Embed Size (px)
Citation preview

European Journal of Operational Research 175 (2006) 769–781
www.elsevier.com/locate/ejor
Discrete Optimization
Scheduling with controllable release dates andprocessing times: Total completion time minimization q
T.C. Edwin Cheng a, Mikhail Y. Kovalyov b, Natalia V. Shakhlevich c,*
a Department of Logistics, The Hong Kong Polytechnic University, Hung Hom, Kowloon, Hong Kongb Faculty of Economics, Belarus State University, and United Institute of Informatics Problems,
National Academy of Sciences of Belarus, Nezavisimosti 4, 220030 Minsk, Belarusc School of Computing, University of Leeds, Leeds LS2 9JT, UK
Received 27 April 2004; accepted 1 June 2005Available online 2 March 2006
Abstract
The single machine scheduling problem with two types of controllable parameters, job processing times and releasedates, is studied. It is assumed that the cost of compressing processing times and release dates from their initial valuesis a linear function of the compression amounts. The objective is to minimize the sum of the total completion time ofthe jobs and the total compression cost. For the problem with equal release date compression costs we construct a reduc-tion to the assignment problem. We demonstrate that if in addition the jobs have equal processing time compression costs,then it can be solved in O(n2) time. The solution algorithm can be considered as a generalization of the algorithm thatminimizes the makespan and total compression cost. The generalized version of the algorithm is also applicable to theproblem with parallel machines and to a range of due-date scheduling problems with controllable processing times.� 2006 Elsevier B.V. All rights reserved.
Keywords: Scheduling; Single machine; Parallel machines; Total completion time; Controllable processing times; Controllable releasedates; Due-date scheduling
1. Introduction
This paper continues the study of the single machine problem with controllable processing times and releasedates started in [3]. In both papers it is assumed that the job processing times and release dates may varywithin certain limits. Compressing any of the two parameters incurs the compression cost that is representedby a linear function of the compression amounts. Such problems arise in manufacturing systems, supply chainscheduling, computing systems that support imprecise computations, computer networks, etc. (see [2,3,7,10,11] for the examples and references).
0377-2217/$ - see front matter � 2006 Elsevier B.V. All rights reserved.
doi:10.1016/j.ejor.2005.06.072
q This research was supported in part by The Hong Kong Polytechnic University under a grant from the Area of Strategic Development
in China Business Services. The research of the second and third authors was additionally supported by INTAS (Project INTAS-96-0820).* Corresponding author. Tel.: +44 113 343 5444; fax: +44 113 343 5468.
E-mail address: [email protected] (N.V. Shakhlevich).

770 T.C.E. Cheng et al. / European Journal of Operational Research 175 (2006) 769–781
In [3] we study the problem of minimizing the makespan together with the compression cost. We constructa reduction to the assignment problem for the case of equal release date compression costs and develop anO(n2) algorithm for the case of equal release date compression costs and equal processing time compressioncosts. For the bicriteria version of the latter problem with agreeable processing times we suggest an O(n2) algo-rithm that constructs the breakpoints of the efficient frontier.
The current paper focuses on the problem of minimizing the sum of the total completion time and the com-pression cost. We adapt the techniques developed in [3] and suggest a generalized algorithm that is applicableto the problem with single machine or parallel machines and to a range of problems with a common due dateand controllable processing times.
The main problem studied in this paper can be formulated as follows. Each job from the set N = {1, . . . ,n}has to be processed on a single machine without preemption. Each job i 2 N is characterized by the twoparameters: release date ri and processing time pi each of which can vary within certain limits:
ri 6 ri 6 �ri;
pi 6 pi 6 �pi.
Compressing the release date of job i from its ‘normal’ (maximum) value �ri by the amount xi ¼ �ri � ri incurs acost aixi. Similarly, compressing the processing time by the amount yi ¼ �pi � pi incurs a cost biyi.
Job i is called crashed, if its processing time is compressed to its minimum value, i.e., if pi = pi, and job i iscalled uncrashed, if it has the maximum processing time, i.e., if pi ¼ �pi. Job i is called partially crashed, ifpi < pi < �pi. We will say that the job is early if it starts before �ri.
The problem with controllable release dates and controllable processing times is defined on the set of fea-sible schedules S ¼ fðx; y; pÞj0 6 xi 6 �xi, 0 6 yi 6 �yi; i 2 Ng, where p is a permutation of the jobs from N. Weassume that the jobs start at their earliest possible times with respect to their release dates �ri � xi and permu-tation p. Given a schedule s 2 S, the job completion times Ci, i = 1, . . . ,n, can easily be determined.
The objective of the problem considered in [3] is to minimize
F maxðx; y; pÞ ¼ Cmaxðx; y; pÞ þ Kðx; yÞ;
where Cmax(x,y,p) = maxi2N{Ci(x,y,p)} is the makespan of the schedule and Kðx; yÞ ¼Pni¼1ðaixi þ biyiÞ is the
compression cost.The objective of the problem considered in this paper is to minimize
F Rðx; y; pÞ ¼X
Ciðx; y; pÞ þ Kðx; yÞ;
whereP
Ciðx; y; pÞ ¼Pn
i¼1Ciðx; y; pÞ is the total completion time.We denote the two problems by Pmax and PR, respectively. Adapting the three-field classification scheme
from [5], problems Pmax and PR are denoted by 1j�ri � xi; �pi � yijF max and 1j�ri � xi; �pi � yijF R.Following the traditional scheduling research for problems with controllable release dates [1,6,8,9,12,15–
17], we make the following assumptions:
ri ¼ r; �ri ¼ �r; i 2 N ð1Þ
and�r � r PXn
i¼1
�pi. ð2Þ
Observe that if (1) does not hold, then both problems Pmax and PR are NP-hard (problem Pmax is studied in[19,21]; problem PR is equivalent to the NP-hard problem of minimizing total weighted earliness and tardinesswith arbitrary due dates). On the other hand, if (2) does not hold, then as shown in [21], problem Pmax is NP-hard and as shown in [15] problem PR is equivalent to the well-known NP-hard problem [13,14] of minimizingtotal earliness and tardiness with restricted common due date. All the results hold even if processing times arefixed (non-controllable).
The paper is organized as follows. Problem PR with ai = a and arbitrary bi is studied in Section 2. Similar toproblem Pmax, it is NP-hard if ai are arbitrary (Section 2.1) and it is reducible to an assignment problem if ai
are equal (Section 2.2).

T.C.E. Cheng et al. / European Journal of Operational Research 175 (2006) 769–781 771
Section 3 starts with the properties of problem PR with arbitrary ai and bi and then considers the specialcase with ai = a and bi = b. We develop Algorithm A 0 that generalizes the O(n2) Algorithm A developedfor problem Pmax in [3]. We show that the time complexity of the generalized algorithm is O(n2) as well.
In Section 4 we demonstrate that Algorithm A 0 can be applied to solve problem PR with parallel machinesand to a range of problems with due-dates and controllable processing times. Finally, the concluding remarksare given in Section 5.
2. Problem PR
In this section, we study problem 1j�r � xi; �pi � yijF R. First we prove that if ai are arbitrary, it is NP-hard.Then we develop an algorithm to solve the problem with ai = a, i = 1, . . . ,n.
2.1. Problem PR with arbitrary ai, bi
Theorem 1. Problem PR is NP-hard even in the case of unrestricted release dates that satisfy (1) and (2).
Observe that if inequality (2) is not satisfied, then NP-hardness of problem PR immediately follows from theNP-hardness of the problem [13,14] of minimizing total earliness–tardiness with a restricted common due date.The latter problem remains NP-hard if the processing times are fixed and bi = b.
Proof. We show that the decision version D of the NP-hard problem 1j�pi � yijPðwiCi þ biyiÞ [22] reduces to
problem PR. Problem D can be formulated as follows: given a set of jobs N 0 = {1, . . . ,k}, their maximum andminimum processing times �p0i and p0i, integers z 0, wi, b0i, i = 1, . . . ,k, determine whether there exists apermutation r of N 0 and compression amounts y0i; 0 6 y0i 6 �p0i � p0i, such that Uðy0; rÞ ¼
Pki¼1ðwiC0i þ b0iy
0iÞ 6
z0; where C0i is the completion time of job i 2 N 0.Given an instance of D, we create an instance of problem PR : n = k, �pi ¼ �p0i; pi ¼ p0i; i ¼ 1; . . . ; n, r ¼ 0;
�r ¼Pn
i¼1�pi, ai ¼ 1� wiW , bi ¼ 1þ b0i�wi
W , i = 1, . . . ,n, where W = max{wiji = 1, . . . ,n}. The threshold value for
F R ¼Pn
i¼1ðCi þ aixi þ biyiÞ is z ¼Pn
i¼1aið�r þ �piÞ þ 1W z0.
Observe that in the instance constructed 0 6 ai < 1, bi > 0, i = 1, . . . ,n, andPn
i¼1ai < n. The latter conditionimplies that there exists an optimal schedule starting at r. Indeed, any schedule s = (x,y,p) that starts after r
can be ‘‘left shifted’’ and FR changes byPh
i¼1apðiÞ � n� �
t < 0 , where p(i) denote the job processed in positioni, h is the number of early jobs in s, and t is a small enough amount such that the number of early jobs does notchange after the left shift.
Consider an arbitrary schedule s = (x,y,p) starting at r. If compression amounts x, y satisfy 0 6 xi 6 �r � r,0 6 yi 6 �pi � pi, i = 1, . . . ,n, then the following relation holds:
F Rðx; y; pÞ ¼Xn
i¼1
ðCpðiÞ þ apðiÞxpðiÞ þ bpðiÞypðiÞÞ ¼Xn
i¼1
ðCpðiÞ þ apðiÞð�r � CpðiÞ þ �ppðiÞ � ypðiÞÞ þ bpðiÞypðiÞÞ
¼Xn
i¼1
aið�r þ �piÞ þXn
i¼1
ðð1� apðiÞÞCpðiÞ þ ðbpðiÞ � apðiÞÞypðiÞÞ
¼Xn
i¼1
aið�r þ �piÞ þXn
i¼1
wpðiÞ
WCpðiÞ þ 1þ
b0pðiÞ � wpðiÞ
W� apðiÞ
!ypðiÞ
!
¼Xn
i¼1
aið�r þ �piÞ þXn
i¼1
wpðiÞ
WCpðiÞ þ 1� apðiÞ �
wpðiÞ
W
� �þ
b0pðiÞW
!ypðiÞ
!
¼Xn
i¼1
aið�r þ �piÞ þ1
W
Xn
i¼1
ðwpðiÞCpðiÞ þ b0pðiÞypðiÞÞ ¼Xn
i¼1
aið�r þ �piÞ þ1
W
Xn
i¼1
ðwrðiÞC0rðiÞ þ b0rðiÞy
0rðiÞÞ
¼ z;
where r(i) = p(i), C0rðiÞ ¼ CpðiÞ, y0rðiÞ ¼ ypðiÞ, i = 1, . . . ,k.

772 T.C.E. Cheng et al. / European Journal of Operational Research 175 (2006) 769–781
It follows that
(a) if the instance of D does not have a solution, then for each r and y 0 satisfying 0 6 y0i 6 �p0i � p0i,i = 1, . . . ,k, we have U(y 0,r) > z 0, and therefore, for each p and x, y satisfying 0 6 xi 6 �r � r,0 6 yi 6 �pi � pi, i = 1, . . . ,n, we have FR(x,y,p) > z;
(b) if the instance of D has a solution (y 0,r), i.e., U(y 0,r) 6 z 0, then we can determine an optimal schedule(x,y,p) for instance of PR by setting pðiÞ ¼ rðiÞ; xpðiÞ ¼ �r � C0rðiÞ þ �prðiÞ � yrðiÞ; ypðiÞ ¼ y 0rðiÞ,i = 1, . . . ,n � 1, such that FR(x,y,p) 6 z. h
2.2. Problem PR with ai = a and arbitrary bi
In this section we reduce problem PR to an assignment problem. We start with formulating the properties ofan optimal schedule for problem PR. Observe that the proofs are similar to those presented in [3] for problemPmax.
Let us say that a job straddles the release date �r if it starts before and completes after time �r.
Statement 1. There exists an optimal schedule for problem PR with no straddling job.
Statement 2. There exists an optimal schedule for problem PR with no partially crashed jobs.
The statement is proved by demonstrating that either crashing or uncrashing of a partially crashed job leadsto a decrease in the objective function value.
Statement 3. There exists an optimal schedule for problem PR with
h ¼ minna
j k; n
n oð3Þ
early jobs. If a P 1, then the job in position h + 1 starts exactly at time �r. Otherwise an optimal schedule startsat time r.
The proof is based on left-shifting or right-shifting the whole schedule in accordance with (3) and verifyingthat for such a transformation the value of the objective function decreases.
We can formulate now the reduction of problem PR to an assignment problem.
Theorem 2. Problem PR is solvable in O(n3) time by a reduction to an assignment problem.
Proof. Consider first the case a P 1. Due to Statement 3, in an optimal schedule there are h early jobs and thejob in position h + 1 starts exactly at time �r. If the values yi, i = 1, . . . ,n, and the job sequence p are given, thenthe starting time of the schedule is equal to �r �
Phj¼1ð�ppðjÞ � ypðjÞÞ and the two components of the objective
function FR are given by the formulas:
Xn
i¼1
Ci ¼ n �r �Xh
j¼1
ð�ppðjÞ � ypðjÞÞ !
þXn
j¼1
ðn� jþ 1Þð�ppðjÞ � ypðjÞÞ;
Kðx; yÞ ¼Xh
j¼1
ajð�ppðjÞ � ypðjÞÞ þXn
j¼1
bpðjÞypðjÞ.
Using these expressions, we determine FR:
F Rðx; y; pÞ ¼ n�r þXh
j¼1
ððaj� jþ 1Þ�ppðjÞ þ ðbpðjÞ � ajþ j� 1ÞypðjÞÞ
þXn
j¼hþ1
ððn� jþ 1Þ�ppðjÞ þ ðbpðjÞ � nþ j� 1ÞypðjÞÞ. ð4Þ

T.C.E. Cheng et al. / European Journal of Operational Research 175 (2006) 769–781 773
The cost of assigning job i to position j does not depend on the assignment of the remaining jobs. FunctionFR(x,y,p) achieves its minimum with respect to y for
ypðjÞ ¼
�ypðjÞ; if j 6 h and bpðjÞ � ajþ j� 1 < 0;
0; if j 6 h and bpðjÞ � ajþ j� 1 P 0;
�ypðjÞ; if j > h and bpðjÞ � nþ j� 1 < 0;
0; if j > h and bpðjÞ � nþ j� 1 P 0.
8>>><>>>:
ð5Þ
Hence, problem PR can be formulated as an assignment problem with cost ,ij for assigning job i to positionj given by
,ij ¼ðaj� jþ 1Þ�pi þminfðbi � ajþ j� 1Þ�yi; 0g for 1 6 j 6 h;
ðn� jþ 1Þ�pi þminfðbi � nþ j� 1Þ�yi; 0g for hþ 1 6 j 6 n.
�
Consider now the case a < 1. In accordance with Statement 3, in an optimal schedule all jobs are early andthe schedule starts at time r. If the values yi, i = 1, . . . ,n, and the job sequence p are given, then the release dateof the first job p(1) is compressed by xpð1Þ ¼ �r � r and the compression amounts for the release dates of allother jobs are given by xpðiÞ ¼ ð�r � rÞ �
Pi�1j¼1ð�ppðjÞ � ypðjÞÞ, i = 1, . . . ,h. The components of the objective func-
tion FR can be determined as follows:
Xn
i¼1
Ci ¼ nr þXn
j¼1
ðn� jþ 1Þð�ppðjÞ � ypðjÞÞ;
Kðx; yÞ ¼ a nð�r � rÞ �Xn
j¼1
ðn� jÞð�ppðjÞ � ypðjÞÞ" #
þXn
j¼1
bpðjÞypðjÞ.
Using these expressions, we determine FR:
F Rðx; y; pÞ ¼ nr þ anð�r � rÞ þXn
j¼1
ððn� jþ 1Þ � aðn� jÞÞ�ppðjÞ
þXn
j¼1
ðbpðjÞ � ðn� jþ 1Þ þ aðn� jÞÞypðjÞ. ð6Þ
The cost of assigning job i to position j does not depend on the job sequence. Function FR(x,y,p) achievesits minimum with respect to y for
ypðjÞ ¼�ypðjÞ; if bpðjÞ � ðn� jþ 1Þ þ aðn� jÞ < 0;
0; otherwise
�ð7Þ
and problem PR can be formulated as an assignment problem with cost ,ij for assigning job i to position j
given by
,ij ¼ ððn� jþ 1Þ � aðn� jÞÞ�pi þminfðbi � ðn� jþ 1Þ þ aðn� jÞÞ�yi; 0g. �
3. Problem PR with ai = a and bi = b
We start this section with characterizing the structure of an optimal schedule if ai = a and bi = b,i = 1, . . . ,n. Minimizing function FR(x,y,p) given by (4) or (6) is equivalent to minimizing functionF(p1, . . . ,pn) represented as the sum of two components depending on actual processing times pi ¼ �pi � yi ofthe jobs:
F ðp1; . . . ; pnÞ ¼Xn
q¼1
kqppðqÞ þXn
i¼1
bð�pi � piÞ. ð8Þ
Here kq are constants defining the positional penalty for assigning a job to position q.

774 T.C.E. Cheng et al. / European Journal of Operational Research 175 (2006) 769–781
It follows from (4) and (6) that
kq ¼minfaq� qþ 1; n� qþ 1g; if a P 1;
ðn� qþ 1Þ � aðn� qÞ; otherwise.
�ð9Þ
Observe that positional penalties kq for problem PR are similar to those for problem Pmax (see [3]):
kqðP maxÞ ¼minfaq; 1g; if an > 1;
1� aðn� qÞ; otherwise.
�ð10Þ
However, the relation k1 6 k2 6 � � � 6 kn that is valid for problem Pmax does not hold for problem PR.For problem PR we have:
k1 6 k2 6 � � � 6 kh and khþ1 P khþ2 P � � �P kn; if a P 1; ðhere h ¼ bn=acÞk1 P k2 P � � �P kn; otherwise.
ð11Þ
If the processing times of the jobs are fixed, then the second component of function F is constant and thefirst component is minimized by matching the largest processing time with the smallest penalty, the next larg-est processing time pi with the next smallest kk, and so on. The following statement formalizes the rule forfinding the optimal job sequence.
Statement 4. The optimal job sequence for the fixed job processing times ~pi, pi 6 ~pi 6 �pi, i = 1,2, . . . ,n, isdetermined by finding two sequences
~pgð1Þ P ~pgð2Þ P � � �P ~pgðnÞ ð12Þ
and
kq16 kq2
6 � � � 6 kqnð13Þ
and placing the ‘th largest job g(‘) with processing time ~pgð‘Þ in position q‘, ‘ = 1, . . . ,n. The objective functionvalue can be calculated as
F ðp1; . . . ; pnÞ ¼Xn
‘¼1
kq‘pgð‘Þ þXn
i¼1
bið�pi � piÞ. ð14Þ
We consider various combinations of parameters a and b and describe the structure of an optimal schedule.
Case a > n. An optimal schedule starts at �r (Statement 3). It follows from (5) that
• if b < 1, then all jobs are crashed;• if b P n, then all jobs are uncrashed;• if 1 6 b < n, then the first n � bbc jobs are crashed and the remaining h1 jobs are uncrashed, where
h1 ¼ bbc.
Case a = n. According to Statement 3, one job is early. Since right shifting does not change the objectivefunction value, we can consider an optimal schedule that starts at �r. The compressions of the jobs are deter-mined as in the previous case.
Case 1 6 a < n. The number of early job is given by h ¼ na
� �(Statement 3). It follows from (5) that
• if b�1a�1
� �P n
a
� �, then all early jobs are uncrashed; otherwise the jobs processed in positions 1; . . . ; b�1
a�1
� �are
uncrashed and the remaining early jobs are crashed;• if n� bbc 6 n
a
� �, then all jobs processed in positions h + 1, . . . ,n are uncrashed; otherwise the jobs processed
in positions h + 1, . . . ,n � bbc are crashed, and the last jobs processed in positions n � bbc + 1, . . . ,n areuncrashed.
• The total number of uncrashed jobs is given by
h2 ¼ minb� 1
a� 1
� �;
na
j k� þmin n� n
a
j k; bbc
n o.

T.C.E. Cheng et al. / European Journal of Operational Research 175 (2006) 769–781 775
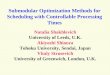
The corresponding schedule is illustrated in Fig. 1a.
Case a 6 1. All jobs are early and start at r (Statement 3). It follows from (7) that
• if b < 1, then all jobs are crashed;
• if b�11�a
� �P n� 1, then all jobs are uncrashed;
• if b�11�a
� �< n� 1, then the jobs processed in positions 1; . . . ; n� 1� b�1
1�a
� �are crashed and the remaining jobs
are uncrashed. The total number of uncrashed jobs is given by
h3 ¼b� 1
1� a
� �þ 1.
The corresponding schedule is illustrated in Fig. 1b.
Our objective is to find h jobs (h = h1, h2 or h3 depending on values of a and b) that are uncrashed inan optimal schedule; an optimal job sequence is constructed afterwards in accordance with Statements 3and 4. As we will show, h uncrashed jobs can be determined in O(n2) time by an algorithm similar toAlgorithm A developed for problem Pmax in [3]. Recall that Algorithm A performs a chain of transi-tions s�0 ! s�1 ! � � � ! s�h in such a way that in every iteration g = 0,1, . . . ,h, schedule s�g is optimal in theclass of schedules Sg with h early jobs, g of which are uncrashed. Each time the algorithm selects a job tobe uncrashed next, so that the decrease in the objective function value is maximal. A global optimal scheduleis given by s�h.
For both problems Pmax and PR, the objective function value is calculated in accordance with essentially thesame formula (8). For problem Pmax, positional penalties kq(Pmax) are given by (10) and the number of earlyjobs is given by
hðP maxÞ ¼ min1
a
� �; n
� . ð15Þ
For problem PR, penalties kq are given by (9) and h is given by (3).
Fig. 1. The structure of an optimal schedule for problem PR if (a) 1 6 a < n, b�1a�1
� �6
na
� �6 n and (b) a < 1, b�1
1�a
� �< n� 1.

776 T.C.E. Cheng et al. / European Journal of Operational Research 175 (2006) 769–781
Consider Problem PR. Calculating FR in accordance with Statement 4 requires maintaining an auxiliary jobpermutation g = (g(1),g(2), . . . ,g(n)) with the jobs sequenced in non-increasing order of their actual processingtimes.
Suppose in iteration g the job permutation gg has been determined:
pggð1Þ P pggð2Þ P � � �P pggðnÞ.
If in iteration g + 1 job j is being decompressed, then permutation gg+1 is obtained from permutation gg byresequencing job j. Observe that there is no need to consider the corresponding schedules s�g and s�gþ1; onlythe last schedule s�h should be constructed applying Statements 3 and 4 to the job permutation gh. Thus insteadof transitions s�g ! s�gþ1 performed by Algorithm A, we can perform transitions gg! gg+1 without construct-ing the corresponding schedules s�g except for the last iteration h.
To perform transition gg! gg+1, one job should be uncrashed and it is selected in a greedy way ensuringthe largest decrease in the value of F. If permutation gg+1 is obtained from gg by inserting uncrashed job j in-between two subsets of jobs Z1 and Z2:
gg ¼ ðgðZ1Þ; gðZ2Þ; j; gðZ3ÞÞ; ðjob j is crashed),
ggþ1 ¼ ðgðZ1Þ; j; gðZ2Þ; gðZ3ÞÞ; ðjob j is uncrashedÞ;
then the change in the value of F is determined as
DF j ¼ kqz1þ1�pj � kqz1þz2þ1
pj � bð�pj � pjÞ þXm2Z2
ðkqmþ1� kqm
ÞpgðmÞ; ð16Þ
where z1 = jZ1j, z2 = jZ2j and kq16 kq2
6 � � � 6 kqnare calculated by (9).
The formal description of the algorithm is given below.
Algorithm A 0
1. Crash all jobs to pi, i = 1, . . . ,n. Renumber the jobs in accordance with p1 P p1 P � � � P pn.Determine the initial job sequence g0 = (1,2, . . . ,n). Determine sequence (q1, . . . ,qn) suchthat kq1
6 kq26 � � � 6 kqn
.2. FOR g = 0 TO h � 1 (h = h1, h = h2 or h = h3 depending on values of a and b)3. For every crashed job j calculate DFj by formula (16).4. Select job i with the minimum value DFi.5. Perform transition gg! gg+1 by uncrashing job i and resequencing it maintaining
the non-increasing order of actual processing times.
6. END FOR
7. Construct schedule s�h by applying Statements 3 and 4 to actual processing times
found in the last iteration for job sequence gh.
The following lemma proved in [3] for problem Pmax holds for problem PR as well.
Lemma 1. Let �pi 6 �pj and pi 6 pj, and at least one of the inequalities is strict. Then in class Sg there does not
exist an optimal schedule s�g with job i uncrashed and job j crashed.
The proof of the lemma repeats the proof from [3] with the expressions for DF modified accordingly.The correctness of Algorithm A 0 for problem PR is established in the following theorem.
Theorem 3. If permutation gg specifies schedule s�g optimal in class Sg, then permutation gg+1 constructed by
Algorithm A 0 specifies schedule s�gþ1 that is optimal in class S�gþ1.
To prove the theorem we can use the same arguments as in the proof of Theorem 2 from [3] replacing kj bykqj
, s�g by gg, s�gþ1 by gg+1.
The time complexity of Algorithm A 0 is O(n2) and it is the same as that of Algorithm A.

T.C.E. Cheng et al. / European Journal of Operational Research 175 (2006) 769–781 777
Finally, if all jobs have agreeable processing times, i.e., when the jobs can be numbered such that
�p1 P �p2 P � � �P �pn and p1 P p2 P � � �P pn; ð17Þ
then Algorithm A 0 determines the next job to be uncrashed without invoking steps 3–4. By Lemma 1, job i tobe uncrashed in Step 5 has the largest processing time among the set of crashed jobs. Thus for agreeable pro-cessing times the time complexity of Algorithm A 0 reduces to O(n logn).4. Further applications of Algorithm A 0
In the previous section we have demonstrated that Algorithm A developed for problem Pmax in [3] can bemodified to solve problem PR. In this section we analyze the main features of problems Pmax and PR that allowapplication of Algorithm A and its generalized version A 0. Then we list some known problems with control-lable processing times that satisfy the requirements of Algorithm A 0 and thus can be solved in O(n2) time.
Algorithm A constructs schedules s�0 ! s�1 ! � � � ! s�h in such a way that in each iteration g = 0,1, . . . ,h � 1,actual job processing times pp(i) and penalties kq are ordered in accordance with the following two relations:
ppð1Þ P ppð2Þ P � � �P ppðnÞ;
k1 6 k2 6 � � � 6 kn.
These relations are essentially used in the proof of the correctness of Algorithm A, while the actual formulasfor kq are not used.
The modified Algorithm A 0 constructs job sequences g0! g1! � � � ! gh in such a way that in each itera-tion g = 0,1, . . . ,h � 1, actual job processing times pggð‘Þ and penalties kq‘ are ordered in accordance with thefollowing relations:
pggð1Þ P pggð2Þ P � � �P pggðnÞ;
kq16 kq2
6 � � � 6 kqn.
A global optimal schedule s�h is obtained from a final job permutation gh by applying Statements 3 and 4.For both algorithms, each transition s�g ! s�gþ1 and gg! gg+1 is performed by decompressing a job that
provides the maximum decrease in the value of the objective function.It follows, that the greedy approach of selecting the next decompressible job can be applied to other prob-
lems with controllable job processing times if the following conditions are satisfied:
(i) the objective function allows representation (8) with the first component being the linear formPn‘¼1kq‘pgð‘Þ of actual processing times pg(‘) and positional penalties kq‘ and another one representing
the processing time compression costPn
i¼1bð�pi � piÞ;(ii) Lemma 1 holds;
(iii) the processing time compression costs are equal for all jobs (bi = b, i = 1, . . . ,n).
If condition (i) is satisfied, then the corresponding problem with fixed crashed processing times ~pi can beeasily solved in O(n logn) time by matching the largest processing time ~pi with the smallest penalty kq, the nextlargest ~pi with the next smallest kq, and so on. If conditions (ii)–(iii) are satisfied, then Theorem 3 is valid, andan optimal schedule can be constructed by uncrashing the jobs one by one ensuring the largest decrease in thevalue of F. The algorithm stops if decompressing the remaining crashed jobs does not decrease the objectivefunction value.
In what follows we discuss how Algorithm A 0 can be applied to solve problems P j�r � xi; �pi � yijF R andQj�r � xi; �pi � yijF R with parallel machines, controllable release dates and processing times (Section 4.1) andto some problems with due dates and controllable processing times (Section 4.2).
4.1. Problem PR with parallel machines
In this section we study problem PR when there are m parallel machines and each job can be processed byany machine M1,M2, . . ., or Mm. We first consider problem P j�r � xi; �pi � yijF R with identical parallel machines.

778 T.C.E. Cheng et al. / European Journal of Operational Research 175 (2006) 769–781
In this problem the processing time of job i does not depend on the machine and it is given by pi, pi 6 pi 6 �pi.Then we generalize the results for the problem with uniform parallel machines Qj�r � xi; �pi � yijF R. In thisproblem, the machines have different speeds sk, k = 1, . . . ,m, and execution of job i with processing require-ment pi on machine k requires pi/sk time.
Using the same arguments as in Section 2 it is easy to verify that the following statements hold for problemsP j�r � xi; �pi � yijF R and Qj�r � xi; �pi � yijF R:
• there exists an optimal schedule without straddling jobs on every machine;• there exists an optimal schedule without partially crashed jobs;• Lemma 1 holds,• if a P 1, then any machine Mk, 1 6 k 6 m, processes nk 6 n jobs assigned to it as represented in Fig. 1a; if
a < 1, then all machines start processing the jobs at time r and any machine Mk processes nk 6 n jobsassigned to it as represented in Fig. 1b.
It follows that for problem P j�r � xi; �pi � yijF R function FR allows representation similar to (8):
F ðp1; . . . ; pnÞ ¼Xm
k¼1
Xnk
q¼1
kq;kpgðqÞ þXn
i¼1
bið�pi � piÞ; ð18Þ
where kq,k is the positional penalty for assigning a job to position q on machine Mk, and nk is the number ofjobs processed by machine Mk.
The formula for kq,k is similar to the formula for kq derived in Section 3:
kq;k ¼minfaq� qþ 1; nk � qþ 1g; if a P 1;
ðnk � qþ 1Þ � aðnk � qÞ; otherwise.
�
As in the case of problem PR, if the processing times of the jobs are fixed, then function F is minimized bymatching the largest processing time with the smallest penalty, the next largest processing time pi with the nextsmallest kk, and so on. It means that in order to find the optimum job permutation, we should find n smallestkq,k from the set of 2nm possible positional penalties
ð19Þ
or from the set of nm possible penalties
1; . . . ; 1; 2� a; . . . ; 2� a; . . . ; n� aðn� 1Þ; . . . ; n� aðn� 1Þf g; if a < 1; ð20Þ
where each penalty kq,k is repeated m times for k = 1, . . . ,m.Observe that finding n smallest kq,k can be done in O(n logn) time without calculating all 2nm or nm values.If kq,k are given by (19), then it is enough to calculate the first n penalties of each of the two types and thenselect the n smallest numbers using a priority queue. If kq,k are given by (20), the n smallest numbers are thefirst n numbers and they can be calculated in O(n) time.
Thus representation (18) of the objective function FR can be reduced to (8), and hence problemP j�r � xi; �pi � yijF R can be solved by Algorithm A 0 in O(n2) time.
Consider now problem Qj�r � xi; �pi � yijF R. It is easy to verify that formulas (19) and (20) should be replacedby
and
1
s1
;1
s2
; . . . ;1
sm;
2� as1
;2� a
s2
; . . . ;2� a
sm; . . . ;
n� aðn� 1Þs1
;n� aðn� 1Þ
s2
; . . . ;n� aðn� 1Þ
sm
� ; if a < 1;
respectively.

T.C.E. Cheng et al. / European Journal of Operational Research 175 (2006) 769–781 779
Renumbering machines in accordance with s1 P s2 P � � �P sm allows finding the n smallest penalties fromthe sets above in O(n logn) time without calculating all 2nm or nm values. Thus Algorithm A 0 is applicable tosolve problem Qj�r � xi; �pi � yijF R as well.
4.2. Due-date scheduling
In this section we consider due-date scheduling problems with controllable processing times. The problemslisted in the table below can be reduced to an assignment problem and thus they are solvable in O(n3) time (see[4,18,20]).
In the first problem, the due dates are equal for all jobs and the common due date d is given, d PPn
i¼1�pi.The objective is to minimize total weighted earliness and tardiness
Pni¼1ðw1Ei þ w2T iÞ together with the pro-
cessing time compression costPn
i¼1biyi, where
TableDue-d
Proble
1j�pi �ðgive
1j�pi �ðcom
1j�pi �ðslac
1j�pi �ðd acom
Ei ¼ maxfdi � Ci; 0g is the earliness of job i;
T i ¼ maxfCi � di; 0g is the tardiness of job i.
In the second problem, common due date d is a decision variable, and the due-date assignment cost w3d
is included in the objective function.In the third problem, each job has a due date equal to its processing time plus a given slack K. Since the
processing times can vary within ½pi; �pi�, the due dates can vary as well affecting the due-date assignment costPni¼1w3di.
Finally, in the last problem a common due window [d,d + D] should be selected for all jobs in order to mini-mize total earliness
Pni¼1w1Ei of the jobs completed before d and the tardiness
Pni¼1w2T i of the jobs completed
after d + D together with the costs w3d and w4D of assigning the due date d and the window length D. In thiscase, earliness and tardiness of job i are calculated in accordance with the formulas:
Ei ¼ max d � Ci; 0f g;T i ¼ max Ci � d þ Dð Þ; 0f g.
As shown in [4,18,20], each of the four problems can be reduced to an assignment problem. One can verifythat if all jobs have equal compression cost bi = b, the objective function allows representation (8) with posi-tional penalties kq given in the last column of Table 1. Moreover, Lemma 1 holds and thus Algorithm A 0 canbe applied.
Observe that if in addition to condition bi = b the processing times are agreeable, then each of the problemscan be solved in O(n logn) time: by Lemma 1, the next job to be uncrashed has the largest processing timeamong those crashed.
1ate scheduling with controllable processing times
m Arbitrary bi bi = b
yi; di ¼ djPðw1Ei þ w2T iÞ þ
Pbiyi
n common due date d PPn
i¼1�piÞO(n3) [20] O(n2) Algorithm A 0
kq = min{w1(q � 1),w2(n � q + 1)}
yi; di ¼ djPðw1Ei þ w2T i þ w3dÞ þ
Pbiyi
mon due date d is a deicision variableÞO(n3) [4] O(n2) Algorithm A 0
kq = min{w1(q � 1) + w3n,w2(n � q + 1)}
yi; di ¼ ð�pi � yiÞ þ KjPðw1Ei þ w2T i þ w3diÞ þ
Pbiyi
k K is a given parameterÞO(n3) [4] O(n2) Algorithm A 0
kq = min{w1q + w3(n + 1),w2(n � q) + w3}
yi; di ¼ djPðw1Ei þ w2T i þ w3d þ w4DÞ þ
Pbiyi
nd D are decision variables that define amon due window ½d; d þ D�Þ
O(n3) [18] O(n2) Algorithm A 0
kq = min{w1(q � 1) + w3n,w2(n � q + 1) + w3,w4n}

Table 2Minimizing
PCi and the compression cost
Problem Arbitrary bi bi = b
1j�r � xi; �pi � yijPðCi þ aixi þ biyiÞ NP-hard Section 2.1 Open
1j�r � xi; �pi � yijPðCi þ axi þ biyiÞ O(n3) Section 2.2 O(n2) Section 3
O(n logn) If pi are agreeable
Qj�r � xi; �pi � yijPðCi þ axi þ biyiÞ O(n3) Section 4.1 O(n2) Section 4.1
780 T.C.E. Cheng et al. / European Journal of Operational Research 175 (2006) 769–781
5. Conclusions
This paper demonstrates how the approach suggested in [3] for the problem with controllable processingtimes and release dates can be adapted to solve a range of problems with other objective functions and pro-cessing environments. The results obtained for the due-date scheduling problems are summarized in Table 1(see Section 4.2). The results obtained for the problem of minimizing the sum of the total completion time andthe compression cost are summarized in Table 2.
It should be noted that while the generalized version A 0 of Algorithm A from [3] is more complicated, theparallel machine problem with FR objective function is polynomially solvable (see Section 4.1). However, asimilar parallel machine problem with the makespan objective is NP-hard (see [3]).
An interesting topic for further research is establishing the computational complexity of problem PR forarbitrary ai and bi = b. Observe that if the processing times are fixed, then the problem is equivalent to prob-lem 1jdj
PðwiEi þ T iÞ of minimizing the weighted total earliness Ei = max{d � Ci, 0} and total tardiness
Ti = max{Ci � d, 0} with unrestricted common due-date d. The complexity status of the latter problem isunknown.
Acknowledgement
The authors are grateful to three anonymous referees for their suggestions and additional references.
References
[1] T.C.E. Cheng, A. Janiak, Resource optimal control in some single-machine scheduling problems, IEEE Transactions on AutomaticControl 39 (1994) 1243–1246.
[2] T.C.E. Cheng, A. Janiak, M.Y. Kovalyov, Bicriterion single-machine scheduling with resource dependent processing times, SIAMJournal on Optimization 8 (1998) 617–630.
[3] T.C.E. Cheng, M.Y. Kovalyov, N.V. Shakhlevich, Scheduling with controllable release dates and processing times: Makespanminimization, European Journal of Operational Research, this issue, doi:10.1016/j.ejor.2005.06.021.
[4] T.C.E. Cheng, C. Oguz, X.D. Qi, Due-date assignment and single machine scheduling with compressible processing times,International Journal of Production Economics 43 (1996) 107–113.
[5] R.L. Graham, E.L. Lawler, J.K. Lenstra, A.H.G. Rinnooy Kan, Optimization and approximation in deterministic sequencing andscheduling: A survey, Annals of Discrete Mathematics 5 (1979) 287–326.
[6] A. Janiak, Time-optimal control in a single machine problem with resource constraints, Automatica 22 (1986) 745–747.[7] A. Janiak, Scheduling independent one-processor tasks with linear models of release dates under a given maximum schedule length to
minimize resource consumption, Journal of System Analysis—Modelling—Simulation 7 (1990) 885–890.[8] A. Janiak, Single machine scheduling problem with a common deadline and resource dependent release dates, European Journal of
Operational Research 53 (1991) 317–325.[9] A. Janiak, Single machine sequencing with linear models of release dates, Naval Research Logistics 45 (1998) 99–113.
[10] A. Janiak, Minimization of the makespan in a two-machine problem under given resource constraints, European Journal ofOperational Research 107 (1998) 325–357.
[11] A. Janiak, M.Y. Kovalyov, Single machine scheduling subject to deadlines and resource dependent processing times, EuropeanJournal of Operational Research 94 (1996) 284–291.
[12] A. Janiak, C.L. Li, Scheduling to minimize the total weighted completion time with a constraint on the release time resourceconsumption, Mathematical and Computer Modelling 20 (1994) 53–58.
[13] N.G. Hall, W. Kubiak, S.P. Sethi, Earliness–tardiness scheduling problems, II: Deviation of completion times about a restrictivecommon due date, Operations Research 39 (1991) 847–856.

T.C.E. Cheng et al. / European Journal of Operational Research 175 (2006) 769–781 781
[14] J.A. Hoogeveen, S.L. van de Velde, Scheduling around a small common due date, European Journal of Operational Research 55(1991) 237–242.
[15] C.L. Li, Scheduling with resource-dependent release dates—a comparison of two different resource consumption functions, NavalResearch Logistics 41 (1994) 807–819.
[16] C.L. Li, Scheduling to minimize the total resource consumption with a constraint on the sum of completion times, European Journalof Operational Research 80 (1995) 381–388.
[17] C.L. Li, E.C. Sewell, T.C.E. Cheng, Scheduling to minimize release-time resource consumption and tardiness penalties, NavalResearch Logistics 42 (1995) 949–966.
[18] S.D. Liman, S.S. Panwalkar, S. Thongmee, A single machine scheduling problem with common due window and controllableprocessing times, Annals of Operations Research 70 (1997) 145–154.
[19] E. Nowicki, S. Zdrzalka, A survey of results for sequencing problems with controllable processing times, Discrete AppliedMathematics 26 (1990) 271–287.
[20] S.S. Panwalkar, R. Rajagopalan, Single-machine sequencing with controllable processing times, European Journal of OperationalResearch 59 (1992) 298–302.
[21] N.V. Shakhlevich, V.A. Strusevich, Single machine scheduling with controllable release and processing parameters, Discrete AppliedMathematics, in press.
[22] G. Wan, B.P.C. Yen, C.L. Li, Single machine scheduling to minimize total compression plus weighted flow cost is NP-hard,Information Processing Letters 79 (2001) 273–280.