Embed Size (px)
Citation preview
Modellistica e simulazione dei sistemi meccatroniciModelling and simulation of mechatronic systemsModelling and simulation of mechatronic systems
02JHCOR
•Crediti ECTS 10 •Crediti ECTS 10 •Orario - Schedule
Lun/Mon 11:30-13:00 aula/room 2ILun/Mon 11:30 13:00 aula/room 2IMer/Wed 08:30-11:30 aula/room 11TGio/Thu 16:00-19:00 aula/room 5IGio/Thu 16:00 19:00 aula/room 5I
•Nessun laboratorio – solo esercitazioni in aula/No lab•Testi & dispense – Textbooks & handouts•Testi & dispense Textbooks & handouts
•B. Bona “Modellistica dei Robot Industriali” CELID,utilizzato anche per il successivo corso di Roboticautilizzato anche per il successivo corso di Robotica
•B. Bona “Modellistica dei Sistemi Multicorpo”, dispensepresso CELID (CELID Bookstore)presso CELID (CELID Bookstore)
•Esame scritto/written examination•Pagina web/Web page•Pagina web/Web page
http://www.ladispe.polito.it/corsi/Meccatronica//
Il corso sarà diviso in due partiIl corso sarà diviso in due parti1. Prima parte: Prof. Bona
11 Ottobre 2010 → 29 Novembre 2010Modellazione secondo l’approccioModellazione secondo l’approccio Lagrangiano
2 S d t P f T li2. Seconda parte: Prof. Tonoli29 Novembre 2010 → 4 febbraio 2011Modellazione secondo l’approccio Bond-G hGraph
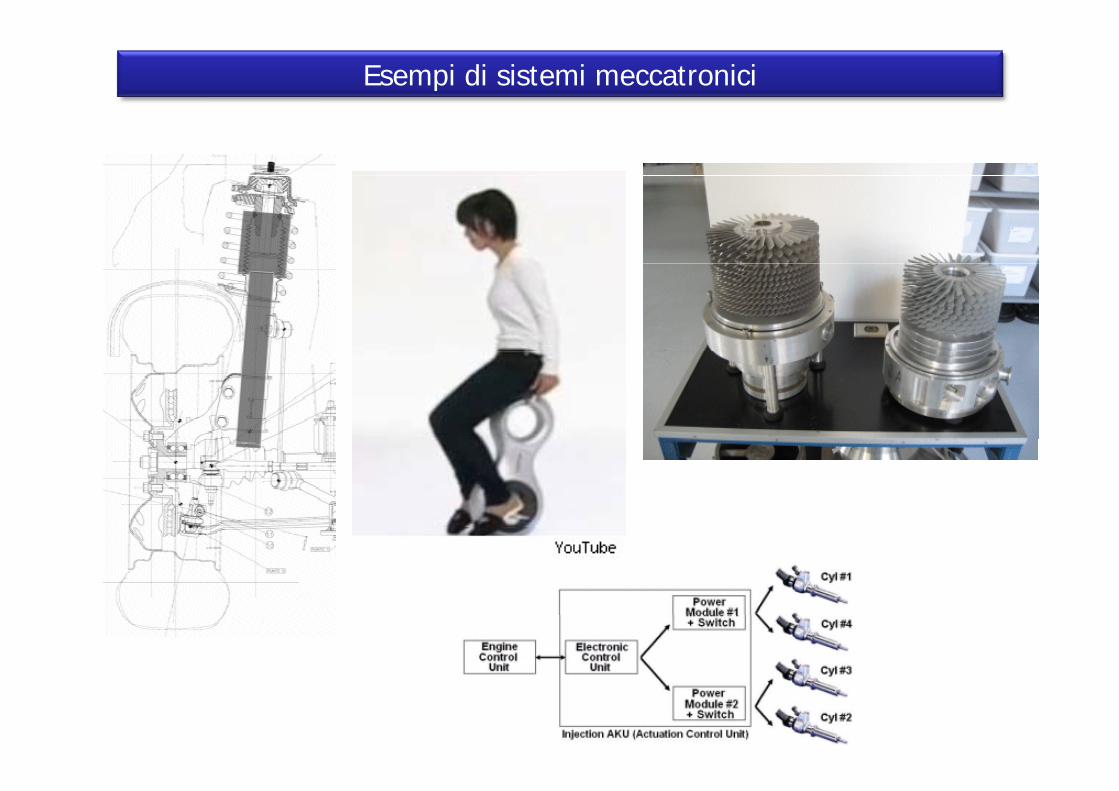
Esempi di sistemi meccatronicip
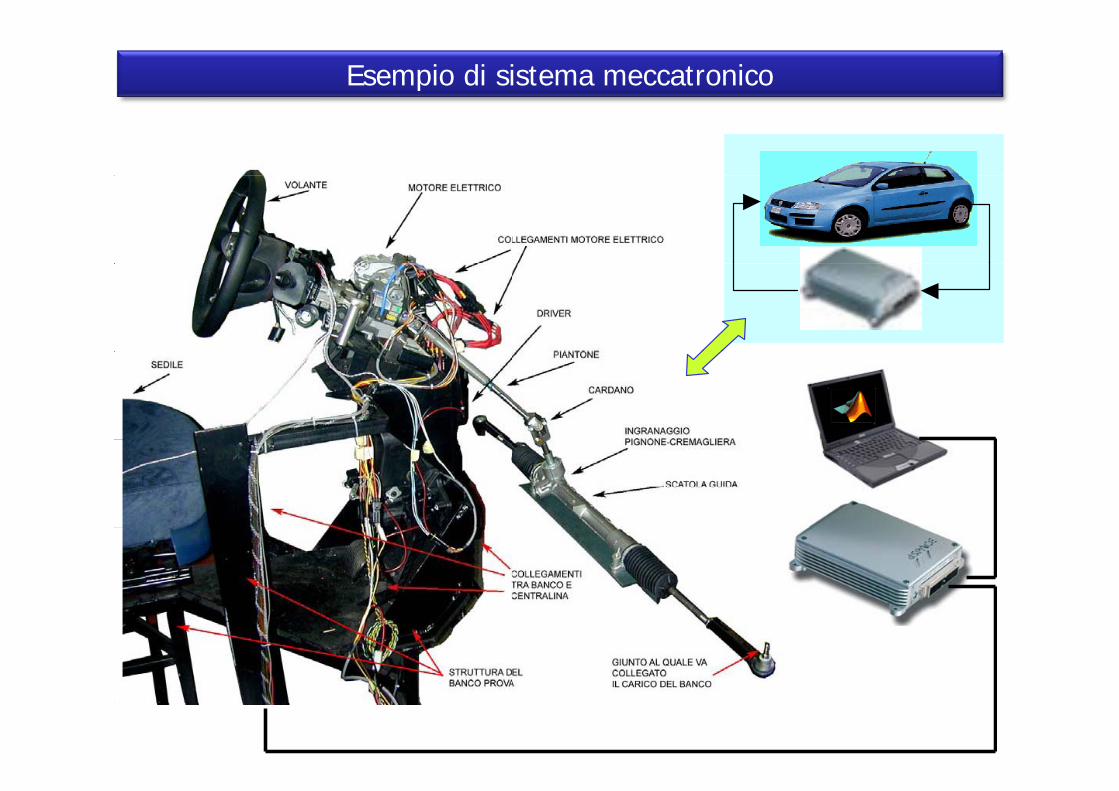
Esempio di sistema meccatronicop

Esempi di sistemi meccatronicip
Argomenti parte 1 (utili anche alla parte 2)
Vettori, Moti rigidi, roto-traslazioni e rappresentazione matriciale
g p ( p )
Velocità e accelerazioni lineari e angolari, funzioni cinematiche
Coordinate generalizzate, gradi di libertà
Momenti d’inerzia matrici d’inerzia
Vincoli geometrici e cinematici, olonomi e anolonomi
Momenti d inerzia, matrici d inerzia
Equazioni dinamiche dei corpi rigidi
M t d di N t E l
Metodo di Lagrange: energia cinetica e potenziale
Metodo di Newton-Eulero
Sistemi meccanici, elettrici, elettromeccanici
Doppi bipoli elettromeccanici
Equazioni di stato











![Makers Meccatronici Fondazione Brigatti Assolombarda ... · 1 0lodqr0rq]dh%uldq]dÆloqrvwursurjhwwrvwudwhjlfrÈ,wdold0hffdwurqlfdÉkdwudjolrelhwwlylqrq vrorwudvphwwhuhoÉhyrox]lrqhfkhohqrvwuhlpsuhvhvwdqqrfrpslhqgr](https://img.pdfslide.net/doc/110x75/5e3178b4858745572b65d9e6/makers-meccatronici-fondazione-brigatti-assolombarda-1-0lodqr0rqdhuldqdloqrvwursurjhwwrvwudwhjlfrwdold0hffdwurqlfdkdwudjolrelhwwlylqrq.jpg)



![Modellistica Dei Combustori - [D. Lentini]](https://img.pdfslide.net/doc/110x75/5695d2191a28ab9b029918a3/modellistica-dei-combustori-d-lentini.jpg)













