Embed Size (px)
Citation preview
République Tunisienne
Ministère de l’Enseignement Supérieur et de la Recherche Scientifique
Université de Tunis El Manar
Ecole Nationale d’Ingénieurs de Tunis
Département Génie Electrique
Projet de Fin d’Études
Présenté par
Sonia Ghazzai
Pour l’obtention du
Diplôme National d’Ingénieur en Génie Électrique
Commande pour la téléopération du robot L2ROV
augmenté d’un bras pour la saisie robuste en
environnement sous-marin
Réalisé à
LIRMM
Soutenu le 21 septembre 2016
Devant le Jury :
Président : M./Mme <Prénom NOM>
Rapporteur : M. <Prénom NOM>
Encadreur Organisme d’accueil : M. <Prénom NOM>
Encadreur ENIT : M. <Prénom NOM>
Année Universitaire 2015/2016
Remerciements

1
Table des matières
Table des figures .................................................................................................................................... 4
Liste des tableaux .................................................................................................................................... 5
Introduction générale ............................................................................................................................... 6
État de l’art ............................................................................................................................................ 7
1.1 introduction ............................................................................................................................. 8
1.2 la robotique sous-marine ......................................................................................................... 8
1.2.1 Historique ............................................................................................................................... 8
1.2.2 Véhicules sous-marins ........................................................................................................... 8
1.2.2.1 Véhicules autonomes sous-marins (AUV) ..................................................................... 8
1.2.2.2 Véhicules Téléopérés (ROV) ......................................................................................... 9
1.2.2.2.1 les ROV d’observation ............................................................................................ 9
1.2.2.2.2 les ROV d’intervention .......................................................................................... 10
1.2.2.2.3 Le L2ROV .............................................................................................................. 10
1.2.2.3 autres types de véhicules ............................................................................................... 11
1.2.2.3.1 Les hybrides (HROV)............................................................................................. 11
1.2.2.3.2 Les véhicules bio-inspirés ...................................................................................... 12
1.2.2.3.3 Les profileurs .......................................................................................................... 12
1.3 Contexte et objectif du projet ..................................................................................................... 12
1.3.1 Contexte du projet ................................................................................................................ 12
1.3.2 Objectifs du projet ................................................................................................................ 13
1.4 Conclusion ............................................................................................................................. 13
Modélisation du véhicule sous-marin L2ROV ...................................................................................... 14
2.1 Introduction ................................................................................................................................. 15
2.2 Cinématique................................................................................................................................ 15
2.3 Dynamique ................................................................................................................................. 16
2.3.1 Forces exercées sur le véhicule ............................................................................................ 16
2.3.1.1 Poussée d’Archimède et Poids ...................................................................................... 16
2.3.1.2 Amortissement hydrodynamique ................................................................................... 17
2.3.1.3 Force d’inertie de Coriolis et d’entraînement ............................................................ 18
2.3.1.4 Effet des actionneurs ................................................................................................. 18
2
2.3.1.5 Perturbations extérieurs ................................................................................................. 19
2.3.2 Modèle dynamique du véhicule dans le repère lié au véhicule ........................................... 19
2.3.3 Modèle dynamique du véhicule dans le repère fixe ............................................................. 20
2.4 Conclusion ................................................................................................................................... 21
Commande du véhicule L2ROV ....................................................................................................... 22
3.1 Introduction article vincent avec thése maalouf biblio .............................................................. 23
3.2 commande par PID ...................................................................................................................... 23
3.2.1 Présentation .......................................................................................................................... 23
3.2.2 Réglage des gains ............................................................................................................. 24
3.2.2.1 La méthode Ziegler-Nichols en boucle ouverte ............................................................ 24
3.2.2.3 La méthode Ziegler-Nichols en boucle fermée ............................................................. 24
3.3 Commande dynamique par retour d’état .................................................................................... 25
3.4 Génération de trajectoire ............................................................................................................ 26
3.5 Résultats expérimentaux ............................................................................................................. 27
3.5.1 Résultat de la simulation du modèle par la commande PID ................................................. 27
3.5.2 Résultat de la simulation du modèle par la commande dynamique par retour d’état .......... 28
3.6 Conclusion ................................................................................................................................... 30
Interface haptique et téléopération .................................................................................................... 31
4.1 Introduction ................................................................................................................................. 32
4.2 Téléopération nanci thése voir mes favori lirmm.fr .................................................................... 32
4.2.1 Historique ............................................................................................................................ 32
4.2.2 Composants et types des systèmes téléopérés ...................................................................... 32
4.2.3 Stabilité et transparence ........................................................................................................ 33
4.2.3.1 stabilités ................................................................................... Erreur ! Signet non défini.
4.2.3.2 transparences ................................................................................................................. 34
4.3 Interface haptique .................................................................................................................. 35
4.3.1Type d’interface haptique ...................................................................................................... 35
4.4 Utilisation du Novint Falcon pour la commande de la trajectoire du L2ROV ...................... 37
4.4.1 Le protocole UDP ................................................................................................................ 37
4.4.2 Les tests réalisés avec le Novint Falcon ............................................................................... 38
4.4.2.1 tests de suivi de trajectoire en boucle fermée avec le contrôleur PID ........................ 38
4.4.2.2 Contrôle du « workspace » (l’espace de travail) grâce au bouton du milieu du Novint
Falcon: 40
4.4.2.3 Contrôle d’un angle de rotation avec les boutons latéraux du Novint Falcon .......... 41
3
4.4.2.4 Réalisation des mêmes codes avec un nouveau contrôleur : contrôleur à retour
d’état dynamique ...................................................................................................................... 42
Conclusion générale ............................................................................................................................ 44
Bibliographie ........................................................................................................................................ 45
Annexe 1 ......................................................................................................... Erreur ! Signet non défini.
Annexe 2 ......................................................................................................... Erreur ! Signet non défini.
4
Table des figures
Figure 1: exemple d'application des robots ............................................................................................ 8
Figure 2: l'AUV Remus 100 et le Hugin .................................................................................................... 9
Figure 3: véhicule ROV avec son système TMS ..................................................................................... 10
Figure 4: véhicule ROV (le Commanche) d'intervention ....................................................................... 10
Figure 5: le L2ROV ................................................................................................................................. 11
Figure 6: véhicule hybride le HROV ...................................................................................................... 11
Figure 7: exemples de véhicules bio-inspiré: la salamandre et la tortue .............................................. 12
Figure 8: le profileur PROVOR CTS 3 ..................................................................................................... 12
Figure 9: repère fixe Rn et repère lié au véhicule Rb ............................................................................ 15
Figure 10: block diagramme du contrôleur PID .................................................................................... 23
Figure 11: réponse indicielle du système .............................................................................................. 24
Figure 12: suivit de trajectoire (sur l'axe Z) avec une flotabilité nulle pour le contrôleur PID ............. 27
Figure 13:suivit de trajectoire (sur l'axe Z) avec une flottabilité non nulle pour le contrôleur PID ...... 28
Figure 14: suivit de trajectoire avec une flottabilité nulle en utilisant la commande dynamique par
retour d'état .......................................................................................................................................... 29
Figure 15:υsuivit de trajectoire avec une flottabilité non nulle en utilisant la commande dynamique
par retour d'état .................................................................................................................................... 30
Figure 16: le système téléopéré crée par Ray Goertz en 1948 ............................................................. 32
Figure 17: composants d'un système téléopéré ................................................................................... 33
Figure 18: modélisation linéaire d'un système de téléopération ......................................................... 34
Figure 19: le CyberTouch ....................................................................................................................... 36
Figure 20: exemples d'Interface haptiques ........................................................................................... 36
Figure 21: L'interface haptique Novint Falcon ...................................................................................... 37
Figure 22:Suivi de la trajectoire imposée par le Novint sur l'axe des X ................................................ 39
Figure 23:suivi de la trajectoire imposée par le Novint sur l'axe des Y ................................................. 39
Figure 24:suivi de la trajectoire imposée par le Novint sur l'axe des Z ................................................. 40
Figure 25: suivit de trajectoire qui va jusqu'à 8m au lieu des 2m imposer par le Novint ..................... 41
Figure 26: réalisation d'une rotation suivant l'angle phi ....................................................................... 42
Figure 27: suivi de la trajectoire imposée par le Novint sur l'axe des Z avec le contrôleur dynamique
par retour d'état .................................................................................................................................... 43

5
Liste des tableaux
Tableau 1: calcule des gains du controleur PID en boucle ouverte par la méthode Ziegler-Nicoles .... 24
Tableau 2:calcule des gains du contrôleur PID en boucle fermée par la méthode Ziegler-Nicoles ...... 25
Tableau 3: Composant de l'en-tête d'un datagramme UDP ................................................................... 37
6
Introduction générale
Les robots sous-marins sont en plein essor. Etant donné développement technologique, leur
usage est répandu, principalement pour des applications scientifiques (océanographie,
climatologie…), des applications pétrolières off-shore et pour des applications militaires
(surveillance, déminage...).
Le projet de fin d’étude s’inscrit dans le cadre d’un projet de recherche scientifique pour
la robotique sous-marine : le projet SEAHAND. Le travail effectué au sein de ce projet a
pour but de réaliser la commande par téléopération d’un robot sous-marin muni d’un bras
manipulateur.
Ce projet a été réalisé au sein du LIRMM : le Laboratoire d’Informatique, de Robotique
et de Microélectronique de Montpellier. C’est une unité mixte de recherche de l’université
Montpellier 2 et du Centre National de la Recherche Scientifique (CNRS).
Il comporte trois départements scientifiques de recherche : Informatique,
Microélectronique et Robotique.
Le travail demandé est d’effectuer tout d’abord une modélisation mathématique du robot
sous-marin L2ROV qui nous permettra de réaliser les différents tests en simulation. On
commande par la suite le modèle du robot avec deux types de contrôleurs (le contrôleur
PID et le contrôleur dynamique par retour d’état). Enfin, grâce à l’interface haptique, on
effectue la téléopération du modèle du L2ROV avec différents scénarios de commande de
la trajectoire.
Ce rapport comporte quatre chapitres :
- Le premier chapitre est consacré à la présentation du projet. Il comporter une
description de la robotique sous-marine et l’objectif du projet.
- Le deuxième chapitre a pour finalité de détailler la modélisation du robot L2ROV afin
d’avoir son équation dynamique qui permettra de réaliser les différentes simulations.
- Le troisième chapitre présente les deux commandes utilisées : le régulateur PID et la
commande dynamique par retour d’état et leur test.
- Le quatrième chapitre présente la téléopération et les interfaces haptiques et teste les
commandes de la trajectoire réalisée par l’interface haptique sur le modèle dynamique
de simulation.
7
Chapitre 1
État de l’art
8
1.1 Introduction La robotique est un domaine en plein essor. On les retrouve dans plusieurs applications
comme la robotique sous-marine.
1.2 La robotique sous-marine 1.2.1 Historique Le mot robot vient du tchèque « robota » qui veut dire le travail d’un asservi. Il a été inventé
par l’écrivain Karel Capek en 1920.
Les premiers robots recensés dans l’histoire ont vu le jour en 1400 av. JC : c’est une horloge
qui mesure le temps en utilisant l’eau. Avec le développement technologique, le domaine
de la robotique lui aussi c’est développé. On est passé de l’homme mécanique jouant d’un
instrument de musique (1737) aux robots actuels (robots humanoïdes, robots émotives
interactives, robots explorateurs …). Les robots, ont ainsi, intégré plusieurs domaines de
notre vie.
Ils sont utilisés dans l’industrie où ils effectuent des tâches qui nécessitent une grande
précision, dangereuses ou qui sont répétitives.
On trouve aussi des robots dans le domaine de la médecine, de l’exploration spatiale et le
domaine de la musique…
Figure 1: Exemples d'applications des robots
Le robot a aussi intégré le domaine de l’exploration sous-marine :
L’être humain ne pouvant pas descendre dans le fond marin sans aide de robot à cause des
conditions extrêmes comme l’obscurité totale et la grande pression, le développement des
robots sous-marins est donc une nécessité pour l’exploration de ses fonds.
Les militaires sont les premiers à avoir développé des sous-marins qui ont la possibilité de
se déplacer en toute discrétion et d’intervenir par surprise. Depuis, les applications des
véhicules sous-marins se sont diversifiés : on retrouve avec les applications militaires des
applications scientifiques et récemment on s’est intéressé à l’exploitation des ressources de
matière première.
Pour réaliser ces différentes missions, l’homme a développé plusieurs types de véhicules
sous-marins. [1]
1.2.2 Véhicules sous-marins
1.2.2.1 Véhicules autonomes sous-marins (AUV)
9
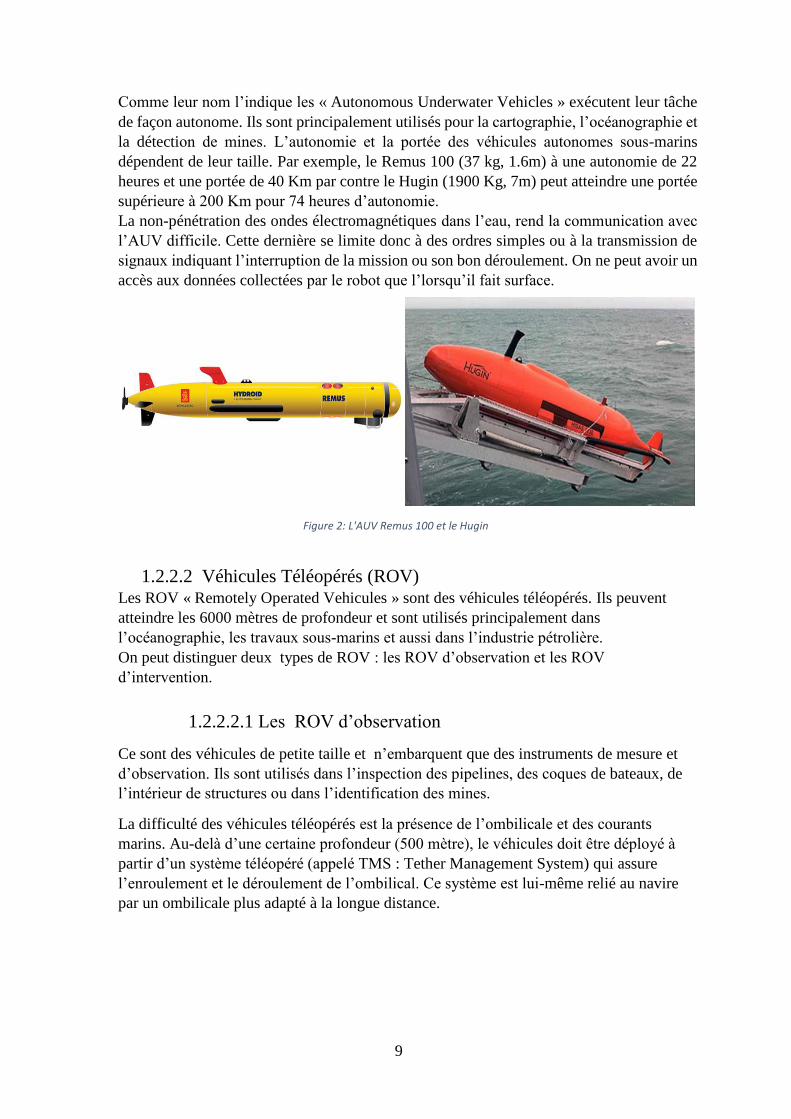
Comme leur nom l’indique les « Autonomous Underwater Vehicles » exécutent leur tâche
de façon autonome. Ils sont principalement utilisés pour la cartographie, l’océanographie et
la détection de mines. L’autonomie et la portée des véhicules autonomes sous-marins
dépendent de leur taille. Par exemple, le Remus 100 (37 kg, 1.6m) à une autonomie de 22
heures et une portée de 40 Km par contre le Hugin (1900 Kg, 7m) peut atteindre une portée
supérieure à 200 Km pour 74 heures d’autonomie.
La non-pénétration des ondes électromagnétiques dans l’eau, rend la communication avec
l’AUV difficile. Cette dernière se limite donc à des ordres simples ou à la transmission de
signaux indiquant l’interruption de la mission ou son bon déroulement. On ne peut avoir un
accès aux données collectées par le robot que l’lorsqu’il fait surface.
Figure 2: L'AUV Remus 100 et le Hugin
1.2.2.2 Véhicules Téléopérés (ROV) Les ROV « Remotely Operated Vehicules » sont des véhicules téléopérés. Ils peuvent
atteindre les 6000 mètres de profondeur et sont utilisés principalement dans
l’océanographie, les travaux sous-marins et aussi dans l’industrie pétrolière.
On peut distinguer deux types de ROV : les ROV d’observation et les ROV
d’intervention.
1.2.2.2.1 Les ROV d’observation
Ce sont des véhicules de petite taille et n’embarquent que des instruments de mesure et
d’observation. Ils sont utilisés dans l’inspection des pipelines, des coques de bateaux, de
l’intérieur de structures ou dans l’identification des mines.
La difficulté des véhicules téléopérés est la présence de l’ombilicale et des courants
marins. Au-delà d’une certaine profondeur (500 mètre), le véhicules doit être déployé à
partir d’un système téléopéré (appelé TMS : Tether Management System) qui assure
l’enroulement et le déroulement de l’ombilical. Ce système est lui-même relié au navire
par un ombilicale plus adapté à la longue distance.
10
Figure 3: Véhicule ROV avec son système TMS
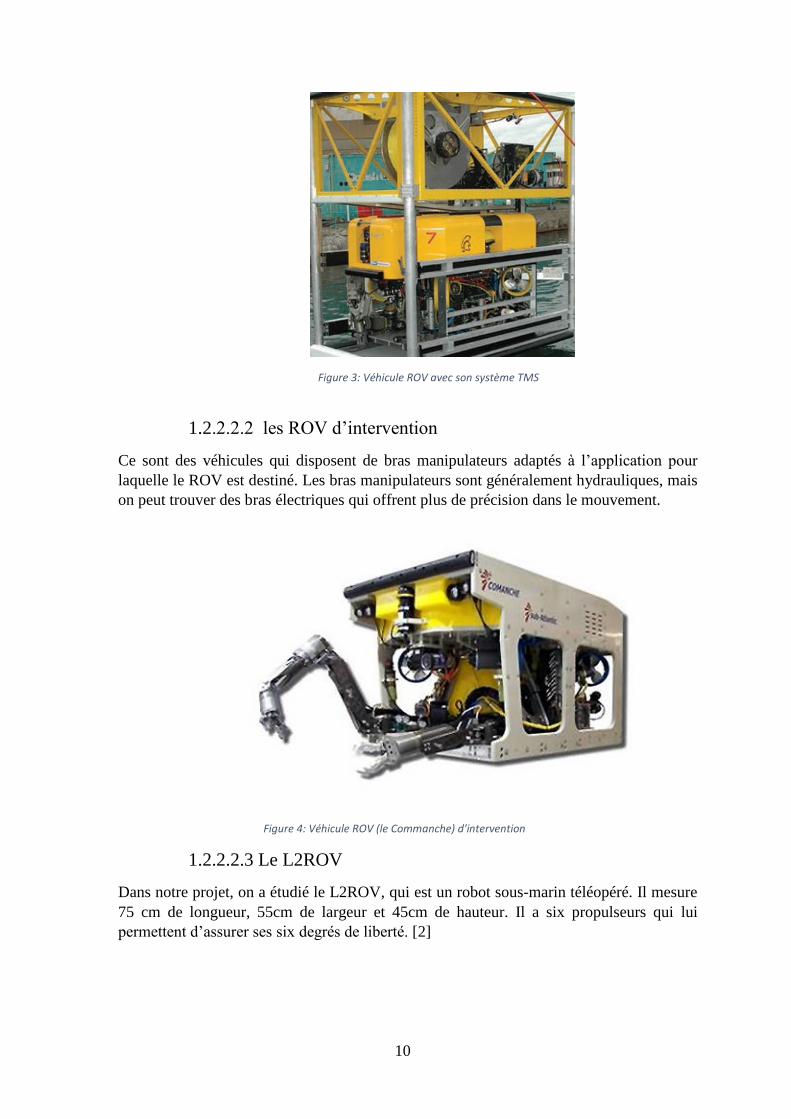
1.2.2.2.2 les ROV d’intervention
Ce sont des véhicules qui disposent de bras manipulateurs adaptés à l’application pour
laquelle le ROV est destiné. Les bras manipulateurs sont généralement hydrauliques, mais
on peut trouver des bras électriques qui offrent plus de précision dans le mouvement.
Figure 4: Véhicule ROV (le Commanche) d'intervention
1.2.2.2.3 Le L2ROV
Dans notre projet, on a étudié le L2ROV, qui est un robot sous-marin téléopéré. Il mesure
75 cm de longueur, 55cm de largeur et 45cm de hauteur. Il a six propulseurs qui lui
permettent d’assurer ses six degrés de liberté. [2]

11
Figure 5: Le L2ROV
Le L2ROV a aussi ces caractéristiques suivantes :
Masse
28Kg
Flottabilité
9N
Le maximum de profondeur qu’il peut
atteindre
100m
Période d’échantillonnage
50ms
Longueur de l’ombilical 150m
1.2.2.3 autres types de véhicules
1.2.2.3.1 Les hybrides (HROV) Ce sont des véhicules qui peuvent être autonome grâce aux batteries intégrées et la
communication par acoustique ou téléopérés grâce à une fibre optique déployée à partir
d’une cage ce qui permet à l’opérateur de commander le véhicule depuis le navire en
surface.
Figure 6: Véhicule hybride le HROV
12
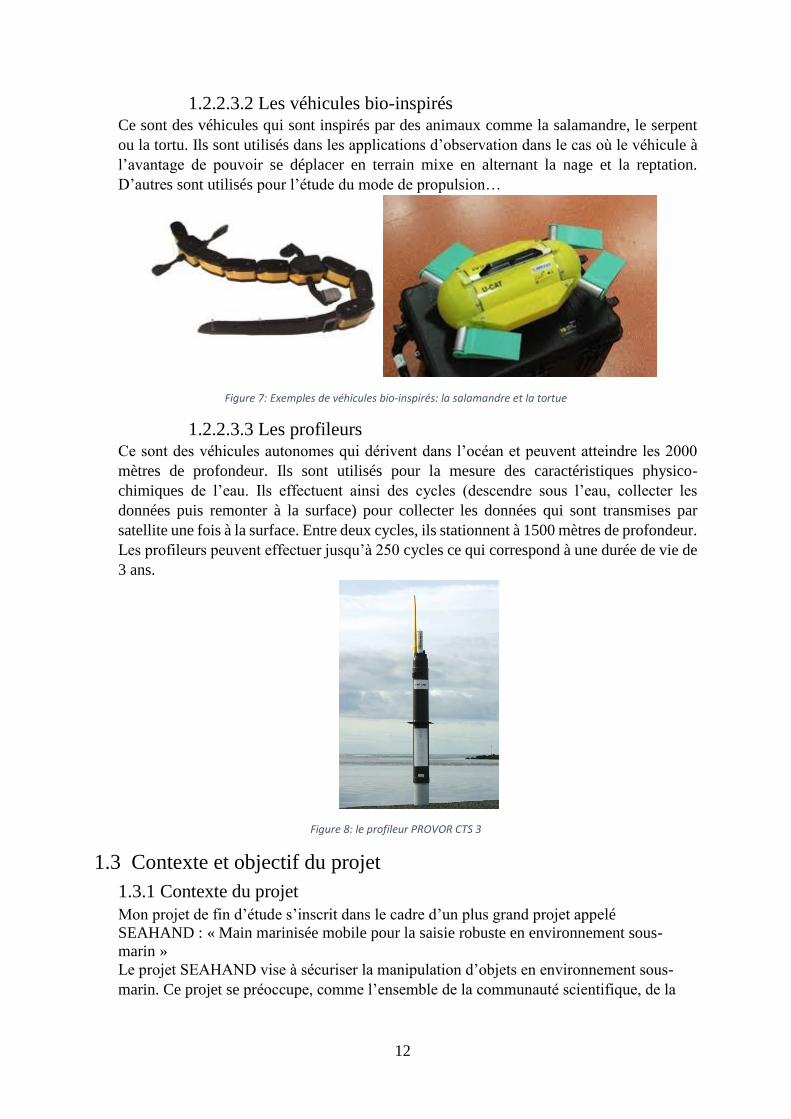
1.2.2.3.2 Les véhicules bio-inspirés Ce sont des véhicules qui sont inspirés par des animaux comme la salamandre, le serpent
ou la tortu. Ils sont utilisés dans les applications d’observation dans le cas où le véhicule à
l’avantage de pouvoir se déplacer en terrain mixe en alternant la nage et la reptation.
D’autres sont utilisés pour l’étude du mode de propulsion…
Figure 7: Exemples de véhicules bio-inspirés: la salamandre et la tortue
1.2.2.3.3 Les profileurs Ce sont des véhicules autonomes qui dérivent dans l’océan et peuvent atteindre les 2000
mètres de profondeur. Ils sont utilisés pour la mesure des caractéristiques physico-
chimiques de l’eau. Ils effectuent ainsi des cycles (descendre sous l’eau, collecter les
données puis remonter à la surface) pour collecter les données qui sont transmises par
satellite une fois à la surface. Entre deux cycles, ils stationnent à 1500 mètres de profondeur.
Les profileurs peuvent effectuer jusqu’à 250 cycles ce qui correspond à une durée de vie de
3 ans.
Figure 8: le profileur PROVOR CTS 3
1.3 Contexte et objectif du projet
1.3.1 Contexte du projet
Mon projet de fin d’étude s’inscrit dans le cadre d’un plus grand projet appelé
SEAHAND : « Main marinisée mobile pour la saisie robuste en environnement sous-
marin »
Le projet SEAHAND vise à sécuriser la manipulation d’objets en environnement sous-
marin. Ce projet se préoccupe, comme l’ensemble de la communauté scientifique, de la
13
protection des épaves situées en profondeur : leur nombre est estimé entre 15000 et 20000
épaves sur le littoral métropolitain français.
Le projet SEAHAND, en partenariat avec le département de Recherches Archéologiques
Subaquatiques et Sous-Marines (DRASSM), assure la mission d’exploration de l’épave de
la lune perdue en 1664. Il a aussi pour mission d’évaluer et de mettre en œuvre des
techniques dont l’objectif serait de pouvoir fouiller les épaves sans plongée humaine.
Avec ces outils, les archéologues piloteraient, depuis la surface, des préhenseur robotiques
à retour d'effort qui effectueront des fouilles et de la collecte d’objets à des profondeurs
pouvant atteindre les 2000 mètres. [3]
1.3.2 Objectifs du projet
Le projet SEAHAND a pour objectif de développer un préhenseur marinisé spécifique
doté de capacités de saisie adaptatives, qui pourra être exploité dans un contexte de
téléopération.
Dans ce contexte, mon projet de fin d’étude a pour but de faire la commande pour la
téléopération du robot L2ROV. Cette commande serait faite premièrement en simulation
puis testée avec une Interface Haptique.
1.4 Conclusion
Dans ce chapitre, on a présenté la robotique sous-marine, ses différentes applications. On
a aussi présenté le contexte et l’objectif de projet de fin d’étude.
14
Chapitre 2
Modélisation du véhicule sous-marin
L2ROV
15
2.1 Introduction La réalisation des objectifs de ce projet passe tout d’abord par la modélisation mathématique
du véhicule sous-marin. Cette modélisation nous permettra d’avoir l’équation dynamique
du L2ROV qui va être utilisée par la suite lors des différents tests.
2.2 Cinématique La cinématique est une branche de la mécanique qui étudie le mouvement d’un corps
indépendamment des forces exercés sur ce corps ou de sa masse. Elle est concernée par la
position du corps, la génération de trajectoire, les vitesses et aussi les accélérations. C’est
pour cette raison que l’aspect géométrique entre dans la description du corps (dans notre
cas un véhicule sous-marin) et ainsi on peut définir les vitesses et les accélérations du corps.
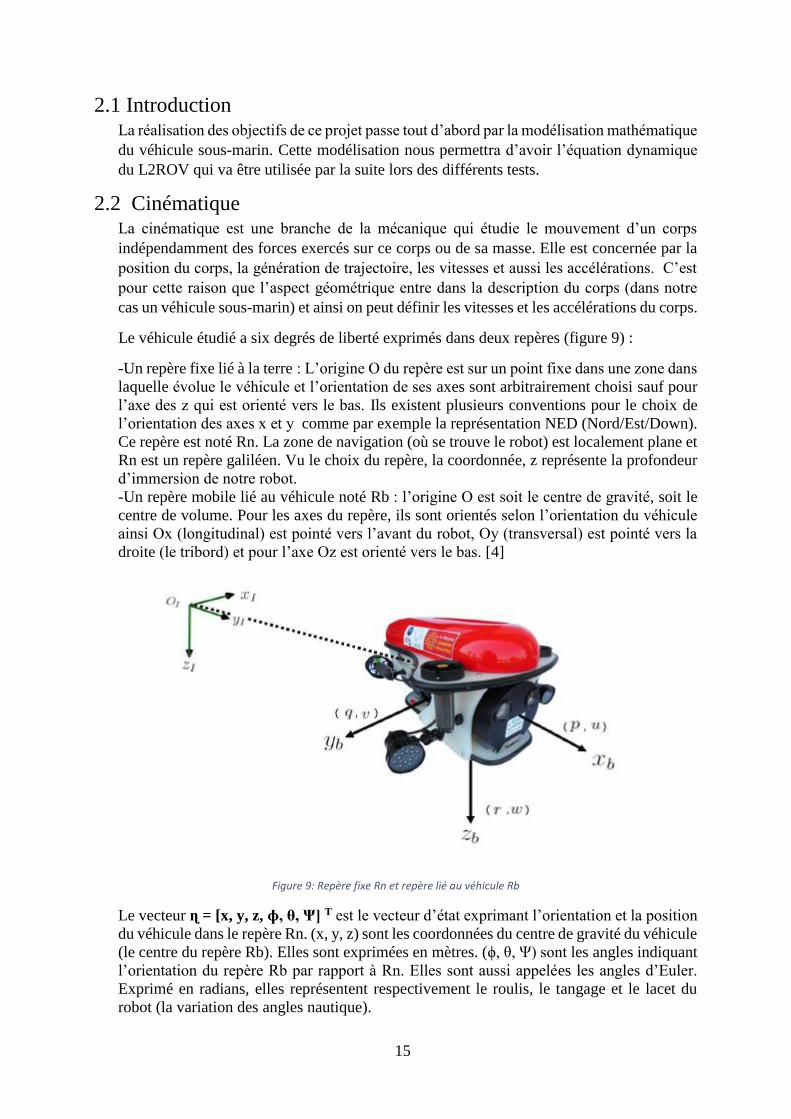
Le véhicule étudié a six degrés de liberté exprimés dans deux repères (figure 9) :
-Un repère fixe lié à la terre : L’origine O du repère est sur un point fixe dans une zone dans
laquelle évolue le véhicule et l’orientation de ses axes sont arbitrairement choisi sauf pour
l’axe des z qui est orienté vers le bas. Ils existent plusieurs conventions pour le choix de
l’orientation des axes x et y comme par exemple la représentation NED (Nord/Est/Down).
Ce repère est noté Rn. La zone de navigation (où se trouve le robot) est localement plane et
Rn est un repère galiléen. Vu le choix du repère, la coordonnée, z représente la profondeur
d’immersion de notre robot.
-Un repère mobile lié au véhicule noté Rb : l’origine O est soit le centre de gravité, soit le
centre de volume. Pour les axes du repère, ils sont orientés selon l’orientation du véhicule
ainsi Ox (longitudinal) est pointé vers l’avant du robot, Oy (transversal) est pointé vers la
droite (le tribord) et pour l’axe Oz est orienté vers le bas. [4]
Figure 9: Repère fixe Rn et repère lié au véhicule Rb
Le vecteur ɳ = [x, y, z, ɸ, θ, Ψ] T est le vecteur d’état exprimant l’orientation et la position
du véhicule dans le repère Rn. (x, y, z) sont les coordonnées du centre de gravité du véhicule
(le centre du repère Rb). Elles sont exprimées en mètres. (ϕ, θ, Ψ) sont les angles indiquant
l’orientation du repère Rb par rapport à Rn. Elles sont aussi appelées les angles d’Euler.
Exprimé en radians, elles représentent respectivement le roulis, le tangage et le lacet du
robot (la variation des angles nautique).

16
Le vecteur υ = [u, v, w, p, q, r]T est le vecteur de vitesses linéaires et angulaires dans le
repère lié au véhicule Rb. (u, v, w) sont les vitesses suivant les axes Ox, Oy et Oz. Exprimées
en m/s, elles sont appelées respectivement vitesse longitudinale, vitesse transversale et
vitesse de pilonnement. (p, q, r) sont les vitesses de rotation autour des différent axes.
Comme υ est lié à Rb et que ɳ est lié au repère fixe, un transfert entre les deux repères est
nécessaire. Ceci est possible grâce à la matrice de transformation notée J. la dérivée ɳ̇ du
vecteur d’état ɳ dans le repère Rn est calculable à partir du vecteur vitesse υ lié au repère
Rb en appliquant cette relation : ɳ̇ = 𝑱( ɳ) ∗ 𝛖 (2.1)
La matrice de transformation est définie comme suit :
𝑱( ɳ) = [𝑱𝟏 𝑶𝑶 𝑱𝟐
] (2.2)
Avec O est la matrice nulle (3x3)
J1 est la matrice de rotation permettant le calcule de �̇�, �̇�, �̇� dans le repère Rn à partir des
vitesses linéaire u, v, w qui elles sont exprimé dans Rb.
J2 est la matrice de transformation qui permet de calculer à partir des vitesses angulaires de
rotation p, q, r les dérivé ϕ̇ , θ̇, Ψ̇
J1 et J2 dépendent de l’orientation du véhicule et ont pour expression :
𝑱𝟏 = [
𝒄𝜳𝒄𝜽 −𝒔𝜳𝒄𝝓 + 𝒄𝜳𝒔𝜽𝒔𝝓 𝒔𝜳𝒔𝝓 + 𝒄𝜳𝒔𝜽𝒄𝝓𝒔𝜳𝒄𝜽 𝒄𝜳𝒄𝝓 + 𝒔𝜳𝒔𝜽𝒔𝝓 −𝒄𝜳𝒔𝝓 + 𝒔𝜳𝒔𝜽𝒄𝝓−𝒔𝜽 𝒄𝜽𝒔𝝓 𝒄𝜽𝒄𝝓
] (2.3)
𝑱𝟐 = [
𝟏 𝒔𝝓𝒕𝜽 𝒄𝝓𝒕𝜽𝟎 𝒄𝝓 −𝒔𝝓𝟎 𝒔𝝓/𝒄𝜽 𝒄𝝓/𝒄𝜽
] (2.4)
Avec c. = cos(.), s. = sin(.) et t. = tan(.).
2.3 Dynamique On peut considérer le repère Rn, bien qu’il soit lié à la terre, un repère galiléen car les forces
dues à la rotation de la terre sont négligeables par rapport aux forces hydrodynamiques.
2.3.1 Forces exercées sur le véhicule
2.3.1.1 Poussée d’Archimède et Poids
La force de gravité et la poussé hydrostatique ont un impact important sur la stabilité.
Dans le cas des véhicules de surface, la poussée d’Archimède est très supérieure à celle du
poids. Dans le cas des véhicules sous-marins et pour minimiser l’énergie utilisée pour que
le véhicule reste immerger, on a tendance à équilibrer le poids pour qu’il soit légèrement
inférieur ou égale à la poussée d’Archimède.

17
En plus pour le L2ROV, le centre de gravité est confondu avec le centre de volume ce qui
rend le véhicule en équilibre instable en permanence. Ceci engendre une très grande
manœuvrabilité du véhicule mais nécessite un asservissement performant pour ϕ, θ et Ψ.
Si la norme de la poussée d’Archimède est notée B (en N) (Buoyancy = flottabilité) et la
norme du poids W (weight), le vecteur fg des forces et couples hydrostatiques dans le
repère Rb est comme suit :
𝒇𝒈 =
[
−(𝑾 − 𝑩)𝒔𝜽(𝑾 − 𝑩)𝒄𝜽𝒔𝝓(𝑾 − 𝑩)𝒄𝜽𝒄𝝓
(𝒚𝒈𝑾 − 𝒚𝒃𝑩)𝒄𝜽𝒄𝝓 − (𝒛𝒈𝑾 − 𝒛𝒃𝑩)𝒄𝜽𝒔𝝓
−(𝒙𝒈𝑾 − 𝒙𝒃𝑩)𝒄𝜽𝒄𝝓 − (𝒛𝒈𝑾 − 𝒛𝒃𝑩)𝒔𝜽
(𝒙𝒈𝑾 − 𝒙𝒃𝑩)𝒄𝜽𝒔𝝓 + (𝒚𝒈𝑾 − 𝒚𝒃𝑩)𝒔𝜽 ]
(2.5)
Avec xg, yg, zg et xb, yb, zb sont respectivement les positions de centre de gravité et de
volume. Dans notre cas le vecteur des forces hydrostatique est égale à :
𝒇𝒈 =
[
(𝑾 − 𝑩)𝒔𝜽
−(𝑾 − 𝑩)𝒄𝜽𝒔𝝓
−(𝑾 − 𝑩)𝒄𝜽𝒄𝝓
𝒛𝒈𝑾𝒄𝜽𝒔𝝓
𝒛𝒈𝑾𝒔𝜽
𝟎 ]
(2.6)
2.3.1.2 Amortissement hydrodynamique Lorsqu'un mobile se déplace dans un fluide, sa vitesse est limitée par la capacité du fluide à
s'opposer à ce mouvement, et plus particulièrement par ses caractéristiques de "résistance à
l'avancement", ou "traînée" au sens large
On peut dénombrer trois formes d’amortissement : la première est due au frottement. Elle
est appelée trainée de friction. Elle correspond à une dissipation d’énergie sous forme de
chaleur. La deuxième est la trainée de forme due à la viscosité du fluide et la troisième est
la trainée induite due aux tourbillons crées par le véhicule. Toutes ces forces sont associées
dans le vecteur forces d’amortissement hydrodynamique fh sous la forme :
𝒇𝒉 = −𝑫(𝝊)𝝊 = −(𝑫𝑰 + 𝑫𝒏(𝝊))𝝊 (2.7)
Avec DI et Dn sont deux matrices 6x6 regroupant respectivement les termes linéaires et non
linéaires d’amortissement. L’estimation de ces termes est difficile, on a généralement
recours à des outils logiciel de simulation ou à des essais dans des bassins instrumentés.
Pour la majorité des véhicules sous-marins la matrice D(υ) est diagonale (les termes
diagonaux sont dominant donc on néglige souvent les autre). On obtient donc :
𝒇𝒉 = −𝑫(𝝊)𝝊 𝒂𝒗𝒆𝒄 𝑫(𝝊) (2.8)
18
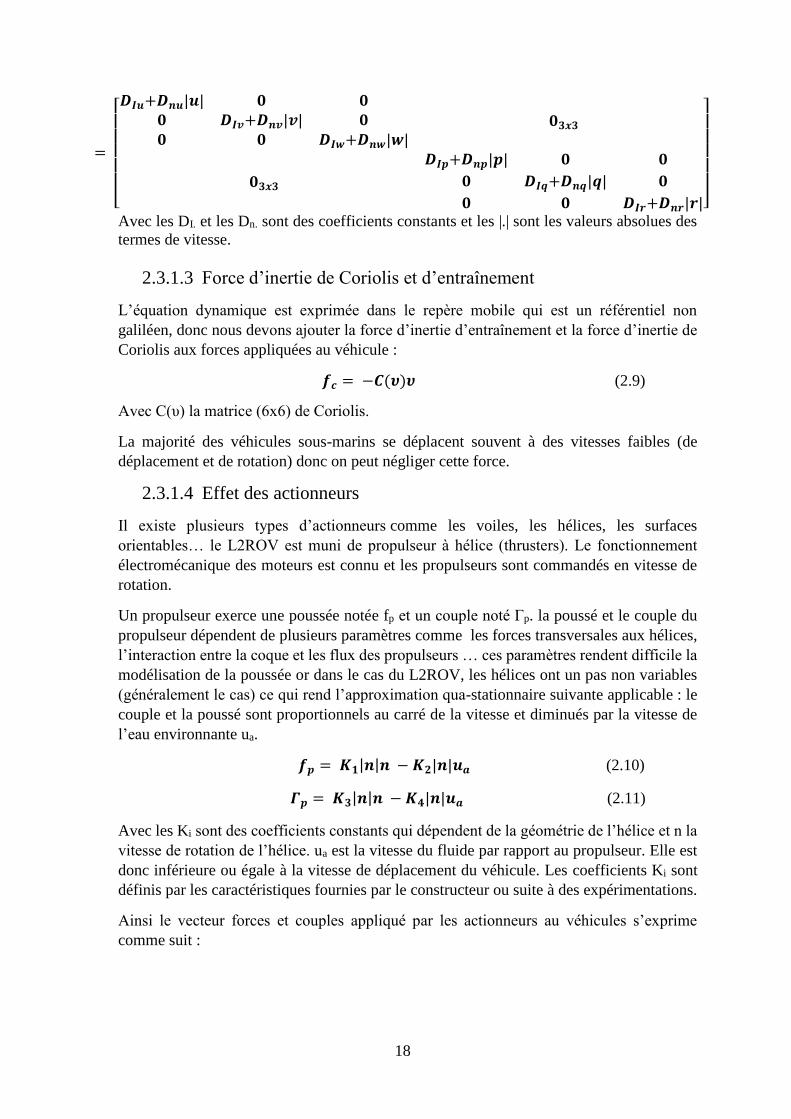
=
[ 𝑫𝑰𝒖+𝑫𝒏𝒖|𝒖| 𝟎 𝟎
𝟎 𝑫𝑰𝒗+𝑫𝒏𝒗|𝒗| 𝟎𝟎 𝟎 𝑫𝑰𝒘+𝑫𝒏𝒘|𝒘|
𝟎𝟑𝒙𝟑
𝟎𝟑𝒙𝟑
𝑫𝑰𝒑+𝑫𝒏𝒑|𝒑| 𝟎 𝟎
𝟎 𝑫𝑰𝒒+𝑫𝒏𝒒|𝒒| 𝟎
𝟎 𝟎 𝑫𝑰𝒓+𝑫𝒏𝒓|𝒓|]
Avec les DI. et les Dn. sont des coefficients constants et les |.| sont les valeurs absolues des
termes de vitesse.
2.3.1.3 Force d’inertie de Coriolis et d’entraînement
L’équation dynamique est exprimée dans le repère mobile qui est un référentiel non
galiléen, donc nous devons ajouter la force d’inertie d’entraînement et la force d’inertie de
Coriolis aux forces appliquées au véhicule :
𝒇𝒄 = −𝑪(𝝊)𝝊 (2.9)
Avec C(υ) la matrice (6x6) de Coriolis.
La majorité des véhicules sous-marins se déplacent souvent à des vitesses faibles (de
déplacement et de rotation) donc on peut négliger cette force.
2.3.1.4 Effet des actionneurs
Il existe plusieurs types d’actionneurs comme les voiles, les hélices, les surfaces
orientables… le L2ROV est muni de propulseur à hélice (thrusters). Le fonctionnement
électromécanique des moteurs est connu et les propulseurs sont commandés en vitesse de
rotation.
Un propulseur exerce une poussée notée fp et un couple noté Γp. la poussé et le couple du
propulseur dépendent de plusieurs paramètres comme les forces transversales aux hélices,
l’interaction entre la coque et les flux des propulseurs … ces paramètres rendent difficile la
modélisation de la poussée or dans le cas du L2ROV, les hélices ont un pas non variables
(généralement le cas) ce qui rend l’approximation qua-stationnaire suivante applicable : le
couple et la poussé sont proportionnels au carré de la vitesse et diminués par la vitesse de
l’eau environnante ua.
𝒇𝒑 = 𝑲𝟏|𝒏|𝒏 − 𝑲𝟐|𝒏|𝒖𝒂 (2.10)
𝜞𝒑 = 𝑲𝟑|𝒏|𝒏 − 𝑲𝟒|𝒏|𝒖𝒂 (2.11)
Avec les Ki sont des coefficients constants qui dépendent de la géométrie de l’hélice et n la
vitesse de rotation de l’hélice. ua est la vitesse du fluide par rapport au propulseur. Elle est
donc inférieure ou égale à la vitesse de déplacement du véhicule. Les coefficients Ki sont
définis par les caractéristiques fournies par le constructeur ou suite à des expérimentations.
Ainsi le vecteur forces et couples appliqué par les actionneurs au véhicules s’exprime
comme suit :

19
𝝉 =
[ 𝒇𝒙
𝒇𝒚
𝒇𝒛
𝜞𝒙
𝜞𝒚
𝜞𝒛]
(2.12)
Avec fi la force exercée le long de l’axe i (en Newton) et Γi le couple exercé autour de l’axe
i (en Newton. Mètres).
2.3.1.5 Perturbations extérieurs
Les perturbations extérieures peuvent prendre plusieurs formes comme les vagues, les
courants marins …
Pour le L2ROV, on ajoute l’effet de l’ombilicale particulièrement lors de la présence de
courant fort. Sa modélisation est difficile comme tous les câbles libres. Les fabricants ont
donc pris des mesures technologiques qui permettent de minimiser les effets indésirables de
l’ombilicale comme par exemple un câble à flottabilité neutre. [5]
2.3.2 Modèle dynamique du véhicule dans le repère lié au véhicule
L’application du principe fondamental de la dynamique dans le repère Rb lié au véhicule,
on obtient :
𝑴�̇� = 𝒇𝒄 + 𝒇𝒉 + 𝒇𝒈 + 𝝉 + 𝑾 (2.13)
Avec fc est le vecteur des forces et couples d’inertie et de Coriolis, fh représente le vecteur
des forces et des couples hydrodynamiques, fg est le vecteur forces et couples induits par la
poussée d’Archimède et le poids, W est le vecteur des perturbations extérieures et τ
représente les forces et les couples produits par les actionneurs.
�̇� =
[ �̇��̇��̇��̇��̇��̇� ]
est le vecteur des accélérations du véhicule. (2.14)
M étant la matrice (6x6) d’inertie et de masse du véhicule. Elle est exprimée comme suit :
𝑴 =
[
𝒎𝟎𝟎𝟎
𝒎𝒛𝒈
−𝒎𝒚𝒈
𝟎𝒎𝟎
−𝒎𝒛𝒈
𝟎𝒎𝒙𝒈
𝟎𝟎𝒎
𝒎𝒚𝒈
−𝒎𝒙𝒈
𝟎
𝟎−𝒎𝒛𝒈
𝒎𝒚𝒈
𝑰𝒙
−𝑰𝒙𝒚
−𝑰𝒙𝒛
𝒎𝒛𝒈
𝟎−𝒎𝒙𝒈
−𝑰𝒙𝒚
𝑰𝒚
−𝑰𝒚𝒛
−𝒎𝒚𝒈
𝒎𝒙𝒈
𝟎−𝑰𝒙𝒛
−𝑰𝒚𝒛
𝑰𝒛 ]
+ 𝑴𝑴𝒂𝒔𝒔𝒆𝒔 𝒂𝒋𝒐𝒖𝒕é𝒆𝒔 (2.15)
Où m la masse du véhicule (en Kg), (xg, yg, zg) la position du centre de gravité exprimée
dans le repère Rb. Les Ii sont les moments d’inertie selon les trois axes du repère Rb et les
Iij sont les produits d’inertie calculées comme suit :
20
𝑰𝒊𝒋 = ∭𝒊 𝒋 𝝆 𝒅𝑽 (2.16)
Avec V le volume du véhicule, ρ la masse volumique du point concerné lors de l’intégration.
La matrice des masses ajoutées est estimée soit par simulation hydrodynamique ou négliger
si on utilise une commande robuste.
Le modèle dynamique du véhicule dans le repère lié au véhicule est plus communément
noté :
𝑴�̇� + 𝑪(𝝊)𝝊 + 𝑫(𝝊)𝝊 + 𝒈(ɳ) = 𝝉 + 𝑾 (2.17)
Avec fc = -C(υ) υ, fh = - D(υ) υ et fg = - g(ɳ).
2.3.3 Modèle dynamique du véhicule dans le repère fixe
Généralement, l’expression du modèle dynamique est exprimée dans le repère lié au
véhicule Rb en raison de la plus grande simplicité d’expression dans ce repère. Par contre
pour certaines applications, il est nécessaire d’exprimer la dynamique du véhicule dans le
repère fixe Rn en fonction du vecteur d’état ɳ représentant la position et l’orientation du
véhicule dans ce repère. Il suffit donc - pour réaliser cela – de dérivé l’équation (2.1) puis
l’utiliser dans l’équation (2.17) pour transformer ses termes. Ainsi on obtient :
ɳ̇ = 𝑱( ɳ) ∗ 𝛖 (2.18)
Devient
ɳ̈ = 𝑱(ɳ)�̇� + �̇�(ɳ)𝝊
Donc
�̇� = 𝑱−𝟏(ɳ)[ɳ̈ − �̇�(ɳ)𝑱−𝟏(ɳ)ɳ̇]
Puisque
𝝊 = 𝑱−𝟏(ɳ)ɳ̇
L’équation dynamique dans le repère Rn devient après avoir utilisé les nouvelles
expressions de 𝜐 et �̇� :
𝑴∗(ɳ)ɳ̈ + 𝑪∗(ɳ , 𝝊)ɳ̇ + 𝑫∗(ɳ , 𝝊)ɳ̇ + 𝒈∗(ɳ) = 𝑱−𝑻(ɳ)(𝝉 + 𝑾)
𝑱−𝑻(ɳ) = (𝑱−𝟏(ɳ))𝑻 (2.23)
Avec
𝑴∗(ɳ) = 𝑱−𝑻(ɳ)𝑴𝑱−𝟏(ɳ) (2.24)
𝑫∗(ɳ , 𝝊) = 𝑱−𝑻(ɳ)𝑫𝑱−𝟏(ɳ) (2.25)
𝑪∗(ɳ , 𝝊) = 𝑱−𝑻(ɳ)[𝑪(𝝊) − 𝑴𝑱−𝟏(ɳ)�̇�(ɳ)]𝑱−𝟏(ɳ) (2.26)
𝒈∗(ɳ) = 𝑱−𝑻(ɳ)𝒈(ɳ) (2.27)
(2.19)
(2.20)
(2.21)
(2.22)

21
2.4 Conclusion Dans ce chapitre nous avons réalisé le modèle dynamique du véhicule dans le repère fixe et
dans le repère lié au véhicule, ce qui nous permettra de passer à la commande de ce système.
22
Chapitre 3 :
Commande du véhicule L2ROV
23
3.1 Introduction
Dans ce chapitre, on s’intéresse à la commande du système en utilisant plusieurs techniques
de commande comme le contrôleur conventionnel PID et la commande dynamique par
retour d’état.
3.2 commande par PID
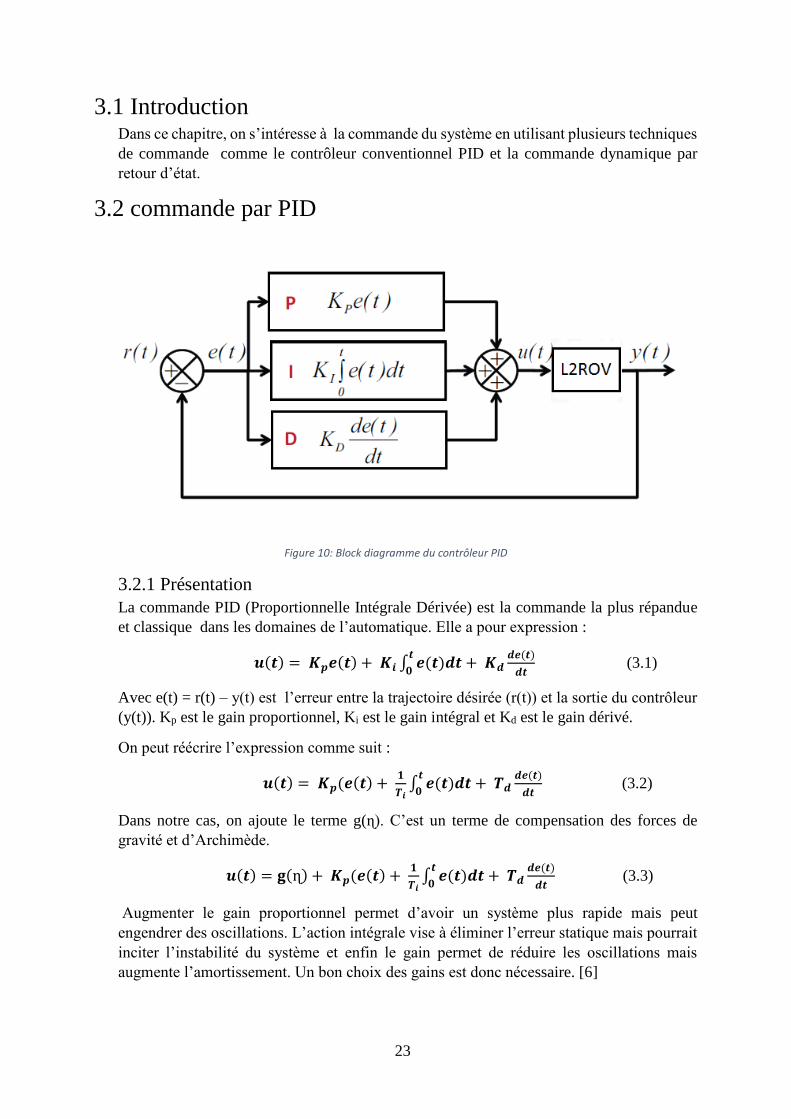
Figure 10: Block diagramme du contrôleur PID
3.2.1 Présentation
La commande PID (Proportionnelle Intégrale Dérivée) est la commande la plus répandue
et classique dans les domaines de l’automatique. Elle a pour expression :
𝒖(𝒕) = 𝑲𝒑𝒆(𝒕) + 𝑲𝒊 ∫ 𝒆(𝒕)𝒅𝒕𝒕
𝟎+ 𝑲𝒅
𝒅𝒆(𝒕)
𝒅𝒕 (3.1)
Avec e(t) = r(t) – y(t) est l’erreur entre la trajectoire désirée (r(t)) et la sortie du contrôleur
(y(t)). Kp est le gain proportionnel, Ki est le gain intégral et Kd est le gain dérivé.
On peut réécrire l’expression comme suit :
𝒖(𝒕) = 𝑲𝒑(𝒆(𝒕) + 𝟏
𝑻𝒊∫ 𝒆(𝒕)𝒅𝒕
𝒕
𝟎+ 𝑻𝒅
𝒅𝒆(𝒕)
𝒅𝒕 (3.2)
Dans notre cas, on ajoute le terme g(ɳ). C’est un terme de compensation des forces de
gravité et d’Archimède.
𝒖(𝒕) = 𝐠(ɳ) + 𝑲𝒑(𝒆(𝒕) + 𝟏
𝑻𝒊∫ 𝒆(𝒕)𝒅𝒕
𝒕
𝟎+ 𝑻𝒅
𝒅𝒆(𝒕)
𝒅𝒕 (3.3)
Augmenter le gain proportionnel permet d’avoir un système plus rapide mais peut
engendrer des oscillations. L’action intégrale vise à éliminer l’erreur statique mais pourrait
inciter l’instabilité du système et enfin le gain permet de réduire les oscillations mais
augmente l’amortissement. Un bon choix des gains est donc nécessaire. [6]
24
3.2.2 Réglage des gains
Le choix des gains est primordial pour avoir un contrôleur robuste. Il existe plusieurs
méthodes de réglage des contrôleurs PID : Ziegler-Nichols, placement des pôles …
l’application de ces méthodes ne donne pas souvent des résultats satisfaisants donc un
réglage fin est nécessaire. Dans notre application nous avons choisi d’utiliser la méthode de
Ziegler-Nichols.
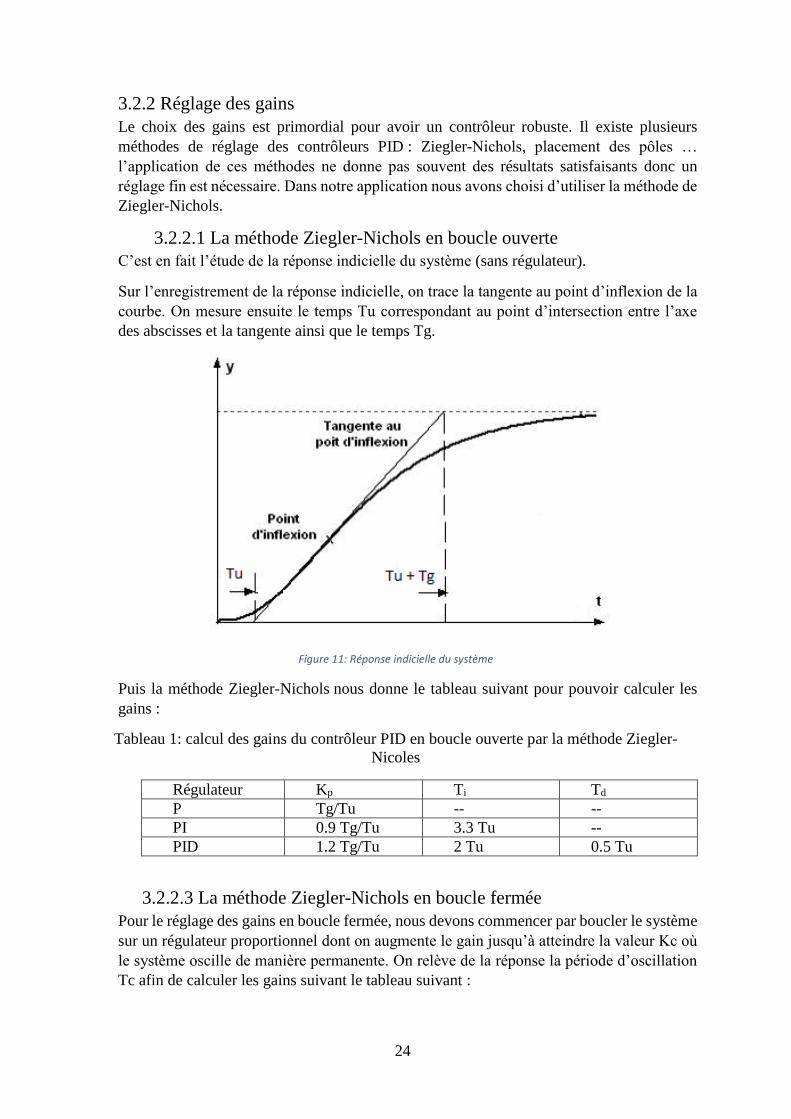
3.2.2.1 La méthode Ziegler-Nichols en boucle ouverte
C’est en fait l’étude de la réponse indicielle du système (sans régulateur).
Sur l’enregistrement de la réponse indicielle, on trace la tangente au point d’inflexion de la
courbe. On mesure ensuite le temps Tu correspondant au point d’intersection entre l’axe
des abscisses et la tangente ainsi que le temps Tg.
Figure 11: Réponse indicielle du système
Puis la méthode Ziegler-Nichols nous donne le tableau suivant pour pouvoir calculer les
gains :
Tableau 1: calcul des gains du contrôleur PID en boucle ouverte par la méthode Ziegler-
Nicoles
Régulateur Kp Ti Td
P Tg/Tu -- --
PI 0.9 Tg/Tu 3.3 Tu --
PID 1.2 Tg/Tu 2 Tu 0.5 Tu
3.2.2.3 La méthode Ziegler-Nichols en boucle fermée
Pour le réglage des gains en boucle fermée, nous devons commencer par boucler le système
sur un régulateur proportionnel dont on augmente le gain jusqu’à atteindre la valeur Kc où
le système oscille de manière permanente. On relève de la réponse la période d’oscillation
Tc afin de calculer les gains suivant le tableau suivant :

25
Tableau 2:calcul des gains du contrôleur PID en boucle fermée par la méthode Ziegler-
Nicoles
Régulateur Kp Ti Td
P 0.5 Kc -- --
PI 0.45 Kc 0.83 Tc --
PID 0.6 Kc 0.5Tc 0.125 Tc
3.3 Commande dynamique par retour d’état L’idée principale de cette commande est de transformer un système dynamique non linéaire
en un système linéaire. La commande dynamique est facilement applicable sur les véhicules
sous-marins car leur modèle est non linéaire et peut être transformé en modèle linéaire.
Cette transformation peut être faite sur le modèle exprimé dans le repère Rn comme dans le
repère Rb
Notre choix c’est porter sur la transformation dans le repère fixe Rn.
Application de la commande dans le repère fixe Rn :
On considère :
ɳ ̈ = 𝒂𝒏 (3.4)
Aves an le vecteur accélération dans le repère Rn.
On sait que la dynamique du véhicule s’exprime comme suit :
ɳ̇ = 𝑱( ɳ) ∗ 𝛖 (3.5)
𝑴�̇� + 𝒏(ɳ , 𝝊) = 𝝉 (3.6)
Avec 𝑛(ɳ , 𝜐) = 𝐶(𝜐)𝜐 + 𝐷(𝜐)𝜐 + 𝑔(ɳ) .
Et on sait que
�̇� = 𝑱−𝟏(ɳ)[ɳ̈ − �̇�(ɳ)𝝊] (3.7)
La loi de contrôle non linéaire s’exprimant comme suit :
𝑴𝒂𝒃 + 𝒏(ɳ , 𝝊) = 𝝉 (3.8)
On l’appliquant à la dynamique du véhicule on a :
𝑴(�̇� − 𝒂𝒃) = 𝑴𝑱−𝟏(ɳ)[ɳ̈ − �̇�(ɳ)𝝊 − 𝑱(ɳ)𝒂𝒃] = 𝟎 (3.9)
En choisissant an tel que
𝒂𝒏 = �̇�(ɳ)𝝊 + 𝑱(ɳ)𝒂𝒃 (3.10)
On obtient le système linéaire suivant

26
𝑴∗(ɳ̈ − 𝒂𝒃) = 𝟎 (3.11)
Avec 𝑀∗(ɳ) = 𝐽−𝑇(ɳ)𝑀𝐽−1(ɳ)
De l’équation précédente on a :
𝒂𝒃 = 𝑱−𝟏(ɳ)[𝒂𝒏 − �̇�(ɳ)𝝊] (3.12)
Le terme an doit être choisi comme étant une loi de contrôle PID avec une compensation
du terme d’accélération :
𝒂𝒏 = ɳ̈𝒅 + 𝑲𝒑𝒆(𝒕) + 𝑲𝒊 ∫ 𝒆(𝒕)𝒅𝒕𝒕
𝟎+ 𝑲𝒅
𝒅𝒆(𝒕)
𝒅𝒕 (3.13)
3.4 Génération de trajectoire Pour pouvoir tester la robustesse des commandes précédentes, on doit avoir une trajectoire
désirée.
On a deux modes de génération de mouvement:
- Un mode point à point : impose l’arrêt du robot à chaque point intermédiaire. Il est
généralement associé à la génération de mouvement dans l’espace articulaire (on vise à
déterminer une loi horaire pour chaque articulation du robot).
- Un mode à trajectoire continue : impose une continuité de la vitesse de mouvement à
chaque point intermédiaire. Il est souvent associé à la génération de mouvement dans
l’espace opérationnel (ou on vise à déterminer directement une trajectoire du robot).
On a choisi de généré une trajectoire continue on utilisant la méthode de base. Cette
méthode consiste à définir le mouvement d’un point de départ xd à un point d’arrivé xa à
l’aide de spline.
Pour la génération de trajectoire, la spline cubique a était implémentée tel que :
𝒙(𝒕) = 𝒂𝒕𝟑 + 𝒃𝒕𝟐 + 𝒄𝒕 + 𝒅 (3.14)
Avec 0 ≤ 𝑡 ≤ 𝑇 ou T est la durée du mouvement
Les coefficients a, b, c, d sont définis à partir des contraintes suivantes :
𝑥(𝒕 = 𝟎) = 𝒙𝒅, 𝒙(𝒕 = 𝑻) = 𝒙𝒂 (3.15)
�̇�(𝒕 = 𝟎) = 𝟎 , �̇�(𝒕 = 𝑻) = 𝟎 (3.16)
On obtient donc :
𝒂 = −𝟐(𝒙𝒂 − 𝒙𝒅)/𝑻𝟑 (3.17)
𝒃 = 𝟑(𝒙𝒂 − 𝒙𝒅)/𝑻𝟐 (3.18)
𝒄 = 𝟎 (3.19)
𝒅 = 𝒙𝒅 (3.20)
27
Après la génération de la trajectoire, on peut tester nos contrôleurs.
3.5 Résultats expérimentaux Pour la simulation du modèle du L2ROV avec les deux commandes, on a utilisé Matlab.
Sous Matlab, on a choisi le « solver » ODE45 pour résoudre l’équation différentielle du
modèle dynamique. Avec les différents choix appropriés de gains, on a eu les résultats
suivants.
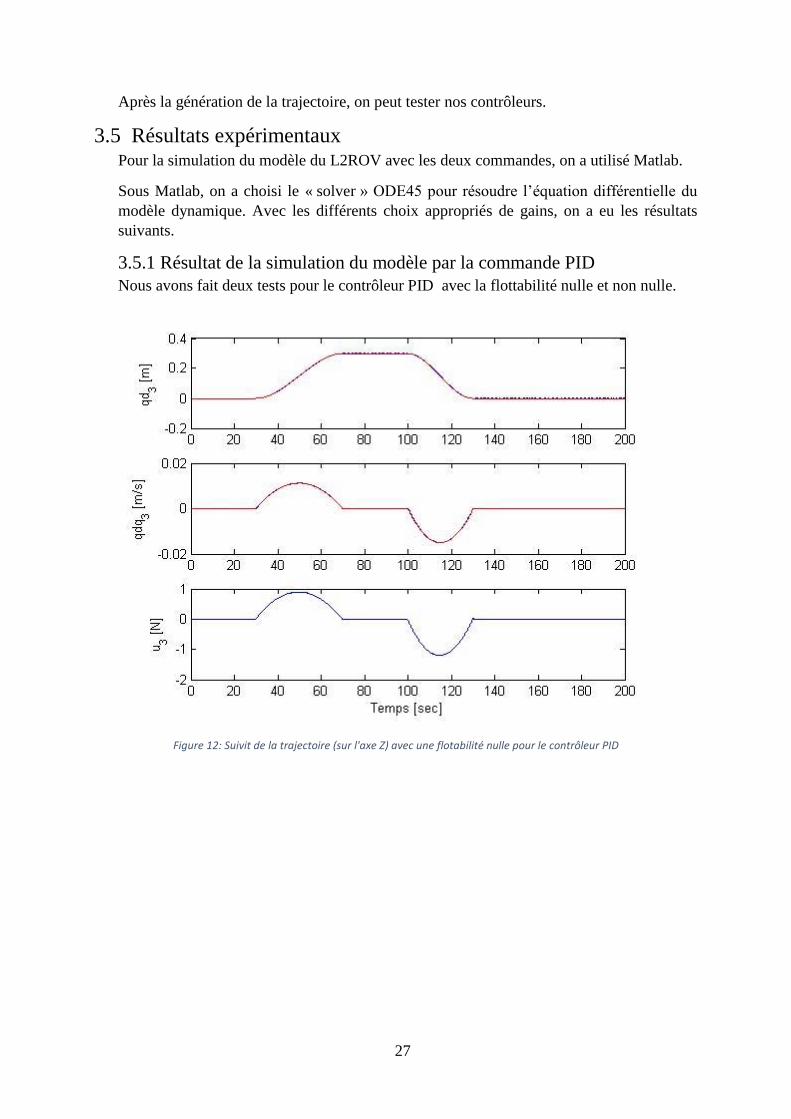
3.5.1 Résultat de la simulation du modèle par la commande PID
Nous avons fait deux tests pour le contrôleur PID avec la flottabilité nulle et non nulle.
Figure 12: Suivit de la trajectoire (sur l'axe Z) avec une flotabilité nulle pour le contrôleur PID
28
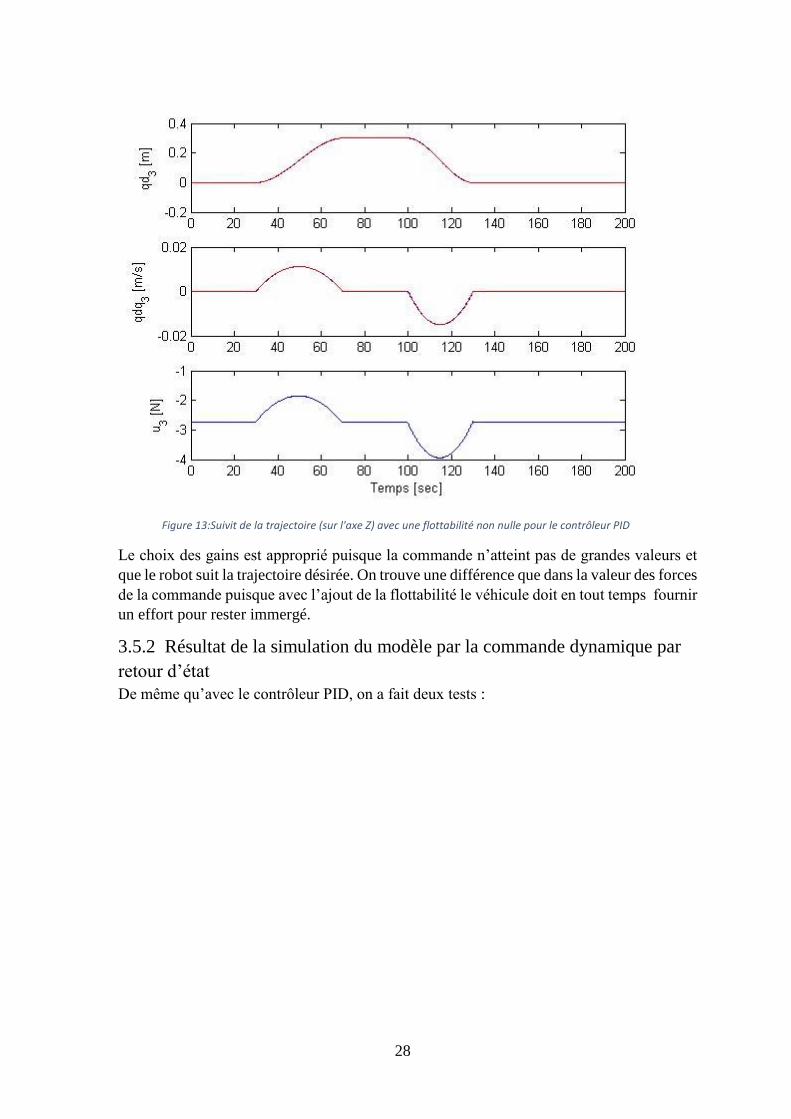
Figure 13:Suivit de la trajectoire (sur l'axe Z) avec une flottabilité non nulle pour le contrôleur PID
Le choix des gains est approprié puisque la commande n’atteint pas de grandes valeurs et
que le robot suit la trajectoire désirée. On trouve une différence que dans la valeur des forces
de la commande puisque avec l’ajout de la flottabilité le véhicule doit en tout temps fournir
un effort pour rester immergé.
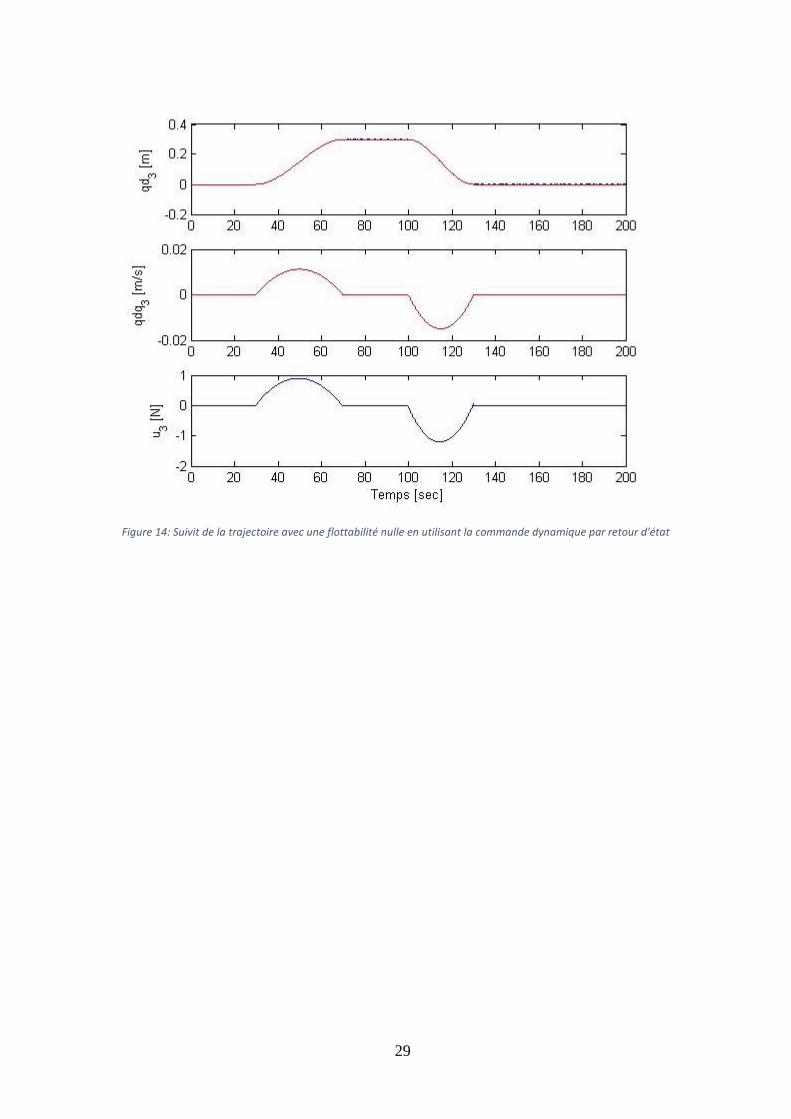
3.5.2 Résultat de la simulation du modèle par la commande dynamique par
retour d’état
De même qu’avec le contrôleur PID, on a fait deux tests :
29
Figure 14: Suivit de la trajectoire avec une flottabilité nulle en utilisant la commande dynamique par retour d'état
30
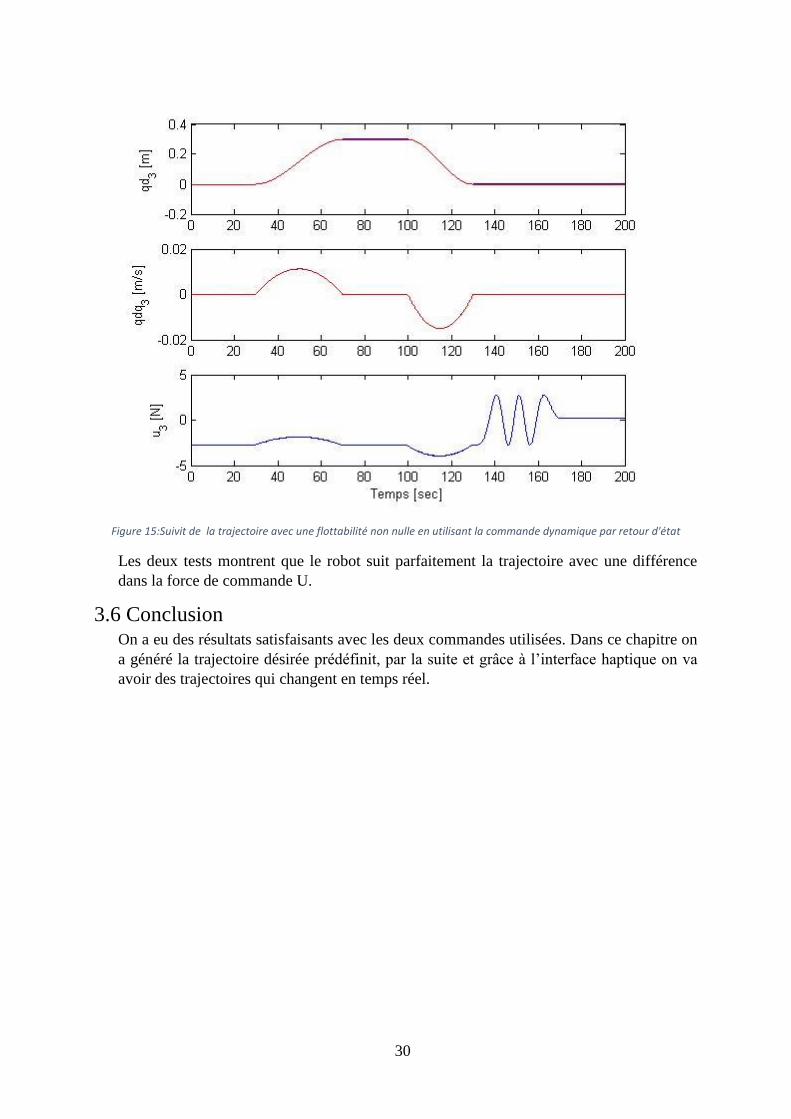
Figure 15:Suivit de la trajectoire avec une flottabilité non nulle en utilisant la commande dynamique par retour d'état
Les deux tests montrent que le robot suit parfaitement la trajectoire avec une différence
dans la force de commande U.
3.6 Conclusion On a eu des résultats satisfaisants avec les deux commandes utilisées. Dans ce chapitre on
a généré la trajectoire désirée prédéfinit, par la suite et grâce à l’interface haptique on va
avoir des trajectoires qui changent en temps réel.
31
Chapitre 4 :
Interface haptique et téléopération
32
4.1 Introduction Après avoir réalisé la commande du modèle dynamique du L2ROV, on est passé à la
commande de la trajectoire avec une interface haptique. On parle de téléopération.
4.2 Téléopération Un système de téléopération est un système qui permet à l’opérateur d’exécuter une
opération à distance.
4.2.1 Historique
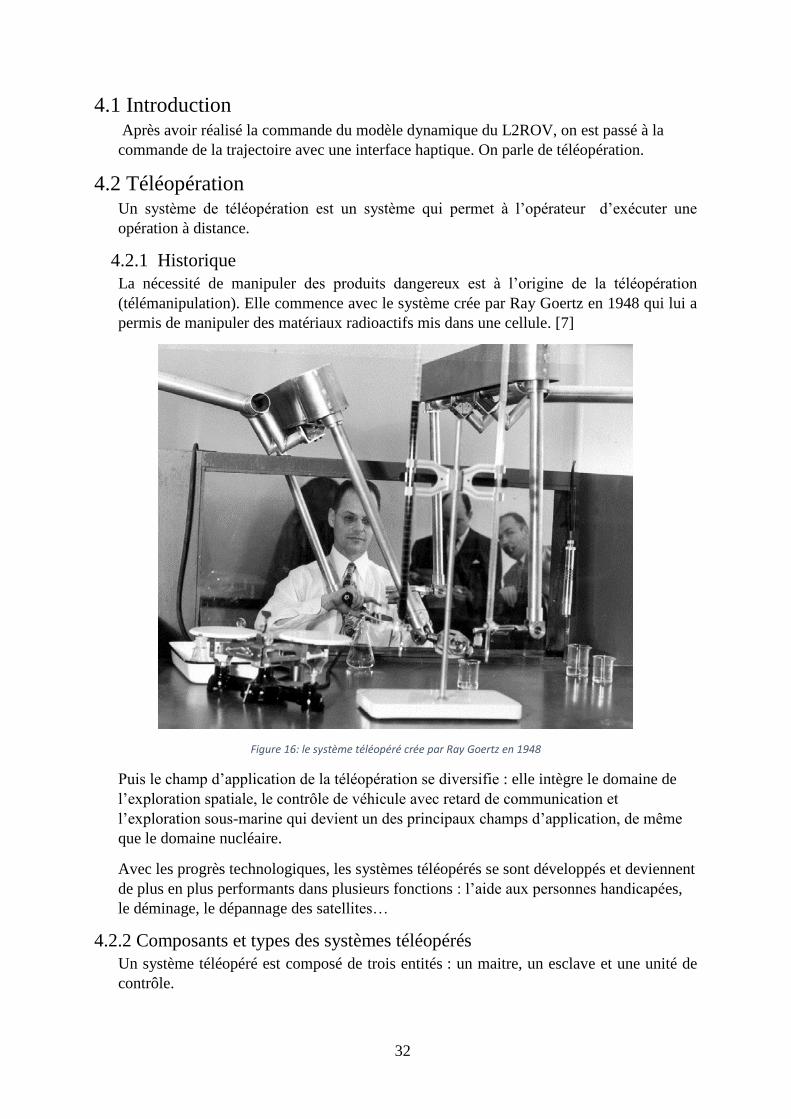
La nécessité de manipuler des produits dangereux est à l’origine de la téléopération
(télémanipulation). Elle commence avec le système crée par Ray Goertz en 1948 qui lui a
permis de manipuler des matériaux radioactifs mis dans une cellule. [7]
Figure 16: le système téléopéré crée par Ray Goertz en 1948
Puis le champ d’application de la téléopération se diversifie : elle intègre le domaine de
l’exploration spatiale, le contrôle de véhicule avec retard de communication et
l’exploration sous-marine qui devient un des principaux champs d’application, de même
que le domaine nucléaire.
Avec les progrès technologiques, les systèmes téléopérés se sont développés et deviennent
de plus en plus performants dans plusieurs fonctions : l’aide aux personnes handicapées,
le déminage, le dépannage des satellites…
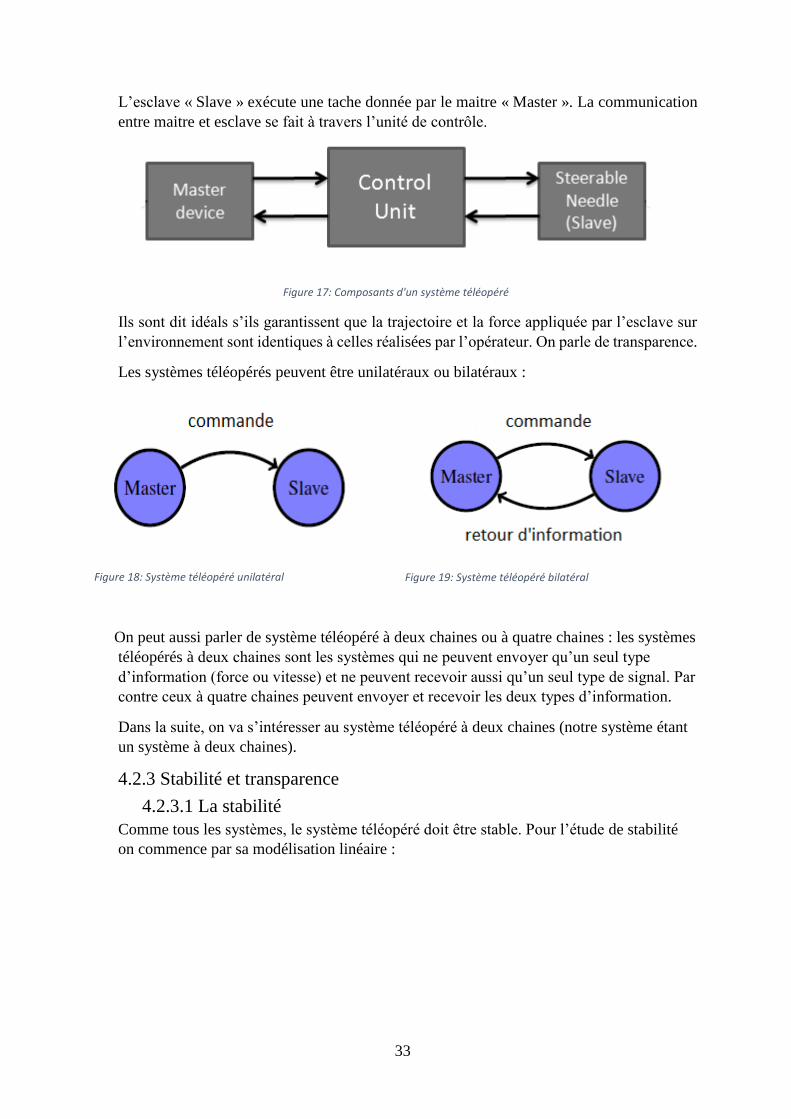
4.2.2 Composants et types des systèmes téléopérés
Un système téléopéré est composé de trois entités : un maitre, un esclave et une unité de
contrôle.
33
Figure 19: Système téléopéré bilatéral
L’esclave « Slave » exécute une tache donnée par le maitre « Master ». La communication
entre maitre et esclave se fait à travers l’unité de contrôle.
Figure 17: Composants d'un système téléopéré
Ils sont dit idéals s’ils garantissent que la trajectoire et la force appliquée par l’esclave sur
l’environnement sont identiques à celles réalisées par l’opérateur. On parle de transparence.
Les systèmes téléopérés peuvent être unilatéraux ou bilatéraux :
Figure 18: Système téléopéré unilatéral
On peut aussi parler de système téléopéré à deux chaines ou à quatre chaines : les systèmes
téléopérés à deux chaines sont les systèmes qui ne peuvent envoyer qu’un seul type
d’information (force ou vitesse) et ne peuvent recevoir aussi qu’un seul type de signal. Par
contre ceux à quatre chaines peuvent envoyer et recevoir les deux types d’information.
Dans la suite, on va s’intéresser au système téléopéré à deux chaines (notre système étant
un système à deux chaines).
4.2.3 Stabilité et transparence
4.2.3.1 La stabilité
Comme tous les systèmes, le système téléopéré doit être stable. Pour l’étude de stabilité
on commence par sa modélisation linéaire :

34
Figure 18: Modélisation linéaire d'un système de téléopération
Avec la force appliquée par l’opérateur et la force appliquée sur l’environnement s’écrivent
comme suit :
𝐹ℎ = 𝐹ℎ∗ − 𝑍ℎ𝑣ℎ (4.1)
𝐹𝑒 = 𝐹𝑒∗ − 𝑍𝑒𝑣𝑒 (4.2)
Dépendant du choix des entrées/sorties (y, u) tel que 𝑦 = 𝑃𝑢 = [𝑃11 𝑃12
𝑃21 𝑃22], on a 4 matrices :
[𝐹ℎ
𝐹𝑒] = [
𝑧11 𝑧12
𝑧21 𝑧22] [
𝑣ℎ
𝑣𝑒] Impédance
[𝑣ℎ
𝑣𝑒] = [
𝑦11 𝑦12
𝑦21 𝑦22] [
𝐹ℎ
𝐹𝑒] Admittance
[𝐹ℎ
−𝑣𝑒] = [
ℎ11 ℎ12
ℎ21 ℎ22] [
𝑣ℎ
𝐹𝑒] Hybride
[𝑣ℎ
𝐹𝑒] = [
𝑔11 𝑔12
𝑔21 𝑔22] [
𝐹ℎ
−𝑣𝑒] Hybride inverse
Elles caractérisent complètement le système de téléopération.
En supposant que Ze et Zh sont passives, on peut déduire que les conditions nécessaires et
suffisantes pour la stabilité absolue sont données par le théorème de Llewellyn’s criterion : [2]
Le système téléopéré est absolument stable si et seulement si :
- P11 et P22 sont des réels positifs
- L’équation suivante est satisfaite :
2𝑅(𝑃11)𝑅(𝑃22) − 𝑅(𝑃12𝑃21) − |𝑃12𝑃21| ≥ 0
Avec R(x) et |x| sont les valeurs réelles et absolues de x
4.2.3.2 transparences
Avec la stabilité, le système téléopéré doit aussi assurer la transparence qui est l’aptitude de
l’esclave à appliquer la même « force » que le maitre.

35
Pour avoir une transparence idéale il faut réaliser une correspondance entre les impédances
de l’environnement et de l’opérateur :
𝑍𝑡𝑜 = 𝐹ℎ
𝑣ℎ=
𝐹𝑒
𝑣𝑒 = 𝑍𝑒 (4.3)
Avec Fh*= 0.
En utilisant la représentation avec la matrice hybride on obtient :
𝑍𝑡𝑜 = 𝐹ℎ
𝑣ℎ = ℎ11 − ℎ12
ℎ21
1+ℎ22 𝑍𝑒 𝑍𝑒 =
ℎ11+ ∆ℎ 𝑍𝑒
1+ℎ11 𝑍𝑒 (4.4)
On en déduit que pour avoir une transparence idéale il faut que :
ℎ11 = ℎ22 = 0 (4.5)
ℎ12 = −ℎ21 = 1 (4.6)
On remarque que ce système est à la limite de stabilité. Donc il faut faire un compromis entre
la stabilité et la transparence : si on augmente la transparence, on réduit la stabilité et vice versa.
Dans notre cas le système téléopéré est l’interface haptique.
4.3 Interface haptique
L’être humain interagit grâce à ses cinq sens : la vue, l’ouï, le gout, l’odorat et le toucher.
Jusqu’à aujourd’hui, les interactions homme-machine, ont été limitées aux deux premiers
sens. Maintenant on peut utiliser le sens du toucher aussi.
Le mot Haptique vient du grec « Haptein » et se réfère au sens de toucher ou sentir, en
utilisant une technologie spécifique qui peut être saisie comme une poigné ou porté
comme un gant.
4.3.1Type d’interface haptique
On distingue deux familles d’interfaces haptiques :
- Les interfaces à retour d’effort permettant de ressentir la position, les mouvements et
les forces exercées.
- Les interfaces tactiles permettant de ressentir la forme, la texture ou la température des
objets manipulés.
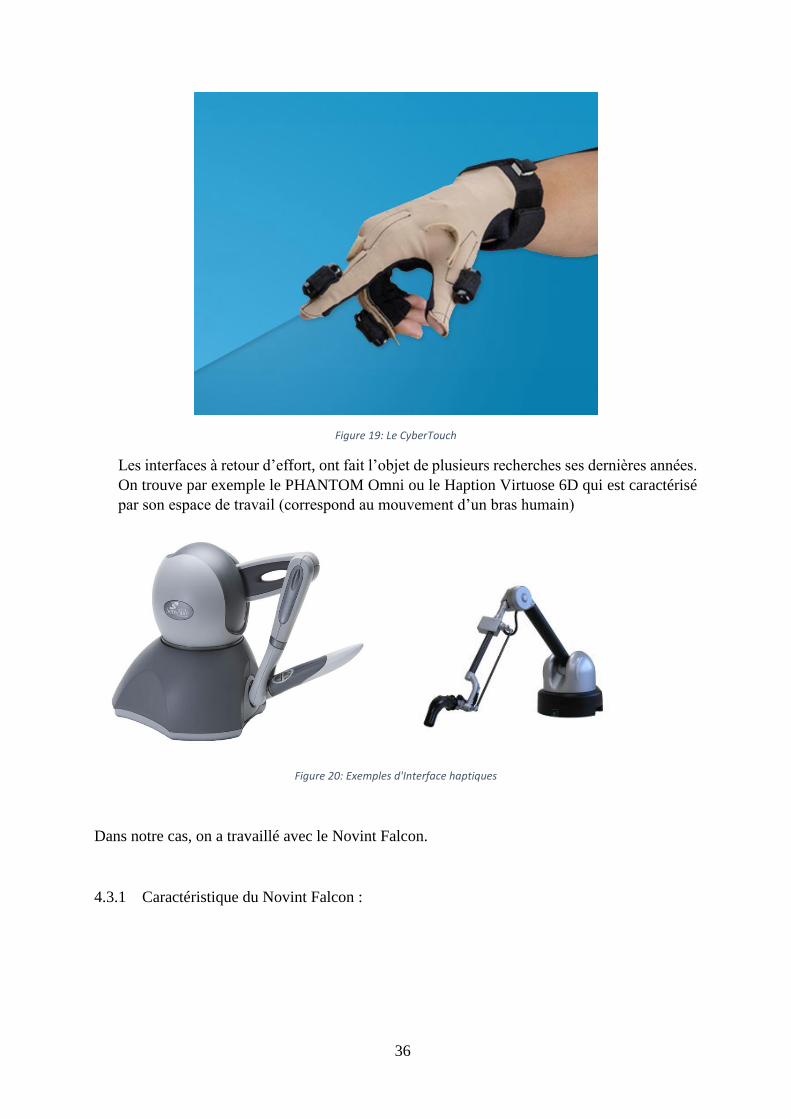
Pour les interfaces tactiles, on a plusieurs technologies : technologies électromagnétiques
(bobines acoustiques, solénoïde), cristaux piézo-électriques, systèmes de pompe à chaleur
thermo- électrique, alliages à mémoire de forme. Exemple : le CyberTouch [3]
36
Figure 19: Le CyberTouch
Les interfaces à retour d’effort, ont fait l’objet de plusieurs recherches ses dernières années.
On trouve par exemple le PHANTOM Omni ou le Haption Virtuose 6D qui est caractérisé
par son espace de travail (correspond au mouvement d’un bras humain)
Figure 20: Exemples d'Interface haptiques
Dans notre cas, on a travaillé avec le Novint Falcon.
4.3.1 Caractéristique du Novint Falcon :
37
Figure 21: L'interface haptique Novint Falcon
Le Novint Falcon a trois degrés de liberté selon les axes x, y et z.
Son espace de travail est représenté par un cube de dimension 10 centimètres.
Les forces que le Novint Falcon peut simuler peuvent atteindre jusqu’à les 9 Newton.
Pour le bon fonctionnement de l’interface haptique, le constructeur a fourni la
bibliothèque HDAL qui permet d’assurer la communication entre le Novint Falcon et
les applications. Elle est basée sur le langage C++ mais n’est disponible que pour le
système d’exploitation Windows. [8]
4.4 Utilisation du Novint Falcon pour la commande de la trajectoire
du L2ROV Lors des tests précédents nous avons utilisé une trajectoire prédéfinie pour simuler le
modèle dynamique du L2ROV. Maintenant, on remplace la trajectoire par une lecture en
temps réel de la position du bras du Novint Falcon. Ceci se fait à travers une application
sous Visual Studio en utilisant le protocole UDP pour la connexion avec l’application de la
simulation sous Matlab.
4.4.1 Le protocole UDP
Le User Datagram Protocol (UDP : protocole de datagramme utilisateur) est un des
principaux protocoles de télécommunication. Il a pour rôle de transmettre des données entre
deux entités. Ces entités doivent être définies par un numéro de port et une adresse IP.
L'en-tête d'un datagramme UDP comporte les parties suivantes :
Tableau 3: Composant de l'en-tête d'un datagramme UDP
Port Source (16 bits) Port Destination (16 bits)
Longueur (16 bits) Somme de contrôle (16 bits)
Données (longueur variable)
38
Le protocole UDP est utilisé pour transmettre de petites quantités de données vers un ou
plusieurs clients simultanément. Le protocole ne garantit pas la livraison des datagrammes
à destination, donc il est utilisé dans les applications ou la perte d’une partie des données
n’est pas gênante ou quand les données doivent être transmises rapidement.
4.4.2 Les tests réalisés avec le Novint Falcon
Pour pouvoir effectuer des tests, on a d’abord vérifié la communication entre le Novint
(l’application sous Visual) et Matlab. Pour réaliser cette communication, nous avons utilisé
deux applications qui reposent sur le principe de serveur/client : le processus de
communication est un système d’échange de données (le client initie l’échange et le serveur
est un programme qui tourne en continu attendant des requêtes du client).
Afin de vérifier le bon fonctionnement de cette communication, on a utilisé l’exemple de
ressort : le bras du Novint devient l’extrémité d’un ressort. Dans cet exemple l’application
sous Visual envoie en continu la position du bras puis l’application sous Matlab calcule la
force qu’exerce le ressort tel que 𝐹 = −𝐾 𝑥 où k est la raideur du ressort et x la position
du bras. Suite à ce calcul, on envoie la force à l’application sous Visual afin de l’appliquer
au bras du Novint Falcon. On a réalisé ce test suivant un seul axe puis sur les trois axes x,
y et z.
Ce test étant concluant, on est passé aux tests réalisés avec l’application de simulation du
L2ROV.
Pour que l’application soit en temps réel, on a effectué des changements dans l’application
de simulation du modèle : on a échangé le solveur ode45 qui a un pas de calcul variable
par le solveur ode1 qui a un pas de calcul fixe (on choisit le pas).
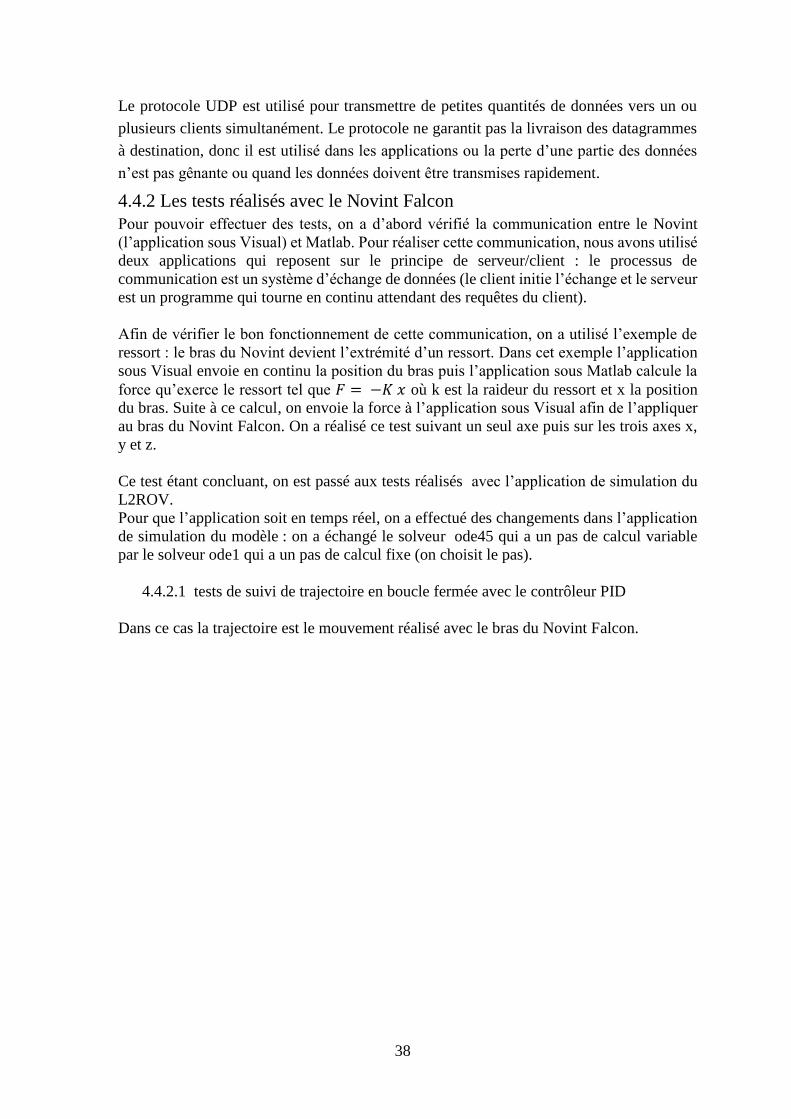
4.4.2.1 tests de suivi de trajectoire en boucle fermée avec le contrôleur PID
Dans ce cas la trajectoire est le mouvement réalisé avec le bras du Novint Falcon.
39
Figure 22:Suivi de la trajectoire imposée par le Novint sur l'axe des X
Figure 23:Suivi de la trajectoire imposée par le Novint sur l'axe des Y
40
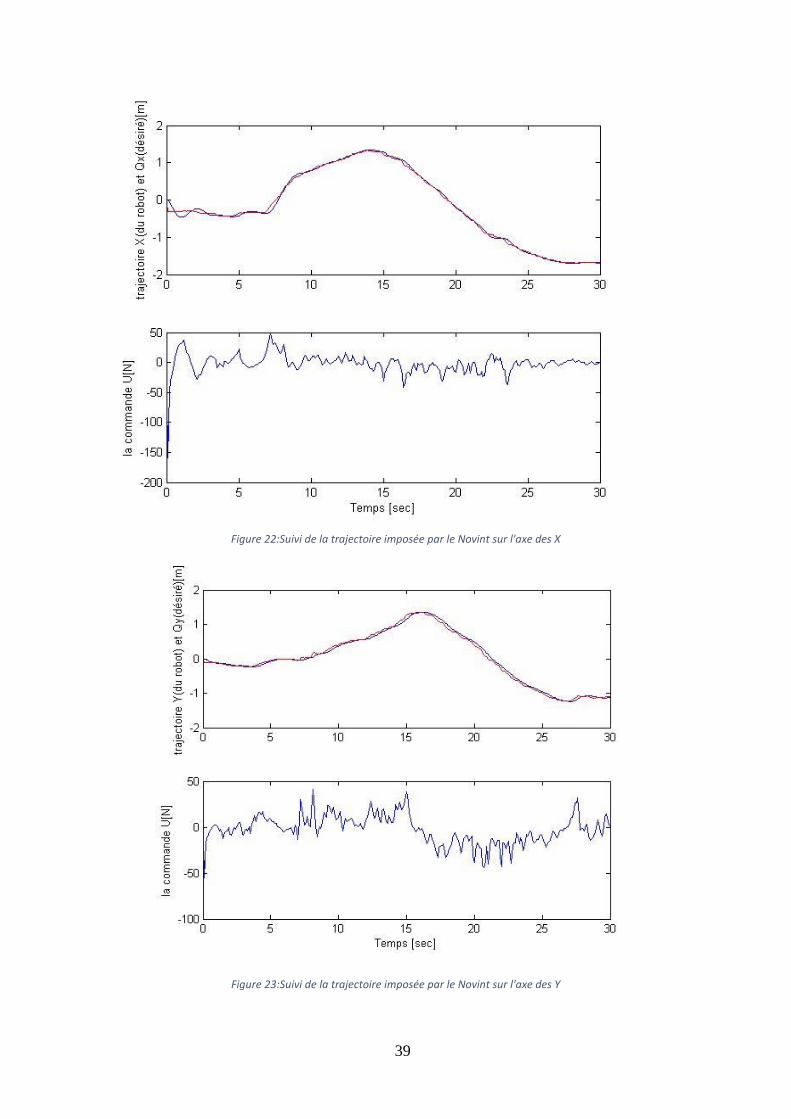
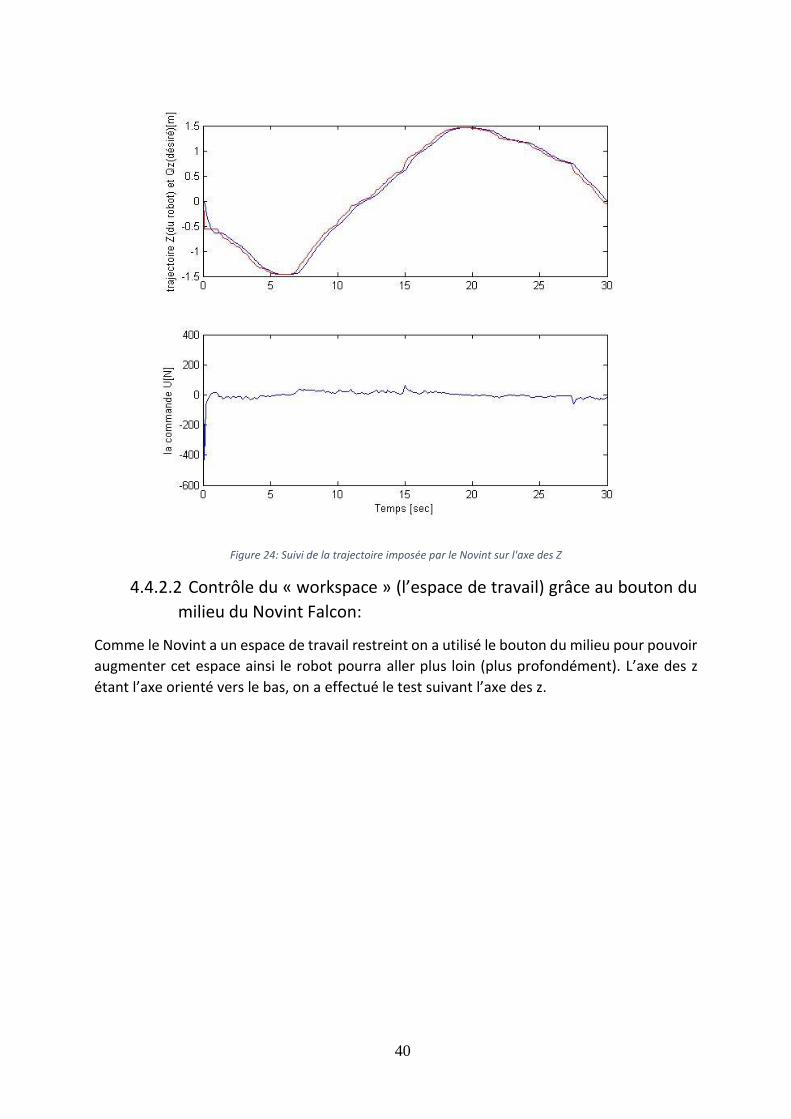
Figure 24: Suivi de la trajectoire imposée par le Novint sur l'axe des Z
4.4.2.2 Contrôle du « workspace » (l’espace de travail) grâce au bouton du
milieu du Novint Falcon:
Comme le Novint a un espace de travail restreint on a utilisé le bouton du milieu pour pouvoir
augmenter cet espace ainsi le robot pourra aller plus loin (plus profondément). L’axe des z
étant l’axe orienté vers le bas, on a effectué le test suivant l’axe des z.
41
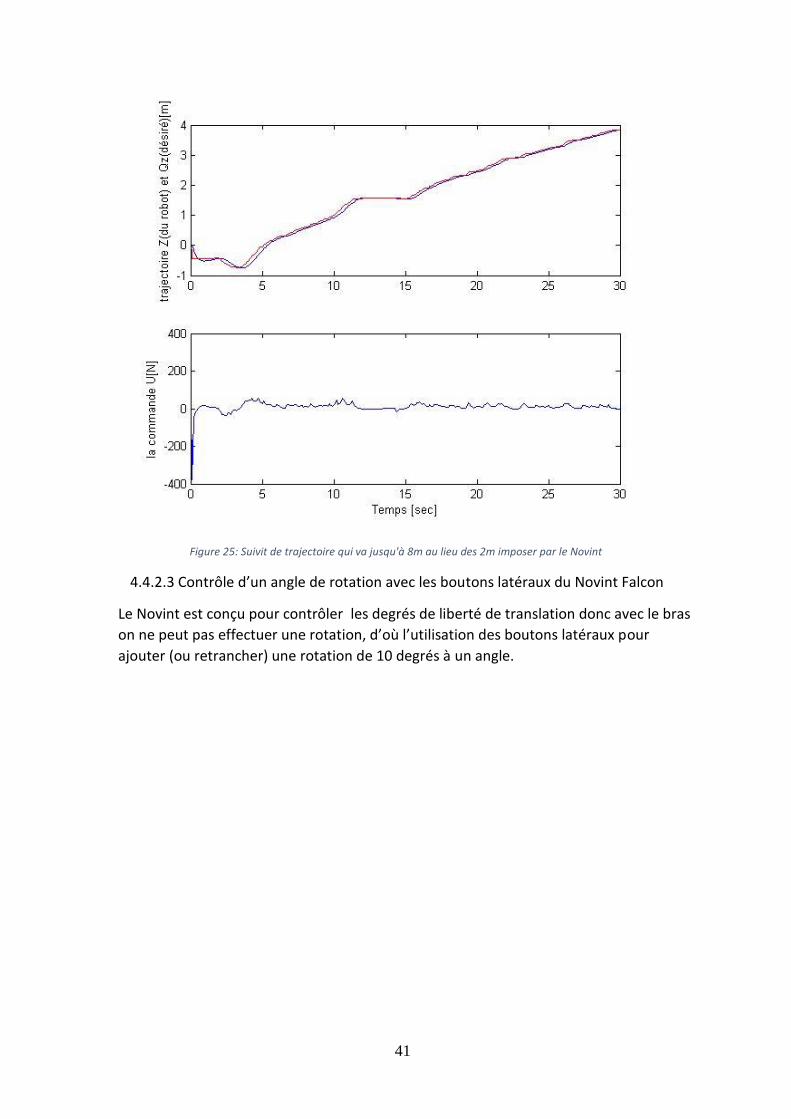
Figure 25: Suivit de trajectoire qui va jusqu'à 8m au lieu des 2m imposer par le Novint
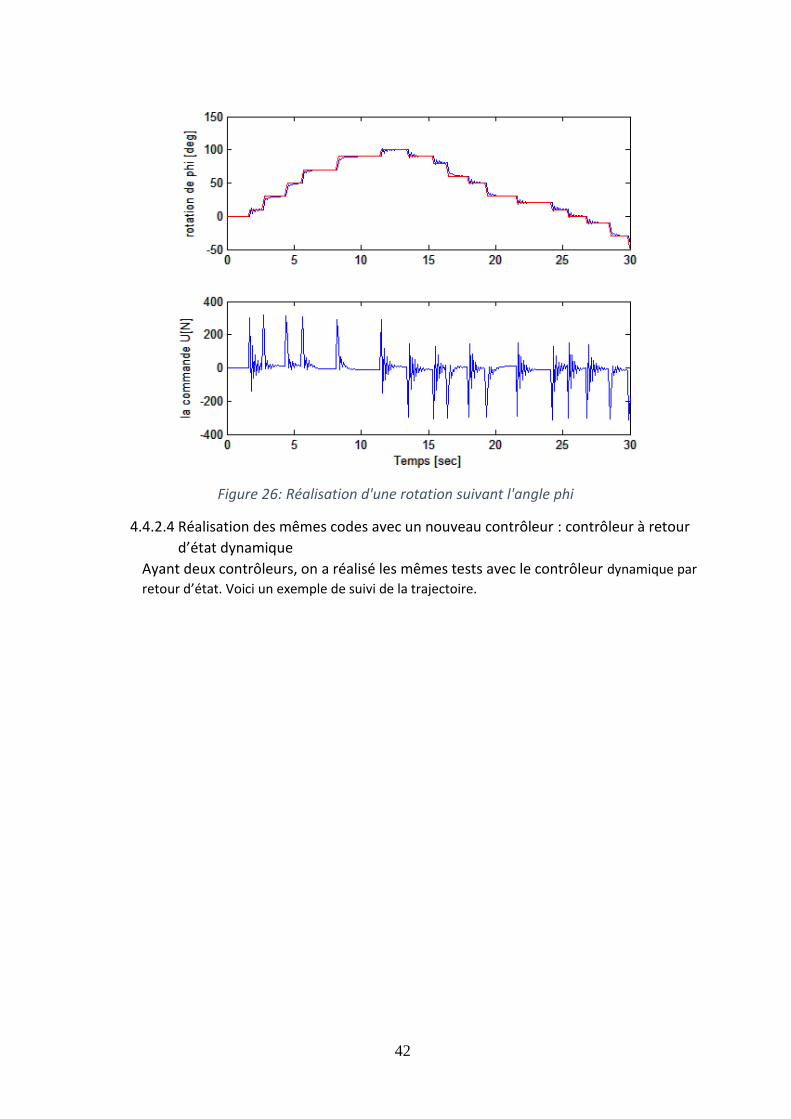
4.4.2.3 Contrôle d’un angle de rotation avec les boutons latéraux du Novint Falcon
Le Novint est conçu pour contrôler les degrés de liberté de translation donc avec le bras
on ne peut pas effectuer une rotation, d’où l’utilisation des boutons latéraux pour
ajouter (ou retrancher) une rotation de 10 degrés à un angle.
42
Figure 26: Réalisation d'une rotation suivant l'angle phi
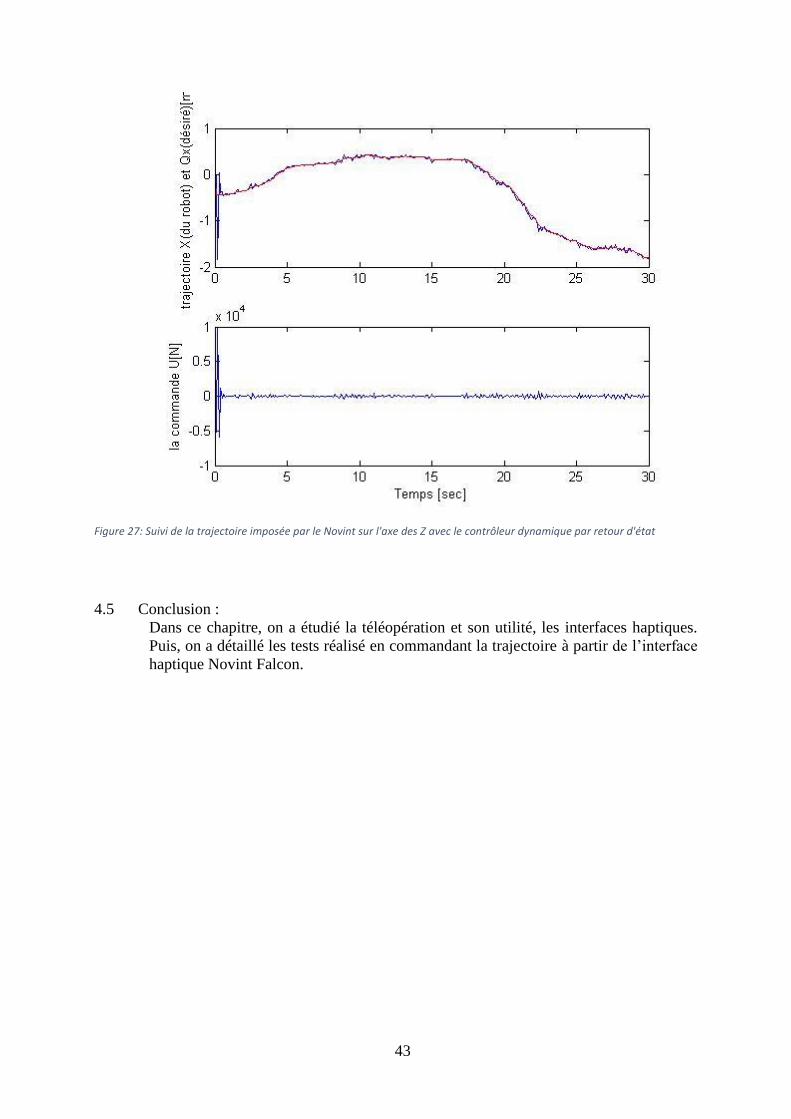
4.4.2.4 Réalisation des mêmes codes avec un nouveau contrôleur : contrôleur à retour
d’état dynamique
Ayant deux contrôleurs, on a réalisé les mêmes tests avec le contrôleur dynamique par
retour d’état. Voici un exemple de suivi de la trajectoire.
43
Figure 27: Suivi de la trajectoire imposée par le Novint sur l'axe des Z avec le contrôleur dynamique par retour d'état
4.5 Conclusion :
Dans ce chapitre, on a étudié la téléopération et son utilité, les interfaces haptiques.
Puis, on a détaillé les tests réalisé en commandant la trajectoire à partir de l’interface
haptique Novint Falcon.
44
Conclusion générale
Ce projet de fin d’étude a était réalisé au sein du laboratoire LIRMM : le Laboratoire
d’Informatique, de Robotique et de Microélectronique de Montpellier.
Le projet s’est divisé en plusieurs étapes :
- On a commencé par la modélisation du robot L2ROV. Cette modélisation a eu pour
résultat l’obtention de l’équation dynamique du modèle et sa simulation sous Matlab.
- On a ensuite réalisé la commande du robot avec deux contrôleurs : un contrôleur PID
et un contrôleur dynamique par retour d’état. On a simulé ainsi le comportement du
robot pour le suivit de trajectoire (une trajectoire désirée).
- A la fin, on a réalisé la commande de la trajectoire grâce à l’interface haptique le Novint
Falcon. On a testé en simulation le comportement du modèle du robot L2ROV en temps
réel.
Ce projet de fin d’étude étant dans le cadre du projet SEAHAND, il comme perspective la
réalisation de tests sur le robot L2ROV, d’ajouter un bras manipulateur au robot et de
réaliser des tests en environnement marin a une profondeur de 90 mètres puis enfin réaliser
des fouilles.
On réalisant ce projet, j’ai eu l’opportunité de travaillé avec de nouvelles technologies
comme le Novint Falcon. J’ai pu aussi utiliser les connaissances acquises au cour de mon
cursus universitaire.
45
Bibliographie
[1] www.cairn.info/revue-realites-industrielles1-2012-1-page-8.htm
[2] E. Campos A. Chemori 3 , V. Creuze 3 , J. Torres 1,2 , R. Lozano2 Saturation Based
Nonlinear Depth and Yaw Control of Underwater Vehicles with Stability
Analysis and Real-time Experiments
[3] DOCUMENT SCIENTIFIQUE : le projet SEAHAND
[4] Vincent creuze Robots marins et sous-marins - Perception, modélisation, commande
[5] Dr. Gianluca Antonelli Underwater Robots
[6] divine Maalouf Contribution to Nonlinear Adaptive Control of low inertia underwater
robots
[7] Aura Nancy Rodriguez ASSET : une architecture générale pour la télérobotique
[8] fiche technique de l’interface haptique Novint Falcon
46

47
















![Is projet[1] projet carriere](https://img.pdfslide.net/doc/110x75/58f14ccb1a28abfe728b4595/is-projet1-projet-carriere.jpg)












