Embed Size (px)
Citation preview
MÉTODOS MATEMÁTICOSDE LA FÍSICA
JOSÉ MIGUEL MARÍN ANTUÑA
TEXTO DE LAS CARRERAS LICENCIATURA EINGENIERÍA FÍSICA
MÉTODOS MATEMÁTICOS DELA FÍSICA
TEXTO DE LAS CARRERAS LICENCIATURA E INGENIERÍAFÍSICA
JOSÉ MIGUEL MARÍN ANTUÑA

PÁGINA LEGALPrimera edición, Editorial Universitaria, 2014.
Calle 23 No. 565 e/ F y G, Vedado, La Habana, Cuba.
E-mail: [email protected]
Teléfono: (+537) 837 4538
e ISBN versión electrónica 978-959-16-2277-8
© Todos los derechos reservados José Miguel Marín Antuña, ProfesorEmérito. Facultad de Física de La Universidad de La Habana. Cuba. E-mail:[email protected]
Indice
Introduccion 15
1 Funciones Especiales de la Fısica Matematica. Teorıa General 17
1.1 Ecuacion Generatriz de las Funciones Especiales . . . . . . . . . . . . . . . . . . 17
1.2 Comportamiento de las soluciones en el entorno de los puntos donde k(x) = 0 . 19
1.3 Problemas de frontera para la ecuacion generatriz de las funciones especiales . . 22
1.3.1 Planteamiento del problema . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.3.2 Propiedades de los autovalores y de las autofunciones . . . . . . . . . . . 24
1.4 Solucion de ecuaciones diferenciales por series de potencias . . . . . . . . . . . . 26
1.4.1 Caso de coeficientes analıticos . . . . . . . . . . . . . . . . . . . . . . . . 26
1.4.2 Caso de coeficientes con puntos singulares aislados . . . . . . . . . . . . . 31
1.4.3 Caso de puntos singulares regulares . . . . . . . . . . . . . . . . . . . . . 36
2 Funciones Cilındricas 43
2.1 Ecuacion de Bessel. Funciones de Bessel . . . . . . . . . . . . . . . . . . . . . . 43
2.2 Otros tipos de funciones cilındricas. Formulas de recurrencia . . . . . . . . . . . 48
2.2.1 Funciones de Neumann y de Hankel . . . . . . . . . . . . . . . . . . . . . 48
2.2.2 Formulas de recurrencia . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
2.3 Norma de las funciones cilındricas . . . . . . . . . . . . . . . . . . . . . . . . . . 58
2.4 Ejemplos de aplicacion de las funciones cilındricas . . . . . . . . . . . . . . . . . 61
2.4.1 Problema de Bernoulli sobre las oscilaciones de una cadena colgada . . . 61
3
4 INDICE
2.4.2 Oscilaciones de la cadena . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
2.4.3 Oscilaciones de una membrana circular con borde fijo . . . . . . . . . . . 67
2.5 Funcion generatriz de la funcion de Bessel . . . . . . . . . . . . . . . . . . . . . 72
2.6 Representacion de las funciones cilındricas a traves de integrales de contorno . . 76
2.6.1 Representacion de las funciones de Hankel . . . . . . . . . . . . . . . . . 76
2.6.2 Representacion de la funcion de Bessel . . . . . . . . . . . . . . . . . . . 81
2.7 Formulas asintoticas de las funciones cilındricas . . . . . . . . . . . . . . . . . . 86
2.8 Funciones cilındricas de orden semientero . . . . . . . . . . . . . . . . . . . . . . 92
2.9 Funciones cilındricas de argumento imaginario . . . . . . . . . . . . . . . . . . . 95
2.9.1 Ecuacion de Bessel de argumento imaginario . . . . . . . . . . . . . . . . 95
2.9.2 Funcion cilındrica de argumento imaginario de primer tipo . . . . . . . . 96
2.9.3 Funcion cilındrica de argumento imaginario de segundo tipo . . . . . . . 98
2.9.4 Ejemplo de aplicacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
3 Polinomios de Legendre 107
3.1 Polinomios de Legendre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
3.1.1 Funcion generatriz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
3.1.2 Formula de Rodrigues . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
3.1.3 Propiedades de los polinomios de Legendre . . . . . . . . . . . . . . . . . 112
3.2 Ecuacion de Legendre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
3.3 Norma de los polinomios de Legendre . . . . . . . . . . . . . . . . . . . . . . . . 120
3.4 Polinomios asociados de Legendre . . . . . . . . . . . . . . . . . . . . . . . . . . 122
3.4.1 Definicion y propiedades . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
3.4.2 Ecuacion de los polinomios asociados de Legendre . . . . . . . . . . . . . 124
3.4.3 Norma de los polinomios asociados de Legendre . . . . . . . . . . . . . . 127
3.5 Ejemplos de aplicacion de los polinomios de Legendre . . . . . . . . . . . . . . . 129
3.5.1 Problema del enfriamiento de una esfera . . . . . . . . . . . . . . . . . . 129
INDICE 5
3.5.2 Problema de una partıcula cuantica en un campo de simetrıa central . . 133
4 Polinomios de Hermite y Laguerre 139
4.1 Polinomios de Hermite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
4.1.1 Definicion, funcion generatriz, propiedades . . . . . . . . . . . . . . . . . 139
4.1.2 Problema de frontera de los polinomios de Hermite . . . . . . . . . . . . 143
4.1.3 Norma de los polinomios de Hermite . . . . . . . . . . . . . . . . . . . . 149
4.2 Polinomios de Laguerre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
4.2.1 Definicion, funcion generatriz . . . . . . . . . . . . . . . . . . . . . . . . 150
4.2.2 Problema de frontera de los polinomios de Laguerre . . . . . . . . . . . . 153
4.2.3 Norma de los polinomios de Laguerre . . . . . . . . . . . . . . . . . . . . 157
4.2.4 Polinomios generalizados de Laguerre . . . . . . . . . . . . . . . . . . . . 158
4.2.5 Problema del atomo de hidrogeno en la Mecanica Cuantica . . . . . . . . 162
5 Funciones Hipergeometricas 171
5.1 Ecuacion hipergeometrica. Solucion . . . . . . . . . . . . . . . . . . . . . . . . . 171
5.1.1 Solucion en el entorno de x = 0. Funcion hipergeometrica . . . . . . . . . 171
5.1.2 Solucion en el entorno de x = 1 . . . . . . . . . . . . . . . . . . . . . . . 177
5.2 Propiedades de las funciones hipergeometricas . . . . . . . . . . . . . . . . . . . 177
5.3 Ecuacion hipergeometrica confluente . . . . . . . . . . . . . . . . . . . . . . . . 183
5.4 Propiedades de la funcion hipergeometrica confluente . . . . . . . . . . . . . . . 187
6 Algunas otras funciones especiales de la Fısica Matematica 189
6.1 Funcion Zeta de Riemann . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189
6.2 Funcion de Mathieu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 190
6.2.1 Ecuacion de Mathieu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 190
6.2.2 Forma de la solucion de la ecuacion de Mathieu . . . . . . . . . . . . . . 192
6.2.3 Ecuacion de Hill . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193
6 INDICE
6.2.4 Soluciones periodicas de la ecuacion de Mathieu . . . . . . . . . . . . . . 193
6.2.5 Construccion de las funciones de Mathieu . . . . . . . . . . . . . . . . . 194
6.2.6 Teorıa de Floquet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 196
6.2.7 Metodo de Hill . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 198
6.3 Funciones de Airy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
6.4 Funciones Integrales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203
6.5 Integrales de Fresnel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 208
6.6 Funcion de Error y Funcion de Error Complementaria . . . . . . . . . . . . . . . 210
Introduccion a las ecuaciones de la Fısica Matematica 213
7 Clasificacion de las ecuaciones en derivadas parciales de segundo orden 215
7.1 Clasificacion de las ecuaciones con dos variables independientes . . . . . . . . . . 215
7.2 Formas canonicas de las ecuaciones en derivadas parciales de segundo orden . . . 220
7.2.1 Ecuacion hiperbolica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 220
7.2.2 Ecuacion elıptica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 221
7.2.3 Ecuacion parabolica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223
7.3 Concepto de planteamiento de los problemas matematicos. Problemas correcta-mente planteados. Idea de solucion generalizada . . . . . . . . . . . . . . . . . . 224
7.4 Ejercicios del capıtulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 227
8 Problemas fısicos que conducen a ecuaciones de la Fısica Matematica 229
8.1 Problemas fısicos que conducen a ecuaciones hiperbolicas . . . . . . . . . . . . . 229
8.1.1 Oscilaciones longitudinales de una barra . . . . . . . . . . . . . . . . . . 229
8.1.2 Oscilaciones transversales de una cuerda . . . . . . . . . . . . . . . . . . 235
8.1.3 Oscilaciones transversales de una membrana . . . . . . . . . . . . . . . . 239
8.1.4 Oscilaciones de volumenes . . . . . . . . . . . . . . . . . . . . . . . . . . 242
8.1.5 Ecuaciones basicas de la Electrodinamica . . . . . . . . . . . . . . . . . . 242
INDICE 7
8.1.6 Ecuaciones de la acustica . . . . . . . . . . . . . . . . . . . . . . . . . . . 244
8.2 Problemas fısicos que conducen a ecuaciones parabolicas . . . . . . . . . . . . . 246
8.2.1 Propagacion de calor en el espacio . . . . . . . . . . . . . . . . . . . . . . 246
8.2.2 Ecuacion de difusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 250
8.2.3 Difusion en presencia de desintegracion . . . . . . . . . . . . . . . . . . . 253
8.2.4 Proceso de reaccion en cadena . . . . . . . . . . . . . . . . . . . . . . . . 253
8.3 Problemas fısicos que conducen a ecuaciones elıpticas . . . . . . . . . . . . . . . 254
8.3.1 Problemas que conducen a la ecuacion de Poisson . . . . . . . . . . . . . 254
8.3.2 Problemas que conducen a la ecuacion de Helmholtz . . . . . . . . . . . 256
9 Planteamiento de los problemas matematicos 261
9.1 Ecuaciones hiperbolicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261
9.1.1 Condiciones iniciales y condiciones de frontera . . . . . . . . . . . . . . . 262
9.1.2 Planteamiento de los problemas matematicos. Unicidad . . . . . . . . . . 268
9.1.3 Problemas en varias dimensiones espaciales . . . . . . . . . . . . . . . . . 273
9.1.4 Problema en la recta infinita . . . . . . . . . . . . . . . . . . . . . . . . . 274
9.1.5 Reduccion del problema general . . . . . . . . . . . . . . . . . . . . . . . 275
9.2 Ecuaciones parabolicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 277
9.2.1 Condicion inicial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 277
9.2.2 Condiciones de frontera . . . . . . . . . . . . . . . . . . . . . . . . . . . . 278
9.2.3 Planteamiento de los problemas matematicos . . . . . . . . . . . . . . . . 280
9.2.4 Problemas en la recta infinita y semiinfinita . . . . . . . . . . . . . . . . 282
9.2.5 Principio del valor maximo y mınimo . . . . . . . . . . . . . . . . . . . . 283
9.3 Ecuaciones elıpticas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 289
9.3.1 Ecuacion elıptica de Poisson . . . . . . . . . . . . . . . . . . . . . . . . . 289
9.3.2 Ecuacion elıptica de Helmholtz . . . . . . . . . . . . . . . . . . . . . . . 315
9.4 Problemas correctos e incorrectos de la Fısica Matematica . . . . . . . . . . . . 317
8 INDICE
10 Metodo de Ondas Viajeras 321
10.1 Solucion general de la ecuacion hiperbolica . . . . . . . . . . . . . . . . . . . . . 321
10.2 Solucion del problema de Cauchy. Formula de D’Alembert . . . . . . . . . . . . 323
10.3 Interpretacion fısica de la formula de D’Alembert . . . . . . . . . . . . . . . . . 326
10.4 Funcion delta de Dirac . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 336
10.5 Funcion de Green. Ecuacion no homogenea . . . . . . . . . . . . . . . . . . . . . 345
10.6 Recta semiinfinita. Metodo de prolongacion . . . . . . . . . . . . . . . . . . . . 352
10.7 Ejercicios del capıtulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 363
11 Metodo de Separacion de Variables 367
11.1 Ecuaciones hiperbolicas y parabolicas unidimensionales . . . . . . . . . . . . . . 367
11.1.1 Problema auxiliar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 368
11.1.2 Solucion de los problemas iniciales . . . . . . . . . . . . . . . . . . . . . . 372
11.1.3 Ejemplo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 375
11.1.4 Condiciones matematicas de validez del metodo . . . . . . . . . . . . . . 376
11.1.5 Interpretacion fısica de la solucion . . . . . . . . . . . . . . . . . . . . . . 380
11.1.6 Funcion de Green . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383
11.1.7 Solucion de la ecuacion no homogenea . . . . . . . . . . . . . . . . . . . 389
11.1.8 Ejemplos ilustrativos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394
11.1.9 Solucion del problema general . . . . . . . . . . . . . . . . . . . . . . . . 404
11.1.10Oscilaciones bajo la accion de una fuerza periodica armonica. Oscilacio-nes amortiguadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 410
11.2 Ecuaciones hiperbolicas y parabolicas en varias dimensiones espaciales . . . . . . 415
11.2.1 Planteamiento de los problemas y reduccion del problema general . . . . 415
11.2.2 Problema auxiliar. Autovalores y autofunciones . . . . . . . . . . . . . . 418
11.2.3 Solucion de la ecuacion homogenea con condicion de frontera homogenea 425
11.2.4 Solucion de las ecuaciones no homogeneas con condiciones homogeneas . 427
INDICE 9
11.3 Ejemplos de solucion de problemas hiperbolicos y parabolicos en varias dimen-siones espaciales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 431
11.3.1 Problemas que no requieren el uso de funciones especiales . . . . . . . . . 432
11.3.2 Problemas que requieren el uso de funciones cilındricas . . . . . . . . . . 444
11.3.3 Problemas que requieren el uso de funciones esfericas. Armonicos esfericos458
11.4 Ecuaciones elıpticas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 472
11.4.1 Ecuacion de Poisson . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 472
11.4.2 Ecuacion de Helmholtz . . . . . . . . . . . . . . . . . . . . . . . . . . . . 492
11.5 Ejercicios del capıtulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 501
12 Metodo de Transformadas Integrales 505
12.1 Ecuaciones hiperbolicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 505
12.1.1 Problema de Cauchy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 505
12.1.2 Problemas en la recta semiinfinita . . . . . . . . . . . . . . . . . . . . . . 509
12.2 Ecuaciones parabolicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 519
12.2.1 Recta infinita. Funcion de Green . . . . . . . . . . . . . . . . . . . . . . 519
12.2.2 Recta semiinfinita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 530
12.2.3 Ejemplo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 544
12.3 Ejercicios del capıtulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 545
13 Metodo de la Funcion de Green 547
13.1 Resumen del concepto de Funcion de Green estudiado anteriormente . . . . . . . 547
13.1.1 Ecuacion hiperbolica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 547
13.1.2 Ecuacion parabolica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 554
13.2 Soluciones fundamentales de los operadores diferenciales lineales . . . . . . . . . 561
13.2.1 Soluciones generalizadas de las ecuaciones diferenciales lineales . . . . . . 561
13.2.2 Soluciones fundamentales . . . . . . . . . . . . . . . . . . . . . . . . . . . 563
13.2.3 Ecuacion con parte derecha . . . . . . . . . . . . . . . . . . . . . . . . . 565
10 INDICE
13.2.4 Solucion fundamental del operador diferencial lineal ordinario . . . . . . 567
13.2.5 Operador de conduccion del calor (de difusion) . . . . . . . . . . . . . . . 568
13.2.6 Operador de onda (de D’Alembert) . . . . . . . . . . . . . . . . . . . . . 569
13.3 Funcion de Green de la ecuacion de Poisson . . . . . . . . . . . . . . . . . . . . 571
13.3.1 Definicion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 571
13.3.2 Problema de Dirichlet . . . . . . . . . . . . . . . . . . . . . . . . . . . . 573
13.3.3 Problema de Neumann . . . . . . . . . . . . . . . . . . . . . . . . . . . . 578
13.3.4 Tercer Problema de Frontera . . . . . . . . . . . . . . . . . . . . . . . . . 579
13.3.5 Caso bidimensional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 580
13.3.6 Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 582
13.3.7 Metodo de las imagenes electrostaticas . . . . . . . . . . . . . . . . . . . 586
13.4 Funcion de Green de la ecuacion de Helmholtz . . . . . . . . . . . . . . . . . . . 592
13.4.1 Soluciones fundamentales de la ecuacion de Helmholtz . . . . . . . . . . 593
13.4.2 Funcion de Green de la ecuacion de Helmholtz . . . . . . . . . . . . . . . 596
13.5 Ejercicios del capıtulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 606
14 Metodo de la Teorıa de Potenciales 607
14.1 Potenciales para la ecuacion de Poisson . . . . . . . . . . . . . . . . . . . . . . . 607
14.1.1 Conceptos iniciales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 607
14.1.2 Integrales impropias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 612
14.1.3 Potencial de volumen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 618
14.1.4 Potencial de doble capa . . . . . . . . . . . . . . . . . . . . . . . . . . . 624
14.1.5 Potencial de capa simple . . . . . . . . . . . . . . . . . . . . . . . . . . . 633
14.2 Potenciales para la ecuacion de Helmholtz . . . . . . . . . . . . . . . . . . . . . 640
14.2.1 Potencial de Volumen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 642
14.2.2 Potencial de doble capa . . . . . . . . . . . . . . . . . . . . . . . . . . . 643
14.2.3 Potencial de capa simple . . . . . . . . . . . . . . . . . . . . . . . . . . . 644
INDICE 11
14.3 Ejercicios del capıtulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 645
15 Problemas en el Espacio Abierto 647
15.1 Propagacion del calor y difusion en el espacio abierto . . . . . . . . . . . . . . . 647
15.2 Oscilaciones en el espacio abierto . . . . . . . . . . . . . . . . . . . . . . . . . . 649
15.2.1 Formula de Kirchhoff . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 650
15.2.2 Solucion del problema de Cauchy para la ecuacion homogenea de oscila-ciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 656
15.2.3 Dependencia de la solucion de las condiciones iniciales . . . . . . . . . . 663
15.2.4 Solucion de la ecuacion no homogenea de oscilaciones en el espacio abierto668
15.3 Solucion de la ecuacion de oscilaciones bajo la accion de una fuerza periodicaarmonica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 675
15.4 Planteamiento de los problemas de frontera para la ecuacion de Helmholtz en elespacio abierto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 679
15.4.1 Planteamiento de los problemas. Analisis de la unicidad de la solucion . 679
15.4.2 Condicion de Radiacion de Sommerfeld . . . . . . . . . . . . . . . . . . . 682
15.4.3 Principio de absorcion lımite . . . . . . . . . . . . . . . . . . . . . . . . . 689
15.4.4 Principio de amplitud lımite . . . . . . . . . . . . . . . . . . . . . . . . . 691
15.5 Ejercicios del capıtulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 693
16 Metodo de Diferencias Finitas 695
16.1 Problemas en diferencias finitas para la ecuacion de Laplace . . . . . . . . . . . 695
16.1.1 Planteamiento del problema . . . . . . . . . . . . . . . . . . . . . . . . . 695
16.1.2 Propiedades de la solucion del problema en diferencias finitas . . . . . . . 698
16.1.3 Solucion del problema en diferencias finitas . . . . . . . . . . . . . . . . . 700
16.2 Ideas Generales de los Metodos de Diferencias Finitas . . . . . . . . . . . . . . . 708
16.2.1 Redes y funciones de redes . . . . . . . . . . . . . . . . . . . . . . . . . . 709
16.2.2 Orden de aproximacion de los operadores . . . . . . . . . . . . . . . . . . 711
16.2.3 Problema en diferencias finitas para la ecuacion de conduccion de calor . 713

12 INDICE
16.2.4 Estabilidad de los esquemas en diferencias finitas . . . . . . . . . . . . . 714
16.2.5 Convergencia de los esquemas en diferencias finitas . . . . . . . . . . . . 718
16.2.6 Metodos de solucion de los esquemas en diferencias finitas. Metodo decorrido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 720
17 Ideas sobre los metodos de solucion de ecuaciones no lineales 725
17.1 Ecuacion de Korteweg-de Vries y el metodo del problema inverso . . . . . . . . . 725
17.1.1 Forma canonica de la ecuacion de Korteweg-de Vries (KdV) . . . . . . . 726
17.1.2 Leyes de conservacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 727
17.1.3 Metodo del problema inverso . . . . . . . . . . . . . . . . . . . . . . . . . 729
17.1.4 Solitones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 732
17.1.5 Otras ecuaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 734
18 Elementos de Espacios Funcionales y Operadores 749
18.1 Espacios lineales normados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 749
18.1.1 Conceptos iniciales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 749
18.1.2 Otros conceptos importantes . . . . . . . . . . . . . . . . . . . . . . . . . 753
18.2 Espacios de Banach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 757
18.3 Espacios de Hilbert . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 759
18.3.1 Conceptos generales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 759
18.3.2 Convergencia debil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 762
18.3.3 Sistemas ortogonales. Series de Fourier . . . . . . . . . . . . . . . . . . . 763
18.3.4 Sistemas ortonormales cerrados y completos . . . . . . . . . . . . . . . . 767
18.3.5 Espacios de Lebesgue y de Soboliev . . . . . . . . . . . . . . . . . . . . . 771
18.3.6 Un ejemplo importante de espacio euclıdeo no completo . . . . . . . . . . 772
18.4 Espacios l2 y L2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 775
18.4.1 El espacio l2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 775
18.4.2 El espacio L2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 784
INDICE 13
18.5 Operadores totalmente continuos y autoconjugados en un espacio de Hilbert . . 791
18.5.1 Conceptos generales sobre operadores . . . . . . . . . . . . . . . . . . . . 791
18.5.2 Operadores conjugados en espacios de Hilbert . . . . . . . . . . . . . . . 795
18.5.3 Operadores autoconjugados . . . . . . . . . . . . . . . . . . . . . . . . . 798
18.5.4 Operadores totalmente continuos . . . . . . . . . . . . . . . . . . . . . . 801
18.5.5 Autovalores de un operador autoconjugado totalmente continuo . . . . . 804
18.5.6 Propiedades fundamentales de los autovalores y las autofunciones de unoperador lineal autoconjugado totalmente continuo . . . . . . . . . . . . 807
18.6 Complementos de la teorıa espectral de operadores . . . . . . . . . . . . . . . . 809
18.6.1 Ecuaciones operacionales . . . . . . . . . . . . . . . . . . . . . . . . . . . 809
18.6.2 Operador resolvente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 812
18.6.3 Solucion de las ecuaciones operacionales por el metodo de aproximacionessucesivas. Serie de Neumann . . . . . . . . . . . . . . . . . . . . . . . . . 816
18.6.4 Propiedades analıticas de la resolvente . . . . . . . . . . . . . . . . . . . 819
18.7 Operadores no acotados en un espacio de Hilbert . . . . . . . . . . . . . . . . . 823
19 Principales Sistemas de Coordenadas 827
19.1 Coordenadas rectangulares cartesianas . . . . . . . . . . . . . . . . . . . . . . . 828
19.2 Coordenadas Cilındricas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 828
19.3 Coordenadas Esfericas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 829
19.4 Coordenadas Elıpticas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 830
19.5 Coordenadas Parabolicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 830
19.6 Coordenadas elipsoidales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 831
19.7 Coordenadas elipsoidales degeneradas . . . . . . . . . . . . . . . . . . . . . . . . 833
19.8 Coordenadas Toroidales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 834
19.9 Coordenadas Bipolares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 835
19.10Coordenadas Esferoidales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 837
19.11Coordenadas Paraboloidales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 838

14 INDICE
Bibliografıa 839
Introduccion General
Titular una obra con un nombre tan general como el de Metodos Matematicos de la Fısica puedeparecer ambicioso y por veces resultar peligroso, pues tratar de abarcar todos los metodos queutiliza la ciencia fısica para el estudio de los procesos y fenomenos fısicos en un libro quepretende servir de texto para estudiantes universitarios, requiere una seleccion cuidadosa parano convertirse en una acumulacion enciclopedica de todos los diversos temas que pudieranagruparse bajo un tıtulo tan general.
Por eso, lo primero que el autor entiende necesario aclarar es que los objetivos que persigue noson otros que brindar a los estudiantes de la Licenciatura en Fısica en nuestro paıs un libro detexto para la disciplina que con el mismo nombre aparece dentro del Plan de Estudios de lacarrera de Fısica en las universidades cubanas.
La base de los materiales que se desarrollan en la obra esta constituida por el curso que por45 anos el autor ha impartido a los estudiantes de Fısica en la Universidad de La Habana y suexperiencia de dos anos de trabajo en la Universidad de Angola. Parte de los contenidos dellibro han sido objeto de estudio en diversos cursos de postgrado dados por el autor tanto enCuba como en otros paıses visitados como profesor invitado. Es logico pensar por lo tanto queel deseo de una exposicion mas amplia de los contenidos haya impuesto la necesidad de analizarciertas cuestiones y contenidos de forma mas detallada de lo que comunmente puede hacerseen el marco de un programa de conferencias. Tambien se incluyen por la misma razon algunostemas que no entran en el contenido de dicho programa, pero que son de utilidad al fısico y alingeniero, o que a veces complementan los aspectos teoricos basicos.
La estructura general de la obra es la siguiente: Una primera parte dedicada a las funcionesespeciales de la Fısica Matematica y una segunda parte que estudia las ecuaciones de la FısicaMatematica y en la que, fundamentalmente, se estudian, sobre la base de problemas fısicosconcretos, las ecuaciones en derivadas parciales de segundo orden y sus diversos metodos desolucion. El enfasis fundamental esta en las ecuaciones lineales y se hace mencion de algunosproblemas que se tratan con ecuaciones no lineales. Se introducen, ademas, modernas tecnicascomputacionales, tanto para el desarrollo de las figuras del libro, como para proponer al lector lasolucion de algunos problemas mediante el uso de programas de computacion que en la carrerason estudiados previamente.
El contenido no agota, por supuesto, los metodos matematicos que utiliza la Fısica, pero seabordan los principales que en todo curso deben ser conocidos por los estudiantes de estaespecialidad. El libro que se presenta es una segunda edicion corregida y ampliada de laprimera publicada por la Universidad de La Habana en 1992; por ello, los criterios y sugerencias
15
16 Jose Marın Antuna
recibidas por el autor sobre la primera edicion han tratado de ser tenidas en cuenta en la quehoy se presenta al lector. Los criterios y sugerencias que sobre la presente edicion los lectorespuedan hacerle llegar al autor seran recibidos con agradecimiento, toda vez que ello redundaraen el futuro mejoramiento del contenido de la obra. Su aceptacion entre nuestros profesoresy alumnos de pregrado y de postgrado, ası como de otros especialistas sera para el autor elprincipal reconocimiento de que su labor no ha sido en vano.
El libro, fruto de largos anos de la imparticion del curso de conferencias del autor a los estu-diantes de Fısica de la Universidad de La Habana, ha recibido de esa practica docente el selloque lo distingue. El contacto constante con un auditorio vivo, cuya asimilacion podıa obser-varse en las conferencias y luego durante los examenes, condujo como cosa natural a prestarmucha atencion al aspecto de la claridad y la accesibilidad de la exposicion del material, lo quehace que el libro se diferencie del estilo comunmente usado en la literatura monografica. Porello, en ocasiones, esta metodologıa conduce a repeticiones posibles de evitar con otra forma deexponer el material. Sin embargo, es opinion del autor que esa otra forma de exposicion mas”economica” pudiera conducir a perdidas en la accesibilidad del contenido.
En este sentido es bueno recordar las palabras del gran matematico y notable pedagogo alemanF. Klein, quien en 1924 escribio: ”siempre hay gente que asemejandose a los escolasticos me-dievales, empieza la ensenanza con las ideas mas generales, defendiendo este metodo como sifuera el unico metodo cientıfico. Pero esta sugerencia no es cierta, pues ensenar cientıficamentesignifica instruir a un ser humano a pensar cientıficamente y no aturdirlo desde el mismocomienzo con una sistematizacion frıa, aunque tuviera esta un aspecto cientıfico”.
De acuerdo con esto, el autor conscientemente evito lo mas posible toda clase de simbolismoespecial y lo sustituyo con palabras descriptivas. Todo simbolismo especial reduce las formu-laciones y representa grandes comodidades para quienes lo han asimilado, es decir, para laspersonas que siempre estan en contacto con este tipo de lenguaje sintetico. Pero el simbolismoresulta un obstaculo bastante serio con frecuencia para un amplio cırculo de lectores que, sinser especialistas en el dominio dado, sienten deseos o tienen la necesidad de familiarizarse condicho dominio. Guiado por esta misma idea, el autor, ya se ha dicho, siempre vincula en el textolas ecuaciones que se estudian, los metodos de solucion que se desarrollan y la interpretacionde los resultados que se obtienen con la Fısica que esta ligada a ellos y evita todo lo posible untratamiento abstracto desprovisto del ropaje fısico del material. Sin embargo, ello no impidetener presente en todo momento el rigor matematico indispensable en el tratamiento de todoslos temas.
Capıtulo 1
Funciones Especiales de la FısicaMatematica. Teorıa General
Abordaremos a continuacion el estudio de las principales funciones especiales de la FısicaMatematica que aparecen al acometer la solucion de diversos problemas de frontera de lasecuaciones en derivadas parciales de segundo orden. Con el estudio que pretendemos hacerno intentamos abarcar todo el conjunto de funciones que comunmente reciben el nombre de”especiales” en la literatura, sino que nos concretaremos al estudio de las mas importantes deellas para el fısico en su trabajo cotidiano. Tales son, por ejemplo, las funciones cilındricas,las funciones esfericas, los polinomios de Hermite y Laguerre y las funciones hipergeometricas,que son las que fundamentalmente aparecen en multitud de problemas de la Fısica Matematicaal aplicar el metodo de separacion de variables. Abordaremos algunas otras, como la funcionZeta de Riemann, las funciones de Mathieu, las de Airy, las funciones integrales, las integralesde Fresnel y las funciones de error y de error complementario, por ser importantes en diversasaplicaciones de la Fısica. Las funciones elıpticas de Jordan, las integrales elıpticas, las fun-ciones de Weierstrass, y las funciones gamma y beta de Euler, se suponen conocidas de cursosanteriores y el lector debe remitirse a literatura especializada sobre ellas. Nuestro interes cen-tral esta en poner a disposicion del lector las herramientas necesarias para abordar la solucionde los problemas de ecuaciones hiperbolicas, parabolicas y elıpticas en dominios cilındricos yesfericos, labor a la que se dedicara la segunda parte de la presente obra y, ademas, informarlode otras funciones que surgen en el tratamiento matematico de la Mecanica Cuantica durantela solucion de sus principales problemas.
1.1 Ecuacion Generatriz de las Funciones Especiales
Comenzaremos nuestro estudio con algunos aspectos teoricos de caracter general que nos serande gran utilidad posteriormente.
Llamaremos ecuacion generatriz de las funciones especiales a la ecuacion diferencial ordinariade segundo orden
17

18 Jose Marın Antuna
d
dx
[k(x)
dy
dx
]− q(x)y + λp(x)y = 0, ∀a < x < b (1.1)
donde k(x) > 0, q(x) ≥ 0 y p(x) > 0 son funciones definidas en el intervalo [a, b] y que puedentener en este diversas caracterısticas que analizaremos posteriormente; λ es cierto parametro.La ecuacion (1.1) recibe su nombre del hecho de que, para casos diferentes de las funcionesk(x), q(x) y p(x), nos da distintas ecuaciones, cuyas soluciones son funciones especiales. Porejemplo, veamos los casos siguientes:
1. k(x) = x, q(x) = ν2
x, p(x) = x, a = 0, b = x0 (ν es un numero cualquiera). En este caso,
la ecuacion (1.1) nos da:
d
dx
[xdy
dx
]+
(λx− ν2
x
)y = 0, ∀0 < x < x0 (1.2)
dividiendo toda la ecuacion por x:
1
x
d
dx
[xdy
dx
]+
(λ− ν2
x2
)y = 0, ∀0 < x < x0 (1.3)
Si introducimos el cambio de variables x′ =√λx, obtenemos
1
x′d
dx′
[x′dy
dx′
]+
(1− ν2
x′2
)y = 0, ∀0 < x′ < x′0 (1.4)
La ecuacion (1.4) se conoce con el nombre de ecuacion de Bessel. Sus soluciones sonllamadas funciones cilındricas y aparecen al resolver problemas de la Fısica Matematicaen dominios cilındricos.
2. k(x) = 1− x2, q(x) = 0, p(x) = 1, a = −1, b = 1. En este caso, la ecuacion (1.1) adoptala forma,
d
dx
[(1− x2)
dy
dx
]+ λy = 0, ∀ − 1 < x < 1 (1.5)
que se conoce con el nombre de ecuacion de Legendre. Sus soluciones son los llamadospolinomios de Legendre.
3. k(x) = 1 − x2, q(x) = m2
1−x2 (m entero), p(x) = 1, a = −1, b = 1. La ecuacion (1.1) seconvierte en:
d
dx
[(1− x)
dy
dx
]− m2
1− x2y + λy = 0, ∀ − 1 < x < 1 (1.6)
que se denomina ecuacion de los polinomios asociados de Legendre. Tanto laecuacion de Legendre (1.5), que es un caso particular de (1.6), como la propia ecuacionde los polinomios asociados de Legendre (1.6), aparecen al resolver problemas en dominiosesfericos.

Funciones Especiales de la Fısica Matematica 19
4. k(x) = e−x2, q(x) = 0, p(x) = e−x
2, a = −∞, b = ∞. En este caso la ecuacion (1.1) se
transforma en
d
dx
[e−x
2 dy
dx
]+ λe−x
2
y = 0, ∀ −∞ < x <∞ (1.7)
que es conocida con el nombre de ecuacion de Hermite. Sus soluciones son los poli-nomios de Hermite y aparecen al resolver el problema del oscilador cuantico.
5. k(x) = xe−x, q(x) = 0, p(x) = e−x, a = 0, b = ∞. Entonces (1.1) se convierte en
d
dx
[xe−x
dy
dx
]+ λe−xy = 0, ∀0 < x <∞ (1.8)
conocida con el nombre de ecuacion de Laguerre. Sus soluciones, los polinomios deLaguerre, aparecen en el estudio del problema del atomo de hidrogeno en la MecanicaCuantica. En realidad, en la Mecanica Cuantica aparece la ecuacion generalizada deLaguerre
d
dx
[xs+1e−x
dy
dx
]+ λxse−xy = 0, ∀0 < x <∞ (1.9)
que se reduce a (1.8) para s = 0 y cuyas soluciones son los llamados polinomios ge-neralizados de Laguerre. De los ejemplos expuestos vemos la importancia de hacerun estudio de las caracterısticas generales de la ecuacion (1.1) y de las soluciones a ellaasociadas. Para ello debemos precisar algunos aspectos de la teorıa de ecuaciones dife-renciales.
1.2 Comportamiento de las soluciones en el entorno de
los puntos donde k(x) = 0
La ecuacion (1.1) del epıgrafe anterior es una ecuacion diferencial lineal ordinaria con coeficien-tes variables de segundo orden que tendra dos soluciones linealmente independientes. De losdiferentes ejemplos que, como casos particulares, hemos analizado en el epıgrafe anterior se veque existen determinados puntos, donde k(x) = 0. Nuestro interes en el presente epıgrafe es in-vestigar las caracterısticas del comportamiento de las dos soluciones linealmente independientesde nuestra ecuacion en el entorno de tales puntos. Tiene lugar la siguiente afirmacion.
Teorema 1
Si en el punto x = a la funcion k(x) tiene un cero de primer orden, es decir, si en su entornotiene la forma
k(x) = (x− a)ϕ(x), ϕ(a) 6= 0, ϕ(a) <∞ (1.10)

20 Jose Marın Antuna
y si la solucion y1(x) de la ecuacion
d
dx
[k(x)
dy
dx
]− q(x)y + λp(x)y = 0 (1.11)
es acotada en x = a, entonces la otra solucion linealmente independiente y2(x) de la ecuacion(1.11) no es acotada en x = a y tienen lugar los siguientes casos:
1. Si y1(x) es acotada, pero diferente de cero en x = a, entonces y2(x) tiene en ese puntouna singularidad logarıtmica, o sea, es del orden de ln 1
x−a para x→ a.
2. Si y1(x) tiene un cero de orden n en x = a, entonces y2(x) tiene en ese punto un polo deorden n.
Demostracion:
Como y1(x) por hipotesis es acotada en x = a, en el entorno de ese punto podra expresarsecomo una serie de Taylor de la forma
y1(x) = (x− a)nψ(x) (1.12)
con
ψ(a) 6= 0
y
ψ(a) 6= ∞
donde n ≥ 0. En la expresion (1.12) tenemos que si n = 0, y1(x) sera acotada, pero diferentede cero en x = a, lo que corresponde al primer caso del enunciado. Si n > 0, entonces y1(x)tendra en x = a un cero de orden n, como se plantea en el segundo caso del enunciado.
Tratemos de expresar la otra solucion linealmente independiente y2(x) de la ecuacion (1.11) enterminos de una cuadratura de y1(x). Colocando y1(x) y y2(x) en la ecuacion (1.11), obtenemoslas identidades:
d
dx[k(x)y′1]− q(x)y1 + λp(x)y1 ≡ 0 (1.13)
d
dx[k(x)y′2]− q(x)y2 + λp(x)y2 ≡ 0 (1.14)

Funciones Especiales de la Fısica Matematica 21
Multiplicando (1.13) por y2(x) y (1.14) por y1(x) y restando, obtenemos:
y2(x)d
dx[k(x)y′1]− y1(x)
d
dx[k(x)y′2] ≡
d
dx[k(x)(y2y
′1 − y1y
′2)] ≡ 0 (1.15)
De (1.15) concluimos que:
k(x)(y2y′1 − y1y
′2) = −C (1.16)
donde C es cierta constante que, evidentemente, es diferente de cero, ya que la expresion entreparentesis a la izquierda de la ecuacion (1.16) es el wronskiano de las soluciones y1, y2 que esdiferente de cero, ya que las soluciones son linealmente independientes. De (1.16) obtenemos,despues de dividir por y2
1(x):
y1y′2 − y2y
′1
y21
≡ d
dx
(y2
y1
)=
C
k(x)y21
(1.17)
De (1.17), integrando, obtenemos para la solucion y2(x) la expresion
y2(x) = y1(x)
[∫ x
x0
Cdx
k(α)y21(α)
+ C1
](1.18)
Como no hay condiciones impuestas, el punto x0 es arbitrario. Tomemoslo de forma tal que lasfunciones ϕ(x) y ψ(x) no cambien de signo dentro del intervalo de integracion. Sustituyendo en(1.18) las expresiones (1.10) y (1.12) y aplicando el teorema del valor medio integral, obtenemos:
y2(x) = (x− a)nψ(x)
[C1 − C
∫ x0
x
dα
ϕ(α)ψ2(α)(α− a)2n+1
]=
= (x− a)nψ(x)
[C1 + C∗
∫ x0
x
dα
(α− a)2n+1
](1.19)
donde hemos llamado
C∗ =C
ϕ(x∗)ψ2(x∗), ∀x∗ ∈ [x, x0] (1.20)
Analicemos los dos casos posibles planteados en el enunciado del teorema:
1. Sea n = 0, es decir, y1(x) acotada y diferente de cero en x = a. Entonces, de (1.19):
22 Jose Marın Antuna
y2(x) = ψ(x)
[C1 + C∗
∫ x0
x
dα
α− a
]= ψ(x)[C12 + C∗ ln(α− a)|x0
x =
= ψ(x)
[C1 + C∗ ln
x0 − a
x− a
](1.21)
La igualdad (1.21) demuestra que, efectivamente, en este caso la solucion y2(x) tiene enx = a una singularidad logarıtmica.
2. Sea n > 0, es decir, y1(x) tiene un cero de orden n en x = a. Entonces de (1.19):
y2(x) = (x− a)nψ(x)
[C1 +
C∗
−2n
1
(α− a)2n|x0x
]=
= C1ψ(x)(x− a)n − C∗
2nψ(x)
(x− a)n
(x0 − a)n+C∗
2nψ(x)
1
(x− a)n(1.22)
lo que significa que, efectivamente, y2(x) tiene un polo de orden n en el punto x = a.
Demostrado el teorema.
El teorema que acabamos de demostrar nos servira de base para fundamentar posteriormenteel comportamiento de las soluciones que hallemos para los distintos casos particulares queestudiaremos de la ecuacion (1.11).
1.3 Problemas de frontera para la ecuacion generatriz
de las funciones especiales
1.3.1 Planteamiento del problema
De las dos soluciones linealmente independientes de la ecuacion generatriz de las funcionesespeciales podemos seleccionar una de ellas mediante la imposicion de determinadas condi-ciones de frontera en los extremos del intervalo [a, b], en correspondencia con las caracterısticasmatematicas de la solucion establecidas con ayuda del teorema demostrado en el epıgrafe ante-rior, o tambien de acuerdo con las condiciones que se deriven del problema fısico que conduzcaa esta ecuacion. Introduzcamos la siguiente notacion. Llamemos
L[y] ≡ d
dx[k(x)y′]− q(x)y (1.23)
donde L[y] es, evidentemente, un operador diferencial lineal. Entonces, la ecuacion generatrizde las funciones especiales tiene la forma:

Funciones Especiales de la Fısica Matematica 23
L[y] + λp(x)y = 0, ∀a < x < b (1.24)
Supongamos que k(a) = 0 y k(b) = 0 y que queremos seleccionar la solucion acotada de laecuacion (1.24). Entonces, para la ecuacion quedara planteado el problema de frontera en lossiguientes terminos:
L[y] + λp(x)y = 0, ∀a < x < b
|y(a)| < ∞ (1.25)
|y(b)| < ∞
La solucion de este problema sera la solucion acotada de nuestra ecuacion. La situacion descritase presenta, por ejemplo, en el caso de la ecuacion de Legendre, donde k(x) = 1 − x2 se hacecero en x = −1 y x = 1.
En otros casos puede ocurrir que k(a) = 0, pero k(b) 6= 0. Entonces desde un punto de vistamatematico, avalado por el teorema del epıgrafe anterior, para seleccionar la solucion acotada,la condicion a imponer en x = a sera |y(a)| < ∞. La condicion en el otro extremo, x = b,quedara a imponer en correspondencia con el problema fısico que estemos resolviendo. En lasegunda parte del presente libro veremos que, en terminos generales, estas condiciones puedenser:
1. De primer tipo: dado el valor nulo de la funcion en el extremo: y(b) = 0.
2. De segundo tipo: dado el valor nulo de la derivada en el extremo: y′(b) = 0.
3. De tercer tipo: dada la relacion entre el valor y la derivada: y′(b) + hy(b) = 0.
Entonces, suponiendo, para fijar ideas, la condicion de frontera de primer tipo, el problema defrontera en este caso quedara planteado de la siguiente manera:
L[y] + p(x)y = 0, ∀a < x < b
|y(a)| < ∞ (1.26)
y(b) = 0
Esta situacion se presenta, por ejemplo, en el caso de la ecuacion de Bessel, en la que k(x) = xse hace cero en el punto x = 0 solamente.
El problema de frontera (1.25) o (1.26) ası planteado es conocido con el nombre de problema deSturm-Liouville o problema de autovalores y autofunciones y con el nos encontraremosen multitud de ocasiones en la segunda parte del presente libro al desarrollar el metodo de se-paracion de variables para la solucion de los diferentes problemas de las ecuaciones en derivadasparciales de la Fısica Matematica.

24 Jose Marın Antuna
Independientemente de que, durante el estudio del esquema general de separacion de variables,hagamos un analisis mas detallado de las caracterısticas del problema de Sturm-Liouville, dire-mos que el mismo tiene solucion no trivial solamente para determinados valores del parametroλ. De esta manera llegamos a la siguiente definicion.
Definicion:
Aquellos valores de λ para los cuales el problema de Sturm-Liouville tiene solucion no trivial sellaman autovalores del problema. Las soluciones no triviales que les corresponden recibenel nombre de autofunciones del problema.
1.3.2 Propiedades de los autovalores y de las autofunciones
El sistema de autovalores y autofunciones del problema de Sturm-Liouville anteriormenteplanteado tiene las siguientes propiedades.
1. Existe un conjunto infinito y real de autovalores
λ1 < λ2 < .... < λn < .... (1.27)
tales que
limn→∞
λn = ∞ (1.28)
A cada autovalor le corresponde un numero finito de autofunciones.
La demostracion de esta propiedad no sera abordada en esta ocasion, debido a su com-plejidad y puede ser demostrada con ayuda de la teorıa de las ecuaciones integrales y suequivalencia con los problemas de frontera.
2. Todos los autovalores cumplen que
λn > minq(x)
p(x)(1.29)
Demostracion:
Independientemente de que esta demostracion puede efectuarse sobre la base de la teorıade las ecuaciones integrales, no es difıcil percatarse de la validez de (1.29) a partir de lossiguientes razonamientos. Colocando el autovalor λn y su correspondiente autofuncionyn(x) en la ecuacion (1.24), obtenemos la identidad:
d
dx[k(x)y′n]− q(x)yn + λnp(x)yn ≡ 0 (1.30)
Multiplicando (1.30) por yn(x) e integrando, despues de aplicar integracion por partes,nos queda:
Funciones Especiales de la Fısica Matematica 25
yn(x)k(x)y′n(x)|ba −
∫ b
a
k(x)[y′n]2dx−
∫ b
a
q(x)y2ndx+ λn
∫ b
a
p(x)y2ndx ≡ 0 (1.31)
El primer sumando en la expresion (1.31) es cero en virtud del planteamiento del problemade frontera. Por consiguiente, para λn obtenemos:
λn =
∫ baq(x)y2
ndx+∫ bak(x)[y′n]
2dx∫ bap(x)y2
ndx>q(x∗)
∫ bay2ndx
p(x∗)∫ bay2ndx
> minq(x)
p(x)(1.32)
lo que demuestra la propiedad. En (1.32) hemos tenido en cuenta el caracter definidopositivo del segundo sumando del numerador y aplicado el teorema del valor medio inte-gral.
3. Las autofunciones correspondientes a distintos autovalores son ortogonales entre sı conpeso p(x) en el intervalo [a, b], es decir:
∫ b
a
yn(x)ym(x)p(x)dx =‖ yn ‖2 δnm (1.33)
donde ‖ yn ‖2 es el cuadrado de la norma de las autofunciones, que se define por:
‖ yn ‖2=
∫ b
a
y2n(x)p(x)dx (1.34)
Demostracion:
Esta propiedad es tambien facil de establecer en estos momentos. Escribamos las identi-dades que se obtienen de la ecuacion (1.24) al sustituir en ella dos autovalores distintosλn 6= λm y sus correspondientes autofunciones. Obtenemos:
d
dx[k(x)y′n]− q(x)yn + λnp(x)yn ≡ 0 (1.35)
d
dx[k(x)y′m]− q(x)ym + λmp(x)ym ≡ 0 (1.36)
Multipliquemos (1.35) por ym(x) y (1.36) por yn(x), restemos ambas expresiones e inte-gremos entre a y b. Obtenemos:
∫ b
a
ym
d
dx[k(x)y′n]− yn
d
dx[k(x)y′m]
dx+ (λn − λm)
∫ b
a
ynymp(x)dx ≡ 0 (1.37)
Para la primera integral en (1.37) tenemos que:
∫ b
a
ym
d
dx[k(x)y′n]− yn
d
dx[k(x)y′m]
dx ≡
∫ b
a
d
dx[k(x)(ymy
′n − yny
′m)]dx = 0 (1.38)
26 Jose Marın Antuna
en virtud de las condiciones de frontera del problema de Sturm-Liouville. Teniendo encuenta (1.38), concluimos de (1.37) que, efectivamente, en el caso en que n 6= m, secumple la ortogonalidad de las autofunciones correspondientes a distintos autovalores,pues λn 6= λm. Para n = m se obtiene una integral definida positiva que, por definicion,es el cuadrado de la norma de las autofunciones.
Demostrada la propiedad.
4. Teorema del Desarrollo.
Si f(x) es continua y dos veces diferenciable en (a, b) y satisface las condiciones de fronteradel problema de Sturm-Liouville, entonces admite un desarrollo en serie de autofuncionesconvergente absoluta y uniformemente en (a, b)
f(x) =∞∑n=1
fnyn(x) (1.39)
donde los coeficientes del desarrollo son
fn =1
‖ yn ‖2
∫ b
a
f(x)yn(x)p(x)dx (1.40)
y se hallan, teniendo en cuenta la ortogonalidad con peso p(x) de las autofunciones apartir de (1.39).
La demostracion de esta cuarta propiedad, al igual que la primera propiedad, se lleva acabo a traves de la teorıa de las ecuaciones integrales y su equivalencia con los problemasde Sturm-Liouville. No obstante, destaquemos el hecho de que la misma nos esta diciendoque el sistema de las autofunciones es cerrado y completo, de manera que forma una baseen un espacio funcional de infinitas dimensiones, en el que puede ser desarrollada cualquierfuncion de dicho espacio como una combinacion lineal de los elementos de esa base. Estainterpretacion relacionada con el Algebra Lineal, ademas de valida, es muy util; sobreello abundaremos en la segunda parte de nuestro libro.
1.4 Solucion de ecuaciones diferenciales por series de po-
tencias
1.4.1 Caso de coeficientes analıticos
Antes de pasar al estudio particular de cada caso de la ecuacion generatriz de las funcionesespeciales, es conveniente detenernos, siquiera brevemente, en el analisis de un metodo amplia-mente utilizado en la solucion de ecuaciones diferenciales ordinarias y que es el de la busquedade la solucion en la forma de una serie de potencias. En los cursos de ecuaciones diferencialesordinarias comunmente se limitan a mostrar que se puede formalmente satisfacer la ecuaciondiferencial con cierta serie de potencias, sin abordar la demostracion de la convergencia dedicha serie. En el presente epıgrafe realizaremos un estudio sistematico apoyados en la teorıa
Funciones Especiales de la Fısica Matematica 27
de funciones analıticas estudiadas en el libro de Teorıa de Funciones de Variable Compleja delautor.
La ecuacion objeto de estudio en este capıtulo puede ser escrita en la forma
k(x)y′′ + k′(x)y′ − q(x)y + λp(x)y = 0 (1.41)
de donde se ve claramente que es una ecuacion lineal de segundo orden con coeficientes variables.Por ello, analizaremos en el plano complejo z la ecuacion
A(z)y′′ + P (z)y′ +Q(z)y = 0 (1.42)
donde A(z), P (z) y Q(z) son funciones analıticas. La funcion incognita y(z) es tambien unafuncion de la variable compleja z = x+ iy. Para el caso en que z = x, la ecuacion (1.41) es uncaso particular de (1.42), donde los coeficientes son definidos como A(x) = k(x), P (x) = k′(x),Q(x) = λp(x)−q(x). Supongamos en (1.42) que el coeficiente A(z) no es identicamente nulo, yaque, de lo contrario, no estarıamos en presencia de una ecuacion de segundo orden. Dividiendotoda la ecuacion (1.42) por A(z), obtenemos la ecuacion en forma reducida:
y′′ + p(z)y′ + q(z)y = 0 (1.43)
donde
p(z) =P (z)
A(z), q(z) =
Q(z)
A(z)(1.44)
Supongamos que a la ecuacion (1.43) le estan impuestas las condiciones iniciales:
y(z0) = c0, y′(z0) = c1 (1.45)
Supongamos que A(z) 6= 0 en cierto cırculo |z−z0| < R. Entonces, en dicho cırculo las funcionesp(z) y q(z) seran analıticas. Tiene lugar la siguiente afirmacion.
Teorema 2
Si los coeficientes p(z) y q(z) de la ecuacion (1.43) son funciones analıticas en el cırculo |z−z0| <R, entonces en dicho cırculo existe la solucion analıtica y unica de la ecuacion (1.43), quesatisface las condiciones iniciales (1.45).
Demostracion:
Introduzcamos la notacion

28 Jose Marın Antuna
u(z) = y′(z) (1.46)
Entonces la ecuacion (1.43) puede escribirse como el siguiente sistema equivalente de dos ecua-ciones diferenciales de primer orden:
u′ = −p(z)u− q(z)y (1.47)
y′ = u
En aras de lograr una simetrıa en las formulas que habremos de obtener, analizaremos el casogeneral del sistema de ecuaciones lineales:
u′ = a(z)u+ b(z)v (1.48)
v′ = c(z)u+ d(z)v
y demostraremos que el sistema (1.48) tiene solucion analıtica en el cırculo |z − z0| < R quesatisface las condiciones
u(z0) = α, v(z0) = β (1.49)
si los coeficientes del sistema (1.48) son funciones analıticas en el cırculo en cuestion. Paraello utilizaremos el metodo de aproximaciones sucesivas. Escribamos el sistema (1.48) con lascondiciones (1.49) en forma de dos ecuaciones integrales equivalentes:
u = α+
∫ z
z0
[a(z)u+ b(z)v]dz
v = β +
∫ z
z0
[c(z)u+ d(z)v]dz (1.50)
Como en el cırculo |z−z0| < R, por hipotesis, las funciones a(z), b(z), c(z) y d(z) son analıticas,seran acotadas, lo que significa que para cierto numero positivo M se cumplira en el cırculoque
|a(z)| < M, |b(z)| < M, |c(z)| < M, |d(z)| < M (1.51)
Ademas, en virtud de la analiticidad, las integrales en (1.50) no dependen del camino de inte-gracion. Construyamos las aproximaciones sucesivas, proponiendo:
Funciones Especiales de la Fısica Matematica 29
u0(z) = α, v0(z) = β (1.52)
y
un+1 = α+
∫ z
z0
[a(z)un + b(z)vn]dz
vn+1 = β +
∫ z
z0
[c(z)un + d(z)vn]dz (1.53)
con n = 1, 2, ...
Sean
|α| < m, |β| < m (1.54)
donde m es cierto numero positivo. En aras de simplificar los calculos consideremos z0 = 0 y,como las integrales no dependen del camino, integremos por la lınea recta entre 0 y z.
Entonces:
z = reiϕ, dz = dreiϕ (1.55)
y para n = 0 de la primera ecuacion de (1.53) obtenemos:
u1 = α+
∫ r
0
[a(z)α+ b(z)β]eiϕdr (1.56)
Teniendo en cuenta (1.51), (1.52) y (1.54), de (1.56) se obtiene que
|u1(z)− u0(z)| < 2Mmr (1.57)
De forma totalmente analoga se obtiene:
|v1(z)− v0(z)| < 2Mmr (1.58)
Para n = 2 de la primera ecuacion de (1.53) se obtiene:
u2 = α+
∫ r
0
[a(z)u1 + b(z)v1]eiϕdr (1.59)
30 Jose Marın Antuna
Restando (1.56) a (1.59), obtenemos:
u2(z)− u1(z) =
∫ r
0
[a(z)(u1 − u0) + b(z)(v1 − v0)]eiϕdr (1.60)
por lo que, teniendo en cuenta (1.51), (1.54), (1.57) y (1.58), es facil obtener que:
|u2(z)− u1(z)| < m(2Mr)2
2!(1.61)
y, de forma analoga:
|v2(z)− v1(z)| < m(2Mr)2
2!(1.62)
Continuando este proceso, es facil llegar a que:
|un+1(z)− un(z)| < m(2Mr)n+1
(n+ 1)!(1.63)
|vn+1(z)− vn(z)| < m(2Mr)n+1
(n+ 1)!(1.64)
Las expresiones (1.63) y(1.64) indican, de acuerdo con el criterio de Weierstrass, que las series
u0(z) +∞∑n=0
[un+1(z)− un(z)]
v0(z) +∞∑n=0
[vn+1(z)− vn(z)] (1.65)
convergen absoluta y uniformemente en el cırculo |z − z0| < R. Como las sumas parciales deestas series son las funciones (1.53), concluimos que las sucesiones funcionales de miembrosdefinidos por (1.53) convergen uniformemente en el cırculo |z− z0| < R a ciertas funciones u(z)y v(z) respectivamente, las cuales -de acuerdo con el teorema de Weierstrass- seran analıticas enel cırculo en cuestion. Tomando el lımite para n→∞ en (1.53), vemos que las funciones u(z)y v(z) cumplen (1.50) y como estas ecuaciones integrales son equivalentes al sistema (1.48) conlas condiciones (1.49) y este, a su vez, es equivalente a la ecuacion (1.43), queda demostrado quela ecuacion (1.43) tiene solucion unica que satisface las condiciones iniciales (1.45) en forma deuna funcion analıtica en el cırculo |z − z0| < R, donde las funciones p(z) y q(z) son analıticas.
Demostrado el teorema.

Funciones Especiales de la Fısica Matematica 31
El teorema demostrado tiene un evidente corolario.
Corolario.
Si los coeficientes p(z) y q(z) de la ecuacion (1.43) son funciones analıticas en un cırculo concentro en el punto z0, entonces su solucion puede expresarse como una serie de potencias dez − z0 convergente absoluta y uniformemente en dicho cırculo y esta solucion es unica para lascondiciones iniciales (1.45).
Demostracion:
Como la solucion de la ecuacion (1.43) es analıtica en el cırculo |z− z0| < R, por el teorema deTaylor dicha solucion admite un desarrollo en dicho cırculo en la serie de potencias
y(x) =∞∑n=0
cn(z − z0)n (1.66)
convergente absoluta y uniformemente en dicho cırculo.
Demostrado el corolario.
Si le damos a los coeficientes c0 y c1 en (1.45) valores determinados, es posible construir a partirde (1.66) dos soluciones y1(z), y2(z) que satisfagan las condiciones iniciales
y1(z0) = α1, y′1(z0) = β1
y2(z0) = α2, y′2(z0) = β2 (1.67)
entonces y1(z), y2(z) seran linealmente independientes y constituiran el sistema fundamentalde la ecuacion (1.43) y cualquier solucion analıtica en el cırculo |z − z0| < R vendra expresadaa traves de estas funciones en la forma
y(z) = A1y1(z) + A2y2(z) (1.68)
Por ultimo, destaquemos que la solucion hallada en el cırculo |z−z0| < R puede ser prolongadaanalıticamente a todo el dominio D de analiticidad de los coeficientes p(z) y q(z) por el metodoconocido de prolongacion analıtica estudiado en el libro de Teorıa de Funciones de VariableCompleja del autor.
1.4.2 Caso de coeficientes con puntos singulares aislados
Enunciemos y demostremos un importante teorema.
Teorema
32 Jose Marın Antuna
Si z0 es un polo o un punto singular esencial para los coeficientes p(z) y q(z) de la ecuacion(1.43), entonces existen dos soluciones linealmente independientes de esta ecuacion que puedenexpresarse en terminos de series de Laurent multiplicadas por una potencia finita de (z − z0).
Demostracion:
Supongamos que p(z) y q(z) tienen en z0 un polo o una singularidad esencial. Entonces en elanillo 0 < |z − z0| < R estas funciones admiten un desarrollo en serie de Laurent de la forma:
p(z) =∞∑−∞
an(z − z0)n
q(z) =∞∑−∞
bn(z − z0)n (1.69)
Cualquier solucion de la ecuacion (1.43) puede ser prolongada analıticamente en el anillo concentro en z0 y, al dar una vuelta alrededor de este punto, esta solucion de la ecuacion puede,en general, tomar nuevos valores. Esto significa que el punto z0 en terminos generales puedeser para la solucion de la ecuacion (1.43) un punto de ramificacion.
Analicemos mas detalladamente el caracter de este punto de ramificacion. Sean y1, y2 dossoluciones cualesquiera linealmente independientes de la ecuacion (1.43). Realicemos un corteen el anillo desde su centro a lo largo de un radio cualquiera. En el dominio simplementeconexo ası obtenido las soluciones y1, y2 seran funciones analıticas univaluadas. Sin embargo,en los bordes de dicho corte estas funciones tomaran valores diferentes. Ello significa que aldar una vuelta alrededor del punto z0 las funciones y1, y2 se transforman en otras funcionesque llamaremos y1, y2. Estas nuevas funciones deberan ser tambien, obviamente, solucion de laecuacion (1.43) y, por consiguiente, deberan expresarse como combinacion lineal de y1, y2. Esdecir:
y1 = a11y1 + a12y2
y2 = a21y1 + a22y2 (1.70)
donde aik son ciertas constantes. Las ecuaciones (1.70) significan que, al dar una vuelta alrede-dor del punto singular z0, las soluciones linealmente independientes sufren una transformacionlineal. Es facil ver que
a11a22 − a12a21 6= 0 (1.71)
ya que, si aceptaramos la igualdad a cero en (1.71), las soluciones y1, y2 se diferenciarıan entresı solo por un factor constante, lo que significarıa que serıan linealmente dependientes, cosa quees imposible, ya que la prolongacion analıtica de soluciones linealmente independientes tieneque dar funciones linealmente independientes.
Funciones Especiales de la Fısica Matematica 33
La forma de la transformacion (1.70) depende, logicamente, de la eleccion de las soluciones y1,y2. Tratemos de construir una solucion que, al dar una vuelta alrededor de z0, se transformesolo en un factor constante. Es decir:
y = λy (1.72)
Si esta solucion existe, tendra que ser, forzosamente, combinacion lineal de las soluciones y1,y2:
y = b1y1 + b2y2 (1.73)
Hallemos los coeficientes b1 y b2. De acuerdo con (1.72):
b1y1 + b2y2 = λ(b1y1 + b2y2) (1.74)
Teniendo en cuenta (1.70), obtenemos:
b1(a11y1 + a12y2) + b2(a21y1 + a22y2) = λ(b1y1 + b2y2) (1.75)
Comparando coeficientes en (1.75), obtenemos el siguiente sistema:
(a11 − λ)b1 + a21b2 = 0
a12b1 + (a22 − λ)b2 = 0 (1.76)
Para que el sistema (1.76) tenga solucion no trivial, debera cumplirse que:
∣∣∣∣ (a11 − λ) a21
a12 (a22 − λ)
∣∣∣∣ = 0 (1.77)
La ecuacion algebraica (1.77) tiene, en general, dos raıces λ1, λ2 que seran los valores posiblesdel factor λ en (1.72) para obtener coeficientes b1, b2 diferentes de cero.
Ello significa que estos valores de λ son los unicos posibles para la existencia de la solucion dela ecuacion (1.43) que, al dar una vuelta alrededor de z0, se multiplique por dicho numero.
Para las raıces λ1, λ2 de la ecuacion (1.77) tendremos dos soluciones linealmente independientesdadas por
y1 = λ1y1, y2 = λ2y2 (1.78)

34 Jose Marın Antuna
Introduzcamos los numeros r1 y r2 mediante las expresiones:
r1 =1
2πilnλ1, r2 =
1
2πilnλ2 (1.79)
Entonces las funciones
(z − z0)r1 ≡ er1 ln(z−z0), (z − z0)
r2 ≡ er2 ln(z−z0) (1.80)
al dar una vuelta alrededor del punto singular z0 se incrementan en el factor
er12πi = elnλ1 ≡ λ1, er22πi = elnλ2 ≡ λ2 (1.81)
Por consiguiente, las expresiones
y1
(z − z0)r1,
y2
(z − z0)r2(1.82)
al dar una vuelta alrededor del punto z0 permanecen univaluadas, es decir, son funcionesanalıticas univaluadas en el entorno de z0 y, por consiguiente, en dicho entorno se expresaran atraves de series de Laurent. De esta manera, las soluciones construidas tendran en el entornode z0 las siguientes expresiones:
y1 = (z − z0)r1
∞∑−∞
cn(z − z0)n
y2 = (z − z0)r2
∞∑−∞
dn(z − z0)n (1.83)
Es conveniente destacar que lnλ esta determinado con exactitud de un sumando de la forma2πmi, con m entero. Por lo tanto, de (1.79) se ve que r1 y r2 se determinan con exactitudde sumandos que son numeros enteros. Ello esta en plena concordancia con (1.83), ya que lamultiplicacion de la serie de Laurent por (z − z0)
m con m entero, nos da de nuevo una serie deLaurent.
Por otra parte, si la ecuacion (1.77) tiene una sola raız multiple, es decir, si λ1 = λ2, entoncespodemos construir una solucion en la forma
y1 = λ1y1 (1.84)
Veamos una segunda solucion y2 linealmente independiente de y1. Al dar una vuelta alrededordel punto singular z0, esta solucion se transforma linealmente de la forma

Funciones Especiales de la Fısica Matematica 35
y2 = a21y1 + a22y2 (1.85)
La ecuacion (1.77) en este caso adopta la forma:
∣∣∣∣ (λ1 − λ) a21
0 (a22 − λ)
∣∣∣∣ = 0 (1.86)
que, de acuerdo con lo dicho, tiene una sola raız multiple λ = λ1. Por lo tanto, a22 = λ1, demanera que de (1.85) obtenemos:
y2 = λ1y2 + a21y1 (1.87)
De (1.84) y (1.87) obtenemos que:
y2
y1
=y2
y1
+a21
λ1
(1.88)
Por lo tanto, tendremos que la diferencia
y2
y1
− a21
2πiλ1
ln(z − z0) ≡y2
y1
− a ln(z − z0) (1.89)
al dar una vuelta alrededor de z0, sera una funcion analıtica univaluada y podra ser expresadacomo un desarrollo en serie de Laurent. Por consiguiente, en este caso, teniendo en cuenta(1.83), las soluciones de la ecuacion (1.43) pueden expresarse en el entorno del punto singularz0 en la forma:
y1 = (z − z0)r1
∞∑−∞
cn(z − z0)n
y2 = (z − z0)r2
∞∑−∞
dn(z − z0)n + ay1 ln(z − z0) (1.90)
donde
a =a21
2πiλ1
Demostrado el teorema.
36 Jose Marın Antuna
1.4.3 Caso de puntos singulares regulares
Los resultados obtenidos en el punto anterior son de ındole puramente teorico, ya que nopermiten en la practica obtener las soluciones de nuestra ecuacion. En el presente puntoveremos un caso particular de gran importancia que se basa en el siguiente concepto.
Definicion.
El punto singular aislado z0 de los coeficientes p(z) y q(z) de la ecuacion (1.43) se llama puntosingular regular de la ecuacion, si las series de Laurent en (1.83) o en (1.90) tienen unnumero finito de miembros en la parte principal. En caso contrario, el punto singular z0 sellama irregular.
Es facil ver que, en este caso, incrementando r1 y r2 en un numero entero, podemos lograr quelas series de potencias en (1.83) y (1.90) no contengan terminos de potencias negativas, es decirque -por ejemplo para (1.83)- en el caso en que el punto z0 sea un punto singular regular parala ecuacion (1.43), las soluciones de dicha ecuacion tendran en el entorno de z0 la forma:
y1 = (z − z0)r1
∞∑n=0
cn(z − z0)n
y2 = (z − z0)r2
∞∑n=0
dn(z − z0)n (1.91)
Tiene lugar el siguiente importantısimo teorema.
Teorema
Para que el punto z0 sea un punto singular regular de la ecuacion (1.43), es necesario y suficienteque sea un polo de primer orden para el coeficiente p(z) de la ecuacion y un polo de segundoorden para el coeficiente q(z) como maximo. Es decir, que la ecuacion (1.43) tenga la forma:
y′′ +p1(z)
z − z0
y′ +q1(z)
(z − z0)2y = 0 (1.92)
donde p1(z) y q1(z) son funciones analıticas en z0.
Demostracion:
1. Necesidad:
Sean y1 y y2 dos funciones linealmente independientes. Colocandolas en (1.43), obtenemos:
y′′1 + p(z)y′1 + q(z)y1 = 0
y′′2 + p(z)y′2 + q(z)y2 = 0 (1.93)

Funciones Especiales de la Fısica Matematica 37
Exigiendo que (1.93) sean identidades, es decir, que y1 y y2 sean soluciones de la ecuacion,obtenemos para p(z) y q(z) las expresiones:
p(z) =y′′2y1 − y′′1y2
y′2y1 − y′1y2
(1.94)
q(z) =y′′1y1
− p(z)y′1y1
(1.95)
El denominador en (1.94) no es cero, ya que es el wronskiano de dos soluciones linealmenteindependientes. Sea z0 un punto singular regular de la ecuacion. Consideremos solamente elcaso r1 6= r2, ya que el caso de las formulas (1.90) puede ser analizado de forma totalmenteanaloga. Tendremos que las soluciones vienen dadas por (1.91). Por consiguiente:
y2
y1
= (z − z0)r2−r1f(z) (1.96)
donde f(z) es analıtica en z0, ya que es el cociente de dos funciones analıticas expresadas porseries de potencias positivas.
Analicemos el wronskiano. Tenemos:
∆(z) = y′2y1 − y′1y2 ≡ y21
d
dz
(y2
y1
)= (z − z0)
2r1ϕ(z)[(z − z0)r2−r1f(z)]′ (1.97)
donde
ϕ(z) =
[∞∑n=0
cn(z − z0)n
]2
es una funcion analıtica en z0. De (1.97) obtenemos:
∆(z) = (z − z0)2r1ϕ(z)[(r2 − r1)(z − z0)
r2−r1−1f(z) + (z − z0)r2−r1f ′(z)] =
= (z − z0)r1+r2−1[(r2 − r1)ϕ(z)f(z) + (z − z0)ϕ(z)f ′(z)] ≡
≡ (z − z0)r1+r2−1ψ(z) (1.98)
donde ψ(z) es una funcion analıtica en z0 dada por la expresion entre corchetes en (1.98).Derivando, obtenemos:
∆′(z) = (r1 + r2 − 1)(z − z0)r1+r2−2ψ(z) + (z − z0)
r1+r2−1ψ′(z) (1.99)

38 Jose Marın Antuna
Por consiguiente, de (1.94) obtenemos que:
p(z) =∆′(z)
∆(z)=
1− r1 − r2z − z0
+ψ′(z)
ψ(z)(1.100)
La expresion (1.100) significa que, efectivamente, p(z) tiene un polo de primer orden en z0. Porotra parte, de acuerdo con la teorıa de residuos, la derivada logarıtmica y′1/y1 tiene en z0 unpolo de primer orden, ya que de (1.91) se ve que y1 tiene un cero en z0. Por consiguiente, y′′1/y1
tendra un polo de segundo orden en z0. De (1.95) concluimos, por tanto, que, efectivamente,q(z) tiene en z0 un polo de segundo orden.
Demostrada la necesidad.
2. Suficiencia:
Supongamos que p(z) tiene un polo de primer orden y q(z) un polo de segundo orden en z0.Demostremos que, entonces, las soluciones de la ecuacion (1.43), que ahora adquiere la forma(1.92), se expresan por (1.91); ello significara que el punto z0 es singular regular de la ecuacion,de acuerdo con la definicion. De nuevo nos limitaremos al caso en que r1 6= r2. En aras desimplificar los calculos, consideraremos z0 = 0. Escribamos la ecuacion (1.92), despues demultiplicarla por z2, en la forma:
z2y′′ + zp1(z)y′ + q1(z)y = 0 (1.101)
y busquemos la solucion en la forma
y = zr∞∑n=0
cnzn (1.102)
Trataremos de demostrar que esta serie converge uniformemente, con lo que quedara demostradoque la solucion tiene la forma (1.102) y que, por lo tanto, z0 es un punto singular regular.Derivando (1.102), obtenemos:
y′ =∞∑n=0
(n+ r)cnzn+r−1, y′′ =
∞∑n=0
(n+ r)(n+ r − 1)cnzn+r−2 (1.103)
Colocando (1.103) en (1.101), obtenemos:
∞∑n=0
(n+ r)(n+ r − 1)cnzn+r + p1(z)
∞∑n=0
(n+ r)cnzn+r + q1(z)
∞∑n=0
cnzn+r (1.104)
Como p1(z) y q1(z) son analıticas, podemos escribir:

Funciones Especiales de la Fısica Matematica 39
p1(z) =∞∑k=0
akzk, q1(z) =
∞∑k=0
bkzk (1.105)
Colocando (1.105) en (1.104) e igualando a cero los coeficientes para distintas potencias de z,se obtienen las ecuaciones para determinar los coeficientes cn:
c0f0(r) = 0
c1f0(r + 1) + c0f1(r) = 0
c2f0(r + 2) + c1f1(r + 1) + c0f2(r) = 0 (1.106)
..............................................
cnf0(r + n) + cn−1f1(r + n− 1) + ...+ c0fn(r) = 0 (1.107)
donde hemos introducido la notacion:
f0(λ) = λ(λ− 1) + λa0 + b0
fn(λ) = λan + bn, n = 1, 2, ... (1.108)
La primera ecuacion (1.106) sera, por lo tanto:
f0(r) = r(r − 1) + ra0 + b0 (1.109)
que es una ecuacion de segundo grado. Sea r1 una raız de (1.109) tal, que para todo n enteropositivo, se cumpla que
f0(r1 + n) 6= 0, n = 1, 2, ... (1.110)
Entonces, las restantes ecuaciones (1.106) nos permiten determinar sucesivamente c1, c2,... Elcoeficiente c0 permanece arbitrario y jugara, obviamente, el papel de constante arbitraria quefigura en la solucion de la ecuacion homogenea (1.101). Podemos, por lo tanto, tomar c0 = 1.Demostremos que la serie ası construida (1.102) converge en un entorno de z = 0. Sea R elradio de convergencia de las series (1.105). Para R1 < R, evidentemente
|ak| <m1
Rk1
, |bk| <m2
Rk1
(1.111)
donde m1 y m2 son constantes relacionadas con las cotas de las funciones analıticas p1(z) yp2(z). Entonces

40 Jose Marın Antuna
|ak|+ |bk| <m1 +m2
Rk1
<M
Rk1
(1.112)
donde M > m1 +m2.La relacion
|r|+ n
f0(r + n)=
|r|+ n
(r + n)(r + n− 1) + (r + n)a0 + b0→ 0, n→∞ (1.113)
Por consiguiente, para cierto N puede escribirse que
|f0(r + n)| > |r|+ n, ∀n > N (1.114)
De las ecuaciones (1.106) tenemos que:
cn = −f1(r + n− 1)
f0(r + n)cn−1 −
f2(r + n− 2)
f0(r + n)cn−2 − ...− fn(r)
f0(r + n)c0 (1.115)
Por lo tanto:
|cn| ≤|f1(r + n− 1)||f0(r + n)|
|cn−1|+ ...+fn(r)|
|f0(r + n)||c0| (1.116)
Por otra parte, de (1.108) tenemos que:
fk(r + n− k) = bk + (r + n− k)ak
por lo que
|fk(r + n− k)| < |bk|+ (|r|+ n)|ak|, k = 1, 2, ..., n (1.117)
Ası pues, podemos afirmar que
|fk(r + n− k)| < (|r|+ n)(|ak|+ |bk|).
Siempre existira un numero positivo P suficientemente grande tal, que para los primeros Ncoeficientes se cumpla que:
|ck| <pk
Rk1
, k = 0, 1, 2, ..., N − 1 (1.118)
Funciones Especiales de la Fısica Matematica 41
Consideraremos que P es elegido de forma tal que se cumpla que:
P > 1 +M (1.119)
Para los restantes coeficientes a partir de cN podemos utilizar (1.114). Demostremos a partir de(1.114) que, si (1.118) se cumple para ck con k = 0, 1, 2, ..., n− 1, entonces se cumple tambienpara k = n. Efectivamente, de acuerdo con (1.114), (1.116) y (1.117), tenemos que
|cn| < (|a1|+ |b1|)|cn−1|+ ...+ (|an|+ |bn|)|c0| (1.120)
Es decir, de acuerdo con (1.112):
|cn| <M
R1
|cn−1|+M
R21
|cn−2|+ ...+M
Rn1
|c0| (1.121)
Teniendo en cuenta que (1.118) se cumple para ck con k = 0, 1, 2, ..., n− 1, tendremos que:
|cn| <M
Rn1
(P n−1 + P n−2 + ...+ 1) ≡ M(P n − 1)
P − 1
1
Rn1
(1.122)
donde hemos utilizado la expresion de la suma de la progresion geometrica. Ahora bien, envirtud de (1.119), tenemos que:
P n+1 − (1 +M)P n +M > 0
Es decir
P n[P − (1 +M)] +M > 0 (1.123)
De (1.123) concluimos que
M(P n − 1)
P − 1< P n (1.124)
Colocando (1.124) en (1.122), llegamos, finalmente, a que:
|cn| <P n
Rn1
(1.125)
lo que demuestra que, efectivamente, (1.118) se cumple para k = n tambien. Ası pues, hemosdemostrado que, si (1.118) se cumple para cierto k y para los subsiguientes se cumple (1.114),entonces (1.125) se cumple para toda n. Pero la serie
42 Jose Marın Antuna
∞∑n=0
P n
Rn1
zn (1.126)
converge absolutamente en el cırculo |z| < R1/P . Por lo tanto, en este cırculo converge abso-lutamente tambien la serie de la formula (1.102) y puede ser derivada miembro a miembro.
Ası pues, hemos demostrado que la formula (1.102) nos da, efectivamente, una solucion de laecuacion (1.101) en el entorno del punto z = 0. Ello implica, evidentemente, que dicha serieconverge en todo el cırculo |z| < R en el que convergen las series (1.105), ya que en casocontrario la funcion definida en el entorno de z = 0 por la serie (1.102) deberıa tener en elcırculo |z| < R un punto singular diferente de z = 0, lo que es imposible.
Demostrada la suficiencia.
Demostrado el teorema.
Comunmente, a las series del tipo (1.102) o (1.91) se les llama series de potencias genera-lizadas.
Como conclusion de la teorıa desarrollada en este espıgrafe podemos decir que, si el punto z0
es un punto singular regular de la ecuacion, ello significa que los coeficientes p(z) y q(z) tienenun polo de primer orden y de segundo orden en z0, respectivamente, y que la solucion de laecuacion puede buscarse en forma de una serie de potencias generalizada con centro en z0. Si,por el contrario, el punto z0 es regular para los coeficientes p(z) y q(z), entonces la solucion dela ecuacion se podra buscar como una serie de potencias comun y corriente con centro en z0.Estos resultados nos permitiran en el proximo capıtulo acometer la busqueda de la solucion dela ecuacion de Bessel en la forma de una serie de potencias generalizada.

Capıtulo 2
Funciones Cilındricas
En el presente capıtulo acometeremos el estudio de uno de los casos particulares de la ecuaciongeneratriz de las funciones especiales vista en el capıtulo anterior y que se conoce con el nombrede ecuacion de Bessel. Dicha ecuacion aparece en la Fısica Matematica al resolver problemasen dominios cilındricos, por lo que sus soluciones son conocidas con el nombre de funcionescilındricas.
2.1 Ecuacion de Bessel. Funciones de Bessel
Con el nombre de ecuacion de Bessel o ecuacion cilındrica se conoce a la ecuacion diferencialordinaria de segundo orden:
1
x
d
dx
[xdy
dx
]+
(1− ν2
x2
)y = 0 (2.1)
donde ν es un parametro dado. En forma explıcita la ecuacion es:
y′′ +1
xy′ +
(1− ν2
x2
)y = 0 (2.2)
de donde se ve que el punto x = 0, en el que el coeficiente k(x) se hace cero, es un puntosingular regular de la ecuacion. Para el caso particular ν = 0 esta ecuacion fue obteniday resuelta por primera vez por D. Bernoulli en 1732 al estudiar las oscilaciones de cadenaspesadas. Posteriormente, en 1738, L. Euler, en el estudio de las oscilaciones de una membranacircular, obtuvo la misma ecuacion con valores enteros de ν (ν = n). Ambos cientıficos lograronobtener expresiones de la solucion en terminos de series de potencias de x y estudiaron algunascaracterısticas de la solucion; en particular, Euler logro extenderla a cualquier valor arbitrarioreal del parametro ν y hallo la expresion de la segunda solucion linealmente independientede la ecuacion. El astronomo aleman F. Bessel, con cuyo nombre se asocian comunmente las
43

44 Jose Marın Antuna
funciones cilındricas, en 1824 obtuvo las formulas recurrentes para las soluciones de la ecuacion(2.1) en un trabajo relacionado con el movimiento de los planetas alrededor del sol, profundizoen el estudio de las propiedades de sus soluciones y obtuvo la representacion integral de lasmismas. Demostro, ademas, que la solucion de la ecuacion tiene un numero infinito de ceros yconfecciono las primeras tablas de las funciones conocidas hoy en dıa como funciones de Bessel.
Dado que el punto x = 0 es singular regular para la ecuacion (2.2), de acuerdo con la teorıadesarrollada en el ultimo epıgrafe del capıtulo anterior, buscaremos su solucion en forma deuna serie de potencias generalizada con centro en el punto x = 0. Es decir, propondremos lasolucion en la forma:
y(x) =∞∑k=0
akxk+σ (2.3)
Derivando (2.3), obtenemos:
y′ =∞∑k=0
ak(k + σ)xk+σ−1, y′′ =∞∑k=0
ak(k + σ)(k + σ − 1)xk+σ−2 (2.4)
Colocando (2.3) y (2.4) en la ecuacion (2.2), obtenemos:
∞∑k=0
[(k + σ)(k + σ − 1) + (k + σ)− ν2]akxk+σ−2 +
∞∑k=0
akxk+σ = 0 (2.5)
En la segunda serie en (2.5) hagamos un cambio de ındice de sumatoria, llamando k − 2 a k.Entonces nos queda, despues de simplificar el corchete en el primer sumando:
∞∑k=0
[(k + σ)2 − ν2]akxk+σ−2 +
∞∑k=2
ak−2xk+σ−2 = 0 (2.6)
Agrupando en (2.6) potencias iguales, obtenemos:
[σ2 − ν2]a0xσ−2 + [(σ + 1)2 − ν2]a1x
σ−1 +∞∑k=2
[(k + σ)2 − ν2]ak + ak−2xk+σ−2 = 0 (2.7)
Para que la igualdad a cero en (2.7) sea valida, deberan ser iguales a cero los coeficientes queacompanan a las potencias de x, en virtud de la independencia lineal de estas. Por consiguiente,concluimos para el coeficiente que acompana a xσ−2 que:
[σ2 − ν2]a0 = 0 (2.8)

Funciones Cilındricas 45
Pero, como debemos suponer a0 6= 0, ya que de lo contrario la solucion propuesta (2.3) nocomenzarıa en k = 0, de (2.8) concluimos que
σ = ±ν (2.9)
Para el coeficiente que acompana a xσ−1, igualmente, tenemos que
[(σ + 1)2 − ν2]a1 = 0 (2.10)
El corchete en (2.10) nunca es igual a cero en virtud de (2.9), por lo que tendra que ser
a1 = 0 (2.11)
Por ultimo, para el resto de los coeficientes de (2.7) obtenemos:
[(k + σ)2 − ν2]ak = −ak−2 (2.12)
De (2.12) obtenemos para los coeficientes ak de la solucion propuesta (2.7) la siguiente formularecurrente:
ak = − ak−2
(k + σ)2 − ν2(2.13)
La expresion (2.13) nos indica que todos los coeficientes pares se expresan a traves de a0 ytodos los coeficientes impares a traves de a1, lo que de (2.11) implica que todos los coeficientesimpares son iguales a cero; por consiguiente, solo quedan los coeficientes pares. Haciendok = 2m, obtenemos para ellos la expresion:
a2m = − a2m−2
(2m+ σ)2 − ν2≡ − a2m−2
(2m+ σ + ν)(2m+ σ − ν)(2.14)
Analicemos uno de los casos posibles del valor de σ dados por (2.9). Especıficamente, conside-remos el caso en que σ = ν. Tendremos entonces que
a2m = − a2m−2
(2m+ 2ν)2m≡ − a2m−2
22m(m+ ν)(2.15)
A partir de (2.15) expresemos el coeficiente a2m en funcion de a0. Tenemos que:
a2m−2 = − a2m−4
22(m− 1)(m+ ν − 1)(2.16)
46 Jose Marın Antuna
a2m−4 = − a2m−6
22(m− 2)(m+ ν − 2)(2.17)
................................................
a4 = − a2
222(2 + ν)(2.18)
a2 = − a0
221(1 + ν)(2.19)
Colocando (2.19) en (2.18) y ası sucesivamente, hasta colocar (2.16) en (2.15), obtenemos,finalmente:
a2m =(−1)ma0
22mm!(ν + 1)(ν + 2)...(ν +m)(2.20)
No es difıcil ver que:
(ν + 1)(ν + 2)...(ν +m) =Γ(m+ ν + 1)
Γ(ν + 1)(2.21)
donde
Γ(s) =
∫ ∞
0
xs−1e−xdx (2.22)
es la conocida funcion gamma de Euler, cuya principal propiedad es que
Γ(s+ 1) = sΓ(s) (2.23)
Colocando (2.21) en (2.20), obtenemos para el coeficiente a2m la expresion:
a2m =(−1)ma0Γ(ν + 1)
22mm!Γ(m+ ν + 1)≡ (−1)ma0Γ(ν + 1)
22mΓ(m+ 1)Γ(m+ ν + 1)(2.24)
donde, en aras de la elegancia de la formula y teniendo en cuenta (2.23), hemos escrito m! =Γ(m + 1), ya que m es entero. De esta manera hemos hallado una expresion final para loscoeficientes de la solucion propuesta (2.3), por lo que podemos considerar resuelta la ecuacionde Bessel (2.2). Como los coeficientes impares son cero, de (2.3) obtenemos que la solucion es,pues σ = ν:

Funciones Cilındricas 47
y(x) =∞∑k=0
akxk+σ ≡
∞∑m=0
a2mx2m+ν (2.25)
Pero, en (2.24) el coeficiente a0 queda indeterminado y es arbitrario. Ello no debe preocuparnos,ya que la ecuacion (2.2) es homogenea y, por lo tanto, su solucion, multiplicada por cualquierconstante, sigue siendo solucion. Apoyados en este hecho y por razones historicas, a fin delograr una correspondencia de la solucion obtenida por el metodo de series de potencias yla solucion expresada a traves de integrales, segun veremos posteriormente, escogeremos elcoeficiente arbitrario a0 en la forma:
a0 =1
2νΓ(ν + 1)(2.26)
Colocando (2.26) en (2.24) y a su vez (2.24) en (2.25), obtenemos, finalmente, para la solucionde la ecuacion de Bessel (2.2) en el caso σ = ν la expresion:
Jν(x) =∞∑m=0
(−1)m(x2
)2m+ν
Γ(m+ 1)Γ(m+ ν + 1)(2.27)
La solucion (2.27) obtenida se conoce con el nombre de funcion de Bessel de orden νo funcion cilındrica de primera especie de orden ν. Es evidente que la serie (2.27) convergeabsoluta y uniformemente para toda x; esta convergencia es muy rapida debido a la presencia deldenominador en forma del producto de dos funciones gamma. Efectivamente, para ν pequena eldenominador es del orden de (m!)2, de manera que ya para m = 4 por ejemplo, la contribuciondel termino correspondiente es del orden de las milesimas. Es de notar que para ν > 0 lafuncion de Bessel (2.27) tiene en x = 0 un cero de orden ν; para ν = 0 esta funcion tiende a 1para x→ 0, es decir, es acotada diferente de cero. Como x = 0 es el punto donde el coeficientek(x) de la ecuacion de Bessel (2.1) se hace cero, la funcion (2.27) sera una de las dos solucioneslinealmente independientes de la ecuacion. Para el segundo caso en (2.9), es decir, σ = −ν, demanera totalmente analoga se obtiene la solucion
J−ν(x) =∞∑m=0
(−1)m(x2
)2m−νΓ(m+ 1)Γ(m− ν + 1)
(2.28)
De acuerdo con la teorıa general desarrollada en el capıtulo 1, la funcion (2.28) sera para ν > 0y no entero la otra solucion linealmente independiente de la ecuacion de Bessel (2.1), ya quepara los valores senalados de ν, de (2.28) se ve que J−ν(x) tiene en x = 0 un polo de ordenν. Por consiguiente, para ν > 0 y no entero la solucion general de la ecuacion de Bessel (2.1)tendra la forma
y(x) = AJν(x) +BJ−ν(x) (2.29)
48 Jose Marın Antuna
donde A y B son constantes arbitrarias. Sin embargo, la segunda solucion linealmente indepen-diente de la ecuacion de Bessel (2.1) aun no esta totalmente determinada, ya que para ν = 0(2.28) coincide con (2.27) por lo que habra que establecer la expresion de esa segunda solucionpara el caso en que ν = 0. Ademas, para valores enteros de ν = n, es facil ver que, en virtudde que Γ(m − n + 1) es infinitamente grande en modulo para 0 ≤ m ≤ n − 1, los primeros nsumandos en (2.28) son iguales a cero por lo que, haciendo el cambio de ındice de sumatoriam− n = k, obtenemos de (2.28):
J−n(x) =n−1∑m=0
(−1)m(x2
)2m−nΓ(m+ 1)Γ(m− n+ 1)
+∞∑m=n
(−1)m(x2
)2m−nΓ(m+ 1)Γ(m− n+ 1)
≡
≡∞∑m=n
(−1)m(x2
)2m−nΓ(m+ 1)Γ(m− n+ 1)
=∞∑k=0
(−1)k+m(x2
)2k+2n−n
Γ(k + n+ 1)Γ(k + 1)=
= (−1)n∞∑k=0
(−1)k(x2
)2k+nΓ(k + 1)Γ(k + n+ 1)
≡ (−1)nJn(x) (2.30)
Es decir, que para ν = n las funciones (2.27) y (2.28) son linealmente dependientes, porlo que para valores enteros de ν aun habra que determinar la segunda solucion linealmenteindependiente de la ecuacion de Bessel (2.1). A fin de establecer una expresion de la soluciongeneral de la ecuacion de Bessel que, a diferencia de (2.29), sea valida para cualquier ν, enel proximo epıgrafe definiremos la otra solucion linealmente independiente de la ecuacion deBessel y otras funciones cilındricas de utilidad en la Fısica Matematica.
2.2 Otros tipos de funciones cilındricas. Formulas de
recurrencia
2.2.1 Funciones de Neumann y de Hankel
Buscaremos la segunda solucion de la ecuacion de Bessel linealmente independiente de la funcionJν(x) obtenida en el epıgrafe anterior. Llamaremos funcion de Neumann a la funcion dadapor la expresion
Nν(x) =Jν(x) cos νπ − J−ν(x)
sin νπ(2.31)
donde Jν(x) y J−ν(x) son las soluciones de la ecuacion de Bessel halladas en el epıgrafe anterior,dadas por (2.27) y (2.28), respectivamente. Para valores no enteros del parametro ν, (2.31) noes mas que una combinacion lineal de ambas soluciones, por lo que esta funcion sera tambiensolucion de la ecuacion de Bessel. Redefiniendo convenientemente las constantes A y B en(2.29), la solucion general de la ecuacion de Bessel, obviamente, podra expresarse en este casocomo:

Funciones Cilındricas 49
y(x) = AJν(x) +BNν(x) (2.32)
Veamos ahora que ocurre en el caso en que ν es entero. Es evidente que no se puede evaluardirectamente ν = n (n = 0, 1, 2, ...) en la expresion (2.31), ya que en ese caso tiene lugar unaindeterminacion del tipo 0/0. Tomemos, por lo tanto, el lımite de la funcion de Neumann (2.31)para ν → n (n = 0, 1, 2, ...). Aplicando la regla de L’Hospital, obtenemos:
limν→n
Nν(x) ≡ Nn(x) = limν→n
(∂Jν
∂ν
)cos νπ − πJν sin νπ −
(∂J−ν
∂ν
)π cos νπ
(2.33)
Ası pues, para ν entero obtenemos para la funcion de Neumann la expresion:
Nn(x) =1
π
(∂Jν∂ν
)ν=n
− (−1)n(∂J−ν∂ν
)ν=n
(2.34)
La funcion de Neumann (2.34) o funcion cilındrica de segunda especie es la otra solucionlinealmente independiente de la ecuacion de Bessel que buscabamos. Teniendo en cuenta estadefinicion, la solucion general de la ecuacion de Bessel -ya para cualquier ν real no negativo-podra expresarse mediante la formula (2.32).
Calculemos, a partir de (2.34), la expresion de la funcion de Neumann. Teniendo en cuenta(2.27) y llamando k a m en esa expresion, es facil ver que
∂Jν∂ν
=(x
2
)νlnx
2
∞∑k=0
(−1)k(x2
)2kΓ(k + 1)Γ(k + ν + 1)
−(x
2
)ν ∞∑k=0
(−1)k(x2
)2kΓ′ν(k + ν + 1)
Γ(k + 1)Γ2(k + ν + 1)≡
≡ Jν(x) lnx
2−
∞∑k=0
(−1)k(x2
)2k+νΓ(k + 1)Γ(k + ν + 1)
ψ(k + ν + 1) (2.35)
donde la funcion
ψ(k + ν + 1) =Γ′ν(k + ν + 1)
Γ(k + ν + 1)≡ d
dνln Γ(k + ν + 1) (2.36)
es la derivada logarıtmica de la funcion gamma, para la cual se conocen las siguientes propie-dades:
ψ(n+ 1) = −γ +n∑
m=1
1
m(2.37)
para todo n entero, y

50 Jose Marın Antuna
ψ(1) = −γ (2.38)
donde
γ = 0.5772156649015325... (2.39)
es conocido con el nombre de numero de Euler, definido por la expresion:
γ = limn→∞
n∑
m=1
1
m− lnn
≈ 1
2(
3√
10− 1) (2.40)
en la teorıa de la funcion gamma de Euler.
Veamos, inicialmente, el caso ν = 0. Entonces:
(∂Jν∂ν
)ν=0
= J0(x) lnx
2−
∞∑k=0
(−1)k(x2
)2kΓ(k + 1)Γ(k + 1)
[−γ +
k∑m=1
1
m
]≡
≡ J0(x) lnx
2+ γ + γ
∞∑k=1
(−1)k(x2
)2k(k!)2
−∞∑k=1
(−1)k(x2
)2k(k!)2
k∑m=1
1
m≡
≡ J0(x)[lnx
2+ γ]−
∞∑k=1
(−1)k(x2
)2k(k!)2
k∑m=1
1
m(2.41)
De forma similar, derivando (2.28) y haciendo ν = 0, obtenemos:
(∂J−ν∂ν
)ν=0
≡ −J0(x)[lnx
2+ γ]
+∞∑k=1
(−1)k(x2
)2k(k!)2
k∑m=1
1
m(2.42)
Por lo tanto, colocando (2.41) y (2.42) en (2.34), obtenemos para la funcion de Neumann deorden cero la expresion:
N0(x) =2
πJ0(x)
[lnx
2+ γ]− 2
π
∞∑k=1
(−1)k(x2
)2k(k!)2
k∑m=1
1
m(2.43)
Notese que para x → 0 esta funcion tiene una singularidad logarıtmica, lo que era de esperar,de acuerdo con la teorıa general desarrollada en el capıtulo anterior, ya que J0(x) → 1 parax→ 0, es decir, es acotada y diferente de cero en x = 0.
Funciones Cilındricas 51
Veamos ahora el caso en que ν = n > 0. Aquı hay que tener cuidado en la derivacion de(2.28), por lo que dicho calculo lo efectuaremos detalladamente. De acuerdo con la formulacomplementaria de la funcion gamma
Γ(x)Γ(1− x) =π
sin πx(2.44)
tendremos que:
Γ(1− ν + k)Γ(ν − k) =π
sin(ν − k)π≡ π
(−1)k sin νπ(2.45)
Por lo tanto, de (2.28) con la consideracion de (2.45), obtenemos:
J−ν(x) =n−1∑k=0
(−1)2k(x2
)2k−νΓ(k + 1)
sin νπ
πΓ(ν − k) +
∞∑k=n
(−1)k(x2
)2k−νΓ(k + 1)Γ(k − ν + 1)
(2.46)
donde n es el numero entero mas cercano a ν por la derecha. Por consiguiente:
∂J−ν∂ν
= −(x
2
)−νlnx
2
∞∑k=0
(−1)k(x2
)2kΓ(k + 1)Γ(k − ν + 1)
+
+n−1∑k=0
(x2
)2k−νΓ(k + 1)
[sin νπ
πΓ′(ν − k) + cos νπΓ(ν − k)
]+
+∞∑k=n
(−1)k(x2
)2k−νΓ(k + 1)Γ(k − ν + 1)
ψ(k − ν + 1) (2.47)
Por lo tanto:
(∂J−ν∂ν
)ν=n
= −J−n(x) lnx
2+ (−1)n
n−1∑k=0
Γ(n− k)
Γ(k + 1)
(x2
)2k−n+
+∞∑k=n
(−1)k(x2
)2k−nΓ(k + 1)Γ(k − n+ 1)
ψ(k − n+ 1) (2.48)
Haciendo k = l + n en la serie de la derecha en (2.48), obtenemos:

52 Jose Marın Antuna
(∂J−ν∂ν
)ν=n
= −J−n(x) lnx
2+ (−1)n
n−1∑k=0
Γ(n− k)
Γ(k + 1)
(x2
)2k−n+
+ (−1)n∞∑k=0
(−1)k(x2
)2k+nΓ(k + 1)Γ(k + n+ 1)
ψ(k + 1) (2.49)
donde hemos llamado de nuevo k a l. Teniendo en cuenta (2.37) y (2.38) y la relacion (2.30)del epıgrafe anterior, de (2.49) obtenemos:
(∂J−ν∂ν
)ν=n
= −(−1)nJn(x)[lnx
2+ γ]
+ (−1)nn−1∑k=0
Γ(n− k)
Γ(k + 1)
(x2
)2k−n+
+ (−1)n∞∑k=1
(−1)k(x2
)2k+nΓ(k + 1)Γ(k + n+ 1)
k∑m=1
1
m(2.50)
ya que
∞∑k=0
(−1)k(x2
)2k+nΓ(k + 1)Γ(k + n+ 1)
ψ(k + 1) =
= −γ(x
2
)n 1
Γ(n+ 1)+
∞∑k=1
(−1)k(x2
)2k+nΓ(k + 1)Γ(k + n+ 1)
[−γ +
k∑m=1
1
m
]=
= −γ∞∑k=0
(−1)k(x2
)2k+nΓ(k + 1)Γ(k + n+ 1)
+∞∑k=1
(−1)k(x2
)2k+nΓ(k + 1)Γ(k + n+ 1)
k∑m=1
1
m(2.51)
y la serie del primer sumando, que acompana a −γ, no es otra cosa que Jn(x). Ademas, de(2.35) tenemos que:
(∂Jν∂ν
)ν=n
= Jn(x)[lnx
2+ γ]−(x
2
)n 1
n!
n∑m=1
1
m
∞∑k=1
(−1)k(x2
)2k+nΓ(k + 1)Γ(k + n+ 1)
k+n∑m=1
1
m(2.52)
donde hemos escrito explıcitamente el termino de la serie correspondiente a k = 0. Colocando(2.50) y (2.52) en (2.34), obtenemos, finalmente, para la funcion de Neumann de orden n laexpresion:
Funciones Cilındricas 53
Nn(x) =2
πJn(x)
[lnx
2+ γ]− 1
π
n−1∑k=0
Γ(n− k)
Γ(k + 1)
(x2
)2k−n− 1
π
(x2
)n 1
n!−
− 1
π
∞∑k=1
(−1)k(x2
)2k+nΓ(k + 1)Γ(k + n+ 1)
[k+n∑m=1
1
m+
k∑m=1
1
m
](2.53)
Notese que el segundo sumando en (2.53) evidencia que la Nn(x) tiene en x = 0 un polo deorden n, resultado que era de esperar de acuerdo con la teorıa general desarrollada en el capıtuloanterior, ya que Jn(x) tiene en x = 0 un cero de orden n.
Los comportamientos analizados para la funcion de Neumann (2.43) y (2.53) en el entorno delpunto x = 0, donde para la ecuacion de Bessel k(x) = 0, nos permiten afirmar, de acuerdocon la teorıa general desarrollada en el capıtulo anterior para la ecuacion generatriz de las fun-ciones especiales, que, efectivamente, la funcion de Neumann es la segunda solucion linealmenteindependiente de la ecuacion de Bessel.
Es conveniente plantear que hubieramos podido proceder de otra forma: Utilizando la expresion(1.18) del capıtulo anterior, la segunda solucion linealmente independiente de la ecuacion deBessel hubiera podido ser escrita en la forma:
Nn(x) = Jn(x)
[∫ x
x0
Cdα
αJ2n(α)
+ C1
](2.54)
El calculo de la expresion (2.54) nos conducirıa a las expresiones (2.43) y (2.53) de la funcionde Neumann, con una seleccion adecuada de las constantes C y C1. De la formula (2.54) se vedirectamente que Nn(x) crece indefinidamente en modulo cuando x→ 0 con las singularidadesrequeridas (Teorema del capıtulo anterior), de donde se desprende que es la segunda solucionlinealmente independiente de la ecuacion de Bessel.
Destaquemos el comportamiento de la funcion de Bessel y de la funcion de Neumann en elentorno de x = 0. De la expresion (2.27) del epıgrafe anterior tenemos para la funcion deBessel de orden cero la expresion:
J0(x) = 1 +∞∑k=1
(−1)k(x2
)2k(k!)2
(2.55)
Tomando el lımite cuando x→ 0 en (2.55), obtenemos que:
J0(x) → 1, ∀x→ 0 (2.56)
Es decir, la funcion de Bessel de orden cero es acotada y diferente de cero en x = 0. Encorrespondencia con este hecho, para la funcion de Neumann de orden cero obtenemos de(2.43) el comportamiento asintotico en el entorno de x = 0:
54 Jose Marın Antuna
N0(x) ∼2
πlnx, ∀x→ 0 (2.57)
lo que esta en correspondencia con la singularidad logarıtmica esperada en virtud de la teorıageneral del capıtulo anterior. Por otra parte, de (2.27) para la funcion de Bessel de orden ntenemos la expresion:
Jn(x) =xn
2nΓ(n+ 1)+
∞∑k=1
(−1)k(x2
)2k+nΓ(k + 1)Γ(k + n+ 1)
(2.58)
lo que evidencia que esta funcion tiene en x = 0 un cero de orden n. En concordancia con esto,de la formula (2.53) se ve que la funcion de Neumann de orden n tiene en el entorno de x = 0un comportamiento asintotico de la forma:
Nn(x) ∼ −2n(n− 1)!
π
1
xn, ∀x→ 0 (2.59)
lo que esta en correspondencia con el polo de orden n que dicha funcion debe tener en x = 0,de acuerdo con la teorıa general desarrollada en el capıtulo anterior. Como se aprecia de (2.57)y (2.59), la funcion de Neumann tiende a −∞ para x→ 0, la de orden cero como un logaritmoy la de orden n > 0 como una hiperbola.
Definamos ahora otras dos funciones cilındricas que son de gran utilidad en diferentes problemaspracticos de la Fısica Matematica; ellas, por supuesto, seran combinaciones lineales de lasfunciones de Bessel y de Neumann. Llamaremos funcion de Hankel de primer tipo a lafuncion:
H(1)ν (x) = Jν(x) + iNν(x) (2.60)
y funcion de Hankel de segundo tipo a la funcion:
H(2)ν (x) = Jν(x)− iNν(x) (2.61)
Estas funciones, evidentemente, son solucion de la ecuacion de Bessel de orden ν. Como sepuede apreciar de su definicion, son funciones complejas de variable real y resultan de granutilidad en diferentes aplicaciones.
Las funciones cilındricas Jν(x), Nν(x), H(1)ν (x), H
(2)ν (x) estudiadas son funciones oscilantes, lo
que puede ser apreciado del hecho de que en la ecuacion de Bessel (2.2) del epıgrafe anterior
el coeficiente(1− ν2
x2
)que acompana a la funcion incognita es positivo a partir de valores de
x mayores que ν; son, ademas, funciones amortiguadas, de forma tal que tienden a cero parax→∞, lo que puede deducirse de la presencia de un coeficiente diferente de cero acompanandoa la primera derivada en la ecuacion de Bessel (2.2), que es una ecuacion diferencial de segundo

Funciones Cilındricas 55
orden. El caracter oscilante puede apreciarse tambien de la propia expresion de la solucion, yaque la serie (2.27) que define a la funcion de Bessel es alternante. De lo dicho se puede implicarque las ecuaciones
Jν(x) = 0, Nν(x) = 0 (2.62)
tienen un numero infinito de raıces en el eje x. El comportamiento asintotico de las funcionescilındricas para x→∞ se expresa por las siguientes formulas:
Jν(x) =
√2
πxcos(x− ν
π
2− π
4
)(2.63)
Nν(x) =
√2
πxsin(x− ν
π
2− π
4
)(2.64)
H(1)ν (x) =
√2
πxei(x−ν
π2−π
4 ) (2.65)
H(2)ν (x) =
√2
πxe−i(x−ν
π2−π
4 ) (2.66)
La validez de las formulas (2.63)-(2.66) para x→∞ sera demostrada, posteriormente, con todorigor teorico. Aunque su obtencion se hara considerando que x → ∞, es posible comprobarpor metodos computacionales que, para valores de x > 10, la diferencia entre los valores dadospor las expresiones (2.63)-(2.66) y por las formulas (2.27), (2.53), (2.60) y (2.61) es del ordende la millonesima, por lo que estas formulas asintoticas son utilizables en la practica para talesvalores de x. Los graficos de algunas funciones de Bessel y de Neumann pueden observarse enla Fig. 2.1 y la Fig. 2.2, respectivamente.
2.2.2 Formulas de recurrencia
A continuacion estableceremos algunas relaciones que resultan de gran utilidad en el trabajocon las funciones cilındricas. Analicemos la expresion siguiente:
d
dx[xνJν(x)] ≡
d
dx
[xν
∞∑k=0
(−1)k(x2
)2k+νΓ(k + 1)Γ(k + ν + 1)
]=
=d
dx
∞∑k=0
(−1)kx2k+2ν
2νΓ(k + 1)Γ(k + ν + 1)=
∞∑k=0
(−1)k2(k + ν)x2k+2ν−1
2νΓ(k + 1)Γ(k + ν + 1)=
= xν∞∑k=0
(−1)k(k + ν)(x2
)2k+ν−1
Γ(k + 1)(k + ν)Γ(k + ν + 1)≡ xνJν−1(x) (2.67)
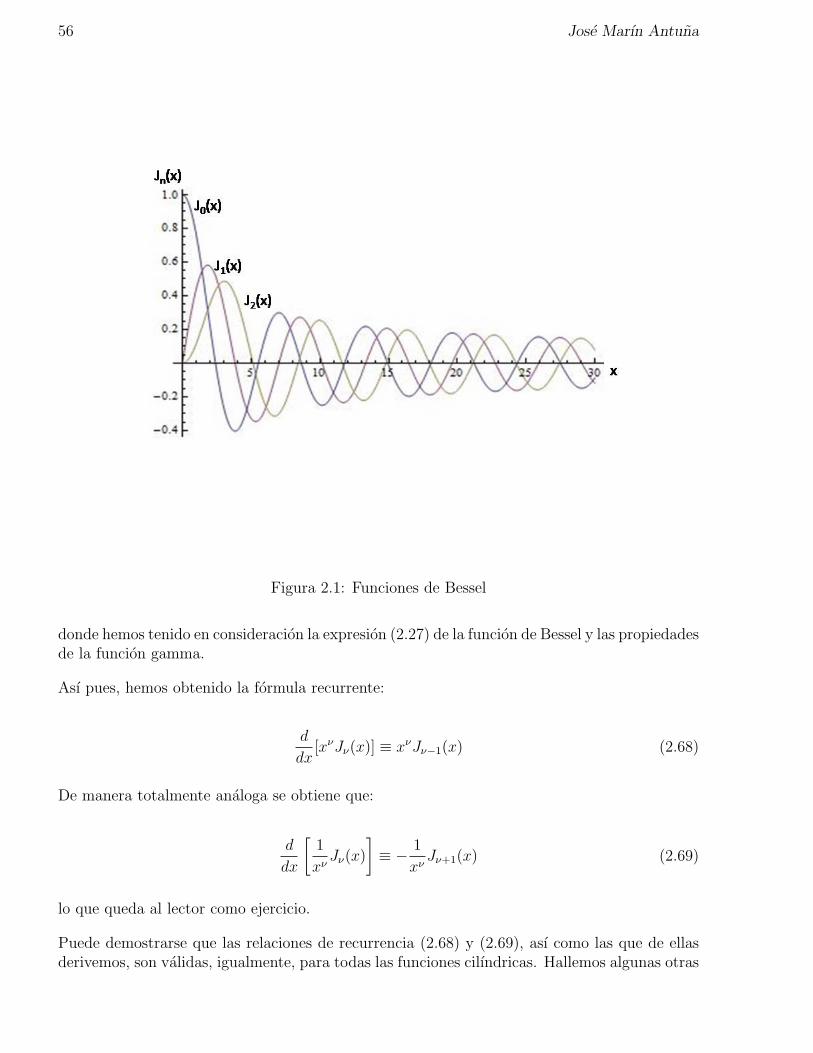
56 Jose Marın Antuna
Figura 2.1: Funciones de Bessel
donde hemos tenido en consideracion la expresion (2.27) de la funcion de Bessel y las propiedadesde la funcion gamma.
Ası pues, hemos obtenido la formula recurrente:
d
dx[xνJν(x)] ≡ xνJν−1(x) (2.68)
De manera totalmente analoga se obtiene que:
d
dx
[1
xνJν(x)
]≡ − 1
xνJν+1(x) (2.69)
lo que queda al lector como ejercicio.
Puede demostrarse que las relaciones de recurrencia (2.68) y (2.69), ası como las que de ellasderivemos, son validas, igualmente, para todas las funciones cilındricas. Hallemos algunas otras

Funciones Cilındricas 57
Figura 2.2: Funciones de Neumann
relaciones de utilidad; si en (2.69) hacemos ν = 0, obtenemos la formula de recurrencia:
J ′0(x) = −J1(x) (2.70)
La expresion (2.70) nos indica que los maximos y los mınimos de J0(x) coinciden con los cerosde J1(x). Por otra parte, si en (2.68) hacemos ν = 1, obtenemos:
d
dx[xνJ1(x)] = xJ0(x) (2.71)
Integrando (2.71) y teniendo en cuenta que J1(0) = 0, obtenemos:
∫ x
0
ξJ0(ξ)dξ = xJ1(x) (2.72)
que es otra formula de recurrencia de utilidad.
58 Jose Marın Antuna
Escribamos (2.68) de forma explıcita. Obtenemos, despues de simplificar:
J ′ν(x) +ν
xJν(x) = Jν−1(x) (2.73)
De forma similar, escribiendo explıcitamente (2.69), nos queda:
−J ′ν(x) +ν
xJν(x) = Jν+1(x) (2.74)
Las formulas (2.73) y (2.74) son formulas de recurrencia utiles. Sumando (2.73) y (2.74), sepuede obtener que:
Jν+1(x) =2ν
xJν(x)− Jν−1(x) (2.75)
La expresion (2.75) es una importante formula de recurrencia que nos establece los valores dela funcion de orden ν + 1 en terminos de los valores de las funciones cilındricas de ordenes ν yν − 1 inmediatos anteriores. Gracias a ella, es suficiente conocer los valores de J0(x) y J1(x)para establecer los valores de J2(x), J3(x), etc. y los valores de N0(x) y N1(x) para hallar losvalores de N2(x), N3(x), etc. Por ello, las tablas que aparecen en los libros contienen solamentelos valores de las funciones cilındricas de orden cero y de orden uno.
Es necesario aclarar, sin embargo, que -aunque lo dicho es valido teoricamente- en la practica,al trabajar con la formula (2.75) en una computadora para el calculo de los valores numericosde funciones cilındricas de ordenes muy superiores a partir de los valores funcionales de lasfunciones de orden cero y de orden uno, se van introduciendo en las iteraciones errores deredondeo, producto de la representacion aproximada de los numeros en la computadora, loque hace que los valores numericos que se obtengan puedan ser bastante diferentes de losque realmente les corresponden a las funciones. Este hecho debe tenerse en cuenta, a fin deno cometer errores en el calculo de las funciones cilındricas de ordenes superiores; existenaproximaciones polinomiales a las funciones cilındricas -posibles de encontrar en la literaturaespecializada sobre metodos numericos- que permiten efectuar los calculos de funciones deordenes superiores con la precision que se necesite.
2.3 Norma de las funciones cilındricas
En la ecuacion de Bessel
1
x
d
dx[xy′] +
(1− ν2
x2
)y = 0 (2.76)
resuelta por nosotros en el epıgrafe 1, hagamos el cambio de variables x = αr, donde α es ciertoparametro. Entonces la ecuacion (2.76) toma la forma

Funciones Cilındricas 59
1
r
d
dr[rR′] +
(α2 − ν2
r2
)R = 0 (2.77)
donde hemos llamado
R(r) ≡ y(αr) (2.78)
Supongamos que la ecuacion (2.77) es resuelta en cierto intervalo (r1, r2). Esta ecuacion es uncaso particular de la ecuacion generatriz de las funciones especiales estudiada en el capıtuloanterior, con k(r) = r, q(r) = ν2
r, p(r) = r y λ = α2 por consiguiente, de acuerdo con la
teorıa general estudiada en dicho capıtulo, sus soluciones seran ortogonales en el intervalo encuestion con peso p(r) = r para distintos valores del autovalor α. El cuadrado de la norma delas autofunciones, de acuerdo con la expresion (1.34), sera
N ≡‖ y(αr) ‖2≡‖ R ‖2=
∫ r2
r1
y2(αr)rdr ≡∫ r2
r1
R2(r)rdr (2.79)
A continuacion buscaremos una expresion de calculo para esta norma, valida para cualquierfuncion cilındrica. Como caso particular, obtendremos la expresion para la funcion de Besselen el intervalo (0, r0).
Introduzcamos la notacion
R1(r) = y(α1r) (2.80)
donde α1 6= α. Para esta funcion, la ecuacion de Bessel sera:
1
r
d
dr[rR′
1] +
(α2
1 −ν2
r2
)R1 = 0 (2.81)
Multipliquemos (2.77) por rR1 y (2.81) por rR y restemos ambas expresiones. Obtenemos:
d
dr[rR′]R1 −
d
dr[rR′
1]R + (α2 − α21)RR1r = 0 (2.82)
Es decir
d
dr[rR1R
′ − rRR′1] = (α2
1 − α2)RR1r (2.83)
Integrando (2.83) entre r1 y r2, obtenemos:
60 Jose Marın Antuna
[rR1R′ − rRR′
1]|r2r1 = (α21 − α2)
∫ r2
r1
RR1rdr (2.84)
Por consiguiente:
∫ r2
r1
RR1rdr =r[R1R
′ −RR′1]|r2r1
α21 − α2
(2.85)
Teniendo en cuenta (2.78) y (2.80), de (2.85) obtenemos que:
∫ r2
r1
y(αr)y(α1r)rdr =r[y(α1r)αy
′(αr)− y(αr)α1y′(α1r)]|r2r1
α21 − α2
(2.86)
Si en (2.86) tomamos el lımite cuando α1 → α obtenemos, para el cuadrado de la norma, laexpresion:
N =
∫ r2
r1
y2(αr)rdr = limα1→α
r[y(α1r)αy′(αr)− y(αr)α1y
′(α1r)]|r2r1α2
1 − α2(2.87)
La formula (2.87) nos da la expresion general del cuadrado de la norma de cualquier funcioncilındrica en el intervalo (r1, r2). Si, en particular, y(αr) = Jν(αr), r1 = 0 y r2 = r0, obtenemospara el cuadrado de la norma de la funcion de Bessel la expresion:
Nν =‖ Jν(αr) ‖2=
∫ r0
0
J2ν (αr)rdr = lim
α1→α
r0[Jν(α1r0)αJ′ν(αr0)− Jν(αr0)α1J
′ν(α1r0)]
α21 − α2
(2.88)
En virtud de la indeterminacion en el lımite de la parte derecha de (2.88), aplicamos la reglade L’Hospital y obtenemos:
Nν = limα1→α
r0f(α, α1, r0)
donde
f =[r0J
′ν(α1r0)αJ
′ν(αr0)− Jν(αr0)J
′ν(α1r0)− Jν(αr0)α1r0J
′′ν (α1r0)]
2α1
(2.89)
Pero como Jν satisface la ecuacion de Bessel, podemos escribir que
J ′′ν (α1r0) = − 1
α1r0J ′ν(α1r0)−
(1− ν2
α21r
20
)Jν(α1r0) (2.90)

Funciones Cilındricas 61
Colocando (2.90) en (2.89) y simplificando convenientemente, obtenemos la expresion generaldel cuadrado de la norma de la funcion de Bessel en el intervalo (0, r0):
Nν ≡‖ Jν(αr) ‖2≡∫ r0
0
J2ν (αr)rdr =
r02
[J ′ν(αr0)]
2 +
(1− ν2
α2r20
)J2ν (αr0)
(2.91)
Las expresiones obtenidas en este epıgrafe seran utilizadas durante la solucion de los problemasde frontera de la Fısica Matematica en la segunda parte de la presente obra, dedicada a lasecuaciones en derivadas parciales de la Fısica Matematica. De acuerdo con lo visto en el capıtuloanterior, podemos afirmar que las funciones cilındricas forman un espacio funcional normadode infinitas dimensiones, ya que el sistema de las funciones cilındricas es cerrado y completo. Elteorema del desarrollo estudiado en dicho capıtulo podra ser aplicado aquı: Cualquier funcioncontinua y dos veces diferenciable y acotada en (0, r0) admite un desarrollo en serie de funcionesde Bessel:
f(r) =∞∑n=1
fnνJν(α(ν)n r) (2.92)
donde
fnν =1
Nν
∫ r0
0
f(r)Jν(α(ν)n r)rdr (2.93)
2.4 Ejemplos de aplicacion de las funciones cilındricas
2.4.1 Problema de Bernoulli sobre las oscilaciones de una cadenacolgada
En el ano 1732 Daniel Bernoulli planteo y resolvio el problema sobre las oscilaciones de unacadena pesada colgada verticalmente. Supongamos que una cadena pesada y homogenea AMBde longitud l esta colgada verticalmente en el punto B y que bajo la accion de la fuerza de lagravedad realiza oscilaciones alrededor de la posicion de equilibrio. Si llamamos t al tiempo, xa la longitud del arco desde el punto A al punto variable M y u = u(x, t) al desplazamiento delpunto M de la vertical (Fig. 2.3), entonces la ecuacion de las oscilaciones pequenas sera
∂2u
∂t2= g
(x∂2u
∂x2+∂u
∂x
)(2.94)
donde g es la aceleracion de la gravedad.
Siguiendo los razonamientos hechos por Bernoulli, resolveremos la ecuacion (2.94) por el metodode separacion de variables. Para ello, en primer lugar, buscaremos su solucion particular que
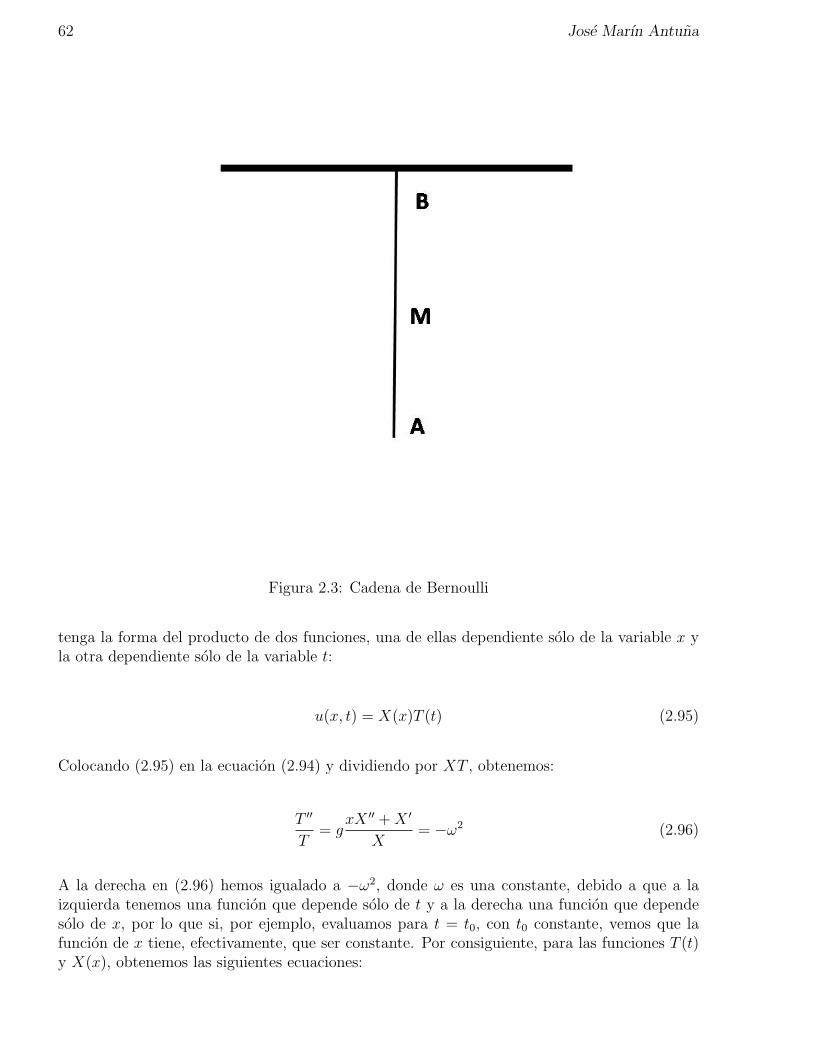
62 Jose Marın Antuna
Figura 2.3: Cadena de Bernoulli
tenga la forma del producto de dos funciones, una de ellas dependiente solo de la variable x yla otra dependiente solo de la variable t:
u(x, t) = X(x)T (t) (2.95)
Colocando (2.95) en la ecuacion (2.94) y dividiendo por XT , obtenemos:
T ′′
T= g
xX ′′ +X ′
X= −ω2 (2.96)
A la derecha en (2.96) hemos igualado a −ω2, donde ω es una constante, debido a que a laizquierda tenemos una funcion que depende solo de t y a la derecha una funcion que dependesolo de x, por lo que si, por ejemplo, evaluamos para t = t0, con t0 constante, vemos que lafuncion de x tiene, efectivamente, que ser constante. Por consiguiente, para las funciones T (t)y X(x), obtenemos las siguientes ecuaciones:

Funciones Cilındricas 63
T ′′ + ω2T = 0
xX ′′ +X ′ +ω2
gX = 0 (2.97)
De aquı se ve porque la constante de separacion de variables fue tomada definida negativa (−ω2).Efectivamente, la ecuacion (2.97) para T (t) tendra de esta manera soluciones oscilantes en eltiempo, lo que esta en concordancia con el fenomeno fısico oscilatorio que estamos analizando.En caso contrario las soluciones T (t) serıan exponenciales reales, es decir, no serıan funcionesoscilantes, lo que en nuestro problema carecerıa de sentido fısico.
La solucion general de la primera de las ecuaciones (2.97) es:
T (t) = A sin(ωt+ ϕ) (2.98)
donde A y ϕ son ciertas constantes. La segunda ecuacion (2.97) puede escribirse de la siguientemanera:
d
dx[xX ′] +
ω2
gX = 0 (2.99)
Para resolverla, hagamos el siguiente cambio de variables:
x =g
4ω2y2, dx =
gy
2ω2dy (2.100)
Colocando en la ecuacion y llamando
X(x) = X( g
4ω2y2)≡ Y (y) (2.101)
obtenemos para Y (y):
2ω2
gy
d
dy
[gy2
4ω2
2ω2
gy
dY
dy
]+ω2
gY = 0 (2.102)
Es decir:
1
y
d
dy
[ydY
dy
]+ Y = 0 (2.103)
La ecuacion (2.103) no es otra cosa que la ecuacion de Bessel de orden cero. Su solucion generalsera:

64 Jose Marın Antuna
Y (y) = BJ0(y) + CN0(y) (2.104)
Regresando a la variable inicial y teniendo en cuenta (2.100), de (2.104) obtenemos para X(x):
X(x) = BJ0
(2ω
√x
g
)+ CN0
(2ω
√x
g
)(2.105)
donde B y C son constantes arbitrarias. Desde el punto de vista fısico, es evidente que, parax → 0, la solucion debe ser acotada. Como la funcion de Neumann no lo es, ello implicaque, forzosamente, tiene que ser C = 0. La constante B podemos tomarla igual a 1, ya queen la expresion para T (t) aparece ya la constante arbitraria A. Por consiguiente, la solucionparticular de la ecuacion (2.94) sera:
u(x, t) = AJ0
(2ω
√x
g
)sin(ωt+ ϕ) (2.106)
La solucion (2.106) que hemos hallado tiene que cumplir la evidente condicion de frontera enel extremo x = l:
u(l, t) = 0 (2.107)
para todo t, ya que la cadena esta fija por ese extremo (Fig. 2.3). Ello significa, de (2.106),que debera cumplirse que
J0
(2ω
√l
g
)= 0 (2.108)
Por consiguiente, si llamamos µ(0)k a las raıces de la ecuacion
J0(µ) = 0 (2.109)
obtenemos que las frecuencias ω de las oscilaciones no son arbitrarias, sino que vendran dadaspor la expresion
ωk =µ
(0)k
2
√g
l(2.110)
Ası pues, de (2.106) tendremos, para la solucion particular, la expresion:

Funciones Cilındricas 65
uk(x, t) = AkJ0
(µ
(0)k
√x
l
)sin
(µ
(0)k
2
√g
lt+ ϕk
)(2.111)
con k = 1, 2, 3, ...
La formula (2.111) nos indica que, para k fijo, los puntos de la cadena oscilan con la mismafrecuencia ωk con una amplitud que varıa de punto en punto por la ley
AkJ0
(µ
(0)k
√x
l
)
Como para x = 0, J0(0) = 1, el coeficiente Ak no es otra cosa que la amplitud del extremolibre A de la cadena. Al variar k, es decir, al tomar diferentes ceros de la funcion de BesselJ0(x), la frecuencia ωk varıa, ası como tambien varıa la forma de la amplitud de oscilacion dela cadena. En las figuras. 2.4, 2.5 y 2.6 aparece la ley de variacion de la amplitud de los puntosde la cadena al tomar el primero, segundo y tercer cero de la funcion de Bessel (es decir, parak = 1, 2, 3, respectivamente).
2.4.2 Oscilaciones de la cadena
En la segunda parte de la presente obra veremos que las oscilaciones reales por el metodo deseparacion de variables se expresan como la superposicion de todas las soluciones particulares(2.111) de la ecuacion (2.94) por todas las posibles k. Como k toma infinitos valores, la soluciontendra la forma
u(x, t) =∞∑k=1
AkJ0
(µ
(0)k
√x
l
)sin
(µ
(0)k
2
√g
lt+ ϕk
)(2.112)
Los coeficientes Ak y ϕk se determinan a partir de las condiciones iniciales: la elongacion inicialy la velocidad inicial de los puntos x de la cadena, que deben ser dadas como funciones conocidasde x:
u(x, 0) = ϕ(x), ut(x, 0) = ψ(x) (2.113)
De (2.112) y (2.113) obtenemos:
ϕ(x) =∞∑k=1
Ak sinϕkJ0
(µ
(0)k
√x
l
)(2.114)
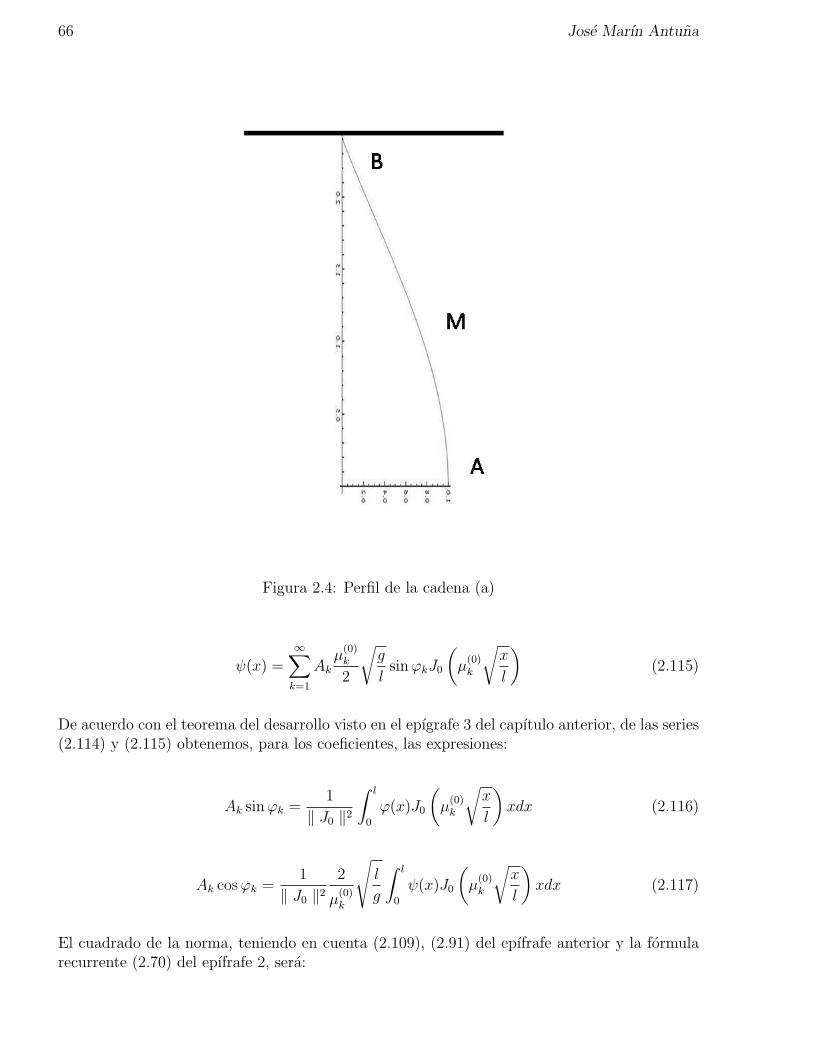
66 Jose Marın Antuna
Figura 2.4: Perfil de la cadena (a)
ψ(x) =∞∑k=1
Akµ
(0)k
2
√g
lsinϕkJ0
(µ
(0)k
√x
l
)(2.115)
De acuerdo con el teorema del desarrollo visto en el epıgrafe 3 del capıtulo anterior, de las series(2.114) y (2.115) obtenemos, para los coeficientes, las expresiones:
Ak sinϕk =1
‖ J0 ‖2
∫ l
0
ϕ(x)J0
(µ
(0)k
√x
l
)xdx (2.116)
Ak cosϕk =1
‖ J0 ‖2
2
µ(0)k
√l
g
∫ l
0
ψ(x)J0
(µ
(0)k
√x
l
)xdx (2.117)
El cuadrado de la norma, teniendo en cuenta (2.109), (2.91) del epıfrafe anterior y la formularecurrente (2.70) del epıfrafe 2, sera:
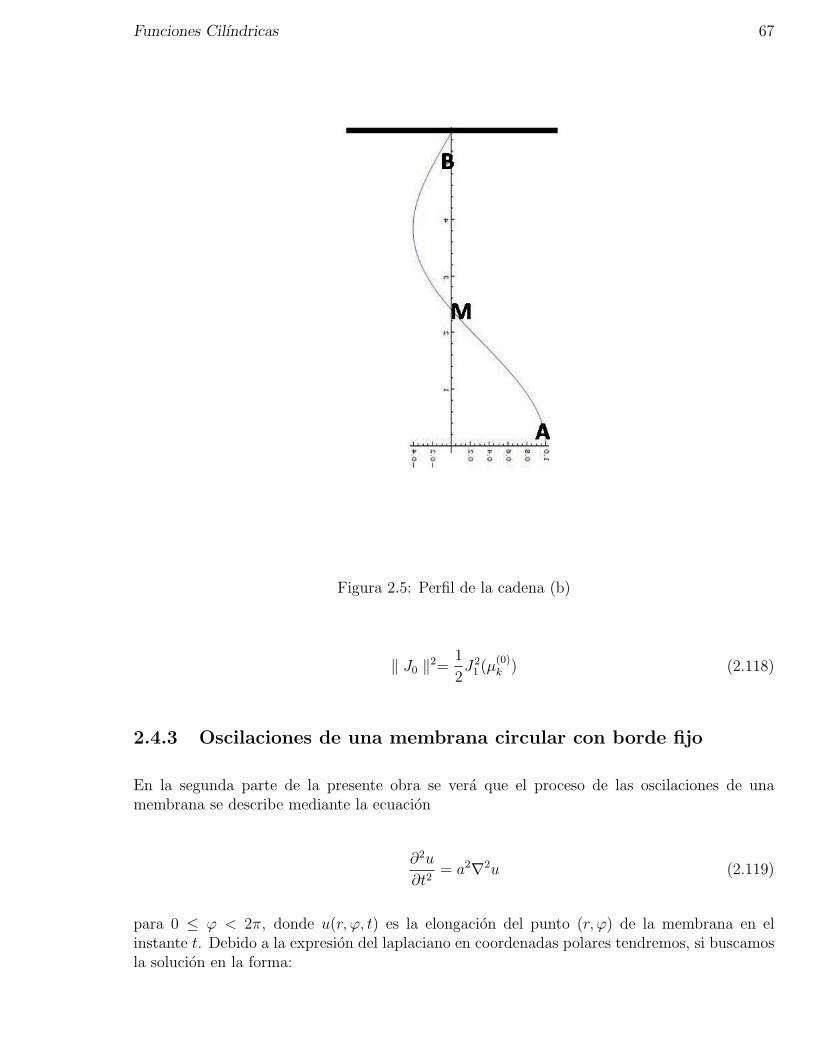
Funciones Cilındricas 67
Figura 2.5: Perfil de la cadena (b)
‖ J0 ‖2=1
2J2
1 (µ(0)k ) (2.118)
2.4.3 Oscilaciones de una membrana circular con borde fijo
En la segunda parte de la presente obra se vera que el proceso de las oscilaciones de unamembrana se describe mediante la ecuacion
∂2u
∂t2= a2∇2u (2.119)
para 0 ≤ ϕ < 2π, donde u(r, ϕ, t) es la elongacion del punto (r, ϕ) de la membrana en elinstante t. Debido a la expresion del laplaciano en coordenadas polares tendremos, si buscamosla solucion en la forma:
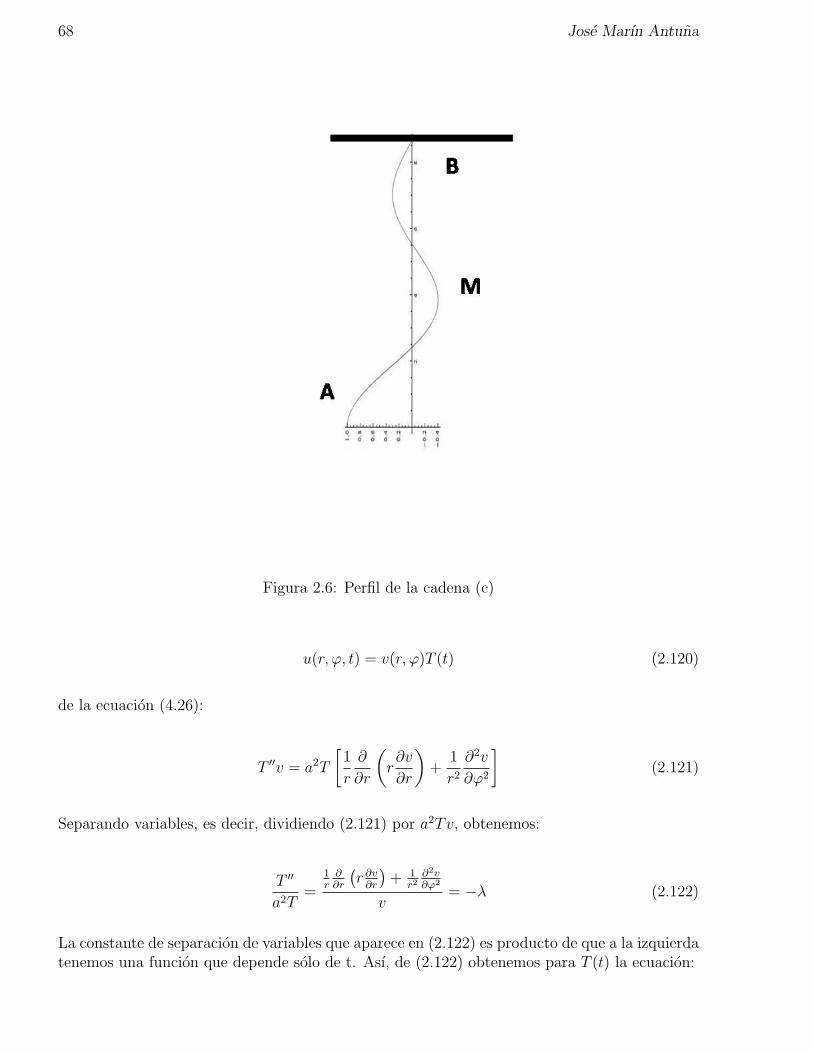
68 Jose Marın Antuna
Figura 2.6: Perfil de la cadena (c)
u(r, ϕ, t) = v(r, ϕ)T (t) (2.120)
de la ecuacion (4.26):
T ′′v = a2T
[1
r
∂
∂r
(r∂v
∂r
)+
1
r2
∂2v
∂ϕ2
](2.121)
Separando variables, es decir, dividiendo (2.121) por a2Tv, obtenemos:
T ′′
a2T=
1r∂∂r
(r ∂v∂r
)+ 1
r2∂2v∂ϕ2
v= −λ (2.122)
La constante de separacion de variables que aparece en (2.122) es producto de que a la izquierdatenemos una funcion que depende solo de t. Ası, de (2.122) obtenemos para T (t) la ecuacion:

Funciones Cilındricas 69
T ′′ + λa2T = 0 (2.123)
cuya solucion general puede ser escrita de la forma:
T (t) = A cos√λat+B sin
√λat (2.124)
Para la funcion v(r, ϕ) de (2.122) obtenemos la ecuacion:
1r∂∂r
(r ∂v∂r
)+ 1
r2∂2v∂ϕ2
v+ λ = 0 (2.125)
A fin de resolver la ecuacion (2.125), buscaremos su solucion en la forma
v(r, ϕ) = R(r)Φ(ϕ) (2.126)
Colocando (2.126) en (2.125), obtenemos:
1
r
d
dr(rR′)Φ +
1
r2Φ′′R + λRΦ = 0 (2.127)
Para separar variables en (2.127), multipliquemos por r2
RΦ. Obtenemos:
r ddr
(rR′)
R+ λr2 = −Φ′′
Φ= γ2 (2.128)
La constante que aparece en (2.128) viene dada por el hecho de que a la izquierda tenemos unafuncion que depende solo de r y a la derecha una funcion que depende solo de ϕ. De (2.128)obtenemos para Φ(ϕ) la ecuacion:
Φ′′ + γ2Φ = 0, ∀0 ≤ ϕ ≤ 2π (2.129)
Es posible demostrar que la solucion general de esta ecuacion correspondiente a una periodicidadde 2π, es decir, que cumpla con la obvia condicion de que
Φ(ϕ+ 2π) = Φ(ϕ) (2.130)
se obtiene para valores enteros de la constante γ, es decir, γ = n, n = 0, 1, 2, 3, ... en la forma:
Φ(ϕ) = Cn cosnϕ+Dn sinnϕ (2.131)

70 Jose Marın Antuna
Con estos valores de γ obtenemos para R(r) la ecuacion:
1
r
d
dr[rR′] +
(1− n2
r2
)R = 0, ∀0 ≤ r < r0 (2.132)
Si en (2.132) hacemos el cambio de variables x =√λr obtenemos, haciendo y(x) ≡ R(r):
1
x
d
dx[xy′] +
(1− n2
x2
)y = 0 (2.133)
La ecuacion (2.133) es la ecuacion de Bessel de orden n. Su solucion general es:
y(x) ≡ R(r) = EJn(√λr) + FNn(
√λr) (2.134)
Pero, como las oscilaciones de la membrana, evidentemente, tienen que ser acotadas y la funcionde Neumann no lo es en r = 0, F = 0 y nos queda la solucion en la forma:
R(r) = Jn(√λr) (2.135)
donde hemos considerado E = 1, ya que las funciones T (t) y Φ(ϕ) contienen ya constantesarbitrarias. Teniendo en cuenta (2.124), (2.131) y (2.135), la solucion particular de la ecuacion(2.119) de las oscilaciones de la membrana sera:
un(r, ϕ, t) = [An cos√λat+Bn sin
√λat] · [Cn cosnϕ+Dn sinnϕ]Jn(
√λr) (2.136)
Supongamos, para fijar ideas, que el borde de la membrana esta fijo. Esto significa que laelongacion para r = r0 es cero todo el tiempo: u(r0, ϕ, t) = 0. De (2.136) ello nos da que:
Jn(√λr0) = 0 (2.137)
Por consiguiente, si llamamos µ(n)k , k = 1, 2, ... a las raıces de la ecuacion
Jn(µ) = 0 (2.138)
obtenemos que los valores de λ tendran que cumplir que
√λ =
µ(n)k
r0(2.139)
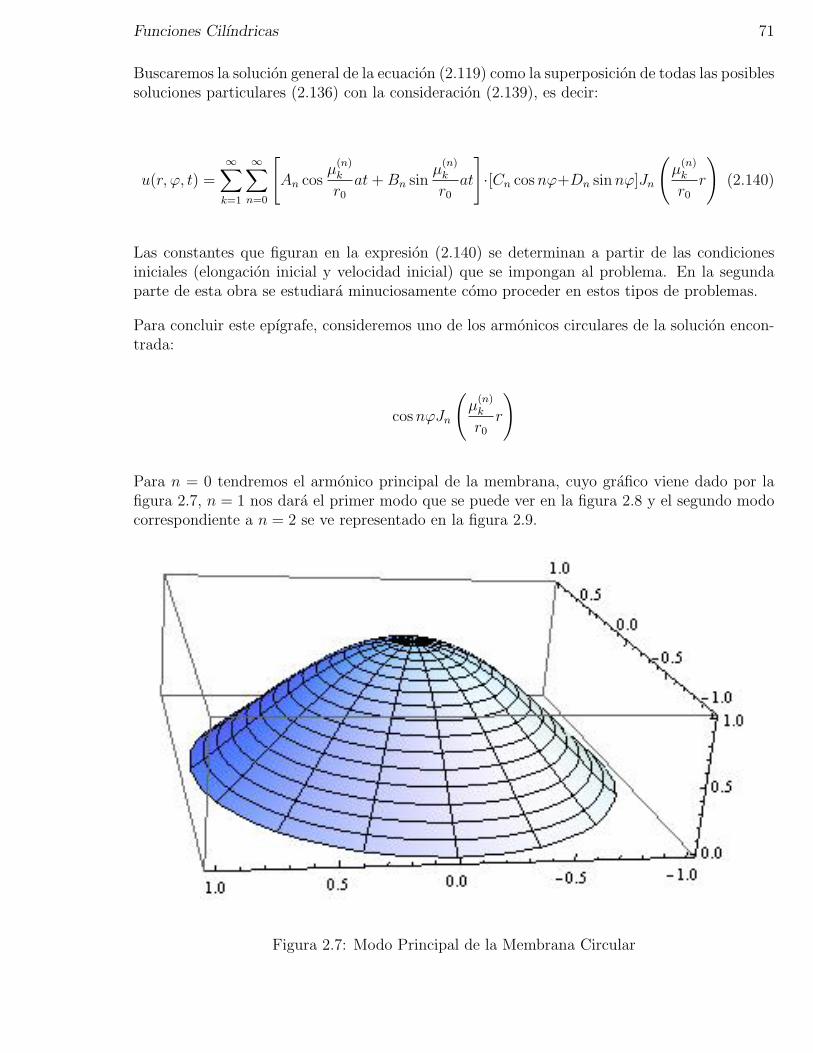
Funciones Cilındricas 71
Buscaremos la solucion general de la ecuacion (2.119) como la superposicion de todas las posiblessoluciones particulares (2.136) con la consideracion (2.139), es decir:
u(r, ϕ, t) =∞∑k=1
∞∑n=0
[An cos
µ(n)k
r0at+Bn sin
µ(n)k
r0at
]·[Cn cosnϕ+Dn sinnϕ]Jn
(µ
(n)k
r0r
)(2.140)
Las constantes que figuran en la expresion (2.140) se determinan a partir de las condicionesiniciales (elongacion inicial y velocidad inicial) que se impongan al problema. En la segundaparte de esta obra se estudiara minuciosamente como proceder en estos tipos de problemas.
Para concluir este epıgrafe, consideremos uno de los armonicos circulares de la solucion encon-trada:
cosnϕJn
(µ
(n)k
r0r
)
Para n = 0 tendremos el armonico principal de la membrana, cuyo grafico viene dado por lafigura 2.7, n = 1 nos dara el primer modo que se puede ver en la figura 2.8 y el segundo modocorrespondiente a n = 2 se ve representado en la figura 2.9.
Figura 2.7: Modo Principal de la Membrana Circular
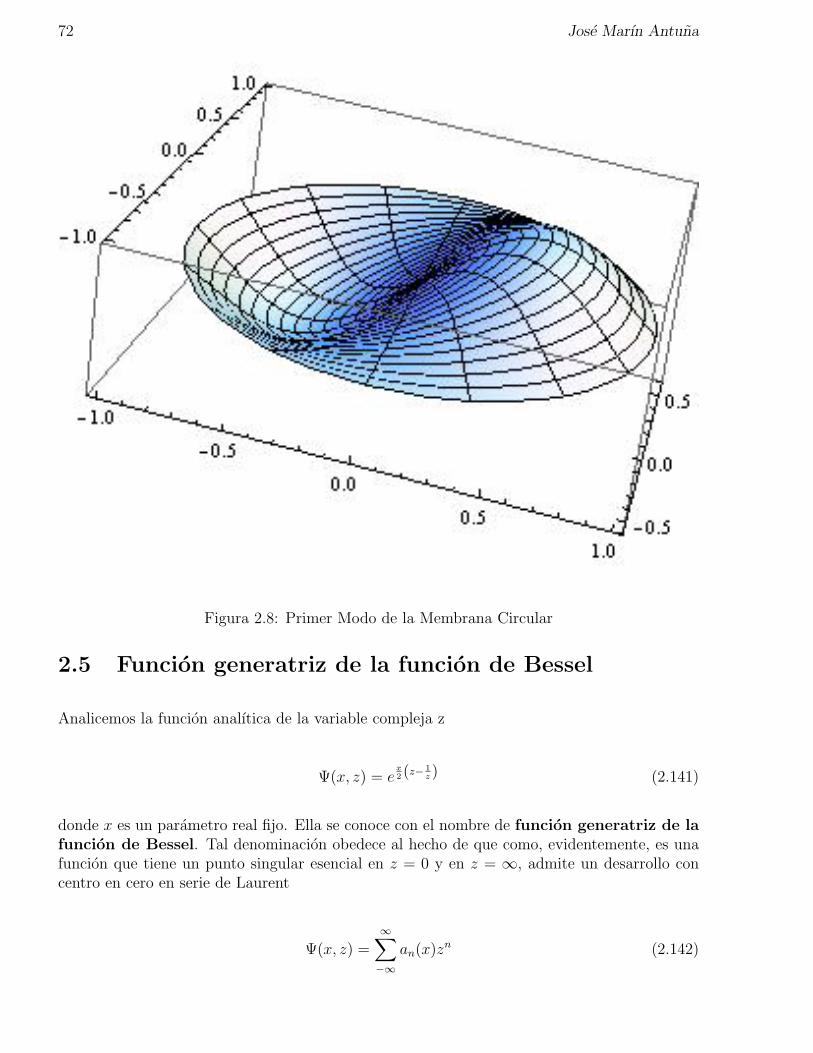
72 Jose Marın Antuna
Figura 2.8: Primer Modo de la Membrana Circular
2.5 Funcion generatriz de la funcion de Bessel
Analicemos la funcion analıtica de la variable compleja z
Ψ(x, z) = ex2 (z−
1z ) (2.141)
donde x es un parametro real fijo. Ella se conoce con el nombre de funcion generatriz de lafuncion de Bessel. Tal denominacion obedece al hecho de que como, evidentemente, es unafuncion que tiene un punto singular esencial en z = 0 y en z = ∞, admite un desarrollo concentro en cero en serie de Laurent
Ψ(x, z) =∞∑−∞
an(x)zn (2.142)
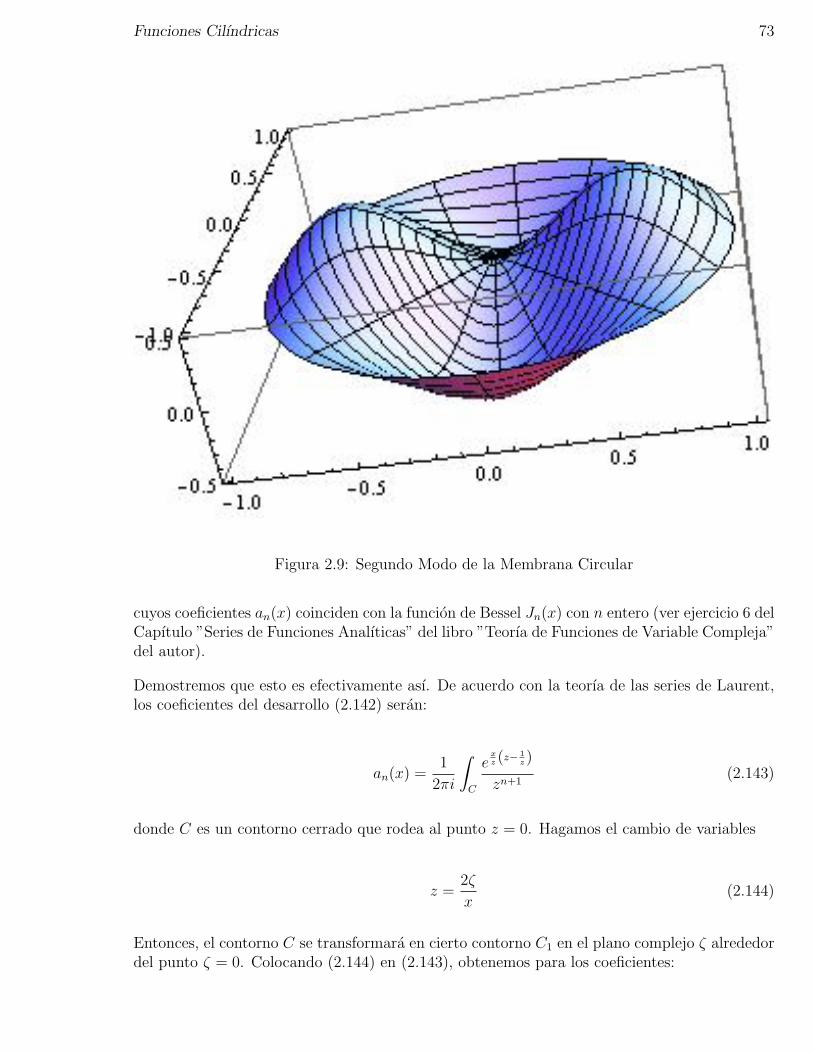
Funciones Cilındricas 73
Figura 2.9: Segundo Modo de la Membrana Circular
cuyos coeficientes an(x) coinciden con la funcion de Bessel Jn(x) con n entero (ver ejercicio 6 delCapıtulo ”Series de Funciones Analıticas” del libro ”Teorıa de Funciones de Variable Compleja”del autor).
Demostremos que esto es efectivamente ası. De acuerdo con la teorıa de las series de Laurent,los coeficientes del desarrollo (2.142) seran:
an(x) =1
2πi
∫C
exz (z−
1z )
zn+1(2.143)
donde C es un contorno cerrado que rodea al punto z = 0. Hagamos el cambio de variables
z =2ζ
x(2.144)
Entonces, el contorno C se transformara en cierto contorno C1 en el plano complejo ζ alrededordel punto ζ = 0. Colocando (2.144) en (2.143), obtenemos para los coeficientes:

74 Jose Marın Antuna
an(x) =1
2πi
(x2
)∫C1
eζ−x2
4ζ
ζn+1dζ (2.145)
Para la funcion e−x2
4ζ tiene validez el desarrollo:
e−x2
4ζ =∞∑k=0
(−1)k(x2
4ζ
)kk!
≡∞∑k=0
(−1)k(x2
)2kk!ζk
(2.146)
Colocando (2.146) en (2.145), nos queda:
an(x) =1
2πi
∞∑k=0
(−1)k(x2
)2kk!
∫C1
eζ
ζn+k+1dζ (2.147)
donde hemos intercambiado la integracion con la sumatoria debido a la convergencia uniformede esta ultima. De acuerdo con la formula generalizada de Cauchy para n+ k ≥ 0, tenemos:
1
2πi
∫C1
eζ
ζn+k+1dζ =
1
(n+ k)!(2.148)
Por consiguiente, para los coeficientes an(x) del desarrollo (2.142) obtenemos:
an(x) =∞∑k=0
(−1)k(x2
)2kk!(n+ k)!
≡ Jn(x), ∀n ≥ 0 (2.149)
Para n < 0 no es difıcil ver que, si cambiamos en (2.141) z por −1z, la funcion generatriz
permanece invariable. Esto significa que a−n(x) = (−1)nan(x), es decir, que para valoresnegativos de n, teniendo en cuenta (2.30) de este capıtulo, obtenemos:
a−n(x) = (−1)nJn(x) = J−n(x) (2.150)
Por consiguiente, de (2.142) obtenemos que:
Ψ(x, z) = ex2 (z−
1z ) =
∞∑−∞
Jn(x)zn (2.151)
Es decir, que, efectivamente, los coeficientes del desarrollo de la funcion generatriz en serie deLaurent son las funciones de Bessel de orden entero. La expresion (2.151) es util para obtener

Funciones Cilındricas 75
algunas caracterısticas de las funciones de Bessel de orden entero. Si en (2.151) hacemos z = eiϕ,entonces
eix sinϕ =∞∑−∞
Jn(x)einϕ (2.152)
lo que significa que una onda plana admite el desarrollo (2.152) en serie de funciones cilındricas.Tomando parte real y parte imaginaria en (2.152), obtenemos:
cos(x sinϕ) = J0(x) +∞∑n=1
Jn(x) cosnϕ+−1∑−∞
Jn(x) cosnϕ
sin(x sinϕ) =∞∑n=1
Jn(x) sinnϕ+−1∑−∞
Jn(x) sinnϕ (2.153)
Si tenemos en cuenta en (2.153) la igualdad (2.30) del presente capıtulo, obtenemos:
cos(x sinϕ) = J0(x) + 2∞∑n=1
J2n(x) cos 2nϕ
sin(x sinϕ) = 2∞∑n=1
J2n−1(x) sin(2n− 1)ϕ (2.154)
Las formulas (2.154) no son otra cosa que el desarrollo de las funciones cos(x sinϕ) y sin(x sinϕ)en serie trigonometrica de Fourier. En virtud de la teorıa de Fourier y aplicando las conocidasformulas para el calculo de los coeficientes de Fourier, se obtienen las siguientes representacionesintegrales para las funciones de Bessel de orden entero:
J2n(x) =1
π
∫ π
0
cos(x sinϕ) cos 2nϕdϕ, ∀n = 0, 1, 2, ...
J2n−1(x) =1
π
∫ π
0
sin(x sinϕ) sin(2n− 1)ϕdϕ, ∀n = 1, 2, ... (2.155)
Es facil comprobar que las formulas (2.155) pueden ser unificadas en una sola expresion:
Jn(x) =1
π
∫ π
0
cos(nϕ− x sinϕ)dϕ, ∀n = 0, 1, 2, ... (2.156)
ya que, de (2.156), obtenemos la primera o la segunda de las formulas (2.155) en dependenciade si n es par o impar.
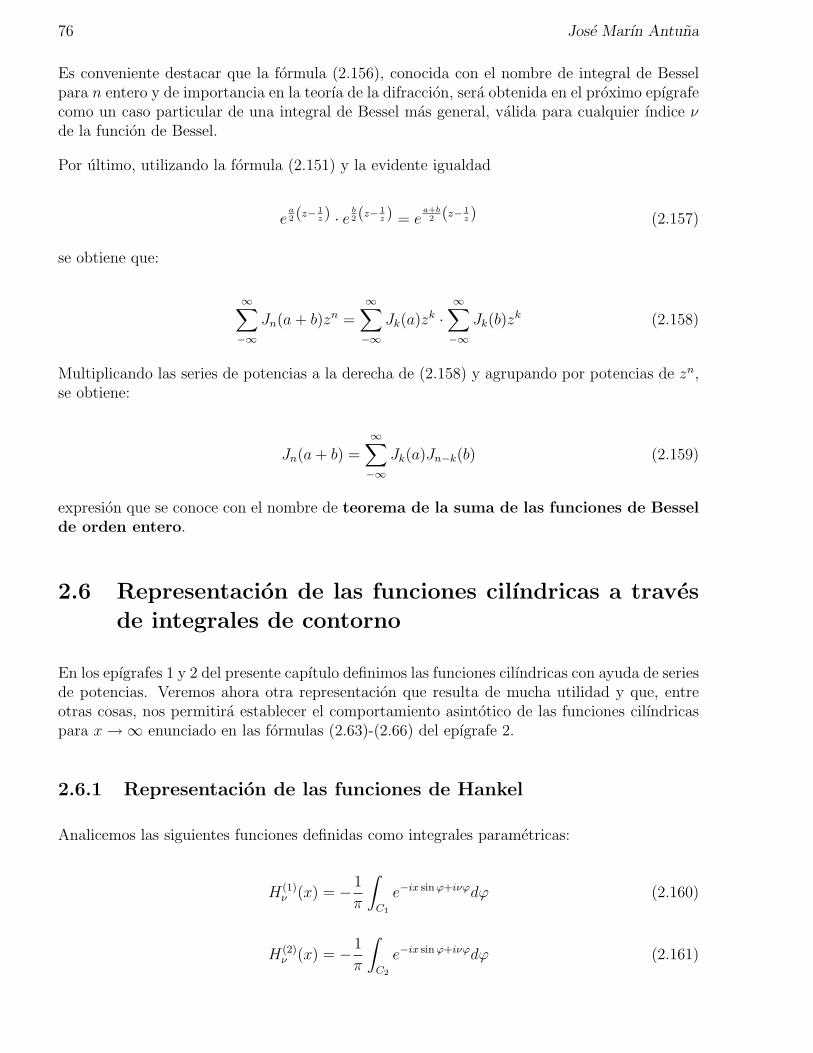
76 Jose Marın Antuna
Es conveniente destacar que la formula (2.156), conocida con el nombre de integral de Besselpara n entero y de importancia en la teorıa de la difraccion, sera obtenida en el proximo epıgrafecomo un caso particular de una integral de Bessel mas general, valida para cualquier ındice νde la funcion de Bessel.
Por ultimo, utilizando la formula (2.151) y la evidente igualdad
ea2 (z−
1z ) · e
b2(z−
1z ) = e
a+b2 (z− 1
z ) (2.157)
se obtiene que:
∞∑−∞
Jn(a+ b)zn =∞∑−∞
Jk(a)zk ·
∞∑−∞
Jk(b)zk (2.158)
Multiplicando las series de potencias a la derecha de (2.158) y agrupando por potencias de zn,se obtiene:
Jn(a+ b) =∞∑−∞
Jk(a)Jn−k(b) (2.159)
expresion que se conoce con el nombre de teorema de la suma de las funciones de Besselde orden entero.
2.6 Representacion de las funciones cilındricas a traves
de integrales de contorno
En los epıgrafes 1 y 2 del presente capıtulo definimos las funciones cilındricas con ayuda de seriesde potencias. Veremos ahora otra representacion que resulta de mucha utilidad y que, entreotras cosas, nos permitira establecer el comportamiento asintotico de las funciones cilındricaspara x→∞ enunciado en las formulas (2.63)-(2.66) del epıgrafe 2.
2.6.1 Representacion de las funciones de Hankel
Analicemos las siguientes funciones definidas como integrales parametricas:
H(1)ν (x) = − 1
π
∫C1
e−ix sinϕ+iνϕdϕ (2.160)
H(2)ν (x) = − 1
π
∫C2
e−ix sinϕ+iνϕdϕ (2.161)

Funciones Cilındricas 77
donde x y ν son parametros reales tales que x > 0, ν ≥ 0 y ϕ = ϕ1 + iϕ2 es una variablecompleja de integracion. Para determinar como tomar los contornos de integracion C1 y C2
en el plano complejo ϕ, hagamos un analisis del integrando. Para que las integrales (2.160) y(2.161) converjan por contornos abiertos en el plano ϕ, la parte real del exponente tiene queser menor que cero; de manera que, cuando ϕ2 tienda a ±∞, la exponencial tienda a cero.Analicemos la parte real del exponente. Tenemos:
Re[−ix sinϕ+ iνϕ] = Re[−ix sinϕ1 coshϕ2 + x sinhϕ2 + iνϕ2] =
= x cosϕ1 sinhϕ2 − νϕ2 < 0 (2.162)
La desigualdad (2.162) debera cumplirse al crecer indefinidamente en modulo ϕ2, para que lasintegrales (2.160) y (2.161) por contornos abiertos sean convergentes. Es facil ver que, si ϕ2 > 0,entonces sinhϕ2 > 0 y, como x > 0, la desigualdad (2.162) se cumplira para valores de ϕ1 talesque
ϕ1 ∈(±π
2,±3π
2
),
(±5π
2,±7π
2
),
(±9π
2,±11π
2
), ... (2.163)
Por consiguiente, en el semiplano superior ϕ2 > 0 en las franjas sombreadas (Fig. 2.10) secumplira la desigualdad (2.162). Para ϕ2 < 0 tendremos que sinhϕ2 < 0 y, como x > 0,tendremos que (2.162) se cumplira si cosϕ1 > 0. Esto tendra lugar si ϕ1 cumple que
ϕ1 ∈(−π
2,π
2
),
(±3π
2,±5π
2
),
(±7π
2,±9π
2
), ... (2.164)
Por lo tanto, en el semiplano inferior ϕ2 < 0 en las franjas sombreadas (Fig. 2.10) se cumplirala desigualdad (2.162).
Es conveniente observar que, para ϕ2 < 0, el segundo sumando en (2.162) es positivo, sinembargo esto no altera el analisis hecho ya que, para ϕ2 →∞, se cumple que sinhϕ2 ϕ2 y,por consiguiente, predomina el signo del primer sumando en dicha expresion.
Basados en el analisis hecho, tomemos los contornos C1 y C2 de integracion en las formulas(2.160) y (2.161) como se indica en la propia figura 2.10. Es decir, el contorno C1 se tomaformado por el semieje imaginario negativo, desde −i∞ hasta 0, el segmento del eje real desde0 hasta −π y por la semirrecta paralela al eje imaginario desde −π hasta −π+ i∞; el contornoC2 se toma formado por la semirrecta paralela al eje imaginario desde π + i∞ hasta π, elsegmento del eje real desde π hasta 0 y el semieje imaginario negativo desde 0 hasta −i∞.
Es conveniente destacar que, por ejemplo, la integral (2.160) pudiera tomarse por otro contorno,que cumpla con el requisito indispensable para la convergencia de la integral de estar dentrode las franjas sombreadas, como es el contorno C ′
1 en la figura 2.11. En este caso es facil ver
que la relacion entre la funcion H(1)ν (x) definida en la formula (2.160) por la integral por C1 y
la integral por C ′1 serıa
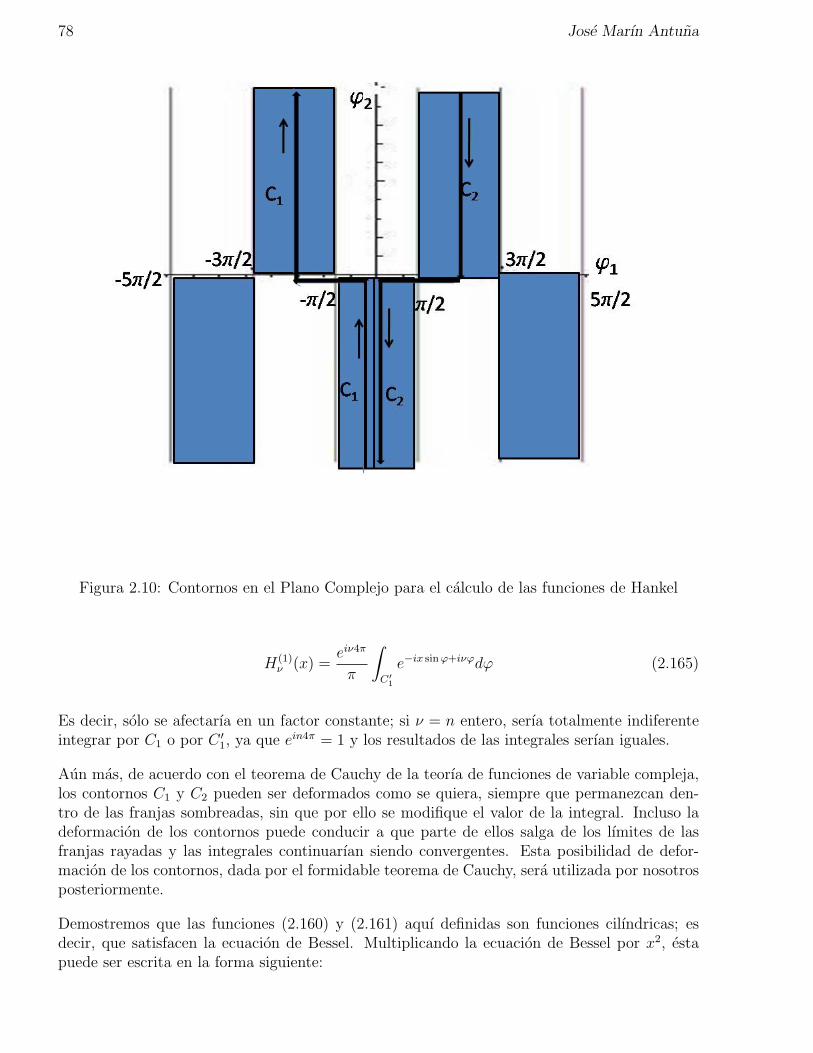
78 Jose Marın Antuna
Figura 2.10: Contornos en el Plano Complejo para el calculo de las funciones de Hankel
H(1)ν (x) =
eiν4π
π
∫C′
1
e−ix sinϕ+iνϕdϕ (2.165)
Es decir, solo se afectarıa en un factor constante; si ν = n entero, serıa totalmente indiferenteintegrar por C1 o por C ′
1, ya que ein4π = 1 y los resultados de las integrales serıan iguales.
Aun mas, de acuerdo con el teorema de Cauchy de la teorıa de funciones de variable compleja,los contornos C1 y C2 pueden ser deformados como se quiera, siempre que permanezcan den-tro de las franjas sombreadas, sin que por ello se modifique el valor de la integral. Incluso ladeformacion de los contornos puede conducir a que parte de ellos salga de los lımites de lasfranjas rayadas y las integrales continuarıan siendo convergentes. Esta posibilidad de defor-macion de los contornos, dada por el formidable teorema de Cauchy, sera utilizada por nosotrosposteriormente.
Demostremos que las funciones (2.160) y (2.161) aquı definidas son funciones cilındricas; esdecir, que satisfacen la ecuacion de Bessel. Multiplicando la ecuacion de Bessel por x2, estapuede ser escrita en la forma siguiente:
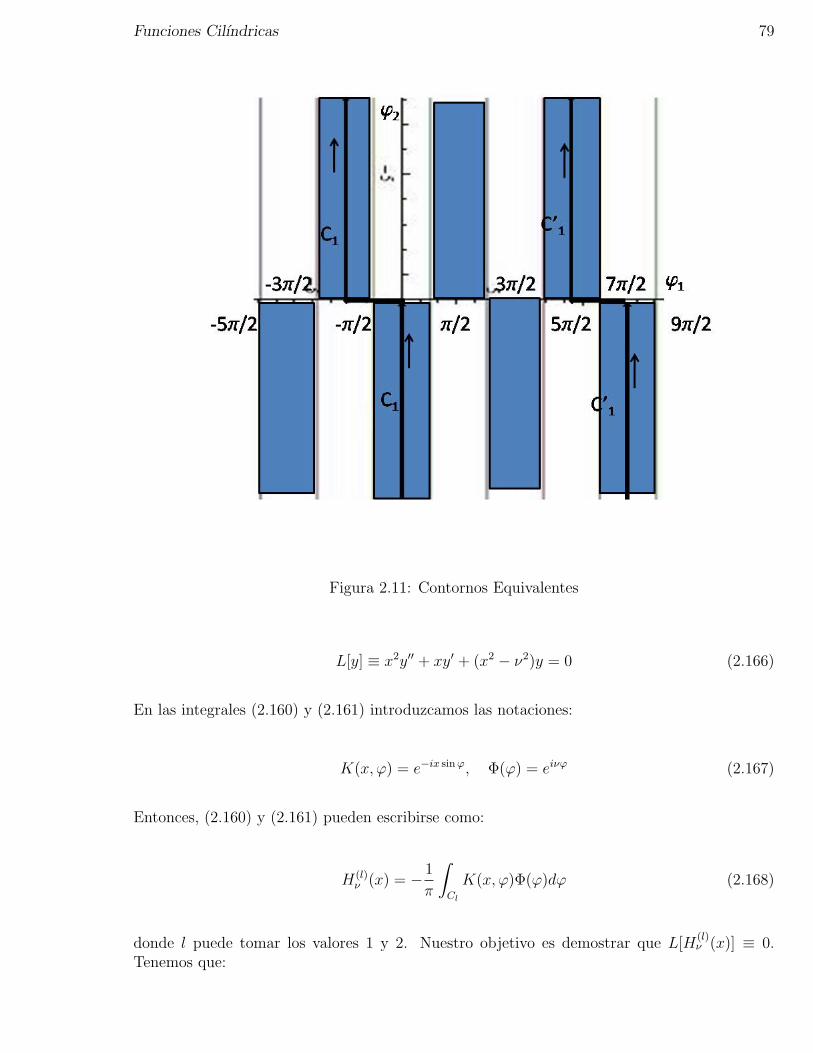
Funciones Cilındricas 79
Figura 2.11: Contornos Equivalentes
L[y] ≡ x2y′′ + xy′ + (x2 − ν2)y = 0 (2.166)
En las integrales (2.160) y (2.161) introduzcamos las notaciones:
K(x, ϕ) = e−ix sinϕ, Φ(ϕ) = eiνϕ (2.167)
Entonces, (2.160) y (2.161) pueden escribirse como:
H(l)ν (x) = − 1
π
∫Cl
K(x, ϕ)Φ(ϕ)dϕ (2.168)
donde l puede tomar los valores 1 y 2. Nuestro objetivo es demostrar que L[H(l)ν (x)] ≡ 0.
Tenemos que:

80 Jose Marın Antuna
L[H(l)ν (x)] = L
[− 1
π
∫Cl
K(x, ϕ)Φ(ϕ)dϕ
]= − 1
π
∫Cl
L[KΦ]dϕ = − 1
π
∫Cl
L[K]Φdϕ (2.169)
ya que el operador L actua solo sobre x. No es difıcil constatar que
Kx = −i sinϕK,Kxx = − sin2 ϕK, Kϕϕ = ix sinϕK − x2 cos2 ϕK (2.170)
Teniendo en cuenta (2.170), es facil ver que
L[K] + ν2K +Kϕϕ ≡ x2Kxx + xKx + x2K − ν2K + ν2K +Kϕϕ =
= −x2 sin2 ϕK − ix sinϕK + x2K + ix sinϕK − x2 cos2 ϕK =
= −x2(sin2 ϕ+ cos2 ϕ)K + x2K = −x2K + x2K = 0 (2.171)
De (2.171) concluimos que
L[K] = −ν2K −Kϕϕ (2.172)
Colocando (2.172) en (2.169), obtenemos:
L[H(l)ν (x)] =
1
π
∫Cl
(ν2K +Kϕϕ)Φdϕ ≡1
π
ν2
∫Cl
KΦdϕ+
∫Cl
KϕϕΦdϕ
(2.173)
Analicemos por separado la segunda integral. Integrando dos veces por partes y teniendo encuenta que Φ′ = iνΦ y que Φ′′ = −ν2Φ, obtenemos:
∫Cl
KϕϕΦdϕ = KϕΦ′|Cl
−∫Cl
KϕΦ′dϕ = −KΦ′|Cl
+
∫Cl
KΦ′′dϕ = −ν2
∫Cl
KΦdϕ (2.174)
En (2.174) hemos tenido en cuenta el hecho de que KϕΦ′ y KΦ′′ tienden a cero cuando ϕ2 →
±∞, ya que las curvas Cl de integracion estan tomadas por las franjas sombreadas de la figura2.10. Colocando (2.174) en (2.173), queda, finalmente:
L[H(l)ν (x)] =
1
π
ν2
∫Cl
KΦdϕ− ν2
∫Cl
KΦdϕ
≡ 0 (2.175)
lo que significa que, efectivamente, las integrales (2.160) y (2.161) definen funciones cilındricas.Mas adelante podremos constatar que dichas integrales nos dan, precisamente, las funciones deHankel de orden 1 y 2 respectivamente.
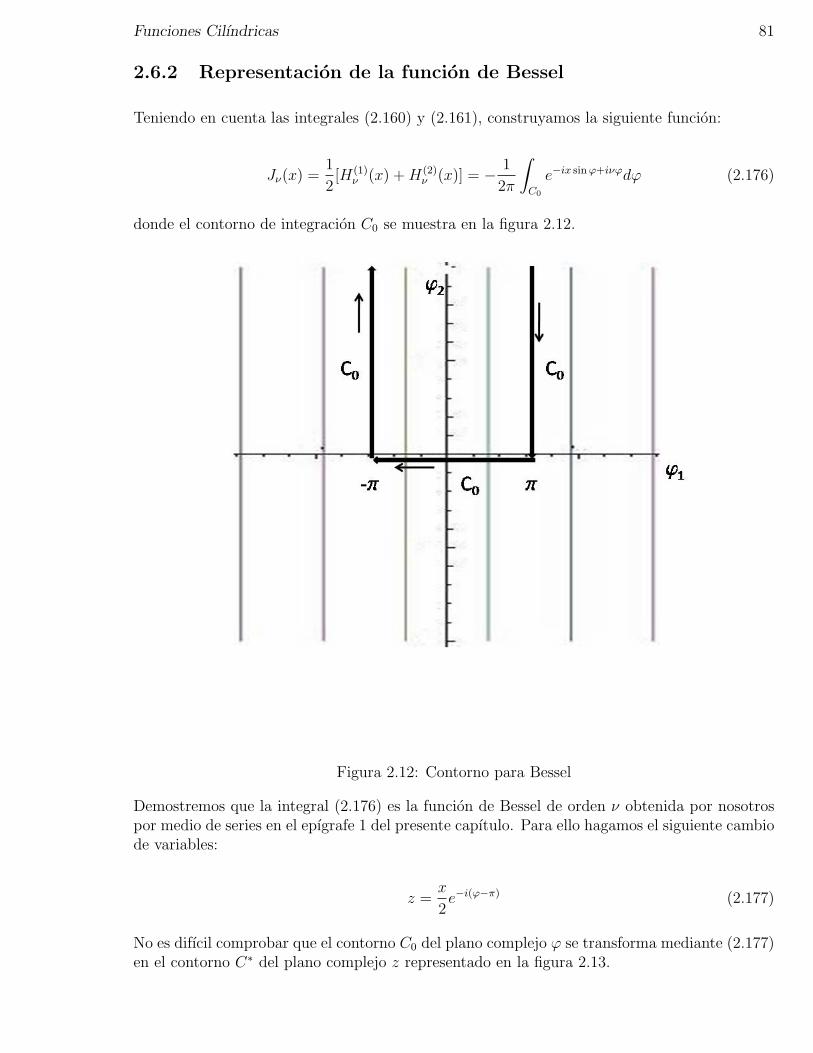
Funciones Cilındricas 81
2.6.2 Representacion de la funcion de Bessel
Teniendo en cuenta las integrales (2.160) y (2.161), construyamos la siguiente funcion:
Jν(x) =1
2[H(1)
ν (x) +H(2)ν (x)] = − 1
2π
∫C0
e−ix sinϕ+iνϕdϕ (2.176)
donde el contorno de integracion C0 se muestra en la figura 2.12.
Figura 2.12: Contorno para Bessel
Demostremos que la integral (2.176) es la funcion de Bessel de orden ν obtenida por nosotrospor medio de series en el epıgrafe 1 del presente capıtulo. Para ello hagamos el siguiente cambiode variables:
z =x
2e−i(ϕ−π) (2.177)
No es difıcil comprobar que el contorno C0 del plano complejo ϕ se transforma mediante (2.177)en el contorno C∗ del plano complejo z representado en la figura 2.13.

82 Jose Marın Antuna
Figura 2.13: Contorno para Bessel en el plano z
donde el radio de la circunferencia que rodea a z = 0 es x/2. Las rectas que forman el contornoC∗ estan trazadas por el borde superior y el borde inferior, respectivamente, de la parte positivadel eje real. De (2.177) tenemos que:
dϕ =idz
z, eiϕ =
x
2zeiπ ≡ − x
2z, e−iϕ =
2z
xe−iπ ≡ −2z
x, eiνϕ =
( x2z
)νeiνπ (2.178)
Por lo tanto, colocando (2.178) en (2.176), obtenemos:
Jν(x) = − 1
2π
∫C0
exp
−ixe
iϕ − e−iϕ
2i+ iνϕ
dϕ = − 1
2π
∫C∗e−
x2 (−
x2z
+ 2zx )( x
2z
)νeiνπ
idz
z=
=1
2πi
∫C∗e−ze
x2
4z
( x2z
)νeiνπ
dz
z(2.179)
Pero el desarrollo en serie de potencias de la funcion exponencial nos da:

Funciones Cilındricas 83
ex2
4z =∞∑k=0
(x2
4z
)kk!
≡∞∑k=0
(x2
)2kzkk!
(2.180)
Colocando (2.180) en (2.179), obtenemos:
Jν(x) =1
2πi
∫C∗e−z
∞∑k=0
(x2
)2kzkk!
( x2z
)νeiνπ
dz
z=
∞∑k=0
(x2
)2k+νk!
eiνπ
2πi
∫C∗e−zz−k−ν−1dz (2.181)
Analicemos la siguiente integral:
I =
∫C∗e−zzs−1dz ≡
∫ 0
∞e−xxs−1dx+
∫Cε
e−zzs−1dz (2.182)
donde Cε es la circunferencia de radio ε, centrada en z = 0.
En (2.182) el contorno C∗ ha sido deformado tomando, en lugar de la circunferencia de radiox/2 que aparece en la figura 2.13, otra circunferencia Cε de radio ε arbitrario, en virtud delteorema de Cauchy, ya que el integrando en (2.182) es una funcion analıtica univaluada paratodo s > 0 en el plano complejo z con un corte en Re z ≥ 0.
De (2.182) tenemos que:
I = [e(s−1)2πi − 1]
∫ ∞
ε
e−xxs−1dx+
∫Cε
e−zzs−1dz (2.183)
Sobre la circunferencia Cε tenemos que |e−z| < M (es analıtica y por lo tanto acotada), y,ademas, |zs−1| = εs−1, |dz| = εsdϕ. Por lo tanto, para la integral por Cε tenemos:
∣∣∣∣∫Cε
e−zzs−1dz
∣∣∣∣ < 2πMεs → 0, ∀ε→ 0 (2.184)
ya que s > 0. Por consiguiente, tomando el lımite para ε→ 0 en (2.183), obtenemos:
I = [e(s−1)2πi − 1]
∫ ∞
0
e−xxs−1dx ≡ [e(s−1)2πi − 1]Γ(s) (2.185)
donde
Γ(s) =
∫ ∞
0
e−xxs−1dx (2.186)
84 Jose Marın Antuna
es la conocida funcion gamma de Euler. De (2.185) obtenemos para la funcion Γ(s) la siguienterepresentacion
Γ(s) =1
e(s−1)2πi − 1
∫C∗e−zzs−1dz (2.187)
donde el contorno C∗, en virtud del teorema de Cauchy, es el de la figura 2.13. Para la funciongamma es conocida la formula del complemento:
Γ(s)Γ(1− s) =π
sin πs(2.188)
De (2.188) tendremos que:
1
Γ(s+ 1)=
sin π(s+ 1)
πΓ(−s) (2.189)
Colocando en (2.189) la expresion (2.187), obtenemos:
1
Γ(s+ 1)=
sin π(s+ 1)
π
1
e(s−1)2πi − 1
∫C∗e−zz−s−1dz =
=sin π(s+ 1)
π
−e(s+1)πi
e(s+1)πi − e−(s+1)πi
∫C∗e−zz−s−1dz =
=esπi
2πi
∫C∗e−zz−s−1dz (2.190)
Por consiguiente:
eiνπ
2πi
∫C∗e−zz−k−ν−1dz =
eiνπ
2πi
2πi
e(k+ν)πi1
Γ(k + ν + 1)=
(−1)k
Γ(k + ν + 1)(2.191)
ya que ekπi = (−1)k. Colocando (2.191) en (2.181), obtenemos, finalmente:
Jν(x) =∞∑k=0
(−1)k(x2
)2k+νk!Γ(k + ν + 1)
(2.192)
De esta manera queda comprobado que la integral (2.176) nos da, precisamente, la funcion deBessel de orden ν. Ello, en virtud de la definicion de las funciones de Hankel dada en el epıgrafe2 del presente capıtulo, nos permite afirmar que, efectivamente, las integrales (2.160) y (2.161)representan a las funciones de Hankel de orden 1 y 2, respectivamente.
Funciones Cilındricas 85
Analicemos mas detenidamente la expresion (2.176) de la funcion de Bessel. En virtud de laforma del contorno de integracion C0 tendremos que:
Jν(x) = − 1
2π
[∫ π
π+i∞e−ix sinϕ+iνϕdϕ+
∫ −π
π
e−ix sinϕ+iνϕdϕ−∫ −π+i∞
−πe−ix sinϕ+iνϕdϕ
](2.193)
En la primera y tercera integral entre corchetes tenemos que:
exp−ix sinϕ+ iνϕ = exp−x sinhϕ2 − νϕ2 ± iνπ (2.194)
y en la segunda integral tenemos:
exp−ix sinϕ+ iνϕ = expi(νϕ1 − x sinϕ1) =
= cos(νϕ1 − x sinϕ1) + i sin(νϕ1 − x sinϕ1) (2.195)
donde ϕ = ϕ1 + iϕ2. Colocando (2.194) y (2.193) y teniendo en cuenta que en la primera ytercera integral dϕ = idϕ2 y en la segunda dϕ = dϕ1, obtenemos:
Jν(x) = − 1
2π
[∫ 0
∞e−x sinhϕ2−νϕ2eiνπidϕ2 +
∫ −π
π
cos(νϕ1 − x sinϕ1)dϕ1
]−
− 1
2π
∫ ∞
0
e−x sinhϕ2−νϕ2e−iνπidϕ2 (2.196)
En (2.196) hemos tenido en consideracion el hecho de que la integral del seno entre −π y π escero, por ser el integrando impar. Sustituyamos en (2.196) las variables mudas de integracionpor ϕ; despues de simples transformaciones obtenemos, finalmente:
Jν(x) =1
π
∫ π
0
cos(νϕ− x sinϕ)dϕ− sin νπ
π
∫ ∞
0
e−x sinhϕ−νϕdϕ (2.197)
En particular, para ν = n entero, sinnπ = 0 y de (2.197) queda
Jn(x) =1
π
∫ π
0
cos(nϕ− x sinϕ)dϕ (2.198)
Las expresiones (2.197) y (2.198) son de gran utilidad en la teorıa de la difraccion y en otrasaplicaciones y reciben el nombre de Integrales de Bessel. Observese que la formula (2.198)obtenida como caso particular de (2.197) para ν = n entero coincide con la formula (2.156)obtenida en el epıgrafe anterior a partir del analisis de la funcion generatriz de la funcion deBessel.
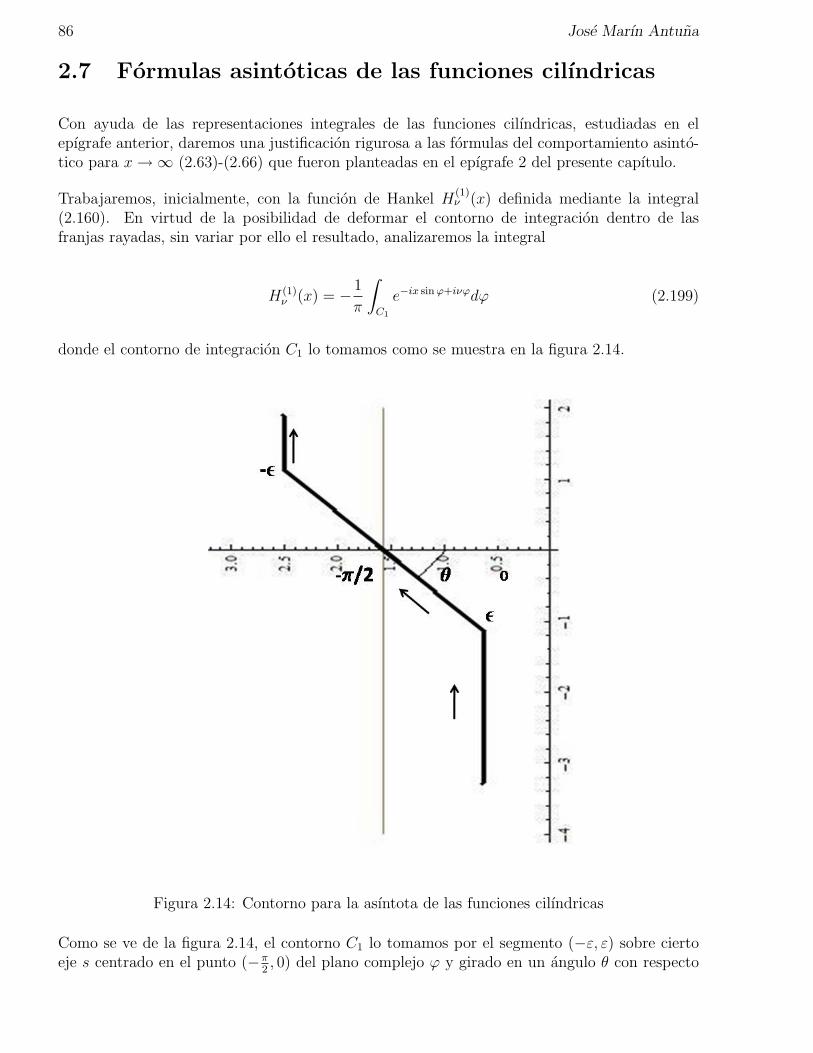
86 Jose Marın Antuna
2.7 Formulas asintoticas de las funciones cilındricas
Con ayuda de las representaciones integrales de las funciones cilındricas, estudiadas en elepıgrafe anterior, daremos una justificacion rigurosa a las formulas del comportamiento asinto-tico para x→∞ (2.63)-(2.66) que fueron planteadas en el epıgrafe 2 del presente capıtulo.
Trabajaremos, inicialmente, con la funcion de Hankel H(1)ν (x) definida mediante la integral
(2.160). En virtud de la posibilidad de deformar el contorno de integracion dentro de lasfranjas rayadas, sin variar por ello el resultado, analizaremos la integral
H(1)ν (x) = − 1
π
∫C1
e−ix sinϕ+iνϕdϕ (2.199)
donde el contorno de integracion C1 lo tomamos como se muestra en la figura 2.14.
Figura 2.14: Contorno para la asıntota de las funciones cilındricas
Como se ve de la figura 2.14, el contorno C1 lo tomamos por el segmento (−ε, ε) sobre ciertoeje s centrado en el punto (−π
2, 0) del plano complejo ϕ y girado en un angulo θ con respecto

Funciones Cilındricas 87
al eje real, mas dos semirrectas paralelas al eje imaginario. Hagamos un analisis del integrandoen (2.199). Como
Re[−ix sinϕ+ iνϕ] = x cosϕ1 sinhϕ2 − νϕ2 < 0 (2.200)
tendremos que
e−ix sinϕ+iνϕ → 0, ∀x→∞ (2.201)
rapidamente para toda ϕ, excepto en el punto ϕ = (−π2, 0) donde Re[−ix sinϕ] = 0. Esto
significa que, cuando x → ∞, todo el valor de la integral (2.199) se va concentrando, cadavez mas, en el entorno del punto (−π
2, 0) y, por lo tanto, para x muy grande, el aporte de las
integrales por las semirrectas superior e inferior del contorno C1 es despreciable y que todo elvalor de la integral (2.199) estara, practicamente, en el segmento (−ε, ε). Esto significa que, alalejarnos del punto (−π
2, 0) en distintas direcciones con x muy grande, el integrando en (2.199)
decrece rapidamente. Busquemos la direccion, es decir, el valor del angulo θ, para la que estedecrecimiento es el mas rapido. Tenemos que en el entorno del punto (−π
2, 0)
ϕ = −π2
+ seiθ (2.202)
Por lo tanto:
−i sinϕ ≡ i cos(π
2+ ϕ
)= i cos(seiθ) = i
[1− s2
2ei2θ + ...
]≈
≈ i
[1− s2
2(cos 2θ + i sin 2θ)
]= i
[1− s2
2cos 2θ − i
s2
2sin 2θ
]=
=s2
2sin 2θ + i
[1− s2
2(cos 2θ)
](2.203)
En (2.203) hemos despreciado -en el desarrollo del coseno en serie de Taylor- los terminos deorden superior a s2, por ser s ∈ (−ε, ε) pequena. Colocando esta expresion en la parte delintegrando dependiente de x, obtenemos que:
e−ix sinϕ ≈ exs2
2sin 2θe
ix[1− s2
2cos 2θ
]→ 0, ∀x→∞ (2.204)
El segundo factor exponencial es oscilante, de manera que la tendencia a cero en (2.204) parax → ∞ se debe a la primera exponencial y sera la mas rapida posible cuando sin 2θ = −1, esdecir, para 2θ = −π
2. Por consiguiente, tomando el angulo θ igual a:
θ = θ0 = −π4
(2.205)

88 Jose Marın Antuna
lograremos que el decrecimiento del integrando, al alejarnos del punto (−π2, 0), sea el mas
rapido posible, de manera que, tomando esa direccion, la integral (2.199) se podra sustituir,aproximadamente, por la integral por el segmento (−ε, ε) con ε pequeno, cuando x → ∞. Enese caso nos quedara:
e−ix sinϕ = exs2
2sin 2θ0e
ix[1− s2
2cos 2θ0
]= e−x
s2
2 eix (2.206)
ya que sin 2θ0 = sin(−π
2
)= −1 y cos 2θ0 = cos
(−π
2
)= 0. Ademas, de (2.202) tendremos que:
dϕ = dse−iπ4 (2.207)
Colocando (2.205), (2.206) y (2.207) en (2.199), luego de sustituir la integral por C1 por laintegral solamente por el segmento (−ε, ε), obtenemos:
H(1)ν (x) ≈ − 1
π
∫ −ε
ε
e−xs2
2 eixeiν(−π2+se−i π
4 )dse−iπ4 =
=1
π
∫ ε
−εe−x
s2
2 dsei(x−νπ2−π
4 ) (2.208)
En (2.208) hemos despreciado, en el tercer exponente, se−iπ4 en comparacion con la constante
−π2, ya que el primero es mucho menor que el segundo en virtud de que s ∈ (−ε, ε) y ε es muy
pequeno. Haciendo en (2.208) el cambio de variables
ξ = s
√x
2, dξ = ds
√x
2(2.209)
obtenemos:
H(1)ν (x) ≈ 1
π
∫ ε√
x2
−ε√
x2
e−ξ2
dξ
√2
xe1(x−ν
π2−π
4 ) → 1
π
∫ ∞
−∞e−ξ
2
dξ
√2
xe1(x−ν
π2−π
4 ), ∀x→∞ (2.210)
Como la integral de Poisson que figura a la derecha de (2.210) es igual a√π, obtenemos,
finalmente, que la funcion H(1)ν (x) tiene, para x muy grande, el siguiente comportamiento
asintotico:
H(1)ν (x) =
√2
πxei(x−ν
π2−π
4 ), ∀x→∞ (2.211)
De forma totalmente analoga, deformando el contorno C2 de manera similar a como procedimospara C1 y hallando la direccion de decrecimiento mas rapido del integrando, puede obtenerse, a

Funciones Cilındricas 89
partir de la expresion integral (2.161) del epıgrafe anterior, para la funcion H(2)ν (x) el siguiente
comportamiento asintotico:
H(2)ν (x) =
√2
πxe−i(x−ν
π2−π
4 ), ∀x→∞ (2.212)
Este resultado es evidente, ya que el valor de la integral por C2 se concentra para x→∞ en elentorno del punto
(π2, 0), de manera que (2.202) se sustituira por
ϕ =π
2+ seiθ (2.213)
y, en lugar de (2.203), se obtiene entonces que:
−i sinϕ = i sin(−ϕ) = −i cos(seiθ) = −s2
2sin 2θ − i
[1− s2
2cos 2θ
](2.214)
de manera que, en lugar de (2.206), se obtiene:
e−ix sinϕ = e−xs2
2 e−ix (2.215)
El angulo de mayor decrecimiento en este caso sera θ0 = π4. El resto del razonamiento nos
conducira consecuentemente a la expresion (2.212).
De acuerdo con las definiciones (2.60) y (2.61) para las funciones de Hankel, tendremos paralas funciones de Bessel y Neumann las expresiones:
Jν(x) =1
2[H(1)
ν (x) +H(2)ν (x)] (2.216)
Jν(x) =1
2i[H(1)
ν (x)−H(2)ν (x)] (2.217)
por lo que, teniendo en cuenta las expresiones asintoticas (2.211) y (2.212), obtenemos au-tomaticamente para las funciones de Bessel y Neumann las siguientes formulas asintoticas:
Jν(x) =
√2
πxcos(x− ν
π
2− π
4
), ∀x→∞ (2.218)
Nν(x) =
√2
πxsin(x− ν
π
2− π
4
), ∀x→∞ (2.219)

90 Jose Marın Antuna
Es conveniente destacar que las igualdades en las formulas (2.211), (2.212), (2.218) y (2.219)son aproximadas. Dicha aproximacion esta dada por una magnitud del orden de x3/2, lo quepuede verificarse a partir de la siguiente afirmacion general.
Lema 1
Toda funcion cilındrica puede ser expresada para valores grandes de x en la forma
yν(x) = A∞sin(x+ ω∞)√
x+O
(1
x3/2
)(2.220)
donde A∞ 6= 0 y ω∞ son ciertas constantes y O(
1x3/2
)es una magnitud del orden de x3/2.
Demostracion:
En la ecuacion de Bessel
y′′ +1
xy′ +
(1− ν2
x2
)y = 0 (2.221)
propongamos la solucion en la forma
y(x) =v(x)√x
(2.222)
Colocando (2.222) en (2.221), obtenemos para v(x) la ecuacion:
v′′ +
(1−
ν2 − 14
x2
)v = 0 (2.223)
Propongamos la solucion de (2.223) en la forma:
v(x) = A sin(x+ ω), v′(x) = A cos(x+ ω) (2.224)
donde A(x) y ω(x) son ciertas funciones de x y A(x) 6= 0 para toda x, ya que, en caso contrario,v y v′ serıan identicamente nulas a la vez, lo que implicarıa que v(x) serıa identicamente nula.De (2.224) tendremos que:
v′ = A cos(x+ ω) = A′ sin(x+ ω) + A(ω′ + 1) cos(x+ ω) (2.225)
v′′ = A′ cos(x+ ω)− A(ω′ + 1) sin(x+ ω) = −(
1−ν2 − 1
4
x2
)A sin(x+ ω) (2.226)
Funciones Cilındricas 91
donde en (2.226) hemos tenido en cuenta la ecuacion (2.223). De aquı concluimos que:
ω′ = −ν2 − 1
4
x2sin2(x+ ω) = O
(1
x2
)(2.227)
y que:
A′
A=
ω′
tan(x+ ω)= −
ν2 − 14
x2sin(x+ ω) cos(x+ ω) = O
(1
x2
)(2.228)
Como
ω(x) = ω(a)−∫ a
x
ω′(ξ)dξ (2.229)
concluimos que existe el lımite
lima→∞
ω(a) = ω∞
y, ademas, en virtud de (2.227):
ω(x) = ω∞ +O
(1
x
)(2.230)
De manera analoga, de (2.228) concluimos que
A(x) = A∞
[1 +O
(1
x
)](2.231)
donde A∞ 6= 0. Por consiguiente, cualquier solucion de la ecuacion (2.223) tiene para x → ∞la forma
v(x) = A∞ sin(x+ ω∞) +O
(1
x
)(2.232)
Colocando (2.232) en (2.222), queda establecido el comportamiento asintotico (2.220).
Demostrado el lema.
Como consecuencia del lema demostrado, se llega al siguiente resultado.
Lema 2

92 Jose Marın Antuna
Toda funcion cilındrica se determina unıvocamente por su expresion asintotica para x→∞.
Demostracion:
Supongamos que existen dos funciones cilındricas yν(x), ¯yν(x) que tienen el mismo compor-tamiento asintotico para x→∞. De acuerdo con el lema anterior, ello significarıa que
A∞ = ¯A∞, ω∞ = ¯ω∞ (2.233)
donde A∞, ¯A∞, ω∞, ¯ω∞ son los parametros que aparecen en la formula (2.220) para las asıntotasde las funciones yν(x), ¯yν(x), respectivamente. Como suponemos que yν(x), ¯yν(x) son diferentes,su diferencia
v(x) = yν(x)− ¯yν(x) 6= 0 (2.234)
sera tambien solucion de la ecuacion de Bessel, es decir, sera tambien una funcion cilındrica.Pero para ella, en virtud de (2.233), tendrıamos el siguiente comportamiento asintotico parax→∞:
v(x) = O
(1
x3/2
)(2.235)
lo que esta en contradiccion con el lema anterior que establece que, para cualquier funcioncilındrica, su comportamiento asintotico tiene la forma (2.220). Por lo tanto debera ser v(x) ≡ 0,lo que significa que yν(x) ≡ ¯yν(x).
Demostrado el lema.
Los calculos realizados en el presente epıgrafe nos permitieron establecer que A∞ =√
2π
para
nuestras funciones cilındricas. A las formulas asintoticas obtenidas (2.211), (2.212), (2.218) y(2.219) debera sumarse la expresion
O
(1
x3/2
)de acuerdo con el primer lema demostrado, a fin de lograr una igualdad exacta en dicho desa-rrollo asintotico. El segundo lema nos garantiza que las formulas asintoticas obtenidas definende forma unıvoca a las funciones cilındricas a que corresponden.
2.8 Funciones cilındricas de orden semientero
Un caso particular de importancia en las aplicaciones esta dado por aquel en el que ν essemientero:

Funciones Cilındricas 93
ν = n+1
2, n = 0,±1,±2, .... (2.236)
Como veremos a continuacion, en este caso las funciones cilındricas se expresan a traves defunciones elementales.
Analicemos la funcion de Bessel de orden ν = 1/2.
J1/2(x) =∞∑k=0
(−1)k(x2
)2k+ 12
k!Γ(k + 3/2)(2.237)
En virtud de la propiedad fundamental de la funcion gamma, tenemos que:
Γ(k + 3/2) =
(k +
1
2
)(k − 1
2
)(k − 3
2
)· · · 3
2
1
2Γ
(1
2
)=
=1 · 3 · 5 · · · (2k − 3)(2k−)(2k + 1)
2k+1
√π ≡ (2k + 1)!!
2k+1
√π (2.238)
ya que Γ(1/2) =√π. Colocando (2.238) en (2.237), queda:
J1/2(x) =∞∑k=0
(−1)kx2k+1− 12 2k+1
22k+1/2k!√π(2k + 1)!!
=∞∑k=0
(−1)kx2k+1√
2√x√π2kk!(2k + 1)!!
=
=
√2
πx
∞∑k=0
(−1)kx2k+1
(2k + 1)!≡√
2
πxsin x (2.239)
En (2.239) hemos utilizado los hechos evidentes de que
2kk! = 2k(2k − 2)(2k − 4) · · · 4 · 2 ≡ (2k)!! (2.240)
y que
(2k)!!(2k + 1)!! = (2k + 1)! (2.241)
Ası pues, vemos que la funcion de Bessel de orden 1/2 se expresa a traves de las funcioneselementales
√x y sin x. La expresion (2.239) es equivalente a escribir:
J1/2(x) =
√2
πxcos(x− π
2
)(2.242)

94 Jose Marın Antuna
Procediendo de forma analoga, se puede obtener que:
J−1/2(x) =
√2
πxcosx (2.243)
Teniendo en cuenta (2.239) y (2.242), ası como la formula (2.31) que define a la funcion deNeumann de orden ν, es facil calcular que:
N1/2(x) =J1/2(x) cos 1
2π − J−1/2(x)
sin 12π
≡ −√
2
πxcosx (2.244)
Es decir:
N1/2 =
√2
πxsin(x− π
2
)(2.245)
Por consiguiente, de acuerdo con la definicion de las funciones de Hankel (formulas (2.60) y(2.61)), obtenemos:
H(1)1/2(x) =
√2
πxei(x−
π2 ) (2.246)
H(2)1/2(x) =
√2
πxe−i(x−
π2 ) (2.247)
Notese que, como era de esperar, J1/2(x) y N1/2(x) tienen comportamientos asintoticos parax→ 0:
J1/2(x) =√x
√2
π
sin x
x→ 0, ∀x→ 0
como x1/2 (cero de orden 1/2),
N1/2(x) = − 1√x
√2
πcosx→ −∞, ∀x→ 0
como 1x1/2 (polo de orden 1/2).
Para todo x > 0, como puede apreciarse de (2.242) y (2.244), sus expresiones coinciden con sucomportamiento asintotico para x→∞.

Funciones Cilındricas 95
El resto de las funciones de orden semientero pueden calcularse con ayuda de la formula derecurrencia (2.75). Ası, tendremos:
J3/2(x) =21
2
xJ1/2(x)− J−1/2(x) =
√2
πx
[1
xsin x− cosx
](2.248)
J5/2(x) =23
2
xJ3/2(x)− J1/2(x) =
√2
πx
[(3
x2− 1
)sin x− 3
xcosx
](2.249)
y, en general:
Jn+1/2(x) =
√2
πx
[Pn
(1
x
)sin x+Qn
(1
x
)cosx
](2.250)
donde Pn y Qn son polinomios de grado menor o igual que n de 1x.
Similares expresiones pueden ser obtenidas para Nn+1/2(x), H(1)n+1/2(x) y H
(2)n+1/2(x).
2.9 Funciones cilındricas de argumento imaginario
En el presente epıgrafe prestaremos nuestra atencion a un tipo de ecuacion diferencial queconstituye un caso modificado de la ecuacion de Bessel, ya que puede ser llevada a ella pormedio de un cambio de variables y que aparece en numerosas aplicaciones de la Fısica.
2.9.1 Ecuacion de Bessel de argumento imaginario
En diversos problemas fısicos se obtiene una ecuacion muy parecida a la ecuacion de Bessel:
y′′ +1
xy′ −
(1 +
ν2
x2
)y = 0 (2.251)
La unica diferencia de la ecuacion (2.251) con la ecuacion de Bessel esta en el signo menosdelante del 1. Las soluciones de esta ecuacion no seran funciones oscilantes. Con el objetivo deresolver la ecuacion (2.251) hagamos el siguiente cambio de variables:
ξ = ix, dx =dξ
i, y(x) = y
(ξ
i
)= Y (ξ) (2.252)
Colocando en la ecuacion, obtenemos:

96 Jose Marın Antuna
i2d2Y
dξ2+i
ξidY
dξ−(
1 +i2ν2
ξ2
)Y = 0
Es decir:
d2Y
dξ2+ξ
dY
dξ+
(1− ν2
ξ2
)Y = 0 (2.253)
La ecuacion (2.253) es la ecuacion de Bessel de orden ν. Su solucion general puede ser expresadaen la forma:
Y (ξ) = AJν(ξ) +BH(1)ν (ξ) (2.254)
O sea, volviendo a la variable inicial:
y(x) = AJν(ix) +BH(1)ν (ix) (2.255)
Como se ve, la solucion general (2.255) de la ecuacion (2.251) se expresa como una combinacionlineal de funciones cilındricas de argumento imaginario. Por ello, la ecuacion (2.251) se conocecon el nombre de Ecuacion de Bessel de argumento imaginario. Los coeficientes A y Ben (2.255) son, en general, complejos.
2.9.2 Funcion cilındrica de argumento imaginario de primer tipo
Analicemos la primera de las dos soluciones linealmente independientes que figuran en la formula(2.255), es decir, la funcion de Bessel de argumento imaginario. Tenemos que:
Jν(ix) =∞∑k=0
(−1)k(ix2
)2k+νΓ(k + 1)Γ(k + ν + 1)
=∞∑k=0
(−1)k(−1)kiν(x2
)2k+νΓ(k + 1)Γ(k + ν + 1)
= iνIν(x) (2.256)
pues i2k = (−1)k. Hemos llamado:
Iν(x) =∞∑k=0
(−1)k(x2
)2k+νΓ(k + 1)Γ(k + ν + 1)
(2.257)
Esta funcion se conoce con el nombre de funcion cilındrica de argumento imaginario deprimer tipo o funcion de Infeld.

Funciones Cilındricas 97
De (2.257) se ve que es una funcion real de argumento real x, monotona creciente que, deacuerdo con (2.256), se define a traves de la funcion de Bessel de argumento imaginario por laformula:
Iν(x) =1
iνJν(ix) (2.258)
notacion que fue introducida por Basset en 1888 en un trabajo sobre Hidrodinamica.
Por consiguiente, si en la solucion general (2.255) de la ecuacion (2.251) tomamos A = i−ν ,B = 0, vemos que la funcion Iν(x) es una de las soluciones linealmente independientes de dichaecuacion. De (2.257) es facil ver que el comportamiento asintotico de la funcion de Infeld parax→ 0 es:
I0(x) → 1, ∀x→ 0
Iν(x) ∼ xν , ∀x→ 0 (2.259)
(tiene un cero de orden ν para ν > 0 cuando x→ 0).
La ecuacion (2.251) es un caso particular de la ecuacion generatriz de las funciones especiales,con k(x) = x. Por lo tanto, es de esperar que la segunda solucion linealmente independientetenga una singularidad logarıtmica en x = 0 para ν = 0 y un polo de orden ν en x = 0 paraν > 0. Veamos el comportamiento asintotico de la funcion de Infeld para x → ∞. En virtudde la formula asintotica para la funcion de Bessel (2.218), tendremos que:
Iν(x) =1
iνJν(x) =
1
iν
√2
πixcos(ix− ν
π
2− π
4
)=
=1
iν
√2
πix
1
2
[ei(ix−ν
π2−π
4 ) + e−i(ix−νπ2−π
4 )]
=1
iν+1/2
√1
2πx
[e−xe−i(ν
π2+π
4 ) + exei(νπ2+π
4 )]
=
=1
iν+1/2
√1
2πxexei
π2(ν+1/2) =
1
iν+1/2
√1
2πxex[ei
π2
]ν+1/2=
1
iν+1/2
√1
2πxexiν+1/2 (2.260)
donde dentro del corchete hemos despreciado el primer sumando, ya que e−x → 0, ∀x → ∞.De (2.260) obtenemos, finalmente:
Iν(x) =
√1
2πxex, ∀x→∞ (2.261)
Es de notar que esta formula asintotica no depende de ν, es decir, todas las funciones deInfeld de cualquier orden tienden a infinito, de acuerdo con (2.261). Los graficos de Iν(x) paradistintas ν se muestran en la figura 2.15.
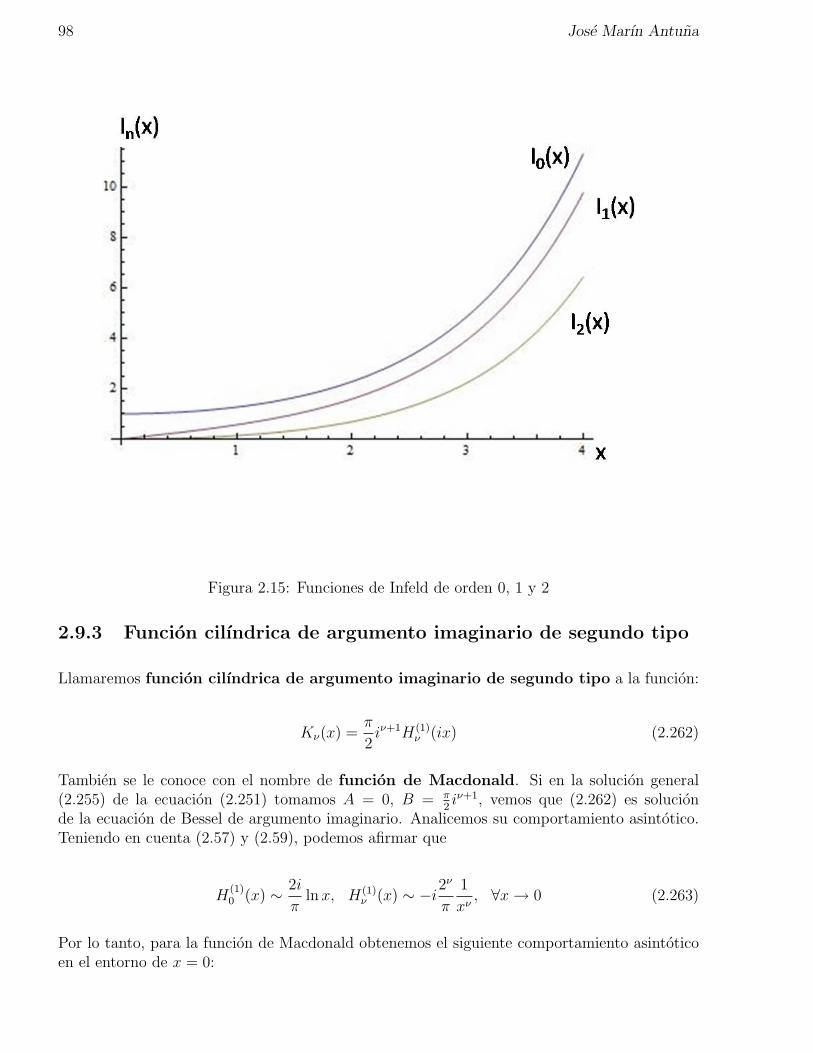
98 Jose Marın Antuna
Figura 2.15: Funciones de Infeld de orden 0, 1 y 2
2.9.3 Funcion cilındrica de argumento imaginario de segundo tipo
Llamaremos funcion cilındrica de argumento imaginario de segundo tipo a la funcion:
Kν(x) =π
2iν+1H(1)
ν (ix) (2.262)
Tambien se le conoce con el nombre de funcion de Macdonald. Si en la solucion general(2.255) de la ecuacion (2.251) tomamos A = 0, B = π
2iν+1, vemos que (2.262) es solucion
de la ecuacion de Bessel de argumento imaginario. Analicemos su comportamiento asintotico.Teniendo en cuenta (2.57) y (2.59), podemos afirmar que
H(1)0 (x) ∼ 2i
πlnx, H(1)
ν (x) ∼ −i2ν
π
1
xν, ∀x→ 0 (2.263)
Por lo tanto, para la funcion de Macdonald obtenemos el siguiente comportamiento asintoticoen el entorno de x = 0:
Funciones Cilındricas 99
K0(x) ∼ − lnx, ∀x→ 0 (2.264)
Kν(x) ∼ 2ν−1 1
xν, ∀x→ 0 (2.265)
Estos resultados indican que la funcion (2.262) es la segunda solucion linealmente independientede la ecuacion (2.251). Por consiguiente, la solucion general de la ecuacion (2.251) puede serexpresada en la forma:
y(x)AIν(x) +BKν(x) (2.266)
donde A y B son constantes arbitrarias.
El comportamiento asintotico de la funcion de Macdonald para x → ∞ puede ser establecidofacilmente a partir de la formula asintotica (2.211) para la funcion de Hankel.
Efectivamente, tendremos que para x→∞:
Kν(x) =π
2iν+1
√2
πixei(ix−ν
π2−π
4 ) =π
2iν+1 1
i1/2
√2
πxe−xe−i
π2 (ν+
12) =
=
√π
2xiν+1/2e−x
1
iν+1/2
Es decir, que:
Kν(x) =
√π
2xe−x, ∀x→∞ (2.267)
De la expresion de Iν(x) se ve que esta funcion es real de argumento real x. Sin embargo, de laexpresion definitoria de Kν(x) esa conclusion no es evidente. Encontremos una expresion paraKν(x) que evidencie que es una funcion real de variable real para toda x.
Tomemos la expresion (2.160) de la funcion de Hankel de primer tipo a traves de una integralde contorno y hagamos una prolongacion analıtica, considerando la variable x compleja: x =x1 + ix2. Debemos entonces reanalizar los dominios de convergencia de dicha integral. Tenemosen este caso que:
Re[−ix sinϕ] = Re[−i(x1 + ix2)(sinϕ1 coshϕ2 + i cosϕ1 sinhϕ2)] =
= x2 sinϕ1 coshϕ2 + x1 cosϕ1 sinhϕ2
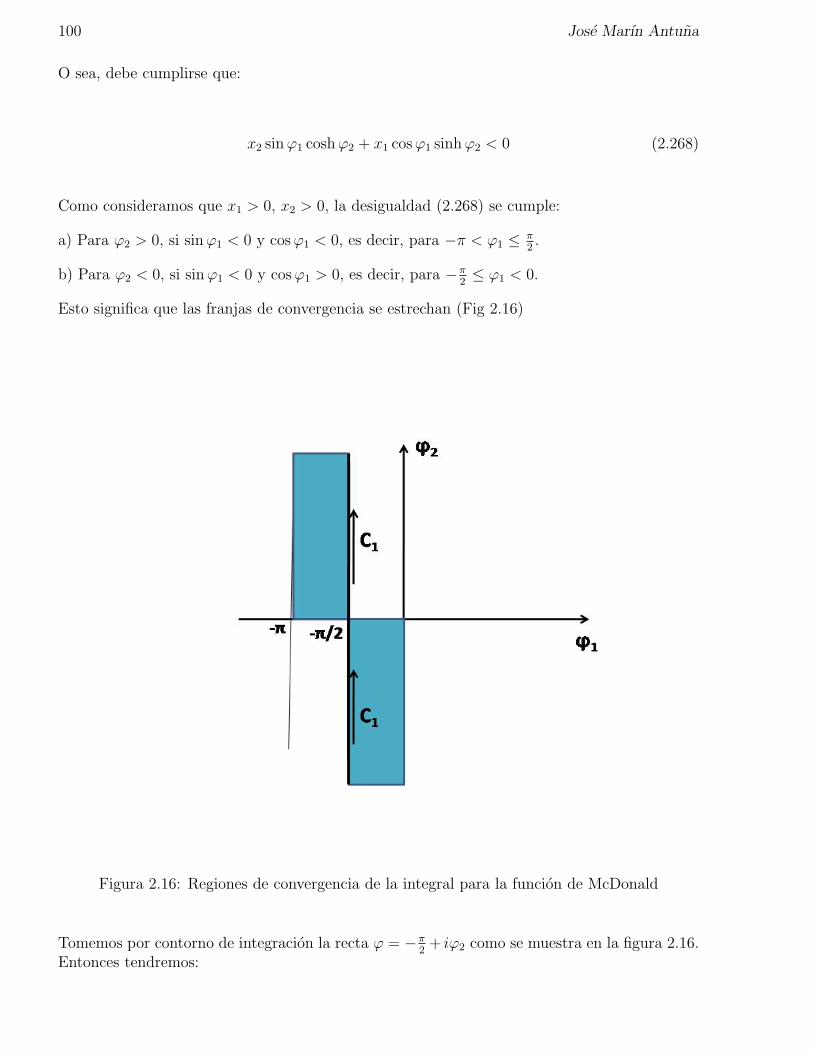
100 Jose Marın Antuna
O sea, debe cumplirse que:
x2 sinϕ1 coshϕ2 + x1 cosϕ1 sinhϕ2 < 0 (2.268)
Como consideramos que x1 > 0, x2 > 0, la desigualdad (2.268) se cumple:
a) Para ϕ2 > 0, si sinϕ1 < 0 y cosϕ1 < 0, es decir, para −π < ϕ1 ≤ π2.
b) Para ϕ2 < 0, si sinϕ1 < 0 y cosϕ1 > 0, es decir, para −π2≤ ϕ1 < 0.
Esto significa que las franjas de convergencia se estrechan (Fig 2.16)
Figura 2.16: Regiones de convergencia de la integral para la funcion de McDonald
Tomemos por contorno de integracion la recta ϕ = −π2+ iϕ2 como se muestra en la figura 2.16.
Entonces tendremos:

Funciones Cilındricas 101
H(1)ν (x) = − 1
π
∫C
e−ix sinϕ+iνϕdϕ = − 1
π
∫ ∞
−∞e−ix sin(−π/2+iϕ2)+iν(−π/2+iϕ2)idϕ2 =
=1
πi
∫ ∞
−∞eix coshϕ2−νϕ2dϕ2 · e−i
π2ν =
1
πiν+1
∫ ∞
−∞eix coshϕ2−νϕ2dϕ2 (2.269)
donde hemos tenido en cuenta que e−iπ2ν = 1
iν.
Tomando x = ix (imaginario puro) y llamando η = ϕ2, de (2.269) obtenemos:
H(1)ν (x) =
1
πiν+1
∫ ∞
−∞eix cosh η−νηdη (2.270)
Colocando (2.270) en la expresion (2.262) que define a la funcion de Macdonald, obtenemos,finalmente:
Kν(x) =1
2
∫ ∞
−∞e−x cosh η−νηdη (2.271)
En particular, para ν = 0 y como cosh η es una funcion par de su argumento:
K0(x) =
∫ ∞
0
e−x cosh ηdη (2.272)
Las formulas (2.271) y (2.272) son validas para toda x > 0 y, ademas de ser formulas utilespara diferentes calculos fısicos matematicos y de la Fısica Teorica, nos demuestran que, efecti-vamente, la funcion de Macdonald es una funcion real de x en todo el eje. La funcion Kν(x) esmonotona decreciente y su grafico para ν = 0, 1, 2 se muestra en la figura 2.17.
2.9.4 Ejemplo de aplicacion
Supongamos que queremos hallar el potencial electrostatico en el interior de un cilindro deradio r0 y altura l, si en el interior del cilindro no hay cargas y la superficie lateral del cilindroesta a un potencial funcion de z, en tanto que el potencial de las tapas superior e inferior delcilindro se mantienen a potencial cero (Fig. 2.18). Es conveniente destacar que el potencialelectrostatico en el interior de un dominio sin cargas en su interior satisface la ecuacion deLaplace, lo que es una consecuencia directa de las ecuaciones de Maxwell; el lector puede ver ladeduccion de lo dicho en el ejemplo 3 del epıgrafe 8.3.1 (formula (8.116)). Al no existir cargasen el interior del cilindro, la ecuacion es la homogenea (de Laplace).
Para resolver el problema, introduzcamos un sistema de coordenadas cilındricas (r, ϕ, z) conorigen en el centro de una de las bases del cilindro de la figura 2.18 y llamemos u(r, ϕ, z) al
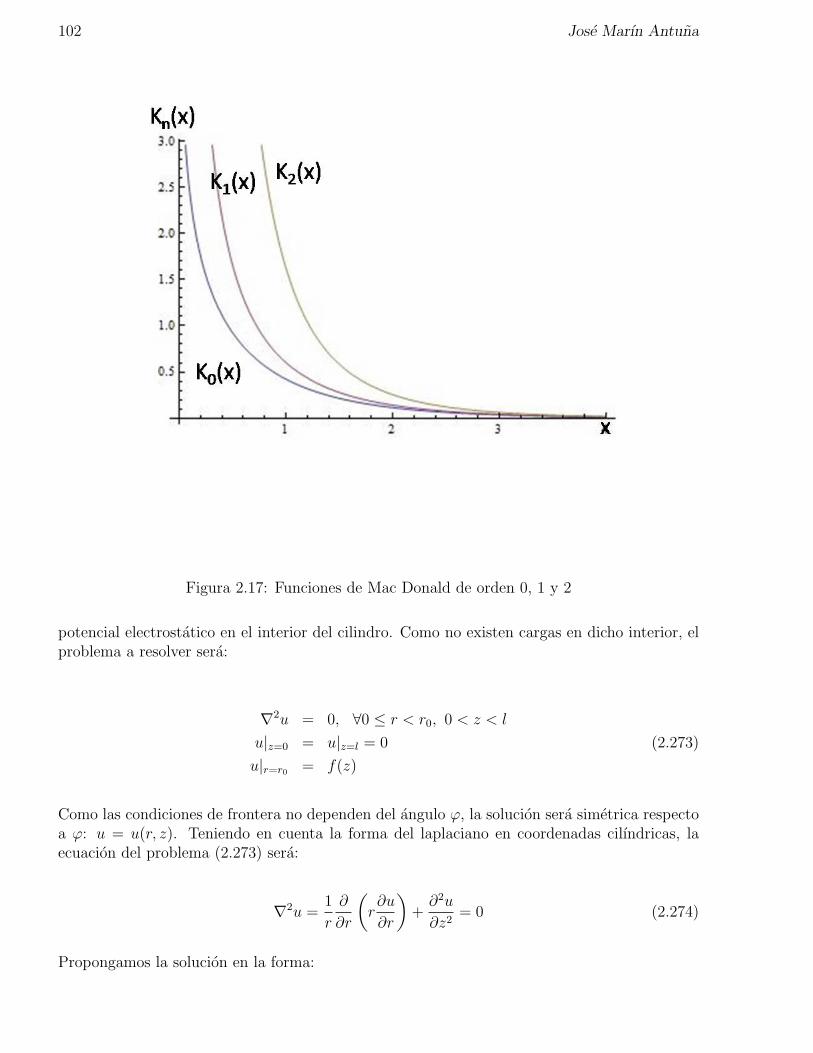
102 Jose Marın Antuna
Figura 2.17: Funciones de Mac Donald de orden 0, 1 y 2
potencial electrostatico en el interior del cilindro. Como no existen cargas en dicho interior, elproblema a resolver sera:
∇2u = 0, ∀0 ≤ r < r0, 0 < z < l
u|z=0 = u|z=l = 0 (2.273)
u|r=r0 = f(z)
Como las condiciones de frontera no dependen del angulo ϕ, la solucion sera simetrica respectoa ϕ: u = u(r, z). Teniendo en cuenta la forma del laplaciano en coordenadas cilındricas, laecuacion del problema (2.273) sera:
∇2u =1
r
∂
∂r
(r∂u
∂r
)+∂2u
∂z2= 0 (2.274)
Propongamos la solucion en la forma:
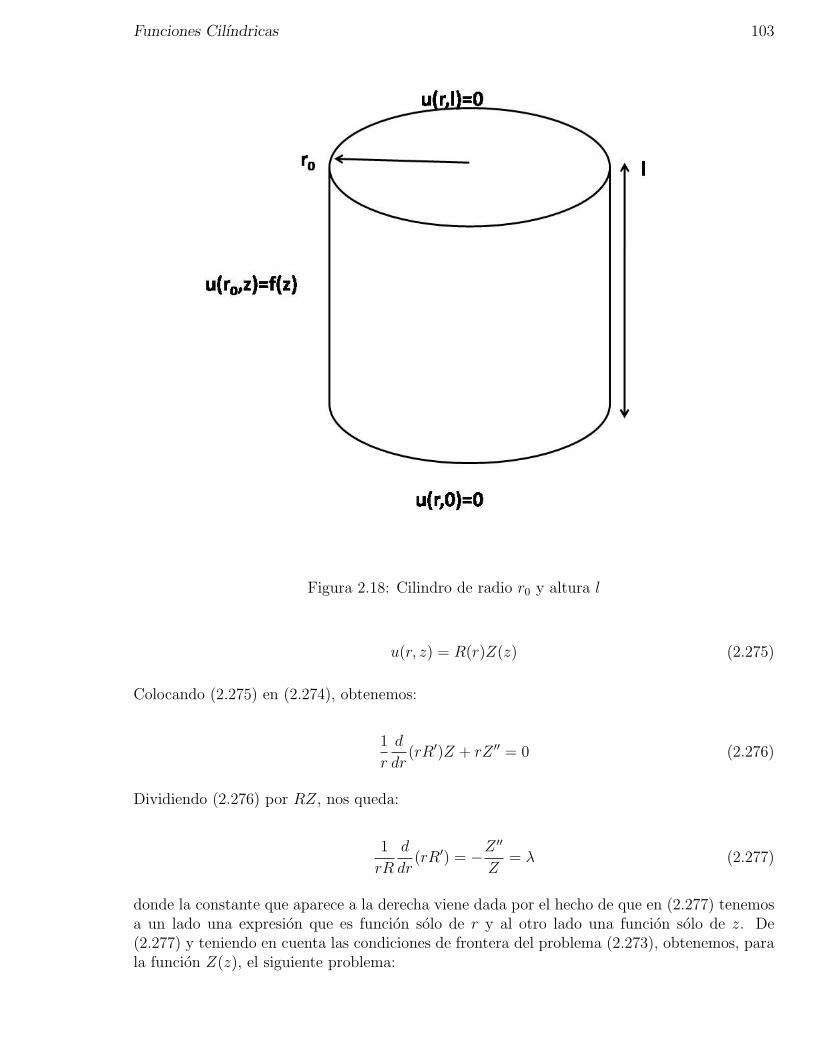
Funciones Cilındricas 103
Figura 2.18: Cilindro de radio r0 y altura l
u(r, z) = R(r)Z(z) (2.275)
Colocando (2.275) en (2.274), obtenemos:
1
r
d
dr(rR′)Z + rZ ′′ = 0 (2.276)
Dividiendo (2.276) por RZ, nos queda:
1
rR
d
dr(rR′) = −Z
′′
Z= λ (2.277)
donde la constante que aparece a la derecha viene dada por el hecho de que en (2.277) tenemosa un lado una expresion que es funcion solo de r y al otro lado una funcion solo de z. De(2.277) y teniendo en cuenta las condiciones de frontera del problema (2.273), obtenemos, parala funcion Z(z), el siguiente problema:

104 Jose Marın Antuna
Z ′′ + λZ = 0, ∀0 < z < l
Z(0) = 0 (2.278)
Z(l) = 0
La solucion del problema (2.278) es
Zn(z) = sinnπ
lz, λn =
(nπl
)2
, n = 1, 2, 3, ... (2.279)
Por consiguiente, para R(r) de (2.277) obtenemos la ecuacion:
1
r
d
dr(rR′)− λnR = 0 (2.280)
Como el potencial u(r, z) tiene que ser acotado, a la ecuacion (2.280) debe imponersele que|R| <∞. Veamos que ecuacion es esta. Haciendo el cambio de variables x =
√λnr y llamando
R(r) = R(
x√λn
)= y(x), obtenemos de (2.280):
1
x
d
dx(xy′)− y = 0 (2.281)
Comparandola con (2.251), vemos que esta es la ecuacion de Bessel de argumento imaginariopara ν = 0. Por lo tanto, de acuerdo con (2.266), su solucion general sera:
y(x) = AI0(x) +BK0(x) (2.282)
Es decir, volviendo a la variable inicial r:
Rn(r) = AnI0
(nπlr)
+BnK0
(nπlr)
(2.283)
Como la solucion tiene que ser acotada dentro del cilindro, debe cumplirse que Bn = 0. Asıpues, la solucion particular de la ecuacion (2.274) tendra la forma:
un(r, z) = AnI0
(nπlr)
sinnπ
lz, n = 1, 2, 3, ... (2.284)
Buscaremos la solucion del problema (2.273) como la superposicion de todas las posibles solu-ciones particulares, es decir:
u(r, z) =∞∑n=1
AnI0
(nπlr)
sinnπ
lz (2.285)
Funciones Cilındricas 105
Exigiendo que esta solucion satisfaga la condicion de frontera para r = r0, obtenemos:
u(r0, z) = f(z) =∞∑n=1
AnI0
(nπlr0
)sin
nπ
lz (2.286)
La expresion (2.286) no es otra cosa que el desarrollo de la funcion f(z) en serie de Fourierseno. Suponiendo que f(z) cumple los requisitos para dicho desarrollo, los coeficientes delmismo seran:
AnI0
(nπlr0
)=
2
l
∫ l
0
f(z) sinnπ
lzdz ≡ fn (2.287)
Por lo tanto, para los coeficientes An, hallamos la expresion:
An =fn
I0(nπlr0) (2.288)
por lo que la solucion del problema (2.273) sera, una vez colocado (2.288) en (2.285):
u(r, z) =∞∑n=1
fnI0(nπlr)
I0(nπlr0) sin
nπ
lz (2.289)
donde fn son los coeficientes de Fourier de la funcion f(z), dados por (2.287). Si, como casoparticular, f(z) = A sin 2π
lz, entonces, en virtud de la ortogonalidad de los senos, tendremos de
(2.287):
fn =2
l
∫ l
0
A sin2π
lz sin
nπ
lzdz = Aδn2 (2.290)
con
δn2 = 0, ∀n 6= 2, δn2 = 1, ∀n = 2
Al colocar (2.290) en (2.289), la sumatoria desaparece y la solucion queda en la forma:
u(r, z) = AI0(
2πlr)
I0(
2πlr0) sin
2π
lz (2.291)
Hagamos, por ultimo, la siguiente observacion. La ecuacion de Bessel de argumento imaginariopuede ser escrita en la siguiente forma:
106 Jose Marın Antuna
xy′′ + y′ − ν2
xy − xy = 0 (2.292)
o, llamando x =√λx1, en la forma:
x1y′′ + y′ − ν2
x1
y − λx1y = 0 (2.293)
Debido al signo menos que aparece delante del termino que contiene a λp(x) = λx, esta ecuacionno es exactamente un caso particular de la ecuacion generatriz de las funciones especiales,aunque se mantenga valido el hecho de que el punto x = 0 es un punto singular regular de laecuacion. Ello conduce a la conclusion de que esta ecuacion nunca constituira un problema deautovalores como en el caso de la ecuacion de Bessel de argumento real y no podra hablarse deortogonalidad de Iν y Kν para distintas λ. En el ejemplo desarrollado, los valores de λ, comose ve, fueron obtenidos como autovalores del problema de frontera para la funcion Z(z), lo queconfirma lo dicho y no como autovalores de la ecuacion de Bessel de argumento imaginario.
Capıtulo 3
Polinomios de Legendre
En el presente capıtulo estudiaremos los polinomios de Legendre y la ecuacion diferencial quesatisfacen y que aparecen al resolver problemas de la Fısica Matematica en dominios esfericos.
3.1 Polinomios de Legendre
Los polinomios de Legendre pueden ser obtenidos, en primera instancia, como resultado deanalizar la solucion fundamental de la ecuacion de Laplace en el espacio. Por solucion funda-mental de la ecuacion de Laplace se entiende la funcion
u =1
R(3.1)
donde R es la distancia entre dos puntos cualesquiera del espacio y que corresponde fısicamenteal potencial creado en un punto por una carga unitaria y puntual colocada en el otro punto.
3.1.1 Funcion generatriz
Precisemos lo dicho, considerando que tenemos una carga unitaria y puntual colocada en M0,el potencial creado por dicha carga en el punto M (Fig. 3.1) de acuerdo con (3.1) sera:
u =1
R=
1√r2 − 2rr0 cos θ + r2
0
(3.2)
Llamemos:
x = cos θ, (−1 ≤ x ≤ 1) (3.3)
107
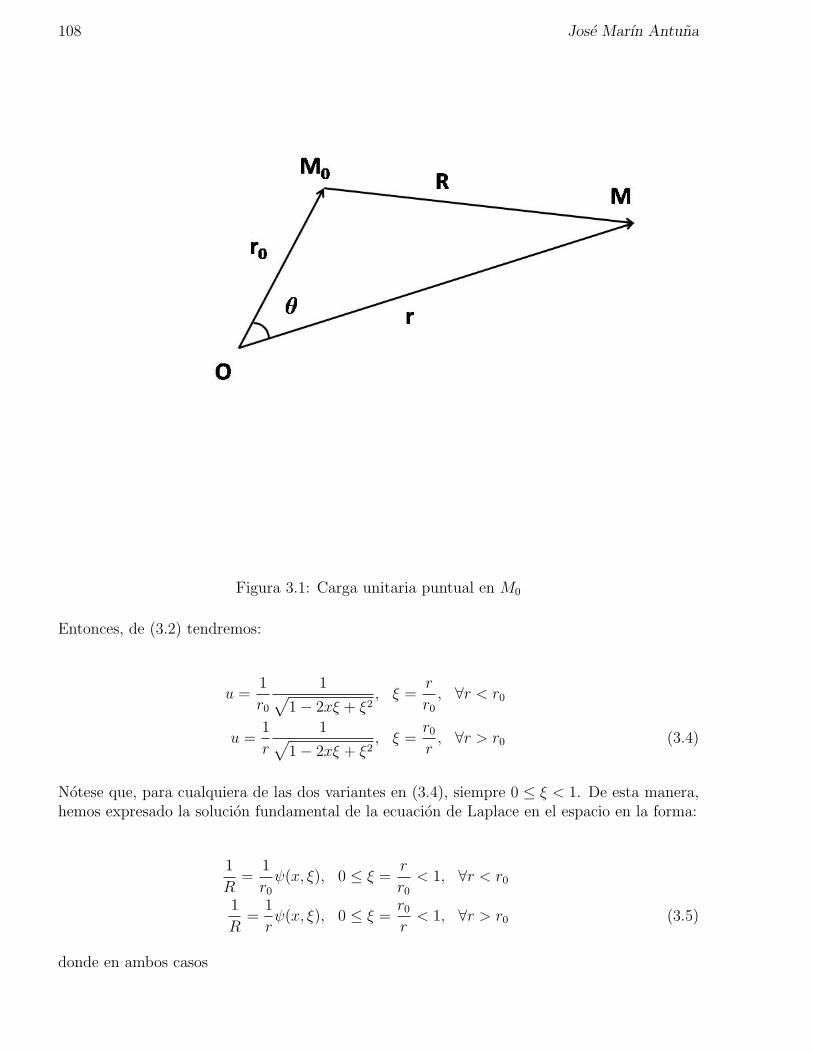
108 Jose Marın Antuna
Figura 3.1: Carga unitaria puntual en M0
Entonces, de (3.2) tendremos:
u =1
r0
1√1− 2xξ + ξ2
, ξ =r
r0, ∀r < r0
u =1
r
1√1− 2xξ + ξ2
, ξ =r0r, ∀r > r0 (3.4)
Notese que, para cualquiera de las dos variantes en (3.4), siempre 0 ≤ ξ < 1. De esta manera,hemos expresado la solucion fundamental de la ecuacion de Laplace en el espacio en la forma:
1
R=
1
r0ψ(x, ξ), 0 ≤ ξ =
r
r0< 1, ∀r < r0
1
R=
1
rψ(x, ξ), 0 ≤ ξ =
r0r< 1, ∀r > r0 (3.5)
donde en ambos casos

Polinomios de Legendre 109
ψ(x, ξ) =1√
1− 2xξ + ξ2(3.6)
La funcion (3.6) se llama Funcion Generatriz de los Polinomios de Legendre. Estenombre proviene del hecho de que los polinomios de Legendre, que representaremos por Pn(x),se definen como los coeficientes del desarrollo de (3.6) en serie de potencias de ξ:
ψ(x, ξ) =∞∑n=0
Pn(x)ξn (3.7)
De esta manera, la solucion fundamental de la ecuacion de Laplace en el espacio, colocando(3.7) en (3.5) y teniendo en cuenta (3.3), toma la forma:
1
R=
1
r0
∞∑n=0
Pn(cos θ)
(r
r0
)n, ∀r < r0
1
R=
1
r
∞∑n=0
Pn(cos θ)(r0r
)n, ∀r > r0 (3.8)
Mas adelante podremos identificar la expresion (3.8) como un desarrollo de la solucion funda-mental en serie de funciones llamadas Armonicos Esfericos. Esta expresion es de utilidad endiferentes aplicaciones de la Fısica.
Tratemos de encontrar una expresion concreta para los polinomios de Legendre aquı definidos.
3.1.2 Formula de Rodrigues
Obtendremos, a continuacion, una formula diferencial para los polinomios de Legendre. Paraello, hagamos una prolongacion analıtica al plano complejo ζ = ξ + iη de la funcion (3.7).Obtenemos la serie de Taylor:
ψ(x, ζ) =∞∑n=0
Pn(x)ζn (3.9)
De acuerdo con la teorıa de las series de Taylor desarrollada en el libro ”Teorıa de Funcionesde Variable Compleja” del autor, tendremos para los coeficientes del desarrollo (3.9) que:
Pn(x) =1
n!
∂nψ
∂ζn|ζ=0 =
1
2πi
∫C
ψ(x, ζ)dζ
ζn+1(3.10)
110 Jose Marın Antuna
donde C es un contorno cerrado cualquiera en el plano complejo ζ que rodea al punto ζ = 0.Hagamos el siguiente cambio de variables conocido con el nombre de racionalizacion deEuler:
z =1−
√1− 2xζ + ζ2
ζ(3.11)
De aquı, despejando ζ en funcion de z, es facil hallar que
ζ = 2z − x
z2 − 1, dζ = −2
z2 − 2zx+ 1
(z2 − 1)2dz (3.12)
Ademas:
√1− 2xζ + ζ2 = −z
2 − 2zx+ 1
z2 − 1(3.13)
Teniendo en cuenta (3.6) y colocando (3.12) y (3.13) en (3.10), se obtiene:
Pn(x) =1
2n1
2πi
∫C1
(z2 − 1)n
(z − x)n+1dz =
1
2nn!
dn
dzn[(z2 − 1)n]|z=x (3.14)
Aquı hemos tenido en cuenta que, de acuerdo con (3.12), el contorno C1 en el plano complejo z,imagen del contorno C del plano ζ, sera un contorno cerrado que rodea al punto z = x, imagende ζ = 0 y, ademas, hemos aplicado la formula generalizada de Cauchy. De (3.14) obtenemospara los polinomios de Legendre la siguiente formula diferencial de calculo:
Pn(x) =1
2nn!
dn
dxn[(x2 − 1)n] (3.15)
que se conoce con el nombre de Formula de Rodrigues, ya que fue obtenida por primera vezpor el matematico frances de origen portugues de ese apellido en 1814 en un trabajo publicadoen la revista ”Correspondencia de la Escuela Politecnica” de ese ano.
Calculando directamente la formula de Rodrigues, es facil obtener la expresion de los primerospolinomios de Legendre:
P0(x) = 1 (3.16)
P1(x) = x (3.17)
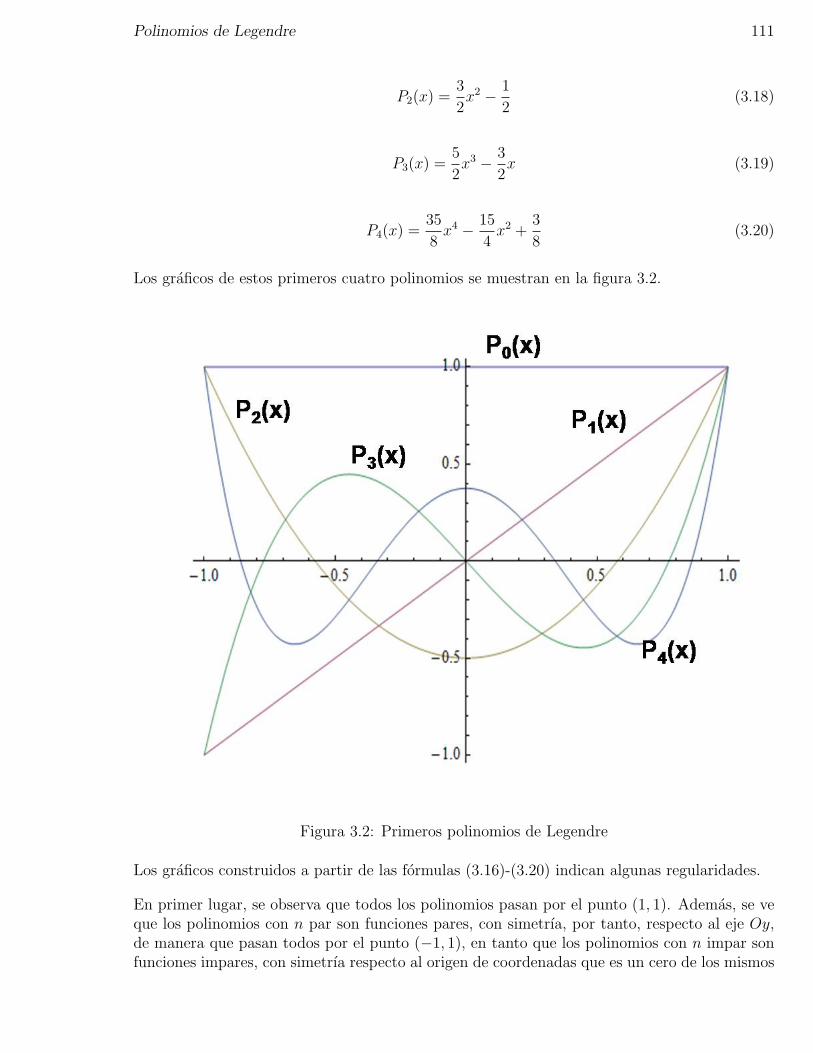
Polinomios de Legendre 111
P2(x) =3
2x2 − 1
2(3.18)
P3(x) =5
2x3 − 3
2x (3.19)
P4(x) =35
8x4 − 15
4x2 +
3
8(3.20)
Los graficos de estos primeros cuatro polinomios se muestran en la figura 3.2.
Figura 3.2: Primeros polinomios de Legendre
Los graficos construidos a partir de las formulas (3.16)-(3.20) indican algunas regularidades.
En primer lugar, se observa que todos los polinomios pasan por el punto (1, 1). Ademas, se veque los polinomios con n par son funciones pares, con simetrıa, por tanto, respecto al eje Oy,de manera que pasan todos por el punto (−1, 1), en tanto que los polinomios con n impar sonfunciones impares, con simetrıa respecto al origen de coordenadas que es un cero de los mismos
112 Jose Marın Antuna
y pasan por el punto (−1,−1). Notese tambien que son polinomios de grado n y que sus nceros son reales y se encuentran en el intervalo (−1, 1); su derivada de orden k se ve que tienen − k ceros en dicho intervalo. Podremos percatarnos a continuacion de que las regularidadesobservadas son propiedades generales de los polinomios de Legendre para toda n.
3.1.3 Propiedades de los polinomios de Legendre
Enunciemos y demostremos las siguientes propiedades generales de los polinomios de Legendre.
1. Para todo n se cumple que Pn(1) = 1.
Demostracion:
Evaluando (3.7) para x = 1, tenemos que:
ψ(1, ξ) =∞∑n=0
Pn(1)ξn =1√
1− 2ξ + ξ2≡ 1
1− ξ=
∞∑n=0
ξn (3.21)
La ultima igualdad a la derecha de (3.21) esta dada por el hecho de que, al ser ξ < 1,la funcion 1
1−ξ es la suma de la serie geometrica. Comparando las dos series en (3.21),concluimos que, efectivamente:
Pn(1) = 1 (3.22)
Demostrada la propiedad.
2. Los polinomios Pn(x) son polinomios de grado n.
Demostracion:
El binomio de Newton (x2 − 1)n que aparece en la formula de Rodrigues (3.15) es unpolinomio de grado 2n. Por consiguiente, su enesima derivada nos dara un polinomio degrado n.
Demostrada la propiedad.
3. Para todo n se cumple que
Pn(−x) = (−1)nPn(x) (3.23)
Demostracion:
Sustituyendo en (3.15) x por −x, obtenemos:
Pn(−x) =1
2nn!
dn
d(−x)n[((−x)2 − 1)n] =
1
2nn!
1
(−1)ndn
dxn[(x2 − 1)n] = (−1)nPn(x)
Demostrada la propiedad.
Polinomios de Legendre 113
La formula (3.23) nos evidencia que, si n es par, Pn(x) es una funcion par y, por lo tanto,contiene solo potencias pares de x y si n es impar, Pn(x) es una funcion impar, por lo quesolo contiene potencias impares de x.
4. Para n = 2m par se cumple que
P2m(0) =(−1)m(2m− 1)!!
(2m)!!, P2m+1(0) = 0 (3.24)
donde (2m− 1)!! = 1 · 3 · 5 · · · (2m− 1), (2m)!! = 2 · 4 · 6 · · · (2m).
Demostracion:
Evaluando (3.7) para x = 0, obtenemos:
ψ(0, ξ) =∞∑n=0
Pn(0)ξn =
1√1 + ξ2
(3.25)
Por otro lado, haciendo η = ξ2 y aplicando el teorema de Taylor, no es difıcil comprobarque
1√1 + ξ2
= 1 +∞∑n=1
(−1)n(2n− 1)!!
(2n)!!ξ2n (3.26)
Comparando (3.25) y (3.26), es inmediato (3.24).
Demostrada la propiedad.
5. Para todo n se cumple que
Pn(−1) = (−1)n (3.27)
Demostracion:
Es evidente a partir de las propiedades 1 y 3.
Demostrada la propiedad.
6. Para todo n los polinomios de Legendre Pn(x) tienen n ceros en el intervalo abierto (−1, 1)y su derivada de orden k tiene n− k ceros en dicho intervalo.
Demostracion:
Analicemos la formula de Rodrigues (3.15). En ella figura la funcion
u = (x2 − 1)n (3.28)
que es, evidentemente, continua en (−1, 1) y tiene un cero de orden n en los extremosdel intervalo. Por consiguiente, en virtud del teorema de Rolle, la derivada u′ de estafuncion tendra al menos un cero en (−1, 1). Como la derivada u′ tiene un cero de ordenn− 1 en x = ±1 y por lo antes dicho tiene al menos un cero en (−1, 1), de nuevo, por elteorema de Rolle, podemos afirmar que la segunda derivada u′′ tiene al menos dos ceros

114 Jose Marın Antuna
en (−1, 1). De manera similar concluimos que u′′′ tiene al menos tres ceros en (−1, 1) yası sucesivamente, hasta llegar a que la enesima derivada u(n) tiene al menos n ceros en(−1, 1). Pero como u(n) es un polinomio de grado n, por lo tanto, el numero de cerosen (−1, 1) sera exactamente n, con lo que queda demostrada la primera afirmacion de lapropiedad. Por consiguiente, los n ceros del polinomio de Legendre de grado n son todosreales y se encuentran contenidos en el intervalo (−1, 1).
Demostremos ahora la segunda afirmacion de la propiedad.
Como Pn(1) 6= 0 y Pn(−1) 6= 0 por las propiedades 1 y 5 (formulas (3.22) y (3.27)), sisuponemos que x1, x2,..., xn son los n ceros de Pn(x), que segun lo demostrado estan enel intervalo (−1, 1), tendremos que en los intervalos (−1, x1) y (xn, 1) no se cumplen losrequisitos del teorema de Rolle, pero en los n−1 intervalos (x1, x2), (x2, x3),..., (xn−1, xn)sı se cumplen dichos requisitos, por lo que, por Rolle, P ′
n(x) tiene al menos n− 1 ceros en(−1, 1). Como P ′
n(x) es un polinomio de grado n−1, ya que es la derivada de un polinomiode grado n, podemos afirmar que P ′
n(x) tiene exactamente n − 1 ceros en (−1, 1). Dela misma forma concluimos que P ′′
n (x) tiene exactamente n − 2 ceros en (−1, 1) y ası
sucesivamente, hasta llegar a que P(k)n (x) tiene exactamente n− k ceros en (−1, 1).
Demostrada la propiedad.
7. Para todo n ≥ 1 se cumple que
(n+ 1)Pn+1(x)− (2n+ 1)Pn(x) + Pn−1(x) = 0 (3.29)
La expresion (3.29) se conoce con el nombre de Primera Formula de Recurrencia delas polinomios de Legendre.
Demostracion:
De la expresion (3.6) para la funcion generatriz tenemos que:
∂ψ
∂ξ= −1
2(1− 2xξ + ξ2)−
32 (2ξ − 2x) =
(x− ξ)ψ
1− 2xξ + ξ2(3.30)
Por consiguiente:
(1− 2xξ + ξ2)∂ψ
∂ξ− (x− ξ)ψ = 0 (3.31)
De (3.7) tenemos que
ψ =∞∑n=0
Pn(x)ξn,
∂ψ
∂ξ=
∞∑n=1
nPn(x)ξn−1 (3.32)
Colocando (3.32) en (3.31), obtenemos:
∞∑n=1
nPn(x)ξn−1 − 2xξ
∞∑n=1
nPn(x)ξn−1 + ξ2
∞∑n=1
nPn(x)ξn−1 −
−x∞∑n=0
Pn(x)ξn + ξ
∞∑n=0
Pn(x)ξn = 0 (3.33)

Polinomios de Legendre 115
Es decir:
∞∑n=1
nPn(x)ξn−1 −
∞∑n=1
2nxPn(x)ξn +
∞∑n=1
nPn(x)ξn+1 −
∞∑n=0
xPn(x)ξn +
∞∑n=0
Pn(x)ξn+1 = 0
(3.34)
La segunda y la tercera sumatoria en (3.34) podemos comenzarlas en n = 0 en vez de enn = 1, ya que con ello no harıamos mas que agregar un cero. Agrupando en (3.34) porpotencias iguales, obtenemos:
∞∑n=0
nPn(x)ξn−1 −
∞∑n=0
(2n+ 1)xPn(x)ξn +
∞∑n=0
(n+ 1)Pn(x)ξn+1 = 0 (3.35)
En la primera sumatoria de (3.35) sustituimos n−1 por n y en la tercera sumatoria n+1por n, a fin de llevarlo todo a potencias iguales de ξ. Obtenemos:
∞∑n=0
(n+ 1)Pn+1(x)ξn −
∞∑n=0
(2n+ 1)xPn(x)ξn +
∞∑n=1
nPn−1(x)ξn = 0 (3.36)
En la ultima sumatoria de (3.36) podemos comenzar a sumar en n = 0, ya que con ellosolo anadirıamos un cero. Por consiguiente obtenemos:
∞∑n=0
[(n+ 1)Pn+1(x)− (2n+ 1)xPn(x) + nPn−1(x)]ξn = 0 (3.37)
En virtud de la independencia lineal de las potencias de ξ, (3.37) se cumple si y solo si laexpresion entre corchetes es cero.
Demostrada la propiedad.
La formula de recurrencia (3.29) obtenida es de gran utilidad, ya que, gracias a ella, bastaconocer P0(x) = 1 y P1(x) = x para poder establecer las expresiones de los polinomiosPn(x) con cualquier n ≥ 2. Efectivamente, con P0(x) y P1(x) hallamos P2(x); con P1(x)y P2(x) hallamos P3(x), etc. Para ello, de (3.29) despejamos Pn+1(x):
Pn+1(x) =2n+ 1
n+ 1xPn(x)−
n
n+ 1Pn−1(x) (3.38)
La formula (3.38) puede resultar de utilidad en calculos numericos en computadoras pormedio de un proceso iterativo para hallar Pn(x) con cualquier n, aunque hay que tenerpresente el hecho de que en dichas iteraciones se van acumulando errores de redondeo acausa de la representacion inexacta de los numeros en los calculos numericos.

116 Jose Marın Antuna
3.2 Ecuacion de Legendre
En el presente epıgrafe comprobaremos que los polinomios de Legendre son las soluciones aco-tadas en el intervalo [−1, 1] de la ecuacion
d
dx[(1− x2)y′] + λy = 0, λ = n(n+ 1) (3.39)
La ecuacion (3.39) es un caso particular de la ecuacion generatriz de las funciones especialesestudiada en el primer capıtulo, con k(x) = 1−x, q(x) = 0, p(x) = 1. De la teorıa desarrolladaen ese capıtulo sabemos que la ecuacion (3.39) tiene dos soluciones linealmente independientes;como k(x) = 0 para x = ±1, una de las soluciones sera acotada en estos puntos y la otra sera noacotada (tendra una singularidad logarıtmica, ya que los polinomios de Legendre son diferentesde cero en x = ±1). Dicha segunda solucion no acotada no tiene interes en las aplicacionesfısicas, por lo que no vamos a estudiarla. Ası las cosas, el problema de frontera para la ecuacion(3.39) se plantea en los siguientes terminos:
d
dx[(1− x2)y′] + λy = 0, ∀ − 1 < x < 1
|y(±1)| < ∞ (3.40)
Demostremos que los polinomios de Legendre son las autofunciones del problema de fronterade Sturm-Liouville (3.40) correspondientes a los autovalores λ = n(n+1). Tomemos la funciongeneratriz (3.6) y derivemosla respecto a x. Obtenemos:
∂ψ
∂x= −1
2(1− 2xξ + ξ2)−
32 (−2ξ) =
ξψ
1− 2xξ + ξ2(3.41)
De (3.41) concluimos que:
(1− 2xξ + ξ2)∂ψ
∂x= ξψ (3.42)
Por otra parte, de (3.31) tenemos:
(1− 2xξ + ξ2)∂ψ
∂ξ= (x− ξ)ψ (3.43)
Dividiendo (3.42) y (3.43), obtenemos:
ξ∂ψ
∂ξ− (x− ξ)
∂ψ
∂x= 0 (3.44)

Polinomios de Legendre 117
Teniendo en cuenta (3.7) en (3.44), obtenemos:
ξ∞∑n=1
nPn(x)ξn−1 − (x− ξ)
∞∑n=0
P ′n(x)ξ
n = 0 (3.45)
Es decir:
∞∑n=1
nPn(x)ξn −
∞∑n=0
xP ′n(x)ξ
n +∞∑n=0
P ′n(x)ξ
n+1 = 0 (3.46)
En la ultima sumatoria de (3.46) sustituimos n+ 1 por n y obtenemos:
∞∑n=1
nPn(x)ξn − xP ′
0(x)−∞∑n=1
xP ′n(x)ξ
n +∞∑n=1
P ′n−1(x)ξ
n = 0 (3.47)
Como P0(x) = 1, el segundo sumando en (3.47) se anula. Agrupando (3.47), nos queda:
∞∑n=1
[nPn(x)− xP ′n(x) + P ′
n−1(x)]ξn = 0 (3.48)
de donde, en virtud de la independencia lineal de las potencias de ξ, obtenemos la llamadaSegunda Formula de Recurrencia de los polinomios de Legendre:
nPn(x)− xP ′n(x) + P ′
n−1(x) = 0 (3.49)
Esta formula relaciona un polinomio de Legendre con su derivada y con la derivada del polinomioinmediato anterior.
Coloquemos, ahora, ξψ dada por (3.42) y ξ ∂ψ∂ξ
dada por (3.44) a la derecha de la evidenteidentidad:
ξ∂
∂ξ(ξψ) ≡ ξ
(ξ∂ψ
∂ξ+ ψ
)(3.50)
Obtenemos:
ξ∂
∂ξ(ξψ) ≡ ξ
[(x− ξ)
∂ψ
∂x+
1
ξ(1− 2xξ + ξ2)
∂ψ
∂x
]= (1− ξx)
∂ψ
∂x(3.51)
Es decir:

118 Jose Marın Antuna
ξ∂
∂ξ(ξψ)− (1− ξx)
∂ψ
∂x= 0 (3.52)
Colocando (3.7) en (3.52), obtenemos:
ξ∂
∂ξ
(ξ
∞∑n=0
Pn(x)ξn
)− (1− ξx)
∞∑n=0
P ′n(x)ξ
n = 0 (3.53)
Desarrollando las operaciones indicadas en (3.53), nos queda:
∞∑n=0
Pn(x)ξn+1 +
∞∑n=0
nPn(x)ξn+1 −
∞∑n=0
P ′n(x)ξ
n +∞∑n=0
xP ′n(x)ξ
n+1 = 0 (3.54)
En la primera, segunda y cuarta sumatoria de (3.54) sustituiremos n+1 por n y como en realidadla tercera sumatoria comienza en n = 1, ya que el termino para n = 0 es cero, obtenemos:
∞∑n=1
Pn−1(x)ξn +
∞∑n=1
(n− 1)Pn−1(x)ξn −
∞∑n=1
P ′n(x)ξ
n +∞∑n=1
xP ′n−1(x)ξ
n = 0 (3.55)
De (3.55) y en virtud de la independencia lineal de las potencias de ξ se obtiene:
nPn−1(x)− P ′n(x) + xP ′
n−1(x) = 0 (3.56)
La expresion (3.56) recibe el nombre de Tercera Formula de Recurrencia de los poli-nomios de Legendre y relaciona un polinomio de Legendre con su derivada y la derivada delpolinomio inmediato posterior.
De (3.49), despejando, obtenemos:
P ′n−1(x) = xP ′
n(x)− nPn(x) (3.57)
Coloquemos (3.57) en (3.56). Queda:
nPn−1(x)− P ′n(x) + x2P ′
n(x)− nxPn(x) = 0 (3.58)
Derivemos (2.20):
nP ′n−1(x)− P ′′
n (x) + 2xP ′n(x) + x2P ′′
n (x)− nPn(x)− nxP ′n(x) = 0 (3.59)

Polinomios de Legendre 119
Sustituyendo (3.57) en (3.59), obtenemos:
nxP ′n(x)− nPn(x)− (1− x2)P ′′
n (x) + 2xP ′n(x)− nPn(x)− nxP ′
n(x) = 0 (3.60)
Cancelando el primer y ultimo termino en (3.60) y multiplicando toda la identidad por (−1),nos queda:
(1− x2)P ′′n (x)− 2xP ′
n(x) + (n2 + n)Pn(x) ≡ 0 (3.61)
Es decir:
d
dx[(1− x2)P ′
n(x)] + n(n+ 1)Pn(x) ≡ 0 (3.62)
La identidad (3.62) prueba que, efectivamente, los polinomios de Legendre son las autofuncionesdel problema (3.40) correspondientes al autovalor λn = n(n+ 1) en el intervalo (−1, 1).
Como la ecuacion de Legendre es un caso particular de la ecuacion generatriz de las funciones es-peciales, de acuerdo con la teorıa general alla desarrollada, podemos afirmar que los polinomiosde Legendre son ortogonales con peso p(x) = 1 en el intervalo (−1, 1), es decir que
∫ 1
−1
Pn(x)Pm(x)dx =‖ Pn ‖2 δnm (3.63)
donde δnm es la conocida delta de Kroneker y
‖ Pn ‖2=
∫ 1
−1
P 2n(x)dx (3.64)
es el cuadrado de la norma de los polinomios de Legendre. Ademas, podemos afirmar que tienelugar el teorema del desarrollo: Si la funcion f(x) es continua y dos veces diferenciable en(−1, 1) y acotada en los extremos de este intervalo, admite un desarrollo en serie de polinomiosde Legendre:
f(x) =∞∑n=0
fnPn(x) (3.65)
convergente absoluta y uniformemente en el intervalo. Los coeficientes del desarrollo vendranexpresados por:
fn =1
‖ Pn ‖2
∫ 1
−1
f(x)Pn(x)dx (3.66)

120 Jose Marın Antuna
de facil obtencion a partir de la ortogonalidad de los polinomios.
Para poder aplicar el teorema del desarrollo, como se ve, es necesario tener el valor de la normade los polinomios de Legendre. Por ello, en el proximo epıgrafe nos dedicaremos a su calculo.Las aplicaciones de estos polinomios de Legendre a problemas de la Fısica Matematica seranestudiadas mas adelante.
3.3 Norma de los polinomios de Legendre
Calculemos la norma de los polinomios de Legendre. De la primera formula recurrente (3.29)podemos escribir que
xPn(x) =n+ 1
2n+ 1Pn+1(x) +
n
2n+ 1Pn−1(x) (3.67)
Escribamos, ademas, la primera formula de recurrencia (3.29) para n = n− 1; tenemos:
nPn(x)− (2n− 1)xPn−1(x) + (n− 1)Pn−2(x) = 0 (3.68)
De (3.68) hallamos que:
Pn(x) =2n− 1
nxPn−1(x)−
n− 1
nPn−2(x) (3.69)
Teniendo en cuenta (3.67) y (3.69), calculemos el cuadrado de la norma de los polinomios deLegendre. Tenemos:
‖ Pn ‖2 ≡ Nn =
∫ 1
−1
Pn(x)Pn(x)dx =
∫ 1
−1
Pn(x)
[2n− 1
nxPn−1(x)−
n− 1
nPn−2(x)
]dx =
=2n− 1
n
∫ 1
−1
xPn(x)Pn−1(x)dx−n− 1
n
∫ 1
−1
Pn(x)Pn−2(x)dx (3.70)
donde hemos sustituido uno de los polinomios por la expresion (3.69). En (3.70) la segunda inte-gral es cero en virtud de la ortogonalidad de los polinomios; en la primera integral sustituyamosxPn(x) por su expresion dada por (3.67). Obtenemos:
Nn =2n− 1
n
∫ 1
−1
[n+ 1
2n+ 1Pn+1(x) +
2
2n+ 1Pn−1(x)
]Pn−1(x)dx =
=2n− 1
2n+ 1‖ Pn−1 ‖2≡ 2n− 1
2n+ 1Nn−1 (3.71)
Polinomios de Legendre 121
donde hemos tenido en cuenta que la primera integral es cero por la ortogonalidad de los poli-nomios. Ası pues, obtenemos una formula que relaciona el cuadrado de la norma del polinomiode Legendre de grado n con el cuadrado de la norma del polinomio de grado n− 1:
Nn =2n− 1
2n+ 1Nn−1 (3.72)
Apliquemos (3.72) a distintos ordenes:
Nn−1 =2n− 3
2n− 1Nn−2 (3.73)
Nn =2n− 5
2n+ 3Nn−3 (3.74)
..............................................
N2 =3
5N1 (3.75)
N2 =1
3N0 (3.76)
y como
N0 =
∫ 1
−1
P 20 (x)dx =
∫ 1
−1
dx = 2 (3.77)
sustituyendo (3.77), (3.76), (3.75),..., (3.74), (3.73) en (3.72), obtenemos:
Nn =2n− 1
2n+ 1
2n− 3
2n− 1
2n− 5
2n− 3· · · 3
5
1
32 (3.78)
de donde, finalmente, obtenemos para el cuadrado de la norma de los polinomios de Legendrela expresion:
Nn ≡‖ Pn ‖2=
∫ 1
−1
P 2n(x)dx =
2
2n+ 1(3.79)

122 Jose Marın Antuna
3.4 Polinomios asociados de Legendre
3.4.1 Definicion y propiedades
Llamaremos polinomios asociados de Legendre de orden m a las funciones definidas por:
P (m)n (x) = (1− x2)
m2dm
dxmPn(x) ≡
1
2nn!(1− x2)
m2dn+m
dxn+m[(x2 − 1)n] (3.80)
donde Pn(x) son los polinomios de Legendre de grado n.
Directamente de la definicion (3.80), puede establecerse una serie de propiedades para lospolinomios asociados de Legendre:
Propiedades.
1. Las funciones P(m)n (x) son polinomios de grado n si m es un numero par.
Demostracion:
Evidentemente, la funcion
v =dm
dxmPn(x) (3.81)
es un polinomio de grado n−m, en virtud de ser la derivada de orden m de un polinomiode grado n. Sea m = 2k. Entonces, de (3.80):
P (m)n (x) ≡ P (2k)
n (x) = (1− x2)kv = (1 + x)k(1− x)kv (3.82)
de donde se verifica que es un polinomio de grado n−m+ 2k = n.
Demostrada la propiedad.
2. Las funciones P(m)n (x) son funciones irracionales de su argumento para m impar.
Demostracion:
Sea m = 2k + 1. Entonces, de (3.80) obtenemos:
P (m)n (x) ≡ P (2k+1)
n (x) = (1− x2)k+1/2v = (1− x2)kv√
1− x2 (3.83)
Demostrada la propiedad.
3. Para toda n y toda m se cumple que
P (m)n (−x) = (−1)n+mP (m)
n (x) (3.84)
Demostracion:
Polinomios de Legendre 123
Directamente de (3.80) tenemos, sustituyendo x por −x:
P (m)n (−x) = (1− (−x)2)m/2
dn+m
dxn+m[((−x)2 − 1)n] =
= (−1)n+m(1− x2)m/2dn+m
dxn+m[(x2 − 1)n] ≡ (−1)n+mP (m)
n (x)
Demostrada la propiedad.
4. Se verifica que
P (m)n (x) = 0, ∀m > n (3.85)
Demostracion:
De (3.80) se ve que, si n > m, la derivada de orden m del polinomio de grado n es siemprecero.
Demostrada la propiedad.
5. Para todo n y todo m, se cumple que
P (m)n (±1) = 0 (3.86)
Demostracion:
El factor (1− x2)m/2 se hace cero en x = ±1 en la expresion (3.80).
Demostrada la propiedad.
6. Los polinomios asociados de Legendre tienen n−m ceros en el intervalo abierto (−1, 1).
Demostracion:
De acuerdo con la propiedad 6 de los polinomios de Legendre, la funcion (3.81) es unpolinomio de grado n−m y tiene exactamente n−m ceros en (−1, 1).
Demostrada la propiedad.
Es conveniente destacar que los polinomios asociados de Legendre P(m)n (x) tienen, exactamente,
n ceros en el intervalo cerrado [−1, 1], lo que coincide con el hecho de que ellos son polinomiosde grado n. Es decir, todas las raıces de (3.80) son reales y estan en el intervalo cerrado [−1, 1];de ellos, n − m raıces estan en el intervalo abierto (−1, 1) y las m raıces restantes estan enlos extremos del intervalo x = ±1, ya que, del factor (1 − x2)m/2, se ve que los extremos del
intervalo son ceros de orden m/2 para P(m)n (x) cada uno.
Como, param impar, las funciones P(m)n (x) no son polinomios, sino funciones irracionales debido
a la presencia del factor√
1− x2 que se aprecia en (3.83), algunos autores dan a P(m)n (x) el
nombre de funciones asociadas de Legendre, en lugar de polinomios asociados de Legendreque hemos utilizado nosotros. Es evidente que para m = 0
P (0)n ≡ Pn(x) (3.87)

124 Jose Marın Antuna
3.4.2 Ecuacion de los polinomios asociados de Legendre
Introduzcamos la notacion
u = Pn(x) (3.88)
Entonces, de (3.80) tendremos que:
P (m)n (x) = (1− x2)
m2 u(m) ≡ (1− x2)
m2 v (3.89)
donde hemos tenido en cuenta (3.81).
En el epıgrafe 2 vimos que (3.88) convierte en identidad la ecuacion de Legendre para λ =n(n+ 1); es decir, que se cumple
(1− x2)u′′ − 2xu′ + n(n+ 1)u ≡ 0 (3.90)
Derivemos la identidad (3.90); obtenemos:
(1− x2)u′′′ − 2xu′′ − 2u′ + n(n+ 1)u′ ≡ 0 (3.91)
Es decir:
(1− x2)u′′′ − (1 + 1)xu′′ − [1(1 + 1)− n(n+ 1)]u′ ≡ 0 (3.92)
Derivemos a su vez (3.92), lo que significa derivar por segunda vez (3.90). Obtenemos:
(1− x2)u(4) − 2xu′′′ − (1 + 1)2xu′′′ − [1(1 + 1)− n(n+ 1)]u′′ ≡ 0 (3.93)
Es decir, reagrupando en (3.93):
(1− x2)u(4) − (2 + 1)2xu′′′ − [2(2 + 1)− n(n+ 1)]u′′ ≡ 0 (3.94)
Derivando por tercera vez y reagrupando, se obtiene:
(1− x2)u(5) − (3 + 1)2xu(4) − [3(3 + 1)− n(n+ 1)]u′′′ ≡ 0 (3.95)
Si continuamos este proceso se ve que, al derivar m veces la identidad (3.90), llegamos a laexpresion:

Polinomios de Legendre 125
(1− x2)u(m+2) − (m+ 1)2xu(m+1) − [m(m+ 1)− n(n+ 1)]u(m) ≡ 0 (3.96)
Por consiguiente, utilizando (3.91), obtenemos:
(1− x2)v′′ − (m+ 1)2xv′ + [n(n+ 1)−m(m+ 1)]v ≡ 0 (3.97)
De (3.89) tenemos que
v = (1− x2)−m2 y (3.98)
donde hemos llamado
y = P (m)n (x) (3.99)
Por consiguiente:
v′ = (1− x2)−m2 y′ +mx(1− x2)−
m2−1y (3.100)
v′′ = (1− x2)−m2 y′′ + 2mx(1− x2)−
m2−1y′ +
+[m(1− x2)−m2−1 + 2mx2(m/2 + 1)(1− x2)−
m2−2]y (3.101)
Colocando (3.98), (3.100) y (3.101) en (3.97), obtenemos:
(1− x2)(1− x2)−m2 y′′ + 2mx(1− x2)−
m2−1y′ +
+[m(1− x2)−
m2−1 + 2mx2
(m2
+ 1)
(1− x2)−m2−2]y −
−(m+ 1)2x(1− x2)−m2 y′ +mx(1− x2)−
m2−1y+
+[n(n+ 1)−m(m+ 1)](1− x2)−m2 y ≡ 0 (3.102)
Cancelando y reagrupando convenientemente en (3.102), nos queda:
(1− x2)y′′ + [2mx− 2mx− 2x]y′ + n(n+ 1)y +
+
[m+
m2x2 + 2mx2
1− x2− 2m2x2 + 2mx2
1− x2−m2 −m
]y ≡ 0 (3.103)
Es decir, despues de operaciones simples, se obtiene, finalmente:

126 Jose Marın Antuna
(1− x2)y′′ − 2xy′ − m2
1− x2y + n(n+ 1)y ≡ 0 (3.104)
Con (3.104) queda demostrado que los polinomios asociados de Legendre son las autofuncionesdel problema de frontera
d
dx[(1− x2)y′]− m2
1− x2y + λy = 0, ∀ − 1 < x < 1
|y(±1)| < ∞ (3.105)
correspondientes a los autovalores
λn = n(n+ 1), ∀n = m,m+ 1, .... (3.106)
con m fijo.
La ecuacion del problema (3.105) (es decir, la ecuacion (3.104), que es la misma) se conoce conel nombre de ecuacion de los polinomios asociados de Legendre. Esta ecuacion es un casoparticular de la ecuacion generatriz de las funciones especiales con k(x) = (1−x2), q(x) = m2
1−x2 ,p(x) = 1 y, como k(x) = 0 para x = ±1, su segunda solucion linealmente independiente tendraen esos puntos polos de orden m/2. Esta segunda solucion no tiene interes para los problemasde la Fısica Matematica y, por consiguiente, no la estudiaremos. En virtud de la teorıa generalestudiada para la ecuacion generatriz de las funciones especiales, podemos afirmar que lospolinomios asociados de Legendre son ortogonales con peso p(x) = 1 en el intervalo (−1, 1)para distintos autovalores, es decir, que
∫ 1
−1
P (m)n1
(x)P (m)n2
(x)dx =‖ P (m)n1
(x) ‖2 δn1n2 (3.107)
donde ‖ P(m)n1 (x) ‖2 es el cuadrado de la norma de los polinomios asociados, dado por la
expresion
‖ P (m)n (x) ‖2≡ N (m)
n =
∫ 1
−1
[P (m)n (x)]2dx (3.108)
Ademas, de acuerdo con el teorema del desarrollo, cualquier funcion f(x) continua y dos vecesdiferenciable en (−1, 1) y acotada en sus extremos, admite un desarrollo en serie de polinomiosasociados de Legendre:
f(x) =∞∑n=m
fnmP(m)n (x) (3.109)

Polinomios de Legendre 127
donde los coeficientes del desarrollo vienen dados por la expresion:
fnm =1
‖ P (m)n (x) ‖2
∫ 1
−1
f(x)P (m)n (x)dx (3.110)
Lo dicho significa que el sistema de los polinomios asociados de Legendre forma una base de unespacio funcional normado de infinitas dimensiones, cuyos elementos pueden expresarse comola combinacion lineal (3.109) de los elementos de la base.
3.4.3 Norma de los polinomios asociados de Legendre
Calculemos, ahora, el cuadrado de la norma de los polinomios asociados de Legendre. Paraello, multipliquemos por (1− x2)m la expresion (3.96). Obtenemos:
(1−x2)m+1u(m+2)−(m+1)2x(1−x2)mu(m+1)− [m(m+1)−n(n+1)](1−x2)mu(m) ≡ 0 (3.111)
Es decir:
d
dx[(1− x2)m+1u(m+1)] = −[n(n+ 1)−m(m+ 1)](1− x2)mu(m) (3.112)
Escribamos (3.112) para m− 1:
d
dx[(1− x2)mu(m)] = −[n(n+ 1)−m(m− 1)](1− x2)m−1u(m−1) (3.113)
Analicemos, ahora, la expresion del cuadrado de la norma. De (3.110) tenemos que, integrando
por partes, luego de sustituir P(m)n (x) por su expresion:
N (m)n =
∫ 1
−1
P (m)n (x)P (m)
n (x)dx =
∫ 1
−1
(1− x2)m/2u(m)(1− x2)m/2u(m)dx =
=
∫ 1
−1
(1− x2)mu(m)u(m)dx = (1− x2)mu(m)u(m−1)|1−1 −
−∫ 1
−1
d
dx[(1− x2)mu(m)]u(m−1)dx (3.114)
El primer sumando a la derecha de (3.114) es cero por el factor (1−x2)m. Sustituyendo (3.113)en (3.114) y teniendo en cuenta la definicion del polinomio asociado de Legendre aplicada a
P(m−1)n (x), obtenemos:

128 Jose Marın Antuna
N (m)n = [n(n+ 1)−m(m− 1)]
∫ 1
−1
(1− x2)m−1u(m−1)u(m−1)dx =
= [n(n+ 1)−m(m− 1)]N (m−1)n (3.115)
La expresion entre corchetes en (3.115) puede ser escrita de la siguiente forma:
n(n+ 1)−m(m− 1) = n2 −m2 + (n+m) = (n+m)(n−m+ 1) (3.116)
Colocando (3.116) en (3.115), obtenemos una expresion para el cuadrado de la norma delpolinomio de orden m en funcion del cuadrado de la norma del polinomio de orden m− 1:
N (m)n = (n+m)(n−m+ 1)N (m−1)
n (3.117)
Por lo tanto:
N (m−1)n = (n+m− 1)(n−m+ 2)N (m−2)
n (3.118)
N (m−2)n = (n+m− 2)(n−m+ 3)N (m−3)
n (3.119)
...............................................
N (2)n = (n+ 2)(n− 1)N (1)
n (3.120)
N (1)n = (n+ 1)nN (0)
n (3.121)
y como, por (3.87), P(0)n (x) = Pn(x), por la formula (3.79), tendremos que
N (0)n ≡ Nn =
2
2n+ 1(3.122)
Colocando (3.122) en (3.121), (3.121) en (3.120) y ası sucesivamente, hasta colocar (3.118) en(3.117), obtenemos:
N (m)n = (n+m)(n+m− 1)(n+m− 2) · · · (n+ 1)n(n− 1) · · · (n−m+ 1)
2
2n+ 1(3.123)
Polinomios de Legendre 129
Para escribir la norma hallada en forma mas compacta, multipliquemos y dividamos en (3.123)por (n − m)!. De esta manera obtenemos, finalmente, para el cuadrado de la norma de lospolinomios asociados de Legendre la expresion:
‖ P (m)n ‖2≡ N (m)
n =
∫ 1
−1
[P (m)n (x)]2dx =
(n+m)!
(n−m)!
2
2n+ 1(3.124)
Notese que, para m = 0, (3.124) se convierte en (3.79). Igualmente, la ecuacion del problema(3.105) se convierte, para m = 0, en la ecuacion de Legendre (3.62), ya que los polinomiosasociados de Legendre, segun (3.87), se convierten en los polinomios de Legendre para m = 0.
Los polinomios de Legendre estudiados en este capıtulo fueron introducidos en el Analisis porprimera vez por Legendre en 1784. Los polinomios asociados de Legendre aparecen en losproblemas de la Fısica Matematica, en primera instancia, como resultado de la solucion de laecuacion de Laplace en coordenadas esfericas y permiten definir las funciones conocidas con elnombre de armonicos esfericos que seran estudiados mas adelante.
3.5 Ejemplos de aplicacion de los polinomios de Legen-
dre
Independientemente de que mas adelante en este libro abundaremos ampliamente en la apli-cacion de los polinomios y los polinomios asociados de Legendre en la solucion de los problemasde frontera de la Fısica Matematica, en el presente epıgrafe daremos al lector una vision de ellomediante el desarrollo de dos ejemplos ilustrativos.
3.5.1 Problema del enfriamiento de una esfera
Consideremos una esfera de radio r0 cuya temperatura inicial es Az y la temperatura de susuperficie se mantiene igual a cero todo el tiempo. El proceso de enfriamiento se describe pormedio de la ecuacion parabolica (Capıtulo 9, epıgrafe 9.2):
ut = a2∇2u (3.125)
donde u(M, t) es la temperatura del punto M en el instante t. Aquı y en lo adelante, elsubındice t en la funcion u significa la derivacion parcial respecto a la variable t; igualmente,el subındice x significara la derivacion parcial respecto a la variable x; esta notacion, como severa, sera empleada habitualmente durante todo el texto. Nuestro objetivo es hallar la ley devariacion de la temperatura en el interior de la esfera de radio r0, es decir, resolver la ecuacion(3.125) para 0 ≤ r < r0. Introduciendo coordenadas esfericas con centro en r = 0, a la ecuacion(3.125) deben imponerse la condicion inicial (temperatura inicial de los puntos de la esfera:u|t=0 = Az = Ar cos θ y la condicion de frontera, que, en este caso, es que la temperatura se

130 Jose Marın Antuna
mantenga todo el tiempo nula sobre la frontera: u|r=r0 = 0. Ası pues, el problema a resolveren coordenadas esfericas es
ut = a2∇2u
u(r, θ, 0) = Ar cos θ (3.126)
u(r0, θ, t) = 0
No hemos considerado la temperatura dependiente del angulo ϕ, ya que ni la condicion inicial,ni la de frontera dependen del mismo, lo que significa que el problema tiene simetrıa respectoa este angulo. Para resolver el problema (3.126) propondremos la solucion en la forma:
u(r, θ, t) = T (t)v(r, θ) (3.127)
Colocando (3.127) en la ecuacion (3.126) y dividiendo por a2Tv, obtenemos:
T
a2T=∇2v
v= −λ (3.128)
donde la constante λ aparece en (3.128) por tener a la izquierda una funcion solo de t. De(3.128) obtenemos para T (t) la ecuacion diferencial ordinaria
T ′ + λa2T = 0 (3.129)
cuya solucion general es:
T (t) = Ce−λa2t (3.130)
donde C es una constante arbitraria. Para v(r, θ) obtenemos de (3.128) la siguiente ecuacion ala que anadimos la condicion de frontera que se deriva de la condicion de frontera de (3.126):
∇2v + λv = 0 ∀0 ≤ r < r0, 0 < θ < π
v(r0, θ) = 0 (3.131)
Desde un punto de vista fısico hay que exigir que |v| < ∞, ya que la solucion del problema(3.126) debe ser, evidentemente, acotada. Para resolver la ecuacion (3.131), que es una ecuacionde Helmholtz, propongamos la solucion en la forma:
v(r, θ) = R(r)Θ(θ) (3.132)

Polinomios de Legendre 131
Teniendo en cuenta la expresion del laplaciano en coordenadas esfericas, la ecuacion adopta laforma:
1
r2
d
dr(r2R′)Θ +
1
r2
1
sin θ
d
dθ(sin θΘ′)R + λRΘ = 0 (3.133)
Multipliquemos (3.133) por r2
RΘ. Obtenemos:
ddr
(r2R′)
R+ λr2 = −
1sin θ
ddθ
(sin θΘ′)
Θ= α (3.134)
La constante α aparece en (3.134) por figurar a la izquierda una funcion solo de r y a la derechauna funcion solo de θ. Ası pues, para Θ(θ) se obtiene el problema:
1
sin θ
d
dθ(sin θΘ′) + αΘ = 0 ∀0 < θ < π
|Θ(θ)| < ∞ (3.135)
Propongamos el siguiente cambio de variables:
x = cos θ, dx = − sin θdθ, Θ(θ) = Θ(arccosx) = y(x) (3.136)
Entonces el problema (3.135) se transforma en:
d
dx[(1− x2)y′] + αy = 0 ∀ − 1 < x < 1
|y(x)| < ∞ (3.137)
El problema (3.137) coincide con el problema (3.40). Por consiguiente:
y(x) = Pn(x) (3.138)
Es decir, regresando a la variable θ:
Θ(θ) = Pn(cos θ) ∀α = n(n+ 1) (3.139)
Para R(r), de (3.134) y, teniendo en cuenta los valores de α dados en (3.139), obtenemos laecuacion:

132 Jose Marın Antuna
d
dr(r2R′) + (λr2 − n(n+ 1))R = 0
|R| < ∞ (3.140)
Es decir, teniendo en cuenta la condicion de frontera en (3.131):
1
r2
d
dr(r2R′) +
(λ− n(n+ 1)
r2
)R = 0
|R| < ∞ (3.141)
R(r0) = 0
Busquemos la solucion de (3.141) en la forma:
R(r) =w(r)√r
(3.142)
Entonces:
R′ =w′√r− w
2r√r, R′′ =
w′′√r− w′
r√r
+3w
4r2√r
(3.143)
Colocando (3.142) y (3.143) en la ecuacion (3.141) y realizando sencillos pasos algebraicos, seobtiene:
w′′ +1
rw′ +
(λ−
(n+ 1
2
)2r2
)w = 0 (3.144)
La ecuacion (3.144) no es mas que la ecuacion de Bessel de orden n+ 1/2. Su solucion acotadaes
w(r) = Jn+1/2(√λr) (3.145)
De acuerdo con (3.142) y considerando la condicion de frontera en (3.141), obtenemos:
Rn(r) =1√rJn+1/2
(ν
(n)k
r0r
)(3.146)
donde hemos llamado ν(n)k , (k = 1, 2, 3, ...) a las raıces de la ecuacion

Polinomios de Legendre 133
Jn+1/2(ν) = 0 (3.147)
Por consiguiente, la solucion particular del problema (3.126) sera:
unk(r, θ, t) = Cnke−(
ν(n)k
a
r0
)2
t 1√rJn+1/2
(ν
(n)k
r0r
)Pn(cos θ) (3.148)
La solucion general del problema sera la superposicion de todas las posibles soluciones particu-lares (3.148), es decir:
u(r, θ, t) =∞∑n=0
∞∑k=1
Cnke−(
ν(n)k
a
r0
)2
t 1√rJn+1/2
(ν
(n)k
r0r
)Pn(cos θ) (3.149)
Aplicando a (3.149) la condicion inicial del problema (3.126):
Ar cos θ =∞∑n=0
∞∑k=1
Cnk1√rJn+1/2
(ν
(n)k
r0r
)Pn(cos θ) (3.150)
Como cos θ = P1(cos θ), en virtud de la ortogonalidad de los polinomios de Legendre n = 1.Los coeficientes C1k se hallaran de acuerdo con el teorema del desarrollo:
C1k =1
‖ J3/2 ‖2
∫ r0
0
Ar√rJ3/2
(ν
(1)k
r0r
)rdr (3.151)
Esta integral puede calcularse con ayuda de las formulas recurrentes para las funciones cilın-dricas. El resultado da:
C1k =
2A
(r0
ν(1)k
)4
[ν(1)k ]5/2J5/2(ν
(1)k )
r30
√π2
1
ν(1)k
[J ′3/2(ν(1)k )]2
(3.152)
lo que se deja al lector como ejercicio.
3.5.2 Problema de una partıcula cuantica en un campo de simetrıacentral
La ecuacion de Schrodinger estacionaria en el caso de un campo de simetrıa central es:

134 Jose Marın Antuna
∇2ψ +2m0
~2[E − U(r)]ψ = 0 (3.153)
donde se exige que |ψ| < ∞. ψ(r, θ, ϕ) es la funcion de onda que describe el estado de lapartıcula, E es la energıa total de la partıcula, m0 su masa y U(r) es la energıa potencial.
~ =h
2π= 1.05 · 10−27erg · s (3.154)
es la constante de Planck. Busquemos la solucion de (3.153) en la forma
ψ = R(r)Y (θ, ϕ) (3.155)
Colocando (3.155) en (3.153) y teniendo en cuenta la expresion del laplaciano en coordenadasesfericas, obtenemos:
1
r2
d
dr(r2R′)Y +
R
r2
[1
sin θ
∂
∂θ
(sin θ
∂Y
∂θ
)+
1
sin2 θ
∂2Y
∂ϕ2
]+
+2m0
~[E − U ]RY = 0 (3.156)
Introduzcamos la notacion
∇2θϕY ≡ 1
sin θ
∂
∂θ
(sin θ
∂Y
∂θ
)+
1
sin2 θ
∂2Y
∂ϕ2(3.157)
que es la parte angular del laplaciano en coordenadas esfericas y multipliquemos por r2
RYla
ecuacion (3.156). Obtenemos:
ddr
(r2R′)
R+
2m0r2
~[E − U(r)] = −
∇2θϕY
Y= λ (3.158)
donde λ es una constante dada por el hecho de que a la izquierda en (3.158) tenemos unafuncion solo de r. Para Y (θ, ϕ) obtenemos la ecuacion y las evidentes condiciones:
∇2θϕY + λY = 0 ∀0 ≤ ϕ ≤ 2π, 0 < θ < π
Y (θ, ϕ+ 2π) = Y (θ, ϕ) (3.159)
|Y (θ, ϕ)| < ∞
Para resolver el problema (3.159) propongamos:

Polinomios de Legendre 135
Y (θ, ϕ) = Θ(θ)Φ(ϕ) (3.160)
Colocando (3.160) en (3.159), obtenemos:
1
sin θ
d
dθ(sin θΘ′)Φ +
1
sin2 θΘd2Φ
dϕ2+ λΘΦ = 0 (3.161)
Multiplicando (3.161) por sin2 θΘΦ
, nos queda:
sin θ ddθ
(sin θΘ′)
Θ+ λ sin2 θ = −Φ′′
Φ= α (3.162)
donde la constante α viene dada por el hecho de que a la izquierda y a la derecha en (3.162)tenemos funciones solo de θ y de ϕ, respectivamente. De (3.162) para Φ se obtiene el problema:
Φ′′ + αΦ = 0
Φ(ϕ+ 2π) = Φ(ϕ) (3.163)
cuya solucion periodica tiene lugar para α = m2, con m = 0, 1, 2, ... y es
Φm(ϕ) = Am cosmϕ+Bm sinmϕ (3.164)
Por consiguiente, para Θ(θ) se tiene el problema:
1
sin θ
d
dθ(sin θΘ′)− m2
sin2 θΘ + λΘ = 0 ∀0 < θ < π
|Θ(θ)| < ∞ (3.165)
Con el cambio de variables:
x = cos θ, dx = − sin θdθ, Θ(θ) = Θ(arccosx) = y(x) (3.166)
obtenemos de (3.165)
d
dx[(1− x2)y′]− m2
1− x2y + λy = 0 ∀ − 1 < x < 1
|y(x)| < ∞ (3.167)

136 Jose Marın Antuna
El problema (3.168) es identico al problema (3.105), por lo que
y(x) = P (m)n (x)
Es decir, volviendo a la variable θ:
Θnm(θ) = P (m)n (θ) = P (m)
n (cos θ) ∀λ = n(n+ 1) (3.168)
Para R(r) se obtiene la ecuacion
1
r2
d
dr(r2R′)− n(n+ 1)
r2R +
2m0
~[E − U(r)]R = 0 (3.169)
En dependencia de la expresion del potencial U(r) tendremos distintas ecuaciones a resolver.Si U(r) = const., obtenemos lo que en Mecanica Cuantica se llama rotador. En este caso,tomando U(r) = 0 (pues el sistema de referencia puede ser tomado con centro en ese valor) yteniendo en cuenta que, en el caso del rotador, R(r) = const., de (3.156) nos queda:
1
r2∇2θϕY +
2m0E
~2Y = 0 (3.170)
De (3.159) y teniendo en cuenta los valores de λ en (3.168), obtenemos
− 1
r2n(n+ 1) +
2m0E
~2= 0 (3.171)
De (3.171) obtenemos los valores cuantificados de la energıa del rotador:
En =~2n(n+ 1)
2m0r2(3.172)
Si U(r) = − e2
r, o sea, el potencial de Coulomb, tendremos el problema del atomo de hidrogeno
y ası sucesivamente. Notese que para la parte angular se obtuvieron las funciones
Ynm(θ, ϕ) = Anm cosmϕ+Bnm sinmϕP (m)n (cos θ) (3.173)
con n = 0, 1, 2, ..., m = 0, 1, 2, ..., n, que se denominan armonicos esfericos y que estudiaremoscon mayor detenimiento en el capıtulo del Metodo de Separacion de Variables en dominiosesfericos.
Los ejemplos que hemos visto en este epıgrafe son de caracter ilustrativo para que el lector tengauna vision de la variada e importante aplicacion que tienen los polinomios de Legendre en la

Polinomios de Legendre 137
solucion de diversos problemas fısicos. Por supuesto, se requiere un estudio mas detallado delas ecuaciones en derivadas parciales de segundo orden y de sus metodos de solucion para unacomprension mas cabal de los ejemplos desarrollados. Ese estudio sera efectuado mas adelanteen el presente libro.

138 Jose Marın Antuna
Capıtulo 4
Polinomios de Hermite y Laguerre
En diversos problemas de la Mecanica Cuantica aparecen los polinomios de Hermite y Laguerreque estudiaremos en el presente capıtulo.
4.1 Polinomios de Hermite
Estudiemos los polinomios de Hermite, que aparecen al resolver el problema del osciladorarmonico cuantico.
4.1.1 Definicion, funcion generatriz, propiedades
Definiremos formalmente los polinomios de Hermite como los coeficientes del desarrollo de lasiguiente funcion
ψ(x, ξ) = e2xξ−ξ2 ≡ ex
2
e−(ξ−x)2 (4.1)
en serie de potencias de ξ y que, por tal motivo, recibe el nombre de funcion generatriz delos polinomios de Hermite. Ası pues, tendremos el desarrollo
ψ(x, ξ) =∞∑n=0
Hn(x)ξn
n!(4.2)
donde Hn(x) son los polinomios de Hermite. Busquemos una expresion diferencial para lospolinomios; haciendo la prolongacion analıtica de la funcion (4.1) al plano complejo ζ = ξ + iηy teniendo en cuenta el desarrollo en serie de Taylor de variable compleja, tendremos:
139

140 Jose Marın Antuna
Hn(x) =∂nψ
∂ζn|ζ=0 =
n!
2πi
∫C
ex2e−(ζ−x)2
ζn+1dζ ≡ ex
2 n!
2πi
∫C
e−(ζ−x)2dζ
ζn+1(4.3)
donde el contorno C en el plano ζ rodea al punto ζ = 0. Hagamos el siguiente cambio devariables:
z = x− ζ, dz = −dζ (4.4)
Entonces de (4.3) obtenemos:
Hn(x) = ex2 n!
2πi
∫C1
e−z2(−dz)
(x− z)n+1= ex
2 n!
2πi
(−1)
(−1)n+1
∫C1
e−z2(−dz)
(z − x)n+1(4.5)
donde el contorno C1 en el plano complejo z rodea al punto z = x. De (4.5) y de acuerdo conla formula generalizada de Cauchy obtenemos, finalmente, la expresion:
Hn(x) = (−1)nex2 dn
dxn[e−x
2
] (4.6)
La formula (4.6) es una expresion diferencial para los polinomios de Hermite, los cuales tienenlas siguientes propiedades:
1. Las funciones Hn(x) son polinomios de grado n.
Demostracion:
Es evidente que, al derivar la funcion e−x2n veces, aparecera una suma de potencias de
x hasta el grado n inclusive, multiplicadas por ex2. Como e−x
2se cancela con ex
2, al final
se obtiene un polinomio de grado n.
Demostrada la propiedad.
El razonamiento indicado en la demostracion de esta propiedad nos indica que el coefi-ciente que acompana a la potencia mayor xn es:
an = 2n (4.7)
2. Para todo n:
Hn(−x) = (−1)nHn(x) (4.8)
Demostracion:
De la formula diferencial (4.6), sustituyendo x por −x, se obtiene:
Polinomios de Hermite y Laguerre 141
Hn(−x) = (−1)ne(−x)2 dn
d(−x)n[e−(−x)2 ] = (−1)nex
2 1
(−1)ndn
dxn[e−x
2
] = (−1)nHn(x)
Demostrada la propiedad.
3. Tiene lugar la siguiente relacion:
H ′n(x) = 2nHn−1(x) (4.9)
que recibe el nombre de primera formula de recurrencia de los polinomios de Hermite.
Demostracion:
Derivando la funcion generatriz (4.1) respecto a x, obtenemos:
∂ψ
∂x= 2ξψ (4.10)
Colocando en (4.10) la expresion (4.2), tendremos:
∞∑n=0
H ′n(x)
ξn
n!= 2ξ
∞∑n=0
Hn(x)ξn
n!=
∞∑n=0
2Hn(x)ξn+1
n!(4.11)
Es decir, cambiando el ındice de sumatoria n a la derecha de (4.11) por n− 1:
∞∑n=0
H ′n(x)
ξn
n!=
∞∑n=1
2Hn−1(x)ξn
(n− 1)!(4.12)
De la formula diferencial (4.6) es obvio que H0(x) = 1 y, por tanto, H ′0(x) = 0. Por
consiguiente, de (4.12) obtenemos:
∞∑n=1
H ′n(x)
ξn
n!=
∞∑n=1
2Hn−1(x)ξn
(n− 1)!(4.13)
Comparando en (4.13) coeficientes asociados a iguales potencias, se obtiene (4.9).
Demostrada la propiedad.
4. Tiene lugar la siguiente relacion:
Hn+1(x)− 2xHn(x) + 2nHn−1(x) = 0 (4.14)
conocida con el nombre de segunda formula de recurrencia de los polinomios deHermite.
Demostracion:
Derivemos la funcion generatriz (4.1) con respecto a ξ. Obtenemos:

142 Jose Marın Antuna
∂ψ
∂ξ= (2x− 2ξ)ψ (4.15)
Colocando en (4.15) la expresion (4.2), se obtiene:
∞∑n=1
Hn(x)ξn−1
(n− 1)!=
∞∑n=0
2xHn(x)ξn
n!−
∞∑n=0
2Hn(x)ξn+1
n!(4.16)
Llamemos n a n− 1 en la primera sumatoria de la izquierda y llamemos n a n+ 1 en laultima sumatoria a la derecha de (4.16). Entonces:
∞∑n=0
Hn+1(x)ξn
n!=
∞∑n=0
2xHn(x)ξn
n!−
∞∑n=1
2Hn−1(x)ξn
(n− 1)!(4.17)
Es decir:
H1(x) +∞∑n=1
Hn+1(x)ξn
n!= 2xH0(x) +
∞∑n=1
2xHn(x)ξn
n!−
∞∑n=1
2Hn−1(x)ξn
(n− 1)!(4.18)
Pasando en (4.17) todos los sumandos para la izquierda, teniendo en cuenta que, deacuerdo con (4.6), H0(x) = 1, H1(x) = 2x y agrupando en potencias iguales, obtenemos:
∞∑n=1
[Hn+1(x)− 2xHn(x) + 2nHn−1(x)]ξn
n!= 0 (4.19)
De (4.19), en virtud de la independencia lineal de las potencias de ξ, se obtiene (4.14).
Demostrada la propiedad.
La formula de recurrencia (4.14) resulta de utilidad para hallar los polinomios de Hermite degrados superiores a traves de los polinomios de grados inferiores. No es difıcil obtener algunospolinomios de Hermite:
H0(x) = 1 (4.20)
H1(x) = 2x (4.21)
H2(x) = 4x2 − 2 (4.22)
H3(x) = 8x3 − 12x (4.23)

Polinomios de Hermite y Laguerre 143
H4(x) = 16x4 − 48x2 + 12 (4.24)
H5(x) = 32x5 − 160x3 + 120x (4.25)
Notese que se verifica (4.7) para los polinomios hallados. Igualmente se comprueba que, enconcordancia con (4.8), los polinomios son funciones impares de x para n impar (y por lo tantosolo contienen potencias impares de x) y son funciones pares de x para n par.
4.1.2 Problema de frontera de los polinomios de Hermite
Coloquemos (4.9) en (4.14). Se obtiene que:
Hn+1(x)− 2xHn(x) +H ′n(x) ≡ 0 (4.26)
Derivemos la identidad (4.26), entonces nos queda:
H ′n+1(x)− 2H ′
n(x)− 2xHn(x) +H ′′n(x) ≡ 0 (4.27)
Pero de (4.9) es facil ver que
H ′n+1(x) = 2(n+ 1)Hn(x) (4.28)
Colocando (4.28) en (4.27), se obtiene, despues de simplificar:
H ′′n(x)− 2xH ′
n(x) + 2nHn(x) ≡ 0 (4.29)
La identidad (4.29) nos indica que los polinomios de Hermite son solucion de la ecuaciondiferencial
y′′ − 2xy′ + λy = 0 ∀λ = 2n (4.30)
Si multiplicamos por e−x2, la ecuacion (4.30) puede ser escrita en la forma:
d
dx[e−x
2
y′] + λe−x2
y = 0 (4.31)
La ecuacion (4.31) es un caso particular de la ecuacion generatriz de las funciones especiales,con k(x) = e−x
2, q(x) = 0, p(x) = e−x
2. Notese que el coeficiente k(x) = 0 para x = ±∞.

144 Jose Marın Antuna
Por consiguiente, la ecuacion (4.31) sera soluble en todo el eje −∞ < x <∞ y los polinomiosde Hermite corresponderan a determinadas condiciones de frontera a imponer para x → ±∞.Esas condiciones de frontera, que nos permiten determinar por autofunciones los polinomios deHermite correspondientes a los autovalores λ = 2n, surgen del problema fısico que conduce a laecuacion de Hermite; dichas condiciones estan constituidas por la exigencia de que la solucionde la ecuacion (4.31) crezca con menos rapidez que la funcion ex
2/2 para x → ∞. En aras delograr una mayor comprension de lo dicho, veremos a continuacion el problema del osciladorarmonico cuantico.
Supongamos que tenemos una partıcula cuantica que oscila en el eje x en el entorno del puntode equilibrio x = 0. Si m0 es la masa de la partıcula y ω la frecuencia de las oscilaciones,entonces la energıa potencial del oscilador sera:
U(x) =m0ω
2x2
2(4.32)
Por consiguiente, la ecuacion de Schrodinger estacionaria que describe el estado de la partıculasera:
d2ψ
dx2+
2m0
~2
[E − m0ω
2x2
2
]ψ = 0 (4.33)
Introduzcamos el siguiente cambio de variables:
x =
√~
m0ωξ (4.34)
Entonces, la ecuacion (4.33) toma la forma
d2ψ
dξ2+
[2E
~ω− ξ2
]ψ = 0 (4.35)
La funcion de onda ψ(x) tiene la siguiente interpretacion fısica: su modulo al cuadrado esla probabilidad de encontrar la partıcula en el intervalo (x, x + dx). Por consiguiente, eslogico esperar que |ψ(±∞)| < ∞, es decir, sea acotada. Redefinamos en (4.35) la variableindependiente llamando de nuevo x a la variable ξ y propongamos la solucion en la forma:
ψ(x) = u(x)e−x2
2 (4.36)
Para lograr que la solucion ψ(x) sea acotada, debemos exigir que la funcion u(x) crezca conmenos rapidez que ex
2/2 para x→∞. Entonces tendremos que
ψ′′(x) = [u′′ − 2xu′ − (1− x2)u]e−x2
2 (4.37)

Polinomios de Hermite y Laguerre 145
Colocando (4.36) y (4.37) en (4.35), obtenemos para u(x) la ecuacion:
u′′ − 2xu′ − (1− x2)u+
[2E
~ω− x2
]u = 0 (4.38)
Es decir, llamando
λ =2E
~ω− 1 (4.39)
obtenemos:
u′′ − 2xu′ + λu = 0 (4.40)
Notese que la ecuacion (4.40) es identica a la ecuacion (4.30) que satisfacen los polinomios deHermite. A (4.40) debemos imponer la condicion de frontera de que u(x) crezca con menosrapidez que ex
2/2 para x → ∞. Demostremos que las autofunciones de este problema defrontera son los polinomios de Hermite estudiados en el punto anterior y que los autovaloresque les corresponden son λ = 2n. En virtud de que x = 0 es un punto regular de la ecuacion(4.40), buscaremos la solucion, de acuerdo con lo estudiado en el primer capıtulo, en forma deuna serie de potencias:
u(x) =∞∑k=0
akxk (4.41)
Colocando (4.41) en la ecuacion (4.40), obtenemos:
∞∑k=2
k(k − 1)akxk−2 − 2x
∞∑k=1
kakxk−1 + λ
∞∑k=0
akxk = 0 (4.42)
Es decir
∞∑k=2
k(k − 1)akxk−2 −
∞∑k=0
2kakxk +
∞∑k=0
akλxk = 0 (4.43)
donde hemos comenzado a sumar desde k = 0 en la segunda serie, ya que ello simplementeequivale a sumar un cero. En la primera serie a la izquierda de (4.43) llamemos k a k − 2.Obtenemos entonces:
∞∑k=0
(k + 2)(k + 1)ak+2xk −
∞∑k=0
2kakxk +
∞∑k=0
akλxk = 0 (4.44)
146 Jose Marın Antuna
En virtud de la independencia lineal de las potencias de x, de (4.44) obtenemos:
(k + 2)(k + 1)ak+2 − (2k − λ)ak = 0 (4.45)
Ası pues, para los coeficientes de la serie (4.41) obtenemos la siguiente formula recurrente:
ak+2 =2k − λ
(k + 2)(k + 1)ak (4.46)
La formula (4.46) nos indica que los coeficientes pares vienen todos expresados a traves de a0,mientras que los coeficientes impares vienen todos expresados a traves de a1. Los coeficientes a0
y a1 son arbitrarios, pues, al ser la ecuacion (4.40) homogenea y de segundo orden, su soluciongeneral contendra dos constantes arbitrarias. De esta manera, en principio, queda resuelta laecuacion (4.40) por la serie (4.41). Analicemos para k → ∞ la relacion de dos coeficientesinmediatos; de acuerdo con (4.46)
akak+2
=(k + 2)(k + 1)
2k − λ∼ k
2, ∀k →∞ (4.47)
Por otro lado tenemos que la serie de la funcion ex2
es:
ex2
=∑
k=0,2,4,...
xk(k2
)!≡
∑k=0,2,4,...
bkxk, bk =
1(k2
)!
(4.48)
Por consiguiente, para los coeficientes bk tendremos, cuando k →∞, que:
bkbk+2
=
(k+22
)!(
k2
)!
=k
2+ 1 ∼ k
2, ∀k →∞ (4.49)
Es decir, de (4.47) y (4.49) se ve que, para k →∞, la relacion entre los coeficientes de nuestraserie solucion (4.41) es del mismo orden que la de los coeficientes del desarrollo de la funcionex
2en serie de potencias, lo que significa que, si nuestra solucion (4.41) fuese efectivamente una
serie, es decir, si tuviese infinitos terminos, serıa del orden de ex2:
u ∼ ex2
(4.50)
Pero entonces (4.41) no serıa la solucion buscada de nuestro problema, pues nosotros nece-sitamos hallar la solucion de la ecuacion (4.40) que crezca con menos rapidez que ex
2/2 parax → ±∞, con el fin de que la solucion (4.36) de nuestro problema fısico permanezca acotadapara x→ ±∞.

Polinomios de Hermite y Laguerre 147
Ası pues, concluimos que, para que la expresion (4.41) nos de la solucion de la ecuacion (4.40)con el debido comportamiento para x → ±∞, es necesario que la formula (4.41) no sea unaserie de infinitos sumandos, ya que entonces serıa del orden de ex
2segun (4.50). Es decir, (4.41)
tiene que ser una suma finita de terminos. En otras palabras, la serie (4.41) debe cortarse enalgun lado. Un analisis de la formula recurrente (4.46) nos permite concluir que si exigimosque para cierto n fijo:
λ = 2n (4.51)
y si exigimos, ademas, que si n es par a1 = 0, entonces tendremos, de acuerdo con (4.46), que:
a1 = a3 = · · · = a2k+1 = 0, ∀ka0 6= 0, a2 6= 0, · · ·, an 6= 0; an+2 = · · ·a2k = 0, ∀2k > n (4.52)
y si n es impar, exigimos que a2 = 0, entonces, de acuerdo con (4.46), tendremos que:
a0 = a2 = · · · = a2k = 0, ∀ka1 6= 0, a3 6= 0, · · ·, an 6= 0; an+2 = · · ·a2k = 0, ∀2k + 1 > n (4.53)
Entonces, la serie (4.41) se cortara en k = n y tendra la forma
u(x) =n∑k=0
akxk (4.54)
lo que significa que las soluciones de (4.40) seran polinomios de grado n y seran, por tanto,funciones que, para x→ ±∞, creceran con menos rapidez que ex
2/2. Los valores del parametroλ, dados por (4.51), seran los autovalores del problema de frontera planteado para la ecuacion(4.40) y, de (4.54), las autofunciones que les corresponden son, de acuerdo con (4.52) y (4.53),respectivamente:
u(x) ≡ Hn(x) = a0 + a2x2 + a4x
4 + · · ·+ anxn, ∀n = par
u(x) ≡ Hn(x) = a1x+ a3x3 + a5x
5 + · · ·+ anxn, ∀n = impar (4.55)
En (4.55) el coeficiente a0 o el coeficiente a1, en dependencia de si n es par o impar, es arbitrarioy lo podemos escoger de forma conveniente, ya que, como la ecuacion (4.40) es homogenea,su solucion, multiplicada por cualquier constante, seguira siendo solucion. Como nosotrosdemostramos en (4.29) que los polinomios de Hermite Hn(x), definidos por (4.6), son solucionde la ecuacion (4.40) para λ = 2n, es evidente que lograremos que Hn(x) = Hn(x) si en (4.55)

148 Jose Marın Antuna
escogemos el coeficiente a0 o a1 de forma tal que an = 2n, ya que, de acuerdo con (4.7), elpolinomio (4.55) coincidira con el polinomio dado por (4.6).
El ejemplo fısico del oscilador cuantico nos permite, pues, concluir que los polinomios de Hermiteson las autofunciones del problema
d
dx[e−x
2
y′] + λe−x2
y = 0, ∀ −∞ < x <∞ (4.56)
Ecuacion a la que se le impone la condicion de que y crezca con menos rapidez que ex2/2 para
x → ±∞. Para este problema, los autovalores correspondientes son los dados por (4.51). Deacuerdo con (4.39) vemos que la energıa del oscilador cuantico toma valores discretos:
En = ~ω(n+
1
2
), ∀n = 0, 1, 2, ... (4.57)
es decir, la energıa del oscilador esta cuantificada; ninguna partıcula del micromundo puedeoscilar con energıas cuyos valores no correspondan a los dados por (4.57). Esto es totalmentediferente a la Mecanica Clasica, en la que para el oscilador la energıa, dada por la expresion
E =p2
2m0
+m0ω
2x2
2(4.58)
donde p es el impulso de la partıcula, toma valores continuos. Notese que de (4.57) se obtieneque en el estado basico (n = 0) el oscilador cuantico tiene una energıa basica diferente de cero:
E0 =~ω2
(4.59)
que, como se demuestra comunmente en los cursos de Mecanica Cuantica, esta vinculada conla relacion de indeterminacion de Heisenberg. La teorıa del oscilador cuantico sienta las basespara la teorıa cuantica de la radiacion, la explicacion de los espectros de los atomos y sirvecomo fundamento para la creacion de la teorıa cuantica de los campos.
El problema (4.56) es un caso particular del problema de la ecuacion generatriz de las funcionesespeciales, con k(x) = e−x
2, p(x) = e−x
2. Por consiguiente, podemos afirmar que los polinomios
de Hermite son ortogonales en (−∞,∞) con peso e−x2, es decir:
∫ ∞
−∞Hn(x)Hm(x)e−x
2
dx =‖ Hn(x) ‖2 δnm (4.60)
donde ‖ Hn(x) ‖2 es el cuadrado de la norma de los polinomios. Ademas, cualquier funcioncontinua y diferenciable en todo el eje x y que crezca con menos rapidez que ex
2/2 para x→ ±∞podra ser desarrollada en una serie de polinomios

Polinomios de Hermite y Laguerre 149
f(x) =∞∑n=0
fnHn(x) (4.61)
convergente absoluta y uniformemente para toda x. Los coeficientes del desarrollo vendrandados por la formula
fn =1
‖ Hn ‖2
∫ ∞
−∞f(x)Hn(x)e
−x2
dx (4.62)
4.1.3 Norma de los polinomios de Hermite
Para concluir el estudio de los polinomios de Hermite calcularemos, a continuacion, el cuadradode su norma dada por la expresion
‖ Hn ‖2≡ Nn =
∫ ∞
−∞H2n(x)e
−x2
dx (4.63)
Sustituyamos para ello en (4.63) uno de los polinomios por su formula diferencial (4.6) e inte-gremos una vez por partes; obtenemos:
Nn =
∫ ∞
−∞Hn(x)Hn(x)e
−x2
dx =
∫ ∞
−∞Hn(x)(−1)nex
2 dn
dxn[e−x
2
]e−x2
dx =
= (−1)nHn(x)dn−1
dxn−1[e−x
2
]|∞−∞ − (−1)n∫ ∞
−∞H ′n(x)
dn−1
dxn−1[e−x
2
]dx (4.64)
El primer sumando a la izquierda en (4.64) es cero, ya que los polinomios crecen con menosrapidez que ex
2cuando x→ ±∞. Sustituyendo en la integral a la izquierda en (4.64) la primera
formula recurrente (4.9) y multiplicando y dividiendo el integrando por ex2, obtenemos:
Nn = (−1)n−1
∫ ∞
−∞2nHn−1(x)
dn−1
dxn−1[e−x
2
]ex2
e−x2
dx ≡
≡ 2n
∫ ∞
−∞Hn−1(x)Hn−1(x)e
−x2
dx ≡ 2nNn−1 (4.65)
Ası pues, hemos obtenido una formula recurrente para el cuadrado de la norma del polinomiode Hermite de grado n, en funcion del cuadrado de la norma del polinomio de grado n− 1. De(4.65) podemos escribir que
Nn = 2nNn−1 (4.66)

150 Jose Marın Antuna
Nn−1 = 2(n− 1)Nn−2 (4.67)
Nn−2 = 2(n− 2)Nn−3 (4.68)
...........................................
N2 = 2 · 2N1 (4.69)
N1 = 2 · 1N0 (4.70)
Como, de acuerdo con (4.20):
N0 =
∫ ∞
−∞H2
0 (x)e−x2
dx =
∫ ∞
−∞e−x
2
dx =√π (4.71)
de (4.66)-(4.71) obtenemos, finalmente, para el cuadrado de la norma de los polinomios deHermite la expresion:
Nn ≡‖ Hn ‖2= 2nn!√π (4.72)
El cuadrado de la norma (4.72) nos permite aplicar la formula (4.62) para el calculo de loscoeficientes del teorema del desarrollo de una funcion en la serie (4.61).
4.2 Polinomios de Laguerre
En diversos problemas de la Mecanica Cuantica aparecen los polinomios de Laguerre que estu-diaremos a continuacion.
4.2.1 Definicion, funcion generatriz
Los polinomios de Laguerre los definiremos formalmente como los coeficientes del desarrollo dela funcion
ψ(x, ξ) =e−
xξ1−ξ
1− ξ(4.73)

Polinomios de Hermite y Laguerre 151
en serie de potencias de ξ. Debido a ello, la funcion (4.73) se conoce con el nombre de funciongeneratriz de los polinomios de Laguerre. Tendremos, por lo tanto, que
ψ(x, ξ) =∞∑n=0
Ln(x)ξn
n!(4.74)
donde los coeficientes Ln(x) son los polinomios de Laguerre.
Busquemos una expresion para estos polinomios en terminos de una formula diferencial. Paraello hagamos la prolongacion analıtica de la funcion (4.73) al plano complejo ζ = ξ + iη;entonces, de acuerdo con la teorıa de las series de Taylor de la teorıa de funciones de variablecompleja, tendremos:
Ln(x) =∂nψ
∂ζn|ζ=0 =
n!
2πi
∫C
e−xζ
1−ζ
1− ζ
dζ
ζn+1(4.75)
donde el contorno C en el plano complejo ζ rodea al punto ζ = 0. Hagamos el cambio devariables:
z =x
1− ζ, 1− ζ =
x
z, dζ =
x
z2dz (4.76)
Entonces, de (4.75) tendremos que:
Ln(x) =n!
2πi
∫C1
e−z(1−xz )
xz
(1− x
z
)n+1
xdz
z2=
n!
2πiex∫C1
zne−zdz
(z − x)n+1(4.77)
donde el contorno C1 en el plano complejo z rodea al punto z = x. De (4.77), en virtud de laformula generalizada de Cauchy, obtenemos para los polinomios de Laguerre la expresion:
Ln(x) = exdn
dxn[xne−x] (4.78)
La formula (4.78) es una expresion diferencial para los polinomios de Laguerre. De ella esevidente que las funciones Ln(x) son polinomios de grado n, ya que la enesima derivada xne−x
por la formula de Leibnitz es
[xne−x](n) =n∑k=0
Ckn(x
n)(n−k)(e−x)(k) = e−xn∑k=0
Ckn(x
n)(n−k)(−1)k (4.79)
donde

152 Jose Marın Antuna
Ckn =
n!
k!(n− k)!(4.80)
es la formula de las combinaciones de n elementos tomados en grupos de k. La sumatoriaque figura a la derecha en (4.79) es un polinomio de grado n y, al colocar (4.79) en (4.78),las exponenciales se cancelan. Colocando (4.79) en (4.78) explıcitamente, obtenemos para lospolinomios de Laguerre la expresion:
Ln(x) =n∑k=0
Ckn(−1)k(xn)(n−k) (4.81)
Es decir:
Ln(x) = n!− n · n!x+n!
2!(n− 2)!n(n− 1) · · · 3x2 + · · ·+ (−1)nxn (4.82)
De la expresion (4.82) se ve que los polinomios de Laguerre contienen todas las potencias de xhasta el grado n y se destacan los coeficientes:
a0 = n!, an = (−1)n (4.83)
Calculemos algunos polinomios de Laguerre. Tenemos:
L0(x) = 1 (4.84)
L1(x) = 1− x (4.85)
L2(x) = 2− 4x+ x2 (4.86)
L3(x) = 6− 18x+ 9x2 − x3 (4.87)
L4(x) = 24− 96x+ 72x2 − 16x3 + x4 (4.88)
L5(x) = 120− 600x+ 600x2 − 200x3 + 25x4 − x5 (4.89)
Polinomios de Hermite y Laguerre 153
4.2.2 Problema de frontera de los polinomios de Laguerre
Introduzcamos las siguientes notaciones:
u = z(n) (4.90)
z = xne−x (4.91)
Derivemos (4.91). Como resultado obtenemos la identidad:
xz′ + (x− n)z ≡ 0 (4.92)
Derivando una vez la identidad (4.92), obtenemos:
xz′′ + (x− n+ 1)z′ + z ≡ 0 (4.93)
Derivando (4.93), es decir, derivando dos veces (4.92), obtenemos:
xz′′′ + (x− n+ 2)z′′ + 2z′ ≡ 0 (4.94)
Derivando tres veces (4.92) se obtiene:
xz(4) + (x− n+ 3)z′′′ + 3z′′ ≡ 0 (4.95)
Por consiguiente, al derivar k veces la identidad (4.92) queda:
x(k+1) + (x− n+ k)z(k) + kz(k−1) ≡ 0 (4.96)
Hagamos k = n+ 1 en (4.96). Entonces, teniendo en cuenta (4.90) se obtiene:
xu′′ + (x+ 1)u′ + (n+ 1)u ≡ 0 (4.97)
Ahora bien, de (4.78), (4.90) y (4.91) concluimos que:
u ≡ e−xLn(x) (4.98)
Por lo tanto:

154 Jose Marın Antuna
u′ = e−xL′n(x)− e−xLn(x) (4.99)
u′′ = e−xL′′n(x)− 2e−xL′n(x) + e−xLn(x) (4.100)
Colocando (4.98), (4.99) y (4.100) en (4.97) y realizando simples operaciones, queda:
xL′′n + (1− x)L′n + nLn ≡ 0 (4.101)
Por consiguiente, concluimos que los polinomios de Laguerre son soluciones de la ecuaciondiferencial
xy′′ + (1− x)y′ + λy = 0, ∀λ = n (4.102)
Si multiplicamos por e−x, la ecuacion (4.102) puede ser escrita como
d
dx[xe−xy′] + λe−xy = 0 (4.103)
La ecuacion (4.103) es un caso particular de la ecuacion generatriz de las funciones especialescon k(x) = xe−x, q(x) = 0, p(x) = e−x. Es de notar que k(x) = 0 para x = 0 y para x→∞. Porlo tanto, la ecuacion (4.103) sera soluble en el semieje 0 < x <∞ y los polinomios de Laguerrecorresponderan a determinadas condiciones de frontera a imponer para x = 0 y para x → ∞.Dichas condiciones de frontera nos permiten establecer como autofunciones los polinomios deLaguerre correspondientes a los autovalores λ = n y surgen del problema fısico que conduce ala ecuacion de Laguerre.
Debido al interes que para la Fısica tiene, procederemos a plantear y resolver el problemade frontera de los polinomios de Laguerre y a obtener la solucion por el conocido metodo debusqueda de la solucion por medio de series de potencias. Las condiciones que surgen de laFısica conducen a la exigencia de que la solucion de la ecuacion (4.103) debe ser acotada parax = 0 y crecer para x → ∞ con rapidez no mayor que una potencia finita de x. Es decir, queel problema de frontera se plantea en los siguientes terminos:
d
dx[xe−xy′] + λe−xy = 0, ∀0 < x <∞
|y(0)| < ∞ (4.104)
y ∼ xn, ∀x→∞
A fin de resolver el problema (4.104) proponemos la solucion en la forma:
Polinomios de Hermite y Laguerre 155
y(x) =∞∑k=0
akxk (4.105)
Entonces:
y′(x) =∞∑k=1
kakxk−1, y′′(x) =
∞∑k=2
k(k − 1)akxk−2 (4.106)
Colocando (4.105) y (4.106) en la ecuacion del problema (4.104), se obtiene:
x
∞∑k=2
k(k − 1)akxk−2 + (1− x)
∞∑k=1
kakxk−1 + λ
∞∑k=0
akxk = 0 (4.107)
Es decir:
∞∑k=1
k(k − 1)akxk−1 +
∞∑k=0
kakxk−1 −
∞∑k=1
kakxk +
∞∑k=0
λakxk = 0 (4.108)
Haciendo en la primera y segunda sumatoria de (4.108) la sustitucion de k−1 por k, obtenemos:
∞∑k=1
(k + 1)kak−1xk +
∞∑k=0
(k + 1)ak+1xk −
∞∑k=1
kakxk +
∞∑k=0
λakxk = 0 (4.109)
En (4.109) la primera y la tercera sumatoria pueden comenzarse desde k = 0, ya que con ellosolo se anadirıa un cero a la expresion. Por consiguiente, de (4.109) obtenemos, despues deagrupar:
∞∑k=0
[(k + 1)kak−1 + (k + 1)ak+1 − kak + λak]xk = 0 (4.110)
En virtud de la independencia lineal de las potencias de x, de (4.110) concluimos que:
ak+1[(k + 1)(k + 1)]− ak[k − λ] = 0 (4.111)
de donde obtenemos una formula recurrente para el calculo de los coeficientes ak:
ak+1 =k − λ
(k + 1)2ak (4.112)
156 Jose Marın Antuna
De (4.112) se ve que todos los coeficientes de la solucion propuesta vienen expresados en funcionde a0, que es arbitrario. La arbitrariedad de a0 no nos debe asustar, ya que, como la ecuacion(4.103) es homogenea, su solucion, multiplicada por cualquier constante, sigue siendo solucion.Mas adelante escogeremos el coeficiente arbitrario a0 de manera conveniente. La solucionobtenida cumple con el requisito del problema (4.104) en x = 0. Para que cumpla con lacondicion de que crezca como xn para x → ∞ tenemos que exigir que la serie se corte en unnumero n fijo. Ello se logra tomando
λ = n (4.113)
que seran, por tanto, los autovalores del problema (4.104). De esta manera, la solucion (4.105)queda en forma de un polinomio de grado n:
y(x) =n∑k=0
akxk = a0 + a1x+ a2x
2 + · · ·+ anxn (4.114)
Analicemos mas detalladamente los coeficientes. De (4.112) tenemos:
a1 = −λa0 (4.115)
a2 =1− λ
22a1 =
(1− λ)(−λ)
22a0 (4.116)
a3 =(2− λ)(1− λ)(−λ)
3222a0 (4.117)
a4 =(3− λ)(2− λ)(1− λ)(−λ)
423222a0 (4.118)
...........................................................................
an =(n− 1− λ)(n− 2− λ) · · · (3− λ)(2− λ)(1− λ)(−λ)
n2(n− 1)2 · · · 423222a0 =
=(−1)n1 · 2 · · · (n− 3)(n− 2)(n− 1)n
(n!)2a0 ≡ (−1)n
a0
n!(4.119)
donde hemos tenido en cuenta (4.113). Con el fin de que la solucion polinomial (4.114) coincidacon los polinomios de Laguerre anteriormente definidos, elegimos el coeficiente arbitrario a0 =n!. Entonces, de (4.119) se ve que an = (−1)n. Ası, de acuerdo con (4.83), los polinomios(4.114) solucion del problema (4.104) seran los mismos polinomios de Laguerre dados por (4.78)y (4.81), como los coeficientes del desarrollo de la funcion generatriz en serie de potencias.
Polinomios de Hermite y Laguerre 157
Notese que, en virtud de que la ecuacion del problema (4.104) es un caso particular de laecuacion generatriz de las funciones especiales, los polinomios de Laguerre seran ortogonales en(0,∞) con peso e−x, es decir:
∫ ∞
0
Ln(x)Lm(x)e−xdx =‖ Ln ‖2 δnm (4.120)
donde el cuadrado de la norma de los polinomios de Laguerre es:
Nn ≡‖ Ln ‖2=
∫ ∞
0
L2n(x)e
−xdx (4.121)
Igualmente, podemos afirmar que tiene lugar el teorema del desarrollo: cualquier funcion con-tinua con segunda derivada continua en (0,∞), acotada en x = 0, admite un desarrollo en seriede polinomios de Laguerre:
f(x) =∞∑n=0
fnLn(x) (4.122)
convergente absoluta y uniformemente en (0,∞). Los coeficientes fn del desarrollo vienen dadospor:
fn =1
‖ Ln ‖2
∫ ∞
0
f(x)Ln(x)e−xdx (4.123)
4.2.3 Norma de los polinomios de Laguerre
Calculemos el cuadrado de la norma (4.121) de los polinomios de Laguerre. Tenemos que,colocando la formula diferencial (4.78) e integrando por partes:
Nn =
∫ ∞
0
L2n(x)e
−xdx =
∫ ∞
0
Ln(x)ex d
n
dxn[xne−x]e−xdx =
=
∫ ∞
0
Ln(x)dn
dxn[xne−x]dx =
dn−1
dxn−1[xne−x]|∞0 +
+(−1)
∫ ∞
0
L′n(x)dn−1
dxn−1[xne−x]dx (4.124)
El primer termino a la derecha de (4.124) es cero, evidentemente. Integrando de nuevo porpartes:
158 Jose Marın Antuna
Nn = (−1)L′n(x)dn−2
dxn−2[xne−x]|∞0 + (−1)2
∫ ∞
0
L′′n(x)dn−2
dxn−2[xne−x]dx (4.125)
En (4.125) el primer termino de nuevo es cero. Al integrar n veces por partes, se obtiene:
Nn = (−1)n∫ ∞
0
L(n)n (x)xne−xdx = (−1)n(−1)nn!Γ(n+ 1) = (n!)2 (4.126)
donde hemos tenido en cuenta que an = (−1)n y que la enesima derivada del polinomio es,
simplemente, L(n)n (x) = ann!. Ademas, de acuerdo con la definicion de la funcion gamma de
Euler:
∫ ∞
0
xne−xdx ≡ Γ(n+ 1) = n! (4.127)
ya que n es entero. Por consiguiente, el cuadrado de la norma del polinomio de Laguerre Ln(x)queda de la forma:
Nn ≡‖ Ln ‖2=
∫ ∞
0
L2n(x)e
−xdx = (n!)2 (4.128)
Con la norma obtenida podemos aplicar la formula (4.123) del calculo de los coeficientes deldesarrollo (4.122) de una funcion en serie de polinomios de Laguerre.
En la Fısica aparecen unos polinomios mas generales que los estudiados en este epıgrafe y queveremos a continuacion.
4.2.4 Polinomios generalizados de Laguerre
Al resolver el problema del atomo de hidrogeno en la Mecanica Cuantica se obtiene, para laparte radial de la solucion, una ecuacion algo diferente a la ecuacion (4.103). En dicho problemase obtiene la ecuacion diferencial
d
dx[xs+1e−xy′] + λxse−xy = 0 (4.129)
cuya solucion se busca en el intervalo (0,∞) bajo la condicion de que la solucion sea acotada enx = 0 y crezca para x→∞ como una potencia finita de x. En (4.129) s ≥ 0 es cierto numero.La ecuacion (4.129) se conoce con el nombre de ecuacion generalizada de Laguerre. Noteseque para s = 0 esta ecuacion coincide con la ecuacion de Laguerre (4.103).
La expresion

Polinomios de Hermite y Laguerre 159
ψs(x, ξ) =e−
xξ1−ξ
(1− ξ)s+1(4.130)
se llama funcion generatriz de los polinomios generalizados de Laguerre, pues estos sedefinen como los coeficientes de su desarrollo en serie de potencias de ξ:
ψs(x, ξ) =∞∑n=0
Qsn(x)
ξn
n!(4.131)
donde Qsn(x) son los polinomios generalizados de Laguerre. Con vistas a hallar una
formula diferencial para estos polinomios, prolonguemos al plano complejo ζ = ξ+ iη la funcion(4.130). Entonces, para los coeficientes del desarollo (4.131) tendremos, de acuerdo con la teorıade las series de Taylor de la teorıa de funciones de variable compleja:
Qsn(x) =
n!
2πi
∫C
e−xζ
1−ζ
(1− ζ)s+1
dζ
ζn+1(4.132)
donde C es un contorno cerrado en el plano complejo ζ que rodea al punto ζ = 0. Hagamos elcambio de variables (4.76). Entonces de (4.132) obtenemos:
Qsn(x) = exx−s
n!
2πi
∫C1
e−zzn+sdz
(z − x)n+1= exx−s
dn
dzn[e−zzn+s]|z=x (4.133)
donde C1 es un contorno en el plano complejo z que rodea al punto z = x. Ası pues, finalmente,obtenemos para los polinomios generalizados de Laguerre la formula diferencial:
Qsn(x) = exx−s
dn
dxn[e−xxn+s] (4.134)
Si tenemos en cuenta el hecho de que, de acuerdo con la formula de Leibnitz para la enesimaderivada del producto de funciones
[xn+se−x](n) =n∑k=0
Ckn(x
n+s)(n−k)(e−x)(k) ≡n∑k=0
Ckn(−1)k(xn+s)(n−k) (4.135)
donde Ckn vienen dados por (4.80), entonces, no es difıcil ver que los polinomios generalizados
de Laguerre (4.134) se expresan como:
Qsn(x) = x−s
n∑k=0
Ckn(−1)k(xn+s)(n−k) ≡ Γ(n+ s+ 1)
Γ(s+ 1)+ · · ·+ (−1)nxn (4.136)

160 Jose Marın Antuna
Es decir, son polinomios de grado n cuyos coeficientes inicial y final son:
a0 =Γ(n+ s+ 1)
Γ(s+ 1), an = (−1)n (4.137)
Notese que los polinomios generalizados de Laguerre se transforman en los polinomios de La-guerre estudiados al inicio de este epıgrafe para s = 0, es decir:
Q0n(x) ≡ Ln(x) (4.138)
Igualmente se ve que la funcion generatriz (4.130) se convierte para s = 0 en la funcion (4.73)y que la ecuacion (4.129) se reduce a la ecuacion (4.103) para s = 0. Por consiguiente, esde esperar que los polinomios generalizados de Laguerre (4.134) sean solucion de la ecuacion(4.129) para λ = n. Comprobemos este hecho de la siguiente manera. Introduzcamos lasnotaciones:
z = e−xxn+s, u = z(n), y = Qsn(x) (4.139)
Derivando la funcion z respecto a x, obtenemos la siguiente identidad:
xz′ + (x− n− s)z ≡ 0 (4.140)
Es facil comprobar que, al derivar k veces la identidad (4.140), se obtiene:
xz(k+1) + (x− n− s+ k)x(k) + kz(k−1 ≡ 0 (4.141)
Si en (4.141) hacemos k = n+ 1, entonces, teniendo en cuenta (4.139), obtenemos:
xu′′ + (x− s+ 1)u′ + (n+ 1)u ≡ 0 (4.142)
Pero de (4.134) y (4.139) tenemos que
u = e−xxsy (4.143)
y, por lo tanto:
u′ = xse−x[y′ −
(1− s
x
)y]
(4.144)
u′′ = xse−x[y′′ + 2
( sx− 1)y′ +
(1− 2s
x− s
x2+s2
x2
)y
](4.145)
Polinomios de Hermite y Laguerre 161
Colocando (4.143), (4.144) y (4.145) en (4.141), despues de simples operaciones algebraicas, seobtiene:
xy′′ + (s− x+ 1)y′ + ny ≡ 0 (4.146)
Multiplicando (4.146) por xse−x, es facil obtener:
d
dx[xs+1e−xy′] + λxse−xy ≡ 0, ∀λ = n (4.147)
con lo que queda demostrado que, efectivamente, los polinomios generalizados de Laguerre sonlas autofunciones acotadas en x = 0 y que crecen como una potencia finita de x para x → ∞de la ecuacion (4.129), correspondientes a los autovalores λ = n.
La ecuacion (4.129) es un caso particular de la ecuacion generatriz de las funciones especialescon k(x) = xs+1e−x, q(x) = 0, p(x) = xse−x. Por consiguiente, podemos afirmar que lospolinomios generalizados de Laguerre son ortogonales en el intervalo (0,∞) con peso p(x) paradistintos autovalores. Es decir:
∫ ∞
0
Qsn(x)Q
sm(x)xse−xdx =‖ Qs
n ‖2 δnm (4.148)
donde el cuadrado de la norma es:
‖ Qsn ‖2≡ N s
n =
∫ ∞
0
[Qsn(x)]
2xse−xdx (4.149)
Ademas, tiene lugar el teorema del desarrollo: cualquier funcion continua, dos veces diferencia-ble en (0,∞) y acotada en x = 0 admite el desarrollo
f(x) =∞∑n=0
fnQsn(x) (4.150)
convergente absoluta y uniformemente. Los coeficientes del desarrollo vienen dados por laexpresion
fn =1
‖ Qsn ‖2
∫ ∞
0
f(x)Qsn(x)x
se−xdx (4.151)
El cuadrado de la norma de los polinomios generalizados de Laguerre se calcula facilmente deforma similar a como se hizo en el caso de los polinomios de Laguerre. Sustituyendo en laformula (4.149) uno de los polinomios por la formula diferencial (4.134) e integrando n vecespor partes se llega a:
162 Jose Marın Antuna
‖ Qsn ‖2≡ N s
n = n!
∫ ∞
0
xn+se−xdx = n!Γ(n+ s+ 1) (4.152)
donde hemos tenido en cuenta que, segun (4.136)
dn
dxn[Qs
n(x)] = (−1)nn! (4.153)
y que la funcion gamma de Euler es
Γ(s) =
∫ ∞
0
xs−1e−xdx (4.154)
Ası pues, puede apreciarse que la norma de los polinomios generalizados de Laguerre, dada por(4.152) se convierte en la norma de los polinomios de Laguerre (4.128) para s=0.
4.2.5 Problema del atomo de hidrogeno en la Mecanica Cuantica
Por el interes que desde el punto de vista fısico tiene, veremos, a modo de aplicacion de lospolinomios de Laguerre estudiados en este epıgrafe, la solucion del problema del atomo dehidrogeno. Este constituye uno de los problemas mas simples de la Mecanica Cuantica yfue una de las confirmaciones exitosas fundamentales de la misma, ya que permitio dar unaexplicacion teorica correcta a los espectros del hidrogeno conocidos desde el punto de vistaexperimental con anterioridad. De la misma forma permitio explicar teoricamente los espectrosde todos los atomos hidrogenoides (con un electron de valencia en la ultima capa) como es, porejemplo, el sodio.
El problema en sı, desde el punto de vista matematico, consiste en la generalizacion cuanticadel problema clasico de Kepler, uno de cuyos ejemplos es el movimiento de un planeta alrededordel Sol y, ademas, tiene interes tambien por el hecho de ser uno de los pocos problemas que,junto con el del oscilador cuantico visto en el epıgrafe anterior, puede ser resuelto de formaexacta.
Un atomo de hidrogeno esta formado por un electron que se mueve en el campo electrostaticode su nucleo, formado por un proton. Por ello, la energıa potencial del mismo sera,
U(x, y, z) = −e2
r(4.155)
donde r es la distancia del electron al nucleo, −e es la carga del electron y e es la carga delnucleo del atomo. Por consiguiente, la ecuacion de Schrodinger estacionaria que describe elmovimiento del electron en este potencial sera:

Polinomios de Hermite y Laguerre 163
∇2ψ +2m0
~2
[E +
e2
r
]ψ = 0 (4.156)
donde m0 es la masa del electron, ~ la constante de Planck y E la energıa total del electron.La funcion de onda ψ depende de las coordenadas espaciales del electron y su interpretacionfısica es que su modulo al cuadrado es una densidad probabilıstica, es decir, la probabilidad deencontrar al electron en el elemento de volumen. Por ello, impondremos que sea una funcionnormalizada, o sea, que cumpla que
∫ ∫ ∫ ∞
−∞|ψ|2dxdydz = 1 (4.157)
Nuestro objetivo sera hallar los valores de la energıa E (autovalores) para los cuales la ecuacion(4.156) tiene solucion continua en todo el espacio y que tienda a cero para r →∞.
Introduzcamos un sistema de coordenadas esfericas con centro en el nucleo, al que considera-remos fijo. Es conveniente aclarar que ya esto constituye cierta aproximacion, pues, hablandocon rigor, en realidad el punto que se mantiene fijo es el centro de masa del sistema electron-proton. Sin embargo, el hecho conocido de que la masa del proton es 1840 veces mayor quela del electron, nos conduce a la conclusion de que el centro de masa del sistema electron-proton debe encontrarse a una distancia 1840 veces menor del proton que del electron. Porconsiguiente, la aproximacion hecha es aceptable, aunque debemos recalcar que las correccionesque introduce en la solucion la consideracion del movimiento del proton se hallan con relativasencillez y explican la llamada ”estructura fina” del espectro del atomo de hidrogeno.
Ası las cosas, en el sistema de coordenadas esfericas con centro en el nucleo fijo, la ecuacion deSchrodinger (4.156) toma la forma:
1
r2
∂
∂r
(r2∂ψ
∂r
)+
1
r2∇2θϕψ +
2m0
r2
[E +
e2
r
]ψ = 0 (4.158)
donde ∇2θϕ es la parte angular del laplaciano en coordenadas esfericas que definimos en la
formula (3.157). Para resolver la ecuacion (4.158) propondremos la solucion en la forma:
ψ(r, θ, ϕ) = P (r)Y (θ, ϕ) (4.159)
Al estudiar el problema de una partıcula cuantica en un campo de simetrıa central pudimospercatarnos de que para la funcion Y (θ, ϕ) se obtiene el problema (3.159), cuyas soluciones sonlos llamados armonicos esfericos
Ylm(θ, ϕ) = Alm cosmϕ+Blm sinmϕP (m)l (cos θ) (4.160)
correspondientes a los autovalores

164 Jose Marın Antuna
λ = l(l + 1), ∀m = 0,±1,±2, · · · ± l (4.161)
de manera que para ellos se cumple la identidad
∇2θϕYlm ≡ −l(l + 1)Ylm (4.162)
Aquı hemos utilizado l en lugar de n, como hicimos anteriormente, ya que en Mecanica Cuanticase acostumbra a designar por n a otro numero cuantico llamado numero cuantico principal.Colocando (4.162) en (4.158), obtenemos para la funcion radial P (r) la ecuacion:
d2P
dr2+
2
r
dP
dr+
[2m0
~2
(E +
e2
r
)− l(l + 1)
r2
]P = 0 (4.163)
Introduzcamos el concepto de energıa potencial efectiva del electron por la expresion:
Uef = −e2
r+
~2l(l + 1)
2m0r2(4.164)
El primer sumando en (4.164) esta dado por la interaccion coulombiana entre el electron yel proton y el segundo sumando viene dado por las fuerzas centrıfugas. En Mecanica Clasicacomunmente se introduce este mismo concepto de potencial efectivo, solo que en el segundosumando aparece en el numerador el cuadrado del momento angular en lugar de la expresioncuantica ~l(l + 1). El grafico de esta energıa potencial efectiva puede verse en la figura 4.1.
De la figura 4.1 se aprecia que, si la energıa total del electron es negativa (E < 0), entonces, sumovimiento tendra lugar en la region que esta limitada por dos barreras potenciales con radiomınimo rmin y radio maximo rmax (el analogo clasico darıa orbitas elıpticas); en lınea curvaaparece el grafico aproximado que tendrıa una de las soluciones de la ecuacion (4.163). Productode ello, el espectro energetico, como veremos mas adelante, sera discreto. Si E ≥ 0, se apreciade la figura 4.1 que la barrera de la derecha no existe; por consiguiente, la posicion del electronpara r → ∞ no tiene cota. En el analogo clasico E > 0 darıa orbitas hiperbolicas y E = 0darıa una orbita parabolica. La solucion para E ≥ 0 nos darıa un espectro energetico continuo;sin embargo, no vamos a detenernos en su estudio, ya que para nosotros tiene interes en estemomento solamente el caso de orbitas cerradas (E < 0), que son las unicas que, logicamente,corresponden a la existencia de atomos estables. Introduzcamos por unidad de longitud lamagnitud
a =~2
m0e2= 0.529 · 10−8cm. (4.165)
que se conoce con el nombre de radio de Bohr y por unidad de energıa la magnitud:
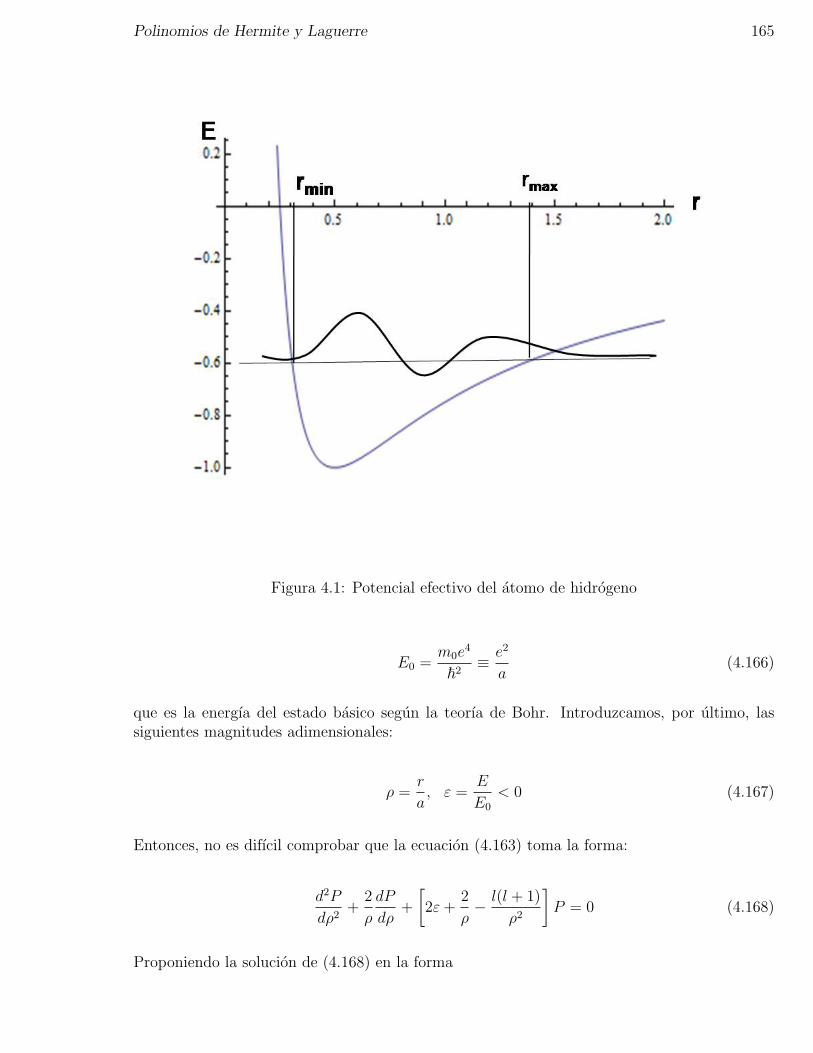
Polinomios de Hermite y Laguerre 165
Figura 4.1: Potencial efectivo del atomo de hidrogeno
E0 =m0e
4
~2≡ e2
a(4.166)
que es la energıa del estado basico segun la teorıa de Bohr. Introduzcamos, por ultimo, lassiguientes magnitudes adimensionales:
ρ =r
a, ε =
E
E0
< 0 (4.167)
Entonces, no es difıcil comprobar que la ecuacion (4.163) toma la forma:
d2P
dρ2+
2
ρ
dP
dρ+
[2ε+
2
ρ− l(l + 1)
ρ2
]P = 0 (4.168)
Proponiendo la solucion de (4.168) en la forma

166 Jose Marın Antuna
P (ρ) =y(ρ)√ρ
(4.169)
no es difıcil obtener para la funcion y(ρ) la ecuacion:
d2y
dρ2+
1
ρ
dy
dρ+
[2ε+
2
ρ− s2
4ρ2
]y = 0 (4.170)
donde hemos llamado
s = 2l + 1 (4.171)
Teniendo en cuenta que ε < 0, introduzcamos como variable real independiente la magnitud:
x = ρ√−8ε (4.172)
Entonces, la ecuacion (4.170) adopta la forma:
xd2y
dx2+dy
dx−(x
4+s2
4x
)y + λy = 0 (4.173)
donde hemos llamado
λ =1√−2ε
(4.174)
Para hallar la solucion de la ecuacion (4.173) observemos su comportamiento asintotico. No esdifıcil percatarse de que para x muy grande (x→∞) la ecuacion (4.173) adopta la forma
d2y∞dx2
− 1
4y∞ = 0 (4.175)
cuya unica solucion acotada es
y∞ = e−x2 (4.176)
Por otro lado, para x muy pequenas (x→ 0) la ecuacion (4.173) es aproximadamente igual a:
d2y0
dx2+
1
x
dy0
dx− s2
4x2y0 = 0 (4.177)

Polinomios de Hermite y Laguerre 167
que no es mas que una ecuacion de Euler cuya solucion acotada en x = 0 es
y0 = xs/2 (4.178)
En virtud del analisis efectuado, la solucion de la ecuacion (4.173) para toda x la buscaremosen la forma
y(x) = y0y∞w ≡ xs/2e−x2w (4.179)
donde w(x) debera ser una funcion acotada en x = 0 y que crezca como una potencia finita dex cuando x→∞ para que y(x) sea acotada en todo el eje. De (4.179) tenemos:
y′ = xs/2e−x2
[w′ + w
(s
2x− 1
2
)](4.180)
y′′ = xs/2e−x2
[w′′ + w′
( sx− 1)
+ w
(1
4− 2
2x− s
2x2+
s2
4x2
)](4.181)
Colocando (4.179), (4.180) y (4.181) en (4.173), obtenemos, despues de simples operacionesalgebraicas, para w(x) la ecuacion:
xw′′ + (s− x+ 1)w′ + λ′w = 0 (4.182)
donde hemos llamado
λ′ = λ− s+ 1
2(4.183)
La ecuacion (4.182) no es otra cosa que la ecuacion de los polinomios generalizados de Laguerre(4.147). Su solucion con la asintotica requerida viene dada, segun vimos, por los polinomiosgeneralizados de Laguerre:
w(x) = Qsn(x) (4.184)
a la cual le corresponden los autovalores:
λ′ = nr, ∀nr = 0, 1, 2, ... (4.185)
Es conveniente aclarar que al numero entero (4.185) le hemos puesto el subındice r debido aque corresponde a la solucion de la parte radial de la solucion de la ecuacion de Schrodinger
168 Jose Marın Antuna
(4.158). De acuerdo con (4.183) y (4.171) obtenemos para el autovalor λ dado por la expresion(4.174):
λ ≡ 1√−2ε
= nr + l + 1 = n, ∀n = 1, 2, 3, ... (4.186)
La igualdad al numero entero n a la derecha de (4.186) esta dada por el hecho de que nr y lson, respectivamente, numeros enteros. En Mecanica Cuantica se acostumbra a denominar alnumero n, numero cuantico principal, en tanto que nr se llama numero cuantico radialy l numero cuantico orbital.
Teniendo en cuenta (4.167), (4.169), (4.172), (4.179) y (4.184), no es difıcil obtener, finalmente,para la funcion de onda (4.159) del electron en el atomo de hidrogeno la expresion:
ψnlm(r, θ, ϕ) =1
(na)3/2
√4
n(n− l − 1)!(n+ 1)!
√(2l + 1)!(l −m)!
2εmπ(l +m)!·
·(
2r
na
)le−
r2
naQ2l+1n−l−1
(2r
na
)Ylm(θ, ϕ) (4.187)
donde
εm = 1, ∀m 6= 0; εm = 2, ∀m = 0 (4.188)
y donde, para hallar el coeficiente delante de (4.187), se tuvo en cuenta la condicion (4.157) ylas expresiones de las normas de los polinomios generalizados de Laguerre, de los polinomiosasociados de Legendre y de las funciones trigonometricas. El modulo al cuadrado de la funcion(4.187) hallada da la probabilidad de encontrar al electron en un elemento de volumen en elpunto (r, θ, ϕ) del espacio. El numero
m = 0,±1,±2, ...,±l (4.189)
que aparece como resultado de la separacion de variables para obtener los armonicos esfericosasociado a la variable angular ϕ recibe el nombre de numero cuantico magnetico. No esdifıcil percatarse de que para un valor fijo dado del numero cuantico principal n y como elnumero cuantico radial nr siempre es positivo, el numero cuantico orbital l no puede ser mayorque n − 1. Es decir, para un valor dado del numero cuantico principal n, el numero cuanticoorbital puede tomar n valores (l = 0, 1, 2, ..., n−1); ademas, a cada uno de esos valores posiblesde l le corresponden 2l + 1 valores del numero cuantico magnetico m. Por consiguiente, comoel numero cuantico principal n -de acuerdo con (4.186)- determina un nivel energetico En delelectron en el atomo, resulta que para un valor dado de la energıa En del electron corresponden
Polinomios de Hermite y Laguerre 169
n−1∑l=0
(2l + 1) = 1 + 3 + 5 + · · ·+ (2n− 1) ≡ n2 (4.190)
autofunciones (4.187) diferentes, lo que significa que cada nivel energetico es n2 veces degene-rado. Los autovalores energeticos de los posibles estados del electron en el atomo de hidrogeno,de acuerdo con (4.186) y teniendo en cuenta (4.166), vendran dados por:
En = −m0e4
2~2n2, ∀n = 1, 2, 3, ... (4.191)
Estos resultados permiten dar una explicacion rigurosa a las diferentes lıneas espectrales quese observan para el atomo de hidrogeno. Como la energıa y la frecuencia estan relacionadaspor la expresion E = −hν, para las frecuencias correspondientes a estos niveles energeticosobtenemos la expresion
νn =m0e
4
2~2n2h=R
n2(4.192)
donde
R =m0e
4
2~2h(4.193)
es la constante de Rydberg. La frecuencia νnn1 que puede observarse en una lınea espectralcorresponde a una transicion del electron del estado de energıa En al estado de energıa En1 .Dicha frecuencia, que es la del cuanto de luz emitido por el atomo al realizar el electron latransicion de un estado a otro, sera:
νnn1 = R
[1
n21
− 1
n2
](4.194)
Si en (4.194) tomamos n1 = 1, entonces para n = 2, 3, ... obtenemos la conocida serie de Lyman:
νn1 = R
[1− 1
n2
](4.195)
Para n1 = 2, n = 3, 4, ... se obtiene la serie de Balmer:
νn2 = R
[1
4− 1
n2
](4.196)
Para n1 = 3, n = 4, 5, ... se obtiene la serie de Paschen:

170 Jose Marın Antuna
νn3 = R
[1
9− 1
n2
](4.197)
Estos resultados habıan sido establecidos experimentalmente antes de la construccion de lateorıa cuantica del atomo de hidrogeno. La serie de Lyman se encuentra en la parte ultravioletadel espectro, la serie de Balmer en la parte del espectro visible y la serie de Paschen en la parteinfrarroja del espectro. La teorıa cuantica del atomo de hidrogeno permitio dar una explicacionteorica consecuente a estos resultados experimentales.
Capıtulo 5
Funciones Hipergeometricas
En algunos problemas fısicos aparece una ecuacion que fue tratada por primera vez por Gaussy a cuyo estudio y solucion dedicaremos el presente capıtulo.
5.1 Ecuacion hipergeometrica. Solucion
Estudiaremos en el presente epıgrafe la ecuacion diferencial de segundo orden con coeficientesvariables
x(1− x)d2y
dx2+ [γ − (1 + α+ β)x]
dy
dx− αβy = 0 (5.1)
donde α, β y γ son ciertas constantes. La ecuacion (5.1) recibe el nombre de ecuacion hiper-geometrica de Gauss. Para ella los puntos x = 0 y x = 1 son puntos singulares regulares,por lo que en la busqueda de la solucion en el entorno de ambos puntos debemos proponerseries de potencias generalizadas, de acuerdo con la teorıa desarrollada anteriormente.
5.1.1 Solucion en el entorno de x = 0. Funcion hipergeometrica
Propongamos la solucion de la ecuacion (5.1) en el entorno del punto x = 0 en la forma:
y(x) =∞∑n=0
anxn+σ (5.2)
Entonces para las derivadas tendremos:
171

172 Jose Marın Antuna
y′ =∞∑n=0
(n+ σ)anxn+σ−1, y′′ =
∞∑n=0
(n+ σ)(n+ σ − 1)anxn+σ−2 (5.3)
por lo que, al sustituir (5.2) y (5.3) en la ecuacion (5.1), obtenemos:
x(1− x)∞∑n=0
(n+ σ)(n+ σ − 1)anxn+σ−2 + [γ − (1 + α+ β)x]
∞∑n=0
(n+ σ)anxn+σ−1 −
− αβ∞∑n=0
anxn+σ = 0 (5.4)
Es decir:
∞∑n=0
[(n+ σ)(n+ σ − 1) + γ(n+ σ)]anxn+σ−1 −
−∞∑n=0
[(n+ σ)(n+ σ − 1)− (1 + α+ β)(n+ σ) + αβ]anxn+σ = 0 (5.5)
A fin de llevar toda la ecuacion (5.5) a terminos de iguales potencias de x, sustituyamos en laprimera suma n− 1 por n. Entonces tendremos:
∞∑n=−1
[(n+ σ + 1)(n+ σ) + γ(n+ σ + 1)]an+1xn+σ −
−∞∑n=0
[(n+ σ)(n+ σ − 1)− (1 + α+ β)(n+ σ) + αβ]anxn+σ = 0 (5.6)
Es decir:
[σ(σ − 1) + γσ]a0xσ−1 +
∞∑n=0
[(n+ σ + 1)(n+ σ) + γ(n+ σ + 1)]an+1 −
− [(n+ σ)(n+ σ − 1)− (1 + α+ β)(n+ σ) + αβ]anxn+σ = 0 (5.7)
En virtud de la independencia lineal de las potencias de x, de (5.7) concluimos que
σ(σ − 1) + γσ ≡ σ(σ − 1 + γ) = 0 (5.8)
Funciones Hipergeometricas 173
ya que tiene que cumplirse que a0 6= 0, pues de (5.7) se ve que an+1 se expresa en terminos dean, por lo que -de ser a0 igual a cero- obtendrıamos an ≡ 0 para toda n y no habrıa solucion.De (5.8) obtenemos dos valores posibles para el parametro σ:
σ1 = 0
σ2 = 1− γ (5.9)
De (5.7) concluimos que:
an+1 =(n+ σ)(n+ σ + α+ β) + αβ
(n+ σ + 1)(n+ σ + γ)an (5.10)
que constituye una formula recurrente para los coeficientes de la serie (5.2). Analicemos estoscoeficientes para los dos valores posibles del parametro σ dados por (5.9).
Sea σ = σ1 = 0. Entonces de (5.10) tenemos:
an+1 =n(n+ α+ β) + αβ
(n+ 1)(n+ γ)an (5.11)
Pero, evidentemente:
n(n+ α+ β) + αβ = n2 + (α+ β)n+ αβ ≡ (n+ α)(n+ β) (5.12)
Colocando (5.12) en (5.11), obtenemos:
an+1 =(n+ α)(n+ β)
(n+ 1)(n+ γ)an (5.13)
Por consiguiente:
an =(n+ α− 1)(n+ β − 1)
n(n+ γ − 1)an−1 (5.14)
..............................................................
a2 =(1 + α)(1 + β)
2(1 + γ)a1 (5.15)
a1 =αβ
γa0 (5.16)
174 Jose Marın Antuna
Sustituyendo (5.16) en (5.15) y ası sucesivamnete hasta sustituir (5.14) en (5.13), obtenemos:
an+1 =(n+ α)(n+ α− 1) · · · (1 + α)α(n+ β)(n+ β − 1) · · · (1 + β)β
(n+ 1)n · · · ·1(n+ γ)(n+ γ − 1) · · · (1 + γ)γa0 (5.17)
Introduzcamos la notacion siguiente:
(α)n =Γ(α+ n)
Γ(α)≡ α(α+ 1) · · · (α+ n− 1) (5.18)
Entonces, podemos escribir (5.17) en forma mas compacta:
an+1 =(α)n+1(β)n+1
(n+ 1)!(γ)n+1
a0 (5.19)
El coeficiente a0 queda, obviamente, indeterminado, pues cualquier solucion de la ecuacionhomogenea (5.1), multiplicada por una constante, sigue siendo solucion. Tomemos, por tanto,a0 = 1. Entonces, sustituyendo en (5.2), obtenemos para σ = 0 la solucion de la ecuacion (5.1)en la forma
F (α, β; γ;x) =∞∑n=0
(α)n(β)n(γ)n
xn
n!(5.20)
La funcion (5.20) es solucion de la ecuacion hipergeometrica (5.1) en el entorno de x = 0 y seconoce con el nombre de funcion hipergeometrica. De la propia definicion queda claro quepara que los coeficientes de la serie (5.20) esten definidos, es necesario que γ 6= 0, γ 6= −n, conn > 0 entero. Aunque desde mediados del siglo XVII se viene empleando el termino de seriehipergeometrica para la serie cuyo enesimo termino es α[α+β][α+2β]...[α+(n− 1)β] (Wallis,1655), todo parece indicar que el empleo actual del termino de serie o funcion hipergeometricaen la forma en que lo hemos definido pertenece a Kummer (1836).
Analicemos el dominio de convergencia de la serie (5.20). Para ello llamemos
cn =(α)n(β)n
(γ)n
xn
n!(5.21)
Entonces, por el criterio de D’Alembert, tendremos:
limn→∞
∣∣∣∣cn+1
cn
∣∣∣∣ = limn→∞
∣∣∣∣ (α)n+1(β)n+1xn+1(γ)nn!
(γ)n+1(n+ 1)!(α)n(β)nxn
∣∣∣∣ =
= limn→∞
∣∣∣∣(n+ α)(n+ β)
(n+ γ)(n+ 1)x
∣∣∣∣ = |x| < 1 (5.22)

Funciones Hipergeometricas 175
Es decir, la serie (5.20) converge absoluta y uniformemente para |x| < 1. Analicemos que ocurrepara x = ±1. Si x = 1, entonces es facil ver que
cncn+1
=(n+ γ)(n+ 1)
(n+ α)(n+ β)=
(1 + 1
n
) (1 + γ
n
)(1 + α
n
) (1 + β
n
) (5.23)
Es obvio que, para n suficientemente grande, α/n y β/n son menores que 1, por lo que, desa-rrollando por la formula de la progresion geometrica, de (5.23) obtenemos:
cncn+1
=
(1 +
1
n
)(1 +
γ
n
)(1− α
n+α2
n2− α3
n3+ ...
)(1− β
n+β2
n2− β3
n3+ ...
)=
= 1 +γ − α− β + 1
n+δnn2
(5.24)
donde δn es acotada: |δn| < A. En virtud del criterio de Gauss, que dice que si, para loselementos de una serie numerica cualquiera
∑un, se puede establecer que
∣∣∣∣ unun+1
∣∣∣∣ = 1 +µ
n+δnnp
(5.25)
entonces la serie converge absolutamente para µ > 1, podemos afirmar que la serie (5.20)converge absolutamente para x = 1 si γ − α− β + 1 > 1, es decir, si
γ − α− β > 0 (5.26)
Para x = −1 tenemos de (5.20) una serie alternante para la que es facil comprobar que
∣∣∣∣ cncn+1
∣∣∣∣ = 1 +γ − α− β + 1
n+δnn2
(5.27)
por lo que, por el criterio de Gauss, podemos afirmar que la serie (5.20) converge absolutamenteen x = −1, tambien, si cumple (5.26). Ası pues, podemos afirmar que la serie (5.20), que definea la funcion hipergeometrica, converge absoluta y uniformemente para |x| ≤ 1 y se debe cumplir(5.26) para x = ±1. La funcion hipergeometrica recibio esa denominacion debido a que es facilconstatar que para α = β = γ = 1 se obtiene la conocida serie geometrica. Efectivamente, deacuerdo con (5.18):
F (1, 1; 1;x) =∞∑n=0
(1)n(1)n(1)n
xn
n!=
∞∑n=0
n!n!
n!
xn
n!=
∞∑n=0
xn (5.28)
Sea, ahora, σ = σ2 = 1− γ. Entonces, de (5.10), obtenemos:

176 Jose Marın Antuna
an+1 =(n+ 1− γ)(n+ 1− γ + α+ β) + αβ
(n+ 2− γ)(n+ 1)an (5.29)
Para el numerador de (5.29) tenemos que:
(n+ 1− γ)(n+ 1− γ + α+ β) + αβ = (n+ 1− γ)2 + (α+ β)(n+ 1− γ) + αβ =
= (n+ α− γ + 1)(n+ β − γ + 1) (5.30)
Es decir, colocando (5.30) en (5.29):
an+1 =(n+ α− γ + 1)(n+ β − γ + 1)
(n+ 1)(n+ 2− γ)an (5.31)
Si introducimos los parametros:
α′ = α− γ + 1
β′ = β − γ + 1 (5.32)
γ′ = 2− γ
entonces, de (5.31), obtenemos:
an+1 =(n+ α′)(n+ β′)
(n+ 1)(n+ γ′)an (5.33)
Comparando (5.33) con (5.13), vemos que los coeficientes en este caso tienen la misma estructuraque en el caso σ = σ1 = 0. Por lo tanto, la solucion que se obtiene para el caso en queσ = σ2 = 1− γ sera, de (5.2):
y =∞∑n=0
(α− γ + 1)n(β − γ + 1)n(2− γ)n
xn+1−γ
n!≡ x1−γF (α− γ + 1, β − γ + 1; 2− γ;x) (5.34)
donde F es la misma funcion hipergeometrica definida por (5.20). Por consiguiente, la soluciongeneral de la ecuacion hipergeometrica (5.1) en el entorno de x = 0 sera la combinacion linealde ambas soluciones, es decir:
y(x) = AF (α, β; γ;x) +Bx1−γF (α− γ + 1, β − γ + 1; 2− γ;x) (5.35)
Funciones Hipergeometricas 177
siempre que 1− γ 6= 0 y 1− γ 6= n entero. Para γ = 1 obtenemos una sola solucion acotada enx = 0:
y(x) = A1F (α, β; 1; x) (5.36)
La segunda solucion linealmente independiente de la ecuacion (5.1) para el caso en que γ = 0o γ = −n no sera tratada aquı, ya que tiene una singularidad en x = 0, por lo que no se utilizaen problemas de Fısica planteados en dominios que contengan el origen.
5.1.2 Solucion en el entorno de x = 1
Para hallar la solucion de la ecuacion (5.1) en el entorno de su otro punto singular regularx = 1, hagamos, simplemente, el cambio de variables:
ξ = 1− x (5.37)
Entonces, teniendo en cuenta que dx = −dξ, dx2 = dξ2, obtenemos de la ecuacion (5.1):
ξ(1− ξ)d2y
dξ2+ [γ − (1 + α+ β)(1− ξ)]
(−dydξ
)− αβy = 0 (5.38)
Es decir:
ξ(1− ξ)d2y
dξ2+ [1 + α+ β − γ − (1 + α+ β)ξ]
dy
dξ− αβy = 0 (5.39)
Por su estructura, la ecuacion (5.39) es igual a (5.1), solo que, en lugar de γ, esta el parametro1 + α+ β − γ. Por consiguiente, podemos afirmar que la solucion de (5.39) sera:
y(ξ) = AF (α, β; 1 + α+ β − γ; ξ) +Bξγ−α−βF (γ − β, γ − α; 1− α− β + γ; ξ) (5.40)
por lo que, sustituyendo (5.37), concluimos que en el entorno del punto x = 1 la solucion generalde la ecuacion hipergeometrica (5.1) sera:
AF (α, β; 1 + α+ β − γ; 1− x) +B(1− x)γ−α−βF (γ − β, γ − α; 1− α− β + γ; 1− x) (5.41)
5.2 Propiedades de las funciones hipergeometricas
Veremos algunas propiedades de utilidad para las funciones hipergeometricas.

178 Jose Marın Antuna
1. Para todo α, β y γ se cumple que
F (α, β; γ; 0) = 1 (5.42)
Demostracion:
De (5.20) es evidente que
F (α, β; γ;x) =(α)0(β)0
(γ)0
+∞∑n=1
(α)n(β)n(γ)n
xn
n!(5.43)
Evaluando (5.43) en x = 0 y teniendo en cuenta que de (5.18) (α)0 = 1, queda au-tomaticamente demostrada la propiedad.
2. Para la derivada de la funcion hipergeometrica se cumple la relacion
d
dxF (α, β; γ;x) =
αβ
γF (α+ 1, β + 1; γ + 1; x) (5.44)
Demostracion:
De acuerdo con (5.20) tenemos que:
d
dxF (α, β; γ;x) ≡ d
dx
∞∑n=0
(α)n(β)n(γ)n
xn
n!=
∞∑n=1
(α)n(β)n(γ)n
xn−1
(n− 1)!=
=∞∑n=0
(α)n+1(β)n+1
(γ)n+1
xn
n!(5.45)
donde hemos llamado n a n− 1. De acuerdo con (5.18) es facil ver que:
(α)n+1 =Γ(α+ n+ 1)
Γ(α)=αΓ(α+ n+ 1)
αΓ(α)= α
Γ(α+ n+ 1)
Γ(α+ 1)= α(α+ 1)n (5.46)
Colocando (5.46) en (5.45), obtenemos:
d
dxF (α, β; γ;x) =
∞∑n=0
α(α+ 1)nβ(β + 1)nγ(γ + 1)n
xn
n!=αβ
γF (α+ 1, β + 1; γ + 1; x) (5.47)
Demostrada la propiedad.
3. La funcion hipergeometrica es simetrica respecto a sus parametros α y β, es decir:
F (α, β; γ;x) = F (β, α; γ;x) (5.48)
Demostracion:
Es evidente a partir de la propia definicion (5.20) de la funcion.

Funciones Hipergeometricas 179
4. Tiene lugar la siguiente ecuacion:
F
(−n, n+ 1; 1;
1− x
2
)= Pn(x) (5.49)
donde Pn(x) son los polinomios de Legendre de grado n.
Demostracion:
Escribamos la ecuacion hipergeometrica para la variable ξ = 1−x2
y los parametros α = −n,β = n+ 1 y γ = 1. La ecuacion es:
ξ(1− ξ)y′′ + [γ − (1 + α+ β)ξ]y′ − αβy = 0 (5.50)
Teniendo en cuenta que dξ = −dx/2, de (5.50) obtenemos:
1− x
2
1 + x
24y′′ +
[1− (1− n+ n+ 1)
1− x
2
](−2y′) + (−n)(n+ 1)y = 0 (5.51)
Es decir:
(1− x2)y′′ −[1− 2
1− x
2
]2y′ + n(n+ 1)y = 0 (5.52)
O sea:
(1− x2)y′′ − 2xy′ + n(n+ 1)y = 0 (5.53)
La ecuacion (5.53) no es mas que la ecuacion de Legendre con λ = n(n+1) cuyas solucionesson los polinomios Pn(x). Es decir, efectivamente, se cumple (5.49).
Demostrada la propiedad.
Esta propiedad nos permite ver a los polinomios de Legendre como un caso particular delas funciones hipergeometricas lo que, en ocasiones, puede resultar de utilidad.
Es conveniente destacar que, para α = −n (entero negativo), la funcion hipergeometrica,efectivamente, se convierte en un polinomio de grado n, ya que si escribimos la funcionen la forma
F (α, β; γ;x) =∞∑k=0
(α)k(β)k(γ)k
xk
k!(5.54)
donde, como sabemos,
(α)k =Γ(α+ k)
Γ(α)≡ α(α+ 1) · · · (α+ k − 1) (5.55)
entonces:

180 Jose Marın Antuna
(−n)k = −n(−n+1)(−n+2) · · ·(−n+k−1) = (−1)kn(n−1)(n−2) · · ·(n−k+1) (5.56)
Multiplicando y dividiendo (5.56) por Γ(n− k + 1), es facil ver que
(−n)k =(−1)kn!
Γ(n− k + 1), ∀k ≤ n
(−n)k = 0, ∀k > n (5.57)
por lo que la serie (5.54) se corta en k = n y nos da, por lo tanto, un polinomio de gradon, lo que esta en correspondencia con la propiedad que acabamos de demostrar.
5. Se cumplen las siguientes relaciones:
F (−n, 1; 1;−x) = (1 + x)n (5.58)
xF (1, 1; 2;−x) = ln(1 + x) (5.59)
xF
(1
2, 1;
3
2;x2
)= arcsinx (5.60)
xF
(1
2, 1;
3
2;−x2
)= arctan x (5.61)
Demostracion:
Comprobemos la validez de (5.58) y (5.59); las igualdades (5.60) y (5.61) quedan al lectorcomo ejercicio.
De acuerdo con (5.54) y (5.57), podemos escribir que:
F (−n, 1; 1;−x) =∞∑k=0
(−n)k(1)k(1)k
(−x)k
k!=
n∑k=0
(−1)kn!
Γ(n− k + 1)
(−1)kxk
k!=
=n∑k=0
n!
k!(n− k)!xk ≡ (1 + x)n (5.62)
lo que demuestra (5.58). Por otro lado:
xF (1, 1; 2;−x) = x∞∑k=0
(1)k(1)k(2)k
(−x)k
k!= x
∞∑k=0
k!
(k + 1)!(−1)kxk =
= x∞∑k=0
(−1)kxk
k + 1= −
∞∑k=1
(−1)kxk
k≡ ln(1 + x) (5.63)
lo que demuestra (5.59).

Funciones Hipergeometricas 181
6. Tiene lugar la siguiente ecuacion:
(x2 − 1)m/2F
(m− n, n+m+ 1;m+ 1;
1− x
2
)Γ(n+m+ 1)
2mm!Γ(n−m+ 1)= P (m)
n (x) (5.64)
donde P(m)n (x) son los polinomios asociados de Legendre.
Demostracion:
Si en la ecuacion (5.50) llamamos:
α = m− n, β = n+m+ 1, γ = m+ 1, ξ =1− x
2(5.65)
no es difıcil obtener para
y = F
(m− n, n+m+ 1;m+ 1;
1− x
2
)(5.66)
la ecuacion:
(1− x2)y′′ − 2x(m+ 1)y′ − (m− n)(n+m+ 1)y = 0 (5.67)
Llamemos:
u = (x2 − 1)m/2Γ(n+m+ 1)
2mm!Γ(n−m+ 1)y ≡ 1
K(x2 − 1)m/2y (5.68)
donde y viene dada por (5.66). Entonces:
y = K(x2 − 1)−m/2u (5.69)
De aquı:
y′ = K(x2 − 1)−m/2(u′ − mx
x2 − 1u
)(5.70)
y′′ = K(x2 − 1)−m/2[u′′ − 2mx(x2 − 1)−1u′ −m(x2 − 1)−1u
]+
+ K(x2 − 1)−m/2[(
m2
2+m
)2x2(x2 − 1)−1u
](5.71)
Sustituyendo (5.69), (5.70) y (5.71) en (5.67), despues de simples operaciones algebraicas,se obtiene para u la ecuacion:
(1− x2)u′′ − 2xu′ − m2
1− x2u+ n(n+ 1)u = 0 (5.72)

182 Jose Marın Antuna
que es la ecuacion de los polinomios asociados de Legendre. Por lo tanto u = P(m)n (x) y
de (5.68) se obtiene, por consiguiente, (5.64).
Demostrada la propiedad.
7. Tiene lugar la siguiente formula integral para la funcion hipergeometrica:
F (α, β; γ;x) =1
B(β, γ − β)
∫ 1
0
tβ−1(1− t)γ−β−1(1− tx)−αdt (5.73)
donde
B(m,n) =Γ(m)Γ(n)
Γ(m+ n)=
∫ 1
0
xm−1(1− x)n−1dx (5.74)
es la funcion beta de Euler.
Demostracion:
En la expresion de la funcion hipergeometrica (5.54) sustituyamos k por n y analicemos
la expresion (β)n
(γ)n. Tenemos, multiplicando y dividiendo por Γ(γ − β):
(β)n(γ)n
=Γ(β + n)Γ(γ)
Γ(β)Γ(γ + n)=
Γ(β + n)Γ(γ)Γ(γ − β)
Γ(β)Γ(γ + n)Γ(γ − β)=
=Γ(β + n)Γ(γ − β)
Γ(n+ γ)
Γ(γ)
Γ(γ − β)Γ(β)≡ Γ(β + n)Γ(γ − β)
Γ(β + n = γ − β)
Γ(γ − β + β)
Γ(γ − β)Γ(β)=
=B(β + n, γ − β)
B(β, γ − β)(5.75)
donde hemos tenido en cuenta la definicion de la funcion beta (5.74). Colocando (5.75)en (5.54), obtenemos para la funcion hipergeometrica:
F (α, β; γ;x) =1
B(β, γ − β)
∞∑n=0
(α)nn!
xnB(β + n, γ − β) =
=1
B(β, γ − β)
∞∑n=0
(α)nn!
xn∫ 1
0
tβ+n−1(1− t)γ−β−1dt =
=1
B(β, γ − β)
∫ 1
0
tβ−1(1− t)γ−β−1dt
∞∑n=0
(α)nn!
(tx)ndt (5.76)
donde hemos tenido en cuenta la definicion de la funcion beta de Euler.
Desarrollemos en serie de Taylor con centro en cero la funcion (1 − y)−α. Tenemos, deacuerdo con la teorıa de funciones de variable compleja:
(1− y)−α =∞∑n=0
anyn (5.77)
Funciones Hipergeometricas 183
donde los coeficientes son:
an =1
n!
dn
dyn[(1− y)−α]|y=0 =
1
2πi
∫C
(1− y)−αdy
yn+1(5.78)
Aquı hemos utilizado la formula generalizada de Cauchy. El contorno C en el planocomplejo rodea al punto y = 0 y no contiene a y = 1 en su interior. Hagamos el siguientecambio de variables
z =1
1− y, dy = −dz
z2(5.79)
Entonces, de (5.78), obtenemos:
an =1
2πi
∫C1
zn+α−1dz
(z − 1)n+1=
1
n!
dn
dzn[zn+α+1]|z=1 =
=1
n!(n+ α− 1)(n+ α− 2) · · · (α+ 1)α
Γ(α)
Γ(α)=
1
n!
Γ(n+ α)
Γ(α)=
(α)nn!
(5.80)
El contorno C1 en el plano complejo z rodea al punto z = 1 y no contiene a z = 0. En(5.80) hemos multiplicado y dividido por Γ(α) para lograr una expresion compacta de loscoeficientes del desarrollo. Colocando (5.80) en (5.77) y haciendo y = tx, obtenemos:
(1− tx)−α =∞∑n=0
(α)nn!
(tx)n (5.81)
Por consiguiente, la serie que aparece en el integrando de (5.76) puede ser sustituida por(5.81), de manera que (5.76) nos da (5.73).
Demostrada la propiedad.
En virtud de los razonamientos efectuados, la formula integral de la funcion hiper-geometrica (5.73) es valida solo para |x| < 1 y para β > 0 y γ > β, de acuerdo conla definicion de la funcion beta de Euler.
5.3 Ecuacion hipergeometrica confluente
En diversos problemas fısicos se presenta la ecuacion
xd2y
dx2+ (γ − x)
dy
dx− αy = 0 (5.82)
donde γ y α son ciertas constantes. La ecuacion (5.82) se conoce con el nombre de ecuacionhipergeometrica confluente. Como el punto x = 0 es singular regular para esta ecuacion,buscaremos su solucion en forma de una serie de potencias generalizada:

184 Jose Marın Antuna
y(x) =∞∑n=0
anxn+σ (5.83)
De aquı tenemos que:
y′(x) =∞∑n=0
(n+ σ)anxn+σ−1, y′′(x) =
∞∑n=0
(n+ σ)(n+ σ − 1)anxn+σ−2 (5.84)
Sustituyendo (5.83) y (5.84) en la ecuacion (5.82), queda:
x
∞∑n=0
(n+ σ)(n+ σ − 1)anxn+σ−2 + γ
∞∑n=0
(n+ σ)anxn+σ−1 − x
∞∑n=0
(n+ σ)anxn+σ−1 −
− α∞∑n=0
anxn+σ (5.85)
Es decir:
∞∑n=0
(n+ σ)(n+ σ − 1) + γ(n+ σ)anxn+σ−1 −∞∑n=0
(n+ σ) + αanxn+σ = 0 (5.86)
En la primera sumatoria de la expresion (5.86) sustituyamos n− 1 por n. Entonces queda:
∞∑n=−1
(n+ σ + 1)(n+ σ) + γ(n+ σ + 1)an+1xn+σ −
∞∑n=0
(n+ σ + α)anxn+σ = 0 (5.87)
de donde:
[σ(σ − 1) + γσ]a0xσ−1 +
∞∑n=0
(n+ σ + 1)(n+ σ + γ)an+1 − (n+ σ) + α)anxn+σ = 0 (5.88)
En virtud de la independencia lineal de las potencias de x, podemos concluir de (5.88), ya quea0 6= 0 pues si no, no existirıa la serie, que:
σ(σ − 1 + γ) = 0 (5.89)
an+1 =n+ σ + α
(n+ σ + 1)(n+ σ + γ)an (5.90)

Funciones Hipergeometricas 185
La ecuacion (5.89) tiene dos posibles soluciones:
σ = 0, σ = 1− γ (5.91)
Consideremos el caso σ = 0. Entonces de (5.90) obtenemos la formula recurrente para loscoeficientes de la solucion (5.83):
an+1 =n+ α
(n+ 1)(n+ γ)an (5.92)
De (5.92) es facil ver que:
an =n+ σ − 1
n(n+ γ − 1)an−1, · · ·, a2 =
1 + α
2(1 + γa1, a1 =
α
1γa0 (5.93)
Colocando (5.93) en (5.92) y teniendo en cuenta la notacion (5.18) de este capıtulo, obtenemos,finalmente:
an+1 =(α)n+1
(γ)n+1(n+ 1)!a0 (5.94)
El coeficiente a0 queda, obviamente, indeterminado y lo podemos tomar arbitrariamente envirtud de que la ecuacion (5.82) es homogenea, por lo que su solucion, multiplicada por cualquierconstante, sigue siendo solucion. Tomemos a0 = 1; entonces, para γ 6= 0 y γ 6= −n, donde n esentero, obtenemos de (5.83) para el caso σ = 0 la solucion de la ecuacion (5.82) en la forma:
F (α; γ;x) =∞∑n=0
(α)n(γ)n
xn
n!(5.95)
La funcion (5.95) recibe el nombre de funcion hipergeometrica confluente.
Analicemos ahora el caso en que σ = 1− γ. De acuerdo con (5.83), aquı la solucion tendra laforma
y(x) = x1−γ∞∑n=0
anxn ≡ x1−γu(x) (5.96)
Derivando (5.96), es facil obtener:
y′ = (1− γ)x−γu+ x1−γu′ (5.97)

186 Jose Marın Antuna
y′′ = −γ(1− γ)x−γ−1u+ 2(1− γ)x−γu′ + x1−γu′′ (5.98)
Sustituyendo (5.96), (5.97) y (5.98) en la ecuacion (5.82) para u(x) se obtiene la ecuacion:
xu′′ + (2− γ − x)u′ − (α− γ + 1)u = 0 (5.99)
La ecuacion (5.99) es identica a la ecuacion (5.82) en su estructura y, por lo tanto, su solucionsera
u(x) = F (α− γ + 1; 2− γ;x) (5.100)
Por consiguiente, de acuerdo con (5.96), la segunda solucion linealmente independiente de laecuacion (5.82) sera:
y(x) = x1−γF (α− γ + 1; 2− γ;x) (5.101)
donde γ 6= n (entero positivo), excepto en el caso en que γ = 1, para el cual ambas soluciones(5.95) y (5.101) coinciden. De esta forma, la solucion general de la ecuacion hipergeometricaconfluente (5.82) sera:
y(x) = AF (α; γ;x) +BF (α− γ + 1; 2− γ;x) (5.102)
donde A y B son constantes arbitrarias y γ 6= 0 o entero.
No es difıcil constatar que la serie (5.95) converge uniformemente para toda x.
La ecuacion (5.82) recibe el nombre de ecuacion hipergeometrica confluente, ya que puede serobtenida de la ecuacion hipergeometrica (5.1) por la confluencia del punto singular x = 1 alinfinito. Si en la ecuacion (5.1) sustituimos x por x/β, es facil obtener:
β
x
(1− x
β
)y′′ +
[γ −
(1
β+α
β+ 1
)x
]y′ − αy
= 0 (5.103)
de donde la expresion entre llaves debera ser igual a cero. Tomando en esta ultima el lımitepara β →∞, se obtiene:
xy′′ + [γ − x]y′ − αy = 0 (5.104)
es decir, la ecuacion hipergeometrica confluente. No es difıcil percatarse mediante una compro-bacion directa que, si en la expresion (5.20) de la funcion hipergeometrica sustituimos x porx/β y tomamos el lımite para β → ∞ se obtiene como resultado la funcion hipergeometricaconfluente (5.95) a la que algunos autores denominan funcion hipergeometrica degenerada.
Funciones Hipergeometricas 187
5.4 Propiedades de la funcion hipergeometrica confluen-
te
Estudiaremos a continuacion algunas propiedades importantes de la funcion hipergeometricaconfluente (5.95).
1. Tiene lugar la siguiente formula integral para la funcion hipergeometrica confluente:
F (α; γ;x) =1
B(α, γ − α)
∫ 1
0
(1− t)γ−α−1tα−1extdt (5.105)
donde B(m,n) es la funcion beta de Euler.
Demostracion:
De acuerdo con la formula (5.75) podemos escribir
(α)n(γ)n
=B(α+ n, γ − α)
B(α, γ − α)=
1
B(α, γ − α)
∫ 1
0
(1− t)γ−α−1tα+n−1dt (5.106)
Por consiguiente, colocando (5.106) en la expresion de la funcion hipergeometrica con-fluente (5.95), obtenemos:
F (α; γ;x) =1
B(α, γ − α)
∫ 1
0
(1− t)γ−α−1tα−1
∞∑n=0
(tx)n
n!dt (5.107)
pero como, de acuerdo con el desarrollo de la funcion exponencial en serie de Taylor,tenemos
∞∑n=0
(tx)n
n!= etx (5.108)
sustituyendo (5.108) en (5.107), queda establecida la formula integral (5.105).
Demostrada la propiedad.
2. Tiene lugar la relacion de Kummer:
F (α; γ;x) = exF (γ − α; γ;x) (5.109)
Demostracion:
De acuerdo con la formula integral (5.105) tenemos que, sustituyendo 1− t por t:
F (γ − α; γ;−x) =1
B(γ − α, α)
∫ 1
0
(1− t)α−1tγ−α−1e−xtdt =
=1
B(γ − α, α)
∫ 1
0
tα−1(1− t)γ−α−1exte−xdt = e−xF (α; γ;x) (5.110)

188 Jose Marın Antuna
ya que la funcion beta es simetrica.
Demostrada la propiedad.
3. Tiene lugar la siguiente relacion:
d
dxF (α; γ;x) =
α
γF (α+ 1; γ + 1; x) (5.111)
Demostracion:
Teniendo en cuenta que
(α)n+1 =Γ(α+ n+ 1)
Γ(α)
α
α= α
Γ(α+ n+ 1)
Γ(α+ 1)= α(α+ 1)n (5.112)
obtenemos, al derivar (5.95):
d
dxF (α; γ;x) =
∞∑n=0
(α)nxn−1
(γ)n(n− 1)!=
∞∑n=0
(α)n+1xn
(γ)n+1n!=α
γF (α+ 1; γ + 1; x) (5.113)
donde hicimos el cambio de ındice de sumatoria n− 1 por n.
Demostrada la propiedad.
4. Tiene lugar la relacion:
m!F (−m; 1; x) = Lm(x) (5.114)
donde Ln(x) son los polinomios de Laguerre.
Demostracion:
Si en la ecuacion hipergeometrica confluente (5.82) sustituimos α = −m, γ = 1, obtene-mos directamente
xy′′ + (1− x)y′ +my = 0 (5.115)
que es la ecuacion de Laguerre con λ = m, cuya solucion es, como sabemos, el polinomiode Laguerre de grado m.
Demostrada la propiedad.
Es oportuno destacar que, de acuerdo con la expresion (5.57), debido a que α = −m < 0,la serie (5.95) se corta en n = m y nos da, efectivamente, un polinomio, como era deesperar.
De esta manera concluimos con el estudio de las funciones hipergeometricas. Lo desarrolladoen este capıtulo sobre estas funciones no agota, ni con mucho, el tema, del cual hemos hechosolamente una presentacion mınima con los elementos indispensables para su posible utilizacionfutura. El lector interesado en una profundizacion debe recurrir a literatura especializada sobreel tema.
Capıtulo 6
Algunas otras funciones especiales dela Fısica Matematica
Debido a la importancia que pueden tener en su aplicacion a diferentes problemas de la FısicaMatematica, presentamos a continuacion en forma breve una resena de algunas otras funcionesespeciales. El caracter de este capıtulo es expositivo y el lector interesado en profundizar losaspectos en el tratados debe remitirse a la literatura especializada en el tema.
6.1 Funcion Zeta de Riemann
Sea el numero complejo s = σ + it, donde σ y t son reales. Entonces, para δ > 0 la serie
ζ(s) =∞∑n=1
1
ns(6.1)
converge uniformemente para todo dominio tal que σ ≥ 1 + δ y, en consecuencia, define unafuncion analıtica de s. La funcion (6.1) se conoce con el nombre de Funcion Zeta de Rie-mann, ya que, aunque ya fue analizada inicialmente por Euler, fue Riemann en su memoriasobre los numeros simples quien la estudio detalladamente y descubrio sus propiedades masrelevantes.
Hurwitz definio la llamada Funcion Zeta Generalizada como
ζ(s, a) =∞∑n=1
1
(a+ n)s(6.2)
donde a es una constante dada por la relacion 0 < a ≤ 1. La rama que se toma de las funcionesanalıticas que se suman es arg(a+ n) = 0. Es obvio de (6.1) y (6.2) que ζ(s, 1) = ζ(s).
189

190 Jose Marın Antuna
Como
(a+ n)−sΓ(s) =
∫ ∞
0
xs−1e−(n+a)xdx (6.3)
para arg x = 0, tendremos que para σ ≥ 1 + δ, colocando (6.3) en (6.2):
Γ(s)ζ(s, a) = limN→∞
N∑n=0
∫ ∞
0
xs−1e−(n+a)xdx =
= limN→∞
∫ ∞
0
xs−1e−ax
1− e−xdx−
∫ ∞
0
xs−1
1− e−xe−(N+1+a)xdx
(6.4)
Pero, para x ≥ 0 se cumple que ex ≥ 1+x y, por consiguiente, el modulo de la segunda integralen (6.4) es menor que la integral
∫ ∞
0
xσ−2e−(N+a)xdx = (N + a)1−σΓ(σ − 1) (6.5)
que para σ ≥ 1 + δ tiende a cero para N → ∞. Por consiguiente, para σ ≥ 1 + δ y arg x = 0obtenemos la siguiente representacion integral de la funcion Zeta Generalizada:
ζ(s, a) =1
Γ(s)
∫ ∞
0
xs−1e−ax
1− e−xdx (6.6)
6.2 Funcion de Mathieu
6.2.1 Ecuacion de Mathieu
Las funciones de Mathieu que estudiaremos en este epıgrafe aparecen en los problemas de laFısica Matematica relacionados con el cilindro elıptico. Por ejemplo, la ecuacion hiperbolicabidimensional que describe las oscilaciones de una membrana es:
utt = a2∇2u (6.7)
Esta ecuacion fue estudiada por Mathieu en el ano 1868 en relacion con las oscilaciones de unamembrana elıptica de la forma siguiente. Supongamos que la membrana se encuentra en elplano (x, y) en la posicion de equilibrio y oscila con frecuencia ω. Entonces, proponiendo lasolucion de la ecuacion (6.7) en la forma
Otras funciones especiales de la Fısica Matematica 191
u(x, y, t) = v(x, y) cos(ωt+ ε) (6.8)
obtenemos para v(x, y) la ecuacion:
vxx + vyy +ω2
a2v = 0 (6.9)
Sean (±h, 0, 0) los focos de la membrana elıptica; introduzcamos nuevas variables reales ξ, ηdefinidas por medio de la ecuacion compleja
x+ iy = h cosh(ξ + iη) (6.10)
de manera que
x = h cosh ξ cos η, y = h sinh ξ sin η (6.11)
Estas variables fueron introducidas por primera vez por Lame quien llamo parametro ter-mometrico a la variable ξ; hoy en dıa se conocen con el nombre de coordenadas confocales.
Las curvas sobre las que ξ o η son constantes son, evidentemente, elipses e hiperbolas confocalescon la frontera. Si tomamos ξ ≥ 0 y −π < η ≤ π, entonces a cada punto (x, y, 0) del planole corresponde uno y solo un par de valores (ξ, η). La ecuacion diferencial (6.9) en las nuevascoordenadas toma la forma:
vξξ + vηη +h2ω2
a2(cosh2 ξ − cos2 η)v = 0 (6.12)
Busquemos la solucion de la ecuacion (6.12) en la forma
v = F (ξ)G(η) (6.13)
Entonces, separando las variables obtenemos:
1
F (ξ)Fξξ +
h2ω2
a2cosh2 ξ = −
[1
G(η)Gηη −
h2ω2
a2cos2 η
]= λ (6.14)
donde la constante λ aparece producto de que en (6.14) la expresion de la izquierda es solofuncion de ξ, en tanto que la de la derecha es solo funcion de η. De (6.14) obtenemos lasecuaciones:

192 Jose Marın Antuna
Fξξ +
(h2ω2
a2cosh2 ξ − λ
)F (ξ) = 0 (6.15)
Gηη −(h2ω2
a2cos2 η − λ
)G(η) = 0 (6.16)
Haciendo en la ecuacion (6.15) el cambio de variable ξ = iz y teniendo en cuenta que cosh(iz) ≡cos z, es facil ver que ambas ecuaciones (6.15) y (6.16) son ecuaciones diferenciales lineales desegundo orden del tipo
d2u
dz2+ (A− 16q cos 2z)u = 0 (6.17)
donde las constantes A y q vienen dadas por las expresiones:
A = λ− h2ω2
2a2, q =
h2ω2
32a2(6.18)
El factor 16 en la expresion de q se introduce para evitar las potencias 2 en las soluciones.
La ecuacion (6.17) se conoce con el nombre de ecuacion de Mathieu y, bajo determinadascondiciones que veremos mas adelante, sus soluciones particulares se llaman funciones deMathieu.
6.2.2 Forma de la solucion de la ecuacion de Mathieu
En los problemas fısicos que conducen a la ecuacion de Mathieu, la constante A no esta dadaa priori y, por tanto, debemos ver como determinarla. A partir de consideraciones fısicas enel problema de las oscilaciones de la membrana es evidente que v(x, y) debe ser una funcionunıvoca del punto y, por consiguiente, debera cumplirse la condicion de que
G(η + 2π) = G(η) (6.19)
La condicion (6.19) es suficiente para la determinacion del conjunto de valores posibles delparametro A para q conocida, de forma similar al hecho de que la solucion de la ecuacionuzz + Au = 0 tiene periodo 2π si y solo si A es el cuadrado de un numero entero.
Cuando A se determina con la condicion (6.19), el parametro q (y por consiguiente ω) sedetermina de la condicion de que F (ξ) = 0 sobre la frontera de la membrana, bajo el supuestode que estamos investigando las oscilaciones de una membrana elıptica de borde fijo. De estamanera se determinan los periodos de las oscilaciones libres de la membrana.

Otras funciones especiales de la Fısica Matematica 193
Existen otros problemas de la Fısica Matematica que conducen a las funciones de Mathieu, talescomo las ondas en la superficie de un lıquido en un recipiente cilındrico con frontera elıptica, ladeterminacion de la forma de un movimiento vorticial en un cilindro elıptico, el debilitamientode la fuerza magnetica en un cilindro metalico y otros. La ecuacion de Mathieu aparece tambienen un problema de la dinamica del cuerpo rıgido que tiene interes general (ver A. W. Young,Proc. Edinburgh Math. Soc., XXXII, 81).
6.2.3 Ecuacion de Hill
Una ecuacion diferencial similar a la ecuacion de Mathieu, pero de caracter mas general, apareceal determinar el movimiento del perigeo de la Luna por el metodo de Hill. Esta ecuacion,llamada ecuacion de Hill, tiene la forma:
d2u
dz2+
(θ0 + 2
∞∑n=1
θn cos 2nz
)u = 0 (6.20)
La teorıa de la ecuacion de Hill es muy similar a la teorıa de la ecuacion de Mathieu a pesarde la presencia de la serie infinita, de manera que ambas ecuaciones pueden ser estudiadassimultaneamente. En las aplicaciones astronomicas las constantes θ0, θ1,... son conocidas, demanera que el problema de su eleccion de forma tal que la solucion sea periodica no tiene lugar.De hecho la solucion de la ecuacion de Hill en la teorıa de la Luna no es periodica.
6.2.4 Soluciones periodicas de la ecuacion de Mathieu
Ası pues, hemos visto que en problemas fısicos, a diferencia de los astronomicos, la constanteA en la ecuacion de Mathieu se elige como funcion de q, de forma tal que la ecuacion tengasolucion periodica.
Sea G(z) dicha solucion periodica. Entonces G(z) sera no solo periodica, sino, ademas, unafuncion entera de z, ya que es evidente que todos los puntos del plano complejo z, excluyendoel infinito, son puntos regulares de la ecuacion (6.17).
Pueden ocurrir tres casos:
1. Que G(z) sea una funcion par de z
2. Que G(z) sea una funcion impar de z
3. Que G(z) no sea ni par, ni impar.
En el caso 3:

194 Jose Marın Antuna
1
2G(z) +G(−z) (6.21)
sera una solucion periodica par y
1
2G(z) +G(−z)
sera una solucion periodica impar de la ecuacion de Mathieu. Estas dos soluciones forman unsistema fundamental. Por ello es suficiente concentrar nuestra atencion solamente en aquellassoluciones periodicas de la ecuacion de Mathieu que sean o bien pares, o bien impares. Estassoluciones y solo ellas reciben el nombre de funciones de Mathieu.
Es posible demostrar que las funciones de Mathieu satisfacen la ecuacion integral de Fredholmhomogenea
G(η) = λ
∫ π
−πek cos η cos θG(θ)dθ (6.22)
donde k =√
32q. Este resultado fue publicado por Whittaker en 1912 y permite construir porun procedimiento simple las funciones pares de Mathieu.
Es posible demostrar que cuando la excentricidad de la elipse tiende a cero, la ecuacion integralpara las funciones pares de Mathieu (6.22) toma en el lımite la forma
Jn(x) =1
2πin
∫ π
−πeix cos θ cosnθdθ (6.23)
6.2.5 Construccion de las funciones de Mathieu
Construyamos ahora las funciones de Mathieu. Para ello observemos que si en la ecuacion deMathieu (6.17) tomamos el caso particular q = 0, entonces las soluciones periodicas se obtienenpara A = n2, donde n es cualquier numero entero. Dichas soluciones seran:
1, cos z, cos 2z, ...
sin z, sin 2z, ... (6.24)
Las funciones de Mathieu que conducen a (6.24) cuando q → 0 las representaremos por
ce0(z, q), ce1(z, q), ce2(z, q), ...
se1(z, q), se2(z, q), ... (6.25)

Otras funciones especiales de la Fısica Matematica 195
La notacion (6.25) fue introducida por Whittaker: coseno y seno del cilindro elıptico. Lasfunciones cen(z, q), sen(z, q) se conocen con el nombre de funciones de Mathieu de ordenn. Los calculos efectuados arrojan las siguientes expresiones para las primeras funciones deMathieu:
ce0(z, q) = 1 +∞∑r=1
2r+1qr
r!r!− 2r+3r(3r + 4)qr+2
(r + 1)!(r + 1)!+O(qr+4)
cos 2rz (6.26)
ce1(z, q) = cos z+∞∑r=1
2rqr
(r + 1)!r!− 2r+1rqr+1
(r + 1)!(r + 1)!+
2rqr+2
(r − 1)!(r + 2)!+O(qr+3)
cos(2r+1)z
(6.27)
se1(z, q) = sin z+∞∑r=1
2rqr
(r + 1)1r!+
2r+1rqr+1
(r + 1)!(r + 1)!+
2rqr+2
(r − 1)!(r + 2)!+O(qr+3)
sin(2r+1)z
(6.28)
ce2(z, q) =
−2q +
40
3q3 +O(q5)
cos z +
+∞∑r=1
2r+1qr
r!(r + 2)!+
2r+1r(47r2 + 222r + 247)qr+2
32(r + 2)!(r + 3)!+O(qr+4)
cos(2r + 2)z (6.29)
Son de destacar los siguientes resultados relacionados con las funciones de Mathieu:
∫ π
−πcem(z, q) cen(z, q) dz = 0, ∀m 6= n (6.30)
∫ π
−πsem(z, q) sen(z, q) dz = 0, ∀m 6= n (6.31)
∫ π
−πcem(z, q) sen(z, q) dz = 0, ∀m,n (6.32)
que establecen la ortogonalidad de dichas funciones. Los siguientes desarrollos pueden ser deutilidad en las aplicaciones fısicas:
ek cos z cos θ =∞∑n=0
Ancen(z, q) cen(θ, q) (6.33)
196 Jose Marın Antuna
cos(k sin z sin θ) =∞∑n=0
Bncen(z, q) cen(θ, q) (6.34)
sin(k sin z sin θ) =∞∑n=0
Cnsen(z, q) sen(θ, q) (6.35)
En particular, es posible demostrar que como caso lımite de (6.34) y (6.35) se puede obtener eldesarrollo
eiz sinϕ =∞∑−∞
Jn(z)einϕ (6.36)
conocido con anterioridad.
6.2.6 Teorıa de Floquet
Veamos ahora, brevemente, el caracter de la solucion de la ecuacion de Mathieu cuando alparametro A no se le imponen condiciones para la periodicidad de la solucion. Este caso esimportante en los problemas astronomicos a diferencia de otras aplicaciones fısicas.
El metodo que veremos es aplicable a cualquier ecuacion lineal con coeficientes periodicos quesean funciones univaluadas de la variable independiente; el caracter de las soluciones generalesde algunas ecuaciones particulares de este tipo ya hace tiempo fue senalado por los astronomosa partir de las condiciones bajo las que surgen dichas ecuaciones. Sus conclusiones fueronconfirmadas por la siguiente investigacion analıtica publicada por Floquet en 1883.
Sean g(z) y h(z) un sistema fundamental de soluciones de la ecuacion de Mathieu (o en casomas general, de cualquier ecuacion lineal cuyos coeficientes tengan periodo 2π). Entonces, siF (z) es cualquier otra integral de la ecuacion, tendremos que
F (z) = c1g(z) + c2h(z) (6.37)
donde c1 y c2 son determinadas constantes.
Como g(z + 2π) y h(z + 2π) evidentemente son soluciones de la ecuacion1, podran expresarsecomo combinaciones lineales del sistema fundamental, es decir:
1Estas soluciones pueden no coincidir con g(z) y h(z) respectivamente, ya que la solucion de una ecuacioncon coeficientes periodicos no es obligatoriamente periodica. Por ejemplo, la funcion no periodica u = ez sin zes solucion de la ecuacion con coeficiente periodico
uz − (1 + cot z)u = 0

Otras funciones especiales de la Fısica Matematica 197
g(z + 2π) = α1g(z) + α2h(z)
h(z + 2π) = β1g(z) + β2h(z) (6.38)
donde α1, α2, β1, β2 son ciertas constantes. Entonces, de (6.37) y (6.38) tendremos:
F (z + 2π) = (c1α1 + c2β1)g(z) + (c1α2 + c2β2)h(z) (6.39)
Si c1 y c2 se toman de forma tal que satisfagan las ecuaciones
c1α1 + c2β1 = κc1
c1α2 + c2β2 = κc2 (6.40)
entonces tendremos que
F (z + 2π) = κF (z) (6.41)
donde κ es una constante. Las ecuaciones (6.40) tienen solucion no trivial si y solo si
∣∣∣∣ α1 − κ β1
α2 β2 − κ
∣∣∣∣ = 0 (6.42)
Si κ es una raız cualquiera de la ecuacion (6.42), entonces puede construirse la funcion F (z)solucion de la ecuacion diferencial dada y tal que cumpla con (6.41).
Si determinamos el parametro µ de la ecuacion
κ = e2πµ
y escribimos ϕ(z) en lugar de e−µzF (z), entonces tendremos que
ϕ(z + 2π) = e−µ(z+2π)F (z + 2π) = ϕ(z) (6.43)
Por consiguiente, la ecuacion diferencial tiene una solucion particular de la forma eµzϕ(z),donde ϕ(z) es una funcion periodica con periodo 2π.
Nosotros vimos que en los problemas fısicos los parametros que aparecen en la ecuacion dife-rencial deben ser elegidos de forma tal que κ = 1 sea raız de la ecuacion cuadratica y que
198 Jose Marın Antuna
entonces cierta solucion es periodica. Sin embargo, en los problemas astronomicos en los quelos parametros son dados a priori en general κ 6= 1 y, por lo tanto, no existe solucion periodica.
En el caso particular de la ecuacion general de Mathieu o de la ecuacion de Hill, el sistemafundamental de soluciones sera el sistema eµzϕ(z), e−µzϕ(−z), ya que la ecuacion no varıa alcambiar z por −z. La solucion completa de la ecuacion general de Mathieu tiene la forma
u = c1eµzϕ(z) + c2e
−µzϕ(−z) (6.44)
donde c1 y c2 son constantes arbitrarias y µ es una funcion de A y q.
6.2.7 Metodo de Hill
Como conclusion, veamos el metodo de solucion de Hill. Una vez que ha sido hallado el caracterfuncional general de la solucion de las ecuaciones con coeficientes periodicos por el teorema deFloquet, se podrıa esperar que la obtencion de las soluciones de las ecuaciones de Mathieu yde Hill fuera relativamente sencilla; sin embargo, esto en realidad no es ası. Por ejemplo, en elcaso de la ecuacion general de Mathieu es necesario obtener una solucion de la forma
y = eµzϕ(z) (6.45)
donde ϕ(z) es una funcion periodica y µ es una funcion de los parametros A y q. La dificultadradica en la determinacion de µ; una vez hecho esto, la determinacion de la funcion ϕ(z) es demenor dificultad.
El primer metodo desarrollado con exito se debe a la pluma de Hill. Veamos la ecuacion deHill:
uzz + J(z)u = 0 (6.46)
donde J(z) es una funcion par de z con periodo π.
Tienen interes los dos casos siguientes; los razonamientos en cada uno de ellos seran identicos:
1. El caso astronomico, cuando z es real y la funcion J(z) puede ser desarrollada en la serie
J(z) = θ0 + 2θ1 cos 2z + 2θ2 cos 4z + ... (6.47)
donde los coeficientes θn son constantes dadas y la serie
∞∑n=0
θn

Otras funciones especiales de la Fısica Matematica 199
converge absolutamente.
2. El caso es que z es una variable compleja y J(z) es una funcion analıtica en una franja delplano que contiene al eje real y limitada por dos rectas paralelas al eje real. El desarrollode la funcion J(z) en serie de Fourier
J(z) = θ0 + a
∞∑n=1
θn cos 2nz (6.48)
tiene entonces validez dentro de la franja y, al igual que antes, la serie∑θn converge
absolutamente.
Proponiendo θ−n = θn, busquemos la solucion de la ecuacion de Hill en la forma
u = eµz∞∑−∞
bne2niz (6.49)
Es conveniente destacar que en el caso 2 esta solucion sera analıtica en la franja senalada.En el caso 1 se puede demostrar que los coeficientes bn que se obtienen son tales que laserie
∞∑−∞
n2bn
converge absolutamente; ello justifica las operaciones que efectuaremos a continuacion.
Colocando (6.49) en la ecuacion, obtenemos:
∞∑−∞
(µ+ 2ni)2bne(µ+2ni)z +
(∞∑−∞
θne2niz
)(∞∑−∞
bne(µ+2ni)z
)= 0 (6.50)
Multiplicando las series convergentes absolutamente e igualando a cero los coeficientesque acompanan a las potencias e2iz, obtenemos el sistema de ecuaciones
(µ+ 2ni)2bn +∞∑
m=−∞
θmbn−m = 0 (6.51)
Si despejamos bn con la ayuda de los determinantes (despues de dividir la enesima ecuacionentre θ0 − 4n2 para garantizar la convergencia) obtenemos2 la ecuacion de Hill:
2Como no todos los coeficientes bn son iguales a cero, podemos obtener este determinante infinito como elresultado de despejar las incognitas del sistema de ecuaciones lineales, multiplicando las ecuaciones del sistemapor los complementos algebraicos correspondientes del determinante y sumandolos.
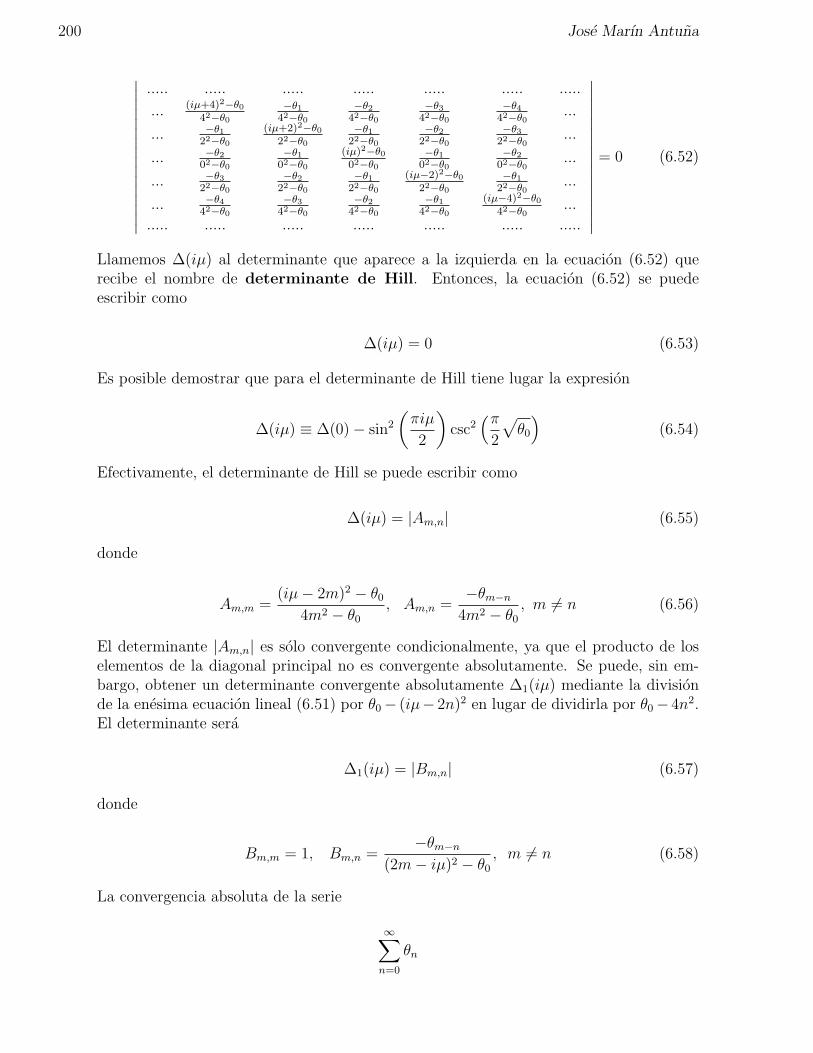
200 Jose Marın Antuna
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
..... ..... ..... ..... ..... ..... .....
... (iµ+4)2−θ042−θ0
−θ142−θ0
−θ242−θ0
−θ342−θ0
−θ442−θ0 ...
... −θ122−θ0
(iµ+2)2−θ022−θ0
−θ122−θ0
−θ222−θ0
−θ322−θ0 ...
... −θ202−θ0
−θ102−θ0
(iµ)2−θ002−θ0
−θ102−θ0
−θ202−θ0 ...
... −θ322−θ0
−θ222−θ0
−θ122−θ0
(iµ−2)2−θ022−θ0
−θ122−θ0 ...
... −θ442−θ0
−θ342−θ0
−θ242−θ0
−θ142−θ0
(iµ−4)2−θ042−θ0 ...
..... ..... ..... ..... ..... ..... .....
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣= 0 (6.52)
Llamemos ∆(iµ) al determinante que aparece a la izquierda en la ecuacion (6.52) querecibe el nombre de determinante de Hill. Entonces, la ecuacion (6.52) se puedeescribir como
∆(iµ) = 0 (6.53)
Es posible demostrar que para el determinante de Hill tiene lugar la expresion
∆(iµ) ≡ ∆(0)− sin2
(πiµ
2
)csc2
(π2
√θ0
)(6.54)
Efectivamente, el determinante de Hill se puede escribir como
∆(iµ) = |Am,n| (6.55)
donde
Am,m =(iµ− 2m)2 − θ0
4m2 − θ0
, Am,n =−θm−n
4m2 − θ0
, m 6= n (6.56)
El determinante |Am,n| es solo convergente condicionalmente, ya que el producto de loselementos de la diagonal principal no es convergente absolutamente. Se puede, sin em-bargo, obtener un determinante convergente absolutamente ∆1(iµ) mediante la divisionde la enesima ecuacion lineal (6.51) por θ0− (iµ− 2n)2 en lugar de dividirla por θ0− 4n2.El determinante sera
∆1(iµ) = |Bm,n| (6.57)
donde
Bm,m = 1, Bm,n =−θm−n
(2m− iµ)2 − θ0
, m 6= n (6.58)
La convergencia absoluta de la serie
∞∑n=0
θn

Otras funciones especiales de la Fısica Matematica 201
garantiza la convergencia del determinante (6.57) excepto en el caso en que µ tenga unvalor tal que el denominador de una de las expresiones (6.58) sea igual a cero. Por ladefinicion de un determinante infinito, tendremos que
∆(iµ) = ∆1(iµ) limp→∞
p∏n=−p
θ0 − (iµ− 2n)2
θ0 − 4n2
(6.59)
y por consiguiente:
∆(iµ) = −∆1(iµ)sin π
2(iµ−
√θ0) sin π
2(iµ+
√θ0)
sin2(π2
√θ0
) (6.60)
Escribiendo el determinante ∆1(iµ) en forma explıcita, no es difıcil percatarse de que esuna funcion periodica par de µ con periodo 2i y que, ademas, es una funcion analıtica deµ (sin considerar los evidentes polos simples) que tiende a uno cuando la parte real de µtiende a ±∞.
Si tomamos ahora una constante K de forma tal que la funcion
D(µ) ≡ ∆1(iµ)−K
cotπ
2(iµ+
√θ0)− cot
π
2(iµ−
√θ0)
(6.61)
no tenga polo en el punto µ = i√θ0, entonces, como D(µ) es una funcion periodica par
de µ, no tendra polos en ninguno de los puntos 2ni± i√θ0, donde n es un numero entero
arbitrario.
Por consiguiente, la funcion D(µ) es una funcion periodica de µ con periodo 2i y no tienepolos y es, ademas, acotada cuando Reµ → ±∞. Por consiguiente, de acuerdo con elteorema de Liouville, D(µ) es constante. Tomando el lımite para µ→∞ vemos que esaconstante es igual a la unidad. Ası pues:
∆1(iµ) = 1 +K
cotπ
2(iµ+
√θ0)− cot
π
2(iµ−
√θ0)
(6.62)
y por lo tanto:
∆(iµ) = −sin π
2(iµ−
√θ0) sin π
2(iµ+
√θ0)
sin2(π2
√θ0
) + 2K cot(π
2
√θ0
)(6.63)
Para determinar K hagamos µ = 0; entonces:
∆(0) = 1 + 2K cot(π
2
√θ0
)(6.64)
De aquı, despues de restar, obtenemos:
∆(iµ) = ∆(0)−sin2
(π2iµ)
sin2(π2
√θ0
) (6.65)
lo que demuestra la validez de (6.54).

202 Jose Marın Antuna
Las raıces del determinante de Hill son, por consiguiente, las raıces de la ecuacion
sin2(π
2iµ)
= ∆(0) sin2(π
2
√θ0
)(6.66)
Una vez determinado µ de esta manera, los coeficientes bn pueden ser expresados a travesde b0 y de los menores del determinante ∆(iµ) y la solucion de la ecuacion diferencial deHill queda efectuada.
Hill demostro que, para el problema astronomico desarrollado por el, se puede obteneruna aproximacion muy buena del valor de µ tomando solamente las tres filas y las trescolumnas centrales del determinante.
6.3 Funciones de Airy
La funcion entera
Ai(x) =1
32/3π
∞∑n=0
Γ(n3
+ 13
)n!
sin
2
3(n+ 1)π
(31/3x)n (6.67)
se llama Integral de Airy o Funcion de Airy, debido a que para valores reales de x es iguala la integral
1
π
∫ ∞
0
cos
(t3
3+ xt
)dt (6.68)
que por primera vez aparecio en el ano 1838 en las investigaciones de Airy en Optica. Se puededemostrar que esta funcion es solucion de la ecuacion
y′′ − xy = 0 (6.69)
y que puede ser expresada en terminos de funciones de Bessel de orden 1/3:
Ai(x) =
√x
3
[I−1/3
(2
3x3/2
)− I1/3
(2
3x3/2
)]∀x > 0
=
√|x|3
[J−1/3
(2
3|x|3/2
)+ J1/3
(2
3|x|3/2
)]∀x < 0 (6.70)
La ecuacion (6.69) tiene dos soluciones mas: Ai(ωx) y Ai(ω2x), donde ω = e2πi/3 es la raızcubica de la unidad. Estas tres soluciones estan relacionadas entre sı por la expresion

Otras funciones especiales de la Fısica Matematica 203
Ai(x) + ωAi(ωx) + ω2Ai(ω2x) = 0 (6.71)
En calidad de segunda solucion en lugar de la funcion Ai(ωx) o de la funcion Ai(ω2x) se utilizala funcion
Bi(x) = iω2Ai(ω2x)− iωAi(ωx) (6.72)
que tiene la ventaja de tomar valores reales para x reales.
Si x > 0, entonces, haciendo x = ν2 con ν > 0, de la formula (6.68) se deduce que
Ai(ν2) =1
2πi
∫I
eν2s− s3
3 ds (6.73)
donde I es el eje imaginario integrado desde −i∞ hasta +i∞. Aplicando el teorema de Cauchynos percatamos de que el contorno I puede ser sustituido por un contorno L, compuesto pordos rayos, desde ω2∞ hasta 0 y despues desde 0 hasta ω∞ y, como la integral a lo largo de Lconverge uniformemente respecto a ν para cualquier dominio del plano ν, la igualdad
Ai(ν2) =1
2πi
∫L
eν2s− s3
3 ds (6.74)
es valida para todos los valores de ν.
Es posible demostrar por el metodo del declive que el comportamiento asintotico de la funcionde Airy para x→∞ es
Ai(x) ≈ 1
2√πx
14
e−23x
32 (6.75)
La funcion de Airy se encuentra en diferentes aplicaciones de la Mecanica Cuantica.
6.4 Funciones Integrales
Se conocen en la literatura con el nombre de Funciones Integrales las siguientes integralesdefinidas:
1. Exponencial Integral
Ei(x) =
∫ x
−∞
et
tdt, ∀x < 0 (6.76)

204 Jose Marın Antuna
2. Logaritmo Integral
li(x) =
∫ x
0
dt
ln t, ∀0 < x < 1 (6.77)
3. Seno Integral
si(x) = −∫ ∞
x
sin t
tdt,
(si(0) = −π
2
)(6.78)
4. Coseno Integral
ci(x) = −∫ ∞
x
cos t
tdt, ∀x > 0 (6.79)
Ademas, se introducen las notaciones:
Si(x) =π
2+ si(x) =
∫ x
0
sin t
tdt,
[Si(∞) =
π
2
](6.80)
Ci(x) = ci(x) (6.81)
Para x > 1 la funcion li(x) se define como
li(x) = limε→0
[∫ 1−ε
0
dt
ln t+
∫ x
1+ε
dt
ln t
](6.82)
Para x > 0 la funcion Ei(x) toma valores complejos y por Ei(x) se representa la parte real deEi(x).
Sin ofrecer ninguna demostracion, enumeremos simplemente algunas relaciones importantes conlas funciones integrales:
Ei(ln x) = li(x), ∀x < 1 (6.83)
Ei(ln x) = li(x), ∀x > 1 (6.84)
li(ex) = Ei(x), ∀x < 0 (6.85)
Ei(x) = ci(x) + isi(x) (6.86)

Otras funciones especiales de la Fısica Matematica 205
Ei(x± i0) = Ei(x)∓ πi (6.87)
Si(−x) = −Si(x) (6.88)
si(−x) = −si(x)− π (6.89)
Ci(−x) = Ci(x)± πi, ∀x > 0 (6.90)
Si(2x) =sin2 x
x+
∫ x
0
(sin t
t
)2
dt (6.91)
Las representaciones de las funciones integrales en series de potencias son:
Ei(x) = C + ln(−x) +∞∑k=1
xk
kk!, ∀x < 0 (6.92)
Ei(x) = C + lnx+∞∑k=1
xk
kk!, ∀x > 0 (6.93)
li(x) = C + ln(− lnx) +∞∑k=1
(lnx)k
kk!, ∀0 < x < 1 (6.94)
li(x) = C + ln(lnx) +∞∑k=1
(lnx)k
kk!, ∀x > 1 (6.95)
si(x) = −π2
+∞∑k=1
(−1)k+1 x2k−1
(2k − 1)(2k − 1)!(6.96)
ci(x) = C + lnx+∞∑k=1
(−1)kx2k
2k(2k)!(6.97)
En todas las formulas C = 0.5772156649... es la constante de Euler.
El comportamiento asintotico en el entorno de x = 0 de las funciones integrales es:
li(x) ≈ − x
ln 1x
(6.98)

206 Jose Marın Antuna
Si(x) ≈ x (6.99)
si(x) ≈ x− π
2(6.100)
Ci(x) ≈ Ei(x) ≈ Ei(−x) ≈ C + lnx (6.101)
y el comportamiento asintotico para x→∞ se expresa por las formulas:
Ei(x) =ex
x
(1 +
1!
x+
2!
x2+
3!
x3+ ...
)(6.102)
si(x) = −cosx
x
(1− 2!
x2+
4!
x4− ...
)− sin x
x
(1!
x− 3!
x3+
5!
x5− ...
)≈ −cosx
x(6.103)
ci(x) = −sin x
x
(1− 2!
x2+
4!
x4− ...
)− cosx
x
(1!
x− 3!
x3+
5!
x5− ...
)≈ −sin x
x(6.104)
Ei(x) ≈ ex
x(6.105)
Ei(−x) ≈ e−x
−x(6.106)
Algunos valores numericos de interes son:
Ei(−1) = 0.219383934... (6.107)
Ei(1) = 1.895117816... (6.108)
li(1.4513692346...) = 0 (6.109)
Algunos lımites utiles de estas funciones son:
limx→−∞
si(x) = −π (6.110)
limx→−∞
ci(x) = ±πi (6.111)

Otras funciones especiales de la Fısica Matematica 207
limx→∞
[xρsi(x)] = 0, ∀ρ < 1 (6.112)
limx→∞
[xρci(x)] = 0, ∀ρ < 1 (6.113)
limx→∞
e−xEi(x) = 0 (6.114)
limx→∞
xe−xEi(x) = 1 (6.115)
Por ultimo, algunas integrales de interes de las funciones integrales:
∫ x
0
Ei(−mt)dt = xEi(−mx)− 1− e−mx
m(6.116)
∫ ∞
0
e−ptCi(qt)dt = −1
pln
(1 +
p2
q2
)(6.117)
∫ ∞
0
e−ptsi(qt)dt = −1
parctan
p
q(6.118)
∫ ∞
0
cos tCi(t)dt =
∫ ∞
0
sin tsi(t)dt =π
4(6.119)
∫ ∞
0
Ci2(t)dt =
∫ ∞
0
si2(t)dt =π
2(6.120)
∫ ∞
0
Ci(t)si(t)dt = − ln 2 (6.121)
∫ ∞
0
ci(αt)ci(βt)dt =
∫ ∞
0
si(αt)si(βt)dt =π
2α, ∀α > β
=π
2β, ∀α < β (6.122)

208 Jose Marın Antuna
6.5 Integrales de Fresnel
Por Integrales de Fresnel se entienden las siguientes expresiones:
1. Integral Seno de Fresnel
S(x) =
√2
π
∫ x
0
sin t2dt,
[S(∞) =
1
2
](6.123)
2. Integral Coseno de Fresnel
C(x) =
√2
π
∫ x
0
cos t2dt,
[C(∞) =
1
2
](6.124)
En ocasiones estas funciones se presentan definidas de la siguiente manera equivalente:
S∗(x) =
∫ x
0
sinπt2
2dt = S
(√π
2x
)(6.125)
C∗(x) =
∫ x
0
cosπt2
2dt = C
(√π
2x
)(6.126)
Otras representaciones de utilidad de las Integrales de Fresnel son:
S(x) =1√2π
∫ x2
0
sin t√tdt (6.127)
C(x) =1√2π
∫ x2
0
cos t√tdt (6.128)
S(xy) =2y√2π
∫ x
0
sin(y2t2)dt (6.129)
C(xy) =2y√2π
∫ x
0
cos(y2t2)dt (6.130)
Para las Integrales de Fresnel tiene lugar la siguiente representacion en series:
S(x) =
√2
π
∞∑k=0
(−1)kx4k+3
(2k + 1)!(4k + 3)(6.131)

Otras funciones especiales de la Fısica Matematica 209
C(x) =
√2
π
∞∑k=0
(−1)kx4k+1
(2k)!(4k + 1)(6.132)
Con las funciones de Bessel y con la funcion de error las Integrales de Fresnel se relacionanmediante las expresiones:
S(x) =1
2
∫ x2
0
J 12(t)dt (6.133)
C(x) =1
2
∫ x2
0
J− 12(t)dt (6.134)
C(z) + iS(z) =
√i
2Erf
(z√i
)=
√2
π
∫ z
0
eit2
dt (6.135)
C(z)− iS(z) =1√2iErf(z
√i) =
√2
π
∫ z
0
e−it2
dt (6.136)
Para las Integrales de Fresnel tienen lugar los siguientes lımites:
limx→∞
S(x) = limx→∞
C(x) =1
2(6.137)
limx→∞
xρ[S(x)− 1
2
]= lim
x→∞
xρ[C(x)− 1
2
]= 0, ∀ρ < 1 (6.138)
Algunas integrales con las Integrales de Fresnel son:
∫ p
0
S(αx)dx = pS(αp) +cos(α2p2)− 1
α√
2π(6.139)
∫ p
0
C(αx)dx = pC(αp)− sin(α2p2)
α√
2π(6.140)
∫ ∞
0
[1
2− S(x)
]sin(2px)dx = −
2√
2 cos π8
π
sin p2
2
p, ∀p > 0 (6.141)
∫ ∞
0
[1
2− C(x)
]sin(2px)dx = −
2√
2 cos π8
π
sin p2
2
p, ∀p > 0 (6.142)

210 Jose Marın Antuna
6.6 Funcion de Error y Funcion de Error Complemen-
taria
Se llama Funcion de Error o Integral de Probabilidad a la funcion
Φ(x) ≡ Erf(x) =2√π
∫ x
0
e−t2
dt, [Erf(∞) = 1] (6.143)
Funcion de Error Complementaria se llama a la expresion:
Erfc(x) = 1− Erf(x) =2√π
∫ ∞
x
e−t2
dt (6.144)
Para la Funcion de Error tienen lugar las siguientes formulas de derivacion y de integracion:
d
dx[Erf(x)] =
2√πe−x
2
(6.145)
∫Erf(x)dx = xErf(x) +
1√πe−x
2
+ C (6.146)
Otras representaciones integrales de la Funcion de Error son:
Erf(x) =1√π
∫ x2
0
e−t√tdt (6.147)
Erf(xy) =2y√π
∫ x
0
e−y2t2dt (6.148)
Erf(√qx) =
√q
π
∫ x
0
e−qt√qtdt (6.149)
La Funcion de Error tiene la siguiente representacion en serie:
Erf(x) =2√π
∞∑k=1
(−1)k+1 x2k−1
(2k − 1)(k − 1)!=
2√πe−x
2∞∑k=0
2kx2k+1
(2k + 1)!!(6.150)
y las siguientes formulas asintoticas:
Erf(√x) = 1− 1
πe−x
∞∑k=0
(−1)kΓ(k + 1
2
)xk+
12
+e−x
πRn (6.151)

Otras funciones especiales de la Fısica Matematica 211
donde
|Rn| <Γ(n+ 1
2
)|x|n+ 1
2 cos ϕ2
∀x = xeiϕ y ϕ2 < π2 (6.152)
La formula asintotica de la Funcion de Error Complementaria es:
Erfc(x) ≈ e−x2
√πx
[1− 1
2x2+
1 · 3(2x2)2
− 1 · 3 · 5(2x2)5
+ ...
](6.153)

212 Jose Marın Antuna
Introduccion a las Ecuaciones de laFısica Matematica
Por ecuaciones de la Fısica Matematica comunmente se entiende aquellas ecuaciones que descri-ben los procesos fısicos. La Fısica utiliza, fundamentalmente, para la descripcion matematicade los problemas que estudia, las ecuaciones diferenciales. De ellas, las llamadas ecuacionesdiferenciales ordinarias son estudiadas en otros libros, por lo que en el presente nos dedicare-mos, principalmente, al estudio de las ecuaciones en derivadas parciales de segundo orden queaparecen en los problemas en los que se estudian diferentes procesos fısicos relacionados con laHidrodinamica, la Teorıa de la Elasticidad, la Electrodinamica, la Mecanica Cuantica, etc.
Desde el punto de vista del objeto de estudio de este tema, ası como de la presentacion ydesarrollo de los metodos de solucion y de los resultados que se obtienen, el contenido del mismoes esencialmente matematico. Sin embargo y siguiendo la tonica del curso de conferencias quele sirve de base, no se realiza un estudio abstracto de las ecuaciones, sino que, constantemente,se vincula el material con la base fısica que lo acompana y se hace enfasis en la interpretacionfısica de los resultados que se obtienen. A lo largo de todo el texto se hace el tratamientonecesario de la funcion de Green correspondiente a cada problema de frontera de cada tipode ecuacion, en un intento de mostrar los aspectos comunes mas generales de ese importanteconcepto fısico matematico. Un capıtulo se dedica especialmente a ese concepto.
Sobre la base de la clasificacion convencional y clasica de las ecuaciones en derivadas parciales desegundo orden, se estudian en capıtulos separados los diferentes metodos de solucion aplicadosa los distintos tipos de ecuaciones definidas, haciendo enfasis, tanto en las particularidades delos metodos de solucion, como en los aspectos generales que los vinculan entre sı, de forma talque el lector pueda ir apropiandose de estos conocimientos al estudiar los diferentes metodosque se exponen, de los casos mas sencillos a los mas complicados. Ello permite asociar, demanera armonica, el contenido del tema con las funciones especiales estudiadas anteriormente.
Siguiendo el espıritu de nuestro trabajo, se ilustran los metodos teoricos con ejemplos esclare-cedores y se proponen al lector ejercicios sobre la materia desarrollada para la comprobaciondel grado de asimilacion de los conocimientos. Sin embargo, no pretendemos catalogar la obracomo un libro amplio en ejercicios.
213

214 Jose Marın Antuna
Capıtulo 7
Clasificacion de las ecuaciones enderivadas parciales de segundo orden
7.1 Clasificacion de las ecuaciones con dos variables in-
dependientes
En terminos generales, una ecuacion en derivadas parciales con n variables independientes tienela forma:
F
(x1, ..., xn, u,
∂u
∂x1
, ...,∂u
∂xn,∂2u
∂x21
, ...
)= 0
donde las variables independientes son x1, x2,..., xn y u(x1, x2, ..., xn) es la funcion incognita quese desea hallar. En dependencia del orden de la mayor derivada que en esta ecuacion aparezca,estaremos en presencia de ecuaciones en derivadas parciales de primer orden, de segundo ordeno de ordenes superiores. Las ecuaciones en derivadas parciales de primer orden son abordadasen otros textos y el estudio de sus metodos de solucion no tiene interes en nuestro curso. Ver,por ejemplo, el libro ”Ecuaciones Diferenciales y Calculo Variacional” de L. Elsgoltz, EditorialMir, Moscu, 1969, Capıtulo 5.
Las ecuaciones de tercer y de cuarto orden -y aun de ordenes superiores- requieren de estudiosque se salen del marco de nuestra obra, dado que tienen aplicacion en algunos problemas aisladosde la Fısica que no abordaremos en el presente libro.
Las ecuaciones que presentan interes para nosotros son las ecuaciones en derivadas parciales desegundo orden, que son las clasicas a las que dedicaremos en este momento nuestra atencion.Con el objetivo de llegar a una clasificacion de las mismas que este acorde con las necesidades dela Fısica que nos ocupa, reduciremos nuestro estudio a las que dependen solamente de dos varia-bles independientes. La correspondiente clasificacion para el caso de mayor numero de variablesindependientes puede obtenerse como una generalizacion de la que en este epıgrafe desarrolla-remos, toda vez que siempre habremos de circunscribir nuestro estudio a aquellos casos que
215
216 Jose Marın Antuna
respondan a procesos fısicos clasicos, conocidos. Desde el punto de vista matematico, puede re-sultar de interes, aparte de la clasificacion que ofrecemos en el presente capıtulo, la clasificacionde las ecuaciones en ultrahiperbolicas, parabolicas elıpticas, parabolicas hiperbolicas, etc.
Ası pues, nos dedicaremos al estudio de las ecuaciones en derivadas parciales de segundo ordencon dos variables independientes que, en general, tienen la forma
F (x, y, u, ux, uy, uxx, uxy, uyy) = 0
En ellas, x, y son las variables independientes, u es la funcion incognita a determinar y por mediode subındices denotamos el proceso de derivacion parcial respecto a la variable subindicada.
Dentro de la clase de estas ecuaciones tienen particular interes para la Fısica las que son linealescon respecto a sus derivadas de orden superior. En ese caso, la ecuacion tiene la forma
a11uxx + 2a12uxy + a22uyy + F (x, y, u, ux, uy) = 0 (7.1)
donde los coeficientes aij, con i, j = 1, 2, son, en general, funciones de x, y.
Con vistas a lograr una clasificacion de esta ecuacion, trataremos de reducirla a su forma massimple, es decir, de llevarla a lo que se conoce con el nombre de forma canonica de la ecuacion.Con ese fin efectuaremos un cambio de variables dado por las ecuaciones
ξ = ξ(x, y)
η = η(x, y) (7.2)
y exigiremos que este cambio de variables sea no degenerado, es decir, que el jacobiano dela transformacion sea diferente de cero. Como se sabe, en este caso existe la transformacioninversa
x = x(ξ, η)
y = y(ξ, η)
Bajo estas condiciones, calculemos las derivadas en las nuevas variables, considerando ya lafuncion u como funcion de las nuevas variables. Aplicando la regla de la cadena, obtenemospara las primeras derivadas:
ux = uξξx + uηηx
uy = uξξy + uηηy
Clasificacion de las ecuaciones 217
Volviendo a aplicar la regla de la cadena a estas primeras derivadas, se obtienen las siguientesexpresiones para las segundas derivadas que figuran en la ecuacion (7.1)
uxx = uξξξ2x + 2uξηξxηx + uηηη
2x + uξξxx + uηηxx (7.3)
uxy = uξξξxξy + uξη(ξxηy + ξyηx) + uηηηxηy + uξξxy + uηηxy (7.4)
uyy = uξξξ2y + 2uξηξyηy + uηηη
2y + uξξyy + uηηyy (7.5)
Sustituyendo las expresiones (7.3), (7.4) y (7.5) en la ecuacion (7.1), obtenemos, despues deagrupar convenientemente:
uξξ[a11ξ2x + 2a12ξxξy + a22ξ
2y ] + 2uξη[a11ξxηx + a12(ξxηy + ξyηx) + a22ξyηy] +
+uηη[a11η2x + 2a12ηxηy + a22η
2y ] + uξ[a11ξxx + 2a12ξxy + a22ξyy] +
+uη[a11ηxx + 2a12ηxy + a22ηyy] + F (ξ, η, u, uξ, uη) = 0
Introduzcamos la siguiente notacion. Llamemos:
a11 = a11ξ2x + 2a12ξxξy + a22ξ
2y (7.6)
a12 = a11ξxηx + a12(ξxηy + ξyηx) + a22ξyηy (7.7)
a22 = a11η2x + 2a12ηxηy + a22η
2y (7.8)
F = uξ[a11ξxx + 2a12ξxy + a22ξyy] + uη[a11ηxx + 2a12ηxy + a22ηyy] + F (ξ, η, u, uξ, uη) (7.9)
Entonces, la ecuacion (7.1) toma, en las nuevas variables, la forma:
a11uξξ + 2a12uξη + a22uηη + F = 0 (7.10)
Es facil comprobar que, con la transformacion de coordenadas efectuada, se cumple la siguienterelacion:
a212 − a11a22 = (a2
12 − a11a22)(ξxηy − ξyηx)2 (7.11)

218 Jose Marın Antuna
Notese que dentro del parentesis elevado al cuadrado que aparece a la extrema derecha de laecuacion (7.11) esta el jacobiano de la transformacion efectuada, de manera que la relacion(7.11) significa que el discriminante de la ecuacion permanece invariante ante la transformacionefectuada.
Al llegar a la ecuacion (7.10) aparentemente no hemos logrado nada, ya que esa ecuacion es,en su forma, igual a la ecuacion (7.1). La diferencia consiste en que en la ecuacion (7.10) loscoeficientes que la acompanan estan por determinar. Precisamente, para llevar esta ecuaciona su forma canonica (mas simple) escogeremos las nuevas variables ξ y η de forma tal que secumpla que
a11 = a11ξ2x + 2a12ξxξy + a22ξ
2y = 0 (7.12)
a22 = a11η2x + 2a12ηxηy + a22η
2y = 0 (7.13)
En otras palabras, escogeremos las nuevas variables ξ y η en funcion de x, y como las dosprimeras integrales de la ecuacion
a11z2x + 2a12zxzy + a22z
2y = 0 (7.14)
La ecuacion (7.14) es una ecuacion de segundo grado en derivadas parciales de primer orden.Resolviendola algebraicamente, obtenemos:
zx +a12 ±
√a2
12 − a11a22
a11
zy = 0 (7.15)
Si llamamos
P (x, y) = a11, Q(x, y) = a12 ±√a2
12 − a11a22
la ecuacion (7.15) puede escribirse en la forma:
Pzx +Qzy = 0 (7.16)
Esta ecuacion es una ecuacion lineal en derivadas parciales de primer orden, cuya solucion vienedada por la solucion de su ecuacion caracterıstica (ver ”Ecuaciones Diferenciales y CalculoVariacional” de L. Elsgoltz. Editorial Mir, Moscu, 1969, Capıtulo 5):
dx
P=dy
Q

Clasificacion de las ecuaciones 219
Es decir
dy
dx=Q
P=a12 ±
√a2
12 − a11a22
a11
que es lo mismo que escribir
a11(dy)2 − 2a12dydx+ a22(dx)
2 = 0 (7.17)
La ecuacion (7.17) recibe el nombre de ecuacion caracterıstica de la ecuacion (7.1) y sussoluciones se llaman caracterısticas de la ecuacion (7.1).
No es difıcil comprobar que la ecuacion (7.17) se descompone en dos ecuaciones:
dy
dx=a12 +
√a2
12 − a11a22
a11
,dy
dx=a12 −
√a2
12 − a11a22
a11
(7.18)
de manera que para ella tenemos, en general, dos soluciones independientes; es decir, dosprimeras integrales:
ϕ(x, y) = C1, ψ(x, y) = C2 (7.19)
Estas dos primeras integrales convierten en identidad, en virtud de lo desarrollado, a la ecuacion(7.14). Por consiguiente, si, como nuevas variables de la transformacion (7.2), tomamos estasprimeras integrales:
ξ = ϕ(x, y), η = ψ(x, y)
tendremos, respectivamente, que se igualaran a cero los coeficientes a11 y a22 de la ecuacion(7.10), de manera que esta quedara reducida a su forma canonica.
Ahora bien, las caracterısticas (7.19) de la ecuacion (7.1) evidentemente dependen del signo deldiscriminante de la ecuacion que figura bajo el radical en las ecuaciones (7.18). Atendiendo alsigno de este discriminante, surge la siguiente clasificacion de la ecuacion (7.1).
Definicion:
En el punto (x, y) la ecuacion (7.1) se llama:
1. Ecuacion hiperbolica, si en ese punto a212 − a11a22 > 0.
2. Ecuacion parabolica, si en ese punto a212 − a11a22 = 0.
3. Ecuacion elıptica, si en ese punto a212 − a11a22 < 0.

220 Jose Marın Antuna
De esta manera, hemos llegado a la clasificacion de las ecuaciones en derivadas parciales desegundo orden con dos variables independientes.
7.2 Formas canonicas de las ecuaciones en derivadas par-
ciales de segundo orden
Obtengamos las formas canonicas de los tres tipos de ecuaciones arriba clasificadas.
7.2.1 Ecuacion hiperbolica
En este caso, el discriminante a212− a11a22 > 0, de manera que la ecuacion caracterıstica (7.17)
tiene sus dos primeras integrales (7.19) reales. Ası pues, tomando como nuevas variables
ξ = ϕ(x, y), η = ψ(x, y) (7.20)
logramos que los coeficientes a11 y a22 de la ecuacion (7.10) sean cero. En virtud de (7.11), a12 6=0, ya que el discriminante, por hipotesis, es definido positivo y el jacobiano de la transformaciones diferente de cero. Por consiguiente, la ecuacion (7.10) se reduce a
2a12uξη + F = 0 (7.21)
O, dividiendo por 2a12 y redefiniendo la funcion convenientemente:
uξη = Φ(ξ, η, u, uξ, uη) (7.22)
La ecuacion (7.22) recibe el nombre de Primera forma canonica de la ecuacion hiperbo-lica. Observese que en ella las nuevas variables ξ y η son reales y la unica derivada de segundoorden que en ella figura es la cruzada.
En ocasiones, es preciso trabajar con una segunda forma canonica, la que obtendremos a con-tinuacion. Para ese fin, introduzcamos dos nuevas variables α y β por medio de las ecuaciones
α =1
2(ξ + η), β =
1
2(ξ − η) (7.23)
En virtud de esta definicion tenemos que
dα =1
2(dξ + dη), dβ =
1
2(dξ − dη) (7.24)

Clasificacion de las ecuaciones 221
Como se sabe, el segundo diferencial es invariante, de manera que podemos escribir que
d2u = uξξdξ2 + 2uξηdξdη + uηηdη
2 = uααdα2 + 2uαβdαdβ + uββdβ
2 (7.25)
Sustituyamos las expresiones (7.24) en la parte derecha de (7.25). Se obtiene:
d2u = uξξdξ2 + 2uξηdξdη + uηηdη
2 = uαα1
4(dξ2 + 2dξdη + dη2) +
+ 2uαβ1
4(dξ2 − dη2) + uββ
1
4(dξ2 − 2dξdη + dη2) (7.26)
Comparando los coeficientes que acompanan al producto dξ dη, concluimos que
2uξη =1
2(uαα − uββ)
Es decir
uξη =1
4(uαα − uββ) (7.27)
Sustituyendo (7.27) en (7.22), obtenemos para la ecuacion la expresion
uαα − uββ = Φ1 (7.28)
donde hemos llamado Φ1 = 4Φ. La ecuacion (7.28) recibe el nombre de segunda formacanonica de la ecuacion hiperbolica.
7.2.2 Ecuacion elıptica
En este caso, el discriminante de la ecuacion a212 − a11a22 < 0. Por consiguiente, aquı las dos
primeras integrales de la ecuacion caracterıstica (7.17) son complejo conjugadas:
ϕ(x, y) = C1, ϕ∗(x, y) = C2 (7.29)
Ası pues, tomando como nuevas variables independientes en este caso a
ξ = ϕ(x, y), η = ξ∗ = ϕ∗(x, y) (7.30)

222 Jose Marın Antuna
de nuevo logramos reducir a cero los coeficientes a11 y a22, en tanto que el coeficiente a12 6= 0por consideraciones evidentes a partir de la expresion (7.11), debido a que el discriminante y eljacobiano de la transformacion son ambos diferentes de cero.
Como consecuencia, la ecuacion (7.10) de nuevo se reduce a la forma
2a12uξη + F = 0
O, dividiendo por 2a12 y redefiniendo convenientemente la funcion
uξξ∗ = Φ (7.31)
Aquı hemos tenido en cuenta que la segunda variable independiente η = ξ∗.
Aunque pudieramos tomar la ecuacion (7.31) como una forma canonica de la ecuacion elıptica(y, de hecho, lo es), con ella practicamente nunca se trabaja, ya que tiene la dificultad de sercompleja. Introduzcamos dos nuevas variables reales de la forma siguiente:
α =1
2(ξ + ξ∗) ≡ Reξ, β =
1
2i(ξ − ξ∗) ≡ Imξ (7.32)
Entonces, teniendo en cuenta la invarianza del segundo diferencial, obtenemos que:
d2u = uξξdξ2 + 2uξξ∗dξdξ
∗ + uξ∗ξ∗dξ∗2 = uααdα
2 + 2uαβdαdβ + uββdβ2 =
= uαα1
4(dξ2 + 2dξdξ∗ + dξ∗2) + 2uαβ
1
4(dξ2 − dξ∗2)− uββ
1
4(dξ2 − 2dξdξ∗ + dξ∗2) (7.33)
Comparando los coeficientes que acompanan al producto dξdξ∗ en (7.33), llegamos a que
2uξξ∗ =1
2(uαα + uββ)
Es decir
uξξ∗ =1
4(uαα + uββ) (7.34)
Ası, sustituyendo (7.34) en (7.31), obtenemos para la ecuacion elıptica la expresion
uαα + uββ = Φ1 (7.35)

Clasificacion de las ecuaciones 223
donde Φ1 = 4Φ. La ecuacion (7.35) se conoce con el nombre de Forma canonica de laecuacion elıptica. Notese que en ella aparece la suma de las segundas derivadas de la funcionu; es decir, el laplaciano de esta funcion.
7.2.3 Ecuacion parabolica
En este caso el discriminante a212 − a11a22 = 0. Por consiguiente, la ecuacion caracterıstica
(7.17) no se descompone en las dos ecuaciones (7.18), como en los casos anteriores, sino que esuna sola ecuacion
dy
dx=a12
a11
(7.36)
y, por lo tanto, tiene una sola integral: ϕ(x, y) = C.
De aquı que, si hacemos
ξ = ϕ(x, y) (7.37)
logramos que el coeficiente a11 se reduzca a cero. Como variable independiente η en la trans-formacion tomamos cualquier funcion independiente de ϕ(x, y), pero ella ya no hara cero alcoeficiente a22, de manera que a22 6= 0. Como, en virtud de la relacion (7.11), tenemos que
a212 − a11a22 = 0 (7.38)
y, ademas, a11 = 0, concluimos que, en este caso, a12 = 0.
En consecuencia, la ecuacion (7.10) adopta la forma
a22uηη + F = 0 (7.39)
Es decir, dividiendo por a22 y redefiniendo la funcion convenientemente:
uηη = Φ(ξ, η, u, uξ, uη) (7.40)
La ecuacion (7.40) recibe el nombre de Forma canonica de la ecuacion parabolica.
224 Jose Marın Antuna
7.3 Concepto de planteamiento de los problemas mate-
maticos. Problemas correctamente planteados. Idea
de solucion generalizada
Analicemos en el presente epıgrafe un concepto de capital importancia en la Fısica Matematica.La ecuacion (7.1) estudiada en este capıtulo puede ser escrita de la siguiente manera:
L[u] = a11uxx + 2a12uxy + a22uyy + F (x, y, u, ux, uy) = 0 (7.41)
donde, como se ve, L[u] es un operador lineal con respecto a las derivadas de segundo orden dela funcion incognita u(x, y). De forma similar a como ocurre para las ecuaciones diferencialesordinarias y las ecuaciones en derivadas parciales de primer orden, las funciones u(x, y) queconvierten en identidad la ecuacion (7.41) forman una familia de funciones que, en general,dependen de varias constantes de integracion. Ello significa que, para seleccionar una soluciondeterminada de dicha familia, es necesario imponer determinadas condiciones a la solucion.
Para fijar ideas, supongamos que queremos resolver la ecuacion (7.41) en el dominio rectangulardefinido por las expresiones x0 < x < x1, y0 < y < y1. Generalmente, las condiciones que seimponen a la solucion de la ecuacion (7.41) estan relacionadas con los valores que debe tomarla funcion solucion u(x, y) en los extremos de los intervalos (x0, x1) y (y0, y1). En los casosde ecuaciones hiperbolicas o parabolicas, generalmente uno de estos intervalos, por ejemplo, elcorrespondiente a la variacion de la variable y, es semiinfinito: (y0,∞).
Las condiciones que se imponen a la solucion u(x, y) o a sus derivadas en x0, x1, y0, y1 sondeterminadas, como regla general, a partir de consideraciones fısicas y dependen, logicamente,del significado fısico de la funcion u(x, y) que deseamos encontrar.
Al hecho de imponer determinadas condiciones a la solucion de la ecuacion (7.41) en los extremosde los intervalos (x0, x1) y (y0, y1):
L[u] = 0, ∀x0 < x < x1, y0 < y < y1 (7.42)
a la que le anadimos condiciones para u(x, y) en x0, x1, y0 y1 le llamamos planteamiento delproblema matematico para la ecuacion (7.41).
El problema matematico (7.42) ası planteado, como se ve, esta compuesto por la ecuacion(7.41) que describe, en terminos generales, determinado proceso fısico y cuya solucion u(x, y)deseamos encontrar, bajo la premisa de que dicha solucion cumpla las condiciones impuestasen los puntos x0, x1, y0, y1.
Es evidente que hay que responder a varias preguntas que surgen como resultado del plantea-miento del problema (7.42).
En primer lugar, hay que indagar si son necesarias las condiciones impuestas a la ecuacionpara la existencia de la solucion. En nuestro libro, en lugar de dedicarnos a la demostracion
Clasificacion de las ecuaciones 225
de un teorema general de existencia, demostraremos, mediante el desarrollo de los metodos desolucion de los diferentes problemas, la existencia de la solucion para las condiciones impuestas.
En segundo lugar, hay que establecer si estas condiciones impuestas son suficientes para laseleccion de una solucion del conjunto de soluciones posibles. La respuesta a esta pregunta lada el teorema de unicidad, que a lo largo del libro se ira demostrando para cada uno de lostipos de ecuaciones que iremos estudiando.
En tercer lugar, es indispensable hacer un analisis que resulta de importancia trascendentalen el problema planteado (7.42) y que consiste en investigar la estabilidad de la solucion dedicho problema con respecto a las condiciones impuestas. Es necesario establecer si, a pequenasvariaciones de las condiciones impuestas a la solucion en los puntos x0, x1, y0, y1, correspon-den pequenas variaciones de la solucion del problema. Dicho de otro modo, por ejemplo, siresolvemos, para fijar ideas, el problema (7.42) con la condicion u(x0, y) = ϕ(y) y como resul-tado obtenemos la solucion u(x, y) y luego lo resolvemos con la condicion u(x0, y) = ϕ1(y) yobtenemos la solucion u1(x, y), es necesario investigar si se cumple que, si |ϕ(y) − ϕ1(y)| < εpara cualquier ε > 0, ello implica que |u(x, y)− u1(x, y)| < ε.
Por definicion, los problemas matematicos en los que las soluciones dependen de forma continuade las condiciones impuestas o, dicho de otro modo, en los que a pequenas variaciones de lascondiciones impuestas corresponden pequenas variaciones de la solucion, se llaman problemascorrectamente planteados o problemas correctos de la Fısica Matematica. En casocontrario, el problema se dice que es incorrecto o que esta incorrectamente planteado.
La necesidad de que el problema planteado sea correcto viene dada por el hecho de que laecuacion (7.41), que figura en el problema (7.42), responde a un modelo matematico, medianteel cual describimos un proceso fısico determinado, en tanto que, en la practica, las condicionesque se imponen a la solucion en el problema (7.42) son establecidas de la realidad fısica -yasea mediante mediciones experimentales o consideraciones teoricas- con cierto grado de erroro inexactitud. De ahı que sea de importancia capital poder garantizar que la solucion queobtengamos con ese cierto grado de error difiera poco de la solucion exacta, que obtendrıamosde poder imponer condiciones exactas, sin error alguno. Es decir, que la solucion aproximada,obtenida a partir de condiciones aproximadas, sea muy parecida a la respuesta exacta que dala naturaleza.
Desgraciadamente, no todos los problemas que se pueden plantear son siempre correctos.Mas adelante, en el ultimo epıgrafe del capıtulo que trata del planteamiento de los proble-mas matematicos, volvemos sobre este tema y ponemos un ejemplo de problema incorrecto y,ademas, exponemos algunas ideas generales desarrolladas para acometer la solucion de los pro-blemas incorrectos de la Fısica Matematica, aunque, en general, el tema se sale de los marcos dela presente obra. En nuestro libro de Ecuaciones Integrales desarrollamos de forma mas ampliael metodo regularizador de Tıjonov para la solucion de las ecuaciones integrales de Fredholmde primer tipo, las que constituyen problemas incorrectos.
Digamos, por ultimo, algo sobre las caracterısticas en sı de la solucion del problema (7.42). Lamayorıa de los metodos matematicos que se emplean para resolver el problema (7.42) exigencondiciones de continuidad y diferenciabilidad de la solucion y de las condiciones impuestas,que no siempre logran cumplirse en la realidad. En el caso en que dichas condiciones sean
226 Jose Marın Antuna
susceptibles de ser cumplimentadas, encontraremos las soluciones clasicas de los problemas.Pero, lamentablemente, no siempre las funciones con las que hay que trabajar cumplen losrequisitos de continuidad y diferenciabilidad indispensables para la obtencion de las solucionesclasicas de los problemas. En tales casos, hay que recurrir a la busqueda de lo que llamaremossoluciones generalizadas de los problemas.
Las soluciones generalizadas estan ıntimamente relacionadas con las llamadas funciones gene-ralizadas.
Sin pretender desarrollar un curso de funciones generalizadas, lo que no es objeto de nuestrotexto, diremos que se entiende por funcion generalizada.
Sea una funcion f(x) integrable en el intevalo (a, b) a la que en lo adelante llamaremos funcionde base o funcion de prueba. Consideremos la sucesion de funciones Fn(x) en el intervalo(a, b) y definamos el producto interno de estas funciones como
(Fn(x), f(x)) ≡∫ b
a
Fn(x)f(x)dx (7.43)
Si existe el lımite
limn→∞
(Fn(x), f(x)) = (F (x), f(x)) (7.44)
entonces, la funcion F (x) -lımite debil de la sucesion Fn(x) para n → ∞- es una funciongeneralizada.
Para ilustrar las ideas, supongamos que en la condicion u(x0, y) = ϕ(y) del problema (7.42),la funcion ϕ(y) no cumple los requisitos que permitan hallar la solucion clasica u(x, y) delproblema, pero que existe -para cierta funcion de base integrable f(y)- una sucesion de funcionesϕn(y) que sı cumplen esos requisitos y tal que
limn→∞
(ϕn(y), f(y)) = (ϕ(y), f(y)) (7.45)
Entonces, resolviendo el problema para ϕn(y), obtenemos las soluciones un(x, y); llamaremossolucion generalizada de nuestro problema a la funcion generalizada u(x, y) dada por
limn→∞
(un(x, y), f(y)) = (u(x, y), f(y)) (7.46)
Independientemente de que, en el cuerpo del texto, mas adelante, definiremos una de las fun-ciones generalizadas mas importantes e historicamente la primera, que es la funcion delta deDirac, con la que trabajaremos para definir el importante concepto de funcion de Green yde solucion fundamental, por el interes actual que para la Fısica Matematica tienen, el lec-tor interesado en ampliar sus conocimientos al respecto puede remitirse al libro ”FuncionesGeneralizadas” del autor de la presente obra.

Clasificacion de las ecuaciones 227
7.4 Ejercicios del capıtulo
Reducir a la forma canonica las siguientes ecuaciones diferenciales:
1.∂2u
∂x2+ 2
∂2u
∂x∂y− 3
∂2u
∂y2+ 2
∂u
∂x+ 6
∂u
∂y= 0
2.∂2u
∂x2+ 4
∂2u
∂x∂y+ 5
∂2u
∂y2+∂u
∂x+ 2
∂u
∂y= 0
3.∂2u
∂x2− 2
∂2u
∂x∂y− ∂2u
∂y2+ α
∂u
∂x+ β
∂u
∂y+ cu = 0
4.∂2u
∂x2− 2 cos x
∂2u
∂x∂y− (3 + sin2 x)
∂2u
∂y2− y
∂u
∂y= 0
5.
y2∂2u
∂x2+ 2xy
∂2u
∂x∂y+ 2x2∂
2u
∂y2+ y
∂u
∂y= 0
6.
tan2 x∂2u
∂x2− 2y tan x
∂2u
∂x∂y+ y2∂
2u
∂y2+ tan3 x
∂u
∂x= 0
7.∂2u
∂x2+ 2 sin x
∂2u
∂x∂y− cos2 x
∂2u
∂y2+ cosx
∂u
∂x+
1
2sin 2x
∂u
∂y= 0
8.
x2∂2u
∂x2+ 2xy
∂2u
∂x∂y− 3y2∂
2u
∂y2− 2x
∂u
∂x+ 4y
∂u
∂y+ 16x4u = 0
9.
(1 + x2)∂2u
∂x2+ (1 + y2)
∂2u
∂y2+ x
∂u
∂x+ y
∂u
∂y= 0

228 Jose Marın Antuna
Capıtulo 8
Problemas fısicos que conducen aecuaciones de la Fısica Matematica
En el presente capıtulo estudiaremos una serie de procesos fısicos que se describen con ecuacioneshiperbolicas, parabolicas y elıpticas como las que estudiamos y clasificamos en el capıtuloanterior.
8.1 Problemas fısicos que conducen a ecuaciones hiper-
bolicas
8.1.1 Oscilaciones longitudinales de una barra
Consideremos una barra solida suficientemente fina. El termino ”suficientemente fina” sig-nificara para nosotros que las dimensiones lineales caracterısticas de su seccion transversal sonmuy pequenas en comparacion con su longitud, de forma tal que los procesos oscilatorios trans-versales puedan ser despreciados y que solo se tengan en consideracion las oscilaciones a lo largodel eje axial de la barra. Llamaremos Ox al eje de coordenadas trazado a lo largo del eje axialde la barra. En virtud de la suposicion hecha, solamente consideraremos las oscilaciones en elsentido de este eje, de manera que cada punto de la barra (en rigor, cada seccion transversalde la barra) se caracterizara por una coordenada x de dicho eje.
Analicemos dos puntos cercanos entre sı de la barra, dados por las coordenadas x y x + ∆x.(Fig. 8.1).
Supongamos que, producto de determinada accion exterior, se produce una deformacion de labarra, de forma tal que el punto x pasa a ocupar la posicion x + u(x, t). Aquı u(x, t) es unafuncion de la coordenada x y del tiempo t que caracteriza el estado (en el presente caso, laelongacion) del punto x en el instante t. De forma similar, el punto x+∆x pasara a la posicionx+ ∆x+ u(x+ ∆x, t).
229
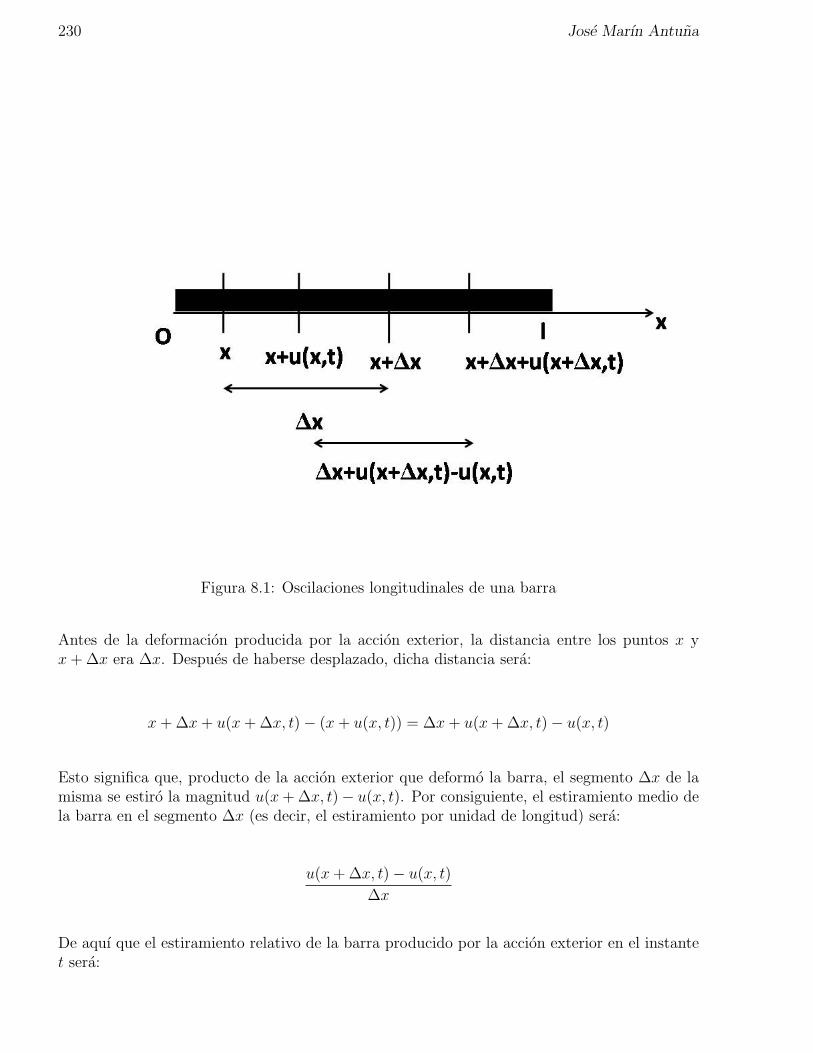
230 Jose Marın Antuna
Figura 8.1: Oscilaciones longitudinales de una barra
Antes de la deformacion producida por la accion exterior, la distancia entre los puntos x yx+ ∆x era ∆x. Despues de haberse desplazado, dicha distancia sera:
x+ ∆x+ u(x+ ∆x, t)− (x+ u(x, t)) = ∆x+ u(x+ ∆x, t)− u(x, t)
Esto significa que, producto de la accion exterior que deformo la barra, el segmento ∆x de lamisma se estiro la magnitud u(x+ ∆x, t)− u(x, t). Por consiguiente, el estiramiento medio dela barra en el segmento ∆x (es decir, el estiramiento por unidad de longitud) sera:
u(x+ ∆x, t)− u(x, t)
∆x
De aquı que el estiramiento relativo de la barra producido por la accion exterior en el instantet sera:

Problemas fısicos 231
lim∆x→0
u(x+ ∆x, t)− u(x, t)
∆x=∂u(x, t)
∂x
Producto de ese estiramiento relativo, como se sabe, surgen en la barra fuerzas elasticas derestitucion que tratan de llevar los puntos de la misma a su posicion de equilibrio, como resultadode lo cual se producen oscilaciones a lo largo de la barra. Nuestro objetivo es, precisamente,hallar la ecuacion que describe ese proceso oscilatorio de la barra.
Como se sabe de Fısica, la ley de Hooke establece que las fuerzas de restitucion que surgen aldeformar un solido son proporcionales al estiramiento relativo ocurrido. De aquı que las fuerzasde restitucion tienen, en nuestro caso, la forma
Φ(x, t) = k(x)∂u(x, t)
∂x(8.1)
donde el coeficiente de proporcionalidad que figura en la formula (8.1) se conoce con el nombrede modulo de Young y se relaciona con el modulo de Hooke mediante la expresion k = SE,donde S es el area de la seccion transversal de la barra y E es el modulo de Hooke.
Con el objetivo de obtener la ecuacion que describe el proceso oscilatorio de los puntos de labarra en el entorno de su posicion de equilibrio, nos auxiliaremos de una ley de conservacion: laley de conservacion de la cantidad de movimiento, que establece que la variacion de la cantidadde movimiento es igual a la suma de los impulsos de las fuerzas que actuan sobre el sistema.
Analicemos un segmento cualquiera (x1, x2) de la barra (Fig. 8.2). La cantidad de movimientode un elemento dx de la barra sera, ya que la cantidad de movimiento es igual a masa porvelocidad:
∂u(x, t)
∂tρ(x)dx
donde ρ(x) es la densidad lineal de la barra.
Por consiguiente, la cantidad de movimiento de todo el segmento (x1, x2) de la barra sera:
C(t) =
∫ x2
x1
∂u(x, t)
∂tρ(x)dx (8.2)
Por lo tanto, al transcurrir el intervalo de tiempo (t1, t2), la variacion de la cantidad de movi-miento del segmento (x1, x2) sera:
C(t2)− C(t1) =
∫ x2
x1
[∂u(x, t2)
∂t− ∂u(x, t1)
∂t
]ρ(x)dx (8.3)

232 Jose Marın Antuna
Figura 8.2: Calculo de la cantidad de movimiento
De acuerdo con la ley, esta variacion de la cantidad de movimiento debera ser igual al impulsode las fuerzas que actuan sobre el segmento (x1, x2) considerado.
La fuerza de restitucion resultante que actua sobre el segmento (x1, x2) es
Φ(x2, t)− Φ(x1, t) = k(x2)∂u(x2, t)
∂x− k(x1)
∂u(x1, t)
∂x
de manera que el impulso de esta fuerza resultante en el transcurso del elemento de tiempo dtsera
dI =
[k(x2)
∂u(x2, t)
∂x− k(x1)
∂u(x1, t)
∂x
]dt
ya que el impulso de una fuerza es el producto de su intensidad por el tiempo durante el cualesta actua.

Problemas fısicos 233
Por consiguiente, el impulso de esta fuerza durante el intervalo de tiempo (t1, t2) vendra dadopor la expresion:
I =
∫ t2
t1
[k(x2)
∂u(x2, t)
∂x− k(x1)
∂u(x1, t)
∂x
]dt (8.4)
Consideremos que, ademas de las fuerzas de restitucion, sobre la barra actuan determinadasfuerzas externas, distribuidas en su accion sobre la barra, con una densidad por unidad delongitud igual a F (x, t). Entonces, estas fuerzas le imprimen al segmento (x1, x2) en el intervalode tiempo (t1, t2) un impulso que vendra dado por
I =
∫ t2
t1
∫ x2
x1
F (x, t)dxdt (8.5)
Teniendo en consideracion las formulas (8.3), (8.4) y (8.5), la ley de conservacion de la cantidadde movimiento del segmento (x1, x2) de la barra en el intervalo de tiempo (t1, t2) toma la forma
∫ x2
x1
[∂u(x, t2)
∂t− ∂u(x, t1)
∂t
]ρ(x)dx =
∫ t2
t1
[k(x2)
∂u(x2, t)
∂x− k(x1)
∂u(x1, t)
∂x
]dt+
+
∫ t2
t1
∫ x2
x1
F (x, t)dxdt (8.6)
Analicemos, por separado, cada una de las integrales que aparecen en la expresion (8.6).
Si llamamos ∆x = x2−x1 y ∆t = t2−t1, entonces, aplicando el teorema del valor medio integraly el teorema del valor medio diferencial a la integral que esta a la izquierda en la expresion(8.6), tendremos:
∫ x2
x1
[∂u(x, t2)
∂t− ∂u(x, t1)
∂t
]ρ(x)dx = [ut(x, t2)− ut(x, t1)]ρ(x)∆x =
= utt(x, t)ρ(x)∆x∆t (8.7)
donde x ∈ (x1, x2), t ∈ (t1, t2).
La primera integral que figura a la derecha en la expresion (8.6) es tratada de forma identica:
∫ t2
t1
[k(x2)
∂u(x2, t)
∂x− k(x1)
∂u(x1, t)
∂x
]dt = [k(x2)ux(x2, ¯t)− k(x1)ux(x1, ¯t)]∆t =
=∂
∂x[k(¯x)ux(¯x, ¯t)]∆x∆t (8.8)

234 Jose Marın Antuna
donde ¯x ∈ (x1, x2), ¯t ∈ (t1, t2).
A la integral de la extrema derecha en la expresion (8.6) le aplicamos dos veces el teorema delvalor medio integral, obteniendo ası:
∫ t2
t1
∫ x2
x1
F (x, t)dxdt = F (¯x, ¯t)∆x∆t (8.9)
donde ¯x ∈ (x1, x2),¯t) ∈ (t1, t2).
Sustituyendo (8.7), (8.8) y (8.9) en la expresion (8.6), obtenemos:
utt(x, t)ρ(x)∆x∆t =∂
∂x[k(¯x)ux(¯x, ¯t)]∆x∆t+ F (¯x, ¯t)∆x∆t (8.10)
En la expresion (8.10) se pueden cancelar ∆x y ∆t. Luego, tomando el lımite para ∆x→ 0 y
∆t→ 0, los puntos x, ¯x y ¯x tenderan a un mismo punto x y los puntos t, ¯t y ¯t tenderan a unmismo instante t, de manera que, de la ecuacion (8.10), obtenemos:
ρ(x)utt =∂
∂x[k(x)ux] + F (x, t) (8.11)
Esta ecuacion (8.11) es la que describe el proceso de las oscilaciones longitudinales de una barra.Es una ecuacion diferencial en derivadas parciales de segundo orden del tipo hiperbolico. Sila barra considerada es homogenea y de seccion transversal constante, entonces ρ = const yk = const, de manera que la ecuacion (8.11) toma la forma
utt = a2uxx + f(x, t) (8.12)
donde hemos llamado
a2 =k
ρ(8.13)
y que, posteriormente veremos que, fısicamente, es el cuadrado de la velocidad de propagacionde las ondas que surgen en la barra, producto de las oscilaciones y
f(x, t) =1
ρF (x, t) (8.14)
que tiene dimensiones de aceleracion y que, fısicamente, es la densidad de las fuerzas externaspor unidad de masa.
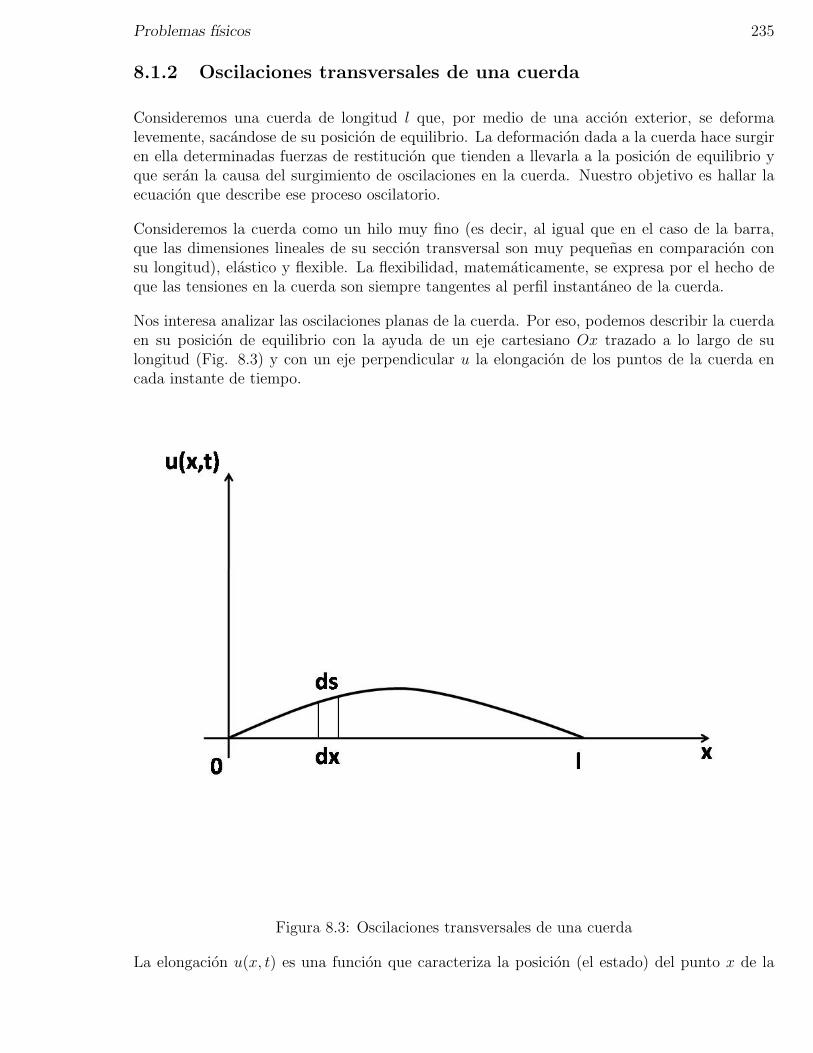
Problemas fısicos 235
8.1.2 Oscilaciones transversales de una cuerda
Consideremos una cuerda de longitud l que, por medio de una accion exterior, se deformalevemente, sacandose de su posicion de equilibrio. La deformacion dada a la cuerda hace surgiren ella determinadas fuerzas de restitucion que tienden a llevarla a la posicion de equilibrio yque seran la causa del surgimiento de oscilaciones en la cuerda. Nuestro objetivo es hallar laecuacion que describe ese proceso oscilatorio.
Consideremos la cuerda como un hilo muy fino (es decir, al igual que en el caso de la barra,que las dimensiones lineales de su seccion transversal son muy pequenas en comparacion consu longitud), elastico y flexible. La flexibilidad, matematicamente, se expresa por el hecho deque las tensiones en la cuerda son siempre tangentes al perfil instantaneo de la cuerda.
Nos interesa analizar las oscilaciones planas de la cuerda. Por eso, podemos describir la cuerdaen su posicion de equilibrio con la ayuda de un eje cartesiano Ox trazado a lo largo de sulongitud (Fig. 8.3) y con un eje perpendicular u la elongacion de los puntos de la cuerda encada instante de tiempo.
Figura 8.3: Oscilaciones transversales de una cuerda
La elongacion u(x, t) es una funcion que caracteriza la posicion (el estado) del punto x de la
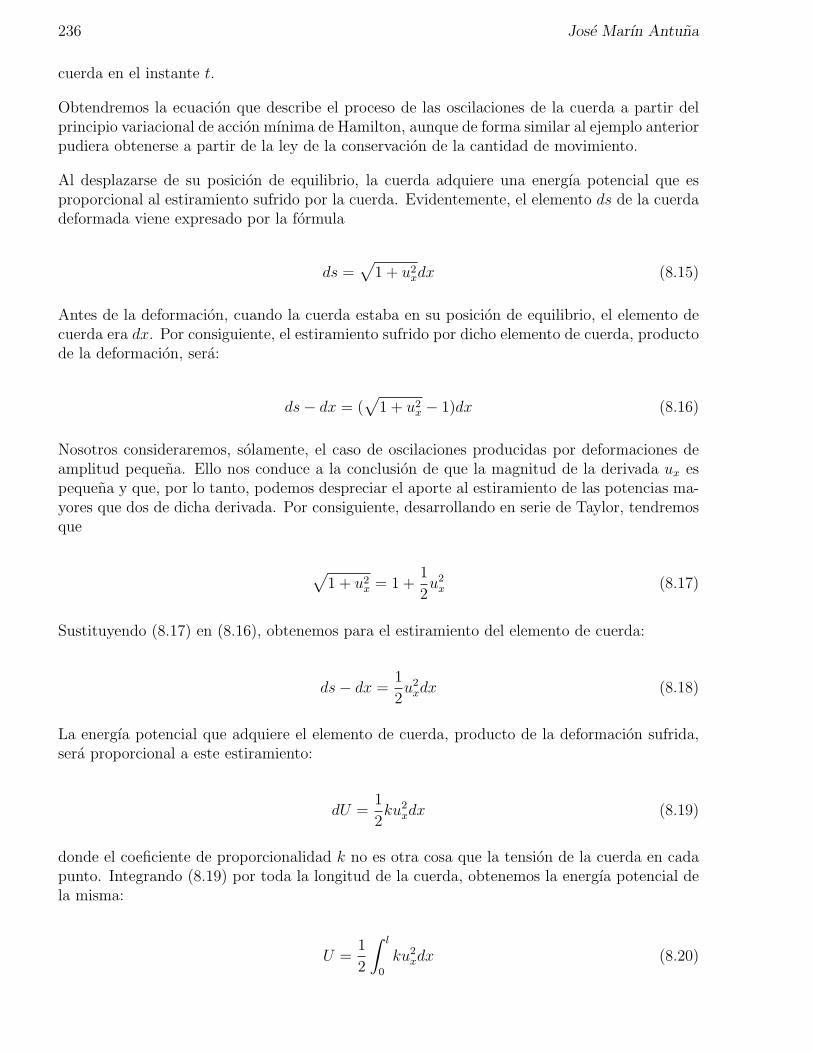
236 Jose Marın Antuna
cuerda en el instante t.
Obtendremos la ecuacion que describe el proceso de las oscilaciones de la cuerda a partir delprincipio variacional de accion mınima de Hamilton, aunque de forma similar al ejemplo anteriorpudiera obtenerse a partir de la ley de la conservacion de la cantidad de movimiento.
Al desplazarse de su posicion de equilibrio, la cuerda adquiere una energıa potencial que esproporcional al estiramiento sufrido por la cuerda. Evidentemente, el elemento ds de la cuerdadeformada viene expresado por la formula
ds =√
1 + u2xdx (8.15)
Antes de la deformacion, cuando la cuerda estaba en su posicion de equilibrio, el elemento decuerda era dx. Por consiguiente, el estiramiento sufrido por dicho elemento de cuerda, productode la deformacion, sera:
ds− dx = (√
1 + u2x − 1)dx (8.16)
Nosotros consideraremos, solamente, el caso de oscilaciones producidas por deformaciones deamplitud pequena. Ello nos conduce a la conclusion de que la magnitud de la derivada ux espequena y que, por lo tanto, podemos despreciar el aporte al estiramiento de las potencias ma-yores que dos de dicha derivada. Por consiguiente, desarrollando en serie de Taylor, tendremosque
√1 + u2
x = 1 +1
2u2x (8.17)
Sustituyendo (8.17) en (8.16), obtenemos para el estiramiento del elemento de cuerda:
ds− dx =1
2u2xdx (8.18)
La energıa potencial que adquiere el elemento de cuerda, producto de la deformacion sufrida,sera proporcional a este estiramiento:
dU =1
2ku2
xdx (8.19)
donde el coeficiente de proporcionalidad k no es otra cosa que la tension de la cuerda en cadapunto. Integrando (8.19) por toda la longitud de la cuerda, obtenemos la energıa potencial dela misma:
U =1
2
∫ l
0
ku2xdx (8.20)

Problemas fısicos 237
Por otra parte, si llamamos ρ a la densidad lineal de la cuerda, entonces la energıa cinetica delelemento dx de cuerda sera:
dT =1
2ρu2
tdx (8.21)
De (8.21), integrando, obtenemos la energıa cinetica de toda la cuerda en la forma:
T =1
2
∫ l
0
ρu2tdx (8.22)
De aquı que la lagrangiana del sistema de la cuerda sera:
L = T − U =1
2
∫ l
0
[ρu2t − ku2
x]dx (8.23)
La integral de accion para la cuerda sera, por tanto:
S =
∫ t1
t0
Ldt =1
2
∫ t1
t0
∫ l
0
[ρu2t − ku2
x]dxdt (8.24)
De acuerdo con el principio de accion mınima de Hamilton , el proceso fısico en la cuerda ocurrede forma tal, que el funcional (8.24) alcanza un mınimo. El funcional (8.24) es un funcional deuna funcion de varias variables, es decir, de la forma
∫D
∫F (x, y, u, ux, uy)dxdy (8.25)
Por lo tanto, su extremal vendra dada por la solucion de la ecuacion de Ostrogradsky (ver ellibre de Ecuaciones Diferenciales y Calculo Variacional de L. Elsgoltz, ya mencionado):
Fu −∂
∂xFp −
∂
∂yFq = 0 (8.26)
donde p = ux y q = uy. En nuestro caso, la variable y es t y, como la funcion integrando en(8.24) no depende explıcitamente de u, tendremos:
Fu = 0, Fp = −2kux, Fq = 2ρut (8.27)
Sustituyendo (8.27) en (8.26), obtenemos la ecuacion diferencial para la extremal del funcional(8.24):
238 Jose Marın Antuna
∂
∂xkux −
∂
∂tρut = 0 (8.28)
Si la cuerda es homogenea, con k = const y ρ = const, (8.28) dara:
kuxx − ρutt = 0 (8.29)
Es decir:
utt = a2uxx (8.30)
que es una ecuacion hiperbolica. En ella hemos llamado
a2 =k
ρ(8.31)
que, como podremos ver, es el cuadrado de la velocidad de propagacion de la deformacion alo largo de la cuerda y que, en coincidencia con nuestros conocimientos practicos, dependedirectamente de la tension de la cuerda e inversamente de su densidad.
La ecuacion (8.30) ha sido obtenida, considerando la no existencia de fuerzas externas que denenergıa al sistema. Si existiesen fuerzas externas con densidad por unidad de longitud F (x, t)aplicadas a la cuerda, entonces, repitiendo el procedimiento anterior y teniendo en cuenta elaporte de esas fuerzas a la lagrangiana, se obtendrıa la ecuacion que describe el proceso de lasoscilaciones de la cuerda en la forma:
utt = a2uxx + f(x, t) (8.32)
donde
f(x, t) =1
ρF (x, t) (8.33)
es la densidad de las fuerzas externas por unidad de masa.
Los dos ejemplos vistos hasta aquı nos indican que los procesos oscilatorios en barras y cuerdasse describen con ecuaciones hiperbolicas. Podemos afirmar que, en general, todos los procesososcilatorios en medios en los que solo se tienen en cuenta las oscilaciones en una dimensionespacial, se describen con este tipo de ecuacion.
A continuacion veremos la extension de la ecuacion hiperbolica al caso de varias dimensionesespaciales, al analizar procesos fısicos de oscilaciones de medios de varias dimensiones.

Problemas fısicos 239
8.1.3 Oscilaciones transversales de una membrana
Para deducir la ecuacion que describe el proceso de las oscilaciones transversales de una mem-brana, procederemos de manera similar a como hicimos en el punto anterior para obtener laecuacion de las oscilaciones transversales de una cuerda. Consideremos una membrana que,en estado de equilibrio, ocupa determinada region D del plano (x, y). Mediante cierta accionexterior la membrana sufre determinada deformacion que la saca levemente de su posicion deequilibrio. Entonces, surgiran fuerzas de restitucion que tienden a llevar a la membrana, denuevo, a dicha posicion y que seran la causa del surgimiento de sus oscilaciones. Denotemos poru(x, y, t) la elongacion del punto (x, y) de la membrana en el instante t. Esta funcion caracterizala posicion (el estado) de cada punto (x, y) de la membrana en cada instante. Al desplazarsede su posicion de equilibrio, la membrana adquiere una energıa potencial proporcional a ladeformacion sufrida por ella. Es evidente que el elemento de membrana deformada sera:
ds =√
1 + u2x + u2
ydxdy (8.34)
donde dxdy es el elemento de membrana sin deformar, en estado de equilibrio (Fig. 8.4).
Por consiguiente, el estiramiento sufrido por el elemento de membrana sera:
ds− dxdy = (√
1 + u2x + u2
y − 1)dxdy (8.35)
Consideraremos solo el caso de oscilaciones de amplitud pequena, de manera que potenciassuperiores al cuadrado de las derivadas ux y uy son despreciables. Por lo tanto, desarrollandoen serie de Taylor
√1 + u2
x + u2y ≈ 1 +
1
2(u2
x + u2y) (8.36)
obtenemos para el estiramiento (8.35) la expresion:
ds− dxdy =1
2(u2
x + u2y)dxdy (8.37)
La energıa potencial adquirida por el elemento de membrana producto de esta deformacion,integrada por toda la membrana, nos dara la energıa potencial de la misma en la forma:
U =1
2
∫D
∫k(u2
x + u2y)dxdy (8.38)
donde el coeficiente de proporcionalidad k tiene el sentido fısico de la tension en la membrana.
Por otra parte, si llamamos ρ a la densidad superficial de la membrana, entonces, la energıacinetica de esta sera:
240 Jose Marın Antuna
Figura 8.4: Oscilaciones transversales de una membrana
T =1
2
∫D
∫ρu2
tdxdy (8.39)
Por lo tanto, la lagrangiana de la membrana sera:
L = T − U =1
2
∫D
∫[ρu2
t − k(u2x + u2
y)]dxdy (8.40)
La integral de accion para la membrana sera:
S =
∫ t1
t0
Ldt =1
2
∫ t1
t0
∫D
∫[ρu2
t − k(u2x + u2
y)]dxdydt (8.41)
Aplicando el principio de accion mınima de Hamilton a este funcional, la extremal vendra dadapor la solucion de la generalizacion de la ecuacion de Ostrogradsky:

Problemas fısicos 241
Fu −∂
∂tFut −
∂
∂xFux −
∂
∂yFuy = 0 (8.42)
donde aquı
F (t, x, y, u, ut, ux, uy) = ρu2t − k(u2
x + u2y) (8.43)
no depende explıcitamente de u. Por consiguiente, (8.42) toma la forma:
∂
∂tFut+
∂
∂xFux+
∂
∂yFuy = 0 (8.44)
Considerando la membrana homogenea, ρ = const, k = const, de (8.44) obtenemos:
ρutt = k∇2u (8.45)
Es decir:
utt = a2∇2u (8.46)
que es una ecuacion hiperbolica en dos dimensiones espaciales que rige las oscilaciones de lamembrana. En ella hemos llamado
a2 =k
ρ(8.47)
al cuadrado de la velocidad de la propagacion de las ondas a lo largo de la membrana.
Basados en el mismo principio de accion mınima de Hamilton se puede obtener, mediante laapropiada construccion de la lagrangiana del sistema de la membrana, que, si sobre la membranaactuan fuerzas externas con densidad por unidad de superficie F (x, y, t), entonces la ecuacionde las oscilaciones de la membrana que se obtiene es:
utt = a2∇2u+ f(x, y, t) (8.48)
donde
f(x, y, t) =1
ρF (x, y, t) (8.49)
es la densidad de las fuerzas externas por unidad de masa.

242 Jose Marın Antuna
El lector puede ver otra manera de deducir la ecuacion de las oscilaciones de la membrana enotros textos, como por ejemplo, Tikhonov y Samarsky, Ecuaciones de la Fısica Matematica.
8.1.4 Oscilaciones de volumenes
Una extension logica de los razonamientos arriba efectuados nos conducen a que la ecuacionque describe el proceso oscilatorio en tres dimensiones es
utt = a2∇2u+ f(M, t) (8.50)
donde M = (x, y, z) es, en este caso, un punto tridimensional, el laplaciano que figura en laecuacion es tridimensional y la funcion de estado o ”elongacion” u = u(x, y, z, t) es funcion delas tres coordenadas espaciales y del tiempo. Sin embargo, en lo expresado no queda clara lanaturaleza fısica de esta funcion u, de manera que, si bien lo dicho es matematicamente correcto,es conveniente, en aras de ganar claridad en el significado fısico de la ecuacion (8.50), analizaralgunos ejemplos fısicos de oscilaciones en tres dimensiones espaciales, cosa que haremos en losdos puntos siguientes.
8.1.5 Ecuaciones basicas de la Electrodinamica
Las ecuaciones de Maxwell que describen el campo electromagnetico en el sistema internacionalde unidades, para medios isotropos y homogeneos, son:
rotH = ε∂E
∂t+ σE (8.51)
rotE = −µ∂H∂t
(8.52)
divE =ρ
ε(8.53)
divH = 0 (8.54)
donde ε y µ son, respectivamente, las permitividades electrica y magnetica del medio y σ suconductividad electrica. Las ecuaciones (8.51) y (8.52) constituyen un sistema de ecuacionesescalares con seis incognitas, donde estan mezclados los campos. Pero no es difıcil encontrarlas ecuaciones para cada vector aparte; apliquemos el operador rot a (8.51):
rot rotH = ε∂
∂trotE + σrotE (8.55)

Problemas fısicos 243
Teniendo en cuenta conocidas identidades vectoriales y la ecuacion (8.52), de (8.55) obtenemos:
grad divH −∇2H = ε∂
∂t
(−µ∂H
∂t
)+ σ
(−µ∂H
∂t
)(8.56)
En virtud de (8.54), de (8.56) obtenemos:
∇2H =1
a2
∂2H
∂t2+
1
b2∂H
∂t(8.57)
donde hemos llamado
a2 =1
εµ, b2 =
1
σµ(8.58)
No es difıcil hallar que en un medio sin cargas el vector E satisface la misma ecuacion (8.57).La ecuacion (8.57) es un sistema de tres ecuaciones para las tres componentes escalares delvector H . Podemos analizar dos casos extremos:
1. Si el medio no es conductor, entonces σ → 0 y la ecuacion (8.57) se transforma en
∂2H
∂t2= a2∇2H (8.59)
que es una ecuacion hiperbolica del tipo (8.50). Notese que, en este caso, el significadode la funcion u es cada una de las componentes del campo magnetico. De esta maneraqueda establecida, a partir de la teorıa electromagnetica de Maxwell, la existencia deondas electromagneticas en medios no conductores que se propagan con velocidad
a ≡ c =1√εµ
(8.60)
2. Si el medio es un buen conductor, entonces σ εµ, por lo que el primer sumandoen (8.57) es despreciable en comparacion con el segundo, de manera que se obtiene laecuacion
∂H
∂t= b2∇2H (8.61)
que es una ecuacion parabolica en tres dimensiones espaciales que describe un procesopuro de difusion del campo en el interior del conductor, producto de la alta disipacionenergetica en el mismo. Mas adelante veremos otros ejemplos fısicos de procesos que sedescriben con ecuaciones parabolicas en el epıgrafe correspondiente. Si las constantes ε, µ,σ son del mismo orden, es decir, si las corrientes de desplazamiento no son despreciablescon respecto a las corrientes de conductividad, entonces la ecuacion (8.57) es una ecuacionhiperbolica que describe un proceso ondulatorio amortiguado, producto de la disipacionde la energıa por la conductividad.

244 Jose Marın Antuna
8.1.6 Ecuaciones de la acustica
Para un fluido compresible -como el aire- en Hidrodinamica se establece que la ecuacion quedescribe su movimiento es
∂v
∂t+ (v ·∇)v = −1
ρ∇p+ f (8.62)
que es la ecuacion de Euler y en la que v(x, y, z, t) es el vector de las velocidades de las partıculasdel fluido en el punto (x, y, z) en el instante t, ρ(x, y, z, t) es la densidad del fluido, p(x, y, z, t)es la presion del fluido y f(x, y, z, t) es la densidad de las fuerzas externas que actuan sobre elfluido.
El hecho de que el fluido es un medio continuo compresible se expresa por medio de la ecuacionde continuidad:
∂ρ
∂t+ ∇ · (ρv) = 0 (8.63)
Ademas, el estado termodinamico del fluido se expresa por medio de la ecuacion de estado, querelaciona la presion con la densidad y que, por tanto, tiene la forma general
p = f(ρ) (8.64)
El sistema de ecuaciones (8.62)-(8.64) forma un sistema de cinco ecuaciones con cinco incognitas:vx, vy, vz, ρ, p y con ellas se describen, en esencia, todos los procesos de fluidos hidro yaerodinamicos ideales, es decir, sin viscosidad. Utilizaremos estas ecuaciones para deducir laecuacion que describe el proceso de propagacion del sonido en el aire y en otros medios fluidos.La deduccion la efectuaremos bajo dos consideraciones que, dadas las caracterısticas de laatmosfera, son aceptables: 1) que las fuerzas externas son despreciables, o sea f = 0 y 2) queel proceso de propagacion del sonido es adiabatico, es decir, que la ecuacion de estado (8.64)es de la forma
p
p0
=
(ρ
ρ0
)γ(8.65)
donde p0 y ρ0 son, respectivamente, la presion y la densidad del aire en equilibrio y γ =Cp/CV ≈ 7/5, para el caso de un gas ideal de moleculas diatomicas, como el aire.
Aquı, Cp y CV son las capacidades calorıficas a presion y volumen constantes, respectivamente.
Consideraremos, ademas, que las oscilaciones son de pequenas amplitudes, de manera que sepuedan despreciar ordenes superiores de las velocidades, de sus gradientes y de la variacion dela densidad.

Problemas fısicos 245
Llamaremos condensacion del fluido a la magnitud
s =ρ− ρ0
ρ0
(8.66)
Entonces, la densidad, en terminos de la densidad de equilibrio, se puede expresar como
ρ = ρ0(1 + s) (8.67)
Colocando (8.67) en (8.65) y desarrollando en serie de Taylor, en la que despreciamos ordenessuperiores de s en virtud de que las oscilaciones son consideradas de amplitud pequena, obte-nemos:
p = p0(1 + s)γ ≈ p0(1 + γs) (8.68)
Entonces, para el primer termino a la derecha de (8.62) podemos escribir:
1
ρ∇p ≈ ∇[ p0(1 + γs)]
ρ0(1 + s)=
p0γ∇s
ρ0(1 + s)≈ p0γ
ρ0
∇s (8.69)
donde, en el denominador, hemos despreciado s por ser pequena.
Coloquemos (8.69) en (8.62) y despreciemos el segundo miembro a la izquierda, en virtud deser ordenes superiores de las velocidades. Entonces:
∂v
∂t= −p0γ
ρ0
∇s (8.70)
Pero, de (8.67) concluimos que
∂ρ
∂t= ρ0
∂s
∂t(8.71)
Colocando (8.71) en la ecuacion de continuidad (8.63), donde en la divergencia sustituimos ρpor ρ0 aproximadamente, obtenemos:
ρ0∂s
∂t+ ρ0∇ · v = 0 (8.72)
Por consiguiente:
∂2s
∂t2+ ∇ · ∂v
∂t= 0 (8.73)
246 Jose Marın Antuna
Colocando en (8.73) la expresion (8.70), obtenemos que la condensacion s satisface la ecuacion
∂2s
∂t2= a2∇2s (8.74)
que es una ecuacion hiperbolica que establece la propagacion de las ondas sonoras en el fluidocon velocidad
a =
√p0γ
ρ0
(8.75)
que, como era de esperar, es directamente proporcional a la presion e inversamente proporcionala la densidad. Para una presion atmosferica normal, γ = 7/5, p0 = 1.033 Kg/cm2, ρ0 =0.001293 g/cm3, por lo que de (8.75) se obtiene
a =
√p0γ
ρ0
= 336m/s
Hasta aquı hemos visto algunos procesos fısicos que se describen con ecuaciones hiperbolicas.Por supuesto, no hemos agotado, ni con mucho, el conjunto de problemas de la Fısica que sedescriben con este tipo de ecuacion; sin embargo, es util senalar que, en general, todos losprocesos fısicos oscilatorios en la naturaleza que tienen caracter lineal son descritos por unaecuacion de tipo hiperbolico similar a (8.12), si el proceso es unidimensional en el espacio, o a(8.50), si el proceso oscilatorio es multidimensional.
Tambien es conveniente expresar que con la ecuacion hiperbolica del tipo (8.50) -la cual, ob-viamente, se reduce a (8.12) en el caso unidimensional- no se agota la descripcion de todos losprocesos oscilatorios lineales. Las oscilaciones transversales de una barra son un ejemplo de lodicho; estas se describen por una ecuacion del tipo (8.12) pero que en la parte derecha aparece,en lugar de uxx, uxxxx.
8.2 Problemas fısicos que conducen a ecuaciones para-
bolicas
8.2.1 Propagacion de calor en el espacio
Desde el punto de vista termico sabemos que un cuerpo se encuentra en equilibrio, si la tempe-ratura en todos sus puntos es la misma. Si la temperatura no es constante en todos los puntosdel cuerpo, se producira un flujo de energıa en forma de calor de las partes mas calientes alas mas frıas, haciendo variar la temperatura de cada punto del cuerpo en cada momento detiempo. Por consiguiente, podemos tomar a la temperatura u(M, t) de cada punto Mx, y, zdel cuerpo en cada instante t como la funcion que caracteriza el estado termodinamico del

Problemas fısicos 247
cuerpo. Si la temperatura no es constante, se define un vector de flujo de calor, mediante la leyde Fourier, proporcional al gradiente de la temperatura (el signo menos se debe a que el calorfluye en sentido contrario al que crece la temperatura):
W = −k∇u (8.76)
donde k es un coeficiente de conductividad termica que depende del material y que toma valoresdentro de un rango muy amplio; por ejemplo, para el vidrio es muy pequeno y para algunosmetales es muy grande. En aras de simplificar la deduccion de la ecuacion fenomenologica quedescribe el proceso de propagacion del calor, emplearemos algunas expresiones idiomaticas nodel todo ortodoxas en el contenido fısico de las mismas; ademas, supondremos que el medioes isotropo, de manera que k es una magnitud escalar; en caso contrario serıa un tensor y ladeduccion serıa mas complicada que la que aquı ofrecemos.
Obtengamos la ecuacion diferencial que describe el proceso de propagacion de calor.
Para ello, consideremos un cuerpo de volumen V y superficie S (Fig. 8.5). Tomemos sobrela superficie S un elemento dσ de la misma y tracemos en el el vector normal exterior a lasuperficie n.
Evidentemente, el flujo de calor que sale del cuerpo de volumen V hacia el exterior (o que entraal cuerpo a traves de la superficie S, ello depende del signo del gradiente de temperatura) atraves del elemento de superficie dσ en la unidad de tiempo sera W · ndσ, de manera que, enel intervalo de tiempo ∆t = t2− t1, a traves de toda la superficie S pasara la cantidad de calor:
Q1 =
∫ t2
t1
dt
∫S
∫W · ndσ =
∫ t2
t1
dt
∫ ∫V
∫∇ ·W dP (8.77)
donde hemos representado por dP al elemento de volumen en la integracion por T . En (8.77) laintegral de superficie ha sido sustituida por la integral de volumen de la divergencia, de acuerdocon el teorema de Gauss-Ostrogradsky.
Supongamos, ahora, que c es la capacidad calorıfica de la sustancia de que esta compuestoel cuerpo y ρ su densidad. Entonces, el elemento dP de volumen del cuerpo se calentara dela temperatura u(P, t1) a la temperatura u(P, t2) en el mismo intervalo de tiempo ∆t por larecepcion de la cantidad de calor
cρ[u(P, t2)− u(P, t1)]dP
Aquı P = ξ, η, ζ. Por consiguiente, la cantidad de calor que permanece dentro del cuerpo yeleva su energıa interna y su temperatura en el intervalo ∆t sera:
Q2 =
∫ ∫V
∫cρ[u(P, t2)− u(P, t1)]dP (8.78)
248 Jose Marın Antuna
Figura 8.5: Cuerpo de volumen V y superficie frontera S
Por ultimo, supongamos que dentro del cuerpo de volumen V existen fuentes de calor dis-tribuidas con densidad F (P, t); es decir, que esas fuentes generan la cantidad de calor F (P, t)en la unidad de tiempo y en la unidad de volumen del cuerpo. Entonces, el calor generado poresas fuentes en todo el cuerpo en el intervalo ∆t sera:
Q3 =
∫ t2
t1
dt
∫ ∫V
∫F (P, t)dP (8.79)
Establezcamos la ecuacion de balance de calor. El calor generado por las fuentes es igual alcalor destinado a elevar la temperatura del cuerpo, mas el calor que se escapa a traves de lasuperficie. Es decir:
Q3 = Q1 +Q2 (8.80)
Colocando en (8.80) las expresiones (8.77), (8.78) y (8.79), obtenemos:
Problemas fısicos 249
∫ ∫V
∫cρ[u(P, t2)− u(P, t1)]dP = −
∫ t2
t1
dt
∫ ∫V
∫∇ ·W dP +
∫ t2
t1
dt
∫ ∫V
∫F (P, t)dP
(8.81)
Analicemos cada una de las integrales de la ecuacion (8.81) por separado. Para la integral dela izquierda, aplicando sucesivamente el teorema del valor medio integral y el teorema del valormedio diferencial, obtenemos:
∫ ∫V
∫cρ[u(P, t2)− u(P, t1)]dP = cρ[u(P , t2)− u(P , t1)]V = cρut(P , t)V∆t (8.82)
donde P ∈ V y t ∈ ∆t.
Para las primeras de las integrales de la parte derecha de (8.81), haciendo los mismos pasos,obtenemos:
∫ t2
t1
dt
∫ ∫V
∫∇ ·W dP = ∇ ·W | ¯P,¯tV∆t (8.83)
donde ¯P ∈ V y ¯t ∈ ∆t.
Por ultimo, para la segunda integral de la parte derecha de (8.81), aplicando el teorema delvalor medio integral para la integracion en el tiempo y en el volumen, obtenemos:
∫ t2
t1
dt
∫ ∫V
∫F (P, t)dP = F (
¯P, ¯t)V∆t (8.84)
donde¯P ∈ V y ¯t ∈ ∆t. Sustituyendo (8.82), (8.83) y (8.84) en (8.81), queda, despues de
cancelar V y ∆t:
cρut(P , t) = −∇ ·W | ¯P,¯t + F (¯P, ¯t) (8.85)
Tomemos el lımite en (8.85) cuando el volumen V se reduce a un punto M y cuando el intervalo
∆t se reduce a un instante t. Entonces, los puntos P , ¯P y¯P convergeran al punto M y t, ¯t y ¯t
convergeran a t, de manera que se obtiene:
cρut(M, t) = −∇ ·W (M, t) + F (M, t) (8.86)
Sustituyendo (8.76) en (8.86) resulta:
cρut = ∇ · (k∇u) + F (M, t) (8.87)
250 Jose Marın Antuna
Suponiendo el medio homogeneo, k es constante y, como la divergencia del gradiente es ellaplaciano, obtenemos:
cρut = k∇2u+ F (M, t) (8.88)
Es decir, dividiendo por cρ y denotando por a2 = k/cρ y f(M, t) = F (M, t)/cρ, obtenemos laecuacion
ut = a2∇2u+ f(M, t) (8.89)
La ecuacion (8.89) es la que describe el proceso de la propagacion de calor en el espacio; es unaecuacion en derivadas parciales de segundo orden de tipo parabolico.
Supongamos que queremos investigar la propagacion de calor a lo largo de una barra muy fina,es decir, de seccion transversal tan pequena en relacion con su longitud, que las variaciones de latemperatura en los ejes y, z son despreciables. Entonces, cada punto de la barra se caracterizarapor su temperatura u(x, t), funcion solo de su coordenada y del tiempo y el laplaciano en laecuacion (8.89) contendra solamente la segunda derivada con respecto a x. Ademas, la funcionf(M, t) en (8.89) que, de acuerdo con su definicion, es la cantidad de calor generado por lasfuentes en la unidad de volumen y en la unidad de tiempo, medido en unidades cρ de calor,dependera solamente de la coordenada x de la barra y del tiempo t, de manera que, de laecuacion (8.89), obtenemos para el proceso de propagacion de calor a lo largo de una barrafina, cuya superficie longitudinal consideramos aislada termicamente (para que a traves de ellano fluya calor) la ecuacion
ut = a2uxx + f(x, t) (8.90)
que es una ecuacion parabolica de dos variables independientes del tipo de las estudiadas en elcapıtulo de clasificacion de las ecuaciones en derivadas parciales de segundo orden.
Si a traves de la superficie longitudinal ocurre un intercambio de calor con el medio exteriorsegun la ley (lineal) de Newton, entonces habrıa que considerar en la ecuacion un termino querefleje ese hecho en forma de una fuente del tipo h(u − u0), donde u0 es la temperatura delmedio exterior. Ello conduce a una ecuacion de la forma
ut + h(u− u0) = a2uxx + f(x, t) (8.91)
que describe el mencionado proceso.
8.2.2 Ecuacion de difusion
Supongamos, ahora, que tenemos un recipiente de volumen V y superficie S en el que haydeterminada sustancia. Las consideraciones que vamos a hacer a continuacion tienen, en cuanto
Problemas fısicos 251
a su estructura matematica, similitud con el punto anterior, de manera que nuestro recipientepuede representarse con la misma Fig. 8.5.
Llamemosle u(M, t) a la concentracion de la sustancia considerada en el punto M del volumenV en el instante t, es decir, la cantidad de sustancia por unidad de volumen. Por el terminosustancia podemos entender igualmente un gas de cualquier naturaleza fısica que se encuentreen el recipiente, que un soluto en una solucion.
Es conocido que, si esta concentracion no es igual en todos los puntos del recipiente, tendralugar el proceso de difusion de la sustancia, fluyendo esta de los puntos de mayor concentraciona los puntos de menor concentracion. Es decir, se establece un flujo de sustancia que, de acuerdocon la ley de Nernst, es proporcional al gradiente de la concentracion:
P = −D∇u (8.92)
donde el coeficiente de proporcionalidad D se llama coeficiente de difusion y depende de lascaracterısticas del medio y de la sustancia que se difunde. El signo menos en (8.92) esta dadopor el hecho de que el flujo es en sentido opuesto al gradiente de la concentracion.
Tomemos un elemento dσ de la superficie S y tracemos la normal n exterior a la superficie.Entonces, es evidente que la cantidad de sustancia que fluye a traves del elemento de superficiedσ en la unidad de tiempo es P · ndσ, por lo que, en el intervalo de tiempo ∆t = t2 − t1, atraves de S pasara la cantidad de sustancia
M1 =
∫ t2
t1
dt
∫S
∫P · ndσ =
∫ t2
t1
dt
∫ ∫V
∫∇ · P dP (8.93)
donde hemos aplicado el teorema de Gauss-Ostrogradsky a la integral de superficie.
La cantidad de sustancia que permanece dentro del recipiente y aumenta la concentracion dela sustancia en el elemento de volumen dP del valor u(P, t1) al valor u(P, t2) es [u(P, t2) −u(P, t1)]dP . Por lo tanto, la cantidad de sustancia que permanece en el recipiente y aumentasu concentracion es
M2 =
∫ ∫V
∫[u(P, t2)− u(P, t1)]dP (8.94)
Por ultimo, si llamamos F (P, t) a la densidad de las fuentes de sustancia dentro del recipiente, esdecir, la cantidad de sustancia generada por las fuentes en la unidad de volumen y en la unidadde tiempo, entonces en el intervalo ∆t esas fuentes daran en todo el volumen del recipiente lacantidad de sustancia
M3 =
∫ t2
t1
dt
∫ ∫V
∫F (P, t)dP (8.95)

252 Jose Marın Antuna
Evidentemente, la cantidad de sustancia generada por las fuentes tiene que ser igual a la sumade la cantidad de sustancia que permanece en el recipiente mas la que fluye a traves de susuperficie:
M3 = M1 +M2 (8.96)
Colocando (8.93), (8.94) y (8.95) en (8.96), obtenemos:
∫ ∫V
∫[u(P, t2)−u(P, t1)]dP = −
∫ t2
t1
dt
∫ ∫V
∫∇ ·P dP +
∫ t2
t1
dt
∫ ∫V
∫F (P, t)dP (8.97)
Aplicando a la ecuacion (8.97) el mismo procedimiento de utilizar el teorema del valor medioque aplicamos a la ecuacion (8.81), obtenemos, despues de realizar el proceso lımite de reducciondel volumen V a un punto M y del intervalo ∆t a un instante t, la siguiente expresion:
ut = ∇ · (D∇u) + F (M, t) (8.98)
Si el coeficiente de difusion D es constante, de (8.98) obtenemos:
ut = D∇2u = F (M, t) (8.99)
que es la ecuacion que describe el proceso de difusion. Para llevarla a la misma forma del casoanterior, llamemos a2 = D, f(M, t) = F (M, t). Entonces, la ecuacion adquiere la forma
ut = a2∇2u = f(M, t) (8.100)
que es una ecuacion parabolica identica a (8.89), solo que, en este caso, el significado fısico dela funcion u, del parametro a2 y de la funcion f son diferentes al caso anterior.
Si suponemos que la difusion se efectua en una sola dimension, a lo largo de un tubo de seccionpequena en comparacion con su longitud, de forma tal que la difusion en el sentido de los ejes y,z pueda ser ignorada, entonces la concentracion sera solo funcion de x, t al igual que la densidadde las fuentes, de manera que la ecuacion (8.100) se transforma en
ut = a2uxx + f(x, t) (8.101)
que, en su forma, es identica a (8.90).
Problemas fısicos 253
8.2.3 Difusion en presencia de desintegracion
En la difusion de gases radiactivos, como por ejemplo el radon, a la par de su difusion tienelugar la desintegracion de sus atomos, de manera que la concentracion del gas disminuye conel tiempo. En este caso, la ecuacion que describe el proceso de difusion es la misma ecuacion(8.100) en la que las fuentes seran negativas (sumideros) y proporcionales a la concentracionde gas, ya que, mientras mayor sea la concentracion de gas que haya en un punto, mas intensasera la desintegracion. Por consiguiente, la densidad de nuestras fuentes en este caso sera
f(M, t) = −αu (8.102)
donde el coeficiente de desintegracion α depende de la sustancia radiactiva. Por consiguiente,en este caso la ecuacion de difusion tiene la forma
ut = a2∇2u− αu (8.103)
8.2.4 Proceso de reaccion en cadena
Es conocido que si un atomo de uranio 235 es bombardeado con un neutron lento, su nucleose descompone en dos mitades, produciendose el fenomeno de fision, que libera cierta cantidadde energıa del nucleo. Esta reaccion nuclear libera, ademas, neutrones que salen del nucleo deuranio fisionado, de manera que si la energıa de estos neutrones es baja, es decir, si se lograque sean tambien neutrones lentos, entonces, al chocar contra nuevos nucleos de uranio, serepetira el proceso descrito de liberacion de energıa y de nuevos neutrones, originandose lo quese conoce con el nombre de reaccion en cadena. Este proceso es la base de las llamadaspilas atomicas para el uso pacıfico de la energıa nuclear. Si el proceso se hace incontrolable,se produce la explosion atomica. El concepto de neutron lento significa que los neutronestienen velocidades termicas, es decir, del orden de las velocidades de las moleculas de un gas.
Obviando el aspecto tecnologico de construccion, supongamos cumplimentados estos requisitos.Entonces, el flujo de neutrones que se mueven dentro del volumen lleno de uranio puede serconsiderado como cierto gas neutronico que se difunde en el. Por consiguiente, llamando u(M, t)a la concentracion de ese gas de neutrones, la ecuacion que describira su difusion sera unaecuacion parabolica que tendra por inhomogeneidad una fuente de neutrones distribuıda portodo el volumen con densidad proporcional a la concentracion, ya que, mientras mas neutroneshaya, mayor cantidad de neutrones se generaran. Ası pues, la ecuacion en este caso sera:
ut = a2∇2u+ βu (8.104)
donde β es un coeficiente que depende del material fisionable, en este caso, el uranio.
De los ejemplos vistos concluimos que los procesos de propagacion de calor y de difusion sedescriben por medio de ecuaciones parabolicas. Existen otros modelos fısicos que se describen

254 Jose Marın Antuna
con esta ecuacion, pero, en esencia, se reducen a procesos de difusion de diversa naturaleza.
En el proximo epıgrafe estudiaremos los procesos fısicos que se describen con ecuaciones elıpti-cas, con lo que quedara completo el analisis de los principales procesos fısicos que se describencon nuestras ecuaciones.
8.3 Problemas fısicos que conducen a ecuaciones elıpti-
cas
8.3.1 Problemas que conducen a la ecuacion de Poisson
1. Distribucion estacionaria de temperaturas
Segun estudiamos en el epıgrafe anterior, la temperatura u(M, t) del punto M = (x, y, z)de un cuerpo de volumen V y superficie S durante un proceso de propagacion de calorsatisface la ecuacion parabolica
ut = a2∇2u+ f(M, t) (8.105)
donde f(M, t) es la intensidad de las fuentes de calor distribuıdas en el volumen, es decir,la cantidad de calor, medida en unidades de calor, generada por las fuentes en la unidadde volumen y en la unidad de tiempo.
Supongamos que las fuentes de calor son estacionarias, es decir, que su intensidad nodepende del tiempo: f(M, t) ≡ f(M). Entonces, transcurrido un tiempo suficientementegrande como para que la influencia de los valores de la temperatura inicial haya desapare-cido, la temperatura del cuerpo de volumen V no dependera del tiempo, sino solamentede las coordenadas espaciales; es decir, sera estacionaria: u(M, t) ≡ u(M). Pero entoncesut = 0, de donde, dividiendo por a2 la ecuacion (8.105) se obtiene
∇2u = −F (M), ∀M ∈ V (8.106)
donde hemos llamado F (M) = f(M)/a2. La ecuacion (8.106) es una ecuacion elıpticay recibe el nombre de ecuacion de Poisson. Si dentro del volumen T no hay fuentes(F = 0), la ecuacion se convierte en homogenea:
∇2u = 0, ∀M ∈ V (8.107)
y se conoce con el nombre de ecuacion de Laplace. Como sabemos, las funciones queson solucion de la ecuacion de Laplace se llaman funciones armonicas.
Ası pues, las distribuciones estacionarias de temperatura se describen con la ayuda deuna ecuacion elıptica del tipo de Laplace o de Poisson. No es difıcil comprobar, de formasimilar, que los procesos de difusion estacionarios se describen por las ecuaciones (8.106)y (8.107), en dependencia de la existencia o no de fuentes.

Problemas fısicos 255
2. Movimiento laminar de un lıquido incompresible dentro de un volumen sinfuentes
Supongamos que dentro de un recipiente de volumen V se mueve un lıquido sin fuentesdentro del volumen y que dicho movimiento es laminar, es decir, sin remolinos. Entonces,cada punto del lıquido tendra una velocidad dada, de manera que en el volumen V estaradado un campo de velocidades v = v(x, y, z).
Por hipotesis, el movimiento del lıquido es laminar, sin remolinos, lo que significa que
∇× v = 0, ∀M ∈ V (8.108)
La ecuacion (8.108) implica que el campo vectorial de velocidades v es potencial, es decir,que existe cierta funcion escalar ϕ(x, y, z) tal que
v = −∇ϕ, ∀M ∈ V (8.109)
y que recibe el nombre de potencial de velocidades del lıquido.
Por otro lado, como se dice que dentro del volumen V no hay fuentes de lıquido y este esincompresible, se cumplira que
∇ · v = 0, ∀M ∈ V (8.110)
Colocando (8.109) en (8.110) y teniendo en cuenta que ∇ ·∇f = ∇2f , obtenemos que elpotencial de velocidades del lıquido satisface la ecuacion de Laplace en el volumen:
∇2ϕ = 0, ∀M ∈ V (8.111)
3. Ecuacion del campo electrostatico
Un campo electrostatico no es otra cosa que un campo electromagnetico estacionario, esdecir, no dependiente del tiempo. Supongamos que dentro del volumen V se produce unproceso electromagnetico que se describe por las ecuaciones de Maxwell:
∇×E = −µc
∂H
∂t, ∇ ·E = 4πρ (8.112)
∇×H =ε
c
∂E
∂t+
4π
cj, ∇ ·H = 0 (8.113)
donde ε y µ son las constantes dielectrica y magnetica del medio, ρ la densidad de cargasdentro del volumen V y j la intensidad de corriente por unidad de volumen en V . E yH son las intensidades del campo electrico y magnetico, respectivamente, c la velocidadde la luz. Hemos escrito estas ecuaciones en sistema gaussiano, considerando el medioisotropo y homogeneo (ε y µ constantes).
Supongamos que el proceso es estacionario. Entonces, ∂E∂t
, ∂H∂t
, j son iguales a cero. Delprimer par de ecuaciones, o sea, (8.112) tendremos que
256 Jose Marın Antuna
∇×E = 0, ∀M ∈ V (8.114)
lo que significa que el vector de intensidad de campo electrico es potencial; es decir, queexiste una funcion escalar ϕ(x, y, z) llamada potencial electrostatico, tal que
E = −∇ϕ, ∀M ∈ V (8.115)
Colocando esta expresion en la segunda ecuacion (8.112), obtenemos para el potencialelectrostatico ϕ la ecuacion de Poisson
∇2ϕ = −4πρ, ∀M ∈ V (8.116)
Si dentro del volumen V no existiesen cargas electricas, la ecuacion se convertirıa en la deLaplace. No es difıcil comprobar que en este caso el par de ecuaciones (8.113) conducen aque H ≡ 0, es decir, que en el campo electrostatico no existe campo magnetico (ello estadado por el hecho de no existir corrientes, j = 0 y la inexistencia de cargas magneticas).
8.3.2 Problemas que conducen a la ecuacion de Helmholtz
1. Oscilaciones estabilizadas
En el punto 4 del primer epıgrafe del presente capıtulo vimos que las oscilaciones devolumenes se describen por la ecuacion
utt = a2∇2u+ f(M, t) (8.117)
Si las fuerzas aplicadas son de la forma (periodicas armonicas):
f(M, t) = f(M)eiωt (8.118)
donde ω es la frecuencia de las oscilaciones de la fuente, entonces se puede demostrar que,pasado un tiempo suficientemente grande, las oscilaciones se estabilizan, lo que significaque la solucion de (8.117) toma la forma
u(M, t) = v(M)eiωt (8.119)
Debemos destacar dos cosas. En primer lugar, que las fuerzas periodicas armonicas deltipo (8.118) son muy comunes en los problemas de la naturaleza, por lo que tiene im-portancia el estudio especıfico de este tipo de fuente de energıa de las oscilaciones. Ensegundo lugar, que, tal como esta dicho, no resulta claro el termino empleado de ”tiemposuficientemente grande”. Mas adelante, en el capıtulo dedicado al estudio de las oscila-ciones en el espacio abierto, veremos con precision y rigurosidad que se entiende por estetermino y demostraremos a cabalidad que, efectivamente, la solucion adopta la forma(8.119).
Por el momento, aceptando la validez de lo dicho, de (8.119) tenemos que:

Problemas fısicos 257
utt = −ω2v(M)eiωt, ∇2u = ∇2veiωt
por lo que, colocando estas expresiones y (8.118) en (8.117), obtenemos, luego de cancelarconvenientemente, para la funcion de la amplitud:
∇2v + k2v = −F (M) (8.120)
donde hemos introducido la notacion:
k =ω
a
que es el numero de onda y
F (M) =1
a2f(M)
La ecuacion (8.120) obtenida es una ecuacion elıptica que se conoce con el nombre deecuacion de Helmholtz. En este caso ella puede ser escrita en la forma general:
∇2v + cv = −f(M) (8.121)
donde
c = k2 =ω2
a2> 0 (8.122)
Ası pues, la amplitud de las oscilaciones estabilizadas satisface una ecuacion de Helmholtzcon parametro c > 0. Estas oscilaciones pueden ser mecanicas, electromagneticas o de lamas variada naturaleza fısica.
2. Difusion estacionaria en presencia de desintegracion
Al difundirse los gases radiactivos, por ejemplo el radon, tiene lugar la desintegracionde los atomos del gas que se difunde. Segun vimos anteriormente, si u(M, t) es la con-centracion del gas, mientras mayor concentracion de gas haya, mas cantidad de este sedesintegra. Esto significa que podemos considerar una fuente negativa de gas distribuidaen todo el volumen donde ocurre la difusion proporcional a la concentracion:
f(M, t) = −αu(M, t) (8.123)
Por consiguiente, la ecuacion de difusion sera:
ut = D∇2u− αu (8.124)
donde D es la constante de difusion. Si suponemos que el proceso de difusion es esta-cionario, entonces u = u(M) y, por tanto, ut = 0, por lo que de (8.124) obtenemos que laconcentracion estacionaria satisface la ecuacion:

258 Jose Marın Antuna
∇2u+ cu = 0 (8.125)
que es una ecuacion de Helmholtz. En este caso
c = −κ2 = − α
D< 0 (8.126)
3. Proceso estacionario de reaccion en cadena
Como vimos antes, al bombardear atomos de uranio 235 con neutrones lentos, dichosatomos se fisionan, liberando energıa y nuevos neutrones que, a su vez, fisionan nuevosatomos, produciendose la llamada reaccion en cadena. Los neutrones deben ser termicos,es decir, su velocidad debe ser ”lenta”, es decir, del orden de la velocidad de las moleculasde un gas que se difunde. Por eso, podemos considerar el proceso como de difusionde un gas neutronico en un volumen que contiene uranio y en el que hay distribuidauna fuente de neutrones proporcional a la concentracion de neutrones, ya que, mientrasmas neutrones haya, mas atomos seran fisionados y, por consiguiente, mas neutrones segeneraran.
Por lo tanto, la ecuacion de difusion de los neutrones sera:
ut = D∇2u+ αu (8.127)
donde D es la constante de difusion y α la constante de proporcionalidad de la fuente.Considerando el proceso estacionario, tendremos u = u(M) y ut = 0, por lo que queda
∇2u+ cu = 0 (8.128)
que es, tambien, una ecuacion de Helmholtz, donde, en este caso
c = k2 =α
D> 0 (8.129)
Pese a la aproximacion clasica, este modelo describe, en terminos generales, bastante bienla realidad.
4. Problema de autovalores de Sturm-Liouville
Mas adelante veremos que, al desarrollar el metodo de separacion de variables para lasolucion de los problemas de la Fısica Matematica, se obtiene, para la funcion dependientede las coordenadas espaciales una ecuacion del tipo
∇2v + cv = 0 (8.130)
que es una ecuacion de Helmholtz. Aquı,
c = k2 = λ > 0 (8.131)
son los autovalores del problema de Sturm-Liouville.
Problemas fısicos 259
5. Ecuacion de Schrodinger estacionaria
En el desarrollo inicial de la Mecanica Cuantica se encuentra el postulado de la existenciade las ondas de de Broglie, para las cuales tiene lugar la conocida ecuacion de la onda
∇2ϕ− 1
a2ϕtt = 0 (8.132)
donde ϕ(M, t) es una funcion que describe el proceso ondulatorio que se propaga convelocidad a. Si la onda es monocromatica, la solucion de (8.132) puede expresarse en laforma
ϕ(M, t) = e−iωtψ(M) (8.133)
donde ω es la frecuencia. La funcion de las coordenadas espaciales ψ(M) satisface, pues,la ecuacion
∇2ψ +ω2
a2ψ = 0 (8.134)
que es una ecuacion de Helmholtz. Introduciendo en (8.134) la longitud de onda
λ =2πa
ω(8.135)
obtenemos para (8.134) la expresion:
∇2ψ +4π2
λ2ψ = 0 (8.136)
Con vistas a obtener a partir de esta ecuacion de onda, que tiene en general un caracteruniversal, la ecuacion que permita describir el movimiento ondulatorio de los electrones,colocamos en lugar de λ la expresion de la longitud de onda de de Broglie:
λ =h
m0v=
2π~p
(8.137)
donde h = 2π~ = 6.6249 · 10−27 erg · s es la constante de Planck; m0, v y p son, res-pectivamente, la masa de reposo, la velocidad y el momentum del electron. Teniendo encuenta, ademas, la ley de conservacion de la energıa:
p2
2m0
+ V (M) = E = const. (8.138)
hallamos que
4π2
λ2=
2m0
~2[E − V (M)] (8.139)
Colocando (8.139) en (8.136), obtenemos la llamada ecuacion de Schrodinger esta-cionaria:

260 Jose Marın Antuna
∇2ψ +2m0
~2[E − V (M)]ψ = 0 (8.140)
que sirve de base para la resolucion de muchos problemas fundamentales de la MecanicaCuantica no relativista y que es una ecuacion de Helmholtz. En ella, como se ve,
c =2m0
~2[E − V (M)] (8.141)
no es una constante, sino una funcion de las coordenadas.
6. Ecuacion de las fuerzas nucleares
La variante inicial de la teorıa de Yukawa del campo nuclear plantea que, para garantizarel caracter de accion a corta distancia de las fuerzas nucleares, es necesario suponer quela interaccion nuclear se efectua por medio de un campo especial con masa de reposodiferente de cero. En la variante mas simple de la teorıa, el campo nuclear es escalar y sedescribe por medio de la ecuacion escalar relativista de Klein-Gordon:
(E2 − c2p2 −m2πc
4)ϕ = 0 (8.142)
donde E = i~ ∂∂t
es el operador de la energıa, p = −i~∇ es el operador del momentum ymπ es la masa en reposo de los mesones π.
En el caso en que el campo sea estatico, no dependiente del tiempo, obtenemos
∇2ϕ− k20ϕ = 0 (8.143)
donde
k0 =mπc
~(8.144)
La ecuacion (8.143) es una ecuacion de Helmholtz. Si en ella suponemos k0 = 0, loque ocurrirıa si la masa de reposo es tomada igual a cero, se obtendrıa una ecuacion deLaplace, a la que responde el campo gravitacional.
Los ejemplos vistos, de las mas variadas ramas de la Fısica, permiten percatarnos de la im-portancia que tiene la ecuacion de Helmholtz. Muchos otros ejemplos podrıan ser presentadospara resaltar aun mas esa importancia.
Con este epıgrafe concluimos el estudio de los problemas fısicos que se describen con ecuacionesde la Fısica Matematica en derivadas parciales de segundo orden y pasaremos al estudio de comoplantear los problemas matematicos para las ecuaciones estudiadas, a fin de poder seleccionar,de entre todas las posibles soluciones, la que responda al problema fısico concreto que deseamosinvestigar.
Capıtulo 9
Planteamiento de los problemasmatematicos
En el presente capıtulo nos dedicaremos al estudio de las condiciones matematicas que hay queimponer a las distintas ecuaciones que hemos visto en el capıtulo anterior con el objetivo deseleccionar la solucion que responda al proceso fısico que estemos investigando, de entre todaslas soluciones de la familia de soluciones posibles. Como una consecuencia logica, abordaremosel analisis de la unicidad de la solucion del problema que resulte de imponer dichas condicionesy otros aspectos de interes por su importancia.
9.1 Ecuaciones hiperbolicas
La ecuacion hiperbolica que obtuvimos en el capıtulo anterior tiene, en una dimension espacial,la forma
utt = a2uxx + f(x, t) (9.1)
y en varias dimensiones espaciales
utt = a2∇2u+ f(M, t) (9.2)
Desde el punto de vista de su estructura matematica, ambas ecuaciones son identicas. Porcontener hasta las segundas derivadas con respecto al tiempo y con respecto a las coordenadasespaciales, su solucion general contendra varias constantes de integracion que generan unafamilia infinita de funciones que las convierten en identidad. Del conjunto de todas las posiblessoluciones de la ecuacion, debemos escoger aquella que corresponda al fenomeno fısico concretoque queremos describir.
Para ello debemos imponer a la ecuacion determinadas condiciones fısicas que vienen dadas por
261
262 Jose Marın Antuna
el problema fısico en cuestion. A la imposicion de dichas condiciones se le llama plantear elproblema matematico.
Las condiciones a imponer son de dos tipos: condiciones iniciales y condiciones de frontera (ode contorno).
9.1.1 Condiciones iniciales y condiciones de frontera
Tanto en el caso unidimensional, como en el caso de varias dimensiones espaciales, las condi-ciones iniciales surgen de dar:
1. La elongacion inicial de los puntos del medio o de la magnitud fısica que oscila:
Para el caso de una cuerda o barra oscilante, es decir, para el problema unidimensional,sera
u(x, 0) = ϕ(x) (9.3)
Para el caso de varias dimensiones espaciales sera
u(M, 0) = ϕ(M) (9.4)
2. La velocidad inicial de dichos puntos:
En una sola dimension espacial
ut(x, 0) = ψ(x) (9.5)
y en el caso de varias dimensiones espaciales
ut(M, 0) = ψ(M) (9.6)
donde las funciones ϕ y ψ son conocidas. Con estas condiciones se determinan las dosconstantes de integracion con respecto al tiempo.
Las condiciones de frontera establecen el comportamiento de la solucion en la frontera deldominio donde se esta buscando la solucion de la ecuacion.
Caso unidimensional:
Veamos, inicialmente, como se expresan las condiciones de frontera en el caso de los problemasen una dimension espacial. En este caso estaremos hablando de oscilaciones transversales decuerdas u oscilaciones longitudinales de barras, para fijar ideas.
Las condiciones de frontera pueden ser, fundamentalmente, de tres tipos:
Planteamiento de los problemas matematicos 263
1. Condicion de frontera de primer tipo
Esta condicion de frontera se obtiene cuando se conoce la ley de movimiento de uno delos extremos de la cuerda o barra. Es decir, si esta dada, por ejemplo, para el extremox = 0, la ecuacion:
u(0, t) = µ(t) (9.7)
donde µ(t) es una funcion conocida del tiempo.
Dada la ley de movimiento del extremo x = l de la cuerda o barra, se obtiene la primeracondicion de frontera de dicho extremo en la forma
u(l, t) = ν(t) (9.8)
donde ν(t) es una funcion conocida del tiempo.
Es evidente que las condiciones de frontera de primer tipo son las mas simples, ya queconsisten solo en la evaluacion de la solucion en los puntos extremos de la cuerda o barra.Como, desde el punto de vista fısico, la funcion u(x, t) significa la elongacion del punto xen el instante t, es facil percatarse de que las condiciones de frontera de primer tipo (9.7)y (9.8) dan el valor de la elongacion de cada extremo en cada momento de tiempo a travesde funciones conocidas dadas. Por consiguiente, fısicamente, las condiciones de fronterade primer tipo homogeneas corresponderan al caso en que los extremos de la cuerda obarra esten fijos todo el tiempo. Es decir:
u(0, t) = 0, u(l, t) = 0 (9.9)
que son las condiciones de frontera de primer tipo homogeneas, reflejan, fısicamente, elhecho de que, en el caso de la ecuacion hiperbolica que nos ocupa, los extremos de lacuerda o barra no se mueven, estan fijos todo el tiempo.
2. Condicion de frontera de segundo tipo
A esta condicion de frontera se llega cuando es conocida la fuerza que esta aplicada alextremo de la cuerda o barra. Sea, por ejemplo, f(t) una fuerza aplicada desde el exterioral extremo x = 0 de la cuerda o barra. Evidentemente, la accion de esta fuerza exteriorsobre el extremo provocara la reaccion de las fuerzas de restitucion en la cuerda o barra,de manera que tendra lugar la igualdad de ambas fuerzas en el extremo:
kux(0, t) = f(t) (9.10)
Dividiendo la ecuacion (9.10) por k, ya que k 6= 0, obtenemos la condicion de frontera desegundo tipo en la forma:
ux(0, t) = µ(t) (9.11)
donde µ(t) es una funcion conocida del tiempo.
264 Jose Marın Antuna
De forma totalmente similar se obtiene la condicion de frontera de segundo tipo en elextremo x = l en la forma
ux(l, t) = ν(t) (9.12)
donde ν(t) es una funcion conocida del tiempo.
En las ecuaciones (9.11) y (9.12) las funciones que figuran en la parte derecha son igualesa la intensidad de la fuerza exterior aplicada al extremo correspondiente, dividida por laconstante k. Es evidente que, si sobre los extremos no actuan fuerzas externas, es decir,si los extremos se mueven libremente, estan libres, las condiciones de frontera que reflejaneste hecho seran las condiciones de frontera de segundo tipo homogeneas:
ux(0, t) = 0, ux(l, t) = 0 (9.13)
3. Condicion de frontera de tercer tipo
Matematicamente, las condiciones de frontera de tercer tipo en los extremos x = 0 yx = l, respectivamente, tienen la forma
ux(0, t)− hu(0, t) = µ(t) (9.14)
ux(l, t) + hu(l, t) = ν(t) (9.15)
donde h es cierta constante conocida y µ(t) y ν(t) son funciones conocidas del tiempo.
Las condiciones de frontera de tercer tipo (9.14) y (9.15) corresponden, fısicamente, a lasituacion -dicho en terminos generales- en que esta dada la ley de intercambio energeticode la cuerda o barra con el medio ambiente exterior a traves de cada uno de los extremos.
Para poder comprender fısicamente como se llega a este tipo de condicion de frontera,analicemos el siguiente ejemplo: consideremos que el extremo x = 0 de la barra se encuen-tra unido elasticamente a una pared por medio de un muelle de coeficiente de elasticidadα (Fig. 9.1).
Entonces la fuerza de restitucion de la barra en el extremo x = 0 actua sobre el muelle, ha-ciendo que este se estire o se encoja. Como ambas fuerzas deben ser iguales en magnitud,ya que no suponemos la existencia de otras fuerzas externas, tendremos que
kux(0, t) = αu(0, t) (9.16)
De aquı, dividiendo por k y llamando h = α/k, se obtiene
ux(0, t)− hu(0, t) = 0 (9.17)
que, como se ve, es la condicion de frontera de tercer tipo arriba expresada por la ecuacion(9.14), pero homogenea. Nuestro analisis nos conduce a concluir que la condicion detercer tipo homogenea, en el caso de la ecuacion hiperbolica, corresponde, fısicamente, ala existencia de una union elastica del extremo, sin la accion de fuerzas externas.

Planteamiento de los problemas matematicos 265
Figura 9.1: Union elastica en x = 0
Si existiera, ademas, una fuerza externa aplicada de intensidad f(t) en el extremo, en-tonces habrıa que sumarla a la parte derecha de la ecuacion (9.16), de manera que, despuesde dividir por k toda la ecuacion, obtendrıamos la ecuacion (9.14), donde µ(t) = f(t)/k.
Debemos senalar que en la ecuacion (9.15), correspondiente al extremo x = l, aparece unsigno mas en lugar de un signo menos, producto de que en ese extremo la relacion entre lasfuerzas es al reves, ya que en x = 0 un desplazamiento positivo (u(0, t) > 0) correspondea un estiramiento del muelle, en tanto que en el extremo x = l un desplazamiento positivo(u(l, t) > 0) corresponde a un encogimiento del muelle (Fig. 9.2)
Un analisis similar es factible de realizar en el caso de la union elastica de los extremosde la cuerda.
Las condiciones de frontera de primero, segundo y tercer tipo aquı estudiadas son las principalesy sobre las cuales centraremos nuestro estudio, pero no son, ni con mucho, las unicas condicionesde frontera posibles.
No son difıciles de concebir otras condiciones de frontera diferentes a las hasta aquı estudiadas.Por ejemplo, si la union elastica del extremo no es con un muelle lineal, sino con un objeto que
266 Jose Marın Antuna
Figura 9.2: Union elastica en x = l
no se someta a la ley de Hooke, entonces la condicion de frontera sera no lineal, digamos deltipo
kux(0, t) = F [u(0, t)] (9.18)
Otras condiciones de frontera pueden ser obtenidas en dependencia de las caracterısticas delfenomeno fısico que las genera. A modo de ejemplo presentamos dos casos: Si el extremo de labarra recibe una resistencia a su movimiento proporcional a su velocidad, entonces la condicionde frontera contendra la derivada con respecto al tiempo:
kux(0, t) = αut(0, t) (9.19)
Si un objeto de masa m esta unido al extremo x = l de la barra, entonces, la condicion defrontera sera mas compleja:

Planteamiento de los problemas matematicos 267
mutt(l, t) = −kux(l, t) +mg (9.20)
Es importante destacar que el planteamiento adecuado de las condiciones de frontera para lasecuaciones en derivadas parciales de la Fısica Matematica, condiciones que deben ser obtenidas apartir del analisis fısico del fenomeno o proceso que se quiere describir, es, en muchas ocasiones,una tarea ardua y de cuidado. En nuestro libro, con el fin de estudiar los metodos principales desolucion y las conclusiones mas importantes a nivel de un curso de pregrado, nos limitaremosal tratamiento de los problemas en los que se utilicen solamente las condiciones de fronterade primero, segundo y tercer tipo arriba definidas, ya que ellas abarcan un numero bastanteamplio de problemas fısicos posibles.
Caso de varias dimensiones espaciales:
En el caso en que el proceso oscilatorio sea en un dominio de dos o tres dimensiones espaciales,las condiciones de frontera de primero, segundo y tercer tipo adquieren las siguientes formas:
1. Condicion de frontera de primer tipo
A esta condicion se llega cuando esta dado el valor -como funcion del tiempo y de lospuntos de la frontera- de la funcion incognita de la ecuacion que queremos resolver sobrela superficie (en el caso tridimensional) o sobre el contorno (en el caso bidimensional)frontera del dominio donde buscamos la solucion de la ecuacion, lo que, en el caso de laecuacion hiperbolica, significa conocer la ley de movimiento de la frontera del dominio queoscila. Por ejemplo, si la ecuacion hiperbolica (9.2) se desea resolver en cierto volumenV de frontera S, la condicion de frontera de primer tipo tendra la forma siguiente:
u|S = µ(M, t) (9.21)
donde µ(M, t) es una funcion conocida de M = (x, y, z) ∈ S y de t.
2. Condicion de frontera de segundo tipo
Si lo que se conoce es la fuerza aplicada sobre la superficie o contorno frontera, la condicionadopta la forma:
∂u
∂n|S = ν(M, t) (9.22)
donde ν(M, t) es una funcion conocida de M = (x, y, z) ∈ S y de t.
3. Condicion de frontera de tercer tipo
En este caso esta dado el intercambio energetico con el exterior a traves de la frontera S,o sea:
∂u
∂n|S − hu|S = χ(M, t) (9.23)
A la solucion de los problemas con estas condiciones dedicaremos nuestra atencion en el futuro.

268 Jose Marın Antuna
9.1.2 Planteamiento de los problemas matematicos. Unicidad
Una vez conocidas las condiciones iniciales y de frontera a imponer a la ecuacion, podemosplantear los llamados problemas de frontera. Comencemos planteando los problemas unidi-mensionales. Si las condiciones a imponer en los extremos de la cuerda o barra son ambas deprimer tipo, estaremos ante el llamado Primer Problema de Frontera (o de contorno);si ambas son de segundo tipo, tendremos el Segundo Problema de Frontera (o de con-torno) y, por ultimo, si son ambas de tercer tipo, entonces tendrıamos el Tercer Problemade Frontera (o de contorno). Pueden darse casos, ademas, en los que se impongan condi-ciones de tipos diferentes en los extremos; en ese caso estarıamos en presencia de problemasmixtos que no reciben una denominacion especial. Ello sucederıa, por ejemplo, en el caso enque, digamos, en el extremo x = 0 de la cuerda estuviera dada la ley de movimiento del mismo:u(0, t) = µ(t), en tanto que en el extremo x = l estuviera dada la fuerza que actua sobre elmismo: ux(l, t) = ν(t).
Ası las cosas, el Primer Problema de Frontera se plantea en los siguientes terminos:
Hallar la funcion u(x, t) definida y continua en 0 ≤ x ≤ l, t ≥ 0 que satisfaga la ecuacion y lascondiciones iniciales y de frontera:
utt = a2uxx + f(x, t), ∀0 < x < l, t > 0
u(x, 0) = ϕ(x), ∀0 ≤ x ≤ l
ut(x, 0) = ψ(x), ∀0 ≤ x ≤ l (9.24)
u(0, t) = µ(t), ∀t ≥ 0
u(l, t) = ν(t), ∀t ≥ 0
Notese que la solucion de la ecuacion se busca en el intervalo abierto (0, l) y para tiemposrigurosamente mayores que cero, en tanto que las condiciones que se imponen deben cumplirseen los intervalos cerrados. Ello implica que, para la compatibilidad del problema, debe cumplirseque ϕ(0) = µ(0), ϕ(l) = ν(0), ψ(0) = µ′(0) y ψ(l) = ν ′(0).
El Segundo Problema de Frontera sera:
Hallar la funcion u(x, t) definida y continua en 0 ≤ x ≤ l, t ≥ 0 que satisfaga la ecuacion y lascondiciones:
utt = a2uxx + f(x, t), ∀0 < x < l, t > 0
u(x, 0) = ϕ(x), ∀0 ≤ x ≤ l
ut(x, 0) = ψ(x), ∀0 ≤ x ≤ l (9.25)
ux(0, t) = µ(t), ∀t ≥ 0
ux(l, t) = ν(t), ∀t ≥ 0
a la que hay que exigir condiciones de compatibilidad similares al caso anterior.

Planteamiento de los problemas matematicos 269
El Tercer Problema de Frontera se planteara en los siguientes terminos:
Hallar la funcion u(x, t) definida y continua en 0 ≤ x ≤ l, t ≥ 0 que satisfaga la ecuacion y lascondiciones:
utt = a2uxx + f(x, t), ∀0 < x < l, t > 0
u(x, 0) = ϕ(x), ∀0 ≤ x ≤ l
ut(x, 0) = ψ(x), ∀0 ≤ x ≤ l (9.26)
ux(0, t)− h1u(0, t) = µ(t), ∀t ≥ 0
ux(l, t) + h2u(l, t) = ν(t), ∀t ≥ 0
con similares condiciones de compatibilidad.
Es necesario hacer las siguientes aclaraciones. El hecho de que se exija que la funcion cumpla conla ecuacion diferencial en el dominio abierto 0 < x < l, t > 0 significa que esta funcion debetener hasta las segundas derivadas continuas respecto a x y a t en dicho dominio, para que puedahablarse de la existencia de la solucion; para el primer problema de frontera habra que exigir,ademas, la continuidad de la primera derivada respecto a t para t ≥ 0 y, para el segundo y tercerproblema de frontera, ademas, la continuidad de la primera derivada respecto a x en el intervalocerrado 0 ≤ x ≤ l. Como comprobaremos mas adelante al estudiar los metodos de solucion,esas condiciones son indispensables para garantizar la existencia de la solucion clasica, ya que,como veremos, con estas caracterısticas, estas son las condiciones necesarias para demostrarla existencia de la solucion. Nosotros no demostraremos un teorema de existencia, sino que,en la medida en que desarrollemos los metodos de solucion y encontremos dichas soluciones,demostraremos la existencia de las mismas junto con las condiciones de validez para dichaexistencia.
Sin embargo, es logico hacerse la siguiente pregunta: ¿Son suficientes las condiciones impuestaspara determinar una solucion? La respuesta a esta interrogante la da el teorema de unicidadque a continuacion demostraremos.
Teorema de Unicidad.
Los problemas de frontera (9.24), (9.25) y (9.26) tienen solucion unica.
Demostracion:
Realicemos la demostracion para cada uno de los problemas por separado.
1. Para el primer problema de frontera.
Supongamos que, contrario a la tesis, existen dos soluciones u1(x, t) y u2(x, t) del problema(9.24). Entonces, es facil comprobar, debido a la linealidad de la ecuacion y de lascondiciones, que la funcion
v(x, t) = u1(x, t)− u2(x, t) (9.27)

270 Jose Marın Antuna
sera solucion de un problema con ecuacion homogenea y todas las condiciones homogeneas:
vtt = a2vxx, ∀0 < x < l, t > 0
v(x, 0) = 0, ∀0 ≤ x ≤ l
vt(x, 0) = 0, ∀0 ≤ x ≤ l (9.28)
v(0, t) = 0, ∀t ≥ 0
v(l, t) = 0, ∀t ≥ 0
Analicemos la siguiente funcion auxiliar:
E(t) =1
2
∫ l
0
kv2x(x, t) + ρv2
t (x, t)dx (9.29)
derivando (9.29) respecto a t, tendremos:
dE
dt=
∫ l
0
kvxvxt + ρvtvttdx =
∫ l
0
kvxvxtdx+
∫ l
0
ρvtvttdx (9.30)
donde, para simplificar las notaciones, no hemos puesto explıcitamente la dependenciarespecto a x y t de los integrandos.
Aplicando a la primera de las dos integrales a la derecha de la ecuacion (9.30) el metodode integracion por partes, obtenemos:
dE
dt= kvxvt|l0 −
∫ l
0
kvtvxxdx+
∫ l
0
ρvtvttdx = kvxvt|l0 +
∫ l
0
ρvtt − kvxxvtdx (9.31)
La integral que figura a la extrema derecha de (9.31) se anula, ya que la expresion entrellaves es cero en virtud de la ecuacion del problema (9.28). Por consiguiente,
E
dt= kvx(l, t)vt(l, t)− kvx(0, t)vt(0, t) (9.32)
Pero, en virtud de las condiciones de frontera del problema (9.28)
v(0, t) = 0, v(l, t) = 0
por lo que
vt(0, t) = 0, vt(l, t) = 0 (9.33)
Sustituyendo (9.33) en (9.32), concluimos que dEdt
= 0. Esto significa que la funcion E(t)es constante y, por lo tanto:
E(t) = E(0) =1
2
∫ l
0
kv2x(x, 0) + ρv2
t (x, 0)dx (9.34)

Planteamiento de los problemas matematicos 271
Pero, en virtud de las condiciones iniciales del problema (9.28)
v(x, 0) = 0, vt(x, 0) = 0
por lo que
v2x(x, 0) = 0, v2
t (x, 0) = 0 (9.35)
Sustituyendo (9.35) en (9.34), concluimos que
E(t) =1
2
∫ l
0
kv2x(x, t) + ρv2
t (x, t)dx = 0 (9.36)
Como el integrando en (9.36) es definido no negativo, la unica forma de cumplirse (9.36)es que
vx(x, t) = 0, vt(x, t) = 0 (9.37)
Pero, esto ultimo significa que v(x, t) es constante para toda x y todo t y sera, por tanto,igual a sus valores para t = 0, o para x = 0, o para x = l, es decir,
v(x, t) ≡ 0 (9.38)
lo que significa que u1(x, t) ≡ u2(x, t), con lo que queda demostrado el teorema de unicidadpara el Primer Problema de Frontera.
La demostracion ha sido obtenida con rigor matematico. Sin embargo, un somero analisisfısico nos llevarıa a la misma conclusion, ya que, por ser la ecuacion del problema (9.28)homogenea -lo que, fısicamente, significa que no existen fuerzas externas aplicadas sobre lacuerda- y ser, ademas, iguales a cero la elongacion inicial, la velocidad inicial y los valoresde la elongacion en la frontera, resulta que no existe ninguna causa fısica que provoquelas oscilaciones de la cuerda, de manera que esta tendra que permanecer, forzosamente,todo el tiempo en reposo.
Observese que la funcion auxiliar (9.29) utilizada en la demostracion no es otra cosa queel funcional de la energıa total de la cuerda que responde al problema (9.28). De ahıes logico esperar que, al no haber ningun aporte energetico al sistema, ni por fuerzasaplicadas, ni por estımulos iniciales o estımulos en la frontera, la energıa total del sistemase mantenga todo el tiempo nula y su unica extremal posible venga dada por (9.38).
2. Para el Segundo Problema de Frontera.
En este caso, el tratamiento es identico. Suponiendo la existencia de dos soluciones u1(x, t)y u2(x, t) del problema (9.25), para la funcion diferencia (9.27) obtenemos el problematodo homogeneo

272 Jose Marın Antuna
vtt = a2vxx, ∀0 < x < l, t > 0
v(x, 0) = 0, ∀0 ≤ x ≤ l
vt(x, 0) = 0, ∀0 ≤ x ≤ l (9.39)
vx(0, t) = 0, ∀t ≥ 0
vx(l, t) = 0, ∀t ≥ 0
En este caso, para la derivada de la funcion auxiliar (9.29) obtenemos la misma expresion(9.32). En esta ultima, en virtud de las condiciones de frontera (9.39)
vx(0, t) = 0, vx(l, t) = 0
concluimos, nuevamente, que E(t) es constante. El resto de la demostracion es identicoa lo efectuado para el primer problema de frontera.
Demostrado el teorema para el Segundo Problema de Frontera.
3. Para el Tercer Problema de Frontera.
De forma similar a los dos casos anteriores, para la funcion (9.27) obtenemos el problematodo homogeneo
vtt = a2vxx, ∀0 < x < l, t > 0
v(x, 0) = 0, ∀0 ≤ x ≤ l
vt(x, 0) = 0, ∀0 ≤ x ≤ l (9.40)
vx(0, t)− h1v(0, t) = 0, ∀t ≥ 0
vx(l, t) + h2v(l, t) = 0, ∀t ≥ 0
Igualmente, para la derivada de la funcion auxiliar (9.29) obtenemos la expresion (9.27).Sustituyendo en esta vx(0, t) y vx(l, t) despejadas de las condiciones de frontera del pro-blema (9.40), obtenemos:
dE
dt= −kh2v(l, t)vt(l, t)− kh1v(0, t)vt(0, t) = −[kh2v(l, t)vt(l, t) + kh1v(0, t)vt(0, t)] =
= −1
2
d
dt[kh2v
2(l, t) + kh1v2(0, t)] (9.41)
Integrando (9.41), obtenemos que
E(t) = −1
2[kh2v
2(l, t) + kh1v2(0, t)] (9.42)
De (9.42) concluimos que E(t) ≤ 0, pero (9.29) nos dice que E(t) ≥ 0. La unica formade cumplir, simultaneamente, ambas conclusiones es que sea E(t) ≡ 0. El resto de lademostracion es igual a los dos casos anteriores.

Planteamiento de los problemas matematicos 273
Demostrado el teorema de unicidad.
Una vez demostrado el teorema de unicidad, podemos dedicarnos tranquilamente a buscarmetodos de solucion, sabiendo que la solucion que encontremos es unica.
9.1.3 Problemas en varias dimensiones espaciales
Si lo que oscila es una membrana, el problema se planteara en dos dimensiones espaciales y silas oscilaciones son en un volumen, en tres dimensiones espaciales. Plantearemos los problemasde frontera para el caso de tres dimensiones espaciales; para dos dimensiones el planteamientoes similar, solo que en lugar de un volumen tendremos una superficie y en vez de una superficiecomo frontera tendremos un contorno. Ası las cosas, los problemas en esos casos seran:
1. Primer Problema de Frontera
Hallar la funcion u(M, t) definida y continua para M ∈ V + S y t ≥ 0 que satisfaga
utt = a2∇2u+ f(M, t), ∀M ∈ V, t > 0
u(M, 0) = ϕ(M), ∀M ∈ V + S
ut(M, 0) = ψ(M), ∀M ∈ V + S (9.43)
u|S = µ(M, t), ∀M ∈ S, t ≥ 0
2. Segundo Problema de Frontera
Hallar la funcion u(M, t) definida y continua para M ∈ V + S y t ≥ 0 que satisfaga
utt = a2∇2u+ f(M, t), ∀M ∈ V, t > 0
u(M, 0) = ϕ(M), ∀M ∈ V + S
ut(M, 0) = ψ(M), ∀M ∈ V + S (9.44)
∂u
∂n|S = µ(M, t), ∀M ∈ S, t ≥ 0
3. Tercer Problema de Frontera
Hallar la funcion u(M, t) definida y continua para M ∈ V + S y t ≥ 0 que satisfaga
utt = a2∇2u+ f(M, t), ∀M ∈ V, t > 0
u(M, 0) = ϕ(M), ∀M ∈ V + S
ut(M, 0) = ψ(M), ∀M ∈ V + S (9.45)(∂u
∂n− hu
)|S = µ(M, t), ∀M ∈ S, t ≥ 0

274 Jose Marın Antuna
9.1.4 Problema en la recta infinita
En este caso no se imponen condiciones de frontera y solo se exige que la solucion u(x, t) seaacotada. Se pide hallar la funcion continua y acotada en −∞ < x <∞, t ≥ 0 que satisfaga laecuacion y las condiciones
utt = a2uxx + f(x, t), ∀ −∞ < x <∞, t > 0
u(x, 0) = ϕ(x) (9.46)
ut(x, 0) = ψ(x)
Este problema, en el que solo aparecen condiciones iniciales, se llama Problema de Cauchy.
Matematicamente, estamos en presencia de oscilaciones de una cuerda infinita. Por supuestoque, desde el punto de vista fısico, el concepto de cuerda infinita es una aproximacion. Sim-plemente estamos buscando las oscilaciones de una cuerda de longitud grande en el entornode su parte central y en un rango de valores del tiempo tal que la accion de la frontera sobreestas oscilaciones aun no se hace sentir. ¿Quien de nino no ha empinado un papalote? Al hacerun movimiento con la mano, vemos una onda que se desplaza a lo largo de la cuerda hacia elpapalote que se encuentra en lo alto del cielo. Durante cierto perıodo de tiempo esta onda viajapor la cuerda como si esta fuera infinita, ya que la presencia de la frontera (nuestra mano enun extremo y el papalote en el otro) no se hace sentir sobre el movimiento y sobre la forma dedicha onda.
Si la cuerda es semiinfinita, habra que dar una condicion de frontera. Esto quiere decir queestamos buscando las oscilaciones cerca de uno de los extremos de una cuerda larga para unrango de valores del tiempo tal, que la accion del otro extremo sobre las oscilaciones no se hacesentir todavıa.
Matematicamente, esto se expresarıa en los siguientes terminos: Se quiere hallar la funcioncontinua y acotada u(x, t) en 0 ≤ x < ∞, t ≥ 0 que satisfaga la ecuacion, las condicionesiniciales y la condicion de frontera
utt = a2uxx + f(x, t), ∀0 < x <∞, t > 0
u(x, 0) = ϕ(x)
ut(x, 0) = ψ(x) (9.47)
u(0, t) = µ(t)
El problema (9.47), dada la condicion de frontera impuesta, es el primer problema de fronteraen la recta semiinfinita. Si la condicion de frontera es la de segundo tipo, tendremos el segundoproblema de frontera y en el caso en que sea la de tercer tipo, tendrıamos el tercer problemade frontera.

Planteamiento de los problemas matematicos 275
9.1.5 Reduccion del problema general
Con el objetivo de buscar la solucion -que ya sabemos unica- de los problemas planteados, esconveniente tratar de descomponerlos en problemas mas simples, ya que es obvio que inten-tar resolver de un inicio, digamos, los problemas (9.24), (9.25) o (9.26) o cualquier problemamixto en los que, tanto la ecuacion, como todas las condiciones iniciales y de frontera, son nohomogeneas, es una tarea difıcil.
La linealidad, tanto de la ecuacion que queremos resolver, como de las condiciones iniciales yde frontera que a ella se imponen, nos permite establecer un importante teorema, conocido conel nombre de Principio de Superposicion:
Teorema
Sean los siguientes problemas:
u(i)tt = a2u(i)
xx + fi(x, t), ∀0 < x < l, t > 0
u(i)(x, 0) = ϕi(x), ∀0 ≤ x ≤ l
u(i)t (x, 0) = ψi(x), ∀0 ≤ x ≤ l (9.48)
u(i)(0, t) = µi(t), ∀t ≥ 0
u(i)(l, t) = νi(t), ∀t ≥ 0
donde i = 1, 2, ..., n.
Entonces la funcion
u(x, t) =n∑i=1
u(i)(x, t) (9.49)
es solucion del problema:
utt = a2uxx + f(x, t), ∀0 < x < l, t > 0
u(x, 0) = ϕ(x), ∀0 ≤ x ≤ l
ut(x, 0) = ψ(x), ∀0 ≤ x ≤ l (9.50)
u(0, t) = µ(t), ∀t ≥ 0
u(l, t) = ν(t), ∀t ≥ 0
donde
f(x, t) =n∑i=1
fi(x, t) (9.51)

276 Jose Marın Antuna
ϕ(x) =n∑i=1
ϕi(x) (9.52)
ψ(x) =n∑i=1
ψi(x) (9.53)
µ(t) =n∑i=1
µi(t) (9.54)
ν(t) =n∑i=1
νi(t) (9.55)
La demostracion de este principio es muy sencilla, dada la linealidad arriba mencionada dela ecuacion y de las condiciones y se deja al lector como ejercicio. Es necesario senalar que,aunque hemos hecho el enunciado del principio, tomando como base el planteamiento del primerproblema de frontera, el principio es valido para todos los problemas de frontera, con condicionesde frontera de segundo y tercer tipo y mixtas. Tambien hay que resaltar el hecho de que,aunque el principio de superposicion aquı ha sido enunciado para el problema con la ecuacionhiperbolica, es tambien valido para los problemas con ecuaciones parabolicas, ası como para lasecuaciones elıpticas y, en general, para cualquier problema de frontera con cualquier ecuacioncon operador diferencial lineal y condiciones lineales impuestas.
Basados en el Principio de Superposicion, procederemos de la siguiente manera: la solucion decualquiera de los problemas de frontera planteados (9.24), (9.25), (9.26) o cualquier problemamixto, la buscaremos en la forma de la suma de tres funciones:
u(x, t) = u(1)(x, t) + u(2)(x, t) + u(3)(x, t) (9.56)
y exigiremos que las funciones u(i)(x, t) (i = 1, 2, 3) sean las soluciones de tres problemas queconstruiremos de la siguiente manera:
u(1)(x, t) sera la solucion de un problema con la ecuacion homogenea, las condiciones inicialesdel problema para u(x, t) y con condiciones de frontera homogeneas del mismo tipo que las delproblema para u(x, t).
u(2)(x, t) sera la solucion de un problema con la ecuacion no homogenea en la que figurarala misma inhomogeneidad de la ecuacion del problema para u(x, t) y condiciones iniciales ho-mogeneas y condiciones de frontera homogeneas del mismo tipo que las del problema parau(x, t).
u(3)(x, t) sera la solucion de un problema con la ecuacion homogenea, con condiciones inicialeshomogeneas y con condiciones de frontera iguales a las del problema para u(x, t).
Planteamiento de los problemas matematicos 277
Para ejemplificar lo dicho, busquemos la solucion del problema (9.24) en la forma (9.56). En-tonces, en virtud de lo expresado arriba, u(1)(x, t), u(2)(x, t) y u(3)(x, t) seran las soluciones,respectivamente, de los siguientes problemas:
u(1)tt = a2u(1)
xx , ∀0 < x < l, t > 0
u(1)(x, 0) = ϕ(x), ∀0 ≤ x ≤ l
u(1)t (x, 0) = ψ(x), ∀0 ≤ x ≤ l (9.57)
u(1)(0, t) = 0, ∀t ≥ 0
u(1)(l, t) = 0, ∀t ≥ 0
u(2)tt = a2u(2)
xx + f(x, t), ∀0 < x < l, t > 0
u(2)(x, 0) = 0, ∀0 ≤ x ≤ l
u(2)t (x, 0) = 0, ∀0 ≤ x ≤ l (9.58)
u(2)(0, t) = 0, ∀t ≥ 0
u(2)(l, t) = 0, ∀t ≥ 0
u(3)tt = a2u(3)
xx , ∀0 < x < l, t > 0
u(3)(x, 0) = 0, ∀0 ≤ x ≤ l
u(3)t (x, 0) = 0, ∀0 ≤ x ≤ l (9.59)
u(3)(0, t) = µ(t), ∀t ≥ 0
u(3)(l, t) = ν(t), ∀t ≥ 0
De forma similar se procedera con cualquier otro problema. Solo habrıa que tener en conside-racion que las condiciones de frontera deben corresponder a las del problema en cuestion.
Una vez establecida esta reduccion del problema general mediante su descomposicion en pro-blemas mas simples, se puede comenzar a estudiar los metodos de solucion de todos los pro-blemas planteados para ecuaciones hiperbolicas, pero primero veremos lo relacionado con elplanteamiento de los problemas para las ecuaciones parabolicas y elıpticas.
9.2 Ecuaciones parabolicas
9.2.1 Condicion inicial
La ecuacion parabolica obtenida en el capıtulo anterior tiene, en una dimension espacial, laforma
278 Jose Marın Antuna
ut = a2uxx + f(x, t) (9.60)
y en varias dimensiones espaciales la forma
ut = a2∇2u+ f(x, t) (9.61)
de manera que solamente habra que imponer una condicion inicial. Si el proceso fısico que seestudia es el de la propagacion del calor, dicha condicion inicial consistira en dar la temperaturainicial de los puntos de la barra, en el caso unidimensional, o de los puntos del cuerpo, en elcaso de varias dimensiones espaciales. Ello, matematicamente, se expresara por las ecuaciones:
u(x, 0) = ϕ(x) (9.62)
en el caso de una dimension espacial y
u(M, 0) = ϕ(M) (9.63)
para el caso de varias dimensiones espaciales.
9.2.2 Condiciones de frontera
Supongamos que tenemos una barra de longitud l. Entonces las condiciones de frontera aimponer en los extremos x = 0 y x = l de la barra podran ser de tres tipos fundamentales:
1. Condicion de frontera de primer tipo
A esta condicion se llega -al igual que en el caso de la ecuacion hiperbolica- cuando seconoce el valor de la funcion incognita en los extremos de la barra:
u(0, t) = µ(t), u(l, t) = ν(t) (9.64)
Si el proceso fısico que se analiza es el de propagacion de calor a lo largo de la barra,entonces las condiciones (9.64) significan que esta dada la temperatura de cada extremo.Si es un proceso de difusion, entonces significaran que esta dada la concentracion en cadaextremo como funciones conocidas de t. La condicion homogenea de primer tipo significa,por tanto, que la temperatura o la concentracion en el extremo de la barra es cero.
Si el proceso que se esta estudiando ocurre en el interior de un dominio de varias di-mensiones espaciales, entonces la condicion de frontera de primer tipo consistira en elestablecimiento del valor de la funcion incognita sobre la frontera del dominio en cuestion.Por ejemplo, si el proceso es en el interior de un cuerpo de volumen V y superficie fronteraS, la condicion tendra la forma:

Planteamiento de los problemas matematicos 279
u|S = µ(M, t), ∀M ∈ S (9.65)
Aquı, µ(M, t) es una funcion definida sobre la superficie frontera S.
2. Condicion de frontera de segundo tipo
A esta condicion se llega, si lo que esta dado como funcion del tiempo es el flujo decalor a traves del extremo, suponiendo el caso del fenomeno de propagacion de calor en labarra. Como sabemos que el flujo de calor es proporcional al gradiente de la temperatura,tendremos que el flujo, digamos en el extremo x = 0, sera igual a determinada funcionconocida f(t) y tendremos:
Q(0, t) ≡ f(t) = kux(0, t)
de donde, dividiendo por k, obtenemos la expresion de la condicion en la forma de laecuacion a la izquierda de (9.66):
ux(0, t) = µ(t), ux(l, t) = ν(t) (9.66)
donde µ(t) es una funcion conocida. En el extremo x = l el analisis nos conduce auna condicion similar dada por la ecuacion de la derecha en (9.66). Si el proceso queanalizamos es el de difusion, entonces (9.66) significaran que se conoce el flujo, de lasustancia que se difunde, a traves de los extremos de la barra x = 0 y x = l.
Evidentemente, la condicion homogenea de segundo tipo significara, o bien que el extremoesta aislado termicamente, si se trata de un proceso de propagacion de calor, o bien queel extremo esta cerrado al paso de la sustancia que se difunde, es decir, es impermeable,si se trata de un proceso de difusion. Esto es ası, porque en ambos casos la condicionhomogenea significara que el flujo a traves del extremo correspondiente es nulo.
En el caso de un proceso en varias dimensiones espaciales, la condicion de frontera desegundo tipo adopta la forma:
∂u
∂n|S = µ(M, t), ∀M ∈ S (9.67)
donde S es la frontera del dominio donde se quiere resolver el problema y n es el vectornormal a la superficie, exterior al dominio en cuestion. El significado fısico en este casoes el mismo: que se conoce el flujo de calor o de sustancia, segun el caso, a traves de lafrontera.
3. Condicion de frontera de tercer tipo
Este tipo de condicion se obtiene, por ejemplo, en el caso de la propagacion de calor,cuando se conoce la ley de intercambio de calor con el medio exterior a traves del extremode acuerdo con la ley de Newton. Esto significa que se conoce la relacion de proporcio-nalidad entre el flujo de calor y la temperatura relativa del extremo. Por ejemplo, parael extremo x = 0, si sabemos que la temperatura del medio exterior es T (t), entonces, elflujo de calor a traves de x = 0 sera proporcional a la diferencia de temperaturas entre

280 Jose Marın Antuna
el medio exterior y la barra en el punto x = 0 y, como el flujo de calor es proporcional algradiente de la temperatura en ese punto, tendremos, finalmente, la relacion:
Q(0, t) = α[T (t)− u(0, t)] = −kux(0, t)
de aquı, dividiendo por k, reagrupando adecuadamente y redefiniendo convenientementelas funciones, obtenemos la condicion de tercer tipo en el extremo x = 0 en la forma:
ux(0, t)− hu(0, t) = µ(t) (9.68)
Un analisis similar en el extremo x = l nos llevarıa a la expresion:
ux(0, t) + hu(0, t) = ν(t) (9.69)
Es conveniente destacar que, en el caso mas general, las constantes h que figuran en (9.68)y (9.69) no tienen que ser, necesariamente, iguales, por lo que, en general, escribiremosh1 y h2.
En el caso de varias dimensiones espaciales, la condicion de frontera de tercer tipo adoptala forma: (
∂u
∂n− hu(M, t)
)|S = µ(M, t), ∀M ∈ S (9.70)
Las condiciones de frontera hasta aquı obtenidas son condiciones lineales y es con ellas conlas que trabajaremos. Sin embargo, no son las unicas condiciones que pudieran obtenerse.Pudiera darse el caso, por ejemplo, de que el intercambio de calor con el medio ambientese realizara, no siguiendo la ley lineal de Newton, sino de acuerdo con la ley de radiacionde Stefan-Boltzmann. Entonces, la condicion serıa no lineal y adoptarıa la forma:
ux = h(T 4 − u4)
Nosotros nos limitaremos a las condiciones lineales arriba obtenidas en nuestro estudio;como es conocido, las ecuaciones no lineales conducen a grandes complicaciones de calculoque no son objeto de analisis en la presente obra.
9.2.3 Planteamiento de los problemas matematicos
Si las condiciones de frontera que se imponen a la ecuacion son de primer tipo, obtenemos elllamado Primer Problema de Frontera. Para las condiciones de segundo y tercer tipo, res-pectivamente, tendremos el Segundo y Tercer Problema de Frontera. Pueden plantearsetambien problemas mixtos, si en cada extremo de la barra en el caso unidimensional o en dife-rentes secciones de la frontera en el caso multidimensional, se imponen condiciones de fronterade diferentes tipos.
Ası, por ejemplo, el primer problema de frontera en el caso unidimensional se plantearıa en lossiguientes terminos:

Planteamiento de los problemas matematicos 281
Hallar la funcion u(x, t) definida y continua en 0 ≤ x ≤ l, t ≥ 0, que satisfaga la ecuacionparabolica, la condicion inicial y las condiciones de frontera siguientes:
ut = a2uxx + f(x, t), ∀0 < x < l, t > 0
u(x, 0) = ϕ(x), ∀0 ≤ x ≤ l
u(0, t) = µ(t), ∀t ≥ 0 (9.71)
u(l, t) = ν(t), ∀t ≥ 0
El segundo problema de fontera sera, similarmente:
ut = a2uxx + f(x, t), ∀0 < x < l, t > 0
u(x, 0) = ϕ(x), ∀0 ≤ x ≤ l
ux(0, t) = µ(t), ∀t ≥ 0 (9.72)
ux(l, t) = ν(t), ∀t ≥ 0
y el tercer problema de frontera sera:
ut = a2uxx + f(x, t), ∀0 < x < l, t > 0
u(x, 0) = ϕ(x), ∀0 ≤ x ≤ l
ux(0, t)− h1u(0, t) = µ(t), ∀t ≥ 0 (9.73)
ux(l, t) + h2u(l, t) = ν(t), ∀t ≥ 0
De manera similar se plantean los problemas mixtos, en los que, en un extremo esta impuestauna condicion de un tipo y en el otro extremo, una condicion de otro tipo.
En los casos multidimensionales, respectivamente, el primero, segundo y tercer problema defrontera seran:
ut = a2∇2u+ f(M, t), ∀M ∈ V, t > 0
u(M, 0) = ϕ(M) (9.74)
u|S = µ(M, t), ∀M ∈ S, t ≥ 0
para el primer problema,
ut = a2∇2u+ f(M, t), ∀M ∈ V, t > 0
u(M, 0) = ϕ(M) (9.75)
∂u
∂n|S = µ(M, t), ∀M ∈ S, t ≥ 0

282 Jose Marın Antuna
para el segundo problema y
ut = a2∇2u+ f(M, t), ∀M ∈ V, t > 0
u(M, 0) = ϕ(M) (9.76)(∂u
∂n− hu
)|S = µ(M, t), ∀M ∈ S, t ≥ 0
para el tercer problema de frontera.
Es necesario aclarar aquı que, al igual que en el epıgrafe anterior, deben cumplirse las condi-ciones de compatibilidad entre las funciones que aparecen en la condicion inicial y en las condi-ciones de frontera, para que el problema tenga sentido.
9.2.4 Problemas en la recta infinita y semiinfinita
Si el problema de la ecuacion parabolica se quiere resolver en la parte central de una barrasuficientemente larga y para un rango de valores del tiempo tal que la influencia de las fronterasno tenga tiempo de hacerse sentir en el proceso que se quiere describir, entonces, se plantea elproblema de la siguiente manera:
Hallar la funcion u(x, t) definida y continua para −∞ < x <∞, t ≥ 0 que cumpla la ecuaciony la condicion inicial:
ut = a2uxx + f(x, t), ∀ −∞ < x <∞, t > 0
u(x, 0) = ϕ(x) (9.77)
donde se exigen las mismas condiciones matematicas a las funciones que fueron impuestas enel problema de la ecuacion hiperbolica en la recta infinita que vimos en el epıgrafe anterior. Siel problema se resuelve en el entorno de uno de los extremos de una barra muy larga, de formatal que la influencia del otro extremo no esta presente, el problema se plantearıa en la rectasemiinfinita y habrıa que incluir una condicion de frontera en el extremo. Ası, por ejemplo, elprimer problema de frontera en la recta semiinfinita se plantearıa en los siguientes terminos:
Hallar la funcion u(x, t) definida y continua para 0 ≤ x <∞, t ≥ 0 que cumpla:
ut = a2uxx + f(x, t), ∀0 < x <∞, t > 0
u(x, 0) = ϕ(x) (9.78)
u(0, t) = µ(t)

Planteamiento de los problemas matematicos 283
9.2.5 Principio del valor maximo y mınimo
Lo primero que debemos analizar es si los problemas planteados tienen solucion unica y estable.La unicidad se requiere para que el metodo de solucion que desarrollemos sea confiable; la esta-bilidad, es decir, la condicion de que el problema sea correcto, se requiere dada la importanciaque ello tiene para la Fısica, debido a la imprecision con que pueden ser dadas las condiciones.Tiene lugar el siguiente teorema, conocido como Principio del valor maximo y mınimo.
Teorema.
Sea la funcion definida y continua para 0 ≤ x ≤ l, 0 ≤ t ≤ T y que satisface la ecuacionparabolica homogenea ut = a2uxx para 0 < x < l, 0 < t ≤ T. Entonces, u(x, t) alcanza sumaximo y su mınimo, o bien para t = 0, o bien para x = 0, o bien para x = l.
Demostracion:
1) Para el maximo.
En el plano de fase (x, t), que se ve en la Fig. 9.3, queremos demostrar que u(x, t) alcanza sumaximo valor en un punto de la frontera ennegrecida.
Demostremoslo por reduccion al absurdo. Llamemos
M = maxu(x, t), ∀t = 0, x = 0, x = l (9.79)
y supongamos que en un punto interior (x0, t0) (ver figura 9.3) la funcion alcanza un maximo,es decir, que se cumple que
u(x, t) = M + ε (9.80)
y, ademas,
∂u(x0, t0)
∂x= 0,
∂2u(x0, t0)
∂x2≤ 0,
∂u(x0, t0)
∂t≥ 0 (9.81)
La primera de las dos desigualdades en (9.81) contiene la igualdad a cero, pues la condicion demaximo estarıa entonces dada por la igualdad a cero de la tercera derivada y la negatividadde la cuarta derivada. La segunda desigualdad contiene la posibilidad de ser mayor que cero,porque, al no ser la lınea t = T frontera del dominio considerado, el punto interior (x0, t0)pudiera ser con t0 = T y, en tal caso, el maximo pudiera alcanzarse en ese punto con derivadapositiva.
Demostremos que, supuesta la existencia de este punto interior (x0, t0) de maximo, existira otropunto (x1, t1), interior tambien, cercano a (x0, t0), en el que la ecuacion no se cumple. Estoserıa una contradiccion con la hipotesis del teorema, de donde concluirıamos que el maximo nopuede alcanzarse en un punto interior.
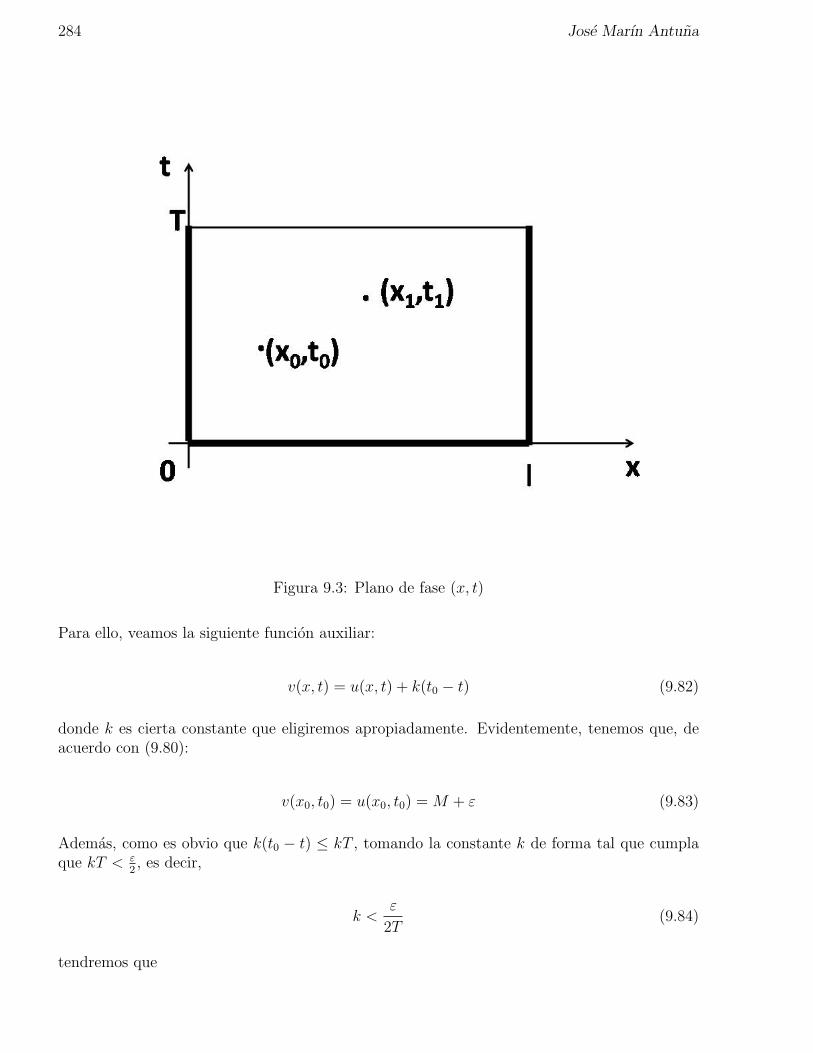
284 Jose Marın Antuna
Figura 9.3: Plano de fase (x, t)
Para ello, veamos la siguiente funcion auxiliar:
v(x, t) = u(x, t) + k(t0 − t) (9.82)
donde k es cierta constante que eligiremos apropiadamente. Evidentemente, tenemos que, deacuerdo con (9.80):
v(x0, t0) = u(x0, t0) = M + ε (9.83)
Ademas, como es obvio que k(t0 − t) ≤ kT , tomando la constante k de forma tal que cumplaque kT < ε
2, es decir,
k <ε
2T(9.84)
tendremos que

Planteamiento de los problemas matematicos 285
v(x, t) ≤ u(x, t) +ε
2(9.85)
Por consiguiente, de (9.85) y teniendo en cuenta (9.79), concluimos para v(x, t) que, evaluadaen los puntos de la frontera,
v(x, t)|x=0,x=l,t=0 ≤M +ε
2(9.86)
Por otro lado, la funcion v(x, t) es continua, por lo que tendra un maximo en cierto punto(x1, t1). Es decir, en este punto se cumplira que
v(x1, t1) ≥ v(x0, t0) = M + ε (9.87)
donde, en (9.87) hemos tenido en cuenta (9.83). La comparacion de (9.86) y (9.87) nos permiteconcluir que, en virtud de la forma en que fue escogida la constante k, segun (9.84), el punto(x1, t1) no pertenece a la frontera. Como en este punto la funcion (9.82) alcanza su maximovalor, se cumplira que
vxx(x1, t1) ≡ uxx(x1, t1) ≤ 0, vt(x1, t1) ≡ ut(x1, t1)− k ≥ 0 (9.88)
De (9.88) concluimos que en (x1, t1) no se cumple la ecuacion para u(x, t), ya que uxx(x1, t1) ≤ 0,en tanto que ut(x1, t1) ≥ k > 0. Como esto contradice la hipotesis del teorema, ya que el punto(x1, t1) es interior y en el se debe cumplir la ecuacion, concluimos que este punto no puede existiry como su existencia estaba condicionada por la existencia del punto (x0, t0) interior de maximode u(x, t), concluimos que este punto tampoco puede existir. Por lo tanto, efectivamente, lafuncion u(x, t) solo puede alcanzar su maximo en x = 0, o en x = l, o en t = 0.
2) Para el mınimo.
Basta, en este caso, analizar la funcion u = −u. Esta funcion satisface, evidentemente, laecuacion parabolica homogenea si u la satisface y, como hemos demostrado que u alcanza sumaximo sobre la frontera, automaticamente queda demostrado que u alcanza su mınimo sobredicha frontera.
Demostrado el teorema.
El teorema demostrado tiene un evidente significado fısico. La ecuacion parabolica homogeneadescribe el proceso de propagacion de calor en una barra sin fuentes de calor en su interior. Porlo tanto, es obvio que, al no existir fuentes de energıa, la temperatura de la barra para t > 0no puede ser mayor que la maxima temperatura en el instante t = 0, o en uno de sus extremos,ni menor que la mınima temperatura en uno de esos puntos, pues entonces se contradirıa elprincipio de conservacion de la energıa, ya que habrıa surgido una energıa no se sabe de donde.
Con la ayuda del principio del valor maximo y mınimo podemos demostrar, facilmente, launicidad y la estabilidad del primer problema de frontera.

286 Jose Marın Antuna
Teorema de Unicidad.
El problema (9.71) tiene solucion unica.
Demostracion:
Supongamos que el problema tiene dos soluciones u1(x, t) y u2(x, t); entonces, es facil ver quela funcion v(x, t) = u1(x, t)− u2(x, t) sera solucion del problema todo homogeneo:
vt = a2vxx, ∀0 < x < l, 0 < t ≤ T
v(x, 0) = 0 (9.89)
v(0, t) = 0
v(l, t) = 0
Pero, de acuerdo con el principio del valor maximo y mınimo y en virtud de las condiciones defrontera del problema (9.89), los valores maximo y mınimo de v(x, t) son iguales a cero. Porconsiguiente, v(x, t) ≡ 0 para 0 < x < l, 0 < t ≤ T , de donde concluimos que u1(x, t) ≡ u2(x, t).
Demostrado el teorema.
Teorema de estabilidad.
Dos soluciones de la ecuacion ut = a2uxx+f(x, t) que se diferencien poco entre sı en el momentoinicial o en la frontera, se diferenciaran poco entre sı en todo momento t y en cualquier puntox. Es decir, el primer problema de frontera de la ecuacion parabolica es correcto.
Demostracion:
Llamemos u1(x, t) y u2(x, t) a dos soluciones de nuestra ecuacion, correspondientes a condicionesiniciales y de frontera del problema (9.71), que se diferencien poco entre sı. Entonces, tendremosque para cierta ε > 0:
|u1(x, 0)− u2(x, 0)| < ε (9.90)
o
|u1(0, t)− u2(0, t)| < ε (9.91)
o
|u1(l, t)− u2(l, t)| < ε (9.92)
Entonces, para la funcion v(x, t) = u1(x, t) − u2(x, t) y en virtud de (9.90), (9.91) y (9.92),tendremos que:

Planteamiento de los problemas matematicos 287
|v(x, 0)| < ε, |v(0, t)| < ε, |v(l, t)| < ε (9.93)
que son su mınimo y su maximo, pues v(x, t) satisface la ecuacion homogenea. Por lo tanto,de acuerdo con el principio del valor maximo y mınimo, tendremos para 0 < x < l, 0 < t ≤ Tque:
−ε < min v(x, t)|x=0,x=l,t=0 < v(x, t) < max v(x, t)|x=0,x=l,t=0 < ε (9.94)
Es decir:
v(x, t) ≡ |u1(x, t)− u2(x, t)| < ε, ∀0 < x < l, 0 < t ≤ T (9.95)
Demostrado el teorema.
Gracias a estos dos teoremas podemos dedicarnos tranquilamente a elaborar los metodos desolucion del problema planteado. El primer teorema nos garantiza que la solucion que encon-tremos sera unica; el segundo nos garantiza algo importante en la Fısica: la condicion inicialy las condiciones de frontera, que surjan del experimento con un margen de error, nos daransoluciones muy similares al comportamiento real de la naturaleza.
Digamos, por ultimo, algunas palabras sobre la unicidad de los otros problemas de frontera(9.72) y (9.73).
Para el segundo problema de frontera (9.72) es posible demostrar la unicidad y la estabilidad desu solucion. Efectivamente, suponiendo dos soluciones u1(x, t) y u2(x, t) del problema (9.72),para la funcion diferencia v(x, t) = u1(x, t)− u2(x, t) tendremos el problema siguiente:
vt = a2vxx, ∀0 < x < l, 0 < t ≤ T
v(x, 0) = 0 (9.96)
vx(0, t) = 0
vx(l, t) = 0
Si llamamos
w(x, t) = vx(x, t) (9.97)
tendremos, de las condiciones de (9.96) que, como v(x, 0) = 0, vx(x, 0) = 0 y, por lo tanto
w(x, 0) = 0 (9.98)
288 Jose Marın Antuna
y, ademas:
w(0, t) = 0 (9.99)
w(l, t) = 0 (9.100)
Integrando (9.97) teniendo en cuenta (9.99), obtenemos que:
v(x, t) =
∫ x
0
w(ξ, t)dξ (9.101)
de donde
vt(x, t) =
∫ x
0
wt(ξ, t)dξ, vxx(x, t) = wx(x, t) (9.102)
Colocando (9.102) en la ecuacion del problema (9.96), obtenemos
∫ x
0
wt(ξ, t)dξ = a2wx(x, t)
y, derivando esta ultima expresion respecto a x, nos queda
wt(x, t) = a2wxx(x, t)
Es decir, la funcion w(x, t) satisface la ecuacion homogenea con condicion inicial y condicionesde frontera de primer tipo homogeneas dadas por (9.98), (9.99) y (9.100). Por lo tanto, deacuerdo con el principio del valor maximo y mınimo, w(x, t) ≡ 0. Es decir, vx(x, t) ≡ 0. Estosignifica que v(x, t) es solo funcion de t:
v(x, t) = C(t) (9.103)
De la condicion inicial del problema (9.96) concluimos que C(0) = 0 y, colocando (9.103) en laecuacion del problema (9.96), obtenemos para la funcion C(t) el problema de Cauchy
Ct = 0
C(0) = 0 (9.104)
cuya unica solucion es la trivial: C(t) ≡ 0. Por consiguiente u1(x, t) = u2(x, t) y quedademostrada la unicidad.
Planteamiento de los problemas matematicos 289
La conclusion de que v(x, t) ≡ 0, donde v es la solucion del problema (9.96), es evidente apartir de consideraciones fısicas: Si no existen fuentes de calor en la barra (pues la ecuaciones homogenea) y si, ademas, la temperatura inicial es cero y no hay flujo de calor a traves dela frontera, la temperatura de la barra tendra que mantenerse, forzosamente, igual a cero todoel tiempo. Similar tratamiento se darıa a la demostracion de la estabilidad de la solucion delsegundo problema de frontera.
En el caso del tercer problema de frontera (9.73), de manera analoga a como hemos procedidohasta aquı, es posible demostrar la unicidad y la estabilidad de su solucion.
9.3 Ecuaciones elıpticas
9.3.1 Ecuacion elıptica de Poisson
1. Soluciones fundamentales de la ecuacion de Laplace
La ecuacion de Poisson, segun vimos anteriormente, tiene la forma general:
∇2u = −f(M) (9.105)
Buscaremos aquı las soluciones de esta ecuacion que se conocen con el nombre de solucionesfundamentales y que tienen gran importancia en toda la teorıa de las ecuaciones elıpticas.
Por solucion fundamental de la ecuacion de Poisson entenderemos un tipo de solucion quetenga la mayor simetrıa posible en el espacio en donde estemos considerando el problema yque, ademas, tenga una singularidad en el origen de coordenadas. Mas adelante veremos, enel capıtulo correspondiente al metodo de solucion de la Funcion de Green, como generalizareste importante concepto y como aplicarlo en los diferentes problemas para todos los tipos deecuaciones objeto de nuestro estudio.
1) Solucion fundamental de la ecuacion de Laplace en el espacio
Supongamos que la funcion, solucion de la ecuacion de Laplace (es decir, la ecuacion (9.105) conparte derecha igual a cero) para r 6= 0, goza de simetrıa esferica: u(r, θ, ϕ) ≡ U(r). Entonces,la ecuacion (9.105) homogenea -teniendo en cuenta la expresion del laplaciano en coordenadasesfericas y tomando solamente la parte radial de la misma- adopta la forma:
∇2u =1
r2
d
dr
(r2dU
dr
)= 0 (9.106)
Notese que esta ecuacion, ası escrita, tiene sentido solo para r 6= 0. Su primera integral es:
290 Jose Marın Antuna
r2dU
dr= −C1 (9.107)
donde hemos puesto el signo menos a la constante por comodidad. Integrando (9.107), obtene-mos:
U(r) =C1
r+ C2 (9.108)
Tomemos en (9.108) la solucion particular mas sencilla, correspondiente a C1 = 1, C2 = 0. Deesta manera obtenemos:
U(r) =1
r(9.109)
La funcion (9.109) recibe el nombre de Solucion Fundamental de la Ecuacion de Laplace(o de Poisson) en el espacio (R3). Su significado fısico se hace evidente, si recordamos, porejemplo, que una carga puntual e colocada en el origen de coordenadas, crea a la distancia run potencial electrostatico igual a
U(r) =e
r
Por consiguiente, la solucion fundamental de la ecuacion de Laplace en el espacio puede inter-pretarse como el potencial creado en todo el espacio por una carga unitaria y puntual colocadaen el origen de coordenadas. Observese que es una funcion armonica en todo el espacio, siempreque r 6= 0. En el origen de coordenadas tiene una singularidad positiva (tiende a +∞, cuandor tiende a cero) como un polo simple. Por el momento tenemos que conformarnos con esteanalisis; en el futuro veremos como poder describir, matematicamente, las cargas puntuales (y,en general todas las magnitudes puntuales o instantaneas, es decir, puntuales en el tiempo) yque significado completo tiene la funcion aquı obtenida.
2) Solucion fundamental de la ecuacion de Laplace en el plano
Supongamos que la funcion en este caso goza de simetrıa cilındrica: u(r, ϕ, z) = U(r). Entoncesla ecuacion de Laplace, teniendo en cuenta la forma del laplaciano en coordenadas cilındricasy tomando solo la parte radial del mismo, tiene la forma:
∇2u =1
r
d
dr
(rdU
dr
)= 0 (9.110)
Esta ecuacion tiene sentido solo si r 6= 0. Su primera integral es
rdU
dr= −C1 (9.111)

Planteamiento de los problemas matematicos 291
de donde, integrando, obtenemos:
U(r) = −C1 ln r + C2 (9.112)
En (9.112) tomemos la solucion particular correspondiente a C1 = 1, C2 = 0. Obtenemos:
U(r) = ln1
r(9.113)
Esta funcion se llama Solucion Fundamental de la ecuacion de Laplace en el plano(R2), y recibe ese nombre porque, al haber simetrıa con respecto al eje axial z, el problemase puede considerar en dos dimensiones en el plano perpendicular al eje z. No es difıcil verque esta solucion es armonica en todo el plano, excepto en el punto r = 0, donde tiene unasingularidad logarıtmica y coincide, fısicamente, con el potencial creado por una lınea cargada,coincidente con el eje z, con densidad de carga por unidad de longitud e = 1/2. Mas adelantepodremos interpretar a plenitud el sentido matematico de esta solucion que responde a unacarga puntual en el origen de coordenadas en el plano.
2. Formulas de Green
Hallaremos, a continuacion, unas relaciones integrales muy utiles en el estudio de las ecuacioneselıpticas y, en general, en toda la Fısica Matematica y que son una consecuencia directa de laformula de Gauss-Ostrogradsky. Como sabemos del Analisis Matematico, si un campo vectorialA tiene componentes continuas en V + S y primeras derivadas continuas en V , donde V escierto dominio en R3 de frontera dada por la superficie S, entonces:
∫ ∫ ∫V
∇ ·AdP =
∫ ∫S
A · ndS (9.114)
donde n es el vector normal a la superficie S, exterior al volumen V , dP es el elemento devolumen y dS el elemento de superficie (Fig. 9.4)
Sean, ahora, u(x, y, z) y v(x, y, z) dos funciones continuas con primeras derivadas continuas enV + S y segundas derivadas continuas en V . Escogeremos por campo A al vector
A = u∇v (9.115)
Entonces, por la identidad conocida para la divergencia:
∇ ·A = ∇ · (u∇v) ≡ u∇2v + ∇u ·∇v (9.116)
y por la definicion de derivada normal:
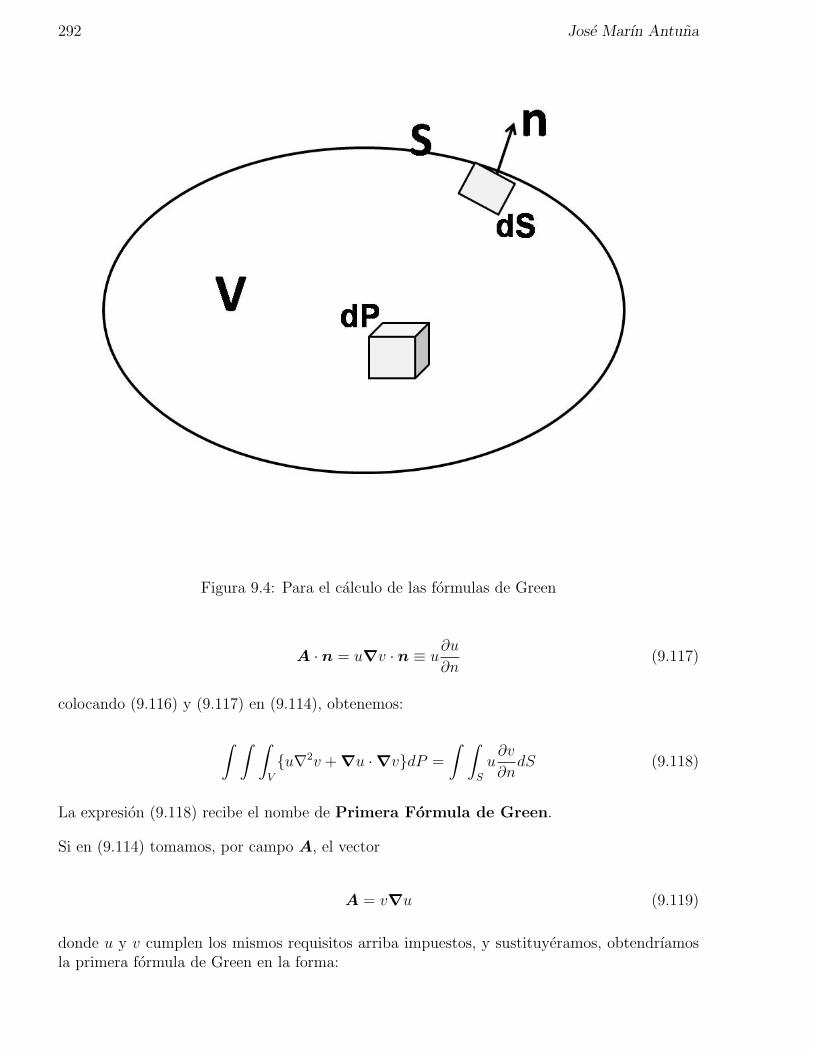
292 Jose Marın Antuna
Figura 9.4: Para el calculo de las formulas de Green
A · n = u∇v · n ≡ u∂u
∂n(9.117)
colocando (9.116) y (9.117) en (9.114), obtenemos:
∫ ∫ ∫V
u∇2v + ∇u ·∇vdP =
∫ ∫S
u∂v
∂ndS (9.118)
La expresion (9.118) recibe el nombe de Primera Formula de Green.
Si en (9.114) tomamos, por campo A, el vector
A = v∇u (9.119)
donde u y v cumplen los mismos requisitos arriba impuestos, y sustituyeramos, obtendrıamosla primera formula de Green en la forma:

Planteamiento de los problemas matematicos 293
∫ ∫ ∫V
v∇2u+ ∇u ·∇vdP =
∫ ∫S
v∂u
∂ndS (9.120)
Restando (9.120) a (9.118), obtenemos:
∫ ∫ ∫V
u∇2v − v∇2udP =
∫ ∫S
u∂v
∂n− v
∂u
∂n
dS (9.121)
que se conoce con el nombre de Segunda Formula de Green.
Notese que la segunda formula de Green es una expresion mas simetrica, obtenida a partir dela primera formula de Green. Si el volumen V es multiconexo, entonces por superficie S seentendera toda la frontera de V con la normal colocada de forma tal que siempre sea exteriora V .
La formula (9.121) es valida para cualesquiera funciones u y v continuas con primeras derivadascontinuas en V + S y segundas derivadas continuas en V . Tomemos en ella una funcion v muyespecıfica:
v =1
rMP
(9.122)
es decir, la solucion fundamental de la ecuacion de Laplace en el espacio. Para nosotros,M = (x, y, z) es un parametro y P = (ξ, η, ζ) es el punto de integracion. Ademas,
rMP =√
(x− ξ)2 + (y − η)2 + (z − ζ)2
es la distancia de M a P .
Si consideramos que M pertenece al dominio V , entonces v no satisface los requisitos para lavalidez de (9.121), ya que en P = M ni ella, ni sus derivadas, son continuas. Por lo tanto,excluiremos el punto M , rodeandolo con una esfera Vε de superficie Sε, centrada en M y radioε (Fig. 9.5).
En el volumen biconexo V −Vε de superficie frontera S+Sε u y v satisfacen los requisitos parala validez de la segunda formula de Green (9.121), por lo que podemos escribir:
∫ ∫ ∫V−Vε
u∇2
(1
rMP
)− 1
rMP
∇2u
dP =
∫ ∫S+Sε
u∂
∂nP
(1
rMP
)− 1
rMP
∂u
∂n
dSP
(9.123)
En (9.123) el subındice P en la derivada normal significa que esta se calcula en el punto P ∈ Sy dicho subındice en el diferencial de superficie indica que la integracion se realiza con respecto

294 Jose Marın Antuna
Figura 9.5: Para el calculo de la tercera formula de Green
a la variable P ; el elemento de volumen dP indica, tambien, que la variable de integracion enesa integral es P ∈ V .
En (9.123) tenemos que
∇2
(1
rMP
)= 0
ya que la funcion es armonica en V − Vε, de manera que nos queda:
−∫ ∫ ∫
V−Vε
1
rMP
∇2udP =
∫ ∫S
u∂
∂nP
(1
rMP
)− 1
rMP
∂u
∂n
dSP +
+
∫ ∫Sε
u∂
∂nP
(1
rMP
)− 1
rMP
∂u
∂n
dSP (9.124)
Calculemos el valor de la integral sobre Sε en la expresion (9.124). Como Sε es una superficie

Planteamiento de los problemas matematicos 295
esferica, la normal exterior al volumen V − Vε tiene igual direccion y sentido contrario al radio(Fig. 9.5). Por consiguiente:
∂
∂n
(1
r
)|Sε = − ∂
∂r
(1
r
)|r=ε =
1
ε2;
1
r|Sε =
1
ε(9.125)
Sustituyendo (9.125) en la integral sobre Sε, queda (los subındices MP los obviamos por co-modidad):
∫ ∫Sε
u∂
∂nP
(1
rMP
)− 1
rMP
∂u
∂n
dSP =
∫ ∫Sε
u
ε2dS −
∫ ∫Sε
1
ε
∂u
∂ndS =
=1
ε2
∫ ∫Sε
u(P )dS − 1
ε
∫ ∫Sε
∂u
∂ndS (9.126)
La funcion u y sus primeras derivadas son, por hipotesis, continuas, por lo que en (9.126)podemos aplicar el teorema del valor medio a las integrales. Teniendo en cuenta que
∫ ∫Sε
dS = 4πε2
es el area de la superficie esferica Sε, obtenemos para las integrales a la derecha de (9.126):
1
ε2
∫ ∫Sε
u(P )dS =1
ε2u(P ∗)4πε2 = 4πu(P ∗) → 4πu(M), ∀ε→ 0 (9.127)
1
ε
∫ ∫Sε
∂u
∂ndS =
1
ε
(∂u
∂n
)|P ∗∗4πε2 = 4πε
(∂u
∂n
)|P ∗∗ → 0, ∀ε→ 0 (9.128)
donde P ∗ ∈ Sε y P ∗∗ ∈ Sε. Ademas, cuando ε → 0, la integral de volumen V − Vε en (9.124)tiende al valor principal de la integral impropia en el volumen V . Teniendo en cuenta estehecho y las expresiones (9.127) y (9.128), al hacer ε→ 0, de (9.124) obtenemos:
−∫ ∫ ∫
V
1
rMP
∇2udP =
∫ ∫S
u∂
∂nP
(1
rMP
)− 1
rMP
∂u
∂n
dSP + 4πu(M) (9.129)
En (9.129) la integral de volumen es el valor principal de esa integral impropia. Finalmente,despejando en (9.129) convenientemente, obtenemos:
u(M) =1
4π
∫ ∫S
1
rMP
∂u
∂n− u(P )
∂
∂nP
(1
rMP
)dSP −
1
4π
∫ ∫ ∫V
∇2u
rMP
dP (9.130)

296 Jose Marın Antuna
La expresion (9.130) recibe el nombre de Tercera Formula de Green en R3 (en el espaciotridimensional) y es de extraordinaria importancia.
En R2 (en el caso bidimensional) existe un analogo de la formula de Gauss-Ostrogradsky en elplano:
∫ ∫S
∇ ·AdS =
∫C
A · ndl (9.131)
donde n es el vector normal exterior al contorno C, frontera de la region S. Un razonamientoidentico al hecho en el caso tridimensional nos conduce a las siguientes expresiones:
∫ ∫S
u∇2v + ∇u ·∇vdS =
∫C
u∂v
∂ndl (9.132)
que es la primera formula de Green en el plano;
∫ ∫S
u∇2v − v∇2udS =
∫C
u∂v
∂n− v
∂u
∂n
dl (9.133)
que es la segunda formula de Green en el plano.
Si en la formula (9.133) tomamos por funcion v la solucion fundamental de la ecuacion deLaplace en el plano:
v = ln1
rMP
y rodeamos al punto M con un cırculo Sε de radio ε y frontera Cε (Fig. 9.6), teniendo encuenta que ∇2v = 0 en S − Sε tendremos:
−∫ ∫
S
∇2u ln1
rMP
dSP =
∫C+Cε
u∂
∂n
(ln
1
rMP
)− ∂u
∂nln
1
rMP
dlP (9.134)
Para la integral por la circunferencia Cε no es difıcil ver que, como ∂∂n
= − ddr
:
∫Cε
u∂
∂n
(ln
1
rMP
)dl =
u(P ∗)
ε
∫Cε
dl = u(P ∗)2π → 2πu(M), ∀ε→ 0 (9.135)
∫Cε
∂u
∂nln
1
rdl =
(∂u
∂n
)|P ∗∗2πε ln
1
ε→ 0, ∀ε→ 0 (9.136)
donde P ∗ ∈ Cε y P ∗∗ ∈ Cε, en virtud del teorema del valor medio aplicado, ya que u y susderivadas son continuas.
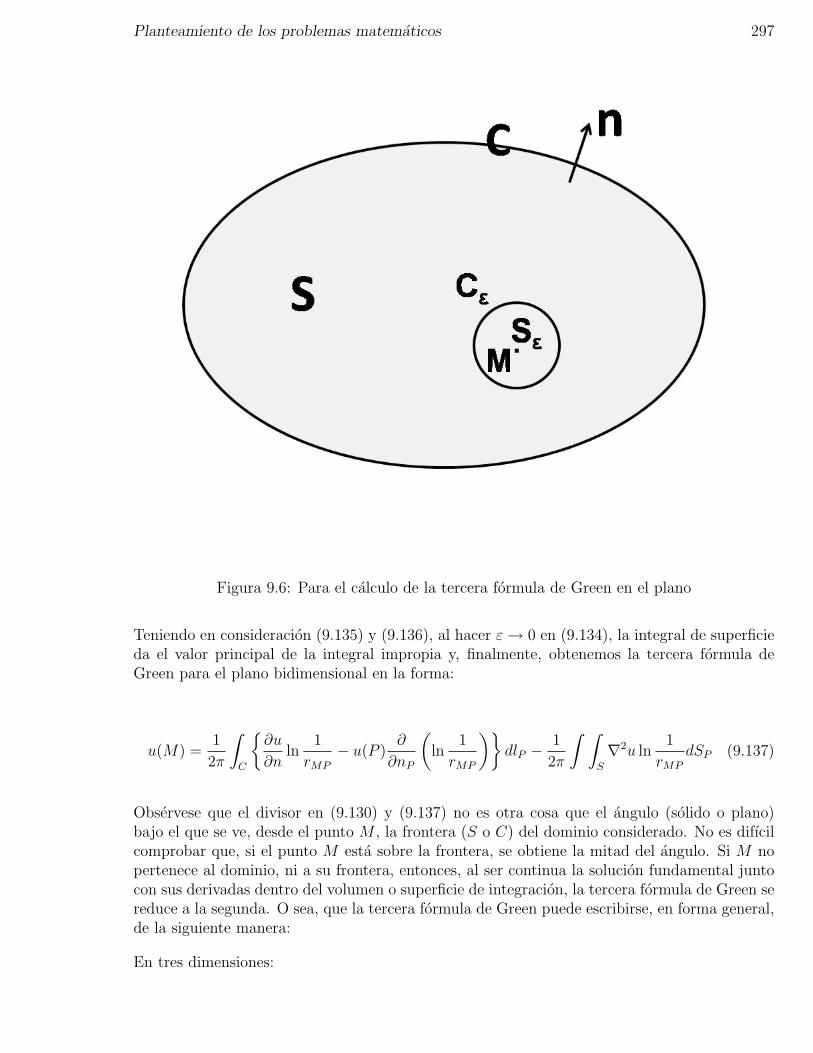
Planteamiento de los problemas matematicos 297
Figura 9.6: Para el calculo de la tercera formula de Green en el plano
Teniendo en consideracion (9.135) y (9.136), al hacer ε→ 0 en (9.134), la integral de superficieda el valor principal de la integral impropia y, finalmente, obtenemos la tercera formula deGreen para el plano bidimensional en la forma:
u(M) =1
2π
∫C
∂u
∂nln
1
rMP
− u(P )∂
∂nP
(ln
1
rMP
)dlP −
1
2π
∫ ∫S
∇2u ln1
rMP
dSP (9.137)
Observese que el divisor en (9.130) y (9.137) no es otra cosa que el angulo (solido o plano)bajo el que se ve, desde el punto M , la frontera (S o C) del dominio considerado. No es difıcilcomprobar que, si el punto M esta sobre la frontera, se obtiene la mitad del angulo. Si M nopertenece al dominio, ni a su frontera, entonces, al ser continua la solucion fundamental juntocon sus derivadas dentro del volumen o superficie de integracion, la tercera formula de Green sereduce a la segunda. O sea, que la tercera formula de Green puede escribirse, en forma general,de la siguiente manera:
En tres dimensiones:

298 Jose Marın Antuna
Ωu(M) =
∫ ∫S
1
rMP
∂u
∂n− u(P )
∂
∂nP
(1
rMP
)dSP −
∫ ∫ ∫V
∇2u
rMP
dP (9.138)
donde
Ω = 4π, ∀M ∈ VΩ = 2π, ∀M ∈ S (9.139)
Ω = 0, ∀Mno ∈ V + S
es el angulo solido bajo el que se observa la frontera S desde el punto M .
En dos dimensiones:
Ωu(M) =
∫C
∂u
∂nln
1
rMP
− u(P )∂
∂nP
(ln
1
rMP
)dlP −
∫ ∫S
∇2u ln1
rMP
dSP (9.140)
donde
Ω = 2π, ∀M ∈ SΩ = π, ∀M ∈ C (9.141)
Ω = 0, ∀Mno ∈ S + C
es el angulo plano bajo el que se observa la frontera C desde el punto M .
Notese que, si la funcion u es armonica, entonces en la tercera formula de Green desaparece laintegral de volumen (en lo adelante nos referiremos a la formula en tres dimensiones (9.130),aunque todo el analisis es valido para la formula en dos dimensiones). Esto significa que todafuncion armonica en un dominio puede ser expresada a traves de sus valores y de los de suderivada normal sobre la frontera del dominio de armonıa. Ademas, en ese caso, cada una delas dos integrales de superficie son, tambien, funciones armonicas. Esas integrales pueden serderivadas respecto a M cuantas veces se desee. De ahı concluimos que toda funcion armonicapuede ser derivada infinitas veces en el dominio de armonıa.
En el caso bidimensional, este resultado nos recuerda un hecho ya conocido, pues una funcionarmonica en dos dimensiones es la parte real o la parte imaginaria de una funcion analıticaque, como sabemos, tiene infinitas derivadas, tambien analıticas. Para tres dimensiones esteresultado es nuevo.
Por ultimo, como quiera que las integrales de superficie en (9.130) son funciones armonicasy la integral de volumen contiene al laplaciano de la funcion u, podemos concluir que todopotencial, es decir, toda funcion dos veces diferenciable con segundas derivadas continuas en

Planteamiento de los problemas matematicos 299
un volumen V de frontera S, puede expresarse como la suma de dos funciones armonicas (lasintegrales de superficie) construidas a partir de los valores de la funcion y de sus derivadassobre la superficie frontera del volumen, mas una funcion (la integral de volumen) que dependede las caracterısticas de la fuente que genera al potencial (ya que ∇2u caracteriza a la fuenteque genera al campo).
Desde el punto de vista fısico, esto significa que todo potencial se puede expresar como la sumade tres potenciales: las integrales de superficie, que se denominan potenciales de superficie(de capa simple y de doble capa, respectivamente) y la integral de volumen que se llamapotencial de volumen.
Esta consideracion fısica de la tercera formula de Green nos va a permitir, mas adelante, elaborarun metodo de solucion de los problemas con ecuaciones elıpticas que estara basado en la teorıade potenciales.
Las formulas de Green en el espacio abierto tienen validez, si las funciones u y v son regularesen el infinito; veamos que significa este concepto.
Definicion.
La funcion u(M) se llama regular en el infinito, si existe un numero A y un radio R0 tales,que siempre fuera de la esfera de radio R0 y centro en el origen de coordenadas (es decir, paraR > R0), se cumple que:
|u| < A
R;
∣∣∣∣∂u∂x∣∣∣∣ < A
R2;
∣∣∣∣∂u∂y∣∣∣∣ < A
R2;
∣∣∣∣∂u∂z∣∣∣∣ < A
R2(9.142)
Sea el volumen infinito V (espacio abierto, exterior a la superficie S). Para comprobar la validezde las formulas de Green en este volumen infinito si las funciones son regulares, tomemos concentro en el origen de coordenadas y radio R > R0 una esfera de superficie SR (Fig. 9.7).
Llamemos VR al dominio limitado por las superficies S y SR. Para ese dominio finito tienelugar la primera formula de Green:
∫ ∫ ∫VR
u∇2v + ∇u ·∇vdP =
∫ ∫S
u∂v
∂ndS +
∫ ∫SR
u∂v
∂ndS (9.143)
Si u y v son regulares en el infinito, entonces, para la integral sobre SR tendremos que:
∣∣∣∣u∂v∂n∣∣∣∣ = |u|
∣∣∣∣∂v∂n∣∣∣∣ < A
R
3B
R2(9.144)
donde B es la constante correspondiente a la definicion (9.142) para la funcion v. Por consi-guiente, tendremos que:
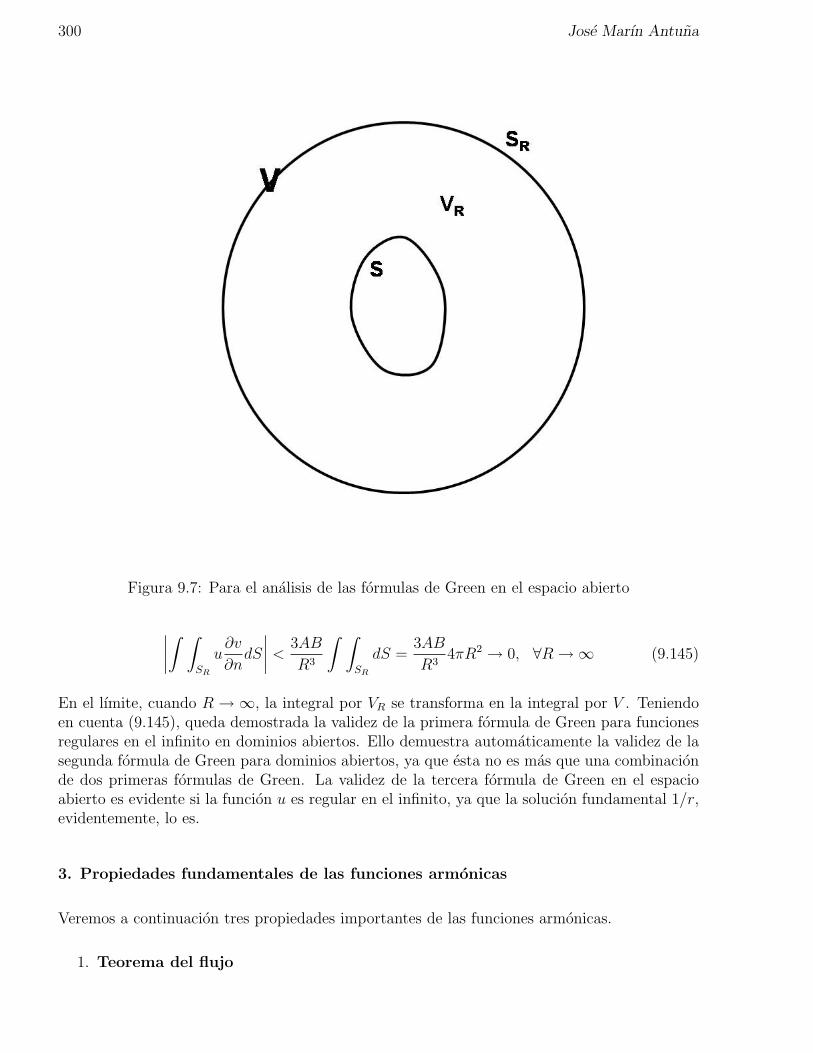
300 Jose Marın Antuna
Figura 9.7: Para el analisis de las formulas de Green en el espacio abierto
∣∣∣∣∫ ∫SR
u∂v
∂ndS
∣∣∣∣ < 3AB
R3
∫ ∫SR
dS =3AB
R34πR2 → 0, ∀R→∞ (9.145)
En el lımite, cuando R →∞, la integral por VR se transforma en la integral por V . Teniendoen cuenta (9.145), queda demostrada la validez de la primera formula de Green para funcionesregulares en el infinito en dominios abiertos. Ello demuestra automaticamente la validez de lasegunda formula de Green para dominios abiertos, ya que esta no es mas que una combinacionde dos primeras formulas de Green. La validez de la tercera formula de Green en el espacioabierto es evidente si la funcion u es regular en el infinito, ya que la solucion fundamental 1/r,evidentemente, lo es.
3. Propiedades fundamentales de las funciones armonicas
Veremos a continuacion tres propiedades importantes de las funciones armonicas.
1. Teorema del flujo

Planteamiento de los problemas matematicos 301
Si u(M) es continua, con derivadas continuas en V + S y armonica en V , entonces:∫ ∫S
∂u
∂ndS = 0 (9.146)
Demostracion:
Tomemos, en la primera formula de Green (9.118) u armonica y v = 1. Entonces, ∇2u = 0y ∇v = 0, con lo que queda, automaticamente, demostrada la propiedad.
Desde el punto de vista fısico, este teorema esta claro: si la funcion es armonica en V ,es decir, si no existen fuentes de campo dentro del volumen, el flujo total a traves dela superficie S tiene que ser igual a cero; o sea, todas las lıneas de fuerza que entran alvolumen V a traves de la superficie S, tienen que salir.
Este teorema se enuncia y se demuestra de forma identica para el caso bidimensional, soloque, entonces, la integral (9.146) se sustituye por la integral de lınea por la curva fronteradel dominio de armonıa.
2. Teorema del valor medio
Si u(M) es continua, con derivadas continuas en V + S y armonica en V y M0 ∈ V escierto punto interior del dominio de armonıa, entonces:
u(M0) =1
4πa2
∫ ∫S
M0a
u(P )dS (9.147)
donde a es el radio de la esfera centrada en M0, SM00 ∈ V . Es decir, el promedio de los
valores de una funcion armonica sobre una esfera contenida en el dominio de armonıa esigual al valor de la funcion en el centro de la esfera.
Demostracion:
Tomemos, con centro en M0 ∈ V , la esfera SM0a ∈ V (Fig. 9.8) de volumen Va.
Escribamos para el volumen esferico Va de frontera Sa la tercera formula de Green, eva-luando en M0:
u(M0) =1
4π
∫ ∫Sa
1
rM0P
∂u
∂n− u(P )
∂
∂nP
(1
rM0P
)dSP −
1
4π
∫ ∫ ∫Va
∇2u
rM0P
dP
(9.148)
Como u es armonica en Va, la integral de volumen es cero. Ademas, como Sa es una esferacentrada en M0,
∂∂n
= ddr
manera que
∂
∂n
(1
r
)|Sa =
d
dr
(1
r
)|r=a = − 1
a2(9.149)
y, ademas,
1
rM0P
|Sa =1
a(9.150)
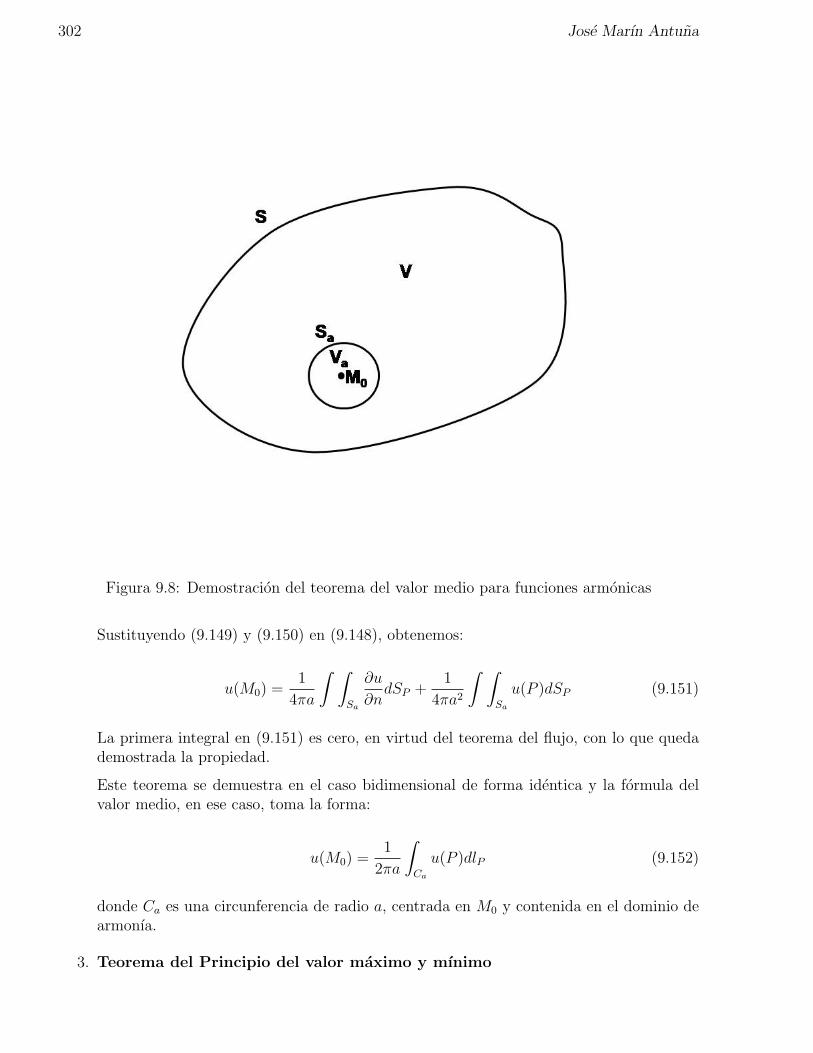
302 Jose Marın Antuna
Figura 9.8: Demostracion del teorema del valor medio para funciones armonicas
Sustituyendo (9.149) y (9.150) en (9.148), obtenemos:
u(M0) =1
4πa
∫ ∫Sa
∂u
∂ndSP +
1
4πa2
∫ ∫Sa
u(P )dSP (9.151)
La primera integral en (9.151) es cero, en virtud del teorema del flujo, con lo que quedademostrada la propiedad.
Este teorema se demuestra en el caso bidimensional de forma identica y la formula delvalor medio, en ese caso, toma la forma:
u(M0) =1
2πa
∫Ca
u(P )dlP (9.152)
donde Ca es una circunferencia de radio a, centrada en M0 y contenida en el dominio dearmonıa.
3. Teorema del Principio del valor maximo y mınimo
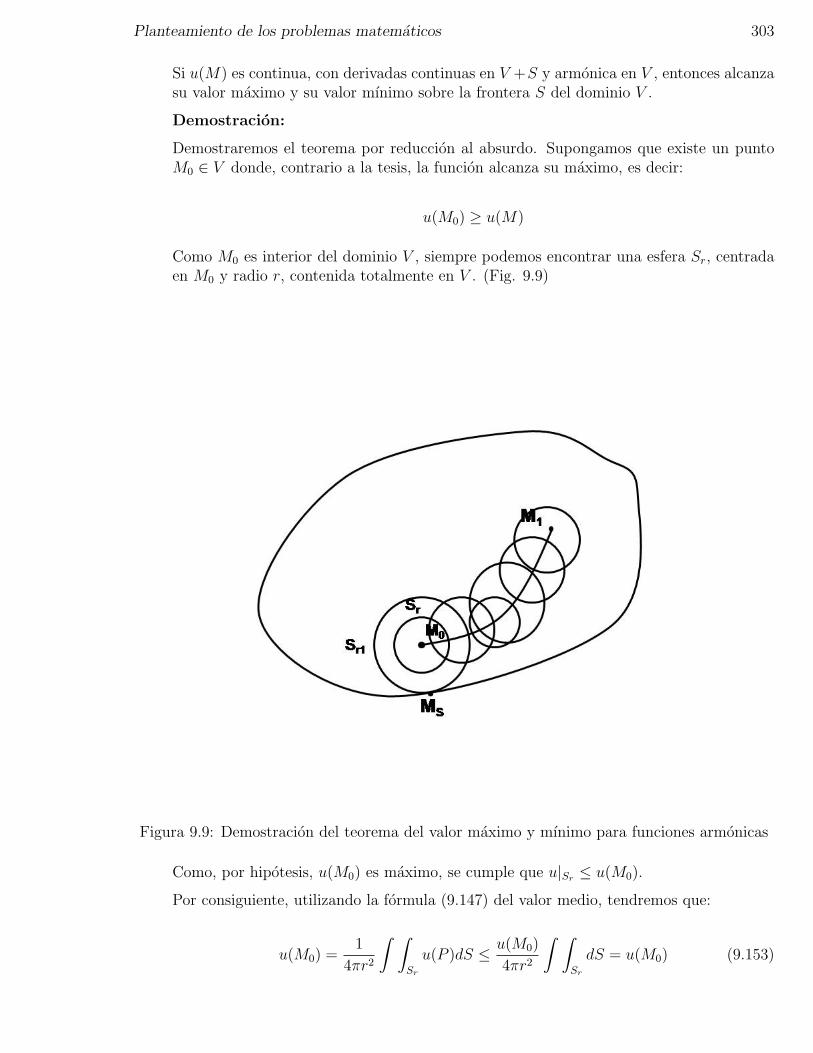
Planteamiento de los problemas matematicos 303
Si u(M) es continua, con derivadas continuas en V +S y armonica en V , entonces alcanzasu valor maximo y su valor mınimo sobre la frontera S del dominio V .
Demostracion:
Demostraremos el teorema por reduccion al absurdo. Supongamos que existe un puntoM0 ∈ V donde, contrario a la tesis, la funcion alcanza su maximo, es decir:
u(M0) ≥ u(M)
Como M0 es interior del dominio V , siempre podemos encontrar una esfera Sr, centradaen M0 y radio r, contenida totalmente en V . (Fig. 9.9)
Figura 9.9: Demostracion del teorema del valor maximo y mınimo para funciones armonicas
Como, por hipotesis, u(M0) es maximo, se cumple que u|Sr ≤ u(M0).
Por consiguiente, utilizando la formula (9.147) del valor medio, tendremos que:
u(M0) =1
4πr2
∫ ∫Sr
u(P )dS ≤ u(M0)
4πr2
∫ ∫Sr
dS = u(M0) (9.153)

304 Jose Marın Antuna
Considerar el signo rigurosamente menor en (9.153) es un absurdo. Por lo tanto, solopuede tener validez el signo igual. Ello significa que u es constante e igual a u(M0) sobretoda la superficie esferica Sr. Como el radio r es arbitrario, ello implica que u(M) =u(M0) = const. en toda la esfera. Evidentemente, se puede hallar un radio maximo r1,de forma tal que la esfera sea tangente, en un punto MS al menos, a la frontera S deldominio V (ver figura 9.9). Ası, si consideramos que la funcion u alcanza un maximoen un punto interior, es una funcion constante, igual a ese supuesto valor maximo, entoda la esfera Sr1 y en un punto MS de la frontera. Para concluir que eso implica laconstancia de u en todo V +S, tenemos que demostrar que u es constante e igual a u(M0)en cualquier otro punto M1 ∈ V . No es difıcil ver que esto es ası, ya que, eligiendo unpunto arbitrario M1, podemos unirlo con M0, mediante una lınea contenida en V (verfigura 9.9). Tomando el punto de interseccion de esa lınea con Srm (en el cual ya estademostrado que u = u(M0)) como centro de una nueva esfera y repitiendo el razonamientoanterior, concluimos que u = u(M0) = const. en esa nueva esfera. Mediante un numerofinito de esferas, podemos recubrir la lınea, hasta llegar a una esfera que contenga al puntoM1. De esta manera quedarıa demostrado que u(M1) = u(M0) = const. Como M1 ∈ Vfue tomado arbitrariamente y las esferas que recubren la lınea siempre pueden tomarsede un radio tal, que puedan tocar a la frontera S al menos en un punto, este resultadosignifica que, si suponemos que u alcanza su maximo en un punto M0 ∈ V , entonces esla funcion constante en V + S y, por lo tanto, alcanza ese valor tambien sobre S.
Por consiguiente, si u(M) no es constante, su maximo no se podra alcanzar en un puntointerior y tendra, forzosamente, que alcanzarse sobre la frontera.
Para demostrar que el mınimo se alcanza tambien sobre la frontera, basta analizar lafuncion
v(M) = −u(M)
que, evidentemente, es armonica. Como, segun vimos, u(M) alcanza su maximo sobre lafrontera, por lo tanto, v(M) alcanza su mınimo sobre la frontera tambien.
Demostrado el teorema.
Este teorema tiene dos interesantes corolarios.
Corolario 1.
Si las funciones u y U son continuas, con derivadas continuas, en V + S y armonicas enV y, si u ≤ U sobre S, entonces, u ≤ U en V .
Demostracion:
La funcion v = U − u es armonica en V y, ademas, v ≥ 0 en S. Es decir, su maximo y sumınimo son no negativos. Por consiguiente, v = U − u ≥ 0 en todo V .
Demostrado el corolario.
Corolario 2.
Si las funciones u y U son continuas, con derivadas continuas, en V + S y armonicas enV y, si |u| ≤ U sobre S, entonces |u| ≤ U en V .
Demostracion:
Tenemos, por hipotesis, que

Planteamiento de los problemas matematicos 305
−U ≤ u ≤ U ∀M ∈ S
Por el corolario 1, cada una de las dos desigualdades se cumplen tambien para todo V .
Demostrado el corolario.
Hasta aquı hemos estudiado los aspectos teoricos generales imprescindibles para acometerel planteamiento y la resolucion de los problemas para las ecuaciones elıpticas tipo Poisson.Pasaremos, de inmediato, a ver como se plantean los problemas de frontera para este tipo deecuaciones.
4. Planteamiento de los problemas de frontera para la ecuacion de Poisson
1) Primer Problema de Frontera: Problema de Dirichlet.
Problema interno.
Se plantea en los siguientes terminos: Hallar la funcion u(M), continua en V +S, que satisfagala ecuacion y la condicion de frontera:
∇2u = −f(M) ∀M ∈ Vu|S = ϕ(M) (9.154)
El dominio V , acotado por la frontera S, puede verse en la figura 9.10.
Podemos enunciar y demostrar el siguiente teorema.
Teorema de unicidad.
El problema de Dirichlet (9.154) tiene solucion unica.
Demostracion:
Supongamos la existencia de dos soluciones, u1(M) y u2(M). Entonces, la funcion v(M) =u1(M)− u2(M) sera, evidentemente, solucion del problema todo homogeneo
∇2v = 0 ∀M ∈ Vv|S = 0 (9.155)
Es decir, v sera armonica y la condicion nula en la frontera nos dice que su maximo y su mınimoson, ambos, iguales a cero. Por el principio del valor maximo y mınimo, concluimos que la unicasolucion posible de (9.155) es v ≡ 0, lo que significa que u1(M) ≡ u2(M).
306 Jose Marın Antuna
Figura 9.10: Problema de Dirichlet interno.
Demostrado el teorema.
Tiene lugar, ademas, el siguiente teorema de estabilidad.
Teorema.
El problema de Dirichlet es correcto. Es decir, si u1(M) y u2(M) son, respectivamente, lassoluciones de los problemas
∇2ui = −f(M) ∀M ∈ Vui|S = ϕi(M) (9.156)
donde i = 1, 2 y si se cumple que |ϕ1 − ϕ2| < ε, entonces, |u1 − u2| < ε, para todo M ∈ V .
Demostracion:
Para la funcion v(M) = u1(M)− u2(M) tendremos el problema

Planteamiento de los problemas matematicos 307
∇2v = 0 ∀M ∈ Vv|S = ϕ1(M)− ϕ2(M) (9.157)
Como v es armonica, su maximo y su mınimo se alcanzan sobre la frontera; es decir, teniendoen cuenta la hipotesis para el modulo de ϕ1 menos ϕ2:
−ε < min(ϕ1 − ϕ2) ≤ v ≤ max(ϕ1 − ϕ2) < ε (9.158)
De (9.158) tenemos que |v| < ε, lo que implica que |u1 − u2| < ε para todo M ∈ V .
Demostrado el teorema.
El problema interno de Dirichlet en dos dimensiones, es decir, en el plano, se plantea de formaidentica:
Hallar la funcion u(M), continua en S+C, que satisfaga la ecuacion y la condicion de frontera
∇2u = −f(M) ∀M ∈ Su|C = ϕ(M) (9.159)
La unicidad y la estabilidad de la solucion del problema (9.159) se demuestran de forma identicaal caso tridimensional anteriormente visto.
Problema externo.
Veamos como se plantea el problema de Dirichlet, cuando se quiere resolver en el espacio abierto,infinito, exterior a cierta superficie S. En este caso, ademas de la condicion sobre la frontera S,habra que imponer el comportamiento de la funcion en el infinito. El problema queda planteadoen los siguientes terminos:
Hallar la funcion u(M), continua en V + S y que satisfaga
∇2u = 0 ∀M ∈ Vu|S = ϕ(M) (9.160)
u(M) → 0 ∀M →∞
El dominio V de frontera S es, en este caso, el espacio exterior infinito a la superficie S, segunse muestra en la figura 9.11.
Es conveniente hacer la aclaracion de que, en realidad, debimos haber escrito en el problema(9.160) la ecuacion de Poisson (no homogenea), en vez de la de Laplace, desde un punto de
308 Jose Marın Antuna
Figura 9.11: Problema de Dirichlet externo.
vista matematico. Sin embargo, en la vida diaria, casi siempre las fuentes estan localizadasen una region del espacio. Nosotros, a la hora de plantear los problemas externos, trataremosde que las fuentes se encuentren contenidas en el espacio finito envuelto por la superficie S,de manera que el problema a resolver en el exterior de S sea el problema (9.160). Claro esta,si el lector se encuentra con una situacion fısica en la que le sea imposible considerar esto,porque las fuentes esten distribuidas por todo el espacio infinito, entonces tendra que plantearel problema, considerando la ecuacion no homogenea en (9.160).
Ası planteado, para el problema (9.160) tiene lugar el siguiente teorema.
Teorema de unicidad.
El problema externo de Dirichlet (9.160) tiene solucion unica.
Demostracion:
Supongamos que existen dos soluciones u1 y u2. Entonces, para la funcion v = u1 − u2,tendremos el problema:
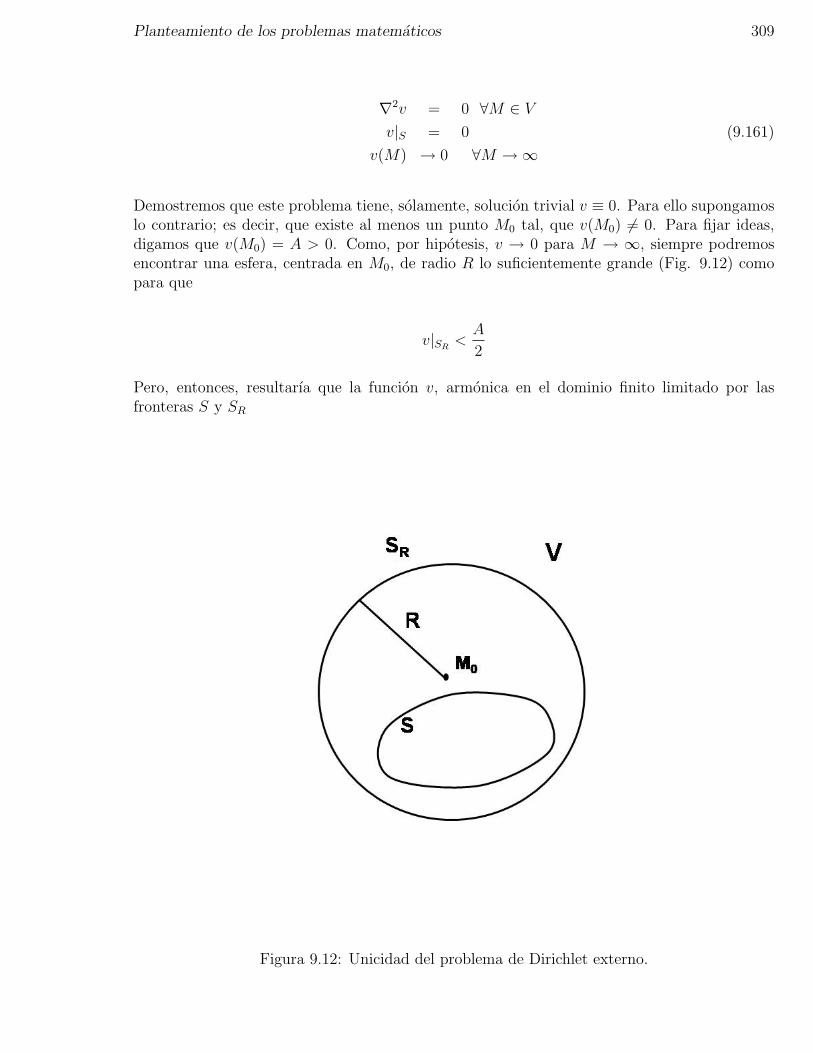
Planteamiento de los problemas matematicos 309
∇2v = 0 ∀M ∈ Vv|S = 0 (9.161)
v(M) → 0 ∀M →∞
Demostremos que este problema tiene, solamente, solucion trivial v ≡ 0. Para ello supongamoslo contrario; es decir, que existe al menos un punto M0 tal, que v(M0) 6= 0. Para fijar ideas,digamos que v(M0) = A > 0. Como, por hipotesis, v → 0 para M → ∞, siempre podremosencontrar una esfera, centrada en M0, de radio R lo suficientemente grande (Fig. 9.12) comopara que
v|SR<A
2
Pero, entonces, resultarıa que la funcion v, armonica en el dominio finito limitado por lasfronteras S y SR
Figura 9.12: Unicidad del problema de Dirichlet externo.

310 Jose Marın Antuna
alcanzarıa un maximo en un punto interior del dominio, lo que contradice el principio delvalor maximo y mınimo. Por consiguiente, no puede existir ni un solo punto M0 con esascaracterısticas. O sea, efectivamente, v ≡ 0 y, por lo tanto, u1 ≡ u2.
Demostrado el teorema.
La estabilidad de la solucion del problema externo de Dirichlet es facilmente demostrabletambien.
Veamos, ahora, como se plantea el problema externo de Dirichlet en el caso bidimensional.Resulta que en este caso, para garantizar la unicidad de la solucion, basta una condicion menosrigurosa en el infinito que la impuesta en el problema (9.160): en lugar de exigir que la soluciontienda a cero, es suficiente exigirle que sea acotada para M →∞. Por consiguiente, el problemase plantea en los siguientes terminos:
Hallar la funcion u, continua en S + C, que satisfaga
∇2u = 0 ∀M ∈ Su|C = ϕ(M) (9.162)
|u(M)| ≤ N ∀M →∞
Tiene lugar el siguiente teorema.
Teorema de unicidad.
El problema externo bidimensional de Dirichlet (9.162) tiene solucion unica.
Demostracion:
Supongamos que existen dos soluciones u1(M) y u2(M) del problema (9.162). Entonces, lafuncion v(M) = u1(M)− u2(M) sera solucion del siguiente problema:
∇2v = 0 ∀M ∈ Sv|C = 0 (9.163)
|v(M)| ≤ 2N ∀M →∞
Tracemos dos circunferencias concentricas, centradas en un punto M0 interior a la curva C: CRde radio R tal que este totalmente contenida en el dominio interior de C y CR1 de radio R1 talque este totalmente contenida en el dominio S, segun se muestra en la figura 9.13.
Analicemos la siguiente funcion auxiliar:
w(M) = 2Nln r
R
ln R1
R
(9.164)
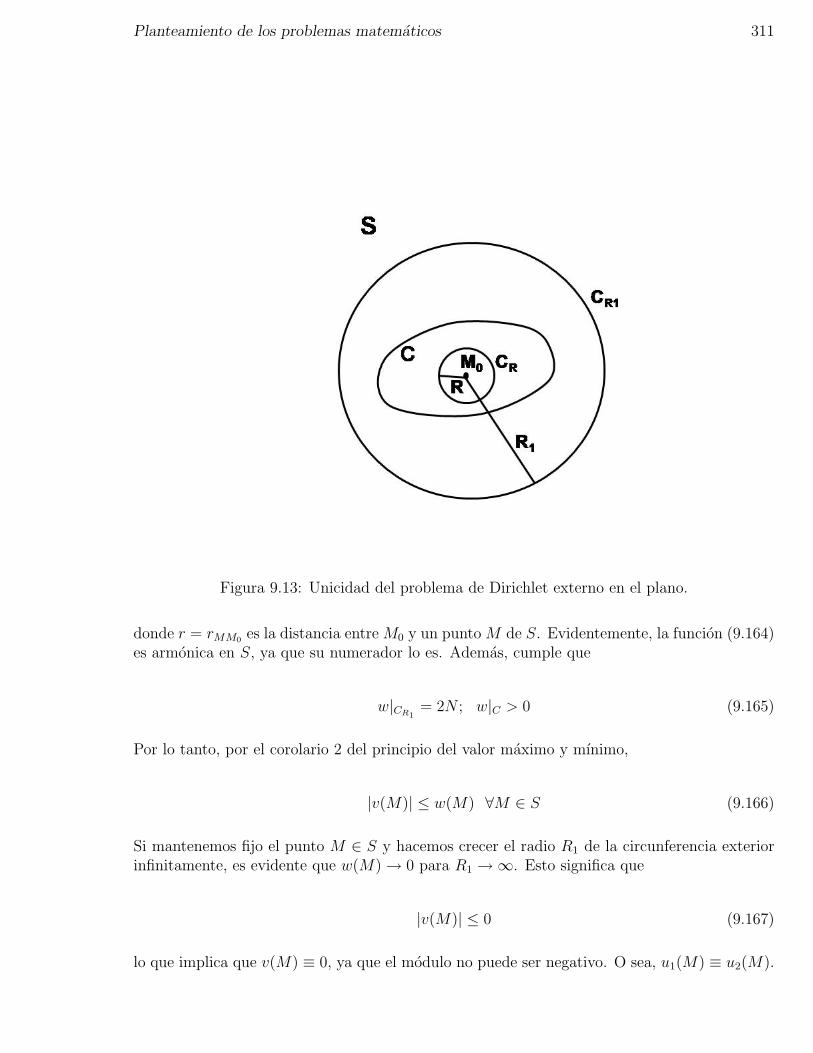
Planteamiento de los problemas matematicos 311
Figura 9.13: Unicidad del problema de Dirichlet externo en el plano.
donde r = rMM0 es la distancia entre M0 y un punto M de S. Evidentemente, la funcion (9.164)es armonica en S, ya que su numerador lo es. Ademas, cumple que
w|CR1= 2N ; w|C > 0 (9.165)
Por lo tanto, por el corolario 2 del principio del valor maximo y mınimo,
|v(M)| ≤ w(M) ∀M ∈ S (9.166)
Si mantenemos fijo el punto M ∈ S y hacemos crecer el radio R1 de la circunferencia exteriorinfinitamente, es evidente que w(M) → 0 para R1 →∞. Esto significa que
|v(M)| ≤ 0 (9.167)
lo que implica que v(M) ≡ 0, ya que el modulo no puede ser negativo. O sea, u1(M) ≡ u2(M).
312 Jose Marın Antuna
En virtud de que el punto fijo M ∈ S fue escogido arbitrariamente, queda demostrada launicidad.
Demostrado el teorema.
La estabilidad puede ser demostrada de forma similar.
De esta manera, queda completamente planteado el problema de Dirichlet interno y externo entres y dos dimensiones para la ecuacion elıptica de Poisson.
2) Segundo Problema de Frontera: Problema de Neumann.
Problema interno.
Este problema se plantea en los siguientes terminos:
Hallar la funcion u(M), continua y con primeras derivadas continuas en V + S, que satisfaga
∇2u = −f(M) ∀M ∈ V∂u
∂n|S = ϕ(M) (9.168)
El dominio V de frontera S es el mismo representado en la figura 9.10.
A diferencia del problema de Dirichlet, el problema (9.168) tiene la particularidad de que,para que tenga sentido su planteamiento, es decir, para la compatibilidad del problema, lasfunciones f(M) y ϕ(M) no pueden ser arbitrarias, sino que deben estar relacionadas entre sıpor la expresion:
∫ ∫S
ϕ(M)dS = −∫ ∫ ∫
V
f(M)DP (9.169)
que se desprende del teorema de la divergencia de Gauss-Ostrogradsky y que puede obtenerse,directamente, de la primera formula de Green (9.118), haciendo v = 1. La ecuacion (9.169)tiene un significado fısico concreto: el flujo del campo a traves de la superficie S tiene quecoincidir con el campo generado por las fuentes que estan en el dominio V . Si f(M) = 0, esdecir, si no hay fuentes en el interior de V , la ecuacion (9.169) expresarıa que el flujo total atraves de la superficie S es cero.
Tiene lugar el siguiente teorema.
Teorema.
Si u1(M) y u2(M) son soluciones del mismo problema de Neumann (9.168), entonces u1(M)−u2(M) = const.
Demostracion:

Planteamiento de los problemas matematicos 313
Sea v(M) = u1(M)− u2(M). Para esta funcion tendremos el problema:
∇2v = 0 ∀M ∈ V∂u
∂n|S = 0 (9.170)
Tomemos en la primera formula de Green (9.118) u y v ambas iguales a la funcion v del problema(9.170). Tendremos:
∫ ∫ ∫V
v∇2v + ∇v ·∇vdP =
∫ ∫S
v∂v
∂ndS (9.171)
En virtud del problema (9.170), de (9.171) obtenemos:
∫ ∫ ∫V
(∇v)2dP = 0
lo que significa que ∇v ≡ 0. Es decir, ∂v∂x≡ 0, ∂v
∂y≡ 0, ∂v
∂z≡ 0. Por lo tanto, v ≡ const.
Demostrado el teorema.
En dos dimensiones, el problema interno de Neumann se plantea de forma similar:
Hallar la funcion u(M), continua y con primeras derivadas continuas en S + C, que satisfaga
∇2u = −f(M) ∀M ∈ S∂u
∂n|C = ϕ(M) (9.172)
donde el dominio S esta en el plano y la frontera C es una curva cerrada. Para este caso, lacondicion de compatibilidad, dada por el teorema de la divergencia, que en tres dimensionesera (9.169), se expresa de la siguiente manera:
∫C
ϕ(M)dl = −∫ ∫
S
f(M)dS (9.173)
La demostracion del teorema anterior, para el caso bidimensional, es identica a la efectuadaen tres dimensiones. Observese que, de acuerdo con este teorema, la solucion del problemainterno de Neumann se determina con exactitud de una constante. Esa constante, para el casoelectrostatico, tiene el sentido fısico claro del promedio del potencial creado por las cargas in-ducidas en la superficie frontera. Esa condicion fısica permitira evaluar adecuadamente dicha

314 Jose Marın Antuna
constante en los problemas fısicos, aunque, desde el punto de vista matematico, es una cons-tante cualquiera que estarıa relacionada con el punto de referencia que tomemos para medir elpotencial.
Problema externo.
El problema externo de Neumann se plantea de la siguiente forma:
Hallar la funcion u(M), continua y con primeras derivadas continuas en V + S, que satisfaga
∇2u = 0 ∀M ∈ V∂u
∂n|S = ϕ(M) (9.174)
u(M) → 0 ∀M →∞ (9.175)
En el problema (9.174) hemos escrito la ecuacion homogenea, basados en las mismas conside-raciones de ındole fısica que usamos al plantear el problema externo de Dirichlet. El dominioV de frontera S es el mismo mostrado en la figura 9.11. y, en este caso, no es necesario exigirya, que el flujo a traves de la frontera S sea cero; es decir, la integral de superficie por S deϕ(M) no tiene que ser cero, pues las fuentes que generan el campo pueden estar en el dominiocomplementario, interior a la superficie S.
Para el problema (9.174) es posible demostrar el mismo teorema sobre la constancia de ladiferencia de dos soluciones del mismo, igual que en el caso del problema interno. El problemaexterno en el caso bidimensional se plantea de forma similar.
3) Tercer Problema de Frontera.
El tercer problema de frontera surge, cuando esta dado el intercambio energetico con el medioexterior a traves de la frontera. El problema interno se plantea de la siguiente manera:
Hallar la funcion u(M), continua y con primeras derivadas continuas en V + S, que satisfaga
∇2u = −f(M) ∀M ∈ V(∂u
∂n− hu
)|S = ϕ(M) (9.176)
En dos dimensiones el planteamiento es completamente similar. Para este problema se puededemostrar la unicidad y la estabilidad de su solucion. El problema externo se plantea de formasimilar a los casos anteriores, exigiendo la regularidad de la solucion en el infinito.
Planteamiento de los problemas matematicos 315
9.3.2 Ecuacion elıptica de Helmholtz
En el presente punto veremos como se realiza el planteamiento del problema matematico parala ecuacion de Helmholtz. En terminos generales, en tres dimensiones espaciales el problemainterno se plantea de la siguiente forma:
Hallar la funcion u(M), continua en V + S, que satisfaga
∇2u+ cu = −f(M) ∀M ∈ Vu|S = ϕ(M) (9.177)
El problema (9.177) es el Primer Problema de Frontera o Problema de Dirichlet in-terno para la ecuacion de Helmholtz. De manera totalmente similar se plantean el SegundoProblema de Frontera o Problema de Neumann y el Tercer Problema de Fronterainternos, con las condiciones de frontera de segundo y tercer tipo, respectivamente:
∂u
∂n|S = ϕ(M)
o
(∂u
∂n− hu
)|S = ϕ(M) (9.178)
Con el objetivo de sacar conclusiones acerca de la solucion del problema (9.177), analicemos elproblema todo homogeneo:
∇2u+ cu = 0 ∀M ∈ Vu|S = 0 (9.179)
Analicemos los dos casos posibles:
1. c = −κ2 < 0.
En este caso, tiene lugar el Principio del Valor Maximo y Mınimo que enunciaremos dela siguiente manera.
Teorema.
La solucion de la ecuacion ∇2u − κ2u = 0, definida en el dominio V de frontera S, nopuede alcanzar en el interior de V , ni un maximo positivo, ni un mınimo negativo.
Demostracion:

316 Jose Marın Antuna
Supongamos lo contrario, es decir, que en el punto M0 ∈ V la funcion u(M) alcanza unmaximo positivo. Entonces en dicho punto
u(M0) > 0, ∇2u|M0 ≤ 0 (9.180)
Pero, entonces, la ecuacion en M0 no se cumplira, ya que, evidentemente,
(∇2u− κ2u)|M0 < 0 (9.181)
O sea, llegamos a un absurdo, por lo que concluimos que, efectivamente, el maximopositivo no puede alcanzarse en ningun punto interior de V . Por consiguiente, se alcanzarasolo sobre la frontera S. Para el mınimo negativo la situacion es similar.
Demostrado el teorema.
Corolario 1.
El problema todo homogeneo (9.179) solo tiene solucion trivial.
Demostracion:
Es evidente. Por ser la ecuacion homogenea con c = −κ2 < 0, el maximo positivo y elmınimo negativo se alcanzaran sobre la frontera S. Pero u|S = 0. Por lo tanto, u(M) ≡ 0para M ∈ V .
Demostrado el corolario.
Corolario 2.
El problema (9.177) tiene solucion unica.
Demostracion:
Efectivamente. Supongamos que el problema (9.177), con c = −κ2 < 0, tiene dos solu-ciones u1(M) y u2(M). Entonces, la funcion u(M) = u1(M) − u2(M) sera, obviamente,solucion del problema todo homogeneo (9.179), con c = −κ2 < 0, el que, por el corolario1, solo tiene solucion trivial. Por lo tanto, u1(M) ≡ u2(M).
Demostrado el corolario.
2. c = k2 > 0.
En este caso, el problema (9.179) es un problema que se conoce con el nombre de Pro-blema de Sturm-Liouville y que se caracteriza porque puede tener soluciones no tri-viales para determinados valores del parametro c.
Mas adelante estudiaremos con detalle este problema, pero anticipemos que, aquellosvalores de c, para los cuales el problema (9.179), con c = k2 > 0, tiene soluciones diferentesde cero se llaman autovalores o valores propios del problema; las soluciones no trivialesque les corresponden se llaman autofunciones o funciones propias del problema.
Sean c = k2 = λn, con n = 1, 2, 3, ..., los autovalores del problema (9.179). En relacioncon la solucion del problema (9.177), con c = k2 > 0, tiene lugar la siguiente alternativa:
Si el problema (9.179) tiene solo solucion trivial (es decir, si c 6= λn, o sea, el parametroc de la ecuacion no coincide con ningun autovalor del problema (9.179)), entonces, elproblema (9.177), con ese valor del parametro c, tiene solucion unica. Pero si el problema
Planteamiento de los problemas matematicos 317
(9.179) tiene solucion diferente de cero (o sea, si el parametro c coincide con un autovalor),entonces, el problema (9.177), con ese valor del parametro c, o bien no tiene solucion, obien tiene infinitas soluciones. Esta afirmacion se conoce con el nombre de Alternativade Fredholm y es estudiada con mayor detalle en el libro de Ecuaciones Integralesdel autor, donde se analiza la equivalencia entre un problema de Sturm-Liouville y unaecuacion integral de Fredholm de segundo tipo homogenea.
El planteamiento de los problemas de frontera para la ecuacion de Helmholtz en el espa-cio abierto tiene una serie de particularidades, basadas en su sentido fısico, por lo quepostergaremos su estudio para un capıtulo posterior, en el que analizaremos los problemasfısico-matematicos en el espacio abierto.
9.4 Problemas correctos e incorrectos de la Fısica Ma-
tematica
El concepto que vamos a estudiar aquı y al que ya hicimos referencia anteriormente es de enormeimportancia, como tendremos ocasion de percatarnos. Enunciemos la siguiente importantısimadefinicion.
Definicion:
Los problemas de la Fısica Matematica en los que la solucion depende de forma continua de lascondiciones que se imponen, se llaman problemas correctos o correctamente planteadosde la Fısica Matematica. En el caso contrario, se llaman problemas incorrectos.
Esta definicion es muy importante y, de hecho, hemos tenido que ver con ella en el transcursode los planteamientos de los problemas de frontera que hemos estudiado en este capıtulo.Efectivamente, en el epıgrafe correspondiente al planteamiento de los problemas para la ecuacionparabolica, ademas de la unicidad de la solucion de los problemas planteados, demostramos unteorema de estabilidad; de hecho allı estabamos diciendo que los problemas de frontera parala ecuacion parabolica eran correctos. Igualmente, en el planteamiento de los problemas defrontera para las ecuaciones elıpticas hicimos alusion a la estabilidad de la solucion de losproblemas planteados e, incluso, demostramos el teorema sobre la estabilidad de la solucion delproblema de Dirichlet para la ecuacion de Poisson. Aunque no hicimos una referencia explıcitaal caracter correcto de los problemas planteados para la ecuacion hiperbolica y para la ecuacionde Helmholtz, es justo y necesario destacar aquı que las soluciones de esos problemas tambienson estables; es decir, esos problemas son correctamente planteados.
¿Por que es importante que sean correctos los problemas de frontera que hemos venido estu-diando? La respuesta a esta pregunta esta dada por el hecho simple de que, habitualmente, lascondiciones (iniciales y de frontera), que se imponen a las ecuaciones con que trabajamos, sonobtenidas a partir de mediciones o de calculos que tienen un cierto grado de error. Ello conducea la necesidad de que las soluciones de la ecuacion que resolvamos, que modela cierto procesofısico, con dichas condiciones aproximadas a la realidad, sean soluciones que se aproximen a lasolucion exacta dada por la naturaleza.

318 Jose Marın Antuna
Es decir, para tener garantıa de que, al resolver un problema con condiciones impuestas quese diferencien algo de la realidad fısica, debido al error de las mediciones, la solucion que seobtenga se diferencie poco de la realidad, o sea, se parezca a la respuesta que da la naturalezacon las condiciones exactas, es indispensable que el problema que resolvamos sea un problemacorrecto. En caso contrario, serıa totalmente inutil buscar la solucion, pues, si el problemafuera incorrecto, a pequenas variaciones de las condiciones impuestas, pudieran ocurrir grandesvariaciones de la solucion, de manera que la solucion obtenida, en tal caso, pudiera no parecerseen nada a la realidad de la naturaleza.
Claro esta, nos hemos cuidado de que los problemas que en el presente libro abordemos, seanproblemas correctos; pero, desgraciadamente, no todos los problemas de la Fısica Matematicaque aparecen en la vida son problemas correctos. Un ejemplo clasico de problema incorrecto esel siguiente. Intentemos resolver el problema siguiente para la ecuacion de Laplace:
uxx + uyy = 0
u(x, 0) = ϕ(x) (9.182)
uy(x, 0) = ψ(x)
Notese que si, en la ecuacion del problema (9.182), en vez de un mas, tuvieramos un signomenos, serıa una ecuacion hiperbolica y el problema serıa un problema de Cauchy para laecuacion hiperbolica que, como demostraremos en el proximo capıtulo, donde estudiaremos elmetodo de ondas viajeras, es un problema correcto. Sin embargo, producto de ser una ecuacionde Laplace, el problema (9.182) resulta ser incorrecto. Efectivamente; no es difıcil comprobarque, si ϕ(x) ≡ ϕ1(x) = 0 y ψ(x) ≡ ψ1(x) = 0, la solucion del problema (9.182) es u1(x, y) = 0.
Sin embargo, si ϕ(x) ≡ ϕ2(x) = 1asin ax y ψ(x) ≡ ψ2(x) = 0, la solucion vendra dada por la
expresion
u2(x, y) =1
asin ax cosh ay
Esto significa que, para valores muy grandes del parametro a, (a→∞), mientras que
|ϕ2(x)− ϕ1(x)| =∣∣∣∣1a sin ax
∣∣∣∣→ 0
(o sea, es muy pequeno), sin embargo ocurre que
|u2(x, y)− u1(x, y)| =∣∣∣∣1a sin ax cosh ay
∣∣∣∣→∞
es decir, ambas soluciones son enormemente diferentes entre sı. Esto nos hace concluir que,efectivamente, el problema (9.182) es incorrecto. Este problema fue estudiado por Hadamarda principios del siglo 20.
Planteamiento de los problemas matematicos 319
Es logico preguntarse: ¿que hacer en estos casos? ¿Tendremos que renunciar a resolver elproblema planteado por la naturaleza? La respuesta es estimulante: Por supuesto que no.Existe toda una teorıa para la solucion de los problemas incorrectos de la Fısica Matematicade la cual aquı solo expondremos la esencia, ya que un estudio detallado de ella se saldrıa delos marcos de nuestros objetivos actuales.
Supongamos que intentamos resolver la ecuacion
L[u] = 0 (9.183)
donde L es cierto operador lineal cuya naturaleza matematica no interesa y supongamos queeste problema es incorrecto. Entonces, en su lugar se resuelve la ecuacion auxiliar
L[u] + αµ[u] = 0 (9.184)
donde µ es cierto operador que se escoge de acuerdo con la naturaleza del problema en cuestiony α es un parametro posible de ser variado de forma continua; entonces se exige:
1. Que este problema auxiliar (9.184) sea correcto
2. Que la solucion del problema auxiliar (9.184) converja a la solucion del problema inco-rrecto (9.183), cuando α→ 0.
Los problemas incorrectos de la Fısica Matematica, desgraciadamente, surgen en la vida coti-diana con mucha mas frecuencia de la que uno desearıa; casi siempre ellos estan estrechamenteasociados a los llamados problemas inversos de la Fısica Matematica, que aparecen en lamayorıa de los casos en que las magnitudes a determinar solo pueden establecerse indirecta-mente. En muchos campos de la Fısica esto ocurre, por ejemplo, en la Astronomıa, en laBiofısica y otros. La mayorıa de las veces, las soluciones de tales problemas estan vinculadas,matematicamente, a ecuaciones integrales de Fredholm de primer tipo, las que, por su esenciaintrınseca matematica, son problemas incorrectos. Por ello, en el libro de Ecuaciones Integralesdel autor se dedica un capıtulo al estudio matematico detallado de los metodos regularizadores,que permiten hallar la solucion de tales problemas incorrectos.
Una vez concluido el estudio del planteamiento de los problemas matematicos de todos los tiposde ecuaciones que obtuvimos anteriormente a partir del analisis de diferentes procesos fısicos ygarantizada la unicidad y la estabilidad de las soluciones de dichos problemas, podemos pasaral estudio de los diferentes metodos con que se puede acometer la solucion de estos problemasplanteados. A ello nos dedicaremos en el libro, a partir del proximo capıtulo.

320 Jose Marın Antuna
Capıtulo 10
Metodo de Ondas Viajeras
Comenzaremos, en este capıtulo, el estudio de los metodos de solucion de los problemas de laFısica Matematica que aprendimos a plantear en el capıtulo anterior. Aquı estudiaremos elllamado metodo de ondas viajeras, que se aplica a las ecuaciones hiperbolicas y que resultade mucha utilidad en la solucion de numerosos problemas de este tipo de ecuacion.
10.1 Solucion general de la ecuacion hiperbolica
Consideremos la ecuacion hiperbolica homogenea
utt = a2uxx (10.1)
que, segun vimos anteriormente, describe los procesos de oscilaciones de cuerdas y barras y, engeneral, de oscilaciones de cualquier naturaleza fısica en una dimension espacial.
Considerando esta ecuacion como un caso particular de la ecuacion (7.1), en el que la variablet juega el papel de la variable y de aquella ecuacion y teniendo en cuenta la teorıa desarrollada,podemos afirmar que la ecuacion caracterıstica (7.17) de alla adopta, para la ecuacion (10.1)de aquı, la forma:
dx2 − a2dt2 = 0 (10.2)
Esta ecuacion se desdobla en las siguientes dos ecuaciones:
dx− adt = 0, dx+ adt = 0 (10.3)
cuyas primeras integrales son:
321
322 Jose Marın Antuna
x− at = C1, x+ at = C2 (10.4)
Por consiguiente, de acuerdo con la teorıa desarrollada, tomando como nuevas variables
ξ = x− at, η = x+ at (10.5)
la ecuacion (10.1) es llevada a su forma canonica:
uξη = 0 (10.6)
Integrando respecto a la variable η, obtenemos
uξ = f(ξ)
e, integrando respecto a la variable ξ, obtenemos
u =
∫f(ξ)dξ + f2(η) ≡ f1(ξ) + f2(η) (10.7)
La expresion (10.7) nos indica que la solucion general de la ecuacion (10.6) tiene la forma dela suma de dos funciones de cada una de las variables por separado. Las funciones f1 y f2 en(10.7) son arbitrarias; lo unico que deben cumplir es que sean dos veces diferenciables respectoa sus argumentos.
Regresando a las variables iniciales, obtenemos que la solucion general de la ecuacion hiperbolicahomogenea (10.1) tiene la forma:
u(x, t) = f1(x− at) + f2(x+ at) (10.8)
Veamos que significado fısico tiene la solucion obtenida. Analicemos la funcion f1(x− at). Enun sistema de coordenadas x′, t′, que se mueva con velocidad a, de izquierda a derecha, enrelacion con el sistema x, t y que viene dado por la transformacion de Galileo
x′ = x− at, t′ = t (10.9)
nuestra funcion queda independiente del tiempo: f1(x − at) = f1(x′). Asociando el proceso
fısico, digamos, a las oscilaciones transversales de una cuerda, esto significa que, viajando eneste sistema primado, se observa todo el tiempo el mismo perfil de la cuerda. Por consiguiente,la funcion f1(x− at) describe una onda viajera que se propaga con velocidad a de izquierda aderecha a lo largo de la cuerda. Un analisis similar nos lleva a la conclusion de que la funcion

Metodo de Ondas Viajeras 323
f2(x+ at) describe una onda viajera que se mueve en sentido contrario, de derecha a izquierda,con velocidad a.
Por consiguiente, la solucion general de la ecuacion hiperbolica es la superposicion de estas dosondas viajeras. De aquı que el metodo de solucion desarrollado reciba el nombre de Metodode Ondas Viajeras. Tambien se le conoce con el nombre de Metodo de D’Alembert.
Segun fue indicado arriba, las funciones f1 y f2 son funciones arbitrarias, dos veces diferenciablesrespecto a su argumento. La imposicion de condiciones a la ecuacion permitira la determinacionde estas funciones.
10.2 Solucion del problema de Cauchy. Formula de D’A-
lembert
Supongamos, ahora, que queremos hallar las oscilaciones de una cuerda o barra infinita sobrela que no hay fuerzas externas aplicadas, si se conocen la elongacion y la velocidad inicialesde sus puntos. Es decir, supongamos que queremos resolver el problema de Cauchy para laecuacion hiperbolica homogenea, que se plantea en los terminos siguientes:
utt = a2uxx, ∀ −∞ < x <∞, t > 0
u(x, 0) = ϕ(x) (10.10)
ut(x, 0) = ψ(x)
En virtud de lo desarrollado en el epıgrafe anterior, la solucion tendra la forma general dada porla expresion (10.8). Hallaremos las funciones f1 y f2 de forma tal, que esta solucion satisfaga,ademas, las condiciones iniciales. Es decir, exigimos que:
u(x, 0) = f1(x) + f2(x) = ϕ(x) (10.11)
Ademas, derivando (10.8) respecto a t, se obtiene:
ut(x, t) = f ′(x− at)(−a) + f ′(x+ at)a (10.12)
Evaluando (10.12) en t = 0, vemos que debemos exigir que se cumpla:
ut(x, 0) = −af ′(x) + af ′(x) = ψ(x) (10.13)
Integrando esta ultima ecuacion y uniendola con (10.11), obtenemos el siguiente sistema parahallar las funciones f1 y f2:
324 Jose Marın Antuna
f1(x) + f2(x) = ϕ(x)
−f1(x) + f2(x) =1
a
∫ x
x0
ψ(α)dα (10.14)
donde x0 es un punto arbitrario del eje x.
Resolviendo este sistema, obtenemos:
f1(x) =ϕ(x)
2− 1
2a
∫ x
x0
ψ(α)dα (10.15)
f2(x) =ϕ(x)
2+
1
2a
∫ x
x0
ψ(α)dα (10.16)
De esta manera, hemos obtenido la forma especıfica de las funciones f1 y f2, dadas las condi-ciones iniciales del problema de Cauchy. Colocando (10.15) y (10.16) en (10.8), obtenemos:
u(x, t) =ϕ(x+ at)
2+
1
2a
∫ x+at
x0
ψ(α)dα+ϕ(x− at)
2− 1
2a
∫ x−at
x0
ψ(α)dα (10.17)
cambiando el signo de la integral de la extrema derecha mediante el intercambio de los lımitesde integracion, obtenemos, finalmente, la solucion del problema de Cauchy (10.10) en la forma:
u(x, t) =ϕ(x+ at) + ϕ(x− at)
2+
1
2a
∫ x+at
x−atψ(α)dα (10.18)
que recibe el nombre de Formula de D’Alembert.
La formula (10.18) nos da la solucion, que sabemos que es unica, del problema (10.10), bajola suposicion de que las funciones ϕ(x) y ψ(x) cumplen determinados requisitos. A saber, lafuncion ϕ(x) debe ser dos veces diferenciable con derivadas continuas respecto a su argumentoy ψ(x) debe ser una vez diferenciable con derivada continua respecto a su argumento en elintervalo (−∞,∞). Suponiendo cumplidos estos requisitos, no es difıcil comprobar que (10.18)satisface la ecuacion y las condiciones iniciales del problema (10.10).
Ahora bien, las condiciones impuestas a las funciones ϕ(x) y ψ(x) han sido formuladas desdeun punto de vista estrictamente matematico, con el objetivo de poder derivar la formula (10.18)hasta las segundas derivadas con respecto a x y a t. ¿Significa esto que si las funciones ϕ(x) yψ(x) no cumplen esas condiciones no existira la solucion? Es evidente que responder afirmati-vamente serıa absurdo, ya que la naturaleza no sabe nada de Matematica y si la elongacion yla velocidad iniciales no pudieran describirse por medio de funciones dos veces diferenciables yuna vez diferenciable respectivamente, no por ello la cuerda, ante ese estımulo inicial, dejarıade oscilar. El proceso fısico ocurrirıa de todas formas. En este caso no existira la solucion en
Metodo de Ondas Viajeras 325
el sentido clasico de la palabra, pero existira la solucion generalizada, en el sentido en que ladefinimos al final del capıtulo donde realizamos la clasificacion de las ecuaciones en derivadasparciales de segundo orden, en forma de una funcion generalizada. Esto significa lo siguiente:Supongamos que tenemos las sucesiones de funciones ϕn(x) y ψn(x) que cumplen los requi-sitos establecidos para que la solucion se exprese a traves de la formula de D’Alembert (10.18)y que, para una funcion de base f(x), se cumple que
(ϕn(x), f(x)) → (ϕ(x), f(x)), (ψn(x), f(x)) → (ψ(x), f(x)), ∀n→∞
donde, como siempre, (ϕ, f) significa el producto interno de estas funciones y ϕ(x) y ψ(x) sonlas condiciones iniciales de nuestro problema. Entonces, la solucion generalizada del problemasera la funcion generalizada u(x, t) definida por
(un(x, t), f(x)) → (u(x, t), f(x)), ∀n→∞
donde un(x, t) sera la solucion dada por la formula de D’Alembert correspondiente a ϕn(x) yψn(x).
Ası pues, hemos demostrado un teorema de existencia que se enuncia de la siguiente manera: Sila funcion ϕ(x) es dos veces diferenciable y la funcion ψ(x) es una vez diferenciable respecto a suargumento en (−∞,∞), entonces, para el problema de Cauchy (10.10), existe la solucion clasica,dada por la formula de D’Alembert (10.18); en caso contrario, existe la solucion generalizada.
Es posible hacer el razonamiento arriba expuesto en terminos generales para todos los metodosde solucion que estudiaremos.
Veamos, ahora, otro aspecto de gran importancia de la solucion obtenida.
Teorema.
Para cualquier t0 y cualquier ε > 0, existe un δ(ε, t0) > 0 tal que, si se cumple que
|ϕ1(x)− ϕ2(x)| < δ, |ψ1(x)− ψ2(x)| < δ (10.19)
entonces, se cumple que
|u1(x, t)− u2(x, t)| < ε (10.20)
donde u1(x, t) y u2(x, t) son las soluciones del problema de Cauchy correspondientes a lascondiciones iniciales ϕ1(x), ψ1(x), y ϕ2(x), ψ2(x), respectivamente. Es decir, el problema deCauchy para la ecuacion hiperbolica en la recta infinita es correcto.
Demostracion:
Tomemos la diferencia de u1(x, t) y u2(x, t), definidas por la formula (10.18):

326 Jose Marın Antuna
u1(x, t)− u2(x, t) =1
2[ϕ1(x+ at)− ϕ2(x+ at)] +
1
2[ϕ1(x− at)− ϕ2(x− at)] +
+1
2a
∫ x+at
x−at[ψ1(α)− ψ2(α)]dα (10.21)
Tomando modulos en (10.21) y teniendo en cuenta (10.19), obtenemos:
|u1(x, t)− u2(x, t)| ≤1
2|ϕ1(x+ at)− ϕ2(x+ at)|+ 1
2|ϕ1(x− at)− ϕ2(x− at)|+
+1
2a
∫ x+at
x−at|ψ1(α)− ψ2(α)|dα < 1
2δ +
1
2δ +
1
2aδ
∫ x+at
x−atdα =
δ +δ
2a[x+ at− x+ at] = δ + δt ≤ δ(1 + t0) < ε (10.22)
La desigualdad de la extrema derecha en (10.22) se logra tan pronto elijamos
δ(ε, t0) <ε
1 + t0
con lo que queda demostrado el teorema.
10.3 Interpretacion fısica de la formula de D’Alembert
Habıamos visto que la formula de D’Alembert (10.18) no es mas que la superposicion de dosondas viajeras:
f1(x− at) =1
2ϕ(x− at)−Ψ(x− at) (10.23)
f2(x+ at) =1
2ϕ(x+ at) + Ψ(x+ at) (10.24)
donde hemos llamado
Ψ(x) =1
2a
∫ x
x0
ψ(α)dα (10.25)
Para una mejor comprension del comportamiento de estas funciones, analicemos el ”espacio defase” (x, t) que, en este caso,es un plano. Como sabemos, las rectas
Metodo de Ondas Viajeras 327
x− at = const., x+ at = const. (10.26)
son las caracterısticas de la ecuacion utt = a2uxx. Por consiguiente, las funciones f1(x − at) yf2(x+ at), respectivamente, seran constantes a lo largo de esas caracterısticas.
Analicemos la funcion f1(x − at) y supongamos que, en el instante inicial, f1(x) 6= 0 en elintervalo (x1, x2) y que f1(x) ≡ 0 fuera de ese intervalo. Tracemos las caracterısticas que pasanpor los extremos del intervalo:
x− at = x1, x− at = x2 (10.27)
Evidentemente, en la franja oblicua limitada por el segmento (x1, x2) del eje x y las carac-terısticas (10.27) del plano de fase, la perturbacion sera diferente de cero, en tanto que en elresto del plano sera cero. Esto es ası por el hecho de que la funcion f1(x− at) representa unaonda viajera, que se mueve de izquierda a derecha con velocidad a. Por consiguiente, las carac-terısticas (10.27) no son otra cosa que las trayectorias, en el plano de fase, del frente anterior ydel frente posterior de la onda f1(x− at) que, en el instante inicial fue generada en el intervalo(x1, x2), de manera que f1(x− at) 6= 0 solo para x1 < x− at < x2.
Supongamos, igualmente, que f2(x) 6= 0 solo en el intervalo (x1, x2). Entonces, un razonamientoidentico nos llevara a concluir que f2(x + at) 6= 0 solo para x1 < x + at < x2, de manera quelas caracterısticas
x+ at = x1, x+ at = x2 (10.28)
seran las trayectorias del frente anterior y posterior en el plano de fase de la onda f2(x + at),que viaja de derecha a izquierda.
Si trazamos todas las caracterısticas que pasan por los puntos x1 y x2, el plano de fase quedaradividido en seis regiones, numeradas del 1 al 6 (Fig. 10.1).
Es facil ver que en el triangulo 1 se encuentran superpuestas las dos ondas f1(x−at) y f2(x+at);en la franja 2 solamente esta f1(x − at), en la franja 3 solo esta f2(x + at) y en las regiones4, 5 y 6 la cuerda esta en reposo. En 5 y en 6, porque a los puntos correspondientes todavıano ha llegado la perturbacion originada en (x1, x2) en el instante inicial y en 4, porque ya poresos puntos paso de largo la perturbacion. Como consecuencia, concluimos que, en el casode las oscilaciones de una cuerda, los frentes anterior y posterior de las perturbaciones estanperfectamente definidos y no existen consecuencias prolongadas del paso de la perturbacion:una vez que esta ha pasado, el punto regresa al estado de reposo. En Fısica este hecho seconoce con el nombre de Principio de Huygens y es de gran importancia; mas adelante,en el capıtulo referente a los problemas en el espacio abierto, volveremos a ver este principio,cuando estudiemos las oscilaciones en el espacio abierto.
Tomemos ahora un punto (x0, t0) del plano de fase y tracemos las dos caracterısticas que pasanpor el. Estas seran:
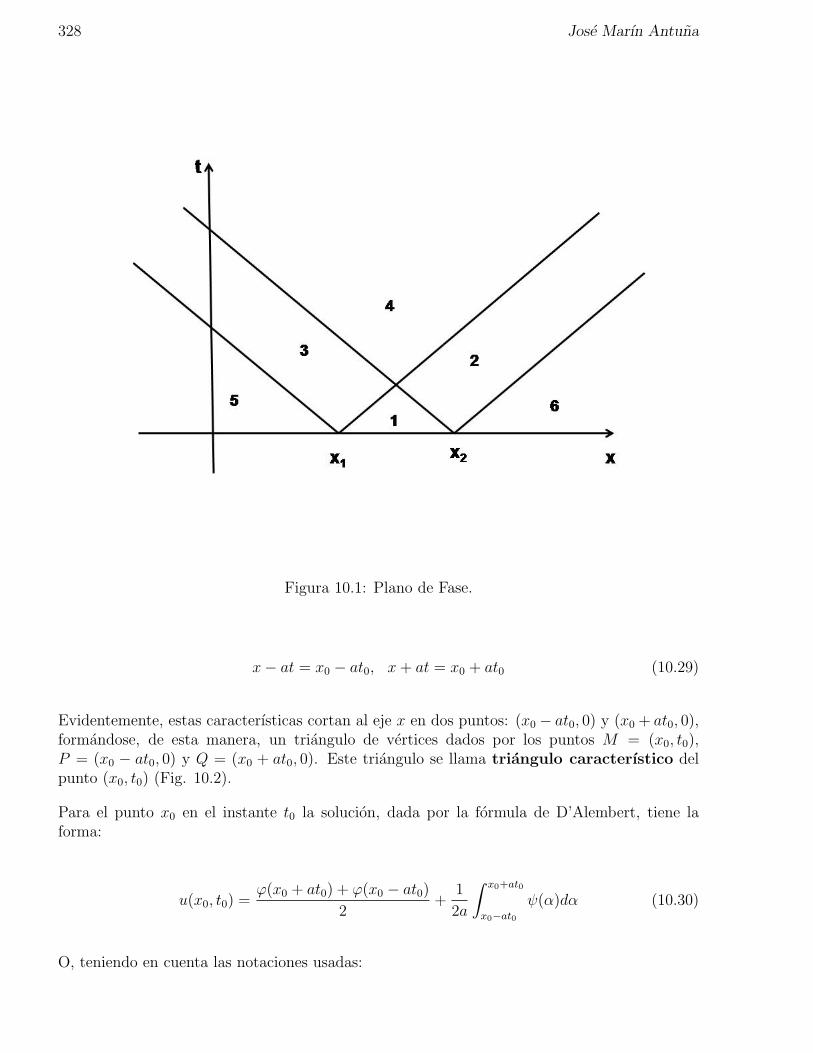
328 Jose Marın Antuna
Figura 10.1: Plano de Fase.
x− at = x0 − at0, x+ at = x0 + at0 (10.29)
Evidentemente, estas caracterısticas cortan al eje x en dos puntos: (x0 − at0, 0) y (x0 + at0, 0),formandose, de esta manera, un triangulo de vertices dados por los puntos M = (x0, t0),P = (x0 − at0, 0) y Q = (x0 + at0, 0). Este triangulo se llama triangulo caracterıstico delpunto (x0, t0) (Fig. 10.2).
Para el punto x0 en el instante t0 la solucion, dada por la formula de D’Alembert, tiene laforma:
u(x0, t0) =ϕ(x0 + at0) + ϕ(x0 − at0)
2+
1
2a
∫ x0+at0
x0−at0ψ(α)dα (10.30)
O, teniendo en cuenta las notaciones usadas:
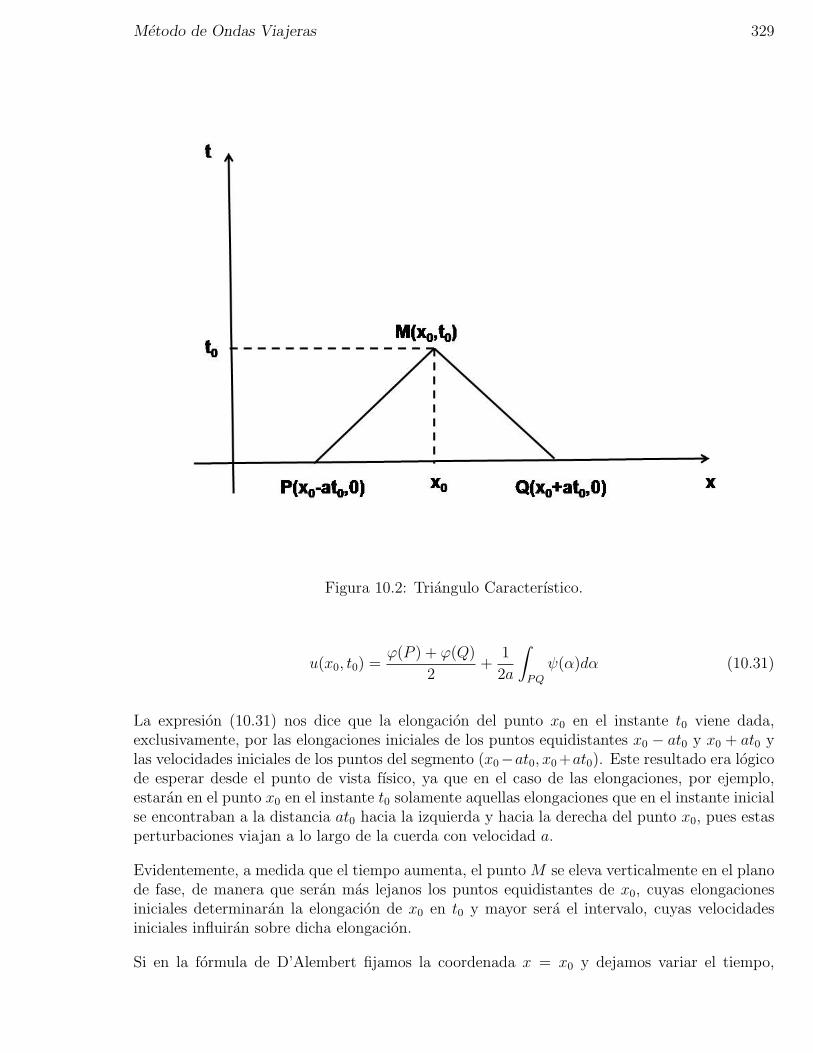
Metodo de Ondas Viajeras 329
Figura 10.2: Triangulo Caracterıstico.
u(x0, t0) =ϕ(P ) + ϕ(Q)
2+
1
2a
∫PQ
ψ(α)dα (10.31)
La expresion (10.31) nos dice que la elongacion del punto x0 en el instante t0 viene dada,exclusivamente, por las elongaciones iniciales de los puntos equidistantes x0 − at0 y x0 + at0 ylas velocidades iniciales de los puntos del segmento (x0−at0, x0 +at0). Este resultado era logicode esperar desde el punto de vista fısico, ya que en el caso de las elongaciones, por ejemplo,estaran en el punto x0 en el instante t0 solamente aquellas elongaciones que en el instante inicialse encontraban a la distancia at0 hacia la izquierda y hacia la derecha del punto x0, pues estasperturbaciones viajan a lo largo de la cuerda con velocidad a.
Evidentemente, a medida que el tiempo aumenta, el punto M se eleva verticalmente en el planode fase, de manera que seran mas lejanos los puntos equidistantes de x0, cuyas elongacionesiniciales determinaran la elongacion de x0 en t0 y mayor sera el intervalo, cuyas velocidadesiniciales influiran sobre dicha elongacion.
Si en la formula de D’Alembert fijamos la coordenada x = x0 y dejamos variar el tiempo,
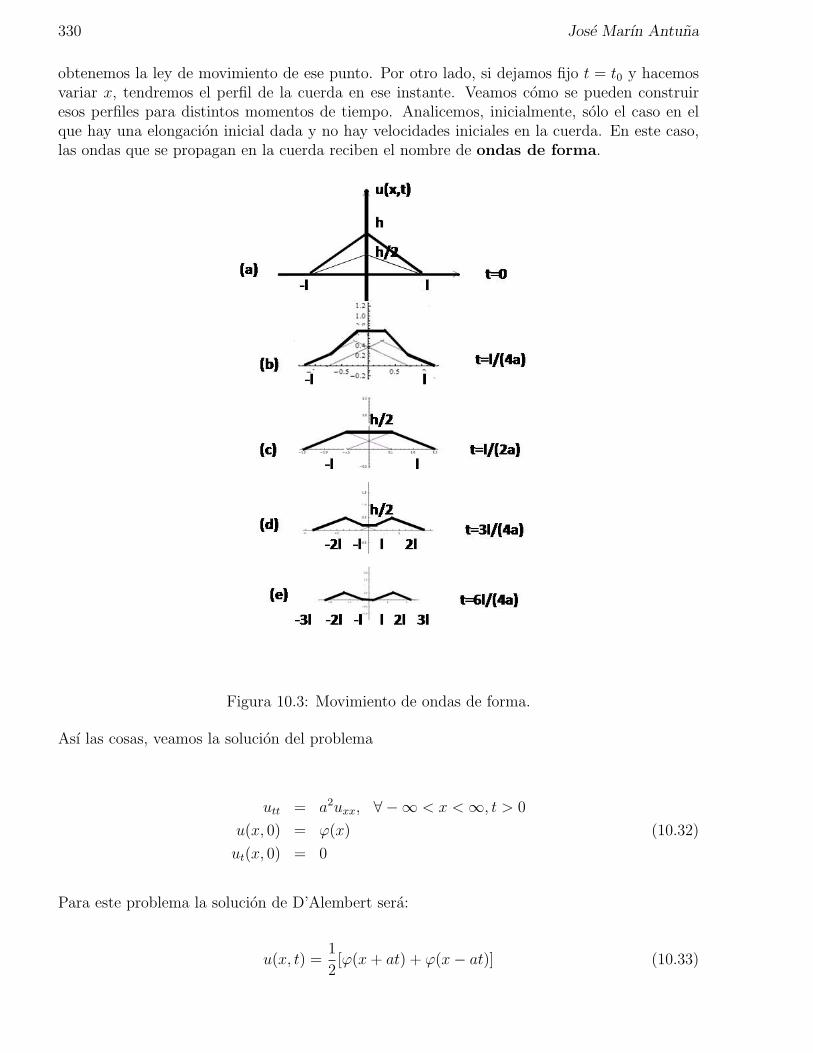
330 Jose Marın Antuna
obtenemos la ley de movimiento de ese punto. Por otro lado, si dejamos fijo t = t0 y hacemosvariar x, tendremos el perfil de la cuerda en ese instante. Veamos como se pueden construiresos perfiles para distintos momentos de tiempo. Analicemos, inicialmente, solo el caso en elque hay una elongacion inicial dada y no hay velocidades iniciales en la cuerda. En este caso,las ondas que se propagan en la cuerda reciben el nombre de ondas de forma.
Figura 10.3: Movimiento de ondas de forma.
Ası las cosas, veamos la solucion del problema
utt = a2uxx, ∀ −∞ < x <∞, t > 0
u(x, 0) = ϕ(x) (10.32)
ut(x, 0) = 0
Para este problema la solucion de D’Alembert sera:
u(x, t) =1
2[ϕ(x+ at) + ϕ(x− at)] (10.33)
Metodo de Ondas Viajeras 331
Sea ϕ(x) la funcion cuyo perfil aparece en la figura 10.3(a) con lınea gruesa.
De acuerdo con la formula (10.33) evaluada para t = 0, esta funcion esta formada por lasuperposicion de dos ondas que, en ese instante inicial, coinciden (con lıneas finas en la figura10.3(a).), una de las cuales, a medida que t crezca, se movera de izquierda a derecha, en tantoque la otra lo hara de derecha a izquierda, hecho que senalamos con unas flechitas junto alvertice de la cresta de cada una de esas dos ondas. Notese que cada una de estas dos ondastiene amplitud igual a ϕ(x)/2, para que su superposicion de la onda inicial ϕ(x).
A medida que el tiempo crece, estas ondas se moveran con velocidad a en sentido contrario,de forma tal que al transcurrir el tiempo t = l
4a, cada una de ellas se habra desplazado a la
izquierda y a la derecha, respectivamente, la distancia l/4, ocupando las posiciones que se venen la figura 10.3(b). La superposicion de ambas ondas dara el perfil que, con lınea gruesa, seobserva en esa figura.
Para t = 2l4a
, la posicion de las ondas sera la que se observa en la figura 10.3(c) y su superposiciondara el perfil dibujado con la lınea gruesa. Para t = 3l
4apueden verse las posiciones de las ondas
y el perfil de la cuerda en la figura 10.3(d). Por ultimo, a partir de t = la, ambas ondas se
separan, de forma tal que, en lo adelante, se veran dos crestas independientes con amplitud iguala la mitad de la elongacion inicial dada, que se mueven hacia la izquierda y hacia la derecha convelocidad a, separandose paulatinamente, de manera que, por ejemplo, para t = 6l
4a, el perfil de
la cuerda sera el que se muestra en la figura 10.3(e).
Con ayuda de Mathematica el lector puede obtener los resultados de la figura 10.3. Una formaque le sugerimos probar es la siguiente. Realice y corra el siguiente programa:
x01 = 3; a = 1; [Delta]t = x01/(4a);u1[x1] = Piecewise[(x1 + x01)/Sqrt[3],
−x01 < x1 < 0, (−x1 + x01)/Sqrt[3], 0 < x1 < x01];u[dt] =
u1[x+ dt] + u1[x− dt]; legend = Placed[LineLegend[”Expressions”,
LegendLabel− > ”Label”, LegendFunction− > ”Frame”, LegendMargins− > 5], Right];
Manipulate[Plot[Evaluate[u1[x+ at]], Evaluate[u1[x− at]], Evaluate[u[at]],
x,−1.5x01, 1.5x01, P lotRange− > 0, 1.5x01, ImageSize− > Medium,
P lotStyle− > Blue,Dashed, Red,Dashed, Thick, F illing− >

332 Jose Marın Antuna
Axis,AxesLabel− > x, u[x,N [at]], P lotLegends− > legend,AspectRatio− >
Automatic], t, 0, 9[Delta]t, .001[Delta]t]
table[i,n] = Table[Plot[u1[x+ at], u1[x− at], u[at], x,−1.5x01, 1.5x01,
P lotRange− > 0, 1.5x01, P lotStyle− > Blue,Dashed, Red,Dashed,
Thickness[.005],
F illing− > 3− > 0, T icks− > −x01, 0, x01, (x01)/Sqrt[3],
(2x01)/Sqrt[3], AxesStyle− > Directive[FontSize− > 7], AxesLabel− > x, u[x,N [at]],
AspectRatio− > Automatic], t, i[Delta]t, (i+ n)[Delta]t, [Delta]t];
g1 = GraphicsGrid[table[0, 2], table[3, 2], table[6, 2], ImageSize− > Full, Frame− > All]
Este programa es una idea de como proceder; el lector es invitado a crear todo lo posible segunsu experiencia personal en el uso de las tecnicas de computacion. El programa arriba esbozadopermite obtener la relacion de figuras que se ofrece en la figura 10.4
El ejercicio 1 propuesto al final de este capıtulo ilustra de manera minuciosa el modo de trabajarcon el plano de fase (x, t) para la obtencion de las expresiones analıticas de la solucion, por loque le recomendamos al lector su solucion.
Veamos, ahora, el caso en el que no se da elongacion inicial a la cuerda, sino que solo se leimprime una velocidad inicial v0, constante, en el segmento (x1, x2). En este caso, las ondasque se propagan reciben el nombre de ondas de velocidad.
Ası pues, buscaremos la solucion del problema
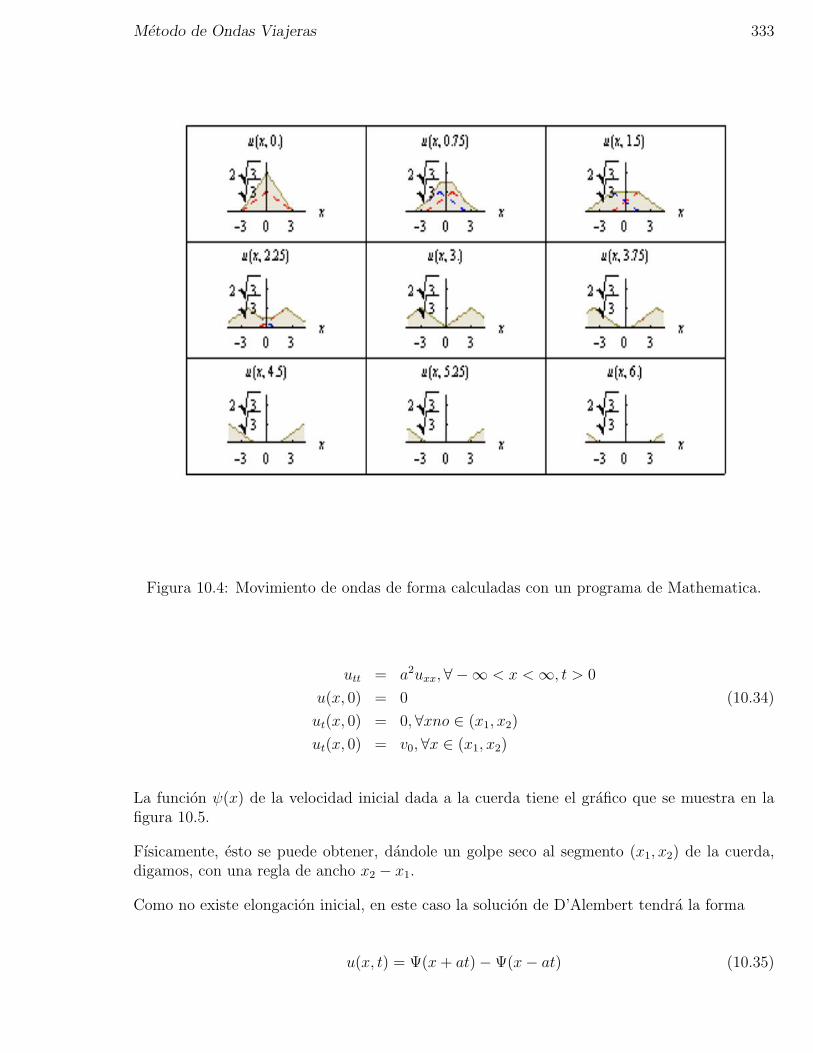
Metodo de Ondas Viajeras 333
Figura 10.4: Movimiento de ondas de forma calculadas con un programa de Mathematica.
utt = a2uxx,∀ −∞ < x <∞, t > 0
u(x, 0) = 0 (10.34)
ut(x, 0) = 0,∀xno ∈ (x1, x2)
ut(x, 0) = v0,∀x ∈ (x1, x2)
La funcion ψ(x) de la velocidad inicial dada a la cuerda tiene el grafico que se muestra en lafigura 10.5.
Fısicamente, esto se puede obtener, dandole un golpe seco al segmento (x1, x2) de la cuerda,digamos, con una regla de ancho x2 − x1.
Como no existe elongacion inicial, en este caso la solucion de D’Alembert tendra la forma
u(x, t) = Ψ(x+ at)−Ψ(x− at) (10.35)
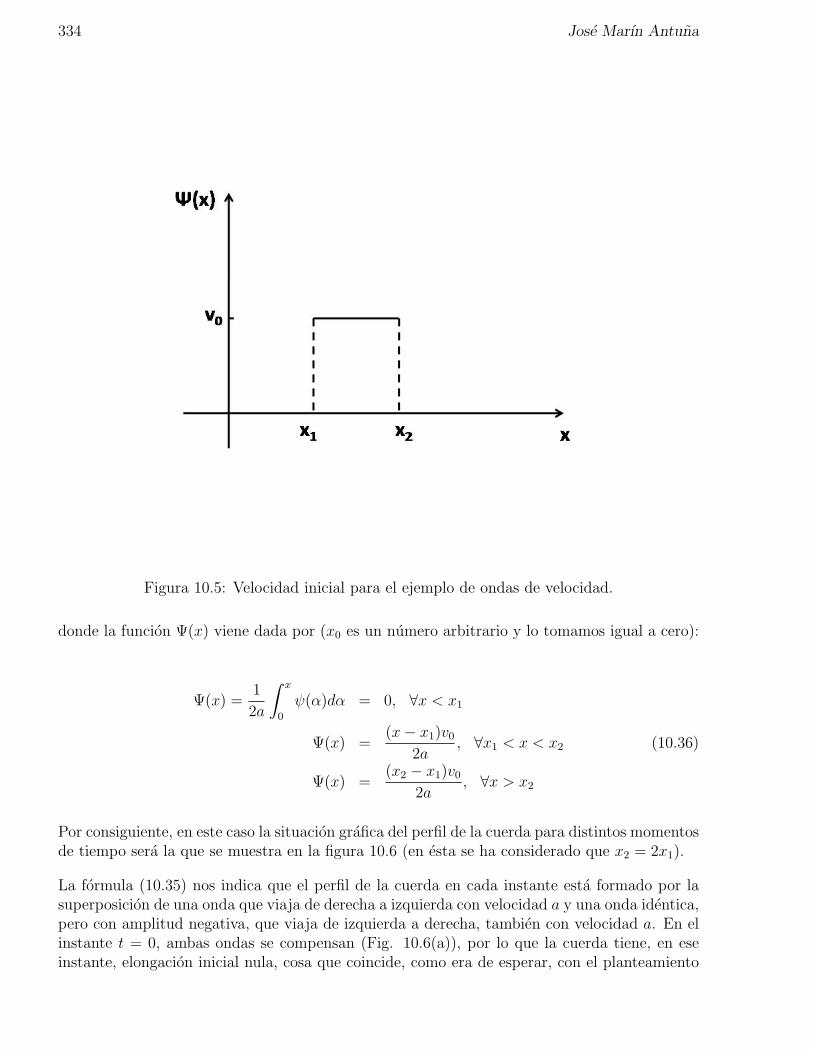
334 Jose Marın Antuna
Figura 10.5: Velocidad inicial para el ejemplo de ondas de velocidad.
donde la funcion Ψ(x) viene dada por (x0 es un numero arbitrario y lo tomamos igual a cero):
Ψ(x) =1
2a
∫ x
0
ψ(α)dα = 0, ∀x < x1
Ψ(x) =(x− x1)v0
2a, ∀x1 < x < x2 (10.36)
Ψ(x) =(x2 − x1)v0
2a, ∀x > x2
Por consiguiente, en este caso la situacion grafica del perfil de la cuerda para distintos momentosde tiempo sera la que se muestra en la figura 10.6 (en esta se ha considerado que x2 = 2x1).
La formula (10.35) nos indica que el perfil de la cuerda en cada instante esta formado por lasuperposicion de una onda que viaja de derecha a izquierda con velocidad a y una onda identica,pero con amplitud negativa, que viaja de izquierda a derecha, tambien con velocidad a. En elinstante t = 0, ambas ondas se compensan (Fig. 10.6(a)), por lo que la cuerda tiene, en eseinstante, elongacion inicial nula, cosa que coincide, como era de esperar, con el planteamiento
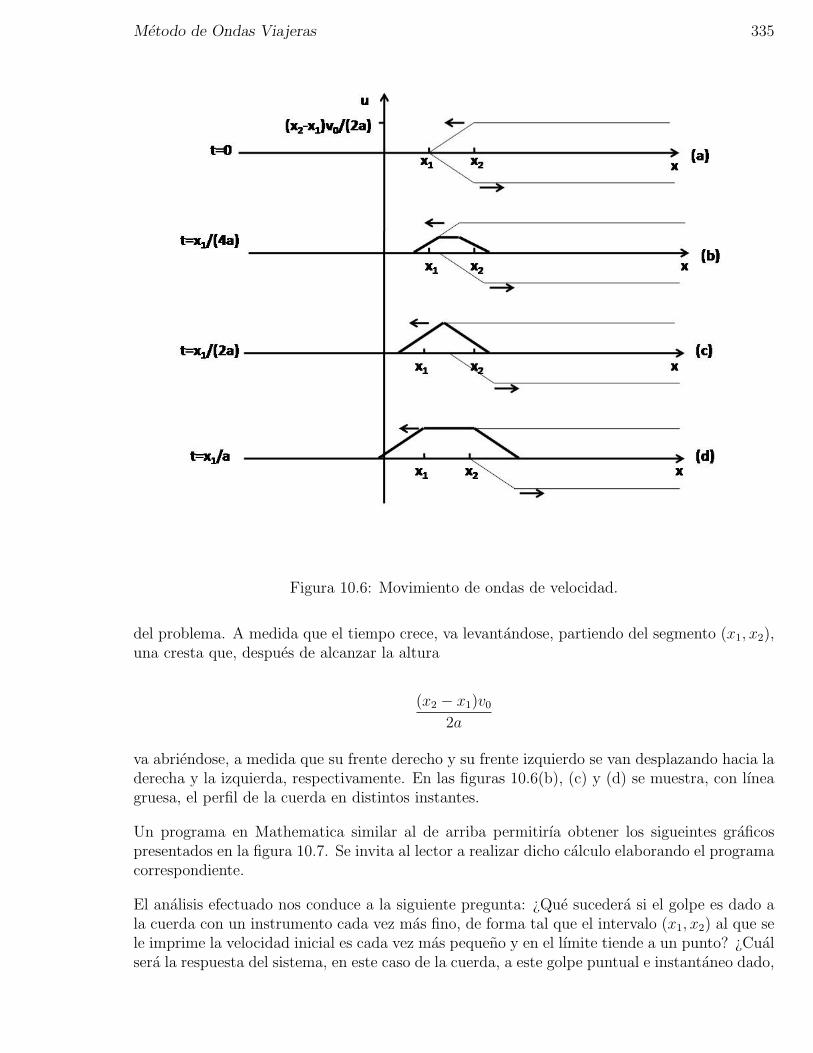
Metodo de Ondas Viajeras 335
Figura 10.6: Movimiento de ondas de velocidad.
del problema. A medida que el tiempo crece, va levantandose, partiendo del segmento (x1, x2),una cresta que, despues de alcanzar la altura
(x2 − x1)v0
2a
va abriendose, a medida que su frente derecho y su frente izquierdo se van desplazando hacia laderecha y la izquierda, respectivamente. En las figuras 10.6(b), (c) y (d) se muestra, con lıneagruesa, el perfil de la cuerda en distintos instantes.
Un programa en Mathematica similar al de arriba permitirıa obtener los sigueintes graficospresentados en la figura 10.7. Se invita al lector a realizar dicho calculo elaborando el programacorrespondiente.
El analisis efectuado nos conduce a la siguiente pregunta: ¿Que sucedera si el golpe es dado ala cuerda con un instrumento cada vez mas fino, de forma tal que el intervalo (x1, x2) al que sele imprime la velocidad inicial es cada vez mas pequeno y en el lımite tiende a un punto? ¿Cualsera la respuesta del sistema, en este caso de la cuerda, a este golpe puntual e instantaneo dado,
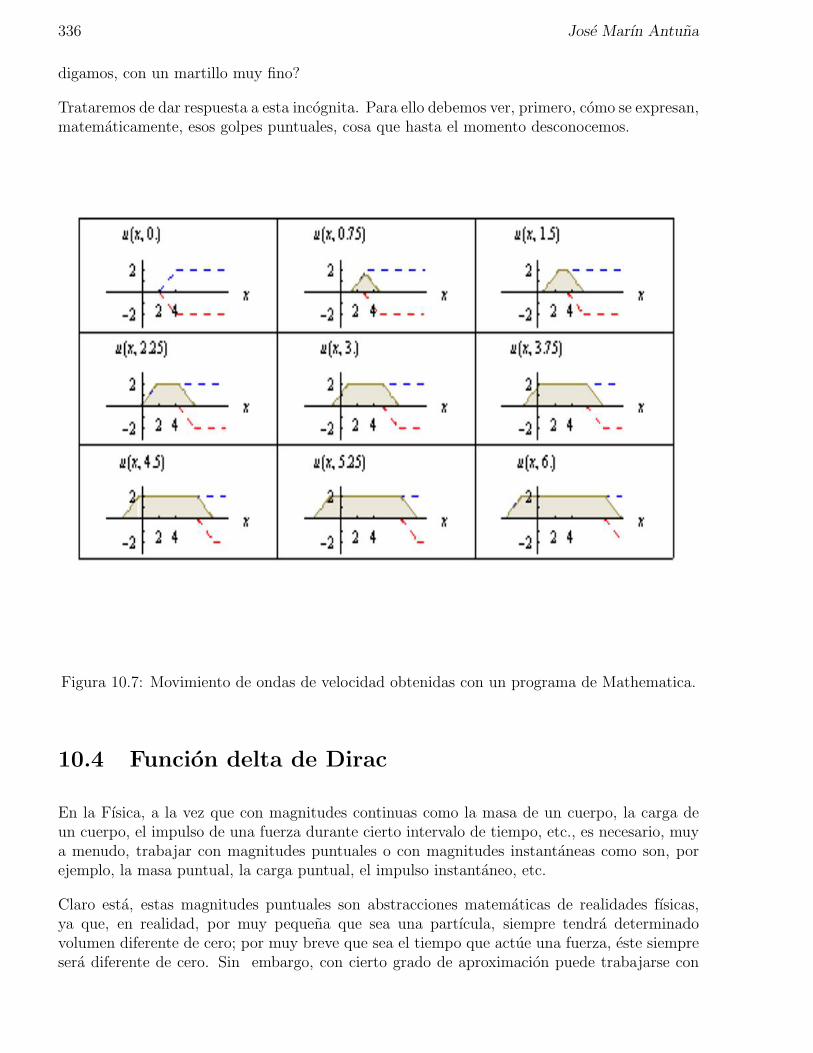
336 Jose Marın Antuna
digamos, con un martillo muy fino?
Trataremos de dar respuesta a esta incognita. Para ello debemos ver, primero, como se expresan,matematicamente, esos golpes puntuales, cosa que hasta el momento desconocemos.
Figura 10.7: Movimiento de ondas de velocidad obtenidas con un programa de Mathematica.
10.4 Funcion delta de Dirac
En la Fısica, a la vez que con magnitudes continuas como la masa de un cuerpo, la carga deun cuerpo, el impulso de una fuerza durante cierto intervalo de tiempo, etc., es necesario, muya menudo, trabajar con magnitudes puntuales o con magnitudes instantaneas como son, porejemplo, la masa puntual, la carga puntual, el impulso instantaneo, etc.
Claro esta, estas magnitudes puntuales son abstracciones matematicas de realidades fısicas,ya que, en realidad, por muy pequena que sea una partıcula, siempre tendra determinadovolumen diferente de cero; por muy breve que sea el tiempo que actue una fuerza, este siempresera diferente de cero. Sin embargo, con cierto grado de aproximacion puede trabajarse con
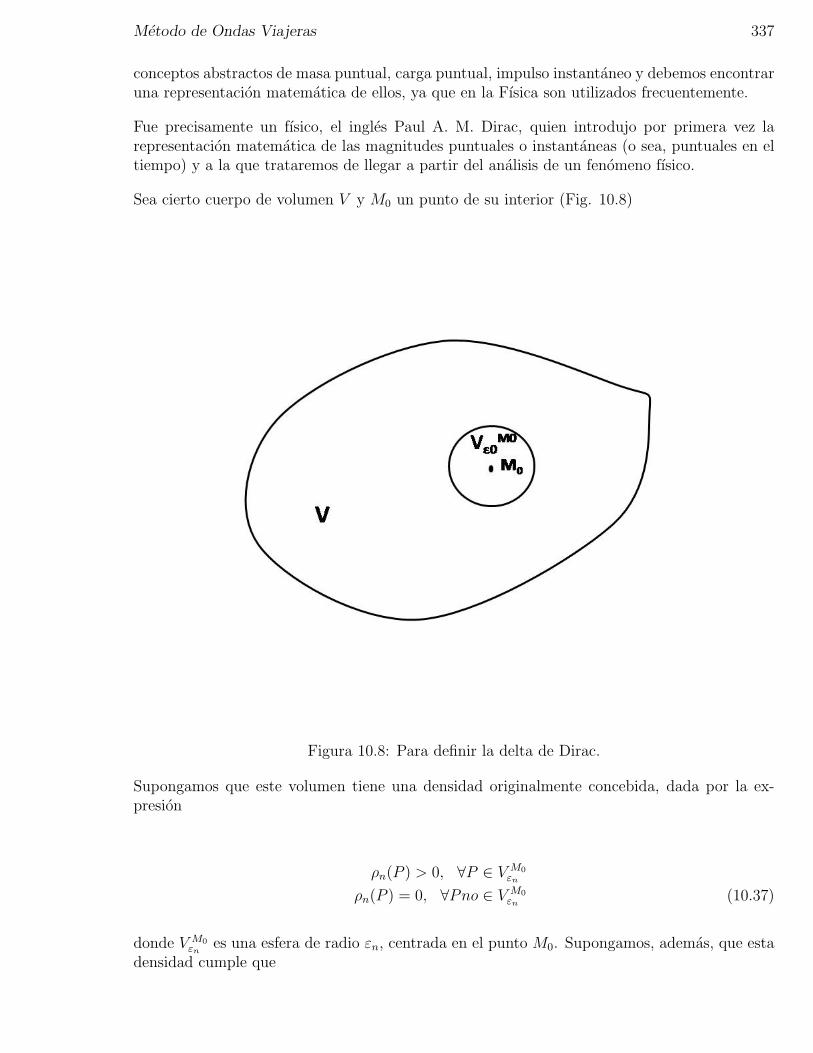
Metodo de Ondas Viajeras 337
conceptos abstractos de masa puntual, carga puntual, impulso instantaneo y debemos encontraruna representacion matematica de ellos, ya que en la Fısica son utilizados frecuentemente.
Fue precisamente un fısico, el ingles Paul A. M. Dirac, quien introdujo por primera vez larepresentacion matematica de las magnitudes puntuales o instantaneas (o sea, puntuales en eltiempo) y a la que trataremos de llegar a partir del analisis de un fenomeno fısico.
Sea cierto cuerpo de volumen V y M0 un punto de su interior (Fig. 10.8)
Figura 10.8: Para definir la delta de Dirac.
Supongamos que este volumen tiene una densidad originalmente concebida, dada por la ex-presion
ρn(P ) > 0, ∀P ∈ V M0εn
ρn(P ) = 0, ∀Pno ∈ V M0εn
(10.37)
donde V M0εn
es una esfera de radio εn, centrada en el punto M0. Supongamos, ademas, que estadensidad cumple que

338 Jose Marın Antuna
∫ ∫ ∫V
ρn(P )dP =
∫ ∫ ∫V
M0εn
ρn(P )dP = 1 (10.38)
O sea, el cuerpo de volumen V tiene una masa por unidad de volumen que solo es diferente decero dentro de cierta esfera y esa densidad es tal, que la masa total es unitaria.
Un cuerpo con semejante masa creara un potencial gravitacional en un punto M del espacioque, evidentemente, vendra dado por la expresion
un(M) =
∫ ∫ ∫V
ρn(P )
rMP
dP (10.39)
Supongamos ahora que, para n → ∞, los radios εn → 0. Entonces, al hacer n → ∞, la esferaV M0εn
se ira haciendo cada vez mas pequena, cerrandose sobre el punto M0.
Veamos el lımite a donde tiende nuestro potencial en este caso. Tenemos, aplicando el teoremadel valor medio integral y teniendo en cuenta (4.2):
limn→∞
un(M) = limn→∞
∫ ∫ ∫V
ρn(P )
rMP
dP = limn→∞
∫ ∫ ∫V
M0εn
ρn(P )
rMP
dP =
= limn→∞
1
rMP ∗
∫ ∫ ∫V
M0εn
ρn(P )dP = limn→∞
1
rMP ∗=
1
rMM0
(10.40)
donde P ∗ ∈ V M0εn
.
Este resultado, fısicamente, es el potencial creado en el punto M por una masa puntual unitariacolocada en el punto M0.
Es decir, si tomamos como densidad de un cuerpo cualquier funcion ρn(P ) que satisfaga lascondiciones definitorias (10.37) y (10.38), entonces, el lımite del potencial creado por un cuerpocon esa densidad, cuando el cuerpo se reduce a un punto, es el potencial de una masa puntualy unitaria.
Es obvio que este resultado es el mismo, sea cual sea la funcion ρn(P ) que tomemos, siempreque esta cumpla los dos requisitos basicos (10.37) y (10.38).
En otras palabras: Una sucesion de funciones ρn(P ), n = 1, 2, 3, ..., definidas por (10.37) y(10.38) tiene un lımite determinado. A ese lımite le llamaremos funcion delta de Dirac y lorepresentaremos por δ(P,M0).
Tratemos de comprender el funcionamiento del razonamiento hecho y comprender el compor-tamiento de esta funcion tan rara, analizando el caso unidimensional. Sea, en este caso, M0 = 0y el segmento (a, b) el equivalente unidimensional del volumen V . Entonces, el equivalente dela esfera V M0
εnsera el segmento (−εn, εn).

Metodo de Ondas Viajeras 339
La sucesion de funciones ρn(x) podemos tomarla como queramos, siempre que cumpla con(10.37) y (10.38), es decir
ρn(x) > 0, ∀x ∈ (−εn, εn)ρn(x) = 0, ∀xno ∈ (−εn, εn) (10.41)
∫ b
a
ρn(x)dx ≡∫ εn
−εn
ρn(x)dx = 1 (10.42)
Para simplificar nuestro razonamiento, tomemos por ρn(x) la sucesion dada por:
ρn(x) =1
2εn, ∀x ∈ (−εn, εn)
ρn(x) = 0, ∀xno ∈ (−εn, εn) (10.43)
pues, automaticamente, se cumple la igualdad (10.42).
Ahora, al hacer tender n→∞, εn → 0, de forma tal que todo el tiempo el area bajo la curva,es decir, la integral (10.42), siga valiendo uno, la altura del rectangulo ira creciendo a medidaque su base se estrecha, obteniendose el cuadro que se observa en la figura 10.9.
Como ”valor lımite” (dicho valor lımite, en la forma en que hasta ahora lo hemos venidoentendiendo, carece de sentido) de la sucesion ρn(x) obtenemos, pues, una ”funcion” quevale cero para toda x 6= 0 e infinito para x = 0, ¡pero que, simultaneamente, su integral valeuno!
Cuando Dirac introdujo esta funcion, que denotaremos por δ(x), en los anos 20-30 del sigloXX, se produjo una conmocion entre los matematicos, ya que esto rompıa con todo lo queel ”sentido comun” hasta ese momento habıa venido dando como valedero e, incluso, algunoshasta le llamaron ”funcion patologica”. Pero la vida es ası y, a veces, el ”sentido comun” nosjuega estas malas pasadas. Pese a todo, hubo que plegarse a la realidad y, como la practicaes, en definitiva, el criterio de la verdad y esta funcion tenıa multiples aplicaciones y con ellase obtenıan resultados fısicos correctos, los matematicos se dedicaron al estudio del asunto y,posteriormente, fue surgiendo la teorıa de las llamadas ”funciones generalizadas” a las que yahemos hecho referencia y a las que el autor le dedica un libro aparte y con las que se logra daruna justificacion rigurosa, desde el punto de vista matematico, a la funcion delta de Dirac y,ademas, ampliar estas nuevas concepciones.
Ası pues, resumiendo, podemos definir, formalmente, la funcion delta de Dirac como la funcionque cumple las siguientes proposiciones
δ(x) = 0, ∀x 6= 0
δ(x) = ∞, ∀x = 0 (10.44)
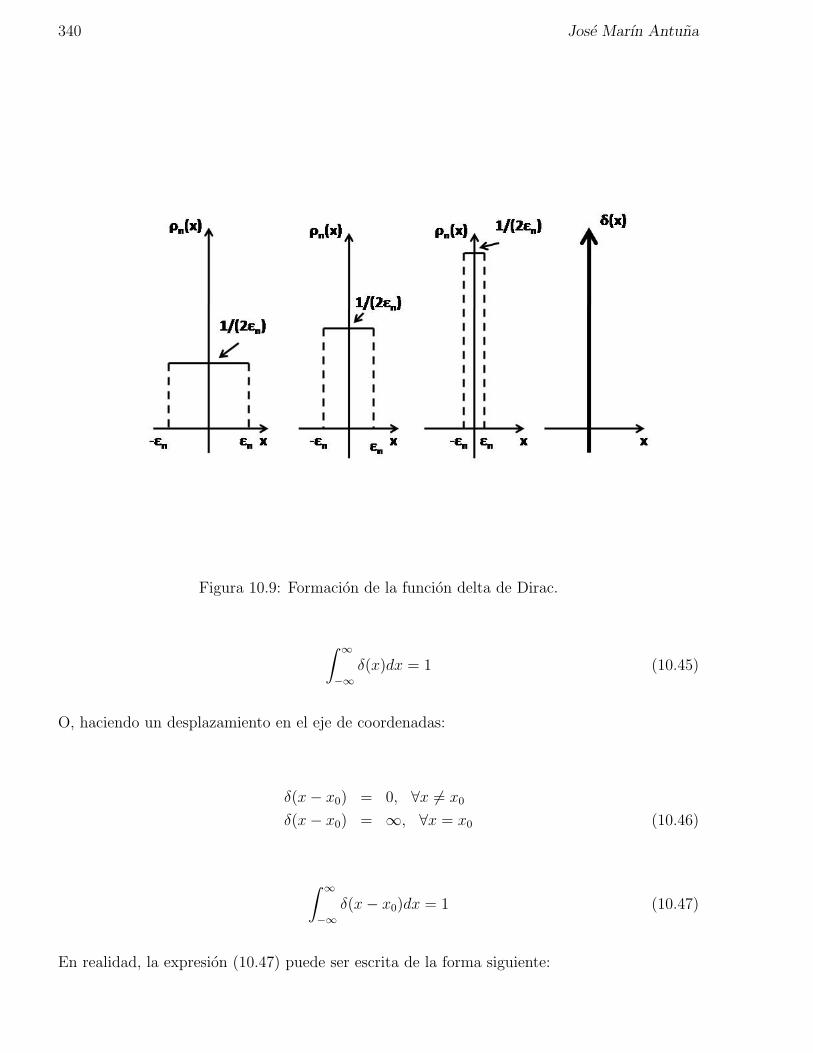
340 Jose Marın Antuna
Figura 10.9: Formacion de la funcion delta de Dirac.
∫ ∞
−∞δ(x)dx = 1 (10.45)
O, haciendo un desplazamiento en el eje de coordenadas:
δ(x− x0) = 0, ∀x 6= x0
δ(x− x0) = ∞, ∀x = x0 (10.46)
∫ ∞
−∞δ(x− x0)dx = 1 (10.47)
En realidad, la expresion (10.47) puede ser escrita de la forma siguiente:
Metodo de Ondas Viajeras 341
∫ b
a
δ(x− x0)dx = 0, ∀x0no ∈ (a, b)∫ b
a
δ(x− x0)dx = 1, ∀x0 ∈ (a, b) (10.48)
que le da un sentido mas preciso y una mayor utilidad en las aplicaciones fısicas que haremos.
La propiedad fundamental de la funcion delta de Dirac puede establecerse con relativa sencillez.Analicemos la integral
I =
∫ b
a
f(x)δ(x)dx (10.49)
donde f(x) es cierta funcion. Si el punto x = 0 no pertenece al intervalo (a, b) es evidente queI = 0. Pero si a < 0 < b, aplicando el teorema del valor medio integral, podemos hacer
I =
∫ b
a
f(x)δ(x)dx =
∫ ε
−εf(x)δ(x)dx = f(x)
∫ ε
−εδ(x)dx = f(x) (10.50)
donde hemos utilizado (10.45) y x ∈ (−ε, ε). Al hacer tender ε→ 0, x→ 0, por lo que queda
∫ b
a
f(x)δ(x)dx = f(0), ∀a < 0 < b (10.51)
O, lo que es lo mismo, haciendo un desplazamiento en el eje de coordenadas:
∫ b
a
f(x)δ(x− x0)dx = f(0), ∀x0 ∈ (a, b)∫ b
a
f(x)δ(x− x0)dx = 0, ∀x0no ∈ (a, b) (10.52)
La propiedad (10.52) sera utilizada con mucha frecuencia.
Al parecer, todo esta claro. Sin embargo, aunque hayamos hecho las cosas con osadıa, nopodemos dejar de reconocer que aquı todavıa no hay nada claro. Las cosas, a pesar de todo,tienen que tener su rigor matematico y aquı, para nuestro mal, hemos pasado por encima delrigor. Hemos dicho que el lımite de la sucesion ρn(x) es la funcion delta. Pero ¿como entenderese lımite, por demas realmente extrano? ¿De que tipo de lımite estamos hablando? En otraspalabras, ¿que tipo de convergencia de sucesiones tenemos frente a nosotros?
Recordemos cuantas formas distintas existen de definir el lımite de una sucesion funcional, osea, cuantos tipos de convergencia existen.

342 Jose Marın Antuna
Sea la sucesion funcional un(x).
1. Se dice que esta sucesion converge uniformemente en (a, b) si, para ε > 0, existe unN(ε) > 0 tal que, para n > N y m > N cualesquiera, se cumple que
|un(x)− um(x)| < ε, ∀x ∈ (a, b) (10.53)
2. Se dice que la sucesion un(x) converge en media (en media cuadratica) en (a, b) si,para ε > 0, existe un N(ε) > 0 tal que, para n > N y m > N cualesquiera, se cumpleque
∫ b
a
[un(x)− um(x)]2dx < ε (10.54)
3. Se dice que la sucesion un(x) converge debilmente en (a, b) si, para cualquier funcionintegrable f(x) en (a, b), la sucesion numerica
cn =
∫ b
a
f(x)un(x)dx (10.55)
converge. Es decir, si para ε > 0 existe un N(ε) > 0 tal que, para n > N y m > Ncualesquiera
|cn − cm| ≡∣∣∣∣∫ b
a
f(x)[un(x)− um(x)]dx
∣∣∣∣ < ε (10.56)
No es difıcil comprobar que la convergencia uniforme implica la convergencia en media y queesta, a su vez, implica la convergencia debil y que, sin embargo, el recıproco no es cierto; esdecir, una sucesion puede converger debilmente y no converger en media, ni uniformemente.Pero estos son objetivos de estudio del Analisis Matematico y no vamos a detenernos en ellos.
Veamos ahora la definicion de funcion delta que dimos, con el fin de ver que significa el lımiteaquel.
Tenıamos la sucesion
ρn(x, x0) > 0, ∀|x− x0| < εn
ρn(x, x0) = 0, ∀|x− x0| > εn (10.57)
que cumple que
∫ b
a
ρn(x, x0)dx ≡∫ x0+εn
x0−εn
ρn(x, x0)dx = 1 (10.58)
Metodo de Ondas Viajeras 343
y decıamos que el ”lımite” de esta sucesion, cuando n → ∞ (ε → 0) era δ(x − x0). Nospreguntamos ahora: ¿Como es esta convergencia? Veamos.
Tenemos que
∫ b
a
f(x)ρn(x, x0)dx ≡∫ x0+εn
x0−εn
f(x)ρn(x, x0)dx ≡ f(x)
∫ x0+εn
x0−εn
ρn(x, x0)dx =
= f(x) → f(x0) ≡∫ b
a
f(x)δ(x− x0)dx (10.59)
donde |x − x0| < εn. En (10.59) la ultima igualdad esta dada por la definicion de la funciondelta. De aquı concluimos que
∣∣∣∣∫ b
a
f(x)[ρn(x, x0)− δ(x− x0)]dx
∣∣∣∣ < ε,∀n > N(ε) (10.60)
dado un ε > 0. La expresion (10.60) significa que la convergencia de ρn(x, x0) a δ(x − x0)debe ser entendida como convergencia debil, es decir, solo tiene sentido a traves de integrales.Esta conclusion es muy importante, porque significa que la funcion delta de Dirac, por serel resultado de la convergencia debil de la sucesion ρn(x, x0), solo cobrara significado cuandose opere con ella bajo signos de integracion y las igualdades en las que aparezca la funciondelta de Dirac, aunque formalmente se escriban como igualdades algebraicas, adquieren suverdadero significado, cuando son expresadas por medio de integrales. En el libro del autorsobre las funciones generalizadas se puede ver que lo que aquı hemos dicho esta basado en elhecho de que la funcion delta de Dirac es lo que se llama una funcion generalizada. Lasfunciones generalizadas -de las que la delta es, historicamente, la primera que surgio- se definena traves de funcionales, es decir tienen sentido solamente a traves de integrales, lo que significaque la convergencia de sucesiones funcionales a ellas solo puede concebirse en el sentido deconvergencia debil de esas sucesiones. El lector, interesado en profundizar en este importanteconcepto, puede remitirse a dicho libro.
Como la definicion de funcion delta de Dirac es valida para cualquier sucesion ρn(x, x0) quecumpla con (10.57) y (10.58), veamos una funcion ρn(x, x0) particular, que cumple con esaspropiedades. Sea en (−π, π):
ρn(x, x0) =1
2π+
1
π
n∑m=1
cosm(x− x0),∀|x− x0| < εn
ρn(x, x0) = 0, ∀|x− x0| > εn (10.61)
Es facil comprobar que, con a = −π y b = π, esta funcion cumple con (10.58). Por consiguiente,su lımite debil nos debe dar la funcion δ(x− x0). Tenemos:

344 Jose Marın Antuna
∫ π
−πf(x)ρn(x, x0)dx =
1
2π
∫ π
−πf(x)dx+
+n∑
m=1
cosmx0
π
∫ π
−πf(x) cosmxdx+
sinmx0
π
∫ π
−πf(x) sinmxdx
(10.62)
La expresion a la derecha de (10.62) no es otra cosa que la suma parcial de la serie trigonometricade Fourier para f(x0). Por consiguiente:
limn→∞
∫ π
−πf(x)ρn(x, x0)dx = f(x0) ≡
∫ π
−pif(x)δ(x− x0)dx (10.63)
De aquı obtenemos que, por lo tanto
δ(x− x0) =1
2π+
1
π
∞∑m=1
cosm(x− x0) (10.64)
La expresion (10.64) serıa el desarrollo de δ(x−x0) en serie de Fourier en (−π, π). Sin embargo,nunca debemos olvidar que esa igualdad es solo formal, ya que tiene sentido solo a traves deintegrales, pues la convergencia es debil. O sea, que la igualdad (10.64) no es verdad, sino quelo que es verdad es que
∫ π
−πδ(x− x0)f(x)dx =
∫ π
−π
[1
2π+
1
π
∞∑m=1
cosm(x− x0)
]f(x)dx = f(x0) (10.65)
Pero, no obstante lo dicho, lo mejor que tiene la funcion δ(x − x0) es que con ella se puedetrabajar formalmente, tratandola como una funcion ”normal”, aunque, despues, los resultadosdeban interpretarse solo a traves de integrales (como convergencia debil). Por ejemplo, de haberdesarrollado formalmente δ(x− x0) en serie de Fourier:
δ(x− x0) =a0
2+
∞∑m=1
am cosmx+ bm sinmx (10.66)
obtendrıamos:
a0 =1
π
∫ π
−πδ(x− x0)dx =
1
π(10.67)
am =1
π
∫ π
−πδ(x− x0) cosmxdx =
1
πcosmx0 (10.68)

Metodo de Ondas Viajeras 345
bm =1
π
∫ π
−πδ(x− x0) sinmxdx =
1
πsinmx0 (10.69)
y, colocando (10.67), (10.68) y (10.69) en (10.66), obtendrıamos la expresion (10.64), la que,no obstante haber sido obtenida formalmente, tiene sentido solo como convergencia debil, esdecir, a traves de integrales.
De manera totalmente similar, δ(x−x0) puede ser desarrollada, digamos, en integral de Fourier;en este caso se obtendrıa
δ(x− x0) =1
2π
∫ ∞
−∞eiω(x−x0)dω (10.70)
aunque, de nuevo, esta igualdad es formal y debe entenderse solamente como convergenciadebil, es decir, que cobra sentido solo a traves de integrales.
10.5 Funcion de Green. Ecuacion no homogenea
Con ayuda de la funcion delta de Dirac definiremos un concepto de gran importancia en laFısica Matematica: el concepto de funcion de Green. Esta definicion la veremos ahora para larecta infinita en la ecuacion hiperbolica, aunque el concepto es mas general, como podremosver mas adelante.
Definicion.
Llamaremos Funcion de Green de la ecuacion hiperbolica en la recta infinita a lasolucion del siguiente problema de Cauchy:
utt = a2uxx, ∀ −∞ < x <∞, t > 0
u(x, 0) = 0 (10.71)
ut(x, 0) = δ(x− x0)
Es decir, el problema en el que la velocidad inicial es una delta de Dirac y la elongacion iniciales cero.
Representaremos a la funcion de Green por G(x, x0, t). Entonces, utilizando la formula deD’Alembert, obtenemos:
G(x, x0, t) =1
2a
∫ x+at
x−atδ(α− x0) =
1
2a, ∀|x− x0| < at
= 0, ∀|x− x0| > at

346 Jose Marın Antuna
Es decir:
G(x, x0, t) =1
2aθ(at− |x− x0|) (10.72)
donde θ(t) es la funcion paso unitario de Heaviside.
Interpretemos fısicamente que significado tiene dar una velocidad inicial en forma de delta yque quiere decir fısicamente la funcion de Green. Para ello, analicemos el siguiente problema:
utt = a2uxx, ∀ −∞ < x <∞, t > 0
u(x, 0) = 0 (10.73)
ut(x, 0) = v0, ∀x ∈ (x1, x2)
ut(x, 0) = 0, ∀xno ∈ (x1, x2)
Este problema significa, suponiendo que fısicamente describe las oscilaciones transversales deuna cuerda infinita, que a dicha cuerda le imprimimos una velocidad inicial v0 en el intervalo(x1, x2). Por muy ”seco” que sea el golpe que le demos a la cuerda en ese intervalo paraimprimirle esa velocidad, en realidad estaremos dandole a la cuerda, durante un intervalode tiempo ∆t pequeno, determinado impulso, que vendra dado por la expresion (suponemosconstante la densidad de la cuerda):
I = ρ
∫ x2
x1
v0dx (10.74)
De aquı que el impulso-longitud por unidad de masa sera:
I
ρ=
∫ x2
x1
v0dx (10.75)
Supongamos dos cosas: 1. Que este impulso se aplica a partir de t = 0 (o sea, ∆t = t) y 2.Que v0 es tal, que este impulso-longitud por unidad de masa es unitario:
I
ρ= 1
Para que esto suceda, la velocidad debera tener un valor determinado. Supongamos ahora losiguiente: Tratemos de reducir el intervalo (x1, x2) cada vez mas y, simultaneamente, hacer mas”seco” el golpe, o sea, reducir ∆t, exigiendo, a la vez, que el valor de I/ρ siga siendo unitario.
Evidentemente, el valor de la velocidad v0 que se imprima debera crecer a medida que disminuya(x1, x2) y ∆t → 0. En el lımite, al reducir el intervalo (x1, x2) al punto x0 y ∆t ≡ t → 0,

Metodo de Ondas Viajeras 347
para que el impulso-longitud siga siendo unitario, tendremos que sustituir v0 por δ(x − x0).Como resultado, obtenemos un impulso puntual (aplicado solo en el punto x0 de la cuerda),instantaneo (aplicado solo en el instante inicial t = 0) y de valor I/ρ = 1.
Ası pues, concluimos que dar por velocidad inicial δ(x − x0) significa, fısicamente, dar a lacuerda un impulso inicial I/ρ unitario, instantaneo (en t = 0) y puntual (en x = x0). Larespuesta de la cuerda (es decir, como ella oscila en este caso) es la funcion de Green.
Por consiguiente, fısicamente, G(x, x0, t) es la elongacion del punto x de la cuerda en el instantet, si, en el instante inicial t = 0, en el punto x = x0 de la cuerda, se imprimio un impulso-longitud por unidad de masa unitario, instantaneo y puntual.
Si el impulso se aplica en x = x0, pero no en el instante inicial, sino en el instante t = t0, larespuesta sera G(x, x0, t− t0), conclusion a la que es facil llegar, haciendo un simple cambio devariables en el tiempo.
Una vez definida, obtenida y analizada fısicamente la funcion de Green, pasemos a resolver elproblema de Cauchy de la ecuacion hiperbolica no homogenea en la recta infinita. Fısicamente,buscaremos la expresion de las oscilaciones de una cuerda infinita, provocadas por la accion deuna fuerza dada con densidad por unidad de longitud F (x, t). Como sabemos, la inhomogenei-dad de la ecuacion sera f(x, t) = F (x, t)/ρ. Consideraremos solo el problema con condicionesiniciales nulas:
utt = a2uxx + f(x, t), ∀ −∞ < x <∞, t > 0
u(x, 0) = 0 (10.76)
ut(x, 0) = 0
ya que, de tener condiciones iniciales diferentes de cero, el problema podrıa descomponerse, porel principio de superposicion, en dos problemas, uno de ellos el (10.76) que hemos planteadoy otro que serıa el problema de la ecuacion homogenea con condiciones iniciales diferentes decero, cuya solucion ya conocemos y que viene dada por la formula de D’Alembert.
Para resolver el problema (10.76), cambiemos las variables x y t, respectivamente, por lasvariables ξ y τ , de forma que la ecuacion del problema (10.76) se escribira en la forma
uττ = a2uξξ + f(ξ, τ) (10.77)
Multipliquemos la ecuacion (10.77) por la funcion de Green G(x, ξ, t− τ) que, en virtud de sudefinicion (10.71), satisface el problema:
Gττ = a2Gξξ
G(x, ξ, 0) = 0 (10.78)
Gτ (x, ξ, 0) = −δ(x− ξ)
348 Jose Marın Antuna
Hagamos algunas aclaraciones utiles y necesarias para la comprension del problema (10.78)planteado. De acuerdo con la definicion (10.71) de la funcion de Green, esta convierte enindentidad el problema
Gtt = a2Gxx, ∀ −∞ < x <∞, t > 0
G(x, ξ, 0) = 0
Gt(x, ξ, 0) = δ(x− ξ)
y para G(x, ξ, t− τ) tenemos que Gt = −Gτ ; Gtt = (−1)2Gττ ≡ Gττ y Gxx = Gξξ, por lo que,en terminos de las variables ξ y τ , el problema definitorio de la funcion de Green sera (10.78).
Ası las cosas, multipliquemos -como se dijo arriba- la ecuacion (10.77) por la funcion de GreenG(x, ξ, t − τ) e integremos respecto a ξ por toda la recta, desde −∞ hasta ∞ y respecto a τdesde 0 hasta t. Obtenemos entonces:
∫ t
0
∫ ∞
−∞uττG(x, ξ, t− τ)dξdτ =
∫ t
0
∫ ∞
−∞a2uξξG(x, ξ, t− τ)dξdτ +
+
∫ t
0
∫ ∞
−∞f(ξ, τ)G(x, ξ, t− τ)dξdτ (10.79)
Veamos por separado las dos primeras integrales de la ecuacion (10.79). Tenemos, integrandopor partes:
∫ t
0
∫ ∞
−∞uττGdξdτ =
∫ ∞
−∞uτGdξ|t0 −
∫ t
0
∫ ∞
−∞uτGτdξdτ =
=
∫ ∞
−∞[uτ (ξ, t)G(x, ξ, 0)− uτ (ξ, 0)G(x, ξ, t)]dξ −
∫ t
0
∫ ∞
−∞uτGτdξdτ =
La primera integral desaparece, ya que G(x, ξ, 0) = 0 en virtud de (10.78) y uτ (ξ, 0) = 0 envirtud de (10.76), de manera que, haciendo una segunda integracion por partes
= −∫ ∞
−∞uGτdξ|t0 +
∫ t
0
∫ ∞
−∞uGττdξdτ =
= −∫ ∞
−∞[u(ξ, t)Gτ (x, ξ, 0)− u(ξ, 0)Gτ (x, ξ, t)]dξ +
∫ t
0
∫ ∞
−∞uGττdξdτ
En la primera integral de esta ultima igualdad, Gτ (x, ξ, 0) = −δ(x−ξ) por (10.78) y u(ξ, 0) = 0por (10.76), de manera que, finalmente, obtenemos para la primera integral de la ecuacion(10.79):
Metodo de Ondas Viajeras 349
∫ t
0
∫ ∞
−∞uττG(x, ξ, t− τ)dξdτ = u(x, t) +
∫ t
0
∫ ∞
−∞uGττdξdτ (10.80)
En los pasos realizados en la integracion por partes es conveniente hacer las siguientes aclara-ciones. Al integrar por partes tomamos u = G(x, ξ, t − τ); de ahı, du = dG(x,ξ,t−τ)
d(t−τ) d(t − τ) =dG(x,ξ,t−τ)
−dτ (−dτ) = Gτdτ , de manera que queda clara la operacion realizada.
Actuando de forma similar con la segunda de las integrales de (10.79) y teniendo en cuentaque, en virtud de (10.72), la funcion de Green en ±∞ es cero, obtenemos:
∫ t
0
∫ ∞
−∞a2uξξG(x, ξ, t− τ)dξdτ = a2
∫ t
0
∫ ∞
−∞uGξξdξdτ (10.81)
Colocando (10.80) y (10.81) en (10.79), obtenemos, despues de agrupar:
u(x, t) +
∫ t
0
∫ ∞
−∞[Gττ − a2Gξξ]u(ξ, τ)dξdτ =
∫ t
0
∫ ∞
−∞f(ξ, τ)G(x, ξ, t− τ)dξdτ (10.82)
La integral a la izquierda en (10.82) es cero en virtud de que la expresion entre corchetes delintegrando es cero, por (10.78). Ası pues, finalmente, obtenemos que la solucion del problemade la ecuacion no homogenea (10.76) viene dada por la formula:
u(x, t) =
∫ t
0
∫ ∞
−∞f(ξ, τ)G(x, ξ, t− τ)dξdτ (10.83)
Este resultado, al que hemos llegado por un procedimiento rigurosamente matematico, puede serobtenido igualmente por medio de un razonamiento fısico, cosa que, a veces, resulta conveniente,toda vez que estos son metodos matematicos de la Fısica y, por lo tanto, las ideas fısicasdeben estar siempre presentes en el tratamiento de nuestras ecuaciones. Recordemos que lainhomogeneidad f(x, t) de nuestra ecuacion (10.76) era f(x, t) = F (x, t)/ρ, de donde la fuerzapor unidad de longitud que esta aplicada a la cuerda es F (x, t) = ρf(x, t). Esta fuerza leimprimira al elemento dξ de la cuerda, durante el intervalo de tiempo dτ un impulso que sera
dI = ρf(ξ, τ)dξdτ (10.84)
de manera que el elemento de impulso-longitud por unidad de masa en este caso sera
dI
ρ= f(ξ, τ)dξdτ (10.85)
Si este elemento de impulso-longitud por unidad de masa hubiera sido unitario, la respuestadel elemento dξ, es decir, su elongacion, hubiera sido la funcion de Green G(x, ξ, t − τ). Porconsiguiente, para un impulso dI/ρ veces superior, la respuesta sera dI/ρ veces G, es decir:
350 Jose Marın Antuna
u = f(ξ, τ)G(x, ξ, t− τ)dξdτ (10.86)
Esta serıa la respuesta del elemento de cuerda dξ, si la fuerza que le imprime el impulso (10.85)actuara solamente durante el tiempo dτ . Por lo tanto, para hallar la respuesta de toda lacuerda, teniendo en cuenta que la fuerza actua no solo el tiempo dτ , sino todo el tiempo (0, t),habra que integrar (10.86) respecto a ξ por toda la cuerda y respecto a τ desde 0 hasta t,obteniendose, por lo tanto, la misma expresion (10.83).
Observemos que si, con la ayuda de la formula (10.83) nos proponemos resolver formalmenteel siguiente problema:
utt = a2uxx + δ(x− x0)δ(t), ∀ −∞ < x <∞, t > 0
u(x, 0) = 0 (10.87)
ut(x, 0) = 0
obtenemos por solucion, en virtud de la regla para integrar la funcion delta de Dirac:
u(x, t) =
∫ t
0
∫ ∞
−∞δ(ξ − x0)δ(τ)G(x, ξ, t− τ)dξdτ ≡ G(x, x0, t) (10.88)
Es decir, la funcion de Green. Este resultado es logico, si tenemos en cuenta que la fuerzaF (x, t) = ρδ(x − x0)δ(t) actua solo en el punto x0 y en el instante t = 0 y le imprime a lacuerda un impulso-longitud por unidad de masa
I
ρ=
∫ t
0
∫ ∞
−∞δ(x− x0)δ(t)dxdt = 1
Por consiguiente, concluimos que los problemas (10.71) y (10.87) son equivalentes. Es decir, esequivalente definir la funcion de Green como la respuesta a una velocidad inicial en forma dedelta y definirla como la respuesta a una fuerza aplicada en forma del producto de dos deltas,ya que el resultado de ambos tipos de excitaciones, fısicamente hablando, es el mismo.
Es necesario destacar que la formula (10.83) nos da la solucion del problema de la ecuacion nohomogenea en la forma del producto de la inhomogeneidad de la ecuacion por la funcion deGreen desplazada en el tiempo, integrando por el tiempo transcurrido (0, t) y por el espaciocorrespondiente (en este caso, la recta infinita, desde −∞ hasta ∞); es decir, en forma de unaconvolucion, en el espacio considerado y en el tiempo transcurrido, de la inhomogeneidad dela ecuacion con la funcion de Green. Mas adelante podremos percatarnos de que este no es unresultado casual, sino la expresion de una ley general.
Aun mas, en el capıtulo en el que estudiaremos el Metodo de la funcion de Green para lasolucion de los problemas de la Fısica Matematica, veremos que, en general, para cualquier

Metodo de Ondas Viajeras 351
operador diferencial lineal L[u], la solucion generalizada de la ecuacion L[u] = δ(x) se llamaSolucion Fundamental de dicho operador y que, por tanto, la funcion de Green aquı definiday la que definiremos en otros problemas de frontera, no es mas que la solucion fundamental deloperador correspondiente al problema que estemos estudiando y correspondiente a determinadascondiciones (iniciales y de frontera) impuestas a la ecuacion formada con dicho operador. Eneste sentido debemos destacar el hecho de que la funcion de Green con la que por primeravez aquı nos hemos encontrado es, en realidad, una funcion generalizada, ya que su verdaderosentido lo adquiere a traves de integrales.
Digamos algo mas. En el caso que nos ocupa como, de acuerdo con (10.72), la funcion de Greenes
G(x, ξ, t− τ) =1
2aθ(a(t− τ)− |x− ξ|) (10.89)
concluimos, de la formula (10.83), que la solucion del problema (10.76) se puede escribir como
u(x, t) =1
2a
∫ t
0
∫ x+a(t−τ)
x−a(t−τ)f(ξ, τ)dξdτ ≡
∫ ∫S
f(ξ, τ)dξdτ (10.90)
donde S no es otra cosa que el triangulo caracterıstico para el punto (x, t) (Fig. 10.2).
No es difıcil comprobar que (10.90) es, efectivamente, la solucion del problema (10.76). Enprimer lugar, es evidente de (10.90) que u(x, 0) = 0. Ademas, utilizando la regla conocida parala derivacion respecto a un parametro de las integrales parametricas con lımites dependientesdel parametro, tenemos que:
ut =1
2
∫ t
0
f(x+ a(t− τ), τ) + f(x− a(t− τ), τ)dτ +1
2a
∫ x
x
f(ξ, τ)dξ (10.91)
La ultima integral en (10.91) es, evidentemente, igual a cero, de donde es obvio que u(x, 0) = 0.
Utilizando la misma regla de derivacion, se obtiene:
utt =1
2
∫ t
0
f ′x(x+ a(t− τ), τ)a− f ′x(x− a(t− τ), τ)adτ +1
2f(x, t) +
1
2f(x, t) (10.92)
y
uxx =1
2a
∫ t
0
f ′x(x+ a(t− τ), τ)− f ′x(x− a(t− τ), τ)dτ (10.93)
Colocando (10.92) y (10.93) en la ecuacion del problema (10.76), comprobamos que la convierteen identidad, con lo que queda demostrada la validez de la solucion (10.90).

352 Jose Marın Antuna
10.6 Recta semiinfinita. Metodo de prolongacion
Vamos ahora a estudiar el problema de las oscilaciones de una cuerda semiinfinita. Matema-ticamente, en este caso, ademas de la ecuacion y las condiciones iniciales, habra que imponeruna condicion de frontera en el extremo de la cuerda. Es decir, suponiendo -para fijar ideas-que la condicion de frontera es de primer tipo, el problema a resolver sera:
utt = a2uxx + f(x, t), ∀0 < x <∞, t > 0
u(x, 0) = ϕ(x) (10.94)
ut(x, 0) = ψ(x)
u(0, t) = µ(t)
Aquı estamos en presencia del primer problema de frontera para la recta semiinfinita. Elsegundo problema de frontera se plantearıa con la condicion de frontera de segundo tipo:
ux(0, t) = µ(t) (10.95)
y el tercer problema de frontera corresponderıa a la condicion de frontera de tercer tipo:
ux(0, t)− hu(0, t) = µ(t) (10.96)
Veremos, inicialmente, el primer problema de frontera. Con vistas a resolverlo, abordaremosprimero el caso mas sencillo, que es cuando no hay fuerzas externas aplicadas (ecuacion ho-mogenea) y cuando, ademas, la condicion de frontera de primer tipo es homogenea (condicionde extremo fijo). Es decir, buscaremos la solucion del siguiente problema:
utt = a2uxx, ∀0 < x <∞, t > 0
u(x, 0) = ϕ(x) (10.97)
ut(x, 0) = ψ(x)
u(0, t) = 0
Con vistas a hallar la solucion del problema (10.97), desarrollaremos el llamado Metodo deProlongacion. Para ello, veamos el siguiente problema en la recta infinita:
Utt = a2Uxx, ∀ −∞ < x <∞, t > 0
U(x, 0) = Φ(x) (10.98)
Ut(x, 0) = Ψ(x)
Metodo de Ondas Viajeras 353
Para el problema (10.98) tiene validez el siguiente lema:
Lema.
Si las condiciones iniciales del problema (10.98), Φ(x) y Ψ(x), son funciones impares de suargumento, entonces, la solucion de (10.98) cumple que U(0, t) = 0. Si Φ(x) y Ψ(x) sonfunciones pares, entonces, la solucion de (10.98) cumple que Ux(0, t) = 0.
Demostracion:
La solucion del problema (10.98) viene dada por la formula de D’Alembert que, en este caso,tiene la forma
U(x, t) =Φ(x+ at) + Φ(x− at)
2+
1
2a
∫ x+at
x−atΨ(α)dα (10.99)
a) Sean Φ(x) y Ψ(x) impares. Es decir:
Φ(x) = −Φ(−x), Ψ(x) = −Ψ(−x) (10.100)
Entonces, evidentemente
U(0, t) =Φ(at) + Φ(−at)
2+
1
2a
∫ at
−atΨ(α)dα = 0
en virtud de (10.100), con lo que queda demostrada la primera afirmacion del lema.
b) Sean Φ(x) y Ψ(x) pares, o sea:
Φ(x) = Φ(−x), Ψ(x) = Ψ(−x) (10.101)
Derivando (10.99), tendremos:
Ux(x, t) =Φ′(x+ at) + Φ′(x− at)
2+
1
2a[Ψ(x+ at)−Ψ(x− at)]
de donde, evidentemente
Ux(0, t) =Φ′(at) + Φ′(−at)
2+
1
2a[Ψ(at)−Ψ(−at)] = 0
ya que, como Φ(x) es par, Φ′(x) es impar.
Demostrado el lema.
354 Jose Marın Antuna
Con ayuda de este lema podemos resolver el problema (10.97). Para ello, resolveremos el pro-blema (10.98) en la recta infinita, donde las funciones Φ(x) y Ψ(x) las construimos, prolongandode forma impar las funciones ϕ(x) y ψ(x) del problema (10.97) hacia el semieje negativo:
Φ(x) = ϕ(x), ∀x > 0
Φ(x) = −ϕ(−x), ∀x < 0
Ψ(x) = ψ(x), ∀x > 0 (10.102)
Ψ(−x) = −ψ(−x), ∀x < 0
Entonces, tendremos una cuerda infinita que oscila segun la ley (10.99) y para la cual, en virtuddel lema demostrado, se cumple que U(0, t) = 0. Por solucion del problema (10.97) tomamos
u(x, t) = U(x, t), ∀x > 0 (10.103)
ya que esta funcion satisface la ecuacion para 0 < x < ∞, t > 0, satisface las condicionesiniciales y satisface, ademas, por construccion, la condicion de frontera de (10.97).
Para escribir de forma explıcita la solucion (10.103), debemos tener en cuenta el signo de losargumentos en las funciones que aparecen en (10.99), de acuerdo con la definicion de Φ(x) y deΨ(x) dada por (10.102).
Ası, como x + at, para x > 0, siempre es positivo, solo tenemos que ocuparnos del argumentox− at. Tenemos dos casos posibles:
a) x− at > 0.
En este caso, teniendo en cuenta (10.102), la solucion del problema (10.97), de acuerdo con laformula (10.99), sera:
u(x, t) =ϕ(x+ at) + ϕ(x− at)
2+
1
2a
∫ x+at
x−atψ(α)dα, ∀t < x
a(10.104)
La formula (10.104) nos indica que, para un punto x de la cuerda, en el intervalo de tiempo0 < t < x
a, este se mueve como si fuera un punto de una cuerda infinita, ya que (10.104) es
identica a la solucion de D’Alembert de la cuerda infinita. Es decir, que para este rango devalores del tiempo, la presencia de la frontera fija x = 0 no ha podido todavıa hacerse sentir enel movimiento de dicho punto, ya que la velocidad de propagacion de la informacion a lo largode la cuerda es a.
b) x− at < 0.
En este caso, por ser un argumento negativo y en virtud de (10.102), tendremos que
Φ(x− at) = −ϕ(at− x) (10.105)

Metodo de Ondas Viajeras 355
Ademas, por ser Ψ(x) impar, tendremos que
∫ x+at
x−atΨ(α)dα =
∫ at−x
x−atΨ(α)dα+
∫ x+at
at−xΨ(α)dα (10.106)
En la expresion (10.106), la primera integral a la derecha es cero, por ser la integral de unafuncion impar entre lımites simetricos y el integrando de la segunda integral es ψ(α), ya que loslımites de integracion son, ambos, positivos. Teniendo en cuenta (10.105) y (10.106), concluimosque, en este caso, la solucion viene dada por la ley
u(x, t) =ϕ(x+ at) + ϕ(at− x)
2+
1
2a
∫ x+at
at−xψ(α)dα, ∀t > x
a(10.107)
lo que significa que, para tiempos t > xa, el punto x de la cuerda ya siente la influencia de la
frontera y, por lo tanto se mueve con una ley diferente del caso de la cuerda infinita.
Haciendo un analisis en el espacio de fase (Fig. 10.10.)
vemos que, mientras mas lejos se encuentre el punto x de la frontera x = 0 de la cuerda, mastiempo este se movera como si perteneciera a una cuerda infinita.
Supongamos, ahora, que queremos resolver el segundo problema de frontera para la ecuacionhomogenea en la recta semiinfinita con condicion de frontera de segundo tipo homogenea:
utt = a2uxx, ∀0 < x <∞, t > 0
u(x, 0) = ϕ(x) (10.108)
ut(x, 0) = ψ(x)
ux(0, t) = 0
En este caso, en virtud del lema demostrado, lo que procede es efectuar una prolongacion parde las condiciones iniciales del problema (10.108), de manera que las condiciones iniciales delproblema (10.98) en la recta infinita en este caso vendran dadas por las expresiones
Φ(x) = ϕ(x), ∀x > 0
Φ(x) = ϕ(−x), ∀x < 0
Ψ(x) = ψ(x), ∀x > 0 (10.109)
Ψ(−x) = ψ(−x), ∀x < 0
Entonces, la solucion de (10.108) vendra dada por la formula (10.99), en la que debera hacerseun analisis similar del signo del argumento x − at, con vistas a escribir, explıcitamente, lasolucion en los distintos intervalos de tiempo.
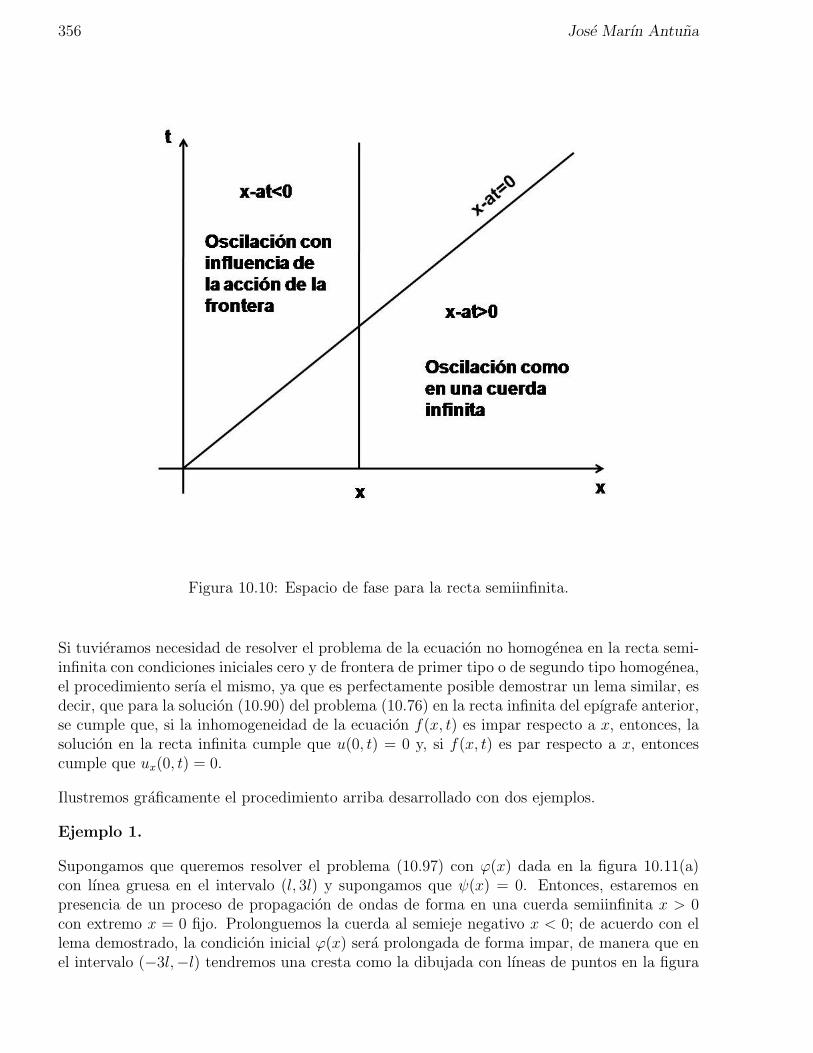
356 Jose Marın Antuna
Figura 10.10: Espacio de fase para la recta semiinfinita.
Si tuvieramos necesidad de resolver el problema de la ecuacion no homogenea en la recta semi-infinita con condiciones iniciales cero y de frontera de primer tipo o de segundo tipo homogenea,el procedimiento serıa el mismo, ya que es perfectamente posible demostrar un lema similar, esdecir, que para la solucion (10.90) del problema (10.76) en la recta infinita del epıgrafe anterior,se cumple que, si la inhomogeneidad de la ecuacion f(x, t) es impar respecto a x, entonces, lasolucion en la recta infinita cumple que u(0, t) = 0 y, si f(x, t) es par respecto a x, entoncescumple que ux(0, t) = 0.
Ilustremos graficamente el procedimiento arriba desarrollado con dos ejemplos.
Ejemplo 1.
Supongamos que queremos resolver el problema (10.97) con ϕ(x) dada en la figura 10.11(a)con lınea gruesa en el intervalo (l, 3l) y supongamos que ψ(x) = 0. Entonces, estaremos enpresencia de un proceso de propagacion de ondas de forma en una cuerda semiinfinita x > 0con extremo x = 0 fijo. Prolonguemos la cuerda al semieje negativo x < 0; de acuerdo con ellema demostrado, la condicion inicial ϕ(x) sera prolongada de forma impar, de manera que enel intervalo (−3l,−l) tendremos una cresta como la dibujada con lıneas de puntos en la figura
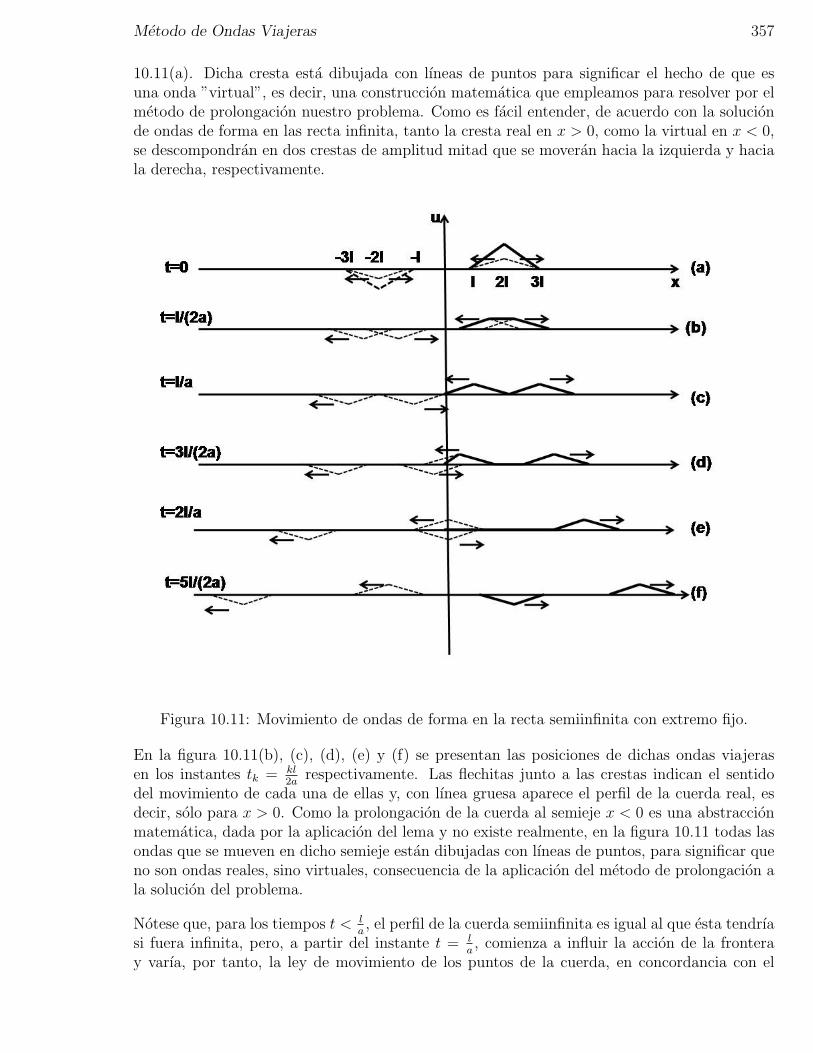
Metodo de Ondas Viajeras 357
10.11(a). Dicha cresta esta dibujada con lıneas de puntos para significar el hecho de que esuna onda ”virtual”, es decir, una construccion matematica que empleamos para resolver por elmetodo de prolongacion nuestro problema. Como es facil entender, de acuerdo con la solucionde ondas de forma en las recta infinita, tanto la cresta real en x > 0, como la virtual en x < 0,se descompondran en dos crestas de amplitud mitad que se moveran hacia la izquierda y haciala derecha, respectivamente.
Figura 10.11: Movimiento de ondas de forma en la recta semiinfinita con extremo fijo.
En la figura 10.11(b), (c), (d), (e) y (f) se presentan las posiciones de dichas ondas viajerasen los instantes tk = kl
2arespectivamente. Las flechitas junto a las crestas indican el sentido
del movimiento de cada una de ellas y, con lınea gruesa aparece el perfil de la cuerda real, esdecir, solo para x > 0. Como la prolongacion de la cuerda al semieje x < 0 es una abstraccionmatematica, dada por la aplicacion del lema y no existe realmente, en la figura 10.11 todas lasondas que se mueven en dicho semieje estan dibujadas con lıneas de puntos, para significar queno son ondas reales, sino virtuales, consecuencia de la aplicacion del metodo de prolongacion ala solucion del problema.
Notese que, para los tiempos t < la, el perfil de la cuerda semiinfinita es igual al que esta tendrıa
si fuera infinita, pero, a partir del instante t = la, comienza a influir la accion de la frontera
y varıa, por tanto, la ley de movimiento de los puntos de la cuerda, en concordancia con el
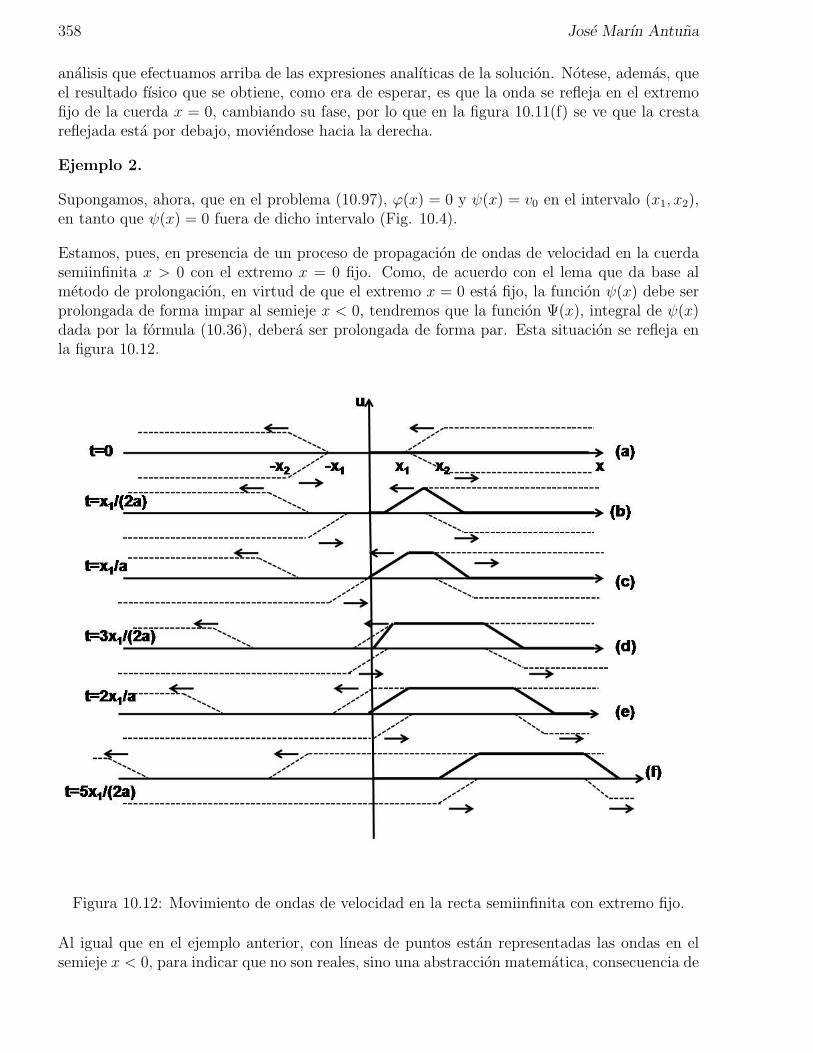
358 Jose Marın Antuna
analisis que efectuamos arriba de las expresiones analıticas de la solucion. Notese, ademas, queel resultado fısico que se obtiene, como era de esperar, es que la onda se refleja en el extremofijo de la cuerda x = 0, cambiando su fase, por lo que en la figura 10.11(f) se ve que la crestareflejada esta por debajo, moviendose hacia la derecha.
Ejemplo 2.
Supongamos, ahora, que en el problema (10.97), ϕ(x) = 0 y ψ(x) = v0 en el intervalo (x1, x2),en tanto que ψ(x) = 0 fuera de dicho intervalo (Fig. 10.4).
Estamos, pues, en presencia de un proceso de propagacion de ondas de velocidad en la cuerdasemiinfinita x > 0 con el extremo x = 0 fijo. Como, de acuerdo con el lema que da base almetodo de prolongacion, en virtud de que el extremo x = 0 esta fijo, la funcion ψ(x) debe serprolongada de forma impar al semieje x < 0, tendremos que la funcion Ψ(x), integral de ψ(x)dada por la formula (10.36), debera ser prolongada de forma par. Esta situacion se refleja enla figura 10.12.
Figura 10.12: Movimiento de ondas de velocidad en la recta semiinfinita con extremo fijo.
Al igual que en el ejemplo anterior, con lıneas de puntos estan representadas las ondas en elsemieje x < 0, para indicar que no son reales, sino una abstraccion matematica, consecuencia de

Metodo de Ondas Viajeras 359
la aplicacion del principio de prolongacion. En la figura 10.12(a) se presenta la situacion parael instante inicial t = 0; con lınea gruesa se ve el perfil de la cuerda. Las flechitas a un lado delas ondas indican su movimiento y en las figuras 10.12(b), (c), (d), (e) y (f) se puede apreciar elproceso de propagacion de las ondas y el perfil resultante de la cuerda en cada instante tk = kx1
2a,
con k = 1, 2, 3, 4, y 6, respectivamente. Para fijar ideas hemos tomado x2 = 2x1 en el grafico.
Digamos, por ultimo, que si quisieramos resolver estos mismos ejemplos en la cuerda semiin-finita, cuyo extremo x = 0 esta libre (condicion ux(0, t) = 0), entonces, de acuerdo con el lemay el principio de prolongacion que este sustenta, las prolongaciones tendran que ser realizadasde forma par.
Ello significa que, en el caso del Ejemplo 1, la cresta virtual en el semieje x < 0 deberaconstruirse como se muestra en la figura 10.13 y luego mover, como indican las flechitas, lascrestas de amplitud mitad hacia la izquierda y hacia la derecha y tomar como perfil de la cuerdael que se obtenga en el semieje x > 0. Puede comprobarse que el resultado fısico que, en estecaso, se obtiene es que la onda se refleja en el extremo libre sin cambiar de fase. Dejamos allector la realizacion grafica de este resultado para que constate por sı mismo la validez de estaafirmacion.
Figura 10.13: Prolongacion par en el caso de recta semiinfinita con extremo libre.

360 Jose Marın Antuna
En el caso del segundo ejemplo, cuando el extremo x = 0 esta libre, la prolongacion par de lafuncion ψ(x) implica la prolongacion impar de su integral Ψ(x), por lo que, en la Fig. 10.12(a)solo hay que cambiar el sentido del movimiento de las ondas virtuales que aparecen en el semiejex < 0, es decir, mover hacia la derecha la onda dibujada con lıneas de puntos con amplitudpositiva (por encima del eje x) y hacia la izquierda la de amplitud negativa (por debajo del ejex). El lector debe construir por sı solo el perfil de la cuerda (x > 0) para los tiempos indicados,a modo de ejercicio.
Al igual que en los casos de la recta infinita, proponemos al lector obtener estos mismos graficoscon la ayuda de la programacion por ejemplo con el uso del Mathematica.
Supongamos, ahora, que la condicion de frontera es no homogenea. Es decir, resolvamos elproblema
utt = a2uxx, ∀0 < x <∞, t > 0
u(x, 0) = 0 (10.110)
ut(x, 0) = 0
u(0, t) = µ(t)
Aquı consideramos las condiciones iniciales nulas ya que, en caso contrario, el principio desuperposicion nos permitirıa desdoblar el problema en dos: uno serıa el problema (10.97) yaresuelto y el otro el (10.110) que acabamos de plantear.
Desde el punto de vista fısico, podemos decir que, como no hay condiciones iniciales, ni fuerzasactuando sobre la cuerda y lo unico que se mueve es el extremo x = 0 por la ley dada comocondicion de frontera en (10.110), por lo tanto, segun el metodo de ondas viajeras, solo podrasurgir una onda que viaje de izquierda a derecha, es decir, que la solucion tendra la forma:
u(x, t) = f(x− at) (10.111)
Hallaremos la funcion f a partir de la condicion de frontera. Es decir:
u(0, t) = f(−at) = µ(t)
o, llamandole z = −at, t = −z/a, obtenemos la relacion funcional:
f(z) = µ(za
)(10.112)
Por consiguiente, para el argumento z = x− at, tendremos
f(x− at) = µ
(x− at
a
)= µ
(t− x
a
)(10.113)

Metodo de Ondas Viajeras 361
Finalmente, la solucion de nuestro problema sera:
u(x, t) = µ(t− x
a
), ∀t > x
a(10.114)
u(x, t) = 0, ∀t < x
a
Es decir,
u(x, t) = θ(t− x
a
)µ(t− x
a
)donde θ(t) es la funcion paso unitario de Heaviside.
En (10.114) hemos tenido en consideracion el hecho de que, en el planteamiento del problema(10.110), la condicion de frontera es valida para t > 0, en tanto que, para t < 0, es supuestacero, ya que t = 0 es el inicio, a partir del cual, fısicamente, consideramos nuestro proceso.De ahı que, para su argumento negativo (t − x/a < 0), la solucion sea cero. Esto ultimo, quees reflejado en la segunda igualdad de la expresion (10.114), significa, fısicamente, que, paratiempos menores que x/a, la onda originada en x = 0 y que viaja de izquierda a derecha convelocidad a, no ha tenido tiempo aun de llegar al punto x, por lo que este se encuentra en estadode reposo, con elongacion cero. Esta solucion la hemos obtenido aquı utilizando el metodo deondas viajeras. Mas adelante, en el capıtulo dedicado al Metodo de Transformadas Integralesveremos como se puede llegar al mismo resultado, aplicando la transformada de Laplace.
Para el segundo problema de frontera
utt = a2uxx, ∀0 < x <∞, t > 0
u(x, 0) = 0 (10.115)
ut(x, 0) = 0
ux(0, t) = ν(t)
se puede aplicar el metodo de ondas viajeras de manera similar a lo hecho arriba. El resultado,que se deja al lector a modo de ejercicio, se obtiene en la forma
u(x, t) = −a∫ t
0
ν(τ − x
a
)dτ (10.116)
y, por el metodo de transformadas integrales, sera tambien obtenido posteriormente. Allıtambien veremos la solucion del tercer problema de frontera en la cuerda semiinfinita, con loque quedaran completamente resueltos todos los problemas que se puedan presentar en ella.
Digamos, por ultimo, que si nuestro objetivo es resolver el problema:

362 Jose Marın Antuna
utt = a2uxx + f(x, t), ∀0 < x <∞, t > 0
u(x, 0) = 0 (10.117)
ut(x, 0) = 0
u(0, t) = 0
en el que, fısicamente hablando, las oscilaciones de una cuerda semiinfinita con extremo x = 0fijo y con elongacion inicial y velocidad inicial nulas son provocadas por una fuerza aplicada ala misma, la solucion tendra la expresion:
u(x, t) =
∫ t
0
∫ ∞
0
f(ξ, τ)G1(x, ξ, t− τ)dξdτ (10.118)
donde la funcion de Green que aparece bajo el signo de integracion se obtiene mediante laprolongacion impar de la velocidad inicial deltaica que la define; es decir, G1(x, ξ, t) sera lasolucion del problema
utt = a2uxx, ∀0 < x <∞, t > 0
u(x, 0) = 0 (10.119)
ut(x, 0) = δ(x− ξ)
u(0, t) = 0
equivalente, gracias al lema demostrado, al problema en la recta infinita
utt = a2uxx, ∀ −∞ < x <∞, t > 0
u(x, 0) = 0 (10.120)
ut(x, 0) = δ(x− ξ)− δ(x+ ξ)
El metodo de ondas viajeras estudiado en este capıtulo tiene su fundamentacion en el hechode que la solucion general de la ecuacion hiperbolica tiene la forma de la superposicion dedos ondas viajeras. Con su ayuda, pues, pueden ser resueltos problemas mas complejos deoscilaciones de cuerdas infinitas y semiinfinitas formadas por la union de dos o mas cuerdas dediferentes densidades, donde se tengan en cuenta otras condiciones fısicas como, por ejemplo,la presencia de objetos materiales de masa definida ensartados en la cuerda, etc. Con estotratamos de hacer ver que no hemos, ni con mucho, agotado toda la gama de problemas queen cuerdas infinitas y semiinfinitas pueden resolverse con la ayuda de este metodo. Cuandoestudiemos mas adelante los procesos oscilatorios en el espacio abierto, veremos la ampliacionde los resultados obtenidos en el presente capıtulo a los casos bi y tridimensional y podremospercatarnos de algunas generalidades de las leyes que aquı hemos estudiado.
Metodo de Ondas Viajeras 363
Es logico preguntarse como actuar en el caso en que la cuerda tenga una longitud finita. Paraaplicar el metodo de ondas viajeras, tendrıamos que hacer prolongaciones pares o impares enlos extremos de la cuerda, en dependencia de si los extremos estan libres o fijos y aplicarlos metodos estudiados en este capıtulo. Aunque en principio ello es factible, sin embargoresulta muy engorroso y nada practico, pues las ondas empiezan a reflejarse y su superposiciones muy difıcil de construir. Esto sin hablar ya de que, si las condiciones de frontera son detercer tipo, el procedimiento se hace mucho mas complejo. Por ello, en el proximo capıtulonos dedicaremos al estudio de otro metodo de solucion, el metodo de separacion de variables,que no solo resulta util para resolver los problemas de oscilaciones de cuerdas finitas sin lasdificultades operativas arriba mencionadas del metodo de ondas viajeras para ese caso, sino queresulta un metodo -como veremos- extraordinariamente potente y aplicable, ademas de paralas ecuaciones hiperbolicas, para las ecuaciones parabolicas y para las ecuaciones elıpticas.
10.7 Ejercicios del capıtulo
1. Una cuerda infinita se excita por un desplazamiento inicial local en forma de una parabolacuadratica (Fig. 10.14). Hallar:
a) las formulas que expresan el perfil de la cuerda para t > 0 y
b) las formulas que expresan la ley de movimiento de los puntos de la cuerda con distintasabcisas para t > 0.
2. En el instante t = 0 una cuerda infinita es excitada mediante un desplazamiento inicial,como el que se observa en la figura 10.15. ¿En que punto x y en que instante t > 0 laamplitud de la cuerda sera maxima? ¿Cual sera el valor de dicha amplitud?
3. Una cuerda infinita recibe en el instante inicial t = 0 un golpe seco en el punto x = x0 quele imprime un impulso I. Hallar la elongacion u(x, t) de la cuerda para t > 0, suponiendoque la elongacion inicial de la cuerda es nula.
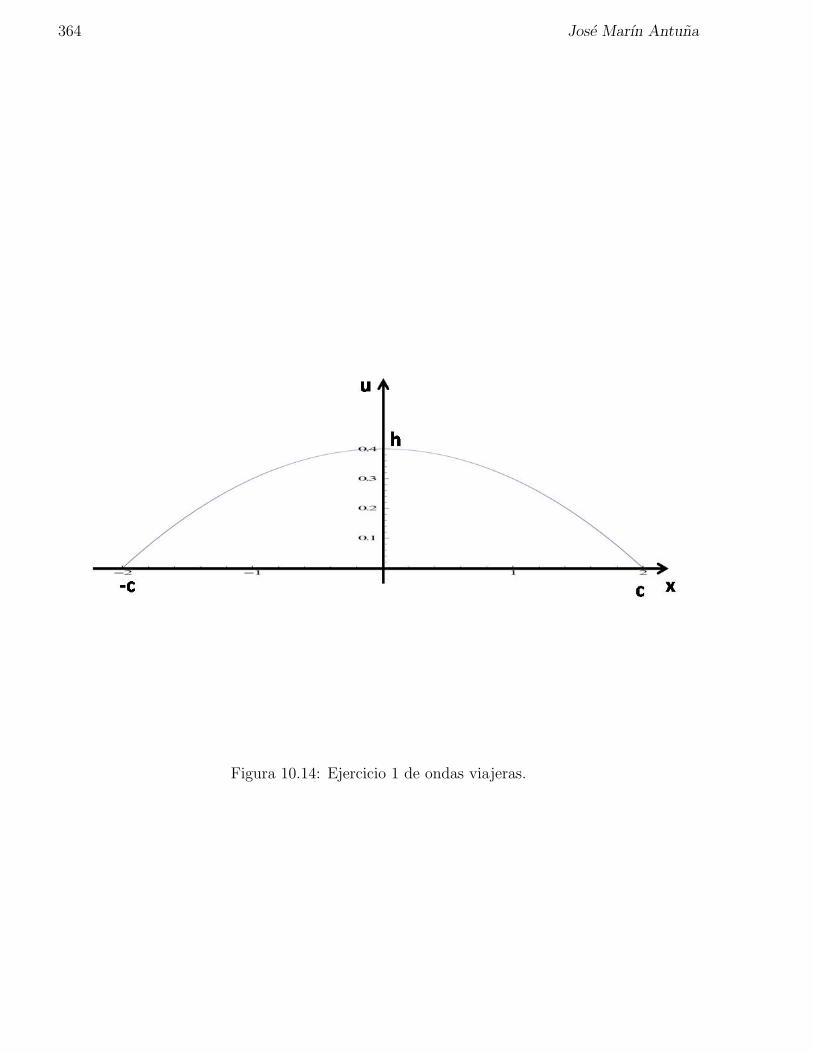
364 Jose Marın Antuna
Figura 10.14: Ejercicio 1 de ondas viajeras.
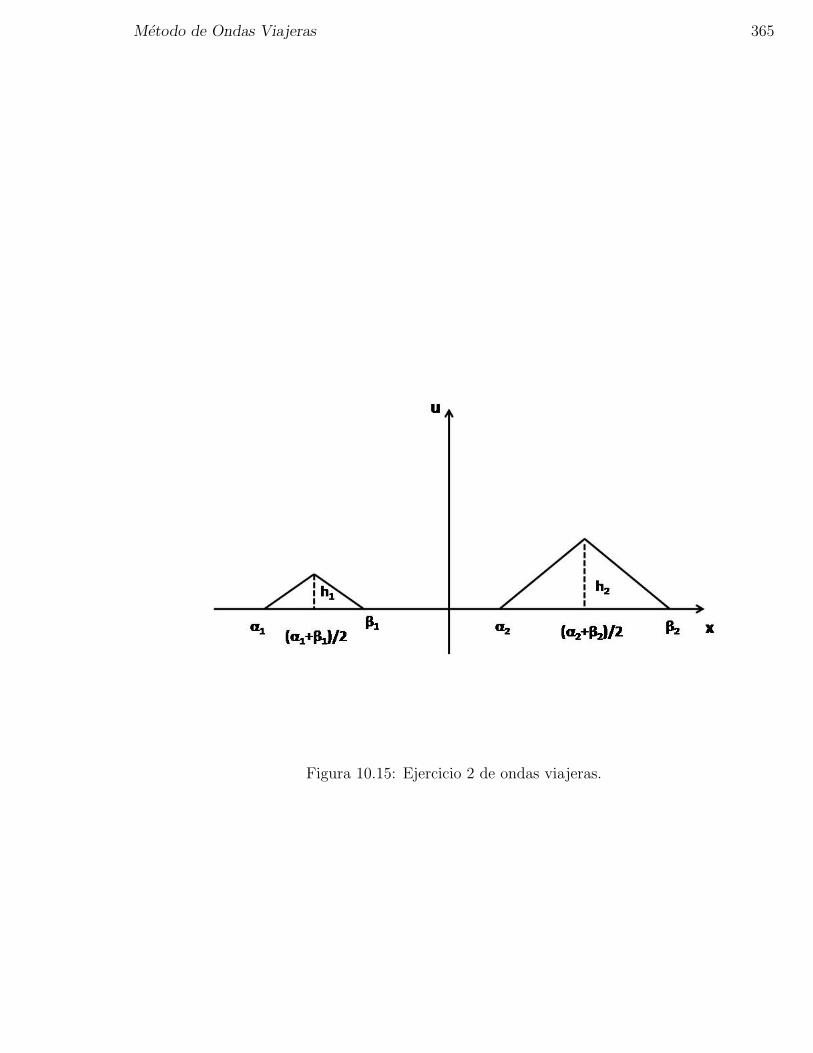
Metodo de Ondas Viajeras 365
Figura 10.15: Ejercicio 2 de ondas viajeras.

366 Jose Marın Antuna
Capıtulo 11
Metodo de Separacion de Variables
En el presente capıtulo desarrollaremos uno de los metodos mas universales y utiles de trabajoen la resolucion de los problemas de frontera de las ecuaciones de la Fısica Matematica y que,en esencia, esta basado en los desarrollos de funciones en series de Fourier en una base defunciones que forman un sistema ortogonal y completo de funciones.
Desarrollaremos el metodo, primero, para casos particulares y, luego, lo generalizaremos. Parael desarrollo del metodo, estudiaremos, primero, el caso mas simple, de la ecuacion homogeneacon condiciones iniciales dadas y condiciones de frontera homogeneas. Debemos destacar que,para poder aplicar el metodo de separacion de variables, es indispensable que las condicionesde frontera sean homogeneas.
11.1 Ecuaciones hiperbolicas y parabolicas unidimensio-
nales
Supongamos que queremos hallar las oscilaciones transversales de una cuerda de longitud lque es excitada por una elongacion y una velocidad iniciales dadas, sin haber fuerzas externasaplicadas sobre ella. Supondremos, inicialmente, a fin de ilustrar el metodo de separacion devariables cuyo estudio es objeto de nuestro capıtulo, que los extremos de la cuerda estan fijos.Es decir, resolveremos el primer problema de frontera homogeneo de la ecuacion hiperbolicahomogenea con condiciones iniciales dadas. Su planteamiento matematico es:
utt = a2uxx, ∀0 < x < l, t > 0
u(x, 0) = ϕ(x)
ut(x, 0) = ψ(x) (11.1)
u(0, t) = 0
u(l, t) = 0
367

368 Jose Marın Antuna
Supongamos, tambien, que queremos hallar la temperatura de una barra de longitud l provo-cada por una distribucion inicial de temperaturas en la barra dada por una funcion conocida,si los extremos de la barra se mantienen todo el tiempo a temperatura cero. Es decir, que-remos resolver el problema de la ecuacion parabolica homogenea con condicion inicial dada ycondiciones de frontera de primer tipo homogeneas:
ut = a2uxx, ∀0 < x < l, t > 0
u(x, 0) = ϕ(x) (11.2)
u(0, t) = 0
u(l, t) = 0
11.1.1 Problema auxiliar
Con el objetivo de resolver los problemas (11.1) y (11.2), plantearemos los siguientes proble-mas auxiliares, consistentes en la ecuacion que se quiere resolver (hiperbolica o parabolica,segun el caso), las condiciones de frontera del problema que se quiere resolver (en ambos casosplanteados, las condiciones de primer tipo) y la exigencia de que la solucion tenga la formade un producto de dos funciones, una dependiente solamente de la coordenada espacial y otradependiente solamente del tiempo, exigiendo que dicha solucion sea no trivial. Es decir, paralos problemas (11.1) y (11.2) plantearemos los siguientes problemas auxiliares:
utt = a2uxx, ∀0 < x < l, t > 0
u(0, t) = 0 (11.3)
u(l, t) = 0
u(x, t) = X(x)T (t) 6= 0
ut = a2uxx, ∀0 < x < l, t > 0
u(0, t) = 0 (11.4)
u(l, t) = 0
u(x, t) = X(x)T (t) 6= 0
Para resolver los problemas (11.3) y (11.4), coloquemos explıcitamente la solucion propuestaen la ecuacion de cada problema. Entonces obtenemos:
T ′′X = a2TX ′′, T ′X = a2TX ′′ (11.5)
Como, por hipotesis, en ambos problemas T (t)X(x) 6= 0, dividiendo por a2TX, obtenemos:

Metodo de Separacion de Variables 369
T ′′
a2T=X ′′
X= −λ, T ′
a2T=X ′′
X= −λ (11.6)
A la extrema derecha de ambas ecuaciones (11.6) hemos escrito una constante (−λ) debido aque, a la izquierda en cada una de dichas ecuaciones, tenemos una funcion dependiente solo det, en tanto que, a la derecha, tenemos una funcion solo dependiente de x. Por consiguiente, porejemplo, si evaluamos la parte izquierda de ambas ecuaciones para un tiempo fijo dado t = t0,obtenemos que la funcion de x a la derecha de ambas ecuaciones es igual a una constante y, deforma similar, si evaluamos a la derecha en un punto x = x0, la funcion de t de la izquierdaen ambas ecuaciones es una constante. A esa constante en las ecuaciones la denotamos por λ,donde el signo menos ha sido puesto por comodidad, en virtud de consideraciones que se haranevidentes mas adelante.
De esta manera, de (11.6) obtenemos, para la funcion T (t), las siguientes ecuaciones:
T ′′ + λa2T = 0, T ′ + λa2T = 0 (11.7)
donde, en general, lo unico que se exige por ahora es que la solucion sea no trivial, es decir,T (t) 6= 0. Las ecuaciones (11.7) son ordinarias y sus soluciones son, respectivamente:
T (t) = A cos√λat+B sin
√λat (11.8)
para la ecuacion de la izquierda en (11.7),
T (t) = Ce−λa2t (11.9)
para la ecuacion de la derecha en (11.7). En (11.8) y (11.9) A, B y C son, por el momento,constantes arbitrarias.
Para la funcion X(x) de ambas ecuaciones (11.6) se obtiene, tanto para el caso hiperbolico,como para el parabolico, la misma ecuacionX ′′+λX = 0, a la que podemos imponer condicionesque salen de las condiciones de frontera del problema inicial. Efectivamente, en virtud de losproblemas auxiliares (11.3) y (11.4), tenemos que
u(0, t) = T (t)X(0) = 0, u(l, t) = T (t)X(l) = 0
y, como la funcion T (t) no puede ser identicamente cero, esto significa que X(0) = 0, X(l) = 0.Por consiguiente, para el caso hiperbolico y para el parabolico obtenemos el mismo problemapara hallar la funcion X(x):

370 Jose Marın Antuna
X ′′ + λX = 0, ∀0 < x < l
X(0) = 0 (11.10)
X(l) = 0
X(x) 6= 0
El problema (11.10) es de extraordinaria importancia y tiene soluciones no triviales solamentepara determinados valores del parametro λ, por lo que tiene lugar la siguiente importantısimadefinicion:
Definicion:
Aquellos valores de λ, para los cuales el problema (11.10) tiene solucion no trivial se llamanautovalores o valores propios de dicho problema. Las soluciones no triviales que les corres-ponden se llaman autofunciones o funciones propias del problema. El problema (11.10)recibe el nombre de problema de autovalores o problema de Sturm-Liouville.
Hallemos los autovalores y las autofunciones, es decir, resolvamos el problema de Sturm-Liouville (11.10). Existen tres posibilidades:
1. λ = −µ2 < 0.
En este caso, la ecuacion del problema (11.10) sera
X ′′ − µ2X = 0 (11.11)
cuya solucion general es:
X(x) = C1eµx + C2e
−µx (11.12)
Exigiendo que (11.12) cumpla las condiciones de frontera de (11.10), tenemos:
x(0) = C1 + C2 = 0
de donde C2 = −C1 y, por tanto
X(x) = C1[eµx − e−µx] = 2C1 sinhµx
De aquı X(l) = 2C1 sinhµl = 0 de donde C1 = 0, ya que sinhµl 6= 0, pues µ 6= 0.
Por consiguiente, en este caso, la solucion serıa la trivial: X(x) ≡ 0. Por lo tanto, λ nopuede ser negativa.
2. λ = 0.
En este caso, la ecuacion de (11.10) serıa
Metodo de Separacion de Variables 371
X ′′ = 0 (11.13)
cuya solucion general es
X(x) = C1x+ C2 (11.14)
Evaluando (11.14) para las condiciones de frontera, se obtiene, facilmente, que C1 = 0 yC2 = 0, por lo que, en este caso, la solucion tambien serıa la trivial. Por consiguiente, λtampoco puede ser cero.
3. λ > 0.
En este caso, la ecuacion de (11.10) tiene por solucion general
X(x) = C1 cos√λx+ C2 sin
√λx (11.15)
Exijamos que (11.15) cumpla con las condiciones de frontera del problema (11.10). Ten-dremos:
X(0) = C1 = 0
Por lo tanto, la solucion sera
X(x) = C2 sin√λx (11.16)
De (11.16):
X(l) = C2 sin√λl = 0 (11.17)
C2 no puede ser igual a cero, pues, entonces, la solucion serıa la trivial y nosotros estamosbuscando las soluciones no triviales. Por consiguiente, de (11.17) concluimos que tieneque cumplirse que
sin√λl = 0 (11.18)
La ecuacion (11.18) se cumplira para√λl = nπ, con n = 1, 2, 3, ... Por lo tanto, los
autovalores del problema (11.10) son:
λn =(nπl
)2
, n = 1, 2, 3, ... (11.19)
y, en virtud de (11.16), las autofunciones del problema (11.10) seran:
Xn(x) = sinnπ
lx, n = 1, 2, 3, ... (11.20)
Notese que el numero entero n no puede tomar el valor cero, pues, en ese caso, X0(x) ≡ 0serıa trivial y, por consiguiente, no serıa autofuncion.

372 Jose Marın Antuna
En (11.20) hemos supuesto C2 = 1, ya que, como la ecuacion del problema de Sturm-Liouville (11.10) es homogenea, la solucion, multiplicada por cualquier constante, es tam-bien solucion y a nosotros lo que nos interesaba hallar era la expresion de la dependenciafuncional.
Una vez halladas las autofunciones y los autovalores del problema (11.10), escribiremos lassoluciones (11.8) y (11.9) de las ecuaciones (11.7) solo para los autovalores (11.19), ya que ellosson los unicos que dan autofunciones, es decir, soluciones no triviales de (11.10) y, por lo tanto,soluciones no triviales de los problemas auxiliares (11.3) y (11.4).
Las soluciones de los problemas auxiliares (11.3) y (11.4) seran, por lo tanto:
un(x, t) =An cos
nπa
lt+Bn sin
nπa
lt
sinnπ
lx (11.21)
para el caso del problema hiperbolico (11.3) y
un(x, t) = Cne−(nπa
l )2t sin
nπ
lx (11.22)
para el caso del problema parabolico (11.4). En ambos casos n = 1, 2, 3, ...
De no haber considerado C2 = 1 en (11.20), una simple redefinicion de los coeficientes arbitrariosAn y Bn en el caso hiperbolico, o del coeficiente Cn en el caso parabolico, nos hubiera conducidoa las expresiones (11.21) y (11.22).
11.1.2 Solucion de los problemas iniciales
Las funciones (11.21) y (11.22) satisfacen en cada caso, para toda n, la ecuacion y las condicionesde frontera de los problemas (11.1) y (11.2), respectivamente. Por lo tanto, por superposicion,proponemos:
Para la solucion del problema hiperbolico (11.1):
u(x, t) =∞∑n=1
An cos
nπa
lt+Bn sin
nπa
lt
sinnπ
lx (11.23)
Para la solucion del problema parabolico (11.2):
u(x, t) =∞∑n=1
Cne−(nπa
l )2t sin
nπ
lx (11.24)
Por construccion, estas soluciones propuestas satisfacen la ecuacion y las condiciones de fron-tera, respectivamente, de los problemas.

Metodo de Separacion de Variables 373
En (11.23) aparecen dos constantes a determinar a partir de las condiciones iniciales del pro-blema (11.1) y en (11.24) una constante a determinar a partir de la condicion inicial del pro-blema (11.2).
Exijamos, pues, que las soluciones (11.23) y (11.24) satisfagan, ademas, las condiciones inicialesde los problemas respectivos. Tendremos entonces:
En el caso de la ecuacion hiperbolica:
u(x, 0) =∞∑n=1
An sinnπ
lx = ϕ(x) (11.25)
ut(x, 0) =∞∑n=1
Bnnπa
lsin
nπ
lx = ψ(x) (11.26)
En el caso de la ecuacion parabolica:
u(x, 0) =∞∑n=1
Cn sinnπ
lx = ϕ(x) (11.27)
Por consiguiente, si ϕ(x) y ψ(x) admiten estos desarrollos de Fourier, obtenemos:
Para el caso hiperbolico:
An ≡ ϕn =2
l
∫ l
0
ϕ(ξ) sinnπ
lξdξ (11.28)
Bnnπa
l≡ ψn =
2
l
∫ l
0
ψ(ξ) sinnπ
lξdξ (11.29)
de donde:
Bn ≡l
nπaψn =
2
nπa
∫ l
0
ψ(ξ) sinnπ
lξdξ (11.30)
Para el caso parabolico:
Cn ≡ ϕn =2
l
∫ l
0
ϕ(ξ) sinnπ
lξdξ (11.31)
Ası pues, las soluciones de los problemas (11.1) y (11.2) vienen dadas, respectivamente, porlas formulas (11.23) y (11.24), donde los coeficientes de los desarrollos An, Bn para el caso

374 Jose Marın Antuna
hiperbolico y Cn para el caso parabolico vienen dados por las formulas (11.28), (11.30) y(11.31), respectivamente.
Es necesario hacer las siguientes aclaraciones.
En primer lugar, las autofunciones y los autovalores obtenidos en el desarrollo arriba realizadoson para el primer problema de frontera, que es el que hemos aquı desarrollado para ilustrar elmetodo de separacion de variables; pero, si las condiciones de frontera de los problemas (11.1)y (11.2) fueran de segundo o de tercer tipo, o condiciones mixtas, al efectuar el procedimientoarriba descrito se obtendrıan otras autofunciones y otros autovalores.
En segundo lugar, aun hay que esclarecer las condiciones matematicas de validez de lo que arribahemos realizado, pues los desarrollos que nos condujeron a las soluciones (11.23) y (11.24) hansido realizados formalmente, sin preocuparnos por si eran factibles o no; simplemente supusimos,tacitamente, que podıan ser efectuados.
Sin embargo, vale la pena senalar lo siguiente. Para las autofunciones Xn(x) y los autovaloresλn, soluciones del problema de Sturm-Liouville (11.10) -que en nuestro caso concreto vienendados por (11.19) y (11.20)- vemos que:
1. λn > 0 son ordenables, es decir, λ1 < λ2 < ... < λn < ... y
limn→∞
λn = ∞
2. Xn(x) son ortogonales en (0, l), es decir,
∫ l
0
Xn(x)Xm(x)dx =
∫ l
0
sinnπ
lx sin
mπ
lxdx =
l
2δnm ≡‖ Xn ‖2 δnm
3. Si f(x) es continua, junto con sus derivadas hasta la de segundo orden en el intervaloabierto (0, l) y cumple las condiciones de frontera del problema de Sturm-Liouville (11.10):f(0) = f(l) = 0, admite el desarrollo
f(x) =∞∑n=1
fn sinnπ
lx
con
fn =l
2
∫ l
0
f(ξ) sinnπ
lξdξ
pues no es otra cosa que su desarrollo en serie de Fourier seno.
Por lo tanto, aquı nos encontramos ante un caso particular de la situacion general analizadacuando estudiamos la ecuacion generatriz de las funciones especiales.

Metodo de Separacion de Variables 375
11.1.3 Ejemplo
Antes de hacer un analisis detallado de las condiciones matematicas de validez del metodo deseparacion de variables aquı desarrollado, veamos un ejemplo ilustrativo del metodo.
Sea una cuerda de longitud l, con extremos fijos, que oscila producto de que, estando inicial-mente en equilibrio (es decir, con elongacion inicial cero), recibe una velocidad inicial parabolica,dada por
v0x(l − x)
l2
Es decir, el problema a resolver es:
utt = a2uxx, ∀0 < x < l, t > 0
u(x, 0) = 0
ut(x, 0) =v0x(l − x)
l2(11.32)
u(0, t) = 0
u(l, t) = 0
Evidentemente, la solucion de este problema viene dada por la formula (11.23) y solo tenemosque calcular los coeficientes An y Bn. En virtud de (11.28) tendremos
An =2
l
∫ l
0
0 · sin nπlξdξ = 0 (11.33)
Es decir, An = 0. Por (11.30) tendremos, integrando por partes:
Bn =2
nπa
∫ l
0
v0ξ(l − ξ)
l2sin
nπ
lξdξ =
2v0
l2nπa
∫ l
0
ξ(l − ξ) sinnπ
lξdξ =
=4v0l
a(nπ)4[1− (−1)n] =
8v0l
an4π4, ∀n = 2m+ 1
= 0, ∀n = 2m
Por consiguiente
B2m+1 =8v0l
aπ4(2m+ 1)4, ∀m = 0, 1, 2, ... (11.34)
Colocando (11.33) y (11.34) en (11.23), la solucion queda como
376 Jose Marın Antuna
u(x, t) =8v0
aπ4
∞∑m=0
1
(2m+ 1)4sin
(2m+ 1)πa
lt sin
(2m+ 1)π
lx (11.35)
Observese que la serie (11.35) converge con gran rapidez. Para m = 0 tenemos el armonicoprincipal (el primer sumando de la serie), que aporta la mayor energıa a la cuerda, pues suamplitud es la mayor. Para el segundo armonico (m = 1) tenemos que este es 1
34 = 181
vecesmenor y el tercer armonico (m = 2) es 1
54 = 1625
veces menor. O sea, dos o tres sumandos de laserie ya dan, practicamente, toda la energıa de la cuerda oscilando, con exactitud hasta en lamilesima (tercera cifra significativa) y los restantes practicamente ni se sienten, pues a penasaportan energıa.
El analisis detallado de la energıa que aporta cada armonico a la cuerda lo haremos masadelante. Primero debemos establecer con precision las condiciones matematicas de validez delmetodo de separacion de variables para el caso que hemos desarrollado en los puntos 1 y 2 deeste epıgrafe, ya que, hasta ahora, este desarrollo ha sido hecho formalmente.
11.1.4 Condiciones matematicas de validez del metodo
Es necesario establecer los requisitos que deben cumplir las funciones ϕ(x) y ψ(x) que aparecenen las condiciones iniciales de los problemas (11.1) y (11.2) para que el metodo sea valido.
Lo primero que tenemos que exigir es que las series (11.23) y (11.24) converjan uniformementepara 0 ≤ x ≤ l y t ≥ 0, ya que, de acuerdo con el planteamiento de los problemas, la soluciondebe ser continua en ese rango de valores.
Veamos primero el caso del problema (11.1). En el caso de la solucion (11.23) para el pro-blema hiperbolico, para el enesimo termino de la serie (11.23) podemos establecer el siguientemayorante numerico:
∣∣∣An cosnπa
lt+Bn sin
nπa
lt∣∣∣ ∣∣∣sin nπ
lx∣∣∣ ≤ |An|+ |Bn| (11.36)
Por consiguiente, de acuerdo con el criterio de Weierstrass para la convergencia uniforme delas series funcionales, la solucion (11.23) convergira uniformemente para 0 ≤ x ≤ l y t ≥ 0, siconvergen las series
∞∑n=1
|An|,∞∑n=1
|Bn|
o, lo que es lo mismo, en virtud de (11.28) y (11.30), deben ser convergentes las series numericas(las constantes las obviamos, pues ellas no influyen en la convergencia):

Metodo de Separacion de Variables 377
∞∑n=1
|ϕn|,∞∑n=1
1
n|ψn| (11.37)
Ademas, la funcion u(x, t), dada por (11.23), debe ser derivable con respecto a t, lo que significaque la serie debe poder ser derivada termino a termino. Para ello, la serie derivada
ut =∞∑n=1
−An
nπa
lsin
nπa
lt+Bn
nπa
lcos
nπa
lt
sinnπ
lx (11.38)
tiene que converger uniformemente. Hallando el mayorante numerico del enesimo termino dela serie (11.38), concluimos que deben ser convergentes las series numericas:
∞∑n=1
n|ϕn|,∞∑n=1
|ψn| (11.39)
Por ultimo, necesitamos, tambien, que u(x, t) sea derivable dos veces respecto a ambos argu-mentos, lo que significa que las series
utt = −∞∑n=1
An
(nπal
)2
cosnπa
lt+Bn
(nπal
)2
sinnπa
lt
sin
nπ
lx (11.40)
uxx = −∞∑n=1
An cos
nπa
lt+Bn sin
nπa
lt(nπ
l
)2
sinnπ
lx (11.41)
tienen que ser convergentes uniformemente. Las series (11.40) y (11.41) tienen el mismo ma-yorante numerico, lo que conduce a concluir que deben ser convergentes las series numericas:
∞∑n=1
n2|ϕn|,∞∑n=1
n|ψn| (11.42)
Recordemos un teorema de la teorıa de las series de Fourier:
Teorema:
Si f(x) tiene k derivadas continuas y la derivada de orden k + 1 es seccionalmente continua en0 ≤ x ≤ l y si se cumple que
f (2m)(0) = f (2m)(l) = 0, ∀0 ≤ 2m ≤ k
entonces, la serie

378 Jose Marın Antuna
∞∑n=1
nk|fn|
converge, donde
fn =2
l
∫ l
0
f(ξ) sinnπ
lξdξ
En virtud de este teorema concluimos que las series mayorantes (11.37), (11.39) y (11.42) seranconvergentes, si se cumplen las siguientes condiciones:
1. ϕ(x) tiene primera y segunda derivadas continuas y tercera derivada seccionalmente con-tinua en 0 ≤ x ≤ l y se cumple que
ϕ(0) = ϕ(l), ϕ′′(0) = ϕ′′(l) (11.43)
2. ψ(x) tiene primera derivada continua y segunda derivada seccionalmente continua en0 ≤ x ≤ l y se cumple que
ψ(0) = ψ(l) (11.44)
Veamos, de manera similar, el caso del problema (11.2). En el caso de la solucion (11.24) parala ecuacion parabolica tenemos que exigir, tambien, que u(x, t) sea continua para 0 ≤ x ≤ ly t ≥ 0, lo que -de acuerdo con la teorıa de series funcionales- la serie debe ser convergenteuniformemente en ese rango de valores de x y de t. Ademas, la solucion debe tener primeraderivada continua respecto a t y segunda derivada continua respecto a x, para que satisfagael planteamiento del problema. Todo esto implica las siguientes exigencias matematicas a lafuncion ϕ(x), temperatura inicial de la barra:
Supongamos que la funcion ϕ(x) es continua y seccionalmente lisa para 0 < x < l y que cumplelas condiciones de frontera del problema de Sturm-Liouville (11.10), es decir, que ϕ(0) = ϕ(l) =0. Entonces ϕ(x) admite el desarrollo en serie de Fourier de senos (11.27) con los coeficientesdados por (11.31) y, ademas, de acuerdo con la teorıa de las series de Fourier, la serie de loscoeficientes converge absolutamente, es decir, la serie
∞∑n=1
|ϕn| ≡∞∑n=1
|Cn|
converge. Pero, entonces tenemos que los miembros de la serie (11.24), solucion del problema(11.2), tienen por mayorante la expresion
∣∣∣Cne−(nπal )
2t sin
nπ
lx∣∣∣ ≤ |Cn|

Metodo de Separacion de Variables 379
ya que
∣∣∣e−(nπal )
2t∣∣∣ ≤ 1
y
∣∣∣sin nπlx∣∣∣ ≤ 1
Por consiguiente, de acuerdo con el criterio de Weierstrass, la serie (11.24) converge uniforme-mente para 0 ≤ x ≤ l y t ≥ 0 y define a una funcion continua.
Analicemos ahora las derivadas, suponiendo la posibilidad de derivar bajo el signo de sumatoria.Tendremos:
ut = −∞∑n=1
(nπal
)2
Cne−(nπa
l )2t sin
nπ
lx (11.45)
y
uxx = −∞∑n=1
(nπl
)2
Cne−(nπa
l )2t sin
nπ
lx (11.46)
Como la funcion ϕ(x) es continua en el intervalo (0, l), por lo tanto sera acotada, es decir,|ϕ(x)| < C, por lo que de (11.31) podemos concluir que |Cn| < 2C. Ası pues, para las series(11.45) y (11.46) podemos obtener el mismo mayorante numerico convergente:
∣∣∣n2Cne−(nπa
l )2t sin
nπ
lx∣∣∣ < 2Cn2e−(nπa
l )2t0 (11.47)
Ambas series tienen el mismo mayorante, porque las constantes no influyen para nada en laconvergencia. En la expresion (11.47) hemos tomado t ≥ t0 > 0 para que la serie del mayoranteconverja, ya que si hacemos t0 = 0 en el mayorante, su serie serıa divergente. De aquı que laconvergencia uniforme de ut y de uxx solo se pueda garantizar para t > 0.
Si colocamos (11.45) y (11.46) en la ecuacion del problema (11.2), comprobamos que la con-vierten en identidad, con lo que queda comprobada la validez del metodo desarrollado desolucion.
Por consiguiente, concluimos que las condiciones matematicas de validez del metodo de sepa-racion de variables en el caso parabolico aquı analizado son:
1. ϕ(x) continua y seccionalmente lisa en (0, l)
380 Jose Marın Antuna
2. ϕ(0) = ϕ(l) = 0
Entonces, la solucion vendra dada por la expresion (11.24) con los coeficientes (11.31).
Estas condiciones arriba expresadas son condiciones matematicas suficientes, que deben cum-plirse para la validez del metodo desarrollado de separacion de variables en el primer problemade frontera.
En principio serıa necesario hacer un analisis similar de la validez del metodo para el segundoproblema de frontera, para el tercer problema de frontera y para los problemas mixtos. Esteanalisis, aunque parezca tedioso para un fısico, no deja de ser indispensable, ya que es precisoconocer, con rigor, las condiciones que deben cumplirse para que tenga sentido la solucion quebuscamos. Sin embargo, no vamos a abordar ahora este asunto, no porque sea tedioso, sinoporque, posteriormente, veremos que, del analisis teorico del problema de Sturm-Liouville, seestablecen las condiciones generales suficientes para que una funcion pueda ser desarrollada enuna serie de autofunciones; esto fue parcialmente visto en el capıtulo que trato sobre la ecuaciongeneratriz de las funciones especiales, pero, dada la importancia que tiene, le dedicaremos unapartado especial al esquema general de separacion de variables. En el caso aquı desarrollado,hemos visto unas autofunciones muy particulares que responden a condiciones de frontera deprimer tipo: X(x) = sin nπ
lx. En la teorıa general veremos que, dadas determinadas condiciones
para la funcion f(x), esta sera desarrollable en una serie del tipo
f(x) =∞∑n=1
fnXn(x) (11.48)
donde los coeficientes del desarrollo vendran dados por
fn =1
‖ Xn ‖2
∫ l
0
f(ξ)Xn(ξ)dξ (11.49)
donde ‖ Xn ‖2 es el cuadrado de la norma de las autofunciones. Este desarrollo (11.48) se puedeinterpretar como la descomposicion de la funcion f(x) en la base ortogonal Xn(x) que genera unespacio funcional de infinitas dimensiones. Pero de esto nos ocuparemos mas adelante. Ahoravamos a dedicarnos a algo mucho mas agradable para los fısicos: analicemos el significado fısicode la solucion obtenida por separacion de variables.
11.1.5 Interpretacion fısica de la solucion
En el caso del problema (11.1) de la ecuacion hiperbolica tenemos que los terminos (11.21) dela solucion dada por la serie (11.23) pueden ser transformados, si los coeficientes An y Bn sonescritos de la siguiente forma:
An = Cn cosαn, Bn = Cn sinαn (11.50)

Metodo de Separacion de Variables 381
donde los coeficientes Cn y αn vienen dados por
Cn =√A2n +B2
n, αn = arctanBn
An(11.51)
Colocando (11.50) en (11.21), obtenemos para un(x, t) la expresion:
un(x, t) = Cn sinnπ
lx cosωn(t− δn) ≡ An(x) cosωn(t− δn) (11.52)
donde ωn = nπal
=√λna es, fısicamente, una frecuencia de oscilacion y δn = αn
ωnes cierta fase.
Tenemos ası que cada punto x de la cuerda oscila con una amplitud fija An(x) = Cn sin nπlx y
todos los puntos de la cuerda oscilan con la misma fase (para n fijo). Es decir, cada sumando (osea, cada armonico) un(x, t) describe una onda estacionaria con frecuencia propia ωn = nπa
l.
De esta manera concluimos que la solucion (11.23) es una superposicion de infinitas ondasestacionarias y el metodo de separacion de variables, conocido tambien con el nombre de metodode Cauchy -a diferencia del metodo de ondas viajeras de D’Alembert- puede llamarse metodode ondas estacionarias.
Como la cuerda es un medio continuo y tiene, por lo tanto, infinitos grados de libertad, tendratambien infinitas frecuencias propias.
El armonico principal (el tono principal, hablando en terminos musicales) sera el correspon-diente al numero n = 1. Los subarmonicos (overtonos o subtonos) corresponderan a los numerosn = 2, 3, ... Las amplitudes Cn van decreciendo, ya que An y Bn tienden a cero para n tiende a∞, segun vimos.
Graficamente, los armonicos (ondas estacionarias) tendran la estructura que se muestra en lafigura 11.1.
Calculemos, ahora, la energıa que cada armonico aporta a la cuerda. La energıa sera la sumade la energıa cinetica y la energıa potencial. Por lo tanto, teniendo en cuenta que k = a2m:
En =1
2
∫ l
0
m
(∂un∂t
)2
+ k
(∂un∂x
)2dx =
=1
2
∫ l
0
mC2
nω2n sin2 nπ
lx sin2 ωn(t− δn) + a2mC2
n
ω2n
a2cos2 nπ
lx cos2 ωn(t− δn)
dx
Teniendo en cuenta que
∫ l
0
sin2 nπ
lxdx =
∫ l
0
cos2 nπ
lxdx =
l
2
obtenemos, finalmente:
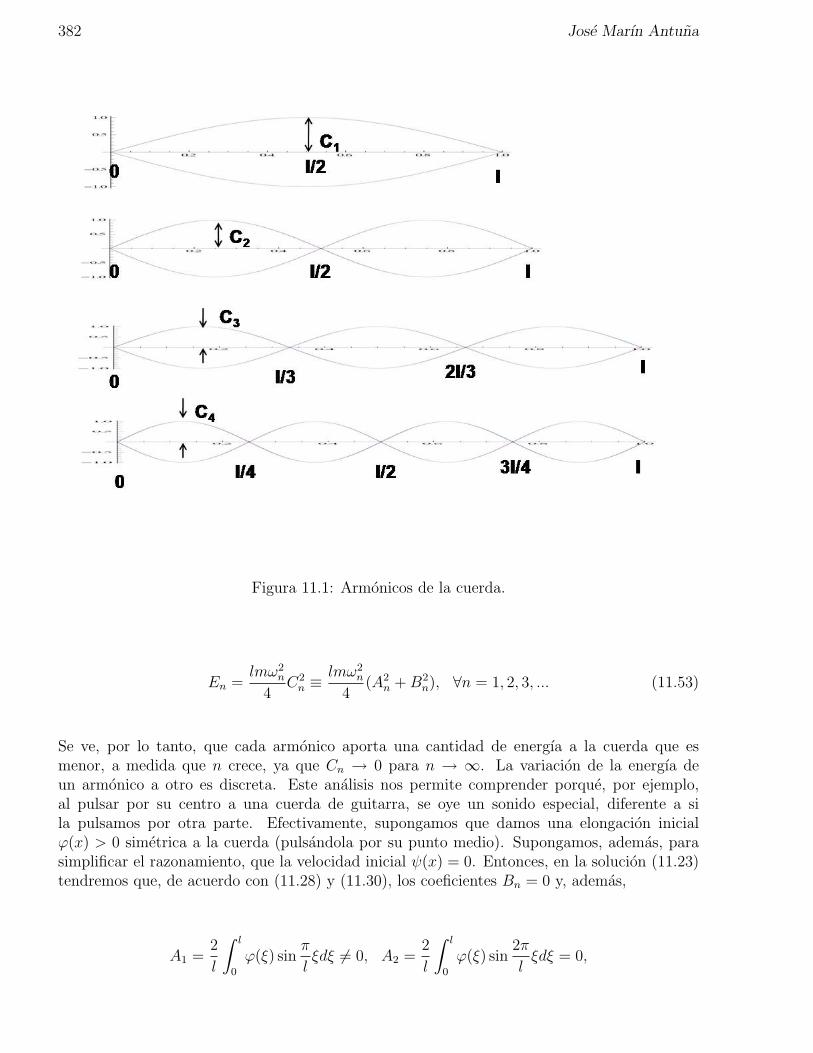
382 Jose Marın Antuna
Figura 11.1: Armonicos de la cuerda.
En =lmω2
n
4C2n ≡
lmω2n
4(A2
n +B2n), ∀n = 1, 2, 3, ... (11.53)
Se ve, por lo tanto, que cada armonico aporta una cantidad de energıa a la cuerda que esmenor, a medida que n crece, ya que Cn → 0 para n → ∞. La variacion de la energıa deun armonico a otro es discreta. Este analisis nos permite comprender porque, por ejemplo,al pulsar por su centro a una cuerda de guitarra, se oye un sonido especial, diferente a sila pulsamos por otra parte. Efectivamente, supongamos que damos una elongacion inicialϕ(x) > 0 simetrica a la cuerda (pulsandola por su punto medio). Supongamos, ademas, parasimplificar el razonamiento, que la velocidad inicial ψ(x) = 0. Entonces, en la solucion (11.23)tendremos que, de acuerdo con (11.28) y (11.30), los coeficientes Bn = 0 y, ademas,
A1 =2
l
∫ l
0
ϕ(ξ) sinπ
lξdξ 6= 0, A2 =
2
l
∫ l
0
ϕ(ξ) sin2π
lξdξ = 0,
Metodo de Separacion de Variables 383
A3 =2
l
∫ l
0
ϕ(ξ) sin3π
lξdξ 6= 0
Por lo tanto, E1 6= 0, E2 = 0 y E3 6= 0. Pero como la energıa E3 es mucho menor que E1, eneste caso practicamente se oira solo la energıa del armonico principal y el sonido que se percibees mas ”puro”. Sin embargo, al pulsar la cuerda por otro punto, se superponen las energıasdel segundo, tercero, cuarto armonicos y superiores y el sonido es distinto. De forma similar,pudieran hacerse otros analisis que permitirıan explicar la diferencia de sonidos de diferentesinstrumentos de cuerda y, tambien de instrumentos de viento, pues, por ejemplo, en una flautaaparecen de la misma forma ondas estacionarias de las oscilaciones del aire dentro del cilindrohueco que forma la flauta.
Resulta conveniente hacer la siguiente aclaracion. Como hemos podido ver, de acuerdo con(11.53), el espectro de energıas de los armonicos de la cuerda oscilante es discreto, pues laenergıa de cada armonico depende de n = 1, 2, ... Este es el principio de cuantificacion de laenergıa en la Mecanica Cuantica, solo que, en el caso clasico que aquı hemos estudiado, elsentido fısico lo tiene la expresion (11.23), es decir, la superposicion de todos los armonicos,mientras que en la teorıa cuantica cada armonico un tiene un sentido fısico concreto asociado ala densidad de probabilidad de encontrar la partıcula cuantica que el modelo describe en ciertopunto del espacio.
En realidad, lo que en la teorıa cuantica tiene sentido es |un|2 como la densidad de probabilidadde que la partıcula se encuentre en determinado elemento de volumen del espacio.
Analicemos, ahora, fısicamente, la solucion (11.24) del problema de la ecuacion parabolica(11.2). Aquı, u(x, t) tiene el sentido fısico de la temperatura de cada punto x de la barraen cada instante de tiempo t > 0, si los extremos de la barra se mantienen todo el tiempo atemperatura cero y si la barra tiene una distribucion inicial de temperaturas dada por ϕ(x). Dela expresion (11.24) se aprecia, claramente, que u(x, t) → 0 para t→∞, pues el calor se escapapor los extremos x = 0 y x = l de la barra y esta tiende, al final, a tener una temperaturauniforme igual a cero en todos sus puntos.
11.1.6 Funcion de Green
Hallemos la funcion de Green para los problemas (11.1) y (11.2) planteados al inicio del presenteepıgrafe y resueltos por el metodo de separacion de variables.
Comencemos con el caso del problema de la ecuacion hiperbolica (11.1). Para ello, coloquemos,explıcitamente, los coeficientes An y Bn dados por (11.28) y (11.30), respectivamente, en laexpresion (11.23) de la solucion. Tendremos:
u(x, t) =
=∞∑n=1
2
l
∫ l
0
ϕ(ξ) sinnπ
lξdξ cos
nπa
lt sin
nπ
lx+
2
nπa
∫ l
0
ψ(ξ) sinnπ
lξdξ sin
nπa
lt sin
nπ
lx

384 Jose Marın Antuna
Como la serie converge uniformemente, en la expresion de arriba podemos intercambiar laintegracion con la sumatoria y escribir:
u(x, t) =
∫ l
0
∞∑n=1
2
lsin
nπ
lx sin
nπ
lξ cos
nπa
ltϕ(ξ)dξ +
+
∫ l
0
∞∑n=1
2
nπasin
nπ
lx sin
nπ
lξ sin
nπa
ltψ(ξ)dξ (11.54)
Con vistas a escribir (11.54) en forma mas compacta, introduzcamos la siguiente notacion.Llamemos:
G(x, ξ, t) =∞∑n=1
2
nπasin
nπ
lx sin
nπ
lξ sin
nπa
lt (11.55)
Entonces, en virtud de (11.54), la solucion del problema (11.1) adquiere la forma:
u(x, t) =
∫ l
0
∂G(x, ξ, t)
∂tϕ(ξ)dξ +
∫ l
0
G(x, ξ, t)ψ(ξ)dξ (11.56)
La formula (11.56) es una expresion integral de la solucion del problema (11.1) que es equivalentea la formula (11.23). Tratemos de resolver, con su ayuda, el problema cuya solucion es, pordefinicion, la funcion de Green. Es decir, a una cuerda de longitud l con sus extremos fijos ycon elongacion inicial cero, le damos en el instante inicial un impulso-longitud por unidad demasa unitario, instantaneo y puntual en el punto x0. Es decir, matematicamente, el problemaa resolver es:
utt = a2uxx, ∀0 < x < l, t > 0
u(x, 0) = 0
ut(x, 0) = δ(x− x0) (11.57)
u(0, t) = 0
u(l, t) = 0
Utilizando la formula (11.56), obtenemos en este caso que la solucion es:
u(x, t) =
∫ l
0
G(x, ξ, t)δ(ξ − x0)dξ = G(x, x0, t) (11.58)
Ası pues, la funcion (11.55) no es otra cosa que la funcion de Green de la cuerda finita conextremos fijos, es decir, la funcion de Green del primer problema de frontera de la ecuacion

Metodo de Separacion de Variables 385
hiperbolica y, fısicamente, expresa la elongacion del punto x de la cuerda en el instante t, sien el punto x0, en el instante inicial, la cuerda recibe un impulso-longitud por unidad de masaunitario, instantaneo y puntual. Esta funcion de Green, al igual que en casos anteriores, es unafuncion generalizada.
Antes de pasar a analizar el caso del problema para la ecuacion parabolica, quisieramos resaltarlo siguiente. Para cualesquiera condiciones de frontera homogeneas, de primero, segundo, tercertipo o mixtas, al resolver el problema de Sturm-Liouville (11.10), se obtienen determinadasautofunciones y determinados autovalores, correspondientes a las condiciones de frontera delproblema en cuestion.
En lo que arriba hemos desarrollado, se obtuvieron las autofunciones sin nπlx y los autovalores
λn =(nπl
)2, porque las condiciones de frontera eran de primer tipo.
Sin embargo, si las condiciones de frontera fueran de segundo tipo, por ejemplo, las autofun-
ciones serıan cos nπlx con los mismos autovalores λn =
(nπl
)2, lo que el lector puede comprobar
con facilidad.
Igualmente, si la condicion en x = 0 fuera de primer tipo y en x = l de segundo tipo, no es difıcil
comprobar que las autofunciones serıan Xn(x) = sin (2n+1)π2l
x, con autovalores λn =[
(2n+1)π2l
]2.
En general, como es facil comprender, para cada par de condiciones de frontera en x = 0 yx = l, corresponden autofunciones y autovalores bien definidos.
Ası las cosas, nuestros resultados hasta aquı vistos pueden ser generalizados, expresando que,para el problema de frontera con condiciones de frontera (c.f.) de cualquier tipo homogeneas
utt = a2uxx, ∀0 < x < l, t > 0
u(x, 0) = ϕ(x)
ut(x, 0) = ψ(x) (11.59)
c.f. = 0
el problema de Sturm-Liouville tendra la forma
X ′′ + λX = 0, ∀0 < x < l (11.60)
c.f. = 0
al que les corresponderan las autofunciones Xn(x) y los autovalores λn.
Entonces, la solucion del problema (11.59), con el metodo de separacion de variables, tendra laforma

386 Jose Marın Antuna
u(x, t) =∞∑n=1
An cos√λnat+Bn sin
√λnatXn(x) (11.61)
donde los coeficientes del desarrollo vendran dados por las formulas
An =1
‖ Xn ‖2
∫ l
0
ϕ(ξ)Xn(ξ)dξ (11.62)
Bn =1√
λna ‖ Xn ‖2
∫ l
0
ψ(ξ)Xn(ξ)dξ (11.63)
donde
‖ Xn ‖2=
∫ l
0
X2n(x)dx (11.64)
es el cuadrado de la norma de las autofunciones.
Por consiguiente, colocando (11.62) y (11.63) explıcitamente en (11.61) y luego de intercambiarla sumatoria con las integraciones, para la solucion se llega exactamente a la misma expresion(11.56), donde, en este caso, la funcion de Green sera
G(x, ξ, t) =∞∑n=1
1√λna ‖ Xn ‖2
Xn(x)Xn(ξ) sin√λnat (11.65)
que, como siempre, sera la elongacion de la cuerda -con las condiciones de frontera homogeneascorrespondientes- en el punto x en el instante t, si en el punto x0 en el instante inicial t = 0 a lacuerda se le imprimio un impulso-longitud por unidad de masa unitario (I/ρ = 1), instantaneoy puntual. O sea, que la funcion de Green (11.65) sera la solucion del problema
utt = a2uxx, ∀0 < x < l, t > 0
u(x, 0) = 0
ut(x, 0) = δ(x− x0) (11.66)
c.f. = 0
ya que, aplicando la formula (11.56) para resolver el problema (11.66), obtenemos
u(x, t) =
∫ l
0
G(x, ξ, t)δ(ξ − x0)dξ = G(x, x0, t) (11.67)

Metodo de Separacion de Variables 387
Notese que en la expresion de la funcion de Green, desarrollada en serie de autofunciones delproblema de Sturm-Liouville correspondiente, aparece el producto de las autofunciones, unaevaluada en x y la otra evaluada en ξ. Esto es una regla general para la expresion de la funcionde Green en serie de autofunciones y, precisamente, ese producto de autofunciones en la serieresponde a la expresion deltaica de la velocidad inicial, ya que el desarrollo formal de la funciondelta de Dirac en serie de autofunciones es
δ(x− x0) =∞∑n=1
1
‖ Xn ‖2Xn(x0)Xn(x) (11.68)
que el lector puede comprobar sin dificultad.
Veamos, ahora, el caso de la ecuacion parabolica. Siguiendo las ideas generalizadoras expresadasarriba, en lugar del problema particular (11.2) con condiciones de frontera homogeneas deprimer tipo, consideraremos el problema mas general
ut = a2uxx, ∀0 < x < l, t > 0
u(x, 0) = ϕ(x) (11.69)
c.f. = 0
De acuerdo con el metodo desarrollado de separacion de variables, la solucion de este problematiene la forma
u(x, t) =∞∑n=1
Cne−λna2tXn(x) (11.70)
donde los coeficientes vienen dados por la expresion
Cn =1
‖ Xn ‖2
∫ l
0
ϕ(ξ)Xn(ξ)dξ (11.71)
Colocando explıcitamente los coeficientes (11.71) en la solucion (11.70), obtenemos:
u(x, t) =∞∑n=1
1
‖ Xn ‖2
∫ l
0
ϕ(ξ)Xn(ξ)dξe−λna2tXn(x) =
=
∫ l
0
∞∑n=1
1
‖ Xn ‖2Xn(x)Xn(ξ)e
−λna2tϕ(ξ)dξ (11.72)
Introduciendo la notacion

388 Jose Marın Antuna
G(x, ξ, t) =∞∑n=1
1
‖ Xn ‖2Xn(x)Xn(ξ)e
−λna2t (11.73)
la solucion (11.72) adopta la forma
u(x, t) =
∫ l
0
G(x, ξ, t)ϕ(ξ)dξ (11.74)
La funcion (11.73) es la funcion de Green del problema de frontera de la ecuacion parabolicaen la recta 0 < x < l, ya que, si resolvemos el problema definitorio de la funcion de Green:
ut = a2uxx, ∀0 < x < l, t > 0
u(x, 0) = δ(x− x0) (11.75)
c.f. = 0
con la formula (11.74), obtenemos:
u(x, t) =
∫ l
0
G(x, ξ, t)δ(ξ − x0)dξ = G(x, x0, t) (11.76)
Analicemos que significa, fısicamente, esta funcion. El hecho de que la temperatura inicial dela barra tenga la forma de una delta de Dirac en x = x0 significa que en el instante t = 0 en elpunto x = x0 se desprendio la cantidad de calor
Q =
∫ l
0
cρδ(x− x0)dx = cρ (11.77)
ya que la cantidad de calor es igual a la capacidad calorıfica por masa y por temperatura. Laecuacion (11.77) nos indica que la cantidad de calor desprendida instantaneamente en el puntox = x0 en el instante inicial t = 0 es la unidad de calor, medida en calorıas. Por consiguiente, lafuncion G(x, x0, t) es, efectivamente, la funcion de Green; es decir, la temperatura del punto xde la barra en el instante t, si en el instante inicial en el punto x0 actuo una fuente instantanea,unitaria y puntual de calor.
Es necesario recalcar lo siguiente. Recuerdese que, en terminos generales, la funcion de Greenes la respuesta del sistema a la accion de una fuente unitaria y puntual de energıa (puntual en elespacio y puntual, es decir, instantanea, en el tiempo). En el caso de la ecuacion hiperbolica ellosignificaba la accion de una fuente instantanea y puntual, que imprimıa un impulso unitario,lo que, matematicamente, se expresaba con una funcion delta de Dirac en la condicion inicialde la velocidad. En el caso de la ecuacion parabolica esto significa la accion de una fuenteinstantanea y puntual que aporta un calor unitario, lo que, matematicamente, se expresa con

Metodo de Separacion de Variables 389
una funcion delta de Dirac en la condicion inicial de la temperatura. En ambos casos la funcionde Green, como hemos visto, es una funcion generalizada. Mas adelante profundizaremos sobreestos conceptos de la funcion de Green; por una parte al estudiar los problemas de las ecuacioneshiperbolicas y parabolicas en varias dimensiones espaciales y tambien al estudiar los problemaspara las ecuaciones elıpticas. Tambien volveremos sobre el concepto al estudiar la llamadasolucion fundamental de un operador diferencial. Podemos percatarnos de la unidad intrınsecaque existe entre todos estos conceptos.
11.1.7 Solucion de la ecuacion no homogenea
Veamos ahora como resolver los problemas hiperbolicos y parabolicos unidimensionales en unintervalo finito 0 < x < l, cuando la ecuacion es no homogenea; es decir, cuando -en el casode la ecuacion hiperbolica- las oscilaciones son provocadas por la accion de una fuerza externa,o -en el caso parabolico- cuando existe una fuente externa de calor distribuida en la barra. Osea, nos dedicaremos a continuacion a resolver los siguientes problemas de frontera:
utt = a2uxx + f(x, t), ∀0 < x < l, t > 0
u(x, 0) = 0
ut(x, 0) = 0 (11.78)
c.f. = 0
ut = a2uxx + f(x, t), ∀0 < x < l, t > 0
u(x, 0) = 0 (11.79)
c.f. = 0
En los problemas planteados hemos considerado las condiciones iniciales homogeneas, pues, sifueran diferentes de cero, con la ayuda del principio de superposicion, podemos descomponerel problema en dos: el primero con la ecuacion homogenea y las condiciones iniciales diferentesde cero, ya resuelto por nosotros en los puntos anteriores y los problemas (11.78) y (11.79)aquı planteados. Notese que, sin embargo, las condiciones de frontera que hemos puesto sonhomogeneas. Ello esta dado por el hecho de que utilizaremos las autofunciones definidas enlos puntos anteriores para construir la solucion de estos problemas. No es ocioso recordar quepara la obtencion de las autofunciones -es decir, para resolver el problema de Sturm-Liouville-se requiere que las condiciones de frontera -cualesquiera que ellas sean- sean homogeneas.
Tanto para el problema (11.78), como para el problema (11.79), procederemos de la siguientemanera. Para las condiciones de frontera homogeneas del problema (11.78) o (11.79), re-solviendo el problema de Sturm-Liouville, hallamos las autofunciones Xn(x) y los autovaloresλn y proponemos la solucion de ambos problemas en la forma de un desarrollo en dichas auto-funciones:
390 Jose Marın Antuna
u(x, t) =∞∑n=1
un(t)Xn(x) (11.80)
donde los coeficientes un(t), que son, en general, funciones de t, estan por determinar. Ademas,suponemos que la inhomogeneidad de la ecuacion puede ser desarrollada en una serie de auto-funciones:
f(x, t) =∞∑n=1
fn(t)Xn(x) (11.81)
donde, por definicion, los coeficientes fn(t) -que son funciones de t- se expresan por la formula:
fn(t) =1
‖ Xn ‖2
∫ l
0
f(ξ, t)Xn(ξ)dξ (11.82)
Debe recalcarse que para la validez de esto es indispensable que la funcion f(x, t) cumpla losrequisitos del teorema del desarrollo en serie de autofunciones, es decir, que sea una funcioncontinua, hasta con sus segundas derivadas continuas en el intervalo abierto (0, l) y que cumplacon las condiciones de frontera del problema de Sturm-Liouville.
Hasta aquı lo propuesto es identico, tanto para el caso del problema de la ecuacion hiperbolica(11.78), como para el caso del problema de la ecuacion parabolica (11.79). A continuacionanalizaremos, primero, el problema (11.78). Colocando la solucion (11.80) propuesta y el desa-rrollo (11.81) de la funcion f(x, t) en la ecuacion del problema (11.78), obtenemos:
∞∑n=1
un(t)Xn(x) = a2
∞∑n=1
un(t)X′′n(x) +
∞∑n=1
fn(t)Xn(x) (11.83)
Pero, las autofunciones Xn(x) convierten a la ecuacion del problema de Sturm-Liouville (11.10)en identidad, por lo que se verifica que X ′′
n ≡ −λnXn. Colocando en (11.83) queda, despues deagrupar bajo un solo signo de sumatoria:
∞∑n=1
un + λna2un − fn(t)Xn(x) ≡ 0 (11.84)
Como las autofunciones forman una base ortogonal y completa, la unica forma de que la iden-tidad (11.84) se cumpla es que sea identicamente nula la expresion entre llaves. Ello significaque las funciones un(t) deben ser soluciones del siguiente problema de Cauchy:

Metodo de Separacion de Variables 391
un + λna2un = fn(t), ∀t > 0
un(0) = 0 (11.85)
un(0) = 0
En el problema (11.85) las condiciones iniciales nulas salen del hecho de que, al evaluar lasolucion propuesta y su primera derivada respecto a t en t = 0, como Xn(x) 6= 0, debe cumplirseque un(0) = 0 y que un(0) = 0.
La solucion del problema (11.85) puede hallarse, por ejemplo, por el metodo de variacion deparametros estudiado en los cursos de ecuaciones diferenciales ordinarias. El resultado es:
un(t) =1√λna
∫ t
0
fn(τ) sin√λna(t− τ)dτ (11.86)
De esta manera, queda resuelto el problema (11.78), ya que la solucion viene dada por laexpresion (11.80), donde los coeficientes un(t) se expresan por (11.86). En esta ultima formulalas funciones fn(t) estan dadas por (11.82). Intentemos encontrar una expresion compacta parala solucion hallada. Para ello, coloquemos, explıcitamente, los coeficientes un(t) dados por(11.86) en la solucion (11.80), teniendo, ademas, en cuenta la expresion (11.82). Tendremos:
u(x, t) =∞∑n=1
1√λna
∫ t
0
1
‖ Xn ‖2
∫ l
0
f(ξ, τ)Xn(ξ)dξ sin√λna(t− τ)dτXn(x) =
=
∫ t
0
∫ l
0
∞∑n=1
1√λna ‖ Xn ‖2
Xn(x)Xn(ξ) sin√λna(t− τ)f(ξ, τ)dξdτ
Pero, en la expresion obtenida se ve -comparando con (11.65)- que
G(x, ξ, t− τ) =∞∑n=1
1√λna ‖ Xn ‖2
Xn(x)Xn(ξ) sin√λna(t− τ)
por lo que, finalmente, para la solucion del problema de la ecuacion hiperbolica no homogenea(11.78) queda la expresion:
u(x, t) =
∫ t
0
∫ l
0
G(x, ξ, t− τ)f(ξ, τ)dξdτ (11.87)
Veamos, ahora, la solucion del problema (11.79) para la ecuacion parabolica no homogenea.Colocando la solucion propuesta (11.80) y el desarrollo (11.81) de la funcion f(x, t) en laecuacion del problema (11.79), obtenemos:

392 Jose Marın Antuna
∞∑n=1
un(t)Xn(x) = a2
∞∑n=1
un(t)X′′n(x) +
∞∑n=1
fn(t)X′′n(x) (11.88)
de donde, de manera analoga al caso hiperbolico, obtenemos:
∞∑n=1
un + λna2un − fn(t)Xn(x) ≡ 0 (11.89)
donde hemos tenido en cuenta, de nuevo, que las autofunciones cumplen la identidad X ′′n ≡
−λnXn. Por consiguiente, teniendo en cuenta la condicion inicial homogenea del problema(11.79), llegamos a que las funciones un(t) deben ser soluciones del siguiente problema deCauchy:
un + λna2un = fn(t), ∀t > 0
un(0) = 0 (11.90)
La solucion del problema (11.90) puede ser hallada tambien, por ejemplo, por el metodo devariacion de parametros y es:
un(t) =
∫ t
0
fn(τ)e−λna2(t−τ)dτ (11.91)
de manera que, en principio, queda resuelto el problema (11.79) mediante la expresion (11.80),donde los coeficientes un(t) vienen dados por (11.91). Las funciones fn(t) estan dadas por laformula (11.82). Con vistas a hallar una expresion compacta de la solucion obtenida, al igualque en el caso hiperbolico, coloquemos, explıcitamente, (11.91) en (11.80), teniendo en cuentala expresion (11.82). Tendremos:
u(x, t) =∞∑n=1
∫ t
0
1
‖ Xn ‖2
∫ l
0
f(ξ, τ)Xn(ξ)dξe−λna2(t−τ)dτXn(x) =
=
∫ t
0
∫ l
0
∞∑n=1
1
‖ Xn ‖2Xn(x)Xn(ξ)e
−λna2(t−τ)f(ξ, τ)dξdτ (11.92)
En virtud de la expresion (11.73), vemos que
G(x, ξ, t− τ) =∞∑n=1
1
‖ Xn ‖2Xn(x)Xn(ξ)e
−λna2(t−τ)

Metodo de Separacion de Variables 393
por lo que la solucion (11.92) queda, finalmente, en la forma
u(x, t) =
∫ t
0
∫ l
0
G(x, ξ, t− τ)f(ξ, τ)dξdτ (11.93)
Resulta oportuno destacar que en ambos casos -hiperbolico y parabolico- hemos obtenido lasolucion del problema de la ecuacion no homogenea en la forma de una integral en el tiempotranscurrido (de 0 a t) y en el espacio considerado (en este caso de 0 a l) del producto de lainhomogeneidad de la ecuacion por la funcion de Green correspondiente, evaluada en t − τ .En el capıtulo dedicado a estudiar el metodo de ondas viajeras nosotros habıamos llegado aeste mismo resultado al resolver el problema de la ecuacion no homogenea de las oscilacionesen una cuerda infinita; solo que alla habıamos obtenido una integracion entre −∞ e ∞ enel espacio, pues estabamos en el caso de la recta infinita. Alla, ademas, la funcion de Greenera la correspondiente al problema en la recta infinita, en general distinta a la funcion deGreen obtenida en este capıtulo, donde hemos abordado los problemas en la recta finita. Sinembargo, es de destacar que la ley para la expresion de la solucion del problema de la ecuacionno homogenea es la misma, solo que integrando en el espacio correspondiente y colocando en laintegral la funcion de Green que corresponda al problema. En el transcurso del desarrollo delcurso podremos percatarnos de que este resultado, aquı obtenido y comentado nuevamente, esuna ley general. Aun mas, podremos percatarnos, cuando estudiemos el concepto de solucionfundamental de un operador diferencial, que siempre la solucion de una ecuacion no homogenease puede expresar como la convolucion en el espacio y en el tiempo de la inhomogeneidad de laecuacion por la solucion fundamental del operador, que no sera mas que la funcion de Greencuando se le impongan las condiciones de frontera correspondientes al problema fısico que sequiere estudiar.
Por supuesto, para esclarecer mas esto ultimo que aquı hemos expresado, veamos la siguientesituacion. La formula (11.87) -que es identica en su forma a la (11.93)- es, en principio,valida para hallar la solucion de la ecuacion -hiperbolica o parabolica- no homogenea concualquier inhomogeneidad, siempre que las condiciones iniciales y de frontera sean homogeneas.Intentemos, con su ayuda, hallar la solucion generalizada de los siguientes problemas:
utt = a2uxx + δ(x− x0)δ(t), ∀0 < x < l, t > 0
u(x, 0) = 0
ut(x, 0) = 0 (11.94)
c.f. = 0
ut = a2uxx + δ(x− x0)δ(t), ∀0 < x < l, t > 0
u(x, 0) = 0 (11.95)
c.f. = 0
Aplicando la formula (11.87), o su equivalente (11.93), en ambos casos obtenemos que la soluciones
394 Jose Marın Antuna
u(x, t) =
∫ t
0
∫ l
0
G(x, ξ, t− τ)δ(ξ − x0)δ(τ)dξdτ ≡ G(x, x0, t) (11.96)
Es decir, la funcion de Green. Esto nos permite afirmar que los problemas definitorios (11.57)y (11.75) de la funcion de Green en el caso, respectivamente, de la ecuacion hiperbolica y de laecuacion parabolica, son equivalentes a los problemas (11.94) y (11.95).
Esta equivalencia se comprende, ademas, a partir del significado fısico de los problemas plantea-dos, pues, en el caso del problema (11.94), la inhomogeneidad en la forma del producto de lasdeltas de Dirac en el espacio y en el tiempo significa que una fuerza actua sobre la cuerdainstantanea (en el momento t = 0) y puntualmente (en el punto x0), imprimiendole a la cuerdael impulso-longitud por unidad de masa
I
ρ=
∫ t
0
∫ l
0
δ(x− x0)δ(t)dxdt = 1
y en el caso de la ecuacion parabolica significa que en el punto x0 en el instante inicial sedesprendio, instantanea y puntualmente, la cantidad de calor
Q =
∫ t
0
∫ l
0
cρδ(x− x0)δ(t)dxdt = cρ
es decir, la unidad de calor.
Ası las cosas, podemos afirmar que la funcion de Green no es mas que la solucion fundamentaldel operador diferencial, adaptada a las condiciones fısicas de frontera del problema que estemosestudiando. Esta afirmacion se comprendera a plenitud, cuando estudiemos con detalles masadelante el concepto de solucion fundamental en el capıtulo dedicado al metodo de la funcionde Green.
Antes de hacer otra cosa, veamos algunos ejemplos que puedan ilustrar adecuadamente lo aquıdicho.
11.1.8 Ejemplos ilustrativos
Ejemplifiquemos el metodo de separacion de variables arriba estudiado, resolviendo algunosproblemas con otras condiciones de frontera.
1. Supongamos que una cuerda de longitud l tiene un extremo fijo y el otro libre. En estecaso el problema a resolver sera:
Metodo de Separacion de Variables 395
utt = a2uxx, ∀0 < x < l, t > 0
u(x, 0) = ϕ(x)
ut(x, 0) = ψ(x) (11.97)
u(0, t) = 0
ux(l, t) = 0
El metodo de separacion de variables nos conduce al siguiente problema de Sturm-Liouville:
X ′′ + λX = 0, ∀0 < x < l
X(0) = 0 (11.98)
X ′(l) = 0
Resolviendo este problema, hallamos que, en este caso, los autovalores y las autofuncionesson:
λn =
[(2n+ 1)π
2l
]2
Xn(x) = sin(2n+ 1)π
2lx, ∀n = 0, 1, 2, ... (11.99)
Por consiguiente, la solucion del problema (11.97) tendra la forma:
u(x, t) =∞∑n=0
An cos
(2n+ 1)πa
2lt+Bn sin
(2n+ 1)πa
2lt
sin
(2n+ 1)π
2lx (11.100)
Evaluando en las condiciones iniciales, se obtienen para los coeficientes An y Bn lasexpresiones:
An =2
l
∫ l
0
ϕ(ξ) sin(2n+ 1)π
2lξdξ (11.101)
Bn =4
(2n+ 1)πa
∫ l
0
ψ(ξ) sin(2n+ 1)π
2lξdξ (11.102)
Colocando, explıcitamente, (11.101) y (11.102) en (11.100), se obtiene, para la funcion deGreen, la expresion:
G(x, ξ, t) =∞∑n=0
4
(2n+ 1)πasin
(2n+ 1)π
2lx sin
(2n+ 1)π
2lξ sin
(2n+ 1)πa
2lt (11.103)

396 Jose Marın Antuna
Notese que las frecuencias propias de la cuerda son, en este caso
ωn =√λna =
(2n+ 1)πa
2l
2. Supongamos, ahora, que una cuerda oscila por la accion de una elongacion y una velocidadiniciales dadas si tiene sus dos extremos libres y sobre ella no actua ninguna fuerza externa.Es decir, resolvamos el segundo problema de frontera:
utt = a2uxx, ∀0 < x < l, t > 0
u(x, 0) = ϕ(x)
ut(x, 0) = ψ(x) (11.104)
ux(0, t) = 0
ux(l, t) = 0
En este caso, el problema de Sturm-Liouville sera:
X ′′ + λX = 0, ∀0 < x < l
X ′(0) = 0 (11.105)
X ′(l) = 0
La solucion de este problema nos da los autovalores y las autofunciones en la forma:
λn =(nπl
)2
Xn(x) = cosnπ
lx, ∀n = 0, 1, 2, 3, ... (11.106)
Notese que, en este caso, n parte de cero, pues la funcion X0(x) = 1 6= 0 es autofuncion.Por consiguiente, la solucion del problema (11.104) tendra la expresion:
u(x, t) =∞∑n=0
An cos
nπa
lt+Bn sin
nπa
lt
cosnπ
lx (11.107)
y los coeficientes An y Bn vendran dados por las formulas:
An =2
l
∫ l
0
ϕ(ξ) cosnπ
lξdξ (11.108)
Bn =2
nπa
∫ l
0
ψ(ξ) cosnπ
lξdξ (11.109)

Metodo de Separacion de Variables 397
Es necesario destacar que en la formula (11.108) el factor 2/l debe sustituirse por 1/lpara el caso en que n = 0, ya que la norma de la autofuncion X0(x) = 1 es l, en vez del/2.
La funcion de Green, en este caso, sera:
G(x, ξ, t) =∞∑n=1
2
nπacos
nπ
lx cos
nπ
lξ sin
nπa
lt (11.110)
y la solucion, en terminos de la funcion de Green, en este caso sera:
u(x, t) =1
l
∫ l
0
ϕ(ξ)dξ +
∫ l
0
ϕ(ξ)∂G(x, ξ, t)
∂tdξ +
∫ l
0
ψ(ξ)G(x, ξ, t)dξ
Notese que, en esta ultima expresion, hemos escrito, explıcitamente, el valor correspon-diente al termino independiente A0, que tiene el sentido fısico del promedio de la elon-gacion inicial de la cuerda.
3. Supongamos, ahora, que la cuerda oscila con un extremo fijo y el otro con una unionelastica; es decir, supongamos que queremos resolver el problema mixto de las oscilacionesde una cuerda de longitud l con primera y tercera condicion de frontera homogeneas, sidichas oscilaciones son provocadas por una elongacion y una velocidad iniciales dadas ysi no existen fuerzas aplicadas sobre la cuerda. El problema sera:
utt = a2uxx, ∀0 < x < l, t > 0
u(x, 0) = ϕ(x)
ut(x, 0) = ψ(x) (11.111)
u(0, t) = 0
ux(l, t) + hu(l, t) = 0
La separacion de variables nos llevara al siguiente problema de Sturm-Liouville:
X ′′ + λX = 0, ∀0 < x < l
X(0) = 0 (11.112)
X ′(l) + hX(l) = 0
Resolvamos el problema (11.112) mas detalladamente. La solucion general de la ecuaciones:
X(x) = C1 cos√λx+ C2 sin
√λx
Imponiendole la condicion de frontera en x = 0, concluimos que C1 = 0, por lo que laautofuncion es:

398 Jose Marın Antuna
X(x) = sin√λx (11.113)
Impongamos, ahora, la condicion de frontera en x = l; tendremos:
√λ cos
√λl + h sin
√λl = 0
es decir,
tan√λl = −
√λ
h(11.114)
Haciendo µ =√λl, de (11.114) hallamos una ecuacion trascendente para hallar los auto-
valores:
tanµ = − µ
hl(11.115)
Las soluciones de esta ecuacion trascendente seran las coordenadas µn, (n = 1, 2, ...) delos puntos de interseccion de las ramas de la funcion y = tanµ con la recta y = − µ
hlde
pendiente negativa (Fig. 11.2). La raız µ = 0 la desechamos, ya que no da autovalor,pues, de acuerdo con (11.113), para µ = 0, X(x) = 0.
Por consiguiente, los autovalores y las autofunciones para este problema de frontera seran:
λn =(µnl
)2
Xn(x) = sinµnlx, ∀n = 1, 2, 3, ... (11.116)
Por lo tanto, la solucion del problema (11.111) sera
u(x, t) =∞∑n=1
An cos
µna
l+Bn sin
µna
l
sin
µnlx (11.117)
Con vistas a hallar los coeficientes An y Bn, evaluamos en las condiciones iniciales:
u(x, 0) =∞∑n=1
An sinµnlx = ϕ(x) (11.118)
ut(x, 0) =∞∑n=1
Bnµna
lsin
µnlx = ψ(x) (11.119)
Las expresiones (11.118) y (11.119) indican que las funciones ϕ(x) y ψ(x) se desarrollanen series de autofunciones por lo que, de acuerdo con (11.48) y (11.49), tendremos, paralos coeficientes de esos desarrollos, que
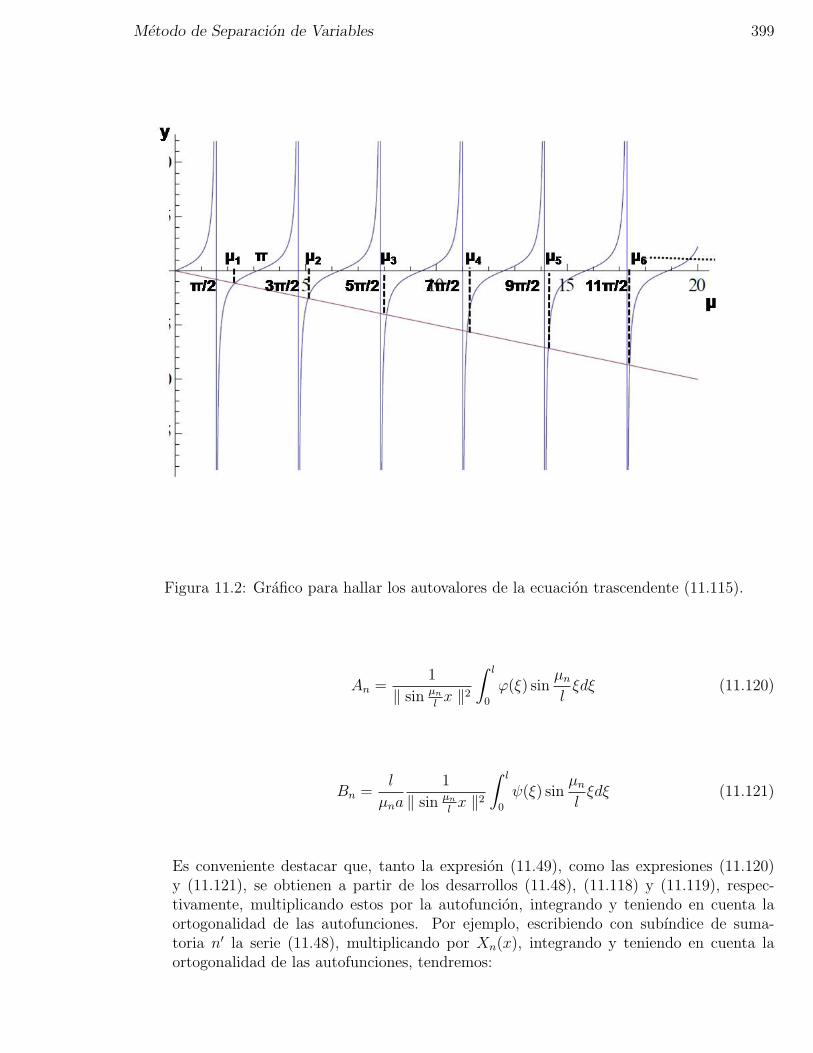
Metodo de Separacion de Variables 399
Figura 11.2: Grafico para hallar los autovalores de la ecuacion trascendente (11.115).
An =1
‖ sin µn
lx ‖2
∫ l
0
ϕ(ξ) sinµnlξdξ (11.120)
Bn =l
µna
1
‖ sin µn
lx ‖2
∫ l
0
ψ(ξ) sinµnlξdξ (11.121)
Es conveniente destacar que, tanto la expresion (11.49), como las expresiones (11.120)y (11.121), se obtienen a partir de los desarrollos (11.48), (11.118) y (11.119), respec-tivamente, multiplicando estos por la autofuncion, integrando y teniendo en cuenta laortogonalidad de las autofunciones. Por ejemplo, escribiendo con subındice de suma-toria n′ la serie (11.48), multiplicando por Xn(x), integrando y teniendo en cuenta laortogonalidad de las autofunciones, tendremos:

400 Jose Marın Antuna
∫ l
0
f(x)Xn(x)dx =∞∑n′=1
fn′
∫ l
0
Xn′(x)Xn(x)dx =
=∞∑n′=1
fn′ ‖ Xn′ ‖2 δnn′ = fn ‖ Xn ‖2
de donde, despejando, se obtiene (11.49), ya que δnn′ es el sımbolo de Kroneker. Actuandode forma similar con (11.118) y (11.119), se obtienen (11.120) y (11.121). De hecho, paraobtener los coeficientes en los problemas anteriores, se procede de forma identica; enaquellos casos, debido a la expresion de los autovalores, la norma de las autofunciones es‖ Xn ‖2= l
2. Sin embargo, en este caso esto no se cumplira, por lo que debemos hacer el
calculo de la norma. Tendremos:
‖ sinµnlx ‖2=
∫ l
0
sin2 µnlxdx =
1
2
∫ l
0
[1− cos
2µnlx
]dx =
=l
2− 1
2
∫ l
0
cos2µnlxdx =
l
2− l
4µnsin
2µnll
Es decir, para este caso la norma de las autofunciones es
‖ Xn ‖2=‖ sinµnlx ‖2=
l
2
[1− 1
2µnsin 2µn
](11.122)
De esta manera queda resuelto el problema.
Observese que, si h → ∞, el problema (11.111) se convierte en el primer problema defrontera (11.1); la recta y = − µ
hltiende a convertirse en el eje x, cortando las ramas
de la funcion tanµ cada vez mas cerca de los ceros de la misma, de manera que, enel lımite, tendremos que µn = nπ y de la expresion de la norma (11.122) vemos queesta se convierte en l/2. Es decir, para h → ∞ obtenemos, como era de esperar, lasautofunciones y los autovalores del primer problema de frontera. De forma similar, sih → 0, el problema (11.111) se convierte en el problema mixto (11.97) que resolvimosarriba, la recta y = − µ
hltiende a convertirse en el eje y, cortando las ramas de la funcion
tanµ cada vez mas cerca de las asıntotas verticales de la misma, de manera que, en ellımite, tendremos que µn = (2n + 1)π
2y la norma, de nuevo, se convierte en l/2, lo que
significa que para h → 0 obtenemos las autofunciones y los autovalores del problemamixto (11.97).
Siguiendo el procedimiento empleado en el punto 6 de este epıgrafe, es facil ver que, parael problema de frontera (11.111), la funcion de Green tendra la forma:
G(x, ξ, t) =∞∑n=1
1
µna
1
‖ sin µn
lx ‖2
sinµnlx sin
µnlξ sin
µna
lt (11.123)
Es de destacar que los ejemplos vistos hasta aquı han sido problemas con la ecuacionhiperbolica, es decir, problemas, cuyo sentido fısico es el de las oscilaciones de, por ejemplo,

Metodo de Separacion de Variables 401
una cuerda. Sin embargo, en el metodo de trabajo que en dichos ejemplos se desarrollapara hallar las autofunciones y los autovalores, se llega a un problema de Sturm-Liouvilleque -como sabemos- es identico al que se obtendrıa en el caso de un problema parabolico,ya que, como vimos al inicio del epıgrafe, el problema de Sturm-Liouville para ambostipos de ecuaciones es el mismo y en ellos solo varıa la ecuacion diferencial que se obtienepara la funcion dependiente del tiempo. Por consiguiente, estos ejemplos sirven tambienpara ilustrar la obtencion de los autovalores y las autofunciones de los distintos problemasde frontera para la ecuacion parabolica en (0, l). No obstante, veamos algunos ejemplosespecıficos ilustrativos de problemas para la ecuacion parabolica.
4. Hallemos la temperatura de una barra de longitud l sin fuentes de calor y aislada termi-camente en su superficie longitudinal, si sus extremos estan aislados termicamente y latemperatura inicial es una funcion arbitraria de x. Consideremos, como caso particular,cuando la temperatura inicial es U0 constante.
El problema matematico a resolver en este caso es
ut = a2uxx, ∀0 < x < l, t > 0
u(x, 0) = ϕ(x) (11.124)
ux(0, t) = 0
ux(l, t) = 0
De acuerdo con lo visto en el ejemplo 2, las autofunciones seran aquı las mismas de aquelcaso, por lo que -separando variables- es facil llegar a la siguiente expresion de la solucion:
u(x, t) =∞∑n=0
Cne−(nπa
l )2t cos
nπ
lx (11.125)
donde los coeficientes vienen dados por
Cn =2
l
∫ l
0
ϕ(ξ) cosnπ
lξdξ (11.126)
De nuevo, en la formula (11.125) el factor 2/l debe sustituirse por 1/l, para n = 0, yaque la norma de la autofuncion para ese valor de n es l y no l/2.
Notese que para t→∞ la solucion (11.125) tiende a convertirse en la constante
C0 =1
l
∫ l
0
ϕ(ξ)dξ (11.127)
que no es otra cosa que el promedio de la temperatura inicial en la barra. Este resultadoes fısicamente comprensible, ya que, como la barra esta totalmente aislada del exterior, amedida que el tiempo crece, el calor dentro de ella tiende a distribuirse uniformemente, demanera que, en el lımite cuando t→∞, la temperatura de toda la barra sera constantee igual al promedio de su temperatura inicial.
Si la temperatura inicial es U0 constante, tendremos de (11.126) que

402 Jose Marın Antuna
Cn =2U0
l
∫ l
0
cosnπ
lξdξ = U0δn0
donde δn0 = 1, para n = 0 y δn0 = 0, para n 6= 0.
Es decir, que en este caso u(x, t) = U0. Este resultado es logico desde el punto de vistafısico, pues si no existen fuentes de calor en la barra y esta se encuentra totalmenteaislada termicamente, entonces, todo el tiempo su temperatura se mantendra igual a latemperatura inicial constante U0.
5. Hallar la temperatura de una barra en cuya superficie longitudinal se produce un inter-cambio de calor con el medio ambiente por la ley de Newton, suponiendo que el medioexterior se encuentra a temperatura igual a cero y si se mantienen flujos de calor cons-tantes a traves de los extremos de la barra. La temperatura inicial de la barra es unafuncion arbitraria de x.
En este caso, existe una fuente de calor distribuida a lo largo de la barra, ya que hay unintercambio de calor con el medio exterior a traves de su superficie longitudinal. No esdifıcil llegar a determinar que la intensidad de esta fuente por unidad de longitud es
f(x, t) = −hu
donde
h =αp
cρσ
Aquı α es el coeficiente de intercambio de calor entre la superficie de la barra y el medioambiente, p es el perımetro de la seccion transversal de la barra, de area σ, c es lacapacidad calorıfica del material del que esta compuesta la barra y ρ su densidad. Porconsiguiente, la ecuacion a resolver sera aquı ut = a2uxx − hu.
Las condiciones de frontera se obtienen de la siguiente forma. Como el flujo de calor esconstante a traves de los extremos de la barra, llamando q1 y q2 a la cantidad de calor quefluye a traves de los extremos de la barra x = 0 y x = l, respectivamente, en la unidadde tiempo, tendremos que, en esos extremos, se cumplira que
kσux(0, t) = −q1, kσux(l, t) = q2
donde k es el coeficiente de conductividad termica del material que forma la barra.
Si llamamos Q1 = − q1kσ
y Q2 = q2kσ
, entonces el problema a resolver sera
ut = a2uxx − hu, ∀0 < x < l, t > 0
u(x, 0) = ϕ(x) (11.128)
ux(0, t) = Q1
ux(l, t) = Q2

Metodo de Separacion de Variables 403
Por ser estacionarias las condiciones de frontera, buscaremos la solucion de (11.128) enla forma
u(x, t) = v(x, t) + w(x) (11.129)
Para la funcion v(x, t) obtenemos, entonces, la ecuacion
vt = a2vxx − hv − hw + a2w′′ (11.130)
Por otra parte, para poder aplicar el metodo de separacion de variables -como hemos visto-es necesario que las condiciones de frontera sean homogeneas; por lo tanto, exigiremosque la funcion w(x) sea tal que convierta en homogeneas las condiciones de frontera delproblema para v(x, t). Exigiremos, ademas, que en la ecuacion (11.130), para v(x, t), nofiguren los dos ultimos sumandos de la derecha que contienen a w y su derivada. En otraspalabras, buscaremos la funcion w(x) de forma que sea solucion del problema
w′′ − h
a2w = 0
w′(0) = Q1 (11.131)
w′(l) = Q2
El problema (11.131) es un problema de frontera para una ecuacion diferencial ordinariacon coeficientes constantes, cuya solucion es facil de obtener en la forma
w(x) =a√hQ1 sinh
√h
ax+
Q2 −Q1 cosh√hal
√ha
sinh√hal
cosh
√h
ax (11.132)
Entonces, para la funcion v(x, t), nos queda el siguiente problema a resolver:
vt = a2vxx − hv, ∀0 < x < l, t > 0
v(x, 0) = ϕ(x)− w(x) (11.133)
vx(0, t) = 0
vx(l, t) = 0
Separando variables, para la parte espacial obtenemos las autofunciones y los autovaloresdel segundo problema de frontera, dados por (11.106). Para la funcion del tiempo en estecaso la ecuacion que se obtiene es:
T ′ + (h+ λna2)T = 0 (11.134)
cuya solucion sera:
Tn(t) = Cne−hte−(nπa
l )2t (11.135)

404 Jose Marın Antuna
Finalmente, por lo tanto, la solucion del problema (11.133) vendra dada por la expresion:
v(x, t) = e−ht∞∑n=0
Cne−(nπa
l )2t cos
nπ
lx (11.136)
donde los coeficientes vienen dados por la expresion
Cn =2
l
∫ l
0
[ϕ(ξ)− w(ξ)] cosnπ
lξdξ (11.137)
En la formula (11.137) debe tenerse presente que, para n = 0, el factor 2/l (inverso dela norma de la autofuncion) debe sustituirse por 1/l. La solucion del problema (11.128)vendra dada por (11.129), donde v(x, t) es (11.136) con los coeficientes (11.137) y w(x)es (11.132). Es de interes hacer notar que (11.136) es la solucion del problema (11.133)que responde, fısicamente, a la distribucion de temperaturas en una barra que, con unadistribucion inicial de temperaturas, realiza un intercambio de calor con el medio exteriora traves de su superficie longitudinal, si sus extremos estan aislados termicamente. Debidoal factor e−ht se ve que la temperatura de la barra tiende a cero para t → ∞, ya que elcalor se escapa de la barra hacia el exterior a traves de la superficie de la barra.
En el ultimo ejemplo estudiado hemos acometido la resolucion de un problema con condi-ciones no homogeneas de frontera. El metodo para acometer problemas de este tipo logeneralizaremos, cuando abordemos la solucion del problema general por separacion devariables, cosa que haremos a continuacion.
11.1.9 Solucion del problema general
Supongamos que queremos hallar las oscilaciones de una cuerda de longitud l con una fuerzaaplicada, con condiciones iniciales diferentes de cero y condiciones de frontera, tambien, nohomogeneas. Paralelamente y por la similitud del procedimiento a utilizar, acometeremos elproblema de hallar la temperatura en una barra de longitud l en cuyo interior hay fuentes decalor, si la condicion inicial es diferente de cero y las condiciones de frontera son, tambien,diferentes de cero. En ambos casos, para fijar ideas, haremos nuestro analisis para condicionesde frontera de primer tipo. Ademas, haremos algunas consideraciones y comentarios para elacometimiento de problemas similares en los que las condiciones de frontera no homogeneassean de otro tipo.
Ası las cosas, nos proponemos resolver los siguientes problemas.
En el caso de la ecuacion hiperbolica:

Metodo de Separacion de Variables 405
utt = a2uxx + f(x, t), ∀0 < x < l, t > 0
u(x, 0) = ϕ(x)
ut(x, 0) = ψ(x) (11.138)
u(0, t) = µ(t)
u(l, t) = ν(t)
y en el caso de la ecuacion parabolica:
ut = a2uxx + f(x, t), ∀0 < x < l, t > 0
u(x, 0) = ϕ(x) (11.139)
u(0, t) = µ(t)
u(l, t) = ν(t)
Para poder aplicar el metodo de separacion de variables, segun vimos, es necesario que lascondiciones de frontera sean homogeneas. Por consiguiente, buscaremos la solucion, tanto delproblema (11.138), como del problema (11.139), en la forma
u(x, t) = v(x, t) + w(x, t) (11.140)
donde escogeremos la funcion w(x, t) continua y diferenciable en (0, l) y de forma tal queel problema que quede para v(x, t) tenga ya condiciones de frontera homogeneas. Es facilcomprobar que, para v(x, t), se obtiene el siguiente problema:
En el caso hiperbolico:
vtt = a2vxx + f(x, t)− [wtt − a2wxx], ∀0 < x < l, t > 0
v(x, 0) = ϕ(x)− w(x, 0)
vt(x, 0) = ψ(x)− wt(x, 0) (11.141)
v(0, t) = µ(t)− w(0, t)
v(l, t) = ν(t)− w(l, t)
y, en el caso parabolico:
vt = a2vxx + f(x, t)− [wt − a2wxx], ∀0 < x < l, t > 0
v(x, 0) = ϕ(x)− w(x, 0) (11.142)
v(0, t) = µ(t)− w(0, t)
v(l, t) = ν(t)− w(l, t)

406 Jose Marın Antuna
Escogeremos, por lo tanto, w(x, t) de manera que cumpla que
w(0, t) = µ(t), w(l, t) = ν(t) (11.143)
ya que, ası, las condiciones de frontera de (11.141) y de (11.142) resultan homogeneas. Endependencia del problema que estemos resolviendo y de la funcion f(x, t), podrıamos exigir quew(x, t), ademas, satisfaga la ecuacion homogenea correspondiente, con lo que la expresion entrecorchetes en la ecuacion de los problemas (11.141) y (11.142) se harıa cero; pudieramos, ademas,exigirle que cumpliera con condiciones iniciales homogeneas. En una palabra, aplicarle al pro-blema general el Principio de Superposicion que desarrollamos anteriormente en este libro. Ellodepende de la conveniencia que veamos, en funcion del caso particular que estemos resolviendo.Sin embargo, como lo fundamental es lograr hacer homogeneas las condiciones de frontera parav(x, t) y como el teorema de unicidad nos garantiza que la solucion que encontremos es unica,es suficiente, en este caso que nos ocupa del primer problema de frontera, tomar w(x, t) como:
w(x, t) = µ(t) +x
l[ν(t)− µ(t)] (11.144)
Entonces, para v(x, t), nos queda el problema:
En el caso hiperbolico:
vtt = a2vxx + f ∗(x, t), ∀0 < x < l, t > 0
v(x, 0) = ϕ∗(x)
vt(x, 0) = ψ∗(x) (11.145)
v(0, t) = 0
v(l, t) = 0
y, en el caso parabolico:
vt = a2vxx + f ∗(x, t), ∀0 < x < l, t > 0
v(x, 0) = ϕ∗(x) (11.146)
v(0, t) = 0
v(l, t) = 0
donde hemos introducido las siguientes notaciones:
f ∗(x, t) = f(x, t)− [wtt − a2wxx]
para el caso hiperbolico
Metodo de Separacion de Variables 407
f ∗(x, t) = f(x, t)− [wt − a2wxx]
para el caso parabolico, y
ϕ∗(x) = ϕ(x)− w(x, 0) (11.147)
ψ∗(x) = ψ(x)− wt(x, 0)
De acuerdo con el principio de superposicion, los problemas (11.145) y (11.146) se puedenresolver, proponiendo su solucion como la suma de dos funciones:
v(x, t) = v(1)(x, t) + v(2)(x, t) (11.148)
donde v(1)(x, t) es la solucion del problema con la ecuacion homogenea del problema (11.145)o (11.146), las condiciones iniciales de uno u otro de dichos problemas y las condiciones defrontera nulas del problema en cuestion y v(2)(x, t) es la solucion del problema con la ecuacionno homogenea del problema (11.145) o (11.146) y las condiciones iniciales y de frontera ho-mogeneas. Dichos problemas para v(1)(x, t) y v(2)(x, t) ya han sido resueltos por nosotros enpuntos anteriores de este epıgrafe, de manera que, en principio, queda resuelto el problema masgeneral posible para la ecuacion hiperbolica y para la ecuacion parabolica unidimensionales enun segmento finito (0, l) por el metodo de separacion de variables.
Es necesario destacar que, para los problemas de frontera de segundo y tercer tipo y mix-tos, el procedimiento de proponer la funcion w(x, t) en la forma (11.144) no es aplicable. Elprocedimiento general esta basado, como dijimos, en el principio de superposicion expuesto an-teriormente y el lector que intente resolver un problema con condiciones de frontera de segundo,tercer tipo o mixto, debera guiarse por lo establecido en dicho principio.
La tecnica para hacer homogeneas las condiciones de frontera de un problema, a fin de aplicar elmetodo de separacion de variables, se puede sistematizar. Ya habıamos visto que para resolverel primer problema de frontera con condiciones de primer tipo se buscaba la solucion en la forma(11.140) y, entonces, bastaba elegir a w(x, t) en la forma (11.144), pues de esa manera parav(x, t) se obtenıan condiciones de frontera homogeneas. El problema para v(x, t) se resolvıa yapor el metodo de separacion de variables.
En esencia, para hacer homogeneas las condiciones de frontera de v(x, t), es suficiente construiruna funcion w(x, t) continua hasta sus segundas derivadas en (0, l) que satisfaga las mismascondiciones de frontera del problema que se desea resolver. Ası, por ejemplo, si el problema aresolver es el segundo problema de frontera, cuyas condiciones son
ux(0, t) = µ(t), ux(l, t) = ν(t) (11.149)
es facil ver que w(x, t) puede tomarse en la forma
408 Jose Marın Antuna
w(x, t) = µ(t)x+x2
2l[ν(t)− µ(t)] (11.150)
pues ası, las condiciones de segundo tipo para v(x, t) se hacen homogeneas.
Supongamos, ahora, que el problema que queremos resolver es un problema mixto con condi-ciones
u(0, t) = µ(t), ux(l, t) = ν(t) (11.151)
En este caso, la funcion w(x, t) que hace homogeneas las condiciones referidas para v(x, t) puedetomarse igual a
w(x, t) = µ(t) +x2
2lν(t) (11.152)
Veamos el caso en que las condiciones de frontera son
u(0, t) = µ(t), ux(l, t) + hu(l, t) = ν(t) (11.153)
Busquemos la funcion w(x, t) que cumpla dichas condiciones en la forma
w(x, t) = (ax+ b)µ(t) + (cx+ d)ν(t) (11.154)
La condicion
w(0, t) = bµ(t) + dν(t) = µ(t) (11.155)
nos indica que b = 1, d = 0, de manera que
w(x, t) = (ax+ 1)µ(t) + cxν(t) (11.156)
Por lo tanto, la condicion de tercer tipo en x = l sera:
wx(l, t) + hw(l, t) = aµ(t) + cν(t) + h(al + 1)µ(t) + clν(t) = ν(t)
Para que esta condicion se cumpla, las constantes a y c deben ser iguales a:
a = − h
1 + hl, c =
1
1 + hl(11.157)

Metodo de Separacion de Variables 409
Ası pues, la funcion w(x, t) buscada en este caso es
w(x, t) =
(1− hx
1 + hl
)µ(t) +
x
1 + hlν(t) (11.158)
De manera totalmente analoga, para el tercer problema de frontera:
ux(0, t)− h1u(0, t) = µ(t), ux(l, t) + h2u(l, t) = ν(t) (11.159)
proponemos la funcion w(x, t) en la forma (11.154). Al exigirle que cumpla las condiciones(11.159), para los parametros a, b, c y d se obtienen los valores
a =h2
h1 + h2 + h1h2l, b = − 1 + h2l
h1 + h2 + h1h2l
c =h1
h1 + h2 + h1h2l, d =
1
h1 + h2 + h1h2l(11.160)
con lo que queda construida la funcion que hace homogeneas las condiciones de tercer tipopara la funcion v(x, t). Un caso particular de las condiciones de tercer tipo se obtiene cuandoh1 = h2 = h:
ux(0, t)− hu(0, t) = µ(t), ux(l, t) + hu(l, t) = ν(t) (11.161)
En este caso, en la funcion w(x, t) dada por (11.154) los parametros a, b, c y d son:
a =1
2 + hl, b =
1 + hl
h(2 + hl), c =
1
2 + hl, d =
1
h(2 + hl)(11.162)
Un ultimo caso posible es el de las condiciones de frontera del tipo
ux(0, t) = µ(t), ux(l, t) + hu(l, t) = ν(t) (11.163)
Las condiciones (11.163) se obtienen de (11.159), si consideramos h1 = 0 y h2 = h. Por lotanto, de (11.160) obtenemos para los parametros a, b, c y d:
a = 1, b = −1 + hl
h, c = 0, d =
1
h(11.164)
por lo que, en este caso, la funcion w(x, t) es:

410 Jose Marın Antuna
w(x, t) =
(x− 1 + hl
h
)µ(t) +
1
hν(t) (11.165)
Con lo expuesto aquı, el lector queda en posesion de todos los recursos necesarios para aplicar elesquema general de separacion de variables, desarrollado anteriormente, en cualquier problemade frontera de ecuaciones hiperbolicas y parabolicas en el intervalo 0 < x < l.
11.1.10 Oscilaciones bajo la accion de una fuerza periodica armoni-ca. Oscilaciones amortiguadas
Veremos, a continuacion, la aplicacion del metodo de separacion de variables a la solucion dedos problemas particulares que tienen especial importancia en las aplicaciones fısicas.
1. Supongamos que sobre una cuerda de longitud l, con sus extremos fijos, actua una fuerza, porunidad de longitud, de intensidad F (x, t) = F (x) sinωt; es decir, una fuerza periodica armonica,con frecuencia ω constante. Queremos hallar la expresion de las oscilaciones, suponiendo quela elongacion inicial y la velocidad inicial son nulas.
Antes de acometer la solucion del problema, debemos aclarar que hemos supuesto extremosfijos para fijar ideas, aunque lo que a continuacion desarrollaremos es, en esencia, valido paracualesquiera condiciones de frontera homogeneas en los extremos de la cuerda. Ademas, lascondiciones iniciales nulas las proponemos para simplificar la resolucion del problema, pues loque queremos investigar es lo que aporta, cualitatiamente, al movimiento de la cuerda el hechode que la fuerza aplicada tenga la forma arriba propuesta y, como sabemos, de ser diferentes decero las condiciones iniciales, por el principio de superposicion siempre podrıamos descomponerel problema en uno como el que a continuacion vamos a resolver y otro que responderıa a laecuacion homogenea con condiciones iniciales dadas, que sin dificultades ya sabemos resolver.
Ası las cosas, llamando f(x) = F (x)/ρ, queremos resolver el siguiente problema:
utt = a2uxx + f(x) sinωt, ∀0 < x < l, t > 0
u(x, 0) = 0
ut(x, 0) = 0 (11.166)
u(0, t) = 0
u(l, t) = 0
El problema (11.166) es un importante caso particular del problema con ecuacion no homogeneay condiciones iniciales y de frontera homogeneas ya estudiado en el punto 7 de este epıgrafe, porlo que utilizaremos los resultados ya obtenidos. De acuerdo con la formula (11.87) y teniendo encuenta que, por ser condiciones de frontera de primer tipo, las autofunciones y los autovalores,respectivamente, son

Metodo de Separacion de Variables 411
Xn(x) = sinnπ
lx,
√λn =
nπ
l(11.167)
y, por lo tanto, en la expresion de la funcion de Green (11.65) hay que colocar dichas autofun-ciones y dichos autovalores, la solucion del problema (11.166) tiene la forma
u(x, t) =
∫ t
0
∫ l
0
∞∑n=1
1
nπa
2
lsin
nπ
lx sin
nπ
lξ sinωn(t− τ)f(ξ) sinωτdξdτ =
=∞∑n=1
1
nπasin
nπ
lx
∫ l
0
f(ξ) sinnπ
lξdξ
∫ t
0
sinωn(t− τ) sinωτdτ =
=∞∑n=1
1
ωnfn sin
nπ
lx
∫ t
0
sinωn(t− τ) sinωτdτ (11.168)
donde, recordemos, ωn =√λna ≡ nπa
lson las frecuencias propias de la cuerda y
fn =2
l
∫ l
0
f(ξ) sinnπ
lξdξ (11.169)
son los coeficientes de Fourier del desarrollo de la funcion f(x) en serie de autofunciones.Calculemos la integral que aparece en la extrema derecha en la expresion (11.168). No es difıcilver que, si ω 6= ωn, es decir, si la frecuencia de la fuerza aplicada no coincide con ninguna delas frecuencias propias de la cuerda, se obtiene
I =
∫ t
0
sinωn(t− τ) sinωτdτ =1
ω2n − ω2
[ωn sinωnt− ω sinωt] (11.170)
por lo que, en el caso en que no hay resonancia, la solucion tiene la forma:
u(x, t) =∞∑n=1
fnωn
1
ω2n − ω2
[ωn sinωnt− ω sinωt] sinnπ
lx (11.171)
Sin embargo si, para n = n0, ocurre que ωn0 = ω; es decir, si la frecuencia de la fuerza aplicadacoincide con una de las frecuencias propias de la cuerda, entonces, para ese armonico particularde la cuerda, el coeficiente que le corresponde sera (en la integral I para ese caso consideramosωn0 = ω):
I =
∫ t
0
sinω(t− τ) sinωτdτ =1
2ω[sinωt− ωt cosωt] (11.172)
por lo que, en el caso en que hay resonancia (o sea, que la frecuencia de la fuerza coincide conuna de las frecuencias propias de la cuerda), la solucion sera:
412 Jose Marın Antuna
u(x, t) =∞∑
n=1(n6=n0)
fnωn
1
ω2n − ω2
[ωn sinωnt− ω sinωt] sinnπ
lx+
+fn0
2ω2[sinωt− ωt cosωt] sin
n0π
lx (11.173)
El ultimo termino en (11.173) crece, en valor absoluto, indefinidamente a medida que t crece,lo que significa que la elongacion de la cuerda se hara, en valor absoluto, cada vez mayor hastaque, en un momento dado, se parta la cuerda. Es de notar que siempre que la frecuenciaω de la fuerza aplicada coincida con una frecuencia propia cualquiera de la cuerda ωn0 estoocurrira, aunque es evidente que, mientras mas pequena sea n0, menos tiempo durara la cuerdasin partirse, ya que ω en (11.173) es mas pequena. En los problemas mecanicos esta situacionde resonancia es indeseable y por todos los medios se trata de evitar, a fin de preservar laintegridad de los sistemas mecanicos; es conocida la anecdota de la vida real en la que un grupode soldados, al marchar sobre un puente con paso uniforme, de manera que golpeaban el piso delpuente con frecuencia coincidente con una de las frecuencias propias del puente, destrozaron elmismo y sufrieron un lamentable accidente. Por la misma causa los trenes, al pasar por puentesde longitud grande no lo hacen a velocidad uniforme; ası evitan que las vibraciones del puente,provocadas por los golpes periodicos de las ruedas del tren al pasar los tramos de longitudconstante de las lıneas provoquen una accion sobre el puente con una fuerza con frecuenciaigual a una de las frecuencias propias del puente y evitar ası que no se produzca el fenomeno deresonancia que aquı hemos visto y el puente se destruya con consecuencias catastroficas para eltren y los pasajeros que en el viajen. Sin embargo, en los sistemas electronicos, precisamente loque se busca es lograr la resonancia; por ejemplo, en un circuito RLC de sintonıa de cualquierradiorreceptor, el capacitor variable se utiliza para lograr la resonancia del sistema con unade las ondas electromagneticas que se reciben a traves de la antena y, de esa manera, podersintonizar la estacion que transmite a esa frecuencia. Esto puede verse con mas detenimientoen cualquier curso elemental de radiotecnica y electronica.
2. Supongamos que una cuerda de longitud l, con sus extremos fijos, oscila, producto dedeterminadas condiciones iniciales dadas, en un medio que le ofrece a su movimiento unaresistencia proporcional a la velocidad. Queremos hallar las elongaciones de la cuerda, teniendoen cuenta todas las posibilidades del valor del coeficiente de proporcionalidad de la resistenciay despreciando en el proceso la accion de la gravedad.
La fuerza de resistencia del medio sera Fρ
= −2νut, donde el coeficiente de proporcionalidad νes considerado mayor que cero. Por consiguiente, el problema que queremos resolver es:
utt = a2uxx − 2νut, ∀0 < x < l, t > 0
u(x, 0) = ϕ(x)
ut(x, 0) = ψ(x) (11.174)
u(0, t) = 0
u(l, t) = 0

Metodo de Separacion de Variables 413
Aplicando el metodo de separacion de variables, en virtud de que las condiciones de fronterade (11.174) son de primer tipo, las autofunciones y los autovalores seran los mismos que vienendados por (11.167) y, para la funcion T (t), a partir de la ecuacion del problema (11.174),obtenemos la ecuacion:
T ′′n + 2νT ′n + ω2nTn = 0 (11.175)
donde ωn = nπal
son las frecuencias propias de la cuerda.
Aplicando a (11.175) el metodo de Euler para hallar la solucion general, proponemos la solucioncomo T (t) = ekt, por lo que obtenemos la siguiente ecuacion caracterıstica:
k2 + 2νk + ω2n = 0 (11.176)
cuyas raıces son:
k = −ν ±√ν2 − ω2
n
Aquı debemos tener en consideracion varios casos posibles:
1. Sea ν < ω1 = πal. Entonces, las dos raıces de (11.176) son complejas, de manera que la
solucion general de (11.175) sera:
Tn(t) = e−νtAn cos ωnt+Bn sin ωnt (11.177)
donde ωn =√ω2n − ν2 son las frecuencias con que oscila, en este caso, la cuerda y que,
evidentemente, son menores que las frecuencias propias de la cuerda. Por consiguiente,las oscilaciones de la cuerda aquı seran
u(x, t) = e−νt∞∑n=1
An cos ωnt+Bn sin ωnt sinnπ
lx (11.178)
De la expresion (11.178) es evidente que las oscilaciones van amortiguandose con el tiempo,debido a la presencia del factor e−νt en la expresion de la solucion. Estamos, por lo tanto,en presencia de oscilaciones amortiguadas. Los coeficientes An y Bn se hallan a partirde las condiciones iniciales del problema (11.174) y para ellos se obtiene:
An =2
l
∫ l
0
ϕ(ξ) sinnπ
lξdξ, Bn =
νAnωn
+2
lωn
∫ l
0
ψ(ξ) sinnπ
lξdξ (11.179)
2. Sea ν = ω1. Este es un caso lımite. Aquı, la unica raız de la ecuacion caracterıstica(11.176) para n = 1 es k = −ν de multiplicidad 2. Por consiguiente

414 Jose Marın Antuna
T1(t) = e−νt(A1 +B1t) (11.180)
para n ≥ 2 las soluciones, al igual que en el caso anterior, vendran dadas por (11.177),por lo que, de acuerdo con (11.180), la solucion en este caso sera:
u(x, t) = e−νt
(A1 +B1t) sin
π
lx+
∞∑n=2
An cos ωnt+Bn sin ωnt sinnπ
lx
(11.181)
Como el termino predominante energeticamente (n = 1) no es oscilante, la cuerda nooscilara, sino que disminuira su amplitud paulatinamente, regresando a la posicion deequilibrio para t → ∞, ya que la exponencial negativa tiende a cero mas rapidamenteque lo que crece el termino lineal (A1 + B1t). Este caso, en ocasiones se conoce con elnombre de movimiento crıticamente amortiguado. Se deja al lector el calculo de loscoeficientes An y Bn.
3. Sea ν > ω1, digamos, por ejemplo, para fijar ideas, ω3 < ν < ω4. En este caso, paran = 1, 2, 3, las raıces de la ecuacion caracterıstica (11.176) son reales, de manera que
Tn(t) = e−νtAne
√ν2−ω2
nt +Bne−√ν2−ω2
nt
(11.182)
y, para n ≥ 4, las Tn(t) vendran dadas, de nuevo, por (11.177). Por lo tanto, la expresionde la solucion en este caso sera
u(x, t) = e−νt3∑
n=1
Ane
√ν2−ω2
nt +Bne−√ν2−ω2
nt
sinnπ
lx+
+ e−νt∞∑n=4
An cos ωnt+Bn sin ωnt sinnπ
lx (11.183)
Como en (11.183) los terminos predominantes, energeticamente, son los correspondientesa n = 1, 2, 3, el resultado sera que la cuerda tampoco oscilara. En este caso, el movimientose denomina sobreamortiguado. El lector debe hallar las expresiones de An y Bn a modode ejercicio. Los casos en que ν ≥ ω1 corresponden al caso de sobreamortiguamiento dela cuerda. Esta claro que, si ν = ωn0 , con n0 fijo, el armonico correspondiente a n = n0 setratara de la misma forma que en el inciso 2 y los armonicos correspondientes a 1 ≤ n < n0
se trataran como el inciso 3.

Metodo de Separacion de Variables 415
11.2 Ecuaciones hiperbolicas y parabolicas en varias di-
mensiones espaciales
11.2.1 Planteamiento de los problemas y reduccion del problemageneral
En el capıtulo en el que estudiamos el planteamiento de los problemas matematicos vimos comose plantean los problemas de frontera para las ecuaciones hiperbolicas y parabolicas en variasdimensiones espaciales. De acuerdo con lo que allı vimos, en general, los problemas se planteande la siguiente manera.
Hallar la funcion u(M, t) continua en V +S, que satisfaga, en el caso de la ecuacion hiperbolica:
utt = a2∇2u+ f(M, t), ∀M ∈ V, t > 0
u(M, 0) = ϕ(M)
ut(M, 0) = ψ(M) (11.184)
u|S = µ(M, t), ∀M ∈ S
y, en el caso de la ecuacion parabolica:
ut = a2∇2u+ f(M, t), ∀M ∈ V, t > 0
u(M, 0) = ϕ(M) (11.185)
u|S = µ(M, t), ∀M ∈ S
Los problemas (11.184) y (11.185) planteados constituyen el primer problema de fronterapara la ecuacion hiperbolica y para la ecuacion parabolica, respectivamente. En ellos, si sesustituye la condicion de frontera de primer tipo por la condicion de frontera de segundo tipo
∂u
∂n|S = µ(M, t), ∀M ∈ S
o por la condicion de frontera de tercer tipo
∂u
∂n|S + hu|S = µ(M, t), ∀M ∈ S
se obtienen, respectivamente, el segundo problema de frontera y el tercer problemade frontera, segun vimos anteriormente. Es posible tambien el planteamiento de problemasmixtos, cuando en una porcion de la frontera la condicion es de un tipo y en otra de otro tipo.

416 Jose Marın Antuna
Esto, por supuesto, depende de las caracterısticas del problema fısico que se desea resolver yno vamos a abordarlo aquı en una forma general.
Es necesario decir que, para los problemas de frontera aquı formulados, se puede enunciary demostrar el teorema de unicidad de la solucion en forma general, al igual que lo hicimosanteriormente para los problemas planteados en una sola dimension espacial. No obstante, eneste momento no nos detendremos en el analisis de este aspecto, que consideraremos establecidoy que puede verse como una generalizacion al caso de varias dimensiones espaciales de losteoremas demostrados en aquella ocasion. En el libro de Ecuaciones Integrales del autor, alestudiar la equivalencia entre las ecuaciones integrales y los problemas de frontera, se vuelve atocar este aspecto.
Para abordar la resolucion de los problemas (11.184) y (11.185) -ası como de los problemasque se deriven de colocar, en lugar de la condicion de frontera de primer tipo, una condicionde frontera de segundo o de tercer tipo- por el metodo de separacion de variables, debemos,inicialmente, hacer cero la condicion de frontera. Para ello, buscaremos la solucion en la forma
u(M, t) = v(M, t) + w(M, t) (11.186)
y exigiremos que la funcion w(M, t) satisfaga la condicion del problema que queremos resolver.En el caso del primer problema de frontera (11.184) o (11.185) esto significa que exigiremos que
w|S = µ(M, t) (11.187)
Entonces, para la funcion v(M, t), a partir de (11.184) o (11.185), obtenemos, respectivamente,los problemas:
vtt = a2∇2v + f ∗(M, t), ∀M ∈ V, t > 0
v(M, 0) = ϕ∗(M)
vt(M, 0) = ψ∗(M) (11.188)
v|S = 0, ∀M ∈ S
vt = a2∇2v + f ∗(M, t), ∀M ∈ V, t > 0
v(M, 0) = ϕ∗(M) (11.189)
v|S = 0, ∀M ∈ S
donde hemos introducido las siguientes notaciones:
f ∗(M, t) = f(M, t)− [wtt − a2∇2w]
Metodo de Separacion de Variables 417
o
f ∗(M, t) = f(M, t)− [wt − a2∇2w]
ϕ∗(M) = ϕ(M)− w(M, 0) (11.190)
ψ∗(M) = ψ(M)− wt(M, 0)
A su vez, para resolver el problema (11.188) o (11.189), buscamos la solucion en la forma:
v(M, t) = v(1)(M, t) + v(2)(M, t) (11.191)
y exigimos que v(1)(M, t) y v(2)(M, t) sean, respectivamente, la solucion de los problemas siguien-tes:
En el caso de la ecuacion hiperbolica:
v(1)tt = a2∇2v(1), ∀M ∈ V, t > 0
v(1)(M, 0) = ϕ∗(M)
v(1)t (M, 0) = ψ∗(M) (11.192)
v(1)|S = 0, ∀M ∈ S
v(2)tt = a2∇2v(2) + f ∗(M, t), ∀M ∈ V, t > 0
v(2)(M, 0) = 0
v(2)t (M, 0) = 0 (11.193)
v(2)|S = 0, ∀M ∈ S
y, en el caso de la ecuacion parabolica:
v(1)t = a2∇2v(1), ∀M ∈ V, t > 0
v(1)(M, 0) = ϕ∗(M) (11.194)
v(1)|S = 0, ∀M ∈ S
v(2)t = a2∇2v(2) + f ∗(M, t), ∀M ∈ V, t > 0
v(2)(M, 0) = 0 (11.195)
v(2)|S = 0, ∀M ∈ S

418 Jose Marın Antuna
De esta manera, hemos reducido el problema general, en cada caso, descomponiendolo enproblemas mas sencillos, de forma similar a como actuamos en el caso de una sola dimensionespacial. Este esquema de reduccion del problema general lo hemos ejemplificado con el primerproblema de frontera, pero para el segundo y tercer problema de frontera se procede de maneraidentica. La esencia del proceso de reduccion consiste, segun dijimos, en escoger en la solucionpropuesta (11.191) la funcion w(M, t) de forma tal que cumpla con la correspondiente condicionde frontera del problema que queremos resolver, ya que de esa forma garantizamos que para lafuncion v(M, t) la condicion de frontera es homogenea, con el fin de poder aplicar el esquemaconocido de separacion de variables.
Al desarrollo del esquema general de separacion de variables en este caso nos dedicaremos acontinuacion.
11.2.2 Problema auxiliar. Autovalores y autofunciones
Supongamos que queremos resolver los siguientes problemas:
utt = a2∇2u, ∀M ∈ V, t > 0
u(M, 0) = ϕ(M)
ut(M, 0) = ψ(M) (11.196)
c.f.|S = 0, ∀M ∈ S
ut = a2∇2u, ∀M ∈ V, t > 0
u(M, 0) = ϕ(M) (11.197)
c.f.|S = 0, ∀M ∈ S
Notese que hemos puesto en forma generica que la condicion de frontera (c.f. en el plantea-miento) -que puede ser de cualquiera de los tipos- sea homogenea y que, de forma similar acomo actuamos en el caso de una sola dimension espacial, comenzamos abordando el problemade la ecuacion homogenea y condiciones iniciales dadas.
Para aplicar el metodo de separacion de variables, planteamos un problema auxiliar, consistenteen la ecuacion que queremos resolver, la condicion de frontera del problema que queremosresolver y la exigencia de que la solucion sea no trivial y tenga la forma del producto dedos funciones, una dependiente solamente del tiempo y otra dependiente de las coordenadasespaciales. Es decir, el problema auxiliar sera:
utt = a2∇2u, ut = a2∇2u
c.f.|S = 0 (11.198)
u(M, t) = v(M)T (t) 6= 0

Metodo de Separacion de Variables 419
Colocando la solucion propuesta en cada una de las ecuaciones, obtenemos:
T ′′v = a2T∇2v, T ′v = a2T∇2v (11.199)
o, separando las variables en las ecuaciones (11.199):
T ′′
a2T=∇2v
v= −λ, T ′
a2T=∇2v
v= −λ (11.200)
donde λ es un parametro que se toma positivo.
Ası pues, para la funcion T (t) obtenemos, en dependencia de la ecuacion:
T ′′ + λa2T = 0, T ′ + λa2T = 0 (11.201)
que son ecuaciones diferenciales ordinarias, cuyas soluciones son conocidas:
Para el caso hiperbolico:
T (t) = A cos√λat+B sin
√λat (11.202)
Para el caso parabolico:
T (t) = Ceλa2t (11.203)
En ambos casos, de (11.200) obtenemos para la funcion v(M) y teniendo en cuenta la condicionde frontera del problema auxiliar (11.198), el problema:
∇2v + λv = 0, ∀M ∈ Vc.f.|S = 0 (11.204)
Notese que la ecuacion para v(M) que figura en el problema (11.204) es una ecuacion deHelmholtz para el caso en que c = λ > 0. Cuando estudiamos el planteamiento de los problemaspara la ecuacion de Helmholtz, nosotros hicimos alusion a este problema; ahora veremos endetalle las afirmaciones que en aquella ocasion hicimos.
El problema (11.204) es un problema de Sturm-Liouville planteado en el volumen V de fron-tera S, donde se desea resolver el problema (11.196) o (11.197). Este problema (11.204) tienesoluciones no triviales solo para determinados valores de λ, que se llaman autovalores delproblema. Las soluciones no triviales correspondientes a dichos autovalores se denominan au-tofunciones del problema.
420 Jose Marın Antuna
Para los autovalores y las autofunciones del problema (11.204) se tienen las siguientes propie-dades:
1. Los autovalores del problema de Sturm-Liouville forman un conjunto infinito, real y or-denable:
λ1, λ2 < ... < λn < ...
que cumple que
limn→∞
= ∞
A cada autovalor le puede corresponder, en general, un numero finito de autofuncioneslinealmente independientes y el sistema de las autofunciones es cerrado.
La demostracion de esta propiedad es estudiada en el libro de Ecuaciones Integrales delautor.
2. Los autovalores del problema de Sturm-Liouville (11.204) son no negativos.
Demostracion:
De acuerdo con la Primera Formula de Green:∫ ∫ ∫V
u∇2v + ∇u ·∇vdP =
∫ ∫S
u∂v
∂ndS (11.205)
donde u y v son dos funciones cualesquiera con primeras derivadas continuas en V + S ysegundas derivadas continuas en V . Tomemos, pues, en esta formula u y v ambas igualesa la autofuncion vn, correspondiente al autovalor λn del problema de Sturm-Liouville(11.204). Entonces, en virtud de (11.204), ∇2vn ≡ −λnvn y, si la condicion de fronterahomogenea del problema (11.204) es de primero o de segundo tipo, la integral de superficiedesaparece y, por lo tanto, tendremos:
−λn∫ ∫ ∫
V
v2ndP +
∫ ∫ ∫V
(∇vn)2dP = 0
o, finalmente,
λn =
∫ ∫ ∫V(∇vn)
2dP∫ ∫ ∫Vv2ndP
≥ 0 (11.206)
Si la condicion de frontera homogenea del problema (11.204) es de tercer tipo, entonces,para la integral de superficie en (11.205) tendremos, despues de sustituir u y v por vn:∫ ∫
S
vn∂vn∂n
dS = −h∫ ∫
S
v2ndS
por lo que, en lugar de (11.206), llegamos a la siguiente expresion:
Metodo de Separacion de Variables 421
λn =
∫ ∫ ∫V(∇vn)
2dP∫ ∫ ∫Vv2ndP
+h∫ ∫
Sv2ndS∫ ∫ ∫
Vv2ndP
≥ 0 (11.207)
El numerador a la derecha en las expresiones (11.206) y (11.207) es definido no negativo,por ser la integral del cuadrado del gradiente de la autofuncion en el caso de (11.206) y, enel caso de (11.207), ademas, la integral de superficie del cuadrado de vn. El denominadorno es otra cosa que el cuadrado de la norma de la autofuncion, por lo que, obviamente,es definido positivo.
Demostrada la propiedad.
3. Las autofunciones correspondientes a distintos autovalores son ortogonales entre sı, esdecir: ∫ ∫ ∫
V
vn(P )vm(P )dP =‖ vn ‖2 δnm (11.208)
donde δnm es el sımbolo de Kroneker y,
‖ vn ‖2=
∫ ∫ ∫V
v2n(P )dP (11.209)
es el cuadrado de la norma de la autofuncion.
Demostracion:
Tomemos dos autovalores λn y λm y sus correspondientes autofunciones vn y vm. Alcolocarlos en la ecuacion del problema (11.204), esta se convierte en identidad:
∇2vn + λnvn ≡ 0 (11.210)
∇2vm + λmvm ≡ 0 (11.211)
Multipliquemos (11.210) por vm y (11.211) por vn; restemos ambas expresiones e integre-mos por el volumen V . Obtenemos:∫ ∫ ∫
V
vm∇2vn − vn∇2vmdP + (λn − λm)
∫ ∫ ∫V
vnvmdP ≡ 0 (11.212)
La primera integral de volumen a la izquierda de (11.212) puede ser sustituida por unaintegral por la superficie S, de acuerdo con la segunda formula de Green:
∫ ∫ ∫V
vm∇2vn − vn∇2vmdP =
∫ ∫S
(vm∂vn∂n
− vn∂vm∂n
)dS = 0 (11.213)
Esta integral de superficie es cero, en virtud de la condicion de frontera homogenea delproblema (11.204). Por lo tanto, queda que:
422 Jose Marın Antuna
(λn − λm)
∫ ∫ ∫V
vnvmdP ≡ 0 (11.214)
Por consiguiente, si λn 6= λm, la integral de volumen tiene que ser cero, con lo que quedademostrada la ortogonalidad. Si λn = λm, la identidad (11.214) se sigue cumpliendo,aunque la integral se transforma en el cuadrado de la norma de la autofuncion que,obviamente, no es cero, en virtud de la definicion de autofuncion.
Demostrada la propiedad.
4. Teorema del desarrollo:
Cualquier funcion f(M) continua y dos veces diferenciable en V y que satisfaga en S lacondicion de frontera del problema de Sturm-Liouville (11.204), admite un desarrollo enserie de autofunciones convergente absoluta y uniformemente en V :
f(M) =∞∑n=1
fnvn(M) (11.215)
Los coeficientes fn del desarrollo (11.215) se calculan por la formula:
fn =1
‖ vn ‖2
∫ ∫ ∫V
f(P )vn(P )dP (11.216)
que se deduce facilmente, en virtud de la ortogonalidad de las autofunciones. Efecti-vamente, escribiendo el desarrollo (11.215) en funcion de la variable de integracion P ,multiplicandolo por vm(P ) (m fijo) e integrando en el volumen V , obtenemos, teniendoen cuenta (11.208):
∫ ∫ ∫V
f(P )vm(P )dP =∞∑n=1
fn
∫ ∫ ∫V
vn(P )vm(P )dP =
=∞∑n=1
fn ‖ vn ‖2 δnm = fm ‖ vm ‖2
lo que demuestra la validez de la formula (11.216). La demostracion del teorema deldesarrollo se puede ver en el libro de Ecuaciones Integrales del autor.
Las cuatro propiedades enumeradas nos permiten afirmar que el sistema de autofunciones delproblema de Sturm-Liouville forman una base ortogonal de un espacio funcional de infinitasdimensiones, cuyos elementos son el conjunto de todas las funciones continuas y dos vecesdiferenciables en V .
Debe destacarse el hecho de que ha quedado establecida la ortogonalidad de las autofuncionescorrespondientes a distintos autovalores. Sin embargo, a un autovalor puede corresponderle unnumero finito de autofunciones y, para las aplicaciones, es conveniente que tambien las autofun-ciones correspondientes a un mismo autovalor sean ortogonales entre sı. Si esto no ocurriera,
Metodo de Separacion de Variables 423
puede aplicarse el metodo de ortogonalizacion de Schwarz para redefinir dichas autofunciones,de forma tal, que sean ortogonales entre sı y cuya esencia es la siguiente:
Supongamos que al autovalor λn le corresponden sn autofunciones linealmente independientes
v(1)n , v(2)
n , ..., v(sn)n (11.217)
Sustituyamos el conjunto de autofunciones (11.217) por un conjunto nuevo de autofunciones,ya ortogonales entre sı, que representaremos por
v(1)n , v(2)
n , ..., v(sn)n (11.218)
y que construiremos, siguiendo el siguiente esquema:
Hacemos
v(1)n = v(1)
n (11.219)
v(2)n = v(2)
n + αv(1)n (11.220)
El parametro α se escoge de forma tal que estas nuevas autofunciones sean ortogonales, es decir,que
∫ ∫ ∫V
v(1)n v(2)
n dP =
∫ ∫ ∫V
v(1)n v(2)
n dP + α
∫ ∫ ∫V
[v(1)n ]2dP = 0 (11.221)
Como la integral que acompana a α en (11.221) es diferente de cero, ya que es el cuadrado de
la norma de la autofuncion v(1)n , concluimos que
α = −∫ ∫ ∫
Vv
(1)n v
(2)n dP∫ ∫ ∫
V[v
(1)n ]2dP
(11.222)
Analogamente, proponemos:
v(3)n = v(3)
n + β1v(1)n + β2v
(2)n (11.223)
La funcion definida en (11.223) no es identicamente cero, ya que el sistema, como dijimos, eslinealmente independiente. Buscamos los parametros β1 y β2 de forma tal que (11.223) sea
ortogonal a v(1)n y a v
(2)n , es decir:
424 Jose Marın Antuna
∫ ∫ ∫V
v(3)n v(1)
n dP =
∫ ∫ ∫V
v(3)n v(1)
n dP + β1
∫ ∫ ∫V
[v(1)n ]2dP +
+β2
∫ ∫ ∫V
v(1)n v(2)
n dP = 0 (11.224)
La integral que acompana a β2 en (11.224) es cero, en virtud de (11.221), de manera que, paraβ1 obtenemos:
β1 = −∫ ∫ ∫
Vv
(3)n v
(1)n dP∫ ∫ ∫
V[v
(1)n ]2dP
(11.225)
y de la condicion
∫ ∫ ∫V
v(3)n v(2)
n dP =
∫ ∫ ∫V
v(3)n v(2)
n dP + β1
∫ ∫ ∫V
v(1)n v(2)
n dP +
+β2
∫ ∫ ∫V
[v(2)n ]2dP = 0 (11.226)
como la integral que acompana a β1 es, de acuerdo con (11.221), igual a cero, obtenemos paraβ2 la expresion:
β2 = −∫ ∫ ∫
Vv
(3)n v
(2)n dP∫ ∫ ∫
V[v
(2)n ]2dP
(11.227)
A continuacion se propondrıa
v(4)n = v(4)
n + γ1v(1)n + γ2v
(2)n + γ3v
(3)n (11.228)
y, exigiendo la ortogonalidad de (11.228) con v(1)n , v
(2)n y v
(3)n , se obtendrıan expresiones para
los parametros γ1, γ2 y γ3. Este proceso se continua hasta obtener todo el sistema (11.218)que, por construccion, sera ya ortogonal. En lo adelante, siempre consideraremos que, si esnecesaria, la ortogonalizacion ha sido ya realizada.
En Fısica, comunmente, se acostumbra a llamar degenerado al autovalor al que le correspondemas de una autofuncion.
Es conveniente, por ultimo, aclarar que, debido a la generalidad de nuestra exposicion, aquıhemos utilizado un solo numero discreto n para caracterizar al conjunto de autovalores y au-tofunciones. Sin embargo, veremos mas adelante que, producto de que los problemas queresolvemos son en varias dimensiones espaciales, el numero n es, en realidad, un conjunto de

Metodo de Separacion de Variables 425
numeros discretos; la degeneracion de los autovalores genera, a su vez, nuevos numeros. Todoesto sera visto en los ejemplos que, en el futuro, desarrollaremos.
Una vez resuelto el problema de Sturm-Liouville y hallados los autovalores y las autofunciones,podemos, teniendo en cuenta las soluciones (11.202) y (11.203), escribir la solucion del problemaauxiliar (11.198) en la siguiente forma:
Para el caso hiperbolico:
un(M, t) = An cos√λnat+Bn sin
√λnatvn(M) (11.229)
Para el caso parabolico:
un(M, t) = Cne−λna2tvn(M) (11.230)
De esta manera, estamos ya en condiciones de resolver los problemas (11.196) y (11.197), a loque nos dedicaremos en el proximo inciso.
11.2.3 Solucion de la ecuacion homogenea con condicion de fronterahomogenea
Para el problema (11.196) buscamos la solucion como la superposicion de las soluciones (11.229)del problema auxiliar; es decir:
u(M, t) =∞∑n=1
An cos√λnat+Bn sin
√λnatvn(M) (11.231)
quedando ası, automaticamente, satisfecha la ecuacion, -por la construccion hecha- y la con-dicion de frontera del problema (11.196), en virtud de la forma en que obtuvimos las auto-funciones. Solo queda, pues, exigir que se satisfagan las condiciones iniciales del problema, esdecir:
u(M, 0) =∞∑n=1
Anvn(M) = ϕ(M) (11.232)
ut(M, 0) =∞∑n=1
Bn
√λnavn(M) = ψ(M) (11.233)
Si las funciones ϕ(M) y ψ(M) cumplen los requisitos del teorema del desarrollo, entonces, paralos coeficientes An y Bn se obtienen las expresiones:

426 Jose Marın Antuna
An =1
‖ vn ‖2
∫ ∫ ∫V
ϕ(P )vn(P )dP (11.234)
Bn =1√λna
1
‖ vn ‖2
∫ ∫ ∫V
ψ(P )vn(P )dP (11.235)
De esta forma, la solucion del problema (11.196) vendra dada por la expresion (11.231), dondelos coeficientes vienen dados por las formulas (11.234) y (11.235). Coloquemos estas ultimasexpresiones, explıcitamente, en (11.231). Obtenemos:
u(M, t) =∞∑n=1
1
‖ vn ‖2
∫ ∫ ∫V
ϕ(P )vn(P )dP cos√λnatvn(M) +
+∞∑n=1
1√λna
1
‖ vn ‖2
∫ ∫ ∫V
ψ(P )vn(P )dP sin√λnatvn(M) (11.236)
Como las series en (11.236), por hipotesis, convergen absoluta y uniformemente, podemosintercambiar la integracion con la sumatoria y obtener:
u(M, t) =
∫ ∫ ∫V
ϕ(P )∂G(M,P, t)
∂tdP +
∫ ∫ ∫V
ψ(P )G(M,P, t)dP (11.237)
donde hemos introducido la notacion:
G(M,P, t) =∞∑n=1
vn(M)vn(P )√λna ‖ vn ‖2
sin√λnat (11.238)
La funcion (11.238) es la funcion de Green para la ecuacion hiperbolica, ya que es facil com-probar, con la ayuda de (11.237), que es la solucion del problema
utt = a2∇2u, ∀M ∈ V, t > 0
u(M, 0) = 0
ut(M, 0) = δ(M,M0) (11.239)
c.f.|S = 0, ∀M ∈ S
cuya solucion es, por definicion, la funcion de Green, ya que, fısicamente, este problema respondea la aplicacion de un impulso unitario, instantaneo y puntual en el punto M0, en el instantet = 0.
Metodo de Separacion de Variables 427
De manera totalmente analoga, para el problema parabolico (11.197) la solucion se obtienecomo:
u(M, t) =∞∑n=1
Cne−λna2tvn(M) ≡
∫ ∫ ∫V
ϕ(P )G(M,P, t)dP (11.240)
donde los coeficientes vienen dados por
Cn =1
‖ vn ‖2
∫ ∫ ∫V
ϕ(P )vn(P )dP (11.241)
y donde
G(M,P, t) =∞∑n=1
vn(M)vn(P )
‖ vn ‖2e−λna2t (11.242)
es la funcion de Green para la ecuacion parabolica, ya que es la solucion del problema
ut = a2∇2u, ∀M ∈ V, t > 0
u(M, 0) = δ(M,M0) (11.243)
c.f.|S = 0, ∀M ∈ S
que, fısicamente, corresponde a la presencia de una fuente de calor unitaria, instantanea ypuntual en el punto M0, en el instante t = 0 y cuya respuesta, como sabemos, es la funcion deGreen.
11.2.4 Solucion de las ecuaciones no homogeneas con condicioneshomogeneas
Desarrollaremos, ahora, el metodo de solucion de los problemas con ecuaciones no homogeneasy condiciones iniciales y de frontera homogeneas. Veamos, inicialmente, el caso hiperbolico; seael problema:
utt = a2∇2u+ f(M, t), ∀M ∈ V, t > 0
u(M, 0) = 0
ut(M, 0) = 0 (11.244)
c.f.|S = 0, ∀M ∈ S

428 Jose Marın Antuna
Conocidas las autofunciones vn(M) del problema de Sturm-Liouville con la misma condicionde frontera del problema que queremos resolver, proponemos la solucion del problema (11.244)en la forma:
u(M, t) =∞∑n=1
Tn(t)vn(M) (11.245)
y, aceptando que la funcion f(M, t) satisface las condiciones del teorema del desarrollo, laexpresamos en serie de autofunciones en la forma:
f(M, t) =∞∑n=1
fn(t)vn(M) (11.246)
donde
fn(t) =1
‖ vn ‖2
∫ ∫ ∫V
f(P, t)vn(P )dP (11.247)
Colocando (11.245) y (11.246) en la ecuacion del problema (11.244), obtenemos:
∞∑n=1
T ′′n (t)vn(M) = a2
∞∑n=1
Tn(t)∇2vn(M) +∞∑n=1
fn(t)vn(M) (11.248)
pero, como ∇2vn ≡ −λnvn, ya que vn(M) son las autofunciones del problema de Sturm-Liouville, sustituyendo en (11.248) y agrupando, obtenemos:
∞∑n=1
T ′′n + λna2Tn − fn(t)vn(M) = 0 (11.249)
Teniendo en cuenta las condiciones iniciales del problema (11.244), obtenemos de (11.249) elsiguiente problema de Cauchy para hallar las funciones Tn(t):
T ′′n + λna2Tn = fn(t), ∀t > 0
Tn(0) = 0 (11.250)
T ′n(0) = 0
Como ya sabemos, la solucion de este problema es:
Tn(t) =1
a√λn
∫ t
0
fn(τ) sin√λna(t− τ)dτ (11.251)

Metodo de Separacion de Variables 429
Por consiguiente, obtenemos la solucion de nuestro problema como
u(M, t) =∞∑n=1
1
a√λn
∫ t
0
fn(τ) sin√λna(t− τ)dτvn(M) (11.252)
Colocando (11.244) en (11.252) e intercambiando la sumatoria con las integraciones, ya que,por hipotesis, la serie converge uniformemente, obtenemos:
u(M, t) =
∫ t
0
∫ ∫ ∫V
f(P, τ)G(M,P, t− τ)dPdτ (11.253)
donde
G(M,P, t− τ) =∞∑n=1
vn(M)vn(P )√λna ‖ vn ‖2
sin√λna(t− τ) (11.254)
es la misma funcion de Green (11.238), obtenida en el inciso anterior, pero evaluada en tiem-pos t − τ . La formula (11.253) nos permite concluir que la funcion de Green es la soluciongeneralizada del problema
utt = a2∇2u+ δ(M,M0)δ(t), ∀M ∈ V, t > 0
u(M, 0) = 0
ut(M, 0) = 0 (11.255)
c.f.|S = 0, ∀M ∈ S
que, por lo tanto, resulta equivalente al problema (11.243), definitorio de la funcion de Green.Al igual que en el caso de una dimension espacial, no es difıcil comprobar que la inhomogenei-dad en la ecuacion del problema (11.255) corresponde, fısicamente, a la presencia de una fuenteunitaria, instantanea y puntual, que imprime un impulso unitario al punto M0 en el instantet = 0. El problema (11.255) nos evidencia que la funcion de Green (11.238) (es decir, (11.254))es la solucion fundamental generalizada del operador de D’Alembert en el volumen V , corres-pondiente a la condicion de frontera del problema (11.255). Sobre este concepto de solucionfundamental volveremos cuando estudiemos el metodo de la funcion de Green y se precisa conmayor profundidad en el libro de Funciones Generalizadas del autor.
Notese que, en su estructura, la formula (11.253) tiene la misma forma que obtuvimos al resolverel problema en una dimension espacial, tanto en la cuerda finita por el metodo de separacionde variables, como en la cuerda infinita por el metodo de las ondas viajeras: la solucion vieneexpresada como una integracion en el tiempo transcurrido (0, t) y en el espacio considerado (eneste caso, el volumen V ; anteriormente, en la cuerda infinita se integraba en (−∞,∞) y, enla cuerda finita se hacıa en (0, l)) del producto de la funcion de Green por la inhomogeneidad
430 Jose Marın Antuna
de la ecuacion. Veremos mas adelante que esta regla es general y una propiedad intrınseca delconcepto de solucion fundamental.
En el caso de la ecuacion parabolica el problema a resolver serıa:
utt = a2∇2u+ f(M, t), ∀M ∈ V, t > 0
u(M, 0) = 0 (11.256)
c.f.|S = 0, ∀M ∈ S
Un desarrollo similar nos llevarıa a la siguiente expresion de la solucion:
u(M, t) =
∫ t
0
∫ ∫ ∫V
f(P, τ)G(M,P, t− τ)dPdτ (11.257)
donde, en este caso
G(M,P, t− τ) =∞∑n=1
vn(M)vn(P )
‖ vn ‖2e−λna2(t−τ) (11.258)
es la misma funcion de Green (11.242) del inciso anterior, pero evaluada en tiempos t − τ yque, como se ve, es la solucion del problema
utt = a2∇2u+ δ(M,M0)δ(t), ∀M ∈ V, t > 0
u(M, 0) = 0 (11.259)
c.f.|S = 0, ∀M ∈ S
que, por tanto, resulta equivalente al problema (11.243), definitorio de la funcion de Green. Lafuente colocada en el problema (11.259) representa el desprendimiento en M0, en el instantet = 0, de la unidad de calor, como no es difıcil comprobar. Al igual que en el caso hiperbolico,el problema (11.259) evidencia que la funcion de Green (11.242) (es decir, (11.258)) es lasolucion fundamental generalizada del operador de difusion en el volumen V , correspondientea la condicion de frontera del problema (11.256).
De nuevo, al igual que en el caso hiperbolico, vemos que la solucion del problema viene dadapor una integracion, en el tiempo transcurrido y en el espacio considerado, del producto de lafuncion de Green por la inhomogeneidad de la ecuacion. Se aprecia, igualmente, la similitud deesta expresion de la solucion con lo estudiado al resolver la ecuacion parabolica no homogeneaunidimensional en una barra de longitud l. Mas adelante podremos percatarnos de que, enla recta infinita, la solucion del problema para la ecuacion parabolica no homogenea tienela misma estructura; es decir, una integral en el tiempo transcurrido (0, t) y en el espacioconsiderado (alla sera entre −∞ y +∞) del producto de la funcion de Green que se obtenga
Metodo de Separacion de Variables 431
por la inhomogeneidad de la ecuacion. Como dijimos arriba, esta regularidad -que se cumpleen todos los casos de ecuaciones de la Fısica Matematica- sera fundamentada en el capıtulo quese dedica a la funcion de Green de la presente obra.
Con las soluciones obtenidas en este punto, ya estamos en condiciones de resolver el problemamas general para las ecuaciones hiperbolicas y parabolicas en varias dimensiones espaciales porel metodo de separacion de variables en dominios finitos.
Como hemos visto, el problema central radica en la solucion del problema de Sturm-Liouville(11.204) y la obtencion, con ello, de las autofunciones y los autovalores del problema de frontera.En dependencia del tipo de dominio V donde estemos buscando la solucion, esta tendra diferenteforma. Esto esta dado por el hecho de que la expresion del laplaciano en distintos sistemas decoordenadas tiene diferente estructura.
Si el dominio donde queremos resolver el problema es un rectangulo, por ejemplo, o un paralele-pıpedo rectangular en tres dimensiones, es evidente entonces que, en coordenadas cartesianas, lacondicion de frontera del problema (11.204) se expresa de forma simple, mediante la constanciade cada una de las coordenadas y, por ello, en ese caso, resulta conveniente la utilizacion deesas coordenadas en las que el laplaciano tiene una expresion relativamente simple y facil deresolver por el metodo de separacion de variables.
Sin embargo, si el dominio donde queremos resolver el problema es cilındrico o esferico, en-tonces, expresar la condicion de frontera en coordenadas cartesianas serıa complejo, ya que elloconducirıa a determinadas ecuaciones difıciles de trabajar. Pero en coordenadas cilındricas oesfericas, segun el caso, la condicion de frontera se expresarıa por una ecuacion simple, mediantela constancia de una de las variables. Sin embargo, como el laplaciano en coordenadas cilındricaso esfericas tiene una expresion mas compleja, la solucion vendra dada en terminos de funcionesespeciales. Esta situacion es inevitable y trataremos, en proximos epıgrafes, de dar una ejem-plificacion de ello.
Si el dominio donde se desea resolver el problema es mas complejo, como, digamos por ejemplo,elipsoides, hiperboloides, etc. la situacion se complica aun mas. En ocasiones muy limitadas,utilizando algun sistema de coordenadas especiales, es posible hallar una solucion analıtica,pero en la mayorıa de los casos no queda mas remedio que recurrir a los metodos numericosde solucion, con el uso de las tecnicas de computacion. Este camino, por veces el mas comun,requiere de estudios especıficos que no entran dentro del marco del presente libro. En uncapıtulo posterior haremos una breve incursion en los metodos de diferencias finitas que per-miten preparar los problemas de las ecuaciones en derivadas parciales de segundo orden paraque puedan ser resueltos con la ayuda de las tecnicas de computacion.
11.3 Ejemplos de solucion de problemas hiperbolicos y
parabolicos en varias dimensiones espaciales
En el presente epıgrafe nos dedicaremos a ilustrar la aplicacion del metodo de separacion devariables visto en el epıgrafe anterior, a fin de ofrecer al lector una guıa util para acometer

432 Jose Marın Antuna
problemas de esta ındole, en aquellos casos en que, por las caracterısticas del dominio donde sebusca la solucion, es factible la obtencion de soluciones analıticas por el metodo de separacionde variables.
11.3.1 Problemas que no requieren el uso de funciones especiales
En este punto veremos algunos ejemplos de solucion de problemas de ecuaciones hiperbolicas yparabolicas en dominios que, por su forma, permiten hallar la solucion sin necesitar el uso defunciones especiales. Para ello, utilizaremos el esquema de trabajo desarrollado en el epıgrafeanterior, aunque, en aras de una mayor claridad, realizaremos los calculos con suficiente detalle.
1. Hallar la temperatura en el interior de un paralelepıpedo 0 ≤ x ≤ l1, 0 ≤ y ≤ l2, 0 ≤ z ≤ l3,si su temperatura inicial es f(x, y, z) y la temperatura de su superficie se mantiene nula todoel tiempo.
Aquı estamos ante un primer problema de frontera del tipo del problema (11.197) del epıgrafeanterior. Para resolverlo, coloquemos un sistema de coordenadas cartesianas con el origen enuno de los vertices del paralelepıpedo, segun se ilustra en la figura 11.3.
En virtud de la forma en que hemos escogido el sistema de coordenadas, la condicion de fronterau|S = 0, correspondiente al problema, puede ser escrita como el conjunto de seis ecuaciones,donde la funcion u(x, y, z, t), evaluada en cada una de las caras que forman la superficie frontera,es igual a cero. Por consiguiente, para la temperatura u tenemos que resolver el siguienteproblema:
ut = a2∇2u, ∀0 < x < l1, 0 < y < l2, 0 < z < l3, t > 0
u(x, y, z, 0) = f(x, y, z) (11.260)
u(0, y, z, t) = u(l1, y, z, t) = 0
u(x, 0, z, t) = u(x, l2, z, t) = 0
u(x, y, 0, t) = u(x, y, l3, t) = 0
Siguiendo el esquema desarrollado en el epıgrafe anterior, buscamos la solucion en la forma
u(x, y, z, t) = T (t)v(x, y, z) (11.261)
Separando variables, obtenemos para T (t) la ecuacion
T ′ + λa2T = 0 (11.262)
cuya solucion es
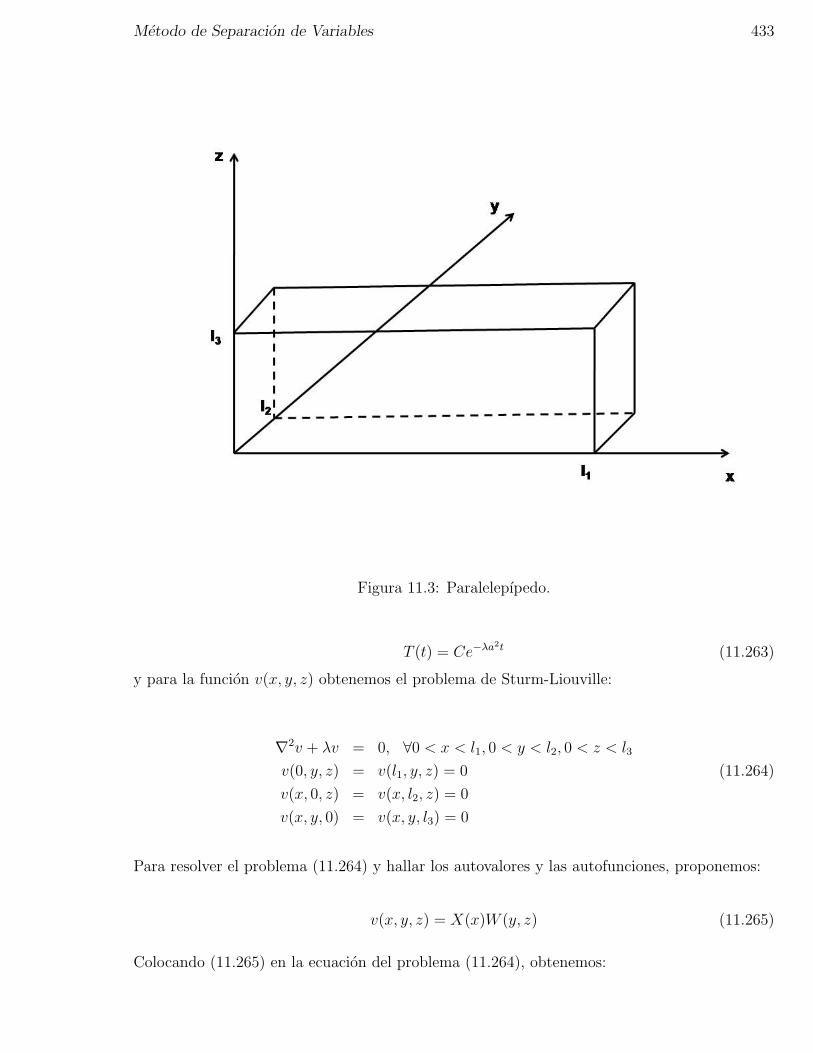
Metodo de Separacion de Variables 433
Figura 11.3: Paralelepıpedo.
T (t) = Ce−λa2t (11.263)
y para la funcion v(x, y, z) obtenemos el problema de Sturm-Liouville:
∇2v + λv = 0, ∀0 < x < l1, 0 < y < l2, 0 < z < l3
v(0, y, z) = v(l1, y, z) = 0 (11.264)
v(x, 0, z) = v(x, l2, z) = 0
v(x, y, 0) = v(x, y, l3) = 0
Para resolver el problema (11.264) y hallar los autovalores y las autofunciones, proponemos:
v(x, y, z) = X(x)W (y, z) (11.265)
Colocando (11.265) en la ecuacion del problema (11.264), obtenemos:

434 Jose Marın Antuna
X ′′W +X∇2yzW + λXW = 0 (11.266)
donde por ∇2yz expresamos la parte del laplaciano, correspondiente a las variables y, z. Divi-
diendo (11.266) entre XW y separando variables, queda:
∇2yzW
W+ λ = −X
′′
X= µ (11.267)
La presencia de la constante µ esta dada por el hecho de que, en (11.267), la parte izquierdaes funcion de y, z, en tanto que la parte derecha es solo funcion de x. De aquı, para W (y, z),obtenemos la ecuacion
∇2yzW + (λ− µ)W = 0 (11.268)
y para la funcionX(x), teniendo en cuenta el primer par de condiciones de frontera del problema(11.264), obtenemos el siguiente problema unidimensional de Sturm-Liouville:
X ′′ + µX = 0, ∀0 < x < l1
X(0) = 0 (11.269)
X(l1) = 0
Debemos destacar el hecho de que el signo asignado a la constante µ en (11.267) esta dadoporque debemos obtener -dadas las condiciones de frontera del problema- soluciones oscilantesen la direccion del eje x, a fin de poder lograr que, en x = 0 y en x = l1, la solucion se reduzcaa cero, lo que no se lograrıa igualando a −µ, ya que, en ese caso, las soluciones de la ecuacionpara X(x) serıan exponenciales reales, que nunca podrıan hacerse cero, a la vez, en x = 0 yen x = l1, a menos que fuera la solucion trivial. Este criterio para definir el signo a ponerdelante de la constante de separacion de variables siempre debe tenerse en cuenta al resolverlos problemas.
Desde el epıgrafe 1 del presente capıtulo sabemos que el problema (11.269) tiene por solucionlas autofunciones y los autovalores siguientes:
Xn(x) = sinnπ
l1x, µn =
(nπ
l1
)2
, ∀n = 1, 2, 3, ... (11.270)
En (3.9) proponemos la solucion en la forma
W (y, z) = Y (y)Z(z) (11.271)
que, al colocarla en dicha ecuacion, nos la lleva a la forma:
Metodo de Separacion de Variables 435
Y ′′Z + Y Z ′′ + (λ− µ)Y Z = 0 (11.272)
Dividiendo (11.272) entre Y Z y separando variables, obtenemos:
Z ′′
Z+ (λ− µ) = −Y
′′
Y= ν (11.273)
donde la constante ν aparece como resultado de que la parte izquierda en (11.273) es funcionsolo de z, en tanto que la derecha lo es solo de y. De aquı y teniendo en cuenta las restantescondiciones de frontera del problema (11.264), obtenemos para la funcion Y (y) el problemaunidimensional
Y ′′ + νY = 0, ∀0 < y < l1
Y (0) = 0 (11.274)
Y (l2) = 0
cuya solucion, como sabemos, viene dada por las autofunciones y los autovalores:
Ym(y) = sinmπ
l2y, νm =
(mπ
l2
)2
, ∀m = 1, 2, 3, ... (11.275)
y para la funcion Z(z), denotando por
σ = λ− µ− ν (11.276)
obtenemos el problema:
Z ′′ + σZ = 0, ∀0 < z < l3
Z(0) = 0 (11.277)
Z(l3) = 0
cuya solucion viene dada por las autofunciones y los autovalores:
Zk(z) = sinkπ
l3z, σk =
(kπ
l3
)2
, ∀k = 1, 2, 3, ... (11.278)
Por consiguiente, de acuerdo con (11.265), (11.271) y (11.276), las autofunciones y los autova-lores del problema de Sturm-Liouville (11.264) son:

436 Jose Marın Antuna
vnmk(x, y, z) = sinnπ
l1x sin
mπ
l2y sin
kπ
l3z (11.279)
λnmk = π2
(n2
l21+m2
l22+k2
l23
)(11.280)
donde:
n = 1, 2, 3, ...; m = 1, 2, 3, ...; k = 1, 2, 3, ...
Notese que, como habıamos aclarado anteriormente, en este caso se presentan tres numerosdiscretos, n, m, k, que toman, independientemente entre sı, valores dentro del conjunto de losnumeros naturales, producto de ser un problema en tres dimensiones espaciales. La suma de losautovalores unidimensionales conforma el autovalor del problema de Sturm-Liouville (11.264)dado por (11.280) y el producto de las autofunciones unidimensionales nos da la autofuncion(11.279) del problema de Sturm-Liouville (11.264).
De acuerdo con el esquema desarrollado, la solucion del problema (11.260) vendra dada por laexpresion:
u(x, y, z) =∞∑n=1
∞∑m=1
∞∑k=1
Cnmke−a2π2(n2
l21+m2
l22+ k2
l23)sin
nπ
l1x sin
mπ
l2y sin
kπ
l3z (11.281)
Para hallar los coeficientes Cnmk imponemos a (11.281) la condicion inicial del problema (11.260)
f(x, y, z) =∞∑n=1
∞∑m=1
∞∑k=1
Cnmk sinnπ
l1x sin
mπ
l2y sin
kπ
l3z (11.282)
De aquı, admitiendo que f(x, y, z) cumple los requisitos del teorema del desarrollo, tendremos:
Cnmk =1
‖ vn ‖2
∫ l1
0
∫ l2
0
∫ l3
0
f(ξ, η, ζ) sinnπ
l1ξ sin
mπ
l2η sin
kπ
l3ζdξdηdζ (11.283)
donde el cuadrado de la norma de las autofunciones en este caso es:
‖ vn ‖2=
∫ l1
0
∫ l2
0
∫ l3
0
sin2 nπ
l1ξ sin2 mπ
l2η sin2 kπ
l3ζdξdηdζ =
l1l2l38
(11.284)
De esta manera queda completamente resuelto el problema.
Es conveniente hacer algunas reflexiones en relacion con la solucion obtenida. En primer lugar,se aprecia que la distribucion de la temperatura en el interior del paralelepıpedo, dada por

Metodo de Separacion de Variables 437
(11.281), satisface -por construccion- la ecuacion del problema (11.260) y las condiciones defrontera de dicho problema en las paredes de dicho paralelepıpedo, ya que los senos se anulanpara los valores extremos de sus respectivas variables. Ademas, se ve que esta temperaturatiende a cero, cuando t → ∞; este resultado era de esperar desde el punto de vista fısico,ya que, si la temperatura de la frontera se mantiene todo el tiempo nula, el calor dentro delparalelepıpedo se ira escapando a traves de la frontera y, al final, la temperatura del cuerposera uniformemente cero en todo su volumen. Por otra parte, es conveniente destacar que la ex-presion (11.282), obtenida a partir de la condicion inicial, no es mas que una serie trigonometricade Fourier tridimensional; la garantıa del desarrollo de la funcion f(x, y, z) en tal serie vienedada por los requisitos del teorema del desarrollo en serie de autofunciones que enunciamosen forma general en el epıgrafe anterior, pero, en este caso particular, se aprecia claramenteque, para que dicho desarrollo sea valido, la funcion f(x, y, z) debera ser susceptible de serprolongada de forma impar hacia afuera del paralelepıpedo en las tres direcciones coordenadas.Para ello, como expresa el teorema del desarrollo, es suficiente que esta funcion cumpla con lascondiciones de frontera del problema (11.264) y sea continua junto con sus derivadas hasta elsegundo orden en el interior del paralelepıpedo (en el dominio abierto).
2. Hallar las oscilaciones de una membrana rectangular 0 ≤ x ≤ l1, 0 ≤ y ≤ l2 con su borde fijo,si la elongacion inicial es Axy(l1 − x)(l2 − y) y su velocidad inicial es cero.
Al igual que en el ejemplo anterior, tomaremos un sistema de coordenadas cartesianas, en estecaso bidimensional, con centro en uno de los vertices de la membrana, segun se ilustra en lafigura 11.4.
Entonces, la condicion de borde fijo de la membrana se expresara mediante cuatro ecuaciones,donde la funcion u(x, y, t), evaluada en cada uno de los bordes, es igual a cero. Por consiguiente,para la elongacion u, tenemos que resolver el problema:
utt = a2∇2u, ∀0 < x < l1, 0 < y < l2, t > 0
u(x, y, 0) = Axy(l1 − x)(l2 − y)
ut(x, y, 0) = 0 (11.285)
u(0, y, t) = u(l1, y, t) = 0
u(x, 0, t) = u(x, l2, t) = 0
Aplicando el esquema general de separacion de variables, proponemos la solucion como:
u(x, y, t) = T (t)v(x, y) (11.286)
Colocando la solucion propuesta (11.286) en la ecuacion y separando variables, obtenemos paraT (t) la ecuacion:
T ′′ + λa2T = 0 (11.287)
cuya solucion general es:
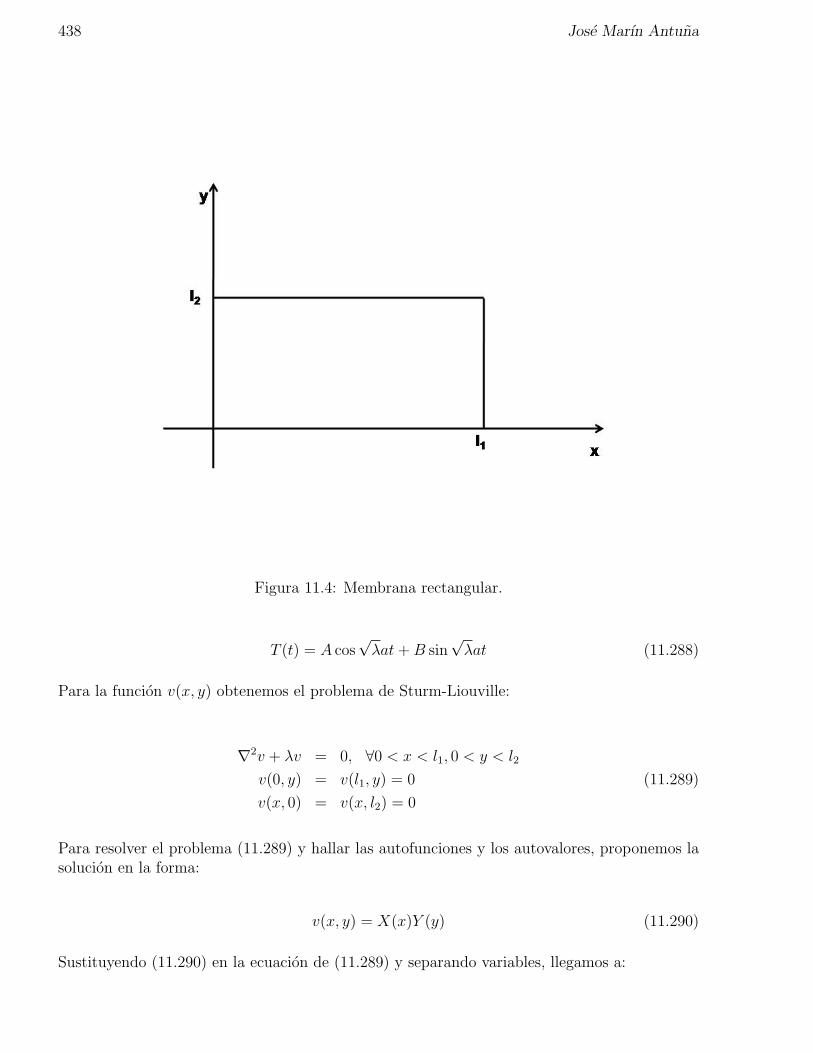
438 Jose Marın Antuna
Figura 11.4: Membrana rectangular.
T (t) = A cos√λat+B sin
√λat (11.288)
Para la funcion v(x, y) obtenemos el problema de Sturm-Liouville:
∇2v + λv = 0, ∀0 < x < l1, 0 < y < l2
v(0, y) = v(l1, y) = 0 (11.289)
v(x, 0) = v(x, l2) = 0
Para resolver el problema (11.289) y hallar las autofunciones y los autovalores, proponemos lasolucion en la forma:
v(x, y) = X(x)Y (y) (11.290)
Sustituyendo (11.290) en la ecuacion de (11.289) y separando variables, llegamos a:

Metodo de Separacion de Variables 439
Y ′′
Y+ λ = −X
′′
X= µ (11.291)
donde la constante µ, como siempre, es el resultado de la separacion de variables y su signo seescoge de manera que las soluciones para X(x) sean periodicas, a fin de poder hallar solucionesno triviales que se anulen en los extremos x = 0 y x = l1. De (11.291) obtenemos para X(x),teniendo en cuenta el primer par de condiciones de frontera del problema (11.289):
X ′′ + µX = 0, ∀0 < x < l1
X(0) = 0 (11.292)
X(l1) = 0
problema, cuya solucion, como sabemos, viene dada por las autofunciones y los autovaloresunidimensionales:
Xn(x) = sinnπ
l1x, µn =
(nπ
l1
)2
, ∀n = 1, 2, 3, ... (11.293)
Introduciendo la notacion
ν = λ− µ (11.294)
y teniendo en cuenta el segundo par de condiciones de frontera del problema (11.289), obtenemospara Y (y) el problema:
Y ′′ + νY = 0, ∀0 < y < l2
Y (0) = 0 (11.295)
Y (l2) = 0
cuya solucion viene dada por las autofunciones y los autovalores:
Ym(x) = sinmπ
l2y, νm =
(mπ
l2
)2
, ∀m = 1, 2, 3, ... (11.296)
Teniendo en cuenta (11.290), (11.293), (11.294) y (11.295), hallamos las autofunciones y losautovalores del problema de Sturm-Liouville (11.289) como:
vnm = sinnπ
l1x sin
mπ
l2y (11.297)

440 Jose Marın Antuna
λnm = π2
[n2
l21+m2
l22
](11.298)
donde, en este caso, tenemos dos numeros n y m que toman independientemente los valores
n = 1, 2, 3, ...; m = 1, 2, 3, ...
De acuerdo con el esquema general de separacion de variables, la solucion del problema (11.285)tendra la expresion:
u(x, y, t) =∞∑n=1
∞∑m=1
Anm cos
(√n2
l21+m2
l22πat
)+Bnm sin
(√n2
l21+m2
l22πat
)·
· sin nπl1x sin
mπ
l2y (11.299)
Evaluemos, ahora, las constantes a partir de las condiciones iniciales; tenemos:
u(x, y, 0) = Axy(l1 − x)(l2 − y) =∞∑n=1
∞∑m=1
Anm sinnπ
l1x sin
mπ
l2y (11.300)
Como la funcion que figura en la condicion inicial satisface las condiciones del teorema deldesarrollo, tendremos para los coeficientes Anm la expresion:
Anm =4
l1l2
∫ l1
0
∫ l2
0
Aξη(l1 − ξ)(l2 − η) sinnπ
l1ξ sin
mπ
l2ηdξdη (11.301)
Las integrales que figuran en la expresion (11.301) son facilmente calculables y se obtiene:
∫ l1
0
ξ(l1 − ξ) sinnπ
l1ξdξ =
4l31(2n+ 1)3π3
(11.302)
∫ l2
0
η(l2 − η) sinmπ
l2ηdη =
4l32(2m+ 1)3π3
(11.303)
Colocando (11.302) y (11.303) en (11.301), obtenemos, finalmente, para los coeficientes Anm:
Anm =64Al21l
22
(2n+ 1)3(2m+ 1)3π6(11.304)

Metodo de Separacion de Variables 441
donde n = 0, 1, 2, ...; m = 0, 1, 2, ..., ya que los numeros 2n+1 y 2m+1 son impares y el menorde ellos, que corresponde al valor n = 0 y m = 0, es 1, a partir del cual se comienza la sumaen la serie (11.299).
Los coeficientes Bnm = 0, en virtud de la condicion inicial nula para la velocidad. Por consi-guiente, la solucion del problema (11.285) queda, definitivamente, como:
u(x, y, t) =64Al21l
22
π6
∞∑n=0
∞∑m=0
cos(√
n2
l21+ m2
l22πat)
(2n+ 1)3(2m+ 1)3sin
(2n+ 1)π
l1x sin
(2m+ 1)π
l2y (11.305)
Como se aprecia, la solucion tiene la forma de una serie bidimensional de Fourier de senosque converge con mucha rapidez, pues si el primer sumando (n = 0, m = 0) tiene coeficiente1, el sumando correspondiente a n = 0, m = 1 tiene coeficiente 1
81≈ 0.01, al igual que el
sumando correspondiente a n = 1, m = 0. El sumando correspondiente a n = 1, m = 1 yatiene un coeficiente igual a 1/(81)2 ≈ 0.0001, de manera que es practicamente despreciable.La solucion obtenida satisface, por construccion, la ecuacion y las condiciones iniciales delproblema. Ademas, dadas las autofunciones que en ella aparecen, tambien satisface la condicionde frontera. Esta solucion expresa las elongaciones de los puntos (x, y) de la membrana encada instante t; notese que a lo largo de los ejes de coordenadas se tienen elongaciones, paratiempo fijo, que son una extension al caso bidimensional de los dibujos que hicimos al analizarfısicamente las oscilaciones de una cuerda finita obtenidas por el metodo de separacion devariables. El lector puede ver los modos de oscilacion de la membrana programando por ejemploen Mathematica la funcion Plot3D[Sin[n Pi x] Sin[m Pi y/2], x, 0, 1, y, 0, 0.5], dandole diferentesvalores a n y am de manera independiente. A continuacion en la figura 11.5 se muestran algunosde los modos de oscilacion que pueden obtenerse de esta manera.
De manera totalmente analoga puede resolverse el problema de las oscilaciones en tres di-mensiones, en el interior de un paralelepıpedo rectangular, solo que, en ese caso, aparecerala solucion en forma de una serie tridimensional de Fourier. La interpretacion fısica de dichoresultado estara en dependencia del significado fısico que, en dicho problema, tenga la funcionu(M, t). Esta puede ser, tanto la concentracion de un fluido, si estamos analizando las oscilacio-nes acusticas en el mismo, como las componentes del vector de intensidad del campo electricoo magnetico, si el problema se refiere a las oscilaciones del campo electromagnetico, o cual-quier otro problema fısico oscilatorio de otra naturaleza. Le proponemos al lector, a modo deentrenamiento, que resuelva solo este problema tridimensional.
3. Algunos problemas en esferas se resuelven, facilmente, sin el uso de funciones especiales,gracias a la simetrıa.
Hallar la temperatura de una esfera de radio r0, cuya superficie se mantiene a temperatura U1
constante, si en el momento inicial su temperatura fue U0 constante y si no hay fuentes de calordentro de la esfera.
Nuestro problema, matematicamente, se plantea en los siguientes terminos:
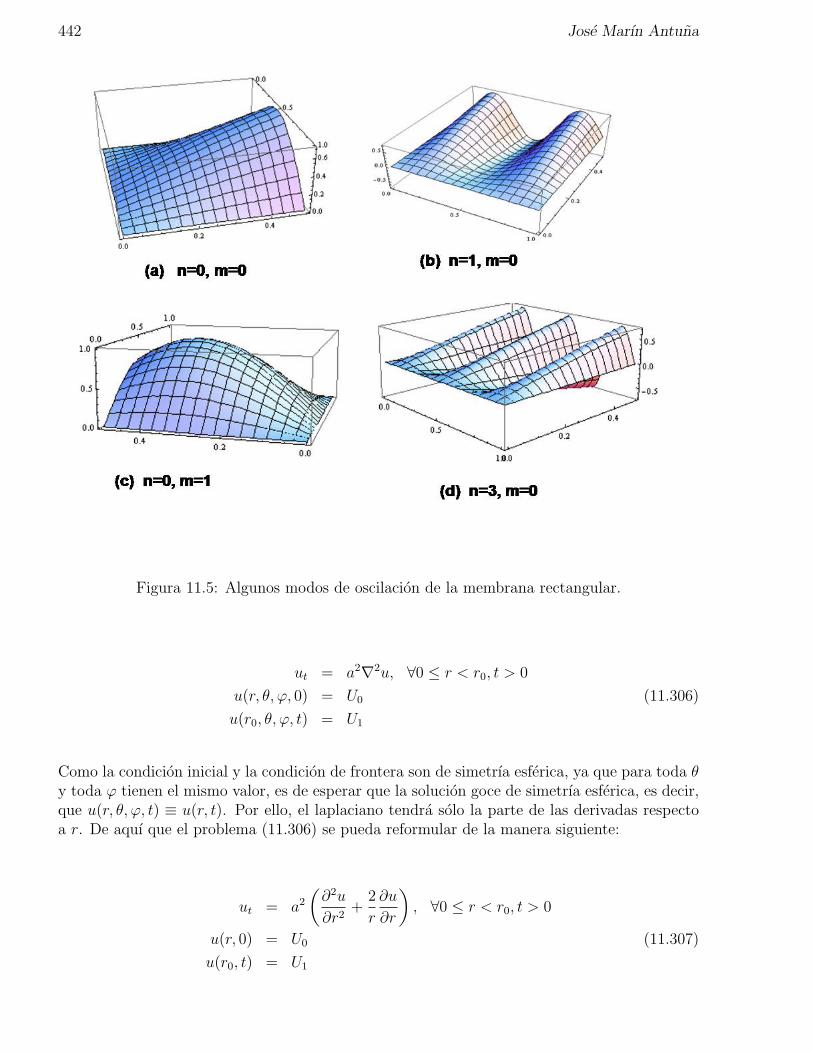
442 Jose Marın Antuna
Figura 11.5: Algunos modos de oscilacion de la membrana rectangular.
ut = a2∇2u, ∀0 ≤ r < r0, t > 0
u(r, θ, ϕ, 0) = U0 (11.306)
u(r0, θ, ϕ, t) = U1
Como la condicion inicial y la condicion de frontera son de simetrıa esferica, ya que para toda θy toda ϕ tienen el mismo valor, es de esperar que la solucion goce de simetrıa esferica, es decir,que u(r, θ, ϕ, t) ≡ u(r, t). Por ello, el laplaciano tendra solo la parte de las derivadas respectoa r. De aquı que el problema (11.306) se pueda reformular de la manera siguiente:
ut = a2
(∂2u
∂r2+
2
r
∂u
∂r
), ∀0 ≤ r < r0, t > 0
u(r, 0) = U0 (11.307)
u(r0, t) = U1

Metodo de Separacion de Variables 443
Para librarnos de la inhomogeneidad en la frontera, buscamos la solucion de (11.307) en laforma:
u(r, t) = v(r, t) + U1 (11.308)
de manera que, para v(r, t), se obtiene el problema
vt = a2
(∂2v
∂r2+
2
r
∂v
∂r
), ∀0 ≤ r < r0, t > 0
v(r, 0) = U0 − U1 (11.309)
v(r0, t) = 0
Para hallar la solucion de (11.309) proponemos:
v(r, t) =1
rw(r, t) (11.310)
donde la nueva funcion w(r, t) tiene que cumplir que w(0, t) = 0, para que v(r, t) sea acotada.No es difıcil obtener que
∂2v
∂r2+
2
r
∂v
∂r=
1
rwrr,
∂v
∂t=
1
rwt (11.311)
por lo que, al colocar estas expresiones (11.310) y (11.311) en (11.309), obtenemos para lafuncion w(r, t) el problema:
wt = a2wrr, ∀0 ≤ r < r0, t > 0
w(r, 0) = (U0 − U1)r (11.312)
w(0, t) = 0
w(r0, t) = 0
El problema (11.312) es identico a los problemas unidimensionales estudiados por nosotros eneste mismo capıtulo, por lo que su solucion puede ser facilmente hallada como:
w(r, t) =∞∑n=1
Cne−(
nπar0
)2tsin
nπ
r0r (11.313)
La condicion inicial en (11.312) nos permite hallar los coeficientes Cn en la forma:

444 Jose Marın Antuna
Cn = (−1)n+1 2r0(U0 − U1)
nπ(11.314)
Teniendo en cuenta (11.308) y (11.310), la solucion del problema (11.306) queda en la forma:
u(r, t) = U1 −2r0(U0 − U1)
π
∞∑n=1
(−1)n
n
sin nπr0r
re−(
nπar0
)2t
(11.315)
Se aprecia que la temperatura de la esfera viene dada como la temperatura de la frontera masun desarrollo en autofunciones que constituye una desviacion de la temperatura, respecto a lade la frontera. Cuando t → ∞ se ve que la temperatura de la esfera tiende a tomar el valorde la temperatura de la superficie, resultado totalmente logico, toda vez que el calor dentrode la esfera tiende a escaparse a traves de la superficie (si U0 > U1) o a entrar en la esfera (siU0 < U1), de manera que la temperatura de la esfera se va estabilizando hasta tomar un valorconstante igual a la temperatura de la superficie U1.
Notese que las autofunciones obtenidas para este problema sonsin nπ
r0r
r. No es difıcil comprobar
que, de haber resuelto el problema sin hacer la sustitucion (11.310), sino buscando las auto-funciones con la expresion del laplaciano en esfericas, se obtendrıan las autofunciones comoJ1/2(
√λr)√
r, las que son facilmente reducibles a las autofunciones
sin nπr0r
rque aquı hemos obtenido.
Los ejemplos arriba vistos han tenido la condicion de frontera de primer tipo. Se le recomiendaal lector, a modo de entrenamiento, resolver problemas similares con condiciones de frontera desegundo y de tercer tipo, ası como tambien con ecuaciones no homogeneas, a fin de practicarel esquema elaborado en los epıgrafes anteriores de este capıtulo.
11.3.2 Problemas que requieren el uso de funciones cilındricas
Veremos aquı problemas que, para su solucion, es necesario utilizar funciones cilındricas.
1. Supongamos que queremos resolver el problema de las oscilaciones de una membrana circularde borde fijo, dadas la elongacion inicial y la velocidad inicial arbitrarias, si el radio de lamembrana es r0 y no hay fuerzas aplicadas sobre la membrana.
Para resolver este problema, colocamos un sistema de coordenadas polares (r, ϕ), con el origenen el centro de la membrana. (Fig. 11.6).
Entonces, en este sistema de coordenadas, el problema a resolver sera:
utt = a2∇2u, ∀0 ≤ r < r0, t > 0
u(r, ϕ, 0) = f(r, ϕ) (11.316)
ut(r, ϕ, 0) = F (r, ϕ)
u(r0, ϕ, t) = 0

Metodo de Separacion de Variables 445
Figura 11.6: Membrana circular.
donde hemos utilizado f y F para representar la elongacion inicial y la velocidad inicial, res-pectivamente. La condicion de borde fijo u|C = 0, en este caso, se expresa en la forma en quese ve en el planteamiento (11.316).
De acuerdo con el esquema general de solucion visto anteriormente, la solucion se busca en laforma
u(r, ϕ, t) = T (t)v(r, ϕ) (11.317)
y, separando variables, se obtiene para T (t) la ecuacion
T ′′ + λa2T = 0 (11.318)
cuya solucion general es:

446 Jose Marın Antuna
T (t) = α cos√λat+ β sin
√λat (11.319)
Para v se obtiene el problema de Sturm-Liouville:
∇2v + λv = 0, ∀0 ≤ r < r0
v(r0, ϕ) = 0 (11.320)
que debemos pasar a resolver ahora, para hallar los autovalores y las autofunciones del primerproblema de frontera en el cırculo. Para ello, proponemos la solucion en la forma
v(r, ϕ) = R(r)Φ(ϕ) (11.321)
y, teniendo en cuenta la expresion del laplaciano en polares, al colocar (11.321) en la ecuaciondel problema (11.320), esta adquiere la forma:
1
r
d
dr(rR′)Φ +
1
r2RΦ′′ + λRΦ = 0 (11.322)
Multiplicando (11.322) por r2
RΦpara separar variables, obtenemos:
r
R
d
dr(rR′) + λr2 = −Φ′′
Φ= γ (11.323)
donde la constante γ de separacion de variables aparece, producto de que la parte izquierdaen (11.323) es solo funcion de r y la parte derecha es funcion solo de ϕ. De aquı, para Φ(ϕ),obtenemos un problema que, en virtud de la periodicidad que necesariamente tiene que cumplirdicha funcion, ya que la solucion tiene que ser independiente de si la medimos en ϕ, o en ϕ+2π,se expresa en la forma:
Φ′′ + γΦ = 0 (11.324)
Φ(ϕ+ 2π) = Φ(ϕ)
Como sabemos, la solucion del problema (11.324) tiene la forma
Φn(ϕ) = An cosnϕ+Bn sinnϕ (11.325)
con

Metodo de Separacion de Variables 447
γ = n2, ∀n = 0, 1, 2, 3, ... (11.326)
Teniendo en cuenta (11.326), de (11.323) obtenemos para R(r) la ecuacion
r
R
d
dr(rR′) + λr2 − n2 = 0 (11.327)
Multipliquemos por Rr2
. Entonces, teniendo en cuenta que la solucion debe ser acotada y que,ademas, de la condicion de frontera del problema de Sturm-Liouville (11.320) se deduce queR(r0) = 0, obtenemos, para R(r), el problema:
1
r
d
dr(rR′) +
(1− n2
r2
)R = 0, ∀0 ≤ r < r0
|R| < ∞ (11.328)
R(r0) = 0
Para hallar la solucion del problema (11.328), hagamos un cambio de variables, proponiendo:
x =√λr, dx =
√λdr (11.329)
y llamemos
R(r) = R
(x√λ
)≡ y(x) (11.330)
Entonces
R′ ≡ dR
dr=√λdR
dx≡√λy′ (11.331)
Colocando (11.329), (11.330) y (11.331) en la ecuacion del problema (11.328), obtenemos:
√λ
x
√λd
dx
(x√λ
√λy′)
+
(λ− n2λ
x2
)y = 0 (11.332)
Es decir:
λ
[1
x
d
dx(xy′) +
(1− n2
x2
)y
]= 0 (11.333)
Como λ 6= 0 por concepto de autovalor, para y(x) obtenemos la ecuacion:

448 Jose Marın Antuna
1
x
d
dx(xy′) +
(1− n2
x2
)y = 0 (11.334)
La ecuacion (11.334) no es otra cosa que la ecuacion de Bessel de orden n. Por consiguiente,su solucion general sera:
y(x) = CJn(x) +DNn(x) (11.335)
donde Jn(x) es la funcion de Bessel y Nn(x) la funcion de Neumann estudiadas anteriormente.
Regresando a la variable r, de (11.335) obtenemos:
R(r) = CJn(√λr) +DNn(
√λr) (11.336)
La condicion de acotamiento |R| < ∞ implica que D = 0, ya que la funcion de Neumann noes acotada en r = 0. Como la solucion R(r) sera multiplicada por Φn(ϕ), que contiene dosconstantes arbitrarias a determinar, consideraremos que C = 1, de manera que, de (11.336),nos queda la solucion como:
Rn(r) = Jn(√λr) (11.337)
Aplicando a (11.337) la condicion de frontera del problema (11.328), nos queda:
Rn(r0) = Jn(√λr0) = 0 (11.338)
De (11.338) obtenemos que los autovalores λ del problema de Sturm-Liouville (11.320) son:
λnm =
(µ
(n)m
r0
)2
, ∀m = 1, 2, 3, ... (11.339)
donde µ(n)m son las soluciones de la ecuacion trascendente Jn(µ) = 0, es decir, los ceros de la
funcion Jn(µ). (Fig. 11.7.).
La raız µ = 0 no se considera, ya que λ = 0 no es autovalor del problema. Es evidente queel conjunto de los autovalores hallados es infinito y su lımite es infinito para m → ∞, puesla funcion de Bessel tiene infinitos ceros en el eje. Este resultado era de esperar, en virtudde la teorıa general de los autovalores y las autofunciones del problema de Sturm-Liouville.Colocando los autovalores (11.339) hallados en (11.337), obtenemos, para la parte radial, laexpresion:
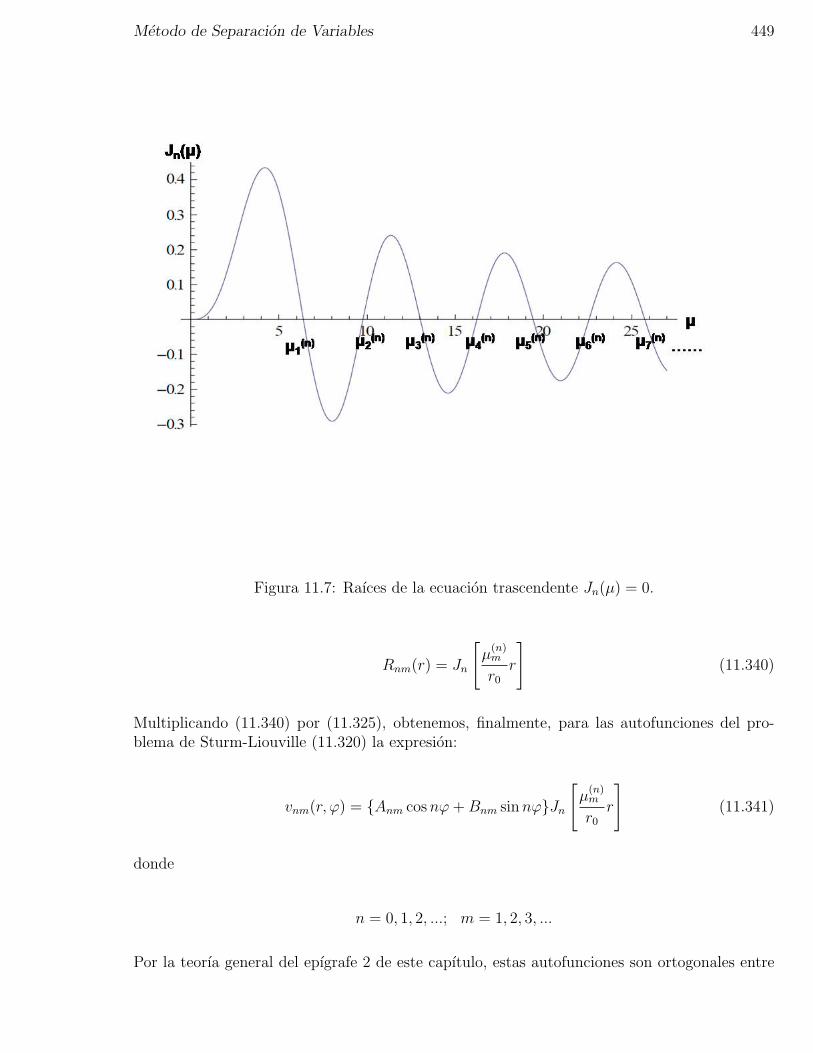
Metodo de Separacion de Variables 449
Figura 11.7: Raıces de la ecuacion trascendente Jn(µ) = 0.
Rnm(r) = Jn
[µ
(n)m
r0r
](11.340)
Multiplicando (11.340) por (11.325), obtenemos, finalmente, para las autofunciones del pro-blema de Sturm-Liouville (11.320) la expresion:
vnm(r, ϕ) = Anm cosnϕ+Bnm sinnϕJn
[µ
(n)m
r0r
](11.341)
donde
n = 0, 1, 2, ...; m = 1, 2, 3, ...
Por la teorıa general del epıgrafe 2 de este capıtulo, estas autofunciones son ortogonales entre

450 Jose Marın Antuna
sı para distintos autovalores, es decir:
∫ ∫S
vnmvn′m′dS =‖ vnm ‖2 δnn′δmm′ (11.342)
lo que se ve, explıcitamente, del hecho de que
∫ ∫S
vnmvn′m′dS =
∫ 2π
0
Anm cosnϕ+Bnm sinnϕ · An′m′ cosn′ϕ+Bn′m′ sinn′ϕdϕ ·
·∫ r0
0
Jn
[µ
(n)m
r0r
]J ′n
[µ
(n′)m′
r0r
]rdr (11.343)
En (11.343) las integrales de los productos cosnϕ cosn′ϕ y sinnϕ sinn′ϕ son iguales a ceropara n 6= n′ e iguales al cuadrado de la norma de esas funciones para n = n′, en tanto quelas integrales de los productos cosnϕ sinn′ϕ y sinnϕ cosn′ϕ son siempre iguales a cero. Paran = n′, que es el unico caso en que las integrales respecto a la variable ϕ son diferentes de cero,la integral respecto a la variable r en (11.343):
∫ r0
0
Jn
[µ
(n)m
r0r
]Jn
[µ
(n)m′
r0r
]rdr =‖ Jn ‖2 δmm′ (11.344)
pues la ecuacion del problema (11.328) es un caso particular de la ecuacion generatriz de las fun-ciones especiales estudiada anteriormente, por lo que sus soluciones, para distintos autovalores,son ortogonales con peso p = r.
Es necesario destacar, como algo importante, que en la teorıa desarrollada en el estudio de lasfunciones de Bessel no se establece en ningun momento ningun tipo de ortogonalidad de estasfunciones para distintos ν = n, que constituyen en la ecuacion de Bessel un parametro fijo,sino que la ortogonalidad se establece respecto a diferentes autovalores λ y estos, como puedeapreciarse, para n fijo, son diferentes para diferentes valores de m. En (11.344) se obtiene param = m′ el cuadrado de la norma de las funciones de Bessel. En el capıtulo de las funcionescilındricas nosotros obtuvimos la siguiente expresion para el cuadrado de la norma de la funcionde Bessel; esta era:
‖ Jν ‖2=r20
2
[J ′ν(αr0)]
2 +
(1− ν2
α2r20
)J2ν (αr0)
(11.345)
En el caso que nos ocupa, como la condicion de frontera del problema condujo a (11.338),
tomando α =√λ = µ
(n)m
r0, obtenemos que en (11.345) el segundo sumando es cero, de manera
que, para la funcion de Bessel de nuestro primer problema de frontera, queda:

Metodo de Separacion de Variables 451
‖ Jn
(µ
(n)m
r0r
)‖2≡
∫ r0
0
J2n
(µ
(n)m
r0r
)rdr =
r20
2[J ′n(µ
(n)m )]2 (11.346)
Es evidente que, de estar resolviendo el segundo problema de frontera, en la formula (11.345)se harıa cero el primer sumando de la parte derecha y el cuadrado de la norma quedarıa enterminos diferentes. Similarmente, se obtendrıa otra expresion para el cuadrado de la normaa partir de (11.345) en el caso del tercer problema de frontera. Es bueno expresar que, encaso de resolver problemas en otros dominios (por ejemplo, un sector o un anillo) en donde lasolucion R(r) pueda contener, ademas de la funcion de Bessel, la de Neumann u otras funcionescilındricas, el cuadrado de la norma debera ser calculado sobre la base de su expresion general.
Una vez expresado el cuadrado de la norma (11.346), debemos obtener el cuadrado de la normade las autofunciones (11.341). Con ese fin, escribamos dichas autofunciones en la forma:
vnm(r, ϕ) = Anmv(1)nm(r, ϕ) +Bnmv
(2)nm(r, ϕ) (11.347)
donde hemos llamado:
v(1)nm(r, ϕ) = cosnϕJn
[µ
(n)m
r0r
](11.348)
v(2)nm(r, ϕ) = sinnϕJn
[µ
(n)m
r0r
](11.349)
Calculemos el cuadrado de las normas de estas dos funciones. Tenemos:
‖ v(1)nm ‖2=
∫ r0
0
∫ 2π
0
[v(1)nm(r, ϕ]2rdrdϕ =
=
∫ r0
0
J2n
[µ
(n)m
r0r
]rdr
∫ 2π
0
cos2 nϕdϕ =r20
2[J ′n(µ
(n)m )]2πεn (11.350)
con n = 0, 1, 2, 3, ... y m = 1, 2, 3, ...
donde
εn = 1, ∀n 6= 0 (11.351)
εn = 2, ∀n = 0
y, ademas:
452 Jose Marın Antuna
‖ v(2)nm ‖2=
∫ r0
0
∫ 2π
0
[v(2)nm(r, ϕ]2rdrdϕ =
=
∫ r0
0
J2n
[µ
(n)m
r0r
]rdr
∫ 2π
0
sin2 nϕdϕ =r20
2[J ′n(µ
(n)m )]2π (11.352)
con n = 1, 2, 3, ... y m = 1, 2, 3, ...
Notese que, como cosa natural, al expresar en (11.343), en (11.350) y en (11.351) el elemento dearea dS en polares, dS = rdrdϕ, se obtiene, automaticamente, para la parte radial, el necesariopeso igual a r que se requiere para la ortogonalidad de las funciones de Bessel y para el calculodel cuadrado de su norma.
El teorema del desarrollo, expresado en terminos generales en el epıgrafe 2 del presente capıtulo,tendra aquı la siguiente forma: Cualquier funcion f(r, ϕ) continua junto con sus derivadas hastael segundo orden en 0 ≤ r < r0, 0 ≤ ϕ ≤ 2π, acotada en r = 0, periodica con perıodo 2π respectoa ϕ y que cumpla con la condicion de frontera del problema de Sturm-Liouville, es decir, eneste caso, que se anule en r = r0, admite un desarrollo en serie de autofunciones convergenteabsoluta y uniformemente en 0 ≤ r < r0, 0 ≤ ϕ ≤ 2π:
f(r, ϕ) =∞∑m=1
∞∑n=0
Cnmvnm(r, ϕ) ≡∞∑m=1
∞∑n=0
Anmv(1)nm(r, ϕ) +Bnmv
(2)nm(r, ϕ) (11.353)
donde los coeficientes Anm y Bnm se hallan, en virtud de la ortogonalidad, por las formulas:
Anm =1
‖ v(1)nm ‖2
∫ r0
0
∫ 2π
0
f(r, ϕ)Jn
[µ
(n)m
r0r
]cosnϕrdrdϕ (11.354)
Bnm =1
‖ v(2)nm ‖2
∫ r0
0
∫ 2π
0
f(r, ϕ)Jn
[µ
(n)m
r0r
]sinnϕrdrdϕ (11.355)
Una vez expuestos estos resultados, podemos pasar a terminar de resolver el problema (11.316).De acuerdo con el esquema general de separacion de variables y teniendo en cuenta (11.319) y(11.341), la solucion de (11.316) tendra a forma:
u(r, ϕ, t) =∞∑m=1
∞∑n=0
αnm cos
µ(n)m
r0at+ βnm sin
µ(n)m
r0at
·
·Anm cosnϕ+Bnm sinnϕJn
[µ
(n)m
r0r
](11.356)

Metodo de Separacion de Variables 453
Exigiendo que esta solucion satisfaga las condiciones iniciales del problema (11.316), obtenemos:
f(r, ϕ) =∞∑m=1
∞∑n=0
αnmAnm cosnϕ+Bnm sinnϕJn
[µ
(n)m
r0r
](11.357)
F (r, ϕ) =∞∑m=1
∞∑n=0
βnmµ
(n)m a
r0Anm cosnϕ+Bnm sinnϕJn
[µ
(n)m
r0r
](11.358)
De aquı, suponiendo que f(r, ϕ) y F (r, ϕ) satisfacen los requisitos del teorema del desarrollo,calculamos los coeficientes.
2. Resolver el problema del enfriamiento de un cilindro circular infinito de radio r0 con tempe-ratura inicial u0 constante y temperatura igual a cero en la frontera.
Como hay simetrıa axial en el problema, basta resolverlo en el cırculo de seccion transversaldel cilindro. Por consiguiente, el problema a resolver sera:
ut = a2∇2u, ∀0 ≤ r < r0, t > 0
u(r, ϕ, 0) = u0 (11.359)
u(r0, ϕ, t) = 0
Segun vimos en el epıgrafe 2, por separacion de variables la solucion es:
u(r, ϕ, t) =∞∑m=1
∞∑n=0
e−(
µ(n)mr0
a
)2
tvnm(r, ϕ) (11.360)
donde
vnm(r, ϕ) = Anm cosnϕ+Bnm sinnϕJn
[µ
(n)m
r0r
](11.361)
Aquı hemos tenido en cuenta las autofunciones y los autovalores del primer problema de fronterade Sturm-Liouville, obtenidos en el ejercicio anterior. Para hallar los coeficientes Anm y Bnm
utilizamos la condicion inicial:
u(r, ϕ, 0) = u0 =∞∑m=1
∞∑n=0
Anm cosnϕ+Bnm sinnϕJn
[µ
(n)m
r0r
](11.362)
De aquı, por el teorema del desarrollo, tendremos:
454 Jose Marın Antuna
Anm =u0
‖ v(1)nm ‖2
∫ r0
0
Jn
[µ
(n)m
r0r
]rdr
∫ 2π
0
cosnϕdϕ = 0, ∀n 6= 0 (11.363)
Es decir, Anm = 0 para n 6= 0, ya que la integral del coseno es cero. Ademas:
A0m =u0
‖ v(1)0m ‖2
∫ r0
0
J0
[µ
(n)m
r0r
]rdr · 2π (11.364)
pues, para n = 0, la integral respecto a ϕ da 2π. Por otra parte,
Bnm =u0
‖ v(2)nm ‖2
∫ r0
0
Jn
[µ
(n)m
r0r
]rdr
∫ 2π
0
sinnϕdϕ = 0, ∀n,m (11.365)
O sea, Bnm = 0 para toda n y toda m, pues la integral del seno es siempre cero.
Por consiguiente, solo sobreviven los coeficientes A0m, resultado logico, si tenemos en cuentaque la condicion inicial de nuestro problema es simetrica con respecto al angulo ϕ, por lo quela solucion no debera depender de ϕ. Terminemos el calculo de estos coeficientes. Colocandoel valor del cuadrado de la norma en (11.364) y haciendo el cambio de variables
ξ =µ
(0)m
r0r, dξ =
µ(0)m
r0dr (11.366)
obtenemos, de (11.364):
A0m =2u02π
r20J
21 (µ
(0)m )2π
∫ r0
0
J0
[µ
(n)m
r0r
]rdr =
=2u0
r20J
21 (µ
(0)m )
∫ µ(0)m
0
J0(ξ)r0
µ(0)m
ξr0
µ(0)m
dξ =2u0
(µ(0)m )2J2
1 (µ(0)m )
∫ µ(0)m
0
J0(ξ)dξ
En las operaciones efectuadas hemos tenido en cuenta la formula recurrente de las funciones deBessel
J ′0(x) = −J1(x) (11.367)
en la expresion del cuadrado de la norma. Como, ademas, otra formula recurrente de lasfunciones cilındricas es
∫ x
0
J0(ξ)ξdξ = xJ1(x) (11.368)

Metodo de Separacion de Variables 455
obtenemos, finalmente, de (11.367), para los coeficientes A0m, la expresion:
A0m =2u0
µ(0)m J1(µ
(0)m )
(11.369)
Colocando en (11.360) los coeficientes hallados (11.363), (11.365) y (11.369), obtenemos, final-mente, para la temperatura en el cilindro la expresion:
u(r, t) =∞∑m=1
1
µ(0)m J1(µ
(0)m )
e−(
µ(0)mr0
a
)2
tJ0
(µ
(0)m
r0r
)(11.370)
quedando, ası, resuelto el problema. Notese que para t → ∞ la temperatura del cilindro, queen t = 0 es u0, tiende a cero.
3. Hallar las oscilaciones de una membrana circular con borde fijo, si su elongacion inicial esA(r− r0) cosϕ y su velocidad inicial es nula. En coordenadas polares el problema a resolver es
utt = a2∇2u, ∀0 ≤ r < r0, t > 0
u(r, ϕ, 0) = A(r − r0) cosϕ (11.371)
ut(r, ϕ, 0) = 0
u(r0, ϕ, t) = 0
Este es el mismo problema 1 del presente punto, pero con condiciones iniciales especıficas, porconsiguiente, de acuerdo con el resultado alla obtenido, la solucion sera:
u(r, ϕ, t) =∞∑m=1
∞∑n=0
αnm cos
µ(n)m
r0at+ βnm sin
µ(n)m
r0at
·
·Anm cosnϕ+Bnm sinnϕJn
(µ
(n)m
r0r
)(11.372)
Evaluemos las constantes a partir de las condiciones iniciales. Tenemos:
u(r, ϕ, 0) = A(r − r0) cosϕ =∞∑m=1
∞∑n=0
αnmAnm cosnϕ+Bnm sinnϕJn
(µ
(n)m
r0r
)(11.373)
En virtud de la ortogonalidad en (0, 2π) del cosϕ con sinnϕ para toda n y con cosnϕ paran 6= 1, lo que, en otras palabras, significa que cosϕ no se puede desarrollar en serie de sinnϕ
456 Jose Marın Antuna
y que su desarrollo en cosnϕ es ella misma, automaticamente concluimos que Bnm = 0 paratoda n y que Anm = 0 para n 6= 1, quedando, por lo tanto, solamente:
A(r − r0) cosϕ =∞∑m=1
α1mA1m cosϕJ1
(µ
(n)m
r0r
)(11.374)
Por lo tanto, aplicando el teorema del desarrollo:
α1mA1m =A
‖ v(1)1m ‖2
∫ r0
0
(r − r0)J1
(µ
(n)m
r0r
)rdr
∫ 2π
0
cos2 ϕdϕ =2A
r20[J
′1(µ
(1)m ]2
Im (11.375)
donde hemos llamado
Im =
∫ r0
0
(r − r0)J1
(µ
(n)m
r0r
)rdr (11.376)
integral que dejamos indicada.
Aplicando ahora la segunda condicion inicial:
ut(r, ϕ, 0) = 0 =∞∑m=1
∞∑n=0
βnmµ
(n)m a
r0Anm cosnϕ+Bnm sinnϕJn
(µ
(n)m
r0r
)(11.377)
concluimos que βnm = 0 para toda n y toda m.
Ası pues, finalmente, la solucion del problema (11.371) queda en la forma:
u(r, ϕ, t) =2A cosϕ
r20
∞∑m=1
ImJ1
(µ
(1)m
r0r)
[J ′1(µ(1)m )]2
cosµ
(1)m
r0at (11.378)
que, como se ve, es una superposicion de ondas de frecuencia µ(1)m
r0a y que, para cada instante de
tiempo, tienen la forma de una funcion cilındrica J1, es decir, las oscilaciones de la membranacircular tienen la forma de la superposicion de ondas cilındricas estacionarias.
4. Hallar las oscilaciones de una membrana circular de borde fijo, si su elongacion inicial es el
paraboloide dado por A(1− r2
r20
)y la velocidad inicial es cero.
El problema matematico a resolver es
Metodo de Separacion de Variables 457
utt = a2∇2u, ∀0 ≤ r < r0, t > 0
u(r, 0) = A
(1− r2
r20
)(11.379)
ut(r, 0) = 0
u(r0, t) = 0
donde ya hemos tenido en consideracion el hecho de que, al haber simetrıa con respecto a ϕ enlas condiciones, la solucion solo dependera de r y de t. Esto conducira, evidentemente, a queen la solucion solo aparecera J0. Es decir, como este problema es igual al problema 1 con otrascondiciones iniciales, en la expresion (11.356) Bnm = 0 para todo n, solo sera diferente de ceroA0m y la solucion de (11.379) tendra la forma:
u(r, t) =∞∑m=1
A0m
α0m cos
µ(0)m
r0at+ β0m sin
µ(0)m
r0at
J0
[µ
(0)m
r0r
](11.380)
Evidentemente, β0m = 0, dada la velocidad inicial nula en (11.379). Hallemos α0m; tenemos:
u(r, 0) = A
(1− r2
r20
)=
∞∑m=1
A0mα0mJ0
[µ
(0)m
r0r
](11.381)
Por consiguiente, por el teorema del desarrollo tendremos, cancelando el 2π del cuadrado de lanorma con el de la integral respecto a ϕ:
A0mα0m =2A
r20J
21 (µ
(0)m )
∫ r0
0
(1− r2
r20
)J0
[µ
(0)m
r0r
]rdr (11.382)
donde hemos tenido en cuenta (11.367). Calculando la integral, teniendo en cuenta las formulasrecurrentes (11.368) y,
∫ x
0
ξ3J0(ξ)dξ = 2x2J0(x) + (x3 − 4x)J1(x) (11.383)
tendremos, entonces, finalmente, para la solucion la expresion:
u(r, t) = 8A∞∑m=1
J0
[µ
(0)m
r0r]
[µ(0)m ]2J1(µ
(0)m )
cosµ
(0)m
r0at (11.384)

458 Jose Marın Antuna
11.3.3 Problemas que requieren el uso de funciones esfericas. Ar-monicos esfericos
En este punto veremos problemas con ecuaciones hiperbolicas y parabolicas que requieren lautilizacion de las llamadas funciones esfericas que definiremos aquı, utilizando los polinomiosasociados de Legendre. Anteriormente, al estudiar dichos polinomios, vimos una primera nocionde estas funciones que en el presente punto precisaremos. Como es de esperar, estas apareceranal resolver problemas en dominios esfericos.
Desarrollaremos la solucion de distintos ejemplos.
1. Hallar las autofunciones y los autovalores del primer problema de frontera de Sturm-Liouvilleen una esfera de radio r0.
En el punto 2 del epıgrafe 2 del presente capıtulo obtuvimos el problema de Sturm-Liouville enla forma (formula (11.204)):
∇2v + λv = 0, ∀M ∈ Vv|S = 0 (11.385)
donde, en este caso, hemos puesto la condicion de frontera de primer tipo, ya que ese es elproblema que en este ejercicio queremos resolver. Supongamos que el dominio V es una esferade radio r0 y que colocamos un sistema de coordenadas esfericas centrado en la esfera. Entonces,el problema (11.385) adopta la forma:
∇2v + λv = 0, ∀0 ≤ r < r0, 0 ≤ ϕ ≤ 2π, 0 ≤ θ ≤ π
v(r0, θ, ϕ) = 0 (11.386)
Para resolver el problema (11.386), proponemos la solucion en la forma
v(r, θ, ϕ) = R(r)Y (θ, ϕ) (11.387)
Entonces, teniendo en cuenta la expresion del laplaciano en coordenadas esfericas, al colocar(11.387) en la ecuacion del problema (11.386), obtenemos:
1
r2
d
dr(r2R′)Y +
1
r2∇2θϕY R + λRY = 0 (11.388)
donde ∇2θϕ es la parte angular del laplaciano en coordenadas esfericas:
∇2θϕY =
1
sin θ
∂
∂θ
(sin θ
∂Y
∂θ
)+
1
sin2 θ
∂2Y
∂ϕ2(11.389)

Metodo de Separacion de Variables 459
Multipliquemos (11.388) por r2
RYy separemos variables; obtenemos:
ddr
(r2R′)
R+ λr2 = −
∇2θϕY
Y= γ (11.390)
La constante de separacion γ aparece por el hecho de que, en (11.390) a la izquierda, hay unafuncion que depende solo de r, en tanto que, a la derecha, hay una funcion dependiente solo delos angulos θ y ϕ.
De (11.390) obtenemos, para la funcion Y (θ, ϕ), el problema:
∇2θϕY + γY = 0, ∀0 < θ < π, 0 < ϕ < 2π
Y (θ, ϕ+ 2π) = Y (θ, ϕ) (11.391)
|Y (0, ϕ)| < ∞|Y (π, ϕ)| < ∞
donde las condiciones impuestas se derivan del hecho de que la solucion tiene que ser univaluadaal dar una vuelta completa en el angulo cıclico ϕ y acotada en los valores del angulo asimutalθ donde la ecuacion tiene singularidades regulares (ver la expresion de la parte angular dellaplaciano (11.389)). El problema (11.391) es un problema de autovalores. Sus autofuncionesse llaman funciones esfericas o armonicos esfericos.
Para hallar la expresion de los armonicos esfericos, proponemos la solucion de (11.391) en laforma:
Y (θ, ϕ) = Θ(θ)Φ(ϕ) (11.392)
Colocando (11.392) en la ecuacion del problema (11.391), obtenemos:
1
sin θ
∂
∂θ(sin θΘ′)Φ +
1
sin2 θΦ′′Θ + γΘΦ = 0 (11.393)
de donde, separando variables, nos queda:
sin θ ∂∂θ
(sin θΘ′)
Θ+ γ sin2 θ =
Φ′′
Φ= α (11.394)
La nueva constante α de separacion de variables es escogida con signo positivo para que lasfunciones Φ(ϕ) sean periodicas. De (11.394), para Φ(ϕ), obtenemos el problema:
Φ′′ + αΦ = 0 (11.395)
Φ(ϕ+ 2π) = Φ(ϕ)

460 Jose Marın Antuna
Como sabemos, la solucion del problema (11.395) tiene soluciones periodicas solo cuando α =m2, con m = 0, 1, 2, 3, ..., de la forma
Φm(ϕ) = Am cosmϕ+Bm sinmϕ (11.396)
De (11.394), para la funcion Θ(θ), sustituyendo α = m2, se obtiene la ecuacion:
sin θd
dθ
[sin θ
dΘ
dθ
]−m2Θ + γ sin2 θΘ = 0
o, dividiendo entre sin2 θ:
1
sin θ
d
dθ
[sin θ
dΘ
dθ
]− m2
sin2 θΘ + γΘ = 0 (11.397)
Esta ecuacion puede ser transformada por medio del siguiente cambio de variables:
x = cos θ, dx = − sin θdθ, sin2 θ = 1− x2, Θ(θ) = Θ(arccosx) = X(x) (11.398)
El angulo asimutal θ varıa entre 0 y π. Con el cambio de variables (11.398) la nueva variable xvariara entre −1 y 1. De esta manera, se ve que a la ecuacion (11.397) hay que imponerle lascondiciones de acotamiento expresadas en (11.391) en los puntos singulares θ = 0 y θ = π, osea, para x = −1 y x = 1 en la nueva variable. De esta forma, para la funcion X(x) obtenemosel problema:
d
dx
[(1− x2)
dX
dx
]− m2
1− x2X + γX = 0, ∀ − 1 < x < 1
|X(−1)| < ∞ (11.399)
|X(1)| < ∞
El problema (11.399), como sabemos, tiene por soluciones los polinomios asociados de Legendre
Xnm(x) = P (m)n (x) (11.400)
con autovalores
γn = n(n+ 1), n = 0, 1, 2, 3, ... (11.401)
Regresando a la variable inicial θ, obtenemos, por tanto:

Metodo de Separacion de Variables 461
Θnm(θ) = P (m)n (cos θ) (11.402)
Con ayuda de (11.396) y (11.402) la solucion general del problema (11.391) adquiere la forma
Ynm(θ, ϕ) = Am cosmϕ+Bm sinmϕP (m)n (cos θ) (11.403)
donde
n = 0, 1, 2, 3, ...; m = 0, 1, 2, 3, ..., n
El parametro m no toma valores mayores que n, pues en tal caso, como sabemos, los polinomiosasociados de Legendre son nulos.
Las funciones (11.403) estan formadas, para cada n fijo, por 2n + 1 soluciones linealmenteindependientes:
Y (1)nm(θ, ϕ) = P (m)
n (cos θ) cosmϕ, Y (2)nm(θ, ϕ) = P (m)
n (cos θ) sinmϕ (11.404)
que se conocen con el nombre de armonicos esfericos. Tomando como base las exponencialescomplejas para la solucion del problema (11.395), los armonicos esfericos pueden escribirse enla forma:
Y (1)nm(θ, ϕ) = P (m)
n (cos θ)e−imϕ, Y (2)nm(θ, ϕ) = P (m)
n (cos θ)eimϕ (11.405)
con n = 0, 1, 2, 3, ... y m = 0, 1, 2, 3, ..., n, que, a su vez, pueden ser escritos en la siguienteforma mas compacta:
Ynm(θ, ϕ) = P (|m|)n (cos θ)eimϕ (11.406)
con n = 0, 1, 2, 3, ... y m = 0,±1,±2, ...,±n.
Las formas (11.404), (11.405) y (11.406) de expresar los armonicos esfericos son equivalentes yson utilizadas indistintamente en la literatura.
Los armonicos esfericos son llamados armonicos celulares, dado su comportamiento sobre lasuperficie de una esfera. En virtud de que los polinomios asociados de Legendre P
(m)n (cosθ)
tienen n−m ceros en el intervalo (0, π) y de que, ademas, en los polos θ = 0 y θ = π de la esferason iguales a cero, tendremos que, sobre una superficie esferica, estos polinomios se haran cero-ademas de en los polos- en n −m paralelos de la esfera. Por otro lado, la funcion cosmϕ (elmismo razonamiento es valido para sinmϕ) se hace cero entre ϕ = 0 y ϕ = 2π en 2m valoresdel angulo ϕ, de manera que, sobre la superficie esferica, quedaran definidos 2m meridianos,
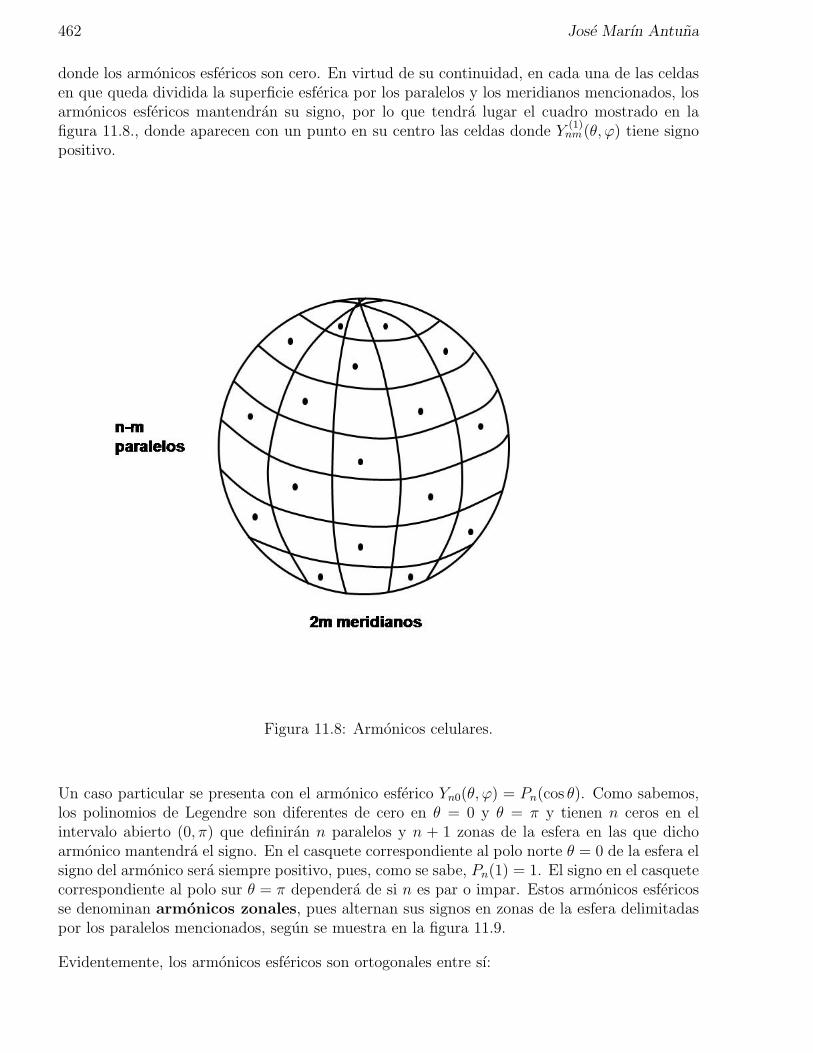
462 Jose Marın Antuna
donde los armonicos esfericos son cero. En virtud de su continuidad, en cada una de las celdasen que queda dividida la superficie esferica por los paralelos y los meridianos mencionados, losarmonicos esfericos mantendran su signo, por lo que tendra lugar el cuadro mostrado en lafigura 11.8., donde aparecen con un punto en su centro las celdas donde Y
(1)nm(θ, ϕ) tiene signo
positivo.
Figura 11.8: Armonicos celulares.
Un caso particular se presenta con el armonico esferico Yn0(θ, ϕ) = Pn(cos θ). Como sabemos,los polinomios de Legendre son diferentes de cero en θ = 0 y θ = π y tienen n ceros en elintervalo abierto (0, π) que definiran n paralelos y n + 1 zonas de la esfera en las que dichoarmonico mantendra el signo. En el casquete correspondiente al polo norte θ = 0 de la esfera elsigno del armonico sera siempre positivo, pues, como se sabe, Pn(1) = 1. El signo en el casquetecorrespondiente al polo sur θ = π dependera de si n es par o impar. Estos armonicos esfericosse denominan armonicos zonales, pues alternan sus signos en zonas de la esfera delimitadaspor los paralelos mencionados, segun se muestra en la figura 11.9.
Evidentemente, los armonicos esfericos son ortogonales entre sı:
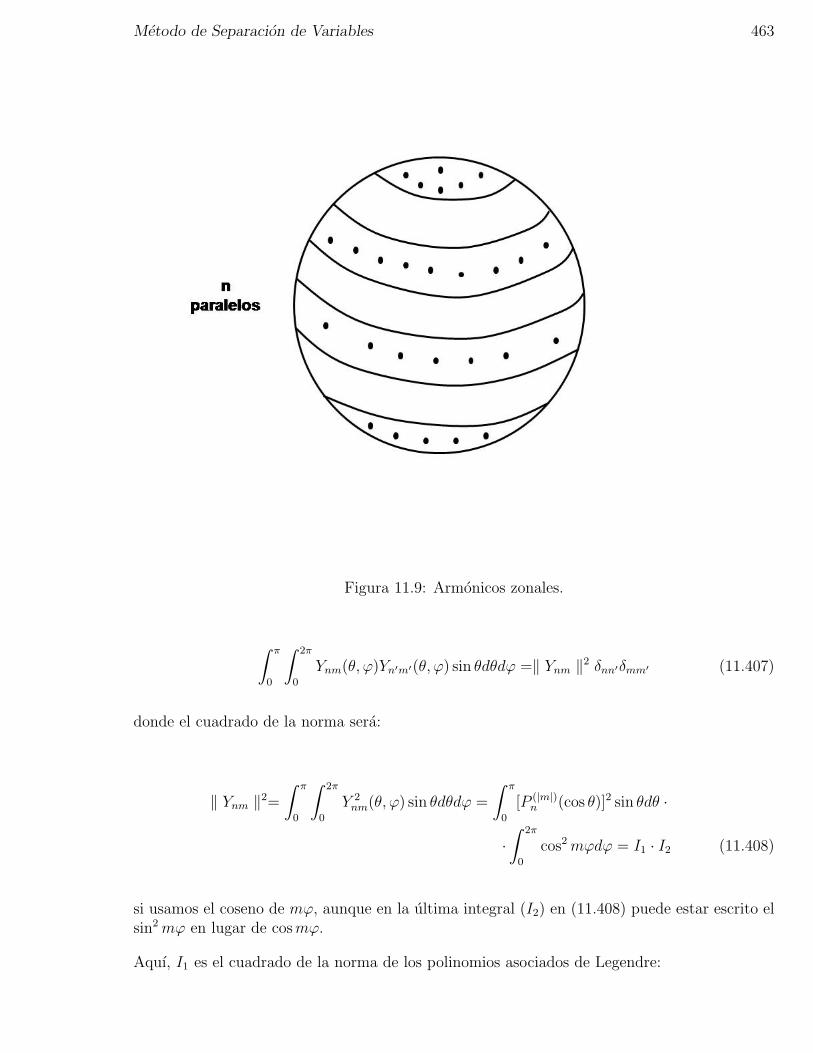
Metodo de Separacion de Variables 463
Figura 11.9: Armonicos zonales.
∫ π
0
∫ 2π
0
Ynm(θ, ϕ)Yn′m′(θ, ϕ) sin θdθdϕ =‖ Ynm ‖2 δnn′δmm′ (11.407)
donde el cuadrado de la norma sera:
‖ Ynm ‖2=
∫ π
0
∫ 2π
0
Y 2nm(θ, ϕ) sin θdθdϕ =
∫ π
0
[P (|m|)n (cos θ)]2 sin θdθ ·
·∫ 2π
0
cos2mϕdϕ = I1 · I2 (11.408)
si usamos el coseno de mϕ, aunque en la ultima integral (I2) en (11.408) puede estar escrito elsin2mϕ en lugar de cosmϕ.
Aquı, I1 es el cuadrado de la norma de los polinomios asociados de Legendre:

464 Jose Marın Antuna
I1 =
∫ π
0
[P (|m|)n (cos θ)]2 sin θdθ =
(n+ |m|)!(n− |m|)!
2
2n+ 1(11.409)
I2 es el cuadrado de la norma de las funciones circulares que, evidentemente, es:
I2 = πεm (11.410)
donde
εm = 1, ∀m 6= 0 (11.411)
ε0 = 2
Por consiguiente, el cuadrado de la norma de los armonicos esfericos viene dado por la expresion:
‖ Ynm ‖2=(n+ |m|)!(n−m)!
2πεm2n+ 1
(11.412)
Ademas, es evidente que tendra lugar el siguiente teorema del desarrollo para los armonicosesfericos:
Si f(θ, ϕ) es continua, dos veces diferenciable respecto a sus argumentos para 0 < θ < π,0 < ϕ < 2π, periodica respecto a ϕ y acotada en θ = 0 y θ = π, entonces, admite el desarrollosiguiente:
f(θ, ϕ) =∞∑n=0
n∑m=0
fnmYnm(θ, ϕ) ≡
≡∞∑n=0
An0Pn(cos θ) +∞∑n=0
n∑m=0
Anm cosmϕ+Bnm sinmϕP (m)n (cos θ) (11.413)
donde los coeficientes vienen dados por:
fnm =1
‖ Ynm ‖2
∫ π
0
∫ 2π
0
f(θ, ϕ)Y )nm(θ, ϕ) sin θdθdϕ (11.414)
Es decir:
An =1
‖ Ynm ‖2
∫ π
0
∫ 2π
0
f(θ, ϕ)P (|m|)n (cos θ) cosmϕ sin θdθdϕ (11.415)

Metodo de Separacion de Variables 465
Bn =1
‖ Ynm ‖2
∫ π
0
∫ 2π
0
f(θ, ϕ)P (|m|)n (cos θ) sinmϕ sin θdθdϕ (11.416)
Es evidente, por el desarrollo efectuado, que los armonicos esfericos son las autofunciones delproblema (11.391) correspondientes a los autovalores γn = n(n + 1). Por construccion se veque estas autofunciones son degeneradas, ya que, a cada autovalor, le corresponden 2n + 1autofunciones definidas por el rango de variacion del parametro m para cada valor de n; estasautofunciones correspondientes a un autovalor ya son ortogonales entre sı, lo que se evidenciade (11.410), por lo que no es necesario proceder a su ortogonalizacion por el metodo de Schwarzque explicamos en el epıgrafe 2.
Una vez obtenida y analizada la solucion de la parte angular, resolvamos la ecuacion de la parteradial que se obtiene de (11.390):
r2R′′ + 2rR′ + [λr2 − n(n+ 1)]R = 0 (11.417)
Dividiendo (11.417) entre r2 y teniendo en cuenta que la solucion debe satisfacer la condicionde frontera del problema de Sturm-Liouville (11.385) y debe ser, ademas, acotada, obtenemospara R(r) el problema:
R′′ +2
rR′ +
[λ− n(n+ 1)
r2
]R = 0, ∀0 ≤ r < r0
R(r0) = 0 (11.418)
|R(r)| < ∞
Para hallar la solucion del problema (11.418), busquemosla en la forma:
R(r) =y(r)√r
(11.419)
Entonces, no es difıcil comprobar que para y(r) se obtiene la ecuacion:
y′′ +1
ry′ +
[λ− (n+ 1/2)2
r2
]y = 0 (11.420)
Haciendo x =√λr, es facil ver que (11.420) es la ecuacion de Bessel de orden n + 1/2, por lo
que su solucion general es:
y(r) = CJn+ 12(√λr) +DNn+ 1
2(√λr) (11.421)
Por consiguiente, de (11.419), para R(r) obtenemos:

466 Jose Marın Antuna
R(r) =C√rJn+ 1
2(√λr) +
D√rNn+ 1
2(√λr) (11.422)
Como la solucion del problema (11.418) tiene que ser acotada, D = 0, ya que la expresion
1√rJn+ 1
2(√λr) → 0
cuando r → 0, pues
Jn+ 12(x) ∼ xn+ 1
2
para x→ 0, mientras que Nn+ 12(x) no es acotada en x = 0.
Imponiendo la condicion de frontera en r0:
Rn(r0) =C√r0Jn+ 1
2(√λr0) = 0 (11.423)
obtenemos los autovalores del problema de Sturm-Liouville (11.385) como:
λnk =
(ν
(n)k
r0
)2
(11.424)
donde ν(n)k ≡ µ
(n+ 12)
k son las raıces positivas de la ecuacion Jn+ 12(ν) = 0.
Por consiguiente, las autofunciones del problema (11.385) son:
vnmk(r, θ, ϕ) =1√rJn+ 1
2
(ν
(n)k
r0r
)Ynm(θ, ϕ) ≡
≡ 1√rJn+ 1
2
(ν
(n)k
r0r
)Anmk cosmϕ+Bnmk sinmϕP (m)
n (cos θ) (11.425)
con lo que queda resuelto el ejercicio. En ocasiones, para estas autofunciones se utiliza otraexpresion; para ello introduzcamos las llamadas funciones esfericas de Bessel:
jn(x) ≡ ψn(x) =
√π
2xJn+ 1
2(x), χn(x) =
√π
2xNn+ 1
2(x) (11.426)

Metodo de Separacion de Variables 467
ξ(1)n (x) =
√π
2xH
(1)
n+ 12
(x), ξ(2)n (x) =
√π
2xH
(2)
n+ 12
(x) (11.427)
Entonces, redefiniendo convenientemente los coeficientes, las autofunciones (11.425) pueden serexpresadas en la forma:
vnmk(r, θ, ϕ) = ψn
(ν
(n)k
r0r
)Ynm(θ, ϕ) ≡
≡ ψn
(ν
(n)k
r0r
)Anmk cosmϕ+Bnmk sinmϕP (m)
n (cos θ) (11.428)
Las expresiones (11.425) y (11.428) de las autofunciones son equivalentes. A ellas les corres-ponden los autovalores (11.424) con los numeros:
n = 0, 1, 2, 3, ...; m = 0, 1, 2, 3, ..., n; k = 1, 2, 3, ...
Las funciones esfericas de Bessel son ortogonales con peso r2; efectivamente:
∫ r0
0
ψn
(ν
(n)k
r0r
)ψn
(ν
(n)k′
r0r
)r2dr =
=
∫ r0
0
√πr0
2ν(n)k r
Jn+ 12
(ν
(n)k
r0r
)√πr0
2ν(n)k′ r
Jn+ 12
(ν
(n)k′
r0r
)r2dr =
=r0π
2
√ν
(n)k ν
(n)k′
∫ r0
0
Jn+ 12
(ν
(n)k
r0r
)Jn+ 1
2
(ν
(n)k′
r0r
)rdr =‖ ψn ‖2 δkk′
ya que las funciones cilındricas son ortogonales con peso r. El cuadrado de su norma se calculafacilmente, teniendo en cuenta el cuadrado de la norma de la funcion de Bessel:
‖ ψn ‖2 =
∫ r0
0
[ψn
(ν
(n)k
r0r
)]2
r2dr =r0π
2ν(n)k
∫ r0
0
[Jn+ 1
2
(ν
(n)k
r0r
)]2
rdr =
=r0π
2ν(n)k
r20
2
[J ′n+ 1
2(ν
(n)k )]2
=r20
2
√ π
2ν(n)k
J ′n+ 1
2(ν
(n)k )
2
Es decir:

468 Jose Marın Antuna
‖ ψn ‖2=
∫ r0
0
[ψn
(ν
(n)k
r0r
)]2
r2dr =r20
2[ψ′n(ν
(n)k )]2 (11.429)
2. Resolver el problema del enfriamiento de una esfera de radio r0, cuya superficie se mantienea temperatura cero, si su temperatura inicial es arbitraria.
Matematicamente, el problema a resolver es:
ut = a2∇2u, ∀0 ≤ r < r0, t > 0
u(r, θ, ϕ, 0) = f(r, θ, ϕ) (11.430)
u(r0, θ, ϕ, t) = 0
De acuerdo con el esquema general de separacion de variables, la solucion tendra la forma:
u(r, θ, ϕ, t) =∞∑n=0
∞∑k=1
n∑m=−n
Cnmke−λnka
2tvnmk(r, θ, ϕ) (11.431)
donde λnk y vnmk(r, θ, ϕ) son los autovalores y las autofunciones del primer problema de fronterade Sturm-Liouville, obtenidos en el ejercicio anterior. En forma explıcita:
u(r, θ, ϕ, t) =∞∑n=0
∞∑k=1
n∑m=−n
e−λnka2t
Jn+ 12
(ν(n)k
r0r
)√r
·
·Anmk cosmϕ+Bnmk sinmϕP (m)n (cos θ) (11.432)
Aplicando la condicion inicial:
f(r, θ, ϕ) =∞∑n=0
∞∑k=1
n∑m=−n
Jn+ 12
(ν(n)k
r0r
)√r
·
·Anmk cosmϕ+Bnmk sinmϕP (m)n (cos θ) (11.433)
Por consiguiente, de acuerdo con el teorema del desarrollo:
Anmk =1
‖ vnmk ‖2
∫ r0
0
∫ π
0
∫ 2π
0
f(r, θ, ϕ)
Jn+ 12
(ν(n)k
r0r
)√r
·
· cosmϕP (m)n (cos θ)r2dr sin θdθdϕ (11.434)

Metodo de Separacion de Variables 469
Bnmk =1
‖ vnmk ‖2
∫ r0
0
∫ π
0
∫ 2π
0
f(r, θ, ϕ)
Jn+ 12
(ν(n)k
r0r
)√r
·
· sinmϕP (m)n (cos θ)r2dr sin θdθdϕ (11.435)
donde ‖ vnmk ‖2 es el producto de los cuadrados de las normas de las funciones esfericas deBessel y de los armonicos esfericos:
‖ vnmk ‖2=πr3
0εm2n+ 1
(n+m)!
(n−m)![ψ′n(ν
(n)k )]2 (11.436)
De esta manera queda resuelto el problema.
3. Veamos el mismo problema del ejercicio anterior, con el caso particular en que la temperaturainicial es:
u(r, θ, ϕ, 0) = Az ≡ Ar cos θ ≡ ArP1(cos θ) (11.437)
para ver como se procede en estos casos.
Como en la condicion inicial no hay dependencia del angulo ϕ, por tanto m = 0. Ademas, comoen dicha condicion solo esta P1(cos θ), por tanto n = 1 y el resto de los sumandos en (11.432)desaparece. Por consiguiente, la solucion queda en la forma:
u(r, θ, ϕ, t) =∞∑k=1
e−λ1ka2t
J 32
(ν(n)k
r0r
)√r
A10kP1(cos θ) (11.438)
De la condicion inicial obtenemos:
ArP1(cos θ) =∞∑k=1
A10k
J 32
(ν(n)k
r0r
)√r
P1(cos θ) (11.439)
de donde, tras cancelar P1(cos θ), queda el desarrollo de la funcion Ar en serie de Bessel. Porlo tanto, de acuerdo con (11.434):
A10k =A
‖ v10k ‖2
∫ r0
0
J 32
(ν
(n)k
r0r
)r
52dr (11.440)
De la conocida formula recurrente

470 Jose Marın Antuna
d
dx[xνJν(x)] = xνJν−1(x) (11.441)
integrando, obtenemos:
xνJν(x) =
∫ ξ
0
ξνJν−1(ξ)dξ (11.442)
Por consiguiente, haciendo ξ =ν1
k
r0r, obtenemos:
∫ r0
0
J 32
(ν
(n)k
r0r
)r
52dr =
(r0
ν(1)k
) 72 ∫ ν
(1)k
0
J 32(ξ)ξ
52dξ =
=
(r0
ν(1)k
) 72
(ν(1)k )
52J 5
2(ν
(1)k ) (11.443)
Colocando (11.443) en (11.440), obtenemos para los coeficientes:
A10k =
2A
(r0
ν(1)k
)4
[ν(1)k ]
52J 5
2(ν
(1)k )
r30
√π2
1
ν(1)k
[J ′32
(ν(1)k )]2
(11.444)
Esta expresion puede ser simplificada con ayuda de la formula de recurrencia:
Jν+1(x) =2ν
xJν(x)− Jν−1(x) (11.445)
ya que, gracias a ella, podemos escribir que:
J 52(x) =
232
xJ 3
2(x)− J 1
2(x) (11.446)
Por lo tanto:
J 52(ν
(1)k ) =
3
ν(1)k
J 32(ν
(1)k )− J 1
2(ν
(1)k ) ≡ −J 1
2(ν
(1)k ) (11.447)
ya que

Metodo de Separacion de Variables 471
J 32(ν
(1)k ) = 0 (11.448)
por definicion de ν(1)k .
Ademas, de la formula de recurrencia
J ′ν(x) = Jν−1(x)−ν
xJν(x) (11.449)
podemos escribir:
J ′32(ν
(1)k ) = J 1
2(ν
(1)k )−
32
ν(1)k
J 32(ν
(1)k ) ≡ J 1
2(ν
(1)k ) (11.450)
en virtud de (11.448). Teniendo en cuenta (11.447) y (11.450), (11.444) puede escribirse como:
A10k =
2A
(r0
ν(1)k
)4
[ν(1)k ]
52
r30
√π2
1
ν(1)k
J 12(ν
(1)k )
(11.451)
Pero, como segun sabemos:
J 12(x) =
√2
πxsin x (11.452)
en definitiva queda:
A10k = − 2Ar0
sin ν(1)k
(11.453)
Por consiguiente, finalmente, la solucion sera:
u(rθ, ϕ, t) = −∞∑k=1
2Ar0
sin ν(1)k
e
(ν(1)k
a
r0
)2
t
ψ1
(ν
(1)k a
r0r
)P1(cos θ) (11.454)
Notese que la ley de la temperatura de la esfera obtenida cumple con la condicion inicial delproblema y ademas, como era de esperar, para t→∞, tiende a cero.
Los ejemplos vistos ilustran la forma de proceder en la solucion de este tipo de problemas.Sin embargo, el lector debe entrenarse mediante la solucion de otros problemas con diferentescondiciones de frontera e iniciales, a fin de adquirir la destreza necesaria.
472 Jose Marın Antuna
11.4 Ecuaciones elıpticas
El metodo de separacion de variables en su aplicacion a las ecuaciones elıpticas es, en esencia,el mismo desarrollado para las ecuaciones hiperbolicas y parabolicas; es aplicable con eficaciatambien en dominios muy especıficos (rectangulares, cilındricos o esfericos) y la mayorıa delas veces se obtienen resultados a traves de funciones especiales. A continuacion ilustraremosla aplicacion del metodo mediante la resolucion de algunos ejemplos. Para ello, veremos porseparado las ecuaciones elıpticas del tipo de Poisson y las del tipo de Helmholtz.
11.4.1 Ecuacion de Poisson
1) Problemas en dominios rectangulares y circulares.
1. Comencemos, para ilustrar el metodo, resolviendo un problema sencillo bidimensional: Hallarel potencial electrostatico en el interior del rectangulo 0 < x < a, 0 < y < b, si en el interiordel mismo no hay cargas, su lado y = b se encuentra cargado a un potencial f(x) y sus treslados restantes estan conectados a tierra (es decir, tienen potencial cero).
El problema matematico a resolver es:
∇2u = 0, ∀0 < x < a, 0 < y < b
u(0, y) = 0
u(a, y) = 0 (11.455)
u(x, 0) = 0
u(x, b) = f(x)
Como sabemos, para poder aplicar el metodo de separacion de variables, se requieren condi-ciones de frontera homogeneas respecto a una de las variables, al menos. En este caso, estacondicion se cumple para la variable x, de manera que podemos proponer
u(x, y) = X(x)Y (y) (11.456)
Separando variables y escogiendo convenientemente el signo de la constante de separacion, demanera que para la funcion X(x) se obtenga un problema de Sturm-Liouville, obtenemos, paraX(x), el problema:
X ′′ + λX = 0, ∀0 < x < a
X(0) = 0 (11.457)
X(a) = 0

Metodo de Separacion de Variables 473
cuya solucion, como sabemos, es:
Xn(x) = sinnπ
ax, λn =
(nπa
)2
(11.458)
Para la funcion Y (y) obtenemos el problema:
Y ′′ − λY = 0, ∀0 < y < b
|Y | < ∞ (11.459)
cuya solucion general, para los autovalores obtenidos, es:
Yn(y) = An coshnπ
ay +Bn sinh
nπ
ay (11.460)
Por consiguiente, de acuerdo con el esquema general de separacion de variables, la soluciontendra la forma:
u(x, y) =∞∑n=1
An coshnπ
ay +Bn sinh
nπ
ay sin
nπ
ax (11.461)
En virtud de las condiciones de frontera para la variable y tendremos:
u(x, 0) = 0 =∞∑n=1
An sinnπ
ax (11.462)
lo que nos permite concluir que An = 0. Ademas:
u(x, b) = f(x) =∞∑n=1
Bn sinhnπ
ab sin
nπ
ax (11.463)
Por consiguiente, los coeficientes Bn seran:
Bn =2
a sinh nπab
∫ a
0
f(ξ) sinnπ
aξdξ (11.464)
Colocando An y Bn en (11.461), obtenemos la solucion en la forma:
u(x, y) =2
a
∞∑n=1
∫ a
0
f(ξ) sinnπ
aξdξ
sinh nπay
sinh nπab
sinnπ
ax (11.465)
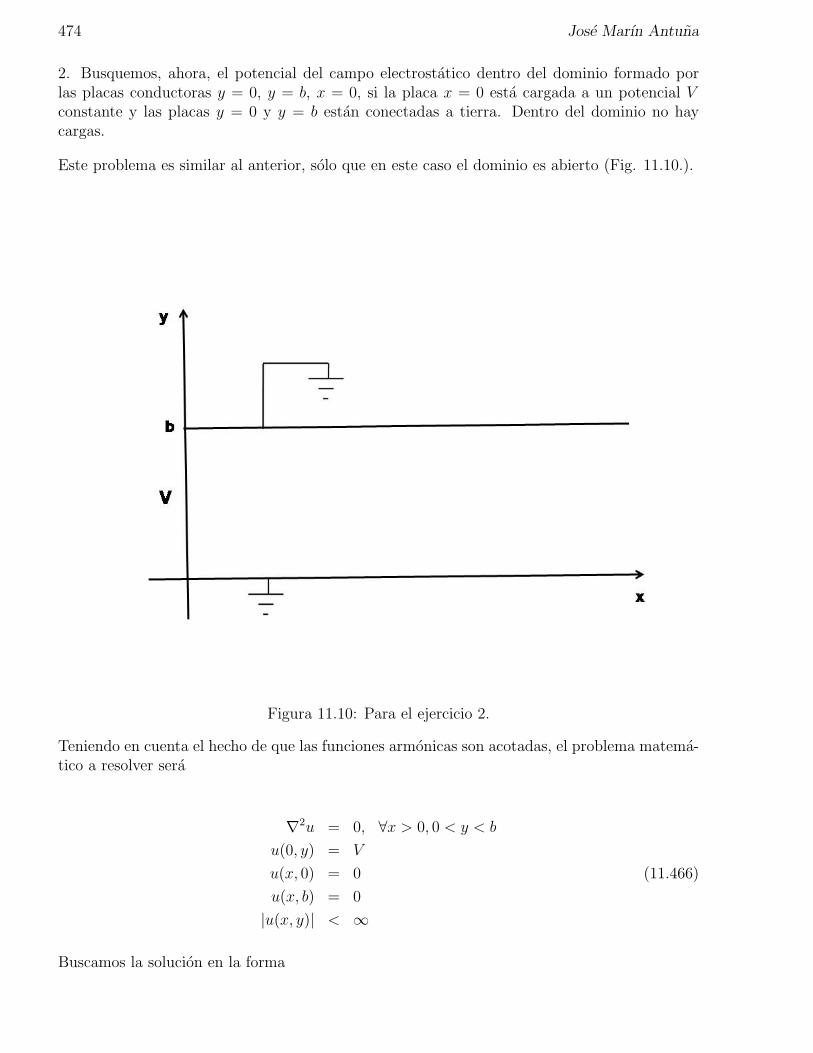
474 Jose Marın Antuna
2. Busquemos, ahora, el potencial del campo electrostatico dentro del dominio formado porlas placas conductoras y = 0, y = b, x = 0, si la placa x = 0 esta cargada a un potencial Vconstante y las placas y = 0 y y = b estan conectadas a tierra. Dentro del dominio no haycargas.
Este problema es similar al anterior, solo que en este caso el dominio es abierto (Fig. 11.10.).
Figura 11.10: Para el ejercicio 2.
Teniendo en cuenta el hecho de que las funciones armonicas son acotadas, el problema matema-tico a resolver sera
∇2u = 0, ∀x > 0, 0 < y < b
u(0, y) = V
u(x, 0) = 0 (11.466)
u(x, b) = 0
|u(x, y)| < ∞
Buscamos la solucion en la forma

Metodo de Separacion de Variables 475
u(x, y) = X(x)Y (y) (11.467)
Colocando (11.467) en la ecuacion del problema (11.466) y separando variables, tenemos,eligiendo convenientemente el signo de la constante de separacion, los problemas:
Y ′′ + λY = 0, ∀0 < y < b
Y (0) = 0 (11.468)
Y (b) = 0
que es un problema de Sturm-Liouville, cuya solucion, como sabemos, es:
Yn(y) = sinnπ
by λn =
(nπb
)2
(11.469)
y:
X ′′ − λX = 0, ∀x > 0 (11.470)
|X| < ∞
cuya solucion acotada, para los autovalores obtenidos sera:
Xn(x) = Cne−nπ
bx (11.471)
Las expresiones (11.469) y (11.471) nos dan, de acuerdo con el esquema general de separacionde variables, la solucion del problema (11.466) en la forma:
u(x, y) =∞∑n=1
Cne−nπ
bx sin
nπ
by (11.472)
Aplicamos a (11.472) la condicion de frontera en x = 0 y obtenemos:
u(0, y) = V =∞∑n=1
Cn sinnπ
by (11.473)
Por consiguiente, para los coeficientes Cn obtenemos:
Cn =2
b
∫ b
0
V sinnπ
bydy = −2V
nπcos
nπ
by|b0 =
2V
nπ[1− (−1)n] =
4V
(2m+ 1)π(11.474)

476 Jose Marın Antuna
donde m = 0, 1, 2, ... Finalmente, para nuestra solucion obtenemos:
u(x, y) =4V
π
∞∑m=0
1
(2m+ 1)e−
(2m+1)πb
x sin(2m+ 1)π
by (11.475)
3. Si la ecuacion no es homogenea, se sigue el mismo esquema utilizado para el metodo deseparacion de variables anteriormente expuesto, es decir, se busca la solucion en forma de undesarrollo en serie de autofunciones y se desarrolla la inhomogeneidad en serie de autofunciones.A modo de ejemplo, veamos el problema de hallar el potencial creado en el dominio dado porla figura 11.10, por una carga unitaria y puntual colocada en el punto interior (x0, y0), si todala frontera esta conectada a tierra.
El problema a resolver sera
∇2u = −δ(x− x0)δ(y − y0), ∀x > 0, 0 < y < b
u(0, y) = 0
u(x, 0) = 0 (11.476)
u(x, b) = 0
Las autofunciones (11.469) del problema anterior satisfacen las dos ultimas condiciones defrontera del problema (11.476). Por consiguiente, buscamos la solucion en la forma:
u(x, y) =∞∑n=1
un(x) sinnπ
by (11.477)
Desarrollando la inhomogeneidad en serie de autofunciones, obtenemos:
δ(x− x0)δ(y − y0) =2
bδ(x− x0)
∞∑n=1
sinnπ
by0 sin
nπ
by (11.478)
Colocando (11.477) y (11.478) en la ecuacion del problema (11.476), obtenemos, para la funcionun(x), el siguiente problema:
u′′n −(nπb
)2
un = −2
bδ(x− x0) sin
nπ
by0, ∀x > 0
un(0) = 0 (11.479)
|un(x)| < ∞
Dos soluciones linealmente independientes, convenientemente seleccionadas, de la ecuacion ho-mogenea son:

Metodo de Separacion de Variables 477
u1n(x) = sinhnπ
bx, u2n(x) = e−
nπbx
Por consiguiente, la solucion del problema (11.479) sera (ver L.E. Elsgoltz. Ecuaciones Dife-renciales y Calculo Variacional. Cap. 2 §9):
un(x) =2
nπsin
nπ
by0 sinh
nπ
bx0e
−nπbx, ∀x ≥ x0
=2
nπsin
nπ
by0e
−nπbx0 sinh
nπ
bx, ∀x ≤ x0 (11.480)
con lo que queda resuelto el problema. Mas adelante podra comprobarse que la solucion (11.480)obtenida no es otra cosa que la funcion de Green del problema de Dirichlet para la ecuacion dePoisson en el dominio considerado.
4. Supongamos ahora que todas las condiciones de frontera son diferentes de cero, para vercomo proceder en ese caso. A modo de ejemplo, resolvamos el siguiente problema:
∇2u = 0, ∀0 < x < a, 0 < y < b
u(0, y) = ϕ0(y)
u(a, y) = ϕ1(y) (11.481)
u(x, 0) = ψ0(x)
u(x, b) = ψ1(x)
Por supuesto, deberan cumplirse las condiciones ϕ0(0) = ψ0(0), ϕ0(b) = ψ1(0), ϕ1(0) = ψ0(a)y ϕ1(b) = ψ1(a).
Como quiera que, para aplicar el metodo de separacion de variables y a fin de hallar las autofun-ciones, deben haber condiciones de frontera homogeneas, aplicamos el principio de superposiciony proponemos la solucion en la forma:
u(x, y) = u1(x, y) + u2(x, y) (11.482)
donde las funciones u1(x, y) y u2(x, y) satisfacen los siguientes problemas, respectivamente:
∇2u1 = 0, ∀0 < x < a, 0 < y < b
u1(0, y) = 0
u1(a, y) = 0 (11.483)
u1(x, 0) = ψ0(x)
u1(x, b) = ψ1(x)

478 Jose Marın Antuna
∇2u2 = 0, ∀0 < x < a, 0 < y < b
u2(0, y) = ϕ0(y)
u2(a, y) = ϕ1(y) (11.484)
u2(x, 0) = 0
u2(x, b) = 0
Aplicando a los problemas (11.483) y (11.484) el metodo de separacion de variables, no es difıcilllegar a la siguiente expresion para la solucion del problema (11.481):
u(x, y) =2
b
∞∑n=1
[sinh
nπ(a− x)
b
∫ b
0
ϕ0(η) sinnπ
bηdη + sinh
nπ
bx
∫ b
0
ϕ1(η) sinnπ
bηdη
]·
·sin nπ
by
sinh nπba
+2
a
∞∑n=1
[sinh
nπ(b− y)
a
∫ a
0
ψ0(ξ) sinnπ
aξdξ + sinh
nπ
ay
∫ a
0
ψ1(ξ) sinnπ
aξdξ
]·
·sin nπ
ax
sinh nπab
(11.485)
El lector puede comprobar este resultado por sı solo.
Veamos ahora algunos problemas ilustrativos de la aplicacion del metodo de separacion devariables en dominios circulares.
5. Resolvamos el siguiente problema:
∇2u = 0, ∀0 ≤ r < a
u(a, ϕ) = A cosϕ (11.486)
que consiste en hallar la funcion armonica en el cırculo de radio a, si se conoce su valor sobrela frontera del cırculo como cierta funcion del angulo polar ϕ (0 ≤ ϕ ≤ 2π), (A es unaconstante dada). Resolveremos este problema de Dirichlet por medio del metodo de separacionde variables. En coordenadas polares la ecuacion del problema (11.486) tiene la forma:
1
r
∂
∂r
[r∂u
∂r
]+
1
r2
∂2u
∂ϕ2= 0 (11.487)
Proponemos la solucion en la forma
u(r, ϕ) = R(r)Φ(ϕ) (11.488)

Metodo de Separacion de Variables 479
Colocando (11.488) en (11.487), obtenemos:
1
r
d
dr
[rdR
dr
]Φ +
1
r2RΦ′′ = 0
o, separando variables, mediante la multiplicacion por el factor r2
RΦ,
r ddr
[rR′]
R= −Φ′′
Φ= λ (11.489)
El signo de la constante λ se toma de manera que la funcion Φ(ϕ) sea periodica. Ası, paraΦ(ϕ), obtenemos el problema:
Φ′′ + λΦ = 0, ∀0 ≤ ϕ ≤ 2π
Φ(ϕ+ 2π) = Φ(ϕ) (11.490)
La condicion impuesta a la ecuacion en el problema (11.490) es evidente, dado que el valor delpotencial en cada punto es unico. La solucion general tiene la forma:
Φ(ϕ) = A cos√λϕ+B sin
√λϕ
Aplicando la condicion de periodicidad
Φ(ϕ+ 2π) = A cos√λ(ϕ+ 2π) +B sin
√λ(ϕ+ 2π) = A cos
√λϕ+B sin
√λϕ
vemos que tiene que cumplirse que√λ = n, con n = 0, 1, 2, ... Es decir, que los autovalores, en
este caso, son λ = n2 y la solucion del problema (11.490) es:
Φn(ϕ) = A cosnϕ+B sinnϕ (11.491)
Teniendo en cuenta el valor obtenido para λ, el problema para R(r) sera:
rd
dr[rR′]− n2R = 0
|R(r)| < ∞ (11.492)
La ecuacion de (11.492), escrita en forma explıcita, es:

480 Jose Marın Antuna
r2R′′ + rR′ − n2R = 0
que es una ecuacion de Euler, cuya solucion se propone en la forma R = rk, obteniendose laecuacion caracterıstica
k(k − 1) + k − n2 = 0
Es decir, k2 − n2 = 0, por lo que k = ±n.
Por consiguiente, la solucion general sera:
Rn(r) = C1rn + C2r
−n
Dada la condicion impuesta en (11.492), C2 = 0, para que la solucion sea acotada en el interiordel cırculo, de manera que, finalmente, nos queda:
Rn(r) = rn (11.493)
Hemos considerado C1 = 1, ya que esta solucion debe multiplicarse por (11.491), en la quefiguran constantes arbitrarias.
Es conveniente hacer aquı una importante aclaracion: La ecuacion de Euler tiene, para n = 0,la solucion particular, facilmente comprobable,
R0(r) = C0 ln1
r
de manera que la solucion general en realidad es
Rn(r) = C0 ln1
r+ C1r
n + C2r−n
pero como en el ejemplo que estamos estudiando la funcion u es armonica, por lo tanto |u| <∞,lo que implica que C0 = 0 y C2 = 0, por lo que Rn(r) = rn, como habıamos escrito arriba. Sinembargo, en el caso en que, por las caracterısticas del problema, haya que tener en cuenta elcaso en que C0 6= 0 (ecuacion no homogenea, por ejemplo), no podemos obviar esta solucionparticular de la ecuacion de Euler. Esto es importante y, como vemos, la solucion particularln(1/r) aquı hallada es, precisamente, lo que se conoce con el nombre de solucion fundamentalde la ecuacion de Laplace en el plano R2.
Hecha esta alcaracion, de acuerdo con el esquema general de separacion de variables, la soluciondel problema (11.486) tendra la forma:

Metodo de Separacion de Variables 481
u(r, ϕ) =∞∑n=0
An cosnϕ+Bn sinnϕrn (11.494)
Aplicando la condicion de frontera de (11.486), tenemos:
u(a, ϕ) =∞∑n=0
An cosnϕ+Bn sinnϕan = A cosϕ (11.495)
En virtud de la ortogonalidad de senos y cosenos en (0, 2π), de (11.495) concluimos que:
A1a = A, An = 0, ∀n 6= 1, Bn = 0, ∀n
Por lo tanto, A1 = A/a y la solucion, finalmente, es:
u(r, ϕ) = Ar
acosϕ (11.496)
6. Resolvamos ahora el siguiente problema de Neumann:
∇2u = 0, ∀0 ≤ r < a∂u
∂n|r=a = A sinϕ+B sin3 ϕ (11.497)
Debe comprobarse previamente si la condicion de flujo nulo se cumple, para que el problemaplanteado tenga sentido. No es difıcil comprobar que, en este caso, ello se cumple.
Procediendo de la misma forma que en el problema anterior, la forma general de la solucionpor separacion de variables es:
u(r, ϕ) =∞∑n=0
An cosnϕ+Bn sinnϕrn (11.498)
Aplicamos a (11.498) la condicion de frontera:
∂u
∂n|r=a ≡
∂u
∂r|r=a =
∞∑n=1
nAn cosnϕ+Bn sinnϕan−1 =
= A sinϕ+B sin3 ϕ ≡(A+
3B
4
)sinϕ− B
4sin 3ϕ

482 Jose Marın Antuna
Por consiguiente:
An = 0, ∀n, B1 = A+3B
4, B3 = − B
12a2, Bn = 0, ∀n 6= 1, 3
de manera que la solucion, finalmente,es:
u(r, ϕ) =
(A+
3B
4
)r sinϕ− B
12a2r3 sin 3ϕ+ C (11.499)
En (11.499) a la solucion se le ha sumado una constante ya que, como sabemos, dos solucionesdel problema de Neumann se diferencian entre sı en una constante.
7. Veamos un tercer problema de frontera:
∇2u = 0, ∀0 ≤ r < a(∂u
∂n− hu
)|r=a = −f(ϕ) (11.500)
Separando variables, obtenemos de nuevo:
u(r, ϕ) =∞∑n=0
An cosnϕ+Bn sinnϕrn
Aplicando la condicion de frontera, nos queda:
∞∑n=1
Annan−1 cosnϕ+Bnnan−1 sinnϕ − h
∞∑n=1
Anan cosnϕ+Bnan sinnϕ −
−A0h = −f(ϕ)
O sea:
f(ϕ) = A0h+∞∑n=1
An[han − nan−1] cosnϕ+Bn[han − nan−1] sinnϕ (11.501)
Comparando (11.501) con el desarrollo de f(ϕ) en serie de Fourier, obtenemos para los coefi-cientes las siguientes expresiones:
A0 =α0
2h, An =
αnhan − nan−1
, Bn =βn
han − nan−1(11.502)

Metodo de Separacion de Variables 483
donde:
αn =1
π
∫ 2π
0
f(ϕ) cosnϕdϕ, βn =1
π
∫ 2π
0
f(ϕ) sinnϕdϕ (11.503)
con lo que queda resuelto el problema.
8. Veamos un problema con condicion de frontera discontinua. Un cilindro conductor infinitoesta cargado a potencial V1 para 0 < ϕ < π, V2 para π < ϕ < 2π, donde V1 y V2 son constantes.Hallar el potencial dentro del cilindro, si en su interior no hay cargas.
El problema a resolver es:
∇2u = 0, ∀0 ≤ r < a
u(a, ϕ) = V1, ∀0 < ϕ < π (11.504)
= V2, ∀π < ϕ < 2π
Separando variables, obtenemos:
u(r, ϕ) =∞∑n=0
An cosnϕ+Bn sinnϕrn
y, aplicando la condicion de frontera:
u(a, ϕ) =∞∑n=0
An cosnϕ+Bn sinnϕan = F = V1, ∀0 < ϕ < π
= V2, ∀π < ϕ < 2π
Por consiguiente:
A0 =1
2π
∫ 2π
0
Fdϕ =1
2π
∫ π
0
V1dϕ+
∫ 2π
π
V2dϕ
=V1 + V2
2(11.505)
Similarmente, se obtiene:
An = 0, Bn ≡ B2m+1 =2(V1 − V2)
(2m+ 1)πa2m+1
Finalmente, la solucion sera:

484 Jose Marın Antuna
u(r, ϕ) =V1 + V2
2+
2(V1 − V2)
π
∞∑m=0
sin(2m+ 1)ϕ
(2m+ 1)
(ra
)2m+1
(11.506)
Con el fin de lograr un analisis fısico mas claro de la solucion obtenida, hagamos el siguientecalculo: Es conocido que
∞∑m=0
z2m+1
2m+ 1=
1
2ln
1 + z
1− z(11.507)
Con ayuda de este resultado podemos sumar la serie que figura a la derecha en la expresion(11.506). Llamando ξ = r
a, z = ξeiϕ, tendremos:
∞∑m=0
(ra
)2m+1 sin(2m+ 1)ϕ
(2m+ 1)=
1
2i
∞∑m=0
ξ2m+1ei(2m+1)ϕ
2m+ 1−
∞∑m=0
ξ2m+1e−i(2m+1)ϕ
2m+ 1
=
=1
2i
∞∑m=0
z2m+1
2m+ 1−
∞∑m=0
z∗2m+1
2m+ 1
=
1
2i
1
2ln
1 + z
1− z− 1
2ln
1 + z∗
1− z∗
=
=1
4iln
1 + z
1− z· 1− z∗
1 + z∗=
1
4iln
1− ξ2 + 2iξ sinϕ
1− ξ2 − 2iξ sinϕ(11.508)
y como:
arctan z =1
2ilni− z
i+ z(11.509)
tendremos en (11.508):
∞∑m=0
(ra
)2m+1 sin(2m+ 1)ϕ
(2m+ 1)=
1
2
1
2iln
1− ξ2 + 2iξ sinϕ
1− ξ2 − 2iξ sinϕ=
=1
2
1
2ilni− z
i+ z=
1
2arctan z (11.510)
donde z se halla, despejando de la igualdad
1− ξ2 + 2iξ sinϕ
1− ξ2 − 2iξ sinϕ=i− z
i+ z
y se obtiene:

Metodo de Separacion de Variables 485
z =2 arcsinϕ
a2 − r2(11.511)
Colocando (11.511) en la solucion, finalmente esta queda en la forma:
u(r, ϕ) =V1 + V2
2+
2(V1 − V2)
πarctan
2 arcsinϕ
a2 − r2(11.512)
De la solucion obtenida se ve que, si 0 < ϕ < π, entonces sinϕ > 0, por lo que, en la fronterar = a, se obtiene arctan∞ = π/2, por lo que se cumple que
u(a, ϕ) = V1, ∀0 < ϕ < π
para π < ϕ < 2π, como sinϕ < 0, en la frontera r = a se obtiene arctan(−∞) = −π/2, por loque
u(a, ϕ) = V2, ∀π < ϕ < 2π
En el centro del cilindro, cuando r = 0, el potencial es el promedio
u(0, ϕ) =V1 + V2
2
como era de esperar.
Los ejemplos vistos ilustran la aplicacion del metodo de separacion de variables a los problemasque no requieren el uso de funciones especiales. Es necesario aclarar que, si el problema aresolver en el cırculo es externo, la solucion del problema (11.492) sera r−n en lugar de (11.493),para lograr que el resultado sea acotado. Los ejemplos vistos no pretenden agotar todas lassituaciones posibles, sino brindar algunas ideas de como proceder en este tipo de problemas.
2) Problemas que requieren el uso de funciones especiales.
De la misma manera que en el punto anterior, ilustraremos el metodo con algunos problemasy haremos, ademas, algunos analisis y consideraciones.
1. Hallar la distribucion estacionaria de la temperatura en el interior de un cilindro homogeneode radio a y altura l, si las bases del cilindro se mantienen a temperatura cero y la superficielongitudinal del cilindro esta a temperatura que depende solo de z.
Como hay simetrıa respecto a ϕ, en coordenadas cilındricas el problema a resolver sera:

486 Jose Marın Antuna
∇2u = 0, ∀0 ≤ r < a, 0 < z < l
u(r, 0) = 0 (11.513)
u(r, l) = 0
u(a, z) = f(z)
Al haber simetrıa respecto ϕ, la solucion es solo dependiente de r y de z, de manera que laecuacion queda como:
∇2u =1
r
∂
∂r
(r∂u
∂r
)+∂2u
∂z2= 0
Proponemos u(r, z) = R(r)Z(z), por lo que obtenemos, despues de separar variables:
1
r
d
dr(rR′) = −Z
′′
Z= λ (11.514)
El signo de la constante de separacion en (11.514) se ha escogido de forma tal, que la solucioncon respecto a z sea periodica, a fin de poder satisfacer las condiciones de frontera para esavariable. De aquı obtenemos para la funcion Z(z) el problema:
Z ′′ + λZ = 0, ∀0 < z < l
Z(0) = 0 (11.515)
Z(l) = 0
cuyas soluciones son las autofunciones
Zn(z) = sinnπ
lz (11.516)
con los autovalores
λn =(nπl
)2
, n = 1, 2, 3, ... (11.517)
Como la solucion del problema (11.513) es armonica y, por lo tanto acotada, para la funcionR(r) obtenemos el problema:
R′′ +1
rR′ − λnR = 0, ∀0 ≤ r < a
|R(r)| < ∞ (11.518)
Metodo de Separacion de Variables 487
A fin de resolver el problema (11.518), hagamos el siguiente cambio de variables:
√λr = x, dr =
dx√λ, R(r) = R
(x√λ
)≡ y(x) (11.519)
Entonces, el problema (11.518) se convierte en:
y′′ +1
xy′ − y = 0
|y(x)| < ∞ (11.520)
La ecuacion del problema (11.520) no es otra cosa que la ecuacion de Bessel de argumentoimaginario para ν = 0. Por consiguiente, su solucion sera:
y(x) = CI0(x) +DK0(x) (11.521)
donde I0(x) y K0(x) son las funciones cilındricas de argumento imaginario de orden cero. Envirtud de que la solucion debe ser acotada, D = 0, ya que K0(x) no es acotada en x = 0.Regresando a la variable inicial, obtenemos, finalmente:
Rn(r) = CnI0
(nπlr)
(11.522)
Siguiendo el esquema general de separacion de variables, con ayuda de (11.516) y (11.522), lasolucion del problema (11.513) sera:
u(r, z) =∞∑n=1
CnI0
(nπlr)
sinnπ
lz (11.523)
Exigimos que (11.523) cumpla la condicion de frontera en r = a del problema (11.513):
u(a, z) =∞∑n=1
CnI0
(nπla)
sinnπ
lz = f(z)
de donde, suponiendo que f(z) cumple con los requisitos del teorema del desarrollo, hallamoslos coeficientes Cn en la forma:
Cn =2
lI0(nπla) ∫ l
0
f(z) sinnπ
lzdz (11.524)
De esta forma queda resuelto el problema.

488 Jose Marın Antuna
Notese que las funciones cilındricas de argumento imaginario, por ser monotonas, no constituyenautofunciones.
2. Resolvamos ahora el problema de Dirichlet para la ecuacion de Laplace en una esfera deradio a:
∇2u = 0, ∀0 ≤ r < a (11.525)
u(a, θ, ϕ) = f(θ, ϕ)
Para aplicar el metodo de separacion de variables, proponemos la solucion en la forma:
u(r, θ, ϕ) = R(r)Y (θ, ϕ) (11.526)
Colocando (11.526) en la ecuacion del problema (11.525), obtenemos:
1
r2
d
dr(r2R′)Y +
1
r2∇2θϕY ·R = 0 (11.527)
donde, al igual que en el epıgrafe anterior,hemos llamado:
∇2θϕY =
1
sin θ
∂
∂θ
(sin θ
∂Y
∂θ
)+
1
sin2 θ
∂2Y
∂ϕ2(11.528)
que es la parte angular del laplaciano en coordenadas esfericas.
Separando variables, obtenemos:
ddr
(r2R′)
R= −
∇2θϕY
Y= λ (11.529)
De (11.529) obtenemos, para la parte angular, el problema de los armonicos esfericos queresolvimos detalladamente en el punto 3 del epıgrafe anterior:
∇2θϕY + λY = 0, ∀0 < θ < π, 0 < ϕ < 2π
Y (θ, ϕ+ 2π) = Y (θ, ϕ) (11.530)
|Y (0, ϕ)| < ∞|Y (π, ϕ)| < ∞
La solucion general del problema (11.530), como sabemos, es:

Metodo de Separacion de Variables 489
Ynm(θ, ϕ) = Am cosmϕ+Bm sinmϕP (m)n (cos θ) (11.531)
correspondientes a los valores de λ:
λ = n(n+ 1) (11.532)
Aquı, n = 0, 1, 2, 3, ... y m = 0, 1, 2, 3, ..., n, de manera que, para cada valor de n, se tienen2n+ 1 soluciones linealmente independientes y ortogonales entre sı:
Y (1)nm(θ, ϕ) = cosmϕP (m)
n (cos θ), Y (2)nm(θ, ϕ) = sinmϕP (m)
n (cos θ)
o su expresion equivalente:
Ynm(θ, ϕ) = P (|m|)n (cos θ)eimϕ
y con cuadrado de la norma dado por:
‖ Ynm ‖2=(n+ |m|)!(n− |m|)!
2πεm2n+ 1
(11.533)
donde
εm = 1, ∀m 6= 0 (11.534)
ε0 = 2
Para la parte radial, de (11.529) y teniendo en cuenta (11.532), se obtiene el problema
r2R′′ + 2rR′ − n(n+ 1)R = 0 (11.535)
|R(r)| < ∞
ya que la solucion, evidentemente, tiene que ser acotada. Esta es una ecuacion de Euler cuyasolucion se propone de la forma R = rk. Para k se obtienen los valores
k = n
k = −(n+ 1)

490 Jose Marın Antuna
de forma tal que la solucion general sera:
Rn(r) = Cnrn +Dnr
−(n+1) (11.536)
Es conveniente destacar que aquı la solucion particular, correspondiente al caso n = 0 (R0(r) =1/r), esta contenida en la expresion (11.536) y corresponde a la llamada Solucion Funda-mental de la ecuacion de Laplace en el espacio R3, como ya conocemos.
En virtud de la condicion de acotamiento del problema (11.535) que estamos resolviendo, Dn =0, por lo que
Rn(r) = Cnrn (11.537)
Siguiendo el esquema general de separacion de variables, la solucion del problema (11.525) seexpresara en la forma:
u(r, θ, ϕ) =∞∑n=0
n∑m=−n
CnmrnYnm(θ, ϕ) =
=∞∑n=0
n∑m=0
rnAm cosmϕ+Bm sinmϕP (m)n (cos θ) (11.538)
Aplicando la condicion de frontera del problema (11.525) a (11.538), obtenemos:
u(a, θ, ϕ) = f(θ, ϕ) =∞∑n=0
n∑m=−n
CnmanYnm(θ, ϕ) ≡
≡∞∑n=0
n∑m=0
anAm cosmϕ+Bm sinmϕP (m)n (cos θ) (11.539)
Por el teorema del desarrollo tendremos, por lo tanto:
Cnm =1
an1
‖ Ynm ‖2
∫ π
0
∫ 2π
0
f((θ, ϕ)Ynm((θ, ϕ) sin θdθdϕ ≡ fnman
(11.540)
por lo que la solucion, en forma compacta, sera:
u(r, θ, ϕ) =∞∑n=0
n∑m=−n
fnm
(ra
)nYnm(θ, ϕ) (11.541)

Metodo de Separacion de Variables 491
De utilizar la expresion con cosenos y senos, quedarıa:
Anm =1
an1
‖ Ynm ‖2
∫ π
0
∫ 2π
0
f((θ, ϕ) cosmϕP (m)n (cos θ) sin θdθdϕ (11.542)
Bnm =1
an1
‖ Ynm ‖2
∫ π
0
∫ 2π
0
f((θ, ϕ) sinmϕP (m)n (cos θ) sin θdθdϕ (11.543)
Ambas formas de expresar la solucion son equivalentes y se utilizan indistintamente, segun laconveniencia.
Si el problema a resolver fuera un problema externo, es decir:
∇2u = 0, ∀a < r <∞ (11.544)
u(a, θ, ϕ) = f(θ, ϕ)
entonces, la unica diferencia estarıa en que, en la solucion (11.536), serıa Cn = 0, para lograrque la solucion sea acotada, de manera que, en lugar de (11.537), la solucion de la parte radialserıa:
Rn(r) = Dnr−(n+1) (11.545)
Un calculo similar al efectuado arriba nos conducirıa a la solucion del problema (11.544) en laforma:
u(r, θ, ϕ) =∞∑n=0
n∑m=−n
fnm
(ar
)n+1
Ynm(θ, ϕ) (11.546)
De manera completamente similar se resolverıa el problema de Neumann y el tercer problemade frontera en la esfera.
Por ultimo, diremos que las funciones
U(r, θ, ϕ) = rnYnm(θ, ϕ)) (11.547)
son, evidentemente, soluciones de la ecuacion de Laplace y reciben el nombre de armonicosesfericos solidos.
Con este ejemplo concluimos la aplicacion del metodo de separacion de variables a las ecuacionesde Laplace y Poisson. Para adquirir la destreza necesaria en su utilizacion, el lector debe intentarresolver varios problemas, tomando como base lo expuesto en el presente punto.
492 Jose Marın Antuna
11.4.2 Ecuacion de Helmholtz
En la resolucion de los problemas internos para la ecuacion de Helmholtz en determinadostipos de dominios, se puede utilizar el metodo de separacion de variables. Ilustraremos estaaplicacion con algunos ejemplos.
1. Hallar la distribucion estacionaria de la concentracion de un gas inestable en el interior deun cilindro infinito de seccion circular de radio r0, si en la superficie del mismo se mantiene unaconcentracion constante u0.
Segun vimos en los capıtulos donde estudiamos los procesos fısicos que se describen con ecua-ciones de Helmholtz y el planteamiento de los problemas matematicos, el problema a resolveren este caso es:
∇2u− κ2u = 0, ∀0 ≤ r < r0
u|r=r0 = u0 (11.548)
donde κ = αD
. En el problema planteado, en virtud de que en la condicion de frontera haysimetrıa con respecto a z y a ϕ, la solucion dependera solo de r. Por ello, la ecuacion en(11.548) en coordenadas cilındricas toma la forma:
u′′ +1
ru′ − κ2u = 0 (11.549)
donde u = u(r). La ecuacion (11.549) no es otra cosa que la ecuacion de Bessel de argumentoimaginario, cuya solucion general es:
u(r) = AI0(κr) +BK0(κr) (11.550)
pero, evidentemente, la solucion debe ser acotada, por lo que B = 0. Aplicando, ademas, lacondicion de frontera, obtenemos:
AI0(κr0) = u0 (11.551)
de donde se obtiene el valor de A. Por consiguiente, la solucion del problema (11.548) sera:
u(r) = u0I0(κr)
I0(κr0)(11.552)
2. Resolver el mismo problema anterior en el exterior del cilindro, es decir, para r0 < r <∞.

Metodo de Separacion de Variables 493
En este caso, como la solucion tiene que ser acotada, concluimos que, en (11.550), A = 0.Evaluando en la condicion de frontera, obtenemos el valor de B, por lo que, finalmente, lasolucion queda en la forma:
u(r) = u0K0(κr)
K0(κr0)(11.553)
3. Resolver el mismo problema 1, si el proceso de difusion tiene lugar en el interior de unaesfera de radio r0 y si la condicion de frontera es:
1. u|r=r0 = u0
2. u|r=r0 = u0 cos θ
1. En este caso el problema a resolver en coordenadas esfericas es
∇2u− κ2u = 0, ∀0 ≤ r < r0
u|r=r0 = u0 (11.554)
Por haber simetrıa en la condicion de frontera respecto a ϕ y θ, la solucion sera u = u(r).La ecuacion del problema (11.554) en coordenadas esfericas adquiere la forma:
u′′ +2
ru′ − κ2u = 0 (11.555)
Buscamos la solucion en la forma:
u(r) =R(r)√r
(11.556)
y, colocandola en la ecuacion, obtenemos, para la funcion R(r):
R′′ +1
rR′ −
(κ+
(12
)2r2
)R = 0 (11.557)
que, con el cambio de variables x =√κr vemos que es una ecuacion de Bessel de argu-
mento imaginario de orden 1/2. Su solucion acotada es
R(r) = AI1/2(κr) (11.558)
que, colocada en (11.556), nos da para nuestro problema la solucion:
u(r) = AI1/2(κr)√
r(11.559)

494 Jose Marın Antuna
Apliquemos a (11.559) la condicion de frontera del problema (11.554):
u(r0) = AI1/2(κr0)√
r0= u0 (11.560)
De (11.560) obtenemos la expresion del coeficiente A, por lo que la solucion de (11.554)queda, finalmente, como:
u(r) = u0
√r0√r
I1/2(κr)
I1/2(κr0)(11.561)
2. En este caso el problema a resolver es
∇2u− κ2u = 0, ∀0 ≤ r < r0
u|r=r0 = u0 cos θ (11.562)
De la condicion de frontera se ve que la solucion depende de r y de θ y no depende de ϕ.Como cos θ ≡ P1(cos θ), podemos simplificar el problema, proponiendo, directamente, lasolucion en la forma
u(r, θ) = R(r) cos θ (11.563)
Colocando (11.563) en la ecuacion del problema (11.562), obtenemos:
R′′ cos θ +2
rR′ cos θ +
1
r2 cos θ
d
dθ
(sin θ
d(cos θ)
dθ
)R− κ2R cos θ = 0 (11.564)
Operando con (11.564), se obtiene para R(r) la ecuacion:
R′′ +2
rR′ −
(κ2 +
2
r2
)R = 0 (11.565)
Proponiendo la solucion de (11.565) en la forma
R(r) =y(r)√r
(11.566)
obtenemos, para y(r), la ecuacion
y′′ +1
ry′ −
(κ2 +
(32
)2r2
)y = 0 (11.567)
que es una ecuacion de Bessel de argumento imaginario de orden 3/2. Su solucion acotadanos conduce, para R(r), de acuerdo con (11.566), a la expresion:
Metodo de Separacion de Variables 495
R)r) = AI3/2(κr)√
r(11.568)
Por consiguiente, de (11.563), obtenemos para nuestro problema la solucion en la forma:
u(r, θ) = AI3/2(κr)√
rcos θ (11.569)
Evaluando en la condicion de frontera:
u(r0, θ) = AI3/2(κr0)√
r0cos θ = u0 cos θ (11.570)
obtenemos la expresion del coeficiente A. Finalmente, la expresion de la solucion sera:
u(r, θ) = u0
√r0√r
I3/2(κr)
I3/2(κr0)cos θ (11.571)
Esta solucion pudo haberse obtenido, proponiendo, en lugar de (11.563), la solucion enla forma u(r, θ) = R(r)Θ(θ) y aplicando el esquema general de separacion de variables,de manera similar a como hemos procedido en otros tipos de ecuaciones.
Se recomienda al lector que, a modo de entrenamiento, efectue esos calculos, suponiendo en elproblema (11.562) la condicion de frontera en la forma:
u(r0, θ, ϕ) = f(θ, ϕ) (11.572)
La solucion debera dar:
u(r, θ, ϕ) =∞∑n=0
√r0√r
In+ 12(κr)
In+ 12(κr0)
Yn(θ, ϕ) (11.573)
donde
Yn(θ, ϕ) = An0Pn(cos θ) +n∑
m=1
Anm cosmϕ+Bnm sinmϕP (m)n (cos θ) (11.574)
Anm =2n+ 1
2πεm
(n−m)!
(n+m)!
∫ π
0
∫ 2π
0
f(θ, ϕ) cosmϕP (m)n (cos θ) sin θdθdϕ (11.575)
Bnm =2n+ 1
2π
(n−m)!
(n+m)!
∫ π
0
∫ 2π
0
f(θ, ϕ) sinmϕP (m)n (cos θ) sin θdθdϕ (11.576)

496 Jose Marın Antuna
Aquı:
εm = 1, ∀m 6= 0 (11.577)
ε0 = 2
4. Comprobar que en un tubo cilındrico infinito de seccion arbitraria y con paredes absolu-tamente rıgidas pueden existir, bajo ciertas condiciones, ondas sonoras que se propaguen, esdecir, que el tubo puede ser una guıa de ondas sonoras. Hallar la menor frecuencia posible (lamayor longitud de onda posible) de la onda propagada. Analizar los casos de seccion circulary rectangular.
Segun vimos en el capıtulo donde estudiamos los procesos fısicos que se describen con ecuacioneshiperbolicas, para el potencial de velocidades en el interior del tubo tendremos es problema
utt = a2∇2u∂u
∂n|Σ = 0 (11.578)
donde Σ es la superficie frontera del tubo.(Fig. 11.11). La condicion de frontera del problema(11.578) viene dada por el hecho de que, al ser rıgidas las paredes del tubo, el gradiente normaldel potencial de velocidades sobre la frontera es nulo. En el problema no consideramos nifuentes, ni condiciones iniciales, ya que para resolver el problema no necesitamos estos datos.
Suponiendo oscilaciones periodicas armonicas, la solucion tendra la forma:
u = veiωt (11.579)
y obtenemos para v el problema
∇2v + k2v = 0 (11.580)
∂v
∂n|Σ = 0
donde
k =ω
a=
2π
λ(11.581)
Colocando un sistema de coordenadas con el eje z como se muestra en la figura 11.11 y pro-poniendo la solucion de (11.580) como
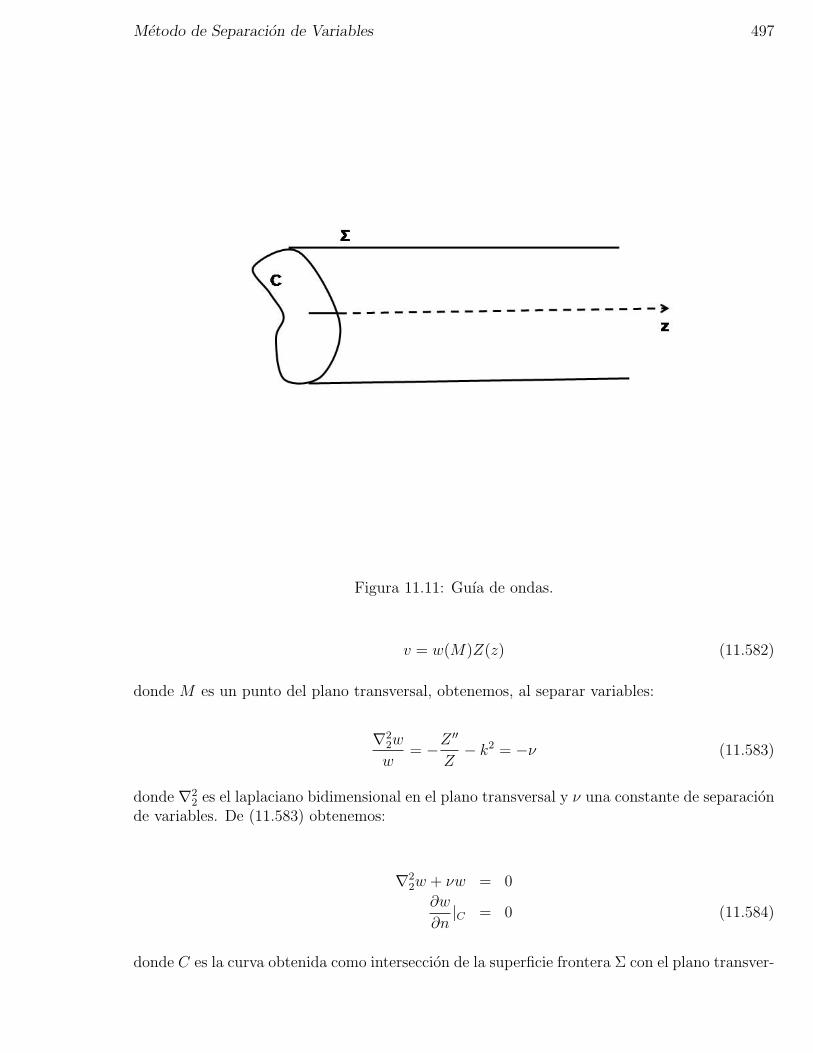
Metodo de Separacion de Variables 497
Figura 11.11: Guıa de ondas.
v = w(M)Z(z) (11.582)
donde M es un punto del plano transversal, obtenemos, al separar variables:
∇22w
w= −Z
′′
Z− k2 = −ν (11.583)
donde ∇22 es el laplaciano bidimensional en el plano transversal y ν una constante de separacion
de variables. De (11.583) obtenemos:
∇22w + νw = 0
∂w
∂n|C = 0 (11.584)
donde C es la curva obtenida como interseccion de la superficie frontera Σ con el plano transver-

498 Jose Marın Antuna
sal (Fig. 11.11). Este segundo problema de frontera para la ecuacion de Helmholtz en el planoes un problema de Sturm-Liouville. Por lo tanto, su solucion vendra dada por las autofuncionesy los autovalores
wn(M), νn, ∀n = 1, 2, 3, ... (11.585)
Para la funcion Z(z) obtenemos la ecuacion:
Z ′′ + (k2 − νn)Z = 0 (11.586)
o, llamando
γn =√k2 − νn (11.587)
Z ′′ + γ2nZ = 0 (11.588)
cuya solucion general puede expresarse en la forma
Zn(z) = eiγnz (11.589)
Por consiguiente, la amplitud de las ondas estabilizadas sera:
vn(M, z) = wn(M)eiγnz ≡ wn(M)ei√k2−νnz (11.590)
De (11.590) se ve que, si νn0 < k2 < νn0+1, existiran n0 ondas que se propagan a lo largo de laguıa de ondas, ya que para ν1, ν2, ..., νn0 (11.590) da expresiones oscilantes. Para k2 > νn0+1,de (11.588) tendremos
γn =√k2 − νn = i
√νn − k2 (11.591)
y, por lo tanto, para esos valores
vn(M, z) = wn(M)e−√νn−k2z (11.592)
que son expresiones que se amortiguan exponencialmente a lo largo del eje z y que, por tanto,no dan ondas que se propaguen.
Llamaremos longitud de onda crıtica a

Metodo de Separacion de Variables 499
λcrit =2π√νn0
(11.593)
ya que todas las ondas con λ > λcrit se propagaran en la guıa, mientras que aquellas conλ < λcrit se amortiguaran.
La mayor longitud de onda posible vendra dada por la expresion
λmax =2π√ν1
(11.594)
a la que le correspondera la mınima frecuencia posible
fmin =a√ν1
2π(11.595)
Analicemos, ahora, el caso de la guıa de onda con seccion rectangular. En este caso ∇22 =
∂2
∂x2 + ∂2
∂y2, de manera que, proponiendo w = X(x)Y (y), el problema (11.584) adopta la forma:
X ′′Y +XY ′′ + λXY = 0, ∀0 < x < x0, 0 < y < y0
X ′(0) = X ′(x0) = 0 (11.596)
Y ′(0) = Y ′(y0) = 0
Separando variables, obtenemos:
X ′′
X= −Y
′′
Y− ν = −α (11.597)
de donde
X ′′ + αX = 0, ∀0 < x < x0
X ′(0) = 0 (11.598)
X ′(x0) = 0
cuyas soluciones son:
Xn(x) = cosnπ
x0
x, αn =
(nπ
x0
)2
(11.599)

500 Jose Marın Antuna
y, ademas, llamando
β = (ν − α) (11.600)
obtenemos
Y ′′ + βY = 0, ∀0 < y < y0
Y ′(0) = 0 (11.601)
Y ′(y0) = 0
cuyas soluciones son:
Ym(y) = cosmπ
y0
y, βm =
(mπ
y0
)2
(11.602)
Por consiguiente, en el caso de seccion rectangular, obtenemos:
wnm(x, y) = cosnπ
x0
x cosmπ
y0
y (11.603)
νnm = π2
[n2
x20
+m2
y20
], n = 0, 1, 2, 3, ..., m = 0, 1, 2, 3, ... (11.604)
Veamos, ahora, el caso de seccion circular. Entonces
∇22 =
1
r
∂
∂r
(r∂
∂r
)+
1
r2
∂2
∂ϕ2
por lo que, proponiendo la solucion w = R(r)Φ(ϕ) y separando variables, obtenemos:
r2(R′′ + 1
rR′)
R+ νr2 = −Φ′′
Φ= α (11.605)
Resolviendo los problemas que se desprenden de (11.605), obtenemos:
Φn(ϕ) = An cosnϕ+Bn sinnϕ (11.606)
Rnk(r) = Jn
(µ
(n)k
r0r
), k = 1, 2, ... (11.607)

Metodo de Separacion de Variables 501
donde µ(n)k son las raıces positivas de la ecuacion trascendente J ′n(µ) = 0. Por consiguiente, en
este caso
wnk(r, ϕ) = An cosnϕ+Bn sinnϕJn
(µ
(n)k
r0r
)(11.608)
11.5 Ejercicios del capıtulo
1. Una cuerda de longitud l, con extremos fijos, tiene, en el instante inicial, una elongaciondada por la funcion
ϕ(x) =16
5h
[(xl
)4
− 2(xl
)3
+(xl
)]donde h > 0 es un numero suficientemente pequeno. Hallar las oscilaciones de la cuerdapara t > 0, si la velocidad inicial es cero y no hay fuerzas aplicadas a la cuerda.
2. Una cuerda de longitud l, con extremos fijos, recibe una elongacion inicial dada por lafuncion
ϕ(x) = A sinπx
l, ∀0 ≤ x ≤ l
Hallar las oscilaciones de la cuerda para t > 0, si la velocidad inicial es cero y no hayfuerzas aplicadas a la cuerda.
3. Hallar las oscilaciones de una cuerda de longitud l con condiciones iniciales nulas, si elextremo x = 0 se mantiene fijo y el extremo x = l se mueve por la ley A sinωt. (Considerarω diferente de las frecuencias propias de la cuerda y el caso de resonancia, apartes).
4. Una barra esta suspendida verticalmente y oprimida de forma tal, que el desplazamientoen cada punto es igual a cero. En el instante t = 0 se le libera de la presion, manteniendolasujeta de su extremo superior. Hallar las oscilaciones forzadas de la barra, teniendo encuenta la presencia de la gravedad.
5. Hallar la distribucion de la temperatura en una barra de longitud l, si los extremos semantienen a temperatura cero y la temperatura inicial es una funcion arbitraria f(x). Enel interior de la barra no hay fuentes de calor.
6. Hallar la temperatura de una barra de longitud l, si su temperatura inicial es U0 = const,el extremo x = 0 se mantiene a temperatura U1 = const y el extremo x = l se mantienea temperatura U2 = const. Dentro de la barra no hay fuentes de calor.
7. Hallar el potencial electrostatico en el interior de un cilindro de radio a sin cargas, sisobre la superficie del cilindro el potencial es igual a A+B sinϕ.

502 Jose Marın Antuna
8. Resolver el problema de Neumann:
∇2u = 0, ∀0 ≤ r < a, 0 ≤ ϕ ≤ 2π∂u
∂n|r=a = A cosϕ+B
9. Resolver el problema
∇2u = 0, ∀0 ≤ r < a, 0 ≤ ϕ ≤ 2π∂u
∂n|r=a = A cosϕ+B sin3 ϕ
10. Hallar la solucion del tercer problema de frontera interno para la ecuacion de Laplace enel cırculo.
11. Un cilindro circular infinito de radio a se mueve con velocidad v0 perpendicularmente asu eje en un lıquido incompresible. Hallar el potencial de velocidades del lıquido relativasal cilindro, considerando que la velocidad en el infinito es cero.
12. Resolver el problema del flujo de un lıquido ideal alrededor de un cilindro de radio ainmovil, si la velocidad del lıquido en el infinito es v0.
13. Un cilindro conductor infinito se encuentra en un campo electrostatico E0, dirigido a lolargo del eje x (el eje z coincide con el eje del cilindro). Hallar el campo E en el exteriordel cilindro.
14. Hallar la solucion del problema interno de la ecuacion de Laplace en el cırculo de radioa, si la condicion de frontera es:
(a)u|r=a = A sinϕ, ∀0 < ϕ < π
(b)
u|r=a =1
3A sin3 ϕ, ∀π < ϕ < 2π
15. Hallar la funcion u(r, ϕ, z), armonica en el interior de un cilindro finito de radio a y alturah, que se anule en las bases del cilindro y en su superficie lateral tome el valor f(z).
16. Las bases del toroide a < r < b, 0 < z < l se mantienen a temperatura u0 = const y sussuperficies laterales a temperatura u1 = const. Hallar la distribucion estacionaria de latemperatura dentro del toroide, si en su interior no hay fuentes de calor.
17. Obtener la expresion del potencial de una carga puntual colocada en el eje de un cilindrofinito 0 < r < a, 0 < z < h, si sus paredes estan a potencial cero.
18. Hallar la solucion de la ecuacion de Laplace en el interior de una esfera de radio a, si lacondicion de frontera es ∂u
∂n|r=a = A cos θ (θ es el angulo asimutal: 0 < θ < π).
Metodo de Separacion de Variables 503
19. Hallar el potencial electrostatico dentro de una esfera de radio r0, si en su interior no hayfuentes y en su superficie u|r=r0 = 5 sin2 θ cos 2ϕ.
20. Hallar el potencial dentro de una esfera de radio r0 sin cargas en su interior, si en susuperficie el potencial es u(r0, θ, ϕ) = A sin θ sinϕ.
21. Hallar el potencial electrostatico dentro de una esfera de radio a sin cargas internas,cuya mitad superior esta cargada a potencial V1 = const y su mitad inferior a potencialV2 = const.
22. Hallar la temperatura de un paralelepıpedo de lados l1, l2, l3, si en su interior no hayfuentes de calor y en su superficie se efectua un intercambio de calor con el medio exteriora temperatura cero, segun la ley lineal de Newton. Considerar la temperatura inicial iguala f(x, y, z).
23. Hallar la temperatura de una esfera de radio r0, si en su interior no hay fuentes de calor,en su superficie ocurre un intercambio de calor con el medio ambiente a temperatura cerosegun la ley de Newton y la temperatura inicial de la esfera depende solo de r: f(r).
24. Hallar las oscilaciones transversales de una membrana rectangular, 0 < x < l1, 0 < y < l2,con borde fijo, si en el momento inicial esta en equilibrio y se le imprime un impulso I,concentrado en el punto (x0, y0) y si el medio ambiente le ofrece una resistencia a sumovimiento proporcional a la velocidad.
25. Hallar las dimensiones crıticas de una pila atomica esferica de radio R, si esta se encuentraconstruida de forma tal, que en su superficie la concentracion de neutrones es nula.
26. Resolver el problema sobre el calentamiento de un cilindro circular infinito de radio r0, sisu temperatura inicial es cero y en su superficie se mantiene una temperatura U0 = const.
27. Hallar las oscilaciones de una membrana circular de radio r0 con condiciones inicialesnulas, si su borde se mueve mediante la ley A sinωt. Resolver los casos resonante y noresonante.
28. Hallar la temperatura de un cilindro infinito de radio r0, si su temperatura en la superficiese mantiene igual a cero y su temperatura inicial es 2A sinϕ cosϕ.
29. Hallar las oscilaciones de una membrana circular de radio r0 provocadas por condicionesiniciales de simetrıa radial, si el medio ambiente le ofrece una resistencia a las oscilacionesproporcional a la velocidad.
30. Un recipiente esferico lleno de cierto gas se mueve uniformemente durante un tiempo largoa velocidad v y, luego, en el instante t = 0, se detiene instantaneamente, permaneciendoen lo adelante completamente inmovil. Hallar las oscilaciones del gas dentro de la esferaprovocadas por este hecho.
31. Una esfera de radio R se encuentra en el instante t = 0 a temperatura cero. A partir deese momento en su superficie se mantiene una temperatura U0 = const. Hallar el procesode calentamiento de la esfera.
504 Jose Marın Antuna
32. Resolver el problema sobre el enfriamiento de una esfera de radio r0, si en su superficietiene lugar un intercambio de calor con el medio ambiente a temperatura cero por la leyde Newton. La temperatura inicial de la esfera es u(M, 0) = f(r, θ, ϕ).
33. Un recipiente esferico lleno de gas realiza, a partir del instante t = 0, pequenas oscilacionesarmonicas en la direccion de uno de sus diametros. La oscilacion es A sinωt a lo largode dicho diametro. Hallar las oscilaciones del gas dentro de la esfera, considerando que,para t < 0, el gas estaba en reposo.
34. Hallar las oscilaciones del aire en el interior de un globo esferico, creadas por oscilacionespequenas de su superficie, dirigidas a lo largo del radio, con velocidad f(θ) cosωt.
35. Hallar la distribucion estacionaria de la concentracion de un gas radiactivo en el interiorde un cilindro infinito de seccion circular de radio a, si en la superficie del cilindro semantiene una concentracion constante u0.
36. Resolver el mismo problema anterior en el exterior del cilindro.
37. Resolver el mismo problema en el interior de una esfera de radio a, si:
a) u|r=a = u0, b) u|r=a = u0 cos θ.
Capıtulo 12
Metodo de Transformadas Integrales
El metodo de transformadas integrales es extraordinariamente poderoso para resolver problemascon ecuaciones diferenciales, tanto ordinarias, como en derivadas parciales. Esta basado en lautilizacion de las transformadas integrales, fundamentalmente las de Fourier y Laplace, queson las que emplearemos en el presente capıtulo, aunque, en principio, pueden utilizarse otrastransformadas integrales.
Ya desde el siglo pasado, muchos matematicos comenzaron a trabajar con el llamado calculosimbolico, asociando un operador a la accion de derivacion y el operador inverso a la accion deintegracion; el empleo de la teorıa de funciones de variable compleja y la teorıa general de opera-dores del Analisis Funcional permitieron dar una fundamentacion acabada a las transformadasintegrales.
En el libro ”Teorıa de Funciones de Variable Compleja” del autor se ofrece una exposiciondel llamado Metodo Operacional e, incluso, se dan algunos ejemplos de su utilizacion en laresolucion de diversos problemas de la Fısica Matematica. En el presente capıtulo veremos unavision sistematizada de la utilizacion de dicho metodo en los problemas que venimos estudiando.La aplicacion del metodo de transformadas integrales sera estudiada aquı en su aplicacion a losdiferentes problemas de los distintos tipos de ecuaciones que anteriormente definimos.
12.1 Ecuaciones hiperbolicas
12.1.1 Problema de Cauchy
En el capıtulo donde desarrollamos el metodo de ondas viajeras estudiamos como se resolvıa elproblema de Cauchy para la ecuacion hiperbolica que describe, como sabemos, las oscilacionesde una cuerda infinita sin fuerzas aplicadas y provocadas por una elongacion y una velocidadiniciales. Por la importancia metodologica que tiene en el estudio de la aplicacion del metodode transformadas integrales, resolveremos a continuacion ese mismo problema, utilizando latransformada de Fourier.
505
506 Jose Marın Antuna
Ası las cosas, nos proponemos resolver el problema:
utt = a2uxx, ∀ −∞ < x <∞, t > 0
u(x, 0) = ϕ(x) (12.1)
ut(x, 0) = ψ(x)
Por supuesto, ya sabemos que la solucion del problema (12.1) viene dada por la formula deD’Alembert, que obtuvimos y analizamos fısicamente en aquel capıtulo. Ejemplificaremos, pues,la utilizacion de la transformada de Fourier, resolviendo este problema, ya que como conocemosel resultado, podemos juzgar sobre la validez de lo que hagamos por lo que obtengamos. Lametodologıa de trabajo que con el ejemplo desarrollaremos es, no obstante, general y muy utilen muchos casos y, mas adelante, la utilizaremos en otros problemas.
Recordemos que la transformada de Fourier de la funcion f(x) se define formalmente mediantela integral:
F (k) =
∫ ∞
−∞f(ξ)eikξdξ (12.2)
en el supuesto de que esta integral converja. En el libro ”Teorıa de Funciones de VariableCompleja” del autor se exponen las condiciones que debe cumplir la funcion f(x) para tenertransformada de Fourier, dada por (12.2) y que, en esencia, se reducen a que f(x) debe sercuadrado integrable en el intervalo (−∞,∞), es decir, en todo el eje real. Allı tambien seexpone que, en el caso en que f(x) no cumpla este requisito, aunque no exista la transformadareal de Fourier (o sea, con k real), existe la transformada de Fourier con k compleja para laclase de funciones que crezcan con menos rapidez que cierta exponencial para x → ±∞. Ası,si f(x) cumple con las siguientes valoraciones:
|f(x)| < Aeax, ∀x→∞ (12.3)
|f(x)| < Bebx, ∀x→ −∞
entonces, la transformada de Fourier (12.2) existe y define una funcion analıtica de la variablecompleja k = k1 + ik2 en la franja a < k2 < b del plano complejo k. En particular, si a < 0y b > 0, esta franja de analiticidad contiene al eje real k = k1. La transformada inversa deFourier se calcula por la formula:
f(x) =1
2π
∫ ∞
−∞F (k)e−ikxdx (12.4)
formula que se generaliza para el caso de k compleja como:

Metodo de Transformadas Integrales 507
f(x) =1
2π
∫ ∞+iγ
−∞+iγ
F (k)e−ikxdx (12.5)
donde γ es un numero tal, que la recta de integracion, paralela al eje real, este contenida dentrode la franja de analiticidad de F (k), es decir, a < γ < b.
Para la transformada de Fourier ası definida se cumple que:
f ′(x) ↔F −ikF (k), f ′′(x) ↔F −k2F (k)
y, en general:
f (l)(x) ↔F (−ik)lF (k) (12.6)
donde hemos utilizado la notacion f(x) ↔F F (k) para indicar que f(x) tiene a F (k) portransformada de Fourier.
La relacion (12.6) es muy facil de demostrar utilizando la integracion por partes. Por ejemplo,para la transformada de la primera derivada tenemos, integrando por partes:
f ′(x) ↔F
∫ ∞
−∞f ′(ξ)eikξdξ = f(ξ)eikξ|∞−∞ − ikF (k) ≡ −ikF (k)
Aplicando reiteradamente este procedimiento, es facil demostrar (12.6).
Supongamos que en el problema (12.1) la funcion u(x, t) admite transformada de Fourier, aligual que las funciones ϕ(x) y ψ(x) y denotemos dichas transformadas por:
u(x, t) ↔F U(k, t), ϕ(x) ↔F Φ(k), ψ(x) ↔F Ψ(k)
Entonces, como la transformada de Fourier es, evidentemente, una operacion lineal, aplicandotransformada de Fourier al problema (12.1), obtenemos:
Utt + k2a2U = 0, ∀t > 0
U(k, 0) = Φ(k) (12.7)
Ut(k, 0) = Ψ(k)
La solucion general de la ecuacion del problema (12.7) es:
U(k, t) = A(k)eikat +B(k)e−ikat (12.8)
508 Jose Marın Antuna
De las condiciones iniciales del problema (12.7) se obtienen, para las constantes A(k) y B(k)las siguientes expresiones:
A(k) =1
2Φ(k) +
1
2ikaΨ(k)
B(k) =1
2Φ(k)− 1
2ikaΨ(k) (12.9)
Colocando (12.9) en (12.8) y hallando la transformada inversa, obtenemos, para la solucion delproblema (12.1), la expresion:
u(x, t) =1
2
1
2π
∫ ∞
−∞
[Φ(k) +
1
2ikaΨ(k)
]eikat +
[Φ(k)− 1
2ikaΨ(k)
]e−ikat
e−ikxdk (12.10)
donde son conocidas las transformadas Φ(k) y Ψ(k) de ϕ(x) y ψ(x), respectivamente, por lasformulas:
Φ(k) =
∫ ∞
−∞ϕ(ξ)eikξdξ
Ψ(k) =
∫ ∞
−∞ψ(ξ)eikξdξ (12.11)
Por lo tanto, en principio, queda resuelto el problema (12.1); la solucion viene dada por laformula (12.10) donde las funciones Φ(k) y Ψ(k) estan dadas por las formulas (12.11). Es con-veniente destacar que la formula (12.10) debe coincidir con la formula de D’Alembert, obtenidaanteriormente, ya que -como sabemos- la solucion es unica. Por lo tanto, transformemos laexpresion (12.10), a fin de verificar que ella coincide con la formula de D’Alembert. No esdifıcil llevar la expresion (12.10) a la siguiente forma:
u(x, t) =1
2
1
2π
∫ ∞
−∞Φ(k)[e−ik(x−at) + e−ik(x+at)]dk +
+1
2
1
2π
∫ ∞
−∞
1
aik[e−ik(x−at) − e−ik(x+at)]dk (12.12)
En la expresion (12.12) tenemos que:
1
ik[e−ik(x−at) − e−ik(x+at)] ≡ − 1
ik[e−ik(x+at) − e−ik(x−at)] =
=
∫ x+at
x−ate−ikαdα (12.13)
Metodo de Transformadas Integrales 509
Colocando (12.13) en (12.12), queda:
u(x, t) =1
2
1
2π
∫ ∞
−∞Φ(k)e−ik(x−at)dk +
1
2
1
2π
∫ ∞
−∞Φ(k)e−ik(x+at)dk +
+1
2a
1
2π
∫ x+at
x−at
∫ ∞
−∞Ψ(k)e−ikαdkdα (12.14)
El primero y el segundo integrando en (12.14) son, respectivamente, ϕ(x− at) y ϕ(x+ at), porla definicion de transformada de Fourier; en el tercer sumando, el factor 1/2π, multiplicado porla integral interior es ψ(α), por la definicion de transformada de Fourier. Ası pues, finalmente,de (12.14) obtenemos:
u(x, t) =1
2ϕ(x− at) +
1
2ϕ(x+ at) +
1
2a
∫ x+at
x−atψ(α)dα (12.15)
La expresion (12.15) es, exactamente, la formula de D’Alembert obtenida por el metodo deondas viajeras. Este resultado, por supuesto, era de esperar.
En el ejemplo visto, constatamos lo poderoso que es el uso de la transformada de Fourier parala solucion de problemas. Veremos mas adelante una aplicacion nueva, al caso de la ecuacionparabolica.
12.1.2 Problemas en la recta semiinfinita
Generalmente, la transformada de Fourier se aplica, por ser bilateral (es decir, que se define parafunciones dadas entre −∞ y +∞), cuando se quieren resolver problemas en todo el espacio; latransformada de Laplace en tanto, por ser unilateral (o sea, que se define para funciones dadasen el semieje, desde 0 hasta +∞), se emplea para resolver problemas en rangos de valorespositivos de la variable. Ası pues, generalmente, la transformada de Fourier se aplica en elespacio, en tanto que la transformada de Laplace se aplica en el tiempo. No debemos olvidarque, en esencia, la transformada de Laplace es la transformada de Fourier unilateral, girada unangulo π/2 en el plano complejo, de manera que la afirmacion hecha arriba es convencional,aunque permite automatizar mucho los calculos en la practica.
Veremos, en el presente punto, un ejemplo de aplicacion de la transformada de Laplace a lasolucion de un problema de la Fısica Matematica para la ecuacion hiperbolica.
Resolvamos el problema de las oscilaciones de una cuerda semiinfinita, provocadas por el movi-miento de su extremo por una ley dada. Es decir, resolvamos el problema:

510 Jose Marın Antuna
utt = a2uxx, ∀0 < x <∞, t > 0
u(x, 0) = 0 (12.16)
ut(x, 0) = 0
u(0, t) = µ(t)
El problema (12.16) fue resuelto, tambien por el metodo de ondas viajeras, de manera que susolucion aquı por el metodo de transformadas integrales nos servira de comprobacion, tambien,de la validez de nuestros calculos.
Apliquemos la transformada de Laplace en el tiempo, suponiendo que u(x, t) y µ(t) son ori-ginales. Llamemos U(x, p) y M(p), respectivamente, a las transformadas de Laplace de estasfunciones, es decir:
u(x, t) : U(x, p), µ(t) : M(p)
donde, como sabemos, la transformada de Laplace del original f(t) viene dada por la expresion
f(t) : F (p) =
∫ ∞
0
f(t)e−ptdt
Ası, aplicando la transformada de Laplace a la ecuacion y a la condicion de frontera del problema(12.16) y teniendo en cuenta que las condiciones iniciales en el problema son nulas, obtenemos:
Uxx −p2
a2U = 0, ∀x > 0 (12.17)
U(0, p) = M(p)
donde hemos tenido en cuenta las conocidas formulas para la transformada de Laplace de lasderivadas:
ut : pU − u(x, 0), utt : p2U − pu(x, 0)− ut(x, 0)
La solucion general, acotada para x→∞, del problema (12.17) es:
U(x, p) = M(p)e−pax (12.18)
de manera que, por la formula de Mellin para el calculo del original a partir de la transformada,obtenemos:

Metodo de Transformadas Integrales 511
u(x, t) =1
2πi
∫ s+i∞
s−i∞M(p)e−
paxeptdp =
1
2πi
∫ s+i∞
s−i∞M(p)ep(t−
xa)dp =
= µ(t− x
a
), ∀t > x
a(12.19)
= 0, ∀t < x
a
que es el mismo resultado obtenido por el metodo de ondas viajeras. Para obtener el resultado(12.19) hemos tenido en cuenta que, de acuerdo con la teorıa de residuos, para poder aplicar elLema de Jordan, cerramos por la izquierda para t− x
a> 0, donde -por definicion- el integrando
tiene singularidades y cerramos por la derecha para t− xa< 0, donde el integrando es analıtico.
Los ejemplos hasta aquı vistos son de problemas cuyas soluciones conocemos a priori, puesfueron obtenidas anteriormente por nosotros por el metodo de ondas viajeras. Ellos, simple-mente, nos permiten verificar la validez y potencia del uso de las transformadas integrales parala resolucion de problemas de la Fısica Matematica. Basados en esta evidencia, a continuacionresolveremos otros problemas con la ayuda de las transformadas integrales que anteriormenteno habıamos acometido.
En especıfico, dentro de las ecuaciones hiperbolicas y la recta semiinfinita, busquemos la soluciondel tercer problema de frontera, con ecuacion no homogenea y condicion de frontera homogenea:
utt = a2uxx + f(x, t), ∀0 < x <∞, t > 0
u(x, 0) = 0 (12.20)
ut(x, 0) = 0
ux(0, t)− hu(0, t) = 0
que, por definicion de funcion de Green, tendra por solucion la expresion:
u(x, t) =
∫ t
0
∫ ∞
0
f(ξ, τ)G3(x, ξ, t− τ)dξdτ (12.21)
donde hemos denotado por G3(x, ξ, t) a la funcion de Green de la ecuacion hiperbolica en larecta semiinfinita, correspondiente a la condicion de frontera de tercer tipo. La validez de laexpresion (12.21) para la solucion de nuestro problema esta dada por el hecho de que, comohemos constatado en los capıtulos anteriores, la solucion del problema con la ecuacion nohomogenea y condiciones iniciales y de frontera homogeneas, siempre se expresa a traves deuna integral en el espacio considerado (en este caso de 0 a ∞) y en el tiempo transcurrido (de 0a t) del producto de la inhomogeneidad de la ecuacion por la funcion de Green correspondiente.
Ası pues, en esencia, lo que queremos hallar es la funcion de Green G3(x, ξ, t), correspondienteal tercer problema de frontera de la ecuacion hiperbolica en la recta semiinfinita. A fin deresolver el problema, por el metodo de transformadas integrales, apliquemos al problema (12.20)
512 Jose Marın Antuna
la transformada de Laplace en el tiempo. Entonces, teniendo en cuenta que las condicionesiniciales son nulas y las reglas para el calculo de la transformada de las derivadas, obtenemosde (12.20) el problema:
Uxx −p2
a2U = − 1
a2F (x, p), ∀x > 0 (12.22)
Ux(0, p)− hU(0, p) = 0
donde hemos utilizado las notaciones:
U(x, p) : u(x, t), F (x, p) : f(x, t) (12.23)
La solucion del problema diferencial ordinario (12.22), en terminos de la funcion de Green, es:
U(x, p) =
∫ ∞
0
G(x, ξ, p)
a2F (ξ, p)dξ (12.24)
lo que puede verse en el capıtulo sobre la equivalencia entre un problema de Sturm-Liouvilley una ecuacion integral de Fredholm de segundo tipo, del libro de Ecuaciones Integrales delautor. Construyamos la funcion de Green, cuya forma general, de acuerdo con lo expuesto enel libro de Ecuaciones Integrales, es:
G(x, ξ, p) =1
Wy1(x)y2(ξ), ∀0 ≤ x ≤ ξ <∞ (12.25)
=1
Wy1(ξ)y2(x), ∀0 ≤ ξ ≤ x <∞
donde
W =
∣∣∣∣ y1(x) y2(x)y′1(x) y′2(x)
∣∣∣∣ (12.26)
es el wronskiano de las funciones y1(x) y y2(x) que son, por definicion, dos soluciones linealmenteindependientes de la ecuacion del problema (12.22) con las siguientes caracterısticas: y1(x) debesatisfacer la condicion de frontera del problema (12.22) en x = 0; y2(x) debe cumplir la condicionde frontera en el otro extremo (o sea, en este caso, ser acotada para x → ∞). Hallemos lasfunciones y1(x) y y2(x); para ello resolvamos la ecuacion:
y′′ − p2
a2y = 0
Su solucion general es:

Metodo de Transformadas Integrales 513
y(x) = Ae−pax +Be
pax
Exigiendo que esta solucion cumpla la condicion de frontera en x = 0 del problema (12.22),obtenemos la funcion y1(x) en la forma:
y1(x) = epax +
pa− h
pa
+ he−
pax (12.27)
Por solucion y2(x) linealmente independiente y acotada para x→∞ tomamos la funcion:
y2(x) = e−pax (12.28)
El calculo del wronskiano de estas funciones nos da:
W = −2p
a(12.29)
por lo que, finalmente, obtenemos la funcion de Green en la forma (el lector interesado enadquirir la necesaria destreza en este tipo de metodo debe realizar los calculos aquı indicadosde forma individual):
G(x, ξ, p) =a
2p
[e−
pa(ξ−x) +
pa− h
pa
+ he−
pa(x+ξ)
], ∀0 ≤ x ≤ ξ <∞
G(x, ξ, p) =a
2p
[e−
pa(x−ξ) +
pa− h
pa
+ he−
pa(x+ξ)
], ∀0 ≤ ξ ≤ x <∞
es decir,
G(x, ξ, p) =a
2p
[e−
pa|x−ξ| +
pa− h
pa
+ he−
pa(x+ξ)
](12.30)
Colocando (12.30) en (12.24) obtenemos, para la transformada de Laplace de la solucion delproblema (12.20), que es a su vez la solucion del problema (12.22), la expresion:
U(x, p) =
∫ ∞
0
F (ξ, p)1
2ap
[e−
pa|x−ξ| +
pa− h
pa
+ he−
pa(x+ξ)
]dξ (12.31)
Pero, de tablas de transformadas integrales (ver, por ejemplo, el libro de Bateman y Erdelyi)se sabe que:

514 Jose Marın Antuna
1
pe−
pa|x−ξ| : θ
(t− |x− ξ|
a
);
1
pe−
pa|x+ξ| : θ
(t− (x+ ξ)
a
)(12.32)
y
2h1
pa
+ he−
pa|x+ξ| : 2haθ
(t− (x+ ξ)
a
)e−ha(t−
x+ξa ) (12.33)
donde
θ(t) = 1, ∀t > 0
= 0, ∀t < 0 (12.34)
es la funcion paso unitario de Heaviside. Por consiguiente, aplicando la propiedad de la trans-formada de Laplace de la integral de un original, tenemos que:
1
p2h
1pa
+ he−
pa|x+ξ| : 2ha
∫ t
0
θ
(s− (x+ ξ)
a
)e−ha(s−
x+ξa )ds =
= 2ha
∫ t
x+ξa
e−ha(s−x+ξ
a )ds = 2haθ
(t− (x+ ξ)
a
)∫ t−x+ξa
0
e−haydy (12.35)
Ası pues, aplicando a (12.31) el teorema de la convolucion, obtenemos, finalmente:
u(x, t) =1
2a
∫ ∞
0
∫ t
0
dξdτ f(ξ, τ) · (12.36)
·
[θ
(t− τ − |x− ξ|
a
)+ θ
(t− τ − |x+ ξ|
a
)− 2haθ
(t− τ − |x+ ξ|
a
)∫ t−x+ξa
0
e−haydy
]
Por consiguiente, la funcion de Green del tercer problema de frontera para la ecuacion hiperbo-lica en la recta semiinfinita tiene la forma:
G3(x, ξ, t) =1
2a
[θ(at− |x− ξ|) + θ(at− |x+ ξ|)− 2hθ(at− |x+ ξ|)
∫ at−|x+ξ|
0
e−hsds
](12.37)
Por definicion, esta funcion de Green (12.37) sera la solucion del problema:

Metodo de Transformadas Integrales 515
utt = a2uxx, ∀0 < x <∞, t > 0
u(x, 0) = 0 (12.38)
ut(x, 0) = δ(x− ξ)
ux(0, t)− hu(0, t) = 0
o de su problema equivalente:
utt = a2uxx + δ(x− ξ)δ(t), ∀0 < x <∞, t > 0
u(x, 0) = 0 (12.39)
ut(x, 0) = 0
ux(0, t)− hu(0, t) = 0
Observese que, si en la funcion (12.37) hacemos h = 0, se obtiene:
G3(x, ξ, t)|h=0 =1
2a[θ(at− |x− ξ|) + θ(at− |x+ ξ|)] ≡ G2(x, ξ, t) (12.40)
que serıa la funcion de Green en la recta semiinfinita para la ecuacion hiperbolica para elsegundo problema de frontera (ux(0, t) = 0) y que puede obtenerse, facilmente, mediante laprolongacion par de las condiciones iniciales a la recta infinita. Este resultado era de esperar,ya que, para h = 0, la condicion de frontera del problema (12.20) se convierte en la condicionde segundo tipo y, en el capıtulo del metodo de ondas viajeras vimos que, para condicion defrontera de segundo tipo en la recta semiinfinita, la solucion, por el metodo de prolongacionse obtiene, realizando una prolongacion par de las condiciones iniciales. La funcion G2(x, ξ, t),por definicion, sera la solucion del problema:
utt = a2uxx, ∀0 < x <∞, t > 0
u(x, 0) = 0 (12.41)
ut(x, 0) = δ(x− ξ)
ux(0, t) = 0
o de su equivalente:
utt = a2uxx + δ(x− ξ)δ(t), ∀0 < x <∞, t > 0
u(x, 0) = 0 (12.42)
ut(x, 0) = 0
ux(0, t) = 0

516 Jose Marın Antuna
Por el metodo de prolongacion ambos problemas son equivalentes al siguiente problema en larecta infinita:
utt = a2uxx, ∀ −∞ < x <∞, t > 0
u(x, 0) = 0 (12.43)
ut(x, 0) = δ(x− ξ) + δ(x+ ξ)
que corresponde a una prolongacion par de la condicion inicial deltaica.
La integral en la funcion G3(x, ξ, t), dada por (12.37), se puede calcular explıcitamente:
∫ at−|x+ξ|
0
e−hsds =1
h
[1− e−h(at−|x+ξ|)
]por lo que una expresion equivalente a (12.37) es:
G3(x, ξ, t) =1
2a[θ(at− |x− ξ|) + θ(at− |x+ ξ|)− 2θ(at− |x+ ξ|)[1− e−h(at−|x+ξ|)]] (12.44)
De esta ultima expresion se ve que, para h→∞, se obtiene:
G3(x, ξ, t)|x→∞ =1
2a[θ(at− |x− ξ|)− θ(at− |x+ ξ|)] ≡ G1(x, ξ, t) (12.45)
que serıa la funcion de Green en la recta semiinfinita para la ecuacion hiperbolica para elprimer problema de frontera (cuando h→∞, en la condicion ux(0, t)− hu(0, t) = 0 prevaleceel segundo termino, por lo que la condicion se convierte en u(0, t) = 0, es decir, la condicion defrontera de primer tipo). Esta funcion puede obtenerse, facilmente, mediante la prolongacionimpar de las condiciones iniciales a la recta infinita. Por definicion, (12.45) serıa la solucion delproblema:
utt = a2uxx, ∀0 < x <∞, t > 0
u(x, 0) = 0 (12.46)
ut(x, 0) = δ(x− ξ)
u(0, t) = 0
o su equivalente en la recta infinita:

Metodo de Transformadas Integrales 517
utt = a2uxx, ∀ −∞ < x <∞, t > 0
u(x, 0) = 0 (12.47)
ut(x, 0) = δ(x− ξ)− δ(x+ ξ)
que corresponde a una prolongacion impar de la velocidad inicial deltaica.
Por el sentido fısico de la funcion de Green, el problema (12.46) es equivalente al siguienteproblema:
utt = a2uxx + δ(x− ξ)δ(t), ∀0 < x <∞, t > 0
u(x, 0) = 0 (12.48)
ut(x, 0) = 0
u(0, t) = 0
Con ayuda de las funciones de Green aquı obtenidas, la solucion del problema general:
utt = a2uxx + f(x, t), ∀0 < x <∞, t > 0
u(x, 0) = ϕ(x) (12.49)
ut(x, 0) = ψ(x)
c.f. = 0
se expresa en la forma:
u(x, t) =
∫ ∞
0
ϕ(ξ)∂Gi(x, ξ, t)
∂tdξ +
∫ ∞
0
ψ(ξ)Gi(x, ξ, t)dξ +
+
∫ t
0
∫ ∞
0
f(ξ, τ)Gi(x, ξ, t− τ)dξdτ (12.50)
con i = 1, 2, 3, respectivamente, para la condicion de frontera de primero, segundo y tercer tipo.
Para poder decir que todos los problemas de la ecuacion hiperbolica en la recta semiinfinita estanresueltos, hay que resolver, ademas, los problemas con condiciones de frontera no homogeneas.Ya anteriormente resolvimos el problema con condicion de frontera de primer tipo:
utt = a2uxx, ∀0 < x <∞, t > 0
u(x, 0) = 0 (12.51)
ut(x, 0) = 0
u(0, t) = µ(t)
518 Jose Marın Antuna
(ver problema (12.16)), cuya solucion viene dada por la formula (12.19). De forma totalmenteanaloga se resuelve, aplicando transformada de Laplace, el segundo problema de frontera:
utt = a2uxx, ∀0 < x <∞, t > 0
u(x, 0) = 0 (12.52)
ut(x, 0) = 0
ux(0, t) = ν(t)
cuya solucion tiene la forma:
u(x, t) = −a∫ t
0
θ(τ − x
a
)ν(t− τ)dτ (12.53)
Como su obtencion, no ofrece dificultades, se deja al lector como ejercicio.
Por ultimo, resolvamos el tercer problema de frontera:
utt = a2uxx, ∀0 < x <∞, t > 0
u(x, 0) = 0 (12.54)
ut(x, 0) = 0
ux(0, t)− hu(0, t) = µ(t)
Aplicando transformada de Laplace en el tiempo, obtenemos el siguiente problema ordinario:
Uxx −p2
a2U = 0, ∀0 < x <∞
Ux(0, p)− hU(0, p) = M(p) (12.55)
|U | < ∞
donde, al igual que antes, hemos llamado M(p) a la transformada de Laplace de µ(t). Lasolucion de (12.55) es:
U(x, p) = C(p)e−pax (12.56)
La constante C(p) se halla, a partir de la condicion de frontera de (12.55), de manera que,finalmente, obtenemos:

Metodo de Transformadas Integrales 519
U(x, p) =M(p)pa
+ he−
pax ≡ −a M(p)
p+ hae−
pax :
: −a∫ t
0
µ(τ)θ(t− τ − x
a
)e−ha(t−τ−
xa)dτ (12.57)
pues, de tablas de transformadas, sabemos que:
1
p+ βe−αp : θ(t− α)e−β(t−α) (12.58)
Por consiguiente, finalmente, obtenemos:
u(x, t) = −a∫ t
0
µ(τ)θ(t− τ − x
a
)e−ha(t−τ−
xa)dτ (12.59)
De esta forma, tenemos completamente resueltos todos los problemas que, en principio, sepueden presentar en la recta semiinfinita para la ecuacion hiperbolica. En el proximo epıgrafeacometeremos la solucion, por el metodo de transformadas integrales, de problemas con ecua-ciones parabolicas.
12.2 Ecuaciones parabolicas
Aplicaremos, a continuacion, el metodo de las transformadas integrales a la solucion de proble-mas con la ecuacion parabolica.
12.2.1 Recta infinita. Funcion de Green
Recordemos que para nosotros, desde un punto de vista fısico, una barra infinita sera aquella enla que el proceso fısico que analizamos se desarrolla en una region de la barra y en un intervalode tiempo tales, que la accion y presencia de los extremos de la barra no se manifiestan sobrela solucion.
Comenzaremos nuestro estudio, viendo el caso de la ecuacion homogenea. Es decir, buscaremosla distribucion de la temperatura en una barra infinita, sin fuentes de calor en su interiory aislada termicamente a lo largo de su superficie, si se conoce la distribucion inicial de latemperatura como una funcion de x. Matematicamente, ello significa que debemos resolver elproblema:
ut = a2uxx, ∀ −∞ < x <∞, t > 0 (12.60)
u(x, 0) = ϕ(x)

520 Jose Marın Antuna
El problema (12.60) es un problema de Cauchy en el que, implıcitamente, desde un punto devista fısico, la solucion tiene que ser acotada para toda x, ya que no existen fuentes de calor enla barra. Para su solucion, apliquemos la transformada de Fourier en la coordenada espacial.Denotando por
u(x, t) ↔F U(k, t) =
∫ ∞
−∞u(x, t)eiktdx
y, teniendo en cuenta las propiedades de la transformada enunciadas en el epıgrafe anterior,obtenemos, al aplicar la transformada de Fourier al problema (12.60):
Ut = −k2a2U, ∀t > 0 (12.61)
U(k, 0) = Φ(k)
donde Φ(k) es la transformada de Fourier de la funcion ϕ(x). La solucion del problema (12.61)es:
U(k, t) = Φ(k)e−k2a2t (12.62)
de manera que, aplicando la transformada inversa de Fourier, obtenemos para la solucion delproblema (12.60) la expresion:
u(x, t) =1
2π
∫ ∞
−∞Φ(k)e−k
2a2te−iktdk (12.63)
Colocando en (12.63) la expresion de la transformada de Fourier de la funcion ϕ(x), obtenemos:
u(x, t) =1
2π
∫ ∞
−∞
∫ ∞
−∞ϕ(ξ)eikξe−k
2a2te−iktdξdk =
=1
2π
∫ ∞
−∞ϕ(ξ)
∫ ∞
−∞e−ik(x−ξ)e−k
2a2tdk
dξ (12.64)
Dentro de la expresion (12.64) figura la integral parametrica
I(α, β) =
∫ ∞
−∞e−ikβe−k
2αdk ≡∫ ∞
−∞cos kβe−k
2αdk (12.65)
donde hemos llamado β = x − ξ y α = a2t. La igualdad de la derecha en la expresion (12.65)esta dada por el hecho de que, al descomponer el factor e−ikβ por la formula de Euler, la integral

Metodo de Transformadas Integrales 521
que contiene al seno es cero, en virtud de ser impar el integrando y ser una integral entre lımitessimetricos.
Esta integral fue calculada con ayuda de la teorıa de residuos en el ejemplo 6 del punto 4 delepıgrafe 2 del Capıtulo 5 del libro ”Teorıa de Funciones de Variable Compleja” del autor. Sucalculo, por metodos tradicionales de calculo de las integrales parametricas, puede efectuarse,tambien, de la siguiente manera. Derivando la integral (12.65) respecto al parametro β eintegrando una vez por partes, obtenemos:
∂I
∂β= −
∫ ∞
−∞k sin kβe−k
2αdk =1
2αe−k
2α sin kβ|∞−∞ −β
2α
∫ ∞
−∞cos kβe−k
2αdk = − β
2αI
en virtud de que el primer sumando en la integracion por partes es, obviamente, igual a cero.De esta manera obtenemos una ecuacion diferencial para calcular nuestra integral:
∂I
∂β+
β
2αI = 0 (12.66)
a la que se le impone la evidente condicion inicial:
I(α, 0) =
∫ ∞
−∞e−k
2αdk =
√π
α(12.67)
No es difıcil hallar que la solucion del problema de Cauchy formado por la ecuacion (12.66) yla condicion (12.67) tiene la siguiente expresion:
I(α, β) =
√π
αe−
β2
4α (12.68)
que es la misma expresion que fue obtenida con ayuda de la teorıa de residuos.
Sustituyendo α y β por sus valores y colocando (12.68) en (12.64), obtenemos la solucion delproblema (12.60) en la forma que a continuacion se expresa:
u(x, t) =1
2π
∫ ∞
−∞ϕ(ξ)
√π
a2te−
(x−ξ)2
4a2t dξ
es decir:
u(x, t) =1√
4πa2t
∫ ∞
−∞ϕ(ξ)e−
(x−ξ)2
4a2t dξ (12.69)

522 Jose Marın Antuna
La formula (12.69) nos da el valor de la temperatura del punto x de la barra infinita en elinstante t si, en el instante inicial, en la barra habıa una distribucion de temperaturas dada porla funcion ϕ(x) y recibe el nombre de formula de Poisson.
Si introducimos la notacion:
G(x, ξ, t) =1√
4πa2te−
(x−ξ)2
4a2t (12.70)
entonces, la solucion toma la forma:
u(x, t) =
∫ ∞
−∞ϕ(ξ)G(x, ξ, t)dξ (12.71)
Resolvamos, con ayuda de (12.71), el problema definitorio de la funcion de Green. Comosabemos, este problema corresponde a una temperatura inicial en forma de una delta de Dirac,lo que significa, fısicamente, que en el punto x = x0 se desprende, instantaneamente, la unidadde calor:
ut = a2uxx, ∀ −∞ < x <∞, t > 0 (12.72)
u(x, 0) = δ(x− x0)
En virtud de la propiedad fundamental de la delta de Dirac, la solucion del problema (12.72)es u(x, t) = G(x, x0, t). Por consiguiente, la expresion (12.70) no es otra cosa que la funcion deGreen de la ecuacion parabolica en la recta infinita, cuyo significado fısico, como sabemos, es latemperatura del punto x en el instante t si, en el instante inicial, en el punto x0 se desprendiola unidad de calor.
Un analisis de la expresion (12.70) de la funcion de Green nos permite comprobar que
limt→0
G(x, ξ, t) = 0, ∀x 6= ξ
= ∞, ∀x = ξ
lo que era de esperar, ya que debe cumplir la condicion inicial del problema (12.72).
A partir de ese momento se ve que la distribucion de temperaturas en la barra es simetricacon respecto al punto ξ, en forma de una campana de Gauss con centro en x = ξ y puntos deinflexion en x = ±2a
√t, puntos que se van alejando de x = ξ, a medida que t crece. (Fig.
12.1).
Igualmente se ve que el maximo de la campana decrece a medida que t crece y el area bajo lacurva todo el tiempo es, haciendo α = x−ξ
2a√t:
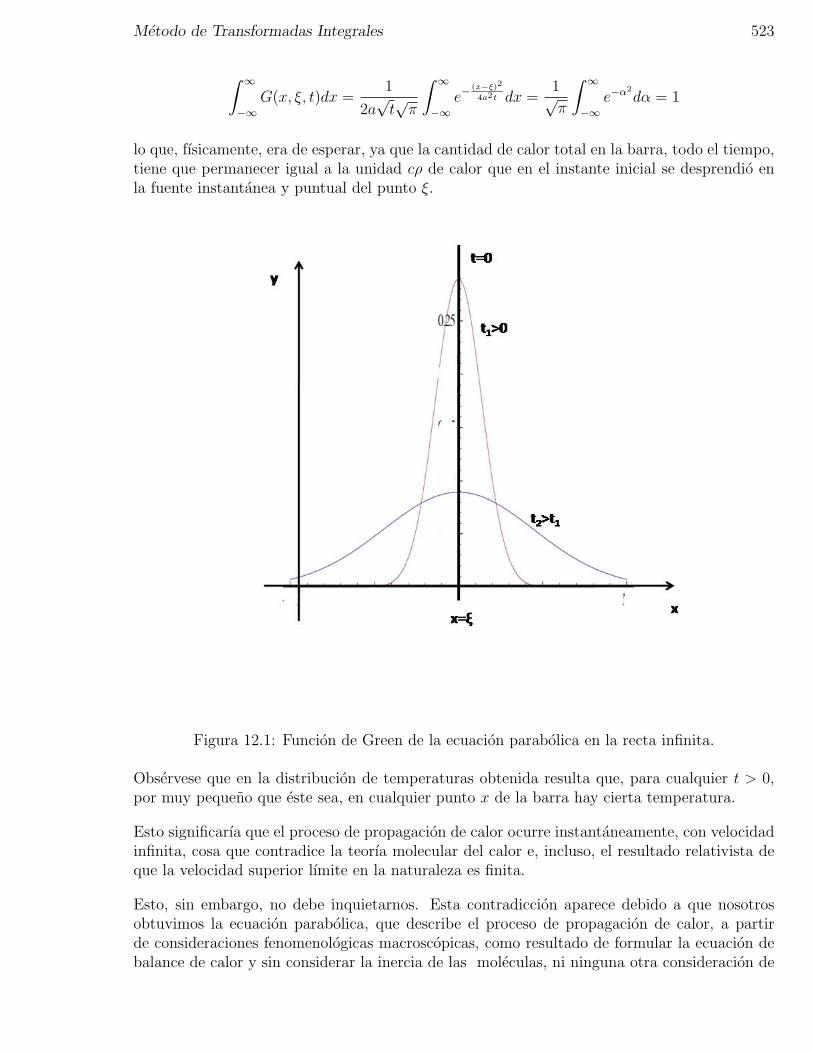
Metodo de Transformadas Integrales 523
∫ ∞
−∞G(x, ξ, t)dx =
1
2a√t√π
∫ ∞
−∞e−
(x−ξ)2
4a2t dx =1√π
∫ ∞
−∞e−α
2
dα = 1
lo que, fısicamente, era de esperar, ya que la cantidad de calor total en la barra, todo el tiempo,tiene que permanecer igual a la unidad cρ de calor que en el instante inicial se desprendio enla fuente instantanea y puntual del punto ξ.
Figura 12.1: Funcion de Green de la ecuacion parabolica en la recta infinita.
Observese que en la distribucion de temperaturas obtenida resulta que, para cualquier t > 0,por muy pequeno que este sea, en cualquier punto x de la barra hay cierta temperatura.
Esto significarıa que el proceso de propagacion de calor ocurre instantaneamente, con velocidadinfinita, cosa que contradice la teorıa molecular del calor e, incluso, el resultado relativista deque la velocidad superior lımite en la naturaleza es finita.
Esto, sin embargo, no debe inquietarnos. Esta contradiccion aparece debido a que nosotrosobtuvimos la ecuacion parabolica, que describe el proceso de propagacion de calor, a partirde consideraciones fenomenologicas macroscopicas, como resultado de formular la ecuacion debalance de calor y sin considerar la inercia de las moleculas, ni ninguna otra consideracion de

524 Jose Marın Antuna
tipo microscopico. Sin embargo, en virtud de que la curva gaussiana decrece exponencialmenteal alejarse del punto x = ξ, la temperatura lejos del centro de la campana puede considerarsepracticamente nula, por lo que la solucion obtenida puede aceptarse como una buena aproxi-macion a la realidad.
Una vez hechas estas consideraciones desde el punto de vista fısico y para completar nuestroanalisis, debemos ver, desde el punto de vista matematico, las condiciones de validez de lasolucion obtenida.
Para garantizar que, efectivamente, la formula de Poisson (12.69) es la solucion del problema(12.60), debemos demostrar que se cumplen las siguientes cuatro proposiciones:
1. Si la distribucion inicial de temperaturas ϕ(x) es acotada, entonces la solucion es acotada,con la misma cota; es decir, si
|ϕ(x)| < M,
entonces
|u(x, t)| < M
Demostracion:
Supuesto |ϕ(x)| < M , tenemos que, de (12.69) y haciendo
α =x− ξ
2a√t, dα =
−dξ2a√t
|u(x, t)| ≤ 1√4πa2t
∫ ∞
−∞|ϕ(ξ)|e−
(x−ξ)2
4a2t dξ <M√4πa2t
∫ ∞
−∞e−
(x−ξ)2
4a2t dξ =
=M√4πa2t
∫ ∞
−∞e−α
2
2a√tdα = M
lo que demuestra la afirmacion.
2. La funcion u(x, t), dada por (12.69), es continua para |x| ≤ L y 0 < t1 ≤ T , donde L, t1y T son cualesquiera.
Demostracion:
Tenemos que demostrar que la solucion, dada por (12.69), es una funcion continua en elrectangulo que se muestra en la figura 12.2.
Para ello, demostraremos que la integral (12.69) converge uniformemente en dicho rectan-gulo.
Como L es finito, pero arbitrario, al igual que T , ello significara que nuestra solucionsatisface los requisitos del planteamiento del problema (12.60).
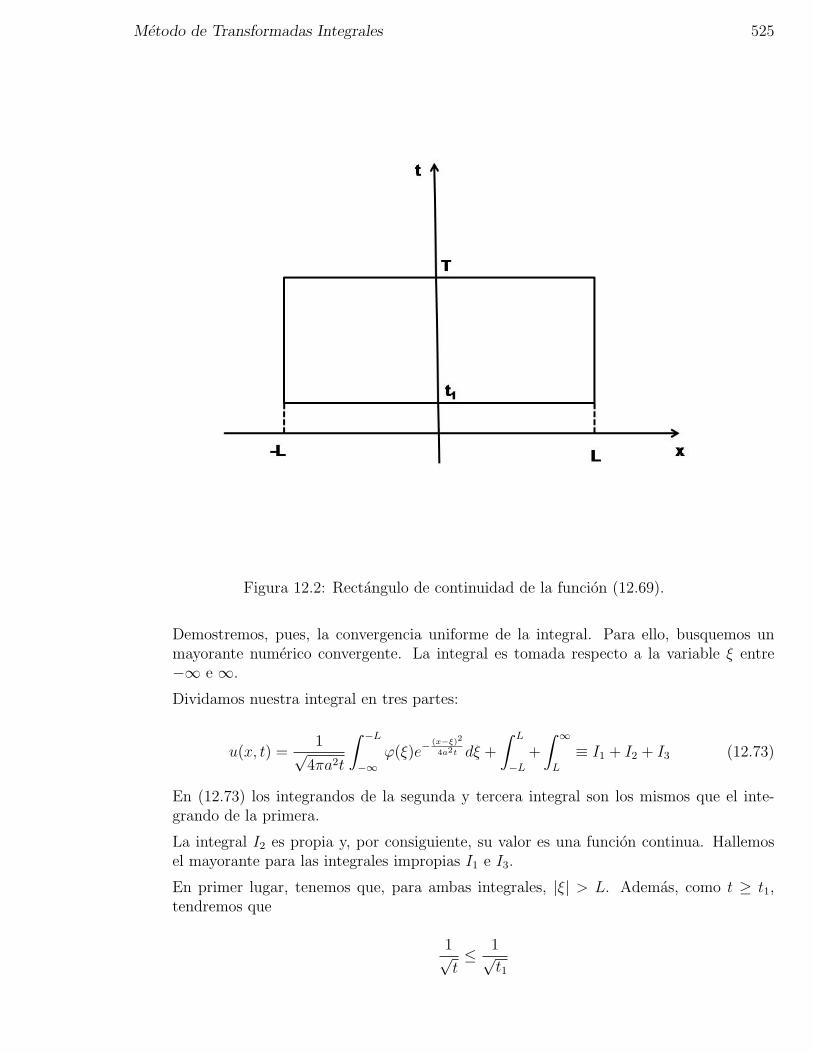
Metodo de Transformadas Integrales 525
Figura 12.2: Rectangulo de continuidad de la funcion (12.69).
Demostremos, pues, la convergencia uniforme de la integral. Para ello, busquemos unmayorante numerico convergente. La integral es tomada respecto a la variable ξ entre−∞ e ∞.
Dividamos nuestra integral en tres partes:
u(x, t) =1√
4πa2t
∫ −L
−∞ϕ(ξ)e−
(x−ξ)2
4a2t dξ +
∫ L
−L+
∫ ∞
L
≡ I1 + I2 + I3 (12.73)
En (12.73) los integrandos de la segunda y tercera integral son los mismos que el inte-grando de la primera.
La integral I2 es propia y, por consiguiente, su valor es una funcion continua. Hallemosel mayorante para las integrales impropias I1 e I3.
En primer lugar, tenemos que, para ambas integrales, |ξ| > L. Ademas, como t ≥ t1,tendremos que
1√t≤ 1√
t1
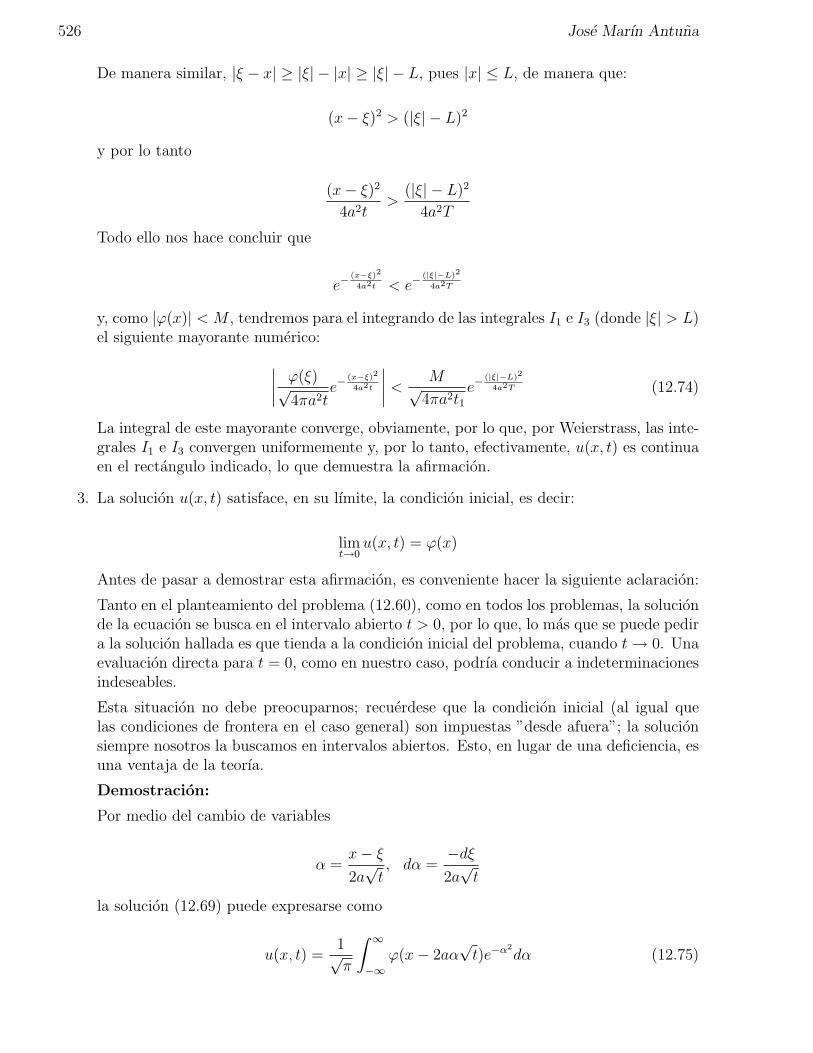
526 Jose Marın Antuna
De manera similar, |ξ − x| ≥ |ξ| − |x| ≥ |ξ| − L, pues |x| ≤ L, de manera que:
(x− ξ)2 > (|ξ| − L)2
y por lo tanto
(x− ξ)2
4a2t>
(|ξ| − L)2
4a2T
Todo ello nos hace concluir que
e−(x−ξ)2
4a2t < e−(|ξ|−L)2
4a2T
y, como |ϕ(x)| < M , tendremos para el integrando de las integrales I1 e I3 (donde |ξ| > L)el siguiente mayorante numerico:∣∣∣∣ ϕ(ξ)√
4πa2te−
(x−ξ)2
4a2t
∣∣∣∣ < M√4πa2t1
e−(|ξ|−L)2
4a2T (12.74)
La integral de este mayorante converge, obviamente, por lo que, por Weierstrass, las inte-grales I1 e I3 convergen uniformemente y, por lo tanto, efectivamente, u(x, t) es continuaen el rectangulo indicado, lo que demuestra la afirmacion.
3. La solucion u(x, t) satisface, en su lımite, la condicion inicial, es decir:
limt→0
u(x, t) = ϕ(x)
Antes de pasar a demostrar esta afirmacion, es conveniente hacer la siguiente aclaracion:
Tanto en el planteamiento del problema (12.60), como en todos los problemas, la solucionde la ecuacion se busca en el intervalo abierto t > 0, por lo que, lo mas que se puede pedira la solucion hallada es que tienda a la condicion inicial del problema, cuando t→ 0. Unaevaluacion directa para t = 0, como en nuestro caso, podrıa conducir a indeterminacionesindeseables.
Esta situacion no debe preocuparnos; recuerdese que la condicion inicial (al igual quelas condiciones de frontera en el caso general) son impuestas ”desde afuera”; la solucionsiempre nosotros la buscamos en intervalos abiertos. Esto, en lugar de una deficiencia, esuna ventaja de la teorıa.
Demostracion:
Por medio del cambio de variables
α =x− ξ
2a√t, dα =
−dξ2a√t
la solucion (12.69) puede expresarse como
u(x, t) =1√π
∫ ∞
−∞ϕ(x− 2aα
√t)e−α
2
dα (12.75)

Metodo de Transformadas Integrales 527
En virtud de la integral de Poisson:√π =
∫∞−∞ e−α
2dα, podemos escribir:
ϕ(x) =1√π
∫ ∞
−∞ϕ(x)e−α
2
dα (12.76)
Restando (12.76) a (12.75), obtenemos:
u(x, t)−ϕ(x) =1√π
∫ ∞
−∞[ϕ(x− 2aα
√t)−ϕ(x)]e−α
2
dα ≡∫ −N
−∞+
∫ N
−N+
∫ ∞
N
(12.77)
Hemos dividido la integral en tres partes para poder analizar el lımite cuando t → 0 enla integral propia de −N a N , teniendo presente la convergencia uniforme de la integralimpropia.
En las integrales laterales, en (−∞, N) y en (N,∞), podemos decir que:
|ϕ(x− 2aα√t)− ϕ(x)| ≤ |ϕ(x− 2aα
√t)|+ |ϕ(x)| < 2M (12.78)
de manera que, dejando intacta la integral en (−N,N), obtenemos de (12.77):
|u(x, t)− ϕ(x)| < 1√π
2M
∫ −N
−∞e−α
2
dα+ 2M
∫ ∞
N
e−α2
dα
+
+1√π
∫ N
−N|ϕ(x− 2aα
√t)− ϕ(x)|e−α2
dα (12.79)
Sustituyendo α por −α en la primera integral y agrupando convenientemente, llegamosde (12.79) a la expresion:
|u(x, t)− ϕ(x)| < 4M√π
∫ ∞
N
e−α2
dα+1√π
∫ N
−N|ϕ(x− 2aα
√t− ϕ(x)|e−α2
dα (12.80)
Analicemos la parte derecha en la desigualdad (12.80). Como sabemos, la integral
∫ ∞
0
e−α2
dα =
√π
2
converge. Por consiguiente, podemos tomar una N lo suficientemente grande, como paraque, dado un ε > 0, se cumpla que
4M√π
∫ ∞
N
e−α2
dα <ε
2(12.81)
Por otra parte, en la integral propia en (−N,N), en virtud de la continuidad de ϕ(x),podemos tomar t lo suficientemente pequeno (t→ 0), como para que se cumpla que

528 Jose Marın Antuna
|ϕ(x− 2aα√t− ϕ(x)| < ε
2(12.82)
Por consiguiente, tomando ε > 0 y los correspondientes valores de N y t→ 0, tendremos,considerando (12.81) y (12.82) en (12.80), que:
|u(x, t)− ϕ(x)| < ε
2+
ε
2√π
∫ N
−Ne−α
2
dα
Es decir, para N suficientemente grande, se cumplira que:
|u(x, t)− ϕ(x)| < ε, ∀t→ 0
Pero esto significa que, efectivamente, limt→0 u(x, t) = ϕ(x), lo que demuestra la afir-macion.
4. La funcion u(x, t), dada por (12.69), convierte en identidad la ecuacion del problema(12.60). Es decir, ut ≡ a2uxx, para −∞ < x <∞, t > 0.
Demostracion:
Para lograr una demostracion rigurosa, debemos comprobar que (12.69) puede ser deriva-da una vez respecto a t y dos veces respecto a x bajo el signo de integracion y que dichasderivadas son continuas.
No es difıcil obtener que
ut =1
2a√π
∫ ∞
−∞ϕ(ξ)
[(x− ξ)2
4a2t2√t− 1
2t√t
]e−
(x−ξ)2
4a2t dξ (12.83)
y que
uxx = − 1
2a√π√t
∫ ∞
−∞
ϕ(ξ)
2a2t
[1− (x− ξ)2
2a2t
]e−
(x−ξ)2
4a2t dξ (12.84)
De forma similar a como actuamos en la demostracion de la segunda de estas cuatroafirmaciones, no es difıcil constatar que las integrales (12.83) y (12.84) convergen unifor-memente en el rectangulo de la figura 12.2 y definen, por tanto, funciones continuas.
Colocando (12.83) y (12.84) en la ecuacion parabolica del problema (12.60), es facil verque esta se convierte en identidad, con lo que queda demostrada la afirmacion.
Con la demostracion de estas cuatro afirmaciones, queda totalmente justificada la solucionhallada.
Resolvamos, ahora, el problema de la ecuacion no homogenea en la recta infinita, considerandola condicion inicial nula:
ut = a2uxx + f(x, t), ∀ −∞ < x <∞, t > 0 (12.85)
u(x, 0) = 0
Metodo de Transformadas Integrales 529
La condicion inicial ha sido considerada nula, ya que, en caso contrario, el principio de super-posicion nos permitirıa desdoblar el problema en el que acabamos de escribir y el problema(12.60), cuya solucion ya conocemos.
Escribamos la ecuacion del problema (12.85) en las variables ξ y τ , multipliquemosla por lafuncion de Green G(x, ξ, t− τ) e integremos en el tiempo y en el espacio. Tendremos:
∫ t
0
∫ ∞
−∞utG(x, ξ, t− τ)dξdτ = a2
∫ t
0
∫ ∞
−∞uξξG(x, ξ, t− τ)dξdτ +
+
∫ t
0
∫ ∞
−∞f(ξ, τ)G(x, ξ, t− τ)dξdτ (12.86)
Teniendo en cuenta que, por definicion de la funcion de Green, G(x, ξ, 0) = δ(x − ξ) y que,ademas, Gτ ≡ −a2Gξξ, ya que Gt = −Gτ y Gxx = Gξξ y la funcion de Green convierte laecuacion en identidad, calculemos las dos primeras integrales en (12.86).
Integrando una vez por partes la primera integral con respecto al tiempo, tendremos:
∫ t
0
∫ ∞
−∞uτG(x, ξ, t− τ)dξdτ = u(x, t)−
∫ t
0
∫ ∞
−∞uGτdξdτ (12.87)
En la obtencion de (12.87) hemos tenido en cuenta la condicion inicial del problema (12.85),la condicion inicial que cumple la funcion de Green y la propiedad fundamental de la funciondelta de Dirac.
Integrando dos veces por partes la segunda integral y teniendo en cuenta que para ξ → ±∞,las funciones tienden a cero, es facil obtener:
∫ t
0
∫ ∞
−∞uξξG(x, ξ, t− τ)dξdτ =
∫ t
0
∫ ∞
−∞uGξξdξdτ (12.88)
Colocando (12.87) y (12.88) en (12.86) y agrupando convenientemente, obtenemos:
u(x, t) =
∫ t
0
∫ ∞
−∞u[Gτ + a2Gξξ]dξdτ +
∫ t
0
∫ ∞
−∞f(ξ, τ)G(x, ξ, t− τ)dξdτ (12.89)
En la primera integral a la derecha, la expresion entre corchetes es identicamente nula, porser la funcion de Green solucion de la ecuacion, de manera que, finalmente, obtenemos para lasolucion del problema (12.85) la expresion:
u(x, t) =
∫ t
0
∫ ∞
−∞f(ξ, τ)G(x, ξ, t− τ)dξdτ (12.90)

530 Jose Marın Antuna
Este resultado era esperado, en virtud del significado fısico de la funcion de Green.
Como se observa, una vez mas hemos obtenido la solucion de la ecuacion no homogenea, comola integral en el tiempo transcurrido y en el espacio considerado, del producto de la inhomo-geneidad de la ecuacion por la funcion de Green.
De (12.90) es evidente que la funcion de Green puede definirse, tambien, como la solucion delproblema:
ut = a2uxx + δ(x− x0)δ(t), ∀ −∞ < x <∞, t > 0 (12.91)
u(x, 0) = 0
que, fısicamente, significa el desprendimiento en el punto x0, en el instante inicial t = 0, de launidad de calor y que, por lo tanto, es equivalente al problema (12.72).
De esta manera concluimos con nuestro estudio de la propagacion de calor en la recta infinitay pasaremos al estudio de la solucion de los problemas en la recta semiinfinita.
12.2.2 Recta semiinfinita
Buscar la distribucion de temperaturas en una barra semiinfinita significa que, ademas de laecuacion y de la condicion inicial, debera darse una condicion de frontera.
Supongamos, inicialmente, que el extremo de la barra, o bien esta 1a temperatura cero (primeracondicion de frontera homogenea), o bien se encuentra aislado termicamente (segunda condicionde frontera homogenea).
Esto quiere decir que estamos buscando la distribucion de temperaturas en la barra semiinfinitasi su extremo cumple con una de dichas condiciones; es decir, que el problema a resolver sera:
ut = a2uxx + f(x, t), ∀0 < x <∞, t > 0
u(x, 0) = ϕ(x) (12.92)
u(0, t) = 0 o ux(0, t) = 0
Con el objetivo de resolver este problema, veamos un importante y util lema, similar al queestudiamos en el capıtulo correspondiente a las ecuaciones hiperbolicas:
Lema.
Si las funciones Φ(x) y F (x, t) son impares (pares), respecto al argumento x, entonces, lasolucion del problema para la recta infinita

Metodo de Transformadas Integrales 531
Ut = a2Uxx + F (x, t), ∀ −∞ < x <∞, t > 0 (12.93)
U(x, 0) = Φ(x)
satisface la condicion U(0, t) = 0 (Ux(0, t) = 0).
Es conveniente aclarar que hemos enunciado el lema en forma de alternativa: si las funcionesson impares, se cumplira que U(0, t) = 0; por el contrario, si ambas funciones son pares, secumplira que Ux(0, t) = 0.
Demostracion:
1. Para Φ(x) y F (x, t) impares.
Segun vimos, en la recta infinita la solucion es:
U(0, t) =
∫ ∞
−∞Φ(ξ)G(x, ξ, t)dξ +
∫ t
0
∫ ∞
−∞F (ξ, τ)G(x, ξ, t− τ)dξdτ
De aquı, evaluando en x = 0, obtenemos:
U(x, t) =
∫ ∞
−∞Φ(ξ)G(0, ξ, t)dξ +
∫ t
0
∫ ∞
−∞F (ξ, τ)G(0, ξ, t− τ)dξdτ (12.94)
Pero, de acuerdo con (12.70)
G(0, ξ, t) =1√
4πa2te−
ξ2
4a2t
es una funcion par de ξ y, como las funciones Φ(ξ) y F (ξ, τ) son impares con respectoa ξ, los integrandos en (12.94) son impares, de manera que las integrales entre lımitessimetricos (−∞,∞) dan cero, con lo que queda demostrado el lema para funciones im-pares.
2. Para Φ(x) y F (x, t) pares.
Calculando Ux(x, t) y evaluando en x = 0, tendremos:
Ux(0, t) =
∫ ∞
−∞Φ(ξ)Gx(0, ξ, t)dξ +
∫ t
0
∫ ∞
−∞F (ξ, τ)Gx(0, ξ, t− τ)dξdτ (12.95)
Pero, de acuerdo con (12.70)
Gx(0, ξ, t) =1√
4πa2t
ξ
2a2te−
ξ2
4a2t
es una funcion impar de ξ y, como Φ(ξ) y F (ξ, τ) son pares, los integrandos en (12.95) sonimpares, por lo que sus integrales entre lımites simetricos (−∞,∞) son iguales a cero, loque demuestra la segunda parte del lema.

532 Jose Marın Antuna
Demostrado el lema.
Con ayuda de este lema resolveremos el problema (12.92). Para ello, veamos, inicialmente, elproblema con la ecuacion homogenea y condicion de frontera de primer tipo homogenea. Esdecir:
ut = a2uxx, ∀0 < x <∞, t > 0
u(x, 0) = ϕ(x) (12.96)
u(0, t) = 0
En virtud del lema demostrado, haremos una prolongacion impar de la condicion inicial delproblema (12.96) hacia la parte negativa del eje x y resolveremos en la barra infinita el problema
Ut = a2Uxx, ∀ −∞ < x <∞, t > 0 (12.97)
U(x, 0) = Φ(x) = ϕ(x), ∀x > 0
= −ϕ(−x), ∀x < 0
La solucion del problema (12.97) viene dada por la formula (12.69); es decir, efectuando loscalculos:
U(x, t) =1√
4πa2t
∫ ∞
−∞Φ(ξ)e−
(x−ξ)2
4a2t dξ =
=−1√4πa2t
∫ 0
−∞ϕ(−ξ)e−
(x−ξ)2
4a2t dξ +1√
4πa2t
∫ ∞
0
ϕ(ξ)e−(x−ξ)2
4a2t dξ (12.98)
Hagamos el cambio de variables ξ = −ξ en la primera integral a la derecha de (12.98). Ten-dremos, entonces:
U(x, t) =1√
4πa2t
∫ 0
∞ϕ(ξ)e−
(x+ξ)2
4a2t dξ +1√
4πa2t
∫ ∞
0
ϕ(ξ)e−(x−ξ)2
4a2t dξ =
=1√
4πa2t
∫ ∞
0
ϕ(ξ)
e−
(x−ξ)2
4a2t − e−(x+ξ)2
4a2t
dξ (12.99)
La solucion del problema (12.96), evidentemente, sera u(x, t) = U(x, t) para x > 0.
Ası pues, para el problema (12.96) obtenemos por solucion la expresion:
u(x, t) =
∫ ∞
0
ϕ(ξ)G1(x, ξ, t)dξ (12.100)

Metodo de Transformadas Integrales 533
donde hemos llamado
G1(x, ξ, t) =1√
4πa2t
e−
(x−ξ)2
4a2t − e−(x+ξ)2
4a2t
(12.101)
De manera totalmente similar, pero realizando una prolongacion par, es facil obtener que lasolucion del problema
ut = a2uxx, ∀0 < x <∞, t > 0
u(x, 0) = ϕ(x) (12.102)
ux(0, t) = 0
vendra dada por
u(x, t) =
∫ ∞
0
ϕ(ξ)G2(x, ξ, t)dξ (12.103)
donde
G2(x, ξ, t) =1√
4πa2t
e−
(x−ξ)2
4a2t + e−(x+ξ)2
4a2t
(12.104)
Es evidente que (12.101) y (12.104) son las funciones de Green de los problemas de fronteracorrespondientes, ya que son solucion, respectivamente, de los problemas (12.96) y (12.102) enlos que, por condicion inicial, se tenga δ(x− x0).
Es decir, que las funciones de Green (12.101) y (12.104) son, respectivamente, la temperaturade la barra semiinfinita, si en el punto x0, en el instante t = 0, se desprende la unidad de calorinstantanea y puntualmente, con el extremo x = 0 a temperatura cero, para el primer caso, ocon el extremo x = 0 aislado termicamente, para el segundo caso.
El significado fısico de las funciones de Green (12.101) y (12.104) puede verse, tambien, de lasiguiente manera:
La funcion (12.101) es la temperatura en el punto x > 0 de una barra infinita en el instantet, que se obtiene como resultado de colocar en el punto ξ una fuente unitaria, instantanea ypuntual de calor, en el instante t = 0 y en el punto −ξ una fuente de frıo (de calor negativo)en ese mismo instante, de forma tal, que, para todo t > 0, la temperatura del punto x = 0 seacero, en tanto que (12.104) es la temperatura que se obtiene en ese caso, como resultado decolocar en ξ y en −ξ la misma fuente unitaria, instantanea y puntual de calor, de manera queel flujo de calor a traves del punto x = 0 sea, todo el tiempo, nulo.
El problema de la ecuacion no homogenea en la barra semiinfinita:

534 Jose Marın Antuna
ut = a2uxx + f(x, t), ∀0 < x <∞, t > 0
u(x, 0) = 0 (12.105)
u(0, t) = 0 o ux(0, t) = 0
podrıa ser resuelto, con todo rigor, con ayuda del lema, prolongando de forma impar o par,segun el caso, la funcion f(x, t) y utilizando la formula (12.90); este calculo se le recomienda allector a modo de ejercicio.
Sin embargo, nuestros conocimientos sobre el significado fısico de la funcion de Green nospermiten afirmar que dicha solucion tendra la forma:
u(x, t)
∫ t
0
∫ ∞
0
f(ξ, τ)Gi(x, ξ, t− τ)dξdτ (12.106)
donde i = 1 para el primer problema de frontera, i = 2 para el segundo problema de frontera.
Notese que, de nuevo, la solucion del problema de la ecuacion no homogenea se obtiene comola integral respecto al tiempo transcurrido y al espacio considerado (en este caso de 0 a ∞) delproducto de la inhomogeneidad de la ecuacion por la funcion de Green.
Por la propia definicion, es evidente que la funcion de Green Gi es la solucion del problema
ut = a2uxx + δ(x− x0)δ(t), ∀0 < x <∞, t > 0
u(x, 0) = 0 (12.107)
u(0, t) = 0 o ux(0, t) = 0
que, obviamente, es equivalente al problema (12.96) o (12.102) en el que por condicion inicialeste la funcion delta de Dirac.
Veamos, ahora, como resolver el problema de frontera con condicion de tercer tipo homogenea:
ut = a2uxx, ∀0 < x <∞, t > 0
u(x, 0) = ϕ(x) (12.108)
ux(0, t)− hu(0, t) = 0
que responde, fısicamente, a la presencia de un intercambio convectivo de calor con el medioambiente a traves de la frontera x = 0 de la barra semiinfinita.
Este problema no puede resolverse con la ayuda del lema demostrado arriba, pues no es posibleaplicar una prolongacion, ni par, ni impar en este caso. Por lo tanto, aplicaremos el metodo detransformadas integrales que venimos estudiando en el presente capıtulo.

Metodo de Transformadas Integrales 535
Apliquemos la transformada de Laplace al problema (12.108); entonces, obtenemos el siguienteproblema ordinario:
Uxx −p
a2U = −ϕ(x)
a2, ∀0 < x <∞ (12.109)
Ux(0, t)− hU(0, t) = 0
donde, como siempre, hemos utilizado la notacion:
U(x, p) : u(x, t)
por lo que
pU(x, p)− ϕ(x) : ut(x, t)
La solucion del problema (12.109), en terminos de la funcion de Green G(x, ξ, p), es:
U(x, p) =
∫ ∞
0
G(x, ξ, p)ϕ(ξ)
a2dξ (12.110)
Construyamos esta funcion de Green, de forma similar a como procedimos en el primer epıgrafedel presente capıtulo. Su forma general es:
G(x, ξ, p) = c(ξ)y1(x)y2(ξ), ∀0 ≤ x ≤ ξ <∞ (12.111)
= c(ξ)y1(ξ)y2(x), ∀0 ≤ ξ ≤ x <∞
donde
c(ξ) = − 1
W (ξ)
y
W =
∣∣∣∣ y1(ξ) y2(ξ)y′1(ξ) y′2(ξ)
∣∣∣∣ (12.112)
es el wronskiano de y1(x) y y2(x). Estas funciones son dos soluciones linealmente independientesde la ecuacion del problema (12.109) con las siguientes caracterısticas: y1(x) debe satisfacer lacondicion de frontera en x = 0 del problema; y2(x) debe satisfacer la condicion de frontera de
536 Jose Marın Antuna
dicho problema en el otro extremo (en este caso, ser acotada para x → ∞). Hallemos estasfunciones. Resolviendo la ecuacion
y′′ − p
a2y = 0 (12.113)
tenemos que su solucion general es:
y(x) = Ae−√
p
a +Be√
p
a (12.114)
Exigiendo que (12.114) cumpla la condicion en x = 0 del problema (12.109) y tomando B = 1,ya que es una constante arbitraria, obtenemos y1(x) en la forma:
y1(x) = e√
p
a +
√p
a− h
√p
a+ h
e−√
p
a (12.115)
Por y2(x) linealmente independiente de y1(x) y acotada para x→∞ tomamos la solucion
y2(x) = e−√
p
a (12.116)
Calculando el wronskiano (12.112), es facil obtener:
W = −2√p
a(12.117)
Ası pues, finalmente, se obtiene, para la funcion de Green, la expresion:
G(x, ξ, p) =a
2√p
[e−
√p
a|x−ξ| +
√p
a− h
√p
a+ h
e−√
p
a(x+ξ)
]=
=a
2√p
[e−
√p
a|x−ξ| + e−
√p
a(x+ξ) − 2h
√p
a+ h
e−√
p
a(x+ξ)
](12.118)
Colocando (12.118) en (12.110), obtenemos, para la solucion del problema (12.109), la expresion:
U(x, p) =a
2√p
∫ ∞
0
ϕ(ξ)e−√
p
a|x−ξ|dξ +
a
2√p
∫ ∞
0
ϕ(ξ)e−√
p
a(x+ξ)dξ −
− 1√p
∫ ∞
0
h√p
a+ h
ϕ(ξ)e−√
p
a(x+ξ)dξ (12.119)

Metodo de Transformadas Integrales 537
Pero, de tablas de transformadas integrales, tenemos que:
1√pe−
√p
a|x−ξ| :
1√πte−
(x−ξ)2
4a2t
1√pe−
√p
a(x+ξ) :
1√πte−
(x+ξ)2
4a2t
1√p
2h√p
a+ h
e−√
p
a(x+ξ) : hehx+hξ+a
2h2terfc
(x+ ξ
2a√t
+ ah√t
)
Por lo tanto, aplicando la transformada inversa, la solucion de (12.108) queda en la forma:
u(x, t)
∫ t
0
∫ ∞
0
ϕ(ξ)G3(x, ξ, t)dξ (12.120)
donde G3(x, ξ, t) es la funcion de Green del tercer problema de frontera para la ecuacionparabolica en la recta semiinfinita y viene dada por la expresion:
G3(x, ξ, t) =1√
4πa2t
e−
(x−ξ)2
4a2t + e−(x+ξ)2
4a2t
−
− 1√4πa2t
2ah√πtehx+hξ+a
2h2terfc
(x+ ξ
2a√t
+ ah√t
)(12.121)
De esta manera, queda completamente resuelto el problema planteado.
Es conveniente destacar que en el libro ”Problemas de la Fısica Matematica” de Budak,Samarsky y Tıjonov, la funcion de Green (12.121) se presenta en la forma:
G3(x, ξ, t) =1√
4πa2t
e−
(x−ξ)2
4a2t + e−(x+ξ)2
4a2t − 2h
∫ ∞
0
e−(x+ξ+η)2
4a2t−hηdη
No es difıcil demostrar que ambas funciones coinciden exactamente.
Efectivamente, si analizamos la ultima integral que figura en la formula de arriba, se ve, clara-mente, que ella puede ser procesada de la siguiente manera:
∫ ∞
0
e−(x+ξ+η)2
4a2t−hηdη =
∫ ∞
0
e−1
4a2t[(x+ξ+η)2+4a2thη]dη =
=
∫ ∞
0
e−1
4a2t[(x+ξ)2+2(x+ξ)η+η2+4a2th]2dη =

538 Jose Marın Antuna
= e4(x+ξ)a2th
4a2t+ 4a4t2h2
4a2t
∫ ∞
12a√
t(x+ξ+2a2th)
2a√te−y
2
dy =
= a√πtehx+hξ+a
2h2terfc
(x+ ξ
2a√t
+ ah√t
)con lo que queda demostrada la equivalencia entre ambas expresiones de la funcion de Greendel tercer problema de frontera para la ecuacion parabolica en la recta semiinfinita.
Observese que, en la funcion de Green G3(x, ξ, t), dada por (12.121), si h = 0, se obtiene
G3(x, ξ, t)|h=0 =1√
4πa2t
e−
(x−ξ)2
4a2t + e−(x+ξ)2
4a2t
≡ G2(x, ξ, t)
es decir, la funcion de Green en la recta semiinfinita para el segundo problema de frontera, queobtuvimos por el metodo de prolongacion par de la condicion inicial. Esto era de esperar, yaque la tercera condicion de frontera (ux(0, t) − hu(0, t) = 0) se transforma, para h = 0, en lasegunda condicion de frontera (ux(0, t) = 0).
Por otra parte, para h → ∞, la tercera condicion de frontera se transforma en la primera:u(0, t) = 0. Si analizamos la integral que figura en G3(x, ξ, t), en la formula de arriba, parah→∞, tendremos:
∫ ∞
0
e−(x+ξ+η)2
4a2t−hηdη =
∫ ∞
0
e−(x+ξ)2
4a2t− 2(x+ξ)η
4a2t− η2
4a2t−hηdη ≈
≈ (h→∞) ≈ e−(x+ξ)2
4a2t
∫ ∞
0
e−hηdη =1
he−
(x+ξ)2
4a2t (12.122)
En la obtencion de (12.122) hemos, tacitamente, calculado la integral impropia como
limL→∞
∫ L
0
e−(x+ξ)2
4a2t− 2(x+ξ)η
4a2t− η2
4a2t−hηdη
y, antes de tomar el lımite, despreciado los exponentes que no contienen a h, frente al quecontiene a h, dado que h→∞.
Colocando (12.122) en la formula de arriba y tomando el ımite para h→∞, queda:
G3(x, ξ, t)|h→∞ =1√
4πa2t
e−
(x−ξ)2
4a2t + e−(x+ξ)2
4a2t − 2e−(x+ξ)2
4a2t
=
=1√
4πa2t
e−
(x−ξ)2
4a2t − e−(x+ξ)2
4a2t
≡ G1(x, ξ, t)

Metodo de Transformadas Integrales 539
es decir, la funcion de Green en la recta semiinfinita del primer problema de frontera parala ecuacion parabolica, que obtuvimos por el metodo de prolongacion impar de la condicioninicial, como era de esperar.
Con ayuda de estas funciones de Green, la solucion del problema general
ut = a2uxx + f(x, t), ∀0 < x <∞, t > 0
u(x, 0) = ϕ(x) (12.123)
c.f = 0
se expresa en la forma:
u(x, t) =
∫ ∞
0
ϕ(ξ)Gi(x, ξ, t)dξ +
∫ t
0
∫ ∞
0
f(ξ, τ)Gi(x, ξ, t− τ)dξdτ (12.124)
con i=1,2,3, respectivamente, para la condicion de frontera de primero, segundo y tercer tipo.
Para completar nuestro estudio de la recta semiinfinita, debemos resolver los problemas en losque la condicion de frontera no sea homogenea.
Comencemos viendo el segundo problema de frontera; es decir, cuando esta dado el flujo decalor a traves de la frontera como cierta funcion conocida del tiempo. Por supuesto, en virtuddel principio de superposicion, consideraremos, solamente, el caso de la ecuacion homogenea yla condicion inicial homogenea, ya que, de no ser ası, la solucion serıa la superposicion de lassoluciones anteriormente obtenidas y la que a continuacion obtendremos. Ası pues, deseamosresolver el siguiente problema:
ut = a2uxx, ∀0 < x <∞, t > 0
u(x, 0) = 0 (12.125)
ux(0, t) = ν(t)
Este problema fue resuelto con la ayuda de la transformada de Laplace en el capıtulo 7 dellibro ”Teorıa de Funciones de Variable Compleja” del autor de la presente obra, por lo que aquıestudiaremos otra forma de resolverlo, a partir de consideraciones fısicas.
La condicion de frontera del problema (12.125) dice que hacia la barra, a traves del extremox = 0, hay un flujo de calor en un intervalo de tiempo ∆t dado por:
∆Q = −kux(0, t)∆t = −kν(t)∆t (12.126)
Analicemos en la barra infinita el siguiente problema:

540 Jose Marın Antuna
ut = a2uxx + f(t)δ(x), ∀ −∞ < x <∞, t > 0 (12.127)
u(x, 0) = 0
La inhomogeneidad en la ecuacion del problema (12.127) significa que se tiene en el punto x = 0una fuente puntual de calor de intensidad
F (x, t) = cρf(t)δ(x)
que, en el intervalo de tiempo ∆t genera una cantidad de calor igual a:
∆Q =
∫ ∞
−∞F (x, t)dx∆t = cρf(t)∆t (12.128)
Este calor fluye, desde x = 0, la mitad hacia la izquierda y la mitad hacia la derecha. Por lotanto, si proponemos que el flujo de calor hacia la derecha en la barra (o sea, hacia la semibarrax > 0) sea el mismo que (12.126):
1
2cρf(t)∆t = −kν(t)∆t
obtenemos que
f(t) = −2k
cρν(t) ≡ −2a2ν(t) (12.129)
Por consiguiente, proponer una fuente puntual
f(x, t) = −2a2ν(t)δ(x)
equivale, energeticamente, a que el flujo hacia dentro de la barra semiinfinita sea ux(0, t) = ν(t).
Es decir, ambos problemas (12.125) y (12.127) son equivalentes, si f(t) viene dado por (2.70).Por lo tanto, sus soluciones seran iguales. Pero el problema (12.127) es un problema en la rectainfinita que ya sabemos resolver; su solucion es:
u(x, t) =
∫ t
0
∫ ∞
−∞f(ξ, τ)G(x, ξ, t− τ)dξdτ =
=
∫ t
0
∫ ∞
−∞(−2a2ν(τ)δ(ξ)
1√4πa2(t− τ)
e− (x−ξ)2
4a2(t−τ)dξdτ =
=−2a2
2a√π
∫ t
0
ν(τ)√t− τ
e− x2
4a2(t−τ)dτ

Metodo de Transformadas Integrales 541
Ası pues, finalmente, obtenemos para la solucion del problema (12.125) la expresion:
u(x, t) =−a√π
∫ t
0
ν(τ)√t− τ
e− x2
4a2(t−τ)dτ (12.130)
que, por supuesto, coincide con la obtenida por transformada de Laplace, aunque aquı la hemosobtenido a partir de consideraciones fısicas.
Resolvamos, ahora, el primer problema de frontera:
ut = a2uxx, ∀0 < x <∞, t > 0
u(x, 0) = 0 (12.131)
u(0, t) = µ(t)
que tambien fue resuelto con ayuda de la transformada de Laplace en el libro de Teorıa deFunciones de Variable Compleja.
Aquı procederemos de la siguiente manera:
Buscaremos la funcion u(x, t), solucion del problema (12.131), en la forma u = vx, es decir, laderivada respecto a x de otra funcion. Entonces, para v(x, t), obtenemos de la ecuacion delproblema (12.131), la siguiente expresion:
vxt = a2vxxx
que, integrada respecto a x una vez, nos da:
vt = a2vxx + C1(t)
donde C1(t), obviamente, es una expresion que solo depende de t. La condicion inicial delproblema (12.131) nos da, para v(x, t):
vx(x, 0) = 0
que, integrada, se convierte en
v(x, 0) = C2
donde C2 es una constante.
La condicion de frontera de (12.131) queda, para v(x, t), en la forma:

542 Jose Marın Antuna
vx(0, t) = µ(t)
Ası pues, para la funcion v(x, t), obtenemos el siguiente problema:
vt = a2vxx + C1(t), ∀0 < x <∞, t > 0
v(x, 0) = C2 (12.132)
vx(0, t) = µ(t)
Nosotros ya sabemos resolver el problema (12.132); su solucion es la suma de las solucionesde los problemas (12.102) con ϕ(x) = C2, (12.105), dada por (12.106), ambas con la funcionG2(x, ξ, t) y (12.125), dada por (12.130).
Por consiguiente, la solucion del problema (12.132) sera:
v(x, t) =
∫ ∞
0
C2G2(x, ξ, t)dξ +
∫ t
0
∫ ∞
0
C1(τ)G2(x, ξ, t− τ)dξdτ +
+−a√π
∫ t
0
µ(τ)√t− τ
e− x2
4a2(t−τ)dτ (12.133)
Analicemos las dos primeras integrales que figuran en la formula (12.133). Tenemos que:
∫ ∞
0
C2G2(x, ξ, t)dξ = C2
∫ ∞
0
1√4πa2t
e−
(x−ξ)2
4a2t + e−(x+ξ)2
4a2t
dξ =
=C2
2a√t√π
∫ −∞
x2a√
t
e−α2
(−2a√tdα) +
∫ ∞
x2a√
t
e−α2
2a√tdα
=
=C2√π
∫ ∞
−∞e−α
2
dα = C2 (12.134)
Es decir, la misma constante C2.
Para la segunda integral tenemos:
∫ t
0
∫ ∞
0
C1(τ)G2(x, ξ, t− τ)dξdτ =
∫ t
0
C1(τ)√4πa2(t− τ)
∫ ∞
0
e− (x−ξ)2
4a2(t−τ) + e− (x+ξ)2
4a2(t−τ)
dξdτ =
=
∫ t
0
C1(τ)√π
∫ −∞
x
2a√
(t−τ)
e−α2
(−dα) +
∫ ∞
x
2a√
(t−τ)
e−α2
dα
dτ =
=
∫ t
0
C1(τ)√π
∫ ∞
−∞e−α
2
dαdτ =
∫ t
0
C1(τ)dτ = F (t) (12.135)
Metodo de Transformadas Integrales 543
donde F (t) es cierta funcion, obviamente, solo de t.
Ası las cosas, para la funcion v(x, t), solucion del problema (12.132) nos queda, de (12.133), laexpresion que viene dada por la superposicion de las tres expresiones arriba calculadas:
v(x, t) = C2 + F (t)− a√π
∫ t
0
µ(τ)√t− τ
e− x2
4a2(t−τ)dτ (12.136)
y, como u = vx, derivando (12.136), obtenemos, finalmente, para la solucion del problema(12.131) la expresion:
u(x, t) =x
2a√π
∫ t
0
µ(τ)
(t− τ)3/2
e− x2
4a2(t−τ)dτ (12.137)
De esta forma queda resuelto, tambien, el segundo problema de frontera para la ecuacionparabolica en la recta semiinfinita, con condicion de frontera de segundo tipo no homogenea.
La expresion (12.137) coincide, exactamente, con la solucion obtenida en el Capıtulo 7 dellibro ”Teorıa de Funciones de Variable Compleja” del autor de la presente obra utilizando latransformada de Laplace, como era de esperar.
Para poder completar el estudio de la solucion de los problemas de frontera para la ecuacionparabolica en la recta semiinfinita, debemos resolver el tercer problema de frontera con condicionde frontera no homogenea. Ası pues, a continuacion nos dedicaremos a resolver el problema:
ut = a2uxx, ∀0 < x <∞, t > 0
u(x, 0) = 0 (12.138)
ux(0, t)− hu(0, t) = µ(t)
Aplicando la transformada de Laplace en el tiempo, de (12.138) obtenemos el problema:
Uxx −p
a2U = 0, ∀0 < x <∞
Ux(0, p)− hU(0, p) = M(p) (12.139)
|U | < ∞
donde, como siempre, hemos denotado por U(x, p) a la transformada de Laplace de la funcionu(x, t) y por M(p) a la transformada de Laplace de la funcion µ(t). La solucion acotada de(12.139) que cumple con la condicion de frontera impuesta es:
U(x, p) = −a M(p)√p+ ha
e−√
p
ax (12.140)

544 Jose Marın Antuna
Pero, de tablas de transformadas (ver, por ejemplo, Bateman y Erdelyi, Tablas de Transfor-madas Integrales. Tomo I. Transformadas de Fourier, Laplace y Mellin. Nauka, Moscu, 1969)se sabe que:
1√p+ β
e−α√p :
1√πte−
x2
4t − βeαβ+β2terfc
(α
2√t
+ β√t
)(12.141)
donde erfc(z) es la funcion de error complementaria:
erfc(z) = 1− Φ(z), Φ(z) =2√π
∫ z
0
e−α2
dα (12.142)
Por consiguiente:
1√p+ ha
e−√
p
ax :
1√πte−
x2
4a2t − haeha+h2a2terfc
(x
2a√t
+ ha√t
)Finalmente, la solucion de (12.138) sera, por lo tanto:
u(x, t) = −a∫ t
0
µ(τ) ·
·
[1√
π(t− τ)e− x2
4a2(t−τ) − haeha+h2a2(t−τ)erfc
(x
2a√t− τ
+ ha√t− τ
)]dτ (12.143)
con lo que queda completamente resuelto el problema.
Con los problemas resueltos en este epıgrafe queda completamente agotado el tema de la rectasemiinfinita para la ecuacion parabolica. Cualquier problema de propagacion de calor en unabarra semiinfinita del tipo:
ut = a2uxx + f(x, t), ∀0 < x <∞, t > 0
u(x, 0) = ϕ(x) (12.144)
c.f = µ(t)
podra resolverse con la superposicion de las formulas que hemos obtenido aquı.
12.2.3 Ejemplo
A modo de ejemplo de aplicacion, hallemos la temperatura de una barra semiinfinita, si estatiene una temperatura inicial u0 constante y, desde el momento t = 0, se mantiene su extremo

Metodo de Transformadas Integrales 545
x = 0 a temperatura cero. Es decir, buscaremos la ley del proceso de enfriamiento de unabarra semiinfinita que esta, inicialmente, a temperatura dada constante, si la temperatura desu extremo se mantiene cero todo el tiempo.
El problema, matematicamente, sera:
ut = a2uxx ∀0 < x <∞, t > 0
u(x, 0) = u0 (12.145)
u(0, t) = 0
La solucion vendra dada por la formula (12.124), con f(x, t) = 0, ϕ(x) = u0 e i = 1:
u(x, t) =
∫ ∞
0
u0G1(x, ξ, t)dξ =u0√4πa2t
∫ ∞
0
e−(x−ξ)2
4a2t dξ −∫ ∞
0
e−(x+ξ)2
4a2t dξ
=
=u0√π
∫ ∞
− x2a√
t
e−α2
dα−∫ ∞
x2a√
t
e−α2
dα
=
∫ x2a√
t
− x2a√
t
e−α2
dα =2u0√π
∫ x2a√
t
0
e−α2
dα (12.146)
Introduciendo la funcion de error, ya conocida por nosotros:
Φ(z) =2√π
∫ z
0
e−α2
dα
para la que hay extensas y detalladas tablas, (12.146) nos da la solucion en la forma:
u(x, t) = u0Φ
(x
2a√t
)(12.147)
El perfil de las temperaturas de la barra, para diferentes instantes de tiempo, se muestra en lafigura 12.3.
donde t4 > t3 > t2 > t1 > 0.
Es de notar que, a medida que t crece, va produciendose una disminucion de los valores de latemperatura de los diferentes puntos de la barra. En el lımite, cuando t→∞, tendremos paratoda x que u(x, t) → Φ(0) = 0, lo que significa que la barra se ha enfriado totalmente.
12.3 Ejercicios del capıtulo
1. Hallar la temperatura de una barra infinita con superficie longitudinal aislada termica-mente, si la temperatura inicial es cero y en el instante inicial se desprenden en el puntox = x0 Q unidades de calor.
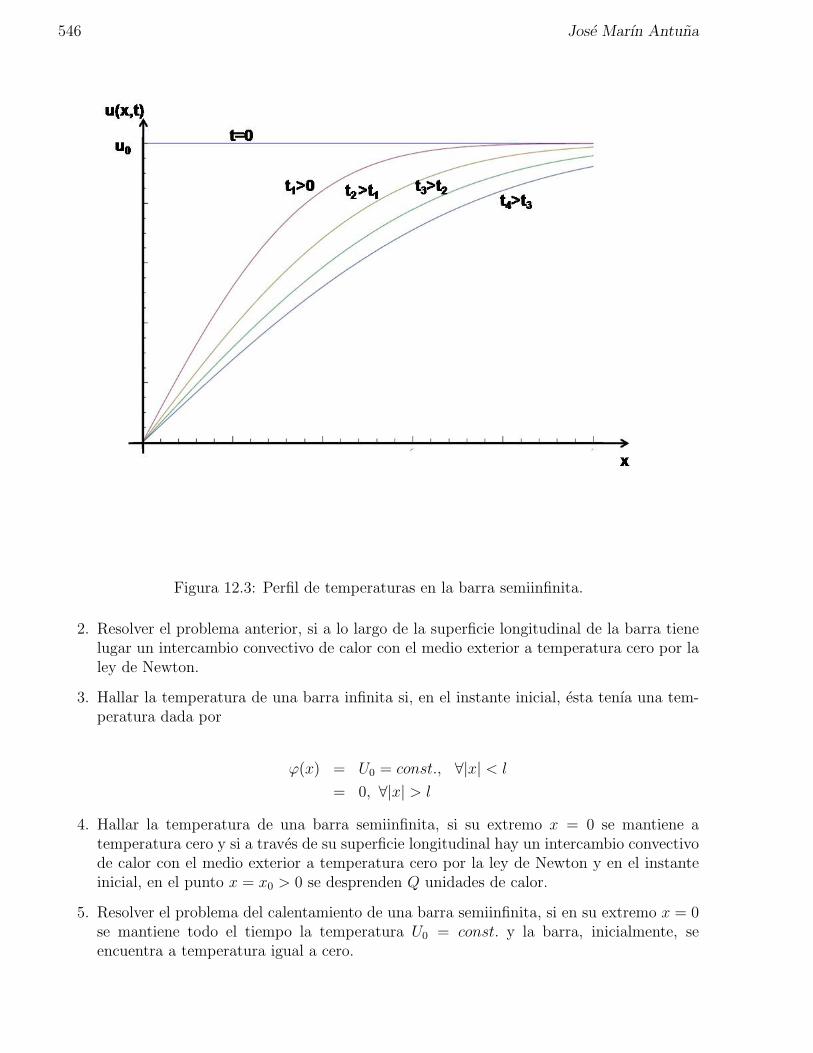
546 Jose Marın Antuna
Figura 12.3: Perfil de temperaturas en la barra semiinfinita.
2. Resolver el problema anterior, si a lo largo de la superficie longitudinal de la barra tienelugar un intercambio convectivo de calor con el medio exterior a temperatura cero por laley de Newton.
3. Hallar la temperatura de una barra infinita si, en el instante inicial, esta tenıa una tem-peratura dada por
ϕ(x) = U0 = const., ∀|x| < l
= 0, ∀|x| > l
4. Hallar la temperatura de una barra semiinfinita, si su extremo x = 0 se mantiene atemperatura cero y si a traves de su superficie longitudinal hay un intercambio convectivode calor con el medio exterior a temperatura cero por la ley de Newton y en el instanteinicial, en el punto x = x0 > 0 se desprenden Q unidades de calor.
5. Resolver el problema del calentamiento de una barra semiinfinita, si en su extremo x = 0se mantiene todo el tiempo la temperatura U0 = const. y la barra, inicialmente, seencuentra a temperatura igual a cero.
Capıtulo 13
Metodo de la Funcion de Green
En el presente capıtulo haremos una recapitulacion de lo que hemos visto en los capıtulosanteriores relacionado con la funcion de Green, de manera que podamos resumir y condensar lasideas fundamentales relativas a este importantısimo concepto y pasaremos a generalizar las ideasrelacionadas con la definicion de la funcion de Green, el concepto de solucion fundamental y susaplicaciones para resolver los problemas diferentes de las ecuaciones de la Fısica Matematica.
Para poder acometer las ideas que desarrollaremos, introduciremos algunos conceptos rela-cionados con las funciones generalizadas, tratando de hacerlo de manera que el lector puedaapropiarse de los elementos mas importantes vinculados con ello, de forma que le sea util, tantopara la comprension del capıtulo, como para su futura utilizacion como fısico.
No obstante, debido a la importancia que tiene en el desarrollo de la Fısica Matematica moder-na el concepto de funcion generalizada, remitimos al lector interesado al libro Teorıa deFunciones Generalizadas del autor de la presente obra.
13.1 Resumen del concepto de Funcion de Green estu-
diado anteriormente
13.1.1 Ecuacion hiperbolica
1. Recta infinita.
Cuando en el capıtulo donde estudiamos el Metodo de Ondas Viajeras vimos como resolverel problema de las oscilaciones de una cuerda infinita, introdujimos el concepto de Funcionde Green para la ecuacion hiperbolica en la recta infinita, como la solucion del siguienteproblema:
547

548 Jose Marın Antuna
utt = a2uxx, ∀ −∞ < x <∞, t > 0
u(x, 0) = 0 (13.1)
ut(x, 0) = δ(x− x0)
Allı vimos que, fısicamente, la velocidad inicial deltaica significaba dar un impulso inicialinstantaneo, puntual y unitario (I/ρ = 1) a la cuerda en el punto x0, en el instante t = 0.
Con la ayuda de la formula de D’Alembert, entonces, obtuvimos, para la funcion de Greendefinida como solucion del problema (13.1), la expresion:
G(x, x0, t) =1
2a, ∀|x− x0| < at
= 0, ∀|x− x0| > at
Es decir:
G(x, x0, t) =1
2aθ(at− |x− x0|) (13.2)
donde θ(t) es la funcion paso unitario de Heaviside, definida por:
θ(t) = 1, ∀t > 0 (13.3)
= 0, ∀t < 0
Para un instante de tiempo t > 0, el grafico de esta funcion se muestra en la figura 13.1.
Es decir, ante una velocidad inicial deltaica, como, aproximadamente se intenta repre-sentar a la izquierda de la figura 13.1, se obtiene en la cuerda el pulso rectangular, quese muestra a la derecha en la figura 13.1, cuyos frentes izquierdo y derecho se mueven,respectivamente, hacia la izquierda y hacia la derecha, con velocidad a.
Por supuesto, es necesario recalcar que lo aquı representado es una abstraccion matema-tica; jamas podremos, en la realidad, aplicar un impulso unitario de forma instantanea(en t = 0) y puntual (en x = x0).
En la realidad solo podremos dar un golpe -por muy seco que este sea- durante un intervalode tiempo ∆t = t en el instante inicial muy pequeno, pero finito y, ademas en un intervalo∆x centrado en el punto x0, muy pequeno tambien (mas pequeno, mientras mas fino seael objeto con el que demos el golpe), pero finito tambien.
Como resultado de esto, la velocidad inicial se asemejara a una campana de Gauss muyestrecha, centrada en el punto x0, muy semejante a una delta de Dirac, pero, al fin yal cabo con altura finita y, como respuesta a ese estımulo, el pulso no sera exactamenterectangular, como el dibujado en la figura 13.1, sino trapezoidal, con sus lados lateralesligeramente inclinados.
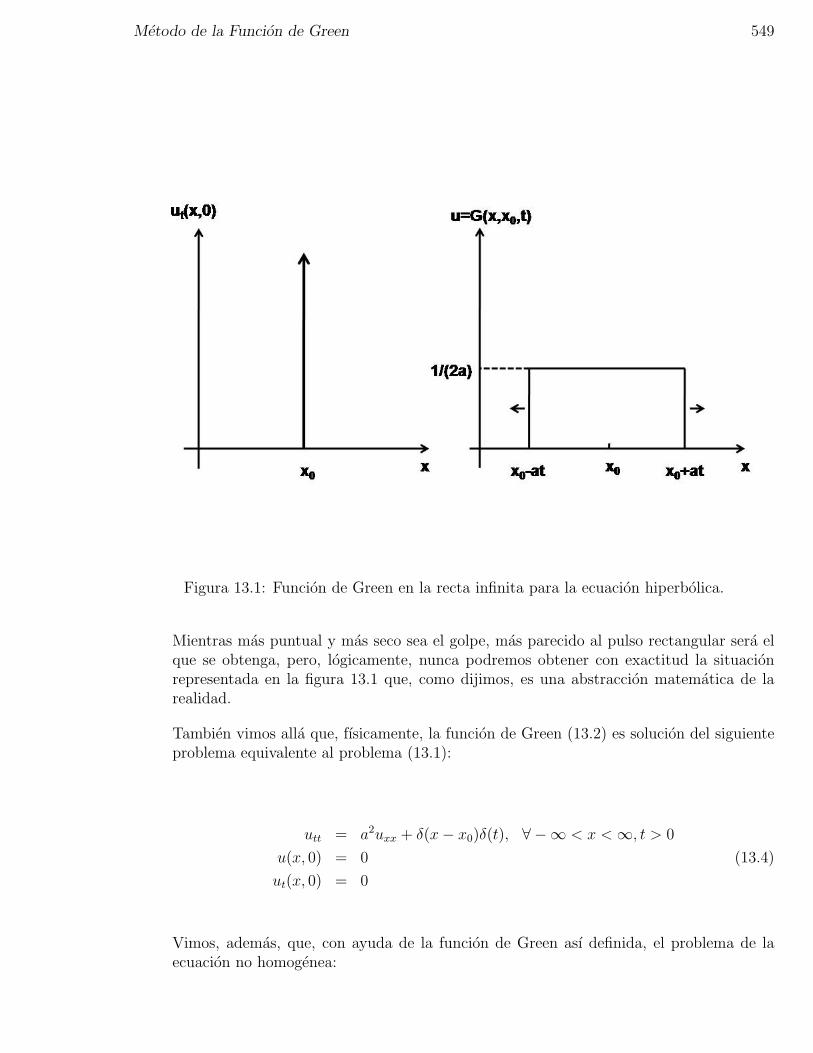
Metodo de la Funcion de Green 549
Figura 13.1: Funcion de Green en la recta infinita para la ecuacion hiperbolica.
Mientras mas puntual y mas seco sea el golpe, mas parecido al pulso rectangular sera elque se obtenga, pero, logicamente, nunca podremos obtener con exactitud la situacionrepresentada en la figura 13.1 que, como dijimos, es una abstraccion matematica de larealidad.
Tambien vimos alla que, fısicamente, la funcion de Green (13.2) es solucion del siguienteproblema equivalente al problema (13.1):
utt = a2uxx + δ(x− x0)δ(t), ∀ −∞ < x <∞, t > 0
u(x, 0) = 0 (13.4)
ut(x, 0) = 0
Vimos, ademas, que, con ayuda de la funcion de Green ası definida, el problema de laecuacion no homogenea:

550 Jose Marın Antuna
utt = a2uxx + f(x, t), ∀ −∞ < x <∞, t > 0
u(x, 0) = 0 (13.5)
ut(x, 0) = 0
tiene por solucion la expresion:
u(x, t) =
∫ t
0
∫ ∞
−∞f(ξ, τ)G(x, ξ, t− τ)dξdτ (13.6)
Notese que la expresion de la solucion (13.6) es una integral en el tiempo transcurrido(de 0 a t) y en el espacio considerado (de −∞ a ∞, ya que estamos en la cuerda infinita)del producto de la inhomogeneidad de la ecuacion del problema (13.5), por la funcion deGreen, evaluada en t − τ . En otras palabras, como la convolucion en el espacio y en eltiempo de ambas funciones.
2. Recta semiinfinita.
Anteriormente obtuvimos que, para los problemas de frontera de la ecuacion hiperbolicaen la recta semiinfinita, la funcion de Green adoptaba las siguientes expresiones.
Para el primer problema de frontera (condicion de primer tipo: u(0, t) = 0):
G1(x, ξ, t) =1
2a[θ(at− |x− ξ|)− θ(at− |x+ ξ|)] (13.7)
Para el segundo problema de frontera (condicion de segundo tipo: ux(0, t) = 0):
G2(x, ξ, t) =1
2a[θ(at− |x− ξ|) + θ(at− |x+ ξ|)] (13.8)
Y para el tercer problema de frontera (condicion de tercer tipo: ux(0, t)− hu(0, t) = 0):
G3(x, ξ, t) =1
2aθ(at−|x−ξ|)+θ(at−|x+ξ|)−2θ(at−|x+ξ|)[1−e−h(at−|x+ξ|)] (13.9)
Las funciones (13.7), (13.8) y (13.9), por definicion, son soluciones, respectivamente, delos problemas:
utt = a2uxx, ∀0 < x <∞, t > 0
u(x, 0) = 0 (13.10)
ut(x, 0) = δ(x− x0)
u(0, t) = 0
Metodo de la Funcion de Green 551
utt = a2uxx, ∀0 < x <∞, t > 0
u(x, 0) = 0 (13.11)
ut(x, 0) = δ(x− x0)
ux(0, t) = 0
utt = a2uxx, ∀0 < x <∞, t > 0
u(x, 0) = 0 (13.12)
ut(x, 0) = δ(x− x0)
ux(0, t)− hu(0, t) = 0
lo que, fısicamente, significa la respuesta a un impulso unitario, instantaneo y puntualdado en el punto x = ξ > 0 de la cuerda semiinfinita, si en el extremo x = 0 se tienela condicion de primer tipo (es decir, extremo fijo) en el caso del problema (13.10), lacondicion de segundo tipo (o sea, extremo libre) en el caso del problema (13.11), o lacondicion de frontera de tercer tipo (es decir, extremo unido elasticamente) en el caso delproblema (13.12).
Los problemas (13.10), (13.11) y (13.12) son equivalentes a los problemas
utt = a2uxx + δ(x− x0)δ(t), ∀0 < x <∞, t > 0
u(x, 0) = 0 (13.13)
ut(x, 0) = 0
c.f. = 0 (13.14)
donde, respectivamente, la condicion de frontera sera de primero, de segundo o de tercertipo, en correspondencia con cada uno de los problemas mencionados.
Con ayuda de estas funciones de Green, la solucion del problema:
utt = a2uxx + f(x, t), ∀0 < x <∞, t > 0
u(x, 0) = 0 (13.15)
ut(x, 0) = 0
c.f. = 0 (13.16)
viene dada por la formula:
u(x, t) =
∫ t
0
∫ ∞
0
f(ξ, τ)Gi(x, ξ, t− τ)dξdτ (13.17)
donde i = 1, 2, 3, respectivamente, para el primero, el segundo o el tercer problema defrontera.

552 Jose Marın Antuna
Notese que, de nuevo, la solucion del problema con la ecuacion no homogenea viene ex-presada como una integral en el tiempo transcurrido (de 0 a t) y en el espacio considerado(en este caso, de 0 a +∞, ya que estamos en la cuerda semiinfinita) del producto de lainhomogeneidad de la ecuacion por la funcion de Green correspondiente al problema defrontera en cuestion, evaluada en t−τ ; es decir, la convolucion en el tiempo y en el espaciode la inhomogeneidad de la ecuacion por la funcion de Green correspondiente al problemade frontera en cuestion.
3. Cuerda finita.
En el caso de las oscilaciones de una cuerda de longitud l, durante el estudio del metodode separacion de variables definimos a la funcion de Green como la solucion del problema:
utt = a2uxx, ∀0 < x < l, t > 0
u(x, 0) = 0 (13.18)
ut(x, 0) = δ(x− x0)
c.f. = 0
donde por c.f. entendemos las condiciones de frontera de primero, segundo o tercer tipohomogeneas en los extremos x = 0 y x = l de la cuerda. El problema (13.18) describe,fısicamente, la respuesta de la cuerda a un impulso unitario instantaneo y puntual dadoen t = 0 y en x = x0.
Por el metodo de separacion de variables hallamos una representacion de Fourier para lafuncion de Green en la forma:
G(x, x0, t) =∞∑n=1
1
a√λn ‖ X ‖2
Xn(x)Xn(x0) sin√λnat (13.19)
donde Xn(x) y λn son, respectivamente, las autofunciones y los autovalores del problemade Sturm-Liouville:
X ′′ + λX = 0, ∀0 < x < l (13.20)
c.f. = 0
Vimos alla que el problema (13.18) es equivalente al problema:
utt = a2uxx + δ(x− x0)δ(t), ∀0 < x < l, t > 0
u(x, 0) = 0 (13.21)
ut(x, 0) = 0
c.f. = 0
y que la solucion del problema

Metodo de la Funcion de Green 553
utt = a2uxx + f(x, t), ∀0 < x < l, t > 0
u(x, 0) = 0 (13.22)
ut(x, 0) = 0
c.f. = 0
se expresa por la formula:
u(x, t) =
∫ t
0
∫ l
0
f(ξ, τ)G(x, ξ, t− τ)dξdτ (13.23)
De nuevo vemos que la solucion viene expresada como una integral (convolucion) enel tiempo transcurrido (de 0 a t) y en el espacio considerado (de 0 a l, ya que ahoraestamos en una cuerda de longitud l) del producto de la inhomogeneidad de la ecuaciondel problema, por la funcion de Green correspondiente, evaluada en t− τ .
4. Caso de varias dimensiones espaciales.
En el propio capıtulo sobre el metodo de separacion de variables definimos la funcion deGreen como la solucion del problema:
utt = a2∇2u, ∀x ∈ V, t > 0
u(M, 0) = 0 (13.24)
ut(M, 0) = δ(M,M0)
c.f. = 0
y, por el metodo de separacion de variables, obtuvimos su expresion en la forma:
G(M,M0, t) =∞∑n=1
1
a√λn ‖ vn ‖2
vn(M)vn(M0) sin√λnat (13.25)
donde vn(M) y λn son, respectivamente, las autofunciones y los autovalores del problemade Sturm-Liouville:
∇2v + λv = 0, ∀M ∈ V (13.26)
c.f. = 0
Vimos, tambien, que el problema (13.24) era equivalente al problema:
utt = a2∇2u+ δ(M,M0)δ(t), ∀x ∈ V, t > 0
u(M, 0) = 0 (13.27)
ut(M, 0) = 0
c.f. = 0

554 Jose Marın Antuna
y que el problema
utt = a2∇2u+ f(M, t), ∀x ∈ V, t > 0
u(M, 0) = 0 (13.28)
ut(M, 0) = 0
c.f. = 0
tenıa por solucion la expresion:
u(x, t) =
∫ t
0
∫ ∫ ∫V
f(P, τ)G(M,P, t− τ)dPdτ (13.29)
donde, de nuevo, se ve que la solucion viene dada como una integral tipo convolucion enel tiempo transcurrido (de 0 a t) y en el espacio considerado (en este caso el dominio V ,donde se buscan las oscilaciones en varias dimensiones) del producto de la inhomogeneidadde la ecuacion del problema por la funcion de Green correspondiente, evaluada en t− τ .
Es obvio que, en este caso, la funcion de Green (13.25) tiene el sentido fısico de la elon-gacion del punto M en el instante t, si en el punto M0 en el instante inicial t = 0 hayuna fuente unitaria instantanea y puntual de energıa de las oscilaciones que el problema(13.24) o su equivalente (13.27) describe.
Lo hasta aquı resumido nos da una vision compacta de las funciones de Green parala ecuacion hiperbolica, estudiadas en los capıtulos anteriores y como estas pueden serutilizadas para resolver los problemas que se presenten en esos casos.
13.1.2 Ecuacion parabolica
1. Recta infinita.
Al estudiar el metodo de transformadas integrales definimos la funcion de Green para laecuacion parabolica en la recta infinita como la solucion del siguiente problema:
ut = a2uxx, ∀ −∞ < x <∞, t > 0 (13.30)
u(x, 0) = δ(x− x0)
El analisis fısico de este problema nos permitio afirmar que la temperatura inicial deltaicasignificaba que se tenıa una fuente instantanea (en t = 0), puntual (en x = x0) y unitaria(que desprende en ese punto y en ese instante la unidad de calor cρ).
Es decir, que la solucion del problema (13.30) -que por definicion es la funcion de Green-es la distribucion de las temperaturas en la barra infinita para t > 0, si en el instanteinicial en el punto x = x0, se desprendıa la unidad de calor cρ, de manera instantanea ypuntual.
Para dicha funcion de Green obtuvimos la siguiente expresion:
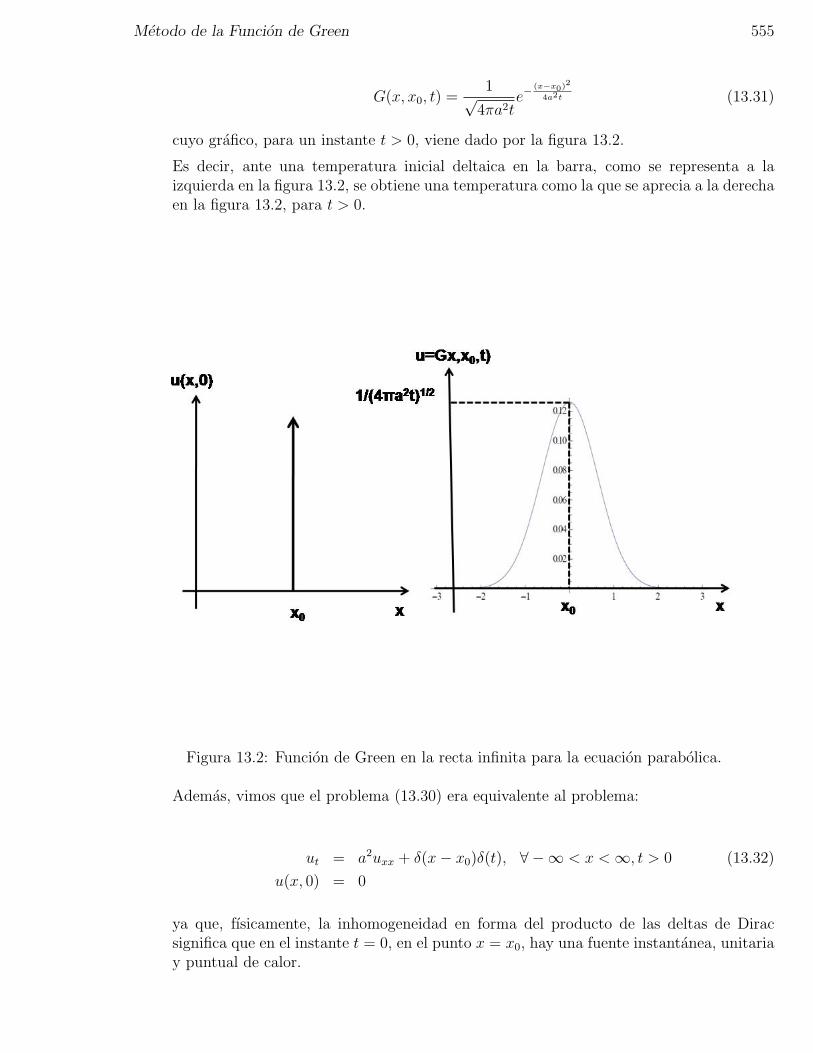
Metodo de la Funcion de Green 555
G(x, x0, t) =1√
4πa2te−
(x−x0)2
4a2t (13.31)
cuyo grafico, para un instante t > 0, viene dado por la figura 13.2.
Es decir, ante una temperatura inicial deltaica en la barra, como se representa a laizquierda en la figura 13.2, se obtiene una temperatura como la que se aprecia a la derechaen la figura 13.2, para t > 0.
Figura 13.2: Funcion de Green en la recta infinita para la ecuacion parabolica.
Ademas, vimos que el problema (13.30) era equivalente al problema:
ut = a2uxx + δ(x− x0)δ(t), ∀ −∞ < x <∞, t > 0 (13.32)
u(x, 0) = 0
ya que, fısicamente, la inhomogeneidad en forma del producto de las deltas de Diracsignifica que en el instante t = 0, en el punto x = x0, hay una fuente instantanea, unitariay puntual de calor.

556 Jose Marın Antuna
Segun vimos, la solucion del problema:
ut = a2uxx + f(x, t), ∀ −∞ < x <∞, t > 0 (13.33)
u(x, 0) = 0
viene dada por la expresion:
u(x, t) =
∫ t
0
∫ ∞
−∞f(ξ, τ)G(x, ξ, t− τ)dξdτ (13.34)
que, de nuevo, es una integral tipo convolucion en el tiempo transcurrido (de 0 a t) y enel espacio considerado (de −∞ a +∞) del producto de la inhomogeneidad de la ecuacionpor la funcion de Green en t− τ .
2. Recta semiinfinita.
En este caso, por el metodo de prolongacion obtuvimos, en el caso de condiciones defrontera de primero o segundo tipo homogenea, para la funcion de Green la expresion:
Gi(x, ξ, t) =1√
4πa2t
e−
(x−ξ)2
4a2t ∓ e−(x+ξ)2
4a2t
(13.35)
cuyo problema definitorio era:
ut = a2uxx, ∀0 < x <∞, t > 0 (13.36)
u(x, 0) = δ(x− ξ)
c.f. = 0
y donde el signo menos corresponde a la condicion de frontera homogenea de primer tipo(con i = 1) y el signo mas (con i = 2) a la condicion de frontera homogenea de segundotipo.
En el caso de la condicion de frontera de tercer tipo homogenea, obtuvimos la funcion deGreen en la forma:
G3(x, ξ, t) =1√
4πa2t
e−
(x−ξ)2
4a2t + e−(x+ξ)2
4a2t − 2h
∫ ∞
0
e−(x+ξ+η)2
4a2thηdη
(13.37)
que, por definicion, responde al mismo problema (13.36), pero con la condicion de fronterade tercer tipo homogenea.
El problema (13.36) con cualquiera de las tres condiciones de frontera homogenea esequivalente al problema:
ut = a2uxx + δ(x− ξ)δ(t), ∀0 < x <∞, t > 0 (13.38)
u(x, 0) = 0
c.f. = 0

Metodo de la Funcion de Green 557
por su sentido fısico y la solucion del problema:
ut = a2uxx + f(x, t), ∀0 < x <∞, t > 0 (13.39)
u(x, 0) = 0
c.f. = 0
vendra dada por la expresion:
u(x, t) =
∫ t
0
∫ ∞
0
f(ξ, τ)Gi(x, ξ, t− τ)dξdτ (13.40)
donde i = 1 para la condicion de frontera de primer tipo, i = 2 para la condicion defrontera de segundo tipo e i = 3 para la condicion de frontera de tercer tipo, homogenea.
De nuevo se aprecia que la solucion viene dada como una integral tipo convolucion en eltiempo transcurrido y en el espacio considerado del producto de la inhomogeneidad de laecuacion por la funcion de Green correspondiente.
3. Recta finita.
En el caso de la propagacion de calor en una barra finita, de longitud l, la funcion deGreen se definio como la solucion del problema:
ut = a2uxx, ∀0 < x < l, t > 0 (13.41)
u(x, 0) = δ(x− ξ)
c.f. = 0
y por separacion de variables obtuvimos, para la funcion de Green en este caso, la ex-presion:
G(x, ξ, t) =∞∑n=1
1
‖ Xn ‖2Xn(x)Xn(ξ)e
−λna2t (13.42)
que, fısicamente, es la respuesta (o sea, la temperatura) en la barra a una fuente unitaria,instantanea (en t = 0) y puntual (en x = ξ) de calor.
En (13.42), Xn(x) son las autofunciones y λn los autovalores del problema de Sturm-Liouville correspondientes a las condiciones de frontera del problema (13.41).
Por su sentido fısico, el problema
ut = a2uxx + δ(x− ξ)δ(t), ∀0 < x < l, t > 0 (13.43)
u(x, 0) = 0
c.f. = 0

558 Jose Marın Antuna
es equivalente al problema (13.41) y la solucion del problema
ut = a2uxx + f(x, t), ∀0 < x < l, t > 0 (13.44)
u(x, 0) = 0
c.f. = 0
viene dada por la formula:
u(x, t) =
∫ t
0
∫ l
0
f(ξ, τ)G(x, ξ, t− τ)dξdτ (13.45)
que, de nuevo, tiene la forma de una integral tipo convolucion en el tiempo transcurrido yen el espacio considerado del producto de la inhomogeneidad de la ecuacion por la funcionde Green correspondiente.
4. Caso de varias dimensiones.
En este caso, como vimos, la funcion de Green es la solucion del problema:
ut = a2∇2u, ∀M ∈ V, t > 0 (13.46)
u(M, 0) = δ(M,M0)
c.f. = 0
que, por su sentido fısico, es equivalente al problema:
ut = a2∇2u+ δ(M,M0)δ(t), ∀M ∈ V, t > 0 (13.47)
u(M, 0) = 0
c.f. = 0
y su expresion, por separacion de variables, nos dio en la forma:
G(M,P, t) =∞∑n=1
1
‖ vn ‖2vn(M)vn(P )e−λna2t (13.48)
donde vn(M) y λn son, respectivamente, las autofunciones y los autovalores del problemade Sturm-Liouville correspondiente a la condicion de frontera del problema (13.47).
La solucion del problema:
ut = a2∇2u+ f(M, t), ∀M ∈ V, t > 0 (13.49)
u(M, 0) = 0
c.f. = 0

Metodo de la Funcion de Green 559
viene dada por la expresion:
u(x, t) =
∫ t
0
∫ ∫ ∫V
f(P, τ)G(M,P, t− τ)dPdτ (13.50)
que, de nuevo, evidencia que la solucion se expresa como la integral de convolucion en eltiempo transcurrido y en el espacio considerado de la inhomogeneidad de la ecuacion porla funcion de Green.
Lo que hemos recapitulado aquı de lo ya estudiado en capıtulos anteriores, nos permite sacaralgunas consideraciones generalizadoras.
En lo hasta el momento estudiado estamos en presencia de operadores diferenciales lineales.
Operador de D’Alembert o Dalembertiano:
En una dimension espacial: L[u] = utt − a2uxx,
En varias dimensiones espaciales: L[u] = utt − a2∇2u,
que en muchos problemas se define en la forma:
u ≡ 1
a2utt −∇2u
y el Operador de difusion o de propagacion del calor:
En una dimension espacial: L[u] = ut − a2uxx,
En varias dimensiones espaciales: L[u] = ut − a2∇2u.
En todos los casos que hasta aquı hemos visto, la funcion de Green ha resultado ser la soluciondel operador con parte derecha deltaica y determinadas condiciones iniciales y de fronterahomogeneas impuestas:
L[u] = δ(x− x0)δ(t)
c.i. = 0 (13.51)
c.f. = 0 (13.52)
en el caso de una dimension espacial (aquı el problema puede estar planteado en una regionfinita, semiinfinita o infinita y hemos usado la notacion c.i. para las condiciones iniciales y comoantes c.f. para las condiciones de frontera), o, en el caso de varias dimensiones espaciales:
560 Jose Marın Antuna
L[u] = δ(M,M0)δ(t)
c.i. = 0 (13.53)
c.f. = 0 (13.54)
y, ademas, la solucion del problema:
L[u] = f(M, t)
c.i. = 0 (13.55)
c.f. = 0 (13.56)
se expresa mediante la formula:
u(M, t) =
∫ t
0
∫ ∫ ∫V
f(P, τ)G(M,P, t− τ)dPdτ (13.57)
donde por V consideramos en el caso unidimensional el intervalo (finito, semiinfinito o infinito)de variacion de la coordenada espacial y la integral como una integral simple, ya que en (13.57),tacitamente, hemos escrito la solucion, suponiendo el caso de un problema multidimensional.
Antes de seguir con el contenido de lo que pretendemos estudiar en el presente capıtulo, debemoshacer algunas observaciones.
Es conveniente recordar que la funcion delta de Dirac tiene sentido solo a traves de integrales,ya que ella es lo que se conoce con el nombre de funcion generalizada. Por consiguiente, enrigor, las funciones de Green que hemos visto son tambien funciones generalizadas.
En lo que a continuacion desarrollaremos, trataremos de sistematizar estos conceptos. En ellibro de Teorıa de Funciones Generalizadas del autor, se presenta un estudio de estas funcionesy el lector interesado en profundizar en este importante concepto puede remitirse a el.
Sin embargo, habıamos ya visto una ligera nocion de funcion generalizada, como el lımite debilde una sucesion determinada con una funcion base:
(ϕ, fn) → (ϕ, f), ∀n→∞
En este caso la funcion f , lımite debil de la sucesion fn, se llamo funcion generalizada.
Sin hacer un estudio especıfico de las funciones generalizadas, que se expone en el libro arribacitado, vimos el ejemplo de la funcion generalizada llamada delta de Dirac. En el proximoepıgrafe desarrollaremos los conceptos esenciales de las soluciones fundamentales de los opera-dores diferenciales lineales.

Metodo de la Funcion de Green 561
13.2 Soluciones fundamentales de los operadores dife-
renciales lineales
En este epıgrafe veremos algunos conceptos importantes.
13.2.1 Soluciones generalizadas de las ecuaciones diferenciales linea-les
Lo que vamos a exponer a continuacion puede hacerse de un modo mucho mas general yabstracto. Simplemente trataremos de concretarnos a lo esencial.
Los problemas que, hasta aquı hemos estudiado, se pueden generalizar de la siguiente manera:
Hallar la funcion u(x, t), continua con sus derivadas en 0 ≤ x ≤ l, t ≥ 0, que cumpla:
1
p(x)
∂
∂x
[k(x)
∂u
∂x
]− q(x)u
= L[u] ≡
N∑n=1
fn(t)∂nu
∂tn, ∀0 < x < l, t > 0
∂mu
∂tm|t=0 = ϕm(x), m = 0, 1, 2, ..., N − 1 (13.58)
α1ux(0, t)− β1u(0, t) = 0
α2ux(l, t) + β2u(l, t) = 0
En el problema (13.58), que es una generalizacion de los problemas estudiados en los primeroscapıtulos del presente libro, si N = 1 tenemos una ecuacion parabolica y, si N = 2, una ecuacionhiperbolica. En nuestro estudio no hemos visto casos con N > 2, aunque, en principio, puedenexistir.
Proponiendo la solucion del problema (13.58) en la forma
u(x, t) = X(x)T (t) (13.59)
obtenemos, para la parte temporal, la ecuacion:
L[T ] + λT = 0, ∀t > 0 (13.60)
y para la parte espacial, agregando las condiciones de frontera que salen de las condiciones defrontera del problema (13.58):

562 Jose Marın Antuna
d
dx[k(x)X ′]− q(x)X + λp(x)X = 0, ∀0 < x < l
α1X′(0)− β1X(0) = 0 (13.61)
α2X′(l) + β2X(l) = 0
que es un problema de Sturm-Liouville, que define determinados autovalores λn y determinadasautofunciones Xn(x).
Notese que la ecuacion diferencial del problema (13.61) es, exactamente, la ecuacion genera-triz de las funciones especiales que estudiamos al inicio de la presente obra, de manera queconocemos las propiedades de los autovalores y de las autofunciones que aquı se obtienen.
En virtud de lo dicho, veamos, a continuacion, operadores diferenciales lineales generales quecontengan, como caso particular, los que aparecen en nuestro trabajo y para ellos desarrollare-mos las cosas.
Veamos, pues, la ecuacion diferencial de orden m con coeficientes ak(x) continuos con todas susderivadas en Rn (x ∈ Rn, n ≥ 1):
m∑k=0
ak(x)Dku = f(x) (13.62)
donde D ≡ ddx
es el operador de derivacion y, por consiguiente, Dk es la operacion de derivacionk-esima.
Introduzcamos el siguiente operador:
L(x,D) =m∑k=0
ak(x)Dk (13.63)
Entonces, la ecuacion (13.62) adopta la forma:
L(x,D)u = f(x) (13.64)
Aquı suponemos que, en general, f(x) es una funcion generalizada.
Estudiaremos la siguiente importante definicion.
Definicion:
Llamaremos solucion generalizada de la ecuacion (13.64) a la funcion generalizada u(x) quesatisfaga la ecuacion en sentido generalizado; es decir, si para la funcion ϕ(x) finita con infinitasderivadas en Rn (funcion de base) se cumple que:
Metodo de la Funcion de Green 563
(L(x,D)u, ϕ) = (f, ϕ) (13.65)
donde hemos utilizado la notacion:
(f, ϕ) =
∫f(x)ϕ(x)dx (13.66)
En (13.66) se integra en el espacio en que se este buscando la solucion, es decir, si estamostrabajando en Rn, la integral en (13.66) sera una integral n-dimensional.
Tienen lugar las siguientes afirmaciones:
1. Toda solucion clasica de la ecuacion (13.64) es, a la vez, solucion generalizada.
La afirmacion es evidente, ya que, si la solucion es clasica, entonces, para la funcion debase ϕ(x), se cumplira (13.65), lo que significa, por definicion, que u(x) es, tambien, lasolucion generalizada.
2. Si f(x) es continua y la solucion generalizada u(x) de la ecuacion (13.64) es continua,junto con sus derivadas hasta el orden m, entonces ella tambien es la solucion clasica dela ecuacion.
La demostracion de esta segunda afirmacion requiere de un poco mas elaboracion y laexponemos en el libro de Teorıa de Funciones Generalizadas antes citado.
13.2.2 Soluciones fundamentales
Sea ahora el operador L con coeficientes constantes, ak(x) = ak. Es decir:
L(D) =m∑k=0
akDk (13.67)
Veamos el siguiente importante concepto.
Definicion:
La funcion generalizada E(x) se llama solucion fundamental (funcion de influencia) deloperador L(D), si satisface, en Rn, la ecuacion:
L(D)E(x) = δ(x) (13.68)
Tiene lugar la siguiente afirmacion:
Teorema.
564 Jose Marın Antuna
Toda solucion fundamental se determina con exactitud de una solucion de la ecuacion ho-mogenea.
La demostracion es muy sencilla y se expone en el libro citado.
Lo que expresa el teorema es que, si E0(x) es tal que L(D)E0(x) = 0 y E(x) es solucionfundamental, entonces, E(x) + E0(x) es, tambien, solucion fundamental del operador L(D).
Recordemos que, para una funcion f(x), su transformada de Fourier se define como
F (k) =
∫ ∞
−∞f(ξ)eikξdξ (13.69)
y la transformada inversa se expresa por la formula:
f(x) =1
2π
∫ ∞
−∞F (k)e−ikxdx (13.70)
Como sabemos, la transformada de Fourier de las derivadas de la funcion f(x) se calculan porla formula:
f (l)(x) ↔F (−ik)lF (k) (13.71)
Tiene lugar un importante teorema.
Teorema.
Para que la funcion generalizada E(x) sea solucion fundamental del operador L(D), es necesarioy suficiente que su transformada de Fourier E(k) satisfaga la ecuacion:
L(−ik)E(k) = 1 (13.72)
donde
L(k) =m∑n=0
ankn (13.73)
por lo que L(−ik) = P (k) es cierto polinomio.
La demostracion de este teorema la obviamos; el lector interesado puede verla en el libro citado.Lo que nos interesa ahora es sacar la conclusion siguiente:
El problema de construir soluciones fundamentales de los operadores diferenciales lineales concoeficientes constantes se reduce a resolver ecuaciones algebraicas del tipo
Metodo de la Funcion de Green 565
P (k)E(k) = 1 (13.74)
Es decir, la transformada de Fourier de la solucion fundamental tiene la forma:
E(k) =1
P (k)(13.75)
La ecuacion P (k) = 0 se conoce, en el caso de las ecuaciones hiperbolicas, con el nombre derelacion de dispersion.
En virtud de lo dicho, la solucion fundamental se halla, de acuerdo con (13.70), en la forma:
E(x) =1
2π
∫ ∞
−∞
e−ikx
P (k)dk (13.76)
La integral en (13.76) se puede calcular, por ejemplo, con ayuda de la teorıa de residuos, demanera que el metodo aquı descrito resulta comodo y poderoso.
Tacitamente, aquı hemos escrito las expresiones para el caso en que x ∈ R; en el caso en quex ∈ Rn, la expresion (13.76) se sustituye por la formula:
E(x) =1
(2π)n
∫ ∞
−∞
e−ik·x
P (k)dk (13.77)
y todo se trabaja de forma igual.
13.2.3 Ecuacion con parte derecha
Con ayuda de la solucion fundamental E(x) del operador L(D), se puede construir la solucionde la ecuacion
L(D)u = f(x) (13.78)
con f(x) arbitraria. Efectivamente, tiene lugar la siguiente afirmacion:
Teorema.
Sea f(x) una funcion generalizada tal, que la convolucion E ∗ f existe en el sentido de funciongeneralizada. Entonces, la solucion de la ecuacion (13.78) existe en la clase de funciones gene-ralizadas y viene dada por la formula:

566 Jose Marın Antuna
u = E ∗ f (13.79)
Esta solucion es unica en la clase de funciones generalizadas para las que existe la convolucioncon E.
Demostracion:
Apliquemos el operador L(D) a la convolucion (13.79). Obtenemos:
L(D)(E ∗ f) =m∑k=0
akDk(E ∗ f) =
(m∑k=0
akDkE
)∗ f = l(D)E ∗ f = δ ∗ f = f
Ası queda demostrado que (13.79) es solucion de la ecuacion (13.78).
La unicidad de esta solucion es evidente, ya que la ecuacion homogenea L(D)u = 0 solo tienesolucion trivial.
Efectivamente:
u = u ∗ δ = u ∗ L(D)E = L(D)u ∗ E = 0
Demostrado el teorema.
Analicemos el sentido fısico de la solucion (13.79).
La fuente f(x) se puede escribir como la ”suma” de fuentes puntuales, es decir:
f(x) = δ ∗ f =
∫f(ξ)δ(x− ξ)dξ (13.80)
Por (13.68), a cada fuente puntual f(ξ)δ(x− ξ) le corresponde una influencia f(ξ)E(x− ξ). Porconsiguiente, la solucion de (13.78) es la superposicion de estas influencias, es decir:
u = E ∗ f =
∫f(ξ)E(x− ξ)dξ (13.81)
De esta manera concluimos nuestro analisis relacionado con la solucion fundamental de opera-dores lineales de x ∈ Rn.
Pero, en nuestro esquema general tenemos, ademas, la ecuacion ordinaria (13.60); por esoestudiaremos, a continuacion, la solucion fundamental del operador diferencial ordinario.

Metodo de la Funcion de Green 567
13.2.4 Solucion fundamental del operador diferencial lineal ordi-nario
Sea, por definicion, la solucion fundamental del operador diferencial lineal ordinario la funcionE(t) que cumpla:
L[E] =dnE
dtn+ a1
dn−1E
dtn−1+ ...+ anE = δ(t) (13.82)
En el libro de Teorıa de Funciones Generalizadas del autor, se demuestra que, en este caso, lasolucion fundamental E(t) tiene la forma:
E(t) = θ(t)Z(t) (13.83)
donde Z(t) es la solucion del problema:
L[E] = 0
E(0) = 0 (13.84)
E′(0) = 0
.........
E(n−1)(0) = 1
Para nuestros problemas practicos en el curso son de interes los casos:
L1 =d
dt+ a, L2 =
d2
dt2+ a2
que corresponden, respectivamente, a la parte temporal de la ecuacion parabolica y a la de laecuacion hiperbolica.
Ası, los problemas que nos interesan son:
dZ
dt+ aZ = 0 (13.85)
Z(0) = 1
cuya solucion es inmediata:
Z(t) = e−at (13.86)

568 Jose Marın Antuna
y
d2Z
dt2+ a2Z = 0
Z(0) = 0 (13.87)
Z ′(0) = 1
cuya solucion es:
Z(t) =sin at
a(13.88)
Por lo tanto, de acuerdo con (13.83), la solucion fundamental de la ecuacion
dE
dt+ aE = δ(t) (13.89)
es
E1(t) = θ(t)e−at (13.90)
y la solucion fundamental de la ecuacion
d2E
dt2+ a2E = δ(t) (13.91)
es
E2(t) = θ(t)sin at
a(13.92)
Con los resultados hasta aquı obtenidos podemos calcular algunas soluciones fundamentales.
13.2.5 Operador de conduccion del calor (de difusion)
Por definicion, la solucion fundamental es la solucion de la ecuacion:
∂E
∂t− a2Exx = δ(x)δ(t) (13.93)
Aplicando la transformada de Fourier, tendremos que si denotamos por E(k, t) a la transfor-mada de E(x, t):

Metodo de la Funcion de Green 569
E(x, t) ↔F E(k, t), Exx ↔F −k2E
de manera que obtenemos de (13.93):
dE(k)
dt+ k2a2E = δ(t) (13.94)
por lo que, de acuerdo con lo analizado en el punto anterior, tendremos:
E(k, t) = θ(t)e−k2a2t (13.95)
Ası pues, para la solucion fundamental, aplicando la transformada inversa de Fourier, obtene-mos:
E(x, t) =θ(t)
2π
∫ ∞
−∞e−k
2a2te−ikxdk (13.96)
La integral en (13.96) fue calculada en el capıtulo anterior al resolver por transformada deFourier el problema la propagacion de calor en la recta infinita, por lo que, tomando el resultado,finalmente obtenemos, para la solucion fundamental del operador de conduccion de calor, laexpresion:
E(x, t) =θ(t)√4πa2t
e−x2
4a2t (13.97)
Del resultado obtenido se ve que aquella funcion que alla habıamos llamado ”Funcion de Greende la ecuacion parabolica en la recta infinita” es, exactamente, la ”Solucion fundamental” deloperador parabolico.
13.2.6 Operador de onda (de D’Alembert)
En este caso, la solucion fundamental sera la solucion de la ecuacion
E(x, t) ≡ ∂2E
∂t2− a2∇2E = δ(x)δ(t), ∀x ∈ Rn (13.98)
o
∂2E
∂t2− a2∂
2E
∂x2= δ(x)δ(t), ∀x ∈ R1 (13.99)

570 Jose Marın Antuna
Aplicando la transformada de Fourier con las mismas notaciones que en el punto anterior,obtenemos:
d2E
dt2+ k2a2E = δ(t) (13.100)
por lo que, de acuerdo con lo hecho en el punto anterior, tendremos:
E(k, t) = θ(t)sin kat
ka(13.101)
Aplicando la transformada inversa de Fourier obtenemos, pues:
E(x, t) =θ(t)
2πa
∫ ∞
−∞
sin kat
ke−ikxdk (13.102)
La integral en (13.102) puede calcularse indirectamente si tenemos en cuenta el hecho de quela transformada de Fourier de la funcion de Heaviside θ(at− |x|) es:
θ(at− |x|) ↔F
∫ ∞
−∞θ(at− |x|)eikxdx ≡
∫ at
−ateikxdx =
=1
ikeikx|at−at =
1
ik(eikat − e−ikat) =
2
ksin kat (13.103)
Por consiguiente, la transformada inversa de sin katk
es:
sin kat
k↔F 1
2θ(at− |x|) (13.104)
Ası queda calculada, indirectamente, la integral. Por lo tanto:
E(x, t) =θ(t)
2aθ(at− |x|) ≡ 1
2aθ(at− |x|) (13.105)
La ultima igualdad a la derecha es porque siempre consideramos que t > 0.
El resultado obtenido (13.105) nos indica que -al igual que en el caso de la ecuacion parabolica-la funcion de Green de la hiperbolica en la cuerda infinita, obtenida por nosotros en el metodode ondas viajeras, no es otra cosa que la solucion fundamental del operador de D’Alembert enR1.
Veamos, ahora, como serıa la solucion fundamental del operador de D’Alembert en R2 o en R3.De nuevo hay que partir de (13.101), solo que, en este caso, k es un vector bidimensional otridimensional.
Metodo de la Funcion de Green 571
En el libro de Teorıa de Funciones Generalizadas del autor puede verse el calculo correspon-diente; aquı solo presentaremos el resultado.
En el caso bidimensional se obtiene como solucion fundamental del operador de D’Alembert lafuncion:
E(x, t) =θ(at− |x|)
2π√
(at)2 − |x|2, ∀x ∈ R2 (13.106)
y en el caso tridimensional la solucion fundamental es:
E(x, t) =θ(t)
2πaθ((at)2 − |x|2), ∀x ∈ R3 (13.107)
A estos mismos resultados llegaremos por otra vıa cuando estudiemos el proceso de propagacionde ondas en el espacio abierto, en el capıtulo correspondiente del presente libro.
Resumiendo lo visto en el presente epıgrafe, podemos decir que las soluciones fundamentalesde los operadores son funciones generalizadas solucion de la ecuacion que se forma con dichooperador cuando por parte derecha se coloca la funcion delta de Dirac. Ademas, aquello quellamamos funcion de Green es, en esencia lo mismo; ella coincide con la solucion fundamentaldel operador cuando se calculo en todo el espacio-tiempo (−∞ < x < ∞, t > 0) y, paradominios acotados, dadas determinadas condiciones de frontera, la funcion de Green es laforma que adopta la solucion fundamental del operador correspondiente para esa region y esascondiciones y es, tambien, una funcion generalizada.
Para concluir nuestro estudio del metodo de la funcion de Green, pasaremos a continuacion alestudio de esta funcion en el caso de las ecuaciones elıpticas.
13.3 Funcion de Green de la ecuacion de Poisson
13.3.1 Definicion
Anteriormente estudiamos que las funciones 1/r y ln(1/r) eran, respectivamente, la solucionfundamental de la ecuacion de Laplace en el espacio R3 y en el plano R2. En aquella ocasionllegamos a dichas soluciones fundamentales buscando aquellas soluciones de la ecuacion deLaplace que tuvieran la mayor simetrıa posible en el espacio considerado.
El analisis fısico que entonces realizamos nos condujo a concluir que ambas funciones eran lospotenciales creados en todo el espacio por una carga unitaria y puntual colocada en el origende las coordenadas.
De acuerdo con lo que hemos visto en el epıgrafe anterior, lo dicho significa que se cumplen lassiguientes ecuaciones:

572 Jose Marın Antuna
∇2
(− 1
4πr
)= δ(r), ∀R3, ∇2
(− 1
2πln
1
r
)= δ(r), ∀R2 (13.108)
En las expresiones (13.108) hemos colocado las constantes y los signos adecuados para quehaya una correspondencia total con todas las formulas asociadas a esta teorıa (el numero 4πcorresponde al angulo solido que abarca todo el espacio R3 y el numero 2π al angulo planoque abarca todo el plano R2; el signo menos aparece producto de la correspondencia necesariaque debe existir con las formulas integrales de Green que obtuvimos a partir de la formula deGauss-Ostrogradsky).
Tratemos, a continuacion, de construir la funcion de Green que nos permita resolver los pro-blemas de frontera de Dirichlet, Neumann y Tercer Problema para la ecuacion de Poisson; esdecir, los problemas:
De Dirichlet:
∇2u = −f(M), ∀M ∈ V (13.109)
u|S = ϕ(M)
De Neumann:
∇2u = −f(M), ∀M ∈ V (13.110)
∂u
∂n|S = ϕ(M)
Tercer problema de frontera:
∇2u = −f(M), ∀M ∈ V (13.111)(∂u
∂n− hu
)|S = ϕ(M)
Todo el desarrollo lo efectuaremos para el caso tridimensional y, luego, haremos las considera-ciones oportunas para el caso bidimensional.
Observemos la tercera formula de Green:
u(M) =1
4π
∫ ∫S
1
rMP
∂u
∂n− u(P )
∂
∂nP
(1
rMP
)dSP −
1
4π
∫ ∫ ∫V
∇2u
rMP
dP (13.112)
Recuerdese que esta formula es valida en un dominio V de superficie frontera S.

Metodo de la Funcion de Green 573
Ella depende del laplaciano de la funcion u en el volumen V , que es una expresion conocida en lostres problemas planteados (13.109), (13.110) y (13.111). Ademas, depende, simultaneamente,de los valores de la funcion u y de los valores de su derivada normal sobre la superficie fronteradel volumen.
Como en los problemas planteados no se conocen simultaneamente esos valores, ya que en(13.109) solo es conocido el valor de u sobre S, pero no se conoce el valor de ∂u
∂nsobre esa
superficie, en el problema (13.110) se conoce el valor de ∂u∂n
sobre S, pero se desconoce el valorde u y en el problema (13.111) lo que se conoce es una combinacion lineal de ambos valores,pero no cada uno de ellos por separado, la formula (13.112) no nos permite hallar una expresionanalıtica de la solucion de estos problemas en funcion de expresiones conocidas.
Por ello, tratemos de transformar la formula de manera que se pueda eliminar en ella el terminodesconocido; para ello, escribamos la segunda formula de Green en la que por u tomaremos lamisma funcion que queremos encontrar y por v tomaremos una funcion por determinar a la quelo unico que le exigiremos es que sea armonica en el volumen V , es decir: ∇2v = 0 en V .
Bajo estas consideraciones, podemos escribir la segunda formula de Green en la forma siguiente:
0 =
∫ ∫S
v∂u
∂n− u
∂v
∂n
dS −
∫ ∫ ∫V
v∇2udP (13.113)
Sumando las expresiones (13.112) y (13.113), obtenemos:
u(M) =
∫ ∫S
∂u
∂nG(M,P )− u(P )
∂G(M,P )
∂nP
dSP −
∫ ∫ ∫V
∇2u ·G(M,P )dP (13.114)
donde hemos introducido la notacion:
G(M,P ) =1
4πrMP
+ v (13.115)
La expresion (13.114) en su forma no se diferencia de la tercera formula de Green, salvo en elhecho de que, en ella, la funcion G(M,P ), dada por (13.115) no esta totalmente determinada,ya que en ella la funcion v esta aun por definir y de ella lo unico que se sabe es que es armonicaen V .
13.3.2 Problema de Dirichlet
Como la funcion v esta por definir (de ella solo sabemos que ∇2v = 0), si queremos resolver elproblema (13.109) en el que esta dado el valor de u sobre S, como desconocemos el valor de ∂u
∂n
sobre S, eliminamos el termino en (13.114) que lo contiene, eligiendo la funcion armonica v deforma tal, que se cumpla que
574 Jose Marın Antuna
G|S = 0 (13.116)
Entonces, la solucion del problema (13.109) se obtiene de (13.114) en la forma:
u(M) = −∫ ∫
S
ϕ(P )∂G(M,P )
∂nPdSP +
∫ ∫ ∫V
f(P )G(M,P )dP (13.117)
De esta manera, el problema de Dirichlet (13.109) queda resuelto.
La condicion (13.116) significa que v se escoge de forma que sea la solucion del problema:
∇2v = 0, ∀M ∈ V (13.118)
v|S = − 1
4πrMP
|P∈S
El problema (13.118) indudablemente es tambien un problema de Dirichlet, pero mas sencillo,ya que en el la ecuacion es homogenea y la condicion de frontera no es una funcion arbitraria,sino una funcion concreta. Por ello, en principio, es mas facil de encontrar la funcion v e,incluso, sobre la base de la interpretacion fısica electrostatica de la funcion G(M,P ), dada por(13.115), se pueden elaborar metodos para hallarla, que estudiaremos posteriormente.
Para poder determinar quien es la funcion G(M,P ), resolvamos con ayuda de la formula(13.117) arriba obtenida el siguiente problema de Dirichlet cuya solucion, por definicion, esla funcion de Green de este problema:
∇2u = −δ(M,M0), ∀M ∈ V (13.119)
u|S = 0
Aplicando (13.117), obtenemos:
u(M) =
∫ ∫ ∫V
δ(P,M0)G(M,P )dP = G(M,M0) (13.120)
Ası pues, la funcion G(M,M0) es la funcion de Green del problema de Dirichlet y, fısicamente,se puede interpretar como el potencial creado en el punto M por una carga unitaria y puntualcolocada en M0, si la superficie S se encuentra conectada a tierra (pues G|S = 0).
Notese que esta funcion de Green es la suma de la solucion fundamental de la ecuacion deLaplace en todo el espacio, mas cierta funcion v, solucion de la ecuacion homogenea, escogidade forma tal que G se anule sobre S. Por consiguiente, esta funcion de Green es la solucion fun-damental para este problema, ya que -como vimos en el epıgrafe anterior- la suma de la solucionfundamental, mas una solucion de la ecuacion homogenea es tambien solucion fundamental.
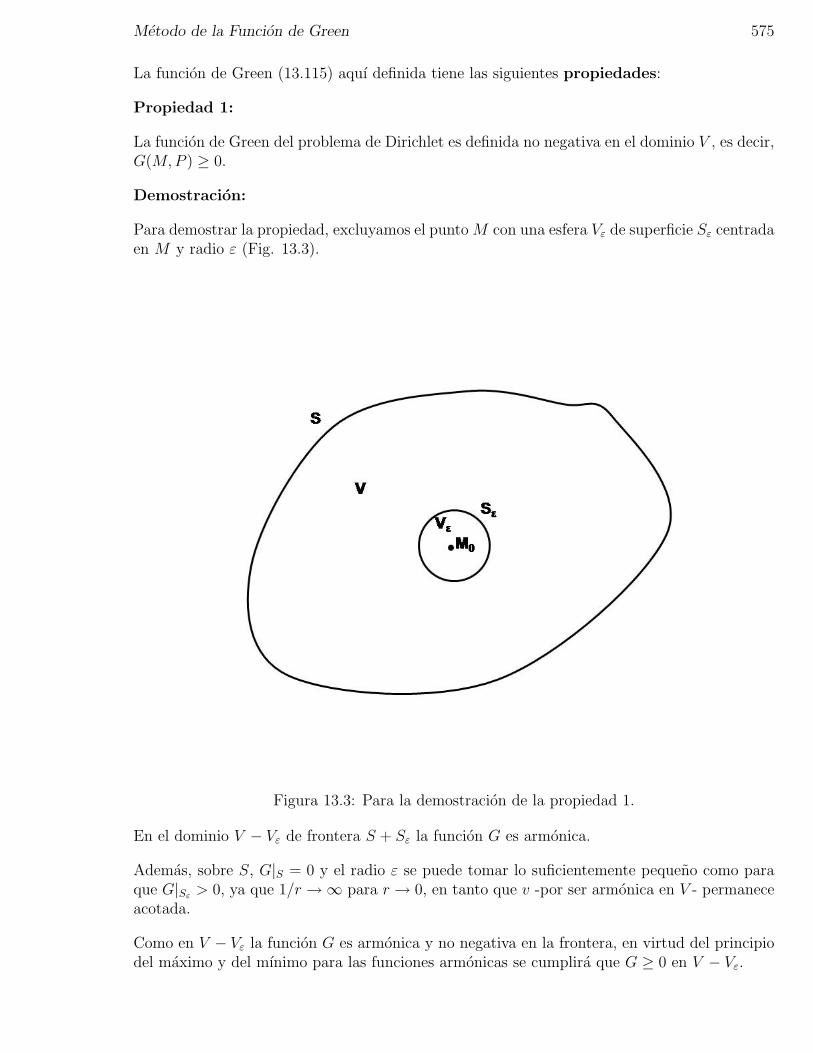
Metodo de la Funcion de Green 575
La funcion de Green (13.115) aquı definida tiene las siguientes propiedades:
Propiedad 1:
La funcion de Green del problema de Dirichlet es definida no negativa en el dominio V , es decir,G(M,P ) ≥ 0.
Demostracion:
Para demostrar la propiedad, excluyamos el puntoM con una esfera Vε de superficie Sε centradaen M y radio ε (Fig. 13.3).
Figura 13.3: Para la demostracion de la propiedad 1.
En el dominio V − Vε de frontera S + Sε la funcion G es armonica.
Ademas, sobre S, G|S = 0 y el radio ε se puede tomar lo suficientemente pequeno como paraque G|Sε > 0, ya que 1/r →∞ para r → 0, en tanto que v -por ser armonica en V - permaneceacotada.
Como en V − Vε la funcion G es armonica y no negativa en la frontera, en virtud del principiodel maximo y del mınimo para las funciones armonicas se cumplira que G ≥ 0 en V − Vε.
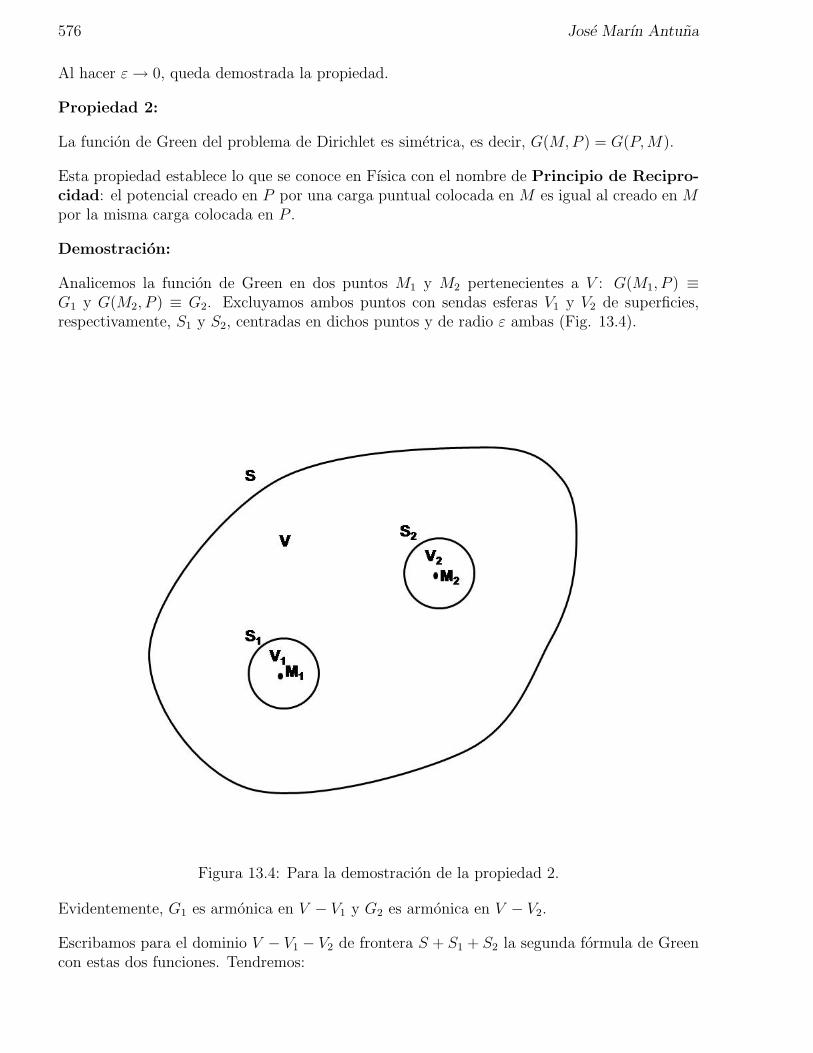
576 Jose Marın Antuna
Al hacer ε→ 0, queda demostrada la propiedad.
Propiedad 2:
La funcion de Green del problema de Dirichlet es simetrica, es decir, G(M,P ) = G(P,M).
Esta propiedad establece lo que se conoce en Fısica con el nombre de Principio de Recipro-cidad: el potencial creado en P por una carga puntual colocada en M es igual al creado en Mpor la misma carga colocada en P .
Demostracion:
Analicemos la funcion de Green en dos puntos M1 y M2 pertenecientes a V : G(M1, P ) ≡G1 y G(M2, P ) ≡ G2. Excluyamos ambos puntos con sendas esferas V1 y V2 de superficies,respectivamente, S1 y S2, centradas en dichos puntos y de radio ε ambas (Fig. 13.4).
Figura 13.4: Para la demostracion de la propiedad 2.
Evidentemente, G1 es armonica en V − V1 y G2 es armonica en V − V2.
Escribamos para el dominio V − V1 − V2 de frontera S + S1 + S2 la segunda formula de Greencon estas dos funciones. Tendremos:

Metodo de la Funcion de Green 577
∫ ∫ ∫V−V1−V2
G1∇2G2 −G2∇2G1dP =
∫ ∫S+S1+S2
G1∂G2
∂n−G2
∂G1
∂n
dS (13.121)
La integral de volumen en (13.121) se anula, pues G1 y G2 son armonicas dentro del dominiode integracion. Ademas, la integral por la superficie S tambien se anula, ya que G1 y G2 soniguales a cero sobre dicha superficie.
Por consiguiente, de (13.121) obtenemos:
∫ ∫S1+S2
G1∂G2
∂n−G2
∂G1
∂n
dS = 0 (13.122)
Analicemos detalladamente las integrales en (13.122). Sobre la superficie esferica S1 tendremos,en virtud de que la normal exterior al volumen V − V1− V2 esta dirigida en la misma direcciony sentido contrario al radio, que:
G1|S1 =1
4πε+ v, y
∂G1
∂n|S1 =
1
4πε2− ∂v
∂r|S1 (13.123)
Ademas, ∂G2
∂nes acotada sobre S1, pues es armonica en dicho punto; es decir:
∣∣∣∣∂G2
∂n
∣∣∣∣ |S1 < A (13.124)
Teniendo en cuenta (13.123) y (13.124), tendremos para las integrales por S1:
∣∣∣∣∫ ∫S1
G1∂G2
∂ndS
∣∣∣∣ ≤ [ 1
4πε+ v
]A4πε2 → 0, ∀ε→ 0 (13.125)
y, aplicando el teorema del valor medio integral:
∫ ∫S1
G2∂G1
∂ndS =
∫ ∫S1
G(M2, P )
[1
4πε2− ∂v
∂r
]dS =
= G(M2, P∗)−G(M2, P
∗)∂v
∂r|P ∗4πε2 → G(M2,M1), ∀ε→ 0 (13.126)
ya que ∂v∂r|S1 es acotada. Aquı P ∗ ∈ S1 y, por lo tanto, P ∗ →M1 para ε→ 0.
Haciendo un analisis identico sobre S2, concluimos que
578 Jose Marın Antuna
∫ ∫S2
G1∂G2
∂n−G2
∂G1
∂n
dS → G(M1,M2), ∀ε→ 0 (13.127)
Colocando (13.126) y (13.127) en (13.122), obtenemos para ε→ 0:
G(M2,M1)−G(M1,M2) = 0
Es decir:
G(M1,M2) = G(M2,M1)
Demostrada la propiedad.
13.3.3 Problema de Neumann
Supongamos, ahora, que queremos resolver el problema de Neumann (13.110). Siguiendo elmismo esquema de razonamiento que en el caso del problema de Dirichlet, deberıamos tratarde eliminar el segundo sumando desconocido en la integral de superficie de la formula (13.114).Por ello, lo logico, aparentemente, serıa escoger la funcion v en la funcion (13.115) de forma talque se cumpliera que
∂G
∂n|S = 0 (13.128)
Sin embargo, hay que tener cuidado con las cosas que, aparentemente, parecen logicas, puesnos pueden conducir a resultados erroneos.
Efectivamente, como la funcion de Green (13.115) cumple con la ecuacion
∇2G = −δ(M,M0) (13.129)
y el teorema de Gauss-Ostrogradsky plantea que
∫ ∫ ∫V
∇2GdP =
∫ ∫S
∂G
∂ndS (13.130)
tendrıamos que la integral de volumen en (13.130), evidentemente, vale −1, por lo que laproposicion (13.128) nos conducirıa a un absurdo.
Con vistas a satisfacer la ecuacion (13.130), en lugar de (13.128) exigiremos que la funcion vsea tal que se cumpla que
Metodo de la Funcion de Green 579
∂G
∂n|S = −1
S(13.131)
donde S es el area de la superficie S. Entonces, la solucion del problema de Neumann (13.110)adquiere, con ayuda de (13.114), la forma:
u(M) =
∫ ∫S
ϕ(P )G(M,P )dSP +
∫ ∫ ∫V
f(P )G(M,P )dP + 〈u〉S (13.132)
donde
〈u〉S =1
S
∫ ∫S
u(P )dS (13.133)
es el promedio del potencial inducido sobre la superficie S por la carga unitaria y puntualcolocada en el interior, en el punto M .
Notese que la solucion (13.132) obtenida es una ecuacion integral, ya que la funcion buscadau(M) aparece, tambien, dentro de la integral. Esto hace que el problema de Neumann sea unproblema difıcil y en el que, por lo general, los autores hacen poco hincapie.
Recuerdese que dos soluciones del problema de Neumann se diferencian entre sı en una cons-tante. Esa constante, generalmente, es, desde el punto de vista electrostatico, el promedio delpotencial inducido sobre la superficie, por lo que, si este dato es conocido experimentalmente, elproblema puede resolverse directamente; en caso contrario, para hallar la solucion del problemano quedara mas remedio que acometer la solucion de la ecuacion integral.
Por otra parte, si la superficie S es abierta (infinita), entonces S = ∞, por lo que 〈u〉S = 0, loque equivale a decir que, en tal caso, se puede proponer la condicion (13.128) y resolver.
13.3.4 Tercer Problema de Frontera
Supongamos, ahora, que queremos resolver el problema (13.111). En este caso, de la formula(13.114) obtenemos:
u(M) =
∫ ∫S
[ϕ(P ) + hu]G− u
∂G
∂n
dSP +
∫ ∫ ∫V
f(P )G(M,P )dP =
=
∫ ∫S
ϕ(P )G(M,P )− u(P )
[∂G
∂n− hG
]dSP +
∫ ∫ ∫V
f(P )G(M,P )dP (13.134)
Con vistas a obtener una solucion en terminos de funciones conocidas, debemos eliminar elsegundo sumando en la integral de superficie, lo que se logra eligiendo la funcion v en lafuncion de Green (13.115), de forma tal que se cumpla que

580 Jose Marın Antuna
[∂G
∂n− hG
]|S = 0 (13.135)
Entonces, la solucion del problema (13.111) queda en la forma:
u(M) =
∫ ∫S
ϕ(P )G(M,P )dSP +
∫ ∫ ∫V
f(P )G(M,P )dP (13.136)
De esta manera quedan resueltos los problemas de frontera de la ecuacion de Poisson con ayudade la funcion de Green.
13.3.5 Caso bidimensional
Como sabemos, los problemas bidimensionales aparecen en la Fısica Matematica cuando elproblema a resolver tiene simetrıa con respecto a una de las coordenadas espaciales, digamos,respecto a la coordenada z.
En el caso de dos dimensiones espaciales, todo el desarrollo es analogo al hasta aquı efectuado.Tomamos la tercera formula de Green en el plano:
u(M) =1
2π
∫C
∂u
∂nln
1
rMP
− u(P )∂
∂nP
(ln
1
rMP
)dlP −
1
2π
∫ ∫S
∇2u ln1
rMP
dSP (13.137)
y tomamos la segunda formula de Green en el plano en la que u es la misma funcion que apareceen (13.137) y por v tomamos una funcion arbitraria, pero armonica en S:
0 =
∫C
∂u
∂nv − ∂v
∂nu
dl −
∫ ∫S
∇2u · vdS (13.138)
Sumamos (13.137) y (13.138) y obtenemos la formula:
u(M) =
∫C
∂u
∂nG(M,P )− u(P )
∂G(M,P )
∂nP
dlP −
∫ ∫S
∇2u ·G(M,P )dSP (13.139)
donde hemos introducido la notacion:
G(M,P ) =1
2πln
1
rMP
+ v (13.140)
que tiene todas las mismas caracterısticas y propiedades de la funcion (13.115) del caso tridi-mensional y es la funcion de Green de la ecuacion de Poisson en R2.
Metodo de la Funcion de Green 581
La solucion del problema de Dirichlet en dos dimensiones
∇2u = −f(M), ∀M ∈ S (13.141)
u|C = ϕ(M)
donde S es un dominio bidimensional en R2 de frontera C, se obtiene escogiendo la funcion vde forma tal que se cumpla que
G|C = 0 (13.142)
y vendra dada por la expresion:
u(M) = −∫C
ϕ(P )∂G(M,P )
∂nPdlP +
∫ ∫S
f(P )G(M,P )dSP (13.143)
Para el problema bidimensional de Neumann
∇2u = −f(M), ∀M ∈ S (13.144)
∂u
∂n|C = ϕ(M)
se elige v de manera que se cumpla que
∂G
∂n|C = −1
l(13.145)
donde l es la longitud del contorno C, frontera del dominio S y la solucion sera:
u(M) =
∫C
ϕ(P )G(M,P )dlP +
∫ ∫S
f(P )G(M,P )dSP + 〈u〉C (13.146)
donde
〈u〉C =1
l
∫C
u(P )dl (13.147)
es el promedio del potencial inducido sobre el contorno C.
Para el tercer problema de frontera:

582 Jose Marın Antuna
∇2u = −f(M), ∀M ∈ S (13.148)(∂u
∂n− hu
)|C = ϕ(M)
escogiendo v de forma tal que se cumpla que
(∂G
∂n− hG
)|C = 0 (13.149)
se obtiene la solucion como:
u(M) =
∫C
ϕ(P )G(M,P )dlP +
∫ ∫S
f(P )G(M,P )dSP (13.150)
Se recomienda al lector que efectue los calculos indicados en este punto, a fin de que obtengapor sı mismo los resultados expresados.
13.3.6 Ejemplos
1. Hallemos la funcion de Green del problema de Dirichlet en el semiplano superior y > 0.
Como estamos en el caso bidimensional, la funcion de Green tendra la forma dada por laecuacion (13.140). A fin de lograr que
G|C ≡ G|P∈C = 0
colocamos una carga puntual igual y negativa en el punto M ′ simetrico con M , respectoa la frontera C, que, en este caso, es el eje x (Fig. 13.5).
El potencial creado por dicha carga colocada en M ′ sera v, de manera que la funcion deGreen, en este caso, tendra la forma
G(M,P ) =1
2πln
1
rMP
− 1
2πln
1
rM ′P(13.151)
Notese que la funcion
v = − 1
2πln
1
rM ′P
es, en el semiplano superior, una funcion armonica, ya que el punto donde el laplacianoes desigual de cero para ella es M ′, que esta fuera del dominio y > 0.
Es obvio que con esta funcion se logra anular la funcion de Green sobre C, pues cuandoP ∈ C (es decir, sobre el eje x), las distancias rMP y rM ′P se hacen iguales (ver Fig. 13.5).

Metodo de la Funcion de Green 583
Figura 13.5: Para la funcion de Green en el semiplano superior y > 0.
Denotando las coordenadas de los puntos, segun indica la figura 13.5, por:
M = (x, y), M ′ = (x,−y), P = (ξ, η)
tendremos para la funcion de Green (13.151):
G(x, y, ξ, η) =1
2π
ln
1√(x− ξ)2 + (y − η)2
− ln1√
(x− ξ)2 + (y + η)2
Es decir:
G(x, y, ξ, η) =1
2πln
√(x− ξ)2 + (y + η)2√(x− ξ)2 + (y − η)2
O, finalmente
G(x, y, ξ, η) =1
4πln
(x− ξ)2 + (y + η)2
(x− ξ)2 + (y − η)2(13.152)

584 Jose Marın Antuna
La expresion (13.152) es la funcion de Green del semiplano superior y > 0 para el problemade Dirichlet.
Notese que, efectivamente,
G|C = G|η=0 = 0
Desde el punto de vista fısico, la igualdad a cero del potencial (13.152) sobre la fronteray = 0 quiere decir que las lıneas de campo son perpendiculares a dicha frontera en todoslos puntos; siempre es conveniente tener en cuenta el significado fısico que tienen losresultados que se obtienen.
Con ayuda de la funcion hallada resolvamos en el semiplano superior el problema:
∇2u = 0, ∀y > 0 (13.153)
u(x, 0) = f(x)
La solucion vendra dada por la formula (13.143). En ella la integral de superficie desa-parece, ya que la ecuacion es homogenea y solo queda la integral por C que, en este caso,es el eje ξ desde −∞ hasta +∞.
Como tenemos que, aquı, dlP = dξ y ϕ(P ) = f(ξ), solo queda calcular ∂G∂nP
|P∈C .
Tenemos, despues de calculos sencillos (la normal exterior al dominio y > 0 esta indicadaen la figura 13.5):
∂G
∂nP|P∈C = −∂G
∂η|η=0 = − 1
π
y
(x− ξ)2 + y2(13.154)
Colocando (13.154) en la formula (13.143), la solucion del problema sera:
u(x, y) =1
π
∫ ∞
−∞
yf(ξ)dξ
(x− ξ)2 + y2(13.155)
La formula (13.155) recibe el nombre de integral de Poisson.
Veamos un ejemplo concreto de aplicacion de la formula (13.155). Resolvamos el problema
∇2u = 0, ∀y > 0 (13.156)
u(x, 0) = cos x
La solucion sera, por la formula de Poisson:
u(x, y) =1
π
∫ ∞
−∞
y cos ξdξ
(x− ξ)2 + y2(13.157)
La integral (13.157) se calcula facilmente con ayuda de la teorıa de residuos. El polosimple en el semiplano superior es ξ = x+ iy, de manera que tendremos:

Metodo de la Funcion de Green 585
u(x, y) =1
π
∫ ∞
−∞
y cos ξdξ
(x− ξ)2 + y2= Re
2πi
y
πRes
[eiξ
(x− ξ)2 + y2, x+ iy
]=
= Re
[iyeixe−y
iy
]= e−y cosx (13.158)
2. La funcion de Green del problema de Neumann en el semiplano superior y > 0 es facil dehallar, debido a que, en este caso, la longitud de la frontera, formada por todo el eje x,es infinita, de forma tal que aquı la condicion (13.145) se convierte en
∂G
∂n|C = 0 (13.159)
No es difıcil percatarse de que, en este caso, la funcion de Green es:
G(M,P ) =1
2πln
1
rMP
+1
2πln
1
rM ′P(13.160)
donde M , M ′ y P son los mismos puntos que aparecen en la figura 13.5.
Fısicamente esto equivale a colocar en el punto M ′, simetrico con M respecto a la frontera,una carga igual y del mismo signo a la carga puntual que esta en el punto M .
La derivada del potencial igual a cero en la frontera significa, como se sabe, que el campoelectrostatico sobre dicha frontera es nulo.
El lector debe intentar dibujar como seran las lıneas de fuerza del campo creado por estasdos cargas en este caso.
3. Hallemos la funcion de Green del problema de Dirichlet en el semiespacio superior z > 0.
Evidentemente, este caso tridimensional se resolvera con la funcion (13.115), donde lafuncion v sera el potencial creado por una carga igual y negativa colocada en el puntoM ′, simetrico con el punto M respecto al plano (x, y) frontera. Ası pues, tendremos:
G(M,P ) =1
4πrMP
− 1
4πrM ′P(13.161)
Denotando las coordenadas de los puntos por
M = x, y, z, M ′ = x, y,−z, P = ξ, η, ζ
la expresion (13.161) toma la forma:
G(x, y, z, ξ, η, ζ) =1
4π
1
[(x− ξ)2 + (y − η)2 + (z − ζ)2]1/2−
− 1
4π
1
[(x− ξ)2 + (y − η)2 + (z + ζ)2]1/2(13.162)
Para hallar la solucion del problema

586 Jose Marın Antuna
∇2u = 0, ∀z > 0 (13.163)
u(x, y, 0) = f(x, y)
con la ayuda de la formula (13.117), se calcula la derivada:
∂G
∂nP|P∈S = −∂G
∂ζ|ζ=0 =
1
2π
1
[(x− ξ)2 + (y − η)2 + z2]3/2(13.164)
que el lector debe efectuar a modo de ejercicio, por lo que la solucion vendra dada por laexpresion
u(x, y, z) =1
2π
∫ ∞
−∞
∫ ∞
−∞
zf(ξ, η)dξdη
[(x− ξ)2 + (y − η)2 + z2]3/2(13.165)
No es difıcil comprobar que para el semiespacio superior, en virtud de que el area delplano (x, y), frontera de dicho dominio, es infinita, la funcion de Green del problema deNeumann sera:
G(M,P ) =1
4πrMP
+1
4πrM ′P(13.166)
ya que con ella se garantiza la condicion ∂G∂nP
|P∈S = 0.
Los puntos M , M ′ y P son los mismos arriba considerados.
13.3.7 Metodo de las imagenes electrostaticas
Los ejemplos de funcion de Green que hemos hallado en el punto anterior estan basados enun criterio y una interpretacion que dan origen al llamado metodo de las imagenes elec-trostaticas para hallar la funcion de Green de un problema. Veamos su esencia.
Como sabemos, hallar la funcion de Green en un dominio V significa buscar la funcion varmonica en V que cumpla con (13.118). De esta manera logramos que G|S = 0 y podemos,con ayuda de la formula (13.117), resolver el problema de Dirichlet.
Observese que el primer sumando 14πrMP
de la funcion de Green es, fısicamente, el potencialcreado en todo punto P del espacio por una carga puntual unitaria colocada en el punto M ∈ V .
La funcion v sera, entonces, otro potencial creado en V por ciertas cargas que se colocaranfuera de V , de forma tal que el potencial resultante sobre la superficie S sea G|S = 0. Es obvioque dichas cargas tienen que estar fuera de V , pues, de acuerdo con (13.118), la funcion v esarmonica en V .
Esas cargas que se colocan detras de la superficie S, fuera del dominio V , se conocen como lasimagenes de la carga colocada en el punto M y el metodo para hallar de esta forma la funcionde Green se llama metodo de las imagenes electrostaticas, debido a su interpretacion.
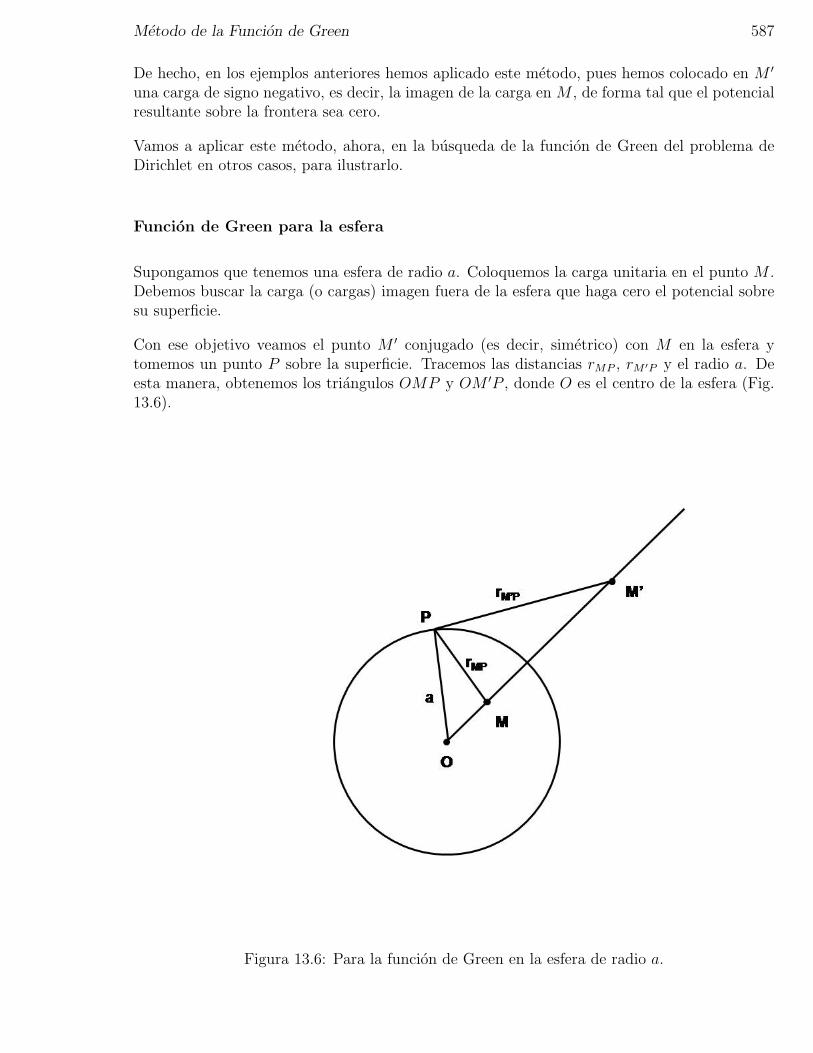
Metodo de la Funcion de Green 587
De hecho, en los ejemplos anteriores hemos aplicado este metodo, pues hemos colocado en M ′
una carga de signo negativo, es decir, la imagen de la carga en M , de forma tal que el potencialresultante sobre la frontera sea cero.
Vamos a aplicar este metodo, ahora, en la busqueda de la funcion de Green del problema deDirichlet en otros casos, para ilustrarlo.
Funcion de Green para la esfera
Supongamos que tenemos una esfera de radio a. Coloquemos la carga unitaria en el punto M .Debemos buscar la carga (o cargas) imagen fuera de la esfera que haga cero el potencial sobresu superficie.
Con ese objetivo veamos el punto M ′ conjugado (es decir, simetrico) con M en la esfera ytomemos un punto P sobre la superficie. Tracemos las distancias rMP , rM ′P y el radio a. Deesta manera, obtenemos los triangulos OMP y OM ′P , donde O es el centro de la esfera (Fig.13.6).
Figura 13.6: Para la funcion de Green en la esfera de radio a.
588 Jose Marın Antuna
Como los puntos M y M ′ son conjugados, tendremos que
OM ·OM ′ = a2
Esto quiere decir que los lados que forman el angulo O, comun a ambos triangulos, son pro-porcionales. Por lo tanto, los triangulos son semejantes y la proporcionalidad se cumplira paralos terceros lados. Es decir, tendremos que:
OM
a=
a
OM ′ =rMP
rM ′P(13.167)
De (13.167) obtenemos:
rMP =OM
arM ′P ≡
r
arM ′P (13.168)
donde hemos llamado r = OM . Ası pues, cuando el punto P esta sobre la superficie S, secumple la igualdad
1
rMP
=a
r
1
rM ′P(13.169)
Por consiguiente, si la carga imagen es colocada en el punto M ′, la funcion v, armonica dentrode la esfera, la tomamos como
v = −ar
1
4πrM ′P(13.170)
ya que esta funcion toma para P ∈ S el valor 14πrMP
y, por tanto, G|S = 0. Ası pues, la funcionde Green en la esfera queda en la forma
G(M,P ) =1
4πrMP
− a
r
1
4πrM ′P(13.171)
Funcion de Green para el cırculo
En el cırculo, es decir, en el problema bidimensional, el analisis hecho es valido, de manera quela funcion de Green para el cırculo sera:
G(M,P ) =1
2πln
1
rMP
− 1
2πlna
r
1
rM ′P(13.172)
Metodo de la Funcion de Green 589
Introduzcamos coordenadas polares. Llamemos
M = (r, ϕ) y, por tanto M ′ =
(a2
r, ϕ
)
y, ademas, llamemos P = (ρ, α). Entonces, tendremos que:
rMP =√r2 − 2rρ cos(ϕ− α) + ρ2 (13.173)
y, ademas:
r
arM ′P =
r
a
√(a2
r
)2
− 2a2
rρ cos(ϕ− α) + ρ2 =
√a2 − 2rρ cos(ϕ− α) +
r2ρ2
a2(13.174)
Colocando (13.173) y (13.174) en (13.172), obtenemos para la funcion de Green en el cırculo ydespues de sencillos calculos la expresion:
G(r, ϕ, ρ, α) =1
4πlna2 − 2rρ cos(ϕ− α) + r2ρ2
a2
r2 − 2rρ cos(ϕ− α) + ρ2(13.175)
Por consiguiente, si queremos resolver el siguiente problema de Dirichlet en el cırculo:
∇2u = 0, ∀r < a (13.176)
u(a, ϕ) = f(ϕ)
con ayuda de la formula (13.143), calculamos
∂G
∂nP|P∈C =
∂G
∂ρ|ρ=a =
1
2πa
r2 − a2
r2 − 2ar cos(ϕ− α) + a2(13.177)
y, colocando (13.177) en (13.143) y teniendo en cuenta que en la circunferencia dl = adα,obtenemos la solucion del problema (13.176) en la forma:
u(r, ϕ) =1
2π
∫ 2π
0
a2 − r2
r2 − 2ar cos(ϕ− α) + a2f(α)dα (13.178)
La expresion (13.178) recibe el nombre de integral de Poisson para el cırculo.
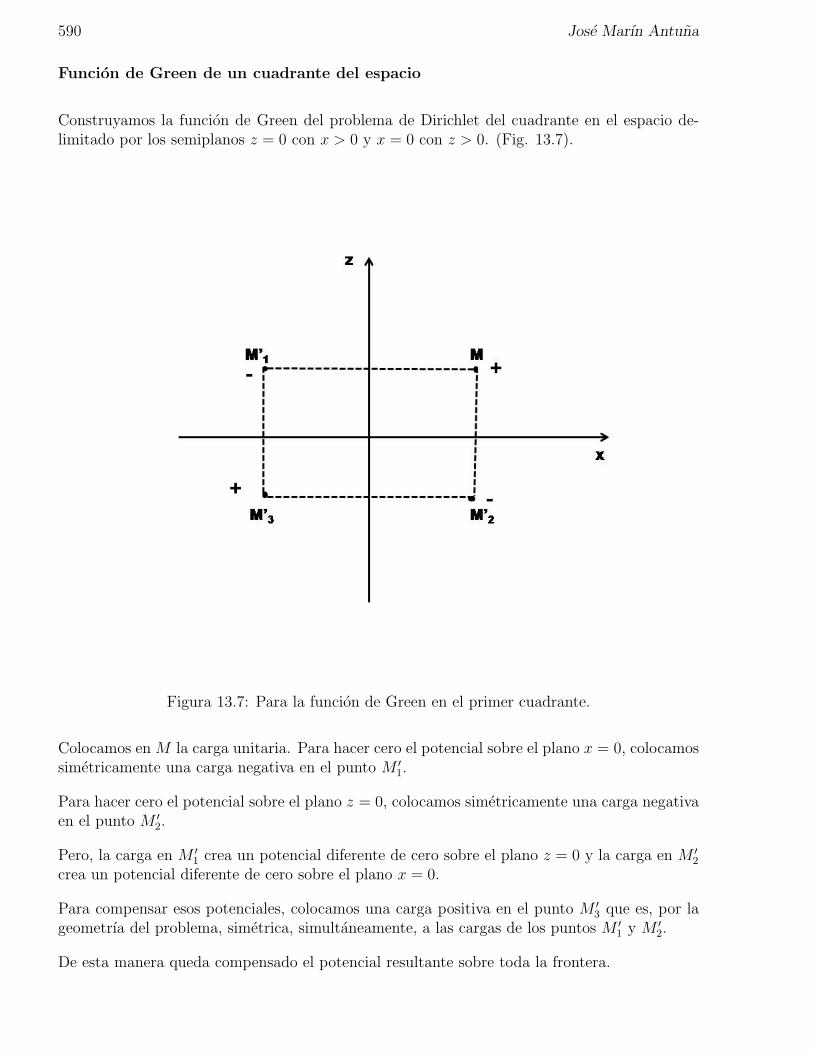
590 Jose Marın Antuna
Funcion de Green de un cuadrante del espacio
Construyamos la funcion de Green del problema de Dirichlet del cuadrante en el espacio de-limitado por los semiplanos z = 0 con x > 0 y x = 0 con z > 0. (Fig. 13.7).
Figura 13.7: Para la funcion de Green en el primer cuadrante.
Colocamos en M la carga unitaria. Para hacer cero el potencial sobre el plano x = 0, colocamossimetricamente una carga negativa en el punto M ′
1.
Para hacer cero el potencial sobre el plano z = 0, colocamos simetricamente una carga negativaen el punto M ′
2.
Pero, la carga en M ′1 crea un potencial diferente de cero sobre el plano z = 0 y la carga en M ′
2
crea un potencial diferente de cero sobre el plano x = 0.
Para compensar esos potenciales, colocamos una carga positiva en el punto M ′3 que es, por la
geometrıa del problema, simetrica, simultaneamente, a las cargas de los puntos M ′1 y M ′
2.
De esta manera queda compensado el potencial resultante sobre toda la frontera.

Metodo de la Funcion de Green 591
Por consiguiente, la funcion de Green sera:
G(M,P ) =1
4π
[1
rMP
− 1
rM ′1P
− 1
rM ′2P
+1
rM ′3P
](13.179)
Funcion de Green entre dos placas paralelas
Construyamos la funcion de Green del problema de Dirichlet en el dominio encerrado por dosplacas paralelas colocadas a la distancia l una de la otra.
Supongamos que las placas estan en z = 0 y z = l. Coloquemos la carga unitaria en el puntointerior M(x, y, z).
Colocamos una imagen en el punto M ′0 = (x, y,−z). Con ella hacemos cero el potencial sobre
el plano z = 0. Pero, en z = l dicho potencial no es cero, por lo tanto, colocamos en M ′1 la
imagen de M y en M1 la imagen de M ′0, haciendo ası igual a cero el potencial sobre z = l.
Aquı
M ′1 = (x, y, 2l − z), M1 = (x, y, 2l + z)
Pero con esto se rompe el equilibrio en z = 0. Para hacer cero el potencial sobre esa superficie,colocamos en M ′
−1 = (x, y,−2l + z) la imagen de M ′1 y en M−1 = (x, y,−2l − z) la imagen de
M1.
Este proceso tenemos que continuarlo hasta el infinito, obteniendo la distribucion de cargas quese observa en la figura 13.8.
La funcion de Green deseada sera:
G(M,P ) =1
4π
∞∑n=−∞
[1
rn− 1
r′n
](13.180)
donde
rn =√
(ξ − x)2 + (η − y)2 + (ζ − zn)2 (13.181)
r′n =√
(ξ − x)2 + (η − y)2 + (ζ − z′n)2 (13.182)
y
zn = 2nl + z, z′n = 2nl − z
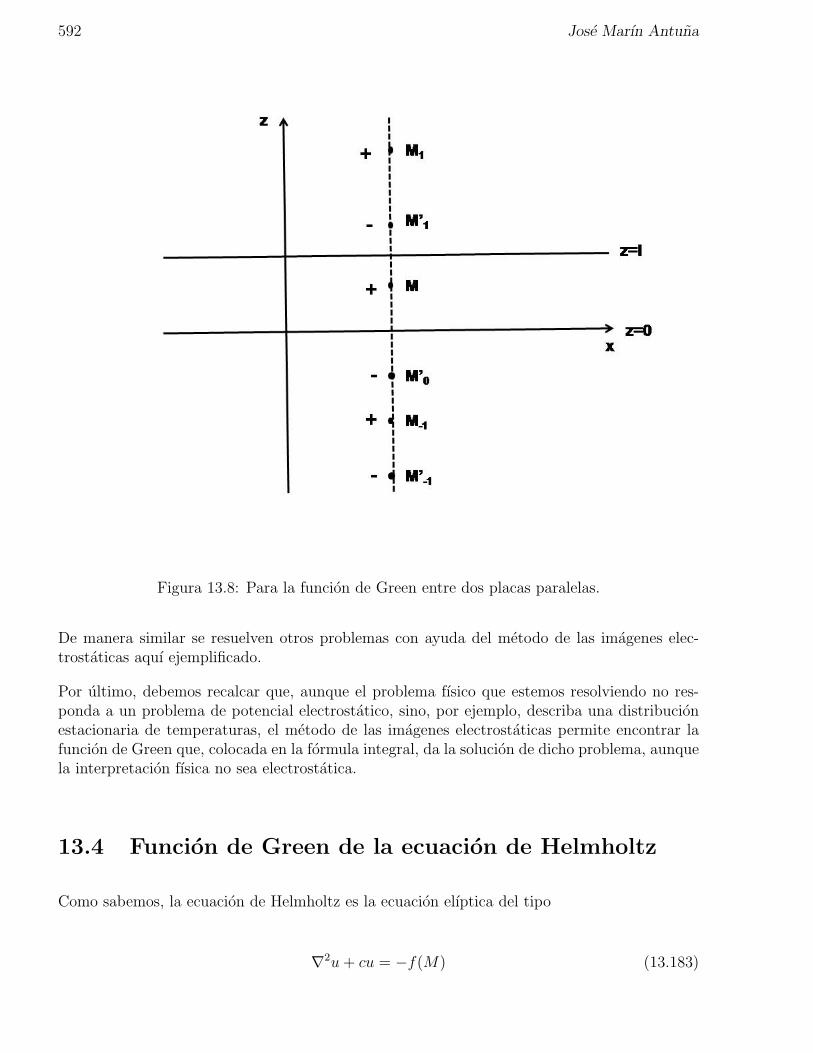
592 Jose Marın Antuna
Figura 13.8: Para la funcion de Green entre dos placas paralelas.
De manera similar se resuelven otros problemas con ayuda del metodo de las imagenes elec-trostaticas aquı ejemplificado.
Por ultimo, debemos recalcar que, aunque el problema fısico que estemos resolviendo no res-ponda a un problema de potencial electrostatico, sino, por ejemplo, describa una distribucionestacionaria de temperaturas, el metodo de las imagenes electrostaticas permite encontrar lafuncion de Green que, colocada en la formula integral, da la solucion de dicho problema, aunquela interpretacion fısica no sea electrostatica.
13.4 Funcion de Green de la ecuacion de Helmholtz
Como sabemos, la ecuacion de Helmholtz es la ecuacion elıptica del tipo
∇2u+ cu = −f(M) (13.183)

Metodo de la Funcion de Green 593
donde podıa ser c = k2 > 0, o c = −κ2 < 0.
13.4.1 Soluciones fundamentales de la ecuacion de Helmholtz
En correspondencia con lo estudiado en el epıgrafe 2 del presente capıtulo, busquemos la solucionde la ecuacion
∇2u+ cu = −4πδ(r) (13.184)
es decir, la solucion fundamental.
Hagamoslo de manera similar a como actuamos para la ecuacion de Laplace, es decir, busque-mos las soluciones de la ecuacion de Helmholtz que tengan una singularidad en el origen decoordenadas.
Veremos por separado los casos tridimensional y bidimensional y, dentro de ellos, los corres-pondientes a los distintos signos del parametro c de la ecuacion.
Caso tridimensional
Buscaremos la solucion con simetrıa esferica: u(r, θ, ϕ) = U(r). Entonces, la ecuacion deHelmholtz homogenea, escrita en coordenadas esfericas, tendra la forma para r 6= 0
1
r2
d
dr
(r2dU
dr
)+ cU = 0 (13.185)
ya que la parte angular del laplaciano en esfericas desaparece.
Propongamos una solucion en la forma
U(r) =v(r)
r(13.186)
Entonces
dU
dr=v′
r− v
r2
y, por lo tanto
d
dr
(r2dU
dr
)=
d
dr[rv′ − v] = rv′′ (13.187)

594 Jose Marın Antuna
Colocando (13.187) en la ecuacion (13.184), con r 6= 0, nos queda, despues de las cancelaciones:
v′′ + cv = 0 (13.188)
La ecuacion (13.188) tiene dos soluciones linealmente independientes
v1 = eir√c, v1 = e−ir
√c (13.189)
Veamos los dos casos posibles para c:
1. c = k2 > 0.
En este caso, de (13.189) obtenemos:
v1 = eikr, v1 = e−ikr
Por lo tanto, obtenemos las soluciones fundamentales de la ecuacion de Helmholtz en laforma:
U1(r) =eikr
r, U2(r) =
e−ikr
r(13.190)
Ambas funciones dadas por (13.190) satisfacen los requisitos de la solucion fundamental;es decir, tienen una singularidad tipo polo simple en r = 0, lo que equivale a decir quesatisfacen la ecuacion (13.184) y, ademas, ambas decrecen y tienden a cero a medida quer crece, o sea, a medida que nos alejamos del origen de las coordenadas.
Esto, fısicamente, es necesario que ocurra, pues -como sabemos- la inhomogeneidaddeltaica en la ecuacion (13.184) significa la presencia de una fuente unitaria del campodescrito por la ecuacion de Helmholtz; por lo tanto, es logico que, al alejarnos de dichafuente, el campo decrezca.
2. c = −κ2 < 0.
Ahora, de (13.189) obtenemos:
v1 = e−κr, v2 = eκr
Por consiguiente, la unica solucion fundamental posible en este caso es
U(r) =e−κr
r(13.191)
que es la que tiene la singularidad requerida en r = 0 y, ademas, tiende a cero parar → ∞. La otra posible solucion desde el punto de vista matematico, con v2 carece desentido fısico, ya que, al alejarnos de la fuente del potencial, ella crece.
Lo aquı obtenido esta en concordancia con el hecho ya estudiado al plantear los problemasmatematicos para la ecuacion de Helmholtz; alla vimos que para c = −κ2 < 0, se cumplıael teorema de unicidad, en tanto que, para c = k2 > 0, no.
Metodo de la Funcion de Green 595
Es conveniente destacar que todas las soluciones fundamentales (13.190) y (13.191) aquı obte-nidas se reducen a la solucion fundamental del operador de Laplace cuando c = 0. Esto estaen correspondencia con el hecho de que el operador de Helmholtz se reduce al de Laplace parac = 0.
Caso bidimensional
Buscaremos en R2 la solucion con simetrıa polar: u(r, ϕ) = U(r). Entonces, la ecuacion deHelmholtz homogenea en coordenadas polares adopta la forma:
1
r
d
dr
(rdU
dr
)+ cU = 0 (13.192)
pues la parte angular del laplaciano en polares desaparece. Veamos los dos casos posibles parac.
1. c = k2 > 0.
En este caso la ecuacion (13.192) es:
1
r
d
dr
(rdU
dr
)+ k2U = 0 (13.193)
que, haciendo el cambio de variable x = kr, vemos que no es mas que la ecuacion deBessel de orden cero.
Expresemos sus dos soluciones linealmente independientes como funciones de Hankel:
U1(r) = H(1)0 (kr), U2(r) = H
(2)0 (kr) (13.194)
ya que ellas tienen una singularidad logarıtmica en el origen de coordenadas r = 0.
De acuerdo con la expresion asintotica de las funciones de Hankel, estas soluciones fun-damentales, dadas por (13.194), tienden a cero para r →∞ en la forma:
U1(r) =
√2
πkrei(kr−
π4 ), U2(r) =
√2
πkre−i(kr−
π4 ) (13.195)
Es decir, ambas soluciones tienden a cero para r →∞ como 1/√r.
Lo dicho esta en concordancia con el sentido fısico que tienen que tener las solucionesfundamentales, ya que responden a una fuente unitaria y puntual del campo colocada enr = 0.
2. c = −κ2 < 0.
En este caso, la ecuacion (13.192) nos da:
596 Jose Marın Antuna
1
r
d
dr
(rdU
dr
)− κ2U = 0 (13.196)
Haciendo el cambio de variable x = κr, nos percatamos de que (13.196) es la ecuacion deBessel de argumento imaginario de orden cero.
Su unica solucion con la singularidad logarıtmica requerida en el origen de coordenadasr = 0 es la funcion de MacDonald. Por lo tanto, la unica solucion fundamental deloperador de Helmholtz en este caso sera:
U(r) = K0(κr) (13.197)
La otra solucion linealmente independiente de (13.196), I0(κr), no tiene singularidad enr = 0 y, ademas, crece a medida que r crece, por lo que carece de sentido y no es solucionfundamental de esta ecuacion.
Lo dicho esta en correspondencia con la unicidad de la solucion de la ecuacion de Helm-holtz para el caso en que c = −κ2 < 0 que estudiamos anteriormente.
No es difıcil percatarse de que, para c = 0, las soluciones fundamentales (13.194) y (13.197) setransforman en la solucion fundamental del operador de Laplace en R2, 1
2πln 1
r, lo que esta en
plena correspondencia con el hecho de que para c = 0 el operador de Helmholtz se convierte enel operador de Laplace.
13.4.2 Funcion de Green de la ecuacion de Helmholtz
Para construir la funcion de Green de la ecuacion de Helmholtz, introduzcamos la notacion
L[u] = ∇2u+ cu (13.198)
que, a veces, se denomina operador de Helmholtz y que, evidentemente, es un operadorlineal.
Haremos nuestro analisis en tres dimensiones en un dominio V de frontera S. Recordemos que,si u y v son dos funciones continuas, con primeras derivadas continuas en V + S y segundasderivadas continuas en V , entonces para ellas tiene validez la segunda formula de Green.
∫ ∫S
u∂v
∂n− v
∂u
∂n
dS =
∫ ∫ ∫V
u∇2v − v∇2udP (13.199)
En la integral de volumen a la derecha de (13.199) sumemos y restemos la expresion cuv; deesta manera la integral no se altera y tendremos:

Metodo de la Funcion de Green 597
∫ ∫S
u∂v
∂n− v
∂u
∂n
dS =
∫ ∫ ∫V
u∇2v + ucv − v∇2u− vcudP ≡
≡∫ ∫ ∫
V
u[∇2v + cv]− v[∇2u+ cu]dP ≡∫ ∫ ∫
V
uL[v]− vL[u]dP
Es decir, obtenemos que la segunda formula de Green sigue siendo valida si en la integral devolumen sustituimos el operador de Laplace por el operador de Helmholtz:
∫ ∫S
u∂v
∂n− v
∂u
∂n
dS =
∫ ∫ ∫V
uL[v]− vL[u]dP (13.200)
Caso c = k2 > 0
Veamos el caso en que c = k2 > 0 y tomemos en (13.200) por funcion v una de las solucionesfundamentales de la ecuacion de Helmholtz:
v =e−ikrMP
rMP
(13.201)
donde rMP es la distancia entre un punto fijo M(x, y, z) ∈ V y el punto P (ξ, η, ζ) de inte-gracion. En principio, pudieramos proceder de forma identica a como hicimos anteriormentepara obtener, a partir de (13.200), una tercera formula de Green, excluyendo el punto de dis-continuidad del integrando, P = M , en V con una esfera Vε de radio ε y frontera Sε centradaen M y aplicando la formula (13.200) al dominio biconexo V −Vε de frontera S+Sε y tomando,despues, el lımite cuando ε→ 0.
Sin embargo, podemos ahorrarnos esos calculos si tenemos en cuenta que, de acuerdo con(13.184), para (13.201) se cumple que:
L[v] ≡ L
[e−ikrMP
rMP
]= −4πδ(M,P ) (13.202)
cosa que ahora podemos afirmar en virtud de lo estudiado en el epıgrafe 2 del presente capıtulo,ya que (13.201) es una solucion fundamental del operador L.
Ası pues, colocando (13.202) en (13.200), queda:
∫ ∫S
u∂
∂nP
(e−ikrMP
rMP
)− e−ikrMP
rMP
∂u
∂n
dSP = − 4π
∫ ∫ ∫V
u(P )δ(M,P )dP −
−∫ ∫ ∫
V
L[u]e−ikrMP
rMP
dP (13.203)
598 Jose Marın Antuna
En virtud de que la primera integral de volumen a la derecha de (13.203), por la propiedadfundamental de la delta de Dirac, es u(M), finalmente obtenemos la expresion:
u(M) =1
4π
∫ ∫S
e−ikrMP
rMP
∂u
∂n− u
∂
∂nP
(e−ikrMP
rMP
)dSP −
1
4π
∫ ∫ ∫V
L[u]e−ikrMP
rMP
dP
(13.204)
La expresion (13.204) es la Tercera Formula de Green para el operador de Helmholtzen el caso c = k2 > 0.
Mas adelante comprobaremos que esta formula describe la amplitud de oscilaciones estabi-lizadas en el espacio, cuando estudiemos ese tema y la formula de Kirchhoff. Por ello, estatercera formula de Green para el operador de Helmholtz se conoce, tambien, como Formulade Kirchhoff estacionaria.
Es evidente que si, en lugar de (13.201), tomamos la otra solucion fundamental del operadorde Helmholtz:
v =eikrMP
rMP
(13.205)
de forma totalmente analoga se obtiene:
u(M) =1
4π
∫ ∫S
eikrMP
rMP
∂u
∂n− u
∂
∂nP
(eikrMP
rMP
)dSP −
1
4π
∫ ∫ ∫V
L[u]eikrMP
rMP
dP (13.206)
Es conveniente efectuar el siguiente analisis. La formula (13.206) ha sido obtenida desde unpunto de vista estrictamente matematico, como resultado de la sustitucion en la segundaformula de Green (13.200) de la segunda solucion fundamental (13.205) de la ecuacion deHelmholtz para el caso en que c = k2 > 0. La sustitucion de la primera solucion fundamental(13.201) nos condujo a la formula (13.204).
Desde el punto de vista matematico, no podemos dar un criterio que nos permita discernir cualde las dos formulas debe ser utilizada a la hora de resolver los problemas fısicos que conduzcana la ecuacion de Helmholtz. Para obtener tal criterio es necesario tener en consideracion elorigen fısico del problema.
En un capıtulo posterior veremos que la ecuacion de Helmholtz es satisfecha por la amplitudde ondas provocadas por fuerzas periodicas armonicas. Si la dependencia temporal de dichases eiωt, como veremos, la amplitud de las ondas provocadas cumple la formula (13.204).
Asociado a esto tenemos que dicha amplitud, multiplicada por la dependencia temporal eiωt
responde a la realidad fısica en el sentido de que nos da en el punto M y en el instante t elvalor del campo ondulatorio en funcion de valores de dicho campo en tiempos anteriores, t− r
a,
donde a es la velocidad de propagacion de la perturbacion.
Metodo de la Funcion de Green 599
La dependencia temporal e−iωt con la formula (13.206) nos darıa la conclusion de que el valor delcampo ondulatorio en el punto M en el instante t estarıa determinado por los valores de dichocampo en tiempos posteriores, t + r
a; es decir, que el campo ondulatorio vendrıa determinado
por sus valores en tiempos posteriores, en el futuro, cosa que, desde el punto de vista fısico eincluso filosofico, carece de sentido.
Sin embargo, si la dependencia temporal de la onda se toma de la forma e−iωt, entonces, laformula (13.206) serıa la que nos darıa un resultado determinıstico correcto, mientras que laformula (13.204) carecerıa de sentido fısico.
Por consiguiente, concluimos que, a la hora de determinar con cual de las dos formulas, (13.204)o (13.206), debemos trabajar, es necesario remontarnos al origen fısico del problema y tener encuenta la dependencia funcional respecto al tiempo considerada.
Lo hasta aquı dicho tiene validez en el analisis clasico de las formulas; existen ramas en laFısica donde la dependencia de la solucion respecto a valores futuros de la misma no es algoque pueda considerarse absurdo.
Caso c = −κ2 < 0
Veamos, ahora, el caso en que c = −κ2 < 0. Aquı tomamos en la segunda formula de Green(13.200) por v la unica solucion fundamental del operador de Helmholtz:
v =e−κrMP
rMP
(13.207)
y efectuamos exactamente los mismos pasos realizados para la obtencion de la formula (13.204);como resultado obtenemos:
u(M) =1
4π
∫ ∫S
e−κrMP
rMP
∂u
∂n− u
∂
∂nP
(e−κrMP
rMP
)dSP −
1
4π
∫ ∫ ∫V
L[u]e−κrMP
rMP
dP
(13.208)
Las formulas (13.204), (13.206) y (13.208) son un analogo de la tercera formula de Greenobtenida anteriormente con el operador de Laplace y se llaman Formulas de Green para laecuacion de Helmholtz.
Notese que las tres se reducen a la tercera formula de Green con el operador de Laplace parac → 0, resultado logico, ya que, para c → 0, la ecuacion de Helmholtz se reduce a la ecuacionde Laplace.
Como se puede apreciar, las tres formulas mencionadas establecen que cualquier funcion con-tinua con primeras derivadas continuas en V + S y segundas derivadas continuas en V es sus-ceptible de ser expresada como la superposicion de tres integrales: dos integrales de superficiey una integral de volumen.

600 Jose Marın Antuna
Estas formulas no son posibles de utilizar directamente para la solucion de los problemas defrontera para la ecuacion de Helmholtz, ya que, en el planteamiento de los mismos, no se dan,simultaneamente, los valores de la funcion y los de su derivada normal ∂u
∂nsobre la superficie S,
frontera del dominio V . Por ello y de forma analoga a como procedimos en el epıgrafe anterior,haremos lo siguiente.
Tomemos la segunda formula de Green (13.200) escrita en la forma siguiente:
0 =
∫ ∫S
v∂u
∂n− u
∂v
∂n
dS −
∫ ∫ ∫V
vL[u]− uL[v]dP (13.209)
y supongamos en ella que la funcion v es solucion de la ecuacion homogenea de Helmholtz, esdecir, L[v] = 0.
Si sumamos, entonces, (13.209) con cada una de las tres formulas (13.204), (13.206) y (13.208),obtenemos la siguiente expresion integral:
u(M) =
∫ ∫S
∂u
∂nG(M,P )− u(P )
∂G(M,P )
∂nP
dSP −
∫ ∫ ∫V
L[u]G(M,P )dP (13.210)
donde la funcion G(M,P ) es:
1. Para c = −κ2 < 0:
G(M,P ) =e−κrMP
rMP
+ v (13.211)
2. Para c = k2 > 0:
G(M,P ) =e±ikrMP
rMP
+ v (13.212)
Aquı el signo + o -, segun vimos arriba, se toma de la Fısica.
Si ahora queremos resolver el primer problema de frontera para la ecuacion de Helmholtz:
L[u] = −f(M), ∀M ∈ V (13.213)
u|S = ϕ(M)
escogemos a v en la funcion (13.212) de forma tal que G|S = 0 y la solucion del problema(13.213), a partir de (13.210), se obtiene en la forma:

Metodo de la Funcion de Green 601
u(M) = −∫ ∫
S
ϕ(P )∂G(M,P )
∂nPdSP +
∫ ∫ ∫V
f(P )G(M,P )dP (13.214)
Si el problema que queremos resolver es el segundo problema de frontera:
L[u] = −f(M), ∀M ∈ V (13.215)
∂u
∂n|S = ϕ(M)
entonces, se escoge la funcion v de forma tal que ∂u∂n|S = 0 y la solucion del problema (13.215)
sera:
u(M) =
∫ ∫S
ϕ(P )G(M,P )dSP +
∫ ∫ ∫V
f(P )G(M,P )dP (13.216)
Por ultimo, si el problema a resolver es el tercer problema de frontera:
L[u] = −f(M), ∀M ∈ V (13.217)(∂u
∂n− hu
)|S = ϕ(M)
entonces, escogiendo v de forma tal que(∂u∂n− hu
)|S = 0, la solucion de (13.217) queda expre-
sada por la formula (13.216).
Veamos, ahora, como se procede en el caso de dos dimensiones espaciales.
Si consideramos la segunda formula de Green en dos dimensiones para un dominio S ∈ R2 defrontera dada por la curva C, entonces, despues de realizar el mismo procedimiento que noscondujo a la formula (13.200) en tres dimensiones, obtenemos la siguiente expresion:
∫C
u∂v
∂n− v
∂u
∂n
dl =
∫ ∫S
uL[v]− vL[u]dS (13.218)
1. Caso c = k2 > 0:
Veamos, primero, el caso en que c = k2 > 0. Si sustituimos en (13.218) v por la solucionfundamental de la ecuacion de Helmholtz expresada como U2 en (13.194), entonces, te-niendo en cuenta que no es difıcil demostrar que
L[U2] ≡ L[H(2)0 (kr)] = −4iδ(r) (13.219)
602 Jose Marın Antuna
se llega, facilmente, a la siguiente tercera formula de Green para el operador de Helmholtzen dos dimensiones, analoga a la formula (13.204):
u(M) =i
4
∫C
∂u
∂nH
(2)0 (krMP )− u(P )
∂
∂nP[H
(2)0 (krMP )]
dlP −
− i4
∫ ∫S
L[u]H(2)0 (krMP )dSP (13.220)
En aras de ganar claridad en el resultado (13.220), vamos a realizar, a continuacion, elcalculo de esta formula por un metodo similar al empleado para la obtencion de la terceraformula de Green de la ecuacion de Laplace. Esto lo haremos, porque, seguramente, noes evidente para el lector la validez de la ecuacion (13.219).
Ası las cosas, sustituyendo en (13.218) v por U2 y excluyendo el punto M , en el que lafuncion de Hankel tiene una singularidad, con un cırculo SMε de frontera CM
ε centrado enM y radio ε (Fig. 13.9) tendremos que -pues hemos eliminado el punto de singularidad-en el dominio S − SMε de frontera C + CM
ε , L[U2] = 0, de manera que, de (13.218),obtenemos:
∫C+CM
ε
u∂
∂n[H
(2)0 (kr)]− ∂u
∂nH
(2)0 (kr)
dl = −
∫ ∫S−SM
ε
L[u]H(2)0 (kr)dS (13.221)
Analicemos las integrales por la circunferencia CMε . Teniendo en cuenta el compor-
tamiento asintotico para ε→ 0 de la funcion de Hankel, tendremos:
∫CM
ε
∂u
∂nH
(2)0 (kr)dl =
(∂u
∂n
)|M∗H
(2)0 (kε)2πε ≈
≈(∂u
∂n
)|M∗
(1− i
2
πlnkε
2
)2πε→ 0, ∀ε→ 0 (13.222)
ya que, obviamente,
limε→0
ln(kε)ε = 0.
Ademas:
∫CM
ε
u∂
∂n[H
(2)0 (kr)]dl ≈ u(M∗∗)
(dH
(2)0 (kr)
dr
)|r=ε2πε ≈
≈ −4iu(M∗∗) → −4iu(M), ∀ε→ 0 (13.223)
pues
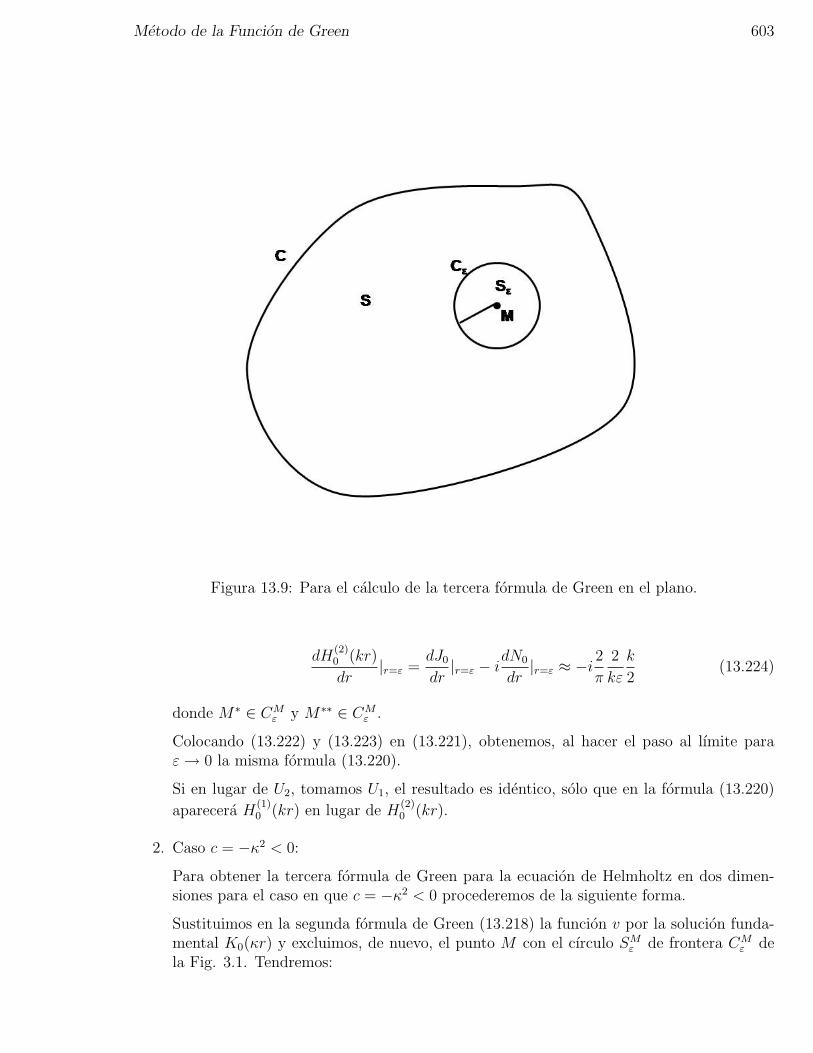
Metodo de la Funcion de Green 603
Figura 13.9: Para el calculo de la tercera formula de Green en el plano.
dH(2)0 (kr)
dr|r=ε =
dJ0
dr|r=ε − i
dN0
dr|r=ε ≈ −i 2
π
2
kε
k
2(13.224)
donde M∗ ∈ CMε y M∗∗ ∈ CM
ε .
Colocando (13.222) y (13.223) en (13.221), obtenemos, al hacer el paso al lımite paraε→ 0 la misma formula (13.220).
Si en lugar de U2, tomamos U1, el resultado es identico, solo que en la formula (13.220)
aparecera H(1)0 (kr) en lugar de H
(2)0 (kr).
2. Caso c = −κ2 < 0:
Para obtener la tercera formula de Green para la ecuacion de Helmholtz en dos dimen-siones para el caso en que c = −κ2 < 0 procederemos de la siguiente forma.
Sustituimos en la segunda formula de Green (13.218) la funcion v por la solucion funda-mental K0(κr) y excluimos, de nuevo, el punto M con el cırculo SMε de frontera CM
ε dela Fig. 3.1. Tendremos:

604 Jose Marın Antuna
∫C+CM
ε
u∂
∂n[K0(kr)]−
∂u
∂nH
(2)0 (kr)
dl = −
∫ ∫S−SM
ε
L[u]H(2)0 (kr)dS (13.225)
Teniendo en cuenta que, por definicion de funcion de MacDonald:
K0(κr) =π
2H
(1)0 (iκr) (13.226)
y en virtud del comportamiento asintotico para x→ 0 de la funcion de Hankel
H(1)0 (x) ≈
(1 + i
2
πlnx
2
)(13.227)
tendremos en el entorno de r = 0:
K0(κr) ≈π
2i
(1 + i
2
πlniκr
2
)= − ln
iκr
2+ i
π
2= − ln
κr
2(13.228)
y, sobre CMε :
∂K0(κr)
∂n|CM
ε= −dK0(κr)
dr|r=ε =
1
ε(13.229)
Por lo tanto, en las integrales sobre CMε tendremos:∫
CMε
∂u
∂nK0(κr)dl ≈ − ln
κε
2
(∂u
∂n
)|M∗2πε→ 0, ∀ε→ 0 (13.230)
∫CM
ε
u∂
∂n[K0(κr)]dl ≈
1
εu(M∗∗)2πε→ 2πu(M), ∀ε→ 0 (13.231)
donde M∗ ∈ CMε y M∗∗ ∈ CM
ε .
Por consiguiente, tomando el lımite para ε→ 0 en (13.225) y teniendo en cuenta (13.230)y (13.231), obtenemos para la tercera formula de Green en el caso c = −κ2 < 0 laexpresion:
u(M) =1
2π
∫C
∂u
∂nK0(κrMP )− u(P )
∂
∂nP[K0(κrMP )]
dlP −
− 1
2π
∫ ∫S
L[u]K0(κrMP )dSP (13.232)
A este mismo resultado hubieramos llegado, si en (13.218) hubiesemos sustituıdo, direc-tamente
L[K0] = −2πδ(r) (13.233)
lo que es posible demostrar.

Metodo de la Funcion de Green 605
Con ayuda de las formulas (13.220) y (13.232) y haciendo el mismo procedimiento efectuadopara la obtencion de la funcion de Green en tres dimensiones espaciales, concluimos que, en elcaso bidimensional la funcion de Green de la ecuacion de Helmholtz es:
1. Para el caso c = k2 > 0:
G(M,P ) =i
4H
(2)0 (kr) + v (13.234)
2. Para el caso c = −κ2 < 0:
G(M,P ) =1
2πK0(κr) + v (13.235)
donde, en ambos casos, la funcion v satisface la ecuacion homogenea de Helmholtz L[v] = 0en el dominio en cuestion y se elige de forma tal que G satisfaga la condicion homogenea deprimero, segundo o tercer tipo, en dependencia de si queremos resolver el primero, segundo otercer problema de frontera en el plano.
Es conveniente destacar que en la obtencion de (13.234) hemos considerado, implıcitamente,que la dependencia temporal de las oscilaciones cuya amplitud es u(M) es del tipo eiωt; de ser
ella de la forma e−iωt, en (13.234) debera aparecer H(1)0 (kr) para lograr un resultado fısicamente
correcto.
Analicemos de la siguiente manera el problema de la seleccion adecuada de la funcion que debefigurar en la funcion de Green de forma tal que el resultado fısico que se obtenga sea logico.
Supongamos la dependencia funcional respecto al tiempo en las ondas del tipo eiωt. Entonces, entres dimensiones, tomando las soluciones fundamentales de la ecuacion de Helmholtz, tenemosque
1
reikreiωt =
1
rei(ωt+kr) (13.236)
es una onda esferica convergente, es decir, que viaja desde el infinito hacia el origen de coorde-nadas, mientras que
1
re−ikreiωt =
1
rei(ωt−kr) (13.237)
es una onda esferica divergente, que viaja desde el origen de coordenadas hacia el infinito.
De manera totalmente analoga, en dos dimensiones
H(1)0 (kr)eiωt (13.238)
606 Jose Marın Antuna
es una onda cilındrica convergente, o sea, que viaja desde el infinito hacia el origen de coorde-nadas, en tanto que
H(2)0 (kr)eiωt (13.239)
es una onda cilındrica divergente, es decir, que viaja desde el origen de coordenadas hacia elinfinito.
Si la dependencia temporal fuera e−iωt la situacion serıa exactamente al reves.
13.5 Ejercicios del capıtulo
1. Hallar por el metodo de las imagenes electrostaticas la funcion de Green del problema deDirichlet para la ecuacion de Laplace en el semicırculo superior cuya frontera en coorde-nadas polares se define por las ecuaciones r = R, 0 ≤ ϕ ≤ π.
2. Hallar por el metodo de las imagenes electrostaticas la funcion de Green del problema deDirichlet para la ecuacion de Laplace en el cuarto de cırculo cuya frontera en coordenadaspolares se define por las ecuaciones r = R, 0 ≤ ϕ ≤ π/2.
3. Hallar la distribucion estacionaria de la concentracion de un gas radiactivo en el espacioinfinito, si dicha concentracion es creada por una fuente puntual de intensidad Q0.
4. La fuente puntual de un gas radiactivo de intensidad Q0 se encuentra en el espacio a ladistancia ζ del plano z = 0. Hallar la distribucion estacionaria de la concentracion deeste gas para el semiespacio z > 0, considerando que la superficie z = 0 es impenetrablepor el gas.
5. Hallar la funcion de Green y la solucion del primer problema de frontera y del segundoproblema de frontera para la ecuacion de Helmholtz con c = k2 > 0 en el semiespaciosuperior z > 0.
6. Resolver el problema anterior para el caso bidimensional en el semiplano superior y > 0.
Capıtulo 14
Metodo de la Teorıa de Potenciales
Abordaremos en el presente capıtulo el estudio teorico de lo que en Fısica Matematica se conocecon el nombre de potenciales y que pueden ser utilizados como un metodo mas para la solucionde los problemas de frontera.
Primero, estudiaremos los potenciales para la ecuacion elıptica de Poisson y despues estudiare-mos los potenciales correspondientes a la ecuacion de Helmholtz.
Al final del capıtulo haremos algunas consideraciones generales.
14.1 Potenciales para la ecuacion de Poisson
14.1.1 Conceptos iniciales
Sabemos que el potencial creado en el punto M del espacio por una carga e colocada en elpunto P es
u =e
rMP
(14.1)
donde rMP es la distancia entre ambos puntos.
Las integrales de esta funcion se conocen con el nombre de potenciales y a su estudio nosdedicaremos de inmediato.
Supongamos que tenemos en cierto cuerpo de volumen V (Fig. 14.1) una carga distribuida condensidad ρ(P ).
El elemento de volumen dP creara sobre el punto M un potencial que sera
607
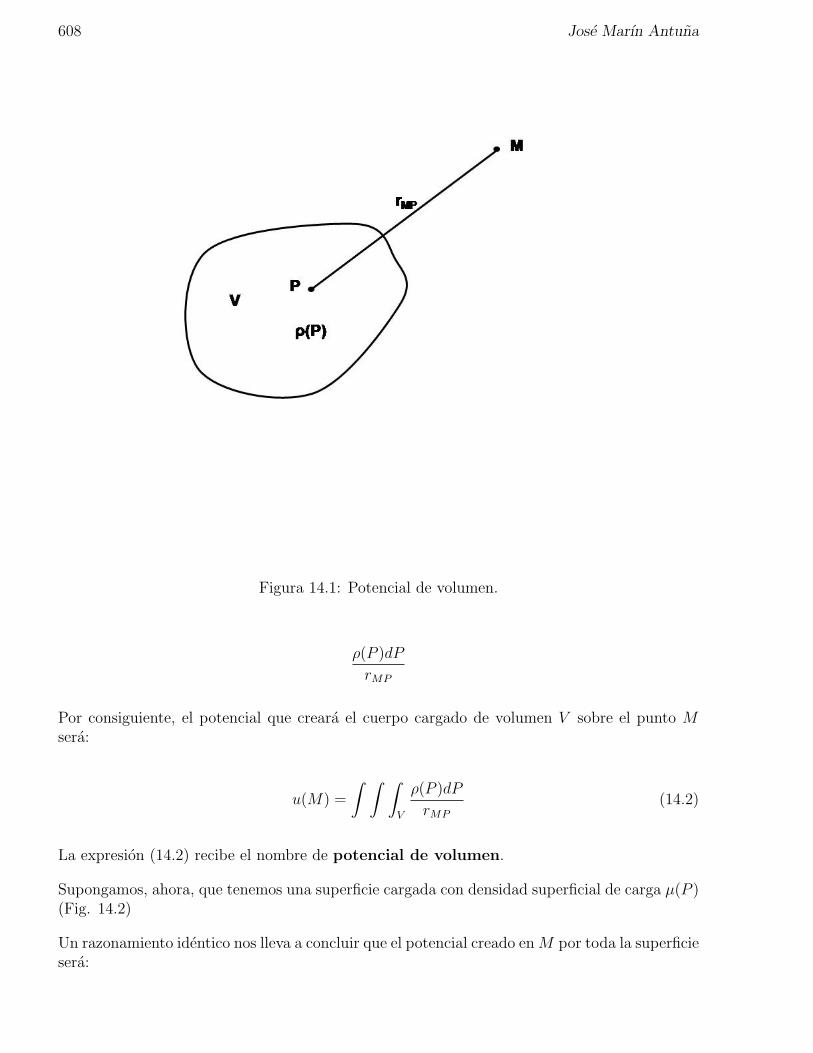
608 Jose Marın Antuna
Figura 14.1: Potencial de volumen.
ρ(P )dP
rMP
Por consiguiente, el potencial que creara el cuerpo cargado de volumen V sobre el punto Msera:
u(M) =
∫ ∫ ∫V
ρ(P )dP
rMP
(14.2)
La expresion (14.2) recibe el nombre de potencial de volumen.
Supongamos, ahora, que tenemos una superficie cargada con densidad superficial de carga µ(P )(Fig. 14.2)
Un razonamiento identico nos lleva a concluir que el potencial creado enM por toda la superficiesera:
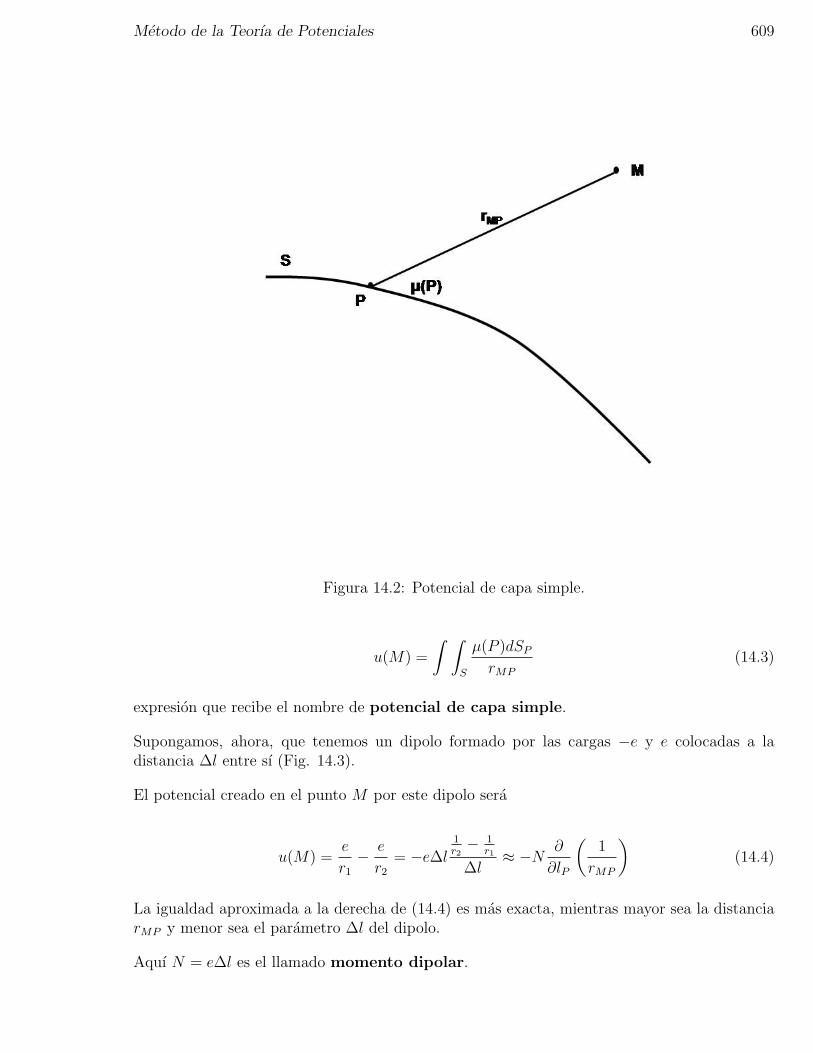
Metodo de la Teorıa de Potenciales 609
Figura 14.2: Potencial de capa simple.
u(M) =
∫ ∫S
µ(P )dSPrMP
(14.3)
expresion que recibe el nombre de potencial de capa simple.
Supongamos, ahora, que tenemos un dipolo formado por las cargas −e y e colocadas a ladistancia ∆l entre sı (Fig. 14.3).
El potencial creado en el punto M por este dipolo sera
u(M) =e
r1− e
r2= −e∆l
1r2− 1
r1
∆l≈ −N ∂
∂lP
(1
rMP
)(14.4)
La igualdad aproximada a la derecha de (14.4) es mas exacta, mientras mayor sea la distanciarMP y menor sea el parametro ∆l del dipolo.
Aquı N = e∆l es el llamado momento dipolar.
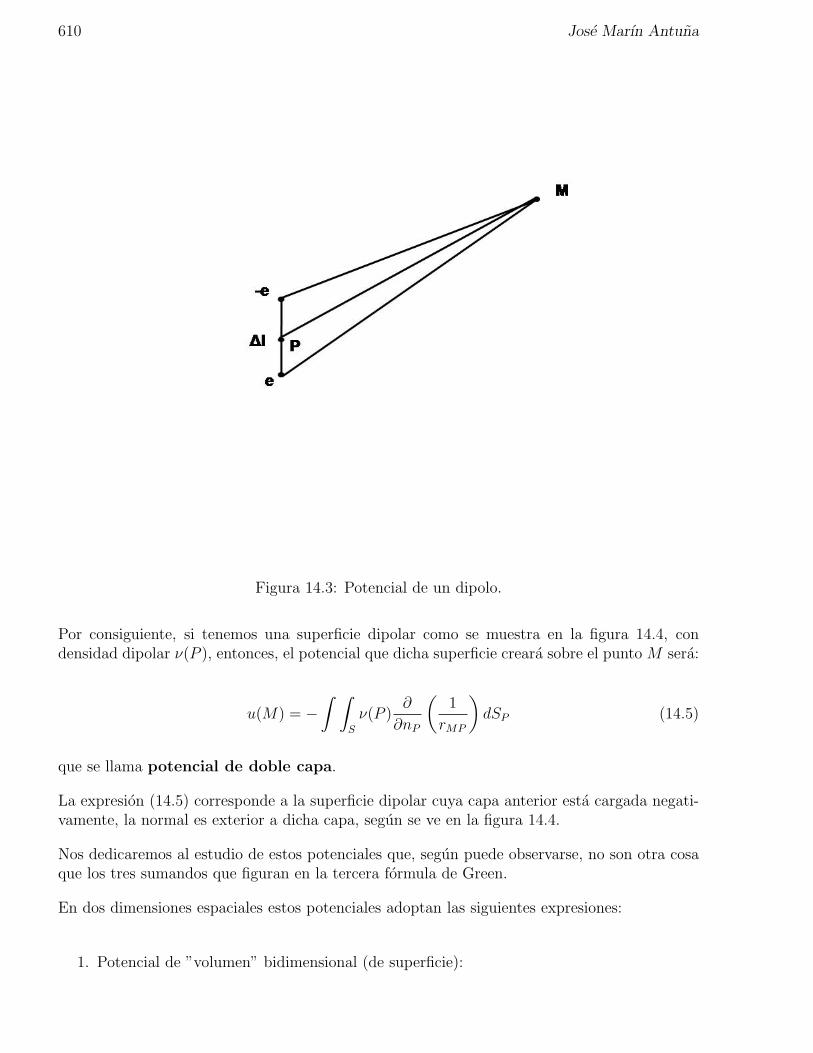
610 Jose Marın Antuna
Figura 14.3: Potencial de un dipolo.
Por consiguiente, si tenemos una superficie dipolar como se muestra en la figura 14.4, condensidad dipolar ν(P ), entonces, el potencial que dicha superficie creara sobre el punto M sera:
u(M) = −∫ ∫
S
ν(P )∂
∂nP
(1
rMP
)dSP (14.5)
que se llama potencial de doble capa.
La expresion (14.5) corresponde a la superficie dipolar cuya capa anterior esta cargada negati-vamente, la normal es exterior a dicha capa, segun se ve en la figura 14.4.
Nos dedicaremos al estudio de estos potenciales que, segun puede observarse, no son otra cosaque los tres sumandos que figuran en la tercera formula de Green.
En dos dimensiones espaciales estos potenciales adoptan las siguientes expresiones:
1. Potencial de ”volumen” bidimensional (de superficie):
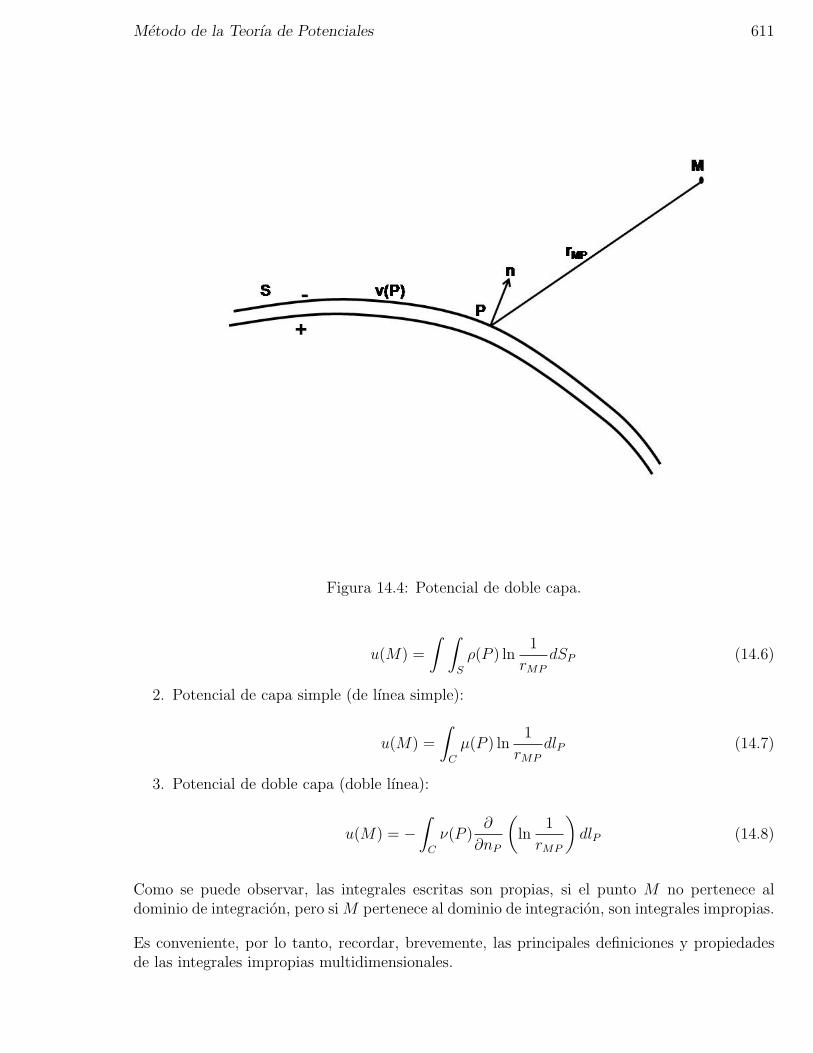
Metodo de la Teorıa de Potenciales 611
Figura 14.4: Potencial de doble capa.
u(M) =
∫ ∫S
ρ(P ) ln1
rMP
dSP (14.6)
2. Potencial de capa simple (de lınea simple):
u(M) =
∫C
µ(P ) ln1
rMP
dlP (14.7)
3. Potencial de doble capa (doble lınea):
u(M) = −∫C
ν(P )∂
∂nP
(ln
1
rMP
)dlP (14.8)
Como se puede observar, las integrales escritas son propias, si el punto M no pertenece aldominio de integracion, pero si M pertenece al dominio de integracion, son integrales impropias.
Es conveniente, por lo tanto, recordar, brevemente, las principales definiciones y propiedadesde las integrales impropias multidimensionales.
612 Jose Marın Antuna
14.1.2 Integrales impropias
Sea la funcion F (M,P ) dada en cierto dominio V y no acotada en el entorno del punto M ∈ V ,es decir, F (M,P ) →∞ para P →M .
Es evidente que, dada esta circunstancia, la integral de F (M,P ) en el dominio V no puede serdefinida como el lımite de sumas integrales, ya que este divergirıa.
Supongamos, ademas, que dado cualquier dominio Vδ que contenga al punto M en su interior,la funcion F (M,P ) en el dominio V − Vδ es acotada e integrable en el sentido corriente de lapalabra; es decir, que la integral
∫ ∫ ∫V−Vδ
F (M,P )dP (14.9)
existe como lımite de sumas integrales. Por δ se representa el diametro del dominio Vδ y seconsidera que, para δ → 0, el dominio Vδ se cierra sobre el punto M , es decir, se reduce a dichopunto.
Definicion 1:
Se llama integral impropia de segundo tipo de la funcion F (M,P ) en el dominio V allımite
∫ ∫ ∫V
F (M,P )dP = limδ→0
∫ ∫ ∫V−Vδ
F (M,P )dP (14.10)
Si este lımite existe, es finito y no depende de la forma en que Vδ se cierra sobre el punto M ,entonces la integral (14.9) se llama convergente; en caso contrario se llama divergente.
En la figura 14.5 se muestra el dominio V y el dominio Vδ mencionados en la definicion.
Es conveniente aclarar que decimos que para δ → 0 la integral (14.9) tiende a un lımite finitodeterminado que no depende de la forma en que el dominio Vδ se cierre sobre el punto M , sipara cualquier sucesion de dominios
Vδ1 , Vδ2 , ..., Vδn , ... (14.11)
cada uno de los cuales contiene al punto M en su interior y cuyos diametros satisfacen lacondicion
δn → 0, ∀n→∞ (14.12)
donde se supone que la sucesion (14.11) se cierra monotonamente sobre M , es decir, que Vδ1 ⊃Vδ2 ⊃ ... ⊃ Vδn ⊃ ... la sucesion correspondiente de numeros
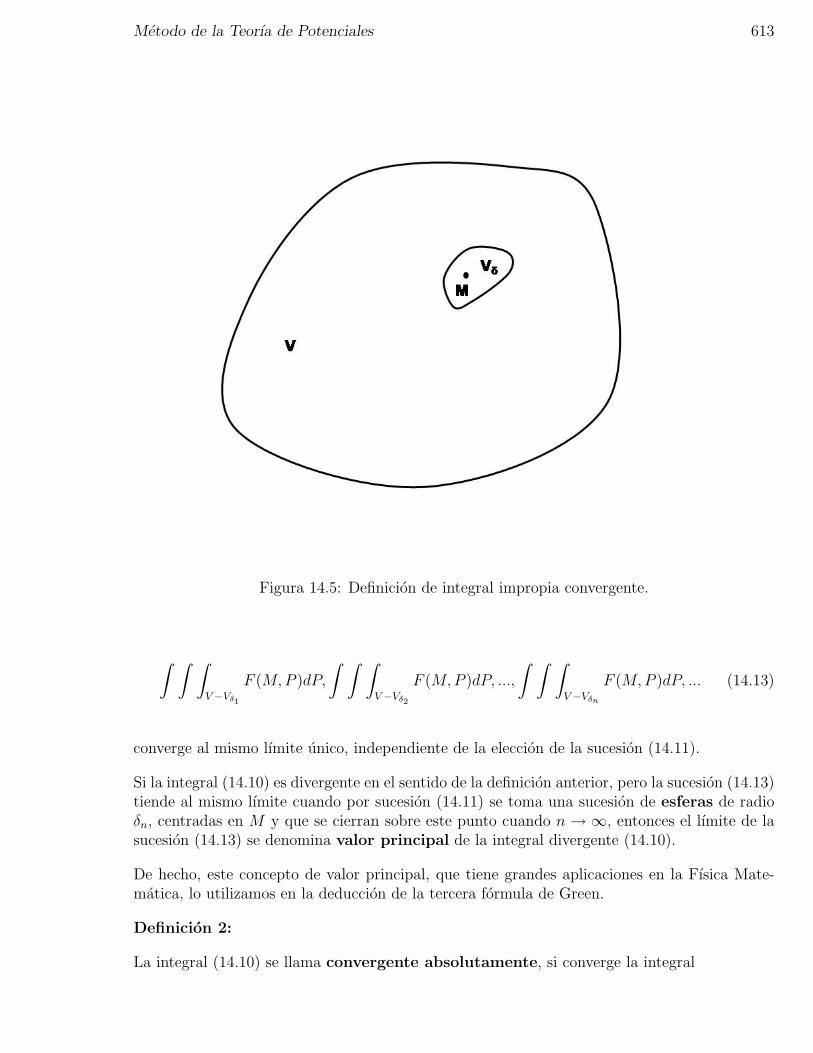
Metodo de la Teorıa de Potenciales 613
Figura 14.5: Definicion de integral impropia convergente.
∫ ∫ ∫V−Vδ1
F (M,P )dP,
∫ ∫ ∫V−Vδ2
F (M,P )dP, ...,
∫ ∫ ∫V−Vδn
F (M,P )dP, ... (14.13)
converge al mismo lımite unico, independiente de la eleccion de la sucesion (14.11).
Si la integral (14.10) es divergente en el sentido de la definicion anterior, pero la sucesion (14.13)tiende al mismo lımite cuando por sucesion (14.11) se toma una sucesion de esferas de radioδn, centradas en M y que se cierran sobre este punto cuando n → ∞, entonces el lımite de lasucesion (14.13) se denomina valor principal de la integral divergente (14.10).
De hecho, este concepto de valor principal, que tiene grandes aplicaciones en la Fısica Mate-matica, lo utilizamos en la deduccion de la tercera formula de Green.
Definicion 2:
La integral (14.10) se llama convergente absolutamente, si converge la integral
614 Jose Marın Antuna
∫ ∫ ∫V
|F (M,P )|dP (14.14)
Es facil establecer el hecho de que, si una integral converge absolutamente, converge en elsentido de la definicion 1.
Definicion 3:
Sea la funcion F (M,P ) definida al inicio de este punto. La integral impropia (14.10) se llamaconvergente uniformemente en el punto M0 ∈ V , si para ε > 0 existe un δ(ε,M0) > 0 talque, para cualquier punto M de la esfera KM0
δ con centro en M0 y radio δ y cualquier dominioVδ ∈ KM0
δ , se cumple que
∣∣∣∣∫ ∫ ∫Vδ
F (M,P )dP
∣∣∣∣ < ε (14.15)
Ilustramos, en la figura 14.6, los elementos considerados en la definicion de convergencia uni-forme.
Analicemos el caso particular de gran importancia para la teorıa de potenciales en que
F (M,P ) =1
rαMP
(14.16)
y veamos para que valores de α la integral converge uniformemente.
Tomando con centro en M y radio 2δ la esfera KM2δ (ver figura 14.7), tendremos, evidentemente,
tomando coordenadas esfericas:
∣∣∣∣∫ ∫ ∫Vδ
dP
rαMP
∣∣∣∣ ≤ ∫ ∫ ∫Vδ
dP
rαMP
≤∫ ∫ ∫
KM0δ
dP
rαMP
≤∫ ∫ ∫
KM2δ
dP
rα=
=
∫ 2π
0
dϕ
∫ π
0
sin θdθ
∫ 2δ
0
1
rαr2dr = 4π
r3−α
3− α|2δ0 , ∀α 6= 3, (14.17)
= 4π ln r|2δ0 , ∀α = 3
De (14.17) es evidente que, cuando δ → 0, el resultado es tan pequeno como se quiera solo en elcaso en que α < 3 y para α ≥ 3 la parte derecha en (14.17) tiende a infinito. Por consiguiente,la integral de la funcion (14.16) es convergente uniformemente para α < 3.
Si el analisis hubiese sido hecho para integrales bidimensionales, hubieramos obtenido α < 2.En general, para integrales multiples, α < n, donde n es la dimension del espacio en que seintegra.
Tiene lugar el siguiente criterio suficiente de convergencia uniforme:
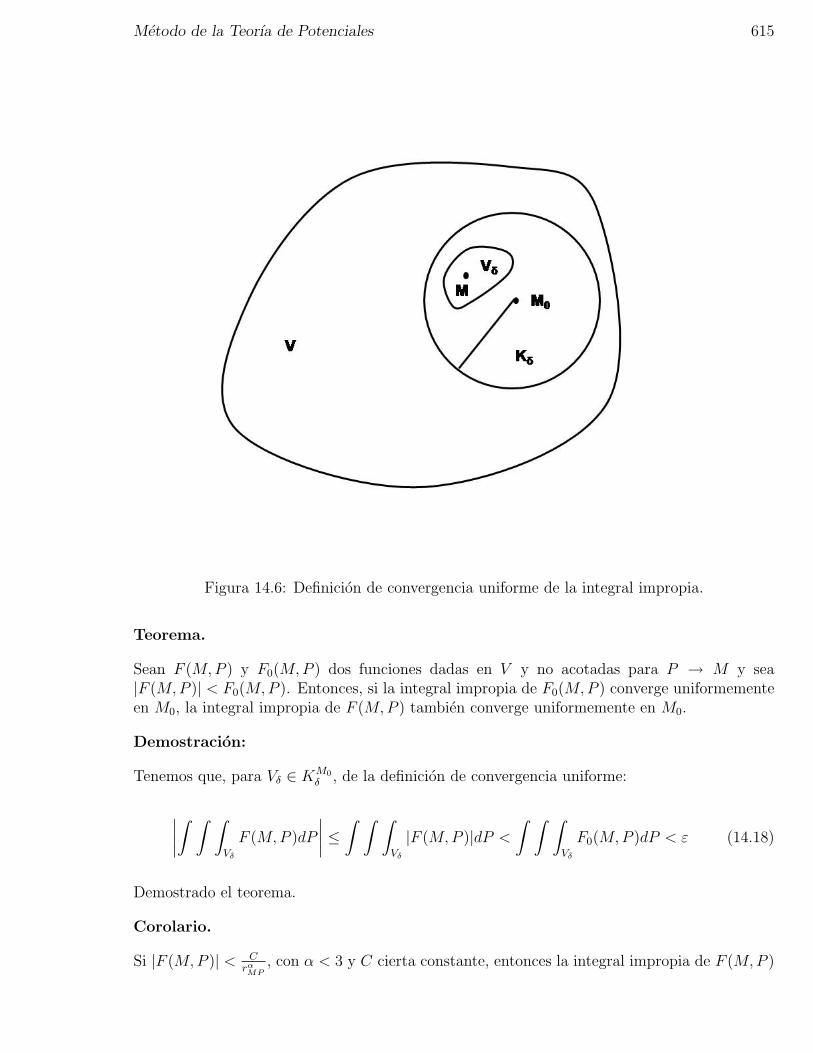
Metodo de la Teorıa de Potenciales 615
Figura 14.6: Definicion de convergencia uniforme de la integral impropia.
Teorema.
Sean F (M,P ) y F0(M,P ) dos funciones dadas en V y no acotadas para P → M y sea|F (M,P )| < F0(M,P ). Entonces, si la integral impropia de F0(M,P ) converge uniformementeen M0, la integral impropia de F (M,P ) tambien converge uniformemente en M0.
Demostracion:
Tenemos que, para Vδ ∈ KM0δ , de la definicion de convergencia uniforme:
∣∣∣∣∫ ∫ ∫Vδ
F (M,P )dP
∣∣∣∣ ≤ ∫ ∫ ∫Vδ
|F (M,P )|dP <
∫ ∫ ∫Vδ
F0(M,P )dP < ε (14.18)
Demostrado el teorema.
Corolario.
Si |F (M,P )| < CrαMP
, con α < 3 y C cierta constante, entonces la integral impropia de F (M,P )
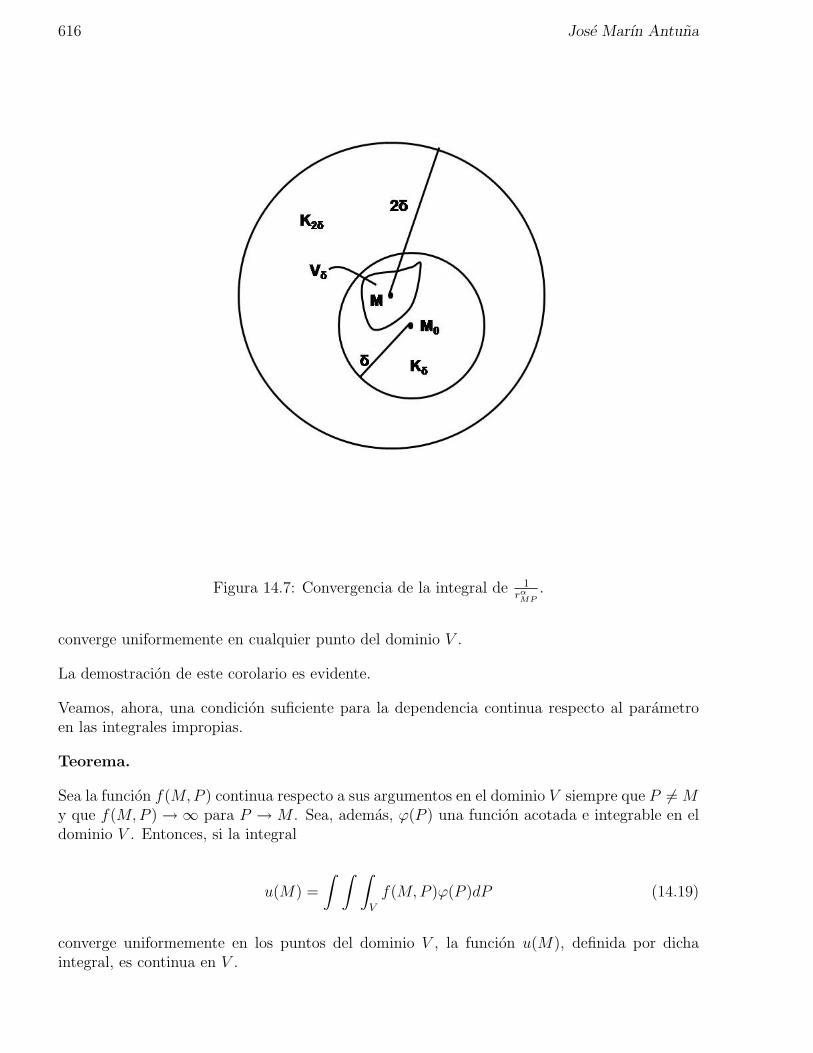
616 Jose Marın Antuna
Figura 14.7: Convergencia de la integral de 1rαMP
.
converge uniformemente en cualquier punto del dominio V .
La demostracion de este corolario es evidente.
Veamos, ahora, una condicion suficiente para la dependencia continua respecto al parametroen las integrales impropias.
Teorema.
Sea la funcion f(M,P ) continua respecto a sus argumentos en el dominio V siempre que P 6= My que f(M,P ) →∞ para P → M . Sea, ademas, ϕ(P ) una funcion acotada e integrable en eldominio V . Entonces, si la integral
u(M) =
∫ ∫ ∫V
f(M,P )ϕ(P )dP (14.19)
converge uniformemente en los puntos del dominio V , la funcion u(M), definida por dichaintegral, es continua en V .
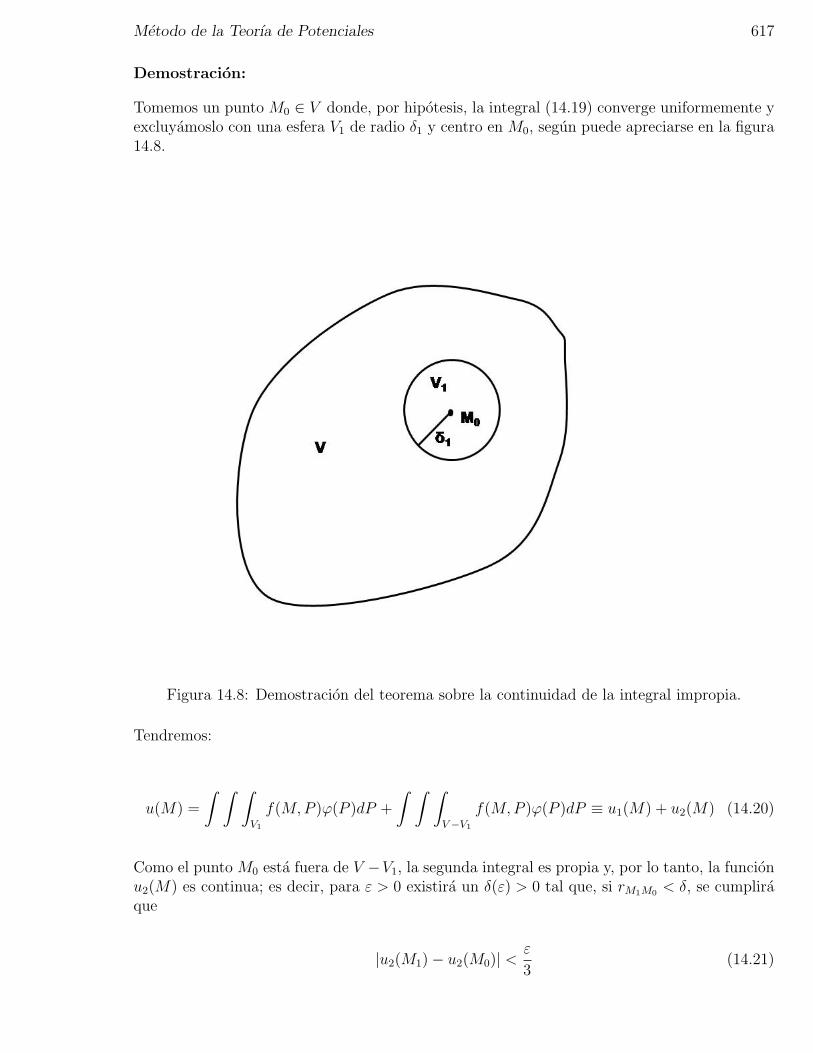
Metodo de la Teorıa de Potenciales 617
Demostracion:
Tomemos un punto M0 ∈ V donde, por hipotesis, la integral (14.19) converge uniformemente yexcluyamoslo con una esfera V1 de radio δ1 y centro en M0, segun puede apreciarse en la figura14.8.
Figura 14.8: Demostracion del teorema sobre la continuidad de la integral impropia.
Tendremos:
u(M) =
∫ ∫ ∫V1
f(M,P )ϕ(P )dP +
∫ ∫ ∫V−V1
f(M,P )ϕ(P )dP ≡ u1(M) + u2(M) (14.20)
Como el punto M0 esta fuera de V −V1, la segunda integral es propia y, por lo tanto, la funcionu2(M) es continua; es decir, para ε > 0 existira un δ(ε) > 0 tal que, si rM1M0 < δ, se cumpliraque
|u2(M1)− u2(M0)| <ε
3(14.21)

618 Jose Marın Antuna
Como, por hipotesis, la integral (14.19) converge uniformemente, para ε > 0 existira un δ′(ε) > 0tal que, si rM1M0 < δ′, se cumplira que
|u1(M1)| <ε
3y |u1(M0)| <
ε
3(14.22)
Por consiguiente, de (14.20) tendremos:
|u(M1)− u(M0)| ≤ |u1(M1)|+ |u1(M0)|+ |u2(M1)− u2(M0)| < ε (14.23)
Demostrado el teorema.
Los aspectos aquı estudiados de las integrales impropias parametricas son suficientes ya paraabordar el estudio de los potenciales definidos en el punto 1 del presente epıgrafe, a lo que nosdedicaremos de inmediato.
14.1.3 Potencial de volumen
Pasemos, ahora, al estudio del potencial de volumen dado por la expresion (14.2). Considerare-mos que la funcion ρ(P ) que figura en dicha expresion y que tiene el sentido fısico de densidadde carga (o de masa) en el volumen, es una funcion acotada en V ; es decir, que
|ρ(P )| < C (14.24)
Si el punto M no pertenece a V , entonces la integral (14.2) es propia y, por lo tanto, defineuna funcion continua.
Si M pertenece al dominio de integracion V , la integral es impropia, ya que el integrando tiendea infinito cuando P →M . Sin embargo, tenemos que, por (14.24)
∣∣∣∣ρ(P )
rMP
∣∣∣∣ < C
rMP
(14.25)
Como la potencia de rMP en (14.25) es α = 1 < 3, en virtud del corolario del criterio suficientede convergencia uniforme estudiado en el punto anterior, podemos afirmar que la integral (14.2)converge uniformemente para M ∈ V y por el ultimo teorema del punto anterior define unafuncion continua en el dominio V .
Por consiguiente, el potencial de volumen es una funcion continua de M en todo el espacio.
Hagamos un analisis similar para las primeras derivadas del potencial de volumen (14.2).Veamos primero el caso en que M no pertenece al dominio de integracion V . Entonces, comola integral es propia, podemos derivar bajo el signo de integracion:
Metodo de la Teorıa de Potenciales 619
∂u
∂x=
∫ ∫ ∫V
∂
∂x
(1
rMP
)ρ(P )dP =
∫ ∫ ∫V
ξ − x
r3MP
ρ(P )dP (14.26)
Similarmente:
∂u
∂y=
∫ ∫ ∫V
η − y
r3MP
ρ(P )dP (14.27)
∂u
∂z=
∫ ∫ ∫V
ζ − z
r3MP
ρ(P )dP (14.28)
No es difıcil comprobar que estas expresiones de las primeras derivadas del potencial de volumenson validas en el caso en que M pertenece a V . Efectivamente, como
∣∣∣∣ξ − x
rMP
∣∣∣∣ < 1
tenemos que
∣∣∣∣ξ − x
r3MP
∣∣∣∣ ≡ ∣∣∣∣ξ − x
rMP
∣∣∣∣ ∣∣∣∣ρ(P )
r2MP
∣∣∣∣ < C
r2MP
(14.29)
y como aquı la potencia de rMP es α = 2 < 3, tendremos que integral (14.26) converge unifor-memente para M ∈ V y define a una funcion continua en ese dominio. Identico razonamientonos conduce a la convergencia uniforme y la continuidad de las derivadas dadas por (14.27) y(14.28).
Por lo tanto, el potencial de volumen tiene primeras derivadas continuas en todo el espacio, lasque se hallan, simplemente, derivando bajo el signo de integracion.
Desde el punto de vista fısico estas primeras derivadas son -sin tener en cuenta el signo- lascomponentes de la fuerza del campo en cada punto.
Veamos, ahora, las segundas derivadas del potencial de volumen. En el caso en que M nopertenezca a V , la integral es propia, se puede derivar bajo el signo de integracion, de maneraque:
∂2u
∂x2=
∫ ∫ ∫V
∂2
∂x2
(1
rMP
)ρ(P )dP =
∫ ∫ ∫V
3(x− ξ)2
r5MP
− 1
r3MP
ρ(P )dP (14.30)
De forma similar:
∂2u
∂y2=
∫ ∫ ∫V
3(y − η)2
r5MP
− 1
r3MP
ρ(P )dP (14.31)
620 Jose Marın Antuna
∂2u
∂y2=
∫ ∫ ∫V
3(z − ζ)2
r5MP
− 1
r3MP
ρ(P )dP (14.32)
No es difıcil observar, sumando (14.30), (14.31) y (14.32), que, para los puntos M exteriores aldominio de integracion V , el potencial de volumen satisface la ecuacion de Laplace; es decir, esuna funcion armonica.
Las formulas (14.30), (14.31) y (14.32) no pueden ser utilizadas para calcular las segundasderivadas del potencial de volumen en los puntos M pertenecientes a V , ya que para ellas nose cumple el corolario del punto anterior que hasta ahora hemos utilizado. Efectivamente, noes difıcil obtener que
∣∣∣∣3(x− ξ)2
r5MP
− 1
r3MP
ρ(P )
∣∣∣∣ < 4C
r3MP
(14.33)
y como aquı α = 3, no se puede hablar de la convergencia de (14.30).
Esto significa que las segundas derivadas del potencial de volumen en el interior de V debenser calculadas siguiendo otro procedimiento.
Tomemos con centro en M ∈ V una esfera KMδ de superficie SMδ de radio δ. El dominio V
quedara dividido en dos, segun se muestra en la figura 14.9.
El potencial de volumen puede, entonces, ser escrito de la siguiente forma:
u(M) =
∫ ∫ ∫V−KM
δ
ρ(P )dP
rMP
+
∫ ∫ ∫KM
δ
ρ(P )dP
rMP
≡ u1(M) + u2(M) (14.34)
La integral u1(M) es propia, ya que se toma por un dominio que excluye al punto M . Por lotanto puede ser derivada bajo el signo de integracion:
∂2u1
∂x2=
∫ ∫ ∫V−KM
δ
ρ(P )∂2
∂x2
(1
rMP
)dP (14.35)
Trabajemos, ahora, con u2(M). Teniendo en cuenta la formula de Gauss-Ostrogradsky para laprimera derivada, la que puede calcularse derivando bajo el signo de integracion, ya que hemosdemostrado que es una funcion continua, tendremos que:
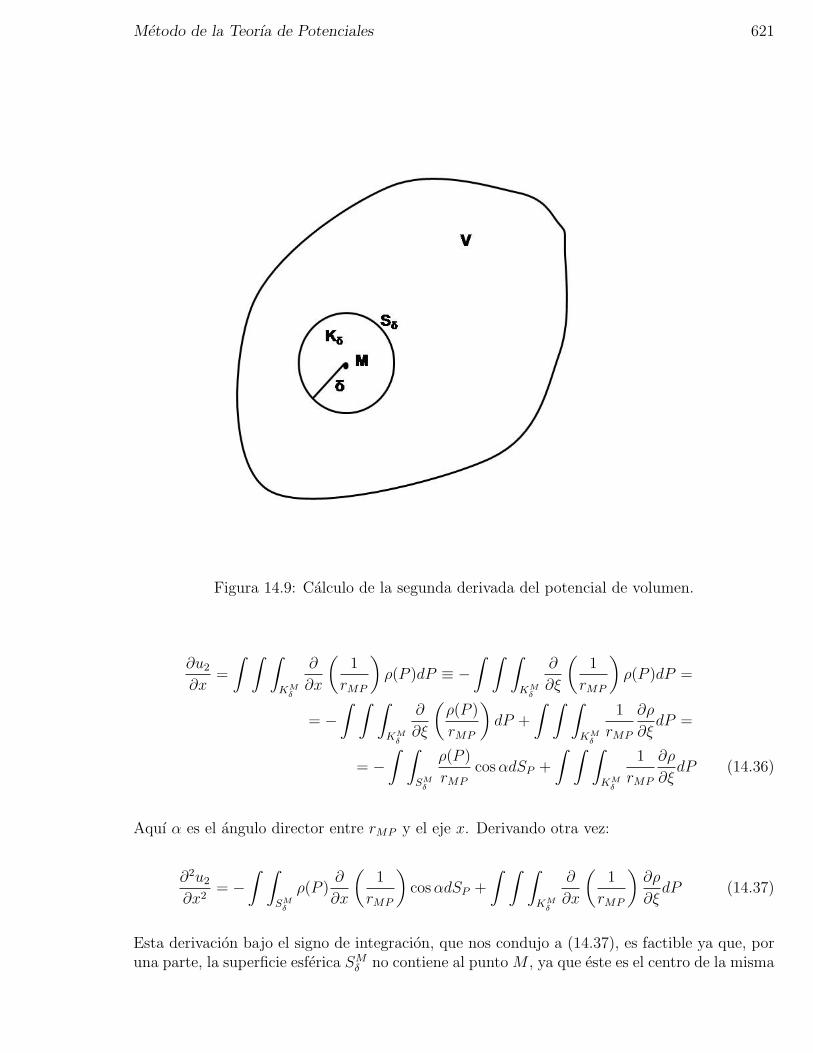
Metodo de la Teorıa de Potenciales 621
Figura 14.9: Calculo de la segunda derivada del potencial de volumen.
∂u2
∂x=
∫ ∫ ∫KM
δ
∂
∂x
(1
rMP
)ρ(P )dP ≡ −
∫ ∫ ∫KM
δ
∂
∂ξ
(1
rMP
)ρ(P )dP =
= −∫ ∫ ∫
KMδ
∂
∂ξ
(ρ(P )
rMP
)dP +
∫ ∫ ∫KM
δ
1
rMP
∂ρ
∂ξdP =
= −∫ ∫
SMδ
ρ(P )
rMP
cosαdSP +
∫ ∫ ∫KM
δ
1
rMP
∂ρ
∂ξdP (14.36)
Aquı α es el angulo director entre rMP y el eje x. Derivando otra vez:
∂2u2
∂x2= −
∫ ∫SM
δ
ρ(P )∂
∂x
(1
rMP
)cosαdSP +
∫ ∫ ∫KM
δ
∂
∂x
(1
rMP
)∂ρ
∂ξdP (14.37)
Esta derivacion bajo el signo de integracion, que nos condujo a (14.37), es factible ya que, poruna parte, la superficie esferica SMδ no contiene al punto M , ya que este es el centro de la misma
622 Jose Marın Antuna
y, por lo tanto, dicha integral es propia y puede derivarse bajo el signo de integracion; por otrolado, en la integral de volumen por KM
δ , suponiendo la continuidad de ∂ρ/∂ξ, es evidente quela aplicacion del corolario del punto anterior nos confirmarıa la convergencia uniforme de dichaintegral, justificandose ası la derivacion bajo el signo de integracion.
Valoremos el segundo sumando en (14.37). Utilizando coordenadas esfericas, tendremos:
∣∣∣∣∣∫ ∫ ∫
KMδ
∂
∂x
(1
rMP
)∂ρ
∂ξdP
∣∣∣∣∣ ≤∫ ∫ ∫
KMδ
∣∣∣∣ξ − x
r3MP
∣∣∣∣ ∣∣∣∣∂ρ∂ξ∣∣∣∣ dP < C1
∫ ∫ ∫KM
δ
dP
r2MP
=
= C1
∫ 2π
0
dϕ
∫ π
0
sin θdθ
∫ δ
0
r2dr
r2= 4πC1δ → 0, ∀δ → 0 (14.38)
Aquı hemos llamado |∂ρ/∂ξ| < C1.
Veamos, ahora, el primer sumando de (14.37). Tenemos:
−∫ ∫
SMδ
ρ(P )∂
∂x
(1
rMP
)cosαdSP = −
∫ ∫SM
δ
ρ(P )ξ − x
r3MP
cosαdSP =
= −∫ ∫
SMδ
ρ(P )1
r2MP
ξ − x
rMP
cosαdSP = −∫ ∫
SMδ
ρ(P )cos2 α
r2MP
dSP (14.39)
Hemos tenido en cuenta en (14.39) la definicion del angulo α.
Aplicando a (14.39) el teorema del valor medio integral y teniendo en consideracion el hechode que, al integrar por toda la superficie esferica SMδ , el cosα toma todos los valores posibles,igual que el cos β y el cos γ, donde β y γ son los angulos directores, respectivamente, de rMP
con los ejes y y z, podemos escribir, continuando la expresion (14.39):
= −∫ ∫
SMδ
ρ(P )∂
∂x
(1
rMP
)cosαdSP = −ρ(P ∗)
∫ ∫SM
δ
cos2 α
r2MP
dSP =
= −ρ(P∗)
3
∫ ∫SM
δ
1
r2MP
cos2 α+ cos2 β + cos2 γdSP =
= −ρ(P∗)
3
∫ 2π
0
dϕ
∫ π
0
sin θdθr2
r2= −4π
3ρ(P ∗) → −4π
3ρ(M), ∀δ → 0 (14.40)
Aquı P ∗ ∈ SMδ segun el teorema del valor medio; hemos tenido en cuenta el hecho de que lasuma de los cuadrados de los cosenos directores es igual a uno y hemos utilizado coordenadasesfericas.
Tomando, pues, el lımite cuando δ → 0, tendremos que (14.35) tendera al valor principal de laintegral impropia:
Metodo de la Teorıa de Potenciales 623
limδ→0
∂2u1
∂x2= V P
∫ ∫ ∫V
ρ(P )∂2
∂x2
(1
rMP
)dP (14.41)
y, ademas:
limδ→0
∂2u2
∂x2= −4π
3ρ(M) (14.42)
Por consiguiente, obtenemos para la segunda derivada respecto a x del potencial de volumenen el interior del dominio de integracion V la expresion:
∂2u
∂x2= V P
∫ ∫ ∫V
ρ(P )∂2
∂x2
(1
rMP
)dP − 4π
3ρ(M) (14.43)
De manera totalmente similar se obtiene:
∂2u
∂y2= V P
∫ ∫ ∫V
ρ(P )∂2
∂y2
(1
rMP
)dP − 4π
3ρ(M) (14.44)
∂2u
∂z2= V P
∫ ∫ ∫V
ρ(P )∂2
∂z2
(1
rMP
)dP − 4π
3ρ(M) (14.45)
Sumando las expresiones (14.43), (14.44) y (14.45), se obtiene que:
∇2u = −4πρ(M) (14.46)
para M ∈ V . Es decir, que dentro del dominio de integracion, el potencial de volumen satisfacela ecuacion de Poisson, donde en la inhomogeneidad figura la densidad de las cargas (o masas)que generan el campo.
En la obtencion de (14.46) se ha tenido en cuenta el hecho de que
V P
∫ ∫ ∫V
ρ(P )∇2
(1
rMP
)dP = 0
ya que ∇2(
1rMP
)= 0 ∀M 6= P y el valor principal implica (pues es un lımite) que M 6= P .
Las propiedades estudiadas del potencial de volumen permiten utilizar dicho potencial pararesolver problemas con la ecuacion de Poisson.
Es necesario destacar que lo hasta aquı desarrollado es para el potencial de volumen en R3; parael potencial de volumen en R2 (14.6) todo es similar; solo el factor 4π en (14.46) se sustituyepor 2π.
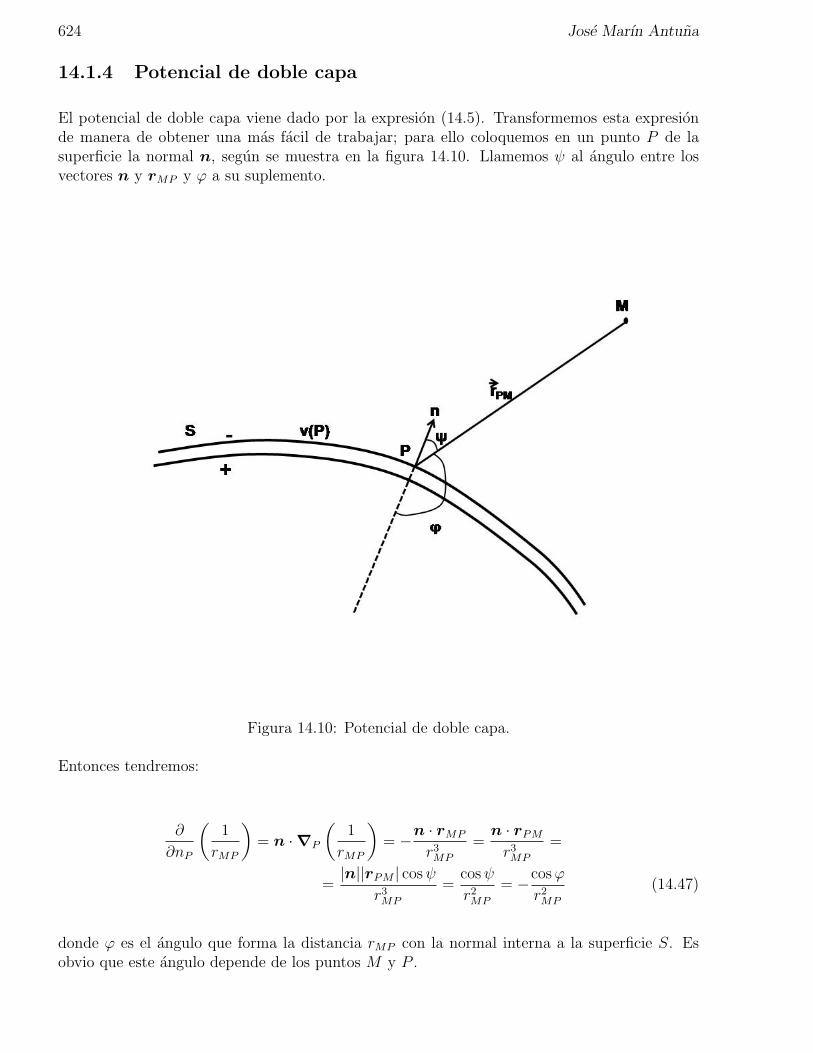
624 Jose Marın Antuna
14.1.4 Potencial de doble capa
El potencial de doble capa viene dado por la expresion (14.5). Transformemos esta expresionde manera de obtener una mas facil de trabajar; para ello coloquemos en un punto P de lasuperficie la normal n, segun se muestra en la figura 14.10. Llamemos ψ al angulo entre losvectores n y rMP y ϕ a su suplemento.
Figura 14.10: Potencial de doble capa.
Entonces tendremos:
∂
∂nP
(1
rMP
)= n ·∇P
(1
rMP
)= −n · rMP
r3MP
=n · rPMr3MP
=
=|n||rPM | cosψ
r3MP
=cosψ
r2MP
= −cosϕ
r2MP
(14.47)
donde ϕ es el angulo que forma la distancia rMP con la normal interna a la superficie S. Esobvio que este angulo depende de los puntos M y P .

Metodo de la Teorıa de Potenciales 625
Ası pues, para el potencial de doble capa (14.5) encontramos la expresion:
u(M) =
∫ ∫S
cosϕ(M,P )
r2MP
ν(P )dSP (14.48)
Un analisis similar nos llevarıa, en el caso bidimensional, a la siguiente expresion del potencial(14.8):
u(M) = −∫C
∂
∂nP
(ln
1
rMP
)ν(P )dlP =
∫C
cosϕ(M,P )
rMP
ν(P )dlP (14.49)
donde ϕ es, tambien, el angulo entre la distancia rMP y la normal interior a la curva C.
Si M no pertenece al dominio (superficie o curva) de integracion, las integrales (14.48) y (14.49)son propias, de forma tal que definen funciones continuas para las que existen derivadas de cual-quier orden que se pueden calcular derivando bajo el signo de integracion. Es facil comprobarque, en este caso, el potencial de doble capa (14.48) y (14.49) es una funcion armonica, es decir,∇2u = 0 para M no ∈ S o M no ∈ C.
Esto es comprensible, ya que nuestro potencial de doble capa tiene la forma de una de lasintegrales de superficie (o de lınea) que figuran en la tercera formula de Green que -comosabemos- son funciones armonicas.
Para puntos M pertenecientes al dominio de integracion el potencial de doble capa es unaintegral impropia. Demostremos que existe para dominios de integracion de curvatura continua.En aras de simplificar los calculos, veremos el caso bidimensional; en el caso tridimensional seprocede de forma similar.
Tomemos la curva C en el plano (x, y) e introduzcamos un sistema de coordenadas cartesianascon centro en el punto P , segun se indica el la figura 14.11.
En el entorno del punto P la ecuacion de C sera y = y(x). Como C es de curvatura continua,la funcion y(x) tendra segunda derivada continua y, por lo tanto, por Taylor:
y(x) = y(0) + xy′(0) +x2
2y′′(θx), 0 < θ < 1
Pero, por la forma en que hemos escogido las coordenadas, y(0) = 0, y′(0) = 0, por lo que
y(x) =x2
2y′′(θx) (14.50)
Teniendo en cuenta (14.50), tendremos que
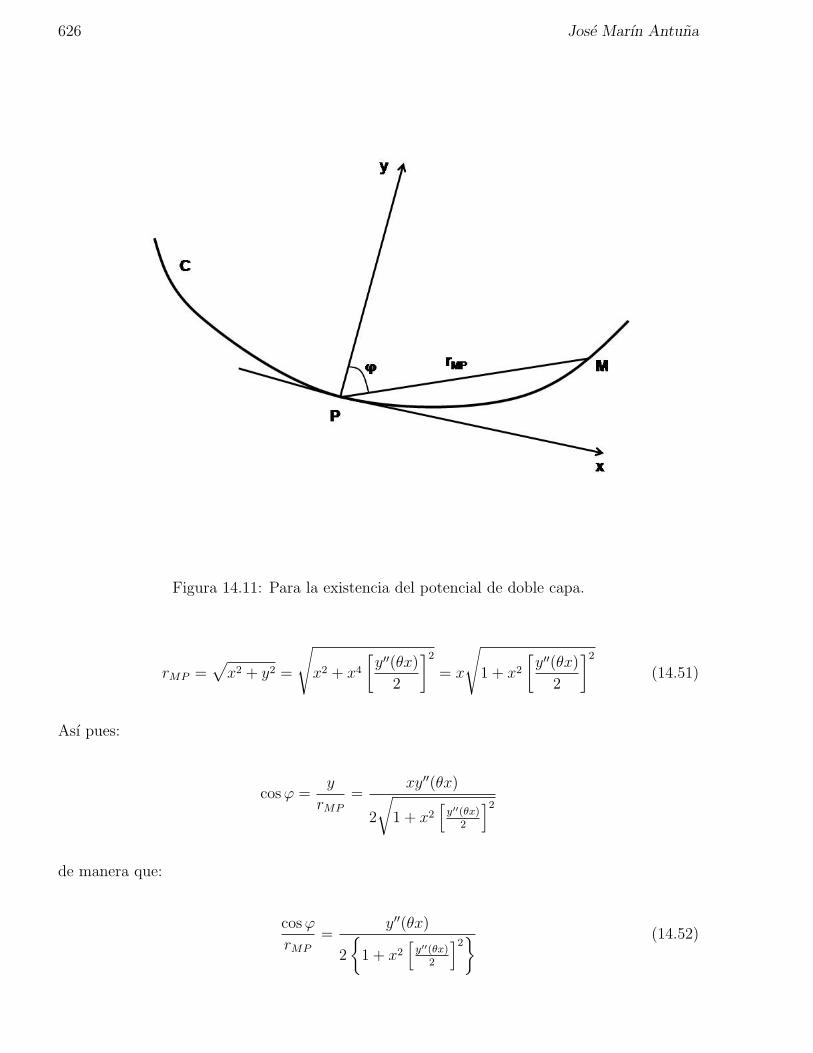
626 Jose Marın Antuna
Figura 14.11: Para la existencia del potencial de doble capa.
rMP =√x2 + y2 =
√x2 + x4
[y′′(θx)
2
]2
= x
√1 + x2
[y′′(θx)
2
]2
(14.51)
Ası pues:
cosϕ =y
rMP
=xy′′(θx)
2
√1 + x2
[y′′(θx)
2
]2de manera que:
cosϕ
rMP
=y′′(θx)
2
1 + x2
[y′′(θx)
2
]2 (14.52)

Metodo de la Teorıa de Potenciales 627
La expresion de la curvatura de una lınea es:
k =y′′
(1 + y′2)3/2
En este caso k(P ) = y′′(0), ya que y′(0) = 0. Por consiguiente, de (14.52):
limrMP→0
cosϕ
rMP
=1
2y′′(0) =
1
2k(P ) (14.53)
Como por hipotesis k(P ) es continua, para ν(P ) continua el integrando en (14.49) es continuoa lo largo de la curva. Esto implica que, efectivamente, la integral sobre la curva C converge,o sea, para puntos M ∈ C esta integral da valores u(M) finitos; esto significa que existe elpotencial de doble capa sobre la curva de integracion.
Un analisis similar nos llevarıa a concluir la existencia de dicho potencial sobre superficies decurvatura continua.
Sin embargo, veremos que el potencial de doble capa es discontinuo sobre el dominio de in-tegracion, es decir, que sufre un salto sobre la superficie o curva de integracion, al pasar delinterior al exterior de la misma.
Veamos, inicialmente, el caso en que la densidad ν(P ) es constante e igual a ν0. Entonces, parael potencial de doble capa en el plano tendremos, de (14.49), la expresion:
u0(M) =
∫C
cosϕ
rν0dl = ν0
∫C
cosϕ
rdl (14.54)
Donde denotamos por u0(M) al valor del potencial para ν(P ) = ν0 = const en el punto P .
Sea la curva cerrada C y sea M un punto en su interior. Tomemos un punto P ∈ C y tracemosla distancia r que forma el angulo ϕ con la normal exterior. Coloquemos el elemento dl a partirde P sobre C y llamemosle P1 a su otro extremo.
Tracemos la distancia MP1. Ahora, con radio r = rMP tracemos un arco de circunferencia concentro en M y llamemos Q al punto en que este arco corta a MP1. dσ es el elemento de arcode circunferencia PQ y dω el angulo plano bajo el que se ve, desde M , dicho elemento (Fig.14.12).
Por ser los angulos de lados perpendiculares entre sı y de la misma denominacion, el angulobajo el que se cortan los elementos dl y dσ es ϕ. Por lo tanto:
cosϕdl = dσ,cosϕdl
r=dσ
r= dω (14.55)
Colocando (14.55) en (14.54):
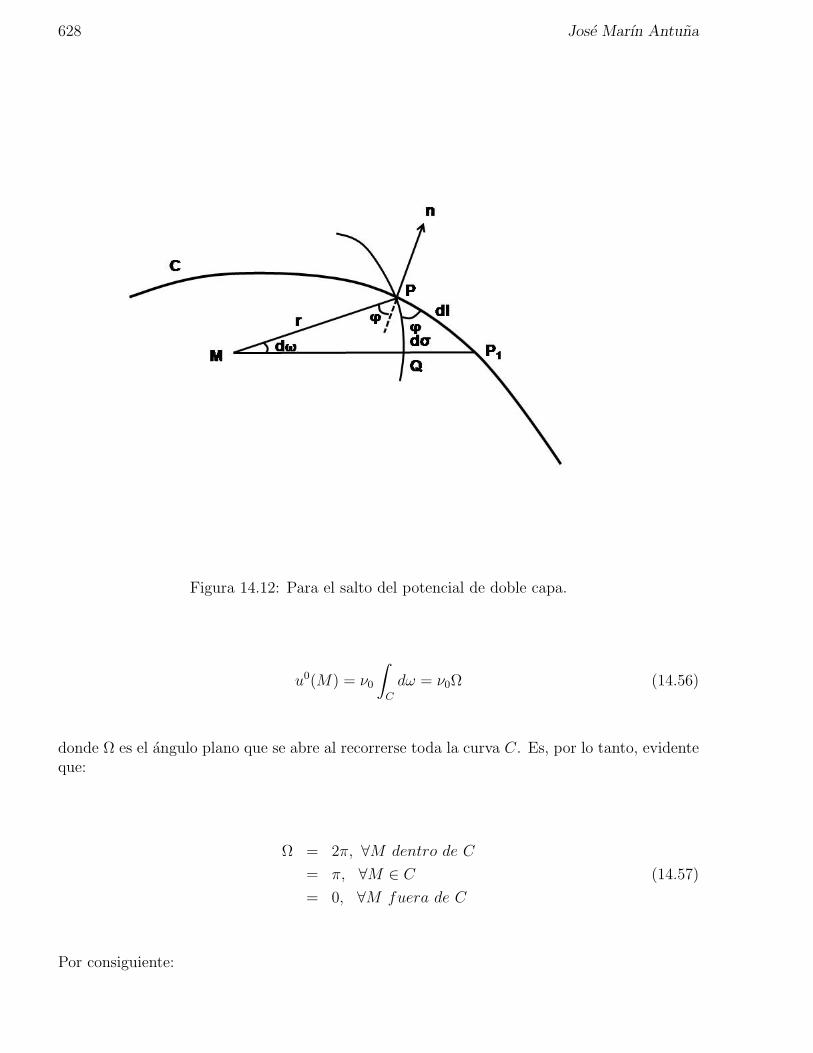
628 Jose Marın Antuna
Figura 14.12: Para el salto del potencial de doble capa.
u0(M) = ν0
∫C
dω = ν0Ω (14.56)
donde Ω es el angulo plano que se abre al recorrerse toda la curva C. Es, por lo tanto, evidenteque:
Ω = 2π, ∀M dentro de C
= π, ∀M ∈ C (14.57)
= 0, ∀M fuera de C
Por consiguiente:

Metodo de la Teorıa de Potenciales 629
u0(M) = ν0Ω = 2πν0, ∀M dentro de C
= πν0, ∀M ∈ C (14.58)
= 0, ∀M fuera de C
Ası pues, para ν(P ) = ν0 = const, u0(M) toma valores constantes en el interior de C, sobre Cy en el exterior de C, de forma tal que se cumple que:
u0int(M) = u0(M)|C + πν0 (14.59)
u0ext(M) = u0(M)|C − πν0 (14.60)
donde los subındices ”int” y ”ext” significan, respectivamente, que el potencial se evalua enun punto cualquiera interior y en un punto cualquiera exterior del contorno C, pues el valordel potencial en todos los puntos interiores y exteriores a la curva C son constantes. u0(M)|Csignifica el potencial evaluado en un punto del contorno C.
En el caso tridimensional todo es igual, ya que, entonces,
cosϕdS
r2= dω
es el elemento de angulo solido bajo el que se ve el elemento dS desde el punto M . Porconsiguiente, si ν(P ) = ν0 = const, se obtiene:
u0(M) = ν0Ω = 4πν0, ∀M dentro de S
= 2πν0, ∀M ∈ S (14.61)
= 0, ∀M fuera de S
de manera que, en tres dimensiones:
u0int(M) = u0(M)|S + 2πν0 (14.62)
u0ext(M) = u0(M)|S − 2πν0 (14.63)
Veamos ahora que sucede, si ν(P ) es una funcion continua y acotada no constante.
Tomemos un punto P0 ∈ S fijo y llamemos ν0 = ν(P0). Analicemos la siguiente expresion:

630 Jose Marın Antuna
I(M) = u(M)− u0(M) =
∫ ∫S
[ν(P )− ν0]cosϕ
r2MP
dSP (14.64)
donde, de nuevo, hemos llamado u0(M) al potencial con densidad constante ν0.
Sea ε > 0. Como ν(P ) es continua en P0, para cierta η > 0 existira siempre un entorno S1 ∈ Sde P0 tal, que
|ν(P )− ν0|| < η, ∀P ∈ S1 (14.65)
Desdoblemos la integral (14.64) de la siguiente forma:
I(M) = u(M)− u0(M) =
∫ ∫S1
[ν(P )− ν0]cosϕ
r2MP
dSP +
∫ ∫S−S1
[ν(P )− ν0]cosϕ
r2MP
dSP ≡ I1 + I2
(14.66)
Entonces, tendremos que:
|I1(M)| ≤∫ ∫
S1
|ν(P )− ν0|| cosϕ|r2MP
dSP < ηBS (14.67)
donde hemos tenido en cuenta (14.65) y BS es una constante tal que
BS ≥∫ ∫
S1
| cosϕ|r2MP
dSP
la que existe, ya que -segun vimos- esta integral converge, supuesta la curvatura continua de lasuperficie. Por lo tanto, tomando
η <ε
BS
obtenemos que |I1(M)| < ε.
Por otra parte, I2(M) es propia. Por consiguiente, hemos demostrado que la integral (14.66)converge uniformemente en P0 y es, por tanto, una funcion continua en dicho punto.
Si por ”int” y ”ext” representamos ahora el lımite cuando se tiende al punto P0 ∈ S desdeadentro y desde afuera, respectivamente, lo anteriormente demostrado implicara que
Iint(P0) = Iext(P0) = I(P0) (14.68)
Metodo de la Teorıa de Potenciales 631
por ser I(M) continua en P0 y como, segun (14.64), u(M) = u0(M) + I(M), tendremos que:
uint(P0) = u0int(P0) + Iint(P0) ≡ u0(P0) + I(P0) + 2πν0 ≡
≡ u(P0) + 2πν(P0) (14.69)
uext(P0) = u0ext(P0) + Iext(P0) ≡ u0(P0) + I(P0)− 2πν0 ≡
≡ u(P0)− 2πν(P0) (14.70)
donde P0 ∈ S.
Las expresiones (14.69) y (14.70) nos permiten afirmar que, para ν(P ) variable, las relacionesde discontinuidad del potencial de doble capa se siguen cumpliendo, si por los subındices ”int”y ”ext” se entiende, en lugar de la evaluacion en un punto interior y en un punto exterior,respectivamente, el lımite cuando se tiende a la superficie desde el interior y desde el exterior.
Ası pues, queda demostrado que se cumplen, para el potencial de doble capa, las relaciones:
En dos dimensiones:
uint(M) = u(M)|C + πν(M) (14.71)
uext(M) = u(M)|C − πν(M) (14.72)
En tres dimensiones:
uint(M) = u(M)|S + 2πν(M) (14.73)
uext(M) = u(M)|S − 2πν(M) (14.74)
El salto que efectua el potencial de doble capa al pasar del interior al exterior del dominio es:
En dos dimensiones:
∆u(M) = 2πν(M) (14.75)
En tres dimensiones:
∆u(M) = 4πν(M) (14.76)
632 Jose Marın Antuna
El potencial de doble capa puede ser utilizado para resolver el problema de Dirichlet de laecuacion de Laplace. Veremos un caso bidimensional. Supongamos que queremos resolver elproblema:
∇2u = 0, ∀M ∈ S (14.77)
u|C = f(M)
Como el potencial de doble capa satisface la ecuacion de Laplace en S, podemos proponer lasolucion de la forma:
u(M) =
∫C
cosϕ(M,P )
rMP
ν(P )dlP (14.78)
ya que el potencial de doble capa (14.78) satisface la ecuacion de Laplace del problema (14.77).
La funcion ν(P ) es aun desconocida y debe ser hallada de la condicion de frontera del problema(14.77).
Como en el planteamiento del problema de Dirichlet se exige que la solucion sea continua enS+C, la condicion de frontera no se puede satisfacer evaluando directamente sobre el contornofrontera C, ya que en ese caso la solucion no serıa continua en S + C, sino tomando el lımiteinterior, es decir:
uint(M) = f(M) = u(M)|C + πν(M)
Ası pues:
πν(M) +
∫C
cosϕ(M,P )
rMP
ν(P )dlP = f(M) (14.79)
donde M ∈ C.
Introduzcamos una sistema de coordenadas a lo largo del contorno C a partir de cierto puntoO, llamando x a la longitud del arco OM de dicho contorno, s a la longitud del arco OP y l ala longitud de todo el contorno C (Fig. 14.13).
Entonces, la ecuacion (14.79) puede ser expresada en la forma:
ν(x) +1
π
∫ l
0
K(x, s)ν(s)ds =1
πf(x) (14.80)
que es una ecuacion integral de Fredholm de segundo tipo, donde
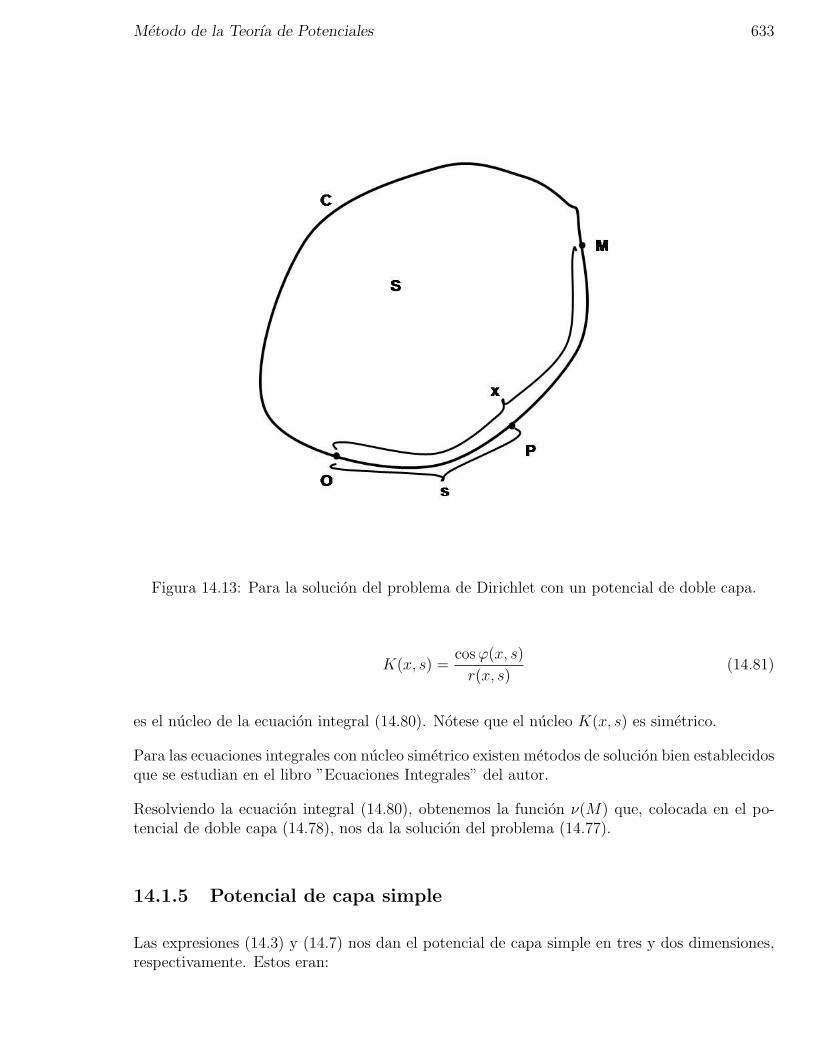
Metodo de la Teorıa de Potenciales 633
Figura 14.13: Para la solucion del problema de Dirichlet con un potencial de doble capa.
K(x, s) =cosϕ(x, s)
r(x, s)(14.81)
es el nucleo de la ecuacion integral (14.80). Notese que el nucleo K(x, s) es simetrico.
Para las ecuaciones integrales con nucleo simetrico existen metodos de solucion bien establecidosque se estudian en el libro ”Ecuaciones Integrales” del autor.
Resolviendo la ecuacion integral (14.80), obtenemos la funcion ν(M) que, colocada en el po-tencial de doble capa (14.78), nos da la solucion del problema (14.77).
14.1.5 Potencial de capa simple
Las expresiones (14.3) y (14.7) nos dan el potencial de capa simple en tres y dos dimensiones,respectivamente. Estos eran:

634 Jose Marın Antuna
En tres dimensiones:
u(M) =
∫ ∫S
µ(P )dSPrMP
(14.82)
En dos dimensiones:
u(M) =
∫C
µ(P ) ln1
rMP
dlP (14.83)
Es evidente que este potencial, para puntos M no pertenecientes al dominio de integracion-tanto en tres, como en dos dimensiones- es una integral propia, por lo que define a una funcioncontinua y, ademas, armonica.
Nuestro problema es estudiar este potencial cuando M pertenece al dominio de integracion, esdecir, cuando es una integral impropia.
Haremos un analisis para el caso tridimensional y los resultados los extenderemos al caso bidi-mensional.
Demostraremos que, a diferencia del potencial de doble capa, el potencial de capa simple esuna funcion continua en todo el espacio. Para ello, probaremos que la integral (14.82) convergeuniformemente en los puntos de la superficie S, siempre que µ(P ) sea acotada. Tomemos unpunto P0 de la superficie S y tracemos con centro en el y radio δ la esfera ΣP0
δ (Fig. 14.14).
La esfera ΣP0δ divide la superficie S en dos partes: S1 contenida en el interior de ella y S2 = S−S1
fuera de ella. Por lo tanto, el potencial (14.82) se desdobla en dos integrales:
u(M) =
∫ ∫S1
µ(P )dSPrMP
+
∫ ∫S2
µ(P )dSPrMP
≡ u1(M) + u2(M) (14.84)
Coloquemos, con centro en el punto P0, un sistema local de coordenadas, de forma tal, que elplano (x, y) sea tangente a la superficie S1 en P0 y el eje z sea paralelo a la normal exterior ala superficie en ese punto, segun se muestra en la figura 14.14.
Analicemos un punto M cualquiera en el interior de la esfera, es decir, tal que rMP0 < δ.
Llamemos S ′1 a la proyeccion de S1 sobre el plano (x, y) y llamemos M ′ a la proyeccion delpunto M sobre el plano (x, y). Obviamente, si las coordenadas del punto M son (x, y, z), lascoordenadas de M ′ seran (x, y, 0).
Llamemos, ademas, KM ′
2δ al cırculo en el plano (x, y) con centro en M ′ y radio 2δ que contiene,evidentemente, totalmente al cırculo KP0
δ , interseccion de la esfera ΣP0δ con el plano (x, y), el
cual, a su vez, contiene en su interior a S ′1. Todas estas construcciones se muestran en la figura14.15.
Llamemos, por ultimo, γ al angulo formado en un plano entre el plano (x, y) y la cuerda de S1
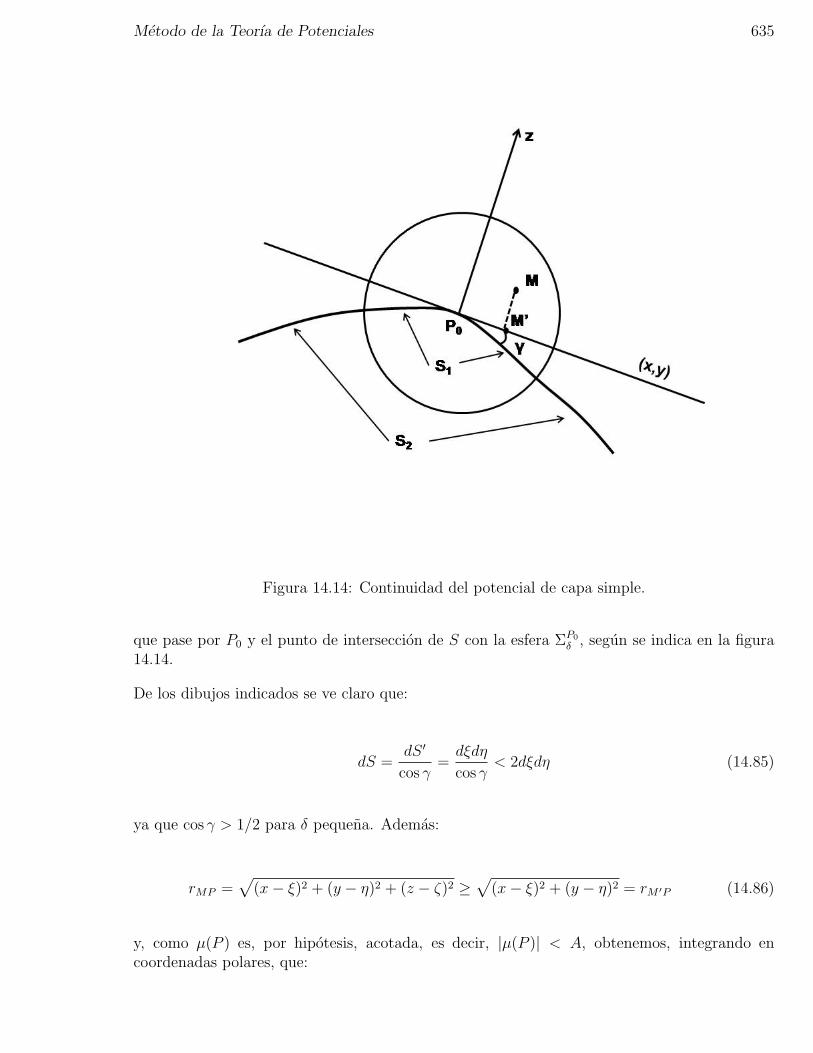
Metodo de la Teorıa de Potenciales 635
Figura 14.14: Continuidad del potencial de capa simple.
que pase por P0 y el punto de interseccion de S con la esfera ΣP0δ , segun se indica en la figura
14.14.
De los dibujos indicados se ve claro que:
dS =dS ′
cos γ=dξdη
cos γ< 2dξdη (14.85)
ya que cos γ > 1/2 para δ pequena. Ademas:
rMP =√
(x− ξ)2 + (y − η)2 + (z − ζ)2 ≥√
(x− ξ)2 + (y − η)2 = rM ′P (14.86)
y, como µ(P ) es, por hipotesis, acotada, es decir, |µ(P )| < A, obtenemos, integrando encoordenadas polares, que:

636 Jose Marın Antuna
Figura 14.15: Para la demostracion de la continuidad del potencial de capa simple.
|u1(M)| =∣∣∣∣∫ ∫
S1
µ(P )dSPrMP
∣∣∣∣ < 2A
∫ ∫S′1
dξdη
rM ′P< 2A
∫ ∫KM′
2δ
dξdη
rM ′P=
= 2A
∫ 2δ
0
∫ 2π
0
rdrdϕ
r= 8πAδ (14.87)
Es decir, que
|u1(M)| < ε (14.88)
si escogemos
δ =ε
8πA
Esto demuestra la convergencia uniforme de u1(M) en P0 y, como u2(M) es propia, queda, por
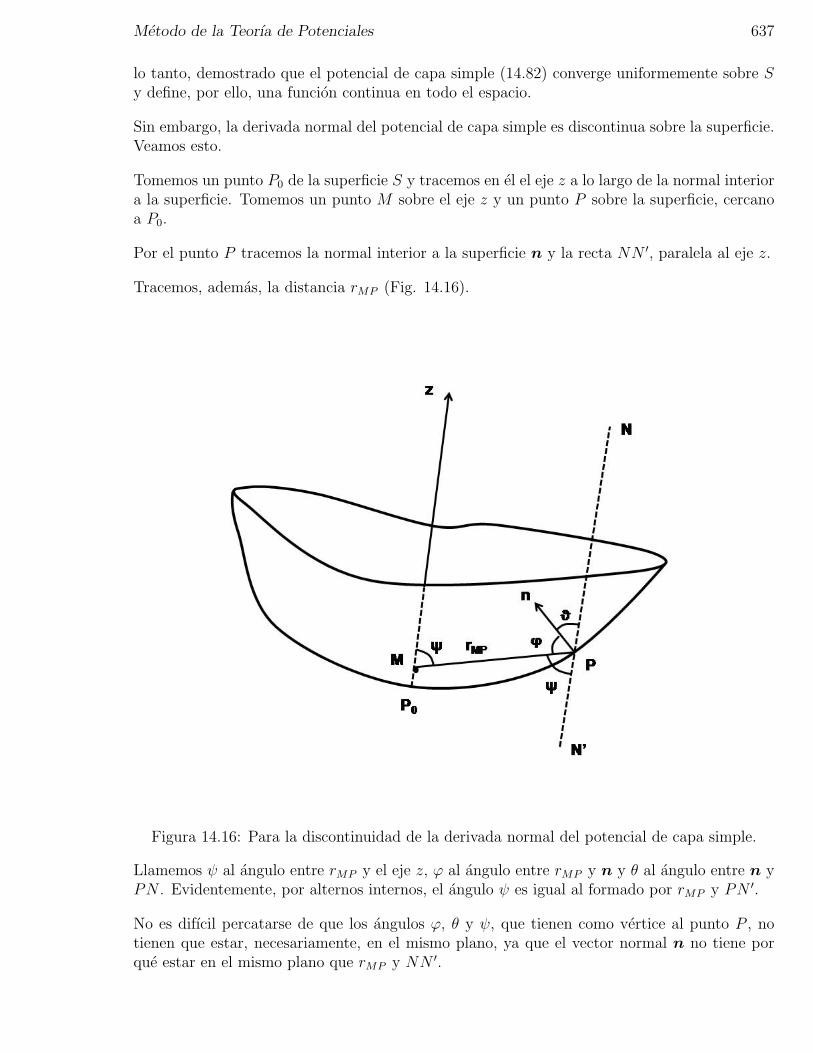
Metodo de la Teorıa de Potenciales 637
lo tanto, demostrado que el potencial de capa simple (14.82) converge uniformemente sobre Sy define, por ello, una funcion continua en todo el espacio.
Sin embargo, la derivada normal del potencial de capa simple es discontinua sobre la superficie.Veamos esto.
Tomemos un punto P0 de la superficie S y tracemos en el el eje z a lo largo de la normal interiora la superficie. Tomemos un punto M sobre el eje z y un punto P sobre la superficie, cercanoa P0.
Por el punto P tracemos la normal interior a la superficie n y la recta NN ′, paralela al eje z.
Tracemos, ademas, la distancia rMP (Fig. 14.16).
Figura 14.16: Para la discontinuidad de la derivada normal del potencial de capa simple.
Llamemos ψ al angulo entre rMP y el eje z, ϕ al angulo entre rMP y n y θ al angulo entre n yPN . Evidentemente, por alternos internos, el angulo ψ es igual al formado por rMP y PN ′.
No es difıcil percatarse de que los angulos ϕ, θ y ψ, que tienen como vertice al punto P , notienen que estar, necesariamente, en el mismo plano, ya que el vector normal n no tiene porque estar en el mismo plano que rMP y NN ′.
638 Jose Marın Antuna
Llamemos, por consiguiente, Ω al angulo bajo el que se cortan los planos MPn y NPn a lolargo del vector n. Entonces, una formula de trigonometrıa espacial nos dice que (el anguloπ − ψ entre rMP y PN no esta, en general en el mismo plano que los angulos ϕ y θ):
cos(π − ψ) ≡ − cosψ = cosϕ cos θ + sinϕ sin θ cos Ω (14.89)
Calculemos, ahora, para (14.82), la derivada en el punto M :
∂u(M)
∂z=
∫ ∫S
µ(P )∂
∂z
(1
rMP
)dSP =
∫ ∫S
cosψ
r2MP
µ(P )dSP (14.90)
Teniendo en cuenta (14.89) en (14.90), obtenemos:
∂u(M)
∂z= −
∫ ∫S
µ(P ) cos θcosϕ
r2MP
dSP −∫ ∫
S
µ(P ) sin θ cos Ωsinϕ
r2MP
dSP (14.91)
El primer sumando de la derecha en (14.91), sin considerar su signo, no es otra cosa -por suestructura- que un potencial de doble capa con densidad ν(P ) = µ(P ) cos θ:
u1(M) =
∫ ∫S
µ(P ) cos θcosϕ
r2MP
dSP (14.92)
El segundo sumando, sin considerar su signo:
I(M) =
∫ ∫S
µ(P ) sin θ cos Ωsinϕ
r2MP
dSP (14.93)
es una integral, cuya convergencia uniforme sobre la superficie S es facil de demostrar, en virtudde que sin θ y sinϕ tienden a cero, cuando P tiende a P0. Por lo tanto, denotando con subındice”int” al lımite interior, cuando M → P0, tendremos, en virtud de las propiedades demostradaspara el potencial de doble capa (14.92) y de la continuidad de (14.93), que:
u1int(P0) = u1(P0) + 2πµ(P0) cos θ ≡ u1(P0) + 2πµ(P0) (14.94)
pues cos θ → 1, cuando P → P0. Ademas:
Iint(P0) = I(P0) (14.95)
De (14.91), (14.94) y (14.95), obtenemos:
(∂u(P0)
∂z
)int
= −u1(P0)− 2πµ(P0)− I(P0) ≡∂u(P0)
∂z− 2πµ(P0) (14.96)
Metodo de la Teorıa de Potenciales 639
Un razonamiento identico nos llevarıa a que:
(∂u(P0)
∂z
)ext
=∂u(P0)
∂z+ 2πµ(P0) (14.97)
Pero, todo lo hemos hecho, considerando al eje z dirigido en el sentido de la normal interna.Por consiguiente, para la normal externa habrıa que cambiar el signo del cosψ, obteniendose,finalmente:
(∂u(M)
∂n
)int
=∂u(M)
∂n|S + 2πµ(M), ∀M ∈ S (14.98)
(∂u(M)
∂n
)ext
=∂u(M)
∂n|S − 2πµ(M), ∀M ∈ S (14.99)
Las formulas (14.98) y (14.99) expresan las relaciones de discontinuidad de la derivada normal,respecto a la normal exterior a la superficie S, del potencial de capa simple sobre la superficiede integracion y tienen conocida aplicacion en Fısica.
Con la ayuda del potencial de capa simple es posible resolver el problema de Neumann parala ecuacion de Laplace, de forma analoga a como hicimos con el potencial de doble capa en lasolucion del problema de Dirichlet.
Por ultimo, no es difıcil obtener, en el caso bidimensional (14.83) las relaciones de discontinuidaden la forma:
(∂u(M)
∂n
)int
=∂u(M)
∂n|C + πµ(M), ∀M ∈ C (14.100)
(∂u(M)
∂n
)ext
=∂u(M)
∂n|C − πµ(M), ∀M ∈ C (14.101)
Como se aprecia de (14.98), (14.99), (14.100) y (14.101), el salto que sufre la derivada normaldel potencial de capa simple sobre la frontera del dominio de integracion al pasar del interioral exterior del dominio es:
En dos dimensiones:
∆
(∂u(M)
∂n
)= 2πµ(M) (14.102)
En tres dimensiones:
640 Jose Marın Antuna
∆
(∂u(M)
∂n
)= 4πµ(M) (14.103)
14.2 Potenciales para la ecuacion de Helmholtz
Recordemos que la tercera formula de Green para el operador de Helmholtz, eran:
Para c = −κ2 < 0:
u(M) =1
4π
∫ ∫S
e−κrMP
rMP
∂u
∂n− u(P )
∂
∂nP
(e−κrMP
rMP
)dSP −
1
4π
∫ ∫ ∫V
L[u]e−κrMP
rMP
dP
(14.104)
en tres dimensiones y:
u(M) =1
2π
∫C
∂u
∂nK0(κrMP )− u(P )
∂
∂nP[K0(κrMP )]
dlP −
− 1
2π
∫ ∫S
L[u]K0(κrMP )dSP (14.105)
en dos dimensiones.
Para c = k2 > 0:
u(M) =1
4π
∫ ∫S
e±ikrMP
rMP
∂u
∂n− u(P )
∂
∂nP
(e±ikrMP
rMP
)dSP −
1
4π
∫ ∫ ∫V
L[u]e±ikrMP
rMP
dP
(14.106)
en tres dimensiones y:
u(M) =i
4
∫C
∂u
∂nH
(j)0 (krMP )− u(P )
∂
∂nP[H
(j)0 (krMP )]
dlP −
− i4
∫ ∫S
L[u]H(j)0 (krMP )dSP (14.107)
en dos dimensiones. Aquı, j puede ser igual a 1 o a 2.
En las formulas (14.104)-(14.107), L[u] = ∇2u + cu, donde c es, en un caso, c = −κ2 y, en elotro caso, c = k2.
Metodo de la Teorıa de Potenciales 641
Las formulas (14.104)-(14.107) nos permiten afirmar que, tambien en el caso de la ecuacion deHelmholtz, la funcion u(M) se puede expresar como la suma de tres potenciales que son:
En tres dimensiones:
Para c = k2 > 0:
u1(M) =
∫ ∫ ∫V
e±ikrMP
rMP
f(P )dP (14.108)
u2(M) =
∫ ∫S
e±ikrMP
rMP
µ(P )dSP (14.109)
u3(M) = −∫ ∫
S
∂
∂nP
(e±ikrMP
rMP
)ν(P )dSP (14.110)
y, para c = −κ2 < 0:
u1(M) =
∫ ∫ ∫V
e−κrMP
rMP
f(P )dP (14.111)
u2(M) =
∫ ∫S
e−κrMP
rMP
µ(P )dSP (14.112)
u3(M) = −∫ ∫
S
∂
∂nP
(e−κrMP
rMP
)ν(P )dSP (14.113)
En dos dimensiones:
Para c = k2 > 0:
u1(M) =
∫ ∫S
H(j)0 (krMP )f(P )dSP (14.114)
u2(M) =
∫C
H(j)0 (krMP )µ(P )dlP (14.115)
u2(M) = −∫C
∂
∂nP(H
(j)0 (krMP ))ν(P )dlP (14.116)
y, para c = −κ2 < 0:

642 Jose Marın Antuna
u1(M) =
∫ ∫S
K0(κrMP )f(P )dSP (14.117)
u2(M) =
∫C
K0(κrMP )µ(P )dlP (14.118)
u2(M) = −∫C
∂
∂nP(K0(κrMP ))ν(P )dlP (14.119)
Los potenciales (14.108), (14.111), (14.114) y (14.117) se conocen con el nombre de potencialesde volumen para la ecuacion de Helmholtz; los potenciales (14.109), (14.112), (14.115) y(14.118) con el nombre de potenciales de capa simple para la ecuacion de Helmholtz ylos potenciales (14.110), (14.113), (14.116) y (14.119) con el nombre de potenciales de doblecapa para la ecuacion de Helmholtz.
Observese que todos ellos se reducen a los potenciales estudiados en el epıgrafe anterior, cuandoc→ 0. Por ello, simplemente enunciaremos -sin demostracion- sus principales propiedades. Ellector puede comprobar la validez de las mismas, realizando analisis similares a los efectuadosen el epıgrafe anterior.
14.2.1 Potencial de Volumen
Para este potencial tienen lugar las siguientes propiedades:
1. Si f(M) es acotada y seccionalmente continua en el dominio de integracion (V en tresdimensiones o S en dos dimensiones), entonces, el potencial de volumen (14.108), (14.111),(14.114) o (14.117) es una funcion continua, con primeras derivadas continuas en todo elespacio considerado (R3 para (14.108) y (14.111) y R2 para (14.114) y (14.117)).
2. El potencial de volumen satisface las siguientes ecuaciones:
En tres dimensiones:
∇2u+ cu = −4πf(M), ∀M ∈ V (14.120)
∇2u+ cu = 0, ∀M no ∈ V
En dos dimensiones:
∇2u+ cu = Cf(M), ∀M ∈ S (14.121)
∇2u+ cu = 0, ∀M no ∈ S
donde C = −4i para c = k2 > 0 y C = −2π para c = −κ2 < 0.
Metodo de la Teorıa de Potenciales 643
14.2.2 Potencial de doble capa
Este tiene las siguientes propiedades:
1. El potencial de doble capa (14.110), (14.113), (14.116) o (14.119) satisface la ecuacion
∇2u+ cu = 0, ∀M ∈ S (enR3) oC (enR2) (14.122)
2. Existe sobre el dominio de integracion, es decir, la integral que lo define converge en lospuntos M ∈ S (en R3) o M ∈ C (en R2).
3. Es discontinuo sobre el dominio de integracion y cumple que:
En tres dimensiones:
uint(M) = u(M) + 2πν(M), ∀M ∈ S (14.123)
uext(M) = u(M)− 2πν(M), ∀M ∈ S (14.124)
En dos dimensiones:
uint(M) = u(M) + πν(M), ∀M ∈ C (14.125)
uext(M) = u(M)− πν(M), ∀M ∈ C (14.126)
donde por el subındice ”int” y ”ext” se entiende, respectivamente, el lımite cuando setiende al punto M del dominio de integracion desde el interior y desde el exterior.
Como puede apreciarse, el potencial de doble capa para la ecuacion de Helmholtz sufreuna discontinuidad sobre el dominio de integracion, es decir, un salto igual a:
∆u(M) = 4πν(M) (14.127)
en tres dimensiones, y
∆u(M) = 2πν(M) (14.128)
en dos dimensiones.

644 Jose Marın Antuna
14.2.3 Potencial de capa simple
Sus propiedades son:
1. El potencial de capa simple (14.109), (14.112), (14.115) o (14.118) satisface la ecuacion:
∇2u+ cu = 0, ∀M ∈ S (enR3) oC (enR2) (14.129)
2. La integral que lo define converge uniformemente en los puntos del dominio de integracion,por lo que el potencial de capa simple es una funcion continua en todo el espacio.
3. Su derivada normal con respecto a la normal exterior al dominio de integracion es dis-continua sobre el dominio de integracion y cumple:
En tres dimensiones: (∂u
∂n
)int
=
(∂u
∂n
)S
+ 2πµ(M), ∀M ∈ S (14.130)
(∂u
∂n
)ext
=
(∂u
∂n
)S
− 2πµ(M), ∀M ∈ S (14.131)
En dos dimensiones: (∂u
∂n
)int
=
(∂u
∂n
)S
+ πµ(M), ∀M ∈ C (14.132)
(∂u
∂n
)ext
=
(∂u
∂n
)S
− πµ(M), ∀M ∈ C (14.133)
Como puede verse, la derivada normal del potencial de capa simple es discontinua sobre eldominio de integracion y sufre un salto, al pasar del interior al exterior de dicho dominiodado por:
En tres dimensiones:
∆
(∂u
∂n
)= 4πµ(M) (14.134)
En dos dimensiones:
∆
(∂u
∂n
)= 2πµ(M) (14.135)
De manera similar a como vimos para el caso de los potenciales para la ecuacion de Poisson,los potenciales de la ecuacion de Helmholtz pueden usarse para resolver distintos problemas defrontera con la ecuacion de Helmholtz.
Metodo de la Teorıa de Potenciales 645
14.3 Ejercicios del capıtulo
1. Hallar el potencial de volumen de una esfera con densidad constante ρ = ρ0.
Sugerencia. Resolver la ecuacion ∇2u = 0 fuera de la esfera y ∇2u = 4πρ0 dentro de laesfera y empalmar ambas soluciones sobre la superficie de la esfera.
2. Hallar el potencial de capa simple con una distribucion de cargas de densidad constanteµ = µ0 sobre una esfera.
Sugerencia. Buscar la solucion de la ecuacion ∇2u = 0 fuera y dentro de la esfera yutilizar la condicion de discontinuidad de la derivada normal del potencial de capa simplesobre la superficie de la esfera.

646 Jose Marın Antuna
Capıtulo 15
Problemas en el Espacio Abierto
Anteriormente estudiamos, con el metodo de ondas viajeras, la solucion de la ecuacion hiper-bolica unidimensional en la cuerda infinita y en la cuerda semiinfinita. Dicha cuerda es, enesencia, un espacio abierto de una sola dimension espacial.
Mas tarde, por medio de las transformadas integrales, obtuvimos la solucion de otros pro-blemas de la ecuacion hiperbolica, ası como de la ecuacion parabolica en el espacio abiertounidimensional.
Luego vimos como se plantean los problemas de frontera para la ecuacion de Poisson en elespacio abierto; entonces vimos que, en tres dimensiones, era necesario exigir -para garantizarla unicidad de la solucion- que esta fuera regular en el infinito, en tanto que para los problemasen dos dimensiones solo era necesario exigir que la solucion en el infinito fuera acotada.
Hasta el momento no hemos abordado el planteamiento y solucion de los problemas de laecuacion de Helmholtz en el espacio abierto, pues para ello es necesario estudiar algunas cosasque veremos en el presente capıtulo.
Fısicamente hablando, la ecuacion hiperbolica describe los procesos oscilatorios y de propa-gacion de ondas en la naturaleza; la ecuacion parabolica describe los procesos de propagacionde calor y de difusion de sustancias.
En el presente capıtulo nos dedicaremos al estudio de la solucion de los problemas en el espacioabierto, con enfasis en los problemas de oscilaciones en el espacio abierto, por la importanciaque estos revisten para la Fısica.
15.1 Propagacion del calor y difusion en el espacio abier-
to
Supongamos que queremos resolver el problema de la propagacion de calor o de la difusionde una sustancia en el espacio abierto tridimensional, si se conoce la temperatura inicial y se
647
648 Jose Marın Antuna
supone que no existen fuentes de calor en R3.
Matematicamente, ello significa que deseamos hallar la solucion del problema
ut = a2∇2u, ∀M ∈ R3, t > 0 (15.1)
u(M, 0) = ϕ(M)
Aplicando el metodo de la transformada de Fourier, extendido al caso tridimensional, la que sedefine por las formulas:
F (k) =
∫ ∫ ∫ ∞
−∞f(P )eik·rdP (15.2)
f(M) =1
(2π)3
∫ ∫ ∫ ∞
−∞F (k)e−ik·rdk (15.3)
al problema (15.1), no es difıcil obtener para la solucion de este problema la expresion:
u(M, t) =
(1√
4πa2t
)3 ∫ ∫ ∫ ∞
−∞ϕ(P )e−
(x−ξ)2+(y−η)2+(z−ζ)2
4a2t dP (15.4)
Aquı, k = (k1, k2, k3), M = (x, y, z) y P = (ξ, η, ζ).
Observese que la formula (15.4) es una generalizacion a tres dimensiones de la solucion parala propagacion de calor en la barra infinita que fue obtenida en el capıtulo que dedicamos almetodo de transformadas integrales. La funcion de Green (solucion fundamental del operadorde propagacion de calor) en este caso es:
G(M,P, t) =
(1√
4πa2t
)3
e−(x−ξ)2+(y−η)2+(z−ζ)2
4a2t (15.5)
la que, por definicion, es la solucion del problema:
ut = a2∇2u, ∀M ∈ R3, t > 0 (15.6)
u(M, 0) = δ(M,P )
Con ayuda de la funcion (15.5) es posible hallar la solucion del problema de propagacion decalor en el espacio abierto, si en este hay fuentes de calor con densidad F (M, t), es decir, lasolucion del problema:

Problemas en el Espacio Abierto 649
ut = a2∇2u+ f(M, t), ∀M ∈ R3 t > 0 (15.7)
u(M, 0) = 0
donde f(M, t) = F (M, t)/cρ. La solucion de (15.7) sera:
u(M, t) =
∫ t
0
∫ ∫ ∫ ∞
−∞f(P, τ)G(M,P, t− τ)dPdτ (15.8)
donde la funcion G esta dada por (15.5) y, por las propiedades de la funcion delta de Dirac,sera solucion del problema
ut = a2∇2u+ δ(M,P )δ(t), ∀M ∈ R3 t > 0 (15.9)
u(M, 0) = 0
que, por lo tanto, es equivalente al problema (15.6).
La solucion del problema general en el espacio abierto
ut = a2∇2u+ f(M, t), ∀M ∈ R3 t > 0 (15.10)
u(M, 0) = ϕ(M)
tendra por solucion la superposicion de las soluciones de los problemas (15.1) y (15.7), es decir,la suma de las formulas (15.4) y (15.8).
15.2 Oscilaciones en el espacio abierto
En el presente epıgrafe acometeremos el estudio de los procesos oscilatorios en el espacio abiertoinfinito. Como sabemos, estos procesos son descritos por la ecuacion hiperbolica
1
a2
∂2u
∂t2= ∇2u+ f(M, t) (15.11)
que, en ocasiones, se escribe en la forma:
u = f(M, t) (15.12)

650 Jose Marın Antuna
donde el operador
u =1
a2
∂2
∂t2−∇2 (15.13)
es conocido con el nombre de dalembertiano u operador de D’Alembert.
La importancia fısica de los procesos descritos por esta ecuacion es sobradamente conocida, porlo que dedicaremos este epıgrafe a su estudio.
15.2.1 Formula de Kirchhoff
Buscaremos una expresion general para la solucion de la ecuacion hiperbolica (15.11), dondeu = u(M, t), M = (x, y, z). La expresion que vamos a encontrar nos dara la solucion dela ecuacion (15.11) en un punto M del espacio en un instante t, en funcion de valores de lasolucion en instantes anteriores en otros puntos de espacio.
Supongamos que tenemos cierto dominio tridimensional V de superficie frontera S y que en eltiene lugar cierto proceso fısico oscilatorio que viene expresado por la ecuacion (15.11).
Buscaremos una expresion de la solucion en el punto M ∈ V en el instante t0. Con centro enel punto M coloquemos un sistema de coordenadas esfericas, de manera que nuestra funcion,evaluada en cualquier punto es u(r, θ, ϕ, t) y u(M, t) = u(0, θ, ϕ, t). En estas coordenadasesfericas y en virtud de la expresion del laplaciano, la ecuacion (15.11) toma la forma:
1
a2utt = urr +
2
rur +
1
r2∇2θϕu+ f (15.14)
donde, como siempre,
∇2θϕu =
1
sin θ
∂
∂θ
(sin θ
∂u
∂θ
)+
1
sin2 θ
∂2u
∂ϕ2(15.15)
es la parte angular del laplaciano en esfericas.
Introduzcamos un cambio de variables dado por:
t∗ = t−(t0 −
r
a
)(15.16)
dejando sin variacion las coordenadas r, θ y ϕ. Llamemos:
u(r, θ, ϕ, t) ≡ u(r, θ, ϕ, t∗ +
(t0 −
r
a
))≡ U(r, θ, ϕ, t∗) (15.17)

Problemas en el Espacio Abierto 651
f(r, θ, ϕ, t) ≡ f(r, θ, ϕ, t∗ +
(t0 −
r
a
))≡ F (r, θ, ϕ, t∗) (15.18)
Entonces, evidentemente:
ur ≡∂u
∂r=∂U
∂r+∂U
∂t∗∂t∗
∂r=∂U
∂r+
1
a
∂U
∂t∗≡ Ut +
1
aUt∗ (15.19)
y
urr = Urr +2
aUrt∗ +
1
a2Ut∗t∗ (15.20)
Ademas:
utt = Ut∗t∗ , ∇2θϕu = ∇2
θϕU (15.21)
Colocando (15.19), (15.20) y (15.21) en la ecuacion (15.14), cancelando y teniendo en cuentaque
2
aUrt∗ +
2
arUt∗ ≡
2
ar
∂
∂r(rUt∗) (15.22)
obtenemos:
∇2U ≡ Urr +2
rUr +
1
r2∇2θϕU = − 2
ar
∂
∂r(rUt∗)− F ≡ −Φ(r, θ, ϕ, t∗) (15.23)
La ecuacion (15.23), considerando t∗ como parametro, es una ecuacion de Poisson. Apliquemoslela tercera formula de Green en el volumen V de frontera S:
4πU(M, t∗) =
∫ ∫S
1
r
∂U
∂n− U(P, t∗)
∂
∂n
(1
r
)dSP −
∫ ∫ ∫V
∇2U
rdP (15.24)
donde r ≡ rMP y P = (ξ, η, ζ) es un punto de integracion.
Tendremos, de acuerdo con (15.23):
4πU(M, t∗) =
∫ ∫S
1
r
∂U
∂n− U(P, t∗)
∂
∂n
(1
r
)dSP+
∫ ∫ ∫V
2
ar2
∂
∂r(rUt∗)dP+
∫ ∫ ∫V
F
rdP
(15.25)
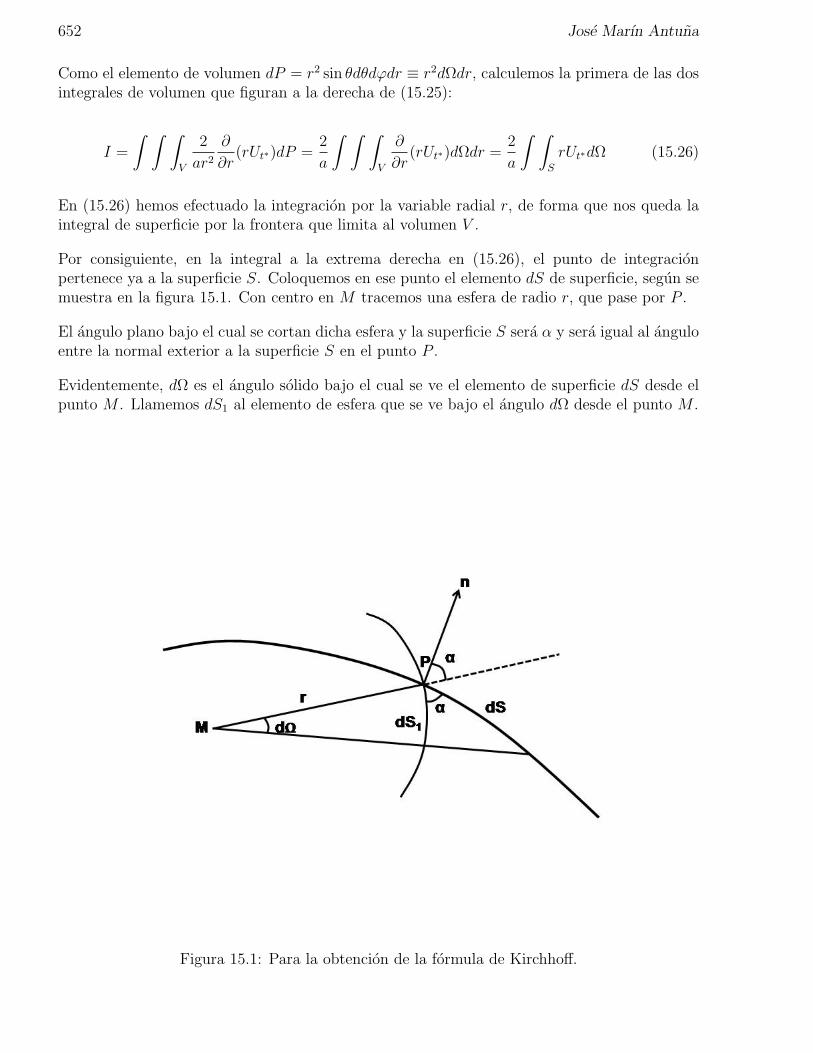
652 Jose Marın Antuna
Como el elemento de volumen dP = r2 sin θdθdϕdr ≡ r2dΩdr, calculemos la primera de las dosintegrales de volumen que figuran a la derecha de (15.25):
I =
∫ ∫ ∫V
2
ar2
∂
∂r(rUt∗)dP =
2
a
∫ ∫ ∫V
∂
∂r(rUt∗)dΩdr =
2
a
∫ ∫S
rUt∗dΩ (15.26)
En (15.26) hemos efectuado la integracion por la variable radial r, de forma que nos queda laintegral de superficie por la frontera que limita al volumen V .
Por consiguiente, en la integral a la extrema derecha en (15.26), el punto de integracionpertenece ya a la superficie S. Coloquemos en ese punto el elemento dS de superficie, segun semuestra en la figura 15.1. Con centro en M tracemos una esfera de radio r, que pase por P .
El angulo plano bajo el cual se cortan dicha esfera y la superficie S sera α y sera igual al anguloentre la normal exterior a la superficie S en el punto P .
Evidentemente, dΩ es el angulo solido bajo el cual se ve el elemento de superficie dS desde elpunto M . Llamemos dS1 al elemento de esfera que se ve bajo el angulo dΩ desde el punto M .
Figura 15.1: Para la obtencion de la formula de Kirchhoff.
Problemas en el Espacio Abierto 653
De la figura 15.1 es evidente que
dS1 = dS cosα (15.27)
y, por definicion de angulo solido:
dΩ =dS1
r2=dS cosα
r2(15.28)
y, como, por definicion de derivada dirigida
∂r
∂n=∂r
∂rcosα ≡ cosα (15.29)
tendremos, de (15.28) y (15.29) que:
dΩ =∂r
∂n
dS
r2(15.30)
Volviendo a (15.26), obtenemos para nuestra integral la expresion:
I =
∫ ∫S
2
ar
∂r
∂n
∂U
∂t∗dS (15.31)
Colocando (15.31) en (15.25), nos queda:
4πU(M, t∗) =
∫ ∫S
1
r
∂U
∂n− U
∂
∂n
(1
r
)+
2
ar
∂r
∂n
∂U
∂t∗
dSP +
∫ ∫ ∫V
F
rdP (15.32)
Regresemos a la variable inicial t. A la izquierda en (15.32) tendremos, en virtud de (15.16):
U(M, t∗) ≡ u(M, t) = u(M, t∗ + t0 −
r
a
)≡ u(M, t∗ + t0) (15.33)
ya que rMP = 0 en este caso, pues P = M en (15.33). Ademas, como:
∂u
∂n=∂U
∂n+∂U
∂t∗∂t∗
∂n=∂U
∂n+∂u
∂t
∂t∗
∂r
∂r
∂n=
1
a
∂r
∂n
∂u
∂t
pues ∂U∂t∗
≡ ∂u∂t
, obtenemos que:
∂U
∂n=∂u
∂n− 1
a
∂r
∂n
∂u
∂t(15.34)

654 Jose Marın Antuna
Colocando (15.33) y (15.34) en (15.32), obtenemos:
u(M, t∗ + t0) =1
4π
∫ ∫S
1
r
∂u
∂n− u
∂
∂n
(1
r
)+
1
ar
∂r
∂n
∂u
∂t
dSP +
1
4π
∫ ∫ ∫V
f
rdP (15.35)
En la expresion (15.35) hay que tener presente que los integrandos en la integral de superficiey en la integral de volumen estan evaluados, de acuerdo con (15.16), en
t = t∗ + t0 −rMP
a
ya que en ellos, en general, P 6= M .
Tomemos, ahora, el caso particular t∗ = 0. Entonces, denotando por t a t0, de (15.35) obtene-mos, introduciendo la notacion completa r ≡ rMP :
u(M, t) =1
4π
∫ ∫S
1
rMP
[∂u
∂n
]− [u]
∂
∂nP
(1
rMP
)+
1
arMP
∂rMP
∂nP
[∂u
∂t
]dSP +
+1
4π
∫ ∫ ∫V
[f ]
rMP
dP (15.36)
La formula obtenida (15.36) se llama formula de Kirchhoff.
En ella los corchetes significan que la funcion dentro de ellos se evalua, no en t, sino en elllamado tiempo local
t′ = t− rMP
a(15.37)
donde rMP es la distancia desde el punto de integracion P hasta el punto M , donde se buscala solucion. Es decir:
[u] = u(P, t− rMP
a
)(15.38)
y a es la velocidad de propagacion de la onda generada por el proceso oscilatorio, segun cono-cemos.
La formula de Kirchhoff (15.36) nos da la expresion general de la solucion de la ecuacionhiperbolica (15.11).
Como se ve, la solucion, en el punto M en el instante t, viene dada a traves de valores entiempos anteriores locales (15.37) de la solucion, de su derivada normal, de su velocidad y dela inhomogeneidad de la ecuacion, es decir, de las fuentes.

Problemas en el Espacio Abierto 655
Fısicamente, ello significa que la perturbacion en (M, t) esta dada por valores de la fuente eninstantes anteriores, ya que esa influencia se mueve en el espacio con velocidad a.
El resultado teorico general obtenido con la formula de Kirchhoff corresponde a la realidadfısica conocida por nosotros. La expresion (15.37) escrita en la forma
t− t′ =rMP
a(15.39)
es la ecuacion, en el espacio tetradimensional P, t′, de un hipercono con vertice en el punto(M, t), cuya proyeccion en el espacio (ξ, η, t′) se muestra en la figura 15.2.
Una senal que salga del punto P en el instante local t′ llega al punto M en el instante t si
rMP
a= t− t′, con t′ < t
Figura 15.2: Proyeccion del hipercono en el espacio ξ, η, t′.
Recalquemos que la formula de Kirchhoff (15.36) es una formula general para la solucion de laecuacion hiperbolica (15.11); en ella S es cualquier superficie, con cualquier forma, frontera del

656 Jose Marın Antuna
dominio V . El tiempo local, como ya hemos enfatizado es comprensible fısicamente: rMP/a esel tiempo que requiere la perturbacion, que viaja con velocidad a, para llegar desde P dondese origina hasta el punto M .
Si queremos que llegue a M en el instante t, tiene que salir de P en el instante t− rMP/a.
Por lo tanto, la formula de Kirchhoff es lo que se conoce en Fısica como formula de lospotenciales retardados.
15.2.2 Solucion del problema de Cauchy para la ecuacion homoge-nea de oscilaciones
Utilicemos, ahora, la formula de Kirchhoff para resolver el problema de Cauchy en el espacioabierto. Veremos los casos tridimensional y bidimensional por separado.
Caso tridimensional
Supongamos que queremos hallar la expresion de las oscilaciones de cierto ente fısico en elespacio de tres dimensiones, provocadas por determinadas condiciones iniciales, es decir por unaelongacion inicial y una velocidad inicial, en ausencia de fuentes. Esto significa que queremosresolver el siguiente problema de Cauchy:
1
a2utt = ∇2u, ∀M ∈ R3, t > 0
u(M, 0) = ϕ(M) (15.40)
ut(M, 0) = ψ(M)
El problema (15.40) es una extension a R3 de las oscilaciones en R (la cuerda infinita) queestudiamos por el metodo de ondas viajeras.
La solucion general de la ecuacion del problema (15.40), como sabemos, viene dada por laformula de Kirchhoff (15.36); en ella -como la funcion f(M, t) = 0 en este caso- la integral devolumen desaparece y solo queda la integral por la superficie S:
u(M, t) =1
4π
∫ ∫S
1
rMP
[∂u
∂n
]− [u]
∂
∂nP
(1
rMP
)+
1
arMP
∂rMP
∂nP
[∂u
∂t
]dSP (15.41)
En principio, S en (15.41) es cualquier superficie que envuelve al punto M donde buscamos lasolucion en el instante t.
Escojamos adecuadamente esta superficie, de manera que podamos utilizar los datos inicialesque nos da el problema (15.40). Como, en general para cualquier funcion v:

Problemas en el Espacio Abierto 657
[v] = v(P, t− rMP
a
)(15.42)
si tomamos rMP = at, de (15.42) tenemos que
[v] = v(P, t− rMP
a
)= v
(P, t− at
a
)= v(P, 0) (15.43)
Por consiguiente, por superficie de integracion S en la formula (15.41) tomaremos una esferaSMat , de radio at, centrada en el punto M donde buscamos la solucion. Entonces, para lasexpresiones que figuran en el integrando tendremos:
[u] = u(P, 0) = ϕ(P ) (15.44)
[∂u
∂n
]=∂u(P, 0)
∂n=∂ϕ(P )
∂n(15.45)
y
[∂u
∂t
]=∂u(P, 0)
∂t= ψ(P ) (15.46)
que son ya funciones conocidas del planteamiento del problema.
Ademas, en este caso, ∂/∂n = ∂/∂r. Por lo tanto, en la formula (15.41) tendremos que:
1
rMP
[∂u
∂n
]− [u]
∂
∂nP
(1
rMP
)≡ 1
r
∂ϕ
∂r+ ϕ
1
r2≡ 1
r2
∂
∂r(rϕ(P )) (15.47)
y
1
arMP
∂rMP
∂nP
[∂u
∂t
]=
1
ar
∂r
∂rψ(P ) =
1
arψ(P ) (15.48)
Colocando (15.47) y (15.48) en (15.41), cuando la superficie de integracion es SMat , nos queda:
u(M, t) =
∫ ∫SM
at
1
r2
∂
∂r(rϕ(P )) +
1
arψ(P )
dS (15.49)
Pero, como dS = r2 sin θdθdϕ, de (15.49) obtenemos, ya que r = at:

658 Jose Marın Antuna
u(M, t) =1
4π
∫ π
0
∫ 2π
0
∂
∂r(rϕ(P )) +
r
aψ(P )
sin θdθdϕ =
=1
4π
1
a
∂
∂t
∫ π
0
∫ 2π
0
atϕ(P ) sin θdθdϕ+
∫ π
0
∫ 2π
0
at
aψ(P ) sin θdθdϕ
(15.50)
Ası pues, finalmente, para la solucion del problema (15.40) queda la expresion:
u(M, t) =1
4π
∂
∂t
[t
∫ π
0
∫ 2π
0
ϕ(P ) sin θdθdϕ
]+ t
∫ π
0
∫ 2π
0
ψ(P ) sin θdθdϕ
(15.51)
La expresion (15.51) recibe el nombre de formula de Poisson para la solucion del problemade Cauchy de la ecuacion homogenea de las oscilaciones en el espacio abierto.
En ocasiones, es conveniente escribir (15.51) de otra manera. Multipliquemos y dividamosdentro de cada integral en (15.51) por a2t. Tendremos:
u(M, t) =1
4π
∂
∂t
∫ π
0
∫ 2π
0
a2t2
a2tϕ(P ) sin θdθdϕ+
∫ π
0
∫ 2π
0
a2t2
a2tψ(P ) sin θdθdϕ
(15.52)
y, como a2t2 = r2 y dS = r2 sin θdθdϕ, obtenemos, finalmente:
u(M, t) =1
4πa2
∂
∂t
∫ ∫SM
at
ϕ(P )
tdS +
∫ ∫SM
at
ψ(P )
tdS
(15.53)
La expresion (15.53) es la misma formula de Poisson (15.51), escrita de otra forma. Ella nosda la solucion del problema de Cauchy en el punto (M, t), en funcion de la perturbacion y lavelocidad iniciales sobre la superficie de una esfera centrada en M y de radio at.
Observese que el radio de la esfera de integracion crece con el tiempo, de manera que sobre lasoscilaciones del punto M influyen condiciones iniciales de puntos cada vez mas lejanos. Esteresultado es, fısicamente, comprensible pues, si la velocidad de propagacion de la perturbaciones a, para cada instante t el estado del punto M -puesto que no hay fuentes- dependera de laperturbacion inicial de los puntos que se encuentran a la distancia at del punto M .
La influencia de las condiciones iniciales de los puntos mas cercanos ya paso por M y la de lospuntos mas alejados aun no ha llegado a dicho punto en el instante t.
Debe destacarse el hecho de que la esfera SMat es una esfera matematica de integracion que norepresenta ningun ente fısico; es una superficie de integracion que, partiendo del punto M enel instante t = 0, se expande hacia el infinito con el crecimiento de t, de forma tal que, en laintegracion sobre ella, se toman las condiciones iniciales de puntos cada vez mas alejados delpunto M . Mas adelante ampliaremos aun mas el analisis fısico de la solucion obtenida.

Problemas en el Espacio Abierto 659
Caso bidimensional
Resolvamos, ahora, el problema de Cauchy bidimensional:
1
a2utt = ∇2
2u, ∀M ∈ R2, t > 0
u(x, y, 0) = ϕ(x, y) (15.54)
ut(x, y, 0) = ψ(x, y)
que se obtiene en el caso tridimensional, cuando las condiciones iniciales y, por consiguientela solucion, tienen simetrıa con respecto a la variable z. Por eso, podemos usar la formula dePoisson (15.53) recien obtenida, en la que no haya dependencia respecto a z.
Como ahora las funciones ϕ y ψ no dependen de z, es decir, tienen iguales valores para toda z,podremos hacer las siguientes modificaciones en las integrales por la superficie esferica SMat .
Introduzcamos un sistema local de coordenadas (x′, y′, z′), con origen en el punto M (Fig. 15.3).
Como x,y,z son las coordenadas del punto M y ξ,η,ζ son las coordenadas del punto de in-tegracion P en el sistema de coordenadas inicial, tendremos que las coordenadas de P en elsistema nuevo seran:
x′ = ξ − x
y′ = η − y (15.55)
z′ = ζ − z
Por otra parte, como ϕ y ψ no dependen de z, la integral por el casquete superior de la esfera SMatpuede ser sustituida por la integral por el cırculo ΣM
at . Igualmente, la integral por el casqueteinferior de la esfera SMat puede sustituirse por la integral por el cırculo ΣM
at .
Esto conduce a que la integral por SMat en la formula (15.53) se convierte en dos veces la integralpor el cırculo ΣM
at en el plano (x′, y′).
Para efectuar esa sustitucion, es necesario sustituir el elemento de esfera dS por el elemento dearea del cırculo dσ. Para ello, observemos que, de acuerdo con la figura 15.3,
dS =dσ
cos γ≡ dξdη
cos γ(15.56)
Ademas, de la propia figura 15.3 no es difıcil percatarse de que
cos γ =
√r2 − x′2 − y′2
r(15.57)
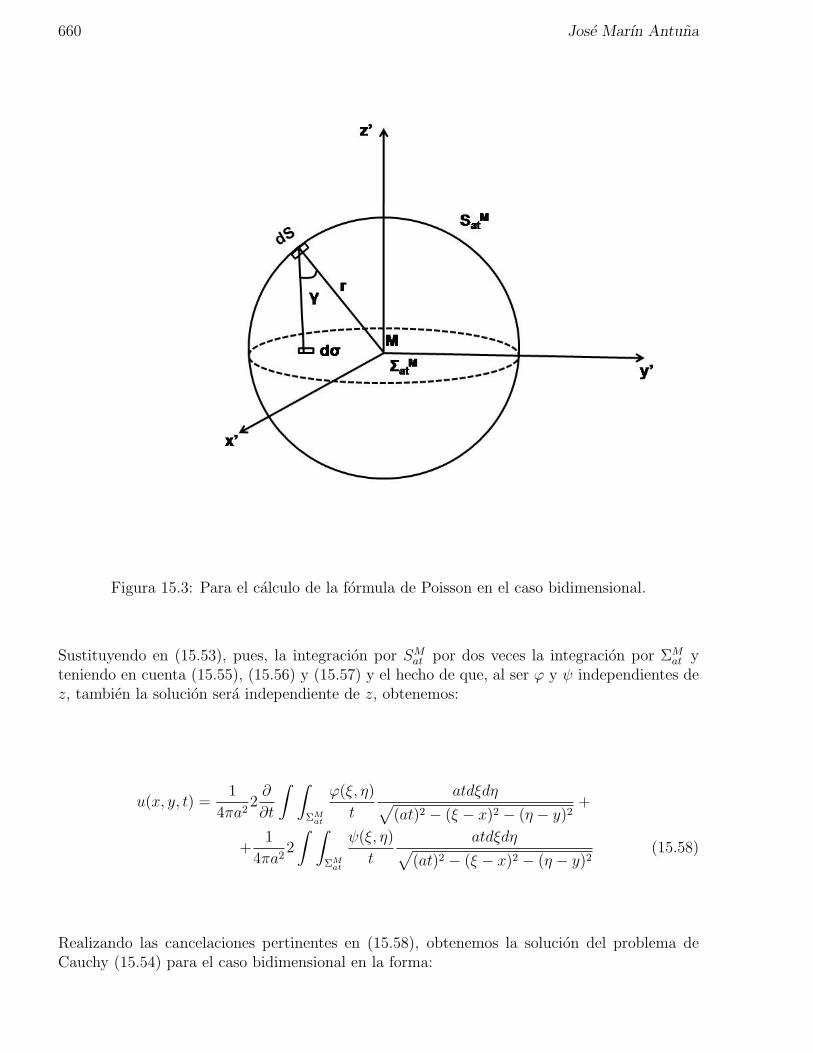
660 Jose Marın Antuna
Figura 15.3: Para el calculo de la formula de Poisson en el caso bidimensional.
Sustituyendo en (15.53), pues, la integracion por SMat por dos veces la integracion por ΣMat y
teniendo en cuenta (15.55), (15.56) y (15.57) y el hecho de que, al ser ϕ y ψ independientes dez, tambien la solucion sera independiente de z, obtenemos:
u(x, y, t) =1
4πa22∂
∂t
∫ ∫ΣM
at
ϕ(ξ, η)
t
atdξdη√(at)2 − (ξ − x)2 − (η − y)2
+
+1
4πa22
∫ ∫ΣM
at
ψ(ξ, η)
t
atdξdη√(at)2 − (ξ − x)2 − (η − y)2
(15.58)
Realizando las cancelaciones pertinentes en (15.58), obtenemos la solucion del problema deCauchy (15.54) para el caso bidimensional en la forma:
Problemas en el Espacio Abierto 661
u(x, y, t) =1
2πa
∂
∂t
∫ ∫ΣM
at
ϕ(ξ, η)dξdη√(at)2 − (ξ − x)2 − (η − y)2
+
+1
2πa
∫ ∫ΣM
at
ψ(ξ, η)dξdη√(at)2 − (ξ − x)2 − (η − y)2
(15.59)
La expresion (15.59) es la formula de Poisson para el caso bidimensional.
Como se aprecia, a diferencia del caso tridimensional, la region de integracion es el cırculocentrado enM que lo contiene, mientras que en el caso tridimensional la integracion se efectuabasobre la superficie de una esfera centrada en M .
En la expresion (15.59) se observa que la perturbacion, en el punto M = (x, y) en el instantet, depende de las condiciones iniciales de todos los puntos que se encuentran en el interiordel cırculo con centro en M y radio at. Esto conducira a diferencias sustanciales con el casotridimensional, desde el punto de vista fısico, como podremos apreciar mas adelante.
Es conveniente destacar aquı, tambien, que el cırculo de integracion ΣMat es un ente matematico
que no representa ningun objeto fısico y que con el crecimiento de t se expande, abarcandopuntos cada vez mas lejanos al punto M .
Caso unidimensional
Desde el punto de vista metodologico, resulta de interes utilizar los resultados anteriores pararesolver el problema de Cauchy de la ecuacion hiperbolica de las oscilaciones en una dimensionespacial:
1
a2utt = uxx, ∀ −∞ < x <∞, t > 0
u(x, 0) = ϕ(x) (15.60)
ut(x, 0) = ψ(x)
cuya solucion es conocida desde el capıtulo donde desarrollamos el metodo de ondas viajerasdel presente libro. Podemos tomar para ello la formula de Poisson bidimensional (15.59) en laque consideraremos que ϕ = ϕ(x), ψ = ψ(x), M = (x, 0). Es decir, que integraremos por elcırculo con centro en (x, 0) y radio at que se muestra en la figura 15.4 y que no es mas queel mismo cırculo que aparece en la formula (15.59), adaptado a la situacion de simetrıa de lascondiciones respecto a la variable y.
Es decir, tendremos:
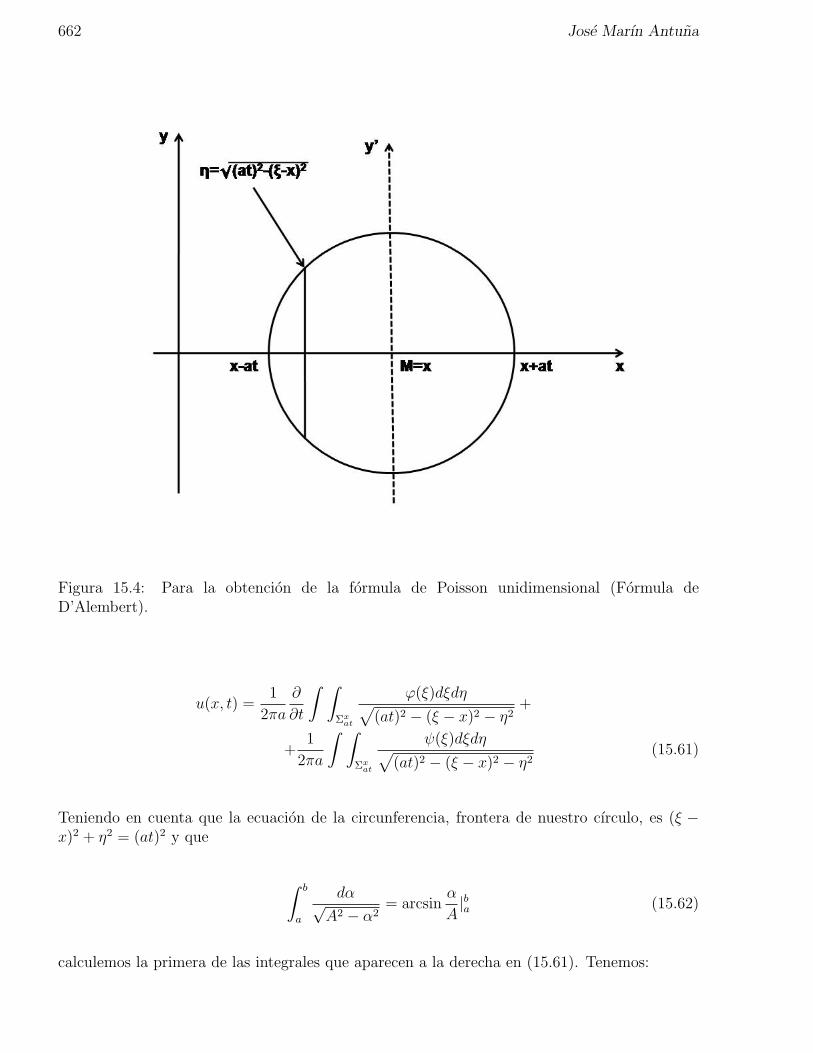
662 Jose Marın Antuna
Figura 15.4: Para la obtencion de la formula de Poisson unidimensional (Formula deD’Alembert).
u(x, t) =1
2πa
∂
∂t
∫ ∫Σx
at
ϕ(ξ)dξdη√(at)2 − (ξ − x)2 − η2
+
+1
2πa
∫ ∫Σx
at
ψ(ξ)dξdη√(at)2 − (ξ − x)2 − η2
(15.61)
Teniendo en cuenta que la ecuacion de la circunferencia, frontera de nuestro cırculo, es (ξ −x)2 + η2 = (at)2 y que
∫ b
a
dα√A2 − α2
= arcsinα
A|ba (15.62)
calculemos la primera de las integrales que aparecen a la derecha en (15.61). Tenemos:
Problemas en el Espacio Abierto 663
∫ ∫Σx
at
ϕ(ξ)dξdη√(at)2 − (ξ − x)2 − η2
=
∫ x+at
x−atϕ(ξ)dξ ·
·2∫ √(at)2−(ξ−x)2
0
dη√(at)2 − (ξ − x)2 − η2
=
= 2
∫ x+at
x−atϕ(ξ)dξ · arcsin
η√(at)2 − (ξ − x)2
|√
(at)2−(ξ−x)20 =
= 2
∫ x+at
x−atϕ(ξ)dξ · arcsin 1 = 2
∫ x+at
x−atϕ(ξ)dξ · π
2= π
∫ x+at
x−atϕ(ξ)dξ (15.63)
De manera totalmente identica se obtiene, para la segunda integral:
∫ ∫Σx
at
ψ(ξ)dξdη√(at)2 − (ξ − x)2 − η2
= π
∫ x+at
x−atψ(ξ)dξ (15.64)
Colocando (15.63) y (15.64) en (15.61) y teniendo en cuenta que
∂
∂t
∫ x+at
x−atϕ(ξ)dξ = ϕ(x+ at) · a− ϕ(x− at) · (−a) (15.65)
obtenemos, finalmente, despues de las cancelaciones oportunas, la solucion en la forma:
u(x, t) =ϕ(x+ at) + ϕ(x− at)
2+
1
2a
∫ x+at
x−atψ(ξ)dξ (15.66)
Es decir, como era de esperar la formula de Poisson, en el caso unidimensional, no es otra cosaque la formula de D’Alembert obtenida por nosotros por el metodo de ondas viajeras y tambienpor el metodo de transformadas integrales.
15.2.3 Dependencia de la solucion de las condiciones iniciales
Desarrollaremos, ahora, la discusion fısica de las formulas de Poisson obtenidas en el puntoanterior, partiendo de la suposicion de que las condiciones iniciales esten localizadas en unaregion finita del espacio.
Analicemos, inicialmente, el caso tridimensional.
Supongamos en la formula de Poisson en tres dimensiones (15.53), que las condiciones inicialesϕ y ψ son diferentes de cero (para fijar ideas, ϕ > 0 y ψ > 0) en cierto dominio V0 del espacioe iguales a cero en el resto del espacio. Ello responde, fısicamente, a la creacion de cierta
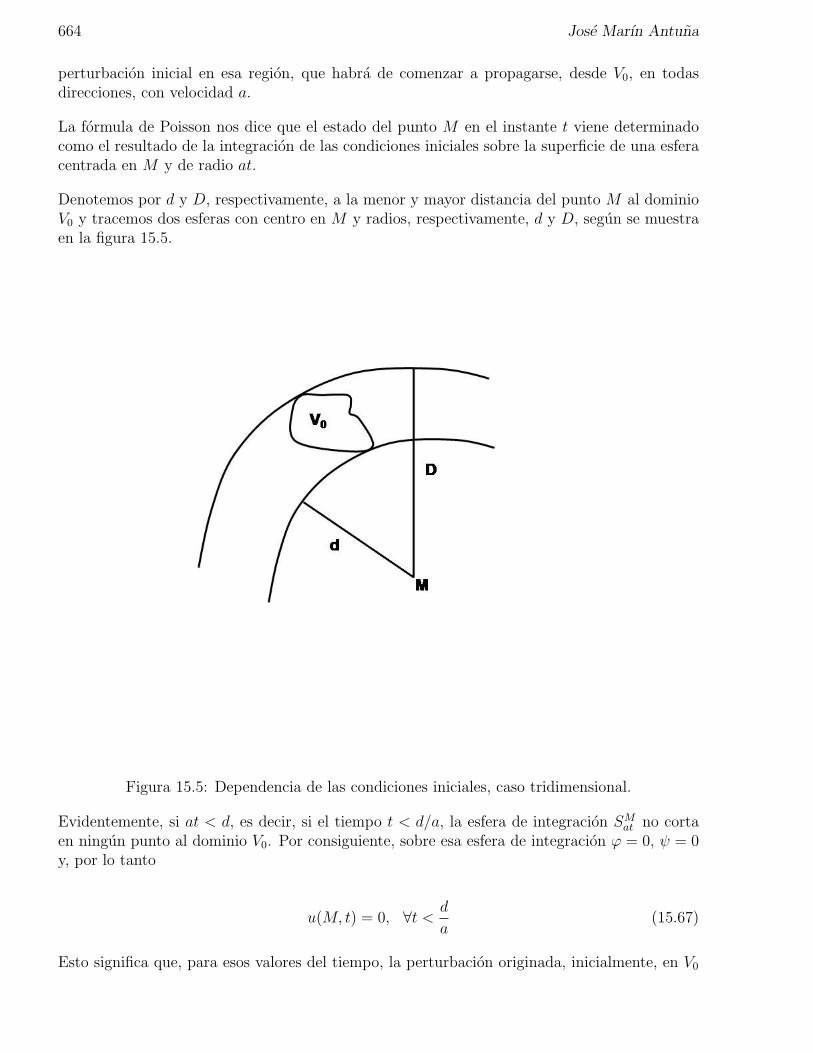
664 Jose Marın Antuna
perturbacion inicial en esa region, que habra de comenzar a propagarse, desde V0, en todasdirecciones, con velocidad a.
La formula de Poisson nos dice que el estado del punto M en el instante t viene determinadocomo el resultado de la integracion de las condiciones iniciales sobre la superficie de una esferacentrada en M y de radio at.
Denotemos por d y D, respectivamente, a la menor y mayor distancia del punto M al dominioV0 y tracemos dos esferas con centro en M y radios, respectivamente, d y D, segun se muestraen la figura 15.5.
Figura 15.5: Dependencia de las condiciones iniciales, caso tridimensional.
Evidentemente, si at < d, es decir, si el tiempo t < d/a, la esfera de integracion SMat no cortaen ningun punto al dominio V0. Por consiguiente, sobre esa esfera de integracion ϕ = 0, ψ = 0y, por lo tanto
u(M, t) = 0, ∀t < d
a(15.67)
Esto significa que, para esos valores del tiempo, la perturbacion originada, inicialmente, en V0

Problemas en el Espacio Abierto 665
no ha tenido tiempo de llegar -viajando con velocidad a- hasta el punto M y este se encuentraen estado de reposo, no perturbado; el frente anterior de la perturbacion que se mueve, viajandodesde V0 hacia afuera, no ha llegado aun al punto M .
Si d < at < D, es decir, si el tiempo t cumple que d/a < t < D/a, la esfera SMat corta a V0 y,por lo tanto, en la interseccion, ϕ 6= 0 y ψ 6= 0 y, por ello
u(M, t) 6= 0, ∀da< t <
D
a(15.68)
Esto significa que la perturbacion, salida de V0 en el instante inicial, esta pasando por el puntoM y este -en ese rango de valores del tiempo- se encuentra en estado excitado.
Cuando at > D, o sea, para tiempos t > D/a, la esfera de integracion SMat de nuevo no corta aldominio V0 y, por lo tanto, sobre ella ϕ = 0, ψ = 0 y, de nuevo
u(M, t) = 0, ∀t > D
a(15.69)
lo que significa que el frente posterior de la perturbacion, originada en el instante inicial en V0,paso por el punto M y este, nuevamente, esta en reposo, no perturbado.
Como resultado de este analisis, concluimos la existencia, bien definida, de un frente anterior yun frente posterior de la onda que se propaga, no existiendo, por lo tanto, fenomenos duraderosde consecuencia en el estado del punto M ; este, del estado de reposo, pasa a un estado excitadoy regresa, nuevamente, al estado de reposo.
La existencia de un frente anterior y un frente posterior bien definidos se conoce con el nombrede Principio de Huygens. Al no existir fenomenos de consecuencia, cada punto del espacioexcitado en el instante t puede mirarse como un nuevo punto generador de ondas que se pro-pagan a partir de el para tiempos mayores que t, que es la forma practica en que el principiode Huygens es utilizado comunmente en Optica.
Ası las cosas, si suponemos que V0 es una esfera de radio R, para un tiempo dado t podemosdibujar la zona perturbada, con el frente anterior a la distancia at + R del centro de la esferaV0 y el frente posterior a la distancia at−R de dicho centro.
Esta zona perturbada esta formada por los puntos M3 para los que sus esferas de integracionSM3at cortan a V0.
Los puntos M2 son aquellos que estan en reposo, porque -en el instante t- la perturbacion yapaso por ellos y su esfera de integracion SM2
at contiene en su interior a V0, mientras que lospuntos M1 estan en reposo por no haber llegado aun a ellos la perturbacion y su esfera SM1
at deintegracion aun no ha llegado a V0.
Recuerdese que en todo este analisis el tiempo t es fijo. El cuadro descrito se ilustra en la figura15.6, donde la zona perturbada esta sombreada.
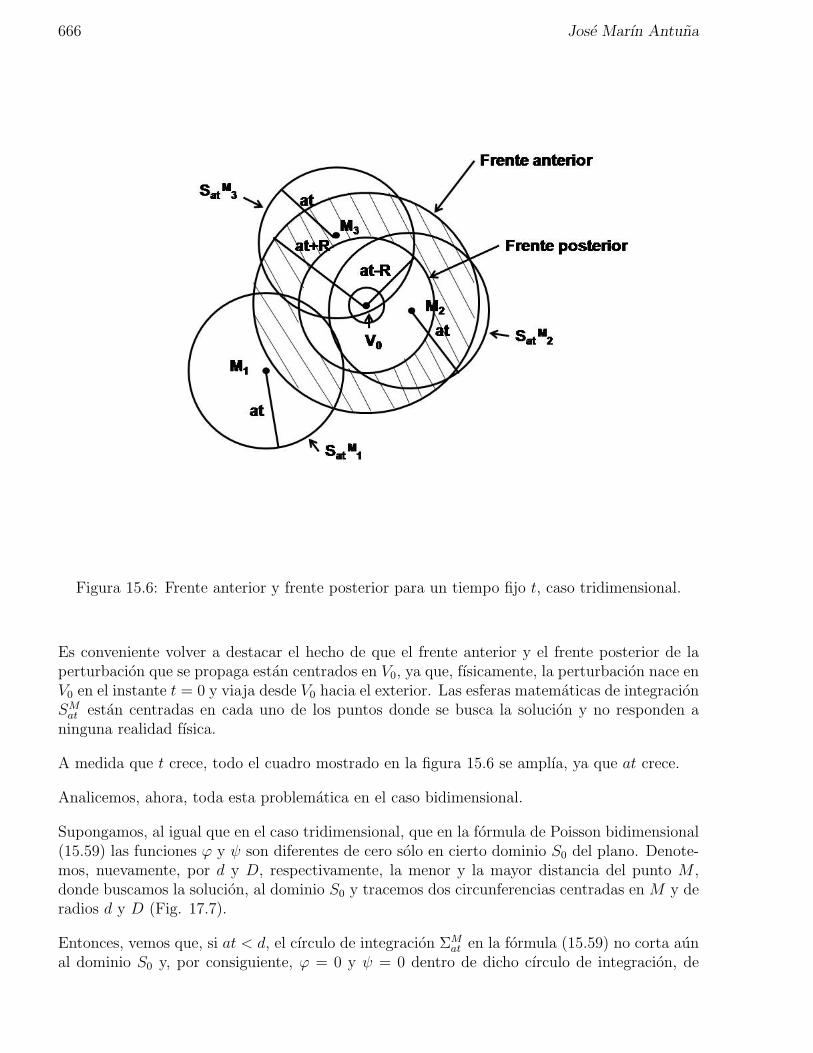
666 Jose Marın Antuna
Figura 15.6: Frente anterior y frente posterior para un tiempo fijo t, caso tridimensional.
Es conveniente volver a destacar el hecho de que el frente anterior y el frente posterior de laperturbacion que se propaga estan centrados en V0, ya que, fısicamente, la perturbacion nace enV0 en el instante t = 0 y viaja desde V0 hacia el exterior. Las esferas matematicas de integracionSMat estan centradas en cada uno de los puntos donde se busca la solucion y no responden aninguna realidad fısica.
A medida que t crece, todo el cuadro mostrado en la figura 15.6 se amplıa, ya que at crece.
Analicemos, ahora, toda esta problematica en el caso bidimensional.
Supongamos, al igual que en el caso tridimensional, que en la formula de Poisson bidimensional(15.59) las funciones ϕ y ψ son diferentes de cero solo en cierto dominio S0 del plano. Denote-mos, nuevamente, por d y D, respectivamente, la menor y la mayor distancia del punto M ,donde buscamos la solucion, al dominio S0 y tracemos dos circunferencias centradas en M y deradios d y D (Fig. 17.7).
Entonces, vemos que, si at < d, el cırculo de integracion ΣMat en la formula (15.59) no corta aun
al dominio S0 y, por consiguiente, ϕ = 0 y ψ = 0 dentro de dicho cırculo de integracion, de

Problemas en el Espacio Abierto 667
Figura 15.7: Dependencia de las condiciones iniciales, caso bidimensional.
manera que
u(M, t) = 0, ∀t < d
a(15.70)
Esto significa que la perturbacion, originada en S0, no ha tenido tiempo aun de llegar -viajandocon velocidad a- al punto M y este se encuentra en estado reposo.
En el instante t = d/a el cırculo de integracion ΣMat toca, con su circunferencia frontera, a la
frontera del dominio S0; en ese instante llega al punto M un frente anterior bien definido de laperturbacion.
Para d < at < D la interseccion del cırculo ΣMat con S0 es cada vez mayor y, por lo tanto ϕ 6= 0
y ψ 6= 0 en areas de integracion cada vez mayores, lo que significa, suponiendo a ϕ y ψ definidaspositivas para fijar ideas,
u(M, t) 6= 0, ∀da< t <
D
a(15.71)

668 Jose Marın Antuna
de manera creciente.
Para at > D, las integrales en la formula (15.59) siguen siendo diferentes de cero siempre, yaque el dominio S0 queda siempre contenido dentro del cırculo de integracion ΣM
at y, por lo tanto
u(M, t) 6= 0, ∀t > D
a(15.72)
aunque, evidentemente, u(M, t) → 0 para t → ∞, en virtud de la presencia del radical en eldenominador de los integrandos en la formula (15.59).
Por consiguiente, concluimos que, en el caso bidimensional, si bien existe un frente anterior de laperturbacion que se propaga, partiendo de S0, no existe un frente posterior. Hay consecuenciasduraderas en el estado de ese punto; este, una vez excitado, permanece en estado perturbadotodo el tiempo y no tiene lugar el principio de Huygens.
Este resultado, ciertamente, puede parecer extrano y ha sido obtenido por medio de un analisispuramente matematico de la expresion de la formula de Poisson bidimensional y, como hemosvisto, esta dado por el hecho de que, en la formula (15.59), la integracion se efectua por lasuperficie del cırculo ΣM
at que, a partir de cierto instante, siempre habra de contener al dominioS0.
Sin embargo dicho resultado tiene una explicacion muy comprensible desde el punto de vistafısico. Efectivamente, la razon esta en el hecho de que un problema bidimensional se obtienea partir de un problema tridimensional con simetrıa en el eje z. En la realidad, fısicamente,todos los problemas son siempre tridimensionales, pues nuestro espacio objetivo y real es detres dimensiones.
En el resultado obtenido lo que se refleja es el hecho de que al punto M siempre van a estarllegando, a partir de t = d/a, perturbaciones originadas en secciones transversales de area S0
mas alejadas del plano (x, y) escogido para resolver el problema, con respecto a z y que llegarana M mas debilitadas, por estar a una distancia real (tridimensional) mayor. (Ver figura 15.8).
15.2.4 Solucion de la ecuacion no homogenea de oscilaciones en elespacio abierto
Supongamos que queremos, ahora, hallar la solucion del problema en el espacio abierto:
1
a2utt = ∇2u+ f(M, t), ∀M ∈ R3, t > 0
u(M, 0) = 0 (15.73)
ut(M, 0) = 0
Este problema responde al proceso de las oscilaciones en el espacio abierto tridimensional,provocadas por la presencia de fuentes (fuerzas aplicadas) con densidad f(M, t) distribuidas,
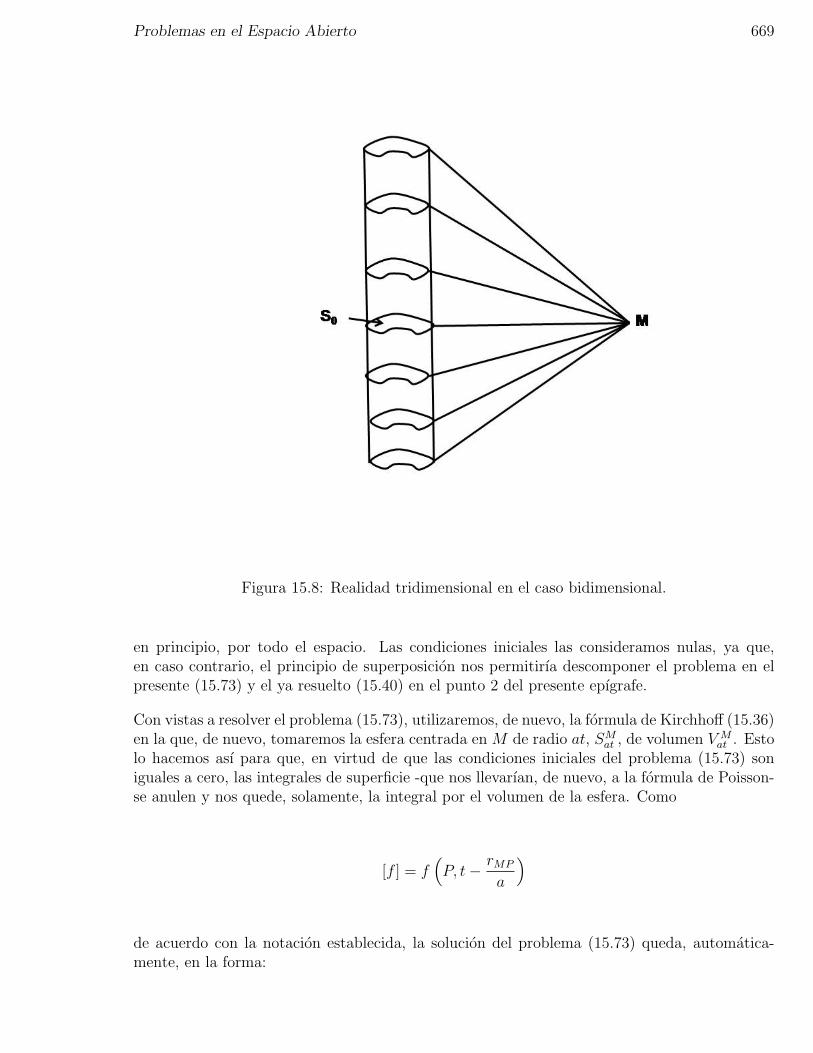
Problemas en el Espacio Abierto 669
Figura 15.8: Realidad tridimensional en el caso bidimensional.
en principio, por todo el espacio. Las condiciones iniciales las consideramos nulas, ya que,en caso contrario, el principio de superposicion nos permitirıa descomponer el problema en elpresente (15.73) y el ya resuelto (15.40) en el punto 2 del presente epıgrafe.
Con vistas a resolver el problema (15.73), utilizaremos, de nuevo, la formula de Kirchhoff (15.36)en la que, de nuevo, tomaremos la esfera centrada en M de radio at, SMat , de volumen V M
at . Estolo hacemos ası para que, en virtud de que las condiciones iniciales del problema (15.73) soniguales a cero, las integrales de superficie -que nos llevarıan, de nuevo, a la formula de Poisson-se anulen y nos quede, solamente, la integral por el volumen de la esfera. Como
[f ] = f(P, t− rMP
a
)
de acuerdo con la notacion establecida, la solucion del problema (15.73) queda, automatica-mente, en la forma:

670 Jose Marın Antuna
u(M, t) =1
4π
∫ ∫ ∫VM
at
f(P, t− rMP
a
)rMP
dP (15.74)
O sea, la solucion viene expresada en la forma de un potencial retardado.
Si en la ecuacion u es el potencial escalar ϕ y f es la densidad de cargas ρ o si u es el potencialvectorial A y f es la densidad de corrientes j, entonces, de (15.74), se obtienen los potencialesretardados que habitualmente se estudian en la Electrodinamica.
En la solucion (15.74) la integracion se efectua por el volumen esferico V Mat que va expandiendose
a medida que crece el tiempo, de manera que sobre el estado del punto M influyen fuentes cadavez mas lejanas, que generan perturbaciones que viajan con velocidad a.
Es decir, sobre la perturbacion en el punto M en el instante t influye la intensidad de la fuenteperturbadora en instantes anteriores y desde cada vez mas lejos, en la medida en que t crece.Esto es ası pues, como puede apreciarse de la formula (15.74), el estado del punto M en elinstante t esta dado por las caracterısticas de la fuente en el instante t − rMP/a, ya que lavelocidad de propagacion de la influencia de la fuente es a y esta, por tanto, demora el tiemporMP/a en llegar del punto P al punto M .
Veamos en este caso la solucion fundamental del operador de D’Alembert o funcion de Greendel problema (15.73). Como sabemos, esta es la respuesta a la accion de una fuente unitaria,instantanea y puntual, colocada en el punto M0, es decir, la solucion del problema:
1
a2utt = ∇2u+ δ(M,M0)δ(t), ∀M ∈ R3, t > 0
u(M, 0) = 0 (15.75)
ut(M, 0) = 0
De acuerdo con (15.74), la solucion sera:
u(M, t) =1
4π
∫ ∫ ∫V M
at
1
rMP
δ(P,M0)δ(t− rMP
a
)dP =
= 0, ∀at < rMM0
=1
4πrMM0
δ(t− rMM0
a
), ∀at > rMM0 (15.76)
Es decir, que en R3 la solucion fundamental (funcion de Green) es la funcion generalizada:
G(M,M0, t) =θ(t− rMM0
a
)4πrMM0
δ(t− rMM0
a
)(15.77)

Problemas en el Espacio Abierto 671
Notese que, de acuerdo con el resultado, la elongacion en el punto M producida por la fuenteunitaria, instantanea y puntual colocada en M0 en t = 0, es igual a cero para todo t 6= rMM0/a,que es el instante en el que, con velocidad a, la perturbacion llega al punto M .
La funcion (15.77) es una funcion generalizada lo que, como sabemos, significa que tiene sentidosolo a traves de integrales, ya que ella, de tratar de interpretarla clasicamente, nos darıa unaelongacion infinita en M , cuando t = rMM0/a.
De acuerdo con nuestros conocimientos generales, conocida la solucion fundamental, la soluciondel problema (15.73) se escribe en la forma:
u(M, t) =
∫ t
0
∫ ∫ ∫R3
G(M,P, t− τ)f(P, τ)dPdτ ≡
≡∫ t
0
∫ ∫ ∫R3
1
4πrMP
δ(t− rMP
a
)f(P, τ)dPdτ =
1
4π
∫ ∫ ∫V M
at
f(P, t− rMP
a
)rMP
dP
es decir, el mismo resultado (15.74), como era de esperar.
Es bueno destacar que, en la mayorıa de los procesos fısicos reales, las fuentes estan localizadasen una region finita del espacio. Si f(M, t) 6= 0 en cierto volumen finito V0, entonces, llamando,respectivamente, d y D a la menor distancia y a la mayor distancia del punto M , donde sebusca la solucion, a la region V0, evidentemente obtendremos que:
u(M, t) = 0, ∀t < d
a(15.78)
u(M, t) =1
4π
∫ ∫ ∫V M
at ∩V0
f(P, t− rMP
a
)rMP
dP, ∀da< t <
D
a(15.79)
u(M, t) =1
4π
∫ ∫ ∫V0
f(P, t− rMP
a
)rMP
dP, ∀t > D
a(15.80)
Por ultimo, si el problema a resolver contiene fuentes y condiciones iniciales diferentes de ceroen cierto dominio V0, es decir, si queremos resolver el problema general:
1
a2utt = ∇2u+ f(M, t), ∀M ∈ R3, t > 0
u(M, 0) = ϕ(M) (15.81)
ut(M, 0) = ψ(M)
donde suponemos que f(M, t) 6= 0, ϕ(M) 6= 0 y ψ(M) 6= 0 en el dominio V0, entonces, deacuerdo con los resultados obtenidos en este epıgrafe, la solucion tendra la forma general:
672 Jose Marın Antuna
u(M, t) =1
4πa2
∂
∂t
∫ ∫SM
at
ϕ(P )
tdS +
∫ ∫SM
at
ψ(P )
tdS
+
1
4π
∫ ∫ ∫VM0
f(P, t− rMP
a
)rMP
dP
(15.82)
Aquı es necesario analizar distintos casos.
Si de nuevo llamamos d y D, respectivamente, a la menor y mayor distancia del punto M aldominio V0, entonces, tendremos que:
u(M, t) = 0, ∀t < d
a(15.83)
Es decir, el punto M se encuentra en estado de reposo, ya que la perturbacion que se originaa partir de t = 0 en el dominio V0 no ha tenido tiempo aun de llegar -viajando con velocidada- al punto M .
Matematicamente, esto viene dado por el hecho de que el radio at de la esfera de integraciones menor que la mınima distancia d, por lo que esta no corta al dominio V0 todavıa.
Para valores del tiempo tales que d/a < t < D/a, la superficie esferica SMat tiene interseccionno nula con el dominio V0, por lo que las integrales de superficie en la expresion (15.82) sondiferentes de cero. Es decir, la influencia de las condiciones iniciales ha llegado al punto M yha modificado su estado. Pero, ademas, la interseccion de la esfera V M
at con el dominio V0 estambien diferente de cero, por lo que la influencia de las fuentes contenidas en V0 tambien dasu aporte al estado del punto M .
Para valores del tiempo t > D/a, la superficie esferica SMat ya no corta al dominio V0, por lo quelas integrales de superficie en (15.82) son de nuevo iguales a cero. Esto significa que la ”chispa”o el ”ruido” creado por las condiciones iniciales paso a traves del punto M y siguio de largo suviaje en el espacio con velocidad a. Sin embargo, la esfera V M
at contiene totalmente al dominioV0; el estado del punto M vendra dado por la expresion (15.80).
En lo adelante, las oscilaciones del punto M estaran determinadas, unicamente, por la accionde las fuentes contenidas en V0, estabilizandose en este sentido la situacion; la influencia de lascondiciones iniciales se hizo sentir sobre el estado del punto M y ya no volveran a influir massobre este.
En la practica cotidiana conocemos multiples ejemplos de esta ”chispa” o este ”ruido” ocasio-nado por la accion de las condiciones iniciales. Es conocido que, si estamos oyendo el radio yalguna persona enciende una luz, en el receptor escuchamos un ”chasquido”. Este es producidopor la onda electromagnetica que, a modo de condicion inicial, surge al empezar a circular lacorriente, cuando se enciende la luz; ella viaja por el espacio a la velocidad de la luz, actuasobre la antena de nuestro radiorreceptor, produce ese desagradable sonido y sigue de largo.
Matematicamente hablando, la esfera de integracion SMat , centrada en la antena de nuestroradiorreceptor, expandiendose, llego hasta el lugar del circuito electrico, donde se origino laperturbacion inicial al encenderse la luz; en ese instante la integral dio un valor diferente de

Problemas en el Espacio Abierto 673
cero y la esfera siguio expandiendose, al crecer t, volviendo a dar cero las integrales por susuperficie.
No es difıcil percatarse de que la funcion de Green (15.77) es la misma solucion fundamental deloperador de D’Alembert (13.107) del epıgrafe 2 del capıtulo en el que estudiamos el metodo dela Funcion de Green, aunque allı solamente presentamos, sin realizar los calculos, el resultado;las diferencias entre ambas expresiones estan motivadas por la diferencia en la forma de escribiralla y aquı el operador de D’Alembert y el lector puede, facilmente, comprobar la igualdadde ambas funciones. Por consiguiente, verificamos que la funcion de Green aquı obtenida es,precisamente, la solucion fundamental del operador de D’Alembert en el espacio tridimensional.
La obtencion de la funcion de Green en el caso bidimensional, es decir, la solucion del problema:
1
a2utt = ∇2u+ δ(M,M0)δ(t), ∀M ∈ R2, t > 0
u(M, 0) = 0 (15.84)
ut(M, 0) = 0
puede efectuarse a partir de (15.77) por el llamado Metodo del Descenso de Hadamard.Dicho metodo consiste en la afirmacion de que (es valido para cualquier funcion):
G2(M,P, t) =
∫ ∞
−∞G3(M,P, t)dz (15.85)
es decir, se integra en la variable que se quiere descender.
En (15.85) a la izquierda M y P son puntos en R2, en tanto que a la derecha son puntos de R3.Calculemos, pues, la funcion de Green en R2, usando la formula (15.85). Para ello, escribamosG3(M,P, t) de la siguiente manera:
G3(M,P, t) =θ(t− RMP
a
)4πRMP
δ
(t− RMP
a
)(15.86)
donde R2MP = r2
MP + z2 y r2MP = x2 + y2, o sea, la distancia en el espacio y en el plano,
respectivamente. Tendremos entonces:
G2(M,P, t) =
∫ ∞
−∞G3(M,P, t)dz =
1
4π
∫ ∞
−∞
θ(t− RMP
a
)RMP
δ
(t− RMP
a
)dz (15.87)
Aplicando la transformada de Laplace a (15.87), tendremos:
Γ2(M,P, p) =1
2π
∫ ∞
0
Lθ(t− RMP
a
)δ(t− RMP
a
)RMP
dz (15.88)

674 Jose Marın Antuna
donde Γ2(M,P, p) es la transformada de Laplace de G2(M,P, t) y L es el operador de la trans-formada de Laplace. En virtud de las propiedades de la transformada de Laplace, tenemosque:
L
θ
(t− RMP
a
)δ
(t− RMP
a
)=
1
2πi
∫ s+i∞
s−i∞Θ(q)∆(p− q)dq (15.89)
donde
Θ(q) =
∫ ∞
0
θ
(t− RMP
a
)e−qtdt =
∫ ∞
RMPa
e−qtdt =1
qe−
qaRMP (15.90)
y
∆(p− q) =
∫ ∞
0
δ
(t− RMP
a
)e−(p−q)tdt = e−
paRMP e
qaRMP (15.91)
Ası pues:
L
θ
(t− RMP
a
)δ
(t− RMP
a
)=
1
2πi
∫ s+i∞
s−i∞
1
qe−
paRMP dq =
=1
2πie−
paRMP · 2πiRes
[1
q, 0
]= e−
paRMP (15.92)
Por lo tanto:
Γ2(M,P, p) =1
2π
∫ ∞
0
e−paRMP
dz
RMP
=1
2π
∫ ∞
0
e−pa
√r2MP +z2 dz√
r2MP + z2
(15.93)
y como una formula integral para las funciones de MacDonald dice que:
K0(AB) =
∫ ∞
0
e−B√A2+ξ2 dξ√
A2 + ξ2(15.94)
tendremos, por lo tanto:
Γ2(M,P, p) =1
2πK0
(rMP
ap)
(15.95)
y, ademas, la funcion de MacDonald, como transformada de Laplace, tiene como original:

Problemas en el Espacio Abierto 675
K0(Ap) :θ(t− A)√t2 − A2
(15.96)
Por consiguiente, finalmente:
G2(M,P, t) =1
2π
θ(t− rMP
a
)√t2 − r2MP
a2
(15.97)
La expresion (15.97) es la funcion de Green, respuesta al problema (15.84) y puede comprobarsefacilmente que ella coincide con la solucion fundamental del operador de D’Alembert (13.106)obtenida en el capıtulo donde desarrollamos el metodo de la Funcion de Green.
Para el problema unidimensional:
1
a2utt = uxx + δ(x− x0)δ(t), ∀x ∈ R, t > 0
u(x, 0) = 0 (15.98)
ut(x, 0) = 0
puede aplicarse tambien el metodo del descenso de Hadamard. Un calculo sencillo nos darıa:
G1(x, ξ, t) =a
2θ
(t− |x− ξ|
a
)(15.99)
que puede ser llevada a la forma de la solucion fundamental del operador de D’Alembert(13.105), teniendo en cuenta las modificaciones que tienen lugar producto de la manera diferentede escritura del operador aquı y alla.
Ası pues, la funcion de Green del espacio abierto unidimensional coincide -como era de esperar-con la solucion fundamental del operador de D’Alembert en R y que ya habıamos estudiadopor primera vez en el capıtulo en el que vimos el metodo de ondas viajeras.
15.3 Solucion de la ecuacion de oscilaciones bajo la ac-
cion de una fuerza periodica armonica
Supongamos que en el problema (15.81) del epıgrafe anterior las fuentes son, como en unabuena parte de los casos fısicos reales, periodicas armonicas; es decir, de la forma:
f(M, t) = f(M)eiωt (15.100)

676 Jose Marın Antuna
donde ω es la frecuencia de las oscilaciones de la fuente. Entonces, el problema a resolver sera:
1
a2utt = ∇2u+ f(M)eiωt, ∀M ∈ R3, t > 0
u(M, 0) = ϕ(M) (15.101)
ut(M, 0) = ψ(M)
Consideremos el caso mas comun con la realidad, que es cuando las funciones ϕ, ψ y f estanlocalizadas en cierta region del espacio V0. Entonces, de acuerdo con el analisis efectuado en elepıgrafe anterior, para tiempos suficientemente grandes, es decir, para t > D/a, donde D es lamayor distancia del punto M -en el que buscamos la solucion- al dominio V0, las integrales desuperficie en la solucion (15.82) se anulan y la solucion de nuestro problema vendra dada porla formula (15.74) que, en este caso, dara:
u(M, t) =1
4π
∫ ∫ ∫V0
f(P )
rMP
eiω(t−rMP
a )dP =1
4π
∫ ∫ ∫V0
f(P )
rMP
e−ikrMP dPeiωt ≡ v(M)eiωt
(15.102)
donde k = ω/a es el numero de onda. La funcion v(M) es el resultado de la integral, divididoentre 4π, que se aprecia en la segunda igualdad arriba.
Hemos llegado a una conclusion importante: Para tiempos suficientemente grandes, si las osci-laciones son provocadas por una fuerza periodica armonica, dichas oscilaciones se estabilizancon la misma frecuencia de la fuente que las genera; es decir, son tambien armonicas y tienenla expresion general:
u(M, t) = v(M)eiωt (15.103)
Veamos que ecuacion satisface la amplitud de las ondas estabilizadas. Para ello, coloquemos(15.103) en la ecuacion del problema (15.101). Obtenemos:
1
a2(−ω2)v · eiωt = ∇2v · eiωt + f(M)eiωt
Es decir:
∇2v + k2v = −f(M) (15.104)
O sea, la ecuacion de Helmholtz con c = k2 > 0.
La ecuacion de Helmholtz es una ecuacion elıptica, cuyas soluciones fundamentales fueronobtenidas por nosotros, ası como sus formulas integrales, su funcion de Green y sus potencialesen capıtulos anteriores.
Problemas en el Espacio Abierto 677
Ya habıamos visto para esta ecuacion como se planteaban y resolvıan sus problemas internospor los distintos metodos de solucion. Debemos, ahora, acometer la solucion de los problemasexternos para esta ecuacion.
Antes de pasar a ello, es conveniente ver -desde un punto de vista estrıctamente metodologico-como obtener la expresion de la tercera formula de Green para la ecuacion (15.104) a partir dela formula de Kirchhoff que dedujimos al principio del presente capıtulo. Tenıamos que:
u(M, t) =1
4π
∫ ∫S
1
rMP
[∂u
∂n
]− [u]
∂
∂nP
(1
rMP
)+
1
arMP
∂rMP
∂nP
[∂u
∂t
]dSP +
+1
4π
∫ ∫ ∫V
[f ]
rMP
dP (15.105)
En virtud de (15.103) tendremos:
[u] = v(P )eiω(t−rMP
a ) ≡ v(P )eiωte−ikrMP (15.106)
[∂u
∂n
]=∂v(P )
∂neiωte−ikrMP (15.107)
[∂u
∂t
]= v(P )iωeiωte−ikrMP (15.108)
[f ] = f(P )eiωte−ikrMP (15.109)
Colocando (15.103), (15.106), (15.107), (15.108) y (15.109) en (15.105), obtenemos:
v(M)eiωt =1
4π
∫ ∫S
1
rMP
∂v
∂neiωte−ikrMP − v(P )eiωte−ikrMP
∂
∂nP
(1
rMP
)dSP +
+1
4π
∫ ∫S
iω
arMP
∂rMP
∂nPv(P )eiωte−ikrMP dSP +
1
4π
∫ ∫ ∫V
f(P )eiωte−ikrMP
rMP
dP (15.110)
Cancelando en (15.110) el factor eiωt y teniendo en cuenta que
∂
∂nP
(e−ikrMP
rMP
)= e−ikrMP
∂
∂nP
(1
rMP
)− ik
1
rMP
∂rMP
∂nPe−ikrMP (15.111)
de (15.110) obtenemos, finalmente:
678 Jose Marın Antuna
v(M) =1
4π
∫ ∫S
e−ikrMP
rMP
− v(P )∂
∂nP
(e−ikrMP
rMP
)dSP +
1
4π
∫ ∫ ∫V
f(P )e−ikrMP
rMP
dP
(15.112)
que es la misma tercera formula de Green para la ecuacion de Helmholtz que obtuvimos enel capıtulo donde estudiamos el metodo de la funcion de Green cuando utilizamos la solucionfundamental de la ecuacion de Helmholtz
e−ikrMP
rMP
(15.113)
y que, por lo tanto, denominaremos tambien, en virtud de la forma en que la hemos obtenido,Formula de Kirchhoff para las oscilaciones estabilizadas. Si la dependencia temporalen (15.103) hubiera sido e−iωt, se hubiera obtenido lo mismo, pero con
eikrMP
rMP
(15.114)
lo que el lector puede comprobar por sı mismo.
En aquel capıtulo, cuando obtuvimos estas terceras formulas de Green a partir de la ecuacionde Helmholtz, no tenıamos un criterio para decidir cual de las dos tomar, con el signo mas, ocon el signo menos.
Aquı ya tenemos un criterio: Si v(M) es la amplitud de las ondas estabilizadas, que satisfacela ecuacion (15.104) y la dependencia temporal es eiωt, tomamos (15.113); si la dependenciatemporal es e−iωt, tomamos (15.114).
Este criterio fısico es importante para escoger la solucion correcta, que describa el proceso quese estudia, es decir, para la unicidad de la solucion.
Ası pues, si vamos a resolver un problema de la ecuacion de Helmholtz con c = k2 > 0 en elinterior de cierto volumen V de frontera S:
∇2v + k2v = −f(M), ∀M ∈ V (15.115)
v|S = ϕ(M)
por el metodo, digamos, de la funcion de Green que ya vimos, analizamos fısicamente el pro-blema que da origen a (15.115): Si la dependencia temporal es eiωt, tomamos la funcion deGreen en la forma:
G(M,P ) =e−ikrMP
4πrMP
+ w (15.116)
Problemas en el Espacio Abierto 679
donde w es una funcion que satisface en V la ecuacion homogenea de Helmholtz.
Si la dependencia temporal es e−iωt, entonces, por funcion de Green tomamos
G(M,P ) =eikrMP
4πrMP
+ w (15.117)
donde w cumple el mismo requisito anterior.
En ambos casos, como queremos resolver el primer problema de frontera, exigimos que w sea talque se cumpla que G|S = 0 y la solucion, entonces, como vimos alla, se expresa por la formula:
v(M) =
∫ ∫S
ϕ(P )∂G(M,P )
∂nPdSP +
∫ ∫ ∫V
f(P )G(M,P )dP (15.118)
segun vimos en aquel capıtulo.
Cuando estudiamos el planteamiento de los problemas para la ecuacion de Helmholtz y, luego,en el capıtulo sobre el metodo de la Funcion de Green vimos su solucion, solo analizamos losproblemas internos. Ası procedimos entonces, porque nos faltaban criterios que ahora tenemos.Por eso, vamos, ahora, a acometer el estudio de los problemas de la ecuacion de Helmholtz enel espacio abierto.
15.4 Planteamiento de los problemas de frontera para la
ecuacion de Helmholtz en el espacio abierto
Estudiaremos, ahora, algo que, ex profeso, habıamos pospuesto: los planteamientos de losproblemas para la ecuacion de Helmholtz en el espacio abierto.
15.4.1 Planteamiento de los problemas. Analisis de la unicidad dela solucion
Veremos como se plantean los problemas de frontera en el espacio infinito para la ecuacion deHelmholtz
∇2u+ cu = −f(M) (15.119)
Haremos enfasis solo en las condiciones en el infinito, ya que, si existen condiciones sobre ciertasuperficie S acotada, con ayuda de los potenciales de superficie para la ecuacion de Helmholtz es-tudiados en el capıtulo correspondiente a la Teorıa de Potenciales, puede construirse la solucionque la satisfaga. Siempre consideraremos que la funcion f(M) es diferente de cero solo en cierto

680 Jose Marın Antuna
dominio V0; es decir, que las fuentes estan localizadas en esa region, ya que eso corresponde ala mayorıa de los problemas fısicos.
Analizaremos por separado los dos casos posibles.
1) c = −κ2 < 0
En este caso, el problema se plantea en los siguientes terminos: Hallar la funcion u(M) continua,con primeras y segundas derivadas continuas en R3, que cumpla
∇2u− κ2u = −f(M), ∀M ∈ R3 (15.120)
u → 0, ∀M →∞
donde, como hemos dicho, f(M) es diferente de cero solo en el interior del dominio acotado V0
y cero fuera de el. La exigencia de que la solucion se haga cero, cuando M → ∞, esta dadapor el sentido fısico del problema. Recuerdese que el problema (15.120) describe determinadosprocesos de difusion; a medida que nos alejemos de las fuentes, la concentracion debe disminuir.
La solucion del problema (15.120) puede expresarse en terminos del potencial de volumen:
u(M) =
∫ ∫ ∫V0
f(P )e−κrMP
4πrMP
dP (15.121)
¿Podra existir otra solucion que no venga dada por la expresion (15.121)? La respuesta la dael siguiente teorema de unicidad:
Teorema.
El problema (15.120) tiene solucion unica.
Demostracion:
Supongamos que existen dos soluciones u1(M) y u2(M) del problema (15.120). Entonces, parala funcion w(M) = u1(M)− u2(M), tendremos el problema
∇2w − κ2w = 0, ∀M ∈ R3 (15.122)
w → 0, ∀M →∞
Si suponemos que w 6= 0, entonces existirıa al menos un punto M0 tal, que w(M0) = A > 0.Tomemos una esfera SR con centro en M0 y radio R lo suficientemente grande, como para quese cumpla que
Problemas en el Espacio Abierto 681
|w(M)||SR≤ A
2(15.123)
Esto siempre es factible, ya que, por (15.122), w → 0 para M →∞. Pero (15.123) significa quela funcion w, que es solucion de la ecuacion homogenea, alcanza un maximo positivo, no sobrela superficie de la esfera SR, sino en su centro. Esto contradice el principio del valor maximopara este caso de la ecuacion de Helmholtz estudiado anteriormente. Por consiguiente, w ≡ 0.
Demostrado el teorema.
Ası pues, en el caso en que c = −κ2 < 0, no existe ningun tipo de dificultad; el problema(15.120) esta completamente definido y la condicion impuesta en el infinito es suficiente paradeterminar una unica solucion.
2) c = k2 > 0
Por analogıa con el caso anterior, el problema matematico aquı se plantearıa como la busquedade la solucion del problema
∇2u+ k2u = −f(M), ∀M ∈ R3 (15.124)
u → 0, ∀M →∞
El problema (15.124) tiene, evidentemente, por posibles soluciones los dos potenciales de vo-lumen factibles de construir con las dos soluciones fundamentales de la ecuacion de Helmholtzen este caso:
u(M) =
∫ ∫ ∫V0
f(P )e−ikrMP
4πrMP
dP (15.125)
u(M) =
∫ ∫ ∫V0
f(P )eikrMP
4πrMP
dP (15.126)
ya que ambas funciones satisfacen la ecuacion y la condicion en el infinito del problema (15.124).
Por consiguiente, desde el punto de vista matematico, el problema (15.124) no esta unıvo-camente planteado; faltan condiciones para garantizar la unicidad de la solucion. Es decir,debemos encontrar que condicion o condiciones mas hay que imponer en el problema (15.124)en el infinito que nos permita determinar una de las dos posibles soluciones.
Existen varios criterios de posible utilizacion y que reciben el nombre generico de Principiosde Radiacion. Estudiemos los mas importantes de ellos.

682 Jose Marın Antuna
15.4.2 Condicion de Radiacion de Sommerfeld
La condicion que debemos anadir al problema (15.124) tiene un caracter esencialmente fısico:Queremos obtener la solucion del problema que corresponda a la amplitud de una onda diver-gente, es decir, que viaje desde la fuente hacia el infinito, ya que esta es la que tiene sentido.
Es obvio que, si al inicio del problema tenıamos la dependencia temporal eiωt, necesitamosescoger la solucion (15.125); si fuera e−iωt, necesitarıamos (15.126).
Pero este criterio de seleccion debe ser reflejado en el propio problema (15.124), en forma deuna condicion matematica a satisfacer por la solucion del mismo. Este criterio sera la condicionde radiacion de Sommerfeld a cuya obtencion nos dedicaremos de inmediato.
Supongamos que queremos, por ejemplo, seleccionar la solucion (15.125); veamos como seescribe ello matematicamente.
La solucion (15.125) es una integral de volumen de la inhomogeneidad por la solucion funda-mental de la ecuacion de Helmholtz. Por ello, veamos, primero, que condicion satisface en elinfinito la solucion fundamental
u0 =e−ikr
r(15.127)
Tenemos que:
du0
dr= −ik e
−ikr
r− e−ikr
r2(15.128)
Es decir:
du0
dr+ iku0 = −e
−ikr
r2≡ o
(1
r
)(15.129)
donde o(1/r) significa una magnitud de orden superior a 1/r y r es la distancia desde el origende coordenadas hasta el punto donde se mide la funcion u0.
Como puede apreciarse, si una fuente puntual esta colocada en el origen de coordenadas, en-tonces la onda que ella emite es esferica, es decir:
u(M, t) =ei(ωt−kr)
r= u0(r)e
iωt (15.130)
y, por consiguiente, para la amplitud se cumple, efectivamente, la condicion (15.129).
Demostremos que la misma relacion es satisfecha por la solucion fundamental desplazada, talcomo aparece en (15.125):
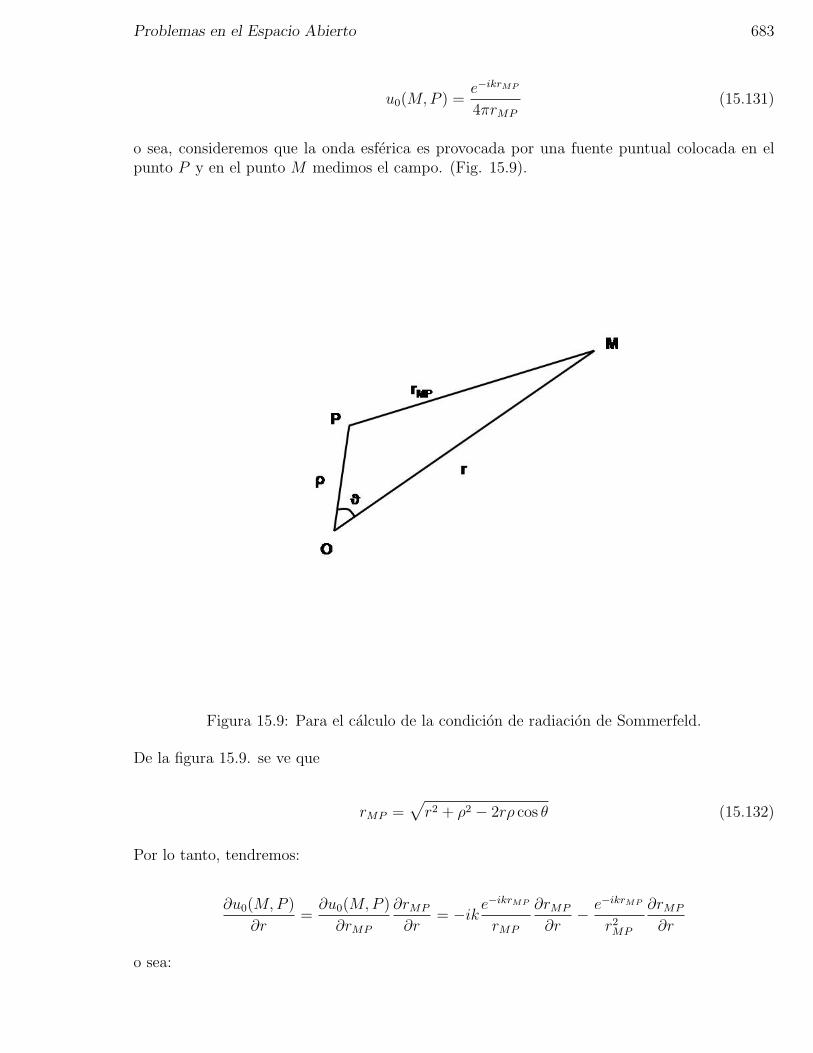
Problemas en el Espacio Abierto 683
u0(M,P ) =e−ikrMP
4πrMP
(15.131)
o sea, consideremos que la onda esferica es provocada por una fuente puntual colocada en elpunto P y en el punto M medimos el campo. (Fig. 15.9).
Figura 15.9: Para el calculo de la condicion de radiacion de Sommerfeld.
De la figura 15.9. se ve que
rMP =√r2 + ρ2 − 2rρ cos θ (15.132)
Por lo tanto, tendremos:
∂u0(M,P )
∂r=∂u0(M,P )
∂rMP
∂rMP
∂r= −ik e
−ikrMP
rMP
∂rMP
∂r− e−ikrMP
r2MP
∂rMP
∂r
o sea:

684 Jose Marın Antuna
∂u0(M,P )
∂r= −iku0(M,P )
∂rMP
∂r− u0(M,P )
1
rMP
∂rMP
∂r(15.133)
Pero:
∂rMP
∂r= − 2r − 2ρ cos θ√
r2 + ρ2 − 2rρ cos θ≈ 1 +O
(1
r
), ∀r →∞ (M →∞) (15.134)
donde O(1/r) es una magnitud del mismo orden que 1/r. Ademas, obviamente:
1
rMP
= O
(1
r
), ∀r →∞ y u0(M,P ) = O
(1
r
), ∀r →∞ (15.135)
Por lo tanto:
∂u0(M,P )
∂r= −iku0(M,P )
(1 +O
(1
r
))−O
(1
r
)O
(1
r
)(1 +O
(1
r
))=
= −iku0(M,P ) + o
(1
r
)
Ası pues, para r →∞:
∂u0(M,P )
∂r+ iku0(M,P ) = o
(1
r
)(15.136)
Efectivamente, (15.131) satisface la misma relacion que (15.127).
Comprobemos, por ultimo, que el potencial de volumen (15.125) cumple la misma relacion.Introduzcamos la notacion:
L[u] ≡ ∂u
∂r+ iku (15.137)
que es un operador que actua solo sobre r (es decir, solo sobre M). Tendremos:
L[u1] = L
[∫ ∫ ∫V0
f(P )e−ikrMP
4πrMP
dP
]=
∫ ∫ ∫V0
f(P )
4πL
[e−ikrMP
rMP
]dP =
= o
(1
r
)∫ ∫ ∫V0
f(P )
4πdP = o
(1
r
)(15.138)
Aquı hemos tenido en cuenta el hecho de que:

Problemas en el Espacio Abierto 685
L
[e−ikrMP
rMP
]= o
(1
r
)(15.139)
y que
∫ ∫ ∫V0
f(P )
4πdP
es un numero.
Ası pues, queda establecido que u1(M) dada por (15.125) cumple identica relacion:
∂u1(M)
∂r+ iku1(M) = o
(1
r
)(15.140)
La relacion (15.140) se conoce con el nombre de Condicion de Radiacion de Sommerfeldy, como es facil ver, es equivalente expresarla en la siguiente forma:
limr→∞
r
[∂u1(M)
∂r+ iku1(M)
]= 0 (15.141)
Ası las cosas, el problema (15.124) debera ser planteado en los siguientes terminos:
∇2u+ k2u = −f(M), ∀M ∈ R3 (15.142)
u = O
(1
r
), ∀r →∞
∂u
∂r+ iku = o
(1
r
), ∀r →∞
La primera condicion en el problema (15.142) es equivalente a la condicion inicialmente impuestaen el problema (15.124) y precisa que es suficiente exigir la tendencia a cero de la solucion parar →∞ con rapidez igual a 1/r.
Una vez planteado el problema (15.142) es logico plantearse si ya son suficientes estas condi-ciones para determinar una solucion unica del problema. La respuesta viene dada por lasiguiente afirmacion.
Teorema
El problema (15.142) tiene solucion unica.
Demostracion:

686 Jose Marın Antuna
Supongamos que hay dos soluciones u1(M) y u2(M). Entonces, para la funcion w(M) =u1(M)− u2(M) tendremos el problema homogeneo:
∇2w + k2w = 0, ∀M ∈ R3 (15.143)
w = O
(1
r
), ∀r →∞
∂w
∂r+ ikw = o
(1
r
), ∀r →∞
Tomemos una esfera SMR centrada en M y de radio R. Entonces, en virtud de la terceraformula de Green, la solucion de (15.143) puede expresarse en la forma (la integral de volumendesaparece, pues la ecuacion es homogenea):
w(M) =1
4π
∫ ∫SM
R
∂w
∂n
e−ikrMP
rMP
− w(P )∂
∂n
(e−ikrMP
rMP
)dSP (15.144)
Como estamos integrando sobre una superficie esferica, la derivada normal es la derivada res-pecto al radio, por lo que:
w(M) =1
4π
∫ ∫SM
R
∂w
∂r
e−ikr
r− w(P )
[−ikr− 1
r2
]e−ikr
dSP =
=1
4π
∫ ∫SM
R
e−ikr
r
[∂w
∂r+ ikw +
w
r
]dS =
1
4π
∫ ∫SM
R
o
(1
r2
)r2dΩ = o
(1
r
)(15.145)
donde hemos tenido en cuenta que:
e−ikr
r= O
(1
r
)(15.146)
∂w
∂r+ ikw = o
(1
r
)(15.147)
w
r= o
(1
r
)(15.148)
De acuerdo con (15.145), w(M) -que es una funcion evaluada en M y que, por lo tanto, nopuede depender del radio R de la esfera- tiende a cero cuando R→∞. Por lo tanto concluimosque w(M) ≡ 0, lo que significa que u1(M) ≡ u2(M).
Demostrado el teorema.
Problemas en el Espacio Abierto 687
De acuerdo con el teorema que acabamos de demostrar, el problema (15.142) esta ya totalmentedefinido; tiene solucion unica.
Ası pues, para el caso c = k2 > 0, hay que imponer, ademas, en el infinito la condicion deradiacion de Sommerfeld.
Hagamos algunas observaciones a lo hasta aquı dicho.
En primer lugar, si quisieramos plantear el problema de manera que la solucion sea u2(M) dadapor (15.126), que responde a una onda divergente, si la dependencia temporal fuera e−iωt, lacondicion de radiacion de Sommerfeld que se impone es:
∂u1(M)
∂r− iku1(M) = o
(1
r
)(15.149)
que es equivalente a escribir:
limr→∞
r
[∂u1(M)
∂r− iku1(M)
]= 0 (15.150)
En segundo lugar, es posible demostrar que, en R2, la condicion de radiacion de Sommerfeldtiene la forma:
limr→∞
√r
[∂u1(M)
∂r+ iku1(M)
]= 0 (15.151)
que responde a una dependencia temporal del tipo eiωt y que elige la solucion fundamentalH
(2)0 (kr) y:
limr→∞
√r
[∂u1(M)
∂r− iku1(M)
]= 0 (15.152)
que responde a una dependencia temporal e−iωt y que elige la solucion fundamental H(1)0 (kr).
Por ultimo, es conveniente destacar que si el problema a plantear consiste en hallar la solucionde la ecuacion de Helmholtz en el espacio exterior a una superficie dada S, entonces deberaimponerse en el problema (15.142), ademas, la correspondiente condicion de frontera sobre S;si es un problema de Dirichlet, por ejemplo, sera u|S dada, si es el problema de Neumann, ∂u
∂n|S
dada.
Entonces, por el estudio realizado podemos afirmar que a la solucion hallada en este epıgrafehabra que sumarle una integral de superficie del tipo general
u(M) =
∫ ∫S
∂u
∂nG(M,P )− u(P )
∂
∂nPG(M,P )
dSP (15.153)

688 Jose Marın Antuna
donde, en dependencia de si el problema es de Dirichlet o de Neumann, se eligira G|S = 0 o∂G∂n|S = 0. Ademas, se eligira la funcion de Green que satisfaga la condicion de radiacion; es
decir, que nos de una onda divergente hacia el infinito.
Con este tipo de problemas estan relacionados los de difraccion de una onda sobre un cuerpoacotado y constituyen un amplio campo en la Fısica Matematica.
Sin hacer desarrollos, sino, simplemente, a modo informativo, diremos que, por ejemplo, elproblema de la difraccion de una onda plana que se propaga en el sentido positivo del eje x,sobre un cuerpo de superficie S, se plantea como el problema de hallar la funcion u en el exteriorde S que cumpla:
∇2u+ k2u = 0 (15.154)
u|S = 0 o∂u
∂n|S = 0
u = eikx + u∗ (15.155)
donde la funcion u∗ satisface la condicion de radiacion.
Son correctos tambien los problemas de difraccion en los que una superficie finita S separa ados medios: uno exterior, en el que la funcion buscada satisface la ecuacion
∇2u+ k2u = 0 (15.156)
y uno interior, en el que se cumple la ecuacion
∇2u1 + k21u1 = 0 (15.157)
de manera que sobre la frontera de ambos medios S se cumplan las condiciones de frontera
u|S = u1|S (15.158)
p∂u
∂n|S = q
∂u
∂n|S, con p > 0 y q > 0
donde p y q son parametros de los medios.
El problema de difraccion en este caso se plantea de la siguiente forma:
Hallar las funciones u en el exterior de S y u1 en el interior de S que cumplan, respectivamente,las ecuaciones (15.156) y (15.157) y las condiciones de frontera (15.158); ademas, en el caso dela difraccion de una onda plana,
Problemas en el Espacio Abierto 689
u = eikx + u∗ (15.159)
donde u∗ satisface la condicion de radiacion.
Es posible demostrar que los problemas de difraccion ası planteados son correctos. El plantea-miento y demostracion del caracter correcto de los problemas de la teorıa de la difraccion, enel caso de cuerpos de frontera infinita conducen a grandes dificultades de tipo matematico.
Se puede formular el principio de radiacion en forma tal, que sea aplicable, practicamente, atodos los problemas de difraccion de ondas estabilizadas.
Una de esas formas es el principio de absorcion lımite; otra, el principio de amplitudlımite. Ambos principios seran estudiados a continuacion.
15.4.3 Principio de absorcion lımite
Las condiciones de radiacion de Sommerfeld pueden ser sustituidas por otros principios deradiacion elaborados, principalmente, por autores rusos posteriormente. (Ver, A.G. Sveshnikov.Principio de Radiacion. Doklady AN SSSR, 73, 5 (1950)).
Uno de estos principios es el llamado Principio de Absorcion Lımite o llamado, tambien,Principio de Friccion Lımite Nula.
Su esencia consiste en que, si queremos determinar la solucion de la ecuacion de Helmholtzdel problema (15.124) que corresponda a ondas divergentes desde la fuente hacia el infinito,colocamos -en lugar de c = k2 real de la ecuacion- la magnitud compleja c = k2 + iε, donde εluego se hace tender a cero (en el desarrollo que haremos a continuacion ε = −ωβ).
Para comprender, tanto el significado fısico de esta sustitucion, como el procedimiento paraobtener la solucion deseada, desarrollemos las ideas, partiendo del problema fısico que conducea dicho coeficiente c complejo.
Supongamos que tenemos un problema sobre oscilaciones forzadas con amortiguamiento:
∇2u =1
a2utt + βut − f(M)eiωt (15.160)
Proponiendo la solucion estabilizada para t suficientemente grande
u(M, t) = u(M)eiωt (15.161)
y, colocando en la ecuacion (15.160) la solucion (15.161), obtenemos, para la amplitud u(M),la ecuacion:

690 Jose Marın Antuna
∇2u+ cu = −f(M) (15.162)
donde
c ≡ q2 = k2 − iωβ (15.163)
es ya una magnitud compleja.
Llamemos a (15.162) ecuacion con absorcion compleja de primer tipo si Im q2 < 0, esdecir, si corresponde a la dependencia temporal eiωt y ecuacion con absorcion compleja desegundo tipo si Im q2 > 0, o sea, si corresponde a e−iωt. Las soluciones fundamentales de laecuacion (15.162) son:
u0 =e−iqr
r, ¯u0 =
eiqr
r(15.164)
donde
q =√k2 − iωβ =
= ±
√√
k2 + ω2β2 + k2
2− i
√√k2 + ω2β2 − k2
2
≡ q0 − iq1 (15.165)
El signo delante de los radicales se elige de forma tal que q1 > 0. Entonces, las solucionesfundamentales seran, de (15.164):
u0 =e−iqr
r=e−iq0r
re−q1r (15.166)
¯u0 =eiqr
r=eiq0r
req1r (15.167)
Se observa que (15.166) es acotada para r →∞, en tanto que (15.167) no lo es.
Por consiguiente, la unica solucion de la ecuacion (15.162) acotada en el infinito sera el potencialformado con la solucion fundamental (15.166):
u(M) =
∫ ∫ ∫V
f(P )e−iq0r
4πre−q1rdP (15.168)
De (15.168) es facil ver que, cuando la absorcion desaparece, es decir, si β → 0,

Problemas en el Espacio Abierto 691
limβ→0
u(M) = limβ→0
∫ ∫ ∫V
f(P )e−iq0r
4πre−q1rdP =
∫ ∫ ∫V
f(P )e−ikr
4πrdP ≡ u1(M) (15.169)
donde u1(M) es la solucion de nuestra ecuacion original (15.124) sin absorcion compleja, corres-pondiente a una onda divergente. Notese que q0 > 0, ya que 2q0q1 = βω y escogimos el signodel radical de forma tal que q1 > 0.
Resumiendo, para la dependencia temporal eiωt, escogiendo el signo de las raıces de forma talque q1 > 0, obtenemos la unicidad del problema con absorcion compleja, cuya solucion unicasera (15.168) y, tomando el lımite para β → 0 de esta solucion, obtenemos la unica solucion delproblema original (15.124) que tiene sentido fısico.
Si, por el contrario, tuvieramos la dependencia e−iωt, entonces, escogiendo de nuevo los signosde las raıces de forma tal que q1 > 0, tendrıamos, en virtud de que 2q0q1 = −ωβ, como q1 > 0,que q0 < 0 y, por tanto, q0 → −k para β → 0. Por ello quedarıa:
limβ→0
u(M) = limβ→0
∫ ∫ ∫V
f(P )e−iq0r
4πre−q1rdP =
∫ ∫ ∫V
f(P )eikr
4πrdP ≡ u2(M) (15.170)
es decir, nos quedarıa de nuevo determinada la unica solucion del problema (15.124) con sentidofısico.
De esta manera, vemos que el principio de absorcion lımite queda enunciado en los siguientesterminos:
La condicion que debemos anadir al problema (15.124) que corresponda a una onda divergenteconsiste en exigir que la funcion u(M) sea el lımite de la solucion acotada de la ecuacion conabsorcion compleja de primer tipo, cuando la parte imaginaria de la absorcion compleja tiendea cero.
El principio de absorcion lımite que hemos estudiado aquı tiene la ventaja, con respecto ala condicion de radiacion de Sommerfeld, de que permite seleccionar la solucion unica de laecuacion de Helmholtz correspondiente a la onda que parte de la fuente hacia el infinito, sinpreocuparnos de cual es su comportamiento en el infinito, sino, simplemente, aplicando unatecnica muy concreta y automatizada.
Por supuesto, la solucion que se obtenga satisfara la condicion de radiacion de Sommerfeldcorrespondiente.
15.4.4 Principio de amplitud lımite
Sin entrar en un analisis minucioso, es facil constatar que la solucion u1(M) de la ecuacion(15.124) dada por (15.125) y que satisface la condicion de radiacion de Sommerfeld (15.140),es decir, la solucion del problema (15.142), cumple la siguiente relacion:

692 Jose Marın Antuna
u1(M) = limt→∞
u(M, t)e−iωt (15.171)
donde u(M, t) es la solucion del problema no estacionario de Cauchy con condiciones inicialesnulas
1
a2utt = ∇2u+ f(M)eiωt, ∀M ∈ R3, t > 0
u(M, 0) = 0 (15.172)
ut(M, 0) = 0
Efectivamente, si introducimos la notacion:
u ≡ ∇2u− 1
a2utt = L[u]eiωt (15.173)
entonces, tendremos que
u(M, t) = [u(M)eiωt] = ∇2ueiωt +ω2
a2ueiωt (15.174)
donde L[u] ≡ ∇2u+ k2u es el operador de Helmholtz.
Por consiguiente, el operador de Helmholtz se puede definir como
L[u] ≡ e−iωt[u(M)eiωt] (15.175)
y, por lo tanto:
u(M, t) = u(M)eiωt (15.176)
de donde la amplitud de las oscilaciones estabilizadas es:
u(M) = u(M, t)e−iωt (15.177)
Ası pues, para hallar la amplitud u(M), solucion de la ecuacion de Helmholtz que correspondaa la onda divergente desde la fuente hacia el infinito, si la fuente tiene la dependencia temporaleiωt, se calcula el lımite (15.171).
De forma similar, para la dependencia temporal e−iωt,
Problemas en el Espacio Abierto 693
u1(M) = limt→∞
u(M, t)eiωt (15.178)
Las relaciones (15.171) y (15.178) constituyen lo que se conoce con el nombre de Principiode Amplitud Lımite y, como es logico, resulta trivial en el espacio abierto, pues ahı, segunvimos, para t > D/a (tiempos ”suficientemente grandes”) la igualdad se cumple.
Sin embargo, para dominios mas complejos es necesario tomar el lımite para t→∞.
Esto es obvio, ya que la funcion u(M, t), en la etapa inicial del proceso oscilatorio, no esrigurosamente periodica, pero, en el transcurso del tiempo, las oscilaciones del sistema se vanestabilizando en forma de oscilaciones periodicas con la frecuencia de la fuente aplicada, segunvimos anteriormente.
Es decir, que transcurrido un tiempo suficientemente grande, la solucion del problema (15.172)-incluso con condiciones iniciales no nulas- adopta la forma (15.176).
El principio de amplitud lımite aquı enunciado puede ser empleado en otro tipo de ecuacionesque describan procesos oscilatorios de naturaleza mas compleja y constituye un metodo quepermite juzgar, con relativa facilidad, si el proceso oscilatorio que se estudia tiene un regimenestabilizado o no, cosa que para distintas aplicaciones y conclusiones fısicas resulta de interesy que no siempre es evidente como, obviamente, lo es en el caso de la ecuacion de oscilacionesde D’Alembert que aquı hemos estudiado.
15.5 Ejercicios del capıtulo
1. Una esfera de radio r0 se encuentra llena, en el instante inicial, con un gas de concentracionu0; fuera de la esfera la concentracion de dicho gas es cero. Hallar la funcion u(M, t) quecaracteriza el proceso de difusion del gas en el espacio no acotado exterior.
2. Construir la funcion de Green para el proceso de propagacion de calor en el interior deuna franja acotada por las superficies z = 0 y z = l, ası como para el interior de la cunade angulo interior π/n, donde n es un numero entero, si las condiciones de frontera enambos casos son homogeneas.
3. Resolver el problema de las oscilaciones en el espacio infinito tridimensional, si la velocidadinicial es cero en todo el espacio y la elongacion inicial de las oscilaciones tiene la forma:
(a)
ϕ(M) = 1, dentro de la esfera de radio unidad
= 0, fuera de la esfera de radio unidad
y

694 Jose Marın Antuna
(b)
ϕ(M) = A cosπ
2r0r, dentro de la esfera de radio r0
= 0, fuera de la esfera de radio r0
4. Resolver el problema de las oscilaciones del semiespacio z > 0 con condiciones de fronterade primero o de segundo tipo homogenea, si:
(a) esta dada una excitacion localizada, es decir, la velocidad inicial y la elongacioninicial son diferentes de cero en cierto dominio V0 del semiespacio en cuestion.
(b) Hay una fuerza concentrada en un punto que actua segun una ley arbitraria.
5. Resolver el mismo problema anterior dentro de la franja −l ≤ z ≤ l.
6. Resolver el problema de las oscilaciones en un dominio en forma de cuna de angulo interiorπ/2 y, en general, π/n, donde n es un numero entero, si las condiciones de frontera sonde primer tipo o de segundo tipo homogeneas y si estan dadas la elongacion inicial y lavelocidad inicial como funciones arbitrarias.
7. Construir la funcion de Green del primer problema de frontera para la ecuacion deHelmholtz ∇2u+ k2u = 0,
(a) en el semiespacio z > 0.
(b) en el semiplano y > 0.
Capıtulo 16
Metodo de Diferencias Finitas
En el presente capıtulo estudiaremos otro metodo para resolver problemas con ecuacioneshiperbolicas, parabolicas y elıpticas, el Metodo de Diferencias Finitas, que constituye unprocedimiento para acomodar los problemas que con el se van a resolver a su solucion numericapor maquinas computadoras y que se utiliza cuando ninguno de los metodos analıticos ante-riormente estudiados se puede emplear.
Ademas del metodo de diferencias finitas que aquı acometeremos, existe -en el caso de lasecuaciones elıpticas- el Metodo de Representaciones Conformes cuyo estudio el lectorinteresado puede hacerlo en el libro de Teorıa de Funciones de Variable Compleja del autor dela presente obra.
Comenzaremos estudiando el metodo de diferencias finitas para el caso mas simple de lasecuaciones elıpticas: la ecuacion de Laplace.
16.1 Problemas en diferencias finitas para la ecuacion de
Laplace
16.1.1 Planteamiento del problema
La esencia del metodo de diferencias finitas consiste en la transformacion del problema dife-rencial en un problema en diferencias finitas; es decir, en un problema equivalente, susceptiblede ser programado para ser resuelto en una maquina computadora y obtener una respuestanumerica. En otras palabras, las maquinas computadoras no saben resolver ecuaciones di-ferenciales, ya que no pueden trabajar con infinitesimales, sino que solo pueden operar condiferencias finitas y el metodo que vamos a estudiar a continuacion es el que se encarga detraducir el problema diferencial a un lenguaje con el que la maquina pueda trabajar.
Lo dicho arriba no obvia el hecho de que en la actualidad existen numerosos programas comer-ciales que resuelven muchos problemas de ecuaciones diferenciales ordinarias y en derivadas
695

696 Jose Marın Antuna
parciales, por lo que la aplicacion de los metodos en diferencias finitas puede muchas veces serobviada. Sin embargo, en muchas ocasiones, el investigador no encuentra el software apropiadoal problema concreto que necesita resolver; en tal caso tiene que recurrir a la aplicacion de losalgoritmos que en este capıtulo desarrollamos. De ahı la utilidad del mismo.
Supongamos que queremos resolver el problema de Dirichlet siguiente:
∇2u = 0, ∀M ∈ V (16.1)
u|Γ = f(M)
donde, en aras de simplificar el desarrollo del material, consideraremos un caso bidimensional,de manera que V es cierto dominio del plano (x, y) con frontera formada por la curva Γ.
Realicemos una particion de los ejes x, y en segmentos de paso h:
xi = ih, yj = jh, i, j = 1, 2, 3, ... (16.2)
De esta manera, obtenemos una red, cuyos nudos seran los puntos (xi, yj), algunos de los cualesestaran dentro del dominio V , segun se muestra en la figura 16.1.
Denotemos por Vh al dominio discreto formado por los nudos de la red que se encuentrencontenidos totalmente dentro del dominio V y denotemos por Γh a la frontera de dicho dominio-tambien discreta- formada por aquellos puntos de la red -internos a V tambien- mas cercanos ala frontera Γ del dominio V (son los puntos que en la figura 16.1 se destacan en forma gruesa).
Para transformar el problema (16.1), planteado en el dominio V de frontera Γ, en un pro-blema equivalente en el dominio discreto Vh de frontera Γh, debemos cambiar las derivadas porrelaciones en diferencias finitas.
Aproximadamente y con mayor exactitud mientras mas fina sea la particion, es decir, mientrasmenor sea h, podemos escribir:
∂u(xi, yj)
∂x≈ u(xi + h/2, yj)− u(xi − h/2, yj)
h(16.3)
Por consiguiente:
∂2u(xi, yj)
∂x2≈ 1
h
[u(xi + h, yj)− u(xi, yj)
h− u(xi, yj)− u(xi − h, yj)
h
]=
=1
h2[u(xi + h, yj) + u(xi − h, yj)− 2u(xi, yj)] (16.4)
De forma similar podemos llegar a:
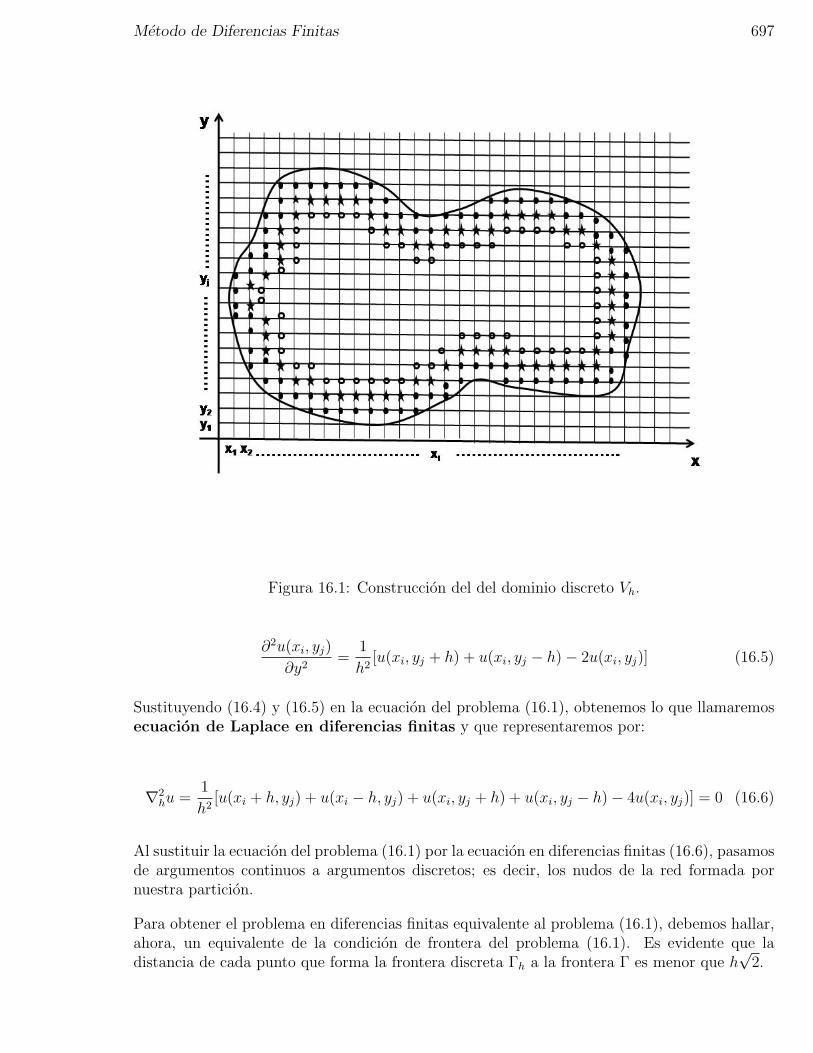
Metodo de Diferencias Finitas 697
Figura 16.1: Construccion del del dominio discreto Vh.
∂2u(xi, yj)
∂y2=
1
h2[u(xi, yj + h) + u(xi, yj − h)− 2u(xi, yj)] (16.5)
Sustituyendo (16.4) y (16.5) en la ecuacion del problema (16.1), obtenemos lo que llamaremosecuacion de Laplace en diferencias finitas y que representaremos por:
∇2hu =
1
h2[u(xi + h, yj) + u(xi − h, yj) + u(xi, yj + h) + u(xi, yj − h)− 4u(xi, yj)] = 0 (16.6)
Al sustituir la ecuacion del problema (16.1) por la ecuacion en diferencias finitas (16.6), pasamosde argumentos continuos a argumentos discretos; es decir, los nudos de la red formada pornuestra particion.
Para obtener el problema en diferencias finitas equivalente al problema (16.1), debemos hallar,ahora, un equivalente de la condicion de frontera del problema (16.1). Es evidente que ladistancia de cada punto que forma la frontera discreta Γh a la frontera Γ es menor que h
√2.
698 Jose Marın Antuna
Llamemos fh al conjunto de valores numericos de la funcion f(M) en los puntos de Γ mascercanos a cada punto de Γh. Sustituiremos la condicion de frontera del problema (16.1) por lasiguiente:
u|Γh= fh (16.7)
con la que significamos que el valor de la funcion u en cada punto de Γh se toma igual al valornumerico de f(M), evaluada en el punto de Γ mas cercano al correspondiente punto de Γh.
Las expresiones (16.6) y (16.7) constituyen el problema en diferencias finitas equivalente a(16.1); es decir:
∇2hu = 0, ∀Mij ∈ Vh (16.8)
u|Γh= fh
No puede dejarse de tener en cuenta el hecho de que, pese a su escritura compacta, el problemaen diferencias finitas (16.8) es un gran conjunto de ecuaciones algebraicas lineales cuya soluciondebemos hallar. Resolver el problema (16.8) significa hallar los valores de la funcion discretau(xi, yj) en los puntos del dominio discreto Vh bajo la condicion de que sus valores sobre lospuntos de la frontera discreta Γh estan dados por los numeros fh.
Dada la forma de la ecuacion en diferencias finitas (16.6), se ve que la funcion en cada punto(xi, yj) se expresa como el promedio de sus valores en los puntos vecinos inmediatos:
u(xi, yj) =1
4[u(xi + h, yj) + u(xi − h, yj) + u(xi, yj + h) + u(xi, yj − h)] (16.9)
Esta realidad expresada por (16.9) nos va a ser de gran utilidad a la hora de buscar la soluciondel problema (16.8).
16.1.2 Propiedades de la solucion del problema en diferencias finitas
La solucion del problema en diferencias finitas (16.8) tiene las siguientes propiedades.
1. Principio del valor maximo y mınimo.
Teorema.
Si la funcion u(xi, yj) es solucion del problema en diferencias finitas (16.8), entoncesalcanza su valor maximo y su valor mınimo en la frontera Γh del dominio Vh.
Demostracion:
Llamemos

Metodo de Diferencias Finitas 699
M = maxu(xi, yj) ≡ u(x0, y0) ≥ u(xi, yj) (16.10)
y supongamos que el punto (x0, y0) se encuentra dentro del dominio Vh. Entonces podemosescribir que:
M = u(x0, y0) =1
4[u(x0 + h, y0) + u(x0 − h, y0) + u(x0, y0 + h) + u(x0, y0 − h)] ≤
≤ 1
4[4u(x0, y0)] = M (16.11)
Es decir, M ≤M . Ası pues, todo queda demostrado, ya que, si se cumpliese la desigualdadestarıamos frente a un absurdo y, por tanto, (x0, y0) no puede estar dentro de Vh. Solopuede cumplirse la igualdad; pero ello implicarıa que u(xi, yj) = u(x0, y0) = const. en loscuatro puntos vecinos inmediatos.
Repitiendo el razonamiento en los nuevos cuatro puntos y ası sucesivamente, llegarıamosa abarcar todo Vh hasta llegar a Γh y concluirıamos que el maximo se alcanza dentro deVh -y, a su vez, tambien en Γh- solo cuando u(xi, yj) es constante.
Por lo tanto, si no es constante, el maximo solo se podra alcanzar sobre Γh.
Para el mınimo, basta analizar la funcion v(xi, yj) = −u(xi, yj) y, automaticamente,llegamos a la misma conclusion.
Demostrado el teorema.
Como puede apreciarse, este teorema es analogo al teorema del valor maximo y mınimodemostrado para las funciones armonicas.
2. Teorema de existencia y unicidad.
Para cualquier condicion de frontera fh existe la solucion unica del problema en diferenciasfinitas (16.8).
Demostracion:
Es evidente, pues el problema (16.8) no es mas que un sistema de ecuaciones algebraicas.En virtud del principio del valor maximo y del valor mınimo, el problema homogeneo
∇2hu = 0, ∀Mij ∈ Vh (16.12)
u|Γh= 0
solo tiene solucion trivial, ya que el valor maximo y el valor mınimo -en virtud de lacondicion de frontera- es cero.
Por un conocido teorema del Algebra Lineal esto implica que el sistema no homogeneo(16.8) tiene solucion unica.
Demostrado el teorema.
700 Jose Marın Antuna
16.1.3 Solucion del problema en diferencias finitas
Una vez vistas las principales propiedades de la solucion del problema en diferencias finitas,debemos tratar de hallar dicha solucion. Tenemos un sistema de ecuaciones lineales algebraicas,por lo que, en principio, podrıamos resolverlo por alguno de los metodos conocidos como, porejemplo, el metodo de Cramer, el de Gauss, etc. Sin embargo, existe aquı una dificultad y esque nosotros debemos hacer una particion muy fina de nuestro dominio V y, por consiguiente,el numero de ecuaciones que podemos obtener es muy grande. Ningun metodo de solucion quese base en la inversion de la matriz del sistema es aplicable, ya que no existe ninguna maquinacomputadora con capacidad de memoria suficiente para almacenar tal cantidad de numeros;ademas, el tiempo de operacion que tales metodos consumirıan serıa enorme.
Por todo lo dicho, es necesario buscar otros metodos de solucion de los problemas en diferenciasfinitas, lo que ha dado pie al desarrollo de toda una ciencia matematica cuyo estudio requerirıaun tiempo mucho mayor de lo que comunmente puede hacerse en el marco de un curso generalde metodos matematicos como el presente.
Sin embargo, en este y los epıgrafes siguientes daremos una informacion lo mas amplia posiblede la idea de tales metodos de solucion y remitiremos al lector interesado en profundizar enesta ciencia de los metodos en diferencias finitas a la literatura especializada que sobre el temaexiste.
Con el objetivo de dar solucion al problema (16.8) procederemos de la siguiente manera. In-troduzcamos una notacion mas breve y comoda; llamemos:
vij ≡ u(xi, yj) (16.13)
a la solucion del problema en diferencias finitas (16.8).
Desarrollaremos el llamado metodo de aproximaciones sucesivas que consiste en lo siguien-te. Damos, arbitrariamente, los valores iniciales v
[0]ij a los cuales lo unico que les exigimos es
que cumplan la condicion de frontera del problema (16.8), es decir, v[0]ij |Γh
= fh. A partir deestos valores construimos las aproximaciones sucesivas en la forma:
v[1]ij =
1
4[v
[0]i+1,j + v
[0]i−1,j + v
[0]i,j+1 + v
[0]i,j−1], ∀Mij ∈ Vh (16.14)
y
v[1]ij |Γh
= fh
La enesima aproximacion sera:
v[n]ij =
1
4[v
[n−1]i+1,j + v
[n−1]i−1,j + v
[n−1]i,j+1 + v
[n−1]i,j−1 ], ∀Mij ∈ Vh (16.15)

Metodo de Diferencias Finitas 701
y
v[n]ij |Γh
= fh (16.16)
Este proceso se repite cuantas veces sea necesario. Tiene lugar un importantısimo teorema:
Teorema
Para cualquier aproximacion inicial arbitraria, el proceso de las aproximaciones sucesivas, dadaspor (16.15) y (16.16), converge, para n → ∞, a la solucion del problema en diferencias finitas(16.8).
Demostracion:
Analicemos la funcion
w[n]ij = v
[n]ij − vij (16.17)
donde v[n]ij son los valores de la enesima iteracion del proceso de aproximaciones sucesivas, dados
por (16.15) y (16.16) y vij son los valores de la solucion del problema en diferencias finitas (16.8).Evidentemente:
w[n]ij |Γh
= 0 (16.18)
Introduzcamos la notacion siguiente.
Llamemosle
Γ(1)h a los puntos de Vh que estan a la distancia h de Γh,
Γ(2)h a los puntos de Vh que estan a la distancia 2h de Γh,
Γ(3)h a los puntos de Vh que estan a la distancia 3h de Γh,
etc.
A modo de ilustracion, en la figura 16.1, los puntos de Γ(1)h se muestran con unas estrellitas y
los puntos de Γ(2)h con unos circulitos.
Es obvio que siempre hallaremos un ultimo conjunto de puntos Γ(N)h situados a la distancia Nh
de Γh. Llamemosle
An = maxw[n]ij (16.19)
Como tenemos que

702 Jose Marın Antuna
w[n+1]ij =
1
4[w
[n]i+1,j + w
[n]i−1,j + w
[n]i,j+1 + w
[n]i,j−1] (16.20)
tendremos, por tanto, que:
w[n+1]ij |
Γ(1)h≤ 3
4An ≡
(1− 1
4
)An (16.21)
ya que, al menos, uno de los valores dentro del corchete en (16.20) -al evaluar esta expresion
sobre Γ(1)h se encuentra sobre Γh y, por tanto, se anula, en tanto que los otros tres son menores
o iguales que An, dada la definicion (16.19).
Ademas:
w[n+1]ij |
Γ(2)h≤ 1
4
(3An +
3
4An
)=
(3
4+
3
42
)An =
[1− 1
4+
(1− 1
4
)1
4
]An =
=
(1− 1
4+
1
4− 1
42
)An
ya que, al evaluar (16.20) sobre Γ(2)h , al menos uno de los valores dentro del corchete esta sobre
Γ(1)h y es menor o igual que 3
4An, en tanto que los otros tres son menores o iguales que An. Es
decir, obtenemos que
w[n+1]ij |
Γ(2)h≤(
1− 1
42
)An (16.22)
Igualmente, se obtiene:
w[n+1]ij |
Γ(3)h≤(
1− 1
43
)An (16.23)
y ası sucesivamente:
w[n+1]ij |
Γ(N)h≤(
1− 1
4N
)An (16.24)
de manera que, si llamamos
An+1 = maxw[n+1]ij (16.25)
entonces, de (16.24) podemos concluir que

Metodo de Diferencias Finitas 703
An+1 ≤ αAn (16.26)
donde
α =
(1− 1
4N
)< 1 (16.27)
La expresion (16.26) significa que
An+1
An< 1 (16.28)
de manera que, por el criterio de D’Alembert para sucesiones, concluimos que la sucesion Anconverge y su lımite para n→∞ es cero.
Si introducimos, ahora
Bn = minw[n]ij (16.29)
y efectuamos un razonamiento similar, concluimos que la sucesion Bn converge y que sulımite para n→∞ es cero. Como
Bn ≤ w[n]ij ≤ An (16.30)
y An → 0 y Bn → 0 para n→∞, concluimos que w[n]ij → 0 para n→∞, es decir que:
limn→∞
v[n]ij = vij (16.31)
Demostrado el teorema.
Es conveniente recalcar que esta convergencia tiene lugar para cualquier aproximacion inicialv
[0]ij que se tome. Ahora bien, el teorema no establece ningun criterio sobre la rapidez de dicha
convergencia. Lo formidable del teorema es que nos asegura que -sea cual sea la aproximacioninicial que tomemos- el metodo de las aproximaciones sucesivas siempre converge a la soluciondel problema en diferencias finitas (16.8). Pero la rapidez de dicha convergencia dependera,logicamente, de cuan cercana a la realidad tomemos la aproximacion inicial.
Resumiendo: Para resolver el problema diferencial (16.1) construimos el problema en diferenciasfinitas (16.8).
Hemos demostrado que este ultimo problema tiene solucion unica y que ella puede ser halladapor el metodo de las aproximaciones sucesivas que siempre converge a dicha solucion.

704 Jose Marın Antuna
Nos queda, por ultimo, establecer la relacion existente entre la solucion del problema en dife-rencias finitas (16.8) y la solucion del problema diferencial (16.1) que es, en definitiva, el quequeremos resolver. Esta relacion la establece el siguiente teorema.
Teorema.
Para cualquier ε > 0, puede hallarse una h0(ε) > 0 tal, que para un paso h < h0 se cumple que:
|uij − vij| < ε
donde uij ≡ u(xi, yj) es la solucion del problema diferencial (16.1) evaluada en los puntos dela red Vh y vij ≡ v(xi, yj) son los valores de la solucion numerica del problema en diferenciasfinitas (16.8) que tambien y solamente estan dados en los puntos de la red Vh.
Demostracion:
En primer lugar, podemos afirmar que como u(x, y) es armonica, ya que es la solucion delproblema diferencial (16.1), es continua; es decir, que para ε > 0 dado se puede hallar unaδ(ε) > 0 tal que, si rM1M2 < δ, se cumple que
|u(M1)− u(M2)| <ε
2(16.32)
Tomemos h < h0 ≤ ε√2. Entonces, podemos afirmar que:
|uij − vij||Γh= |uij|Γh
− vij|Γh| = |uij|Γh
− u|Γ| <ε
2(16.33)
pues vij|Γh= u|Γ en el punto mas cercano de Γ al punto correspondiente de Γh y, ademas,
la distancia entre ese punto de Γh y dicho punto de Γ -por la forma en que fue construida lafrontera Γh- es, tambien, menor que h
√2, o sea, menor que h0
√2 < δ.
Analicemos la funcion siguiente:
w = v − u− ε
(1− x2 + y2
2D2
)(16.34)
donde llamamos D a una magnitud mayor que la distancia desde el origen de coordenadas hastael punto de la frontera Γ mas lejano a dicho origen de coordenadas. Ello significa que
x2 + y2
2D2<
1
2(16.35)
Para esta funcion auxiliar tendremos que:

Metodo de Diferencias Finitas 705
w|Γh=
v − u− ε
(1− x2 + y2
2D2
)|Γh
< 0 (16.36)
pues, segun (16.33),
(v − u)|Γh<ε
2
y, por (16.35)
ε
(1− x2 + y2
2D2
)|Γh
>ε
2
Ademas, es posible demostrar que
|∇2hu−∇2u| ≤ mh2
6(16.37)
donde m = maxuxxxx, uyyyy. La demostracion de (16.37) la haremos despues de concluida lademostracion del teorema.
Por consiguiente, si tomamos ahora
h < h0 <
√12ε
mD2(16.38)
obtenemos, de (16.37), que
|∇2hu−∇2u| ≡ |∇2
hu| <2ε
2D2(16.39)
ya que u es armonica y, por tanto, ∇2u = 0.
Apliquemos, ahora, el operador en diferencias finitas ∇2h a la funcion (16.34):
∇2hw = ∇2
hv −∇2hu+
2ε
2D2= −∇2
hu+2ε
2D2> 0 (16.40)
pues ∇2hv = 0, ya que v es la solucion del problema (16.8) y hemos tenido en cuenta (16.39).
De (16.40) concluimos que:
1
4[wi+1,j + wi−1,j + wi,j+1 + wi+,j−1] > wij (16.41)

706 Jose Marın Antuna
Es decir, que el promedio de w en los cuatro puntos que rodean al punto (i, j) es mayor que elvalor de w en dicho punto.
Esto implica que el maximo de w no puede encontrarse en un punto interior de Vh y, porconsiguiente, puede alcanzarse solo en la frontera Γh. Teniendo en cuenta (16.36), concluimos,pues, que:
maxw|Vh+Γh= maxw|Γh
< 0 (16.42)
De aquı que w < 0 en todos los puntos Vh + Γh. Ello significa -de (16.34)- que:
v − u < ε
(1− x2 + y2
2D2
)< ε (16.43)
ya que la expresion entre parentesis es menor que uno.
Si analizamos, ahora, otra funcion auxiliar dada por la expresion:
w = u− v − ε
(1− x2 + y2
2D2
)(16.44)
y realizamos los mismos razonamientos, obtenemos, igualmente, que
w|Γh< 0, ∇2
hw > 0
de donde se concluye que, tambien, w < 0 en todos los puntos de Vh + Γh. Por consiguiente,u− v < ε; es decir
v − u > −ε (16.45)
De (16.43) y (16.45) concluimos, por lo tanto, que:
|v − u| < ε (16.46)
Demostrado el teorema.
Demostremos, ahora, la relacion (16.37) utilizada en el teorema. Denotemos por
∇2hu ≡ ∇2
hxu+∇2hyu (16.47)
Tenemos que:

Metodo de Diferencias Finitas 707
∇2hxu =
1
h2[ui+1,j + ui−1,j − 2uij] ≡
1
h2[ui+1,j − uij − uij + ui−1,j] (16.48)
Pero, segun la formula de Taylor:
ui+1,j = uij +∂uij∂x
h+∂2uij∂x2
h2
2+∂3uij∂x3
h3
3!+∂4uij∂x4
h4
4!(16.49)
ui−1,j = uij −∂uij∂x
h+∂2uij∂x2
h2
2− ∂3uij
∂x3
h3
3!+∂4uij∂x4
h4
4!(16.50)
Colocando (16.49) y (16.50) en (16.48), obtenemos:
∇2hxu =
1
h2
[2∂2uij∂x2
h2
2+ 2
∂4uij∂x4
h4
4!
]≡ ∂2uij
∂x2+∂4uij∂x4
h2
12(16.51)
De forma identica se obtiene:
∇2hyu =
∂2uij∂y2
+∂4uij∂y4
h2
12(16.52)
Por consiguiente:
|∇2hu−∇2u| ≡
∣∣∣∣∇2hu−
∂2u
∂x2− ∂2u
∂y2
∣∣∣∣ =h2
12uxxxx + uyyyy (16.53)
por lo que, llamando m = maxuxxxx, uyyyy, obtenemos de (16.53) la relacion (16.37).
Ası pues, con este teorema queda garantizado que la solucion del problema en diferencias finitas(16.8) se aproxima a la solucion del problema diferencial (16.1) con mayor exactitud, mientrasmenor sea el paso h de la particion que se efectue.
Como conclusion del epıgrafe, veamos los resultados de la solucion arriba expuesta para unejemplo concreto en el que el dominio es una elipse y la condicion de frontera es el productode sin x por sin y. En la figura 16.2 se ve el dibujo obtenido con la ayuda de un programa enMathematica que muestra las curvas equipotenciales del ejemplo en cuestion. Esperamos quelos lectores elaboren sus propios programas y obtengan resultados similares.
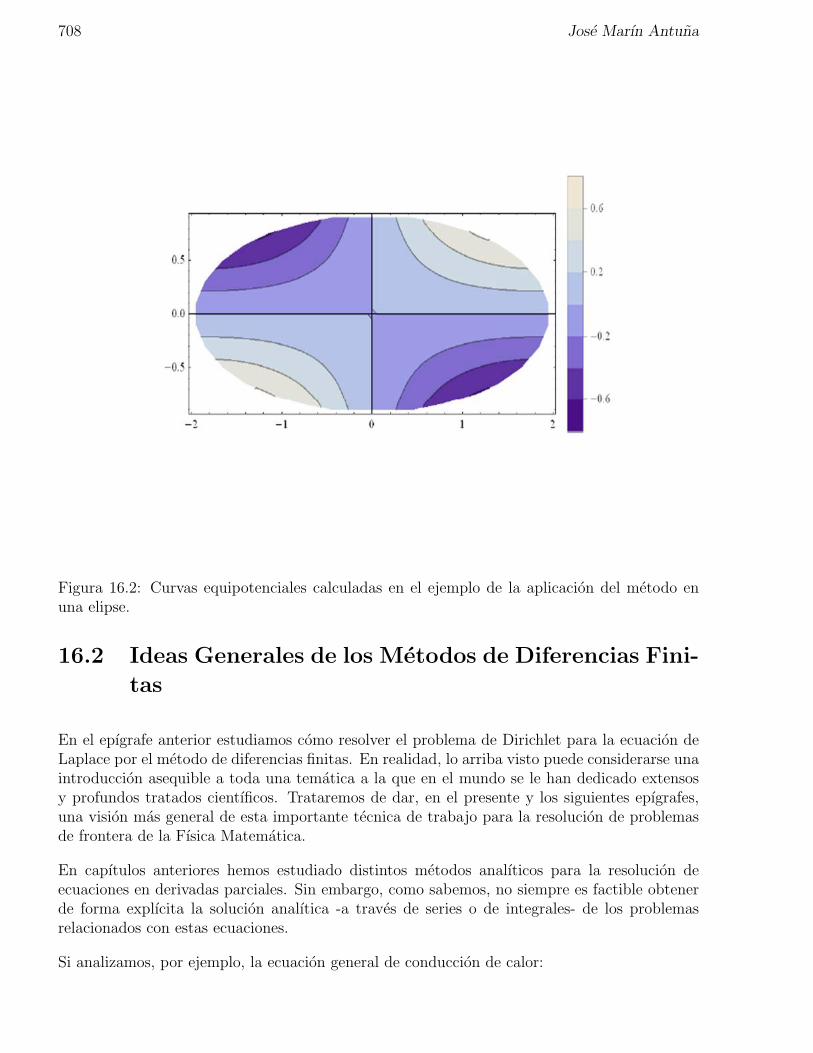
708 Jose Marın Antuna
Figura 16.2: Curvas equipotenciales calculadas en el ejemplo de la aplicacion del metodo enuna elipse.
16.2 Ideas Generales de los Metodos de Diferencias Fini-
tas
En el epıgrafe anterior estudiamos como resolver el problema de Dirichlet para la ecuacion deLaplace por el metodo de diferencias finitas. En realidad, lo arriba visto puede considerarse unaintroduccion asequible a toda una tematica a la que en el mundo se le han dedicado extensosy profundos tratados cientıficos. Trataremos de dar, en el presente y los siguientes epıgrafes,una vision mas general de esta importante tecnica de trabajo para la resolucion de problemasde frontera de la Fısica Matematica.
En capıtulos anteriores hemos estudiado distintos metodos analıticos para la resolucion deecuaciones en derivadas parciales. Sin embargo, como sabemos, no siempre es factible obtenerde forma explıcita la solucion analıtica -a traves de series o de integrales- de los problemasrelacionados con estas ecuaciones.
Si analizamos, por ejemplo, la ecuacion general de conduccion de calor:
Metodo de Diferencias Finitas 709
∂u
∂t=
∂
∂x
(k(x, t)
∂u
∂x
)(16.54)
sabemos que el metodo de separacion de variables es aplicable solo en el caso en que k(x, t) =k1(x)k2(t); sin embargo, con frecuencia aparecen problemas en los que el coeficiente de conduc-tividad termica no puede ser expresado en esta forma e, incluso, en los que dicho coeficientedepende de la temperatura, que son los casos de la llamada ecuacion cuasilineal de conduccionde calor.
Es conocido que la solucion analıtica de las ecuaciones no lineales es posible solo en casos muyparticulares.
El metodo mas universal para resolver aproximadamente las ecuaciones diferenciales es elmetodo de diferencias finitas, el cual es aplicable, ademas, a una clase amplısima de ecuacionesde la Fısica Matematica.
Segun pudimos apreciar en lo desarrollado en el epıgrafe anterior, el metodo de diferenciasfinitas consiste en lo siguiente:
Se sustituye el dominio de variacion continua de los argumentos de la ecuacion que se quiereresolver por un conjunto discreto y finito de puntos; es decir, por una red. En el ejemplo delepıgrafe anterior esta red era toda espacial, pues estabamos resolviendo la ecuacion de Laplace,pero en el caso, digamos, de la ecuacion (16.54) esta red serıa espacio-temporal.
Se sustituye la funcion de argumentos continuos por una funcion de argumentos discretos,definida solo en los nudos de la red y las derivadas se sustituyen por relaciones en diferenciasfinitas, junto con las condiciones impuestas a la ecuacion.
Al efectuar estos cambios, la ecuacion diferencial se convierte en un sistema de ecuacionesalgebraicas y se procede a resolver dicho sistema por metodos del algebra.
Obviamente, hay que exigir que el problema en diferencias finitas que ası se obtiene sea solubley que su solucion, al crecer el numero de nudos de la red, converja -es decir, se acerque- a lasolucion del problema diferencial del que inicialmente partimos.
Lo hasta aquı descrito es, en esencia, lo que fue realizado en el epıgrafe anterior para el problemade Dirichlet de la ecuacion de Laplace.
Tratemos ahora de generalizar lo arriba hecho.
16.2.1 Redes y funciones de redes
Veamos algunos ejemplos sencillos de redes.
Supongamos que la variable x esta definida en el intervalo cerrado [0, l]. Hagamos una particionde dicho intervalo con ayuda de los puntos xi = ih donde i = 1, 2, 3, ..., N ; h > 0. Es decir,
710 Jose Marın Antuna
proponemos una particion del intervalo [0, l] en N partes iguales de longitud h = l/N cada unade ellas.
Llamaremos red del intervalo [0, l] al conjunto de puntos xi que representaremos por ωh; esdecir, ωh = xi = ih, i = 0, 1, 2, ..., N. El numero h, o sea, la distancia entre cada punto onudo de la red ωh se llama paso de la red.
El intervalo [0, l] puede ser dividido, tambien, en N partes por medio de los puntos arbitrariosx1 < x2 < ... < xN−1 < l; en tal caso, obtenemos la red ωh = xi, i = 0, 1, 2, ..., N, x0 = 0, xN =l con paso hi = xi − xi−1 dependiente del numero i del nudo xi.
Si aunque sea para un solo numero i, hi 6= hi+1, la red se llama no uniforme.
Si hi = h = l/N = const. para todos los valores de i, entonces, la red se llama uniforme.
La funcion yi = y(xi) de argumento discreto xi se llama funcion de red definida en la red ωh.A cualquier funcion continua f(x) se le puede poner en correspondencia su funcion de red fhiproponiendo, por ejemplo, fhi = f(xi).
En algunas ocasiones puede resultar mas comodo definir la funcion de red de f(x) de otramanera.
Si el dominio de variacion de los argumentos (x, t) es el rectangulo Q = 0 ≤ x ≤ l, 0 ≤ t ≤ T,entonces, podemos introducir la red uniforme bidimensional ωh,T = xi = ih, tj = jτ ;h =l/N, τ = T/M donde, obviamente, hemos tomado la particion del intervalo [0, l] en N partesiguales y la particion del intervalo [0, T ] en M partes iguales; tambien pudiera tomarse una redno uniforme bidimensional.
El conjunto de nudos (xi, tj) esta, evidentemente, formado por las intersecciones de las rectasx = xi, con las rectas t = tj, de forma similar a como procedimos en el epıgrafe 1, aunque, eneste caso, una de las dimensiones del rectangulo es espacial y la otra temporal.
Sea la funcion de red vij = v(xi, tj) definida en los nudos de la red ωh,T . Definamos lasoperaciones de derivacion en diferencias finitas de la siguiente manera.
Llamaremos derivada anterior a la expresion:
(vij)t =vi,j+1 − vij
τ(16.55)
y derivada posterior a la expresion:
(vij)t =vij − vi,j−1
τ(16.56)
Ademas, a la expresion:
(vij)t =vi,j+1 − vi,j−1
2τ(16.57)

Metodo de Diferencias Finitas 711
le llamaremos derivada central.
Definamos, ademas, la siguiente segunda derivada en diferencias finitas:
(vij)xx =(vij)x − (vij)x
h=vi+1,j − 2vij + vi−1,j
h2(16.58)
En relacion con las derivadas en diferencias finitas aquı introducidas, surge el concepto deescala de un operador.
Llamaremos escala de un operador al conjunto de nudos de una red que se utiliza paradefinir dicho operador; ası, por ejemplo, para la derivada (16.55) la escala esta formada por lospuntos t = tj+1 y t = tj con i constante, para la derivada (16.56) la escala esta formada porlos puntos t = tj y t = tj−1 con i constante, para (16.57) la escala sera t = tj+1 y t = tj−1 coni constante y para (16.58) sera x = xi−1, xi, xi+1 con j constante.
Si introducimos las notaciones:
Λvij = (vij)xx (16.59)
Λσ = Λ[σvi,j+1 + (1− σ)vij] (16.60)
donde σ es un numero arbitrario, no es difıcil percatarse de que (16.60) tiene una escala de seispuntos. Este operador ponderado (16.60) se utiliza con mucha frecuencia en la construccionde esquemas en diferencias finitas; notese que, si σ = 0 obtenemos el operador Λ para valoresfijos de t = tj, en tanto que, para σ = 1, obtenemos dicho operador para valores fijos de t = tj+1.
Antes de pasar al planteamiento de los problemas en diferencias finitas, analicemos el gradode aproximacion que ofrecen los operadores en diferencias finitas aquı definidos respecto a losoperadores diferenciales que les corresponden.
16.2.2 Orden de aproximacion de los operadores
Comparemos en el punto (xi, tj) las expresiones
(uij)t y ut(xi, tj)
donde u(x, t) es cualquier funcion continua hasta sus segundas derivadas en 0 ≤ x ≤ l, 0 ≤t ≤ T. Tendremos que

712 Jose Marın Antuna
ui,j+1 − uijτ
− ut(xi, tj) =
=u(xi, tj) + τut(xi, tj) +O(τ 2)− u(xi, tj)
τ− ut(xi, tj) = O(τ) (16.61)
donde hemos aplicado la formula de Taylor a ui,j+1 de manera consecuente. De acuerdo con(16.61), diremos que el operador
(uij)t
se aproxima a la derivada ut en la red ωh,T con orden O(τ), donde -como siempre- O(τ) significauna magnitud del mismo orden que τ .
Veamos, ahora, el orden de aproximacion en la red ωh,T del operador Λσ(uij).
Tenemos que, si u tiene hasta cuarta derivada continua respecto a x, entonces, aplicando laformula de Taylor:
ui±1,j = u(xi ± h, tj)± hux(xi, tj) +h2
2uxx(xi, tj)±
±h3
6uxxx(xi, tj) +O(h4) (16.62)
Colocando (16.62) en la expresion para Λuij se obtiene, facilmente:
Λuij = uxx(xi, tj) +O(h2)
Λui,j+1 = uxx(xi, tj+1) +O(h2) = uxx(xi, tj) + τUxxt(xi, tj) +O(τ 2 + h2) =
= uxx(xi, tj) +O(τ + h2) (16.63)
Por consiguiente, teniendo en cuenta su definicion, para el operador ponderado Λσ obtenemos:
Λσ(uij) = σΛui,j+1 + (1− σ)Λuij = uxx(xi, tj) +O(τ + h2) (16.64)
Ası pues, el orden de aproximacion de este operador es O(τ + h2).

Metodo de Diferencias Finitas 713
16.2.3 Problema en diferencias finitas para la ecuacion de conduc-cion de calor
Supongamos, ahora, a modo de ejemplo, que queremos resolver el problema de la propagacionde calor:
ut = a2uxx + f(x, t), ∀0 < x < l, 0 < t ≤ T
u(x, 0) = ϕ(x) (16.65)
u(0, t) = 0
u(l, t) = 0
A fin de llevar este problema a un problema en diferencias finitas, introduzcamos la red ωh,Tdefinida en el punto 1 de este epıgrafe.
Con ayuda de los operadores anteriormente definidos planteemos el siguiente problema en dife-rencias finitas:
(vij)t = a2Λσ(vij) + fij
vi0 = ϕi (16.66)
v0j = 0
vNj = 0
donde fij se puede definir, por ejemplo, de la siguiente manera: fij = f(xi, tj).
Es conveniente aclarar que la funcion fij puede ser definida de formas diferentes; por ejemplo,pudieramos definirla por la siguiente relacion:
fij =f(xi+1, tj) + f(xi−1, tj)
2
utilizando otra escala. Esto depende de las caracterısticas del problema que estemos resolviendo.
Es posible demostrar que, mediante la construccion de escalas mas complicadas puede lograrseun orden de aproximacion superior al aquı analizado. Por ejemplo, no es difıcil comprobar que,si en lugar de la ecuacion del problema en diferencias finitas (16.66), tomamos el operador
(vij)t = a2Λσ(vij) + fij (16.67)
con la derivada central en el tiempo, entonces, el orden de aproximacion es O(τ 2 + h2).

714 Jose Marın Antuna
En virtud de las formulas (16.61) y (16.64), podemos establecer el orden de aproximacion delproblema en diferencias finitas (16.66) al problema diferencial (16.65). Para ello introduzcamoslas siguientes notaciones.
Llamemos
Lx,tu ≡ ut − a2uxx − f(x, t) (16.68)
al operador diferencial del problema (16.65) y
Lh,τuij ≡ (uij)t − a2Λσ(uij)− fij (16.69)
al operador en diferencias finitas del problema (16.66).
Entonces, como Lx,tu = 0, con ayuda de (16.61) y de (16.64) obtenemos:
Lh,τuij − Lx,tu|(xi,tj) ≡ Lh,τuij = O(τ + h2) (16.70)
En este caso, se dice que el problema en diferencias finitas (16.66) se aproxima al problemadiferencial (16.65) con orden O(τ+h2); es decir, la solucion numerica del problema en diferenciasfinitas (16.66) se aproxima con ese orden a la solucion del problema diferencial (16.65).
Como dijimos arriba, escogiendo escalas mas complicadas pueden lograrse ordenes de aproxi-macion mayores. Esto es un problema de gran importancia, ya que, si logramos un esquemaen diferencias finitas que converja mas rapidamente a la solucion del problema diferencial cuyasolucion queremos hallar, estaremos ahorrando tiempo de maquina en la computadora que este-mos utilizando y el lector comprende la importancia capital que este ahorro tiene en los mediosmodernos de computo.
A la construccion de esquemas en diferencias finitas que converjan con mayor rapidez estadedicada toda una ciencia que, por supuesto, es imposible agotar en el marco del presentelibro.
Al lector interesado en profundizar en esta tecnica le recomendamos el libro ”Introduccion a laTeorıa de Esquemas en Diferencias Finitas” de A.A. Samarsky de la Editorial Nauka, Moscu,1971 y tambien el libro ”Ecuaciones de la Fısica Matematica” de A.N. Tıjonov y A.A. Samarskyde la Editorial Nauka, Moscu, 1977.
Existe, ademas, una amplia literatura sobre el tema de autores de diferentes paıses.
16.2.4 Estabilidad de los esquemas en diferencias finitas
Introduzcamos el concepto de norma de las funciones de redes de la siguiente manera:

Metodo de Diferencias Finitas 715
‖ v ‖= maxi,j
|vij| (16.71)
‖ vj ‖= maxi|vij| (16.72)
Tambien es posible definir otras normas de las funciones de redes como sigue:
‖ v ‖=
N∑i=1
M∑j=1
|vij|2 1
2
(16.73)
que es la llamada norma media cuadratica,
‖ vj ‖=
N∑i=1
|vij|2 1
2
(16.74)
y otras.
Veamos el siguiente importante concepto:
Definicion:
Un esquema en diferencias finitas se llama estable respecto a la parte derecha y a lascondiciones iniciales si, para h y τ suficientemente pequenas, existen las constantes M1 yM2 independientes de h y de τ tales que se cumple que:
‖ v ‖≤M1 ‖ ϕ ‖ +M2 ‖ f ‖ (16.75)
donde las normas en (16.75) son una cualquiera de las posibles normas definidas en ωh,τ y enωh.
Tiene lugar el teorema siguiente:
Teorema.
Si existen las constantes C1 y C2 independientes de h y de τ tales que resulta valida la valoracion
‖ vj+1 ‖≤ (1 + C1τ) ‖ vj ‖ +C2τ ‖ f ‖ (16.76)
entonces, el esquema en diferencias finitas es estable.
Se aprecia que, por la forma en que esta enunciado, este teorema constituye la condicionsuficiente para la estabilidad del esquema en diferencias finitas.

716 Jose Marın Antuna
Demostracion:
Aplicando, reiteradamente, la valoracion (16.76) que, por hipotesis, se cumple tendremos que:
‖ vj+1 ‖≤ (1 + C1τ) ‖ vj ‖ +C2τ ‖ f ‖≤ (1 + C1τ)2 ‖ vj−1 ‖ +
+C2τ ‖ f ‖ 1 + (1 + C1τ) ≤ ... ≤ (1 + C1τ)j ‖ v0 ‖ +
+C2τ ‖ f ‖ ·1 + (1 + C1τ) + ...+ (1 + C1τ)j ≤
≤ (1 + C1τ)j ‖ ϕ ‖ +C2τ ‖ f ‖ (1 + C1τ)
j (16.77)
Como quiera que j ≤M y que Mτ = T , tendremos que:
(1 + C1τ)j ≤ (1 + C1τ)
M ≤ eC1τM ≤ eC1τ (16.78)
Entonces, haciendo M1 = eC1τ y M2 = C2TeC1τ y tomando el maximo por j, obtenemos (16.75).
Demostrado el teorema.
Pasemos al estudio de esquemas concretos en diferencias finitas.
1. σ = 1. En este caso estamos en presencia del llamado esquema implıcito. Tendremosque:
vi,j+1 − vij = τa2Λvi,j+1 + τfij (16.79)
Introduzcamos la notacion
γ =a2τ
h(16.80)
Entonces:
vi,j+1 = vij − γ[2vi,j+1 − vi+1,j+1 − vi−1,j+1] + τfij (16.81)
Supongamos que en el nudo (i0, j + 1) se encuentre el maximo por i de la funcion de red,es decir, que se cumpla que
vi0,j+1 = maxivi,j+1 ≥ vi,j+1 (16.82)
Entonces:
2vi0,j+1 − vi0+1,j+1 − vi0−1,j+1 ≥ 0 (16.83)
y podemos escribir que
Metodo de Diferencias Finitas 717
vi0,j+1 ≤ vi0,j + τfi0,j ≤‖ vj ‖ +τ ‖ f ‖ (16.84)
Supongamos, ahora, que en el nudo (k0, j + 1) se encuentre el mınimo por i de la funcionde red, es decir, que se cumpla que
vk0,j+1 = minivi,j+1 ≤ vi,j+1 (16.85)
Entonces, de forma analoga:
2vk0,j+1 − vk0+1,j+1 − vk0−1,j+1 ≤ 0 (16.86)
y, por consiguiente:
vk0,j+1 ≥ vk0,j + τfk0,j ≥ − ‖ vj ‖ −τ ‖ f ‖ (16.87)
De las desigualdades (16.84) y (16.87) se desprende que
− ‖ vj ‖ −τ ‖ f ‖≤ vi,j+1 ≤‖ vj ‖ +τ ‖ f ‖
Es decir, finalmente:
‖ vi,j+1 ‖≤‖ vj ‖ +τ ‖ f ‖ (16.88)
de donde, en virtud de la condicion suficiente del teorema demostrado, tomando C1 = 0y C2 = 1, se desprende la estabilidad de este esquema implıcito.
2. σ = 0. En este caso estamos en presencia del esquema explıcito.
En este caso, con la misma notacion (16.80), obtenemos la expresion:
vi,j+1 = vij − γ[vi+1,j + vi−1,j − 2vij] + τfij (16.89)
De (16.89) obtenemos:
vi,j+1 = (1− 2γ)vij + γvi+1,j + γvi−1,j + τfij (16.90)
Sea 1− 2γ > 0, γ < 12
y a2τh2 < 1
2. Entonces:
‖ vj+1 ‖≤ (1− 2γ) ‖ vj ‖ +2 ‖ vj ‖ +τ ‖ f ‖ (16.91)
de donde:
‖ vj+1 ‖≤‖ vj ‖ +τ ‖ f ‖ (16.92)
de donde se desprende la estabilidad para a2τh2 < 1
2.

718 Jose Marın Antuna
Es factible demostrar que en el caso en que γ ≥ 1/2 el esquema es inestable. Efecti-vamente, supongamos que en la capa j la funcion vij se calculo con un error igual a(δv)ij = (−1)nε. Entonces, en la capa j + 1 tendremos:
(δv)i,j+1 = (1− 2γ)(δv)ij + γ(δv)i+1,j + γ(δv)i−1,j (16.93)
o sea:
(δv)i,j+1 = (1− 2γ)(−1)nε− 2γ(−1)nε = (4γ − 1)(−1)nε (16.94)
Al pasar k capas, obtenemos:
|(δv)i,j+k| = (4γ − 1)kε (16.95)
y, como q = 4γ− 1 > 1, el error crece con la rapidez de una progresion geometrica, lo quedemuestra la afirmacion.
16.2.5 Convergencia de los esquemas en diferencias finitas
Sea Lx,tu = f cierta ecuacion diferencial y Lh,τvij = fij su aproximacion en diferencias finitas,llamada tambien su analogo. Analicemos la diferencia:
zij = vij − uij (16.96)
donde uij = u(xi, tj) ≡ u(x, t)|ωh,τ; es decir, la solucion de la ecuacion diferencial evaluada en
los nudos de la red.
La magnitud zij definida por (16.96) se denomina exactitud del esquema en diferencias finitasy la pregunta de rigor es si tendera zij a cero para h y τ tendientes a cero; en otras palabras,si convergira la sucesion de soluciones del esquema de diferencias finitas vijhτ a la solucionexacta u(x, t) de la ecuacion diferencial en la sucesion de redes ωh,τ , cuando h, τ → 0.
A continuacion veremos como este problema se resuelve comunmente.
Si la exactitud zij cumple que
‖ z ‖= O(τ k + hp) (16.97)
entonces, se dice que el esquema tiene una exactitud de orden k respecto a τ y de orden prespecto a h.
De la valoracion (16.97) esta claro que para τ → 0 y h → 0 tiene lugar la convergencia delesquema en diferencias finitas.
Metodo de Diferencias Finitas 719
Veamos como obtener la valoracion (16.97). Frecuentemente aquı se utiliza el resultado delsiguiente teorema:
Teorema.
Para los problemas lineales en diferencias finitas, de la estabilidad respecto a la parte derecha ydel error de la aproximacion se desprende su convergencia uniforme con un orden de exactitudque coincide con el orden del error de la aproximacion.
Demostracion:
Recordemos que un esquema en diferencias finitas es lineal si
Lh,τ [αvij + βwij] = αLh,τvij + βLh,τwij (16.98)
es decir, igual criterio de linealidad que para el operador diferencial Lx,t. Supongamos que elesquema Lh,τ tiene un orden de error de aproximacion:
Lh,τuij − fij = O(τ k + hp) (16.99)
donde uij = u(x, t)|ωh,τy u(x, t) es la solucion exacta del problema Lx,tu = f .
Sea vij la solucion del problema en diferencias finitas Lh,τvij = fij. Entonces:
Lh,τzij = Lh,τvij − Lh,τuij = Lh,τvij − fij − (Lh,τuij − fij) (16.100)
pero
Lh,τvij − fij = 0 y Lh,τuij − fij = O(τ k + hp) (16.101)
Teniendo en cuenta (16.101), de (16.100) obtenemos que:
Lh,τzij = O(τ k + hp) (16.102)
de donde se desprende la convergencia del esquema en diferencias finitas con el orden de errorde la aproximacion.
Demostrado el teorema.
Por consiguiente, podemos concluir que los esquemas implıcito y explıcito estudiados pornosotros convergen para τ → 0 y h → 0 a la solucion exacta del problema diferencial (enel caso del esquema explıcito, bajo la condicion de que γ < 1/2).

720 Jose Marın Antuna
16.2.6 Metodos de solucion de los esquemas en diferencias finitas.Metodo de corrido
Veamos, primero, el esquema explıcito, es decir, cuando σ = 0. En este caso el problema aresolver es:
vi,j+1 = (1− 2γ)vij + γvi+1,j + γvi−1,j + τfij
vi0 = ϕi (16.103)
v0j = vNj = 0
El esquema permite efectuar los calculos sucesivos en la capa j+ 1, si se conocen los valores enla capa j.
Por consiguiente, no hay nada que hacer, el propio esquema permite hallar la solucion mediantela aplicacion directa de las formulas.
Veamos, a continuacion, el esquema implıcito; es decir, cuando σ = 1. Este puede ser escritode la siguiente forma:
γvi−1,j+1 − (2γ + 1)vi,j+1 + γvi+1,j+1 = −τfij − vij
vi0 = ϕi (16.104)
v0,j+1 = vN,j+1 = 0
Supongamos que son conocidos los valores en la capa j; se necesita calcular los valores en lacapa j + 1.
Para resolver este sistema existe un metodo universal conocido con el nombre de Metodo decorrido. Desarrollemos la esencia de dicho metodo.
Consideremos el sistema
Aiyi−1 − Ciyi +Biyi+1 = −Fiy0 = αy1 + β (16.105)
yN = γyN−1 + δ
En el sistema (16.105) hemos puesto una generalizacion de las condiciones de frontera; en el,ademas, i = 1, 2, ...N − 1.
Supondremos que se cumplen las siguientes condiciones:
1. Ai, Bi, Ci > 0.

Metodo de Diferencias Finitas 721
2. Ci ≥ Ai +Bi.
3. 0 ≤ α ≤ 1, 0 ≤ γ ≤ 1.
y buscaremos la solucion en la forma:
yi−1 = αiyi + βi (16.106)
con i = 1, 2, ..., N y αi y βi son los llamados coeficientes de corrido que deben ser hallados.
Coloquemos la solucion propuesta (16.106) en la ecuacion del sistema; obtenemos:
Ai(αiyi + βi)− Ciyi +Biyi+1 = Fi
es decir:
(Aiαi − Ci)yi +Biyi+1 + (Aiβi + Fi) = 0 (16.107)
Coloquemos en (16.107) la expresion de yi que se obtendrıa de (16.106), si sustituimos en ellai− 1 por i y, por tanto, i por i+ 1. Como resultado queda:
(Aiαi − Ci)(αi+1yi+1 + βi+1) +Biyi+1 + (Aiβi + Fi) = 0
Agrupando, obtenemos:
[(Aiαi − Ci)αi+1 +Bi]yi+1 + [Aiβi + Fi + (Aiαi − Ci)] = 0 (16.108)
Para que la igualdad a cero en (16.108) se cumpla, exigimos que los corchetes sean iguales acero; entonces, como resultado, obtenemos:
αi+1 =Bi
Ci − αiAi(16.109)
βi+1 =Aiβi + FiCi − αiAi
(16.110)
Estas relaciones permiten hallar los coeficientes de corrido, ya que de la primera condicion defrontera del problema (16.105), teniendo en cuenta (16.106), tenemos que:
α1 = α, β1 = β (16.111)
722 Jose Marın Antuna
Ademas, de la segunda condicion de frontera del problema (16.105) y teniendo en cuenta(16.106), conocidas αN y βN , podemos hallar yN−1 y yN , pues como
yN = γyN−1 + δ (16.112)
yN−1 = αNyN + βN
se obtiene:
yN =γβN + δ
1− γαN(16.113)
A continuacion, conocidos los coeficientes de corrido y yN , por las formulas (16.106) hallamosel conjunto de los demas valores de yi.
Demostremos, por ultimo, que 0 ≤ αi ≤ 1, lo que garantiza la estabilidad del corrido (es decir,el no aumento de los errores). Para α1 tenemos, obviamente, que
0 ≤ α1 = α ≤ 1 (16.114)
Analicemos, ahora, el coeficiente αi+1. Tenemos, por (16.109) y, considerando la condicionimpuesta de que Ci ≥ Ai +Bi, que:
αi+1 =Bi
Ci − αiAi≤ Bi
Ai +Bi − αiAi=
Bi
Bi + (1− αiAi)≤ 1 (16.115)
ya que 0 ≤ αi ≤ 1. Por consiguiente, por induccion completa, queda demostrado que todoslos coeficientes αi cumplen la relacion requerida, lo que garantiza la estabilidad del metodo decorrido.
Con lo anteriormente expuesto concluimos esta introduccion a los metodos de diferencias finitas.
Debemos recalcar que, ni con mucho, hemos agotado el tema. Los metodos de diferencias finitaspueden ser aplicados con igual exito a las ecuaciones hiperbolicas y tambien a ecuaciones decualquier tipo con coeficientes variables.
En esto ultimo radica la mayor utilidad del metodo, pues si, en ocasiones, resulta difıcil obtenersoluciones analıticas de problemas con coeficientes constantes, dicha dificultad es mucho mayoren el caso de ecuaciones con coeficientes variables.
Los metodos de diferencias finitas aquı estudiados pueden extenderse, tambien, al caso de variasvariables espaciales. En este sentido, la complejidad radica en que la red sera multidimensionaly, por tanto, los sistemas de ecuaciones a resolver, mas complicados. En esos casos cobra mayorimportancia aun la busqueda de algoritmos que tengan ordenes de aproximacion grandes, demanera que la solucion numerica en computadoras se realice con la mayor rapidez posible.

Metodo de Diferencias Finitas 723
Como expresamos arriba, el lector interesado puede referirse a la literatura especializada quesobre este tema existe.

724 Jose Marın Antuna
Capıtulo 17
Ideas sobre los metodos de solucion deecuaciones no lineales
En el presente capıtulo veremos algunas ideas generales relacionadas con la solucion de ciertoscasos de ecuaciones no lineales que aparecen al resolver problemas de la Fısica, sin intentar conello abarcar el universo de problemas y de metodos de solucion de tales problemas y ecuaciones.Una vision mas abarcadora y profunda requiere la lectura de literatura especializada sobre esteimportante tema. Nos limitaremos, por lo tanto, a presentar algunas de las ecuaciones nolineales mas importantes en el desarrollo de problemas de la Fısica Matematica.
17.1 Ecuacion de Korteweg-de Vries y el metodo del pro-
blema inverso
En 1895 Korteweg y de Vries mostraron que las ondas superficiales en aguas someras se descri-bıan con una ecuacion diferencial en derivadas parciales esencialmente no lineal. Este no eraun fenomeno nuevo, pues en epocas tan tempranas como 1847 Stokes mostro que las ondas desuperficie en aguas profundas podıan tener caracter no lineal. Las dificultades para la busquedade soluciones de tales ecuaciones siempre condujo al intento de intentar aproximaciones linealesa los fenomenos estudiados, siempre que fısicamente ello fuera factible. El empleo de metodosnumericos para la solucion de problemas descritos con ecuaciones no lineales fue desde epocastempranas el recurso mas recurrido por investigadores de dichos procesos en la Hidrodinamica,la Geofısica, la Meteorologıa y los fenomenos dewcritos en medios continuos en general.
Uno de los logros notables de la teorıa de ondas no lineales en dispersion fue el descubrimientoen 1967 de un metodo exacto de integracion de la ecuacion de Korteweg-de Vries por un grupode fısicos norteamericanos (Krustal, Gardner, Green, Miura: Methods for solving the Korteweg-de Vries equation. Phys. Rev. Lett. 1967, 19, pp. 1095-1097). Lo notable del procedimientohallado fue que para integrar la ecuacion no lineal, resulta necesario resolver en secuencia dosproblemas lineales: uno para una ecuacion diferencial y el otro para una ecuacion integral. Eldescubrimiento de este metodo, llamado metodo del problema inverso, atrajo la atencion
725

726 Jose Marın Antuna
de muchos investigadores lo que condujo al desarrollo acelerado de metodos exactos de solucionde ecuaciones no lineales en derivadas parciales. Con los esfuerzos de muchos cientıficos, entreellos los rusos Novikov, Sajarov, Shabat, Fadieev y otros, se logro hallar metodos para construirsoluciones exactas de una serie de ecuaciones de interes fısico, entre ellas la ecuacion ”seno-Gordon”, la ecuacion cubica de Shrodinger, la ecuacion de Kadomtsev-Petdiashvili y otras.
A continuacion desarrollaremos los aspectos fundamentales del metodo del problema inversopara la ecuacion de Korteweg-de Vries y el popular concepto de soliton.
17.1.1 Forma canonica de la ecuacion de Korteweg-de Vries (KdV)
La ecuacion de KdV se obtiene al describir de forma aproximada las ondas largas no linealesen aguas someras. Esta ecuacion es:
ηt + c0
(1 +
3
2h0
η
)ηx +
h20
6c0ηxxx = 0 (17.1)
En ella h0 es la profundidad del fluido, c0 =√gh0 es la velocidad de las ondas largas en aguas
someras y g la aceleracion de la gravedad. η = η(x, t) es la forma de la superficie libre delfluido.
Llevaremos la ecuacion (17.1) a la llamada forma canonica. Parta ello, introduzcamos unanueva variable dependiente u segun la ley
η = Au+B
y por nuevas variables independientes tomaremos,
x
x0
,t
t0
que de nuevo representaremos por x y t (es decir: tvieja = t0tnueva; xvieja = x0xnueva). Aquıtomamos
t0 =h0
c0; x0 =
h0
3√t; B = −2
3h0; A = −4h0
3√t
Tenemos entonces:
ηt =Autt0
; ηx =Auxx0
; ηxxx =Auxx3
0
Metodos de solucion de ecuaciones no lineales 727
Por lo tanto, tras sencillas operaciones se obtiene la llamada forma canonica de la ecuacionde KdV que, como se observa, ademas de ser una ecuacion no lineal, es de tercer orden:
ut − 6uux + uxxx = 0 (17.2)
17.1.2 Leyes de conservacion
La ecuacion de KdV (17.2) tiene un grupo de propiedades formidables, una de las cuales es queella tiene un numero infinito de leyes de conservacion, o sea, de integrales de movimiento. Paradeducir esas leyes, usemos la llamada transformacion de Gardner-Miura
u = w + εwx + ε2w2 (17.3)
donde ε es cierto numero. Colocando (17.3) en (17.2) al final se obtiene
(1 + ε
∂
∂x+ 2ε2w
)R[w] = 0 (17.4)
donde
R[w] ≡ wt − 6(w + ε2w2)wx + wxxx (17.5)
Supongamos que la funcion w satisface la ecuacion
R[w] ≡ wt − 6(w + ε2w2)wx + wxxx = 0 (17.6)
llamada ecuacion de Gardner. Ello implica por (17.4) que la funcion u definida segun (17.3)satisface la ecuacion de KdV (17.2). Es decir, si u es solucion de (17.2), entonces w es solucionde (17.4) y viceversa, si w es solucion de la ecuacion de Gardner (17.6), entonces u dada por(17.3) es solucion de la ecuacion de KdV (17.2).
Este resultado nos da las propiedades de la transformacion de Gardner-Miura (17.3).
La funcion u como solucion de la ecuacion de KdV no depende de ε y, por lo tanto, la solucionformal (17.3) ası como la de la ecuacion para w en forma de una serie de potencias de ε tienela forma
w =∞∑n=0
εnwn[u] (17.7)

728 Jose Marın Antuna
donde wn = wn[u] se determinan por formulas recurrentes y dependen de la funcion u y de susderivadas respecto a x. Ası, por ejemplo, w0 = u, w1 = −ux, w2 = uxx − u2,...
Colocando la serie (17.7) en la ecuacion (17.4) e igualando los coeficientes de iguales potenciasde ε podemos corroborar que todas las funciones wn satisfacen la ecuacion de Gardner quereescribiremos en la forma siguiente:
∂
∂twn +
∂
∂x
[−3w2
n − 2ε2w3n +
∂2
∂x2wn
]= 0 (17.8)
Suponiendo ahora un decrecimiento suficientemente rapido de la funcion u y de sus derivadasrespecto a x obtenemos
d
dt
∫ ∞
−∞wn[u]dx = 0
lo que implica que
In =
∫ ∞
−∞wn[u]dx = const.
para todo numero n = 1, 2, ... Ası pues, existe un numero infinito de integrales de movimientoIn para la ecuacion de Korteweg-de Vries. Las primeras no triviales de ellas tienen la forma
I0 =
∫ ∞
−∞u(x, t)dx, I2 =
∫ ∞
−inftyu2(x, t)dx,
I4 =
∫ ∞
−∞
[u3 +
1
2u2x
]dx, ...
La presencia para la ecuacion de KdV (17.2) de un numero infinito de leyes de conservacionsignifica que esta ecuacion posee una profunda simetrıa interna que destaca a esta ecuacion entreotras ecuaciones no lineales y que condiciona la existencia de un metodo extraordinariamentediafano y claro de solucion exacta basado en el llamado problema inverso de dispersion para laecuacion unidimensional de Schrodinger.
Ademas, la presencia de las leyes de conservacion mencionadas resulta ser una propiedad muyutil empleable con frecuencia para el control de los calculos numericos durante la solucion dela ecuacion de KdV encomputadoras.

Metodos de solucion de ecuaciones no lineales 729
17.1.3 Metodo del problema inverso
Problema directo y problema inverso de dispersion
Veremos como resolver la eacuacion de KdV a partir de las ideas desarrolladas por Kruskal,Gardner, Green y Miura. El metodo de integracion que ellos desarrollaron consoste en losiguiente. Ellos notaron que con la ecuacion de KdV esta estrechamente ligada la ecuaciondiferencial
ψxx + [λ− u(x, t)]ψ = 0 (17.9)
que es la ecuacion estacionaria de Schrodinger con potencial u(x, t) que es una funcion quedepende de t como parametro y λ es un parametro numerico. Veamos algunas cuestionesteoricas generales necesarias para el desarrollo de lo que posteriormente veremos.
Definicion: La funcion f(x, t) se llama decreciente rapidamente si
max0≤t≤T
∫ ∞
−∞(1 + |x|)|f(x)|dx <∞
Para la ecuacion (17.9) veremos dos problemas:
Primer problema: Hallar los autovalores λ correspondientes a las autofunciones ψ(x, t) ∈L2(R
1).
Segundo problema: Hallar para λ ≥ 0 las soluciones acotadas de (17.9) que se comportende la siguiente manera:
ψ(x, t) ∼ e−ikx + b(k, t)eikt, ∀x→∞ψ(x, t) ∼ a(x, t)e−ikt, ∀x→ −∞ (17.10)
donde k2 = λ y las funciones a(x, t) y b(x, t) deben ser obtenidas. Desde el punto de vistafısico ambos problemas pueden interpretarse de la forma siguiente: Sobre la base de la teorıade los problemas de Sturm-Liouville en la Mecanica Cuantica, el primero de los problemascomo el de hallar los autovalores (los niveles de energıa cuanticos) de los llamados estadosligados definidos por las funciones de onda ψ(x, t) normadas a la unidad en L2(R
1). El segundoproblema, como el de la dispersion de una onda plana de amplitud unitaria en el potencialu(x, t). Los coeficientes b(k, t) y a(k, t) se interpretan entonces como los coeficientes de reflexiony de trasmision respectivamente, debiendo cumplirse que |a(k, t)|2 + |b(k, t)|2 = 1, expresionque refleja la ley de conservacion de la energıa en la dispersion.
El primer problema para (17.9) puede tener solucion solamente para λ < 0, de manera quedichas soluciones tienen para x → ∞ un comportamiento asintotico del tipo ψm(x, t) ∼
730 Jose Marın Antuna
cm(t)e−κmx donde λm = −κ2m son los autovalores. Por consiguiente, para las autofunciones
ψm normadas a la unidad en L2(R1) correspondientes a los autovalores λm = −κ2
m, los coefi-cientes cm(t) pueden definirse como
cm(t) = limx→∞
ψmeκ(t)x
Supongamos ahora resueltos ambos problemas para la ecuacion (17.9) de manera que estendefinidos los conjuntos κm, cm y a(k, t), b(k, t). Estos conjuntos se llaman datos de ladispersion para el potencial u(x, t). La busqueda de estos conjuntos para el potencialu(x, t) dado constituye el problema directo de dispersion.
Supongamos ahora conocido el conjunto κm, cm, a(k, t), b(k, t) que constituye los datos dela dispersion para cierto potencial u(x, t). Planteemos el problema de buscar el potencial u(x, t)a partir de dichos datos. Este problema se conoce con el nombre de problema inverso dedispersion.
Resulta que los datos de la dispersion son suficientes completamente para la determinacionunıvoca del potencial. El procedimiento para obtenerlo es como sigue. Con los datos de ladispersion se construye la funcion
B(x, t) =n∑
m=1
c2m(t)e−κmx +1
2π
∫ ∞
−∞b(k, t)eikxdk (17.11)
y se busca la solucion K(x, y, t) de la ecuacion integral siguiente:
K(x, y, t) +B(x+ y, t) +
∫ ∞
x
B(y + z, t)K(x, z, t)dz = 0 (17.12)
Resolviendo esta ecuacion integral, conocida con el nombre de ecuacion de Gelfand-Levitan,usamos la formula
u(x, t) = −2d
dxK(x, x, t) (17.13)
para determinar la funcion u(x, t) que es el potencial buscado y, por tanto, la solucion delproblema inverso de dispersion.
Esquema del metodo del problema inverso
Sea el problema de Cauchy para la ecuacion de KdV:

Metodos de solucion de ecuaciones no lineales 731
ut − 6uux + uxxx = 0, ∀ −∞ < x <∞, t > 0 (17.14)
u(x, 0) = u0(x)
Diremos que la solucion del problema de Cauchy (17.14) es decreciente rapidamente si la funcionu(x, t) y todas sus derivadas respecto a x hasta el tercer orden inclusive son funciones decre-cientes rapidamente. La posibilidad de usar el problema inverso de dispersion para construirsoluciones decrecientes rapidamente de (17.14) se basa en los dos teoremas siguientes:
Teorema 1
Si el potencial u(x, t) en (17.9) es solucion decreciente rapidamente de la ecuacion de KdV(17.2), entonces los autovalores λm = −κ2
m no dependen del tiempo t.
Teorema 2
Si el potencial u(x, t) en (17.9) es solucion decreciente rapidamente de la ecuacion de KdV,entonces los datos de la dispersion cm(t), b(k, t) y a(k, t) dependen del tiempo de la siguienteforma:
cm(t) = cm(0)e4κ3mt, κ2
m = −λm, (a)
b(k, t) = b(k, 0)e8ik3t, k2 = λ > 0, (b) (17.15)
a(k, t) = a(k, 0), (c)
Supongamos demostrados ambos teoremas. Veamos sus consecuencias. Sea u(x, t) soluciondecreciente rapidamente del problema (17.14) con u0(x) decreciente rapidamente. Entonces,los datos de la dispersion para esta funcion vista como potencial en (17.9) estan relacionadoscon los datos de la dispersion para el potencial u0(x) ≡ u(x, 0) por las formulas (17.15). Por lotanto, conociendo los datos de la dispersion para u0(x) y construyendo y resolviendo la ecuacion(17.12) se puede hallar la funcion u(x, t).
Ası pues, llegamos al esquema siguiente para buscar soluciones de (17.14) decrecientes rapida-mente:
Se analiza la ecuacion
ψxx + [λ− u0(x)]ψ = 0
Se determinan los datos de la dispersion κm, cm(0) y a(k, 0), b(k, 0) para la condicion inicialu(x, 0) = u0(x).
A partir de aquı, con las formulas (17.15) se hallan cm(t) y bm(k, t) y con ellas se construye elnucleo
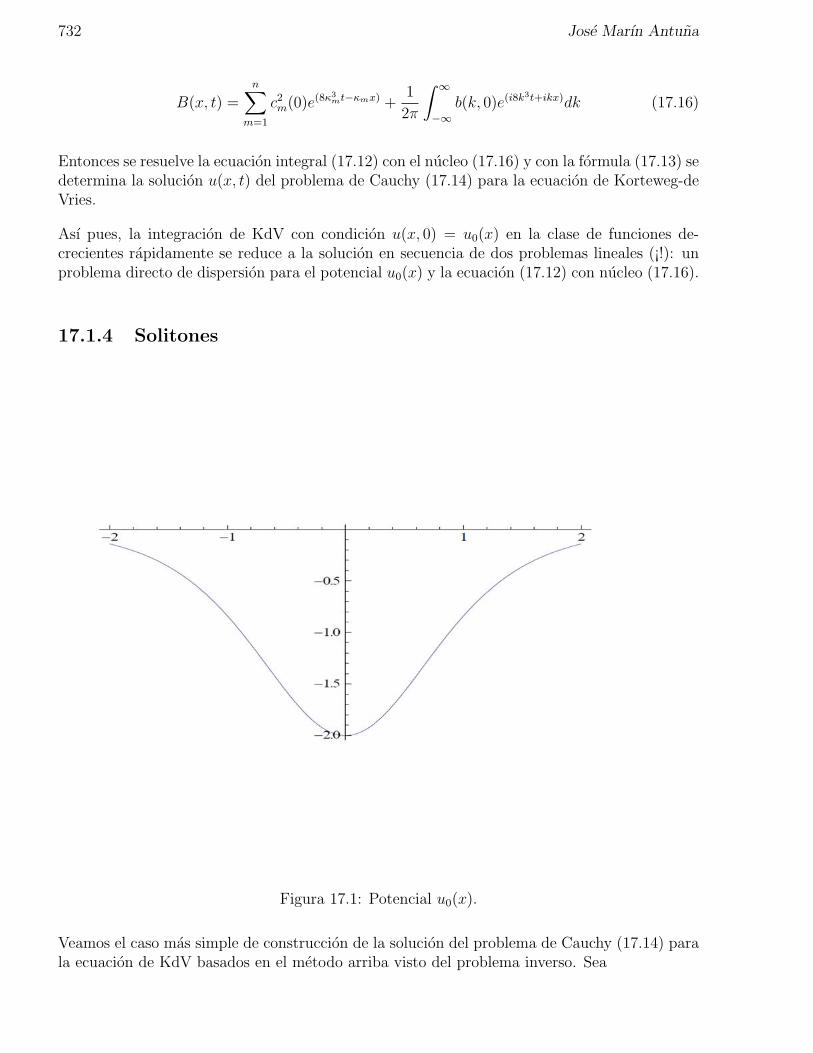
732 Jose Marın Antuna
B(x, t) =n∑
m=1
c2m(0)e(8κ3mt−κmx) +
1
2π
∫ ∞
−∞b(k, 0)e(i8k
3t+ikx)dk (17.16)
Entonces se resuelve la ecuacion integral (17.12) con el nucleo (17.16) y con la formula (17.13) sedetermina la solucion u(x, t) del problema de Cauchy (17.14) para la ecuacion de Korteweg-deVries.
Ası pues, la integracion de KdV con condicion u(x, 0) = u0(x) en la clase de funciones de-crecientes rapidamente se reduce a la solucion en secuencia de dos problemas lineales (¡!): unproblema directo de dispersion para el potencial u0(x) y la ecuacion (17.12) con nucleo (17.16).
17.1.4 Solitones
Figura 17.1: Potencial u0(x).
Veamos el caso mas simple de construccion de la solucion del problema de Cauchy (17.14) parala ecuacion de KdV basados en el metodo arriba visto del problema inverso. Sea

Metodos de solucion de ecuaciones no lineales 733
u0(x) = − 2
cosh2 x
cuyo grafico puede verse en la figura 17.1. Sea la ecuacion
ψxx +
[λ+
2
cosh2 x
]ψ = 0
y hallemos los datos de la dispersion para este potencial u0(x). Aquı resulta b(k, 0) = 0 y setiene un solo autovalor λ1 = −1 = −k2
1 y, ademas, C1(0) =√
2. El nucleo de la ecuacion deGelfand-Levitan (17.12) es aquı
B(x, t) = 2e(8t−x)
Veamos la ecuacion de Gelfand-Levitan con este nucleo:
K(x, y, t) + 2e(8t−x−y) + 2e(8t−y)∫ ∞
x
K(x, z, t)e−zdz = 0 (17.17)
Propongamos la solucion comoK(x, y, t) = L(x, t)e−y. Colocando en (17.17) se obtiene, despuesde simplicar
L+ 2e(8t−x) + e8tLe−2x = 0
de donde, finalmente, se obtiene:
L(x, t) =−2ex
1 + e(2x−8t)
y por lo tanto
K(x, y, t) = − 2e(x−y)
1 + e(2x−8t)
De aquı, usando la formula (17.13)
u(x, t) = − 2
cosh2(x− 4t)(17.18)
La expresion (17.18) es la solucion del problema de Cauchy (17.14) con condicion inicial dadapor la figura 17.1. Esta solucion es un caso particular de una solucion mas general de la ecuacionde KdV que es (es una familia de soluciones):
734 Jose Marın Antuna
u(x, t) = −1
2α2 1
cosh2[
12α(x− x0)− α3t
2
] (17.19)
que se conocen con el nombre se solitones. Son ondas viajeras de forma constante y velocidaddirectamente proporcional a la amplitud de la solucion.
Veamos cualitativamente el caracter de la interaccion de tales ondas solitones. Sean dos solu-ciones uj = uj(x, t, αj, x0j) con j = 1, 2 de la forma (17.19) que estan lejos una de otra, o sea,que x02− x01 > 0 para fijar ideas y grande. Sea tambien α1 > α2. Entonces estos dos solitonespracticamente no interactuan y se propagan independientemente uno del otro. Sin embargo,con el tiempo, el soliton u1 con mayor velocidad α2
1 de propagacion alcanza al soliton u2 y tienelugar una interaccion no lineal entre ellos.
Resulta notable que, despues de esa interaccion, los solitones u1 y u2 se separan sin cambios ensu forma y el soliton u1 se movera en lo adelante delante del soliton u2.
El unico resultado de la interaccion es que ambos solitones reciben un ”salto de fase” o sea, lasmagnitudes x0j reciben un incremento ∆ x0j de manera que ∆x01 > 0 y ∆x02 < 0. Es decir,el soliton u1 ”salta” hacia delante (a la derecha) en ∆x01 y el soliton u2 recibe un ”rechazo”hacia atras en la magnitud ∆x02.
Estas propiedades tipo corpusculares (como de partıculas) que se manifiestan en la interaccionfueron las que generaron el nombre dado a los solitones y tambien el interes enorme por suestudio. El fenomeno asociado fue descrito por primera vez por el escoces John Scott Russell(1808 - 1882) que lo observo inicialmente en la propagacion de una onda a lo largo de un canalde agua. Siguio durante varios kilometros una onda que no parecıa debilitarse remontando lacorriente. En la actualidad el uso de solitones fue propuesto en 1973 por Akira Hasegawa, delos laboratorios Bell de la empresa ATT, para mejorar el rendimiento de las transmisiones enlas redes opticas de telecomunicaciones. En 1988 Linn Mollenauer y su equipo transmitieronsolitones a mas de 4.000 km usando el efecto Raman. Multiples aplicaciones de estas ondasesencialmente no lineales que se describen con ecuaciones no lineales se desarrollan hoy en dıa.
En relacion con lo discutido, intentaremos dar una definicion de soliton como sigue: Llamaremossolitones a aquellas soluciones de ecuaciones no lineales que tienen forma de ondas viajerascompactas que interactuan de forma tal que despues de la interaccion mantienen invariante suforma y solo reciben un incremento en sus fases. Se invita al lector a intentar una graficacionde estas ondas y de su interaccion con el uso de las tecnicas computacionales a su alcance.
17.1.5 Otras ecuaciones
Existen otras ecuaciones no lineales de importancia en la Fısica ademas de la ecuacion de KdVque tienen soluciones tipo solitones. Por supuesto que un estudio mas amplio del tema requiereque el lector se dirija a literatura especializada como por ejemplo el libro de Whitham queaparece en la bibliografıa al final de nuestro libro.
Metodos de solucion de ecuaciones no lineales 735
Ecuacion de Whitham
Se llama ası a la ecuacion:
ut + uux +
∫ ∞
−∞K(x− s)us(s, t)ds = 0 (17.20)
que describe ondas lineales con dispersion arbitraria. Bajo determinadas consideraciones yformas concretas del nucleo K(x − s) describe procesos fısicos reales y puede ser deducida deleyes fısicas generales. Es una ecuacion muy rica desde el punto de vista de la teorıa de lasondas no lineales. La profundizacion de su estudio y del alcance de sus aplicaciones puede verseen la literatura especializada. Aquı solamente mostraremos algunos casos particulares. Sea elnucleo de la ecuacion de Witham de la forma
K0(x) =π
4e−ν|x| (17.21)
donde ν = π2. Este nucleo con exactitud de un factor es la funcion de Green del operador
D2x − ν2 en toda la recta R1 y se cumple que
(D2x − ν2)K0v = −ν2v (17.22)
para todo v ∈ L2(R1) y continua en R1, donde K es un operador definido por la ecuacion
Kv =
∫ ∞
−∞K(x− s)v(s)ds
con el nucleo K0(x). Aquı Dx = ∂∂x
.
Las soluciones de la ecuacion (17.20) pueden buscarse bajo la suposicion de varias condiciones;a saber:
1. Buscaremos soluciones que junto con sus primeras derivadas decrezcan en el infinito demanera ”suficientemente rapida”. El grado de tal decrecimiento llamado ”suficientementerapido” se comprendera mas adelante.
2. El operador integral de convolucion
Kv =
∫ ∞
−∞K(x− s)v(s)ds
tiene un nucleo par, es decir K(−x) = K(x). Esto ocurre cuando la velocidad de fasec(k) = ω
|k| es una funcion par del numero de onda k. Se puede verificar que en este caso
el operador K es simetrico en L2(R1), es decir

736 Jose Marın Antuna
(K, v) = (u, Kv)
donde (u, v) es el producto escalar en L2(R1).
3. Los operadores Dx y K conmutan, es decir:
DxK = KDx
lo que se fundamenta en las propiedades de la convolucion para nucleos K(x) suficiente-mente suaves y funciones sobre las que se aplica este producto de operadores.
A partir de las propiedades arriba enunciadas, la ecuacion de Whitham (17.20) puede escribirseen forma de la la ley local de conservacion:
∂u
∂t+
∂
∂x
[u2
2+ Ku
]= 0 (17.23)
Si buscamos la solucion de la ecuacion de Witham en forma de ondas viajeras u = u(x− ct) seobtiene, despues de integrar una vez:
cu− 1
2u2 + A = K0u (17.24)
donde A es una constante de integracion. Entonces, aplicando a (17.24) el operador D2x − ν2
teniendo en cuenta (17.22) se obtiene
(D2x − ν2)
(cu− 1
2u2
)− ν2A = −ν2u
Multipliquemos esta ultima igualdad por Dx(cu− u2/2) = (c− u)u′ e integremos; obtenemos
(c− u)2u2x = ν2
[(cu− u2
2
)2
− cu2 + 2u3
3
]+ 2ν2A
(cu− u2
2
)+B
donde B es otra constante de integracion. Para obtener soluciones del tipo de ondas solitariassupongamos A = B = 0 y escribamos
(c− u)2u2x = ν2u2
[u2
4−(c− 2
3
)u+ c2 − c
](17.25)
La forma (17.25) de escribir nuestra ecuacion es muy comoda para hacer un analisis cualitativode sus soluciones con ayuda del plano de fase (u, ux). Sin embargo, aquı haremos un estudio

Metodos de solucion de ecuaciones no lineales 737
directo de la ecuacion (17.25) con el objetivo de mostrar la existencia en esa ecuacion desoluciones con la forma de una ”cresta” solitaria, es decir, de una onda solitaria. Sea c ∈ (1, 4/3);entonces, el trinomio a la derecha en (17.25) tiene dos raıces:
u0 = 2
(c− 2
3
)− 2
√4
9− c
3, u1 = 2
(c− 2
3
)+ 2
√4
9− c
3
y se cumplen las desigualdades
0 < u0 < c < u1 (17.26)
Reescribamos la ecuacion (17.25) en la forma
ν2
(dx
du
)2
=(c− u)2
u2[u2
4−(c− 2
3
)u+ c2 − c
] = f 2(u) (17.27)
y analicemosla en el intervalo u ∈ [0, u0]. Despues de sacar la raız, la ecuacion (17.27) puedeser resuelta directamente en el intervalo indicado por el metodo de separacion de variables, demanera que puede ser obtenida la funcion (x− x0)
2 = ϕ2(u) inversa de la buscada.Aquı
ϕ(u) =
∫ u
u0
f(ξ)dξ
y x0 es una constante de integracion de forma tal que u = u0 corresponde a x = x0.
Aquı no buscaremos una forma explıcita para ϕ(u), sino que nos limitaremos solamente alanalisis cualitativo de la solucion, lo que resulta suficiente para nuestros propositos.
Del analisis de la parte derecha de (17.27) se observa que, bajo la suposicion de (17.26), laderivada dx
dusiempre tiene signo definido y para u → 0+ y para u → u0− tiende a +∞
y a −∞, respectivamente. Sabiendo esto, podemos representar cualitativamente la funcion(x − x0)
2 = ϕ2(u) como se muestra en la figura 17.2 (a) y como consecuencia de ello, usandola relacion conocida entre el grafico de una funcion y el de su inversa, podemos representar lafuncion u = u(x) como aparece en la figura 17.2 (b).
De esta manera, ha quedado demostrada la existencia de soluciones de la ecuacion de Whithamdel tipo de ondas solitarias que se propagan sin variar su forma y con velocidad constantecuando el nucleo K(x) tiene una forma especial.
Uno de los efectos mas interesantes que se observan en la teorıa de ondas no lineales en el aguaes la existencia de una amplitud lımite para las ondas viajeras estabilizadas, ya sean periodicaso solitarias. La esencia de este efecto consiste en que la amplitud de la onda estabilizada nopuede ser mayor que cierta magnitud maxima. Y ocurre que la cresta de la onda con amplitudlımite se hace aguda en su punto superior y tiene la forma de un pico simetrico. Este fenomeno
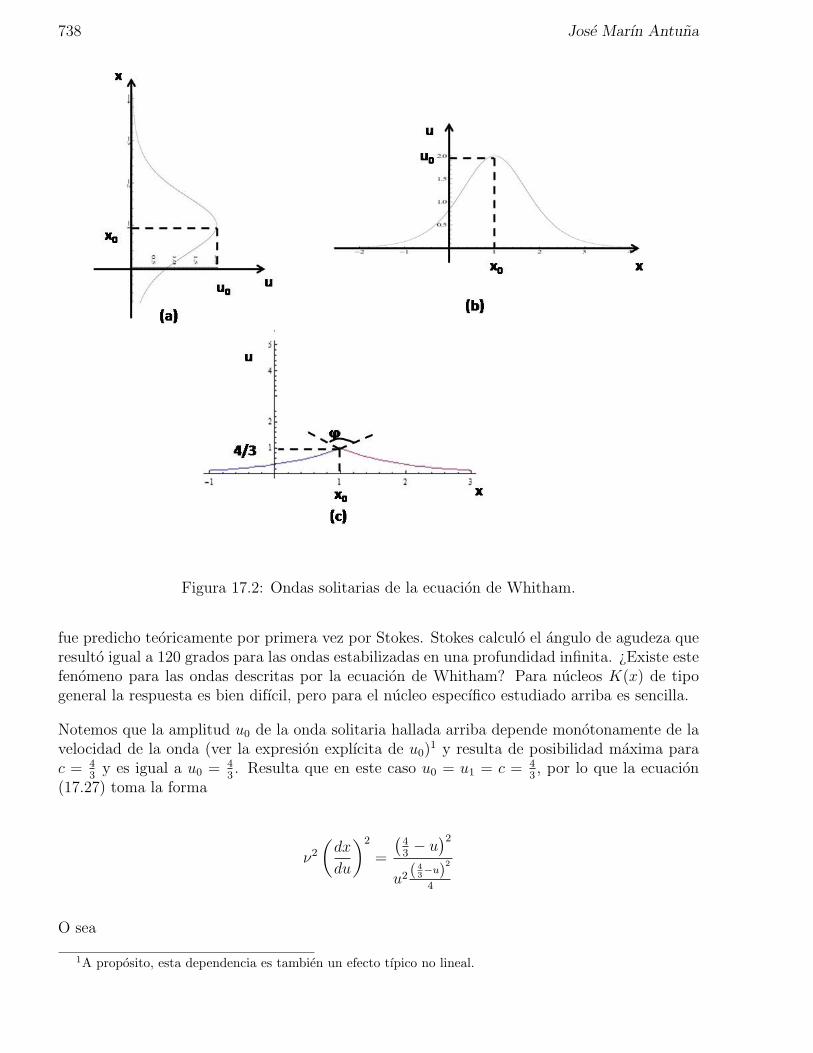
738 Jose Marın Antuna
Figura 17.2: Ondas solitarias de la ecuacion de Whitham.
fue predicho teoricamente por primera vez por Stokes. Stokes calculo el angulo de agudeza queresulto igual a 120 grados para las ondas estabilizadas en una profundidad infinita. ¿Existe estefenomeno para las ondas descritas por la ecuacion de Whitham? Para nucleos K(x) de tipogeneral la respuesta es bien difıcil, pero para el nucleo especıfico estudiado arriba es sencilla.
Notemos que la amplitud u0 de la onda solitaria hallada arriba depende monotonamente de lavelocidad de la onda (ver la expresion explıcita de u0)
1 y resulta de posibilidad maxima parac = 4
3y es igual a u0 = 4
3. Resulta que en este caso u0 = u1 = c = 4
3, por lo que la ecuacion
(17.27) toma la forma
ν2
(dx
du
)2
=
(43− u)2
u2 ( 43−u)
2
4
O sea
1A proposito, esta dependencia es tambien un efecto tıpico no lineal.

Metodos de solucion de ecuaciones no lineales 739
ν2
(dx
du
)2
=4
u2(17.28)
En el intervalo 0 < u ≤ 43
esta ecuacion se integra facilmente y ello da
u(x) = u0e−ν |x−x0|
2 =4
3e−
π|x−x0|4
A la funcion obtenida le corresponde la solucion de la ecuacion de Whitham con nucleo K0(x)
u(x, t) =4
3e−
π4 |x−x0− 4
3t|
Esta funcion describe una onda de amplitud lımite con perfil agudo en el vertice de la onda (verfigura 17.2 (c)). En el caso que aquı analizamos el angulo de agudeza ϕ = 2 arctan π
3≈ 930. No
resulta esperable que la ecuacion de Whitham con K(x) arbitrario nos de un angulo de agudezaigual a los 120 grados de Stokes, pero el resultado principal aquı obtenido es que la ecuacionmodelo de Whitham es capaz de describir ese efecto no lineal sutil de la existencia de ondasestabilizadas solitarias de amplitud lımite y de su agudizacion en la cresta de la onda.
Si la solucion de la ecuacion de Whitham (17.20) es periodica, es decir, cumple que u(x, t) =u(x+2l, t) diremos que estamos en presencia de la ecuacion de Whitham para ondas periodicas.si la solucion es continua y con derivada continua, exigiremos tambien que ux(x, t) = ux(x+2l, t).Se puede demostrar la existencia de ondas viajeras periodicas y toda una serie de resultadosde utilidad en el estudio de este tipo de ondas no lineales; sin embargo, en el marco de nuestrolibro no es posible realizar un estudio mas detallado de este tema. No obstante es interesantecerrar el estudio de la ecuacion de Whitham describiendo un resultado que esta permite obtenerrelacionado con el avance de las olas sobre una orilla en declive suave.
Todos los que han estado a la orilla del mar han observado el proceso de avance de las olasdesde el mar abierto hacia la orilla. Sin dudas, se pueden destacar tres etapas principales dela evolucion de las olas al acercarse a la orilla. Lejos de la orilla en donde la profundidad esgrande, las olas tienen un caracter suave; esta etapa sera llamada etapa de las olas suaves. Alacercarse a la orilla, cuando la profundidad es comparativamente menor, las olas aumentan suamplitud, alcanzan su amplitud lımite y se agudizan en su vertice. En esta segunda etapa estasolas seran llamadas olas de amplitud lımite. Al alcanzar las aguas someras, las olas de amplitudlımite comienzan a destruirse, plegandose hacia adelante en su movimiento. Esta etapa serallamada etapa de destruccion de las olas. Las etapas arriba descritas de evolucion de las olasse ven dibujadas esquematicamente en la figura 17.3
Veamos la variante siguiente de la ecuacion de Whitham:
ηt + c0ηx +3
2
√g
hηηx +
∫ ∞
−∞Kh(x− s)ηs(s, t)ds = 0 (17.29)
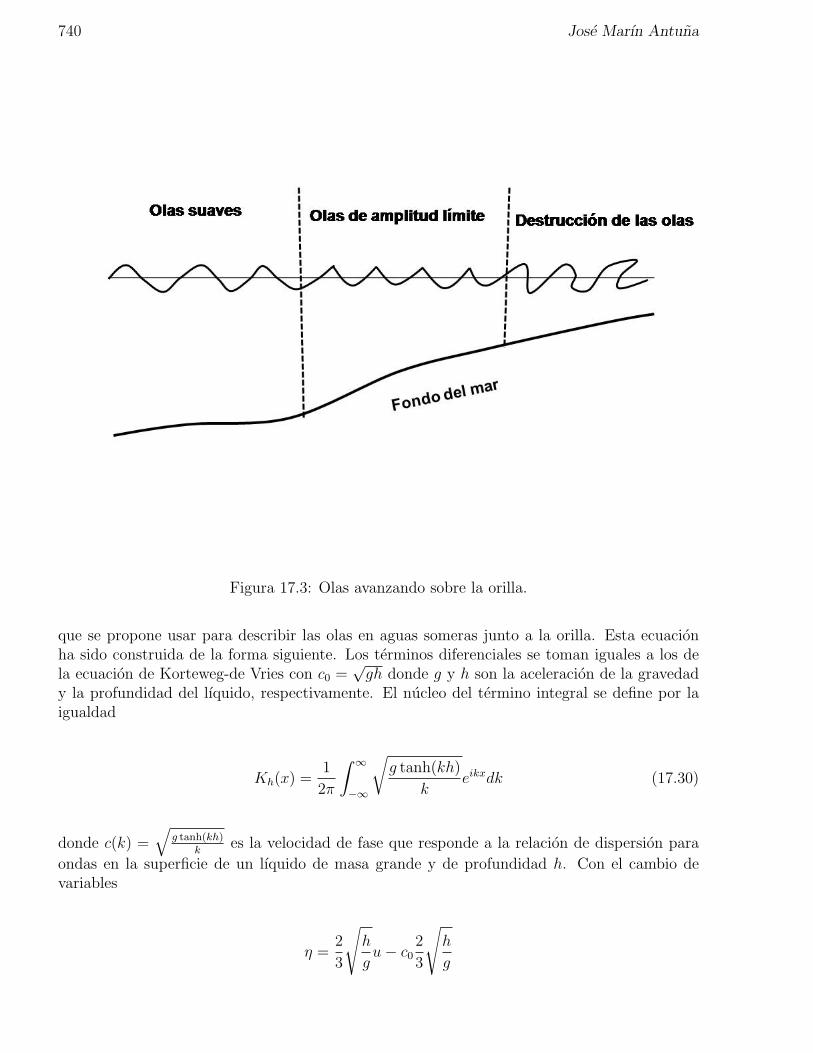
740 Jose Marın Antuna
Figura 17.3: Olas avanzando sobre la orilla.
que se propone usar para describir las olas en aguas someras junto a la orilla. Esta ecuacionha sido construida de la forma siguiente. Los terminos diferenciales se toman iguales a los dela ecuacion de Korteweg-de Vries con c0 =
√gh donde g y h son la aceleracion de la gravedad
y la profundidad del lıquido, respectivamente. El nucleo del termino integral se define por laigualdad
Kh(x) =1
2π
∫ ∞
−∞
√g tanh(kh)
keikxdk (17.30)
donde c(k) =√
g tanh(kh)k
es la velocidad de fase que responde a la relacion de dispersion para
ondas en la superficie de un lıquido de masa grande y de profundidad h. Con el cambio devariables
η =2
3
√h
gu− c0
2
3
√h
g
Metodos de solucion de ecuaciones no lineales 741
la ecuacion (17.29) se convierte en una ecuacion de Whitham del tipo (17.20) y, por lo tanto,todos los resultados obtenidos antes para esa ecuacion tienen validez para la ecuacion (17.29).
Destaquemos tambien que al cambiar la variable de integracion en (17.30), el nucleo Kh(x)toma la forma
Kh(x) =
√g
hD(xh
)(17.31)
donde
D(z) =1
2π
∫ ∞
−∞
√tanhµ
µeiµzdµ
Con los metodos asintoticos habituales de valoracion de integrales se puede obtener
D(z) ∼(
1
2π2z
)− 12
e−πz2
para z →∞.
De esta forma, el nucleo Kh(x) para x 6= 0 y h→ 0 tiende a cero exponencialmente rapido.
Supongamos que la orilla hacia la que viajan las olas es suave en el sentido de que a la distanciade varias longitudes de onda la profundidad no varia de manera sustancial de forma que puedeconsiderarse constante. Es decir, a distancias d caracterısticas para olas de una etapa dada desu evolucion la profundidad del lıquido varıa poco. O sea, ∆h
d 1.
Las consideraciones arriba realizadas permiten un analisis de las diferentes etapas de las olasacercandose a la orilla. En la etapa de profundidad grande las olas avanzando desde el marabierto son olas viajeras suaves periodicas que se describen bien con la ecuacion de Whitham. Eltermino no lineal en este caso juega solo el papel de factor que controla los efectos dispersivossin permitir a las ondas desperdigarse a causa de las diferentes velocidades de fase de lascomponentes armonicas.
Al pasar a profundidades menores, las crestas traseras de las olas se encuentran a una profun-didad mayor por lo que tienen velocidades mayores de propagacion, lo que se desprende de que
c0 =√gh y c(k) =
√g tanh(kh)
ky comienzan a alcanzar a las crestas delanteras. Como resultado
de ello, ocurre una disminucion del periodo de las olas. Sin embargo, la energıa de las olas parauna longitud de onda permanece sin variar en virtud de la ausencia de disipacion de la energıa(o de una disipacion no significativa), lo que conduce a una aumento de la amplitud de las olas.Las amplitudes de las olas crecen solo hasta cierta amplitud lımite y las olas se convierten enolas de amplitud lımite y se agudizan en su vertice superior. El efecto de la no linealidad semanifiesta aquı en la acotacion de la ampltud maxima posible. Ası se llega a la etapa de las olasde amplitud lımite. Como vemos, esta etapa tambien se describe con la ecuacion de Whitham.
742 Jose Marın Antuna
Las olas de amplitud lımite al pasar a las aguas someras comienzan a deformarse volteandosesobre sı mismas y se destruyen. La causa de este fenomeno puede entenderse facilmente conayuda del analisis de la ecuacion de Whitham. Para profundidades pequenas (h→ 0) el nucleodel termino integral tiende casi en todos lados a cero, su influencia se hace pequena al puntode desaparecer casi y no puede compensar la accion del termino no lineal que crece con ladisminucion de la profundidad y conduce a la tendencia a la ola a volcarse sobre sı misma. Enotras palabras, en esta tercera etapa de evolucion de las olas la accion del termino integral espequena (lo que esta asociado a una debil influencia de la dispersion) y las soluciones de laecuacion (17.29) se comportan como las de la ecuacion
ut + uux = 0 (17.32)
que con el tiempo se destruyen.
Veamos este caso con detalles, debido a su importancia. La comparacion de (17.32) con laecuacion de Euler o con la de Korteweg-de Vries permite ver que contiene una no linealidadtıpica cuadrada como la que aparece habitualmente en las ecuaciones fundamentales de laHidrodinamica. Por ello, su estudio es interes metodologico.
Si el coeficiente que se encuentra delante de la derivada ux en la ecuacion (17.32) fuese constante,la solucion general de la ecuacion tendrıa la forma
u = f(x− ut) (17.33)
Intentemos buscar la solucion de la ecuacion (17.32) precisamente en la forma (17.33); obtene-mos
ut = (−u− tut)f′(ξ); ux = (1− tux)f
′(ξ), ξ = x− tu (17.34)
De aquı, colocando (17.34) en (17.32) tendremos
(−u− tut)f′(ξ) + (u− tuux)f
′(ξ) = 0
Es decir
−t(ut + uux)f′(ξ) = 0
Ası, si u(x, t)satisface la ecuacion (17.32), entonces la funcion (17.33) tambien la satisface loque teniendo en cuenta la condicion inicial del problema planteado para la ecuacion (17.32):u(x, 0) = u0(x) nos da como solucion de tal problema de Cauchy:
u(x, t) = u0(x− tu) (17.35)
Metodos de solucion de ecuaciones no lineales 743
Aquı no nos ocuparemos del analisis de la relacion (17.35) e intentaremos obtener los resultadosnecesarios para comprender lo dicho arriba respecto a la destruccion de las olas en las aguassomeras.
Veamos en el plano (x, t) la curva definida por la ecuacion diferencial
dt
1=
dx
u(x, t)
o sea
dx
dt= u(x, t) (17.36)
que se conoce con el nombre de caracterıstica de la ecuacion (17.32). Sea x = x(t) solucion dela ecuacion (17.36). Entonces
d
dtu(x(t), t) = ut + ux
dx
dt= ut + uux|x=x(t) = 0
Es decir, u(x(t), t) es constante sobre la curva x = x(t) y por lo tanto, como se desprende de(17.36), x = x(t) es una lınea recta en el plano (x, t) con pendiente u(x(t), t) = u(x(0), 0) =u0(0) determinada por la funcion inicial u0(ξ), ξ = x(0). Para esta recta se puede escribir laecuacion
t
1=x− ξ
u0(ξ)(17.37)
De esta manera, obtenemos una familia uniparametrica de rectas que dependen del parametroξ y que tienen la propiedad de que la solucion de la ecuacion (17.32) sobre estas rectas esconstante. Esto permite a partir de la funcion inicial u0(ξ) determinar la funcion u(x, t) encualquier instante de tiempo t. Mostremos como esto se hace en la practica.
Supongamos que la funcion inicial u0 tiene la forma que se representa en la figura 17.4 (a) yes igual a cero fuera del intervalo ξ ∈ [a, b]. Escojamos cierto punto ξk ∈ [a, b] y construyamossu caracterıstica Γξk : x = ξk + tu0(ξk) con pendiente tanϕ = 1
u0(ξk)en la figura 17.4 (b). A lo
largo de toda esta caracterıstica se cumple que u(x, t)|Γξk= u0(ξk).
Tracemos en la figura 17.4 (b) la recta horizontal t = t1 y veamos el punto de interseccion de estarecta con la caracterıstica Γξk . Sea este punto de coordenadas (xk, t1). Coloquemos ahora enel plano (x, u) el punto de coordenadas (xk, u0(ξk)). Tras hacer construcciones similares paralos distintos puntos ξk ∈ [a, b] obtenemos un conjunto de puntos (xk, u0(ξk)) que conformancierta curva en el plano (x, u) que es el grafico de la solucion u(x, t) de la ecuacion (17.32) enel instante de tiempo t = t1 (ver figura 17.4 (c)). Con la ayuda de este procedimiento podemoscalcular la funcion u(x, t) en cualquier instante de tiempo.
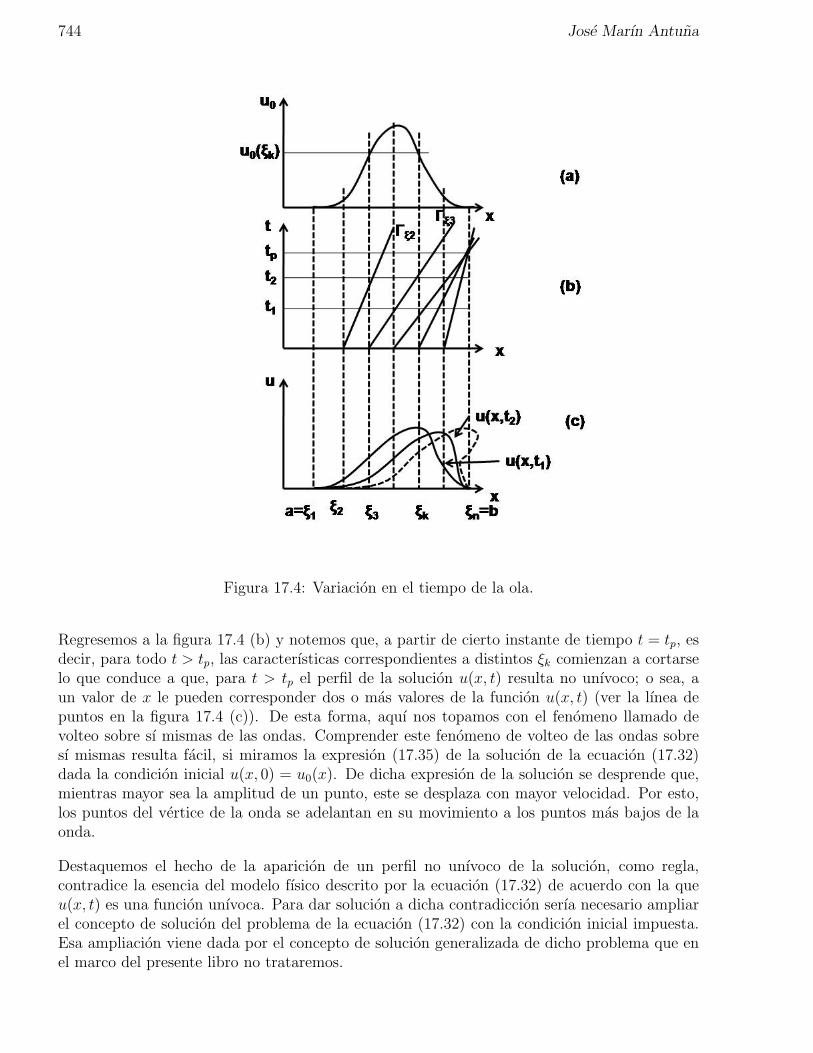
744 Jose Marın Antuna
Figura 17.4: Variacion en el tiempo de la ola.
Regresemos a la figura 17.4 (b) y notemos que, a partir de cierto instante de tiempo t = tp, esdecir, para todo t > tp, las caracterısticas correspondientes a distintos ξk comienzan a cortarselo que conduce a que, para t > tp el perfil de la solucion u(x, t) resulta no unıvoco; o sea, aun valor de x le pueden corresponder dos o mas valores de la funcion u(x, t) (ver la lınea depuntos en la figura 17.4 (c)). De esta forma, aquı nos topamos con el fenomeno llamado devolteo sobre sı mismas de las ondas. Comprender este fenomeno de volteo de las ondas sobresı mismas resulta facil, si miramos la expresion (17.35) de la solucion de la ecuacion (17.32)dada la condicion inicial u(x, 0) = u0(x). De dicha expresion de la solucion se desprende que,mientras mayor sea la amplitud de un punto, este se desplaza con mayor velocidad. Por esto,los puntos del vertice de la onda se adelantan en su movimiento a los puntos mas bajos de laonda.
Destaquemos el hecho de la aparicion de un perfil no unıvoco de la solucion, como regla,contradice la esencia del modelo fısico descrito por la ecuacion (17.32) de acuerdo con la queu(x, t) es una funcion unıvoca. Para dar solucion a dicha contradiccion serıa necesario ampliarel concepto de solucion del problema de la ecuacion (17.32) con la condicion inicial impuesta.Esa ampliacion viene dada por el concepto de solucion generalizada de dicho problema que enel marco del presente libro no trataremos.

Metodos de solucion de ecuaciones no lineales 745
Con el analisis efectuado de la ecuacion de Whitham damos fin al estudio de esta importanteecuacion no lineal. A continuacion veremos brevemente otras ecuaciones.
Ecuacion cubica de Schrodinger
En relacion con la teorıa de haces modulados en optica no lineal, con la investigacion de losllamados ”solitones de la envolvente” para ondas en aguas profundas y con toda una serie deotros problemas aplicados ha surgido la necesidad de estudiar la siguiente ecuacion no lineal
iut + uxx + ν|u|2u = 0 (17.38)
conocida con el nombre de ecuacion cubica de Schrodinger.
Veamos inicialmente la cuestion de la existencia de solucion del tipo de ondas viajeras de formaespecial
u(x, t) = v(x− ct)eikx−ωt (17.39)
donde v(x) es cierta funcion real. La onda de la forma (17.39) debe interpretarse como unaonda plana modulada con envolvente de la forma v(x).
Al colocar (17.39) en (17.38) se obtenemos la siguiente ecuacion diferencial ordinaria:
v′′ + i(2k − c)v′ + (ω − k2)v + νv3 = 0 (17.40)
Como se exige que v(x) sea real, es necesario suponer k = c2. Introduzcamos la notacion
α = k2 − ω = c2
4− ω; entonces, la ecuacion (17.40) se convierte en
v′′ − αv + νv3 = 0
Despues de multiplicar esta ultima expresion por v′ y de integrar obtenemos
v′2 = A+ αv2 − ν
2v4
Para el caso de A = 0 y ν y α mayores que cero, obtenemos para la envolvente una soluciondel tipo de onda solitaria
v(x) =
√2α
ν
1
cosh[√αx]
746 Jose Marın Antuna
de manera que, finalmente, tendremos
u(x, t) =
√2α
νei(
xc2−(
c2
4−α)t)
1
cosh[√α(x− ct)]
(17.41)
La solucion obtenida es llamada frecuentemente soliton de la envolvente debido a que resultaque las soluciones del tipo (17.41) interactuan entre sı en forma tıpicamente solitonica.
El lector interesado en profundizar en el estudio de esta importante ecuacion y de sus soluciones,debe referirse a literatura especializada.
Ecuacion seno-Gordon
Otra ecuacion importante para las aplicaciones fısicas que es factible de ser integrada es laecuacion seno-Gordon
uxy = sinu (17.42)
que, con la ayuda del conocido cambio de variables t = x+y, z = x−y y utilizando la invarianzadel segundo diferencial de forma similar a como hicimos en el capıtulo correspondiente a laclasificacion de las ecuaciones en derivadas parciales de segundo orden, puede ser expresada enla forma
utt − uzz = sinu (17.43)
que es una ecuacion hiperbolica no lineal.
Esta ecuacion seno-Gordon ha aparecido en problemas tales como:
1. La descripcion de las transiciones Josephson en superconductores.
2. Las dislocaciones en cristales.
3. Problemas de propagacion de ondas en materiales ferromagneticos asociadas a la rotacionde la direccion del vector de magneticidad.
4. Los impulsos laser en medios bifasicos.
5. Como ecuacion modelo en la teorıa de las partıculas elementales.
Veamos la solucion de la ecuacion seno-Gordon escrita en la forma (17.43) que responda aondas viajeras u = u(z − ct) donde c es una constante. Colocando esta expresion en (17.43)obtenemos

Metodos de solucion de ecuaciones no lineales 747
d2u
dz2=
sinu
1− c2(17.44)
que es la ecuacion del pendulo matematico. Esta ecuacion tiene soluciones de dos tipos:
1. Para c2 > 1 soluciones periodicas:
u(z) = 2 arcsin
[k sn
(z − z0√c2 − 1
; k
)](17.45)
donde sn es la funcion elıptica de Jacobi de modulo k donde 0 < k < 1 y que puede verse,por ejemplo, en el libro de Teorıa de Funciones de Variable Compleja del autor.
2. Para c2 < 1 soluciones del tipo de ondas solitarias
u(z) = arcsin
[±cn
(− z − z0
k√
1− c2; k
)](17.46)
en las que cn es el coseno elıptico de Jacobi y que tambien puede verse en el libro arribamencionado del autor.
Tomando el lımite para k → 1 en las formulas (17.45) y (17.46) obtenemos una solucion singularde la ecuacion (17.44) que se expresa en terminos de funciones elementales
u(z) = 4 arctan
[e± z−z0√
1−c2
](17.47)
que comunmente llaman soliton de la ecuacion (17.43). Las soluciones del tipo (17.46) y (17.47)son llamadas con frecuencia fluxones, lo que esta relacionado con su significado en la teorıade las transiciones de Josephson.

748 Jose Marın Antuna
Capıtulo 18
Elementos de Espacios Funcionales yOperadores
En el presente capıtulo procederemos a brindar al lector una panoramica de los importantesconceptos de Analisis Funcional relacionados con los espacios funcionales y las ecuaciones ope-racionales que en ellos se definen. Ello nos permitira abordar los conceptos esenciales de ope-radores y, en particular, de operadores autoconjugados, de gran importancia y utilidad para laFısica.
No pretenderemos aquı desarrollar exhaustivamente el tema, ya que ello requerirıa todo ungrueso volumen, sino, tan solo, brindar los elementos que le son de utilidad al fısico en sutrabajo cotidiano.
Los conceptos que aquı desarrollaremos seran de utilidad, tambien, para la comprension dellibro de Ecuaciones Integrales del autor.
El lector interesado en profundizar en los contenidos de esta materia debera recurrir a la amplialiteratura especializada que sobre el mismo existe.
18.1 Espacios lineales normados
18.1.1 Conceptos iniciales
Definicion 1:
Llamaremos espacio lineal X, en su concepcion mas general, al conjunto de elementos, decualquier naturaleza, x, y, ..., para los cuales estan definidas las siguientes operaciones:
a) Para dos elementos cualesquiera x, y ∈ X, se llama suma de dichos elementos al elementoz ∈ X definido por
749

750 Jose Marın Antuna
z = x+ y (18.1)
b) Para un elemento cualquiera x ∈ X y cualquier numero real o complejo λ, se llama productode λ y x al elemento y ∈ X dado por:
y = λx (18.2)
y si estas operaciones satisfacen los siguientes ocho axiomas:
1. La suma es conmutativa: x+ y = y + x
2. La suma es asociativa: x+ (y + z) = (x+ y) + z
3. Existe el elemento nulo del espacio: x+ 0 = x
4. Para todo x ∈ X existe su contrario y ∈ X: x+ y = 0
5. El producto es conmutativo: λx = xλ
6. El producto es asociativo: α(βx) = (αβ)x
7. El producto es distributivo respecto al numero: (α+ β)x = αx+ βx
8. El producto es distributivo respecto a los elementos del espacio: λ(x+ y) = λx+ λy
Como ejemplos de espacios lineales podemos mencionar a todos los espacios vectoriales que seestudian en los cursos de Algebra Lineal.
Es conveniente destacar en esta definicion que los elementos que forman el espacio lineal X aquıdefinido pueden ser de la mas diversa naturaleza; por ejemplo, pueden ser numeros reales, onumeros complejos, o vectores -entendidos estos como un conjunto (finito o infinito) ordenadode numeros reales o complejos, o funciones, o vectores funcionales, o matrices, o conjuntos dematrices, etc.
Es decir, que el concepto de espacio lineal aquı abordado es una generalizacion y una abstraccionde nuestros conceptos habituales de espacio lineal.
Definicion 2:
Un espacio lineal X se llama normado, si existe una ley mediante la cual a cada elementox ∈ X se pone en correpondencia un numero no negativo, que representaremos por el sımbolo‖ x ‖≥ 0, llamado norma del elemento x, tal que se cumplan los axiomas siguientes:
1. ‖ x ‖= 0 si y solo si x = 0.
2. ‖ λx ‖= |λ| ‖ x ‖, donde λ es un numero real o complejo.

Elementos de Espacios Funcionales y Operadores 751
3. ‖ x+ y ‖≤‖ x ‖ + ‖ y ‖, ∀x, y ∈ X.
El axioma 3 se conoce con el nombre de desigualdad triangular.
Debemos destacar que la ley que define la norma en un espacio lineal normado puede sermuy diversa, en dependencia de la naturaleza de los elementos que forman el espacio. A fin deesclarecer estos conceptos, veamos los principales ejemplos de espacios normados que se utilizanen la practica.
1. El espacio R3 de los vectores x = (x1, x2, x3) con la norma:
‖ x ‖=
√√√√ 3∑k=1
x2i (18.3)
2. El espacio Rn de los vectores x = (x1, x2, ..., xn) con la norma:
‖ x ‖=
√√√√ n∑k=1
x2i (18.4)
3. El espacio cn de los vectores x = (x1, x2, ..., xn) con la norma:
‖ x ‖= max1≤k≤n
|xk| (18.5)
4. El espacio ln de los vectores x = (x1, x2, ..., xn) con la norma:
‖ x ‖=n∑k=1
|xn| (18.6)
5. El espacio lnp de los vectores x = (x1, x2, ..., xn) con la norma:
‖ x ‖= p
√√√√ n∑k=1
|xn|p (18.7)
Hasta aquı hemos visto ejemplos de espacios de dimension finita. Veamos otros ejemplos.
6. El espacio l1 de los vectores de dimension infinita (sucesiones) x = (x1, x2, ...) con lanorma:
‖ x ‖=∞∑k=1
|xn| (18.8)
bajo la suposicion de que dicha serie converge. Este espacio es una generalizacion adimension infinita del espacio del ejemplo 4.
752 Jose Marın Antuna
7. El espacio l2 de las sucesiones x = (x1, x2, ...) con la norma:
‖ x ‖=
√√√√ ∞∑k=1
|xn|2 (18.9)
bajo la suposicion de que la serie bajo el radical converge.
Este espacio es una generalizacion a dimension infinita del espacio del ejemplo 5 conp = 2.
8. El espacio m de las sucesiones acotadas x = (x1, x2, ...) con la norma:
‖ x ‖= supk|xk| (18.10)
9. El espacio c0 de las sucesiones que tienden a cero x = (x1, x2, ...) con la norma:
‖ x ‖= maxk|xk| (18.11)
10. El espacio c de las sucesiones convergentes x = (x1, x2, ...) con la norma:
‖ x ‖= supk|xk| (18.12)
11. El espacio C[a, b] de las funciones x(t) continuas en [a, b] con la norma:
‖ x ‖= maxt∈[a,b]
|x(t)| (18.13)
12. El espacio Cn[a, b] de las funciones x(t) derivables con derivadas continuas hasta el ordenn en [a, b] con la norma:
‖ x ‖=n∑k=0
maxt∈[a,b]
|x(k)(t)| (18.14)
13. El espacio M [a, b] de las funciones x(t) acotadas en [a, b] con la norma:
‖ x ‖= supt∈[a,b]
|x(t)| (18.15)
14. El espacio K de las funciones finitas continuas en la recta real, que son iguales a cerofuera de cierto intervalo propio de cada funcion, con la norma:
‖ x ‖= maxt|x(t)| (18.16)

Elementos de Espacios Funcionales y Operadores 753
15. El espacio Lp[a, b] de las funciones x(t) continuas en [a, b] con la norma:
‖ x ‖=∫ b
a
|x(t)|pdt 1
p
(18.17)
Mas adelante trabajaremos, especialmente, con el espacio L2 (p = 2) de gran importanciaen la teorıa que desarrollaremos.
16. El espacio V [a, b] de las funciones x(t) de variacion acotada en [a, b] con la norma:
‖ x ‖= |x(a)|+ supn∑k=1
|x(tk)− x(tk−1)| (18.18)
donde la cota superior se toma por todas las posibles particiones finitas del segmento[a, b].
Recordemos que una funcion x(t) definida en [a, b] se llama funcion de variacionacotada si existe una constante C tal que, para toda particion del segmento [a, b]:a = t0 < t1 < t2 < ... < tn = b, se cumple la desigualdad
n∑k=1
|x(tk)− x(tk−1)| < C (18.19)
Definicion 3:
El espacio lineal X se llama metrico si en el esta definida una metrica, es decir, un numeroρ(x, y), donde x, y ∈ X, llamado distancia entre estos elementos, que cumple:
1. ρ(x, y) = ρ(y, x)
2. ρ(x, y) > 0 y ρ(x, y) = 0 si y solo si x = y
3. ρ(x, y) < ρ(x, z) + ρ(z, y) para x, y, z ∈ X
Todo espacio lineal normado puede considerarse metrico si se define la metrica como:
ρ(x, y) =‖ x− y ‖ (18.20)
18.1.2 Otros conceptos importantes
Veremos aquı varias definiciones relacionadas con conjuntos de elementos de un espacio linealnormado:
Para cualquier elemento x0 del espacio lineal normado X llamaremos bola abierta V x0r , cen-
trada en x0 de radio r, al conjunto de elementos x ∈ X que cumplen que:

754 Jose Marın Antuna
‖ x− x0 ‖< r (18.21)
Llamaremos bola cerrada V x0r , centrada en x0 de radio r, al conjunto de elementos x ∈ X
que cumplan que:
‖ x− x0 ‖≤ r (18.22)
y llamaremos esfera Sx0r , centrada en x0 de radio r, al conjunto de elementos x ∈ X que
cumplen que:
‖ x− x0 ‖= r (18.23)
Un conjunto A ⊂ X de elementos del espacio lineal normado se llama acotado si es posibleencerrarlo en una bola (abierta o cerrada) de dicho espacio.
El numero
d = diamA = supx,y∈A
‖ x− y ‖ (18.24)
se llama diametro del conjunto A ⊂ X.
El numero
ρ(x,A) = infy∈A
‖ x− y ‖ (18.25)
se llama distancia entre un elemento x ∈ X y un conjunto A ⊂ X.
El numero
ρ(A,B) = infx∈A,y∈B
‖ x− y ‖ (18.26)
se llama distancia entre los conjuntos A,B ⊂ X.
Un conjunto M ⊂ X se llama abierto si, para cualquier elemento x ∈ X, existe un r > 0 talque V x
r ⊂M . Es decir, si todos los elementos de M son interiores.
Un elemento a ∈ X se llama punto de acumulacion del conjunto M ⊂ X si, en cualquierbola V a
r , existe un elemento x ∈M (x 6= a).
Debemos aclarar que hemos utilizado el termino ”punto” de acumulacion por la analogıa queen estos conceptos existen con las ideas habituales que tenemos en Rn. En lo adelante usaremosel termino ”punto” indistintamente, entendiendolo como elemento del espacio considerado.

Elementos de Espacios Funcionales y Operadores 755
El conjunto de todos los puntos de acumulacion del conjunto M lo denotaremos por M ′.
El conjunto M ∪ M ′, es decir, la union del conjunto M y del conjunto de sus puntos deacumulacion se llama clausura del conjunto M y lo denotaremos por M .
Un conjunto M ⊂ X se llama cerrado si M = M .
Un conjunto L ⊂ X se llama variedad lineal si el hecho de que x, y ∈ L implica que x+y ∈ Ly λx ∈ L para cualquier numero λ. Si la variedad lineal L es un conjunto cerrado de X,entonces se llama subespacio.
Se llama suma algebraica de los conjuntos A,B ⊂ X al conjunto A + B de todas las sumasposibles del tipo a+ b, donde a ∈ A y b ∈ B.
Sea x0 ∈ X un elemento arbitrario y L ⊂ X una variedad lineal. El conjunto x0 + L se llamavariedad afın.
Sean L y M dos subespacios del espacio X tales que todo elemento x ∈ X se representa deforma unıvoca en la forma x = u + v, donde u ∈ L y v ∈ M . Entonces se dice que X es lasuma directa de L y M , lo que se representa por
X = L⊕M (18.27)
Se llama segmento que una los puntos x, y ∈ X al conjunto de puntos del tipo αx + βy,con α ≥ 0, β ≥ 0 y α+ β = 1.
Un conjunto A ⊂ X se llama convexo si el segmento que une dos puntos cualesquiera de Aesta situado completamente en A.
Un conjunto A ⊂ X se llama siempre denso en X si A = X.
Debemos aclarar este importante concepto. Para ello, veremos la definicion de sucesion con-vergente en un espacio.
Definicion:
La sucesion xn de los elementos xn ∈ X, donde n son numeros naturales, se llama conver-gente hacia x0 ∈ X si, para ε > 0, existe una N(ε) > 0 tal que n > N implica que
‖ xn − x0 ‖< ε (18.28)
La convergencia ası definida se conoce con el nombre de convergencia fuerte o convergenciaen la norma de X.
Indistintamente, la convergencia de la sucesion xn se representa por

756 Jose Marın Antuna
xn → x0, ∀n→∞ (18.29)
limn→∞
xn = x0
Puede demostrarse la equivalencia de la definicion de conjunto siempre denso, dada arriba, conla siguiente definicion utilizada, muy comunmente, por otros autores:
Un conjunto A ⊂ X se llama siempre denso en X si, para cualquier elemento x ∈ X, siemprese puede hallar una sucesion xn de elementos xn ∈ A convergente a x.
De ambas definiciones de conjunto siempre denso resulta evidente, por ejemplo, que ningunconjunto acotado en Rn es siempre denso en este espacio.
Enumeraremos, a continuacion, algunos ejemplos de conjuntos siempre densos:
1. El conjunto de las funciones continuas en [a, b] (o sea, el espacio C[a, b]) es siempre densoen el espacio L2[a, b].
2. El conjunto de funciones lineales seccionalmente continuas es siempre denso en C[a, b].
3. El conjunto de los polinomios es siempre denso en Cn[a, b].
Sigamos viendo otras definiciones:
Un espacio X se llama separable si en el existe un conjunto numerable de elementos A siempredenso. Exhortamos al lector a verificar que, de los ejemplos de espacios dados anteriormenteen este epıgrafe, todos son separables, excepto los espacios m, M [a, b] y V [a, b].
Un conjunto A ⊂ X se llama nunca denso en X si toda bola V ⊂ X contiene a otra bola V1
que no posee puntos pertenecientes a A.
Un espacio X se llama estrictamente normado si en el la igualdad
‖ x+ y ‖=‖ x ‖ + ‖ y ‖
con x 6= 0 y y 6= 0 se cumple solo para y = λx, con λ > 0.
Una aplicacion F : X → Y de un espacio lineal normado X en un espacio lineal normado Yse llama continua en el punto x0 ∈ X si, para ε > 0, existe una δ(ε) > 0 tal que x ∈ V x0
δ
implica que f(x) ∈ V f(x0)ε .
La aplicacion F : X → Y se llama continua en X, si es continua en cada punto de X.
Una aplicacion F : X → Y se llama uniformemente continua si, para ε > 0, existe unaδ(ε) > 0 tal que, para todo x0 ∈ X y todo x ∈ V x0
δ , se cumple que f(x) ∈ V f(x0)ε .
Hasta aquı, en apretada sıntesis, hemos visto los conceptos esenciales de los espacios linealesnormados. Pasaremos al estudio de un tipo de espacio normado de gran importancia.

Elementos de Espacios Funcionales y Operadores 757
18.2 Espacios de Banach
Consideremos en un espacio lineal normado X una sucesion arbitraria xn de elementos dedicho espacio.
Definicion:
La sucesion xn de elementos del espacio lineal normado X se llama fundamental si paraε > 0 existe un N(ε) > 0 tal que, para todo par de numeros n,m > N , se cumple que
‖ xn − xm ‖< ε (18.30)
En relacion con esta definicion podemos analizar lo siguiente. Ya en el epıgrafe anterior, enla definicion (18.28), habıamos visto el concepto de convergencia de una sucesion xn deelementos del espacio lineal normado. Es facil demostrar la siguiente afirmacion:
Teorema.
Si en el espacio lineal normado X la sucesion xn es convergente, entonces, ella es fundamental.
Demostracion:
Efectivamente, si para ε > 0 existe N(ε) > 0 tal que, para n > N , se cumple que
‖ xn − x0 ‖<ε
2(18.31)
entonces, tambien para m > N se cumplira que
‖ xm − x0 ‖<ε
2(18.32)
Por la desigualdad triangular, tendremos de aquı que
‖ xn − xm ‖≡‖ xn − x0 − (xm − x0) ‖≤‖ xn − x0 ‖ + ‖ xm − x0 ‖< ε (18.33)
lo que significa que, efectivamente, xn es fundamental.
Demostrado el teorema.
Surge, de forma natural, la siguiente pregunta: ¿El recıproco de esta afirmacion es valido?Ocurre que no siempre es ası, lo que da pie a la siguiente importante definicion.
Definicion:
Un espacio lineal normado X se llama completo si toda sucesion fundamental en el convergea un elemento de dicho espacio.

758 Jose Marın Antuna
Los espacios lineales normados completos se conocen con el nombre de espacios de Banach.
De lo antedicho se desprende que en los espacios de Banach la condicion necesaria y suficientepara que una sucesion sea convergente es que ella sea fundamental. Esta afirmacion, que esfamiliar para nosotros desde los cursos de Analisis Matematico, es lo que alla se denominabaCriterio de Cauchy. Por lo tanto, de lo dicho se desprende que el criterio de Cauchy tienevalidez solo en los espacios de Banach.
Esta claro que, en principio, la norma en un espacio lineal normado puede definirse de formadiferente, usando distintas leyes; de ahı que sea preciso el siguiente concepto.
Definicion:
Dos normas ‖ x ‖1 y ‖ x ‖2 en un espacio lineal normado X se llaman equivalentes si existendos numeros α > 0 y β > 0 tales que, para cualquier x ∈ X, se cumple la desigualdad
α ‖ x ‖1≤‖ x ‖2≤ β ‖ x ‖1 (18.34)
Veamos, ahora, como hacer comparaciones entre espacios lineales normados.
Definicion:
Los espacios lineales normados X y Y se llaman isomorfos si sobre todo el espacio X estadefinida una aplicacion lineal F : X → Y que realiza el isomorfismo de X y Y como espacioslineales y es tal que existen dos constantes α > 0 y β > 0 tales que, para cualquier x ∈ X, secumple la desigualdad
α ‖ x ‖≤‖ F (x) ‖≤ β ‖ x ‖ (18.35)
En el caso particular en que ‖ F (x) ‖=‖ x ‖, los espacios X y Y se llaman isometricos
Un espacio lineal normado se llama encajado en el espacio lineal normado Y si sobre todo elespacio X esta definida una aplicacion F : X → Y lineal y biunıvoca en el campo de valores yexiste una constante β > 0 tal que, para cualquier x ∈ X se cumple la desigualdad
‖ F (x) ‖≤ β ‖ x ‖ (18.36)
Ademas, un espacio de Banach X se llama completamiento del espacio lineal normado X siX es una variedad lineal siempre densa en el espacio X.
Se puede demostrar que todo espacio lineal normado tiene completamiento y que este es unico,con exactitud hasta una aplicacion isometrica que transforma aX en sı mismo. La demostracionde esta afirmacion puede verse en los cursos especializados de Analisis Funcional y no la abor-daremos aquı.

Elementos de Espacios Funcionales y Operadores 759
Igualmente, se puede demostrar que si en un espacio de Banach X esta dada una sucesion debolas V xn
rn encajadas una en otra, es decir,
V xn+1rn+1
⊂ V xnrn , ∀rn → 0, ∀n→∞ (18.37)
entonces, en el espacio X existe un punto unico que pertenece, a la vez, a todas las bolas.
18.3 Espacios de Hilbert
Una vez establecidos los conceptos generales de los epıgrafes anteriores, podemos pasar alestudio de lo que constituye el elemento fundamental de la teorıa de este capıtulo.
18.3.1 Conceptos generales
Definicion:
Un espacio lineal real X se llama euclıdeo si a todo par de elementos x,y de dicho espaciose pone en correspondencia un numero real (x, y) llamado producto escalar que cumple lossiguientes axiomas:
1. (x, x) ≥ 0, (x, x) = 0 si y solo si x = 0.
2. (x, y) = (y, x)
3. (λx, y) = λ(x, y) con λ real.
4. (x+ y, z) = (x, z) + (y, z), donde, tambien, z ∈ X.
El concepto de espacio euclıdeo arriba definido es una generalizacion y abstraccion de nuestrosconceptos elementales de espacio. Cuando, en el primer ejemplo del epıgrafe 1, nos referıamosal espacio lineal normado R3 (y tambien al espacio Rn del ejemplo 2), dandole el calificativode euclıdeo, tacitamente estabamos teniendo en cuenta nuestra experiencia anterior de que, ental espacio, sabemos que existe la definicion de producto escalar de dos vectores de ese espaciox = (x1, x2, x3), y = (y1, y2, y3) por la conocida ley
(x, y) =3∑
k=1
xkyk (18.38)
La definicion de espacio euclıdeo dada en el presente epıgrafe es una generalizacion de eseconcepto anterior.
760 Jose Marın Antuna
Por ejemplo, de acuerdo con la definicion aquı dada, el espacio de todas las funciones reales devariable real seccionalmente continuas en el intervalo [a, b], con producto escalar definido porla formula
(x, y) =
∫ b
a
x(t)y(t)dt (18.39)
es un espacio euclıdeo de infinitas dimensiones, lo que el lector puede verificar facilmente.
Es, precisamente, en estos espacios euclıdeos donde se construyen las series de Fourier yaconocidas por el lector; a este concepto -generalizado- regresaremos mas adelante.
Veamos otro concepto importante.
Definicion:
Un espacio lineal complejo X se llama unitario si a todo par de elementos x,y de dichoespacio se pone en correspondencia un numero (x, y) llamado producto escalar que cumplelos siguientes axiomas:
1. (x, x) ≥ 0, (x, x) = 0 si y solo si x = 0.
2. (x, y) = (y, x)∗, donde el asterisco significa la conjugacion compleja.
3. (λx, y) = λ(x, y) con λ complejo.
4. (x+ y, z) = (x, z) + (y, z) donde, tambien, z ∈ X.
En esta definicion hay una sutileza que es importante esclarecer: La ley que define el productoescalar correspondiente al espacio unitario tiene que ser construida de forma tal que el producto(x, x) sea un numero real; de lo contrario carecerıa de sentido el primer axioma, toda vez que losnumeros complejos no son ordenables. Algunas formas posibles de definir, en las aplicaciones,este producto escalar en los espacios unitarios que frecuentemente se utilizan son las siguientes:
(x, y) = x · y∗ (18.40)
(x, y) =
∫ b
a
x(t)y∗(t)dt (18.41)
Tanto para los espacios euclıdeos, como para los espacios unitarios aquı definidos, se cumple lallamada desigualdad de Cauchy-Buniakovsky:
|(x, y)|2 ≤ (x, x)(y, y) (18.42)

Elementos de Espacios Funcionales y Operadores 761
Verifiquemos (18.42); para ello, analicemos la desigualdad
(λx− y, λx− y) ≥ 0 (18.43)
valida por el primer axioma y desarrollemosla con la ayuda de los otros axiomas. Tendremos:
(λx− y, λx− y) = (λx, λx)− (λx, y)− (y, λx) + (y, y) =
= λ(x, λx)− (λx, y)− (y, λx) + (y, y) =
λ(λx, x)∗ − λ(x, y)− [λ(x, y)]∗ + (y, y) =
= |λ|2(x, x)− 2Reλ(x, y) + (y, y)
pues la suma de un numero complejo y su conjugado siempre es igual al duplo de la parte realde dicho numero.
Como (x, x) y (y, y) son reales, de arriba de inmediato se desprende que:
Re [|λ|2(x, x)− 2λ(x, y) + (y, y)] ≥ 0
Para que esta desigualdad se cumpla, el discriminante del trinomio tiene que cumplir que:
|(x, y)|2 − (x, x)(y, y) ≤ 0
lo que demuestra (18.43).
De la desigualdad de Cauchy-Buniakovsky se desprende que los espacios euclıdeo y unitario sonnormados y que la norma en ellos se puede definir por la ley
‖ x ‖=√
(x, x) (18.44)
Definicion:
Un espacio euclıdeo o unitario H se llama espacio de Hilbert si es completo.
Recordemos que esto significa que en el toda sucesion fundamental converge.
Es conveniente destacar el siguiente hecho. En la definicion de espacio de Hilbert estan presentestres aspectos:
1. La linealidad del espacio, con las dos operaciones y los ocho axiomas inherentes a ello.
2. La existencia del producto escalar de dos elementos de dicho espacio, junto con sus cuatroaxiomas.
762 Jose Marın Antuna
3. La completitud del espacio con respecto a la norma definida por la regla (18.44).
De lo visto anteriormente se desprende que, por lo tanto, todo espacio de Hilbert es separable.
Para los elementos de un espacio de Hilbert se introduce el siguiente concepto.
Definicion:
Se llama angulo entre dos elementos no nulos x y y de un espacio de Hilbert (o sea, un espacioeuclıdeo o unitario completo) a un numero ϕ entre 0 y π, definido por:
cosϕ =(x, y)
‖ x ‖‖ y ‖(18.45)
18.3.2 Convergencia debil
En los espacios de Hilbert, como espacios normados, tiene lugar el concepto de convergenciafuerte o convergencia en la norma de dicho espacio, que definimos en el epıgrafe 1 (ver formula(18.28) y la definicion a ella asociada).
Tambien es posible dar el siguiente concepto de convergencia debil.
Definicion:
La sucesion xn de elementos xn pertenecientes a un espacio de Hilbert H (x ∈ H) se dice queconverge debilmente a x ∈ H si, para cualquier y ∈ H se cumple que la sucesion numerica(xn, y) converge a (x, y). Es decir, si, para ε > 0, existe un N(ε) > 0 tal que n > N implicaque
|(xn, y)− (x, y)| < ε (18.46)
Tiene lugar la siguiente afirmacion.
Teorema.
Si la sucesion xn de elementos de un espacio de Hilbert converge fuertemente a x0 ∈ H (enla norma de dicho espacio), entonces converge tambien debilmente.
Demostracion:
Por hipotesis, para ε > 0, existe una N(ε) > 0 tal que n > N implica que
‖ xn − x0 ‖<ε2
‖ y ‖(18.47)
Pero, por la desigualdad de Cauchy-Buniakovsky, tenemos que:

Elementos de Espacios Funcionales y Operadores 763
|(xn, y)− (x0, y)| ≡ |(xn − x0, y)| ≤√‖ xn − x0 ‖ · ‖ y ‖ < ε (18.48)
Demostrado el teorema.
Sin embargo, el recıproco de este teorema no es cierto. La convergencia debil de una sucesionno implica su convergencia fuerte.
Definicion:
Sea H un espacio de Hilbert. Un conjunto A ⊂ H se llama compacto debilmente si existeuna sucesion convergente debilmente de elementos de A.
El concepto de convergencia debil es utilizado ampliamente en la teorıa de metodos variacionalespara resolver problemas de la Fısica Matematica, en la teorıa de funciones generalizadas y otrasramas importantes.
18.3.3 Sistemas ortogonales. Series de Fourier
Sea H un espacio de Hilbert. Los elementos x, y ∈ H se llaman ortogonales si
(x, y) = 0 (18.49)
Un conjunto de elementos z ∈ H tales que (z, x) = 0 para cualquier x ∈M ⊂ H se denota porM⊥.
Un sistema de elementos h1, h2, ... ∈ H se llama ortogonal si
(hi, hj) = 0, ∀i 6= j (18.50)
Dicho sistema se llama ortonormalizado si
(hi, hj) = δij (18.51)
donde δij es el conocido sımbolo de Kronecker:
δij = 0, ∀i 6= j
= 1, ∀i = j
El sistema de elementos x1, x2, x3, ... ∈ H se llama linealmente independiente si, paracualquier n natural, el sistema x1, x2, ..., xn es linealmente independiente; es decir, si

764 Jose Marın Antuna
n∑k=1
akxk = 0 (18.52)
si y solo si ak = 0.
Enunciemos la siguiente afirmacion.
Teorema.
Sea h1, h2, ... ∈ H un sistema linealmente independiente de elementos. Entonces, existe unsistema ortogonal de elementos ϕ1, ϕ2, ..., tal que
ϕk =k∑i=1
akihi, ∀k = 1, 2, ... (18.53)
y
hj =
j∑i=1
bjiϕi, ∀j = 1, 2, ... (18.54)
donde aki y bji son, en general, numeros complejos.
Obviaremos la demostracion de este teorema; solo diremos que la construccion de un sistemaortogonal a partir de otro linealmente independiente dado se conoce con el nombre de ortogo-nalizacion. En el proceso de ortogonalizacion aparece el siguiente determinante del sistemade elementos linealmente independientes
Γ(x1, x2, ..., xn) =
∣∣∣∣∣∣∣∣(x1, x1) (x1, x2) ... (x1, xn)(x2, x1) (x2, x2) ... (x2, xn)... ... ... ...
(xn, x1) (xn, x2) ... (xn, xn)
∣∣∣∣∣∣∣∣ (18.55)
que se conoce con el nombre de determinante de Gram.
Supongamos dado un sistema ortonormal ϕk de elementos ϕk ∈ H y sea f ∈ H un elementoarbitrario de este espacio de Hilbert. Tiene lugar el siguiente importante concepto.
Definicion:
Se llama serie de Fourier del elemento f respecto al sistema ϕk a la serie de la forma:
∞∑k=1
fkϕk (18.56)

Elementos de Espacios Funcionales y Operadores 765
donde fk son numeros llamados coeficientes de Fourier del elemento f y que se definen porla ecuacion
fk = (f, ϕk), ∀k = 1, 2, ... (18.57)
facilmente obtenible de (18.56), debido a la ortonormalidad del sistema ϕk. Llamaremos a
Sn =n∑k=1
fkϕk (18.58)
suma parcial enesima de la serie de Fourier (18.56).
Consideremos, ahora, a la par de la suma parcial (18.58), una combinacion lineal arbitraria delos primeros n elementos del sistema ortonormal ϕk:
n∑k=1
Ckϕk (18.59)
con numeros arbitrarios C1, C2, ..., Cn. Llamaremos, ademas, a ‖ f − g ‖ desviacion de grespecto a f en la norma del espacio H. Tiene lugar el siguiente importante teorema.
Teorema.
De entre todas las sumas de la forma (18.59), la suma parcial enesima (18.58) de f ∈ H es laque tiene la menor desviacion respecto a f en la norma del espacio H.
Demostracion:
Tenemos que:
‖n∑k=1
Ckϕk − f ‖2=
(n∑k=1
Ckϕk − f,n∑k=1
Ckϕk − f
)=
=n∑k=1
C2k(ϕk, ϕk)− 2
n∑k=1
Ck(f, ϕk) + (f, f) =n∑k=1
C2k − 2
n∑k=1
Ckfk+ ‖ f ‖2 (18.60)
donde hemos tenido en cuenta la ortonormalidad de ϕk y (18.57). Completando el trinomiocuadrado perfecto en (18.60), facilmente se obtiene:
‖n∑k=1
Ckϕk − f ‖2=n∑k=1
(Ck − fk)2+ ‖ f ‖2 −
n∑k=1
f 2k (18.61)

766 Jose Marın Antuna
A la izquierda en (18.61) tenemos la desviacion de (18.59) respecto a f , elevada al cuadrado.La parte derecha evidencia que si tomamos Ck = fk, dicha desviacion es mınima.
Demostrado el teorema.
Corolario 1.
Para cualquier f ∈ H arbitrario, cualquier sistema ortonormal ϕk y cualesquiera constantesCk, se cumple, para toda n, que:
‖ f ‖2 −n∑k=1
f 2k ≤‖
n∑k=1
Ckϕk − f ‖2 (18.62)
lo que se deduce, directamente, de (18.61).
Corolario 2.
Para cualquier f ∈ H arbitrario y cualquier sistema ortonormal ϕk se cumple, para toda n,que:
‖n∑k=1
fkϕk − f ‖2=‖ f ‖2 −n∑k=1
f 2k (18.63)
La formula (18.63) se conoce con el nombre de identidad de Bessel; su demostracion esevidente, tomando en (18.62) Ck = fk.
Como en (18.63) n es arbitrario, es posible demostrar la siguiente afirmacion.
Teorema.
Para cualquier f ∈ H arbitrario y cualquier sistema ortonormal ϕk, se cumple que:
∞∑k=1
f 2k ≤‖ f ‖2 (18.64)
que recibe el nombre de desigualdad de Bessel.
Demostracion:
Como la izquierda en (18.63) es no negativa, de ella se desprende, directamente, que:
n∑k=1
f 2k ≤‖ f ‖2, ∀n (18.65)
Elementos de Espacios Funcionales y Operadores 767
Pero esto significa que la serie de terminos no negativos que figura en (18.64) es convergente,ya que tiene una sucesion de sumas parciales acotada.
Tomando el lımite para n→∞ en (18.64), queda demostrado el teorema.
18.3.4 Sistemas ortonormales cerrados y completos
Ya estamos en posesion de los elementos necesarios para abordar las siguientes consideraciones.
Definicion 1:
Un sistema ortonormal ϕk de elementos ϕk ∈ H se llama cerrado si la serie de Fourier
f =∞∑k=1
fkϕk (18.66)
de dicho elemento respecto al sistema ϕk converge a f en la norma de H y su suma es iguala f . Es decir, si, para ε > 0, existe una N(ε) > 0 tal que n > N implica que
‖n∑k=1
fkϕk − f ‖< ε (18.67)
Tiene lugar el siguiente
Teorema.
Si el sistema ortonormal ϕk es cerrado, entonces, para cualquier elemento f ∈ H, la desigual-dad de Bessel se convierte en
∞∑k=1
f 2k =‖ f ‖2 (18.68)
llamada igualdad de Parseval.
Demostracion:
Sea f ∈ H un elemento arbitrario de dicho espacio y ε > 0 un numero arbitrario. Comoel sistema ϕk es cerrado, existira un conjunto de numeros C1, C2,..., Cn lo suficientementecercanos a f1, f2,..., fn tal que
‖n∑k=1
Ckϕk − f ‖2< ε (18.69)
768 Jose Marın Antuna
Entonces, de (18.62) se deduce que:
‖ f ‖2 −n∑k=1
f 2k < ε (18.70)
para n lo suficientemente grande. Esto significa que la serie de f 2k converge a ‖ f ‖2, es decir,
(18.67).
Demostrado el teorema.
Definicion 2:
Un sistema ortonormal ϕk, con ϕk ∈ H, se llama completo si (f, ϕk) = 0 implica que f ≡ 0.
Es decir, el sistema se denomina completo si ya el contiene todos los elementos ortogonalesposibles de dicho sistema, de manera que no existe en el espacio H ningun otro elemento quesea ortogonal a los elementos del sistema ϕk, salvo el elemento nulo.
Un importante teorema tiene lugar.
Teorema.
Todo sistema ortonormal cerrado ϕk de un espacio de Hilbert H es completo.
Demostracion:
Sea el sistema ortonormal ϕk cerrado, o sea, que cualquier elemento de H se desarrolla enserie de Fourier respecto al sistema ϕk y sea f un elemento de H ortogonal a todos loselementos ϕk del sistema. Esto es:
fk = (f, ϕk) = 0, ∀k (18.71)
Esto significa que los coeficientes de Fourier del desarrollo de f en serie de Fourier respecto alsistema ϕk son iguales a cero. Por consiguiente, f ≡ 0, lo que implica que el sistema ϕk escompleto.
Demostrado el teorema.
Para los espacios euclıdeos o unitarios no cerrados el recıproco de este teorema no es cierto.
Sin embargo, para los espacios de Hilbert tiene lugar este recıproco que a continuacion veremos.
Teorema.
Todo sistema ortonormal cerrado ϕk de un espacio de Hilbert es completo.
Demostracion:

Elementos de Espacios Funcionales y Operadores 769
Sea ϕk un sistema ortonormal completo de elementos del espacio de Hilbert H. Ello significaque (f, ϕk) = 0 implica que f ≡ 0. Debemos demostrar que de esto se deduce que, paracualquier elemento Φ ∈ H, la suma parcial de la serie de Fourier
Sn =n∑k=1
Φkϕk (18.72)
donde
Φk = (Φ, ϕk) (18.73)
converge al elemento Φ en la norma de H.
En virtud de la desigualdad de Bessel (18.64), podemos afirmar que la serie
∞∑k=1
Φ2k (18.74)
converge.
Por lo tanto, para ε > 0, existe una N(ε) > 0 tal que, para n,m > N
∞∑k=n+1
Φ2k < ε y
∞∑k=m+1
Φ2k < ε (18.75)
Pero, entonces, obviamente
m∑k=n+1
Φ2k < ε (18.76)
Ahora bien, como ϕk es ortonormal:
‖ Sn − Sm ‖=‖m∑
k=n+1
Φkϕk ‖=
(m∑
k=n+1
Φkϕk,
m∑k=n+1
Φkϕk
)=
m∑k=n+1
Φ2k < ε (18.77)
Esto significa que la sucesion ϕk es fundamental.
Como el espacio H es completo, ello implica que dicha sucesion converge, o sea, que existe unelemento Φ0 ∈ H tal que
‖ Sn − Φ0 ‖< ε, ∀n > N (18.78)
770 Jose Marın Antuna
Demostremos que Φ0 ≡ Φ. Como, en virtud de la ortonormalidad de ϕk, es evidente que
(Sn, ϕk) = Φk (18.79)
y, ademas, de acuerdo con la desigualdad de Cauchy-Buniakovsky, tenemos que:
|(Sn, ϕk)− (Φ0, ϕk)| ≡ |(Sn − Φ0, ϕk)| ≤√‖ Sn − Φ0 ‖ · ‖ ϕk ‖ =
√‖ Sn − Φ0 ‖ (18.80)
por lo tanto, de (18.80), teniendo en cuenta (18.78), se obtiene que:
|(Sn, ϕk)− (Φ0, ϕk)| < ε, ∀n > N (18.81)
Esto quiere decir que Φ0 tiene los mismos coeficientes de Fourier que Φ.
Pero ello significa que el elemento Φ− Φ0 es ortogonal a todos los elementos del sistema ϕky, como este es cerrado por hipotesis, concluimos que Φ− Φ0 ≡ 0, es decir, Φ ≡ Φ0.
Ası pues, queda demostrada la convergencia de las sumas parciales de Fourier (18.72) a Φ enla norma de H, o sea, el sistema ϕk es cerrado.
Demostrado el teorema.
Este teorema, junto con el anterior, permite afirmar que, en un espacio de Hilbert, los conceptosde sistema ortonormal cerrado y de sistema ortonormal completo son equivalentes.
Definicion:
Un sistema ortonormal cerrado (y, por tanto, completo) en un espacio de Hilbert se llama baseortonormal de dicho espacio.
Es conveniente destacar que, generalmente, los espacios con los que la Fısica Matematica y laFısica Teorica trabajan son espacios euclıdeos o unitarios completos, es decir, de Hilbert. Enellos, segun hemos visto, los conceptos de base cerrada (la serie de Fourier converge) y de basecompleta (no existen elementos ortogonales a los elementos de la base no considerados ya enella) son equivalentes.
Los espacios de Hilbert mas usados en la Fısica Matematica y la Fısica Teorica son los espaciosl2 y L2[a, b] (ver ejemplos del epıgrafe 1).
El lector puede comprobar que estos espacios son de Hilbert. En el caso del espacio L2[a, b], lanorma debe entenderse en el sentido de integral de Lebesgue, para garantizar la completituddel espacio (ver lo expuesto mas adelante, en el punto 5 de este epıgrafe).
Existen otros espacios normados y completos (o sea, de Hilbert) utiles para la Fısica Matema-tica, entre los cuales mencionaremos, brevemente, los espacios de Lebesgue y de Soboliev.

Elementos de Espacios Funcionales y Operadores 771
18.3.5 Espacios de Lebesgue y de Soboliev
Diremos que un conjunto M ⊂ [a, b] tiene medida nula si, para cualquier ε > 0, existe unsistema finito o numerable de segmentos [αn, βn] tal que
M ⊂⋃n
[αn, βn],∑n
(βn − αn) < ε (18.82)
Si para una sucesion xn(t), con n natural, existe en todo [a, b] -excepto, tal vez, un conjunto demedida nula- el lımite igual a x(t), entonces, se dice que xn(t) converge a x(t) en casi todoslos puntos de [a, b], lo que se representa por
limn→∞
xn(t)ctp = x(t) (18.83)
Sea L1[a, b] el espacio de las funciones continuas en [a, b] con la norma:
‖ x ‖=∫ b
a
|x(t)|dt (18.84)
La convergencia en esta norma se llama convergencia en media.
El espacio L1[a, b] no es completo; su completamiento se denomina espacio de Lebesgue y sedenota por L1[a, b].
Una funcion x(t) se llama integrable segun Lebesgue en el segmento [a, b] si existe unasucesion fundamental en media de funciones continuas xn(t) tal que cumpla con (18.83).
Entonces, se llama integral de Lebesgue en [a, b] de la funcion x(t) al numero
(L)
∫ b
a
x(t)dt = limn→∞
∫ b
a
xn(t)dt (18.85)
Los elementos del espacio L1[a, b] son funciones para las cuales
(L)
∫ b
a
|x(t)|dt <∞ (18.86)
Sea Lp[a, b] el espacio de las funciones continuas sobre [a, b] con la norma:
‖ x ‖=[∫ b
a
|x(t)|pdt] 1
p
(18.87)
772 Jose Marın Antuna
El espacio Lp[a, b] no es completo; su completamiento se denota por Lp[a, b]. Los elementos deLp[a, b] son funciones x(t) para las que
(L)
∫ b
a
|x(t)|pdt <∞ (18.88)
El espacio L2[a, b] es de Hilbert; el producto escalar en el posee la forma
(x, y) = (L)
∫ b
a
x(t)y(t)dt (18.89)
Sea H1[a, b] el espacio de las funciones continuamente diferenciables sobre [a, b] con el productoescalar
(x, y) =
∫ b
a
[x(t)y(t) + x′(t)y′(t)]dt (18.90)
Este espacio no es completo; su completamiento es un espacio de Hilbert llamado espacio deSoboliev y se denota por H1[a, b].
Los elementos que, al completar el espacio H1[a, b], se le unen, pueden ser identificados comofunciones x(t) del espacio L2[a, b] que tienen derivadas generalizadas x′(t) (ver libro deTeorıa de Funciones Generalizadas del autor).
Es posible demostrar que el espacio de Soboliev H1[a, b] esta encajado en el espacio C[a, b].
18.3.6 Un ejemplo importante de espacio euclıdeo no completo
Segun vimos en el punto 4, en un espacio de Hilbert, todo sistema ortogonal cerrado es completoy viceversa.
Para un espacio euclıdeo no completo esta afirmacion no es valida. El siguiente ejemplo ilustraraeste hecho.
Sea el espacio C0[−π, π] de todas las funciones f(x) continuas en el segmento cerrado [−π, π]con producto escalar
(f, g) =
∫ π
−πf(x)g(x)dx (18.91)
El espacio definido no es completo. Para convencernos de ello basta tomar una funcion sec-cionalmente continua en [−π, π] f0(x).

Elementos de Espacios Funcionales y Operadores 773
La sucesion de sumas parciales de la serie trigonometrica de Fourier de f0(x) converge a estafuncion en la norma de L2[−π, π].
Como el espacio L2[−π, π] es completo, dicha sucesion es fundamental; por consiguiente, cadaelemento de esta sucesion es una funcion continua en [−π, π].
Sin embargo, su lımite en L2[−π, π], es decir, la funcion f0(x), no pertenece a C0. Ası, efecti-vamente, C0 no es completo (y, por tanto, no es un espacio de Hilbert).
Veremos que podemos construir en L2[−π, π] un sistema ortonormal cerrado ϕ0, ϕ1, ϕ2,..., ϕn,...tal que ϕ0(x) sea discontinua en [−π, π] y el resto de las ϕn(x) (n = 1, 2, ...) sean continuas enel.
Demostremos que en C0 podemos construir el sistema ortonormal ϕ1, ϕ2,..., ϕn,... cerrado,pero no completo.
Para ello, construyamos en el espacio de Hilbert L2[−π, π] el siguiente sistema ortonormal:
ϕ0(x) = 0, ∀ − π ≤ x < 0 (18.92)
=1√π, ∀0 ≤ x ≤ π
ϕ2n−1(x) =
√2
πsinnx, ∀ − π ≤ x ≤ 0 (18.93)
= 0, ∀0 ≤ x ≤ π
ϕ2n(x) =1√π
cosnx (18.94)
No es difıcil comprobar que, efectivamente, este sistema es ortonormal en L2[−π, π]. Ademas,no es difıcil percatarse de que es un sistema completo en L2[−π, π], ya que el no es mas que labase de la serie trigonometrica de Fourier y, como L2[−π, π] es de Hilbert, es tambien cerradoen dicho espacio, es decir, para n = 0, 1, 2, ... (f, ϕn) = 0 implica que f ≡ 0.
Notese que la funcion ϕ0(x) es discontinua en [−π, π], en tanto que ϕn(x), n = 1, 2, ... soncontinuas en ese intervalo.
Veamos, ahora, el sistema ϕn(x) con n = 1, 2, ... en el espacio C0. Este es un sistema continuoortonormal.
Demostraremos que este sistema es cerrado, pero que, sin embargo, no es completo.
Tomemos una funcion ψ ∈ C0[−π, π] tal que cumpla que
(ψ, ϕn) = 0, ∀n = 1, 2, ... (18.95)

774 Jose Marın Antuna
pero tal que
(ψ, ϕ0) 6= 0 (18.96)
es decir, que sea ortogonal a las funciones ϕn(x), n = 1, 2, ...
Entonces, analicemos la funcion:
f = ψ − ϕ0(ψ, ϕ0) (18.97)
Esta funcion es un elemento de L2[−π, π] para la que se cumple, evidentemente, que
(f, ϕ0) = (ψ, ϕ0)− (ϕ0, ϕ0)(ψ, ϕ0) = (ψ, ϕ0)− (ψ, ϕ0) = 0 (18.98)
y que, para n = 1, 2, ...
(f, ϕn) = (ψ, ϕn)− (ϕ0, ϕn)(ψ, ϕ0) = 0 (18.99)
Es decir, es ortogonal en L2[−π, π] al sistema
ϕ0, ϕ1, ϕ2, ..., ϕn, ... (18.100)
Como L2[−π, π] es de Hilbert, (18.98) y (18.99) implican que f ≡ 0, ya que el sistema ortonor-mal (18.100) es, en L2[−π, π], cerrado y completo.
Por lo tanto, de (18.97) concluimos que
ψ = ϕ0(ψ, ϕ0) (18.101)
Pero, observese que, en (18.101), a la izquierda, tenemos la funcion ψ continua en [−π, π], entanto que, a la derecha tenemos una funcion discontinua en [−π, π], ya que ϕ0(x) lo es y (ψ, ϕ0)es un numero.
La unica forma de que esto tenga sentido es que ψ ≡ 0 y que, por lo tanto, (18.96) no seacierto, sino que (ψ, ϕ0) = 0, pues ψ ≡ 0.
Este resultado, teniendo en cuenta (18.95), demuestra que el sistema ϕ1(x), ϕ2(x), ..., ϕn(x), ...es cerrado en C0.
Para demostrar que este sistema, sin embargo, no es completo en C0, tomemos los polinomios

Elementos de Espacios Funcionales y Operadores 775
P =n∑k=1
akϕk (18.102)
con coeficientes ak totalmente arbitrarios. Teniendo en cuenta la ortonormalidad de ϕ0(x) conϕk(x) para k = 1, 2, ..., y (18.102), resulta obvio que
‖ ϕ0 − P ‖=√
(ϕ0 − P, ϕ0 − P ) =√‖ ϕ0 ‖2 + ‖ P ‖2 ≥ 1 (18.103)
Pero, como el conjunto de las funciones continuas es completo en L2[−π, π], para ϕ0(x) existirauna funcion continua f(x) tal que
‖ ϕ0 − f ‖< 1
2(18.104)
Comparando (18.103) y (18.104), tenemos que
‖ f − P ‖≡‖ ϕ0 − P − f − ϕ0 ‖≥‖ ϕ0 − P ‖ − ‖ f − ϕ0 ‖>1
2(18.105)
Esto significa que un elemento de C0[−π, π] (la funcion continua f(x)) no puede ser aproximadaen la norma de L2[−π, π] por una combinacion lineal de ϕn, con n = 1, 2, ... Es decir, el sistemaϕn con n = 1, 2, ..., si bien es cerrado en C0[−π, π], no es completo en dicho espacio.
Este ejemplo indica que hay que andar con cuidado a la hora de trabajar con diferentes espaciosfuncionales.
18.4 Espacios l2 y L2
En los ejemplos del epıgrafe 1 mencionamos estos espacios. Por su importancia, los estudiaremosmas detalladamente.
18.4.1 El espacio l2
Es un espacio de Hilbert, cuyos elementos son el conjunto de todas las sucesiones x = (x1, x2, ...)(vectores de dimension infinita) tales que la serie
∞∑k=1
x2k (18.106)
converja.

776 Jose Marın Antuna
El producto escalar aquı lo definiremos por la formula
(x, y) =∞∑k=1
xkyk (18.107)
donde y = (y1, y2, ...) es otro elemento del espacio.
Es facil comprobar que (18.107) cumple los cuatro axiomas del producto escalar. La norma enl2 se define por la expresion
‖ x ‖=√
(x, x) =
√√√√ ∞∑k=1
x2k (18.108)
El espacio l2 ası definido es un espacio de Hilbert, concretamente, euclıdeo y, por lo tanto, sonvalidos todos los teoremas y definiciones estudiados anteriormente.
Por sistema ortonormal aquı podemos tomar la sucesion de elementos ek definidos como
e1 = (1, 0, 0, ...)
e2 = (0, 1, 0, ...) (18.109)
e3 = (0, 0, 1, ...)
........................
Puede verificarse sin dificultad que este sistema es completo y cerrado.
Definicion:
Si a cada elemento x ∈ l2 se pone en correspondencia mediante una ley dada un numero real l,se dice que en el espacio l2 esta dado un funcional l = l(x).
El funcional l se llama lineal si, para x, y ∈ l2 se cumple que
l(αx+ βy) = αl(x) + βl(y) (18.110)
Es conveniente recalcar algunas cosas.
El concepto de funcional se define para cualquier espacio lineal normado de la siguiente manera:Si a cada elemento x del espacio lineal normado X se pone en correspondencia, mediante unaley dada, un numero real o complejo l, se dice que en el espacio X esta dado un funcionall = l(x). El funcional es lineal si cumple con (18.110). En ocasiones se utiliza el sımbolo
〈x, l〉 ≡ l(x) (18.111)

Elementos de Espacios Funcionales y Operadores 777
para designar a los funcionales.
El conjunto de funcionales lineales definidos para un espacio X forma un espacio que se llamaespacio dual a X y que se denota por X∗.
Se llama hiperplano al conjunto x ∈ X : 〈x, l〉 = λ, donde l es un funcional lineal y λ es unnumero real o complejo.
Mas adelante veremos que los funcionales son casos particulares de otros entes mas generalesllamados operadores.
Continuemos con la particularizacion de estos conceptos para el espacio l2.
Sea x0 un elemento (un punto) arbitrario de l2. Entonces, tiene lugar el siguiente concepto.
Definicion:
El funcional l(x) definido en l2 se llama continuo en el punto x0 ∈ l2 si, para cualquiersucesion xn de l2 convergente en la norma de l2 a x0, se cumple que la sucesion numerical(xn) converge a l(x0). El funcional l(x) se llama continuo en l2 si es continuo en cada puntode l2.
Teorema.
Si l(x) es un funcional lineal en l2, entonces, de su continuidad en un punto x0 ∈ l2 se desprendesu continuidad en todo l2.
Demostracion:
Por hipotesis, el funcional es continuo en x0. Analicemos la sucesion x0 + xn − x, dondex ∈ l2 y xn → x para n→∞. Por lo tanto, x0 + xn − x → x0 para n→∞. Pero, por lalinealidad del funcional:
l(x0 + xn − x) = l(x0) + l(xn)− l(x) (18.112)
Tomando el lımite para n→∞ en (18.112), obtenemos:
l(x0) = l(x0) + limn→∞
l(xn)− l(x) (18.113)
de donde se desprende que l(xn) → l(x) para n→ infty.
Demostrado el teorema.
Definicion:
Un funcional l(x) se llama acotado si existe una constante C tal que, para todos los elementosx ∈ l2, se cumple que

778 Jose Marın Antuna
|l(x)| ≤ C ‖ x ‖ (18.114)
Teorema.
Para que un funcional lineal l(x) sea continuo es necesario y suficiente que sea acotado.
Demostracion:
Necesidad:
Sea el funcional lineal l(x) continuo. Si suponemos que no existe ninguna constante C quecumpla (18.114), entonces, existira una sucesion no nula de elementos xn tales que
|l(xn)| ≥ n2 ‖ xn ‖ (18.115)
Tomemos, entonces, la sucesion
yn =xn
n ‖ xn ‖(18.116)
Como
‖ yn − 0 ‖≡‖ yn ‖≡1
n→ 0 (18.117)
para n→∞, por la continuidad del funcional tendremos que
l(yn) → l(0) = 0 (18.118)
para n→∞. Pero, por otro lado, aplicando (18.115) a l(yn), tendremos:
|l(yn)| ≥ n2 ‖ yn ‖= n (18.119)
de donde se deducirıa que
l(yn) →∞ (18.120)
para n→∞. La contradiccion entre (18.118) y (18.120) que surge de suponer (18.115) implicaque, efectivamente, l(x) tiene que ser acotado.
Demostrada la necesidad.
Suficiencia:
Elementos de Espacios Funcionales y Operadores 779
Sea el funcional l(x) acotado, o sea, que cumple (18.114).
Sea, ademas, x0 ∈ l2 y xn una sucesion arbitraria convergente a x0 ∈ l2 en la norma de esteespacio.
Entonces, en virtud de la linealidad del funcional, tendremos que l(xn) − l(x0) = l(xn − x0).Por consiguiente, de acuerdo con (18.114):
|l(xn)− l(x0)| = |l(xn − x0)| ≤ C ‖n −x0 ‖ (18.121)
De (18.121) se desprende que l(xn) → l(x0) para n→∞.
Demostrada la suficiencia.
Con este teorema es posible introducir el siguiente concepto.
Definicion.
Llamaremos norma de un funcional lineal continuo l(x) a la expresion:
‖ l ‖= supx∈l2
|l(x)|‖ x ‖
(18.122)
Tiene lugar la siguiente importante afirmacion.
Teorema de Riesz.
Para todo funcional lineal continuo l(x) existe uno y solo un elemento a ∈ l2 tal que, para todox ∈ l2:
l(x) = (a, x) (18.123)
con ‖ l ‖=‖ a ‖.
Demostracion:
Tomemos el sistema ortonormal ek definido por (18.109) y los numeros ak = l(ek). De-mostremos que la sucesion de numeros ak es un elemento de l2.
Para ello, construyamos las sumas parciales
Sn =n∑k=1
akek (18.124)
y apliquemosle el funcional l; en virtud de la linealidad del mismo, tendremos que:

780 Jose Marın Antuna
l(Sn) =n∑k=1
akl(ek) =n∑k=1
a2k =‖ Sn ‖2 (18.125)
Pero, por el teorema anterior y por la definicion de norma (18.122), se tiene que
|l(Sn)| ≤‖ l ‖ · ‖ Sn ‖ (18.126)
De (18.125) y (18.126) se desprende que ‖ Sn ‖≤‖ l ‖, es decir:
n∑k=1
a2k ≤‖ l ‖2 (18.127)
La desigualdad (18.127) significa que la serie
∞∑k=1
a2k (18.128)
converge, por lo que la sucesion (a1, a2, ...) es un elemento de l2 que representaremos por a.
Sea, ahora, x = (x1, x2, ...) un elemento arbitrario de l2. Como el sistema (18.109) es completo,la suma parcial de la serie de Fourier
n∑k=1
xkek (18.129)
converge en la norma de l2 a x, para n→∞.
En virtud de la continuidad del funcional:
l
(n∑k=1
xkek
)→ l(x) (18.130)
para n→∞, y por su linealidad:
l
(n∑k=1
xkek
)=
n∑k=1
xkl(ek) =n∑k=1
xkak (18.131)
Comparando (18.130) y (18.131), concluimos que
Elementos de Espacios Funcionales y Operadores 781
limn→∞
n∑k=1
xkak = l(x) (18.132)
lo que verifica la validez de (18.123) con un unico elemento a ∈ l2 determinado, cuyas coorde-nadas son iguales a l(ek).
Demostremos, por ultimo, que ‖ l ‖=‖ a ‖. De (18.127) es obvio que
‖ a ‖≤‖ l ‖ (18.133)
pero, por otra parte, de (18.123) ya demostrada y de la desigualdad de Cauchy-Buniakovsky
|(a, x)| ≤‖ a ‖ · ‖ x ‖ (18.134)
se obtiene que
|l(x)| ≤‖ a ‖ · ‖ x ‖ (18.135)
De (18.135), por la definicion de norma del funcional, obtenemos:
‖ l ‖≤‖ a ‖ (18.136)
Del cumplimiento simultaneo de (18.133) y (18.136) se deduce que, efectivamente, ‖ l ‖=‖ a ‖.
Demostrado el teorema.
La importancia del teorema de Riesz radica en que establece la forma general de cualquierfuncional lineal continuo en l2.
Definicion.
Un conjunto A de elementos de l2 se llama acotado (acotado en la norma) si existe unaconstante M tal que ‖ x ‖≤M para todos los elementos x ∈ A.
Es conveniente aclarar que, en esencia, esta definicion de conjunto acotado es equivalente a laque dimos en el epıgrafe 1 para los conjuntos acotados en un espacio lineal normado. Como enel presente epıgrafe estamos estudiando, especıficamente y con mayor detenimiento, los espaciosl2 y L2, forzosamente volveremos a ver algunos conceptos en estos espacios que, anteriormente,vimos de forma general.
Definicion.
Un conjunto A de elementos de l2 se llama compacto si, para una sucesion xn de elementosde A, es posible hallar una subsucesion xnk
convergente en la norma de l2.
782 Jose Marın Antuna
Teorema.
Todo conjunto A compacto en l2 es acotado.
Demostracion:
Efectivamente; sea A compacto. Si no fuese acotado, ello implicarıa que existirıa una sucesionde elementos de A, cuya norma crecerıa indefinidamente. De tal sucesion siempre se podrıaescoger una subsucesion divergente, lo que estarıa en contradiccion con la compacidad de A.
Demostrado el teorema.
En los espacios euclıdeos de dimension finita el recıproco de este teorema es valido y se conocecon el nombre de Teorema de Bolzano- Weierstrass: todo conjunto acotado A que contengaun numero infinito de elementos es compacto.
Sin embargo, en los espacios de infinitas dimensiones, como es el caso de l2, el acotamiento deun conjunto infinito de elementos no implica su compacidad.
El ejemplo clasico de lo dicho es el conjunto ek de los elementos del sistema ortonormal(18.109). Este conjunto es acotado, ya que la norma de todos sus elementos es igual a uno. Sinembargo, este conjunto no es compacto, ya que, para que una sucesion de elementos converjaen la norma de l2, es necesario que la norma de la diferencia de dos elementos, con k y k + 1enteros, converja a cero, para k → ∞ y, para cualquier subsucesion de elementos de (18.109)es evidente que ‖ ek − el ‖2=‖ ek ‖2 + ‖ el ‖2= 2, para cualesquiera k 6= l.
De lo dicho resulta clara la conveniencia de introducir el concepto de compacidad de un conjuntoen un sentido mas debil que la definicion dada arriba de compacidad, de forma tal que cualquierconjunto acotado, que contenga un numero infinito de elementos, sea compacto en ese sentidodebil. Este concepto lo establece la siguiente definicion.
Definicion.
Una sucesion xn de elementos de l2 se llama convegente debilmente a un elemento x0 ∈ l2si, para cualquier elemento a ∈ l2 se cumple que
(xn, a) → (x0, a), ∀n→∞ (18.137)
Como quiera que l2 es un espacio de Hilbert, todo lo visto en el punto 2 del epıgrafe 3 setraslada automaticamente hacia aca, incluido el concepto de compacidad debil alla definido.
Abundemos un poco mas en las consecuencias de esta idea con el estudio de esta afirmacionfundamental.
Teorema.
Todo conjunto acotado, con un numero infinito de elementos en l2, es compacto debilmente.
Demostracion:

Elementos de Espacios Funcionales y Operadores 783
Sea A un conjunto arbitrario y acotado de l2 y sea xn una sucesion arbitraria de elementosde A. Como, por hipotesis, A es acotado, por tanto, para cierta constante M , se cumple que‖ xn ‖≤M , donde xn = (xn1 , xn2 , ..., xnk
, ...). Como, por definicion de norma en l2,
‖ xn ‖2=∞∑k=1
x2nk
(18.138)
tendremos que, para cualquier k, la sucesion numerica de las coordenadas k-esimas xnkdel
elemento xn es acotada.
Del Analisis Matematico sabemos que de una sucesion numerica acotada siempre se puedesacar una subsucesion convergente. Por lo tanto, de la sucesion xn podremos sacar una
subsucesion x(1)n , cuyas primeras coordenadas formen una sucesion numerica convergente;
de la subsucesion x(1)n podremos sacar una subsucesion x(2)
n , cuyas primeras y segundascoordenadas formen sucesiones numericas convergentes y, ası sucesivamente, podemos sacar unasubsucesion x(k)
n , cuyas primeras k coordenadas formen sucesiones numericas convergentes,con k arbitrario.
Introduzcamos la notacion zn = x(n)n . Es evidente que zn es una subsucesion de la sucesion
inicial xn tal, que las subsucesiones numericas formadas por cualesquiera coordenadas de loselementos de zn son sucesiones numericas convergentes.
Es decir, si zn = (zn1 , zn2 , ..., znk, ...), se cumple que
znk → ηk, ∀n→∞ (18.139)
con cualquier k = 1, 2, ...
Como ‖ zn ‖≤M , por tanto, para toda n con cualquier N fijo, se cumple que
N∑k=1
z2nk≤M2 (18.140)
Tomando el lımite para n→∞ en (18.140), obtenemos que, para cualquier N :
limn→∞
N∑k=1
z2nk
=N∑k=1
η2k ≤M2 (18.141)
Pero, (18.141) significa que η = (η1, η2, ...) es un elemento de l2. Sea, ahora, a ∈ l2; es decir,que
∞∑k=1
a2k

784 Jose Marın Antuna
converge. Esto significa que, para ε > 0, existe un N(ε) > 0 tal que n,m > N(ε) implica que
m∑k=n
a2k <
ε2
M2(18.142)
Utilizando la desigualdad de Cauchy-Buniakovsky, demostremos que (zn, a) converge uniforme-mente. Efectivamente,
∣∣∣∣∣m∑k=n
znkak
∣∣∣∣∣ ≤√√√√ m∑
k=n
z2nk
m∑k=n
a2k < ε (18.143)
para todos n,m > N(ε). En (18.143) hemos tenido en cuenta (18.140) y (18.142). Pero estosignifica que
(zn, a) =∞∑k=1
znkak (18.144)
converge uniformemente, lo que significa que la subsucesion zn de la sucesion xn acotadaen l2 converge debilmente.
Ası pues, efectivamente, del conjunto xn acotado en l2 con un numero infinito de terminoshemos logrado sacar una subsucesion convergente debilmente; es decir, xn en l2 es compactodebilmente.
Demostrado el teorema.
18.4.2 El espacio L2
Recordemos que el espacio L2[a, b] es el espacio de Hilbert de todas las funciones cuadradointegrables en [a, b] (en el sentido de integral de Lebesgue).
Ya vimos que la norma en L2[a, b] se definıa como
‖ f ‖=(∫ b
a
f 2(t)dt
) 12
≡√
(f, f) (18.145)
donde el producto escalar de dos elementos de L2[a, b] se define por la formula
(f, g) =
∫ b
a
f(t)g(t)dt (18.146)
Elementos de Espacios Funcionales y Operadores 785
Como espacio lineal normado, para el es valida la definicion de conjunto siempre denso quevimos en el punto 2 del epıgrafe 1.
Igualmente, el concepto de separabilidad visto alla es valido.
Por ser un espacio de Hilbert, el espacio L2[a, b] es separable (y, en general, el espacio Lp[a, b],con p ≥ 1).
Tambien puede ser construido un sistema ortonormal de elementos que es cerrado y completo yque, por tanto, constituye una base ortonormal en la que toda funcion de L2[a, b] es desarrollableen serie de Fourier.
Veamos en el espacio L2[a, b] el concepto de convergencia debil.
Definicion.
Una sucesion fn(t) de elementos del espacio L2[a, b] se llama convergente debilmente alelemento f(t) de este espacio si, para cualquier g(t) ∈ L2[a, b], se cumple que
(fn, g) → (f, g), ∀n→∞ (18.147)
es decir:
∫ b
a
fn(t)g(t)dt→∫ b
a
f(t)g(t)dt, ∀n→∞ (18.148)
Por ser un espacio de Hilbert, se desprende que, en L2[a, b], la convergencia de fn(t) en la normadel espacio (o sea, la convergencia fuerte) implica la convergencia debil, pero el recıproco no escierto (cualquier sucesion de elementos ortonormales en L2[a, b] puede servir de ejemplo).
Definicion.
Un conjunto infinito A de elementos de L2[a, b] se llama compacto debilmente si de cualquiersucesion de elementos fn(t) de A se puede elegir una subsucesion convergente debilmente.
El concepto de funcional lineal continuo en L2[a, b] puede introducirse de manera similar a comolo hicimos en l2.
Definicion.
Un funcional l(f) definido sobre los elementos f ∈ L2[a, b] se llama lineal si, para f, g ∈ L2[a, b]y dos numeros arbitrarios α y β, se cumple que
l(αf + βg) = αl(f) + βl(g) (18.149)
El funcional l(f), con f ∈ L2[a, b] se llama continuo en el punto f0 ∈ L2[a, b] si, para cualquiersucesion fn convergente en la norma de L2[a, b], la sucesion numerica l(fn) converge a l(f0).
786 Jose Marın Antuna
El funcional l(f) se llama continuo en L2[a, b] si es continuo en cada punto de L2[a, b].
De manera identica a como hicimos para l2, se puede demostrar, facilmente, que, si un funcionallineal en L2[a, b] es continuo al menos en un punto de este espacio, entonces es continuo en todoel espacio, lo que, a veces, se denomina simplemente continuo.
La pregunta logica es si se pueden extender al espacio L2[a, b] el teorema de Riesz y el teoremasobre la compacidad debil de cualquier conjunto acotado, que fueron establecidos en el puntoanterior para el espacio l2. Para ello, recordemos la definicion de isomorfismo de dos espaciosdada en el epıgrafe 2. Para dos espacios de Hilbert esta definicion puede ser expresada en lasiguiente forma equivalente.
Definicion.
Dos espacios arbitrarios de Hilbert H y H ′ se llaman isomorfos si existe una correspondenciabiunıvoca entre los elementos de ambos espacios de forma tal que, si x′, y′ ∈ H ′ son las imagenesde x, y ∈ H, se cumple que:
1. x′ + y′ ∈ H ′ es la imagen de x+ y ∈ H.
2. Para cualquier λ, λx′ ∈ H ′ es la imagen de λx ∈ H.
3. Los productos escalares (x′, y′) y (x, y) son iguales entre sı.
Del Algebra Lineal sabemos que todo espacio euclıdeo de n dimensiones es isomorfo con En.Para establecer el isomorfismo entre los espacios de infinitas dimensiones L2[a, b] y l2 veamos,previamente, el siguiente teorema.
Teorema de Riesz-Fisher.
Sea ϕn un sistema ortonormal arbitrario en L2[a, b]. Entonces, para cualquier sucesion(c1, c2, ...) que cumpla la condicion
∞∑k=1
c2k <∞ (18.150)
es decir, para cualquier elemento de l2, existe una funcion unica f(t) ∈ L2[a, b] tal que
cn = (f, ϕn) =
∫ b
a
f(t)ϕn(t)dt (18.151)
y que
∞∑k=1
c2k =‖ f ‖2=
∫ b
a
f 2(t)dt (18.152)

Elementos de Espacios Funcionales y Operadores 787
Demostracion:
Llamemos
fn =n∑k=1
ckϕk (18.153)
La sucesion fn es fundamental ya que, para m ≥ n
‖ fm − fn ‖2=m∑
k=n+1
c2k (18.154)
y, por hipotesis, la serie (18.150) converge. Pero, como L2[a, b] es completo, existira un elementof ∈ L2[a, b] tal que
limn→∞
‖ fn − f ‖= limn→∞
∣∣∣∣∣∣∣∣∣∣n∑k=1
ckϕk − f
∣∣∣∣∣∣∣∣∣∣ = 0 (18.155)
De (18.155) y de la identidad de Bessel (18.63) del epıgrafe 3 se desprende que
limn→∞
n∑k=1
c2k ≡∞∑k=1
c2k =‖ f ‖2 (18.156)
Por otra parte, como ϕk son ortonormales, para toda n ≥ k tenemos que
(fn, ϕk) =
(n∑l=1
clϕl, ϕk
)=
n∑l=1
cl(ϕl, ϕk) = ck (18.157)
Ademas, por la desigualdad de Cauchy-Buniakovsky
|(fn, ϕk)− (f, ϕk)| ≡ |(fn − f, ϕk)| ≤√‖ fn − f ‖ · ‖ ϕk ‖ =
√‖ fn − f ‖ (18.158)
y, en virtud de (18.155):
(fn, ϕk) → (f, ϕk), ∀n→∞ (18.159)
De (18.157) y (18.159) se deduce que
(f, ϕk) = ck (18.160)

788 Jose Marın Antuna
para toda k.
Para completar la demostracion del teorema, debemos demostrar que f ∈ L2[a, b] es unico.
Supongamos que existe otro elemento g ∈ L2[a, b] que satisfaga las condiciones del teorema, esdecir, que tambien
(g, ϕk) = ck (18.161)
Por la desigualdad de Cauchy-Buniakovsky
|(fn − f, g)| ≤√‖ fn − f ‖ · ‖ g ‖ (18.162)
y, teniendo en cuenta aquı a (18.155), obtenemos que
(fn − f, g) → 0, ∀n→∞ (18.163)
Pero, de los axiomas del producto escalar, teniendo en cuenta (18.161), tenemos que:
(fn − f, g) ≡
(n∑k=1
ckϕk − f, g
)=
n∑k=1
ck(g, ϕk)− (f, g) =n∑k=1
c2k − (f, g) (18.164)
de manera que, por (18.163):
n∑k=1
c2k = (f, g) (18.165)
De (18.165), junto con (18.152) y su equivalente para g:
∞∑k=1
c2k =‖ g ‖2 (18.166)
obtenemos que:
‖ f − g ‖≡ (f − g, f − g) =‖ f ‖2 −2(f, g)+ ‖ g ‖2≡ 0 (18.167)
Pero (18.167) significa que f − g es el elemento nulo de L2[a, b], o sea f ≡ g.
Demostrado el teorema.
Con la ayuda del teorema de Riesz-Fisher demostraremos la afirmacion fundamental siguiente:

Elementos de Espacios Funcionales y Operadores 789
Teorema.
Los espacios L2[a, b] y l2 son isomorfos.
Demostracion:
Tomemos en L2[a, b] un sistema ortonormal completo ϕk y asociemos a cada elemento f ∈L2[a, b] un elemento c = (c1, c2, ...) ∈ l2, cuyas coordenadas ck vienen dadas por la formula
ck = (f, ϕk) (18.168)
Por el teorema de Riesz-Fisher, esta correspondencia es biunıvoca.
Para completar la demostracion, demostremos que si a los elementos f, g ∈ L2[a, b] les corres-ponden, respectivamente, los elementos c = (c1, c2, ...),d = (d1, d2, ...) ∈ l2, entonces:
1. A f + g ∈ L2[a, b] le corresponde el elemento c + d = (c1 + d1, c2 + d2, ...) ∈ l2.
2. Para cualquier λ, a λf ∈ L2[a, b] le corresponde λc = (λc1, λc2, ...) ∈ l2.
3. Que
(f, g) = (c, d) =∞∑k=1
ckdk (18.169)
la ecuacion (18.169) se llama formula generalizada de Parseval.
Las propiedades 1 y 2 se desprenden, directamente, de las propiedades del producto escalar.Demostremos, pues, (18.169).
En virtud de que ϕk es completo, para f , g y f + g se cumplen las siguientes formulas deParseval:
(f, f) =∞∑k=1
c2k (18.170)
(g, g) =∞∑k=1
d2k (18.171)
(f + g, f + g) =∞∑k=1
(ck + dk)2 (18.172)
Restandole (18.170) y (18.171) a (18.172), se obtiene

790 Jose Marın Antuna
2(f, g) = 2∞∑k=1
ckdk
Demostrado el teorema.
Hagamos la siguiente importante observacion.
El isomorfismo demostrado de los espacios L2[a, b] y l2 permite considerar al espacio l2 comola notacion en coordenadas de los elementos del espacio L2[a, b]. Ademas, todo lo establecidopara l2 es valido para L2[a, b] y viceversa.
Esto, en particular, significa lo siguiente:
1. l2 es completo.
2. Cualquier conjunto acotado en la norma de L2[a, b] que contenga un numero infinito deelementos de L2 es compacto debilmente.
3. Para cualquier funcional lineal continuo l(f) donde f ∈ L2[a, b] existe uno y solo unelemento g ∈ L2[a, b] tal que, para todo elemento f ∈ L2[a, b]:
l(f) = (f, g) (18.173)
donde
‖ l ‖= supf∈L2[a,b]
|l(f)|‖ f ‖
=‖ g ‖ (18.174)
Desde el punto de vista de la Mecanica Cuantica, el teorema que acabamos de demostrar esla justificacion matematica de la equivalencia entre la Mecanica Matricial de Heisenberg y laMecanica Ondulatoria de Schrodinger; es decir, entre el formalismo matematico basado en elespacio de coordenadas l2 y el formalismo matematico basado en el espacio L2 de funciones decuadrado integrable.
El teorema demostrado, ademas, permite afirmar que ambos espacios, l2 y L2, son algo que yasabemos: dos realizaciones especıficas diferentes del mismo espacio abstracto de Hilbert queestudiamos en el epıgrafe 3.
Por ultimo, es necesario hacer la siguiente aclaracion. Si el espacio L2[a, b] es euclıdeo, elproducto escalar definido por la formula (18.146) es real y todas las formulas son reales. Si elespacio es unitario, no debe olvidarse (ver la aclaracion hecha en el epıgrafe 3, en la definicionde espacio unitario) que la definicion de producto escalar debe tomarse en la forma
(f, g) =
∫ b
a
f(t)g∗(t)dt (18.175)
Elementos de Espacios Funcionales y Operadores 791
y en todas las formulas debe tenerse en cuenta esto. Solo ası la norma de los elementos delespacio sera un numero real, como se requiere.
Pasaremos, a continuacion, al estudio de los operadores que se definen en los espacios hastaaquı estudiados y sus principales caracterısticas y propiedades.
18.5 Operadores totalmente continuos y autoconjugados
en un espacio de Hilbert
18.5.1 Conceptos generales sobre operadores
Desde los cursos de Algebra Lineal se conoce el concepto de operador. Las definiciones quea continuacion veremos estan referidas a operadores en espacios lineales normados en general.Posteriormente, particularizaremos estos conceptos a espacios de Hilbert.
Sean dos espacios lineales normadosX,Y . Si a cada elemento x ∈ X se pone en correspondencia,mediante una ley dada, un elemento y ∈ Y , entonces, se dice que esta dado el operador uaplicacion
y = Ax (18.176)
donde A representa la ley de correspondencia.
El operador se llama continuo en el punto x0 si Ax→ Ax0, para x→ x0.
El conjunto D(A) ⊂ X de elementos de X, donde opera el operador A, se llama campo dedefinicion de dicho operador; el conjunto R(A) ⊂ Y , imagen del operador en el espacio Y sellama campo de valores del operador A.
El operador A se llama acotado si transforma todo conjunto acotado de D(A) en un conjuntoacotado en el espacio Y .
El operador A se llama lineal si su campo de definicion D(A) es una variedad lineal (verdefinicion en el epıgrafe 1) en X y, para cualesquiera x, y ∈ D(A) y cualesquiera α, β engeneral complejos, se cumple que
A(αx+ βy) = αAx+ βAy (18.177)
El conjunto N(A) ⊂ D(A) tal que Ax = 0 se llama conjunto de ceros o nucleo del operadorA.
Se puede demostrar que un operador lineal A dado sobre todo X y continuo en el punto 0 ∈ Xes continuo en cualquier x0 ∈ X. De ahı, un operador lineal A con D(A) = X se llama

792 Jose Marın Antuna
continuo si es continuo en 0 ∈ X.
Un operador lineal A con D(A) = X se llama acotado si existe un numero real C > 0 talque, para cualquier x ∈ V 0
1 (para cualquier elemento perteneciente a la bola cerrada centradaen cero y de radio uno) se cumple que
‖ Ax ‖≤ C (18.178)
Puede demostrarse que un operador lineal A con D(A) = X es acotado si y solo si, paracualquier x ∈ X, se cumple la desigualdad
‖ Ax ‖≤ C ‖ x ‖ (18.179)
Tambien es posible demostrar que un operador A con D(A) = X es continuo si y solo si esacotado. La demostracion de esta afirmacion es casi identica a la demostracion que realizamosen el epıgrafe anterior para los funcionales lineales acotados, lo que el lector puede comprobarsin dificultad.
A partir de la definicion (18.179) de operador lineal acotado se puede dar la siguiente definicion.
El numero
‖ A ‖= supx∈X,x6=0
‖ Ax ‖‖ x ‖
(18.180)
se llama norma del operador lineal acotado y = Ax, con D(A) = X.
Esta definicion es equivalente a escribir
‖ A ‖= supx∈X,‖x‖=1
‖ Ax ‖ (18.181)
Si A y B son dos operadores lineales acotados, definidos sobre todo el espacio X, con valorespertenecientes al espacio Y y suponemos por definicion
(A + B)x = Ax+ Bx, (λA)x = λAx (18.182)
y
‖ A ‖= supx∈X,‖x‖=1
‖ Ax ‖ (18.183)
obtenemos el espacio L(X,Y) lineal normado de operadores lineales acotados.

Elementos de Espacios Funcionales y Operadores 793
En el espacio L(X,X) = L(X) suponemos, por definicion, (AB)x = A(Bx). Por lo tanto,L(X) es un algebra con unidad, donde esta es el operador identico I:
Ix = x (18.184)
Una sucesion de operadores An ∈ L(X, Y ) se llama convergente uniformemente al operadorA ∈ L(X,Y ), lo que se representa por An → A para n→∞, si
‖ An −A ‖→ 0, ∀n→∞ (18.185)
Una sucesion An ∈ L(X, Y ) se llama convergente fuertemente al operador A, lo que repre-sentaremos por An →f A para n→∞ si, para todo x ∈ X, se cumple que
‖ Anx−Ax ‖→ 0, ∀n→∞ (18.186)
Es posible demostrar que si Y es un espacio de Banach, entonces L(X, Y ) es tambien un espaciode Banach.
Tambien es posible demostrar que si X,Y son espacios de Banach, An ∈ L(X, Y ) y la sucesionAnx es acotada para cualquier x ∈ X, entonces, la sucesion ‖ An ‖ es acotada.
Si X,Y son espacios de Banach y An ∈ L(X, Y ), entonces, para que la sucesion An converjafuertemente a A ∈ L(X, Y ) es necesario y suficiente que:
1. La sucesion ‖ An ‖ sea acotada.
2. An →f A, ∀n→∞ en una variedad lineal siempre densa en el espacio X.
Si X es un espacio lineal normado, Y un espacio de Banach y A un operador lineal (y = Ax,y ∈ Y , x ∈ X) tal que es acotado en D(A) y ¯D(A) = X, entonces existe un operador linealacotado A ∈ L(X, Y ) tal que Ax = Ax para cualquier x ∈ D(A) y ‖ A ‖=‖ A ‖. El operadorA se llama prolongacion del operador A a todo el espacio X.
Si X,Y son espacios lineales normados y A es un operador lineal que aplica D(A) ⊂ X sobreR(A) ⊂ Y biunıvocamente, entonces existe el operador inverso A−1 que aplica R(A) ⊂ Ysobre D(A) ⊂ X biunıvocamente y tambien es lineal.
El operador lineal A que aplica D(A) ⊂ X sobre R(A) ⊂ Y se llama invertible continua-mente si R(A) = Y y A−1 existe y es acotado.
Se puede demostrar que el operador A−1 existe y es acotado en R(A) si y solo si, para unaconstante m > 0 y cualquier x ∈ D(A), se cumple que
‖ Ax ‖≥‖ x ‖ (18.187)

794 Jose Marın Antuna
Si X,Y son espacios de Banach, A ∈ L(X,Y ), R(A) = Y y A es invertible, entonces A esinvertible continuamente.
Si X es un espacio de Banach, C ∈ L(X) y ‖ C ‖< 1, entonces el operador I−C es invertiblecontinuamente y es valida la estimacion
‖ (I−C)−1 ‖≤ 1
1− ‖ C ‖(18.188)
Si X es un espacio de Banach, A,B ∈ L(X) y A es invertible continuamente de forma tal quese cumpla la desigualdad
‖ B−A ‖≤ 1
‖ A−1 ‖(18.189)
entonces B es invertible continuamente y es valida la estimacion
‖ B−1 ‖≤ ‖ A−1 ‖1− ‖ B−A ‖ · ‖ A−1 ‖
(18.190)
Sean X,Y espacios lineales normados y A ∈ L(X, Y ). El operador A−1d ∈ L(X, Y ) se llama
inverso derecho de A si
AA−1d = IX (18.191)
y el operador A−1i ∈ L(X, Y ) se llama inverso izquierdo de A si
A−1i A = IY (18.192)
donde IX e IY son operadores identicos en los espacios X,Y , respectivamente.
Sean X,Y espacios de Banach. Su suma directa es el espacio de Banach Z = X +Y de paresz = (x, y), donde x ∈ X, y ∈ Y con operaciones
α1z1 + α2z2 = (α1x1 + α2x2, α1y1 + α2y2) (18.193)
donde α1 y α2 son escalares, zi = (xi, yi), i = 1, 2 y con la norma
‖ z ‖=‖ x ‖X + ‖ y ‖Y (18.194)
El conjunto de pares (x,Ax) ⊂ Z = X + Y se llama grafico del operador lineal A con campode definicion D(A) ⊂ X y campo de valores R(A) ⊂ Y .
Elementos de Espacios Funcionales y Operadores 795
El operador lineal A se llama cerrado si su grafico es un conjunto cerrado en el espacioZ = X + Y . O sea, A es cerrado si de xn ∈ D(A), xn → x y Ax → y se desprende quex ∈ D(A) y Ax = y.
Se puede demostrar que si A ∈ L(X,Y ), entonces A es cerrado y que si A es cerrado y A−1
existe, entonces A−1 es cerrado. Tambien, si A es un operador lineal cerrado con D(A) = X,entonces es acotado.
Hasta aquı, en este punto, hemos visto -en apretada sıntesis- las ideas generales sobre losoperadores lineales en espacios lineales normados.
Hemos obviado las demostraciones de las afirmaciones expuestas, pues nuestro objetivo erahacer una introduccion al tema de operadores en espacios funcionales lineales en general. Ellector interesado en profundizar en estos conceptos generales debe remitirse a la literaturaespecializada que sobre el tema existe.
Pasaremos, a continuacion, al estudio mas detallado de los operadores en los espacios de Hilbertestudiados anteriormente, dada la importancia que estos tienen para la Fısica.
18.5.2 Operadores conjugados en espacios de Hilbert
La definicion general de operador dada en el punto 1 de este epıgrafe puede ser especificadapara el caso de un espacio de Hilbert H.
Ası, diremos que si esta dada la ley mediante la cual a cada elemento x ∈ H se pone encorrespondencia cierto elemento y ∈ H, diremos que esta definido un operador A de H en H,lo que se representa, escribiendo y = Ax (ver expresion (18.176)). Este operador es lineal si,para dos elementos x, y ∈ H, se verifica (18.177).
Para los operadores lineales definidos aquı para los espacios de Hilbert tienen validez las defini-ciones de continuidad y acotamiento vistas en el epıgrafe 1. En particular, se puede tomarcomo definicion de operador acotado la expresion (18.179) y, por tanto, la definicion de normade un operador expresada por (18.180) o (18.181).
Veamos un ejemplo de operador lineal continuo en un espacio de Hilbert.
Sea el espacio de Hilbert L2[a, b] y sea K(t, s) una funcion definida y continua en el cuadradoa ≤ t ≤ b, a ≤ s ≤ b. Entonces, el operador integral dado para los elementos x(t) ∈ L2[a, b]:
Ax(t) =
∫ b
a
K(t, s)x(s)ds (18.195)
es un operador lineal y continuo. La funcionK(t, s), comunmente, se llama nucleo del operadorintegral (18.195).
Su linealidad es evidente, ya que la integracion es una operacion lineal. Para demostrar sucontinuidad, basta demostrar su acotamiento, lo que equivale a comprobar el acotamiento de

796 Jose Marın Antuna
su norma, dada por (18.181). Introduzcamos la notacion:
M =
(∫ b
a
∫ b
a
K2(t, s)x(s)dsdt
) 12
(18.196)
y demostremos que ‖ A ‖≤M . De acuerdo con la desigualdad de Cauchy- Buniakovsky:
|Ax(t)|2 ≤∫ b
a
K2(t, s)ds
∫ b
a
x2(s)ds =‖ x ‖2
∫ b
a
K2(t, s)ds (18.197)
Integrando (18.197) respecto a t entre a y b y usando (18.196), obtenemos:
‖ Ax ‖2≤M2 ‖ x ‖2
es decir:
‖ Ax ‖≤M ‖ x ‖ (18.198)
La desigualdad (18.198) significa que el operador A es acotado y que su norma ‖ A ‖< M . Por(18.180) la norma de este operador es ‖ A ‖= M .
El operador integral (18.195) es estudiado con detenimiento en el libro de Ecuaciones Integralesdel autor.
Supongamos, ahora, que en el espacio de Hilbert H esta dado un operador lineal continuoarbitrario A.
Tomemos un elemento arbitrario fijo y ∈ H y analicemos el funcional definido para todos loselementos x ∈ H:
f(x) = (Ax, y) (18.199)
Evidentemente, este funcional es lineal y continuo. Entonces, de acuerdo con el teorema deRiesz demostrado en el epıgrafe 4, existe un unico elemento y solo uno h ∈ H tal que
f(x) = (x, h) (18.200)
para todo elemento x ∈ H. De esta manera, a cada elemento y ∈ H hemos puesto en corres-pondencia uno y solo un elemento h ∈ H tal que cumpla con (18.200). Es decir, en el espacioH hemos definido cierto operador, que denotaremos por A∗, tal que

Elementos de Espacios Funcionales y Operadores 797
h = A∗y (18.201)
Del analisis hecho surge el siguiente concepto.
Definicion.
Un operador A∗ se llama conjugado o adjunto del operador A en el espacio H si, paracualquier elemento x ∈ H
(Ax, y) = (x,A∗y) (18.202)
De lo arriba dicho se desprende que, para cualquier operador lineal continuo A, existe un unicooperador conjugado A∗.
De la definicion dada es evidente que si el operador A∗ tiene conjugado (A∗)∗, este es
(A∗)∗ = A (18.203)
Tiene lugar el siguiente teorema.
Teorema.
Si el operador A en el espacio H es lineal y continuo, entonces el operador conjugado A∗ tambienes lineal y continuo y se verifica para sus normas la igualdad
‖ A∗ ‖=‖ A ‖ (18.204)
Demostracion:
La linealidad de A∗ es evidente a partir de (18.202) y de los axiomas del producto escalar.Demostremos que A∗ es acotado.
En primer lugar, es obvio, de la definicion de norma de un operador lineal continuo (18.180),que
‖ Ay ‖<‖ A ‖ · ‖ y ‖ (18.205)
Teniendo en cuenta (18.202), tendremos por la desigualdad de Cauchy- Buniakovasky:
|(Ax, y)| = |(x,A∗y)| ≤‖ Ax ‖ · ‖ y ‖≤‖ A ‖ · ‖ x ‖ · ‖ y ‖ (18.206)
Sustituyendo en (18.206) x = A∗y:
798 Jose Marın Antuna
‖ A∗y ‖2≤‖ A ‖ · ‖ A∗y ‖ · ‖ y ‖
Es decir:
‖ A∗y ‖≤‖ A ‖ · ‖ y ‖ (18.207)
La desigualdad (18.207) significa que A∗ es acotado y que su norma satisface la condicion
‖ A∗ ‖≤‖ A ‖ (18.208)
Como -al ser acotado- A∗ es continuo, por lo tanto, existe su conjugado (A∗)∗ = A; es decir,que cumple (18.203). En este caso, se dice que A y A∗ son operadores mutuamente conjugados.
Si introducimos la notacion B = A∗ y repetimos el proceso anterior, tendremos que (x = B∗y):
|(Bx, y)| = |(x,B∗y)| ≤‖ Bx ‖ · ‖ y ‖≤‖ B ‖ · ‖ x ‖ ·· ‖ y ‖ (18.209)
De aquı:
‖ B∗y ‖≤‖ B ‖ · ‖ y ‖
o, lo que es lo mismo:
‖ Ay ‖≤‖ A∗ ‖ · ‖ y ‖ (18.210)
lo que evidencia la hipotesis de que el operador A es acotado y que, ademas:
‖ A ‖≤‖ A∗ ‖ (18.211)
De (18.208) y (18.211) se deduce (18.204).
Demostrado el teorema.
18.5.3 Operadores autoconjugados
Definicion:
Un operador arbitrario A en el espacio de Hilbert H se llama autoconjugado si su operadorconjugado A∗ coincide con A, es decir, si

Elementos de Espacios Funcionales y Operadores 799
(Ax, y) = (x,Ay) (18.212)
para todos los elementos x, y ∈ H.
A modo de ejemplo, veamos -de nuevo- el operador integral (18.195). Hallemos su operadorconjugado en correspondencia con la definicion (18.202). Tenemos que
(Ax, y) =
∫ b
a
∫ b
a
K(t, s)x(s)ds
y(t)dt =
∫ b
a
∫ b
a
K(t, s)y(t)dt
x(s)ds ≡
≡∫ b
a
x(t)
∫ b
a
K(s, t)y(s)ds
dt = (x,A∗y) (18.213)
donde, primero, hemos intercambiado el orden de integracion y, luego, hemos tenido en cuentaque las variables de integracion -por ser mudas- pueden intercambiarse. Por consiguiente, eloperador conjugado es:
A∗x(t) =
∫ b
a
K(s, t)x(s)ds (18.214)
Ambos operadores (18.195) y (18.214) son iguales; es decir, el operador A es autoconjugado si
K(t, s) = K(s, t) (18.215)
Si la condicion (18.215) se verifica, el nucleo del operador se dice que es simetrico.
Veamos, ahora, la siguiente afirmacion.
Teorema.
La norma ‖ A ‖ de un operador lineal continuo autoconjugado A en el espacio de Hilbert Hse expresa por la formula
‖ A ‖= supx∈H,‖x‖=1
|(Ax, x)| (18.216)
Demostracion:
Por ser A continuo, es obvio que (Ax, x) es una magnitud acotada, por lo que su valor supremoexiste. Si llamamos
µ = supx∈H,‖x‖=1
|(Ax, x)| (18.217)

800 Jose Marın Antuna
entonces, para establecer la validez de (18.216), es decir, ‖ A ‖= µ, actuaremos de la formasiguiente.
Teniendo en cuenta que buscamos el supremo para cuando ‖ x ‖= 1 y usando la desigualdadde Cauchy-Buniakovsky, podemos escribir por la continuidad del operador (que, por lo tanto,es acotado) que:
|(Ax, x)| ≤‖ Ax ‖ · ‖ x ‖=‖ Ax ‖≤‖ A ‖ (18.218)
Ası pues,
µ ≤‖ A ‖ (18.219)
Por otra parte, para cada elemento x ∈ H, es obvio que
|(Ax, x)| ≤ µ ‖ x ‖2 (18.220)
pues µ es el supremo de dicho modulo para elementos de norma unitaria, es decir, para todoelemento x0 = x
‖x‖ de norma ‖ x0 ‖= 1: |(Ax0, x0)| ≤ µ.
Como, por hipotesis, A es autoconjugado -es decir, cumple (18.212)- y como, ademas, es linealy el producto escalar es lineal, tenemos que:
(A(x+ y), x+ y) = (Ax, x) + (Ax, y) + (Ay, x) + (Ay, y) (18.221)
(A(x− y), x− y) = (Ax, x)− (Ax, y)− (Ay, x) + (Ay, y) (18.222)
Restando (18.222) a (18.221) y teniendo en cuenta (18.212), se obtiene:
4(Ax, y) = (A(x+ y), x+ y)− (A(x− y), x− y) (18.223)
Teniendo presente (18.220), de (18.223) se deduce que
4|(Ax, y)| ≤ 2µ[‖ x ‖2 + ‖ y ‖2] (18.224)
Si en (18.224) tomamos elementos x, y ∈ H de norma unitaria, queda:
|(Ax, y)| ≤ µ (18.225)
Elementos de Espacios Funcionales y Operadores 801
Tomemos en (18.225) elementos y del tipo y = Ax‖Ax‖ de norma unitaria y elementos x tales que
‖ x ‖= 1. Entonces, se obtiene:
(Ax, x)
‖ Ax ‖≤ µ
es decir,
‖ Ax ‖≤ µ (18.226)
lo que significa que
‖ A ‖≤ µ (18.227)
De (18.219) y (18.227) se desprende que ‖ A ‖= µ.
Demostrado el teorema.
18.5.4 Operadores totalmente continuos
Definicion.
El operador A en el espacio de Hilbert H se llama totalmente continuo si transforma cadaconjunto compacto de elementos de H en un conjunto compacto.
Por la teorıa expuesta anteriormente, esto es equivalente a decir que A es totalmente continuoen H si de cualquier sucesion xn acotada de elementos xn ∈ H puede sacarse una subsucesionxnk
tal que la sucesion Axnk converge en la norma de H.
Es conveniente destacar lo siguiente. Ya habıamos visto que un operador lineal es continuo siy solo si es acotado, lo que equivale a decir si y solo si transforma cualquier conjunto acotadoen la norma de H, nuevamente, en un conjunto acotado.
Como todo conjunto compacto es acotado, resulta que todo operador totalmente continuo escontinuo.
El recıproco de esta afirmacion no es cierto. Es decir, no todo operador lineal continuo estotalmente continuo. Por ejemplo, el operador identidad Ix = x es continuo, pero no estotalmente continuo, ya que, digamos, transforma un conjunto acotado no compacto en sımismo.
Tiene lugar la siguiente afirmacion.
Teorema.

802 Jose Marın Antuna
Sea A un operador lineal totalmente continuo en H. Sea, ademas, xn una sucesion arbitrariade elementos de H que converge debilmente a x0 ∈ H y tal que ‖ xn ‖= 1. Entonces, la sucesionAxn converge a Ax0 en la norma de H.
Demostracion:
Como A es lineal y totalmente continuo, por tanto, es continuo. Entonces, en virtud del punto2, para el existe el operador conjugado A∗ y, para xn, y ∈ H se cumple que
(Axn, y) = (xn,A∗y) (18.228)
Como xn converge debilmente a x0, teniendo en cuenta (18.228), tendremos:
(xn,A∗y) → (x0,A
∗y) = (Ax0, y), ∀n→∞ (18.229)
Pero esto significa que Axn converge debilmente a Ax0.
Demostremos, ahora, que Axn converge a Ax0 en la norma de H.
Supongamos que no lo hace, es decir, que para cierta ε > 0 se puede hallar una subsucesionxmk
con k = 1, 2, ... tal que
‖ Axmk−Ax0 ‖≥ ε (18.230)
pero, como A es totalmente continuo y ‖ xn ‖= 1, podemos escoger una subsucesion xnp conp = 1, 2, ... de xmk
tal que la correspondiente subsucesion Axnp converja en la norma deH.
Como arriba demostramos que Axnp converge debilmente a Ax0, por lo tanto convergira aAx0 tambien en la norma de H.
Pero esto contradice la desigualdad (18.230) que era valida para todo mk y, obviamente, paratodo np.
De la contradiccion obtenida se desprende que (18.230) es falso, es decir, que, efectivamente, lasucesion Axn converge a Ax0 en la norma de H.
Demostrado el teorema.
Es conveniente senalar que el teorema demostrado es una consecuencia de un teorema masgeneral que dice:
Teorema.
Un operador A en H es totalmente continuo si y solo si transforma cualquier sucesion xnconvergente debilmente de elementos de H en una sucesion Axn convergente en la norma deH

Elementos de Espacios Funcionales y Operadores 803
La demostracion de este teorema puede verse en cursos mas especıficos de Analisis Funcional.
A modo de ejemplo ilustrativo de operador totalmente continuo veamos, de nuevo, el operadorintegral (18.195).
Tomemos una sucesion arbitraria xn(t) de elementos de L2[a, b] acotados en la norma de L2,o sea, tales que
‖ xn(t) ‖≤ C (18.231)
Entonces, por la desigualdad de Cauchy-Buniakovsky tendremos, haciendo yn(t) = Axn(t),que:
|yn(t)| ≡∣∣∣∣∫ b
a
K(t, s)xn(s)ds
∣∣∣∣ ≤ (∫ b
a
K2(t, s)ds
) 12
‖ xn ‖ (18.232)
lo que significa que la sucesion yn(t) es uniformemente acotada en [a, b]. Por consiguiente, deella puede sacarse una subsucesion convergente uniformemente en [a, b] y, ademas en la normade L2[a, b].
Como puede verse, de la continuidad -y, por tanto, de la continuidad uniforme- del nucleoK(t, s) en el cuadrado a ≤ t ≤ b, a ≤ s ≤ b se deduce que, para ε > 0 arbitrario, existe unaδ > 0 tal que
|K(t1, s)−K(t2, s)| ≤ε
C√b− a
(18.233)
para todo s ∈ [a, b] y todos t1, t2 ∈ [a, b] tales que |t1 − t2| < δ.
De (18.231), (18.233) y la desigualdad de Cauchy-Buniakovsky se obtiene que
|yn(t2)− yn(t1)| ≡∫ b
a
|K(t2, s)−K(t1, s)||xn(s)|ds ≤
≤ ε
C√b− a
∫ b
a
|xn(s)|ds ≤ε
C√b− a
‖ xn ‖(∫ b
a
ds
) 12
= ε (18.234)
para todo par t1, t2 ∈ [a, b] tal que |t1 − t2| < δ.
La desigualdad (18.234) demuestra la equicontinuidad de la sucesion yn(t) en [a, b]. De estamanera, queda establecido que el operador (18.195) es totalmente continuo.

804 Jose Marın Antuna
18.5.5 Autovalores de un operador autoconjugado totalmente con-tinuo
Definicion.
Un numero real λ se llama autovalor o valor propio del operador A si existe un elemento nonulo x ∈ H que satisface la ecuacion
Ax = λx (18.235)
El elemento no nulo que corresponde a λ se llama autovector o elemento propio del operadorA.
Si el operador A es lineal, entonces, para cualquier numero real α no nulo, el elemento αx estambien autovector de A correspondiente a λ.
Por lo tanto, podemos escoger la constante α de forma tal que los autovectores resulten nor-malizados, es decir, que ‖ x ‖= 1. Para ello, es suficiente elegir α = 1
‖x‖ .
Notese que (18.235) significa que la accion del operador sobre un autovector es equivalente amultiplicar el autovector por su autovalor. En ello radica la importancia de este concepto queen la Fısica tiene enormes aplicaciones.
No todo operador tiene autovalores; de ahı la importancia de la siguiente afirmacion.
Teorema.
Si A es un operador autoconjugado totalmente continuo en H, entonces este tiene al menosun autovalor que cumple la condicion |λ| =‖ A ‖. De todos los autovalores de A este es el demayor valor modular.
Demostracion:
Llamaremos M y m al supremo y al ınfimo del producto escalar (Ax, x), respectivamente, paratodo x ∈ H tal que ‖ x ‖= 1:
M = supx∈H,‖x‖=1
(Ax, x), m = infx∈H,‖x‖=1
(Ax, x) (18.236)
Para fijar ideas, consideremos que |M | > |m|, con M > 0. Demostraremos que λ = M esautovalor de A.
Por definicion de supremo, existe una sucesion xn de elementos de H con ‖ xn ‖= 1 tal que
(Axn, xn) → λ (18.237)

Elementos de Espacios Funcionales y Operadores 805
Como xn es acotado en la norma de H, por el teorema de compacidad debil en cualquierconjunto infinito acotado en la norma de H, existe una subsucesion de xn que convergedebilmente a cierto elemento x0 ∈ H. Renumerando dicha subsucesion, la representaremos porxn. Ası, xn converge debilmente a x0.
Pero, entonces, por el teorema del punto 4, la sucesion Axn converge a Ax0 en la norma deH.
Como A es autoconjugado, (Axn, x0) = (xn,Ax0), de lo que se deduce que
(Axn, xn)− (Ax0, x0) = (A(xn − x0), (xn + x0)) (18.238)
Apliquemos a (18.238) la desigualdad de Cauchy-Buniakovsky:
|(Axn, xn)− (Ax0, x0)| ≤‖ xn + x0 ‖ · ‖ Axn −Ax0 ‖→ 0 (18.239)
para n → ∞, ya que Axn → Ax0 en la norma de H y ‖ xn ‖= 1. Ası pues, quedademostrado que
(Axn, xn) → (Ax0, x0) (18.240)
De (18.237) y (18.240) se deduce que
(Ax0, x0) = λ (18.241)
Demostremos, ahora, que ‖ x0 ‖= 1. Por la desigualdad de Cauchy-Buniakovsky
|(xn, y)| ≤‖ xn ‖ · ‖ y ‖ (18.242)
para cualquier elemento y ∈ H. Tomemos en (18.242) el lımite para n → ∞; como xnconverge debilmente a x0 y ‖ xn ‖= 1, obtenemos:
|(x0, y)| ≤‖ y ‖ (18.243)
Como y es arbitrario, si tomamos en (18.243) y = x0, nos queda que
‖ x0 ‖≤ 1 (18.244)
Para demostrar que es el signo igual en (18.244) el unico posible, demostremos que 0 <‖ x0 ‖< 1nos da una contradiccion. Suponiendo, pues, que 0 <‖ x0 ‖< 1, tomemos y0 = x0
‖x0‖ . Entonces,
‖ y0 ‖= 1 y, como el operador es lineal:

806 Jose Marın Antuna
(Ay0, y0) =1
‖ x0 ‖2(Ax0, x0) =
λ
‖ x0 ‖2> λ (18.245)
donde hemos tenido en cuenta (18.241). Pero (18.245), teniendo en cuenta que λ = M , con-tradice a (18.236), pues significarıa que en y0 el producto (Ax, x) alcanzarıa un valor mayorque su supremo, lo que es absurdo.
Por consiguiente, tiene que ser ‖ x0 ‖= 1, forzosamente.
Demostremos, ahora, que x0 es un autovector correspondiente al autovalor λ. Para ello, anali-cemos la expresion:
‖ Ax0 − λx0 ‖2≡ (Ax0 − λx0,Ax0 − λx0) =‖ Ax0 ‖2 −2λ(Ax0, x0) + λ2 ‖ x0 ‖2 (18.246)
Tengamos en cuenta (18.241) en (18.246) y que ‖ x0 ‖= 1. Entonces, queda
‖ Ax0 − λx0 ‖2=‖ A ‖2 −λ2 (18.247)
Pero, λ = M =‖ A ‖2; por lo tanto, queda
‖ Ax0 − λx0 ‖2= 0 (18.248)
Pero esto significa que Ax0 = λx0, es decir, que, efectivamente, x0 es un autovector del autovalorλ.
En el caso en que |M | ≤ |m| se procede de manera similar, solo que, entonces, se debe tomarλ = m.
Solo resta demostrar que si hay otros autovalores, el autovalor |λ| =‖ A ‖ es el mayor de ellosen valor absoluto.
Sea λ1 otro autovalor del operador A y x1 el autovector normalizado que le corresponde. Estosignifica que Ax1 = λ1x1 y, por tanto, (Ax1, x1) = λ1. Pero, de (18.236) se desprende -ya queλ = M - que
|λ| = supx∈H,‖x‖=1
|(Ax, x)|
por lo que, automaticamente, |λ| ≥ |λ1|.
Demostrado el teorema.
Con ayuda del teorema acabado de demostrar analicemos la llamada ecuacion integral deFredholm de segundo tipo:
Elementos de Espacios Funcionales y Operadores 807
x(t) = µ
∫ b
a
K(t, s)x(s)ds (18.249)
Los valores de µ para los que (18.249) tiene solucion no trivial se llaman autovalores de laecuacion. Las soluciones no nulas que corresponden a esos autovalores se llaman autofuncionesde la ecuacion.
El inverso de un autovalor de (18.249) se llama numero caracterıstico de la ecuacion.
Evidentemente, si analizamos el operador integral A dado por (18.195), se ve que los autovaloresde dicho operador son iguales a los numeros caracterısticos de la ecuacion (18.249) y que lasautofunciones de dicho operador son las autofunciones de (18.249).
Bajo las condiciones de que el nucleo K(t, s) sea continuo en el cuadrado a ≤ t ≤ b, a ≤ s ≤ by simetrico, vimos que el operador (18.195) es lineal, autoconjugado y totalmente continuo. Porconsiguiente, en virtud del teorema que acabamos de demostrar, la ecuacion (18.249) con talnucleo tiene al menos un numero caracterıstico.
En en el libro de Ecuaciones Integrales del autor se estudia, especıficamente, la teorıa de lasecuaciones integrales. Para los nucleos simetricos se demuestra allı un teorema de existencia deal menos un autovalor y una autofuncion para la ecuacion integral del tipo (18.249). Aunque elteorema que aquı ya demostramos establece dicha existencia para todo operador autoconjugadototalmente continuo, cual es el caso del operador integral (18.195), mediante el teorema deexistencia que se estudia en dicho libro se desarrolla un metodo de aproximaciones sucesivaspara construir dicho autovalor y la autofuncion correspondiente, cuestion que tiene un valormetodologico practico de indudable importancia.
18.5.6 Propiedades fundamentales de los autovalores y las autofun-ciones de un operador lineal autoconjugado totalmente con-tinuo
Los autovalores y los autovectores de un operador lineal autoconjugado totalmente continuo enH tienen las siguientes propiedades.
1. Los autovectores x1 y x2, correspondientes a autovalores λ1 y λ2 diferentes entre sı, sonortogonales.
Demostracion:
Tenemos que Ax1 = λ1x1 y Ax2 = λ2x2, con λ1 6= λ2. Como A es autoconjugado, parala expresion siguiente tendremos:
(λ1 − λ2)(x1, x2) = (λ1x1, x2)− (λ2x1, x2) = (λ1x1, x2)− (x1, λ2x2) =
= (Ax1, x2)− (x1,Ax2) = (Ax1, x2)− (Ax1, x2) = 0 (18.250)

808 Jose Marın Antuna
Como λ1 6= λ2, de (18.250) se desprende que
(x1, x2) = 0 (18.251)
Demostrada la propiedad.
2. A un autovalor λ diferente de cero le puede corresponder solamente un numero finito deautovectores linealmente independientes.
Demostracion:
Supongamos lo contrario; que existe un numero infinito de autovectores linealmente inde-pendientes, correspondientes a cierto λ 6= 0. Suponiendo ya efectuado el proceso de ortog-onalizacion y de normalizacion de dichos autovectores, tendrıamos un sistema ortonormalinfinito xn de elementos de H, cada uno de los cuales es autovector del operador A,correspondiente al autovalor λ 6= 0. Por consiguiente, para cualquier elemento y ∈ Htiene lugar la desigualdad de Bessel:
∞∑n=1
(xn, y)2 ≤‖ y ‖2 (18.252)
(recuerdese que ‖ xn ‖= 1). Por lo tanto, se cumplira que
limn→∞
(xn, y) = 0 ≡ (0, y) (18.253)
Pero (18.253) significa que la sucesion de autovectores xn converge debilmente al ele-mento nulo de H. Como el operador A es totalmente continuo, del teorema del punto 4se deduce que la sucesion Axn converge al elemento nulo de H en la norma de dichoespacio. Pero, como Axn = λxn, por lo tanto,
‖ Axn ‖= |λ| (18.254)
La parte izquierda de (18.254) tiende a cero para n → ∞, por lo que resulta que |λ| =0. Esto contradice la hipotesis de que λ 6= 0. Ası pues, el numero de autofuncionescorrespondientes al autovalor λ tiene que ser finito.
Demostrada la propiedad.
Las propiedades hasta aquı demostradas nos permiten concluir que todos los autovectores,tanto los correspondientes a un mismo autovalor, como los correspondientes a autovalo-res diferentes, son mutuamente ortogonales y con normas iguales a la unidad; es decir,ortonormales.
3. Si el operador A tiene infinito numero de autovalores, entonces, cualquier subsucesionλn de autovalores es infinitesimal.
Demostracion:
Sea λn cualquier sucesion de autovalores y xn sus autovectores correspondientes que,por lo dicho anteriormente, ya consideramos ortonormales. Entonces, para cualquier y ∈H, igual a como hicimos para demostrar la propiedad 2, podemos escribir la desigualdad
Elementos de Espacios Funcionales y Operadores 809
de Bessel (18.252) de la que, igualmente, concluimos (18.253), lo que significa que lasucesion xn converge debilmente al elemento nulo.
Como el operador A es totalmente continuo, del teorema del punto 4 se deduce quela sucesion Axn converge a cero en la norma de H. Pero, entonces, de la ecuacionAxn = λnxn se deduce que
|λn| =‖ Axn ‖→ 0, ∀n→∞ (18.255)
Demostrada la propiedad.
Esta tercera propiedad nos permite afirmar que los autovalores de un operador linealautoconjugado totalmente continuo tienen como unico punto de acumulacion λ = 0. Ellosignifica que ellos son ordenables de acuerdo con sus valores modulares decrecientes:
|λ1| ≥ |λ2| ≥ |λ3| ≥ ... ≥ |λn| ≥ ... (18.256)
y que
limn→∞
|λn| = 0 (18.257)
Las propiedades aquı estudiadas seran de utilidad, tanto en el estudio del libro de Ecuacio-nes Integrales del autor, como en las aplicaciones de los operadores lineales autoconjugadostotalmente continuos en la Mecanica Cuantica.
18.6 Complementos de la teorıa espectral de operadores
Para concluir este capıtulo daremos, de forma sintetica, algunos conceptos generales que com-plementen lo estudiado.
18.6.1 Ecuaciones operacionales
En los espacios de Banach y, por tanto, en sus casos particulares, los de Hilbert, se definen lasllamadas ecuaciones operacionales lineales de la siguiente manera.
Definicion.
SeaX un espacio de Banach y A un operador totalmente continuo y sean los elementos x, y ∈ X.La ecuacion
Ax = y (18.258)
se llama ecuacion operacional de primer tipo y la ecuacion
810 Jose Marın Antuna
x− λAx = y (18.259)
se llama ecuacion operacional de segundo tipo.
Notese que la ecuacion (18.259) puede ser escrita en la forma equivalente siguiente:
(I− λA)x = y (18.260)
donde I es el operador identidad.
Es logico preguntarse para que valores de λ existe el operador inverso. Tiene lugar el siguienteconcepto.
Definicion.
Aquellos valores de λ para los cuales el operador I− λA es invertible se llaman valores regu-lares o puntos regulares del operador A. El conjunto de valores regulares se llama conjuntoresolvente del operador A y lo representaremos por ρ(A).
Aquellos valores de λ para los cuales el operador I − λA no es invertible forman un conjuntoque se denomina espectro del operador A y que se representa por σ(A).
Es evidente que, en general, σ(A) es el complemento de ρ(A) en el plano complejo.
Veamos, ahora, el concepto de autovalor para el caso general de un operador lineal totalmentecontinuo en un espacio de Banach.
Definicion.
Aquellos valores de λ, para los que la ecuacion operacional homogenea
(I− λA)x = 0 (18.261)
tiene solucion no trivial, se llaman autovalores del operador A. Las soluciones no trivialesque les corresponden se llaman autofunciones o autovectores del operador A.
Es de destacar que, para el caso particular de espacios de Hilbert y operadores autoconjugados,esta definicion coincide con la estudiada en el punto 5 del epıgrafe anterior, solo que alla lellamamos autovalor al inverso del parametro λ que figura en la ecuacion (18.261) lo que, porsupuesto, no tiene mayor trascendencia. Aquı hemos adoptado las formas (18.259) y (18.261)de las ecuaciones operacionales porque, escritas ası, nos permiten extender los resultados queobtengamos a las ecuaciones integrales que se estudian en el libro de Ecuaciones Integrales delautor.
Vale la pena aclarar, tambien, que, en el caso de un operador totalmente continuo cualquieraen un espacio de Banach arbitrario, el parametro λ es, en general, complejo, mientras que en el
Elementos de Espacios Funcionales y Operadores 811
caso de operadores autoconjugados en el espacio de Hilbert -como vimos en el epıgrafe anterior-es un numero real.
Es posible demostrar que ρ(A) es un conjunto abierto, por lo que su complemento, σ(A), esun conjunto cerrado.
En el caso de un espacio de dimension finita, el espectro coincide con el conjunto de autovalores,pero, si el espacio es de dimension infinita, el conjunto de los autovalores es un subconjunto delespectro, por lo que introduciremos los siguientes conceptos.
Definicion.
El conjunto de autovalores del operador A se denomina espectro puntual del operador. Elresto del espectro se denomina espectro continuo del operador.
Tiene lugar el siguiente teorema.
Teorema.
Todo autovalor pertenece al espectro.
Demostracion:
Sea λ0 un autovalor del operador A y x0 su autovector correspondiente. Supongamos que λ0
no pertenece al espectro. Entonces, de acuerdo con lo establecido arriba, ello significarıa queexistirıa el operador inverso
(I− λ0A)−1 = S(λ0) (18.262)
Analicemos la ecuacion
(I− λ0A)x = x0 (18.263)
Como el operador es invertible, existira la solucion
x = S(λ0)x0 (18.264)
Apliquemos a (18.264) el operador de la ecuacion (18.263); obtenemos:
(I− λ0A)S(λ0)x0 = (I− λ0A)x ≡ x0 (18.265)
Conmutando los operadores en (18.265), tendremos:
S(λ0)(I− λ0A)x0 = x0 (18.266)
812 Jose Marın Antuna
Pero (I− λ0A)x0 = 0, pues, por hipotesis, x0 es autovector del autovalor λ0. De (18.266), portanto, se obtendrıa que x0 ≡ 0, lo que significarıa que no es autovector, ya que, por definicion,los autovectores son las soluciones no triviales correspondientes a los autovalores.
Hemos, pues, llegado a una contradiccion. Por lo tanto, efectivamente, λ0 tiene que perteneceral espectro.
Demostrado el teorema.
A modo de ejemplo, veamos en el espacio C[a, b] el operador
Ax = µ(t)x(t) (18.267)
donde µ(t) es una funcion continua dada.
Entonces, la ecuacion operacional (18.260) adopta la forma
[1− λµ(t)]x(t) = y(t) (18.268)
Por lo tanto, si se cumple que
λ 6= 1
µ(t)(18.269)
entonces, el operador es invertible y la solucion de la ecuacion (18.268) sera:
x(t) =y(t)
1− λµ(t)(18.270)
De acuerdo con la definicion tendremos, por lo tanto, que el espectro del operador (18.267) enC[a, b] sera
λ =1
µ(t)(18.271)
es decir, el conjunto de todos los valores funcionales de [µ(t)]−1 para t ∈ [a, b].
Este es un ejemplo de espectro continuo, sin autovalores.
18.6.2 Operador resolvente
Introduzcamos la notacion
Elementos de Espacios Funcionales y Operadores 813
B(λ) = I− λA (18.272)
Por la definicion, en todos los puntos regulares ρ(A) existe el operador inverso que denotaremospor
B−1(λ) ≡ S(λ) = I + λR(λ) (18.273)
donde llamaremos a R(λ) operador resolvente
De (18.273), si λ 6= 0, obtenemos para el operador resolvente la expresion:
R(λ) =S(λ)− I
λ(18.274)
Por definicion de operador inverso:
(I− λA)(I + λR(λ)) = I (18.275)
(I + λR(λ))(I− λA) = I (18.276)
De (18.275) es facil obtener que:
R−A = λAR (18.277)
y, de (18.276), que
R−A = λRA (18.278)
Las igualdades (18.277) y (18.278) nos permiten afirmar que, por lo tanto, para cualquier λ, siR existe, entonces R y A son operadores que conmutan:
AR = RA (18.279)
Tiene lugar la siguiente afirmacion.
Teorema.
Si, para cierta λ, existe un operador T tal que

814 Jose Marın Antuna
T−A = λAT = λTA (18.280)
entonces, dicha λ es un valor regular del operador A (o sea, λ ∈ ρ(A)) y T es el operadorresolvente.
Demostracion:
Demostremos, primero, que T es el operador resolvente. Para ello demostremos que el elementox definido por
x = (I + λT)y (18.281)
es solucion de la ecuacion (18.260).
Efectivamente, tenemos:
(I−λA)x = (I−λA)(I+λT)y = (I+λT−λA−λ2AT)y = (I+λ(T−A)−λ2AT)y (18.282)
Teniendo en cuenta en (18.282) la primera igualdad de (18.280), nos queda:
(I− λA)x = (I + λ2AT− λ2AT)y = Iy = y (18.283)
lo que demuestra que, efectivamente, x satisface la ecuacion (18.260).
Demostremos, ahora, que λ es regular. Para ello, demostremos que la solucion es unica.Apliquemos λT a la ecuacion (18.260), donde x es la solucion; tendremos:
λTy = λT(I− λA)x = λTx− λ2TAx (18.284)
Pero, teniendo en cuenta la segunda igualdad en (18.280):
λTy = λTx− λ(T−A)x = λAx (18.285)
De (18.285) se deduce que, para esa λ, la solucion de (18.260) es:
x = y + λAx ≡ y + λTy = (I + λT)y ≡ x (18.286)
Es decir, es unica y coincide con x. Por consiguiente, queda demostrada la unicidad de lasolucion para esa λ, lo que significa que, efectivamente, λ es un valor regular.
Elementos de Espacios Funcionales y Operadores 815
Demostrado el teorema.
Es posible demostrar una importante afirmacion:
Teorema.
Los operadores resolventes para distintas λ conmutan.
Demostracion:
Sean λ1 y λ2 dos valores del parametro λ tales que λ1 6= λ2. De acuerdo con (18.277) y (18.278),podemos escribir:
λ1R(λ1)A = R(λ1)−A (18.287)
λ2AR(λ2) = R(λ2)−A (18.288)
Multipliquemos (18.287) por la derecha por λ2R(λ2) y (18.288) por la izquierda por λ1R(λ1)y restemos ambas expresiones. Como resultado se obtiene:
λ1λ2R(λ1)AR(λ2)− λ1λ2R(λ1)AR(λ2) =
= λ2R(λ1)R(λ2)− λ2AR(λ2)− λ1R(λ1)R(λ2) + λ1R(λ1)A
Es decir:
0 = (λ2 − λ1)R(λ1)R(λ2)− λ2AR(λ2) + λ1R(λ1)A (18.289)
De (18.289) y teniendo en cuenta (18.287) y (18.288), se obtiene:
(λ2 − λ1)R(λ1)R(λ2) = R(λ2)−R(λ1) (18.290)
y de (18.290)
R(λ1)R(λ2) =R(λ2)−R(λ1)
λ2 − λ1
≡ R(λ1)−R(λ2)
λ1 − λ2
= R(λ2)R(λ1) (18.291)
La igualdad (18.291) significa que, efectivamente, R(λ1) y R(λ2) conmutan.
Demostrado el teorema.

816 Jose Marın Antuna
18.6.3 Solucion de las ecuaciones operacionales por el metodo deaproximaciones sucesivas. Serie de Neumann
Para la ecuacion (18.259) que a continuacion escribiremos en la forma:
x = y + λAx (18.292)
construyamos las aproximaciones sucesivas de la siguiente manera:
x0 = y (18.293)
x1 = y + λAx0 ≡ (I + λA)y
x2 = y + λAx1 ≡ (I + λA + λ2A2)y ≡2∑
k=0
(λA)ky
..................................................
xn =n∑k=0
(λA)ky ≡ Sn(λ)y (18.294)
donde hemos llamado
Sn(λ) =n∑k=0
(λA)k (18.295)
Definicion.
La expresion (18.295) se llama suma parcial de la siguiente serie:
S(λ) =∞∑k=0
(λA)k (18.296)
que se conoce con el nombre de serie de Neumann.
Es evidente que, si la serie de Neumann (18.296) converge en la norma del espacio de Banachconsiderado, entonces el metodo de aproximaciones sucesivas converge. Demostraremos que, ental caso, el metodo de aproximaciones sucesivas converge a la solucion de la ecuacion operacional(18.292). Es decir, demostraremos el siguiente teorema.

Elementos de Espacios Funcionales y Operadores 817
Teorema.
Si, para cierta λ, la serie de Neumann (18.296) converge en la norma del espacio de Banachconsiderado, entonces, para esa λ, existe la solucion unica de la ecuacion operacional (18.292)dada por el metodo de aproximaciones sucesivas. Ademas, la serie de Neumann converge en lanorma del espacio para
|λ| < 1
‖ A ‖(18.297)
Demostracion:
Demostremos, primero, bajo el supuesto de que la serie de Neumann converge en la normadel espacio para una λ dada, que las aproximaciones sucesivas convergen a una solucion de laecuacion (18.71) y que esta solucion es unica. Como la serie converge, existe el lımite
x = S(λ)y = limn→∞
Sn(λ)y (18.298)
Apliquemos a (18.298) la operacion λA; tendremos:
λAx = λAS(λ)y = limn→∞
[λA
n∑k=0
(λA)k
]y = lim
n→∞
n∑k=0
(λA)k+1y = limn→∞
n+1∑k=1
(λA)ky =
= limn→∞
[n+1∑k=0
(λA)k − I
]y = [S(λ)− I]y = S(λ)y − y = x− y(18.299)
Esto significa que
λAx ≡ x− y (18.300)
Por lo tanto, queda demostrado que existe la solucion de la ecuacion (18.292), dada por elmetodo de aproximaciones sucesivas.
Demostremos que esta solucion es unica; para ello, basta demostrar que la ecuacion homogenea
x = λAx (18.301)
solo tiene solucion trivial. Supongamos lo contrario, es decir, que x 6= 0 para la λ dada es unautovector de (18.301) y analicemos la ecuacion
x = λAx+ x (18.302)
818 Jose Marın Antuna
Para hallar la solucion de (18.302) apliquemos el metodo de aproximaciones sucesivas; ten-dremos:
x0 = x
x1 = x+ λAx0 ≡ x+ x = 2x
x2 = 3x
...................................................
xn = (n+ 1)x (18.303)
La expresion (18.303) del enesimo termino de estas aproximaciones sucesivas nos indica que,en este caso, las aproximaciones sucesivas divergen, salvo en el caso en que x ≡ 0.
Por consiguiente, la ecuacion homogenea (18.301) solo puede tener solucion trivial, lo quedemuestra que, efectivamente, la ecuacion no homogenea (18.292) tiene solucion unica.
Demostremos, ahora, que la serie de Neumann converge en la norma del espacio para valoresde λ que cumplan la desigualdad (18.297).
Como el espacio de Banach es completo, bastara con demostrar que la sucesion (18.295) esfundamental. Sea ε > 0. Tenemos que:
‖ Sn − Sm ‖=
∣∣∣∣∣∣∣∣∣∣n∑k=0
(λA)k −m∑k=0
(λA)k
∣∣∣∣∣∣∣∣∣∣ =
∣∣∣∣∣∣∣∣∣∣
n∑k=m+1
(λA)k
∣∣∣∣∣∣∣∣∣∣ ≤
n∑k=m+1
(|λ| ‖ A ‖)k < ε (18.304)
siempre que n,m > N(ε), pues la serie geometrica
∞∑k=0
(|λ| ‖ A ‖)k =1
1− |λ| ‖ A ‖(18.305)
ya que |λ| ‖ A ‖< 1 por (18.297).
Demostrado el teorema.

Elementos de Espacios Funcionales y Operadores 819
18.6.4 Propiedades analıticas de la resolvente
Tiene lugar el siguiente teorema.
Teorema.
Si λ0 es un valor regular del operador A, entonces, el conjunto de λ tales que
|λ− λ0| <1
‖ R(λ0) ‖(18.306)
es tambien regular del operador A y tiene lugar el desarrollo
R(λ) = R(λ0) + (λ− λ0)R2(λ0) + (λ− λ0)
2R3(λ0) + ... ≡∞∑k=0
Rk+1(λ0)(λ− λ0)k (18.307)
Es decir, el operador resolvente R(λ) en el cırculo (18.306) es una funcion analıtica de λ y, portanto, admite el desarrollo de Taylor (18.307).
Demostracion:
Por hipotesis, λ0 es un valor regular del operador A. Analicemos el siguiente operador auxiliar:
B(λ0, µ) = I− µR(λ0) (18.308)
y definamos para el su inverso y su resolvente:
B−1(λ0, µ) ≡ [I− µR(λ0)]−1 = I + µR(λ0, µ) (18.309)
donde R(λ0, µ) es el operador resolvente de B(λ0, µ). En virtud del teorema del punto anterior,podemos afirmar que los valores de µ que cumplan que
|µ| < 1
‖ R(λ0) ‖(18.310)
son valores regulares de R(λ0). Ademas, como, en este caso, la ecuacion
(I− µR(λ0, µ))x = y (18.311)
tiene por solucion
820 Jose Marın Antuna
x = (I + µR(λ0, µ))y ≡∞∑k=0
µkRk(λ0)y (18.312)
De (18.312) se tiene que
I + µR(λ0, µ) = I +∞∑k=1
µkRk(λ0) (18.313)
de donde:
R(λ0, µ) =∞∑k=1
µk−1Rk(λ0) (18.314)
Analicemos, ahora, el operador R(λ0, µ) evaluado en −λ0: R(λ0,−λ0). Tenemos, de (18.309),que:
B−1(λ0,−λ0) ≡ [I + λ0R(λ0)]−1 = I− λ0R(λ0,−λ0) (18.315)
Pero, por ser R(λ0) el resolvente de A:
[I + λ0R(λ0)]−1 = I− λ0A (18.316)
Comparando (18.315) y (18.316), concluimos que
A = R(λ0,−λ0) (18.317)
Ası pues, como λ0 es un punto regular de A, quiere decir que es un punto regular de R(λ0,−λ0).
Analicemos, ahora, el operador R(λ0, µ) evaluado en λ − λ0: R(λ0, λ − λ0). Por el segundoteorema del punto 2:
R(λ0, λ− λ0)R(λ0,−λ0) = R(λ0,−λ0)R(λ0, λ− λ0) (18.318)
y, por la formula (18.289) de ese mismo teorema, (18.318) es igual a
R(λ0, λ− λ0)−R(λ0,−λ0)
λ− λ0 − (−λ0)≡ R(λ0, λ− λ0)−R(λ0,−λ0)
λ(18.319)
Teniendo en cuenta (18.317), de la igualdad de (18.318) y (18.319) concluimos que

Elementos de Espacios Funcionales y Operadores 821
R(λ0, λ− λ0)A =R(λ0, λ− λ0)−A
λ(18.320)
Es decir:
λR(λ0, λ− λ0)A = R(λ0, λ− λ0)−A (18.321)
Por el primer teorema del punto 2, (18.321) significa que R(λ0, λ − λ0) ≡ R(λ), o sea, es eloperador resolvente de A y las λ que cumplen con (18.306) son valores regulares.
Ası pues, por la formula (18.274), para el operador resolvente tenemos que:
R(λ0, λ− λ0) ≡ R(λ) =S(λ0, λ− λ0)− I
λ− λ0
(18.322)
De (18.322) tenemos que
R(λ) =
∑∞k=0(λ− λ0)
kRk(λ0)− I
λ− λ0
=∞∑k=0
Rk(λ0)(λ− λ0)k−1 =
=∞∑n=0
Rn+1(λ0)(λ− λ0)n (18.323)
con lo que queda demostrada la convergencia de la serie (18.307) (o sea, de la serie (18.314)con µ = λ− λ0).
Demostrado el teorema.
El teorema que acabamos de demostrar significa que dentro del cırculo (18.306) centrado en λ0
y de radio 1/ ‖ R(λ0) ‖ que pertenece al conjunto resolvente ρ(A) del operador A, el operadorde la ecuacion no homogenea (18.260) es invertible y dicha ecuacion tiene solucion unica y lacorrespondiente ecuacion homogenea (18.261) solo tiene solucion trivial.
Por lo tanto, en dicho cırculo no existen autovalores del operador A y el operador resolventeR(λ1) es una funcion analıtica de λ.
Es conveniente destacar lo siguiente. El teorema demostrado establece que, dado un valorregular del operador A, existe un cırculo centrado en el y de radio 1/ ‖ R(λ0) ‖ dentro del cualel operador resolvente es analıtico.
Notese que, por la definicion de operador resolvente (18.274) y la expresion de la serie (18.296)
limλ→0
R(λ) = A (18.324)
822 Jose Marın Antuna
Por lo tanto, para λ0 → 0, el cırculo (18.306) se transforma en el cırculo (18.297), que resultarael cırculo maximo de analiticidad del operador R(λ).
Los cırculos (18.306), para distintos λ0, son tales que no se salen del cırculo maximo (18.297).
Esto significa que el conjunto resolvente ρ(A) de un operador A totalmente continuo en unespacio de Banach es un cırculo en el plano complejo λ, donde λ es el parametro que figura enla ecuacion operacional (18.260), centrado en cero y de radio 1/ ‖ A ‖.
Dentro de dicho cırculo el operador resolvente R(λ) es una funcion analıtica de λ y admite, portanto, un desarrollo en serie de Taylor.
Fuera de dicho cırculo el operador R(λ) tiene singularidades que forman el espectro σ(A) deloperador A.
Dicho espectro esta formado, en general, por puntos singulares aislados de R(λ) (espectrodiscreto, autovalores de A), para los cuales la ecuacion homogenea (18.261) tiene solucion notrivial (autovectores) y por singularidades no aisladas que conforman el espectro continuo deloperador A.
Puede demostrarse que, en general, en las singularidades aisladas de R(λ), es decir, para losautovalores de A, la ecuacion operacional (18.260) puede tener, o bien infinitas soluciones, obien no ser soluble (no tener solucion).
Esta afirmacion, conocida con el nombre de Alternativa de Fredholm es demostrada en ellibro de Ecuaciones Integrales del autor.
Para cerrar este epıgrafe, enunciemos y demostremos la siguiente afirmacion.
Teorema.
Sea λn una sucesion de puntos regulares del operador A convergente a cierto λ0 y tal que‖ R(λn) ‖< r <∞. Entonces, λ0 es un punto regular del operador A.
Demostracion:
Como R(λ) es el operador resolvente, en virtud de (18.288) podemos escribir que:
R(λn)−R(λm) = (λn − λm)R(λn)R(λm) (18.325)
Por lo tanto:
‖ R(λn)−R(λm) ‖= |λn − λm| ‖ R(λn) ‖‖ R(λm) ‖< ε (18.326)
ya que, como λn converge, para ε > 0 existe una N(ε) > 0 tal que n,m > N implican que
|λn − λm| <ε
‖ R(λn) ‖‖ R(λm) ‖(18.327)

Elementos de Espacios Funcionales y Operadores 823
La desigualdad (18.326) significa que la sucesion R(λn) es fundamental y, como nuestroespacio es de Banach, converge en la norma de dicho espacio. Por hipotesis tenemos que
limn→∞
λn = λ0 (18.328)
Llamaremos
T = limn→∞
R(λn) (18.329)
Entonces, por (18.285) y (18.286), podemos escribir:
λnR(λn)A = λnAR(λn) = R(λn)−A (18.330)
Tomando el lımite para n→∞ en (18.330), obtenemos:
λ0TA = λ0AT = T−A (18.331)
Pero, por el primer teorema del punto 2, (18.331) significa que T = R(λ0) es el operadorresolvente y, por lo tanto, λ0 es un punto regular.
Demostrado el teorema.
18.7 Operadores no acotados en un espacio de Hilbert
Para concluir el capıtulo, veremos, muy brevemente, los conceptos esenciales de una clase deoperadores de gran importancia en las aplicaciones fısicas: los operadores no acotados.
En un espacio de Hilbert complejo H consideraremos un operador lineal A con campo dedefinicion D(A) denso en H. Sea A∗ el operador conjugado de A.
Definicion.
El operador A se llama simetrico si D(A) ⊂ D(A∗) y sobre D(A) se cumple la igualdad
A∗x = Ax (18.332)
El operador A se llama autoconjugado si D(A) = D(A∗) y sobre D(A) se cumple la igualdad(18.332). Por lo tanto, la igualdad
(Ax, y) = (x,Ay) (18.333)

824 Jose Marın Antuna
para cualesquiera x, y ∈ D(A) es valida, tanto para un operador simetrico, como para unoperador autoconjugado.
Un operador simetrico A se llama no negativo si
(Ax, x) ≥ 0 (18.334)
para todo x ∈ D(A); positivo si cumple (18.334) y la igualdad a cero en (18.334) se cumplesolo para x = 0.
El operador simetrico A se llama definido positivo si existe un γ > 0 tal que, para todox ∈ D(A), se cumple la desigualdad
(Ax, x) ≥ γ ‖ x ‖2 (18.335)
El operador U que aplica L2[a, b] en L2[a, b] definido por
Ux(t) = − d
dt
[k(t)
dx
dt
]+ q(t)x(t) (18.336)
con campo de definicion D(U) compuesto por funciones x(t) dos veces diferenciables en [a, b]y que satisfagan las condiciones de frontera
α1x(a)− α2x′(a) = 0, α2
1 + α22 6= 0
β1x(b) + β2x′(b) = 0, β2
1 + β22 6= 0 (18.337)
se llama operador de Sturm-Liouville. En esta definicion se supone que k(t) ∈ C1[a, b] yque no se anula en [a, b] y que q(t) ∈ C[a, b].
Puede demostrarse que el operador de Sturm-Liouville U es simetrico en el espacio L2[a, b].
Definicion.
Se llama funcion de Green para el operador U a la funcion
G(s, t) = − 1
W0
u(s)v(t), ∀a ≤ s ≤ t ≤ b (18.338)
= − 1
W0
u(t)v(s), ∀a ≤ t ≤ s ≤ b
donde u(t) y v(t) son soluciones no nulas de la ecuacion Ux(t) = 0 que cumplen, respecti-vamente, la primera y la segunda de las condiciones de frontera (18.337); W0 = k(t)W (t) =k(a)W (a) y

Elementos de Espacios Funcionales y Operadores 825
W (t) =
∣∣∣∣ u(t) v(t)u′(t) v′(t)
∣∣∣∣ (18.339)
es el llamado wronskiano de las funciones u(t) y v(t).
Tiene lugar el siguiente teorema.
Teorema.
Sean k(t) > 0, q(t) ≥ 0, αi ≥ 0, βi ≥ 0, i = 1, 2. Si se cumple, al menos, una de las siguientescondiciones:
1. q(t) 6= 0
2. α1 6= 0
3. β1 6= 0
entonces, para cualquier f(t) ∈ C[a, b], la ecuacion
Ux(t) = f(t) (18.340)
tiene por solucion unica x(s) ∈ D(U) a la expresion:
x(s) =
∫ b
a
G(s, t)f(t)dt (18.341)
No procederemos a la demostracion de este teorema ahora, ya que estos conceptos se estudiancon mayor detenimiento en el libro de Ecuaciones Integrales del autor.
A modo de comentario final solo queremos destacar que el concepto de funcion de Green queaquı hemos dado y sobre el que se profundiza en el citado libro de Ecuaciones Integrales estafuertemente ligado al concepto de solucion fundamental de un operador estudiado anteriormenteen la presente obra.
La teorıa de los operadores no acotados es de gran importancia para la Fısica Matematica; ellector interesado en profundizar en ella puede remitirse a literatura especializada sobre el tema.
De hecho, en este libro hemos estado desarrollando la teorıa y las aplicaciones de estos operado-res de manera rigurosa, por lo que para el lector al que esta dedicado tiene en el la informacionmas importante y completa que necesita para la comprension y las aplicaciones de dichosoperadores en su trabajo profesional.
Con este ultimo epıgrafe concluimos el estudio del capıtulo sobre los elementos de espaciosfuncionales y operadores, el que trata de complementar la teorıa de los capıtulos anteriores

826 Jose Marın Antuna
y dar algunas generalizaciones utiles para futuras aplicaciones en el vasto campo de la FısicaMatematica.
Capıtulo 19
Principales Sistemas de Coordenadas
Sean x, y, z las coordenadas cartesianas de un punto en R3 y q1, q2, q3 sus coordenadascurvilıneas ortogonales. El cuadrado del elemento de longitud se expresa como:
ds2 = dx2 + dy2 + dz2 = H21dq
21 +H2
2dq22 +H2
3dq23 (19.1)
donde
Hi =
√(∂x
∂qi
)2
+
(∂y
∂qi
)2
+
(∂z
∂qi
)2
(19.2)
son los coeficientes metricos o coeficientes de Lame. Un sistema ortogonal de coordenadasse caracteriza completamente mediante los coeficientes metricos H1, H2, H3.
A continuacion expresaremos los principales operadores de la Fısica Matematica en coordenadascurvilıneas:
∇u ≡ grad u =3∑j=1
1
Hj
∂u
∂qjij (19.3)
∇ ·A ≡ divA =1
H1H2H3
[∂
∂q1(H2H3A1) +
∂
∂q2(H3H1A2) +
∂
∂q3(H1H2A3)
](19.4)
∇×A ≡ rotA =1
H1H2H3
∣∣∣∣∣∣H1i1 H2i2 H3i3∂∂q1
∂∂q2
∂∂q3
H1A1 H2A2 H3A3
∣∣∣∣∣∣ (19.5)
827

828 Jose Marın Antuna
∇2u ≡ ∇ ·∇u =1
H1H2H3
[∂
∂q1
(H2H3
H1
∂u
∂q1
)+
∂
∂q2
(H3H1
H2
∂u
∂q2
)+
∂
∂q3
(H1H2
H3
∂u
∂q3
)](19.6)
donde i1, i2, i3 son los vectores bases unitarios, A = (A1, A2, A3) es una funcion vectorialarbitraria y u es una funcion escalar arbitraria.
19.1 Coordenadas rectangulares cartesianas
q1 = x, q2 = y, q3 = z, H1 = 1, H2 = 1, H3 = 1
∇u ≡ grad u =∂u
∂xi +
∂u
∂yj +
∂u
∂zk (19.7)
∇ ·A ≡ divA =∂Ax∂x
+∂Ay∂y
+∂Az∂z
(19.8)
∇×A ≡ rotA =
∣∣∣∣∣∣i j k∂∂x
∂∂y
∂∂z
Ax Ay Az
∣∣∣∣∣∣ (19.9)
∇2u = uxx + uyy + uzz (19.10)
donde i, j, k son los vectores directores unitarios de los ejes x, y, z.
19.2 Coordenadas Cilındricas
q1 = r, q2 = ϕ, q3 = z
La relacion con las coordenadas cartesianas viene dada por las ecuaciones
x = r cosϕ, y = r sinϕ, z = z (19.11)
Las superficies de coordenadas son: r = const. (cilindros), ϕ = const (semiplanos), z = const(planos).
H1 = 1, H2 = r, H3 = 1 (19.12)
Principales Sistemas de Coordenadas 829
∇u ≡ grad u =∂u
∂ri1 +
1
r
∂u
∂ϕi2 +
∂u
∂zi3 (19.13)
∇ ·A ≡ divA =1
r
∂
∂r(rA1) +
1
r
∂A2
∂ϕ+∂A3
∂z(19.14)
∇×A ≡ rotA =
(1
r
∂A3
∂ϕ− ∂A2
∂z
)i1 +
(∂A1
∂z− ∂A3
∂r
)i2 +
[1
r
∂
∂r(rA2)−
1
r
∂A1
∂ϕ
]i3 (19.15)
∇2u =1
r
∂
∂r
(r∂u
∂r
)+
1
r2
∂2u
∂ϕ2+∂2u
∂z2(19.16)
19.3 Coordenadas Esfericas
q1 = r, q2 = θ, q3 = ϕ
La relacion con las coordenadas cartesianas esta dada por las ecuaciones
x = r cosϕ sin θ, y = r sinϕ cos θ, z = r cos θ (19.17)
Las superficies de coordenadas son: r = const (esferas concentricas), ϕ = const (semiplanos),θ = const (rama de un cono).
H1 = 1, H2 = r, H3 = r sin θ (19.18)
∇u ≡ grad u =∂u
∂ri1 +
1
r
∂u
∂θi2 +
1
r sin θ
∂u
∂ϕi3 (19.19)
∇ ·A ≡ divA =1
r2
∂
∂r(r2A1) +
1
r sin θ
∂
∂θ(sin θA2) +
1
r sin θ
∂A3
∂ϕ(19.20)
∇×A ≡ rotA =1
r sin θ
[∂
∂θ(sin θA3)−
∂A2
∂ϕ
]i1 +
1
r
[1
sin θ
∂A1
∂ϕ− ∂
∂r(rA3)
]i2 +
+1
r
[∂
∂r(rA2)−
∂A1
∂θ
]i3 (19.21)
∇2u =1
r2
∂
∂r
(r2∂u
∂r
)+
1
r2 sin θ
∂
∂θ
(sin θ
∂u
∂θ
)+
1
r2 sin2 θ
∂2u
∂ϕ2(19.22)

830 Jose Marın Antuna
19.4 Coordenadas Elıpticas
q1 = λ, q2 = µ, q3 = z
que se determinan por medio de las formulas de transformacion
x = cλµ, y =√
(λ2 − 1)(1− µ2), z = z (19.23)
donde c es un factor dimensional.
H1 = c
√λ2 − µ2
λ2 − 1, H2 = c
√λ2 − µ2
1− µ2, H3 = 1 (19.24)
Las superficies de coordenadas son: λ = const (cilindros de seccion elıptica con focos en lospuntos x = ±c, y = 0), µ = const (familia de cilindros hiperbolicos con iguales focos), z = const(planos).
∇u ≡ grad u =1
c
√λ2 − 1
λ2 − µ2
∂u
∂λi1 +
1
c
√1− µ2
λ2 − µ2
∂u
∂µi2 +
∂u
∂zi3 (19.25)
∇ ·A ≡ divA =
√λ2 − 1
c(λ2 − µ2)
∂
∂λ(√λ2 − µ2A1) +
√1− µ2
c(λ2 − µ2)
∂
∂µ(√λ2 − µ2A2) +
∂A3
∂z(19.26)
∇×A ≡ rotA =
[ √1− µ2
c(λ2 − µ2)
∂
∂µ(√λ2 − µ2A3)−
∂A2
∂z
]i1 +
+
[∂A1
∂z−
√λ2 − 1
c(λ2 − µ2)
∂
∂λ(√λ2 − µ2A3)
]i2 +
+
[ √λ2 − 1
c(λ2 − µ2)
∂
∂λ(√λ2 − µ2A2)−
√1− µ2
c(λ2 − µ2)
∂
∂µ(√λ2 − µ2A1)
]i3 (19.27)
∇2u =
√λ2 − 1
c(λ2 − µ2)
∂
∂λ
(√λ2 − 1
∂u
∂λ
)+
√1− µ2
c(λ2 − µ2)
∂
∂µ
(√1− µ2
∂u
∂µ
)+∂2u
∂z2(19.28)
19.5 Coordenadas Parabolicas
Si r, ϕ son las coordenadas polares del punto en el plano, las coordenadas parabolicas se definenpor medio de las formulas:

Principales Sistemas de Coordenadas 831
q1 = λ =√
2r sinϕ
2, q2 = µ =
√2r cos
ϕ
2, q3 = z (19.29)
Para los coeficientes de Lame se obtiene:
H1 = H2 =√λ2 + µ2, H3 = 1 (19.30)
Las superficies de coordenadas λ = const y µ = const son cilindros parabolicos que se cortan;las rectas que los forman son paralelas al eje z.
∇u ≡ grad u =1√
λ2 + µ2
∂u
∂λi1 +
1√λ2 + µ2
∂u
∂µi2 +
∂u
∂zi3 (19.31)
∇ ·A ≡ divA =1
λ2 + µ2
∂
∂λ(√λ2 + µ2A1) +
1
λ2 + µ2
∂
∂µ(√λ2 + µ2A2) +
∂A3
∂z(19.32)
∇×A ≡ rotA =
[1
λ2 + µ2
∂
∂µ(√λ2 + µ2A3)−
∂A2
∂z
]i1 +
+
[∂A1
∂z− 1
λ2 + µ2
∂
∂λ(√λ2 + µ2A3)
]i2 +
+1
λ2 + µ2
[∂
∂λ(√λ2 + µ2A2)−
∂
∂µ(√λ2 + µ2A1)
]i3 (19.33)
∇2u =1
λ2 + µ2
∂2u
∂λ2+
1
λ2 + µ2
∂2u
∂µ2+∂2u
∂z2(19.34)
19.6 Coordenadas elipsoidales
Se definen mediante las ecuaciones:
1. Ecuacion de una elipsoide:
x2
a2 + λ+
y2
b2 + λ+
z2
c2 + λ= 1, λ > −c2 (19.35)
2. Ecuacion de un hiperboloide de una hoja:
x2
a2 + µ+
y2
b2 + µ+
z2
c2 + µ= 1, −b2 < µ < −c2 (19.36)

832 Jose Marın Antuna
3. Ecuacion de un hiperboloide de dos hojas:
x2
a2 + ν+
y2
b2 + ν+
z2
c2 + ν= 1, −a2 < ν < −b2 (19.37)
donde a > b > c.
A cada punto (x, y, z) le corresponde solo un sistema de valores
q1 = λ, q2 = µ, q3 = ν
que se denominan coordenadas elipsoidales. Las coordenadas x, y, z se expresan a traves deλ, µ, ν explıcitamente mediante las formulas:
x = ±
√(λ+ a2)(µ+ a2)(ν + a2)
(b2 − a2)(c2 − a2)(19.38)
y = ±
√(λ+ b2)(µ+ b2)(ν + b2)
(c2 − b2)(a2 − b2)(19.39)
z = ±
√(λ+ c2)(µ+ c2)(ν + c2)
(a2 − c2)(b2 − c2)(19.40)
Los coeficientes de Lame son:
H1 =1
2
√(λ− µ)(λ− ν)
R2(λ), H2 =
1
2
√(µ− ν)(µ− λ)
R2(µ), H3 =
1
2
√(ν − λ)(ν − µ)
R2(ν)(19.41)
donde
R(s) =√
(s+ a2)(s+ b2)(s+ c2) (19.42)
El laplaciano puede expresarse en la forma:
∇2u =4
(λ− µ)(λ− ν)(µ− ν)
[(µ− ν)R(λ)
∂
∂λ
(R(λ)
∂u
∂λ
)+ (ν − λ)R(µ)
∂
∂µ
(R(µ)
∂u
∂µ
)]+
4
(λ− µ)(λ− ν)(µ− ν)
[(λ− µ)R(ν)
∂
∂ν
(R(ν)
∂u
∂ν
)](19.43)

Principales Sistemas de Coordenadas 833
La solucion particular de la ecuacion de Laplace que depende solo de λ: U = U(λ) se expresapor la formula
U = A
∫dλ
R(λ)+B (19.44)
donde A y B son constantes arbitrarias.
19.7 Coordenadas elipsoidales degeneradas
a) Para el elipsoide de rotacion alargado las coordenadas elipsoidales degeneradas (α, β, ϕ) sedefinen mediante las formulas:
x = c sin β cosϕ, y = c sin β sinϕ, z = coshα cos β (19.45)
donde c es un factor de escala, 0 ≤ α <∞, 0 ≤ β ≤ π, −π < ϕ ≤ π.
Las superficies de coordenadas son: α = const (elipsoides de rotacion alargados), β = const(hiperboloides de rotacion de dos hojas), ϕ = const (planos).
Los coeficientes de Lame son:
H1 = H2 = c
√sinh2 α+ sin2 β, H3 = c sinhα sin β (19.46)
donde las coordenadas son
q1 = α, q2 = β, q3 = ϕ
El laplaciano se expresa como:
∇2u =1
c2(sinh2 α+ sin2 β)
[1
sinhα
∂
∂α
(sinhα
∂u
∂α
)+
1
sin β
∂
∂β
(sin β
∂u
∂β
)]+
+1
c2(sinh2 α+ sin2 β)
[(1
sinh2 α+
1
sin2 β
)∂2u
∂ϕ2
](19.47)
b) Para el elipsoide de rotacion achatado el sistema de coordenadas elipsoidales degeneradas(α, β, ϕ) se define mediante las relaciones:
x = c coshα sin β cosϕ, y = c coshα sin β sinϕ, z = c sinhα cosϕ (19.48)

834 Jose Marın Antuna
Las superficies de coordenadas son: α = const (elipsoides de rotacion achatados), β = const(hiperboloides de rotacion de una hoja), ϕ = const (planos que pasan a traves del eje z).
Los coeficientes de Lame son:
H1 = H2 = c
√cosh2 α− sin2 β, H3 = c coshα sin β (19.49)
El laplaciano tiene la forma:
∇2u =1
c2(cosh2 α− sin2 β)
[1
coshα
∂
∂α
(coshα
∂u
∂α
)+
1
sin β
∂
∂β
(sin β
∂u
∂β
)]+
+1
c2(cosh2 α− sin2 β)
[(1
sin2 β− 1
cosh2 α
)∂2u
∂ϕ2
](19.50)
19.8 Coordenadas Toroidales
El sistema de coordenadas toroidales (α, β, ϕ) se define mediante las formulas:
x =c sinhα cosϕ
coshα− cos β, y =
c sinhα sin β
coshα− cos β, z =
c sin β
coshα− cos β(19.51)
donde c es un factor de escala, 0 ≤ α <∞, −π < β ≤ π, −π < ϕ ≤ π.
Las superficies de coordenadas son los toroides α = const:
(ρ− c cothα)2 + z2 =( c
sinhα
)2
, ρ =√x2 + y2 (19.52)
Las esferas β = const:
(z − c cot β)2 + ρ2 =
(c
sin β
)2
(19.53)
y los planos ϕ = const.
Los coeficientes de Lame son:
H1 = H2 =c
coshα− cos β, H3 =
c sinhα
coshα− cos β(19.54)
El laplaciano se expresa en la forma:
Principales Sistemas de Coordenadas 835
∇2u =∂
∂α
(sinhα
coshα− cos β
∂u
∂α
)+
∂
∂β
(sinhα
coshα− cos β
∂u
∂β
)+
+1
(coshα− cos β) sinhα
∂2u
∂ϕ2(19.55)
Resulta conveniente introducir la funcion v por medio de la expresion
u =√
2 coshα− 2 cos βv (19.56)
Entonces la ecuacion de Laplace ∇2u = 0 se reduce a la expresion
∂2v
∂α2+∂2v
∂β2+∂v
∂αcothα+
1
4v +
1
sinh2 α
∂2v
∂ϕ2= 0 (19.57)
19.9 Coordenadas Bipolares
a) Coordenadas bipolares en el plano.
Las variables
q1 = α, q2 = β, q3 = z
se llaman Coordenadas Bipolares si estan relacionadas con las coordenadas cartesianasmediante las ecuaciones:
x =a sinhα
coshα− cos β, y =
a sin β
coshα− cos β, z = z (19.58)
Los coeficientes de Lame son:
H1 = H2 =a
coshα− cos β, H3 = 1 (19.59)
Por lo que el laplaciano es:
∇2u =(coshα− cos β)2
a2
∂2u
∂α2+
(coshα− cos β)2
a2
∂2u
∂β2+∂2u
∂z2(19.60)
b) Las Coordenadas Biesfericas

836 Jose Marın Antuna
q1 = α, q2 = β, q3 = ϕ
se definen a traves de las coordenadas cartesianas por medio de:
x =c sinα cosϕ
cosh β − cosα, y =
c sinα sinϕ
cosh β − cosα, z =
c sinh β
cosh β − cosα(19.61)
donde c es un factor constante, 0 ≤ α < β, −∞ < β <∞, −π < ϕ ≤ π.
Estas formulas pueden expresarse de la siguiente forma compacta:
z + iρ = ci cotα+ iβ
2, ρ =
√x2 + y2 (19.62)
Las superficies de coordenadas son: las superficies de rotacion fusiformes α = cons:
(ρ− c cotα)2 + z2 =( c
sinα
)2
(19.63)
las esferas β = const:
ρ2 + (z − c cot β)2 =
(c
sinh β
)2
(19.64)
y los planos ϕ = const.
Los coeficientes de Lame son:
H1 = H2 =c
cosh β − cosα, H3 =
c sinα
cosh β − cosα(19.65)
y el laplaciano tiene la forma:
∇2u =∂
∂α
(sinα
cosh β − cosα
∂u
∂α
)+
∂
∂β
(sinα
cosh β − cosα
∂u
∂β
)+
+1
sinα(cosh β − cosα)
∂2u
∂ϕ2(19.66)
Al resolver la ecuacion de Laplace es de utilidad introducir la funcion v mediante el cambio
u =√
2 cosh β − 2 cosαv (19.67)

Principales Sistemas de Coordenadas 837
En este caso la ecuacion de Laplace para v toma la forma
∂2v
∂α2+∂2v
∂β2+∂v
∂αcotα− 1
4v +
1
sin2 α
∂2v
∂ϕ2= 0 (19.68)
19.10 Coordenadas Esferoidales
a) Las Coordenadas Esferoidales Alargadas son
q1 = λ, q2 = µ, q3 = ϕ
dadas por las ecuaciones
x = cλµ, y = c√
(λ2 − 1)(1 = µ2) cosϕ, z = c√
(λ2 − 1)(1 = µ2) sinϕ (19.69)
que las relacionan con las coordenadas cartesianas. Deben cumplir que
λ ≥ 1, −1 ≤ µ ≤ 1, 0 ≤ ϕ ≤ 2π
Los coeficientes de Lame son
H1 = c
√λ2 − µ2
λ2 − 1, H2 = c
√λ2 − µ2
1− µ2, H3 = c
√(λ2 − 1)(1− µ2) (19.70)
El laplaciano es:
∇2u =1
c2(λ2 − µ2)
∂
∂λ
[(λ2 − 1)
∂u
∂λ
]+
1
c2(λ2 − µ2)
∂
∂µ
[(1− µ2)
∂u
∂µ
]+
+1
c2(λ2 − 1)(1− µ2)
∂2u
∂ϕ2(19.71)
b) Las Coordenadas Esferoidales Achatadas
q1 = λ, q2 = µ, q3 = ϕ
se definen a partir de las coordenadas cartesianas mediante las ecuaciones:

838 Jose Marın Antuna
x = cλµ sinϕ, y = c√
(λ2 − 1)(1− µ2), z = cλµ cosϕ (19.72)
Las superficies λ = const son esferoides achatados, µ = const son hiperboloides de una hoja.
Los coeficientes de Lame son:
H1 = c
√λ2 − µ2
λ2 − 1, H2 = c
√λ2 − µ2
1− µ2, H3 = cλµ (19.73)
El laplaciano tiene la forma
∇2u =
√λ2 − 1
c2λ(λ2 − µ2)
∂
∂λ
(λ√λ2 − 1
∂u
∂λ
)+
√1− µ2
c2λ(λ2 − µ2)
∂
∂µ
(µ√
1− µ2∂u
∂λ
)+
+1
c2λ2µ2
∂2u
∂ϕ2(19.74)
19.11 Coordenadas Paraboloidales
Las variables
q1 = λ, q2 = µ, q3 = ϕ
definidas respecto a las coordenadas cartesianas por las relaciones
x = λµ cosϕ, y = λµ sinϕ, z =1
2(λ2 − µ2) (19.75)
se llaman Coordenadas Paraboloidales. Las superficies de coordenadas λ = c0nst, µ =const son paraboloides de rotacion alrededor del eje de simetrıa z. Los coeficientes de Lameson:
H1 = H2 =√λ2 + µ2, H3 = λµ (19.76)
El laplaciano tiene la expresion:
∇2u =1
λ(λ2 + µ2)
∂
∂λ
(λ∂u
∂λ
)+
1
µ(λ2 + µ2)
∂
∂µ
(µ∂u
∂µ
)+
1
λ2µ2
∂2u
∂ϕ2(19.77)
Bibliografıa
1. Angot A. Complementos de Matematica.
2. Aramanovich I.G., V.I. Levin. Ecuaciones de la Fısica Matematica.
3. Bateman G., Erdelyi A. Tablas de Transformadas Integrales.
4. Bers L., John F., Schechter M. Ecuaciones en Derivadas Parciales.
5. Budak B.M., Samarsky A.A., Tıjonov A.N. Coleccion de Problemas de Fısica Matematica.
6. Copson E.T. Desarrollos Asintoticos.
7. Courant R., Hilbert D. Partial Differential Equations.
8. Danilov V.L. y otros. Analisis Matematico.
9. Doetsch G. Manual para el uso practico de la transformada de Laplace.
10. Elsgoltz L. Ecuaciones Diferenciales y Calculo Variacional.
11. Ilin V.A., Pozniak E.G. Analisis Matematico.
12. Kolmogorov A.N., Fomin S.V. Elementos de Teorıa de Funciones y del Analisis Funcional.
13. Krasnov M., Kiseliov A., Makarenko G. Ecuaciones Integrales.
14. Lee T.D. Mathematical Methods of Physics.
15. Madelung E. Aparato Matematico de la Fısica.
16. Marchenko V.A. Teorıa Espectral de los Operadores de Sturm-Liouville.
17. Marın Antuna J. Teorıa de Funciones de Variable Compleja.
18. Marın Antuna J. Metodos Matematicos de la Fısica (edicion para la Universidad deAngola).
19. Mathews J., Walker R.L. Metodos Matematicos de la Fısica.
20. Mijailov V.P. Ecuaciones Diferenciales en Derivadas Parciales.
21. Mijlin S.G. Curso de Fısica Matematica.
839
840 Jose Marın Antuna
22. Mijlin S.G. Ecuaciones Integrales.
23. Morse P., Feshbach H. Methods of Theoretical Physics.
24. Petrovsky I.G. Lecciones sobre Ecuaciones en Derivadas Parciales.
25. Petrovsky I.G. Lecciones sobre la Teorıa de Ecuaciones Integrales.
26. Polozhy G.N. Ecuaciones de la Fısica Matematica.
27. Samarsky. A.A. Introduccion a la Teorıa de los Metodos en Diferencias Finitas.
28. Shilov G.E. Analisis Matematico. Segundo Curso Especial.
29. Shilov G.E. Introduccion a la Teorıa de Espacios Lineales.
30. Smirnov M.M. Problemas de Ecuaciones de la Fısica Matematica.
31. Smirnov V.I. Curso de Matematica Superior.
32. Tıjonov A.N., Samarsky A.A. Ecuaciones de la Fısica Matematica.
33. Vladımirov. V.S. Ecuaciones de la Fısica Matematica.
34. Whittaker E.T., Watson. G.N. A Course of Modern Analysis.
35. Whitham G.B., Linear and nonlinear waves.





























