Upload
paramsandhu
View
222
Download
0
Tags:
Embed Size (px)
DESCRIPTION
desi
Citation preview
Demolition Methods
RAJARSHI SHAHU COLLEGE OF ENGINEERING, PUNE
AcknowledgementI take this opportunity to express my deep sense of sincere gratitude to my guide Prof. G.R Patil for his valuable, encouraging & inspiring guidance & support throughout this study. It was a great experience working under Prof. G.R Patils supervision, which helped me to have a deeper interest in this field.I owe sincere thanks, more than what I can express, towards Prof. G.A Hinge, Head of Civil engineering Department, R.S.C.O.E., as all the success is the result of his affectionate encouragement.I would like to thank M.E coordinator Prof R.S Desai for his help & support throughout the course. I am grateful to my Principal Dr.B.S Bormane for his encouragement and guidance throughout the master of engineering course.
Department of Civil Engineering Sandhu Harpreet SinghRSCOE, PuneDecember 2011
INDEXCONTENTPAGE NO
ACKNOWLEDGEMENT1
INDEX2
LIST OF FIGURES3
AIMS AND OBJECTIVES4
CHAPTER 1 : INTRODUCTION 6
CHAPTER 2 : LITERATURE REVIEW11
CHAPTER 3 : NONLINEAR FINITE ELEMENTS43
CHAPTER 5 : RESPONSE ANALYSIS55
REFRENCES61
List of FiguresTITLEPAGE NO
Figure 3.1Catenary cable element35
Figure 3.2Deformed and undeformed configuration of the beam element40
Figure 4.1(a) vehicle model on a bridge element(b) typical modes of vibration44
Figure 4.2The moving load algorithm49
Figure 4.3Bump dimensions53
AIMS AND OBJECTIVESRecent increases in limit spans of cable stayed bridges have highlighted the need for new concept in analysis & design. Because of the flexibility of cable stayed, cable supported system may be subjected to potentially large dynamic motion induced by wind, seismic and traffic forces. The increased flexibility requires more theoretical studies on non-linear behavior & on dynamic analysis. The analysis becomes complicated when this nonlinearity is to be dealt with. Steel-Alloy cables are extensively used to support many slender structures such as long span roofs, communication tower, suspension bridges, offshore structures, etc. Such structures are often more economical than the conventional ones because of high efficiency simple tension. However cable supported structures are quite flexible, so they may deform considerably when subjected to transverse loads. Consequently a more challenging geometric nonlinear analysis may well be required.The recent developments in bridge engineering have also affected damping capacity of bridge structures. Major sources of damping in conventional bridgework have been largely eliminated in modern bridge designs reducing the damping to undesirably low levels. As an example, welded joints are extensively used nowadays in modern bridge design. This has greatly reduced the hysteresis that was provided in riveted or bolted joints in earlier bridges. For long span cable stayed bridges, energy dissipation is very low and is often not enough on its own to suppress vibrations. To increase the overall damping capacity of the bridge structure, one possible option is to incorporate external dampers (discrete damping devices such as viscous dampers and tuned mass dampers) into the system. Such devices are frequently used today for cable-stayed bridges. However, it is not believed that this is always the most effective and the most economic solution. Therefore, a great deal of research is needed to investigate the damping capacity of modern cable-stayed bridges and to find new alternatives to increase the damping of the bridge structure.To consider dynamic effects due to moving traffic on bridges, structural engineers worldwide rely on dynamic amplification factor specified in bridge design codes. These factors are usually a function of the bridge fundamental frequency or span length and states how many times the static effect must be magnified in order to cover the additional dynamic loads. This is the traditional method used today for design purpose and can yield a conservative and expensive design for some bridges but might underestimate the dynamic effects for others. In addition, design codes disagree on how this factor should be evaluated and today, when comparing different national codes, a wide range of variation is found for the dynamic amplification factor. Thus, improved analytical technique that consider all the important parameters that influence the dynamic response, such as bridge-vehicle interaction and road surface roughness, are required in order to check the true capacity of existing bridges to heavier traffic and for proper design of new bridges.Various studies of the dynamic response due to moving vehicles have been conducted on ordinary bridges. However, they cannot be directly applied to cable supported bridges, as cable supported bridges are more complex structures consisting of various structural components with different properties. Consequently, more research is required on cable stayed bridges to take account of the complex structural response and to realistically predict their response due to moving vehicles. Aim And ObjectivesThe aim of this work is to study the moving load problem of cable supported bridges using different analysis methods and modeling techniques. The influence of different parameters of the response of cable stayed bridges is investigated. However, it should be noted that the aim is not to completely solve the moving load problem and develop new formulas for the dynamic amplification factors.Nonlinear finite element method is used to study cable-stayed bridge model, e.g. exact cable behavior and nonlinear geometric effects. A beam element is used for modeling the girder and the pylons, and a catenary cable element, derived using exact analytical expressions for the elastic catenary, is used for modeling the cables. This cable element has the distinct advantage over the traditionally used elements in being able to approximate the curved catenary of the real cable with high accuracy using only one element. Mode superposition technique and the deformed dead load tangent stiffness matrix are used for evaluating the linear traffic load response.1.
CHAPTER 1 - INTRODUCTION1.1 GeneralAlthough several long span cable-stayed bridges are build or proposed for future bridges, little is known about their dynamic behavior under the action of moving traffic loads. Cable supported bridges are complex structures consisting of various structural components with different properties. Thus, to take care of the complex structural response and to more realistically predict their response due to traffic loading, a detailed structural analysis is required. Various studies of the dynamic response due to moving vehicles have been conducted on ordinary bridges. However they cannot be directly applied to modern cable stayed bridges.Due to the low damping, lightweight and high flexibility of modern long span cable stayed bridges, vibrations induced by traffic can be a serious problem. Vibration effects play a much more dominating role for the design and not to be underestimated, as the ratio between traffic load and dead load can be larger for these modern bridges. It is well known that long-term vibration of the bridge deck and cables in particular the cable in the cable-stayed bridges might enhance and accelerate the fatigue damage on the bridge. Costly repairs and modifications have been undertaken on relatively new cable-stayed bridges, because the possibility of fatigue caused the traffic-inducted vibrations had not been sufficiently investigated at the design stage. In addition, dynamic forces of heavy vehicles can lead to bridge deterioration and eventually increasing maintenance costs and decreasing service life of the bridge structure. Therefore it ought to be evident that it is important for engineers to not only use design code formulas but also to accurately investigate and understand the vibration effects at the design stage. At this stage the bridge structure can readily be modified, rather than having to make costly modifications later on.For cable-stayed bridges, energy dissipation is very low and is often not enough on its own to suppress vibrations. To increase the overall damping capacity of the bridge structure, one possible option is to incorporate external dampers into the system. Such dampers can be found today on many existing cable supported bridges. However, it is not always easy to find a location with significant relative movements and enough space to accommodate these devices. Moreover, this is not always the most effective and economic solution. Since the cable supported bridge structures to be analyzed are flexible and can undergo large displacements, the nonlinear finite element method is utilized considering all sources of geometric nonlinearity. A beam element, which includes geometrically nonlinear effect and is derived using a consistent mass formulation, is adopted for modeling the girder and the pylons. Whereas, a two-node cable element derived using exact analytical expressions for the elastic catenary, is adopted for modeling the cables.The dynamic response of the structure is evaluated using the mode superposition technique utilizing the deformed dead load tangent stiffness matrix. This is a linear dynamic procedure based on results from a nonlinear static analysis. This approach has won considerable popularity is spite of its limitations, as one usually only need to consider the first dominant modes of vibration to obtain sufficiently accurate results. 1.2 Cable Structures and Cable Modeling TechniquesThe increasing attention on the cable stayed bridges is not only due to their inherent beauty but also to their stubborn nature is not easily revealing the secret of their nonlinear behavior. Cable structures exhibits geometrically nonlinear behavior, they are very flexible and undergo large displacements before attaining their equilibrium configuration. As an example, due to this inherently nonlinear behavior, conventional dead load analysis which assumes small displacements is often not applicable, except in special cases in the feasibility design stage. In the final design stages however, a refined nonlinear dead load analysis procedure should be adopted.For cable-stayed bridges, the trend today is to use more shallow and slender stiffening girders combined with increasing span lengths. For that reason, it is highly desirable in bridge engineering to develop accurate procedures that can lead to a thorough understanding and a realistic prediction of structural response. Although several investigators studied the nonlinear behavior of cable supported bridges, very few tackled the problem of using cable elements for modeling the cables.Commercial finite element codes used in civil engineering today can be readily used for modeling and analysis of modern cable structures as they can accurately model the actual cable curvature. As the cable represents a flexible member with virtually no resistance to applied moments, the idea of replacing each cable by a bar element with equivalent cable stiffness or by beam element with negligible moment of inertial has found wide acceptance and has been adopted by many investigators and designers using commercial codes.An iterative analysis procedure for cables, based on using exact analytical expression for the elastic catenary, was suggested by some investigators. This approach was later adopted by other investigators, developed and used for the analysis of very simple cable structure and of power transmission lines. The same approach was also suggested for the analysis of cable stayed bridges.
1.3 Objective of the WorkThe main objective of the work is to use a more straightforward and general approach, based on the nonlinear finite element method so that it can handle general analysis difficulties of cable-stayed bridge analysis and allow a through study of the moving load problem of cable stayed bridges.The main aims of this study is to implement a approach for evaluating the response and to find whether linear dynamic traffic load analysis is adequate when investigating the behavior of cable supported bridges under the action of moving traffic.Since, in the work, the main concern is to investigate the dynamic response of bridges and not the dynamics of the vehicle itself and since the spans of the cable supported bridges are considerably larger than the vehicle axle base, a very simple vehicle model is adopted. Since the main aim is not to develop design formula for calculating the dynamic amplification factors, only hypothetical trains of moving traffic are simulated and used for analysis.For the purpose of this study, computer codes, fully capable of handling the above stated important factor and parameters are implemented using the MATLAB language. The developed codes have been tested by comparing results against those obtained using the commercial finite element software.
CHAPTER 2 LITERATURE REVIEWED2.1 IntroductionIn the study of any subject it is necessary to investigate and to find out the different existing cases and the available material concerning that particular subject. In order to collect the necessary and valuable information, the literature survey is done, so that more light can put on the subject. A range of work has been done on the analysis of the cable-stayed bridges. It covers whole range of topics from parametric study of dynamic analysis of Cable-Stayed bridges, effect of non-linearity, different methods of analysis etc.An attempt is made here to present voluminous literature available on dynamic analysis of CableStayed bridges.
2.2 RESEARCH2.2.1 THREE-DIMENSIONAL NONLINEAR STATIC ANALYSIS OF CABLE STAYED BRIDGESBY ALY S. NAZMY AND AHMED M ABDUL-DHAFFARThe nonlinear analysis of three-dimensional long-span cable-stayed bridges under the effect of their own dead weight and a set of initial cable tensions is formulated. All sources of geometric nonlinearity, such as cable sag, axial force-bending moment interaction in the bridge deck and towers and change of the bridge geometry due to large displacements, are considered in the analysis. A computer program that uses a tangent stiffness iterative-incremental procedure is described to perform the nonlinear static analysis. Problems in modeling this special type of structure are addressed. Examples of three-dimensional mathematical models representing the present and future trends in cable-stayed bridge construction are presented. The results show that these flexible structures are highly nonlinear under dead loads, especially for very long span bridges. The analysis is essential to start linear or nonlinear dynamic analyses from the dead load deformed state utilizing the tangent stiffness matrix of the bridge under gravity load conditions.2.2.2 THREE-DIMENSIONAL NONLINEAR DYNAMIC ANALYSIS OF CABLE-STAYED BRIDGEBY THAI HUU-TIA, KIN SEUNG-EOCK, KIM BYUNG SUK AND HOH CHANG BINThe plastic hinge concept is used to model the material yielding while the stability functions are employed to capture the geometric nonlinearity. The cable is modeled using an equivalent cable modulus of elasticity. A computer software considering both geometric and material nonlinearity is developed to predict the nonlinear behavior of the structures. Accuracy and efficiency of the proposed software are verified by comparing with the SAP2000 and ABAQUS. It is concluded that the proposed software proves to be a reliable and efficient tool for daily use in engineering design.2.2.3 NONLINEAR STATIC ANALYSIS OF CABLE-STAYED BRIDGE STRUCTURESBY JOHN F. FLEMINGThe nonlinear static analysis of plane cable-stayed bridge structure is discussed. A computer program is presented which will analyze a plane cable-stayed bridge structure considering the effect of initial cable tensions, member dead weight and distributed and concentrated live loads.2.2.4 ACTIVE MITIGATION OF WIND-INDUCED RESPONSE-PROGRESS, ISSUES & PROSPECTS.BY BOGUSZ BIENKIWICZ & PETER M. YOUNGThis paper presents a brief overview of recent developments in the area of structural response control, with focus on active mitigation of wind-induced effects. Addressed are outstanding issues of response control & aspects specified to active control of wind-induced vibrations. Discussed are also control strategies, successfully implemented in non civil engineering applications, which appears to be tremendous, yet currently underutilized, potential for control of the response of the building, bridge & other structures. A brief tutorial on optimal & robust response control is presented & application of robust controls techniques is illustrated by considering a simple example. Optimal & robust controls strategies are considered in analysis & design of an ideal model of a structure & a model subject to unmolded dynamics & real parametric uncertainty reference is made to the existing analysis & simulation tools (matlab / Simulink / m-Tools) available to aid in robust controller design & validation. Potential impact of these techniques on the expected performance & reliability of practical active control system for civil engineering applications is assessed. Finally, an initiation of a collaborative research, focused on application of wind-induced response is proposed.2.2.5 AERODYNAMIC INVESTIGATION OF CABLE-STAYED BRIDGE WITH 2-EDGE GIRDERBY TAKUYA MURAKAMI, KATSUAKI TAKEDA, MICHIAKI TAKAO AND ROKUSUI YUIThis paper investigates aerodynamic countermeasures using 2-edge girder sections for a cable-stayed bridge. Wind tunnel tests were conducted to confirm the performance of the new countermeasures. Additional structural counter measures based on increasing the rigidity of the bridge were also investigated. This study concluded that the addition of a horizontal member at the top of the tower is the most effective method for increasing the flutter onset velocity. These aerodynamic countermeasures were also found to be economical.2.2.6 WIND TUNNEL TEST OF AN ACTIVE MASS DAMPER FOR BRIDGE DECKSBY R. KORLIN & U. STAROSSEKAn active mass damper is implemented to a bridge section model test in a wind tunnel to enhance the flutter stability. Servo motors controlling the rotational motion of control masses serve as actuators. The torque generated by rotational acceleration is used to control the angular motion of the section model. The mechanical parameters of the uncontrolled and the controlled structures are identified by the Modified Ibrahim Time Domain Method (MITD). The deterioration of the control performance through control loop time delay is determined. The critical wind speeds are determined experimentally by wind tunnel tests and numerically by flutter analysis. The experimental and numerical results are in good agreement. The experimental results underline the applicability of an active mass damper and can be seen as a first step towards an implementation in real bridges.2.2.7 CABLE STAYED BRIDGE OVER VISTULA RIVER IN PLOCK. DYNAMIC ANALYSIS AND SITE TESTBY KRZYSZTOF ZOLTOWSKI, TOMASZ WASKThe bridge over the Vistula River has just been finished. The main span of 375 m is constructed as a steel cable stayed system. The advanced FEM model was developed to verify the structure. Static and dynamic site test was executed to study mechanic nature of the structure. Dynamic load was implemented to the deck and response of superstructure was measured. On the basis of advanced FEM model and site test results, the dynamic response of spans and cables under the traffic load was developed. 2.2.8 TWO SPANS CABLE STAYED BRIDGESBY MOHAMED NAGUIB ABOU EL-SAADThis paper is concerned about the study of two spans cable stayed bridges. Three common types of these bridges as harp, radiating and fan shapes are considered. The static analysis considering single plane and double planes of cables as the mathematical models is carried out. The variations of pylon height to span of the bridge in all cases, the influence of connections between pylons and deck floor and the arrangements of cables are the major factors of this work. The effect of symmetrical and asymmetrical loads such as, the own weight of all structural elements, traffic load including impact, and wind loads in longitudinal and transverse directions of the bridges are taken into account. The study of fundamental natural frequencies is investigated. Finally, the dynamic analysis in time domain for some special cases is presented. In both static and dynamic analysis, the energy method, based on the minimization of the total potential energy of structural elements, via conjugate gradient technique is used. The procedure is carried out using the iterative steps to acquire the final configurations. The author constructed all computer programs used in the analysis. The major conclusions, which have been drawn from the present work, are outlined.2.2.9 NUMERICAL ANALYSIS OF BRIDGE AERODYNAMICSBY GUIDO MORGENTHALPhenomena involving the interaction between wind and structures have become important problems in the design of structures. This is due to more slender and light-weight structures, enabled by modern materials, construction methods and design methodologies. The interaction between structural oscillations and the complicated physics of fluid flow around the structure leads to complex feedback problems. Wind-induced vibrations must be predicted and checked against in the design process. Often the aerodynamic problems are a governing factor in the design and early knowledge about the aerodynamic behavior of a structure is required. The desire of the engineer to understand the aerodynamic behavior of a structure at an early stage of its design thus calls for an office-based solution. Here, numerical methods known as Computational Fluid Dynamics (CFD) are a viable alternative to wind tunnel testing. To date these have, despite of a number of successful applications, by far not reached the significance that their equivalents in structural mechanics and structural dynamics have.2.2.10 LONG-TERM MEASUREMENTS ON A CABLE-STAYED BRIDGEBY ENDER OZKAN, JOSEPH MAIN AND NICHOLAS P. JONESA long-term ambient vibration survey on the Fred Hartman Bridge in Texas is in progress primarily to monitor stay cable vibration. Part of this project includes efforts to better under-stand the overall wind performance and the modal characteristics of the structure. A PC-based data acquisition system was installed on the bridge to monitor deck and stay accelerations, wind speeds/directions and meteorological data during the three-year test program. One of the primary tasks in this process was the identification of structural frequencies and mode shapes under a wide range of meteorological and operating environments. The statistical distributions of the modal frequencies of the structure have been obtained from the locations of the peaks of the power spectra. In addition, the frequencies, as well as mode shape estimates, have been compared to a finite element (FE) model of the structure, showing reasonable agreement. This paper will summarize findings from the efforts described above, as well as describing relevant data from stay cable measurements.2.2.11 MODELING OF CABLE-STAYED BRIDGES FOR ANALYSIS OF TRAFFIC INDUCED VIBRATIONSBY RAID KAROUMIThis paper presents a method for modeling and analysis of cable stayed bridges under the action of moving vehicles. Accurate and efficient finite elements are used for modeling the bridge structure. A beam element is adopted for modeling the girder and the pylons. Whereas, a two-node catenary cable element derived using exact analytical expressions for the elastic catenary, is adopted for modeling the cables. The vehicle model used in this study is a so called suspension model that includes both primary and secondary vehicle suspension systems. Bridge damping, bridge-vehicle interaction and all sources of geometric nonlinearity are considered. An iterative scheme is utilized to include the dynamic interaction between the bridge and the moving vehicles. The dynamic response is evaluated using the mode superposition technique and utilizing the deformed dead load tangent stiffness matrix. To illustrate the efficiency of the solution methodology and to highlight the dynamic effects, a numerical example of a simple cable-stayed bridge model is presented.2.2.12 EFFECT OF DECK SUPPORTS ON BUFFETING RESPONSE OF CABLE STAYED BRIDGES USING TIME DOMAIN ANALYSISBY L. PARAMESWARAN1, KRISHEN KUMAR2, P.N. GODBOLE2, D. N. TRIKHA3The paper describes the time domain buffeting analysis carried out to understand the effect of six different types of deck supports on the response of cable stayed bridges. For this purpose, spectral representation method has been used to digitally generate the stochastic wind velocity field. Instead of assuming a single damping value for different modes, the modal structural damping evaluated by energy based approach and empirically determined aerodynamic damping have been used in the analysis. The study helps in understanding the variation in the mean wind response, peak buffeting response, axial forces in the cables and the spatial distribution of the gust response factor with the type of deck supports. It is concluded that an elastically supported or a floating deck is the most suitable for buffeting governed design of cable stayed bridges, because with these types of supports, the behavior of cable stayed bridges under static and dynamic forces is similar, and the gust response factor is lower in comparison to that for a bridge with hinged or movable type of deck supports.2.2.13 DECENTRALIZED ACTIVE TENDON CONTROL AND STABILITY OF CABLE-STAYED BRIDGESBY D. Q. CAO, J. M. KO, Y. Q. NI AND H. J. LIUIn this paper, active tendon control of cable-stayed bridges subjected to vertical seismic excitation is investigated by using the decentralized control technique. A control system, made up of control cables and the corresponding control mechanism, is employed for seismic response control of cable-stayed bridges. A simply supported cable-stayed beam model with lumped-mass idealization is used as the bridge model for control design. A control algorithm in terms of the decentralized control approach specific for large-scale system is then developed with the bridge model being decomposed into two interconnected subsystems. A set of decentralized controllers that minimize the performance index of each subsystem and guarantee the stability of overall structure are designed by use of the scale Lyapunov functions. The proposed active control algorithm in application to cable-stayed bridges has the advantage that each subsystem can be controlled independently, using only the local information. The performance of the proposed control algorithm is verified through numerical simulation.2.2.14 SLIDING MODE CONTROL OF CABLE-STAYED BRIDGE SUBJECTED TO SEISMIC EXCITATIONBY SEOK J. MOON; LAWRENCE A. BERGMAN, M.ASCE; AND PETROS G. VOULGARISThe working group on bridge control within the ASCE Committee on Structural Control recently initiated a first-generation benchmark problem addressing the control of a cable-stayed bridge subjected to seismic excitation. Previous research examined the applicability of a LQG-based semi active control system using magneto rheological (MR) Dampers to reduce the structural response of the benchmark bridge and confirmed the capability of the MR damper-based system for seismic response reduction. In this paper, sliding mode control (SMC) is applied in lieu of the LQG formulation to the benchmark bridge problem. The performance and robustness of the SMC-based semi active control system using MR dampers (SMC/MR) is investigated through a series of numerical simulations, and it is confirmed that SMC/MR can be very effectively applied to the benchmark cable-stayed bridge, subjected to a wide range of seismic loading conditions.2.2.15 UI FORMULATION FOR CABLE STATE OF EXISTING CABLE-STAYED BRIDGEBY JUAN HUANG, RONGHUI WANG AND TAO TANGAs inclined cables are primary load-bearing members of cable-stayed bridges, the accuracy of the method of analyzing cable state is a key issue in keeping existing bridges safe. Typical cable characteristics are that they are susceptible to corrosion and tend to sag during their long service life, so it is essential to take these characteristics into account in the structural analysis to determine the actual behavior of a cable in service. However, most of the recent methods of cable structure analysis are done on the material in a perfect state. The deterioration characteristics, such as cable corrosion and initial sag caused by the cable weight, are disregarded, which makes it difficult to apply the current methods when dealing with cable structures that are in service. By solving the boundary problem of inclined cable using the governing differential equation for the UL (Updated Lagrangian) formulation, this paper introduces a convergence iterative solution method for the analysis of cable structures of existing cable-stayed bridges. When using the iterative solution, it is convenient to determine the relationship between the co-ordinate difference of cable-end position, cable tension and cable weight. With the approach described in this paper, the effect of cable sag can be included without any approximations. Moreover, cable corrosion described by the method leads to good accuracy of results. The method meets the engineering requirements for the analysis of existing long-span cable structures. The results obtained from the method show that it is efficient and reliable. It can be conveniently applied in the analysis of large-displacement cable structures that are in service, which provides a new approach to structural health monitoring of long-span cable-stayed bridges.2.2.16 ADVANCED CABLE-STAYED BRIDGE CONSTRUCTION PROCESS ANALYSIS WITH ANSYS/ CIVILFEMBY EDUARDO SALETE, JNOS NZ, JAVIER APARICIO, ABELARDO BAOS, EMILIO BAOS - AYUSOThis paper demonstrates how sophisticated computational techniques can help to understand better the behavior of cable-stayed bridges and what kind of tools are available for bridge engineers to handle even the most extreme situations.Since one of the key elements in the success of this structural system lies in its construction method, the main focus of this paper is on the simulation of the free-cantilever construction process and the determination of cable forces during the phases of the erection in order to achieve the desired shape and internal force distribution in the final state of the structure. The paper, using ANSYS/CivilFEM, a software package developed for advanced civil engineering analyses, presents different numerical techniques (based on both linear and non-linear analysis) to determine the final state of the bridge and the backward process analysis to conduct a step-by-step analysis of the construction.Finite Element Analysis can provide engineers with an overwhelming amount of data therefore the efficient presentation of results (post processing) is of outmost importance especially for such complex systems as cable-stayed bridges. The paper also demonstrates how the flexibility of ANSYS/CivilFEM allows the users to find a sensible way to access all the necessary data and produce both text based and graphical outputs.A typical example of a cable-stayed bridge is analyzed by the methods described in the paper and the results are presented using post processing techniques.2.2.17 GEOMETRICALLY NONLINEAR ANALYSIS OF CABLE-STAYED BRIDGES SUBJECT TO WIND EXCITATIONSBY YUH-YI LIN * AND YEN-LUNG LIEUThe effects of geometric nonlinearities on the buffeting response of cable-stayed bridges are investigated in this paper. To incorporate nonlinear effects into this analysis, an autoregressive (AR) approach is used to generate real-time wind loads based on target frequency spectra. Beam-column elements and cable elements are used to model the cable-stayed bridge. The P- effects of decks and towers and the sag effects of inclined cables are considered. The Kao Ping Hsi cable-stayed bridge is chosen as the numerical example, not only to demonstrate the validity and applicability of this time domain analysis, but also, to investigate nonlinear effects on buffeting response. Comparisons between the traditional frequency domain and the present time domain approaches are made through this analysis. It is found that the results calculated from the time domain approach agree well with those from the frequency domain as the geometric nonlinearities are ignored in the dynamic analysis. Comparisons of the results between nonlinear and linear buffeting analyses indicate that geometric nonlinearities become significant as the approaching wind velocity increases.2.2.18 AERODYNAMIC PROBLEMS OF CABLE-STAYED BRIDGES SPANNING OVER ONE THOUSAND METERSBY CHEN AIRONE, MA RUJIN, WANE DALEIThe elongating of cable stayed bridge brings a series of aerodynamic problems. First of all, geometric nonlinear effect of extreme long cable is much more significant for cable stayed bridge spanning over one thousand meters. Lateral static wind load will generate additional displacement of long cables which causes the decrease of supporting rigidity of the whole bridge & the chance of dynamic properties. Wind load being the controlling load in the design of cable-stayed bridge is a critical problem & needs to be solved. Meanwhile research on suitable system between pylon & deck indicates fixed-fixed connection system is an effective way for improvement performance of cable-stayed bridges under longitudinal wind load in order to obtain aerodynamic parameters of cable-stayed bridges spanning over one thousand meters. Identification method for flutter derivatives of full bridge aero-elastic model is developed in this paper. Furthermore vortex induced vibration & Reynolds number effects are detailed discussed.2.2.19 ON THE PERFORMANCE & DURABILITY OF STAY CABLESBY DR. H. WENZELThe number of cable stayed bridges with large spans is growing fast. Computational skills & improvement in materials have led to longer & more slender elements. These more & more flexible structures are characterized by low structural damping & low natural frequencies. Other additional conditions, such as the special arrangement of multi-cables, ice accumulation on cable surface, water rivulet by rain on cable surfaces, show at the cables different aerodynamic vibration patterns, such as rain wind induced vibration, galloping instability, flutter instability vortex induced vibration, wake galloping & similar on combination of the mentioned phenomena. Therefore a careful design has to take cable vibration into account at very early design stages. The precise evaluation of the vibration risk amplitude & if necessary an appropriate vibration control method becomes essential.This paper is concentrated on the state of the art of cable vibrations, referring to recent works of Prof. Matsumoto, Claude Dumoulin, George Magonette, Peter Irwin & others.In order to find out the relevant excitation mechanism a large number of tests in wind tunnels & in the field have been carried out. Direct measurements of the response characteristics of cables have been performed to identify the driving exiting forces. However the behavior had been turned out to be so complex, that closed solutions of the actual generation mechanism & proper vibration control could not be established yet. This contribution therefore concentrates on the state of the art to date & refers to proposed or applied methods to control the wind-induced cable vibration.2.2.20 AERODYNAMIC STABILITY OF CABLE-STAYED BRIDGES UNDER ERECTIONBY ZHANG XIN-JUN, SUN BING-NAN, XIANG HAI-FAN In this work, nonlinear multimode aerodynamic analysis of the Jingsha Bridge under erection over the Yangtze River is conducted, and the evolutions of structural dynamic characteristics and the aerodynamic stability with erection are numerically generated. Instead of the simplified method, nonlinear multimode aerodynamic analysis is suggested to predict the aerodynamic stability of cable-stayed bridges under erection. The analysis showed that the aerodynamic stability maximizes at the relatively early stages, and decreases as the erection proceeds. The removal of the temporary piers in side spans and linking of the main girder to the anchor piers have important influence on the dynamic characteristics and aerodynamic stability of cable-stayed bridges under erection.2.2.21 AN APPLICATION OF STATE SPACE METHOD TO FLUTTER ANALYSIS OF LONG SPAN CABLE STAYED BRIDGEBY S S MISHRA,The paper presents modern theory for the flutter analysis of long span cable supported bridges. An advance aerodynamic model based on finite element has been taken which can handle both flutter and buffeting analysis in the time domain. The unsteady self-excited aerodynamic forces are considered through rational function approximation of the flutter derivatives. The aerodynamic coupling effect on flutter phenomenon is considered. The three-degree freedom equation of motion in time domain is expressed in frequency- independent modal coordinates 'state-space' format. The frequencies, damping ratios and complex mode shapes (at certain wind velocity) and the critical flutter conditions are determined by solving a complex eigen value problem. Flutter conditions can be established without iterative solution because the equation of motion turns frequency independent.2.2.22 DESIGN SPECIFICATIONS FOR A NOVEL CLIMATIC WIND TUNNEL FOR THE TESTING OF STRUCTURAL CABLESBY CHRISTOS T. GEORGAKIS, H. HOLGER H. KOSS, FRANCESCO RICCIARDELLIThe newly proposed Femern fixed link between Denmark and Germany will push the limits in engineering design. The selection of a cable-stayed or suspension bridge will lead to one of the longest bridges of its type in the world. The challenges of designing a bridge are many and the prospects of cable vibrations already preoccupy both the owners and designers. In this connection, the Danish owners/operators Femern Barlt A/S, together with Storebaelt A/S, are funding a collaborative research project to examine the ways of reducing the risk of cable vibrations on a bridge solution. A novel climatic wind tunnel facility, dedicated to the testing of structural cables, is being developed as part of this research project. This paper describes the specifications and considerations for the construction of such a facility.2.2.23 TIME DOMAIN BUFFETING ANALYSIS OF CABLE-SUPPORTED BRIDGESBY W.W YANG, C.C CHANG & T.Y.P CHANGLong span cable-supported bridges are prone to wind-induced vibration. The aerodynamic performance of such bridges in strong wind regions is of great concern. In this paper, a numerical analysis approach in the time domain is proposed to predict the buffeting response of a long-span bride under turbulent wind loading. This approach is based on the nonlinear finite element model & using the step-by-step numerical integration scheme. The turbulent wind field along the bridge span-wise is stochastically simulated. The geometrical & aerodynamic nonlinearities are considered. As an example, the aerodynamic response time histories of Qi Ao Cable-stayed bridge under fully correlated, partially correlated & uncorrelated turbulent wind actions are presented.2.2.24 OUTPUT-ONLY MODAL IDENTIFICATION OF A CABLE-STAYED BRIDGE USING WIRELESS MONITORING SYSTEMSBY JIAN-HUANG WENG, CHIN-HSIUNG LOH, JEROME P. LYNCH, KUNG-CHUN LU, PEI-YANG LIN, YANG WANGThe objective of this paper is to present two modal identification methods that extract dynamic characteristics from output-only data sets collected by a low-cost and rapid-to-deploy wireless structural monitoring system installed upon a long-span cable-stayed bridge. Specifically, an extensive program of full-scale ambient vibration testing has been conducted to measure the dynamic response of the 240 m Gi-Lu cable-stayed bridge located in Nantou County, Taiwan. Two different output-only identification methods are used to analyze the set of ambient vibration data: the stochastic subspace identification method (SSI) and the frequency domain decomposition method (FDD). A total of 10 modal frequencies and their associated mode shapes are identified from the dynamic interaction between the bridges cables and deck vibrations within the frequency range of 07 Hz. The majority of the modal frequencies observed from recording cable vibrations are also found to be associated with the deck vibrations, implying considerable interaction between the deck and cables. 2.2.25 A NEW PROGRAM FOR THE DESIGN OF CABLE-STAYED BRIDGESBY EDOARDO ANDERHEGGEN, PIETRO PEDROZZIA new finite element program has been developed which allows to easily simulating all construction stages of a cable-stayed bridge taking construction history dependent phenomena such as locked-in displacements, creep and shrinkage into account. The program also automatically computes all needed pre-camber values and the cables post-tensioning. It can also be used during the bridge erection to correct unexpected deviations from the planned geometry.2.2.26 MONITORING OF WIND EFFECTS ON THE CABLE-STAYED BRIDGE ACROSS THE ZIEGELGRABENBY DR.-ING. KARL KLEINHAN , DR.-ING. BJRN SCHMIDT-HURTIENNE The second Strelasund link between the island of Rgen and the city of Stralsund crosses the Ziegelgraben with a cablestayed bridge 42 m above sea level. To prevent frequent traffic restrictions due to strong winds, wind shielding walls have been installed after investigating their effectiveness by theoretical simulations and wind tunnel tests.In order to calibrate the traffic regulations under in situ conditions, an extensive monitoring system has been installed collecting data of the wind profile above the bridge deck and on top of the 128 m high pylon. Wind speed and direction are evaluated to determine the tolerable maximum wind speed for light vehicles.The 32 cables of the Ziegelgrabenbrcke consist of parallel strands, a first application for German interstate roads. The aerodynamic properties of the cables, partially equipped with hydraulic dampers, are controlled by acceleration gauges to measure wind- and traffic- induced vibrations. This report points out how precautionary measures during the construction and early service phase - adding functional elements and supervising them by a carefully designed monitoring program will contribute to serviceability and structural integrity of a cable-stayed bridge exposed to strong winds.2.2.27 STATIC INSTABILITY ANALYSIS OF LONG-SPAN CABLE-STAYED BRIDGES WITH CARBON FIBER COMPOSITE CABLE UNDER WIND LOADBY CHIN-SHENG KAO, CHANG-HUAN KOU AND XU XIEIn this paper, a three dimensional analysis is performed to investigate the static instability of long-span cable-stayed bridges due to wind loading. Cables made of carbon fiber composite cable (CFCC) are studied. Nonlinearity due to displacement-dependent wind loading is considered. A 1400- meter cable-stayed bridge model is used to investigate the static behavior of bridges with both steel and CCFC cable. The static instability of the bridges, both after completion as well as under construction, is considered. This study concludes that the static stability of CFCC long-span cable-stayed bridges simulates that of steel cable-stayed bridges. It is also shown that the instability phenomenon occurs when the wind attack angle acting on the girder exceeds 5 degrees.2.2.28 WIND EFFECTS ON LONG SPAN CABLE STAYED BRIDGES: ASSESSMENT AND VALIDATIONBY NICHOLAS P. JONES AND ENDER OZKANThe well-known collapse of Tacoma Narrows Bridge in 1940 clearly identified the importance of aero elastic effects on long-span bridge performance. Extensive research has been carried out since then to better understand the effects of wind on long-span bridges, producing various analytical response prediction techniques. An example of the application of such techniques will be presented. However, due to challenges related with full-scale measurements, these prediction techniques have commonly been validated using only wind-tunnel experiments. Recent research has revolved around the conduct of long-term full-scale measurements on a cable-stayed bridge to compare actual bridge performance with those of analytical predictions. In order to ensure the reliability of predicted response, the input parameters, such as wind conditions at the site and modal properties of the bridge are also calibrated using corresponding measured quantities. This paper will also summarize some of the preliminary results and outline their implications.2.2.29 GEOMETRICALLY NONLINEAR ANALYSIS OF CABLE-STAYED BRIDGES SUBJECT TO WIND EXCITATIONSBY YUH-YI LIN AND YEN-LUNG LIEUThe effects of geometric nonlinearities on the buffeting response of cable-stayed bridges are investigated in this paper. To incorporate nonlinear effects into this analysis, an autoregressive (AR) approach is used to generate real-time wind loads based on target frequency spectra. Beam-column elements and cable elements are used to model the cable-stayed bridge. The P- effects of decks and towers and the sag effects of inclined cables are considered. The Kao Ping Hsi cable-stayed bridge is chosen as the numerical example, not only to demonstrate the validity and applicability of this time domain analysis, but also, to investigate nonlinear effects on buffeting response. Comparisons between the traditional frequency domain and the present time domain approaches are made through this analysis. It is found that the results calculated from the time domain approach agree well with those from the frequency domain as the geometric nonlinearities are ignored in the dynamic analysis. Comparisons of the results between nonlinear and linear buffeting analyses indicate that geometric nonlinearities become significant as the approaching wind velocity increases. 2.2.30 DYNAMIC ANALYSIS OF A CABLE-STAYED BRIDGE WITH UNCERTAIN STRUCTURAL PARAMETERSBY M.V.RAMA RAO & S.VANDEWALLE, M.DE MUNCK & D. MOENSThis paper focuses on the transient dynamic analysis of a cable-stayed bridge with uncertain structural parameters, subjected to an impact load. The analyses uncertainty is associated with the Youngs modulus and mass density of the reinforced concrete deck slab. These parametric uncertainties are quantified based on the fuzzy formalism, and the uncertain transient analysis is performed using the alpha-sublevel technique. At the core of the analysis, Wilsons theta method is applied to solve the transient response problem. In order to solve the sequence of optimization problems, a Kriging-based response surface methodology adapted to multiple output analysis of FE models is developed. The performance and accuracy of this approach is examined with reference to a classical global and local direct optimization approach. The focus in this comparison is both on the accuracy in the obtained interval results and on the computational efficiency. The work demonstrates the effectiveness of the Kriging-approach based fuzzy finite element method in evaluating the dynamic response of the cable-stayed bridge with multiple uncertainties.2.2.31 PRACTICAL NONLINEAR DYNAMIC ANALYSIS OF CABLE-STAYED BRIDGEBY THAI HUU-TAI & KIM SEUNG-EOCKCable-stayed bridges are widely used in bridge engineering in recent decades because of their aesthetic appearance and uniqueness. The theory and formulation of the nonlinear dynamic analysis of cable-stayed bridge have been presented in detail in Tai et al. (2007). The purpose of this paper is to focus on the case studies of the behavior of a cable-stayed bridge. The results of static behavior, natural period as well as dynamic response of the cable-stayed bridge generated by SAP2000, ABAQUS, and proposed software are compared. The good results obtained in all cases of analysis prove that the proposed software can efficiently be used in predicting the nonlinear behavior of cable-stayed bridges subjected to static and dynamic loading.
CHAPTER 3 NONLINEAR FINITE ELEMENTS1 2 3 3.1 GeneralThe cable cable-stayed bridge consists of cables, pylons and girders (bridge decks) and is usually modeled using beam and bar elements for the analysis of the global structural response. In the following, an alternative approach is presented where accurate and efficient cable and beam elements are used for the modeling. All sources of geometric nonlinearity i.e. change of cable geometry under different tension load levels (cable sag effect), change of the bridge geometry due to large displacements, and axial force-bending moment interaction in the bridge deck and pylons (P-effect), are considered in the present study.For simplicity the present study focuses on two-dimensional problems. Consequently, torsional effects and torsional modes of vibration are disregarded. As modern cable supported structures are flexible three-dimensional structures, two dimensional models are of course not adequate when studying the response of such structures under the action of environmental loads like wind, traffic, and earthquakes. However, simplified two-dimensional bridge models are still very useful for bridge designers in the preliminary design stage, e.g. for investigating the feasibility of alternative structural solutions.For formulation of cable and beam element matrices will be described in the following sections. These are included for the sake of clarity and also for the purpose of having a work as self-contained as possible. The matrices will be given in the element local coordinate system. For each individual element in the model, the evaluated element matrices in the local coordinated system are transformed to global coordinate system by the usual coordinated transformation technique. The structure matrices (i.e. the global tangent stiffness matrix Kt, global mass matrix M, and global internal force vector p) are constructed from the transformed matrices of the individual elements of the structure by the general assembly procedure. The superscript e, used later to denote e.g. the length Le or the element nodal displacement vector qe, is omitted for notational convenience.3.2 Modeling of CablesThe problem of analyzing cables under different configurations and loading conditions is very complex. This is because the behavior of cables is inherently nonlinear and also because large displacement introduce nonlinearity in the geometric sense.For cable stayed bridges, there are mainly three approaches used today to consider the nonlinear behavior of the cables. In the first approach each cable is replaced by one bar element with equivalent cable stiffness. This approach, often adopted when modeling cables in cable-stayed bridges, is referred to as the equivalent modulus approach and has been used by several investigators. Equivalent modulus approach results in softer cable response as it accounts for the sag effect but does not account for the stiffening effect due to large displacements. Still for some cases, e.g. for short span cable-stayed bridges, linear analysis utilizing the equivalent modulus approach is often sufficient, especially in the feasibility design stage. Whereas, long span cable-stayed bridges built today or proposed for future bridges are very flexible, they undergo large displacements, and should therefore be analyzed taking into account all sources of geometric nonlinearity.The second approach is to divide each cable into several straight elements, in order to adequately model the curved geometry of the cable. This would introduce many added degree of freedom with a consequent increase in computer storage requirements and computational cost. In addition, numerical problems can occur and spurious results can be obtained if equilibrium conditions, at those nodes are not satisfied.The third approach to model cables is to use isoparametric elements. Using such elements one can model the curved geometry of a cable with fewer elements compared to using straight elements and obtain a better convergence. However, those elements are stiffer and require numerical integration to formulate the element stiffness matrix.The alternative approach presented in this work is based on exact analytical expressions for the elastic catenary. In contrast to other modeling techniques mentioned above, each cable may be represented by a single 2-node finite element, which accurately considers the curved geometry of the cable, making this method very attractive for static response calculations. Even if each cable must be divided into several catenary cable elements, to include cable modes of vibration in the dynamic analysis or external loads acting between cable ends. This is mainly because fewer internal nodes need to be defined for each cable in the model. The main advantages of the proposed cable element is the reduction of degrees of freedom, the simplicity of finding the dead load geometry of the cable system, the exact treatment of cable sag, the exact treatment of cable weight as it is included in the equations used for element formulation, and the simplicity of including the effect of pretension of the cable by simply giving the unstressed cable length.3.2.1 Cable Element FormulationThe procedure presented in this section determines the complete geometry of the cable, the cable element internal force vector, and its tangent stiffness matrix from a given unstressed cable length and given position of the ends of the cable.Consider an elastic cable element, stretched in the vertical plane as shown in figure 3.1 with an unstressed length Lu, modulus of elasticity E, cross section area A, and weight per unit length w (uniformly distributed along the unstressed length). For the elastic catenary, the exact relations between the element projections and cable force components at the ends of the element are:
Figure 3.1: Catenary cable element(3.1)(3.2)where and are the cable tension forces at the two nodes of the element. For the above expressions it is assumed that the cable is perfectly flexible and Hookes law is applicable to the cable material. The expressions for and in equation (3.1) and (3.2) may be written, in terms of the end forces and only, as: (3.3) because and are related by the following equations: (3.4) (3.5) Differential equation (3.3) and rewriting the results using matrix notation gives: (3.6) (3.7)where is the flexible matrix. The stiffness matrix is given by the inverse as:(3.8)The tangent stiffness matrix and the corresponding internal force vector for the cable element can now be obtained in terms of the four nodal degrees of freedom as (noting that).(3.9)The element tangent stiffness matrix relates the incremental element nodal force vector to the incremental element nodal displacement vector Following expressions, obtained by derivation of equation (3.3), may be used to evaluate the matrices (3.10a)(3.10b)(3.10c)(3.10d)To evaluate the tangent stiffness matrix the end forces and must be determined first. Those forces are adopted as the redundant forces and are determined, from given positions of cable end nodes, using an iterative stiffness procedure. This procedure requires starting values for the redundant forces. Based on the catenary relationship the following expressions will be used for the starting values.(3.11)where(3.12)In cases where equation (3.12) cannot be used because the unstressed cable length is less than chord length, a conservative value of 0.2 for is assumed. Anther difficulty arises in equation (3.12) for vertical cables. In that case an arbitrary large value of 106 for is used. Using equations (3.4) and (3.5), new cable projections corresponding to the assumed end forces and are now determined directly from equation (3.1) and (3.2) and the misclosure vector is evaluated as the positions of the end nodes are given. Corrections to the assumed end forces can now be made using the computed misclosure vector as:(3.13)Where the stiffness matrix is given in equation (3.8) and is the iteration number. For this work, this iteration process continued until and are less than 1.10-5. To determine the unstressed cable length, for cases where the initial cable tension is known instead, a similar iteration procedure can be adopted. A starting value for the unstressed cable length is assumed, e.g. equal to the cable chord length, and cable end forces and are computed using the iterative procedure described above. Using equation (3.5), cable tension can now be computed. This is then compared with the given initial tension to obtain a better approximation for for the next iteration step.If the complete geometry of the cable is to be determined, coordinates for a number of points along the cable must be computed. This is very simple because and are now known, so equations (3.1) and (3.2) can be used to compute the coordinates of any point along the cable by replacing by any fraction of For the dynamic analysis, mass discretization is simply done by the static lumping of the element mass at both ends giving the following lumped mass matrix (is the mass density of the cable element):(3.14)
3.3 Modeling of Bridge Deck and PylonsThe pylons and the bridge deck girder or stiffening girder as it is also called are modeled using beam elements able to resist bending, shear, and axial forces. For the present study, the simplest 2D beam element is adopted and the treatment given there will be followed below when deriving the element matrices. This finite element is developed following the total Lagrangian approach and using a linear interpolation scheme for the displacement components.Referring to figure 3.2, the current deformed configuration of the beam axis is described by a regular curve defined by the position vector:(3.15)Where the abscissa is measured on the straight reference configuration of the beam, represents the axial and transverse displacement components and and are unit axis vectors. By introducing the angle as the rotation of the cross section (S) in the deformed configuration, the vectors orthogonal and parallel to cross sections for each point on the deformed beam are obtained as:(3.16)Further, defining the deformation measures according to:
Figure 3.2: Deformed and undeformed configuration of the beam element (3.17)And using equation (3.15) and (3.16), the following expressions are obtained:(3.18)(3.19)(3.20)If the constitutive relations are assumed as linear, the strain energy can be written as:(3.21)where EA, GA and EI represents the axial, shear and flexural rigidities. For and a linear interpolation scheme is used according to:(3.22)Where and contain the corresponding values of the displacements at the two nodes of the element, and are the interpolation function.Finally, the expressions for the internal force vector and the element tangent stiffness matrix are obtained through successive differentiation of the expression for the strain energy according to:(3.23)Where is the nodal displacement vector. The kinetic energy is expressed as the integral over the volume V:(3.24)where is the mass density and represents the velocity in a general point of the beam. The position of this point is defined by the vector as shown in Figure 3.2. for this element, the final expression for the kinetic energy becomes:(3.25)Using the interpolation function, as in equation (3.22), the kinetic energy is written as a function of the velocity components in the nodal degrees of freedom of the element. From the resulting expression for the kinetic energy, the consistent element mass matrix is evaluated as:(3.26)
CHAPTER 4 VEHICLE AND STRUCTURE MODELING
3 4 4.1 Vehicle ModelsVehicles have at least two suspension systems. This model includes not only the body-bounce motion but also wheel-hop motion. The two suspension system, each consisting of a spring and a damper element, can be seen as filters. The first suspension system (primary suspension) reduces the road input into the vehicle structure and creates isolation for frequencies higher than about 15 Hz. The second suspension system (secondary of chassis suspension) produces isolation for frequencies higher than about 2 Hz for air suspension and 3 Hz for leaf spring suspended chassis. This system should also give sufficient damping to the axle and tire system to prevent the tire leaving the ground on very rough surfaces. Other suspension systems e.g. cab suspension which is used to reduce the acceleration levels in and the forces on the cab structure are also present in modern heavy vehicles. However, the simple vehicle model adopted does not contain all suspension system, detailed suspension nonlinearities and complexities of vehicle body motion that are typical of heavy vehicles. Despite that, it is believed that this model is sufficiently realistic for the purpose of this work.For the work, it is assumed that the vehicle never loses contact with the bridge, and spring and the viscous damper have linear characteristics, and the contact between the bridge and the moving vehicle is assumed to be a point contact. Referring to figure 4.1a and denoting the contact force between the bridge and the vehicle by F(t), defined positive when it is acts downward on the bridge, the following dynamic equilibrium equations for the three masses can be established:
Figure 4.1: (a) vehicle model on a bridge element; (b) typical modes of vibration (4.1a) (4.1b) (4.1c)Where and are the vertical displacement of the masses measured from the static equilibrium position, and the stiffness of the linear springs connecting the masses, and the damping coefficients of the viscous dampers, and the acceleration of gravity. A dot superscript denotes differentiation with respect to time. Using the equations above, the contact may be expressed as:(4.2)where the first term on the right-hand side is the dead weight (static part) of the contact force while the other terms represents the inertia effects. When modeling suspended roadway vehicles, the unsprung mass, is always set to zero. This mass is still included in the model to be able to model a vehicle as an unsprung moving mass (so-called moving mass model) or for modeling railway vehicles having unsprung wheels.With the assumption that the road profile cannot be rough enough to make the vehicle jump or leave the road surface, the displacement is not an independent variable but can be coupled at each time step to the displacement of the contact point on the bridge deck. In this way this degree of freedom is eliminated and the displacement and its derivatives are expressed in terms of the nodal degrees of freedom of the bridge as: (4.3a) (4.3b) (4.3c)Where is a row vector containing linear interpolation functions for the vertical displacement of the beam element evaluated at the contact point. As shown in Figure 4.1a, is the distance from left node of the element to the contact point. is the nodal displacement column vector for the element on which the vehicle is positioned, and the vehicle velocity and acceleration in the longitudinal direction, and the surface irregularity evaluated at the contact point. The subscript denotes derivation with respect to.Equation (4.1a) and (4.1b) may be written using matrix notation as: (4.4)The vehicle model has consequently two degrees of freedom and its equation of motion can be written as:(4.5)In order to solve this second order equation of motion, it is transformed into a system of first order equation by complementing it with the equality, where is a 2 x 2 identity matrix. This will give the extended dynamic equilibrium equation:(4.6)This can be written as:(4.7)For the present study, this first order differential equation is solved using the Matlab algorithm which uses automatic step size 4th and 5th order pair Runga-Kutta-Fehlberg integration method.The undamped natural frequencies for this simple sprung mass vehicle model is determined from the eigenvalue equation:(4.8)giving the eigenvalues:(4.9)For typical vehicle mass and stiffness values, the first vibration mode (body-bounce) excites mainly the vehicle body mass,, while the second mode (wheel-hop) almost only excites the wheel mass, , see Figure 4.1b.Heavy roadway vehicles generate most of their dynamic wheel loads in two distinct frequency ranges: body-bounce and pitch motion at 1.5-4 Hz and wheel-hop motion 8-15 Hz, se Figure 4.1b. The body bounce mode of a vehicle is excited by relatively long and the wheel-hop mode by relatively short wavelengths of the road surface irregularities. As an example, the body-bounce mode for a vehicle travelling at 70 km/h is excited by irregularities with wavelength of 4.9-13 m and the wheel-hop mode by irregularity wavelength of 1.3 2.4 m. Moreover, depending on the vehicle speed, a surface irregularity of a certain wavelength may be effective in both frequency ranges.
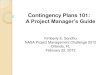
4.2 Vehicle Load Modeling and the Moving Load AlgorithmThe moving load problem is more complicated than other problem in structural dynamics, as the external force vector, containing the interaction forces existing at the contact points between the vehicles and the bridge, is time-dependent. This vector is totally unknown beforehand (except for the moving force problem which is uncoupled), as interaction forces are dependent on the motion of both the bridge structure and the vehicles.The external force vectors for the elements where vehicles are positioned are obtained by adding the dead load and the moving traffic (live) nodal load vectors, i.e. . Using the Dirac function to characterize the action of a unit force concentrated in point, the traffic part can be expressed as:(4.10)Where is the total number of vehicle on the element, the element length (see figure (4.1a), the interaction force between the bridge and theth vehicle wheel, is the distance measured from left node of the element, and the row vector:(4.11)containing the element interpolation function evaluated at the contact point of vehicle, i.e. for. For consistency reasons, the same linear interpolation functions are adopted here as those used in section 4.3 for deriving the beam element matrices.The moving load algorithm, illustrated in Figure 4.2, calculates the bridge-vehicle contact force, for each vehicle on the bridge, and prepares the global external force vector caused by the moving traffic. The code developed is capable of handling unlimited number of vehicles, all having the same velocity (independent on the deflected shape of the bridge deck), and fully consider the dynamic interaction between the vehicles and the bridge.
YesSTARTINITILIZE GLOBAL EXTERNAL TRAFFIC LOAD VECTORLOOP THROUGH ALL VEHICLES ON THE BRIDGEFOR VEHICLE, INITIALIZE AND IDENTIFY THE LOADED ELEMENT, EVALUATE, THE VECTOR AND DETERMINE THE LOADED ELEMENTS dofINTERATION PROBLEMSOLVE DIFFERENTIAL EQUATION 4.7 TO CALCULATE. EVALUATE CONTACT FORCE, , FROM EQUATION 4.2ACCUMULATE NODAL FORCESNEXT VEHICLERETURN MOVING FORCE MODELCALL ALGORITHM FOR EACH ITERATION.INPUT: INITIAL VEHICLE VECTOR AND , NEW VEHICLE POSITIONS, AND SURFACE ROUGHNESS PARAMETERS NoDETERMIN AND CALCULATE FROM EQUATION 4.3
Figure 4.2: The moving load algorithm
4.3 Bridge StructureThe bridge structures are discretized, for the nonlinear fininte element analysis, using a catenary cable element and a simple beam element able to resist bending, shear and axial forces. This cable element is adopted in order to simplify cable modeling and to more accurately predict the response of cable supported bridge structures. The modeling technique and derivation of the elements are discussed in chapter 3. Only two-dimensional bridge models are considered in this work, consequently, the torsional behavior caused by eccentric loading of the bridge deck is disregarded. Furthermore, the nonlinearity considered is of the geometric type, as linear material behavior is assumed.4.3.1 Modeling of Damping in Cable Supported BridgesThe assumption that bridges have no damping is rather restrictive since vibration energy is dissipated in all structures even in very low damped cable stayed bridges. There are various factors causing energy dissipation in bridge structures. Energy dissipation is generally developed by material nonlinearity, opening and closing of hair cracks (in reinforce concrete structures), structural damping such as friction at movable bearings and in the joints of the structure, loss of energy from foundation to ground, and aerodynamic damping by friction with air. The different forces that contribute to the damping of a structure may vary with vibration amplitude, velocity, acceleration, and stress intensity. Thus, theoretical evaluation of damping is extremely difficult and hence at present we have to rely upon the empirical approach. Attempts on theoretical approach to damping evaluation of cable-stayed bridges have been made, where a method is proposed to determine the damping ratio for the desired mode shapes by evaluating the overall energy dissipation and strain energy in the whole bridge. The proposed method predicted the dependency of the damping ratio on oscillation amplitude and cable type with reasonable accuracy. For practical use however, damping models that represents more or less satisfactory approximations have been introduced. The most commonly employed damping model in the field of structural engineering is the viscous one, in which the damping force is proportional to the velocity. This model, also adopted for the present work, is very popular as it leads to the simplest mathematical treatment and generally gives the most satisfactory results.In the case of cable-stayed bridges, the dissipation of energy in cables is potentially a major contribution to the overall damping of the bridge. The damping ratio depends on the type of cables and on the cable configuration used. Using spiral or locked coil strands instead of parallel wire strands (PWS), increases the total damping capacity of the bridge as such strand exhibits significant hysteresis in its longitudinal load-displacement behavior. Despite this, parallel wire strands have been favored in recent years due to economic and durability reasons.A limited amount of information is available on damping of cable supported bridges. However, as more and more forced-excitation and ambient-vibration tests are conducted, fundamental data on the damping ratio is increasing drastically. Obviously made from various tests suggests that the damping ratio for a suspension bridge decreases with increasing frequency (mode number) but for cable-stayed bridges it is found to be variant with frequency. This trend is discussed by interpreting many observed data and it was concluded that friction damping in the main cables of suspension bridges could be a possible explanation that distinguishes cable-stayed from suspension bridges.To derive the damping matrix, one frequently used technique is to assume the damping matrix proportional to mass and stiffness matrices giving the so-called Rayleigh damping, . For practical problems the parameters and are often chosen bases on the knowledge of the damping property of a similar structure. One disadvantage of the Rayleigh damping is the fact that damping behavior of the complete bridge structure is described only by the two parameters and, which are taken as constant values over the entire bridge model. On the other hand, this method gives damping matrices that have the same orthogonal properties with respect to the eigenvectors of the undamped system, as the mass and stiffness matrices. This, by pre-multiplying and post-multiplying with the mode shape matrix, the damping matrix can be diagonalized giving the matrix of generalized (or modal) damping values.(4.12)Due to the earlier mentioned limitation of the Rayleigh damping, the damping matrix derived gives a poor simulation of the real damping characteristics of the bridge structure. An improvement may be achieved by ignoring the proportionality condition and instead establish directly the diagonalized matrix, of equation (4.12). To derive a damping matrix with orthogonal properties, this method is much more flexible that the Rayleigh damping and is preferred if modal damping ratios are available. Another advantage, when compared to Rayleigh damping, is that only the damping ratios of the required modes can be accounted for. The actual expression for the damping matrix may be deducted from the assumed matrix as:(4.13)The damping matrix obtained is full regardless of whether the stiffness and mass matrices are banded or not, but this is of little significance. In practice, the inversion of the mode shape matrix requires a large computational effort. This can be avoided by taking advantage of the orthogonality properties of the mode shapes relative to the mass matrix. Thus, by using the expression to express and in equation (4.13), one can obtain:(4.14)For the present study, the th mode damping ratio in equation (4.12) is assumed as:(4.15)where is the main span length in meter. The above approximation is based on field forced-excitation tests.
CHAPTER 5 RESPONSE ANALYSIS
5 5.1 Dynamic AnalysisIn this chapter, the general equation of motion for a bridge under the action of moving traffic is formulated.Based on the element property matrices and the external nodal force vector derived in the foregoing chapter, one may obtain the following general equation of motion for the entire bridge by means of conventional FEM assemblage:(5.1)bridge node displacement, velocity, and acceleration vectorsbridge mass matrixbridge damping matrixvector of internal elastic forcesexternal force vector resulting from the dead load, the moving trafficThe external force vector is not only time dependent but is also dependent on the bridge displacements, velocities and accelerations. This vector contains the interaction forces existing at the contact points between the vehicles and the bridge and thereby couples the bridge equation of motion with those of the vehicles. Consequently, the external force vector is dependent on the motion of both the bridge structure and the vehicles. To consider the bridge-vehicle interaction, an iterative procedure is adopted. First the displacements etc. of the contact points are assumed and the vehicle equations are solved to obtain the interaction forces and the external force vector. Then the bridge equation of motion, equation (5.1), is solved to obtain improved values of displacement etc. for the contact points. If the convergence criteria are not fulfilled, a new iteration is performed recalculating the external force vector and resolving the bridge equation. The type of convergence criterion adopted here to check the errors is not only the displacement vector, but also the velocity and acceleration vectors. The time step and the number of considered eigenmodes (for the mode superposition procedure) are problem-dependent. Accordingly, for each numerical studied here, a convergence study was carried out with a view to getting reasonably converged reliable solution with an optimum number of increments and optimum number of considered eigenmodes.In this work, tow approaches are adopted for solving equation (5.1) in the time domain: one for evaluating the linear dynamic response and one for the nonlinear dynamic response. These are discussed in details in the following sections.5.1.1 Linear Dynamic AnalysisIf the structure is assumed to respond linearly during the application of traffic loads, it is possible to evaluate the dynamic response using the mode superposition technique starting from the deformed dead load state. Thus, this linear dynamic procedure utilizes the dead load tangent stiffness matrix,. The internal force vector in equation (5.1) is therefore evaluated as:(5.2)Where is obtained from a nonlinear static dead load analysis. It is believed that this approach is adequate for short and medium span cable supported bridges as far as traffic load to dead load ratio are small. Moreover, it is well known that this approach give sufficiently accurate results with minimum consumption of CPU time, as usually one only need to consider the first dominant modes of vibration. On the other hand, this approach requires frequency analysis and eigenmode extraction to start with, which can be expensive and time consuming for large systems. Furthermore, the effectiveness of mode superposition technique is reduced, as the required number of eigenmodes for satisfactory convergence is difficult to estimate beforehand.The eigenmode extraction and the mode superposition technique are well described in many textbooks on structural dynamics. Nevertheless, in order for this thesis to be fully contained and to facilitate understanding, the above mathematical concepts will be described in some depth in the following subsections.5.1.1.1 Eigenmode Extraction and Normalization of EignevectorsThe first step of this approach is to determine the natural frequency and mode shapes of the bridge structure. For this, the undamped free vibration is considered, as the effect of damping on the natural frequencies of most real structures is small. Thus equation (5.1) is reduced to:(5.3)in which 0 is a zero vector. Assuming harmonic motion, which may be expressed as:(5.4)Where is a vector with components independent of time, is a circular frequency, and is a phase angle, and substituting into equation (5.3), we obtain the following eigenvalue problems:(5.5)In this work, this eigenvalue problem is solved using the Matlab algorithm eig giving n (= number of dof) eignesolutions , where is called the ith mode shape vector (eigenvector) and is the corresponding circular frequency of vibration ( is the eigenvalue). Storing the obtained eigensolution in two matrices and, we can now write the n solution to equation (9.5) as:(5.6)Where the matrix contains the eigenvectors in columns and matrix is a diagonal matrix, which stores the eigenvalues on its diagonal, i.e.:(5.7)The obtained eigenvectors are then normalized such that the modal is set to unity, i.e. . From this M-normalization and the orthogonality properties of eigenvectors it follows that: And from equation (5.6) (5.8)Where is the identity or unit matrix. As noted, one of the advantages of this normalization method is that the modal stiffness will be equal to the eigenvalues.5.1.1.2 Mode Superposition TechniqueWhen the natural frequencies and mode shapes are determined, the equation of motion can be solved. The vector of nodal displacement, , can be approximated by a linear combination of s eigenvectors, with s much less than n, giving:(5.9)where in vector are the modal amplitude and state the proportion of each eigenvector in the transformation. Substitution of the above expression into equation (5.1) and post-multiplication of each term by yields:(5.10)Note that the external force vector in the above equation only contains the external forces resulting from the moving traffic and the tuned mass dampers. From the properties of M-orthonormalized eigenvectors, equation (5.8), the above equation is reduced to: (5.10)The damping matrix is introduced to approximate the overall energy dissipation of the bridge structure during vibration and cannot generally be constructed from element damping matrices, such as the mass and stiffness matrices. To obtain a system of s uncoupled differential equations the matrix must have the same orthogonal properties, with respect to the eigenvectors of the undamped structure, as the mass and stiffness matrices. When this is the case, the damping matrix will be diagonalized by pre-multiplying and post-multiplying with the mode shape matrix giving:(5.12)Where are the modal damping values and are here expressed using the damping ratios . The obtained matrix is referred to as the matrix of generalized (or modal) damping values. One of the advantages of this method when compared to other methods like Rayleigh damping is that there is no need to assemble a damping matrix with the same dimension as the stiffness and mass matrix. With the introduction of this matrix we can obtain a system of s independent equations which can be written as:
(5.13)Using the Maple software package for symbolic computations, a program code for the exact solution of the above equations was generated. This code is incorporated in the developed computer program for linear dynamic analysis. Initial values for equation (5.13) are obtained, form known initial values of and , by per-multiplying both sides of equation (5.9) with and taking note of equation (5.8) giving: and (5.14)Finally, having determined the element in vector by solving the above s equations, the response due to live loads (i.e. traffic and TMD) is found equation (5.9). by adding the dead load response, determined using nonlinear static analysis, the total response of the bridge is obtained.5.1.2 Nonlinear Dynamic AnalysisA procedure for evaluating the nonlinear dynamic response using a direct time integration method combined with a nonlinear solution procedure is described in the following. This method is significantly more expensive than the mode superposition method which is usually chosen for linear studies that the bridge will not behave linearly during the application of traffic loads. If this is the case, the natural frequencies and mode shapes will vary with the amplitude of response and the mode superposition technique will consequently be inadequate.For this procedure, it is necessary to assemble not only the stiffness and mass matrices, but also the damping matrix. A method for modeling the damping in matrix form in terms of modal damping rations is presented in chapter 4. As the stiffness is a function of the response amplitude, frequencies and damping ratios will also change as the structure deforms, thus theoretically such damping matrix ought to be updated for each time step. In practice, however this is usually not necessary, because the damping ratios used in most cases be only approximate values evaluated from field tests, taken from codes of practice or the literature.For this study, an implicit procedure based on Newmarks modified average acceleration method combined with a full Newtons-Raphson solution procedure is adopted for solving the bridge equation of motion. Among engineers and researchers in the field of structural engineering, the Newmark method presented 1959 is the most popular algorithm for numerical solution of the equation of motion and is generally the most suitable for nonlinear analysis. In the following, the adopted procedure will be briefly described. Denoting the time step by , for the Newmark method the following expressions hold for the displacement and for the velocities:(5.15a)(5.15b)Where and are the Newmarks integration parameters and are evaluated for the modified average acceleration method as = 0.5 + and = 0.25, with . The parameter introduces numerical damping to the solution but reduces the accuracy to the first order. The second order accurate average acceleration method is obtained by setting (no numerical energy loss).In analogy to the static nonlinear analysis, the residual (error in nodal forces or dynamical out-of-balance forces) can be specified by rewriting equation (5.1) to give (note that also includes the dead load):(5.16)These should vanish at the end of each incremental time step, i.e. by means of an iterative solution technique. For the present study, a procedure using full Newton-Raphson iterations is adopted for solving the residual equation. Denoting as the approximate value of resulting from iteration, the residual after iterations is approximated by linearization around the previous iterated solution as:(5.17)The matrix in the above equation is the iteration (jacobian) matrix and is deduced from:(5.18)The last term reproduces the effect of displacement dependent external loads and is, for simplicity, omitted in this work. Making now use of equation (5.15), the iteration matrix can be specified in detail as:(5.19)At each time step, the iteration has to be started from a prediction of the displacements, velocities and accelerations. This is done here by using equation (5.15) and setting. In each iteration the displacement corrections are computed using equation (5.17) and setting the residual at iteration equals to zero, giving:(5.20)The corrected displacement, velocities, and accelerations are then computed as:(5.21a)(5.21b)(5.21c)By iteratively updating the solution using the corrections, the error in nodal forces, i.e. the residual vector, is reduced when proceeding from iteration to. At each time step, this iteration process continues until the ratio of the Euclidian norm of the residual vector to that of the internal force vector has dropped below a certain chosen tolerance value. For the prescribed procedure, choosing time step is a critical issue, as this not only drives the accuracy of the integration but also governs the stability of the iteration process.
5.2 Static AnalysisIn this study, the dead load response is always evaluated using a nonlinear procedure, while the live load static response is evaluated either linearly based on the dead load tangent stiffness or nonlinearly i.e.:(5.22)And/or(5.23)To evaluate the nonlinear static response, the stiffness matrix is reformulated as the bridge deforms. There are several procedures for evaluating the nonlinear static response and the most frequently used are the Newton-Raphson iteration schemes. In the present study, an incremental-iterative procedure using full Newton-Raphson iterations is adopted. This procedure is generally expected to give quadratic convergence.
References:1. Cable-Stayed Bridges- Theory and Design- M.S Troitsky- 2nd Ed. 19882. Cable stayed bridges-Rene Walther- 1st Ed. 19883. Cable stayed bridges-Rene Walther- 2nd Ed. 19994. Construction & design of Cable stayed bridges- Walter Podolny & John B. Scalzi.5. Wind loading of Structures-John D. Holmes6. Theory & design of bridges- Petros P. Xanthakos7. Steel-concrete composite bridges- David Collings
Dynamic Analysis of Cable Stayed Bridge using Finite Element Method Page 1