Embed Size (px)
Citation preview
COGNITIVE PSYCHOLOGY 7, 371-458 (1975)
Representing Logical and Semantic Structure
of Knowledge Acquired from Discourse
CARL H. FREDERIKSEN
University of California, Berkeley
A network model of logical and semantic structures from which speakers or writers generate linguistic messages at the discourse level is presented. While linguistic structures were considered in developing the model, the semantic and logical networks are defined without reference to linguistic structures and thus may be used to represent knowledge structures acquired from both linguistic and nonlinguistic sources. A second problem addressed is that of determining what logical and semantic information is acquired when a text is understood. To assess acquired knowledge, a procedure is presented for coding a subject’s verbal recon- struction of knowledge acquired from a presented text (or other input) against the logical and semantic structure from which the text (or other input) was derived. The procedures are illustrated using data obtained from children who were asked to “retell” simple narrative stories.
The process of linguistic communication can be characterized in terms of five stages. First, a speaker or writer selects from his store of concep- tual knowledge (or semantic memory) some organized set of information for transmission. Second, the speaker or writer encodes the conceptual message into a string of well-formed natural language productions. The third stage involves the physical transmission and reception of these nat- ural language productions, either through speech or written text. The fourth stage occurs when a listener or reader transforms the natural lan- guage productions actually received into some semantic form or concep- tual message. Finally, the listener or reader incorporates the interpreted semantic information into his semantic memory or general store of knowledge. Understanding, then, may be regarded as a process whereby a listener or reader attempts to infer the knowledge structure of a speaker or writer by using the available linguistic message, contextual information, and his own knowledge store as “data structures” from which the inference is to be made.
A complete account of the communication process will have to start with a description of the knowledge structure from which a text is
This research was supported by grant number OEG-0-9-140396-4497 (010) from the Com- mittee on Basic Research in Education, National Academy of Sciences, and by grant number GS-4023 from the National Science Foundation.
Requests for reprints should be sent to Carl H. Frederiksen, Department of Psychology, University of California, Berkeley, CA 94720.
371 Copyright 0 1975 by Academic Press, Inc. All rights of reproduction in any form reserved.
372 CARL H. FREDERIKSEN
derived and a description of the semantic information which constitutes a listener’s or reader’s understanding of a text. While processes which generate text from semantic structures (processes of linguistic produc- tion) may be quite different from those which generate semantic struc- tures from linguistic productions (comprehension processes), a neces- sary prerequisite to an understanding of either process is an ability to specify semantic structures-both as underlying structures from which texts are generated and as representations of knowledge acquired from texts.
If a detailed model of logical and semantic structures were available, it could be used as a basis for assessing subjects’ memory structures for text, either by providing a basis for systematically probing subjects’ memories for text, or as a reference structure against which subjects’ text recalls (or other verbal responses) could be scored. It then would be possible to assess precisely what semantic information a subject has acquired from a text and to specify what relationship obtains between semantic information acquired from a text and the semantic information from which the text was derived. Thus, by comparing a subject’s mem- ory structure for a text (as inferred from his responses to probes or text recall) to the logical and semantic structure from which the text was generated, it ought to be possible to begin to reconstruct the processing operations which a subject applied to an input text to generate his mem- ory structure for the text. In this manner, one could begin to determine precisely what logical and semantic knowledge is acquired when a text is “understood,” specify the processes by which such knowledge is ac- quired, and by systematically constructing texts from specified semantic and logical structures study effects of structural characteristics of texts on these processes.
The present paper is concerned with presenting an explicit model of knowledge structure. The model may be regarded as representing mem- ory structures from which speakers (or writers) can generate linguistic messages at the discourse level. The model which will be presented will be defined entirely without reference to linguistic structures, although numerous sentence examples will be given to illustrate semantic struc- tures. Thus, the model is capable of representing the informational struc- ture of nonlinguistic “messages” such as visual arrays and experienced events as well as that coded in linguistic messages. The model repre- sents both semantic structures consisting of propositions which are represented as networks of concepts connected by labeled binary rela- tions and which identify events or states, and logical structures con- sisting of networks of propositions which are connected by various labeled logical, causal, and algebraic relations. A second purpose of this paper is to present a procedure for coding logical and semantic informa-
REPRESENTING KNOWLEDGE STRUCTURE 373
tion acquired from text which is based on the logical and semantic struc- tures developed in the first part of the paper.
Our purposes, then, in developing a model of memory structures un- derlying text are both theoretical and methodological. The development of a solution to the methodological problem, the assessment of semantic information which is acquired when a text is understood, is directly related to and dependent on the development of a theoretical model of logical and semantic structures in human long-term memory. The meth- odological problem thus motivates on practical grounds the theoretical development. It should not be surprising that there is such a close rela- tionship between a theoretical and a measurement problem when the measurement problem involves coding responses consisting of free verbal protocols (cf. Newell & Simon, 1971; Waterman & Newell, 1971).
Semantic structures have recently come to be regarded as central to linguistic descriptions of natural language productions. Until relatively recently, linguists influenced by Chomsky, had tended to restrict their attention to the sentence as the largest unit of analysis and had empha- sized syntax at the expense of semantics in representing sentence struc- ture. Criticisms of these two aspects of Chomsky’s theory, the emphasis on syntax and the adoption of the sentence as the unit of analysis, have led to a new emphasis on semantics and on discourse as the unit of anal- ysis,
Generative semanticists such as McCawley (1968) and Lakoff (1971a, b) have come to believe that there is no formal difference between so- called syntactic and semantic rules; rather there are only semantic repre- sentations and grammatical transformations relating them to surface structures (sentences). It has seemed to them that it would be more par- simonious to adopt a system of grammar which starts with logical predi- cates and contains rules for mapping these propositions directly onto surface sentences.
Many linguists have criticized taking the sentence as the primary unit of analysis and defining the grammaticality of a sentence without refer- ence to the context in which a sentence occurs. They have pointed out that certain derivations of a sentence may be judged to be ill-formed in one context and grammatical in another. Thus, speakers apparently have an ability to make judgments of grammaticality which reflect the context in which a sentence occurs. Therefore, any linguistic theory which at- tempts to define grammaticality in isolation from context will be an inad- equate model of speakers’ competence. This realization has led many linguists to give increased attention to effects of context. In this work, attention has been given to: (1) the conceptual context of an utterance: the presuppositions (beliefs or intentions) held by a speaker at the time of an utterance (Kartunnen, 1968, 1971, 1974; Keenan, 1971); (2) the
374 CARL H. FREDERIKSEN
extra-linguistic context: the time, place, and location of speaker and hearer (Fillmore, 1966, 1971; Leech, 1969); and (3) the linguistic context: the context given by previous discourse within which a sentence is em- bedded (Halliday, 1970; Chafe, 1974). The importance of these contextu- alization factors as well as the claim that speakers’ competence (ability to judge grammaticality) pertains to texts and not only to sentences, has led some linguists to propose considering the text as the unit of analysis (Sanders, 1969; Grimes, 1975) and to attempt to develop text grammars (Van Dijk, 1973; G&tad, 1973). A text grammar would not only have to be capable of generating individual sentences within a discourse, it would also have to be capable of generating these sentences relative to the context of previous discourse.
The conception of linguistic productions which seems to be emerging appears to be much more plausible as a basis for a psychological model of linguistic production than was Chomsky’s system of grammar. The conception seems to have the following characteristics. First, the basis for linguistic productions is semantic (propositional) structures. Second, grammatical rules are being formulated at the discourse level, relative to discourse context, extra-linguistic context, and conceptual context. Third, grammatical rules are being formulated as transformations which map directly from semantic structures to surface sentences. To be com- plete, then, a linguistic description of text will have to consist of two components: a semantic structure and a set of grammatical rules which generate texts from semantic structures.
There have been a number of attempts in linguistics (Chafe, 1970; Leech, 1969; Grimes, 1974), computational linguistics (Simmons, 1972, 1973), artificial intelligence (Schank, 1972) and psychology (Kintsch, 1972; Rumelhart, Lindsay & Norman, 1972; Crothers, 1973) to specify semantic structures. Of these, only the work of Crothers and Grimes ap- pears to have been explicity concerned with specifying semantic struc- tures applicable to linguistic messages at the discourse level. Many of these models have adopted the general notion of a semantic network, a concatenation of labeled binary relations which connect semantic “con- cepts.” Systems differ in the types of concepts which are connected into networks, and in the types of elementary semantic relations which con- nect concepts into higher-order semantic units. Most systems allow for “embedding” by allowing that a concept itself may be replaced by a relational structure (or “proposition”). In certain of these models, binary relations corresponding to Fillmore’s (1968, 1971) case categories are defined (e.g., Simmons, 1972, 1973; Chafe, 1970; Grimes, 1974; Rumelhart et al., 1972). Leech (1969) has explicitly adopted a dimen- sional structure into his system in order to represent relations of relative time and location. Simmons and Bruce (1971) have demonstrated the
REPRESENTING KNOWLEDGE STRUCTURE 375
equivalence of semantic network and propositional notations by pre- senting an algorithm for converting their semantic network represent- ations into simple propositions of a first-order predicate calculus.
Systems also differ in their treatment of “concepts” corresponding to lexical items (i.e., content words). Thus, Schank (1972, 1973) analyzes lexical concepts into structures composed of more “primitive” concepts and semantic relations, while Simmons (1973) tends to leave lexical con- cepts intact. Wilks (1973) has commented on this difference, suggesting that it results from a difference in objectives. If one’s purpose is to design a system capable of paraphrasing or translating, one may adopt a level of semantic analysis more like that of Simmons; if one’s purpose is to design a question-answering system with extensive reasoning capabili- ties, then one would adopt a system more like Schank’s. From a psy- chological standpoint, it may be reasonable to suppose that lexical items in most cases represent reasonably intact “concepts” which a subject does not ordinarily “unpack,” but that subjects are capable of ex- panding the meanings of lexical concepts when required to do so by the demands of a particular task.
Semantic networks frequently have been represented as data struc- tures in computer programs (e.g., Simmons, 1973; Frijda, 1972). Compu- tationally, semantic networks so represented can be viewed as functions or procedures to be executed. For example, semantic relations can “be defined as generating functions that would produce an appropriate syn- tactic structure corresponding to each semantic relation and its argu- ments” (Simmons, 1973; p. 78). The significance of this observation is that it has extended the notion of a static semantic memory to include active procedural information. Thus, there need not be any formal dis- tinction between data structures and procedures operating on them and it is possible to formulate memory models which include stored “proce- dural” information as well as “structural” information.
The semantic structure which will be developed in the present paper incorporates a number of ideas developed by previous investigators. The model initially grew out of an attempt to extend Simmons’ (1972) sen- tence-based semantic network to represent semantic and logical informa- tion underlying texts consisting of many sentences. The goal was to defme a network which was sufficiently general that it could be used as a basis for coding subjects’ text recalls. The present semantic structures begin with a taxonomy of objects and actions similar to that suggested by Chafe (1970). The part of the system which specifies causal circum- stances and participants in events is built around “case” relations which derive from Fillmore’s (1968, 1971) case categories and Chafe’s (1970) “relations of nouns to verbs.” The treatment of derived forms is based on Chafe’s (1970) discussion of derivation. The dimensional structure
376 CARL H. FREDERIKSEN
developed in the present system is based on Leech’s (1969) treatment of relative time and location; and the treatment of tense and aspect in the present system reflects Leech’s work on the subject. The semantic network system of notation was adopted from Simmons (1972) and Schank (1972) and the notion of (possibly empty) “slots” connected by labeled binary relations was adopted from Schank (1972, 1973). Two other sources unrelated to linguistics also influenced the development of the present model. One is the treatment of metric data structures in psy- chological measurement theory (cf. Coombs, 1964; Tversky, 1969). The other is Rescher’s (1964) treatment of counter-factual conditional propo- sitions and Simon and Rescher’s (1966) paper on “cause and counterfac- tual.” Further reference to these sources will be made as the relevant topics are introduced.
The logical and semantic structures which will be presented have a number of aspects which distinguish the present network model from other semantic network models. First, the system is well-defined in the sense that every relation specified in the system is explicitly defined without reference to linguistic productions. Definitions consist of restric- tions on the two slots connected by a relation and a definition of the relation connecting the two slots. Second, the model consists of two network structures: (1) a semantic structure or semantic network con- sisting of a collection of labeled binary relations which represent events or states and which connect slots containing (in most cases) concepts; and (2) a logical structure or logical network consisting of a collection of labeled binary logical, causal or algebraic relations connecting proposi- tions which are represented as substructures in the semantic network. Third, the model considers in detail the algebraic (and metric) properties of “noncase” (i.e., classificatory, attributive, degree, temporal, loca- tive, and quantifier) relations and defines certain relations having speci- fied algebraic properties (re: transitivity, symmetry, and reflexivity) which may be used to connect propositions containing these noncase relations. What results is a mechanism for representing comparative relations, and relations of relative time and location, tense and aspect. Fourth, the present system contains a stochastic (or probabilistic) ele- ment, representing the fact that speakers (or writers) are often uncertain, and hence imprecise, in expressing semantic information involving met- ric values. They are also often imprecise in specifying case and other nonmetric information. Such uncertainty is often expressed by quali- fying propositions with “hedges” such as may and might. Uncertainty of this latter sort is treated in the present system as uncertainty about the truth value of a proposition and is represented in the system by means of qualifying operators on the truth value of a proposition defined by a concept-relation-concept triple. Finally, the system distinguishes between “symbolic” and “nonsymbolic” objects, and “cognitive” and
REPRESENTING KNOWLEDGE STRUCTURE 317
“noncognitive” actions, both of which involve symbolic content; and develops relations which specify the content of symbolic objects or cog- nitive (symbolic) actions.
The remainder of the paper is organized into the following sections. The tirst section outlines the main elements of the model, starting with classification of objects and actions and then identifying all case rela- tions and noncase relations which are used to specify events or states in the semantic structure. Numerous examples are included to illustrate the relations. The second section develops detailed definitions and network notation for all relations in the semantic structure. The third section develops detailed definitions and network notation for relations in the logical structure. Included in this section are logical and causal rela- tions, and algebraic (order and proximity) relations which are used to represent relative or comparative information. The use of order and proximity relations to represent relative information is illustrated with structural representations of comparatives, relative time, and relative location. Tense and aspect operators are also defined in this section in terms of their underlying structural representations. Also, in this section operators are defined which, when applied to a relation, operate on the truth-value of a proposition given by a relation and its two connected slots. Modal operators are also defined in this section. In the final sec- tion, the use of the above structures to develop logical and semantic networks underlying discourse is discussed and illustrated with ex- amples. The use of network structures to code semantic and logical in- formation acquired from text is illustrated using data obtained from children who were asked to “retell” simple narrative stories. The entire system is summarized in a series of figures and tables.
MAIN ELEMENTS OF THE MODEL
A semantic network consists of two sorts of elements: concepts which are represented as “nodes” in the network, and labeled binary relations which connect pairs of concepts. A concatenation of concept-relation- concept triples defines a semantic network. The set of all concepts which occur as nodes in a semantic network defines the content of the network. If all of the concepts are removed from a network leaving only empty “slots” in their places, what remains is the structure of the network minus the content. Thus, it is convenient to speak of two sorts of information: conceptual information and structural information. If a text is regarded as derived from a semantic network, then the text may be thought of as conveying both conceptual information which is coded in the text by means of a set of content words, and structural informa- tion which is coded in the text by means of a grammar which generates an ordered string of content words plus syntactic markers.
A semantic network can be defined by specifying a set of concepts
378 CARL H. FREDERIKSEN
and defining a set of labeled binary relations which connect the con- cepts. If the network is to have general applicability as a model of mem- ory structures from which speakers (or writers) generate English texts, then the set of concepts will have to include every concept which is lex- icalized in English, and the set of labeled relations will have to reflect every relation which could hold between concept pairs. Definitions of relations also will have to include restrictions on the types of concepts which they can connect. For example, in A canary is a bird, the relation “is a subset of” can only connect pairs of physical objects. A natural starting point, then, in defining a semantic network is to develop a tax- onomy of concepts. Relations can then be defined which connect restricted classes of concepts, classes which correspond to classes of concepts identified in the taxonomy. In fact, the classification of actions and objects with which we begin will be found to determine many as- pects of the systems of relations which follow.
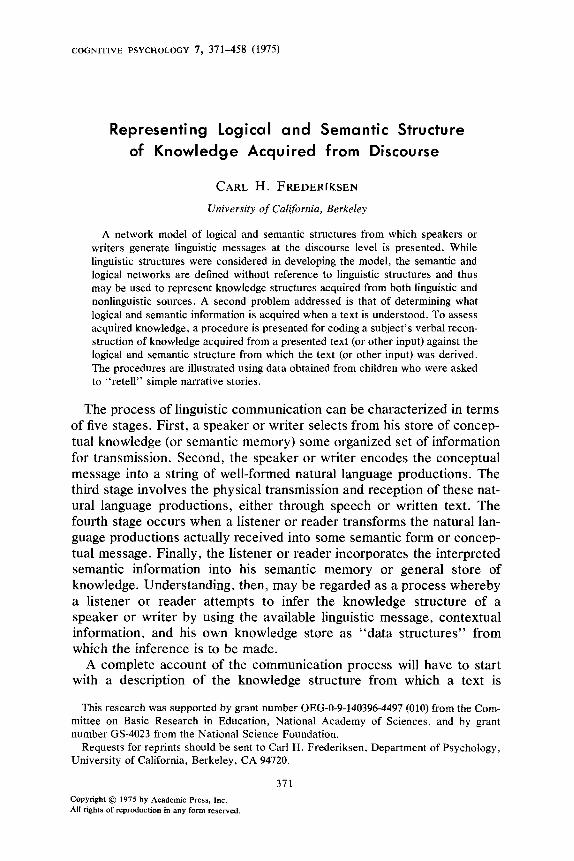
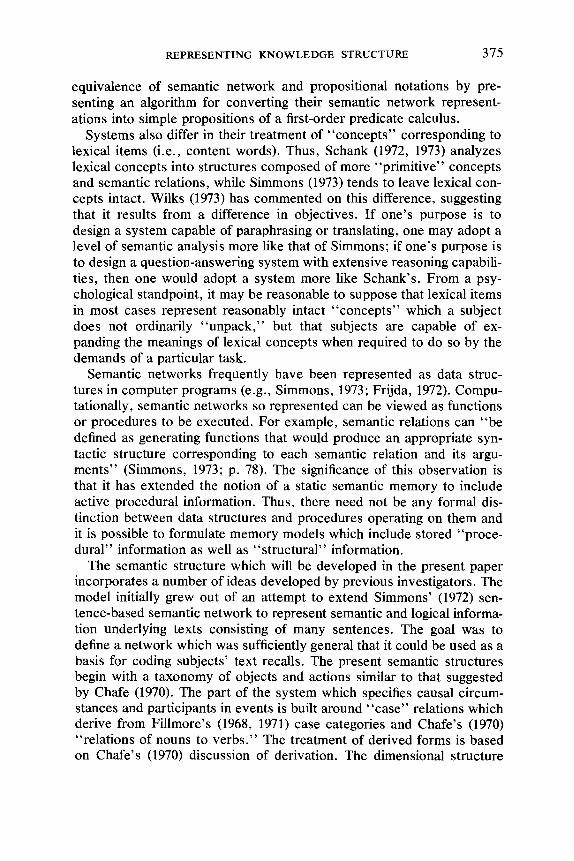
In the present system, we begin with two classes of concepts: objects and actions. Objects are defined as things which occupy space, the defining feature being “having a location in space” (marked as [+loca- tion] in Fig. 1). Actions are defined as things which occupy a position or interval of time and involve change. The defining features for actions, then, are [+time] and [+change] (Fig. 2). Features such as [+location], [+time], and [fchange] in most cases will be regarded as unanalyzed primitives in our system. In general, the notation [+feature] means that the feature is a defining feature for a class of concepts, [-feature] means that absence of the feature is a defining property of the class of con- cepts, and features which are not marked under a class of concepts are not defining features for that conceptual class.
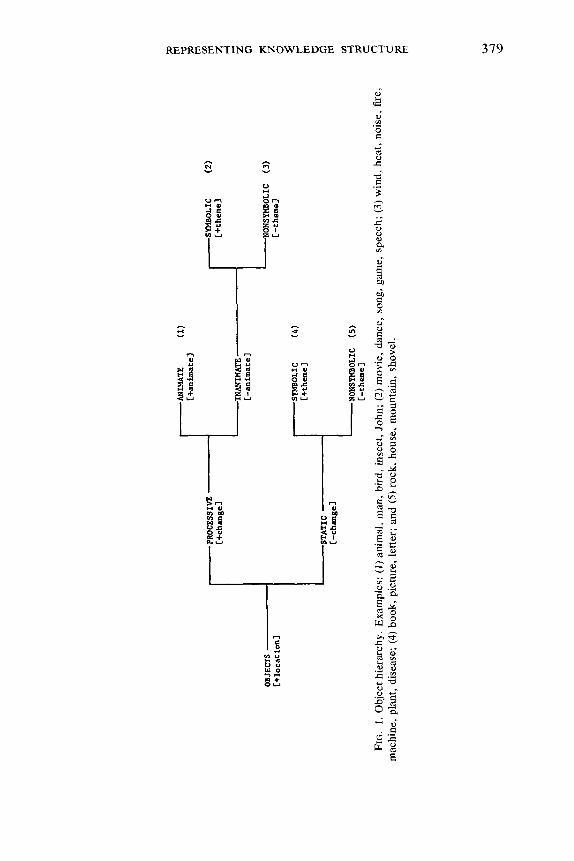
Figure 1 presents the classification of objects. The figure contains a hierarchical tree diagram depicting (as one moves from left to right in the tree) the classification of objects into subclasses. In the tree, branching occurs at three levels and thus generates five main classes of objects. The numbers which occur after each terminal branch refer to the num- bered examples in Fig. 1. The same conventions will be adopted in fig- ures subsequent to Fig. 1. The first branch in the tree represents a classifi- cation of objects into two major subclasses: static objects andprocessive objects, the distinguishing feature being [+change]. Processive objects are characterized by a process, i.e., are constantly undergoing change, while static objects are characterized by the absence of change. Ex- amples of processive objects are (nouns) animal, dance, and wind; examples of static objects are book and rock. Processive objects are fur- ther subdivided into animate objects which are living things capable of initiating change [ +animate], and inanimate processive objects which are not animate [-animate]. Plants are regarded as inanimate processive objects because, while they are characterized by a process (as are all liv-
NONS
TMBO
LEC
(5)
3 C
-them
e1
FIG
. 1.
Obj
ect
hier
arch
y.
Exam
ples
: (1
) ani
mal
, m
an,
bird
, in
sect
, Jo
hn;
(2) m
ovie
, da
nce,
son
g, g
ame,
spe
ech;
(3)
win
d, h
eat,
nois
e, f
ire,
mac
hine
, pl
ant,
dise
ase;
(4)
boo
k, p
ictu
re,
lette
r; an
d (5
) roc
k, h
ouse
, m
ount
ain,
sh
ovel
. 2 fi
380 CARL H. FREDERIKSEN
ing things), they are not capable of initiating change. Processive objects such as wind and&z are classified as inanimate because they are not liv- ing and cannot initiate change. Finally, inanimate processive objects and static objects can be either symbolic (examples (2) and (4)) or non- symbolic (examples (3) and (5)). A symbolic object consists of a set of symbols which represent its meaning or semantic content. For example, a book is a static physical object which consists of a set of symbols representing the book’s semantic content. The feature [+theme] is used to denote the relation “having semantic content.”
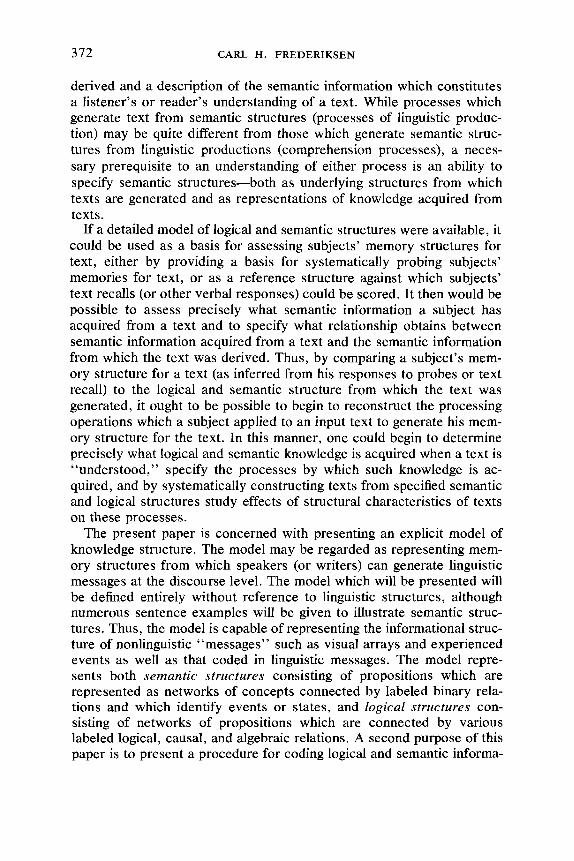
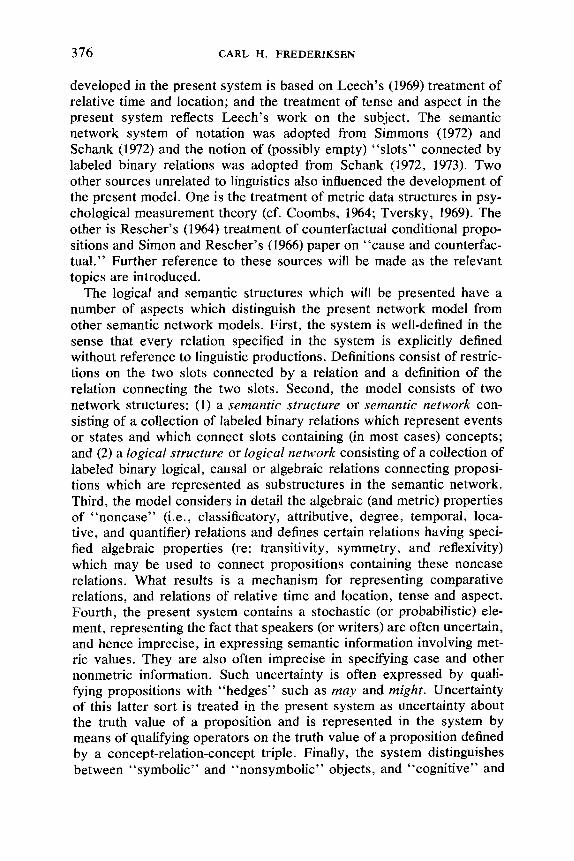
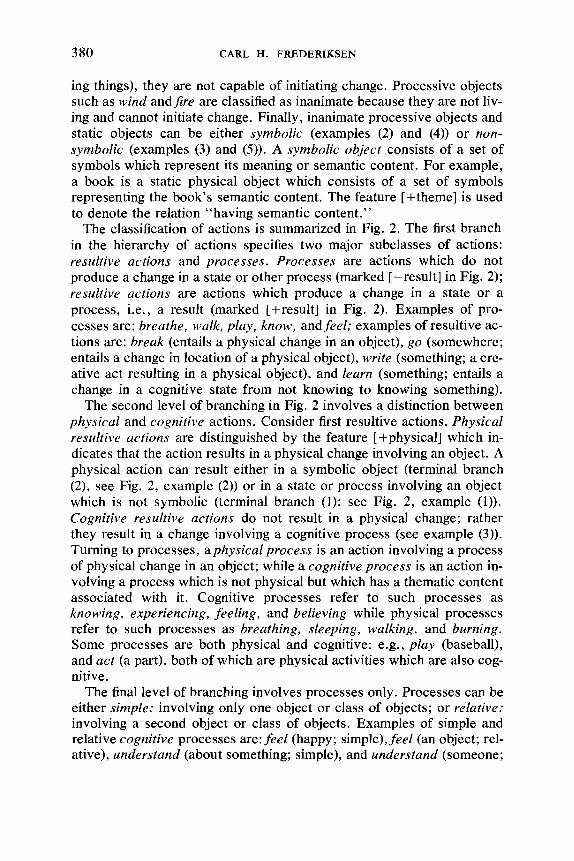
The classification of actions is summarized in Fig. 2. The first branch in the hierarchy of actions specifies two major subclasses of actions: resultive actions and processes. Processes are actions which do not produce a change in a state or other process (marked [-result] in Fig. 2); resultive actions are actions which produce a change in a state or a process, i.e., a result (marked [+result] in Fig. 2). Examples of pro- cesses are: breathe, walk, play, know, and feel; examples of resultive ac- tions are: break (entails a physical change in an object), go (somewhere; entails a change in location of a physical object), write (something; a cre- ative act resulting in a physical object), and learn (something; entails a change in a cognitive state from not knowing to knowing something).
The second level of branching in Fig. 2 involves a distinction between physical and cognitive actions. Consider first resultive actions. Physical resultive actions are distinguished by the feature [+physical] which in- dicates that the action results in a physical change involving an object. A physical action can result either in a symbolic object (terminal branch (2), see Fig. 2, example (2)) or in a state or process involving an object which is not symbolic (terminal branch (1); see Fig. 2, example (1)). Cognitive resultive actions do not result in a physical change; rather they result in a change involving a cognitive process (see example (3)). Turning to processes, a physical process is an action involving a process of physical change in an object; while a cognitive process is an action in- volving a process which is not physical but which has a thematic content associated with it. Cognitive processes refer to such processes as knowing, experiencing, feeling, and believing while physical processes refer to such processes as breathing, sleeping, walking, and burning. Some processes are both physical and cognitive: e.g., play (baseball), and act (a part), both of which are physical activities which are also cog- nitive.
The final level of branching involves processes only. Processes can be either simple: involving only one object or class of objects; or relative: involving a second object or class of objects. Examples of simple and relative cognitive processes are: feel (happy; simple), feel (an object; rel- ative), understand (about something; simple), and understand (someone;
NO
NSY
MBO
LIC
r RES
ULT
(1
) C
-them
e]
L SY
MBO
LIC
R
ESU
LT
(2)
L-+t
hem
el
L C
OG
NIT
IVE
(3)
[+th
emel
C
-phy
sica
l1
C-p
hysi
cal1
(6)
(7)
FIG
. 2.
Act
ion
hier
arch
y.
Exam
ples
: (1
) br
eak.
gi
ve,
go
(som
ewhe
re),
kill,
bu
ild,
mak
e (s
omet
hing
), w
alk
(som
ewhe
re)
(2)
writ
e (s
ome-
th
ing)
, dr
aw
(som
ethi
ng),
com
pose
(s
omet
hing
), as
k (a
que
stio
n),
say
(som
ethi
ng),
sing
(so
met
hing
) (3
) th
ink
(of
som
ethi
ng),
imag
ine
(som
e-
thin
g),
lear
n (s
omet
hing
), re
mem
ber
(som
ethi
ng)
(4)
brea
the,
sl
eep,
w
alk,
da
nce,
bu
rn,
blow
, gr
ow
(5)
ride
(a h
orse
), dr
ive
(a c
ar),
wal
k (th
e do
g) b
urn
(the
woo
d),
blow
(th
e sa
nd)
(6)
play
(b
aseb
all),
ac
t (a
par
t) (7
) pl
ay
(with
so
meo
ne)
(8)
know
(s
omet
hing
), ex
perie
nce
(a f
eelin
g),
z fe
el
(hap
py),
belie
ve
(som
ethi
ng)
(9)
see
(som
ethi
ng),
unde
rsta
nd
(som
eone
), fe
el
(an
obje
ct),
like
(som
eone
or
so
met
hing
). -
382 CARL H. FREDERIKSEN
relative). For examples of simple and relative physical processes, see examples (4)-(7) in Fig. 2.
In addition to a set of objects and actions, a semantic network also consists of a set of relations which connect objects and actions to other concepts, thus defining “states” and “events.” A state consists of an object or object class together with a set of stative relations which iden- tify the object or class of objects, thus distinguishing it from other classes of objects. An event consists of an action or class of actions together with a set of relations which are of two types: case relations and identifying relations. Case relations specify a causal system in- volving an action; identifying relations distinguish an action or class of actions from other classes of actions. The remainder of this section will be concerned with classifying the relations which are employed in the present system to specify states and events. The classification of rela- tions will be presented in the same manner as it was presented for con- cepts: by means of hierarchial tree diagrams. The terminal branches of the trees represent the relations defined in the system. Immediately fol- lowing each terminal branch is a label which is used to denote the rela- tion in the semantic network and a number which corresponds to a num- bered example accompanying the figure. Explicit definitions of each relation and network notation will be presented in later sections. The in- tent here is merely to indicate what relations are used to define the semantic network. We will begin with case relations, considering first case relations involving resultive actions and then case relations in- volving processes. We will then consider in turn: stative relations, the degree relation, relations identifying actions, and relations of location and time.
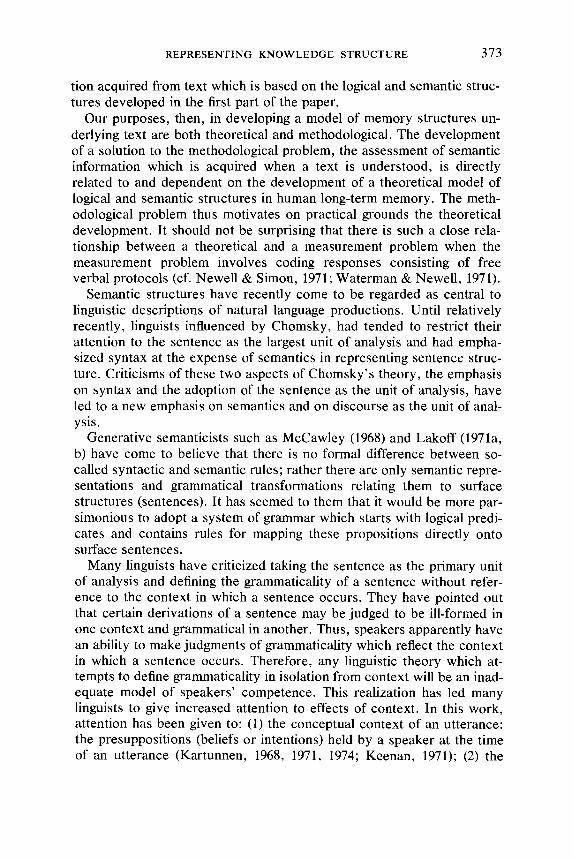
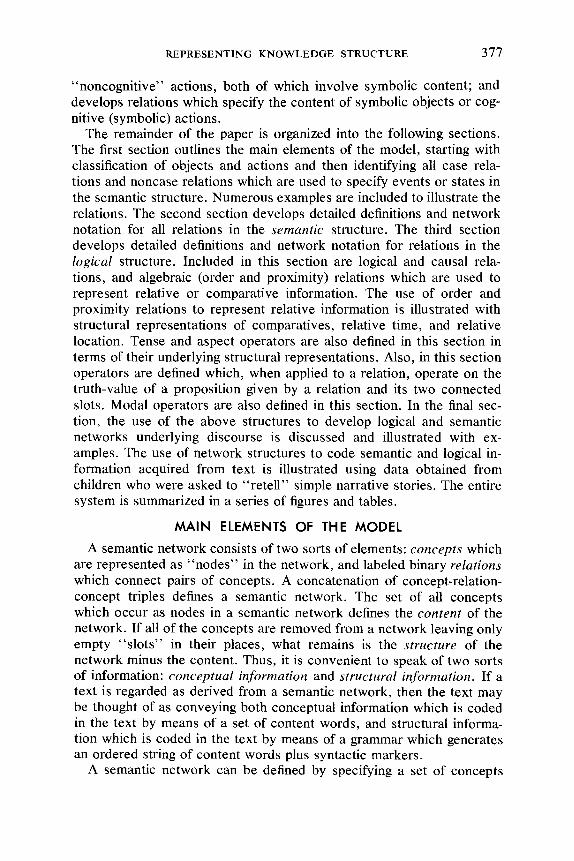
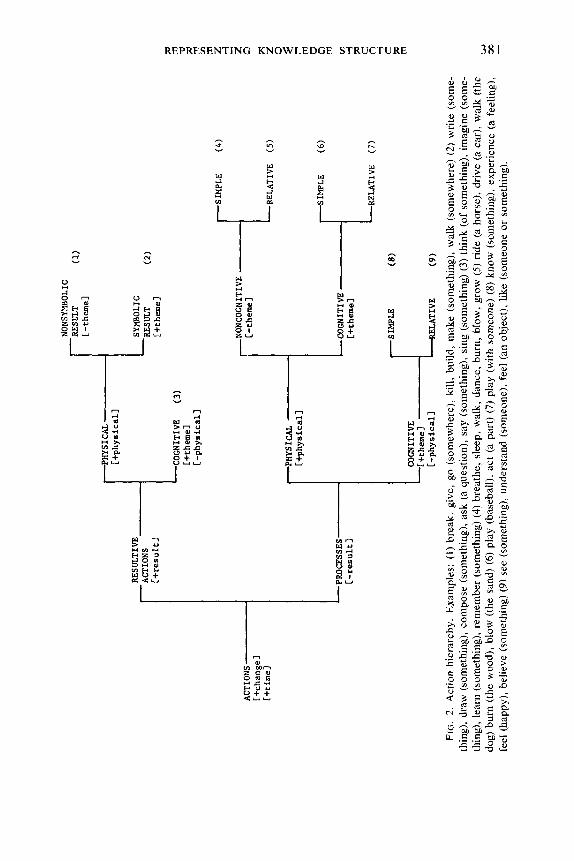
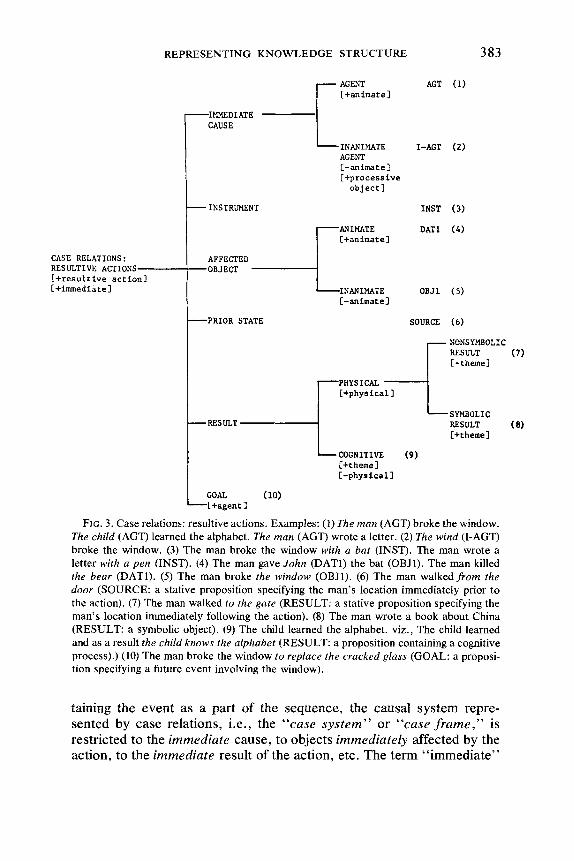
Case relations. A resultive action is an action which produces a change in a state or process. Hence, specifying an event involving a resultive action involves specifying a causal system associated with the event,, a system which includes the resulting state or process. Figure 3 iden- tifies the immediate structural components of the causal system as- sociated with a resultive action. The system consists of an immediate cause of the action which can be either animate (agent: AGT) or inani- mate (inanimate. agent: I-AGT); an instrument (INST) which may be used to carry out the action; animate or inanimate objects which are immediately affected by the action (affected objects: DATl (“dative”) for animate objects and OBJl for inanimate objects); the state or process existing immediately prior to the action (SOURCE); the state or process existing immediately after the action (RESULT); and, if the action has an immediate cause which is animate, there may be a future state or process towards which the action is directed (GOAL). Since an event in- volving a resultive action may occur as a part of a causal sequence con-
REPRESENTING KNOWLEDGE STRUCTURE 383
AGENT ACT (1) [+animatel
-IMMEDIATE CAUSE
INANIMATE I-AGT (2) AGENT [-animate] [+processive
object]
CASE RELATIONS: RESULTIVE ACTIONS C+resultive action1 C+immediHtel
-INSTRUMENT INST (3)
ANIMATE DATl (4) C+animatel
AFFECTED OBJECT
4 INANIMATE OBJl (5) C-animate1
-PRIOR STATE SOURCE (6)
4
NONSYMBOLIC RESULT (7) C-theme]
r PHYSICAL [+physicall
-SYMBOLIC FESULT (8) C+themel
GOAL (10) c+agent1
LCCGNITIVE (9) E+themel C-physic.41
FIG. 3. Case relations: resultive actions. Examples: (1) The mnn (AGT) broke the window. The child (AGT) learned the alphabet. The WZQII (AGT) wrote a letter. (2) The wind (I-AGT) broke the window. (3) The man broke the window with a bat (INST). The man wrote a letter wifh a pen (INST). (4) The man gave John (DATl) the bat (OBJl). The man killed the bear (DATl). (5) The man broke the window (OBJl). (6) The man walked from the door (SOURCE: a stative proposition specifying the man’s location immediately prior to the action). (7) The man walked to the gate (RESULT: a stative proposition specifying the man’s location immediately following the action). (8) The man wrote a book about China (RESULT: a symbolic object). (9) The child learned the alphabet. viz., The child learned and as a result the child knows the alphabet (RESULT: a proposition containing a cognitive process).) (10) The man broke the window to rep&e the cracked glass (GOAL: a proposi- tion specifying a future event involving the window).
taining the event as a part of the sequence, the causal system repre- sented by case relations, i.e., the “case system” or “case frame,” is restricted to the immediate cause, to objects immediately affected by the action, to the immediate result of the action, etc. The term “immediate”
384 CARL H. FREDERIKSEN
signifies that there is no other cause, affected object, result, etc., which intervenes between (respectively) the immediate cause and the action, between the action and the immediate affected object, between the ac- tion and the immediate result, etc. Sentence examples of each case rela- tion may be found in Fig. 3. Observe that the distinctions which were made involving resultive actions, i.e., between physical and cognitive actions, and between symbolic and nonsymbolic results, occur as dif- ferent classes of results of an action (examples (7)-(9)). Thus, a non- symbolic physical result is a state or physical process (e.g., the man walked to the gate, a stative result; the man made the motor run, a processive result); a symbolic physical result is a symbolic object (ex- ample (8): write a book); and a cognitive result is a cognitive process (example (9)). The RESULT relation will later be defined as connecting a resultive action and a “slot” containing a proposition representing a state or event. The SOURCE and GOAL relations correspondly connect propositions to a resultive action. Thus slots associated with these case relations contain embedded semantic structures.
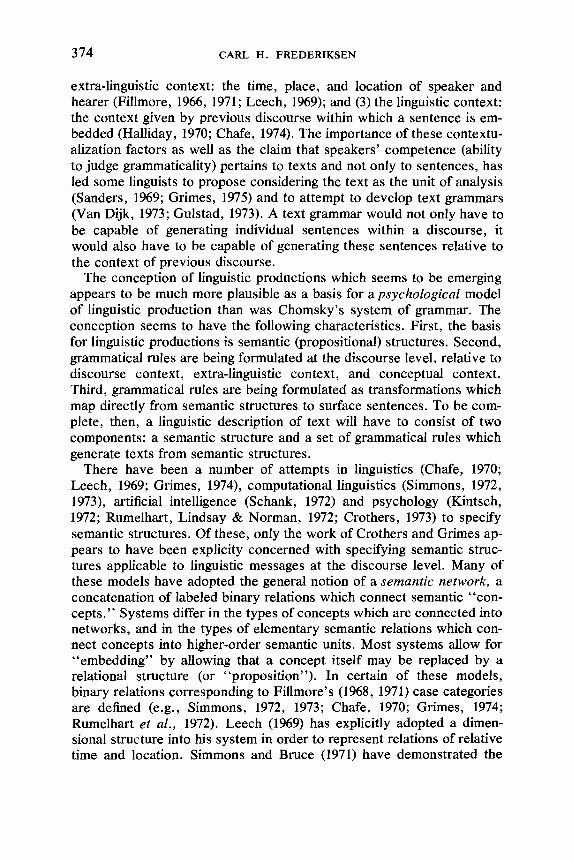
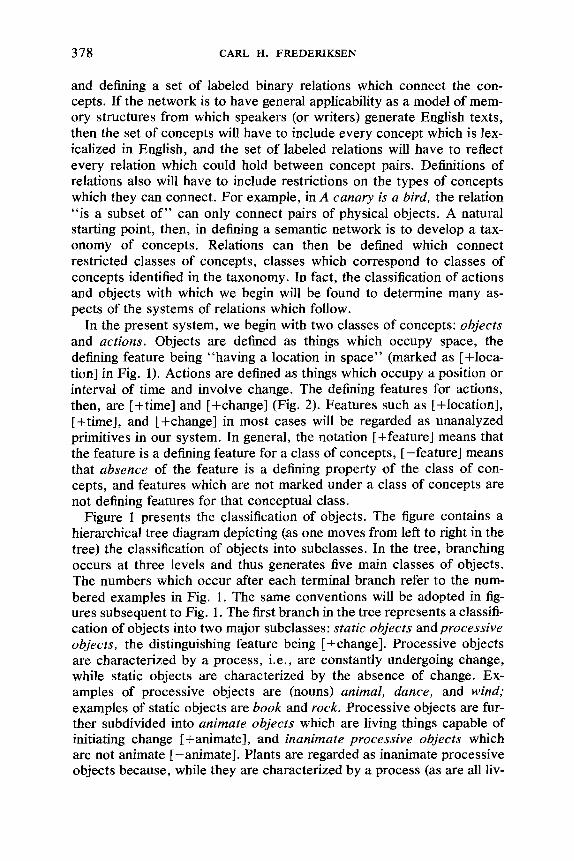
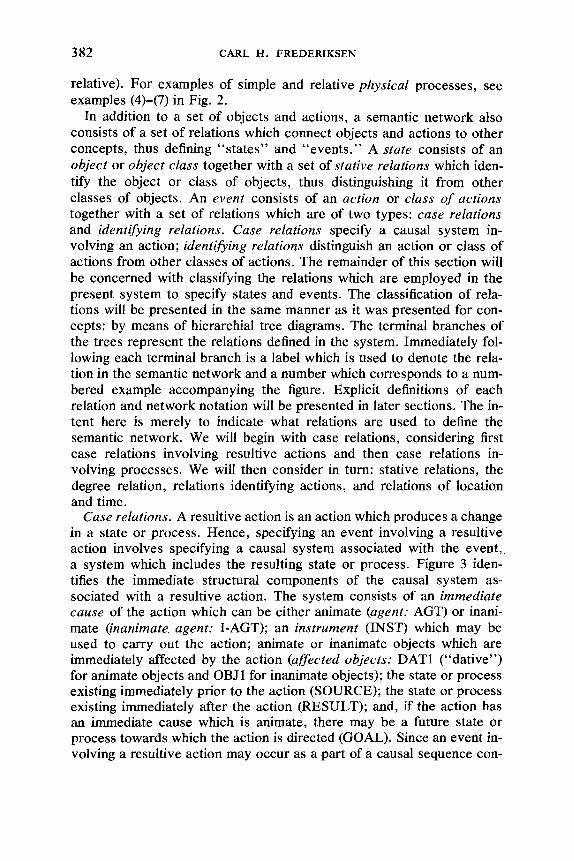
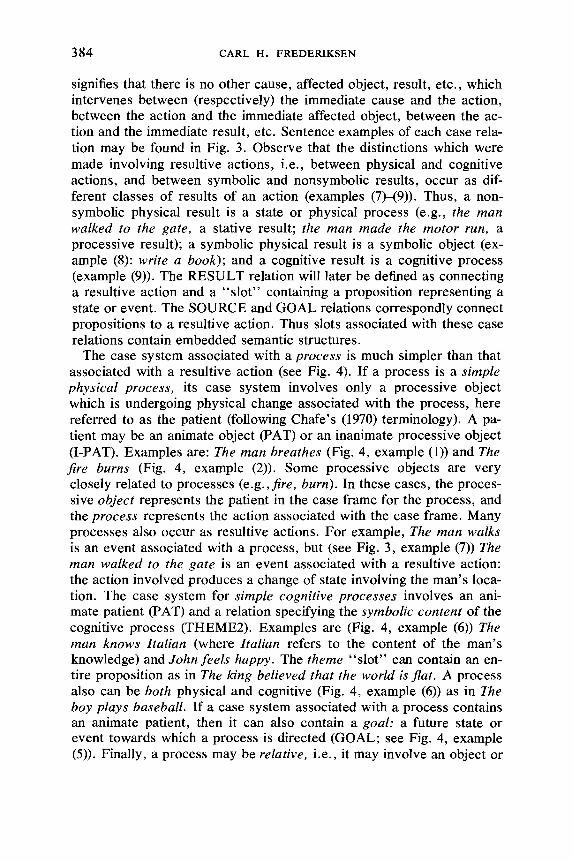
The case system associated with a process is much simpler than that associated with a resultive action (see Fig. 4). If a process is a simple physical process, its case system involves only a processive object which is undergoing physical change associated with the process, here referred to as the patient (following Chafe’s (1970) terminology). A pa- tient may be an animate object (PAT) or an inanimate processive object (I-PAT). Examples are: The man breathes (Fig. 4, example (1)) and The fire burns (Fig. 4, example (2)). Some processive objects are very closely related to processes (e.g.,fire, burn). In these cases, the proces- sive object represents the patient in the case frame for the process, and the process represents the action associated with the case frame. Many processes also occur as resultive actions. For example, The man walks is an event associated with a process, but (see Fig. 3, example (7)) The man walked to the gate is an event associated with a resultive action: the action involved produces a change of state involving the man’s loca- tion. The case system for simple cognitive processes involves an ani- mate patient (PAT) and a relation specifying the symbolic content of the cognitive process (THEME2). Examples are (Fig. 4, example (6)) The man knows Italian (where Italian refers to the content of the man’s knowledge) and John feels happy. The theme “slot” can contain an en- tire proposition as in The king believed that the world is flat. A process also can be both physical and cognitive (Fig. 4, example (6)) as in The boy plays baseball. If a case system associated with a process contains an animate patient, then it can also contain a goal: a future state or event towards which a process is directed (GOAL; see Fig. 4, example (5)). Finally, a process may be relative, i.e., it may involve an object or
REPRESENTING KNOWLEDGE STRUCTURE 385
-PATIENT --I ANIMATE I+animatel
INANIMATE C-animate1 C+processivel
BELATED -OBJECT
C+relativel
--r
ANIMATE C+animatel
CASE RELATIONS:- Processes c+process1 -GOAL C+immediatel c+animate
patient 1
INANIMATE C-animate1
IXEME C+cognltive
process1
PAT (1)
I-PAT (2)
DATZ (3)
0852 (4)
GOAL2 (5)
THEME2 (6)
FIG. 4. Case relations: processes. Examples: (1) The man (PAT) breathes. The man (PAT) knows Italian. The boy (PAT) plays baseball. (2) The$re (I-PAT) burns. The wind (I-PAT) blows. The plant (I-PAT) grows. (3) The man (PAT) rides the horse (DAT2). John (PAT) likes Alice (DATZ). (4) The man (PAT) drives the car (OBJ2). The fire (I-PAT) bums the wood (OBJ2). (5) The man (PAT) jogs to lose weight (GOALZ: a stative proposition spec- ifying the man’s weight relative to his weight at the time at which he jogs). (6) The man (PAT) knows Ifaliun (THEME2). John (PAT) feels happy (THEME2). The boy plays base- ball (THEME2). The King (PAT) believed that the world is flat (THEME2: a stative proposition).
object set other than the patient. Such an object is called the related ob- ject of a process and may be animate (DAT2) or inanimate (OBJ2). A related object, unlike an affected object in the case of a resultive action, is not necessarily affected by the process. Examples of related objects are given in Fig. 4, examples (3) and (4).
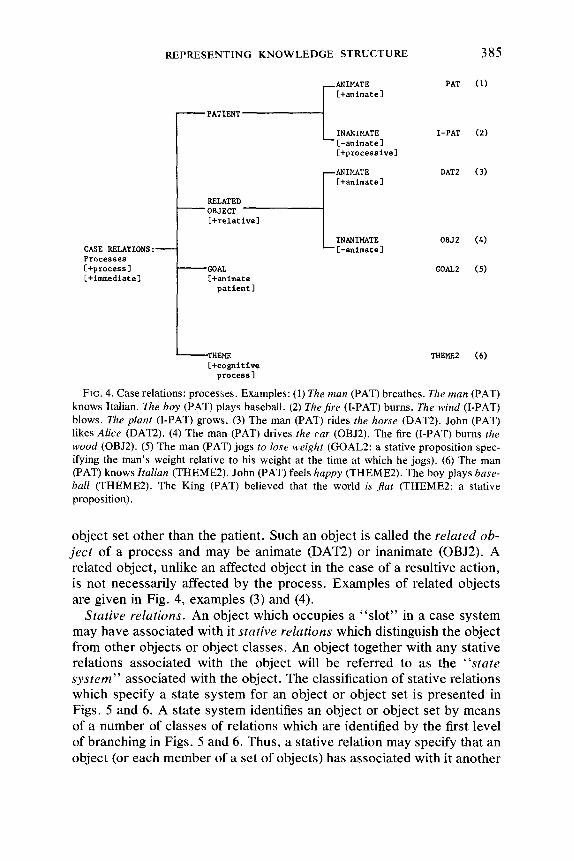
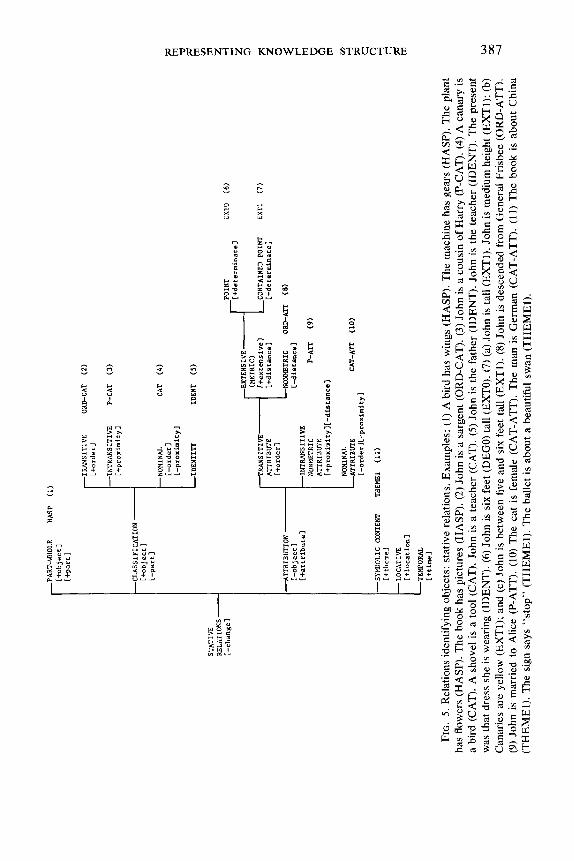
Stative relations. An object which occupies a “slot” in a case system may have associated with it stative relations which distinguish the object from other objects or object classes. An object together with any stative relations associated with the object will be referred to as the “state system” associated with the object. The classification of stative relations which specify a state system for an object or object set is presented in Figs. 5 and 6. A state system identifies an object or object set by means of a number of classes of relations which are identified by the first level of branching in Figs. 5 and 6. Thus, a stative relation may specify that an object (or each member of a set of objects) has associated with it another
386 CARL H. FREDERIKSEN
object (or object set) which is a part of the object (the HASP relation; example (1)). It may specify that an object set contains another object set as a subset, or that the object set is a subset of a larger class of ob- jects (class$catory relations). It may specify that an object or object set has associated with it an attribute (attributive relations); that an object or object set has a spatial location (locative relations); or location in time (temporal relations). If an object is symbolic, a stative relation may specify the symbolic content of the object (the THEME1 relation, Fig. 5, example (11)). Finally, stative relations include relations which de- termine and quantify a countable object set (determiner and quantifier relations: Fig. 6). Altogether, stative relations define a state system which specifies how an object set is determined and quantified, its loca- tion in space and time, its attributes, its content (if it is symbolic), its parts (if it has parts), and the classes of objects which it contains or which contain the object set. We will now consider classification, at- tribution, determination and quantification in more detail.
In the discussion of processes (Fig. 2), a distinction was made between processes which are simple and processes which are relative. A similar distinction can be made between object classes which are simple (nominal), i.e., not defined relative to other object classes, and object classes which are relative, i.e., defined relative to some other object class or classes. Examples of relative classes are kinship classes (e.g., father, cousin, uncle). Relative classes are of two types: transitive (or- dered) classes and intransitive (i.e., incompletely or partially ordered) classes. Transitive classes are connected by a relation which is transi- tive. Thus, Sargent is one of an ordered series of object classes: classes which are ordered according to rank. Intransitive classes, like ordered classes, are defined relative to other classes, but the set of object classes does not form a transitive ordered sequence. For example, John is a cousin of Harry indicates that John and Harry both belong to object classes labeled cousins and that the set of cousins of which John is a member and the set of cousins of which Harry is a member are related (i.e., they contain common elements, John and Harry). However, John and Harry can be cousins and Harry and Bob can be cousins without John and Bob being cousins. Thus, the classes are related but the rela- tion is not transitive. A classificatory relation which connects an object set to a second object set which is a transitive class is called an ordered categorical relation (ORD-CAT, see Fig. 5, branch (2) and the corre- sponding example); a classificatory relation which connects an object set to a second object set which is intransitive (i.e., not necessarily transi- tive) is called an intransitive categorical relation (P-CAT, Fig. 5, branch (3)). A classificatory relation which connects an object set to a second object set which is nominal is called a nominal categorical relation
STAT
IVE
REL
ATIO
NS
- :-c
hang
e1
OR
D-C
AT
(2)
INTR
ANSI
TIVE
P-
CAT
(3
)
CAT
(4
)
IDEN
T (5
)
5
POIN
T ix1
0 (6
) [+
dere
rmin
atel
EX
TEN
SIVE
(H
ETR
IC)
-I
RAN
SITI
’JE
--L
c+ex
tens
ive1
CO
NTA
INED
PO
INI
EXIl
(7)
ATTR
IBU
TE
[+di
stan
cel
C-de
term
inar
el
C+o
rder
l IT
RIB
OTI
ON
NO
NMET
RIC
OR
D-A
TT
(8)
C-o
bjec
t] C-
dinc
ance
l C+
attri
bute
l IN
TRAN
SITI
VE
NONH
ETRI
C P-
ATT
(9)
ATTR
IRU
W
C+pr
oxi.it
ylC-d
istan
ce1
NOHI
NAL
ATTR
IBU
TE
I-ord
erlc-
prox
imity
1 C
AT-A
TT
(10)
SYM
COLI
C CO
NTEN
T TH
EME,
(1
1)
l+fh
emel
LOC
ATIV
E L+
loca
tionl
TEM
POR
AL
c+rim
e1
FIG
. 5.
Rel
atio
ns i
dent
ifyin
g ob
ject
s: s
tativ
e re
latio
ns.
Exam
ples
: (1
) A b
ird h
as w
ings
(H
ASP)
. Th
e m
achi
ne h
as g
ears
(H
ASP)
. Th
e pl
ant
has
flow
ers
(HAS
P).
The
book
has
pic
ture
s (H
ASP)
. (2
) Joh
n is
a S
arge
nt (O
RD
-CA
T).
(3) J
ohn
is a
cou
sin
of H
arry
(P
-CAT
). (4
) A c
anar
y is
a
bird
(C
AT).
A sh
ove1
is a
tool
(C
AT).
John
is a
teac
her
(CAT
). (5
) Joh
n is
the
fath
er (
IDEN
T).
John
is th
e te
ache
r (ID
ENT)
. Th
e pr
esen
t w
as th
at d
ress
she
is w
earin
g (ID
ENT)
. (6
) Joh
n is
six
fee
t (D
EG
O) t
all
(EXT
O).
(7) (
a) J
ohn
is ta
ll (E
XTl).
Jo
hn is
med
ium
hei
ght
(EXT
I):
(b)
Can
arie
s ar
e ye
llow
(E
XTI);
an
d (c
) Jo
hn is
bet
wee
n fiv
e an
d si
x fe
et t
all
(EXT
I).
(8) J
ohn
is d
esce
nded
fro
m G
ener
al F
risbe
e (O
RD
-ATT
). (9
) Joh
n is
mar
ried
to A
lice
(P-A
TT).
(10)
The
cat
is
fem
ale
(CAT
-ATT
). Th
e m
an is
Ger
man
(C
AT-A
TT).
(11)
The
boo
k is
abo
ut C
hina
(T
HEM
El).
The
sign
say
s “s
top”
(T
HEM
EI).
The
balle
t is
abo
ut a
bea
utifu
l sw
an (
THEM
EI).
388 CARL H. FREDERIKSEN
(CAT, Fig. 5, example (4)). Finally, two objects sets which are identical, i.e., which contain the same elements, are connected by an identity rela- tion (IDENT, Fig. 5, example (5)).
Most attributive relations are extensive, that is, they specify a contin- uous attribute scale on which an object (or members of an object set) have metric values. An attributive relation which specifies that an object (or each member of an object set) has associated with it a value on a metric scale is called an extensive relation (EXT; Fig. 5, examples (6) and (7)). Examples (6) and (7) illustrate further distinctions which can be made among types of extensive relations. These distinctions will be dis- cussed in subsequent sections. The defining properties of an extensive relation are: (1) the attribute is transitive (marked [+order] in Fig. 5), (2) the attribute is metric, that is, a distance can be defined between pairs of attribute values [+distance], and (3) the attribute scale is continuous [+extensive]. As will be seen in subsequent sections, the critical test for a transitive metric attribute is that comparative statements can be made with respect to the attribute. Thus we have John is tall and John is taller than Bob.
GENERIC
F (NO DETERMINER) C-locationl
DEFINITE DEF C+locationl C+definitel
STATIVE RELATIONS C-change1 -4
I- INDEFINITE (TOKEN) TOX C+locationl C-definite]
NULL
r
0
+01NT NUN0
t uNIv!mSAL v
EXISTENTIAL a
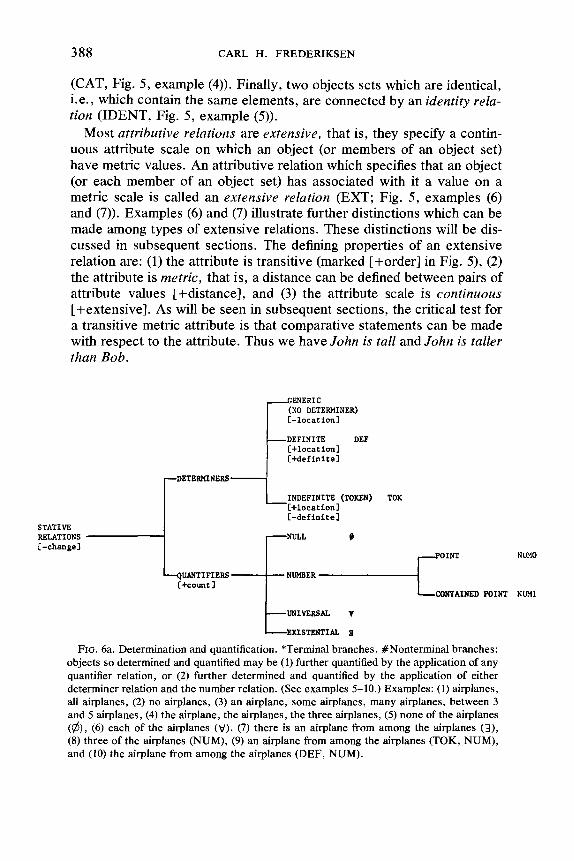
FIG. 6a. Determination and quantification. *Terminal branches. #Nonterminal branches: objects so determined and quantified may be (1) further quantified by the application of any quantifier relation, or (2) further determined and quantified by the application of either determiner relation and the number relation. (See examples 5-10.) Examples: (1) airplanes, all airplanes, (2) no airplanes, (3) an airplane, some airplanes, many airplanes, between 3 and 5 airplanes, (4) the airplane, the airplanes, the three airplanes, (5) none of the airplanes (@), (6) each of the airplanes (t/), (7) there is an airplane from among the airplanes (3), (8) three of the airplanes (NUM), (9) an airplane from among the airplanes (TOK, NUM), and (10) the airplane from among the airplanes (DEF, NUM).
REPRESENTING KNOWLEDGE STRUCTURE 389
Determiner Quantifier
IVERSAL (l)*
ENERIC
-r C-location1
NULL (a*
GENERIC
-I!
INDEFINITE NUMBER (3)# OBJECT SET C+locationl
C-definite
DEFINITE [+locationl C+definitel
NUMBER (4)#
* Terminal branches
c Non-terminal branches: objects so determined and quantified
may be (1) further quantified by the application of any quantifier relation, or (2) further determined and quantified by the application of either determiner relation and the number relation. (see examples S-10)
Examples:
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)
(9)
(10)
airpl.SIlC3, all airplanes
no airplanes
an airplane, some airplanes, many airplanes, between 3 and 5 airplanes
the airplane, the airplanes, the three airplanes
none of the airplanes (d)
each of the airplanes (v)
there is an airplane from among the airplanes (a)
three of the airplanes (NUM)
an airplane from among the airplanes (TOK,NUM)
the airplane from among the airplanes (DEF.NLM)
FIGURE 6b.
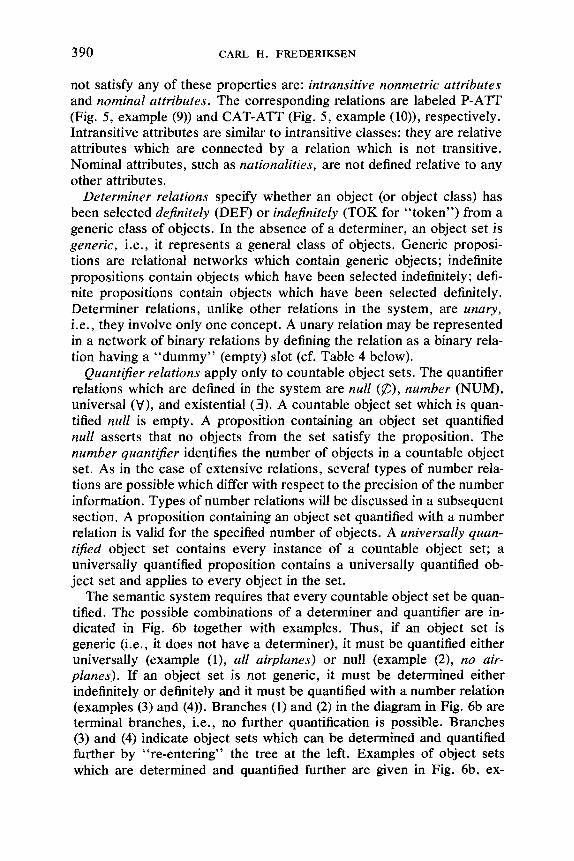
Although most attributes are extensive, there do appear to be a few examples of attributive relations which do not satisfy all three defining properties of extensive relations: [ +order], [ +distance], and [fexten- sive]. The first such class of attributes has the defining features [+order] and [-distance]. An example of such an attribute is descended from, as in John is descended from Bob. The attributive relation which assigns such an attribute to an object is labeled ORD-ATT in Fig. 5. The at- tribute orders objects (people) but does not necessarily allow a distance to be defined between people. Two other classes of attributes which do
390 CARL H. FREDERIKSEN
not satisfy any of these properties are: intransitive nonmetric attributes and nominal attributes. The corresponding relations are labeled P-ATT (Fig. 5, example (9)) and CAT-ATT (Fig. 5, example (lo)), respectively. Intransitive attributes are similar to intransitive classes: they are relative attributes which are connected by a relation which is not transitive. Nominal attributes, such as nationalities, are not defined relative to any other attributes.
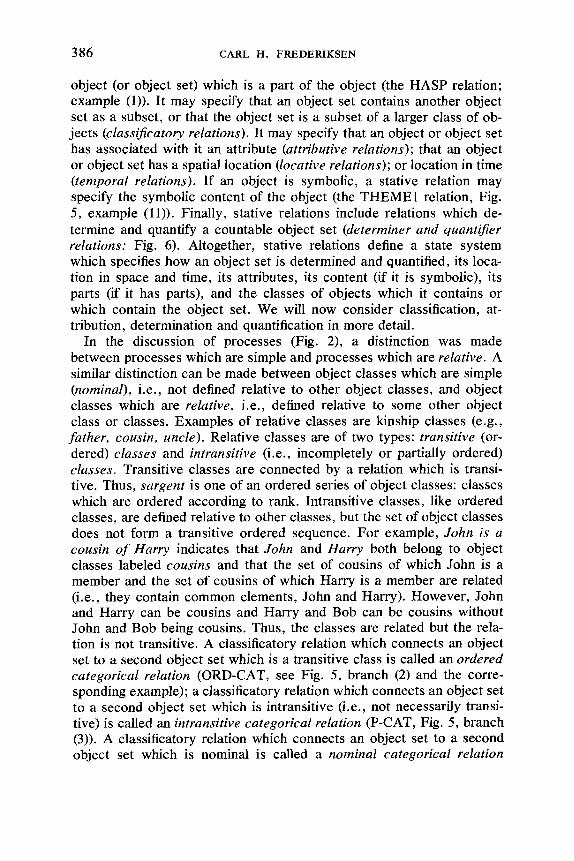
Determiner relations specify whether an object (or object class) has been selected definitely (DEF) or indefinitely (TOK for “token”) from a generic class of objects. In the absence of a determiner, an object set is generic, i.e., it represents a general class of objects. Generic proposi- tions are relational networks which contain generic objects; indefinite propositions contain objects which have been selected indefinitely; defi- nite propositions contain objects which have been selected definitely. Determiner relations, unlike other relations in the system, are unary, i.e., they involve only one concept. A unary relation may be represented in a network of binary relations by defining the relation as a binary rela- tion having a “dummy” (empty) slot (cf. Table 4 below).
Quantifier relations apply only to countable object sets. The quantifier relations which are defined in the system are null ((a), number (NUM), universal (V), and existential (3). A countable object set which is quan- tified null is empty. A proposition containing an object set quantified null asserts that no objects from the set satisfy the proposition. The number quantifier identifies the number of objects in a countable object set. As in the case of extensive relations, several types of number rela- tions are possible which differ with respect to the precision of the number information. Types of number relations will be discussed in a subsequent section. A proposition containing an object set quantified with a number relation is valid for the specified number of objects. A universally quan- tified object set contains every instance of a countable object set; a universally quantified proposition contains a universally quantified ob- ject set and applies to every object in the set.
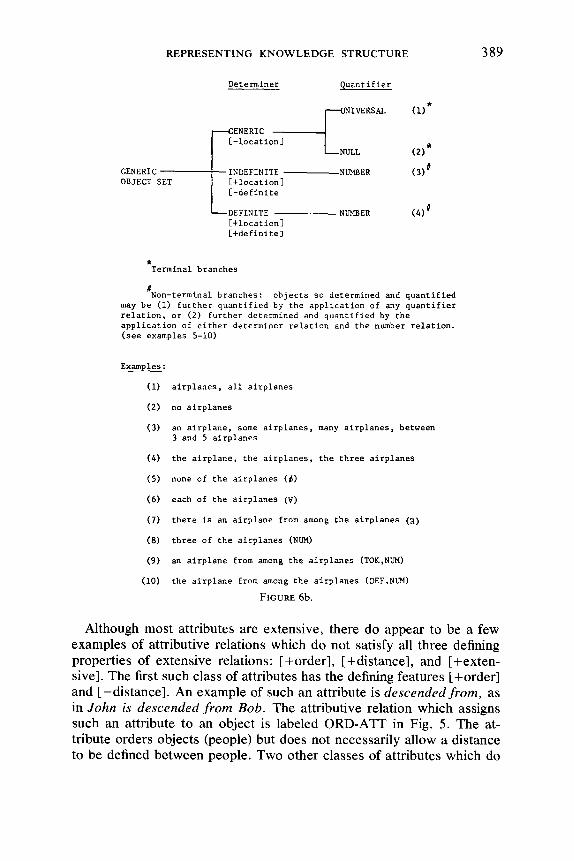
The semantic system requires that every countable object set be quan- tified. The possible combinations of a determiner and quantifier are in- dicated in Fig. 6b together with examples. Thus, if an object set is generic (i.e., it does not have a determiner), it must be quantified either universally (example (l), all airplanes) or null (example (2), no air- planes). If an object set is not generic, it must be determined either indefinitely or definitely and it must be quantified with a number relation (examples (3) and (4)). Branches (1) and (2) in the diagram in Fig. 6b are terminal branches, i.e., no further quantification is possible. Branches (3) and (4) indicate object sets which can be determined and quantified further by “re-entering” the tree at the left. Examples of object sets which are determined and quantified further are given in Fig. 6b, ex-
REPRESENTING KNOWLEDGE STRUCTURE 391
amples (5)-(10). Thus, in example (5), ozone of the airplanes, the null quantifier has been applied to an object set which is already definite (DEF) and plural (NUM). The existential quantifier, unlike the other quantifiers, can only be applied to an object set which is already definite or indefinite and plural. Thus, a proposition containing an existential quantifier asserts that there exists one (or more than one) object from a definite or indefinite object set containing more than one element for which the proposition is valid. The number of objects in the set is specified by a number relation (see Fig. 6b, example (7)).
Degree. The “quantification” of object sets which are not countable is accomplished through the degree relation (DEG; see Fig. 7, examples (8) and (9)) and involves the specification of a value for the object on an ex- tensive attributive scale such as amount. The degree relation assigns to an object having an extensive attribute a value (“degree”) on the exten- sive attribute scale. The degree relation is not restricted to attributive relations; it can assign a degree to any extensive property of an object or action. Further distinctions involving the degree relation will be dis- cussed in a subsequent section.
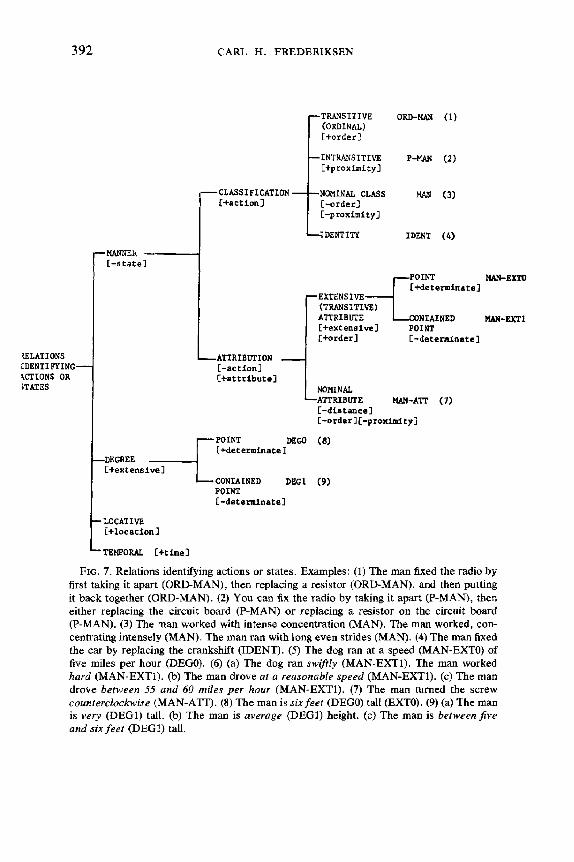
Relations identifying actions. Just as an object or object set may have associated with it stative relations which identify the object or object set, an action or class of actions which occupies a “slot” in a case system may also have associated with it relations which identify the ac- tion or class of actions, distinguishing the action from other classes of actions. An action together with any identifying relations associated with the action will be referred to as the “manner system” associated with the action. A manner system identifies an action or class of actions by means of manner relations. Figure 7 depicts the classification of manner relations. The classification is similar to the classification of stative rela- tions (Fig. 5). Thus, manner relations, like stative relations, are of two kinds: c1ussiJicator-y relations and attributive relations. A classificatory manner relation connects two classes of actions and specifies that one class of actions is a subset of the other class of actions. For example, running is a subset of the class of actions moving, and sprinting is a subset of running. An attributive manner relation specifies that an action or class of actions has associated with it an attribute. Actions can be fur- ther identified by means of locative and temporal relations. We will now consider classificatory and attributive manner relations, and then turn our attention to location and time.
In discussing object classes and classificatory relations which connect objects, a distinction was made between nominal object classes and rela- tive object classes. A similar distinction can be made with respect to actions: nominal classes of actions are not defined relative to other ac- tions, while relative classes of actions are defined relative to other ac- tions. Relative classes of actions, like relative classes of objects, can be
392 CARL H. FREDERIKSEN
TMSITIVE (ORDINAL) C+orderl
INTRANSITIVE C+proxlmityI
-CLASSIFICATION
t
NOMINAL CLASS r.+action1 C-order]
[-proximity]
K4NNEh -- C-state] POINT r MAN-EXTII r+determinate]
EXTBNSIVE r 7 (TRANSITIVE) ATTRIBUIE ~NTAINED MAN-EXTI C+extensfveJ POINT C+orderl C-deterninate]
ORD-Mm (1)
P-Mm (2)
IDENT (4)
U!LATIONS [DENTIFYING UZION.5 OR iTATES
l- ATTRIBLITION C-action1 C+attributel
1 NOMINAL LATTRIBLtTE MAN-Al-l. (7)
C-dFstance1 C-orderlC-proximity1
-L- POINT DEGO (8) [+determinatel
-DEGBEE C+extensivel
CONTAINED DEGl (9) POINT l-determinate]
t
LOCATIYE C+locationl
TEMPORAL C+t imel
FIG. 7. Relations identifying actions or states. Examples: (1) The man fixed the radio by first taking it apart (ORD-MAN), then replacing a resistor (ORD-MAN), and then putting it back together (ORD-MAN). (2) You can fix the radio by taking it apart (P-MAN), then either replacing the circuit board (P-MAN) or replacing a resistor on the circuit board (P-MAN). (3) The man worked with intense concentration (MAN). The man worked, con- centrating intensely (MAN). The man ran with long even strides (MAN). (4) The man fixed the car by replacing the crankshift (IDENT). (5) The dog ran at a speed (MAN-EXTO) of five miles per hour (DEGO). (6) (a) The dog ran swiftly (MAN-EXTl). The man worked hard (MAN-EXTl). (b) The man drove at a reasonable speed (MAN-EXTl). (c) The man drove between 55 and 60 miles per hour (MAN-EXTl). (7) The man turned the screw counterclockwise (MAN-ATT). (8) The man is sixfeet (DECO) tall (EXTO). (9) (a) The man is very (DEGl) tall. (b) The man is average (DEGI) height. (c) The man is between jive and sixfeet (DEGI) tall.
REPRESENTING KNOWLEDGE STRUCTURE 393
transitive (i.e., ordered) or intransitive. For example, the actionjxing a radio may consist of a set of actions which form a transitive ordered sequence (see example (l), Fig. 7) or a set of actions which are related in the sense that one action has to be performed before another but the actions do not form a transitive ordered sequence (see example (2), Fig. 7). A classificatory manner relation which connects a class of actions to a second class which is transitive is called an ordered manner relation (ORD-MAN; Fig. 7, branch (1)). A classificatory manner relation which connects a class of actions to a second class which is intransitive is called an intransitive manner relation (P-MAN; Fig. 7, branch (2)). A classificatory manner relation which connects a class of actions to a sec- ond nominal class is called a nominal manner relation (MAN; Fig. 7, ex- ample (3)). If two classes of actions are identical, i.e., the sets contain the same elements, then they are connected by the identity relation (IDENT, see Fig. 7; example (4)).
Attributive manner relations appear to be of only two types: extensive and nominal. An attributive manner relation which is extensive (MAN- EXT) assigns to an action (or to each member of a class of actions) a value on a continuous attribute scale (see Fig. 7, example (6)). Exten- sive manner relations differ with respect to the precision of the informa- tion they provide concerning the value on the attribute scale which is as- signed to an action. These distinctions will be discussed in a subsequent section. A nominal attributive manner relation (MAN-ATT) assigns a nominal attribute to an action or class of actions, as in The man turned the screw counterclockwise. It appears as if most attributive manner relations are extensive.
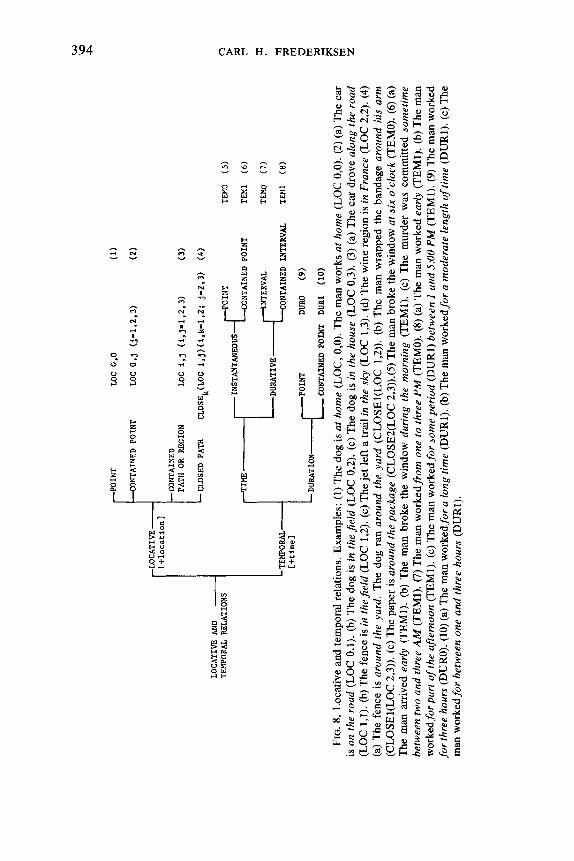
Locative and temporal relations. Both objects and actions can be located in space and time. Thus, objects and actions may have as- sociated with them locative and temporal relations which specify loca- tive and temporal information concerning their respective states and events. An object or action together with any locative relations as- sociated with the object or action will be referred to as the “locative system” associated with the object or action; an object or action together with any temporal relations associated with the object or action will be referred to as the “temporal system” associated with the object or ac- tion. The relations which may be used to specify a locative or temporal system for an object or action are presented in Fig. 8.
The locative system involves a set of relations which in various ways represent an object or action as a point, path, or region located within a jield having a specified dimensionality. Thus, for example, an object may be represented as a point (zero-dimensional region) on a line (one- dimensional field), as in The car is on the road; as a point in a two- dimensional field, e.g., The dog is in the yard; and as a point in a three- dimensional field, e.g., The dog is in the house. An action can be
POIN
T
F Lo
t 0.
0 (1
)
ON
TAIN
ED P
OIN
T LO
C 0
.j (j-
1,2,
3)
(2)
CO
NTA
INED
PA
TH O
R R
EGIO
N
LOC
i,j
(i,j-1
,2,3
) (3
)
--i
LOC
ATIV
E AN
D
TEH
POR
AL R
ELAT
ION
S
LCLO
SED
PA
TH
CLO
SEk(
LOC
i,j)
(i,k=
l,Z;
j-2,3
) (4
)
OIX
T IE
n0
(5)
c)
rTI~
rIN
STAN
TAN
EOU
S O
NTA
INED
PO
INT
TEH
l (6
)
FIG
. 8.
Loc
ativ
e an
d te
mpo
ral
rela
tions
. Ex
ampl
es:
(1) T
he d
og is
at
hom
e (L
OC
, 0,
O).
The
man
wor
ks a
t ho
me
(LO
C 0
,O).
(2) (
a) T
he c
ar
is o
n th
e ro
ad
(LO
C 0
,l).
(b)
The
dog
is in
the
@id
(L
OC
0,2
). (c
) Th
e do
g is
in t
he h
ouse
(LO
C 0
,3).
(3) (
a) T
he c
ar d
rove
alo
ng f
he r
oad
(LO
C 1
,l).
ib)
The
fenc
e is
in t
heje
ld
(LO
C 1
,2).
(c) T
he je
t le
ft a
trail
in t
he s
ky (
LOC
1,3
). (d
) The
win
e re
gion
is
in F
ranc
e (L
OC
2,2
). (4
) (a
) Th
e fe
nce
is a
roun
d th
e ya
rd.
The
dog
ran
arou
nd t
he y
ard
(CLO
SE
l(LO
C
1,2)
). (b
) Th
e m
an w
rapp
ed
the
band
age
arou
nd
his
arm
(C
LOS
El(L
OC
2,
3)).
(c) T
he p
aper
is a
roun
d th
e pa
ckag
e (C
LOS
E2(
LOC
2,
3)).(
5) T
he m
an b
roke
the
win
dow
at
six
o’cl
ock
(TE
MO
). (6
) (a)
Th
e m
an a
rrive
d ea
rly
(TE
Ml).
(b
) Th
e m
an b
roke
th
e w
indo
w
durin
g th
e m
orni
ng
(TE
MI).
(c
) Th
e m
urde
r w
as c
omm
itted
so
mef
ime
betw
een
two
and
thre
e AM
(T
EM
l).
(7) T
he m
an w
orke
dfro
m
one
to t
hree
PA4
(TE
MO
). (8
) (a)
The
man
wor
ked
ear/y
(T
EM
l).
(b)
The
man
w
orke
dfor
pa
rt of
the
afte
rnoo
n (T
EM
l).
(c) T
he m
an w
orke
dfor
so
me
perio
d (D
UR
l) be
twee
n I
and
5:O
O PM
(TE
Ml).
(9
) The
man
wor
ked
for
thre
e ho
urs
(DU
RO
). (1
0) (a
) The
man
wor
kedf
or
a lo
ng
time
(DU
Rl).
(b
) The
man
wor
kedf
or
a m
oder
ate
leng
th
oftim
e (D
UR
l).
(c) T
he
man
wor
ked@
be
twee
n on
e an
d th
ree
hour
s (D
UR
l).
REPRESENTING KNOWLEDGE STRUCTURE 395
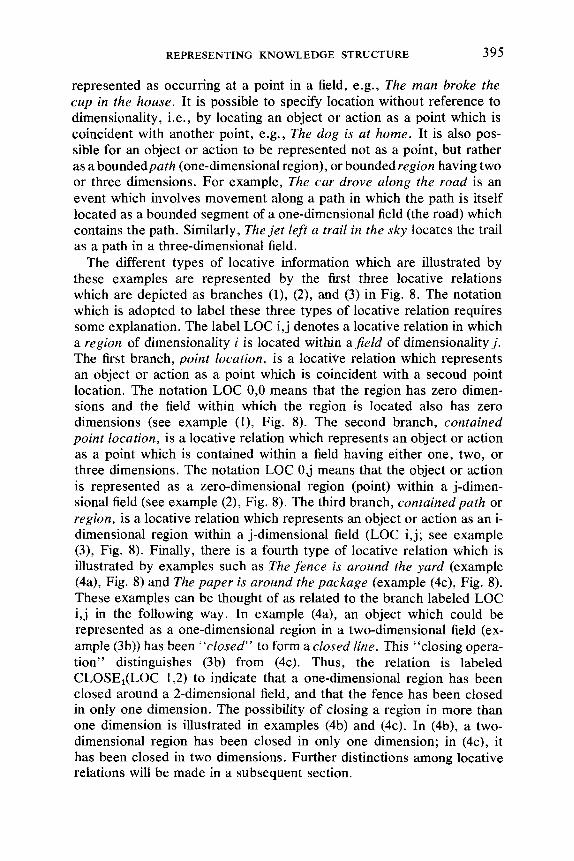
represented as occurring at a point in a field, e.g., The man broke the cup in the house. It is possible to specify location without reference to dimensionality, i.e., by locating an object or action as a point which is coincident with another point, e.g., The dog is at home. It is also pos- sible for an object or action to be represented not as a point, but rather as a boundedpath (one-dimensional region), or bounded region having two or three dimensions. For example, The car drove along the road is an event which involves movement along a path in which the path is itself located as a bounded segment of a one-dimensional field (the road) which contains the path. Similarly, The jet left a trail in the sky locates the trail as a path in a three-dimensional field.
The different types of locative information which are illustrated by these examples are represented by the first three locative relations which are depicted as branches (l), (2), and (3) in Fig. 8. The notation which is adopted to label these three types of locative relation requires some explanation. The label LOC i,j denotes a locative relation in which a region of dimensionality i is located within afield of dimensionality j. The first branch, point location, is a locative relation which represents an object or action as a point which is coincident with a second point location. The notation LOC 0,O means that the region has zero dimen- sions and the field within which the region is located also has zero dimensions (see example (l), Fig. 8). The second branch, contained point location, is a locative relation which represents an object or action as a point which is contained within a field having either one, two, or three dimensions. The notation LOC Oj means that the object or action is represented as a zero-dimensional region (point) within a j-dimen- sional field (see example (2), Fig. 8). The third branch, contained path or region, is a locative relation which represents an object or action as an i- dimensional region within a j-dimensional field (LOC i,j; see example (3), Fig. 8). Finally, there is a fourth type of locative relation which is illustrated by examples such as The fence is around the yard (example (4a), Fig. 8) and The paper is around the package (example (4c), Fig. 8). These examples can be thought of as related to the branch labeled LOC i,j in the following way. In example (4a), an object which could be represented as a one-dimensional region in a two-dimensional field (ex- ample (3b)) has been “closed” to form a closed line. This “closing opera- tion” distinguishes (3b) from (4~). Thus, the relation is labeled CLOSE,(LOC 1,2) to indicate that a one-dimensional region has been closed around a 2-dimensional field, and that the fence has been closed in only one dimension. The possibility of closing a region in more than one dimension is illustrated in examples (4b) and (4~). In (4b), a two- dimensional region has been closed in only one dimension; in (4c), it has been closed in two dimensions. Further distinctions among locative relations will be made in a subsequent section.
396 CARL H. FREDERIKSEN
The temporal system involves a set of relations which specify the absolute time and elapsed time or duration associated with a state or event. Consider tirst absolute time. An event can be represented in the temporal system as instantaneous or durative, while a state would always be represented as durative. An instantaneous temporal relation (TEM) assigns to an event a point in absolute time. For examples, see Fig. 8, examples (5) and (6). Further distinctions among instantaneous temporal relations which are illustrated by these examples will be dis- cussed in a subsequent section. A durative temporal relation assigns to an event or state an interval in absolute time (see examples (7) and (Q Fig. 8). A durative relation (DUR) assigns an interval of elapsed time to a durative event or state (see examples (9) and (lo), Fig. 8). Further dis- tinctions among durative temporal relations and durative relations will be made in subsequent sections.
Logical structure. Any collection of concepts and relations which define a state or event defines a proposition having a truth value. While by convention, a proposition is regarded as having positive truth value, propositions can be negated by applying a negative operator to any rela- tion in the semantic network which delines the proposition. Negative and other truth-value operators will be discussed in detail in a later sec- tion. A logical network consists of a set of propositions and a set of labeled binary relations which connect the set of propositions into a logi- cal network. The relations which define a logical network are of three types: logical relations, causal relations, and algebraic relations.
Logical relations are defined in terms of truth tables involving the pairs of propositions which each relation connects. Logical relations include conjunction (&), disjunction (nonexclusive alternation, OR), log- ical implication (material conditional, IF), material biconditional (IFF), and contrafactual conditional (COND) relations. A set of propositions which are connected by logical relations will be referred to as a logical system. Detailed definitions of logical relations will be given in a later section.
The causal contrafactual conditional relation or causal relation (CAU) is defined as a relation which expresses one variable (the effect) as a function of another variable (the cause). The directionality of the causal relation is given by the asymmetry of the system of functional relations involving the variables (cf. Simon & Rescher, 1966). The causal relation, thus, is fundamentally different from the contrafactual condi- tional relation. A set of propositions which are connected by causal rela- tions will be referred to as acausal system.
Algebraic relations are relations which connect pairs of propositions which contain identical transitive or intransitive relations. Thus the propositions corresponding to John is tall and Mary is tall can be con- nected by an algebraic relation since both involve the transitive relation
REPRESENTING KNOWLEDGE STRUCTURE 397
EXT (extensive attribute). Algebraic relations are of two types: order relations which connect propositions containing transitive relations, and proximity relations which connect propositions containing intransitive relations. Different types of order and proximity relations are defined in terms of their symmetry and reflexivity properties. For example, an equivalence relation (EQUIV) is an order relation which is symmetric and reflexive (e.g., John and Mary are the same height); and the relation ORD is an order relation which is asymmetric and irreflexive (e.g., John is taller than Mary). In the first example, the two connected proposi- tions are John is tall (to an unspecified degree) and Mary is tall (to an unspecified degree); the relations EQUIV and ORD connect the two propositions and place a relative constraint on the degrees of height as- sociated with John and Mary. Thus, EQUIV constrains their heights to have the same degree, and ORD restricts John’s height to have degree greater than Mary’s height. A set of transitive or intransitive proposi- tions which are connected by order or proximity relations will be re- ferred to as a relative system.
All three systems-logical, causal, and relative-make up a logical structure or logical network. A logical network, like a semantic network, has both a content and a structure. The propositional content of a logical network is the set of propositions which occupy slots in the network. The logical structure of a logical network is what is left after all proposi- tions have been removed from the network leaving “empty slots” in their places. All of these topics will be developed in detail in a sub- sequent section.
SEMANTIC NETWORKS
In the previous section, a semantic network was described as con- sisting of a set of concepts which occupy slots in a network of labeled binary relations. The set of concepts defines the content of the network and the network of relations (with the concepts removed) defines the structure. Since it is possible to have networks with identical structure and different content, this distinction between content and structure is of more than just theoretical interest. This section will be principally con- cerned with the structure of semantic networks. In it we will present (by means of a series of tables) precise definitions of the relations identified in the previous section. Each relation in the system will be defined in terms of a concept-relation-concept triple. A definition will consist of (1) restrictions on the classes of concepts which can occupy slots connected by a relation and (2) a definition of the relation. Altogether, the defini- tions presented in this section define the structure of the semantic networks described in the previous section.
The semantic networks which were described consist of a number of systems which specify different types of semantic information. Case

398 CARL H. FREDERIKSEN
systems specify causal systems involving actions; state systems identify objects; manner systems identify actions; and locative and temporal systems specify locative and temporal information concerning events or states. In this section, we will develop a network structure for each of these systems. The network structures which will be developed may be regarded as prototype structures into which concepts may be inserted, thus specifying events or states. The specification of states involves the state, locative, and temporal systems; specification of events involves a case system together with the state, manner, locative, and temporal systems.
Case systems. Case systems are of two types: case systems associated with resultive actions and those associated with processes. The structure of case systems for resultive actions is determined by the components of a causal system, e.g., the system must include a cause, a state or process existing prior to an action, an effect or result of the action, a specification of objects affected by the action, etc.; and by the classi- fication of resultive actions, e.g., into cognitive and physical actions. Similarly, the case system for processes is determined by the physical characteristics of a processive system, e.g., a processive system must include the object undergoing the change associated with the process; and by the classification of processes, e.g., into simple or relative, cog- nitive or physical processes.
Definitions of case relations involving resultive actions are presented in Table 1. Altogether, these relations define a network structure for resul- tive case systems. The case system so defined has the following structure into which concepts (or embedded network structures) may be inserted, thus defining a network:
(animate object)* 5 (resultive action) OBJI - (inanimate object) DATI - (animate object) 1 * SOURCE_\ [proposition]*
RESULT_, [proposition]* INST - (object)
5 [proposition]
A single asterisk is used to mark slots which are obligatory for every re- sultive action. The double asterisk indicates that at least one of the two slots is obligatory when the action is physical and that neither is present when the action is not physical. The case system for resultive actions having inanimate agents has the same structure except that AGT is re- placed with I-AGT, the I-AGT slot contains a processive object, and the GOAL1 relation is not present.
REPRESENTING KNOWLEDGE STRUCTURE 399
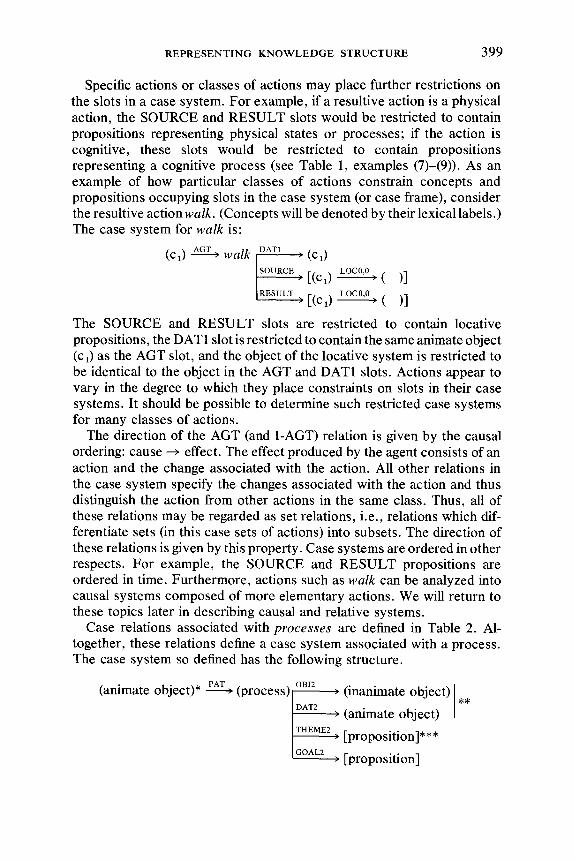
Specific actions or classes of actions may place further restrictions on the slots in a case system. For example, if a resultive action is a physical action, the SOURCE and RESULT slots would be restricted to contain propositions representing physical states or processes; if the action is cognitive, these slots would be restricted to contain propositions representing a cognitive process (see Table 1, examples (7)-(9)). As an example of how particular classes of actions constrain concepts and propositions occupying slots in the case system (or case frame), consider the resultive action walk. (Concepts will be denoted by their lexical labels.) The case system for walk is:
(cl) - walk DAT’
E (cl) SOURCE ,(c,> LOCO,0 , ( ), RESULT L(c1) LOCO,0 > ( >]
The SOURCE and RESULT slots are restricted to contain locative propositions, the DATl slot is restricted to contain the same animate object (c,) as the AGT slot, and the object of the locative system is restricted to be identical to the object in the AGT and DATl slots. Actions appear to vary in the degree to which they place constraints on slots in their case systems. It should be possible to determine such restricted case systems for many classes of actions.
The direction of the AGT (and I-AGT) relation is given by the causal ordering: cause + effect. The effect produced by the agent consists of an action and the change associated with the action. All other relations in the case system specify the changes associated with the action and thus distinguish the action from other actions in the same class. Thus, all of these relations may be regarded as set relations, i.e., relations which dif- ferentiate sets (in this case sets of actions) into subsets. The direction of these relations is given by this property. Case systems are ordered in other respects. For example, the SOURCE and RESULT propositions are ordered in time. Furthermore, actions such as walk can be analyzed into causal systems composed of more elementary actions. We will return to these topics later in describing causal and relative systems.
Case relations associated with processes are defined in Table 2. Al- together, these relations define a case system associated with a process. The case system so defined has the following structure.
(animate object)* 5 (process) OBJ2 (inanimate object) 1 **
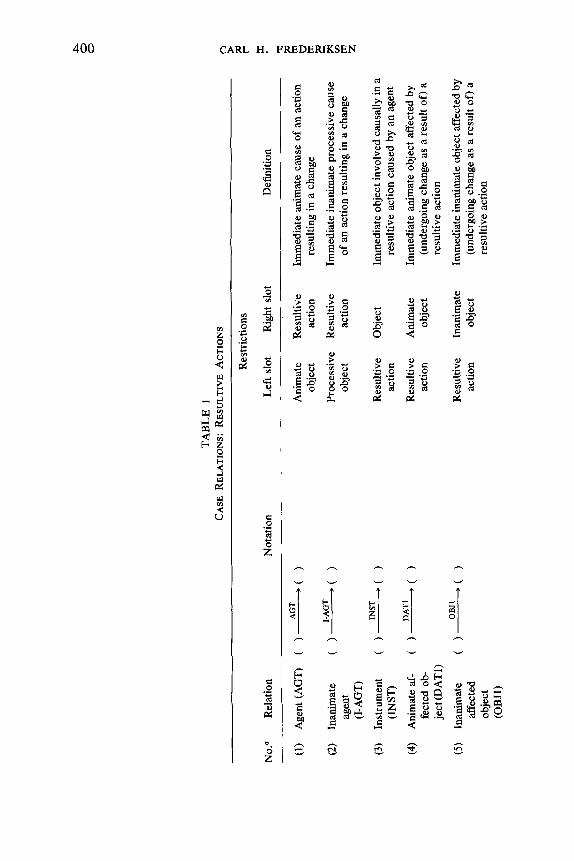
TABL
E 1
CAS
E R
ELAT
ION
S:
RES
ULT
IVE
ACTI
ON
S
Res
trict
ions
No.
” R
elat
ion
Not
atio
n Le
ft sl
ot
Rig
ht s
lot
Def
initi
on
(1)
Agen
t (A
GT)
(2)
Inan
imat
e ag
ent
(I-A
GT)
(3)
Inst
rum
ent
(INST
)
(4)
Anim
ate
af-
fect
ed o
b-
ject
(D
ATl)
(5)
Inan
imat
e af
fect
ed
obje
ct
(OB
JI)
( 1-
t )
( )a
( )
Anim
ate
Res
ultiv
e ob
ject
ac
tion
Proc
essi
ve
Res
ultiv
e ob
ject
ac
tion
Res
ultiv
e ac
tion
Res
ultiv
e ac
tion
Obj
ect
Anim
ate
obje
ct
( )o
BJl
( 1
Res
ultiv
e In
anim
ate
actio
n ob
ject
Imm
edia
te
anim
ate
caus
e of
an
actio
n re
sulti
ng i
n a
chan
ge
Imm
edia
te i
nani
mat
e pr
oces
sive
cau
se
of a
n ac
tion
resu
lting
in
a ch
ange
Imm
edia
te o
bjec
t in
volv
ed
caus
ally
in
a re
sulti
ve
actio
n ca
used
by
an a
gent
Imm
edia
te a
nim
ate
obje
ct a
ffect
ed b
y (u
nder
goin
g ch
ange
as
a re
sult
of)
a re
sulti
ve
actio
n
Imm
edia
te i
nani
mat
e ob
ject
affe
cted
by
(und
ergo
ing
chan
ge a
s a
resu
lt of
) a
resu
ltive
ac
tion
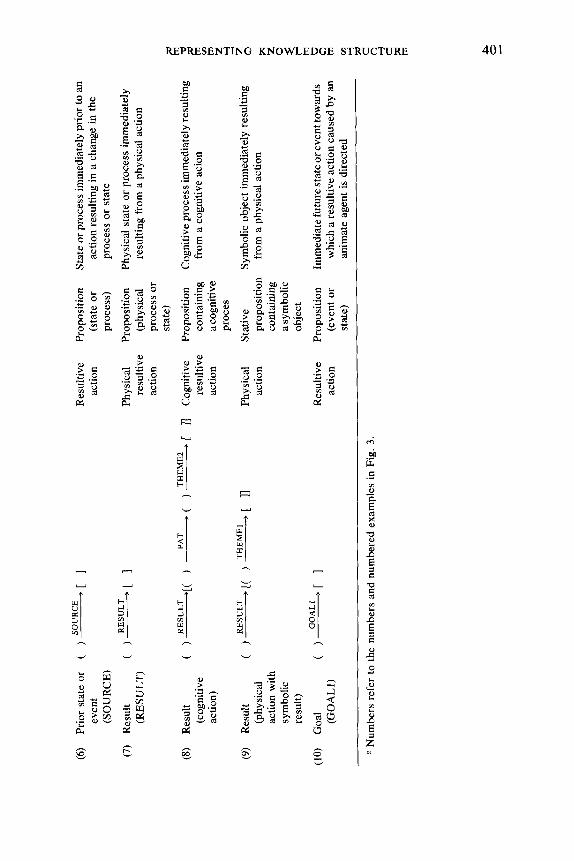
(6)
Prio
r st
ate
or
even
t (S
OU
RC
E)
(7)
Res
ult
(RES
ULT
)
(8)
Res
ult
(cog
nitiv
e ac
tion)
(9)
Res
ult
(phy
sica
l ac
tion
with
sy
mbo
lic
resu
lt)
( )S
[ ]
Res
ultiv
e ac
tion
( )S
[ ]
resu
ltive
ac
tion
( )S
[( )
PAT
-( 1
THEM
E2
- [
]] C
ogni
tive
resu
ltive
ac
tion
( )
RES
ULT
,
[( )
THEM
EI
, [
II Ph
ysic
al
actio
n
Pro
posi
tion
Stat
e or
pro
cess
imm
edia
tely
prio
r to
an
(sta
te o
r ac
tion
resu
lting
in
a ch
ange
in t
he
proc
ess)
pr
oces
s or
sta
te
Pro
posi
tion
(phy
sica
l pr
oces
s or
st
ate)
Phys
ical
sta
te o
r pr
oces
s im
med
iate
ly
resu
lting
fro
m a
phy
sica
l ac
tion
Pro
posi
tion
cont
aini
ng
a co
gniti
ve
proc
es
Cog
nitiv
e pr
oces
s im
med
iate
ly
resu
lting
fro
m a
cog
nitiv
e sc
ion
Stat
ive
prop
ositi
on
cont
aini
ng
a sy
mbo
lic
obje
ct
Sym
bolic
ob
ject
im
med
iate
ly
resu
lting
fro
m a
phy
sica
l ac
tion
(10)
G
oal
( )B
[ ]
Res
ultiv
e P
ropo
sitio
n Im
med
iate
fut
ure
stat
e or
eve
nt to
war
ds
(GO
ALI
) ac
tion
(eve
nt o
r w
hich
a re
sulti
ve a
ctio
n ca
used
by
an
stat
e)
anim
ate
agen
t is
dire
cted
a N
umbe
rs r
efer
to
the
num
bers
and
num
bere
d ex
ampl
es i
n Fi
g. 3
.
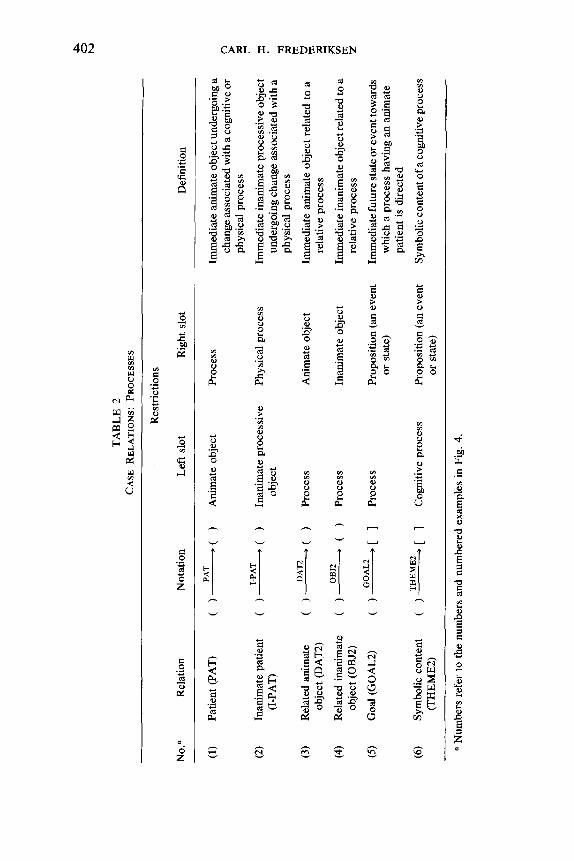
TABL
E 2
CAS
E R
ELAT
ION
S: P
RO
CES
SES
No.
”
(1)
(2)
(3)
(4)
(5)
(6)
Rel
atio
n
Res
trict
ions
Not
atio
n Le
ft sl
ot
Rig
ht s
lot
Def
initi
on
Patie
nt (
PAT)
Inan
imat
e pa
tient
(I-
PA
T)
Rel
ated
ani
mat
e ob
ject
(D
AT2)
Rel
ated
ina
nim
ate
obje
ct (
OB
J2)
Goa
l (G
OA
L2)
Sym
bolic
con
tent
(T
HEM
E2)
PAT
( J-
C
1 An
imat
e ob
ject
( )a
( )
Inan
imat
e pr
oces
sive
ob
ject
( I=
( 1
Proc
ess
OBJ
2 (
) -
( )
Proc
ess
( )a
[
] Pr
oces
s
( )W
[ ]
Cog
nitiv
e pr
oces
s
Proc
ess
Phys
ical
pro
cess
Anim
ate
obje
ct
Inan
imat
e ob
ject
Pro
posi
tion
(an
even
t or
sta
te)
Pro
posi
tion
(an
even
t or
sta
te)
Imm
edia
te a
nim
ate
obje
ct u
nder
goin
g a
chan
ge a
ssoc
iate
d w
ith a
cog
nitiv
e or
ph
ysic
al
proc
ess
Imm
edia
te i
nani
mat
e pr
oces
sive
obj
ect
unde
rgoi
ng c
hang
e as
soci
ated
with
a
phys
ical
pr
oces
s
Imm
edia
te
anim
ate
obje
ct r
elat
ed t
o a
rela
tive
proc
ess
Imm
edia
te i
nani
mat
e ob
ject
rel
ated
to
a re
lativ
e pr
oces
s
Imm
edia
te f
utur
e st
ate
or e
vent
tow
ards
w
hich
a p
roce
ss h
avin
g an
ani
mat
e pa
tient
is
dire
cted
Sym
bolic
con
tent
of a
cog
nitiv
e pr
oces
s
n N
umbe
rs r
efer
to
the
num
bers
and
num
bere
d ex
ampl
es i
n Fi
g. 4
.
REPRESENTING KNOWLEDGE STRUCTURE 403
The single asterisk denotes a slot which is obligatory for every process; the double asterisk indicates that at least one of the relations OBJ2 or DAT2 must be present if the process is relative; the triple asterisk indi- cates that the relation THEME2 must be present if the process is cognitive. The case system for processes having inanimate patients has the same structure except that the relation PAT is replaced with I-PAT, the I-PAT slot contains a processive object, and the THEME2 and GOAL2 relations are not present. Just as specific resultive actions may have associated with them case systems which incorporate additional restrictions on certain slots in the system, specific processes or classes of processes may place restrictions on the slots in a case system. For example, the case system for burn is:
(fire> * burn
I I
OBJ2 ( ) **
DAT2 ( 1
Here, the processive object is very closely related to the process. Pro- cesses, like resultive actions, vary substantially in the degree to which they restrict slots in their case systems.
The direction of the PAT (and I-PAT) relation is given by the causal ordering: object (cause) + action (effect). The cause-effect relationship between patient and process may be seen by examining processes which may be transformed into resultive actions. For example, in The man walked, the cause of the process is the patient, since, if the process is transformed into a resultive action (e.g., The man walked to the gate), the man becomes the agent of the action. The cause-effect relationship certainly would be preserved under the transformation from process to resultive action. All other relations in the case system may be regarded as set relations: they further specify the nature of relative and cognitive processes.
It is possible to define case systems which contain unfilled slots. Case systems with “open” or unfilled slots allow one to represent events about which one has only partial knowledge. For example, a speaker may know that an event involving a resultive action occurred without knowing the agent of the action. He may express his partial knowledge of the event by means of a passive sentence. Languages have many devices for ex- pressing incomplete semantic structures. Chafe (1970) has identified a number of such examples in his chapter on derivation. Among his examples of derived forms of expression, several are interesting examples of in- complete case systems containing open or uni?.lled slots. The first example, “experiential attribution, ” involves case systems for cognitive processes in which the PATIENT and THEME2 slots are filled but the processive slot is unfilled, e.g., John is sad:
John - ( ) s sad.
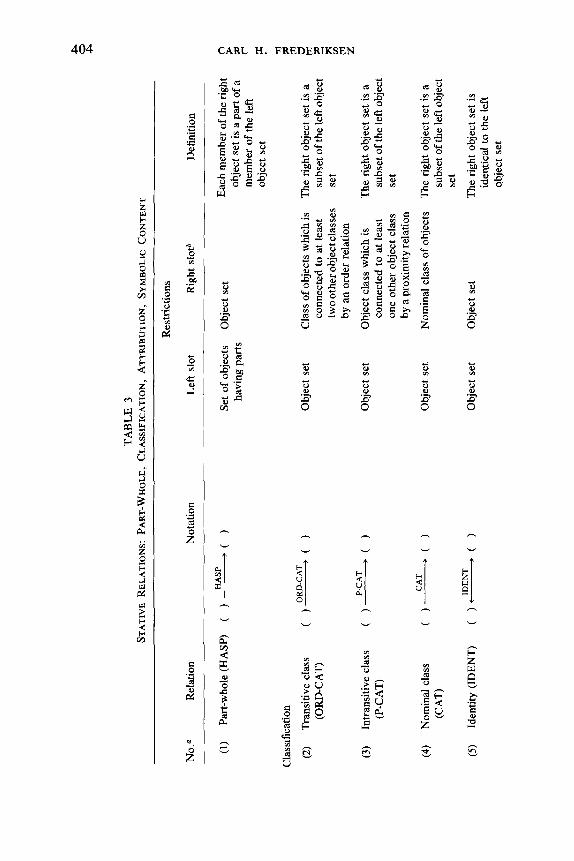
TABL
E 3
STAT
IVE
REL
ATIO
NS:
PA
RT-
WH
OLE
, CLA
SSIF
ICAT
ION
, ATT
RIB
UTI
ON
, SY
MBO
LIC
CO
NTE
NT
Res
trict
ions
No.
” R
elat
ion
Not
atio
n Le
ft sl
ot
Rig
ht s
loth
D
efin
ition
(1)
Part-
who
le (
HAS
P)
( )
a (
) Se
t of
obje
cts
Obj
ect
set
Each
mem
ber
of th
e rig
ht
Cla
ssifi
catio
n
(2)
Tran
sitiv
e cl
ass
(OR
D-C
AT)
(3)
Intra
nsiti
ve
clas
s (P
-CAT
)
(4)
Nom
inal
cla
ss
(CAT
)
(5)
Iden
tity
(IDEN
T)
havi
ng-p
arts
()W
( 1
()a(
)
CAT
()
----
-+(
1
Obj
ect
set
Obj
ect
set
Obj
ect
set
Obj
ect
set
Cla
ss o
f obj
ects
whi
ch i
s co
nnec
ted
to a
t lea
st
two
othe
r ob
ject
cla
sses
by
an
orde
r re
latio
n
Obj
ect
clas
s w
hich
is
conn
ecte
d to
at l
east
on
e ot
her
obje
ct c
lass
by
a p
roxi
mity
re
latio
n
Nom
inal
cl
ass
of o
bjec
ts
()-ID
ENT(
) O
bjec
t se
t
obje
ct s
et is
a p
art
of a
m
embe
r of
the
left
obje
ct s
et
The
right
obj
ect
set i
s a
subs
et o
f the
left
obje
ct
set
The
right
obj
ect
set i
s a
subs
et o
f the
left
obje
ct
set
The
right
obj
ect
set i
s a
subs
et o
f the
left
obje
ct
set
The
right
obj
ect
set i
s id
entic
al
to t
he le
ft ob
ject
set
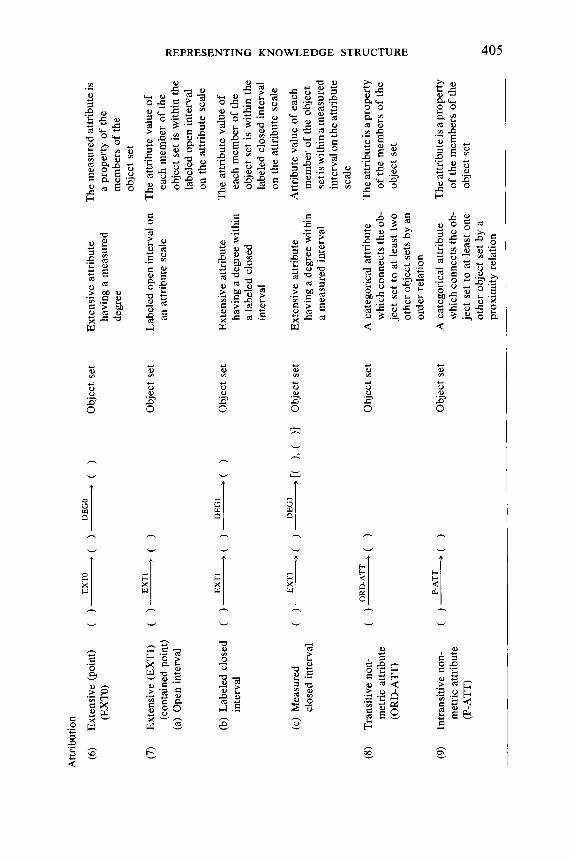
Attr
ibut
ion
(6)
(7) (8)
(9)
Exte
nsiv
e (p
oint
) (E
XTO
)
Exte
nsiv
e (E
XTI)
(con
tain
ed p
oint
) (a
) O
pen
inte
rval
(b)
Labe
led
clos
ed
inte
rval
(c)
Mea
sure
d cl
osed
inte
rval
Tran
sitiv
e no
n-
met
ric a
ttrib
ute
(OR
D-A
I-I)
Intra
nsiti
ve
non-
m
etric
attr
ibut
e (P
-ATT
)
EXTO
D
ECO
(
)-----
-+(
)-(
1 O
bjec
t se
t
()=(
) O
bjec
t se
t
( )a
( )S
( )
Obj
ect
set
( )
EXTl
3
( )
DEG
l ,
[( 1,
(
)I O
bjec
t se
t
( )O
RD
-ATT
( )
Obj
ect
set
( )S
( )
Obj
ect
set
Exte
nsiv
e at
tribu
te
havi
ng a
mea
sure
d de
gree
Labe
led
open
inte
rval
on
an
attr
ibut
e sc
ale
Exte
nsiv
e at
tribu
te
havi
ng a
deg
ree
with
in
a la
bele
d cl
osed
in
terv
al
Exte
nsiv
e at
tribu
te
havi
ng a
deg
ree
with
in
a m
easu
red
inte
rval
A ca
tego
rical
attr
ibut
e w
hich
con
nect
s th
e ob
- je
ct s
et to
at
leas
t tw
o ot
her
obje
ct s
ets
by a
n or
der
rela
tion
A ca
tego
rical
attr
ibut
e w
hich
con
nect
s th
e ob
- je
ct s
et to
at l
east
one
ot
her
obje
ct s
et b
y a
prox
imity
re
latio
n
The
mea
sure
d at
tribu
te i
s a
prop
erty
of
the
m
embe
rs o
f th
e ob
ject
set
The
attri
bute
va
lue
of
each
mem
ber
of t
he
obje
ct s
et is
with
in
the
labe
led
open
inte
rval
on
the
attri
bute
sc
ale
The
attri
bute
va
lue
of
each
mem
ber
of t
he
obje
ct s
et is
with
in
the
labe
led
clos
ed i
nter
val
on th
e at
tribu
te
scal
e
Attri
bute
va
lue
of e
ach
mem
ber
of t
he o
bjec
t se
t is w
ithin
a m
easu
red
inte
rval
on
the
attri
bute
sc
ale
The
attri
bute
is
a pr
oper
ty
of th
e m
embe
rs o
f th
e ob
ject
se
t
The
attri
bute
is
a pr
oper
ty
of th
e m
embe
rs o
f th
e ob
ject
set
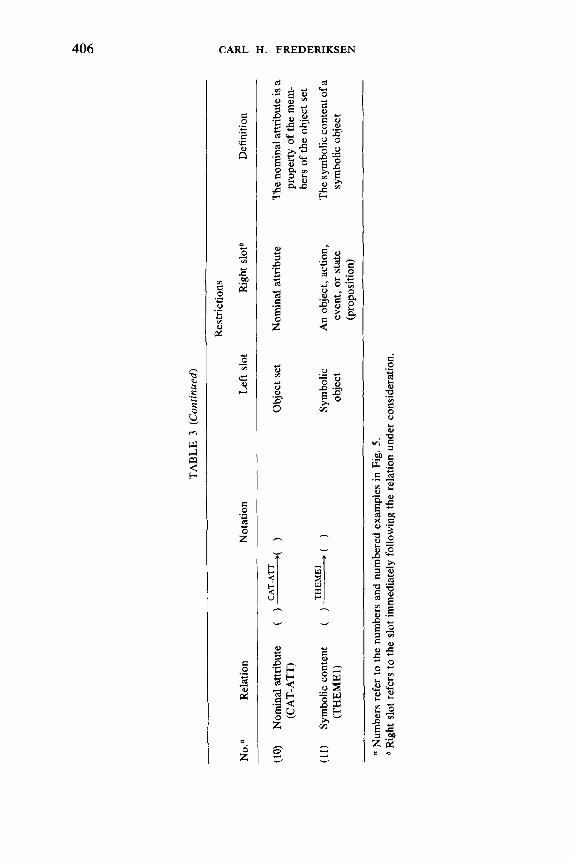
TABL
E 3
(Con
tinue
d)
Res
trict
ions
No.
” R
elat
ion
Not
atio
n Le
ft sl
ot
Rig
ht s
loth
D
efin
ition
(10)
N
omin
al a
ttrib
ute
( )r
n(
) O
bjec
t se
t N
omin
al
attri
bute
Th
e no
min
al a
ttrib
ute
is a
(C
AT-A
TT)
prop
erty
of
the
mem
- be
rs o
f th
e ob
ject
set
(11)
Sy
mbo
lic c
onte
nt
( )-
=+L(
)
Sym
bolic
An
obj
ect,
actio
n,
The
sym
bolic
con
tent
of a
(T
HEM
El)
obje
ct
even
t, or
sta
te
sym
bolic
obj
ect
(pro
posi
tion)
a N
umbe
rs r
efer
to
the
num
bers
and
num
bere
d ex
ampl
es i
n Fi
g. 5
. b R
ight
slo
t re
fers
to
the
slot
imm
edia
tely
fo
llow
ing
the
rela
tion
unde
r co
nsid
erat
ion.
REPRESENTING KNOWLEDGE STRUCTURE 407
In the second example, “resultive attribution,” only the action and OBJI (or DATl) slots in a resultive case system are filled, e.g., The window is broken:
break 3 window.
In sentences such as this one, the action is represented as if it were an attribute of the affected object. Other examples of “resultive attribution” occur in which an attributive form of expression is used to represent the fact that an object can be affected by an action, e.g., This cereal is edible. The final example involves a case system in which the RESULT slot is filled by a proposition and all other slots in the system are unfilled. In such systems, all that is known is that a change of state involving an attribute of an object has occurred. For example, The road widened ex- presses the following case system:
( > RESULT [road = wide];
widen represents a “derived verb” signifying that a change of state in- volving the attribute has taken place. In The workmen widened the road, the agent slot has been filled, but the action slot remains unspecified:
workmen -( >= [road s wide].
State systems. Definitions of stative relations are presented in Tables 3 and 4. Table 3 contains definitions of the part-whole relation (l), classifi- catory relations (2-9, attributive relations (6-lo), and the THEME1 re- lation (11). Table 4 presents network structures corresponding to the pos- sible combinations of determiners and quantifiers which were identified in Fig. 6(b). Altogether, the relations defined in these two tables may be combined to define a state system associated with an object. Unlike case systems which consist of a single prototype structure containing obligatory slots, state systems are subject to few constraints on the system as a whole. The principal constraint on a state system is that an object must be determined and quantified, i.e., the state system must contain one of the network structures presented in Table 4. Other than that, a state sys- tem consists of a network of stative relations selected from Tables 3 and 4 and is subject only to the constraints these relations impose on their slots.
The definitions of extensive attributive relations and number relations require further explanation. In the previous section extensive relations were defined as relations which are: (1) transitive, (2) metric, and (3) continuous. The transitivity property requires that propositions contain- ing extensive relations may be connected by a transitive order relation (e.g., John is taZler than Bob); the metric property implies that a distance can be defined between two metric propositions (e.g., John is two inches taller than Bob); and the continuity property requires that an extensive
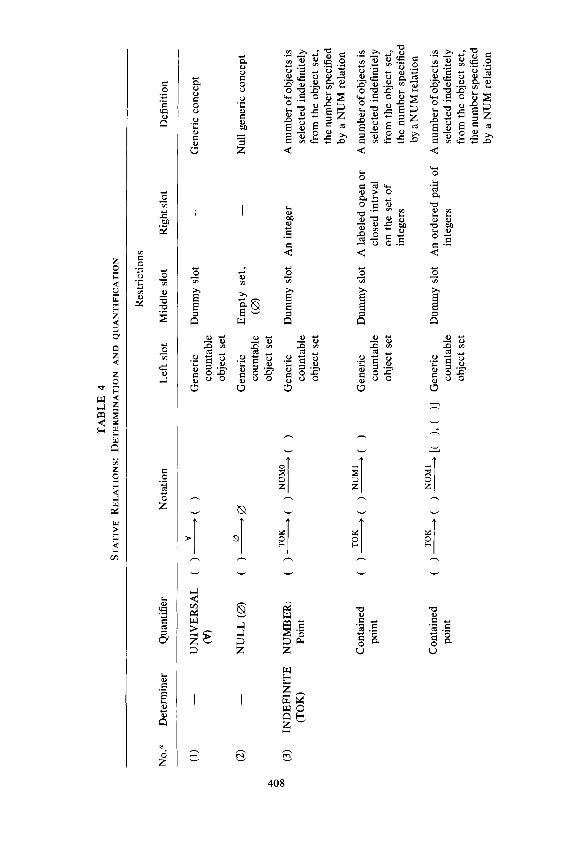
TABL
E 4
STAT
IVE
REL
ATIO
NS:
D
ETER
MIN
ATIO
N
AND
Q
UAN
TIFI
CAT
ION
Res
trict
ions
No.
” D
eter
min
er
Qua
ntifi
er
Not
atio
n Le
ft sl
ot
Mid
dle
slot
R
ight
slo
t D
efin
ition
(1)
- U
NIV
ERSA
L (
) &
( )
(W
Gen
eric
D
umm
y sl
ot
- G
ener
ic c
once
pt
coun
tabl
e ob
ject
set
(2)
- N
ULL
(0
) (
I”0
Gen
eric
Em
pty
set,
- N
ull
gene
ric c
once
pt
coun
tabl
e (0
)
i2
obje
ct s
et
m
(3)
IND
EFIN
ITE
NU
MBE
R:
( $5
(
I=(
1 G
ener
ic
Dum
my
slot
An
int
eger
A
num
ber
of o
bjec
ts is
(T
OW
P
oint
co
unta
ble
sele
cted
inde
finite
ly
obje
ct s
et
from
the
obj
ect
set,
the
num
ber
spec
ified
by
a N
UM
re
latio
n
Con
tain
ed
( )T
OK(
)J
=%(
) po
int
Gen
eric
D
umm
y sl
ot
A la
bele
d op
en o
r A
num
ber
of o
bjec
ts is
co
unta
ble
clos
ed in
trval
se
lect
ed in
defin
itely
ob
ject
set
on
the
set
of
from
the
obj
ect
set,
inte
gers
th
e nu
mbe
r sp
ecifi
ed
by a
NU
Mre
latio
n
Con
tain
ed
poin
t (
)TO
K (
) s
[( ),
( )]
Gen
eric
D
umm
y sl
ot
An o
rder
ed p
air
of
A nu
mbe
r of
obj
ects
is
coun
tabl
e in
tege
rs
sele
cted
inde
fmite
ly
obje
ct
set
from
the
obj
ect
set,
the
num
ber
spec
ified
by
a N
UM
re
latio
n
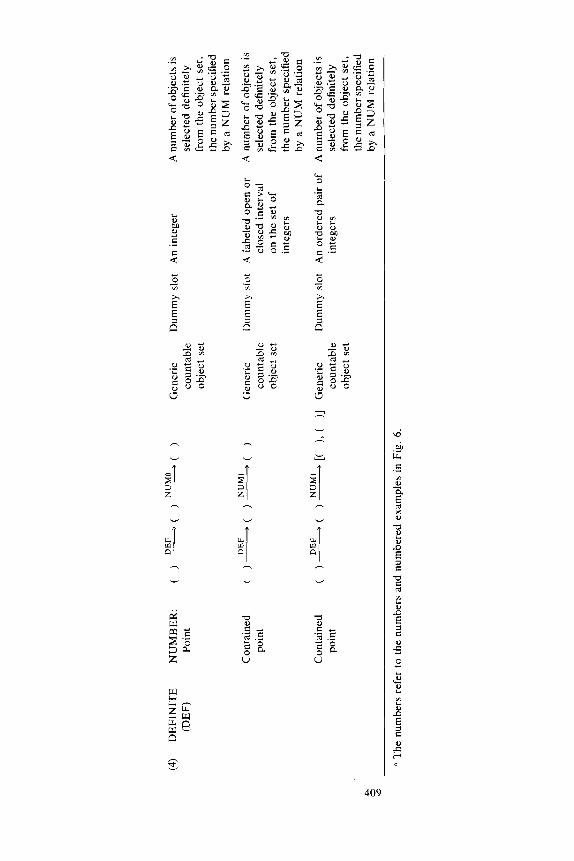
(4)
DEF
INIT
E N
UM
BER
: (
)B(
)3(
) (D
EW
P
oint
Con
tain
ed
poin
t (
)S(
)S(
) G
ener
ic
Dum
my
slot
.4
labe
led
open
or
A nu
mbe
r of
obj
ects
is
coun
tabl
e cl
osed
inte
rval
se
lect
ed d
efin
itely
ob
ject
set
on
the
set o
f fro
m t
he o
bjec
t se
t, in
tege
rs
the
num
ber
spec
ified
by
a N
UM
re
latio
n
Gen
eric
D
umm
y sl
ot
An i
nteg
er
A nu
mbe
r of
obj
ects
is
coun
tabl
e se
lect
ed d
efin
itely
ob
ject
set
fro
m t
he o
bjec
t se
t, th
e nu
mbe
r sp
ecifi
ed
by a
NU
M
rela
tion
Con
tain
ed
poin
t (
)3(
)J=s
R
1, (
)I G
ener
ic
Dum
my
slot
An
ord
ered
pai
r of
A
num
ber
of o
bjec
ts i
s co
unta
ble
inte
gers
se
lect
ed d
efin
itely
ob
ject
set
fro
m t
he o
bjec
t se
t, th
e nu
mbe
r sp
ecifi
ed
by a
NU
M
rela
tion
0 Th
e nu
mbe
rs r
efer
to
the
num
bers
and
num
bere
d ex
ampl
es i
n Fi
g. 6
.
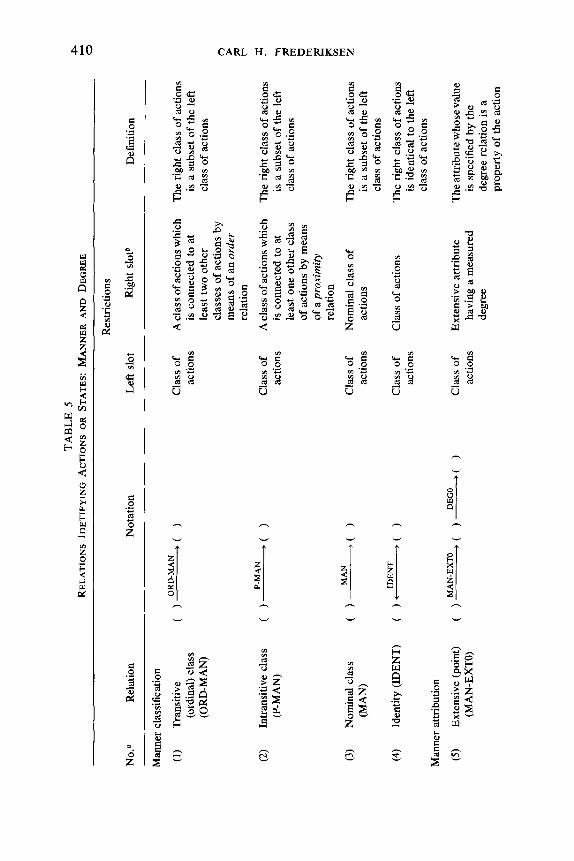
No.
~ R
elat
ion
TABL
E 5
REL
ATIO
NS
IDET
IFYI
NG
AC
TIO
NS
OR
STA
TES:
M
ANN
ER
AND
D
EGR
EE
Res
trict
ions
Not
atio
n Le
ft sl
ot
Rig
ht s
loth
D
efin
ition
Man
ner
clas
sific
atio
n
(1)
Tran
sitiv
e (
F==+
( 1
Cla
ss o
f (o
rdin
al)
clas
s ac
tions
(O
RD
-MA
N)
(2)
Intra
nsiti
ve
clas
s P-
MAN
(
)-(
1 (P
-MA
N)
(3)
Nom
inal
cla
ss
MAN
(
1-c
1 (M
AN)
(4)
Iden
tity
(IDEN
T)
IDEN
T (
1-c
1
Man
ner
attri
butio
n
(5)
Exte
nsiv
e (p
oint
) (
) M
AN-E
XTO
l (
) D
ECO
,(
)
(MAN
-EXT
O)
Cla
ss o
f ac
tions
Cla
ss o
f N
omin
al
clas
s of
ac
tions
ac
tions
Cla
ss o
f ac
tions
C
lass
of
actio
ns
Cla
ss o
f ac
tions
A cl
ass
of a
ctio
ns w
hich
is
con
nect
ed t
o at
le
ast
two
othe
r cl
asse
s of
act
ions
by
mea
ns o
f an
ord
er
rela
tion
A cl
ass
of a
ctio
ns w
hich
is
con
nect
ed t
o at
le
ast
one
othe
r cl
ass
of a
ctio
ns b
y m
eans
of
a pr
oxim
ity
rela
tion
Exte
nsiv
e at
tribu
te
havi
ng a
mea
sure
d de
gree
The
right
cla
ss o
f ac
tions
is
a s
ubse
t of
the
left
clas
s of
act
ions
The
right
cla
ss o
f ac
tions
is
a s
ubse
t of
the
left
clas
s of
act
ions
The
right
cla
ss o
f ac
tions
is
a s
ubse
t of
the
left
clas
s of
act
ions
The
right
cla
ss o
f ac
tions
is
iden
tical
to
the
left
clas
s of
act
ions
The
attri
bute
who
se v
alue
is
spe
cifie
d by
the
de
gree
rel
atio
n is
a
prop
erty
of
the
act
ion
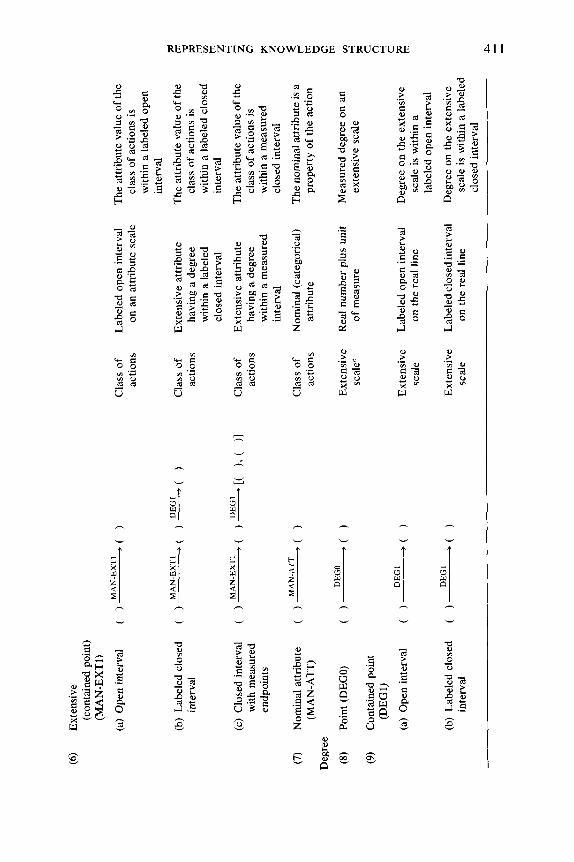
(6)
Exte
nsiv
e (c
onta
ined
poi
nt)
(MAN
-EXT
l)
(a)
Ope
n in
terv
al
(b)
Labe
led
clos
ed
inte
rval
(c)
Clo
sed
inte
rval
w
ith m
easu
red
endp
oint
s
(7)
Nom
inal
attr
ibut
e (M
AN-A
TT)
Deg
ree
(8)
Poi
nt (
DE
GO
)
(9)
Con
tain
ed p
oint
(D
EG 1
)
(a)
Ope
n in
terv
al
(b)
Labe
led
clos
ed
inte
rval
( )M
AN-E
XT1(
)
( )
MAN
-EXT
I ,
( )
s (
)
( )-(
)=
%[(
),(
)]
( )M
AN-A
TT(
1
DEG
O
( 1-
c 1
Cla
ss o
f ac
tions
La
bele
d op
en in
terv
al
on a
n at
tribu
te
scal
e
Cla
ss o
f ac
tions
Ex
tens
ive
attri
bute
ha
ving
a d
egre
e w
ithin
a
labe
led
clos
ed in
terv
al
Cla
ss o
f ac
tions
Ex
tens
ive
attri
bute
ha
ving
a d
egre
e w
ithin
a
mea
sure
d in
terv
al
Cla
ss o
f ac
tions
N
omin
al
(cat
egor
ical
) at
tribu
te
Exte
nsiv
e R
eal n
umbe
r pl
us u
nit
scal
e”
of m
easu
re
Exte
nsiv
e sc
ale
Labe
led
open
inte
rval
on
the
rea
l lin
e
Exte
nsiv
e sc
ale
Labe
led
clos
ed in
terv
al
on t
he r
eal
line
The
attri
bute
va
lue
of th
e cl
ass
of a
ctio
ns i
s w
ithin
a
labe
led
open
in
terv
al
The
attri
bute
va
lue
of th
e cl
ass
of a
ctio
ns i
s w
ithin
a
labe
led
clos
ed
inte
rval
The
attri
bute
va
lue
of th
e cl
ass
of a
ctio
ns i
s w
ithin
a
mea
sure
d cl
osed
inte
rval
The
nom
inal
attr
ibut
e is
a
prop
erty
of
the
actio
n
Mea
sure
d de
gree
on
an
exte
nsiv
e sc
ale
Deg
ree
on th
e ex
tens
ive
scal
e is
with
in
a la
bele
d op
en in
terv
al
Deg
ree
on t
he e
xten
sive
sc
ale
is w
ithin
a
labe
led
clos
ed in
terv
al
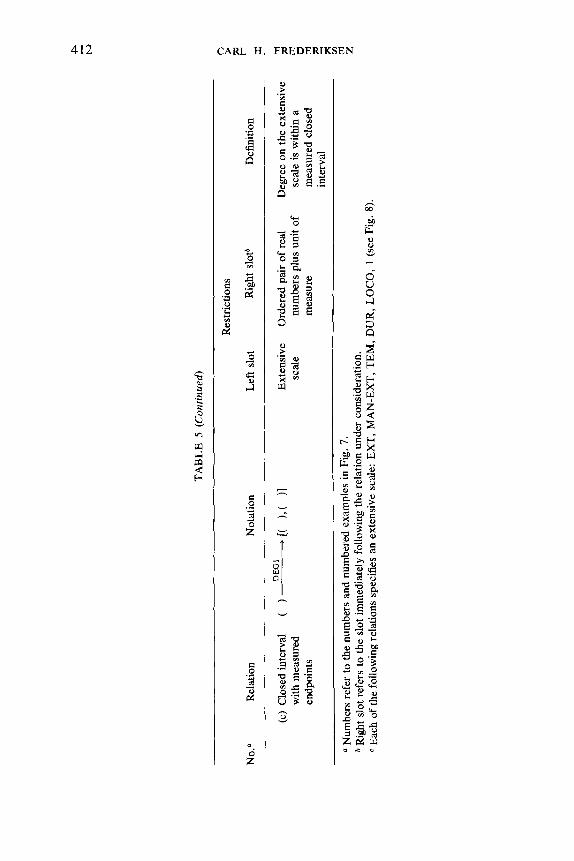
TABL
E 5
(Con
tinue
d)
No.
~ R
elat
ion
Not
atio
n
Res
trict
ions
F
Left
slot
R
ight
slo
th
Def
miti
on
? .“r
(c)
Clo
sed
inte
rval
(
) &
[( 1,
( )I
Exte
nsiv
e O
rder
ed p
air
of r
eal
Deg
ree
on th
e ex
tens
ive
with
mea
sure
d sc
ale
num
bers
plu
s un
it of
sc
ale
is w
ithin
a
endp
oint
s m
easu
re
mea
sure
d cl
osed
in
terv
al
a N
umbe
rs r
efer
to
the
num
bers
and
num
bere
d ex
ampl
es i
n Fi
g. 7
. * R
ight
slo
t re
fers
to
the
slot
imm
edia
tely
fo
llow
ing
the
rela
tion
unde
r co
nsid
erat
ion.
c E
ach
of th
e fo
llow
ing
rela
tions
spe
cifie
s an
ext
ensi
ve
scal
e: E
XT,
MAN
-EXT
, TE
M,
DU
R,
LOC
O,
1 (s
ee F
ig.
8).
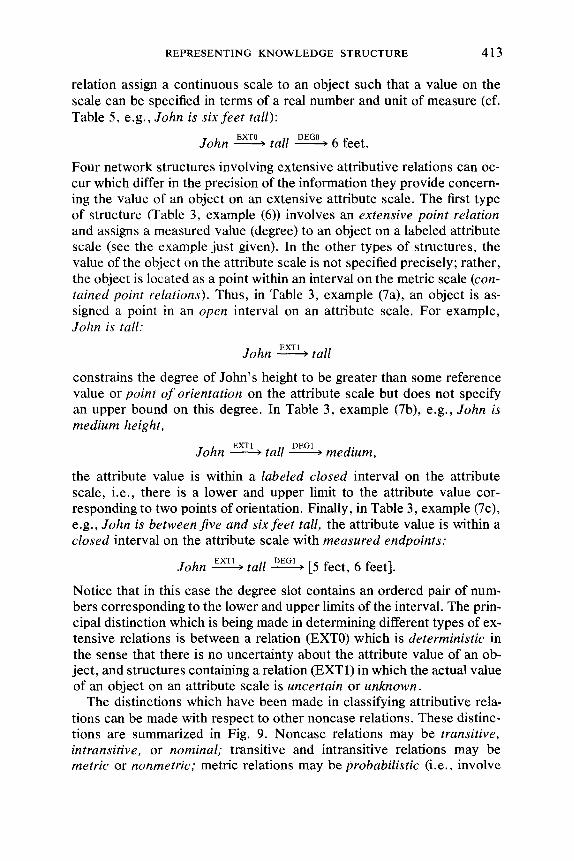
REPRESENTING KNOWLEDGE STRUCTURE 413
relation assign a continuous scale to an object such that a value on the scale can be specified in terms of a real number and unit of measure (cf. Table 5, e.g., John is six feet tall):
J&n - tall s 6 feet.
Four network structures involving extensive attributive relations can oc- cur which differ in the precision of the information they provide concern- ing the value of an object on an extensive attribute scale. The first type of structure (Table 3, example (6)) involves an extensive point relation and assigns a measured value (degree) to an object on a labeled attribute scale (see the example just given). In the other types of structures, the value of the object on the attribute scale is not specified precisely; rather, the object is located as a point within an interval on the metric scale (con- tained point relations). Thus, in Table 3, example (7a), an object is as- signed a point in an open interval on an attribute scale. For example, John is tall:
John % tall
constrains the degree of John’s height to be greater than some reference value or point of orientation on the attribute scale but does not specify an upper bound on this degree. In Table 3, example (7b), e.g., John is medium height,
John - tall % medium,
the attribute value is within a labeled closed interval on the attribute scale, i.e., there is a lower and upper limit to the attribute value cor- responding to two points of orientation. Finally, in Table 3, example (7c), e.g., John is between jive and six feet tall, the attribute value is within a closed interval on the attribute scale with measured endpoints:
John % tall % [5 feet, 6 feet].
Notice that in this case the degree slot contains an ordered pair of num- bers corresponding to the lower and upper limits of the interval. The prin- cipal distinction which is being made in determining different types of ex- tensive relations is between a relation (EXTO) which is deterministic in the sense that there is no uncertainty about the attribute value of an ob- ject, and structures containing a relation (EXTl) in which the actual value of an object on an attribute scale is uncertain or unknown.
The distinctions which have been made in classifying attributive rela- tions can be made with respect to other noncase relations. These distinc- tions are summarized in Fig. 9. Noncase relations may be transitive, intransitive, or nominal; transitive and intransitive relations may be metric or nonmetric; metric relations may be probabilistic (i.e., involve
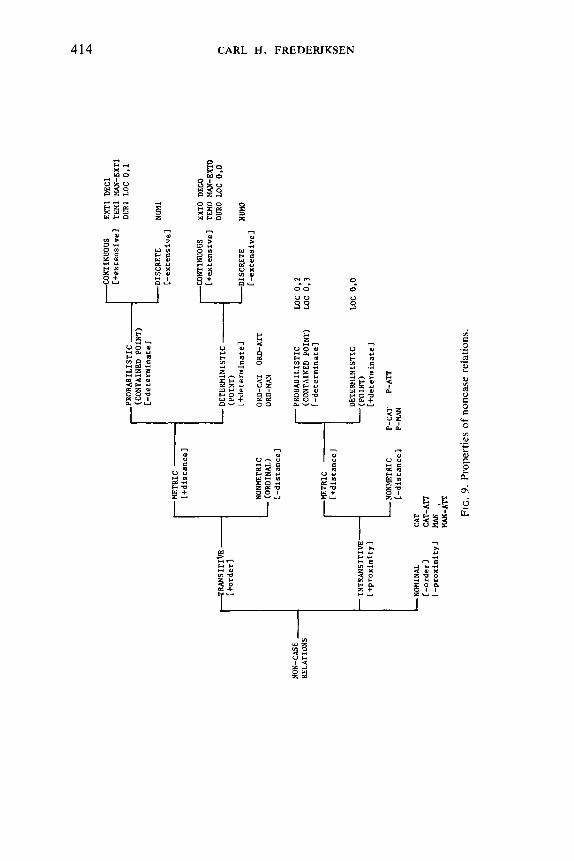
-TR
ANSI
TIh
C+o
rder
l
NO
N-C
ASE
REL
ATIO
NS
INTR
ANSI
TIVE
C
+pro
xim
ityl
NO
MIN
AL
L N
ON
MET
RIC
(O
RD
INAL
) C
-dis
tanc
e]
r C
ON
TIN
UO
US
c+ex
tens
ive1
-DET
ERM
INIS
TIC
---
---I
(PO
INT)
L+
dete
rmln
atel
D
ISC
RET
E I-e
xten
sive1
O
RD
-CAT
O
IlD-A
TT
OR
D-M
AN
-L
PRO
BABI
LIST
IC
Lot
0,2
(CO
NTA
INED
PO
INT)
La
c 0.
3 I-d
eter
min
ate1
M
ETR
IC
[+df
stan
ceJ
DET
ERM
INIS
TIC
Lo
t 0.
0 (P
OIN
T)
C+d
eter
.inat
el
NO
NM
YETR
I C
P-
CAT
P-
ATT
t-dist
ance
1 P-
HAN
C-o
rder
] C
AT-A
m
I-pro
xim
ity1
MAN
NA
N-Ai
T
EXTI
D
EGl
TEM
I M
AN-E
XTl
DlJ
Rl
LOC
0.1
EXTO
DEG
O
TEM
O M
AN-E
XTD
D
IJR
O LO
C 0
.0
NUM
O
FIG
. 9.
Pro
perti
es o
f no
ncas
e re
latio
ns.

REPRESENTING KNOWLEDGE STRUCTURE 415
uncertainty) or deterministic; and finally, metric transitive relations may be continuous (extensive) or discrete. Since the only probabilistic intran- sitive metric relations which occur are continuous, viz. LOC 0,2 and LOC 0,3 (which are intransitive because they involve two and three di- mensional spaced, respectively), the continuous-discrete distinction is not made for intransitive relations. All noncase relations are listed after their appropriate branches in Fig. 9. Thus, Fig. 9 indicates which relations have identical algebraic, metric, and statistical properties.
The following network illustrates many of the stative relations defined in Tables 3 and 4. In addition to specifying several state systems, the example includes processive case systems in which slots in the case sys- tems are filled by embedded networks representing state systems. Note that proper names are considered to be definite and singular and thus do not take determiner and quantifier relations.
(birds L ( )) % (canaries % ( >)
EXTL small
-E
EXT’ yellow
HASP ((wings % ( ) Splural) EXTl small)
John PAT have m (canaries 3 ( ) 5 1)
TT;;igaF (5,7 OZ.)
John PAT have % (friend % ( ) NUMO\ 1) s Bill
Bill 5 have =% [(book TOK_, ( ) =+-% 1)
THEMEl (canaries L= ( ))]
The following text can be generated from this network: Canaries are small yellow birds with small wings. John has a canary. His canary is female and weighs between five and seven ounces. John’s friend Bill has a book about canaries.
Whenever an object or action occurs repeatedly in a network, there is an implied identity relation connecting slots containing the same object or action (e.g., John, have, and canaries in the above example). Brackets or parentheses always enclose slots which contain an embedded network structure. Square brackets enclose propositions. The example also il- lustrates how a network is constructed from a collection of concept- relation-concept triples. The reader should verify that the slot fillers in the above example satisfy the restrictions imposed on them by the structure as defined in Tables l-4.
Manner systems. Manner relations are defined in Table 5. Defined are
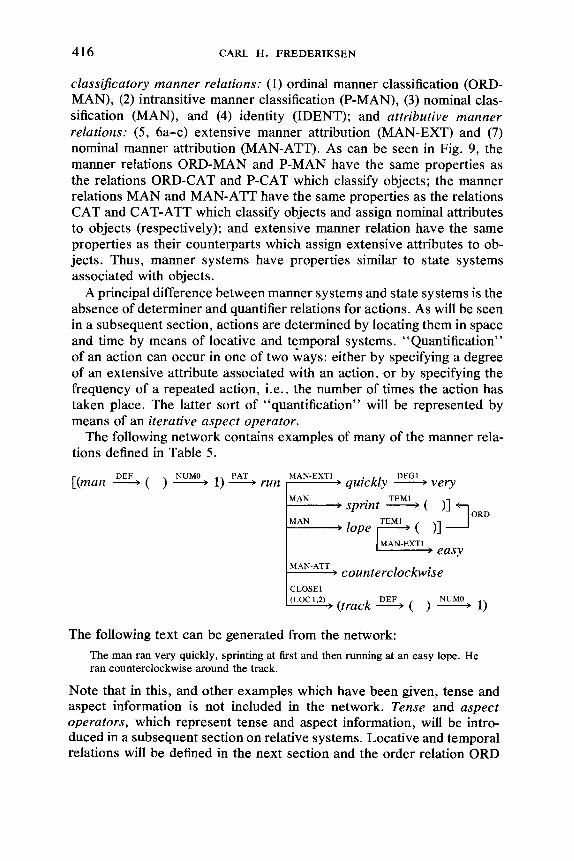
416 CARL H. FREDERIKSEN
cfussijcatory manner relations: (1) ordinal manner classification (ORD- MAN), (2) intransitive manner classification (P-MAN), (3) nominal clas- sification (MAN), and (4) identity (IDENT); and attributive manner relations: (5, 6a-c) extensive manner attribution (MAN-EXT) and (7) nominal manner attribution (MAN-ATT). As can be seen in Fig. 9, the manner relations ORD-MAN and P-MAN have the same properties as the relations ORD-CAT and P-CAT which classify objects; the manner relations MAN and MAN-ATT have the same properties as the relations CAT and CAT-ATT which classify objects and assign nominal attributes to objects (respectively); and extensive manner relation have the same properties as their counterparts which assign extensive attributes to ob- jects. Thus, manner systems have properties similar to state systems associated with objects.
A principal difference between manner systems and state systems is the absence of determiner and quantifier relations for actions. As will be seen in a subsequent section, actions are determined by locating them in space and time by means of locative and temporal systems. “Quantification” of an action can occur in one of two Gays: either by specifying a degree of an extensive attribute associated with an action, or by specifying the frequency of a repeated action, i.e., the number of times the action has taken place. The latter sort of “quantification” will be represented by means of an iterative aspect operator.
The following network contains examples of many of the manner rela- tions defined in Table 5.
[(man 5 ( ) a 1) S run MAN-EXTI quickly DEGI_ very
MAN > sprint -=+( )] MAN
) iwe cxil ,li2°RD
MAN-ATT > counterclockwise CLOSE1
(LOC1.2) (truck 5 ( ) s 1)
The following text can be generated from the network: The man ran very quickly, sprinting at first and then running at an easy lope. He ran counterclockwise around the track.
Note that in this, and other examples which have been given, tense and aspect information is not included in the network. Tense and aspect operators, which represent tense and aspect information, will be intro- duced in a subsequent section on relative systems. Locative and temporal relations will be defined in the next section and the order relation ORD
REPRESENTING KNOWLEDGE STRUCTURE 417
(which also occurs in the example) will be discussed in the section on relative systems.
Locative and temporal systems. Table 6 defines a network structure for the locative and temporal systems. Locative relations are of the four types previously described: point location (LOC O,O), contained point lo- cation (LOC O,l, LOC 0,2, and LOC 0,3), contained path or region (LOC l,l, LOC 1,3, LOC 2,3, etc.), and closed path or region (CLOSE,(LOC 1,2), etc.). As is illustrated in Fig. 9, the point locative re- lation has the same properties as the EXTO, MAN-EXTO, and DEGO relations; and the contained point locative relation LOC 0,l in which an object or action is assigned a point on a line (i.e., in a one-dimensional field) has the same properties as the EXTl , MAN-EXTl , and DEGl re- lations. Three types of LOC 0,l relations are possible (Table 6, (2a-c)) which correspond to the three types of probabilistic attribution (cf. Ta- ble 3, (7a-c)). The three types are: open interval (e.g., The car is on the road) :
(CUY =+ ( ) = 1) Loco,I road,
labeled closed interval (represented in the same manner as open interval, e.g., The car is on the 1.500 block of University Avenue); and measured closed interval or closed interval with labeled endpoints, e.g., The car is between Washington and Baltimore):
(cur s ( > NUMO, 1) LOCO.1 ~ (Washington, Baltimore).
Since transitivity is a property associated with one-dimensional systems, contained point locative relations which assign a point in a two- or three- dimensional space to an object (LOC 0,2 and LOC 0,3) do not have the transitivity property (cf. Fig. 9).
Locative systems frequently occur as parts of relative systems in which locative propositions are connected by algebraic relations into networks representing information about direction, orientation, and relative posi- tion. Relative systems containing locative propositions will be developed in the next section.
Temporal systems are defined by two types of time relations: tem- poral relations (Table 6, (5)-(g)) and durative relations (examples (9) and (10)). In defining temporal relations, a distinction must be made between relations which assign a point in time to an instantaneous action and relations which assign an interval of time to a durative action or state. Temporal relations may also be deterministic, i.e., assign measured times to actions or states (Table 6, (5) and (7)), or probabilistic, i.e., involve uncertainty with respect to the exact time at which an action or state occurred (Table 6, (6) and (8)). As indicated in Fig. 9, the TEMO relation has the same properties as EXTO while TEMl has the same
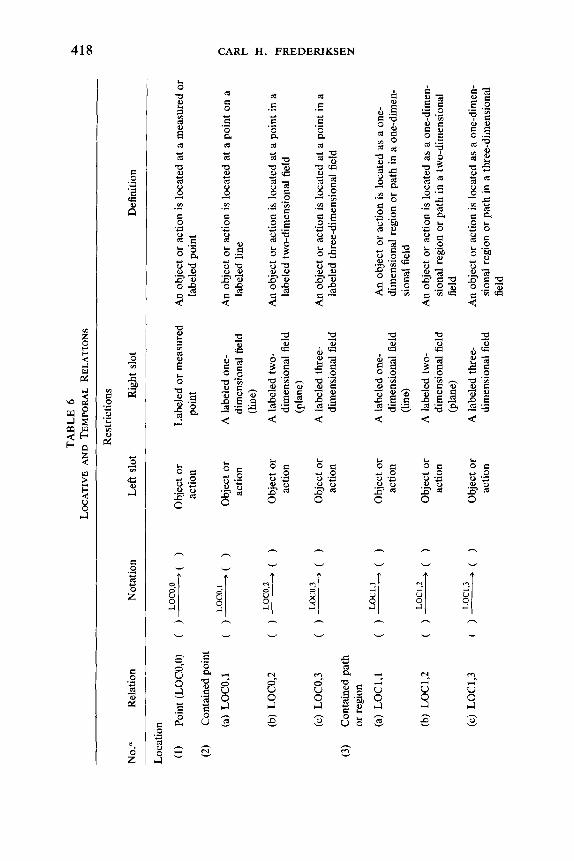
TABL
E 6
LOC
ATIV
E AN
D
TEM
POR
AL
REL
ATIO
NS
Res
trict
ions
No.
” R
elat
ion
Not
atio
n Le
ft sl
ot
Rig
ht s
lot
Def
initi
on
Loca
tion
(1)
Poi
nt (
LOC
O,O
)
(2)
Con
tain
ed p
oint
(a)
LOC
O,1
(b)
LOC
O,2
(c)
LOC
O,3
(3)
Con
tain
ed p
ath
or r
egio
n
(a)
LOC
I,1
(b)
LOC
I,2
(c)
LOC
1,3
( )X
( )
Obj
ect
or
Labe
led
or m
easu
red
actio
n po
int
( )=
%(
) O
bjec
t or
ac
tion
()a(
) O
bjec
t or
ac
tion
()=f
L()
Obj
ect
or
actio
n
A la
bele
d on
e-
dim
ensi
onal
fie
ld
(line
)
A la
bele
d tw
o-
dim
ensi
onal
fie
ld
Wan
e)
A la
bele
d th
ree-
di
men
sion
al f
ield
()=%
()
Obj
ect
or
actio
n
()S
()
Obj
ect
or
actio
n
()rn
()
Obj
ect
or
actio
n
A la
bele
d on
e-
dim
ensi
onal
fie
ld
(line
)
A la
bele
d tw
o-
dim
ensi
onal
fie
ld
WW
A la
bele
d th
ree-
di
men
sion
al f
ield
An o
bjec
t or
act
ion
is lo
cate
d at
a m
easu
red
or
labe
led
poin
t
An o
bjec
t or
act
ion
is lo
cate
d at
a p
oint
on
a $
labe
led
line
F F An
obj
ect
or a
ctio
n is
loca
ted
at a
poi
nt i
n a
labe
led
two-
dim
ensi
onal
fie
ld
2 g
An o
bjec
t or
act
ion
is lo
cate
d at
a p
oint
in
a E
labe
led
thre
e-di
men
sion
al
field
I2
g
An o
bjec
t or
act
ion
is lo
cate
d as
a o
ne-
dim
ensi
onal
reg
ion
or p
ath
in a
one
-dim
en-
sion
al f
ield
An o
bjec
t or
act
ion
is lo
cate
d as
a o
ne-d
imen
- si
onal
reg
ion
or p
ath
in a
two-
dim
ensi
onal
fie
ld
An o
bjec
t or
act
ion
is lo
cate
d as
a o
ne-d
imen
- si
onal
reg
ion
or p
ath
in a
thre
e-di
men
sion
al
field
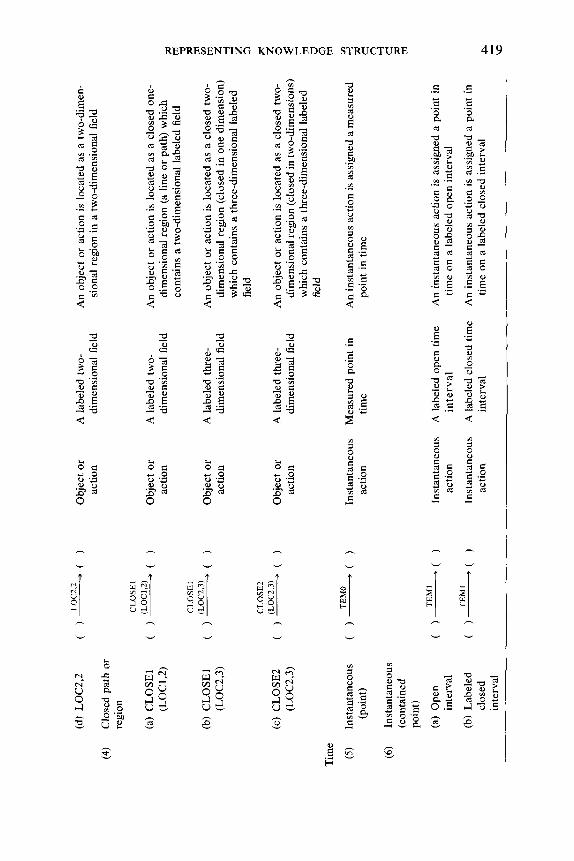
(d)
LOC
2,2
()X()
(4)
Clo
sed
path
or
regi
on
(a)
CLO
SE1
(LO
C1,
2)
CLO
SE1
( )
a.O
C1,
2)) (
)
(b)
CLO
SE1
(LO
C2,
3)
(c)
CLO
SE2
(LO
C2,
3)
Tim
e
(5)
Inst
anta
neou
s (p
oint
)
(6)
Inst
anta
neou
s (c
onta
ined
po
int)
(4
Ope
n in
terv
al
(b)
Labe
led
clos
ed
inte
rval
CLO
SE1
CLO
SE2
()=()
( )a
( )
TEM
I (
1-c
1
Obj
ect
or
actio
n A
labe
led
two-
di
men
sion
al f
ield
Obj
ect
or
actio
n A
labe
led
two-
di
men
sion
al f
ield
Obj
ect
or
actio
n A
labe
led
thre
e-
dim
ensi
onal
fie
ld
Obj
ect
or
actio
n A
labe
led
thre
e-
dim
ensi
onal
fie
ld
Inst
anta
neou
s M
easu
red
poin
t in
ac
tion
time
Inst
anta
neou
s A
labe
led
open
tim
e ac
tion
inte
rval
Inst
anta
neou
s A
labe
led
clos
ed ti
me
actio
n in
terv
al
An o
bjec
t or
act
ion
is lo
cate
d as
a tw
o-di
men
- si
onal
reg
ion
in a
two-
dim
ensi
onal
fie
ld
An o
bjec
t or
act
ion
is lo
cate
d as
a c
lose
d on
e-
dim
ensi
onal
reg
ion
(a li
ne o
r pa
th)
whi
ch
cont
ains
a tw
o-di
men
sion
al
labe
led
field
An o
bjec
t or
act
ion
is lo
cate
d as
a c
lose
d tw
o-
dim
ensi
onal
reg
ion
(clo
sed
in o
ne d
imen
sion
) w
hich
con
tain
s a
thre
e-di
men
sion
al
labe
led
field
An o
bjec
t or
act
ion
is lo
cate
d as
a c
lose
d tw
o-
dim
ensi
onal
reg
ion
(clo
sed
in tw
o-di
men
sion
s)
whi
ch c
onta
ins
a th
ree-
dim
ensi
onal
la
bele
d fie
ld
An in
stan
tane
ous
actio
n is
ass
igne
d a
mea
sure
d po
int
in t
ime
An i
nsta
ntan
eous
act
ion
is a
ssig
ned
a po
int
in
time
on a
labe
led
open
int
erva
l
An i
nsta
ntan
eous
act
ion
is a
ssig
ned
a po
int
in
time
on a
labe
led
clos
ed in
terv
al
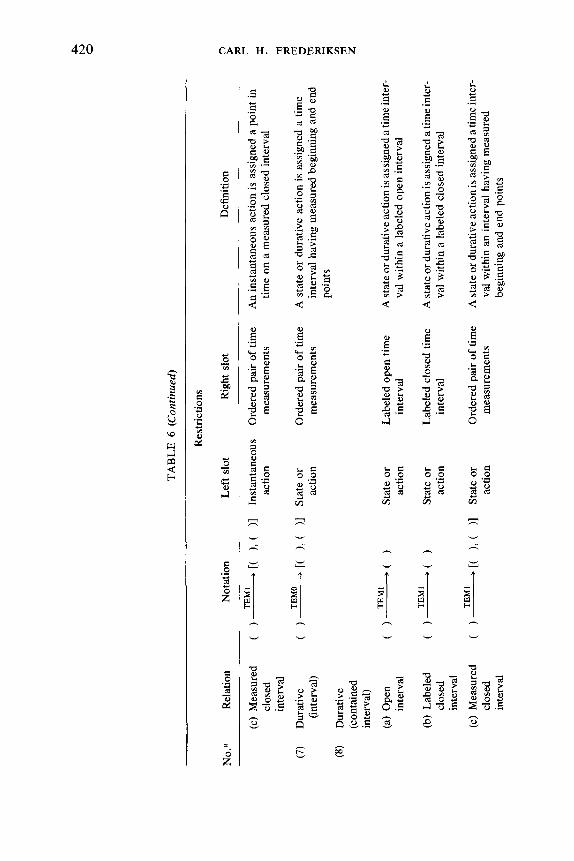
TABL
E 6
(Con
tinue
d)
No.
” R
elat
ion
(c)
Mea
sure
d cl
osed
in
terv
al
(7)
Dur
ativ
e (in
terv
al)
(8)
Dur
ativ
e (c
onta
ined
in
terv
al)
(a)
Ope
n in
terv
al
(b)
Labe
led
clos
ed
inte
rval
(c)
Mea
sure
d cl
osed
in
terv
al
Res
trict
ions
Not
atio
n Le
ft sl
ot
Rig
ht s
lot
Def
initi
on
2
( )
TEM
l [(
), (
)] In
stan
tane
ous
Ord
ered
pai
r of
tim
e An
ins
tant
aneo
us a
ctio
n is
ass
igne
d a
poin
t in
T1
actio
n m
easu
rem
ents
tim
e on
a m
easu
red
clos
ed i
nter
val
F 2 (
) TE
MO
[(
), (
)] St
ate
or
Ord
ered
pai
r of
tim
e A
stat
e or
dur
ativ
e ac
tion
is a
ssig
ned
a tim
e m
actio
n m
easu
rem
ents
in
terv
al
havi
ng m
easu
red
begi
nnin
g an
d en
d Fi
po
ints
E Ln
( 1-
c )
Stat
e or
ac
tion
( 1-
c 1
Stat
e or
ac
tion
( )
TEM
l [(
), (
)] St
ate
or
actio
n
Labe
led
open
tim
e in
terv
al
Labe
led
clos
ed t
ime
inte
rval
A st
ate
or d
urat
ive
actio
n is
ass
igne
d a
time
inte
r- va
l w
ithin
a
labe
led
open
int
erva
l
A st
ate
or d
urat
ive
actio
n is
ass
igne
d a
time
inte
r- va
l w
ithin
a
labe
led
clos
ed in
terv
al
Ord
ered
pai
r of
tim
e A
stat
e or
dur
ativ
e ac
tion
is a
ssig
ned
a tim
e in
ter-
mea
sure
men
ts
val
with
in
an in
terv
al
havi
ng m
easu
red
begi
nnin
g an
d en
d po
ints
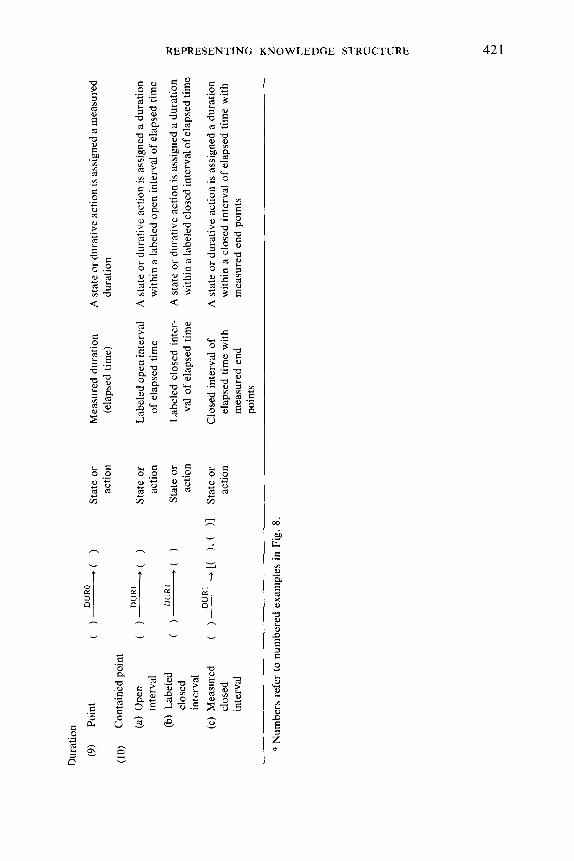
Dur
atio
n
(9)
Poi
nt
(10)
C
onta
ined
poi
nt
(a)
Ope
n in
terv
al
(b)
Labe
led
clos
ed
inte
rval
(c
) M
easu
red
clos
ed
inte
rval
DURO
(
I-----
-*(
1 St
ate
or
actio
n
DURl
(
)-(
1 St
ate
or
actio
n DU
Rl
( )--
----t(
1
Stat
e or
ac
tion
( ) s
[(
), (
)I St
ate
or
actio
n
Mea
sure
d du
ratio
n (e
laps
ed t
ime)
Labe
led
open
inte
rval
A
stat
e or
dur
ativ
e ac
tion
is a
ssig
ned
a du
ratio
n of
ela
psed
tim
e w
ithin
a la
bele
d op
en in
terv
al o
f ela
psed
tim
e
Labe
led
clos
ed i
nter
- A
stat
e or
dur
ativ
e ac
tion
is a
ssig
ned
a du
ratio
n va
l of
ela
psed
tim
e w
ithin
a la
bele
d cl
osed
inte
rval
of e
laps
ed ti
me
Clo
sed
inte
rval
of
el
apse
d tim
e w
ith
mea
sure
d en
d po
ints
A st
ate
or d
urat
ive
actio
n is
ass
igne
d a
dura
tion
with
in
a cl
osed
inte
rval
of
ela
psed
tim
e w
ith
mea
sure
d en
d po
ints
A st
ate
or d
urat
ive
actio
n is
ass
igne
d a
mea
sure
d du
ratio
n
a N
umbe
rs r
efer
to
num
bere
d ex
ampl
es i
n Fi
g. 8
.
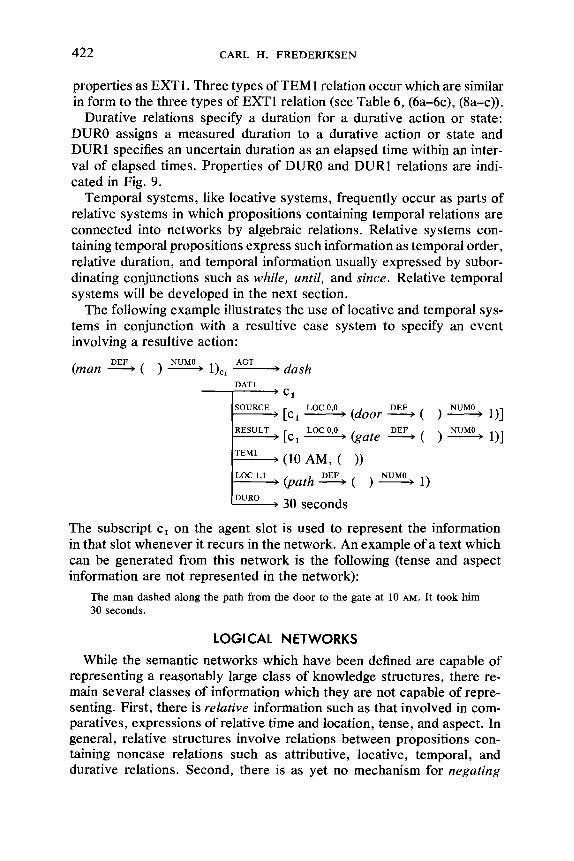
422 CARL H. FREDERIKSEN
properties as EXTl. Three types of TEMl relation occur which are similar in form to the three types of EXTl relation (see Table 6, (6a-6c), @a-c)).
Durative relations specify a duration for a durative action or state: DURO assigns a measured duration to a durative action or state and DURl specifies an uncertain duration as an elapsed time within an inter- val of elapsed times. Properties of DURO and DURl relations are indi- cated in Fig. 9.
Temporal systems, like locative systems, frequently occur as parts of relative systems in which propositions containing temporal relations are connected into networks by algebraic relations. Relative systems con- taining temporal propositions express such information as temporal order, relative duration, and temporal information usually expressed by subor- dinating conjunctions such as while, until, and since. Relative temporal systems will be developed in the next section.
The following example illustrates the use of locative and temporal sys- tems in conjunction with a resultive case system to specify an event involving a resultive action:
(man = ( ) = l),, AGT dash DATI
Cl
SOURCE
RESULT
2
[Cl Lot (door -3. ( ) = l)]
[Cl Lot (gate 5 ( ) s l)]
TEMl (10 AM, ( 1)
LOC 1.1 buth s ( ) NUMO, 1)
DURO 30 seconds
The subscript c1 on the agent slot is used to represent the information in that slot whenever it recurs in the network. An example of a text which can be generated from this network is the following (tense and aspect information are not represented in the network):
The man dashed along the path from the door to the gate at 10 AM. It took him 30 seconds.
LOGI CAL NETWORKS
While the semantic networks which have been defined are capable of representing a reasonably large class of knowledge structures, there re- main several classes of information which they are not capable of repre- senting. First, there is relative information such as that involved in com- paratives, expressions of relative time and location, tense, and aspect. In general, relative structures involve relations between propositions con- taining noncase relations such as attributive, locative, temporal, and durative relations. Second, there is as yet no mechanism for negating
REPRESENTING KNOWLEDGE STRUCTURE 423
or in other ways operating on the truth-value of propositions; the proposi- tions which have been defined were considered to have positive truth- value. Third, the semantic networks do not represent logical relations such as conjunction, alternation, and implication which are defined in terms of truth tables for pairs of propositions. Finally, in the semantic networks which have been defined, causal systems were restricted to case systems involving objects, states, and events immediately causally connected to an action. More general causal systems need to be con- sidered which contain case systems as components. In this section rela- tions, operators on relations, and networks will be defined which represent these classes of information.
Logical networks were described previously as consisting of sets of propositions connected into networks by relations of three types: logical relations, causal relations, and algebraic relations. Logical networks are composed of three distinct systems: logical systems, causal systems, and relative systems. Each of these systems consists of sets of propositions which are connected into networks by relations of one of the three types: logical, causal, or algebraic. This section will develop network structures for each of these systems beginning with relative systems and then con- sidering logical and causal systems. Truth-value operators will be defined in conjunction with logical systems.
Relative systems. In defining relations in the state, manner, locative, and temporal systems, a major distinction was made between relations which are relative, i.e., relations which identify objects or actions by specifying relative information about the objects or actions and thus di- rectly relating them to other objects or actions, and relations which are nominal, i.e., relations which identify objects or actions by specifying information about the objects or actions which does not directly relate them to other objects or actions. A relative relation was found to be of one of two kinds depending upon whether the relation is transitive or intransitive (i.e., not necessarily transitive; see Fig. 9).
Algebraic relations connect propositions containing transitive or in- transitive relations. A relative system consists of a network of algebraic relations and a set of propositions containing transitive or intransitive re- lations which occupy slots in the network. Algebraic relations are of two kinds: order relations and proximity relations. Order relations connect propositions containing identical transitive relations; proximity relations connect propositions containing identical intransitive relations. Different types of order and proximity relations may be defined in terms of their symmetry, reflexivity, and transitivity properties. Definitions of order and proximity relations are presented in Table 7; a classification of the order and proximity relations defined in Table 7 is presented in Fig. 10. Figure 10 also provides examples of each of the relations defined in Table 7.
Order relations may be illustrated by the following example in which
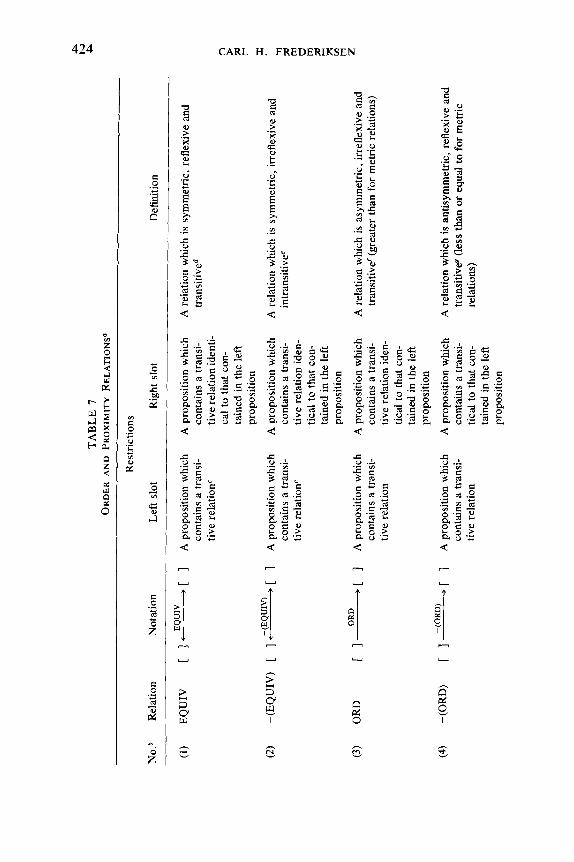
TABL
E 7
OR
DER
AN
D P
RO
XIM
ITY
REL
ATIO
NS~
Res
trict
ions
No.
* R
elat
ion
Not
atio
n Le
ft sl
ot
Rig
ht s
lot
Def
initi
on
(1)
(2)
(3)
(4)
EQU
IV
-(EQ
UIV
)
OR
D
- (O
RD
)
[ 1 -
[ EQ
UIV
1
r I<
-(EQ
UIV)
l [
1
OR
D
r I-1
1
[ l-
-~~~
) 1
1
A pr
opos
ition
w
hich
co
ntai
ns a
tran
si-
tive
rela
tionc
A pr
opos
ition
w
hich
co
ntai
ns a
tran
si-
tive
rela
tionC
A pr
opos
ition
w
hich
co
ntai
ns a
tran
si-
tive
rela
tion
A pr
opos
ition
w
hich
co
ntai
ns a
tran
si-
tive
rela
tion
A pr
opos
ition
w
hich
co
ntai
ns a
tran
si-
tive
rela
tion
iden
ti-
cal t
o th
at c
on-
tain
ed i
n th
e le
ft pr
opos
ition
A pr
opos
ition
w
hich
co
ntai
ns a
tran
si-
tive
rela
tion
iden
- tic
al t
o th
at c
on-
tain
ed i
n th
e le
ft pr
opos
ition
A pr
opos
ition
w
hich
co
ntai
ns a
tran
si-
tive
rela
tion
iden
- tic
al t
o th
at c
on-
tain
ed i
n th
e le
ft pr
opos
ition
A pr
opos
ition
w
hich
co
ntai
ns a
tran
si-
tical
to
that
con
- ta
ined
in
the
left
prop
ositi
on
A re
latio
n w
hich
is
sym
met
ric,
refle
xive
an
d tra
nsiti
ved
A re
latio
n w
hich
is
sym
met
ric,
irref
lexi
ve
and
?
intra
nsiti
vee
2 g E z
A re
latio
n w
hich
is
asym
met
ric,
irref
lexi
ve
and
trans
itive
’ (g
reat
er t
han
for
met
ric r
elat
ions
)
A re
latio
n w
hich
is
antis
ymm
etric
, re
flexi
ve
and
trans
itive
(le
ss th
an o
r eq
ual t
o fo
r m
etric
re
latio
ns)
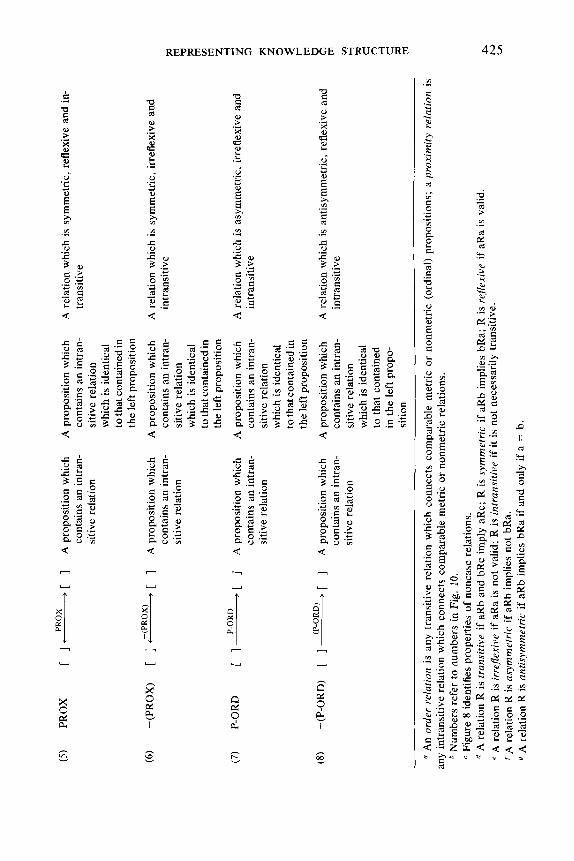
(5)
(6)
(7)
(8)
PRO
X
-(PR
OX)
P-O
RD
-(P-O
RD
)
[ 1
PRO
X -[
1
[ I<
- (P
RO
X)
>[
1
r 1 =
r 1
[ 1
-(P-O
RD)
,[ 1
A pr
opos
ition
w
hich
co
ntai
ns a
n in
tran-
si
tive
rela
tion
A pr
opos
ition
w
hich
co
ntai
ns a
n in
tran-
si
tive
rela
tion
A pr
opos
ition
w
hich
co
ntai
ns a
n in
tran-
si
tive
rela
tion
A pr
opos
ition
w
hich
co
ntai
ns a
n in
tran-
si
tive
rela
tion
A pr
opos
ition
w
hich
co
ntai
ns a
n in
tran-
si
tive
rela
tion
whi
ch i
s id
entic
al
to th
at c
onta
ined
in
the
left
prop
ositi
on
A pr
opos
ition
w
hich
co
ntai
ns a
n in
tran-
si
tive
rela
tion
whi
ch i
s id
entic
al
to th
at c
onta
ined
in
the
left
prop
ositi
on
A pr
opos
ition
w
hich
co
ntai
ns a
n in
tran-
si
tive
rela
tion
whi
ch i
s id
entic
al
to th
at c
onta
ined
in
the
left
prop
ositi
on
A pr
opos
ition
w
hich
co
ntai
ns a
n in
tran-
si
tive
rela
tion
whi
ch i
s id
entic
al
to t
hat
cont
aine
d in
the
lef
t pr
opo-
si
tion
A re
latio
n w
hich
is
sym
met
ric,
refle
xive
an
d in
- tra
nsiti
ve
A re
latio
n w
hich
is
sym
met
ric,
irref
lexi
ve
and
intra
nsiti
ve
A re
latio
n w
hich
is
asym
met
ric,
irref
lexi
ve
and
intra
nsiti
ve
A re
latio
n w
hich
is
antis
ymm
etric
, re
flexi
ve
and
intra
nsiti
ve
’ An
ord
er
rela
tion
is a
ny t
rans
itive
re
latio
n w
hich
con
nect
s co
mpa
rabl
e m
etric
or
nonm
etric
(o
rdin
al)
prop
ositi
ons;
a
prox
imity
re
latio
n is
an
y in
trans
itive
re
latio
n w
hich
con
nect
s co
mpa
rabl
e m
etric
or
nonm
etric
re
latio
ns.
* Num
bers
ref
er t
o nu
mbe
rs i
n Fi
g. 1
0.
c Fi
gure
8 id
entif
ies
prop
ertie
s of
non
case
rel
atio
ns.
’ A
rela
tion
R is
tran
sitiv
e if
aRb
and
bRc
impl
y aR
c; R
is sy
mm
etric
if
aRb
impl
ies
bRa;
R is
ref
lexi
ve
if aR
a is
val
id.
e A r
elat
ion
R is
irre
jexi
ve
if aR
a is
not
val
id;
R is
intra
nsiti
ve
if it
is n
ot n
eces
saril
y tra
nsiti
ve.
f A r
elat
ion
R is
asy
mm
etric
if
aRb
impl
ies
not
bRa.
g
A re
latio
n R
is a
ntis
ymm
etric
if
aRb
impl
ies
bRa
if an
d on
ly if
a =
b.
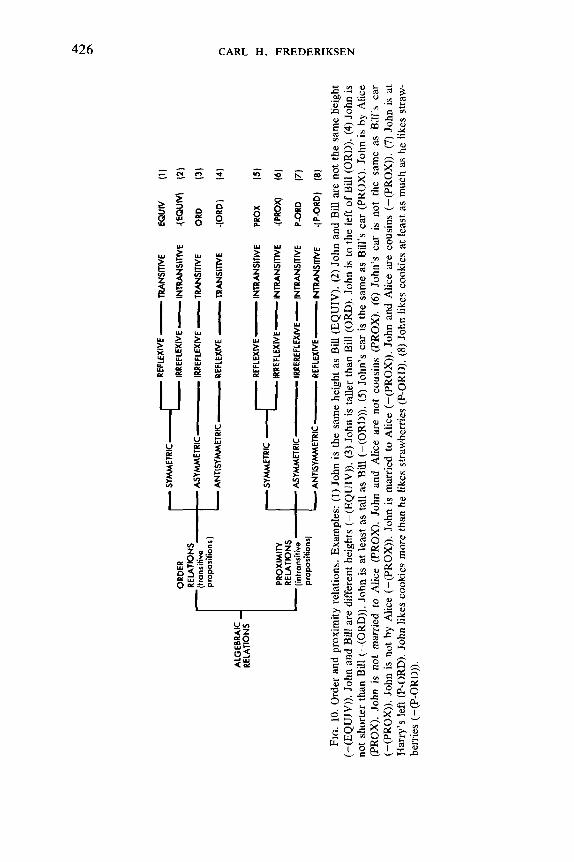
- TR
ANSI
TIVE
OR
DER
r
- TR
ANSI
TNE
- TR
ANSI
TIVE
ALG
EBR
AIC
R
ELAT
ION
S
I R
EFL
ExN
E
- IN
TRAN
SITI
VE
P-
SYM
MET
RIC
EQU
IV
(11
-(EQ
Ulw
12
1 O
RD
PI
-IOR
D]
I41
PRO
X i5
l “r
-(P
ROX)
16
1 2
P-O
RD
17
1 Fi
u m
l -[P
-ORD
) (8
) .-.
E
FIG
. 10
. Ord
er a
nd p
roxi
mity
re
latio
ns.
Exam
ples
: (1
) Joh
n is
the
sam
e he
ight
as
Bill
(EQ
UIV
). (2
) Joh
n an
d Bi
ll ar
e no
t th
e sa
me
heig
ht
(-(E
QU
IV))
. Jo
hn a
nd B
ill ar
e di
ffere
nt h
eigh
ts (
-(E
QU
IV))
. (3
) Joh
n is
talle
r th
an B
ill (O
RD
). Jo
hn is
to t
he l
eft
of B
ill (O
RD
). (4
) Joh
n is
no
t sh
orte
r th
an B
ill (-
(OR
D))
. Jo
hn is
at
leas
t as
tall
as B
ill (-
(OR
D))
. (5
) Joh
n’s
car
is t
he s
ame
as B
ill’s
car
(PR
OX
). Jo
hn is
by
Alic
e (P
RO
X).
John
is
not
mar
ried
to A
lice
(PR
OX
). Jo
hn a
nd A
lice
are
not
cous
ins
(PR
OX)
. (6
) Jo
hn’s
ca
r is
not
th
e sa
me
as B
ill’s
car
(-(P
RO
X))
. Jo
hn is
not
by
Alic
e (-
(PR
OX
)).
John
is m
arrie
d to
Alic
e (-
(PR
OX
)).
John
and
Alic
e ar
e co
usin
s (-
(PR
OX
)).
(7)
John
is
at
Har
ry’s
le
ft C
P-O
RD
). Jo
hn li
kes
cook
ies
mor
e th
an h
e lik
es s
traw
berri
es
(P-O
RD
). (8
) Joh
n lik
es c
ooki
es a
t le
ast
as m
uch
as h
e lik
es s
traw
- be
rries
(-(
P-O
RD
)).
REPRESENTING KNOWLEDGE STRUCTURE 427
two propositions containing a transitive attribute (height) are connected by the relation EQUIV which is transitive, symmetric, and reflexive (see Fig. 10, example (1)):
[John s height s ( )Ipl
[Bill 3 height s (
EQurv
)I,, II
(The propositions are labeled p1 and p2 for convenience.) Propositions p1 and pz identify John and Bill as each having an unspecified (unknown) degree on an extensive attribute height. The relation EQUIV connects p1 and pz and constrains the unfilled slots in the two propositions in the following manner. (1) The relation EQUIV is transitive: hence, if we have
[Bob 3 height s ( )I,,
and p2 < EQUIV > p3, thenp, +EQU’V ) p3 is valid. (2) The relation is symmetric:
thus p 1 < EQurv > pz and pz c EQ”lV > p1 are both valid; and (3) the relation is re-
flexive: hence p1 +EQ”lv > p1 is valid. Thus, example (1) constrains the un- filled degree slots to be equivalent. The relation -(EQUIV) is defined to be an order relation which is intransitive, symmetric, and irreflexive. The
proposition p1 I pz similarly will be found to constrain John’s height to be unequal to Bill’s height.
The relation ORD is defined as an order relation which is transitive,
asymmetric, and irreflexive. Thus, in the example: p1 ORD\ pz (Fig. 10, ORD example (3)), the relation ORD is transitive: p1 + ORD
p2 - p3 implies
that p1 % p3 is valid; it is asymmetric: p1 % pz and p2 ORD p1 are
not both valid; and it is irreflexive: p1 % p1 is not valid. The proposition
pl s pz by convention will be taken to constrain the unspecified degree of height associated with John to be greater than that assigned to Bill. The relation -(ORD) is transitive, antisymmetric, and reflexive. Thus, in the
example: p1 * pz (Fig. 10, example (4)), if p1 e pz _-O p3is
valid, then p1 I-(ORD) p3 is valid (transitivity); p, ( -@RW p2 and p1 -CORD) >
pz are both valid only if p1 z p2 (antisymmetry), and p1 m p1
is valid (reflexivity). The proposition p1 z pz thus constrains John’s height to be not less than Bill’s height.
In all of the above examples, the propositions connected by order re- lations contain the extensive attribute height which is one-dimensional and hence transitive. Since intransitivities are produced by systems having
428 CARL H. FREDERIKSEN
dimensionality greater than one, a convenient example of a proximity relation is adjacency (Fig. 10, example (5): John is by Alice):
[John w ( >I,, PROX [Alice Lot ( )I,, 3
Propositions p1 and pz in this example contain intransitive locative relations which assign unspecified point locations to John and Alice in a two-dimensional field. The relation PROX is intransitive, sym- metric, and reflexive and thus constrains the point locations in the unfilled slots in the following way. (1) The relation PROX is intransitive:
hence, if we have a third locative proposition [Bill m ( )],, such that
pz a p3, it is not necessary thatp, a p3 be valid. (2) The relation
PROX is symmetric: thus p1 a pz and pz s p1 are both valid;
and (3) the relation is reflexive: hence p1 a p1 is valid (John is by himself). The relation -(PROX) is defined to be intransitive, symmetric,
and irreflexive. The proposition p1 a pz will be found similarly to constrain John’s and Alice’s locations to be nonadjacent.
An example of the relation P-ORD which is intransitive, asymmetric, and irreflexive is provided by relative systems representing direction. We will consider as examples relative systems from which the following two sentences can be generated: (1) John is to the left offfurry and (2) John is to Hurry’s left. The first example involves a relative system containing a transitive ORD relation; the second involves the intransitive relation P-ORD. The relative system corresponding to example (1) is:
[John D left (Speaker)],,
[Hurry Lot ( )I,, f 10RD
Proposition p1 assigns to John a point location in an open interval (labeled left (Speaker)) on a line (one-dimensional field) where the direction of the line in space is determined by reference to the speaker. Harry is as- signed an unspecified point on the same line. By convention a labeled open interval (e.g., left) is taken as the positive direction on an extensive scale unless it is otherwise marked as the negative direction (with a minus sign). The relation ORD constrains John’s location to be on that half of the speaker-defined left-right axis labeled left. That the connecting relation is transitive can be seen by considering the system:
[John -=% left @peaker)l,, zl
ORD [Hurry m left @peal=%,
[Bob Lot ( )I,, LORD
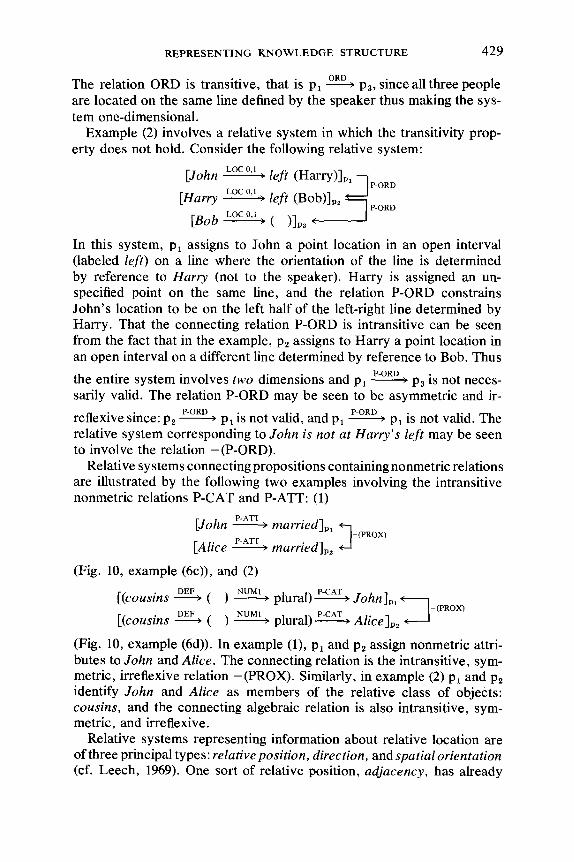
REPRESENTING KNOWLEDGE STRUCTURE 429
The relation ORD is transitive, that is p1 % p3, since all three people are located on the same line defined by the speaker thus making the sys- tem one-dimensional.
Example (2) involves a relative system in which the transitivity prop- erty does not hold. Consider the following relative system:
[John % left W=-w%, P-ORD [Hurry % left (Bob)],, 3
[Bob Lot ( )I,, 2 P-oRD
In this system, p1 assigns to John a point location in an open interval (labeled left) on a line where the orientation of the line is determined by reference to Hurry (not to the speaker). Harry is assigned an un- specified point on the same line, and the relation P-ORD constrains John’s location to be on the left half of the left-right line determined by Harry. That the connecting relation P-ORD is intransitive can be seen from the fact that in the example, p2 assigns to Harry a point location in an open interval on a different line determined by reference to Bob. Thus
the entire system involves two dimensions and p1 P-ORD p3 is not neces- sarily valid. The relation P-ORD may be seen to be asymmetric and ir-
reflexive since: p2 P-ORD p1 is not valid, and p1 P-ORD p1 is not valid. The relative system corresponding to John is not at Harry’s left may be seen to involve the relation -(P-ORD).
Relative systems connecting propositions containing nonmetric relations are illustrated by the following two examples involving the intransitive nonmetric relations P-CAT and P-ATT: (1)
[John P-ATT married],,
[Alice P-ATT married],, 3 -(PRoX)
(Fig. 10, example (6c)), and (2)
[(cousins 5 ( ) s plural)- John],,
[(cousins 5 ( ) 3 plural)% Alice],, 3 -(PROX)
(Fig. 10, example (6d)). In example (l), p1 and pz assign nonmetric attri- butes to John and Alice. The connecting relation is the intransitive, sym- metric, it-reflexive relation -(PROX). Similarly, in example (2) p1 and pz identify John and Alice as members of the relative class of objects: cousins, and the connecting algebraic relation is also intransitive, sym- metric, and irreflexive .
Relative systems representing information about relative location are of three principal types: relative position, direction, andspatial orientation (cf. Leech, 1969). One sort of relative position, adjacency, has already
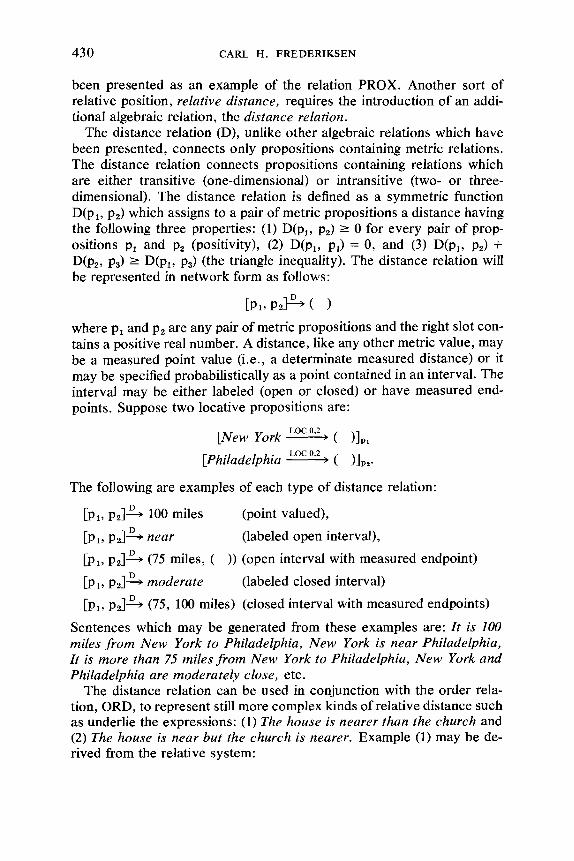
430 CARL H. FREDERIKSEN
been presented as an example of the relation PROX. Another sort of relative position, relative distance, requires the introduction of an addi- tional algebraic relation, the distance relation.
The distance relation (D), unlike other algebraic relations which have been presented, connects only propositions containing metric relations. The distance relation connects propositions containing relations which are either transitive (one-dimensional) or intransitive (two- or three- dimensional). The distance relation is defined as a symmetric function D(p,, pz) which assigns to a pair of metric propositions a distance having the following three properties: (1) D(p,, p2) 2 0 for every pair of prop- ositions p1 and pz (positivity), (2) D(p,, pl) = 0, and (3) D(p,, pz) + D(p,, p3) 2 D(p,, p3) (the triangle inequality). The distance relation will be represented in network form as follows:
[PI, P21S ( > where p1 and p2 are any pair of metric propositions and the right slot con- tains a positive real number. A distance, like any other metric value, may be a measured point value (i.e., a determinate measured distance) or it may be specified probabilistically as a point contained in an interval. The interval may be either labeled (open or closed) or have measured end- points. Suppose two locative propositions are:
[New York D ( )IpI
[Philadelphia B ( )lDz.
The following are examples of each type of distance relation:
[PI, p,]% 100 miles (point valued),
[PI, P21s near (labeled open interval),
Ip,, ~~1% (75 miles, ( )) (open interval with measured endpoint)
[pl, ~~1% moderate (labeled closed interval)
[pl, p$+ (75, 100 miles) (closed interval with measured endpoints)
Sentences which may be generated from these examples are: It is ZOO miles from New York to Philadelphia, New York is near Philadelphia, It is more than 75 miles from New York to Philadelphia, New York and Philadelphia are moderately close, etc.
The distance relation can be used in conjunction with the order rela- tion, ORD, to represent still more complex kinds of relative distance such as underlie the expressions: (1) The house is nearer than the church and (2) The house is near but the church is nearer. Example (1) may be de- rived from the relative system:
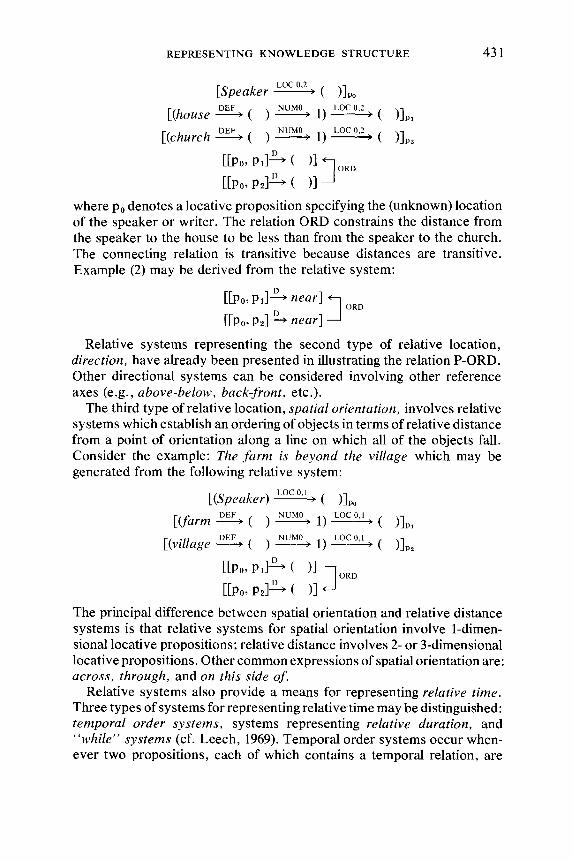
REPRESENTING KNOWLEDGE STRUCTURE 431
[Speaker = ( j],
[(house = ( j = 1) = ( )lpl
[(church - ( j =ff+ 1) = ( j],,
KPo> PIIS ( )I 3
ORD
[[PO, P21S c >I where p0 denotes a locative proposition specifying the (unknown) location of the speaker or writer. The relation ORD constrains the distance from the speaker to the house to be less than from the speaker to the church. The connecting relation is transitive because distances are transitive. Example (2) may be derived from the relative system:
KPO, PIIS near1 II
ORD
[[PO, P21s near1
Relative systems representing the second type of relative location, direction, have already been presented in illustrating the relation P-ORD. Other directional systems can be considered involving other reference axes (e.g., above-below, back-front, etc.).
The third type of relative location, spatial orientation, involves relative systems which establish an ordering of objects in terms of relative distance from a point of orientation along a line on which all of the objects fall. Consider the example: The farm is beyond the village which may be generated from the following relative system:
[(Speaker) Lot ( j],,
[Cfarm 5 ( j S I)5 ( )I*,
[(village S ( j S 1) Lot ( )Ipz
[[PO, PrlS ( )I ORD
[[PO> P213 ( )I J The principal difference between spatial orientation and relative distance systems is that relative systems for spatial orientation involve l-dimen- sional locative propositions; relative distance involves 2- or 3-dimensional locative propositions. Other common expressions of spatial orientation are: across, through, and on this side of.
Relative systems also provide a means for representing relative time. Three types of systems for representing relative time may be distinguished: temporal order systems, systems representing relative duration, and “while” systems (cf. Leech, 1969). Temporal order systems occur when- ever two propositions, each of which contains a temporal relation, are
432 CARL H. FREDERIKSEN
connected by an order relation (e.g., ORD, -(ORD), EQUIV). Temporal order systems can occur both for instantaneous and durative propositions. Let pl(t,) represent a proposition p1 containing a simple (instantaneous) time relation where t, refers to the time assigned to the proposition. If p&J is another such proposition, then
P&) = Pm
signifies that p1 occurred before pz (i.e., that t, < t,);
signifies that p1 occurred not later than pz (i.e., that t, I t,); and
P 10 1) f EQurv ’ Pm
signifies that p1 and pz occurred at the same time. Temporal order systems for durative propositons are represented as follows. Let p1(t,o,, tzcl,) repre- sent a durative proposition containing a closed interval of time (tlu), t,,,J, let p&J denote the beginning point, let p&,,,) denote the endpoint, and let p&,,, t.& be a second durative proposition. Then
P&IS = P&23
signifies that p1 ended before pz began, i.e., that tzcl, < tl(%) (etc.). Temporal order systems also may represent measured intervals of time
between events. Such systems require the algebraic relation difference (-) which connects propositions containing identical transitive metric re- lations. The difference relation is represented [pl, pJ I, ( ) where p1 and pz are an ordered pair of propositions containing identical transitive metric relations and the right slot contains a real number corresponding to the difference between the metric value associated with p1 and that associated
with pz. Suppose pl(tl) e p&J (or alternatively p&J E pz(tlczJ for durative propositions). Then a relative system representing a measured time interval between p1 and pz is [pz, pl] + ( ), e.g., p1 occurredJive minutes before pz.
Temporal order systems may also represent tense and aspect informa- tion. Using the notation which has been adopted for simple and durative propositions, Table 8 presents relative systems which define three tense operators: present (PRES), past (PAST), and future (FUT); and nine aspect operators: simple (no operator), continuous (CONT), completive (COMP), inceptive (INCPT), cessive (CESS), iterative (ITER), iterative- completive (ITER-COMP), iterative-inceptive (ITER-INCPT), and iterative-cessive (ITER-CESS). While the tense and aspect operators de- fined in Table 8 could be represented as relative systems, it is convenient to represent them as operators on relations. The convention is, in the case
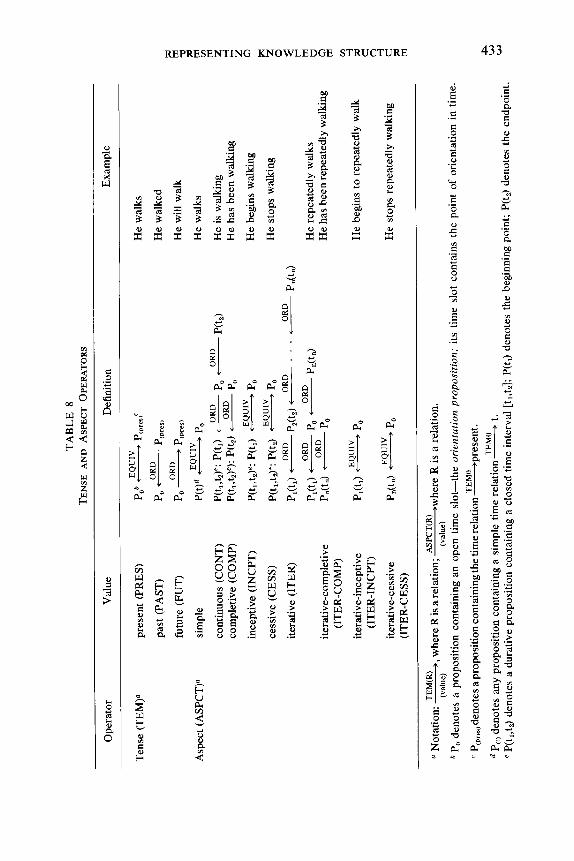
TABL
E 8
TEN
SE A
ND
ASP
ECT
OPE
RAT
OR
S
Ope
rato
r Va
lue
Def
initi
on
Exam
ple
Tens
e (T
EM)a
Aspe
ct (
ASPC
T)”
pres
ent
(PR
ES)
past
(PA
ST)
futu
re (
FUT)
sim
ple
cont
inuo
us (
CO
NT)
co
mpl
etiv
e (C
OM
P)
ince
ptiv
e (IN
CPT
)
cess
ive
(CES
S)
itera
tive
(ITER
)
itera
tive-
com
plet
ive
(ITER
-CO
MP)
itera
tive-
ince
ptiv
e (IT
ER-IN
CPT
)
itera
tive-
cess
ive
(ITER
-CES
S)
PO
b EQU
IV
- Pm
es:
PO
- pa
lres,
PO
5 po
ms~
EQU
IV
P(t)
d -
P, O
RD
P
(L,W
P
(tl)
- P,
O
RD
=
P@*)
P
(tl,t*
Y):
P(t2
) -
PO
P(t&
)e:
P&)
(EQ
U’V
, PO
P(tJ
,)‘:
P(Q
<E
QU
IV, P
, O
RD
P&
J +-
o=P
&)
2=
. .
. -
P,&)
=
P,
OR
D
= P”
&J
pm
- PO
P&)
= P,
P”(
tJ
2=%
P,
He
wal
ks
He
wal
ked
He
will
wal
k E
He
wal
ks
E
He
is w
alki
ng
g
He
has
been
wal
king
3 z
He
begi
ns w
alki
ng
Q
He
stop
s w
alki
ng
$
P”(
tJ
He
repe
ated
ly
wal
ks
g
He
has
been
repe
ated
ly w
alki
ng
z
He
begi
ns t
o re
peat
edly
w
alk
z 2 H
e st
ops
repe
ated
ly
wal
king
2 z
a N
otat
ion:
TE
MW
AS
PCT(
R)
,
(val
ue)
, whe
re R
is a
rela
tion;
-w
here
R
is a
rel
atio
n.
(val
ue)
* P,
deno
tes
a pr
opos
ition
co
ntai
ning
an
open
tim
e sl
ot-th
e or
ient
atio
n pr
opos
irion
; its
tim
e sl
ot c
onta
ins
the
poin
t of
orie
ntat
ion
in t
ime.
CP (
pres
j deno
tes
a pr
opos
ition
con
tain
ing
the
time
rela
tion
-pre
sent
.
d Pet
, den
otes
any
pro
posi
tion
cont
aini
ng a
sim
ple
time
rela
tion-
TEM
O
t, ti
e P(t,
,tJ
deno
tes
a du
rativ
e pr
opos
ition
co
ntai
ning
a c
lose
d tim
e in
terv
al
[tl,tJ
; P
(tJ d
enot
es t
he b
egin
ning
poi
nt;
P(tJ
den
otes
the
end
poin
t. w
434 CARL H. FREDERIKSEN
of resultive actions or processes, to apply tense and aspect operators to the AGT and PAT relations. In the case of stative propositions, tense and aspect operators are applied to the stative relation contained in the propo- sition. An action or event occurring in a network without a tense operator is considered to be tenseless and hence generic. Thus, actions are “de- termined” by tense and aspect operators. Examples of tense and aspect operators are:
TEM ASPCT
John * walk (John was walking), CONT
TEM ASPECT
John ++ walk (John begins walking), INCPT
TEM ASPCT
John (PAT) walk (John walked six times). PAST
ITER = 6
Systems representing relative duration consist of durative propositions containing durative relations (DUR) in which the propositions are con- nected by an order relation. Thus, for example:
TEM
[Alice (PAT) PAST study
TEM ORD
[(Speaker) 9 study =+( )]
may be expressed: Alice studied for a longer time than I. “While” systems involve order relations connecting durative prop-
ositions containing closed temporal intervals where the boundaries of the intervals may be unspecified. “While” systems are of four types, as il- lustrated by the following sentence examples: (1) co-extensive intervals of time (Alice was at home while Z was at the lecture), (2) point con- tained within a temporal interval (When I looked away, Billy grabbed the toy), (3) “until” and “since” (John’s ideas have changed since he went to the lecture), and (4) temporal interval contained within an inter- val of time (John talked to us while we were on vacation). The relative systems for these cases have the following forms:
(1) Co-extensive intervals:
p&J ( EQ”rv > p&,,) (same beginning points)
p&IJ < EQUIV ’ pAb,,J (same endpoints),

REPRESENTING KNOWLEDGE STRUCTURE 435
(2) Point contained within an interval:
P&o,, t,,,J is a durative proposition, pz(tJ is an instantaneous proposition,
P&,1,) -C’RD) , P2(t2) -(OR@ ~
P&U,)>
(3) “until” and “since”:
(p,(t& ( EQUIV ’ pz(tlcX,) (endpoint of p1 coincides with beginning of p2),
(4) interval contained within an interval (pz contained within pl):
P&J e P&S
P&1,) i -(ORD) P&J
Logical systems. While propositions defined in a semantic network are by convention considered to have positive truth-value, propositions generally can be either true or false. Rather than specify a truth-value for every proposition defined in a network, false propositions are represented by applying a negative operator to a proposition and rep- resenting the negated proposition in the network as having positive truth
value. The negative operator is defined for a proposition ( ) % ( ) as
a proposition ( ) % ( ) which is true when ( ) % ( ) is false and
false when ( ) %= ( > is true (Table 10). Since propositions are de- fined by relational networks, when the negative operator is applied to a relation in a network defining a proposition, it operates on the truth- value of the proposition as a whole.
Definitions of logical relations are presented in Table 9. Logical re- lations connect pairs of propositions and are defined as in the proposi- tional calculus by means of truth tables for pairs of propositions. A set of propositions occupying slots in a network of logical relations defines a logical system. The following logical relations are defined in Table 9.
Conjunction (&) is defined as a proposition p1 &% pz which is true only if both p1 and pz are true (and is false otherwise). Disjunction (nonex-
clusive alternation) is defined as a proposition p1 +% p2 which is false only when p1 and p2 are both false. Exclusive alternation is defined struc- turally in terms of the & and OR relations (see Table 9, (3)). The material conditional (IF) is also defined as in the propositional calculus as a
proposition p1 % pz which is false whenever p1 (the antecedent) is true and p2 (the consequent) is false and otherwise is true. The material con-
ditional relation contraposes, that is, both p1 % p2 and -pz % -pl have the same truth table. The material biconditional (IFF) is a proposi-
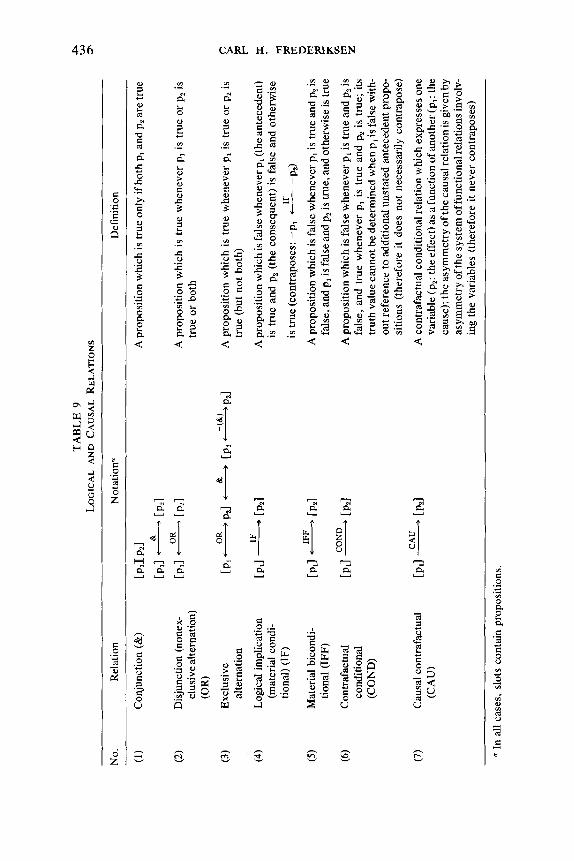
TABL
E 9
LOG
ICA
L AN
D C
AUSA
L R
ELAT
ION
S
No.
R
elat
ion
Not
atio
n”
Def
initi
on
(1)
Con
junc
tion
(86)
(2)
(3)
Dis
junc
tion
(non
ex-
clus
ive
alte
rnat
ion)
(O
RI
Excl
usiv
e al
tern
atio
n
(4)
Logi
cal
impl
icat
ion
(mat
eria
l co
ndi-
tiona
l) (IF
)
(5)
Mat
eria
l bi
cond
i- tio
nal
(IFF)
(6)
Con
trafa
ctua
l co
nditi
onal
(C
ON
D)
(7)
Cau
sal c
ontra
fact
ual
(CA
U)
[PJ
P21
[PII
A [P
,l
[PII
+=+
[I%1
A pr
opos
ition
w
hich
is
true
only
if b
oth
pi a
nd p
2 are
true
A pr
opos
ition
w
hich
is
true
whe
neve
r p1
is t
rue
or p
z is
tru
e or
bot
h
[PI-P
21
+-s
[PI
-Pzl
A
prop
ositi
on
whi
ch i
s tru
e w
hene
ver
p1 is
tru
e or
p2
is
true
(but
not
bot
h)
[PII
A [P
*l A
prop
ositi
on w
hich
is
fals
e w
hene
ver
p, (t
he a
ntec
eden
t) is
tru
e an
d pz
(th
e co
nseq
uent
) is
fals
e an
d ot
herw
ise
is tr
ue (
cont
rapo
ses:
-pl
+=
-P
z)
[PII
- [P
,l A
prop
ositi
on
whi
ch i
s fa
lse
whe
neve
r p1
is tr
ue a
nd p
2 is
fals
e, a
nd p
, is
fals
e an
d p2
is tr
ue,
and
othe
rwis
e is
true
[PII
= [P
,l A
prop
ositi
on
whi
ch i
s fa
lse
whe
neve
r pi
is tr
ue a
nd p
s is
fals
e, a
nd t
rue
whe
neve
r p1
is t
rue
and
pz is
tru
e; i
ts
truth
val
ue c
anno
t be
det
erm
ined
whe
n p,
is fa
lse
with
- ou
t ref
eren
ce t
o ad
ditio
nal
unst
ated
ant
eced
ent p
ropo
- si
tions
(th
eref
ore
it do
es n
ot n
eces
saril
y co
ntra
pose
)
[PII
-=L
[P,l
A co
ntra
fact
ual
cond
ition
al r
elat
ion
whi
ch e
xpre
sses
one
va
riabl
e (p
2: th
e ef
fect
) as
a fu
nctio
n of
ano
ther
(p,
: th
e ca
use)
; the
asy
mm
etry
of t
he c
ausa
l re
latio
n is
giv
en b
y as
ymm
etry
of t
he s
yste
m o
f fun
ctio
nal
rela
tions
invo
lv-
ing
the
varia
bles
(th
eref
ore
it ne
ver
cont
rapo
ses)
a In
all
case
s, s
lots
con
tain
pro
posi
tions
.
REPRESENTING KNOWLEDGE STRUCTURE 437
tion p1 +% pz which is false whenever p1 is false and p2 is true, p1 is true and p2 is false, and otherwise is true. The material biconditional is the conjunction of two material conditional propositions.
Material conditional and material biconditional relations occur infre- quently in ordinary discourse. A logical relation which occurs more fre- quently is the contrujiuctual conditional relation (COND) which is defined,
like the material conditional, as a proposition pl% p2 which is false whenever p1 is true and pz is false, and true whenever p1 is true and pz is true; but, unlike the material conditional, its truth value cannot be determined when p1 is false. For this reason, contrafactual conditional relations do not contrapose. The incompleteness of the truth table for con- t&actual conditional propositions (and the resulting failure of contra- factual conditional propositions to contrapose) is due to the failure to state all of the premises (antecedent propositions) upon which the validity of pz (the consequent) depends (cf. Rescher, 1964).
An example of a contrafactual conditional proposition may be ex- pressed as follows: Zf it rains, Z will open my umbrella, which is gen- erated from the following network:
[(ruin) I-PAT ruin],,
[Speaker % open OBJl (Speaker 5
have OBJ2 (umbrella s ( ) s I))], COND
Pl - 9
The truth table for the contrafactual conditional proposition p1 COND\ q specifies: (1) that the conjunction of p1 and -q is false (i.e., it is false that it ruins and Z do not open my umbrella), and (2) that the conjunc- tion of p1 and q is true (i.e., it rains and Z open my umbrella is true). How-
ever, it does not specify truth values for either -pl A q or -pl G% -4, i.e., it does not specify whether or not I open my umbrella if it doesn’t rain. Suppose we were to accept the additional antecedent proposition:
Zf it is cloudy (pJ, Z will open my umbrella (pz s q). Then the prop-
ositions -pl G% q and -pl A -q are both true. Thus, by accepting
pz COND\ q, a contrafactual conditional proposition was converted into a material conditional. The above example can also be converted into a material biconditional by accepting a different additional antecedent prop- osition, e.g., Zf it does not ruin, Z will not open my umbrella. In this
case, -pl &% q is false and -pl &% -q is true. The truth table is now that of a material biconditional proposition. These examples demonstrate that there is more than one way in which the unspecified truth values
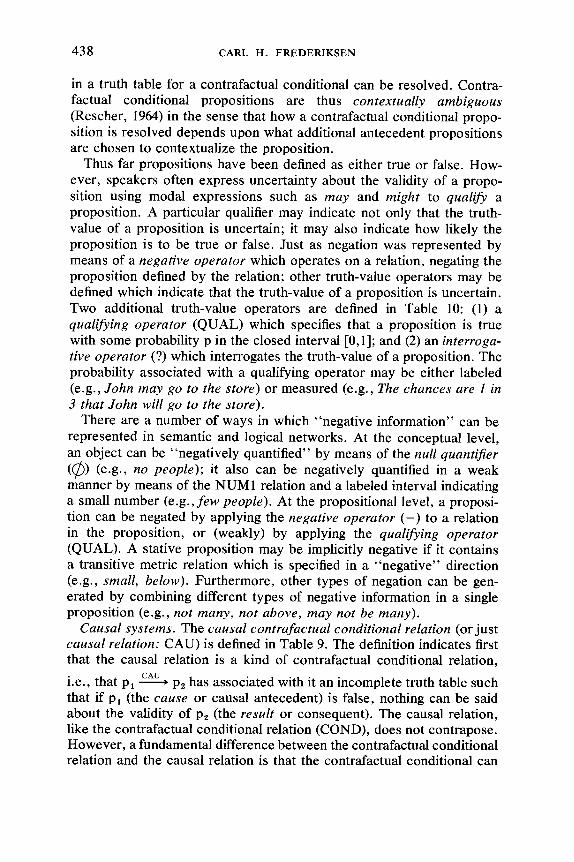
438 CARL H. FREDERIKSEN
in a truth table for a contrafactual conditional can be resolved. Contra- factual conditional propositions are thus contextually ambiguous (Rescher, 1964) in the sense that how a contrafactual conditional propo- sition is resolved depends upon what additional antecedent propositions are chosen to contextualize the proposition.
Thus far propositions have been defined as either true or false. How- ever, speakers often express uncertainty about the validity of a propo- sition using modal expressions such as may and might to qualify a proposition. A particular qualifier may indicate not only that the truth- value of a proposition is uncertain; it may also indicate how likely the proposition is to be true or false. Just as negation was represented by means of a negative operator which operates on a relation, negating the proposition defined by the relation; other truth-value operators may be defined which indicate that the truth-value of a proposition is uncertain. Two additional truth-value operators are defined in Table 10: (1) a qualifying operator (QUAL) which specifies that a proposition is true with some probability p in the closed interval [O,l]; and (2) an interroga- tive operator (?) which interrogates the truth-value of a proposition. The probability associated with a qualifying operator may be either labeled (e.g., John may go to the store) or measured (e.g., The chances are 1 in 3 that John will go to the store).
There are a number of ways in which “negative information” can be represented in semantic and logical networks. At the conceptual level, an object can be “negatively quantified” by means of the null quantifier @> (e.g., no people); it also can be negatively quantified in a weak manner by means of the NUMl relation and a labeled interval indicating a small number (e.g., few people). At the propositional level, a proposi- tion can be negated by applying the negative operator (-) to a relation in the proposition, or (weakly) by applying the qualifying operator (QUAL). A stative proposition may be implicitly negative if it contains a transitive metric relation which is specified in a “negative” direction (e.g., small, below). Furthermore, other types of negation can be gen- erated by combining different types of negative information in a single proposition (e.g., not many, not above, may not be many).
Causal systems. The causal contrafactual conditional relation (or just causal relation: CAU) is defined in Table 9. The definition indicates first that the causal relation is a kind of contrafactual conditional relation,
i.e., that p1 % pZ has associated with it an incomplete truth table such that if p1 (the cause or causal antecedent) is false, nothing can be said about the validity of pZ (the result or consequent). The causal relation, like the contrafactual conditional relation (COND), does not contrapose. However, a fundamental difference between the contrafactual conditional relation and the causal relation is that the contrafactual conditional can
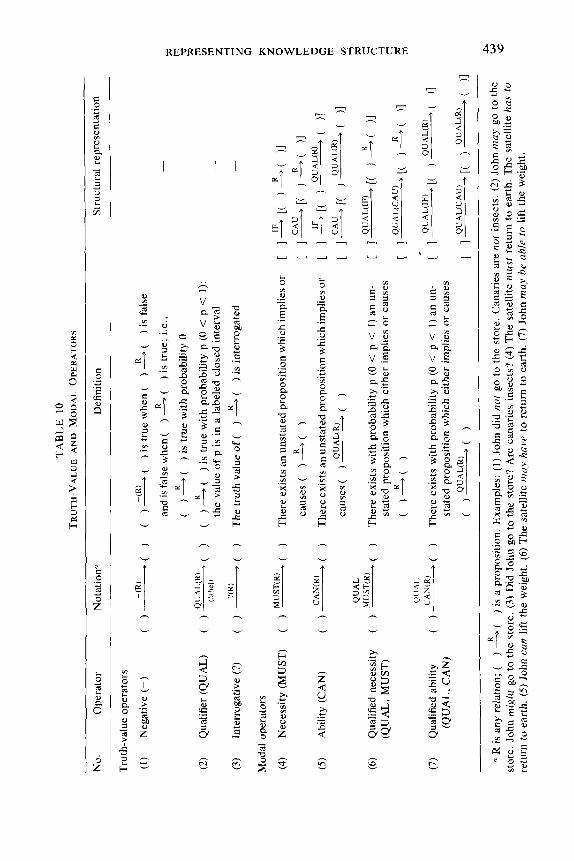
TABL
E 10
TR
UTH
-VAL
UE
AND
M
OD
AL
OPE
RAT
OR
S
No.
O
pera
tor
Not
atio
n=
Def
initi
on
Trut
h-va
lue
oper
ator
s
(1)
Neg
ativ
e (-)
(2)
Qua
lifie
r (Q
UAL
)
(3)
Inte
rroga
tive
(?)
Mod
al
oper
ator
s
(4)
Nec
essi
ty
(MU
ST)
(5)
Abilit
y (C
AN)
(6)
Qua
lifie
d ne
cess
ity
(QU
AL,
MU
ST)
(7)
Qua
lifie
d ab
ility
(QU
AL,
CAN
)
-(R
I (
)-(
1
( )y
$$h
1
( )L
( )
( )-(
)
Stru
ctur
al
repr
esen
tatio
n
( )a
(
)is
true
whe
n(
) L(
)
is f
alse
and
is fa
lse
whe
n (
) 5
( )
is t
rue;
i.e
.,
( )
5 (
) is
tru
e w
ith
prob
abilit
y 0
( )
-%
( )
is t
rue
with
pr
obab
ility
p (0
<
p <
1);
the
valu
e of
p i
s in
a la
bele
d cl
osed
in
terv
al
The
truth
va
lue
of (
)
5 (
) is
int
erro
gate
d
Ther
e ex
ists
an
uns
tate
d pr
opos
ition
w
hich
im
plie
s or
caus
es
( )
2 (
)
Ther
e ex
ists
an
uns
tate
d pr
opos
ition
w
hich
im
plie
s or
caus
es(
) Q
UAL
(R)
) (
)
[ 1a
c ,A
( )I
!2
[ 1 =
[(
1 -5
( )I
F [G
+K)
), Q
UAU
R)
f (
r l-
CAU
,(
) Q
UAL
(R)+
(
j3
Ther
e ex
ists
w
ith
prob
abilit
y p
(0 <
p
< 1)
an
un-
stat
ed
prop
ositi
on
whi
ch
eith
er
impl
ies
or
caus
es
( )L
( 1
[ I
QU
AL(IF
)
[I Q
lJAL
(CAU
,
Ther
e ex
ists
w
ith
prob
abilit
y p
(0 <
p
< I)
an u
n-
stat
ed
prop
ositi
on
whi
ch
eith
er
impl
ies
or
caus
es
L’ 1
QU
AL(IF
)+,(
) Q
UAL
(R1
( ,,
( )
QU
AL(R
) l
( )
r 1
QU
AL(C
AU)
,[(
1 Q
UAI
- >(
)I
n R
is
any
rela
tion;
(
) 5
( )
is a
pro
posi
tion,
Ex
ampl
es:
(1)
John
di
d na
t go
to
the
stor
e.
Can
arie
s ar
e no
t in
sect
s.
(2)
John
nz
ay g
o to
the
%
stor
e.
John
mig
hr
go t
o th
e st
ore.
(3
) D
id
John
go
to
the
stor
e’?
Are
cana
ries
inse
cts?
(4
) Th
e sa
tellit
e m
ust
retu
rn
to
earth
. Th
e sa
tellit
e ha
s to
\o
retu
rn
to e
arth
. (5
) Jo
hn c
an
lift
the
wei
ght.
(6)
The
sate
llite
may
ha
ve
to r
etur
n to
ear
th.
(7)
John
m
uy
be a
ble
to l
ift
the
wei
ght.

440 CARL H. FREDERIKSEN
be converted into a material conditional or material biconditional while the causal relation cannot. That is, by specifying additional antecedent propositions, the relation COND can be made to contrapose, but the causal relation cannot be made to contrapose.
The reason for this difference between cause and contrafactual involves another fundamental difference between causal and contrafactual condi- tional relations, viz. the causal relation, unlike the contrafactual condi- tional relation, represents an asymmetric functional relation which ex- presses one variable (p2: the dependent variable, result, or effect) as a function of another variable (PI: the independent variable or cause). The asymmetry of the causal relation is given by the fact that a causal rela- tion is given by the fact that a causal relation does not stand alone but rather represents only one relation in a system of functional relations involving the independent and dependent variables. Causal relations may be conceived of as equations; it is well known that systems of equations can be formulated to represent systems of functional relations such that asymmetric relations occur among individual equations in the system. The reader is referred to a paper by Simon and Rescher (1966) for a de- tailed discussion of these matters.
To illustrate the defining properties of the causal relation, consider the following example (from Simon et al., 1966): Zf it rains, the wheat will grow or, alternatively, The rain causes the wheat to grow which is de- rived from the network:
The contrapositive form of this example would be -p2 % -pl (Zf the wheat does not grow, it does not ruin) which is not valid. The causal
proposition p1 % pz may be regarded as a functional relation which expresses the amount of wheat Y as a function of the amount of rain X: Y = f(X). This alone does not explain the asymmetry of the causal rela- tion since the function may possess an inverse, i.e., X = f-‘(Y). However, suppose the amount of rain (PI) and the amount of fertilizer (p3) determine the size of the wheat crop:
Pl -=L pz
p3 CAU
Now, although p1 % pz and p3 % pz are symmetric in the sense that they may be regarded as functional relations which possess inverses, when these relations are embedded in a complete structure (such as that given above), the asymmetry is produced by the asymmetry of the sys- tem as a whole.
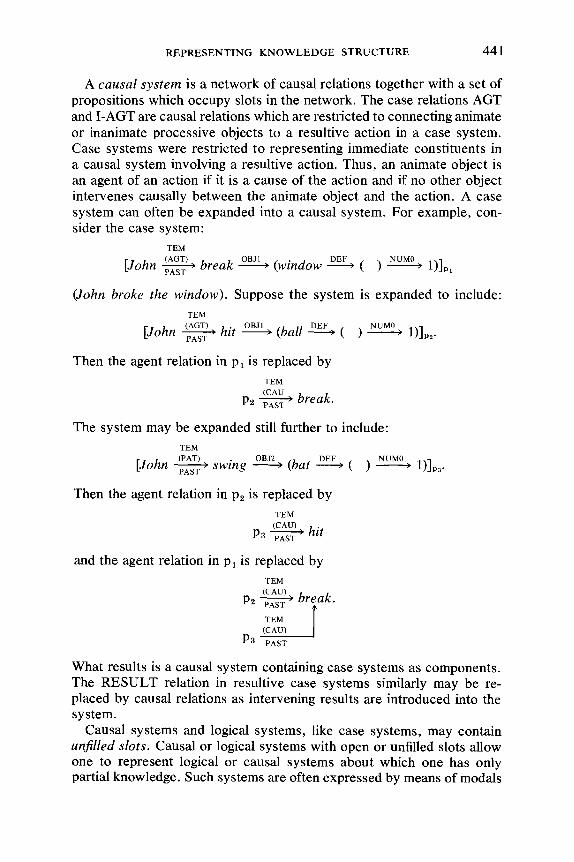
REPRESENTING KNOWLEDGE STRUCTURE 441
A causal system is a network of causal relations together with a set of propositions which occupy slots in the network. The case relations AGT and I-AGT are causal relations which are restricted to connecting animate or inanimate processive objects to a resultive action in a case system. Case systems were restricted to representing immediate constituents in a causal system involving a resultive action. Thus, an animate object is an agent of an action if it is a cause of the action and if no other object intervenes causally between the animate object and the action. A case system can often be expanded into a causal system. For example, con- sider the case system:
TEM
[John 9 break % (window = ( ) = l)],,
(John broke the window). Suppose the system is expanded to include: TEM
[John + r44GsTT) hit OBJl (ball % ( ) - l)],,.
Then the agent relation in p1 is replaced by TEM
P2 -f$+ break.
The system may be expanded still further to include: TEM
[John 3 swing % (bat -% ( ) - I)],,.
Then the agent relation in p2 is replaced by TEM
hit
and the agent relation in p1 is replaced by TEM
pz 9 bryk.
p3 EMU, 1 PAST
What results is a causal system containing case systems as components. The RESULT relation in resultive case systems similarly may be re- placed by causal relations as intervening results are introduced into the system.
Causal systems and logical systems, like case systems, may contain unfilled slots. Causal or logical systems with open or unfilled slots allow one to represent logical or causal systems about which one has only partial knowledge. Such systems are often expressed by means of medals
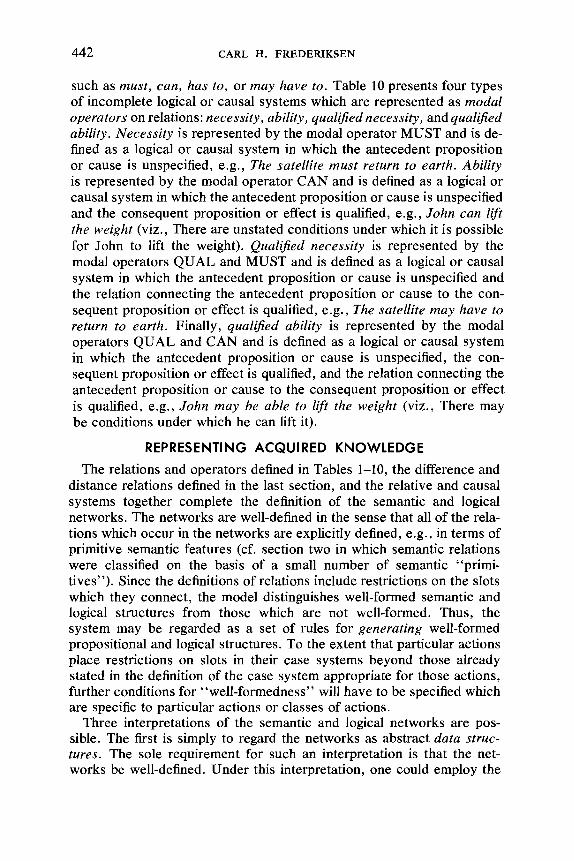
442 CARL H. FREDERIKSEN
such as must, can, has to, or may have to. Table 10 presents four types of incomplete logical or causal systems which are represented as modal operators on relations: necessity, ability, qualified necessity, and qualified ability. Necessity is represented by the modal operator MUST and is de- fined as a logical or causal system in which the antecedent proposition or cause is unspecified, e.g., The satellite must return to earth. Ability is represented by the modal operator CAN and is defined as a logical or causal system in which the antecedent proposition or cause is unspecified and the consequent proposition or effect is qualified, e.g., John can lift the weight (viz., There are unstated conditions under which it is possible for John to lift the weight). Qualified necessity is represented by the modal operators QUAL and MUST and is defined as a logical or causal system in which the antecedent proposition or cause is unspecified and the relation connecting the antecedent proposition or cause to the con- sequent proposition or effect is qualified, e.g., The satellite may have to return to earth. Finally, qualified ability is represented by the modal operators QUAL and CAN and is defined as a logical or causal system in which the antecedent proposition or cause is unspecified, the con- sequent proposition or effect is qualified, and the relation connecting the antecedent proposition or cause to the consequent proposition or effect is qualified, e.g., John may be able to lift the weight (viz., There may be conditions under which he can lift it).
REPRESENTING ACQUIRED KNOWLEDGE
The relations and operators defined in Tables l-10, the difference and distance relations defined in the last section, and the relative and causal systems together complete the definition of the semantic and logical networks. The networks are well-defined in the sense that all of the rela- tions which occur in the networks are explicitly defined, e.g., in terms of primitive semantic features (cf. section two in which semantic relations were classified on the basis of a small number of semantic “primi- tives”). Since the definitions of relations include restrictions on the slots which they connect, the model distinguishes well-formed semantic and logical structures from those which are not well-formed. Thus, the system may be regarded as a set of rules for generating well-formed propositional and logical structures. To the extent that particular actions place restrictions on slots in their case systems beyond those already stated in the definition of the case system appropriate for those actions, further conditions for “well-formedness” will have to be specified which are specific to particular actions or classes of actions.
Three interpretations of the semantic and logical networks are pos- sible. The first is simply to regard the networks as abstract data struc- tures. The sole requirement for such an interpretation is that the net- works be well-defined. Under this interpretation, one could employ the
REPRESENTING KNOWLEDGE STRUCTURE 443
network structures defined here as data structures representing informa- tional inputs such as texts or physical events, or as data structures against which subjects’ responses could be analyzed. Neither application requires that the model be correct as a representation of the form of in- formation in human long-term memory.
A second way in which the network structures can be interpreted is as a model of memory structure: a representation of the form in which in- formation structures are coded in long-term memory. As a model of memory structures, a network can be regarded as a model of knowledge structures from which linguistic messages are derived, as a model of the knowledge acquired from particular texts or experienced events, and as a model of world knowledge: the permanent store of knowledge about the world. The present network structures are proposed both as abstract data structures and as a model of the representational format by which information is organized in semantic memory. As a memory model, the emphasis will be placed on semantic and logical networks as models of knowledge structures from which texts are derived and as models of semantic and logical information acquired from texts. The presumption is that much world knowledge is stored in the same representational format.
There is still a third way in which semantic networks may be in- terpreted, that is, as the semantic or propositional component of a text grammar. In the conception of linguistic productions which has been developing within linguistics, a grammar consists of a propositional base structure and a set of grammatical rules (grammatical transformations) for mapping these propositions directly onto surface sentences. In this view, propositional structures defined without reference to grammatical rules cannot be regarded as a part of a linguistic description of text since the propositional structures represent only the semantic “deep struc- ture” of “surface” sentences or texts. In fact, the sort of propositional structures which may be developed as the semantic component of a text grammar may be substantially different in form from networks which are defined as data structures without reference to language. Furthermore, if a network structure were adopted as a model of memory structure, then it would be subject to the restrictions imposed by psychological data. These data may not lead to the same propositional model as would con- siderations of grammatical constraints. It is possible, however, that as linguistic models are formulated which incorporate the idea of a univer- sal semantic base, they may become very similar to psychological models of memory structure. For these reasons, the network structures presented here are not proposed as components of a linguistic descrip- tion of text.
The present section will illustrate many aspects of the semantic and logical networks defined in the previous three sections by means of a
444 CARL H. FREDERIKSEN
network structure which was used to generate a short narrative text-a children’s story entitled About Bill and His Sister. The story is one of four which were written along themes found in children’s textbooks and stories and is intended to be typical of texts used in kindergarten to grade two. The stories were written by Judith 0. Harker for use in her doctoral dissertation at the University of California, Berkeley. In this section we shall also illustrate how network structures may be employed in coding semantic and logical information acquired from texts using data obtained from a sample of Harker’s subjects, kindergarteners who were asked to retell presented stories.
The network structure from which About Bill and His Sister was derived is presented in Fig. 11. The semantic structure can be seen to consist of ten propositions, each of which represents an event, and a set of five stative propositions involving kinship classes. The logical struc- ture consists of a temporal order system in which propositions repre- senting events are connected by order relations into an ordered temporal sequence, and a nonmetric relative system representing kinship relations among participants in the actions. The network contains numerous em- bedded propositions including embedded relative locative system (viz. a directional system in pZ and an adjacency system in p5). The entire network is connected in two ways: (1) referentially, that is, every time a concept or network structure recurs in the network, there is an implied identity relation connecting slots containing identical concepts or net- work structures; and (2) by the logical structure, in this case by a set of algebraic relations which connect the propositions into temporal order and non-metric relative systems.
Propositions p1 and pZ each consists of a resultive case system and a temporal order system. In p1 the action move constrains the SOURCE and RESULT slots to contain locative propositions. The SOURCE slot contains an embedded proposition consisting of a processive case system and a locative relation containing an unfilled slot; the RESULT slot also contains a locative proposition have an unfilled slot. Since SOURCE and RESULT slots in a case system are constrained not to con- tain identical propositions, the unspecified locations are not identical. In p2, the action sit (down) constrains the SOURCE and RESULT slots to contain directional systems which place Bill either above or oy1 the couch (respectively). Also notice that only after couch has been deter- mined and quantified is it able to occupy the object slot for the LOC 0,l relation. Propositions p3 and p4 represent events involving relative pro- cesses. The case system in p4 includes in addition a GOAL slot con- taining a resultive action. Note that no tense operator is specified for an event which is an embedded GOAL.
Proposition p5 contains the resultive action leave, an OBJl slot con-
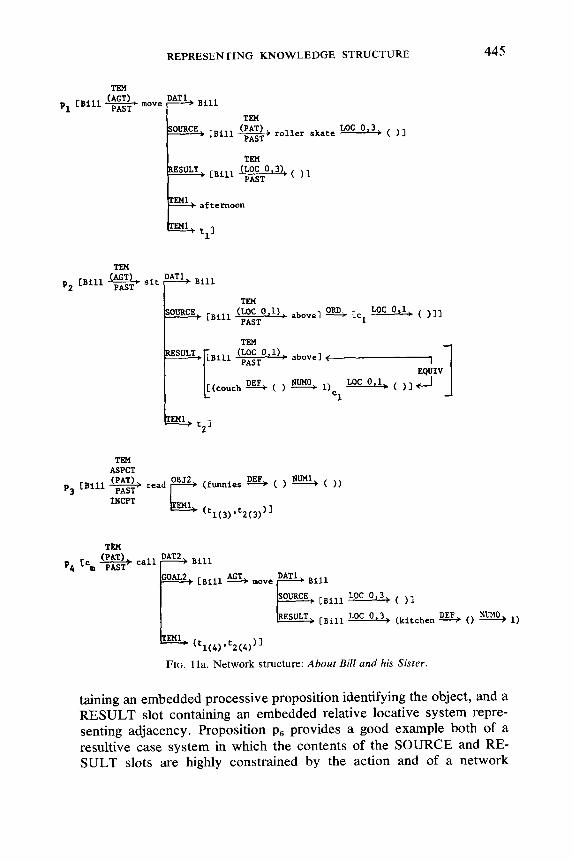
REPRESENTING KNOWLEDGE STRUCTURE 445
TM
pl [Bill w rmve DAT1 Bill
F
SoURCE [Bill $$-b roller skate Loc Oy3, ( )I
p2 [Bill
above1 <,
EQUIV
ASPCT
pj [Bill & read
INCPT
(funnies DEF, ( ) Nunl ( ))
1(3)‘t2(3))3
I-+ SOURCE cBill LOC ‘3,3> ( ),
I IRESULT, [Bill 'Oc Os3, (kitchen DEF, () NUMO, 1)
l(4) l ‘2(4))’
FIG. 1 la. Network structure: About Bill and his Sister.
taming an embedded processive proposition identifying the object, and a RESULT slot containing an embedded relative locative system repre- senting adjacency. Proposition ps provides a good example both of a resultive case system in which the contents of the SOURCE and RE- SULT slots are highly constrained by the action and of a network
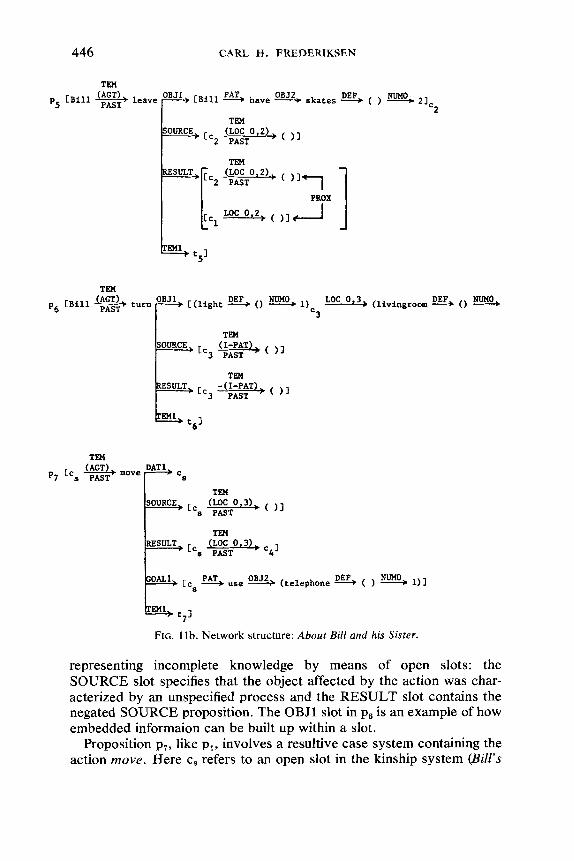
446 CARL H. FREDERIKSEN
p5 [Bill NUMO_ 21 =2
[(light DEF, () NUHO, 1) =3
Lot Ot3* (livingroom DEF, () Nun0
TM (I-PAT)
3 PAST ' ( )I
Ccs PAT, use OBJ2, (telephone DEF, ( ) NUHO, 1)I
FIG. 1 lb. Network structure: About Bill and his Sister.
representing incomplete knowledge by means of open slots: the SOURCE slot specifies that the object affected by the action was char- acterized by an unspecified process and the RESULT slot contains the negated SOURCE proposition. The OBJl slot in ps is an example of how embedded informaion can be built up within a slot.
Proposition p,, like pl, involves a resultive case system containing the action move. Here cs refers to an open slot in the kinship system (Bill’s
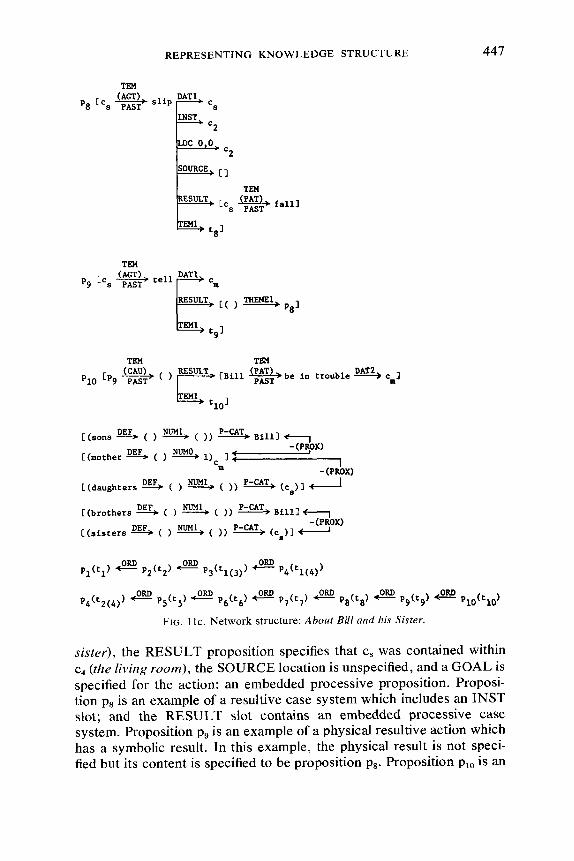
REPRESENTING KNOWLEDGE STRUCTURE 447
pg [cs gg+ tell DAT1 cm
E
RRSuLT cc ) l=% PBI
TEM1 tl 9
[(sons = ( ) % ( )) P-CAT, BIllI 1
[(mother %= ( ) NUMO, l)= I’ -(PROX)
m FOX)
C(dauBhters DEF, ( ) NUM1, ( )) P-CAT, (cJ1 _
[(brothers DEF, ( ) - ( )) P-CAT, Bill1 1 -(PROX)
[(sisters DEF, ( ) NUM1, ( )) P-CAT, (cs)l u
ORD Pl(tl) = p,(t,) = P3(tl(3)) - P4(tl(4))
P4$(4)) = Pg$,) = Pg(t& = P&1 * P&J ,oRD pg(tg) ,oRD Plo(tlo)
FIG. 1 lc. Network structure: About Bill and his Sister.
sister), the RESULT proposition specifies that c, was contained within cq (the living room), the SOURCE location is unspecified, and a GOAL is specified for the action: an embedded processive proposition. Proposi- tion ps is an example of a resultive case system which includes an INST slot; and the RESULT slot contains an embedded processive case system. Proposition p9 is an example of a physical resultive action which has a symbolic result. In this example, the physical result is not speci- fied but its content is specified to be proposition pg. Proposition pl,, is an
448 CARL H. FREDERIKSEN
example of an incomplete case system in which the action is unspecified, the RESULT proposition is specified (a processive event), and the AGT relation has been replaced by a causal relation connecting the action to P9.
The remainder of the semantic network consists of a set of stative rel- ative propositions involving kinship categories. The relationships among the kinship categories are represented by algebraic relations having the appropriate algebraic properties, viz. intransitivity, symmetry, and ir- reflexivity: -(PROX). Propositions pl-pl,, are connected by means of a set of ORD relations which sequentially order them in time. All ten propositions contain TEM operators, and one, p3, contains the ASPCT operator INCPT (inceptive).
The following story is an example of a text which can be generated from the network in Fig. 11.
One afternoon, Bill came in from roller skating (pJ. He sat down on the couch (p2) and started reading the funnies (p3). Then his mother called him into the kitchen (p4). He left his skates by the couch (p5). Then he turned off the light in the living room @B). His sister came in to use the telephone (p,). Then she slipped and fell on the skates (p&. She told her mother what happened (pg). Bill got in trouble (p,,).
This text represents one realization of the network structure-a real- ization in which a part of the information in the network is represented in the text. To ascertain precisely what information from the network is represented in the text, the text can be scored against the network by checking each item of information in the network which is explicitly represented in the text in linguistically coded form. An “item” consists of either a concept or a relation. A concept may be represented in a text by the occurrence of a lexical item; a relation may be structurally represented in a text through the application of grammatical rules. To illustrate, compare sentence one of the text to preposition p1 in Fig. 11. The action slot is represented in the text by the verb come, the ACT in- formation by Bill occurring as the subject of an active sentence, the SOURCE relation by the preposition from, the embedded SOURCE proposition by the phrase roller skating occurring within the preposi- tional phrase from roller skating, the RESULT relation and embedded locative proposition by the preposition in occurring immediately after come, and the DAT2 relation and its slot by one afternoon. The em- bedded locative relation in the SOURCE slot is not represented in the text (but could have been represented as in Bill came in from roller skating outside).
Table 11 lists each item (concept or relation) which occurs in the
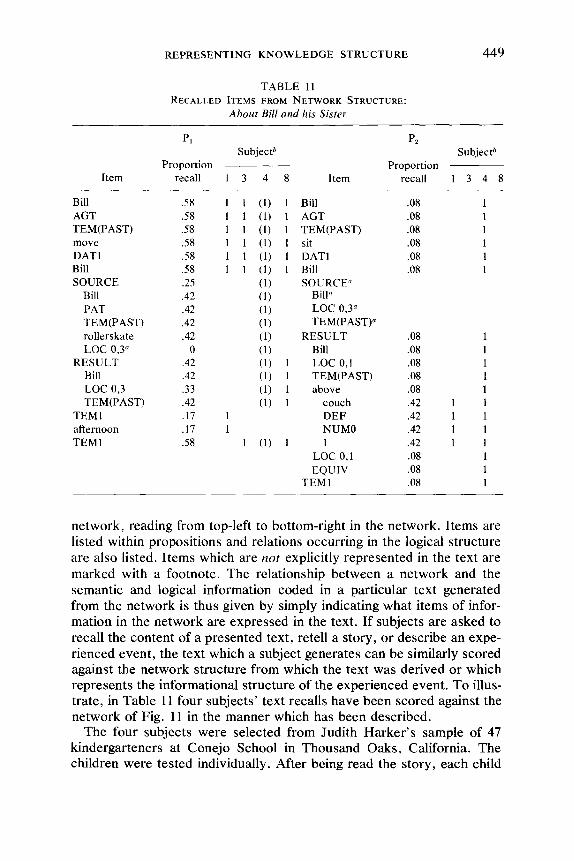
REPRESENTING KNOWLEDGE STRUCTURE
TABLE 11 RECALLED ITEMS FROM NETWORK STRUCTURE:
About Bill and his Sister
449
Item
Bill ACT TEM(PAST) move DATl Bill SOURCE
Bill PAT TEM(PAST) rollerskate LOC 0,3”
RESULT Bill LOC 0,3 TEM(PAST)
TEMl afternoon TEMl
-
PI
Proportion recall
.58 -58 .58 S8 .58 .58 .25 .42 .42 .42 .42
0 .42 .42 .33 .42 .17 .I7 .58
Subject*
I 3 4 8 Item
1 1 (1) I Bill 1 1 (1) 1 AGT 1 1 (1) 1 TEM(PAST) 1 1 (1) 1 sit 1 1 (1) 1 DATl 1 1 (1) 1 Bill
(1) SOURCE” (1) Bill”
(1) LOC 0,3”
(1) TEM(PAST)”
(1) RESULT (1) Bill (1) 1 LOC 0,l (1) 1 TEM(PAST) (1) 1 above (1) 1 couch
1 DEF 1 NUMO
1 (1) 1 1 LOC 0,l EQUIV
TEMl
P2 Subject*
Proportion recall 1 3 4 8
.08 1
.08 1
.08 1
.08 1
.08 1
.08 1
.08 1
.08 1
.08 1
.08 1
.08 1
.42 1 1
.42 1 1
.42 1 1
.42 1 1
.08 1
.08 1
.08 1
network, reading from top-left to bottom-right in the network. Items are listed within propositions and relations occurring in the logical structure are also listed. Items which are not explicitly represented in the text are marked with a footnote. The relationship between a network and the semantic and logical information coded in a particular text generated from the network is thus given by simply indicating what items of infor- mation in the network are expressed in the text. If subjects are asked to recall the content of a presented text, retell a story, or describe an expe- rienced event, the text which a subject generates can be similarly scored against the network structure from which the text was derived or which represents the informational structure of the experienced event. To illus- trate, in Table 11 four subjects’ text recalls have been scored against the network of Fig. 11 in the manner which has been described.
The four subjects were selected from Judith Harker’s sample of 47 kindergarteners at Conejo School in Thousand Oaks, California. The children were tested individually. After being read the story, each child
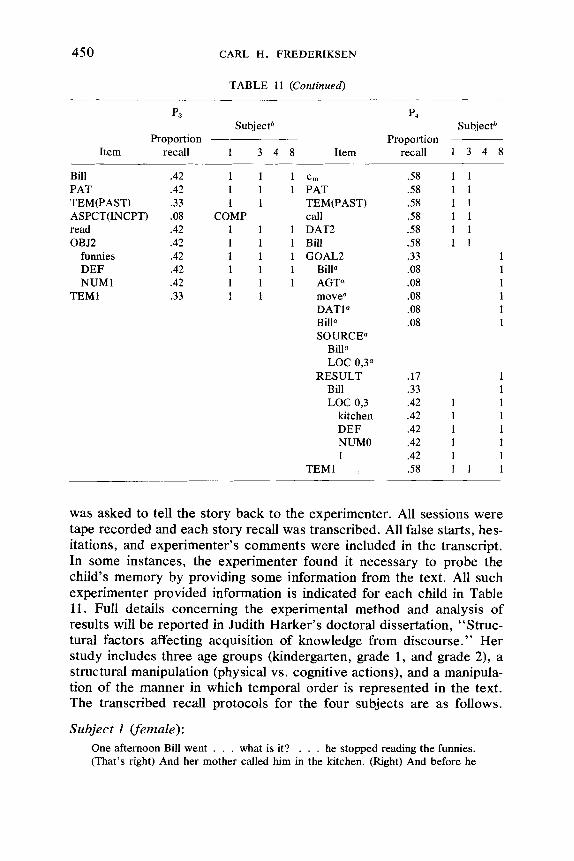
450 CARL H. FREDERIKSEN
TABLE 11 (Continued)
p3 P4 Subjectb Subjec@
Proportion Proportion Item recall 1 3 4 8 Item recall 1 3 4 8
Bill .42 1 1 lc, PAT .42 1 1 1 PAT TEM(PAST) .33 1 1 TEM(PAST) ASPCT(INCPT) .08 COMP call read .42 1 1 1 DAT2 OBJ2 .42 1 1 1 Bill
funnies .42 1 1 1 GOAL2 DEF .42 1 1 1 Bill” NUMl .42 1 1 1 AGTa
TEMl .33 1 1 movea DATla BW SOURCE”
Bill” LOC 0,3”
RESULT Bill LOC 0,3
kitchen DEF NUMO 1
TEMl
.58
.58
..58
.58
.58
.58
.33
.08
.08
.08
.08
.08
.17
.33
.42
.42
.42
.42
.42
.58
1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1
1 1
1 1 1 1 1 1 1 1 1 1 1 1 1
was asked to tell the story back to the experimenter. All sessions were tape recorded and each story recall was transcribed. All false starts, hes- itations, and experimenter’s comments were included in the transcript. In some instances, the experimenter found it necessary to probe the child’s memory by providing some information from the text. All such experimenter provided information is indicated for each child in Table 11. Full details concerning the experimental method and analysis of results will be reported in Judith Harker’s doctoral dissertation, “Struc- tural factors affecting acquisition of knowledge from discourse.” Her study includes three age groups (kindergarten, grade 1, and grade 2), a structural manipulation (physical vs. cognitive actions), and a manipula- tion of the manner in which temporal order is represented in the text. The transcribed recall protocols for the four subjects are as follows.
Subject 1 Cfemale): One afternoon Bill went . . what is it? . _ he stopped reading the funnies. (That’s right) And her mother called him in the kitchen. (Right) And before he
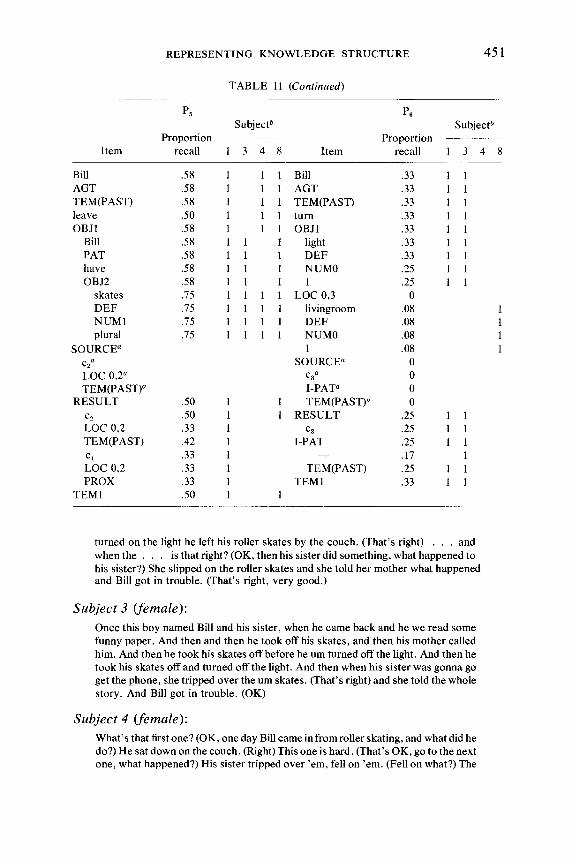
REPRESENTING KNOWLEDGE STRUCTURE 451
P5
Item Proportion
recall
Bill AGT TEM(PAST) leave OBJl
Bill PAT have OBJ2
skates DEF NUMl plural
SOURCE” cz* LOC 0,2” TEM(PAST)
RESULT
20, 0,2 TEM(PAST) Cl LOC 0.2 PROX
TEMl
.58 58 58 SO .58 .58 .58 .58 .58 .75 .75 .75 .75
.50
.50
.33
.42
.33
.33
.33
.50
TABLE 11 (Continued)
Subject*
1 3 4 8 Item
PC
Proportion recall
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1
Bill AGT TEM(PAST) turn OBJl
light DEF NUMO 1
LOC 0,3 livingroom DEF NUMO 1
SOURCE” c3= I-PATa TEM(PAST)”
RESULT C3
I-PAT -
TEM(PAST) TEMl
.33
.33
.33
.33
.33
.33
.33
.25
.25 0
.08
.08
.08
.08 0 0 0 0
.25
.25
.25
.17
.25
.33
Subject*
1 3 4 8
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1
1 1 1 1 1 1
1 1 1 1 1
turned on the light he left his roller skates by the couch. (That’s right) . . . and when the . . is that right? (OK, then his sister did something, what happened to his sister?) She slipped on the roller skates and she told her mother what happened and Bill got in trouble. (That’s right, very good.)
Subject 3 Cfemale): Once this boy named Bill and his sister, when he came back and he we read some funny paper. And then and then he took off his skates, and then his mother called him. And then he took his skates off before he urn turned off the light. And then he took his skates off and turned off the light. And then when his sister was gonna go get the phone, she tripped over the urn skates. (That’s right) and she told the whole story. And Bill got in trouble. (OK)
Subject 4 (female): What’s that first one? (OK, one day Bill came in from roller skating, and what did he do?) He sat down on the couch. (Right) This one is hard. (That’s OK, go to the next one, what happened?) His sister tripped over ‘em, fell on ‘em. (Fell on what?) The
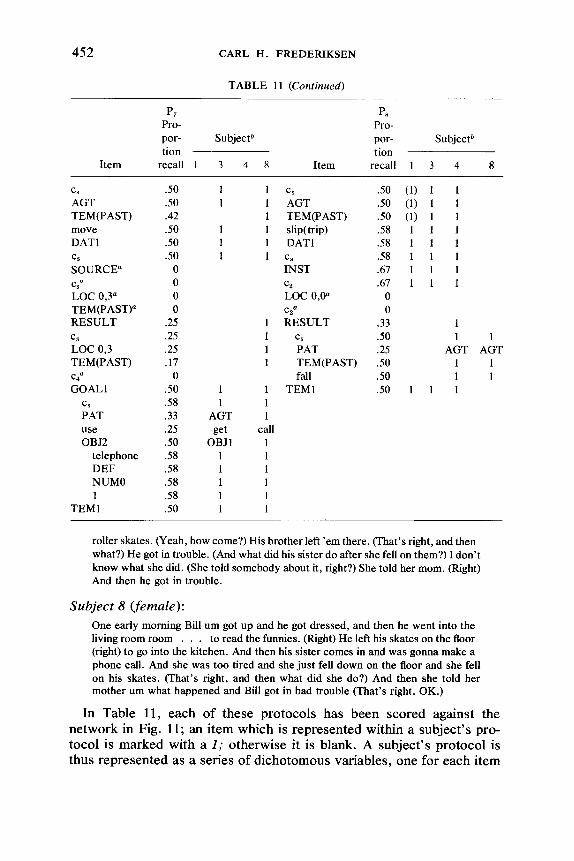
452 CARL H. FREDERIKSEN
TABLE 11 (Continued)
p, P* Pro- Pro- por- Subject* por- Subject0 tion tion
Item recall 1 3 4 8 Item recall 1 3 4 8
CS AGT TEM(PAST) move DATI CS SOURCE” CSQ LOC 0,3” TEM(PASTY RESULT CS LOC 0,3 TEM(PAST)
a :OALl
;AT use OBJ2
telephone DEF NUMO 1
TEMl
.50
.50
.42
.50
.50
.50 0 0 0 0
.25
.25
.25
.17 0
.50
.58
.33
.25
.50
.58
.58
.58
.58
.50
1 1
1 1
AGT get
OBJl 1 1 1 1 1
1 CS .50 (1) 1 1 1 AGT .50 (1) 1 1 1 TEM(PAST) .50 (1) 1 1 1 slip( trip) .58 1 1 1 1 DATl .58 1 1 1 1 CS .58 1 1 1
INST .67 1 1 1 C2 .67 1 1 1 LOC 0,oa 0 ha 0
1 RESULT .33 1 1 CS .50 1 1 1 PAT .25 AGT AGT 1 TEM(PAST) .50 1 1
fall .50 1 1 1 TEMl .50 1 1 1
call 1
1 1
roller skates. (Yeah, how come?) His brother left ‘em there. (That’s right, and then what?) He got in trouble. (And what did his sister do after she fell on them?) I don’t know what she did. (She told somebody about it, right?) She told her mom. (Right) And then he got in trouble.
Subject 8 Cfemale): One early morning Bill urn got up and he got dressed, and then he went into the living room room . . . to read the funnies. (Right) He left his skates on the floor (right) to go into the kitchen. And then his sister comes in and was gonna make a phone call. And she was too tired and she just fell down on the floor and she fell on his skates. (That’s right, and then what did she do?) And then she told her mother urn what happened and Bill got in bad trouble (That’s right, OK.)
In Table 11, each of these protocols has been scored against the network in Fig. 11; an item which is represented within a subject’s pro- tocol is marked with a I; otherwise it is blank. A subject’s protocol is thus represented as a series of dichotomous variables, one for each item
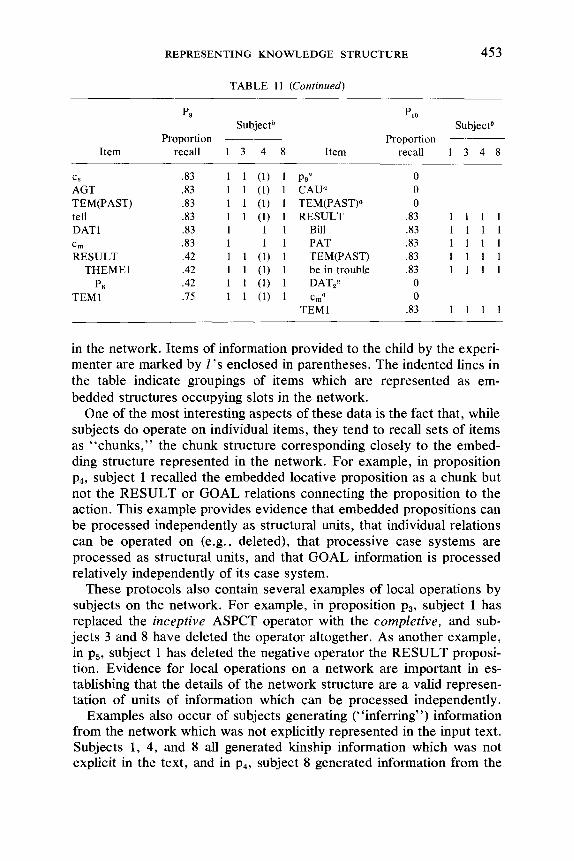
REPRESENTING KNOWLEDGE STRUCTURE 453
TABLE 11 (Continued)
P, P 10 Subject” SubjecF
Proportion Proportion Item recall 13 4 8 Item recall 1 3 4 8
CS AGT TEM(PAST) tell DAT 1 Clll RESULT
THEME1
P8 TEMl
.83 1 1 (1) 1
.83 1 1 (1) 1
.83 1 1 (1) 1
.83 1 1 (1) 1
.83 1 1 1
.83 1 1 1 .42 1 1 (1) 1 .42 1 1 (1) 1 .42 1 1 (1) 1 .75 1 1 (1) 1
Psn 0
CAU” 0
TEM(PAST)” 0
RESULT .83 1 1 1 1 Bill .83 1 1 1 1 PAT .83 1 1 1 1 TEM(PAST) .83 1 1 1 1 be in trouble .83 1 1 1 1 DATza 0
”
T& 0
.83 1 1 1 1
in the network. Items of information provided to the child by the experi- menter are marked by l’s enclosed in parentheses. The indented lines in the table indicate groupings of items which are represented as em- bedded structures occupying slots in the network.
One of the most interesting aspects of these data is the fact that, while subjects do operate on individual items, they tend to recall sets of items as “chunks,” the chunk structure corresponding closely to the embed- ding structure represented in the network. For example, in proposition p4, subject 1 recalled the embedded locative proposition as a chunk but not the RESULT or GOAL relations connecting the proposition to the action. This example provides evidence that embedded propositions can be processed independently as structural units, that individual relations can be operated on (e.g., deleted), that processive case systems are processed as structural units, and that GOAL information is processed relatively independently of its case system.
These protocols also contain several examples of local operations by subjects on the network. For example, in proposition p3, subject 1 has replaced the inceptive ASPCT operator with the completive, and sub- jects 3 and 8 have deleted the operator altogether. As another example, in p5, subject 1 has deleted the negative operator the RESULT proposi- tion. Evidence for local operations on a network are important in es- tablishing that the details of the network structure are a valid represen- tation of units of information which can be processed independently.
Examples also occur of subjects generating (“inferring”) information from the network which was not explicitly represented in the input text. Subjects 1, 4, and 8 all generated kinship information which was not explicit in the text, and in p4, subject 8 generated information from the
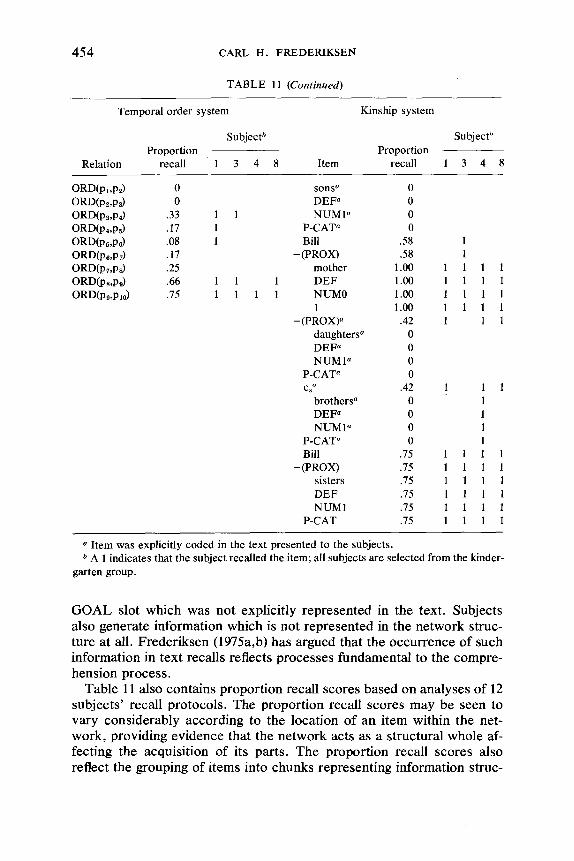
454 CARL H. FREDERIKSEN
TABLE 11 (Continued)
Temporal order system Kinship system
Subject* Subjectb Proportion Proportion
Relation recall 1 3 4 8 Item recall 1 3 4 8
ORD@l,p2) 0 ORD@z,pd 0 ORD@,,pJ .33 1 1 ORD@~,P~) .17 1 - ORD@,,pd .08 1 ORD@,,p,) .17 ORD@,p,! .25 ORDQJ,,P$ .66 1 1 1 ORD(P,>PJ .75 1 1 1 1
sons” 0 DEF” 0 NUM 1” 0
P-CATa 0 Bill .58
-(PROX) .58 mother 1.00 DEF 1 .oo NUMO 1 .oo 1 1.00
- (PROX)” .42 daughtersa 0 DEFa 0 NUMl” 0
P-CAT” 0 CS” .42
brother9 0 DEFa 0 NUMl” 0
P-CAT” 0 Bill .75
-(PROX) .75 sisters .75 DEF .75 NUMl .75
P-CAT .75
1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
a Item was explicitly coded in the text presented to the subjects. b A 1 indicates that the subject recalled the item; all subjects are selected from the kinder-
garten group.
GOAL slot which was not explicitly represented in the text. Subjects also generate information which is not represented in the network struc- ture at ah. Frederiksen (1975a,b) has argued that the occurrence of such information in text recalls reflects processes fundamental to the compre- hension process.
Table 11 also contains proportion recall scores based on analyses of 12 subjects’ recall protocols. The proportion recall scores may be seen to vary considerably according to the location of an item within the net- work, providing evidence that the network acts as a structural whole af- fecting the acquisition of its parts. The proportion recall scores also reflect the grouping of items into chunks representing information struc-
REPRESENTING KNOWLEDGE STRUCTURE 455
tures which are recalled as structural units. While proportion recall scores do not necessarily reflect individual response patterns, for these data when a set of items occurring together are recalled at the same level, the same subjects are recalling each item in the “chunk.” These data exhibit a close correspondence between the embedding structure of the network and the grouping of items in recall. When data are available from a substantial number of subjects, it will be possible to study higher order processing units by analyzing measures of stochastic dependency in the recall of item pairs which directly reflect individual response pat- terns. The appropriate measures are inter-item tetrachoric correlations, since tetrachoric correlations are not affected by the absolute level of recall of individual items (cf. Frederiksen, 1973).
DISCUSSION
The present research has had two principal objectives. The first was to specify data structures which are sufficiently general that they are capable of representing a variety of information structures from which subjects acquire knowledge-including natural language discourse. The motivation for this first objective was essentially pragmatic: to define a network structure which could be used to represent information struc- tures presented to subjects, principally in the form of written or spoken texts but also as physical events, and to provide a reference structure against which one could code logical and semantic information acquired from a presented text or other information structure. The second objec- tive was to develop an explicit model of the format by which information is represented in semantic memory, a model which is sufficiently general that it is capable of representing semantic information acquired from a very large class of texts. It was found that previous network models were not sufficiently general to be applied at the text level and that therefore they were not satisfactory as models of logical and semantic information which subjects acquire in understanding texts. It appears appropriate in attempting to evaluate the present model, to consider these two objectives separately.
With respect to the hrst objective, the networks which have been presented are extremely general, i.e., they are capable of representing a very large class of semantic and logical structures. They are also well- defined in the sense that was discussed in the previous section, and they are parsimonious since the network structures are “built up” from a small number of semantic primitives (e.g., particularly the development of relative systems). However, the semantic networks are incomplete to the extent that they do not represent case structures for particular ac- tions or classes of actions. As these networks are employed in research on comprehension, it will be important to develop a “dictionary” of ac- tions which specifies those restrictions which particular actions or
456 CARL H. FREDERIKSEN
classes of actions place on their case systems. A second problem occurs in generating information structures such as texts from semantic and log- ical networks for presentation to experimental subjects. The generation of event sequences (such as pictures or films) appears to be a relatively straightforward process; however, the generation of texts from semantic and logical networks is at present informal, making use of experi- menter’s (and scorers’) informal knowledge of English grammar. While we typically obtain a high degree of agreement among different scorers, it would be desirable to have available a set of procedures for generating texts from network structures, or for generating network structures from texts. It is important to future research on text comprehension to have available such a set of procedures and to implement them in the form of computer programs for generating texts from network structures and for generating networks from texts.
A number of experimental procedures appear to have promise as methods for experimentally verifying network models of memory. If the focus is on memory structures derived from particular informational inputs such as texts rather than on the general store of world knowledge, three techniques suggest themselves. First, one can experimentally manipulate the network structure from which a text (or other informa- tional input) is derived and study effects of such manipulations on recall of items of information from the network structure or on responses to probes derived from the network. Particular network models suggest possible structural manipulations which may or may not affect subjects’ responses. Failure to find effects predicted from structural manipula- tions would disco&-m those aspects of the model which were used to generate the predictions. Second, one can generate probes from a pre- sented network, and attempt to find a systematic relationship between structural aspects of the network and response latencies to probes. A third method is to estimate probabilities of recall of individual items of information in a network using free recall tasks, and examine corre- spondences between the location of an item in a network and probability of recall of the item. It is also possible to consider stochastic depen- dencies in the recall of item pairs by analyzing the joint probabilities of recalling item pairs. As indicated in the previous section, the analysis of interitem dependencies can reveal higher-order informational units or “chunks” which are recalled as structural units. One can investigate correspondences between the embedding structure associated with a network and the chunk structure which may be inferred from stochastic dependencies in the recall of items from the network. The experimental verification of network models of memory will undoubtedly be a lengthy process. A principal justification for the development of detailed models of memory structure is that they make possible systematic experi- mentation and precise assessment of the knowledge which subjects acquire when they understand text.
REPRESENTING KNOWLEDGE STRUCTURE 457
REFERENCES Chafe, W. Meaning and the structure of language. Chicago: University of Chicago Press,
1970. Chafe, W. Language and consciousness. Language, 1974, in press. Coombs, C. H. A theory of data. New York: Wiley, 1964. Crothers, E. J. The psycholinguistic structure of knowledge. In K. Romney and K. Wexler
(Eds.), Cognitive organization and psychological processes. Washington, DC: Na- tional Academy of Sciences, 1973.
Fillmore, C. J. Deictic categories in the semantics of “come.” Foundations of Language, 1966, 2, 219-227.
Fillmore, C. J. The case for case. In E. Bach and R. Harms (Eds.), Universals in linguistic theory. New York: Holt, Rinehart, & Winston, 1968.
Fillmore, C. J. Some problems for case grammar. Georgetown University Monograph Series in Languages and Linguistics, 1971, 24, 35-56.
Fillmore, C. J. Santa Cruz lectures on deixis, 1971, unpublished. Frederiksen, C. H. Semantic information processing in the acquisition of knowledge from
written text. Paper presented at symposium on “Methodologies for research on written materials,” American Psychological Association, Montreal, Canada, August 29, 1973.
Frederiksen, C. H. Acquisition of semantic information from discourse: effects of repeated exposures. Journal of Verbal Learning and Verbal Behavior, 1975, 14, 158-169.
Frederiksen, C. H. Effects of context-induced processing operations on semantic informa- tion acquired from discourse. Cognitive Psychology, 1975, 7, 139-166.
Frijda, N. Simulation of human long-term memory. Psychological Bulletin, 1972, 77, 1-31. Grimes, J. E. The thread ofdiscourse. The Hague: Mouton, 1975, in press. Gulstad, D. E. A generative discourse model. Linguistics, 1973, 99, 5-70. Halliday, M. A. K. Language structure and language function. In J. Lyons (Ed.), New
horizons in linguistics. Baltimore: Penguin, 1970. Kartunnen, L. What makes definite noun phrases definite? Santa Monica: Rand Corpora-
tion, Technical Report P-3871, 1968. Kartunnen, L. Plugs, filters, and holes: the projection problem for presupposition. Paper
presented at Second Annual Meeting of the Northeastern Linguistic Society, Montreal, Canada, 1971.
Kartunnen, L. Remarks on presupposition. In A. Rogers (Ed.), Performatives, presupposi- tions, and implicafures. Washington, DC: Center for Applied Linguistics, 1974.
Keenan, E. Two kinds of presupposition. In C. Fillmore and T. Langendoen (Eds.), Studies in linguistic semantics. New York: Holt, Rinehart, & Winston, 1971.
Kintsch, W. Notes on the structure of semantic memory. In E. Tulving and W. Donaldson (Eds.), Organization of memory. New York: Academic Press, 1972.
Kintsch, W. The representation of meaning in memory. Hillsdale, NJ: L. E. Erlbaum As- sociates, 1974.
Lakoff, G. On generative semantics. In D. D. Steinberg and L. A. Jakobovits (Eds.), Semantics: an interdisciplinary reader in philosophy, linguistics, and psychology. Cambridge: Cambridge University Press, 1971. (a)
Lakoff, G. The role of deduction in grammar. In C. Fillmore and T. Langendoen (Eds.), Studies in linguistic semantics. New York: Holt, Rinehart, & Winston, 1971. (b)
Leech, G. Towards a semantic description ofEnglish. Bloomington, IN: Indiana Univer- sity Press, 1969.
McCawley, J. D. The role of semantics in grammar. In E. Bach and R. Harms (&Is.), Uni- versals in linguistic theory. New York: Holt, Rinehart, & Winston, 1968.
Newell, A., & Simon, H. A. Human problem solving. Englewood Cliffs, NJ: Prentice Hall, 1971.
Rescher, N. Hypothetical reasoning. Amsterdam: North Holland, 1964.
458 CARL H. FREDERIKSEN
Rumelhart, D., Lindsay, P., & Norman, D. A. A process model for long-term memory. In E. Tulving and W. Donaldson (Eds.), Organization of memory. New York: Aca- demic Press, 1972.
Sanders, G. A. On the natural domain of grammar. Linguisrics, 1970, 63, 51-124. Schank, R. Conceptual dependency: A theory of natural language understanding. Cogni-
tive Psychology, 1972, 3, 552631. Schank, R. Identification of conceptualizations underlying natural language. In R. Schank
and K. Colby (Ed%), Computer models of thought and language. San Francisco: W. H. Freeman, 1973.
Simmons, R. F. Some semantic structures for representing English meanings. In R. Freedle and J. B. Carroll (Eds.), Language comprehension and the acquisition of knowledge. Washington, DC: V. H. Winston, 1972.
Simmons, R. R. Semantic networks: their computation and use for understanding English sentences. In R. Schank and K. Colby (Eds.), Computer models of thought and lan- guage. San Francisco: W. H. Freeman, 1973.
Simmons, R. F., & Bruce, B. C. Some relations between predicate calculus and semantic net representations of discourse. Proceedings of the Second Joint International Con- ference on Artificial Intelligence. Washington, DC: MITRE Corp., 1971.
Simon, H. A., & Rescher, N. Cause and counterfactual. Philosophy of Science, 1966, 33, 323-340.
Tversky, A. Intransivity of preference. Psychological Review, 1969, 76, 31-48. Van Dijk, T. A. Models for text grammars. Linguistics, 1973, 105, 35-68.
Waterman, D. A., & Newell, A. Protocol analysis as a task for artificial intelligence. Ar- tificial Intelligence, 1971, 2, 258-318.
Wilks, Y. An artificial intelligence approach to machine translation. In R. Schank and K. Colby (Eds.), Computer models of thought and language. San Francisco: W. H. Freeman, 1973.
(Accepted January 9, 1975)





























