Embed Size (px)
Citation preview

540 IEEE Transactions on Power Delivery, Vol. 10, No. 1, January 1995
Power System Distributed On-line Fault Section Estimation Using Decision Tree Based Neural Nets Approach
Hong-Tzer Yang, Member Wen-Yeau Chang, St. Member Ching-Lien Huang, Member
Department of Electrical Engineering National Cheng Kung University
Tainan, 701, TAIWAN R.O.C.
Abstract-This paper proposes a distributed neural nets de- cision approach to on-line estimation of the fault section of a transmission and distribution (T&D) system. The dis- tributed processing alleviates the burden of communication between the control center and local substations, and in- creases the reliability and flexibility of the diagnosis sys- tem. Besides, by using the algorithms of data-driven de- cision tree induction and direct mapping from the decision tree into neural net, the proposed diagnosis system features parallel processing and easy implementation, overcoming the limitations of overly large and complex system. The a p proach has been practically tested on a typical Taiwan Power (Taipower) TOD system. The feasibility of such a diagnosis system is presented.
Keywords- Decision Tree, Neural Nets, Fault Section Esti- mation, Transmission & Distribution
I. INTRODUCTION The on-line fault section estimation of a bulk T&D sys-
tem to achieve rapid system restoration is a difficult and complicated process. To deal with the symbol-recognizing and knowledge-intensive problems of the fault section es- timation, rule-based expert systems, incorporating the ex- periences and knowledge of the operators, have been devel- oped [l-31. Although the rule-based approach offers pow- erful solution to the fault diagnosis, knowledge acquisition and knowledge base revision of the expert system in on-line application demand further progress.
In recent years, some papers presented the artificial neu- ral nets approach to power system fault diagnosis [4-61. Excellent capabilities of neural nets in on-line fault diag- nosis have been exhibited. However, the problems regard- ing the training of conventional neural nets by error back- propagation [7], such as the determination of the network parameters and the slow convergence in the training pro- cess, still remain somewhat of an art or yet unsolved in practical applications. Additionally, for a bulk T&D sys- tem, the conventional neural nets approaches will lead to a huge-structured system which is not efficient for the re- quirements of computer memory and training time.
To solve such problems, a distributed neural nets diag- nosis system is proposed for on-line estimate of the faulted
This paper was presented at the 1994 IEEE PES Transmission and Distribution Conference and Exposition held in Chicago, Illinois, April 10-15, 1994.
section in a T&D system by using the information on the on-off states of protective devices. The diagnosis system has been implemented on six PC-level computers, each one of which takes charge of the fault diagnosis a t a substation. The system is practically evaluated in a typical T&D SYS- tem of Taipower. The overall test results and a detailed case study, which verify the effectiveness of our system op- eration, will be presented.
11. SYSTEM DESCRIPTION A . Decomposition of a T &D System
To set up the distributed diagnosis systems (DDSs), the bulk T&D system should be decomposed into several local substations in addition to the control center. A local sub- station here is defined as a portion of a T&D system, which is separated by circuit breakers from the rest of. the system and is connected to other substations by transmission lines. B. Outline of the Diagnosis System
For a T&D system that has been divided into n local substations, the diagnosis system contains n corresponding DDSs. Figure 1 shows the block diagram of the diagnosis system. The DDSs are designed to have parallel, inde- pendent architecture. This architecture refers to parallel operation of the individual DDSs which diagnose their own systems independently. For the fault events which affect several substations, e.g., the protective devices and their back-up ones are, respectively, located at distinct local sub- stations, the final decision is left to be made at the Coor- dinating Unit.
The Coordinating Unit also gives the explanation of the decision by accessing the comment from the Comment Base according to the given pointer of comment. Detailed de- scription of the individual units of the distributed diagnosis system (DDS) is given in the following section.
111. DISTRIBUTED DIAGNOSIS SYSTEM The configuration of the individual DDS using the de-
cision tree based neural nets is shown in Fig. 2. Design of the individual units of the DDS will be described in the sequel. A . Creation of Training Data Base
In place of numerous consistent rules required in the pre- vious rule-based expert systems [l-31 to describe the pro- tective scheme and the power system configuration, the in- formation needed to build our diagnosis system is simply the data on protection. These data associate the sections of concern in the power system with their disconnecting
0885-8977/95/$04.00 0 1994 IEEE

541
-(h -h R a d r s w N P u a d n - !dD;:,l + ,d:*i ,d ; i
DDSP .a. DDSn-1
Communication Channels
Coordinating Unit
L o c s l ~ d c o m “
~
3.
4.
1 1 WPormSrOfCOm“
I Comment Base Selector I
mens ocs-MmautedMspnoyrsyrtam
Fig. 1. Overall structure of the proposed diagnosis system
Relay ard Breaker States
Fig. 2. Structure of the distributed diagnosis system a t a local substation
switches, primary and/or back-up protective relays and cir- cuit breakers. The following steps are used to elicit the data on protection:
1. Prepare the one-line diagram of the power system. For each type of basic sections which are equipped with the same protective scheme, list the possible fault events that would occur.
For each fault section, indicate all the possible operat- ing states of the disconnecting switches, and the prc- tective relays and breakers, which include primary and back-up primary and secondary protective devices. If the back-up protective devices belong to distinct sub- station, an index of dependence is appended to the related fault event. Such an index of dependence is re-
2. Inquire the protective relaying scheme.
lied on to make the final diagnosis by the Coordinating Unit. Assign a pointer of comment (which includes the in- dex of dependence mentioned above) and the blackout region to each fault event. Associate each fault event with the on-off states of the switches, relays and breakers. The on-off states are expressed as binary values of “1” or “0,” with “1” standing for “operating” or “opened,” and “0” for “not operating” or “closed.”
B. Man-Machine Interface The MMI serves as a communication medium between
the operator and the DDS. The MMI requires the experi- enced operators to input the data on the protective scheme in an interactive manner. Sequentially input are the ba- sic sections to be considered, the codes of these fault sec- tions, the related switches, primary/back-up protective re- lays and breakers, and the blackout regions. According to the characteristics of the section type, the MMI automati- cally yields the training data base of each fault section. AS shown in Fig. 3, to each record of the fault event in train- ing data base, a pointer of comment is assigned. Definition of the symbols used in Fig. 3 is listed in Table I for clarity.
The pointer of comment is the only information to be transmitted to the Coordinating Unit via the communica- tion channels. The data format of the pointer of comment specifies that two digits at the right represent the index of dependence and the rest of the digits stands for the ad- dress of record in the Comment Base. For the single fault occurring at a local substation with failure breaker and thus making operate the back-up protection located a t another local substation, i.e., the fault event affecting distinct sub- stations, the indices of dependence corresponding to these two fault events (of different DDSs) have the same non- zero codes. By checking these indices accompanied with the pointers of comment from the DDSs, the Coordinating Unit can thus make accurate diagnosis on the true fault event. C. Decision Tree Induction Unit
Binary decision tree offers a widely used decision making approach in pattern recognition [8]. Starting with the root node, a binary decision tree consists of internal nodes and terminal nodes. Figure 4 shows an example of a binary decision tree.
Decision Tree Induction Unit can construct the decision tree automatically according to the training data base (Seg- ments 1, 2, and 10) from the MMI. Since the decision tree is generated in a distributed manner, one for each basic section, the following mechanisms for data-driven tree in- duction can be applied:
1. The hierarchical ordering of the decision tree equals the number of all the protective devices, i.e., the num- ber of columns in Segment 10 of the training data base as shown in Fig. 3.
2. The decision function of each internal node is a thresh- old logic function, whose input and output are limited

542
SEGMENT I SEGMENT 2 SEGMENT 3 SEGMENT 4 SEGMENT 5 SEGMENT 6 SEGMENT 7 SEGMENT 8 SEGMENl9
JEN-DER
JEN-DER
- - - - - 10101100 F1 ON ON ON ON . . . OFF CB1,COI - lolOZ~00 F 1 ON ON ON ON . . . OFF CB1,COl CB790.CO790 - CB1
- I : . ' . - 1
SEGMENT 10
I 0 0 0 . . . I . . . 0 0
I 0 0 0 . . . 1 . . . 0 0
Note: (1) Add- of the "meat m r d (2) Index ofdepmdaa
Fig. 3. Training data base for a local substation (Tainan Substation)
TABLE I SYMBOLS USED IN FIGS. 3 AND 4
Symbol Definition CB circuit breaker DS disconnecting Switch CO over current relay DR differential relay UV undervoltage relay F1 feeder 1 F2 feeder 2 C2 capacitor 2
to be binary values. Each decision function tests only one state of the input data, namely, the state of a switch, a relay, or a breaker. If the state is "1," then the result of test is "1;" otherwise, the result is "0."
3. States of protective devices for each fault event make one path of the decision tree. In this path the num- ber of internal nodes is the number of states of the protective devices.
4. The number of terminal nodes in the tree is equal to that of total fault events, i.e., the number of fault sec- tion codes in Segment 2 of the training data base.
In the Decision Tree Induction Unit, decision trees for in- dividual basic sections are created separately from the cor- responding training data base according to the above data- driven tree induction mechanisms. The individual trees are then integrated into a monolithic system-level decision tree through a common root node. The status of the protective devices that cannot be classified by the decision tree into one of the terminal nodes will be regarded as erroneous or missing data existing in the transmission signal. An addi- tional terminal node is assigned to such a case. Shown in Fig. 4 is an example of a system-level decision tree of a practical local substation. The symbols used in Fig. 4 are illustrated in Table I as well. D. Decision Tree Based Neural Nets
To reach a terminal node of a decision tree (i.e., to arrive at a decision), all the conditions along the path from the root node to that particular terminal node must be satis- fied. Thus, each path of a decision tree implements an AND operation on the features tested. If two or more terminal nodes result in the same decision, then the corresponding paths are in an OR relationship.
Since a layered neural net for pattern recognition also im- plements ANDing of decision functions followed by ORing
... 1 Fi I I ... ... ...
I I I I I I I I . I I 1 .
... 1 - I I I I
... ...
... ... f.F. . . . . . . . .
Decision Tree I I Drrision Tree I I Decision Tree of Section CZ I ... I of Section TZ I ... I of Section F1
0 : Internal Node Legend: : Root Node
Note: ( '1 The decisions on the fault section.
0 : Terminal Node - : Branch
('1 The pointers of comment which are Linked t o the Comment Bare to obtain the corresponding explanation of the fault eveot.
Fig. 4. A diagnosis decision tree for a local substation (Tainan Substation)
in the output layer, in the light of input-output mapping, a decision tree and a layered neural net are equivalent [8]. After the creation of the decision tree, a mapping algorithm can be applied to transfer the decision tree into a layered neural net. The mapping algorithm from a decision tree to a layered neural net is stated in the following steps [8,9]:
1 . The number of neurons in the first layer of the neural net equals the number of the internal nodes with dif- ferent features (or decision functions) in the tree. Each of these neurons implements one of the decision func- tions of internal nodes. This layer is the partitioning layer.
2. All paths (or terminal nodes) in the decision tree have a corresponding neuron in the second hidden layer

543
where the ANDing is implemented. This layer is the Record of Comment Base
ANDing layer. 3. The number of neurons in the output layer equals the
number of distinct classes or labels of decision. This layer implements the ORing of those tree paths that lead to the same class or decision.
4. The weights of connections between partitioning layer and ANDing layer are set to be “1,” if the test output of the associated internal node in the tree is “1;” and are set to be “-1,” if the associated test output is “0.” The weights of connections between ANDing layer and ORing layer are always set to be “1.”
5 . The activation function of the j t h neuron in the AND- ing layer is given by
1
yj = f ( C x i w i j - ~ j ) , for j = 1, ..., M ( 1 i=l
where ti is the ith input element of the j t h ANDing neuron, is the weight for the input xi, w;j
T j -
f
1
M
is the threshold, and is equal to the number of input weights being “1,” is a binary threshold function: yj=O, if xi=, xiw;, < Tj; yj=l, otherwise, is the number of input elements of the j t h ANDing neuron, is the number of neurons in the AND- ing layer.
6 . The activation function of the neuron in the ORing layer is the same as that in (l), except that the thresh- old is set equal to 1.
The neural net mapped from the decision tree of Fig. 4 is shown in Fig. 5: Since the connection weights of the neural net have been determined implicitly in the decision tree, the conventional learning process of adjustment of connection weights can be avoided. Conclusion of the neural nets is achieved by simply multiplying the input data by the con- nection weights through a parallel and hierarchical struc- ture. The aim of the mapped neural nets is to facilitate the software programming and to substitute (and thus to speed up) the search process in the decision tree. The decision tree, therefore, plays the role of medium to construct the neural nets. E. Data Preparation Unit
The Data Preparation Unit receives the status signals of protective relays and breakers from the SCADA system, and the on-off states of the disconnecting switches from the File of Disconnecting Switch States. The File of Dis- connecting Switch States is a data base for current states of disconnecting switches and is updated by the operator when the states of the disconnecting switches are changed. Such a file is necessitated due to the lack of the real-time signals of the disconnecting switches in the present SCADA system of Taipower.
Only simplified and integrated relay signals are processed in the diagnosis system. For example, the signals of over-
Note: (’) States of the protective devices 0) The pointer of mmment (4 The fault section diagnmd
Fig. 5. Mapped neural net from the decision tree of Fig. 4
current relays in each phase of the same feeder will be inte- grated as a single overcurrent relay signal in the diagnosis system. These real-time signals are integrated and simpli- fied in the required data format by the Data Preparation Unit and then provided to the mapped neural net for di- agnosis with a rate of 1 second. Any change of the status during the fault estimation is registered in the buffers of the Unit.
Hamming-coded signal transmission [lo] is provided to detect and correct the communication errors between the substations and the central location. If failure communica- tion between any DDS and the central location is detected, the result of the DDS with non-zero index of dependence and without mapped dependent DDS will be ignored in order to avoid false alarm.
F. Comment Base Comment Base is set up using the data in Segments 4-9
of the training data base as given in Fig. As men- tioned in Sec. III-D, each output of the neuron from the ANDing layer of the neural nets is equivalent to a path in the decision tree. Each output of the ANDing neuron is then linked to one of the records of the Comment Base. The Comment Base is intended to explain the background of the fault event diagnosed by the neural net. For each fault, the information offered by the Comment Base con- cerns the related operating protective devices (including primary protection as well as back-up), the failure devices if existing, and the blackout region due to the fault.
Each DDS has its own Comment Base. All the Comment Bases are also duplicated and centralized in the control center as shown in Fig. 1. After the final decision is given
3.

544
snan-Shang/ Snan-Shang1 Talnanllung- TalnanlTung- Lung-Chll Lung - ulll Talnan Talnan men men Taman Talnan
Sea Llne flountatn Llne Wnlte Llne Red Llne flountaln Llne sea Llne
LEGENO:
0 : OperatlngRelay
1 : Tripped Breaker
0 : Fallure Breaker
f : Faulted section
Station - 1
Talnan Substation Hou-Chia Substation Yung - Kang Substation
Fig. 6. Topology and fault situation of the testing T&D system
by the Coordinating Unit, appropriate pointers of comment will be sent to the Comment Base Selector for accessing the comments on the fault event from the corresponding Comment Bases. G. Maintenance of the Diagnosis System
The maintenance of the diagnosis system is conducted completely on the input data for induction of the tree. The learning of new or changed knowledge for the decision tree based neural nets is accomplished through the procedure: interactive input of the changed data on protection via the MMI, automatic revision of the training data by the MMI, data-driven tree induction, and direct mapping of the tree into the net. Owing to the distributed nature for the indi- vidual basic sections, when the configuration or protective scheme of the power system changes, only the data related to the portion changed need to be re-input into the system interactively.
The training time needed to execute the procedure from reading the data on protection to obtaining new neural net only takes several seconds, in contrast to tens of hours needed for the previous neural nets trained by back propa- gation algorithm [5].
IV. TEST ON A PRACTICAL T & D SYSTEM A . Description of the Test Power System
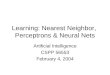
The practical Taipower T&D system utilized to test the effectiveness of the proposed diagnosis system is shown in Fig. 6 . The typical system, located in Tainan, Taiwan,
consists of one primary substation (161kV/69kV), and five secondary substations (69kV/11.4kV); each secondary sub- station contains ten radial distribution feeders. B. System Implementation
The diagnosis system has been implemented on six sep- arate PG486-33 computers using Turbo-C language. The six PC-level computers with 4MB RAM and 120MB hard- disk memory are appointed to the above six substations, one primary substation and five secondary substations. The communication channels are established through RS-232 and asynchronous modems with 9,600 bps. A PGemulator of SCADA system is also developed to test the SCADA in- terface in the Data Preparation Unit. The communication system between DDSs and the control center at the primary substation is simulated by a modem-linked communication net. C. Decomposition of the T &D System
According to the decomposition mechanism described in Sec. 11-A, the T&D system is divided into six local sub- stations. The secondary substations are categorized into six kinds of basic sections: transformers, 11.4kV bus bars, 69kV capacitors, 11.4kV capacitors, and two types of ra- dial distribution feeders. The primary substation is also as- sorted into six kinds of basic sections: transformers, 69kV capacitors, 69kV bus bars, subtransmission lines, secondary substation transformers, and bus bars.
Because the same protective scheme is equipped for those

545
basic sections of the same type, only one of the sections needs to be input the integral information on all the pos- sible fault situations, their related switches, and operating primary and back-up protective relays and breakers. For the other sections of a kind, only the corresponding iden- tity codes to these items are required to be input into the system by following the indication of the MMI.
Besides, the five secondary substations can be further classified into two types of substations. Because the sub- stations of the same type have identical system topology, once the diagnosis system of one of the substations has been constructed, the fundamental shell of the diagnosis system applies to the rest of the substations of the same type. Such a station-oriented design simplifies the implementation of the diagnosis system and well suits the Taipower T&D sys- tem. D. Induction of the Decision Tree
The Decision Tree Induction Unit reads the training data matrix from the MMI and initiates the construction of the decision tree. The training data base consists of all pos- sibilities of fault situations, but excluding the cases with more than two malfunctioned protective devices, or the cases with more than two states of erroneous or missing sig- nal transmission at local substations. Detailed structures of the individual decision trees are given in Table 11. E. Mapping of Decision Tree into Neural Net
According to the decision tree created above, the map- ping algorithm transfers the decision tree into the neural nets. Table I11 shows the detailed structures of the indi- vidual decision tree based neural nets.
The processing time for automatically generating the six decision tree based neural nets takes only 17.542 seconds at the PC-486-33 computer. F. Test of the Diagnosis System
To test the effectiveness of the overall neural nets diag- nosis system, the testing cases include single fault, multi- ple faults, temporary load unbalance, one malfunctioned protective device, and one-state erroneous or missing sig- nal transmission in the data for diagnosis in the individual DDS. The fault types for each event comprise single line-to- ground, double line-to-ground, two-phase short circuit, and three-phase short circuit faults. Not included in the test- ing cases are signal transmission errors/failures between the substations and central location.
The testing results show that the implemented diagno- sis system can achieve an estimation accuracy as high’as 100%. In the above cases, the processing time from the fault alarms (all relays and breakers have arrived at their final states) to the displaying of the fault conditions in the control center takes an average of only 0.5 second, a rate which makes feasible the diagnosis system on-line and real- time applications in a practical T&D system. All times are measured at the PC-486-33 computer. G. A Case Study
Among the test cases in the power system, an example is to be further demonstrated. The example is a realis- tic fault event of single fault occurring previously at the
69 kV subtransmission line between Hou-Chia Substation and Yung-Kang Substation on July 16, 1992. The direc- tional overcurrent relay “DR610” operated but its corre- sponding breaker “CB610” failed. The primary back-up protective relays (directional overcurrent relays), “DR660” and “DR670” at Tainan primary substation, thus operated and tripped the back-up breakers, “CB660” and “CB670.” The fault situation is shown in Fig. 6.
This fault event resulted in a large area of blackout, which included the whole region supplied electrically by both Hou-Chia Substation and Yung-Kang Substation. The distance between Yung-Kang Substation and Tainan pri- mary substation (Tainan Station) is over 4 km. When the fault event took place, the operators at Hou-Chia Sub- station, Yung-Kang Substation, and Tainan Station were informed the alarms of operating relays and tripped cir- cuit breakers. The operators of these three substations surveyed the protective schemes of their own substations, discussed with each other the fault situation via telephone lines (since the VHF communication was damaged by the fault), and finally diagnosed the actual fault. It took the heavily stressed operators about 7 minutes to find out the real fault section and to start correction to restore the power system.
Fig. 7 shows the result of our diagnosis system for the fault event. The fault is detected by three local DDSs: Hou-Chia Substation, Yung-Kang Substation, and Tainan Station. The status is identified as “dependent” by check- ing the indices of dependence issued from the associated DDSs. The Coordinating Unit concludes that there is a single fault at the 69 kV subtransmission line between Hou- Chia Substation and Yung-Kang Substation with a failure circuit breaker. The execution time for the diagnosis of this fault event is reduced to 0.427 second in our automatic diagnosis system rather than 7 minutes taken by previous human diagnosis.
V. CONCLUSIONS
A distributed neural nets decision approach to on-line fault section estimation in a T&D system has been pro- posed and demonstrated to have several advantages over previous systems. Distributed diagnosis can greatly reduce the communication burden of the busy SCADA system dur- ing a fault. The features of parallel and independent op- erations in the DDSs eliminate the drawbacks of long de- velopment time and an enormous requirement for comput- ing power in the centralized mechanisms. Construction of the diagnosis system can be easily achieved by the training data base which associates the protective scheme with the individual sections at the local substation. These data can be easily provided by any experienced operator through a friendly MMI. Knowledge acquisition and knowledge base revision which usually demand the participation of knowl- edge engineers are avoided in our system.
Algorithms using data-driven decision tree induction and direct mapping of the decision tree into a layered neural net have also made the system easily and straightforwardly implemented. The problems with the conventional neural

546
TABLE I1 STRUCTURES OF THE DECISION TREES
Substation System Section Types Sections Attributes Internal Nodes Terminal Nodes Type of Number of Number of Number of Number of Number of
Tainan Station Primary Substation 5 30 151 54360 360 Tainan Substation Secondary Substation 5 16 61 11346 186 Yung-Kang Substation Secondary Substation 5 16 61 11346 186 Hou-Chia Substation Secondary Substation 5 16 61 11346 186 Pac-An Substation Secondary Substation 6 17 69 13800 200 Chung-Hsiao Substation Secondary Substation 6 17 69 13800 200
TABLE I11 STRUCTURES OF THE MAPPED NEURAL NETS
Number of Nodes in Layer Substation - Partitioning AND. ing ORing
Wiinan Station 151 360 31 Tainan Substation 61 186 17 Yung-Kang Substation 61 186 17 Hou-Chia Substation 61 186 17 Pac-An Substation 69 200 18 Chung-Hsiao Substation 69 200 18
I Fault Case I Single Fault with Failure Operating Devices
e l , ,It @,.A:-“ I SubtnvDmbslon LLle Between HwChia I auu UC~.LIUII and Yunexanp Sutstation
Blackout Region I Hou-Chia Area, Yung-Kang Area
Announced by Distributed Diagnosis System at
Comment Primary Protection
Relays I DR 610
Breakers CB 610 Operating Protective Devices
Secondary Back-up Protection
Relays
Breakers Failure Relays
False Relays
Protective CB 610
none
Fig. 7. Fault diagnosis result in the case study
nets trained by back propagation, such as slow convergence and arbitrary choice regarding the network parameters, are circumvented in this paper.
The practical test results in a typical Taipower T&D sys- tem show that the proposed method diagnoses the faults at a very high speed and accuracy. Further, due to very short time needed to re-establish new neural nets, the fault diag- nosis system can adapt flexibly to frequent changes in the power system topology from maintenance and expansion.
VI. ACKNOWLEDGEMENTS This work reported in this paper is sponsored by the Na-
tional Science Council, R.O.C. Also, the authors are greatly indebted to the operators of the Taipower Tainan Substa- tion for supporting the test of the diagnosis system.
REFERENCES C. Fukui and J. Kawakami, “An Expert System for Fault Sec- tion Estimation Using Information from Protective Relays and Circuit Breakers,” IEEE Trans. on P W R D , Vol. 1, NO. 4, pp. 83-90,1986. S.,Kumano, H. Ito, T. Goda, Y. Uekubo, S. Kyomoto, H. Kourogi and Y. Ariura, “Development of Expert System for O p eration a t Substation,” IEEE Trans. on P W R D , Vol. 8, No. 1, pp. 5665, 1993. K. Tomsovic, C.C. Liu, P. Ackerman and S. Pope, “An Expert System as a Dispatchers’ Aid for the Isolation of Line Section Faults,” IEEE Trans. on P W R D , Vol. 2, No. 3, pp.736743, 1987. E.H.P. Chan, “Application of Neural-Network Computing in In- telligent Alarm Processing,” Proceedings of PICA Conf. , Seat- tle, WA, U.S.A., pp. 246251, 1989. H.T. Yang, W.Y. Chang and C.L. Huang, “A New Neural Net- works Approach to On-line Fault Section Estimation Using In- formation of Protective Relays and Circuit Breakers” presented at the IEEE/PES 1993 Winter Meeting, OH, U.S.A., Paper No. 93 WM 088-5 PWRD, Jan. 1993. K.H. Kim and J.K. Park, “Application of Hierarchical Neu- ral Networks to Fault Diagnosis of Power Systems,” Electrical Power & Energy Systems, Vol. 15, No. 2, pp. 65-70, 1993. R.P. Lippmann, “An Introduction to Computing with Neural Nets,” IEEE ASSP Magazine, Vol. 4, No. 2, pp. 4-22, 1987. I.K. Sethi, “Entropy Nets: From Decision Trees to Neural Net- works,” Proceedings of the IEEE, Vol. 78, No. 10, pp. 1605-1613, 1990. P.A. Ramamoorthy and S. Huang, “Implementation of Rule- based Expert Systems for Time-critical Applications Using Neu- ral Networks,” Proceedings of IEEE International Conference on Systems Engineering, Fairbom, OH, U.S.A., pp. 147-150, Aug. 1990. G.C. Clark, Jr. and J.B. Cain, Error-Correction Coding for Dig- ital Communications, Plenum Press, 1981.
Hong-Tzer Yang received the B.S. and M.S. degrees from National Cheng-Kung University, Tainan, Taiwan in 1982 and 1984, respec- tively, and his Ph.D. degree from National Tsing-Hua University, Hsin-Chu, Taiwan in 1989, all in electrical engineering. He is now a Technical Superintendent of Chung Shan Institute of Science and Technology. He is also an associate professor of E.E. Dept. a t Na- tional Cheng-Kung University. His present research interests are on the neural networks and expert system applications in power systems. Dr. Yang is a member of Phi Tau Phi and the IEEE PES.
Wen-Yeau Chang received the M.S.E.E. degree from National Tsing- Hua University, Hsin-Chu, in 1988. He is currently working toward his Ph.D. degree at National Cheng-Kung University, Tainan, Tai- wan. His research interests are on the restoration and fault diagnosis of power system.
Ching-Lien Huang received the B.S. degree from National Cheng- Kung University, Tainan, Taiwan, in 1957, and the M.S.E.E. degree from Osaka University, Osaka, Japan, in 1973. Since 1964, he has been with the Department of Electrical Engineering, National Cheng-Kung University, where he is now a professor. His major research interests are on the power system switching surge and protection.