Embed Size (px)
Citation preview

On affine Sawada–Kotera equation
Changzheng Qu a,*, Yuqin Si b, Ruochen Liu a
a Department of Mathematics, Northwest University, Xi’an 710069, Chinab Department of Physics, Northwest University, Xi’an 710069, China
Accepted 27 May 2002
Abstract
It is shown that motion of plane curves in affine geometry induces naturally the Sawada–Kotera hierarchy. The
affine Sawada–Kotera equation is obtained in view of the equivalence of equations for the curvature and graph of plane
curves when the curvature satisfies the Sawada–Kotera equation. The affine Sawada–Kotera equation can be viewed as
an affine version of the WKI equation since they have similarity properties, such as they have loop-solitons, they are
solved by the AKNS-scheme and are obtained by choosing the normal velocity to be the derivative of the curvature with
respect to the arc-length. Its symmetry reductions to ordinary differential equations corresponding to an one-dimen-
sional optimal system of its Lie symmetry algebras are discussed.
� 2002 Elsevier Science Ltd. All rights reserved.
1. Introduction
The inverse scattering transformation (IST) approach to solving certain nonlinear partial differential equations
(PDEs) was discovered 20 years ago in two landmark articles by Zabusky and Kruskal [1] and Gardner et al. [2]. After
that, soliton theory has had enormous impact on applied mathematics and mathematical physics. Nonlinear PDEs
integrated by IST possess a number of remarkable properties: soliton solutions, an infinite number of conservation
laws, an infinite number of symmetries, B€aacklund transformation and Darboux transformation, bi-Hamiltonian
structures and so on [3,4]. In particular, the Liouville and sine-Gordon equations arising from Euclidean geometry are
integrable by the IST method.
It has been shown for long time that integrable equations are closely related to motion of curves or surfaces, such
relationship provides new insight and structures of integrable equations. The pioneering work is due to Hasimoto [8], he
showed that the nonlinear Schr€oodinger equation arises from the dynamics of a nonstretching string. Lamb [9] used the
Hasimoto transformation to connect other motions of curves to the mKdV and sine-Gordon equations. Lakshmanan
[10] interpreted the dynamics of a nonlinear string of fixed length in R3 through the consideration of the motion of an
arbitrary rigid body along it, deriving the AKNS spectral problem without spectral parameter. Langer and Perline [11]
showed that the dynamics of nonstretching vortex filament in R3 gives to the NLS hierarchy. Motions of curves in S2
and S3 were considered by Doliwa and Santini [12]. Schief and Rogers [13] obtained the extended Harry Dym equation
from the bi-normal motion of curves with constant torsion or curvature. Nakayama [14,15] (see also [16]) showed that
the defocusing nonlinear Schr€oodinger equation, the Regge-Lund equation, a coupled system of KdV equations and
their hyperbolic type arise from motions of curves in hyperboloids in the Minkowski space. He also showed that the
AKNS-scheme can be obtained through the consideration of the motion of curves in the Minkowski space. More
recently, Chou and Qu [17,18] showed that motions of space curves in centro-affine, affine and similarity geometries
*Corresponding author.
E-mail address: [email protected] (C. Qu).
0960-0779/03/$ - see front matter � 2002 Elsevier Science Ltd. All rights reserved.
PII: S0960-0779 (02 )00121-2
Chaos, Solitons and Fractals 15 (2003) 131–139www.elsevier.com/locate/chaos

yield several integrable equations including the KdV, Sawada–Kotera, Boussinesq, Tzitz�eeica, Hirota–Satsuma and
Kaup–Kupershmidt equations.
As compared to motions of curves in space, there are very fewer results investigating relationship between integrable
equations and motion of plane curves. In an intriguing paper of Goldstein and Petrich [19], they discovered that the
dynamics of a nonstretching string on the plane naturally produces the recursion operator of the mKdV hierarchy.
Nakayama et al. [20] further obtained the sine-Gordon equation by considering a nonlocal motion. They also pointed
out that the Serret–Frenet equations for curves in R2 and R3 are equivalent to the AKNS spectral problem without
spectral parameter. In [22,23], it was shown that the KdV, Camassa–Holm, Sawada–Kotera, Burgers and mKdV hi-
erarchies naturally arise from motions of plane curves in centro-affine, affine, similarity and fully affine geometries.
The equivalence between integrable equations for the curvature and invariant motion leads to new integrable
equations. Since very often we can express a motion law as a single evolution equation for some quantity, in view of this
equivalence this evolution equation should also be integrable. In general, there are many ways to reduce the motion to a
single equation. As an illustration let’s recall that the the curvature of an inextensible plane curve satisfies mKdV hi-
erarchy. Suppose the flow can be expressed as the graph ðx; uðx; tÞÞ of some function u on the x-axis. Using the fact that
the normal speed of c, ut=ð1þ u2xÞ1=2
, is given by �ks, one finds that u satisfies
ut ¼uxx
ð1þ u2xÞ32
!x
: ð1Þ
It is nothing but the well-known WKI equation. In fact, it turns out the integrability of (1) was established by Wadati
et al. [5] who showed that it is the compatibility condition of a certain WKI-scheme of IST. This WKI-scheme for u is
connected to the AKNS-scheme for k by a gauge transformation explicitly displayed in [6] (see also [7]). Thus the
approach here gives a geometric interpretation of this correspondence.
In the same manner, the Sawada–Kotera equation [24,25]
jt þ j5 þ 5jjsss þ 5jsjss þ 5j2js ¼ 0; ð2Þ
can be written as
ut þ ðu�5=3xx uxxxx � 5
3u�8=3xx u2xxxÞx ¼ 0; ð3Þ
in terms of the graph ðx; uðxÞÞ, where the normal velocity of c is given by js, j and s are respectively the affine arc-length
and curvature. Eq. (3) is called as the affine Sawada–Kotera equation. We will show later that it has several interesting
similar properties as the WKI equation, and it can be viewed as an affine version of the WKI equation.
It is easy to verify that the Sawada–Kotera Eq. (2) only admits the trivial Lie symmetry groups: translations for t, s
and a dilatation. But the the Lie symmetry groups of the affine Sawada–Kotera equation become much larger. Note
that the affine Sawada–Kotera equation is invariant under affine motion in ðx; uÞ. So its symmetry group is generated by
the affine motion (acting trivially on t), t-translation and a dilatation. We will see in Section 5 that an optimal system of
the Lie symmetry groups of (3) consists of 21 elements. Since the Sawada–Kotera equation and the affine Sawada–
Kotera equation are gauge equivalent, the symmetry groups of the affine Sawada–Kotera equation are viewed as hidden
symmetries of the Sawada–Kotera equation. According to Lie’s theory, under certain conditions a one-parameter
subgroup of the symmetry group generates a group-invariant solution for (3). The equations satisfied by these special
solutions, called reduced equations, are ordinary differential equations. Though the reduced ODEs are difficult to solve
in general, certain explicit solutions will be obtained.
The purpose of this paper is to investigate Eq. (3) in detail. The outline is as follows. In Section 2, we show how to
derive (3) and its hierarchy from motion of plane curves in affine geometry. In Section 3, the AKNS-scheme for solving
(3) is given. In Section 4, loop-solitons of (3) are obtained by considering the motion of plane curves in affine geometry
corresponding to the solitons of the Sawada–Kotera equation. In Section 5, the symmetry groups of (3) are determined,
and its symmetry reductions to ODEs corresponding to its one-dimensional optimal system are obtained.
2. Derivation of Eq. (3)
As mentioned in introduction, the WKI equation is obtained by considering the motion of nonstretching plane
curves in Euclidean geometry. Motivated by the observation, we obtain the affine Sawada–Kotera equation by con-
sidering motion of nonstretching plane curves in affine geometry. Affine geometry is an old subject. For a modern
exposition we refer to [26–28]. The isometries of affine geometry contains all SLð2Þ-isometries plus the translations in x
and u [29]. The affine arc-length dq and curvature l, are given in terms of the Euclidean arc-length s and curvature j by
132 C. Qu et al. / Chaos, Solitons and Fractals 15 (2003) 131–139

dq ¼ k1=3ds
and
l ¼ k4=3 þ 13ðk�5=3ksÞs:
Motion of curves in affine geometry is described by
ct ¼ fNþ gT; ð4Þ
where f and g are normal and tangent velocities respectively, T and N are respectively tangent and normal vectors. The
affine Serret-Frenet formulas are given by
T
N
� �q
¼ 0 1�l 0
� �T
N
� �: ð5Þ
The affine tangent and normal are related to t and n via
t ¼ k1=3T; n ¼ 13k�5=3ksTþ k�1=3N:
We relate the motion (4) to Euclidean motion [19,20]
ct ¼ ~ff nþ ~ggt: ð6Þ
It follows that
~ff ¼ k1=3f ; ~gg ¼ k�1=3g � 13k�5=3ksf :
By a direct computation
~ffss ¼ 13ðk�2=3ksÞsf þ k�1=3ksfq þ kfqq;
~ggs � k ~ff ¼ gq � 13k�4=3ksðg þ fqÞ � lf :
Substituting these equations into the evolution equations for s and k [19–21], we have
st ¼ s gq
�� 1
3k�4=3ksðg þ fqÞ � lf
�; kt ¼ k½fqq þ k�4=3ksðfq þ gÞ þ lf �:
Hence, the first variation of the affine perimeter satisfies
dLdt
¼I
c
kt3k
�þ st
s
�dq ¼
I1
3fqq
�� 2
3lf þ gq
�dq:
So the inextensibility condition isI13fqq
�� 2
3lfdq ¼ 0 ð7Þ
and
g ¼ �13fq þ 2
3o�1
q ðlf Þ: ð8Þ
On the other hand, we have time evolution of frame vectors
T
N
� �t
¼ gq � lf fq þ gH1 H2
� �T
N
� �; ð9Þ
where H1 ¼ gqq � 2lfq � lqf � lg and H2 ¼ fqq þ 2gq � lf . Under (7) and (8), ½o=oq; o=ot� ¼ 0, and so the compati-
bility condition between (5) and (9) implies
lt ¼ 13ðD4q þ 5lD2
q þ 4lqDq þ lqq þ 4l2 þ 2lqo�1q lÞf ; ð10Þ
after using (8).
Taking f ¼ �3lq in (10), we get the Sawada–Kotera Eq. (2). This is very much like the mKdV equation arising from
the motion of plane curves in Euclidean geometry in which the normal velocity is equal to the derivative of the cur-
vature with respect to the arc-length [19–21]. The Sawada–Kotera flow is
C. Qu et al. / Chaos, Solitons and Fractals 15 (2003) 131–139 133

ct ¼ �3lqj1=3nþ ½j�1=3ðlqq � l2Þ þ j�5=3jslq�t: ð11Þ
In view of the graph ðx; uðx; tÞÞ, one finds Eq. (11) is just the affine Sawada–Kotera Eq. (3).
Similarly, we obtain the seventh-order affine Sawada–Kotera equation
ut þ 127½u�16=3
2 ð27u32u6 � 189u22u3u5 � 126u22u24 þ 735u2u23u4 � 455u43Þ�x ¼ 0;
where uj ¼ oju=oxj, j ¼ 2; 3; . . .More general, we obtain the affine Sawada–Kotera hierarchy
ut þ 3½ðD2q þ lÞo�1
q Xn�1lq�x ¼ 0;
where
Dq ¼ u�1=3xx Dx; l ¼ 1
3u�5=3xx uxxxx � 5
9u�8=3xx u2xxx;
and
X ¼ ðD3q þ 2lDq þ 2DqlÞðD3
q þ D2qlo
�1q þ o�1
q lD2q þ 1
2ðl2o�1
q þ o�1q l2ÞÞ
is the recursion operator of the Sawada–Kotera equation [30].
3. AKNS-scheme for Eq. (3)
It follows from Section 2 that the Sawada–Kotera Eq. (2) is obtained by the AKNS-scheme without spectral pa-
rameter. A natural questions arises: whether the affine Sawada–Kotera Eq. (3) can be obtained via the AKNS-scheme?
To this end, we use the approach of Ishmori [6], Wadati and Sogo [7].
The AKNS-scheme of the Sawada–Kotera Eq. (2) reads
/t ¼ U/; /q ¼ V /; ð12Þ
where
U ¼ gq � lf gqq � 2lfq � lqf � lgfq þ g fqq þ 2gq � lf
� �; V ¼ 0 1
�l 0
� �:
Introducing the gauge transformation
s ¼ t; q ¼ qðx; tÞ; /̂/ðx; sÞ ¼ /ðq; sÞ;
where
oqox
¼ u1=3xx ;
we have the spectral problem of new AKNS scheme
/̂/x ¼0 u1=3xx
� 13u�4=3xx uxxxx þ 5
9u�7=3xx u2xxx 0
!/̂/ � bVV /̂/: ð13Þ
On the other hand
/t ¼ /̂/s þ /̂/xxt:
From the Sawada–Kotera flow (11), we have
xt ¼1ffiffiffiffiffiffiffiffiffiffiffiffiffi
1þ u2xp ð~gg � ux
~ff Þ:
Then the associated time dependence for the eigenfunction is
/̂/s ¼ bUU /̂/ ¼ ðU � xt bVV Þ/̂/; ð14Þ
134 C. Qu et al. / Chaos, Solitons and Fractals 15 (2003) 131–139

where
bUU ¼bAA bBBbCC �bAA
� �;
with bAA ¼ 1243
u�20=32 ½7480u53 � 15; 360u2u33u4 þ 4140u22u
23u5 � 27u22u3ð28u2u6 � 215u24Þ þ 27u32ð3u2u7 � 50u4u5Þ�;
bBB ¼ � 127u�16=32 ½27u32u6 � 180u22u3u5 � 135u22u
24 þ 720u2u23u4 � 440u43�;bCC ¼ 1
729u�82 ½358; 560u2u43u4 � 143; 000u63 � 101; 340u22u
33u5 þ 81u22u
23ð251u2u6 � 2605u24Þ � 2916u32u3ðu2u7 � 25u4u5Þ
þ 81u32ð3u22u8 þ 200u34 � 75u2u4u6 � 50u2u25Þ�:
One can readily verify that the compatibility condition between (13) and (14) yields the affine Sawada–Kotera Eq.
(3).
4. Loop solitons of Eq. (3)
A nice feature of the WKI equation is that it possesses the so-called loop-solitons [32,33]. In this section, we show
that the affine Sawada–Kotera equation also has such property. To obtain the loop-solitons, we consider motion of
plane curves corresponding to solitons of the Sawada–Kotera equation in affine geometry, we shall see that curves
corresponding to N-solitons of the Sawada–Kotera equation have N-loops, namely they are loop-solitons of the affine
Sawada–Kotera equation.
In general, given an affine curvature l, we solve the third-order linear ODE
yqqq þ lyq ¼ 0; ð15Þ
to obtain two independent solutions ðy1; y2Þ, yi 6¼ const. Then for any A 2 SLð2;RÞ, B 2 R2, the curve cðqÞ ¼ AY þ B,Y t ¼ ðy1; y2Þ, takes q and l to be its respective arc-length and curvature. Just as the Euclidean curvature determines the
curve up to a rigid motion, the affine curvature l determines the curve up to an unimodular affine transformations.
Now suppose the curve moves according to the Sawada–Kotera Eq. (2). It determines a family of curves
cðq; tÞ ¼ AðtÞY ðq; tÞ þ BðtÞ, where ½Y ðq; 0Þ; Yqðq; 0Þ� may be taken to be the identity matrix. By substituting cðq; tÞ intothe Sawada–Kotera flow
ct ¼ �3lqcqq þ ðlqq � l2Þcq; ð16Þ
we obtain
A0Y þ AYt þ B0 ¼ �3lqAYqq þ ðlqq � l2ÞAYq: ð17Þ
It follows from (15) that yi;t, i ¼ 1; 2; satisfies
yi;qqqt þ lyi;qt ¼ ðl5 þ 5ll3 þ 5l1l2 þ 5l2l1Þyiq:
So we can express yi;t in terms of l and yi and their derivatives with respect to q. Putting this expression into (17), we
have, after performing integration by parts and a lengthy computation
y1;ty2;t
� �¼ J11 J12
J21 �J11
� �y1y2
� �þ J1
J2
� �; ð18Þ
where
J11 ¼ �ðl3 þ llqÞð0; tÞ; J12 ¼ �ðl4 þ 3ll2 þ l2q þ l3Þð0; tÞ; J21 ¼ ð2l2 þ l2Þð0; tÞ;
J1 ¼ ð�l2 þ l2Þð0; tÞ; J2 ¼ 3lqð0; tÞ;
and A and B satisfy
A0 þ AJ11 J12J21 �J11
� �¼ 0; B0 þ A
J1J2
� �¼ 0:
C. Qu et al. / Chaos, Solitons and Fractals 15 (2003) 131–139 135

We first consider the one-soliton solution of the Sawada–Kotera equation, it is given by
l ¼ 3
2c sech2
ffiffiffic
p
2ðq � ctÞ:
In this case
y1 ¼1
8h2 � 3
4h tanh
h2; y2 ¼
2
3h � 2 tanh
h2; h ¼
ffiffiffic
pðq � ctÞ:
A and B are given by
A ¼ 1 32c5=2t
0 1
� �; B ¼
12c5t2
23c5=2t
!:
So the curve corresponding to the one-soliton of the Sawada–Kotera equation is given by
cðq; tÞ ¼ 1 32c5=2t
0 1
� �y1y2
� �þ
12c5t2
23c5=2t
� �:
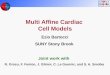
A one loop-soliton of the affine Sawada–Kotera equation is given in Fig. 1.
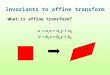
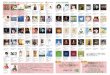
Similarly it is interesting to study motions of curves corresponding to N-solitons of the Sawada–Kotera equation. In
general, N-solitons give curves with N-loops. Figs. 2 and 3 are the curves with two and three loops respectively cor-
responding to the 2- and 3-solitons of the Sawada–Kotera equation. This is similar to the mKdV equation and KdV
equation, respectively in Euclidean and centro-affine geometry [21–23] and suggests the affine Sawada–Kotera equation
is an affine version of the WKI equation.
5. Symmetry groups of Eq. (3)
In this section, we shall determine Lie symmetry groups of the affine Sawada–Kotera equation to obtain its sym-
metry reduction to ODEs and its some exact solutions. It has been known that certain group-invariant solutions play
important roles in the analysis of the formation of singularities and asymptotic behavior of geometric flow [34,35]. The
analysis for the group-invariant solutions of the affine curve shortening equation has been carried out in [36]. Since
Fig. 1. An one loop soliton of the affine Sawada–Kotera equation.
Fig. 2. A two loop soliton of the affine Sawada–Kotera equation.
136 C. Qu et al. / Chaos, Solitons and Fractals 15 (2003) 131–139

Eq. (3) is a geometric flow, any reparametrization of a curve cðx; tÞ also gives a solution of the equation. To obtain
meaningful results we must get rid of these trivial symmetries.
Let’s introduce the following vector fields in the three-dimensional space ðx; u; tÞ 2 R3.
v1 ¼ ox; ðtranslation in xÞ;
v2 ¼ ou; ðtranslation in uÞ;
v3 ¼ xou � uox; ðrotation in ðx; uÞÞ;
v4 ¼ xou þ uox; ðhyperbolic rotation in ðx; uÞÞ;
v5 ¼ xox � uou;
t ¼ ot; ðtranslation in timeÞ;
d ¼ xox þ uou þ10
3tot; ðdilatationÞ:
By the invariance criterion for symmetry [31], a straightforward calculation shows
Theorem 1. A basis of the vector space of infinitesimal symmetries for (3) is given by
g ¼ fv1; v2; v3; v4; v5; t; dg:
Notice that the vectors, v1 to v5 act trivially on t, they generate the affine group in R2. On the other hand, t generates thediffeomorphism T : ðx; u; tÞ ! ðx; u; t þ �Þ; � 2 R, and d generates Dðx; u; tÞ ! ðe�x; e�u; eð10=3Þ�t). Since any linear com-
bination of these vector fields are also symmetry Lie algebras of Eq. (3), it is necessary to classify these vector fields. Let
G be the corresponding Lie group of g. Given any two one-parameter subgroups of G, H and H 0. The subgroup H is
equivalent to H 0, if there exists some g in H such that H 0 ¼ g�lHg. The conjugacy of subgroups introduces an equiv-
alence relation on all one-parameter subgroup of G. An optimal system of one-parameter subgroups or one-parameter
subalgebras consists of exactly one representative from each equivalence class. Therefore, once an optimal system is
found all group-invariant solutions with respect to each of its elements are determined, all other group-invariant so-
lutions can be derived as the images of some g. We now introduce the vector fields
w1 ¼ v1; w2 ¼ t; w3 ¼ v2 þ t;
w4 ¼ v3; w5 ¼ v3 þ t; w6 ¼ v3 � t;
w7 ¼ d; w8 ¼ dþ av3; w9 ¼ v4;
w10 ¼ v3 � v4; w11 ¼ v3 þ v4 þ v1; w12 ¼ v4 þ t;
w13 ¼ v3 þ v4 þ t; w14 ¼ v3 þ v4 � t; w15 ¼ v3 þ v4 þ v1 þ t;
w16 ¼ v3 þ v4 þ v1 � t; w17 ¼ dþ v4; w18 ¼ dþ v4 þ v2;
w19 ¼ dþ av4; a > 0; a 6¼ 1; w20 ¼ dþ v3 þ v4; w21 ¼ �dþ v3 þ v4:
Fig. 3. A three loop soliton of the affine Sawada–Kotera equation.
C. Qu et al. / Chaos, Solitons and Fractals 15 (2003) 131–139 137

In fact, we have
Theorem 2. An optimal system of one-dimensional symmetry subalgebras of (3) consists of the vector fieldsfwi; i ¼ 1; . . . ; 21g.
In the rest of this section, we list nontrivial invariant solutions and symmetry reductions to ODEs for elements in the
one-dimensional optimal system fwig in Table 1. In Table 1, a, b and c are constants,
g1 ¼ ðrhþ 1Þ2hrr þ ðrhþ 1Þðrh2r þ 8hhrÞ þ 6h3;
A ¼ 32ðwwr þ 5
2w� 7
2rwrÞ þ ðw� 7
2rÞðwwr þ 5
2w� 7
2rwrÞr;
H ¼ ð2þ yhÞ�8=3½ð2þ yhÞð4þ y3h00Þ � 53ðy2h0 � 2Þ2�:
Acknowledgements
This research was supported by the NNSF of China (grant no. 19901027) and NSF of Shaan Xi Province.
References
[1] Zabusky NJ, Kruskal MD. Interaction of solitons in a collisionless plasma and the recurrence of initial states. Phys Rev Lett
1965;15:240–3.
[2] Gardner CS, Greene JM, Kruskal MD, Miura RM. Method for solving the Korteweg-de Vries equation. Phys Rev Lett
1967;19:1095–7.
Table 1
Symmetry reducion of the affine Sawada–Kotera equation to ODEs
No. Invariant solution Reduced ODEs
w2 u ¼ uðxÞ f 2x þ 3af 8=3 þ bf 10=3 ¼ 0; f ¼ uxx
w3 u ¼ vðxÞ þ t v00 ¼ 33=2 13x3�
þ axþ b�2=3
w5 u ¼ x tanðvðyÞ þ tÞ 203ðyhyÞ2 � 3yh½gðg þ 1Þ2 þ 12y2gg2
y � 4yg2ðygyy � 2gyÞ þ 4yðygyy þ 2gyÞ� � 4yhðyhyÞy�ð1
2y þ aÞh8=3 ¼ 0; y ¼ x2 þ u2; g ¼ 2yvy ; h ¼ 2y2gy þ ygð1þ g2Þ
w7 u ¼ xvðyÞ ½h�5=3ðg�2hrr � g�3grhr � 7g�1hr þ 12hÞ � 53h�8=3ðg�2h2r � 6g�1hhr þ 9h2Þ�r � 3
10ð1� 2rgÞ ¼ 0;
y ¼ t�10=3x; r ¼ y2v; f ¼ ln y; g ¼ fr; h ¼ 2r � 3g�1 � g�3gr
w8 u ¼ x tan½ 310a ln t þ vðyÞ� ½20
3h�8=3ðyhyÞ2 � 3yh�5=3ðgðg þ 1Þ2 þ 12y2gg2
y � 4yg2ðygyy � 2gyÞ þ 4yðygyy þ 2gyÞÞ�4yh�5=3ðyhyÞy �y � 3
10ay þ 3
5y2vy ¼ 0; y ¼ t�5=3ðx2 þ u2Þ; g ¼ 2yvy ; h ¼ 2y2gy þ ygð1þ g2Þ
w12 u ¼ etvðyÞ � x ½2h2 þ ð1þ rhÞhr�½4hg1 þ ð1þ rhÞg1;r� � 53g21 � 2�5=3ðr þ aÞ½2h2 þ ð1þ rhÞhr�8=3 ¼ 0;
y ¼ ðu� xÞet; r ¼ yv; f ¼ ln v; h ¼ fr1�rfr
w13 u ¼ etvðxÞ þ 2xt v00 ¼ ð� 118x4 þ ax2 þ bxþ cÞ�3=2
w15 u ¼ vðyÞ þ x2 r2wAþ 23rw2ðwwr þ 5
2w� 7
2rwrÞ � 2
3w4 � r2=3w8=3 ¼ 0;
y ¼ x� t; z ¼ ln v; r ¼ v�7=2f ; wðrÞ ¼ 2þ7rzr2zr
w17 u ¼ tð3=10Þð1�aÞvðyÞ þ x ðv5=32 v4 � 53v�8=32 v23Þy � 3
10� 4�4=3½ða � 1Þvþ ða þ 1Þyv0� ¼ 0; y ¼ t�3=10ðaþ1Þðuþ xÞ
w18 u ¼ xþ 310ln t þ vðyÞ ½f �5=3
y fyyy � 53f �8=3y f 2
yy �y þ 310� 4�5=3ð1� 2yf Þ ¼ 0; y ¼ t�3=5ð2xþ 2uþ 1Þ; f ¼ v0
w20 u ¼ 2x ln xþ xvðyÞ yhy � 43h ¼ 3
10y13=3vy ; y ¼ t�3=10x; hðyÞ ¼ ðvþ yvyÞy
138 C. Qu et al. / Chaos, Solitons and Fractals 15 (2003) 131–139

[3] Ablowitz MJ, Kaup DJ, Newell AC, Segur H. The inverse scattering transform-Fourier analysis for nonlinear problems. Stud
Appl Math 1974;53:249–315.
[4] Ablowitz MJ, Clarkson PA. Solitons nonlinear evolution equations and inverse scattering. Cambridge: Cambridge University
Press; 1991.
[5] Wadati M, Konno K, Ichikawa Y. New integrable nonlinear evolution equations. J Phys Soc Jpn 1979;47:1698–700.
[6] Ishimori Y. A relationship between the AKNS and WKI schemes of the inverse scattering method. J Phys Soc Jpn 1982;51:3036–
41.
[7] Wadati M, Sogo K. Gauge transformations in soliton theory. J Phys Soc Jpn 1983;52:394–8.
[8] Hasimoto H. A soliton on a vortex filament. J Fluid Mech 1972;51:477–85.
[9] Lamb Jr GL. Solitons on moving space curves. J Math Phys 1977;18:1654–61.
[10] Lakshmanan M. Rigid body motions, space curves, prolongation structures, fiber bundles, and solitons. J Math Phys
1979;20:1667–72.
[11] Langer J, Perline R. Poisson geometry of the filament equation. J Non-linear Sci 1991;1:71–93.
[12] Doliwa A, Santini PM. An elementary geometric characterization of the integrable motions of a curve. Phys Lett A 1994;185:373–
84.
[13] Schief WK, Rogers C. Binormal motion of curves of constant curvature an torsion. Generation of soliton surfaces. Proc Roy Soc
Lond A 1999;455:3163–88.
[14] Nakayama K. Motion of curves in hyperboloids in the Minkowski space. J Phys Soc Jpn 1998;67:3031–7.
[15] Nakayama K. Motion of curves in hyperboloids in the Minkowski space II. J Phys Soc Jpn 1999;68:3214–8.
[16] G€uurses M. Motion of curves on two-dimensional surfaces and soliton equations. Phys Lett A 1998;241:329–34.
[17] Chou KS, Qu CZ. Integrable motions of space curves in affine geometry. Chaos, Solitons and Fractals 2002;14:29–44.
[18] Chou KS, Qu CZ. Motions of curves in similarity geometries and Burgers-mKdV hierarchies. 2002, preprint.
[19] Goldstein RE, Petrich DM. The Korteweg-de Vries hierarchy as dy-namics of closed curves in the plane. Phys Rev Lett
1991;67:3203–6.
[20] Nakayama K, Segur H, Wadati M. Integrability and the motion of curves. Phys Rev Lett 1992;69:2603–6.
[21] Nakayama K, Wadati M. Motion of curves in the plane. J Phys Soc Jpn 1993;62:473–9.
[22] Chou KS, Qu CZ. The KdV equation and motion of plane curves. J Phys Soc Jpn 2001;70:1912–6.
[23] Chou KS, Qu CZ. Integrable equations arising from motions of plane curves. Physica D 2002;162:9–33.
[24] Sawada K, Kotera T. A method for finding N-soliton solutions of the KdV and KdV like equation. Prog Theor Phys
1974;51:1335–67.
[25] Caudrey PJ, Dodd RK, Gibbon JD. A new hierarchy of KdV equations. Proc Roy Soc London A 1976;351:407–22.
[26] Guggenheimer HG. Differential geometry. New York: Dover; 1963.
[27] Nomizu K, Sasaki T. Affine differential geometry. Cambridge: Cambridge University Press; 1994.
[28] Li AM, Simon U, Zhao G. Global affine differential geometry of hypersurfaces. Berlin: DeGruyter; 1993.
[29] Olver PJ. Equivalence, invariants and symmetry. Cambridge: Cambridge University Press; 1995.
[30] Fuchssteiner B, Oevel W. The bi-Harmiltonian structure of some nonlinear fifth- and seventh-order differential equations and
recursion formulas for their symmetries and conserved covariants. J Math Phys 1982;23:358–63.
[31] Olver PJ. Applications of Lie groups to differential equations. New York: Springer-Verlag; 1986.
[32] Konno K, Ichikawa YH, Wadati M. A loop soliton propagating along a stretched rope. J Phys Soc Jpn 1981;50:1025–6.
[33] Konno K, Jeffrey A. Some remarkable properties of two loop soliton solutions. J Phys Soc Jpn 1983;52:1–3.
[34] Abresh U, Langer J. The normalized curve shortening flow and homothetic solutions. J Differen Geom 1986;23:175–96.
[35] Angenent SB. On the formation of singularities in the curve shortening flow. J Differen Geom 1991;33:601–33.
[36] Chou KS, Li GX. Optimal systems of group invariant solutions for the generalized curve shortening flows. Comm Anal Geom,
in press.
C. Qu et al. / Chaos, Solitons and Fractals 15 (2003) 131–139 139