Embed Size (px)
Citation preview
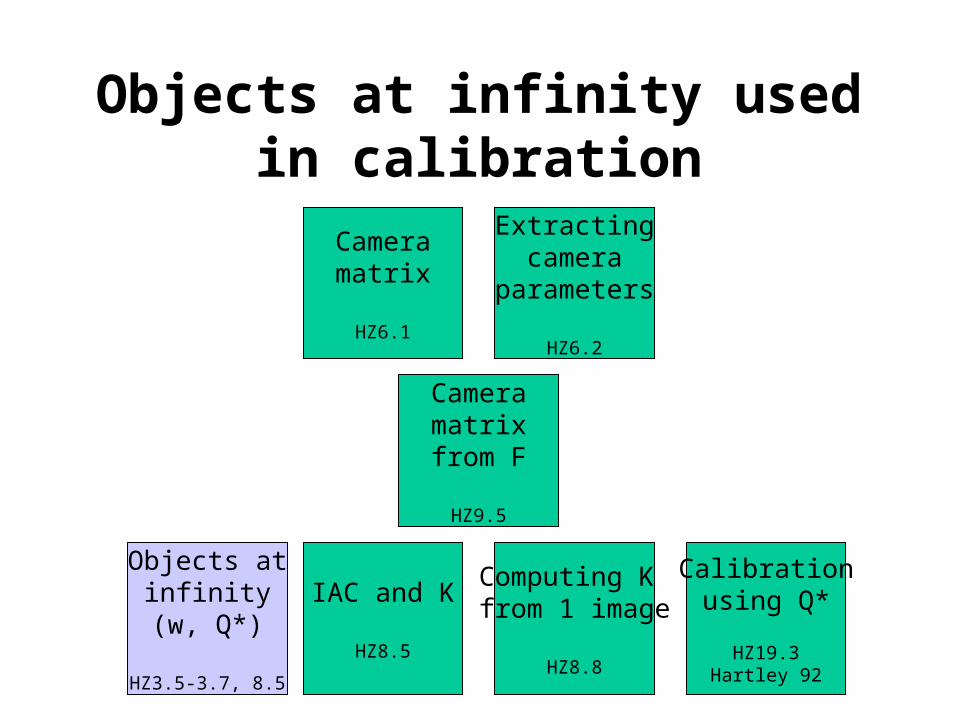
Objects at infinity used in calibration
Computing K from 1 image
HZ8.8
IAC and K
HZ8.5
Cameramatrixfrom F
HZ9.5
Objects atinfinity(w, Q*)
HZ3.5-3.7, 8.5
Extractingcamera
parameters
HZ6.2
Cameramatrix
HZ6.1
Calibrationusing Q*
HZ19.3Hartley 92
Thoughts about calibration
• now that we have motivated the necessity for moving from projective information about the camera to metric information, we consider calibration of the camera (Chapters 8 and 19)
• this requires an understanding of the absolute conic Ω∞ (Ch. 3.6-3.7) and the image of the absolute conic or IAC ω (Ch 8.5), as well as the absolute dual quadric Q*∞
• we will start with IAC and develop a method for finding the calibration matrix K using a single image (but also some calibration objects)
• later we will show how to develop the entire homography that corrects our camera matrix using IAC and Q*∞ , using two views but no calibration objects
• in short:– stage 1: calibration from a single view, using IAC and calibration objects– stage 2: calibration from two views, using IAC and Q*∞ without
calibration objects
More thoughts about calibration
• the absolute conic Ω∞ -- and its dual, the absolute dual quadric Q*∞ -- are structures that characterize a 3d similarity, like the dual conic did for the 2d similarity
• we get interested in images of objects at infinity, since they depend only on camera rotation and calibration matrix K
• IAC, a special object at infinity, depends only on K, so it contains the key to solving for K in the calibration stage
• IAC and Q*∞ allow angle to be measured in 3-space• given the relationship of IAC and Q*∞ to angle, we can
solve for them using angle constraints
Plane at infinity π∞
• once again, we shall be fascinated by objects at infinity• plane at infinity characterizes the affinity• in projective 3-space, points at infinity (x,y,z,0) lie on the plane at infinity π∞ =
(0,0,0,1)• two lines (resp., two planes, a line and a plane) are parallel iff intersection lies on
π∞
• a projective transformation is an affinity iff π∞ is fixed (as a plane, not pointwise)
– i.e., this is a defining invariant of the affinity– identifies the excess: the difference between an affinity (12dof) and a projectivity
(15dof) is exactly the 3dof of the plane at infinity π∞
• intuition: once π∞ is known, parallelism is also known, which is a defining invariant of the affinity
– can restore parallel lines (think of HW1)– just as angle is a defining invariant of the similarity
• i.e., affine rectification involves restoring image of π∞ to its rightful position• HZ80-81
The image of π∞
• we are interested in discovering the internal parameters of the camera such as focal length (or computationally in finding K)
• to isolate the internal camera parameters, we need to factor out the effects of camera translation and rotation
• we get interested in the image of objects at infinity, since these images are independent of the position of the camera– makes sense, since points at infinity are directions, independent of
position• the homography between π∞ and the image plane is a planar
homography H = KR– proof: consider the image of an ideal point under the camera KR[I –C]:image(d 0) = KR[I –C] (d 0) = KRd– have eliminated the last column’s translation vector
• HZ209-210
Absolute conic Ω∞
• absolute conic characterizes the similarity• absolute conic is 3D analogue to circular points (just as π∞ is 3D analogue of
L∞ )• circular points are 0D subset of 1D line at infinity• absolute conic is 1D subset of 2D plane at infinity• conic = plane/quadric intersection• absolute conic Ω∞ = intersection of quadric x2 + y2 + z2 = 0 with plane at
infinity• equivalently, absolute conic Ω∞ is represented by the conic with identity
matrix I on the plane at infinity• a projective transformation is a similarity iff Ω∞ is fixed (as a set)
– proof: if A-t I A-1 = kI (so AAt = kI), then mapping A is scaled orthogonal, so represents scaled rotation (perhaps along with reflection)
– identifies the excess: difference between a similarity (7dof) and an affinity (12dof) is exactly the 5dof of Ω∞
• HZ81-82
More on absolute conic
• metric rectification involves restoring Ω∞ to its rightful position (Charles II)
• recall that every circle contains the circular points of its plane
• every sphere contains Ω∞
• any circle intersects Ω∞ in 2 points = circular points of the plane that contains the circle
• once again, we can measure angle using Ω∞ (just as we could with dual of circular points)– and it is invariant to projectivities; but angle measure
with next construct Q*∞ is better
The image of Ω∞ (aka ω or IAC)
• the image of π∞ was good, but the image of Ω∞ (a certain object on the plane at infinity) is even better: it is independent of both position and orientation of the camera
• the image of the absolute conic Ω∞ is known by its acronym IAC, and since it is so valued for calibration, it is given its own symbol ω
– lowercase ω = uppercase Ω
– we’ll call it William
– calibration is our end goal and often our last step (so omega)
• ω = (KKt)-1
• proof: we saw that the plane at infinity transforms according to the homography KR, so the conic I on the plane at infinity transforms to (KR)-t I (KR)-1 = K-t RR-1 K-1 = (KKt)-1
– since conics map contravariantly (HZ37) and R is orthogonal (R t = R-1)
• conclusion: knowledge of ω implies knowledge of K
• HZ210
IAC and circular points
• we have seen that circular points lie on the absolute conic, so their image lies on William
• this will be used to find William: if we can find enough points on William, we have William
• every plane contains 2 circular points– in the plane’s coordinate system, these are (1,i,0) and (1,-i,0)
• the plane intersects the plane at infinity in a line at infinity, which intersects the absolute dual conic in 2 points: these are the plane’s circular points
• since the plane’s circular points lie on the absolute conic Ω∞, their images lie on the IAC ω
• how to find image of circular point?• we shall find the image of a circular point on plane π as H(1,+-i, 0) where H
is the homography between π and the image plane• HZ82, 211
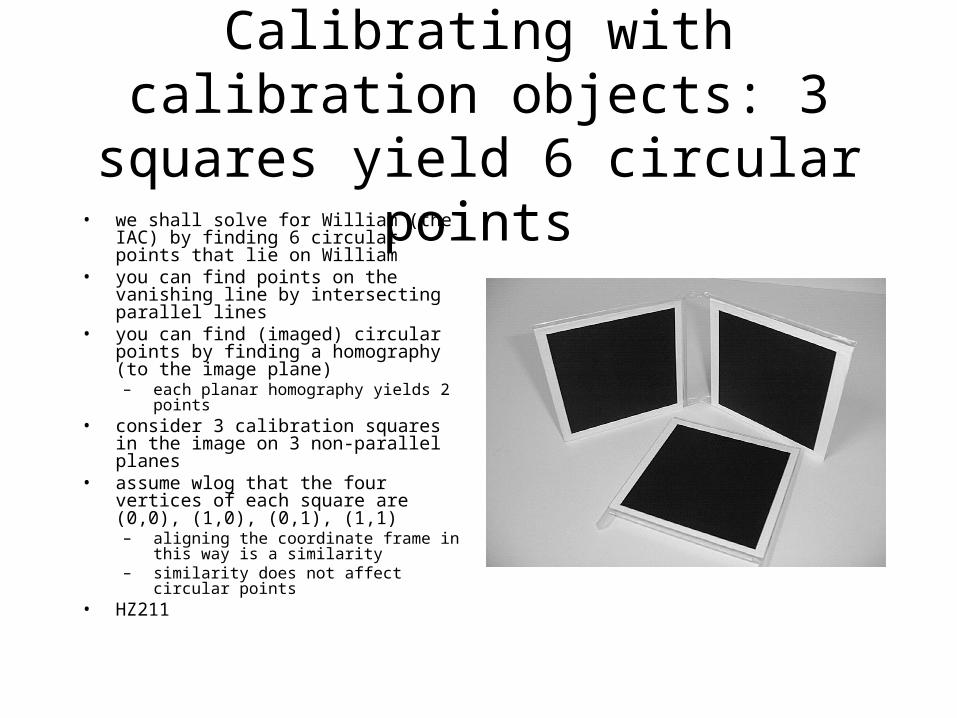
Calibrating with calibration objects: 3 squares yield 6 circular points
• we shall solve for William (the IAC) by finding 6 circular points that lie on William
• you can find points on the vanishing line by intersecting parallel lines
• you can find (imaged) circular points by finding a homography (to the image plane)– each planar homography yields 2
points• consider 3 calibration squares in the
image on 3 non-parallel planes• assume wlog that the four vertices of
each square are (0,0), (1,0), (0,1), (1,1)– aligning the coordinate frame in this
way is a similarity– similarity does not affect circular
points• HZ211
3-square algorithm
1. For each calibration square [find 2 points on ω]a) Find the corners of the calibration square using user input or automated tracking (see David’s
excellent demo).b) Use the DLT algorithm to compute the homography H that maps each square vertex to its
image [only 4 pts needed].c) Apply this homography to the circular points I and J to find 2 points on ω.
• they are h1 +- i h2, where h1 and h2 are first 2 columns of H
2. Fit ω to 6 points [using numerical computing]a) real and imaginary components of x^t ω x = 0 (applied to circular points) yield 2 eqns:
1. h1t ω h2 = 0
2. h1t ω h1 = h2
t ω h2
b) interesting: the pair of circular points encode the same information, so only one circular point gives useful information; but we still get 2dof because of real and imaginary components (so in effect we are not fitting to 6 points, but getting 6 constraints from 3 pts)
c) encode these linear equations in Hw = 0 where w is the row-major encoded ω (see development of DLT algorithm)
d) solve for w (and hence ω) as null vectora) Extract calibration matrix K from ω using Cholesky.
• ω-1 = KKt
• HZ211
Overview of 3-square algorithm
• homography of squares to imaged squares 6 imaged circular points (2 per square) image of absolute conic (by fitting) K (by Cholesky factorization) metric properties (see Chapter 19 for how to use K to get metric)





























