Embed Size (px)
Citation preview
PENGENDALI LAMPU TAMAN SISTEM TELEPON BERBASIS
MIKROKONTROLER AT89S51
TUGAS AKHIR
Diajukan dalam rangka penyelesaian studi Diploma Tiga
Untuk mencapai gelar Ahli Madya
Disusun Oleh :
Nama : Kurniawan Setianto
NIM : 5352302005
Program Studi : Diploma Tiga Teknik Elektro
Konsentrasi : Instrumentasi dan Kendali
FAKULTAS TEKNIK
UNIVERSITAS NEGERI SEMARANG
2006

ii
ABSTRAK
Kurniawan Setianto (2006). Pengendali Lampu Taman Sistem Telepon Berbasis
Mikrokontroler AT89S51. Tugas Akhir. Program Studi D3 Teknik Elektro. Konsentrasi
Teknik Instrumentasi dan Kendali. Fakultas Teknik. Universitas Negeri Semarang.
Pada umumnya, lampu taman dikendalikan secara manual sehingga seseorang
yang akan meninggalkan rumah harus menyalakan terlebih dahulu sebelum bepergian.
Pembuatan pengendali lampu taman sistem telepon berbasis mikrokontroler AT89S51
dilatarbelakangi oleh semakin berkembangnya peralatan elektronika yang menggunakan
pengendali jarak jauh.
Pengendali lampu taman sistem telepon berbasis mikrokontroler AT89S51 terdiri
atas beberapa rangkaian penyusun, yaitu rangkaian deteksi dering, rangkaian hook,
rangkaian detektor DTMF, mikrokontroler, dan rangkaian sakelar. Rangkaian deteksi
dering berfungsi untuk mendeteksi adanya sinyal dering pada line telepon dan rangkaian
hook berfungsi untuk menghubungkan line telepon dengan alat kendali. Sedangkan
rangkaian detektor DTMF berguna untuk mendeteksi nada-nada DTMF yang masuk ke
dalam alat kendali. Mikrokontroler sebagai pusat pengendali mengatur jalannya proses
pengendalian serta rangkaian sakelar sebagai driver untuk dihubungkan pada beban yaitu
lampu taman.
Hasil pengujian menunjukkan bahwa unit pengendali lampu taman sistem telepon
berbasis mikrokontroler AT89S51 dapat berjalan dengan baik. Meskipun tegangan yang
dihasilkan kurang dari 5 volt namun tetap dapat bekerja karena range kondisi high
mikrokontroler yaitu 1,9 – 5,5 volt. Faktor komponen dan pengawatan juga
mempengaruhi menurunnya tegangan yang dihasilkan.
iii
HALAMAN PENGESAHAN
Laporan Tugas Akhir ini telah dipertahankan di hadapan sidang penguji Tugas Akhir
Fakultas Teknik Universitas Negeri Semarang pada :
Hari : Senin
Tanggal : 7 Agustus 2006
Pembimbing
Drs. Slamet Seno Adi, M. Pd, M. T
NIP. 131474227
Penguji II
Drs. Suryono
NIP. 131474228
Penguji I
Drs. Slamet Seno Adi, M. Pd, M. T
NIP. 131474227
Ketua Jurusan
Drs. Djoko Adi Widodo, M. T
NIP. 131570064
Ketua Program Studi
Drs. Agus Murnomo, M. T
NIP. 131616610
Dekan,
Prof. DR. Soesanto
NIP. 130875753
iv
MOTTO DAN PERSEMBAHAN
MOTTO :
1. Jalanilah hidup dengan penuh keyakinan.
2. Hidup hanya sekali maka isilah hidupmu dengan kebahagiaan.
3. Jangan pernah menilai sebuah buku dari covernya tetapi nilailah sebuah buku dari isi
didalamnya.
PERSEMBAHAN :
� Bapak Ibuku tercinta atas dorongan serta doa-doanya
� Kakak dan Adikku tersayang
� Teman-temanku yang selalu memberi dorongan
v
KATA PENGANTAR
Alhamdulillah, puji dan syukur senantiasa dipanjatkan ke hadirat Allah SWT
yang telah melimpahkan rahmat dan karunia-Nya, sehingga Laporan Tugas Akhir
berjudul “ PENGENDALI LAMPU TAMAN SISTEM TELEPON BERBASIS
MIKROKONTROLER AT89S51” dapat terselesaikan.
Dalam penyusunan hingga terselesinya Laporan Tugas Akhirini banyak mendapat
bimbingan dan pengarahan dari berbagai pihak, maka dalam kesempatan ini diucapkan
terima kasih kepada :
1. Bapak Slamet Seno Adi, M. Pd, M. T, selaku Dosen Pembimbing Tugas Akhir.
2. Bapak Drs. Djoko Adi Widodo, M. T serta Bapak Drs. Agus Murnomo, M. T, selaku
Ketua Jurusan Teknik Elektro Universitas Negeri Semarang dan Ketua Program Studi
Diploma Tiga Teknik Elektro Universitas Negeri Semarang.
3. Kedua Orang tua atas bantuan spiritual maupun material.
4. Teman-teman atas semangat dan motivasi yang diberikan.
Penyusunan Laporan Tugas Akhir ini masih jauh dari kesempurnaan, maka saran
dan kritik sangat diharapkan guna sempurnanya laporan ini. Semoga Laporan Tugas
Akhir ini dapat memenuhi tujuan dan bermanfaat bagi pembaca.
Semarang, Juli 2006
Penulis
vi
DAFTAR ISI
HALAMAN JUDUL ................................................................................................i
ABSTRAK...............................................................................................................ii
HALAMAN PENGESAHAN ............................................................................... iii
MOTTO DAN PERSEMBAHAN..........................................................................iv
KATA PENGANTAR .............................................................................................v
DAFTAR ISI...........................................................................................................vi
DAFTAR LAMPIRAN............................................................................................x
DAFTAR GAMBAR ..............................................................................................xi
DAFTAR TABEL................................................................................................. xii
BAB I PENDAHULUAN
A. Latar Belakang ..............................................................................1
B. Tujuan ...........................................................................................2
C. Manfaat .........................................................................................2
BAB II ISI
A. LANDASAN TEORI......................................................................3
1. Mikrokontroler ................................................................................3
1.1 Bagian-Bagian Pokok Mikrokontroler............................................3
a. CPU (Central Processing Unit) ..............................................3
b. Memori....................................................................................4
c. Port I/O....................................................................................4
vii
d. Osilator....................................................................................4
e. Reset........................................................................................6
1.2 Mikrokontroler AT89S51 ...............................................................6
2. Telepon ............................................................................................9
2.1 Blok Diagram Pesawat Telepon......................................................9
a. Rangkaian Pemanggil (Dialer) .............................................10
b. Rangkaian Bell (Tone Ringer) ..............................................10
c. Rangkaian Bicara (Speech Network) ....................................10
2.2 Macam-macam Keadaan Pesawat Telepon...................................10
a. Keadaan On Hook................................................................10
b. Keadaan Off Hook................................................................11
c. Keadaan Pemanggilan (Dialing)..........................................11
d. Keadaan Pembicaraan..........................................................11
e. Keadaan Pemutusan Hubungan ...........................................12
2.3 Macam-macam Nada Pada Pesawat Telepon ...............................12
a. Nada Pilih (Dialing Tone).....................................................12
b. Nada Panggil Balik (Ring Back Tone) .................................12
c. Nada Sibuk (Busy Tone).......................................................13
2.4 Sistem Pensinyalan Pada Pesawat telepon....................................13
a. Signalling Decadic................................................................13
b. Signalling DTMF ..................................................................13
3. Dekoder DTMF MT8888...............................................................14
B. PERENCANAAN DAN PENGUJIAN ALAT.............................17
viii
1. Perencanaan ..................................................................................17
1.1 Diagram Blok Rangkaian..............................................................17
1.2 Perangkat Keras ............................................................................18
a. Rangkaian Deteksi Dering...................................................18
b. Rangkaian Hook...................................................................18
c. Rangkaian Detektor DTMF .................................................19
d. Mikrokontroler.....................................................................21
e. Rangkaian Sakelar ...............................................................22
f. Rangkaian Catu Daya ..........................................................22
1.3 Perangkat Lunak ...........................................................................23
a. Program Pendeteksi Dering dan Hook ................................23
b. Program Pengiriman dan Penerimaan Nada DTMF............25
c. Program Kendali Sakelar.....................................................31
d. Program Nada Beep.............................................................32
1.4 Pembuatan Program Mikrokontroler AT89S51............................35
2. Pengujian Alat...............................................................................36
3. Hasil Pengujian dan Pembahasan .................................................38
3.1 Hasil Pengujian .............................................................................38
a. Rangkaian Deteksi Dering ....................................................38
b. Rangkaian Hook ....................................................................38
c. Pengujian Tegangan Transistor Pad
Driver Kendali Sakelar .........................................................38
3.2 Pembahasan...................................................................................39
ix
a. Rangkaian Deteksi Dering...................................................39
b. Rangkaian Hook...................................................................39
c. Rangkaian Kendali Relai .....................................................39
BAB III PENUTUP
A. Kesimpulan ..................................................................................41
B. Saran..............................................................................................42
x
DAFTAR LAMPIRAN
Lampiran 1. Listing Program Unit Pengendali
Lampiran2. Datasheet Mikrokontroler AT89S51
Lampiran 3. Datasheet IC MT8888
Lampiran 4. Cara Pemakaian Pengendali Lampu Taman Sistem Telepon Berbasis
Mikrokontroler AT89S51
Lampiran 5. Pernyataan Selesai Revisi
xi
DAFTAR GAMBAR
Gambar 1. Penggunaan Osilator Internal ........................................................................5
Gambar2. Penggunaan Clock Eksternal.........................................................................5
Gambar 3. Bentuk Fisik Mikrokontroler AT89S51 ........................................................6
Gambar 4. Blok Diagram Mikrokontroler AT89S51......................................................8
Gambar 5. Blok Diagram Dasar Pesawat Telepon ........................................................9
Gambar 6. IC MT8888..................................................................................................15
Gambar 7. Blok Diagram Alat Kendali ........................................................................17
Gambar 8. Rangkaian Deteksi Dering ..........................................................................18
Gambar 9. Rangkaian Hook ..........................................................................................18
Gambar 10. Rangkaian Detektor DTMF.........................................................................20
Gambar 11. Mikrokontroler ............................................................................................21
Gambar 12. Rangkaian Sakelar.......................................................................................22
Gambar 13. Rangkaian Catu Daya..................................................................................22
Gambar 14. Diagram Alir Program Deteksi Dering dan Hook.......................................24
Gambar 15. Diagram Alir Program Kirim Nada DTMF ................................................26
Gambar 16. Diagram Alir Program Terima Nada DTMF ..............................................27
Gambar 17. Diagram Alir Program Kendali Sakelar ......................................................31
Gambar 18. Diagram Alir Program Beep .......................................................................33
Gambar 19. Pengujian 1..................................................................................................36
Gambar 20. Pengujian 2..................................................................................................36
Gambar 21. Pengujian 3..................................................................................................37

xii
DAFTAR TABEL
Tabel 1. Pembagian Frekuensi DTMF..............................................................................14
Tabel 2. Pengukuran Tegangan Keluaran Rangkaian Deteksi Dering .............................38
Tabel 3. Pengukuran Tegangan Rangkaian Hook .............................................................38
Tabel 4. Pengujian Tegangan Transistor Pada Driver Kendali Sakelar............................38
1
BAB I
PENDAHULUAN
A. Latar Belakang
Seiring dengan perkembangan zaman, aktivitas manusia semakin meningkat
sehingga menyebabkan manusia sering meninggalkan rumah. Dengan kesibukan
dalam beraktivitas tersebut, seseorang akan mengalami kesulitan berkomunikasi
atau berinteraksi dengan peralatan elektronik yang ada di rumah. Misalkan saja
bila seseorang akan bepergian jauh dan pulang larut malam, tentunya ia
sebelumnya harus mempersiapkan terlebih dahulu beberapa hal selama
kepergiannya. Salah satunya yaitu menyalakan lampu penerangan sebelum
kepergiannya. Hal tersebut tentunya akan membuang energi listrik dengan sia-sia.
Komunikasi merupakan salah satu kebutuhan manusia yang sangat penting
karena dengan berkomunikasi manusia dapat saling bertukar informasi satu
dengan yang lainnya. Salah satu komunikasi jarak jauh yang sering digunakan
adalah melalui saluran telepon. Saluran telepon ini dapat juga digunakan untuk
melakukan pengiriman data. Salah satu pengiriman data yang sering dipakai yaitu
sistem DTMF (Dual Tone Multiple Frequency).
Sistem pengiriman data menggunakan sinyal DTMF merupakan sistem
pengirim data dengan dua buah frekuensi, yaitu frekuensi tinggi dan frekuensi
rendah. Jika diperhatikan, suara dari tiap tombol nomor telepon yang ditekan akan
mnghasilkan suara yang berbeda. Dari suara tiap tombol tersebut bila diukur

2
dengan menggunakan osiloskop maka tiap suara dari tombol yang ditekan akan
menghasilkan dua buah frekuensi yang berbeda untuk tiap tombol. Sistem DTMF
ini dapat digunakan untuk pengendalian jarak jauh, yang dapat membantu segala
macam aktivitas manusia.
Oleh sebab itu, dicoba untuk merancang suatu alat kendali jarak jauh
digunakan untuk berinteraksi dengan peralatan yang ada di rumah.
B. Tujuan
Membuat unit pengendali dengan teknologi digital telekomunikasi berbasis
mikrokontroler AT89S51.
C. Manfaat
Pemanfaatan jaringan telepon sebagai sarana pengendali peralatan listrik jarak
jauh melalui jalur telepon.
3
BAB II
ISI
A. LANDASAN TEORI
1. Mikrokontroler
1.1. Bagian-Bagian Pokok Mikrokontoler
Mikrokontroler merupakan suatu komponen programmable yang berbentuk
sekeping IC (Integrated Circuit). Kemampuannya untuk dapat diprogram
beberapa kali dan kemudahan untuk mengisi program serta harga yang terjangkau
membuat mikrokontroler sering digunakan pada berbagai peralatan kendali
elektronik. Meskipun berbentuk kecil, tetapi pada mikrokontroler terdapat CPU,
memori, port I/O, Osilator, dan reset.
a. CPU (Central Processing Unit)
CPU (Central Processing Unit) adalah bagian mikrokontroler yang
merupakan pusat pengolahan data. CPU terdiri atas dua bagian, yaitu unit
pengendali (control unit) serta unit aritmatika dan logika (ALU).
Fungsi unit pengendali adalah mengambil, mengkodekan, dan melaksanakan
urutan instruksi sebuah program yang tersimpan dalam memori. Sedangkan ALU
berfungsi untuk melakukan proses perhitungan yang diperlukan selama program
dijalankan serta mempertimbangkan suatu kondisi dan mengambil keputusan
yanmg diperlukan untuk instruksi-instruksi berikutnya.
4
b. Memori
Memori adalah tempat dalam suatu mikrokontroler untuk menyimpan data
atau program. Pada mikrokontroler terdapat dua jenis memori yaitu RAM dan
Flash PEROM.
RAM merupakan memori yang dapat dibaca dan ditulis. RAM biasanya
digunakan hanya untuk menyimpan data atau sering disebut denan memori data
saat program bekerja. Data yang terdapat pada RAM akan hilang apabila catu
daya dari RAM dimatikan.
Flash PEROM merupakan memori yang hanya dapat dibaca. Data yang
tersimpan pada ROM tidak akan hilang meskipun tegangan supply dimatikan.
Oleh karena itu ROM sering dipakai untuk menyimpan program pada suatu
mikrokontroler. Flash PEROM dapat ditulis beberapa kali dan dapat dihapus
secara elektrik atau dengan tegangan listrik.
c. Port I/O
Port I/O adalah saluran agar mikrokontroler dapat berhubungan dengan
perangkat eksternal lain. Pada mikrokontroler terdapat 32 buah saluran I/O.
Saluran ini dikelompokkan menjadi Port 0, Port 1, Port 2 dan Port 3.
d. Osilator
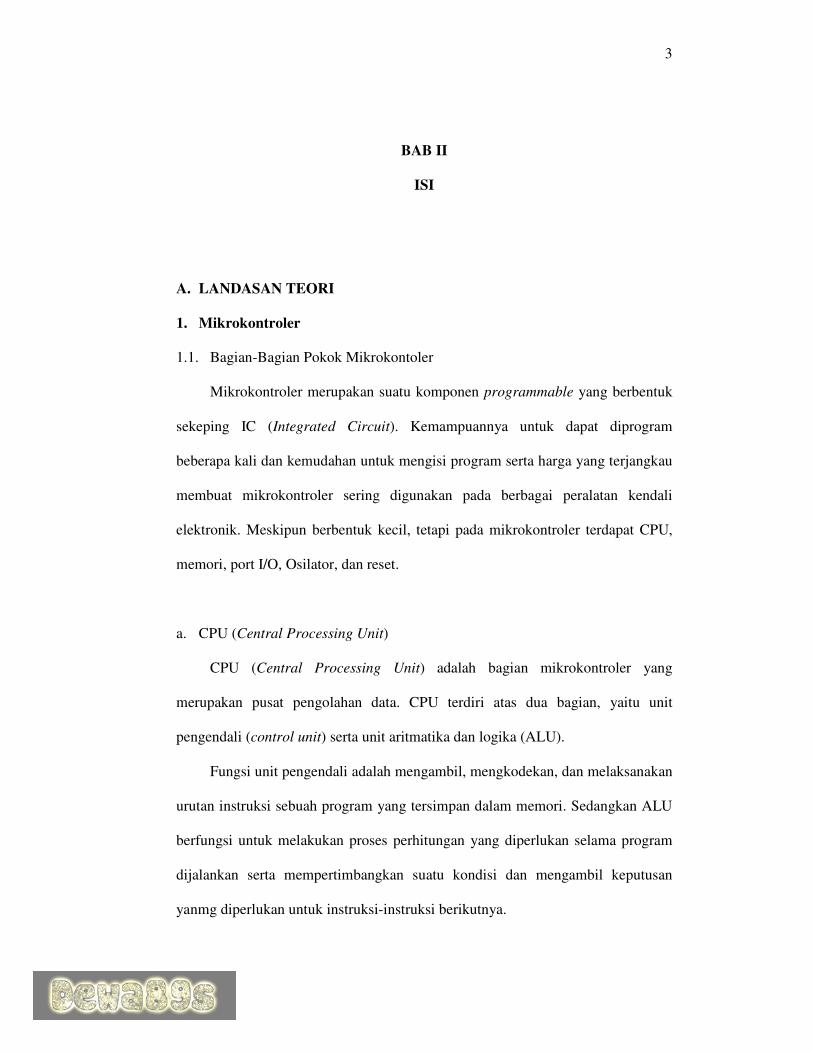
Osilator merupakan pembangkit frekuensi sebagai sumber detak bagi CPU
pada sebuah mikrokontroler. Untuk menggunakan osilator internal pada
mikrokontroler diperlukan sebuah kristal atau resonator keramik. Kristal yang
5
dapat digunakan sebagai sumber detak merupakan kristal berfrekuensi 0 sampai
12 MHz. Kapasitor yang digunakan sebesar 30 pF ± 10 pF. Penggunaan kristal
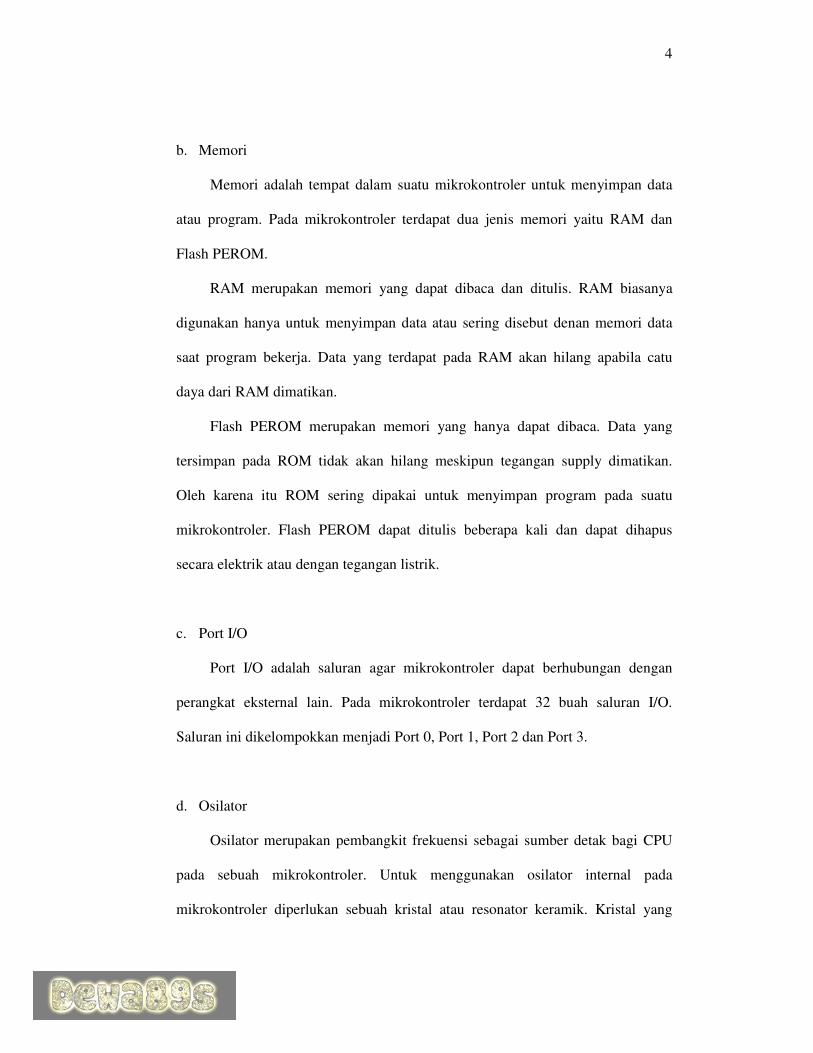
pada mikrokontroler terlihat pada gambar 1. Sedangkan bila menggunakan clock
eksternal ditunjukkan pada gambar 2.
Gambar 1. Penggunaan Osilator Internal
Gambar 2. Penggunaan Clock Eksternal
6
e. Reset
Reset adalah mengembalikan keadaan mikrokontroler pada saat program
belum berjalan atau dilaksanakan. Reset dapat dilakukan secara manual maupun
otomatissaat power diaktifkan. Setelah dilakukan reset maka mikrokontroler akan
mulai menjalankan program dari alamat 0000H.
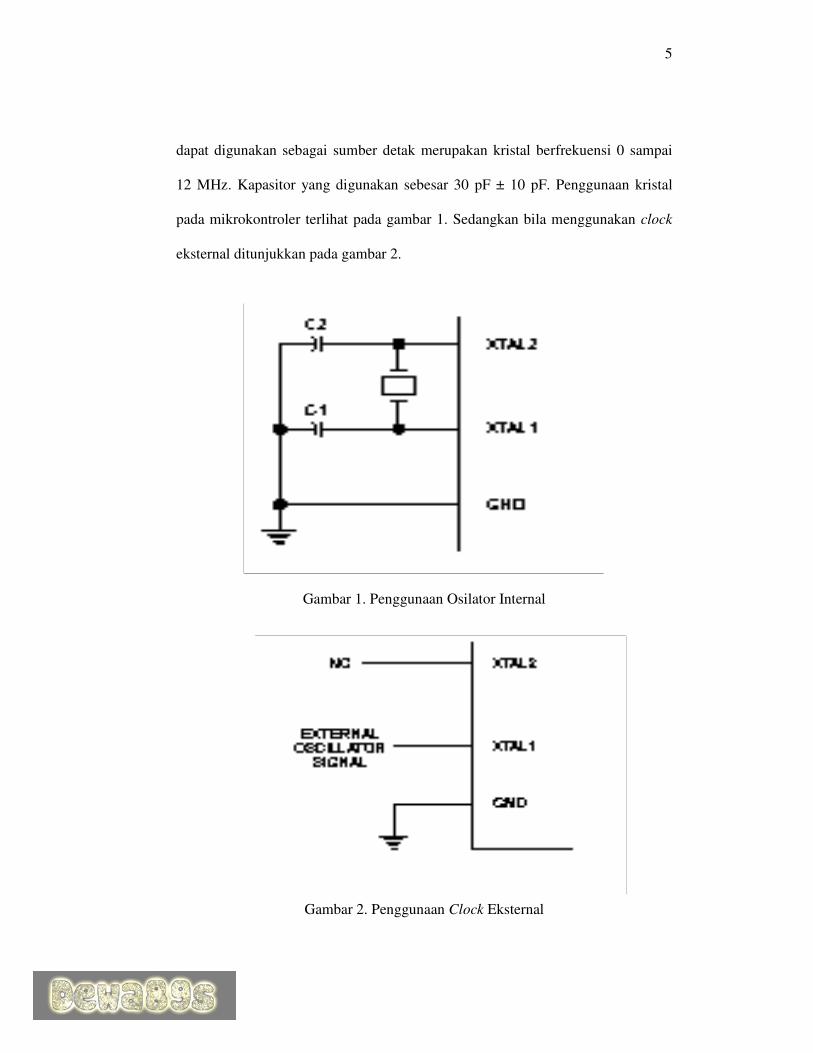
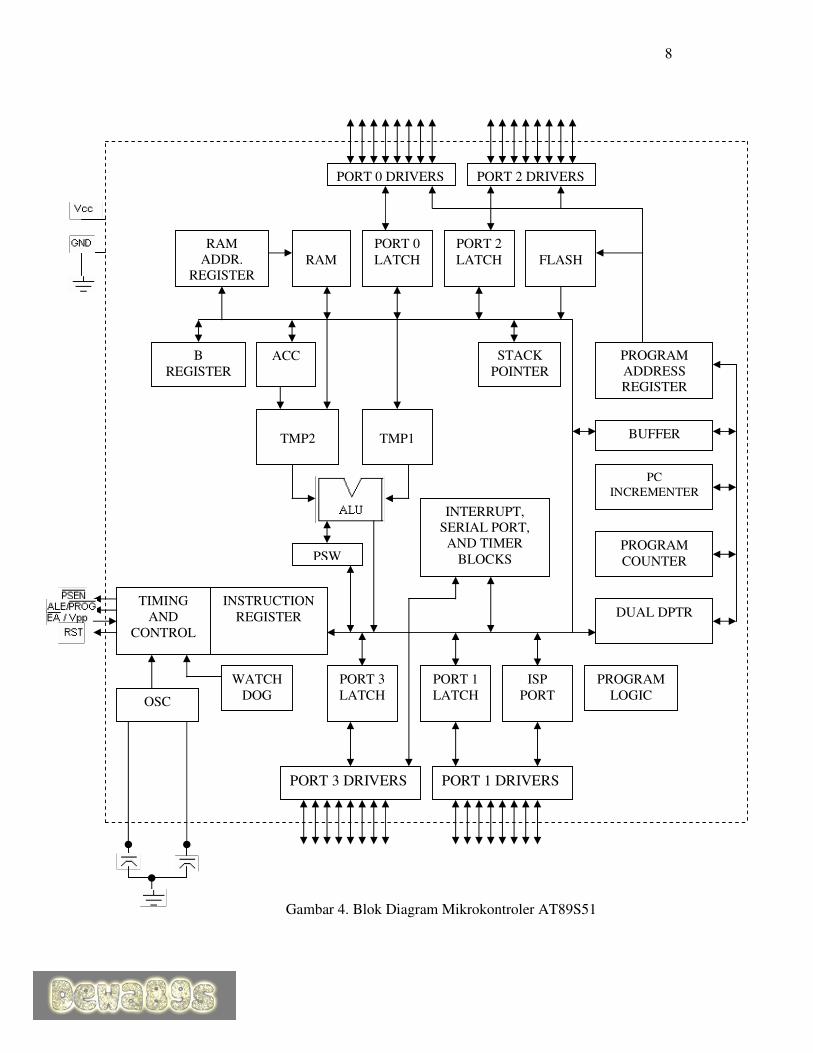
1.2. Mikrokontroler AT89S51
Mikrokontroler AT89S51 salah satu keluarga dari MCS-51 keluaran Atmel.
Mirkrokontroler jenis ini memiliki RAM internal 128 byte dan Flash PEROM 4
Kbyte. Adapun bentuk fisik dari mikrokontroler AT89S51 seperti terlihat pada
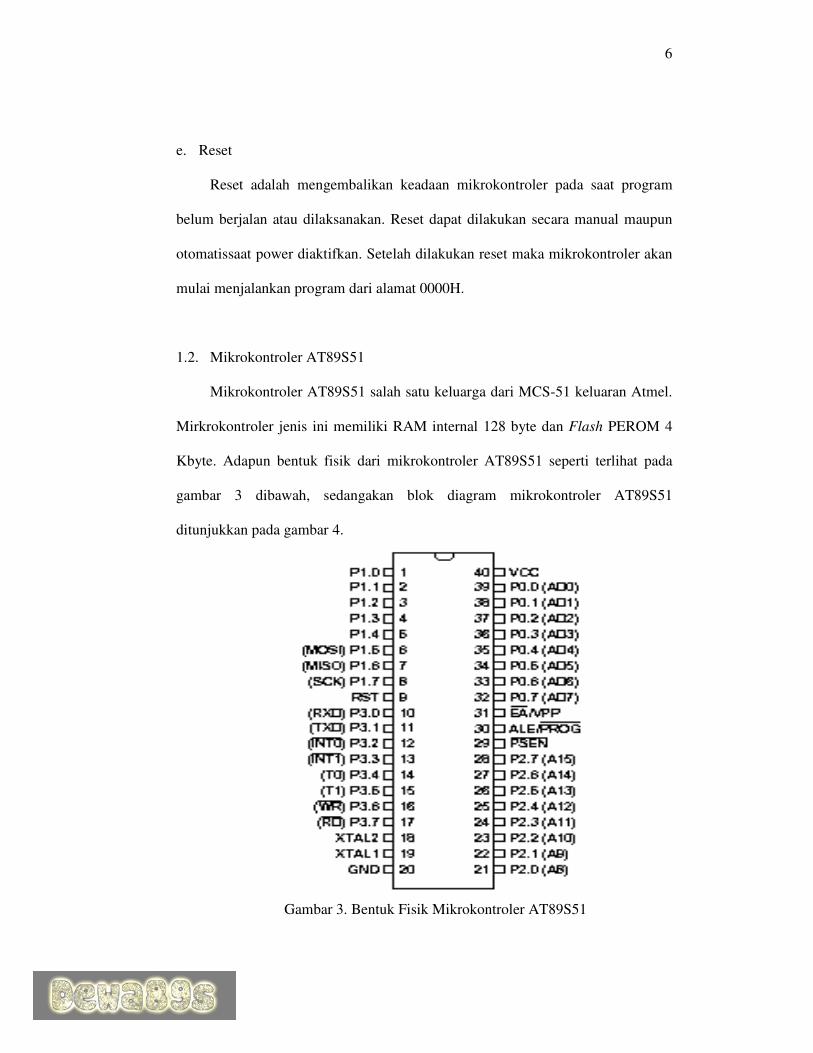
gambar 3 dibawah, sedangakan blok diagram mikrokontroler AT89S51
ditunjukkan pada gambar 4.
Gambar 3. Bentuk Fisik Mikrokontroler AT89S51
7
Penjelasan untuk masing-masing pin dari mikrokontroler AT89S51 adalah
sebagai berikut:
� Pin 1 – 8 merupakan pin saluran I/O. Pin ini juga disebut sebagai Port 1.
Masing-masing pin dapat digunakan tanpa bergantung dengan pin lainnya.
� Pin 9 merupakan pin untuk rangkaian reset yang digunakan untuk
mengembalikan kondisi awal mikrokontroler.
� Pin 10 – 17 merupakan pin terminal masukan dan keluaran, disebut juga port
3. Masing-masing pin dari port 3 ini juga dapat digunakan secara bit.
� Pin 18 – 19 merupakan terminal masukan dan keluaran dari rangkaian osilator.
� Pin 20 merupakan ground catu daya mikrokontroler.
� Pin 21 – 28 merupakan saluran masukan dan keluaran yang dinamakan
sebagai port 2. Pin dapat digunakan tanpa tergantung dengan pin lainnya.
� Pin 29 merupakan pin yang berfungsi pada saat mengeksekusi program yang
terletak pada memori eksternal. Pin ini dinamakan pin PSEN.
� Pin 30 (ALE/PROG) merupakan penahan alamat memori eksternal selama
mengakses memori eksternal. Pin ini juga berfungsi sebagai pulsa/sinyal input
pemrograman selama proses pemrograman.
� Pin 31 (EA) merupakan sinyal kontrol untuk pembacaan memori program.
� Pin 32 – 39 merupakan terminal I/O pada mikrokontroler dan disebut sebagai
port 2.
� Pin 40 merupakan pin tegangan power supply.
8
Gambar 4. Blok Diagram Mikrokontroler AT89S51
TIMING AND
CONTROL
WATCH DOG
INSTRUCTION REGISTER
OSC
PORT 0 DRIVERS PORT 2 DRIVERS
RAM ADDR.
REGISTER
RAM
PORT 0 LATCH
PORT 2 LATCH
FLASH
B REGISTER
ACC
TMP2
TMP1
STACK POINTER
PSW
INTERRUPT, SERIAL PORT,
AND TIMER BLOCKS
PROGRAM ADDRESS REGISTER
BUFFER
PC INCREMENTER
PROGRAM COUNTER
DUAL DPTR
PORT 1 LATCH
ISP PORT
PROGRAM LOGIC
PORT 3 DRIVERS
PORT 3 LATCH
PORT 1 DRIVERS
9
2. Telepon
Kata “telephone” berasal dari bahasa Yunani “tele” yang berarti jauh, dan
”phone” yang berarti suara. Dalam pengertian masa kini, ‘telefoni” (telephony)
meliputi konversi dari sinyal-sinyal suara menjadi sinyal-sinyal listrik frekuensi
audio yang kemudian dapat dipancarkan melalui sistem transmisi listrik, dan
akhirnya dikonversikan kembali menjadi sinyal-sinyal tekanan suara pada ujung
penerima. Sinyal-sinyal listrik dapat dipancarkan melalui radio atau melalui
kawat.
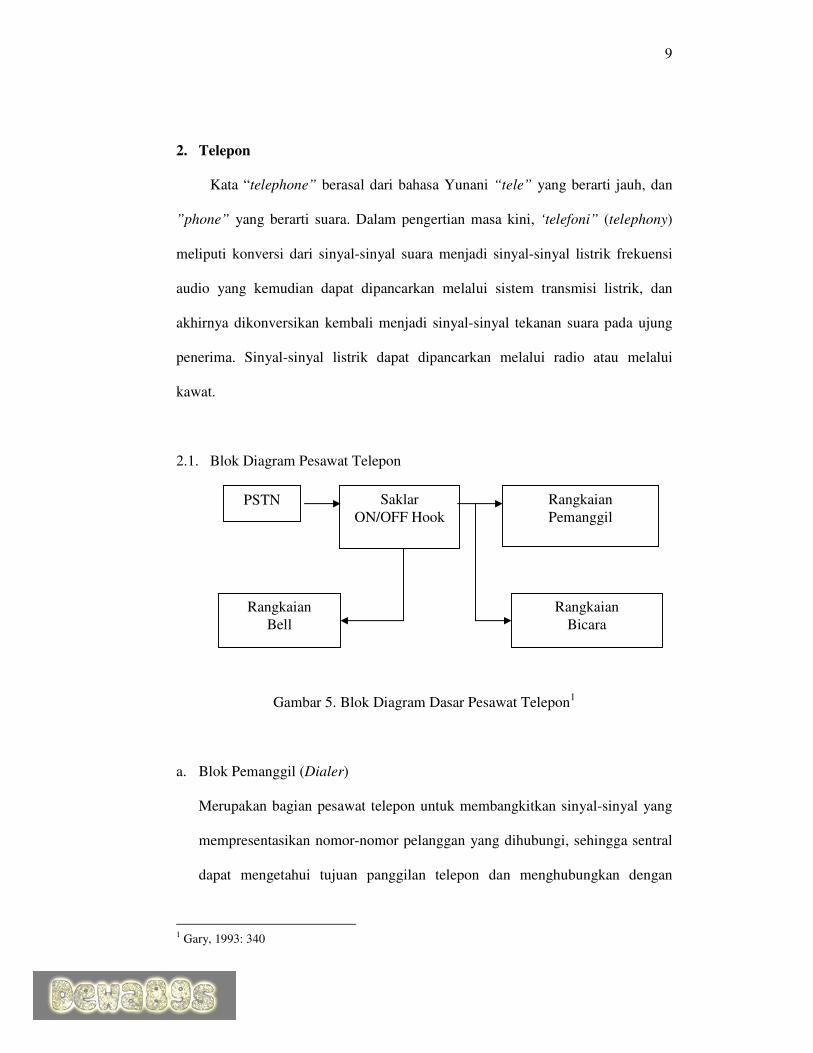
2.1. Blok Diagram Pesawat Telepon
Gambar 5. Blok Diagram Dasar Pesawat Telepon1
a. Blok Pemanggil (Dialer)
Merupakan bagian pesawat telepon untuk membangkitkan sinyal-sinyal yang
mempresentasikan nomor-nomor pelanggan yang dihubungi, sehingga sentral
dapat mengetahui tujuan panggilan telepon dan menghubungkan dengan
1 Gary, 1993: 340
PSTN Saklar ON/OFF Hook
Rangkaian Bell
Rangkaian Pemanggil
Rangkaian Bicara
10
pesawat telepon lain yang nomornya dipanggil. Sinyal-sinyal tersebut dapat
berupa sinyal decadic dan DTMF.
b. Blok Bell (Tone Ringer)
Merupakan rangkaian pendeteksi dan pembangkit sinyal panggilan telepon
(dering) yang dikirim oleh sentral. Jika ada pesawat telepon lain yang
memanggil maka sentral akan memberikan sinyal yang mengaktifkan
rangkaian bel.
c. Blok Bicara (Speech Network)
Merupakan rangkaian yang berfungsi mengubah sinyal suara menjadi sinyal
listrik dan sebaliknya. Rangkaian ini mempunyai sistem anti side tone. Side
tone adalah peristiwa pada saat berbicara dengan menggunakan telepon, orang
yang bicara dapat mendengar suaranya sendiri karena disamping mengalir ke
saluran suara juga mengalir ke speaker pada pesawat telepon yang sama.
2.2. Macam-macam Keadaan Pesawat Telepon
Dalam sistem komunikasi telepon terdapat berbagai macam keadaan yang
berhubungan dengan saluran telepon. Keadaan tersebut adalah :
a. Keadaan On Hook
Keadaan on hook disebut keadaan bebas yang artinya pesawat telepon siap
menerima panggilan. Pesawat telepon diasumsikan seperti sebuah rangkaian
terbuka, karena hook switch membuat saluran telepon terputus dengan
rangkaian bicara. Pada kondisi tersebut besarnya tegangan pada saluran sekitar
48 V DC. Dalam kondisi ini rangkaian bel terhubung ke line telepon siap
menerima sinyal ringing current yang berupa sinyal AC dengan frekuensi 50-

11
60 Hz dan tegangan 48-90 V. Jika ada panggilan maka sentral akan
mengirimkan ringing current yang akan mengaktifkan rangkaian bel.
b. Keadaan Off Hook
Keadaan off hook adalah keadaan pesawat telepon saat handset diangkat. Pada
saat itu pesawat sedang melakukan pendudukan yang artinya pesawat telepon
siap melakukan dialing atau komunikasi dengan pesawat telepon lain. Dalam
kondisi ini rangkaian bel terputus dari saluran sedang rangkaian pengirim
sinyal dial dan rangkaian bicara terhubung ke saluran karena kerja hook
switch. Pada kondisi ini besarnya tegangan pada saluran berubah dari 48 V
menjadi 6 V DC.
c. Keadaan Pemanggilan (Dialing)
Dialing atau pemanggilan dilakukan pada keadaan off hook dengan
mengirimkan sinyal-sinyal yang mempresentasikan nomor-nomor yang
hendak dituju. Pada kondisi ini rangkaian pemanggil dan rangkaian bicara
terhubung ke line telepon.
d. Keadaan Pembicaraan
Setelah mengirim penggilan telepon yaitu saat pesawat telepon pada keadaan
off hook dan nomor yang dihubungi tidak sedang dipergunakan. Maka akan
diperoleh nada panggilan kembali (ring back) yang berarti rangkaian bel
pesawat telepon yang dihubungi aktif. Dan jika pesawat telepon yang
dihubungi menjawab dengan mengangkat handset maka keadan pembicaraan
terjadi.
12
e. Keadaan Pemutusan Hubungan
Setelah keadaan pembicaraan berakhir, dengan meletakkan handset maka
pesawat telepon kembali pada keadaan on hook dan loop saluran kembali
terbuka.
2.3. Macam-macam Nada Pada Pesawat Telepon
Macam nada dibangkitkan oleh generator nada (Tone Generator). Pada
sentral sistem sambungan otomatis (SSO) dan dikirimkan kepada setiap
pelanggan sesuai dengan kebutuhannya. Nada-nada ini merupakan petunjuk
(indikator) bagi pelanggan untuk mengetahui keadaan sentral atau pelanggan lain
dipanggil.
a. Nada Pilih (Dialing Tone)
Nada ini dikirimkan kepada pemanggil oleh sentral SSO yang berarti memberi
tanda bahwa peralatan sentral dalam keadaan bebas dan siap menerima impuls
dari pemanggil. Nada ini merupakan nada kontinyu dengan frekuensi 350-440
Hz ± 2,5%.
b. Nada Panggil Balik (Ring Back Tone)
Nada yang diterima pemanggil ini, bersamaan dengan pengiriman arus
pengebel (Ringing Current) kepada pelanggan yang dipanggil. Dimana nada
ini akan berhenti bila pelanggan yang dipanggil mengangkat handset,
pemanggil mendapatkan nada sibuk (Busy Tone).
13
c. Nada Sibuk (Busy Tone)
Yaitu nada yang dikirimkan kepada pemanggil apabila pelanggan yang
dipanggil sedang bicara (handsetnya dalam keadaan terangkat = off hook),
sehingga nada memberikan tanda agar handset pemanggil segera diletakkan
kembali. Nada ini mempunyai bilangan getar 480-620 Hz ± 2,5 % yang
terputus-putus pada selang waktu setengah detik.
2.4. Sistem Pensinyalan Pada Pesawat Telepon
Dalam suatu jaringan telepon pensinyalan (signalling) digunakan dalam
proses pemanggilan, pengontrolan, dan pemutusan hubungan telepon. Pensinyalan
memberitahu sentral tentang keperluan pelanggan pemanggil dan memberitahu
pelanggan tentang kondisi peralatan sentral dan pelanggan yang dipanggil. Secara
umum ada dua macam proses pensinyalan
a. Signalling Decadic
Digunakan pada sentral analog yang menggunakan sistem penyambungan
direct control atau step by step. Sistem decadic menggunakan sepuluh pulsa
untuk menyatakan nomor dari 0 sampai 9. Angka 1 dinyatakan dengan satu
pulsa, dan seterusnya. Sedangkan angka 0 dinyatakan dengan sepuluh pulsa.
b. Signalling DTMF
Signalling DTMF merupakan cara pengiriman sinyal ke sentral telepon
dengan menekan tombol yang ada pada pesawat telepon. DTMF adalah teknik
mengirimkan angka-angka pembentuk nomor telepon yang dikodekan dengan
2 nada yang dipilih dari 8 buah frekuensi yang sudah ditentukan. Frekuensi-
14
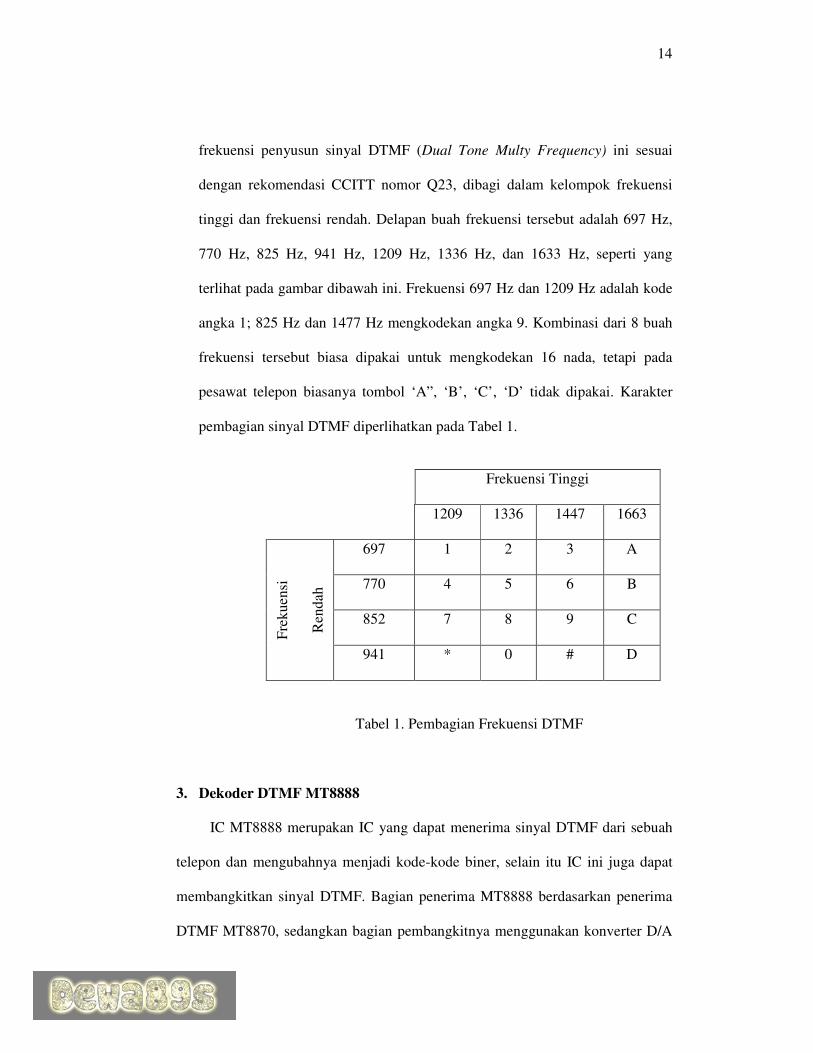
frekuensi penyusun sinyal DTMF (Dual Tone Multy Frequency) ini sesuai
dengan rekomendasi CCITT nomor Q23, dibagi dalam kelompok frekuensi
tinggi dan frekuensi rendah. Delapan buah frekuensi tersebut adalah 697 Hz,
770 Hz, 825 Hz, 941 Hz, 1209 Hz, 1336 Hz, dan 1633 Hz, seperti yang
terlihat pada gambar dibawah ini. Frekuensi 697 Hz dan 1209 Hz adalah kode
angka 1; 825 Hz dan 1477 Hz mengkodekan angka 9. Kombinasi dari 8 buah
frekuensi tersebut biasa dipakai untuk mengkodekan 16 nada, tetapi pada
pesawat telepon biasanya tombol ‘A”, ‘B’, ‘C’, ‘D’ tidak dipakai. Karakter
pembagian sinyal DTMF diperlihatkan pada Tabel 1.
Frekuensi Tinggi
1209 1336 1447 1663
697 1 2 3 A
770 4 5 6 B
852 7 8 9 C
Frek
uens
i
Ren
dah
941 * 0 # D
Tabel 1. Pembagian Frekuensi DTMF
3. Dekoder DTMF MT8888
IC MT8888 merupakan IC yang dapat menerima sinyal DTMF dari sebuah
telepon dan mengubahnya menjadi kode-kode biner, selain itu IC ini juga dapat
membangkitkan sinyal DTMF. Bagian penerima MT8888 berdasarkan penerima
DTMF MT8870, sedangkan bagian pembangkitnya menggunakan konverter D/A

15
dengan kapasitor untuk distorsi rendah tetapi pensinyalan DTMF dengan tingkat
akurasi tinggi.
Rangkaian dekoder DTMF berfungsi untuk mendekode sinyal yang dikirim
oleh enkoder DTMF sehingga menjadi data digital yang dapat dipahami oleh
rangkaian logic. Sinyal DTMF merupakan perpaduan antara dua frekuensi yaitu
grup frekuensi rendah dan frekuensi tinggi yang menyatakan nomor angka
desimal satu digit.
MT8888 adalah penerima DTMF lengkap yang merupakan pendeteksi dua
frekuensi rendah dan tinggi untuk diubah menjadi data digital 4 bit dengan
keluaran D0, D1, D2, D3. D3 berfungsi sebagai MSB sedangkan D0 berfungsi
sebagai LSB. Dengan jumlah output sebanyak empat, maka akan dihasilkan
sebanyak 24 atau sama dengan enam belas jenis kode (0 s/d 9 ditambah A, B, C, D,
# dan *).
Gambar 6. IC MT8888C
D2
2
RS0
D3
D1
20
CS
RD
IRQ/CP
R/W
7
ESt
9
VDD
8
IN- St/Gt
OSC2
12
1
4
VSS
ONE 13
10
17
5
11
15
19
14 D0
GS
OSC1
IN+
16
VRef
183
6
16
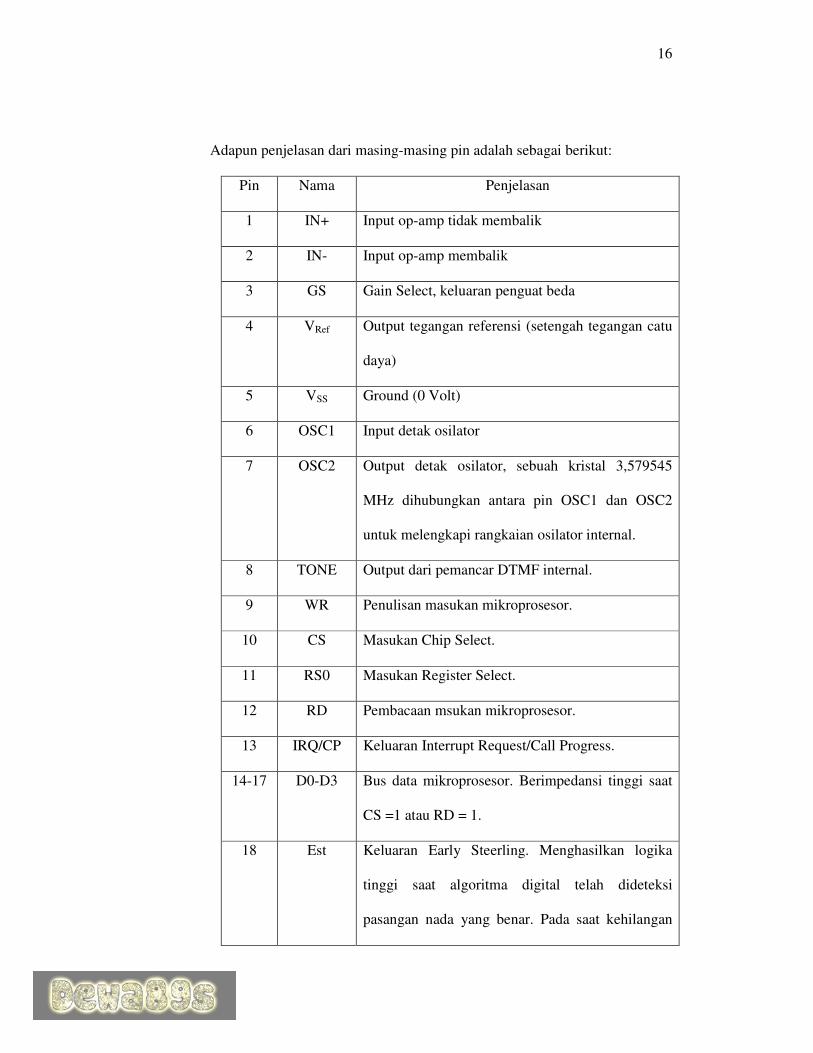
Adapun penjelasan dari masing-masing pin adalah sebagai berikut:
Pin Nama Penjelasan
1 IN+ Input op-amp tidak membalik
2 IN- Input op-amp membalik
3 GS Gain Select, keluaran penguat beda
4 VRef Output tegangan referensi (setengah tegangan catu
daya)
5 VSS Ground (0 Volt)
6 OSC1 Input detak osilator
7 OSC2 Output detak osilator, sebuah kristal 3,579545
MHz dihubungkan antara pin OSC1 dan OSC2
untuk melengkapi rangkaian osilator internal.
8 TONE Output dari pemancar DTMF internal.
9 WR Penulisan masukan mikroprosesor.
10 CS Masukan Chip Select.
11 RS0 Masukan Register Select.
12 RD Pembacaan msukan mikroprosesor.
13 IRQ/CP Keluaran Interrupt Request/Call Progress.
14-17 D0-D3 Bus data mikroprosesor. Berimpedansi tinggi saat
CS =1 atau RD = 1.
18 Est Keluaran Early Steerling. Menghasilkan logika
tinggi saat algoritma digital telah dideteksi
pasangan nada yang benar. Pada saat kehilangan
17
sinyal akan menyebabkan Est kembali berlogika
rendah.
19 St/Gt Keluaran Steering Input/Guard Time.
20 VDD Tegangan catu daya positif.
B. PERENCANAAN DAN PENGUJIAN ALAT
1. Perencanaan
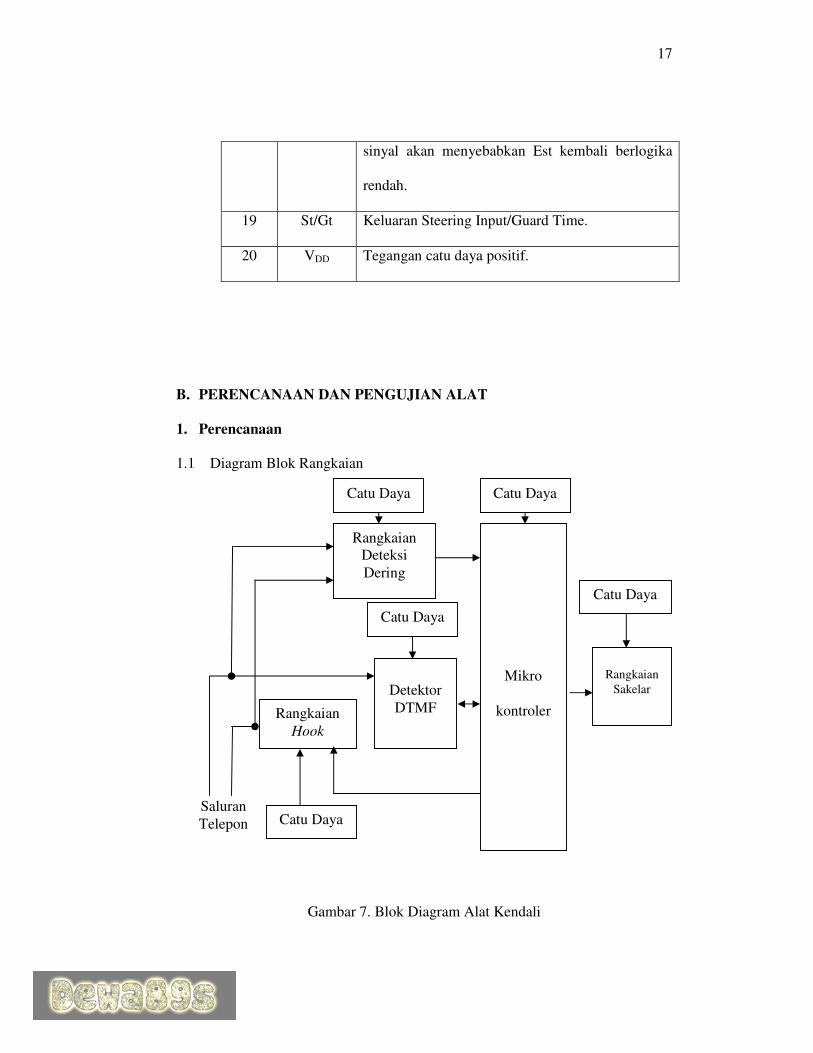
1.1 Diagram Blok Rangkaian
Gambar 7. Blok Diagram Alat Kendali
Saluran Telepon
Rangkaian Deteksi Dering
Rangkaian Hook
Detektor DTMF
Mikro
kontroler
Catu Daya Catu Daya
Rangkaian
Sakelar
Catu Daya Catu Daya
Catu Daya
18
1.2 Perangkat Keras
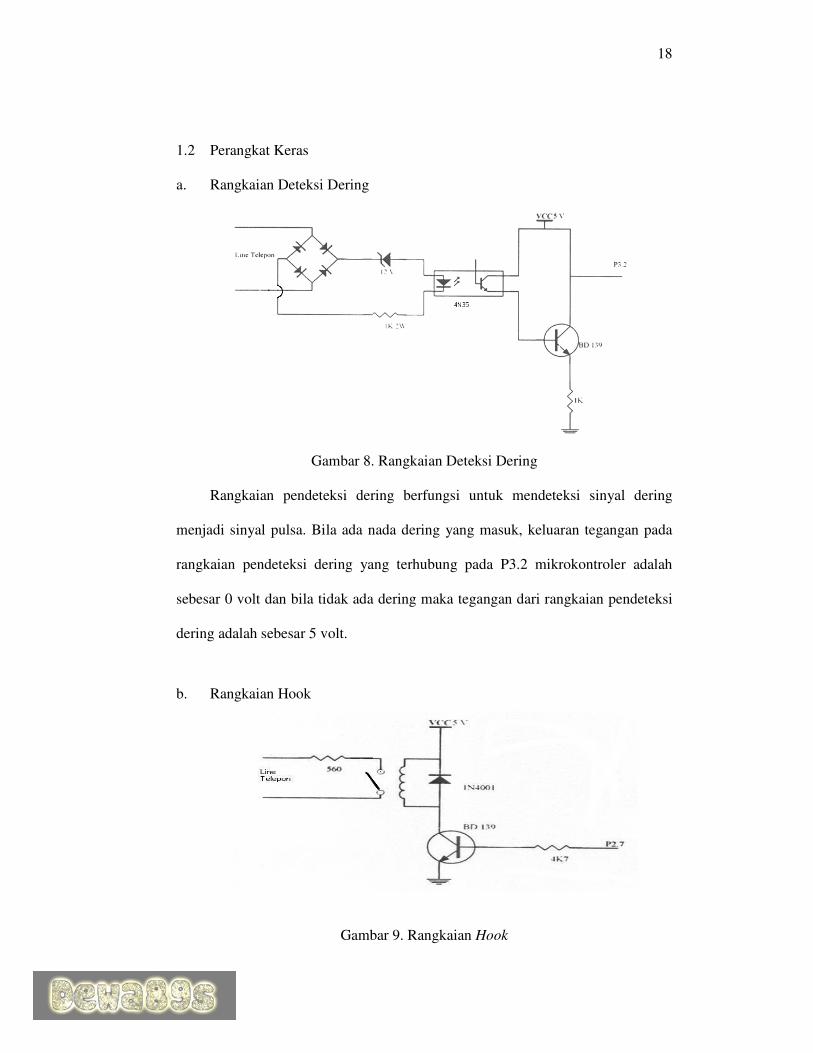
a. Rangkaian Deteksi Dering
Gambar 8. Rangkaian Deteksi Dering
Rangkaian pendeteksi dering berfungsi untuk mendeteksi sinyal dering
menjadi sinyal pulsa. Bila ada nada dering yang masuk, keluaran tegangan pada
rangkaian pendeteksi dering yang terhubung pada P3.2 mikrokontroler adalah
sebesar 0 volt dan bila tidak ada dering maka tegangan dari rangkaian pendeteksi
dering adalah sebesar 5 volt.
b. Rangkaian Hook
Gambar 9. Rangkaian Hook
19
Rangkaian hook berfungsi untuk mengendalikan hubungan antara line
telepon dengan rangkaian alat. Rangkaian ini terhubung dengan P2.7
mikrokontroler. Rangkaian hook ini dikontrol melalui telepon, yaitu dengan
melakukan panggilan nomor telepon yang dituju yang mana saluran telepon yang
dituju tersebut terhubung secara paralel dengan alat pengendali. Setelah mendial
nomor telepon, akan terdengar suara dering sehingga rangkaian deteksi dering
akan memberikan sinyal atau data pada mikrokontroler. Setelah data diterima oleh
mikrokontroler dan data tersebut sesuai dengan data yang telah ditentukan saat
pemrograman, mikrokontroler akan memberi sinyal atau data pada rangkaian hook
yang akan menyebabkan rangkaian ini berada pada kondisi aktif atau nonaktif.
Untuk dapat mengontrol rangkaian hook ini maka mikrokontroler harus
memberikan data sinyal pulsa 0 atau 1. Jika mikrokontroler memberikan data
sinyal pulsa 0, maka hook berada dalam kondisi tidak aktif, tapi bila data sinyal
pulsa yang dikirimkan oleh mikrokontroler adalah 1 maka hook akan aktif.
Adanya nada dering akan mengaktifkan rangkaian ini.
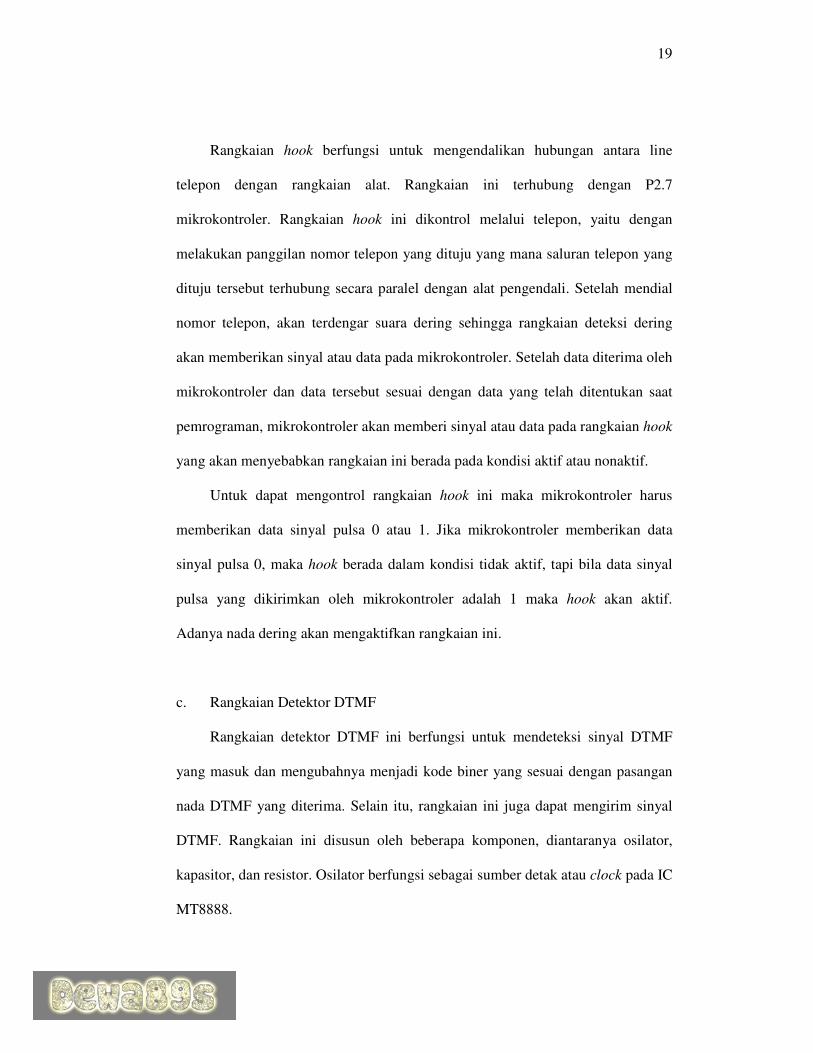
c. Rangkaian Detektor DTMF
Rangkaian detektor DTMF ini berfungsi untuk mendeteksi sinyal DTMF
yang masuk dan mengubahnya menjadi kode biner yang sesuai dengan pasangan
nada DTMF yang diterima. Selain itu, rangkaian ini juga dapat mengirim sinyal
DTMF. Rangkaian ini disusun oleh beberapa komponen, diantaranya osilator,
kapasitor, dan resistor. Osilator berfungsi sebagai sumber detak atau clock pada IC
MT8888.
20
Gambar 10. Rangkaian Detektor DTMF
Kapasitor C3 berfungsi untuk memblokir tegangan DC dan melewatkan
sinyal DTMF. Resistor R5 dan R6 terhubung ke penguat inverting pada IC
MT8888, dengan besar penguatan sebagai berikut :
56
RR
Av =
Kapasitor C4 dan R7 digunakan untuk menentukan waktu minimal untuk
mengenali nada DTMF yang diterima. Bila ada sinyal berupa nada DTMF dan
nada tersebut lamanya melebihi konstanta waktu yang telah ditentukan oleh nilai
dari kapasitor C4 dan resistor R7, receiver data register pada register status akan
menjadi 1.
Kondisi receiver data register akan berubah menjadi 0 setelah isi register
status dibaca oleh mikrokontroler melalui kaki IRQ pada IC MT8888. IRQ ini
digunakan untuk memantau data pada IC MT8888. Saat ada sinyal nada DTMF
yang masuk ke rangkaian detektor DTMF, IRQ akan berlogika 0, bila tidak ada
21
nada DTMF yang masuk maka kaki IRQ berlogika 1. Pada rangkaian detektor
DTMF, kaki IRQ terhubung pada kaki P3.3 atau INT1 yang terdapat pada
mikrokontroler AT89S51.
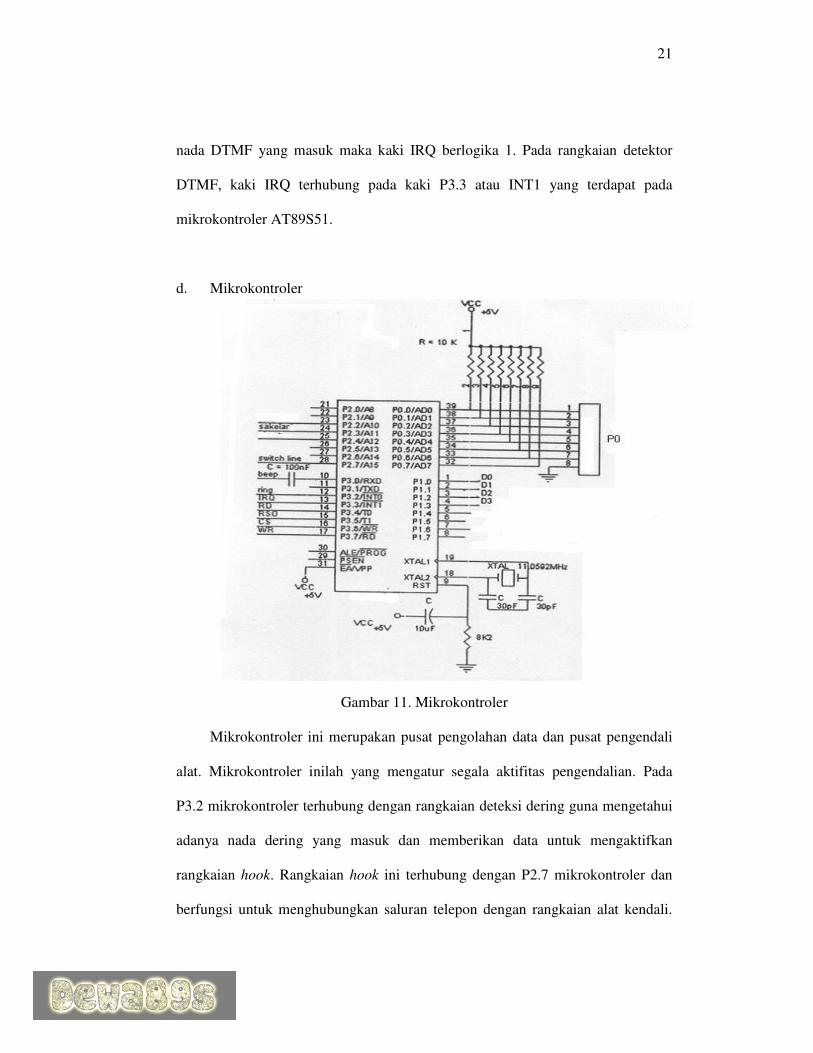
d. Mikrokontroler
Gambar 11. Mikrokontroler
Mikrokontroler ini merupakan pusat pengolahan data dan pusat pengendali
alat. Mikrokontroler inilah yang mengatur segala aktifitas pengendalian. Pada
P3.2 mikrokontroler terhubung dengan rangkaian deteksi dering guna mengetahui
adanya nada dering yang masuk dan memberikan data untuk mengaktifkan
rangkaian hook. Rangkaian hook ini terhubung dengan P2.7 mikrokontroler dan
berfungsi untuk menghubungkan saluran telepon dengan rangkaian alat kendali.
22
Kemudian pada P3.3 - P3.7 terhubung dengan rangakain DTMF yang berfungsi
untuk mengatur adanya nada DTMF yang akan dikirimkan ke mikrokontroler.
Sedangkan P1.0 – P1.3 juga terhubung pada rangkaian DTMF untuk mengirimkan
nada DTMF dari mikrokontroler ke rangkaian tersebut. Rangkaian sakelar
terhubung pada P2.2 mikrokontroler.
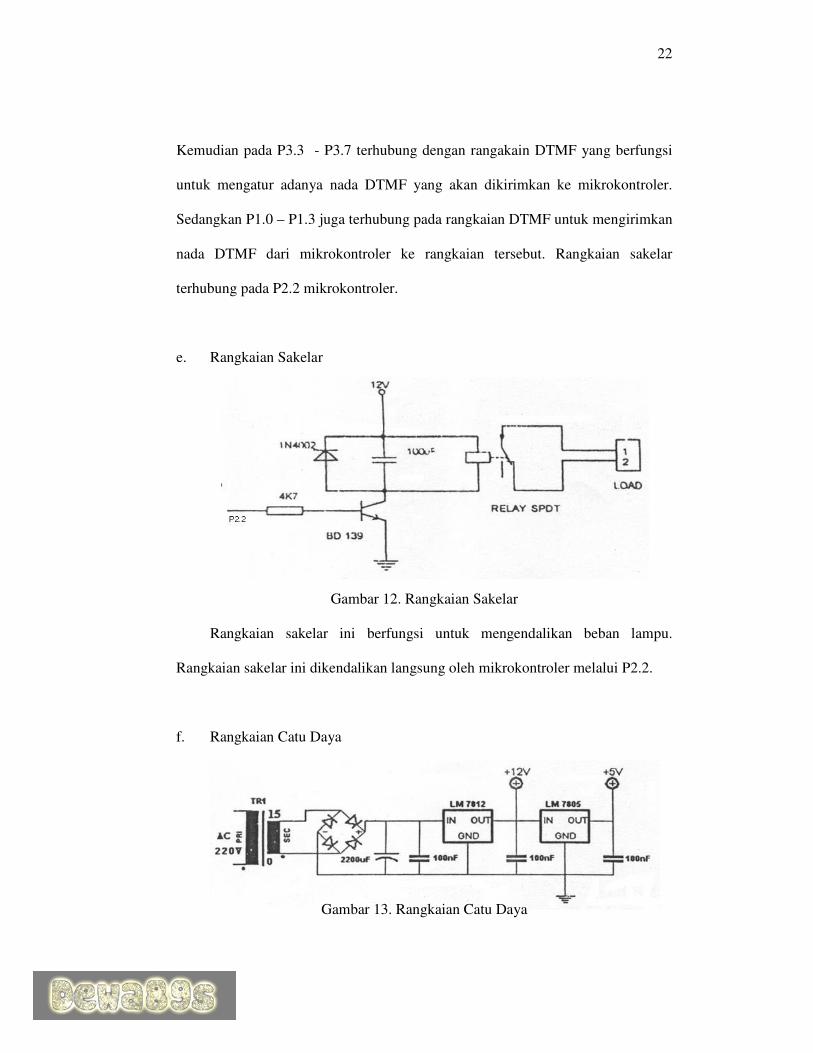
e. Rangkaian Sakelar
Gambar 12. Rangkaian Sakelar
Rangkaian sakelar ini berfungsi untuk mengendalikan beban lampu.
Rangkaian sakelar ini dikendalikan langsung oleh mikrokontroler melalui P2.2.
f. Rangkaian Catu Daya
Gambar 13. Rangkaian Catu Daya
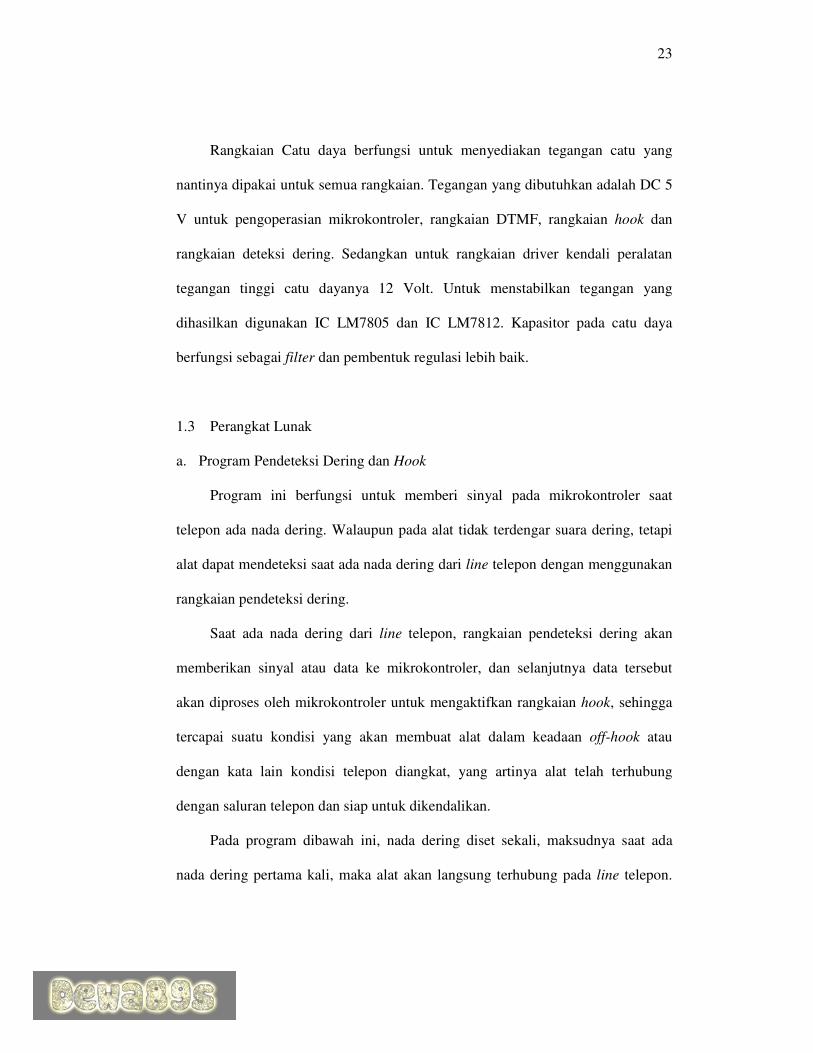
23
Rangkaian Catu daya berfungsi untuk menyediakan tegangan catu yang
nantinya dipakai untuk semua rangkaian. Tegangan yang dibutuhkan adalah DC 5
V untuk pengoperasian mikrokontroler, rangkaian DTMF, rangkaian hook dan
rangkaian deteksi dering. Sedangkan untuk rangkaian driver kendali peralatan
tegangan tinggi catu dayanya 12 Volt. Untuk menstabilkan tegangan yang
dihasilkan digunakan IC LM7805 dan IC LM7812. Kapasitor pada catu daya
berfungsi sebagai filter dan pembentuk regulasi lebih baik.
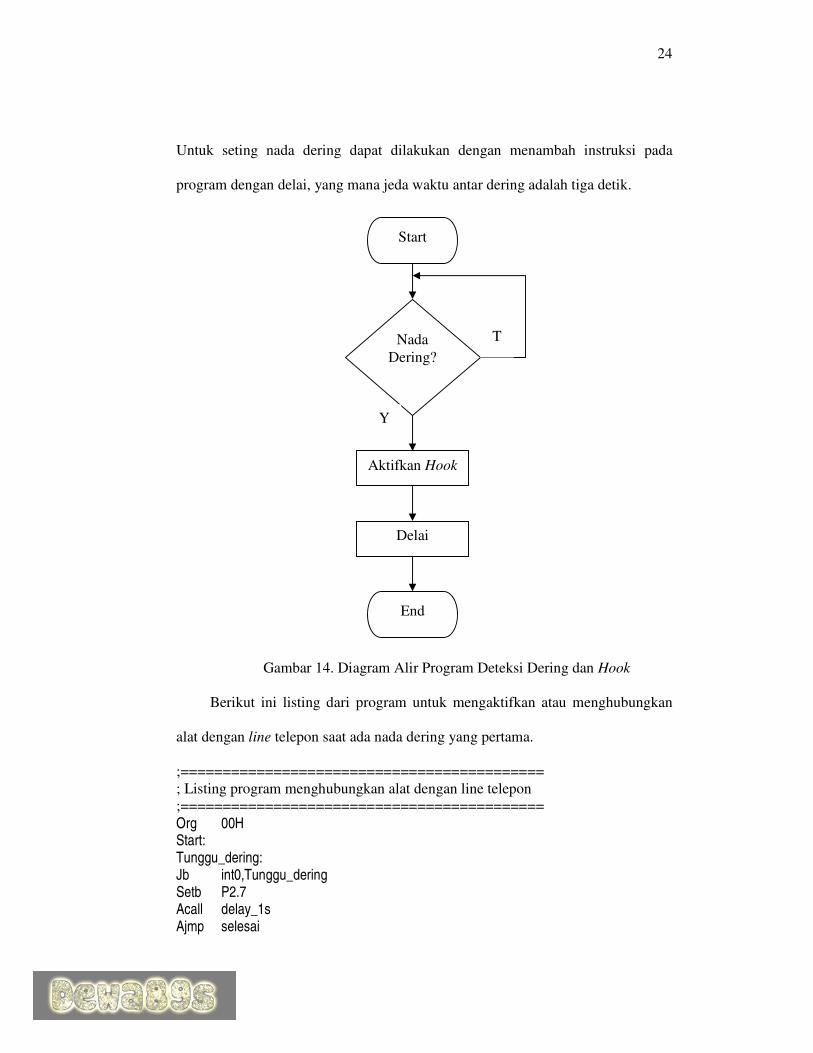
1.3 Perangkat Lunak
a. Program Pendeteksi Dering dan Hook
Program ini berfungsi untuk memberi sinyal pada mikrokontroler saat
telepon ada nada dering. Walaupun pada alat tidak terdengar suara dering, tetapi
alat dapat mendeteksi saat ada nada dering dari line telepon dengan menggunakan
rangkaian pendeteksi dering.
Saat ada nada dering dari line telepon, rangkaian pendeteksi dering akan
memberikan sinyal atau data ke mikrokontroler, dan selanjutnya data tersebut
akan diproses oleh mikrokontroler untuk mengaktifkan rangkaian hook, sehingga
tercapai suatu kondisi yang akan membuat alat dalam keadaan off-hook atau
dengan kata lain kondisi telepon diangkat, yang artinya alat telah terhubung
dengan saluran telepon dan siap untuk dikendalikan.
Pada program dibawah ini, nada dering diset sekali, maksudnya saat ada
nada dering pertama kali, maka alat akan langsung terhubung pada line telepon.
24
Untuk seting nada dering dapat dilakukan dengan menambah instruksi pada
program dengan delai, yang mana jeda waktu antar dering adalah tiga detik.
Gambar 14. Diagram Alir Program Deteksi Dering dan Hook
Berikut ini listing dari program untuk mengaktifkan atau menghubungkan
alat dengan line telepon saat ada nada dering yang pertama.
;=========================================== ; Listing program menghubungkan alat dengan line telepon ;=========================================== Org 00H Start: Tunggu_dering: Jb int0,Tunggu_dering Setb P2.7 Acall delay_1s Ajmp selesai
Start
Delai
End
Aktifkan Hook
Nada Dering?
T
Y
25
delai_1s: Mov r1,#8 Loop1: Mov r2,#250 Loop2: Mov r3,#250 Loop3: Djnz r3,Loop3 Djnz r2,Loop2 Djnz r1,Loop1 Ret Selesai: End
b. Program Pengiriman dan Penerimaan Nada DTMF
Rangkaian detektor DTMF yang digunakan berfungsi untuk menerima nada
DTMF dan mengubah ke dalam bentuk biner, selain itu rangkaian detektor DTMF
ini juga dapat membangkitkan sinyal atau nada DTMF dari kode biner yang
dikirim oleh mikrokontroler melalui alamat P1.0 sampai P1.3 ke rangkaian
detektor DTMF. Listing program dibawah ini berisi program untuk menerima
sinyal atau nada DTMF yang dikirimkan melalui tombol pesawat telepon, dan
membangkitkan atau mengirim nada DTMF melalui line telepon dari kode biner
yang dikirim oleh mikrokontroler.
26
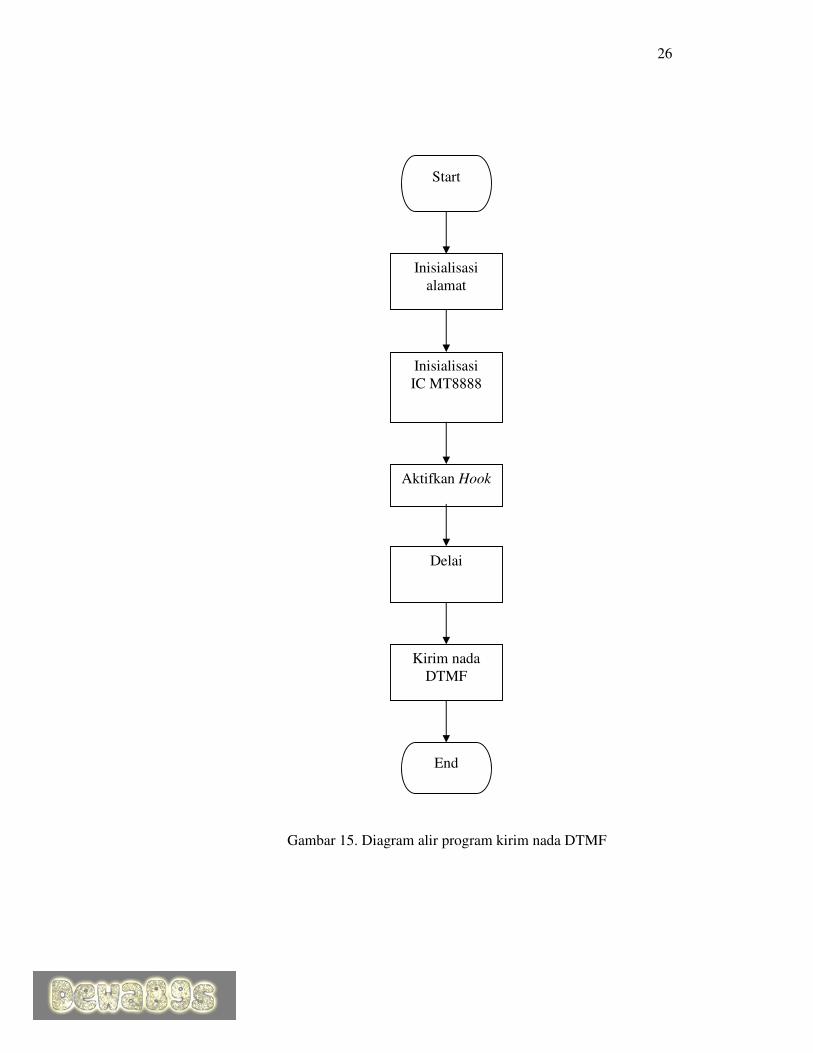
Gambar 15. Diagram alir program kirim nada DTMF
Start
Inisialisasi IC MT8888
Inisialisasi alamat
Aktifkan Hook
End
Kirim nada DTMF
Delai
27
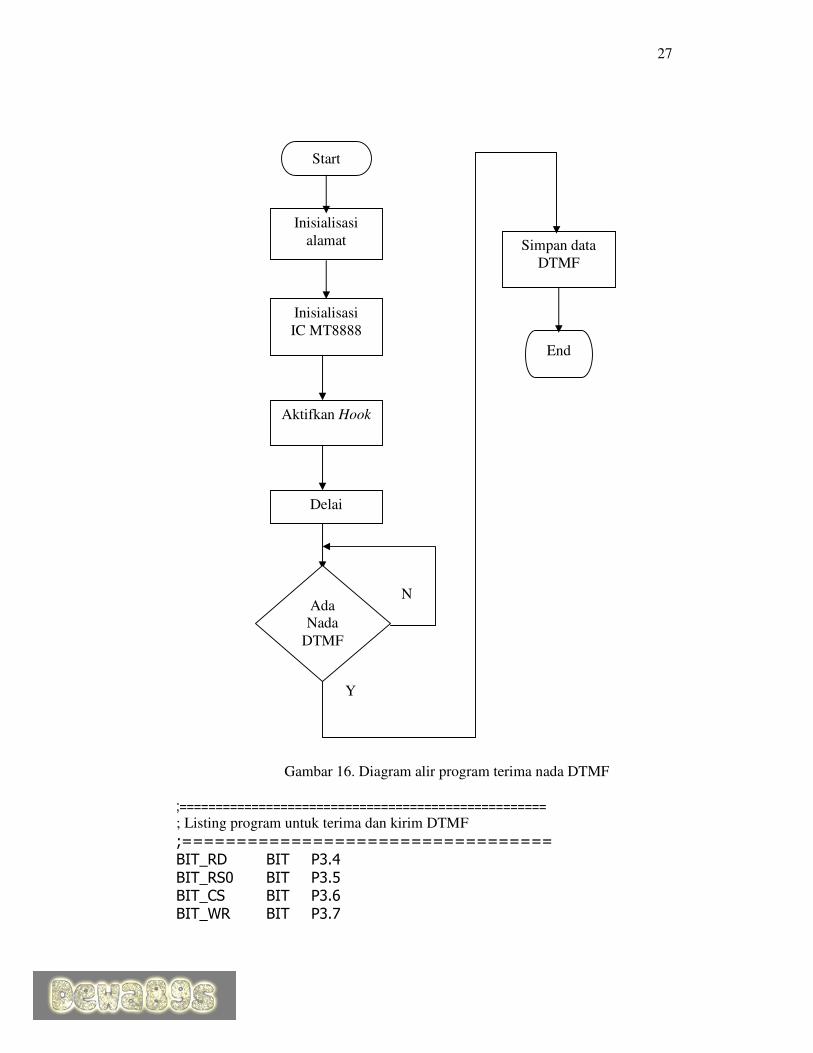
Gambar 16. Diagram alir program terima nada DTMF
;=================================================== ; Listing program untuk terima dan kirim DTMF ������������������������������������
������ ���� �� �
�������� ���� ����������� ���� ����������� ���� ����
�
End
Simpan data DTMF
Start
Inisialisasi IC MT8888
Inisialisasi alamat
Aktifkan Hook
Delai
Ada Nada
DTMF
Y
N
28
���� ����
�������������������������������������������
��������������� �!!!!�������������������������������������
"#� �$%���� "#� &$%&&&&&&&&'�
"#� �$%&&�&&&&&'�()���� *+����&��()���� *+����&��
()���� *+����&��
()���� ����� �!!!!�()���� ,�-�������.��
���� � ($%&&&&����'�
"#� ($%�-�
()���� /���0�/"���"���()���� ,�-�������.��
���� � ($%&&&&����'�
���� � ���������+�'� �������+�'� �������
�+�'� 1������� � �������
()���� *+����&��
()���� *+����&���(203� �+��0��
� �
(203� 4���0��
�+��0���
5'� � �6�&$�+��0��()���� ,�-�������.��()���� '�)��� 7�
()���� *+����&��
"#� ��$(�(203� �+�+�����
4���0��()���� ����� �!!!!�
"#� ($%�(��()���� 4���0���*�� 7�
"#� ($%�!��()���� 4���0���*�� 7�
29
"#� ($%�&��
()���� 4���0���*�� 7� "#� ($%����
()���� 4���0���*�� 7� "#� ($%����
()���� 4���0���*�� 7� "#� ($%����
()���� 4���0���*�� 7� "#� ($%�&��()���� 4���0���*�� 7�
"#� ($%����
()���� 4���0���*�� 7� "#� ($%�8��
()���� 4���0���*�� 7�
"#� ($%�1��
()���� 4���0���*�� 7� "#� ($%�1��
()���� 4���0���*�� 7�
"#� ($%����()���� 4���0���*�� 7�()���� *+����&��
()���� *+����&��(203� �+�+����
�
����� �!!!!�� "#� ($%����()���� 4���0�4"���"��
"#� ($%����
()���� 4���0�4"���"�� "#� ($%����&���'�
()���� 4���0�4"���"��
"#� ($%����()���� 4���0�4"���"���+��
�
/���0���*�� 7��()���� 4���0�� 7� "#� ($%�������&'�
()���� 4���0�4"���"��()���� *+����&��0��
"#� ($%��������'�()���� 4���0�4"���"��
()���� *+����&��0���+��
30
4���0�� 7��
���� � ������������ � �������
(��� � &$%�7�-����� � &$(�
6"3�6"3�
�+�'� ��������+���
'�)��� 7��
���� � ������������ � ������
"#� ($&�
6"3�
6"3��+�'� ������
�+��
�4���0�4"���"����+�'� ��������
���� � �������(��� � &$%�7�-�
���� � &$(�
6"3�6"3��+�'� �������
�+��
�,�-�������.���
�+�'� ��������
���� � ������6"3�6"3�
()���� *+����&��0��
"#� ($&�(��� � ($%�7-��+�'� ������
�+���
*+����&��0��� "#� �&$%1���
,""3&�� "#� �1$%1���
31
,""31��
2�9� �1$,""31�2�9� �&$,""3&�
�+���
*+����&��� "#� �&$%!�
,""3��� "#� �1$%1���,""3 ��
"#� ��$%1���
,""3���2�9� ��$,""3��
2�9� �1$,""3 �
2�9� �&$,""3��
�+���+�+�����
:�*�
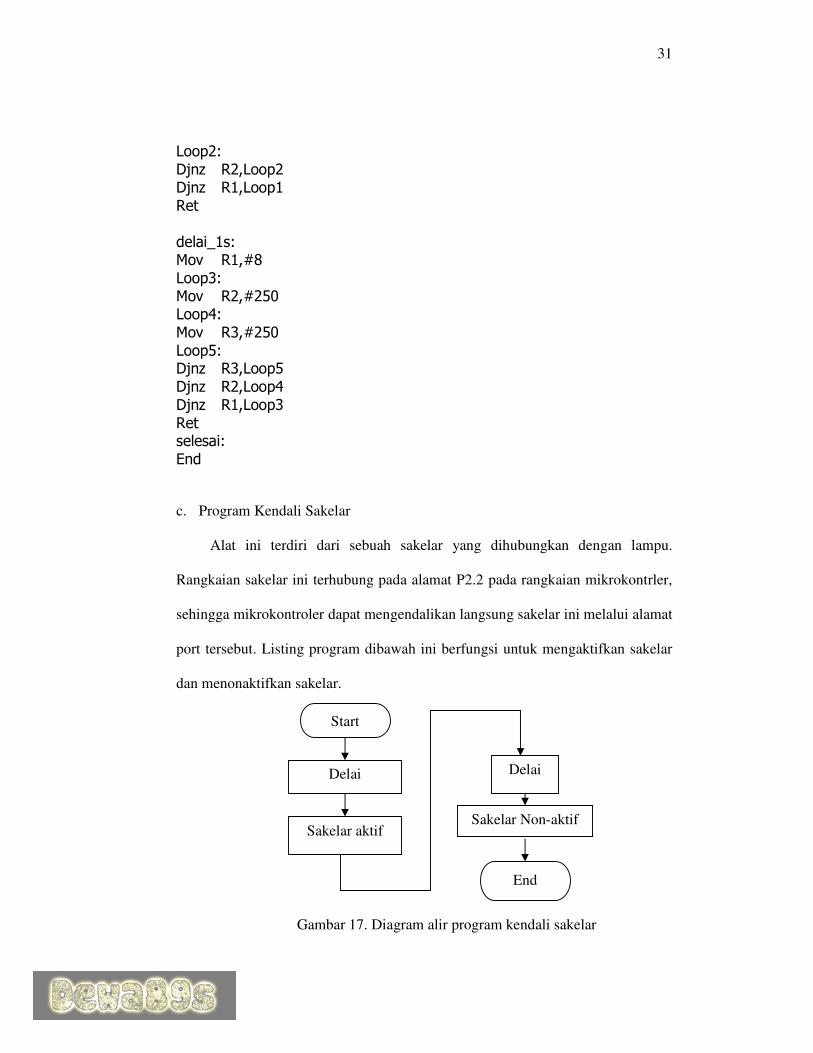
c. Program Kendali Sakelar
Alat ini terdiri dari sebuah sakelar yang dihubungkan dengan lampu.
Rangkaian sakelar ini terhubung pada alamat P2.2 pada rangkaian mikrokontrler,
sehingga mikrokontroler dapat mengendalikan langsung sakelar ini melalui alamat
port tersebut. Listing program dibawah ini berfungsi untuk mengaktifkan sakelar
dan menonaktifkan sakelar.
Gambar 17. Diagram alir program kendali sakelar
Start
Sakelar aktif
Delai
Delai
End
Sakelar Non-aktif
32
;=================================================== ; Listing program beep ;================================== ���� �����������
()���� *+��������
��4+�����4��;���+�'� 1�1�()���� *+�������
�
��4+�����"��4��;������ 1�1�(203� �+�+����
�
*+�������� "#� �&$% ��,""3&��
"#� �1$%1���,""31��
"#� ��$%1���,""3���
2�9� ��$,""3��2�9� �1$,""31�
2�9� �&$,""3&��+���
�+�+�����
:�*��
d. Program Nada Beep
Program nada beep ini berfungsi untuk memberi tanda berupa suara beep
pada pengendalian alat jarak jauh melalui line telepon. Pada pengendalian jarak
jauh atau melalui line telepon, suara beep tentunya sangat diperlukan, karena
suara beep ini akan sangat membantu saat proses verifikasi dalam memasukkan
kode password maupun saat pengendalian dilakukan. Jadi saat kode password
yang dimasukkan benar maka akan terdengar suara beep sekali, dan saat kode
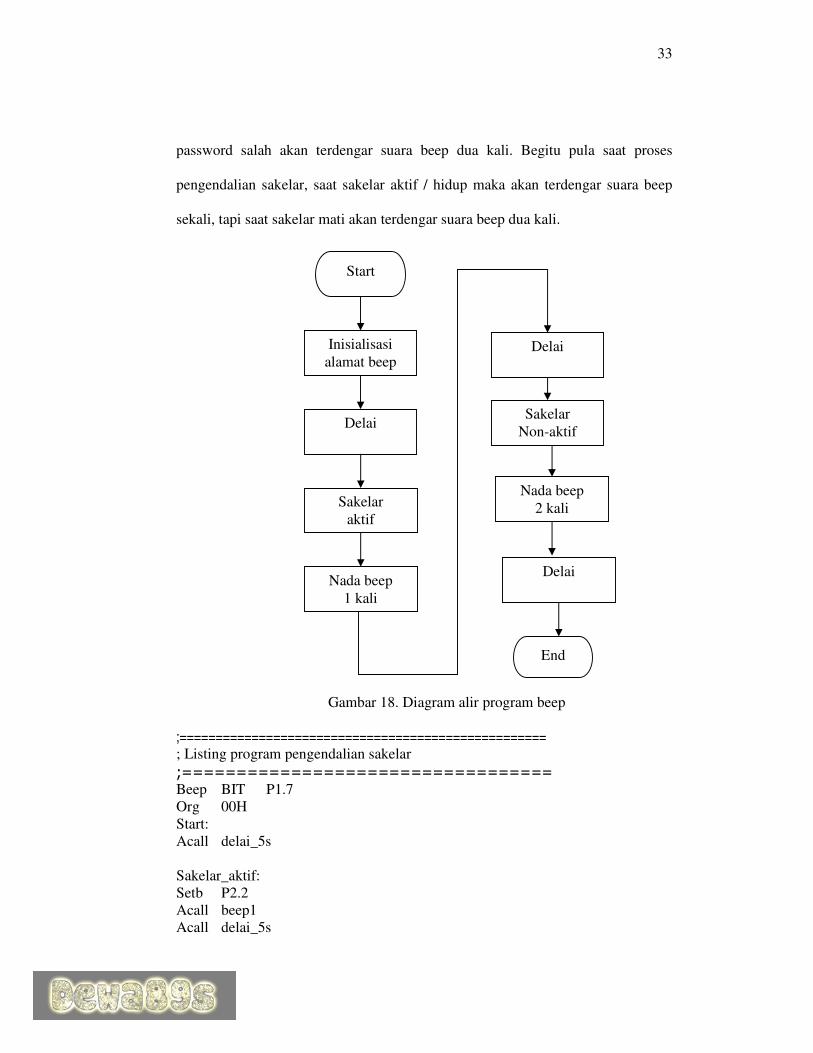
33
password salah akan terdengar suara beep dua kali. Begitu pula saat proses
pengendalian sakelar, saat sakelar aktif / hidup maka akan terdengar suara beep
sekali, tapi saat sakelar mati akan terdengar suara beep dua kali.
Gambar 18. Diagram alir program beep
;=================================================== ; Listing program pengendalian sakelar ������������������������������������Beep BIT P1.7 Org 00H Start: Acall delai_5s Sakelar_aktif: Setb P2.2 Acall beep1 Acall delai_5s
Start
Delai
Inisialisasi alamat beep
Sakelar aktif
End
Nada beep 1 kali
Delai
Sakelar Non-aktif
Nada beep 2 kali
Delai
34
Sakelar_nonaktif: Clr P2.2 Acall beep2 Acall delai_5s Ajmp selesai Beep1: Mov R6,#50 Suara1: Setb Beep Acall delai_beep Clr Beep Call delai_beep Djnz r6,SUARA1 Call delai_50ms Ret Beep2: Acall Beep1 Acall delai_50ms Acall Beep1 Ret delai_beep: Mov R1,#3 Loop1: Mov R2,#250 Loop2: Djnz R2,Loop2 Djnz R1,Loop1 Ret delai_5s: Mov R3,#40 Loop3: Mov R4,#250 Loop4: Mov R5,#250 Loop5: Djnz R5,Loop5 Djnz R4,Loop4 Djnz R3,Loop3 Ret delai_50ms: Mov R3,#100
35
Loop6: Mov R4,#250 Loop7: Djnz R4,Loop7 Djnz R3,Loop6 Ret Selesai: End
1.4 Pembuatan Program Mirkokontroler AT89S51
Langkah-langkah pemrograman pada mikrokontroler AT89S51 adalah
sebagai berikut :
• Program dibuat dalam bahasa assembler mikrokontroler. Program dapat
diketik menggunakan sembarang editor teks (misal program EDIT pada
MSDOS prompt/program editor teks lainnya), kemudian program
disimpan dalam ekstensi *.asm
• Setelah program selesai diketik, maka program tersebut dikompilasi
dengan mengetikkan perintah asm51 <nama_file.asm>.
• Jika terjadi kesalahan penulisan maka akan ditunjukkan dan harus
diperbaiki terlebih dahulu. Bila tidak terjadi kesalahan maka akan
dihasilkan berkas object yang kemudian dapat diubah ke hexa.
• Ubah file yang telah terkompilasi dengan perintah oh <nama_file.obj>.
• Setelah diubah maka akan didapatkan file dengan ekstensi *.HEX.
Kemudian file ini diisikan ke dalam mikrokontroler dengan bantuan
downloader.
36
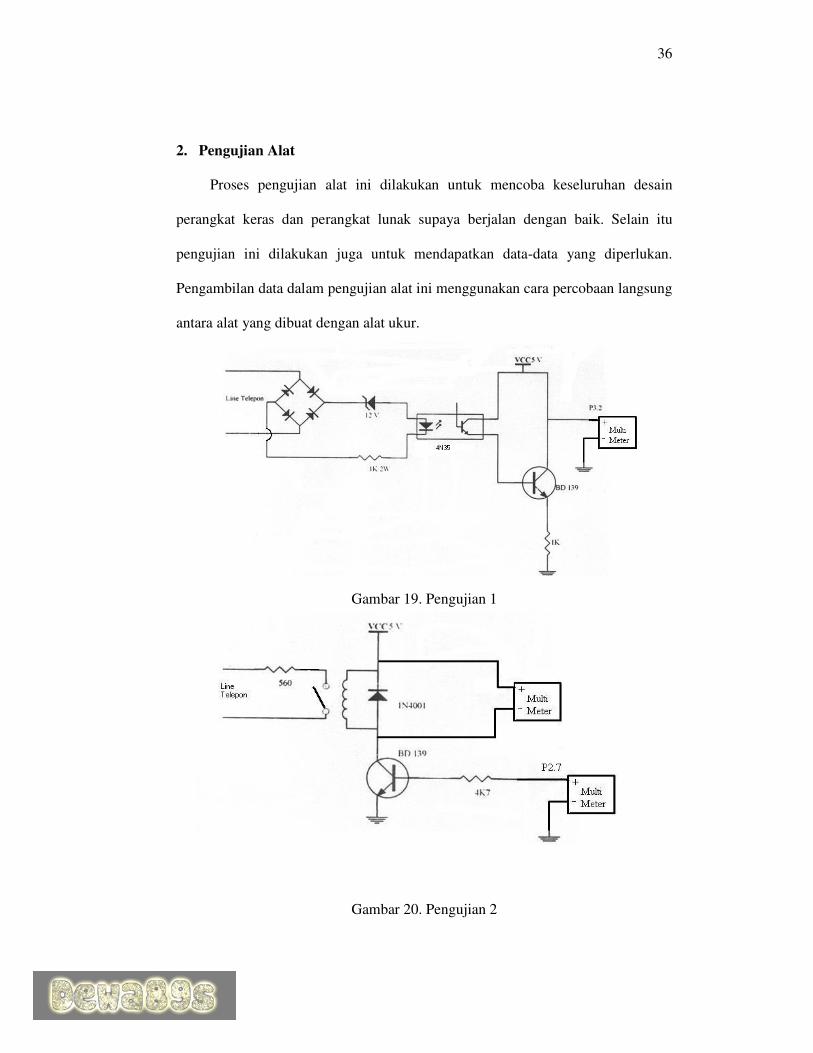
2. Pengujian Alat
Proses pengujian alat ini dilakukan untuk mencoba keseluruhan desain
perangkat keras dan perangkat lunak supaya berjalan dengan baik. Selain itu
pengujian ini dilakukan juga untuk mendapatkan data-data yang diperlukan.
Pengambilan data dalam pengujian alat ini menggunakan cara percobaan langsung
antara alat yang dibuat dengan alat ukur.
Gambar 19. Pengujian 1
Gambar 20. Pengujian 2
37
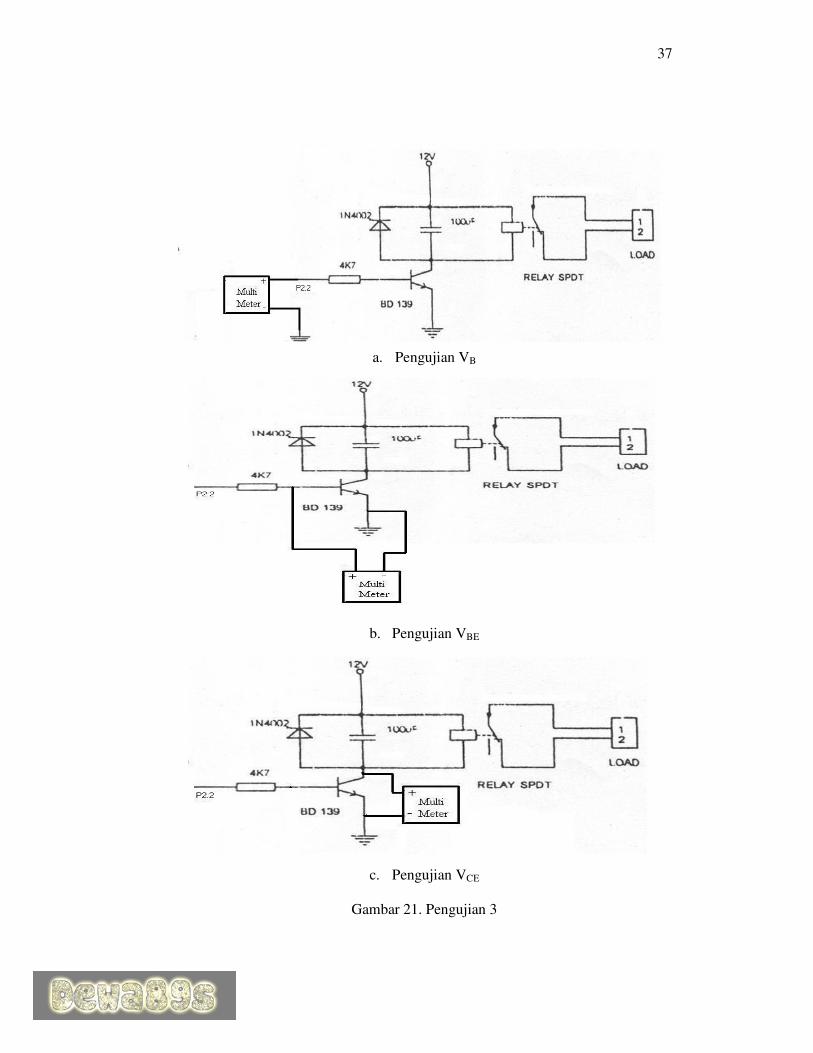
a. Pengujian VB
b. Pengujian VBE
c. Pengujian VCE
Gambar 21. Pengujian 3
38
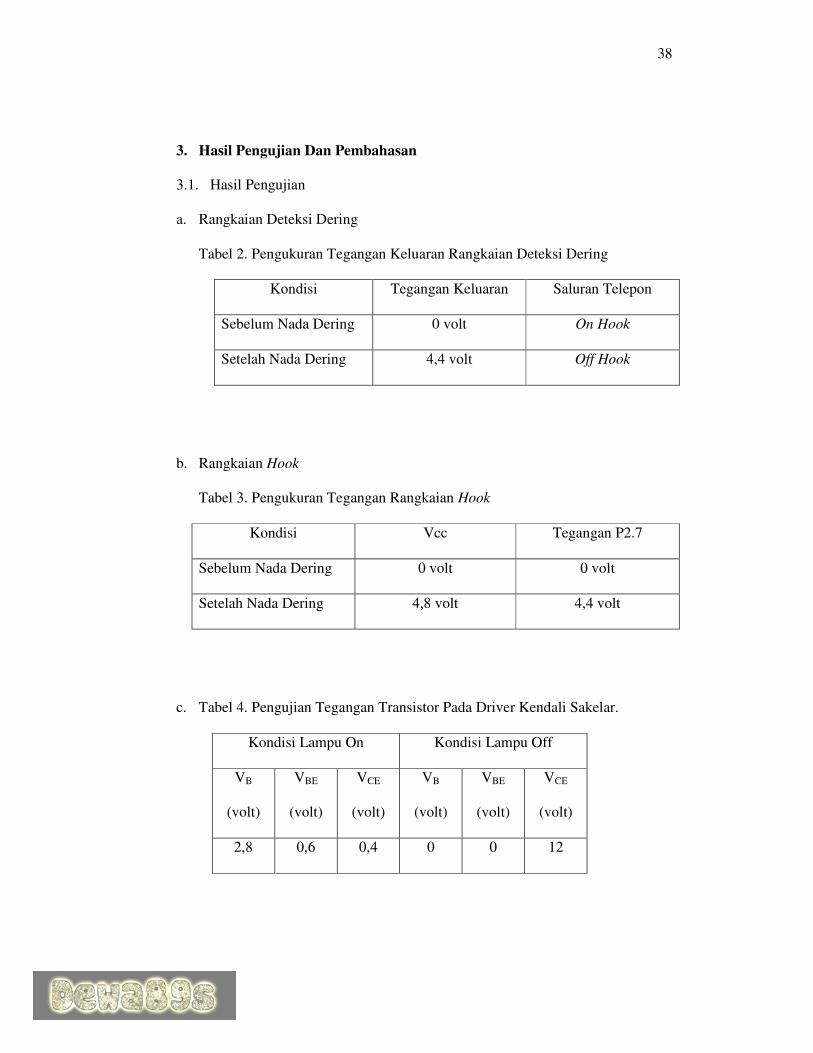
3. Hasil Pengujian Dan Pembahasan
3.1. Hasil Pengujian
a. Rangkaian Deteksi Dering
Tabel 2. Pengukuran Tegangan Keluaran Rangkaian Deteksi Dering
Kondisi Tegangan Keluaran Saluran Telepon
Sebelum Nada Dering 0 volt On Hook
Setelah Nada Dering 4,4 volt Off Hook
b. Rangkaian Hook
Tabel 3. Pengukuran Tegangan Rangkaian Hook
Kondisi Vcc Tegangan P2.7
Sebelum Nada Dering 0 volt 0 volt
Setelah Nada Dering 4,8 volt 4,4 volt
c. Tabel 4. Pengujian Tegangan Transistor Pada Driver Kendali Sakelar.
Kondisi Lampu On Kondisi Lampu Off
VB
(volt)
VBE
(volt)
VCE
(volt)
VB
(volt)
VBE
(volt)
VCE
(volt)
2,8 0,6 0,4 0 0 12
39
3.2. Pembahasan
a. Rangkaian Deteksi Dering
• Tegangan yang dihasilkan oleh rangkaian deteksi dering adalah 4,4 volt.
Pada level tegangan tersebut mikrokontroler tetap dapat bekerja karena
range tegangan untuk kondisi high pada mikrokontroler adalah 1,9 volt –
5,5 volt.
• Adanya nada dering pada saluran telepon akan mengakibatkan P3.2
mikrokontroler dalam kondisi high atau berlogika 1. Data ini oleh
mikrokontroler digunakan untuk mengaktifkan rangkaian hook.
b. Rangkaian Hook
• Rangkaian hook berfungsi sebagai sakelar penghubung antara alat dengan
saluran telepon. Rangkaian hook tetap bekerja dengan baik meskipun Vcc
terukur adalah 4,8 volt karena tegangan ini hanya sebagai pemicu agar
relai bekerja. Dengan adanya arus yang mengalir pada kumparan relai
maka kontak NO relai akan menutup.
• Logika tinggi dilakukan oleh mikrokontroler dengan perintah Setb P2.7.
Logika tinggi dicapai setelah mikrokontroler menerima data dari rangkaian
deteksi dering terlebih dahulu.
c. Rangkaian kendali relai
• Rangkaian driver sakelar menggunakan prinsip transistor sebagai sakelar
untuk mengendalikan relai.. Dalam kondisi Vi = 0 da IB = 0 berarti tidak

40
ada masukan, ini berarti bahwa transistor berada dalam keadaan tersumbat.
Pada keadaan ini tidak ada arus yang mengalir melalui hambatan, kecuali
arus bocor ICEO. Kondisi seperti ini dinamakan terbuka (off), karena
tegangan antara emitor dan kolektor besarnya mendekati Vcc.
Jika Vi diberi tegangan cukup besar sehingga IB juga cukup besar, maka
transistor akan berubah dari keadaan tersumbat menuju ke keadaan jenuh,
yaitu harga IC mencapai harga maksimum. Kemudian kenaikan IB tidak
lagi menyebabkan kenaikan IC. Kondisi tersebut dianggap sakelar tertutup
(on).
• Pada saat belum terjadi pengendalian (masih dalam keadaan off) maka
tegangan pada P2.2 tidak ada tegangan sehingga tidak akan arus yang
mengalir pada transistor. Pada saat pengendalian dilakukan maka pada
transistor akan ada arus yang mengalir dan menyebabkan kontak NO relai
menutup dan lampu menyala.
41
BAB III
PENUTUP
A. Kesimpulan
1. Unit pengendali lampu taman sistem telepon berbasis mikrokontroler
AT89S51 dapat terealisasi dengan baik.
2. Meskipun pada rangkaian deteksi dering hanya menghasilkan tegangan
4,5 volt tetapi unit pengendali ini tetap berjalan dengan baik karena
mikrokontroler tetap dapat bekerja dalam range tegangan 1,9 – 5,5 volt.
3. Rangkaian hook tetap bekerja dengan baik walaupun tegangan yang
keluar hanya 4,8 volt untuk memicu relai bekerja. Faktor komponen dan
pengawatan dapat menjadi penyebab menurunnya tegangan yang
dihasilkan.
4. Unit pengendali lampu taman sistem telepon berbasis mikrokontroler
AT89S5 dapat dikendalikan baik melalui telepon umum maupun telepon
selular karena prinsip kerjanya menggunakan saluran telepon sebagai
media perantara. Prinsip kerja alat ini adalah dengan menghubungi
nomor telepon yang dituju, kemudian setelah nada dering pertama alat
akan segera terhubung dengan telepon dan siap untuk dilakukan
pengendalian.
42
B. Saran
� Unit pengendali ini dapat diterapkan pada industri dengan mengganti
beban lampu taman dengan beban yang akan dikendalikan. Tetapi juga
harus diperhatikan kemampuan driver sakelar dalam menampung
beban.
� Pusat pengendalian pada unit pengendali lampu taman ini terletak pada
mikrokontroler, maka disarankan mahasiswa dapat mendalami
pemrograman mikrokontroler tersebut sehingga unit pengendali lampu
taman ini dapat lebih bermanfaat.