Embed Size (px)
Citation preview

8/8/2019 Mathematics and Tensegrity
http://slidepdf.com/reader/full/mathematics-and-tensegrity 1/10
8/8/2019 Mathematics and Tensegrity
http://slidepdf.com/reader/full/mathematics-and-tensegrity 2/10
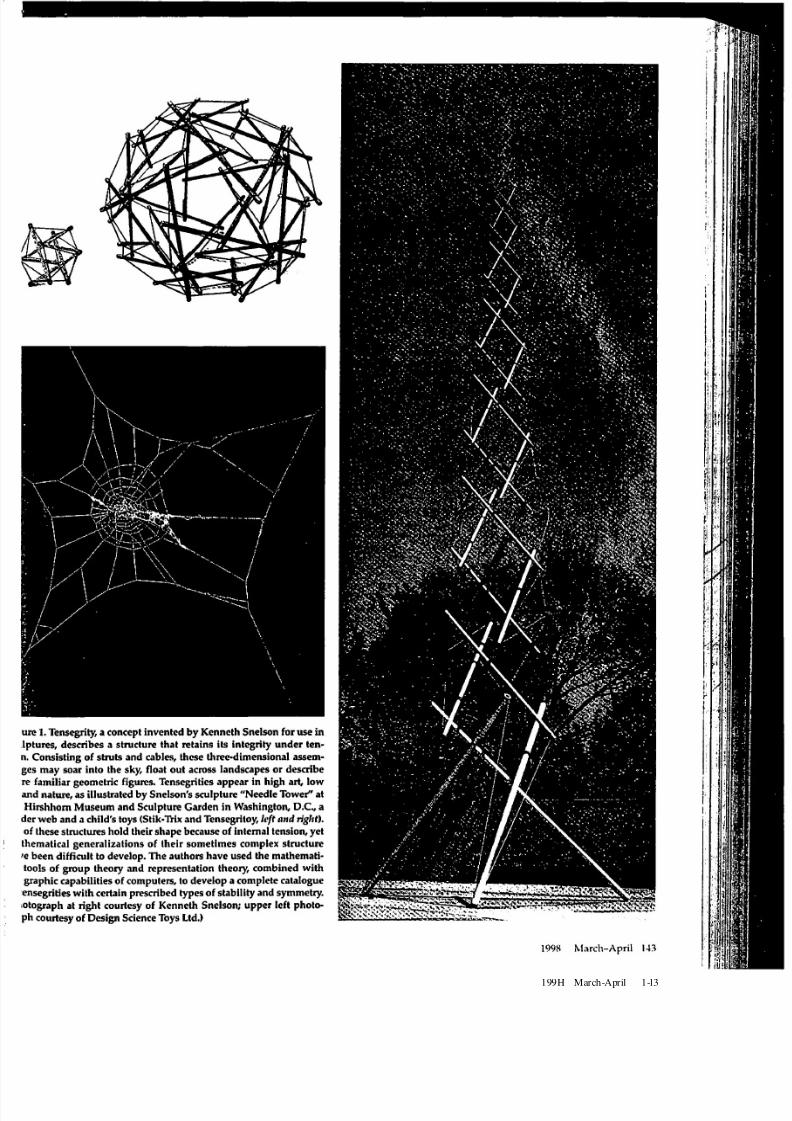
e 1. Tensegrity, a concept invented by Kenneth Snelson for use in
ture5, describes a structure that retains its integrity under ten-
Consisting of struts and cables, these three-dimensional assem-s may soar into the sky, float out across landscapes or describe
familiar geometric figures. Tensegrities appear in high art, low
d nature, as illustrated by Snelson's sculpture "Needle Tower" at
irshhorn Museum and Sculpture Garden in Washington, D.C., a
r web and a child's toys (Slik-Trix and Tensegritoy, left and rigllt).
f these structures hold their shape because of internal tension, yet
ematical generalizations of their sometimes complex structure
been difficult to develop. The authors have used the mathemati-
ols of group theory and representation theory, combined with
raphic capabilities of computers, to develop a complete catalogue
segrities with certain prescribed types of stability and symmetry.
ograph at right courtesy of Kenneth Snelson; upper left photo-
courtesy of Design Science Toys Ltd.)
199H March-April 1-l3
8/8/2019 Mathematics and Tensegrity
http://slidepdf.com/reader/full/mathematics-and-tensegrity 3/10
initial configuration
3 4
target configuration
4
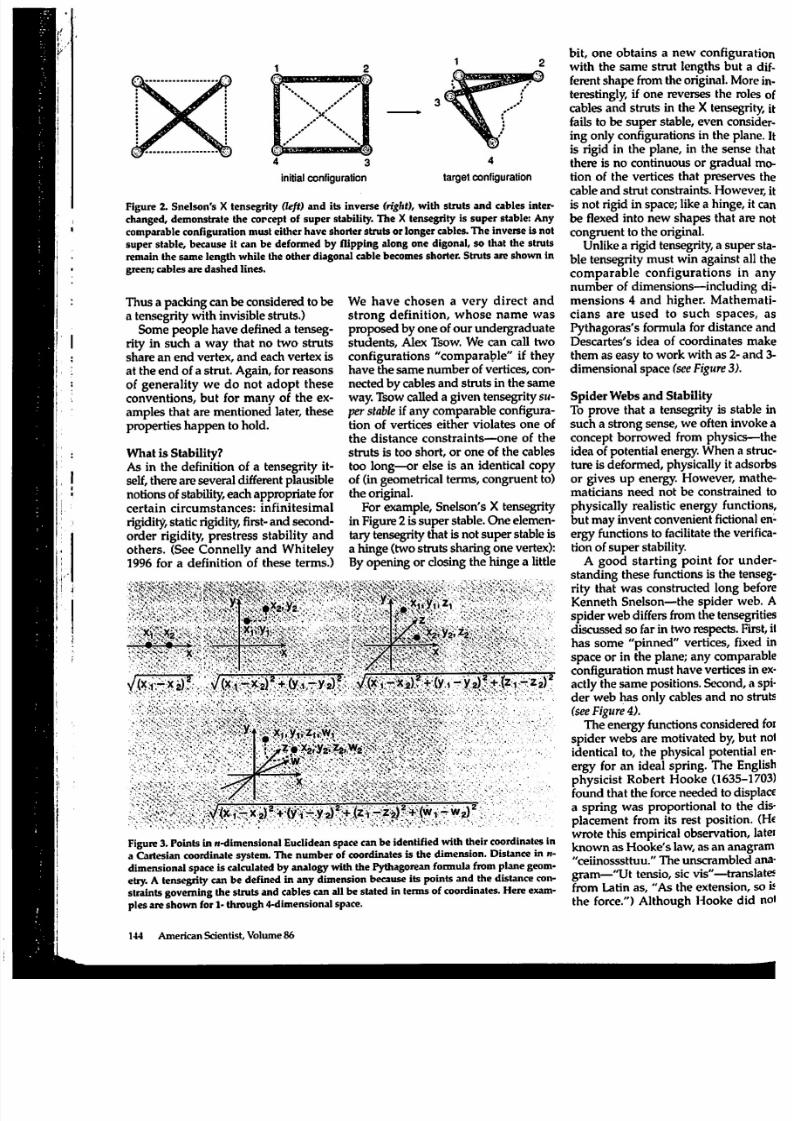
Figure 2. Snelson's X tensegrity (left) and its inverse (right), with struts and cables inter-
changed, demonstrate the corcept of super stability. The X tensegrity is super stable: Any
comparable configuration must either have shorter struts or longer cables. The Inverse Is not
super stable, because it can be defonned by flipping along one digonal, so that the struts
remain the same length while the other diagonal cable becomes shorter. Struts are shown in
green; cables are dashed lines.
Thus a packing can be considered to bea tensegrity with invisible struts.)
Some people have defined a tenseg-rity in such a way that no two strutsshare an end vertex, and each vertex is
at the end of a strut. Again, for reasonsof generality we do not adopt theseconventions, but for many of the ex-amples that are mentioned later, theseproperties happen to hold.
What is Stability?As in the definition of a tensegrity it-self,there are several different plausiblenotions of stability,each appropriate forcertain circumstances: infinitesimalrigidity,static rigidity, fiBt-and second-order rigidity, prestress stability andothers. (See Connelly and Whiteley
1996 for a definition of these terms.)
We have chosen a very direct andstrong definition, whose name wasproposed by one of our undergraduatestudents, Alex Tsow. We can call twoconfigurations "comparaple" if theyhave the same number of vertices, con-nected by cables and struts in the sameway. Tsowcalled a given tensegrity su -
per stable ifany comparable configura-tion of vertices either violates one of the distance constraints-one of thestruts is too short, or one of the cablestoo long-or else is an identical copyof (in geometrical terms, congruent to)
the original.For example, Snelson's X tensegrity
in Figure 2 is super stable. One elemen-tary tensegrity that is not super stable isa hinge (two struts sharing one vertex):
By opening or closing the hinge a little
v " ' " '2"";;" ""'< 2'····':·2;':-:·:"···Y·,,,·. :.j!: ....., ~.... .....·~~:1.:~:~2} ; ' : " ,~,',(~:.t;~:'82t, · , : f . J y ': ; 1 ; 7 . Y " i! ) ~ : " ; " Y : . ( X ; : { 7 ; · r . ij) . , : * '·( Y ,1 ' 7Y.2)/~·(Z;f'~·Z2 ) .
\' ~"~f.:::.;~";\,~'~~~;,~,;,': ..'.\ <\" .:~~~::.'.','~!,~",.";';,,',~.~ ~ > ~ ~ ;_ '.. .': ': '.:~: t ,:,~< <'<','" :';:';2';':~:,~" \ . : _ < : < . . . . . .} ~ . .>.:'~~:;:~.<..'~,~> ' ~ ' , , ' , ' : ' ; \ . : \ ~ , ~ ~ ' ~ : . ~ ~ . ; , , . t , ' ;. ' ":. . . . . :,~. ,' . " . ,",
J : ; : ; : , : : · ; i : ~ ~ ; ~ : . · ) : , : : + : ; ; : f ~ ~ ~ H ~ ~ · : · ~ ~ ; t ! ~ f . : , ~ : : ; ' , ; , ~ , ~ , , : : ; } ~ ; ~ ; ~ ~ , j : : ~ § ; ~ i i I . g ~ k % ~ ~ ~ } l f 8 ~ ~ ~ { M : , . · : : : : ; ' ; ' ' < : '. • .~ ' . : ' . '
.D~¥~:~>Fi''''.'·'.i..' f ." . '~ ;" ;" . . . . . 5 ; . . . •; 'i . ! I \ , i ; ~ ; ; ; :• •·,<..;,'., " .J:,!:.•.;,.,,~V,:(X,'k,.X2}" ~ (y '1· · · . ,y ,2} . .+ , (z . l · · .;~~~.:.«wl: W . 2) '.'
. .~ - - : . - .: . , ~. .~ ' . '\ : ~ : : ~ . ' ~: . : ~ . ': '> : ~ ' . , ~ ~< ~. /. ." : . - : > .'t,"""',~: '."':..',.' :-..,~,;...; :~,:;'> ~ -, ' , :~ . : : , .> : ' , : , : , , : . ~ ~ . ; ~ ' ~ ~ ~ . ~ , ~ ~ . ~. ~ , • .~ ; . ~ : : . :~'>:::;t: I',· • ,'. -,' .'-.
Figure 3. Points in n-dimensional Euclidean space can be identified with their coordinates in
a Cartesian coordinate system. The number of coordinates is the dimension. Distance inn-
dimensional space is calculated by analogy with the Pythagorean fOIDlula from plane geom-
etry. A tensegrity can be defined in any dimension because its points and the distance con-
straints governing the struts and cables can aU be stated in tenns of coordinates. Here exam-
ples are shown for 1- through 4-dimensional space.
144 American Scientist, Volume 86
bit, one obtains a new configurwith the same strut lengths but ferent shape from the original. Moterestingly, if one reverses the rocables and struts in the X tensegrfails to be super stable, even coning only configurations in the plais rigid in the plane, in the sensthere is no continuous or graduation of the vertices that preserve
cable and strut constraints. Howeis not rigid in space; like a hinge, be flexed into new shapes that acongruent to the original.
Unlike a rigid tensegrity, a supeble tensegrity must win against acomparable configurations innumber of dimensions-includingmensions 4 and higher. Mathecians are used to such spacePythagoras's formula for distancDescartes's idea of coordinates them as easy to work with as 2- adimensional space (see Figure 3) .
Spider Webs and StabilityTo prove that a tensegrity is stasuch a strong sense, we often invconcept borrowed from physicsidea of potential energy. When a ture is deformed, physically it ador gives up energy. However, mmaticians need not be constrainphysically realistic energy funcbut may invent convenient fictionergy functions to facilitate the vetion of super stability.
A good starting point for ustanding these functions is the terity that was constructed long bKenneth Snelson-the spider wspider web diffeB from the tensegdiscussed so far in two respects_Fhas some "pinned" vertices, fixspace or in the plane; any compaconfiguration must have verticesactly the same positions. Second,der web has only cables and no (see Figure 4) .
The energy functions considerspider webs are motivated by, b
identical to, the physical potentiergy for an ideal spring. The Ephysicist Robert Hooke (1635-found that the forceneeded to dia spring was proportional to thplacement from its rest positionwrote this empirical observationknown as Hooke's law, as an ana"ceiinosssttuu." The unscrambledgram-"Ut tensio, sic vis"-translfrom Latin as, "As the extensionthe force.") Although Hooke di
8/8/2019 Mathematics and Tensegrity
http://slidepdf.com/reader/full/mathematics-and-tensegrity 4/10
rase the law in terms of energy, it
plies that the energy in a spring is
oportional to the square of the dis-
ce it is stretched or compressed.
In a spider-web tensegrity, the energy
nction for each cable is simply pro-
)rtional to the total length squared-as
he cable were a spring with a resting
gth of zero. It remains to determine
hatthe constants of proportionality form cable should be or (if we think of
e cables as springs) how "strong" the
ings are. For a given configuration,
e goal is to choose these fictional
engths insuch a way that the config-
ation represents a unique minimum
the corresponding energy function,
e sum of the energy functions of all
ecables. Then any comparable spider
eb that does not increase any cable
gth must have the same energy or
aller, because each cable contributes
e swme, or less, to the total. But since
e given configuration is supposed toresent a unique minimum energy,
e two configurations must be identi-
Consequently, such a spider webe that minimizes some energy func-
n) is super stable. This is called the
ciple of lens t w ork , in honor of the sim-
principle that is used in structural
ineering.
How does one recognize when a spi-
r web has an energy function that is
ecisely minimized by the given con-
uration? One answer is the equilibri-
of stresses-another concept bor-
ed from engineering. Again, it helps
magine the cables that meet at any
en vertex as springs, each one tug-
g in a different direction. Remember
t this force can be made "stronger"
"weaker" by a proportionality con-
nt, which we will call the s tress in the
le; thus the strength of each cable's
is equal to its length times its stress.
he stresses are picked in just the right
y, so that the tug-of-war wmong all
cables leading to a given vertex is a
w, then the stresses at that vertex are
quilibrium. If that happens at everyinned vertex, then the whole spider
b is said to be in equilibrium.
These stresses are simply numbers
t are assigned to cables; they need
thave anything to do with the size of
cable or even its physical or me-
nical characteristics. However, it is
ortant that all the stresses are posi-
e: If some are zero, then the given
figuration may not be a unique min-
m of the energy function, and the
nciple of least work will not apply.
For tensegrities ingeneral, equilibri-
um of the stresses is not enough to guar-
antee that the configuration ha s the min-. imum energy. However, for the special
case of a spider web with no unstressed
cables, it is enough. The reason is that
the energy function, composed as it is of
quadratic polynomials with positive cer
e£ficients, ha s a property called convex i ty .
No matter how you move the (un-pinned) vertices around, starting from a
critical eqUilibrium configuration, the
energy function will increase. A convex
function, like a parabola, can only have
one minimum point. Ifa spider web sat-
isfies the equilibrium condition, it ha s tobe the one. Thus the principle of least
work applies to show that the spider
web is super stable.
Note that this method does not just
provide a ''local'' result only valid for
small (or even bounded) perturbations.
yy
V I~I •
i \
6·····~,/ \
. ' ( 1 i !
.. /~. i',.."" ~ ® " @
0:......····· .....
~..' "l
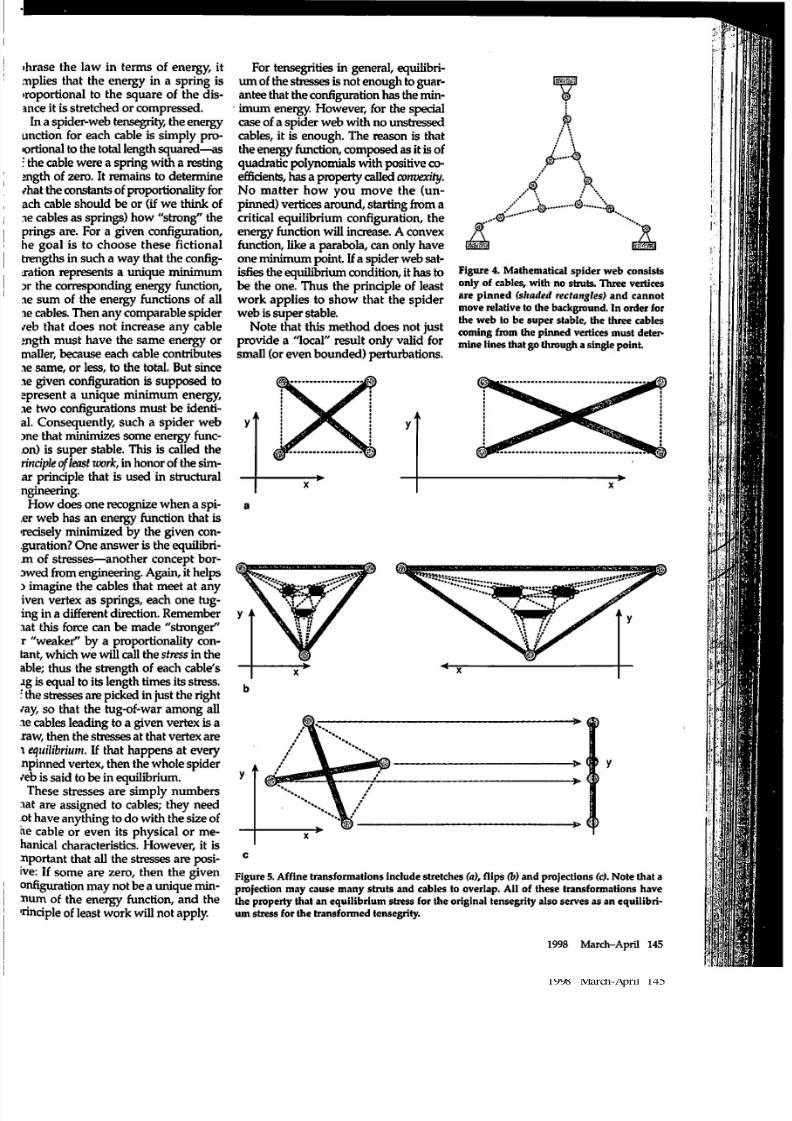
Figure 4. Mathematical spider web consists
only of cables, with no struts. Thn!e vertices
are pinned (slladed rectangles) and cannot
move relative to the background. Inorder for
the web to be super stable, the three cables
coming from the pinned vertices must deter-
mine lines that go through a single point.
x x
a
b
y
x
c
y
Figure S. Affine transformations include stretches (a),flips (b) and projections (c'. Note that a
projection may cause many struts and cables to overlap. AU of these transformations have
the property that an eqUilibrium stress for the original tensegrity also serves as an equilibri-
um stress for the transformed tensegrity.
1998 March-April 145
8/8/2019 Mathematics and Tensegrity
http://slidepdf.com/reader/full/mathematics-and-tensegrity 5/10
i ". . . ..'.'.'.'
··········-..~
. . .. '.'.'. . .
••••••••••••••••• -@.".'.
" ." .
. . . . . . . . . . . . . . . . . .....
..........
.. . . . . .. . . . . . . .
. . . . .~ -(
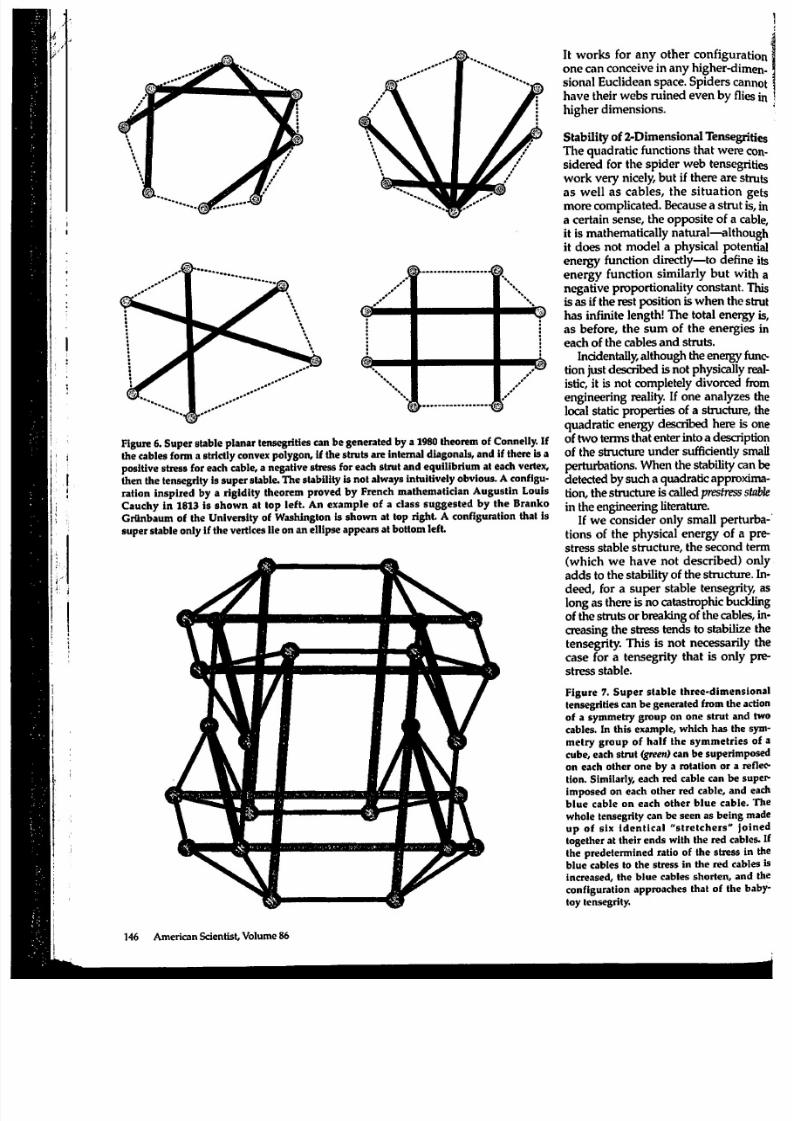
Figure 6. Super stable planar tensegrities can be generated by a 1980 Iheorem of Connelly. If
the cables form a strictly convex polygon, If the struts are inlemal diagonals, and If Ihere Is a
positive stress for each cable, a negative stress for each sinal and eqUilibrium al each vertex,
then the lensegrlty Is super slable. The stabUlty Is not always intuitively obvious. A configu·
ration inspired by a rigidity theorem proved by French mathematician Augustin Louis
Cauchy in 1813 is shown at top left. An example of a dass suggested by the Branko
GrIlnbaum of the University of Washington is shown at top right. A configuration that is
super stable only Ifthe vertices lie on an ellipse appears at boHom left.
14 6 American Scientist, Volume 86
It works for any other configuratione can conceive in any higher-dime
sional Euclidean space. Spiders ca
have their webs ruined even by fli
higher dimensions.
l'i!
Stability of 2-Dimensional Tensegri
The quadratic functions that were
sidered for the spider web tensegri
work very nicely, but if there are st
as well as cables, the situation
more complicated. Because a strut
a certain sense, the opposite of a c
it is mathematically natural-although
it does not model a physical poten
energy function directly-to defin
energy function similarly but wi
negative proportionality constant.
is as if the rest position is when the
has infinite length! The total energ
as before, the sum of the energies
each of the cables and struts.
Incidentally, although the energy ftion just described is not physically
istic, it is not completely divorced
engineering reality. If one analyzes
local static properties of a structure,
quadratic energy described here is
of two terms that enter into a descrip
of the structure under sufficiently s
perturbations. When the stability ca
detected by such a quadratic approxi
tion, the structure is called prestress s
in the engineering literature.
If we consider only small pertu
lions of the physical energy of a
stress stable structure, the second
(which we have not described)
adds to the stability of the structure
deed, for a super stable tensegrity
long as there is no catastrophic buck
of the struts or breaking of the cable
creasing the stress tends to stabilize
tensegrity. This is not necessarily
case for a tensegrity that is only
stress stable.
Figure 7. Super stable three·dimension
tensegrlties can be generated from the a
of a symmetry group on one strut and
cables. InIhis example, which has the
metry group of half the symmetries
cube, each strut (green) can be superimpoon each other one by a rotation or a r
tion. Similarly, each red cable can be s
imposed on each other red cable, and
blue cable on each other blue cable.
whole tensegrity can be seen as being
up of six Identical "stretchers" jo
together at their ends with the red cab
the predetermined ratio of the stress i
blue cables to the stress in the red cab
increased, the blue cables shorten, an
configuration approaches that of the
toy tensegrlty.
8/8/2019 Mathematics and Tensegrity
http://slidepdf.com/reader/full/mathematics-and-tensegrity 6/10
A second problem when we move
m spider webs to tensegrities is the
of pinned vertices, which technically
s out the whole idea of a "unique"
rgy minimum. Since nothing is
ned, the whole configuration can be
dly moved about, and the energy
l remain the same. Not only that,
there also can be massive distor-
ms to the configuration-certainds of rescaling transformations as
l as projections of a tensegrity
wn to its "shadow" in a lower num-
of dimensions-that do not alter
energy. The equilibrium condition
reserved by such maps, which are
ed af fine l inear t rans/ont la t ions (seere 5).s before, call the coefficient of the
rgy function for each cable or strut
stress. As with the spider web
egrities, the tensegrity is said to be
quilibrium with that collection of
sses if the stresses balance at each
rtex. For example, Snelson's X
egrity is in equilibrium when all
r cables have stress 1,and the two
ts have stress -1.
As in the case of spider webs, if a
segrity has an energy function that
minimized for a certain configura-
, then the configuration is in equi-
ium. But the converse is no longer
: Even when the configuration is at
ilibrium for a given set of stresses,
energy may not be at a minimum.
r exwmple, simply reverse the roles
cables and struts for Snelson's X
segrity, and reverse the signs of the
sses as well. The new tensegrity
l still be in equilibrium, but the en-
y will be at a maximum instead of a
imum, and the tensegrity will not
uper stable.
hus, to prove that a given tensegri-
s super stable, there are three tasks
must complete. First, we must
w that the energy function is at a
nimum-not just at an equilibrium.
ond, we must show that the only
ne transformations that do not vio-any cable and strut constraints are
ually congruences (that is, no
tching or shrinking is allowed). Fi-
ly, we must show that the given
segrity cannot be the "shadow" of
higher-<iimensional tensegrity that
lso in equilibrium. (Maria Terrell of
rnell University has called the latter
operty the universality of the tenseg-
y.)Under these conditions, the prin-
e of least work implies that the giv-
tensegrity is super stable.
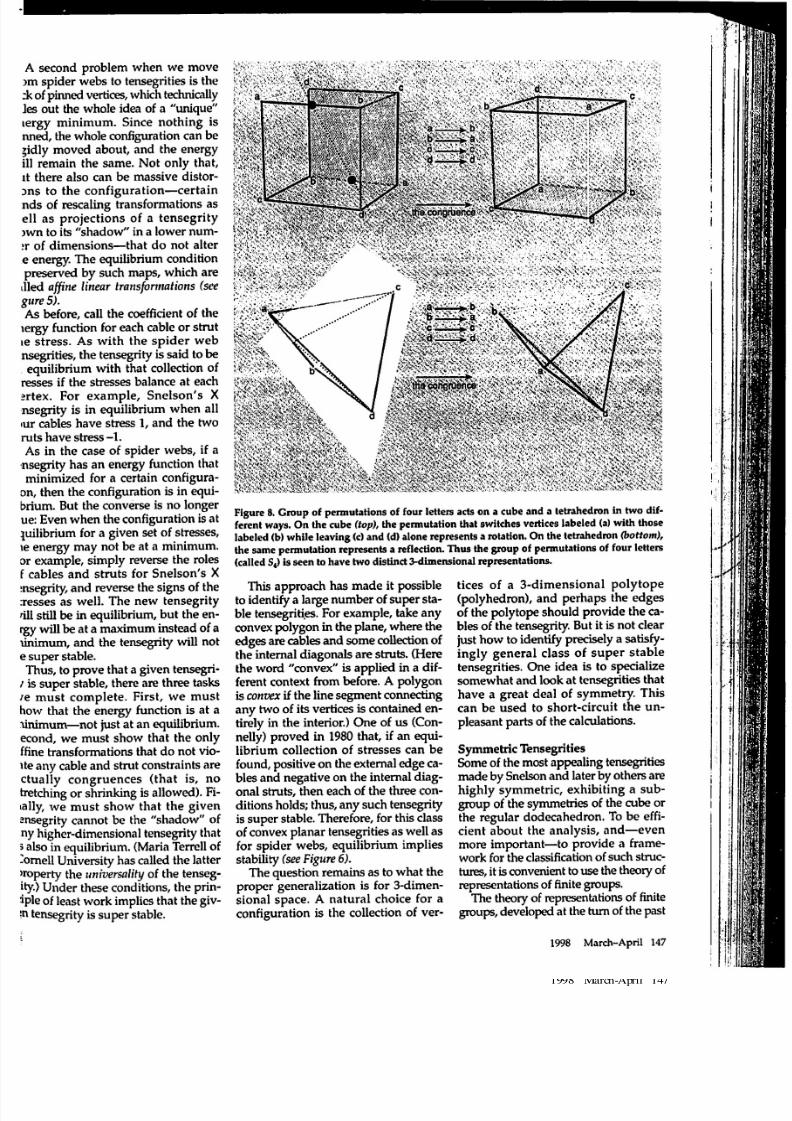
Figure 8. Croup of permutations of four letters acts on a cube and a tetrahedron intwo dif-
ferent ways. On the cube (top), the permutation that switches vertices labeled (a) with those
labeled (b) while leaving (c) and (d) alone represents a rotation. On the tetrahedron (bottom),
the same permutation represents a reflection. Thus the group of permutations of four letters
(called S.) is seen to have two distinct 3-dimensional representations.
This approach has made it possible
to identify a large number of super sta-
ble tensegriti.es. For example, take any
convex polygon in the plane, where the
edges are cables and some collection of
the internal diagonals are struts. (Here
the word "convex" is applied in a dif-
ferent context from before. A polygon
is convex ifthe line segment connecting
any two of its vertices is contained en-
tirely in the interior.) One of us (Con-
nelly) proved in 1980 that, if an equi-
librium collection of stresses can befound, positive on the external edge ca-
bles and negative on the internal diag-
onal struts, then each of the three con-
ditions holds; thus, any such tensegrity
is super stable. Therefore, for this class
of convex planar tensegrities as well as
for spider webs, equilibrium implies
stability (see Figure 6).The question remains as to what the
proper generalization is for 3-dimen-
sional space. A natural choice for a
configuration is the collection of ver-
tices of a 3-dimensional polytope
(polyhedron), and perhaps the edges
of the polytope should provide the ca-
bles of the tensegrity. But it is not clear
just how to identify precisely a satisfy-
ingly general class of super stable
tensegrities. One idea is to specialize
somewhat and look at tensegrities that
have a great deal of symmetry. This
can be used to short-circuit the un-
pleasant parts of the calculations.
Symmetric Tensegrities
Some of the most appealing tensegrities
made by Snelson and later by others are
highly symmetric, exhibiting a sub-
group of the symmetries of the cube or
the regular dodecahedron. To be effi-
cient about the analysis, and-even
more important-to provide a frame-
work for the classification of such struc-
tures, it is convenient to use the theory of
representations of finite groups.
The theory of representiltions of finite
groups, developed at the turn of the past
1998 March-April 147
8/8/2019 Mathematics and Tensegrity
http://slidepdf.com/reader/full/mathematics-and-tensegrity 7/10
inthe same orb i t ifat least one symme-try of the tensegrity superimposes oneof the pair onto the o ther. In Figure 7 ,each cable or strut in a given orbit hasthe same color. The grouP. of symme-tries of these tensegrities is transitive
on the struts (because there is only oneorbit, colored green) but not quite tran-sitive on the cables (because there aretwo orbits, colored red and blue).
With this in mind, it is especially easyto check whether there is an equilibriumstress for the cables and struts. If there isany energy function at all that is mini-
mized by the given configuration, thenthere is one that has the swme symmebyas the tensegrity i tself. Thus the samestress can be assigned to each cable orstrut in any given orbit. Similarly, the bal-ance of stresses only needs to be checkedat one vertex, because all vertices arealike under the group of symmetries. Fo ralmost all the exwmples considered here,i t turns out to be easy to check that theonly affine motions that preserve the ca-ble and strut constraints are congruences.Hence only one difficulty remains beforewe can apply the least work principle:We have to make sure that the energy isa minimum. That is where group repre-sentations enter the picture.
Group RepresentationsSo far, groups have appeared in only oneg uis e: t he g ro up o f s ymme tr ie s o f atensegr ity. But groups can a lso be de-fined inthe abstract, without referenceto any particular physical object . Fromthis point of view, a group is simply a setwhose elements can be "multiplied" andthat obeys certain rules, such as the exis-
tence of an identity element. Inthe case just presented, the elements of the groupwere motions that superimpose a tenseg-rity on itself, and "multiplication" of two
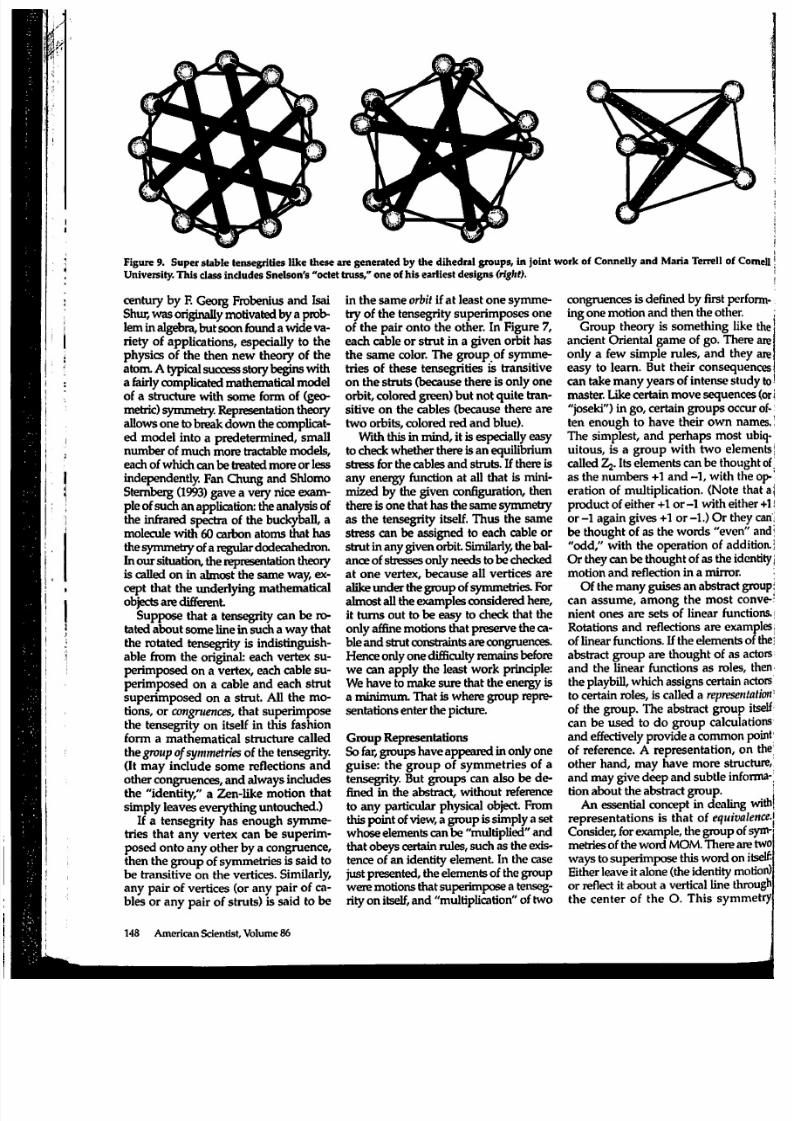
Figure 9. Super stable tensegrities Ilke these are generated by the dihedral groups, in joint work of Connelly and Maria Terrell of C
University. This class includes Snelson's "octet truss," one of his earliest designs (right).
148 American Scientist, Volume 86
congruences is defined by first perfing one m otion and then the other.
Group theory is something l ikancient Oriental game of go. Theronly a few simple rules , and theeasy to learn. But their conseque
can take many yeaB of intense stumaster. Like certain move sequence"joseki") in go, certain groups occten enough to have the ir own naThe s implest, and perhaps most u itous, i s a group wi th two e lemcalled ~. It s elements can be thougas the numbeB +1 and -1, with theration of multiplication. (Note tproduct of either +1 or-1 with eithor -1 again gives +1 or -1.) Or thebe thought of as the words "even""odd," with the operation of addOr they can be thought of as the ide
motion and reflection in a mirror.Of the many guises an abstract g
c an a ss ume , a mon g t he mo st c onient ones are sets of l inear funcRotations and reflections are examof linear functions. H the elements abstract group are thought of as aand the l inear functions as roles,the playbill, which assigns certain ato certain roles, is called a representof the group. The abstract group can be used to do group calcula tand effectively provide a common of re ference . A representation, oother hand, may have more s trucand m ay give deep and subtle info
tion about the abstract group.An essential concept in dealing
representations i s that of eql l iva lp
Consider, Corexwmple, the group ofmetries of the word MOM. There arways to superimpose this word onEither leave it alone (the identity mo
or reflect it about a vertical linet he c en te r o f t he O . T his
century by F . Georg Frobenius and IsaiShur, wa s originally motivated by a prob-lem in algebra, but soon found a wide va-riety of applications, especially to thephysics of the then new theory of theatom. A typical success story begins witha fairly complicated mathematical modelof a s tructure wi th some form of (ge0-metric) symmetry. Representation theoryallows one to break down the complicat-ed model into a predetermined, smallnumber of much m ore tractable models,each of which can be treated more or lessindependently. Fan Chung and ShlomoSternberg (1993) gave a very nice exam-ple of such an application: the analysis of the infrared spectra of the buckyball, amolecule with 60 carbon atoms that hasthe symmetry of a regular dodecahedron.Inour situation, the representation theoryis called on in almost the swme way, ex -cept that the underlying mathematicalobjects are different.
Suppose that a tensegri ty can be r0-
tated about some line insuch a way thatthe rotated tensegrity is indistinguish-able from the original: each vertex su-perimposed on a vertex, each cable su-perimposed on a cable and each s t ruts up er imp os ed o n a st ru t. A ll t he mo -tions, or congruence s , that superimposethe tensegrity on i tself in this fashionform a mathemat ical s tructure cal led
the grou p o f sym m e tr ies of the tensegrity.( It may include some ref lections andother congruences, and always includesthe "ident ity," a Zen-l ike mot ion thatsimply leaves everything untouched.)
If a tensegri ty has enough symme-t ries that any vertex can be superim-posed onto any other by a congruence,then the group of symmetries is said tobe transitive on the vertices. Similarly,any pair of vertices (or any pair of ca-bles or any pair of struts) is said to be
8/8/2019 Mathematics and Tensegrity
http://slidepdf.com/reader/full/mathematics-and-tensegrity 8/10
oup, therefore, is a representation of
e abstract group 22, Likewise, if we
med the word MOM on its side, its
mmetry group would still be a repre-
ntation of 22, Although the actual re-
ction involved is different-it is now a
lection through a horizontalline--the
ential symmetry of the word has not
en changed by turning iton its side. A
athematician would say that these tworesentations of ~ are equivalent.
Compare this with the group of sym-
tries of the word MOW. Again, there
two ways to superimpose the word
itself: the identity and a l8O-degree
ation about the center of the O. This
mmetry group is also a representa-
n of 22, but somehow it feels differ-
. The difference is not in the group
elf, but in the geometry-the linear
Dction involved is a rotation, not a re-
ction. Thus a mathematician would
that this representation of ~ is not
i valent to the previous one.The symmetries of 3-dimensional
ures involve representations of some
ore interesting groups than ~. The
up of rotations of the cube and the
up of all symmetries of the regular
rahedron are both representations of
group of pennutations of four let-
s (denoted 54)' These two represen-
ons of 54 tum out to be inequivalent,
can be seen in Figure 8.
The representations of a group can
combined in a Simple but important
y. For example, think of two repre-
tations of a group, one as motions
3-space and the other as motions of
pace. Now think of a 5-dimensional
ce, where the fiBt three coordinates
rrespond to the 3-space, and the next
O coordinates correspond to the 2-
ce. Create a new representation of
group by letting the first represen-
on act on the first three coordinates
the second representation act on
next two coordinates. Then the new
resentation is called the sum of the
0 representations.
The process sometimes works in fe-
se, too: Given a representation, it may
possible to split it up as a sum of
ller-dimensiona! representations. For
mple, each of the two elements in the
unetry group of the word MOM su-
mposes a horizontal line through the
er of the 0 onto itself. Likewise, each
superimposes a vertical line onto it-
This representation, therefore, is re-
ible to the sum of two l-dimensional
resentations. But the situation is dif-
eJlt for the two 3-dimensional repre-
sentations of the group 54' Although a
line or plane may be superimposed on it-
self by an individual rotation, there is no
line or plane that is superimposed on it-
self by all the symmetries of the cube or
the tetrahedron. Thus these representa-
tions are called irreducible.
One of the major insights of Frobenius
and Shur was that any representation
can be decomposed in an essentiallyunique way into irreducible ones. Hence
the irreducible representations are the
building blocks of the theory, much like
prime numbers in number theory.
Now we can define a representation
that is very closely related to the energy
function for tensegrities. Any group,
such as the group 5", has a representa-
tion as a permutation of its own ele-
ments. af we return to the actor-and-role
metaphor, this is like every actor playing
himself.) Since 54 has 24 elements, imag-
ine a space with 24 coordinates, with
each coordinate axis labeled by one ele-
ment of the group. Each element of 54
corresponds to a permutation of the axes,
and each one of these extends in a natur-
al way to a congruence of the 24-dimen-
sional Euclidean space. These congru-
ences form the wgular representatioll of 5 4 ' Frobenius proved that the regular rep-
resentation of any group "contains" all of
the irreducible ones, each repeated anumber of times equal toits dimension.
For example, for S 4 the irreducible repre-
sentations are the two 3-dimensional
ones illustratl.'Ciabove, as well as a 2-di-
mensiona! one, a nontriviall-dimension-
al representation, and the biviall-dimen-
siona! representation (where all elements
of the group are represented as the iden-
tity). So in the regular representation, the
two 3-dimensional representations are re-
peated three times, accounting for nine
dimensions each; the 2-dimensional rep-
resentation is repeated twice, accounting
~0~
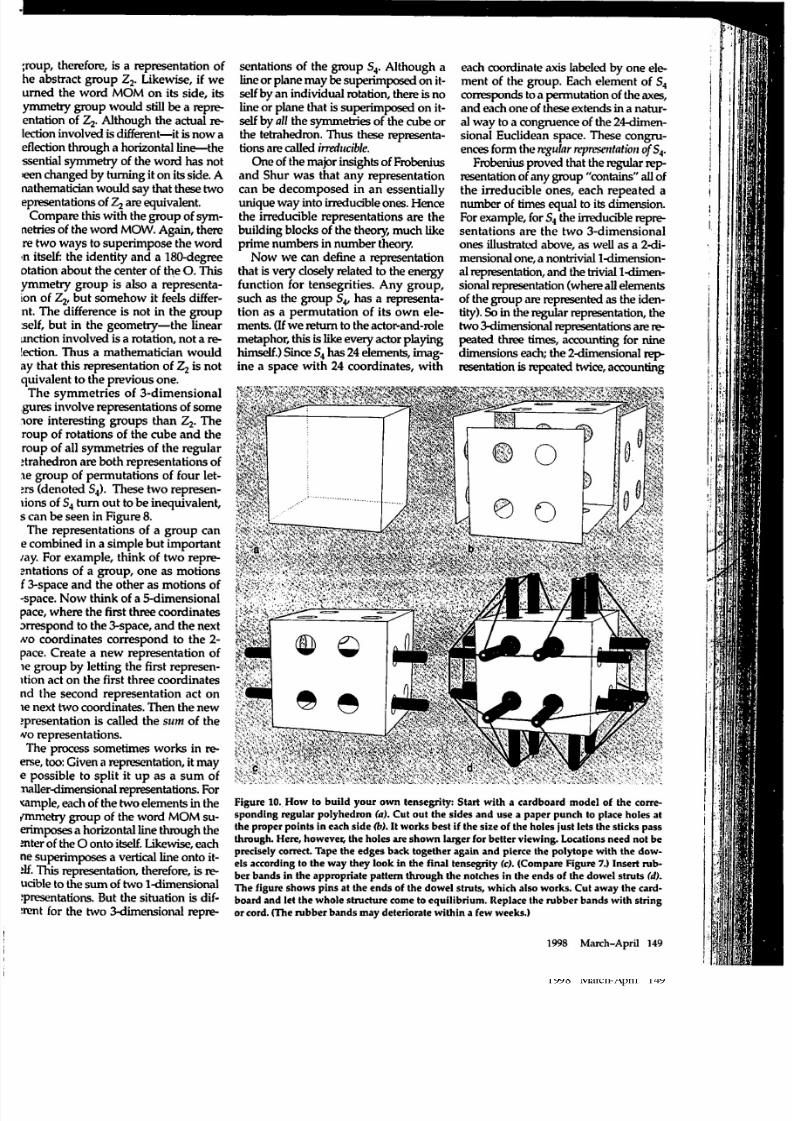
Figure 10..How to build your own tensegrity: Start with a cardboard model of the corre-
sponding regular polyhedron (a). Cut out the sides and use a paper punch to place holes at
the proper points In each side (b). Itworks best if the size of the holes just lets the sticks pass
through. Here, however. the holes are shown larger for better viewing. Locations need not be
precisely correct. Tape the edges back together again and pierce the polytope with the dow-
els according to the way they look in the final tensegrity (c). (Compare Figure 1.) Insert rub-
ber bands in the appropriate pattern through the notches in the ends of the dowel struts (d).
The figure shows pins at the ends of the dowel struts, which also works. Cut away the card-
board and let the whole structure come to equilibrium. Replace the rubber bands with string
or cord. (The rubber bands may deteriorate within a few weeks.)
1998 March-April 149
8/8/2019 Mathematics and Tensegrity
http://slidepdf.com/reader/full/mathematics-and-tensegrity 9/10
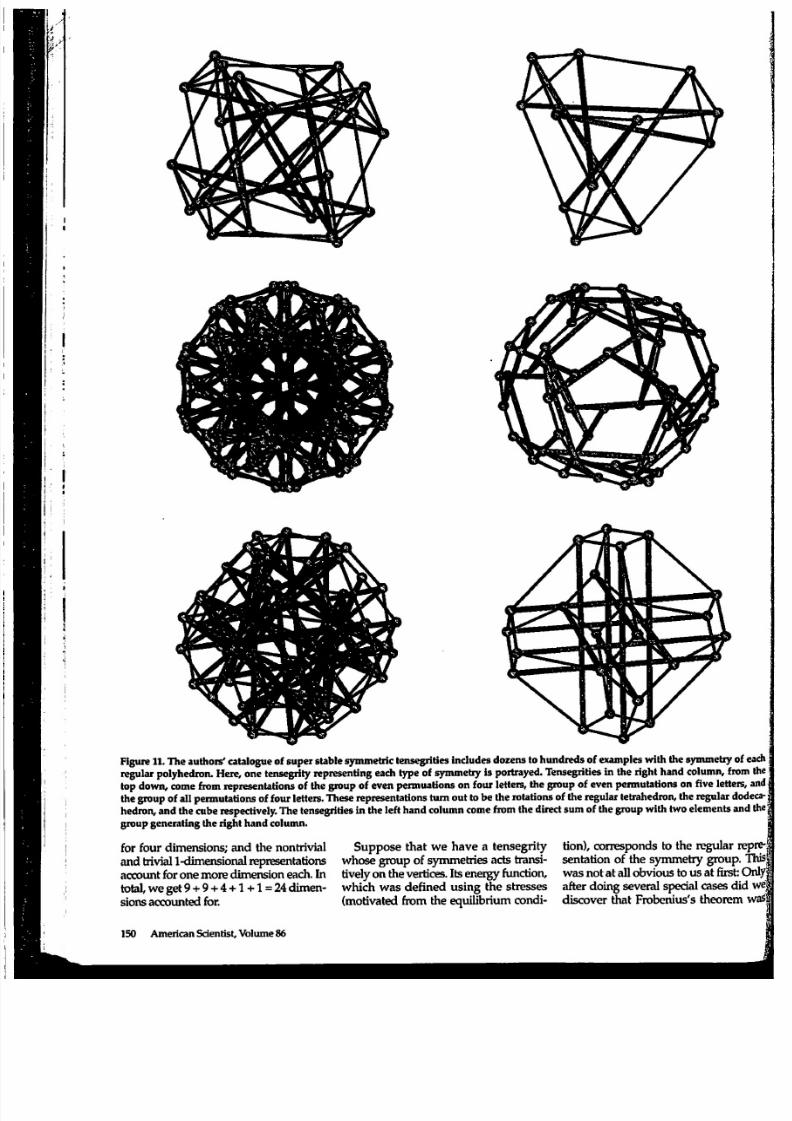
Figure 11. The autholS' catalogue of super stable symmetric tensegrities includes dozens to hundreds of examples with the symmetry of regular polyhedron. Here, one tensegrity representing each type of symmetry is portrayed. Tensegrities inthe right hand column, from
top down, come &om representations of the group of even permuations on four letters, the group of even permutations on five letters,
the group of allpermutations of four letters. These representations tum out to be the rotations of the regular tetrahedron, the regular dod
hedron, and the cube respectively. The tensegrities inthe left hand column come from the direct sum of the group with two elements and
group generating the right hand column.
for four dimensions; and the nontrivi ,l land trivial1-dimensional representationsaccount for one more dimension each. In
total, we get 9 + 9 + 4 + 1 + 1 =24 dimen-sions accounted for.
Suppose that we have a tensegri tywhose group of symmetries acts transi-tively on the vertices. Its energy function,which was def ined using the s t resses(motivated from the equilibrium condi-
t ion), corresponds to the regularsentation of the symmetry group.was not at all obvious to us at first:after doing several special cases did
discover that Frobenius's theorem
150 American Scientist, Volume 86
8/8/2019 Mathematics and Tensegrity
http://slidepdf.com/reader/full/mathematics-and-tensegrity 10/10
e to order for our problem. Usingtheorem, the energy function can bet en as a sum of energy functions thatespond to each of the irreducible rep-ntations. So the calculations can bee for the m uch smaller-dimensional
ducible configurations. For exwmple,ulating a minimum energy configu-on for the group S . . , without the de-
position coming from representationory, would involve solving equations
least 24 variables. B ut by using theduClble representations, it takes only
calculations with three variables,calculation involving two variableso ne w it h o ne v ari ab le . .ow consider the problem a bit differ-y. Start with the stresses, and then aske of the representations has an equi-um configuration for that collectionresses. This is like looking for thee of the Cheshire cat (the stress) be-
we find the cat itself (the tensegrlty).l the stresses are posit ive, then i t is
that all the terms inthe definition of nergy function are positive or zero. If
able graph is connected, this meansthe only representation that gives anibrium configwation will be the triv-ne-in which all the vertices are onf each other. Next, choose one of thes that you eventually want to be a D ecrease the stress coefficient for
strut, even allowing it to be negative.p decreasing that coefficient until the
energy function itself just starts to
values on the borderline of beingtive (that is, zero). Then at least onee nontrivial irreducible representa-
has a configuration that is in equi-um with respect to that stress. Calle equilibrium configurations, result-rom irreducible representations, crit-configurations. Usually, but not al-
s, it turns out that there is only onesentation that has a critical configu-n. Ifso , this is the desired configura-
and the corresponding tensegrity.ne unset t ling feature of this processat there do not seem to be any assur-
s beforehand as to which represen-n will be the one that provides theal stress. If one of the "winneB"ens to be a 3-dimensional represen-
n (as ithas been in many of the casesave tr ied), then we get a super sta-
ensegrity that we can see, rather thannferring its existence in some higherension. But we do not know of anyeral theory that would predict theome without doing the calculation.ot many abstract groups can occurni te g ro up s o f s ymme tr ie s i n 3-
space. They include two infinite fami-l ies: the cycl ic groups on n elements(which can be identified with the rota-t ions of a regular n-sided polygon) andthe dihedral group wi th 2n elements(the group of all symmetries, includingreflections, of a regular n-sided poly-gon). There are six other possibil it ies:S . a : the "alternating groups" At and A s
with 12 and 60 elements respectively;and the "direct sum" of each of thesewith the group Z 2 t which doubles thenumber of e lements. Each of these s ixcan be represented as a group or sub-group of symmetries of a regular poly-hedron: For example, the group of rcrtations of a regular dodecahedron is arepresentation of A s .
F or a ny g iv en f inite gro up , o urmethod allows us to compile efficiently acomplete catalogue of the symmetr ictensegrities with two orbits of cables, oneorbit of struts and one orbit of vertices.The most intriguing-and most recentlydiscovered--ones correspond to the sixgroups mentioned in the last paragraph.Because the struts ca n be connected tothe cables in hundreds of different ways,maintaining the symmetry, the completecatalogue has well over a hundred dif-ferent tensegri ties . For Figure 11 wehave chosen one representative to il-
lustrate each of the six possible types of symmetry. The complete catalogue canbe v ie we d o n o ur W orld W id e W e bpage a t http://mathlab.cit.comell.edu/
visualization/tenseg/tenseg.html.InFigure 10 we show you how to de -sign your own tensegrities. Although thenumber of configuration types is finite,there is still plenty of room for artistic ex-perimentation: The lengths of the strutscan be chosen more or less at will (prcrvided they are all the swme length), andthe locat ions and lengths of the o ther
membeB will change accordingly. Mak-ing the tensegrity init ially with rubberbands helps the tensegrity "find" a su-per stable configuration, and the designcan then be made permanent by replac-ing the rubber bands with string.
For readeB who would l ike to buildvir tual tensegri ties , we recommend aprogram called SI'RUCK, by Gerald de
Jong and Karl Erickson. This programcan be accessed on the World Wide Webat http://wolfenet.com/-setebos/ springspace.hbnl.
AcknowledgmentThe authors thank D ana M ackenzie for hisexcellent editing in the preparation of thisar tic le . CO/mel ly also thanks the A lexan-der von H um boldt F oundat ion f or t he ir generous support i n t he academ ic year 1991-92, where many o f the ideas of thisarticle w ere developed.
References
Otung. F ., and S. Stemberg.1993. Mathematicsand the buckybalL Ameriam Sdmtist 81:56-71.
Connel ly , R . 1980. Rigidity and energy. Invenliones M athemDticae 66:11-33.
Connelly, R., and M. Terrell. 1995. Globallyrigid symmetric tensegrities. StructuralTopology 21:59-78.
Connelly, R., and W . Whiteley. 1996. Second-order rigidity and prestress stability fo rtensegrity frameworks. S IA M T o urna i of
Discrete M athematics (9)3:453-491 .
Hartog, J . P . 1949. Strength of M aterials. Ne wYork:Dover, pp. 3-4.
Lyustemik, L. A. 1956. Convex Figures and
Polyhedra. New York:Dover.
New YorkAcademy of Sciences. 1989. Kenndh
Snelson: Th e Nature of Structure. New York:New YorkAcademy of Sciences.
Pugh, A. 1976. An Introduction to Tensegrity.Berkeley and Los Angeles, Calif.:Universityof California Press .
Snelson, Kenneth. Kenneth Snelson. <http:// www.teleportcom/-pdx4d/sneison.html>.
1998 March-April 151





























