Embed Size (px)
Citation preview

On Finding Spanning Eulerian Subgraphs
M. B. Richey and R. Gary Parker School of Industrial and Systems Engineering, Georgia Institute of Technology,
Atlanta, Georgia 30332
R. L. Rardin School of Industrial Engineering, Purdue University, W. Lafayette, Indiana 47907
In this article, we examine the problem of producing a spanning Eulerian subgraph in an undirected graph. After the bX?-completeness of the general problem is established, we present polynomial-time algorithms for both the maximization and minimization versions where instances are defined on a restricted class of graphs referred to as series-parallel. Some novelties in the minimization case are discussed, as are heuristic ideas.
1. INTRODUCTION
Combinatorial optimization problems defined on graphs and networks have long been a source of great interest to practitioners and researchers alike. This is due, in large measure, to the obvious value associated with possession of effective algorithms for treating a host of practical problems arising in areas of distribution, routing, sched- uling, and the like. It is also the case, however, that interest is generated from the general intransigence of such problems regarding the development of efficient schemes for their resolution.
One of the classic models in this area is the so-called Chinese postman’s problem. Required is a minimum length cycle in a graph which includes each edge at least once. Of course, if the input graph is Eulerian (connected with even degree at every vertex), the problem is trivially resolved-we simply trace the existing Eulerian cycle. Alter- natively, if the graph is not Eulerian, a simple but elegant scheme [4] can be used which, in essence, yields a minimum cost edge duplication. The resulting graph is Eulerian and the desired cycle can then be traced.
From a more abstract perspective, the Chinese postman’s problem can be viewed as one of seeking, given some graph GO?,&), a minimum cardinality superset 1 6, such that G@,& is Eulerian. With this in mind, suppose we consider the opposite notion. Given G@,&), find a subset 6 C_ 6, such that G(tl,6) is Eulerian. That is, we now seek a spanning Eulerian subgraph (SES) of Gel,&). In fact, it is with this problem that this article is concerned.
Clearly, in dealing with the SES problem, it is meaningful to consider both a maximum and minimum cardinality version. Obviously, a maximum version of the Chinese postman problem is ill-defined (assuming nonnegative edge costs). Regardless, in what follows, we shall examine the complexity of the basic problem of simply finding an arbitrary SES, which, as we shall see, is WP-complete. This makes especially legitimate the investigation of special cases. Accordingly, we provide polynomial-time algorithms for the problem defined on the class of graphs known as series-parallel. We conclude with a brief discussion regarding heuristic notions.
Naval Research Logistics Quarterly, Vol. 32, pp. 443-455 (1985) Copyright 0 1985 by John Wiley & Sons, Inc. CCC O28- 1441 /85/03O443- 13$O4.OO
444 Naval Research Logistics Quarterly, Vol. 32 (1985)
2. PROBLEM COMPLEXITY
Establishing the difficulty of the minimum (cardinality) SES is a straightforward exercise. Clearly, a suitable algorithm could then be used to decide which graphs are Hamiltonian; that is, a Hamiltonian cycle is an SES and is minimal in this regard.
The analogous complexity result for the maximum SES case is only slightly less obvious once we have the following lemma:
LEMMA 2.1: Deciding hamiltonicity in cubic, three-connected planar graphs is %?-complete.
PROOF: See [ 5 ] . Q.E.D.
Observe that a graph is called cubic if it is regular with every vertex having degree 3. Thus, minimum or maximum edge cardinality issues notwithstanding, the following theorem can be stated, which establishes that simply finding an SES is difficult.
THEOREM 2.2: Given an arbitrary undirected graph, G@,&), deciding whether or not G@,G) possesses an SES is ‘39-complete.
PROOF: Clearly the problem is in %!? since for any subgraph of G , checking eulericity (including connectivity) is easy. To show the necessary reduction, we employ Lemma 2.1. Let GOY,&) be a graph satisfying the hypothesis of the lemma. Then, obviously, the only SES in G@,&) is also a Hamiltonian cycle for any more dense subgraph cannot have even degree everywhere and, alternatively, the only other even- degree subgraphs are not connected. Hence, an algorithm for finding an SES in arbitrary graphs could be used to decide hamiltonicity in the restricted class specified in Lemma 2.1. The latter problem is c.nt9-complete and the result follows. Q.E.D.
Obvious in the proof of Theorem 2.2 is the equivalence of the minimum and max- imum SES problems defined on cubic graphs. Simply stated, on such graphs, minimum and maximum SESs are one and the same. This aside, however, it may be instructive to briefly point out the failure of the naive Chinese postman-based algorithm for the maximum SES version.
Recall in the classic case, some non-Eulerian G@,&) is appended by a least cardinality edge-set, G, such that the supergraph GOY,& U g) is Eulerian. In the maximum SES problem, the aim is the opposite-we seek the least cardinality edge removal that leaves an SES. Important in this context is that the former (Chinese postman) problem is easily solved while the latter, as Theorem 2 .2 shows, is not.
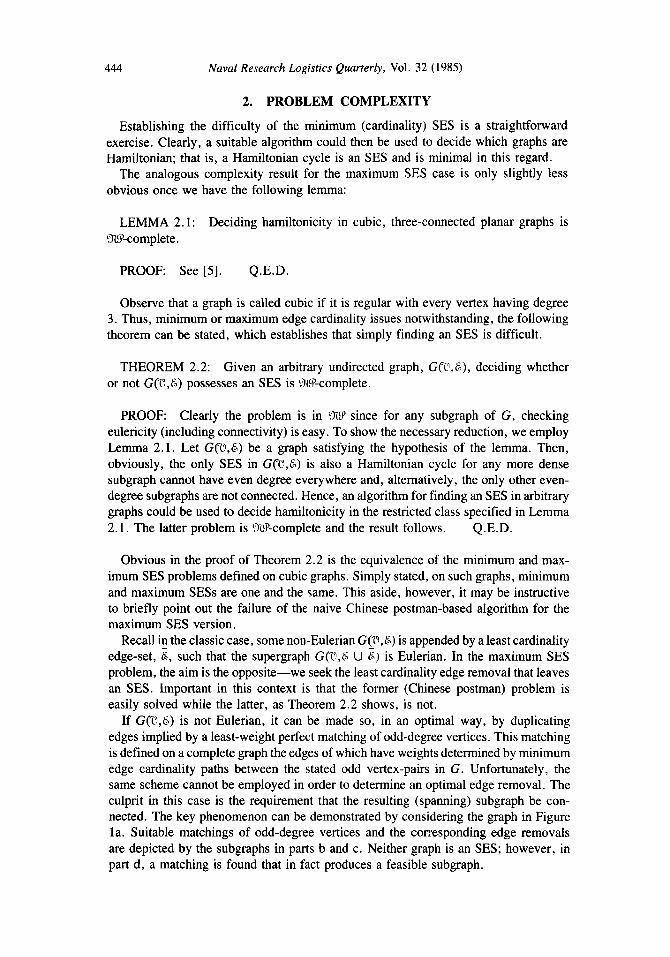
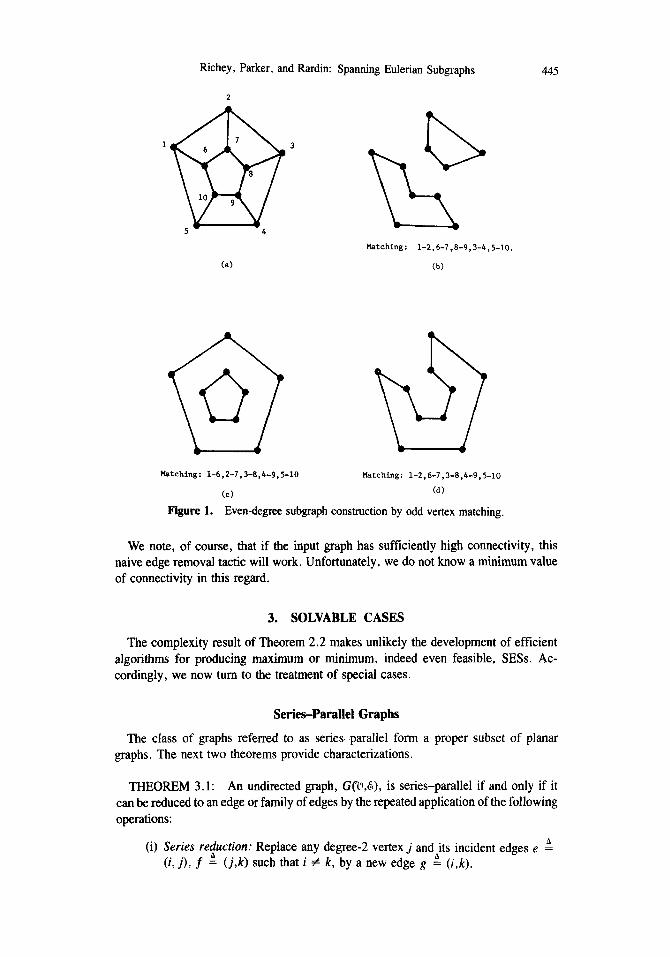
If GO?,&) is not Eulerian, it can be made so, in an optimal way, by duplicating edges implied by a least-weight perfect matching of odd-degree vertices. This matching is defined on a complete graph the edges of which have weights determined by minimum edge cardinality paths between the stated odd vertex-pairs in G. Unfortunately, the same scheme cannot be employed in order to determine an optimal edge removal. The culprit in this case is the requirement that the resulting (spanning) subgraph be con- nected. The key phenomenon can be demonstrated by considering the graph in Figure 1 a. Suitable matchings of odd-degree vertices and the corresponding edge removals are depicted by the subgraphs in parts b and c. Neither graph is an SES; however, in part d, a matching is found that in fact produces a feasible subgraph.
445 Richey, Parker, and Rardin: Spanning Eulerian Subgraphs
2
Matching: 1-2.6-7,8-9,3-4,5-10.
(a) (b)
Matching: 1-6,2-7,3-8,4-9,5-10 Matching: 1-2,6-7,3-8.4-9,5-10
(d 1 ( C )
Figure 1. Even-degree subgraph construction by odd vertex matching.
We note, of course, that if the input graph has sufficiently high connectivity, this naive edge removal tactic will work. Unfortunately, we do not know a minimum value of connectivity in this regard.
3. SOLVABLE CASES
The complexity result of Theorem 2.2 makes unlikely the development of efficient algorithms for producing maximum or minimum, indeed even feasible, SESs. Ac- cordingly, we now turn to the treatment of special cases.
Series-Parallel Graphs
The class of graphs referred to as series-parallel form a proper subset of planar graphs. The next two theorems provide characterizations.
THEOREM 3.1: An undirected graph, GO?,&), is series-parallel if and only if it can be reduced to an edge or family of edges by the repeated application of the following operations:
A (i) Series reduction: Replace any degree-2 vertex j and its incident edges e = A
( i , j ) , f A ( j , k ) such that i # k , by a new edge g = ( i , k ) .
446 Naval Research Logistics Quarterly, Vol. 32 (1985)
A A (ii) Parallel reduction: Replace any two edges e = (i,j) and f = (i,j) by a new
(iii) Jackknife reduction: Replace any degree-1 vertex i , its incident edge e =
A edge g = (i,j).
( i , j ) , and any other edge f = ( j , k ) by a new edge g = ( j , k ) .
A
A A
PROOF: See [7]. Q.E.D.
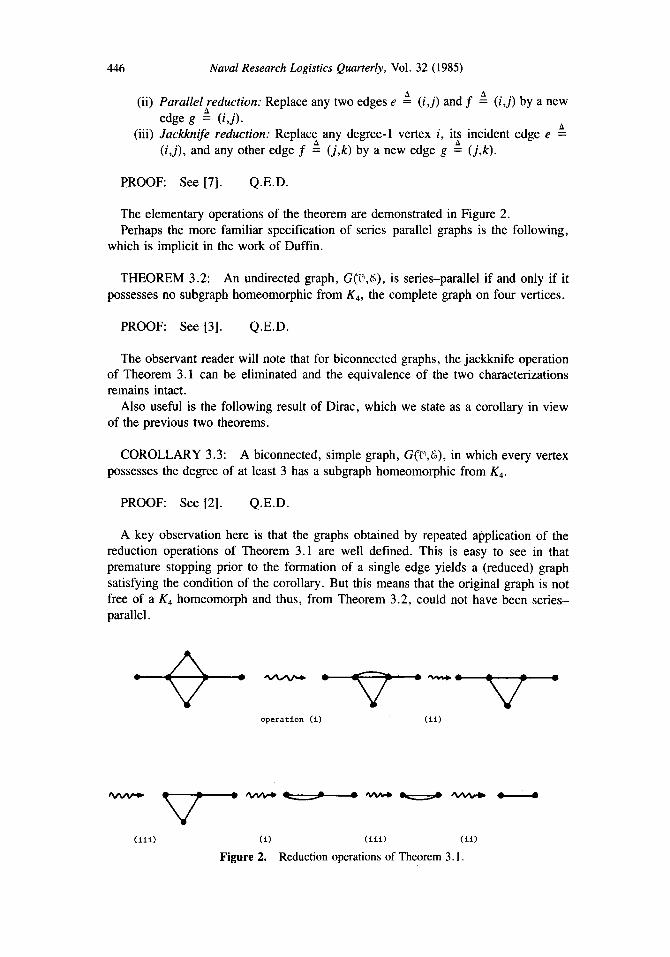
The elementary operations of the theorem are demonstrated in Figure 2. Perhaps the more familiar specification of series-parallel graphs is the following,
which is implicit in the work of Duffin.
THEOREM 3.2: An undirected graph, G@y,6), is series-parallel if and only if it possesses no subgraph homeomorphic from K4, the complete graph on four vertices.
PROOF: See [3]. Q.E.D.
The observant reader will note that for biconnected graphs, the jackknife operation of Theorem 3.1 can be eliminated and the equivalence of the two characterizations remains intact.
Also useful is the following result of Dirac, which we state as a corollary in view of the previous two theorems.
COROLLARY 3.3: A biconnected, simple graph, G(V,&), in which every vertex possesses the degree of at least 3 has a subgraph homeomorphic from K4.
PROOF: See [2]. Q.E.D.
A key observation here is that the graphs obtained by repeated application of the reduction operations of Theorem 3.1 are well defined. This is easy to see in that premature stopping prior to the formation of a single edge yields a (reduced) graph satisfying the condition of the corollary. But this means that the original graph is not free of a K4 homeomorph and thus, from Theorem 3.2, could not have been series- parallel.
operation (i) (ii)
wL-a--wvirb-
(iii) (i) (iii) (ii)
Figure 2. Reduction operations of Theorem 3.1.
Richey , Parker, and Rardin: Spanning Eulerian Subgraphs 447
The importance of series-parallel graphs from our perspective is that the SES problem is solvable on instances defined accordingly. It is worth noting that such graphs also provide resolvable cases for a host of other problems as well. The important reference in this regard is Takamizawa et al. [ 101 where it is shown that members of fairly broad, generic problem classes are solvable on series-parallel graphs. Other treatises can be found from works given in the reference list (e.g., [8], [9], and [ll]).
Following, we provide details of polynomial-time algorithms for each SES case (maximum and minimum). These have been separated in order to expose a particular refinement when the minimum version is related to hamiltonicity testing.
The Maximum SES Case
Throughout the reduction process defined by operations (i)-(iii) of Theorem 3.1, pseudoedges are formed. Moreover, each such edge represents a subgraph of the original graph. Let us denote by G,(D,,G,) the current reduced graph, and let Q[e] and &[el be the vertex and edge sets, respectively, which correspond to e E 6,. Setsd[e] and &[el define a specific subgraph, denoted simply as G[e]. Also, we call i a renninal of e if i E V[e] fl 13,.
The basic notion is straightforward. We simply keep track of SESs or potential SESs relative to subgraphs G[e]. This, in turn, requires that we correctly ascertain the interrelationships between these subgraphs vis-his their series, parallel, and jackknife combinations. The following lemma captures the idea.
LEMMA 3.4: If maximum edge cardinality subgraphs of G[e] are known relative to the following properties for every e E G,, then the maximum SES of G@,@ can be determined.
(i) A spanning Eulerian subgraph of G[e] denoted by SES. (ii) The vertex disjoint union of two closed walks, each beginning and ending
at only one terminal of e (neither passing through both terminals) and which together span 3 [ e ] , denoted by BI.
(iii) A (possibly nonsimple) path beginning at one terminal of e , ending at the other, and which spans D[e] denoted by PATH.
(iv),(v) A closed walk beginning and ending at the left (right) terminal of e, say iL( iR) , where iL(iR) is a cut-vertex in G,, denoted by W(RJ).
PROOF: Since, by definition, a complete solution must be spanning, so too must every corresponding subgraph of G[e] relative to V[e] (which includes the terminals of e). Now, if every vertex in such a (spanning) subgraph has even degree, then the subgraph can necessarily be expressed as the edge-disjoint union of cycles. Cases (i) and (ii) of the lemma capture the only possibilities in this regard. In (i), the subgraph is connected and is thus Eulerian, while in case (ii), it is not. If the subgraph is connected, spanning, and possesses two odd-degree vertices (the terminals of e), then it can be expressed as a (perhaps nonsimple) path beginning at one terminal of e and ending at the other. This semi-Edenan case is exhausted in (iii). Note that, here, we allow the possibility that eulericity results ultimately by augmentation with any non- G[e] path between the terminals of e. Finally, cases (iv) and (v) conform to the jackknife operation, where in general, any SES which includes a cut-vertex of G, must be
448 Naval Research Logistics Quarterly, Vol. 32 (1985)
expressable as a closed walk beginning and ending at the cut-vertex which is the terminal (left or right) of the respective e .
These are the only ways spanning Eulerian or semi-Edenan subgraphs can arise and the proof is complete. Q.E.D.
Actual computation regarding maximum values for each of the subgraphs detailed in Lemma 3.4 can be performed through (pseudo)-edge labels given by the 5-tuple, L[e] = (SES,BI,PATH,LJ,RJ) where l(e,*) denotes the value of * E {SES,BI,PATH,LJ,RJ}. Throughout these label updates, one may need to replace LJ by RJ, or vice versa, depending on the conventions adopted relative to “leftness” and “rightness.” Thus, for series reduction we have the following lemma.
LEMMA 3.5: If (pseudo)-edges e and f are series reduced, then for the resulting edge g, L[g] is determined as follows:
l(g,SES) = Z(e,SES) + l(f,SES) + l(e,RJ), l(g,BI) = max[l(e,SES) + l(f,BI),l(e,BI) + I(f,SES)] + Z(e,RJ),
l(g,LJ) = KeLJ), &g,RJ) = U,RJ) .
I(g,PATH) = l(e,PATH) + Z(f,PATH) + I(e,RJ),
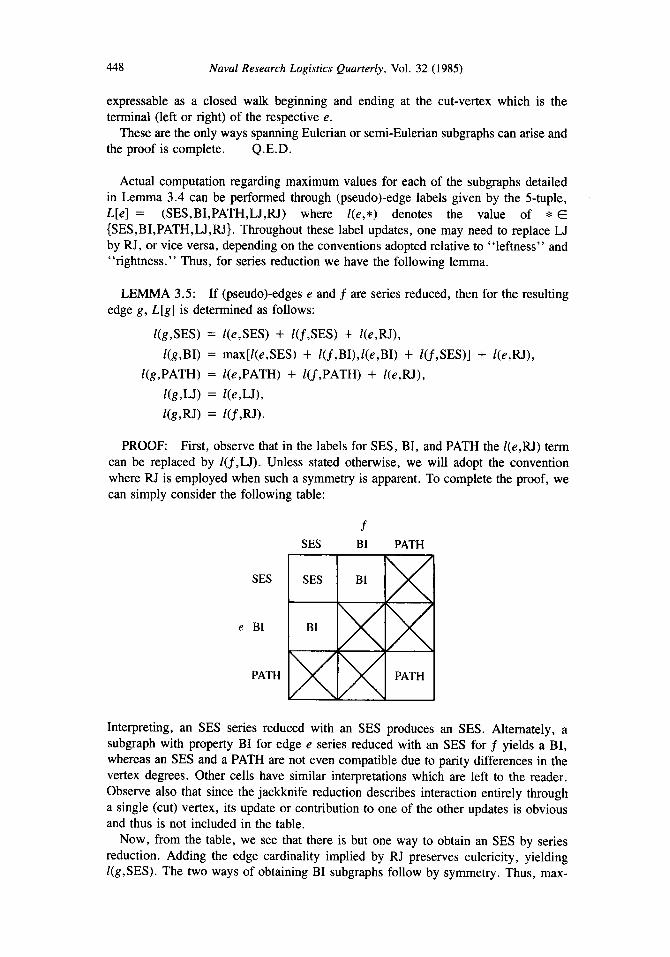
PROOF: First, observe that in the labels for SES, BI, and PATH the I(e,RJ) term can be replaced by Z(f,LJ). Unless stated otherwise, we will adopt the convention where RJ is employed when such a symmetry is apparent. To complete the proof, we can simply consider the following table:
f SES BI PATH
SES
e BI
PATH
Interpreting, an SES series reduced with an SES produces an SES. Alternately, a subgraph with property BI for edge e series reduced with an SES for f yields a BI, whereas an SES and a PATH are not even compatible due to parity differences in the vertex degrees. Other cells have similar interpretations which are left to the reader. Observe also that since the jackknife reduction describes interaction entirely through a single (cut) vertex, its update or contribution to one of the other updates is obvious and thus is not included in the table.
Now, from the table, we see that there is but one way to obtain an SES by series reduction. Adding the edge cardinality implied by RJ preserves eulericity , yielding I(g,SES). The two ways of obtaining BI subgraphs follow by symmetry. Thus, max-
Richey, Parker, and Rardin: Spanning Eulerian Subgraphs 449
imizing over the two SES-BI cases and appending by RJ gives l(g,BI). Finally, g is a PATH only if e and f are. Hence, adding path values and RJ clearly produces I(g , PATH). Q . E . D .
A similar result regarding parallel reduction can also be given:
LEMMA 3.6: If (pseudo)-edges e and f are parallel reduced, then for the resulting edge g, L[g] is determined as follows:
(l(e,PATH) + l(f,PATH),
(l(e,SES) + l(f,PATH), l(g,BI) = l(e,BI) + W J W ,
I(e,BI) + l(f,PATH), l(e,PATH) + l(f,SES),
l(g,PATH) = max
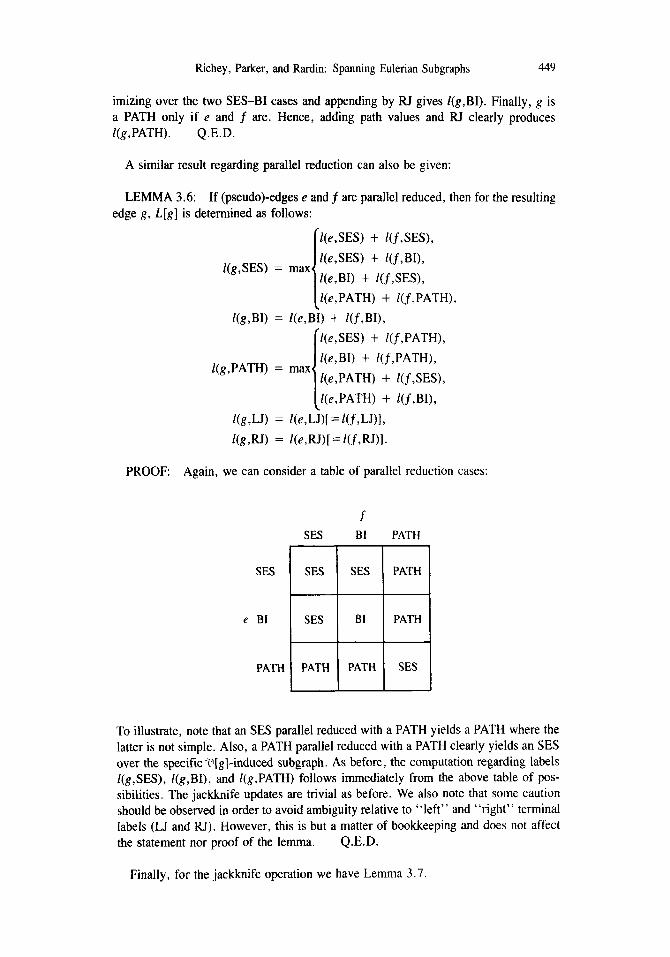
PROOF: Again, we can consider a table of parallel reduction cases:
f SES BI PATH
SES
e BI
PATH
To illustrate, note that an SES parallel reduced with a PATH yields a PATH where the latter is not simple. Also, a PATH parallel reduced with a PATH clearly yields an SES over the specific V[g]-induced subgraph. As before, the computation regarding labels l(g,SES), l(g,BI), and l(g,PATH) follows immediately from the above table of pos- sibilities. The jackknife updates are trivial as before. We also note that some caution should be observed in order to avoid ambiguity relative to “left” and “right” terminal labels (LJ and RJ). However, this is but a matter of bookkeeping and does not affect the statement nor proof of the lemma. Q.E.D.
Finally, for the jackknife operation we have Lemma 3.7.
450 Naval Research Logistics Quarterly, Vol. 32 (1985)
LEMMA 3.7: If (pseudo)-edge f is jackknife reduced with edges el,e2, . . . ,ek, then for the resulting edges g,&, . . . ,gkr L[gi ] are determined as follows:
l(gi,RJ) = l(ei3J) + l(f,SES) + l(f,RJ),
l (gi ,*) = l(e,,*) for all other labels *.
PROOF: Again, the stated updates follow immediately since jackknife reductions interact only through a single-cut (terminal) vertex. Q.E.D.
Observe that the original definition of a jackknife uses only one edge e rather than k such edges. This distinction does not change the series-parallel property of the graph, but it is needed in order for the algorithm to be correct.
We are now in a position to state the basic computational procedure for the maximum SES problem. Accordingly, we have:
ALGORITHM MXSES
STEP 0: Initialization. Let G@$) be a series-parallel graph and set gr + 6. For each e E 6, initialize L[e] such that I(e,SES) = - w, I(e,BI) = 0, l(e,PATH) = 1, and l(e,LJ) = l(e,RJ) = 0.
STEP 1: Reduction. Beginning with the initial G,, perform series, parallel, and jackknife operations referring to Lemmas 3.5-3.7, updating G , accordingly. When G, is a single edge, stop; the optimal SES can be obtained by backtracking through the labels created in the reduction sequence.
We will leave it to the reader to demonstrate the use of algorithm MXSES. Its correctness and complexity are summarized by Theorem 3.8.
THEOREM 3.8: Algorithm MXSES will produce a maximum edge cardinality SES in a series-parallel graph, G(D,&), in time, which is polynomial in ID1 and l&l.
PROOF: The correctness of the procedure follows from the proofs of Lemmas 3.5-3.7. Its complexity can be determined from the requirements of testing whether or not an arbitrary graph, G(I7,6), is series-parallel. In Rardin et al. [7], this effort is shown to be linear in 1'111 and 161. The only additional requirement involves label updates per the earlier lemmas. However, this computation is independent of instance size relative to series and parallel reductions and linear for jackknife reduction. The stated polynomiality of the algorithm follows. Q.E.D.
The Minimum SES Case
Of course, for an arbitrary series-parallel graph, finding an SES having the fewest number of edges can also be accomplished by the procedure given above. We simply replace maximization with minimization everywhere and replace --a, in Step 0 with +a. Let us suppose, however, that we want to employ the algorithm to test if an arbitrary series-parallel graph is Hamiltonian. Obviously, we could find an SES of minimum cardinality (assuming one exists) and compare this value (+ 00 if an SES
Richey, Parker, and Rardin: Spanning Eulerian Subgraphs 45 I
does not exist) with the order of the input graph. In what follows, we describe a shortcut.
First, a simplification is in order in that the statement of Theorem 3.1 can be modified to include only biconnected graphs. This is done to accommodate the trivial, necessary condition that for a graph to be Hamiltonian, it must contain no cut-vertex. It follows then that the jackknife reduction in the theorem can be eliminated.
A principal result of this section can be summarized by Theorem 3.9.
THEOREM 3.9: If a biconnected graph, GV”(6), is series-parallel, then it has at most one Hamiltonian cycle.
PROOF: Consider any sequence of series and parallel operations [(i) and (ii) of Theorem 3.11 that reduce G to a single edge. Letting the reduced graphs be given again by G,, it is clear the operation (i) on some G, cannot reduce the number of Hamiltonian cycles and operation (ii) will do so only if G, consists of two parallel edges. It thus follows that G contains at most a single Hamiltonian cycle. Q.E.D.
An alternative way of viewing the result of Theorem 3.9 is that if a graph, GQJ,&), has at least two Hamiltonian cycles, then it cannot be series-parallel. That is, let a pair of distinct cycles be el and t$. Then letting 6, and 6* be the edge sets implied by
and C2, it is clear that G(D,&l U G,) possesses a subgraph homeomorphic from K 4 . Using the proof of Theorem 3.9, we now give the following algorithm for finding
a Hamiltonian cycle in series-parallel graphs or concluding that one does not exist.
ALGORITHM SPHAM
STEP 0: Initialization. Relative to the (series-parallel) graph G(T\,6), label each edge e E 6 by l(e) = {e}. Let G, + G.
STEP 1: Series reduction. Locate (if possible) a degree-; vertex in G,, say j , and denote the (pseudo)-edges incident to j by e = ( i , j ) and f = ( j , k ) . If the only such j has i = k, go to Step 3. Otherwise, replace e and f with labels l(e) = by (pseudo)-edge g with I(g) = tl 0 t2.
STEP 2: Parallel reduction. Locate (if possible) a pair of parallel (pseudo)-edges in G,, e and f with incident vertices i and j . If e and f are both pseudo and G, contains more than two vertices, stop; G is not Hamiltonian. If one or both of the edges are pseudo and these are the only edges in G,, go to Step 3. If neither e nor f is pseudo and these are not the only edges of G,, replace e and f by g with I (g) = {e} . Finally, if one edge is pseudo and the other is not, keep the (pseudo)-edge as well as its label and discard the other edge. Repeat this step until no parallel edges remain, then return to Step 1.
STEP 3: Stopping. G, is now a cycle on two vertices where either one edge is pseudo and the other is not, where both are pseudo, or where both are real. In all cases, the Hamiltonian cycle in G is obtained from the labels of the final two edges.
and l(f) =
Clearly, for those graphs which are Hamiltonian, the required vertex ordering can
The correctness of SPHAM follows from earlier results and the simple Lemma 3.10. be preserved and updated during the course of the reduction.
452 Naval Research Logistics Quarterly, Vol. 32 (1985)
LEMMA 3.10: Any graph that is homeomorphic from the complete bipartite graph K2.3 cannot be Hamiltonian.
PROOF: The biparticity of K2.3 precludes it from having an odd cycle and it is thus non-Hamiltonian. Likewise, any graph homeomorphic from K2,3 cannot be Ham- iltonian either since arbitrary vertex insertions cannot alter this condition. Q.E.D.
Hence, we have:
THEOREM 3.11: Algorithm SPHAM will correctly produce a Hamiltonian cycle in a biconnected, series-parallel graph, G, or will conclude that none exists.
PROOF: If Step 3 of the algorithm is reached, we have certainly concluded that G is Hamiltonian. Since each label represents a Hamiltonian path on the subgraph corresponding to its (pseudo)-edge, and since all vertices of G must be in one of the two subgraphs, the desired cycle is easily produced from the final labels. Otherwise, the only way the algorithm can stop is in Step 2. Here, some G, results with more than two vertices and having two (pseudo)-edges in parallel. But this means that the original graph possesses a subgraph homeomorphic from K2,3 and so is not Hamiltonian by Lemma 3.10. Q.E.D.
As before, we shall leave the demonstration of the algorithm to the reader. Rather, we summarize this section with the following characterization.
THEOREM 3.12: A biconnected, series-parallel graph, G(V,&), is Hamiltonian if and only if it has no subgraph homeomorphic from K2.3.
PROOF: The theorem will follow easily from a pair of lemmas we state without proof.
LEMMA 3.13: (e.g., [ 6 ] ) If a biconnected graph, G(U,&), possesses no subgraph homeomorphic from K2.3, then G is Hamiltonian. Also, we have the following necessary condition for Hamiltonicity.
LEMMA 3.14: (e.g., [l]) If a graph, G(V,&), is Hamiltonian, then for every nonempty subset =6 C D, the number of connected components of the graph induced by .(1/.fl is no greater than 161.
Now to establish the result of Theorem 3.12, we see first that the if part follows directly from Lemma 3.13. To see the only if direction, let G@,&) be any graph satisfying the hypothesis of the theorem and suppose G possesses a subgraph ho- meomorphic from K2,3. Then G must have at least three internally disjoint paths con- necting a pair of vertices, say x and y. However, these paths must each contain at least two edges. Now, since G is series-parallel, it contains no subgraph homeomorphic from K4, which implies that any path connecting internal vertices of any two of the xy paths must contain x or y. Thus, letting ?) = {x,y} , we have that the graph induced by TlR!) contains no fewer than three components. However, this violates the necessary conditions of Lemma 3.14, so G is not Hamiltonian and the proof is complete.
Richey , Parker, and Rardin: Spanning Eulerian Subgraphs 45 3
4. DISCUSSION
In a sense, the natural sparseness of series-parallel graphs may lead to the expectation that for a given instance, values of the minimum and maximum SES problems would not differ greatly. Indeed, finding an instance on which they agree contributes to the statement and proof of Theorem 2.2. As a minor aside, however, one might wonder about the maximum difference between the two values.
It turns out that this difference can be, in the limit, as large as the number of vertices. To see this, consider the maximum number of edges present in any series-parallel graph (without multiple edges). For p vertices, the number is 2p - 3, which follows from the fact that the edge disjoint union of two spanning trees on p vertices must contain a K4 homeomorph. Further, it is easy to construct Hamiltonian (but non- Eulerian) graphs with this number and, moreover, such that the removal of a single edge leaves an SES.
Changing our perspective somewhat, suppose we consider the problem of producing a maximum SES on non-series-parallel graphs. Since we have little hope of doing this by any polynomial-time procedure, we may turn to nonexact ideas. To this extent, the following naive approach could be used From some non-series-parallel graph, G(V,&), simply construct a maximal series-parallel subgraph and apply algorithm MXSES.
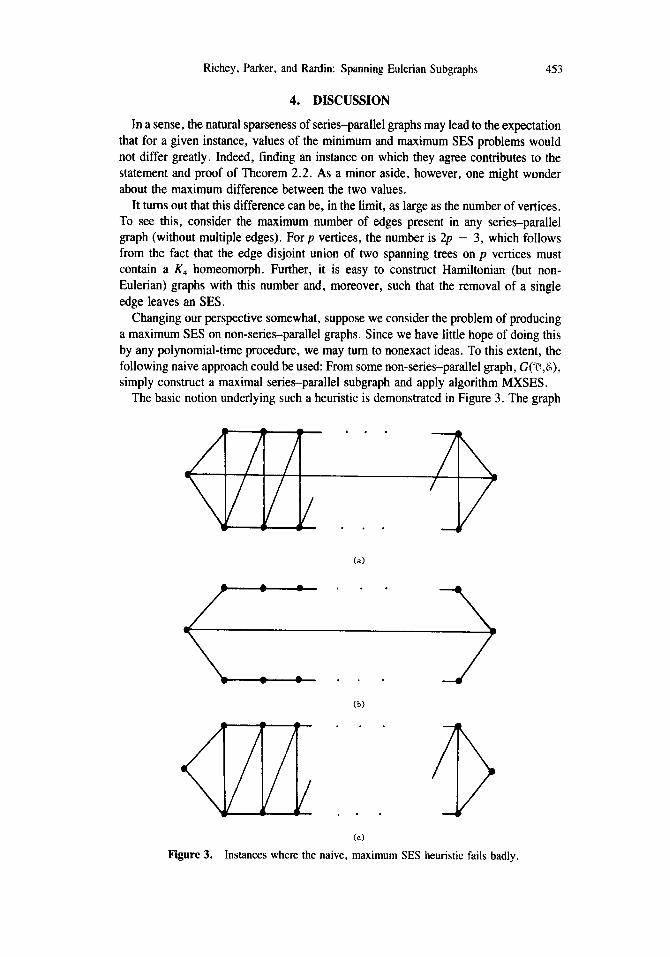
The basic notion underlying such a heuristic is demonstrated in Figure 3. The graph
(C)
Figure 3. Instances where the naive, maximum SES heuristic fails badly.
454 Naval Research Logistics Quarterly, Vol. 32 (1985)
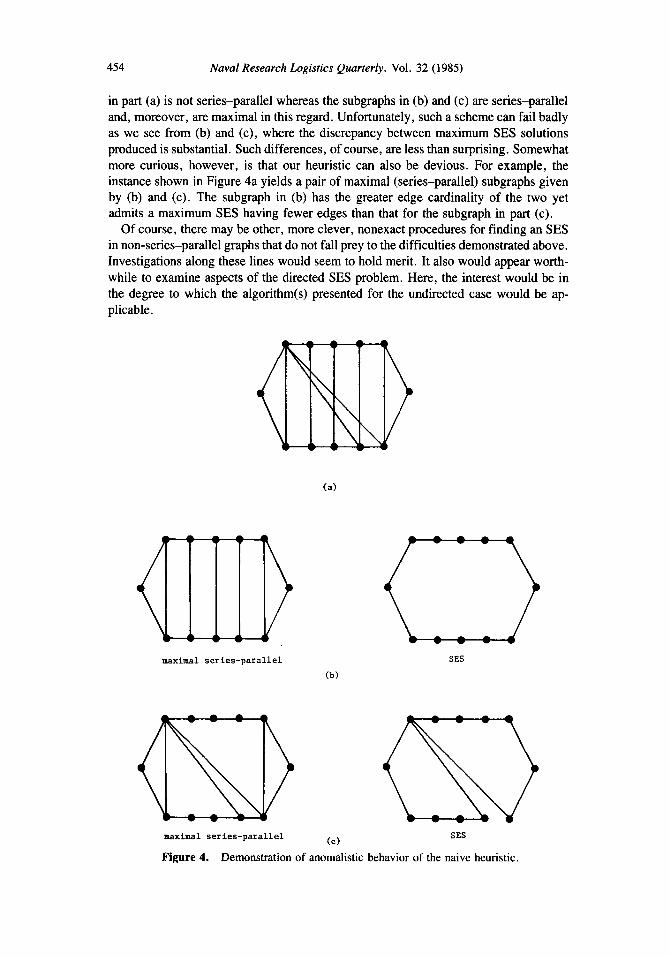
in part (a) is not series-parallel whereas the subgraphs in (b) and (c) are series-parallel and, moreover, are maximal in this regard. Unfortunately, such a scheme can fail badly as we see from (b) and (c), where the discrepancy between maximum SES solutions produced is substantial. Such differences, of course, are less than surprising. Somewhat more curious, however, is that our heuristic can also be devious. For example, the instance shown in Figure 4a yields a pair of maximal (series-parallel) subgraphs given by (b) and (c). The subgraph in (b) has the greater edge cardinality of the two yet admits a maximum SES having fewer edges than that for the subgraph in part (c).
Of course, there may be other, more clever, nonexact procedures for finding an SES in non-series-parallel graphs that do not fall prey to the difficulties demonstrated above. Investigations along these lines would seem to hold merit. It also would appear worth- while to examine aspects of the directed SES problem. Here, the interest would be in the degree to which the algorithm(s) presented for the undirected case would be ap- plicable.
maximal series-parallel
maximal series-parallel
SES
(b)
SES ( C )
Figure 4. Demonstration of anomalistic behavior of the naive heuristic.
Richey, Parker, and Rardin: Spanning Eulerian Subgraphs 455
ACKNOWLEDGMENT
This material is based on work partially supported by The National Science Foun- dation under Grant ECS-8300533. The authors would like to thank an anonymous referee for helpful comments on an earlier version of this paper.
REFERENCES
[ 11 Bondy, J. A., and Murty, U. S . R., Graph Theory with Applications, American Elsevier
[2] Dirac, G. A., “A Property of 4-Chromatic Graphs and Some Remarks on Critical Graphs,”
[3] Duffin, R. J., “Topology of Series-Parallel Networks,” Journal Math. Anal. Appl. 10,
[4] Edmonds, J., and Johnson, E. L., “Matching, Euler Tours and the Chinese Postman,”
[5] Garey, M., Johnson, D. S., and Tarjan, R. E., “The Planar Hamiltonian Circuit Problem
[6] Harary, F., Graph Theory, Addison-Wesley, Reading, MA, 1969. [7] Rardin, R. L., Parker, R. G., and Wagner, D., “Definitions, Properties and Algorithms
for Detecting Series-Parallel Graphs,” ISyE Report Series, Georgia Institute of Technology, Atlanta, GA, 1983.
[8] Rardin, R. L., Parker, R. G., and Richey, M. B., “A Polynomial-Time Algorithm for the Steiner Tree Problem on Graphs,” ISyE Report Series, Georgia Institute of Technology, Atlanta, GA, 1982.
[9] Richey, M. B., Parker, R. G., and Rardin, R. L., “A Solvable Case of the Minimum Weight Equivalent Subgraph Problem,” ISyE Report Series, Georgia Institute of Tech- nology, Atlanta, GA, 1983.
[lo] Takamizawa, K., Nishizeki, T., and Saito, N., “Linear-Time Computability of Combi- natorial Problems on Series-Parallel Graphs,” J.A.C.M. , 29, 623-641 (1982).
[ l l ] Wald, J. A., and Colboum, C. J., “Steiner Trees, Partial 2-Trees, and Minimum IF1 Networks,” Networks, 13, 159-167 (1983).
Publishing Co., New York, 1976.
J o u r y l of the London Mathematical Society, 27, 85-92 (1952).
303-318 (1965).
Mathematical Programming, 5 , 88-124 (1973).
is NP-complete,” SIAM Journal of Computing, 5 , 704-714 (1976).





























