Embed Size (px)
Citation preview
Nonlinear Analysis
of Phase Synchronization Systems:
Phase-locked Loop and Costas Loop
Nikolay Kuznetsov
Saint-Petersburg State University (Russia)University of Jyvaskyla (Finland)
Kuznetsov N.V. Nonlinear analysis of Phase-locked loop and Costas Loop, CityU HK (2012) 1 / 29
ContentI History of phase-locked loop (PLL)I Methods for analysis and design of phase-locked loop
I Simulation of phase-locked loopI Computation of self-excited attractors and hidden attractors
(hidden periodic oscillations and hidden chaotic attractors)I Hidden attractors in applied modelsI Linear analysisI Nonlinear analysis of phase-locked loop
I Nonlinear analysis and simulation of classical PLLI Equivalence of PLL models in the time (signal) and
phase-frequency spacesI Computation of multiplier phase detector characteristicsI Averaging methods and Dynamical model of PLLI PLL simulation
I Nonlinear analysis and simulation of Costas loopI Nonlinear analysis and simulation of classical DPLL
Kuznetsov N.V. Nonlinear analysis of Phase-locked loop and Costas Loop, CityU HK (2012) 2 / 29
Phase-locked loops (PLL): history
I Radio and TVI de Bellescize H., La reception synchrone, L'Onde Electrique, 11, 1932I Wendt, K. & Fredentall, G. Automatic frequency and phase control of
synchronization in TV receivers, Proceedings IRE, 31(1), 1943
I Computer architectures (frequency multiplication)Ian Young, PLL in a microprocessor i486DX2-50 (1992)
(in Turbo regime stable operation was not guaranteed)
I Theory and TechnologyX F.M.Gardner, Phase-Lock Techniques, 1966X A.J. Viterbi, Principles of Coherent Comm., 1966X W.C.Lindsey, Synch. Syst. in Comm. and C., 1972X W.F.Egan, Freq. Synthesis by Phase Lock, 2000X B. Razavi, Phase-Locking in High-Perf. Syst., 2003X R.Best, PLL: Design, Simulation and Appl., 2003
X V.Kroupa, Phase Lock Loops and Freq. Synthesis, 2003
Kuznetsov N.V. Nonlinear analysis of Phase-locked loop and Costas Loop, CityU HK (2012) 3 / 29
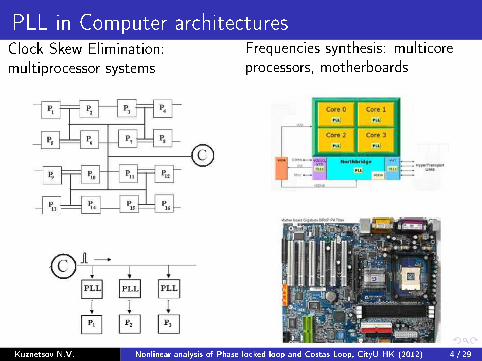
PLL in Computer architecturesClock Skew Elimination:multiprocessor systems
Frequencies synthesis: multicoreprocessors, motherboards
Kuznetsov N.V. Nonlinear analysis of Phase-locked loop and Costas Loop, CityU HK (2012) 4 / 29
PLL analysis & design
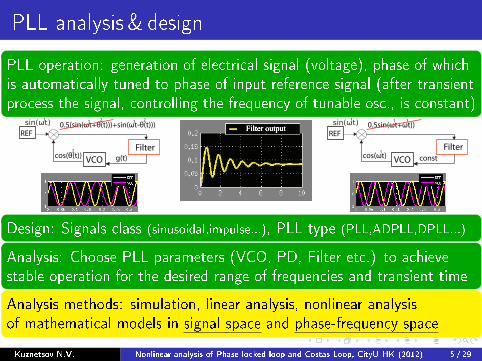
PLL operation: generation of electrical signal (voltage), phase of whichis automatically tuned to phase of input reference signal (after transientprocess the signal, controlling the frequency of tunable osc., is constant)
0.5(sin(ωt+θ(t)))+sin(ωt-θ(t)))
cos(θ(t))Filter
VCO
11 2
2
REF
21
g(t)
0.5sin(ωt+ωt))
cos(ωt)
1 1 1
const1
REF
VCO
Filter
Design: Signals class (sinusoidal,impulse...), PLL type (PLL,ADPLL,DPLL...)
Analysis: Choose PLL parameters (VCO, PD, Filter etc.) to achievestable operation for the desired range of frequencies and transient time
Analysis methods: simulation, linear analysis, nonlinear analysisof mathematical models in signal space and phase-frequency space
Kuznetsov N.V. Nonlinear analysis of Phase-locked loop and Costas Loop, CityU HK (2012) 5 / 29
PLL analysis & design: simulation
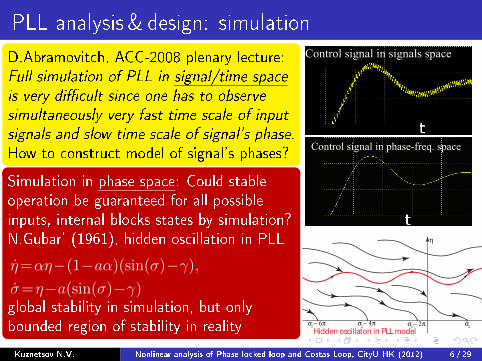
D.Abramovitch, ACC-2008 plenary lecture:Full simulation of PLL in signal/time spaceis very dicult since one has to observesimultaneously very fast time scale of inputsignals and slow time scale of signal's phase.How to construct model of signal's phases?
Simulation in phase space: Could stableoperation be guaranteed for all possibleinputs, internal blocks states by simulation?N.Gubar' (1961), hidden oscillation in PLL
η=αη−(1−aα)(sin(σ)−γ),
σ=η−a(sin(σ)−γ)global stability in simulation, but onlybounded region of stability in reality
Control signal in signals space
Control signal in phase-freq. space
η
σσ2
σ − 2π 2
σ − 4π 2
σ − 6π 2
Hidden oscillaton in PLL model
Kuznetsov N.V. Nonlinear analysis of Phase-locked loop and Costas Loop, CityU HK (2012) 6 / 29
PLL simulation: attractors computation
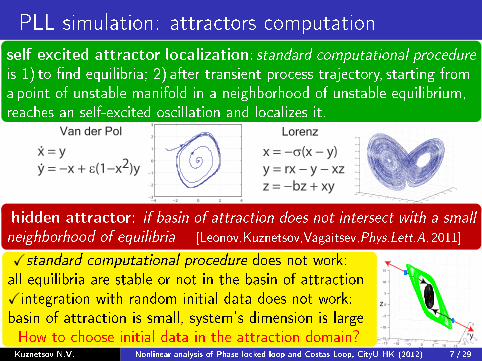
self-excited attractor localization: standard computational procedureis 1) to nd equilibria; 2) after transient process trajectory, starting froma point of unstable manifold in a neighborhood of unstable equilibrium,reaches an self-excited oscillation and localizes it.
−4 −2 0 2 4−3
−2
−1
0
1
2
3
x = y
y = −x + ε(1−x2)y.
.
−20−15
−10−5
05
1015
20 −30
−20
−10
0
10
20
30
5
10
15
20
25
30
35
40
45
x = −σ(x − y)
y = rx − y − xz
z = −bz + xy
Van der Pol Lorenz
hidden attractor: if basin of attraction does not intersect with a smallneighborhood of equilibria [Leonov,Kuznetsov,Vagaitsev,Phys.Lett.A, 2011]
Xstandard computational procedure does not work:all equilibria are stable or not in the basin of attractionXintegration with random initial data does not work:basin of attraction is small, system's dimension is largeHow to choose initial data in the attraction domain?
−15 −10 −5 0 5 10 15−5
0
5
−15
−10
−5
0
5
10
15
y
x
z
Kuznetsov N.V. Nonlinear analysis of Phase-locked loop and Costas Loop, CityU HK (2012) 7 / 29
PLL analysis & design: analytical linear methods0.5(sin(θ (t)-θ (t))+sin(θ (t)+θ (t)))
cos(θ(t))
1 2
2
21
g(t)
Filter
VCO
PDsin(θ (t)
1
θ2
F(s) g
θ1
+0.5 θ=(θ -θ )
1 2
-0.5
VCO
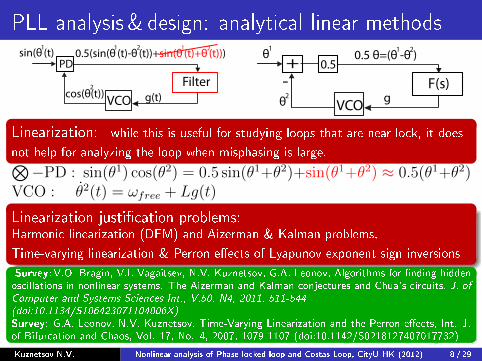
Linearization: while this is useful for studying loops that are near lock, it does
not help for analyzing the loop when misphasing is large.⊗−PD : sin(θ1) cos(θ2) = 0.5 sin(θ1+θ2)+sin(θ1+θ2) ≈ 0.5(θ1+θ2)
VCO : θ2(t) = ωfree + Lg(t)
Linearization justication problems:Harmonic linearization (DFM) and Aizerman & Kalman problems,
Time-varying linearization & Perron eects of Lyapunov exponent sign inversions
Survey: V.O. Bragin, V.I. Vagaitsev, N.V. Kuznetsov, G.A. Leonov, Algorithms for nding hiddenoscillations in nonlinear systems. The Aizerman and Kalman conjectures and Chua's circuits, J. ofComputer and Systems Sciences Int., V.50, N4, 2011, 511-544(doi:10.1134/S106423071104006X)Survey: G.A. Leonov, N.V. Kuznetsov, Time-Varying Linearization and the Perron eects, Int. J.of Bifurcation and Chaos, Vol. 17, No. 4, 2007, 1079-1107 (doi:10.1142/S0218127407017732)
Kuznetsov N.V. Nonlinear analysis of Phase-locked loop and Costas Loop, CityU HK (2012) 8 / 29
PLL analysis & design: analytical nonlinear methods
0.5(sin(θ (t)-θ (t))+sin(θ (t)+θ (t)))
cos(θ(t))
1 2
2
21
g(t)
Filter
VCO
PDsin(θ (t)
1
θ2
F(s) g
θ1
+0.5 θ=(θ -θ )
1 2
-0.5
VCO
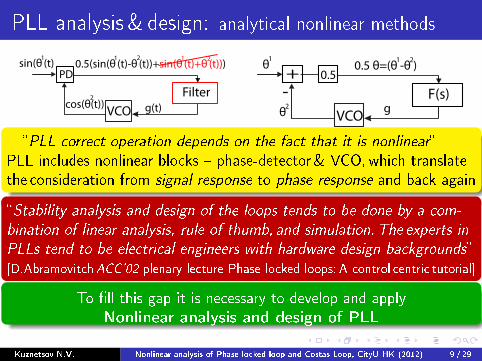
PLL correct operation depends on the fact that it is nonlinearPLL includes nonlinear blocks phase-detector& VCO,which translatethe consideration from signal response to phase response and back again
Stability analysis and design of the loops tends to be done by a com-bination of linear analysis, rule of thumb, and simulation. The experts inPLLs tend to be electrical engineers with hardware design backgrounds[D.AbramovitchACC'02 plenary lecture Phase-locked loops: A control centric tutorial]
To ll this gap it is necessary to develop and applyNonlinear analysis and design of PLL
Kuznetsov N.V. Nonlinear analysis of Phase-locked loop and Costas Loop, CityU HK (2012) 9 / 29
Classical PLL:models in time&phase-freq. domains
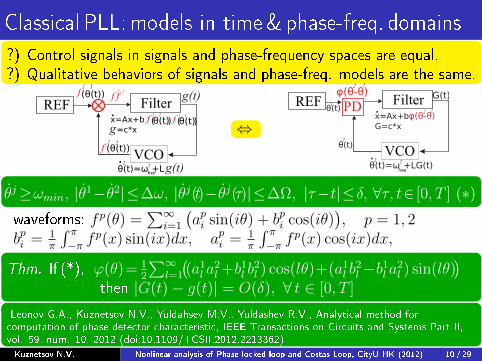
?) Control signals in signals and phase-frequency spaces are equal.?) Qualitative behaviors of signals and phase-freq. models are the same.
REF Filter
VCO
free
⇔
REF PDFilter
VCO
free
θj≥ωmin, |θ1−θ2|≤∆ω, |θj(t)−θj(τ)|≤∆Ω, |τ−t|≤δ, ∀τ, t∈ [0, T ] (∗)waveforms: fp(θ) =
∑∞i=1
(api sin(iθ) + bpi cos(iθ)
), p = 1, 2
bpi = 1π
∫ π−π f
p(x) sin(ix)dx, api = 1π
∫ π−π f
p(x) cos(ix)dx,
Thm. If (*), ϕ(θ)= 12
∑∞l=1
((a1l a
2l +b
1l b
2l ) cos(lθ)+(a1l b
2l −b1l a2l ) sin(lθ)
)then |G(t)− g(t)| = O(δ), ∀ t ∈ [0, T ]
Leonov G.A., Kuznetsov N.V., Yuldahsev M.V., Yuldashev R.V., Analytical method forcomputation of phase-detector characteristic, IEEE Transactions on Circuits and Systems Part II,vol. 59, num. 10, 2012 (doi:10.1109/TCSII.2012.2213362)
Kuznetsov N.V. Nonlinear analysis of Phase-locked loop and Costas Loop, CityU HK (2012) 10 / 29
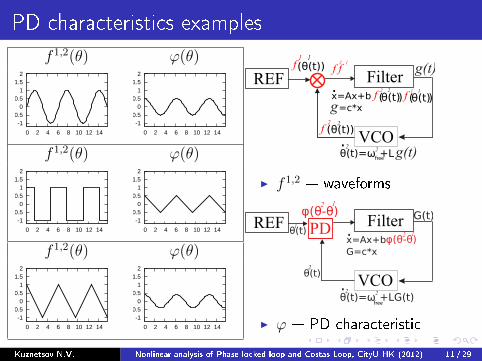
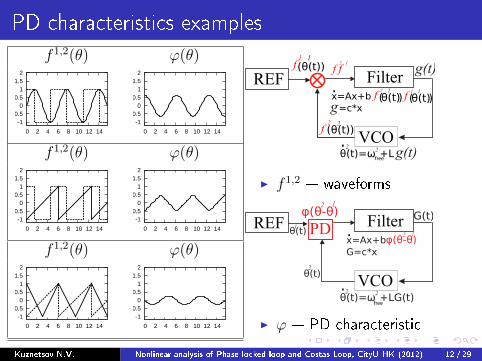
PD characteristics examples
f 1,2(θ) ϕ(θ)
-1-0.5
0 0.5
1 1.5
2
0 2 4 6 8 10 12 14
-1-0.5
0 0.5
1 1.5
2
0 2 4 6 8 10 12 14
f 1,2(θ) ϕ(θ)
-1-0.5
0 0.5
1 1.5
2
0 2 4 6 8 10 12 14
-1-0.5
0 0.5
1 1.5
2
0 2 4 6 8 10 12 14
f 1,2(θ) ϕ(θ)
-1-0.5
0 0.5
1 1.5
2
0 2 4 6 8 10 12 14
-1-0.5
0 0.5
1 1.5
2
0 2 4 6 8 10 12 14
REF Filter
VCO
free
I f 1,2 waveforms
REF PDFilter
VCO
free
I ϕ PD characteristic
Kuznetsov N.V. Nonlinear analysis of Phase-locked loop and Costas Loop, CityU HK (2012) 11 / 29
PD characteristics examples
f 1,2(θ) ϕ(θ)
-1-0.5
0 0.5
1 1.5
2
0 2 4 6 8 10 12 14
-1-0.5
0 0.5
1 1.5
2
0 2 4 6 8 10 12 14
f 1,2(θ) ϕ(θ)
-1-0.5
0 0.5
1 1.5
2
0 2 4 6 8 10 12 14
-1-0.5
0 0.5
1 1.5
2
0 2 4 6 8 10 12 14
f 1,2(θ) ϕ(θ)
-1-0.5
0 0.5
1 1.5
2
0 2 4 6 8 10 12 14
-1-0.5
0 0.5
1 1.5
2
0 2 4 6 8 10 12 14
REF Filter
VCO
free
I f 1,2 waveforms
REF PDFilter
VCO
free
I ϕ PD characteristic
Kuznetsov N.V. Nonlinear analysis of Phase-locked loop and Costas Loop, CityU HK (2012) 12 / 29
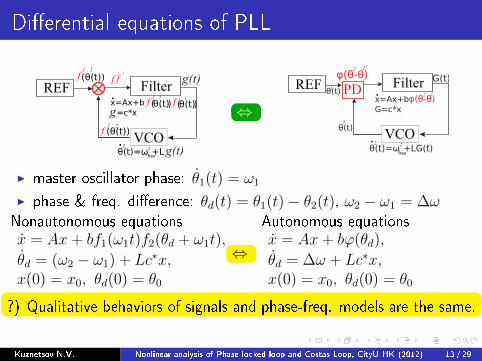
Dierential equations of PLL
REF Filter
VCO
free
⇔
REF PDFilter
VCO
free
I master oscillator phase: θ1(t) = ω1
I phase & freq. dierence: θd(t) = θ1(t)− θ2(t), ω2 − ω1 = ∆ω
Nonautonomous equationsx = Ax+ bf1(ω1t)f2(θd + ω1t),
θd = (ω2 − ω1) + Lc∗x,x(0) = x0, θd(0) = θ0
⇔
Autonomous equationsx = Ax+ bϕ(θd),
θd = ∆ω + Lc∗x,x(0) = x0, θd(0) = θ0
?) Qualitative behaviors of signals and phase-freq. models are the same.
Kuznetsov N.V. Nonlinear analysis of Phase-locked loop and Costas Loop, CityU HK (2012) 13 / 29
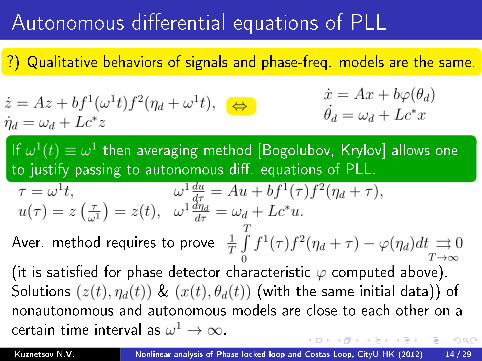
Autonomous dierential equations of PLL
?) Qualitative behaviors of signals and phase-freq. models are the same.
z = Az + bf 1(ω1t)f 2(ηd + ω1t),ηd = ωd + Lc∗z
⇔x = Ax+ bϕ(θd)
θd = ωd + Lc∗x
If ω1(t) ≡ ω1 then averaging method [Bogolubov, Krylov] allows oneto justify passing to autonomous di. equations of PLL.
τ = ω1t, ω1 dudτ
= Au+ bf 1(τ)f 2(ηd + τ),
u(τ) = z(τω1
)= z(t), ω1 dηd
dτ= ωd + Lc∗u.
Aver. method requires to prove 1T
T∫0
f 1(τ)f 2(ηd + τ)− ϕ(ηd)dt ⇒T→∞
0
(it is satised for phase detector characteristic ϕ computed above).Solutions (z(t), ηd(t)) & (x(t), θd(t)) (with the same initial data)) ofnonautonomous and autonomous models are close to each other on acertain time interval as ω1 →∞.
Kuznetsov N.V. Nonlinear analysis of Phase-locked loop and Costas Loop, CityU HK (2012) 14 / 29
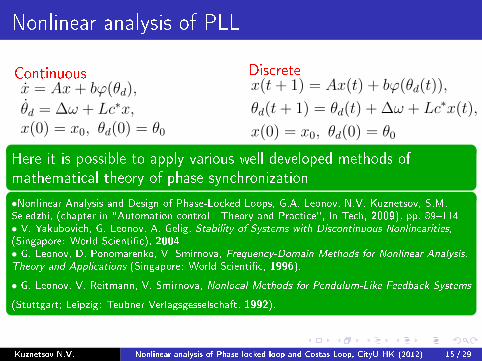
Nonlinear analysis of PLL
Continuousx = Ax+ bϕ(θd),
θd = ∆ω + Lc∗x,x(0) = x0, θd(0) = θ0
Discretex(t+ 1) = Ax(t) + bϕ(θd(t)),
θd(t+ 1) = θd(t) + ∆ω + Lc∗x(t),
x(0) = x0, θd(0) = θ0
Here it is possible to apply various well developed methods ofmathematical theory of phase synchronization
•Nonlinear Analysis and Design of Phase-Locked Loops, G.A. Leonov, N.V. Kuznetsov, S.M.Seledzhi, (chapter in "Automation control - Theory and Practice", In-Tech, 2009), pp. 89114• V. Yakubovich, G. Leonov, A. Gelig, Stability of Systems with Discontinuous Nonlinearities,(Singapore: World Scientic), 2004• G. Leonov, D. Ponomarenko, V. Smirnova, Frequency-Domain Methods for Nonlinear Analysis.Theory and Applications (Singapore: World Scientic, 1996).
• G. Leonov, V. Reitmann, V. Smirnova, Nonlocal Methods for Pendulum-Like Feedback Systems
(Stuttgart; Leipzig: Teubner Verlagsgesselschaft, 1992).
Kuznetsov N.V. Nonlinear analysis of Phase-locked loop and Costas Loop, CityU HK (2012) 15 / 29
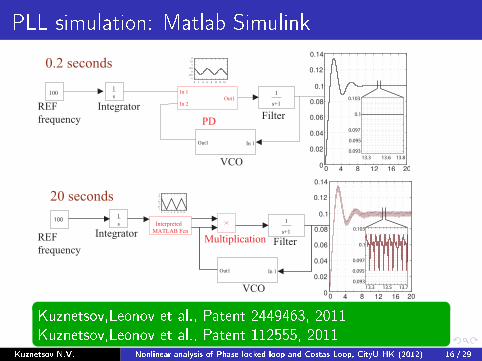
PLL simulation: Matlab Simulink
Filter
1
s+1
PD
In 1
In 2Out1
VCO
In 1Out1
ScopeIntegrator
1
s
REF
frequency
100
0.2 seconds-1
-0.5
0
0.5
1
1.5
2
0 2 4 6 8 10 12 14
Filter
1
s+1
In 1Out1
ScopeMultiplication
Interpreted
MATLAB FcnIntegrator
1
s
REF
frequency
100
VCO
20 seconds-1
-0.5
0
0.5
1
1.5
2
0 2 4 6 8 10 12 14
Kuznetsov,Leonov et al., Patent 2449463, 2011Kuznetsov,Leonov et al., Patent 112555, 2011
Kuznetsov N.V. Nonlinear analysis of Phase-locked loop and Costas Loop, CityU HK (2012) 16 / 29
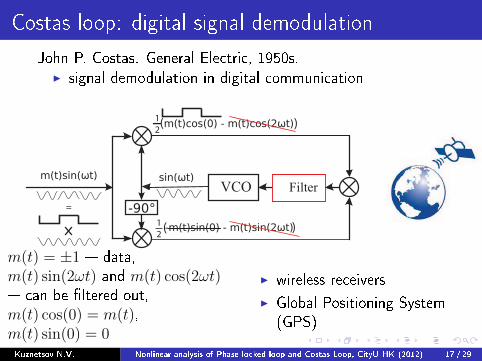
Costas loop: digital signal demodulation
John P. Costas. General Electric, 1950s.I signal demodulation in digital communication
1
2(
1
2(
)
)
VCO Filter
=
m(t) = ±1 data,m(t) sin(2ωt) and m(t) cos(2ωt) can be ltered out,m(t) cos(0) = m(t),m(t) sin(0) = 0
I wireless receivers
I Global Positioning System(GPS)
Kuznetsov N.V. Nonlinear analysis of Phase-locked loop and Costas Loop, CityU HK (2012) 17 / 29
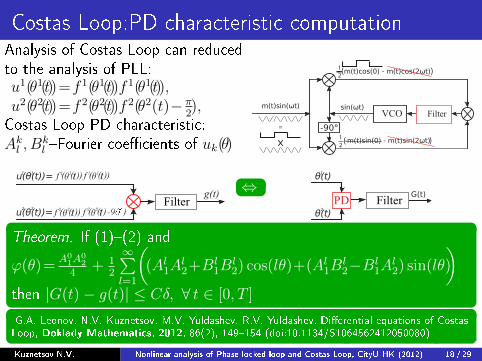
Costas Loop:PD characteristic computationAnalysis of Costas Loop can reducedto the analysis of PLL:u1(θ1(t))=f 1(θ1(t))f 1(θ1(t)),u2(θ2(t))=f 2(θ2(t))f 2(θ2(t)− π
2),
Costas Loop PD characteristic:Akl , B
kl Fourier coecients of uk(θ)
1
2(
1
2(
)
)
VCO Filter
=
Filter
⇔PD Filter
Theorem. If (1)(2) and
ϕ(θ)=A0
1A02
4+ 1
2
∞∑l=1
((Al1A
l2+Bl
1Bl2) cos(lθ)+(Al1B
l2−Bl
1Al2) sin(lθ)
)then |G(t)− g(t)| ≤ Cδ, ∀ t ∈ [0, T ]
G.A. Leonov, N.V. Kuznetsov, M.V. Yuldashev, R.V. Yuldashev, Dierential equations of CostasLoop, Doklady Mathematics, 2012, 86(2), 149154 (doi:10.1134/S1064562412050080)
Kuznetsov N.V. Nonlinear analysis of Phase-locked loop and Costas Loop, CityU HK (2012) 18 / 29
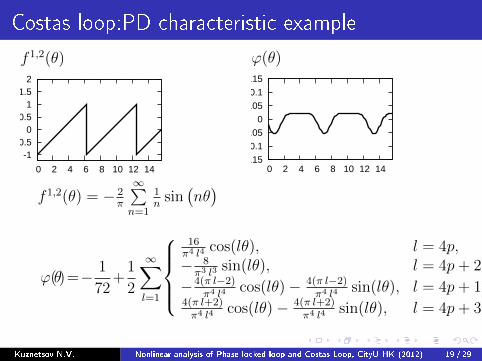
Costas loop:PD characteristic example
f 1,2(θ)
-1-0.5
0 0.5
1 1.5
2
0 2 4 6 8 10 12 14
ϕ(θ)
-0.15-0.1
-0.05 0
0.05 0.1
0.15
0 2 4 6 8 10 12 14
f 1,2(θ) = − 2π
∞∑n=1
1n
sin(nθ)
ϕ(θ)=− 1
72+
1
2
∞∑l=1
16π4 l4
cos(lθ), l = 4p, p ∈ N0
− 8π3 l3
sin(lθ), l = 4p+ 2, p ∈ N0
−4(π l−2)π4 l4
cos(lθ)− 4(π l−2)π4 l4
sin(lθ), l = 4p+ 1, p ∈ N04(π l+2)π4 l4
cos(lθ)− 4(π l+2)π4 l4
sin(lθ), l = 4p+ 3, p ∈ N0
Kuznetsov N.V. Nonlinear analysis of Phase-locked loop and Costas Loop, CityU HK (2012) 19 / 29
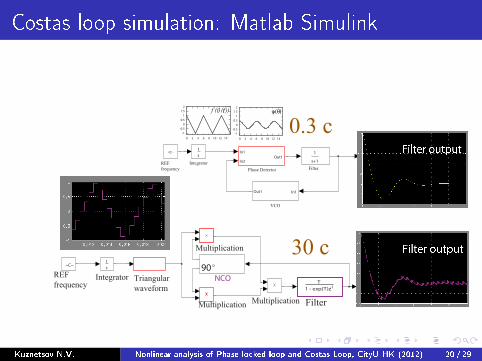
Costas loop simulation: Matlab Simulink
30 c
0.3 c-1
-0.5
0
0.5
1
1.5
2
0 2 4 6 8 10 12 14
REF
frequency
−C−
NCOIntegrator
1
s
T
1 - exp(T)z-1
90 о
Filter
Triangular
waveform
Multiplication
MultiplicationMultiplication
1
s+1
In1
In2Out1
In1Out1
Scope
1
s
REF
frequency
-c-
Integrator
Phase Detector Filter
VCO
-1
-0.5
0
0.5
1
1.5
2
0 2 4 6 8 10 12 14
Kuznetsov N.V. Nonlinear analysis of Phase-locked loop and Costas Loop, CityU HK (2012) 20 / 29
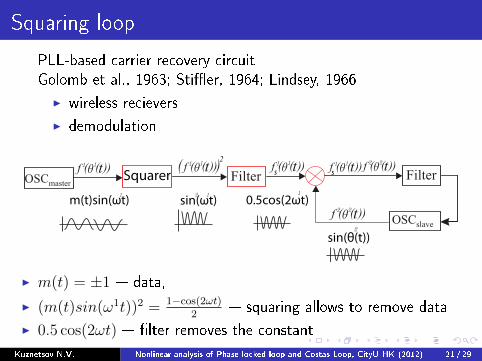
Squaring loop
PLL-based carrier recovery circuitGolomb et al., 1963; Stier, 1964; Lindsey, 1966
I wireless recievers
I demodulation
Squarer s s
2
m(t)sin(ωt) sin(ωt) 0.5cos(2ωt)
sin(θ(t))
I m(t) = ±1 data,
I (m(t)sin(ω1t))2 = 1−cos(2ωt)2
squaring allows to remove data
I 0.5 cos(2ωt) lter removes the constant
Kuznetsov N.V. Nonlinear analysis of Phase-locked loop and Costas Loop, CityU HK (2012) 21 / 29
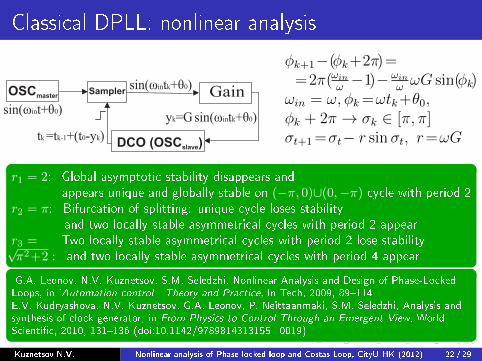
Classical DPLL: nonlinear analysis
sin(ωint+θ0)
Gain
tk =tk-1+(t0-yk)
sin(ωintk+θ0)
yk=G sin(ωintk+θ0)
φk+1−(φk+2π)==2π(ωin
ω−1)− ωin
ωωG sin(φk)
ωin = ω, φk=ωtk+θ0,φk + 2π → σk ∈ [π, π]σt+1 =σt− r sinσt, r=ωG
r1 = 2: Global asymptotic stability disappears andappears unique and globally stable on (−π, 0)∪(0,−π) cycle with period 2
r2 = π: Bifurcation of splitting: unique cycle loses stabilityand two locally stable asymmetrical cycles with period 2 appear
r3 = Two locally stable asymmetrical cycles with period 2 lose stability√π2+2 : and two locally stable asymmetrical cycles with period 4 appear
G.A. Leonov, N.V. Kuznetsov, S.M. Seledzhi, Nonlinear Analysis and Design of Phase-LockedLoops, in 'Automation control - Theory and Practice, In-Tech, 2009, 89114E.V. Kudryashova, N.V. Kuznetsov, G.A. Leonov, P. Neittaanmaki, S.M. Seledzhi, Analysis andsynthesis of clock generator, in From Physics to Control Through an Emergent View, WorldScientic, 2010, 131136 (doi:10.1142/9789814313155_0019)
Kuznetsov N.V. Nonlinear analysis of Phase-locked loop and Costas Loop, CityU HK (2012) 22 / 29
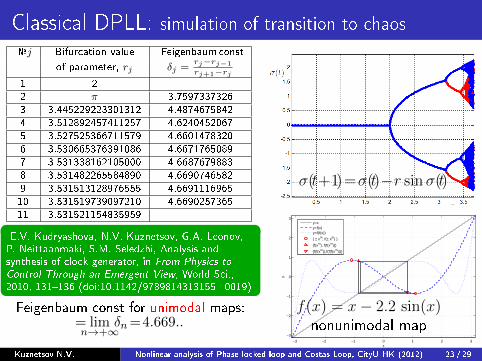
Classical DPLL: simulation of transition to chaos
j Bifurcation value Feigenbaum const
of parameter, rj δj =rj−rj−1
rj+1−rj
1 22 π 3.75973373263 3.445229223301312 4.48746758424 3.512892457411257 4.62404520675 3.527525366711579 4.66014783206 3.530665376391086 4.66717650897 3.531338162105000 4.66876798838 3.531482265584890 4.66907465829 3.531513128976555 4.669111696510 3.531519739097210 4.669025736511 3.531521154835959
E.V. Kudryashova, N.V. Kuznetsov, G.A. Leonov,P. Neittaanmaki, S.M. Seledzhi, Analysis andsynthesis of clock generator, in From Physics toControl Through an Emergent View, World Sci.,2010, 131136 (doi:10.1142/9789814313155_0019)
Feigenbaum const for unimodal maps:= limn→+∞
δn=4.669..
σ(t+1)=σ(t)−r sinσ(t)
−3 −2 −1 0 1 2 3
−3
−2
−1
0
1
2
3
x
y
y=xy=f(x)y=f(f(x))
± xm, f(± xm)
f(xm), f(f(xm))
f(f(xm)),f(f(f(xm)))
f(x) = x− 2.2 sin(x)nonunimodal map
Kuznetsov N.V. Nonlinear analysis of Phase-locked loop and Costas Loop, CityU HK (2012) 23 / 29
Publications: PLL, 2012-2011
• G.A. Leonov, N.V. Kuznetsov, M.V. Yuldashev, R.V. Yuldashev, Analytical method forcomputation of phase-detector characteristic, IEEE Transactions on Circuits and Systems II,59(10), 2012, 633637 (doi:10.1109/TCSII.2012.2213362)• G.A. Leonov, N.V. Kuznetsov, M.V. Yuldashev, R.V. Yuldashev, Dierential equations of CostasLoop, Doklady Mathematics, 2012, 86(2), 149154 (doi:10.1134/S1064562412050080)• Kuznetsov N. V., Leonov G. A., Yuldashev M. V., Yuldashev R. V.", Nonlinear analysis of Costasloop circuit, 9th International Conference on Informatics in Control, Automation and Robotics, Vol.1, 2012, 557560, (doi:10.5220/0003976705570560)• Kuznetsov N.V., Leonov G.A., Neittaanmaki P., Seledzhi S.M., Yuldashev M.V., Yuldashev R.V.,Simulation of Phase-Locked Loops in Phase-Frequency Domain, IEEE IV International Congress onUltra Modern Telecommunications and Control Systems, 2012, 364368• G.A. Leonov, N.V. Kuznetsov, M.V. Yuldashev, R.V. Yuldashev, Computation of Phase DetectorCharacteristics in Synchronization Systems, Doklady Mathematics, 84(1), 2011, 586590,(doi:10.1134/S1064562411040223)•N. Kuznetsov, G. Leonov, P. Neittaanmaki, S.Seledzhi, M. Yuldashev, and R. Yuldashev,High-frequency analysis of phase-locked loop and phase detector characteristic computation, 8th Int.Conf. on Informatics in Control, Automation and Robotics, 2011, 272278,(doi:10.5220/0003522502720278).• N.V. Kuznetsov, G.A. Leonov, M.V. Yuldashev, R.V. Yuldashev, Analytical methods forcomputation of phase-detector characteristics and PLL design, ISSCS 2011IEEE InternationalSymposium on Signals, Circuits and Systems, Proceedings, 2011, 710,(doi:10.1109/ISSCS.2011.5978639)
Kuznetsov N.V. Nonlinear analysis of Phase-locked loop and Costas Loop, CityU HK (2012) 24 / 29
Publications: PLL, 2010-...
• G.A. Leonov, S.M. Seledzhi, N.V. Kuznetsov, P. Neittaanmaki, Nonlinear Analysis of Phase-lockedloop, IFAC Proceedings Volumes (IFACPapersOnline), 4(1), 2010(doi:10.3182/20100826-3-TR-4016.00010)G.A. Leonov, S.M. Seledzhi, N.V. Kuznetsov, P. Neittaanmaki, Asymptotic analysis of phase controlsystem for clocks in multiprocessor arrays, ICINCO 2010 - Proceedings of the 7th InternationalConference on Informatics in Control, Automation and Robotics, 3, 2010, 99102(doi:10.5220/0002938200990102)N.V. Kuznetsov, G.A. Leonov, S.M. Seledzhi, Nonlinear analysis of the Costas loop and phase-lockedloop with squarer, IASTED International Conference on Signal and Image Processing, SIP 2009,2009, 17N.V. Kuznetsov, G.A. Leonov, S.M. Seledzhi, P. Neittaanmaki, Analysis and design of computerarchitecture circuits with controllable delay line. ICINCO 2009 - 6th International Conference onInformatics in Control, Automation and Robotics, Proceedings, 3 SPSMC, 2009, 221224(doi:10.5220/0002205002210224).N.V. Kuznetsov, G.A. Leonov, S.M. Seledzhi, Phase locked loops design and analysis. ICINCO 2008- 5th International Conference on Informatics in Control, Automation and Robotics, Proceedings,SPSMC, 2008, 114118 (doi:10.5220/0001485401140118)N.V. Kuznetsov, G.A. Leonov, S.M. Seledzhi, Analysis of phase-locked systems with discontinuouscharacteristics of the phase detectors, IFAC Proceedings Volumes (IFACPapersOnline), 1 (PART 1),2006, 107112 (doi:10.3182/20060628-3-FR-3903.00021)•Nonlinear Analysis and Design of Phase-Locked Loops, G.A. Leonov, N.V. Kuznetsov, S.M.Seledzhi, Automation control - Theory and Practice, In-Tech, 2009), 89114
Kuznetsov N.V. Nonlinear analysis of Phase-locked loop and Costas Loop, CityU HK (2012) 25 / 29
Publications: Hidden attractorsX Leonov G.A., Kuznetsov N.V., Analytical-Numerical Methods for Hidden Attractors' Localization:The 16th Hilbert Problem, Aizerman and Kalman Conjectures, and Chua Circuits, ComputationalMethods in Applied Sciences, 27(1), 2013, Springer, 4164, (doi:10.1007/978-94-007-5288-7_3)X Leonov G.A., Kuznetsov N.V., Vagaitsev V.I., Hidden attractors in smooth Chua's systems,Physica D, 241(18) 2012, 1482-1486 (doi:10.1016/j.physd.2012.05.016)X Kuznetsov N.V., Kuznetsova O.A., Leonov G.A., Visualization of four normal size limit cycles intwo-dimensional polynomial quadratic system, Dierential equations and Dynamical systems, 2012(doi:10.1007/s12591-012-0118-6)X Kiseleva M.A., Kuznetsov N.V., Leonov G.A., Neittaanmaki P., Drilling Systems Failures andHidden Oscillations, NSC 2012 - 4th IEEE Int. Conf. on Nonlinear Science and Complexity, 2012,109-112 (doi:10.1109/NSC.2012.6304736)X V.O. Bragin, V.I. Vagaitsev, N.V. Kuznetsov, G.A. Leonov Algorithms for nding hiddenoscillations in nonlinear systems. The Aizerman and Kalman Conjectures and Chua's Circuits, J. ofComputer and Systems Sciences Int.,50(4),2011, 511-544 (doi:10.1134/S106423071104006X)(survey)X Leonov G.A., Kuznetsov N.V., Vagaitsev V.I, Localization of hidden Chua's attractors , PhysicsLetters A, 375(23), 2011, 2230-2233 (doi:10.1016/j.physleta.2011.04.037)X G.A. Leonov, N.V. Kuznetsov, O.A. Kuznetsova, S.M. Seledzhi, V.I.Vagaitsev, Hidden oscillationsin dynamical systems, Transaction on Systems and Control, 6(2), 2011, 5467 (survey)X G.A. Leonov, N.V. Kuznetsov, and E.V. Kudryashova, A Direct Method for Calculating LyapunovQuantities of Two-Dimensional Dynamical Systems, Proceedings of the Steklov Institute ofMathematics, 272(Suppl. 1), 2011, 119-127 (doi:10.1134/S008154381102009X)X N.V. Kuznetsov, G.A. Leonov and V.I. Vagaitsev, Analytical-numerical method for attractorlocalization of generalized Chua's system, IFAC Proceedings Volumes (IFAC-PapersOnline), 4(1),2010 (doi:10.3182/20100826-3-TR-4016.00009)
Kuznetsov N.V. Nonlinear analysis of Phase-locked loop and Costas Loop, CityU HK (2012) 26 / 29
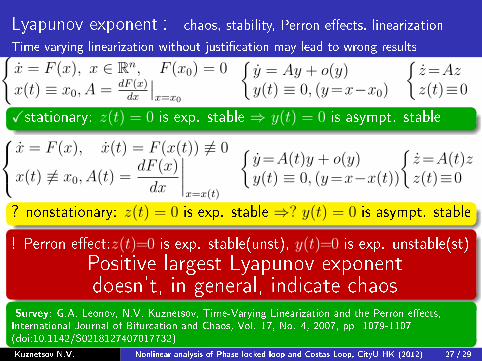
Lyapunov exponent : chaos, stability, Perron eects, linearization
Time-varying linearization without justication may lead to wrong resultsx = F (x), x ∈ Rn, F (x0) = 0
x(t) ≡ x0, A = dF (x)dx
∣∣x=x0
y = Ay + o(y)y(t) ≡ 0, (y=x−x0)
z=Azz(t)≡0
Xstationary: z(t) = 0 is exp. stable ⇒ y(t) = 0 is asympt. stablex = F (x), x(t) = F (x(t)) 6≡ 0
x(t) 6≡ x0, A(t) =dF (x)
dx
∣∣∣∣x=x(t)
y=A(t)y + o(y)y(t) ≡ 0, (y=x−x(t))
z=A(t)zz(t)≡0
? nonstationary: z(t) = 0 is exp. stable ⇒? y(t) = 0 is asympt. stable
! Perron eect:z(t)=0 is exp. stable(unst), y(t)=0 is exp. unstable(st)
Positive largest Lyapunov exponentdoesn't, in general, indicate chaos
Survey: G.A. Leonov, N.V. Kuznetsov, Time-Varying Linearization and the Perron eects,International Journal of Bifurcation and Chaos, Vol. 17, No. 4, 2007, pp. 1079-1107(doi:10.1142/S0218127407017732)
Kuznetsov N.V. Nonlinear analysis of Phase-locked loop and Costas Loop, CityU HK (2012) 27 / 29
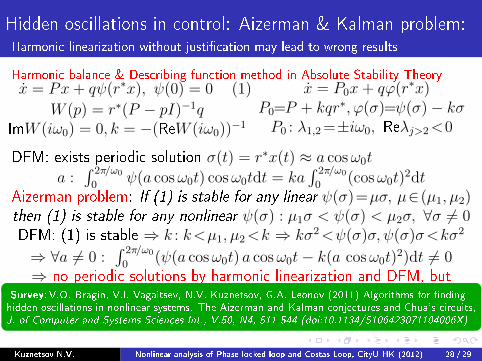
Hidden oscillations in control: Aizerman & Kalman problem:Harmonic linearization without justication may lead to wrong results
Harmonic balance & Describing function method in Absolute Stability Theoryx = Px+ qψ(r∗x), ψ(0) = 0 (1) x = P0x+ qϕ(r∗x)
W (p) = r∗(P − pI)−1qImW (iω0) = 0, k = −(ReW (iω0))
−1P0=P + kqr∗, ϕ(σ)=ψ(σ)− kσP0 : λ1,2 =±iω0, Reλj>2<0
DFM: exists periodic solution σ(t) = r∗x(t) ≈ a cosω0t
a :∫ 2π/ω0
0ψ(a cosω0t) cosω0tdt = ka
∫ 2π/ω0
0(cosω0t)
2dtAizerman problem: If (1) is stable for any linear ψ(σ)=µσ, µ∈(µ1, µ2)then (1) is stable for any nonlinear ψ(σ) : µ1σ < ψ(σ) < µ2σ, ∀σ 6= 0DFM: (1) is stable ⇒ k : k<µ1, µ2<k ⇒ kσ2<ψ(σ)σ, ψ(σ)σ<kσ2
⇒ ∀a 6= 0 :∫ 2π/ω0
0(ψ(a cosω0t) a cosω0t− k(a cosω0t)
2)dt 6= 0⇒ no periodic solutions by harmonic linearization and DFM, but
Survey: V.O. Bragin, V.I. Vagaitsev, N.V. Kuznetsov, G.A. Leonov (2011) Algorithms for ndinghidden oscillations in nonlinear systems. The Aizerman and Kalman conjectures and Chua's circuits,J. of Computer and Systems Sciences Int., V.50, N4, 511-544 (doi:10.1134/S106423071104006X)
Kuznetsov N.V. Nonlinear analysis of Phase-locked loop and Costas Loop, CityU HK (2012) 28 / 29
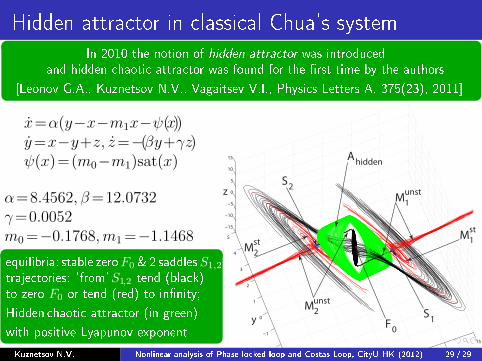
Hidden attractor in classical Chua's systemIn 2010 the notion of hidden attractor was introduced
and hidden chaotic attractor was found for the rst time by the authors
[Leonov G.A., Kuznetsov N.V., Vagaitsev V.I., Physics Letters A, 375(23), 2011]
x=α(y−x−m1x−ψ(x))y=x−y+z, z=−(βy+γz)ψ(x)=(m0−m1)sat(x)
α=8.4562, β=12.0732γ=0.0052m0 =−0.1768,m1 =−1.1468
equilibria: stable zeroF0 &2 saddlesS1,2
trajectories: 'from'S1,2 tend (black)to zero F0 or tend (red) to innity;
Hidden chaotic attractor (in green)
with positive Lyapunov exponent
−15
−10
−5
0
5
10
15
−5
−4
−3
−2
−1
0
1
2
3
4
5
−15
−10
−5
0
5
10
15
x
y
z
M2unst
M1
unst
Ahidden
S2
S1
M2
stM1
st
F0
Kuznetsov N.V. Nonlinear analysis of Phase-locked loop and Costas Loop, CityU HK (2012) 29 / 29