Embed Size (px)
Citation preview

78 Incercari de control al starii tehnice
unor carosari speciale sau dispuneri a incarcaturii In alt mod decit eelavut in vedere la proiectarea automobilului de baza, variatii ireversi-bile ale sagetii suspensiei (deformatii remanente ale elementelor elastice}sau uzuri ale unor elemente ale osiei si suspensiei din fata pot duce lamodificari ale unghiurilor de montaj ale rotilor de directie; in consecin-ta — dat fiind rolul acestor unghiuri — va fi necesara o verificare a
:
$
Q bFig. 4.2. Unghiurile de montaj ale ro^ilor directoare.
C
valorilor respective ori de cite ori automobilul se pregates.te in vedereaunor incercari la maniabilitate s.i/sau stabilitate (v. cap. 8), sau la incer-cari de fiabilitate la care se urmares.te ?i uzura pneurilor.
Odata cu implementarea unor mijloace moderne de verificare, ce re-duc timpul necesar pentru aceasta, masurarea unghiurilor de montajale rotilor directoare, in totalitatea lor, a devenit o operatie de controlperiodic al starii tehnice a automobilului. Un rol deosebit revine verifi-carii convergentei care, exprimata prin diferen^a a—b, se poate efectuacu mijloace simple, la indemina chiar si a s.oferilor amatori.
4.4.2. Aparatura utilizata §i metoda de verificare
Convergenta rotilor se verifies, de obicei, prin masurarea marimi-lor a s.i 6 cu ajutorul unei rigle speciale, la marginile din fata si din spa-te ale jantelor rotilor de directie, in plan paralel la suprafata de spri-jin §i care trece prin centrele rotilor. Riglele de masurare reprezinta defapt niste bare telescopice gradate, ale caror capete palpatoare, ce vinin contact cu jantele, sint apasate pe acestea de un arc interior s.i carepot fi blocate la lungimea necesara pentru o lectura comoda a indica-tiilor.
Unghiurile de montaj a §i -y se verifica pe instalatii speciale preva-zute cu dispozitive optice. Din punct de vedere constructiv, aceste insta-latii sint foarte diferite, dar principiul de functionare este, in general,acelasi si consta in incadrarea automobilului intr-un dreptunghi optic,astfel incit planul longitudinal de simetrie al automobilului sa treacaprin axa mare a dreptunghiului optic, iar axa rotilor directoare sa fieparalela cu laturile mici ale acestuia. Ca urmare a existentei unghiurilorde montaj, intre planele mediane ale rotilor directoare si planul median

Verificarea unghiurilor rotilor directoare 79
vertical pe dreptunghiul optic va exista un anumit unghi, sesizat de dis-pozitivul optic al instalatiei si convertit in valorile parametrilor cautati.
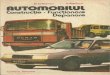
In fig. 4.3 sint aratate elementele unei instalatii cu dispozitive op-tice pentru masurarea unghiurilor rotilor directoare de tip HPA-4401(Danemarca). Instalatia consta din: doua proiectoare 1 cu lampi de halo-geni, montate centrat pe cele doua roti directoare prin intermediul dis-
Fig. 4.3. Instalatia HPA-4401 pentru verificarea unghiunilor de montaj alerotilor de directie.
'
pozitivelor mecanice 2 si care emit, printr-un dispozitiv optic focalizat,doua fascicule de lumina reciproc perpendiculare, ce constituie laturiledreptunghiului optic; placutele indicatoare de paralelism 3, ce se mon-teaza pe j an tele rotilor din spate (instalatia se poate adapta si la automo-bilele cu osie dubla in spate); discurile rotitoare 4 de asezare a rotilordirectoare, rezemate pe placile de baza prin intermediul unor bile de rul-menti, dispuse pe o cale circulars (spre a permite mis.carea libera a dis-curilor la virare); grupul de alimentare cu curent a proiectoarelor 5; dis-pozitivul 6 de fixare a pedalei de frina; rigla 7 pentru verificarea §i reg-larea instalatiei s.i stativul 8 al riglei.
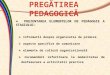
In fig. 4.4 se arata modul de amplasare a instalatiei in cazul masu-rarii unghiurilor rotilor directoare ale unui autocamion si schema utili-zarii dreptunghiului optic pentru masurarea convergentei.
Dupa montarea proiectoarelor pe rotile directoare ale automobiluluise regleaza pozitia acestora astfel ca impreuna cu scala gradata ce-i a-partine sa fie cuprins intr-un plan paralel cu planul median al rotilorrespective. Pentru masurarea convergentei rotilor, dupa verificarea para-lelismului mentionat, se citesc indicatiile de pe scalele montate la cape-tele tuburilor anterioare ale proiectoarelor. Daca valorile indicate la cele

80 Incercfiri de control a! starii lehnice
doua roti difera, se reface reglajul convergentei, mentionind conditia cadistantele indicate pe riglele montate pe rotile din spate sa fie egale laambele roti. Pentru masurarea unghiului de cadere se aduce roata in po-
, •*••
Converqenta
Fig. 4.4. Masurarea unghiurilor de montaj ale rotilor de di-rectie la un autocainion.
zitie ,de convergenta nula ?i se cite§te direct pe scala proiectorului va-loarea respectiva. Masurarea unghiului de inclinare longitudinala a pivo-tului se face bracind roata respectiva cu 20° lateral spre stinga §i apoi
2200
• 800 600 BOO
igjp-..-^g _—-j-
I \\M\\H k
-|
1 ̂Y
<m:n 1000, max 1700
^4-^v\\
50.
spre dreapta, masurindu-se unghiurile de cadere corespunzatoare; unghiulcautat rezulta ca diferenta a unghiurilor de cadere corespunzatoare ce-lor doua pozitii ale rotii. Unghiul de bracaj al rotilor se citeste directpe scala gradata. pe discul rotitor al suportului. De mentionat este fap-
Pig. 4.5. Platforma pentru masurarea unghiurilor rotilor dedirectie.

Verificarect de laborator a starii tehniee a motorului 81
tul ca pentru a se asigura orizontalitatea automobilului suportii rotitorise monteaza in asa fel incit placa superioara sa se afle la nivelul supra-fetei de dispunere a automobilului (fig. 4.5).
Verificarea trapezului de direcfie se face efectuind bracarea succesi-va a fiecarei roti cu 20° §i citind unghiul de bracaj al celeilalte roti, caretrebuie sa aiba valoarea prevazuta in documentatia tehnica a automo-bilului.
Deoarece unghiurile de inclinare ale rotilor directoare isi modifiedvaloarea in functie de starea de incarcare a automobilului, verificareaacestora se va face la acea stare de incarcare pentru care au fost indi-cate de constructor in documentatia tehnica. Inainte de masurari se vaverifica presiunea din pneuri si se va face un control amanuntit al tutu-ror elementelor mecanismelor de rulare si directie.
4.5. Verificarea de laborator a starii tehniee a motorului
Aprecierea starii tehniee a motorului prin masurarea consumului decombustibil de control are un anumit caracter conventional si de sinteza,fiind de obicei indicata in faza imediat premergatoare a unor alte incer-cari pe parcurs (de dinamica, de economicitate etc.).
In cazul unor incercari de durata sau in timpul exploatarii reale aautomobilului, o incercare pe parcurs de tipul celei aratate la § 4.2 nueste recomandabila deoarece, pe linga ca presupune un consum supli-mentar de combustibil, nu poate oferi imediat masurile de remedierenecesare daca rezultatul masurarii a fost necorespunzator. Solutia optimaconsta in asemenea cazuri in efectuarea unor verificari de laborator cuo aparatura specials de diagnosticare (intimita frecvent la statiile ser-vice), cu ajutorul careia se pot determina atit parametrii functional! glo-bali ai motorului, cit si ai principalelor agregate ale acestuia.
Starea tehnica a motorului este caracterizata, in principal de modul defunctionare si reglajele sistemului de alimentare, de aprindere si de dis-tributie.
In cazul motoarelor cu aprindere prin scinteie, valorile parametrilorde reglaj al carburatiei §i al sistemului de aprindere ofera indicatii refe-ritor la starea tehnica a motoarelor respective. Parametrii de reglaj aicarburatiei unui motor sint evidentiati in mod concludent de catre coe-ficientul excesului de aer al amestecului carburant, sau prin continutulprocentual de oxid de carbon si bioxid de carbon in gazele de evacuareale motorului. Coeficientul excesului de aer sau continutul procentual ingazele de evacuare a CO si a CO2 depind de nivelul combustibilului incamera de nivel constant, de tararea jicloarelor carburatorului, de gradulde imbicsire a filtrului de aer etc.
Pentru stabilirea modului de functionare al echipamentului de aprin-dere (constituit din mai multe elemente) este necesara verificarea functio-narii ruptor-distribuitorului de curent, a unghiului avansului la aprindere,a bujiilor, a tensiunii din circuitul secundar al sistemului de aprindere etc.
Pentru determinarea continutului de oxid de carbon in gazele de ar-dere se folosesc analizoare de gaze. Unul dintre tipurile de analizoareexistente (produs de firma Bosch) este aratat in fig. 4.6, iar in fig. 4.76 — Metode $i mijloace de incercare

82 incercari de control al starii tehnice
este prezentata schema functionala a acestuia. Principiul de functionareconsta in incalzirea placii de ceramica la temperatura de 700°C, cindaceasta incepe sa emita raze de lumina infrarosii. Reflectorul reflectarazele infrarosii in doua fascicule si le transmite catre corpul divizor al
razelor prin. cele doua canale. Amin-doua canalele conduc razele catrecamera de masurare. Un fascicul deraze infrarosii trece prin cameraprin care circula gazele de evacuare,iar celalalt fascicul trece printr-ocamera in care se afla un gaz eta-Ion ce serveste pentru comparatie.
Odata cu masurarea continutuluide CO in gazele de evacuare, se ma-scara si turatia motorului si depre-siunea in galeria de admisie. Inain-tea efectuarii masurarilor pentrudeterminarea continutului de COdin gazele de evacuare, se verificasi, daca este cazul, se regleaza, con-form prescriptiilor constructoruluimotorului, jocul culbutoarelor siavansul la aprindere. Jocul culbu-toarelor se verifica si regleaza utili-zind lere si dispozitive specializatepentru stringerea s.uruburilor de re-glaj si contrapiulitele acestora.
Pentru masurarea unghiului deavans la aprindere se folosesc apa-rate stroboscopice (fig. 4.8), cunos-cute §i sub denumirea de pistoalestroboscopie. Alimentarea cu curentelectric a pistolului stroboscopie seface de la bateria de acumulatoarea automobilului ncercat, iar bornade inalta tensiune se conecteaza prinracorul special la bujia cilindru-lui nr. 1 al motorului. Pentru masu-rarea avansului pe fulia arborelui co-tit, sau pe roata volanta, in pozitia co-respunzatoare pistonului nr. 1 la
Fig. 4.6. Aparatul Bosch pentru masu-rarea continutului de CO in gazele de
evacuare.
Camera
efalon
^--RefkcforPI oca dinceramica
Corpdivizor
ksiret^lffoze arse
,=v In f raresarse
Camera demosurare
Fig. 4.7. Schema functionala aaparatului Bosch pentru determi-narea continutuului de CO in ga-
zele de evacuare.
P.M.I., se afla trasat pe generatoare un semn ce are corespondents cu un altsemn marcat pe blocul motor, capacul distributiei sau carterului ambre-iajului. Acest semn se considera ca fiind linie zero pentru sistemul degradatii unghiulare marcat pe fulie. Avansul la aprindere se determinaprin decalajul dintre linia zero de pe fulie sau roata volanta s.i cea depe blocul motor, observat la lumina stroboscopului.
In lipsa pistolului stroboscopie, avansul la aprindere se poate reglautilizind o lampa de control conectata, pentru alimentarea cu curent,la borna de joasa tensiune a ruptor-distribuitorului de curent. Se roteste

Verificarea de laborator a starii tehnice a motorului
motorul (fara pornire) pina ce pistonul nr. 1 se deplaseaza spre P.M./.,pe timpul compresiei, iar liniei de zero de pe blocul motor sa-i cores-punda gradatia de pe fulie pentru unghiul de avans indicat de construc-torul motorului. In continuare, se slabeste surubul de fixare pe bloculmotor a ruptor-distribuitorului si se realizeaza contactul la broasca de
Cu scala pentru' unghiul ae avarnFara scala pentru
unghiul de avans»• Pentru "1
Fig. 4.8. Pistolul stroboscopic.
contact, fara insa a actiona demarorul. Daca lampa de control ramine incontinuare stinsa, motorul nu are avansul corespunzator la aprindere §ieste necesar a roti corpul ruptor-distribuitorului in sensul invers rotiriiaxului acestuia, pina in momentul aprinderii lampii. Aprinderea lampiicorespunde momentului producerii scinteii. In aceasta pozitie se va stringe§urubul de fixare a ruptor-distribuitorului pe blocul motor.
Pentru verificarea starii de uzura a •ansamblului cilindru-piston, saua etanseitatii supapelor se utilizeaza un compresiometru, care, la mo-toarele cu aprindere prin scinteie, se conecteaza in locasul pentru bujie,iar la motoarele cu aprindere prin compresie in locasul pentru injector.Motorul se roteste cu ajutorul demarorului, iar presiunea in cilindru in-dicata de compresiometru trebuie sa corespunda limitelor indicate deconstructorul motorului.
La motoarele cu aprindere prin comprimare, starea tehnica este carac-terizata de valorile parametrilor de reglaj ai echipamentului de injec-tie al motorului: debitul de combustibil si uniformitatea debitarii, formajetului combustibilului injectat si presiunea la care deschide acul pul-verizatorului injectorului. De asemenea, mai poate fi considerat para-metru al echipamentului de injectie momentul (turatia) intrarii in actiunea regulatorului de turatie la regimul nominal al motorului.
La motoarele cu aprindere prin comprimare, importanta deosebita pre-zinta verificarea sistemului de alimentare si injectie al combustibilului.In acest scop este necesar a se dispune de aparatura specializata si depersonal cu inalta calificare. Operatia de verificare cea mai importantacosta in centricubarea pompei de injectie, intelegind prin aceasta reg-lajul debitelor si uniformitatea debitarii combustibilului de catre sec-tiunile de pompare, pentru toti cilindrii motorului. O alta verificare cese efectueaza consta in masurarea turatiei de intrare in actiune a regula-

84 Incerccri de control a! starii lehniee
torului pompei, pentru regimul nominal al motorului. Reglajele pentrudebite §i turatie se fac in limitele indicate de constructorul motoruluirespectiv. In fig. 4.9 este prezentat un stand de tipul HARTRIDGE (Anglia)
destinat incercarii pompelorde injectie.
De asemenea importantadeosebita in functionareamotorului prezinta verifica-rea modului de pulverizare acombustibilului in camera deardere a motorului. Aceastase realizeaza cu un dispozi-tiv de tipul celui prezentatschematic in fig. 4.10.
4.6. Veriflcarea echipa-nieniului de frinare si a sis-iernelor de direcfie si derulare
Deoarece ansamblurilementionate in acest para-graf au o importanta hotari-toare in asigurarea securita-tii circulatiei automobilului,verificarea acestora consti-tuie operatii obligatorii ori-caror pregatiri pentru incer-cari de parcurs. De aseme-nea, verificarile trebuie sainsoteasca utilizarea automo-bilului in conditiile pentrucare a fost destinat cu oca-zia lucrarilor de mentenantaiar uneori sint efectuate deorganele care reglementeazacirculatia rutiera.
La dispozitivele echipa-mentului de frinare se veri-fica periodic entaseitatea, jo-cul dintre saboti si tambure,jocul §i cursa pedalei defrina. In garajele sau atelie-rele dotate cu standuri deincercare a frinelor se veri-fica fortele de frinare la roti(v. fig. 7.9).
La mecanismul de direc-tie se verifica in primul rind
.
Fig. 4.9. Stand pentru verificarea pompelor deinjectie.
^&r^Maftiihiffi
Fig. 4.10. Dispozitiv pentru verificarea func-tionarii injectoarelor.

VerHicarea echipamentu!ui de frinare 85
jocul liber al volanului (care trebuie sa se inscrie in limite specificate)?i eventualele jocuri in articulatii (capete de bara).
La rotile automobilului se verifica presiunea din pneuri §i jocuriledin rulmen^i; o importan^a deosebita prezinta verificarea echilibrarii di-namice a rotilor, operatic care se poate efectua numai cu standuri spe-cializate, existence de obicei in garajele moderne sau la statiile service.
Periodicitatea operatiilor mentionate este indicate de obicei in ins-tructiunile de exploatare ale automobilului.
•
,
-
•I
!
.
•
•
-
.
•
•
.
.'
.
•
•
,

I—IO. DETERMINAREA CARACTERISTICILOR DINAMICE
ALE AUTOMOBILELOR•
/
5.1. General Itati si conditii de incercare
Parametrii definitori pentru calitatile dinamice ale automobilelor s.iterminologia aferenta se prezinta in STAS 6689/4-75. Calitatile dinamiceale unui automobil se afla in strinsa interactiune cu cele de tractiune,.care in ultima instanta asigura posibilitatile de deplasare ale acestuia.In mod uzual, parametrii pentru aprecierea dinamicii automobilului sintviteza maxima si intensitatea demarajului, iar calitatile de trac^iune seapreciaza prin forta de tractiune la cirlig, dependents direct de forta detractiune la rotile motoare. Caracteristicile dinamice si de tractiune aleunui automobil determina in mare masura productivitatea utilizarii aces-tuia, exprimata prin cantitatea de bunuri transportata in unitatea de timpin conditii de circulatie date, sau prin viteza medie tehnica de deplasare.
Determinarea caracteristicilor dinamice ale automobilului constituieo activitate obligatorie a tuturor incercarilor de omologare a prototipului,seriei zero, incercarilor de lot, incercarilor dupa repara^ii capitale, sauincercarilor de cercetare legate de investigarea calitatilor unor automo-bile model de referinta. Determinarea vitezelor si timpilor de accelerareconstituie si obiectul STAS 6926/11-78, precum si al unor standarde in-ternationale.
5.1.1. Pregatirea automobilului pentru incercare
Incercarile de dinamica se efectueaza cu automobilul functionind laputerea sau cuplul maxim al motorului, deci la un regim energetic ridi-cat. Din aceasta cauza, inainte de incercari, automobilul trebuie supusunor verificari minutioase, care cuprind:
— controlul starii tehnice generale, al echipamentului de frinare,sistemului de rulare si de directie;
— verificarea reglajelor specif ice ale mecanismelor si comenzilor, in-clusiv ale motorului (la motor se va verifica presiunea de compresiunedin cilindri la rotirea cu ajutorul demarorului, jocul intre supape si ta-cheti, turatia minima de mers in gol, presiunea uleiului din instalatia deungere, functionarea limitatorului de turatie, modul de functionare a car-buratorului si sistemului de comanda a clapetei de acceleratie sau modulde functionare a injectoarelor, momentul de incepere a injectiei, unifor-mitatea debitarii pompei de injectie, functionarea regulatorului de tura-tie si a sistemului de comanda a cremalierei pompei de injectie);
- verificarea starii bateriei de acumulatoare, reglajului avansului

Qeneralitati si conditii de incercare 87
fix, jocului intre contactele distribuitorului de curent, distantei dintreelectrozii bujiilor (la motoarele cu aprindere prin scinteie).
Aceste verificari se efectueaza in conditii de garaj, utilizind o apara-tura de control si diagnosticarea adeevata, iar la iesirea automobilului pepista de incercare se vor incheia printr-o verificare a spatiului de rulareliber a.
Automobilul supus incercarilor de dinamica va trebui sa fie perfectrod at (un rulaj prealabil de 5 000—6 000 km), alimentat cu combustibilulsi lubrifiantii indicati de instructiunile de exploatare, cu toate plinurilefacute (si verificate) si cu starea de incarcare prevazuta de programul deincercare (de obicei la greutatea totala maxima admisibila), de asemeneaverificata nemijlocit inainte de incercare. Regimul termic al ansamblu-rilor si agregatelor automobilului trebuie sa fie eel normal, din carecauza, inainte de incercare (si chiar inainte de verificarea la rulare li-bera), se va efectua un rulaj de incalzire de 25—30 km.
5.1.2. Pregatirea pistei de incercare
Exceptind determinarea rampei maxime, toate incercarile la dinamicasi tractiune se efectueaza pe sectoare de drum sau piste de incercare ori-zontale (in limitele unor abateri locale de max 0,5%), rectilinii, netede, cuSmbracamintea dura (beton sau asfalt), avind la ambele capete portiunide drum suficient de lungi pentru realizarea accelerarii la viteza doritasi obtinerea (si verificarea) regimurilor stabilizate de deplasare, inaintede inceperea masurarilor. Punctele caracteristice ale sectorului de drumde masurare se vor jalona corespunzator, in acest scop putindu-se fo-losi si bornele kilometrice si hectometrice de pe xnarginea drumului, dacaincercarile se efectueaza pe drumurile publice. In acest ultim caz, se iautoate masurile necesare, inclusiv intreruperea circulatiei, pentru asigura-rea securitatii deplasarii automobilului incercat si a altor automobile par-ticipante la traficul rutier. Din motive de securitate a personalului de ex-perimentare, se vor alege portiuni de drum fara arbori lateral!, cu acosta-ment larg si neted, fara lucrari de arta. Evident, daca incercarile se efec-tueaza pe pista unui poligon de incercare, o serie de masuri de securitatesint indeplinite automat de insasi constructia pistei. La pistele de incer-care din poligoane prevazute cu mijloace specifice pentru masurari de di-namica (celule fotoelectrice, aparate de televiziune etc.), in faza de pre-gatire a incercarii se va verifica buna functionare a acestor mijloace.
5,1.3. Pregatirea aparatelor de masurare
Asa cum se va arata la paragrafele respective, mijloacele de masurarea caracteristicilor dinamice si de tractiune pot fi foarte variate, cele maimoderne fiind dispuse uneori chiar in afara automobilului (amenajari alepistei). Majoritatea aparatelor utilizate in prezent pentru masurari de di-namica sint insa de tipul roata a 5-a (v. fig. 5.1) si urmeaza a fi montatepe automobil inainte de incercare; locul de dispunere se va alege functiede lungimea cablului flexi'bil al aparatului in raport cu a automobiluluiincercat, de constructia specifics a structurii portante a automobilului si

Detsrminarea caracteristicilor dinamice ale outomobilelor
de tipul dispozitivului de montaj al aparatului. In unele situatii poate flnecesara realizarea unor elemente de adaptare intre aparatul roata a 5-asi automobil. La incercarile de tractiune participa si automobilul de fri-nare (remorca dinamometrica, v. fig. 12.9), astfel ca va fi necesara o veri-ficare a acestuia atit ca automobil, cit si ca mijloc de frinare sau chiar demasurare, daca pe acesta sint montate aparatele legate de traductorul deforta sau dispozitivul roata a 5-a.
•5.1.4. Conditiile atmosferice de incercare
Pentru obtinerea unor rezultate practic neinfluentate de conditiilemeteorologice in care s-au efectuat masurarile este necesar ca presiuneaatmosferica sa se gaseasca in limitele 720—765 mmHg, temperatura aeru-lui sa fie cuprinsa intre +5°C... +30°C, iar viteza vintului sa nu depa-seasca 3 m/s. Se exclud de asemenea precipitatiile de orice forma. Res-pectarea conditiilor aratate restringe perioadele acceptabile pentru incer-carile de dinamica s.i tractiune pe parcurs, fapt ce a determinat in bunamasura realizarea unor standuri pentru incercari de dinamica s,i tractiunein conditii de laborator.
i5.2. Masurarea viteielor si timpilor de accelerate'
5.2.1. Masurarea vitezei maxime
Conform STAS 6689/4-75, viteza maxima reprezinta cea mai mare vi-teza stabila pe care o poate mentine automobilul pe distanta de 1 Ion, pedrum orizontal, neted, asfaltat sau betonat, cu conditia ca dupa incer-care sa nu apara o stare de functionare anormala a automobilului §i caacesta sa poata functiona in continuare. Definitia stabileste implicit lun-gimea sectorului de verificare, dar nu mentioneaza durata sau lungimeaportiunii de demarare pina in momentul inceperii masurarii vitezei ma-xim'e. finind seama de faptul ca atingerea vitezei maxime de catre unautomobil are loc in mod asimptotic, pentru asigurarea repetabilitatii in-cercarii este indicat ca in fisa de masurare sa se prezinte mai detaliatdecit prevede standardul conditiile de demarare ce au precedat masu-rarea.
In timpul incercarii, pedala de acceleratie trebuie sa fie apasata co-respunzator deschiderii complete a clapetei carburatorului (sau actionariicomplete a cremalierei pompei de injectie, in cazul motoarelor cu aprin-dere prin comprimare).
Masurarea vitezei maxime se poate face comod cu ajutorul unui cro-nometru cu precizia de 0,05 s, declans.at si oprit de catre experimentatorulaflat in automobilul incercat in momentul trecerii in dreptul jalonului cemarcheaza inceputul si, respectiv, sfir?itul sectorului de incercare. Va-loarea vitezei maxime rezulta din relatia
VmlK=3600/t [km/h], (5.1)
in care t reprezinta timpul de parcurgere a sectorului de 1 000 m, masuratin secunde.

Mcsararea viteze!or si timpiior de accelerate 89
Viteza maxima se poate determina s.i cu vitezometrul unui dispozitivroata a 5-a sau din inregistrarea spatiului si timpului oferita de aparatsau cu mijloacele aferente pistei (celule fotoelectrice, radar etc.).
Imediat dupa incercare se va verifica regimul termic al motorului siagregatelor automobilului s,i se va mentiona daca acesta se afla in limi-tele normale, in caz contrar masurarea trebuind reluata la o viteza maimica, desigur dupa o racire prealabila. Masurarea se repeta de cite douaori in ambele sensuri de parcurgere a pistei, iar valoarea medie calcu-lata cu datele respective se va rotunji la 0,5 km/h.
In STAS 6689/4-75 se defineste viteza maxima de durata cu semni-ficatie evidenta si care reprezinta regimul de deplasare la incercarea inregim de putere maxima (v. § 13.4). Determinarea acestei caracteristicide dinamica este posibila fie pe o autostrada cu flux de circulatie restrinssi situata intr-o zona de cimpie, fie pe un inel de viteze din cadrul unuipoligon de incercare (v. § 16.1.1).
In fis.a de masurare se va indica si turatia motorului la care s-a rea-lizat viteza maxima, utilizind in acest scop turometrul de bord sau untraductor de turatie in legatura cu arborele cotit al motorului.
Pentru verificari uzuale, in scopuri de explorare, viteza maxima sepoate determina si cu ajutorul vitezometrului de bord al automobiluluiincercat, etalonat in prealabil, respectind desigur celelalte conditii de in-cercare aratate.
In figura 5.1 este prezentat un dispozitiv roata a 5-a tip Peiseler, com-pus din pupitrul de comanda, afis,are a datelor s.i inregistrare 1, roatatraductor 2 cu suportul de fixare, cablul flexibil de antrenare 3 si pedaladinamometrica 4 (utilizabila la incer-carile de frinare). Roata traductortransmite mi§carea de rotate princablul flexibil la pupitrul de coman-da, afis,are si inregistrare, la care sepoate citi in orice moment viteza dedeplasare. In aparatul inregistratoreste incorporata o baza de timp, aleearei semnale electrice la intervalede o secunda sint marcate pe hirtiade inregistrare, care se deplaseazaprin rulare pe tamburii interiori, cuo viteza proportionals cu viteza derulare a rotii pe sol.
Lungimea benzii de hirtie, pe caresint marcate intervale de timp dinsecunda in secunda, este proportionala cu lungimea distance! parcursa deroata traductor, la o scara specifica aparatului s,i cunoscuta. Astfel, cu-noscind spatiul real parcurs s.i timpul, se pot determina, pentru fiecaremoment, parametrii ce caracterizeaza dinamicitatea — viteza si accelera-tia miscarii automobilului.
Constructii mai noi de dispozitive roata a 5-a permit inregistrarea di-recta a curbei de variable a vitezei in timp.
Cu mijloacele existente de obicei intr-un laborator de incercari autose pot realiza diferite tipuri artizanale de dispozitive roata a 5-a, unui
Fig. 5.1. Dispozitiv roata a 5-a tipPeiseler.

90 Determinarea caracteristicilor dinamice ale automobiieior
Fig. 5.2. Dispozitiv roataa 5-a realizat prin auto-dotare. Se observa taho-generatorul pentru inre-gistrarea vitezei de de-
plasare.,
•
• I! 1Fig. 5.3. Montarea ruptorului-distri-buitor la axul rotii aratate in
fig. 5.2.
o
Fig. 5.4. Schema de principiu a instala-tiei electrice pentru inregistrarea vi-
tezei.
din acestea fiind aratat in fig 5.2.Aceasta consta dintr-o roata-traduc-tor, pe care este montat un tahoge-iierator de curent alternativ, ce daun curent proportional cu viteza dedeplasare a automobilului, si un rup-tor-distribuitor care permite inregis-trarea numarului de rotatii al rotii(fig. 5.3).
In fig. 5.4 este prezentata sche-ma de principiu a instalatiei electricepentru inregistrarea vitezei de de-plasare a automobilului. Variatiatensiunii tahogeneratorului de curentalternativ 2, antrenat de roata tra-ductor 1, se inregistreaza pe bucla 6a oscilografului prin intermediulunui circuit format din redresorulcu semiconductoare 3, care redresea-za curentul alternativ debitat de ta-hogenerator, s.i de filtrul 4. Acesta,necesar pentru indreptarea pulsariitensiunii tahogeneratorului, se com-pune din condensatoarele Cj, C2, C3si rezistenta Rt. Pentru adaptareacircuitului la parametrii buclei 6 aoscilografului, in paralel cu aceasta,se monteaza rezistenta de sarcina Rs.Stabilirea amplitudinii inregistrariipe banda oscilografului s-a facut cuajutorul potentiometrului 5.
In faza de etalonare a aparatuluieste necesara determinarea razei derulare a rotii traductor.
5.2.2, Masurarea vitezeiminime
Viteza minima a unui automobilintr-o anumita treapta de viteze esteviteza cea mai mica cu care acestase poate deplasa uniform, fara ba-tai s,i socuri in transmisie sau opririale motorului, iar la apasari brustepe pedala de acceleratie motorul seaccelereaza normal. Viteza minimaofera informatii referitoare la stabili-tatea functionarii motorului si trans-

Masurarea vitezelor si iimpilor de accelerare 91
misiei la turatii coborite. Importanta mai mare prezinta viteza minima intreapta superioara de viteze.
Pentru masurarea vitezei minime este necesar un sector de drum de200 m pe care automobilul intra cu viteza stabilizata in treapta de vi-teze ce intereseaza, dupa parcurgerea careia se verifica, prin apasareabrusca a pedalei de acceleratie, accelerarea normala a motorului. Traseulse parcurge cite odata in ambele sensuri, in succesiunea imediata, ma-surindu-se timpul necesar pentru parcurgerea acestuia si calculind apoiviteza corespunzatoare cu relatia
^mi»=720/t [km/h], (5.2)
in care t este timpul de parcurgere, in secunde. Se pot aplica si alte me-tode de determinare, utilizind de exemplu un dispozitiv roata a 5-a.
5.2.3. Masurarea vitezei medii
In STAS 6689/4-75 se definesc trei tipuri de viteze medii: viteza me-die tehnicd, rezultata din impartirea drumului parcurs de automobil latimpul de mers efectiv; viteza medie tehnica de exploatare, la calculareacareia se tine seama si de timpul pentru opririle legate de circulatie (sto-puri, opriri la intersectii, bariere de cale ferata); viteza medie comercialala calcularea careia se are in vedere timpul de circulatie, timpul pentruopriri legate de circulatie, timpul pentru depanari ivite pe parcure si pen-tru incarcarea s.i descarcarea marfurilor, respectiv urcarea sau coborireapasagerilor in statii. Singura viteza legata exclusiv de calitatile dinamiceale automobilului este viteza medie tehnica, celelalte depinzind evidentde conditii exterioare automobilului sau chiar de mentenabilitatea aces-tuia. Determinarea oricareia dintre vitezele medii enumerate presupuneinregisararea amanuntita a duratelor de circulatie si stationare (indife-rent de cauzele respective), pe un traseu de lungime stabilita, ales in co-relatie cu destinatia principals a automobilului incercat. O astfel de evi-denta se obtine comod cu ajutorul unui vitezograf montat la bordul au-tomobilului, as.a cum se arata in cap. 15 (v. fig. ,15.1).
Pentru a avea o semnificatie practica, viteza medie trebuie raportatala conditiile concrete de deplasare: categoria drumului, conditiile meteo-rologice si particularitatile drumului (zona geografica, intensitatea circu-latiei rutiere, frecventa localitatilor, a barierelor etc.).
Deplasarea automobilului in timpul determinarii se va face cu vitezamaxima admisa de regulamentele de circulatie, iar in cazul unor drumuride categorii inferioare — de conditia asigurarii integritatii marfurilortransportate s,i a evitarii distrugerii unor elemente ale automobilului. Subacest aspect, viteza medie depinde si de calitatile suspensiei automobilu-lui (mersul lin al acestuia). Traseele de determinare se vor parcurge inambele sensuri, calculindu-se valorile medii rezultate. Lungimea trase-ului de incercare se alege de ordinul a 50—100 km, dar trebuie tinutseama si de obiectivul urmarit: daca se are in vedere aprecierea produc-tivit&tii transportului pe un anumit marsrut, determinarea se va facepe intreaga lungime a acestuia.

92 Dsterminarea caracteristicilor dinamice ale automobilelo;
Un caz special il reprezinta determinarea vitezei medii a autobuzelorurbane pe liniile de exploatare respective. In acest scop, pentru compara-rea calitatilor dinamice ale unor autobuze de constructie diferita, incerca-rea se poate face prin realizarea unor cicluri de functionare conventio-nale, constituite din deplasari cu viteze constante si frinari, stationari,care simuleaza funetionarea pe liniile de exploatare reala. In acest fel seelimina unele influente exterioare riesemnificative pentru dinamica realaa autobuzului (ora determinarii, ziua determinarii, blocaje accidentals decirculatie etc.), iar compararea dinamicii devine posibila fara echivoc.Ciclurile simulate se pot efectua pe sectoare de drum cu circulate putinintensa sau in poligoane, parametrii acestora putind fi controlati mai pre-cis decit in conditiile traficului urban.
5,2.4. Masurarea timpilor de accelerare;
Timpul de accelerare reprezinta durata dintre momentul inceperii ac-celerarii automobilului de la o stare initiala data si pina in momentul incare unul dintre parametrii miscarii acestuia atinge o valoare prestabi-lita. Astfel, in STAS 6926/11-78 se mentioneaza timpii dupa care vitezaautomobilului atinge valoarea de 50 km/h si respectiv 100 km/h. Se poateaprecia ca acesti parametri nu sint intru totui adecvati, deoarece o largacategorie de automobile are viteza maxima sub 100 km/h. Mult mai con-venabil par a fi, inclusiv din punctul de vedere al usurintei de determi-nare, timpii de parcurgere a 500 m si respectiv 1 000 m de la punctulde incepere a accelerarii. In aceasta ultima varianta este suficienta doarmarcarea pe pista de incercare a distantelor de 500 si 1 000 m, masura-rea urmind a se face cu ajutorul unui cronometru cu doua ace indica-toare, sau cu doua cronometre obisnuite, in timp ce in primul caz trebuiedeterminate in prealabil curba de variatie V=f (t), lucru posibil numaicu ajutorul unui dispozitiv roata a 5-a. In orice caz, prin utilizarea dis-pozitivului roata a 5-a ambii parametri temporal! de apreciere se pot de-termina la fel de comod.
Accelerarea automobilului se face de la punct fix (V=0 km/h), inprima treapta de viteze de accelerare, schimbind succesiv treptele de vi-teze pina se ajunge la 0,9 Vmo, in treapta maxima de viteze. Pornireade pe loc se va face fara smucituri in transmisie, iar schimbarea trep-telor de viteze se va face la turatia nominala a motorului din care cauzaeste necesara existenta unui turometru la bordul automobilului incercat.Pedala de acceleratie se va actiona astfel incit clapeta de acceleratie acarburatorului sa fie complet deschisa sau cremaliera pompei de injec-tie sa fie actionata la cursa maxima. Pe banda de inregistrare a dispo-zitivului roata a 5-a se vor inscrie spatiul, timpul si viteza sub forma unorsemnale impuls sau, la aparatele mai noi, curbele de variatie S=f (t}sau V=f (t) si V=f (S). In orice caz, in final se va dispune de datele ca-re permit determinarea timpilor de acceleratie cautati.
In fig. 5.5 este aratata caracteristica V=f (t) pentru un autobuz urbande mare capacitate, la care se observa ca nu exista un timp corespunzatoratingerii vitezei de 100 km/h, desi calitatile de accelerare apreciate prin-tr-o valoare medie a acceleratiei de demarare sint relativ ridicate.

Determinated calitatilor de tractiune
Pentru aprecierea dinamicitatii unei anumite trepte de viteze se efec-tueaza uneori accelerari de la viteza minima in treapta respectiva, pinala viteza maxima sau egala cu 0,9 din aceasta. Valoarea timpilor de acce-lerare raportati in fisa de masurare va fi constituita din medierea valo-rilor obtinute la cite doua masurariefectuate in ambele sensuri ale tra-seului de iacercare.
•
5.3. Determinarea calitafiior defracfiune
Cea mai completa descriere a ca-litatilor de tractiune ale unui auto-mobil o ofera caracteristica de trac-tiune, care reprezinta graficul de va-riatie a fortei de tractiune Ft la ro-tile mOtoare ale automobilului infunctie de viteza de deplasare V, indiferite trepte de viteze (fig. 5.6).Obtinerea caracteristicii de tractiunepe cale experimentala este o operaticextrem de laborioasa si costisitoare,realizabila convenabilnumai in con-ditii de laborator, cu ajutorul unorstanduri dinamometrice (v. fig. 5.7 si5.8). Din aceasta cauza, de obicei, sedetermina doar punctele semnifica-tive ale caracteristicii de tractiune,posibile a fi obtinute prin incercaride parcurs, a?a cum se prezinta siin § 12.2.1.
Determinarea prin incercari deparcurs a unor puncte ale caracte-risticii de tractiune se face cu aju-torul unei remorci dinamometrice acarei rezistenta la inaintare sa poatafi variata dupa voie. Aceasta repre-zinta de fapt un autovehicul echipatcu dispozitive de frinare, care per-mit variatia continua §i lina a forteinecesare pentru tractare. Dispozitivele
Fig. 5.5. Caracteristica de demarareu —/(£) a unui autobuz de .mare capa-
citate.
V, kmjh
Fig. 5.6. Caracteristica de trac-tiune F(=f(V) a unui automobil
cu patru trepte de viteze.
— j. „ —^..^~, ^^^^w^iv*v^-4.v, de frinare pot fi mecanice,hidraulice sau electrice. Cele mai des utilizate sint frinele electrice, careasigura o miscare stabila pentru automobilul incercat. In lipsa unei re-morci dinamometrice se poate folosi un alt automobil a carui masa totalasa depaseasca pe cea a automobilului incercat, avind frine puternice §iin stare perfects de functionare.
Forta de tractiune se masoara cu ajutorul unui dinamograf sau tra-ductor de forta dispus intre cirligul de tractiune al remorcii dinamome-trice §i eel al automobilului incercat care tracteaza remorca. Pentru ma-

94 Determinated caracteristicilor dinamice ale automobilelor
surarea vitezei de deplasare se utilizeaza un dispozitiv roata a 5-a sauvitezometre de bord etalonate. In timpul efectuarii masurarilor trebuiesa existe posibilitateta urmaririi permanente a valorilor simultane alefortei de tractiune si vitezei de deplasare a automobilului.
Stabilirea corelatiei intre viteza de deplasare a automobilului si fortade tractiune se poate face in mai multe moduri. O variants posibila estedescrisa in cele ce urmeaza. Se prestabilesc valori ale vitezei de masu-rare in treapta de viteze respectiva, cuprinse intre viteza corespunzatoareturatiei cuplului maxim si 0,9 din viteza maxima, la intervale de ordinula 5 km/h. Automobilul cu remorca dinamometrica se deplaseaza cu vi-teza maxima si pedala de acceleratie apasata la cursa maxima, dupa carese frineaza remorca pina ce viteza automobilului scade la prima valoare demasurare. Dupa ce acest regim de deplasare se stabilizeaza (viteza tre-nului ajunge uniforma), se declanseaza dispozitivele de inregistrare afortei de tractiune (si eventual a vitezei de deplasare). In continuare,mentinind pedala de acceleratie apasata la cursa maxima, cu ajutoruldispozitivului de frinare al remorcii se reduce viteza automobilului pinala o noua viteza de masurare si se iriregistreaza un al doilea grup de va-lori corespondente. Se obtin astfel puncte ale caracteristicii de tractiunein treapta respectiva de viteze. Daca masurarea se efectueaza in treaptade viteze cu demultiplicare maxima si cu viteza de deplasare minima (inapropierea turatiei cuplului maxim), se va obtine forfa de tractiune ma-xima la cirlig corespunzatoare starii de incarcare date.
Un alt parametru al calitatilor de tractiune utilizat in aprecierea auto-mobilului este forta de tractiune la cirlig la pornire, cu semnificatieevidenta si care se determina de asemenea in treapta de viteze cu demul-tiplicare maxima, asa cum specifica STAS 6689/4-75.
Determinarea fortei de tractiune in condifti de laborator se face uti-lizind un stand de incercare cu rulouri, aratat schematic in fig. 5.7. Pu-terea dezvoltata la rotile motoare ale automobilului se transmite prinfrecare celor doua rulouri si este consumata prin frinarea arborelui A,cuplat cu rotorul frinei, cu ajutorul careia se poate determina momen-tul Mt de frinare a rulourilor. Pentru ca sa ramina cu axa osiei sale mo-toare in planul vertical al ,axei arborelui A, automobilul se ancoreaza cuajutorul unui cablu la un punct fix P, astfel incit cablul sa fie cuprinsin planul orizontal ce contine axa osiei motoare. Un dinamometru D per-mite masurarea fortei T din cablu.
Determinarea fortei de tractiune se poate face si prin masurarea mo-mentului MT dezvoltat la rotile motoare. Acest moment da nastere unuimoment de reactiune egal si de sens contrar, care tinde sa roteasca car-casa osiei motoare in sensul miscarii acelor de ceasornic, avind ca rezul-tat descarcarea osiei din fata. Momentul la roti rezulta din relatia
Mr=(G,—Zj) L, (5.3)in care G} este incarcarea statica a osiei din fata, determinate prin masu-rari anterioare, Zt este incarcarea osiei din fata masurata in timpul de-terminarii cu dinarnometre adecvate iar L este ampatamentul automobi-lului presupus de asemenea cunoscut.
Forta de tractiune rezulta din relatia
Ft=Mt/Rt+Fr2, (5.4)

Determinarea rampei maxime 95
in care Rt este raza rulourilor, iar Fr2 este rezistenta la rulare a rotilormotoare pe rulouri, care se poate calcula analitic cunoscind coeficientulde rezistenta la rulare pe rulou / determinat in prealabil sau luat dintabele.
Fig. 5.7. Schema de principiu a unui stand cu rulouripentru determinarea caracteristicii de tractiune a unui auto-
mobil.
Prin varierea momentului de frinare Mt dezvoltat de sistemul de fri-nare al rulourilor se modifica turatia nt a acestora si, odata cu aceasta,viteza V a automobilului. Pentru a elimina influenta alunecarii dintrepneuri si rulouri viteza automobilului se va determina cu ajutorul unortraductoare de turatie montatela rotile motoare ale automobi-lului incercat.
In fig. 5.8 este aratat pupi-trul de comanda al unui standde incercare cu rulouri in tim-pul incercarii unui autobuz TV.
5.4. Determinarea rampeimaxime
Rampa maxima ce poate fiurcata de un automobil estefunctie directs de forta de trac-tiune la rotile motoare si repre-zinta concomitent un indicatoral calitatilor de dinamica si ca-pacitate de trecere a unui auto-mobil. Pentru determinarea valorii rampei maxime a unui automobil estenevoie de un set de rampe artificiale, betonate, cu lungimea de eel pu-tin trei ori mai mare ca lungimea automobilului incercat §i avind decli-vitati diferite, in limitele aratate la cap. 12. Metoda de masurare esteprezentata in detaliu la § 12.3.4.
Fig. 5.8. Pupitrul de comanda al unui standcu rulouri Schenck utilizat la incercarea
unui autobuz.

o. MASURAREA CONSUMUIU! DE COMBUSTBIL
6.1. Gensralitafs
In conditiile crizei energetice actuale si a eforturilor intreprinse intoate domeniile activitatii tehnologice pentru economisirea produselorpetroliere, consumul de combustibil al unui automobil in exploatare re-prezinta unul din cei mai important! indicatori ai rentabilitatii utilizariiacestuia in transporturile de bunuri si persoane. Costul combustibiluluireprezinta in prezent 20—30% din totalul cheltuielilor de exploatare siexista temei in a presupune ca valorile mentionate vor manifesta ten-dinta de crestere.
Consumul de combustibil al automobilului depinde de o serie de fac-tori legati de constructia acestuia (tipul si puterea motorului, particula-ritatile transmisiei si sistemului de rulare etc.) si de conditiile de utili-zare (calitatea s.i structure retelei rutiere, nivelul tehnic al sistemului deintretinere si reparatie, calificarea personalului de exploatare). Din aceastacauza nu exista un indicator unic al economicitatii automobilului dinpunctul da vedere al consumului de combustibil, ci un grup de indicatoristabiliti fie pentru conditii de determinare specificate, fie pentru tipuride activitati concrete la care acestea sint utilizate. Evident, eel mai uzitatindicator ramine consumul specific de combustibil exprimat in 1/100 kmsau km/1 (desi ramine de precizat modul in care se calculeaza si conditiilede masurare), dar pentru autocamioane sau autobuze mai indicat este pa-rametrul l/(t-km) sau l/(pasager • km), mai usor de corelat cu eficientaeconomics a intreprinderilor de transport.
Masurarea consumului de combustibil, ca activitate de incercare aautomobilului, are ca scop determinarea unor indicatori care sa ilustrezepremisele oferite de acesta — prin solutiile constructive adoptate — pen-tru o exploatare rentabila din punctul de vedere al cheltuielilor de ex-pioatare legate de asigurarea combustibilului necesar. Trebuie spus insaca masurarile de consum cu caracter de incercare nu se efectueaza nu-mai cu ocazia omologarii unor automobile noi sau modernizate (care in-tereseaza in primul rind constructorul), ci si dupa reparatii capitale saualte activitati de mentenanta aflate in atentia utilizatorului. O masurarea consumului de combustibil in condi^ii normate reprezinta totodata o ac-tivitate de control periodic recomandabila pentru orice posesor de auto-mobil, daca doreste sa evite surprizele neplacute ale unui bilant pagubi-tor pe termen mai lung, prin depistarea si remedierea din timp a unordeficiente in functionarea automobilului sau. Este de subliniat ca men-tionatele conditii normate de verificare se pot include fara dificultate inmajoritatea cazurilor in circulatia lucrativa a automobilului.

Aparate $i dispozitive utilizate pentru masurarea consumului de combustibil 97
6.2. Condifii de incercare
In fara unor masurari cu obiective speciale, conditiile necesare laincercarea automobilului la consumul de combustibil sint aceleasi ca sila incercarile de dinamica. (v. § 5.1.2. si § 5.1.4.). In raport cu condi-tiile reale de exploatare, acestea sint desigur situatii particulare, darpermit compararea diferitelor automobile si a diferitelor stari tehnice aleaceluiasi automobil in decursul exploatarii. Derogari de la conditiile ara-tate se pot accepta atunci cind obiectivul incercarii este verificarea con-sumului de combustibil in situatii de exploatare deosebite: in regiunimontane, pe timp de iarna, in teren sau pe drumuri nemodernizate etc.
6.3. Aparate si dispozitive utilizate pentru masurareaconsamului de combustibil
Exista in prezent o mare varietate de aparate utilizabile pentru ma-surarea consumului de combustibil, incepind cu simpli cilindri sau reci-piente gradate si terminind cu aparate electronice cu afisaj numeric sauinregistrare si asistate de minicalculatoare. In anumite situatii, si cu res-pectarea unor metodologii de lucru precise, este posibila efectuarea ma-surarilor de consum de combustibil chiar si fara utilizarea unei aparaturispeciale (metoda refacerii plinului rezervorului de combustibil).
Fig. 6.1. Schema de principiu a unui debitmetru pentru masura-rea consumului de combustibil In regim de func^ionare nesta-
tionar.
In fig. 6.1 se prezinta un debitmetru cu volum initial de combusti-bil fix, similar cu un rezervor auxiliar, utilizabil pentru masurari deconsum in regim nestationar, sau pe distante relativ mici. Cilindrii 11si 13 ai aparatului, alimentati prin robinetul 7 de la pompa de combus-tibil a motorului, comunica intre ei prin robinetul 12; inchiderea sau des-7 — Metoda $1 mijloace d* incercarc

98 Masurarea consumului de combustibi)
Fig. 6.2. Debitmetru de combustibil cupistona§e tip £9071 Miihlner.
Reiernml Kma de Tmductoful Carburatariil
chiderea robinetului permite utilizarea unui singur cilindru sau a ambi-lor cilindri, obtinindu-se astfel sensibilitati diferite la masurare. Cilin-drul 11 impreuna cu electrodul 9, fixat in izolatorii 10, reprezinta uncondensator cilindric, in care combustibilul are rol de dielectric. Prin va-riatia nivelului de combustibil variaza si capacitatea electrica a conden-satorului. Condensatorul este conectat la o punte capacitiva 1, a careialimentare se face cu ajutorul generatorului de oscilatii de inalta frec-venta 2. Dezechilibrul puntii este amplificat in amplificatorul 3 si apoiredresat in redresorul 4. Semnalul continuu este din nou amplificat inamplificatorul 5 si inregistrat pe banda oscilografului 6. Legatura dintredebitmetru s.i aparatul electric se realizeaza cu ajutorul cablului ecranat
15. Controlul nivelului de li-chid din debitmetru se realizea-za cu ajutorul sticlelor de nivel8 si 16. Umplerea debitmetru-lui se realizeaza prin pilnia 14si robinetul 12.
In cazul determinarii consu-mului de combustibil in regimde functionare nestationar, con-comitent cu inregistrarea con-sumului instantaneu, se inre-gistreaza si parametrii miscariiautomobilului, cu ajutorul unuidispozitiv roata a 5-a.
In fig. 6.2 se arata traduc-torul de debit 1 ?i aparatul in-registrator 2 al unui debitme-tru cu pistona§e de tip EgonMiihlner, care permite masura-rea, cu inregistrare pe un con-tor, a consumului de combusti-bil pe durate de timp masura-bile (consumul orar). O variantade debitmetru Egon Miihlner,deosebit de indicata pentru ma-surari in regim nestationar, per-mite inregistrarea pe o bandade hirtie cerata a impulsuri-lor corespunzatoare consumarilunui volum de combustibil egalcu volumul unei curse a pisto-nasului si a unor impulsuri detimp.
Un tip modern de debitmetru cu pistonase, denumit Flowtronic, con-sta dintr-un traductor de debit cu patru pistonase dispuse radial (in cruce),puse in miscare de presiunea combustibilului, a caror miscare liniara estetransformata de un mic arbore cotit in miscare de rotatie a arborelui pecare se afla un generator de impulsuri electronice cu frecventa proportio-nala cu turatia. Aceste impulsuri sint transmise la un aparat de inregis-
Racordin T Buson de ia rtfurultti
Reiemrul Jraduchnil.de combustibil de debit Inregisfrotoml
Robinetul Sisfemulde itijec/ie
Fig. 6.3. Schema de montare a traductoruluide debit Flowtronic in circuital de alimen-
tare al motorului:o — cu aprindere prin sclnteie; b — cu aprindere
prin compriraare.

Metodiea de incercare 99
trare constituit dintr-un contor de impulsuri si un minicalculator, pro-gramat sa execute automat anumite operatii de calcul pentru determma-rea diferitelor consumuri specifice. Aparatul permite efectuarea unorrnasurari pe distante mici si mari, asigurind o precizie de +0,5%, pu-tind masura debite de 0,5—60 1/h (unitatea de debit egala cu 0,6610,669 cm3) si consumuri insumate de pina la 99,999999 1. In fig. 6.3 searata modul' de montare in circuitul de alimentare al motorului a traduc-torului de debit.
;
6.4. Metodiea de incercareMasurarea consumului de combustibil in conditii de functionare sta-
bila este prezentata in STAS 6926/10-76.
6.4.1. Masurarea consumului de combustibilla viteza constanta
Consumul de combustibil la viteza constanta se determina pentru au-tomobilul incarcat cu sarcina utila maxima admisibila. Sectorul de drumde masurare (orizontal, rectiliniu, cu imbracaminte dura, asfaltat sau be-tonat) va avea o lungime astfel stabilita incit durata de parcurgere laviteza maxima de masurare sa fie de minimum 60 s. Deplasarea automo-bilului va avea loc In treapta superioara a cutiei de viteze, cu viteze va-riabile din 10 in 10 km/h, incepind cu viteza minima stabila sau cu20 km/h, pina la viteza cea mai apropiata de 0,9 Vmax. Fiecare masurarese va repeta de citeva ori in ambele sensuri ale traseului, pina ce se potalege doua rezultate consecutive ce difera intre ele cu mai putin de 5%,a caror medie reprezinta rezultatul raportat al masurarii. Valprile mediicorespunzatoare fiecarei viteze de masurare se inscriu intr-o diagrama cafunctie de viteza de deplasare (fig. 6.4).Aceasta diagrama permite evidentiereaunei viteze de deplasare economice (dacao asemenea viteza exista), sau stabilireaconsumului specific de combustibil pen-tru o viteza de deplasare adoptata pe bazaunor criterii ce se vor mentiona. In cazuldin fig. 6.4 consumul specific minim co-respunde unei viteze aflate intre 30 si40 km/h. O atare viteza economics estedesigur inadecvata pentru o productivi-tate acceptabila a transportului, acceptin-du-se un compromis intre dinamica circu-latiei si consum.
50 60V, Km/h
Fig. 6.4. Ctirba de varia^ie aconsumului de combustibi! in re-gim de deplasare cu viteza con-stanta, in funcpe de viteza de
deplasare.
6.4.2. Masurarea consumului de control
Aceasta masurare este, de asemenea, prevazuta de STAS 6926/10-76.T?inind seama de aspectul de control pe care il are, metodica de determi-nare a acestui parametru a fost prezentata la cap. 4, etapizarea masurariiintr-un program concret de incercare, rezultind din obiectivele urmariteprioritar.

Masurarea consumului de combustibil
6.4.3, Masurarea consumului mediu de combustibil
Fara indoiala ca se pot defini mai multe tipuri de consumuri medii,de obicei asociate unor viteze medii corespunzatoare. In cele ce urmeazase va prezenta determinarea consumului mediu corespunzator unor staride incarcare deosebite: fara sarcina utila, pentru automobilele destinatetransportului de marfuri a caror sarcina utila maxima admisibila nu de-pases_te 1 500 kg; jumatate din sarcina utila maxima admisibila, pentrucelelalte automobile.
Sectorul de drum de incercare se va alege in afara localitatilor §i cuintensitate mijlocie a traficului, pentru a putea mentine o viteza de de-plasare pe cit posibil constanta. Lungimea sectorului va fi de 10 km sise va parcurge de doua ori in ambele sensuri, insumindu-se astfel un par-curs total de 40 km.
Viteza de deplasare pentru masurare se va alege, funcfte de timpulautomobilului, dupa cum urmeaza:
— autocamioane si autobasculante 45—50 km/h;— autobuze 60—65 km/h;— autoturisme si variantele lor utilitare 50—60 km/h.Parcurgerea sectorului de drum in fiecare sens include pornirea auto-
mobilului de pe loc s_i accelerarea acestuia, cu schimbarea progresiva avitezelor pina in treapta maxima de viteze, in care se va men^ine vitezade deplasare constanta conform tipului de automobil incercat. Conformstandardului, incercarea se va efectua la trei automobile din productia deserie sau de trei ori pentru acelasi automobil, calculindu-se valoarea me-die a rezultatelor obtinute. Consumul de combustibil se calculeaza curelatia
Cm=e/S-100 [1/100/km], (6.1)
In care Q este valoarea medie a consumului masurat, in 1, iar S este lun-gimea traseului de incercare, in km.
In cazul automobilelor destinate transportului de marfuri cu sarcinautila mai mare de 1 500 kg, consumul mediu de combustibil masurat inconditiile aratate se corecteaza in func^ie de sarcina maxima utila admi-sibila. In acest scop, se va determina consumul mediu de combustibil inconditiile de mai inainte pentru automobilul incarcat cu sarcina utila ma-xima admisibila Cp si se va determina coeficientul de corectie cu relatia
K-Cp/Cm— 1, (6.2)
In care Cm este dat de relatia (6.1). Pentru un automobil dat, se va indicaatit consumul mediu Cm, cit si valoarea coeficientului K.
6.4.4. Masurarea consumului de combustibil pentru automobileexploatate in mediu urban
Pentru automobilele exploatate in mediu urban, cu regim de func^io-nare nestationar, indicarea numai a consumului de combustibil nu oferao imagine completa asupra economicitatii acestora. Datorita succesiuniiunor faze de miscare constind din pornire, accelerare, circulatie cu viteza

da incercare 101
constanta, frinare (eventual rulare libera), stationare cu motorul functio-nind in gol, repetate de numeroase ori, consumul de combustibil rezultattrebuie coroborat cu numarul de opriri ce revine la 100 km parcursi saucu distanta medie dintre opriri.
Pentru a fi repetabila este necesar ca masurarea consumului sa sefaca in timpul deplasarii automobilului pe cicluri de miscare inchise, detipul aratat in fig. 6.5. In acest fel se pot compara din punctul de vedereal consumului automobile de diferite ti-puri. Parametrii de deplasare ai automo-bilului in cadrul ciclului de miscare sestabilesc functie de tipul si destinatiaautomobilului incercat. Evident, un ase-menea ciclu reprezinta o idealizare s.i oreducere la parametrii semnificativi aiciclurilor de miscare reala ce pot prezentao mare variabilitate si suprapuneri ale fa-zelor componente.
Incercarea se efectueaza de obicei pen-tru doua stari de incarcare: cu sarcinatrtila maxima admisibila si cu jumatatedin aceasta. Se pot desigur adopta ?i alte stari de incarcare, functie deobiectivul incercarii, cu conditia ca automobilele comparate sa prezintastari de incarcare similare.
O parte importanta a acestei masurari este stabilirea vitezei celei maimari ce trebuie atinsa in timpul parcurgerii unui ciclu de miscare, notatacu Vmax ciclu- Aceasta viteza nu trebuie sa depaseasca viteza maxima admi-
la deplasarea in localitati pentru categoria respectiva de automobil.
r, sFig. 6.5. Ciclu de deplasare fnconditii de circulate urbana,
idealizat.
4
1-8
50
1 20
§ 10
100. 200 300 <tOONr. opriri pe 100 km
I WOO SOO 333 ~250Eistanta mire opriri, rn
a
100 200 300 - WONr. opriri pe 100 km
1000 500 ' 333 250Uistanta ?nfre opriri, m
b
Fig. 6.6. Variatia consumului de combustibil (a) §i a vi-tezei medii de circulate (b) in condign urbane, in func-tie de numarul de opriri raportat la 100 km §i de dis-tanta dintre opriri. pentru un autobuz de mare capa-
citate.
Cu >~ezultatele obtinute la masurarea consumului de combustibil intimpul depiasarii in cicluri de miscare se construieste curba consumuluide combustibil in functie de numarul de opriri pe 100 km si de distantaImtre wpriri, aratata in fig. 6.6.

102 Masurarea consumului de combustibil
Determinind concomitent viteza medie de deplasare in timpul parcur-gerii ciclurilor ca functie de numarul de opriri la 100 km sau distantaintre opriri, se obtine o imagine clara asupra economicitatii §i dinamici-tatii automobilului incercat in conditiile caracteristice circulatiei urbane.Pe baza unor astfel de date se poate optimiza regimul de lucru al auto-mobilelor implicate in transportul urban (de exemplu, distanta dintrestatii).
'
6.4.5. Masurarea consumului de ulei
Pentru motorul de automobil determinarea consumului de ulei rapor-tat la 100 km sau la consumul de combustibil permite aprecieri asuprauzurii principalelor organe ale acestuia si anume cilindrul motor si pisto-nul cu segmentii respectivi.
Intreprinderile constructoare indica consumul de ulei admisibil, va~loarea acestuia fiind de obicei situata in jurul a 1 litru de ulei pentru1 000 km parcursi.
Practic, determinarea consumului de ulei se face prin masurarea can-titatii de ulei ce trebuie introdusa in baia de ulei a motorului pentrucompletare pina la nivelul indicat s.i marcat pe indicatorul nivelului deulei (joja de ulei), dupa ce s-a efectuat un parcurs cu automobilul deincercat.
Inaintea mceperii efectuarii parcursului de incercare se verifica §i seau in vedere urmatoarele: nivelul uleiului in motor sa fie exact la sem-nul max marcat pe indicatorul de ulei; sa nu existe pierderi de ulei laimbinarea diferitelor elemente (capac culbutori, baie de ulei, capac distri-butie etc.); calitatea uleiului in motor sa fie conform indicatiilor construc-torului motorului; echipamentul pentru reglarea regimului termic al mo-torului sa fie in perfects stare de functionare.
Lungimea parcursului de incercare se adopts de 100 km pe drumuride diverse categorii. Starea de incSrcare a automobilului trebuie sa fiecorespunzatoare masei totale maxime admisibile. Masurarea cantitatii deulei ce se introduce in motor dupa efectuarea parcursului de incercare seface cu ajutorul unui cilindru gradat, cu gradatii eel mult din 10 in 10 ml.
In timpul verificarii nivelului uleiului din motor, automobilul va fiparcat pe o platforma orizontala. Elementele suspensiei si sistemului derulare trebuie sa fie in perfects stare, pentru a mentine in timpul verifi-carii nivelului uleiului pozitia orizontala a automobilului.

VERSFiCAREA CAUT&TILOR DE FRlNARE
Ca urmare a rolului hotaritor avut in asigurarea securitatii active acirculatiei, verificarea calitatilor de frinare constituie una dintre cele maifrecvente incercari ale automobilelor, facute la cele mai diferite niveluritehnice si cu cele mai variate mijloace. Astfel, in afara de numeroaseleincercari de cercetare legate de realizarea si omologarea unui nou tipde automobil, de verificarile specifice dupa operatiile de intretinere teh-nice si activitati ,,service", de investigatiile legate de anchetarea unoraccidente de circulatie, verificarea starii tehnice si performantelor echi-pamentelor de frinare inainte de plecarea intr-o cursa mai lunga de ca-tre soferul prudent profesionist sau amator constituie unul din cele maicunoscute aspecte ale incercarii automobilelor. Metodele de verificare afrinelor si parametrii limita impusi performantelor acestora constituie,de asemenea, capitole ale reglementarilor legale privind acceptarea auto-mobilelor in circulatia rutiera.
Odata cu dezvoltarea intensa a transportului auto international din ul-timele doua decenii au aparut o serie de documente normative Interna-tionale, printre care este de mentionat in primul rind Regulamentul nr. 13al C.E.E. a O.N.U. ,,prescripfii uniforme relative la omologarea vehicule-lor in ceea ce priveste frmarea". Pentru eliminarea oricarui echivoc, inlimbajul tehnic referitor la echipamentele de frinare, terminologia afe-renta frinarii automobilelor a fost standardizata pe plan international deISO 611-1972; in baza acestei norme Internationale in tara noastra s-aelaborat STAS 8499-75 — Frinarea autovehiculelor s.i remorcilor. Termi-nologie.
7.1. Parametrii de apreciere a caiitafilor de frinareale unui automobi!
Practica a aratat ca pentru aprecierea calitatilor de frinare ale unuiautomobil nu se poate utiliza numai un singur parametru, chiar daca seaccepta unanim ca eel mai intim legat de ideea de securitate a circula-tiei este spafiul de frinare. Intelegerea procesului de frinare a unui au-tomobil si, legata de aceasta, adoptarea celor mai adecvati parametri ca-racteristici ai acestui proces in functie de obiectivul incercarii se pot facepe baza diagramei de frinare, care reprezinta inregistrarea grafica infunctie de timp a deceleratiei instantanee a frinarii; aceasta poate fi com-pletata cu inregistrarea evolutiei altor parametri (forta aplicata elemen-tului de comanda, vitezele unghiulare ale rotilor, presiunea fluidului deiucru din transmisie etc.).
Un exemplu de diagrama de frinare se arata in fig. 7.1, unde s-au no-

104 Verificarea calitafilor de frinare
§ W
^20
15,0
|.?5
10
0,2s
t
Nd
tat si unele momente caracteristice ale miscarii, conforme cu definitiiledin STAS 8499-75. Este de subliniat ca momentul zero al diagramei defrinare (punctul a) corespunde momentului inceperii actionarii de catre§ofer a pedalei sau manetei de frina iar momentul final (punctul b) —opririi automobilului. Aceste doua momente definesc timpuZ total de fri-! nare tf, spatiul de frinare
fiind distanta parcursa daautomobil in acest timp.
Diagrama de frinare subforma care rezulta din ma-surarile direate prezinta o
j/tT importanta limitata la inves-'> i FT tigatii practice si teoretice
ale procesului de frinare, din% \ \ \ \ I V:1 *\ \ \ l-l— care cauza se accepts una-
nim unele schematizari cenu afecteaza justetea conclu-ziilor sau precizia inginereas-ca a calculelor. Una din-tre cele mai uzitate schemede simplificare a diagrameide frinare este aratata infig. 7.2. Conform acesteischematizari, procesul frina-rii se desfasoara in doua fazedistincte: intr-o prima faza,corespunzatoare unui timpde raspuns initial conventio-nal tr(, miscarea automobi-lului continua sa fie unifor-ma (deceleratia nula); in fazaa doua, a timpului de frinareactiv£ conventional t'f, mis-carea automobilului este uni-form incetinita, cu decelera-tia Om. Se poate arata ca, in
Fig. 7.1. Evolutia tipica a for^ei de comanda ^ia deceleratiei in timpul frinarii unui automobil:a — momentul Inceperii actionSrii pedalei de frina',b — momentul opririi automobilului; tf — timpul tola)de frinare; taf — timpul de erestere a fortei de fri-nare <deoeleratiei; </a — timpul de frinare activa;
trt— timpul de raspuns initial.
•'!>..
Fig. 7.2. Sehematizarea evolutiei in timpa decelerate! in procesul frinarii unui
uutomobil :I _ evolutia reala a decelerate! (din fig. 7.1);
' ded«raspuns initial conventional; tfa— timpul
trtnara «ctlva conventional.
limitele unor erori sub 6,5%, pentru procesele de frinare ce decurg inmod normal, intre parametrii exteriori ai frinarii (spatiul de frinare S/,viteza initiala a frinarii V4 si timpul total de frinare tf) si parametrii ca-raeteristici ai diagramei de frinare schematizate (fig. 7.2) exista relatiile:
(7.1)(7.2)
S/=V,t;<+VlV(2am). (7.3)
In relatiile (7.1)—(7.3), viteza initiala Vt s-a exprimat in m/s, timpulIn s, spatiul Sf in m si acceleratia c ,̂ in m/s2. Se poate observa ca o re-latie de tipul (7.3) sta la baza normarii spatiului de frinare in Regulamen-tul 13 al C.E.E. a O.N.U. (v. tabelul 7.1).
Relatia (7.3) ilustreaza faptul ca un spatiu de frinare excesiv de mar*

Verificarea: pertormanfelor dispozilivului frinei de serviciu 103
poate fi datorat fie unui timp de raspuns initial prea mare (inertie marea transmiterii comenzii de frinare §i/sau frinelor), fie unei deceleratii defrinare pe intervalul frinarii active prea mica (ineficacitatea frinelor), fieunei combina^ii ale celor doua cauze. Din aceasta cauza masurarea for-tei de frinare sau a deceleratiei frinarii pe standuri sau a decelerate!frinarii pe parcurs nu constituie incercari exhaustive ale echipamentuluide frinare, ci complementare masurarii spatiului de frinare. Acelasi lu-cru este valabil si pentru masurarea timpului de raspuns al dispozitive-lor de frinare.
O practica curenta la incercarile de frinare efectuate fara aparaturade masurare sau inregistrare a deceleratiei consta din calcularea unei de-celerafii medii cu una din relatiile:
am=V\l(2Sf); (7.4)
am=Vi/tf; (7.5)
(7.6)
Relatia (7.4) ofera cea mai mica valoare pentru o aeceleratie medie,iar (7.6) — cea mai apropiata de valoarea am rezultata din relatia (7.1) sicea mai mare ca valoare absoluta. Din aceasta cauza indicarea unei dece-lerafii medii pentru o frinare fara mentionarea relatiei de calcul respec-tive poate duce la confuzii in aprecierea rezultatelor. Utilizarea decele-ratiei (maxime sau medii) pentru aprecierea calitatilor de frinare ale unuiautomobil se explica prin comoditatea masurarii (existen^a unei game va-riate de decelerometre si decelerografe) sj este de certa utilitate pentruaprecierea eficacitatii frinelor (excluzind efectul transmisiei comenzii),sau atunci cind documentatia de executie sau normativa prevede valoride control ale deceleratiei.
7.2. Verificarea performanfelor dispozitivului frinei de serviciu
Performantele dispozitivului frinei de serviciu, utilizat pentru condu-cerea normals, curenta, a automobilului, definesc intr-o masura determi-nants calitafile de frinare ale acestuia, in acceptiunea uzuala a notiunii.Verificarea performantelor se face exclusiv prin incercari de parcurs pepiste din poligoane sau pe drumuri publice, cu luarea masurilor de se-curitate necesare, pe portiuni de cale rectilinii, orizontale (in limitele aiO,5Vo), netede, curate si uscate, cu imbracamintea din beton-ciment saubeton asfaltic. Portiunea de pista de incercare trebuie sa prezinte acosta-mente cit mai largi si sa nu aiba santuri laterale, pomi sau marcaje ru-tiere. De asemenea, se vor exclude zonele in rambleu sau cu poduri.
Fiecare incercare se repeta de eel putin doua ori in ambele sensuri alepistei de incercare si in aceeasi portiune de pista. In timpul incercarilor,temperatura aerului trebuie cuprinsa intre +5 si +25°C, iar viteza vin-tului nu trebuie sa depas.easca 3 m/s.
Inainte de incercari, in afara de Verificarea starii tehnice a dispoziti-vului frinei de serviciu incercate, se va verifica buna functionare a dispo-zitivului frinei de securitate. De asemenea, se va verifica presiunea dinpneuri si starea normala a benzii de rulare a anvelopelor. Automobilul

106 Verifiearea calitafilor de frinare
se va lesta la sarcina utila nominala; sacii de lestare se vor dispune uni-form pe platforma autocamioanelor si corespunzator pozitiei pasagerilor(pe scaune sau pe intervalul dintre scaune) la automobilele de persoane.In automobilul incercat se va afla numai personalul strict necesar pen-tru efectuarea masuratorilor dotat cu centuri de siguranta.
Parametrul de baza pentru verificarea frinelor de serviciu este spa-tiul de frinare, care trebuie masurat cu o precizie de +2,5%. Viteza ini-tiala de frinare trebuie de asemenea, cunoscuta precis (cu precizie de4-1,5%), ceea ce de obicei exclude posibilitatea utilizarii vitezometruluide bord la determinarea acesteia, iar forta de actionare a comenzii tre-buie masurata cu precizia de +3%. Timpul de frinare trebuie sa poata fimasurat cu precizia de +0,02 s, preciziile de masurare mentionate seobtin prin utilizarea, in vederea incercarii, a unui dispozitiv roata a 5-a(utilizat si pentru incercarile de dinamica, v. fig. 5.1—5.4). Exista nume-roase tipuri de astfel de dispozitive, fie construite de firme specializate(Peiseler K/PKS, R.F.G., Performance Measurements — S.U.A.), fie con-struite de laboratoare uzinale sau institute de cercetari pentru tipuri spe-cifice de automobile.
O problema deosebita o prezinta asigurarea de catre §ofer a efortuluiprescris de actionare a elementului de comanda, atunci cind acest efortse include direct in fluxul fortei de stringere din frine (cazul frinelor cutransmisii hidraulice si mecanice). In absen^a unui sofer-experimentatordeosebit de rutinat, performantele corespunzatoare efortului de comandaprescris se afla printr-o interpolare grafica, asa cum se arata in fig. 9.4,cu observatia ca se porneste de la valoarea prescrisa pentru efort, spre agasi spatiul de frinare corespunzator.
FRENOTEST
•:
t-innE IN POLAMn
1' \<-w/iffl
I I'll
11— i
Fig. 7.3. Decelerometru cu pendul Fre~notcst.
Fig. 7.4. Decelerograful VI-HAG.
In cazul unor verificari de mai mica importanta, in locul spatiului defrinare se poate utiliza deceleratia de frinare, maxima sau mediata pebaza unei inregistrari, masurarea efectuindu-se cu un decelerometru(fig. 7.3) sau decelerograf (fig. 7.4). In primul caz, valoarea deceleratieimaxime (retinute pe cadranul indicator al aparatului) se compara cu in-dicatiile reglementate pentru tipul de automobil incercat. In al doileacaz, diagrama de frinare inregistrata permite o analiza de detaliu, asa cumse ilustreaza in fig. 7.1.

Verificarea performanjelor dispozitivului frinei de serviciu 107
Masurarea spatiului de frinare, cu o ruleta, prin incercari de parcursnu este atit de simpla cum ar parea la prima vedere, din cauza dificul-tatii corelarii momentului inceperii actionarii comenzii (punctului a dinfig. 7.1) cu pozitia automobilului pe pista de incercare. Masurarile simplece s-ar putea face comandind frinarea in raport cu un jalon fixat pe mar-ginea pistei includ in spatiul de frinare si spatiul parcurs de automobil intimpul de reactie al soferului. Pentru excluderea acestuia este necesar undispozitiv care sa marcheze pe suprafata drumului, cu un jet de vopsea,punctul de ac^ionare a comenzii. Un astfel de dispozitiv poate consta din-tr-un pistol cu vopsea, declansat electric cu un microintrerupator ampla-sat pe suprafata pedalei sau manetei de frina.
Un fenomen nedorit ce poate aparea in cazul unor frine executate saureglate necorespunzator este pierderea stabilitatii automobilului in tim-pul frinarii (abaterea de la traiectoria rectilinie ca urmare a derapajului).Aparitia unor atare incidente va fi mentionata in buletinul de incercaresi va fi apreciata ca deosebit de grava daca nu se elimina printr-o refa-cere a reglajului frinelor.
Metodologia de incercare a dispozitivului frinei de serviciu se va aplicasi la incercarea dispozitivelor din componenta echipamentului de frinaremenite sa suplineasca rolul acestuia in caz de avarie (frina de securi-tate).
7.2.1. Verificarea performantelor de frinare cu frinele reel(incercari de tip 0)
Incercarile se efectueaza conform metodicii descrise, asigurindu-seintre diferitele frinari un timp de racire suficient ca temperatura exte-rioara a tamburelor sau discurilor frinelor sa scada sub 100°C. Pentrugrabirea racirii se poate face un rulaj de 15—20 min, evitind efectuareaunor frinari in acest timp. Temperatura frinelor se poate masura cu untermometru cu sonda de contact (termocuplu- sau termistor) sau se poateverifica manual: frina e rece daca mina poate ramine in contact indelun-gat cu tamburul sau discul acesteia. Conditiile de efectuare a frinarilorde tip O pentru diferite tipuri de automobile, precum si performanteleimpuse de Regulamentul 13 al C.E.E. a O.N.U. se prezinta in tabelul 7.1.
Suplimentar, pentru o edificare completa asupra dispozitivului de fri-nare se mai pot efectua si frinari cu motorul nedebreiat, de la diferiteviteze initiale cuprinse intre 0,8 si 0,3 din viteza maxima a automobilu-lui incercat.
7.2.2. Incercari pentru determinarea scaderii eficacitafiiprin mcalzire a frinelor
Incalzirea frinelor prin frinari repetate (incercari de tip I). Particula-ritatea acestor incercari consta in aceea ca verificarea performantelor defrinare se face nemijlocit dupa un numar de frinari repetate, in confor-mitate cu datele din tabelul 7.2. Verificarea se face, de asemenea, cumotorul debreiat, conform tabelului 7.1, iar eficacitatea remanenta a fri-narilor nu trebuie sa fie mai mica de 80% din aceea prescrisa pentru ca-

Tabelul 7.1Incercariie pentru verificarea performantelor dispozitivelor de trinare de scrviciu §i de secnritate
Caracteristicile automobilelorIncercate
Categoria dupadestinatie
Automobile depersoane cumaximum 8locuri (exclusivsoferul)Automobile depersoane cumai mult de 8locuri (exclusivsoferul)Automobile depersoane cumai mult de 8locuri (exclusivsoferul)Automobile debunuri
Automobile debunuri
Automobile debunuri
Masa to-tals ma-xima, kg
< 5000
> 5000
< 3500
3 500—12 000
> 12 000
Conditiile de efectuare a Incercarilor de tip O cu motorul lebreiat
Viteza deIncercare,V*, km/h
80
r •) *
60
60
70
50
40
Forta aplicataasupra elemen-tului de coman-
dS, daN
Cupiciorul
50
^!',t
***
«","'.
vP
n̂,.0
"~~
70
70
70
Cumina
40
60
-60',-.
60
60
60
Relatia de calcul al spatiului defrmare admisibll, In m, pentrufrina de serviciu si pentru cea
de securitate
0,1 Vj+VjVlSO(0,1 Vj-r-V^/75)** -
^ ;:
-r .
0,15 Vj+V^/lSO(0,15 V,+V4
2/65)
f
- " .. *"0,15 Vj+V^/lSO . ^ -
(0,15 V,+V,2/65) . " " ""5? •' -^* _
0,15 Vi+VJ2/115
(0,15 Vt+Vf/57,5)
0,15 Vj+VjVllS(0,15 Vi+V{
2/57,5)0,15 Vi+Vf/115(0,15 V^Vf/57,5)
Deceleratia me-die in regim defrlnare, m/s2,pentru Irina de
serviciu
5,8(2,9)
5,0(25)x")**/
5,0(2 5)\t*y*Jf
4,4(2,2)
4,4(2,2)
4,4(2,2)
Tipul Incercariipentru verifi-carea scaderileficacitatil frl-nelor Incalzite
I
- " j .7
i§i II bis
"
r
' I si IIsau II bis •
I
• > ' ' I '" . '
'--
? I 5i II ;
* Daca viteza maxima a automobilului incercat este mai mica decit valoarea Vi recomandata pentru categoria res-pectiva, incercarea se va efectua de la viteza maxima.
** Pentru frina de securitate

Verificarea performantelor dispozitivului frinei de serviciu 109
tegoria de automobil incercata, cu frinele reel, sau mai mica de 60% dinaceea determinata experimental conform § 7.2.1.
Verificarea comportarii frinelor automobilului la coborirea unor panteindelungate (incercari de tip II). Aceasta verificare se prescrie numai pen-tru anumite categorii de automobile (v. tabelul 7.1). Incercarile de frinareca atare se efeetueaza dupa metodica aratata la § 7.2.1, insa fara ca fri-nele sa fie reci. Energia degradata in frine va trebui sa fie echivalenta
Tabelul 7.2
Conditiile de efectuare a frinarilor ciclice in vederea incalzirii frinelorpentru determinarea seaderii eficacitatii
Conditiile de efectuare a frinarilor suceeslve
Caracteristicile automobilelorJncercate
Categoria dupSdestinatie
Automobile de persoanecu maximum 8 locuri<exclusiv soferul)
Automobile de persoanecu mai mult de 8 locuri(exclusiv $oferul)
Automobile de persoanecu mai mult de 8 locuri(exclusiv soferul)
Automobile de bunuri
Automobile de bunuri
Masa to-talS maxi-
ma, kg
_
«S 5000
> 5000
sS 3500
> 3500
Vitezainitials,
la Incepu-tul frtnarii
V f , km/h
0.8 Vm *^ 120
0>8 v^^ 100
°'8 v™^ 60
0,8 Vm
=S 120
0,8 Vm n
=S 60
Viteza lasflr§itulfrinarii
F/( km/h
1
~2 ^i
I
2 i
I
2Vi
1
2 '
12 ^
Durataunui clclude frinare
(timpulIntre In-ceperea adoua frl-nari con-secutive)
At, s
45
55
60
55
60
Nr. deciclurlda fri-nare n
15
15
20
15
20
* ^max — viteza maximfi a automobiluluiObservafii:
1. In cazul cind calita^ile dinamice ale automobilului nu permit respectareaduratei prescrise pentru At, aceasta poate fi mSrita. In orice caz, va trebui s& sedispuna, in afara de timpul de frinare si accelerare a automobilului, de 10 secundeJn fiecare ciclu, pentru stabilizarea vitezei V..
2. For^a de ac^ionare a elementului de comandfi trebuie reglata astfel incit laprima frinare decelera^ia medie In regim de frinare sa fie de 3 m/s2; aceasta for\S,va ramine constants in timpul tuturor frinarilor succesive ulterioare.
3. FrinSrile se efectueazfi cu motorul ambreiat, in treapta superioara a cutieide viteze (excluzind supramultiplicatoarele).
4. Demarajul dupa fiecare frinare se va face cu schimbarea de viteze car*asigurS durata de accelerare cea mai scurta (atingerea cea mai rapid posibilS 8vitezei ini^iale Vt, ^inind seama de caracteristicile motorului si transmisiei).

110 Verificarea calitatilor de frinare
cu aceea ce se degradeaza in acelasi timp pentru automobilul condus cuviteza medie de 30 km/h, pe o panta coboritoare de 6% lunga de 6 km,cu cutia de viteze intr-o treapta adecvata (se va avea grija ca la vitezade incercare turatia motorului sa nu depas.eascS valoarea maxima indi-cata) sj avind in functiune eventualele dispozitive de incetinire din com-ponenta echipamentului de frinare. Daca automobilul nu este prevazutcu dispozitive de incetinire, se admite o tolerantS de +5 km/h pentruviteza de coborire.
Gasirea unui drum in panta care sa satisfaca cerintele aratate maiinainte si totodata aflat in apropierea unor zone orizontale pe care sa sepoata efectua verificarile de tip O este anevoioasS. Din aceasta cauza serecurge la incSlzirea frinelor printr-o serie de frinari repetate, efectuatepe drum orizontal, pe o durata de 12 min, cu o degradare de energieegala cu aceea corespunzatoare coboririi pantei de 6%. Numarul de fri-nari necesare n si viteza initials V, [m/s] se determina din relatia
n V!=7 063,2. (7.7)
evident depinzind de calitatile dinamice ale automobilului incercat.Daca automobilul este prevazut cu frine de incetinire a caror eficaci-
tate a fost determinate prin incercSri specifice (v. § 7.4), se va putea re-nunta la incercarea de tip. II.
O variants de incercare denumita de tip II bis, prevazuta special pen-tru unele automobile (v. tabelul 7.1) destinate exploatarii in regiuni demunte, presupune coborirea unei pante de 7%, restul conditiilor si me-todelor de incercare raminind aceleasi.
7.2.3. Verificarea regimului de saturatie termica a frinelor
Aceasta reprezinta, de obicei, o incercarede cercetare, legata de adoptarea tipului degarnituri de frictiune ale frinelor sau pre-vSzuta pentru automobile destinate a fi ex-ploatate in regim de circulatie cu frinariintensive. Incalzirea frinelor se efectueazaprin frinari repetate, pina la oprire, cu de-celeratia constants am de 3—4 m/s, de la vi-teza initials Vt de 30 km/h (intervalele Atdintre frinari rezultS de ordinul a 30—45 s)§i se continua pina ce temperatura tambure-lor sau discurilor de frinS tinde sS se stabi-lizeze (fig. 7.5). Aceasta presupune fie masu-rarea continua si inregistrarea temperaturiitamburelor sau discurilor cu ajutorul unortermocupluri rniniaturale incluse in garni-turile de frictiune, in imediata apropiere asuprafetei de frecare, fie masurarea tempe-
raturii exterioare a elementelor mentionate, in timpul opririlor dintrefrinari, cu ajutorul unor termometre de contact cu inertie mica. In ulti-mul caz, masurarile se pot face numai din 10 in frinari sau chiar mairar, in functie de viteza de cres.tere a temperaturii. Incercarea se incheie
10 20 30 W 50 60 WNumonil de frinari, n
Fig. 7.5. Curba de cre§tere atemperaturii exterioare a unuitambur de frina de autoca-mion in cazul unor frinari re-
petate:®tnax ~ temperatura de saturatetermica (278CC); 9 — temperatura
aerului ambiant.

incercarea frinei de incetinire 111
cind intre 3—4 masurari succesive diferentele de temperatura sint sub2°C. Dupa racirea frinelor se verifica revenirea parametrilor frinarii lavalorile anterioare (refacind in prealabil reglajele frinelor).
7.3. Verificarea frinei de stationare
Daca dispozitivul frinei de stationare preia si rolul dispozitivului fri-nei de securitate, asa cum se intfmpla la numeroase automobile, oprima serie de verificari se va face in conformitate cu § 7.2.1. Calitatilede stationare se determina prin verificarea sigurantei mentinerii automo-bilului in stare de imobilitate pe o panta de 18%, in pozitia de urcare §ieo'borire. Valoarea pantei de verificare este in unele standards de 30%,iar unele caiete de sarcini sint inca si mai severe, prevazind verificareafrinei de stationare pe rampa maxima ce poate fi urcata de automobil.Incercarea se efectueaza pe o portiune de drum cu inclinare corespunza-toare sau pe rampe artificiale (v. fig. 12.13). Efortul aplicat la comanda deIrina va fi eel indicat in tabelul 7.1, iar durata verificarii 5 min. Se vautiliza sistemul de blocare al levierului sau minerului de comanda.
7.4. incercarea frinei de incetinire
Incercarile de tip II §i II bis veri-fica implicit si performantele dispoziti-vului de incetinire, raportate la carac-teristicile de masa ale automobiluluirespectiv. Exista insa incercari specificede verificare a dispozitivelor de inceti-nire, ca parametri absoluti atit pe stand,cit si pe parcurs. Ultimul tip de incer-cari of era avantajul de a permite apre-cierea eficacitatii incetinitoarelor in co-relatie cu automobilul pe care urmeazaa fi utilizate [6]. Metoda de incercareconsta din remorcarea automobiluluirespectiv pe un drum orizontal moder-nizat, cu si fara dispozitivul de inceti-nire in functionare, cu'viteze de 20, 30§i 40 km/h; forta de frinare este egalanumeric cu efortul la cirligul de re-morcare mai putin rezistenta la rulare(care trebuie masurata in prealabil inaceleasi conditii de deplasare). Raportuldintre forta de frinare si greutateaautomobilului, egal cu indicele de fri-nare, este egal totodata §i cu marimeateza uniform^ corespunzatoare (fig. 7.6),
La determinari, in afara de forta lasoara (inregistreaza): turatia motorului
Fig. 7.6. Prezentarea grafica a re-zultatelor incercarilor de deter-minare a eficacitatii frinei de in-cetinire prin metoda tractarii:0 — pozi(la neutrS a cutiel de viteze;ill, IV, V — treptele de viteze de Jn-cercare; linia continua corespundeactionarii Incetinitorului, linia Intre-rupt3 — Incetinitorului neaetfonat (Sn-
cetinirea datS numai de motor).
pantei ce poate fi coborita cu vi-
cirligul de remorcare, se mai ma-si valoarea contrapresiunii din ga-

112 Verificarea calitafilor de frinare
leria de evacuare (cu ?i fara clapeta de obturare actionata), tura^ia s.i pa-rametrii specific! ai frlnei de incetinire (daca e de tip hidrodinamic sauelectromagnetic).
Nemijlocit, inaintea masurarilor, se va asigura incalzirea elementelortransmisiei la regimul termic normal, printr-un rulaj de lungime adec-vata §i se va verifica rezisten^a la rulare cu cutia de viteze in pozitianeutra si in treptele de viteze compatible cu deplasarea automobiluluipentru toate vitezele de deplasare prevazute pentru incercarea propriu-zisa.
7.5. Determinated parametrilor functional! ai unor agregatedin componen^a dispozitivelor de frinare
7.5.1. Masurarea timpului de raspuns al dispozitivelorde frinare cu transmisie pneumatica
Masurarea se efectueaza cu automobilul oprit, la conducta de intrarein cilindrul de frina eel mai defavorizat din punctul de vedere al alimen-tarii cu aer. Cursele tijelor pistoanelor se regleaza pentru un joe minimdintre garniturile de frictiune §i tambur. In rezervoarele de aer se sta-bileste presiunea corespunzatoare la care intra in functiune regulatorulde presiune sau egala cu 90% din presiunea cu care constructorul a cal-culat dispozitivul de frinare.
ilL
s-o
byT
7.6
A./o
10,1 0,2 0,3 0^
Tim put de acfionare a camenzii.s
7.8. Metoda de determi-a timpului de raspuns
pentru un dispozitiv de fri-nare cu transmisie pneumatica.
^« 75
fe:l 5ff
-1"| 25nFig. 7.7. Inregistrarea simul-tana, pe baza de timp, a curseipedalei de frina S (curba 1) sia presiunii aerului comprimatdin cilindrul de frina eel maidefavorizat (2), in vederea de-terminarii timpului de raspunsal dispozitivului de frinare.
Timpul de raspuns, ca functie de timpul de actionare, se obt.ine prin-tr-o succesiune de actionari cu cursa completa a pedalei, incepind cu oactionare in eel mai scurt timp posibil, pina la un timp de actionare de0,4 s (fig. 7.7); in acest scop, se utilizeaza traductoare de presiune adec-vate si un mijloc de inregistrare cu baza de timp. Valorile masurate ast-fel se inscriu intr-o diagrama (fig. 7.8).

Determinated parametrilor functional! 113
Timpul de raspuns luat in considerate va fi acela ce corespunde la untimp de actionare de 0,2 s, pentru care presiunea aerului din cilindruajunge la 75°/o din valoarea asimptotica maxima. Regulamentul 13 alC.E.E. a O.N.U. normeaza acest timp la 0,6 s.
7.5.2. Masurarea fortelor de frinare la rotile automobilului
Masurarea fortelor de frinare la rotile automobilului se face cu ajuto-rul unor standuri speciale, de obicei de tipul cu rulouri; acestea permitmasurarea sau inregistrarea fortei tangentiale la periferia pneului rotii
Fig. 7.9. Verificarea frinelor unui autoturism Dacia 1300 pe un standcu rulouri cu doua canale de masurare.
frinate si la contactul cu rola de reac^ie a standului, inclusa intr-un sis-tern de masurare a cuplului. Exista numeroase variante constructive deastfel de standuri (fig. 7.9), diferentele constind in cantitatea si forma in-formatiilor oferite: simpla indicare pe un cadran a fortei de frinare, in-registrarea pe o banda de hirtie a dependence! dintre forta de frinare sifor^a de comanda, functionarea simultana pe doua sau patru canale etc.Din punctul de vedere al performantelor de frinare prezinta importantanu numai valorile absolute ale fortelor de frinare la ro$, ci si raportuldintre aceste valori si masa ce revine rotilor respective, care trebuie sa seinscrie in limite bine precizate (v. anexa 10 la Regulamentul 13 al C.E.E.a O.N.U.), daca in componenta echipamentului de frinare nu sint inclusesisteme ,,antiblocare".
•
8 — Metode 5! mijloace de Incercare

VERiFICAREA MANIABILITATH SI STAB1LITAJI!AUTOMOBILELOR
Maniabiiitatea sistemului automobil-conducator reprezinta capacitateaacestuia de a-s.i men^ine directia de mers sau de a s.i-o schimba dupa do-rinta conducatorului, prin actionarea asupra volanului. Slabilitatea ca-racterizeaza calita^ile automobilului de a se deplasa in diferite conditiide drum meteoclimatice, fara a se rSsturna s_i fara deraparea lateralssau alunecarea longitudinals a rotilor de la o punte sau de la toate pun-tile simultan.
Maniabilitatea este strins legatS de stabilitate, deoarece cu cit este maimare stabilitatea, cu atit mai mult se apropie traiectoria reala de mersa automobilului de traiectoria doritS §i imprimata de conducator aces-tuia. De aceea, la incercSrile de verificare a maniabilitatii §i stabilitatii,se determina in ansamblu toti parametrii care le caracterizeazS si se in-fluenteaza reciproc: maniabilitatea la mers rectiliniu §i in timpul ma-nevrelor de trecere de pe o banda a drumului pe alta sau de ocolire brus-cS a unui obstacol, manevrabilitatea la intrarea si la iesjrea din curba,capacitatea de virare statica si dinamiea, efortul la volan si razele devirare, stabilitatea longitudinals, stabilitatea transversals in timpul vi-rajului §i pe drumuri rectilinii cu inclinare transversals, inclinarea late-rals a caroseriei, unghiurile de montaj s.i unghiurile de bracare maximaale rotilor de directie, precum §i raportul de transmitere unghiular alsistemului de directie.
Automobilele care sint supuse probelor de verificare a maniabilitatiisi stabilitatii trebuie sS corespunda intru totul conditiilor tehnice §i safie incarcate la valoarea nominalS a sarcinii utile, uniform distributepe suprafata de asezare sau pe scaune. In prealabil se verifies toate jocu-rile din sistemul de directie, presiunea aerului din pneuri si uzura an-velopelor, care nu trebuie sa depa§eascS 30o/0 din inaltimea initials aproeminentelor benzii de rulare. Parametrii maniabilitS^ii si stabilitatiise determina in conditii normale de exploatare, fie pe suprafete specialamenajate, fie pe anumite portiuni de drum delimitate la 500 m atuncicind incercSrile se fac cu vite'ze de 10—30 km/h §i la 1 000 m pentruviteze mai mari.
Efectuarea incercSrilor de verificare a maniabilitStii si stabilitatii au-tomobilelor se realizeazS cu conducStori auto-experimentatori de inaltScalificare, special instruiti inaintea fiecSrei probe, iar in cazul unor in-cercSri comparative, experientele trebuie fScute de aceleasi persoane.Inaintea incercSrilor propriu-zise, agregatele transmisiei automobiluluitrebuie aduse la un regim termic normal, printr-o rulare adecvata pe unparcurs convenabil, timp in care se verifies ?i se regleaza s.i aparatura de

Verificarea parometrilor mank.biiitafii automobilelor 115
masurare si inregistrare. Incercarile se efectueaza pe timp lipsit de pre-cipitatii, cu viteza vintuiui nu mai mare de 3 m/s, temperatura mediuluiambiant de 5—30°C (cu exceptia incercarilor efectuate pe drumuri saupiste acoperite cu zapada sau gheatS, pentru care domeniul de tempe-raturi este de —3 ... —15°C), iar diferentele de temperatura dintre di-ferite experience sa nu depaseasca +3°C.
3.1. Verificarea parametrilor maniabilitatii automobilelor
Abatarea automobilului de la traiectoria rectilinie sau de la direc-tia de mers impusa de conducator prin rotirea volanului poate fi cauzataatit de starea tehnica si particularitatile constructive (unghiurile de mon-taj ale rotilor directoare, corectitudinea trapezului de directie, jocuriledin sistemul de directie, elasticitatea laterals a anvelopelor, diferentelede presiune din pneurile rotilor din dreapta si din stinga, tipul suspen-siei), cit si de factori externi, cum sint neregularitatile si inclinarea trans-versals a drumului, vintul lateral, aderen^e si rezistente la rulare dife-rite la rotile din dreapta si din stinga.
Verificarea maniabilitatii automobilului are drept scop determinareaunor parametri care caracterizeaza direct capacitatea de virare (mania-bilitatea la mers rectiliniu, la trecerea de pe o bands a drumului pe altacu ocolirea brusca a unor obstacole, la intrarea si iesirea din curba, ca-pacitatea de virare statica si dinamica) si a unor caraoteristici construc-tive ale automobilului care au o influents nemijlocita asupra capacitStiide manevrare (unghiurile de montaj ale rotilor de directie, unghiurilemaxime de bracare a acestora, raportul de transrnitere unghiular al sis-temului de directie, efortul la volan si razele de viraj).
•
8.1.1. Verificarea maniabilitatii la mersul rectiliniu
Incercarea de verificare a maniabilitStii la mersulrectiliniu are un caracter comparativ, oferind un cri-teriu de comparatie a maniabilitatii unor automobilediferite, avind caracteristici dimensionale si de greu-tate identice sau apropiate.
Maniabilitatea la mersul rectiliniu se verifies pesectoare de drum orizontale si rectilinii cu lungimeanu mai mica de 800 m, latimea nu mai mica de 3,5 m,inclinarea longitudinals de eel mult 1% ?i inclina-rea transversals nu mai mare de 0,5%. Drumurilevor avea urrnatoarele tipuri de invelisuri:
— asfaltate sau betonate, netede, curate, uscatesi umezite in mod uniform pe toatS lungimea demasurare, avind dispuse pe suprafatS, pe douS liniice corespund traiectoriilor automobilului, la distanta de 200 m unul dealtul, alternativ, obstacole artificiale cu forma aratata in fig. 8.1 si urrna-toarele dimensiuni: pentru autoturisme si autocamioane cu masa totala
Fig. 8.1. Forma §i di-mensiunile de gabarit
ale obstacolelor.

116 Verificarea maniabilitatii $i stabilitatii automobileloi
de 3 500 kg, a=230 mm, b=600 mm, 7i=40 mm, iar pentru celelaltetipuri de autoturisme: a=280 mm, b=600 mm §i ft=60 mm;
— pietruite cu bolovani de riu, uscate s.i de o calitate suficient debuna pentru a permite viteze de deplasare de eel putin 70 km/h pentruautoturisme §i 60 km/h pentru autobuze §i autocamioane, in conditii desecuritate;
— acoperite cu zapada batatorita, care sa asigure deplasarea auto-mobilului in conditii de siguranta, cu vitezele aratate mai inainte.
Pe fiecare sector de drum se executa nu mai putin de opt incercariintr-o singura directie, cu miscare uniforma si doua valori ale vitezeide deplasare: una situata in apropiere de viteza maxima respectiva saude viteza limitata de conditiile de securitate si alta cu 10—30 km/h maimica decit cea maxima pentru autoturisme si cu 5—15 km/h, mai micadecit cea maxima pentru autobuze s.i autocamioane.
Viteza de parcurgere a sectorului de masurare se stabilizeaza inaintede a intra pe acest sector s.i se mentine neschimbata in limitele arfcS km/h, avind grija ca automobilul sa se mentina pe mijlocul benzii decirculate §i in as.a fel incit rotile acestuia sa treaca peste toate obstaco-lele artificiale, cu deplasari minime ale volanului. Aparatura de inre-gistrare se conecteaza la intrarea pe sectorul de masurare si se deconec-teaza la ie§irea de pe acest sector, asigurind masurarea continua a un-ghiului de retire a volanului a, a unghiului dintre axa longitudinals aautomobilului s.i directia de mis. care 7, a timpului, precum sj inregistra-rea unor semnale corespunzatoare inceputului si sfirs.itului experientei.
Inregistrarea unghiului a se face cu ajutorul unui traductor poten-tiometric, montat la volan, iar a unghiului Y cu un traductor giroscopic,montat pe podeaua cabinei, ambele traductoare fiind conectate la un os-
a , cilograf, care pune la dispozitia expe-/ j? rimentatorului oscilograme de tipul ce-
lei prezentate in fig. 8.2. Liniile neutrepentru curbele de variatie a unghiuri-lor a si 7 se traseaza la prelucrareaoscilogramei in asa fel incit suma su-prafetelor de deasupra sa fie egala cusuma suprafetelor de dedesubt. Acestelinii corespund pozitiei neutre a vola-nului (curba a) si respectiv miscariiautomobilului exact pe directia secto-rului de masurare (curba b).
Utilizind notatiile de pe oscilograma din fig. 8.2, se calculeaza pentrufiecare parcurgere a sectorului de masurare valorile medii corespunza-toare ale unghiurilor a s.i Y ?i valoarea medie a frecventei schimbariisensului de rotatie a volanului \, cu relatiile:
?i M=pl(2lmt), (8.1)
Fig. 8.2. Oscilograma reprezentindunghiurile de retire a axei longitu-dinale a automobilului f si a vola-nului a, in timpul deplasarii recti-
linii a automobilului.
in care: ma, mY si mt reprezinta scarile de inregistrare pe diagrama aunghiurilor a si ^ §i a timpului; p — numarul de virfuri ale curbeia=/(t) (v. fig. 8.2), diferentiate intre ele prin mai mult de 3°; I - - lungi-mea de diagrama prelucrata, corespunzatoare sectorului de masurare.

Verificarea parametrilor maniabilitatii automobilelor 117
Parametrii aj, yj si \ se pot obtine si direct prin utilizarea unei apara-turi specials de integrare.
Dupa obtinerea acestor valori, se calculeaza pentru fiecare tip de sec-tor si fiecare viteza de incercare, valorile medii ale acestor parametri(ao» Yo. VTO) ca medie aritmetica a datelor diferitelor parcurgeri ale sec-toarelor de drum.
Maniabilitatea automobilului la mersul rectiliniu se apreciaza cu aju-torul vitezei medii de deviere laterala a automobilului (VT), data derelatia
Vr=V«,Yo, (8.2)
in care F ,̂ este viteza medie de deplasare a automobilului pe sectorulde drum considerat, iar YO este unghiul mediu de deviere laterala aautomobilului de la traiectoria rectilinie.
8.1.2. Verificarea maniabilitatii la trecerea de pe o bandape alta a drumului §i la intrarea in curba
Trecerea automobilului de pe o banda de circulatie pe alta se face lamanevra de depasire, la pregatirea de intoarcere si la ocolirea brusca aunor obstacole aparute instantaneu pe traiectoria de deplasare. Acest as-pect al maniabilitatii prezinta o influents deosebita asupra securitatii cir-culatiei [39]. Incercarile au un caracter comparativ, se efectueaza pe unsector de drum lat de eel putin 10 m, cu lungimea de eel putin 500 m,marcat conform schemei din fig. 8.3, cu urmatoarele tipuri de invelisuri:beton sau asfalt cu suprafata neteda si curata; asfalt cu suprafata uni-form umeda; zapada batatorita. Inclinarea transversals a drumului nu
Infrare m v/raf, ._ Manevra de oco/ire __ tesire din viraj
.
Acostamenfut drumului
Limifo b yrzii de circulatie din stingo
realize/fa
~^^~~ Traiecforia conveniionala—Am
jr drumului
Limito bemii de circulatie din dreapfa
Acosfamenfu/ drumului
Fig. 8.3. Marcarea sectorului de drum pentru efectuarea ma-nevrei de trecere de pe o banda pe alta a drumului.
trebuie sa depaseasca 0,5%, iar cea longitudinals 1%- Pe suprafata dru-mului se delimiteaza doua benzi de circulatie cu latimea de 3,5 m fiecare(fig. 8.3). Inainte de incercare, conducatorul auto stabileste, prin manevresuccesive din ce in ce mai intense, curbura limita a traiectoriei pe care

118 Verificarea maniabilitatii si s!abilita)ii auiomobilelor
automobilul poate trece, cu o viteza data, de pe o banda de circulatiepe alta, fara sa apara deraparea ro^ilor sau rasturnarea. Aceasta curburapoate fi, de asemenea, limitata de viteza maxima de retire a volanului.Toate incercarile comparative se efectueaza cu aceleasi viteze de depla-sare, stabilite functie de tipul automobilului si starea drumului. Mania-bilitatea fiecarui automobil se verifies pentru doua valori ale vitezei dedeplasare, cu o diferenta intre ele de eel putin 10 km/h, in timpul a8-—10 parcursuri efectuate pentru fiecare din cele doua viteze stabilite.
din vinojFig. 8.4. Oscilograma inregistarii unghiurilor de retire a ?i 1 intimpul efectuarii manevrei de trecere de pe o banda pe alta a
drumului.
Parametrul de apreciere a maniabilitatii in acest caz se considers ceamai mare viteza cu care se efectueaza toate aceste probe. In afara deaceasta, cu ajutorul aparaturii de oscilografiere si a unor traductoaregiroscopice montate pe automobil, se inregistreaza variatia in timp a un-ghiurilor de abatere a volanului de la pozitia neutra si a automobiluluide la directia rectilinie initiala. (fig. 8.4). Pe baza acestor oscilograme sedetermina, pentru fiecare din parcursuri, timpul de ocolire t0 din mo-mentul inceperii rotirii volanului si pina la sfirsitul manevrei, dupa careamplitudinea oscilatiei axei longitudinale a automobilului devine egalasau mai mica de 1,5°. De asemenea, se poate face o prelucrare statisticsa oscilogramelor, calculind unghiul total de rotire a volanului si va-loarea medie a vitezei unghiulare de rotire a axei longitudinale a auto-mobilului, care se confrunta cu aprecierile subiective ale conducatoruluiexperimentator.
Verificarea maniabilitatii la intrarea in curba are drept scop determi-narea vitezei limita cu care se poate deplasa automobilul mentinin-du-si capacitatea de virare, la intrarea in curbe cu raze constante, pedrumuri cu coeficient de aderenta mare. Viteza limita se considera aceaviteza la care automobilul isi pierde maniabilitatea prin derapare, ras-turnare sau neinscriere pe traiectoria de mers dorita. Experienta se exe-cuta pe o platforma circulara cu raza de eel putin 120 m, acoperita cubeton sau asfalt, cu suprafata neteda, uscata si curata, marcata dupa cumse arata in fig. 8.5, respectiv cu o raza interioara de intoarcere de 25 mpentru autocamioane si autobuze cu numar de locuri mai mare de 10 side 35 m pentru autoturisme si autobuze de capacitate mica. Coridorul deintrare in curba se recomanda sa aiba o latime de eel putin 3 m.

Verificarea parametrilor maniabilitatii automobilelor 119
In scopul preintimpinarii rasturnarii laterale a automobilului, pe la-tura lui dinspre exteriorul curbei, se fixeaza un dispozitiv de rezemarecu una sau doua roti de siguranta suspendate, care vin in contact cusuprafa^a de rulare in momentul cind rotile automobilului din interiorulcurbei se desprind de sol, momentinregistrat cu ajutorul unui contactelectric. Inclinarea limita a carose-riei automobilului la intrarea incurba se recomanda sa nu fie maimare de 25—30°, dupa care intra infunctiune dispozitivul de rezemare.
Conducatorul auto, in mod pro-gresiv, de la experienta la experien-ta, mareste viteza de deplasare cu1—2 km/h pina la limita la care seproduce pierderea maniabilitatii sidupa aceea face 5—6 parcursuri cuaceasta viteza limita. Drept parame-tru de apreciere a maniabilitatiiautomobilului la intrarea in curbaserveste valoarea medie a vitezei li- g5 Marcarea drumului la efec_mita atmsa in cele 5—6 parcursuri tuarea manevrei de intrare §i iesireinregistrate. din curba.
8.1.3. Verificarea maniabilitatii la deplasarea automobiluluipe o traiectorie in forma de S
In ultima vreme se acorda o importantadeosebita aprecierii maniabilitatii automobi-bilului la deplasarea curbilinie cu regim deviteza stabilizat, dar cu unghiuri de bracarevariabile. In acest caz, automobilul se in-cearca pe un coridor in forma de S, cu douacurbe dispuse la 90°, spre stinga si spredreapta (fig. 8.6). Delimitarea acestui cori-dor se face cu ajutorul unor jaloane dispusela 5 ni unul de altul, latimea coridorului Asi distanta dintre axele celor doua directiiparalele la intrare si la iesire H se aleg infunctie de parametrii automobilului, respec-tiv A=2(L+B) si H=3 A, unde A este ama-patamentul si B ecartamentul automobilu-lui. Suprafata drumului trebuie sa fie tare,neteda, uscata si curata.
Aparatura instalata pe automobil trebuiematorilor parametri: unghiul de intoarcere atiile transversale ale puntilor din fata si dinabaterea axei longitudinale a automobilului,
Fig. 8.6. Marcarea drumului laefectuarea deplasarii pe otraiectorie in forma de unghi
drept.
sa permita inregistrarea ur-rotilor de directie, accelera-spate, inclinarea caroseriei,viteza de deviere a rotilor

120 Verificareo maniabilitatii si stabilitafii automobilelor
din fata si din spate. Xncercarile se recomanda sa se execute cu vitezelede 10; 20 si 30 km/h, iar Inregistrarea parametrilor — pe parcursuldintre momentul mceperii inelinSrii rotilor de direc^ie de la pozitia
neutra pina ce revin in aceeasi pozitiedupS parcurgerea traseului in forma de S.
Maniabilitatea automobilului, in acestcaz, se apreciaza cu ajutorul a trei crite-rii: capacitatea de virare dinamica, intir-zierea reactiei automobilului la bracarearotilor si unghiul dintre vectorul. vitezeipunctului din mijlocul puntii din spate siaxa longitudinals a automobilului. Dupacum se arata in fig. 8.7, se poate scrie camaniabilitatea dinamica
tf2s tge
0
Fig. 8.7. Schema cinematicsefectuarii virajului.
R ^m *-, x , ,—f' (8-3)R2 tg(6—8i)cos dz + sin8a
unde: E2& ?i ^2 sint razele instantanee alevirajului punctului din mijlocul puntii dinspate cu si, respectiv, fSra deviere late-rals, 6 este unghiul mediu de bracare arotilor de directie, iar Sj si S2 sint unghiu-rile de deviere laterals a puntilor din fatasi din spate.
Capacitatea de virare dinamica se determina cu ajutorul valorilormedii ale raportului Rzs/R* pentru timpul parcurgerii intregii traiectoriiin S.
Intirzierea reactiei automobilului la bracarea rotilor de directie sedetermina cu ajutorul diferentei valorilor medii ale raportului Rzs/R* laintrarea si la iesirea din curba. Aceste valori medii se determina ince-pind cu unghiuri de bracare de 5° si apoi mai mari.
Unghiul dintre vectorul vitezei centrului puntii din spate si axa lon-gitudinals a automobilului se determinS cu ajutorul valorii medii a un-ghiurilor maxime de deviere la puntea din spate S2m<K din toata seria deincercari.
Se considers ca maniabilitatea automobilului este cu atit mai buna cucit valoarea medie Rzs/Rz este mai apropiata de unu, cu cit este mai micadiferenta dintre valorile R2slR^a intrarea si iesirea din curba si cu citeste mai mic unghiul 82mo)C.
r
8.1.4. Determinarea capacita^ii de virare staticaa automobilulu!
Capacitatea de virare statica este caracterizata de posibilitatea auto-mobilului de a se opune deraparii determinate de actiunea for^ei centri-fuge la deplasarea pe o traiectorie circulars. Aprecierea capacitatiistatice de virare se face cu ajutorul graficului de dependents a diferenteiAStf dintre unghiurile de deviere la puntea din fata Sj si la puntea din

Verificarea parametrilor maniabiiitatii automobilelor 121
spate 82 si accelera^ia centrifuga ac, la misearea uniforms pe cere a au-tomobilului, cu volanul blocat,
ASS4=S!—82=f(ac), (8.4)
sau cu ajutorul dependentei dintre rezerva stabilitatii statice W si accele-centrifuga ac,
f(a<:), (8.5)
unde lcs este distanta de la centrul de greutate pinS la linia neutrS deintoarcere, situata la inaltimea centrului de greutate.
In fig. 8.8 este datS dependents marimilor Si, S2 A8n de acceleratiacentrifugS ac, care se obtine in urma inregistrarii si prelucrarii datelor.
IncercSrile se efectueazape o platforms betonatS, ori-zontala, netedS si uscata, cuun diametru de eel putin80 m, pe care se traseazS cuvopsea un cere cu raza de25 m. Aparatura utilizatatrebuie sa asigure inregistra-rea neintreruptS a unghiului g 8 Caracteristica de ^rare statlca a auto_de deviere la puntea dm mobilului.spate, a spatiului si timpuluiparcurs de un punct oarecare al automobilului, sau a unghiurilor de de-viere de la ambele punti si a acceleratiei centrifuge.
In timpul Jncercarilor, automobilul se deplaseaza pe cercul marcat, cuo crestere succesiva a vitezei dupS fiecare tura, incepind de la viteza mi-nimS stabilS de 3—4 km/h pinS la viteza limits (din conditii de securi-tate), mentinind valoarea acesteia constants pe intreg parcursul lungimiiunui cere.
Pentru inregistrarea timpului, spatiului si unghiului de deviere sepoate folosi roata a 5-a de constructie specials, care se monteaza subpuntea din spate a automobilului si se pune in legaturS cu un oscilograf.Deplasarea transversals a rofii a 5-a este permisS numai catre centrulde virare al automobilului.
Cunoscind datele constructive ale automobilului, raza de viraj la mis-care cu viteza minima, fara deviere, unghiul de deviere a puntii dinspate 8 2 la diferite viteze si calculind, pe baza datelor inregistrate, razelede viraj corespunzatoare diferitelor viteze de incercare (cu existenta de-vierii), se poate determina unghiul de deviere Sj si acceleratia centrifugaac si, prin urmare, graficul funcftei descrise de relatia (8.4) si arStatein fig. 8.8.
8.1.5. Determinarea capacitatii de virare dinamicaa automobilului
Capacitatea de virare dinamica se determina la deplasarea automobi-lului pe o traiectorie sinusoidalS (in slalom), marcatS cu eel pu^in saptejaloane dispuse coliniar pe axa drumului, la distanta S unul de altul,care trebuie sa fie egala cu: 10 m, la automobilele cu ampatamentul sub

122 Verificarea maniabilitatii fi stabilitatii automobileior
Acostomenful drumului -*- I
Fig. 8.9. Marcarea drumului la efec-tuarea deplasarii pe traiectorie in
forma de S.
2,7 m; 15 m, la automobilele cu ampatamentul de 2,7—3,5 m; 20 m, laautomobilele cu ampatamentul de 3,5—4,2 m; 25 m, la automobilele cuampatamentul peste 4,2 m (fig. 8.9). Incerearile se executa pe un drumbetonat, orizontal, cu suprafata neteda, curata, cu latimea de eel putin10 m si pa ambele parti cu acostamente dure de eel putin 2 m. Automo-bilul se echipeaza cu aparatura necesara pentru inregistrarea concomi-
tenta, in functie de timp, a rotiriivolanului si a axei longitudinale aautomobilului in raport cu axa dru-mului.
In timpul experientelor, automo-bilul se conduce printre jaloane, lao distanta cit mai mica posibil, cuviteza constants. Vitezele se schimbade la cea mai mare posibila, pina lacea mai mica (8—10 km/h), la inter-vale de 2—3 km/h, iar volanul seroteste lin si continuu, fara opririmai mari de 0,2 s sau smucituri in
sensul opus fata de rotatia necesara. Sectorul de masurare se parcurgede 3—5 ori si pe banda oscilografului se inregistreaza unghiurile de in-toarcere a volanului §i a axei longitudinale a automobilului in raport cuaxa drumului, precum si timpul necesar parcurgerii unui drum egalcu 3 S.
Capacitatea de virare dinamica este caracterizata de urmatorii para-metri: diferenta dintre unghiurile de deviere la puntea din fata §i dinspate AS; viteza maxima de retire a volanului Wj, in timpul parcurgeriisinusoidei, diferenta dintre valoarea reala s.i cea teoretic necesara a un-ghiului de intoarcere a volanului Ar^, pe o portiune de drum cuprinsaintre patru jaloane consecutive. Ca parametru ajutator se foloseste di-ferenta ASra dintre unghiurile de deviere ale puntilor, in momentul atin-gerii valorii maxime a unghiului de intoarcere a volanului. To^i aces.tiparametri se prezinta sub forma unor functii de acceleratia unghiularamaxima am la deplasarea pe sinusoida.
Aprecierea calitatilor de virare dinamice se face pe baza intirzieriirotirii automobilului 'in raport cu rotirea volanului, care se exprima prindiferenta unghiurilor de deviere ale puntilor din fata si din spate aleautomobilului la acceleratia unghiulara maxima a automobilului, in tim-pul miscarii pe traiectoria sinusoidala. Viteza maxima de rotire a vo-lanului in timpul parcurgerii traiectoriei sinusoidale si diferenta dintrenumarul de rotiri teoretic necesare ale volanului pe sectoral de masuraresi numarul de rotiri realizat practic servesc la aprecierea modului delucru al conducatorului auto experimentator.
8.1.6. Determinarea efortului la volanUs.urinta ac$ionarii sistemului de directie al automobilului se apre-
ciaza dupa' masurarea efortului la volan cind rotile de directie se intorcpe loc, la deplasarea pe o traiectorie ,,in opt" si la trecerea consecutivaa rotilor din stinga s.i din dreapta peste niste obstacole de forma si cudispunerea celor din fig. 8.10.

Verificarea parametrilor maniabilitfltii automobilelor 123
Fig. 8.10. Forma §i dimensiunilede gabarit ale obstacolelor pentrudeterminarea efortului la volan.
Manevra intoarcerii rotilor de directie pe loc se efectueaza pe o su-prafata betonata, orizontala, uscata, curata §i neteda. Forta la volan semasoara in timpul bracarii line a rotilor de directie din pozitia neutraspre dreapta s,i spre stinga (trecind prin pozitia neutra), pina ce acestease opresc in limitatoare. Aceste masurari se repeta apoi in succesiune in-versa, dupa ce in prealabil rotile au fost aduse pe o noua portiune dedrum. Daca sistemul de directieal automobilului este prevazut cuservomecanisme, masurarea efor-tului la volan se face cu motorulfunctionind, la o turatie cu apro-ximativ 20—30% mai mare decitturatia de mers in gol. In timpulincercarilor, efortul la volan se in-registreaza cu ajutorul unui volandinamometric (v. fig. 9.6, 9.7si 9.8).
Incercarile pentru masurareaefortului la volan in timpul depla-sarii se efectueaza pe o traiectorie,,m opt" trasata pe o platformabetonata uscata, orizontala §i cu-rata (fig. 8.11). La fiecare buclaa optului se dispune cite trei porfide 3,5 m, realizate cu ajutorulunor jaloane; dimensiunile traiec-toriei prezentate in fig. 8.11, a serefera la automobilele de per-soane cu mai putin de opt locuri §i la automobilele de bunuri cumasa totala maxima de 3,5 t, iar dimensiunile traiectoriei prezentate infig. 8.11, b se refera la toate celelalte tipuri de automobile. Automobileledin prima categorie trebuie sa parcurga traiectoria cu viteza de 25 km/h,iar cele dintr-a doua, cu viteza de 20 km/h. Ca parametru de aprecierea usurintei de actionare a volanului se considers valoarea medie a efor-turilor maxime aplicate la volan, obtinute in decursul a cite trei par-curgeri ale traiectoriei in ambele sensuri de miscare.
Masurarea efortului la volan se mai face si in timpul trecerii auto-mobilului peste obstacole de forma celor aratate in fig. 8.10, dispuse peo platforma betonata, orizontala si curata. Trecerea peste obstacole seface cu viteza de 20 km/h, consecutiv cu rotile din dreapta s.i din stinga,volanul fiind mentinut tot timpul nemiscat. Efortul la volan in acest cazse calculeaza ca medie aritmetica a trei valori, separat pentru rotile dindreapta si din stinga.
8.1.7. Determinarea razelor de viraj
Determinarea razelor de viraj, care caracterizeaza latimea fisiei de gra-barit, se efectueaza pe o platforma betonata, orizontala, neteda, uscata sicurata, suficient de mare pentru a permite virarea si manevrarea auto-mobilului. Incercarile au drept scop determinarea urmatorilor parametri
3,5m
a bFig. 8.11 Traiectoria ,,fn opt" pentru
determinarea efortului la volan.

124 Verificarea maniabilitatii fi stabilitafii automobilelor
Fig. 8.12. Parametrii de virajautomobilului.
(fig. 8.12): raza minima de viraj Rm^; raza gabaritica exterioara de virajRge; raza gabaritica interioara de viraj RKl si latimea de viraj Lv, data dediferen^a dintre cele doua raze gabaritice la valoarea lor minima, res-pectiv Lv=Rge—Rg. Toti acesti parametri se determina atit pentru vira-jul la dreapta, cit §i la stinga, cu rotile de directie bracate pina la limi-tatoare. Viteza automobilului in timpul incercarii trebuie sa fie constants
si stabila de 3—5 km/h, obtinuta intr-otreapta de viteze corespunzatoare.
Roata din fata exterioara virajului,dupa ce automobilul s-a inscris in vira-jul cu raza minima, se pulverizeaza cuvopsea sau praf de creta si in acest felpe platforma de incercare se inscriu ur-mele rotii respective sub forma uneitraiectorii circulare. Centrul de virajse determina prin masurarea diametru-lui cercului obtinut, in doua directiiperpendiculare una pe alta. Raza mi-nima de viraj se masoara de la acestcentru pina la mijlocul urmei lasate deroata considerate. Razele gabaritice sestabilesc prin oprirea automobilului inviraj si determinarea proiectiilor pe sol
ale punctelor extreme ale automobilului cu ajutorul unui fir cu plumb.Daca valorile parametrilor obtinute pentru virajul la stinga si la dreaptadifera prea mult, incercarile trebuie repetate dupa ce, in prealabil, s-aefectuat o reglare si verificare atenta a sistemului de directie.
8.1.8. Verificarea unghiurilor de montaj ale rotilor de direc^ieManiabilitatea si stabilitatea automobilului sint mult influentate de
unghiurile de montaj ale rotilor de directie si de corectitudinea trapezu-lui de directie. Unghiurile d'e montaj ale rotilor de directie au fost pre-zentate in fig. 4.3, iar metoda de determinare a valorilor respective estedata la § 4.4, impreuna cu aparatura necesara in acest scop (v. fig. 4.5).Asa cum s-a mai specificat, verificarea unghiurilor de montaj ale rotilorde directie trebuie sa preceada incercarile la stabilitate si maniabilitate(mai ales in cazul automobilelor prototip), dar constituie o operatie efec-tuata si cu ocazia lucrarilor de mentenanta preventiva, asigurind — inafara de parametrii de maniabilitate specificati — uzarea normala apneurilor si o conducere comoda a automobilului (v. cap. 9).
8.1.9. Determinarea unghiurilor maxime de bracare a rotilor?i a raportului de transmitere unghiular al sistemului de direc^ie
Unghiurile maxime de bracare ale rotilor de directie la virarea spredreapta si spre stinga, precum si unghiurile maxime de rotire a volanuluispre dreapta ocdf si spre stinga ocw se masoara cu ajutorul standului ara-tat in fig. 4.3, asezind ro^ile de directie pe discurile rotitoare 4, prevazute

Verificarea parametrilor momabilitcitii automobilelor 125
pe circumferinta cu gradatii din 0,5° in 0,5°, si aducindu-le in pozitiileextreme, pina la limitatoare, Unghiul de rotatie a volanului se masoaratrasind pe partea lui exterioara linii de reper din 45° in 45° si fixind pecaroserie o sageata corespunzatoare pozitiei neutre a volanului si linieide reper de pe volan.
Pentru determinarea raportul de transmitere unghiular al directieise roteste volanul spre dreapta pina la refuz si apoi in sens invers, pinala pozitia neutrS, cu opriri la fiecare 45°. La fiecare oprire se citesc pediscurile rotitoare unghiurile de retire a rotilor directoare. Dupa ce mS-surarea se repeta si in sens invers, cu datele ob^inute se construieste gra-ficul variatiei unghiurilor de bracare a rotilor de directie, functie deunghiul de rotire a volanului spre stinga §i spre dreapta.
Raportul de transmitere unghiular al directiei, in limitele unui unghide bracare a rotilor directoare pina la 20°, se determine pe baza acestuigrafic, ca semisuma a rapoartelor de transmitere obtinute la rotireaspre dreapta si spre stinga a rotilor de directie cu unghiul 9
*m=(a*+««)/2e, (8.6)in care ocdr si as( sint unghiurile de rotire a volanului spre dreapta si sprestinga, corespunzatoare unghiului 9, determinate de graficul 9—;f(a).
8.2. Verificarea parametrilor stabilitatii automobilului
Deplasarea automobilului in anumite conditii poate deveni instabilSatit in directie longitudinals, cit si in directie transversals. Pierderea sta-bilitatii longitudinale se manifests sub forma rasturnarii automobiluluiin raport cu una din puntile sale sau sub forma alunecarii longitudinalepe suprafata de rulare. Pierderea stabilitatii transversale se manifestssub forma rasturnarii in raport cu linia care uneste punctele de contactcu drumul ale rotilor de pe aceeasi parte a automobilului sau sub formaderaparii laterale.
Calitatile de stabilitate reprezinta tocmai posibilitatea automobiluluide a se opune acestor fenomene, respectiv de a se deplasa in diferiteconditii de drum fara a se rasturna si fara deraparea laterals sau alune-carea longitudinals a rotilor sale.
8.2.1. Verificarea stabilitatii longitudinale
Pierderea stabilitatii longitudinale a automobilului este posibilS la ur-carea sau coborirea pantelor mari, pe terenuri cu aderenta foarte mare.La automobilele obisnuite rampa maxima este limitata de forta de trac-tiune §i de aderenta cu solul la valori la care este exclus pericolul ras-turnarii longitudinale §i de aceea aceasta verificare are sens numai laautomobilele speciale, cu capacitate de trecere mare. $i in acest caz, ras-turnarea longitudinals nu este posibila, fiind precedata de alunecarealongitudinals, daca:
q><6//ig (in raport cu puntea din spate la urcare)<p<a/7ig (in raport cu puntea din fata la coborire),
unde <» este coeficientul de aderenta, o si b — coordonatele longitudinale

126 Verificarea maniabilitatii si stabilitatii automobilelor
ale centrului de masa si hs — inaltimea centrului de masa al auto-mobilului.
Incercarea de verificare a stabilitatii longitudinale se face pe drumuricu rampe mari, urmate de catre un palier. Automobilul verificat estetractat printr-un cablu de catre un alt automobil care se deplaseaza pepalier, cu aceeasi viteza. Momentul desprinderii de sol a rotilor din fataale automobilului tractat stabileste valoarea unghiului de stabilitate lon-gitudinala, parametru de comparatie cu alte automobile.
8.2.2. Verificarea stabilitatji transversale
Pierderea stabilitatii transversale se poate produce fie prin rasturna-rea laterala sub actiunea componentei transversale a fortei centrifuge ladeplasarea in viraj sau sub actiunea componentei paralele cu drumul agreutatii automobilului la deplasarea pe drum cu inclinare transversala,fie prin deraparea laterala a automobilului. Atunci cind inclinarea trans-versala a drumului este mare, rasturnarea laterala sau deraparea potavea loc si la mersul rectiliniu al automobilului.
Verificarea stabilitatii transversale se poate face fie prin determi-narea unor parametri constructivi care o influenteaza, fie prin deterrni-nari nemijlocite, atit in conditii de laborator, cit si pe parcurs.
Unghiul liinita de inclinare transversala a drumului la care inceperasturnarea laterala a automobilului este tg$r—B/2hg, iar unghiul limitade inclinare transversala a drumului la care incepe deraparea laterala aautomobilului este tgp<j=iq> si deci conditia ca rasturnarea transversalasa fie precedata de derapare (fenomen mai putin periculos) este
<p<B/27id, (8.7)
unde B este ecartamentul rotilor automobilului, hd — inaltimea centruluide greutate si cp — coeficientul de aderenta.
Determinarea pe cale analitica a unghiului de stabilitate transversalap, este destul de dificila, deoarece asupra acestuia actioneaza in plus ri-giditatea unghiulara a elementului portant al automobilului (cadru, ca-roserie) si deformatiile arcurilor si pneurilor, care creeaza o inclinare su-plimentara a maselor suspendate si, prin aceasta, se micsoreaza valoareaunghiului stabilitatii transversale. De aceea unghiurile stabilitatii staticetransversale a automobilului se recomanda sa fie determinate pe un banede incercare, de tipul celui aratat in fig. 8.13.
Acesta dispune de patru platforme inclinabile, care au o axa comunade retire si sint prevazute fiecare, in mod independent, cu actionare hi-draulica. Pe fiecare platforma sint montate traductoare electromagnetice,care se afla sub rotile automobilului incercat. Aceste traductoare, in mo-mentul desprinderii rotilor de platforma, deconecteaza sistemul hidraulicde inclinare si, prin aceasta, automat, opresc platforma sau platformelein momentul in care a fost atins unghiul static de stabilitate transver-sala. Retinerea automobilului de la rasturnare se realizeaza cu ajutorulunor cabluri legate la cilindrii hidraulici si la niste suporti special! aiplatformelor. Cilindrii hidraulici dispun de supape electromagnetice, careblocheaza un sistem de siguranta, concomitent cu oprirea inclinarii plat-

Verificarea parametrilor stcbilitatii auiomobilului 127
formelor. Cadrul standului 1 este montat pe fundatie si are pilonii desustinere 2, in capetele carora sint fixate axele de retire 3 ale celor patruplatforme 4. Aceste platforme se pot roti fie toate patru deodata, fie citeuna, fie cite doua in sensuri diferite. Aceasta permite sa se rezolve pestand si alte probleme legate de torsionarea caroseriei si deplasarea rela-tiva dintre subansamblurile transmisiei. Platformele se fixeaza in pozitie
Fig. 8.13. Vedere generala a standului de rasturnare.
orizontala cu ajutorul fixatoarelor 5, care concomitent blocheaza si re-teaua electrica de alimentare pentru sistemul de forta. Platformele seinclina cu ajutorul cilindrilor hidraulici 6, pina la 55° intr-o parte s.i 15°in cealalta parte. Pentru reducerea sarcinii asupra cilindrilor hidraulicila revenirea platformelor in pozitie orizontala sint prevazute cite douaacumulatoare hidropneumatice la fiecare platforma.
Cu ajutorul unghiului de stabilitate transversala pr, astfel determinat,se poate afla o forta orizontala Tmax care provoaca rasturnarea transver-sala a automobilului:
Tmax^Ga tg p,, (8.8)
unde GO este greutatea totala a automobilului.Cu ajutorul acestui parametru se pot face aprecieri, intr-o prima
aproximare, asupra calitatilor de stabilitate transversala ale automobile-lor, respectiv se considera multumitoare stabilitatea transversala dacapentru automobilele cu doua punti p,=32°, iar pentru cele cu trei punti
In afara unghiului static de stabilitate transversala, cu ajutorul stan-dului prezentat se pot rezolva si alte probleme, cum sint: determinarea

128 Verrficarea maniabilitatii si stabilitatii automobilelor
inaltimii centrului de masa, determinarea rigiditatilor unghiulare ale sus-pensiei si earoseriei, precum si determinarea unghiurilor de torsiune alecadrului s_i stabilirea deplasarilor unghiulare relative dintre puntile auto-mobilului, prin inclinarea platformelor in sensuri diferite. Unghiul sta-tic maxim de torsiune a automobilului sub actiunea greutatii proprii vaavea loc la desprinderea rotilor de pe platformele standului, dupa careinclinarea pe mai departe a platformelor nu mai influenteaza marimeaacestui unghi.
;
8.2.3. Verificarea stabilitatii automobilului la deplasareape traiectorii circulate $i in curbe
Unul dintre indicator!! principal! ai stabilitatii s.i maniabilitatii auto-mobilului este viteza maxima in diferite curbe s.i traiectorii circulare lacare are loc rasturnarea, deraparea laterals sau neinscrierea corecta in tra-iectoria impusa sau dorita de conducatorul auto. Acest parametru — vi-teza limita de rasturnare V^ — este comod pentru aprecierea calitatilorde stabilitate la diferite tipuri de automobile.
Incercarile se fac pe poligoane speciale (fig. 8.14) sau pe platforme cumarcaje speciale (fig. 8.15) acoperite cu beton sau asfalt. Pentru prein-timpinarea rasturnarii automobilului, pe latura acestuia dinspre exterio-rul curbei, se monteaza un dispozitiv de rezemare, prevazut cu o roata
Fig. 8.14. Poligon de incercare lastabilitatea in curba.
Fig. 8.15. Marcarea drumu-lui pentru incercarea pe
traiectorii circulare.
si cu un contact care inregistreaza momentul desprinderii rotii sau ro-tilor de pe sol. Viteza automobilului create la fiecare tura a poligonuluicircular cu 1—2 km/h, pina la atingerea valorii maxime (viteza de ras-turnare).
8.2.4. Verificarea stabilizarii rotilor de directie
Verificarea stabilizarii rotilor de direc^ie se face dupa viteza de reve-nire a acestora la iesirea din curba. Pentru aceasta automobilul se de-plaseaza cu viteza de 20 km/h, in asa fel incit roata exterioara din fa#i

Verificarea parametrilor stabilitatii automobilului 129
sa calce pe cercul cu raza de 15 m, desenat pe o platforma betonatasau asfaltata, cu suprafata neteda si uscata (v. fig. 8.15).
La un semnal, conducatorul lasa liber volanul automobilului si acestase Intoarce spre pozitia corespunzatoare mersului rectiliniu al automobi-lului. In acest timp, pe banda de oscilograf, se inregistreaza variatia un-ghiului sau vitezei de revenire a volanului in functie de timp. Deplasareaautomobilului continua cu o viteza constants pina la incetarea rotirii vo-lanului. Dupa aceea automobilul este oprit si volanul este adus in pozitianeutra. Prin prelucrarea oscilogramelor se determina vitezele medii aleautorevenirii volanului si ale stabilizarii rotilor de directie pentru treiparcursuri inregistrate in sens de dus si inters.
.
.
!'
• r !
•
9 — Metode §1 mijloace de Incercare
I!<1|M

DETERMINAREA USURINTEI DE CONDUCERE§1 CONFORTULU! SOFERULUI §1 PASAGERILOR
.
,
Usurinta de conducere si confortul asigurat soferului unui automobilconstituie factori constructivi cu rol deosebit in asigurarea randamentuluimuncii lui si securitatii circulatiei [25, 32]. Pe de alta parte, in cazulautoturismelor si autobuzelor (autocarelor), confortul oferit pasagerilorreprezinta o caracteristica functionala de prim ordin, mai ales in situatiautilizarii acestora in curse lungi sau in conditii ambientale excesive. Atitusurinta de conducere cit si confortul nu reprezinta parametri definibilicantitativ printr-un singur indicator numeric, ci constituie caracteristicide calitate de sinteza, iar determinarea acestora presupune masurari dincele mai diferite domenii ale tehnicii.
In mod uzual, usurinta de conducere se considera a fi asigurata degeometria dispunerii scaunului soferului in raport cu comenzile si alteelemente ale automobilului, de marimea eforturilor la comenzi, vizibili-tatea drumului, eficacitatea sistemului de iluminare s.i semnalizare, iarconfortul — de calita^ile scaunului ca element izolator la vibratii si sus-tinator al corpului cu presiune optima, de nivelul zgomotului interior,eficacitatea instala^iei de incalzire §i ventilatie a caroseriei (cabinei, salo-nului), etansarea caroseriei la gazele de evacuare, praf si apa. Evident, inceea ce priveste activitatea soferului, parametrii usurintei de conduceresi confortului se intrepatrund strins in asigurarea securitatii circulatiei.
In cazul automobilelor de mSrfuri, echivalentul confortului pasageri-lor il constituie conditiile de protejare a incarcaturii din caroserie la vi-bratii, socuri si alte acftuni ale mediului ambiant.
9.1. Determinarea parametrilor dimensional! $i ai organizariipostului de conducere
Parametrii dimensionali ai postului de conducere si ai locului pentrupasageri (dimensiunile interioare ale cabinei si caroseriei), a caror metodade masurare este descrisa in cap. 2, intervin in mod nemijlocit in asi-gurarea atit a usurintei de conducere, cit si a confortului. Pe baza ex-perien^ei constructorilor de automobile si a studiilor de ergonomie mairecente exista in prezent recomandari de valori numerice pentru uniisau altii din acesti parametri.
In cazul postului de conducere al autocamioanelor si autobuzelor,asemenea recomandari sint chiar standardizate in tara noastra deSTAS R 10666/1-76. Acestea constituie — asa cum de altfel mentioneazasi standardul amintit — coaditii minime si nu-si propun sa acorde un

Determinated parametrslor dimensional! 131
calificativ calitaftlor de ergonomie sub aspectul organizarii spatiale a pos-tului de conducere.
Este usor de constatat ca limitarea intr-un singur sens a unora dintredimensiunile specificate de standard nu exclude situatia realizarii unuipost de conducere neergonomic pentru o categorie relativ mare de soferi(din punctul de vedere al staturii), care totusi se inscrie in prevederilestandardului.
Din aceasta oauza este recomandabil ca, in afara de masurarile dimen-sionale stabilite la cap. 2, sa se f aca si unele aprecieri subiective, calitative,apelind in acest scop la soferi cu bogata experien^a de conducere si apar-tinind diferitelor grupe de straturi reprezentative. Pentru aceasta se vastabili un nivel de notare de la 1 la 5 si se va folosi nota medie rezultataca un atribut numeric al ergonomiei postului de conducere. Pentru o apre-ciere mai precisa este indicat ca subiectii sa circule cu automobilul respec-tiv eel putin 50—100 km, in conditii care sa permita cele mai variate regi-muri de mers (in mod ideal intr-un poligon de incercare), unice pentrutoti, iar notarile sa se acorde separat pentru diferiti parametri, ca: po-zitia scaunului in raport cu comenzile, calitatile lui specifice, eforturilela comenzi, vizibilitatea, zgomotul interior etc.
Considerentele de mai inainte se aplica, mutatis mutandis si la apre-cierea confortului locurilor pentru pasageri, ale caror dimensiuni, inceea ce priveste autobuzele, sint reglementate de STAS 10666/4-76. Me-todele de masurare sint aratate, de asemenea, in cap. 2.,
In ceea ce priveste postul de conducere al autoturismelor, pentru de-terminarea corectitudinii dispunerii scaunului in raport cu comenzile sepoate aplica metoda recomandata de norma interna^ionala ISO 3958-1977.Aceasta stabileste o infa§uratoare a distan^elor maxime de actiune aleunei miini a soferului asezat pe scaun, cu cealalta mina pe volan s.i pi-ciorul drept pe pedala de acceleratie, avind montata o Centura de sigu-ran^a cu trei puncte deprindere. Ac^iunea §oferuluiconsta din tinerea cu treidegete a unui buton de co-manda cu diametrul de 25mm, situat spre inainte fatade §ofer si manevrat pe ori-zontala.
In fig. 9.1 se pot urmaricaracteristicile geometriceale postului de conducere inraport cu punctul R al scau-nului §oferului (corespunza-tor articula^iei coxo-femu-rale a manechinului tridimensional STAS R 10666/2-76), cu lungimeagambelor corespunzatoare grupei de staturi reprezentative de 95%. Aces-tea se masoara cu scaunul reglat in pozitia normala de conducere ceamai coborita si mai retrasa posibil, specificata de constructor (punctul R).Toate celelalte reglaje ale scaunului sau volanului se vor stabili, de ase-menea, conform specificatiilor constructorului.9'
Punctul
Pedala deacce/eraf/e
•funcful calcii.
Fig. 9.1. Dimensiunile principals ale postului deconducere.

132 Determinated ufurintei de conducere
Metoda este aplicabila in limitele urmatoarelor dimensiuni caracteris-tice (v. fig. 9.1):
— unghiul de inclinare spre inapoi (5,— distant^ verticala dintre punctul R si
punctul calcii Hv— cursa orizontala a punctului R,
9— 33°;
130—520 mm;min 130 mm,330—600 mm;10— 70°;660—152 mm;530—838 mm.
— diametrul volanului D,— unghiul de inclinare a volanului a,— distanta orizontala a volanului Wx,— distanta verticala a volanului Wx,Configuratia geometrica a postului de conducere se exprima prin fac-
torul G (factorul caracteristic al structurii dimensionale), definit de re-latia
G=0,018 Hz—0,0197 p+0,0027 D+0,0106oc——0,0011 W*+0,0024 Wz+0,00277—3,0853, (9.1)
in care termenii literal! se inlocuiesc cu marimile corespunzatoare masu-rate (fig. 9.1), in unitatile de masura aratate mai inainte.
Infasuratoarele stabilite de norma definesc limitele in care trebuiesa fie amplasate comenzile spre a putea fi atinse de eel putin 95% dinpopulat^ia de soferi compusa din rapoartele de barbati/femei de 50/50,
75/25 'si 90/10 si saptev__^_ ^ | configuratii diferite
pentru postul de con-ducere (valori ale fac-torului G).
Alegerea uneia din-tre infasuratoare pen-tru un automobil dat seface in functie de va-loarea lui G determi-nata, dupa masurari,cu relatia (9.1) si rapor-tul barbati/femei con-si derat ca adecvat infunctie de destinatiaprioritara a automobi-lului.
Planul de referinti oriionfo! la ma/timea zeroFig. 9.2. Infa^urStoarea distantelor maxima de actiune
ale miinilor.
Infasuratoarele sintlocalizate in automobilin raport cu un sistemortogonal de plane de
ferinta: un plan orizontal ce trece prin punctul R, un plan vertical cetrece prin axa soferului si este paralel cu planul longitudinal de sime-trie si un plan vertical perpendicular pe axa longitudinala a automobi-lului, a carui distanta, pe orizontala, fata de punctul cdZcu este data derelatia
d=786—99 G. (9.2)Daca d—Hx<0, acest ultim plan de referinta se va gasi la distanta
data de relatia (9.2) in spatele punctului calcii, iar daca d—Hjc>0, planul"fi

Tabelul 9.1
lnfa§uratoarea distantelor de acfiune ale miinilor, tn mm, pentru automobilecu G<— 1,25 §i raportui populapilor barbati/femei 50/50
tnaltimea de-asupra punc-
tului H
800700
600500450
400350
300250200
1000
-100
Puncte situate spre exteriorul automobilului,In raport cu planul ce trece prin axa sofe-
rului
400
387463
519556567
574576
574567557
524474410
800
438506
555586596
600601
597590578544
250
456520
567598607
612914
612605596
566
200
470631
576606615
621623
622617608
581
100
490546
586609615
618616
611602590
50
497551686603604
601594
0
502556584589583
571555
Puncte situate spre interiorul automobilului Jn raport cuplanul ce trece prin axa soferului
0
493560
590914620
621619
'
BO
501562
605630636
637633
100
504566
611638645
648646639628613
200
495557604637649
656660
660657649
624584528
250
483546596631644
654660
662662658
639607561
800
468532
584622636
646654
658658656
640615567
400
426499
555595609
619625
626624618
593551493
500
377455
514553565
572574
572564551
510449367
600
449486498
506511
510506498
469423360
Obseruafie:Cifrele incadrate se voi folosi cu D-udenfa. corespunzind unor diferente mai mari de 25 mm intre modelul de de-
terminare §i valorile limita nominale mSsurate. Zonele albe ale tabelului corespund fie lipsei unor masurari, fieimposibilitatii stabilirii 'inor limite teoretice.

134 Determinarea usurintei de conducere
de referinta va fi considerat ca trecind prin punctul R. In fig. 9.2 se pre-zinta infasuratoarea pentru cazul d—Hx>0.
In tabele speciale se dau cotele punctelor infasuratoarelor in raportcu ultimul plan de referinta mentionat, pentru diferite valori ale distan-tei fata de planul de referinta orizontal si eel vertical longitudinal cetrece prin axa soferului, in functie de valoarea factorului G si raportulbarbati/femei. Pentru ilustrare, in tabelul 9.1 se prezinta astfel de datecorespunzatoare clasei de automobile avind G<—1,25 si raportul popu-latiilor barbati/femei de 50/50.
Se considera ca o comanda reala avind punctul central eel putin lanivelul infasuratoarei sau inapoia acesteia va putea fi ajunsa si actio-nata eel putin de procentajul specificat al populatiei considerate.
Pentru masurari este necesara recurgerea le un manechin tridimen-sional (v. fig. 3.15) si mijloace auxiliare de fixare a planelor si axelorde referinta. In general, sint necesare interpolari, deoarece punctele realese afla adeseori in ,,golurile" re^elei infasuratoarei definite de tabele.
9.2. Masurarea eforturilor la comenziCercetarile ergonomice au aratat ca pentru ca soferul sa conduca un
automobil cu oboseala minima, valorile eforturilor aplicate pe comenzitrebuie sa se gaseasca intre anumite limite. Masurarea valorilor reale aleacestor eforturi are deci ca scop obtinerea unei imagini a ergonomiei pos-tului de conducere din acest punct de vedere.
9.2.1. Masurarea eforturilor la manete si pedale
Metoda uzuala de masurare a efor-turilor la pedale consta in utilizareaunei pedale dinamometrice ce se fi-xeaza pe pedala cercetata si prin in-termediul careia for^a de actionare asoferului se aplica comenzii respective.Exists in acest scop pedale dinamome-trice special concepute (fig. 9.3) avindca anexa un aparat indicator. Dimen-siunile mici ale pedalei dinamometricede tipul aratat in fig. 9.3 modificafoarte putin condi^iile de actionare decatre sofer, ceea ce face utilizareaacesteia deosebit de comoda.
In lipsa unei astfel de pedale sepoate utiliza un traductor de for^a dedimensiuni mici si cu domeniul demasurare de eel putin 80 daN, asociatcu un amplificator adecvat si cu un
aparat indicator sau inregistrator. In acest caz, va trebui acordata o aten-tie deosebita fixarii traductorului pe pedala si aplicarii piciorului asupratraductorului insusi, pentru a se asigura pe de o parte actionarea axialaa acestuia, iar pe de alta — aplicarea efortului normal pe suprafata pe-dalei.
Fig. 9.3. Pedala dinamometrica tipBosch.

Masurarea eforturilor la comenzi 135
La efectuarea mSsurarilor trebuie avute in vedere urmatoarele:— ac$onarea pedalei sa se faca din pozitia cea mai convenabila a
scaunului (daca aceste este prevazut cu mijloace de reglare), pentru asi-gurarea corectitudinii aplicarii efortului si a controlului asupra do-zarii acestuia;
— actionarea comenzii sa fie oprita atunci cind operatia comandataa fost realizata (de exemplu, apasarea pedalei de ambreiaj trebuie opritade indata ce a avut loc debreierea, a pedalei de acceleratie — la atinge-rea deschiderii maxime a clapetei de acceleratie sau a cursei maxime acremalierei pompei de injectie, iar a pedalei de frina — la atingereaunei eficacitati de frinare prescrise sau deschiderea completa a supapeide aer); in caz contrar, exista riscul de a masura si raporta valori exce-sive la actionarea comenzilor, limitarea decurgind doar din forta fizicaa actionatorului.
Din cauza dificultatii sesizarii de catre experimentator a atingeriistarilor limita (cursei) la care actionarea trebuie oprita, se recomanda caaceste masurari sa se faca in timpul efectuarii de catre automobil a unormanevre specifice, in miscare. De exemplu, masurarea efortului la pedalade acceleratie se va ef ectua in timpul unor demaraje cu schimbari de vitezespre a asigura atingerea pozitiei pedalei de acceleratie corespunzatoareturatiei maxime. Pentru masurarea efortului la pedala de frina, starealimita va rezulta simplu, la automobilele echipate cu frine pneurnatice,masurind presiunea in camerele robinetului de frinare cu ajutorul unuimanometru. La automobilele echipate cu frine hidraulice si mai ales incazul celor neprevazute cu servoamplificator, valoarea efortului la pe-dala va fi aceea corespunzaitoare atingerii parametrilor prescri§i ai fri-narii. Astfel, de exemplu, daca parametrul prescris este spatiul de fri-nare, se vor efectua mai multe frinari, aplicind eforturi diferite asuprapedalei de frina, de la viteza initiala prescrisa, §i cu datele obtinute dinmasurarea efortului la pedala si spatiului de frinare (cu un aparat roataa 5-a) se va trasa (fig. 9.4) functia Sf—j(Fpedai^. Cu ajutorul acestei dia-grame, pornind de la valoarea Sf prescrisa, se determina comod efortul
Fig. 9.4. Modul de determinare a for^ei la pedala defrina a unui autoturism pe baza rezultatelor unor in-cercari de frinare de la viteza initiala de 80 km/h.
70
SO
50
30
if:
1
50,7m "V
(
1
1
1
11
*
Ipatiuldeficanforrrt
tey.13C'EF
^X
'flee/
fe
7/0
mars
Of/I/
Mine nil proprlu -2/0"
20 30 W 50.60 70 80Eforlul aplicatpe psdala defrina, datJ
Marci fenso-,metrics"
Spreopunk^amplified—!*
ioareFig. 9.5. Miner dinamometric cu marci
tensornetrice.
Car/7de fixare
mimefe
la pedala de frina pe baza caruia se va aprecia ergonomia actionarii.Evident, toate frinarile se vor efectua in conformitate cu prevederileexpuse la cap. 7.
In ceea ce prive^te masurarea eforturilor la manete, se pot utiliza mi-nere dinamometrice sau chiar manete dinamometrice construite ad-hoc

136 Determinated Uiurintei de conducere
cu ajutorul unor marci tensometrice rezistive si etalonate corespunza-tor (fig. 9.5). §i in acest caz trebuie avuta o grija deosebita pentru evi-tarea supraacftonarii, lucru realizabil mai ales in cazul manetei cutieide viteze, prin masurari facute din mers, cind limitarea actionarii se rea-lizeaza in mod firesc.
•
9.2.2. Masurarea efortului la volan•Necesitatea asigurarii repetabilitatii masurarilor, precum si a posibili-
ta^ii compararii diferitelor automobile din punctul de vedere al efortuluila volan, a facut ca acesta sa se masoare in timpul efectuarii de catreautomobil a unei manevre specif ice ,,in opt" §i al trecerii cu rotile uneiadin parti peste obstacole artificiale cu profil, periodicitate si viteza dedeplasare stabilite (v. §. 8.1.6 si STAS 6926/6-70).
Pentru masurarea efortului la volan se utilizeaza asa-numitele volanedinamometrice, care fie se monteaza in locul volanului automobilului, fiese aplica pe acesta in mod adecvat. Un exemplu de volan dinamometricde primul tip este aratat in fig. 9.6. Dupa cum se poate vedea, acesta este
rCoblurife de fa\ man/kfeiKomefr/ce
un v°lan obisnuit, pe ale carui spite meta-g lice s~au montat, la o distanta stabilita in
oplico'te raport cu butucul, trei marci tensometricerezistive.
Rotind volanul, spitele lucreaza la inco-voiere, eforturile unitare respective — de-terminate cu ajutorul marcilor si al uneipunti de amplificare adecvate — fiind pro-portionale cu momentul aplicat prin obadavolanului. La aprecierea rezultatelor masu-rarilor trebuie sa se tina seama de eventua-lele diferente intre diametrul volanului ori-ginal al automobilului si diametrul volanu-lui dinamometric utilizat pentru masurari.
In cazurile (destul de frecvente in prac-tica) in care volanul dinamometric dispo-nibil de tipul celui din fig. 9.6 nu poate in-locui volanul automobilului incercat, se vautiliza un volan dinamometric de construc-tie diferita, aratat in fig. 9.7. Pe volanulautomobilului incercat se prinde placa 1,avind mijloacele de fixare (coliere si bride)2, adaptabile la diferite marimi de volane,si un ax central pe care se monteaza butu-cul volanului dinamometric propriu-zis 3.Intre o spita a volanului dinamometric §iun reazem fixat pe placa 1 se monteaza,
tangent la circumferinta corespunzatoare unei distante stabilite de butuca punctului de fixare pe spi^a si perpendicular pe aceasta, traductorulde for^a 4, de tractiune-compresiune, cu dimensiuni mici ?i domeniu demasurare pina la 50 sau 100 daN.
Marco fensomefricanzistim
Fig. 9.6. Volan dinamometriceu marci tensometrice rezis-
tive.

Masurarea eforturilor la comenzi 137
3
Ac^ionarea sistemului de directie se face prin volanul dinamometric—traductor—placa de baza—volanul automobilului, iar efortul, masuratcu o punte de amplificare adecvata, poate fi folosit pentru determinareaefortului raportat la volanul automobilului. Aceasta solutie, mai univer-sala, are dezavantajul de a necesita o atentie deosebita la centrarea ce-lor doua volane si de a schimba conditiile de lucru ale soferului.
Exista, de asemenea, volane dinamometrice cu traductoare de cuplufn arbore (similar celui din fig. 9.6) sau in butuc (similar celui dinfig. 9.7), diferentele fiind evidentnesemnificative din punctul devedere al obiectivului urmarit. Inorice caz, intrucit masurarile deeforturi la volane se fac dinamic,sint necesare in mod obligatoriumijloace de inregistrare a efortu-lui, indiferent de tipul de traduc-tor utilizat.
Drept parametru de evaluarea us.urintei de actionare a volanu-lui se considera valoarea medie aeforturilor maxime aplicate la vo-lan, determinate din inregistrarileobtinute in decursul a cite treiparcurgeri ale traiectoriei in optsau ale pistei cu obstacole, in am-bele sensuri de miscare. In fig. Fig. 9.7. Volan dinamometric cu traductor
de9.8 se arata un exemplu de dia-grama Jnregistrata.
In unele cazuri, efortul la volan se masoara in stationare (intoarcerefn loc), de asemenea pe suprafete betonate, netede. Bracarea ro^ilor seface cit mai lin, de la pozi^ia neutra pina la pozitiile maxime extreme
Fig. 9.8. Diagrama efortului la volan in timpul a trei parcurgeri ale traseului ,,inopt". Valoarea efortului se considers a fi media fortelor Ft—Fg.
stinga si dreapta. Utilizind concomitent un volan dinamometric si un po-tentiometru rotitor actionat prin angrenaj sau curea de arborele volanu-lui, cu ajutorul unui inregistrator X—Y, se poate obtine diagrama de va-riatie a fortei la volan in functie de unghiul de irotire. §i din aceste apre-

138 Determinarea usurintei de conducere
cieri se vor exclude valorile maxime extreme ale efortului aparute caurmare a lovirii rotilor directoare, bracate la maximum, in limitatoare.Dupa fiecare masurare, automobilul se va deplasa cu putin spre inaintesi inapoi, pentru ca rotile directoare sa-si schimbe pozitia si suprafata deasezare,
9.3. Mosurarea vizibilitatii de pe locul sofsrului
Desi au existat si exista relativ numeroase metode de determinare avizibilitatii de pe locul soferului, problema gasirii unor indicator! adec-vati de apreciere a fost rezolvata destul de dificil si oarecum incomplet.Dificultatea provine din faptul ca acesti indicator! sint dependent! atitde geometria postului de conducere si a cabinei sau caroseriei, cit si dedatele antropometrice ale soferului. Solutia cea mai recenta, prescrisa deRegulamentul nr. 43 al C.E.E. a O.N.U. si de STAS 6926/5-80 pentruautoturisme, recurge la manechinul tridimensional (v. STAS 10666/2-76)in raport cu care se stabilesc unele zone de vizibilitate obligatorie prinparbriz.
In cele ce urmeaza se vor prezenta citeva variante de determinare avizibilitatii mai uzitate, urmind ca alegerea uneia sau alteia sa se facafunctie de tipul autoinobilului, mijloacele disponibile sau prevederile pro-gramului de incercare.
9.3.1, Determinarea cimpului de vizibilitate pe un ecransemicilindric
Aceasta metoda a fost descrisain STAS 6926/5-70 si odata cureactualizarea partiala a acestuia,in anul 1980, a ramas aplicabilanumai la autocamioane si auto-buze. Consta din pozitionarea, inraport cu scaunul soferului, aunui punct al ochilor (fig. 9.9), incare se dispune un bee puterniccare — aprins — contureaza peun ecran semicilindric, amplasatin fata automobilului si avind axaverticals trecind prin punctulochilor, limitele cimpului de vizi-bilitate.
Pentru simularea greutatii so-ferului, pe perna scaunului seasaza central o masa de 50 kg,sub forma unui corp cilindric cu
Fig. 9.9. Pozitia punctului ochilor in carese amplaseaza becul pentru determinarea
vizibilitatii de pe locul §oferului.
diametrul de 350 mm, avind suprafata inferloara, asezata pe perna, ra-cordata la partea cilindrica cu o raza de 30 mm. F'e acest corp se prindetija de sustinere a becului, in asa fel ca acesta sa se af le in planul de sime-trie al scaunului. Scaunul se regleaza astfel ca distanta minima dintremarginea posterioara a volanului si spatar sa fie de 370 mm, iar unghiu]

Masurarea eforturilor la comenzi 139
de inclinare a spatarului — daca acesta e reglabil — sa fie de 97°. Ecra-nul semicilindric are raza §i inaltimea de 3,5 m s.i se caroiaza vertical din10° in 10°, iar orizontal — din 500 in 500 mm. Acesta se dispune simetricfata de planul vertical ce trece prin punctul ochilor (caruia, deci, ii va co-respunde gradatia 0°). Atit ecranul, cit si automobilul se dispun pe un
Fig. 9.10. Trasarea epurii de vizibilitatepe ecranul semicilindric,la un autoturism.
platou orizontal si neted (fig. 9.10). Pentru o manevrare comoda ecranulse va realiza din panouri (sectoare) corespunzatoare la cite 45°.
Dupa incercare, epura limitelor de vizibilitate prin parbriz, prin zonaparbrizului din raza de actiune a stergatoarelor si prin geamurile lateraledin fata (atit cit apare ea pe ecran) se deseneaza desfasurata, marcindunghiurile corespunzatoare zonelor vizibile si invizibile (obturate destilpii parbrizului) la nivelul punctului ochilor, nivel reprezentat, de ase-menea, in epura.
O variants a acestei metode consta din utilizarea a doua becuri (co-respunzatoare celor doi ochi), in care caz pe ecran apar zone de penum-bra cu vizibilitate partiala (numai cu un ochi) si total invizibile, cu um-bra mai densa. Axa ecranului semicilindric se stabile§te la mijlocul dis-tantei dintre cei doi ,,ochi", egala cu 65 mm.
Cu ajutorul metodelor descrise se poate obtine o reprezentare obiec-tiva a vizibilitatii, dar interpretarea epurelor corespunzatoare este difi-cila, mai ales in ceea ce priveste efectul zonei obturate de stilpul dinstinga al parbrizului. Cercetarile au aratat, de exemplu, ca un unghi deobturare de numai 6° pe linia ochilor din epura de vizibilitate poateacoperi total un autoturism ce vine din sens opus, aflat la distan^a de11 m. Din aceasta cauza, metodele se pot utiliza cu eficacitate numai laincercari comparative.

140 Determinated ufurinfei de conduce:*
9.3.2. Determinarea cimpului de vizibilitatein planul drumului
In acest caz, suprafata pe care se proiecteaza limitele cimpului devizibilitate cu ajutorul becului dispus in punctul ochilor este insSsJ su-prafata de as.ezare a automobilului. Pentru buna desfSs.urare a mSsurariieste necesar ca automobilul sa se plaseze pe un platou neted, orizontal,betonat sau asfaltat, iar epura respectivS sa se raporteze la un sistem dereferinta avind originea In proiectia pe platou a punctului ochilor, o axaparalelS cu planul longitudinal de simetrie al automobilului s.i cealaltS —perpendiculars pe aceasta. Limitele de vizibilitate se vor trasa cu cretape suprafata platoului. Pentru pozitionarea comodS a diferitelor puncteale limitei de vizibilitate, zona de platou situatS la 10 m inainte in raportcu axa de referintS transversals si la 5 m la dreapta §i la stinga axeide referintS longitudinale se va caroia la intervale de 1 m. Evident, inpractica se va desena mai intii caroiajul respectiv pe suprafata platoului§i apoi se va aseza adecvat automobilul in raport cu caroiajul.
Pe desenul trasat pe baza epurei (recomandabil la scara 1 :100) se vamarca limita extremS a zonei invizibile pe linia corespunzatoare punc-
tului ochilor, precum sj in fi-§ia de plan egala cu latimeaautomobilului, dinaintea aces-tuia. Se recomandS mentiona-rea §i a limitei de vizibilitatelaterals stinga, la zona de ra-cordare a conturului acopeririidate de stilpul parbrizului cucea a portierei din stinga.
Nici aceasta masurare nudefine^te strict calitatea vizibi-litStii s.i, mai ales, nu eviden-
Unqhiul ftaza suficient efectele obtu-k vedera rarii date de stilpul parbrizu-
lui. O variants menita sa eli-mine acest dezavantaj constadin raportarea cimpului de vi-zibilitate a planului drumuluila un semicerc cu central inproiectia punctului ochilor peacest plan §i cu raza de 12 m(fig. 9.11).
Cimpul de vizibilitate sprefata este considerat ca fiindsuficient daca conturul zoneiinvizibile delimitate de ele-
n/sfanfa mediedintre e/oua
acoperir!
Lofimeo maxima o acopeririiconform re laflet (9.3)
Fig. 9.11. Determinarea vizibilitatii drumuluisu ajutorul unui semicerc de referinta de pe
suprafata de as.ezare.
mentele constructive ale automobilului, exclusiv stilpii parbrizului si altimontanti, se incadreaza in limitele acestui semicerc (efectul^oglinzilorretrovizoare se neglijeaza). Se impune ca vizibilitatea libera in fata safie asigurata pentru un unghi de vizibilitate al carui arc sa determine pesemicerc o coarda de eel putin; 9,5 m. In limitele acestui unghi se admit

Masurarea vizibilitatii de pe locul soferului 141
eel mult doua acoperiri (obturari) datorate unor montanti. Pe intregulsemicerc se recomanda sa nu existe mai mult de 6 obturari.
Latimile admisibile, masurate pe semicercul de referinta, ale obturari-lor datorate unor montanti nu trebuie sa depaseasca valorile date de re-latia
ZmaJ=a/(6-65) [m], (9.3)
in care a este distanta de la punctul ochilor la elementul obturant, inmm, iar b — latimea in mm, a elementului ce impiedica vizibilitateasoferului. In cazul cind latimea elementelor obturante este mai mare de80 mm, se impune ca intre centrele acoperirilor, pe cercul de vizibilitate,sa existe o distanta (pe coarda) de minimum 2,5 m.
Norma care defineste metoda de masurare prezentata mai inaintecontine si alte indicatii ce definesc mult mai complet calitatile de vizi-bilitate ale automobil'ului, inclusiv recomandari cu caracter constructivprivind parbrizele, parasolarele etc. Recurgerea la aceasta metoda demasurare se poate considera recomandabila la cercetarile la care regle-mentarile STAS 6926/5-80 nu sint obligatorii, sau ca un complement lamasurarile efectuate conform standardului respectiv.
9.3.3. Determinarea unghiurilor de vizibilitate
Unghiurile de vizibilitate in plan orizontal se pot determina, asa cums-a aratat, din epura de vizibilitate trasata pe un ecran semicilindric.Spre a avea in vedere si vizibilitatea prin geamurile laterale si din spate,masurarea descrisa la § 9.3.1 se va repeta — in cazul autoturismelor —si cu automobilul asezat cu spatele spre ecran, cele doua epure racordin-du-se adecvat spre a oferi o imagine de ansamblu a vizibilitatii in planulpunctelor ochilor (fig. 9.12). Din figura rezulta evident si semnificatiaunghiurilor de vizibilitate in plan vertical longitudinal si transversal sia notatiilor corespunzatoare. Masurarea acestor unghiuri se face cu aju-torul ecranului semicilindric si al unor panouri mobile amplasate la dis-tan|:e convenabile de automobil, trasind, bineinteles, si contururile epureide vizibiltate pe suprafata de asezare. Se vor utiliza, de asemenea, riglegradate, rigle ajutatoare, clinometre etc., care sa permita fie masurareadirecta a unghiurilor, fie determinarea unei functii trigonometrice aacestora.
Legate de unghiurile de vizibilitate sint si unele lungimi caracteris-tice. La aceasta se mai adauga uneori distanta de la partea frontala aautomobilului, sau de la proiectia pe suprafata drumului a punctuluiochilor, la proiectia punctului in care latura superioara a unghiului devizibilitate longitudinala spre fata atinge inaltimea de 5 m.
9.3.4. Determinarea cimpului de vizibilitate al soferuluiprin suprafetele normative ale parbrizului
O metoda de determinare cantitativa, repetabila, a vizibilitatii de pelocul soferului, tinind seama de date antropometrice bine precizate, defaptul ca vederea este in realitate binoculara iar soferul roteste capul

Fig. 9.12. Unghiurile de vizibilitate ale unui autoturism in plan vertical §i orizontal.
• < s
"^-i3?; «
•S*
3 ^V9 V">\i . /

Masurarea vmbilitdjii de pe locul joferuiui 143
la observarea spatiului dinaintea sa, a fost stabilita de Regulamentulnr. 43 al C.E.E. a O.N.U., cu aplicabilitate la autoturisme. Metoda a fostpreluata de STAS 6926/5-80, de asemenea pentru autoturisme, iar stan-dardul GOST 22893-77 a adaptat-o pentru autocamioane si autobuze.
Pentru aplicarea acestei metode este necesara utilizarea unui ma-nechin tridimensional echipat cu un dispozitiv special, precum si cunoas-terea din documenta$ia de constructie a automobilului a punctului R<v. § 9,1.), a plajei de reglare, pe verticala si orizontala, a pozitiei scau-nului soferului si a unghiurilor de inclinare ale spatarului acestuia. Inraport cu toate aceste date constructive, utilizind un sistem de plane dereferinta legat de asemenea de constructia automobilului, se definesc oserie de puncte de referinta specifice, si ,,se traseaza" pe suprafata par-brizului asa-numitele suprafefe normative ce trebuie s.terse de lamelestergatoarelor de parbriz in proportie de 99»/o si 75%, unghiurile de vi-zibilitate in plan orizontal §i vertical- longitudinal, precum si unghiurile
Fig. 9.13. Schema de principiu a dispozitivului de trasare acimpului de vizibilitate cu tija telescopica.
de obturare a vizibilitatii de catre stilpii parbrizului. Pentru inscriereapunctelor de referinta ?i trasarea limitelor suprafe^elor normative, petija ce materializeaza linia de referinta a manechinului tridimensional semonteaza un dispozitiv cu posibilitati de reglare pe orizontala §i verticala{fig. 9.13, a), prevazut cu un aparat de trasare mecanic, cu tija telesco-pica (fig. 9.13, 6), optic, cu ocular sau cu proiec^ie de lumina.

144 Determinated usurintei de conducere
Inainte de masurarile propriu-zise de vizibilitate se verifica daca po-zitia punctului H al scaunului se afla in domeniul stabilit in raport cupunctul R, precum §i unghiul de inclinare al spatarului scaunului. Acestemasurari sint descrise detaliat in STAS 10666/2-76 (v. fig. 3.15 si § 3.2.3).Manechinul tridimensional va fi incarcat corespunzator unei persoane cumasa de 75,6 kg. Pe suprafata parbrizului se lipeste hirtie milimetrica pecare se deseneaza conturul zonelor sterse de lamele stergatoarelor deparbriz, precum si linii situate echidistant la 25 mm de marginea ,,zoneitransparente" a parbrizului. Reglarea dispozitivului in plan longitudinalse face in funcfte de unghiul constructiv de inclinare a spatarului scau-nului, iar in plan vertical — la cotele Vt si V2 prescrise de Regulament,respectiv STAS 6926/5-80.
Dispunerea dispozitivului pe manechin este ilustrata in fig. 9.13, a,evidentiindu-se faptul ca elementele extreme ale cimpului de vizibilitatese stabilesc in raport cu ,,elipsele de dispersie" ale punctelor ochilor, re-
Fig. 9.14. Trasarea punctelor de referin^a §i a zonelor normative pesuprafata parbrizului §i determinarea unghiurilor S de obturaredatorate stilpilor parbrizului din dreapta §i stlnga; in paranteze, pen-tru punctele caracteristice, se indica pozitiile corespunzatoare din
fig. 9.13.
zultate ca urmare a reglajelor scaunului si tolerantelor de fabricatie aleautomobilului. In fig. 9.13, 6 se reprezinta dispozitivul de trasare meca-nica utilizat de NAMI (U.R.S.S.). Gaura 2 din placa 1 a dispozitivului(fig. 9.13, 6) corespunde cu punctul / din fig. 9.13, a, iar gaura 3 — cupunctul //. Gaura 4 din placa 1 corespunde cu punctele Vl sj V2 dinfig. 9.13, a, ce caracterizeaza pozitiile extreme ale ochilor pe inaltime.

Masurarea vfzibilitatii de pe locul soferului 145
In gaurile 11 si 12 ale placii 1 se monteaza piesa 15 in forma de T, avindgaurile 8 si 14 distan^ate la 65 mm, eorspunzatoare ochilor soferului, si
de la piciorul T-ului (aflat in figura in gaura 12), corespunzator gi-tului, la distanta de 104 mm de ,,ochii"8 si 14. Pe scalele unghiulare 13 semasoara unghiul de rotire a capului,la masurari avindu-se in vedere ca so-ferul poate sa priveasca lateral, fara aintoarce capul, in limitele a maximum30°. Pe scalele unghiulare 7 si 10 semasoara unghiurile de vizibilitate inplan orizontal si respectiv, vertical.
Cu piesa 15 in T montata consecu-tiv in punctele 11 sj 12 si aparatul detrasare 6 montat de fiecare data ingaurile 8 si 14, se masoara unghiul deobturare datorita stilpilor parbrizuluidin dreapta si, respectiv, din stinga(fig. 9.14, b). Valoarea maxima admi-sibila a acestui unghi este de 6° lastinga §i 4°30' la dreapta. Cu aparatulde trasare montat cu boltul 5 in gaura4, la inaltimile extreme de dispunerea dispozitivului pe manechin (punctele^i §i ^2), se delimiteaza, superior §iinferior, cu tija 9 inclinata la unghiu-rile aratate in fig. 9.14, a, zonele cetrebuie §terse de stergatoarele de par-briz in propor^ie de 75o/0 (S^ §i 99%(S2), precum §i punctele de referinfdverticals superior si inferior A s.i Bdedesubtul planului orizontal. Cu apa-ratul montat, consecutiv, in gaurile(fig. 9.14, a), corespunzatoare unuiunghi de 7° deasupra §i respectiv de 6°2 si 3 se delimiteaza lateral spredreapta si stinga suprafeljele 5j si S2mentionate si punctul de referinfa ori-zontal situat la un unghi de 17° sprestinga fata de planul longitudinal, no-tat cu D in fig. 9.14, a si fig. 9.15. Infig. 9.15 se prezinta epurele supra-fetelor normative si punctelor de re-ferinta trasate prin metoda descrisapentru citeva automobile incercate.
Instalatia aratata in fig. 9.13 se poate monta in caroserie si fara ma-nechin, demontind scaunul soferului si introducind in locul acestuia unsuport rigid adecvat, care sa permita amplasarea aparaturii si efectuareareglajelor corecte in raport cu punctul R.10 — Metode ?i mijloace de inceroare
f
Fig. 9.15. Epurele zonelor norma-tive si punctele de referinta ale
parbrizelor la citeva automobile:Si — zona normativa pentru suprafatade parbriz ce trebuie §tearsa In pro-portie de 75%; Sj — zona normativa pen-tru suprafata de parbriz ce trebuie stear-sa In proportie de 99%; S3 — zonS deparbriz ne§tearsa din cauza desprinde-rii lamelei stergatorului; D — punctul dereferintS orizontal; 1 — conturul zone! deparbriz stearsS de stergator; 2 — liniaaflata echidistant la 25 ram de marginea
suprafefei transparente a parbrizului.

146 Determinarea usurintei de conducere
9.4. Determinarea eficacitafii sistemului de iiuminare exterioarasi semnalizare
Eficacitatea sistemului de iiuminare exterioara si semnalizare depindede dimensiunile de montaj si dimensiunile suprafetelor active ale faru-rilor si lampilor de semnalizare, de vizibilitatea geometrica, determinatede amplasarea lampilor pe caroseria sau sasiul automobilului si vizibili-tatea fiziologica asigurata de ansamblul corp de iluminat — dispersor. Infunctie de acesti parametri, in tabelul 9.2 se prezinta grupat tipurile deincercari aplicate diferitelor elemente ale iluminarii exterioare, in con-formitate cu prevederile STAS 6926/18-70.
Tabelul 9.2Tipurile cle incercari pentru verificarea iluminarii exterioare a unui automobil*
Tipul de luminl de semnalizare
Incercarea
Verificarea dimensiuni-lor de montaj
Verificarea dimensiuni-lor suprafetei active
Determinarea vizibili-tatii geometrice
Determinarea vizibili-tatii fiziologice
Verificarea montajuluiMasurarea caracteristi-cilor fotometrice
OJiQ,
1a0)
2af*
-f
•f
—
—+
+
KB
•HIa•au
3cafa
+
—
—
——
£I0)-a<3J
1°i*fe.f+———
+ +
ii OS QSB ,.aj cs ^*
«) CJ.2J'O -O -^
^ OJ g'8,«g_.
J G 'C N
+
—-|-
+—
+
i1 0C Jl
V. rfl
*C *oaj -u
>C3 CTJ ETJJ G G
+
—
+
-f-
—
+
1
£*'D.
T3 w
1J 3)
||i-i cj
+
—
+
+—
+
S.2" t?W "
*C t3CJ D
11G3>TO CoJ G
+
—
-f
-j-—
+
•aij«
cs
a? 4^
Ifi3'S
—
—_
+—
+
CJ
,54 H> .K'-is ^o u^ "HQ tl
+
_
-j-—
—
* Incercarea notata cu + se executa.
9.4.1. Verificarea dimensiunilor de montaj
Dimensiunile de montaj specifice diferitelor lumini de semnalizarecare se recomanda in STAS 6926/18-70 a fi masurate sint date in ta-belul 9.3. Semnificatia diferitelor dimensiuni este evidenta.
Inainte de efectuarea masurarilor propriu-zise va trebui verificat dacastarea de incarcare a automobilului si dispunerea incarcaturii in auto-mobil este cea prevazuta, deoarece dimensiunile verticale sint, evident,functie de sageata suspensiei si inclinarea longitudinals a caroseriei.Principalele dimensiuni de montaj sint normalizate de STAS 8825-71 iarpe plan international de recomandarea ISO/R 303.
9.4.2. Masurarea suprafetei active a dispozitivelor de iiuminare
Suprafata activa a unui dispozitiv de iluminat se considers a fi pro-iectia suprafetei de iiuminare a acestuia pe un plan vertical perpendicu-

Determinated eficacitatii sistemului de iluminare exterioara 147
Iar pe (sau paralel cu) planul longitudinal de simetrie al automobilului.Aceasta masurare se face pe baza de trasaje, cu o precizie de pina la1 cm2.
Dimenslunile de montaj masurate in mod uzual la verificarea iluminarii exterioare*
Tipul de lumini de semnalizare
Tabelul 9.3
Dimensiunea masurata
Distanta de la marginea in-ferioara a suprafetei activepina la suprafata drumului
Distanta de la marginea su-perioara a suprafetei activepina la suprafata drumului
Distanta de la marginea late-rala a suprafetei active pinala gabaritul lateral al auto-camionului
Distanta, pe orizontala, intremarginile inferioare ale su-prafetelor active
3a1a£
I
-j-
+
4.
—
*S.o98)
•C
13hafa
+
+
Jf
—
aCU
•o0
t! oS G
S,s
—
—
—
—
i ft :£.S ̂ 'N
l«%tj 'CJ
III« ssjj G O
_f_
+
-|,
—
S njW «
"Cf T3
S S c u
SacxS C8.O
+
+
4-
—
§j(TJ"'at3 re1j CD
S K̂)CI3 CS
+
+
—
—
,1sg"*l0^"•85 g
105 03<4 C
+
+
4-
+
CJ «>.aisa u
CU
+
+
4-
+
* Dimensiunea notata cu + se mascara.
9.4.3. Determinarea vizibilitatii geometrice a dispozitivelorde iluminare si semnalizare optica
Vizibilitatea geometrica a dispozitivelor de iluminare §i semnalizareoptica este definita de unghiurile maxime, masurate in plan orizontal sivertical (longitudinal si transversal), sub care acestea pot fi vazute deun observator exterior. Pentru masurarea comoda a acestor unghiurieste bine ca automobilul sa se aseze pe o suprafata caroiata, pe care, cuajutorul unor rigle gradate si tije ajutatoare, se pot stabili comod punc-tele ce determina o functie trigonometries a unghiului cautat. In uneiecazuri este preferabil sa se materializeze, cu ajutorul unor tije sau rigle,laturile acestor unghiuri, iar valoarea lor sa se masoare cu un clinometru(in cazul unghiurilor in plan vertical).
Unghiurile de vizibilitate se definesc in raport cu planele paralelecu planul longitudinal de simetrie (stinga-dreapta) si cu un plan paralelcu planul de baza (sus-jos). Valorile acestora sint normalizate de reco-mandarea internationala ISO/R 303 si de standarde nationale sau con-ditii tehnice specifice diferitelor tipuri de automobile.
10'

148 Determinarea usurinfei de conducere
9.4.4. Determinarea vizibilitafli fiziologice.
Vizibilitatea fiziologica se determina pentru luminile de semnalizares.i iluminarea numerelor de circulatie, precum si pentru dispozitivelereflectorizante. Se apreciaza prin distan^a de la care o persoana cu vazulnormal remarca luminile de semnalizare si poate citi numarul de circu-latie. Determinarile se fac ziua si noaptea (fara luna) pentru luminilesemnalizatoare de direc^ie s.i lampile stop si noaptea pentru celelalte lu-mini de semnalizare si dispozitivele reflectorizante. Inainte de masurarese verifica daca corpurile de iluminat sint de puterea prescrisa.
Pentru eliminarea unei aprecieri subiective se recomanda ca aprecie-rea vizibilita^ii fiziologice sa se faca in aceleasi conditii de catre trei per-soane cu vazul normal.
Vizibilitatea fiziologica este, de asemenea, normata de recomandareaISO/R 303 si de standarde sau conditii tehnice nationale.
9.4.5. Verificarea reglajului farurilor
Aceasta verificare constitute o operatie repetata periodic in decursulexploatarii unui automobil. Din punctul de vedere al incercarii automo-bilelor reprezinta, in primul rind, o operatie preliminara verificarii foto-
metrice a farurilor (v. §. 9.4.6.).!
X
-h; Litniia
super/oaro a umbreiwLi mi fa inferioara
"7, o umbrei
Verificarea consta din deter-minarea limitelor dintre luminas.i umbra pentru lumina difuza-ta de farurile principale (fazade drum s,i faza de intilnire) s,ifarurile de mers inapoi, pe unecran de masurare vertical, per-pendicular pe planul longitudi-nal de simetrie al automobilu-lui $i amplasat la distanta de25 m de marginea anterioara asuprafetei active a farurilor. Infig. 9.16 §i 9.17 se arata modulin care se traseaza corect, prinparametrii masurati x, y, z s.ia limita dintre lumina ?i um-bra pe ecran, pentru faza deintilnire a unor faruri simetrices.i, respectiv, asimetrice.
Ca §i la masurarea dimen-siunilor de montaj, inainte demasurari se va verifica sta-rea de incarcare a automobi-lului. De asemenea, se va veri-
fica starea de incarcare a bateriei de acumulatoare, care trebuie sa fieincarcata 100«/o din capacitatea nominala. Se verifica daca puterea si ten-siunea de alimentare a diferitelor corpuri de iluminat este cea prevazuta
Fig. 9.16. Verificarea montajului fazei deIntilnire simetrice:
h—h — urma planului orlzontal trecJnd princentral focal al farului; v—v — urma planului
vertical treclnd prin central local al farului.
I"a umbrei
lim/fa inferioars
Fig. 9.17. Verificarea montajului fazeide intilnire asimetrice:
h—h — urma planului orizontal treclnd princentrul focal al farului; v—v — urma pla-nului vertical treclnd prin centrul focal al
farului.

Determinarea calitatilor de confori ale scauneior 149
sau, asa cum se recomanda in STAS 6926/18-70, se monteaza pe auto-mobil corpuri de iluminat etalon. Caracteristicile acestor lampi etalon(puterea si fluxul luminos) in functie de tipul farului (faza) si tensiuneala bordul automobilului sint date de Regulamentul nr. 1 al C.E.E. a/~> TIT TTO.N.U.
9.4.6. Masurarea caracteristicilor fotometrice ale lampilor
2250 2250
Fig. 9.18. Punctele ?i zonele I—IV demasurare a iluminarii ecranului de fazade intilnire simetrica a unui far princi-
pal de automobil:h—ft — urma planulul orizontal treclnd princentrul focal al farului; v—v — urma planului
vertical trecind prin centrul focal al farului.
3960 3960
Cu aceleasi lucrari si verificari preliminare, in acelasi mod si de celemai multe ori succedind imediat verificarii reglajului farurilor, se ma-soara si intensitatea iluminarii(iluminanta) acestora. Pe pa-noul dispus la 25 m inainteapartii frontale a suprafe^eloractive se traseaza patru zonedistincte (fig. 9.18 si 9.19), iarin punctele marcate se dispuneun luxmetru a carui suprafataactiva poate fi inscrisa intr-unpatrat cu latura de 65 mm.
Verificarea farurilor de cea-ta se face la fel ca a fazei deintilnire a farurilor principale,folosindu-se in acest scop lampietalon ce emit lumina alba saucolorata, in conformitate cu pre-vederile intreprinderii construc-toare sau cu prescriptive legaleaferente.
In STAS 6926/18-70 se maiprevede masurarea intensitatiiiluminarii placutelor cu numa-rul de circulate, precum si alampilor de semnalizare si stop.Aprecierea acestora se face pebaza valorii intensitatii lumi-noase maxime, in limitele un-ghiurilor de vizibilitate.
9.5. Determinareacalitatilor de confortale scauneior
Fig. 9.19. Punctele ?i zonele de masurarea iluminarii ecranului de faza de intilni-re asimetrica a unui far principal de
automobil:h — ft — urma planului orizontal trectnd princentrul focal al farului; v— v — urma planu-lui vertical treclnd prin centrul focal al fa-
rului.Iluminarea, Ix, pentrucirculatia pe dreapta
In afara de aspectele dimen-sionale si cele legate de ampla-sarea scaunului in raport cu co-
PunctulRSOI,0wv*q
I5B
50R25t25RZona IZona IIIZona IV
=£0,63=1,5
<20
'7
menzile si alte elemente constructive aferente postului de conducere, laasigurarea confortului scaunului contribuie in mod deosebit de impor-tant calitatile lui de izolator la vibratii si de sustinator al corpului safe-

150 Determinarea usurinfei de conducere
rului (sau pasagerilor) cu incarcari specifice mici si juridicios aplicate di-feritelor zone.
9.5.1. Determinarea calitatilor de izolator !a vibratiiale scaunului
In abordarea oarecum traditionala, eficacitatea izolarii la vibratii asoferului (si evident a pasageriior) este considerata ca o components amersului lin al automobilului. In acest sens, este, de altfel, redactata siincercarea specif ica prevazuta de STAS 6926/13-74. Cu toate acestea, tre-buie facuta diferenta intre mersul lin ca trasatura constructive, derivindnemijlocit din oscilatiile masei suspendate a automobilului in ansamblu(calitatile suspensiei), ale caror determinari constituie obiectul principalal standardului mentionat, s.i vibratiile pe scaunul s,oferului, care sintrezultatul ,,filtrarii" oscilatiilor masei suspendate de catre sistemul osci-lant reprezentat de scaun. De cele mai multe ori, nu mersul lin in sem-nificatia aratata defineste vibratiile transmise de scaun corpului s,oferului,ci potrivirea dintre parametrii oscilatiilor proprii ale masei suspendatea automobilului si ale scaunului, cu sof erul asezat pe el. O apropiere afrecventelor proprii ale celor doua sisteme oscilante poate duce la feno-mene de rezonanta ce fac scaunul imposibil de utilizat. Cunoasterea frec-ventelor proprii ale suspensiei automobilului si scaunului reprezinta deaceea o conditie preliminara a unei aprecieri cantitative si calitative areusitei unui scaun din punctul de vedere al izolarii la vibratii.
Determinarea caracteristicilor oscilatiilor proprii ale masei suspen-date a automobilului. In mod uzual, din punctul de vedere al mersuluilin, intereseaza valoarea accelera^iilor inregistrate in diferite puncte alecaroseriei §i in diferite conditii de mers. Pentru masurarile ce se prezintain acest capitol este suficienta insa determinarea frecventei proprii amasei suspendate si, auxiliar, a coeficientului de amortizare relativa alsuspensiei. Ambii parametri se pot determina daca se inregistreaza va-riatia in timp a deplasarii sau acceleratiei oscilatiilor libere ale masei sus-pendate ce revine suspensiei fiecarei roti a automobilului. In cazul auto-mobilelor cu mai mult de doua osii s.i cu suspensie la fiecare osie, se vor
avea in vedere oscilatiile pe ver-ticala si de tangaj al unui punctsituat in apropierea centrului demasa al masei suspendate.
Cel mai frecvent, automobiluise aduce in starea de oscilatie li-bera prin metoda ,,caderil«. Osiacorespunzatoare suspensiei cerce-tate se ridica cu ajutorul unei ma-carale sau pod rulant, pina ce ro-tile respective ajung la 150—
200 mm distanta de sol. Cu ajutorul unui mecanism cu declansare brusca,introdus pe cablul de ridicare, se lasa sa cada pe sol partea ridicata aautomobilului. Un traductor de acceleratie amplasat pe sasiu sau caro-serie, deasupra osiei, va transmite unui sistem de inregistrare, cu bazade timp, variatia acceleratiei in timpul oscilatiilor libere (fig. 9.20).
,---"*
s^ -.1
/3
2\'\5i
!7K
/)
r-. rv-\
• zi Sr ^
f/ "N
.'
Fig. 9.20. Diagrams oscilatiilor libere alemasei suspendate ce revine osiei din fa^a
a unui automobil:TO — perioada oscilatiilor libere.

Determinated caiitatilor ds confort ale scauneior 151
Din prelucrarea diagramei, se pot calcula:— frecventa proprie, in Hz,
coeficientul de amortizare relativa
(9.4)
sau = (9.5)
' de declansore\brusca
p.*:
in care T0, Zlt Z{, Z3, au semnificatia ce rezulta din fig. 9.20.Suspensia pun^ii neridicate se va bloca (oscila^iile sa aiba loc in raport
cu osia acesteia), in caz contrar pe diagrama inregistrata suprapunindu-se§i efectul oscilatiilor ei. Pentru eliminarea influentei oscilatiilor pneuri-lor sau caroseriei, cu frecventa mai ridicata, asupra formei diagrameioscilatiilor libere ale suspensiei, semnalul de la traductorul de acceleratie-se va filtra cu un filtru trece-jos cu frecventa de taiere de 4—5 Hz. Inmod uzual, frecventele proprii ale suspensiilor de automobile sint cu-prinse intre 1 si 1,5 Hz, iar coeficientii de amortizare relativa intre 0,253ji 0,3. La valori ale coeficientului de amortizare relativa mai mari de0,3, eroarea determinarii frecventei proprii prin metoda aratata incepesa creasca rapid peste 5»/o.
Masurarile trebuie efectuate cu automobilul in stare echipata, farasarcina utila si incarcat cu sarcina utila nominala, cu balastul respectivdispus adecvat pe scaune sau pe suprafata de incarcare.
Determinarea caracteristicilor oscilatiilor proprii ale scaunului. Intr-oprima aproximatie, frecventa proprie si coeficientul de amortizare rela-tiva se pot determinaprin aducerea scaunuluiin stare de oscilatie li-bera. In acest scop, cuajutorul unui dispozitivadecvat sau al unuistand special (fig. 9.21)se lasa sa cada vertical,pe perna scaunului, omasa de 50 kg, de for-ma adecvata (imitindsezutul omului), pe ca-rre este prins un traduc-tor de acceleratie cuaxa sensibilita^ii maxi-me dispusa vertical. Unaparataj adecvat (am-•plificator, filtru, inre-gistrator), permite obtinerea diagramei oscilatiei libere a scaunului, care•este similara cu cea aratata in fig. 9.20, cu observatia ca in acestcaz frecventa proprie rezulta, de obicei, de 2—3 Hz, iar coeficientul deamortizare relativa de aproximativ 0,25.
O analiza mai detaliata a caracteristicilor oscilatorii ale scaunului so-ferului se face determinindu-i deperiden^a de frecventa de excitable a ra-portului dintre acceleratia unui punct al scaunului (cu masa de pe pernade 50 kg) si acceleratia dispozitivului de excitatie a oscilatiilor. In acest
Traduchr dsaccelerafie
Ampliftcafor
/nregisfrafor
Fig. 9.21. Stand pentru determinarea oscilatiilor pro-prii ale scaunului.

152 Determinated ujurintei de conducere
scop, cele mai indicate sint standurile electrohidraulice de tip Schenck(Hydropuls; fig. 9.22) sau MTS, ce permit frecvente de excitatie pina la60—80 Hz, acoperind astfel tot domeniul de frecvente de interes.
Masurarea nivelului oscilatiilor pe scaunul soferului in timpul mersu-lui automobilului. Cercetarile intense din ultimul deceniu au aratat caefectul oscilatiilor asupra corpului omenesc depinde de valoarea eficace
a accelerator, de du-rata de expunere si decomponenta de frecven-te a oscilatiilor respec-tive. In legatura cuaceasta din urma, estede mentionat ca la os-cilatii, cu frecventa sub0,5 Hz reactia organis-mului la oscilatii, ce semanifests sub formaunor stari similare rdu-lui de mare, difera sub-stantial de la individla individ. In domeniulde frecvente de 1—4 Hz,efectul oscilatiilor asu-pra organismului es-te eel mai intens ne-placut, deoarece aparfenomene de rezonantala organele interne,membre, cap, ochi etc.Pe masura cresteriifrecventei, are loc o ate-nuare a efectului os-cilatiilor, dupa 80 Hzacestea fiind preluateintegral la nivelul pie-lei.
Acest lucru a fostavut in vedere la elabo-rarea normei Internatio-nale ISO 2631-1978 ca-re stabileste o metodajudicioasa de aprecierea efectului oscilatiilor
asupra corpului omenesc si care se aplica curent si la incercarea auto-mobilelor. Conform acestei norme, severitatea oscilatiilor se apre-ciaza prin mSrimea acceleratiei medii pStratice (valoarea eficace) trans-misa prin scaun corpului, masurata cu filtrarea si ponderea semnaluluiin benzi de treime de octava, in gama de frecvente cuprinsS intre 1 Hzsi 80 Hz. In mod optim, aceasta filtrare si ponderare este efectuatS cu oretea electronics introdusa intre traductorul de acceleratie si aparatul in-
Fig. 9.22. Stand electrohidraulic Schenck pentru stu-dierea oscilatiilor scaunului de automobil.
Pentru acceleratii•longitudinals
Penfru acceleratii^verticals
' 5 10 20
Frecventa, Hz
50 100
Fig. 9.23. Curbele de ponderare a acceleratii-lor medii patratice in gama de frecvente de
la 1 la 80 Hz.