Embed Size (px)
Citation preview

Proceedings of the International Conference on Information and Automation, December 15-18, 2005, Colombo, Sri Lanka. 1
Performance Skill Acquisition ofHandstand from Backward Giant Circle
Using a Rings Gymnastic RobotTakaaki Yamada∗, Keigo Watanabe†, and Kazuo Kiguchi†
∗Department of Mechanical Engineering, Kagoshima National College of Technology1460-1 Shinko, Hayato-cho, Kirishima-shi, Kagoshima 899-5193, Japan
Email: [email protected]†Department of Advanced Systems Control Engineering, Saga University
1 Honjomachi, Saga-shi, Saga 840-8502, Japan
Abstract— We have already proposed the “rings gymnasticrobot” aiming at an application to gymnastic coaching. We havebeen also focusing on performance skill acquisition and obtainedthe skill of backward giant circle by using various models stepby step. In order to apply the skills obtained by the robot tocoaching, many skills collected by a three-dimensional modeland experiments are required. However, a handstand has beenonly realized by two- and three-link models of the robot intwo-dimensional plane. In this paper, the performance skill ofhandstand is newly acquired based on the three-dimensionalmodel, as the next step.
I. INTRODUCTION
The rings event is one of men’s apparatus gymnastics.The ring exercises have the characteristics that the apparatus,namely rings, can move in all directions freely, i.e., free-floating characteristics at gripping point [1]. This is a differentpoint from other gymnastic events and therefore its motionproperty is totally unique. The rings have been mainly studiedin the field of biomechanics since the late twenty century.Chapman and Borchardt [2] have recorded the forces actingon gymnast’s hands during a backward giant circle. Suchstudies on rings mainly discuss the results obtained by motionmeasurements of actual gymnasts’ performances.
On the other hand, we have already proposed the “ringsgymnastic robot” [3]. In the approach using the rings gym-nastic robot, it is possible to analyze not only performancesaccording to body type and characteristics for each gymnastbut also feats that nobody has ever done, unlike the approachbased on the above-mentioned motion measurements. The pur-pose of studies on the rings gymnastic robot is to understandring exercises through the robot and to apply the acquiredskill to gymnastic coaching. In other words, it is to acquirethe performance skill through the robot and to transfer theskill from the robot to gymnasts (to improve their motions)respectively. In researches on the rings gymnastic robot, fuzzycontrol is adopted to control the robot. Because informationon how to generate forces required in a performance is usefulfor the gymnastic coaching, as indicated in the area of sportsbiomechanics [4]. In addition, if the control strategy is repre-sented as “if-then” rules, it is easy for gymnasts to understand
the knowledge to realize the performance, as compared toreading the time-series data.
So far we have been mainly studying the skills acquisition,which is the first purpose of our research as mentioned above,of some performances. The performance skill of backwardgiant circle has been already acquired by using not only two-and three-link models of the robot in two-dimensional plane[3], [5], [6] but also a three-dimensional model consideringarm abduction [7] step by step. On the other hand, the skillof handstand has been only obtained with the two- and three-link models [3], [5], [6] and it has not been acquired yet inthe three-dimensional model. In order to apply performanceskills to gymnastic coaching as the final objective, we furtherneed to acquire skills of various performances by simulationsbased on the three-dimensional model and experiments.
From this fact, in this paper, we acquire performance skillof a handstand from backward giant circle by the three-dimensional model in an evolutionary manner as the nextstep. Note here that a backward giant circle and handstand arethe compulsory requirements in the rings event, and thereforethey are important performances. The performance skill is de-scribed by fuzzy control rules. Parameters of the fuzzy controlrules are searched with a genetic algorithm (GA). In acquiringthe handstand skill, fitness functions incorporating the jointangles throughout handstand are adopted from the viewpointof the skill and appearance of handstand [8]. Finally, theeffectiveness of the skill is illustrated by a three-dimensionalanimation based on simulation results.
II. THREE-DIMENSIONAL MODEL OF RINGS GYMNASTICROBOT
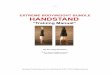
We have already proposed the three-dimensional modelconsidering arm abduction of the rings gymnastic robot [7].In this section, we show the model as shown in Fig. 1. Inthe modeling, torso and head (link 1), thigh (link 2), shank-foot (link 3), and arm (link 4) are assumed as one rigidlink. Six degrees-of-freedom, that is, each two degrees-of-freedom (flexion/extension and abduction) at right and leftshoulder joints and each one degree-of-freedom at hip and
180
Proceedings of the International Conference on Information and Automation, December 15-18, 2005, Colombo, Sri Lanka. 2
X
Z
O
),( 00 zx
Rope1φ
),( 44 zxe4θ
Hip joint
Knee joint
Shoulder joint(Arm elevation)
Shoulder joint(Arm abduction)
Z
Y
),( 33 zx
),( 22 zx
1θ),( 11 zx
1l
3l
2l
),( 33 zy
),( 00 zy
),( 44 zy
),( 11 zy
),( 22 zy
1gl2gl
3gl2θ
O
rw
sw
Fig. 1. Three-dimensional model of rings gymnastic robot
knee joints can be driven. It is assumed that the robot’smotion is symmetric with respect to X-Z plane. (x1, z1) is thecoordinates of mass center of link 1, θ1 is the angle betweenZ-axis and link 1, θ2 is the angle of hip joint, θ3 is the angle ofknee joint, and θ4e and θ4a are the angles of flexion/extensionand abduction at the shoulder joint respectively. Note thatθ3 ≤ 0 is satisfied due to the characteristics of the knee jointand the angles at the shoulder joints rotate in the order of θ4e
and θ4a.Letting the generalized coordinate be q = [x1 z1 θ1 θ2 θ3
θ4e θ4a]T , the dynamic equation of the model derived usingthe Lagrangian formulation is given by
M(q)q̈ + h(q, q̇) + g(q) = Q, (1)
where M(q) is a 7×7 symmetric mass matrix, h(q, q̇) is a7×1 vector of centrifugal and Coriolis terms, g(q) is a 7×1vector of gravity terms, and Q is a 7×1 vector of generalizedforce terms. Note that 2wr is a distance between the fixedpoints of rope, 2ws is a length between right and left shoulderjoints, φ1 and φ2 are rope angles, τi (i = 2, 3, 4e, 4a) is inputtorque, and Ti is torque caused by an impedance at each jointand expressed as
Ti = −ki(θi − θ̄i) − biθ̇i, (2)
where ki and bi denote a spring constant and a viscousdamping coefficient respectively, and θ̄i indicates an angle ina basic posture.
III. PROCEDURE FOR ACQUIRING SKILL
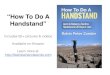
Although this paper is focused on the handstand skill, ahandstand from backward giant circle is adopted as the wholeobjective performance. In order to realize such a performance,it is divided into two basic exercises, i.e., a backward giantcircle and a handstand. A fuzzy controller is prepared for eachbasic exercise. One of the controllers is selected according tothe situation. Parameters of the fuzzy control rules are searchedwith a two-stage approach as shown in Fig. 2. In Fig. 2 kh
����� ������ ��
������ ����� ����
����� ������ ��
���������
������
����
����
�� ��������
������ �� ��
����������� ������ ��
������ ����� ����
��� ��� ��� ��������� �������
Focus of the paper
Fig. 2. Procedure for acquiring the parameters of fuzzy controllers by two-stage approach
�
���� ���
���� ���
�
�
�
�
���
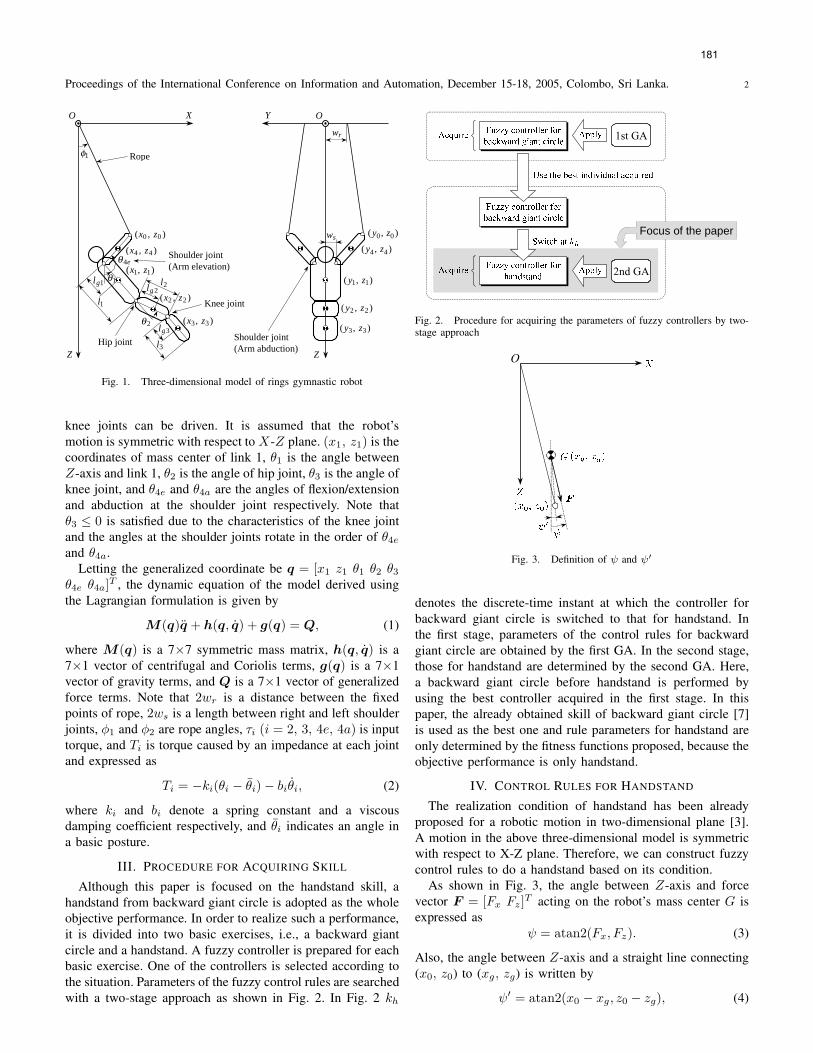
Fig. 3. Definition of ψ and ψ′
denotes the discrete-time instant at which the controller forbackward giant circle is switched to that for handstand. Inthe first stage, parameters of the control rules for backwardgiant circle are obtained by the first GA. In the second stage,those for handstand are determined by the second GA. Here,a backward giant circle before handstand is performed byusing the best controller acquired in the first stage. In thispaper, the already obtained skill of backward giant circle [7]is used as the best one and rule parameters for handstand areonly determined by the fitness functions proposed, because theobjective performance is only handstand.
IV. CONTROL RULES FOR HANDSTAND
The realization condition of handstand has been alreadyproposed for a robotic motion in two-dimensional plane [3].A motion in the above three-dimensional model is symmetricwith respect to X-Z plane. Therefore, we can construct fuzzycontrol rules to do a handstand based on its condition.
As shown in Fig. 3, the angle between Z-axis and forcevector F = [Fx Fz ]T acting on the robot’s mass center G isexpressed as
ψ = atan2(Fx, Fz). (3)
Also, the angle between Z-axis and a straight line connecting(x0, z0) to (xg, zg) is written by
ψ′ = atan2(x0 − xg, z0 − zg), (4)
181

Proceedings of the International Conference on Information and Automation, December 15-18, 2005, Colombo, Sri Lanka. 3
��
��
� ����
Fig. 4. Antecedent membership functions for handstand
TABLE IPARAMETERS OF ANTECEDENT MEMBERSHIP FUNCTIONS FOR
HANDSTAND
Inputs aN aP
sh −π/90 π/90φ1 −π/18 π/18
φ̇1 −1 1
where (xg, zg) denotes the coordinate of robot’s mass centerand (x0, z0) is the coordinate of robot’s end point. Further-more, we define
sh = ψ − ψ′. (5)
A handstand can be realized if ψ and ψ′ are equal. Thereforesh is given as one of the inputs to the antecedent part of thefuzzy reasoning. The input torque depends on the angle φ1
between Z-axis and the rope and on its rate φ̇1 as well as sh,so that φ1 and φ̇1 are also given as the inputs to the antecedentpart.
The fuzzy control rules on input torques τi (i = 2, 4e) tohip joint and flexion/extension at shoulder joint are describedas follows:
Rule 1: If sh is 1Di and φ1 is 1Ei
and φ̇1 is 1Fi then τi = 1ci···Rule 27: If sh is 27Di and φ1 is 27Ei
and φ̇1 is 27Fi then τi = 27ci.
If all inputs are zero, the handstand is stable; in this case,the input torques have to be zero. In order to satisfy such acondition, a triangular and two trapezoidal functions shownin Fig. 4 are used as the antecedent membership functionsfor each input. The parameters of the membership functionsfor each input are tabulated in Table I. Note here that theantecedent grade is given as the product of the grade for eachmembership function.
Joint impedance is adjusted by changing the spring constantki (i = 2, 4e) at each joint according to the followingequation:
ki ={γiki, within range of motionki, otherwise , (6)
where γi denotes a changing rate for the spring constant ki.While doing a handstand, γi is kept to be an output value fromthe controller for backward giant circle at the transition frombackward giant circle to handstand.
V. ACQUISITION OF RULE PARAMETERS WITH GENETICALGORITHM
In this section, we describe GA used to determine theparameters of control rules and deal with fitness functionsin the GA. In order to consider the skill and appearance ofhandstand, we introduce the fitness functions incorporatingthe joint angles throughout handstand, as in the case of thethree-link model [8].
A. Genetic algorithmIn GA, the number of individuals is 60. A uniform crossover
is used with a crossover rate of 0.6 and a mutation rate is0.01. A tournament strategy with 3 individuals is adopted inthe selection. An elite strategy of 6 individuals is used in analternation of generations.
In the fuzzy control rules for handstand, the consequentconstants 14ci (i = 2, 4e), whose fuzzy labels are all Z in theantecedent part, are set to zero. Other 52 constants, i.e. 1ci–13ciand 15ci–27ci, are determined with GA. The search spaces ofthese consequent constants are set in the range of [−100, 50]for i = 2 and [−50, 100] for i = 4e.
B. Fitness functionsIn simulations in evaluation process of GA, the fuzzy con-
troller for backward giant circle is selected at the beginning,and then it is switched to that for handstand at kh. Thehandstand skill is evaluated successively while the controllerfor handstand is selected.
The fitness function is given by
fh = fh1 + fh2, (7)
where fh1 denotes a stability of the handstand and fh2 evalu-ates the joint angles throughout handstand. By minimizing thisfitness function, we anticipate acquiring a desirable handstandfrom the viewpoint of not only its skill but also appearance.fh1 is written in detail by
fh1 = f ′h1 + 10f ′′
h1, (8)
where
f ′h1 =
1k′ − kh + 1
k′∑i=kh
|sh(i)|
+ max{|sh(kh)|, ..., |sh(k′)|}, (9)f ′′
h1 = p. (10)
f ′h1 is the sum of the mean and maximum values of |sh|, which
represents a stability of the handstand. f ′′h1 denotes a penalty
in the case where the handstand is unsuccessful. On the otherhand, fh2 in (7) is further expressed by
fh2 = f ′h2 + f ′′
h2, (11)
where
f ′h2 =
1k′ − kh + 1
k′∑i=kh
{|θ2(i)| + |θ4e(i)|} (12)
f ′′h2 = max [max{|θ2(kh)|, ..., |θ2(k′)|} ,
max{|θ4e(kh)|, ..., |θ4e(k′)|}] . (13)
182
Proceedings of the International Conference on Information and Automation, December 15-18, 2005, Colombo, Sri Lanka. 4
0 1 2 3 4 5
–3
–2
–1
0
1
2
3
Time t [s]
An
gle
[ra
d]
θ1
θ2
θ3
0 1 2 3 4 5
0
1
2
3
Time t [s]
An
gle
[ra
d]
θ4e
θ4a
0 1 2 3 4 5
0
100
200
300
400
Time t [s]
To
rqu
e τ
i [N
m]
τ2
τ4e
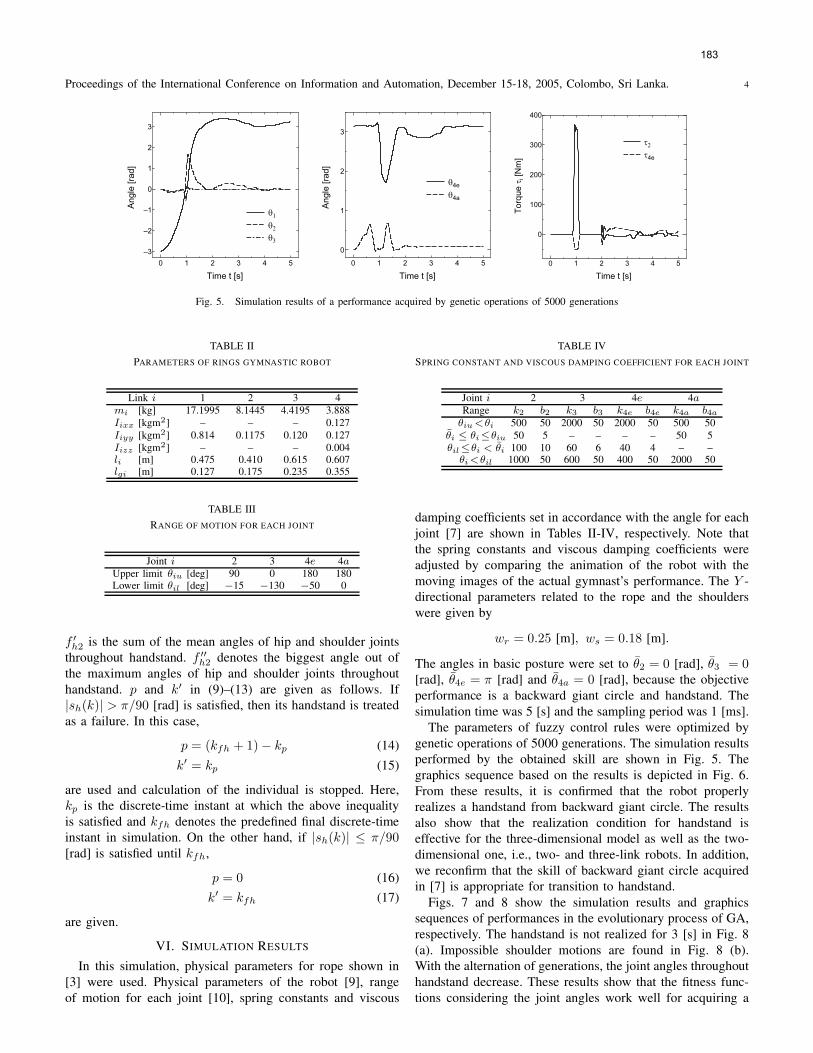
Fig. 5. Simulation results of a performance acquired by genetic operations of 5000 generations
TABLE IIPARAMETERS OF RINGS GYMNASTIC ROBOT
Link i 1 2 3 4mi [kg] 17.1995 8.1445 4.4195 3.888Iixx [kgm2] – – – 0.127Iiyy [kgm2] 0.814 0.1175 0.120 0.127Iizz [kgm2] – – – 0.004li [m] 0.475 0.410 0.615 0.607lgi [m] 0.127 0.175 0.235 0.355
TABLE IIIRANGE OF MOTION FOR EACH JOINT
Joint i 2 3 4e 4aUpper limit θiu [deg] 90 0 180 180Lower limit θil [deg] −15 −130 −50 0
f ′h2 is the sum of the mean angles of hip and shoulder joints
throughout handstand. f ′′h2 denotes the biggest angle out of
the maximum angles of hip and shoulder joints throughouthandstand. p and k′ in (9)–(13) are given as follows. If|sh(k)| > π/90 [rad] is satisfied, then its handstand is treatedas a failure. In this case,
p = (kfh + 1) − kp (14)k′ = kp (15)
are used and calculation of the individual is stopped. Here,kp is the discrete-time instant at which the above inequalityis satisfied and kfh denotes the predefined final discrete-timeinstant in simulation. On the other hand, if |sh(k)| ≤ π/90[rad] is satisfied until kfh,
p = 0 (16)k′ = kfh (17)
are given.
VI. SIMULATION RESULTS
In this simulation, physical parameters for rope shown in[3] were used. Physical parameters of the robot [9], rangeof motion for each joint [10], spring constants and viscous
TABLE IVSPRING CONSTANT AND VISCOUS DAMPING COEFFICIENT FOR EACH JOINT
Joint i 2 3 4e 4aRange k2 b2 k3 b3 k4e b4e k4a b4a
θiu<θi 500 50 2000 50 2000 50 500 50θ̄i ≤ θi≤θiu 50 5 – – – – 50 5θil≤θi < θ̄i 100 10 60 6 40 4 – –θi<θil 1000 50 600 50 400 50 2000 50
damping coefficients set in accordance with the angle for eachjoint [7] are shown in Tables II-IV, respectively. Note thatthe spring constants and viscous damping coefficients wereadjusted by comparing the animation of the robot with themoving images of the actual gymnast’s performance. The Y -directional parameters related to the rope and the shoulderswere given by
wr = 0.25 [m], ws = 0.18 [m].
The angles in basic posture were set to θ̄2 = 0 [rad], θ̄3 = 0[rad], θ̄4e = π [rad] and θ̄4a = 0 [rad], because the objectiveperformance is a backward giant circle and handstand. Thesimulation time was 5 [s] and the sampling period was 1 [ms].
The parameters of fuzzy control rules were optimized bygenetic operations of 5000 generations. The simulation resultsperformed by the obtained skill are shown in Fig. 5. Thegraphics sequence based on the results is depicted in Fig. 6.From these results, it is confirmed that the robot properlyrealizes a handstand from backward giant circle. The resultsalso show that the realization condition for handstand iseffective for the three-dimensional model as well as the two-dimensional one, i.e., two- and three-link robots. In addition,we reconfirm that the skill of backward giant circle acquiredin [7] is appropriate for transition to handstand.
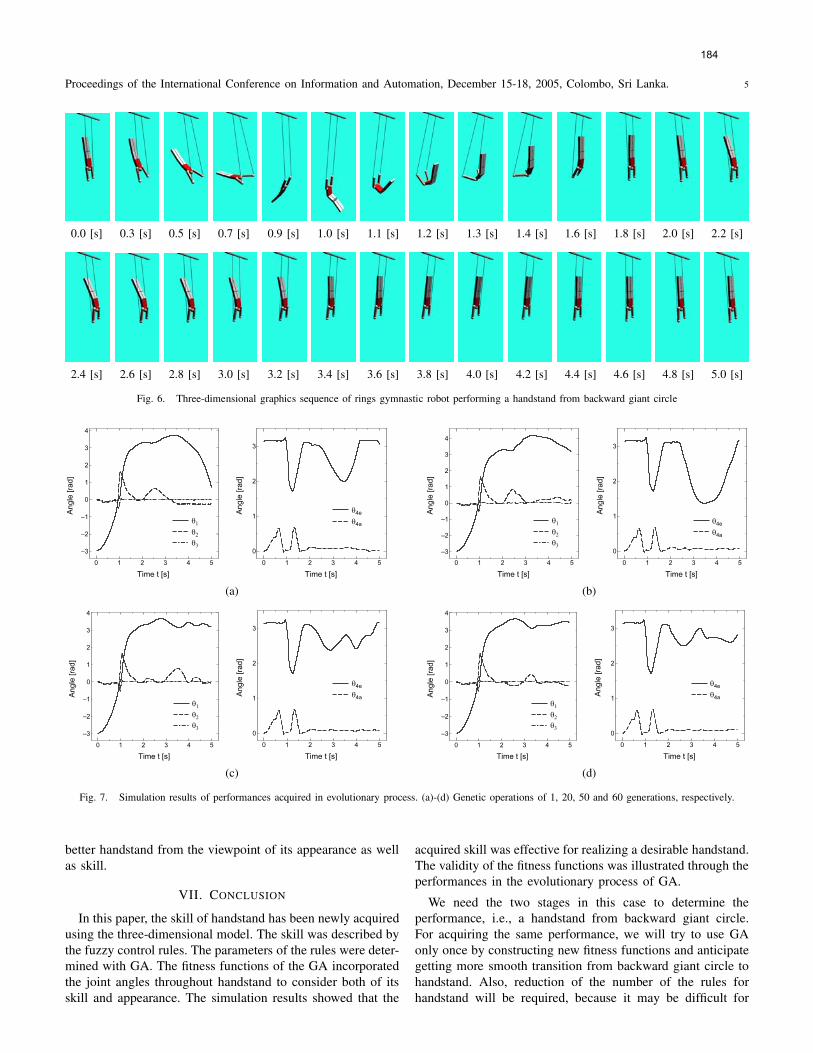
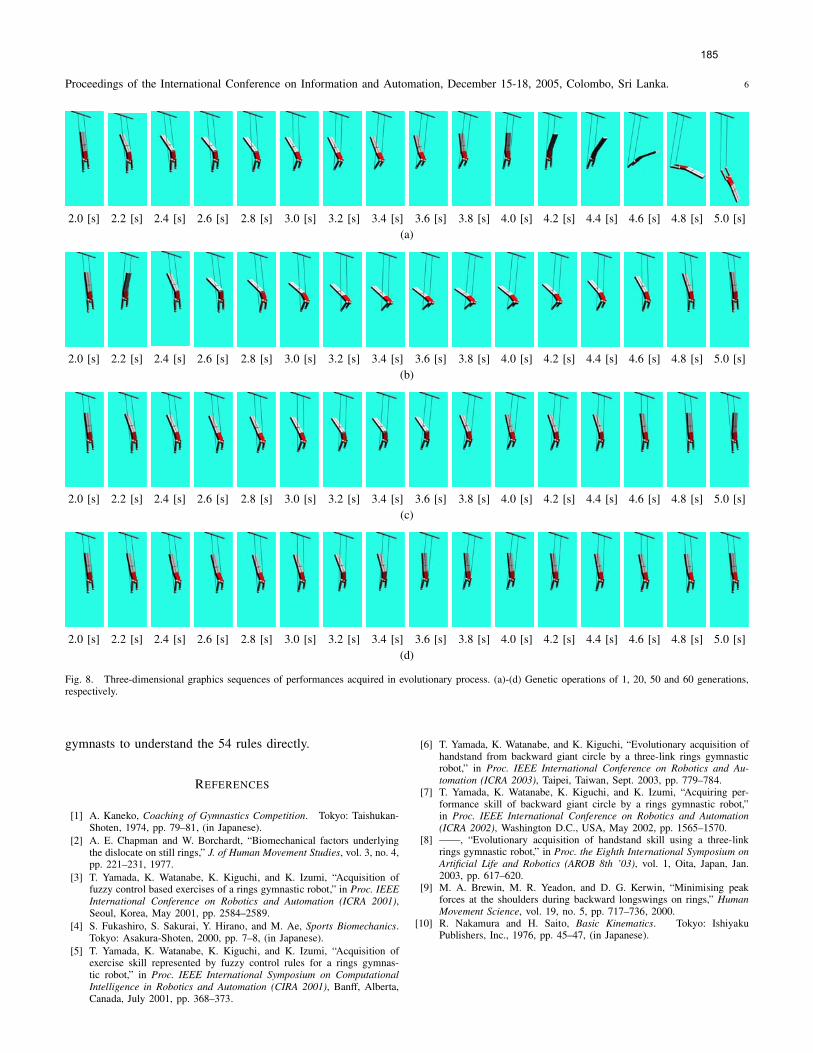
Figs. 7 and 8 show the simulation results and graphicssequences of performances in the evolutionary process of GA,respectively. The handstand is not realized for 3 [s] in Fig. 8(a). Impossible shoulder motions are found in Fig. 8 (b).With the alternation of generations, the joint angles throughouthandstand decrease. These results show that the fitness func-tions considering the joint angles work well for acquiring a
183
Proceedings of the International Conference on Information and Automation, December 15-18, 2005, Colombo, Sri Lanka. 5
0.0 [s] 0.3 [s] 0.5 [s] 0.7 [s] 0.9 [s] 1.0 [s] 1.1 [s] 1.2 [s] 1.3 [s] 1.4 [s] 1.6 [s] 1.8 [s] 2.0 [s] 2.2 [s]
2.4 [s] 2.6 [s] 2.8 [s] 3.0 [s] 3.2 [s] 3.4 [s] 3.6 [s] 3.8 [s] 4.0 [s] 4.2 [s] 4.4 [s] 4.6 [s] 4.8 [s] 5.0 [s]
Fig. 6. Three-dimensional graphics sequence of rings gymnastic robot performing a handstand from backward giant circle
0 1 2 3 4 5
–3
–2
–1
0
1
2
3
4
Time t [s]
An
gle
[ra
d]
θ1
θ2
θ3
0 1 2 3 4 5
0
1
2
3
Time t [s]
An
gle
[ra
d]
θ4e
θ4a
0 1 2 3 4 5
–3
–2
–1
0
1
2
3
4
Time t [s]
An
gle
[ra
d]
θ1
θ2
θ3
0 1 2 3 4 5
0
1
2
3
Time t [s]
An
gle
[ra
d]
θ4e
θ4a
(a) (b)
0 1 2 3 4 5
–3
–2
–1
0
1
2
3
4
Time t [s]
An
gle
[ra
d]
θ1
θ2
θ3
0 1 2 3 4 5
0
1
2
3
Time t [s]
An
gle
[ra
d]
θ4e
θ4a
0 1 2 3 4 5
–3
–2
–1
0
1
2
3
4
Time t [s]
An
gle
[ra
d]
θ1
θ2
θ3
0 1 2 3 4 5
0
1
2
3
Time t [s]
An
gle
[ra
d]
θ4e
θ4a
(c) (d)
Fig. 7. Simulation results of performances acquired in evolutionary process. (a)-(d) Genetic operations of 1, 20, 50 and 60 generations, respectively.
better handstand from the viewpoint of its appearance as wellas skill.
VII. CONCLUSION
In this paper, the skill of handstand has been newly acquiredusing the three-dimensional model. The skill was described bythe fuzzy control rules. The parameters of the rules were deter-mined with GA. The fitness functions of the GA incorporatedthe joint angles throughout handstand to consider both of itsskill and appearance. The simulation results showed that the
acquired skill was effective for realizing a desirable handstand.The validity of the fitness functions was illustrated through theperformances in the evolutionary process of GA.
We need the two stages in this case to determine theperformance, i.e., a handstand from backward giant circle.For acquiring the same performance, we will try to use GAonly once by constructing new fitness functions and anticipategetting more smooth transition from backward giant circle tohandstand. Also, reduction of the number of the rules forhandstand will be required, because it may be difficult for
184
Proceedings of the International Conference on Information and Automation, December 15-18, 2005, Colombo, Sri Lanka. 6
2.0 [s] 2.2 [s] 2.4 [s] 2.6 [s] 2.8 [s] 3.0 [s] 3.2 [s] 3.4 [s] 3.6 [s] 3.8 [s] 4.0 [s] 4.2 [s] 4.4 [s] 4.6 [s] 4.8 [s] 5.0 [s](a)
2.0 [s] 2.2 [s] 2.4 [s] 2.6 [s] 2.8 [s] 3.0 [s] 3.2 [s] 3.4 [s] 3.6 [s] 3.8 [s] 4.0 [s] 4.2 [s] 4.4 [s] 4.6 [s] 4.8 [s] 5.0 [s](b)
2.0 [s] 2.2 [s] 2.4 [s] 2.6 [s] 2.8 [s] 3.0 [s] 3.2 [s] 3.4 [s] 3.6 [s] 3.8 [s] 4.0 [s] 4.2 [s] 4.4 [s] 4.6 [s] 4.8 [s] 5.0 [s](c)
2.0 [s] 2.2 [s] 2.4 [s] 2.6 [s] 2.8 [s] 3.0 [s] 3.2 [s] 3.4 [s] 3.6 [s] 3.8 [s] 4.0 [s] 4.2 [s] 4.4 [s] 4.6 [s] 4.8 [s] 5.0 [s](d)
Fig. 8. Three-dimensional graphics sequences of performances acquired in evolutionary process. (a)-(d) Genetic operations of 1, 20, 50 and 60 generations,respectively.
gymnasts to understand the 54 rules directly.
REFERENCES
[1] A. Kaneko, Coaching of Gymnastics Competition. Tokyo: Taishukan-Shoten, 1974, pp. 79–81, (in Japanese).
[2] A. E. Chapman and W. Borchardt, “Biomechanical factors underlyingthe dislocate on still rings,” J. of Human Movement Studies, vol. 3, no. 4,pp. 221–231, 1977.
[3] T. Yamada, K. Watanabe, K. Kiguchi, and K. Izumi, “Acquisition offuzzy control based exercises of a rings gymnastic robot,” in Proc. IEEEInternational Conference on Robotics and Automation (ICRA 2001),Seoul, Korea, May 2001, pp. 2584–2589.
[4] S. Fukashiro, S. Sakurai, Y. Hirano, and M. Ae, Sports Biomechanics.Tokyo: Asakura-Shoten, 2000, pp. 7–8, (in Japanese).
[5] T. Yamada, K. Watanabe, K. Kiguchi, and K. Izumi, “Acquisition ofexercise skill represented by fuzzy control rules for a rings gymnas-tic robot,” in Proc. IEEE International Symposium on ComputationalIntelligence in Robotics and Automation (CIRA 2001), Banff, Alberta,Canada, July 2001, pp. 368–373.
[6] T. Yamada, K. Watanabe, and K. Kiguchi, “Evolutionary acquisition ofhandstand from backward giant circle by a three-link rings gymnasticrobot,” in Proc. IEEE International Conference on Robotics and Au-tomation (ICRA 2003), Taipei, Taiwan, Sept. 2003, pp. 779–784.
[7] T. Yamada, K. Watanabe, K. Kiguchi, and K. Izumi, “Acquiring per-formance skill of backward giant circle by a rings gymnastic robot,”in Proc. IEEE International Conference on Robotics and Automation(ICRA 2002), Washington D.C., USA, May 2002, pp. 1565–1570.
[8] ——, “Evolutionary acquisition of handstand skill using a three-linkrings gymnastic robot,” in Proc. the Eighth International Symposium onArtificial Life and Robotics (AROB 8th ’03), vol. 1, Oita, Japan, Jan.2003, pp. 617–620.
[9] M. A. Brewin, M. R. Yeadon, and D. G. Kerwin, “Minimising peakforces at the shoulders during backward longswings on rings,” HumanMovement Science, vol. 19, no. 5, pp. 717–736, 2000.
[10] R. Nakamura and H. Saito, Basic Kinematics. Tokyo: IshiyakuPublishers, Inc., 1976, pp. 45–47, (in Japanese).
185