Embed Size (px)
Citation preview

Francisco J. Escribano
Universidad de Alcalá de Henares
Spain
e-mail: [email protected]
Performance Evaluation of Parallel Concatenated Chaos-Based Coded Modulations
Politecnico di Torino, Italia, 18Politecnico di Torino, Italia, 18thth September 2009 September 2009

22
Background I
In most cases, chaos based encoders/modulators for digital communications had so far proved poor performing in terms of bit error rate (BER).
Recent work shows that poor performing chaos-based systems can benefit from the performance boost of parallel concatenation. F. J. Escribano, S. Kozic, L. López, M. A. F. Sanjuán and M.
Hasler, Turbo-like Structures for Chaos Coding and Decoding,IEEE Transactions on Communications, March 2009.
We will analyze here how such concatenated chaos-based systems work, with the aim to gain insight in their possibilities.

33
Background II
At the waveform level. E.g.: Chaos Shift Keyng.
At the coding level. E.g.: sequences for spread
spectrum communications.
Chaos-based systems for digital communications used to work:

44
CCM basics I
Chaos-Based Coded Modulated (CCM) systems. They work at a joint waveform and coding level.
They are based on expanding piecewise linear chaotic maps. S. Kozic, T. Schimming and M. Hasler, Controlled One- and
Multidimensional Modulations Using Chaotic Maps, IEEE Transactions on Circuits & Systems I, September 2006.
Map example: Bernoulli shift map (BSM).
1 mod 2)( 11 −− == nnn zzfz
[ ] [ ]0,10,1:)( →zf
Uncontrolled dynamics

55
CCM basics II
Control by small perturbations through binary sequence bn:
Q (integer>=1) gives the amplitude of the perturbation.
Symbolic dynamics of the uncontrolled BSM:
The perturbation manifests itself after Q-1 iterations.
Qn
nn
bzfz
2)( 1 += −
{ }
∑∞
=+
+−=
∈
+=
0
)1(2
1,0 2
1
iin
in
nnn
sz
szsSimbolic state
Binary expansionof the chaotic sequence

66
CCM basics III
Let’s define the set SQ as
When , then if
Therefore, with the small perturbations setup and choosing, e.g., z0=0, the iteration leaves the set SQ
invariant -> we get a quantized chaos-based sequence.
The process can be described by a finite state machine.
−== 12,...,1,0
2Q
QQ mm
S
QSz ∈0 Qn Sz ∈Qn
nn
bzfz
2)( 1 += −

77
CCM basics IV
Trellis encoder view of the BSM driven by small perturbations, restricted to SQ:
In the concatenated setup, we will need feedback to get interleaver gain:
≥<
=
⋅+=
−
−−
−−−
2/1
2/1 ),(
2),()(
1
11
11
nn
nnnn
Qnnnn
zb
zbzbg
zbgzfz

88
CCM basics V
We can extend the CCM concept to build a system based on switched maps driven by small perturbations:
f0 and f1 can be the same (case seen with BSM), or different maps (switched maps).
The whole framework can be generalized to cover multidimensional maps (Kozic et al, TCAS-I, 2006).
The encoding process finishes with a scaling process:
[ ]1,1 12
2),(),(
0
11
+−∈−=
∈→∈⋅+= −
−−
nnn
QnQ
Qnnnnn
xzx
SzSz
zbgbzfz
==
==−
−− 1 )(
0 )(),(
11
101
nn
nnnnn bzf
bzfbzfz [ ] [ ]0,10,1:)(1,0 →zf
One-dimensionalswitched maps drivenby small perturbations
with feedback

99
General Setup: CCM constituent blocks
Maps and corresponding CCM’s considered in the examples (expanding maps with slope ±2):
Bernoulli shift map (BSM)
Switched version of the BSM, multi-BSM (mBSM)
Tent map (TM)
Switched version of the TM, multi-TM (mTM)

1010
General Setup: concatenated modulator
Similar setup to the parallel concatenation of Trellis Coded Modulations (TCM): Two Chaos Coded Modulation (CCM) blocks + Interleaver
Parallel Concatenated Chaos-Based Coded Modulations (PCCCM)
Differences with respect to traditional parallel cocatenated systems: Individual CCMs (one-dimensional) work at a rate of one symbol per bit
Bit interleaver instead of symbol interleaver
Strongly nonlinear in general

1111
General Setup: parameters
Parameters: Kind of CCM blocks (underlying map)
Quantization level (Q)
Size of interleaver π (N)
Structure of permutation
Quantization level: Q>=4 is normally enough to make quantization effects
neglibigle in practice
Interleaver: S-random interleaver without any optimization
The channel considered for the test simulations is the standard AWGN channel.

1212
General Setup: iterative decoder
The trellis coded characteristics of the chaos-based signal allows the use of known decoding frameworks for concatenated coding.
The decoder consists on two SISO (soft-input soft-output) decoding blocks working iteratively.
The decoders interchange soft information in the form of log likelihood ratios (llr’s).

1313
Convergence analysis
The similitude with a Turbo-TCM system allows the use of known principles and tools for analysis of convergence (pinchoff point) and performance (error floor).
Convergence of the iterative decoder: EXIT charts.
mBSM CCM’sQ=5
They are ableto predict thepinchoff point
with a mismatchof some tenths of dB

1414
Error floor analysis: binary error events I
Each CCM kind considered has weight 2 binary error event loops with structure 10…01, and length L*=Q+n.
n=1,2 depending on the kind of CCM.
Error loop in the BSM CCM trellis, Q=3

1515
Error floor analysis: binary error events II
The important parameter is the Euclidean distance between CCM sequences xn and xn’ corresponding to said error loops:
In our setup, if S>3L*, the dominant error events for high Eb/N0 mainly consist in the concatenation of two of said error events:
( )∑−+
=
−=1
2'2
* mL
mnnnE xxd

1616
Error floor analysis: Euclidean distance
The sequences xk and xk’ related through such compound binary error event exhibit four chaos coded subsequences of length L* with non-zero difference
For the BSM CCM, each individual Euclidean distance has the same value, regardless of xk and xk’: dE
2≈4(4/3).
For the other CCM’s, the Euclidean distance depends on the values of xk and xk’ (exact path through the trellis). They do not comply with the uniform error event property.
The evaluation of the corresponding distance spectrum requires evaluating the distance spectrum of the individual error events and of their combinations.
( )∑=
+++=−=N
kEEEEkkE ddddxxd
2
1
22222'2
4321

1717
Error floor analysis: Euclidean distance spectra I
Histograms for the individual error events (Q=5)
mBSM TM
mTM

1818
Error floor analysis: Euclidean distance spectra II
Histogram for the compund error events (mTM, Q=5):
Distance spectra basically does not change with Q (>=4).
Main contributiongiven by the few
sequencesleading to this
few values

1919
Error floor analysis: bound
The bound for the bit error probability in the error floor region can be given in the general case by numerical integration over the probability density function (pdf) of the Euclidean distance spectrum dE
2 as estimated through the histogram:
p(v): pdf of the overall dE2
N: size of the interleaver
w4=4: Hamming weight of the related binary error event
N4: number of combinations of pairs of individual binary errors of Hamming weight 2 and length L* allowed by the interleaver
R=1/2: overall rate of the PCCCM
P≈1/3: power of the chaos-based coded sequence
∫
⋅≈
2max
2min
0
44
4erfc)(
2
E
E
floor
d
d
bb dv
N
ER
P
vvp
N
NwP

2020
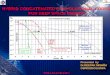
Simulation results and bounds
N=10000, Q=5, S=23 (left plot), 20 decoding iterations.
mBSM, different N, QSame parameters, different maps

2121
Concluding remarks I
BER performance of the PCCCM system is comparable to the attainable with other turbo related systems (Turbo-TCM): Steep waterfal at low Eb/N0 (exception: BSM)
Relatively high error floor for high Eb/N0
The error floor decreases as 1/N
By examining the permutation structure of the interleaver, it is possible to approximately bound the BER at the error floor region.
The PCCCM system based on a quasi-linear CCM (BSM) complies with the uniform error property, but the final behaviour is poor (weak coding structure and poor distance properties).
The CCM’s not complying with the uniform error property and with complex distance spectra lead to lower error floors.

2222
Concluding remarks II
The effect of the quantization level is small.
The system behaviour seems to be rather linked to the dynamics of the underlying map.
The PCCM system is nonlinear and sends chaotic-like samples to the channel.
This chaotic-like signal is easy to generate and can be decoded efficiently with known frameworks.
Iterative decoding helps to avoid the possibility of catastrophic decoding. H. Andersson, Error-Correcting Codes Based on Chaotic
Dynamical Systems, PhD Thesis, Linköping University, Sweden.

2323
Open issues
We have shown that: Chaos-based digital communications systems can attain similar
performance to standard communications schemes Well known analysis techniques could be applied to predict the
final behavior
But there is still a number of important questions to be addressed: Study other encoding structures, based on a more general
framework, and give general properties and design criteria Try to find an optimized interleaver structure Consider other kind of channels Try to find the link between chaotic dynamics and performance Try to get higher spectral efficiency Unsolved question: chaos in the channel seems to be not so bad
performing after all…, but what is it really good for?
Thanks for your attention


![Modulations Cover Score · modulations for percussion trio Full Score [2017] Christopher LaRosa Perusal](https://img.pdfslide.net/doc/110x75/5e88d76cc25a3d277f3b6748/modulations-cover-modulations-for-percussion-trio-full-score-2017-christopher.jpg)