Embed Size (px)
Citation preview

Eurographics Symposium on Geometry Processing 2010Olga Sorkine and Bruno Lévy(Guest Editors)
Volume 29 (2010), Number 5
Möbius Transformations ForGlobal Intrinsic Symmetry AnalysisVladimir G. Kim, Yaron Lipman, Xiaobai Chen, and Thomas Funkhouser
Princeton University
AbstractThe goal of our work is to develop an algorithm for automatic and robust detection of global intrinsic symmetriesin 3D surface meshes. Our approach is based on two core observations. First, symmetry invariant point sets canbe detected robustly using critical points of the Average Geodesic Distance (AGD) function. Second, intrinsicsymmetries are self-isometries of surfaces and as such are contained in the low dimensional group of Möbiustransformations. Based on these observations, we propose an algorithm that: 1) generates a set of symmetric pointsby detecting critical points of the AGD function, 2) enumerates small subsets of those feature points to generatecandidate Möbius transformations,and 3) selects among those candidate Möbius transformations the one(s) thatbest map the surface onto itself. The main advantages of this algorithm stem from the stability of the AGD inpredicting potential symmetric point features and the low dimensionality of the Möbius group for enumeratingpotential self-mappings. During experiments with a benchmark set of meshes augmented with human-specifiedsymmetric correspondences, we find that the algorithm is able to find intrinsic symmetries for a wide variety ofobject types with moderate deviations from perfect symmetry.
1. IntroductionDetecting symmetries in 3D surface meshes is an impor-tant research problem with applications in object alignment,matching, compression, completion, and beautification.
Several effective methods have been proposed for detectingextrinsic symmetries (e.g., [MGP06, PSG∗06]). They gen-erally utilize a low-dimensional representation for extrinsicsymmetry transformations (e.g., rigid transformations havesix degrees of freedom) to perform a search for the bestsymmetry transformation using variants of the GeneralizedHough transform, Geometric Hashing, RANSAC, ICP, orsome other rigid alignment algorithm.
Due to the difficulty in parameterizing non-rigid trans-formations, there has been fewer advances in detectingintrinsic symmetries – ones that are invariant to isomet-ric deformations. Recently, methods have been proposedto find symmetric feature correspondences with embed-dings based on eigenvectors of the Laplace-Beltrami opera-tor [OSG08], loopy Bayesian belief propagation [LTSW09],subgraph matching [BBW∗08], and combinatorial search offeature correspondences [RBB∗10]. However, these meth-ods are either theoretically intractible [RBB∗10], expen-sive in practice [LTSW09], depend on local shape similar-ities [BBW∗09a], and/or fail to detect all types of intrinsicsymmetries [OSG08].
The focus of our work is to investigate algorithms for
Figure 1: Intrinsically symmetric point correspondencesfound by our algorithm.
discovery of intrinsically symmetric point correspondencesusing methods based on analysis of Möbius transforma-tions [LF09, ZWW∗10] (Figure 1). The Möbius transforma-tion group can describe all isometric transformations with alow dimensional representation (six degrees of freedom forgenus-zero surface), and thus it can be searched efficientlyfor a global mapping from a surface onto itself using algo-rithms traditionally used for finding extrinsic symmetries.
In this paper, we explore the idea of using Möbius transfor-mations to find correspondences between intrinsically sym-metric points on a 3D mesh. In addition to the main idea,we make several research contributions: 1) we develop the-ory regarding the relationship between intrinsic symmetry
c© 2010 The Author(s)Journal compilation c© 2010 The Eurographics Association and Blackwell Publishing Ltd.Published by Blackwell Publishing, 9600 Garsington Road, Oxford OX4 2DQ, UK and350 Main Street, Malden, MA 02148, USA.

V. Kim & et al. / Möbius Transformations For Global Intrinsic Symmetry Analysis
and symmetry-invariant functions, 2) we utilize that theoryto extract point sets from 3D meshes that provably con-tain stationary points and correspondences with respect toan intrinsic symmetry transformation if one exists, 3) weobserve that intrinsic symmetries in surfaces are containedin the larger group of anti-Möbius transformations, 4) wesearch triplets and quadruplets of point correspondences tofind the anti-Möbius transformation that best maps a meshonto itself, 5) we utilize properties of intrinsic symmetryto cull anti-Möbius transformations that are obviously notself-isometries, and 6) we evaluate the anti-Möbius trans-formations found with our algorithm with respect to human-annotated symmetric point correspondences for three bench-mark data sets containing 366 meshes in total.
2. Related workUnderstanding the symmetries of shapes is a well studiedproblem in many disciplines, including perceptual psychol-ogy, computer vision, computational geometry, and com-puter graphics.
Most prior work has focused on detection of extrinsic sym-metry transformations – rigid body transformations that mapa surface onto itself. For example, methods have recentlybeen proposed to detect partial, extrinsic symmetries us-ing the Generalized Hough Transform [MGP06], GeometricHashing [GCO06], and spectral analysis of an associationgraph [LE06]. Generally speaking, they sample the space ofpossible transformations, measuring how well or how muchof the surface is aligned for each transformation or corre-spondence. They are effective and efficient because the spaceof transformations has low dimensionality and thus can besampled efficiently (e.g., planar reflections have only threedegrees of freedom).
More recently, work has focused on detecting intrinsicsymmetry transformations – i.e., isometric transformationsthat map a surface onto itself. Due to the difficulty in pa-rameterizing non-rigid transformations, most recent work onthis problem has focused on combinatorial algorithms thatsearch for symmetric feature correspondences [BBW∗08,BBW∗09b, LTSW09, RBB∗10, WJG07, ZSCO∗08]. Thisproblem is NP-Hard in theory, but several approaches arepractical when shape descriptors can be used to prune po-tential feature correspondences.
For example, in the work of Raviv et al [RBB∗10], featurepoints are generated by iteratively selecting the point far-thest from previously selected samples. Then, a histogramis computed for each feature point that stores the distribu-tion of geodesic distances (or diffusion distances [RBB∗10])to other feature points, and a branch-and-bound algorithmis used to search for sets of feature point correspondenceswhere the histograms for corresponding points are compat-ible. The resulting sparse set of point correspondences isrefined with the GMDS algorithm [BBK08], possibly aug-mented with a fuzzy set membership function [RBBK10].
To avoid searching the exponential complexity of the corre-spondence space, the method uses a threshold on the simi-larity between histograms of geodesic distances to establisha sparse set of point correspondences. As a result, it is onlypractical for cases where the self-mapping is not too far fromisometric.
An alternative approach is to embed a surface into a high-dimensional Euclidean space where intrinsic symmetries ap-pear as extrinsic ones. For example, Ovsjanikov et al. per-form an embedding into a signature space defined by theeigenfunctions of the Laplace-Beltrami operator [OSG08].This embedding transforms intrinsic symmetries into ex-trinsic ones. However, since the embedding space is high-dimensional, it is difficult to detect extrinsic symmetry trans-formations in that space directly. Instead, Ovsjanikov et al.consider a reduced embedding space, where each point isrepresented only by a sequence of signs of non-repeatingeigenfunctions. As a result, their approach is sensitive toshape perturbations that flip or re-order eigenspaces.
Some researchers have proposed algorithms for detectingstructures that characterize intrinsic symmetries, without ex-plicitly establishing a set of symmetric point correspon-dences. For example, Xu et al. proposed an algorithm todetect the Partial Intrinsic Reflectional Symmetry Axis ofa surface, the locus of points that are stationary with re-spect to a reflectional symmetry [XZT∗09]. Lipman et al.proposed a method for detecting symmetry orbits, sets ofpoints that map onto one another within each symmetrygroup [LCDF10]. These methods solve a subset of the prob-lem addressed in this paper – our method finds all symmetricpoint correspondences, which includes stationary points andorbits.
Our algorithm is motivated by the Möbius Voting paper ofLipman and Funkhouser [LF09]. In that paper the authorssuggest searching for (near-)isometries between two differ-ent genus-zero surfacesM,N in the space of Möbius trans-formations, which contains the entire collection of (orienta-tion preserving) conformal maps between the surfaces. Theyleverage the low dimensionality of Möbius transformationsto find point correspondence between two surfaces with thefollowing algorithm. First, both meshes are mapped to theextended plane C = C ∪ {∞} with the mid-edge flatten-ing scheme. Second, the meshes are sampled with the far-thest point algorithm to produce uniform sample set on eachmesh, SM ⊂M,SN ⊂N . Third, triplets of potential pointcorrespondences are generated randomly, zi ∈ SM, wi ∈SN , i = 1,2,3. For each triplet, the unique Möbius trans-formation m(·) interpolating the correspondences m(zi) =wi, i = 1,2,3 is used to map SM into m(SM). Mutuallyclosest points are extracted (in the flattened space). If thefraction of mutually closest is above a threshold, a deforma-tion error (the reciprocal of the average Euclidean distancebetween mutually closest pairs) is computed and summedinto a fuzzy correspondence matrix. After enough votes havebeen cast, correspondences are extracted from the fuzzy cor-
c© 2010 The Author(s)Journal compilation c© 2010 The Eurographics Association and Blackwell Publishing Ltd.

V. Kim & et al. / Möbius Transformations For Global Intrinsic Symmetry Analysis
respondence matrix using a greedy algorithm. Finally, goodcorrespondences with low confidence (values in correspon-dence matrix) pairs are further extracted using geodesic con-sistency.
Our work is different from Möbius Voting in four impor-tant ways. First, we propose novel theory and algorithmsfor extracting stable intrinsically symmetric sets of pointsfrom a surface (to be used as candidates for correspon-dence). Second, we observe that intrinsic symmetries in sur-faces are contained in the larger group of anti-Möbius trans-formations (anti-Möbius transformations are both “regular”Möbius transformation and Möbius transformations com-posed with a reflection) and then adjust the algorithm to con-sider this larger set. Third, we introduce methods for pruningpotential triplets of candidate correspondences that take ad-vantage of stationary points and other properties unique tosymmetry. Finally, we improve the implementation for al-most every step of the original algorithm.
3. MethodThe goal of our work is to detect intrinsic symmetries insurface meshes. Intrinsic symmetries are self-mappings ofsmooth surface M to itself f :M→M which preservepairwise geodesic distances dg(p,q) = dg( f (p), f (q)). Inother words they are self-isometries of the surface and pre-serve the metric tensor.
In this work, we assume M is orientable and topologi-cally a sphere (genus zero). We note however that the fol-lowing arguments can be generalized to arbitrary orientablesurfaces [GY03], but this is outside the scope of this pa-per. Isometries f : M →M can be either globally ori-entation preserving or globally orientation reversing. Intu-itively, orientation preserving means that f preserves thenormal direction, while orientation reversing means that fflips the normal direction. An orientation preserving isom-etry can be viewed as a particular instance of a confor-mal map, while orientation inverting isometry is an instanceof anti-conformal map. This means that for finding (per-fect) symmetries f :M→M it is enough to search withinthe collection of conformal and anti-conformal mappingsm :M→M.
Motivated by these observations we have developed an al-gorithm to detect intrinsic symmetry in meshes. Our algo-rithm proceeds in the following three steps:
1. Symmetric point sampling. We extract two symmetry-invariant sets of points on the surface S1 ⊂ S2 ⊂ M,where S1 is “coarse” and S2 is “dense”. By symmetry-invariant set Si, i = 1,2 we mean that for all symmetriesf :M→M and all p ∈ Si, f (p) ∈ Si. Since f−1 is alsosymmetry this implies f (Si) = Si. The coarse set S1 isused to produce candidate anti-Möbius transformations,while S2 to assign correspondences.
2. Searching anti-Möbius transformations. The nextstage iteratively picks small subsets of points (generating
sets) from the coarse set S1, where each generating setprovides constraints to define an anti-Möbius transforma-tion that is potentially an intrinsic symmetry. Each candi-date transformation is assigned with an alignment scorebased on how well the transformed surface aligns with it-self. After exhausting all possible generating sets from S1the algorithm returns the best aligning anti-Möbius trans-formation.
3. Extracting correspondences. Using the best anti-Möbius transformation from previous step we define aset of correspondences within the set S2 by taking mu-tually closest pairs. The last step is to use the extractedcorrespondences within set S2 to predict more correspon-dences within the set S2. The prediction is made basedon consistency of geodesic distances to found correspon-dences.
In the following sections we provide the details for each ofthese steps.
4. Symmetric point samplingThe goal of the first step is to construct an algorithm thatextracts symmetry-invariant point samples on the surface. Asymmetry invariant point set S ⊂M satisfies f (S) = S, forall global intrinsic symmetries f :M→M. Our algorithmuses sets with this property to form candidate symmetricpoint correspondences in the second and third steps.
The key idea in constructing the symmetry-invariant setS = {pi} ⊂ M is to extract critical points of a symme-try invariant function S = {p ∈M | ∇ |p Φ = 0}, wheresymmetry-invariant function Φ : M → R is defined byΦ( f (p)) = Φ(p), for all symmetries f and p ∈ M. Intu-itively, the collection of critical points of symmetry-invariantfunction is a symmetry-invariant set of points. This is provedin Section 7. In that section we also prove more propertiesof this set and its relation to intrinsic symmetries.
Using this principle, we construct a two stage algorithm forsampling symmetry-invariant point sets on surfaces. First,we construct a coarse set of symmetry-invariant points, andsecond, we add points to this set while maintaining the in-variance property.
Coarse symmetry-invariant set. We would like to take asymmetry-invariant function Φ :M→R and extract its crit-ical points. Since we want our algorithm to be robust to devi-ations from perfect symmetries and non-symmetric extrane-ous and missing parts, it is desired to use symmetry-invariantfunctions which involve averaging over many geodesic dis-tances. A natural function in this context is the AverageGeodesic Distance (AGD):
Φagd(p) =ZM
dg(p,q)dvolM(q). (1)
Proposition 7.2 in Section 7 provides a proof that AGD isindeed symmetry-invariant function. The coarse symmetry-
c© 2010 The Author(s)Journal compilation c© 2010 The Eurographics Association and Blackwell Publishing Ltd.

V. Kim & et al. / Möbius Transformations For Global Intrinsic Symmetry Analysis
Figure 2: The symmetric sampling procedure is demon-strated on an intrinsically bilateral reflective horse model.In the left column we show the AGD function (top) and itsextracted critical points S1 (bottom, two opposite views). Inthe right column the MGD to S1 is shown on top, and theaugmented symmetry-invariant set S2 is shown on bottom(two opposite views). Note the symmetric sampling.
invariant set is then defined
S1 ={
p ∈M | ∇ |p Φagd = 0}
. (2)
Figure 2 (left column) shows the AGD and the correspond-ing S1 for an intrinsically symmetric horse (bilateral reflec-tive symmetry).
Augmenting the symmetry-invariant set. Once a coarsesymmetry-invariant set S1 is found, we can use it to find asuperset S2 ⊃ S1 that is also symmetry-invariant. For thatend we will construct a second symmetry-invariant func-tion based on the Minimal Geodesic Distance (MGD) to thesymmetry-invariant set S1:
Φmgd(p) = Φmgd(p;S1) = minq∈S1
dg(p,q). (3)
Proposition 7.3 in Section 7 provides a proof ofthe invariant property of this function. We defineS2 =
{p ∈M | ∇ |p Φmgd = 0
}. This procedure can
be repeated by extracting critical points of Φmgd(p;S2)and defining this set as an updated S2. This way we can
produce arbitrary large set S2. In our implementation, forstability, we choose only local maximas of Φmgd(p;S1),which are the vertices of the Voronoi diagram definedby the centers S1. Figure 2 (right column) shows theMGD function for S1 and its augmented set S2 (after 2iterations). The set S2 is not guaranteed to be uniformlyspread across the surface, since it depends on distancesto points in the coarse set S1. To increase uniformitya possible modification of this algorithm is to takeonly critical points not far from the global maximum: S2 ={
p ∈M | ∇ |p Φmgd = 0 and Φmgd(p) > τ ·maxMΦmgd}
,with τ ∈ [0,1].
Implementation on meshes For calculating the symmetryinvariant sets on meshesM= (V,E), where V is the verticesset and E the edges set, we have discretized the above con-cepts in the standard way. First, we approximate the geodesicdistances on surfaces with Dijkstra’s algorithm. Second, theaverage geodesic distance function is approximated by theaverage distance to all vertices, that is
Φagd(vi) = ∑v j∈V
Ai
3dg(vi,v j),
where Ai is the area of the 1-ring of vertex i. In ourimplementation for extracting the critical points we havesmoothed the AGD function by averaging it over local 1-rings, and picked local (1-ring again) extremas (maxima andminima).
5. Searching Möbius transformationsThe second step is to search for the anti-Möbius transforma-tion that induces the best mapping of the mesh onto itself.The anti-Möbius group is the group of Möbius transforma-tions augmented by Möbius transformations composed witha reflection (z 7→ z, as explained below in more details).
Previous work [LF09] has suggested to search the Möbiustransformations group for finding isometries and near-isometries between two surfaces. Our work builds upon thisidea once making the observations that intrinsic symmetriesare self-isometries of the surface. We suggest a few modi-fications over the algorithm suggested in [LF09] mainly totake advantage of the fact that we are looking for symme-tries in one surface and to provide more justified choices forsome components of the algorithm.
The outline of our algorithm for searching the anti-Möbiustransformations is as follows:
1. Uniformization. We map the mesh surface to the ex-tended complex plane C via the mid-edge uniformizationprocedure, as in [LF09].
2. Generating sets of anti-Möbius transformation. Weconsider correspondences amongst triplets and quadru-plets of points from the symmetry-invariant set S1 to gen-erate candidate anti-Möbius transformations.
3. Pruning generating sets. For each generating set, weapply a set of filters to determine whether the distances
c© 2010 The Author(s)Journal compilation c© 2010 The Eurographics Association and Blackwell Publishing Ltd.

V. Kim & et al. / Möbius Transformations For Global Intrinsic Symmetry Analysis
and properties of corresponding points are conservativelyconsistent with a symmetric arrangement.
4. Measuring alignment score. If the generating set is notpruned, we apply the implied anti-Möbius transformationto a dense set of points Su and measure how well theyalign to estimate an alignment score.
5. Return best anti-Möbius transformation. As generat-ing sets are considered, we remember the anti-Möbiustransformation that yielded the (few) best alignmentscore, and return it as the final answer.
Uniformization. Uniformization theory guarantees that(smooth enough) genus zero surfaces can be mapped confor-mally onto the extended complex plane C = C∪{∞}whichis conformally equivalent to the 2-sphere S2 = {(x,y,z) |x2 + y2 + z2 = 1} ⊂ R3. (The case of higher genus surfacescan be treated using covering spaces [GY03], but we did nottreat this case in our algorithm.)
Uniformization or conformal parameterization of surfacesis an active research field and several researchers have sug-gested different techniques. In this work we chose to usethe mid-edge uniformization technique suggested in [PP93,LF09] due to its simplicity. Employing their technique re-sults in embedding of each mid-edge point in the complexplane. Then, we map each vertex vi ∈ V 7→ zi ∈ C to theaverage of its 1-ring mid-edge points already embedded inC. This results in flattening of the meshM. We denote theflattened set of vertices by Z = {zi}.Generating candidate anti-Möbius transformations.Once the mesh surface is flattened onto the extended planeC, it is well known that the entire collection of conformal1-1 and onto maps m : C→ C is exactly the Möbius trans-formations which have the following formula in the extendedcomplex plane:
m(z) =az+bcz+d
, (4)
where a,b,c,d ∈ C satisfying ad−bc 6= 0.
We observe that the entire collection of anti-conformalmappings m : C→ C (which contain reflections) can be de-scribed by the anti-Möbius transformations:
m(z) = m(z), (5)
where m is any Möbius transformation. It is not hard tosee from these formulas that both Möbius and anti-Möbiustransformations have six (real) degrees of freedom, and fix-ing the image of three points zi 7→ wi, i = 1,2,3, on theextended complex plane zi,wi ∈ C uniquely defines either.There are known formulas for prescribing a Möbius transfor-mation from three pairs of points (zi,wi), i = 1,2,3 (see forexample [LF09]), however we will suggest a new method forfitting Möbius in the least-squares sense which is applicableif more than three pairs are provided. For prescribing anti-Möbius transformation it is enough to find a Möbius trans-formation between the pairs (zi,wi), i = 1,2,3.
Let (zi,wi), i = 1,2, ..,k be k pairs of points zi,wi ∈ C.
We wish to find a Möbius transformation such that m(zi) ≈wi, i = 1, ..,k. Plugging eq. (4), and rearranging the terms wearrive at a system of linear equations:
azi +b− cwizi−dwi = 0 , i = 1, ...,k (6)
An easy approach to solve this system will be to set, say,a = 1 and solve the system (6) in the least-squares sense.We might miss a solution with a = 0, therefore we can solveagain with b = 1 and take the solution with the smaller resid-ual error. Note that it is not possible that a = 0 and b = 0simultaneously and therefore we cover all Möbius transfor-mations. We note that the suggested least-squares solutionminimizes an error based on Euclidean distances with cer-tain non-linear weighting. Therefore setting a = 1 or b = 1or c = 1 or d = 1 will produce different results in general.In practice we are trying all these options and pick the onewhich minimizes the sum of Euclidean distances squared.
For prescribing generating sets of points, that is, sets ofpoints which uniquely determine an anti-Möbius transfor-mation, we generally need to set at-least three pairs (zi,wi),i = 1,2,3. However, if we restrict ourselves to certain typesof symmetry, we can select generating sets in more restric-tive sense.
For example, in this paper, we discuss in detail bilateral re-flective symmetries. One option is taking a triplet z1,z2,z3 ∈S1, and prescribe an anti-Möbius transformation by the re-quirements that m(z1) = z1, m(z2) = z3, m(z3) = z2. If thereis a reflective bilateral symmetry f :M→M then thereare such three points z1,z2,z3 that generate that symmetry.Indeed, every bilateral reflective symmetry corresponds tosome anti-Möbius transformation m. Since, bilateral sym-metry satisfies f 2 = Id , then also m satisfies the same rela-tion m2 = Id . It means that for every z2 ∈ C we can takez3 = m(z2), and
m(z3) = m(m(z2)) = z2.
Proposition 7.5 in Section 7 proves that bilateral reflectivesymmetries have a closed curve of stationary points. Corol-lary 7.7 then shows that at least two of its points are in theset S1. This result justifies taking three points and fixingone to be stationary. Another option for generating candi-dates for bilateral reflective symmetry is to take four pointsz1,z2,z3,z4 ∈ S1, and find the anti-Möbius that in the least-squares sense (see above) transforms z1↔ z2 and z3↔ z4.
In our implementation, we exhaustively check the twotypes of generating sets (triplets and quadruplets) in S1. Fur-thermore, for numerical stability we first use a anti-Möbiustransformation to transform the generating set to a “canon-ical frame.” In case of three points we simply take an equi-lateral triangle and map the three points (and the set S2 withit) to its vertices. In case of four points, we map (as much aspossible) to four vertices of a square, trying the two possibledifferent assignments and choosing the one that minimizesum of Euclidean distances squared.
Lastly, we also implemented the Möbius search algorithm
c© 2010 The Author(s)Journal compilation c© 2010 The Eurographics Association and Blackwell Publishing Ltd.

V. Kim & et al. / Möbius Transformations For Global Intrinsic Symmetry Analysis
for general symmetry, where four points zi ∈ S1, i = 1, ..4,can define a general symmetry by one of the two relations:1) z1→ z1, and z2→ z3→ z4, and 2) z1→ z2→ z3→ z4.
Pruning generating sets. If we consider all possible tripletsand quadruplets, there are O(|S1|4) such generating sets.Since S1 is a small set (usually 5− 15 points) it is tractableto check all possibilities. However, there are quite a fewgenerating sets which can be detected with high proba-bility as bad, and pruned out. In particular we check towhat extent geodesic distance between every two points z,w,which are not mapped to each other via m, is preserved:if dg(z,w)
dg(m(z),m(w)) < δ (or the reciprocal is smaller than δ) weprune this set (we use δ = 0.9). Other two useful criteria are:1) if z,w are mapped to each other, we wouldn’t want thesetwo points to be very close to each other: if dg(z,w) < ε weprune this set, we use ε =
√area(M)/32π. 2) We check if
the AGD gives similar value on points z,w which are mappedto each other: if Φagd(z)
Φagd(w) < γ (or reciprocal rule) we prune thisset (we use γ = 0.9).
Measuring alignment score. The last component of thesearch procedure is to provide each candidate anti-Möbiustransformation with a score, measuring how well it aligns thesurface to itself. For that we uniformly sample the surfaceSu ⊂M defined by randomizing the first point and itera-tively adding the farthest geodesic point from the previouslyselected set. The anti-Möbius transformation m(z) maps theset Su onto M, and our goal is to measure how well thetwo sets Su, m(Su) align. Note that there is no distance func-tion invariant to anti-Möbius transformations (see [LF09])and therefore measuring distances (Euclidean or any otherdistance function) in the flattened space cannot be done inan invariant manner – that is, distances resulted from dif-ferent alignments are not comparable. Therefore, we defineour alignment score based on the metric of the surface: wemeasure geodesic distances between points in m(Su) andSu. This distance is (by definition) invariant to anti-Möbiustransformations. To compute the geodesic distance betweenpairs of points z∈ m(Su),w∈Su we first need to map z backtoM (we already know where w is). This is done by locat-ing the face ofM containing z and using barycentric coor-dinates to map back to the mesh. We consider the amount ofaligned surface area as our alignment score. We approximatethis value by the number of mutually closest (geodesically)pairs of the sets m(Su),Su. Since each point in Su representsapproximately equal area surface patch, the number of mu-tually closest pairs is an approximation to the amount of areaaligned: for example, if the arm of a person is mapped to itsbelly there will be cluster of points from m(Su) mapped ona sparse set of Su so there will not be many mutually closestpairs. Note that while our alignment score is generally ro-bust to outliers, it is global since it favors symmetric mapsthat include the largest possible fraction of a surface.
6. Extracting correspondencesThe final step is to take the best anti-Möbius transformationand extract correspondences within the symmetry invariantset S2 ⊂M. This is done in two stages: First, after applyingthe best anti-Möbius to S2 and mapping back to the surfacewe extract geodesically mutually closest pairs (pi,qi), i =1,2, ..,k, pi,qi ∈ S2.
Second, we augment them to points in S2 which did notget assigned. This is done using consistency of geodesic dis-tances as follows. For each point p ∈ S2 which is not as-signed, that is p /∈ {pi} we calculate a feature vector
ψ(p) = (dg(p, p1), ...,dg(p, pk)) . (7)
Next, let us define a relative deviation measure
D(ψ(p),ψ(q)) =k
∑i=1
(dg(p, pi)−dg(q,qi)
dg(p, pi)
)2
.
Then, we add to the set of correspondences all pairs (p,q)that have mutually smallest deviation. That is
D(ψ(p),ψ(q)) = minr∈S2
D(ψ(p),ψ(r)) ,
and symmetrically
D(ψ(q),ψ(p)) = minr∈S2
D(ψ(q),ψ(r)) .
Lastly, For every point p ∈ M we can use the extractedcorrespondences (pi,qi), i = 1,2, ...,K, pi,qi ∈ S2 to find acorresponding point q ∈M. This is done by looking for q ∈Mwhich is closest in feature space, that is D(ψ(p),ψ(q))≤minr∈S2 D(ψ(p),ψ(r)).
7. TheoryIn this section we provide a rigorous treatment of the relationbetween intrinsic symmetry and symmetry-invariant func-tions. We use the theoretical results of this section to con-struct a stable set of potential intrinsically symmetric pointsfor our algorithm (Section 4). However, we believe these re-sults can be used also in other contexts and actually pro-vide the basis for a direct algorithm which uses the notion ofsymmetry-invariant functions and sets directly to extract andanalyze symmetry properties of surfaces. Throughout thissection f :M→M denotes an intrinsic symmetry.
We start by showing that given a symmetry invariant func-tion Φ, the set S ⊂M which is defined by the critical pointsof Φ, S = {p | ∇ |p Φ = 0}, is a symmetry-invariant setthat satisfies f (S) =S. Next, we prove that certain functions(like MGD, AGD and few of its variations) are symmetry-invariant. And lastly, we prove few useful properties regard-ing stationary points of symmetries and their presence in S.
First, we establish a connection between gradients of sym-metry invariant function at symmetric points:Proposition 7.1 Let f :M→M be a symmetry and Φ :M→ R a symmetry invariant function. Then,
∇ | f (p) Φ · d f |p=∇ |p Φ, (8)
c© 2010 The Author(s)Journal compilation c© 2010 The Eurographics Association and Blackwell Publishing Ltd.

V. Kim & et al. / Möbius Transformations For Global Intrinsic Symmetry Analysis
where d f |p: TpM→ Tf (p)M denotes the differential of themap f acting as a linear map between the tangent planesTpM and Tf (p)M.
Proof Consider the identity Φ( f (p)) = Φ(p), and differen-tiate it. Using the chain rule we get the relation (8).
Since f is an isometry its differential is in particular invert-ible (it is actually orthogonal transformation w.r.t the met-ric), therefore ∇ |p Φ = 0⇔ ∇ | f (p) Φ = 0. This impliesthat S satisfies f (S) = S (since f−1 is also a symmetry).
Next, we prove that the family of AGD functions issymmetry-invariant.
Proposition 7.2 The average geodesic distance functionΦagd(·) as defined in eq. (1) is invariant to intrinsic sym-metries f :M→M. That is,
Φagd( f (p)) = Φagd(p).
Furthermore, all the following variations of the averagegeodesic function are symmetry-invariant:
Φα,ragd(p) =
Zdg(p,q)≤r
dg(p,q)αdvolM(q). (9)
Proof It is enough to prove the invariance for the generalaverage geodesic distance function Φ
α,ragd .
Φα,ragd( f (p)) =
Zdg( f (p),q)≤r
dg( f (p),q)αdvolM(q)
=Z
dg(p, f−1(q))≤rdg(p, f−1(q))αdvolM(q)
=Z
dg(p,q)≤rdg(p, q)αdvolM(q)
= Φα,ragd(p),
where in the previous to last equality we have changed thevariable q = f−1(q) in the integral and used the fact that f(and f−1) is an isometry and hence volume preserving.
Furthermore, the minimal geodesic distance to a symmetry-invariant set S1 is also a symmetry-invariant function:
Proposition 7.3 The minimal geodesic distance functionΦmgd(·), defined in eq. (3), is a symmetry-invariant function.
Proof We directly check this property:
Φmgd( f (p)) = minq∈S1
dg( f (p),q)
= minq∈S1
dg(p, f−1(q))
= minq∈S1
dg(p,q)
= Φmgd(p),
where the second equality is due to the fact that f−1 is alsointrinsic symmetry, and the previous to last equality is jus-tified since S1 is symmetry-invariant, that is f−1(S1) = S1.
So far we have justified the use of the AGD,MGD in defin-ing the symmetry-invariant sets S1,S2 introduced in Section
4. In the rest of this section we would like to prove someproperties regarding stationary points of intrinsic symme-tries, that is points p ∈M satisfying f (p) = p. The key ob-servation is that local analysis of the symmetry at a station-ary point provides a representation of the symmetry groupas a subgroup of orthogonal matrices acting on R2, i.e., thelocal tangent plane at the stationary point TpM.
Theorem 7.4 Let f :M→M be intrinsic symmetry, andlet p∈M be a stationary point of f , that is f (p) = p. Then:
1. The differential d f |p: TpM→ TpM is an orthogonallinear transformation, that is,
(d f |p)T (d f |p) = Id .
2. d f |p is orientation preserving iff f is orientation preserv-ing.
3. Let g :M→M be another symmetry, the map Σ : f 7→d f |p is a homomorphism. Namely,Σ( f ◦g) = Σ( f ) ·Σ(g).It means that we can think of the tangent plane TpM asthe vector space of the representation, and the differentiald f |p as the action of the intrinsic symmetry group.
4. The differential d f |p is linear bilateral reflection (w.r.tsome direction), iff f is a bilateral reflection. Further-more, this reflection line (stationary direction) is parallelto the stationary curve of f passing through that point.
Proof First, let us parameterizeM in a neighborhood of pover TpM. We choose an orthonormal basis in TpM and theparametrization can be written as follows
Ψ : (x,y) 7→ (x,y,h(x,y)),
where h(x,y) is the height function over the tangent planeand therefore h(0,0) = 0, hx(0,0) = 0, and hy(0,0) = 0. Themetric tensor in this local coordinate system has the follow-ing form:(
E FF G
)=(
1+hx(x,y)2 hx(x,y)hy(x,y)hx(x,y)hy(x,y) 1+hy(x,y)2
).
In particular at (x,y) = (0,0) we have E = 1 = G, F = 0. Thesymmetry f is an isometry fixing p, therefore its differentialis a linear map d f |p: TpM→ TpM which preserves themetric tensor at (x,y) = (0,0), that is
Id = d f T Idd f ,
where Id is the identity matrix. This implies that d f |p isan orthogonal matrix. This proves (1). (2) follows directlyfrom the definition of orientation preserving maps and thefact that isometry is either globally orientation preservingor globally orientation reversing. (3) is an immediate conse-quence of the chain rule: d( f ◦ g) = d f · dg, using the factthat both d f |p, f g |p: TpM→ TpM. Lastly we prove (4). Iff is a bilateral reflection with stationary point p, it satisfiesf 2 = Id . Using previous argument and taking g = f results in(d f |p)2 = Id , and d f |p is an orthogonal transformation, andd f |p is orientation reversing, that is det(d f |p) < 0. There-fore the only possible case is that d f |p is a linear bilateral
c© 2010 The Author(s)Journal compilation c© 2010 The Eurographics Association and Blackwell Publishing Ltd.

V. Kim & et al. / Möbius Transformations For Global Intrinsic Symmetry Analysis
reflection. On the other direction, if f is not bilateral reflec-tion then f 2 6= Id or f is orientation preserving. If f 2 6= Idthen (d f |p)2 6= Id . Otherwise, we can find q ∈M such thatq 6= f 2(q). The geodesic from p to q is transformed by f 2
to geodesic from p to f 2(q). However, its tangent vector atTpM remain constant since we assume that d f 2 |p= Id . Thisis a contradiction since geodesics are uniquely determinedby emanating direction and length. On the other hand, if f isorientation preserving then det(d f |p) > 0 and d f |p cannotbe linear bilateral reflection since the eigenvalues of such re-flection must be −1,1. Furthermore, the stationary directionof d f |p (eigenvector with eigenvalue 1) has to be parallel tothe stationary curve in the case of bilateral reflection.
A related fact is that bilateral reflective symmetries neces-sarily have a closed differentiable curve of stationary points,we prove it for genus zero surfaces:
Proposition 7.5 Bilateral reflective symmetry f :M→Mon genus zero surface has a differentiable closed curve ofstationary points.
Proof This proposition follows from the fact that on the ex-tended plane (C) f has the form of anti-Möbius m, whichsatisfies the relation m◦ m = Id , that is anti-involution. Thisnecessarily means (see [Sch79] for more details) that m isan inversion w.r.t some circle which it fixes. This circle willcorrespond to a stationary differentiable closed curve on thesurface.
Furthermore, every Möbius transformation (on C) has at-least one fixed point (solution of quadratic equation over thecomplex numbers). We continue by characterizing the be-havior of symmetry invariant functions at stationary pointsof symmetry.
Theorem 7.6 Let f :M→M be a symmetry, and Φ :M→R a symmetry-invariant function. Then,
1. If f is bilateral reflective symmetry the gradient of Φ isparallel to the curve of stationary points of f .
2. If f 6= Id is any other symmetry (than bilateral reflection)then any stationary point p is isolated and the gradient ofΦ is zero there. In other words, every stationary point iscritical point of Φ.
Proof For (1), Proposition 7.5 implies that there is a closeddifferentiable curve of stationary points of f . Theorem 7.4tells us that the differential d f |p is a bilateral linear reflec-tion. From Proposition 7.1 we see that at stationary pointp = f (p) we have:
∇ |p Φ · d f |p=∇ |p Φ. (10)
This means that the (transpose of the) differential of f atp fixes the gradient direction of Φ. Therefore, the gradient∇ |p Φ has to be parallel (including the zero vector case) tothe reflection line which is the direction of the tangent of thestationary curve. To prove (2) we note that if f has any othersymmetry type (and it is not simply identity), Theorem 7.4implies that d f |p does not have a stationary direction. Fur-
thermore, it is an orthogonal transformation. Eq. (10) nownecessarily implies that∇ |p Φ = 0.
A simple corollary guarantees that the symmetry-invariantsets we construct must contain stationary point(s) if they ex-ist.
Corollary 7.7 Let f :M→M be an intrinsic symmetry,M genus zero surface, and Φ :M→ R symmetry invariantfunction. Then the set S = {p | ∇ |p Φ = 0} includes at-least one stationary point of f , if it exists. If f is bilateralreflective then S includes at-least two stationary points of f .
Proof If f is not bilateral reflection and has a stationarypoint, then by Theorem 7.6 this point is critical for Φ andtherefore in the set S. If f is bilateral reflective, it has a dif-ferentiable closed stationary curve by Proposition 7.5. Re-stricted to this curve, Φ achieves maximum and minimum.From Theorem 7.6 the gradient of Φ is parallel to the curvehence it is zero at these two points. These two points aretherefore in S.
8. ResultsIn this section, we report results of experiments with our al-gorithm for finding intrinsic symmetry correspondences fora wide range of 3D meshes.
Benchmark data sets: The first challenge in evaluating ouralgorithm is to find a set of meshes for which ground-truthintrinsic symmetry correspondences are known. Unfortu-nately, to our knowledge, no such data set exists. Imagesof automatically detected symmetry correspondences havebeen shown in prior papers (e.g., [BBW∗09a, BBW∗09b,LTSW09, OSG08, RBB∗10]), but we are not aware of anylarge-scale, quantitative analysis of an intrinsic symmetry al-gorithm over a wide range of 3D meshes.
To overcome this challenge, we recruited a volunteer to usean interactive program to specify ground truth correspon-dences C(T ) for a large set of points T for all meshes inthree data sets (Figure 3):
1. Watertight: 400 meshes arranged evenly in 20 ob-ject categories, many of which are articulated figures(humans, octopi, four-legged animals, ants, etc.). Themeshes were originally created for the SHREC 2007 Wa-tertight Benchmark [GBP07]. Our volunteer selected anaverage of 10-30 point correspondences per mesh, wheresome are self-correspondences (stationary points).
2. SCAPE: 71 meshes representing a human body in dif-ferent poses [ASK∗05]. All the meshes were fit to scan-ner data with a common template, and thus they sharethe same mesh topology. Our volunteer selected 35 pointcorrespondences on one of the meshes, which were thenmapped via vertex IDs to all others.
3. Non-Rigid World: 75 meshes representing people andanimals in a variety of poses [BBK08]. The meshes ap-pear in 8 groups with common topology. Our volunteerselected an average of 15-35 point correspondences from
c© 2010 The Author(s)Journal compilation c© 2010 The Eurographics Association and Blackwell Publishing Ltd.
V. Kim & et al. / Möbius Transformations For Global Intrinsic Symmetry Analysis
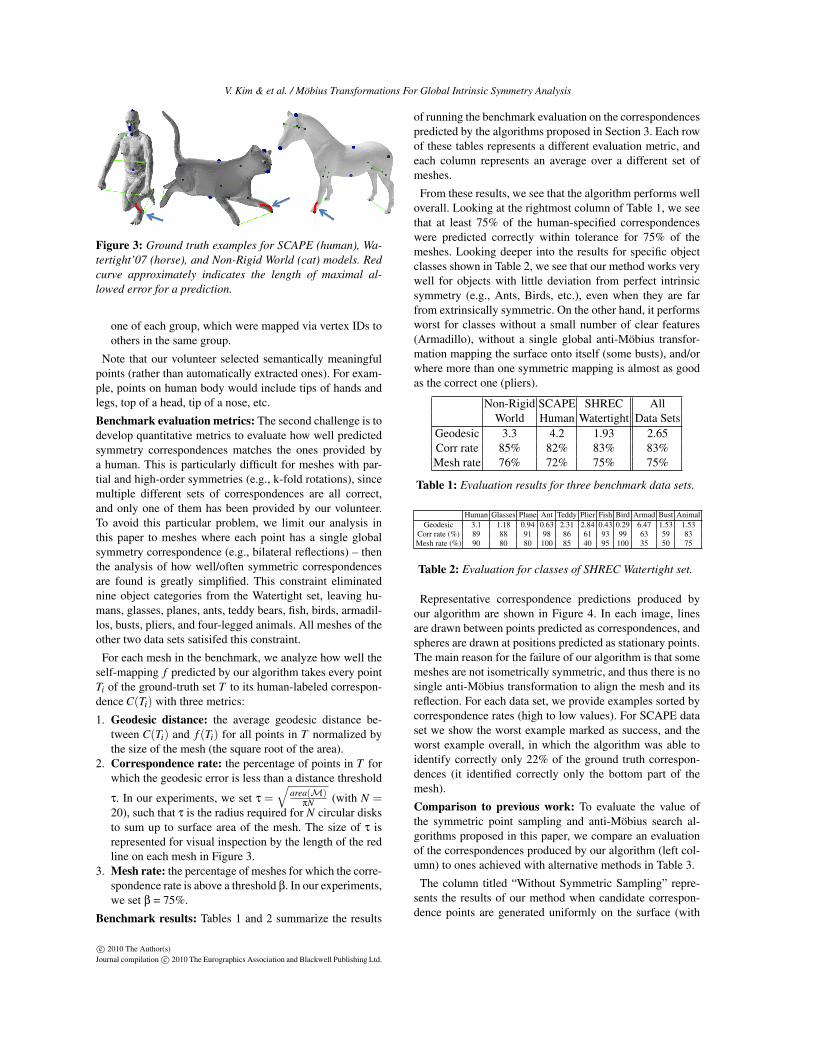
Figure 3: Ground truth examples for SCAPE (human), Wa-tertight’07 (horse), and Non-Rigid World (cat) models. Redcurve approximately indicates the length of maximal al-lowed error for a prediction.
one of each group, which were mapped via vertex IDs toothers in the same group.
Note that our volunteer selected semantically meaningfulpoints (rather than automatically extracted ones). For exam-ple, points on human body would include tips of hands andlegs, top of a head, tip of a nose, etc.
Benchmark evaluation metrics: The second challenge is todevelop quantitative metrics to evaluate how well predictedsymmetry correspondences matches the ones provided bya human. This is particularly difficult for meshes with par-tial and high-order symmetries (e.g., k-fold rotations), sincemultiple different sets of correspondences are all correct,and only one of them has been provided by our volunteer.To avoid this particular problem, we limit our analysis inthis paper to meshes where each point has a single globalsymmetry correspondence (e.g., bilateral reflections) – thenthe analysis of how well/often symmetric correspondencesare found is greatly simplified. This constraint eliminatednine object categories from the Watertight set, leaving hu-mans, glasses, planes, ants, teddy bears, fish, birds, armadil-los, busts, pliers, and four-legged animals. All meshes of theother two data sets satisifed this constraint.
For each mesh in the benchmark, we analyze how well theself-mapping f predicted by our algorithm takes every pointTi of the ground-truth set T to its human-labeled correspon-dence C(Ti) with three metrics:
1. Geodesic distance: the average geodesic distance be-tween C(Ti) and f (Ti) for all points in T normalized bythe size of the mesh (the square root of the area).
2. Correspondence rate: the percentage of points in T forwhich the geodesic error is less than a distance threshold
τ. In our experiments, we set τ =√
area(M)πN (with N =
20), such that τ is the radius required for N circular disksto sum up to surface area of the mesh. The size of τ isrepresented for visual inspection by the length of the redline on each mesh in Figure 3.
3. Mesh rate: the percentage of meshes for which the corre-spondence rate is above a threshold β. In our experiments,we set β = 75%.
Benchmark results: Tables 1 and 2 summarize the results
of running the benchmark evaluation on the correspondencespredicted by the algorithms proposed in Section 3. Each rowof these tables represents a different evaluation metric, andeach column represents an average over a different set ofmeshes.
From these results, we see that the algorithm performs welloverall. Looking at the rightmost column of Table 1, we seethat at least 75% of the human-specified correspondenceswere predicted correctly within tolerance for 75% of themeshes. Looking deeper into the results for specific objectclasses shown in Table 2, we see that our method works verywell for objects with little deviation from perfect intrinsicsymmetry (e.g., Ants, Birds, etc.), even when they are farfrom extrinsically symmetric. On the other hand, it performsworst for classes without a small number of clear features(Armadillo), without a single global anti-Möbius transfor-mation mapping the surface onto itself (some busts), and/orwhere more than one symmetric mapping is almost as goodas the correct one (pliers).
Non-Rigid SCAPE SHREC AllWorld Human Watertight Data Sets
Geodesic 3.3 4.2 1.93 2.65Corr rate 85% 82% 83% 83%Mesh rate 76% 72% 75% 75%
Table 1: Evaluation results for three benchmark data sets.
Human Glasses Plane Ant Teddy Plier Fish Bird Armad Bust AnimalGeodesic 3.1 1.18 0.94 0.63 2.31 2.84 0.43 0.29 6.47 1.53 1.53
Corr rate (%) 89 88 91 98 86 61 93 99 63 59 83Mesh rate (%) 90 80 80 100 85 40 95 100 35 50 75
Table 2: Evaluation for classes of SHREC Watertight set.
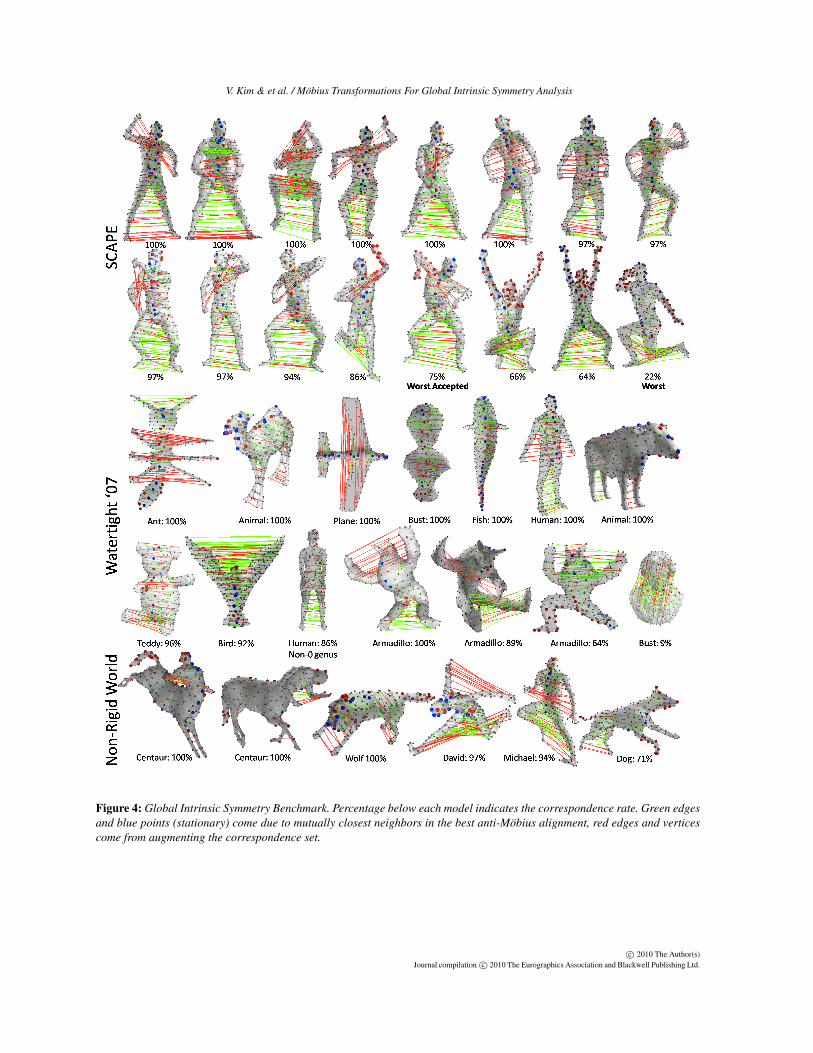
Representative correspondence predictions produced byour algorithm are shown in Figure 4. In each image, linesare drawn between points predicted as correspondences, andspheres are drawn at positions predicted as stationary points.The main reason for the failure of our algorithm is that somemeshes are not isometrically symmetric, and thus there is nosingle anti-Möbius transformation to align the mesh and itsreflection. For each data set, we provide examples sorted bycorrespondence rates (high to low values). For SCAPE dataset we show the worst example marked as success, and theworst example overall, in which the algorithm was able toidentify correctly only 22% of the ground truth correspon-dences (it identified correctly only the bottom part of themesh).
Comparison to previous work: To evaluate the value ofthe symmetric point sampling and anti-Möbius search al-gorithms proposed in this paper, we compare an evaluationof the correspondences produced by our algorithm (left col-umn) to ones achieved with alternative methods in Table 3.
The column titled “Without Symmetric Sampling” repre-sents the results of our method when candidate correspon-dence points are generated uniformly on the surface (with
c© 2010 The Author(s)Journal compilation c© 2010 The Eurographics Association and Blackwell Publishing Ltd.
V. Kim & et al. / Möbius Transformations For Global Intrinsic Symmetry Analysis
Figure 4: Global Intrinsic Symmetry Benchmark. Percentage below each model indicates the correspondence rate. Green edgesand blue points (stationary) come due to mutually closest neighbors in the best anti-Möbius alignment, red edges and verticescome from augmenting the correspondence set.
c© 2010 The Author(s)Journal compilation c© 2010 The Eurographics Association and Blackwell Publishing Ltd.

V. Kim & et al. / Möbius Transformations For Global Intrinsic Symmetry Analysis
the furthest point algorithm) instead of the symmetric pointsampling algorithm described in Section 4. The symmetricpoint sampling improves the results slightly, because slightdisplacement of corresponding predictions to a more sym-metric location, does not affect geodesic distances greatly.
The column titled “Mobius Voting (Lipman ‘09)” repre-sents the results that are achieved if the Mobius Voting al-gorithm were only augmented to work with anti-Möbiustransformations without using the improved symmetric pointsampling, sampling strategies, alignment score, and corre-spondence extraction algorithms proposed in this paper. Inthis case, the difference is quite significant.
Our Without MobiusProposed Symmetric VotingMethod Sampling (Lipman ‘09)
Geodesic 3.49 3.51 6.78Corr rate (%) 86% 85% 70%Mesh rate (%) 72% 69% 51%
Table 3: Comparison. Note that our approach performs bet-ter than the Möbius Voting approach. Symmetric samplingalso slightly improves correspondence results. Contrary toother examples we used 128 samples per mesh due to speedconstraints of method Lipman’09.
Timing results: For each of the meshes in the benchmark,our algorithm takes 30-90 seconds to run from beginningto end on a 2.2GHz Opteron 275 processor. Specifically, formeshes simplified to 5K triangles, using Dijkstra’s algorithmto compute geodesic distances between all pairs of verticestook approximately 8 seconds; flattening the mesh to thecomplex plane took 8 seconds; symmetric point samplingtook 8 seconds; searching for the best anti-Möbius trans-formation took 1-60 seconds, depending on the number ofpoints in S1 (5 points took 1 second, and 17 points took60 seconds); and, augmenting the correspondence set took1 second. The main bottlenecks are the memory requiredfor flattening (a sparse matrix is stored in n2 space in ourcurrent implementation, not our contribution) and the timerequired for searching anti-Möbius transformations (whichtakes O(|S1|4) in the worst case, but is greatly acceleratedby the pruning steps described in Section 3).
Partial and Rotational Symmetries As a final result, weprovide examples showing how our algorithm can work forpartial and rotational symmetries. Results are not as easilyquantifiable in these cases (as described above), and so weresort to depicting our results with images.
Figure 5 (left) shows an example of patrial reflectionalsymmetry detection; the palm of hand is reflectional sym-metric, leaving the thumb as an outlier. In Figure 6, we findintrinsic orientation-preserving rotational symmetry.
9. LimitationsIn this section we outline the main drawbacks and limitationsof our method. First, our method does not handle general
Figure 5: Intrinsically symmetric point correspondencesfound by our algorithm. Searching for bilateral reflectivesymmetries, the best Möbius transformation recovered theapproximately global reflective symmetry of the hand (left).The second best Möbius recovered partial intrinsic symme-try of the hand, leaving the thumb as an outlier.
Figure 6: Example of rotational intrinsic symmetry.
partial intrinsic symmetries. While it is relatively robust tooutliers (e.g. Figure 5), it searches for conformal mappingsthat maps most of the surface onto itself. Therefore, it wouldfail recognizing “small” symmetric parts.
Second, all the theory regarding symmetry invariant func-tions and sets is provided in the smooth and perfectly sym-metric settings. In practice these functions are approximatedon meshes that are not perfectly symmetric, and criticalpoints are extracted from these approximations. It is there-fore crucial that the symmetry invariant functions possessgood approximation properties (i.e., smoothness) – higherregularity of these functions provides more stability. TheAGD function for example is defined by integrating geodesicdistances and is therefore smooth. The MGD on the otherhand, is defined using geodesic distances directly and hencesomewhat less regular and stable. Another issue is related tosampling in case of partial symmetry. We note that the par-tial AGD function (defined and analyzed in Prop. 7.2) wouldcapture partial intrinsic symmetries for r>0 small enough.We have not experimented with this parameter for partialsymmetry detection and we consider it as a possible topicfor future work.
c© 2010 The Author(s)Journal compilation c© 2010 The Eurographics Association and Blackwell Publishing Ltd.

V. Kim & et al. / Möbius Transformations For Global Intrinsic Symmetry Analysis
10. Conclusion and Future WorkThis paper investigates using anti-Möbius transformationsas a tool for analyzing and detecting intrinsic symmetriesin surfaces. It provides two main research contributions: 1)theory and algorithms for construction of symmetric pointsamples on surfaces, and 2) algorithms to discover intrinsicsymmetries by searching the anti-Möbius group efficiently.We find that the combination of these two contributions iseffective for finding symmetries in the vast majority of ex-amples in a newly-created, human-labeled benchmark dataset for mesh symmetry detection.
This work is a first step towards algorithms that utilize sym-metry invariant functions to help identify intrinsic symme-tries. We believe that our theoretical findings, such as thesymmetry invariant functions, the characterization of intrin-sic symmetries as 2D-rigid symmetries at stationary points(group representation), and the results including stationarypoints in the symmetry invariant sets provide groundworkfor further exploring intrinsic symmetry, independently fromthe approach taken in this work. In particular, one can imag-ine algorithms for extracting stationary points and/or intrin-sic symmetry group description from these tools. One canalso think of applications to representing the intrinsic sym-metry group as a subgroup of orthogonal transformations inR2. We believe these directions can lead to new algorithmsfor intrinsic symmetry analysis.
AcknowledgementsThis project would not have been possible without the helpof people and organizations who provided the data and fund-ing. For the 3D models used in this paper, we thank DanielaGiorgi and AIM@SHAPE for the SHREC 2007 WatertightModels, Drago Arguelov and Stanford University for theSCAPE data set, and Project TOSCA for the Non-rigidWorld models. For funding in support of this project, wethank the NSERC, NSF (IIS-0612231, CNS-0831374, CCF-0702672, and CCF-0937139), Google, and The RothschildFoundation.
References[ASK∗05] ANGUELOV D., SRINIVASAN P., KOLLER D.,
THRUN S., RODGERS J., DAVIS J.: Scape: shape completionand animation of people. ACM Trans. on Graphics 24, 3 (2005).
[BBK08] BRONSTEIN A. M., BRONSTEIN M. M., KIMMEL R.:Numerical Geometry of Non-Rigid Shapes. Springer, 2008.
[BBW∗08] BERNER A., BOKELOH M., WAND M., SCHILLINGA., SEIDEL H.-P.: A graph-based approach to symmetry detec-tion. In IEEE/EG Symposium on Volume and Point-Based Graph-ics (2008).
[BBW∗09a] BERNER A., BOKELOH M., WAND M.,SCHILLING A., SEIDEL H.-P.: Generalized Intrinsic Sym-metry Detection. Tech. Rep. MPI-I-2009-4-005, Max-PlanckInstitute, August 2009.
[BBW∗09b] BOKELOH M., BERNER A., WAND M., SEIDELH.-P., SCHILLING A.: Symmetry detection using line features.Computer Graphics Forum (Eurographics) 28, 2 (2009).
[GBP07] GIORGI D., BIASOTTI S., PARABOSCHI L.:SHREC:SHape REtrieval Contest: Watertight models track,http://watertight.ge.imati.cnr.it/, 2007.
[GCO06] GAL R., COHEN-OR D.: Salient geometric featuresfor partial shape matching and similarity. ACM Transaction onGraphics (2006).
[GY03] GU X., YAU S.-T.: Global conformal surface parameteri-zation. In SGP ’03: Proceedings of the 2003 Eurographics/ACMSIGGRAPH symposium on Geometry processing (2003), Euro-graphics Association, pp. 127–137.
[LCDF10] LIPMAN Y., CHEN X., DAUBECHIES I.,FUNKHOUSER T.: Symmetry factored embedding and dis-tance. ACM Transactions on Graphics (Proc. SIGGRAPH) 29, 3(2010).
[LE06] LOY G., EKLUNDH J.-O.: Detecting symmetry and sym-metric constellations of features. In ECCV (2006), pp. 508–521.
[LF09] LIPMAN Y., FUNKHOUSER T.: Mobius voting for surfacecorrespondence. ACM Transactions on Graphics (Proc. SIG-GRAPH) 28, 3 (August 2009).
[LTSW09] LASOWSKI R., TEVS A., SEIDEL H., WAND M.: Aprobabilistic framework for partial intrinsic symmetries in geo-metric data. In ICCV (2009).
[MGP06] MITRA N. J., GUIBAS L., PAULY M.: Partial and ap-proximate symmetry detection for 3d geometry. In ACM Trans-actions on Graphics (2006), vol. 25, pp. 560–568.
[OSG08] OVSJANIKOV M., SUN J., GUIBAS L.: Global intrinsicsymmetries of shapes. Computer Graphics Forum (Symposiumon Geometry Processing) 27, 5 (2008), 1341–1348.
[PP93] PINKALL U., POLTHIER K.: Computing discrete mini-mal surfaces and their conjugates. Experimental Mathematics 2(1993), 15–36.
[PSG∗06] PODOLAK J., SHILANE P., GOLOVINSKIY A.,RUSINKIEWICZ S., FUNKHOUSER T.: A planar-reflective sym-metry transform for 3D shapes. ACM Transactions on Graphics(Proc. SIGGRAPH) 25, 3 (July 2006).
[RBB∗10] RAVIV D., BRONSTEIN A., BRONSTEIN M., KIM-MEL R., SAPIRO G.: Diffusion symmetries of non-rigid shapes.In Symposium on 3D Data Processing, Visualization and Trans-mission (3DPVT) (2010).
[RBBK10] RAVIV D., BRONSTEIN A., BRONSTEIN M., KIM-MEL R.: Full and partial symmetries of non-rigid shapes. Inter-national Journal of Computer Vision (IJCV) to appear (2010).
[Sch79] SCHWERDTFEGER H.: Geometry of Complex Numbers.Courier Dover Publications, 1979.
[WJG07] WANG S., JIN M., GU X. D.: Conformal geometry andits applications on 3d shape matching, recognition, and stitching.IEEE Trans. Pattern Anal. Mach. Intell. 29, 7 (2007), 1209–1220.Member-Yang Wang and Member-Dimitris Samaras.
[XZT∗09] XU K., ZHANG H., TAGLIASACCHI A., LIU L., LIG., MENG M., XIONG Y.: Partial intrinsic reflectional symmetryof 3d shapes. ACM Transactions on Graphics (SIGGRAPH ASIA)28, 5 (2009).
[ZSCO∗08] ZHANG H., SHEFFER A., COHEN-OR D., ZHOUQ., VAN KAICK O., TAGLIASACCHI A.: Deformation-drivenshape correspondence. Comput. Graph. Forum 27, 5 (2008),1431–1439.
[ZWW∗10] ZENG Y., WANG C., WANG Y., GU X., SAMRASD., PARAGIOS N.: Dense non-rigid surface registration usinghigh-order graph matching. In CVPR ’10 (2010).
c© 2010 The Author(s)Journal compilation c© 2010 The Eurographics Association and Blackwell Publishing Ltd.