Embed Size (px)
Citation preview
ROBOT PENGINTAIROBOT PENGINTAIMENGGUNAKAN PC BERBASISMENGGUNAKAN PC BERBASISMIKROKONTROLER AT89S51MIKROKONTROLER AT89S51
ROBOT PENGINTAIROBOT PENGINTAIMENGGUNAKAN PC BERBASISMENGGUNAKAN PC BERBASISMIKROKONTROLER AT89S51MIKROKONTROLER AT89S51
IndraIndra PatiPati AndhikaAndhika PribadiPribadi
2222108367108367
Fakultas Ilmu Komputer & Teknologi InformasiFakultas Ilmu Komputer & Teknologi Informasi
Jurusan Sistem Komputer (SJurusan Sistem Komputer (S--1)1)
LATAR BELAKANG MASALAH
• Manusia selalu mencari pengembangan alat-alat otomasi maupun elektrik untukmemudahkan pekerjaan
• Meminimalisasi pekerjaan yang beresiko tinggi
• Robot yang dapat mengintai dan dikendalikandari Pc menggunakan jaringan Nirkabel
• Manusia selalu mencari pengembangan alat-alat otomasi maupun elektrik untukmemudahkan pekerjaan
• Meminimalisasi pekerjaan yang beresiko tinggi
• Robot yang dapat mengintai dan dikendalikandari Pc menggunakan jaringan Nirkabel
TUJUAN PENELITIAN
• membuat sebuah robot yang dikendalikanoleh pengguna melalui komputer dan dapatmemantau keadaan sekitar melalui kamerayang terpasang pada robot
• membuat sebuah robot yang dikendalikanoleh pengguna melalui komputer dan dapatmemantau keadaan sekitar melalui kamerayang terpasang pada robot
Rumusan Masalah
• Masalah yang akan penulis atasi dibatasi padapembahasan tentang pengendalian robotmenggunakan PC, yang terhubung keMikrokontroler AT89S51 menggunakankomunikasi serial dengan kabel RS232, danpada Robot terdapat kamera yang dapatmenginformasikan ke Komputer keadaansekitar
• Masalah yang akan penulis atasi dibatasi padapembahasan tentang pengendalian robotmenggunakan PC, yang terhubung keMikrokontroler AT89S51 menggunakankomunikasi serial dengan kabel RS232, danpada Robot terdapat kamera yang dapatmenginformasikan ke Komputer keadaansekitar

GAMBARAN UMUM
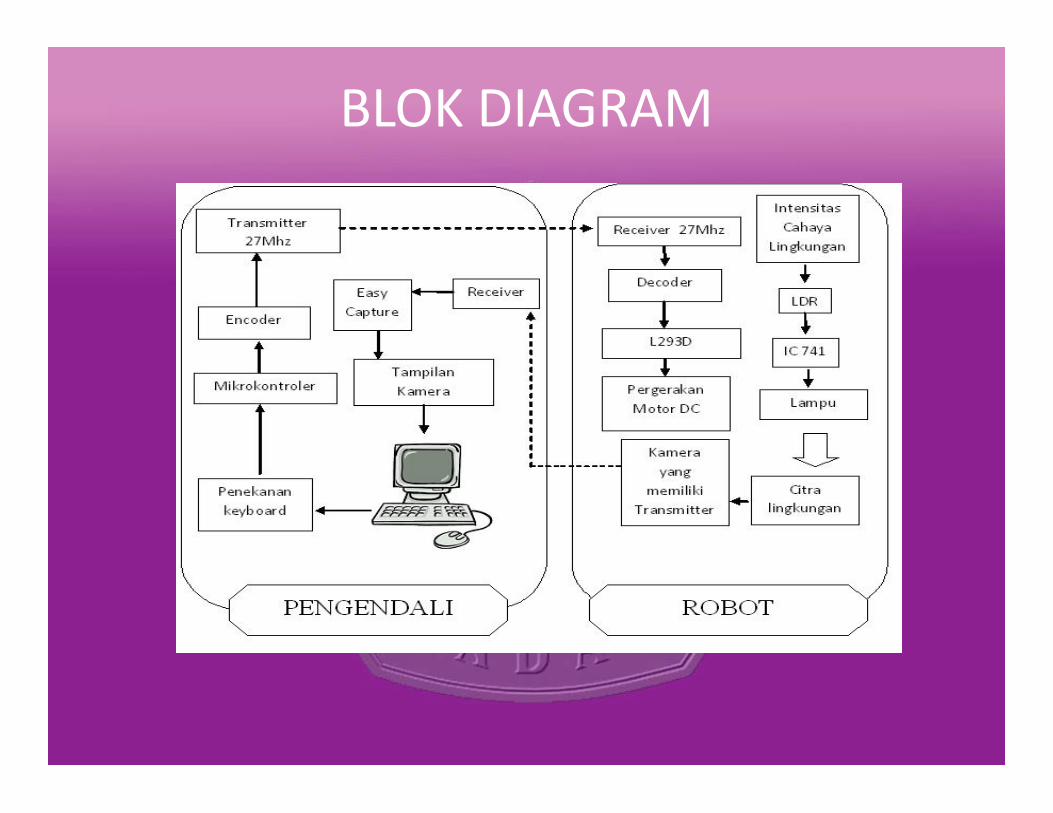
BLOK DIAGRAM
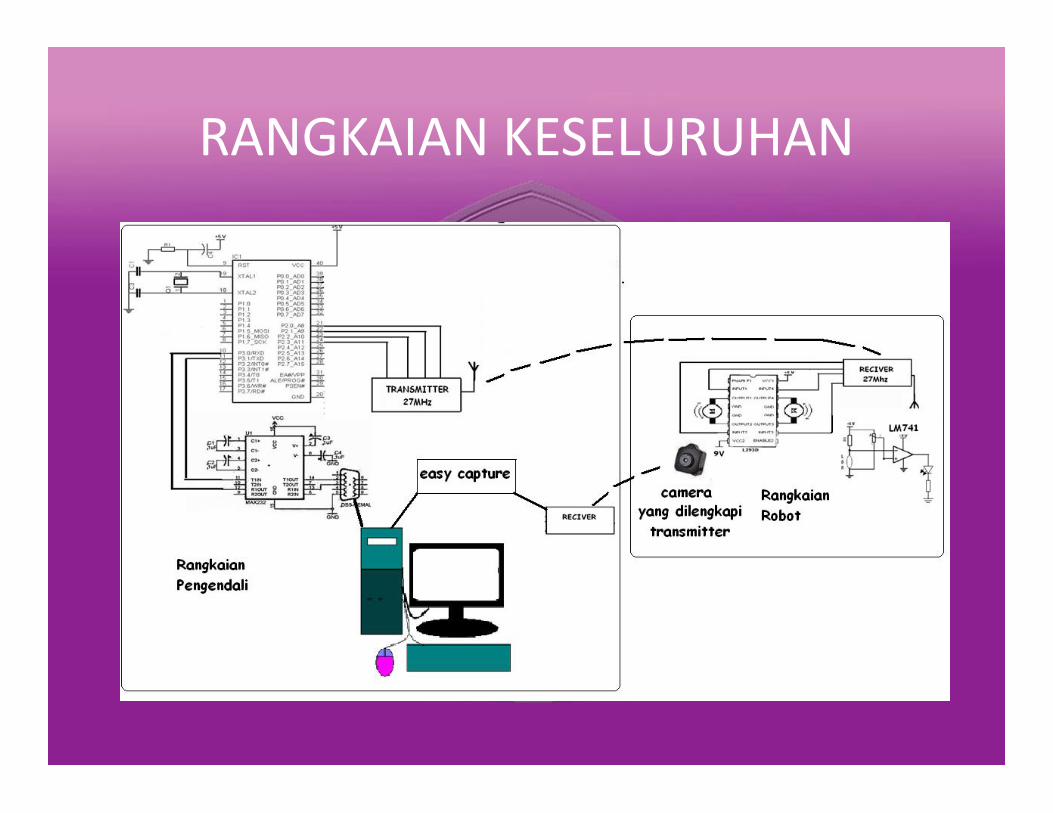
RANGKAIAN KESELURUHAN
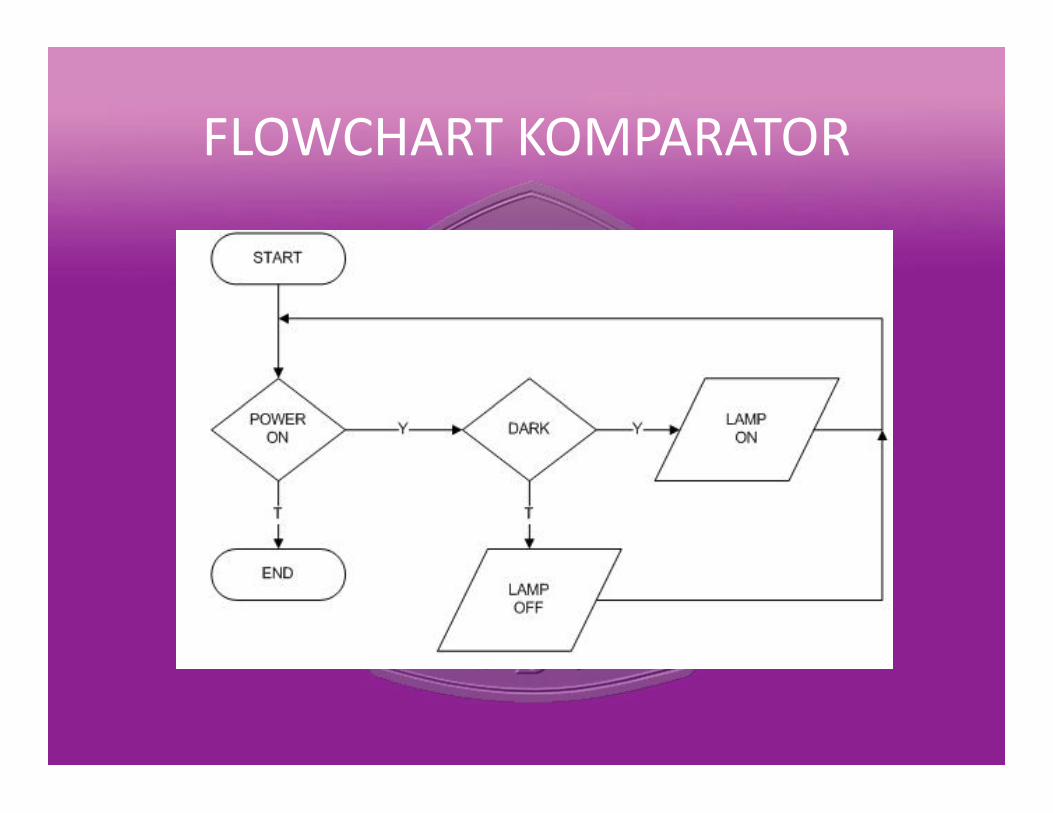
FLOWCHART KOMPARATOR

FLOWCHART ROBOT
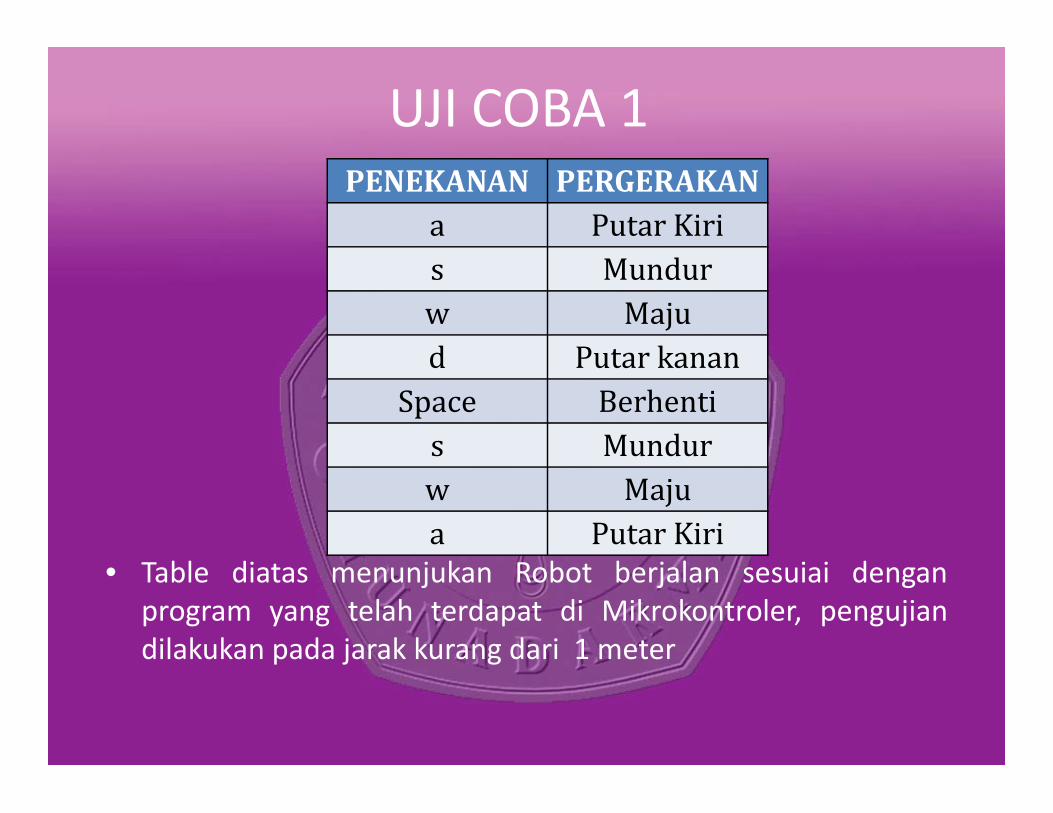
PENEKANAN PERGERAKANa Putar Kiris Mundurw Majud Putar kananSpace Berhenti
UJI COBA 1
• Table diatas menunjukan Robot berjalan sesuiai denganprogram yang telah terdapat di Mikrokontroler, pengujiandilakukan pada jarak kurang dari 1 meter
Space Berhentis Mundurw Majua Putar Kiri
UJI COBA 2
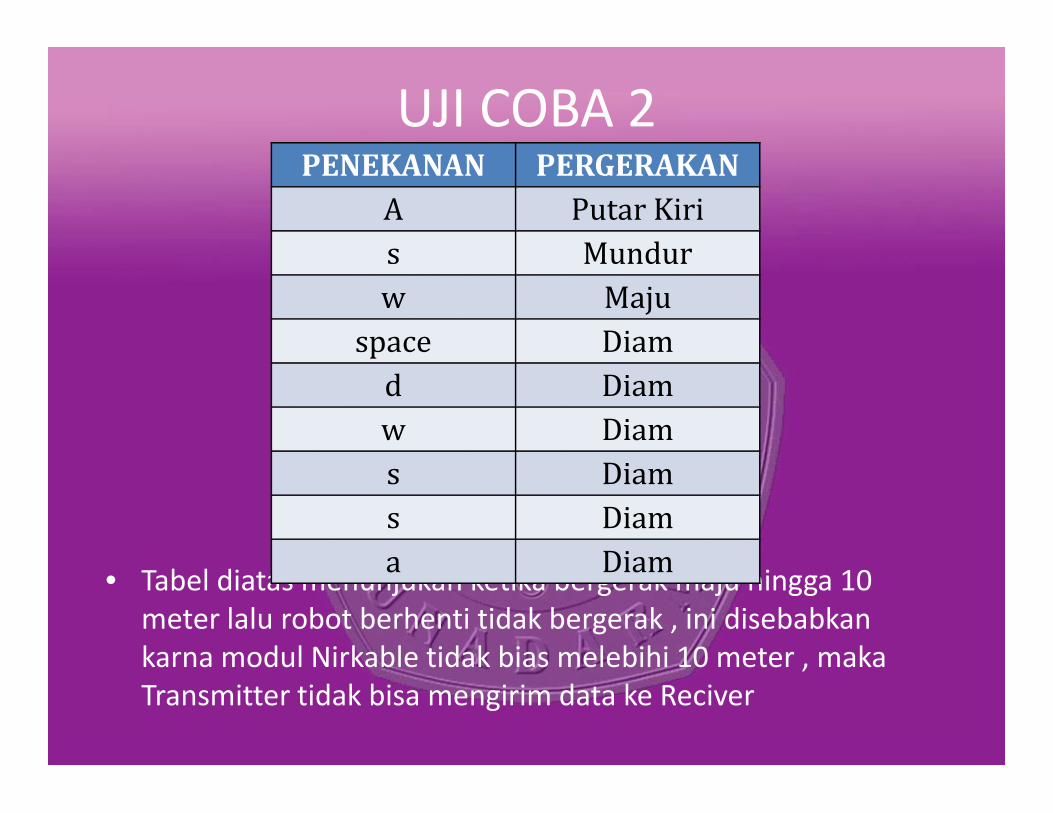
• Tabel diatas menunjukan ketika bergerak maju hingga 10meter lalu robot berhenti tidak bergerak , ini disebabkankarna modul Nirkable tidak bias melebihi 10 meter , makaTransmitter tidak bisa mengirim data ke Reciver
PENEKANAN PERGERAKANA Putar Kiris Mundurw Majuspace Diamd Diamw Diam• Tabel diatas menunjukan ketika bergerak maju hingga 10
meter lalu robot berhenti tidak bergerak , ini disebabkankarna modul Nirkable tidak bias melebihi 10 meter , makaTransmitter tidak bisa mengirim data ke Reciver
d Diamw Diams Diams Diama Diam
Uji coba 3
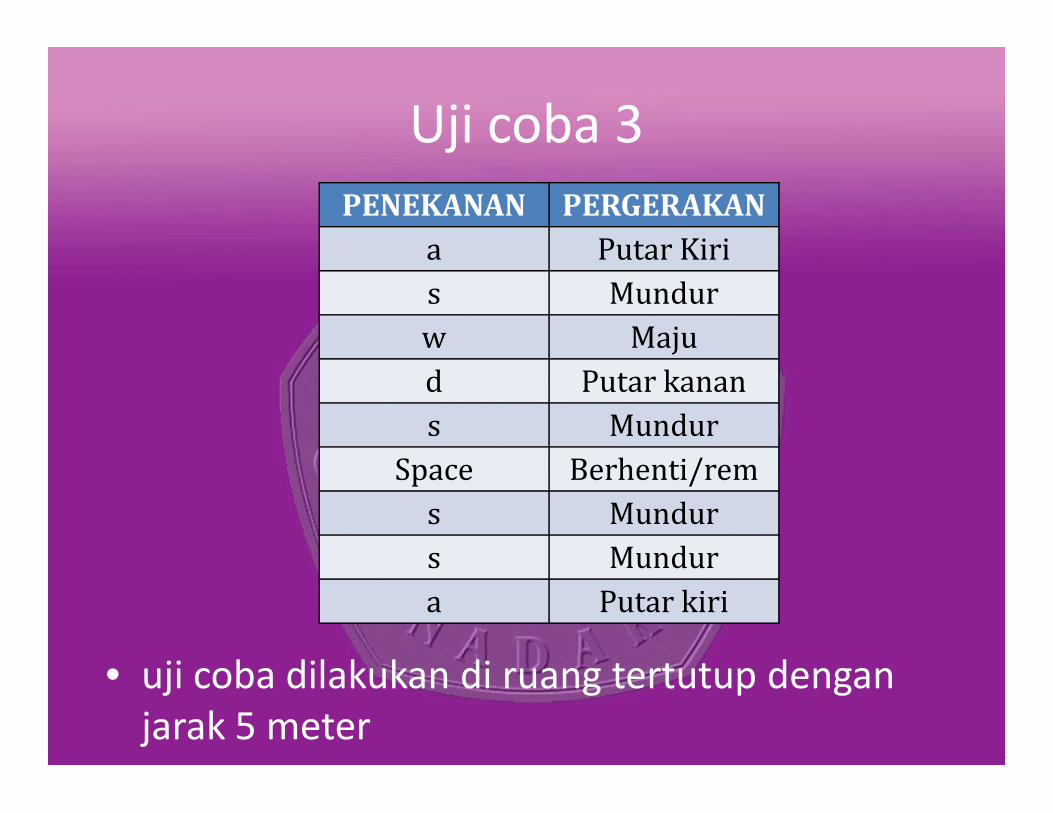
• uji coba dilakukan di ruang tertutup denganjarak 5 meter
PENEKANAN PERGERAKANa Putar Kiris Mundurw Majud Putar kanans Mundur
• uji coba dilakukan di ruang tertutup denganjarak 5 meter
s MundurSpace Berhenti/rems Mundurs Mundura Putar kiri
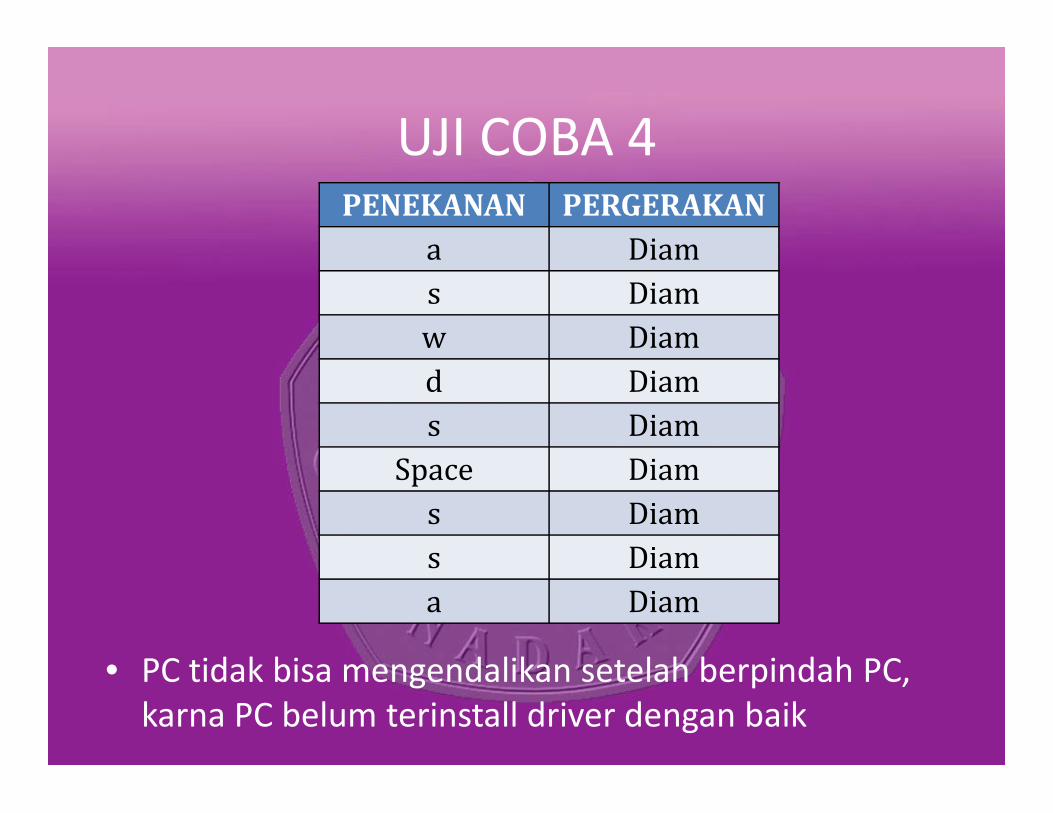
• PC tidak bisa mengendalikan setelah berpindah PC,karna PC belum terinstall driver dengan baik
PENEKANAN PERGERAKANa Diams Diamw Diamd Diams Diam
UJI COBA 4
• PC tidak bisa mengendalikan setelah berpindah PC,karna PC belum terinstall driver dengan baik
s DiamSpace Diams Diams Diama Diam
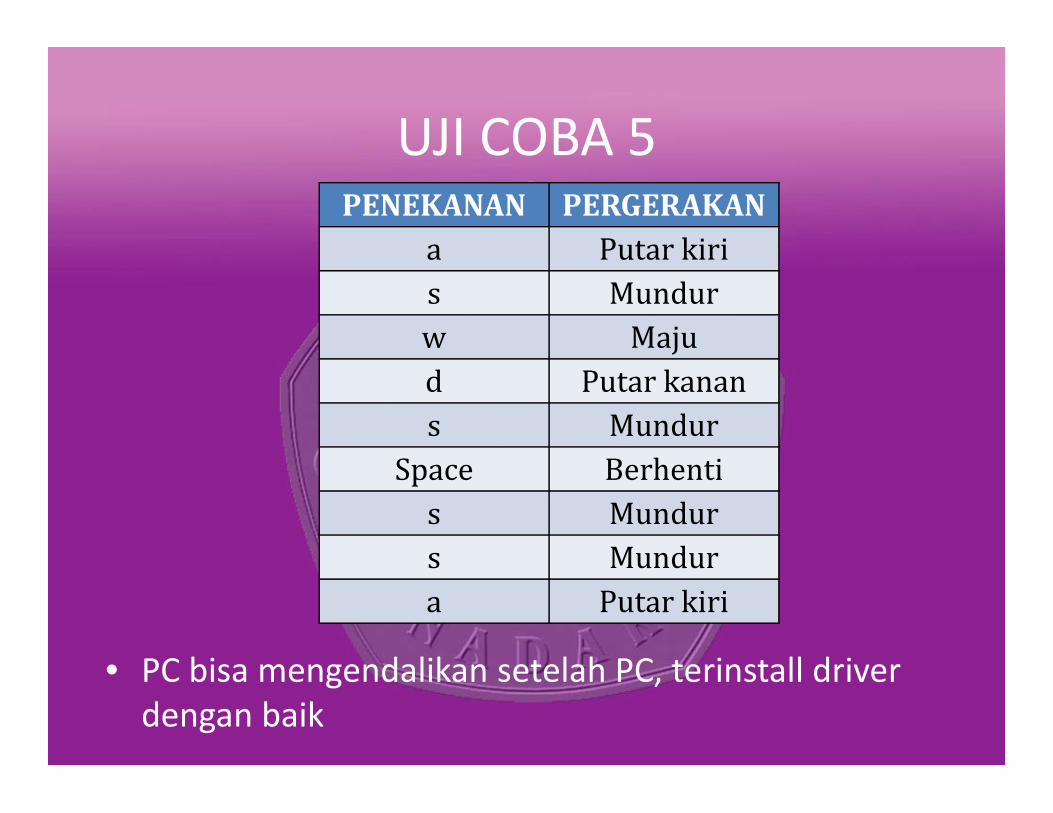
• PC bisa mengendalikan setelah PC, terinstall driverdengan baik
PENEKANAN PERGERAKANa Putar kiris Mundurw Majud Putar kanans Mundur
UJI COBA 5
• PC bisa mengendalikan setelah PC, terinstall driverdengan baik
s MundurSpace Berhentis Mundurs Mundura Putar kiri
• Tranmitter rusak karna diberikan tegangan 5V
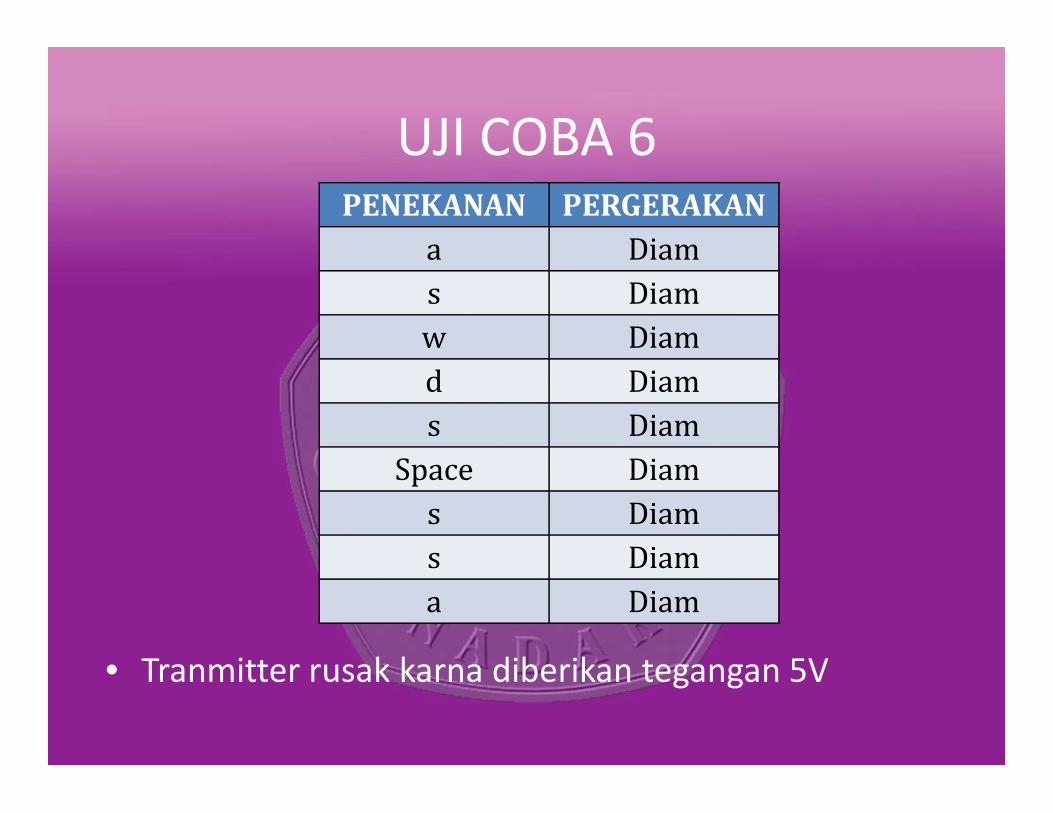
PENEKANAN PERGERAKANa Diams Diamw Diamd Diams Diam
UJI COBA 6
• Tranmitter rusak karna diberikan tegangan 5V
s DiamSpace Diams Diams Diama Diam
• Pergerakan tersendat karna bateri habis
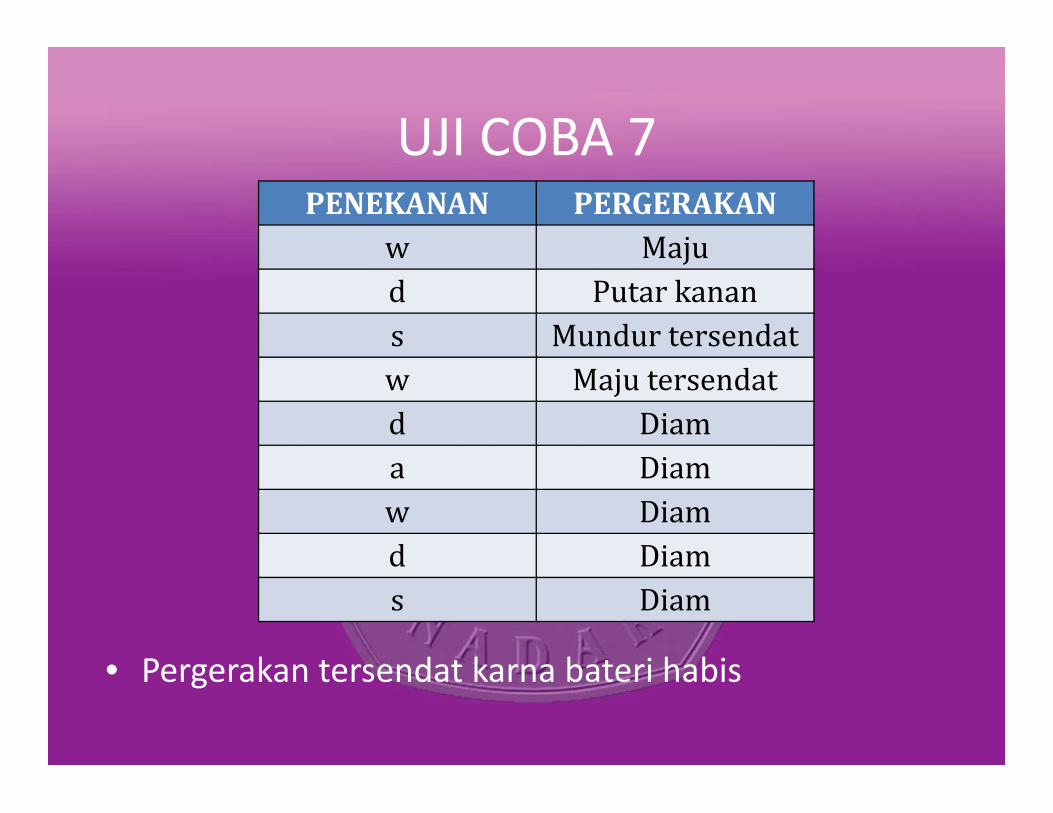
PENEKANAN PERGERAKANw Majud Putar kanans Mundur tersendatw Maju tersendatd Diam
UJI COBA 7
• Pergerakan tersendat karna bateri habis
d Diama Diamw Diamd Diams Diam
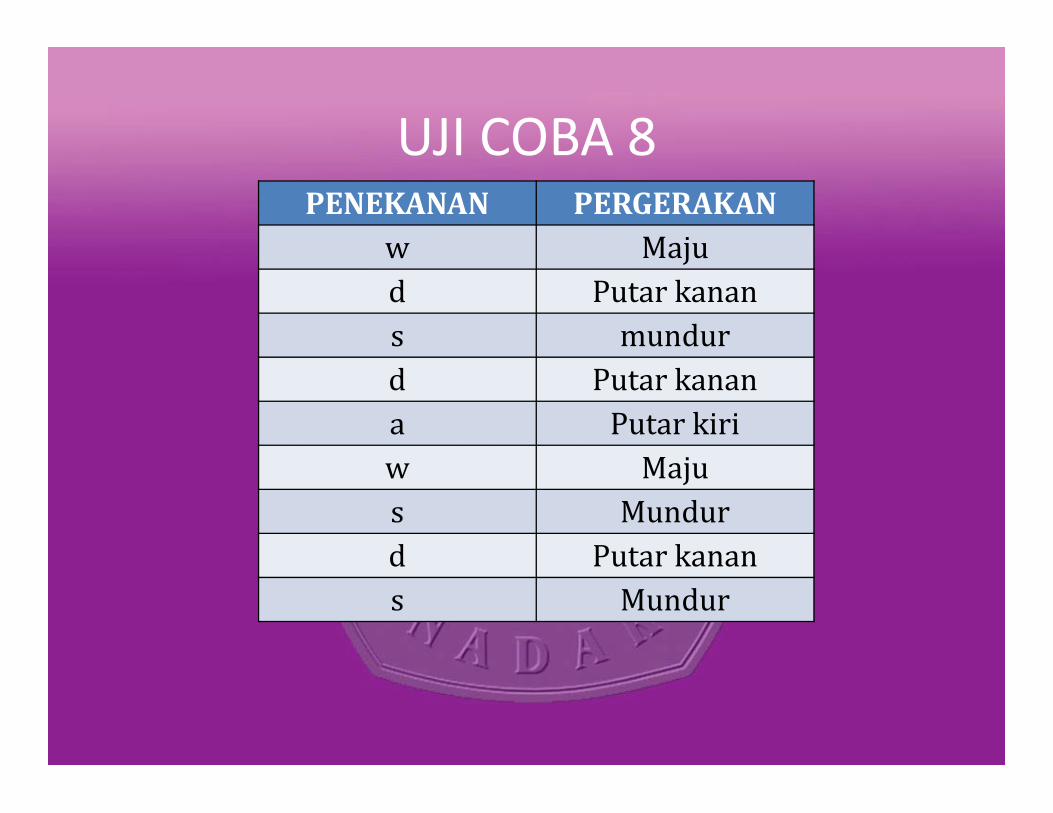
PENEKANAN PERGERAKANw Majud Putar kanans mundurd Putar kanana Putar kiri
UJI COBA 8
a Putar kiriw Majus Mundurd Putar kanans Mundur

PENEKANAN PERGERAKANa Putar kanans Mundurw majud Putar kanana Putar kiri
UJI COBA 9
a Putar kiriw Majus Mundurd Putar kanans Mundur
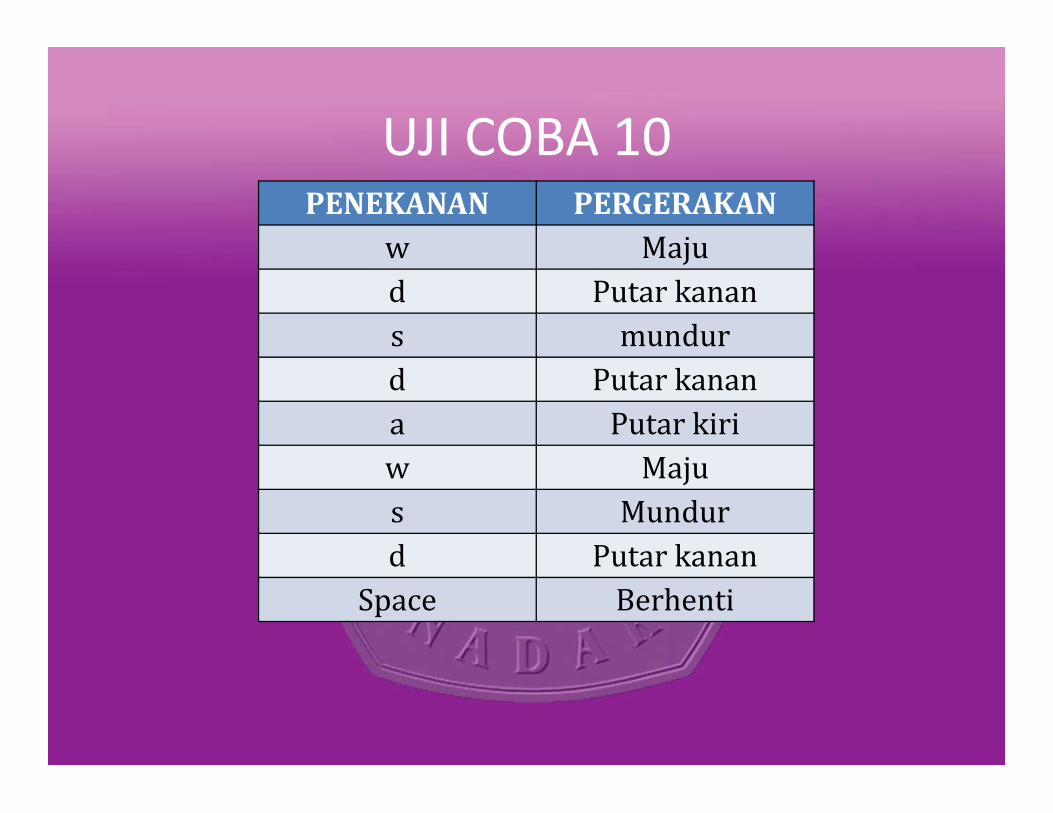
PENEKANAN PERGERAKANw Majud Putar kanans mundurd Putar kanana Putar kiri
UJI COBA 10
a Putar kiriw Majus Mundurd Putar kananSpace Berhenti
PENUTUP
• Pengendalian Robot menggunakan PC dengankomunikasi serial, satu arah (Simplex) dari PCke Mikrokontroler
• Driver Usb To Serial harus terpasang denganbaik pada PC yang akan digunakan agar dapatmengendalikan Robot
• Dengan Konfigurasi yang tepat maka Robotakan berjalan dengan baik
• Pengendalian Robot menggunakan PC dengankomunikasi serial, satu arah (Simplex) dari PCke Mikrokontroler
• Driver Usb To Serial harus terpasang denganbaik pada PC yang akan digunakan agar dapatmengendalikan Robot
• Dengan Konfigurasi yang tepat maka Robotakan berjalan dengan baik
TERIMA KASIHTERIMA KASIH





























