Embed Size (px)
Citation preview
EECI19 M22: MPC for Diesel Engines
Model Predictive Diesel
Engine Control
1
EECI19 M22: MPC for Diesel Engines
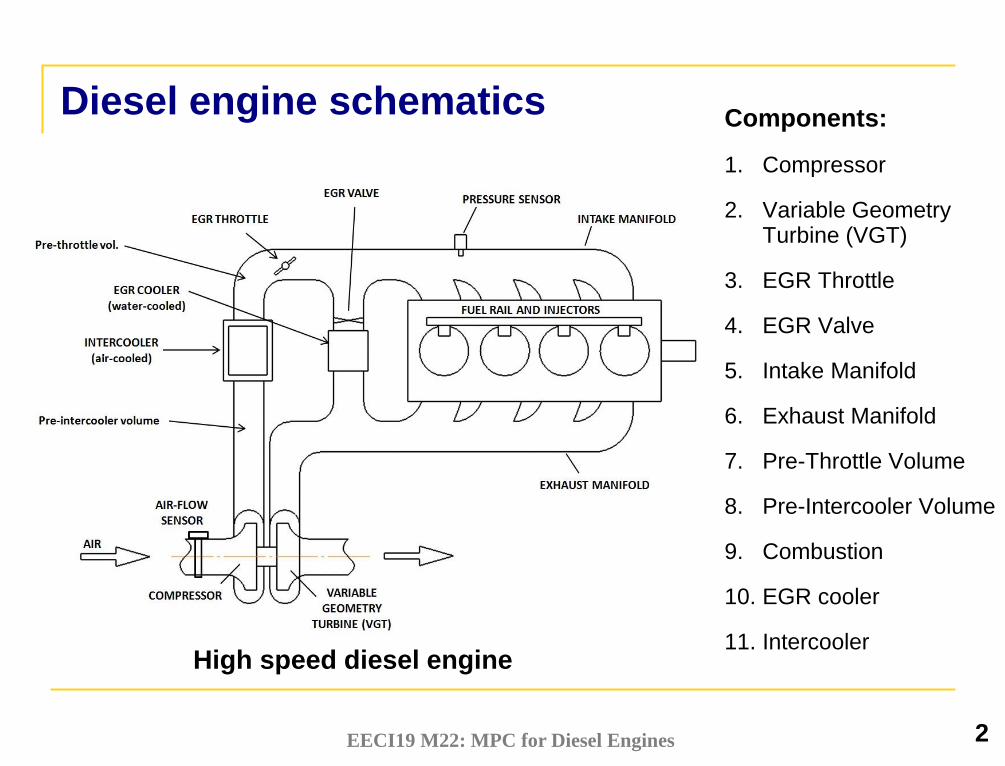
Components:
1. Compressor
2. Variable Geometry Turbine (VGT)
3. EGR Throttle
4. EGR Valve
5. Intake Manifold
6. Exhaust Manifold
7. Pre-Throttle Volume
8. Pre-Intercooler Volume
9. Combustion
10. EGR cooler
11. Intercooler
Diesel engine schematics
2
High speed diesel engine
EECI19 M22: MPC for Diesel Engines
Diesel air path control
Tracking objectives:
• Control intake manifold pressure and EGR rate (= EGR valve flow
/ Cylinder Flow) to specified set-points
• Engine speed and fuel flow are measured disturbances
• Fast response desired to reduce turbo-lag
Constraints:
• Input constraints: EGR valve, EGR throttle, and VGT lift have limited
ranges
• Output constraints are imposed on intake manifold pressure
overshoot, exhaust manifold pressure overshoot, turbocharger
speed, EGR rate, etc.
3
EECI19 M22: MPC for Diesel Engines
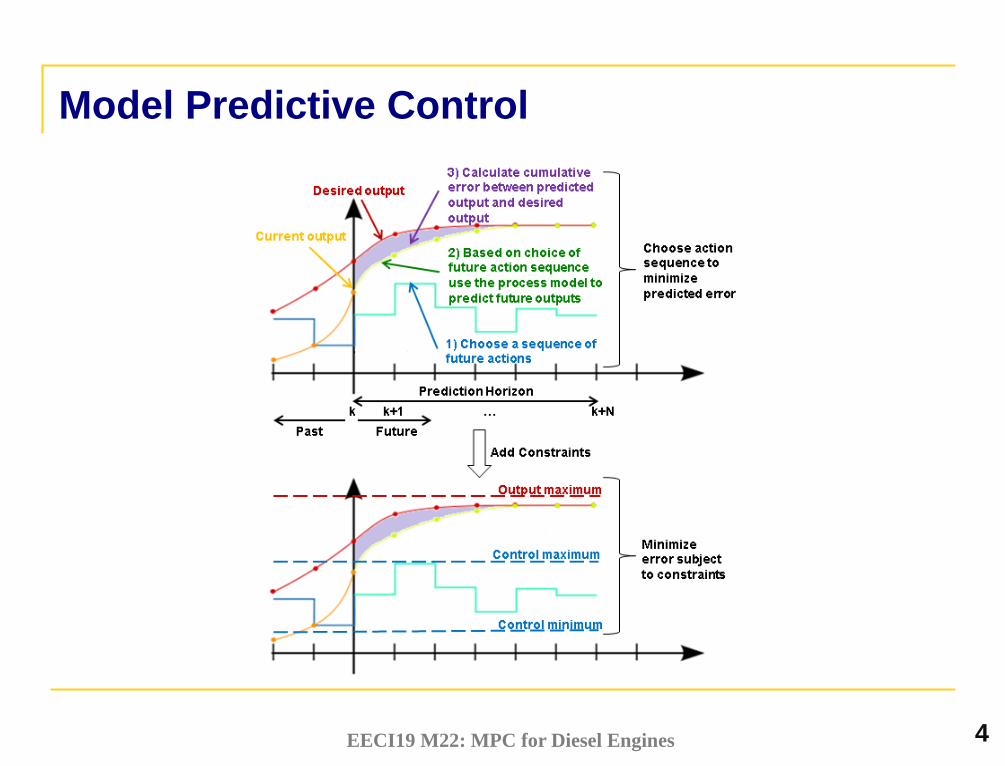
Model Predictive Control
4
EECI19 M22: MPC for Diesel Engines
Low complexity explicit LQ-MPC
5
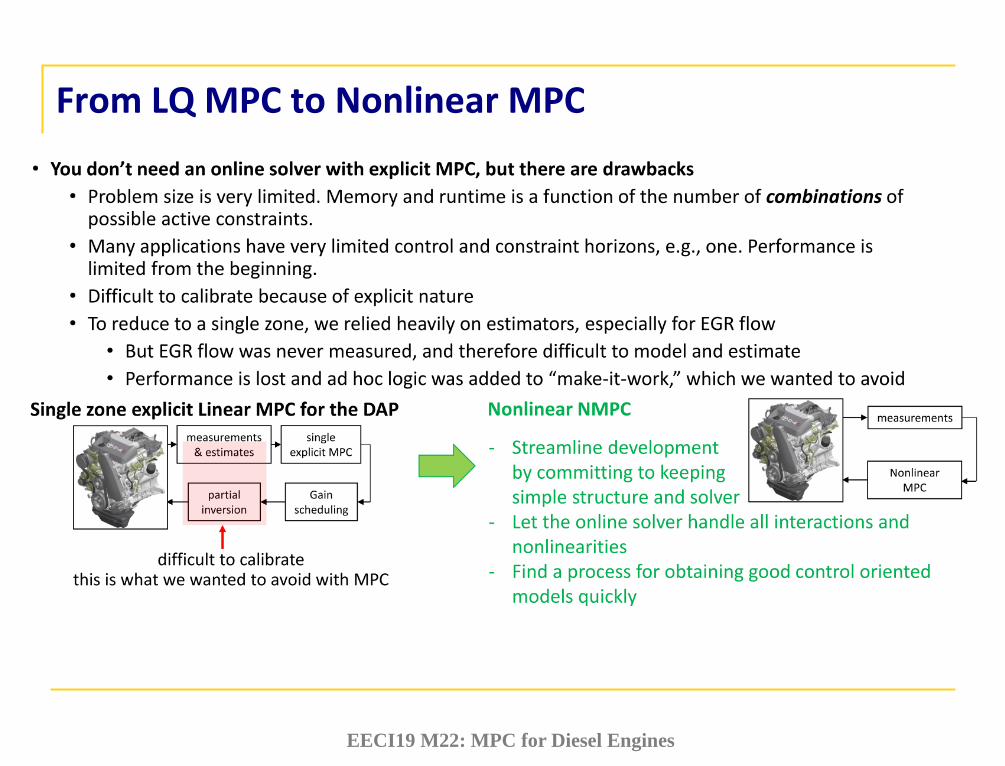
• Nonlinear inversion to make plant to which MPC is applied “more linear”
• Rate-based model at a single linearization point
• Intermittent tightened constraint enforcement
• Constraint re-modeling (e.g., constraint on turbocharger speed is remodeled as a constraint on intake manifold pressure)
• Special MPC formulation:
• Control horizon = 1
• Prediction horizon = 1
• LQ-based terminal cost
• Longer constraint horizon, with intermittent enforcement
• Low complexity gain scheduling
EECI19 M22: MPC for Diesel Engines
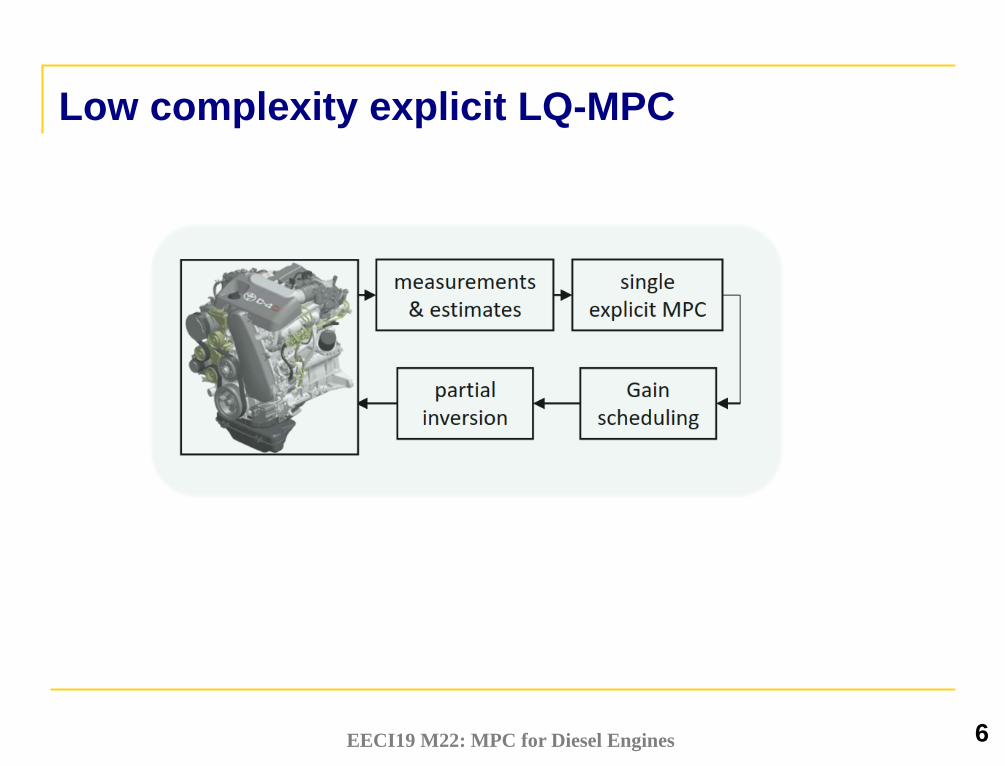
Low complexity explicit LQ-MPC
6
EECI19 M22: MPC for Diesel Engines
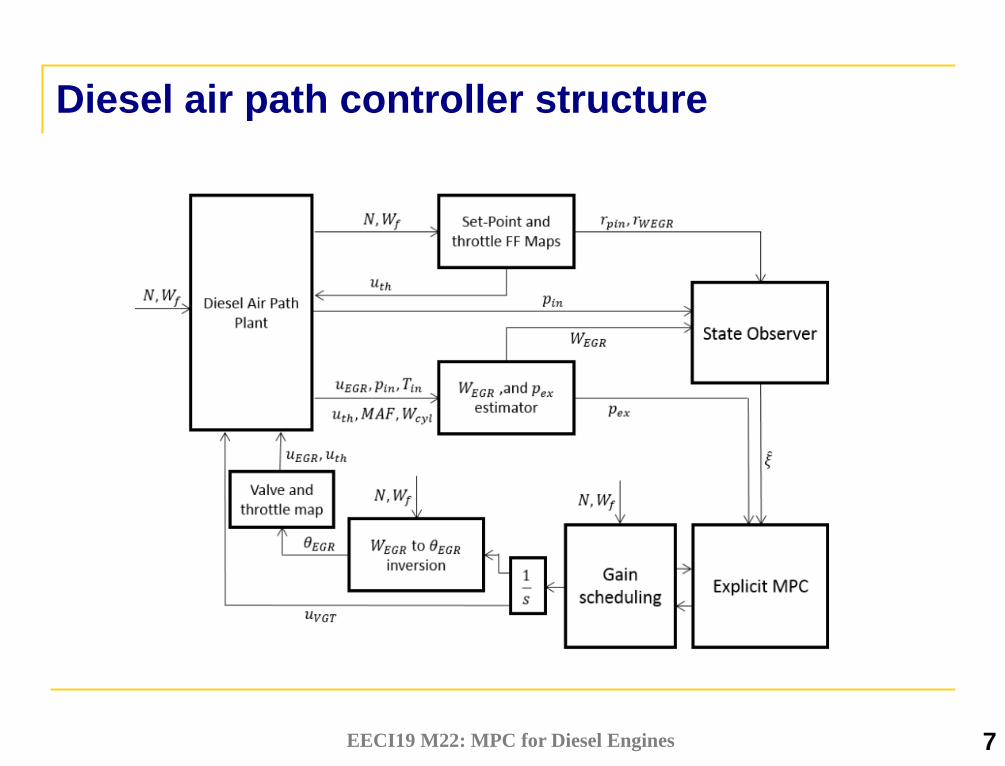
Diesel air path controller structure
7
EECI19 M22: MPC for Diesel Engines
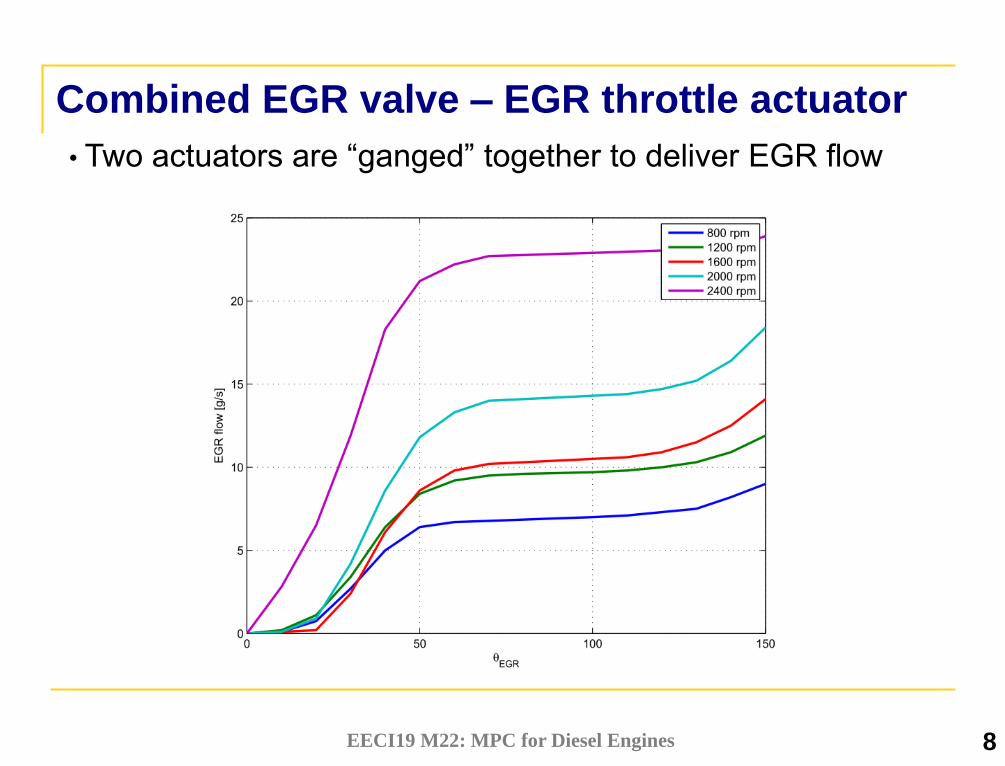
Combined EGR valve – EGR throttle actuator
• Two actuators are “ganged” together to deliver EGR flow
8
EECI19 M22: MPC for Diesel Engines
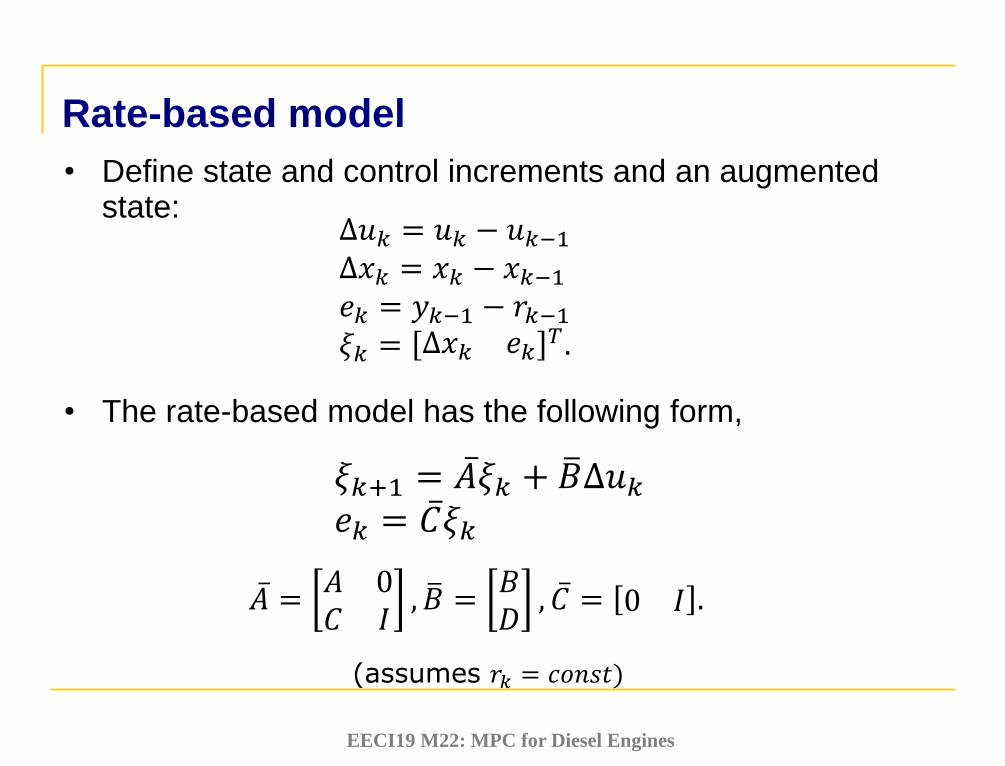
• Define state and control increments and an augmented state:
• The rate-based model has the following form,
Δ𝑢𝑘 = 𝑢𝑘 − 𝑢𝑘−1Δ𝑥𝑘 = 𝑥𝑘 − 𝑥𝑘−1𝑒𝑘 = 𝑦𝑘−1 − 𝑟𝑘−1𝜉𝑘 = Δ𝑥𝑘 𝑒𝑘
𝑇 .
𝜉𝑘+1 = ҧ𝐴𝜉𝑘 + ത𝐵Δ𝑢𝑘𝑒𝑘 = ҧ𝐶𝜉𝑘
ҧ𝐴 =𝐴 0𝐶 𝐼
, ത𝐵 =𝐵𝐷
, ҧ𝐶 = 0 𝐼 .
Rate-based model
(assumes 𝑟𝑘 = 𝑐𝑜𝑛𝑠𝑡)

EECI19 M22: MPC for Diesel Engines
The MPC optimization problem then becomes,
min 𝜉𝑁𝑇𝑃𝜉𝑁 +
𝑘=1
𝑁−1
𝑒𝑘𝑇𝑄𝑒𝑘 + Δ𝑢𝑘
𝑇𝑅Δ𝑢𝑘
subject to:𝜉𝑘+1 = ҧ𝐴𝜉𝑘 + ത𝐵Δ𝑢𝑘
𝑒𝑘 = ҧ𝐶𝜉𝑘𝑢𝑘 = 𝑢𝑘−1 + Δ𝑢𝑘
𝑒𝑘 + 𝑟 ∈ 𝑌𝑘 ,𝑢𝑘 ∈ 𝑈𝑘 .
Rate-based MPC (cont’d)
EECI19 M22: MPC for Diesel Engines
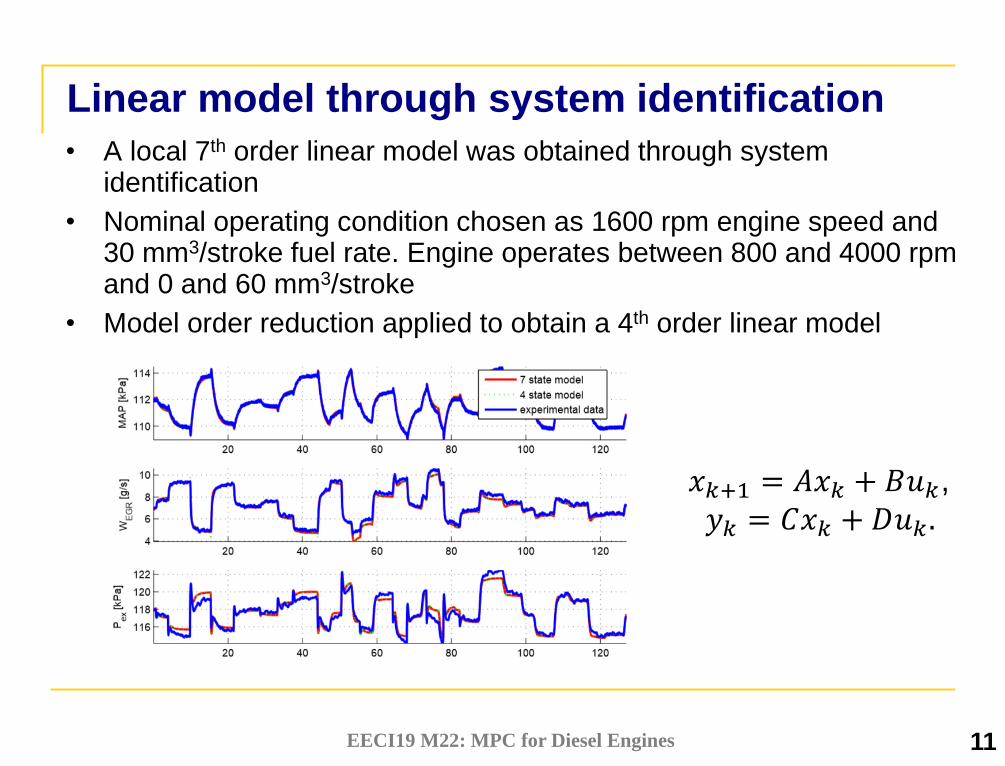
Linear model through system identification
• A local 7th order linear model was obtained through system identification
• Nominal operating condition chosen as 1600 rpm engine speed and 30 mm3/stroke fuel rate. Engine operates between 800 and 4000 rpm and 0 and 60 mm3/stroke
• Model order reduction applied to obtain a 4th order linear model
𝑥𝑘+1 = 𝐴𝑥𝑘 + 𝐵𝑢𝑘,
𝑦𝑘 = 𝐶𝑥𝑘 + 𝐷𝑢𝑘 .
11
EECI19 M22: MPC for Diesel Engines
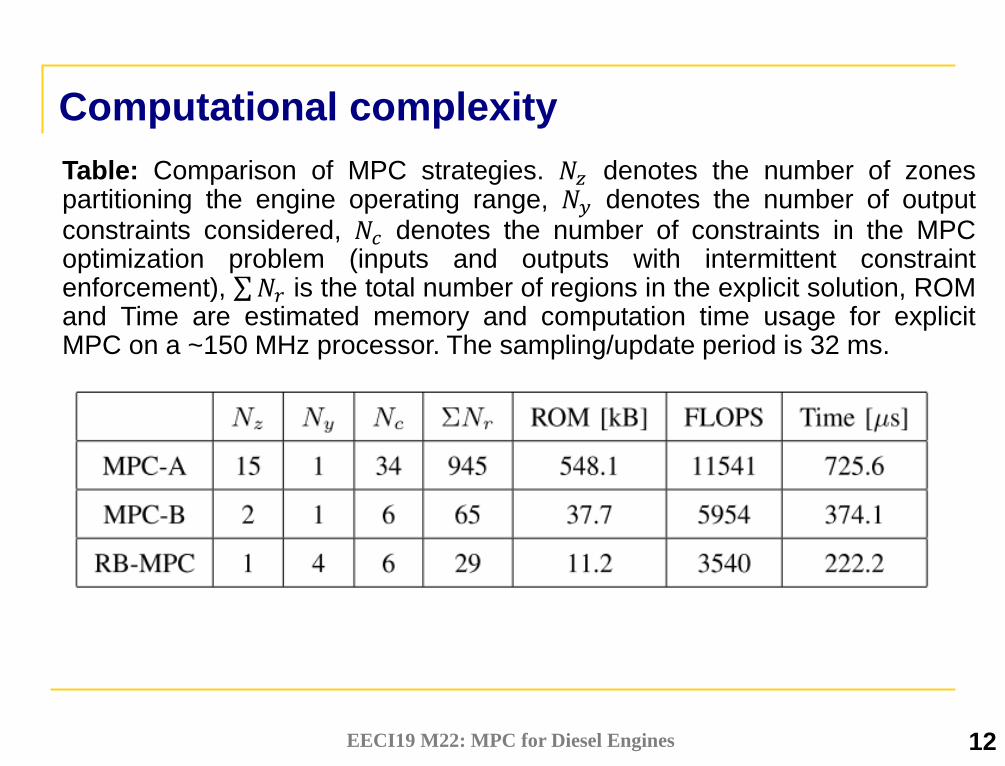
Computational complexity
Table: Comparison of MPC strategies. 𝑁𝑧 denotes the number of zonespartitioning the engine operating range, 𝑁𝑦 denotes the number of outputconstraints considered, 𝑁𝑐 denotes the number of constraints in the MPCoptimization problem (inputs and outputs with intermittent constraintenforcement), σ𝑁𝑟 is the total number of regions in the explicit solution, ROMand Time are estimated memory and computation time usage for explicitMPC on a ~150 MHz processor. The sampling/update period is 32 ms.
12

EECI19 M22: MPC for Diesel Engines
Low complexity gain scheduling1
EECI19 M22: MPC for Diesel Engines
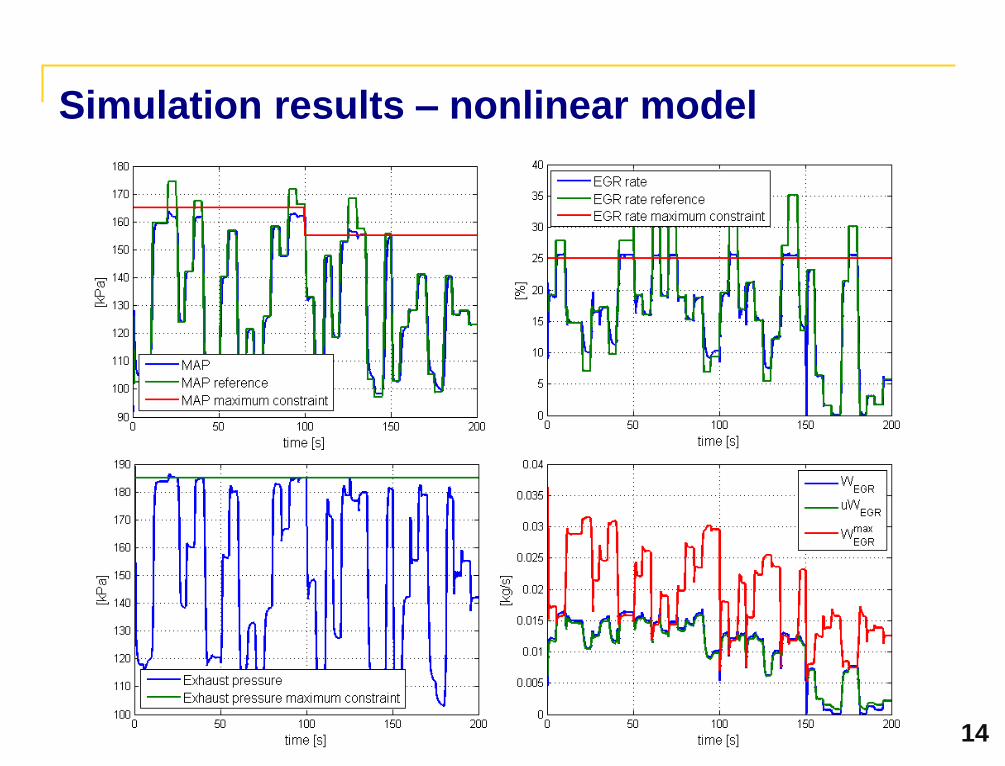
Simulation results – nonlinear model
14

EECI19 M22: MPC for Diesel Engines
Engine experiments
1200 rpm 1600 rpm
15
EECI19 M22: MPC for Diesel Engines
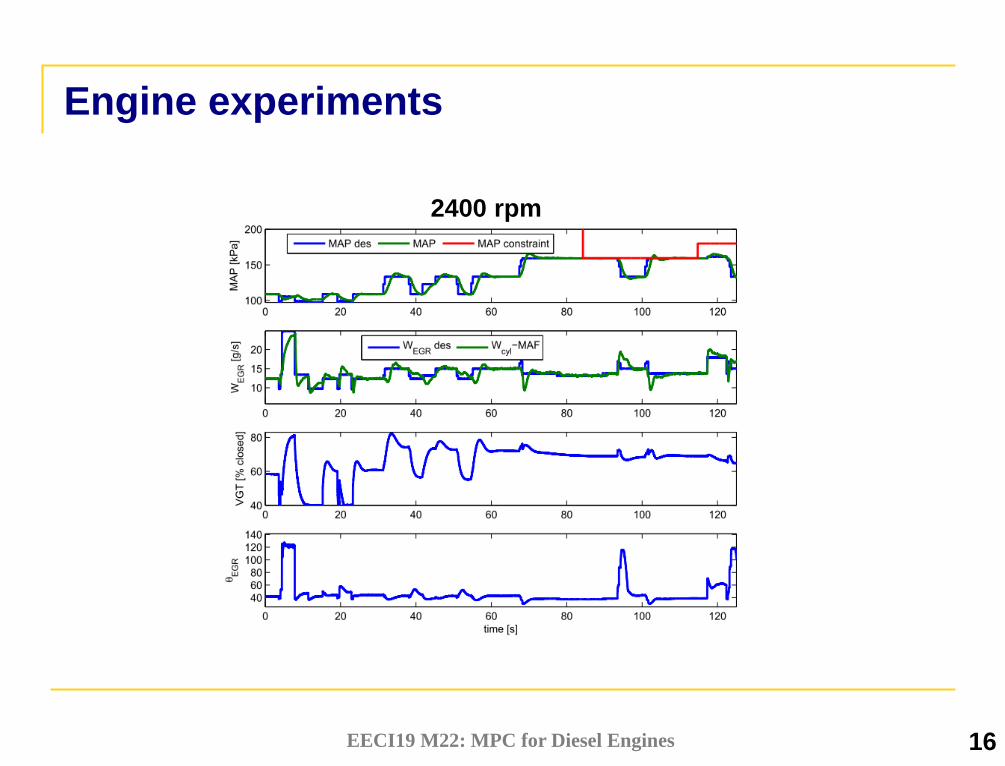
2400 rpm
Engine experiments
16
EECI19 M22: MPC for Diesel Engines
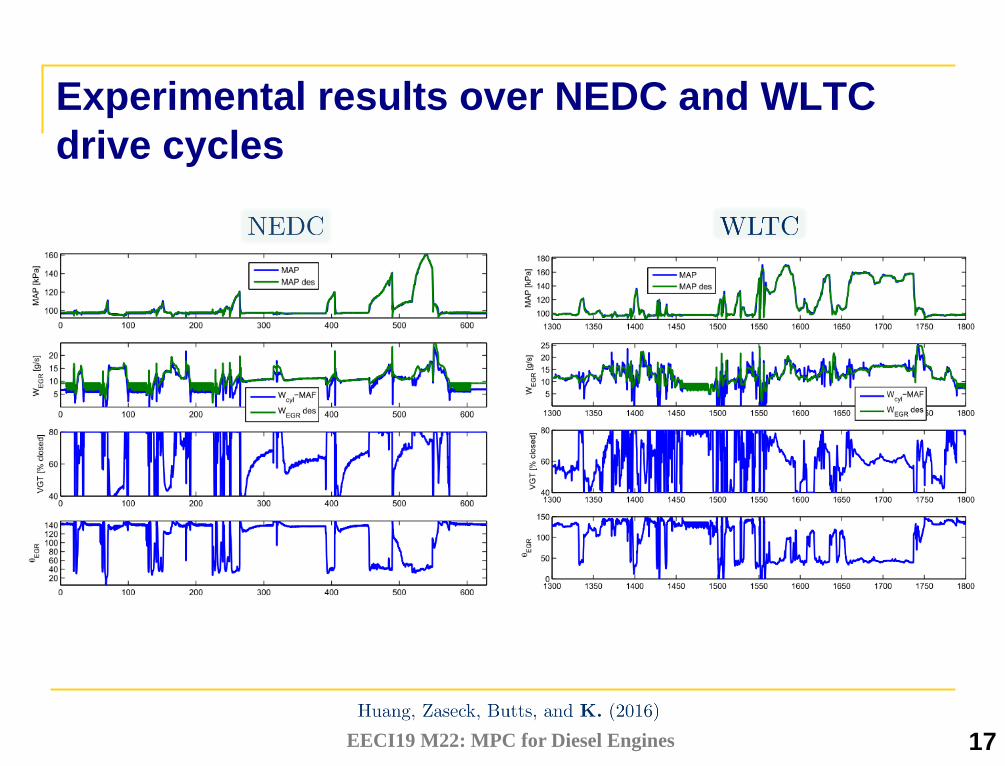
Experimental results over NEDC and WLTC
drive cycles
17
EECI19 M22: MPC for Diesel Engines
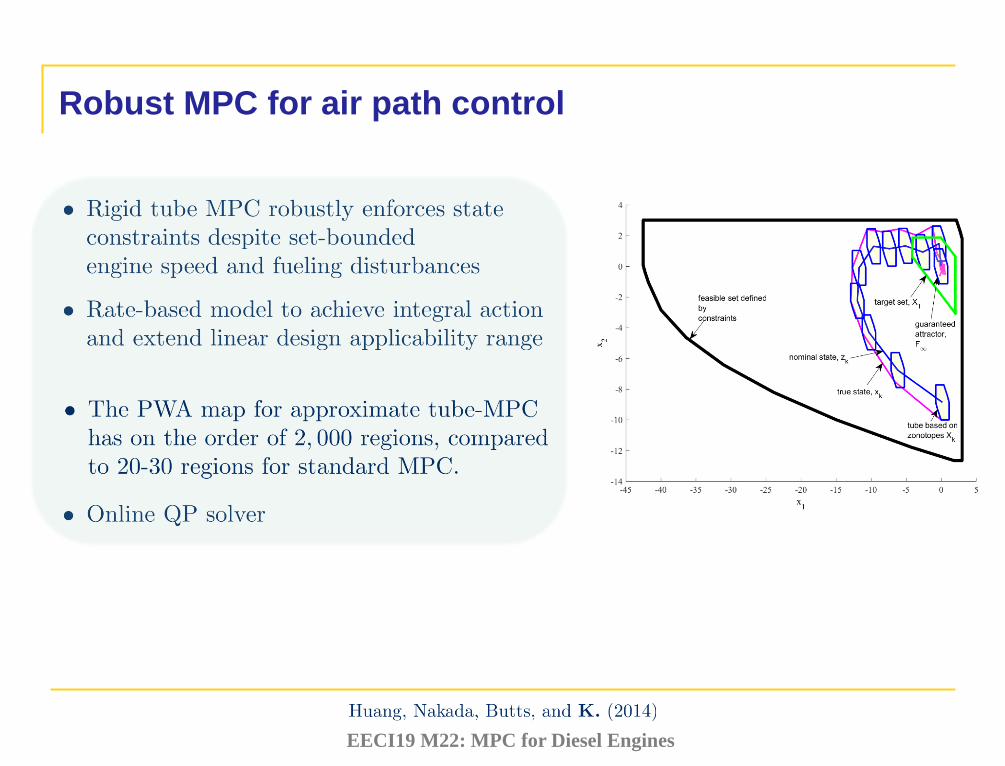
Robust MPC for air path control
EECI19 M22: MPC for Diesel Engines
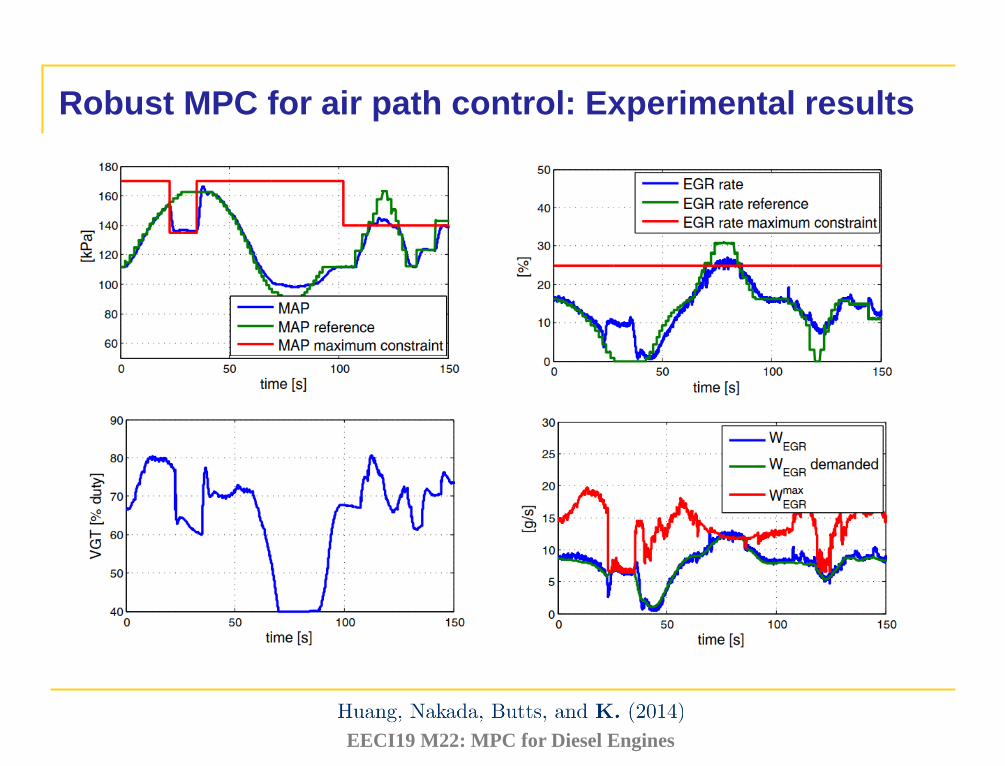
Robust MPC for air path control: Experimental results
EECI19 M22: MPC for Diesel Engines
From LQ MPC to Nonlinear MPC
EECI19 M22: MPC for Diesel Engines
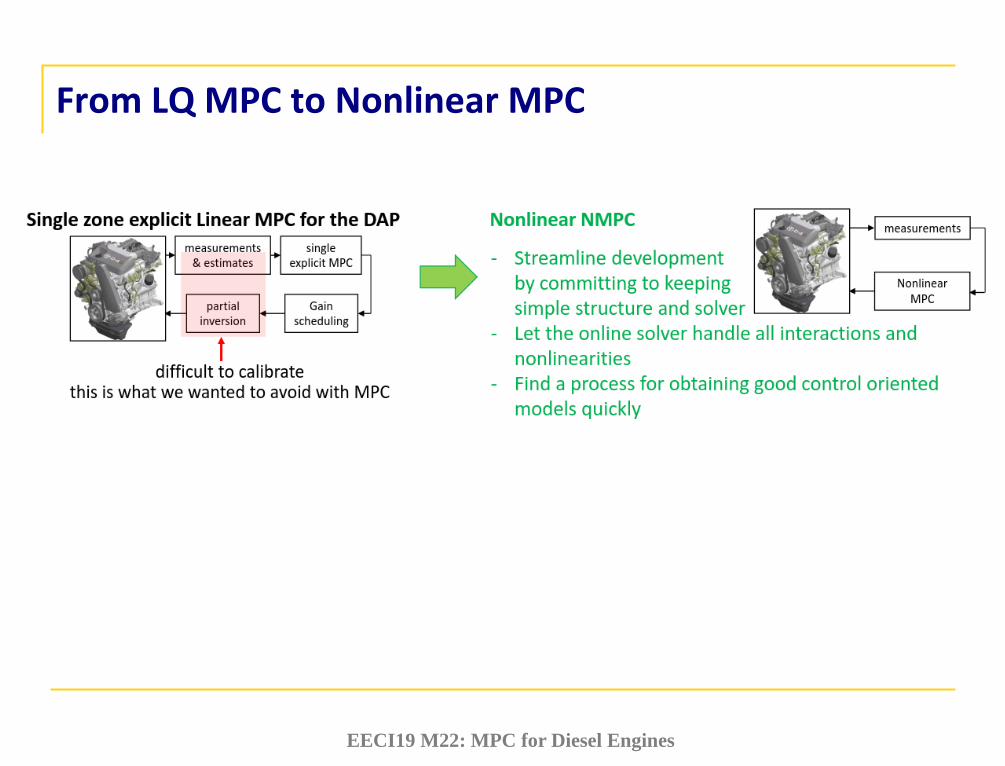
From LQ MPC to Nonlinear MPC
EECI19 M22: MPC for Diesel Engines
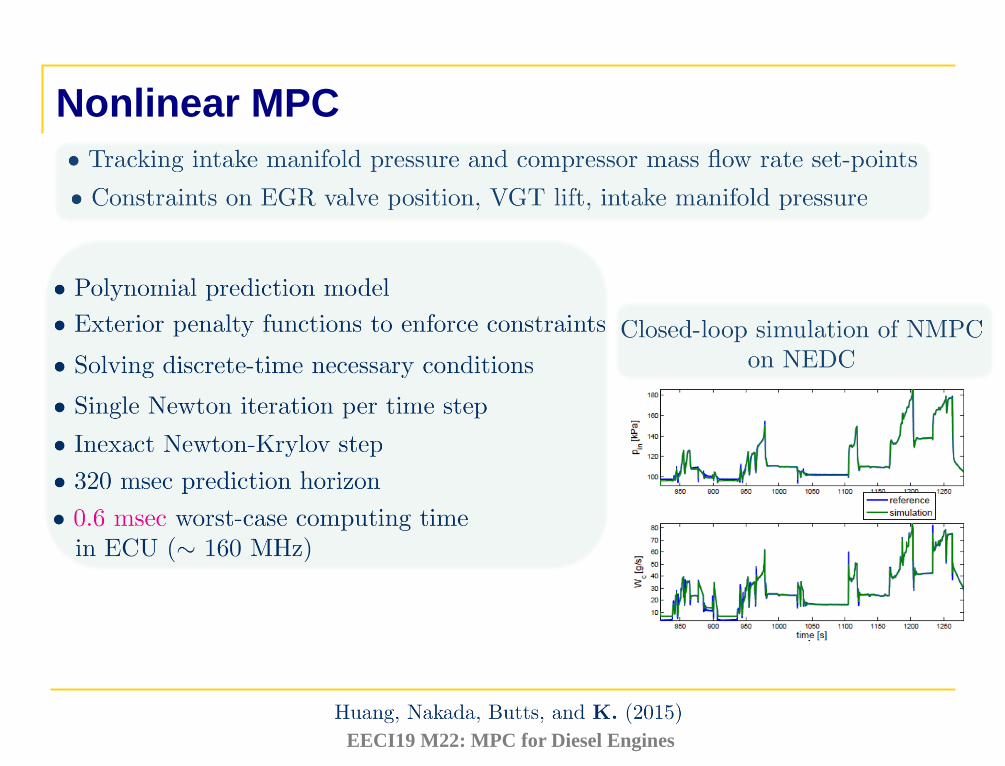
Nonlinear MPC
EECI19 M22: MPC for Diesel Engines
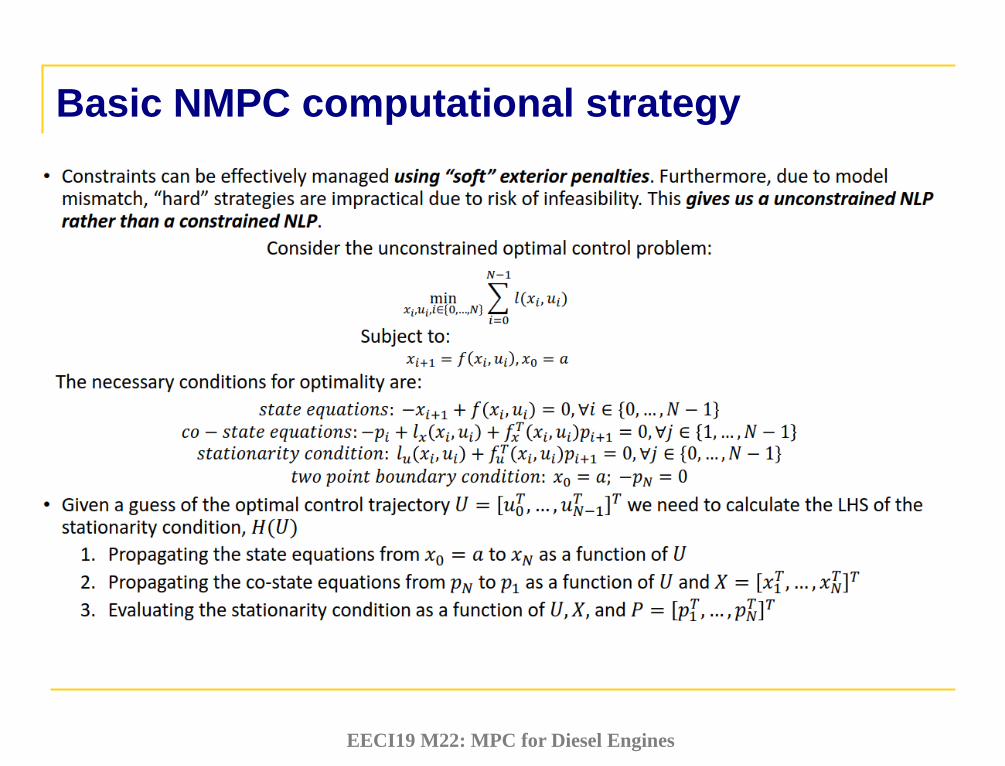
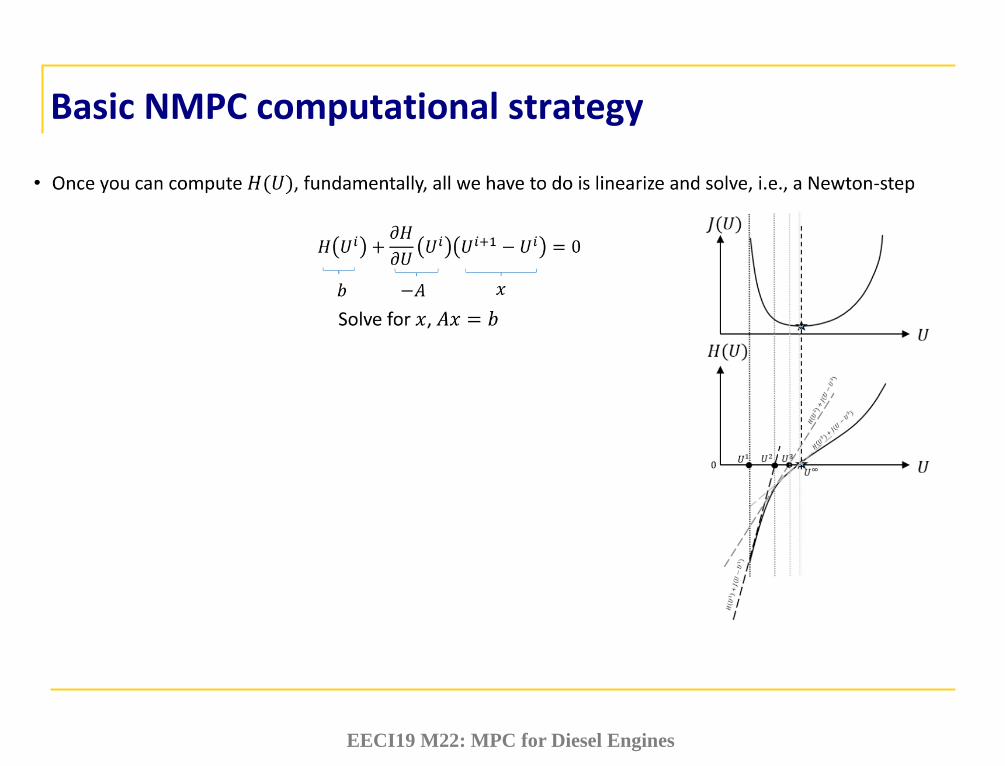
Basic NMPC computational strategy
EECI19 M22: MPC for Diesel Engines
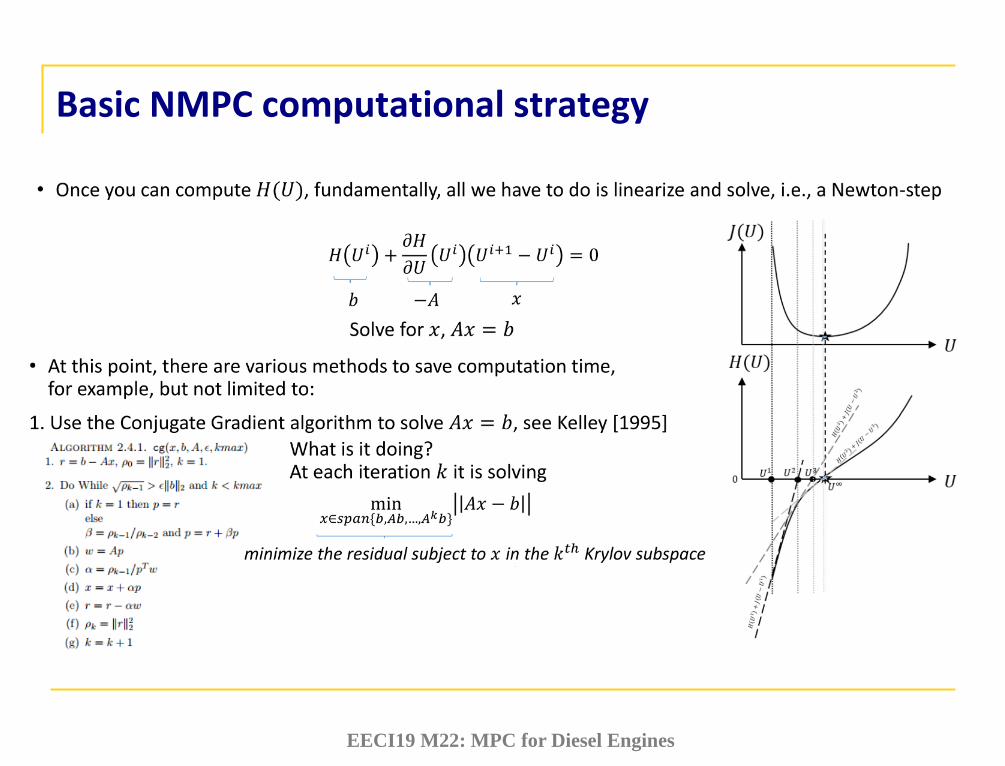
Basic NMPC computational strategy
EECI19 M22: MPC for Diesel Engines
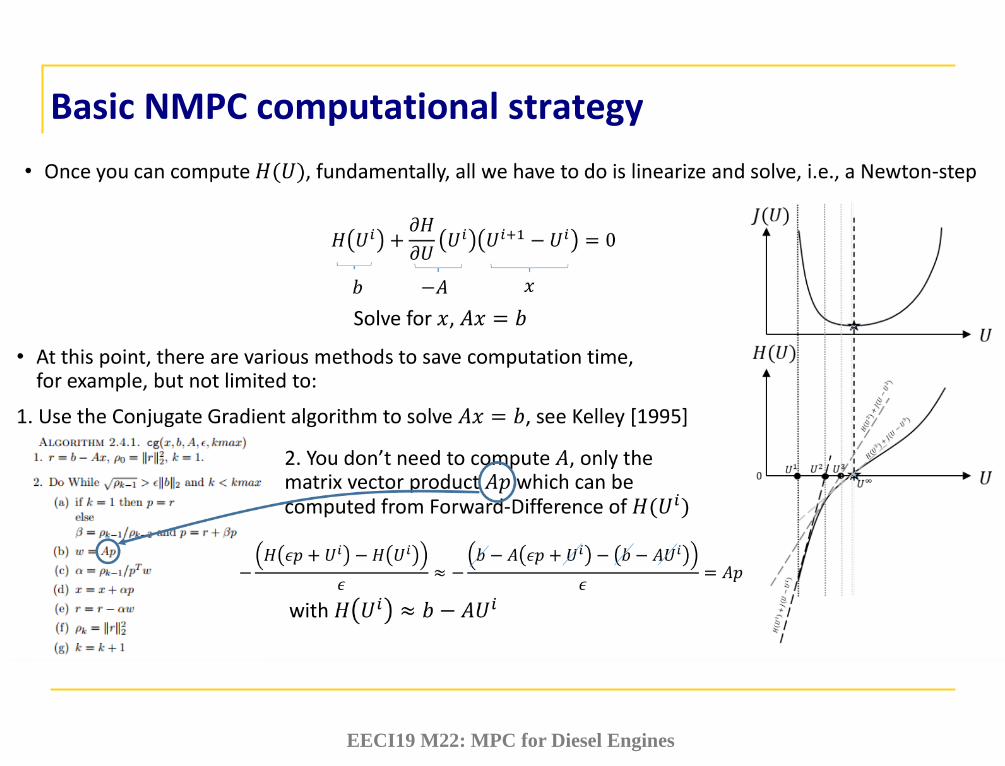
Basic NMPC computational strategy
EECI19 M22: MPC for Diesel Engines
Basic NMPC computational strategy
EECI19 M22: MPC for Diesel Engines
Basic NMPC computational strategy
EECI19 M22: MPC for Diesel Engines
Towards more advanced NMPC
EECI19 M22: MPC for Diesel Engines
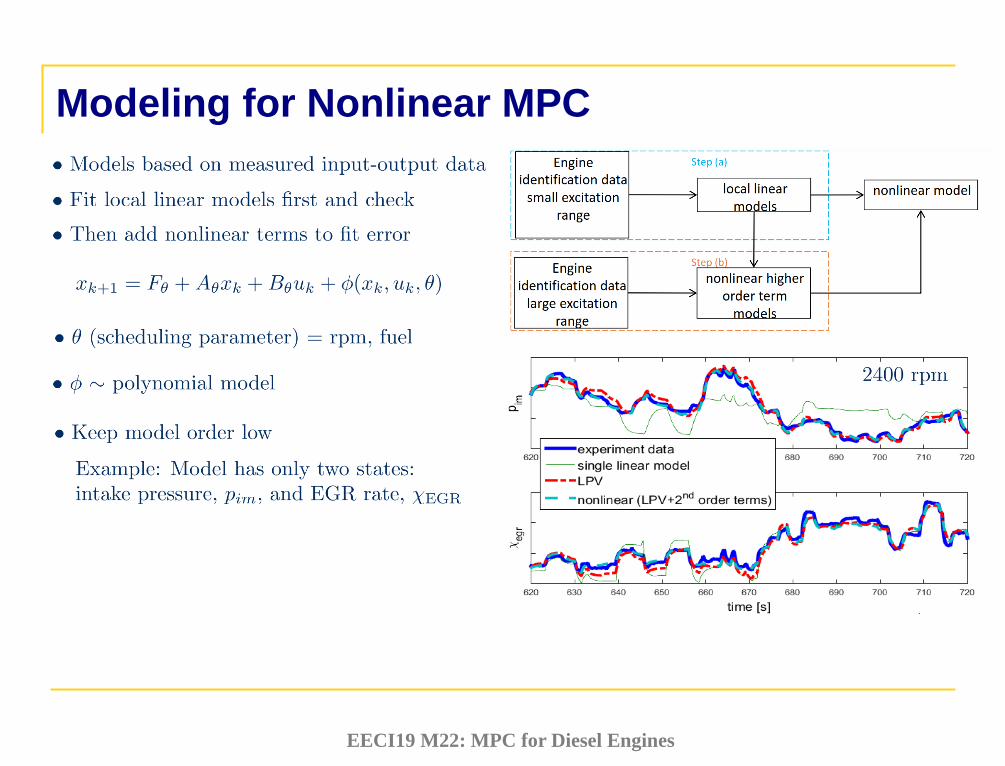
Modeling for Nonlinear MPC
EECI19 M22: MPC for Diesel Engines
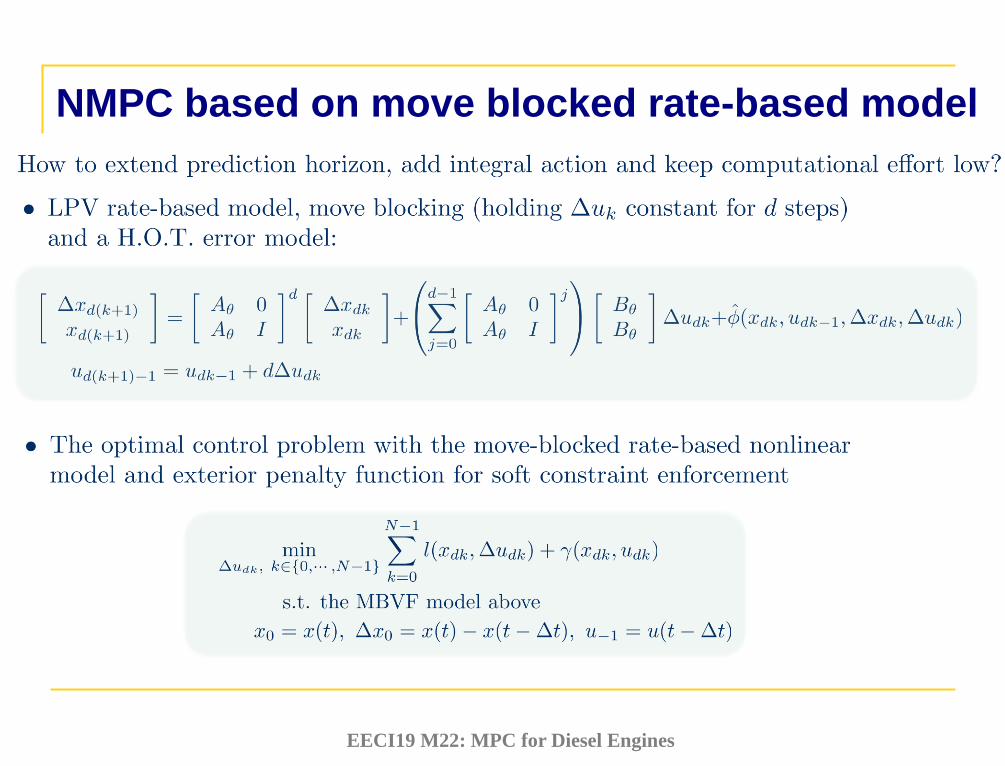
NMPC based on move blocked rate-based model

EECI19 M22: MPC for Diesel Engines
MPC for feedforward and feedback
EECI19 M22: MPC for Diesel Engines
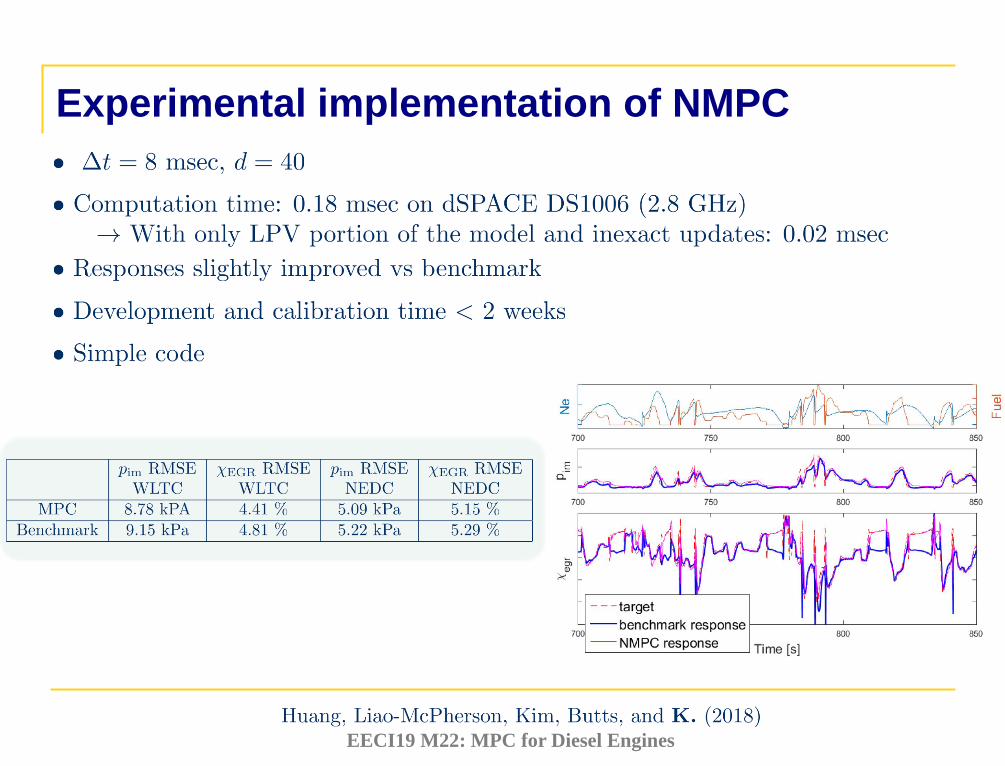
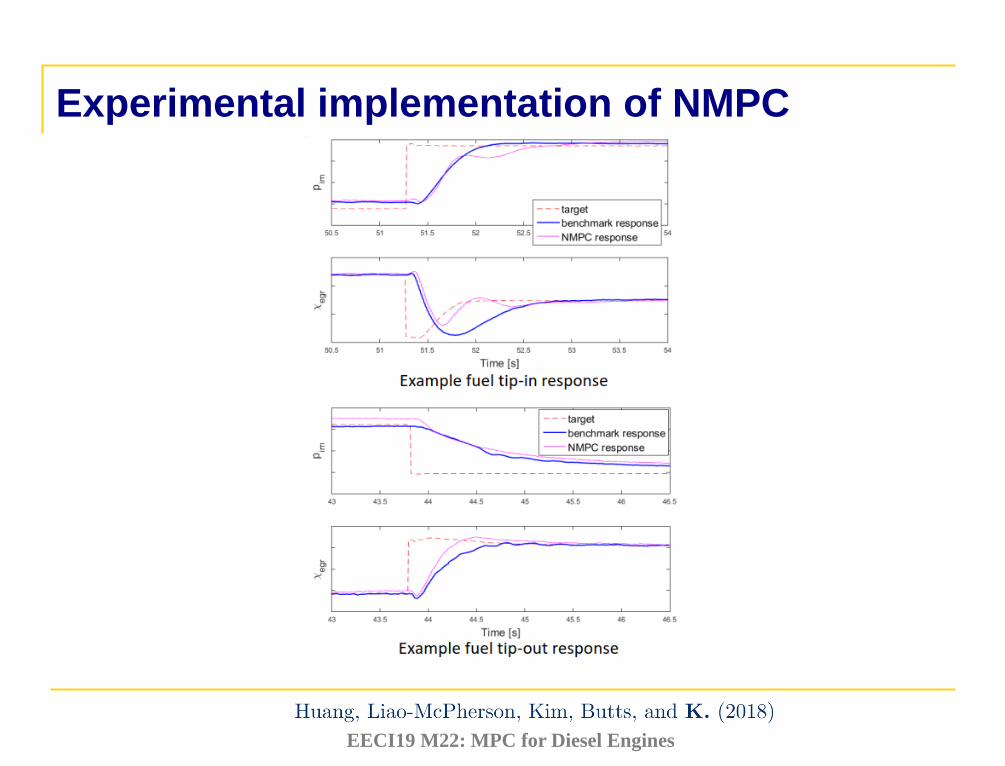
Experimental implementation of NMPC
EECI19 M22: MPC for Diesel Engines
Experimental implementation of NMPC
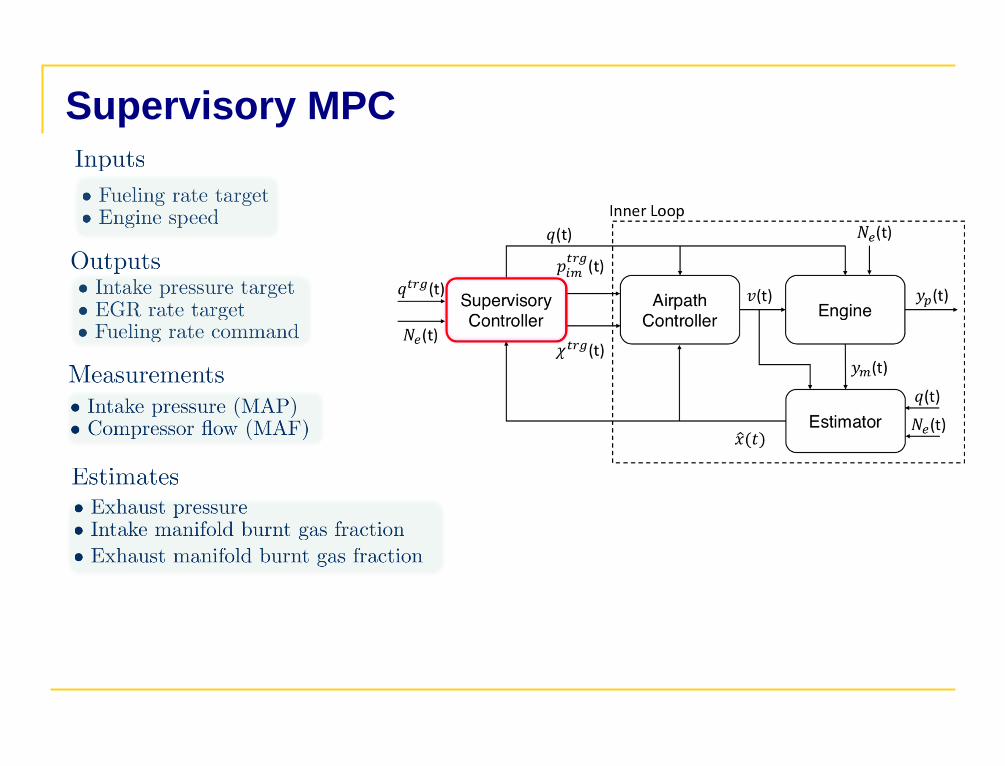
Supervisory MPC
EECI19 M22: MPC for Diesel Engines
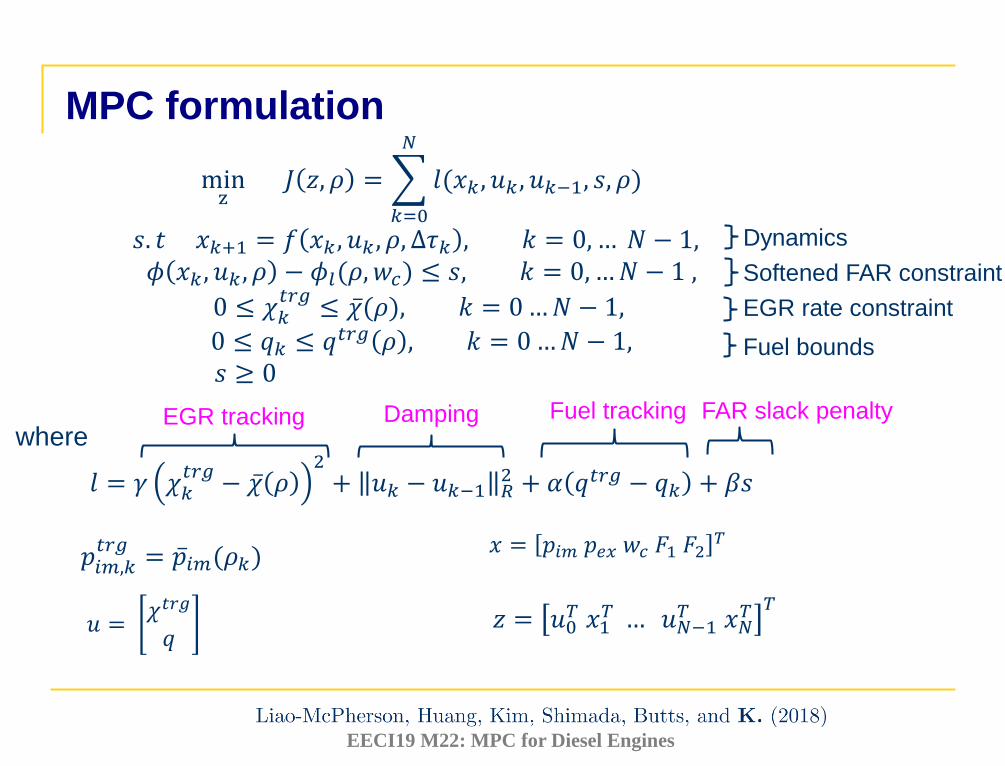
minz
𝐽 𝑧, 𝜌 =
𝑘=0
𝑁
𝑙(𝑥𝑘 , 𝑢𝑘 , 𝑢𝑘−1, 𝑠, 𝜌)
𝑠. 𝑡 𝑥𝑘+1 = 𝑓 𝑥𝑘 , 𝑢𝑘 , 𝜌, Δ𝜏𝑘 , 𝑘 = 0, … 𝑁 − 1,𝜙 𝑥𝑘 , 𝑢𝑘 , 𝜌 − 𝜙𝑙(𝜌, 𝑤𝑐) ≤ 𝑠, 𝑘 = 0,…𝑁 − 1 ,
0 ≤ 𝜒𝑘𝑡𝑟𝑔
≤ ҧ𝜒(𝜌), 𝑘 = 0…𝑁 − 1,
0 ≤ 𝑞𝑘 ≤ 𝑞𝑡𝑟𝑔 𝜌 , 𝑘 = 0…𝑁 − 1,𝑠 ≥ 0
where
𝑙 = 𝛾 𝜒𝑘𝑡𝑟𝑔
− ҧ𝜒 𝜌2+ 𝑢𝑘 − 𝑢𝑘−1 𝑅
2 + 𝛼 𝑞𝑡𝑟𝑔 − 𝑞𝑘 + 𝛽𝑠
Fuel trackingDampingEGR tracking
𝑧 = 𝑢0𝑇 𝑥1
𝑇 … 𝑢𝑁−1𝑇 𝑥𝑁
𝑇 𝑇
FAR slack penalty
Dynamics
Softened FAR constraint
EGR rate constraint
Fuel bounds
𝑝𝑖𝑚,𝑘𝑡𝑟𝑔
= ҧ𝑝𝑖𝑚(𝜌𝑘)
𝑢 =𝜒𝑡𝑟𝑔
𝑞
𝑥 = 𝑝𝑖𝑚 𝑝𝑒𝑥 𝑤𝑐 𝐹1 𝐹2𝑇
MPC formulation
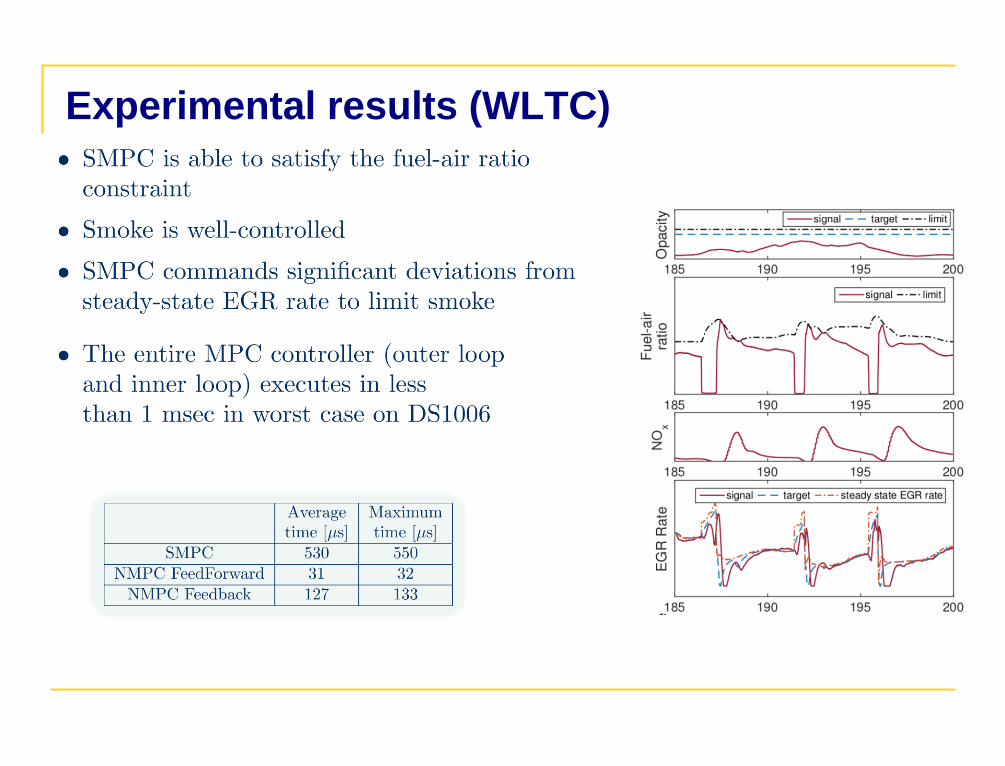
Experimental results (WLTC)
EECI19 M22: MPC for Diesel Engines
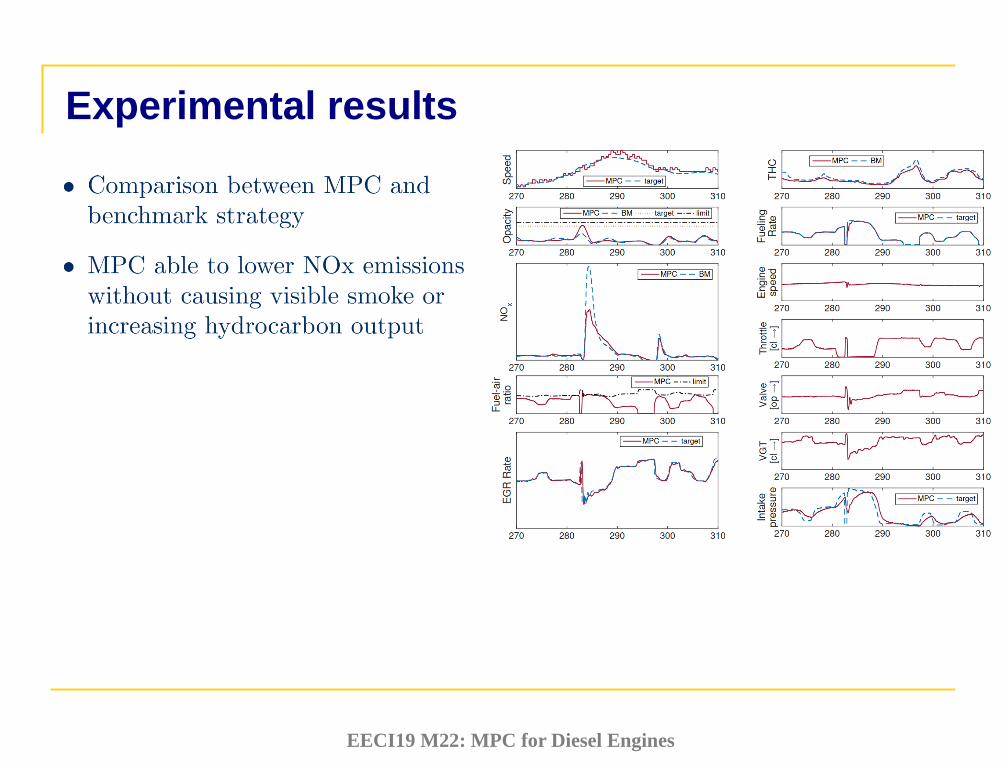
Experimental results

FBRS method for convex quadratic programming
EECI19 M22: MPC for Diesel Engines
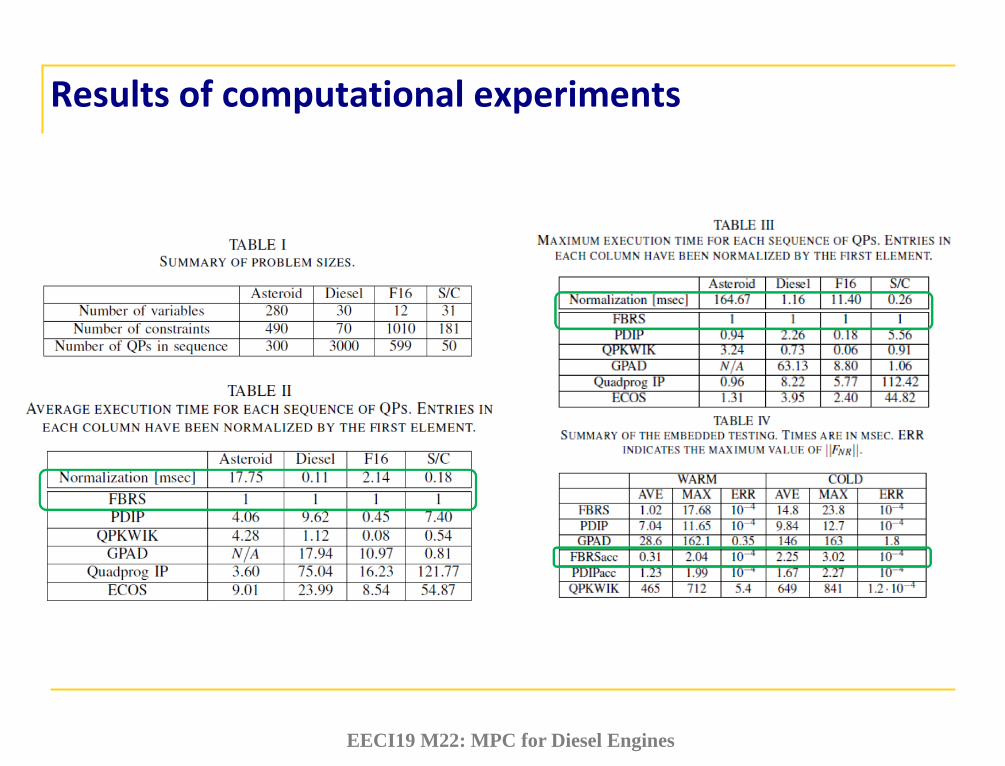
Results of computational experiments
EECI19 M22: MPC for Diesel Engines
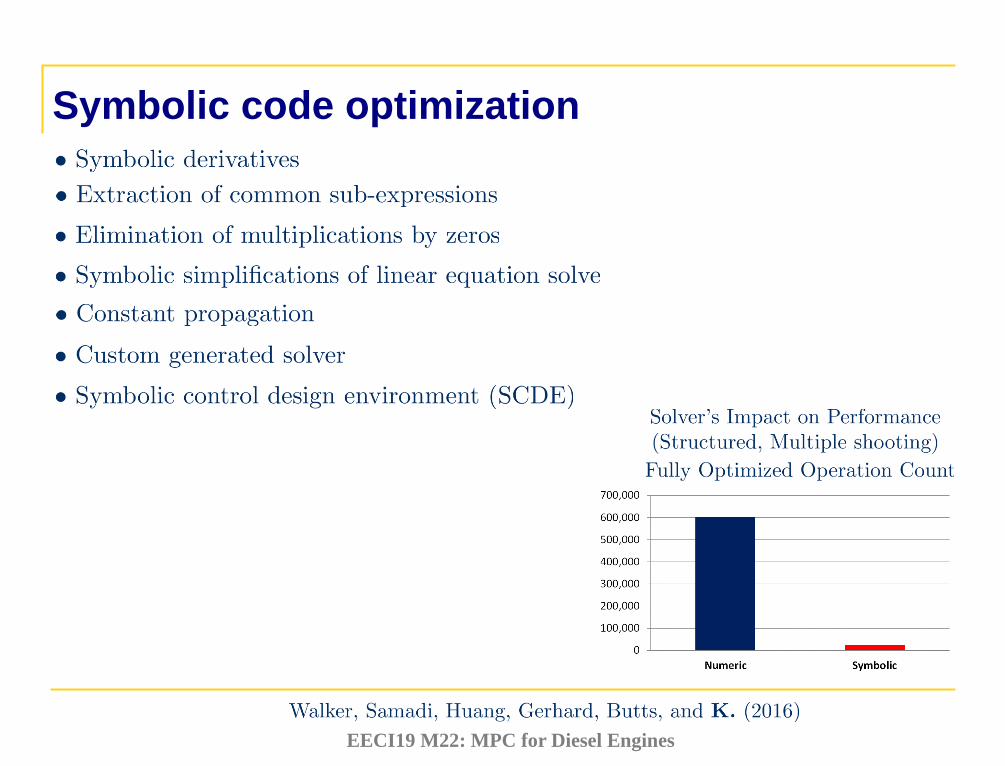
Symbolic code optimization
Towards economic MPC (eMPC)
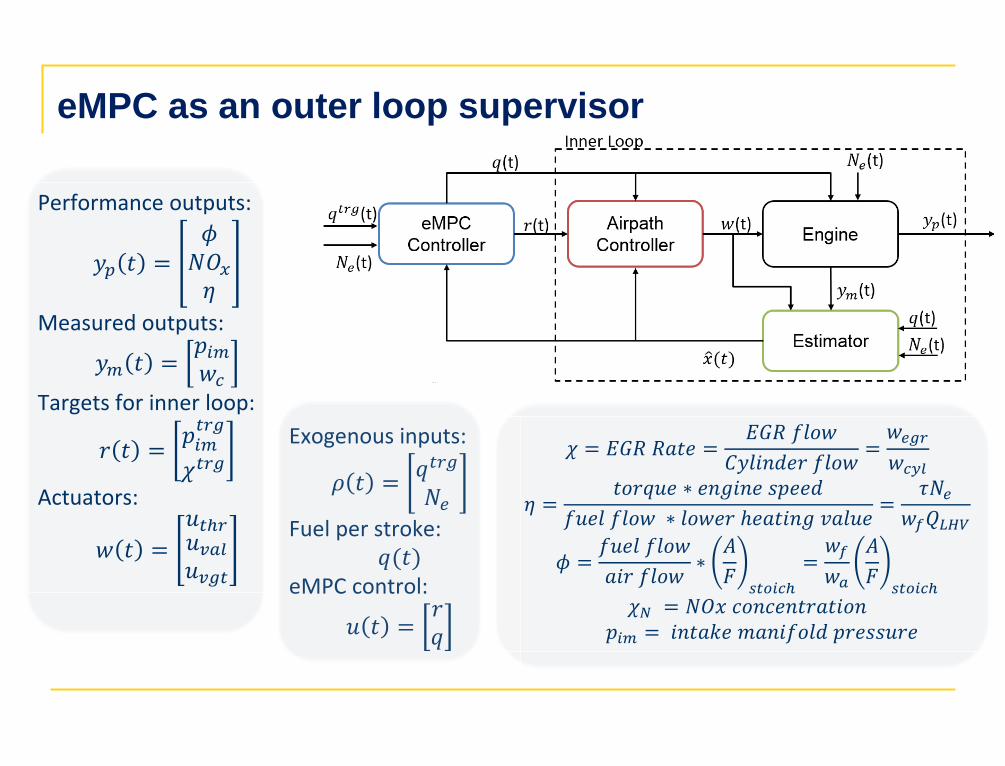
eMPC as an outer loop supervisor
Performance outputs:
𝑦𝑝 𝑡 =𝜙𝑁𝑂𝑥𝜂
Measured outputs:
𝑦𝑚 𝑡 =𝑝𝑖𝑚𝑤𝑐
Targets for inner loop:
𝑟 𝑡 =𝑝𝑖𝑚𝑡𝑟𝑔
𝜒𝑡𝑟𝑔
Actuators:
𝑤 𝑡 =
𝑢𝑡ℎ𝑟𝑢𝑣𝑎𝑙𝑢𝑣𝑔𝑡
𝜒 = 𝐸𝐺𝑅 𝑅𝑎𝑡𝑒 =𝐸𝐺𝑅 𝑓𝑙𝑜𝑤
𝐶𝑦𝑙𝑖𝑛𝑑𝑒𝑟 𝑓𝑙𝑜𝑤=𝑤𝑒𝑔𝑟
𝑤𝑐𝑦𝑙
𝜂 =𝑡𝑜𝑟𝑞𝑢𝑒 ∗ 𝑒𝑛𝑔𝑖𝑛𝑒 𝑠𝑝𝑒𝑒𝑑
𝑓𝑢𝑒𝑙 𝑓𝑙𝑜𝑤 ∗ 𝑙𝑜𝑤𝑒𝑟 ℎ𝑒𝑎𝑡𝑖𝑛𝑔 𝑣𝑎𝑙𝑢𝑒=
𝜏𝑁𝑒𝑤𝑓𝑄𝐿𝐻𝑉
𝜙 =𝑓𝑢𝑒𝑙 𝑓𝑙𝑜𝑤
𝑎𝑖𝑟 𝑓𝑙𝑜𝑤∗
𝐴
𝐹𝑠𝑡𝑜𝑖𝑐ℎ
=𝑤𝑓
𝑤𝑎
𝐴
𝐹𝑠𝑡𝑜𝑖𝑐ℎ
𝜒𝑁 = 𝑁𝑂𝑥 𝑐𝑜𝑛𝑐𝑒𝑛𝑡𝑟𝑎𝑡𝑖𝑜𝑛𝑝𝑖𝑚 = 𝑖𝑛𝑡𝑎𝑘𝑒 𝑚𝑎𝑛𝑖𝑓𝑜𝑙𝑑 𝑝𝑟𝑒𝑠𝑠𝑢𝑟𝑒
Exogenous inputs:
𝜌 𝑡 =𝑞𝑡𝑟𝑔
𝑁𝑒Fuel per stroke:
𝑞(𝑡)eMPC control:
𝑢 𝑡 =𝑟𝑞
EECI19 M22: MPC for Diesel Engines
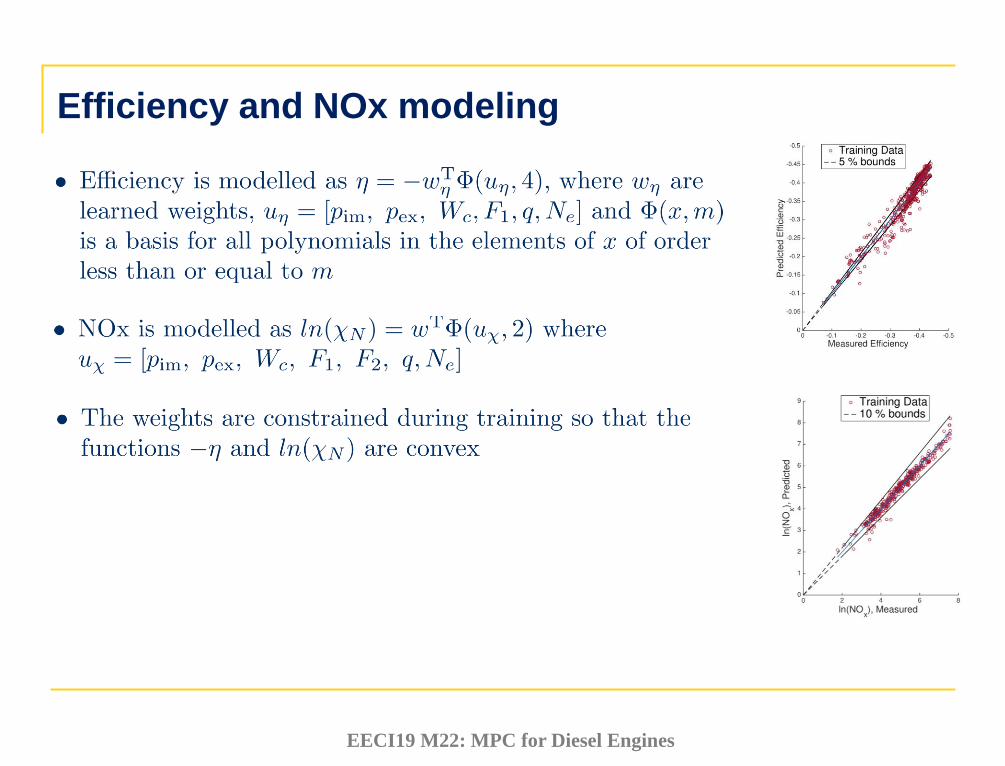
Efficiency and NOx modeling
EECI19 M22: MPC for Diesel Engines
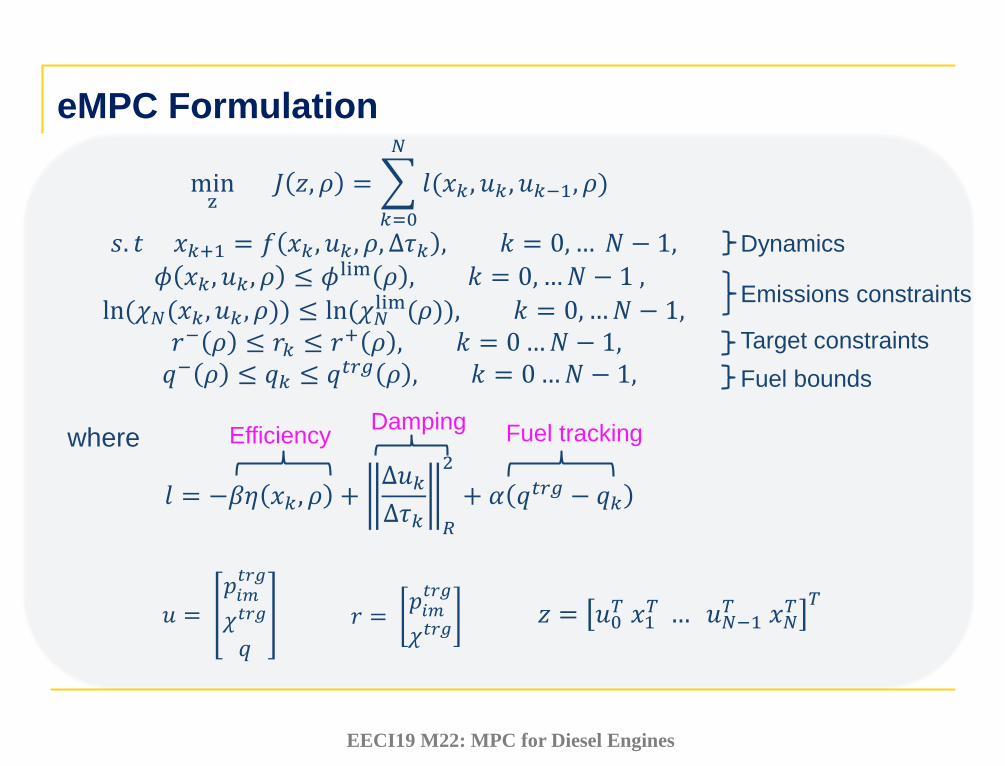
eMPC Formulation
minz
𝐽 𝑧, 𝜌 =
𝑘=0
𝑁
𝑙(𝑥𝑘 , 𝑢𝑘 , 𝑢𝑘−1, 𝜌)
𝑠. 𝑡 𝑥𝑘+1 = 𝑓 𝑥𝑘 , 𝑢𝑘 , 𝜌, Δ𝜏𝑘 , 𝑘 = 0, … 𝑁 − 1,
𝜙 𝑥𝑘 , 𝑢𝑘 , 𝜌 ≤ 𝜙lim 𝜌 , 𝑘 = 0,…𝑁 − 1 ,
ln(𝜒𝑁(𝑥𝑘 , 𝑢𝑘 , 𝜌)) ≤ ln(𝜒𝑁lim(𝜌)), 𝑘 = 0,…𝑁 − 1,
𝑟− 𝜌 ≤ 𝑟𝑘 ≤ 𝑟+ 𝜌 , 𝑘 = 0…𝑁 − 1,𝑞− 𝜌 ≤ 𝑞𝑘 ≤ 𝑞𝑡𝑟𝑔 𝜌 , 𝑘 = 0…𝑁 − 1,
where
𝑙 = −𝛽𝜂 𝑥𝑘 , 𝜌 +Δ𝑢𝑘Δ𝜏𝑘 𝑅
2
+ 𝛼 𝑞𝑡𝑟𝑔 − 𝑞𝑘
Dynamics
Emissions constraints
Target constraints
Fuel bounds
Fuel trackingDamping
Efficiency
𝑧 = 𝑢0𝑇 𝑥1
𝑇 … 𝑢𝑁−1𝑇 𝑥𝑁
𝑇 𝑇𝑢 =
𝑝𝑖𝑚𝑡𝑟𝑔
𝜒𝑡𝑟𝑔
𝑞
𝑟 =𝑝𝑖𝑚𝑡𝑟𝑔
𝜒𝑡𝑟𝑔
EECI19 M22: MPC for Diesel Engines
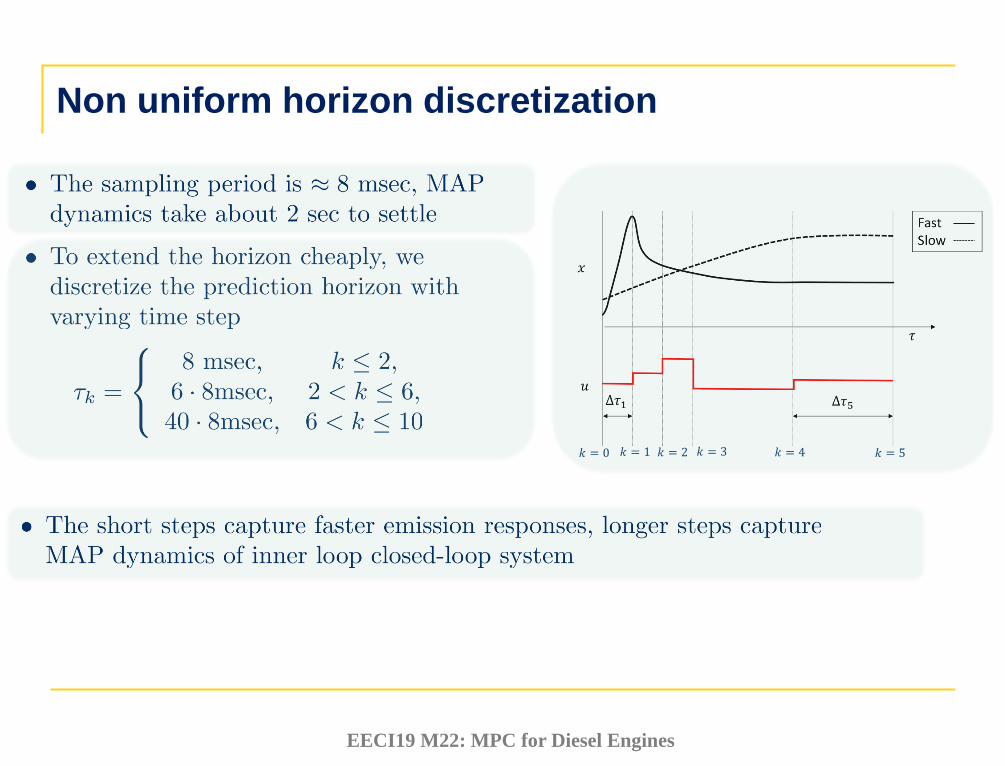
𝑘 = 0 𝑘 = 1 𝑘 = 2 𝑘 = 3 𝑘 = 4 𝑘 = 5
Non uniform horizon discretization
EECI19 M22: MPC for Diesel Engines
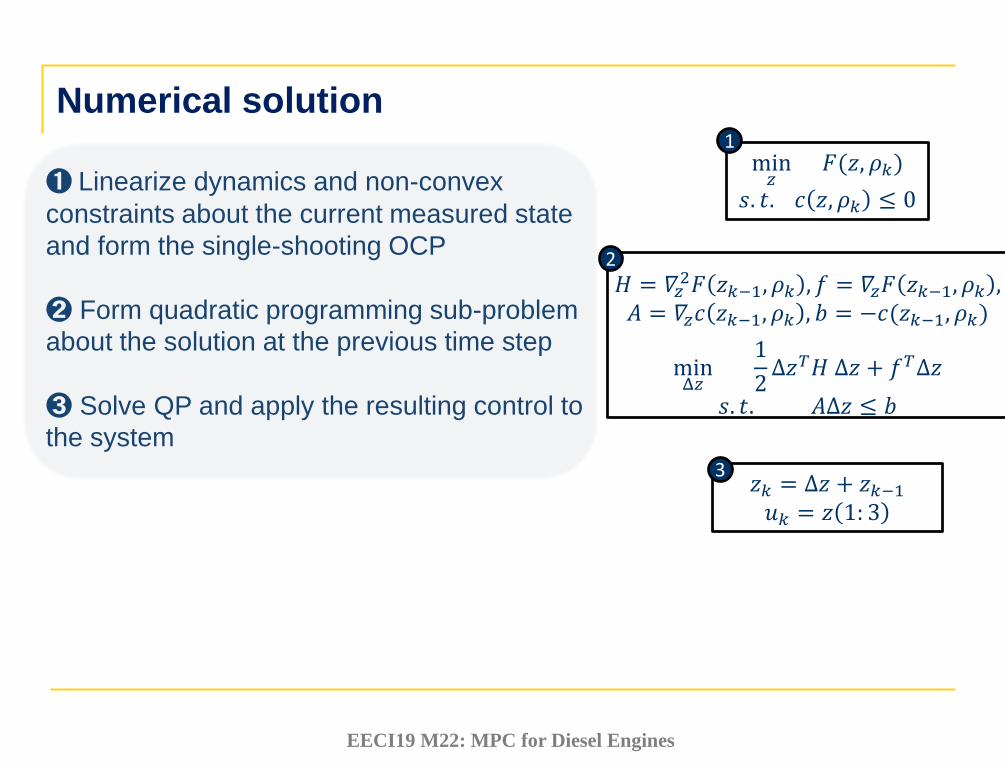
Numerical solution
➊ Linearize dynamics and non-convex
constraints about the current measured state
and form the single-shooting OCP
➋ Form quadratic programming sub-problem
about the solution at the previous time step
➌ Solve QP and apply the resulting control to
the system
minΔ𝑧
1
2Δ𝑧𝑇𝐻 Δ𝑧 + 𝑓𝑇Δ𝑧
𝑠. 𝑡. 𝐴Δ𝑧 ≤ 𝑏
𝐻 = 𝛻𝑧2𝐹 𝑧𝑘−1, 𝜌𝑘 , 𝑓 = 𝛻𝑧𝐹 𝑧𝑘−1, 𝜌𝑘 ,
𝐴 = 𝛻𝑧𝑐 𝑧𝑘−1, 𝜌𝑘 , 𝑏 = −𝑐(𝑧𝑘−1, 𝜌𝑘)
min𝑧
𝐹(𝑧, 𝜌𝑘)
𝑠. 𝑡. 𝑐 𝑧, 𝜌𝑘 ≤ 0
𝑧𝑘 = Δ𝑧 + 𝑧𝑘−1𝑢𝑘 = 𝑧 1: 3
1
2
3
EECI19 M22: MPC for Diesel Engines
➊
➋
➌ 3
2
1
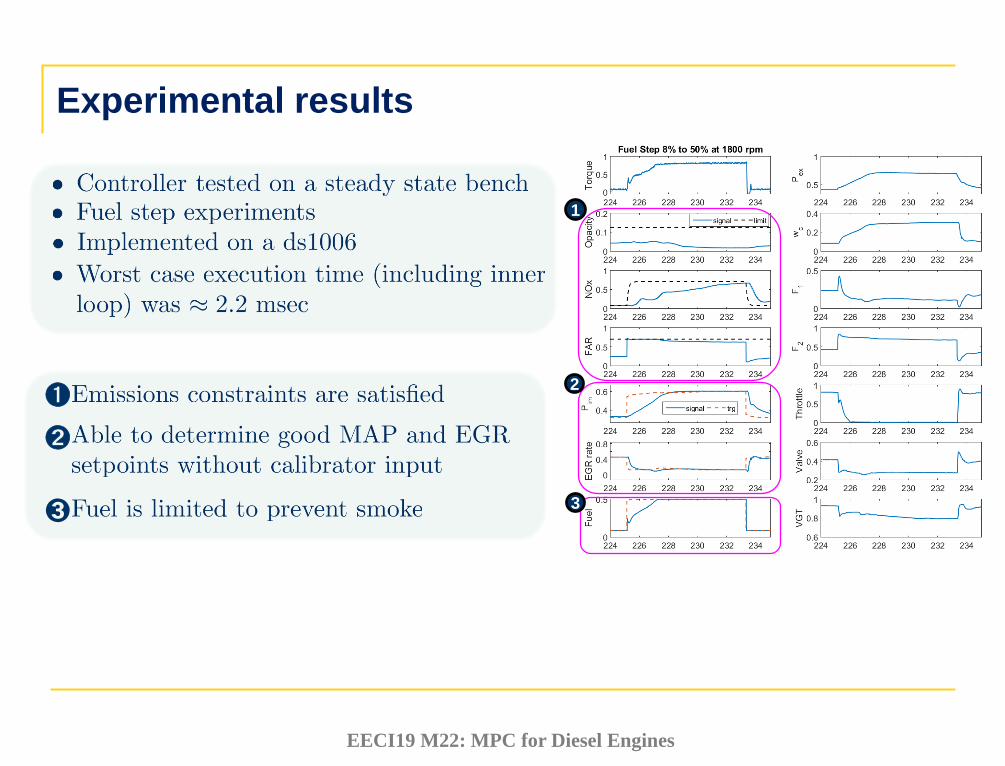
Experimental results
EECI19 M22: MPC for Diesel Engines
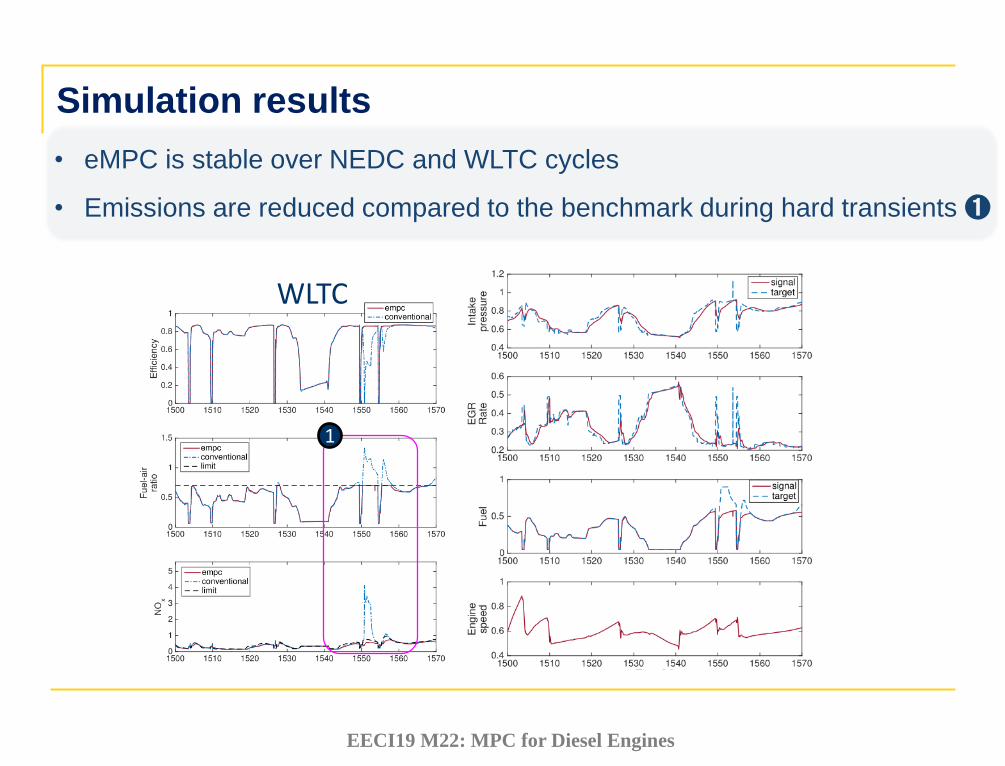
Simulation results
• eMPC is stable over NEDC and WLTC cycles
• Emissions are reduced compared to the benchmark during hard transients ➊
WLTC
1

EECI19 M22: MPC for Diesel Engines
Simulation results (cont’d)• NOx constraint violations are penalized, leading to soft constraint
enforcement and reducing NOx over the cycles
• Fuel-air-ratio constraint is not always satisfied due to conflict with the
drivability constraint ➊
1
EECI19 M22: MPC for Diesel Engines
ReferencesHuang, M., Zaseck, K., Butts, K., and Kolmanovsky, I.V., “Rate-based Model Predictive Controller for
diesel engine air path: Design and experimental evaluation,” IEEE Transactions on Control Systems
Technology, vol. 24, no 4, pp. 1922-1955, 2016.
Liao-McPherson, D., Huang, M., and Kolmanovsky, I.V., “A regularized and smoothed Fischer-Burmeister
method for quadratic programming with applications to Model Predictive Control,” IEEE Transactions on
Automatic Control, 2019.
Huang, M., Liao-McPherson, D., Kim, S., Butts, K., and Kolmanovsky, I.V., “Towards real-time automotive
model predictive control: A perspective from a diesel air path control development,” Proceedings of 2018
Annual American Control Conference (ACC), June 27–29, 2018. Wisconsin Center, Milwaukee, USA, pp.
2425-2430.
Walker, K., Samadi, B., Huang, M., Gerhard, J., Butts, K., and Kolmanovsky, I.V., "Design environment for
Nonlinear Model Predictive Control," SAE Technical Paper 2016-01-0627, April, 2016, SAE World
Congress, doi:10.4271/2016-01-0627
Huang., M., Kolmanovsky, I.V., and Butts, K., ``A low complexity gain scheduling strategy for explicit
model predictive control of a diesel air path,’’ Proceedings of 2015 Dynamic Systems and Control
Conference, Columbus, Ohio, 2015, Paper DSCC2015-9654.
Huang, M., Nakada, H., Butts, K., and Kolmanovsky, I.V., “Nonlinear model predictive control of a diesel
engine air path: A comparison of constraint handling and computational strategies,” Proceedings of the 5th
IFAC Symposium on Nonlinear Model Predictive Control, Seville, Spain, September 2015, IFAC-
PapersOnLine, vol. 48, no. 23, 2015, pp. 372-379.
EECI19 M22: MPC for Diesel Engines
References (cont’d)
Huang, M., Nakada, H., Butts, K., Kolmanovsky, I.V., “Robust rate-based Model Predictive Control of
diesel engine air path,” Proceedings of 2014 American Control Conference, Portland, Oregon, pp. 1505-
1510, 2014.
Huang, M., Nakada, H., Polavarapu, S., Butts, K.R., and Kolmanovsky, I.V., “Rate-based Model Predictive
Control of diesel engines,” Proceedings of the 7th IFAC Symposium on Advances in Automotive Control,
September 4-7, 2013, Tokyo, Japan, pp. 177-182.
Huang, M., Nakada, H., Polavarapu, S., Choroszucha, R., Butts, K.R., and Kolmanovsky, I.V., “Towards
combining nonlinear and predictive control of diesel engines,” Proceedings of 2013 American Control
Conference, Washington DC, pp. 2852-2859.



![Fast Calibration of a Robust Model Predictive Controller ... · arXiv:1804.06161v1 [cs.SY] 17 Apr 2018 Fast Calibration of a Robust Model Predictive Controller for Diesel Engine Airpath](https://img.pdfslide.net/doc/110x75/5cef025f88c993f1758dc0f6/fast-calibration-of-a-robust-model-predictive-controller-arxiv180406161v1.jpg)

























