Embed Size (px)
Citation preview
SENZORI SILA
Vedran Babić
Sadržaj
UvodSile rezanjaPrincip radaPiezoelektrični efektProblemi kod mjerenjaPrincipi gradnje senzoraStruktura senzoraVrste senzoraPrimjeri
UvodFunkcija nadzornog sustava je brza i precizna identifikacija stanja
stroja, alata i/ili obratka u cilju postizanja visokog stupnja autonomnosti, pouzdanosti, robusnosti, fleksibilnosti i produktivnosti obradnih strojeva.
Senzori su uređaji koji mjere neku fizikalnu veličinu i pretvaraju ju u signal pogodan za daljnju obradu (najčešće električni signal).
Najčešće korišteni signali su: sile/momenti, jakosti struja, vibracije, akustična emisija.
Većina senzora radi na principu piezoelektričnog efekta.
Sile rezanja
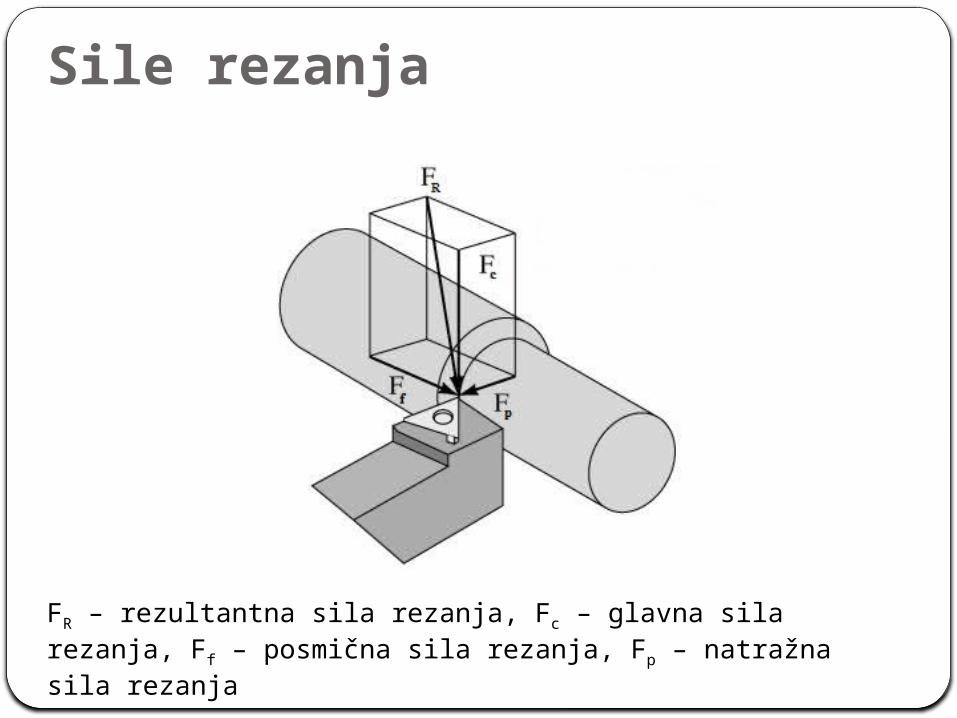
FR – rezultantna sila rezanja, Fc – glavna sila rezanja, Ff – posmična sila rezanja, Fp – natražna sila rezanja
Princip radaSenzor sile služi za pretvaranje sile (opterećenja) u lako mjerljivu
električnu veličinu.Sila koja djeluje na kvarcni kristal pretvara se u proporcionalan
električni napon.Povećanje otpora silikonskih piezootpornika kada se otpornici
deformiraju pod bilo kojom primjenjenom silom. Senzor usmjerava silu kroz čelični klip direktno na silikonski osjetljivi element. Veličina otpora mijenja se razmjerno s količinom sile. Ta promjena u otpornom krugu rezultira odgovarajućom razinom mV izlaza.
Najčešće tehnologije senzora sila su piezoelektrika i mjerni instrument za mjerenje naprezanja (promjenjivi otpornici osjetljivi na naprezanje vezani su za dijelove strukture koji se deformiraju pri mjerenju).
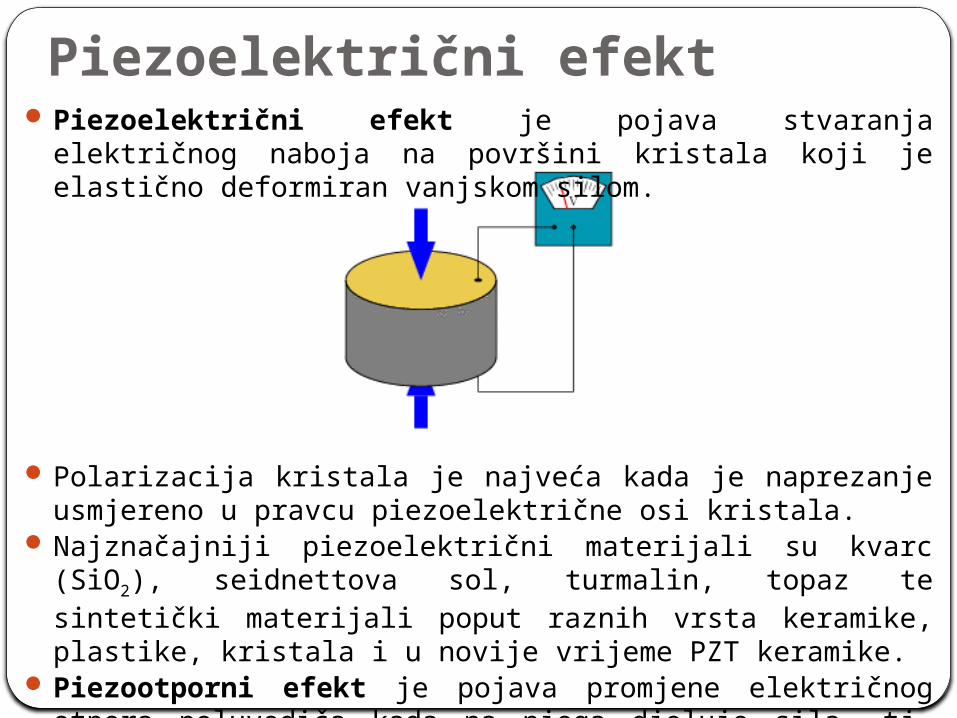
Piezoelektrični efekt Piezoelektrični efekt je pojava stvaranja električnog naboja na površini
kristala koji je elastično deformiran vanjskom silom.
Polarizacija kristala je najveća kada je naprezanje usmjereno u pravcu piezoelektrične osi kristala.
Najznačajniji piezoelektrični materijali su kvarc (SiO2), seidnettova sol, turmalin, topaz te sintetički materijali poput raznih vrsta keramike, plastike, kristala i u novije vrijeme PZT keramike.
Piezootporni efekt je pojava promjene električnog otpora poluvodiča kada na njega djeluje sila, tj. naprezanje. Ova pojava izaziva samo promjenu električnog otpora, ne i električnog napona.
Problemi kod mjerenja
Točnost - mjerenje sile se u pravilu mora provoditi s točnošću koja je veća nego kod mjerenja drugih veličina. U tehničkim mjerenjima zahtijeva se točnost od 1-2 %, ali je u automatiziranoj proizvodnji i robotici neophodna točnost od 0,1-0,2 %.
Drugi problem nastaje zbog toga što je sila vektorska veličina, a senzor na izlazu daje skalarnu velicinu.
Ograničenost mehaničkih naprezanja u realnom materijalu - uvijek se smatra da sila djeluje u jednoj točki, ali kako realni materijali mogu izdržati samo ograničena naprezanja, kod mjerenja sile moraju se definirati određeni segmenti površine na kojima djeluje sila.
Senzor sile ponaša se na jedan način kada je sam, a na drugi način kada je ugrađen u složeni mjerni sistem.
Principi gradnje senzoraGradnja senzora sila određena je fizikanim principom pretvorbe sile u
izlazni signal te tehnološkim i ekonomskim mogućnostima. Za postizanje optimalnih tehničkih karakteristika treba poštovati:
princip monolitnosti
princip integriranja
princip simetrije
princip optimalnih konstruktivnih granica
Struktura senzora
Rad senzora sila zasniva se na različitim fizikalnim principima, ali u strukturi svakog senzora mogu se uočiti sljedeći elementi:
ulazni elementelement za prijenos sile od ulaznog elementa do konvertora sile u
električni signalselektor koji štiti senzor od poprečnih parazitnih sila osigurač od opterećenjaelastični elementkonvertor sile u električni signalkućište
Vrste senzora
Akcelerometarski senzori – rijetko se primjenjuju (sila djeluje na tijelo koje se ne kreće, pa nema ni ubrzanja).
Elastični senzori – imaju mehanički elastični element čija je deformacija proporcionalna sili koja na njega djeluje. Deformacijski element može biti opruga, elementi u obliku prstena, cilindra..
Magnetoelastični senzori – radi na pricipu obrnutog magnetostrikcijskog efekta (promjena stanja magnetiziranog materijala pod utjecajem mehaničkih naprezanja).
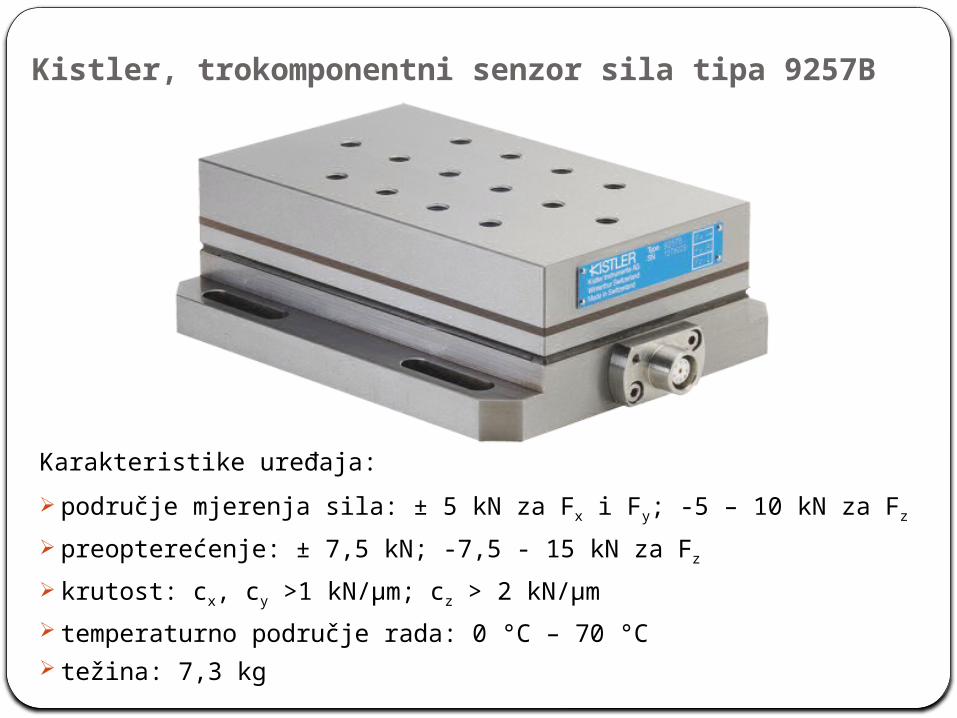
Kistler, trokomponentni senzor sila tipa 9257B
Karakteristike uređaja:
područje mjerenja sila: ± 5 kN za Fx i Fy; -5 – 10 kN za Fz
preopterećenje: ± 7,5 kN; -7,5 - 15 kN za Fz
krutost: cx, cy >1 kN/μm; cz > 2 kN/μm temperaturno područje rada: 0 °C – 70 °C težina: 7,3 kg
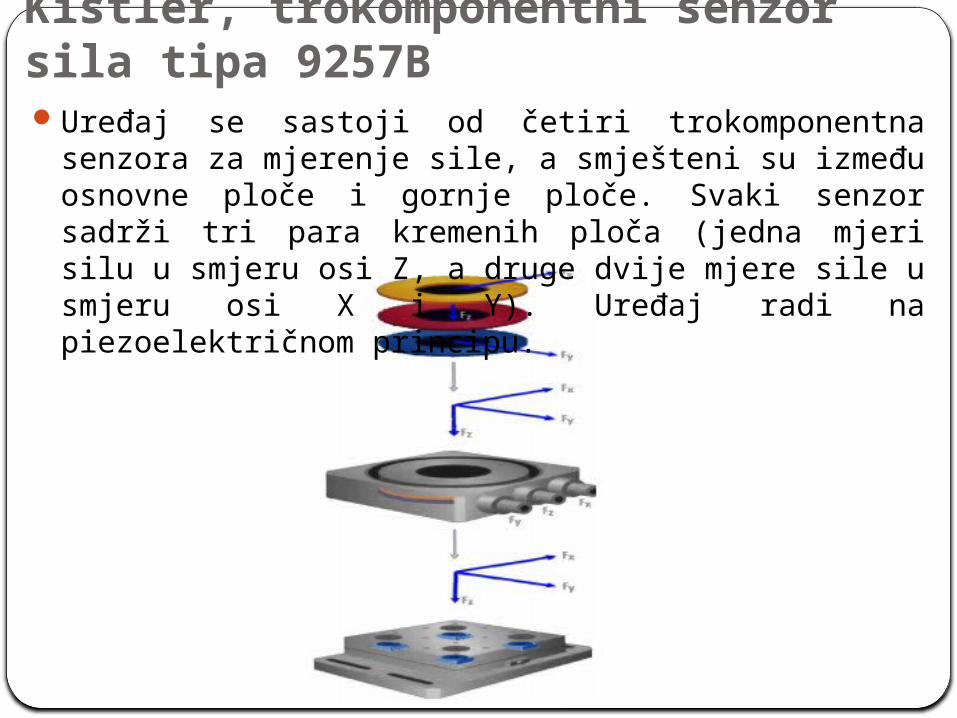
Kistler, trokomponentni senzor sila tipa 9257BUređaj se sastoji od četiri trokomponentna senzora za mjerenje sile, a
smješteni su između osnovne ploče i gornje ploče. Svaki senzor sadrži tri para kremenih ploča (jedna mjeri silu u smjeru osi Z, a druge dvije mjere sile u smjeru osi X i Y). Uređaj radi na piezoelektričnom principu.
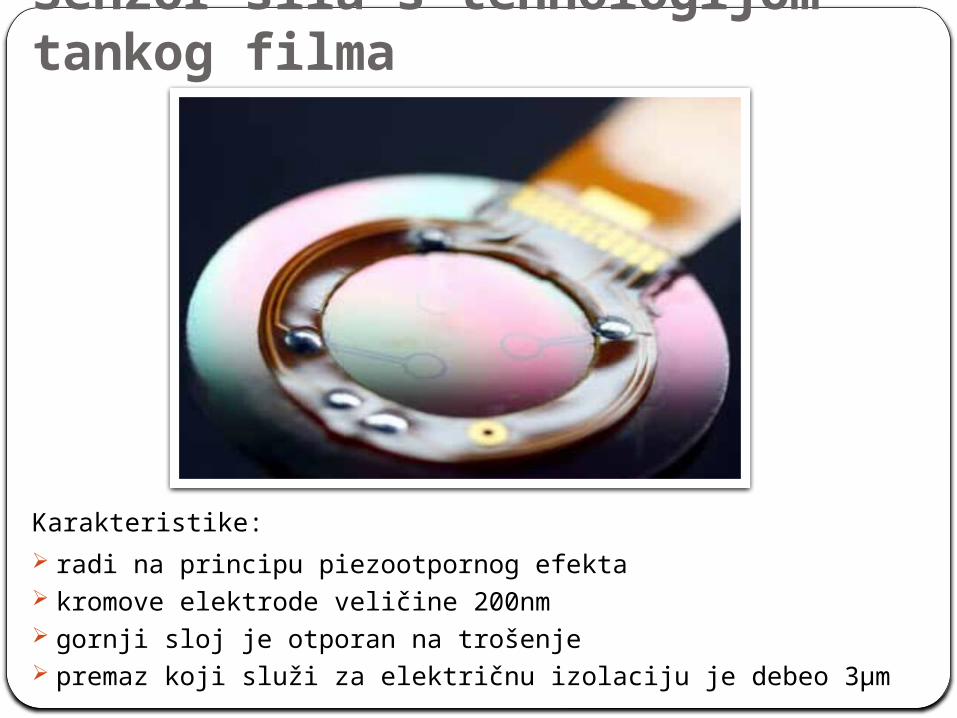
Senzor sila s tehnologijom tankog filma
Karakteristike: radi na principu piezootpornog efekta kromove elektrode veličine 200nm gornji sloj je otporan na trošenje premaz koji služi za električnu izolaciju je debeo 3µm

Senzor sila s tehnologijom tankog filma
Senzor u svom kućištu





























