Embed Size (px)
Citation preview
ROMÂNIA NECLASIFICAT MINISTERUL APĂRĂRII NAŢIONALE Exemplar nr. CENTRUL DE CERCETARE ŞTIINŢIFICĂ PENTRU FORŢELE NAVALE
APROB ŞEFUL CENTRULUI DE CERCETARE ŞTIINŢIFICĂ PENTRU FORŢELE NAVALE Comandor dr. ing.
Georgică SLĂMNOIU
De acord, rog a aproba
p.Locţiitor ştiinţific Comandor ing.
Gabriel OANCEA
Director de proiect Comandor dr. ing. Georgică SLĂMNOIU
Responsabil ştiinţific proiect Comandor (rz.) ing.
Ovidiu RADU
RAPORT ŞTIINŢIFIC ŞI TEHNIC
PROIECTUL: Sistem pentru detecţie, localizare, urmărire şi identificare a factorilor de risc la adresa obiectivelor de importanţă strategică din zone de litoral
ETAPA a IV-a: Testare – evaluare model funcțional SIROLC
2017
NECLASIFICAT
Neclasificat 2 din 20
1. Obiectivul proiectului și etapei Obiectivul proiectului SIROLC este (aşa cum se menţionează în documentaţia pe baza căreia s-a aprobat
finanţarea) de a realiza modelul funcţional al unui sistem destinat detecţiei, localizării şi, după caz, a identificării factorilor de risc la adresa securităţii infrastructurilor critice (de navigaţie şi obiective de interes aflate sub apă) dinspre mediul acvatic, în ape puţin sau foarte puţin adânci (zone de litoral, canale, ape fluviale, deltă, lacuri etc.).
Sistemul pentru detecţie, localizare, urmărire şi identificare a factorilor de risc la adresa obiectivelor de importanţă strategică din zone de litoral – SIROLC, în etapa de dezvoltare actuală – model funcțional, este compus din două subsisteme:
• subsistem vehicul subacvatic autonom (AUV), incluzând:
� platformă mobilă autonomă propriu-zisă, integrând subsisteme de propulsie, navigație (traductor de presiune, compas magnetic, accelerometru triaxial), alimentare cu energie, comunicații, calcul și procesare ș.a.m.d., sonar cu scanare laterală, senzor CT (integrat în cadrul proiectului actual);
� console operator (laptop) pe care sunt instalate produsele software de planificare a misiunii (VectorMap, hărți electronice etc.) și procesare a datelor post-misiune (Sonar Mosaic);
� echipamente suport: interfață radio (WiFi) portabil, cărucior transport, telecomandă pornit / oprit, conectică alimentare cu energie etc.
• subsistemul HDAPT incluzând:
� hidrofoane (existente în dotarea CCSFN: Bruel&Kjaer 8106, 8104 etc.); � cablu hidrofoane (200 m pentru hidrofoane 8106 și 8104); � dispozitiv de amplasare și ancorare hidrofon (trepied proiectat și realizat de General Conf Grup); � unitate de achiziție date (modul de achiziţie Bruel&Kjaer 3052 A – 3 intrări – cu alimentare de la rețea
220V/50Hz (modul ZG – 0426) sau acumulator (modul 2831), software data-logger B&K Notar BZ – 7848 – A, interfețe de conectare BNC sau LEMO și card de memorie SDHC);
� sistem de calcul (laptop cu software B&K Pulse – cu opțiunea Data Recorder – 7708, SigView și aplicații dezvoltate în cadrul proiectului pentru identificare nave / scafandri autonomi) pentru prelucrarea și afişarea datelor de la sistemul de achiziţie (on-line și off-line) și salvarea acestora pentru analiza ulterioară.
SIROLC asigură îndeplinirea următoarelor misiuni principale: • supravegherea mediului submarin (detecţie, monitorizare) în zona porturilor şi a altor obiective din zona de
coastă, raioanelor de staţionare ale navelor, punctelor obligatorii de trecere;
• avertizare despre prezenţa pericolului submarin şi de suprafaţă în zonele de interes.
Misiunile secundare ale SIROLC pot fi: • determinarea amprentelor acustice ale navelor de suprafaţă, submarinelor, scafandrilor şi mijloacelor de
deplasare ale acestora;
• furnizarea informaţiilor din mediul submarin pentru integrarea în cadrul imaginii maritime recunoscute.
Modelul funcțional al SIROLC este: • modular;
• mobil;
• expandabil;
• integrabil cu alte sisteme de supraveghere de la litoral;
• cu o fiabilitate şi disponibilitate intrinsecă ridicate;
• cu nevoi de resurse pentru exploatare şi mentenanţă reduse.
Obiectivul general al prezentei etape a proiectului SIROLC este de testare-evaluare „in house” și în condiții operaționale a modelului funcțional al sistemului incluzând:
• elaborarea de proceduri și planuri de testare pentru sistemul SIROLC și pentru subsistemele componente;
• evaluarea „in house” a subsistemelor componente ale SIROLC;
• testarea în condiții operaționale a sistemului;
• diseminarea informațiilor.
2. Activităţi realizate în cadrul etapei Activităţile realizate în cadrul etapei au constat în: 1. elaborarea / analiza documentelor referitoare la cerinţele funcţionale și de performanţă care trebuie
verificate pentru testarea, evaluarea și validarea modelului funcţional (MF) SIROLC; 2. elaborarea unui plan de testare - evaluare model funcţional SIROLC; 3. pregătirea informativă și tehnică a activităților de testare-evaluare; 4. efectuarea testării - evaluării „in house” și în condiţii operaționale a MF SIROLC; 5. redactarea raportului de cercetare pentru validarea modelului funcţional SIROLC; 6. diseminarea informațiilor.
3. Rezumatul etapei 3.1. Activitatea 1
În cadrul activităţii de elaborare / analiză a documentelor referitoare la cerinţele funcţionale și de performanţă care trebuie verificate pentru testarea, evaluarea și validarea modelului funcţional SIROLC au fost stabilite următoarele:
NECLASIFICAT
Neclasificat 3 din 20
• Modelul funcțional al sistemului a fost realizat pe baza documentațiilor elaborate în etapele de proiectare anterioare și care au avut drept fundament documentele cu cerințe operaționale pentru sistem în ansamblul său, dar și pentru cele două subsisteme componente.
• Cerințele generale impuse MF SIROLC sunt:
� realizarea s-a efectuat prin integrarea de echipamente, subansamble, dispozitive, accesorii, aplicaţii software ș.a.m.d. care, împreună, asigură capabilitatea acestuia de a detecta, localiza, urmări şi identifica potenţiali factori de risc la adresa obiectivelor din zone de litoral;
� sistemul este de tip transportabil; � subsistemul AUV trebuie să aibă capabilitatea de a relua periodic, conform procedurilor utilizatorului,
traseele unor misiuni anterioare, în scopul urmăririi / identificării unor obiecte de pe fund; � sistemul HDAPT trebuie să asigure detecţia şi semnalizarea a două categorii de ameninţări ce pot
produce riscuri de securitate în zone de litoral: navele mici şi scafandri autonomi.
• CCSFN deține toate specificațiile de produs pentru elementele componente ale MF SIROLC și, împreună cu partenerii din proiect, poate asigura condițiile necesare desfășurării activităților de testare-evaluare „in house” și în condiții operaționale.
• Diseminarea informațiilor se va efectua pe tot parcursul etapei prin publicarea de articole, participarea la expoziții ș.a.m.d.
3.2. Activitatea 2
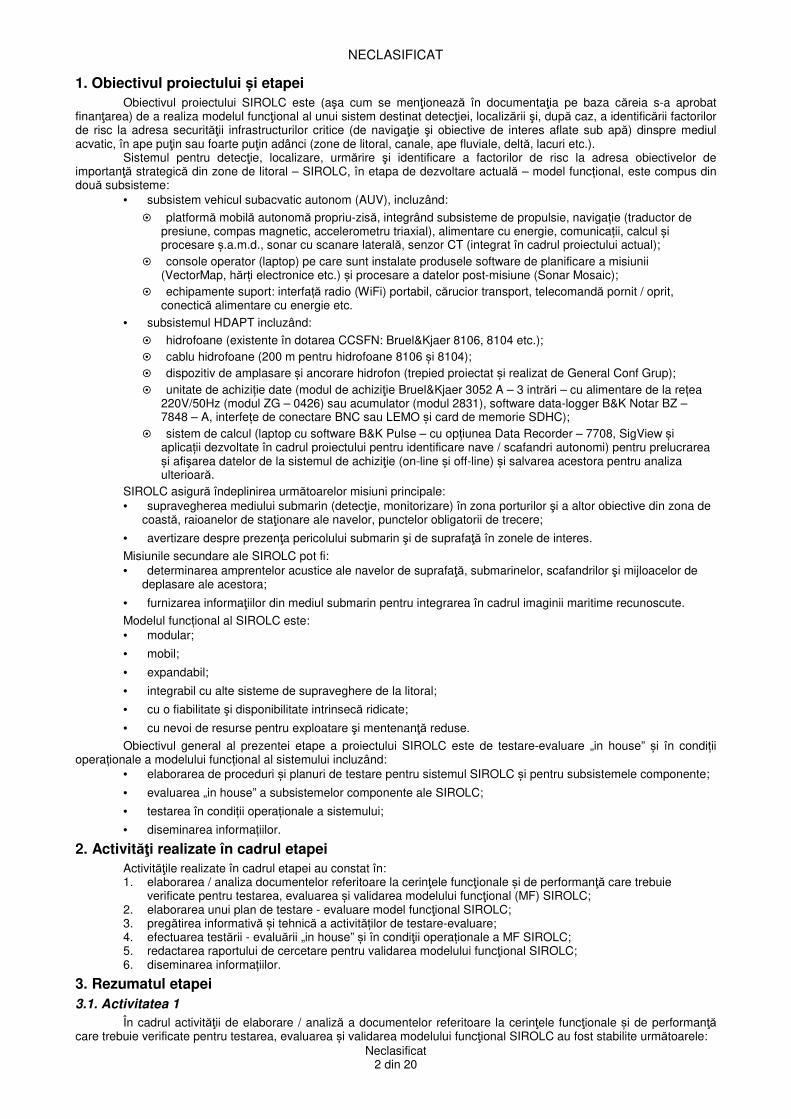
• Planul de testare-evaluare MF SIROLC este prezentat (în linii generale) în tabelul următor: Nr. crt. Activitate Cerinţa Metoda Comentarii
1. Sistemul a fost realizat prin integrarea de echipamente și aplicaţii software care împreună asigură funcţiile de detecţie, localizare, urmărire şi identificare ţinte
- Inspecţie - Identificarea produselor supuse testării-evaluării - Verificarea conformităţii cu documentaţia de realizare MF
- Sunt analizate specificațiile tehnice pentru elementele componente ale sistemului - Se verifică integrare echipamentelor / aplicațiilor software
2. Sistemul SIROLC este de tip transportabil
Inspecţia produselor și a documentaţiei de realizare MF
- Analiza maselor, gabaritelor, variantelor de asigurare a transportabilității
3.
Testare-evaluare cerinţe generale SIROLC
Autonomie de durată, imersiune maximă, poziționare hidrofon
- Analiza specificațiilor AUV - Analiza specificațiilor HDAPT
- Se vor realize simulări ale misiunilor pentru AUV utilizând software-ul de planificare VectorMap
4. Asigură monitorizarea, achiziţia și stocarea de imagini sonar și date din mediul subacvatic
- Examinare documentaţie - Analiză înregistrări misiuni reale
- Sunt analizate specificațiile tehnice pentru elementele componente ale sistemului - Se analizează modul de planificare a misiunii și date stocate în misiuni
5. Asigură detecţia obiectelor aflate pe fund ce pot reprezenta factori de risc
- Examinare documentaţie - Analiză înregistrări misiuni reale
idem
6. Asigură localizarea obiectelor aflate pe fund
- Examinare documentaţie - Analiză înregistrări misiuni reale
idem
7. Asigură urmărirea obiectelor aflate pe fund
- Examinare documentaţie
idem
8.
Testare-evaluare SIROLC_AUV
Asigură identificarea obiectelor aflate pe fund
- Examinare documentaţie - Analiză înregistrări misiuni reale
idem
9. Subsistemul trebuie să asigure achiziţia / monitorizarea zgomotelor din mediu subacvatic
- Examinare documentaţie - Efectuare înregistrări zgomot nave
- Sunt analizate specificațiile tehnice pentru elementele componente ale sistemului - Se verifică integrare echipamentelor / aplicațiilor software - Sunt efectuate și analizate înregistrări de zgomot
10. Asigură detecţia unei nave care a pătruns sau se deplasează în zona supravegheată
- Examinare documentaţie - Aplicaţie software detecţie nave
- Sunt efectuate și analizate înregistrări de zgomot
11. Asigură localizarea unei nave care a pătruns sau se deplasează în zona supravegheata
- Examinare documentaţie - Algoritm determinare direcţie la navă
- Sunt efectuate și analizate înregistrări de zgomot - Prezentare soluție de extindere MF pentru determinarea direcției la țintă
12. Asigură urmărirea unei nave care a pătruns sau se deplasează în zona supravegheată
- Examinare documentaţie - Algoritm determinare direcţie la navă
- Sunt efectuate și analizate înregistrări de zgomot - Prezentare soluție de extindere MF pentru determinarea direcției la țintă
13.
Testare evaluare HDAPT-N
Asigură identificarea unei - Examinare - Sunt efectuate și analizate
NECLASIFICAT
Neclasificat 4 din 20
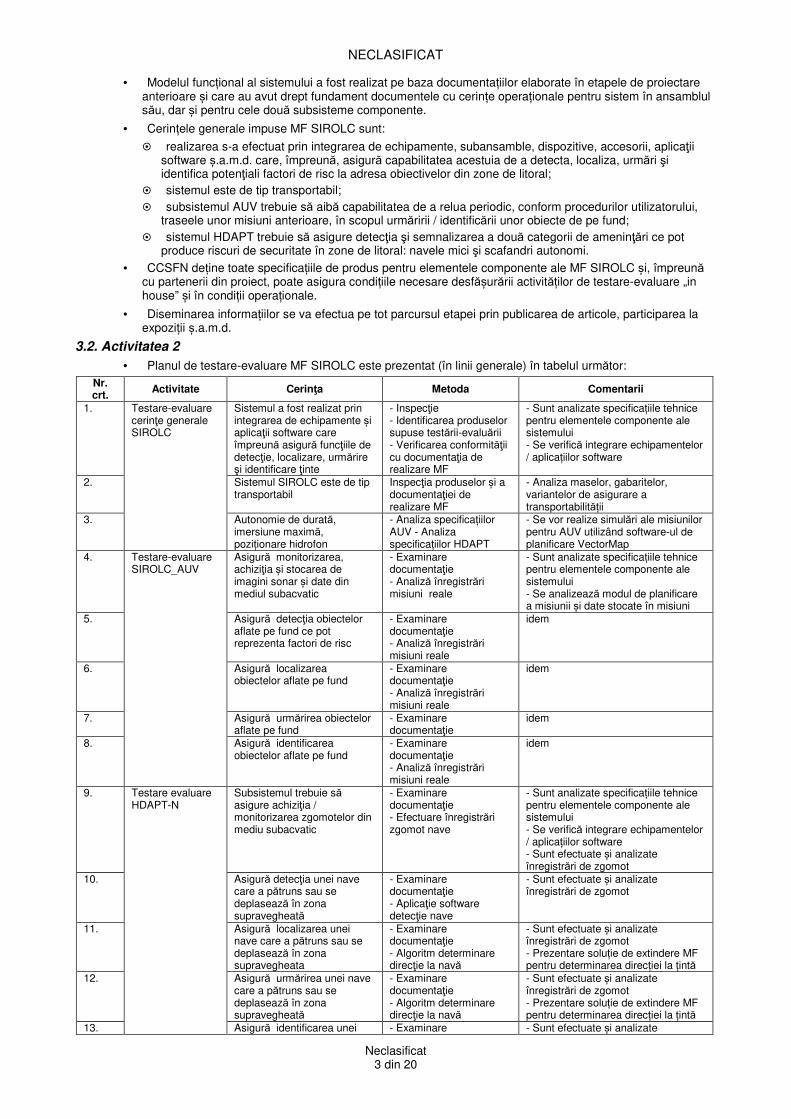
Nr. crt.
Activitate Cerinţa Metoda Comentarii
nave care a pătruns sau se deplasează în zona supravegheată
documentaţie - Aplicaţie software detecţie nave
înregistrări de zgomot
14. Asigură monitorizarea acustică pasivă, achiziţia zgomotelor din mediu subacvatic
- Examinare documentaţie - Aplicaţie software detecţie scafandri - Analiza înregistrări scafandru in bazin anecoid
- Sunt analizate specificațiile tehnice pentru elementele componente ale sistemului - Se verifică integrare echipamentelor / aplicațiilor software - Sunt efectuate și analizate înregistrări de zgomot (înregistrări zgomot scafandru în bazin anecoid)
15. Asigură detecţia scafandrului care a pătruns sau se deplasează în zona supravegheată
- Examinare documentaţie - Aplicaţie software detecţie scafandri
- Sunt efectuate și analizate înregistrări de zgomot
16. Asigură localizarea scafandrului care a pătruns sau se deplasează în zona supravegheată
- Examinare documentaţie - Aplicaţie software detecţie scafandri - Algoritm determinare direcţie la țintă
- Sunt efectuate și analizate înregistrări de zgomot - Prezentare soluție de extindere MF pentru determinarea direcției la țintă
17. Asigură urmărirea scafandrului care a pătruns sau se deplasează în zona supravegheată
- Examinare documentaţie - Aplicaţie software detecţie scafandri
idem
18.
Testare-evaluare HDAPT-S
Asigură identificarea scafandrului care a pătruns sau se deplasează în zona supravegheată
- Examinare documentaţie - Aplicaţie software detecţie scafandri
- Sunt efectuate și analizate înregistrări de zgomot
Cerințe specifice pentru testarea-evaluarea „in house” și în condiții operaționale (ținte subacvatice potențiale: locație, caracterizare etc., nave țintă, sprijin activități cu scafandri pentru instalare hidrofoane – dacă este cazul, avize speciale pentru executarea activităților ș.a.m.d.) s-au stabilit pe durata activității de pregătire informativă (activitatea 3).
3.3. Activitatea 3
Activitatea de pregătire informativă a testării-evaluării modelului funcţional SIROLC a inclus o amplă documentare pentru colectarea informațiilor necesare referitoare la:
• ținte subacvatice în zona litoralului romanesc al Marii Negre – pentru evaluare capacități SIROLC_AUV:
� caracteristici ale unor ținte localizate: distrugătorul Moskva, submarinul SCH 213, MV „Arkadia”; � barajele de mine istorice de pe litoralul românesc: localizare, tipuri de mine lansate la litoralul românesc
în cel de-al doilea război mondial: UMA, UMB, EMC I, EMC II, FMB; � arheologie subacvatică în Marea Neagră: portul antic Callatis, portul antic Tomis;
• descrierea hidrografică și oceanografică a portului Constanța:
� informații hidrografice și oceanografice privind portul Constanța; � informaţii hidrometeorologice generale; � topografia fundului mării; � factori oceanografici din zona de interes;
• informaţii trafic naval – port Constanța pentru perioada dorită testării în condiții operaționale;
• potențiale nave suport și țintă pentru testare-evaluare MF SIROLC: șalupa hidrografică „Cpt. cdor. A. Cătuneanu 2”, ambarcaţiunea hidrografică “Cpt. Cdor. A. Cătuneanu 1” etc..
Pentru activitățile de testare-evaluare în condiții operaționale locația selectată a fost zona Farul Roșu din portul Constanța avându-se la bază următoarele considerente:
• este locul de bazare permanentă pentru nava hidrografică „Cpt. cdor. A. Cătuneanu” aparținând DHM și, pe cale de consecință, echipa de testare dispune de facilitățile existente la bord;
• este într-o zonă a portului unde activitățile desfășurate nu încurcă traficul navelor;
• este în proximitatea zonei de bazare permanentă a scafandrilor aparținând Statului Major al Forțelor Navale, factor important în cazul unui accident de scufundare sau dacă este necesară prezența mai multor scafandri pentru activități de amplasare a elementelor subsistemului HDAPT etc.;
3.4. Activitatea 4
Exceptând modul de îndeplinire a cerințelor generale, activitățile de testare - evaluare „in house” și în condiţii operaționale a MF SIROLC se va prezenta detaliat pe cele două subsisteme: AUV și HDAPT.
Din momentul în care a fost depusă propunerea de proiect s-a urmărit realizarea sistemului prin integrarea de echipamente și aplicaţii software. AUV-ul aflat în dotarea CCSFN are o structură modulară, pe platforma subacvatică propriu-zisă putând fi integrați diverși senzori sau echipamente. În primă instanță specialiștii CCSFN au integrat (în cadrul unui proiect din Planul Sectorial de CD al MApN) sonarul cu scanare laterală, iar în cadrul proiectului SIROLC a fost integrat un senzor de conductivitate – temperatură (CT). Ansamblul senzorilor de conductivitate și temperatură NBOSI CT pentru utilizare pe AUV include:
NECLASIFICAT
Neclasificat 5 din 20
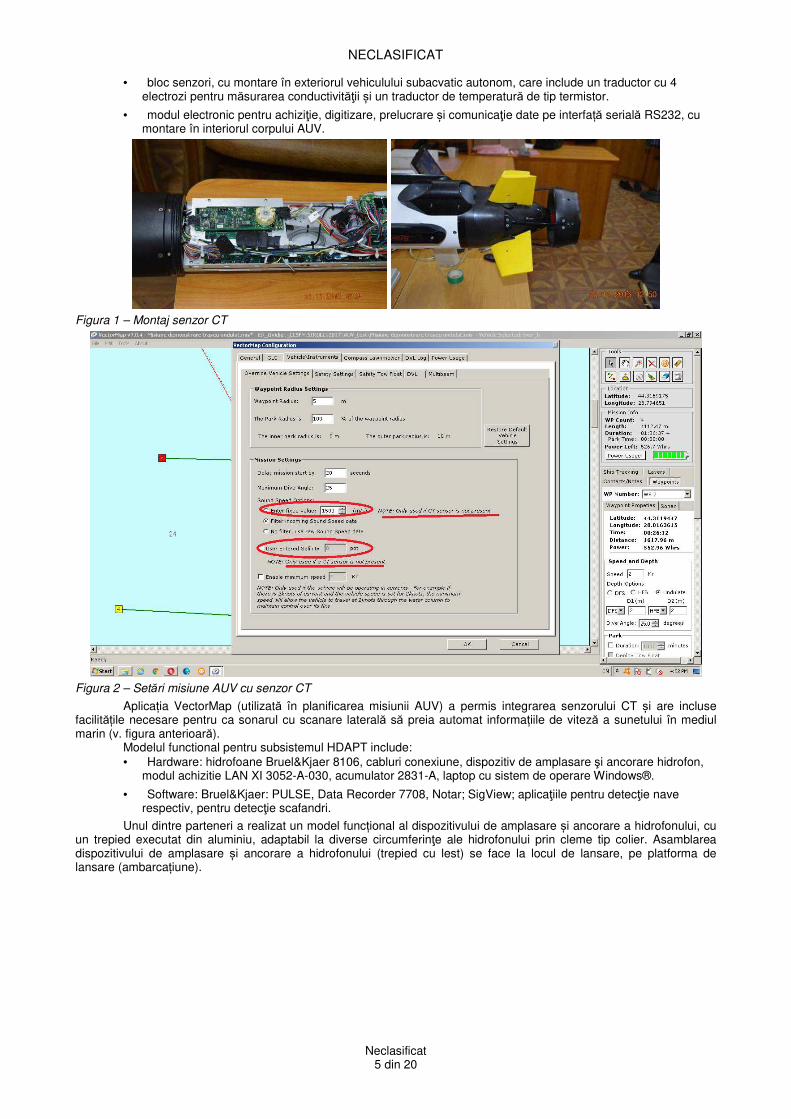
• bloc senzori, cu montare în exteriorul vehiculului subacvatic autonom, care include un traductor cu 4 electrozi pentru măsurarea conductivităţii și un traductor de temperatură de tip termistor.
• modul electronic pentru achiziţie, digitizare, prelucrare și comunicaţie date pe interfață serială RS232, cu montare în interiorul corpului AUV.
Figura 1 – Montaj senzor CT
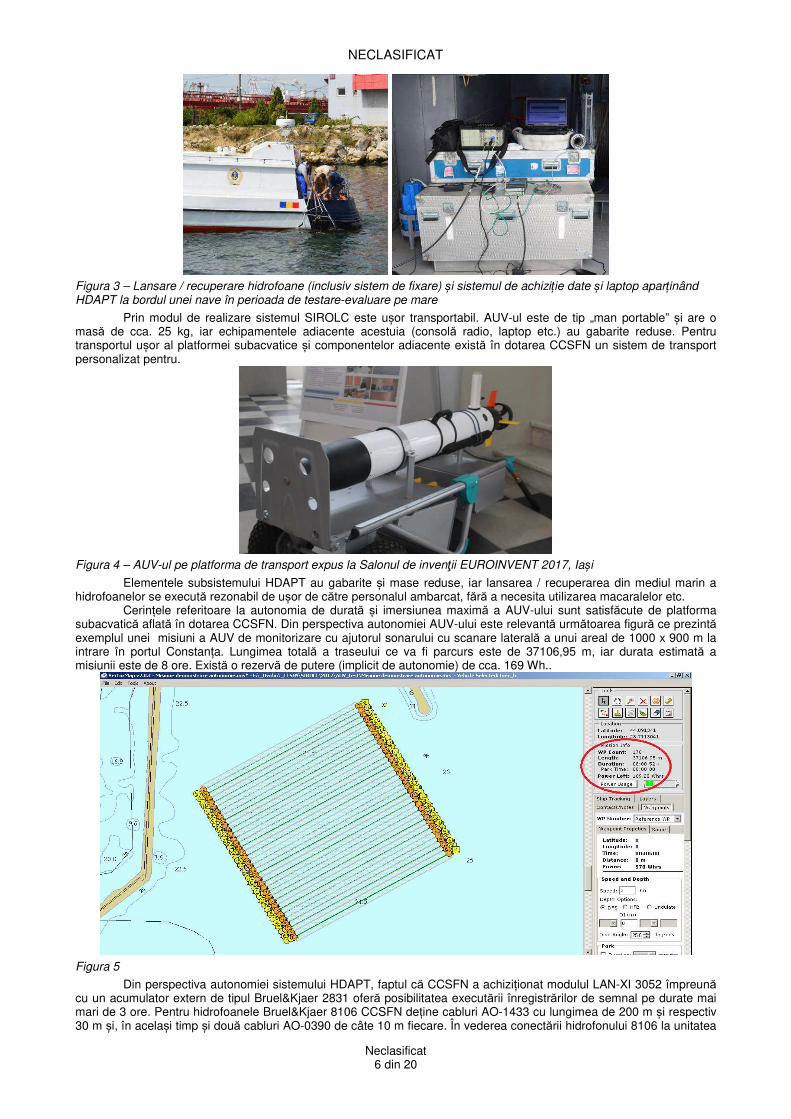
Figura 2 – Setări misiune AUV cu senzor CT
Aplicația VectorMap (utilizată în planificarea misiunii AUV) a permis integrarea senzorului CT și are incluse facilitățile necesare pentru ca sonarul cu scanare laterală să preia automat informațiile de viteză a sunetului în mediul marin (v. figura anterioară).
Modelul functional pentru subsistemul HDAPT include: • Hardware: hidrofoane Bruel&Kjaer 8106, cabluri conexiune, dispozitiv de amplasare şi ancorare hidrofon,
modul achizitie LAN XI 3052-A-030, acumulator 2831-A, laptop cu sistem de operare Windows®.
• Software: Bruel&Kjaer: PULSE, Data Recorder 7708, Notar; SigView; aplicaţiile pentru detecţie nave respectiv, pentru detecţie scafandri.
Unul dintre parteneri a realizat un model funcțional al dispozitivului de amplasare și ancorare a hidrofonului, cu un trepied executat din aluminiu, adaptabil la diverse circumferinţe ale hidrofonului prin cleme tip colier. Asamblarea dispozitivului de amplasare și ancorare a hidrofonului (trepied cu lest) se face la locul de lansare, pe platforma de lansare (ambarcațiune).
NECLASIFICAT
Neclasificat 6 din 20
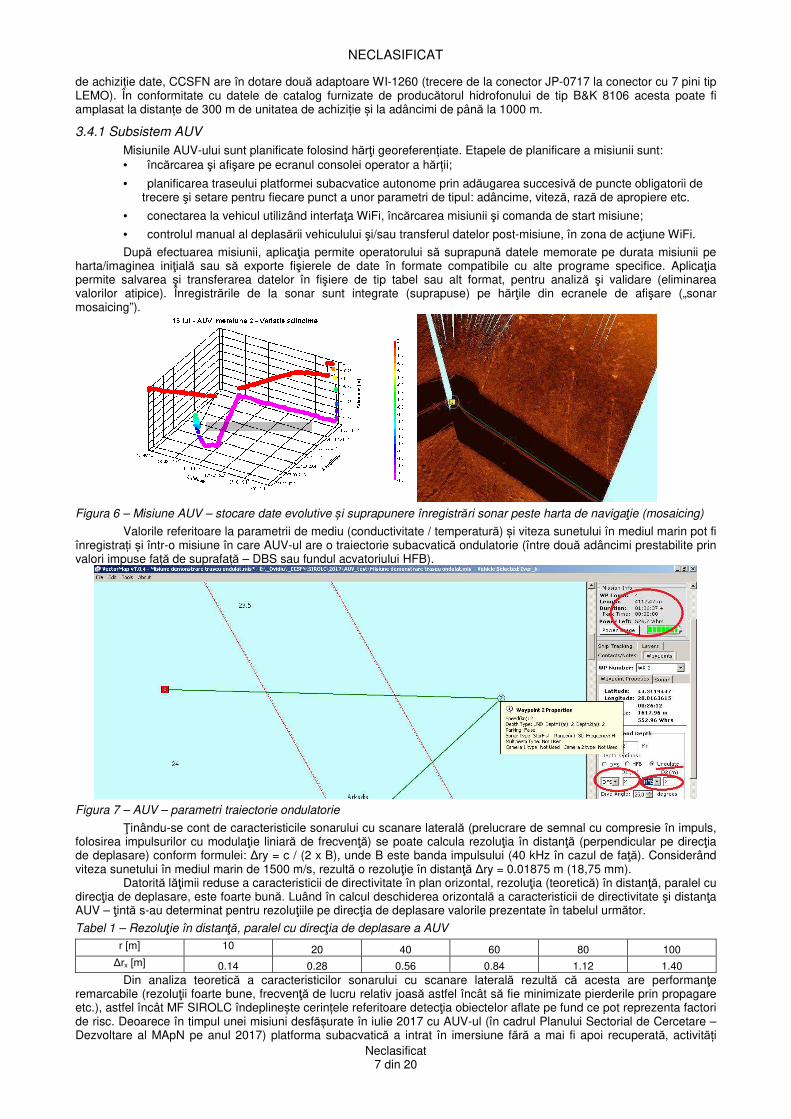
Figura 3 – Lansare / recuperare hidrofoane (inclusiv sistem de fixare) și sistemul de achiziție date și laptop aparținând HDAPT la bordul unei nave în perioada de testare-evaluare pe mare
Prin modul de realizare sistemul SIROLC este ușor transportabil. AUV-ul este de tip „man portable” și are o masă de cca. 25 kg, iar echipamentele adiacente acestuia (consolă radio, laptop etc.) au gabarite reduse. Pentru transportul ușor al platformei subacvatice și componentelor adiacente există în dotarea CCSFN un sistem de transport personalizat pentru.
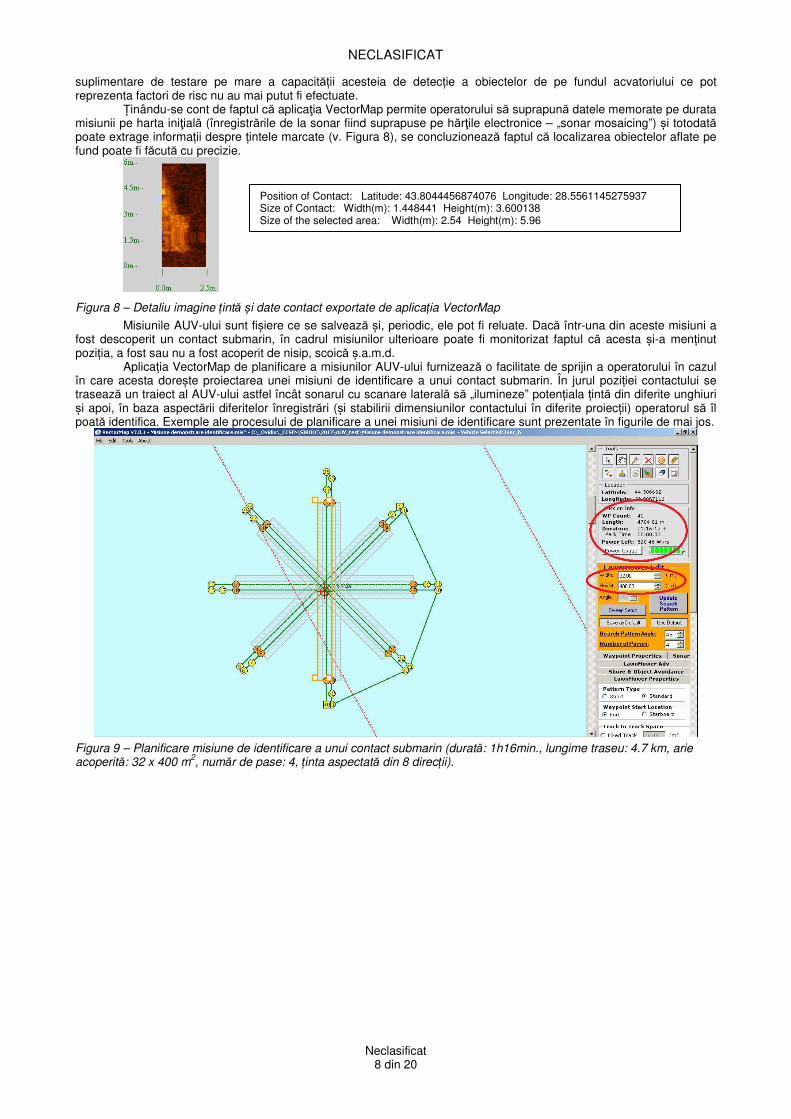
Figura 4 – AUV-ul pe platforma de transport expus la Salonul de invenţii EUROINVENT 2017, Iași
Elementele subsistemului HDAPT au gabarite și mase reduse, iar lansarea / recuperarea din mediul marin a hidrofoanelor se execută rezonabil de ușor de către personalul ambarcat, fără a necesita utilizarea macaralelor etc.
Cerințele referitoare la autonomia de durată și imersiunea maximă a AUV-ului sunt satisfăcute de platforma subacvatică aflată în dotarea CCSFN. Din perspectiva autonomiei AUV-ului este relevantă următoarea figură ce prezintă exemplul unei misiuni a AUV de monitorizare cu ajutorul sonarului cu scanare laterală a unui areal de 1000 x 900 m la intrare în portul Constanța. Lungimea totală a traseului ce va fi parcurs este de 37106,95 m, iar durata estimată a misiunii este de 8 ore. Există o rezervă de putere (implicit de autonomie) de cca. 169 Wh..
Figura 5
Din perspectiva autonomiei sistemului HDAPT, faptul că CCSFN a achiziționat modulul LAN-XI 3052 împreună cu un acumulator extern de tipul Bruel&Kjaer 2831 oferă posibilitatea executării înregistrărilor de semnal pe durate mai mari de 3 ore. Pentru hidrofoanele Bruel&Kjaer 8106 CCSFN deține cabluri AO-1433 cu lungimea de 200 m și respectiv 30 m și, în același timp și două cabluri AO-0390 de câte 10 m fiecare. În vederea conectării hidrofonului 8106 la unitatea
NECLASIFICAT
Neclasificat 7 din 20
de achiziție date, CCSFN are în dotare două adaptoare WI-1260 (trecere de la conector JP-0717 la conector cu 7 pini tip LEMO). În conformitate cu datele de catalog furnizate de producătorul hidrofonului de tip B&K 8106 acesta poate fi amplasat la distanțe de 300 m de unitatea de achiziție și la adâncimi de până la 1000 m.
3.4.1 Subsistem AUV
Misiunile AUV-ului sunt planificate folosind hărţi georeferențiate. Etapele de planificare a misiunii sunt: • încărcarea şi afişare pe ecranul consolei operator a hărții;
• planificarea traseului platformei subacvatice autonome prin adăugarea succesivă de puncte obligatorii de trecere şi setare pentru fiecare punct a unor parametri de tipul: adâncime, viteză, rază de apropiere etc.
• conectarea la vehicul utilizând interfaţa WiFi, încărcarea misiunii şi comanda de start misiune;
• controlul manual al deplasării vehiculului şi/sau transferul datelor post-misiune, în zona de acţiune WiFi.
După efectuarea misiunii, aplicaţia permite operatorului să suprapună datele memorate pe durata misiunii pe harta/imaginea iniţială sau să exporte fişierele de date în formate compatibile cu alte programe specifice. Aplicaţia permite salvarea şi transferarea datelor în fişiere de tip tabel sau alt format, pentru analiză şi validare (eliminarea valorilor atipice). Înregistrările de la sonar sunt integrate (suprapuse) pe hărţile din ecranele de afişare („sonar mosaicing”).
Figura 6 – Misiune AUV – stocare date evolutive și suprapunere înregistrări sonar peste harta de navigaţie (mosaicing)
Valorile referitoare la parametrii de mediu (conductivitate / temperatură) și viteza sunetului în mediul marin pot fi înregistrați și într-o misiune în care AUV-ul are o traiectorie subacvatică ondulatorie (între două adâncimi prestabilite prin valori impuse față de suprafață – DBS sau fundul acvatoriului HFB).
Figura 7 – AUV – parametri traiectorie ondulatorie
Ţinându-se cont de caracteristicile sonarului cu scanare laterală (prelucrare de semnal cu compresie în impuls, folosirea impulsurilor cu modulaţie liniară de frecvenţă) se poate calcula rezoluţia în distanţă (perpendicular pe direcţia de deplasare) conform formulei: Δry = c / (2 x B), unde B este banda impulsului (40 kHz în cazul de faţă). Considerând viteza sunetului în mediul marin de 1500 m/s, rezultă o rezoluţie în distanţă Δry = 0.01875 m (18,75 mm).
Datorită lăţimii reduse a caracteristicii de directivitate în plan orizontal, rezoluţia (teoretică) în distanţă, paralel cu direcţia de deplasare, este foarte bună. Luând în calcul deschiderea orizontală a caracteristicii de directivitate şi distanţa AUV – ţintă s-au determinat pentru rezoluţiile pe direcţia de deplasare valorile prezentate în tabelul următor.
Tabel 1 – Rezoluţie în distanţă, paralel cu direcţia de deplasare a AUV
r [m] 10 20 40 60 80 100 Δrx [m] 0.14 0.28 0.56 0.84 1.12 1.40
Din analiza teoretică a caracteristicilor sonarului cu scanare laterală rezultă că acesta are performanţe remarcabile (rezoluţii foarte bune, frecvenţă de lucru relativ joasă astfel încât să fie minimizate pierderile prin propagare etc.), astfel încât MF SIROLC îndeplinește cerințele referitoare detecţia obiectelor aflate pe fund ce pot reprezenta factori de risc. Deoarece în timpul unei misiuni desfășurate în iulie 2017 cu AUV-ul (în cadrul Planului Sectorial de Cercetare – Dezvoltare al MApN pe anul 2017) platforma subacvatică a intrat în imersiune fără a mai fi apoi recuperată, activități
NECLASIFICAT
Neclasificat 8 din 20
suplimentare de testare pe mare a capacității acesteia de detecție a obiectelor de pe fundul acvatoriului ce pot reprezenta factori de risc nu au mai putut fi efectuate.
Ținându-se cont de faptul că aplicaţia VectorMap permite operatorului să suprapună datele memorate pe durata misiunii pe harta iniţială (înregistrările de la sonar fiind suprapuse pe hărţile electronice – „sonar mosaicing”) și totodată poate extrage informații despre țintele marcate (v. Figura 8), se concluzionează faptul că localizarea obiectelor aflate pe fund poate fi făcută cu precizie.
Figura 8 – Detaliu imagine țintă și date contact exportate de aplicația VectorMap
Misiunile AUV-ului sunt fișiere ce se salvează și, periodic, ele pot fi reluate. Dacă într-una din aceste misiuni a fost descoperit un contact submarin, în cadrul misiunilor ulterioare poate fi monitorizat faptul că acesta și-a menținut poziția, a fost sau nu a fost acoperit de nisip, scoică ș.a.m.d.
Aplicația VectorMap de planificare a misiunilor AUV-ului furnizează o facilitate de sprijin a operatorului în cazul în care acesta dorește proiectarea unei misiuni de identificare a unui contact submarin. În jurul poziției contactului se trasează un traiect al AUV-ului astfel încât sonarul cu scanare laterală să „ilumineze” potențiala țintă din diferite unghiuri și apoi, în baza aspectării diferitelor înregistrări (și stabilirii dimensiunilor contactului în diferite proiecții) operatorul să îl poată identifica. Exemple ale procesului de planificare a unei misiuni de identificare sunt prezentate în figurile de mai jos.
Figura 9 – Planificare misiune de identificare a unui contact submarin (durată: 1h16min., lungime traseu: 4.7 km, arie acoperită: 32 x 400 m
2, număr de pase: 4, ținta aspectată din 8 direcții).
Position of Contact: Latitude: 43.8044456874076 Longitude: 28.5561145275937 Size of Contact: Width(m): 1.448441 Height(m): 3.600138 Size of the selected area: Width(m): 2.54 Height(m): 5.96
NECLASIFICAT
Neclasificat 9 din 20
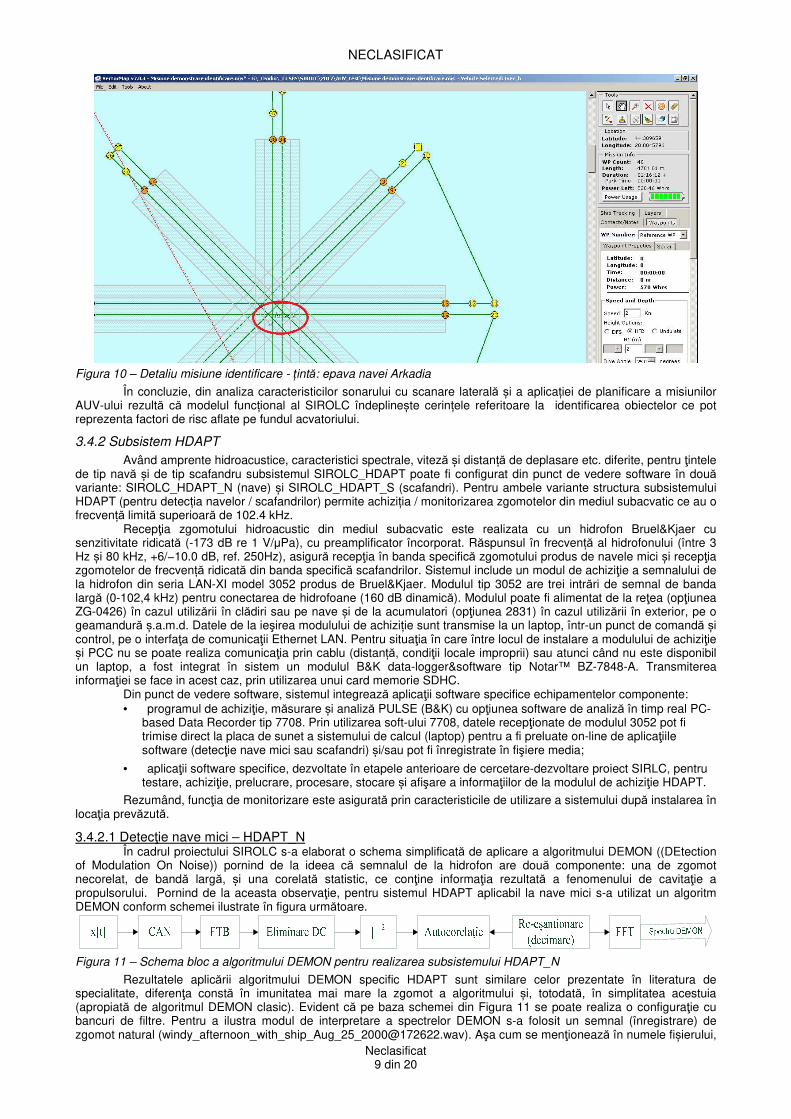
Figura 10 – Detaliu misiune identificare - țintă: epava navei Arkadia
În concluzie, din analiza caracteristicilor sonarului cu scanare laterală și a aplicației de planificare a misiunilor AUV-ului rezultă că modelul funcțional al SIROLC îndeplinește cerințele referitoare la identificarea obiectelor ce pot reprezenta factori de risc aflate pe fundul acvatoriului.
3.4.2 Subsistem HDAPT
Având amprente hidroacustice, caracteristici spectrale, viteză și distanță de deplasare etc. diferite, pentru ţintele de tip navă și de tip scafandru subsistemul SIROLC_HDAPT poate fi configurat din punct de vedere software în două variante: SIROLC_HDAPT_N (nave) și SIROLC_HDAPT_S (scafandri). Pentru ambele variante structura subsistemului HDAPT (pentru detecția navelor / scafandrilor) permite achiziția / monitorizarea zgomotelor din mediul subacvatic ce au o frecvență limită superioară de 102.4 kHz.
Recepţia zgomotului hidroacustic din mediul subacvatic este realizata cu un hidrofon Bruel&Kjaer cu senzitivitate ridicată (-173 dB re 1 V/μPa), cu preamplificator încorporat. Răspunsul în frecvență al hidrofonului (între 3 Hz și 80 kHz, +6/−10.0 dB, ref. 250Hz), asigură recepţia în banda specifică zgomotului produs de navele mici și recepţia zgomotelor de frecvență ridicată din banda specifică scafandrilor. Sistemul include un modul de achiziţie a semnalului de la hidrofon din seria LAN-XI model 3052 produs de Bruel&Kjaer. Modulul tip 3052 are trei intrări de semnal de banda largă (0-102,4 kHz) pentru conectarea de hidrofoane (160 dB dinamică). Modulul poate fi alimentat de la reţea (opţiunea ZG-0426) în cazul utilizării în clădiri sau pe nave și de la acumulatori (opţiunea 2831) în cazul utilizării în exterior, pe o geamandură ș.a.m.d. Datele de la ieşirea modulului de achiziție sunt transmise la un laptop, într-un punct de comandă și control, pe o interfaţa de comunicaţii Ethernet LAN. Pentru situaţia în care între locul de instalare a modulului de achiziţie și PCC nu se poate realiza comunicaţia prin cablu (distanță, condiţii locale improprii) sau atunci când nu este disponibil un laptop, a fost integrat în sistem un modulul B&K data-logger&software tip Notar™ BZ-7848-A. Transmiterea informaţiei se face in acest caz, prin utilizarea unui card memorie SDHC.
Din punct de vedere software, sistemul integrează aplicaţii software specifice echipamentelor componente: • programul de achiziţie, măsurare și analiză PULSE (B&K) cu opţiunea software de analiză în timp real PC-
based Data Recorder tip 7708. Prin utilizarea soft-ului 7708, datele recepţionate de modulul 3052 pot fi trimise direct la placa de sunet a sistemului de calcul (laptop) pentru a fi preluate on-line de aplicaţiile software (detecţie nave mici sau scafandri) și/sau pot fi înregistrate în fişiere media;
• aplicaţii software specifice, dezvoltate în etapele anterioare de cercetare-dezvoltare proiect SIRLC, pentru testare, achiziţie, prelucrare, procesare, stocare și afişare a informaţiilor de la modulul de achiziţie HDAPT.
Rezumând, funcţia de monitorizare este asigurată prin caracteristicile de utilizare a sistemului după instalarea în locaţia prevăzută.
3.4.2.1 Detecţie nave mici – HDAPT_N În cadrul proiectului SIROLC s-a elaborat o schema simplificată de aplicare a algoritmului DEMON ((DEtection
of Modulation On Noise)) pornind de la ideea că semnalul de la hidrofon are două componente: una de zgomot necorelat, de bandă largă, și una corelată statistic, ce conţine informaţia rezultată a fenomenului de cavitaţie a propulsorului. Pornind de la aceasta observaţie, pentru sistemul HDAPT aplicabil la nave mici s-a utilizat un algoritm DEMON conform schemei ilustrate în figura următoare.
Figura 11 – Schema bloc a algoritmului DEMON pentru realizarea subsistemului HDAPT_N
Rezultatele aplicării algoritmului DEMON specific HDAPT sunt similare celor prezentate în literatura de specialitate, diferenţa constă în imunitatea mai mare la zgomot a algoritmului și, totodată, în simplitatea acestuia (apropiată de algoritmul DEMON clasic). Evident că pe baza schemei din Figura 11 se poate realiza o configuraţie cu bancuri de filtre. Pentru a ilustra modul de interpretare a spectrelor DEMON s-a folosit un semnal (înregistrare) de zgomot natural ([email protected]). Aşa cum se menţionează în numele fișierului,
NECLASIFICAT
Neclasificat 10 din 20
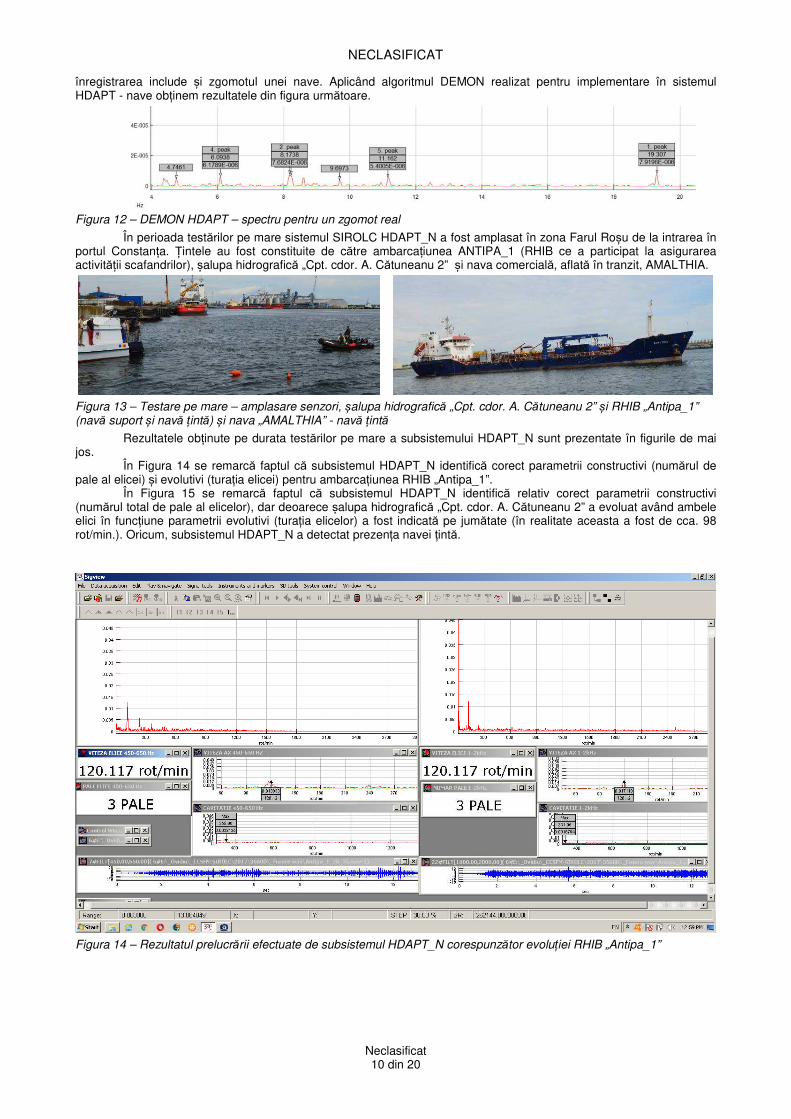
înregistrarea include și zgomotul unei nave. Aplicând algoritmul DEMON realizat pentru implementare în sistemul HDAPT - nave obținem rezultatele din figura următoare.
Figura 12 – DEMON HDAPT – spectru pentru un zgomot real
În perioada testărilor pe mare sistemul SIROLC HDAPT_N a fost amplasat în zona Farul Roșu de la intrarea în portul Constanța. Țintele au fost constituite de către ambarcațiunea ANTIPA_1 (RHIB ce a participat la asigurarea activității scafandrilor), șalupa hidrografică „Cpt. cdor. A. Cătuneanu 2” și nava comercială, aflată în tranzit, AMALTHIA.
Figura 13 – Testare pe mare – amplasare senzori, șalupa hidrografică „Cpt. cdor. A. Cătuneanu 2” și RHIB „Antipa_1” (navă suport și navă țintă) și nava „AMALTHIA” - navă țintă
Rezultatele obținute pe durata testărilor pe mare a subsistemului HDAPT_N sunt prezentate în figurile de mai jos.
În Figura 14 se remarcă faptul că subsistemul HDAPT_N identifică corect parametrii constructivi (numărul de pale al elicei) și evolutivi (turația elicei) pentru ambarcațiunea RHIB „Antipa_1”.
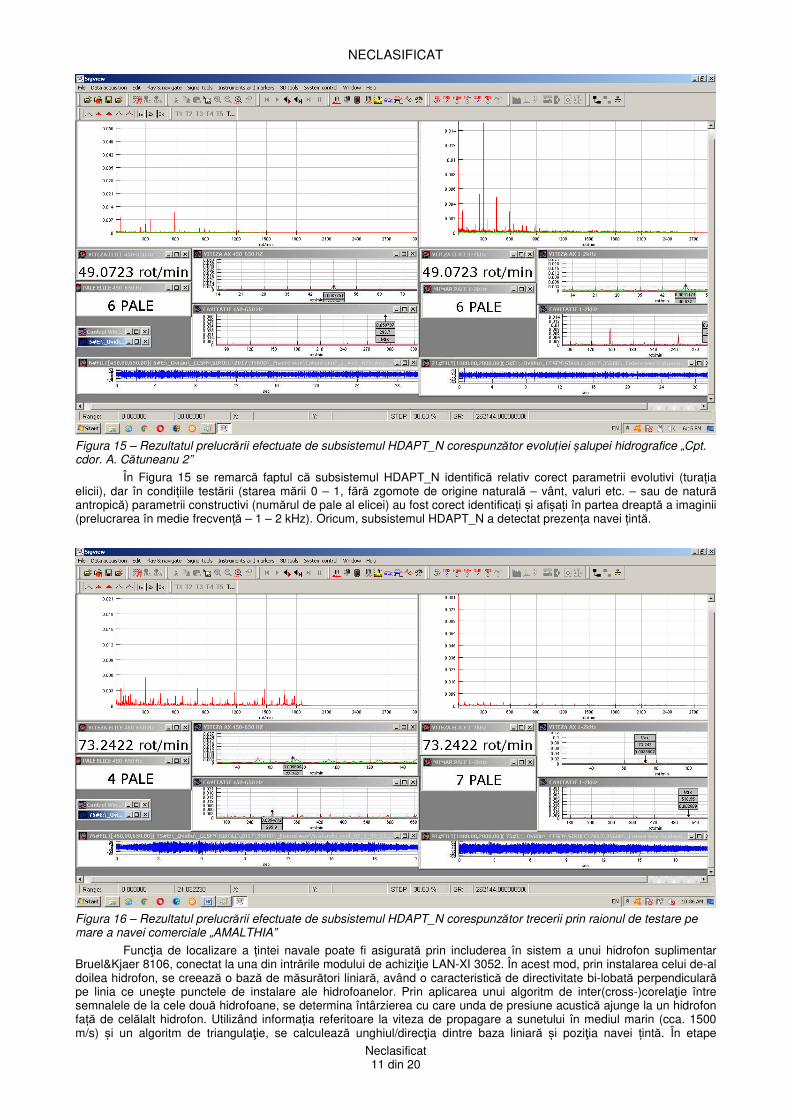
În Figura 15 se remarcă faptul că subsistemul HDAPT_N identifică relativ corect parametrii constructivi (numărul total de pale al elicelor), dar deoarece șalupa hidrografică „Cpt. cdor. A. Cătuneanu 2” a evoluat având ambele elici în funcțiune parametrii evolutivi (turația elicelor) a fost indicată pe jumătate (în realitate aceasta a fost de cca. 98 rot/min.). Oricum, subsistemul HDAPT_N a detectat prezența navei țintă.
Figura 14 – Rezultatul prelucrării efectuate de subsistemul HDAPT_N corespunzător evoluției RHIB „Antipa_1”
NECLASIFICAT
Neclasificat 11 din 20
Figura 15 – Rezultatul prelucrării efectuate de subsistemul HDAPT_N corespunzător evoluției șalupei hidrografice „Cpt. cdor. A. Cătuneanu 2”
În Figura 15 se remarcă faptul că subsistemul HDAPT_N identifică relativ corect parametrii evolutivi (turația elicii), dar în condițiile testării (starea mării 0 – 1, fără zgomote de origine naturală – vânt, valuri etc. – sau de natură antropică) parametrii constructivi (numărul de pale al elicei) au fost corect identificați și afișați în partea dreaptă a imaginii (prelucrarea în medie frecvență – 1 – 2 kHz). Oricum, subsistemul HDAPT_N a detectat prezența navei țintă.
Figura 16 – Rezultatul prelucrării efectuate de subsistemul HDAPT_N corespunzător trecerii prin raionul de testare pe mare a navei comerciale „AMALTHIA”
Funcţia de localizare a țintei navale poate fi asigurată prin includerea în sistem a unui hidrofon suplimentar Bruel&Kjaer 8106, conectat la una din intrările modului de achiziţie LAN-XI 3052. În acest mod, prin instalarea celui de-al doilea hidrofon, se creează o bază de măsurători liniară, având o caracteristică de directivitate bi-lobată perpendiculară pe linia ce uneşte punctele de instalare ale hidrofoanelor. Prin aplicarea unui algoritm de inter(cross-)corelaţie între semnalele de la cele două hidrofoane, se determina întârzierea cu care unda de presiune acustică ajunge la un hidrofon față de celălalt hidrofon. Utilizând informația referitoare la viteza de propagare a sunetului în mediul marin (cca. 1500 m/s) și un algoritm de triangulaţie, se calculează unghiul/direcţia dintre baza liniară și poziţia navei țintă. În etape
NECLASIFICAT
Neclasificat 12 din 20
ulterioare de dezvoltare a sistemului (ME, prototip) se va putea integra și un al treilea hidrofon (creându-se o bază triunghiulară de măsură) pentru ca prin aceeaşi metodă să se determine punctul ţintei și să se elimine ambiguitatea față-spate (caracteristică rețelelor liniare de antene). În Figura 17 este prezentat rezultatul (diagrama DEMON) obținut cu aplicația software pentru detecția navelor mici (dezvoltată în etapa de proiectare sistem SIROLC) pentru semnalul receptionat de un hidrofon. Se poate observa că a fost detectată o navă cu o elice cu 4 pale și viteza de rotaţie a elicei de 196 rot/min. Prin integrarea unui al doilea hidrofon, rezultatul afișat de aplicație va fi identic.
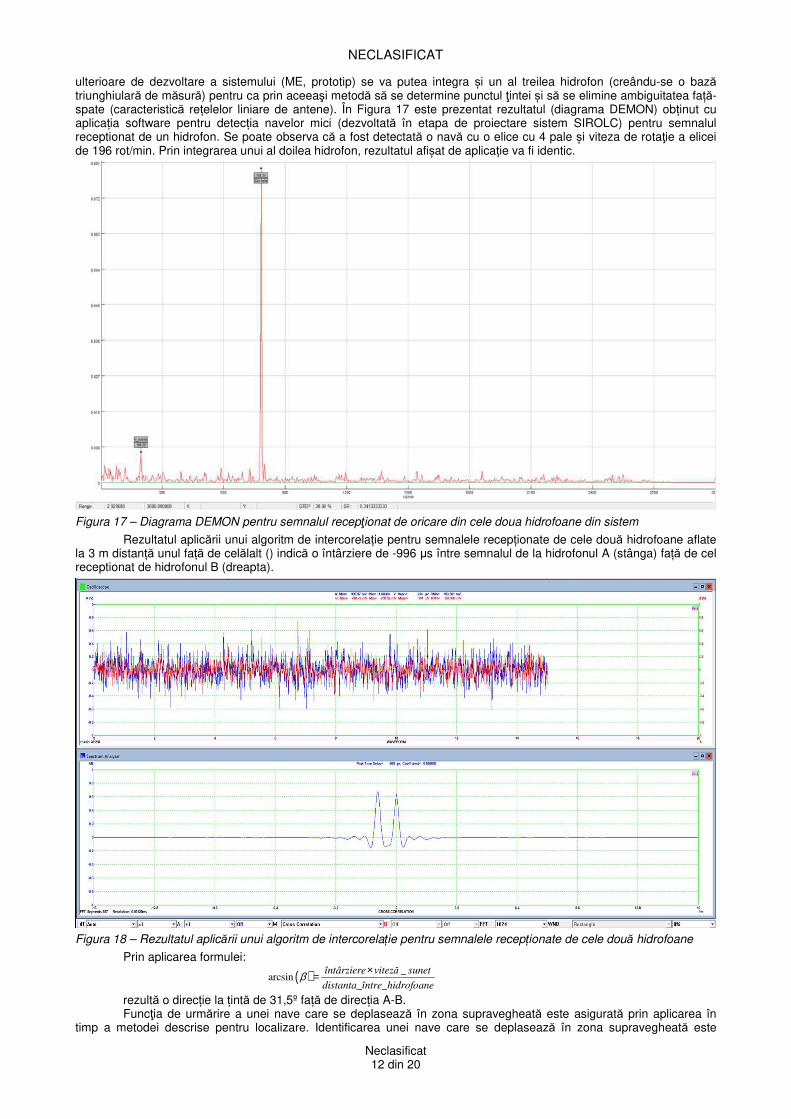
Figura 17 – Diagrama DEMON pentru semnalul recepţionat de oricare din cele doua hidrofoane din sistem
Rezultatul aplicării unui algoritm de intercorelație pentru semnalele recepționate de cele două hidrofoane aflate la 3 m distanță unul față de celălalt () indică o întârziere de -996 μs între semnalul de la hidrofonul A (stânga) față de cel receptionat de hidrofonul B (dreapta).
Figura 18 – Rezultatul aplicării unui algoritm de intercorelație pentru semnalele recepționate de cele două hidrofoane
Prin aplicarea formulei:
( ) _arcsin
întârziere viteză sunet
distanta_între_hidrofoaneβ ×=
rezultă o direcție la țintă de 31,5º față de direcția A-B. Funcţia de urmărire a unei nave care se deplasează în zona supravegheată este asigurată prin aplicarea în
timp a metodei descrise pentru localizare. Identificarea unei nave care se deplasează în zona supravegheată este
NECLASIFICAT
Neclasificat 13 din 20
asigurată prin utilizarea aplicaţiei software pentru detecţia navelor, proiectată și realizată în cadrul activităţilor de cercetare-dezvoltare proiect SIROLC. Aplicaţia prelucrează semnalul hidroacustic de la modulul de achiziţie și afişează informaţii de interes (diagrama DEMON, viteza de rotaţie a elicei, numărul de pale). În Figura 14, Figura 15, Figura 16 sunt prezentate interfaţa operator afişată pe consola de supraveghere (laptop) prin utilizarea aplicaţiei software de detecţie nave.
3.4.2.2 Detecţie scafandri – HDAPT_S Pentru detecţia unui scafandru algoritmii trebuie să prelucreze porţiuni din semnalul de la hidrofon reprezentând
circa 4-5 perioade cu o rată de respiraţie relativ stabilă. Considerând limitele pentru o respiraţie normală între 10 şi 30 respiraţii pe minut (0,15… 0,5Hz), rezultă că în cazul unui ritm de 10 resp/min, sunt necesare circa 30 secunde, în timp ce pentru scafandrul care se deplasează rapid (cu peste 30 resp/min), intervalul necesar pentru detecţie s-ar reduce la o treime. Pe de altă parte, cu cât numărul de perioade de respiraţie luat în prelucrare este mai mare, cu atât algoritmul aplicat este mai puţin sensibil la variaţii relative de ritm şi nivel de zgomot ambiant.
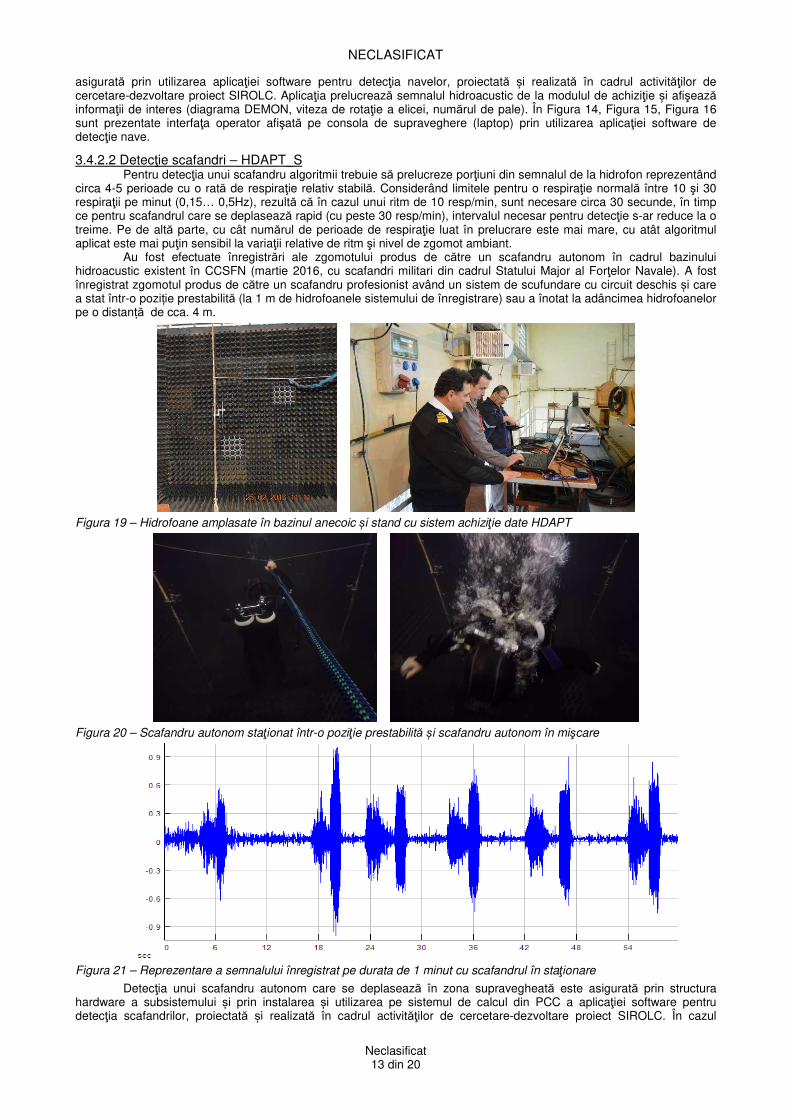
Au fost efectuate înregistrări ale zgomotului produs de către un scafandru autonom în cadrul bazinului hidroacustic existent în CCSFN (martie 2016, cu scafandri militari din cadrul Statului Major al Forţelor Navale). A fost înregistrat zgomotul produs de către un scafandru profesionist având un sistem de scufundare cu circuit deschis și care a stat într-o poziție prestabilită (la 1 m de hidrofoanele sistemului de înregistrare) sau a înotat la adâncimea hidrofoanelor pe o distanță de cca. 4 m.
Figura 19 – Hidrofoane amplasate în bazinul anecoic și stand cu sistem achiziţie date HDAPT
Figura 20 – Scafandru autonom staţionat într-o poziţie prestabilită și scafandru autonom în mişcare
Figura 21 – Reprezentare a semnalului înregistrat pe durata de 1 minut cu scafandrul în staţionare
Detecţia unui scafandru autonom care se deplasează în zona supravegheată este asigurată prin structura hardware a subsistemului și prin instalarea și utilizarea pe sistemul de calcul din PCC a aplicaţiei software pentru detecţia scafandrilor, proiectată și realizată în cadrul activităţilor de cercetare-dezvoltare proiect SIROLC. În cazul
NECLASIFICAT
Neclasificat 14 din 20
scafandrului cu sistem respirator în circuit deschis, semnalul generat este ușor de diferențiat pe fondul zgomotului și, în același timp, se pot distinge clar momentele inspirației (amplitudine mai mică) și cele ale expirației (amplitudine mare).
Figura 22 – Spectograma semnalului înregistrat cu scafandrul în mişcare
Se observă clar că periodicitatea este mult mai distinctă în banda de frecvențe înalte decât în banda de frecvențe joase. Acest rezultat indică că banda înaltă este alegerea ideală pentru detecția pasivă a scafandrilor. Totodată, figurile anterioare arată că ciclul de respirație durează aproximativ 3 secunde.
Pentru detecția pasivă a scafandrilor autonomi banda de frecvențe înalte (aprox. 9 - 13 kHz) este cea recomandată (așa cum se remarcă și din spectograma semnalului înregistrat în bazinul anecoic și reprezentată mai sus), deoarece periodicitatea anvelopei semnalului este mult mai clară aici decât în banda de joasă frecvență, iar atenuarea energiei în banda de frecvențe înalte (vibrația regulatorului) este mai redusă decât în banda de frecvențe joase (expirație).
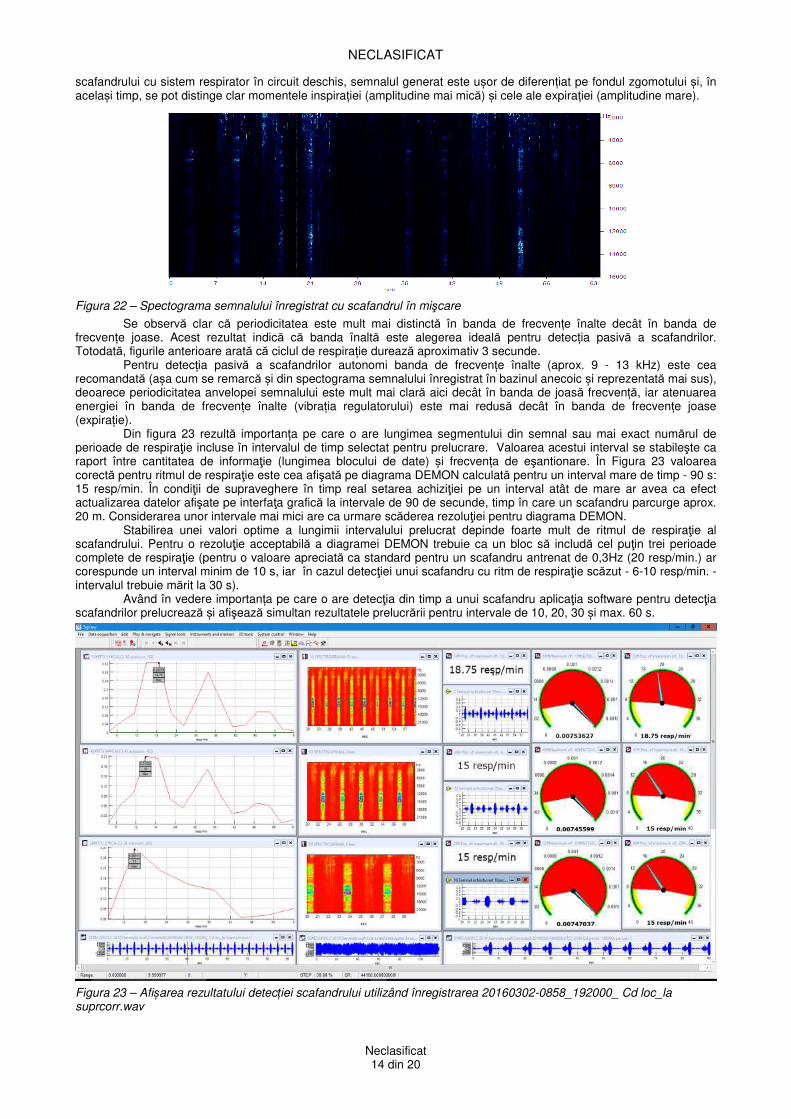
Din figura 23 rezultă importanța pe care o are lungimea segmentului din semnal sau mai exact numărul de perioade de respiraţie incluse în intervalul de timp selectat pentru prelucrare. Valoarea acestui interval se stabileşte ca raport între cantitatea de informaţie (lungimea blocului de date) și frecvența de eşantionare. În Figura 23 valoarea corectă pentru ritmul de respiraţie este cea afişată pe diagrama DEMON calculată pentru un interval mare de timp - 90 s: 15 resp/min. În condiţii de supraveghere în timp real setarea achiziţiei pe un interval atât de mare ar avea ca efect actualizarea datelor afişate pe interfaţa grafică la intervale de 90 de secunde, timp în care un scafandru parcurge aprox. 20 m. Considerarea unor intervale mai mici are ca urmare scăderea rezoluţiei pentru diagrama DEMON.
Stabilirea unei valori optime a lungimii intervalului prelucrat depinde foarte mult de ritmul de respiraţie al scafandrului. Pentru o rezoluţie acceptabilă a diagramei DEMON trebuie ca un bloc să includă cel puţin trei perioade complete de respiraţie (pentru o valoare apreciată ca standard pentru un scafandru antrenat de 0,3Hz (20 resp/min.) ar corespunde un interval minim de 10 s, iar în cazul detecţiei unui scafandru cu ritm de respiraţie scăzut - 6-10 resp/min. - intervalul trebuie mărit la 30 s).
Având în vedere importanța pe care o are detecţia din timp a unui scafandru aplicaţia software pentru detecţia scafandrilor prelucrează și afişează simultan rezultatele prelucrării pentru intervale de 10, 20, 30 și max. 60 s.
Figura 23 – Afișarea rezultatului detecției scafandrului utilizând înregistrarea 20160302-0858_192000_ Cd loc_la suprcorr.wav
NECLASIFICAT
Neclasificat 15 din 20
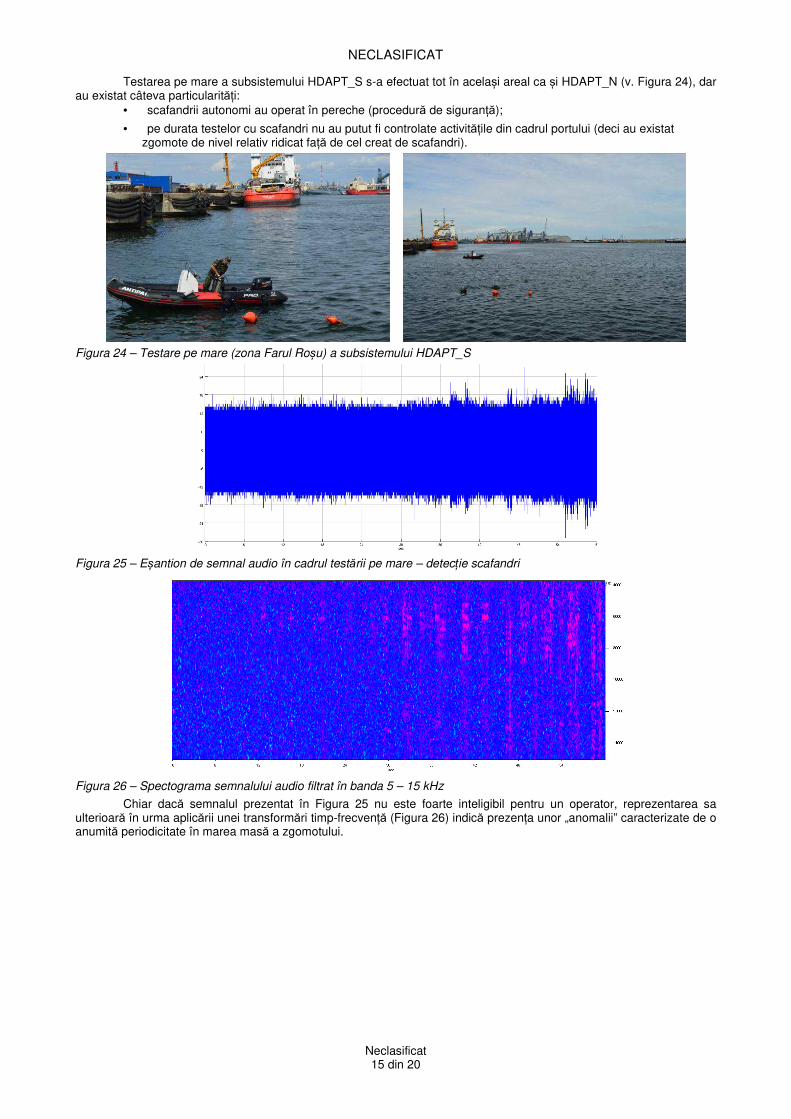
Testarea pe mare a subsistemului HDAPT_S s-a efectuat tot în același areal ca și HDAPT_N (v. Figura 24), dar au existat câteva particularități:
• scafandrii autonomi au operat în pereche (procedură de siguranță);
• pe durata testelor cu scafandri nu au putut fi controlate activitățile din cadrul portului (deci au existat zgomote de nivel relativ ridicat față de cel creat de scafandri).
Figura 24 – Testare pe mare (zona Farul Roșu) a subsistemului HDAPT_S
Figura 25 – Eșantion de semnal audio în cadrul testării pe mare – detecție scafandri
Figura 26 – Spectograma semnalului audio filtrat în banda 5 – 15 kHz
Chiar dacă semnalul prezentat în Figura 25 nu este foarte inteligibil pentru un operator, reprezentarea sa ulterioară în urma aplicării unei transformări timp-frecvență (Figura 26) indică prezența unor „anomalii” caracterizate de o anumită periodicitate în marea masă a zgomotului.
NECLASIFICAT
Neclasificat 16 din 20
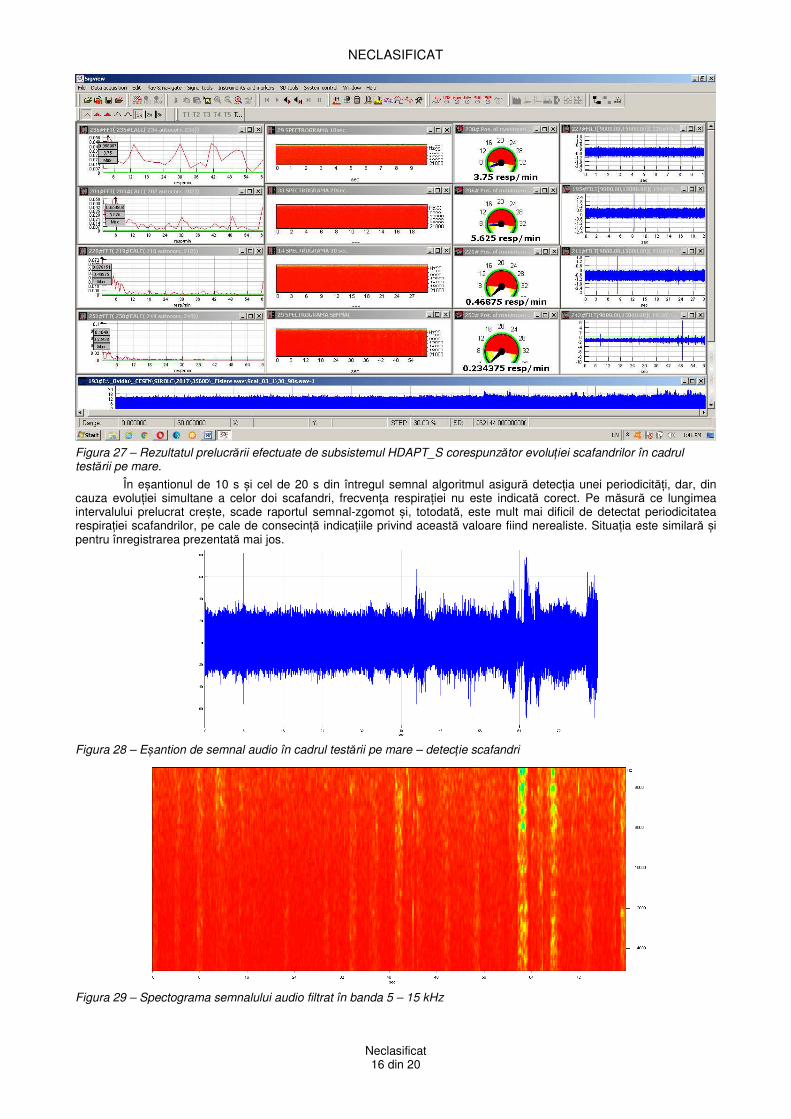
Figura 27 – Rezultatul prelucrării efectuate de subsistemul HDAPT_S corespunzător evoluției scafandrilor în cadrul testării pe mare.
În eșantionul de 10 s și cel de 20 s din întregul semnal algoritmul asigură detecția unei periodicități, dar, din cauza evoluției simultane a celor doi scafandri, frecvența respirației nu este indicată corect. Pe măsură ce lungimea intervalului prelucrat crește, scade raportul semnal-zgomot și, totodată, este mult mai dificil de detectat periodicitatea respirației scafandrilor, pe cale de consecință indicațiile privind această valoare fiind nerealiste. Situația este similară și pentru înregistrarea prezentată mai jos.
Figura 28 – Eșantion de semnal audio în cadrul testării pe mare – detecție scafandri
Figura 29 – Spectograma semnalului audio filtrat în banda 5 – 15 kHz
NECLASIFICAT
Neclasificat 17 din 20
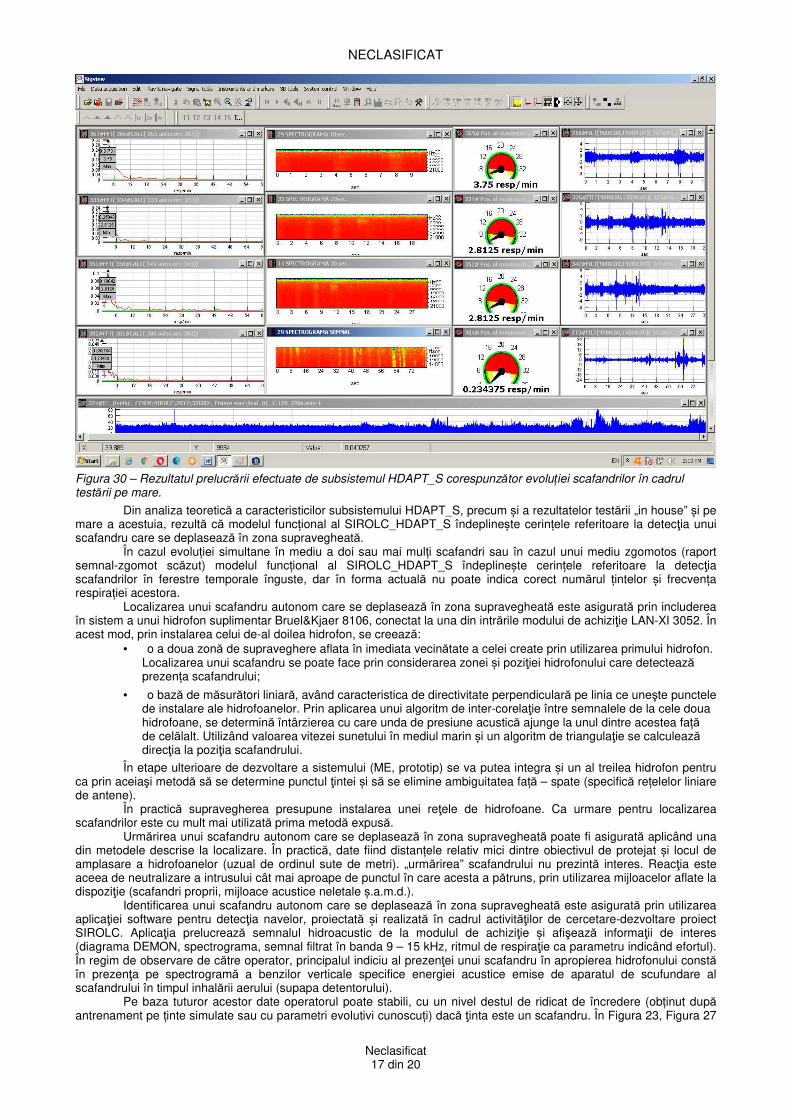
Figura 30 – Rezultatul prelucrării efectuate de subsistemul HDAPT_S corespunzător evoluției scafandrilor în cadrul testării pe mare.
Din analiza teoretică a caracteristicilor subsistemului HDAPT_S, precum și a rezultatelor testării „in house” și pe mare a acestuia, rezultă că modelul funcțional al SIROLC_HDAPT_S îndeplinește cerințele referitoare la detecţia unui scafandru care se deplasează în zona supravegheată.
În cazul evoluției simultane în mediu a doi sau mai mulți scafandri sau în cazul unui mediu zgomotos (raport semnal-zgomot scăzut) modelul funcțional al SIROLC_HDAPT_S îndeplinește cerințele referitoare la detecţia scafandrilor în ferestre temporale înguste, dar în forma actuală nu poate indica corect numărul țintelor și frecvența respirației acestora.
Localizarea unui scafandru autonom care se deplasează în zona supravegheată este asigurată prin includerea în sistem a unui hidrofon suplimentar Bruel&Kjaer 8106, conectat la una din intrările modului de achiziţie LAN-XI 3052. În acest mod, prin instalarea celui de-al doilea hidrofon, se creează:
• o a doua zonă de supraveghere aflata în imediata vecinătate a celei create prin utilizarea primului hidrofon. Localizarea unui scafandru se poate face prin considerarea zonei și poziţiei hidrofonului care detectează prezența scafandrului;
• o bază de măsurători liniară, având caracteristica de directivitate perpendiculară pe linia ce uneşte punctele de instalare ale hidrofoanelor. Prin aplicarea unui algoritm de inter-corelaţie între semnalele de la cele doua hidrofoane, se determină întârzierea cu care unda de presiune acustică ajunge la unul dintre acestea față de celălalt. Utilizând valoarea vitezei sunetului în mediul marin și un algoritm de triangulaţie se calculează direcţia la poziţia scafandrului.
În etape ulterioare de dezvoltare a sistemului (ME, prototip) se va putea integra și un al treilea hidrofon pentru ca prin aceiaşi metodă să se determine punctul ţintei și să se elimine ambiguitatea față – spate (specifică rețelelor liniare de antene).
În practică supravegherea presupune instalarea unei reţele de hidrofoane. Ca urmare pentru localizarea scafandrilor este cu mult mai utilizată prima metodă expusă.
Urmărirea unui scafandru autonom care se deplasează în zona supravegheată poate fi asigurată aplicând una din metodele descrise la localizare. În practică, date fiind distanțele relativ mici dintre obiectivul de protejat și locul de amplasare a hidrofoanelor (uzual de ordinul sute de metri). „urmărirea” scafandrului nu prezintă interes. Reacţia este aceea de neutralizare a intrusului cât mai aproape de punctul în care acesta a pătruns, prin utilizarea mijloacelor aflate la dispoziţie (scafandri proprii, mijloace acustice neletale ș.a.m.d.).
Identificarea unui scafandru autonom care se deplasează în zona supravegheată este asigurată prin utilizarea aplicaţiei software pentru detecţia navelor, proiectată și realizată în cadrul activităţilor de cercetare-dezvoltare proiect SIROLC. Aplicaţia prelucrează semnalul hidroacustic de la modulul de achiziţie și afişează informaţii de interes (diagrama DEMON, spectrograma, semnal filtrat în banda 9 – 15 kHz, ritmul de respiraţie ca parametru indicând efortul). În regim de observare de către operator, principalul indiciu al prezenţei unui scafandru în apropierea hidrofonului constă în prezenţa pe spectrogramă a benzilor verticale specifice energiei acustice emise de aparatul de scufundare al scafandrului în timpul inhalării aerului (supapa detentorului).
Pe baza tuturor acestor date operatorul poate stabili, cu un nivel destul de ridicat de încredere (obținut după antrenament pe ținte simulate sau cu parametri evolutivi cunoscuți) dacă ţinta este un scafandru. În Figura 23, Figura 27
NECLASIFICAT
Neclasificat 18 din 20
și Figura 30 sunt prezentate interfaţa operator afişată pe consola de supraveghere (laptop) prin utilizarea aplicaţiei software de detecţie scafandri.
3.5. Activitatea 5
Raportul de cercetare final pentru validarea modelului funcţional SIROLC a fost redactat de către coordonatorul proiectului și se află înregistrat în arhiva tehnică a CCSFN.
3.6 Activitatea 6
3.6.1. Participare la expoziții
În perioada 25 - 27 mai 2017, la Iași s-a desfășurat la Salonul de Invenții EuroInvent 2017.Colectivul CCSFN format din: Georgică Slămnoiu, Ovidiu Radu, Valerică Roșca, Camelia Pascu, Roxana-Gabriela Damian, George Surdu, Elena Curcă și Adrian Rădulescu a obținut:
• diploma și medalia de aur a EUROINVENT 2017 pentru produsul „Vehicul autonom subacvatic utilizat în misiuni de securitate maritimă”;
• diploma și medalia de argint a EUROINVENT 2017 pentru produsul „Subsistem hidroacustic de determinare a amprentei potențialelor ținte din sistemul SIROLC”;
• diploma de excelență și medalia de aur a Universității Tehnice a Moldovei pentru proiectul „Sistem pentru detecţie, localizare, urmărire și identificare a factorilor de risc la adresa obiectivelor de importanță strategică din zone de litoral SIROLC”.
Figura 31
3.6.2. Articole publicate în reviste de specialitate de circulație internațională
1. G. Slămnoiu, O. Radu, V. Roşca, C. Pascu, G. Surdu, E. Curcă, R. Damian, A. Rădulescu, „Efficient use of AUVs in maritime environment”, EUROINVENT 2017, ”ICIR EUROINVENT 2017 International Conference on Innovative Research”, Iași, 25-26 Mai, IOP Conference Series: Materials Science and Engineering, Vol. 209, conference 1, pp. 012098, doi: 10.1088/1757-899X/209/1/012098.
2. G. Slămnoiu, O. Radu, V. Roşca, C. Pascu, G. Surdu, E. Curcă, R. Damian, A. Rădulescu, „Risk factors detection for strategic importance objectives in littoral areas”, EUROINVENT 2017, ”ICIR EUROINVENT 2017 International Conference on Innovative Research”, Iași, 25-26 Mai, IOP Conference Series: Materials Science and Engineering, Vol. 209, conference 1, pp. 012099, doi: 10.1088/1757-899X/209/1/012099.
3. G. Slămnoiu, O. Radu, V. Roşca, C. Pascu, G. Surdu, E. Curcă, R. Damian, A. Rădulescu, „Test of the detection capabilities of a side scanning sonar mounted on an AUV”, Scientific Bulletin ”Mircea cel Batrân” Naval Academy, 3rd International Conference SEA-CONF 2017, Constanta, 18-20 mai 2017, vol. 20, nr. 1/2017, p. 317.
3.6.3. Articole publicate în volumele unor manifestări ştiinţifice naționale
1. G. Slămnoiu, R. Damian, O. Radu, V. Roșca, G. Surdu, E. Curcă, C. Pascu, L. Dumitrache, „Posibilităţi de utilizare a AUV-urilor în misiuni specifice Forţelor Navale”, atelierul de lucru “Hidrografia românească - trecut și viitor”, organizat cu ocazia aniversării a 91 de ani de la înființarea Direcției Hidrografice Maritime, 23 februarie 2017.
NECLASIFICAT
Neclasificat 19 din 20
3.6.4. Mese rotunde organizate în cadrul proiectului SIROLC
1. G. Slămnoiu, O. Radu, V. Roșca, Romeo Boşneagu, L. Dumitrache, V. Ionaşcu, G., D. Flaut, Masă rotundă cu tema ”Valorificarea rezultatelor şi experienţei din cadrul proiectului SIROLC” organizată în cadrul proiectului „Sistem pentru detecţie, localizare, urmărire şi identificare a factorilor de risc la adresa obiectivelor de importanţă strategică din zone de litoral” – SIROLC, Universitatea „Ovidius” Constanța, 25 septembrie 2017.
4. Concluzii generale ale etapei
Obiectivele generale şi specifice ale etapei au fost atinse. • Activitatea de testare evaluare a modelului funcţional SIROLC realizat în cadrul proiectului a avut ca
obiectiv atestarea capabilităţii acestuia de a asigura detecţia, localizarea, urmărirea și identificarea factorilor ce pot prezenta un risc de securitate pentru obiectivele strategice de pe litoral.
• Au fost realizate activitățile prevăzute în planul de realizare a proiectului pentru etapa a IV-a:
� evaluare „in house” și în condiţii reale a subsistemelor componente ale SIROLC; � diseminare informaţii.
• Testarea și evaluarea „in house” și în condiţii reale a subsistemelor componente ale SIROLC a presupus:
� elaborarea / analiza documentelor referitoare la cerinţele funcţionale și de performanţă care trebuie verificate pentru testarea, evaluarea și validarea modelului funcţional SIROLC;
� elaborarea unui plan de testare - evaluare model funcţional SIROLC; � pregătirea informativă și tehnică a activităților de testare-evaluare; � efectuarea testării - evaluării „in house” respectiv în condiţii reale a subsistemelor componente ale
SIROLC. � redactarea raportului de cercetare pentru validarea modelului funcţional SIROLC.
• Sistemul pentru detecţie, localizare, urmărire şi identificare a factorilor de risc la adresa obiectivelor de importanţă strategică din zone de litoral – SIROLC, în etapa de dezvoltare actuală – model funcțional, este compus din două subsisteme:
� subsistem AUV; � subsistem hidroacustic pentru determinarea amprentelor potenţialelor ţinte.
• SIROLC asigură îndeplinirea următoarelor misiuni principale:
� supravegherea mediului submarin (detecţie, monitorizare) în zona porturilor şi a altor obiective din zona de coastă, raioanelor de staţionare ale navelor, punctelor obligatorii de trecere;
� avertizare despre prezenţa pericolului submarin şi de suprafaţă în zonele de interes.
• Modelul funcțional al SIROLC este:
� modular; � mobil; � expandabil; � integrabil cu alte sisteme de supraveghere de la litoral; � cu o fiabilitate şi disponibilitate intrinsecă ridicate; � cu nevoi de resurse pentru exploatare şi mentenanţă reduse.
• Activitățile de testare-evaluare au urmărit verificarea:
� realizării sistemului prin integrarea de echipamente și aplicaţii software; � transportabilității sistemului; � autonomiei de durată, imersiunii maxime, poziționării hidrofonului; � capacității de monitorizare, achiziţie și stocare de imagini sonar și date din mediul subacvatic; � capacității de detecţie, localizare, urmărire și identificare a obiectelor aflate pe fund ce pot reprezenta
factori de risc; � capacității de achiziţie / monitorizare a zgomotelor din mediu subacvatic; � capacității de detecţie, localizare, urmărire și identificare a unei nave care se deplasează în zona
supravegheată; � capacității de detecţie, localizare, urmărire și identificare a unui scafandru autonom care se deplasează
în zona supravegheată; • Sonarul cu scanare laterală instalat pe AUV are performanţe remarcabile (rezoluţii foarte bune, frecvenţă
de lucru relativ joasă etc.), iar pentru eliminarea perturbaţiilor cauzate de fluctuaţiile vitezei sunetului în mediul marin a fost integrat un senzor CT (conductivitate / salinitate – temperatură).
• Din punctul de vedere al elementelor componente dedicate, subsistemul HDAPT ca parte componenta a SIROLC include:
� Hidrofon � Cablu hidrofon � Dispozitiv de amplasare și ancorare hidrofon � Unitate de achiziție date
NECLASIFICAT
Neclasificat 20 din 20
� Sistem de calcul pentru prelucrarea și afişarea datelor de la sistemul de achiziţie (on-line și off-line) și salvarea acestora (în fişiere media sau de tip ASCII) pentru analiza ulterioară.
• Pentru hidrofoanele Bruel&Kjaer 8106 (care includ preamplificator) CCSFN deține cabluri AO-1433 cu lungimea de 200 m și respectiv 30 m și, în același timp și două cabluri AO-0390 de câte 10 m fiecare. În vederea conectării hidrofonului 8106 la unitatea de achiziție date, CCSFN are în dotare două adaptoare WI-1260 (trecere de la conector JP-0717 la conector cu 7 pini tip LEMO).
• CCSFN a achiziționat un sistem mobil de achiziție date de la hidrofoane a cărui compunere este:
� Bruel&Kjaer LAN – XI 3052 – 1 buc. � acumulator 2831-A – 1 buc. � software LAN – XI NOTAR BZ-7848-A – 1 buc. � front panel 3 canale BNC – 1 buc. � front panel 3 canale LEMO – 1 buc.
• Detecția pasivă a ambarcațiunilor mici și rapide sau a scafandrilor autonomi poate fi efectuată pe baza algoritmului DEMON [Detection of Envelope MOdulation on Noise].
• Deoarece în timpul unei misiuni desfășurate în iulie 2017 cu AUV-ul (în cadrul Planului Sectorial de Cercetare – Dezvoltare al MApN pe anul 2017) platforma subacvatică a intrat în imersiune fără a mai fi apoi recuperată, activități suplimentare (față de cele deja efectuate) de testare pe mare a capacității acesteia de detecție a obiectelor de pe fundul acvatoriului ce pot reprezenta factori de risc nu au mai putut fi efectuate.
• În cazul evoluției simultane în mediu a două sau mai multe ținte (nave, nave cu mai multe propulsoare, doi sau mai mulți scafandri etc.) sau în cazul unui mediu zgomotos (raport semnal-zgomot scăzut) modelul funcțional al SIROLC_HDAPT îndeplinește foarte bine cerințele referitoare la detecţia țintei, dar pentru identificarea mult mai exactă a acestora trebuie dezvoltate pentru etapele ulterioare (model experimental, prototip ș.a.m.d.) extinderi ale algoritmului DEMON HDAPT (de exemplu utilizând bancuri de filtre – așa cum a fost precizat în etapele anterioare ale proiectului).
• Toate evaluările „in hause” și în mare au condus la concluzia că modelul funcțional SIROLC este validat și satisface cerințele impuse.
• Rezultatele activităților de cercetare din cadrul proiectului SIROLC au fost intens diseminate prin participarea la saloane de invenții, publicarea de articole în reviste de specialitate de circulație națională și internațională etc.
• În cadrul manifestărilor unde au fost prezentate elementele modelului funcțional al SIROLC au primit aprecieri de un nivel foarte ridicat.
5. Aspecte relevante privind respectarea documentelor de planificare Documentele de planificare s-au respectat. Proiectul a fost realizat conform cerințelor contractuale
asumate.
6. Modificări semnificative ce se impun în concepţia proiectului pentru realizarea obiectivelor
Nu se impun modificări pentru realizarea proiectului.
7. Anexe Programul și participanții mesei rotunde cu tema ”Valorificarea rezultatelor şi experienţei din cadrul
proiectului SIROLC” organizată în cadrul proiectului „Sistem pentru detecţie, localizare, urmărire şi identificare a factorilor de risc la adresa obiectivelor de importanţă strategică din zone de litoral” – SIROLC, Universitatea „Ovidius” Constanța, 25 septembrie 2017.
![PERFORMANȚĂ, STANDARDE ȘI MODELE DE RAPORTARE …€¦ · țiile unui spor demografic negativ înregistrat constant în ultimii 25 de ani [7], ameliorarea stării de sănătate](https://img.pdfslide.net/doc/110x75/6070365265a55016a363b11e/performan-standarde-i-modele-de-raportare-iile-unui-spor-demografic-negativ.jpg)




























