-
Motor Sinkron
Dosen Pembimbing :Bpk. Chairul Hudaya
Kelompok : 8Cakra Wirabuana 0806365570Febi Hadi Permana
0806365753Handy Hermawan 0806365873Handy Hermawan 0806365873Ihin
Solihin 0806365923
Departemen Teknik ElektroU i i I d i
1
Universitas IndonesiaTeknik Tenaga Listrik Ekstensi 2010
-
Kelompok 8
hi S lihi Febi Hadi PermanaIhin Solihin
0806365923
Febi Hadi Permana 0806365753
Cakra Wirabuana
0806365570Handy Hermawan 0806365873
2
-
Pembahasan
1. Overview
2. Pengertian Motor Sinkron
3. Bagian-Bagian/ Structure Motor Si kSinkron
4. Karakteristik Motor Sinkron
5. Prinsip Kerja Motor Sinkron
6. Keuntungan dan Kerugian
7. Contoh Soal
3
-
Overview
Klasifikasi Jenis Motor Listrik
4
-
Overview
Motor Sinkron adalah motor AC tiga-fasa yang dijalankan pada
kecepatan sinkron tanpa slipkecepatan sinkron, tanpa slip.
Motor sinkron adalah motor AC, bekerja pada kecepatan tetap pada
sistem frekuensi tertentu. Motor ini memerlukan arus DC puntuk
pembangkitan daya dan memiliki torsi awal yang rendah, dan oleh
karena itu motor sinkron cocok untuk penggunaan awal untuk beban
rendah seperti kompresor udara perubahanawal untuk beban rendah,
seperti kompresor udara, perubahan frekuensi dan generator motor.
Motor sinkron mampu memperbaiki faktor daya sistem sehingga sering
digunakan pada sistem yang menggunakan banyak listrik.
5
-
Perbedaan Motor Induksi & Motor Sinkron
Pada Mesin induksi memiliki karakteristik :- Motor induksi
adalah yang paling popular di industri karena kehandalan dan lebih
mudah perawatannyap y- Motor induksi AC cukup murah dan juga
memberikan rasio daya yang cukup tinggi - Konstruksi dan
pemeliharaan yang sederhana- Faktor daya relatif rendah dan
efisiensi- Faktor daya relatif rendah dan efisiensi
Pada Motor sinkron sangat menarik untuk drive kecepatan rendah-
Faktor daya selalu dapat menyesuaikan hingga 1,0 dengan efisiensi y
p y gg gtinggi- Dapat meningkatkan faktor daya - Dapat dirancang
untuk memberikan torsi awal yang lebih tinggi
6
-
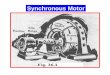
Bagian Dasar dari Motor Sinkron
Bagian dasar dari sebuah motor sinkron: Rotor Perbedaan utama
antara motor sinkron dan motor induksi adalah bahwa rotor mesin
sinkron berjalan pada kecepatan putar yang sama dengan
perputaran medan magnet. Hal ini j p p p y g g p p gmemungkinkan
sebab medan magnet rotor tidak lagi terinduksi. Rotor memiliki
magnet permanen atau arus DC excited, yang dipaksa untuk mengunci
pada posisi tertentu bila di hadapkan pada medan magnet
lainnya.
Stator Menghasilkan medan magnet berputar yang sebanding dengan
frekuensi yangStator Menghasilkan medan magnet berputar yang
sebanding dengan frekuensi yang dipasok. Motor ini berputar pada
kecepatan sinkron, yang diberikan oleh persamaan berikut:
f120Dimana :f = Frekuensi dari pasokan frekuensiP= Jumlah
kutub
Pf120N s =
P Jumlah kutub
7
-
Konsep Motor Sinkron
konsep Motor Sinkronstator adalah berbentuk cincin dilaminasi
inti besi d iliki ldengan memiliki slot
Gulungan tiga fasa ditempatkan dalam slot
Lingkaran besi padat dilengkapi dengan slot
Setiap gulungan p g gditempatkan pada masing masing slot. Sumber
DC disupplay melalui cincin putar
8
melalui cincin putar
-
Karakteristik Motor Sinkron Synchronous motor ac digunakan untuk
mengubah tenaga listrik menjadi tenaga
mekanik. Rotasi dari Synchronous motor dibentuk oleh rangkaian
fase dari tiga fasa AC
yang diterapkan ke stator motor. Seperti dengan tiga fase motor
induksi, rotasi y g g gsynchronous motor dapat berubah dengan
membalik tiap dua stator penunjuk. Polaritas rotor tidak
berpengaruh pada rotasi.
Synchronous motor seringkali langsung digabungkan ke beban dan
dapat berbagi sebuah poros bersama dan bantalan dengan beban.
Synchronous motor yang besar biasanya dimulai sebagai across the
line Synchronous motor yang besar biasanya dimulai sebagai across
the line. Kadang-kadang, metode mengurangi tegangan, seperti
autotransformer atau bagian yang berliku dapat digunakan.Sebuah
motor sinkron, seperti namanya, berjalan pada kondisi stabil pada
kecepatan tetap disebut kecepatan sinkron.
Kecepatan sinkron bergantung pada (a) frekuensi tegangan dan (b)
jumlah kutub dalam mesin Dengan kata lain kecepatan motor sinkron
independen dari bebandalam mesin. Dengan kata lain, kecepatan motor
sinkron independen dari beban selama beban dalam kemampuan
motor.
Jika beban melebihi torsi maksimum yang dapat dikembangkan oleh
motor, motor berhenti dan torsi rata-rata yang dikembangkan adalah
nol.
Kebanyakan motor sinkron memiliki nilai antara 150 kW (200 hp)
dan 15 MW y ( p)(20,000 hp) dan kecepatan berkisar 150-1.800 r /
min. Akibatnya, mesin-mesin ini digunakan dalam industri berat.
Motor sinkron dibangun di unit besar dibandingkan dengan motor
induksi (motor induksi lebih murah untuk peringkat yang lebih
kecil) dan digunakan untuk industri kecepatan konstan drive
9
kecepatan konstan drive.
-
Karakteristik Motor Sinkron Kutub yang ditampilkan di bagian
kanan adalah tipe rotor brush yang menggunakan cincin slip untuk
aplikasi arus medan DCaplikasi arus medan DC.
Tegangan rendah DC digunakan untuk memutar bidang. Tipe tegangan
yang tipikal digunakan adalah 120 VDC d 250 VDCVDC dan 250 VDC.
Polaritas cincin slip tidaklah kritikal dan harus secara berkala
dibalik untuk menyamakan pada pemakaian cincin y p pslip. Cincin
polaritas negatif akan memperlama pemakaian dibandingkan cincin
positif karena faktor elektrolisis.
Cincin slip biasanya terbuat dari baja untuk umur pemakaian yang
lama.
10
-
Prinsip Kerja Motor Sinkron
Amortisseur pada rotor menghasilkan Torsi awal dan Mempercepat
Torsi untuk mempercepat synchronous motor.
Ketika kecepatan motor mencapai sekitar 97% dari papan RPMKetika
kecepatan motor mencapai sekitar 97% dari papan RPM, medan arus DC
diterapkan ke rotor untuk menghasilkan torsi tarikan dan rotor akan
menarik langkah dan mensinkronisasi dengan medan fluks yang
berputar di dalam stator. Motor akan dijalankan pada kecepatan
sinkron dan menghasilkan torsi yang sinkron ataupada kecepatan
sinkron dan menghasilkan torsi yang sinkron atau Synchronous
Torque.
Setelah sinkronisasi, dorongan torsi tidak dapat ditingkatkan
lagi atau motor akan menjadi di luar kendali. Kadang-kadang, jika
kelebihan beban sesaat motor akan slip dan sinkronisasi
ulangkelebihan beban sesaat, motor akan slip dan sinkronisasi
ulang. Perlindungan saat dorongan harus disediakan, jika tidak
motor akan berjalan sebagai sebuah motor induksi arus tinggi dan
memungkinkan kerusakan motor yang parah.
11
-
Metode Excitation
Metode Excitation: Dua metode yang umumnya digunakan untuk
aplikasi
d i d DC k t h tdari medan arus DC ke rotor synchronous motor.
Sistem tipe brush menerapkan output dari suatu
generator DC yang terpisah (Exciter) ke cincin slip dari g y g p
( ) protor.
Sistem brushless excitation memanfaatkan suatu integral exciter
dan perakitan penyearah yang berputarintegral exciter dan perakitan
penyearah yang berputar yang menghilangkan kebutuhan akan brushes
dan cincin slip.
12
-
Metode Brush Type Excitation
Brush-Type Excitation System
13
-
Cara Kerja Metode Brush-Excitation
Dalam metode eksitasi DC, arus medan untuk synchronous
motordisediakan oleh generator DC terpisah dikenal sebagai exciter.
Exciteradalah gabungan mesin DC yang didorong oleh synchronous
motor itu ada a gabu ga es C ya g d do o g o e sy c o ous oto
tusendiri (garis putus-putus) atau oleh suatu motor penggerak yang
terpisah. Misalnya Excavators, sering memiliki garis exciter yang
terdiri dari sejumlah exciters yang digerakkan oleh motor induksi
AC tunggal.
Bidang exciter terpisah dengan kontrol perangkat. Beberapa
kontrol eksitasi g g gmenyediakan penyesuaian manual dari kekuatan
bidang. Sistem lain secara otomatis mengatur medan synchronous
motor dalam suatu konfigurasi loop tertutup yang telah dirancang
untuk mempertahankan kekuatan medan yang memadai untuk berbagai
beban atau untuk mempertahankan faktor daya konstan Medan exciter
diberikan energimempertahankan faktor daya konstan. Medan exciter
diberikan energi ketika 52A membantu menutup pemutus utama.
Pada ilustrasi sistem di atas, kekuatan medan exciter mengontrol
output DC dari exciter yang diambil oleh brushes pembalik ke
brushes cincin slip motor dan diterapkan melalui cincin slip ke
medan perputaran utama darimotor, dan diterapkan melalui cincin
slip ke medan perputaran utama dari synchronous motor.
Synchronous motor dimulai sebagai sebuah motor induksi. Ketika
rotor mencapai kecepatan mendekati sinkron, medan arus pada motor
diterapkan oleh Field Application Relay (Standard Device
Designation #56).
14
p pp y ( g )
-
Prinsip Brushless-Excitation
15
-
Prinsip Brushless-Excitation
Metode eksitasi ini menghilangkan kebutuhan akan brushes atau
sikat, baik di exciter dan motor.
Ketika motor mulai dinyalakan (Std Device #52) mesin
breakerKetika motor mulai dinyalakan (Std Device #52), mesin
breaker menutup dan menerapkan sistem AC tiga fasa ke gulungan
stator motor. Motor dimulai sebagai motor induksi menggunakan
Amortisseur winding pada rotor.g p
Mesin breaker 52a membantu kontak juga menutup dan menerapkan
output DC dari solid-state control bidang ke stasioner exciter yang
berliku. Sebuah sistem tiga fasa AC diinduksi ke dalam gulungan
rotor g g gexciter dan tegangan induksi ini disearahkan oleh
penyearah putaran. Ketika rotor mendekati tegangan sinkron,
aplikasi SCR (Synchronizing Control Package) dan rectifier DC
diterapkan pada synchronous motor. Lihat skema di halaman
berikutnya untuk tambahan rincian.
16
-
Prinsip Sikronisasi
17
-
Prinsip SikronisasiField Application Circuit dalam suatu sistem
eksitasi synchronous motor harus memenuhi
tiga fungsi: Menyediakan jalur bebas untuk arus yang diinduksi
ke wound rotor selama proses awal
dan membuka sirkit ini ketika eksitasi diterapkan. Selama proses
awal, motor b i b i t i d k i d t i di d k i l h i lberoperasi
sebagai motor induksi dengan torsi yang diproduksi oleh squirrel
cage winding. Wound rotor juga dipotong oleh fluks stator berputar
dan memiliki tegangan yang terinduksi di dalamnya. Selama fase
start-up ini, SCR2 dalam diagram di atas merupakan gerbang on oleh
Field Application Circuit dan menyediakan jalur bebas untuk arus
rotor induksi yang melalui Field Discharge Resistor (FDR) seperti
yang dit j kk l h h h t t F k i t dii d k i i iditunjukkan oleh
panah merah putus-putus. Frekuensi arus rotor yang diinduksi ini
memberitahu rangkaian aplikasi bahwa kecepatan yang ada pada rotor
sedang berjalan. Lihat bentuk gelombang pada oscilloscope
dibawah.
Ketika kecepatan rotor mencapai sekitar 97% dari sinkronisasi
dan polaritas rotor telah mencapai sinkronisasi, SCR2 akan berubah
menjadi off dan SCR1 merupakan p j pgerbang on memungkinkan koreksi
arus DC dari putaran rectifier tiga fasa ke melewati bidang
putaran, seperti yang ditunjukkan oleh panah hijau, menghasilkan
Synchronizing Torque yang diperlukan untuk rotor untuk menarik
dengan putaran fluks stator.
Field Application Circuit harus menghapus eksitasi segera jika
motor di luar kendali.
18
-
Salient-Pole Synchronous Motor
Stator
19
-
Rotor
20
-
Salient Motor Machine
21
-
Salient Motor Machine
22
-
Rotating Stator Magnetic Field
23
-
Keuntungan dari Motor Sinkron
Pengaturan ketepatan kecepatan membuat synchronous motor sebagai
pilihan ideal untuk proses industri tertentu dan sebagai penggerak
utama generatordan sebagai penggerak utama generator.
Synchronous motor memiliki kecepatan atau karakterisik torsi
yang cocok untuk penggerak langsung dari mesin bertenaga kuda yang
besar beban RPM rendah sepertibertenaga kuda yang besar, beban RPM
rendah seperti kompresor maju-mundur.
Synchronous motor beroperasi pada faktor daya yang ditingkatkan
dengan demikian dapat meningkatkanditingkatkan, dengan demikian
dapat meningkatkan faktor daya sistem secara keseluruhan dan
menghilangkan atau mengurangi utilitas faktor daya. Peningkatan
faktor daya juga mengurangi dropnya g y j g g g p ytegangan sistem
dan dropnya tegangan pada terminal motor.
24
-
Pengereman Motor Sinkron
Karena inersia dari rotor dan beban, SM yang besar dapat memakan
waktu beberapa jam untuk berhenti setelah putus dari baris. Untuk
mengurangi waktu, metode pengereman berikut dapat digunakan:
Menjaga dc eksitasi penuh dengan angker hubungan arus pendek.
Menjaga dc eksitasi penuh dengan angker terhubung ke tiga resistor
enjaga dc eksitasi penuh dengan angke te hubung ke tiga esisto
eksternal. Terapkan mekanis pengereman.
Dalam metode 1 dan 2 motor melambat karena berfungsi sebagai
generator Dalam metode 1 dan 2, motor melambat karena berfungsi
sebagai generator, menghilangkan energi dalam elemen resistif dari
rangkaian.
Pengereman mekanik biasanya diterapkan pada setelah motor telah
mencapai setengah kecepatan atau kurang Kecepatan yang lebih rendah
pantassetengah kecepatan atau kurang. Kecepatan yang lebih rendah
pantas mencegah pemakaian sepatu rem.
25
-
Rangkaian Equivalent Motor Sinkron
where,
a
a
ii diSRvoltageexcitationphasePerE
voltageinputphasePerV::
s
a
cereacssynchronouphasePerXceresiswindingStatorR
tan:tan:
saaaaa XjIRIEV ++=
aaa jXR
EVI
or=
26
saa jXR +
-
Rangkaian Ekivalen
Motor sinkron pada dasarnya adalah sama p ydengan generator
sinkron, kecuali arah aliran daya pada motor sinkron merupakan
kebalikan dari generator sinkron Oleh karena arah alirandari
generator sinkron. Oleh karena arah aliran daya pada motor sinkron
dibalik, maka arah aliran arus pada stator motor sinkron juga dapat
p j g pdianggap dibalik. Maka rangkaianekuivalen motor sinkron
adalah sama dengan rangkaian ekuivalen generator sinkron kecuali
arah arus Iaekuivalen generator sinkron, kecuali arah arus Ia
dibalik. Bentuk rangkaian ekuivalen motor sinkron diperlihatkan
27
-
Contoh Soal
Motor Sinkron 3, 12 kutub, mempunyai impedansi , , p y pjangkar
100 ohm, dan reaktansi 0.5 ohm/fasa. Beroperasi dengan 2000 V, 3,
25 Hz. Bila pengaturan 80% dari kemampuan hitunglah daya maksimum
dan80% dari kemampuan, hitunglah daya maksimum dan torsi dalam Nm
sebelum mesin keluar dari sinkronisasi.
Jawab :V1 = 2000 Volt dan Eb = 80% sehingga V2 = 1600 volt
R=
0.5 Ohm dan Zs = 10 ohm D k i dih ilk l h i i kDaya maksimum
yang dihasilkan oleh mesin sinkron :
2
2221Zs
RVZsVVPd =
28
ZsZs
-
Pd maks dari ketiga fasa =
= 2
2
105.0
31600
3101600
32000 xPd 1033103
wattxxPd 307200200
1160010
16002000 2 =
=
Kecepatan mesin sinkron dengan 12 kutub
= 120 x 25/12 = 250 rpmTmaks pada kondisi daya maksimum :
xxT
xT maks
3072002502307200=
Nmxx
xT
xT
maks
maks
117242502
60307200
30720060
==
=
29
xx 2502
-
Daftar Pustaka
http://www kilowattclassroom
com/Archive/http://www.kilowattclassroom.com/Archive/SyncMotors.pdf
Zuhal Dasar Teknik Tenaga Listrik dan Zuhal. Dasar Teknik Tenaga
Listrik dan Elektronika Daya. Jakarta. PT Gramedia Pustka Utama
1995Pustka Utama. 1995.
http://www.tpub.com/content/neets/14177//14177 92
htcss/14177_92.htm
30




![PowerPoint Presentation...29. Assertion (A): A synchronous motor is not inherently self starting. [ESE 2010] Reason (R): At standstill the rotor of a synchronous motor is subjected](https://img.pdfslide.net/doc/110x75/6085f7ce25025105b26b4395/powerpoint-presentation-29-assertion-a-a-synchronous-motor-is-not-inherently.jpg)