ÎNFASURARILOR DE CURENT CONTINUU ÎN TOBA
Dupa modul de înseriere a sectiilor se deosebesc doua tipuri principale de înfasurari în toba:
Ø Înfasurarea buclata la care sectiile succesive conectate în serie pe calea de curent au
laturile de ducere, respectiv de întoarcere asezate sub aceeasi perechi de poli. Capetele
unei sectii sunt legate la lamele vecine, sau la lamele apropiate între ele pe colector.
Ø Înfasurarea ondulata la care sectiile succesive conectate în serie pe calea de curent sunt
situate sub perechi de poli diferite, în ordinea în care se succed la periferia indusului. La
aceasta înfasurare, capetele unei sectii sunt legate la lamele distantate la periferia
colectorului cu un interval aproape egal cu dublul pasului polar (K/p lamele de colector).
a) Pasul înfasurarii. Pentru caracterizarea tipului de înfasurare si a constructiei acesteia se
definesc urmatorii pasi:
− Primul pas al înfasurarii, denumit si pasul sectiilor, sau pasul de ducere (pasul în spate),
se noteaza cu y1 si reprezinta intervalul dintre laturile unei sectii masurat prin numarul de lamele de
colector (sau numarul de crestaturi elementare). Primul pas al îmfasurarii este aproximativ egal cu
pasul polar,p2
Ky1 ⋅
≈ , si determina latimea bobinelor. Deschiderea sectiei masurata prin numarul de
crestaturi îmbratisat de sectie este egala cu pasul polar la înfasurarile diametrale
,p2
Zy c1 ⋅
= (A.1)

Anexa A
276
sau diferit de acesta, la înfasurarile cu pas scurtat
⋅
<⋅
>⋅⋅
=p2
Zysau
p2Z
ycup2
Zy c1c1c1 . (A.2)
− Al doilea pas al înfasurarii, denumit si pasul la întoarcere (sau pasul la spate) se noteaza
cu y2 si reprezinta intervalul dintre latura de întoarcere a unei sectii si latura de ducere a sectiei
urmatoare conectata în serie în circuitul înfasurarii, masurat de asemenea prin numarul de lamele la
colector; pasul y2 determina distanta dintre doua bobine care se succed în circuitul înfasurarii.
− Pasul rezultant denumit pasul la colector, se noteaza cu y si reprezinta intervalul dintre
laturile de ducere a doua sectii care se succed în circuitul înfasurarii, masurat de asemenea prin
numarul de lamele de colector.
Înfasurarile sunt încrucisate daca laturile de ducere si de întoarcere ale aceleiasi sectii, sau
ale aceluiasi înconjur se încruciseaza la colector: înfasurarile sunt neîncrucisate daca laturile sectiei,
sau ale inconjului nu se încruciseaza la colector.
În figura A.1 s-au reprezentat desfasurat sectii ale înfasurarii bucla te neîncrucisate ( 12 yy < ,
în figura A.1, a), respectiv încrucisate (y2 > y1, în figura A.1, b).
Pasul rezultant la înfasurarea buclata este dat de relatia:
.yyy 21 −= (A.3)
La înfasurarea buclata neîncrucisata y > 0, iar la înfasurarea buclata încrucisata y < 0.
În figura A.2 s-au reprezentat desfasurat sectii ale înfasurarii ondulate neîncrucisate (p ⋅ y <
K, în figura A.2, a), respectiv încrucisate (p ⋅ y > K, în figura A.2, b).
Fig A.1 Sectii ale infasurarii buclate: Fig A.2 Sectii ale infasurarii ondulate:
a) neîncrucisata; b) încrucisata a) neîncrucisata; b) încrucisata
Pasul rezultant la înfasurarea ondulata este dat de relatia:
21 yyy += . (A.4)
La înfasurarea ondulata neîncrucisata, ;Kyp <⋅ dupa un înconjur se efectueaza p pasi
rezultanti si se depaseste lamela de la care s-a pornit.
În general, se prefera înfasurarile neîncrucisate, deoarece consumul de material conductor
necesar pentru legaturile dintre sectii este mai redus.
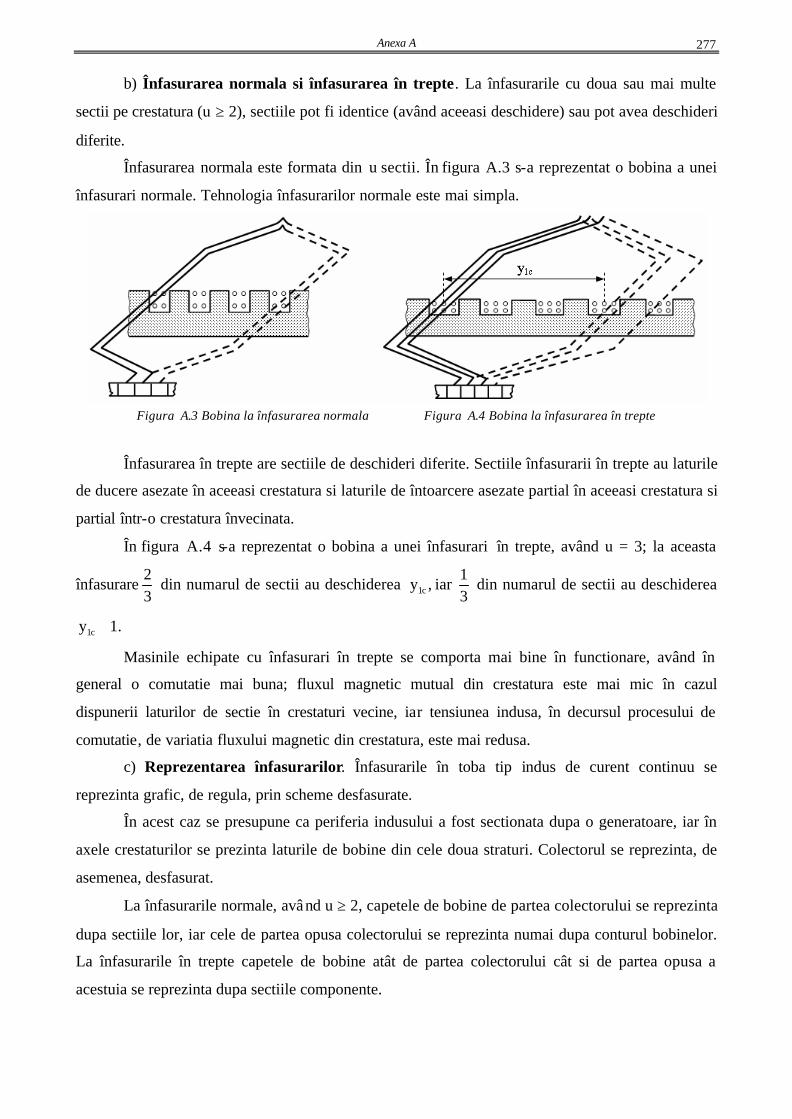
Anexa A
277
b) Înfasurarea normala si înfasurarea în trepte. La înfasurarile cu doua sau mai multe
sectii pe crestatura (u ≥ 2), sectiile pot fi identice (având aceeasi deschidere) sau pot avea deschideri
diferite.
Înfasurarea normala este formata din u sectii. În figura A.3 s-a reprezentat o bobina a unei
înfasurari normale. Tehnologia înfasurarilor normale este mai simpla.
Figura A.3 Bobina la înfasurarea normala Figura A.4 Bobina la înfasurarea în trepte
Înfasurarea în trepte are sectiile de deschideri diferite. Sectiile înfasurarii în trepte au laturile
de ducere asezate în aceeasi crestatura si laturile de întoarcere asezate partial în aceeasi crestatura si
partial într-o crestatura învecinata.
În figura A.4 s-a reprezentat o bobina a unei înfasurari în trepte, având u = 3; la aceasta
înfasurare32
din numarul de sectii au deschiderea ,y c1 iar 31
din numarul de sectii au deschiderea
.1y c1 +
Masinile echipate cu înfasurari în trepte se comporta mai bine în functionare, având în
general o comutatie mai buna; fluxul magnetic mutual din crestatura este mai mic în cazul
dispunerii laturilor de sectie în crestaturi vecine, iar tensiunea indusa, în decursul procesului de
comutatie, de variatia fluxului magnetic din crestatura, este mai redusa.
c) Reprezentarea înfasurarilor. Înfasurarile în toba tip indus de curent continuu se
reprezinta grafic, de regula, prin scheme desfasurate.
În acest caz se presupune ca periferia indusului a fost sectionata dupa o generatoare, iar în
axele crestaturilor se prezinta laturile de bobine din cele doua straturi. Colectorul se reprezinta, de
asemenea, desfasurat.
La înfasurarile normale, având u ≥ 2, capetele de bobine de partea colectorului se reprezinta
dupa sectiile lor, iar cele de partea opusa colectorului se reprezinta numai dupa conturul bobinelor.
La înfasurarile în trepte capetele de bobine atât de partea colectorului cât si de partea opusa a
acestuia se reprezinta dupa sectiile componente.
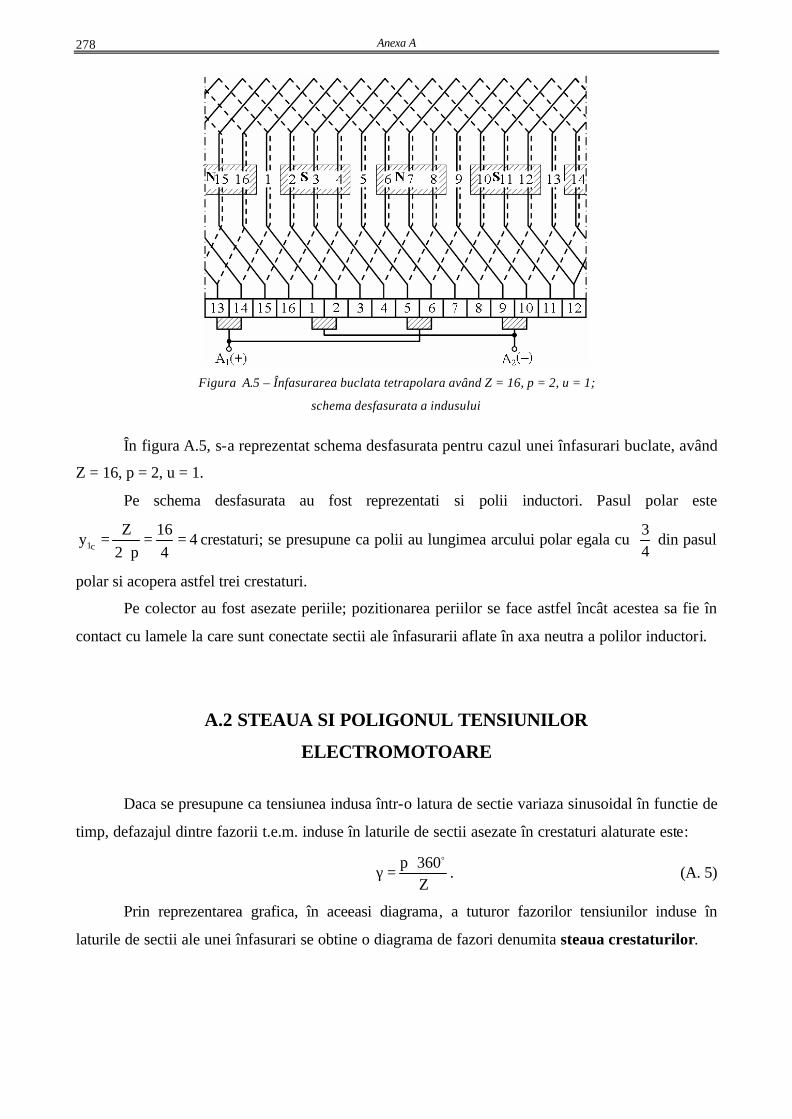
Anexa A
278
Figura A.5 – Înfasurarea buclata tetrapolara având Z = 16, p = 2, u = 1;
schema desfasurata a indusului
În figura A.5, s-a reprezentat schema desfasurata pentru cazul unei înfasurari buclate, având
Z = 16, p = 2, u = 1.
Pe schema desfasurata au fost reprezentati si polii inductori. Pasul polar este
4416
p2Z
y c1 ==⋅
= crestaturi; se presupune ca polii au lungimea arcului polar egala cu 43
din pasul
polar si acopera astfel trei crestaturi.
Pe colector au fost asezate periile; pozitionarea periilor se face astfel încât acestea sa fie în
contact cu lamele la care sunt conectate sectii ale înfasurarii aflate în axa neutra a polilor inductori.
A.2 STEAUA SI POLIGONUL TENSIUNILOR
ELECTROMOTOARE
Daca se presupune ca tensiunea indusa într-o latura de sectie variaza sinusoidal în functie de
timp, defazajul dintre fazorii t.e.m. induse în laturile de sectii asezate în crestaturi alaturate este:
Z360p o⋅
=γ . (A. 5)
Prin reprezentarea grafica, în aceeasi diagrama, a tuturor fazorilor tensiunilor induse în
laturile de sectii ale unei înfasurari se obtine o diagrama de fazori denumita steaua crestaturilor.
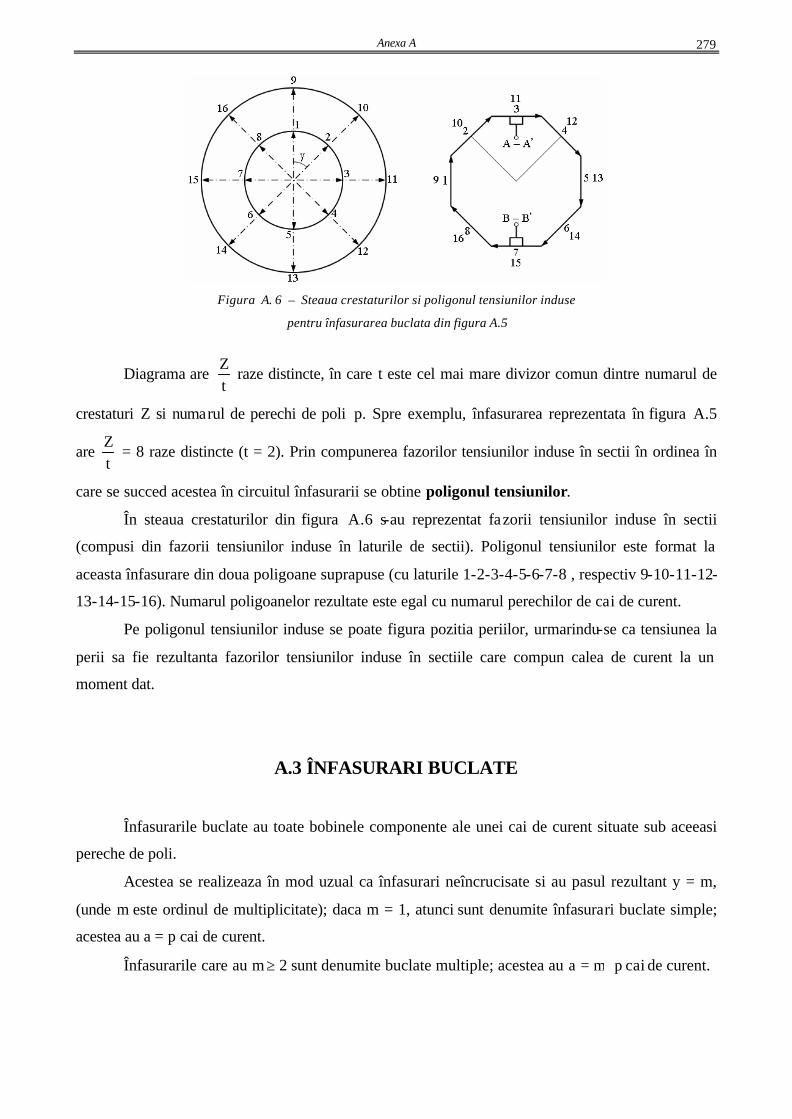
Anexa A
279
Figura A. 6 – Steaua crestaturilor si poligonul tensiunilor induse
pentru înfasurarea buclata din figura A.5
Diagrama are tZ
raze distincte, în care t este cel mai mare divizor comun dintre numarul de
crestaturi Z si numarul de perechi de poli p. Spre exemplu, înfasurarea reprezentata în figura A.5
are tZ
= 8 raze distincte (t = 2). Prin compunerea fazorilor tensiunilor induse în sectii în ordinea în
care se succed acestea în circuitul înfasurarii se obtine poligonul tensiunilor.
În steaua crestaturilor din figura A.6 s-au reprezentat fazorii tensiunilor induse în sectii
(compusi din fazorii tensiunilor induse în laturile de sectii). Poligonul tensiunilor este format la
aceasta înfasurare din doua poligoane suprapuse (cu laturile 1-2-3-4-5-6-7-8 , respectiv 9-10-11-12-
13-14-15-16). Numarul poligoanelor rezultate este egal cu numarul perechilor de cai de curent.
Pe poligonul tensiunilor induse se poate figura pozitia periilor, urmarindu-se ca tensiunea la
perii sa fie rezultanta fazorilor tensiunilor induse în sectiile care compun calea de curent la un
moment dat.
A.3 ÎNFASURARI BUCLATE
Înfasurarile buclate au toate bobinele componente ale unei cai de curent situate sub aceeasi
pereche de poli.
Acestea se realizeaza în mod uzual ca înfasurari neîncrucisate si au pasul rezultant y = m,
(unde m este ordinul de multiplicitate); daca m = 1, atunci sunt denumite înfasurari buclate simple;
acestea au a = p cai de curent.
Înfasurarile care au m ≥ 2 sunt denumite buclate multiple; acestea au pma ⋅= cai de curent.
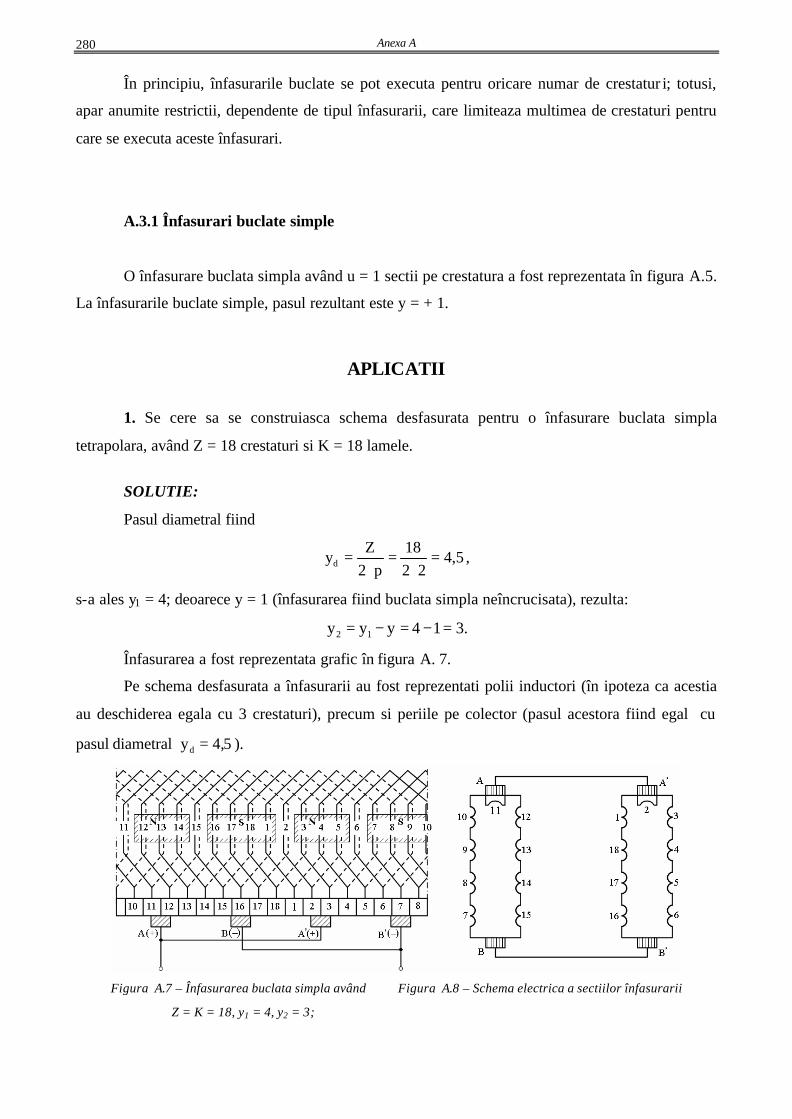
Anexa A
280
În principiu, înfasurarile buclate se pot executa pentru oricare numar de crestatur i; totusi,
apar anumite restrictii, dependente de tipul înfasurarii, care limiteaza multimea de crestaturi pentru
care se executa aceste înfasurari.
A.3.1 Înfasurari buclate simple
O înfasurare buclata simpla având u = 1 sectii pe crestatura a fost reprezentata în figura A.5.
La înfasurarile buclate simple, pasul rezultant este y = + 1.
APLICATII
1. Se cere sa se construiasca schema desfasurata pentru o înfasurare buclata simpla
tetrapolara, având Z = 18 crestaturi si K = 18 lamele.
SOLUTIE:
Pasul diametral fiind
5,422
18p2
Zyd =
⋅=
⋅= ,
s-a ales y1 = 4; deoarece y = 1 (înfasurarea fiind buclata simpla neîncrucisata), rezulta:
.314yyy 12 =−=−=
Înfasurarea a fost reprezentata grafic în figura A. 7.
Pe schema desfasurata a înfasurarii au fost reprezentati polii inductori (în ipoteza ca acestia
au deschiderea egala cu 3 crestaturi), precum si periile pe colector (pasul acestora fiind egal cu
pasul diametral 5,4yd = ).
Figura A.7 – Înfasurarea buclata simpla având Figura A.8 – Schema electrica a sectiilor înfasurarii
Z = K = 18, y1 = 4, y2 = 3;

Anexa A
281
Sectiile 11, respectiv 2 sunt scurtcircuitate de periile A, respectiv A’ în momentul considerat
(figura A.8).
2. Se cere sa se construiasca schema desfasurata pentru o înfasurare buclata simpla, normala,
tetrapolara, având Z = 12 crestaturi si u = 3 crestaturi elementare pe crestatura.
SOLUTIE:
Prin urmare la aceasta înfasurare rezulta K = u ⋅ Z = 3 ⋅ 12 = 36 crestaturi elementare.
Pasii înfasurarii sunt: .819yyy,9436
p2K
y 121 =−=−===⋅
=
Figura A.9 Înfasurarea buclata simpla normala: Z = 12, u = 3, y1 = 9 si p = 2
În figura A.9 au fost reprezentate crestaturile reale si lamelele de colector; numerotarea s-a
facut corespunzator crestaturilor elementare (la o crestatura normala corespund u = 3 crestaturi
elementare). Înfasurarea are toate sectiile cu deschiderile egale cu pasul yc = 3 crestaturi.
3. Se cere sa se construiasca schema desfasurata pentru o înfasurare simpla tetrapolara, în
trepte, având Z = 12 crestaturi, u = 3 crestaturi elementare pe crestatura.
SOLUTIE:
O înfasurare buclata în trepte se poate realiza numai în cazul în care u ≥ 2. Spre exemplu,
daca în cazul înfasurarii examinate în A.3.2, pentru pasul polar y1 s-ar fi luat una din valorile 7, 8,
10 sau 11, înfasurarea ar fi rezultat în trepte. În figura A.10 s-au reprezentat schematic portiuni din
înfasurarea în trepte având Z = 12 crestaturi, u = 3, p = 2, y1 = 10, respectiv 11, iar y2 = 9, respectiv
10.
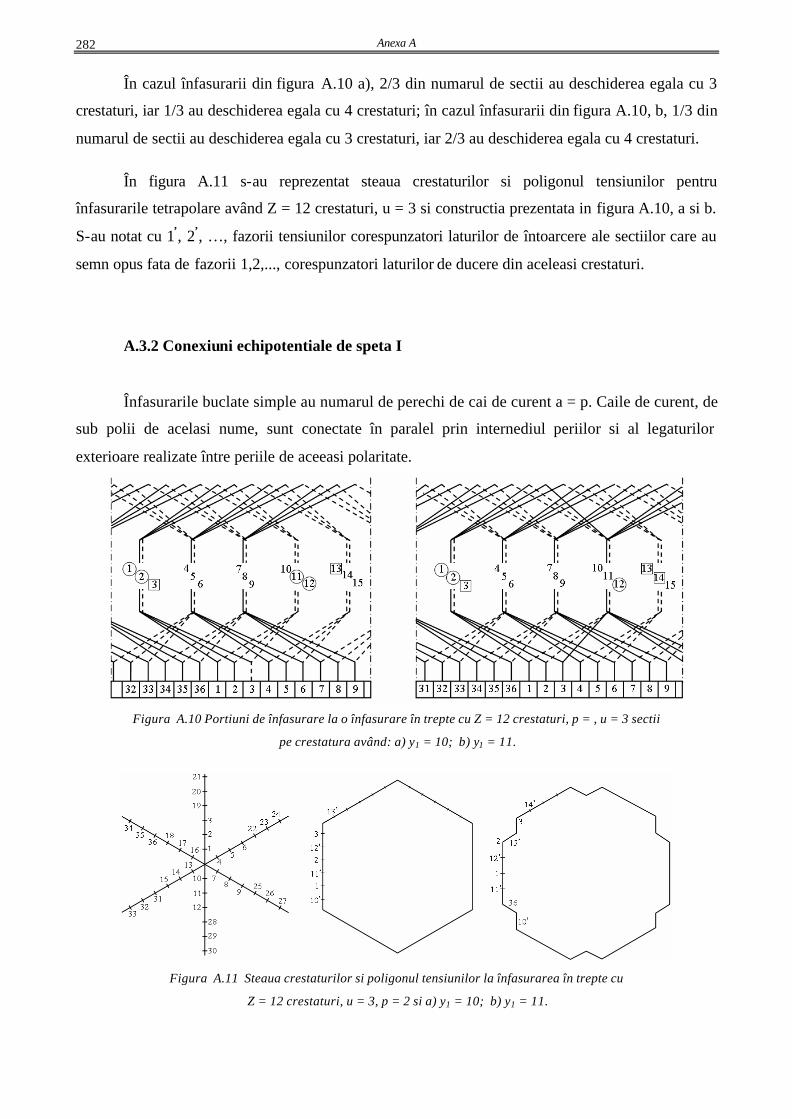
Anexa A
282
În cazul înfasurarii din figura A.10 a), 2/3 din numarul de sectii au deschiderea egala cu 3
crestaturi, iar 1/3 au deschiderea egala cu 4 crestaturi; în cazul înfasurarii din figura A.10, b, 1/3 din
numarul de sectii au deschiderea egala cu 3 crestaturi, iar 2/3 au deschiderea egala cu 4 crestaturi.
În figura A.11 s-au reprezentat steaua crestaturilor si poligonul tensiunilor pentru
înfasurarile tetrapolare având Z = 12 crestaturi, u = 3 si constructia prezentata in figura A.10, a si b.
S-au notat cu 1’, 2’, …, fazorii tensiunilor corespunzatori laturilor de întoarcere ale sectiilor care au
semn opus fata de fazorii 1,2,..., corespunzatori laturilor de ducere din aceleasi crestaturi.
A.3.2 Conexiuni echipotentiale de speta I
Înfasurarile buclate simple au numarul de perechi de cai de curent a = p. Caile de curent, de
sub polii de acelasi nume, sunt conectate în paralel prin internediul periilor si al legaturilor
exterioare realizate între periile de aceeasi polaritate.
Figura A.10 Portiuni de înfasurare la o înfasurare în trepte cu Z = 12 crestaturi, p = , u = 3 sectii
pe crestatura având: a) y1 = 10; b) y1 = 11.
Figura A.11 Steaua crestaturilor si poligonul tensiunilor la înfasurarea în trepte cu
Z = 12 crestaturi, u = 3, p = 2 si a) y1 = 10; b) y1 = 11.
Anexa A
283
Tensiunile induse pe caile de curent, în cazul unor conditii identice, au valori egale.
La masinile reale, datorita neomogenitatii circuitului magnetic, anizotropiei diferite a
polilor, sau din cauza largirii diferite a întrefierului de la un pol la altul ca urmare a aparitiei unei
excentricitati a rotorului fata de stator (produsa de montajul masinii sau prin uzura laga relor),
tensiunile induse în caile de curent pot avea valori diferite între ele.
Curentul se distribuie neuniform pe caile de curent ale înfasurarii, producându-se astfel o
încalzire suplimentara a înfasurarii.
Pentru a evita închiderea curentilor prin perii, înfasurarea indusului se echipeaza cu
conexiuni echipotentiale, denumite conexiuni echipotentiale de speta întâi; acestea constau din
legaturi conductoare între puncte ale înfasurarii care în mod normal ar avea acelasi potential. Astfel,
legaturile echipotentiale se efectueaza între puncte ale înfasurarii distantate ca un dublu pas polar,
pasul acestora fiind pZ
ye = crestaturi. Rolul acestor legaturi echipotentiale consta în asigurarea
unor circuite de închidere a curentilor de circulatie, în afara legaturilor dintre perii.
La masinile electrice de puteri mijlocii si mari reactanta înfasurarii rotorului este mai mare
decât rezistenta acestora, curentii de circulatie prin înfasurare fiind defazati cu aproape 2π
în raport
cu tensiunea indusa; în aceste conditii curentii de circulatie modifica distributia câmpului magnetic
rezultant din întrefierul masinii, producând o atenuare partiala a asimetriilor magnetice.
APLICATII
1. Se cere sa se construiasca schema desfasurata, steaua crestaturilor si poligonul tensiunilor
electromotoare pentru o înfasurare buclata multipla de ordinul m = 2 si având Z = 18 crestaturi, p =
2 perechi de poli si K = 18 lamele de colector.
SOLUTIE:
Pasul diametral este:
.5,44
18p2
Ky d1 ==
⋅=
Pasul înfasurarii se poate lua egal cu 4 sau 5; se considera pasul y1 = 5.
Pasul rezultant este:
y = m = 2.
Al doilea pas al înfasurarii rezulta din relatia:
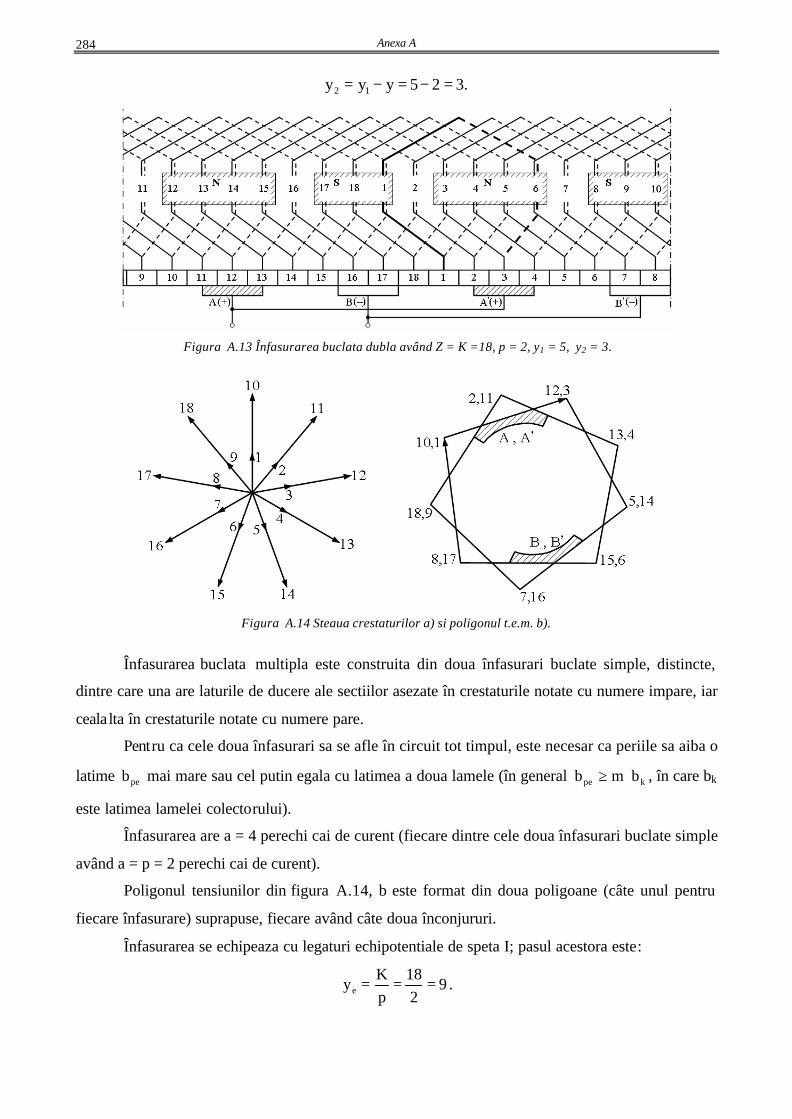
Anexa A
284
.325yyy 12 =−=−=
Figura A.13 Înfasurarea buclata dubla având Z = K =18, p = 2, y1 = 5, y2 = 3.
Figura A.14 Steaua crestaturilor a) si poligonul t.e.m. b).
Înfasurarea buclata multipla este construita din doua înfasurari buclate simple, distincte,
dintre care una are laturile de ducere ale sectiilor asezate în crestaturile notate cu numere impare, iar
ceala lta în crestaturile notate cu numere pare.
Pentru ca cele doua înfasurari sa se afle în circuit tot timpul, este necesar ca periile sa aiba o
latime peb mai mare sau cel putin egala cu latimea a doua lamele (în general kpe bmb ⋅≥ , în care bk
este latimea lamelei colectorului).
Înfasurarea are a = 4 perechi cai de curent (fiecare dintre cele doua înfasurari buclate simple
având a = p = 2 perechi cai de curent).
Poligonul tensiunilor din figura A.14, b este format din doua poligoane (câte unul pentru
fiecare înfasurare) suprapuse, fiecare având câte doua înconjururi.
Înfasurarea se echipeaza cu legaturi echipotentiale de speta I; pasul acestora este:
9218
pK
ye === .
Anexa A
285
Legaturile echipotentiale leaga sectii ale unei înfasurari, cu sectii ale celeilalte înfasurari (de
exemplu 1 – 10, 5 – 14, 13 – 4 etc.). În acest fel se rigidizeaza si pozitia relativa a contururilor
poligonale.
A.3.3.Conexiuni echipotentiale de speta a II-a
La înfasurarile multiple se poate întâmpla ca o perie sa nu realizeze un contact bun cu toate
lamelele colectorului. În acest caz, vor ramâne în circuitul electric al indusului numai o parte din
caile de curent ale înfasurarii prin care va trece curentul total; se vor produce pierderi Joule sporite
si o încalzire suplimentara a portiunilor de înfasurare aflate în functiune.
Între perie si lamela cu care nu se realizeaza contactul, apare o tensiune electrica egala cu
tensiunea indusa în sectie si se produc scântei la colector; astfel, de exemplu, la înfasurarea
reprezentata în figura A.13, daca peria B face un contact bun numai cu lamelele 14 si 15, atunci
între perie si lamela 16 apare tensiunea sectiei 14 – 16 care provoaca scântei în zona de contact
imperfect a periei cu colectorul.
La înfasurarea buclata dubla din figura A.15 conexiunile echiptentiale de speta întâi se
efectueaza între puncte ale celor doua înfasurari si contribuie, totodata, la uniformizarea
potentialului pe colector, respectiv la închiderea curentului total prin toate caile de curent ale
înfasurarii.
La înfasurarea buclata din figura A.15 sunt necesare legaturi conductoare suplimentare,
denumite conexiuni echipotentiale de speta a II- a, între puncte ale înfasurarilor distincte care în
mod normal se afla la aceeasi potential. Pentru ca aceste puncte sa fie accesibile, la înfasurarea cu
un singur conductor pe sectie, este necesar ca pasii înfasurarii sa îndeplineasca relatia:
.yyyy 2dd1 −=− (A.7)
În acest fel, lamela intermediara cuprinsa între cele doua lamele la care este legata sectia va
avea potentialul electric egal cu media potentialelor vecine si este posibila efectuarea unor
conexiuni echipotentiale de speta a II-a între capetele de bobine dispre colector si cele opuse
colectorului, ca în figura A.15.
Pentru ca în circuitul legaturilor echipotentiale de speta a II-a, realizate între puncte ale
capetelor de bobina aflate în partile frontale opuse ale înfasurarii, sa nu se induca tensiuni, acestea
sunt conduse prin interiorul indusului, în afara câmpului magnetic din întrefier.
În cazul general, conexiunile echipotentiale de speta I îndeplinesc si rolul conexiunilor de
speta a II-a, când acestea leaga între ele sectii apartinând înfasurarilor distincte (la înfasurarea
închisa de mai multe ori), sau contururilor diferite.
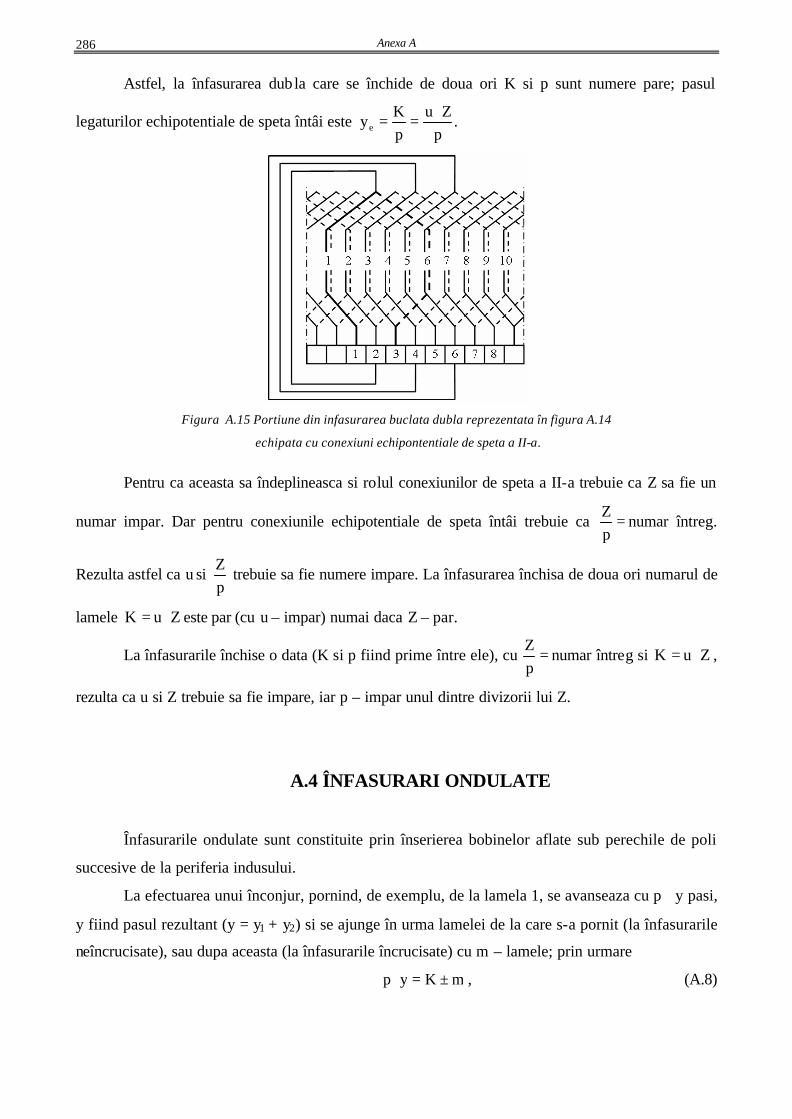
Anexa A
286
Astfel, la înfasurarea dub la care se închide de doua ori K si p sunt numere pare; pasul
legaturilor echipotentiale de speta întâi este .pZu
pK
ye⋅
==
Figura A.15 Portiune din infasurarea buclata dubla reprezentata în figura A.14
echipata cu conexiuni echipontentiale de speta a II-a.
Pentru ca aceasta sa îndeplineasca si rolul conexiunilor de speta a II-a trebuie ca Z sa fie un
numar impar. Dar pentru conexiunile echipotentiale de speta întâi trebuie ca =pZ
numar întreg.
Rezulta astfel ca u si pZ
trebuie sa fie numere impare. La înfasurarea închisa de doua ori numarul de
lamele ZuK ⋅= este par (cu u – impar) numai daca Z – par.
La înfasurarile închise o data (K si p fiind prime între ele), cu =pZ
numar întreg si ZuK ⋅= ,
rezulta ca u si Z trebuie sa fie impare, iar p – impar unul dintre divizorii lui Z.
A.4 ÎNFASURARI ONDULATE
Înfasurarile ondulate sunt constituite prin înserierea bobinelor aflate sub perechile de poli
succesive de la periferia indusului.
La efectuarea unui înconjur, pornind, de exemplu, de la lamela 1, se avanseaza cu p ⋅ y pasi,
y fiind pasul rezultant (y = y1 + y2) si se ajunge în urma lamelei de la care s-a pornit (la înfasurarile
neîncrucisate), sau dupa aceasta (la înfasurarile încrucisate) cu m – lamele; prin urmare
mKyp ±=⋅ , (A.8)

Anexa A
287
în care m este ordinul de multiplicitate al înfasurarii; semnul (−) corespunde înfasurarilor
neîncrucisate, iar semnul (+) înfasurarilor încrucisate.
Înfasurarile ondulate au a = m – perechi de cai de curent.
Din relatia (A.8) rezulta:
==p
mKy
m numar întreg. (A.9)
Prin urmare înfasurarile ondulate se pot executa numai pentru anumite numere de crestaturi,
respectiv, lamele de colector. De exemplu, la înfasurarile ondulate simple (m = 1), la numar par de
perechi de poli p, numarul de lamele K trebuie sa fie impar, ceea ce este posibil numai daca u si Z
sunt impare; la numar impar de perechi de poli, p trebuie sa se afle printre divizorii numarului
(K−1).
La înfasurarile ondulate duble (m = 2) la numar par de perechi de poli, numarul de lamele la
colector K trebuie sa fie, de asemenea, par.
A.4.1 Înfasurari ondulate simple
La aceste înfasurari m = ± 1; pasul rezultant se obtine din relatia (A.9), iar pasii partiali, din
relatiile:
p2
Ky1 ⋅
= , 12 yyy −= . (A.10)
APLICATII
1. Se cere sa se construiasca schema desfasurata pentru o înfasurare ondulata simpla
tetrapolara, având Z = 19 crestaturi si K = 19 lamele de colector.
SOLUTIE:
Pasii înfasurarii neîncrucisate sunt:
− pasul rezultant ( ) ( )
92
119p
1Ky =
−=
−= ;
− pasul ε±⋅
=p2
Ky1 pasul diametral fiind
( ) 43
44
19p2
Kyd ⋅==
⋅= , se considera pentru
pasul y1, valoarea y1 = 5;
− pasul .459yyy 12 =−=−=
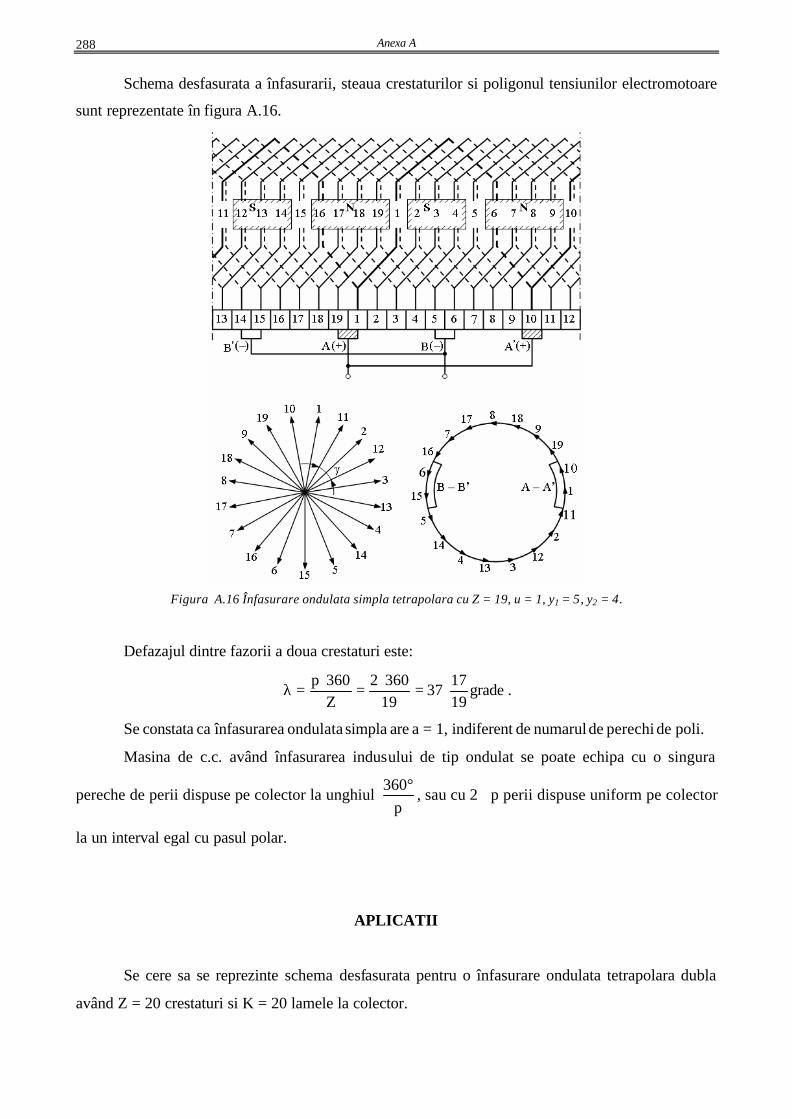
Anexa A
288
Schema desfasurata a înfasurarii, steaua crestaturilor si poligonul tensiunilor electromotoare
sunt reprezentate în figura A.16.
Figura A.16 Înfasurare ondulata simpla tetrapolara cu Z = 19, u = 1, y1 = 5, y2 = 4.
Defazajul dintre fazorii a doua crestaturi este:
grade1917
37193602
Z360p
⋅=⋅
=⋅
=λ .
Se constata ca înfasurarea ondulata simpla are a = 1, indiferent de numarul de perechi de poli.
Masina de c.c. având înfasurarea indusului de tip ondulat se poate echipa cu o singura
pereche de perii dispuse pe colector la unghiul p
360°, sau cu 2 ⋅ p perii dispuse uniform pe colector
la un interval egal cu pasul polar.
APLICATII
Se cere sa se reprezinte schema desfasurata pentru o înfasurare ondulata tetrapolara dubla
având Z = 20 crestaturi si K = 20 lamele la colector.
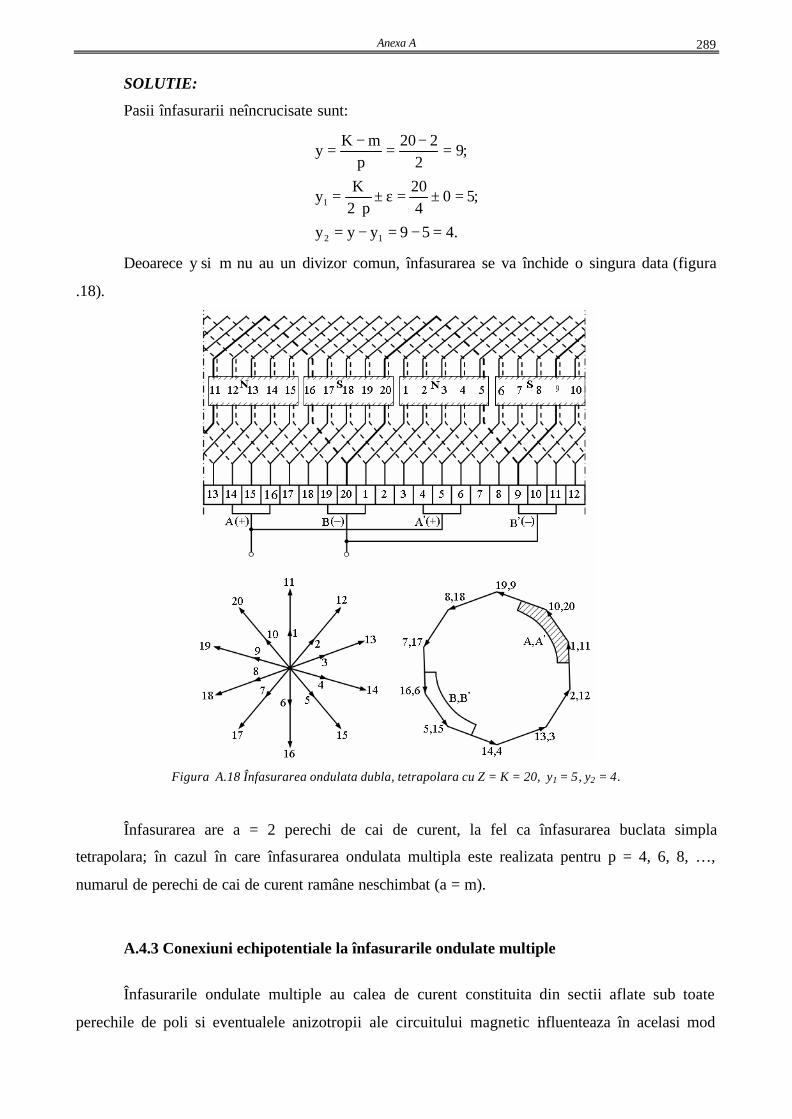
Anexa A
289
SOLUTIE:
Pasii înfasurarii neîncrucisate sunt:
.459yyy
;50420
p2K
y
;92
220p
mKy
12
1
=−=−=
=±=ε±⋅
=
=−
=−
=
Deoarece y si m nu au un divizor comun, înfasurarea se va închide o singura data (figura
.18).
Figura A.18 Înfasurarea ondulata dubla, tetrapolara cu Z = K = 20, y1 = 5, y2 = 4.
Înfasurarea are a = 2 perechi de cai de curent, la fel ca înfasurarea buclata simpla
tetrapolara; în cazul în care înfasurarea ondulata multipla este realizata pentru p = 4, 6, 8, …,
numarul de perechi de cai de curent ramâne neschimbat (a = m).
A.4.3 Conexiuni echipotentiale la înfasurarile ondulate multiple
Înfasurarile ondulate multiple au calea de curent constituita din sectii aflate sub toate
perechile de poli si eventualele anizotropii ale circuitului magnetic influenteaza în acelasi mod

Anexa A
290
valoarea tensiunilor induse pe calea de curent; în consecinta, înfasurarile ondulate multiple nu
necesita conexiuni echipotentiale de speta I.
Înfasurarile ondulate multiple necesita conexiuni echipotentiale de speta a II-a, din aceleasi
consideratii ca si înfasurarile buclate multiple.
Legaturile echipotentiale de speta a II-a se efectueaza de aceeasi parte a înfasurarii cu pasul
==pK
ye numar întreg, daca =pZ
numar întreg sau =⋅pZg
numar întreg, cu g =1, 2, 3, ….
În acest din urma caz pasul legaturilor echipotentiale este pKg
ye⋅
= , daca mp
g = , rezulta
mK
ye = .
În cazul înfasurarii ondulate multiple din figura A.19 legaturile echipotentiale se pot efectua
de aceeasi parte a colectorului si au pasul
.10220
pK
ye ===
Acestea leaga contururi de înfasurare diferite. Schema conexiunilor este reprezentata în
figura A.19.
Figura A.19 Schema legaturilor echipotentiale de speta a II-a
pentru înfasurarea ondulata dubla din figura A.18
În cazul în care conexiunile echipotentiale de speta a II-a nu se pot executa de aceeasi parte
a indusului înfasurarea trebuie construita astfel încât sa fie posibile conexiuni echipotentiale
realizate între puncte ale înfasurarii aflate de o parte si de alta a indusului; punctele care în mod
normal au acelasi potential rezulta din poligonul tensiunilor construit pentru înfasurare.
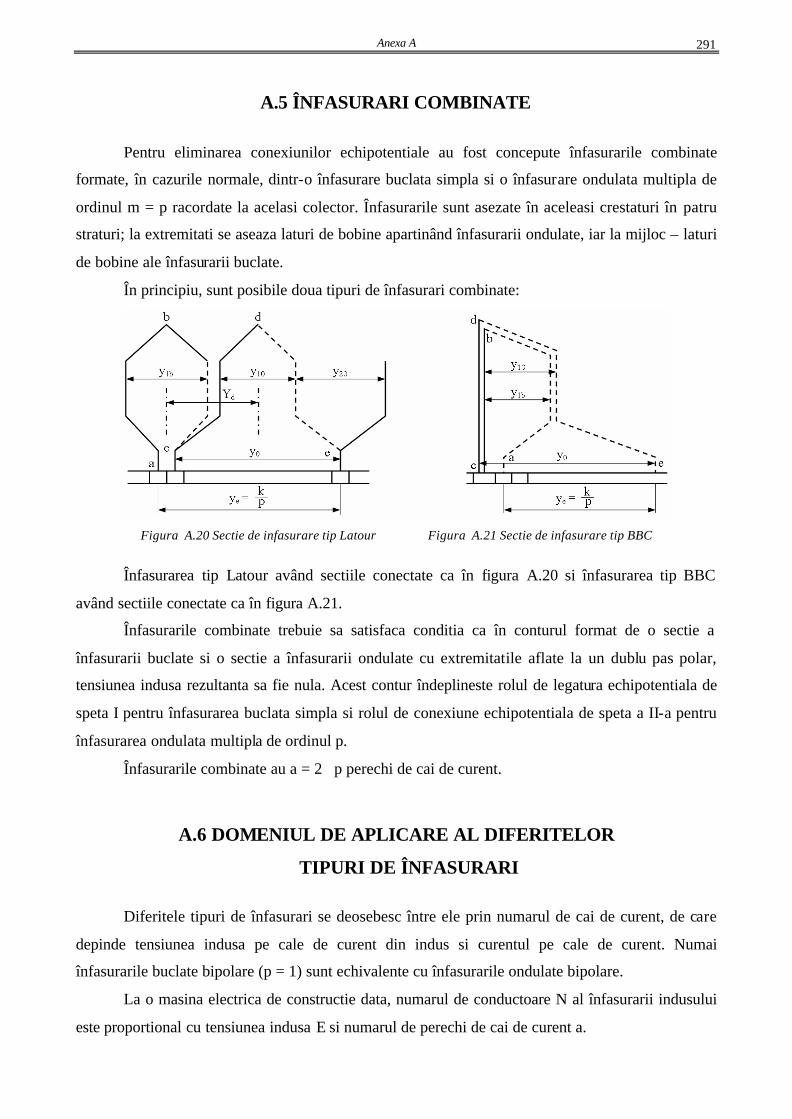
Anexa A
291
A.5 ÎNFASURARI COMBINATE
Pentru eliminarea conexiunilor echipotentiale au fost concepute înfasurarile combinate
formate, în cazurile normale, dintr-o înfasurare buclata simpla si o înfasurare ondulata multipla de
ordinul m = p racordate la acelasi colector. Înfasurarile sunt asezate în aceleasi crestaturi în patru
straturi; la extremitati se aseaza laturi de bobine apartinând înfasurarii ondulate, iar la mijloc – laturi
de bobine ale înfasurarii buclate.
În principiu, sunt posibile doua tipuri de înfasurari combinate:
Figura A.20 Sectie de infasurare tip Latour Figura A.21 Sectie de infasurare tip BBC
Înfasurarea tip Latour având sectiile conectate ca în figura A.20 si înfasurarea tip BBC
având sectiile conectate ca în figura A.21.
Înfasurarile combinate trebuie sa satisfaca conditia ca în conturul format de o sectie a
înfasurarii buclate si o sectie a înfasurarii ondulate cu extremitatile aflate la un dublu pas polar,
tensiunea indusa rezultanta sa fie nula. Acest contur îndeplineste rolul de legatura echipotentiala de
speta I pentru înfasurarea buclata simpla si rolul de conexiune echipotentiala de speta a II-a pentru
înfasurarea ondulata multipla de ordinul p.
Înfasurarile combinate au a = 2 ⋅ p perechi de cai de curent.
A.6 DOMENIUL DE APLICARE AL DIFERITELOR
TIPURI DE ÎNFASURARI
Diferitele tipuri de înfasurari se deosebesc între ele prin numarul de cai de curent, de care
depinde tensiunea indusa pe cale de curent din indus si curentul pe cale de curent. Numai
înfasurarile buclate bipolare (p = 1) sunt echivalente cu înfasurarile ondulate bipolare.
La o masina electrica de constructie data, numarul de conductoare N al înfasurarii indusului
este proportional cu tensiunea indusa E si numarul de perechi de cai de curent a.
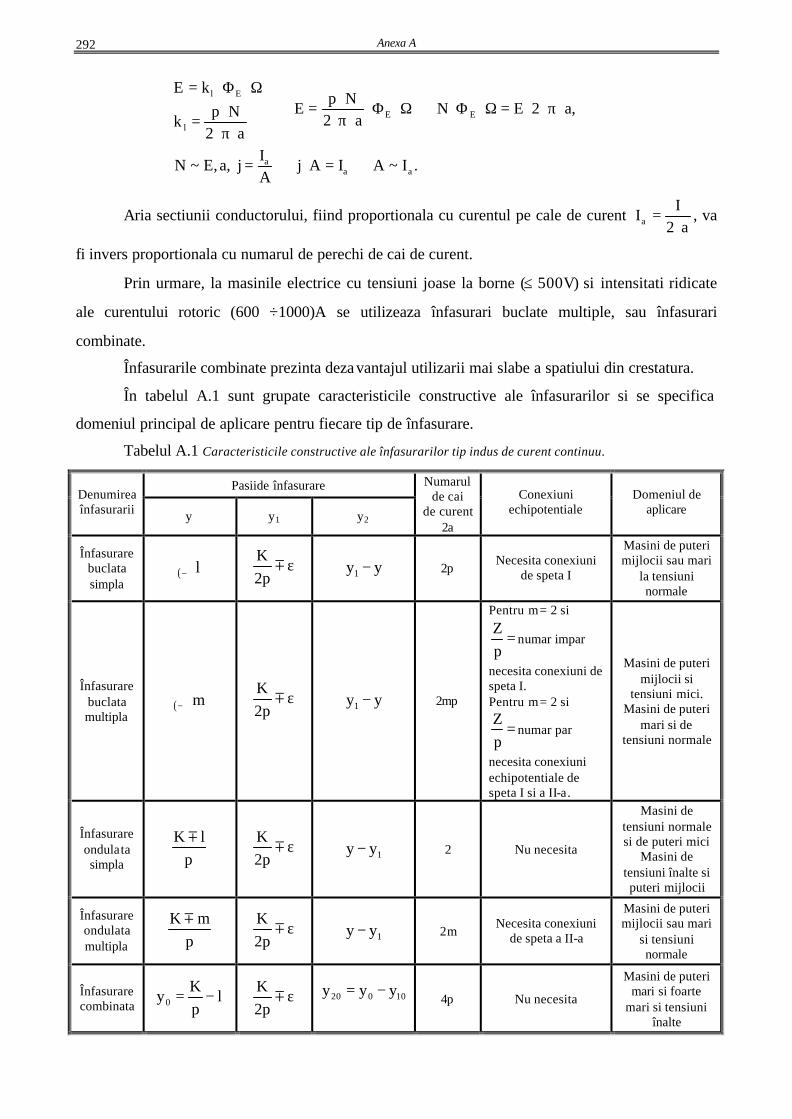
Anexa A
292
.I~AIAjAI
j,a,E~N
,a2ENa2
NpE
a2Np
k
kE
aaa
EEl
El
⇒=⋅⇒=
⋅π⋅⋅=Ω⋅Φ⋅⇒Ω⋅Φ⋅⋅π⋅
⋅=⇒
⋅π⋅⋅
=
Ω⋅Φ⋅=
Aria sectiunii conductorului, fiind proportionala cu curentul pe cale de curent a2
IIa ⋅
= , va
fi invers proportionala cu numarul de perechi de cai de curent.
Prin urmare, la masinile electrice cu tensiuni joase la borne (≤ 500V) si intensitati ridicate
ale curentului rotoric (600 ÷1000)A se utilizeaza înfasurari buclate multiple, sau înfasurari
combinate.
Înfasurarile combinate prezinta dezavantajul utilizarii mai slabe a spatiului din crestatura.
În tabelul A.1 sunt grupate caracteristicile constructive ale înfasurarilor si se specifica
domeniul principal de aplicare pentru fiecare tip de înfasurare.
Tabelul A.1 Caracteristicile constructive ale înfasurarilor tip indus de curent continuu.
Pasiide înfasurare Denumirea înfasurarii y y1 y2
Numarul de cai
de curent 2a
Conexiuni echipotentiale
Domeniul de aplicare
Înfasurare buclata simpla
( ) l+− εm
p2K
yy1 − 2p Necesita conexiuni
de speta I
Masini de puteri mijlocii sau mari
la tensiuni normale
Înfasurare buclata multipla
( ) m+− εm
p2K
yy1 − 2mp
Pentru m = 2 si
=pZ
numar impar
necesita conexiuni de speta I. Pentru m = 2 si
=pZ
numar par
necesita conexiuni echipotentiale de speta I si a II-a.
Masini de puteri mijlocii si
tensiuni mici. Masini de puteri
mari si de tensiuni normale
Înfasurare ondulata simpla p
lK m εm
p2K
1yy − 2 Nu necesita
Masini de tensiuni normale si de puteri mici
Masini de tensiuni înalte si puteri mijlocii
Înfasurare ondulata multipla p
mK m εm
p2K
1yy − 2m
Necesita conexiuni de speta a II-a
Masini de puteri mijlocii sau mari
si tensiuni normale
Înfasurare combinata
lpK
y0 −= εmp2
K 10020 yyy −=
4p Nu necesita
Masini de puteri mari si foarte
mari si tensiuni înalte
Anexa B
TIPURI DE ÎNFASURARI DE CURENT
ALTERNATIV
B.1 ELEMENTE CONSTRUCTIVE SI CLASIFICAREA
ÎNFASURARILOR DE CURENT ALTERNATIV
Înfasurarile masinilor electrice de c.a. se realizeaza cu conductor de cupru sau aluminiu,
izolat cu hârtie, bumbac (impregnat), email, fibre de sticla, micanita etc.
Elementele constructive ale unei înfasurari sunt: spira, latura de bobina, bobina si grupa de
bobine (sau semigrupa de bobine).
O înfasurare a unei masini electrice este realizata din bobine, conectate în serie sau în
paralel. Bobina este formata din una sau mai multe spire conectate în serie; spirele aceleiasi bobine
sunt grupate împreuna si se aseaza, adesea, în aceleasi crestaturi.
Înfasurarea de c.a. polifazata este formata din m înfasurari distincte, fiecare fiind parcursa de
unul din cei m curenti de faza. Înfasurarea de faza realizata cu una sau mai multe bobine pe
perechea de poli având laturile de ducere, respectiv, de întoarcere, situate în aceleasi crestaturi, este
denumita înfasurare concentrata.
Înfasurarea de faza, realizata cu doua sau mai multe bobine pe perechea de poli si asezate în
crestaturi alaturate, este denumita înfasurare repartizata.
Bobinele apartinând aceleiasi înfasurari si care au laturile de sub un pol asezate în crestaturi
alaturate, constituie o grupa de bobine.
Înfasurarile se executa frecvent pentru armaturi prevazute cu crestaturi repartizate uniform.
Se noteaza cu Z numarul total de crestaturi al armaturii unei masini, în care se aseaza o înfasurare
cu m faze si p perechi de poli. Numarul de crestaturi pe pol si faza se noteaza cu q si rezulta din
relatia:
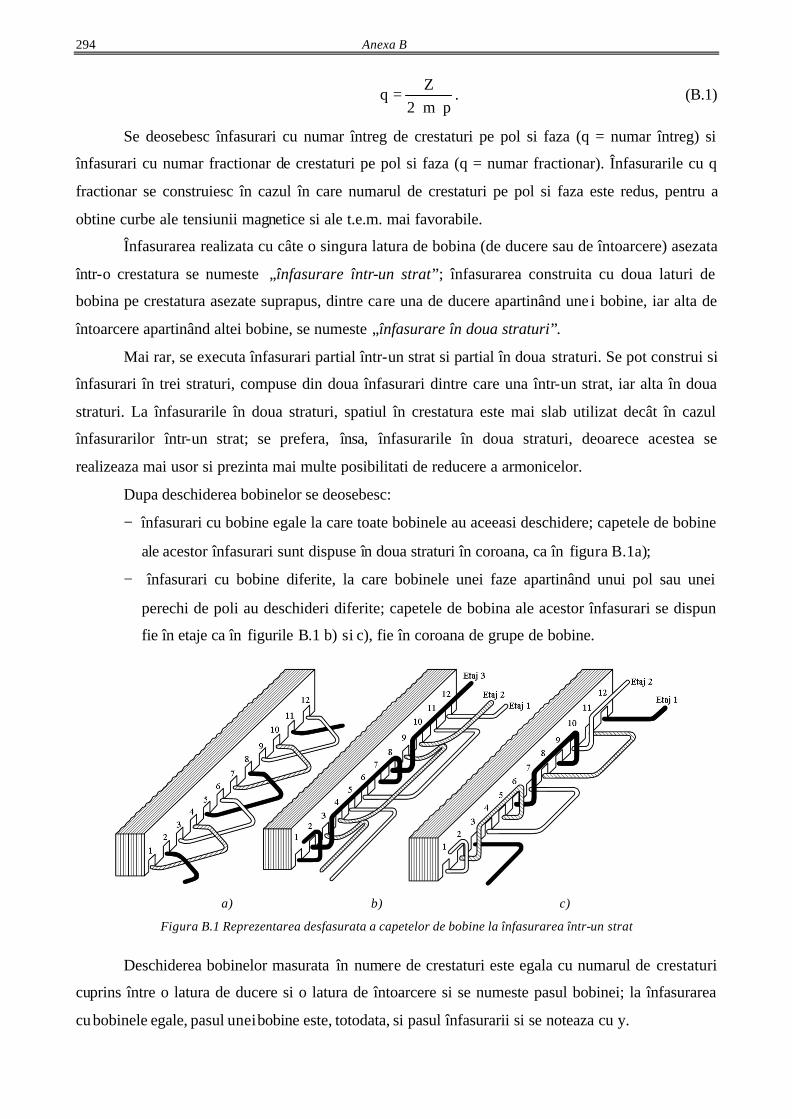
Anexa B 294
pm2
Zq
⋅⋅= . (B.1)
Se deosebesc înfasurari cu numar întreg de crestaturi pe pol si faza (q = numar întreg) si
înfasurari cu numar fractionar de crestaturi pe pol si faza (q = numar fractionar). Înfasurarile cu q
fractionar se construiesc în cazul în care numarul de crestaturi pe pol si faza este redus, pentru a
obtine curbe ale tensiunii magnetice si ale t.e.m. mai favorabile.
Înfasurarea realizata cu câte o singura latura de bobina (de ducere sau de întoarcere) asezata
într-o crestatura se numeste „înfasurare într-un strat”; înfasurarea construita cu doua laturi de
bobina pe crestatura asezate suprapus, dintre care una de ducere apartinând une i bobine, iar alta de
întoarcere apartinând altei bobine, se numeste „înfasurare în doua straturi”.
Mai rar, se executa înfasurari partial într-un strat si partial în doua straturi. Se pot construi si
înfasurari în trei straturi, compuse din doua înfasurari dintre care una într-un strat, iar alta în doua
straturi. La înfasurarile în doua straturi, spatiul în crestatura este mai slab utilizat decât în cazul
înfasurarilor într-un strat; se prefera, însa, înfasurarile în doua straturi, deoarece acestea se
realizeaza mai usor si prezinta mai multe posibilitati de reducere a armonicelor.
Dupa deschiderea bobinelor se deosebesc:
− înfasurari cu bobine egale la care toate bobinele au aceeasi deschidere; capetele de bobine
ale acestor înfasurari sunt dispuse în doua straturi în coroana, ca în figura B.1a);
− înfasurari cu bobine diferite, la care bobinele unei faze apartinând unui pol sau unei
perechi de poli au deschideri diferite; capetele de bobina ale acestor înfasurari se dispun
fie în etaje ca în figurile B.1 b) si c), fie în coroana de grupe de bobine.
a) b) c)
Figura B.1 Reprezentarea desfasurata a capetelor de bobine la înfasurarea într-un strat
Deschiderea bobinelor masurata în numere de crestaturi este egala cu numarul de crestaturi
cuprins între o latura de ducere si o latura de întoarcere si se numeste pasul bobinei; la înfasurarea
cu bobinele egale, pasul unei bobine este, totodata, si pasul înfasurarii si se noteaza cu y.
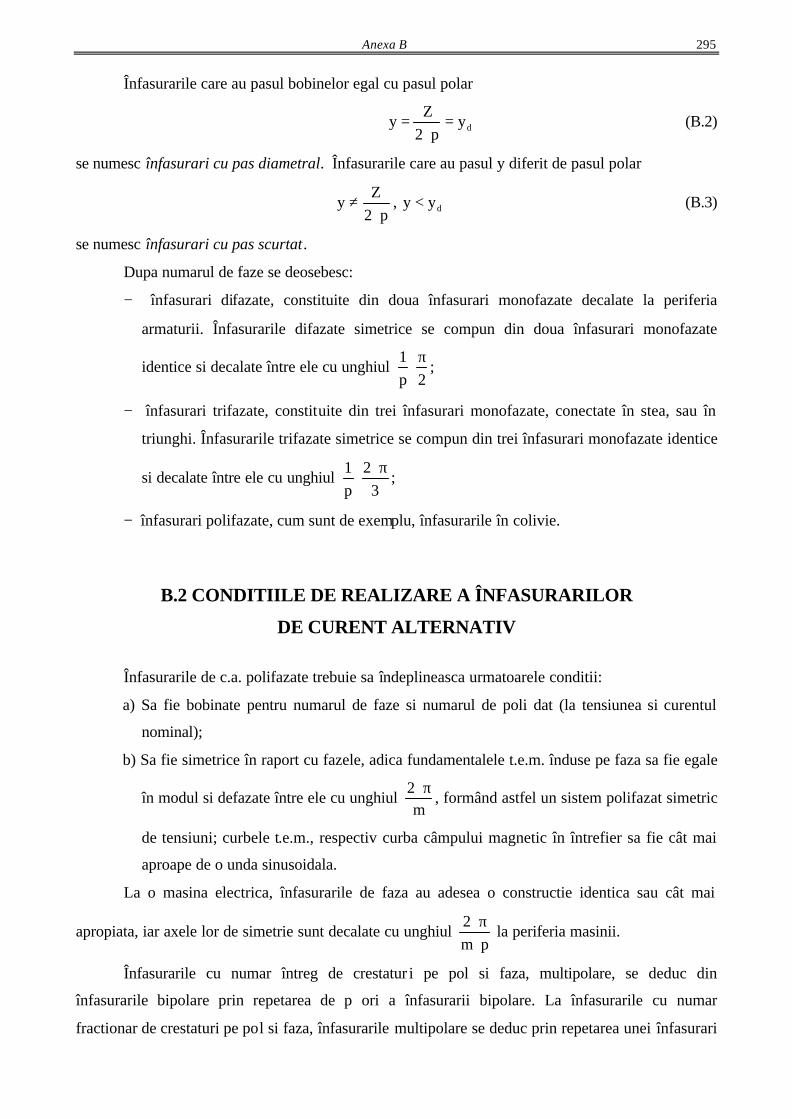
Anexa B
295
Înfasurarile care au pasul bobinelor egal cu pasul polar
dyp2
Zy =
⋅= (B.2)
se numesc înfasurari cu pas diametral. Înfasurarile care au pasul y diferit de pasul polar
dyy,p2
Zy <
⋅≠ (B.3)
se numesc înfasurari cu pas scurtat.
Dupa numarul de faze se deosebesc:
− înfasurari difazate, constituite din doua înfasurari monofazate decalate la periferia
armaturii. Înfasurarile difazate simetrice se compun din doua înfasurari monofazate
identice si decalate între ele cu unghiul 2p
1 π⋅ ;
− înfasurari trifazate, constituite din trei înfasurari monofazate, conectate în stea, sau în
triunghi. Înfasurarile trifazate simetrice se compun din trei înfasurari monofazate identice
si decalate între ele cu unghiul 3
2p1 π⋅
⋅ ;
− înfasurari polifazate, cum sunt de exemplu, înfasurarile în colivie.
B.2 CONDITIILE DE REALIZARE A ÎNFASURARILOR
DE CURENT ALTERNATIV
Înfasurarile de c.a. polifazate trebuie sa îndeplineasca urmatoarele conditii:
a) Sa fie bobinate pentru numarul de faze si numarul de poli dat (la tensiunea si curentul
nominal);
b) Sa fie simetrice în raport cu fazele, adica fundamentalele t.e.m. înduse pe faza sa fie egale
în modul si defazate între ele cu unghiul m
2 π⋅, formând astfel un sistem polifazat simetric
de tensiuni; curbele t.e.m., respectiv curba câmpului magnetic în întrefier sa fie cât mai
aproape de o unda sinusoidala.
La o masina electrica, înfasurarile de faza au adesea o constructie identica sau cât mai
apropiata, iar axele lor de simetrie sunt decalate cu unghiul pm
2⋅π⋅
la periferia masinii.
Înfasurarile cu numar întreg de crestatur i pe pol si faza, multipolare, se deduc din
înfasurarile bipolare prin repetarea de p ori a înfasurarii bipolare. La înfasurarile cu numar
fractionar de crestaturi pe pol si faza, înfasurarile multipolare se deduc prin repetarea unei înfasurari

Anexa B 296
cu tp
perechi de poli, în care t este câtul dintre numarul de perechi de poli p si numitorul partii
fractionare a numarului de crestaturi q;
c) Sa fie realizabile tehnic. La înfasurarile trifazate cu p perechi de poli si Z crestaturi,
începuturile înfasurarilor de faza au pasul:
qk6q2yf ⋅⋅+⋅= , (B.3)
unde: p2,...2,1,0k = .
Prin urmare trebuie ca:
pmZ
k3pm
Zy f ⋅
⋅+⋅
= = numar întreg,
sau la înfasurarile trifazate
pZ
kp3
Zy f ⋅+
⋅= = numar întreg.
Daca toate bobinele apartinând unei înfasurari de faza sunt conectate în serie, se obtine o
înfasurare cu o cale de curent. Prin conectarea în paralel a doua sau mai multe portiuni de înfasurare
în care se induc t.e.m. egale si în faza, se obtine o înfasurare cu doua sau mai multe cai de curent;
aceasta constituie o conditie restrictiva suplimentara de realizare a înfasurarilor de c.a.
B.3 STEAUA CRESTATURILOR SI DIAGRAMA DE FAZORI
Fiecarei crestaturi a armaturii îi corespunde un fazor al t.e.m. egal cu t.e.m. indusa în bobina
înfasurarii în inel. Tensiunile electromotoare induse în laturile de bobina sunt defazate între ele cu
unghiul
Zp2 ⋅π⋅
=γ , (B.4)
deoarece la o rotatie completa a câmpului învârtitor cu p perechi de poli, îi corespund p perioade ale
unei t.e.m. induse.
Prin reprezentarea în planul complex a fazorilor fundamentalelor t.e.m. induse în laturile de
bobina se obtine o diagrama de fazori, numita steaua crestaturilor.
La înfasurarile cu bobine egale, se reprezinta grafic fazorii t.e.m. induse în bobine, defazati
cu acelasi unghi γ.
Prin compunerea fazorilor t.e.m. induse în bobinele dintr-o cale de curent a unei faze, se
obtine fazorul t.e.m. induse pe faza; procedând astfel pentru fiecare înfasurare de faza, se obtin m
fazori care reprezinta diagrama fazorilor t.e.m. induse în înfasurare.
Anexa B
297
B.4 ÎNFASURARI ÎNTR-UN STRAT CU NUMAR ÎNTREG DE
CRESTATURI PE POL SI FAZA
În fiecare crestatura se aseaza o latura de bobina: numarul total de bobine bN este:
2Z
N b = . (B.5)
Numarul de bobine pe faza trebuie sa fie un numar întreg:
m2Z
N fb ⋅= = numar întreg.
Prin urmare, numarul de crestaturi tebuie sa fie divizibil cu dublul numarului de faze, pentru
a rezulta m înfasurari de faza cu câte bfN bobine.
APLICATII
1. Se cere sa se construiasca schema desfasutrata pentru o înfasurare trifazata ( 3m = ), în
trei etaje, bipolara ( 1p = ), având 4q = crestaturi pe pol si faza, iar capetele de bobina asezate în trei
etaje formate de semigrupe de bobine.
SOLUTIE:
La dispunerea capetelor de bobina în trei etaje, fiecare faza ocupa câte un etaj. Numarul total
de crestaturi este:
244132qpm2Z =⋅⋅⋅=⋅⋅⋅= .
Pasul diametral al înfasurarii este:
12224
p2Z
yd ==⋅
= .
În figura B.2, s-a reprezentat partial înfasurarea cu doua cai de curent.
Figura B.2 Înfasurare trifazata bipolara cu doua cai de curent

Anexa B 298
Daca faza 21 UU − cuprinde laturile de bobina 1, 2, 3, 4, atunci ea mai cuprinde si laturile
1 + 12 = 13, 2 + 12 = 14, 3 + 12 = 15 si 4 + 12 = 16. Deoarece este indiferenta succesiunea laturilor
de bobina în circuitul înfasurarii, daca se pastreaza sensul lor de parcurgere, legaturile frontale între
capetele de bobina se efectueaza astfel încât lungimea lor sa rezulte cât mai scurta, iar înfasurarea sa
se poata realiza.
Începutul fazei 21 UU − se poate alege într-una din crestaturile 1, 2, 3, 4; în figura B.2,
începutul înfasurarii marcat cu litera 1U s-a considerat în crestatura 3.
Cele doua semigrupe de bobine ale aceleiasi faze pot fi conectate în serie, rezultând astfel o
cale de curent, sau în paralel pentru a obtine o înfasurare cu doua cai de curent, ca în figura B.2.
Faza 21 VV − are începutul decalat fata de faza 21 UU − cu pasul 8q2yf =⋅= , adica în
crestatura 3 + 8 = 11 (daca se considera k = 0); capetele de bobina ale acestei înfasurari au fost
asezate în etajul urmator. Schema desfasurata a acestei înfasurari este identica cu schema fazei
21 UU − ; bobinele fazei 21 VV − sunt asezate în crestaturile 12 – 21, 11 – 22, 10 – 23, 9 – 24.
Faza 21 WW − are începutul decalat fata de faza 21 VV − cu pasul 8yf = , adica în crestatura
11 + 8 = 19 si bobinele sunt asezate în crestaturile 20 – 5, 19 – 6, 18 – 7, 17 – 8.
În figura B.3 este reprezentata steaua crestaturilor. Defazajul dintre doua faze este:
oo
1524360
Z360p
==⋅
=γ
În figura B.4 a fost reprezentata curba tensiunii magnetice.
Sensurile curentilor prin înfasurare, precum si curba tensiunii magnetice V(x) din figura B.3,
corespund momentului în care curentul este maxim si pozitiv prin faza 21 UU − , iar fazele 21 VV − si
21 WW − curentul este negativ si de valoare egala cu jumatate din valoarea maxima.
Figura B.3 Figura B.4

Anexa B
299
Deoarece succesiunea de înseriere a laturilor de bobina nu prezinta importanta asupra t.e.m.
induse, daca se mentine sensul de înfasurare, înfasurarea este echivalenta cu o înfasurare cu pas
diametral.
Înfasurari trifazate în doua etaje
La înfasurarile în doua etaje, capetele de bobina ale fazelor sunt asezate dupa doua suprafete
de revolutie (figura B.1, c); în acelasi etaj sunt asezate capete de bobine apartinând la faze diferite.
La înfasurarile cu capetele de bobine asezate în doua etaje, numarul de grupe de bobine
bob,grN trebuie sa fie divizibil cu numarul de etaje (2), adica:
=⋅
=
⋅
⋅=⋅2
pmq2
Z21
N21
bob.gr numar întreg.
La înfasurarile trifazate, numarul de faze este m = 3 si prin urmare, numarul de perechi de
poli p trebuie sa fie un numar par.
APLICATII
1. Se cere sa se construiasca schema desfasurata pentru o înfasurare trifazata tetrapolara, în
doua etaje cu o cale de curent si având q = 2 crestaturi pe pol si faza.
SOLUTIE:
Numarul de crestaturi se determina utilizând relatia:
242232qpm2Z =⋅⋅⋅=⋅⋅⋅= ,
iar pasul diametral al înfasurarii este:
622
24p2
Zyd =
⋅=
⋅= .
Înfasurarea este reprezentata în figura B.5 a. Daca începutul fazei 21 UU − se afla în
crestatura 1, începutul fazei 21 VV − se afla în crestatura decalata fata de crestatura 1, cu pasul:
==
=⋅⋅+⋅=1kpentru,160kpentru,4
qk6q2y f ,
adica în crestatura 1 + 4 = 5 sau 1 + 16 = 17. În figura B.5 s-a considerat începutul fazei 21 VV − în
crestatura 5, iar începutul fazei 21 WW − în crestatura 5 + 4 = 9.
Din schema desfasurata a înfasurarii rezulta ca înfasurarea este simetrica în raport cu fazele;
fiecare faza este compusa din bobine care se închid atât în etajul 1, cât si în etajul 2.
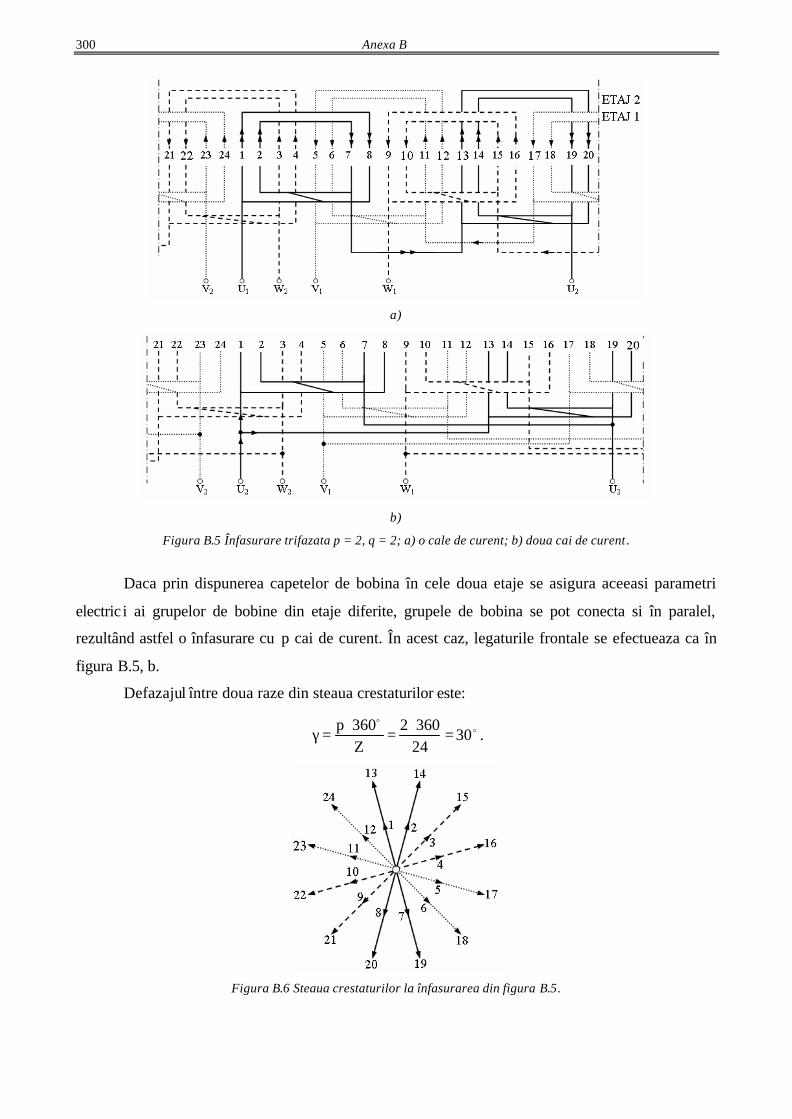
Anexa B 300
a)
b)
Figura B.5 Înfasurare trifazata p = 2, q = 2; a) o cale de curent; b) doua cai de curent .
Daca prin dispunerea capetelor de bobina în cele doua etaje se asigura aceeasi parametri
electric i ai grupelor de bobine din etaje diferite, grupele de bobina se pot conecta si în paralel,
rezultând astfel o înfasurare cu p cai de curent. În acest caz, legaturile frontale se efectueaza ca în
figura B.5, b.
Defazajul între doua raze din steaua crestaturilor este:
oo
30243602
Z360p
=⋅
=⋅
=γ .
Figura B.6 Steaua crestaturilor la înfasurarea din figura B.5.
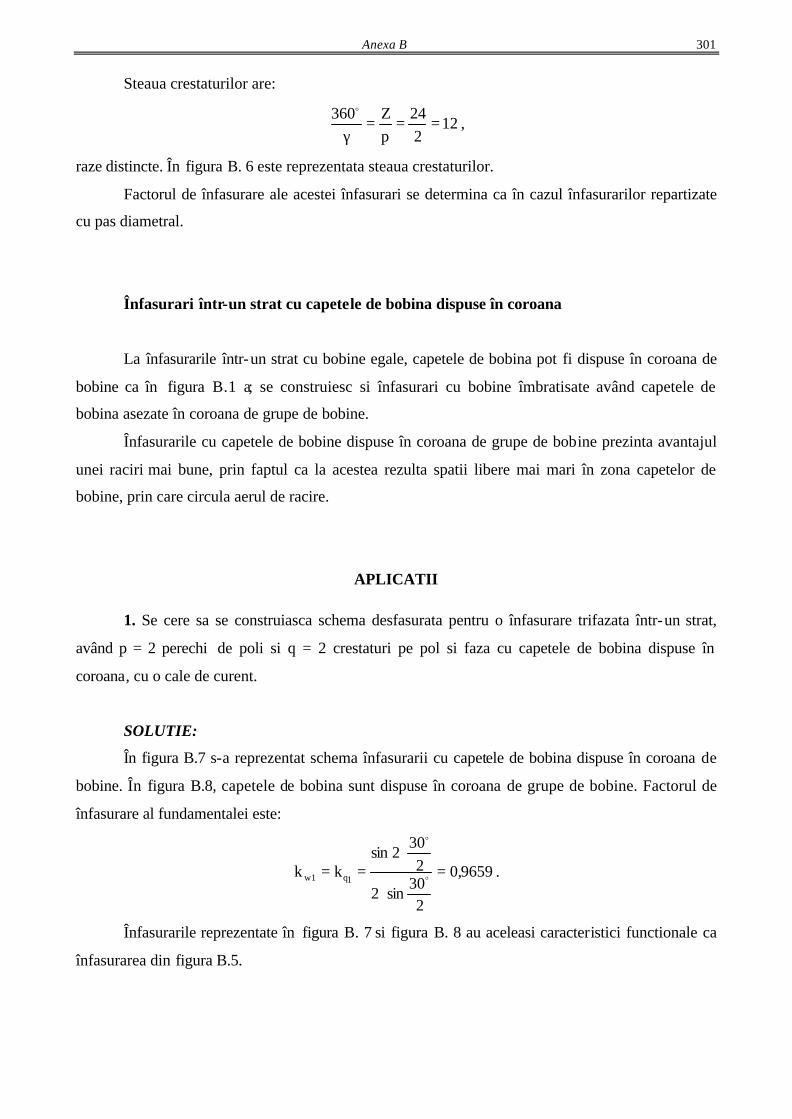
Anexa B
301
Steaua crestaturilor are:
12224
pZ360
===γ
o
,
raze distincte. În figura B. 6 este reprezentata steaua crestaturilor.
Factorul de înfasurare ale acestei înfasurari se determina ca în cazul înfasurarilor repartizate
cu pas diametral.
Înfasurari într-un strat cu capetele de bobina dispuse în coroana
La înfasurarile într-un strat cu bobine egale, capetele de bobina pot fi dispuse în coroana de
bobine ca în figura B.1 a; se construiesc si înfasurari cu bobine îmbratisate având capetele de
bobina asezate în coroana de grupe de bobine.
Înfasurarile cu capetele de bobine dispuse în coroana de grupe de bobine prezinta avantajul
unei raciri mai bune, prin faptul ca la acestea rezulta spatii libere mai mari în zona capetelor de
bobine, prin care circula aerul de racire.
APLICATII
1. Se cere sa se construiasca schema desfasurata pentru o înfasurare trifazata într-un strat,
având p = 2 perechi de poli si q = 2 crestaturi pe pol si faza cu capetele de bobina dispuse în
coroana, cu o cale de curent.
SOLUTIE:
În figura B.7 s-a reprezentat schema înfasurarii cu capetele de bobina dispuse în coroana de
bobine. În figura B.8, capetele de bobina sunt dispuse în coroana de grupe de bobine. Factorul de
înfasurare al fundamentalei este:
9659,0
230
sin2
230
2sinkk
1q1w =⋅
⋅== o
o
.
Înfasurarile reprezentate în figura B. 7 si figura B. 8 au aceleasi caracteristici functionale ca
înfasurarea din figura B.5.
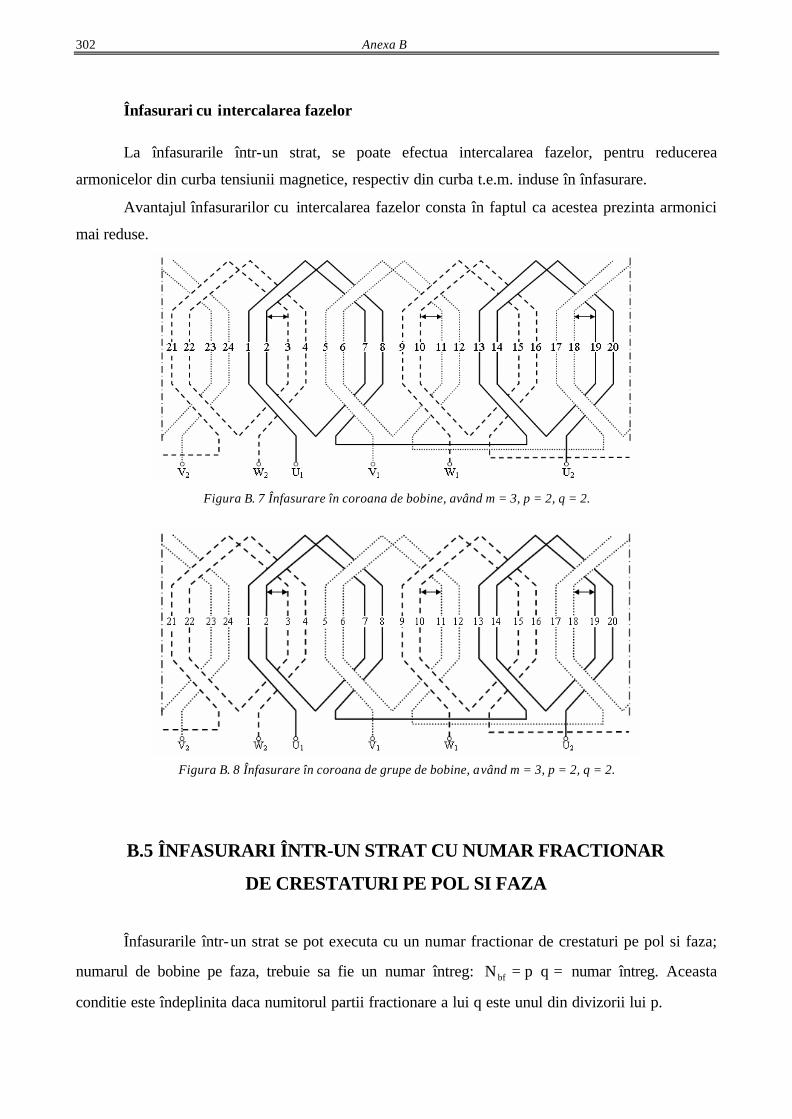
Anexa B 302
Înfasurari cu intercalarea fazelor
La înfasurarile într-un strat, se poate efectua intercalarea fazelor, pentru reducerea
armonicelor din curba tensiunii magnetice, respectiv din curba t.e.m. induse în înfasurare.
Avantajul înfasurarilor cu intercalarea fazelor consta în faptul ca acestea prezinta armonici
mai reduse.
Figura B. 7 Înfasurare în coroana de bobine, având m = 3, p = 2, q = 2.
Figura B. 8 Înfasurare în coroana de grupe de bobine, având m = 3, p = 2, q = 2.
B.5 ÎNFASURARI ÎNTR-UN STRAT CU NUMAR FRACTIONAR
DE CRESTATURI PE POL SI FAZA
Înfasurarile într-un strat se pot executa cu un numar fractionar de crestaturi pe pol si faza;
numarul de bobine pe faza, trebuie sa fie un numar întreg: =⋅= qpN bf numar întreg. Aceasta
conditie este îndeplinita daca numitorul partii fractionare a lui q este unul din divizorii lui p.

Anexa B
303
Este posibil sa se construiasca înfasurarea, astfel încât tensiunile electromotoare induse pe
faza sa fie defazate între ele cu unghiul m
2 π⋅, daca numarul de raze distincte din steaua crestaturilor
este divizibil cu numarul de faze. Numarul de raze distincte tZ
(în care t este cel mai mare divizor
comun al numarului de crestaturi Z si al numarului de perechi de poli p), rezulta din conditia:
=⋅⋅+
+⋅⋅+⋅= bc
k62ak6a2y f numar întreg.
Se observa, de exemplu, ca pentru c = multiplu de 3, aceasta conditie nu poate fi îndeplinita.
APLICATII
1. Se cere sa se construiasca schema desfasurata a unei înfasurari într-un strat, în doua etaje,
cu numar fractionar de crestaturi pe pol si faza, având m = 3, p = 2 si25
q = .
SOLUTIE:
Numarul total de crestaturi este:
302
5232qpm2Z =
⋅⋅⋅=⋅⋅⋅= .
Numarul de bobine pe faza este 5m2
ZNbf =
⋅= ; acest numar de bobine se repartizeaza în
doua grupe de bobine si anume: trei într-o grupa si doua în alta grupa. Într-un etaj, se dispun grupele
de câte trei bobine, iar în celalalt etaj, grupele de câte doua bobine. Numarul de raze distincte
15tZ
= este divizibil cu numarul de faze m = 3.
În figura B.10 s-a reprezentat schema desfasurata si curba tensiunii magnetice în momentul
în care curentul prin faza 21 VV − este egal si de semn contrar cu cel prin faza 21 UU − , iar curentul
prin faza 21 WW − este nul; în figura B.10, b este desenata diagrama de fazori a curentilor si axa
timpului corespunzatoare momentului considerat.
Odata cu fundamentala si armonicile superioare, mai apar în curba tensiunii magnetice V(x)
si subarmonicele de perioada egala cu dublul pasului polar, datorita numarului fractionar de
crestatutri pe pol si faza.
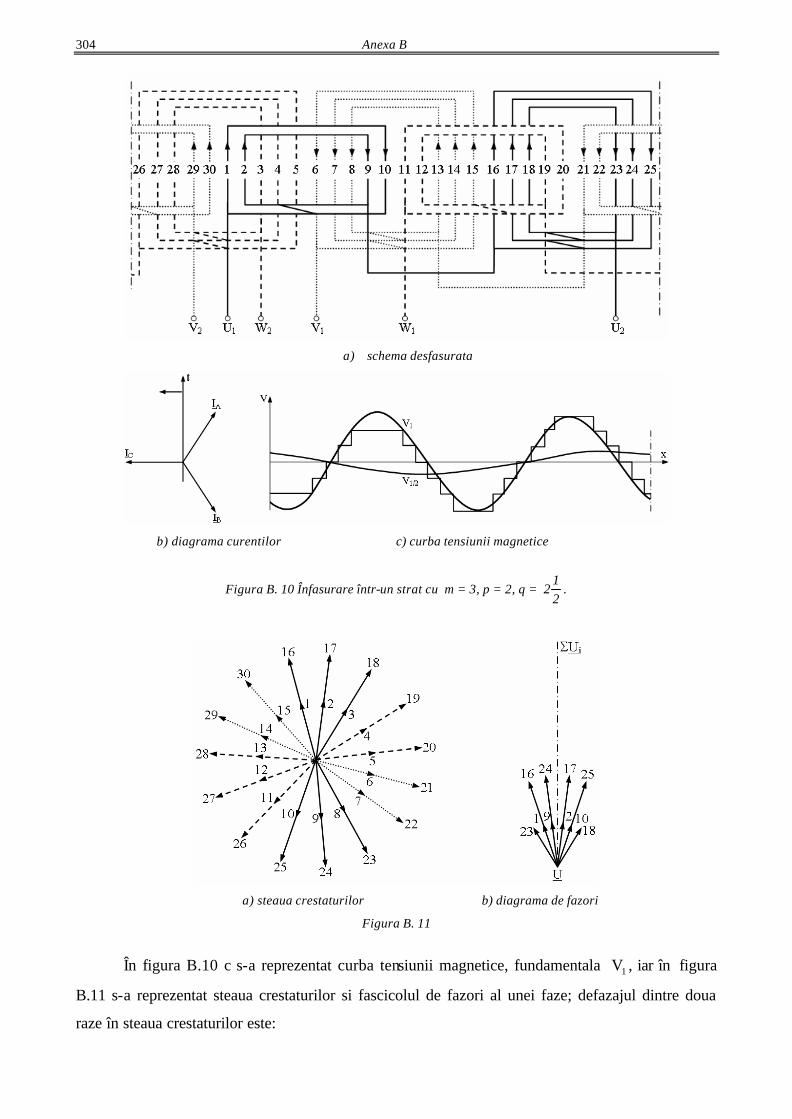
Anexa B 304
a) schema desfasurata
b) diagrama curentilor c) curba tensiunii magnetice
Figura B. 10 Înfasurare într-un strat cu m = 3, p = 2, q = 21
2 .
a) steaua crestaturilor b) diagrama de fazori
Figura B. 11
În figura B.10 c s-a reprezentat curba tensiunii magnetice, fundamentala 1V , iar în figura
B.11 s-a reprezentat steaua crestaturilor si fascicolul de fazori al unei faze; defazajul dintre doua
raze în steaua crestaturilor este:

Anexa B
305
oo
24303602
Z360p
=⋅
=⋅
=γ .
Factorul de înfasurare al fundamentalei se calculeaza din figura B.11, b si rezulta:
9514,0U10
30cosU218cosU46cosU4
U
Uk 10
li
10
li
wl =⋅
⋅⋅+⋅⋅+⋅⋅==
∑
∑ ooo
,
în care Ui este fazorul t.e.m. induse într-o latura de bobina a unei faze.
B.6 ÎNFASURARI ÎN DOUA STRATURI CU q ÎNTREG
Capetele de bobina ale înfasurari se dispun în coroana de bobine. Înfasurarile în doua
straturi se executa cu bobine identice. În fiecare crestatura se aseaza doua laturi de bobina: o latura
de ducere apartinând unei bobine si o latura de întoarcere, apartinând altei bobine. Numarul
bobinelor Nb este egal cu numarul de crestaturi Z, iar numarul de bobine pe faza este dat de:
==mZ
N bf numar întreg.
Prin urmare, la aceste înfasurari numarul de crestaturi trebuie sa fie divizibil cu numarul de
faze.
Înfasurarile în doua straturi se pot executa cu una, doua, trei sau mai multe cai de curent în
paralel, cu pasul diametral sau cu pasul scurtat, cu extinderea partiala sau totala a zonelor, cu sau
fara intercalarea fazelor; aceste tipuri constructive sunt folosite în constructia masinilor electrice, în
scopul reducerii armonicelor. Procesul tehnologic de executie al acestor înfasurari este mai simplu
si posibilitatile de micsorare a armonicelor cresc.
Înfasurarile în doua straturi se pot executa cu q întreg sau cu q fractionar.
La înfasurarile în doua straturi cu bobine egale, steaua crestaturilor este, de fapt, diagrama
de fazori a t.e.m. induse în bobine.
Înfasurarea cu pas diametral
Înfasurarile în doua straturi cu pas diametral sunt înfasurari cu sase zone dintr-un strat,
apartinând la o faza.
Pasul înfasurarii este dat de relatia:

Anexa B 306
=⋅=⋅
⋅⋅⋅=
⋅= qm
p2qpm2
p2Z
y numar întreg.
APLICATII
1. Se cere sa se construiasca schema desfasurata pentru o înfasurare trifazata, în doua
straturi, având p = 1, q = 3.
SOLUTIE:
Numarul de crestaturi fiind 18qpm2Z =⋅⋅⋅= , rezulta numarul de bobine pe faza.
6qp2mZ
Nbf =⋅⋅== .
Pasul înfasurarii este:
9qmp2
Zy =⋅=
⋅= crestaturi.
Grupele de bobine ale unei faze se pot conecta în serie (la înfasurarea cu o cale de curent),
sau în paralel (la înfasurarea cu 2 cai de curent).
La înfasurarea bipolara cu o cale de curent, cele doua grupe de bobine care se succed la
periferia armaturii si apartin aceleiasi faze sunt situate la un pas polar si se conecteaza în circuitul
înfasurarii în opozitie, pentru a se însuma solenatiile în crestatura, respectiv sub acelasi pol.
Bobinele cu mai multe spire au forma unor bucle; de aici provine si numele de înfasurare buclata.
În figura B. 12 s-a reprezentat schema desfasurata a înfasurarii cu o cale de curent, steaua
crestaturilor si diagrama de fazori. Faza 21 UU − cuprinde grupa de bobine 1 – 10, 2 – 11, 3 – 12,
conectata în opozitie cu grupa 11 – 2 si 12 – 3. În diagrama de fazori t.e.m. induse în bobinele
conectate în opozitie au fost marcate cu semnul minus (–).
O înfasurare multipolara cu p perechi de poli se obtine din înfasurarea de mai sus, prin
repetarea sa de p ori.
Înfasurarile cu o singura spira pe bobina au, în general, conductorul realizat din bara
conductoare; aceste înfasurari se numesc înfasurari în bare sau înfasurari ondulate si executia se
poate efectua dupa scheme prin care se scurteaza si, în parte, se evita legaturile frontale între
diferitele bobine, apartinând aceleiasi faze. Bobinele acestor înfasurari au forma unor ondule; de la
aceasta forma a bobinelor provine si numele de înfasurare ondulata.
Anexa B
307
Înfasurarea cu pas scurtat
Scurtarea pasului se alege potrivit pentru reducerea armonicelor, îndeosebi a armonicilor 5
si 7, din unda tensiunii magnetice, respectiv t.e.m.. Un efect favorabil se obtine prin scurtarea
pasului în raportul:
)83,082,0(
p2Zy
÷= .
Pentru a realiza acest raport favorabil, numarul de crestaturi pe pol si faza trebuie sa aiba
numai anumite valori.
De exemplu, pentru q = 2 si m = 3, pasul diametral rezulta 6qmyd =⋅= ; prin alegerea
pasului bobinelor y = 5, rezulta raportul favorabil 833,065
yy
d
== .
În cazul în care q = 3 si m = 3, pasul diametral fiind yd = 9, iar pasii posibili ai înfasurarii y
= 8 sau 7, rezulta pentru raportul 98
yy
d
= sau 97
(adica valorile 0,889 respectiv 0,778).
Prin urmare, în acest caz, înfasurarea nu se poate executa cu un pas favorabil pentru
reducerea ambelor armonici de ordinul 5 si 7.
La înfasurarile cu pas scurtat se reduce consumul de material conductor pentru înfasurari,
deoarece se reduce lungimea capetelor de bobina ; creste, însa, numarul de spire pentru compensarea
scaderii de tensiune datorita micsorarii factorului de înfasurare. Se poate determina din aceste
conditii o scurtare optima în ceea ce priveste consumul de material.
Un alt efect al scurtarii consta în reducerea reactantei de dispersie a înfasurarii, prin faptul ca
în unele crestaturi sunt asezate laturi de bobine apartinând la faze diferite; solenatia rezultanta pe
crestatura este mai redusa si scade, în acest fel, fluxul de dispersie din crestatura. O reducere rezulta
si pentru reactanta portiunii frontale de înfasurare, prin faptul ca se reduce suprafata prin care se
închide câmpul magnetic de dispersie frontal.
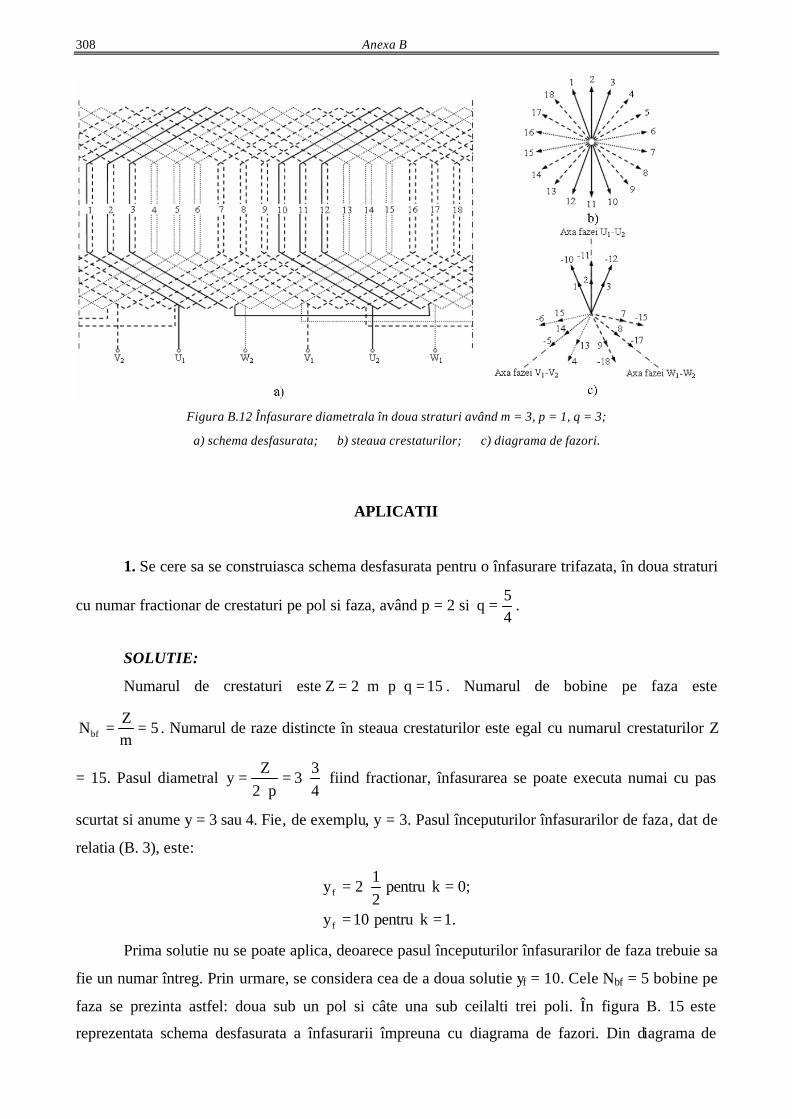
Anexa B 308
Figura B.12 Înfasurare diametrala în doua straturi având m = 3, p = 1, q = 3;
a) schema desfasurata; b) steaua crestaturilor; c) diagrama de fazori.
APLICATII
1. Se cere sa se construiasca schema desfasurata pentru o înfasurare trifazata, în doua straturi
cu numar fractionar de crestaturi pe pol si faza, având p = 2 si 45
q = .
SOLUTIE:
Numarul de crestaturi este 15qpm2Z =⋅⋅⋅= . Numarul de bobine pe faza este
5mZ
Nbf == . Numarul de raze distincte în steaua crestaturilor este egal cu numarul crestaturilor Z
= 15. Pasul diametral 43
3p2
Zy ⋅=
⋅= fiind fractionar, înfasurarea se poate executa numai cu pas
scurtat si anume y = 3 sau 4. Fie, de exemplu, y = 3. Pasul începuturilor înfasurarilor de faza, dat de
relatia (B. 3), este:
.1kpentru10y
;0kpentru21
2y
f
f
==
=⋅=
Prima solutie nu se poate aplica, deoarece pasul începuturilor înfasurarilor de faza trebuie sa
fie un numar întreg. Prin urmare, se considera cea de a doua solutie yf = 10. Cele Nbf = 5 bobine pe
faza se prezinta astfel: doua sub un pol si câte una sub ceilalti trei poli. În figura B. 15 este
reprezentata schema desfasurata a înfasurarii împreuna cu diagrama de fazori. Din diagrama de
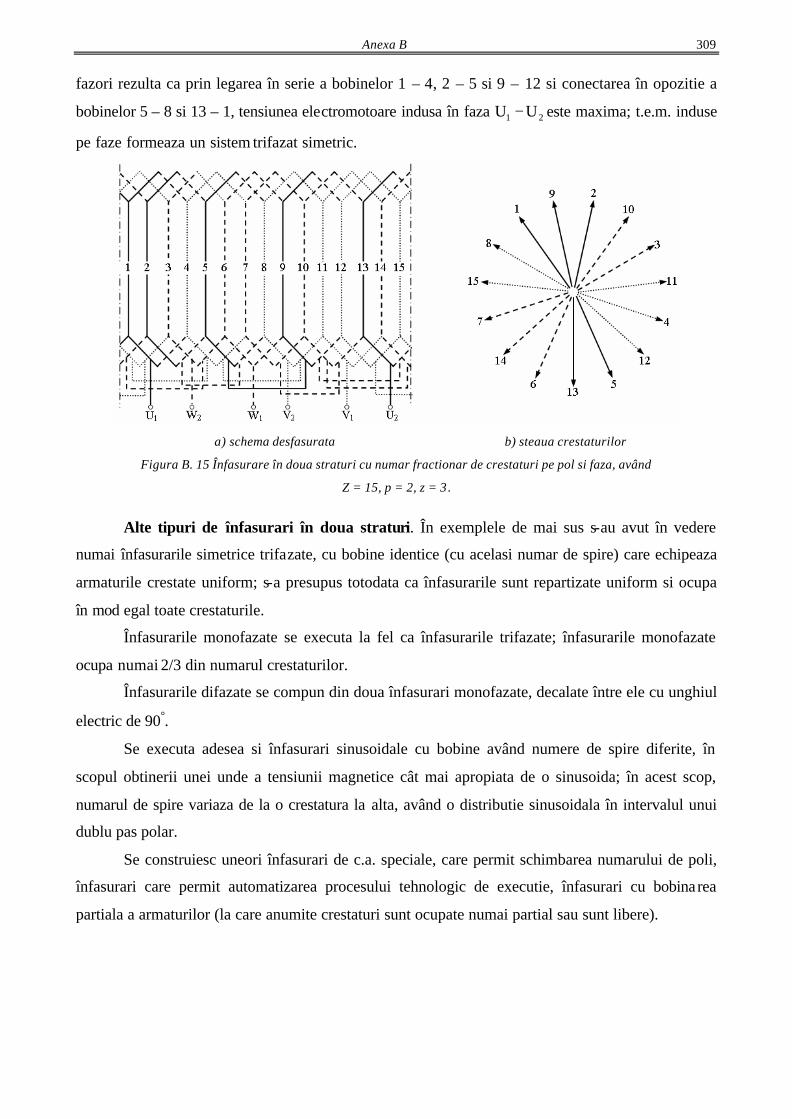
Anexa B
309
fazori rezulta ca prin legarea în serie a bobinelor 1 – 4, 2 – 5 si 9 – 12 si conectarea în opozitie a
bobinelor 5 – 8 si 13 – 1, tensiunea electromotoare indusa în faza 21 UU − este maxima; t.e.m. induse
pe faze formeaza un sistem trifazat simetric.
a) schema desfasurata b) steaua crestaturilor
Figura B. 15 Înfasurare în doua straturi cu numar fractionar de crestaturi pe pol si faza, având
Z = 15, p = 2, z = 3.
Alte tipuri de înfasurari în doua straturi. În exemplele de mai sus s-au avut în vedere
numai înfasurarile simetrice trifazate, cu bobine identice (cu acelasi numar de spire) care echipeaza
armaturile crestate uniform; s-a presupus totodata ca înfasurarile sunt repartizate uniform si ocupa
în mod egal toate crestaturile.
Înfasurarile monofazate se executa la fel ca înfasurarile trifazate; înfasurarile monofazate
ocupa numai 2/3 din numarul crestaturilor.
Înfasurarile difazate se compun din doua înfasurari monofazate, decalate între ele cu unghiul
electric de 90°.
Se executa adesea si înfasurari sinusoidale cu bobine având numere de spire diferite, în
scopul obtinerii unei unde a tensiunii magnetice cât mai apropiata de o sinusoida; în acest scop,
numarul de spire variaza de la o crestatura la alta, având o distributie sinusoidala în intervalul unui
dublu pas polar.
Se construiesc uneori înfasurari de c.a. speciale, care permit schimbarea numarului de poli,
înfasurari care permit automatizarea procesului tehnologic de executie, înfasurari cu bobinarea
partiala a armaturilor (la care anumite crestaturi sunt ocupate numai partial sau sunt libere).
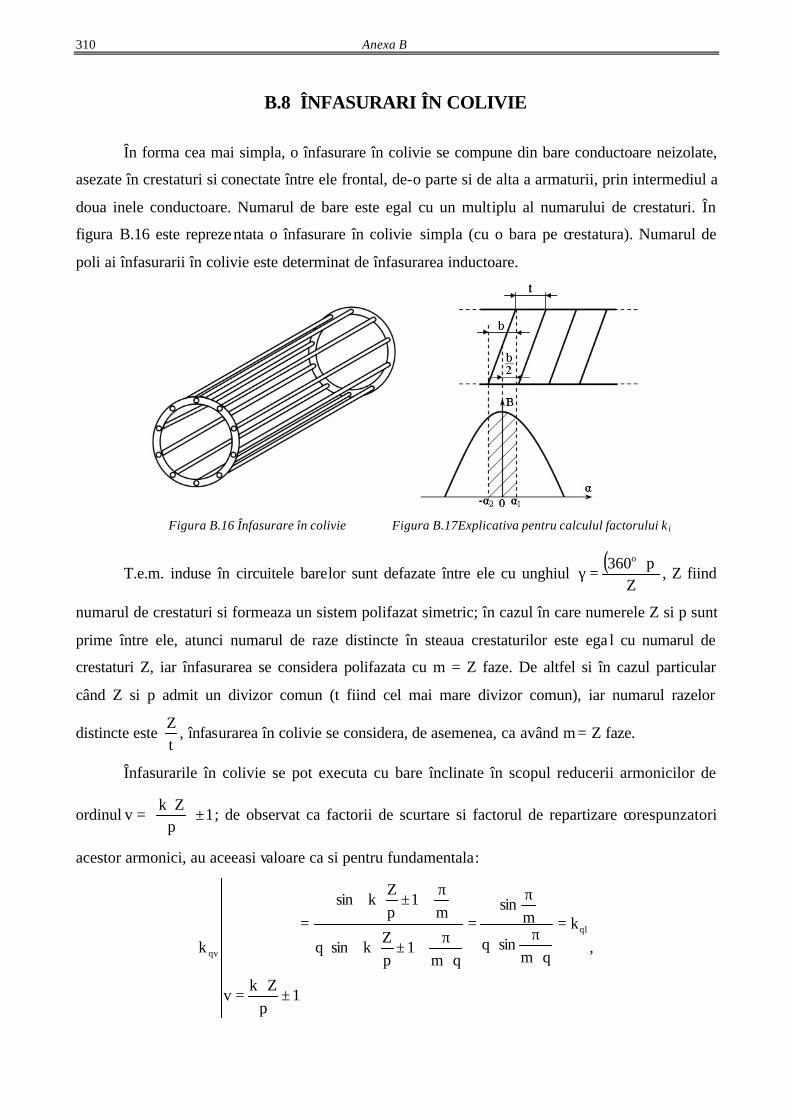
Anexa B 310
B.8 ÎNFASURARI ÎN COLIVIE
În forma cea mai simpla, o înfasurare în colivie se compune din bare conductoare neizolate,
asezate în crestaturi si conectate între ele frontal, de-o parte si de alta a armaturii, prin intermediul a
doua inele conductoare. Numarul de bare este egal cu un multiplu al numarului de crestaturi. În
figura B.16 este reprezentata o înfasurare în colivie simpla (cu o bara pe crestatura). Numarul de
poli ai înfasurarii în colivie este determinat de înfasurarea inductoare.
Figura B.16 Înfasurare în colivie Figura B.17Explicativa pentru calculul factorului k i
T.e.m. induse în circuitele barelor sunt defazate între ele cu unghiul ( )
Zp360o ⋅
=γ , Z fiind
numarul de crestaturi si formeaza un sistem polifazat simetric; în cazul în care numerele Z si p sunt
prime între ele, atunci numarul de raze distincte în steaua crestaturilor este ega l cu numarul de
crestaturi Z, iar înfasurarea se considera polifazata cu m = Z faze. De altfel si în cazul particular
când Z si p admit un divizor comun (t fiind cel mai mare divizor comun), iar numarul razelor
distincte este tZ
, înfasurarea în colivie se considera, de asemenea, ca având m = Z faze.
Înfasurarile în colivie se pot executa cu bare înclinate în scopul reducerii armonicilor de
ordinul 1pZk
v ±
⋅= ; de observat ca factorii de scurtare si factorul de repartizare corespunzatori
acestor armonici, au aceeasi valoare ca si pentru fundamentala:
,
1pZk
v
k
qmsinq
msin
qm1
pZ
ksinq
m1
pZ
ksin
kql
qv
±⋅
=
=
⋅π
⋅
π
=
⋅π
⋅
±⋅⋅
π⋅
±⋅
=

Anexa B
311
,2
y2
ypZ
ksin2
y1
pZ
ksin1
pZk
vk sv
π⋅
τ±
π⋅
τ⋅⋅=
π⋅
τ⋅
±⋅=
±⋅
=
tinând seama ca: ,
p2Zyy
⋅
=τ
factorul de scurtare al armonicilor 1pZk
v ±⋅
= are valoarea data de relatia urmatoare:
1s1
pZk
,sk
2y
yksink =
π
⋅τ
±π⋅⋅=±
⋅
oricare ar fi pasul bobinei.
Factorul de înclinare . În figura B.17 s-a reprezentat o portiune de înfasurare în colivie
asezata în crestaturi înclinate. Tensiunea electromotoare în circuitul unei bare are valoarea maxima:
∫α
α−δδ α
α⋅⋅⋅=αα⋅⋅
α⋅⋅⋅=
1
1 1
11
11sl
sinBlvdcosB
21
lvU ,
unde: Z
p2tb
2 1⋅π⋅
⋅=α⋅ ;
- v – viteza relativa dintre colivie si câmp;
- t – pasul crestaturii;
- Z – numarul de crestaturi al armaturii.
În absenta înclinarii tensiunea indusa este:
δ⋅⋅ν= BlU 1e , 1
1
e
el1i
sinUU
kα
α== , (B. 11)
Zp
tb
Zp
tb
sink il ⋅π
⋅
⋅π⋅
= ,
iar factorul sau este denumit factorul de inclinare al fundamentalei. În cazul unei armonici ν
oarecare, factorul de înclinare kiν este:
Zp
tb
Zp
tb
sink i π⋅
⋅⋅ν
π⋅⋅⋅ν
=ν . (B. 12)
La armatura cu crestaturi înclinate factorul de înclinare este subunitar. Înclinarea tb
a
crestaturilor se determina din conditia ca factorul kiν al unei anumite armonici sa se anuleze.
Bibliografie
1. I.S. Gheorghiu, Al. Fransua – Tratat de masini electrice, vol. I – IV, Editura Academiei
R.S.R., Bucuresti, 1969 – 1972 ;
2. C. Bala – Masini electrice, Editura Didactica si Pedagogica, Bucuresti, 1982;
3. Al Fransua, R. Magureanu – Masini si actionari electrice. Elemente de executie, Editura
Tehnica, Bucuresti, 1986 ;
4. I. Boldea, Gh. Atanasiu – Analiza unitara a masinilor electrice, Editura Academiei
R.S.R., Bucuresti, 1983 ;
5. T. Dordea – Masini electrice, Editura Didactica si Pedagogica, Bucuresti, 1978;
6. P.K. Kovacs – Analiza regimurilor tranzitorii ale masinilor electrice, Editura Tehnica,
Bucuresti, 1980;
7. R. Magureanu – Masini electrice speciale pentru sisteme automate, Editura Tehnica,
Bucuresti, 1981 ;
8. R. Magureanu, N. Vasile – Motoare sincrone cu magneti permanenti si reluctanta
variabila, Editura Tehnica, Bucuresti, 1982 ;
9. Al. Simion – Masini electrice speciale pentru automatizari, Editura Universitas, Chisinau,
1933 ;
10. A. Câmpeanu – Masini electrice, Editura Scrisl Românesc, Craiova, 1977 ;
11. R. Magureanu, N. Vasile – Servomotoare fara perii tip sincron, Editura Tehica,
Bucuresti, 1990 ;
12. D. Calueanu, R. Teodorescu, N. Badea, M. Berbeciu, T. Munteanu – Masini electrice –
Note de curs, Litografia Universitatii „Dunarea de Jos”, Galati, 1994;
13. J. Hindmarsh – Electrical machines and their application. 5th edition, Pergamon Press,
Oxford, 1984;
14. I. Cioc, I. Vlad, G. Calota – Transformatorul electric. Constructie. Teorie. Proiectare.
Fabricare. Exploatare., Editura Scrisul Românesc, Craiova, 1989.