Embed Size (px)
Citation preview
PROPOSAL
KEGIATAN PASKA PELATIHAN FUNDAMENTAL ELETRICAL ENGINERING (KPP FET)
Workshop, Education and Games Competition of Electrical Enginering Robotic (WE GREAT)
TEKNIK ELEKTRO ITS
HIMPUNAN MAHASISWA TEKNIK ELEKTROFAKULTAS TEKNOLOGI INDUSTRI
INSTITUT TEKNOLOGI SEPULUH NOPEMBER SURABAYA
1
I. LATAR BELAKANG
Sebagai salah satu negara berkembang, Indonesia mulai turut ambil bagian dalam perkembangan teknologi dunia. Salah satu teknologi yang sedang berkembang adalah teknologi robotika. Institut Teknologi Sepuluh Nopember ( ITS ) sebagai salah satu institusi teknik yang terbaik di Indonesia, harus mampu turut ambil bagian dalam perkembangan teknologi tersebut. Terlebih lagi bagi mahasiswa D3 dan S1 Jurusan Teknik Elektro FTI- ITS, karena jurusan ini adalah jurusan yang berbasis teknologi.
Jurusan Teknik Elektro FTI - ITS merupakan salah satu jurusan terbesar di ITS. Melalui jurusan Teknik Elektro inilah, lahir kader - kader unggulan. Demi membentuk kader yang kompeten perlu proses pembinaan dengan mengikuti serangkaian pelatihan. Oleh sebab itu, maka diadakan kegiatan Fundamental Electrical Training ( FET ) yang diikuti oleh mahasiswa baru baik D3 maupun S1 Jurusan Teknik Elektro FTI – ITS. Tujuan dari kegiatan ini adalah untuk menyiapkan kader – kader unggulan yang mampu meneruskan generasi sebelumnya. Setelah mengikuti suatu pelatihan, akan diadakan rangkaian kegiatan paska pelatihan untuk mengaplikasikan materi yang telah didapatkan. Oleh karena itu, diadakan Kegiatan Paska Pelatihan (KPP) FET yang nantinya akan dilaksanakan dan digagas oleh mahasiswa D3 dan S1 Jurusan Teknik Elektro FTI - ITS angkatan 2010 untuk mereka itu sendiri yang bertujuan agar mampu berkoordinasi dengan baik yang nantinya bisa benar - benar menjadi kader unggulan yang kompeten dan mampu membawa D3 dan S1 eknik Elektro menjadi lebih baik lagi.
Untuk itulah di Kegiatan Paska Pelatihan Fundamental Electrical Training ( KPP FET ) ini, selain untuk mendidik menjadi kader yang unggul, mahasiswa D3 dan S1 Jurusan Teknik Elektro FTI- ITS angkatan 2010 mampu berkoordinasi dengan baik. Kegiatan ini juga digunakan untuk mengenalkan dunia teknologi elektronik terutama teknologi tentang robotika, yang diharapkan juga nantinya ada bibit unggul yang mampu membawa nama Institut Teknologi Sepuluh Nopember (ITS) dan Jurusan Teknik Elektro FTI- ITS untuk ikut andil dalam kompetisi robot serta berprestasi nantinya.
II. TUJUAN
Kegiatan WE GREAT dmakudkan supaya mahasiswa D3 dan S1 Jurusan Teknik Elektro FTI- ITS angkatan 2010 mampu berkordinasi dengan baik serta mengenalan tentang dunia robotika. Menumbuhkan kreatifitas dan rasa persaingan dalam hal teknologi Robotika supaya nantinya mampu untuk memajukan prestasi Institut Teknologi Sepuluh Nopember ( ITS ) dan juga D3 dan S1 Jurusan Teknik Elektro FTI- ITS di dunia teknologi robotika.
III. SASARAN KEGIATAN
2
Sasaran kegiatan WE GREAT adalah mahasiswa D3 dan S1 Jurusan Teknik Elektro FTI- ITS angkatan 2010
IV. YANG DAPAT DIPELAJARI PESERTA
1. Mengerti dasar-dasar dari Robot yang selama ini telah berkembang di tingkat ITS maupun di tingkat Nasional.2. Mampu mengimplementasikan hasil dari workshop dalam bentuk sebuah robot sederhana.3. Mampu menumbuhkan kreatifitas dan ide – ide baru yang berhubungan dengan teknologi yang sedang berkembang.
V. BENTUK KEGIATAN
a. Workhshop dan Pelatihan
Workshop dan pelatihan diadakan dihari pertama, tujuannya mengenalkan tentang dunia robot dalam bentuk penyampaian materi. Materi yang disampaikan mengenai komponen elektronik yang digunakan untuk pembuatan robot. Nantinya dilaksanakan di dua tempat berbeda karena nantinya akan membahas dua jenis robot yang berbeda yaitu robot line tarcer atau pengikut garis dan robot sumo, dala workshop ini menggunakan beberapa metode dalam penyampaian materi, yaitu :
Multisensory (Visual-Auditory-Kinestetik) sebagai cara bentuk cepat interactive, membuat para peserta lebih terlibat dalam workshop. Sharing merupakan cara supaya peserta lebih mendalami materi dengan lebih aktif dan lebih dekat kepada fasilitator.
b. Simulasi
Untuk melihat sejauh mana pemahaman peserta rhadap materi workshop dan pelatihan, maka dilakukan simulasi dan kompetisi, simulasi ini dibagi menjadi dua, yaitu simulasi awal dalam bentuk perancangan dan perakitan dan simulasi total yang dalam bentu kompetisi.
Perancangan dan Perakitan merupakan metode untuk melihat sejauh mana kemampuan peserta unruk menerapkan ilmu yang didapatkan dari workshop dan pelatihan secar langsung. Simulasi Total dalam bentuk kompetisi merupakan sarana yang dapat dimanfaatkan oleh peserta untuk melihat sejauh mana hasil dari perancangan dan perakitan robotnya.
VI. PESERTA DAN SUSUNAN ACARA
3
Workshop dan simulasi ini diikuti oleh seluruh mahasiswa D3 dan S1 Jurusan Teknik Elektro FTI- ITS angkatan 2010 yang terdaftar sebagai pesrta Fundamental Electrical Training ( FET )
Waktu dan Tempat
WorkshopWaktu : 30 Januari 2011
Tempat : Theater B dan Theater C ITS
Peserta : Seluruh mahasiswa D3 dan S1 Jurusan Teknik Elektro FTI- ITS angkatan 2010 yang terdaftar sebagai pesrta Fundamental Electrical Training ( FET )
Simulasi KompetisiWaktu : 31 Januari 2011
Tempat : Jalan Depan Ruang C106-C110
Peserta : Peserta yang mengikuti workshop
VII. FASILITATOR
Fasilitator adalah fasilitator yang profesional dan berpengalaman di bidang Robotika. Dalam pelatihan ini juga mendatangkan senior dari bidang studi Elektronika dan dari divisi workshop, serta mahasiswa baru teknik elektro angkatan 2010
VIII. RINCIAN ACARALampiran 1
IX. MEKANISME DAN SYARAT KOMPETISILampiran 2
X. RINCIAN DANALampiran 3
XI. SUSUNAN KEPANITIAANLampiran 4
XII. PENUTUPHarapan dari keseluruan rangkaian acara ini adalah untuk mencapai tujuan-tujuan yang telah disebutkan di atas, serta dapat memberikan sumbangsih bagi Jurusan Teknik Elektro dan Institut Teknologi Sepuluh Nopember (ITS) jika nantinya bisa menjadi juara di kompetisi robot di Indonesia.
Akhirnya untuk mencapai semua tujuan baik diatas, kami memerlukan dorongan, doa dan partisipasi dari seluruh Civitas Akademika Jurusan Teknik Elektro FTI-
4
ITS. Keberhasilan pelaksanaan acara ini merupakan tanggung jawab bersama seluruh panitia pelaksana. Untuk itu diharapkan seluruh pihak yang bersangkutan memberikan dukungan terhadap pelaksanaan kegiatan ini baik berupa saran maupun kritik yang membangun agar kegiatan ini berhasil. Atas perhatian dan dukungan yang diberikan, panitia mengucapkan terima kasih.
Surabaya, 4 Desember 2010
Ketua Panitia Sekretaris
M. Rizky Akbar Anisa EndarwatiNRP. 22 10 100 097 NRP. 22 10 100 162
LEMBAR PROPOSALKEGIATAN PASKA PELATIHAN FUNDAMENTAL ELETRICAL
ENGINERING (KPP FET)
Workshop, Education and Games Competition of Electrical Enginering Robotic (We Great)
5
TEKNIK ELEKTRO ITS
Nomor :
Perihal : Workshop dan Kompetisi Robot
Lampiran : lembar
Surabaya, 23 Desember 2010
Ketua Himatektro Sekretaris Umum
Anindito Kusumojati Adhyatmoko WiranantoNRP. 2208 100 122 NRP. 2208 100 034
Mengetahui dan Menyetujui,
Ketua Jurusan Teknik Elektro ITS
Prof. Dr. Ir. Mochamad Ashari,M.Eng. NIP. 1965 101 2199 003 1003
LAMPIRANLAMPIRAN 1
RINCIAN ACARA
Susunan Acara Apel dan Sambutan
Tempat: Plaza Elektro
Hari/Tgl Jam Acara Keterangan
Minggu / 30 Januari 2011
07.00-08.00 Apel Pagi Pengarahan oleh hima S1 dan D3
08.00-08.30 Sambutan Ketua Hima S1 Teknik Elektro
Ketua Hima D3 Teknik Elektro
08.30-08.45 Doa dan Perwakilan Hima
6

Penutup
Susunan Acara Pelatihan dan Simulasi
Tempat : Teather B dan Teather C ITS
Hari/Tgl Sesi/Jam Acara/Materi
Minggu / 30 Januari 2011
08.45-09.00 Pengkondisian
09.00 - 10.00 Materi
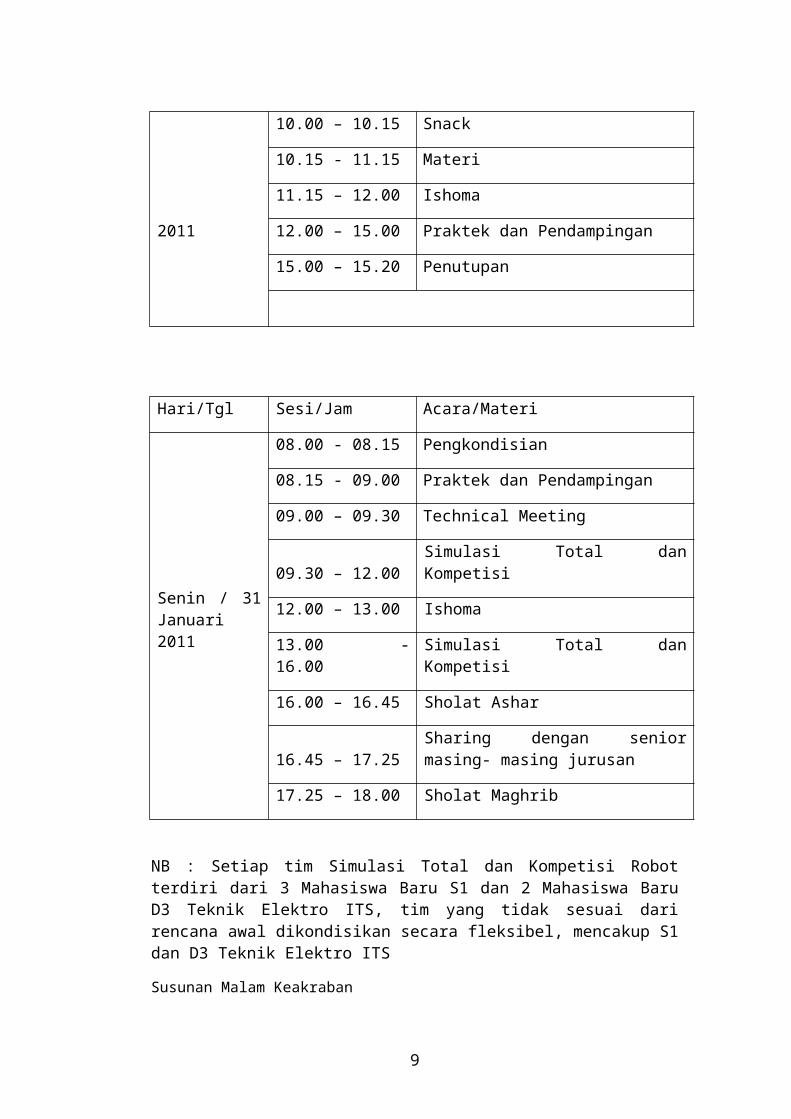
10.00 – 10.15 Snack
10.15 - 11.15 Materi
11.15 – 12.00 Ishoma
12.00 – 15.00 Praktek dan Pendampingan
15.00 – 15.20 Penutupan
Hari/Tgl Sesi/Jam Acara/Materi
Senin / 31 Januari 2011
08.00 - 08.15 Pengkondisian
08.15 - 09.00 Praktek dan Pendampingan
09.00 – 09.30 Technical Meeting
09.30 – 12.00 Simulasi Total dan Kompetisi
12.00 – 13.00 Ishoma
13.00 - 16.00 Simulasi Total dan Kompetisi
16.00 – 16.45 Sholat Ashar
16.45 – 17.25Sharing dengan senior masing- masing jurusan
17.25 – 18.00 Sholat Maghrib
7
NB : Setiap tim Simulasi Total dan Kompetisi Robot terdiri dari 3 Mahasiswa Baru S1 dan 2 Mahasiswa Baru D3 Teknik Elektro ITS, tim yang tidak sesuai dari rencana awal dikondisikan secara fleksibel, mencakup S1 dan D3 Teknik Elektro ITS
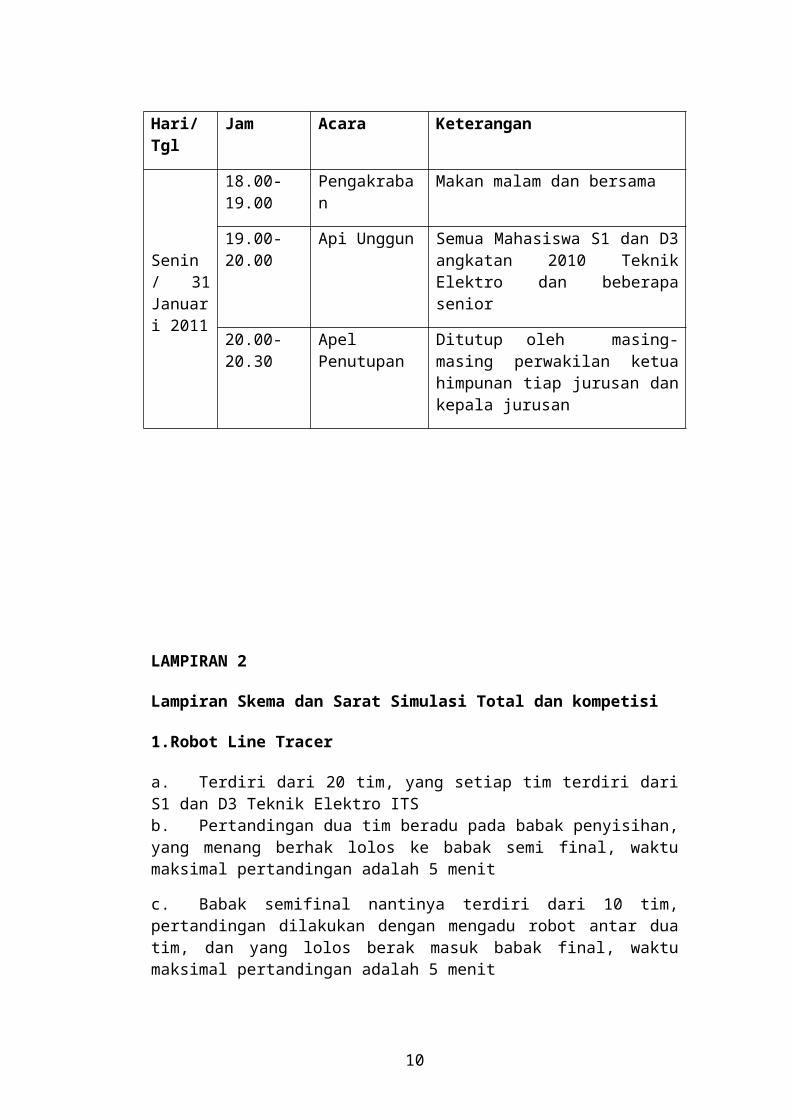
Susunan Malam Keakraban
Hari/Tgl Jam Acara Keterangan
Senin / 31 Januari 2011
18.00-19.00 Pengakraban Makan malam dan bersama
19.00-20.00 Api Unggun Semua Mahasiswa S1 dan D3 angkatan 2010 Teknik Elektro dan beberapa senior
20.00-20.30 Apel Penutupan Ditutup oleh masing- masing perwakilan ketua himpunan tiap jurusan dan kepala jurusan
LAMPIRAN 2
Lampiran Skema dan Sarat Simulasi Total dan kompetisi
1.Robot Line Tracer
a. Terdiri dari 20 tim, yang setiap tim terdiri dari S1 dan D3 Teknik Elektro ITSb. Pertandingan dua tim beradu pada babak penyisihan, yang menang berhak lolos ke babak semi final, waktu maksimal pertandingan adalah 5 menit
c. Babak semifinal nantinya terdiri dari 10 tim, pertandingan dilakukan dengan mengadu robot antar dua tim, dan yang lolos berak masuk babak final, waktu maksimal pertandingan adalah 5 menit
d. Babak final terdiri dari 5 tim dan kompetisi dilakukan secara bersamaan antara 5 tim tersebut
e. Juara ditetukan bagi robot yang tercepat menyelesaikan tantangan
8
Sarat kompetisi LineTracer
a. Waktu pertandingan pada babak penyisihan diberi waktu maksimal 5 menitb. Perwakilan tim boleh memasuki arena untuk menata posisi robot pada babak penyisihan dan semifinal
c. Pada babak penyisihan robot yang melakukan kesalahan dalam berjalan, boleh ditata ulang, tapi dikembalikan ke titik aman sebelumnya.
d. Pada babak penyisihan robot dijalankan selama 5 menit, dan yang berhak menuju babak selanjutnya adalah robot yang berhasil menempuh tantangan lebih awal dan mauk garis finish, jika robot tidak ada yang mencapai garis finish dan waktu melampaui 5 menit maka robot yang paling dekat dengan garis finish adalah yang lolos ke babak selanjutnya
e. Pada babak semifinal robot yang melakukan kesalahan dalam berjalan, boleh ditata ulang, tapi dikembalikan ke dua titik aman sebelumnya. Pada babak semifinal robot dijalankan selama 5 menit, dan yang berhak menuju babak selanjutnya adalah robot yang berhasil menempuh tantangan lebih awal dan masuk garis finish, jika robot tidak ada yang mencapai garis finish dan waktu melampaui 5 menit maka robot yang paling dekat dengan garis finish adalah yang lolos ke babak selanjutnya
f. Saat final, robot dijalankan di lintasan tanpa boleh ditata ulang atau disentuh
g. Pemenang adalah robot yang menyelesaikan tantangan dan mencapai garis finish lebih dahulu, waktu fleksibel.
h. Sarat lain akan diumumkan waktu Technical Meeting dan saat pelaksanaan kompetisi.
2. Sumo Robot Contest
a. Sumo Robot Contest adalah pertandingan 2 robot atau lebih yang diadu dengan saling menabrakkan satu dengan yang lainnyab. Peserta terdiri dari 40 tim, dengan anggota masing-masing 5 orang per tim di mana setiap tim terdiri dari jurusan Teknik Elektro S1 dan D3c. Sumo Robot Contest menggunakan sistem gugur yang dimana setiap pertandingan mempertandingkan 2 robot dari babak penyisihan sampai dengan babak final, namun untuk babak perdelapan final akan mempertandingkan 3 robot sekaligusd. Pertandingan selama babak penyisihan akan menggunakan 4 arena pertandingan, namun setelah memasuki babak selanjutnya sampai dengan babak final hanya akan menggunakan 1 arena
Regulasi Sumo Robot Contest
9
a. Waktu untuk 1 pertandingan adalah 5 menitb. Arena yang digunakan berbentuk lingkaran dengan diameter 3 meterc. Berat dari robot maksimal adalahd. Saat pertandingan berlangsung, peserta tidak boleh menyentuh robote. Pemenang adalah peserta yang robotnya dapat membuat robot lawan keluar arena pertandinganf. Sedangkan jika dalam waktu yang telah ditentukan tidak ada robot yang keluar arena, maka pemenang ditentukan dari robot yang berhasil mendorong lawan dengan jarak terjauh dari titik awal pertandingang. Ketentuan lain akan diumumkan saat Technical Meeting
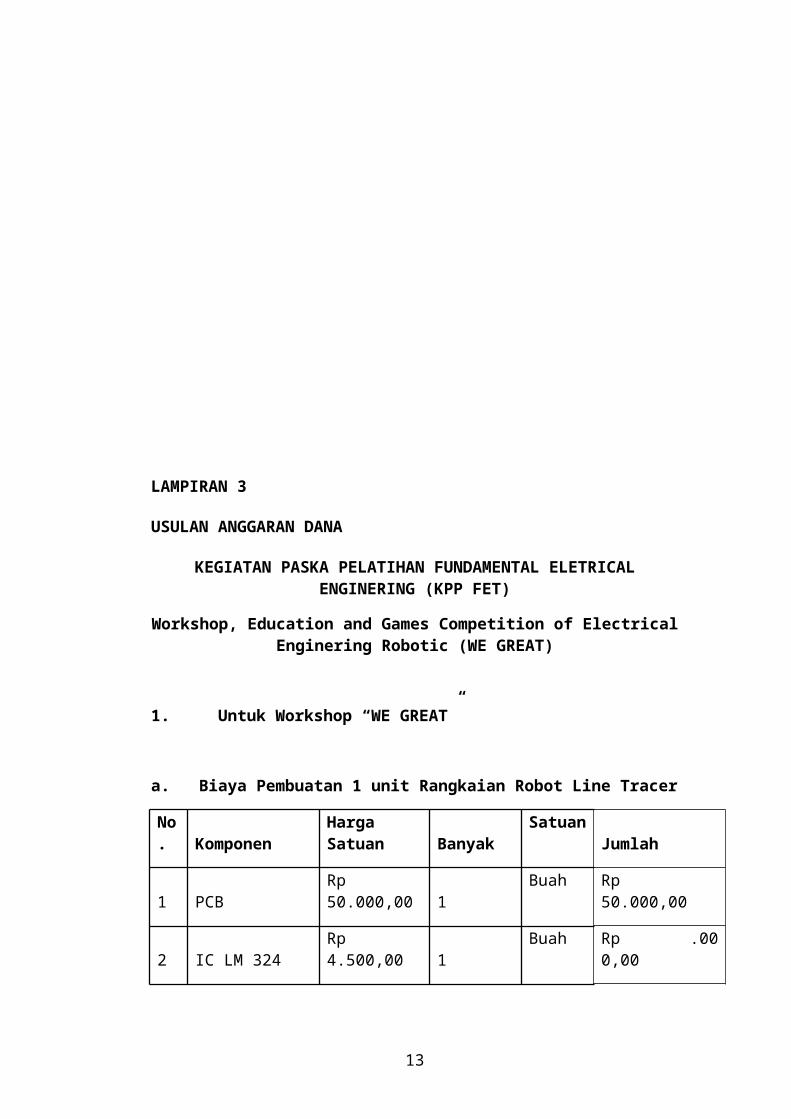
LAMPIRAN 3
USULAN ANGGARAN DANA
KEGIATAN PASKA PELATIHAN FUNDAMENTAL ELETRICAL ENGINERING (KPP FET)
Workshop, Education and Games Competition of Electrical Enginering Robotic (WE GREAT)
1. Untuk Workshop “WE GREAT”
a. Biaya Pembuatan 1 unit Rangkaian Robot Line Tracer
No. Komponen Harga Satuan Banyak Satuan Jumlah
10
1 PCB Rp 50.000,00 1 Buah Rp 50.000,00
2 IC LM 324 Rp 4.500,00 1 Buah Rp .000,00
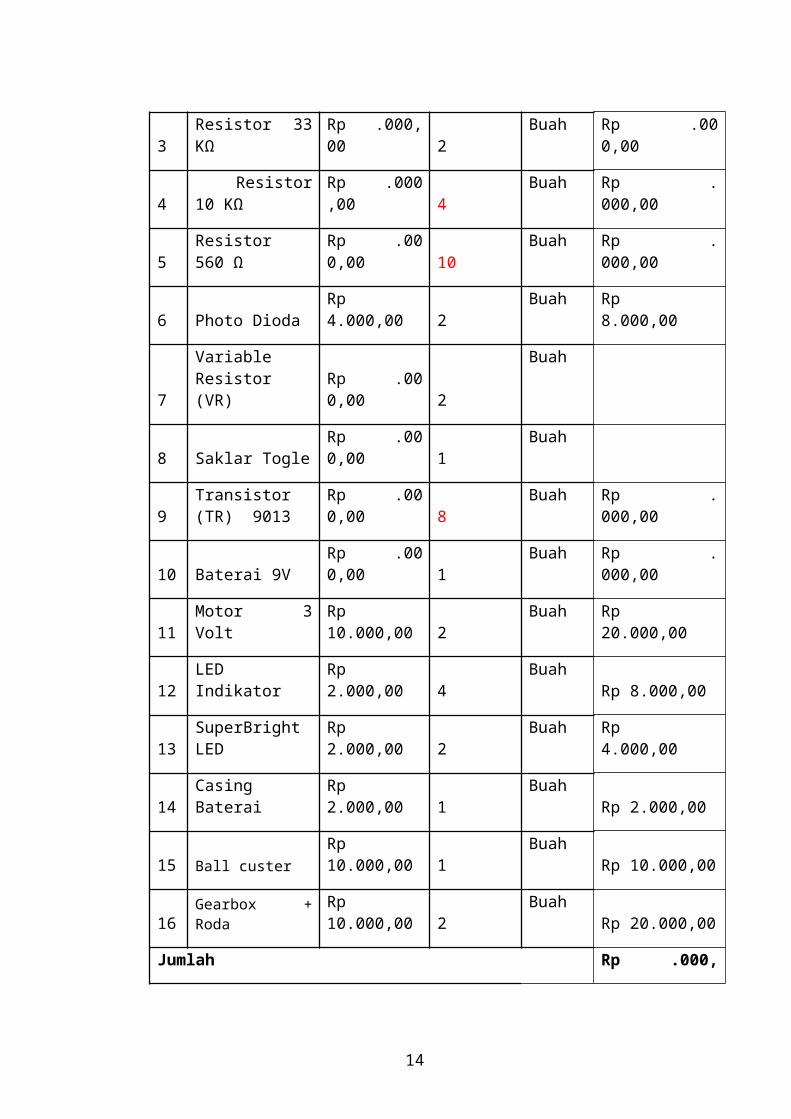
3 Resistor 33 KΩ Rp .000,00 2 Buah Rp .000,00
4 Resistor 10 KΩ Rp .000,00 4 Buah Rp .000,00
5 Resistor 560 Ω Rp .000,00 10 Buah Rp .000,00
6 Photo Dioda Rp 4.000,00 2 Buah Rp 8.000,00
7Variable Resistor (VR) Rp .000,00 2
Buah
8 Saklar Togle Rp .000,00 1 Buah
9Transistor (TR) 9013 Rp .000,00 8
BuahRp .000,00
10 Baterai 9V Rp .000,00 1 Buah Rp .000,00
11 Motor 3 Volt Rp 10.000,00 2 Buah Rp 20.000,00
12 LED Indikator Rp 2.000,00 4 Buah Rp 8.000,00
13 SuperBright LED Rp 2.000,00 2 Buah Rp 4.000,00
14 Casing Baterai Rp 2.000,00 1 Buah Rp 2.000,00
15 Ball custer Rp 10.000,00 1 Buah Rp 10.000,00
16 Gearbox + Roda Rp 10.000,00 2 Buah Rp 20.000,00
Jumlah Rp .000,00
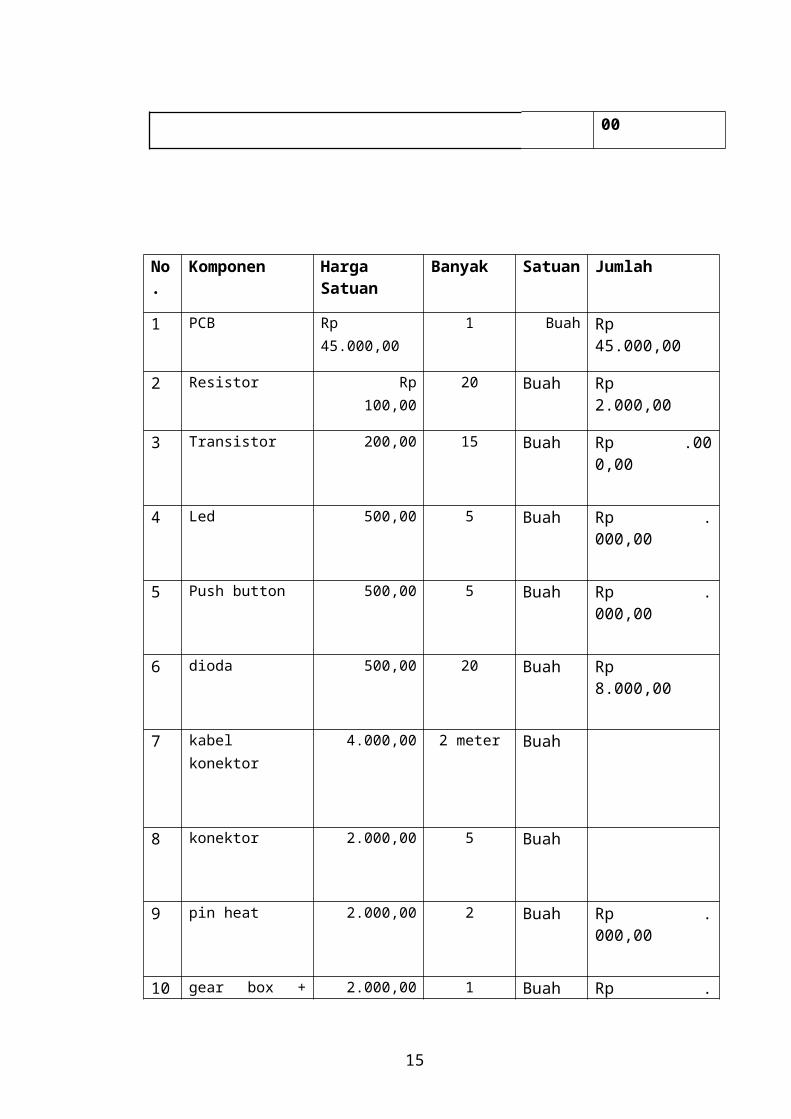
No. Komponen Harga Satuan Banyak Satuan Jumlah
1 PCB Rp 45.000,00 1 Buah Rp 45.000,00
2 Resistor Rp 100,00 20 Buah Rp 2.000,00
3 Transistor 200,00 15 Buah Rp .000,00
11
4 Led 500,00 5 Buah Rp .000,00
5 Push button 500,00 5 Buah Rp .000,00
6 dioda 500,00 20 Buah Rp 8.000,00
7 kabel konektor 4.000,00 2 meter Buah
8 konektor 2.000,00 5 Buah
9 pin heat 2.000,00 2 Buah Rp .000,00
10 gear box + roda 2.000,00 1 Buah Rp .000,00
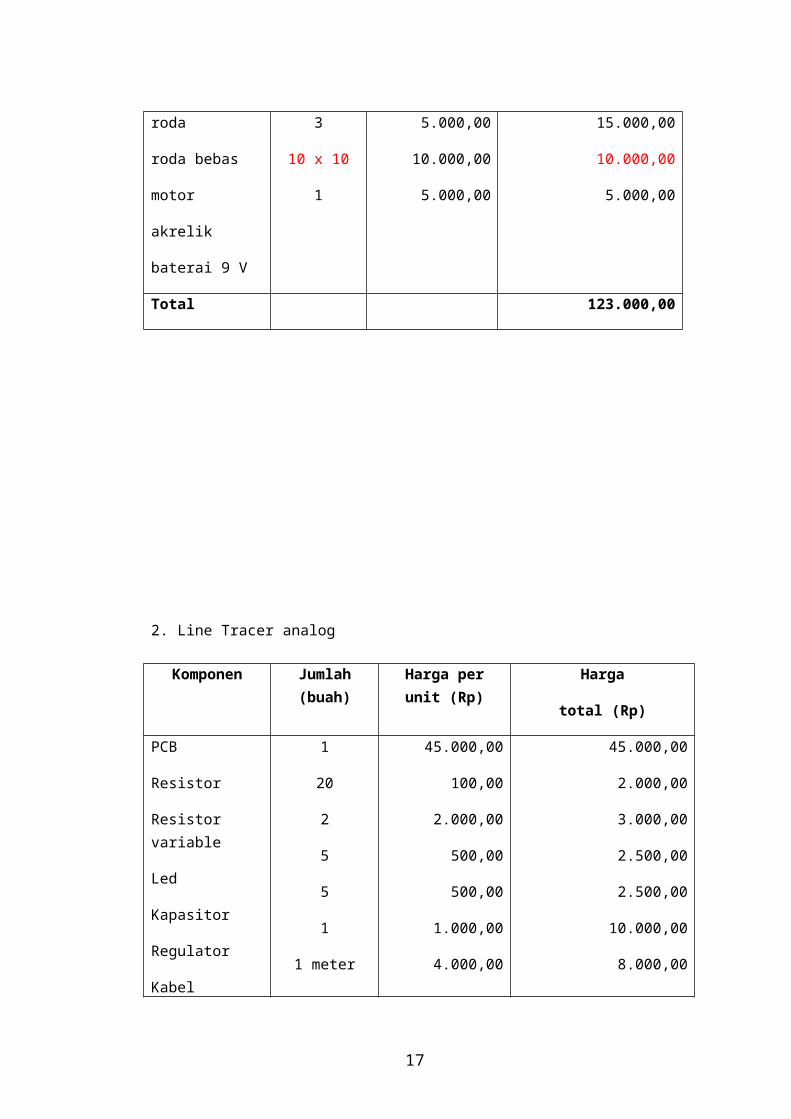
11 roda bebas 5.000,00 3 Buah Rp 20.000,00
12 motor Rp 10.000,00 10 x 10 Buah Rp 8.000,00
13 akrelik Rp 5.000,00 1 Buah Rp 4.000,00
Jumlah Rp .000,00
1. robosoccer
Komponen Jumlah (buah)
Harga per unit (Rp) Harga
12
total (Rp)
PCB
Resistor
Transistor
Led
Push button
dioda
kabel konektor
konektor
pin heat
gear box + roda
roda bebas
motor
akrelik
baterai 9 V
1
20
15
5
5
20
2 meter
5
2
1
3
10 x 10
1
45.000,00
100,00
200,00
500,00
500,00
500,00
4.000,00
2.000,00
2.000,00
2.000,00
5.000,00
10.000,00
5.000,00
45.000,00
2.000,00
3.000,00
2.500,00
2.500,00
10.000,00
8.000,00
10.000,00
4.000,00
2.000,00
15.000,00
10.000,00
5.000,00
Total 123.000,00
2. Line Tracer analog
Komponen Jumlah (buah) Harga per unit (Rp) Harga
13
total (Rp)
PCB
Resistor
Resistor variable
Led
Kapasitor
Regulator
Kabel konektor
Konektor
Pin heat
komparator
photo dioda
gear box + roda
motor
akrelik
baterai 9 V
1
20
2
5
5
1
1 meter
10
2
1
5
4
4
10 x 10
1
45.000,00
100,00
2.000,00
500,00
500,00
1.000,00
4.000,00
2.000,00
20.000,00
2.000,00
5.000,00
10.000,00
5.000,00
45.000,00
2.000,00
3.000,00
2.500,00
2.500,00
10.000,00
8.000,00
4.000,00
40.000,00
2.000,00
15.000,00
10.000,00
5.000,00
Total 149.000,00
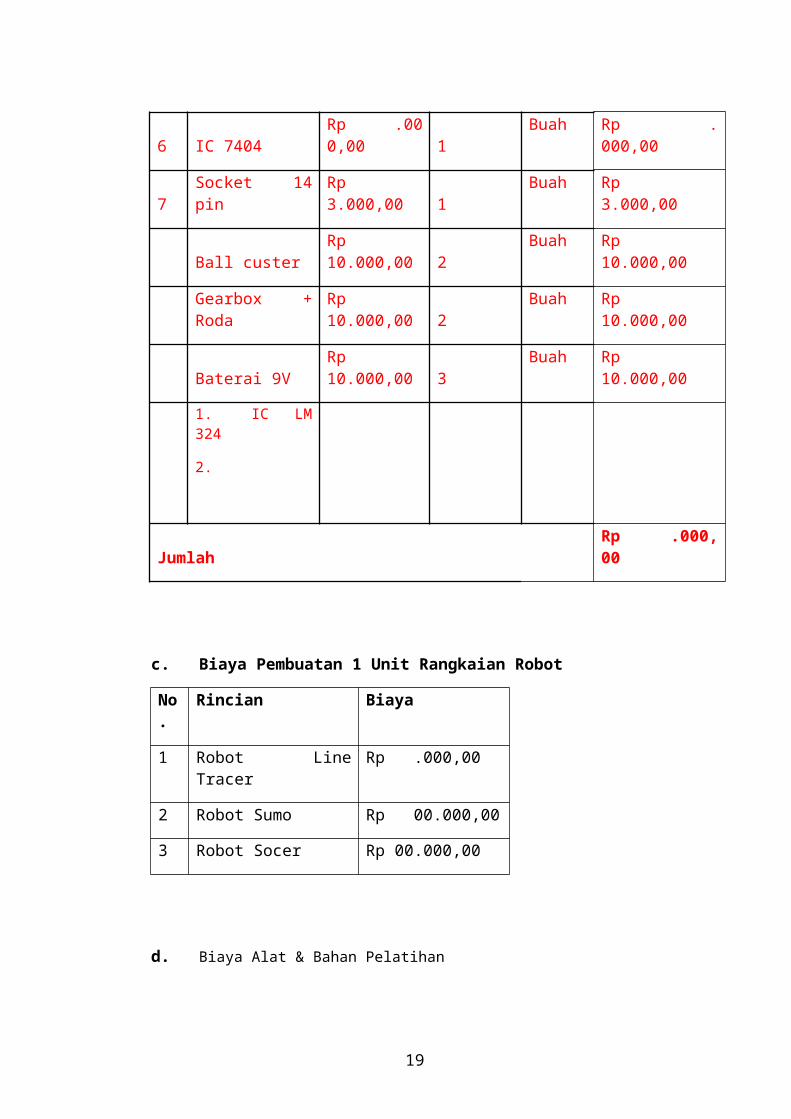
b. Biaya Pembuatan 1 Unit Rangkaian Robot Sumo
No. Komponen Harga Satuan Banyak Satuan Jumlah
1 PCB dan Sablon Rp 10.000,00 1 Buah Rp 10.000,00
2 Motor DC Rp 10.000,00 2 Buah Rp 20.000,00
3 Transistor TIP 12 Rp .000,00 2 Buah Rp .000,00
4 Dioda 4002 Rp .000,00 1 Buah Rp .000,00
14
5 Kabel jumper Rp .000,00 1 Buah Rp .000,00
6 IC 7404 Rp .000,00 1 Buah Rp .000,00
7 Socket 14 pin Rp 3.000,00 1 Buah Rp 3.000,00
Ball custer Rp 10.000,00 2 Buah Rp 10.000,00
Gearbox + Roda Rp 10.000,00 2 Buah Rp 10.000,00
Baterai 9V Rp 10.000,00 3 Buah Rp 10.000,00
1. IC LM 324
2.
Jumlah Rp .000,00
c. Biaya Pembuatan 1 Unit Rangkaian Robot
No. Rincian Biaya
1 Robot Line Tracer Rp .000,00
2 Robot Sumo Rp 00.000,00
3 Robot Socer Rp 00.000,00
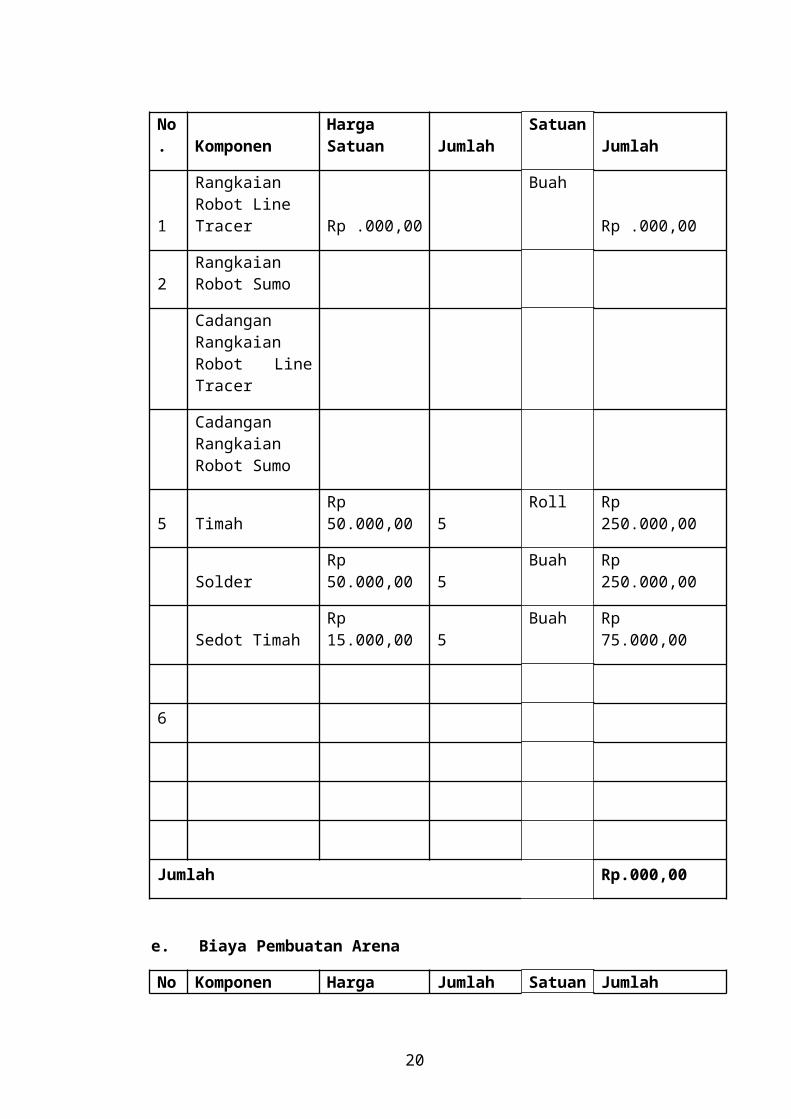
d. Biaya Alat & Bahan Pelatihan
No. Komponen Harga Satuan Jumlah Satuan Jumlah
1Rangkaian Robot Line Tracer Rp .000,00
BuahRp .000,00
2Rangkaian Robot Sumo
Cadangan Rangkaian Robot Line Tracer
Cadangan
15

Rangkaian Robot Sumo
5 Timah Rp 50.000,00 5 Roll Rp 250.000,00
Solder Rp 50.000,00 5 Buah Rp 250.000,00
Sedot Timah Rp 15.000,00 5 Buah Rp 75.000,00
6
Jumlah Rp.000,00
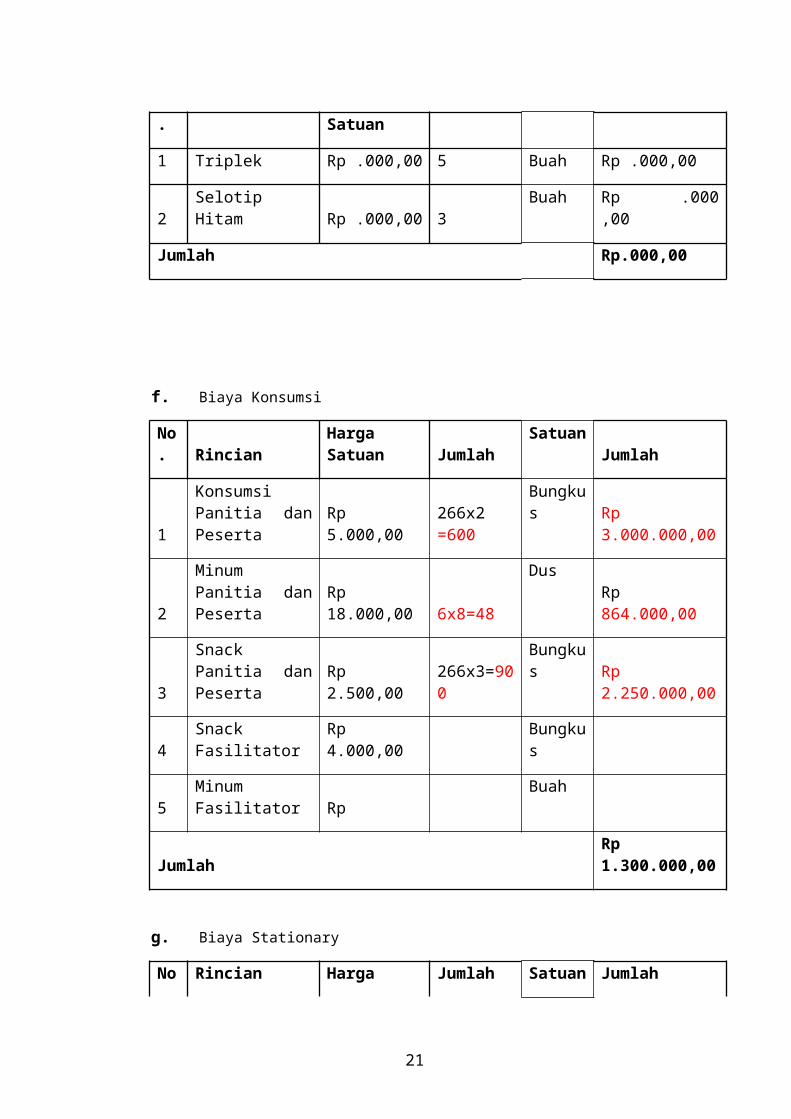
e. Biaya Pembuatan Arena
No. Komponen Harga Satuan Jumlah Satuan Jumlah
1 Triplek Rp .000,00 5 Buah Rp .000,00
2 Selotip Hitam Rp .000,00 3 Buah Rp .000,00
Jumlah Rp.000,00
f. Biaya Konsumsi
No. Rincian Harga Satuan Jumlah Satuan Jumlah
1Konsumsi Panitia dan Peserta Rp 5.000,00 266x2 =600
BungkusRp 3.000.000,00
2Minum Panitia dan Peserta Rp 18.000,00 6x8=48
DusRp 864.000,00
3Snack Panitia dan Peserta Rp 2.500,00 266x3=900
BungkusRp 2.250.000,00
16
4 Snack Fasilitator Rp 4.000,00 Bungkus
5 Minum Fasilitator Rp Buah
Jumlah Rp 1.300.000,00
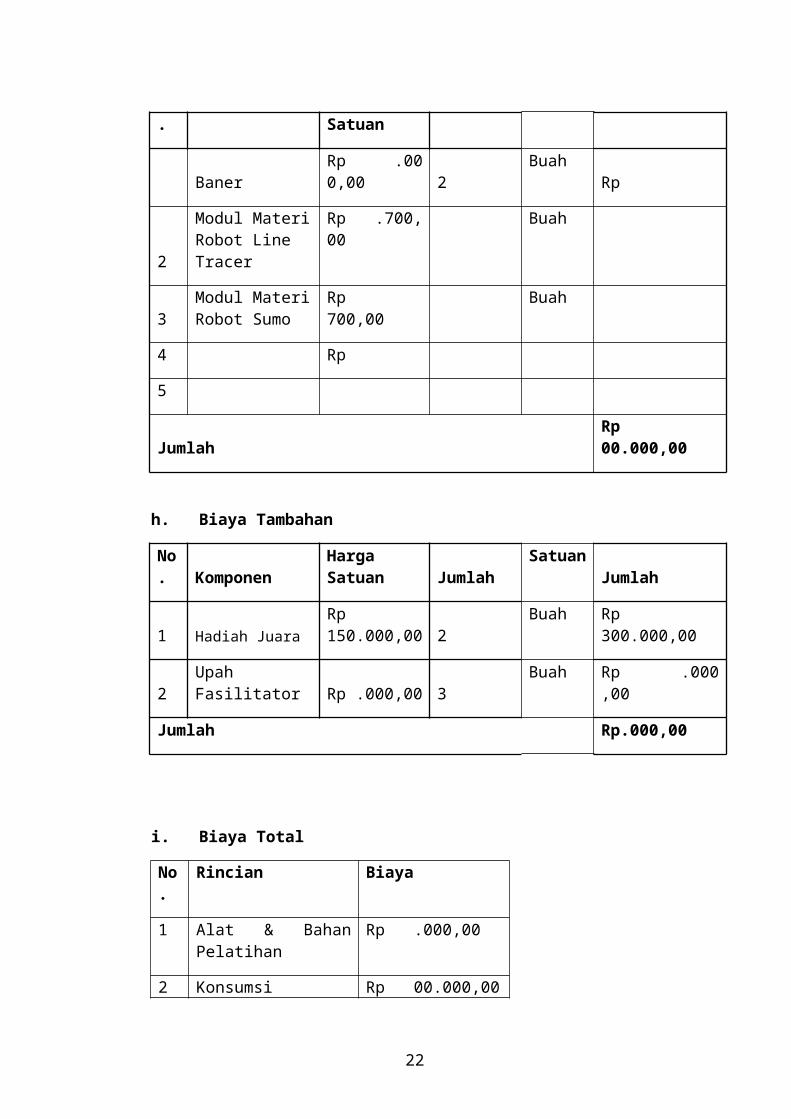
g. Biaya Stationary
No. Rincian Harga Satuan Jumlah Satuan Jumlah
Baner Rp .000,00 2 Buah Rp
2
Modul Materi Robot Line Tracer
Rp .700,00 Buah
3Modul Materi Robot Sumo
Rp 700,00 Buah
4 Rp
5
Jumlah Rp 00.000,00
h. Biaya Tambahan
No. Komponen Harga Satuan Jumlah Satuan Jumlah
1 Hadiah Juara Rp 150.000,00 2 Buah Rp 300.000,00
2 Upah Fasilitator Rp .000,00 3 Buah Rp .000,00
Jumlah Rp.000,00
i. Biaya Total
No. Rincian Biaya
1 Alat & Bahan Pelatihan Rp .000,00
2 Konsumsi Rp 00.000,00
3 Stationary
17

4 Biaya Tambahan
Total Rp .000,00
Masukan Dana :
1. Iuran Mahasiswa Baru S1 = 193 x 10.000 = Rp 1.930.000,00
2. Iuran Mahasiswa Baru D3 = 73 x 10.000 = Rp 730.000,00
3. Sumbangan Jurusan Teknik Elektro = Rp +
TOTAL PEMASUKAN = Rp
TOTAL PENGELUARAN = Rp
LAMPIRAN 4
SUSUNAN KEPANITIAAN
Pelindung kegiatan : Ketua Jurusan Teknik Elektro ITS
Prof. Dr. Ir. Mochamad Ashari, M. Eng.
NIP.196510121990031003
Pembina kegiatan : Tim Konsultasi Kemahasiswaan
Jurusan Teknik Elektro FTI-ITS
Imam Arifin, ST, MT.
Penanggung Jawab : Rijalul Fikri 2210100088
Ketua Panitia : Muhamad Rizki Akbar 2210100097
Wakil Ketua Panitia : Muchamad Rizqy 2210030047
Sekretaris : Anisa Endarwati 2210100162
18
: Desi Anggraini 2210038017
Bendahara : Hikmah Miladiyah 2210100046
: Rizki Amalia W. 2210038014
: Nancy Ardelina 2210100188
Sie acara
Koordinator : Arif Rahartomo 2210100004
Anggota : Achmad Irfan 2210030081
: M. Yusro Muhtadi 2210100155
: Dwi Didit Prasetiyo 2210100165
: Thomas Aditya 2210030103
: Muh Azis Iswantoro 2210100176
Sie konsumsi
Koordinator : Desi Natalia 2210100158
Anggota : Stella Arga P. 2210030076
: Lailatul Fadhilah 2210030001
: Niora Fatimah T 2210100152
: Sandy Galang P. 2210100201
: Feri Andriawan 2210100089
Sie Perlengkapan
Koordinator : Rosyid Mukhlasin 2210100035
Anggota : Erza Handi S. 2210100034
: Ramadhan Kukuh P. 2210030037
: Bayu Subekti 2210030091
: Zafrullah Ismail 2210100153
Sie Publikasi dan Dokumentasi
Koordinator : Gama Dwi Nevanda 2210030013
Anggota : Yoga Dwi Pranata 2210100048
: Fardian Ramadhani 2210030007
19
: Zainur Okta 2210030069
Sie Keamanan dan Perijinan
Koordinasi : Wahyu Surya A. 2210038004
Anggota : Eka Prasetyo H. 2210100161
: Achmad Rizal Mutaqin 2210100177
: Abdullah Iskandar 2210100103
: Riza Fathur R. 2210038016
ROBOT LINE FOLLOWER ANALOG
ABSTRAK
Dalam makalah ini akan dibahas mengenai robot Line Follower. Robot ini merupakan salah satu bentuk robot beroda yang memiliki komponen utama diantaranya, seperti resistor, dioda, transistor, Led yang dirangkai untuk menghasilkan jenis kendaraan yang berjalan secara otomatis dengan kecepatan tertentu mengikuti garis.
Di dalam rangkaian Line Follower terdapat 3 bagian utama, yaitu bagian sensor, komparator dan driver. Untuk bagian sensor digunakan photodioda sebagai sensor cahaya, sedangkan komparatornya menggunakan IC LM 324 sebagai pembanding tegangan dan untuk drivernya digunakan 2 buah motor sebagai penggerak rodanya.
Hasil uji coba rangkaian Line Follower ini menunjukkan performa yang mampu berjalan di beberapa medan, diantaranya medan lurus, belok, naik, dan menurun.
I. PENDAHULUAN I.1. Latar Belakang
20
Perkembangan teknologi elektronika saat ini sudah sedemikian pesatnya yang kadang-kadang berawal dari rangkaian-rangkaian sederhana yang biasa kita jumpai dalam buku-buku hobby elektronika. Aplikasi dari Line Follower biasanya digunakan sebagai motor mainan anak-anak dan juga sebagai sarana transportasi di area pabrik.. Jadi dalam makalah ini akan dijelaskan rangkaian elektronika dari Line Follower beserta cara kerjanya.
I.2. Rumusan masalah
Berdasarkan latar belakang di atas, maka disusun rumusan masalah sebagai berikut :
1.Komponen apa saja yang diperlukan dalam pembuatan Line Follower.
2. Bagaimana prinsip kerja pada Line Follower r.
3. Bagaimana cara membuat rangkaian Line Follower.
I.3. Tujuan dan Manfaat
Mengetahui komponen-komponen elektonika yang menjadi fungsi-fungsinya sehingga dapat mengaplikasikannya dalam bentuk sebuah rangkaian. Mengetahui dan memahami sistem dan cara kerja Line Follower dengan segala kendala.
Mengetahui bagaimana cara membuat rangkaian robot Line Follower.
I.4 Batasan Masalah
Dalam penyusunan makalah ini kami hanya membatasi materi mengenai :
1.Fungsi tiap komponen dalam rangkaian Line Follower yang terdiri dari rangkaian sensor, komparator, dan driver.2.Prinsip kerja dari Line Follower.
II. DASAR TEORI
II.1. Komponen-komponen Line Follower
Komponen-komponen pada rangkaian Line Follower terdiri dari :
A. Resistor
Penggunaan resistor dalam rangkaian berfungsi sebagai penghambatarus listrik, memperkecil arus dan membagi arus listrik dalam suatu rangkaian. Satuan yang dipakai untuk menentukan besar kecilnya nilai resistor adalah Ohm atau disingkat dengan Ω (Omega).
Gambar 2.1. Simbol resistor
21
Gambar 2.2. Garis warna resistor
B. Transistor
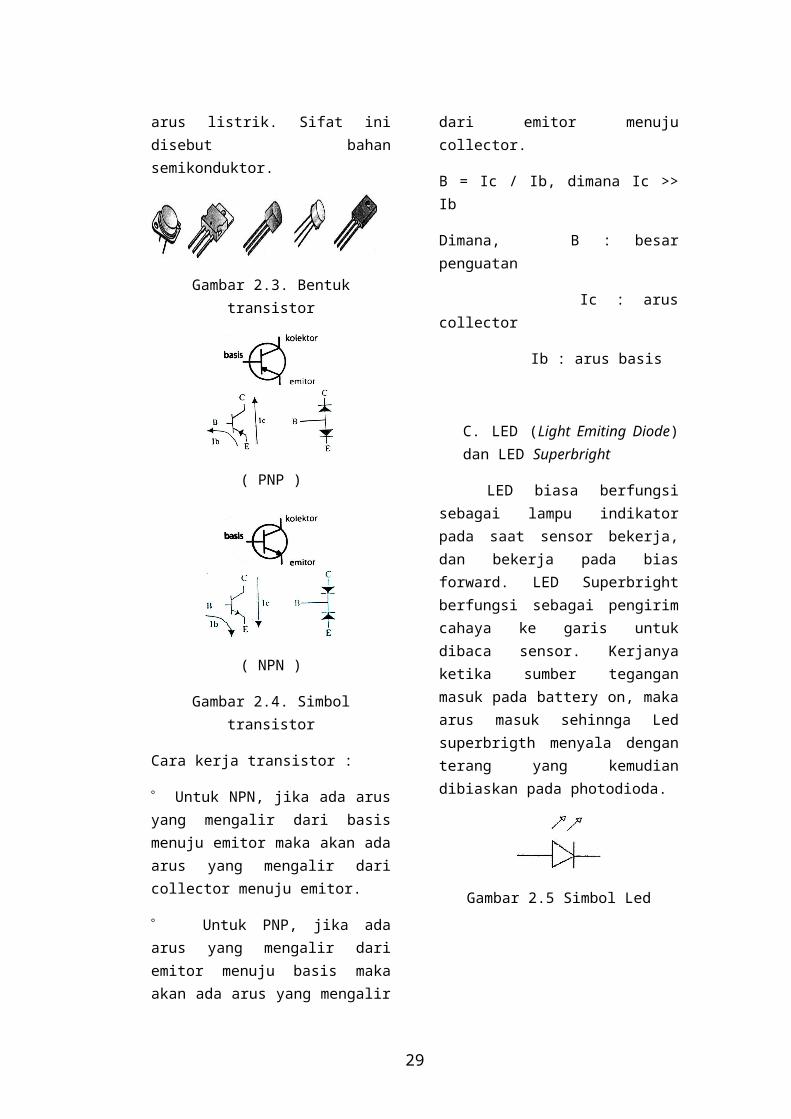
Transistor adalah suatu bahan yang dapat merubah bahan yang tidak dapat menghantarkan arus listrik menjadi bahan penghantar atau setengah menghantar arus listrik. Sifat ini disebut bahan semikonduktor.
Gambar 2.3. Bentuk transistor
( PNP )
( NPN )
Gambar 2.4. Simbol transistor
Cara kerja transistor :
Untuk NPN, jika ada arus yang mengalir dari basis menuju emitor maka akan ada arus yang mengalir dari collector menuju emitor.
Untuk PNP, jika ada arus yang mengalir dari emitor menuju basis maka akan ada arus yang mengalir dari emitor menuju collector.
B = Ic / Ib, dimana Ic >> Ib
Dimana, B : besar penguatan
Ic : arus collector
Ib : arus basis
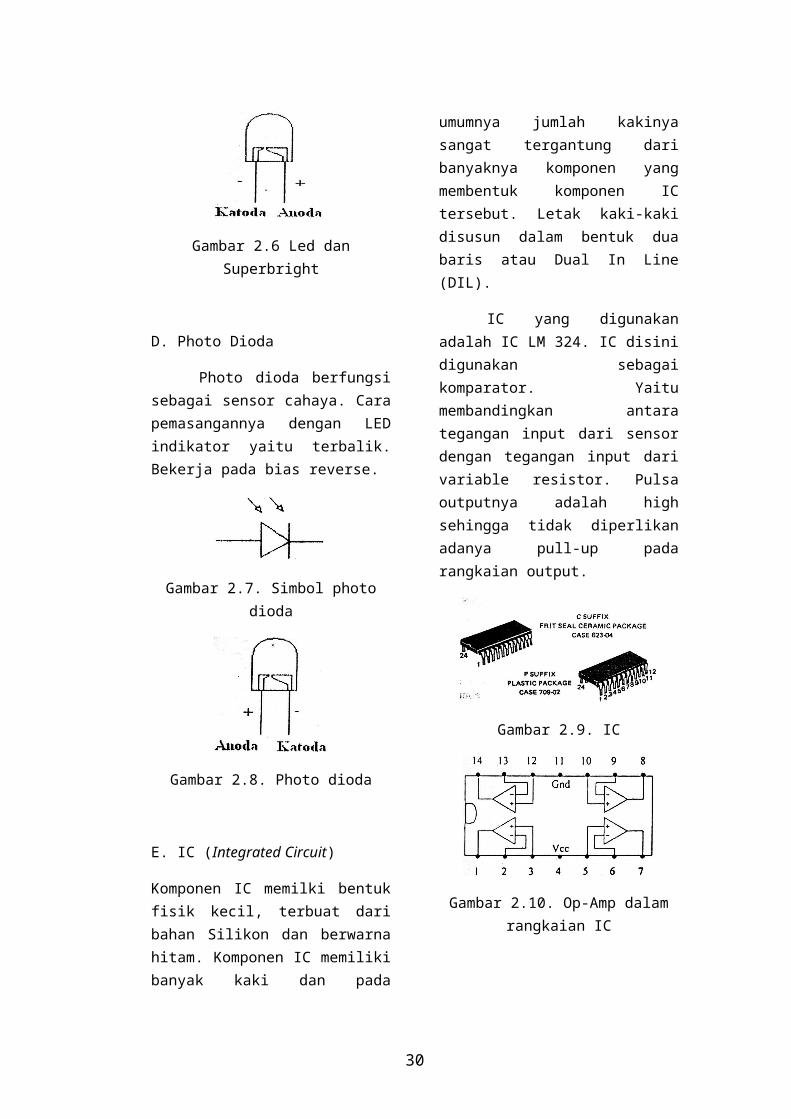
C. LED (Light Emiting Diode) dan LED Superbright
LED biasa berfungsi sebagai lampu indikator pada saat sensor bekerja, dan bekerja pada bias forward. LED Superbright berfungsi sebagai pengirim cahaya ke garis untuk dibaca sensor. Kerjanya ketika sumber tegangan masuk pada battery on, maka arus masuk sehinnga Led superbrigth menyala dengan terang yang kemudian dibiaskan pada photodioda.
Gambar 2.5 Simbol Led
Gambar 2.6 Led dan Superbright
D. Photo Dioda
22
Photo dioda berfungsi sebagai sensor cahaya. Cara pemasangannya dengan LED indikator yaitu terbalik. Bekerja pada bias reverse.
Gambar 2.7. Simbol photo dioda
Gambar 2.8. Photo dioda
E. IC (Integrated Circuit)
Komponen IC memilki bentuk fisik kecil, terbuat dari bahan Silikon dan berwarna hitam. Komponen IC memiliki banyak kaki dan pada umumnya jumlah kakinya sangat tergantung dari banyaknya komponen yang membentuk komponen IC tersebut. Letak kaki-kaki disusun dalam bentuk dua baris atau Dual In Line (DIL).
IC yang digunakan adalah IC LM 324. IC disini digunakan sebagai komparator. Yaitu membandingkan antara tegangan input dari sensor dengan tegangan input dari variable resistor. Pulsa outputnya adalah high sehingga tidak diperlikan adanya pull-up pada rangkaian output.
Gambar 2.9. IC
Gambar 2.10. Op-Amp dalam rangkaian IC
F. Motor Penggerak (Dinamo)
Motor adalah komponen yang mengubah energi listrik menjadi energi mekanik, dalam kasus perancangan robot, umumnya digunakan motor DC, karena jenis motor tersebut mudah untuk dikendalikan.
Kecepatan yang dihasilkan oleh motor DC berbanding lurus dengan potensial yang diberikan. Untuk membalik arah putarnya cukup membalik polaritas yang diberikan.
Gambar 2.11. Motor
23
III. PEMBAHASAN
III.1. Rangkaian Line Follower
Dari beberapa komponen diatas, maka dihasilkan sebuah rangkaian Line Follower. Rangkaian Line Follower terdiri dari tiga bagian
utama, yaitu rangkaian sensor, rangkaian komparator (pembanding) dan rangkaian driver.
Gambar 3.1. Rangkaian Line Follower
24
III.2. Cara Kerja Line Follower
Cara kerja dari rangkaian-rangkaian tersebut adalah sebagai berikut :
A. Prinsip Kerja Sensor
Sensor yang digunakan terdiri dari photo dioda. Sensor ini nilai resistansinya akan berkurang bila terkena cahaya dan bekerja pada kondisi riverse bias. Untuk sensor cahayanya digunakan LED Superbright, komponen ini mempunyai cahaya yang sangat terang, sehingga cukup untuk mensuplai cahaya ke photo dioda.
Gambar 3.2. Rangkaian sensor
Cara kerjanya :
Gambar 3.3. Sensor tidak terkena cahaya
Jika photo dioda tidak terkena cahaya, maka nilai resistansinya akan besar atau dapat kita asumsikan tak hingga. Sehingga arus yang mengalir pada komparator sangat kecil atau dapat diasumsikan dengan logika 0.
Gambar 3.4. Sensor terkena cahaya
Jika photo dioda terkena cahaya, maka photo dioda akan bersifat sebagai sumber tegangan dan nilai resistansinya akan menjadi kecil, sehingga akan ada arus yang mengalir ke komparator dan berlogika 1.
B. Prinsip Kerja Komparator
Komparator pada rangaian ini menggunakan IC LM 324 yang didalamnya berisi rangkaian Op Amp digunakan untuk membandingkan input dari sensor. Dimana input akan dibandingkan dari Op Amp IC LM 324 yang output berpulsa high. Sehingga tidak perlu adanya pull up pada outputnya. IC ini dapat bekerja pad range 3 volt sampai 30 volt dan dapat bekerja dengan normal mulai tegangan 6 volt.
Dalam rangkaian ini juga terdapat 4 LED, yang berfungsi sebagai indikator. Untuk mengatur tagangan pada pembanding, disambungkan Variable Resistor (VR) diantara kedua OP Amp IC LM 324.
Gambar 3.5. Rangkaian komparator
Jika tidak ada arus yang mengalir dari rangkaian sensor ke rangkaian ini maka tegangan masukan untuk rangkaian ini adalah 0 Volt, akibatnya pada IC 1 tegangan di terminal (+) > (-), maka LED-A on, sedangkan pada IC 2 sebaliknya LED-B off.
Jika ada arus yang mengalir dari rangkaian sensor ke rangkaian ini maka tegangan masukan untuk rangkaian ini mendekati Vcc, akibatnya pada IC 2 tegangan di terminal (+) < (-), maka LED-B on, sedangkan pada IC 1 sebaliknya maka LED-A off.
Kondisi antara titik A dan b akan selalu keterbalikan.
C. Prinsip Kerja Driver Motor
Driver adalah rangkaian yang tersusun dari transistor yang digunakan untuk menggerakkan motor DC. Dimana komponen utamanya adalah transistor yang dipasang sesuai karakteristiknya.
Gambar 3.6. Rangkaian driver
Pada saat input A berlogika 1, maka ada arus yang mengalir pada rangkaian, akibatnya transistor 1 dan 4 on karena basis terbias, sehingga motor berputar. Sehingga saat input A berlogika 1 maka input B akan berlogika 0, jadi transistor 2 dan 3 akan off.
Pada saat input B berlogika 1, maka ada arus yang mengalir pada rangkaian, akibatnya transistor 2 dan 3 on karena basis terbias, sehingga motor berputar tapi dengan arah yang berlawanan.
IV.4. Uji Coba Line Follower
Hasil uji coba Line Follower ini menunjukkan mampu berjalan di beberapa medan, dintaranya medan lurus, belok, naik, dan menurun.
Hasil : 3 detik jarak =100 cm
Gambar 3.7. Medan lurus
Hasil : 4 detik jarak =100 cm
Gambar 3.8. Medan naik

Hasil : 2 detik jarak =100 cm
Gambar 3.9. Medan turun
Hasil : 5 detik jarak =100 cm
Gambar 3.10. Medan belok
Hasil : 15 detik jarak =275 cm
Gambar 3.11. Medan kombinasi
III.5.Komponen Yang Dibutuhkan
Dalam pembuatan rangkaian Line Follower ini dibutuhkan beberapa komponen-komponen elektronika, yaitu sebagai berikut :
Komponen Jumlah
(buah)
1. IC LM 324
2. Resistor 33 KΩ
3. Resistor 10 KΩ
4. Resistor 560 Ω
5. Transistor (TR) 9013
6. Variable Resistor (VR)
7. LED Indikator
8. LED Superbright
9. Photodioda
10. Motor 3 Volt
11. PCB Metrik
12. Baterai
13. Saklar Togle
1
2
4
10
8
2
4
2
2
2
1
1
1
IV. KESIMPULAN
Line Follower r adalah suatu robot rangkaian elektronik yang tersusun dari beberapa komponen-komponen elektronik. Dalam Line Follower terdapat 3 bagian rangkaian utama, yaitu ; rangkaian sensor (menggunakan photo dioda sebagai sensor cahaya), komparator (menggunakan IC LM 324 sebagai pembanding suatu tegangan) dan driver (digunakan sebagai penggerak roda).
Hasil uji coba Line Follower ini menunjukkan mampu berjalan di beberapa medan, dintaranya medan lurus, belok, naik, dan menurun.
V. DAFTAR PUSTAKA
1. Dedy Rusmadi, Aneka Rangkaian Elektronika Alarm dan Bel Listrik, Pioner Jaya, Bandung, 2005.
2. Politeknik Elektronika Negeri Surabaya, Pelatihan Line Tracer, ITS, 2006.
3. Fahmizal, fahmizaleeits.wordpress.com, 2010
Workshop n kompetisi line traccer n robot sumo electrical enginering Workshop n competition games electrical enginering activity robotic (WE GREAT)
Rangkaian Sensor
Trimpot 20 kilo ohm
IC LM 324
Socket 14 kaki
Photo Dioda 2
Led merah 4
Resistor 270 ohm 2
Resistor 470 ohm 2
Resistor 10 kilo Ohm 2
Motor Driver
Dioda N4001