Embed Size (px)
Citation preview
SCIENTIFIC VISUALIZATION
Lecture 3 part 1
Scientific Visualization GroupVisual Information Technology and ApplicationsLinköping University
CONTENTS
• Color mapping
• Contouring
– Marching Cubes in detail
– Effective searching
– Other algorithms
• Scalar generationInsight!
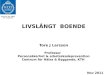
VISUALIZATION
RenderingArchive
Experiment
Computation
Computer-representation
Transformation
Image control
Process steering
Computational steering
TRANSFORMATIONS
• Structure
– Effects that the transformation has on the topology and geometry of the dataset
• Type
– The kind of data set the transformation is operating on
STRUCTURAL CLASSIFICATION
• Geometric transformations
– Alter input geometry but not topology
• Topological transformations
– Alter topology but not geometry and attribute
• Attribute transformations
– Converts attribute data or creates new attributes
• Combined transformations
– Changes both dataset structure and attributes
TYPE CLASSIFICATION
•Scalar algorithms
•Vector algorithms
•Tensor algorithms
•Modelling algorithms
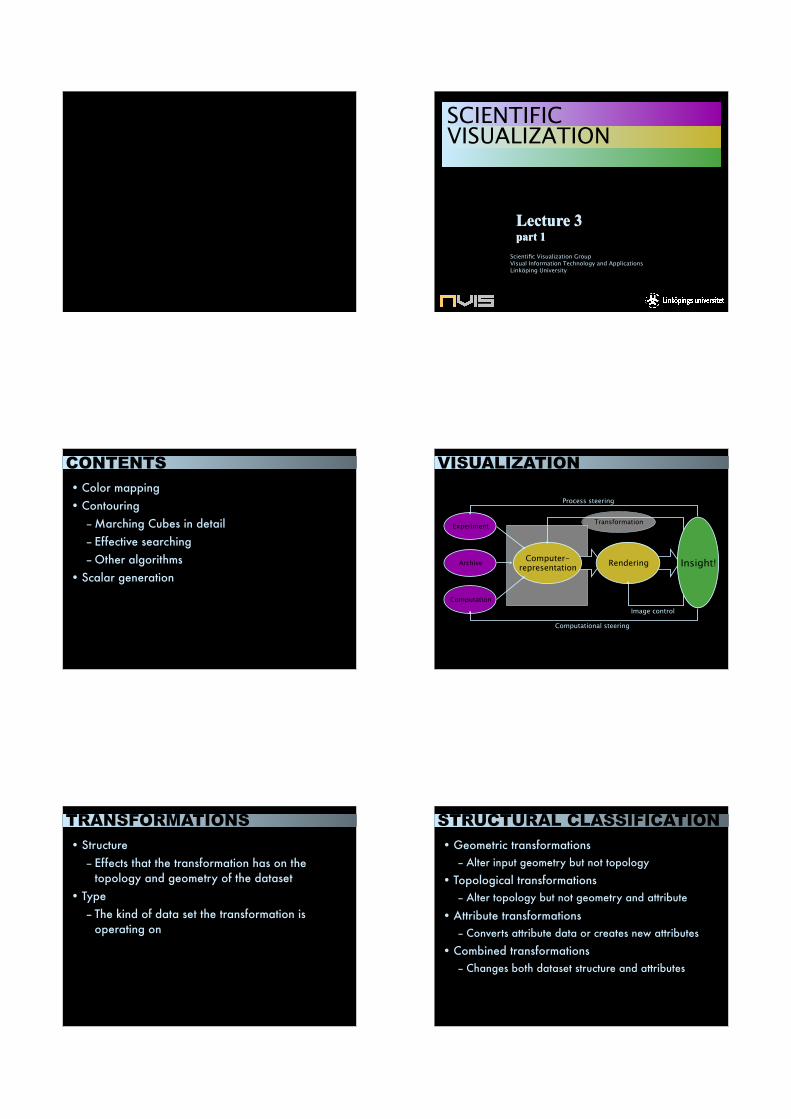
COLOR MAPPPING
• Maps the scalar to a color (1D technique)
• Implemented using lookup tables indexed with the scalar value
• Lookup table specifies RGB or HSVA components
TRANSFER FUNCTIONS
• Instead of using a lookup table we could specify a “transfer function” mapping scalar values to RGB components
Red
value
I
Green
value
I
Blue
value
I
A VTK LOOKUP TABLE
• Insert values in table to enhance features
• Make sure you know the difference between colormaps and actorproperties
VtkLookupTable *lut=vtkLookupTable::New(); lut->SetHueRange(0.6667, 0.0); lut->SetSaturationRange(1.0, 1.0); lut->SetValueRange(1.0, 1.0) lut->SetNumberOfColors(256) lut->Build();
vtkPolyDataMapper *mapper=vtkPolyDataMapper::New();
mapper->SetLookupTable(lut); mapper->SetScalarRange(min,max)
COLOR MAPPING
See VTK book page 153!
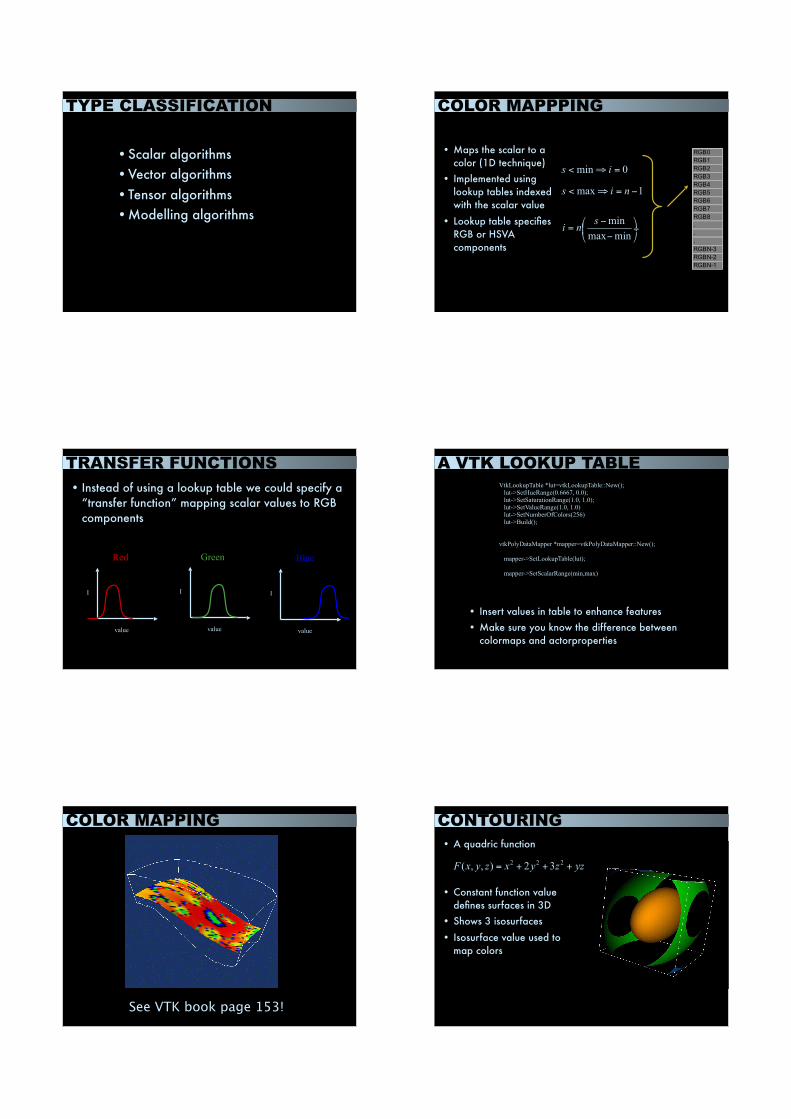
CONTOURING
• A quadric function
• Constant function value defines surfaces in 3D
• Shows 3 isosurfaces
• Isosurface value used to map colors
CONTOURING
• Gives contours in 2D
• Gives iso-surfaces in 3D
• Several different methods exists
– We will deal with two for iso-surfaces
•Marching Cubes (Lorensen & Cline 1987)
•Surface reconstruction from planar contours (Fuchs et al 1977)
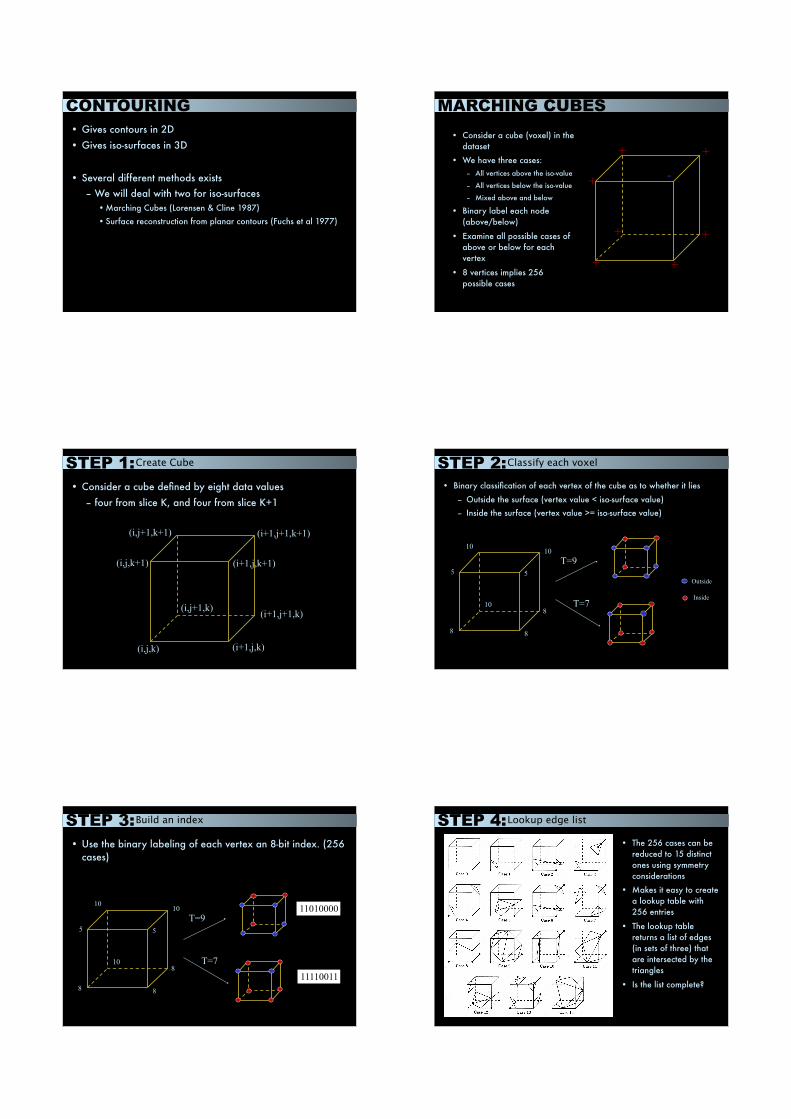
MARCHING CUBES
• Consider a cube (voxel) in the dataset
• We have three cases:
– All vertices above the iso-value
– All vertices below the iso-value
– Mixed above and below
• Binary label each node (above/below)
• Examine all possible cases of above or below for each vertex
• 8 vertices implies 256 possible cases
+
+
+
+
+ +
+
-
STEP 1:
• Consider a cube defined by eight data values
– four from slice K, and four from slice K+1
(i,j,k)
(i,j+1,k+1)
(i+1,j,k)
(i,j,k+1)
(i,j+1,k)(i+1,j+1,k)
(i+1,j+1,k+1)
(i+1,j,k+1)
Create Cube STEP 2:
• Binary classification of each vertex of the cube as to whether it lies
– Outside the surface (vertex value < iso-surface value)
– Inside the surface (vertex value >= iso-surface value)
8
10
8
5
108
10
5
T=9
T=7
Outside
Inside
Classify each voxel
STEP 3:
• Use the binary labeling of each vertex an 8-bit index. (256 cases)
8
10
8
5
108
10
5
T=9
T=7
11010000
11110011
Build an index STEP 4: Lookup edge list
• The 256 cases can be reduced to 15 distinct ones using symmetry considerations
• Makes it easy to create a lookup table with 256 entries
• The lookup table returns a list of edges (in sets of three) that are intersected by the triangles
• Is the list complete?
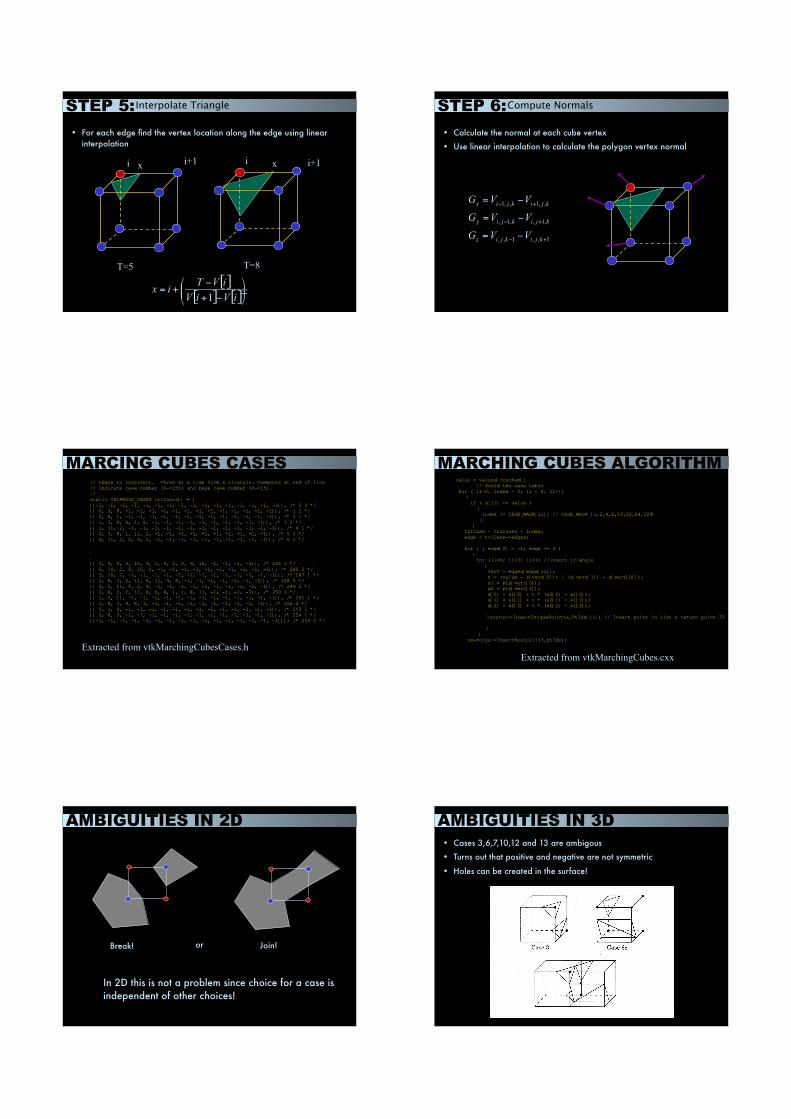
STEP 5:
• For each edge find the vertex location along the edge using linear interpolation
Interpolate Triangle Vertices
T=5 T=8
i i+1xi x i+1
STEP 6:
• Calculate the normal at each cube vertex
• Use linear interpolation to calculate the polygon vertex normal
Compute Normals
MARCING CUBES CASES// Edges to intersect. Three at a time form a triangle. Comments at end of line// indicate case number (0->255) and base case number (0->15).//static TRIANGLE_CASES triCases[] = { {{-1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1}}, /* 0 0 */{{ 0, 3, 8, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1}}, /* 1 1 */{{ 0, 9, 1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1}}, /* 2 1 */{{ 1, 3, 8, 9, 1, 8, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1}}, /* 3 2 */{{ 1, 11, 2, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1}}, /* 4 1 */{{ 0, 3, 8, 1, 11, 2, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1}}, /* 5 3 */{{ 9, 11, 2, 0, 9, 2, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1}}, /* 6 2 */
.
.
.
{{ 3, 9, 0, 3, 10, 9, 1, 9, 2, 2, 9, 10, -1, -1, -1, -1}}, /* 245 3 */{{ 0, 10, 2, 8, 10, 0, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1}}, /* 246 2 */{{ 3, 10, 2, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1}}, /* 247 1 */{{ 2, 8, 3, 2, 11, 8, 11, 9, 8, -1, -1, -1, -1, -1, -1, -1}}, /* 248 5 */{{ 9, 2, 11, 0, 2, 9, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1}}, /* 249 2 */{{ 2, 8, 3, 2, 11, 8, 0, 8, 1, 1, 8, 11, -1, -1, -1, -1}}, /* 250 3 */{{ 1, 2, 11, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1}}, /* 251 1 */{{ 1, 8, 3, 9, 8, 1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1}}, /* 252 2 */{{ 0, 1, 9, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1}}, /* 253 1 */{{ 0, 8, 3, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1}}, /* 254 1 */{{-1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1}}}; /* 255 0 */
Extracted from vtkMarchingCubesCases.h
MARCHING CUBES ALGORITHM value = values[contNum]; // Build the case table for ( ii=0, index = 0; ii < 8; ii++) { if ( s[ii] >= value ) { index |= CASE_MASK[ii]; // CASE_MASK {1,2,4,8,16,32,64,128} } } triCase = triCases + index; edge = triCase->edges;
for ( ; edge[0] > -1; edge += 3 ) { for (ii=0; ii<3; ii++) //insert triangle { vert = edges[edge[ii]]; t = (value - s[vert[0]]) / (s[vert[1]] - s[vert[0]]); x1 = pts[vert[0]]; x2 = pts[vert[1]]; x[0] = x1[0] + t * (x2[0] - x1[0]); x[1] = x1[1] + t * (x2[1] - x1[1]); x[2] = x1[2] + t * (x2[2] - x1[2]);
locator->InsertUniquePoint(x,PtIds[ii]) // Insert point in list & return point ID
} } newPolys->InsertNextCell(3,ptIds);
Extracted from vtkMarchingCubes.cxx
AMBIGUITIES IN 2D
Break! or Join!
In 2D this is not a problem since choice for a case is independent of other choices!
AMBIGUITIES IN 3D
• Cases 3,6,7,10,12 and 13 are ambigous
• Turns out that positive and negative are not symmetric
• Holes can be created in the surface!
SOLUTIONS
• Use marching tetrehedra
– Requires more trigangles
– Can create artificial bumps in iso-surfaces
• Use asymptotic decider
– looks at the variation of the scalar across the surface
• Use other complimentary cases (see paper by Montani et. al.)
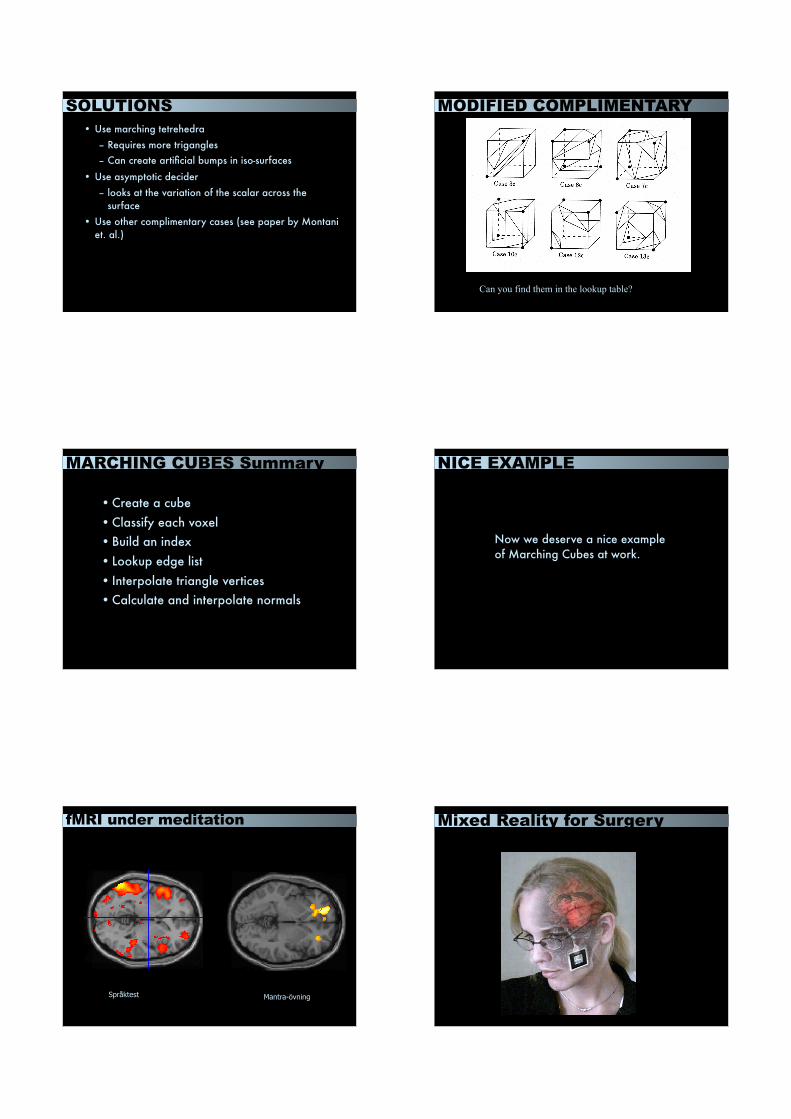
MODIFIED COMPLIMENTARY
Can you find them in the lookup table?
MARCHING CUBES Summary
•Create a cube
•Classify each voxel
•Build an index
•Lookup edge list
• Interpolate triangle vertices
•Calculate and interpolate normals
NICE EXAMPLE
Now we deserve a nice example of Marching Cubes at work.
fMRI under meditation
Mantra-övningSpråktest
Mixed Reality for Surgery
fMRI demonstrator
• Use state of the art Canonical Correlation Analysis developed by CMIV (Friman et. al.)
• Improve methods to achieve real-time responses
• New approaches to data processing are needed.
• Realtime visualization and interaction
• Study bio feedback through visualization of a square which follows the point of focus of the eyes.
Experimental setup
SCIENTIFIC VISUALIZATION
Lecture 3 part 2
Scientific Visualization GroupVisual Information Technology and ApplicationsLinköping University
EFFICIENT SEARCHING
• With < 10% of the voxels contributing to the surface, it is a waste to look at every voxel
• A voxel can be specified in terms of its interval, its minimum and maximum values
• Define the span space!
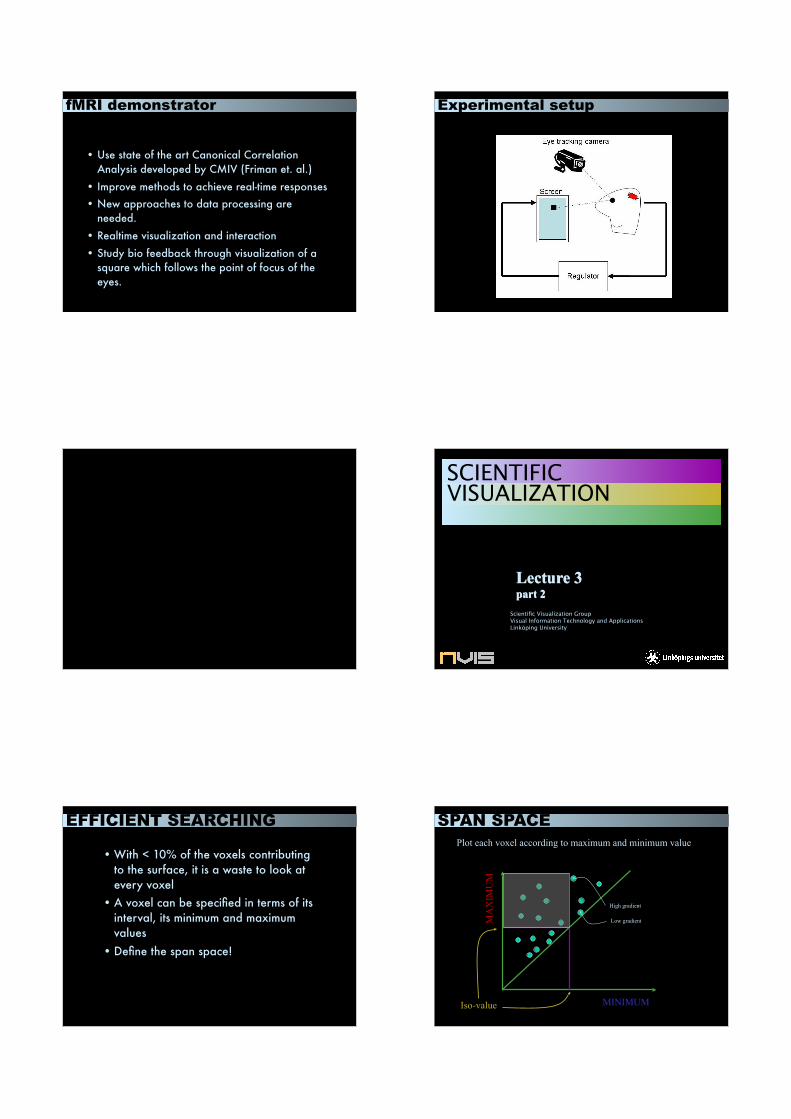
SPAN SPACE
Plot each voxel according to maximum and minimum value
MA
XIM
UM
MINIMUMIso-value
Low gradient
High gradient
SPAN SPACE REPRESENTATION
•Kd-Trees
MA
XIM
UM
MINIMUM Split max axis
Split min axis
CONTOUR STITCHING
• Given: 2 two-dimensional closed curves
– Curve #1 has m points
– Curve #2 has n points
• Which point(s) does vertex j on curve one correspond to on curve two
j
?
?
A SOLUTION: • Fuchs, et al.
– Optimization problem
– Nice paper (graph
theory)
– 1 stitch consists of:
• 2 spans between
curves
• 1 contour segment
• Triangles
• Consistent normal directions
or
Fuchs et. al. Fuchs et. al.
• Left span
– P(i)Q(j) =>go up
• Right span (either)
– P(i+1) Q(j) => go down
– P(i)Q(j+1)=> go down
• Constraints
– Each contour segement is used once and only once
– If a span appears as a left span, then it must also appear as a right span
– If a span appears as a right span, then it must also appear as a left span
This produces an optimal surface from a topological point of view, i.e. no holes.
Fuchs et. al.
• Graph problem
• Vertices V(ij) = span between P(i) and Q(j)
• Edges are constructed from a left span to a right span
– Only two valid right spans for a left span.
P(i)
Q(j) Q(j+1)
P(i+1)
Left span
Potential right spans
Fuchs et. al.
P
Q
i
j
{Q(j),P(i),Q(j+1)}
{P(i+1),Q(j),P(i)}
• Organize the edges as a grid!
– Incoming arrows causes span to be a right span in tile
– Outgoing arrows causes span to be a left span in tile
Fuchs et. al.
• Acceptable graphs
– Exactly one vertical arc between P(i) and P(i+1)
– Exactly one horizontal arc between Q(j) and Q(j+1)
– Either
•Indegree(V(ij))= Outdegree (V(ij)) = 0
•both > 0
–(if a right also has to be a left)
Fuchs et. al.
• Claim:
– An acceptable graph, S, is weakly connected
• Lemma
– Only 0 or 1 vertex of S has indegree =2
•E.g. two cones touching in the center
– All other vertices in the graph have indegree=1
– (recall indegree = outdegree)
Fuchs et. al.
• Theorem: S is an acceptable surface if and only if:
– S has one and only one horizontal arc between adjacent columns
– S has one and only one vertical arc between adjacent rows
– S is Eulerian (possible to perform closed walk with every arc only used only once)
Fuchs et. al.
• Number of arcs is thus m+n (number of vertices in P + number of vertices in Q)
• Still many possible solutions
• Associate costs with each edge
– Area of resulting triangle
– Aspect ratio of triangle
Fuchs et. al.
• Note that V(i0) is in S for some i
• Note that V(0j) is in S form some j
• With the weights (costs) we can compute the minimum path from a starting node V(i0)
– Since we do not know which V(i0) we compute the pats for all of them and take the minimum
– Easy, uh?