Embed Size (px)
Citation preview

Scheduling Jobs with Exponentially Distributed Processing Times and Intree PrecedenceConstraints on Two Parallel MachinesAuthor(s): Michael Pinedo and Gideon WeissSource: Operations Research, Vol. 33, No. 6 (Nov. - Dec., 1985), pp. 1381-1388Published by: INFORMSStable URL: http://www.jstor.org/stable/170644 .
Accessed: 08/05/2014 23:24
Your use of the JSTOR archive indicates your acceptance of the Terms & Conditions of Use, available at .http://www.jstor.org/page/info/about/policies/terms.jsp
.JSTOR is a not-for-profit service that helps scholars, researchers, and students discover, use, and build upon a wide range ofcontent in a trusted digital archive. We use information technology and tools to increase productivity and facilitate new formsof scholarship. For more information about JSTOR, please contact [email protected].
.
INFORMS is collaborating with JSTOR to digitize, preserve and extend access to Operations Research.
http://www.jstor.org
This content downloaded from 169.229.32.137 on Thu, 8 May 2014 23:24:09 PMAll use subject to JSTOR Terms and Conditions

Scheduling Jobs with Exponentially Distributed Processing Times and Intree Precedence
Constraints on Two Parallel Machines MICHAEL PINEDO
Columbia University, New York, New York
GIDEON WEISS Georgia Institute of Technology, Atlanta, Georgia and Tel Aviv University, Tel Aviv, Israel
(Received April 1984; revised November 1984; accepted February 1985)
We consider n jobs with independent exponentially distributed processing times that are to be processed on two machines operating in parallel. The jobs are subject to precedence constraints that have the form of an intree, i.e., each job, except for the last one, has one direct successor. A job is at level / if its successor is at level / - 1 (the last job is at level 0). We assume that all jobs at level / have i.d. exponentially distributed processing times, with mean 1/,l,. Under these assumptions, we show that the policy that schedules HLF (highest level first) minimizes the expected makespan in the class of preemptive as well as nonpreemptive schedules. This conclusion generalizes a previous result of Chandy and Reynolds.
CONSIDER n jobs and two machines in parallel. Jobs are subject to precedence constraints, described by a graph that has the form of
an intree. This situation implies that each job has at most one successor (see Figure 1). The job at the root of the tree is said to be at level 0. A job is said to be at level 1 for 1 = 1, . . . , s if its successor is at level 1 - 1. We assume that the processing times of the jobs are independent random variables, with those at level I identically and exponentially distributed with rate Al. The objective is to find a policy that minimizes the makespan which is the expected completion time of the last job. One policy, the so- called highest level first (HLF) policy is intuitively appealing. This policy instructs the decision maker, whenever a machine is freed, to choose, among the remaining jobs that are ready for processing, any one of those that are at the highest level. We show that the HLF policy is optimal in the class of nonpreemptive policies as well as in the larger class of preemptive policies. Moreover, we show that the expected makespan under the HLF policy depends on the number of jobs at each level, but
Subject classification: 566 distributions, 572 stochastic model applications, 581 production/scheduling.
Operations Research Vol. 33, No. 6, November-December 1985
0030-364X/85/3306-1381 $01.25 ?D 1985 Operations Research Society of America
1381
This content downloaded from 169.229.32.137 on Thu, 8 May 2014 23:24:09 PMAll use subject to JSTOR Terms and Conditions
1382 Pinedo and Weiss
not on the structure of the intree which describes the precedence con- straints.
In the literature, this problem has received considerable attention. Many papers have been written on the scheduling of deterministic jobs on parallel machines when the jobs are subject to precedence constraints; for a survey see Lawler, Lenstra and Rinnooy Kan (1982) and Garey, Johnson, Tarjan and Yannakakis (1982). Hu (1961) showed that the HLF policy is optimal when there are m machines in parallel and n identical jobs with deterministic processing times which are subject to intree precedence constraints. Chandy and Reynolds (1975) considered the stochastic case of two machines in parallel and n jobs subject to intree precedence constraints; when all n jobs have i.i.d. exponentially distributed processing times, they showed that the HLF policy is optimal among nonpreemptive as well as preemptive policies.
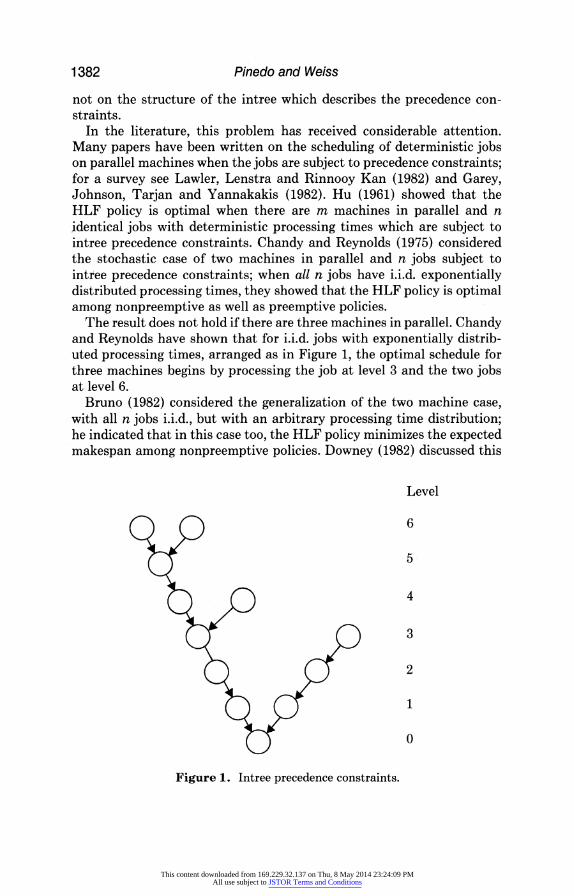
The result does not hold if there are three machines in parallel. Chandy and Reynolds have shown that for i.i.d. jobs with exponentially distrib- uted processing times, arranged as in Figure 1, the optimal schedule for three machines begins by processing the job at level 3 and the two jobs at level 6.
Bruno (1982) considered the generalization of the two machine case, with all n jobs i.i.d., but with an arbitrary processing time distribution; he indicated that in this case too, the HLF policy minimizes the expected makespan among nonpreemptive policies. Downey (1982) discussed this
Level
6
5
4
3
2
1
0
Figure 1. Intree precedence constraints.
This content downloaded from 169.229.32.137 on Thu, 8 May 2014 23:24:09 PMAll use subject to JSTOR Terms and Conditions
Scheduling Jobs on Two Parallel Machines 1383
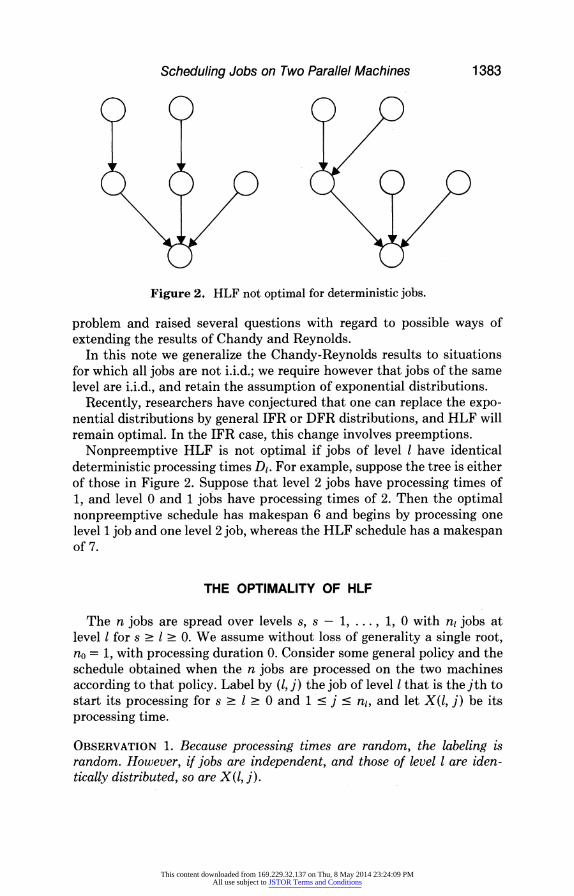
Figure 2. HLF not optimal for deterministic jobs.
problem and raised several questions with regard to possible ways of extending the results of Chandy and Reynolds.
In this note we generalize the Chandy-Reynolds results to situations for which all jobs are not i.i.d.; we require however that jobs of the same level are i.i.d., and retain the assumption of exponential distributions.
Recently, researchers have conjectured that one can replace the expo- nential distributions by general IFR or DFR distributions, and HLF will remain optimal. In the IFR case, this change involves preemptions.
Nonpreemptive HLF is not optimal if jobs of level 1 have identical deterministic processing times D1. For example, suppose the tree is either of those in Figure 2. Suppose that level 2 jobs have processing times of 1, and level 0 and 1 jobs have processing times of 2. Then the optimal nonpreemptive schedule has makespan 6 and begins by processing one level 1 job and one level 2 job, whereas the HLF schedule has a makespan of 7.
THE OPTIMALITY OF HLF
The n jobs are spread over levels s, s - 1, ..., 1, 0 with n, jobs at level 1 for s > >1 0. We assume without loss of generality a single root, no = 1, with processing duration 0. Consider some general policy and the schedule obtained when the n jobs are processed on the two machines according to that policy. Label by (1, j) the job of level 1 that is the jth to start its processing for s > >1 0 and 1 < I < ni, and let X(l, j) be its processing time.
OBSERVATION 1. Because processing times are random, the labeling is random. However, if jobs are independent, and those of level 1 are iden- tically distributed, so are X(l, j).
This content downloaded from 169.229.32.137 on Thu, 8 May 2014 23:24:09 PMAll use subject to JSTOR Terms and Conditions

1384 Pinedo and Weiss
Again, for a general policy and its schedule, let U(l, j) c V(l, j) denote the instants at which the two machines complete the processing of all the jobs of levels s, s- 1,. .., 1 + 1 as well as jobs (1, 1), .. ., (1, j). In addition, we let U1 = U(l, nr) and V1 = V(l, n1) for 1 = s, s - 1, . . ., 1, and let U = U(s, 0) < V(s, 0) = V be the times at which the two machines first become available.
The HLF policy will start jobs of level s first. Once all those have been scheduled, it will start jobs of level s - 1, and so forth. If at some time the highest level jobs are of level m, both machines will be processing jobs of level m. If only one job of level m is left, it will be processed by one machine; the other machine will process a job of level 1, 1 < m, of which there are more than one job left, while in each of the levels m-1, .. ., 1 + 1 there is exactly one job left. There will be no idle time until only single jobs are left at levels 1, ..., m, which will then be processed by one machine. All these relationships are consequences of the intree structure of the precedence constraints.
OBSERVATION 2. With intree constraints and identical distributions at each level, the distribution of the makespan under HLF depends on the number of jobs at each level, but not on the structure of the intree. The only restriction on HLF schedules is that the last job of level 1 can start only after all jobs of levels s, ..., 1 + 1 are completed.
Under HLF, in addition to the notation introduced previously, let U(l- 1, ) = U1, V(l - 1,0 ) = V, for I = s, . . ., 1; then job (1, j) starts at U(l, j - 1) if 1 c j < ni, while job (1, n1) starts at max(U(I, n1 - 1), VI+,) if s - I - 1. We prove the following deterministic result:
LEMMA 1. Let (1, j) denote the jobs in their processing order under HLF, and X(l, j) their deterministic processing times. Then, U(l, j), V(l, j) and the start and finish of job (1, j) are increasing functions of U and V.
Proof. Assume the lemma holds both for levels higher than I and for jobs preceding j on level 1, and consider U(l, j) and V(l, j). For 1 cj < n1,
U(l, j) = min(U(I, j - 1) + X(l, j), V(l, j - 1))
V(l, j) = max(U(l, j - 1) + X(l, j), V(l, j - 1))
and
V, = V(l, ni) = max(U(l, ni - 1) + X(l, n1), VI+1 + X(l, n1), V(l, ni - 1))
so by the induction hypothesis these quantities are increasing in U, V. To investigate U1 = U(l, n1), consider two pairs of starting times U, V and U', V', with U c U' and V < V'; we need to show UJ > U1, using the induction hypothesis.
This content downloaded from 169.229.32.137 on Thu, 8 May 2014 23:24:09 PMAll use subject to JSTOR Terms and Conditions
Scheduling Jobs on Two Parallel Machines 1385
Case i. U(l, n1 - 1) > V1+1, U'(l, n, - 1)- VA-1:
U'(l, n1) = min(U'(l, ni - 1) + X(l, n1), V'(l, ni - 1))
>- min(U(l, n, - 1) + X(l, n1), V(l, n, - 1)) = U(l, n1).
Case ii. U(l, ni - 1) < V1+1:
U'(1, n1) > min(V/+1, U'(1, ni - 1))
> min(V1+1, U(l, ni - 1)) = U(l, ni - 1) = U(l, ni).
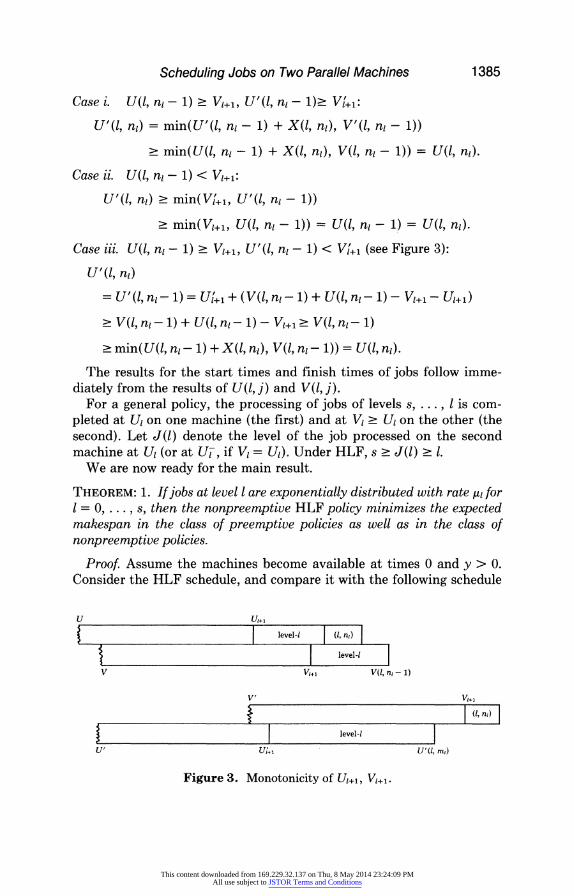
Case iii. U(l, n, - 1) > V1+1, U'(l, n, - 1) < VA-1 (see Figure 3):
U'(l, n1)
- U'(l,ni-1)= U[1+ (V(l,ni-1) + U(ln1-1)- V+1 - U1+1)
> V(l, n1-1) + U(l, ni-1)- V1+1 > V(l, ni-1)
> min(U(l, n, - 1) + X(l, n1), V(l, n, - 1)) = U(l, n1).
The results for the start times and finish times of jobs follow imme- diately from the results of U(l, j) and V(l, j).
For a general policy, the processing of jobs of levels s, .I., 1 is com- pleted at U1 on one machine (the first) and at V1 ? U1 on the other (the second). Let J(l) denote the level of the job processed on the second machine at U1 (or at UT, if V1 = Ul). Under HLF, s > J(l) ? 1.
We are now ready for the main result.
THEOREM: 1. If jobs at level 1 are exponentially distributed with rate ,4 for I = 0, ..., s, then the nonpreemptive HLF policy minimizes the expected makespan in the class of preemptive policies as well as in the class of nonpreemptive policies.
Proof. Assume the machines become available at times 0 and y > 0. Consider the HLF schedule, and compare it with the following schedule
U Ul+l
1 level-I I (1, no) I
level-i
V VI V(l, n1-1)
VI VI+,
7 I (i,nj)I
I . .-I level-I
U' Ul+1 UT(i, ml)
Figure 3. Monotonicity of U1+1, VI+,.
This content downloaded from 169.229.32.137 on Thu, 8 May 2014 23:24:09 PMAll use subject to JSTOR Terms and Conditions
1386 Pinedo and Weiss
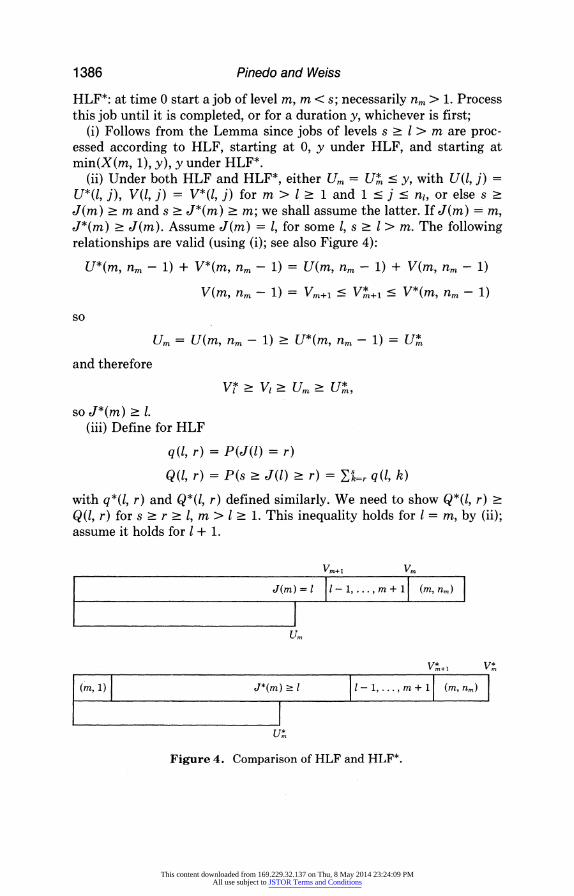
HLF*: at time 0 start a job of level m, m < s; necessarily nf > 1. Process this job until it is completed, or for a duration y, whichever is first;
(i) Follows from the Lemma since jobs of levels s - 1> m are proc- essed according to HLF, starting at 0, y under HLF, and starting at min(X(m, 1), y), y under HLF*.
(ii) Under both HLF and HLF*, either Un = U* c y, with U(l, j) =
U*(l, j), V(l, j) = V*(l, j) for m > 12 1 and 1 c j c ni, or else s- J(m) - m and s 2 J*(m) 2 m; we shall assume the latter. If J(m) = m, J*(m) 2 J(m). Assume J(m) = 1, for some 1, s > 1 > m. The following relationships are valid (using (i); see also Figure 4):
U*(m, nm - 1) + V*(m, nm - 1) = U(m, nm - 1) + V(m, nm - 1)
V(m, nm - 1) = Vm+i V*+1 c V*(m, nm - 1)
so
UM = U(m, nm - 1) 2 U*(m, nm - 1) =UM
and therefore
V* Vi 2 UM - U*,
soJ*(m) >1. (iii) Define for HLF
q(l, r) = P(J(I) = r)
Q(l, r) = P(s 2 J(l) 2 r) sk=r q(l, k)
with q*(l, r) and Q*(l, r) defined similarly. We need to show Q*(l, r) >
Q(l, r) for s 2 r - 1, m > 1 : 1. This inequality holds for 1 = m, by (ii); assume it holds for 1 + 1.
Vm+1 V.
J(m) = I -1, .. m+ 1 (mnm)
Urn
V*~ V* vM+1 vin (m, 1) J*(m)> 1 I-i . m+ 1 (m, nm)
UF
Figure 4. Comparison of HLF and HLF*.
This content downloaded from 169.229.32.137 on Thu, 8 May 2014 23:24:09 PMAll use subject to JSTOR Terms and Conditions
Scheduling Jobs on Two Parallel Machines 1387
For s - k-r > 1, let
Q(l, r I l + 1, k) = P(J(l) r I J(l + 1) = k)
= P(J*(l) 2 r I J*(l + 1) = k).
The equality holds, by the exponential assumption. Note that Q (1, r j 1 + 1, k) is an increasing function of k. Hence, by the induction hypothesis, for r > 1,
Q*(l, r) = Ek=r q*(l + 1, k)Q(l, r I 1 + 1, k)
> I=r q(l + 1, k)Q(l, r I 1 + 1, k) = Q(l, r)
with Q*(l, 1) = Q(l, 1) = 1. This conclusion completes the proof.
ADDITIONAL REMARKS
(i) We have shown that the makespan under the optimal policy, i.e., under HLF, is distributed independently of the actual intree constraints; it depends only on the distribution at each level, and the number of jobs at each level.
(ii) For more than two machines, the distribution of the makespan under HLF depends on the intree constraints. This property is one of the reasons why HLF does not minimize expected makespan in such cases.
(iii) Consider two systems which both have n jobs that are exponen- tially distributed with mean one. If the first system has at least as many jobs as the second system at or above level 1 for 1 = 0, 1, . .. , s, then the expected makespan under HLF for the first system is more than the makespan for the second system.
(iv) We have shown that not only the expected makespan but the expected completion times of each level are minimized by HLF.
(v) We conjecture that these minimizations are valid in the stochastic sense, and that the expected value of every increasing function of the level completion times is minimized by HLF.
(vi) We conjecture that HLF is optimal among preemptive as well as nonpreemptive strategies if jobs at each level are i.i.d. with DFR distri- butions.
(vii) We conjecture that preemptive HLF, combined with LERPT (longest expected remaining processing time first) within each level, is optimal if jobs at each level are i.i.d. with IFR distributions. The non- preemptive problem, even for deterministic jobs, may be NP hard.
This content downloaded from 169.229.32.137 on Thu, 8 May 2014 23:24:09 PMAll use subject to JSTOR Terms and Conditions
1388 Pinedo and Weiss
REFERENCES
BRUNO, J. 1982. Deterministic and Stochastic Scheduling with Treelike Prece- dence Constraints. Deterministic and Stochastic Scheduling, pp. 367-374, Dempster et al. (eds.). Reidel, Dordrecht, The Netherlands.
CHANDY, K. M., AND P. F. REYNOLDS. 1975. Scheduling Parially Ordered Tasks with Probabilistic Execution Times. Proceedings of the Fifth Symposium on Operating Systems Principles, pp. 169-177.
DOWNEY, P. J. 1982. Discussant's Report on "Scheduling Stochastic Jobs on Parallel Machines" by Richard Weber. Applied Probability in Computer Science: The Interface, pp. 339-344. Disney and Ott (eds.). Birkhauser, Boston.
GAREY, M. R., D. S. JOHNSON, R. E. TARJAN AND M. YANNAKAKIS. 1982. Scheduling Opposing Forests. SIAM J. Alg. Disc. Meth. 4, 72-93.
Hu, T. C. 1961. Parallel Sequencing and Assembly Line Problems. Opns. Res. 9, 841-848.
LAWLER, E. L., J. K. LENSTRA AND A. H. G. RINNOoY KAN. 1982. Recent Developments in Deterministic Sequencing and Scheduling: A Survey. Deter- ministic and Stochastic Scheduling, pp. 35-74, Dempster et al. (eds.). Reidel, Dordrecht, The Netherlands.
This content downloaded from 169.229.32.137 on Thu, 8 May 2014 23:24:09 PMAll use subject to JSTOR Terms and Conditions