Embed Size (px)
Citation preview

Journal of Combinatorial Optimization 4, 99–107 (2000)c© 2000 Kluwer Academic Publishers. Printed in The Netherlands.
On Shortestk-Edge-Connected Steiner Networksin Metric Spaces∗XIUFENG DUDepartment of Mathematics, University of Qiqihaer, Heilongjiang, China
XIAODONG HU† [email protected]. of Applied Math., Chinese Academy of Sciences, Beijing, China
XIAOHUA JIA [email protected] of Computer Science, City University of Hong Kong, Kowloon, Hong Kong
Received September 1, 1999; Revised September 2, 1999
Abstract. Given a set of pointsP in a metric space, letlk(P) denote the ratio of lengths between the shortestk-edge-connected Steiner network and the shortestk-edge-connected spanning network onP, and letrk =inf{lk(P) | P} for k ≥ 1. In this paper, we show that in any metric space,rk ≥ 3/4 for k ≥ 2, and there exists apolynomial-timeα-approximation for the shortestk-edge-connected Steiner network, whereα = 2 for evenk andα = 2+ 4/(3k) for oddk. In the Euclidean plane,rk ≥
√3/2, r3 ≤ (
√3+ 2)/4 andr4 ≤ (7+ 3
√3)/(9+ 2
√3).
Keywords: k-edge-connectivity, spanning networks, Steiner networks, Steiner ratio
1. Introduction
Let P be a finite set of points in a metric space. Ak-edge-connected Steiner network onPis a multigraph whose vertex-set containsP and for each pair of vertices inP there existk edge disjoint paths between them. The length of any such network is the total length ofthe interconnecting edges. Here the length of an edge is defined as the distance betweenits two end vertices. GivenP, let lk(P) denote the ratio of lengths between the shortestk-edge-connected Steiner network and the shortestk-edge-connected spanning network onP, and letrk = inf{lk(P) | P}. Clearly,rk ≤ 1 for all k ≥ 1. rk is called thegeneralizedSteiner ratio, and to determine the value ofrk is called thegeneralized Steiner ratio problem,asr1 is known as theSteiner ratio(Du and Hwang, 1995).
For k = 1, Du and Hwang (1992) proved that in the Euclidean planer1 =√
3/2, thissolves Gilbert-Pollak’s long standing conjecture (Gilbert and Pollak, 1968). In addition,Hwang (1976) proved that in the rectilinear planer1 = 2/3. Readers may refer to thesurvey by Du and Hwang (1995) on Steiner ratio problems. Fork ≥ 2, Hsu and Hu
∗This work is supported in part by City Univ. of Hong Kong under grant No. 7000778 and National 973 InformationTechnology and High-Performance Software Program of China.†Current address: Department of Computer Science, City University of Hong Kong, Kowloon, Hong Kong.E-mail: [email protected]

100 DU, HU AND JIA
(1994, 1998) proved that in the Euclidean plane√
3/2 ≤ r2 ≤ 2(2+ √3)/(6+ √3) and√3/2 ≤ r3 ≤ (3+ √3)/5. Moreover, when all points inP lie on the boundary of the
convex hull ofP, l2(P) = 1 andl3(P) > (2+√3)/4. In addition, Hsu et al. (1995) provedthat in the rectilinear plane, 3/4≤ r2 ≤ 6/7 and 2/3≤ r3 ≤ 7/8.
In Hsu et al. (to appear), Hsu et al. studied a generalized Steiner ratio problem, where forP, k-edge-connected Steiner network onP is defined to be anyk-edge-connected spanningnetwork onV with V ⊇ P, i.e., for each pair of points inV (not just in P) there existk edge-disjoint paths between them. They proved that fork ≥ 2 and P in any metricspace,lk(P) ≥ (k + 1)/(k + 2) for evenk ≥ 2, andlk(P) ≥ k/(k + 1) for odd k ≥ 3.Moreover, there exists a polynomial-tiemα-approximation algorithm for the shortestk-edge-connected Steiner network, whereα = 3/2 for evenk andα = (3k + 1)/(2k) foroddk.
Monma et al. (1990) and Bienstock et al. (1990) studied the problem of constructing theshortestk-connected spanning networks onP, where the length is defined by a nonnegative,symmetric function onP × P satisfying the triangle inequality. They proved that for anyP, l2(P) ≥ 3/4, and the equality can be approached arbitrarily closely by a special classof graphs with canonical distance function.
Note that fork-edge-connected Steiner networks onP with k ≤ 3, assumingk edgedisjoint paths between any pair of given points or any pair of vertices in Steiner networksmakes no difference. Accordingly, the resent results in Hsu et al. (to appear) improve someof early results in Hsu and Hu (to appear) and Hsu et al. (1995). In this paper, we showthat fork ≥ 2, rk ≥ 3/4 in any metric space and moreover, there exists a polynomial-timeα-approximation for constructing the shortestk-edge-connected Steiner network, whereα = 2 for evenk andα = 2+ 4/(3k) for oddk. In the Euclidean plane,rk ≥
√3/2 for
k ≥ 2 andr3 ≤ (√
3+ 2)/4, which improves an earlier result in Hsu and Hu (to appear),andr4 ≤ (7+ 3
√3)/(9+ 2
√3).
2. Preliminaries
Given P in a metric space, letG be ak-edge-connected Steiner network onP. (G maycontain multiple-edge.) Denote byV(G) the vertex-set and byE(G) the edge-set ofG.Points inV(G)\P are calledSteinerpoints while points inP are calledregular points(also called terminals in some references). Denote byλ(x, y;G) the maximal number ofedge-disjoint paths betweenx andy in G. It is well known that ifG is k-edge-connected,then
λ(G) ≡ minx,y∈V(G)
λ(x, y;G) ≥ k.
Denote by [x, y]G the set of edges between the verticesx andy in G and byxyan arbitrarysingle edge in [x, y]G.
The length of edge betweenx andy is defined as the distance betweenx andy in under-lying metric space and denoted byl (x, y). Accordinglyl ( , ) is a nonnegative, symmetricfunction satisfying the triangle inequality, i.e., for allx, y andz in the metric space,
k-EDGE-CONNECTED STEINER NETWORKS 101
(A) l (x, y) ≥ 0, the equality holds if and only ifx = y,(B) l (x, y) = l (y, x),(C) l (x, z) ≤ l (x, y)+ l (y, z).
The length ofG, denoted byl (G), is defined as the total length of edges inG, i.e.,
l (G) ≡∑
xy∈E(G)
l (x, y).
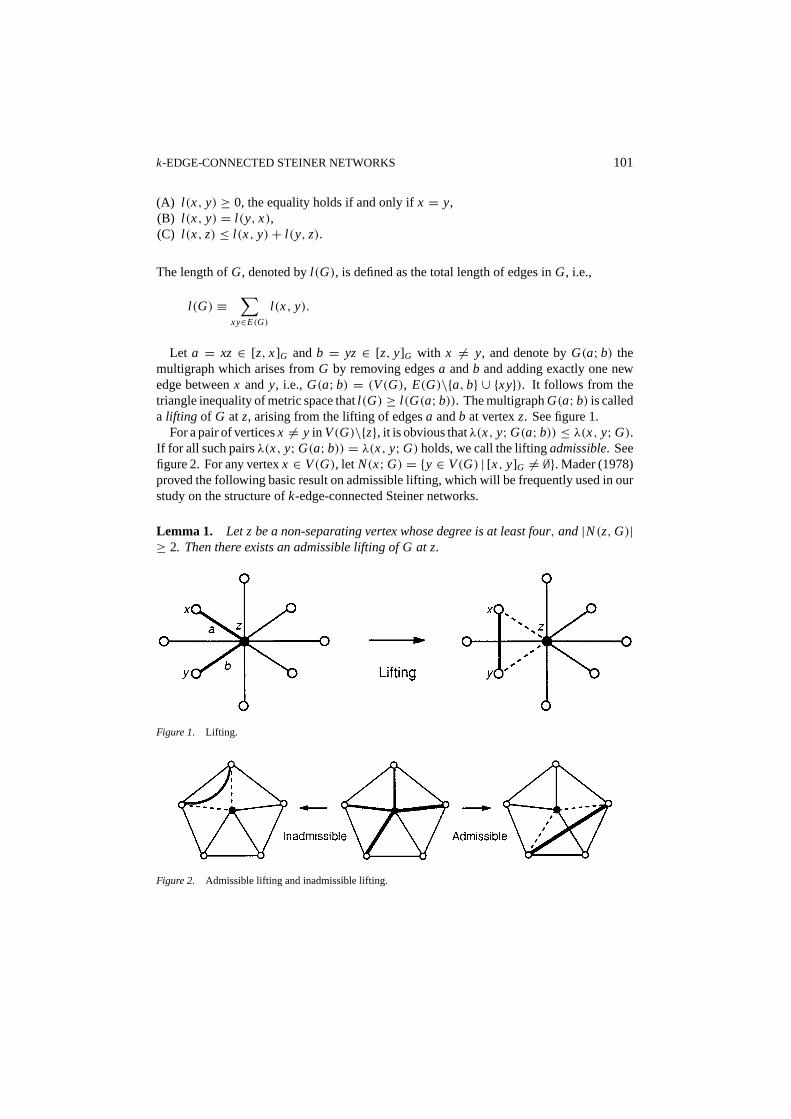
Let a = xz ∈ [z, x]G andb = yz ∈ [z, y]G with x 6= y, and denote byG(a; b) themultigraph which arises fromG by removing edgesa andb and adding exactly one newedge betweenx and y, i.e., G(a; b) = (V(G), E(G)\{a, b} ∪ {xy}). It follows from thetriangle inequality of metric space thatl (G) ≥ l (G(a; b)). The multigraphG(a; b) is calleda lifting of G at z, arising from the lifting of edgesa andb at vertexz. See figure 1.
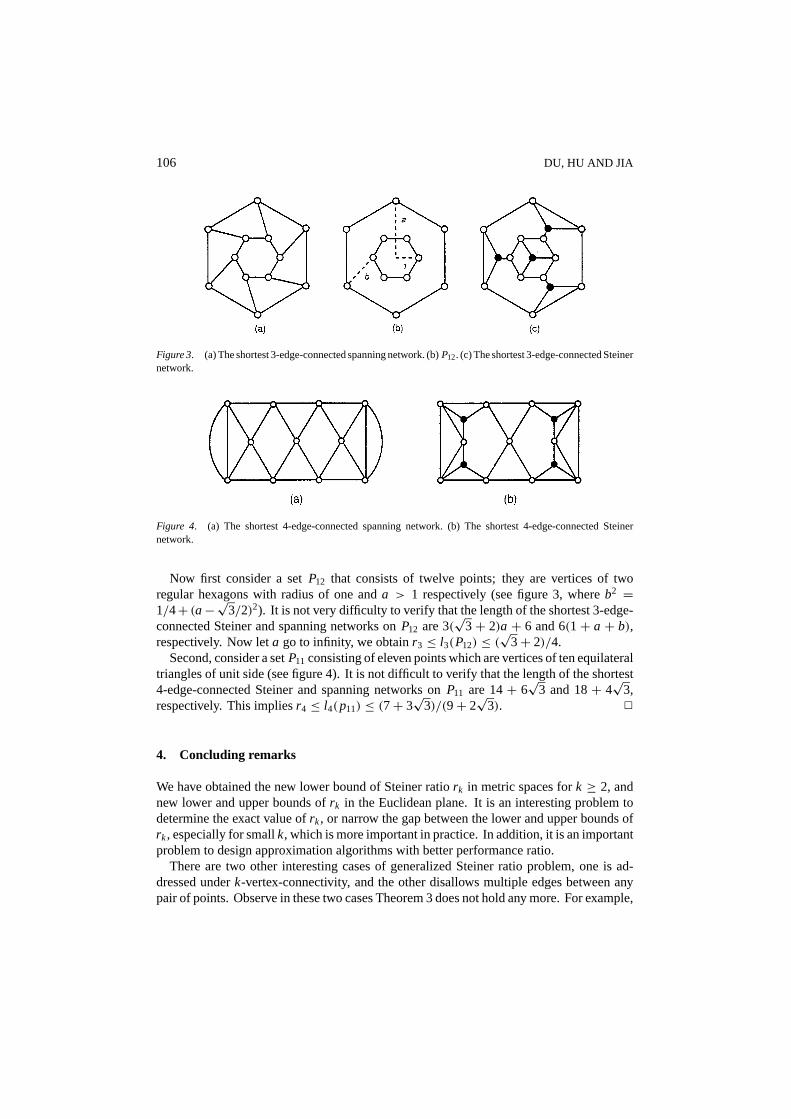
For a pair of verticesx 6= y in V(G)\{z}, it is obvious thatλ(x, y;G(a; b)) ≤ λ(x, y;G).If for all such pairsλ(x, y;G(a; b)) = λ(x, y;G) holds, we call the liftingadmissible. Seefigure 2. For any vertexx ∈ V(G), let N(x;G) = {y ∈ V(G) | [x, y]G 6= ∅}. Mader (1978)proved the following basic result on admissible lifting, which will be frequently used in ourstudy on the structure ofk-edge-connected Steiner networks.
Lemma 1. Let z be a non-separating vertex whose degree is at least four, and|N(z,G)|≥ 2. Then there exists an admissible lifting of G at z.
Figure 1. Lifting.
Figure 2. Admissible lifting and inadmissible lifting.

102 DU, HU AND JIA
Edmonds (1973) obtained many results on edge-disjoint branching of (unweighted)graphs and digraphs. One of them is given below, which finds an interesting application forstudying the length ofk-edge-connected Steiner networks.
Lemma 2. LetG be a digraph andv a vertex ofG = (V, E). Suppose that for any subsetS ⊆ V\{v}, there are k arcs fromV\S to S inG. ThenG has k arc-disjoint spanningarborecences routed atv.
3. Main results
Lemma 3. Given a set of points P in a metric space and k≥ 2, there exists a shortestk-edge-connected Steiner network G on P such that every Steiner point in V(G)\P hasdegree three.
Proof: Letsbe a Steiner point ofG that has degree at least four. Thens is a non-separatingvertex ofG, and|N(s,G)| ≥ 2. By Lemma 1,G has an admissible lifting ats if it has degreeat least four. Thus we can apply admissible liftings ats until the degree ofs is reducedto 3 or 2, since the degree ofs decreases by two each time of lifting while the degree ofother vertices remain unchanged. If the final degree ofs is two, then we can construct a newnetworkG′ by lifting at s and removings (along with two edges incident tos). Obviously,G′ is still ak-edge-connected Steiner network onP, sinceλ(x, y;G′) = λ(x, y;G), for allpairsx 6= y in V(G)\{s} = V(G′). Moreover it follows from the triangle inequality thatl (G′) ≤ l (G). 2
Theorem 1. In any metric space rk(P) ≥ 3/4 for k ≥ 2.
Proof: Let G be a shortestk-edge-connected Steiner network inP. By Lemma 3, wemay assume that each Steiner point inG has degree three. Lets be a Steiner point ands′
be a point inN(s;G) such thatl (s, s′) = min{l (s, x) | x ∈ N(s;G)}. Consider the networkG′ = (V(G), E(G)∪ {ss′}). Clearly,G′ is ak-edge-connected Steiner network onP. Notethat Steiner points has degree four inG′. Now construct a new network reduced fromG′ bytwo times of admissible liftings ats and deletings. This reduced network is still ak-edge-connected Steiner network onP but with fewer Steiner points than original networkG. Inthe case of thats′ is also a Steiner point of degree four inG′, apply admissible lifting ats′ and deletes′. As a result of this operation, two Steiner pointss ands′ can be removedfrom G′ while keeping the reduced networkk-edge-connected. Clearly, we are able to applythis lifting and deleting process to every Steiner point remained in the resulting network(and remove one or two Steiner points each time) until no Steiner point exists. LetSbe theset consisting of all the Steiner points which receive lifting and deleting process. Clearly,S⊆ V(G)\P, where the inclusion strictly holds when the above mentioned case occurs, i.e.,s′ ∈ V(G)\P ands′ /∈ S. Denote byG∗ the final network. ClearlyG∗ is ak-edge-connected

k-EDGE-CONNECTED STEINER NETWORKS 103
spanning network onP. Moreover
l (G)+∑s∈S
l (s, s′)
=(
l (G)−∑s∈S
∑x∈N(s;G)
l (s, x)
)+∑s∈S
( ∑x∈N(s;G)
l (s, x)+ l (s, s′)
)≥ l (G∗).
For eachs ∈ S, let N(s;G′) = {x, y, s′}. Then
l (s, s′)+∑
x∈N(s;G)l (s, x) = 2l (s, s′)+ l (s, x)+ l (s, y) ≥ l (s′, x)+ l (s′, y),
which implies,
l (G)+∑s∈S
l (s, s′) ≥ l (G∗)
Since for anys ∈ S, we havel (s, s′) ≤ l (s, x), ∀x ∈ N(s;G) ands has degree three inG,i.e., |N(s;G)| = 3, then
l (s, s′) ≤ 1
3
∑x∈N(s;G)
l (s, x).
Therefore,
l (G∗)l (G)
≤ 1+∑
s∈S l (s, s′)l (G)
= 1+∑
s∈S l (s, s′)(l (G)−∑s∈S l (N(s;G)))+∑s∈S l (N(s;G))
≤ 1+ 1
3,
which implies that
lk(P) ≥ l (G)
l (G∗)≥ 3
4.
The proof is completed. 2
Lemma 4. For any finite point set P in a metric space, let Gk be a shortest k-edge-connected spanning network on P. Then the length of Gk is at least k/2 times of the lengthof minimum spanning tree of P, i.e., l (Gk) ≥ k
2l (G1), for k ≥ 2.

104 DU, HU AND JIA
Proof: Let Gk be a digraph obtained fromGk by replacing each edge inGk with twooppositely oriented arcs. Clearly,Gk satisfies the condition of Lemma 2. Thus for anyvertexv, there arek arc-disjoint spanning arborecences rooted atv in Gk, each of them haslength greater than or equal to the length of minimum spanning tree ofP. Hence we get2l (Gk) = l (Gk) ≥ kl(G1), and the proof is finished. 2
Note that Lemma 4 is proved without using the triangle inequality, and it matches theresult |E| ≥ k
2|V | of unweighted graphs. Moreover, we can get a better lower bound ofl (Gk) in the following way: choose vertexs in Gk with maximum degree in terms ofweights, i.e.,
∑v∈N(s;Gk)
l (sv) = max
{ ∑v∈N(u;Gk)
l (uv)
∣∣∣∣∣ u ∈ V(Gk)
},
and denote byGk the digraph obtained fromGk by deleting arcs enterings. Hence we canget (
1− 1
n
)l (Gk) ≥ l (Gk) ≥ kl(G1),
which implies
l (Gk) ≥ k
2
(n
n− 1
)l (G1).
Theorem 2. There exists a polynomial-timeα-approximation for the shortest k-edge-connected Steiner network, whereα = 2 for even k andα = 2+ 4/(3k) for odd k.
Proof: Consider a simple algorithm as follows: 1) Apply Christofides’ heuristic(Christofides, 1976) to generate a Hamiltonian cycle ofP, denoted byC(P); 2) ApplyKruskal’s method (Kruskal, 1956) to produce a minimal spanning tree ofP, denote it byK(P); 3) Construct a spanning network onP consisting ofbk/2c duplication ofC(P) and(dk/2e − bk/2c) duplication ofK(P), and indicate it byCKk(P). It is easy to verify thatthis algorithm can produce ak-edge-connected spanning network onP in time of O(|P|3)(see Papadimitriou and Steiglitz, 1982).
Now let Gk andGk be a shortestk-edge-connected Steiner and spanning network onP,respectively. Then by Theorem 1 and Lemma 4, we havel (Gk) ≥ 3
4l (Gk) ≥ 3k8 l (K(P)).
In addition, by Christofides’ result (Christofides, 1976), we havel (C(P)) ≤ 32l (K(P)).
Therefore
l (CKk(P)) =⌊
k
2
⌋l (C(P))+
(⌈k
2
⌉−⌊
k
2
⌋)l (K (P))
≤⌊
k
2
⌋3
2l (K (P))+
(⌈k
2
⌉−⌊
k
2
⌋)l (K (P))

k-EDGE-CONNECTED STEINER NETWORKS 105
=(⌈
k
2
⌉+ 1
2
⌊k
2
⌋)l (K (P))
≤ 8
3k
(⌈k
2
⌉+ 1
2
⌊k
2
⌋)l (Gk),
hence the proof is completed. 2
Observe that in some metric spaces, adding Steiner points is unable to reduce the lengthof spanning networks. For example, consider discrete metric spaceD, wherel (x, x) = 0,for all x inD andl (x, y) = 1, for any pairx 6= y inD. It is not difficult to show that for anyP in D, lk(P) = 1 for k ≥ 1, this means, Steiner ratiork = 1. However, in the followingwe show that in Euclidean plane, Steiner ratiork is less than one.
Theorem 3. In the Euclidean plane and lk(P) ≥√
3/2 for k ≥ 2 and moreover, r3 ≤(√
3+ 2)/4 and r4 ≤ (7+ 3√
3)/(9+ 2√
3).
Proof: Given a finite point setP, letGk be a shortestk-edge-connected Steiner network onP. Now produce a new networkG′k by removing a Steiner points (together with those threeedges incident tos) and adding a minimum spanning tree (MST) ofN(s;Gk). It is easy toverify thatk-edge-connectivity is preserved. Notice that there exists a points′ ∈ N(s;Gk)
which has degree two in this MST ofN(s;Gk). In the case of thats′ is also a Steiner point,this means thats ands′ are two adjacent Steiner points. Thens′ has degree four inG′k. Wecan apply two admissible liftings ats′ to the new network and deletes′. In fact, we are ableto remove all Steiner points fromG′k by repeating this process. LetSbe the set consisting ofall Steiner points which receive this lifting and removing process. Clearly,S⊆ V(Gk)\P,and the inclusion strictly holds when the above mentioned case occurs, i.e.,s′ ∈ V(G)\Pands′ /∈ S. Denote the final network byG∗k. It is obvious thatG∗k is ak-edge-connectedspanning network onP. From Du and Hwang’s result (Du and Hwang, 1992), we have
l (Gk) =(
l (Gk)−∑s∈S
l (N(s;Gk))
)+∑s∈S
l (N(s;Gk))
≥(
l (Gk)−∑s∈S
l (N(s;Gk))
)+√
3
2
∑s∈S
l (MST of(N(s;Gk)))
≥√
3
2
(l (G′k)−
∑s∈S
l (N(s;G′k))+∑s∈S
l (MST of(N(s;Gk)))
)
=√
3
2l (G∗k).
Hence
lk(P) ≥ l (Gk)
l (G∗k)≥√
3
2.
106 DU, HU AND JIA
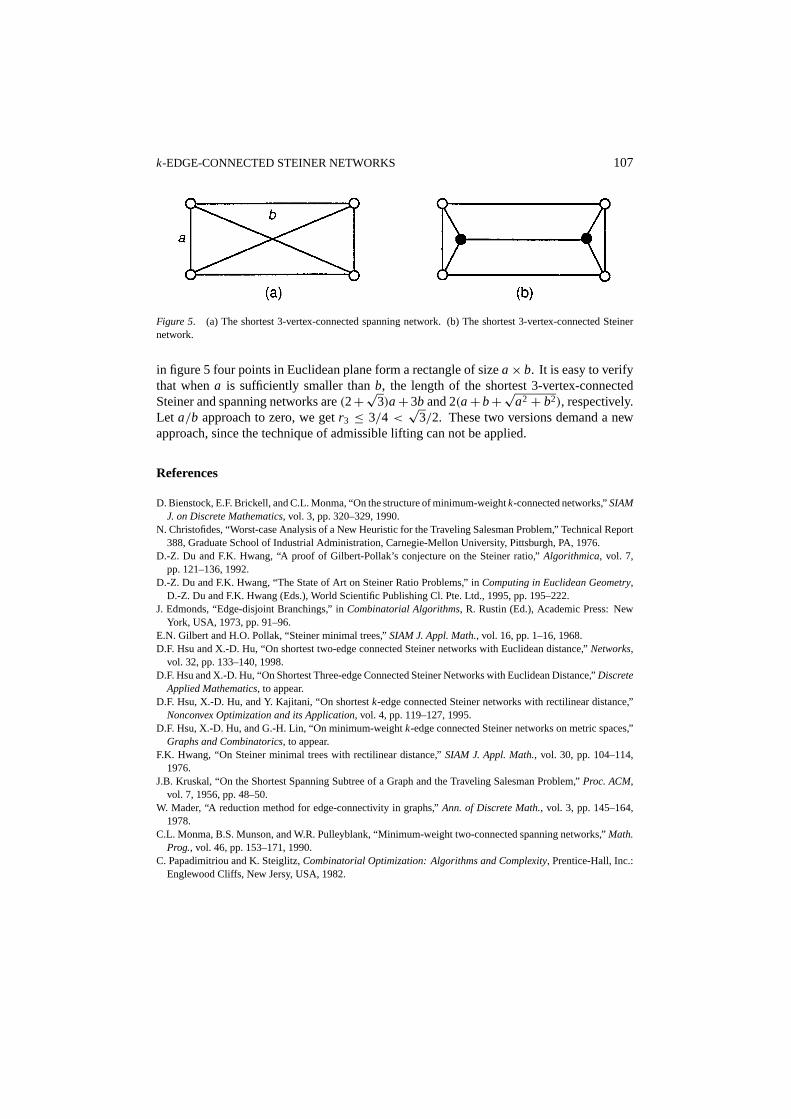
Figure 3. (a) The shortest 3-edge-connected spanning network. (b)P12. (c) The shortest 3-edge-connected Steinernetwork.
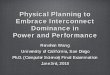
Figure 4. (a) The shortest 4-edge-connected spanning network. (b) The shortest 4-edge-connected Steinernetwork.
Now first consider a setP12 that consists of twelve points; they are vertices of tworegular hexagons with radius of one anda > 1 respectively (see figure 3, whereb2 =1/4+ (a−√3/2)2). It is not very difficulty to verify that the length of the shortest 3-edge-connected Steiner and spanning networks onP12 are 3(
√3+ 2)a + 6 and 6(1+ a + b),
respectively. Now leta go to infinity, we obtainr3 ≤ l3(P12) ≤ (√
3+ 2)/4.Second, consider a setP11 consisting of eleven points which are vertices of ten equilateral
triangles of unit side (see figure 4). It is not difficult to verify that the length of the shortest4-edge-connected Steiner and spanning networks onP11 are 14+ 6
√3 and 18+ 4
√3,
respectively. This impliesr4 ≤ l4(p11) ≤ (7+ 3√
3)/(9+ 2√
3). 2
4. Concluding remarks
We have obtained the new lower bound of Steiner ratiork in metric spaces fork ≥ 2, andnew lower and upper bounds ofrk in the Euclidean plane. It is an interesting problem todetermine the exact value ofrk, or narrow the gap between the lower and upper bounds ofrk, especially for smallk, which is more important in practice. In addition, it is an importantproblem to design approximation algorithms with better performance ratio.
There are two other interesting cases of generalized Steiner ratio problem, one is ad-dressed underk-vertex-connectivity, and the other disallows multiple edges between anypair of points. Observe in these two cases Theorem 3 does not hold any more. For example,
k-EDGE-CONNECTED STEINER NETWORKS 107
Figure 5. (a) The shortest 3-vertex-connected spanning network. (b) The shortest 3-vertex-connected Steinernetwork.
in figure 5 four points in Euclidean plane form a rectangle of sizea× b. It is easy to verifythat whena is sufficiently smaller thanb, the length of the shortest 3-vertex-connectedSteiner and spanning networks are(2+√3)a+3b and 2(a+b+√a2+ b2), respectively.Let a/b approach to zero, we getr3 ≤ 3/4 <
√3/2. These two versions demand a new
approach, since the technique of admissible lifting can not be applied.
References
D. Bienstock, E.F. Brickell, and C.L. Monma, “On the structure of minimum-weightk-connected networks,”SIAMJ. on Discrete Mathematics, vol. 3, pp. 320–329, 1990.
N. Christofides, “Worst-case Analysis of a New Heuristic for the Traveling Salesman Problem,” Technical Report388, Graduate School of Industrial Administration, Carnegie-Mellon University, Pittsburgh, PA, 1976.
D.-Z. Du and F.K. Hwang, “A proof of Gilbert-Pollak’s conjecture on the Steiner ratio,”Algorithmica, vol. 7,pp. 121–136, 1992.
D.-Z. Du and F.K. Hwang, “The State of Art on Steiner Ratio Problems,” inComputing in Euclidean Geometry,D.-Z. Du and F.K. Hwang (Eds.), World Scientific Publishing Cl. Pte. Ltd., 1995, pp. 195–222.
J. Edmonds, “Edge-disjoint Branchings,” inCombinatorial Algorithms, R. Rustin (Ed.), Academic Press: NewYork, USA, 1973, pp. 91–96.
E.N. Gilbert and H.O. Pollak, “Steiner minimal trees,”SIAM J. Appl. Math., vol. 16, pp. 1–16, 1968.D.F. Hsu and X.-D. Hu, “On shortest two-edge connected Steiner networks with Euclidean distance,”Networks,
vol. 32, pp. 133–140, 1998.D.F. Hsu and X.-D. Hu, “On Shortest Three-edge Connected Steiner Networks with Euclidean Distance,”Discrete
Applied Mathematics, to appear.D.F. Hsu, X.-D. Hu, and Y. Kajitani, “On shortestk-edge connected Steiner networks with rectilinear distance,”
Nonconvex Optimization and its Application, vol. 4, pp. 119–127, 1995.D.F. Hsu, X.-D. Hu, and G.-H. Lin, “On minimum-weightk-edge connected Steiner networks on metric spaces,”
Graphs and Combinatorics, to appear.F.K. Hwang, “On Steiner minimal trees with rectilinear distance,”SIAM J. Appl. Math., vol. 30, pp. 104–114,
1976.J.B. Kruskal, “On the Shortest Spanning Subtree of a Graph and the Traveling Salesman Problem,”Proc. ACM,
vol. 7, 1956, pp. 48–50.W. Mader, “A reduction method for edge-connectivity in graphs,”Ann. of Discrete Math., vol. 3, pp. 145–164,
1978.C.L. Monma, B.S. Munson, and W.R. Pulleyblank, “Minimum-weight two-connected spanning networks,”Math.
Prog., vol. 46, pp. 153–171, 1990.C. Papadimitriou and K. Steiglitz,Combinatorial Optimization: Algorithms and Complexity, Prentice-Hall, Inc.:
Englewood Cliffs, New Jersy, USA, 1982.



















![Shortest-pathg rocerys hoppingjustinppearson.com/pages/shortest-path-grocery-shopping/shortest-path-grocery-shopping.pdfGraphPlot[meshGraph, ImageSize→ Full] Getthegraphvertices](https://img.pdfslide.net/doc/110x75/5ec9717fc18133726b4d56ff/shortest-pathg-rocerys-h-graphplotmeshgraph-imagesizea-full-getthegraphvertices.jpg)







