Embed Size (px)
Citation preview

MechatronicsIntroduction
K. Craig1
Mechatronics
Dr. Kevin Craig
Associate Chair for Graduate Studies &Associate Professor of Mechanical Engineering
Department of Mechanical Engineering, Aeronautical Engineering, & MechanicsRensselaer Polytechnic Institute
Troy, NY 12180Office: JEC 2046 Phone: 518-276-6671
E-Mail: [email protected] Fax: 518-276-6025Mechatronics Laboratory: JEC 1022 Phone: 518-276-8978

MechatronicsIntroduction
K. Craig2
Mechatronics is the synergistic
combination of mechanical engineering,
electronics, controls engineering, and
computers, all integrated through the
design process.
What is Mechatronics?

MechatronicsIntroduction
K. Craig3
Cost
SystemComplexity
Electro-Mechanical DesignsType 1:
Electronics,Computers, &Controls Add
AdditionalOperations
Type 2:Electronics,
Computers, &Controls Impart
AdditionalFunctions
Type 3:Electronics,
Computers, &Controls
Provide SystemSynergy
Type 3Designs are
MechatronicSystems

MechatronicsIntroduction
K. Craig4
Design
Manufacture
Design
Manufacture
Design
Manufacture
Design
Manufacture
Electrical Mechanical Control Computer
“Over the Wall” State

MechatronicsIntroduction
K. Craig5
Concurrent Engineering
Electrical Mechanical Control Computer
Design+
Manufacture
Design+
Manufacture
Design+
Manufacture
Design+
Manufacture

MechatronicsIntroduction
K. Craig6
Mechatronics
Design+
Manufacture
Electrical Mechanical Control Computer

MechatronicsIntroduction
K. Craig7
The Design Challenge
The cost-effective incorporation of electronics, computers, and control elements in mechanical systems
requires a new approach to design.
The modern engineer must drawon the synergy ofMechatronics.

MechatronicsIntroduction
K. Craig8
Difficulties in Mechatronic Design
• Requires System Perspective
• System Interactions Are Important
• Requires System Modeling
• Control Systems Go Unstable

MechatronicsIntroduction
K. Craig9
Balance: The Key to Success
The Mechatronic System Design Process
Modeling&
Analysis
Experimental Validation
&Hardware
Implementation
Computer Simulation Without Experimental Verification Is At Best Questionable, And At Worst Useless!

MechatronicsIntroduction
K. Craig10
Balance in Mechatronics is the Key!
• modeling (physical and mathematical), analysis (closed-form and numerical simulation), and control design(analog and digital) of dynamic physical systems
• experimental validation of models and analysis (for computer simulation without experimental verification is at best questionable, and at worst useless!) and understanding the key issues in hardware implementationof designs
The essential characteristic of a mechatronics engineer and the key to success in mechatronics is a balance between the
following sets of skills:

MechatronicsIntroduction
K. Craig11
Dynamic System Investigation
PhysicalSystem
ExperimentalAnalysis
ComparisonMathematical
Analysis
MathematicalModel
PhysicalModel

MechatronicsIntroduction
K. Craig12
P h y s i c a l
S y s t e m
P h y s i c a l
M o d e l
M a t h
M o d e l
M o d e l
P a r a m e t e rI D
A c t u a lD y n a m i c
B e h a v i o r
C o m p a r eP r e d i c t e dD y n a m i c
B e h a v i o r
M a k eD e s i g n
D e c i s i o n s
D e s i g n
C o m p l e t e
Measurements,Calculations,
Manufacturer 's Specifications
Assumptions
andEngineering Judgement
Physical Laws
ExperimentalAnalysis
Equation Solut ion:
Analyticaland Numerical
Solution
Model Adequate ,Performance Adequate
Model Adequate ,
Performance Inadequate
Modify or
Augment
Model Inadequate:
Modify
D y n a m i c S y s t e m I n v e s t i g a t i o n
Which Parameters to Identify?
What Tests to Perform?

MechatronicsIntroduction
K. Craig13
Mechatronics is NOTConcurrent Engineering
CONCURRENT ENGINEERINGBridges Design and Manufacturing.
Electrical, Mechanical, Control and Computer Engineers Operate in Separate Environments.
(vertical integration)
MECHATRONICSIntegration of Electrical, Mechanical, Control, and Computer
Engineering Knowledgein Both Design and Manufacturing.(horizontal & vertical integration)

MechatronicsIntroduction
K. Craig14
ELECTROMECHANICSDesign of prime movers: a.c. motors, d.c. motors, solenoids.
Design of generators. Control of motors: commutation of d.c. motors, startup of a.c. motors.
MECHATRONICSThe synergistic combination of actuators, sensors, control
systems, and computers in the design process.
Mechatronics is NOT Electromechanics

MechatronicsIntroduction
K. Craig15
Mechatronics draws heavily on the concepts of control systems only because they provide a coherent
framework for system analysis.
Controls are an integral component to any mechatronic design and not an afterthought add-on.
However, open-loop and feedforward control structures are as valid as feedback ones for design solutions.
Mechatronics is MORE than just Control Systems

MechatronicsIntroduction
K. Craig16
Benefits of Mechatronics
• Shorter Development Cycles
• Lower Costs
• Increased Quality
• Increased Reliability
• Increased Performance
• Increased Benefits to Customers
Mechatronics is spawning a new breed of intelligent components and systems that combine an optimum blend of all available technologies.

MechatronicsIntroduction
K. Craig17
The Realm of Mechatronics
• High Speed
• High Precision
• High Efficiency
• Highly Robust
• Micro-Miniature

MechatronicsIntroduction
K. Craig18
Mechatronic Design Concepts
• Direct Drive Mechanisms
• Simple Mechanics
• System Complexity
• Accuracy and Speed from Controls
• Efficiency and Reliability from Electronics
• Functionality from Microcomputers
Think System !

MechatronicsIntroduction
K. Craig19
Mechatronics Engineer
• Leader in the initiation and integration of design
• Interdisciplinary knowledge of various techniques
• Ability to master the entire design process from concept to manufacturing
• Ability to use the knowledge resources of other people and the particular blend of technologies which provide the most optimal design solution

MechatronicsIntroduction
K. Craig20
Mechatronic Areas of Study
• Mechatronic system design principles
• Modeling, analysis, and control (continuous and discrete) of dynamic physical systems
• Analog and digital control electronics
• Control sensors and actuators
• Interfacing sensors, actuators, and microcontrollers
• Real-time programming for control
• Advanced topics, e.g.,
- fuzzy logic control
- smart materials as sensors and actuators - magnetic bearings

MechatronicsIntroduction
K. Craig21
Challenge to Industry
• Control Design and Implementation is still the domain of the specialist.
• Controls and Electronics are still viewed as afterthought add-ons.
• Electronics and Computers are considered costly additions to mechanical designs.
• Few engineers perform any kind of modeling.
• Mathematics is a subject not viewed as enhancing one’s engineering skills but as an obstacle to avoid.
• Few engineers can balance the modeling\analysis and hardware implementation essential for Mechatronics.

MechatronicsIntroduction
K. Craig22
Industry’s Choices
• Train the engineers you have in the mechatronics approach to design.
• Give them the tools to be successful:• Knowledge: modeling, analysis, controls
• Hardware: sensors, actuators, instrumentation, real-time control, microcontrollers
• Software for Simulation and Control Design, e.g., Matlab / Simulink, Electronics Workbench
• Give them the time to use these tools!

MechatronicsIntroduction
K. Craig23
Have this happen to your engineers!
OR

MechatronicsIntroduction
K. Craig24
Industry’s Bottom Line
Train your engineers in aMechatronics approach to design.
Give them the tools and the time todesign with synergy and
integration.

MechatronicsIntroduction
K. Craig25
RPIMechatronics
TeachingLaboratory
RPI MechatronicsCourses:
Graduate & Undergraduate100 students / year
School of EngineeringCapstone Design Courses
and Student Projects500 students / year
RSVPDistance Learning:
High SchoolsProfessionals
K-12 Student & TeacherPrograms in
MechatronicsRPI Center for Pre-College Initiatives
Portal to Industry:Professional Engineers
MentoringProfessors and Students
at RPI
Math, Science, EngineeringIntegration
Across the RPI CurriculumNSF Project LINKS
PDI Program
Preparation and Distribution of Educational Materials:Tutorials for Undergrads, HS Students, Professionals
byVideotapes, CD’s, Web Sites, Publications
Introduction to Engineering DesignSophomore Course1000 students / year
Mechatronics at RPI

MechatronicsIntroduction
K. Craig26
Mechatronics Demonstrations
• Spring-Pendulum Dynamic System• Inverted-Pendulum Dynamic System:
Rotary and Arm-Driven• Two-Mass, Three-Spring Dynamic System• Electrodynamic Vibration Exciter• High-Speed, Micron-Level Positioning System
with Variable Coulomb Friction• Ball-on-Plate Balancing System• Hydraulically-Balanced Beam System• Ball-on-Beam Balancing System• Drive-Train Friction/Backlash/Compliance Testbed

MechatronicsIntroduction
K. Craig27
Spring-Pendulum Dynamic System
m
l + r
θ
k

MechatronicsIntroduction
K. Craig28
Spring PendulumDynamic System
t
time
theta
theta position
u^2
square
0.333
spring lengthunstretched
(meters)
sin(u)
sin
r
r position
95.21
k/mk=172.8 N/mm=1.815 kg
u^(-1)
inverse
9.81
gravity (m/s^2)
cos(u)
cos
Sum2
Sum
Sum
Product
Product
Product
Product
Product
1/s
Integrate r acc
1/s
Integratetheta vel
1/s
Integratetheta acc
1/s
Integrater vel
2
Gain
5.710/1.815
Ft=5.71 Nm=1.815 kg
Clock
Mathematical Modeling and Analysis of Spring-Pendulum System
( ) 2tmr m l r kr F mg cos( ) 0
(l r) 2r gsin( ) 0
− + θ + + − θ =
+ θ + θ + θ =
&&&&& &&

MechatronicsIntroduction
K. Craig29
0 10 20 30 40 50 60-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
time (sec)
angu
lar
and
radi
al p
osit
ion
(rad
or
met
ers)
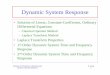
Simulation Results: Initial Conditions theta=0.021 rad, r=0.115 m
Dynamic Response of Spring-Pendulum System

MechatronicsIntroduction
K. Craig30
Inverted-Pendulum Dynamic System:
Rotary and Arm-Driven
• Brushed DC Motor• Two Optical Encoders (2000
cpr)• PWM Servo-Amplifier• Power Supply• Pendulum Balancing Control• Pendulum Swing-Up Control• Classical, State-Space, and
Fuzzy Logic Control• Converts between Rotary and
Arm-Driven Systems • dSpace Real-Time Control
Implementation

MechatronicsIntroduction
K. Craig31
Multi-Mass, Multi-Spring Dynamic System• Brushed DC Motor with Tachometer• Optical Encoder with 2000 cpr• Two Infrared Position Sensors• Free and Forced Vibrations• System Behavior below, at, and above resonance• Dynamic Vibration Absorber• Physical Significance of Transfer Function Poles and Zeros• Colocated and Non-colocated Control• dSpace Real-Time Control Implementation

MechatronicsIntroduction
K. Craig32
44.5N Electrodynamic Vibration Exciter

MechatronicsIntroduction
K. Craig33
Physical Model of Vibration Shaker

MechatronicsIntroduction
K. Craig34
High-Speed, Micron-Level Positioning System with Variable Coulomb Friction
• Actuators:• Brushed DC Motor• Brushless DC Motor• Stepper Motor with
microstepping• 80,000 and 144,000 cpr
Optical Encoders• Coulomb Friction Device• Variable Inertia• Direct or Belt Drive• MatLab Modeling and
Control Design Environment
• dSpace Real-Time Control Implementation

MechatronicsIntroduction
K. Craig35
Ball-on-Plate Balancing System
• Two Brushed DC Motors• Two Optical Encoders
(4000 cpr)• Touch-screen Resistive
Ball-Position Sensor • Two PWM Servo-
Amplifiers• Two Power Supplies• Disturbance Rejection• Ball Position Command
Tracking, e.g., line, circle, figure eight
• dSpace Real-Time Control Implementation

MechatronicsIntroduction
K. Craig36
Hydraulically-BalancedBeam System
• System Converts between Open-Loop Stable and Open-Loop Unstable Configurations
• Two Gear Pumps• Two Pressure Sensors at
Tank Bases to Determine Liquid Height
• Potentiometer for Beam Angle
• Two PWM Servo-Amplifiers
• Two Power Supplies• Disturbance Rejection• Position and Velocity
Command Tracking• Linear and Nonlinear
Control Techniques• dSpace Real-Time Control
Implementation

MechatronicsIntroduction
K. Craig37
Ball-on-BeamBalancing System
• Brushed DC Motor• Beam Sensors:
Optical Encoder, Tachometer, Potentiometer
• Ball Sensors: Ultrasonic, Potentiometer, Phototransistor
• PWM Servo-Amplifier
• Power Supply• Disturbance
Rejection• Ball Position
Command Tracking• dSpace Real-Time
Control Implementation

MechatronicsIntroduction
K. Craig38
Testbed to Study the Effects of Gear Backlash, Drive-Shaft
Compliance, Coulomb Friction & Variable Inertia on Accurate
Positioning
Drive-Train Friction/Backlash/Compliance
Testbed

MechatronicsIntroduction
K. Craig39
Mechatronic System Case Studies
• Thermal System Closed-Loop Temperature Computer Control
• Pneumatic System Closed-Loop Position Computer Control
• Stepper Motor Open-Loop and Closed-Loop Computer Position Control
• DC Motor Closed-Loop Speed Control• Analog Control• Digital Control with Embedded Microcontroller
• Magnetic Levitation System
• MR Fluid Rotary Damper System

MechatronicsIntroduction
K. Craig40
Two-Person MechatronicsLaboratory Station
• Pentium Computer with MATLAB, Electronics Workbench, and Working Model
• Function Generator• Digital Oscilloscope• Multimeter• Powered Protoboard• Microcontroller• Assorted analog /
digital sensors, actuators and components

MechatronicsIntroduction
K. Craig41
Blue Earth Micro 485 Specifications
Blue Earth Micro 485 SpecificationsFeature Specification
Microprocessor Intel 8051 running at 12 MHzDigital I/O 27 Bi-directional TTL compatible pins
Analog Inputs 4 12-bit 0-5 volt A/D converter channelsSerial Communication RS-422, RS-232
RAM 128K, battery-backed for retention after power downROM 32K, contains on-board Basic and Monitor

MechatronicsIntroduction
K. Craig42
Thermal System Closed-Loop Temperature Control
• aluminum plate• thin-film resistive heater• ceramic insulation• conduction and convection
heat transfer• AD590 temperature sensor• microcontroller• on-off closed-loop control
with relay• support analog electronics

MechatronicsIntroduction
K. Craig43
Pneumatic System Closed-Loop Position Control
• 3/4” bore, double-acting, non-rotating air cylinder
• linear potentiometer to measure mass position
• 30 psig air supply• two flow-control valves• two 1/8”ported, 3-way, spring-
return, two-positionsolenoid valves
• Darlington switches to energize solenoids
• microcontroller• on-off, modified on-off, PWM
closed-loop control

MechatronicsIntroduction
K. Craig44
Schematic of Pneumatic Servomechanism
A BPis ton M a s s
Microcont ro l le r
w i th 12-B i t
A / D C o n v e r t e r
P o w e r
Supp ly
L i nea r Po ten t i ome te r
4 - Inch S t roke
Ac tua to r
3 /4 Inch Bore , Doub le -Ac t ing ,
Non-Ro ta t ing A i r Cy l i nder
Manua l F low Con t ro l Va l ves
1 /8 Inch Por ted , 3 -Way , Spr ing -Re tu rn ,
Two-Pos i t ion , So leno id Va lves
Supply A i r
5 Vol ts
Va lve A Va lve BDar l i ng ton
Sw i t ches
30 ps ig
P i s t o n S h a f t
C h a m b e r 1C h a m b e r 2
Pneumatic Posit ioning Closed-Loop Control System

MechatronicsIntroduction
K. Craig45
Stepper Motor Open-Loop and Closed-Loop Control
• stepper motor• optical encoder• microcontroller• electronics to interface the
microcontroller to themotor and encoder
• full-step and half-step operation
• control via a Quad-Darlington IC
• control via a step-motor-driver IC
• programming in Basic or C

MechatronicsIntroduction
K. Craig46
Stepper Motor Open-Loop and Closed-Loop Control
Stepper Motor System Design:
Ink-Jet Printer Application

MechatronicsIntroduction
K. Craig47
DC Motor Closed-Loop Speed Control
• Permanent-magnet brushed DC motor
• integral analog tachometer• aluminum disk load inertia• PWM power amplifier• 24-volt, 4-amp power supply• analog control design and
implementation:lead, lag, lead-lag

MechatronicsIntroduction
K. Craig48
Microcontrol Motor-Speed-Control Testbed• Two embedded microcontrollers
from MicroChip Inc. configured for: 3 channel 8-bit analog / digital (A/D) acquisition , 10-bit pulse-width-modulated (PWM) drive, serial communication to PC, general purpose digital I/O
• High power H-bridge for output stage of pulse-width-modulated (PWM) driver (for d.c. motors)
• Hex keypad for data entry
• Liquid crystal display (LCD) for data display
• Analog electronics (op amps) for measuring tachometer and input reference signal

MechatronicsIntroduction
K. Craig49
Magnetic Levitation System
• Magnetically-levitated 1/2”-diameter steel ball
• electromagnet actuator: 1/4”steel screw with 3000 turns of 26-gauge wire
• gap sensor: infra-red diodeemitter andphototransistordetector
• TIP-31, NPN, bipolar transistoras a current amplifier
• ±15 volt, +5 volt power supply• analog lead controller design
and implementation

MechatronicsIntroduction
K. Craig50
Schematic OfMagnetic Levitation System
Controllers
& Power
Amplif ier
Objec t
Electromagnet
I R L E D
Phototransis tor
Device Schematic

MechatronicsIntroduction
K. Craig51
Mechanical System Digital Speed Control using DC Motor with MR Fluid Brake
• MR Fluid RotaryDamper
• Brushed DC Motor with Gearbox
• Motor Tachometer• Shaft Potentiometer • Current Controller• PWM Power Amplifier• 24-Volt, 4-Amp Power
Supply• AC/DC Adapter• Pulley / Arm Attached
to MR Fluid Brake
• Microcontroller with D/A Converter

MechatronicsIntroduction
K. Craig52
All these systems areindustrially relevant and require
a complete dynamic system investigation with a balance
between modeling / analysis and hardware implementation.
Only a Mechatronics engineer can accomplish
this!

MechatronicsIntroduction
K. Craig53
MechatronicsExercise Examples
• Analog Electronics: Time Response, Frequency Response, Loading Effects
• Dynamic System Modeling and Analysis: Space Station Solar Alpha Rotary Joint
• Modeling, Analysis, and Control of an Electrohydraulic Valve-Controlled Servomechanism

MechatronicsIntroduction
K. Craig54
0 1 2 3 4 5 6 7 8
x 10-4
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Time (sec)
Am
plit
ude
Analog Electronics:RC Low-Pass FilterTime Response &Frequency Response
Time Constant τ = RC
VV RCs
out
in
=+
11
Resistor 15 KΩ
Capacitor 0.01 Fµ VoutVin
Time Response

MechatronicsIntroduction
K. Craig55
102
103
104
105
-25
-20
-15
-10
-5
0
Frequency (rad/sec)
Gai
n dB
Bandwidth = 1/τ
102
103
104
105
-100
-80
-60
-40
-20
0
Frequency (rad/sec)
Ph
ase
(deg
rees
)
Frequency Response

MechatronicsIntroduction
K. Craig56
Analog Electronics:Loading Effects
V
i
RCs R
Cs
V
i
VV RCs s
i
ZV
i
R
RCs
ZV
i
RCs
Cs
in
in
out
out
out
inout
outout
out V
inin
in i
in
out
LNM
OQP
=+ −
−LNM
OQPLNM
OQP
=+
=+
=
= =+
= =+
=
=
1
1
11
11
0
1
1
0
0
τ when
Output Impedance
Input Impedance
RC Low-Pass Filter
Resistor 15 KΩ
Capacitor 0.01 FµVoutVin

MechatronicsIntroduction
K. Craig57
VV
G s G sRCs RCs
VV
G s G s
RCs ZZ
RCs
RCs RCs
out
inunloaded unloaded
out
inloaded unloaded
out
in
≠ =+
FHG
IKJ +FHG
IKJ
=
=+
FHG
IKJ +
F
H
GGG
I
K
JJJ +FHG
IKJ
=+ +
− −
− −
−
−
( ) ( )
( ) ( )
1 2
1 2
1
2
2
11
11
11
1
1
11
1
1b g
2 RC Low-Pass Filters in Series
Only if Zout-1 << Zin-2 for the frequency range of interest will loading effects be negligible.
Resistor 15 K Ω
Capacitor 0.01 FµVoutVin Capacitor 0.01 Fµ
Resistor 15 KΩ

MechatronicsIntroduction
K. Craig58
Space Station Solar Alpha Rotary Joint: Physical System and Physical Model
Vin
+
-
R L
im+
-
eb
Stator
Rotor
Statormechanically
grounded
Jm
JsaJobN:1Gear Ratio
K1 K2
B2B1
+x
′θθm θθob θθsa
θθ m
Td
SolarArray
SolarArray
OutboardBody
InboardBody
+x
StatorRotor
GearTrain

MechatronicsIntroduction
K. Craig59
Solar Alpha Rotary Joint Mathematical Model
′
′
L
N
MMMMMMMM
O
Q
PPPPPPPP
=− −
− − − −
− −
L
N
MMMMMMMMMMM
O
Q
PPPPPPPPPPP
′
′
&&&&&&&&&
&&
θ
θθ
θθ
θ
θ
θθ
θ
m
ob
sa
m
ob
sa
m m m m
ob ob ob ob ob ob
sa sa sa sa
m
ob
sa
m
K
N J
K
N J
B
N J
B
N JKJ
K KJ
KJ
BJ
B BJ
BJ
K
J
K
J
B
J
B
J
0 0 0 1 0 0
0 0 0 0 1 0
0 0 0 0 0 1
0 0
0 0
12
12
12
12
1 1 2 2 1 1 2 2
2 2 2 2
θ
θob
sa
t
m
sa
m
d
NKN J
J
i
T
&
L
N
MMMMMMMM
O
Q
PPPPPPPP
+
L
N
MMMMMMMMM
O
Q
PPPPPPPPP
LNM
OQP
0 0
0 0
0 0
0
0 0
01
2

MechatronicsIntroduction
K. Craig60
10-1
100
101
102
103
-400
-200
0
Frequency (rad/sec)
Gai
n dB
10-1
100
101
102
103
-360
0
360
θob
′θm
θsa
θob
′θm
θsa
φo
Frequency Response Plots: Input im

MechatronicsIntroduction
K. Craig61
0 5 10 15 20 250
0.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
0.018
0.02
Time (secs)
Am
plitu
de
θsa
′θm
θob
Time Response: im = cos(0.6t)

MechatronicsIntroduction
K. Craig62
Electrohydraulic Valve-ControlledServomechanism

MechatronicsIntroduction
K. Craig63
Xc dot Pcr
PclXc
Qcr
Qcl
ELECTROHYDRAULIC VALVE-CONTROLLED SERVOMECHANISM
Xv - Xc Positive
Xv - Xc Negative
Xv Step Command
input
To Workspace6
Pcr
To Workspace5
Pcl
To Workspace4
Qcr
To Workspace3
Qcl
To Workspace2
Xc
To Workspace1
time
To Workspace
Pcl
Pcr
Xc
Xc dot
Mass
Pcl
Xv - Xc Pos
Xv - Xc NegPcr
Qcl
Qcr
Flow
XcQcl
Qcr
Xc dot
Pcl
Pcr
Cylinder
Xv Command
Xc
Xv - Xc Positive
Xv - Xc Negative
Controller
Clock
Nonlinear Model

MechatronicsIntroduction
K. Craig64
C x C pVM
dp
dtK p p A
dx
dtx v p p cl pB
cl ppl cl p cr p p
C p, ,
,, ,
,− − − − =c h c h0
− − − + − = −C x C pVM
dp
dtK p p A
dx
dtx v p p cr pB
cr ppl cl p cr p p
C p, ,
,, ,
,c h c h0
p p A Bdx
dtf M
d x
dtcl p cr p pC p
U pC p
, ,,
,,− − + =c h
2
2
Linear Mathematical Model

MechatronicsIntroduction
K. Craig65
Pcl
Pcr
Xc
ELECTROHYDRAULIC VALVE-CONTROLLED SERVOMECHANISM (LINEAR)Xv Step Command
input_l
To Workspace6 Qcr_l
To Workspace5
Qcl_l
To Workspace4
Xc_l
To Workspace3
Pcr_l
To Workspace2
Pcl_l
To Workspace1
time_l
To Workspace Sum8
Sum7
Sum6
Sum5
Sum4
Sum3
Sum2
Sum1
Sum
1/s
Integrator3
1/s
Integrator2
1/s
Integrator1
1/s
Integrator
Ap
Gain9
Cx
Gain8
Cp
Gain7
Cp
Gain6
Kpl
Gain5
Ap
Gain4
MB/Vo
Gain3
MB/Vo
Gain2
B
Gain1
1/M
Gain
0
Disturbancefu
500
Constant1
Clock
Linear Model

MechatronicsIntroduction
K. Craig66
V s M K C
C M
K
C
A s
CK
C
V s M K C
C M
A s
CA A Ms Bs
x
x
f
B pl p
x B
pl
x
p
x
pl
x
B pl p
x B
p
x
p p
v
v
U
0
0
2
+ + −
− − +
− +
L
N
MMMMMMM
O
Q
PPPPPPP
L
NMMM
O
QPPP
=L
NMMM
O
QPPP
c h
c h
p
p
x
cl
cr
C
Take the Laplace Transform of these linear equations and derive six useful transfer functions relating the two inputs, xv
and fU, to the three outputs, pcl, pcr, and xC.

MechatronicsIntroduction
K. Craig67
xx
sK
ss s
C
v
n n
a f =+ +
FHG
IKJ
2
2
21
ωζ
ω
KC A
A B C K
M A B C K
MV
BM MV
KM M
VC
M MV
A B C K
x p
p p pl
n
B p p pl
Bpl
Bp
Bp p pl
=+ +
=+ +
=+FHG
IKJ +
FHG
IKJ
+ +
2
2 2
2 2
2
2 2 2
2
2
0
0 0
0
2
c hc h
c h
ω
ζ
One of these transfer functions is:
where