Embed Size (px)
DESCRIPTION
Department of Biophysics and Physical Chemistry, Faculty of Pharmacy, Heyrovskeho 1203, 500 05 Hradec Kralove, Czech Republic DELTER v.o.s. Lohenice 43, 535 01 Prelouc , Czech Republic. Resonance meters for viscoelasticity measurement. Introductory remarks - PowerPoint PPT Presentation
Citation preview

RESONANCE METERS FOR VISCOELASTICITY MEASUREMENT
Department of Biophysics and Physical Chemistry, Faculty of Pharmacy, Heyrovskeho 1203, 500 05 Hradec Kralove, Czech Republic
DELTER v.o.s. Lohenice 43, 535 01 Prelouc, Czech Republic

Introductory remarks
Quantification of relations between strains and stresses in dynamic loading is one of the key tasks of biomechanics.
In contrast to static loading, in dynamic loading energy losses play a relevant role. Viscoelasticity must thus be taken into account.
Rheological viscoelastic models are currently applied on this field. Nevertheless, they do not ensure a satisfactory approximation.There are two main sources of discrepancy between the behavior of rheological models and the behavior of real viscoelastic structures. The first issue is the problematic disregard of the influence of inertial forces. The second lies in the fact that the current rheological models use lumped parameters which are incongruous with the distributed parameters in real bodies.
Complex moduli or, more generally, complex stiffnesses, provide adequate tools for satisfactory characterizing dynamic behavior of linear mechanical systems.

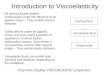
energy generator
fixed end
inertial body
sample
deformation sensor signal to computer
damping oscillations Resonance methods represent an alternative to direct
measurements of frequency characteristics (DMA
apparatuses). Crucial advantage of resonance meters
consists in the high sensitivity of measurements and the
elimination of errors resulting from the effect of the mass of
the sample and the mass of the moving part of the meter on
measurement results. Moreover, its design enables
contactless sensing, which further improves the accuracy
and precision. Application of this principle leads to a
reduction of costs and elimination of some errors.
deformation
time
Principle of resonance apparatuses (RMA)
RMA measure complex stiffnes and complex moduli. RMA are based on the measurement of mechanical resonance of samples of biological materials.

Inverse problem solutions
)(1
)(0 tFlala
n
j
jj
Fundamental equations:
deformation
time
).(sin.)( . teAty ta
Complex stiffness of system sample-inertial body in periodic mode:
)(1
)(0 tbb
n
j
jj
)()()(
iliFiS
Complex modulus definition: )()()(
iiiE
AlSE SRERE0 A
lSE SIMIM0
Loss modulus of sample: Storage modulus of sample:
Complex stiffness definition:
inertial body
sample
F
l0
)( iTS
)( iTB
)()()( iiSiSiS IMRE
MTRE M
TIM
2

RMA – tensile measurements

RMA – measurements in bending loading

RMA – measurements of surface sitiffness

Potential application of measurement of viscoelasticity in biomechanics
Solutions of problems of mechanical compatibility
Origin of additional stresses in mechanically incompatible bodies.
Tangent stresses in tensile loading.
Condition of mechanical compatibility is the same complex stiffness in all bodies in contact.

body1 body2 body nbody 3
F
1
2
n
Serial systems
n
i iCS SS 1
11
n
iiCP SS
1
Knowledge of stiffnesses of partial bodies enables calculation of stiffness of whole system
Parallel systems
F
L2
L3
L1
F3F1 F2
L
Potential application of measurement of viscoelasticity in biomechanics
Solutions of problems of complex mechanical systems

Addenda

Přechodová charakteristika - odezva na skok síly
čas
Síla nebo mechanické napětí
Příklad přechodové charakteristiky Voigtova modelu
)1.()(.t
NH
eHFtL
)1.()(.tE
eE
t
defo
rmac
e
čas

Křivka toku - odezva na obdélníkový impuls síly
čas
mechanické napětí
Příklad křivky toku Voigtova modelu
)1.()(.t
NH
eHFtL
defo
rmac
e
čas
tNH
eHFtL
.)(

Frekvenční charakteristikysíl
a, d
efor
mac
e
čas
F0 φ
L0
imaginární osa
reálná osasměr rotace fázorů
ωt
poloha fázoru v čase t imaginární osa
reálná osa
φpoloha fázoru odezvy v čase 0
poloha fázoru síly v čase 0
tFtF sin)( 0
)(sin)( 0 tLtL
Fázorové (vektorové) zobrazení síly a deformace

Další používané charakteristiky
síla
čas
čas
T2 T1 síla
síla
čas
T1 T2
síla
čas
Odezvy na lineárně rostoucí sílu – rampová charakteristika
Cyklické odezvy
Odezvy na pilový průběh síly
Odezvy na trojúhelníkovýprůběh síly
Odezvy na sílu rostoucí po skocích

Teorie chování lineárních mechanických systémů
Základní diferenciální rovnice
m
j
jj
n
i
ii fbfblala
1
)(0
1
)(0
kde a a b jsou koeficienty, i a j jsou stupně derivace, l je deformace, f je namáhání
Pokud je vstupní veličina síla F a výstupní veličina deformace l, lze vztah napsat ve jednodušší formě
)(1
)(0 tFlala
n
i
ii

Fourierova transformace
)()()()(1
01
0 iFibbiLiaam
j
jj
n
l
ll
Základní diferenciální rovnice je na obecné úrovni obtížně řešitelná. S použitím Fourierovy transformace ji však možné řešení podstatně usnadnit. Princip spočívá v tom, že se čas nahradí novou proměnnou (iω). Dostáváme pak relace mezi fázory síly a deformace. Tyto relace jsou popsány algebraickou rovnicí, jejíchž řešení je snadnější. Tato metoda se používá v elektronice a regulační technice.
dtetxiX ti )()(
Převody mezi časovými průběhy a fázory
Transformační vztah, definující Fourierovu transformaci se v praxi obvykle přímo nepoužívá.
.Využívá se tzv. slovník transformace, kde je transformace již vypočtena.
Fourierova transformace je vhodná pro analýzu frekvenčních závislostí mezi namáháním a deformací. Lze ji využít i pro fyzikálně reálné periodické průběhy. Využíváme tzv. harmonickou analýzu, založenou na Fourierově trigonometrické řadě.Dokonce i neperiodické průběhy lze řešit pomocí Fourierovy transformace.

Laplaceova transformacePodobně jako Fourierova transformace, nahrazuje Laplaceova transformace základní diferenciální rovnici algebraickou rovnici. Princip spočívá v tom, že se čas nahradí novou proměnnou (p). Dostáváme pak relace mezi Laplaceovými obrazy síly a deformace.
Transformační vztah
Transformační vztah se opět v praxi obvykle přímo nepoužívá.
.
I v případě Laplaceovy transformace se využívá se tzv. slovník transformace, kde je transformace již vypočtena pro běžné funkce.
0
)()( dtetfpF pt
pXpbbpYpaam
j
jj
n
i
ii
10
10 )(
Rovněž tato metoda se používá v elektronice a regulační technice. Ulehčuje zejména hledání impulsních a přechodových charakteristik.

Komplexní tuhost a komplexní moduly
)()()(
iliFiT
)()()( iSiiSiS IMRE
Komplexní mechanická tuhost T(iω) je poměr fázoru síly F(iω) a deformace l(iω):
.Komplexní mechanická tuhost obsahuje reálnou složku (TRE) a imaginární složku (TIM).
imaginární osa
reálná osa
φpoloha fázoru odezvy v čase 0
poloha fázoru v čase 0
S (iω)
imaginární osa
reálná osa
φ
d = |S(iω)| SIM
SRE
dynamická tuhost
fázorová presentace

)()()(
iiiE
)()()( iEiiEiE IMRE
AF
0ll
0yAES
V režimu namáhání v tahu a tlaku lze u těles tvaru homogenní tyče charakterizovat materiál pomocí komplexních modulů.
Komplexní modul E(iω) je poměr fázoru mechanického napětí σ(iω) a relativní deformace ε(iω):
Komplexní modul obsahuje reálnou složku (ERE) a imaginární složku (EIM).
Imaginární část komplexního modulu se nazývá „storage modulus“.
Imaginární část komplexního modulu se nazývá „loss modulus“.
Relace mezi komplexní tuhosti a komplexním modulem
Protože pro namáhání v normálovém směru (tahu a tlaku platí):
Platí také:
Komplexní modul

Energetické ztráty při dynamickém zatěžování
Energetické ztráty závisí na frekvenci a na imaginární části komplexní tuhosti. Při normálovém namáhání tedy na ztrátovém modulu EIM (loss modulus).
tFtF sin)( 0
)(sin)( 0 tLtL
Pokud je průběh síly dán vztahem:
A průběh deformace vztahem:
Obecně lze energetické ztráty určit podle vztahu: sin2
00 LFPz
Při znalosti komplexní tuhosti je možno použít vztah: 20
2LSP IMz

Komplexní tuhost a komplexní moduly mechanických soustavMechanické soustavy více vzájemně spojených těles do kombinací „sériově“ spojených částí (u nichž je společné namáhání) a „paralelně“ spojených částí (společná je deformace). Například Maxwellův model je sériové spojení Hookeova a Newtonova tělesa, Voigtův model je paralelní spojení Hookeova a Newtonova tělesa.
n
iiCP iSiS
1
)()(
n
i iCS iSiS 1 )(1
)(1
Celková tuhost je součet dílčích tuhostí
Převrácená hodnota celková tuhost je součet převrácených hodnot dílčích tuhostí
F
stejné síly
těleso1 těleso 2 těleso ntěleso 3
Sériová kombinace
F
1
2
n
L
stejné deformace
Paralelní kombinace

Dynamická tuhost složitých soustav viskoelastických struktur - příklady
Sériová kombinace
1
L
n
i iCS iSiS 1 )(1
)(1
L2(ω)
T1(ω)
T2(ω)
Modelové příklady použití:
Držadlo s krytemPodrážka boty složená z více vrstevPodložky
Lze určit :
Deformace dílčích strukturCelkovou komplexní tuhost v závislosti na frekvenciEnergetické ztráty v dílčích strukturách v závislosti na frekvenciTlumení vibrací v závislosti na frekvenci

Dynamická tuhost složitých soustav viskoelastických struktur - příklady
Paralelní kombinace
L
n
iiCP iSiS
1
)()(
F2(ω)
T1(ω) T2(ω)
Modelové příklady použití:
Tělesa s povrchovým krytem či lakemVícevrstevný textilPovrch těla a přiléhající struktury (textil, obuv, náplasti a obinadla)
Lze určit :
Síly a namáhání v dílčích strukturáchCelkovou komplexní tuhost v závislosti na frekvenciEnergetické ztráty v dílčích strukturách v závislosti na frekvenciNamáhání na rozhraní struktur v závislosti na frekvenci
Paralelní struktury

Příklady problémů které lze řešit na základě znalosti komplexní dynamické tuhosti
1) Deformace v dílčích strukturách
2) Namáhání dílčích struktur
3) Ztráty energie, celkové i v dílčích strukturách
4) Mechanická kompatibilita materiálů
Znalost komplexní dynamické tuhosti lze využít také k řešení problematiky nebezpečí vzniku trvalých deformací a porušení celistvosti (prasknutí) dílčích struktur.

H N
F
E η
σ
Voigtův (Kelvinův) modelNamáhání je společné pro obě tělesa deformace se sčítají
Obecně Pro normálové namáhání tyče
Komplexní tuhost Komplexní modul
NiHiS )( iEiE )(
Praktické poznámky:
U Voigtova modelu jsou parametry (H, N, E, η) frekvenčně nezávislé.
Rovněž je frekvenčně nezávislá reálná část tuhosti a modulu.
Reálná část komplexního modulu je shodná s Youngovým modulem pružnosti.
Imaginární části komplexní tuhosti i komplexních modulů jsou přímo úměrné frekvenci.

H N
F
Voigtův model se setrvačnostíNamáhání je společné pro obě tělesa deformace se sčítají
Komplexní tuhost
MNiHiS 2)(
Praktické poznámky:
U tělesa chovajícího se podle Voigtova modelu jsou parametry (H, N, M) frekvenčně nezávislé.
Reálná část tuhosti i imaginární část modulu je frekvenčně závislá.
M

Viskoelastické modelySložené reologické modely
Závěry
Složené modely tvoří sério-paralelní struktura Hookeových a Newtonových těles.
Modely neberou v úvahu vliv setrvačných si, což je při dynamickém zatěžování principiální nedostatek.
Identifikace a odhad parametrů modelů je obtížně řešitelný úkol.
Praktické použití reologických modelů je sporné.
F

Význam kvantitativního popisu viskoelasticity
Mechanická kompatibilita těles a materiálůKontrola kvality produktů.Metodika ovlivnění houževnatosti a křehkosti volbou viskoelastických parametrůStabilita parametrů v závislosti na vnějších podmínkách a stárnutí materiálu.Mechanické filtry vibracíKvantifikace viskoelasticity biomateriálů

Vibrace, vlastní oscilace, mechanické filtry vibrací
F
stejné síly
těleso1
těleso 2
těleso n
těleso 3
Sériová kombinace těles
Selektivní mechanické filtry vibracíV řadě praktických případů se setkáváme se situací, kdy je mechanická soustava složena z dílčích těles, namáhaných stejnou silou. Příkladem mohou být držadla, podrážky bot, podložky apod.Deformace v dílčích tělesech lze určit na základě vztahů pro komplexní tuhosti.Častá je také situace, kdy je třeba minimalizovat vibrace v některých tělesech, respektive „odfiltrovat“ některé frekvence vibrací. Například je žádoucí, aby určité frekvence vibrací nepřecházely do lidského těla (rukojeti pneumatických kladiv, volanty u automobilů, jsou markantní příklady).Vhodná volba viskoelasticity ochranných vrstev umožňuje takovéto selektivní filtrování. Znalost komplexních tuhostí umožňuje vhodnou volbu viskoelasticty mechanických filtrů.
0 1 2 3 4 5 6 7 8
Výkon
frekvence (Hz)
Výkon přenášený do koncového tělesa
těleso1 těleso 2
Přiklad selektivního mechanického filtru pro vibrace od 5 do 7 Hz
Analýza mechanického chování soustav těles, založená na znalosti komplexní tuhosti, umožňuje předpovídat možnost vzniku vlastních kmitů, jejich frekvenci a tlumení.

Řešení inversního problémuZ frekvenčních charakteristik
Z hlediska komplexní tuhosti se jedná o přímou metodu. Tuto metodu využívají přístroje DMA.
síla,
def
orm
ace
čas
F0
L0Δt
tFtF sin)( 0 )(sin)( 0 tLtL
t
)()()( IMRE SiSS
)(cos)()( SSRE )(sin)()( SSIM
Hledáme reálnou a imaginární část komplexní tuhosti v závislosti na frekvenci
Postup:
a) Určíme deformaci pro harmonický průběh síly
b) Určíme absolutní hodnotu komplexní tuhosti0
0)(LFS
c) Určíme fázový posun
d) Určíme reálné a imaginární části komplexní tuhosti
e) Měření opakujeme pro různé frekvence

Řešení inversního problémuZ přechodových charakteristikTato metoda je použitelná pro periodické i neperiodické odezvy. Obecně je odezva součtem periodických a aperiodických částí. Na obecné úrovni je řešení inversního problému komplikované, byť možné. Odezva má totiž obecně složitý průběh:
Snadnější je řešení pro ryze periodickou odezvu a je shodné s řešením podle postupu u impulsních charakteristik.
Pokud je chování tělesa v souladu s Voigtovým modelem, má odezva deformace na skok síly F průběh:
čas
Síla de
form
ace
čas
j
tj
iii
tai
ji eBteAtl ).(sin.)( .
)1()( NH
eHFtl
Z parametrů H a N lze vypočítat komplexní tuhost takto:
Parametry H a N lze snadno určit. Toto je klasický reologický přístup. Deformace však bývají malé a měření je zatíženo velkou chybou. Významná chyba vzniká navíc zanedbáním vlivu setrvačnosti tělesa a případně i setrvačností senzoru deformace.
HSRE
NS IM
Pokud je odezva pouze aperiodická, obsahuje součet klesajících exponenciálních průběhů, které lze jednoduše, ale s omezenou přesností, identifikovat.

RESONANČNÍ PŘÍSTROJE (RMA)
Přesná, citlivá a levná metodika měření mechanického chování viskoelastických těles při dynamickém zatěžování.
Základní myšlenka řešení
Resonanční metody měření se požívají v mnoha oborech. Vyznačují se zpravidla velkou citlivostí a přesností.
Příklady resonančních metod: NMR, EPR, spektrofotometrie, měření elektrické impedance, měření torzních kmitů v mechanice atd.
Předpokladem použití resonanční metody periodický charakter odezvy měřené veličiny na vstupní stimul. Musí docházet k resonanci.
Pohybová rovnice viskoelastických těles však v reálných situacích nemá periodické řešení.
Vhodnou úpravou (spojením měřeného tělesa se „setrvačným členem“) lze dospět ke stavu, kdy pohybová rovnice systému těleso-setrvačný člen má periodické řešení a lze tedy použít resonančního principu měření.
Toto řešení ve spojení s bezkontaktním snímáním deformace je spojeno s dalšími výhodami.

Ilustrace principu RMA na měření tyče při namáhání v tahu
délka L
setrvačné těleso
sensor deformace počítač a SW
vzorek
Deformační odezva y na vnesení energie do systému krátkým impulsem je součet tlumených harmonických průběhů.
ii
ti teAty i sin)(
Část výrazu:t
iieA
je úměrná disipaci energie v tělese.
Parametry Ai, ωi a αi vypočte z naměřených průběhů počítač a jeho software.
Z parametrů Ai, ωi a αi lze určit komplexní dynamickou
tuhost tělesa, komplexní modul pružnosti, ztrátový úhel
a časové konstanty deformační odezvy na skok
namáhání.

Obvyklý postup:
1) Pro zvolené M změříme impulsní nebo přechodovou charakteristiku.
2) Určíme α a ω tlumených kmitů dílčích složek průběhu (vypočte SW).
3) Vypočteme celkovou a po odečtení tuhosti setrvačného členu i tuhost
samotného tělesa.
4) Měření opakujeme pro různé ω.
Takto získáme frekvenční závislosti reálných i imaginárních částí komplexního
modulu tělesa.

Přístroje RMA umožňují měřit:
Komplexní tuhost těles
Komplexní mechanickou impedanci těles
Komplexní modul pružnosti
Časové konstanty tělesa pro skokovou změnu namáhání
Měření lze provádět při různých frekvencích a různých úrovních klidového namáhání
(předpětí), tyto parametry lze nastavovat nezávisle

Nelineárně elastická tělesa a materiály

Lineární viskoelasticita
Statické mechanické chování těles
V ustálených stavech se i u viskoelastických těles uplatňují pouze elastické síly.
Například pro tyč namáhanou v tahu se klasicky předpokládá platnost Hookeova zákona:
E SF
0ll
E je modul pružnosti, F je síla, S je průřez tyče, l je délka tyče při namáhání, l0 je délka tyče bez namáhání.Modul se považuje za konstantu a závislost mezi σ a ε je tedy lineární.
σ
ε
Namáhání na relativní deformaciProtože klidová délka se v řadě případů určuje obtížně, je možno ze zatěžovacího grafu určit modul podle vztahu:
E
Δσ
Δε
Takto lze postupovat jen u lineárně se chovajících těles. Modul, takto určený, je nezávislý na rozdílu hladin i na velikosti deformace či předpětí.

Nelineární viskoelasticita – statická namáhání
Viskoelastická tělesa se často chovají nelineárně. Například průběh na grafu je výrazně nelineární.
U nelineárních průběhů je možné mechanické chování popsat tak, že v každém bodě grafu určíme diferenciálně určovaný modul.
σ
ε
Namáhání na deformaci - nelineární průběh
Δσ
Δσ
Δε1
Δε2
ddED
Diferenciální modul je směrnice ke grafu v daném bodě (pro dané předpětí). Na grafu je v oblasti kolem bodu 1 mnohem menší modul než kolem bodu 2.
Právě diferenciální moduly jsou pro praxi zásadní, protože namáhání se zpravidla mění v okolí jistého klidového zatížení (tedy předpětí).
1
2

Nelineární viskoelasticita – dynamické namáhání
Dynamické mechanické chování tělesa se obvykle určuje pomocí komplexních modulů. Komplexní modul je poměr fázoru namáhání ku fázoru deformace.U nelineárních systémů určujeme diferenciální komplexní moduly v daném pracovním bodě:
U přístroje RMA vycházíme z měření tlumených
oscilací o velmi malé amplitudě kolem pracovního
bodu. Tedy pro dané předpětí.
Z oscilací pak počítáme diferenciální komplexní modul
(moduly stroge i loss).
σ
ε
Namáhání na deformaci - nelineární průběh
bod 1
bod 2
)()()(
ididiE

Dodatek:
Teorie RMA podrobněji

)(1
)(0 tfyaya
n
i
ii
Teoretická východiska
U lineárních či linearizovatelných systémů má rovnice popisující vztahy mezi vstupem a výstupem následující tvar:
kde a a b jsou koeficienty, i jsou stupně derivace, y je výstupní veličina (deformace), f(t) je vstupní veličina (síla,
napětí)
Dále budeme za vstupní veličinu považovat sílu a za výstup (absolutní) deformaci.
Poznámka: Toto pojetí vychází z faktu, že při měření vycházíme ze sil a absolutních deformací. Přechod k relacím
mezi mechanickým napětím a relativní deformaci (veličinami obvykle používanými v literatuře) je možný, ale až
sekundární krok, závisející na geometrii vzorku.
(1)

Z teorie diferenciálních rovni vyplývá, že deformační odezva na Diracův impuls síly
je tvořena součtem exponenciálních průběhů a tlumených harmonických průběhů.
Tento charakter má i odezva na změnu síly formou skoku mezi dvěma konstantními
hladinami.
Principiálně je tedy možné určit koeficienty v rovnici (1) na základě měření impulsní
charakteristiky (odezvy na krátký impuls) nebo na základě přechodové charakteristiky
(odezvy na skok mezi hladinami). Jinými slovy na základě měření impulsní
charakteristiky lze dospět k obecnému popisu mechanického chování tělesa (vyřešit
tzv. inverzní problém).
Koeficienty v rovnici (1) lze určit také na základě měření závislostí mezi
harmonickým namáháním a deformací. Na tomto principu pracuje řada přístrojů
kategorie DMA. K řešení inversního problémů je v tomto případě třeba měřit
frekvenční závislosti pro dostatečným počet frekvencí.
)(1
)(0 tfyaya
n
i
ii
(1)

Snadnější vhled do této problematiky přináší aplikace Laplaceovy transformace na rovnici (1). Po
Laplaceově transformaci totiž rovnice (1) přejde na algebraickou rovnici (2):
)(1
)(0 tfyaya
n
i
ii
(1)
pXpFpYpaan
i
ii )()(
10
, (2)
kde Y(p) je obraz výstupu, X(p) je obraz vstupu, p je Laplaceův operátor.
Obraz výstupní veličiny (deformace) racionální lomená funkce, kterou lze pomocí metody parciálních
zlomků převést na součet zlomků typu:
i
i
pA
222 2sin)(cos
iii
iii pp
pB
i
i
pA
teAty )(Členy typu odpovídají v časové oblasti klesajícím exponenciálám podle vztahu:
222 2sin)(cos
iii
iii pp
pB
)sin()( teBty t
Členy typu odpovídají v časové oblasti klesajícím exponenciálám podle vztahu: