Embed Size (px)
Citation preview
Mitschrift zurAnalytische Mechanik und Spezielle
Relativitatsthoerieaus der Vorlesung vonProf. Dr. Holger Frahm
von Oleg Heinrichund Daniel Edler
Wintersemster 2011/2012

Inhaltsverzeichnis
1 Lagrange Mechanik 11.1 Beschreibung der Newtonschen Mechanik . . . . . . . . . . . . . . . . 1
1.1.1 Die Lagrange Mechanik . . . . . . . . . . . . . . . . . . . . . 21.1.2 d’Alembertsches Prinzip . . . . . . . . . . . . . . . . . . . . . 3
1.2 Allgemeiner Formalismus . . . . . . . . . . . . . . . . . . . . . . . . . 61.2.1 Konservative außere Krafte . . . . . . . . . . . . . . . . . . . 8
1.3 Hamiltonfunktion und kanonische Impulse . . . . . . . . . . . . . . . 91.4 Geschwindigkeitabhangende “Potentiale” . . . . . . . . . . . . . . . . 121.5 Reibung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2 Variationsprinzip 142.1 Variationsrechung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.2 Hamiltonisches Prinzip . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.2.1 Hamiltonisches Prinzip der stationaren Wirkung . . . . . . . . 162.2.2 Invarianz der Lagrange-Gleichungen . . . . . . . . . . . . . . . 17
2.3 Variation mit Nebenbedgingungen . . . . . . . . . . . . . . . . . . . . 182.3.1 Variation mit mehreren unabhangigen Variablen . . . . . . . . 24
3 Zwei-Korper-Problem 243.1 Eindimensionales Problem . . . . . . . . . . . . . . . . . . . . . . . . 243.2 Zentralkrafte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263.3 Noether-Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283.4 Kepler-Problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4 Der starre Korper 324.1 Bezugssysteme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.1.1 Die Euler Winkel . . . . . . . . . . . . . . . . . . . . . . . . . 364.2 Tragheitstensor und Drehimpuls . . . . . . . . . . . . . . . . . . . . . 39
4.2.1 Arten von Kreiseln . . . . . . . . . . . . . . . . . . . . . . . . 404.2.2 Drehimpuls des starren Korpers . . . . . . . . . . . . . . . . . 41
4.3 Der kraftefreie starre Korper . . . . . . . . . . . . . . . . . . . . . . . 424.4 Der schwere symmetrische Kreisel . . . . . . . . . . . . . . . . . . . . 454.5 Bewegung im beschleunigtem Bezugssystem . . . . . . . . . . . . . . 49
5 Hamiltonische Dynamik 515.1 Legendre Transformation und Hamilton Gleichungen . . . . . . . . . 515.2 kanonische Transformation . . . . . . . . . . . . . . . . . . . . . . . . 575.3 Symplektische Struktur . . . . . . . . . . . . . . . . . . . . . . . . . . 595.4 Poisson-Klammern und kanonische Invariation . . . . . . . . . . . . . 605.5 Erhaltungssatze, Lioville Theorem . . . . . . . . . . . . . . . . . . . . 635.6 Hamilton-Jacobi-Theorie . . . . . . . . . . . . . . . . . . . . . . . . . 66
5.6.1 Von Hamilton-Jacobi zur Quantentheorie . . . . . . . . . . . . 69
6 gekoppelte Schwingungen, nichtlineare Dynamik 696.1 kleine Schwingungen . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
1

6.2 Parametrisierte Resonatoren . . . . . . . . . . . . . . . . . . . . . . . 696.3 Anharmonische Oszillatoren . . . . . . . . . . . . . . . . . . . . . . . 72
6.3.1 Fourier - Analyse (γ = 0) . . . . . . . . . . . . . . . . . . . . . 726.3.2 Subharmonische Schwingungen mit Frequenz . . . . . . . . . . 74
6.4 Jenseits Storungsrechung, Poincare-Birkhoff Theorem . . . . . . . . . 75
7 Spezielle Relativitat 767.1 Raum-Zeit-Diagramm . . . . . . . . . . . . . . . . . . . . . . . . . . 767.2 7.2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 767.3 7.3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 767.4 Krafte, kovariante Formulierung der Maxwell-Gleichung . . . . . . . . 787.5 Streuung relativistisch . . . . . . . . . . . . . . . . . . . . . . . . . . 80
7.5.1 Lagrange-Formalismus: Lorentz-invariante Wirkung S . . . . . 807.5.2 Teilchen im konservativen Kraftfeld . . . . . . . . . . . . . . . 81
8 Relativistische Elektrodynamik 818.1 Transformation der elektromagnetischen Felder . . . . . . . . . . . . . 818.2 Lagrange-Dichte fur das elektromagnetische Feld . . . . . . . . . . . . 818.3 Energie und Impuls . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
8.3.1 Erhaltungssatze bei außeren Quellen . . . . . . . . . . . . . . 848.4 Losung der kovarianten Wellengleichung . . . . . . . . . . . . . . . . 858.5 Strahlungsfelder beschleunigter Ladungen . . . . . . . . . . . . . . . . 88
9 Sonstiges/Snippets 899.1 Ubung 11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
9.1.1 Vorbereitung . . . . . . . . . . . . . . . . . . . . . . . . . . . 899.1.2 Aufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
2

Vorwort
Themengebiete1
• Lagrange-Mechanik: Zwangsbedingungen, Multiplikatoren, Lorentz-Kraft
• Variationsrechnung: Funktionalableitung, Extrema mit Nebenbedingungen
• Wirkungsprinzip, Noether-Theorem, Erhaltungssatze
• Dynamik des starren Korpers: Euler-Gleichungen, Kreisel, Prazession, Nuta-tion
• Hamiltonsche Mechanik: Legendre-Transformation, kanonische Gleichung, Er-haltungssatze
• kanonische Transformationen: Phasenportrait, symplektische Struktur, Inva-rianten
• kovariante Formulierung von Maxwell & Lorentz, Lagrangedichte, Erhaltungs-satze
• spezielle Relativitat: Kinematik, Dynamik von Massenpunkten, Vierer-Nota-tion
Dieses Dokument ist eine Vorlesungsmitschrift der Vorlesung Theoretische Phy-sik: Analytische Mechanik/Spezielle Relativitatsthoerie aus dem Wintersemester2011/12 gehalten von Herrn Prof. Dr. Holger Frahm. Gelegentlich wurden kleinereAnderungen vom Tafelanschrieb durchgefuhrt. Diese Mitschrift erhebt keinen An-spruch auf Vollstandigkeit oder Richtigkeit. Korrekturen und Anmerkungen sindimmer erwunscht und konnen entgegengenommen werden unter daniel.edler# oderoleg.heinrich#2.
Dieses Dokument wird unter http://www.muk.uni-hannover.de/~edler/uni furnicht kommerzielle Zwecke zum Download bereitgestellt.
1Auszug aus dem Modulkatalog Physik SoSe 2011 der Leibniz Universitat Hannover2Wobei # := @stud.uni-hannover.de

1 Lagrange Mechanik
1.1 Beschreibung der Newtonschen Mechanik
• Bewegung von Massepunkten im euklidischen (3-D) Raum
• Newtonsche Bewegungsgleichung: m · ~r = ~F (~r, ~r, t)
Dabei gilt fur Element aus Kraftfeld ~F : Kraft definiert System und hangt vonOrt, Geschwindigkeit und Zeit ab.
• Zusammen mit einer Anfangsbedingung gilt: Die Zukunft des Systems stehtfest.
Wiederholung der Newtonschen Mechanik anhand eines Beispiels:Beispiel I: Klotz auf Keil
• Es gibt zwei Bewegungsfreiheitsgrade:
– m kann den Keil herunter rutschen
– M kann sich horizontal bewegen
Mit Newton gilt:
• Krafte, die auf m wirken:
(i) Schwerkraft: −m · g · y
(ii) “Zwangskraft” zur Einschrankung der Bewegung:
– Senkrecht auf Keiloberflache: ~F1 = F1(sinα · x+ cosα · y)
Bewegung im Innertialsystem:
• Beschleunigung des Keils ~A ‖ ~x
• Beschleunigung des Klotzes ~a (relativ zum Keil)
Also folgt mit Newton:
~Fm = ~F1 −m · g · y =m(~a+ ~A) (1.1)
bzw. F‖ = m · g · sinα =m · a‖ +m · Ax · cosα
F⊥ = F1 −m · g · cosα=m · a⊥ +m · Ax · sinα (1.2)
Zwangsbedingung: Bewegung nur auf Keiloberflache → a⊥ = 0
⇒ F1 = m · g · cosα +m · Ax · sinα (1.3)
Bewegungsgleichung fur den Keil: (actio=reactio)
(i) Zwangskraft: −~F1
(ii) Zwangskraft von der Ebene y = 0 : ~F2 = F2 · y
1

⇒ ~FM = −~F1 + ~F2 −M · g · y = M · ~A (1.4)
F2 −M · g = −F1 · cosα
M · Ax = −F1 · sinα (1.5)
⇒ Ax = −
(sinα · cosα
sin2 α + Mm
)· g (1.6)
a‖ = g · sinα− Ax · cosα
1.1.1 Die Lagrange Mechanik
• Beschreibung der Bewegung in “Konfigurationsraum” (→differentierbare Raum-faltigkeit)
• Krafte mussen nicht explizit angegeben werden
• Effizient durch die Anzahl der Gleichungen und der Anzahl der physikalischwesentlichen Variablen (Bei Newton reduziert man von der 3. Deminsion bisin die benotigte Dimension, bei Lagrange werden gleich so viel Freiheitsgradegenutzt wie benotigt)
• Mechanik wird so formuliert, dass uber die Zwangskrafte nichts genaueresgewusst werden muss (Im Allgemeinen sind diese namlich unbekannt)
Alternative Losung zum Beispiel I:Die Nutzung “naturlicher” Variablen fur das Problem.d ist dabei definiert im beschleunigten System (Nicht-Innertial)
~rm = (x+ d · cosα)x− d · sinα · y mit ~RM = x · x+ const. · x (1.7)
Kinetische Energie (Punktmasse, nicht relativistisch)
Tm =m
2· (~rm)2 =
m
2(x+ d · cosα)2 + (d · sinα)2 (1.8)
TM =M
2· x2
T = TM + Tm =M +m
2· x2 +
m
2(d2 + 2 · d · x · cosα)
Betrachte “virtuelle Verschiebungen” δd, δx
* Zeit ist “fest” (ungleich realer Verschiebung mit Zeit, dt)
2
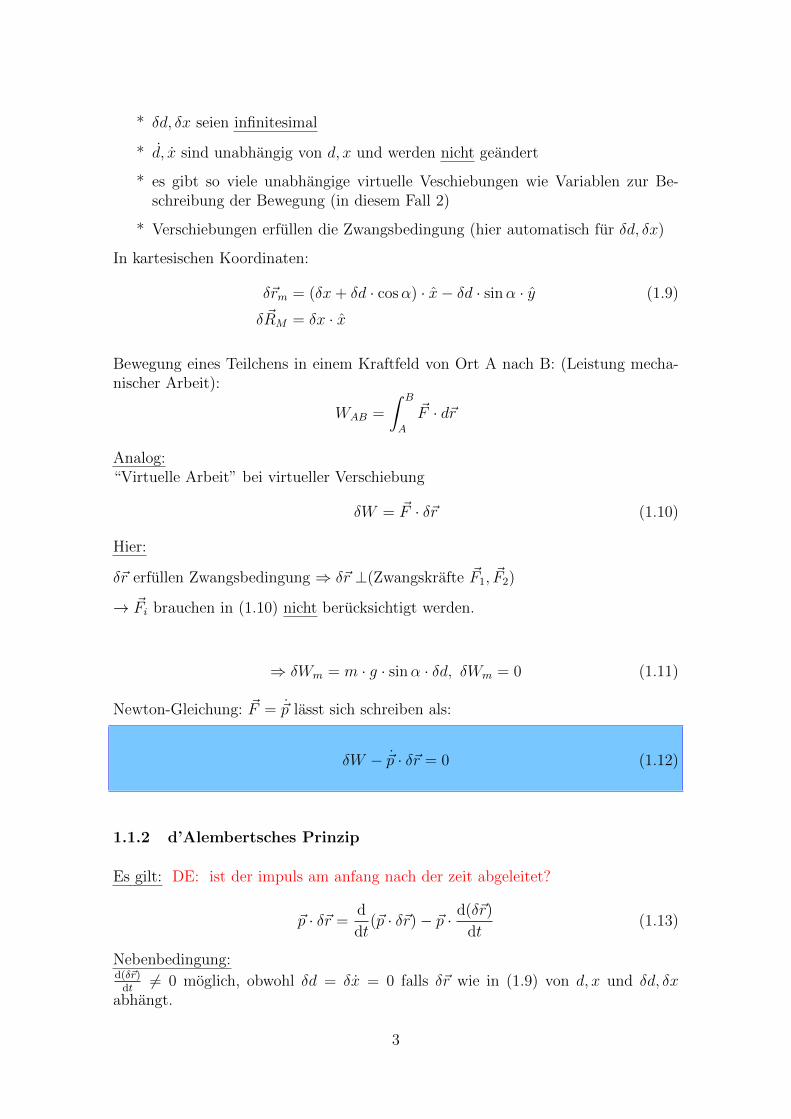
* δd, δx seien infinitesimal
* d, x sind unabhangig von d, x und werden nicht geandert
* es gibt so viele unabhangige virtuelle Veschiebungen wie Variablen zur Be-schreibung der Bewegung (in diesem Fall 2)
* Verschiebungen erfullen die Zwangsbedingung (hier automatisch fur δd, δx)
In kartesischen Koordinaten:
δ~rm = (δx+ δd · cosα) · x− δd · sinα · y (1.9)
δ ~RM = δx · x
Bewegung eines Teilchens in einem Kraftfeld von Ort A nach B: (Leistung mecha-nischer Arbeit):
WAB =
∫ B
A
~F · d~r
Analog:“Virtuelle Arbeit” bei virtueller Verschiebung
δW = ~F · δ~r (1.10)
Hier:
δ~r erfullen Zwangsbedingung ⇒ δ~r ⊥(Zwangskrafte ~F1, ~F2)
→ ~Fi brauchen in (1.10) nicht berucksichtigt werden.
⇒ δWm = m · g · sinα · δd, δWm = 0 (1.11)
Newton-Gleichung: ~F = ~p lasst sich schreiben als:
δW − ~p · δ~r = 0 (1.12)
1.1.2 d’Alembertsches Prinzip
Es gilt: DE: ist der impuls am anfang nach der zeit abgeleitet?
~p · δ~r =d
dt(~p · δ~r)− ~p · d(δ~r)
dt(1.13)
Nebenbedingung:d(δ~r)
dt6= 0 moglich, obwohl δd = δx = 0 falls δ~r wie in (1.9) von d, x und δd, δx
abhangt.
3
Hier gilt: d(δ~r)dt
= 0Fur die Bewegungsgleichung (1.12) benotigen wir:
~p · δ~r = ~p · ∂~r∂d· δd+ ~p · ∂~r
∂x· δx (1.14)
Fur die Geschwindigkeit gilt:
~v = ~r =∂~r
∂d· d+
∂~r
∂x· x (1.15)
d, x und d, x sind unabhangig, weshalb sich (formal) ergibt:
⇒ ∂~r
∂d=∂~r
∂d,
∂~r
∂x=∂~r
∂x(1.16)
⇒ ~p · δ~r =
(~p · ∂~r
∂d
)· δd+
(~p · ∂~r
∂x
)· δx (1.17)
Impuls:
(~p)α =∂T
∂rα(1.18)
→ ~p · δ~r =∂T
∂~r· ∂~r∂d· δd+
∂T
∂~r· ∂~r∂x· δx
=∂T
∂d· δd +
∂T
∂x· δx
(1.19)
(Dies gilt fur beliebige mechanische Systeme mit zwei Freiheitsgraden.)T ist additiv! → (1.19) kann fur Klotz, Keil oder Gesamtsystem angewand werden.
(1.19)+(1.12/1.13)+(1.8):
m · g · sinα · δd =
(d
dt· ∂T∂d
)· δd+
(d
dt· ∂T∂x
)· δx
=(
(m−M) · x+m · d · cosα) · δx+m · (x · cosα + d)· δd (1.20)
δd, δx sind unabhangig → Koeffizienten verschwinden → Bewegungsgleichung (1.6)
Rezept zum schreiben von so was:
• Wahle geeignete Koordinaten (hier: d, x)
• Bestimme T und dW in den dynamischen Variablen (hier: d(t), x(t))
• d’Alembertsches Prinzip umschreiben (1.19) (was spater auch noch uberflussigwird)
4

→ Daraus erhalt man eine Bewegungsgleichung
Wiederholung:Bei Newton:
• Bewegungsgleichung der Bahnkurven ~r(t) im R3
• Bei N Teilchen ergibt sich ein gekoppeltes System von 3N DGL’s 2.Ordnung(Anfangsbedinungen sind notig)
• alle Krafte mussen bekannt sein bzw. mussen berucksichtitgt werden
• in Intertialsystemen wird gerechnet: m~r = ~p = ~F (~r, ~r, t)
Alternativ (mit Lagrange):
• wahle geeignete Koordinaten qi ⇒ ~r(qi)
• man braucht kinetische Energie T in diesen Variablen
• es werden “virtuelle” Verschiebungen eingefuhrt, wobei t fest bleibt und somiteine Bewegung quasi “instantan” ist. δqi ist kompatibel mit Zwangsbedingung⇒ virtuelle Arbeit: (~F ist ohne Zwangskrafte, da ~Fz ⊥ δ~r)
δW = ~F · δ~r(qi, δqi)
Schritt von Newton zu d’Alembert (⇒Bewegungsgleichung):
(~F − ~p) · δ~r = 0 ; δW︸︷︷︸bekannt
−~p · δ~r︸︷︷︸aus T
“Zwangsbedingungen sind Bedinugnen, die die frei Bewegung der Systemteilcheneinschranken (geometrische Bindung). Zwangskrafte sind Krafte, die die Zwangsbe-dinungen bewirken, also die freie Teilchenbewegungen behindert”3 (z.B. Verhindertdie Zwangskraft, dass der Klotz durch die Auflageflache des Keils durchgeht; Faden-spannung)
Beispiel 1.1Eine Perle auf einem rotierendem Draht. Dann hat das System einen Freiheitsgrad,was bedeutet, dass es auch eine dynamische Variable q gibt.
x(t) = q(t) sinα cos(ωt)
y(t) = q(t) sinα sin(ωt)
z(t) = q(t) cosα
(1.21)
Es gilt:
x2 + y2 + z2 = q2(t) , tanα =
√x2 + y2
z2(1.22)
3Nolting II, S.3 (richtig zitieren kommt noch)
5
Fur die Geschwindigkeiten:
x(t) = q sinα cos(ωt)− ωq sinα sin(ωt)
y(t) = q sinα sin(ωt) + ωq sinα cos(ωt)
z(t) = q cosα
(1.23)
⇒ T =m
2
(x2 + y2 + z2
)=m
2
(ω2q2 sinα + q2
)(1.24)
Fur die virtuelle Verschiebung: DE: warum gilt das folgende?
δ~r = ~r(q + δq, t)− ~r(q, t) =∂~r
∂qδq
δ~r = ~r(q + δq, q, t)− ~r(q, q, t) =∂~r
∂qδq 6= 0 (1.25)
Virtuelle Arbeit:
δW = −mg cos(α)δq!
=d
dt(~p · δ~r)− ~p · δ~r (1.26)
~p · δ~r (1.19)=
∂T
∂qδq = m q δq (1.27)
∂T
∂qδq =
∂
∂q
(1
2m~r · ~r
)δq = m~r︸︷︷︸
~p
∂~r
∂qδq︸ ︷︷ ︸
≡δ~r
(1.28)
= mω2q sin2(α)δq (1.29)
Verwendung von d’Alembert: δW = ddt
(∂T∂q
)δq − ∂T
∂qδq
⇒ q − ω2 sin2(α)q = −g cosα (1.30)
1.2 Allgemeiner Formalismus
M Massenpunkte ohne Einschrankung ergibt N = 3M Freiheitsgrade (allgemeiner:d ·M im Rd) = unabhangige Koordinaten.
Die Zwangsbedingungen schranken die Bewegungen ein
Klassifizierung: (Auch Kombinationen moglich)
holonome Zwangsbedingungen darstellbar duch Gleichungen fur Koordinatenund Zeit t
fi(~r1, . . . , ~rm, t) = 0 , i = 1, . . . , k
Beispiele: Bewegung langs von Kurven/Flachen; starrer Korper(~ri − ~rj)2 − c2
ij = 0
6

nichtholonome/anholonome Zwangsbedingung
• Molekule in Behalter: ~ri2 < R2
• Bedingungen zwischen Geschwindigkeiten z.B. Rollbedingungen v = Rφ
weitere Unterteilungsmoglichkeit
skleronome Zwangsbedingungen Nicht explizit von der Zeit abhangig, zumBeispiel Kugelpendel (r2 − R2 = 0). Bei Holonom-skleronomen Zwangs-bedingungen gilt:
∂fi∂t
= 0
rheonome Zwangsbedingungen Expliziete Zeitabhangigkeit. Bei Holonom-rheonome Zwangsbedingungen gilt:
∂fi∂t6= 0
Zwangsbedingungen fuhren zu Abhangigkeiten der vorher unabhangigen Koordina-ten. Fur NUR holonome Zwangsbedingungen fuhrt man die generalisierten Koor-dinaten q1, . . . , qk ein. Diese mussen nicht unbedingt Langen darstellen, sondern nurgeschickt das System beschreiben.
M Teilchen, k Zwangsbedingungen, N Freiheitsgrade (1.31)
Mit fi = 0 lassen sich k Variablen eliminieren⇒ N = 3M−k unabhangige neue Va-riablen q1, . . . , qN (N entspricht der Anzahl der Freiheitsgrade). Die generalisiertenKoordinaten mussen dazu zwei Bedingungen erfullen
1. Sie mussen ein System zu einem festgelegten Zeitpunkt endeutig festlegen
; ~ri = ~ri(q1, . . . , qN , t) (1.32)
2. Die Koordinaten qk, qk, t sind unabhangig. Mit den Geschwindigkeiten:
~vi = ~ri =N∑k=1
∂~ri∂qk
qk +∂~ri∂t
(1.33)
gilt also:
⇒ ∂~ri∂qk
=∂~ri∂qk
(1.34)
Diese N generalisierten Koordinaten spannen dann den N -dimensionalen Kofigu-rationsraum auf. Ein Konfigurationsvektor beschreibt einen moglichen Zustand desSystems.
7

Eine virtuelle Verschiebung ~ri ist dann:
δ~ri =∑k
∂~ri∂qk
δqk (1.35)
virtuelle Arbeit:
δW =M∑i=1
~Fi · δ~ri =N∑k=1
(∑i
~Fi ·∂~ri∂qk
)︸ ︷︷ ︸
≡Fk
δqk (1.36)
Fk =M∑i=1
~Fi ·∂~ri∂qk
=δW
δqkgeneralisierte Krafte
Nebenbemerkung: Fk ·δqk hat Dimension [Arbeit], Fk nicht notwendigerweise dieder [Kraft]
kinetische Energie T ist additiv; fur nicht-relativistisches und holonomes System:
T =1
2
M∑i=1
mi ~ri2 = T (q1, . . . , qN , q1, . . . , ˙qN , t) (1.37)
d’Alembert durch virtuelle Arbeit (Fk + Ableitung von T ) ausdrucken:
∂T
∂qk=∑i
mi ~ri∂~ri∂qk
=M∑i=1
~pi ·∂~ri∂qk
(1.38)
∂T
∂qk=∑i
mi~ri∂~r
∂qk
(1.34)=∑i
~pi ·∂~ri∂qk
d
dt
(∂T
∂qk
)=∑i
~pi∂~ri∂qk
+∑i
~pi∂~ri∂qk
Sind die ~ri im Inertialsystem definiert, so ist wegen ~pi = ~Fi: (“Generalisierte Bewe-gungsgleichung”)
d
dt
(∂T
∂qk
)− ∂T
∂qk= Fk , k = 1, . . . , N (1.39)
Fur holonome Systeme gilt, dass man eine skalare Funktion benotigt der Form:T (q, q, t) + Fk
1.2.1 Konservative außere Krafte
(herleitbar aus Potentialkraft)
V ≡ potentielle Energie , Fi = −~∇iV (~r1, . . . , ~rM) (1.40)
8

(1.37)⇒ Fk =∑i
~Fi∂~ri∂qk
= −∑i
(~∇iV )∂~ri∂qk≡ −∂V
∂qk(1.41)
Fur holonome Systeme mit konservativen Kraften gilt dann:
d
dt
(∂T
∂qk
)− ∂(T − V )
∂qk= 0
Nach Voraussetzung ist: ∂V
∂ ~ri= 0 = ∂V
∂qk
Euler Lagrange Gleichung bzw. Lagrange-Gleichung 2.Art
⇒ d
dt
(∂L∂qk
)− ∂L∂qk
= 0 , k = 1, . . . , N (1.42)
mit der Lagrange-FunktionL = T − V (1.43)
1.3 Hamiltonfunktion und kanonische Impulse
Erhaltungsgroßen (Konstanten, (Integrale) der Bewegung) ≡ konstant unter Evolu-tion des Systems
Beispiel: Gesamtenergie E = T + V , falls E zeitunabhangig: ist Energie erhalten.Hier: Hamilton-Funktion H ist unter sehr allgemeinen Bedingungen erhalten.
H ≡N∑k=1
qk∂L∂qk− L (1.44)
Es stellt sich die Frage, ob dies eine Erhaltungsgroße ist.
dH
dt=
N∑k=1
qk∂L∂qk
+ qkd
dt
(∂L∂qk
)− dL
dt
dL(q, q, t)
dt=∂L∂t
+∑k
∂L∂qk
qk +∑k
∂L∂qk
qk
⇒ dH
dt=∑k
(d
dt
(∂L∂qk
)− ∂L∂qk
)︸ ︷︷ ︸
=0
qk −∂L∂t
dH
dt= −∂L
∂t
9

Also gilt die Hamilton-Funktion ist eine Erhaltungsgroße, wenn die Lagrange-Funk-tion unabhangig von der Zeit ist!
Wiederholung: Lagrange (und Hamilton) BewegungsgleichungWir betrachten nun ein System mit M -Punktmassen, also 3 ·M mit unabhangigenKoordinaten.
• Zwangsbedingungen in einem System erkennen. Hier haben wir “holonome”Zwangsbedingungen, also:
fi(~r1, . . . , ~rM , t) ≡ 0, i = 1, . . . , k
Daher haben wir N = 3 ·M − k unabhangige Koordinaten, oder auch Frei-heitsgrade.
• Wahle geeignete “generalisierte” Koordinaten: q1, . . . , qN , sodass sich ein Orts-vektor darstellt als ~rj = ~rj(q1, . . . , qN , t) so dass
fi(~r1(q1, . . . , qN , t), . . . , ~rM(q1, . . . , qN , t), t) = fi(q1, . . . , qN , t) ≡ 0, ∀qk
• Formuliere kinetische Energie:
T =1
2
M∑i=1
mi(~ ir)2 = . . . = T (q1, . . . , qN , q1, . . . , ˙qN , t)
• 1. Schritt zur kompletten Bewegungsgleichung geht uber die virtuelle Arbeit:(wobei F die generalisierten Krafte beschreibt)
δW =∑i
~Fi · δ~ri = . . . =N∑k=1
Fkδqk
Mit d’Alembert folgt nun die Bewegungsgleichung:
d
dt
(∂T
∂qk
)− ∂T
∂qk= Fk, k = 1, . . . , N
• 2. Schritt berucksichtigt die potentielle Energie und geht uber die konservativeKrafte ~Fi = −~∇iV (~r1, . . . , ~rM , t)
⇒ Fk = −∂V∂qk
(1.45)
• Aus ∂V∂qk
= 0 folgt die Euler-Lagrange-Bewegungsgleichung: (wobei L = T −V ,
die Lagrange-Funktion ist)
d
dt
(∂L∂qk
)− ∂L∂qk
= 0, k = 1, . . . , N
10

• Bewegungsgleichung mit den 2N Anfangsbedingungen losen
• Rucktransformation der generalisierten Koordinaten in “anschaulichere”, ur-sprungliche Koordinaten
Hamilton-Funktion: (nur wenn die Lagrange-Funktion L nicht explizit zeitabhangigist)
H =N∑k=1
qk∂L∂qk− L
⇒ dH
dt= −∂L
∂t= 0
Wenn nun die kinetische Energie T eine quadratische Funktion der Geschwindigkeitist (es sei nichtrelativistisch mit skleronomen Zwangsbedingungen), dann gilt:
H =∑k
qk∂L∂qk︸︷︷︸−L = 2 · T − (T − V ) = T + V (1.46)
∂T
∂qk=
∂
∂qk(α · q2
k) = 2α · qk
⇒H beschreibt die Gesamntenergie des Systems
Beispiel II: (mit rheonomen Zwangsbedingungen)
L = T − V =m
2(q2 + ω2q2 sin2 α)−m · g · q cosα
⇒ H =m
2q2 − m
2ω2q2 sin2 α +m · g · q · cosα
H ist also erhalten, wenn ω unabhangig von t.
Handelt es sich dabei um die Lagrange-Funktion einer generalisierten Ge-schwindigkeit qk, jedoch nicht der entsprechenden Koordinaten qk, dann heißtqk zyklisch bzw. zyklische Koordinate.
Euler-Lagrange-Gleichung
d
dt
(∂L∂qk
)= 0 (1.47)
⇒ pk =∂L∂qk
(1.48)
Dies ist eine Erhaltungsgroße und pk heißt zu qk kanonisch konjugiert. BeimImpuls gilt beim Beispiel eines freien Teilchens:
L =1
2m · q2
k → pk = m · qk
Dies ist erhalten, da q zyklisch ist.
11

1.4 Geschwindigkeitabhangende “Potentiale”
Das Ziel ist es eine Erweiterung von (1.42) auf nicht-konservative Systeme zu finden.Dies ist moglich falls
Fk = −∂U∂qk
+d
dt
(∂U
∂qk
)(1.49)
fur geeignete Funktionen U(qk, qk) des verallgemeinerten Potentials bzw. geschwin-digkeitsabhangigen Potentials. Dies fuhrt zu einer ahnlichen Bewegungsgleichungwie (1.42) mit der verallgemeinerten Lagrange-Funktion
L = T − U (1.50)
Beispiel Lorentz-Kraft
Ladung q, Masse m die in einem elektro-magnetischen Feld sind mit dem orts-und zeitabhangigen elektrischen Feld und magnetischen Fluss: ~E(~r, t), ~B(~r, t)
→ ~F = q( ~E + ~v × ~B) (1.51)
~E, ~B lassen sich aus Potentialen φ(~r, t), ~A(~r, t) ableiten:
~E = −~∇φ− ∂ ~A
∂t, ~B = ~∇× ~A (1.52)
Wahle ein (verallgemeinertes) Potential, welches auch von den Geschwindig-keiten qk abhangt (Hier: generalisierte = kartesische Koordinaten): U = q ·φ− q(~v · ~A). DE: warum sollte ich das gerade so wahlen? Dies ist bereits dielosung! Siehe besseren weg im Nolting S. 32
⇒ L (1.50)=
1
2m · ~v2 − q · φ+ q · (~v · ~A) (1.53)
d
dt
(∂L∂~v
)=
d
dt(m · ~v + q · ~A)
= m · ~v + qd
dt~A(~r, t)
= m · ~v + q
(~∇ · ~A · ∂~r
∂t+∂ ~A
∂t
)
= m · ~v + q
(~v · ~∇) ~A+
∂ ~A
∂t
Damit nun U so aussieht wie ein Potential wird gefordert: DE: ? Ist daseigentlich alles gleich 0
!= −~∇U = −q~∇φ+ q~∇(~v · ~A)
12
= −q~∇φ+ q~∇(~v · ~A)
m · ~v = q
(−~∇φ− ∂ ~A
∂t
)︸ ︷︷ ︸
~E
+q~∇(~v · ~A)− (~v · ~∇) ~A
︸ ︷︷ ︸
=~v×[~∇× ~A]︸ ︷︷ ︸~B
kanonischer Impuls:
~p =∂L∂~v
= m · ~v + q · ~A (1.54)
Hamiltonfunktion:
H = ~v · ~p− L
= m · ~v2 + q(~v · ~A)− m
2· ~v2 + q · φ− q(~v · ~A)
=1
2 ·m(~p− q · ~A)2 + q · φ (1.55)
(1.56)
nicht relativistische Quantenmechanik
1.5 Reibung
Reibungskrafte wurden bislang vernachlassigt bzw. nicht betrachtet. Die Schwierig-keit ist, dass sie nicht einfach als Zwangskrafte betrachtet werden konnen, da siees im eigentlichen Sinn nicht sind; Sie erfullen nicht das d’Alembertsche Prinzip.Es kann ebenfalls nicht aus den geschwindigkeitsabhangigen Potentialen abgeleitetwerden.
Eine Folge ist, dass in einem System mit Reibung L keine Erhaltungsgroße ist undsomit von der Zeit abhangt
Dabei ergibt sich die Bewegungsgleichung
d
dt
∂L∂qk− ∂L∂qk
= F (R)k
wobei F (R)k den Einfluss der Reibung beschreibt und genauer beschrieben werden
kann durch (βki = βik)
Q(R)k = −
N∑i
βkiqi
“Krafte dieser Art werden durch die Rayleighsche Dissipationsfunktion be-schrieben”(Nolting, S. 35)
D =1
2
N∑i,m=1
βimqi ˙qm
13

Es ergibt sich die reibungs Lagrange-Gleichung
d
dt
∂L∂qk− ∂L∂qk
+∂D
∂qk= 0
2 Variationsprinzip
DE: svg-datei einbinden: Variationsprinzip(a) und Variationsprinzip(b) Bislanghaben wir uns auf einer gegebenen Trajektorie eine virtuelle Verschiebung zu ei-ner Zeit t0 angeguckt. D’Alembert brachte uns zu den Euler-Lagrange-Gleichungen(Differentialprinzip)
Variation im Konfigurationsraum [q(t)] fuhrt dazu, dass man die gesamte Trajektorievirtuell Verschiebt: (Integralprinzip)
q(t) + δq(t)
Ausgenommen sind Start und Endpunkte t0, t1. Fur diese gilt δy(t0) = δy(t1) = 0
Die Idee hinter dem Variationsprinzip ist, dass man die Kurve sucht, die zwei Punk-te verbindet, entlang der sich ein Teilchen unter dem Einfluss der Schwerkraft inkurzester Zeit bewegt
2.1 Variationsrechung
Mathematische Formulierung (Euler):
Gegeben sei eine Funktion F (x(x), dydx, x) einer unbekannten Funktion von y(x), de-
ren erste Ableitung nach x F (x(x), dydx, x) ergibt.
Gesucht ist die Funktin y∗(x), fur die
I[ y︸︷︷︸y(x)
] =
∫ x1
x0
F
(y,
dy
dx, x
)dx (2.1)
extremal ist.
• I[y] ist eine Funktion einer Funktion y(x) → genannt Funktional
• Eindeutige Losung erfordert Vorgabe von y(x0), y(x1)
• Allgemeine Losung in Form einer DGL fur
y∗ :dF
dy=
d
dx
dF
d(∂y∂x
) (2.2)
Stichwort: Euler
14

Herleitung:
Sei x eine unabhangige Variable (uber die in I[y] integriert wird), dann sind (y, ∂y∂x
)
unabhangige Variablen in F . Variation von (y, ∂y∂x
) fur festes x:
y → y + δy,
dy
dx→ dy
dx+ δ
dy
dx=
dy
dx+
d
dxδy
Es sind y(x0), y(x1) vorgegeben. Eine Variation ist hier also nutzlos δy(x0) = 0 =δy(x1):
⇒ δI = I[y + δy]− I[y]
=
∫ x1
x0
F
(y + δy,
dy
dx+ δ
dy
dx, x
)dx−
∫F
(y,
dy
dx, x
)dx
Taylor-Entwicklung von F liefert:
F
(y + δy,
dy
dx+ δ
dy
dx, x
)≈ F
(y,
dy
dx, x
)+∂F
∂y· δy +
∂F
∂ ∂y∂x
· δdy
dx+ . . .
Grenzfall: δy, δ dydx→ 0
⇒ δI =
∫ x1
x0
∂F
∂y· δy +
∂F
∂ ∂y∂x
δ
(dy
dx
)︸ ︷︷ ︸= d
dx(δy)
dx
∫ x1
x0
∂F
∂ dydx
d
dx(δy) =
[∂F
∂ dydx
δy
]x1
x0
−∫ x1
x0
(d
dx
∂F
∂ dydx
)δy dx
⇒ δI =
∫ x1
x0
(∂F
∂y− d
dx
∂F
∂ dydx
)δy(x) dx
⇒ ∂F
∂y− d
dx
∂F
∂ dydx
= 0
Wir haben y∗ so bestimmt, dass I[y∗] extremal ist, also muss fur beliebiges δy(x)
folgendes gelten: δI!
= 0
Beispiel: Die kurzeste Verbindung zwischen zwei Punkten in x, y-Ebene:
ds2 = dx2 + dy2
15

x als unabhangie Variabel. Also folgt:
s[y] =
∫ 1
0
ds =
∫ x1
x0
dx
√1 +
(dy
dx
)2
Hier: F
(y,
dy
dx, x
)=
√1 +
(dy
dx
)2
∂F
∂y= 0,
∂F
∂ ∂y∂x
=dydx√
1 +(
dydx
)2
= f
(dy
dx
)→ d
dxf
dy
dx= 0
⇒ dy
dx= const. · x
⇒ y = const.
Wiederholung: Variationsprinzip
I [y]︸︷︷︸=y(x)
=
∫ x1
x0
F
(y(x),
dy(x)
dx, x
)dx ; δI(y) = 0⇔ ∂F
∂y=
d
dx
∂F
∂ ∂y∂x
2.2 Hamiltonisches Prinzip
Definition 2.1 (Wirkung)Die Wirkung S[q] ist das Zeitintegral uber den Lagrangien4 entlang eines Pfades
q(t), ˙q(t) den ein physikalisches Sysytem durchlauft
S[q] =
∫L(q(t), q(t), t) dt (2.3)
Nebenbemerkung: Hamiltonisches Prinzip fuhrt zu Bewegungsgleichung
2.2.1 Hamiltonisches Prinzip der stationaren Wirkung
Fur den physikalischen Pfad ist die Wirkung stationar. D.h. S ist extremal oder hatSattelpunkt
δS =
∫δL dt = 0 (2.4)
⇒ grundlegendes Postulat der Mechanik konservativer Systeme
4Lagrange-Funktion
16

Fur physikalischen Pfad identifiziere F in Gleichung (2.1) mit der Lagrange-Funktionunabhangiger Variablen ist t, I[y]→ Wirkung S
δS = 0 ⇔ ∂L∂q
=d
dt
∂L∂q
(2.5)
⇒ Systeme mit mehreren Freiheitsgraden ergibt sich die Lagrange Funktion:
L(q1, . . . , qN , q1, . . . , ˙qN , t)
Definition 2.2 (Variationsableitung)
δLδqk
:=∂L∂qk− d
dt
∂L∂qk
(2.6)
Variation qk → qk + δqk liefert erste Ordnung Taylor:
δS =
∫dt
(∑k
[∂L∂qk− d
dt
(∂L∂qk
)]δqk
)!
= 0
qk konnen unabhangig variirt werden
δS = 0 ⇔ ∂L∂qk− d
dt
∂L∂qk
= 0 (2.7)
2.2.2 Invarianz der Lagrange-Gleichungen
Bewegungsgleichungen folgen aus Variationsprinzip. Damit haben die Euler- Lagrange-Gleichungen immer die Form von (1.42) – unabhangig von der Wahl der generali-sierten Koordinaten. Genauer: qk, Qk seien Koordinatensysteme. Daraus folgt,dass es invariable Abbildungen gibt fur die gilt: (qk, t) 7→ (Qk(q, t), t)
Nach (2.7) sind die Bewegungsgleichungen “Punkt-Transformationen”:
δLδqk
= 0 ⇔ δLδQk
= 0 (2.8)
aquivalent, falls L(Q, Q, t) die Lagrange-Funktion ist, die nach Einsetzten der Punkt-Transformation in L(q, q, t) folgt Wahlfreiheit von L
L → L+ const;L · const
t→ t · const
L → L+d
dtF (q, t)
δS =
∫ t1
t0
dt L → F (q, t)|t1t0 +
∫ t1
t0
dt L
liefern alle dieselbeEuler-Lagrange-Gleichung
17

Klassische Mechanik “ohne Newton”
• Wirkungsprinzip als Basis (mathematische Vorschrift)
• Physik steckt in Lagrangien
Beispiel 2.3 (freier Massenpunkt)Folgendes wird zum freien Massenpunkt gefordert:
• Homogenitat in der Zeit: L unabhangig von t
• Homogenitat des Raumes: L unabhangig von ~r
• Isotropie des Raumes (keine Richtung ist ausgezeichnet): L = L(~r = L(~v2)(nicht von Abhangig von ~r, t)
Galilei-Invarianz Bewegungsgleichungen sind invariant unter
~r → ~r′ + ~v0t′ mit: t = t′
Das bedeutet, dass unter diesen Transformationen gelten muss:
L(~v2)→ L(~(v′)
2)
+d
dtF (~r, t)
L(~(v′)
2)
= L((~v − ~v0)2) = L((~v)2
)− 2~v · ~v0
∂L∂(~v2)
+ o(v20)
d
dtF (~r, t) = ~v · ~∇F +
∂
∂tF (~r, t) ist linear in ~r
⇒ ∂L∂(~v)2
= const⇒ L =m
2~v2
2.3 Variation mit Nebenbedgingungen
Es gibt Probleme, wenn wir mehr als die qk(t) bestimmen wollen. Dies soll im Naher-en vertieft werden und spateren mit der Methode der Lagrangen Multiplikatoren(→ Mathematische Methode zur Bestimmung von Extrema unter Nebenbedingun-gen) gelost werden.
Ein System moge b Zwangsbedingungen – b holonome und b(6= 0) anholonome –besitzen. Die b tragen allerdings nicht zur Reduktion der Anzahl der dynamischenVariablen bei (Beispiel: Fadenspannung eines Pendels):
N = 3M − b
Dass heißt, dass es mehr dynamische Variablen qk als Freiheitsgrade N gibt mitk = 1, . . . , N,N + 1, . . . , N + b
Angenommen bei dem Problem eines Fadenpendels wird nicht die generalisierte Ko-ordinate des Winkels sondern die ublichen Kartesischen x, y verwendet. So existiert
18

immer noch eine Zwangsbedingung G(x, y) = x2 + y2 = l2 = const (mit l = Fa-denlange), die in die Bewegungsgleichung muss DE: darf wohl nicht von geschwin-digkeiten abhangen
Gi(q1, . . . , qN+b, t) = 0, i = 1, . . . , b (2.9)
Alternativ lasst sich diese Gleichung5 auch so formulieren: Gi(q1, . . . , qN+b, t) =
const = C. Gi und Gi sind bis auf einen konstanten Summanden identisch.
Die Variation der Wirkung ist bei diesem Problem:
δS =
∫dt
[N+b∑k=1
δL(q1, . . . , qN+b, t)
δqkδqk
]= 0 (2.10)
Dabei ist zu beachten, dass die Unabhangigkeit der qk nicht gegeben ist. Wegen (2.9)folgt aus δS = 0 nicht, dass die Koeffizienten von δqk einzeln verschwinden.
Ausweg: Lagrange-Multiplikatoren. Durch Variation der b Zwangsbedingungen Gi
von (2.9), welche von den N + b Variablen qk abhangt, folgt:
δGi =N+b∑k=1
∂Gi
∂qkδqk
!= 0 (2.11)
Statt die uberzahligen Variablen mithilfe von (2.9) zu eliminieren betrachten wirVariation von S → S + δS(G):
L → L+∑i
λiGi
bzw: L → L +∑b
i=1 λi(Gi − C). Zu beachten ist, da Gi bzw. (Gi − C) null ergibt,dass sich die Lagrange Gleichung nicht verandert. Variation dieser “neuen” Funktionergibt:
δS =
∫dt
[δL+ δ
(∑i
λiGi
)]
δS =
∫dt
[N+b∑k=1
δLδqk
δqk +N+b∑k=1
b∑i=1
λi∂Gi
∂qkδqk
]
δS =
∫dt
[N+b∑k=1
(δLδqk
+b∑i=1
λi∂Gi
∂qk
)δqk
]!
= 0 (2.12)
wobei: λi = λi(t) := Lagrange - Multiplikatoren. Dies ist eine beliebige Funktion derZeit (und nicht des Ortes qi). Diese Multiplikatoren sind die einzigen Objekte, diein dieser Gleichung noch nicht bestimmt sind und von uns so gewahlt werden, dassdie Koeffizienten von δqN+1, δqN+b verschwinden:
δLδqk
+b∑i=1
λi∂Gi
∂qk= 0 k = N + 1, . . . , N + b (2.13)
5wie im “Finch”
19
Diese Forderung erinnert an eine Extremwerteaufgabe: Wenn die (hier: virtuelle)Ableitung einer Funktion gleich null ist, so ist an dieser Stelle ein Extremum (oderSattelpunkt o.a.). Die Methode der Multiplikatoren kommt genau aus diesem Bereichder Mathematik
Damit folgt, dass die ubrig gebliebenen Terme in δS = 0 alle unabhangig vonein-ander null sind. Es liefert uns Gleichungen fur die ubrigen q1, . . . , qN Koordinaten.DE: 〈?〉 Insgesamt N + 2b Gleichungen: DE: 〈/?〉 (mit der Variationsableitungs-definition aus Gleichung (2.6))
Lagrange-Gleichung erster Art
dLdt
∂L∂qk− ∂L∂qk
+b∑i=1
λi∂Gi
∂qk= 0 (2.14)
mit Gi(qk, t) = 0. Es gibt insgesamt die Unbekannten:
q1, . . . , qN , qN+1, . . . , qN+b, λi, . . . , λb︸ ︷︷ ︸N+2b
In Analogie zu Abschnitt 1.2 (mit M := Insgesamte Teilchenanzahl) DE: versteheich nicht
Nk =b∑i=1
λi∂Gi
∂qk=
M∑j=1
~Nj ·∂~rj∂qk
(2.15)
“generalisierte Zwangskrafte”, Zwangskraft auf die Punktmasse mi
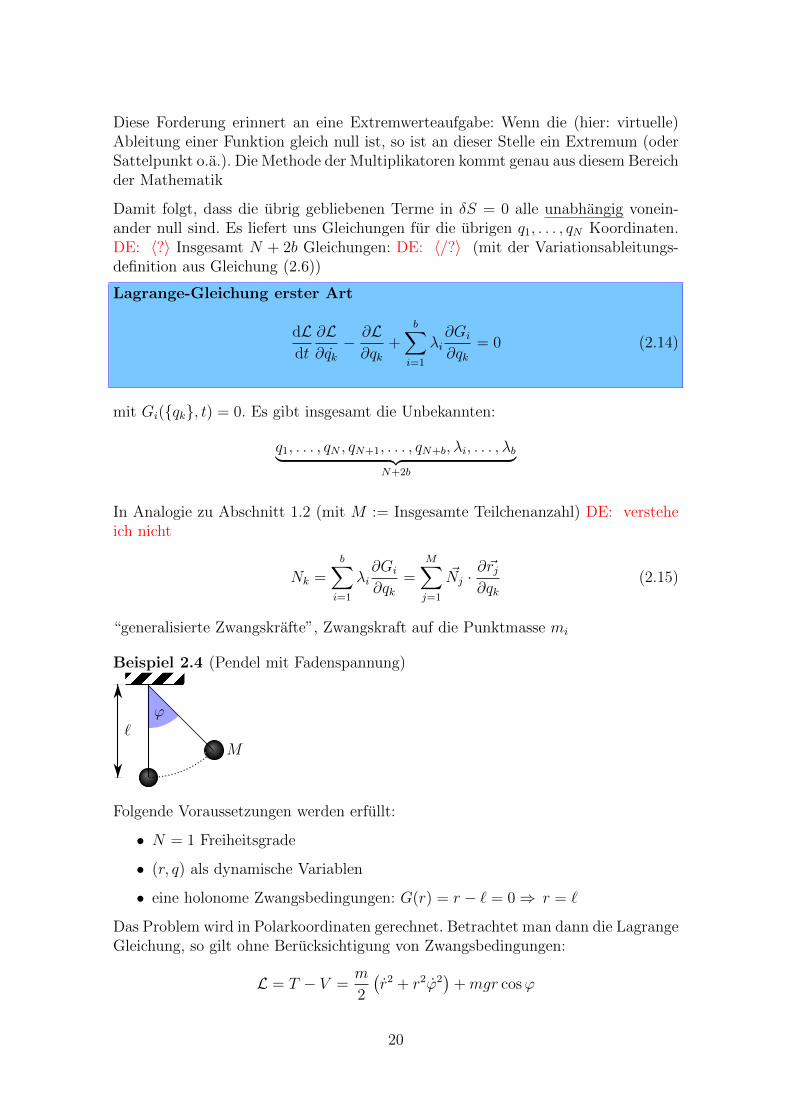
Beispiel 2.4 (Pendel mit Fadenspannung)
ϕ
M`
Folgende Voraussetzungen werden erfullt:
• N = 1 Freiheitsgrade
• (r, q) als dynamische Variablen
• eine holonome Zwangsbedingungen: G(r) = r − ` = 0⇒ r = `
Das Problem wird in Polarkoordinaten gerechnet. Betrachtet man dann die LagrangeGleichung, so gilt ohne Berucksichtigung von Zwangsbedingungen:
L = T − V =m
2
(r2 + r2ϕ2
)+mgr cosϕ
20
Fuge Zwangbedingung G ein: L → L+ λG
δLδr
+ λ∂G
∂r= mrϕ2 +mg cosϕ−mr + λ
!= 0
δLδϕ
+ λ∂G
∂ϕ= −mg sinϕ− d
dt
(mr2ϕ
) != 0
= −g sinϕ =d
dt
(r2ϕ)
Nur die erste Gleichung ist von λ abhangig und dort muss λ so gewahlt werden,dass die Gleichung null ergibt:
λ = mr −mrϕ2 −mg cosϕ
= −m(`ϕ2 + g cosϕ)
Da r = 0. Dies druckt die Fadenspannung (Zwangskraft in radialer Richtung) aus.Grenzfalle: ϕ ≡ 0 ⇒ λ = −mg; ϕ → ∞ ⇒ λ = −m`ω2). DE: Aus irgendwelchenGrunden fehlt ein quadrat und es folgt
ϕ = −gl
sinϕ
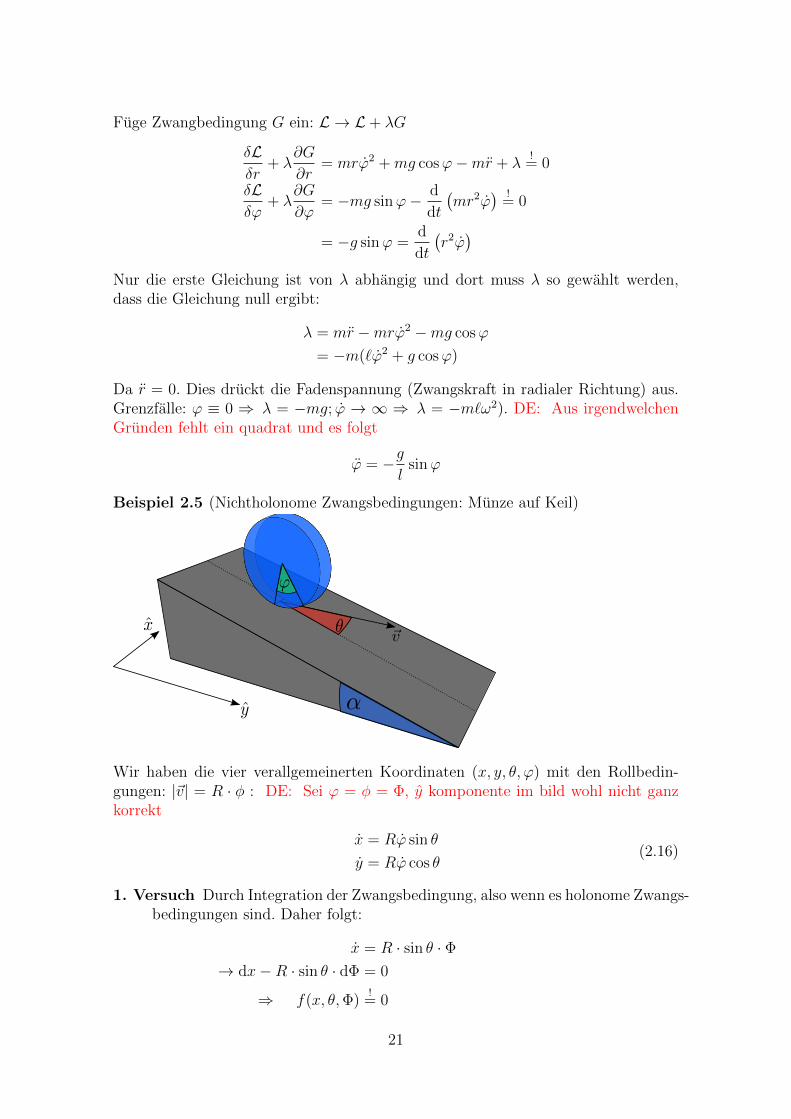
Beispiel 2.5 (Nichtholonome Zwangsbedingungen: Munze auf Keil)
Wir haben die vier verallgemeinerten Koordinaten (x, y, θ, ϕ) mit den Rollbedin-gungen: |~v| = R · φ : DE: Sei ϕ = φ = Φ, y komponente im bild wohl nicht ganzkorrekt
x = Rϕ sin θ
y = Rϕ cos θ(2.16)
1. Versuch Durch Integration der Zwangsbedingung, also wenn es holonome Zwangs-bedingungen sind. Daher folgt:
x = R · sin θ · Φ→ dx−R · sin θ · dΦ = 0
⇒ f(x, θ,Φ)!
= 0
21

⇒ 0 = (∂xf) · dx+ (∂θf)︸ ︷︷ ︸!=0
·dθ + (∂Φf)︸ ︷︷ ︸−R·sin θ
·dΦ
⇒ ∂2f
∂φ∂θ= 0,
∂2f
∂θ∂φ6= 0
Widerspruch! Also existiert f nicht.
2. Versuch Bei gegebener Zeit t hat man durch (2.16) fur die virtuelle Verschie-bungen
δx = R · sin θδΦ (2.17a)
δy = R · cos θδΦ (2.17b)
Lagrange-Funktion:
L = T − V =m
2R2
(3
2φ2 +
1
4θ
)−m · g · y sinα (2.18)
Eigenschaften von der Lagrange-Funktion hier:
- unabhangig von x, x
- zwei Freiheitsgrade, aber drei dynamische Variablen y, θ, φ
- eine relevante Zwangsbedingung (2.17b) (mit Lagrange-Multiplikator)
; δS = 0
∫ (δLδyδy +
δLδθδθ +
δLδφδφ
)dt+
∫λ(δy −R cos θδφ
)dt
Wie bei den holonomen Zwangsbedingungen (2.13/2.14) wahlen wir λ(t) so,dass alle Koeffizienten von δq verschwinden. Das Wirkungsprinzip liefert dreiBewegungsgleichungen: DE: warum α
∼δy −m · g · sinα + λ(t) = 0
∼δφ 3
2m ·R2 · φ− λ(t) ·R · cos θ = 0 (2.19)
∼δθ m
4·R2 · θ = 0
Die Integration liefert φ(t), θ(t) und aus (2.16) folgen x(t), y(t). Nun haben wirstatt einer effektiven Lagrange-Funktion bei holonomen ZwnagsbedingungenL + λG, die Zwangsbedingungen (2.16) in linearer Relation zwischen δq um-geschrieben und daraus in δS = 0 mit dem Lagrange-Multiplikator eingebaut.
Allgemein gesehen: Durch nicht integrierbare, nicht holonome Zwangsbedingun-gen zwischen N + b dynamischen Variablen. Also:
N+b∑k=1
ai,k(q, t)qk + bi(q, t) = 0, i = 1, . . . , b
22

Folgt die lineare Relation zwischen δqk (dies zu fester Zeit). Also:
N+b∑k=1
ai,k(q, t)δqk = 0
Variation:
δS =
∫ ∑k
(δLδqk
+b∑i=1
λi(t)ai,k(q, t)
)︸ ︷︷ ︸
=0→ Bewegungsgleichung
δqk dt!
= 0
Wiederholung: Wirkung, Hamilton’sches PrinzipWirkung
S[q] =
∫L(q, q, t)dt
Hamilton’sches Prinzip:
Fur physikalische Pfade ist die Wirkung stationar:
δS = 0 =
∫ (δLδq
)δq dt⇔ ∂L
∂q− d
dt
∂L∂q︸ ︷︷ ︸
δLδq
= 0
* grundlegendes Prinzip
* beschreibt die Physik in Lagrange
Wiederholung: Variation mit (anholonomen) NebenbedingungenMit N Freiheitsgraden, N + b dynamischen Variablen und b Zwangsbedingungen:(vgl. Nolting S. 38)
1. Sei ein System mit sowohl b holonome als auch b nicht-holonome Zwangsbedin-gungen gegeben. Die Gesamtzahl der Zwangsbedinungen moge mit b = b + bbezeichnet werde. Zunachst werden wie bisher die Holonomen zur Reduktionder Koordinatenzahl benotigt. Dieser Schritt ist nicht unbedingt notwendig,da die Bedingungen (genauso wie Anholonomen) anderweitig Berucksichtigungfinden konnen. Der Lagrange Multiplikator Algorithmus ist also auch auf Ho-lonome anwendbar(, aber komplizierter)
N = 3M − b
Die Teilchenorte ~ri werden dann durch die N generalisierte Koordinaten aus-gedruckt:
~ri = ~ri(q1, . . . , qN , t)
Dabei sind Koordinaten qj nicht alle voneinander unabhanig, jedoch aber ei-nige. Dazu spater mehr
23

Gi(q1, . . . , qN+b, t) = 0, i = 1, . . . , b
Durch diese Ersetzungen L → L+b∑i=1
λiGi; δS = 0 folgt:
Fur N + b gilt die Euler-Lagrange-Gleichung:δLδqN
=0; Mit N + b q’s
und fur b die Zwangsbedingung: Gi =0; Mit b λ’s
2.3.1 Variation mit mehreren unabhangigen Variablen
Beispiel: Seite
- 2 unabhanige Variablen x, t
- Lagrange-Funktion von q(x, t), δqq(x,t)
δt, δqq(x,t)
δx, x, t
- Wirkung: Doppelintegral uber t, x:
S =
∫ ∫L(q,
∂q
∂x,∂q
∂t, x, t)
Dabei ist L die Lagrange-Dichte.
- Variation:
q → q + δq
∂q
∂t→ ∂q
∂t+∂
∂tδq
∂x
∂x→ ∂q
∂x+
∂
∂xδx
⇒ Euler-Lagrange-Gleichung:
∂L∂q− ∂
∂x
∂L∂ ∂q∂x
− ∂
∂t
∂L∂ ∂q∂t
= 0
⇒ partiale Differentialgleichung fur q(x, t)
3 Zwei-Korper-Problem
3.1 Eindimensionales Problem
- Bei Systemen mit einem Freiheitsgrad nimmt die Lagrange-Funktion die fol-gende Form an:
L = L(q, q)
24

- L nichtexplizit Zeitabhangig
⇒Die Hamilton-Funktion (??) ist eine Erhaltungsgroße
- Besonderheit: Sei T quadratisch in q (nicht relativistisch mit skleronomenZwangsbedingungen)
⇒Die Hamilton-Funktion H ist die Gesamtenergie:
H = E = T + V =1
2q2 + V (q) (3.1)
Physikalische Losung q(t) hat eine positive kinetische Energie T :
q = ±√
2 · T = ±√
2(E − V (q)) (3.2)
⇒ E ≥ V (q)
E ≥ E0 : V (q) ' E0 + x2(q − q0)2 + . . .
⇒ harmoischer Oszillator
E0 < E < E1 : Die periodische Losung sagt aus, dass die Umkehrpunkte qmin/qmaxsind.
Die Periode TP ist die Funktion von E
Wenn E = E1 : Dann ist qmin ein instabiles Gleichgewicht: TP →∞
E > E1 (oder (q(t) = 0) < q∗) : Die Bewegung ist nicht periodisch.
Phasenraum-Potrait
Die Lange (3.2) in q − q-Diagramm(≡Phasenraum):
; Trajektorien im Phasenraum entsprechen E = const (3.1). Die Existenz derErhaltungsgroße E schrankt die Trajektorien auf einen eindimensionalen Unterraumdes Phasenraums ein. (Z∗ ist die Anzahl der Freiheitsgrade minus der Anzahl derErhaltungsgroßen)
Die Losung von (3.2) ist durch Trennung der Variabeln mit der Anfangsbedingungq(0) = q0:
t = ±∫ q(t)
q0
1√2(E − V (q′))
dq′ (3.3)
⇒ t(q), q(t) lasst sich daraus im allgemeinen nichtbestimmen! Periodische Bewegung:
TP = 2
∫ qmax
qmin
1√2(E − V (q′))
dq′ (3.4)
25

3.2 Zentralkrafte
Hier haben wir ein Zwei-Korper Problem im dreidimensionalem eulklidischen Raum,also sechs Freicheitsgrade. 1 Ausnutzunge der Symmetrien zur Reduzierung der An-zahle der Freiheitsgrade:
Allgemein ist die Lagrange-Funktion fur die Geschwindigkeit unabhangig von denPotentailen:
L =m1
2~r
2
1 +m2
2~r
2
2︸ ︷︷ ︸T
−V (1)ext (~r1)− V (2)
ext (~r2)− V12(~r1, ~r2) (3.5)
• V12 kann nur von ~r1 − ~r2 abhangig sein
• Zentralkrafte V12 = V12(|~r1 − ~r2|)
Bei konsertiven Systemen fur zwei Punktmassen (also 6 Freiheitsgraden) gilt:
L =m1
2~r2 +
m2
2~r2 − V (1)
ext (~r1)− V (2)ext (~r2)− V12(|~r1 − ~r2|)︸ ︷︷ ︸
Zentralkraft
im abgeschlossenen System:
V(i)
ext(~r) = 0, keine außere Kraft
Daraus folgt die Invarianz der Lagrange-Funktion unter Translation des KoordinatenUrsprungs :
L(~r1, ~r2, ~r1, ~r2) ≡ L(~r1 + ~a, ~r2 + ~r2 + ~a, ~r1, ~r2) (3.6)
infinitesemale Translation: L(~r1, ~r2, ~r1, ~r2) + ~a · (~∇1 + ~∇2)L+ o(a2)
⇒ ~∇1L+ ~∇2L=0 (3.7)
Euler-Lagrange−−−−−−−−→ d
dt
(∂L∂ ~r1
)=
d
dt~pi = ~∇iL (3.8)
⇒ d
dt(~p1 + ~p2)=~∇1L+ ~∇2L = 0 (3.9)
⇒Gesamtimpuls ist erhalten
Der Schwerpunkt des Systems
~R =m1~r1 +m2~r2
m1 +m2
(3.10)
bewegt sich, wie ein freies Teilchen
Variablenwechsel: (~r1, ~r2)→ (~R,~r)
~r1 = ~R +m2
m1 +m2
~r , ~r2 = R +m1
m1m2
~r (3.11)
26

T =m1 +m2
2~R2 + (. . .)︸︷︷︸
=0
~R · ~r +1
2
m1m2
m1 +m2︸ ︷︷ ︸=:µ= reduzierte Masse
~r2
L =m1 +m2
2~R2 +
µ
2~r2 − V (r) (3.12)
Ohne außere Krafte gilt: ~R = const ⇒ Transformation ins Schwerpunktsystem
( ~R = 0):
L = Lrelativ =µ
2~r2 − V (r) (3.13)
⇒ nur noch 3 Freiheitsgrade
(3.13) ist invariant unter Drehung (wegen Zentralpotential)
L(~r, ~r) = L(~r + ~φ× ~r, ~r + ~φ× ~r)
Entwicklung, |~φ| 1
= L(~r, ~r) + (~φ× ~r) · ∂L∂~r
+ (~φ× ~r + o(φ2))
= L(~r, ~r) + ~φ
(~r × ∂L
∂~r+ ~r × ∂L
∂~r
)︸ ︷︷ ︸
≡0
+o(φ2) (3.14)
0 = ~r × ∂L∂~r
+ ~r × ∂L∂~r
EL= ~r ×
(d
dt
∂L∂~r
)+ ~r × ∂L
∂~r
=d
dt
(~r × ∂L
∂~r
)=
d
dt(~r × ~p) (3.15)
Rotationsinvarianz ⇒Drehimpulserhaltung:
~L = ~r × ~p = µ(~r × ~r
)(3.16)
⇒Relativgeschwindigkeit und -abstand stehen senkrecht auf dem konstanten Vektor~L ⇒ zwei Dimensionales Problem.
Die generalisierten Koordinaten ρ und ϕ in dieser Ebene lauten
⇒ L =µ
2
(ρ2 + ρ2ϕ2
)− V (ρ) (3.17)
ϕ ist zyklisch
⇒ pϕ =∂L∂ϕ
= µρ2ϕ = const = Lz ⇔ ϕ =L
µρ2(3.18)
27

Drehimpulserhaltung: Flache F , die von “Leitstrahl” uberstrichen wird:
dF =1
2ρ2dϕ⇒ dF
dt=
1
2ρ2ϕ ∼ Lz
⇒ konstante Flachengeschwindigkeit dFdt
→ 2. Keplersches Gesetz.
Aus der Drehimpulserhaltung folgt, dass es 2 Freiheitsgrade gibt. ϕ(t) ist aus Inte-gration von (3.18) bekannt, falls ρ(t) bekannt ist. Energiesatz aus (3.17) ist nichtexplizit zeitabhangig ⇒Hamilton Funktion
H =∑
qipi − L = E =µ
2
(ρ2 + ρ2ϕ2
)+ V (ρ)
=µ
2ρ2 +
L2z
2µρ2+ V (ρ)︸ ︷︷ ︸
≡Veff(ρ)
= const
wobei L2z
2µρ2 die Zentrifugalkraft ist
Wie ist V (ρ) designed?:
limρ→∞
V (ρ) = 0 ; limρ→0
V (ρ) = “nicht zu aktraktiv”
Winkelanderung wahrend einer Periode der Radialbewegung:ρmin → ρmax → ρmit :
∆ϕ =L
µ
∫dt
1
ρ(t)2=
2L
µ
∫ ρmax
ρmin
dρ1
ρ2
√2
µ(E − Veff)
Phasenraum-Portrait: (hier 2 Freiheitsgrade (ρ, ϕ)) Einschrankung auf ρ, ρ
BILD
Poincare-Schnitt: Markiere (ρ, ρ)|tn : ϕ(tn) = 0 ⇒Punkte liegen auf Kurven
Platzhalter19 (3.19)
Platzhalter20 (3.20)
Platzhalter21 (3.21)
3.3 Noether-Theorem
Aus der Symmetrie der Lagrange-Funktionen (??) und (??) folgt Erhaltungsgroßen.Betrachte allgemeine (einparametrige) Koordinaten-Transformation
Qs : q(t) 7→ Qs(q(t)) = Qs(t) (3.22)
mit s kontinuierlicher Paramter und Qs=0(q(t)) ≡ q(t)
BILD
28
Qs heißt Symmetrie(-Transformation) eines Systems, falls dessen Wirkungsfunktio-nal bei Anwendung von Qs invariant bleibt.
S[q] = S[Qs(q)] (3.23)
⇒ 0 =d
dsS[Qs] =
d
ds
∫ t1
0
dtL(Qs, Qs, t)
=
∫ t1
0
dt
[∂L∂Qs
∂Qs
∂s+
∂L∂Qs
Qs
s
]︸ ︷︷ ︸
≡0
+∂L∂Qs
∂Qs
∂s
∣∣∣∣t10
t1 beliebig:
→ d
dt
(∂L∂Qs
Qs
s
)= 0 (3.24)
Fur s→ 0 haben wir eine Erhaltungsgroße
I(q1, . . . , qN , q1, . . . , ˙qN) =N∑k=1
pk∂Qs
∂s
∣∣∣∣s=0
≡ 0 (3.25)
Noether-Theorem: Ist die Wirkung invariant unter einre kontinuierlichen Symmetrie-Transformation, so exisitert eine Erhaltungsgroße
Nebenbemerkung: In (3.24) wurde verwendet, dass die Zeit nicht mit Qs transfor-miert wird, allgemeiner Qs(t) ≡ τs
0 =d
dsS[Qs] =
∫ τ
τ0
dτd
dsL(Qs, Qs, τs)︸ ︷︷ ︸
=...+∫ τ1τ0
dτ dτds
∂L∂τs
=...+ dτdsL|τ1τ0
+
[∂τs∂sL(Qs, Qs, τs)
]τ1τ0
s→0−−→ p∂Q
∂s
∣∣∣∣s=0
+ L ∂τ
∂s
∣∣∣∣s=0
= I(q, q, t)
hinreichende Bedingung fur die Invarianz der Wirkung ist die Invarianz der Lagrange-Funktion
d
dsL(Qs, Qs, τs
)= 0 (3.26)
Zwei-Korper-Problem: 2 · 3 = 6 Freiheitsgrade
⇒ L =m1
2~r
2
1 +m2
2~r
2
2 −V(1)ext (~r1)− V (2)
ext (~r2)︸ ︷︷ ︸keine außeren Krafte
= 0
−V12(~r1, ~r2)︸ ︷︷ ︸entspricht Zentralkrafte
= V12(|~r1 − ~r2|)
Symmetrie Erhaltungssatze
29

• Translationsinvarianz
~ri → ~ri + ~a⇒ d
dt
(∂L∂~r1
+∂L∂~r2
)=
d
dt(~p1 + ~p2) = 0 (3.27)
⇒Der Gesamtimpus bleibt erhalten.
• Schwerpunkt/ Relativkoordinaten:
~R =m1 · ~r1 +m2 · ~r2
m1 +m2
, ~r = ~r1 − ~r2
L = LSwpkt.( ~R) + LRel., LRel. =µ
2· ~r2 − V (r), =
m1 ·m2
m1 +m2drei Freiheitsgrade
• Rotationsinvariant:
~r → ~r + φ× ~r :d
dt
(~r × ∂L
∂~r
)=
d
dt(~r × ~p) = 0
⇒Drehimpulserhaltung
~L = ~r × ~p = µ(~r × ~r) = const⇒ ~r, ~r ⊥ ~L
• Polarkoordinaten in der Ebene senkrecht zu ~L
L =µ
2(ρ2 + ρ2φ2)− V (ρ)
ρ, φ sind hier die generalisierten Koordinaten (also zwei Freiheitsgrade)
φ ist hier zyklisch, also folgt
pφ =∂L∂φ
= µρ2φ = L⇒ φ =L
µ · ρ2
• L ist zeitabhangig→Energieerhaltung
H =µ
2· ρ2 +
L2
2 · µ · ρ2+ V (ρ)︸ ︷︷ ︸
=Veff
≡ E = const (3.28)
3.4 Kepler-Problem
Die Potentielle energie schwerer Korper:
V (ρ) = −Gm1 ·m2
ρ(3.29)
30

bzw.Veff (ρ) = −kρ
+β
ρ2, k = G ·m1 ·m2 > 0, β =
c2
2µ(3.30)
Minimum beik
ρ20
− 2β
ρ30
= 0 > ρ0 =2β
k(3.31)
V0 = − k2
4β
Physikalisch sinvolle Losung fur E > V0:
ρmin = − k
2E
(1−
√1 +
4Eβ
k2
)=
2βk
1 +√
1 + 4Eβk2
≡ p
1 + ε(3.32)
ρmax = − k
2E
(1 +
√1 +
4Eβ
k2
)=
p
1− ε← , falls E < 0
p =2β
k, ε =
√1 +
4Eβ
k2(3.33)
Fur die Bahnkurve ρ(φ) gilt:
• Substitution von µ = 1ρ
• Verwende φ (anstellen von t) als unabhanige Variable: Dies gilt wegen (3.18)
µ · ρ2dφ = L dtyd
dt=L
µu2 d
dφ,
dρ
dt= − 1
u2
du
dt= −L
µ
du
dφ(3.34)
⇒Der Energiesatz (??):
E(u,du
dφ) =
L2
2µ
[(du
dφ
)2
+ u2
]− k · u = β
[(du
dφ
)2
+ u2
]− k · u = const (3.35)
dE
dφ= 0
d2u
dφ2+ u =
k
2β(3.36)
⇒ dies ist ein harmonischer Oszillator mit konstanter Kraft
u(φ+ 2π = u(φ)) (3.37)
⇒Die Periode der Bewegung ist ∆φ = 2π⇒ eine spezielle Eigenschaft des 1ρ-Poten-
tials (und außerdem V (ρ) ∼ ρ2)
Die Losung ware dann:
31

u =1
ρ=
k
2β+ A · cosφ =
1
p(1 + ε · cosφ) (3.38)
⇒Kugelschnitte: ε-Extentrizitat
v0 < E < 0 : Bahnkurven sind Ellipsen mit ε ≤ 1 (und Kreise fur ε = 0)
E > 0 : Bahnkurven sind Hyperbeln mit ε > 1
E = 0 : Bahnkurven sind Parabeln mit ε = 1
Umformung von (3.38):
p = ρ+ ερ cosφ =√x2 + y2 + εx
⇒ (1− ε2)x2 + 2 · ε · p · x+ y2 − p2 = 0
⇒ (1− u2)
(x+
ε · p1− ε2
)2
+ y2 =p2
1− ε2
0 ≤ ε < 1
(x− xca
)2
+(yb
)2
= 1
Zentrum: xc = − ε·p1−ε2 |ρmin ist ein Perikel (Zur Sonne nachster Punk)
große Halbachse: a = p1−ε2
kleine Halbachse: b = p√1−ε2
Erstes keplersches Gesetz: Planetenbahnen sind Ellipsen, in deren Brennpunkt dieSonne steht (weil die Sonnenmasse sehr viel großer der Planetenmasse)
Zweites keplersches Gesetz (??): dFdt
= L2µ
= const
Mit der Umlaufzeit:
τ =2µ
Lπ(a · b)︸ ︷︷ ︸
Flache der Ellipsen
=2 · π · µL
√p · a3 = 2 · π
õ
k
√a3
k
µ= G(m1 +m2) ' G ·m1 mit m1 m2
Drittes keplersches Gesetz: τ 2 ∼ a3 mit Proportionalitatskonstante, die fur allePlaneten gleich ist. (Abweichung fur Jupiter etwa 0, 1%)
4 Der starre Korper
Ein System aus M Teilchen mit der Wechselwirkungsenergie:
Vinf(~r1, . . . , ~rM) =1
2
∑i 6=j
V12(~ri − ~rj) (4.1)
32

Die “innere potentiele Energie” andert sich nicht mit der Zeit:
Die Ausnahme sind starre Korper: Die haben holonome Zwangsbedingungen fur dieAbstande von Punktpaaren.
r2ij = |~ri − ~rj|2 = C2
ij, i, j = 1, . . . ,M (4.2)
4.1 Bezugssysteme
Mit (4.2) haben wir O(M2) Zwangsbedingungen fur 3 ·M Freiheitsgrade
⇒ Sind also nicht unabhangig!
Festlegen eines Punktes im starren Korper, also benotigen wir die Abstande zu drei(nicht kollinearen) Punkten und die Koordinaten ~r1, ~r2, ~r3
⇒Alles durch die Zwanhsbedingung (4.2), außer ~r1, ~r2, ~r3, fixiert. Also ist die Anzahlder Freinheite N ≤ 9. Damit lauten die verbleibenden Zwangsbedingungen:
r12 = c12, r23 = c23, r13 = c13
⇒Der starre Korper hat N = 6 Freiheitsgrade, also werden sechs generalisierteKoordinaten benotigt:
• Sei K durch das raumfeste Koordinatensystem x1, x2, x3 definiert.
• Sei K ′ durch das korperfeste Koordinatensystem x′1, x′2, x′3 definiert.
– Also bestimmen drei Koordinaten den Ursprung von K ′ relativ zu K.
~r = ~R + ~r′ “Translationsfreiheitsgrade” (4.3)
– Also bestimmen drei Koordinaten die Orientierung der Achsen in K ′ relativzu K: Die sind dann die “Rotationsfreiheitsgrade”.
1
2
3
K ′
~R
K
x1
x2
x3
x′2
x′3
x′1
Seien ~ei, ~ej Basisvektoren in K ′ und K (also normiert)⇒ beliebiger Vektor ~g (mitder Zwangsbedingung ~r, ~r′).
~g = gi~ei = g′i~e′i (4.4)
33

Definition 4.1 (Summenkonvektion)Uber jeden Index, der in einem Term doppelt auftritt wird automatisch summiert:
~g = g1~e1 + g2~e2 + g3~e3 =3∑i=1
gi~ei ≡ gi~ei
Festlegung der Orientierung von K ′ relativ zu K uber “Richtungskosinusse”
αij = ~e′i · ~ej = cos θij (4.5)
⇒ ~e′i = (~e′i · ~ej) · ~ej =αij · ~ei, ~ei = (~ei · ~e′j) · ~e′j = αji · ~e′j (4.6)
Ebenso fur beliebige Vektoren ~g (vergleiche (4.4)):
g′i = ~e′i · ~g = αij · gj
gi = ~ei · ~g = αji · g′j(4.7)
Dabei bilden ~ei, ~e′j ein Orthonomalsystem (ONS)
⇒ δij = ~e′i · ~e′j = αik · αjk , ~ei · ~ej = αki · αkj!
= δij (4.8)
(allgemeine) Lineare Transformation zwischen zwei Koordinatensystemen xi, x′imit dem gleichen Ursprung:
x′i = αij︸︷︷︸konstante Koeffizient, unabhangig von xi
xj (4.9)
Mit der Bedingung (4.8) heißt diese Transformation orthogonale Matrixform
A =
α11 α12 α13
α21 α22 α23
α31 α32 α33
, A · AT = E (4.10)
~x′ = A~x , ~x = AT ~x′
(Recall: Aus A · AT = E ⇒ detA = ±1)
Bewegung des starren Korpers wird nur durch Transformationen mit detA = −1 ist
eine Inversion(
1 0 00 1 00 0 −1
)⇒Gruppe SO(3) bzw. SO(3,R)
Geschwindigkeiten: Aus (4.7):
gi = αjigj + αjig′j
⇒ ~g = gi~ei = αjig′i~ei + αji g′j~ei︸︷︷︸
~ej
34

= αjigjαki ~e′k + g′j~e′j = βikg
′j~e′k + g′j
~e′j (4.11)
= βij = αjiαki = (AAT )jk (4.12)
Wegen AAT = E gilt
αjiαki + αjiαki = 0 ⇒ βik + βkj = 0
Daraus folgt, dass B = (βij) eine schiefsymetrische Matrix ist; die Diagonalelementeverschwinden ⇒ 3 unabhangige Parameter:
β12 = ω′3β23 = ω′1β31 = ω′2
(4.13)
Damit definieren wir einen Vektor:
~ω = ω′i~e′i = ωi~ei (4.14)
→ βikg′j~e′k = (β1kg
′1 + β2kg
′2 + β3kg
′3)~e′k = ~ω × ~g (4.15)
zeitliche Anderung von ~g in K(Raumfest), K ′(Korperfest):
~g =
(d
dt~g
)K
, g′j~e′j =
(d
dt~g
)K′
(4.16)
(4.11)⇒(
d
dt~g
)K
=
(d
dt~g
)K′
+ ~ω × ~g (4.17)
Bei verschiedenen Ursprungen von K,K ′:
xi = Ri + αji x′j
xi = Ri + αji x′j
(4.18)
(x′j = 0 im Korperfesten System wegen Zwangsbedingung)
~r = R︸︷︷︸Geschwindigkeit des Ursprungs
+
Winkelgeschwindigkeit der Drehung von K′ relativ zu K︷︸︸︷~ω (4.19)
Wahl des Ursprungs von K ′:
• ~R→ ~R Geschwindigkeit des “neuen” Urspungs
• ~ω → ~Ω Winkelgeschwindigkeit relativ zu neuen Basispunkt
• ~r′ → ~r′ + ~a Ortsvektor in neuen Bezugssystem K ′
35

⇒ ~r =~R + ~Ω× ~r′ (4.20)
(4.19)⇒ ~r = ~R + ~ω × (~r′ + ~a) (4.21)
Vgl:~R = ~R + ~ω × ~a, ~Ω = ~ω (4.22)
⇒Winkelgeschwindigkeit ist unabhangig von der Wahl des korperfestem Bezugsys-tems
Sind ~R, ω senkrecht zueinander (bei fester Zeit t), so gilt das in jeden Bezugssystemwegen (4.19):
~r = ~R + ~ω × ~r′
Das bedeutet, dass die Geschwindigkeiten in Ebene senkrecht zu ~ω sind. Wahle K ′
so dass ~R = 0. Diese Wahl des Ursprungs von K ′ liegt die “momentane Drehachse”fest. Vollstandige Bewegung ist Rotation und Translation in Richtung um ~ω
4.1.1 Die Euler Winkel
αij waren nicht unabhangig voneinander wegen Orthogonalitatsbedingung (4.8).Mogliche Wahl von generalisierte Koordinaten sind die Euler-Winkel. Diese be-schreiben eine Drehung von einem festen K → Korperfesten K ′ durch Sequenz von3 Drehungen um gegebener Achse.
1. Drehung um x3 - Achse mit ϕ:
x1, x2, x3 → ξ, η, ζ
ϕ
x1
x2
x3
ξ
η
ζ
2. Drehung um ξ - Achse mit Winkel θ:
ξ, η, ζ → ξ′, η′, ζ ′
36
ϕ
x1
x2
x3
ξ
η
ζ
θ
ζ ′
η′
ξ′
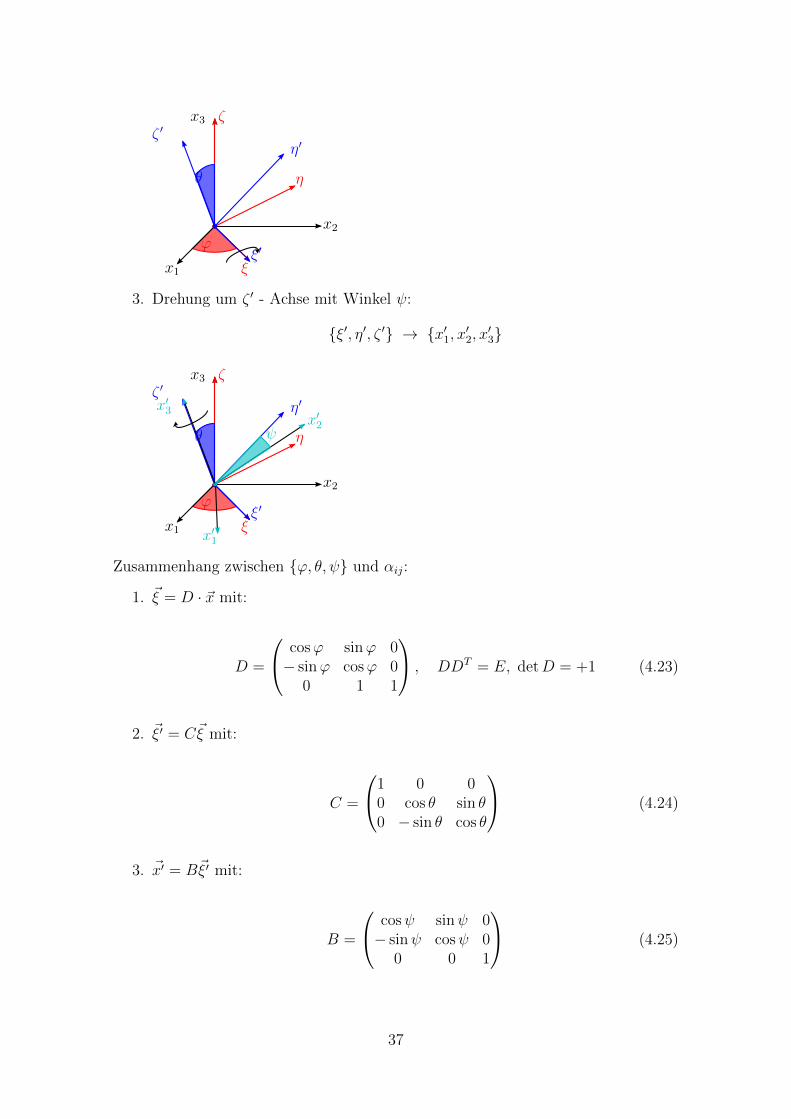
3. Drehung um ζ ′ - Achse mit Winkel ψ:
ξ′, η′, ζ ′ → x′1, x′2, x′3
ϕ
x1
x2
x3
ξ
η
ζ
θ
ζ ′
η′
ξ′
x′3x′2
x′1
ψ
Zusammenhang zwischen ϕ, θ, ψ und αij:
1. ~ξ = D · ~x mit:
D =
cosϕ sinϕ 0− sinϕ cosϕ 0
0 1 1
, DDT = E, detD = +1 (4.23)
2. ~ξ′ = C~ξ mit:
C =
1 0 00 cos θ sin θ0 − sin θ cos θ
(4.24)
3. ~x′ = B~ξ′ mit:
B =
cosψ sinψ 0− sinψ cosψ 0
0 0 1
(4.25)
37

Alles Zusammengenommen ergibt das fur die Transformation:
~x′ = A · ~x = (B · C ·D) · ~x (4.26)
αij = bikckldlj (4.27)
A = αij (4.28)
=
cosψ cosϕ− cos θ sinϕ sinψ cosψ sinϕ+ cos θ cosϕ sinψ sinψ sin θ− sinψ cosϕ− cos θ sinϕ cosϕ − sinψ sinϕ+ cos θ cosϕ cosψ cosψ sin θ
sin θ sinϕ − sin θ cosϕ cos θ
A ist die Transformation von K → K ′. Sie wird nach (4.10) beschrieben durch AT .Sequenz ist offensichtlich nicht eindeutig. Zwangsbedingungen:
• ϕ: Drehung um Drehimpulsachse
• ψ: Drehung um Figurenachse
• θ: Winkel zwischen Figur und Drehimpuls
Winkelgeschwindigkeit:
ω′1 =β23 = α2iα3i = ϕ sin θ sinψ + θ cosψ
ω′2 =β31 = α3iα1i = ϕ sin θ cosψ − θ sinψ
ω′3 =β12 = α1iα2i = ϕ cos θ + ψ
(4.29)
Analog gilt:
ωϕ = ϕ(sin θ sinψ, sin θ cosψ, cos θ) parallel zu xz
ωθ = θ(cosψ,− sinψ, 0)
ωψ = ψ(0, 0, 1) parallel zur x′j
(4.30)
Vorgehensweise beim starren Korper
• Parametrisierung der orthogonalen Transformation A : K → K ′ mit A ·AT =E. Bei einer Spiegelung muss gelten detA = +1
• Beachte die zeitabhangigkeit von Vektoren(d
dt~g
)Raumfest
=
(d
dt~g
)Korperfest
+ ~ω × ~g
spezielle Ortsvektoren: ~r = ~R + ~ω × ~r′
• Parametrisierung von A durch Euler-Winkel (siehe Gleichung 4.29)
38

4.2 Tragheitstensor und Drehimpuls
Lagrangefunktion des kraftefreien starren Korpers (Sei M := Massenpunkte)
L = T =1
2
M∑k=1
mk ~2rk
=1
2
M∑k=1
mk( ~R + ~ω × ~r′k)2
=1
2
M∑k=1
mk︸ ︷︷ ︸gesamte Masse M
~R2 +M∑k=1
mk
(~R · (~ω × ~r′k)
)+
1
2
M∑k=1
mk(~ω × ~r′k)2 (4.31)
Bezugspunkt des starren Korpers ≡ Schwerpunkt:
M∑k=1
mk~r′k ≡ 0 (4.32)
⇒ L =1
2M ~R2 +
1
2
M∑k=1
mk(~ω × ~r′k)2
︸ ︷︷ ︸kinetische Energie der Rotation
(4.33)
Euler-Lagrange-Gleichungen fur Schwerpunktsbewegung:
δLδ ~R
=∂L∂ ~R− d
dt
∂L
∂ ~R= −M ~R = 0 (4.34)
Trot =1
2
∑k
mk(~ω × ~r′k) · (~ω × ~r′k)2
=1
2
∑k
mk~ω ·(~r′k × (~ω × ~r′k)
)=
1
2
∑k
mk
(~ω2(~r′k)
2 − (~ω · ~r′k)2)
=1
2
∑kmk
((ω′i)
2( x′kl︸︷︷︸l:=kartesische Komponenten=1,...,3
)2 − (ω′ix′ki)(ω
′j × x′kj)
)=
1
2θijω
′iωj (4.35)
mit:
θij =∑k
mk
((x′kl)
2δij − x′kix′kj)
(4.36)
39

Fazit: Der Tragheitstensor des starren Korpers θ ist symmetrisch, d.h.
θij = θji (4.37)
→ θ ist additiv, θij eines Korpers ist gleich Summe der θij seiner Teile. Die fuhrt zurUberlegung von diskreten Massepunkten zu einer kontinuierlichen Massenverteilungmit Dichte ρ(~r)
θij =
∫V
d3x′ρ(~x′)(
(~x′)2δij − x′i − x′j)
(4.38)
Fur Trot ≥ 0:
Trot =1
2θijω
′iω′j ⇒ θ ist positiv semidefinit (4.39)
θ ist symmetrischer Tensor 2.Stufe⇒ durch Wahl von K ′ zu diagonaliseren θij = θδij(Hauptachsentransformation)
θi: Haupt-Tragheitsmomente in diesem Bezugssystem ist
Trot =1
2
3∑i=1
θi(ω′i) (4.40)
4.2.1 Arten von Kreiseln
• θi paarweise verschieden: dreiachsiger Kreisel
• θ1 = θ2 6= θ3 : symmetrischer Kreisel
• θ1 = θ2 − θ3 : Kugelkreisel
θ1 + θ2 =∑k
(2(~r′k)
2 − (x′k1)2 − (x′k2)2)
=∑k
mk
((x′k1)2 + (x′k2)2 + 2(x′k3)2
)≥∑k
mk
((x′k1)2 + (x′k2)2
)= θ3 (4.41)
θi konnen nicht großer sein, als die Summe der beiden anderen Haupt-Tragheitsmo-mente. Sonderfall “Rotator” (Alle Massenpunkte auf einer Geraden)
; funf Freiheitsgrade: drei Translation plus zwei Rotation
; θ1 = θ2 =∑
kmk(x′k3)2 , θ3 ≡ 0
Nebenbemerkung: Berechnet man θij in einem korperfesten Bezugssystem K ′, ge-
genuber K ′ ein Vektor ~a verschoben:~r′ = ~r′ + ~a
θij =∑k
mk
((~r′ + ~a)2δij − (x′ki + ai)(x
′kj + aj)
)40

= θij +M(~a2δij − aiaj) + . . .+∑k
mkx′ki︸ ︷︷ ︸
0, da K′ Ursprung im Schwerpunkt hatte
(4.42)
4.2.2 Drehimpuls des starren Korpers
~L hangt von der Wahl des Bezugspunktes ab. Wahle Schwerpunkt
~L(??)=
M∑k=1
mk(~rk × ~rk)
=M∑k=1
mk(~R + ~r′k)× ( ~R + ~ω × ~r′k)
=M ~R× ~R +∑k
mk
(~r′k × (ω × ~r′k)
)(4.43)
Fur spezial Fall des kraftefreien starren Korpers: ~R = const, ~R = ~Rj + ~Rt. “Trans-lationsdrehimpuls”
Ltrans = M ~R× ~R = const (4.44)
(verschwindet bei Bewegung des Schwerpunktes durch Urspungs von K)
Eigendrehimpuls ~Lrot (im Folgenden ~L) ist:
~L =∑k
mk
((x′k)
2~ω − ~r′k(~ω · ~r′k))
=∑k
mk
((x′k)
2ω′j − x′kjω′ix′ki)· ~e′j
=∑k
mk
((x′ki)
2δij − x′kjxki)· ω′i~e′j
= θjiω′i~e′j = θ~ω (4.45)
Mit Trot aus (4.35)
L′i =∂T
∂ω′i(4.46)
Anschaulich:
T = const =1
2
∑ij
θijω′iω′j → Ellipsoid
L′i = θiω′i → kraftefreier Starrer Korper: ~L = const
~L ⊥ auf Tangentialebene an Ellipsoid (4.46) ; Ellipsoid dreht sich damit ~L =const ∀t
41

4.3 Der kraftefreie starre Korper
Wahle K ′ so dass θij diagonalisierbar ⇒Hauptachsensystem ⇒L′i = θiω′i (in K:
Drehimpulserhaltung)
0 =
(d~L
dt
)raumfest
(??)=
(d~L
dt
)korperfest
+ ~ω × ~L (4.47)
in Komponenten: (Euler-Gleichungen)
θ1ω′1 + (θ3 − θ2)ω′2ω′3 = 0
θ2ω′2 + (θ1 − θ3)ω′3ω′1 = 0
θ3ω′3 + (θ2 − θ1)ω′1ω′2 = 0
(4.48)
Alternativ aus Variationsprinzip:
L = Trot =1
2
∑i
θi(ω′i)
2 =1
2θ1
(ϕ sin θ sinψ + θ cosψ
)2
+ . . .+ . . . (4.49)
;d
dt
∂L∂ψ
=d
dt
(θ3( ˙ψ + ϕ cos θ)
)∂L∂ψ
=(θ1 − θ2)[ϕ2 sin2 θ sinψ cosψ − θ2 cosψ sinψ + ϕθ sin θ2 sinψ cosψ
]; 3 Euler-Gleichungen:
θ3ω′3 =(θ1 − θ2)ω′1ω′2 (4.50)
Integration der Bewegung Gleichung:
Drehimpulerhaltung
~L2 = const = (L′1)2 + (L′2)2 + (L′3)2 = C2 (4.51)
Energieerhaltung Mit (??):
Trot =(L′1)2
2θ1
+(L′2)2
2θ2
+ . . . = E = const (4.52)
Aus (4.51) folgt: Kugel mit Radius C im “~L - Raum”Aus (4.52) folgt: “Binet”- Ellipsoid mit Halbachsen der Lange
√2Eθi
Sei θ1 ≤ θ2 ≤ θ3. Aus (4.51) und (4.52) folgt, dass ~L die Schnittkurve der Kugelo-berflache mit dem Binet-Ellipsoid durchlauft. Ist gleich der Kurve vierter Ordnungfur√
2Eθ3 > C >√
2Eθ1
Es gibt 3 Falle:
42

1. C2 ≥ 2Eθ1 : Kurve ist nahe der kleinsten Hauptachse, fur alle t
2. C2 ≤ 2Eθ3 : Bewegung nah der großten Hauptachse
3. C2 = 2Eθ2 : Schnittkurven konnen sich beruhren → “Torkelbewegung”
Kraftefreier starrer Korper
0 =
(d
dt~L
)raumfest
=
(d
dt~L
)korperfest
+ ~ω × ~L
Dabei beschreibt das koperfeste Bezugssystem das Haupachsensystem.
θij =∑k
= mk(( ~x′k)2δij − x′kj) =
∫ρ(~x′)(~x′)2δij − x′ix′j
θ =
θ1
θ2
θ3
Dies Matrix ist diagonal im Hauptachsensystem.
~L = θ~ω; L′i = θiω′i
Euler-Lagrange-Gleichung:
θ1ω′1 + (θ3 − θ2)ω′2ω
′3 = 0 + Zyklisch
Erhaltungsgroße:
~L2 = (L′1)2 + (L′2)2 + (L′3)2 = c2
T =(L′1)2
2θ1
+(L′2)2
2θ2
+(L′3)2
2θ3
= E
Aus ~L2 und T folgt:
2E · θ3 − c2 =θ3
θ1
(L′1)2 +θ3
θ2
(L′2)2 + (L′3)2 − (L′1)2 − (L′2)2 − (L′3)2
= θ1(θ3 − θ1)(ω′1)2 + θ2(θ3 − θ2)(ω′2)2 (4.53)
ebenso: 2E · θ1 − c2︸ ︷︷ ︸const
= θ2(θ1 − θ2)(ω′2)2 + θ3(θ1 − θ3)(ω′3)2 (4.54)
⇒ ω′2 =θ3 − θ1
θ2
ω′1ω′3 (4.55)
=1
θ2
√θ1 · θ3
√(2E · θ3 − c2 − θ2(θ3 − θ2)(ω′2)2) · (c2 − 2E · θ1 − (θ2 − θ1)(ω′2)2)
Trennung der Variablen gibt t(ω′2) als elliptisches Integral: Standartform:
τ = t
√(θ3 − θ2)(c2 − 2E · θ1)
θ1 · θ2 · θ3
(4.56)
43

s = ω′2
√θ2(θ3 − θ2)
2E · θ3 − c2
K2 =θ2 − θ1
θ3 − θ2
· 2E · θ3 − c2
c2 − 2E · θ1
< 1
⇒ τ(s) =
∫ s
0
1√(1− s2)(1−K2 · s2)
ds (4.57)
Umkehrung S(τ) fuhrt auf eine Jacobifunktion elliptischer Form.
s = sn(τ) (4.58)
Außerdem folgt:
cn(τ) =√
(1− s2n)
dn(τ) =√
1− k2s2n(τ) (4.59)
ω′1 =
√2Eθ3 − c2
θ1(θ3 − θ1)cn(τ)
ω′2 =
√2Eθ3 − c2
θ2(θ3 − θ2)sn(τ) (4.60)
ω′3 =
√c2 − 2Eθ1
θ3(θ3 − θ1)dn(τ)
Die elliptischen Funktionen (cn, sn, dn) sind periodisch in τ mit einer Periode von4k, also folgt:
K =
∫ 1
0
1√(1− s2)
1√(1− k2s2)
ds (4.61)
Die Schnittkurve (4.51), (4.52) hat die Periode von
Tp = 4k
√θ1θ2θ3
(θ3 − θ2)(c2 − 2Eθ1)(4.62)
Spezialfall: Symmetrischer Kreisel
θ1 = θ2 6= θ3 ⇒ k2 = 0
⇒ sn(τ)→ sin(τ)
cn(τ)→ cos(τ) (4.63)
dn(τ)→ 1
⇒ ω′1 = a · cos
(θ3 − θ1
θ1
ω′3t
)ω′2 = a · sin
(θ3 − θ1
θ1
ω′3t
)44

ω′3 =
√c2 − 2Eθ1
θ3(θ3 − θ1)= const
⇒ a =
√2Eθ3 − c2
θ1(θ3 − θ1)(4.64)
Also haben wir eine Projektion von ~ω auf der Ebene senkrecht zur Figurenachse(x′3) mit einer konstanten Winkelgeschwindigkeit θ3−θ1
θ1ω′3 rotiert.
Daher ist |~ω konstant und die Richtung von ~ω pprazediertum Figurenachse. Bewegungim raumfesten Bezugssystem
Wahle x3-Achse in Richtung des erhaltenen Drehimpulses ~L:
~L′ = αij~L = C︸︷︷︸=|~L|
sinψ sin θcosψ sin θ
cos θ
=
θ1ω′1
θ2ω′2
θ3ω′3
(4.60)= ~L′(τ) (4.65)
cos θ =θ3ω
′3
C=
√θ3(c2 − 2Eθ1)
c2(θ3 − θ1)dn(τ)
tanψ =θ1ω
′1
θ1ω′2=
√θ1(θ3 − θ2)
θ2(θ3 − θ1)
cn(τ)
sn(τ)(4.66)
Bestimmung von φ uber ω′i = f(φ, θ, ψ) in (4.29)
φ =ω′1 sinψ + ω′2 cosψ
sin θ= C
θ1(ω′1)2 + θ2(ω′2)2
θ21(ω′1)2 + θ2
2(ω′2)2(4.67)
Integration liefert φ(τ)! Spezialfall:Symmetrischer Kreisel
⇒ cos θ =
√θ3(c2 − 2Eθ1)
c2(θ3 − θ1)= const (4.68)
Also schließen die Drehimpulsachse (x3) und Figurenachse (x′3) konstante Winkelein.
Damit folgt:
tanψ = cot τ, ⇒ ψ =π
2− τ (4.69)
ψ =
√(θ3 − θ1)(c2 − 2Eθ1)
c2(θ3 − θ1)= const
⇒ φ =C
θ1
= const (4.70)
4.4 Der schwere symmetrische Kreisel
Newton: d~Ldt
= ~N Euler-Lagrange-Gleichung (??) mit N ′i auf der rechten Seite.
Lagrange:
45

• Drehung des Kreisels um Drehpunkt, der ungleich dem Schwerpunkt ist
• Doch der Drehpunkt liegt auf der Symmetrieachse
• θ′1 = θ′2 und θ′3 seien Haupttragheitsmomente relativ zum Schwerpunkt
• Haupttragheitsmomente relativ zum Drehpunkt, nach (??) (Steiner’scher Satz):
θ1 = θ2 = θ′1 +M l2, θ3 = θ′3 (4.71)
L =θ1
2(φ2 sin2 θ + θ2) +
θ3
2(φ cos θ + ψ)2︸ ︷︷ ︸
kinetische Energie der Rotation um Drehpunkt
−M g l cos θ︸ ︷︷ ︸2 Koord. des Schwerpkts.
Kreisel:
Keine außeren Krafte (also kraftefrei), es gilt fur die Euler-Lagrange-Gleichung:
θ1ω′1 + (θ3 − θ2)ω′2ω′3 = 0 + zyklisch
Erhaltungsgroßen (im korperfestem Bezugssystem):
TRot =1
2
∑i
θi(ω′i)
2 = E
~L2 =∑i
(L′i)2 =
∑i
θ2i (ω
′i)
2 = c2
Eine Differentialgleichung 1. Ordnung fur ω′2, also folgt die Losung durch ellipti-sche Funktion.
Symmetrischer Kreisel:
θ1 = θ2 6= θ3, K′ω′3 = const(
ω′1ω′2
)= a
cossin
(θ3 − θ1
θ1
ω′3t)
Schwerer Kreisel:(symmetrisch)
Auf der Symmetrieachse ist der Drehpunkt ungleich dem Schwerpunkt.
Steiner’scher Satz:
θ1 = θ2︸ ︷︷ ︸rel. zum Drehpkt.
= θ′1 +Ml2,Haupttragheitsachse rel. zum Schwerpkt.
θ3 = θ′3
L = θ1/2(φ2 sin2 θ + θ2) + θ3/2(ψ + φ cos θ)2 −Mgl cos θ
ψ, φ sind zyklisch, also 2 Erhaltungsgroßen.
pψ =∂L∂ψ
= θ3(ψ + φ cos θ) = θ3ω′3 ≡ θ1 · a
46

pφ =∂L∂φ
= (θ1 sin2 θ + θ3 cos2 θ)φ+ θ3ψ cos θ ≡ θ1 · b (4.72)
System ist konservativ, also gilt die Energieerhaltung:
E = T + V = θ1/2(φ2 sin2 θ + θ2) + θ3/2(ψ + φ cos θ)2 −Mgl cos θ (4.73)
⇒ θ3ψ = θ1a− θ3φ cos θ θ1φ sin2 θ + θ1a cos θ = θ1b
⇒ φ =b− a cos θ
sin2 θ, ψ =
θ1
θ3
a− cos θb− a cos θ
sin2 θ(4.74)
Ist φ(t) bekannt, folgt φ(t), ψ(t) durch Integration
Andererseits lasst sich φ, ψ aus dem Energiesatz eliminieren:
E ′ = E − θ3/2(ω′3)2 = θ1/2θ2 + θ3/2(
b− a cos θ
sin θ)2 +Mgl cos θ
(4.75)
⇒ 1. dimensionales Problem fur θ : sin2 θθ2 =
(2E ′
θ1
− 2Mgl cos θ
θ1
)sin2 θ − (b− a cos θ)2
= (α− β cos θ) sin2 θ − (b− a cos θ)2
(4.76)
Substitution: u = cos θ:
u2 = (1− u2)(α− β u)− (b− a u)2 ≡ f(u)Losung: L =
∫ u(t)
u0
1√(1− u2)(α− β u)− (b− a u)2
(4.77)
Qualitativ:
. f(u) = 0: Umkehrfunktion ist ein Vorzeichenwechsel von θ (oder θ = 0, π:Schwerkraft wirkungslos, Kreisel steht senkrecht)
. |u|gg1 : f(u) w βu3 β>0→ ±∞ fur w → ±∞
. u = ±1 : f(u) = −(b∓ a)2 < 0
(??): sgn(φ) = sgn(b− a u) wechselt bei u′ = ba
Fallunterscheidung:
1. u′ > u2 : u1 ≤ u ≤ u2 < u′ : Vorzeichen von φ ist fest.
2. u1 < u′ < u2 : Vorzeichenwechsel von φ
3. u′ = u2 : θ = 0 = φ, u1 = u2
Notation:
Rotation in φ: Prazesion; Rotation in θ: Nutation.
Quantitativ:
47

• Abbildung wie in 3)
• schneller Kreisel: Erot Epot
Gesucht:
• Amplitude/Frequenz der Nutation
• mittlere Frequenz der Prazession
Nach Variation:
Energiesatz:
u0 =b
a, E ′ = Mgl cos θ0 α = βu0 (4.78)
⇒ f(u) = (u0 − u)β(1− u2)− a2(u0 − u) (4.79)
A) Amplitude der Nutation:
x1 = u0 − u1 mit f(u1) = 0⇔ (1− u21)− a2
β(u0 − u1) = 0
x21 + px1 − q = 0, p =
a2
β− 2u0, q = 1− u2
0 (4.80)
Schneller Kreisel:
a2
β=θ2
3(ω′3)2
θ12Mgl 1 (4.81)
p ∼=a2
β q,
x1 =q
p∼=β(1− u2
0)
a2=
θ12Mgl
θ3θ3(ω′3)2sin2 θ0 ∼
1
(ω′3)2(4.82)
A) Frequenz der Nutation: Sei x = u0−u, also 0 ≤ x ≤ x1 1. Durch (1−u2) '(1− u2
0/1) = a2
βfolgt:
x2 = u2 = a2x(x1 − x) (4.83)
⇒ x(t) = x1/2(1− cos(at))⇒ a− θ3
θ1
ω′3, Nutationsfreq. ∼ ω′3 (4.84)
A) Frequenz der Prazession:
φ =b− a cos θ
sin2 θ= a
u0 − u1− u2
0
=ax
1− u20
=β
2a(1− cos(at)) (4.85)
Zeit-Mittel:¯φ =
cos(at)=0
β
2a=Mgl
θ3ω′3∼ 1
ω′3(4.86)
48

4.5 Bewegung im beschleunigtem Bezugssystem
Newton: Inertialsystem
Lagrange: Wirkungsprinzip δS = 0, keine Einschrankungen bezuglich der Wahl desBezugssystems. Bewegungsgleichungen sind immer δL
δ~r= 0
Inertialsystem K0: Lagrange-Funktion eines freien Teilchens im Potential V .
L0︸︷︷︸in K0
=1
2m~v0
2 − V (~r0) (4.87)
A) Bezugssystem K ′ bewegt sich mit Geschwindigkeit ~v(t) relativ zu K0
~v0 = ~v(t) + ~v′, L′ = 1
2m(~v′)2 +m~v′~v(t) +
m
2(~v(t))2 − V
(4.88)
~v2(t) =dF (t)
dt
m~v′~v(t)~ ′r =d
dt(m~v~r′)−m~r′ ~v
= ~A(t)
(4.89)
⇒ L′ = m
2(~v′)2 − ~A(t)(m~r′)− V (4.90)
Bewegungsgleichung: m~ ′v = −~∇V −m ~A(t)homogenes Kraftfeld, Produkt an Teilchenmasse und Beschleunigung ~A
(4.91)
A) K ′ rotiert bezuglich K0 mit Winkelgeschwindigkeit ~Ω(t)
~v0 = ~v(t) + ~v′ + ~Ω× ~r′
L′ = 1
2m(~v′)2 +m~v′(~Ω× ~r) +
m
2(~Ω× ~r′)2 −m~A(t)~r′ − V (4.92)
Allgemeine Losung fur Teilchen im beschleunigtem Bezugssystem. Bewegungs-gleichung:
∂L′
∂~v′= m~v +m(~Ω× ~r)
∂L∂~r′
= m(~v × ~Ω) +m(~Ω× ~r′)× ~Ω−m~A− ~∇V
49

⇒ m~ ′v = −~∇v −m~A+m(~r′ × ~Ω) + 2m(~v′ × ~Ω)︸ ︷︷ ︸Corioliskraft
+m~Ω× (~r × ~Ω)︸ ︷︷ ︸Zentrifugalkraft︸ ︷︷ ︸
Tragheitskrafte durch Rotation des Besugssystems
(4.93)
Wiedholung: Nichtinertialsystem und WirkungsprinzipSei K das Inertialsystem und K ′ das Bezugssystem, welches zur Analyse betrachtetwird. Mit L0 = 1
2m~v0
2 − V (~r0)
~v0 = ~v(t) + ~v′ +(~Ω(t)× ~r′
)L′ = m
2
(~v′)2
− V (~r′)−m~A(t) · ~r′ +m~v′ ·(~Ω× ~r′
)+m
2
(~Ω× ~r′
)2
m~v′ = −~∇V −m~A(t) +m(~r′ × ~Ω
)+ 2m
(~v′ × ~Ω
)+m~Ω×
(~r′ × ~Ω
)Speziell gilt: ~v(t) = 0, ~Ω(t) = const. L′ ist zeitabhangig. Das bedeutet eine Energie-erhaltung
E = H = ~v′ · ∂L′
∂~v′− L′
=m
2
(~v′)2
+ v − m
2
(~Ω× ~r′
)2
︸ ︷︷ ︸Zentrifugalkraft
(4.94)
Impuls:∂L′
∂~v′= m
(~v′ + ~Ω× ~r′
)= m~v0 ≡ Impuls im Inertialsystem
Newton: Punktmassen im drei dimensionalen euklidischen Raum
• Inertialsystem
• Zwangskrafte
Lagrange: Beschreibung mechanischer im “Konfiguration”6. Die Lagrange-Funktion:
L(q, q) : ist die Funktion auf Tangentialbundel der Mannigfaltigkeit
Hamilton: Geometrie im Phasenraum
6differentierbare Mannigfaltigkeit
50

5 Hamiltonische Dynamik
Das Problem im Lagrange-Formalismus ist, dass die Variablen (q, q) funktionalabhangig sind. Die Alternative ist die Ersetzung der Geschwindigkeiten mit Ko-ordinaten.
→ Phasenraum parametrisiert durch N Koordinaten qk und N Impulse pk = ∂L∂qk
.
Diese Parameter (insgesamt 2N) sind unabhangig. Daraus folgt, dass es 2N DGL1.Ordnung gibt. Anstelle von N DGL 2.Ordnung im Lagrange-Formalismus
5.1 Legendre Transformation und Hamilton Gleichungen
Erzeuge ausgehend von einer Variablen eine neue Funktion einer anderen Varia-blen ohne Infos zu verlieren (→ partielle DGL, vgl. Thermodynamik). Sei A(x, y)gegeben. Damit definiert:
B(x, y, z) = yz − A(x, y) (5.1)
x, y, z sind unabhangige Variablen Differential von B
dB =zdy + ydz − ∂A
∂x
∣∣∣∣y
dx− ∂A
∂y
∣∣∣∣x
dy
=
(z − ∂A
∂y
∣∣∣∣x
)dy + ydz − ∂A
∂x
∣∣∣∣y
dx (5.2)
Sei: z = z(x, y) ≡ ∂A
∂y
∣∣∣∣x
(5.3)
• 1 Term in (5.2) verschwindet
• B ist nur eine Funktion von x, z
•
∂B
∂z
∣∣∣∣x
= y,∂B
∂x
∣∣∣∣z
= − ∂A
∂x
∣∣∣∣y
(5.4)
• explizit:
y = y(x, z) ⇒ B = B(x, y(x, z), z) (5.5)
Mit (5.5) konnen wir die Legendre Transformation ruckgangig machen:
y = y(x, z) =∂B
∂z
∣∣∣∣x
(5.6)
Partielle Ableitung ∂A∂x
∣∣y, ∂B∂x
∣∣z
lassen sich wegen (5.4) aus A oder B:
51
DE: BILDER FEHLEN
B(x, z) = yz − A(x, y) , z =∂A
∂y
∣∣∣∣x
, p =∂L∂q
∣∣∣∣q
H(p, q)(??)= pq − L(q, q) (5.7)
Hamiltonische Prinzip
δS =
∫ t1
t0
dtL = 0 (5.8)
(5.7); δL =qδp+ pδq − δH
δH =∂H
∂qδq +
∂H
∂pδp
=
(q − ∂H
∂p
)δp−
(p+
∂H
∂q
)δq +
d
dt(pδq) (5.9)
δS = 0 fur unabhangige Variation von p, q ⇒ Kraft von δp, δq verschwinden.( d
dt(pδq) tragt nicht zu δS bei, da δq|t0,t1 = 0). Mit Gleichung (5.7):
dH = qdp+ pdq − ∂L∂q
∣∣∣∣q
dq − ∂L∂q
∣∣∣∣q
dq − ∂L∂q
∣∣∣∣q
dq (5.10)
⇒ q =∂H
∂p
∣∣∣∣q
∂H
∂q
∣∣∣∣p
= − ∂L∂q
∣∣∣∣q
Euler-Lagrange= − d
dt
∂L∂q
∣∣∣∣q
= −p(5.11)
Unabhangig infinitesemale Variation δp, δq andern die Wirkung nicht, wenn p, q denphysikalischen Pfad des Systems im Phasenraum beschreiben
dH = qdp− pdq (5.12)
N Freiheitsgrade im 2N Dimensionalen Phasenraum mit Variablen qk, pk
H =N∑k=1
pkqk − L(. . .) = H(q1, . . . , qN , p1, . . . , pN , t) (5.13)
dH = qkdpk − pkdqk +∂H
∂tdt (5.14)
52
Nach (5.4)
∂H
∂t
∣∣∣∣qk,pk
= − ∂L∂t
∣∣∣∣qk,qk
(5.15)
⇒ dH
dt= qkpk − pkqk +
∂H
∂t= −∂L
∂t(5.16)
Es ergeben sich die Hamiltonischen Bewegungsgleichung :
qk =∂H
∂pk, k = 1, . . . , N
pk = −∂H∂qk
, k = 1, . . . , N
dH
dt= −∂L
∂t
(5.17)
Zusammenfassung/Kochrezept: Hamilton Dynamik bei gegebenen Lagrangien
1. kanoisch konjugierte Impulse pk = ∂L∂qk
∣∣∣qk
formulieren (mit k = 1, . . . , N)
2. Hamilton aus (5.13)
3. Invertiere die Gleichung zu den kanonischen Impulsen zu qk = qk(q1, . . . , qN , p1, . . . , pN)
4. Eliminiere qk aus H woraus folgt, dass H(q1, . . . , qN , p1, . . . , pN , t)
5. Nun kann man mit (5.17) die 2N Bewegungsgleichungen 1.Ordnung aufstellenund losen
Beispiel 5.1 (Masse auf parabolischen Draht) • Parabolgleichung: y = 12x2
• generalisierte Koordinate x
• Lagrangefunktion: L = m2
(x2 − y2)−mq = m2
(1 + x2) x− mq2x2
• L ist quadratisch in x→ H = T + V = E
• kanonische Impuls: p = ∂L∂x
= m(1 + x2)x
⇒ H =m
2
(1 + x2
)x2 +
mg
2x2 =
p2
2m(1 + x2)+mg
2x2
x =∂H
∂p=
p
m(1 + x2)6= p
m
p = −∂H∂x
= −x[
p2
m(1 + x2)2+mg
]
• E = const → Losung der Bewegungsgleichungen sind Aquipotentiallinien vonH im Phasenraum
53

Beispiel 5.2 (rotierendes Bezugssystem)
L =m
2
(~v′ + ~Ω× ~r′
), ~v′ =
~p′
m−(~Ω× ~r′
)+ V (~r′)
=~p′
2
2m+ V (~r′) + V (~r′)− ~Ω ·
(~r′ × ~p′
)︸ ︷︷ ︸≡L (Drehimpuls
HΩ6=0 = HΩ=0 − ~Ω · ~L
Geladenes Teilchen im Magnetfeld (→ ??)
H =1
2m
(~p− q ~A
)2
+ qφ
~A =1
2( ~B × ~r)
=H(p, r, ?)
Hamiltonsche Formulierung:
L(q, q, t)↔ H( q, p︸︷︷︸Koordinaten und Impuls als unabhangige Freiheitsgrade
, t)
• Lagrange-Transformation
A(x, y)↔ B(x, y, z) = y 6= −A(x, y)
dB = −∂A∂x|y dx+
(z − ∂A
∂y|x)dy + y dz
⇒ z = Z(x, y) ≡ ∂A
∂A|x
Umkehrung:∂B
∂z|x = y(x, z)
Hier:
H(qk, pk, t) = pk qk − L(qk, qk, t) mit pk =∂L∂qk|qk
• Bewegungsgleichung aus
S = 0 ⇒ qk =∂H
∂pk
pk = −∂H∂qk
2N -Bewegungsgleichung 1 Ordnung∂H
∂t= −∂L
∂t
Qk, Pk sollen kanonische Koordinaten im Sinne von (??), das heißt in Variations-prinzip muss gelten:
δ
∫ t2
t1
dt pkQk −K(Q, p, t)︸ ︷︷ ︸L(Qk,Qk,t)
= 0 (5.18)
54

außerdem:
δ
∫ t2
t1
dt pkqk −H(q, p, t)︸ ︷︷ ︸L(qk,qk,t)
= 0
jeweils mit:
δp(ti) = 0 = δq(ti)
δP (ti) = 0 = δQ(ti)
i = 1, 2
(??) sind erfullt wenn:
λ(pkqk −H) = (PkQk −K +dF
dt) (5.19)
mit F beliebige Funktion der Phasenraum-Koordinaten qk, pk, Qk, Pk mit 2 stetigenAbbildungen.
Sei λ eine Konstante, unabhangig von qk, pk, Qk, Pk, t beschreibt sie eine Skalen-Transformation, etwa:
Qk = µqk, Pk = νpk, K(Q,P ) = νµH(q, p)
⇒ λ = 1
Transformationen zwischen 2 Satzen kanonischer Koordinaten q, p, Q,P mit
pkqk −H = PkQk −K +dF
dt(5.20)
heißen kanonisch.
F:
• Funktion von (qk, pk, t) oder (Qk, Pk, t) oder (qk, Qk, pk, t)
• dFdt
tragt im Variationsprinzip (??)/(??) nur an den Endpunkten t1, t2 bei
⇒ verschwindender Beitrag zu δS
• (??): 2N Beziehungen zwischen qk, pk Qk, Pk
⇒ F ist eine Funktion der Halfte der q, p,Q, P
• heißt Erzeugende Funktion der kanonischen Transformation
Sei F eine Funktion der alten und neuen generalisierten Koordinaten:
F = F1(qk, Qk, t) (5.21)
ydF
dt=∂F1
∂qkqk +
∂F1
∂Qk
Qk +∂F1
∂t
⇒ pkqk −H(qk, pk) = PkQk −K(Qk, Pk) +∂F1
∂qkqk +
∂F1
∂t+∂F1
∂Qk
Qk
55

Hier sind qk, Qk 2N unabhangige Variablen⇒ Koeffizienten von qk, Qk musseneinzeln verschwinden.
⇒ pk =∂F1
∂qk, Pk = − ∂F1
∂Qk
= pk(qk, Qk, t) = Pk(q,Q, t)
⇒ Qk = Qk(qk, pk, t) = Pk(qk, pk, t)
H(q, p) = K(Q,P ) +∂F1
∂t(5.22)
Beispiel I:
F1 = q ·Q ⇒ p =∂F1
∂q= Q
P =− ∂F1
∂Q= −q
K(Q,P ) = H(q, p) = H(−P,Q)
⇒ Koordinaten und Impuls werden ausgetauscht.
Unabhangig des Verfahrens:
1. gegebene Transformation (??)
2. damit beschreibe pk, Pk Funktionen der Koordinaten qk, Qk, t
3. damit sind (??) partielle Differentialgleichungen fur Erzeugende F1
⇒ F1 bis auf Additive Funktion der Zeit
⇒ K
Beispiele II:
Kanonische Oszillator:
H(q, p) =1
2(p2 + ω2q2)
F1(q,Q) =ω2q2
2cot(2πQ) -geraten-
⇒ p =∂F1
∂q= ωq cot 2πQP = −∂F1
∂Q=
πωq2
sin2(2πQ)
p =
√ωP
πcos(2πQ)
q =
√P
πωsin(2πQ)
⇒ H(Q,P ) =ω
2πP ⇒ Qzyklisch, das heißt: P = const
Q =ω
2π: Q =
ω
2πt
⇒(p(t)q(t)
)=
√P
π
(√ω cos(ωt)
1√ω
)
56

5.2 kanonische Transformation
Qk = Qk(q, . . . , p, . . . , t)
Pk = Pk(q, . . . , p, . . . , t)
H(q, p)→ K(Q,P )
so dass Qk =∂K
∂Pk; Pk = − ∂K
∂Qk
(5.23)
Wirkungsprinzip:
0 = δS = δ
∫ t1
t0
dtL(. . .) = δ
∫ t1
t0
dt(pq −H(. . .))
⇒ λ(pkqk −H) = (PkQk −K + dFdt
) mit λ = 1 nach einer Skalentransformation
F (q, p,Q, P︸ ︷︷ ︸4NVariablen
, t) = F1(q,Q, t)⇒ pk =∂F1
∂qk, Pk = − ∂F1
∂Qk
, K = H +∂F1
∂t
Eine alternative Reduzierung der Arguemnte von f , etwa durch Vorgabe von pk =pk(q, P, t)⇒ erzeugenden Funktion F2(q, P, t). Ebenso F3(p,Q, t) und F4(p, P, t) (DieTransformationsgleichung muss immer alte und neue Variableen enthalten). Trans-formation selbst durch partielle Ableitungen der Fi (vgl. (??)). Alle so definierten Fibeschreiben dieselbe kanonische Transformation. Der Zusammenhang besteht uberdie Legendre Transformation. Zum Beispiel:
F3(p,Q, t) = F1(q,Q, t)− qp mit: p =∂F1
∂q(5.24)
F1 ist nicht explizit von p abhangig
q = −∂F3
∂p(5.25)
Aus (??) folgt
p = −∂F1
∂Q= −∂F3
∂Q(5.26)
Beispiel 5.3 (Harmonische Oszilator)
F1(q,Q) =ωq2
2cot 2πQ, p =
∂F1
∂q= ωq cot 2πQ
F3(p,Q) = F1 − qp
= − p2
2ωtan 2πQ
57

Aus (5.25)
q = −∂F3
∂p=p
ωtan 2πQ
q = πp2
ω
1
cos2 2πQ= πω
q2
sin2 2πQ
⇒F1 und F3 erzeugen dieselbe Transformation. Ebenso
F4(p, P, t) = F3(p,Q, t) + PQ, P = −∂F1
∂Q(5.27)
p =∂F1
∂q=∂F2
∂q, Q =
∂F2
∂P(5.28)
Transformation der Hamilton-Funktion
K = H +∂F
∂t(5.29)
Erzeugende kanonische Transformation triviales Beispiel
F1(q,Q, t) p = ∂F1
∂q; P = −∂F1
∂QF1 = qQ ; Q = p, P = −q
F2(q, P, t) p = ∂F2
∂q; Q = ∂F2
∂PF2 = qP ; Q = q, P = p
F3(p,Q, t) q = −∂F3
∂p; P = −∂F3
∂QF3 = pQ ; Q = −q, P = −p
F4(p, P, t) q = −∂F4
∂p; Q = ∂F4
∂PF4 = pP ; Q = p, P = −q
Euler-Lagrange-Gleichungen sind invariant unter der Punkt-Transformation, die-se sind auch kanonische-Transformation. Die Erzeugende ist: F2(q, P, t) − f(q, t)P .Transformationsgleichungen.
Q =∂F2
∂P= f(q, t)
p =∂F2
∂q=∂f
∂qP
Beispiel 5.4Infinitesemale kanonische Transformation F2 = qP : Identitat. Wahle F2(q, P ) =qP + εG(q, P ) ⇒Transformations-Gleichungen
p =∂F2
∂q= P + ε
∂G
∂q→ P = p− ε∂G
∂q
Q =∂F2
∂P= q + ε
∂G
∂P
Wahle spezielle G(p,Q) = H(q, P ) = H(q, p). ε→ 0⇒ H Bewegungs Gleichungen.Hamiltonfunktion generiert eine Reihe infinitesemaler Transformationen (q, p)t →(q, p)tdt
58

5.3 Symplektische Struktur
Die Hamilton-Gleichungen qk = ∂H∂pk, pk = − ∂H
∂qksind “fast symmetrisch”. Sei
ηk ≡ qk, ηk+N = pk (5.30)
(~∇2H)k =∂H
∂ηk
∂H∂qk, k = 1, . . . , N
∂H∂pk−N
, k = N + 1, . . . , 2N(5.31)
Sei J eine 2N × 2N Matrix
J =
(0 ENEN 0
)(5.32)
Eigenschaften:
JT =
(0 −EN−EN 0
)= −J
JJT = E2N
J2 = J · J = −E2N
det J = +1
(5.33)
⇒ Hamilton-Gleichung: η = J ~∇ηH (5.34)
in Komponenten: ηk = Jkl∂H
∂ηl
Beispiel 5.5 (N = 2)
q1
q2
p1
p2
=
01 00 1
−1 00 −1
0
=
∂H∂q1∂H∂q2∂H∂p1∂H∂p2
(5.35)
Die kanonische Transformation ist nicht explizit von der Zeit abhangig
Qk = Q(q, p)
Pk = Pk(q, p)(5.36)
⇒ ζk = ζk(η) (5.37)
mit k = 1, . . . , 2N
Bewegungsgleichungen:
ζk =∂ζk∂ηl
ηl = Mklηl (5.38)
wobei M : Jacobi-Matrix der kanonischen Transformation (5.37)
⇒ ζ = M · J · ~∇η ·H (5.39)
59

Umkehrung der kanonischen Transformation (5.37)
H(η) = H(η(ζ)) = H(ζ)
∂H
∂ηk=H
ζl
∂ζl∂ηk
bzw. ~∇ηH = MT ~∇ζH (5.40)
⇒ ζ = M · J ·MT ~∇ζ(H) (5.41)
Alternativ: Hamilton-Gleichung aus der transformierten Hamiltonfunktion K(ζ). Dadie kanonische Transformation zeitunabhangig ist, folgt aus (5.29)
K(ζ) = H(η(ζ))
⇒ ζ = J · ~∇ζH (5.42)
Das heißt die Transformation (5.37) ist genau dann kanonisch, wenn die Jacobi-Matrix
M · J ·MT = J (5.43)
erfullt. Mit (5.33) ergibt sich:
M · J = J(MT )−1
J ·M = (MT )−1J
MT · J ·M = J
(5.44)
Eine Matrix M , die (5.43) erfullt, heißt “symplektisch”. Fur eine Transformation,die (5.43) erfullt, existiert eine erzeugende Funktion (ohne Beweis bzw. in Ubung)
5.4 Poisson-Klammern und kanonische Invariation
Sei f = f(q, p, t) eine beliebige Funktion
df
dt=∂f
∂t+
N∑k=1
∂f
∂qkqk +
∑ ∂f
∂pkpk
=∂f
∂t+f
qk
∂H
∂pk− ∂f
∂pk
∂H
∂qk
=∂f
∂t+ f,Hq,p (5.45)
“Poisson-Klammer”:
A,Bp,q =∑k
∂A
∂qk
∂B
∂pk− ∂A
∂pk
∂B
∂qk(5.46)
bzw. A,Bη = (~∇ηA)TJ(~∇ηB) (5.47)
60

A,B sind selbst kanonische Koordinaten
qk, qlqp = 0 = pk, plqpqk, plql = δkl = −pk, ql
(5.48)
bzw. η, ηη = J (5.49)
Hamilton:
H(q, p), qk =∂H
∂pkbzw.η = J∇ηH, η = (q1, . . . , qN︸ ︷︷ ︸
N
, p1, . . . , pN︸ ︷︷ ︸N
)
Variablenwechsel:
ξ = ξ(η) Hamilton-Funktion fur M J MT = J Mkl =∂ξk∂ηl
Jacobi-Matrix
Dafur existieren erzeugende Funktion:
F (η, ξ) = Fi( q︸︷︷︸η
, Q︸︷︷︸ξ
)
p =∂F1
∂q, P =
∂F1
∂Q
zeitabhangig: F (η, ξ, t) : H → K = H +∂F
∂t
Poisson-Klammer:
A,B seien Funktionen der Zeit und der unabhangigen Variablen auf Phasen: (p, q)
d
dtA(q, p, t) =
∂A
∂t+ A,Hq,p
A,Bq,p =∂A
∂qk
∂B
∂pk− ∂B
∂qk
∂A
∂pk
oder: A,Bη = (~∇ηA)TJ(~∇ηB)
qk, qlq,p = 0 = pk, qlq,pqk, plq,p = δk,l = −pk, qlη, ηη = J
Poisson-Klammer der transformierten Variablen Q,P kanonische Transformation:
ξk, ξlη = (~∇ηξk)TJ ~∇ηξl, ξk = ξ(η)
ξ, ξη = (~∇ηξ)TJ ~∇ηξ=(
∂ξk∂ηl
)l=M= MTJM
(5.33)= J (5.50)
⇒ ξ, ξη = J (5.51)
Es gilt auch: ξ, ξξ = J (5.52)
Poisson-Klammer der kanonischen Variablen (ξ) haben immer den gleichen Wert(??)/(??) unabhangig von der kanonischen Variable (η), in denen sie berechnetwurde.
61

Beliebige Funktion A,B auf Phasenraum:
∂A
∂ηk=∂A
∂ξl
∂ξl∂ηk
= Ml,k∂A
∂ξl~∇ηA = MT ~∇ξA (5.53)
⇒ A,Bη = (~∇ηA)TJ(~∇ηB) = (~∇ξA)T MJMT︸ ︷︷ ︸≡J
(~∇ξB)
Ist die Transformation ξ = ξ(η) kanonisch, so folgt: A,Bη = A,Bξ
Poisson-Klammer sind invariant unter kanonische Transformation. (5.54)
Index η bzw. ξ ist uberflussig!
Eigenschaften der Poisson-Klammer.
Antisymmetrisch A,B = −B,A = −B,A, A,B = 0
Linearitat A1 + A2, B = A1, B+ A2, B, αA,B = αA,BProduktegel A1 · A2, B = A1A2, B+ A2A1, B (5.55)
Jacobi-Identitat A, B,C = B, C,A+ C, A,B = 0
Bemerkung:
Fassen wir die Operatoren A,B 7→ A,B als Produkt auf, so folgt aus der Jacobi-Identitat dass diese Produkte nichtassoziativ ist! Klammern [·, ·], die (??) erfullenund fur die gilt [Ai, Aj] = cki,j Ak bilden eine (nicht kommutative) Lineare-Algebra.
Beispiel:
• Kreuzprodukt fur 3-komponentigen Vektoren [A,B]V P = A×B
• A,B Matrizen: [A,B]Mat. = AB −BA (Kommentator)
Quantentheorie: A,B → 1ı~(AB − BA) (Korrespondenz-Prinzip)
Invarianz der Phasenraume
kanonische Transformation: η → ξ(η)
Transformation des Volumenelements
d2Nη = dq1 ·dq2 · . . . ·dqN ·dp1 · . . . ·dpN → dQ1 ·dQ2 · . . . ·dQN ·dP1 · . . . ·dPN (5.56)
Große der Volumenelemente hangt mit dem Betrag der Jacobi-Determinante zusam-men:
d2Nξ = d2Nη
∣∣∣∣det
(∂ξk∂ηl
)∣∣∣∣ = ‖M‖d2Nη (5.57)
62

N=1
dQ · dP =
∣∣∣∣∣∂Q∂q ∂Q∂p
∂P∂q
∂P∂p
∣∣∣∣∣ dq dp = (∂Q
∂q
∂P
∂p− ∂P
∂q
∂Q
∂p)︸ ︷︷ ︸
Q,P=1
dq dp (5.58)
N-beliebig:
Fur die symplektische Matrix M gilt nach (5.43):
MJMT = J → (det M)2 det J = det J ⇒ | det M | = 1 (5.59)
Das Volumen einer beliebigen Region im folgendem Phasenraum ist invers unterkanonische Transformation:
JN =
∫· · ·∫d2Nη (5.60)
Ebenso:
J1 =N∑k=1
∫∫dqk · dpk =
∑k
∮pkdqk
ist inverse unter kanonische Transformation. Dabei handelt es sich hierbei um dieSumme der Projektion einer Region im Phasenraum auf die (qk, pk)-Ebene. Poin-care-Abbildung
5.5 Erhaltungssatze, Lioville Theorem
Hamilton-Gleichungen lassen sich mit der Poisson-Klammer formulieren und mit(??) ist fur beliebige Funktionen der kanonische Variable und die Zeit:
df
dt=∂f
∂t+ f,H (5.61)
Hiermit haben wir die Bewegungsgleichung fur f.
• Fur f = qk oder f = pk:
•qk = qk, H =
∂H
∂pk, pk = pk, H (5.62)
•η = η,H = J ~∇ηH (5.63)
•f = H :
dH
dt=∂H
∂t+ H,H︸ ︷︷ ︸
=0
(5.64)
63

Nebenbedingung:
·, · ist kanonisch invariant: Nach (??) gilt in jedem System mit kanonischen Va-riablen, wenn auch H transformiert wird: K = H + ∂F
∂t
Ist f eine Erhaltungsgroße (H, ~L, ~P , . . .), das heißt
df
dt= 0
⇒ H, f =∂f
∂t(5.65)
Diese Bedingung ist aquivalent dazu, dass f Konstante der Bewegung ist, die nichtexplizitvon t abhangig ist: H, f = 0 Poisson-Theorem:
Seien f, g Erhaltungsgroßen. Dann ist f, g auch Erhaltungsgroße:
d
dtf, g = 0 fur H, f =
∂f
∂t, H, g =
∂g
∂t(5.66)
A)
∂f
∂t= 0 =
∂g
∂t: Jacobi-Identitat
0 = H, f, g+ f, g,H︸ ︷︷ ︸=0
+ g, h, f︸ ︷︷ ︸=0
= H, f, g = −df, gdt
(5.67)
A) f, g explizit zeitabhangig:
df, gdt
=∂f, g∂t
+ f, g, H (5.68)
∂f∂t, g+ f, ∂g
∂t (5.69)
⇒ aus Jacobi-Identitat: . . . = ∂f∂t
+ f,H, g+ f, ∂g∂t
+ g,H
= ∂f∂t, g+ f, ∂g
∂t =
df, gdt
= 0 (5.70)
Wiederholung: Invarianten
• Poissonklammern: Seien A,B Funktionen auf dem Phasenraum q1, . . . , qN ,p1, . . . , pN (evtl. t)
A,Bq,p =∂A
∂qk
∂B
∂pk− ∂A
∂pk
∂B
∂qk
wobei q, p im Index der Poisson-Klammer invariant unter kanonischer Trans-formation ist.
64

Beispiel 5.6
qk, ql = 0 = pk, plqk, pk = δkl
dA
dt=∂A
∂t+ A,H
Beispiel 5.7
q = q,H , p = p,H
A ist eine Erhaltungsgroße:
0 =dA
dt;
∂A
∂t= H,A
A,B bleiben erhalten, also A,B erhalten (Noether-Theorem)
• kanonische Invarianten: Phasenvolumen
JN =
∫dNq dNp
J1 =N∑k=1
φpkdqk
Poincare Integralinvariante
Aus klassischen Systeme mit bekannter Hamilton-Funktion und vollstandigen An-fangsbedingungen folgt, dass die Bewegung fur alle Zeiten t bestimmt ist
Fur Makroskopischen Systemen mit N ∼ 1023 ist dies nutzlos. Aus diesem Grundmacht die statistische Physik eine Beschrankung auf Aussagen zu “mittleren Großen”.Dabei erfolgt die MIttelung uber viele identische Systeme (meist mit derselbenHamilton-Funktion) “Ensemble”. Zustand eines dieser Systeme ist identisch miteinem Punkt im Phasenraum
BILD
Im Ensemble gilt: ρ(q, p) von Systemen in der Umgebung eines Testsystems (q, p)entwickelt sich gemaß der Hamilton Beschreibung
dρ
dt= ρ,H︸ ︷︷ ︸
implizite Zeitabhangigkeit der p, qZeitabhangig ⇒Trajektorie des Testsystems
explizite Zeitabhangigkeit (q0, p0 fest)z.B. falls nicht im Gleichgewicht︷︸︸︷
∂ρ
∂t(5.71)
1. Anzahl der Punkte ∆N in Volumenelementen ∆V bleibt konstant unter Ha-miltonischen Evolution
65

2. Bewegung der Phasenraumpunkt ist erzeugt durch kanonische Transformation(vgl. Kapitel 5.3)
Daraus folgt, dass die Große des Volumenelements zeitunabhangig ist (→ JN) ⇒ρ(q, p) = ∆N
∆Vist eine Konstante der Bewegung. Daraus folgt der
Liouvillesche Satz
dρ
dt= 0 ⇔ ∂ρ
∂t= H, ρ (5.72)
Im statischen Gleichgewicht ist die Zahl der Elemente des Ensemblen in einem Zu-stand (q0, p0) zeitabhangig. Daraus folgt
∂ρGG∂t
= 0 = H, ρGG
(5.72) heißt nicht, dass “ahnliche Anfangsbedingungen” zu “ahnlich” Zielverteilungfuhre
BILD
Nebenbemerkung: Dissipative Dynamik ist keine Hamiltion.
dρ
dt+ ρ
∂q
∂q+∂p
∂p
︸ ︷︷ ︸=0fur Hamilton
= 0 (5.73)
; ρ(q(t), p(t)) = ρ(q(0), p(0)) + e−∫ t0 dt( ∂q∂q+ ∂p
∂p) (5.74)
Das bedeutet eine Kontraktion, also eine Expansion des Phasenraumvolumens → Aktraktiv
5.6 Hamilton-Jacobi-Theorie
Suche eine Losung durch kanonische Transformation
K(Q,P, t) = H(q, p, t) +∂F
∂t(5.75)
so, dass K unabhangig von den Q’s wird. Das heißt, dass alle Qk (mit k = 1, . . . , N)zyklisch sind.
Alternative: Suche kanonische Transformation so, dass die transformierte HamiltonFunktion K = const. Ohne Beschrankung der Allgemeinheit kann man sogar K = 0fordern. DE: fehlendes wort also Erzeugende:
F2(q, P, t) ≡ S(q, P, t) : H(q, p, t) +∂S
∂t= 0 (5.76)
⇒ Qk =∂K
∂Pk= 0, Pk = −K
Qk
= 0 (5.77)
66
Es werden also 2N Konstanten (z.B. Anfangsbedingungen Qk = qk(t0), Pk = pk(t0))benotigt. Samtliche Infos ubere der Zeitentwicklung steckt in S. Nach (??):
pk =∂S
∂qk, Qk =
∂S
∂Pk(5.78)
⇒ H(qk,∂S
∂qk, t) +
S
t= 0 (5.79)
Partielle Differentialgleichung fur Erzeugende S(q, P, t) in N + 1 unabhangigen Va-riablen (q1, . . . , qN , t) ⇒Hamilton-Jacobi-Gleichung. Allgemeine Losung dieser par-tiellen DGL enthalt N + 1 Integrationsbedingungen DE: ? eine ist additiv, wegender Invarianz von (5.79) unter ρ → ρ + const. Die ubrigen N Konstanten sind Pk,welche sich aus den Anfangsbedingugnen ergeben. Bei zeitabhangigen Hamilton-Funktionen ist der Seperationsansatz hilfrei ∂H
∂t= 0. Ansatz:
S(q, P, t) = W (q, P ) + T (t) (5.80)
Einsetzen
H
(q1, . . . , qN ,
∂W
∂q1
, . . . ,∂W
∂qN
)+∂T
∂t= 0
⇒ H(q,∂W
∂q) = const = −T
t≡ E ⇒ T = −Et
⇒ “stationare” Hamilton-Jacobi-Gleichung
H(q,∂W
∂q) = E (5.81)
W ist ebenfalls kanonische Transformation von Typ F2 mit
K = H +∂W
∂t= H +
∂S
∂t− ∂T
∂t= E
E ist einer der freien Parameter in der Losung von (5.79). Zum Beispiel: P1 = E
⇒ Q1 =∂K
∂E= 1 ∧ Q1 = t+ const =
∂W
∂E(5.82)
⇒ t ist kanonisch konjugiert zur Energie E
Beispiel 5.8 (freies Teilchen in 1D)
H =p2
2m,
1
2m
(∂W
∂q
)2
= E
67

Integration liefert: W (q) =√
2mEq + const︸ ︷︷ ︸=0
Aus (??) folgt:
t− t0 =∂W
∂E=
√m
2Eq ; q(t) =
√2E
m(t− t0)
p = ∂W∂q
=√
2mE = const
Beispiel 5.9 (Zentralpotential V (ρ))
H =1
2m
(p2ρ +
1
ρ2p2ϕ
)+ V (ρ)
=1
2m
[(∂W
∂ρ
)2
+1
ρ2
(∂W
∂ϕ
)2]
+ V (ρ) = E
Weiterer Seperationsansatz:W (ρ, ϕ) = W1(ρ)+W2(ϕ). (W ′2(ϕ))2 muss ϕ-unabhangig,
außerdem unabhangig von ρ.
⇒ W ′1(ρ) =
√2m
√E − V (ρ)− L2
2mρ2
W (ρ, ϕ) = Lϕ︸︷︷︸W2(ϕ)
+√
2m
∫ ρ
ρ0
dr√E − Veff(r)
pρ =∂W
∂ρ=√
2m√E − Veff E = P1
pϕ =∂W
∂ϕ= L ≡ P2
t− t0 =∂W
∂E=
√m
2
∫ ρ
ρ0
dr1√
E − Veff(r)
Q2 =∂W
∂P2
=∂W
∂L= ϕ+
√2m
∫ ρ
ρ0
dr− L
2mr2
2√E − Veff
≡ ϕ0
ϕ− ϕ0 =
√L2
2m
∫ ρ
ρ0
dr1
r2√E − Veff(r)
68
5.6.1 Von Hamilton-Jacobi zur Quantentheorie
klassische Mechanik (geometrische) Optik
Trajektoreine im Konfigurationsraum Lichtstrahlen in Medien mit variablenBrechungsindex
Variationsprinzip Fermat’sches PrinzipTrajektoren senkrecht auf FlachenS = const Lichtstrahlen senkrecht auf “Wellenfron-
ten konstanter PhasenBewegung der Flachen gemaßS = W (. . .)− Et Propagation der Wellenfronten
Massenpunkt im konservativen Kraftfeld H = ~p2
2m+ V (~r) ⇒Hamilton-Jacobi
1
2m(~∇S)2 + V (~r) = −∂S
∂t
folgt daraus eine Wellengleichung:
− ~2m
(i
~~∇S
)2
+ V (r) = i~∂(
i~S)
∂t
Es fuhrt irgendwann auf die Schrodinger Gleichung
6 gekoppelte Schwingungen, nichtlineare Dyna-
mik
6.1 kleine Schwingungen
6.2 Parametrisierte Resonatoren
Wiederholung:
• Gleichgewicht: Fk = −∂V∂q
= 0 ⇒ qk, 0
• starrer Korper: qk = qk,0
• kleine Schwingungen V (q) = V0 + 12
∑i,j
∂2V∂qi∂qj,0
, T = 12mij qiqj
Entkopplung durch Losung der verallgemeinerten EW-Problems
(Vij − ω2Tij)aj = 0, j = 1, . . . , N
; Summe unabhangig harmonische Oszilator in den Normalkoordinaten
x+k
mx = 0
69

zeitliche Aufhangung ( km≡ 1)
x+ (1 + r)x = 0, 0 ≤ t ≤ τ
2
x+ (1− r)x = 0,τ
2≤ t < T
Hill’sche Gleichung
q + a(t)q + b(t)q = 0
a(t+ T ) = a(t), b(t+ T ) = b(t)(6.1)
; invariant unter Verschiebung des Zeit-Nullpunktes um T
Theorem 6.1 (von Floquet bzw. Block (in Festkorperphysik))Es existiert komplexe Losungen von der Hill’schen Gleichung (6.1) mit
q(t) = P (t)eiµt, P (t) = P (t+ T ) (6.2)
Beweis. Gleichung (6.1) ist eine lineare DGL zweiter Ordnung. Daraus folgt, dassdie Losung eindeutig festgelegt sind durch die angabe der Anfangsbedingungenq(t = 0), q(t = 0). Wegen der Linearitat lassen sich beliebige Losungeen als Li-nearkombination von zwei unabhangigen Systemen darstellen. Wahle als Anfangs-bedingung:
A : qA(0) = 1, qA(t = 0) = 0 ; qA(t)
B : qB(0) = 0, qB(t = 0) = 1 ; qB(t)
Die allgemeine Losung von (6.1) liefert:
q(t) = q(0)qA(t) + q(0)qB(t)
; q(T ) = qA(T )q(0) + qB(T )q(0) = αq(0) + βq(0)
q(T ) = qA(T )q(0) + qB(T )q(0) = γq(0) + δq(0)(qq
)t=T
=
(a βγ δ
)︸ ︷︷ ︸
=:M
)t=0
Die Eigenwerte eiµT der Matrix M bestimmen die Zeitentwicklung der Floquet-Losungen (6.2); µ heißt charakteristischer Eigenwert
Nebenbemerkung: α, β, γ, δ mussen in der Regel numerisch bestimmt werden. Wegendes Lioville-Theorems ist detM = 1, falls kein Dampfungsterm vorhanden ist. Indiesem Fall sind die Eigewerte von M :
λ± =1
2trM ±
√1
4(trM)2 − 1
Das heißt |eiµ±T | = 1, falls | trM | < 2 fuhrt zu einer stabilen Losung
70

Beispiel 6.2Aus (??):
M(T, r) =
(cos Γ−
1√1−r sin Γ−
− 1√1−r sin Γ− cos Γ−
)·
(cos Γ+
1√1+r
sin Γ+
− 1√1+r
sin Γ+ cos Γ+
);
1
2trM(T, r) = cos Γ+ cos Γ− − (1− r2)−
12 sin Γ+ sin Γ−
BILD
→ Amplitude wachst unbeschrankt an ⇒ nichtlinearer Term in den Bewegungsglei-chungen (??) nicht zu beachten
Beispiel 6.3 (Pendel mit oszilierenden Aufhangepunkt)BILD
Y (t) = Y0 cos Ωt
x = l sin θ ' lθ
y = Y (t) + l(1− cos θ) = Y (t) +lθ2
2
T =1
2m(x2 + y2
)=m
2
(l2θ2 − 2lY θθ
)(hohere Ordnungenen in θ, θ, Y werden vernachlassigt). Das das Potential V giltbekanntlich V = mgy. Außerderm:
δ
δθ(T − V ) = 0 : θ +
1
l(g + γ)θ = 0
Reskaliere Zeit: τ = Ωt2
Ω2
4
d2θ
dτ 2+
(g
c− Y0Ω2
lcos 2τ
)θ = 0
Mathieu-Gleichung (Quantenmechanik: Teilchen im per. Potential)
d2θ
dτ 2+ (a− 2q cos 2τ) θ = 0
mit: a =(
2ω0
Ω
)2, ω0 =
√gl, q = 2Y0
l
Nebenbemerkung:
• a ist positiv, a = 1 entspricht Ω = 2ω0 = doppelte Eigenfrequenz
• Vorzeichen von q kann durch Phasenverschiebung der treibenden Kraft geandertwerden
• “Oszilatoren” um instabile Gleichgewichtslage bei θ = π liefern (??) mit a < 0
71

• numerische Integraton zur Bestimmung von M liefert dann Parameterbereichestabiler bzw. instabiler Bewegungen
• Antrieb mit Ω = 2ω0 (a ≡ 1) ist immer instabil (“parametrische Resonanz”)
• Fur a < 0 gibt es stabile Losugnen (Ω >> ω0) und q hinreichend groß fur dasinvertierbare Pendel
• weitere Instabilitaten bei Ω = 2ω0
n, n ∈ N
BILDER
6.3 Anharmonische Oszillatoren
Statt (6.1) betrachent wir den
“Duffing Oszilator”
q + γq + ω20q + εq2 = f cosωt (6.3)
wobei die rechte Seite der Gleichung einen periodischen Antrieb darstellt
ε = 0 Gedampfter harmonischer Oszillator mit periodischen Antrieb. Sobald dieTransienten weggedampft sind (γ > 0) schwingt das System mit der auge-spragten Frequenz ω
q(t) = q0 cos(ωt+ ϕ)
E ∼ (q0)2 =1
(ω − ω0)2 + γ2ω2
(6.4)
Resonaz bei ω ' ωr =√ω2
0 −γ2
2BILD
ε 6= 0 Nach Abschnitt ?? ist die Eigenfrequenz (γ = 0, f = 0) einer Funktion derEnergie des Systems ⇒ stabile Oszillation auch ohne Dampfung (γ = 0) undω = ω0 moglich
6.3.1 Fourier - Analyse (γ = 0)
Annahme: Losung von (??) ist periodisch → Fourier-Entwicklung. (??) ist invariantunter Zeitumkehr:
t→ −t, wegen γ = 0t→ t+ π, q → −q
q(t) =∞∑n=0
A2n+1(ω) cos((2n− 1)ωt) (6.5)
72

Einsetzen in Bewegungsgleichung
cos3 x =1
4(3 cosx+ cos 3x), A1 A2 . . .
f cosωt =(ω20 − ω2)A1 cosωt+ (ω2
0 − 9ω2)A3 cos3 ωt+ . . .
+ ε
(3
4A3
1 cosωt+1
4A3
1 cosωt+ . . .
)(6.6)
DE: hier ist noch eine Wiederholung und ein Motivationsloch hervorgerufen durcheine Computer-Ubung
Storungstheorie: Umschreiben von (??)
q + ω2q = µ[(ω2 − ω2
0
)q − εq3 + f cosωt
]︸ ︷︷ ︸“kleine” Storung der homogenen Gleichung fur harmonische Oszilation mit Frequenz ω (statt ω0)
Ansatz fur Losung:
q(t) = q0(t) + µq1(t) + µ2q2(t) + . . . (6.7)
Achtung: Storung ist resonant → sakularen (≡ nicht periodische) Losungen.Ausweg: Berucksichtige Anderung der Frequenz (f = 0) oder Phasenverschiebungmit Variation der Amplitude in Storungsrichtung
f = 0 Lindstadt - Poincare → (6.7)
• ω(µ) = ω0 + µω1 + µ2ω2 + . . .
• Variablenwechsel: t→ τ = ω(µ)t
f 6= 0 Frequenz ω ist durch außere Kraft vorgegeben. → (6.7):
• Phasenverschiebung zwischen außeren Kraft vorgegeben
δ(µ) = δ0 + µδ1 + µ2δ2 + . . .
Variablenwechsel: t→ τ = ωt− δ(µ)
⇒ q + q = µ(1−(ω0
ω
)2
)q − µ ε
ω2q3 +
µf
ω2cos(τ + δ(µ)) (6.8)
Entwicklung in µ:
q0 + q = 0
q1 + q =
(1−
(ω2
0
ω2
))q0 −
ε
ω2q3
0 +f
ω2cos(τ + δ0)
q2 + q =
(1−
(ω2
0
ω2
))q1 −
1
ω2
[3εq2
0q1 + δ1f sin(τ + δ0)] (6.9)
73

Anfangsbedingungen: qi(t = 0) = 0, i = 0, 1, 2, . . . (→ q(τ) = q(−τ)). DieLosung von (6.9):
q0(τ) = A1 cos τ (6.10)
q1 + q1 =
(1− ω2
0
ω0
)A1 cos τ − 1
ω2
(3
4εA3
1 cos τ + f cos δ0 cos τ +1
4εA3
1 cos 3τ + f sin δ0 sin τ
)(6.11)
keine sakulare Losung erwunscht → Terme ∼ cos τ, sin τ mussen verschwinden
⇒ sin δ0 = 0, cos δ0 = +1 (6.12)
(ω2 − ω2)A1 −3
4εA3
1f = 0vgl (??) (6.13)
q1 + q1 = − ε
4ω2A3
1 cos 3τ (6.14)
Allgemeine Losung:
q1(τ) =ε
32ω2A3
1 cos 3τ︸ ︷︷ ︸spezielle Losung
+B1 cos τ︸ ︷︷ ︸homo
Ordnung
µ2 : q2 + q2 =
(1− ω2
2
ω
)q1 −
1
ω2
[3εq2
0q1 + δ1f sin(τ + δ0)]
Einsetzen von q0, q1, δ0 ergibt wieder sakulare Terme → mussen verschwinden.
D.h. δ1 = 0, B1(−1 +ω2
0
ω+ 9ε
4ω2A21) + 3ε2
128ω4A51 = 0 legt B fest. Die spezielle
Losung der verbleibenden Gleichunge fur q2 enthalt die 5.Harmonische
6.3.2 Subharmonische Schwingungen mit Frequenz ωn, n ∈ N
Substitution τ = ωt in (??) aber Antrieb mit Frequenz 3ω (weiter γ = 0)
ω2q + ω20q + εq3 = f cos 3τ (6.15)
Ansatz
q0 = A cos τ +B sin τ︸ ︷︷ ︸subharmonische Oszillation
+f
ω20 − 9ω2
cos 3τ︸ ︷︷ ︸spezielle Losung des ??? Teils von (??)
(6.16)
Einsetzen in (??) und Foerderung, dass sakulare Terme verscwhinden (∼ sin τ, cos τ).Daraus ergeben sich zwei Gleichungen fur Amplituden A,B. Eine Losung dieserGleichungen ist B = 0. → reele Losung fur A:
A(f) = − f
2(ω20 − 9ω2)
±√D(f)
3(6.17)
74
D(f) = 16(ω2 − ω2
0)
ε− 21
f 2
(ω2 − ω2)
!> 0 (6.18)
Stabiltat Entwickeln von (??) um q0, d.h. q = q0 +ξ ⇒Hillsche DGL fur die Storungξ: ; Stabiltiatsuntersuchung gem. Floquet-Theorem, liefert dass (??) mit “+” stabi-le Losungeen zulasst⇒ stabile Oszillation mit 1
3der Frequenz der außeren Antriebs!
6.4 Jenseits Storungsrechung, Poincare-Birkhoff Theorem
Einssatz der Harmoinischen Mechanik: Duffing-Oszillator
q + ω22q + εq3 = F (t) (6.19)
als Hamilton-Bewegungsgleichungen
q = p!
=∂H
∂P, p = F (t)− ω2
0q − εq3 != −∂H
∂q
⇒ H(q, p, t) =p2
2+ω2
0
2q2 +
ε
4q4 − qF (t) (6.20)
kanonische Transformation: F2(q, P, t) ≡ Pq − Et
; p− ∂F2
∂q= P, Q− ∂F2
∂p= q︸ ︷︷ ︸
Identitat; siehe ??
(6.21)
K(q, p, t,−E) = H 6= ∂F2
∂t= H(q, p, t)− E (6.22)
Zwei Paare von kanonischen konjugierten VAriablen (q, p), (t,−E)⇒Bewegungsgleichungin Zeit τ :
∂q
∂τ=∂K
∂p= P
∂p
∂t= −∂K
∂q= F (t)− ω2q − εq3
∂t
∂τ=
∂K
∂−E= 1
∂E
∂τ=∂K
∂t
(6.23)
K hangt nicht explizit von τ ab → Erhaltungsgroße
dK
dτ= 0 (6.24)
DE: am Ende der Vorlesung fehlte immer noch die Motivation
75

7 Spezielle Relativitat
7.1 Raum-Zeit-Diagramm
7.2 7.2
7.3 7.3
Wiederholung: Spezielle Relativitat
1. Gesetze der Physik sind in jedem Inertialsystem gleich
2. Lichtgeschwindigkeit ist fur Beobachter in jedem Inertialsystem gleich
Lorentz Gesetz: “Boost” in x-Richtung, β = vc, γ = 1√
1−β2, x′ = γ(x − βt), t′ =
γ(t− βx), y′ = y, z′ = z
Vierer-Vektor spezifiziert Ereignis = Punkt in Raum-Zeit
(x0, x1, x2, x3) = (ct, x, y, z) bzw. xµ, µ = 0, 1, 2, 3
Lorentz-Boost:
Λ =
γ −βγ 0 0−βγ γ 0 0
0 0 1 00 0 0 1
allgemeine Transformation: Λ = Λboost · Arot = A′rot · Λ′boost
(∆s)2 = (∆x′)2 − (∆x′)2 − (∆x2)2 − (∆x3)2
→ invariant unter Lorentz-Transformation, nicht positiv definit
“Weltlinie” eines massiven Teilchens P : λ→ (x0(λ), x1(λ), x2(λ), x3(λ), x4(λ)). Pa-rametrisierung durch “Eigenzeit ≡ Zeit in dem Inertial-System in dem das Teilchenin Reihe ist⇒ 4er Geschwindigkeit uµ = dxµ
dτ. Ist ~v = ~r
tdie 3-Geschwindigkeit, so ist
dt = γdτ , uµ = (γc, γ · ~v) (7.1)
Alternativ: Basis fur Raumzeit e0, e1, e2, e3
P (τ) = xµ(τ) · eµ
u(τ) =dP
dτ=
dxµ
dτeµ = uµeµ
(7.2)
(Summenkonvention: doppelt auftretende Indizes (1 oben/1 unten) wird summiert)Abstand bzw. Betrag des 4-Vektors ∆xµ ist.
76

Invariant unter Lorentz-Transformation ⇒ “(Lorentz-) Skalar”. Skalarprodukt Ab-bildung eines Paares von 4-Vektoren auf Skalar.
g(u, v) = g(v, u) = u · v (7.3)
Skalarprodukt der Basisvektoren “metrischer Tensor”
g(eα, eβ) = eα · eβ ≡ gαβ (7.4)
• ∆xµ : ∆x = ∆xµ · eµ
g(∆x,∆x) = ∆x ·∆x = ∆xα ·∆xβ eα · eβ︸ ︷︷ ︸=gαβ
!= (∆s)2 − (∆x0)2 − (∆x1)2 − (∆x2)2 − (∆x3)2 (7.5)
∼ g =
+1 0 0 00 −1 0 00 0 −1 00 0 0 −1
, u · v = uα · vβgαβ (7.6)
• Betrag der 4-Geschwindigkeit (7.1)
u · u = (u0)2 − (u1)2 − (u2)2 − (u3)2 = γ2(c2 − ~v2) = c2 > 0 (7.7)
• 4-Impulspµ = m · uµ > p · p = m2c2 > 0
bzw.
p · p = m2c2γ2 −m2γ2~v2 ≡ E2
c2−m2~p2
mit 3-Impuls ~p = mγ~v und
E2 = m2c4 + ~p2c2 (7.8)
Relativistische kinetische Energie
T = E −mc2 −√
(mc2)2 + ~p2c2 −mc2 (7.9)
= mc2[√
1 + γ2β2 − 1]
(7.10)
Entwicklung fur kleine vc
= β
T ' 1
2m~v2 + o(βu)
• kinetische Energie eines Teilchens mit endlicher Ruhemasse m divergiert fur|~v| → c mit (β → 1, γ → ∞). Mit gαβ (7.6) konnen wir einen 4-Vektor(“kovarianter” Vektor) ein weiteres 4-Komponentiges Objekt zuordnen
vα = gαβvβ : uv = uαvα (7.11)
“kovarianter Vektor”. Umgekehrt ist vα = gαβvβ, gαβgαβ = (δ)αγ (7.11) gαβ ist
inverse Metrik
77

• Skalarprodukt von zwei 4-Vektoren (7.6) ist invariant unter Lorentz-Transformationund raumliche Drehung
• Ist das Skalarprodukt von (a, b, c, d) mit 4-Vektoren vµ
Weitere 4-Vektoren
1.
∂(ct)
∂(ct)+∂x
∂x+∂y
∂y+∂z
∂z= 4 in jedem Inertialsystem (7.12)
xµ = (ct, x, y, z)ist 4-Vektor (7.13)
→ ∂µ = (1
c∂t,−~∇) = ∂xµ (7.14)
(??) ist 4-Vektor (4-Gradient)
2. Kontiuitatsgleichung (muss in jedem Inertialsystem gelten)
∂tρ+ ~∇ ·~j = 0 ⇔ ∂ · j = 0 (7.15)
jµ = (cρ,~j) ist 4-Vektor
3. Lorentz-Eichung der elektro-magnetische Potentiale
1
c2
∂
∂tφ+ ~∇ · ~A = 0 ⇔ ∂A = 0Aµ =
(φ
c, ~A
)ist 4-Vektor
7.4 Krafte, kovariante Formulierung der Maxwell-Gleichung
Experimenteller Befund: Newtonsche Gesetze gelten fur Objekte mit |~v| c relativzum Beobachter.
Gesucht: Kovariante Form (d.h. vertraglich mit Postulaten) des Kraftgesetzes
~F =d
dt(m~v) (7.16)
Annahme: Die Maxwellgleichungen sind die korrekte Beschreibung der elektroma-gnetischen Theorie. Wellengleichung fur elektromagnetischen Potentiale:
~A =1
c
d2
dt2~A− ~∇2 ~A = µ0
~j
φ =1
c=
∂2
∂t2φ− ~∇2φ =
1
ε0
ρ (7.17)
bzw.
Aµ = (∂ · ∂)Aµ = µ0 · jµ (7.18)
78
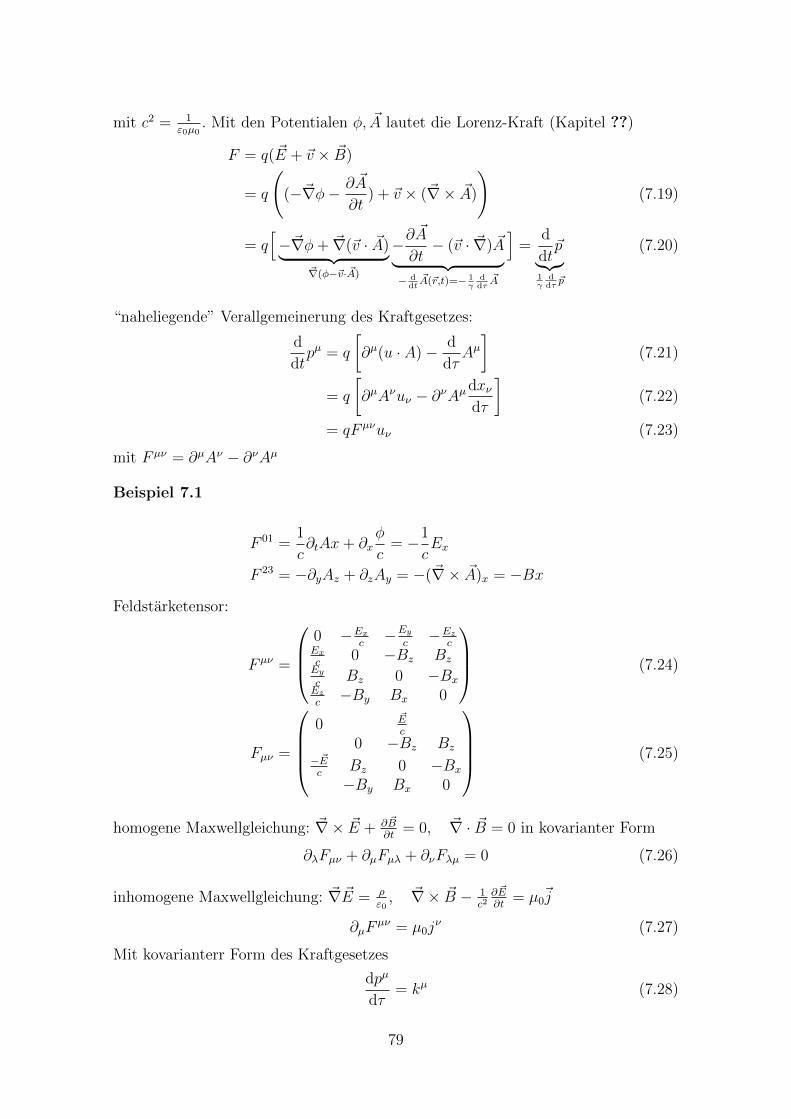
mit c2 = 1ε0µ0
. Mit den Potentialen φ, ~A lautet die Lorenz-Kraft (Kapitel ??)
F = q( ~E + ~v × ~B)
= q
((−~∇φ− ∂ ~A
∂t) + ~v × (~∇× ~A)
)(7.19)
= q[−~∇φ+ ~∇(~v · ~A)︸ ︷︷ ︸
~∇(φ−~v· ~A)
−∂~A
∂t− (~v · ~∇) ~A︸ ︷︷ ︸
− ddt~A(~r,t)=− 1
γddτ~A
]=
d
dt~p︸︷︷︸
1γ
ddτ~p
(7.20)
“naheliegende” Verallgemeinerung des Kraftgesetzes:
d
dtpµ = q
[∂µ(u · A)− d
dτAµ]
(7.21)
= q
[∂µAνuν − ∂νAµ
dxνdτ
](7.22)
= qF µνuν (7.23)
mit F µν = ∂µAν − ∂νAµ
Beispiel 7.1
F 01 =1
c∂tAx+ ∂x
φ
c= −1
cEx
F 23 = −∂yAz + ∂zAy = −(~∇× ~A)x = −Bx
Feldstarketensor:
F µν =
0 −Ex
c−Ey
c−Ez
cExc
0 −Bz BzEyc
Bz 0 −BxEzc−By Bx 0
(7.24)
Fµν =
0
~Ec
0 −Bz Bz
− ~Ec
Bz 0 −Bx
−By Bx 0
(7.25)
homogene Maxwellgleichung: ~∇× ~E + ∂ ~B∂t
= 0, ~∇ · ~B = 0 in kovarianter Form
∂λFµν + ∂µFµλ + ∂νFλµ = 0 (7.26)
inhomogene Maxwellgleichung: ~∇ ~E = ρε0, ~∇× ~B − 1
c2∂ ~E∂t
= µ0~j
∂µFµν = µ0j
ν (7.27)
Mit kovarianterr Form des Kraftgesetzes
dpµ
dτ= kµ (7.28)
79

7.5 Streuung relativistisch
Wiederholung: Transformationsverhalten von Tensoren4-Vektor (kontravariant) uµ, µ = 1, . . . , 4
Σ→ Σ′ uµ′= Λµ′
µ uµ
Σ′ → Σ uµ = Λµµ′
(Λµ′
µ
)−1
=(Λµµ′
)(7.29)
1-Form (kovarianter Vektor)
vµ = gµνvν , vµ = gµνvν
Σ→ Σ′
vµ′ = gµ′ν′vν′ = gµ′ν′Λ
ν′
ν vν
= gµ′ν′Λν′νgνρvν
= Λµµ′vρ
alternativ: Skalarprodukt ist invariant unter Lorentz-Transformation
uµvµ!
= uµ′vµ′ = Λµ′
µ Λνν′︸ ︷︷ ︸
δνµ
uµvν
Feldstarketensor
F µν : F µ′ν′ = Λµ′
µ Λν′
ν Fµν
Fµν : Fµ′ν′ = Λµµ′Λ
νν′Fµν
allgemein
Tµ′1µ′2···µ′p
ν′1ν′2···ν′q
= Λµ′1µ1· · ·Λµ′p
µpΛν1
ν′1· · ·Λνp
ν′q· T µ1µ2···µp
ν1ν2···νq
→Tensor der Stufe a-(p, q)
Streuexperiment: 4-Impuls-Erhaltung pµ =(Ec, ~p)
mit
E = mc2 + T ' mc2 +1
2m~v2 + o(β′′)
⇒ Schwellwerte fur Teilchenprodukte
7.5.1 Lagrange-Formalismus: Lorentz-invariante Wirkung S (→ Skalar)
Bei freien Teilchen:
S = −mc2
∫dτ =
∫dtL
L = −mc2√
1− β2
80

• kanonische Impulse (vgl. (??))
~p =∂L∂~v
=m~v√
1−(vc
)2= mγ~v (7.30)
• Euler-Lagrange-Gleichung
d
dt~p = 0 (7.31)
; ~p · ~v = const fur freies Teilchen
• Hamilton Funktion
H ≡ ~p · ~v − L− dS = −Ldt = Hdt− ~pd~x =
(H
c, ~p
)· (cdt, d~x)
⇒(Hc, ~p)
ist 4-Vektor ⇒ H = E
→ E =m~v2√
1−(vc
)2+mc2
√1−
(vc
)2
=mc2√
1−(vc
)2= γmc2 (7.32)
(Energie inklusive Betrag der Ruhemasse)
7.5.2 Teilchen im konservativen Kraftfeld
Wie in Abschnitt ?? gilt:
L = −mc2
√1−
(vc
)2
− V (~x) (7.33)
Beispiel 7.2
d~p
dt=
d
dt
m~v√1− β2
= −∂V∂~x
= ~F (7.34)
stimmt mit (??)/(??) uberein
DE: rest fehlt
8 Relativistische Elektrodynamik
8.1 Transformation der elektromagnetischen Felder
8.2 Lagrange-Dichte fur das elektromagnetische Feld
8.3 Energie und Impuls
81

Wiederholung:
L = Lmat +
∫d3xL(0)
em +
∫d3xLint
• Lmat =∑
i−mic2√
1− βi fuhrt zu den Gewegungs Gleichung fur freie Teilchenddτpµ = 0
• L(0)em = − 1
4µ0FµνF
µν (Lorentzskalar ∂α ∂L∂(∂Aβ)
= ∂L∂Aβ
⇒ ∂αFαβ = 0)
F µν = ∂µAν − ∂νAµ (Jacobi-Identitat: ∂λF µν + zyklisch = 0)
• Lint = −JµAµ ⇒ ∂µFαβ = µ0Jβ Quellenterme zu Maxwellddτpµ = qF µνuν (Lorentz-Kraft)
Hamilton Funktion: H = pq − LHamilton Dichte: H =
∫d3xH mit: H = ∂L
∂φk
Lorentz-kovariante-Formulierung mit dem kanonischen Energie-Impuls-Tensor
T µν =∂L
∂(∂µφk)∂φk − gµνL
Energiesatz in Punktmechanik: dHdt
= 0 fur ∂L∂t
= 0Energiesatz in Feldtheorie: T µν ist “verallgemeinerte Energiedichte”. Kovariante ver-allgemeinerung des Energiesatzes:
∂µTµν = 0 (8.1)
Beweis.
∂µTµν = ∂µ
(∂L
∂(∂µφk)∂nuφk
)− ∂νL
= ∂µ
(∂L
∂(∂µφk)∂nuφk︸ ︷︷ ︸
Euler-Lagrange-Gleichung: ∂L∂φk
+∂L
∂(∂µφk)∂µ∂
νφk − ∂νL)
=∂L
∂φk∂νφk +
∂L
∂(∂µφk)∂ν∂µφk − ∂νL
= ∂ν(L(φk, ∂µφk))− ∂νL = 0
L ist nicht explizit von den Raum-Zeit-Koordinaten abhangig
Aus (8.1) folgt:
0 =
∫(∂µT
µν)d3x = ∂0
∫d3xT 0ν +
3∑i=1
∫d3x∂iT iν
Sind die Felder φk auf einen endlichen Raumgebiet und ist dieser zusatzlich ungleichnull, so folgt, dass zwei Integrale verschwinden (→Oberflachenintegrale, Satz von
82

Gauß)
d
dt
∫d3xT 00 = 0︸ ︷︷ ︸
Energie-Erhaltung
d
dt
∫d3xT 0i = 0︸ ︷︷ ︸
Impuls-Erhaltung
(8.2)
Freies elektromagnetische Feld
L(0) = − 1
4µ0
FµνFµν
T µν =∂L
(0)em
∂(∂µAλ)︸ ︷︷ ︸∂L
∂(∂αAβ)=− 1
µ0Fαβ
(∂νAλ)− gµνL(0)em
= − 1
µ0
gµεFελ(∂νAλ)− gµνL(0)
em (8.3)
Dieser Ausdruck ist recht unschon, da er nicht symmetrisch unter µ ↔ ν ist. Sym-metrierung: ∂νAλ = −F λν + ∂λAν
; T µν =1
µ0
(gµεFελF
λν +1
4gµνFελF
ελ
)− 1
µ0
F λµ∂λAν
symmetrisch unter µ↔ ν und nach (??) eichinvariant; Rest:
T µνD = − 1
µ0
gµεFελ∂λAν
=1
µ0
F λµ∂λAν
=1
µ0
(F λµ∂λA
ν +(∂λF
λµ)︸ ︷︷ ︸
=0, Maxwell im Vakuum
Aν)
=1
µ0
∂λ(F λµAν
)Beitrag von TD zu (8.1)
∂µTµνD =
1
µ0
∂µ∂λ︸︷︷︸symmetrisch
( F λµ︸︷︷︸antisymmetrisch
Aν) ≡ 0
⇒ (8.1) gilt auch fur den symmetrischen Energie-Impuls Tensor
θµν = T µν − T µν
=1
µ0
(gµεFελF
λν +1
4gµνFελF
ελ
)(8.4)
83

• symmetrische und spurfrei, d.h.
tr θ = θµ = 0 (8.5)
In ~E, ~B ist:
−θ00 = θ00 =ε0
2~E2 +
1
2µ0
~B2 = u (8.6)
Energie-Dichte des elektromagnetisches Feldes
•
θ0i = θi0 = −θ0i = −θi0 =1
cµ0
( ~E × ~B)i =1
c~Si (8.7)
⇒Energie-Stromdichte (Poynting-Vektor) ~S
• raumliche Komponente des Energie-Impuls-Tensors θij ⇒Maxwellscher Span-nungstensor (entspricht Impuls-stromdichte des elektromagnetischen Feldes)
• differentielle Energie-Satz (8.1): (Poynting’scher Vektor)
0 = ∂µθµ0 =
1
c
(∂n
∂τ+ ~∇ · ~S
)(8.8)
8.3.1 Erhaltungssatze bei außeren Quellen
Bei der Symmetrie des Energie-Impulstensors zu (??) haben wir Maxwellgleichungenim Vakuum (∂µFµν = µJν︸︷︷︸
=0
). Fur Jν 6= 0 verschwindet die Divergenz von θ nicht mehr
∂µθµν =
1
µ0
[∂µ(FµλF
λν)− 1
4∂ν(FµλF
µλ)
]=
1
µ0
[(∂µFµλ)︸ ︷︷ ︸
=µ0Jλ
F λν + Fµλ∂µF λν +
1
2Fµλ∂
νF µλ]
∂µθµν + F νλJλ =
1
2µ0
Fµλ[∂µF λν + ∂µF λν + ∂νF µλ
]︸ ︷︷ ︸=−∂λF νµ
= 0
⇒ ∂µθµν = −F νλJλ (8.9)
0-Komponente:
1
c
(∂n
∂t+ ~∇ · ~S
)= −1
c~E ·~j (8.10)
raumliche (1,2,3)-Komponenten: RHS DE: was soll RHS denn bedeuten?
F iλJλ = (ρ ~E +~j × ~B)i (8.11)
⇒Lorentz-Kraftdichte
84

8.4 Losung der kovarianten Wellengleichung
In Lorentz-Eichung
2Aµ = µ0Jµ (8.12)
Losung durch Green’sche Funktion G(x, x′)
2xG(x, x′) = δ(x0 − x′0)δ(3)(~x− ~x0) (8.13)
mit δ(4)(x − x′) ≡ δ(x0 − x′0)δ(3)(~x ~x0). Obere “Rander” ist Green Funktion dieDifferenz zµ = xµ − (x1)µ d.h.
G(x, x′) = G(x− x′) = G(z) , 2zG(z) = δ(4)(z) (8.14)
Losung durch Fourier-Transformation (mit: kµ =(ωc, ~k)
)
G(z) =1
(2π)4
∫d4kG(k)e−ikz
→ 2zG(z) =1
(2π)4
∫d4kG(k)
(∂
∂zµ∂
∂zµexp [−ikµzµ]
)=
1
(2π)4
∫d4kG(k)
(∂
∂zµ(−ikµ) exp [−ikµz
µ]
)=
1
(2π)4
∫d4kG(k)(−k · k)e−ikz
Darstellung der δ(4)-Funktionen:
δ(4)(z) =1
(2π)4
∫d4k exp [−ikz]2zG(z) = δ(4)(z)⇒ G(k)(−k · k) = 1
G(k) = − 1
k · k⇒ G(z) = −
∫d4k
1
(2π)4
e−ikz
k · k(8.15)
Integrand ist singular (k ·k ist nicht positiv definit)⇒Festlegung, wie Singularitaten
zu behandeln sind. Sei ε = |~k| :
G(z) = − 1
(2π)4
∫d3k exp
[i~k · ~r
] ∫ ∞−∞
dk0e−ikz0
k20 − ε2︸ ︷︷ ︸
→ einfache Pole bei k0 = ±ε
(8.16)
Folglich sind verschiedene Greensche Funktionen moglich
Bewegte PUnktladung q bei ~r(t) (in Σ)
ρ(~x, t) = qδ(~x− ~r(t))
~j(~x, t) = ~v(t)ρ(~x, t), ~v =d~r(t)
dt
85

kovariante Darstellung
Jµ(x) = qc
∫dτuµ(τ)δ(4)(x− r(τ))
Aµ(x) = µ0
∫d4x′ Gr(x− x′)︸ ︷︷ ︸
12πθ(x0−x′0)δ((x−x′))
Jµ(x′)
=q
2πε0c
∫dτuµ(t)θ(x0 − r0(τ))δ((x− r(τ))2)
Beitrag zum∫
dτ . . .
(x− r(τ0))2 = 0 Lichtkegelkausalitat
Aus x0 > r0(τ0) folgt das Lenart-Wichert-Potential: (mit k = 14πε0
)
Aµ(x) =2k
cq
[uµ
u · (x− r(τ))
]τ=τ0
DE: Nummerierung wahrscheinlich analog zur letzten Vorlesung
1
J0θ(x0 − r0(τ))︸ ︷︷ ︸δ(x0−r0(τ))
δ((x− r(τ))2) = δ((x0 − r0(τ))2 − (~x− ~r(τ))2)
= δ(−R2), R = x0 − r0(τ) 6= ~x− ~r(τ)
Beitrag nur fur R = 0. Fur den Fall R 6= 0 nur
2
Jµδ((x− r(τ))2) =
[d
dτδ((x− r(τ)))
]· dτ
d((x− r(τ))2)· Jµ((x− r(τ))2)
Jµ((x− r(τ))2) = 2(x− r(τ))
d
dτ
((x− r(τ))2
)= −2(x− r(τ)) · dr(τ)
dτ= −2u · (x− r(τ))
=− xµ − rµ(τ)
u · (x− r(τ))
d
dτ(δ((. . .)))
⇒ ∂µAν =2k
cq
∫dττ
(uν(xµ − rµ(τ))
u · (x− r(τ))
)θ(x0 − r0(τ))δ((x− r(τ))2)
(8.17)
Auswertung wie in Abschnitt ?? → ??
F µν(x) =kq
c
[1
c · (x− r(τ))
d
dτ
(x− r(τ))µuν − (x− r(τ))νuµ
u · (x− r(τ))
]τ=τ0
(8.18)
86
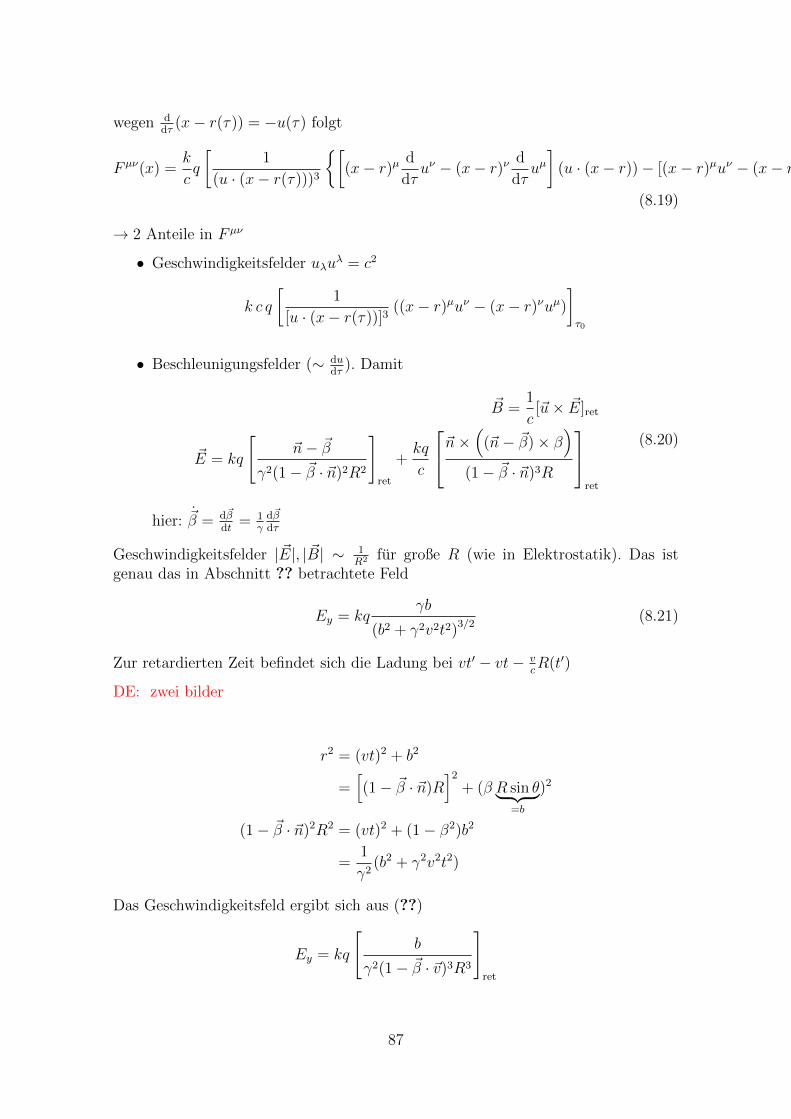
wegen ddτ
(x− r(τ)) = −u(τ) folgt
F µν(x) =k
cq
[1
(u · (x− r(τ)))3
[(x− r)µ d
dτuν − (x− r)ν d
dτuµ]
(u · (x− r))− [(x− r)µuν − (x− r)νuµ]
[(x− r)λduµ
dτ− uλuλ
]]τ0
(8.19)
→ 2 Anteile in F µν
• Geschwindigkeitsfelder uλuλ = c2
k c q
[1
[u · (x− r(τ))]3((x− r)µuν − (x− r)νuµ)
]τ0
• Beschleunigungsfelder (∼ dudτ
). Damit
~B =1
c[~u× ~E]ret
~E = kq
[~n− ~β
γ2(1− ~β · ~n)2R2
]ret
+kq
c
~n×(
(~n− ~β)× β)
(1− ~β · ~n)3R
ret
(8.20)
hier: ~β = d~βdt
= 1γ
d~βdτ
Geschwindigkeitsfelder | ~E|, | ~B| ∼ 1R2 fur große R (wie in Elektrostatik). Das ist
genau das in Abschnitt ?? betrachtete Feld
Ey = kqγb
(b2 + γ2v2t2)3/2(8.21)
Zur retardierten Zeit befindet sich die Ladung bei vt′ − vt− vcR(t′)
DE: zwei bilder
r2 = (vt)2 + b2
=[(1− ~β · ~n)R
]2
+ (β R sin θ︸ ︷︷ ︸=b
)2
(1− ~β · ~n)2R2 = (vt)2 + (1− β2)b2
=1
γ2(b2 + γ2v2t2)
Das Geschwindigkeitsfeld ergibt sich aus (??)
Ey = kq
[b
γ2(1− ~β · ~v)3R3
]ret
87

8.5 Strahlungsfelder beschleunigter Ladungen
Beschleunigungsfelder: ~E, ~B ⊥ ~n, Abfall ∼ 1R
, d.h. Strahlung
Energiefluss (∼ ~E2) durch entfernte Kugeloberflache (∼ R2) und durch Beschleuni-gungsfelder dominiert. Poyntingvektor:
~S =1
µ0
(~E × ~B
)=
1
µ0c
(~u · ~E2 − ~E(~u · ~E)
)(8.22)
=q2
(4π)2ε0c~n
[1
R2
∣∣∣∣∣~n× ((~n− ~β)× ~β)
(1− ~β · ~n)3
∣∣∣∣∣]
ret
+ o
(1
R2
)(8.23)
~S · ~n: Energie pro Flache- und Zeiteinheit zur Zeit t beobachtet und zur Zeit t′ =t− R(t′)
cvon der Ladung emittiert wird⇒Abgestrahlte Energie pro Raumwinkel der
Ladung im t′-Intervall
dP (t′)
dΩ= R2(~S · ~n)
dt
dt′= R2(~S · ~n)(1− ~β · ~n)
=q2
(4π)2ε0c
|~n× ((~n− ~β)× ~β)|2
(1− β · ~n)5(8.24)
(keine Retardierungsbedingung, da alle in t′ der bewegten Ladung angegeben ist!)⇒ (??) ist Winkelverteilung der abgegeben ist!
1. ~‖~β, θ : Winkel zwischen ~n und ~β bzw. ~β
→ P
Ω=
q2
(4π)2ε0c
β2 sin2 θ
(1− β cos θ)5(8.25)
β 1 dPdΩ∼ sin2 θ
β . 1 “Strahlungskeulen in bewegungs Richtung geneigt. (??) cos θmax = 1zβ
(√
1 + 15β2−1); θm → 0 fur β → 1, Pm ∼ γ8. Gesamt abgestrahlte Leistung:
P (t′) =
∫dΩ
dP
dΩ=
q2
8πε0cβ2
∫dθ
sin3 θ
(1− β cos θ)5(8.26)
=q2
6πε0c3γ6v2 γ→1−−→ q2
6πε0c3v2 Larmor-Formel (8.27)
Hangt von der Beschleunigung v aber nicht der Geschwindigkeit v ab
2. ~β ⊥ ~β “Synchrotorn-Strahlung
dP (t′)
dΩ=
q2
(4π)2ε0c
β2
(1− β cos θ)3
[1− sin2 θ cos2 ϕ
γ2(1− β cos θ)2
](8.28)
Den Energieverlust der strahlenden Ladun haben wir vernachlassigt (→ großeRuhemasse)
88

9 Sonstiges/Snippets
zu kanonischen Transformationen (heißt bei Hamilton; Verfahren bei Lagrange heißtpunkttrafo):
H(Q,P ) = H(q(Q,P ), p(Q,P ), t) +∂F (q(Q,P ), Q, t)
∂t
Diese Gleichung zeigt, dass fur die kanonische Transformation die neue Hamilton-funktion H gefunden werden kann durch einsetzen des Inversens der Transformati-onsgleichung, welche P und Q in den “alten” Variablen ‘p, q ausdruckt, in die alteHamiltonian. Falls noch eine Zeitabhangigkeit der Erzeugenden existiert, so mussdies durch seine partielle zeitliche Ableitung an die Gleichung hinzuaddiert werden
Kochrezept zur kanonischen transformation
1. Aufstellen einer erzeugenden Funktion F (q,Q, t)
2. P = −∂F∂Q, p = ∂F
∂qfuhrt zu Funktionen P,Q
3. einsetzen
9.1 Ubung 11
9.1.1 Vorbereitung
Kontravarianter Vektor: v −→ xµ; x′µ = Λµνx
ν
Kovarianter Vektor: vµ −→ ∂µ := ∂∂xµ
; ∂′µ = (Λ−1)µν∂ν
Dabei:
Λ ∈ O(1, 3)⇐⇒ Λ−1 = ΛT
Λ ∈ SO(1, 3)⇐⇒ Λ−1 = ΛT ∧ det Λ = 1
Vektorraum hier: Minkovskiraum R1,3 = M4 ← kontravariante Vektoren(R1,3)∗ ← kovariante Vektoren
vµ : R1,3 → Rvµ(aν) = vµa
µ
Tensoren sind multilineare Abbildungen. (p, q)-Tensor:
T µ1...µpν1...νq := Aµ1 ⊗ . . .⊗ Aµp ⊗Bν1 ⊗ . . .⊗Bνq
89

9.1.2 Aufgaben
Weisen Sie die Invarianz von δµν unter Lorentz-Transformationen nach
δµν −→ δ′µσ = Λµ
ρΛνσδρν
= ΛµρΛν
ρ
= δµν = 1
⇒Kronecker Delta ist ein forminvarianter (1,1) Tensor
Wie transformiert sich der total antisymmetrische Tensor εµνρσ ((4,0)-Tensor)
εµνρσ −→ ε′µνρσ = Λµα1Λν
α2Λρα3Λσ
α4εα1α2α3α4
= det(Λ)εµνρσ
genannt: “Tensor-Dichte”/”Pseudo-Tensor”
allg: (p, q)-Tensor-Dichte
T ′µ1...µpν1...νq = det(Λ) · Λµ1
α1 · · ·Λµpαp · Λν1
β1 · Λν1
β1 · · ·Λνqβq · Tα1...αp
β1...βq
fur eigentliche Lorentz-Transformation (SO(1,3)): εµνρσ = ε′µνρσ
Sei T µν ein Tensor. Zeigen Sie, dass ΣµTµµ nicht invariant unter Lorentz-
Transformation ist
ΣµTµν −→ ΣµT
′µν = ΣµΛµνΛ
µρT
νρ
6= ΣµTµµ
Sei AµBµ invariant fur beliebige Vierer-Vektroen Aµ. Zeigen Sie, dass Bµ
ein kovarianter Vierer-Vektor ist
AµBµ −→ (AµBµ)′ = AµBµ = A′µB′µ
= ΛµνA
νB′µ
= ΛνµA
µB′ν
= AµΛνµB′ν
Aµ −→ A′µ
= ΛµνA
ν ⇒ Bµ = ΛνµB′ν
ΛρµBµ = δνρB
′ν = Bρ
′ ⇒ B′µ = ΛµνBν
90

Seien Aµ und Bµ Vektoren Zeigen Sie, dass Cµν := Aµ +Bν keinen Tensordefiniert
Cµν := Aµ +Bµ ; Dµν := Aµ ·Bν = Aµ ⊗Bν
Cµν −→ C ′µν
= A′µ
+B′ν
= ΛνρA
ρ + ΛνσB
σ
6= ΛνρΛ
νσC
ρσ
Zeigen Sie, dass aber Dµν := AµBν einen Tensor definiert
Dµν −→ D′µν
= A′µB′ν
= ΛµρA
ρΛνσB
σ
= ΛµρΛ
νσ A
ρBσ︸ ︷︷ ︸Dρσ
gµν : R1,3 → (R1,3)∗ Es gilt:
wµ = gµνwν , wµ = gµνwν
mit: gµν := (gµν)−1; gµν =
+−−−
Sei F µν ein antisymmetrischer Tensor: F µν = −F νµ. Zeigen Sie, dass F µν
antisymmetrisch in allen Inertialsystemen ist. Zeigen Sie, dass der zu-gehorige kovariante Tensor Fµν ebenfalls antisymmetrisch ist
F µν −→ F ′µν
= ΛµρΛ
νσF
ρσ
= −ΛµρΛ
νσF
σρ
= −ΛµσΛν
ρFρσ
= −ΛνρΛ
µσF
ρσ
= −F ′νµ
Λ1Λ2 6= Λ2Λ1 ABER ΛµσΛσ
ρ = ΛσρΛ
µσ
Fµν = gµρgνσFρσ
= −gµρgνσF σρ
(ρ→ σ;σ → ρ) = −gµσgνρF ρσ
= −gνρgµσF σρ
= −Fνµ
91
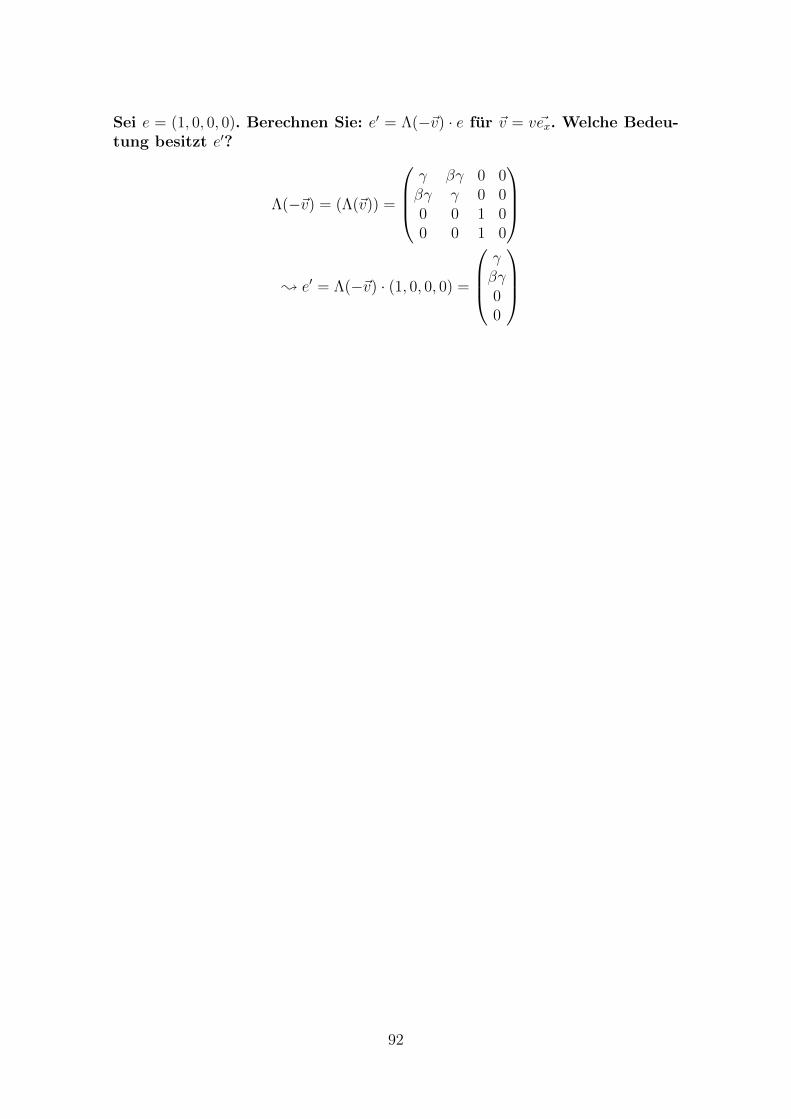
Sei e = (1, 0, 0, 0). Berechnen Sie: e′ = Λ(−~v) · e fur ~v = v ~ex. Welche Bedeu-tung besitzt e′?
Λ(−~v) = (Λ(~v)) =
γ βγ 0 0βγ γ 0 00 0 1 00 0 1 0
; e′ = Λ(−~v) · (1, 0, 0, 0) =
γβγ00
92