Embed Size (px)
Citation preview
Simulation und Analyse der dynamischen Wechselwirkung von
Windenergieanlagen mit dem Elektroenergiesystem
Vom Fachbereich Ingenieurwissenschaften der
Universität Duisburg-Essen
zur Erlangung des akademischen Grades eines
Doktors der Ingenieurwissenschaften
genehmigte Dissertation
von
Friedrich W. Koch
aus Kevelaer
Referent: Univ.-Prof. Dr.-Ing. habil. István Erlich Korreferent: Univ.-Prof. Dr.-Ing. habil. Zbigniew A. Styczynski
Tag der mündlichen Prüfung: 19. 09. 2005

Vorwort
Die vorliegende Arbeit entstand während meiner Tätigkeit als wissenschaftlicher Mitarbeiter im
Fachgebiet Elektrische Anlagen und Netze der Universität Duisburg-Essen. Mein herzlichster
Dank gilt all denen, die zum Gelingen dieser Arbeit beigetragen haben.
Mein erster Dank gilt Univ.-Prof. Dr.-Ing. habil. István Erlich, Leiter des Fachgebietes
Elektrische Anlagen und Netze der Universität Duisburg-Essen. Denn seine langjährige
Erfahrung im Bereich der Netzdynamik hat diese Arbeit durch viele wertvolle Anregungen und
Ratschläge erst ermöglicht.
Herrn Univ.-Prof. Dr.-Ing. habil. Zbigniew A. Styczynski danke ich für die Übernahme des
Korreferats.
Mein Dank gilt im Besonderen allen Kolleginnen und Kollegen des Fachgebietes Elektrische
Anlagen und Netze der Universität Duisburg-Essen für die gute Zusammenarbeit, die stete
Hilfsbereitschaft und das freundliche Arbeitsklima.
Weiterhin danke ich allen Studenten der Universität Duisburg-Essen, die im Rahmen ihrer
Studien- und Diplomarbeiten einen entscheidenden Beitrag zu dieser Arbeit geleistet haben.
Mein ganz besonderer Dank gilt meiner Frau Ellen und unserem Sohn Wichard für ihr
Verständnis und den Verzicht auf zahlreiche gemeinsame Stunden, ohne die das Gelingen dieser
Arbeit nicht möglich gewesen wäre.
Duisburg, im September 2005
Friedrich W. Koch

Inhaltsverzeichnis
Bilderverzeichnis ..........................................................................................................................iv
Tabellenverzeichnis ....................................................................................................................viii
1 Einleitung ..............................................................................................................................1
1.1 Ziele der Arbeit..............................................................................................................1
1.2 Einordnung und Gliederung der Arbeit.........................................................................3
1.3 Verwendete Programmsysteme .....................................................................................6
2 Modellbildung einer Windenergieanlage (WEA) mit Asynchronmaschine (ASM).......7
2.1 Überblick .......................................................................................................................7
2.2 Leistungscharakteristik des Windrotors ........................................................................7
2.2.1 Bestimmung der Windrotorleistung ..................................................................8
2.2.2 Leistungsbegrenzung durch Stallbetrieb ...........................................................8
2.2.3 Leistungsanpassung durch Rotorblattverstellung..............................................9
2.3 Modell des mechanischen Triebstrangs.......................................................................10
2.3.1 Bewegungsgleichungen des Zwei-Massenschwingers....................................10
2.3.2 Vergleich der unterschiedlichen Massen-Modelle ..........................................11
2.4 Mechanisch-Elektrisches Energiewandlersystem .......................................................13
2.4.1 Ausführliches Gleichungssystem der ASM.....................................................14
2.4.1.1 Mathematisches Modell der ASM fünfter Ordnung.........................14
2.4.1.2 Quasistationäres Modell der ASM dritter Ordnung .........................16
2.4.1.3 Stationäres Modell der ASM............................................................18
2.4.1.4 Drehmoment und Leistungen der ASM im stationären Zustand......19
2.4.2 Vergleich der unterschiedlichen Modelle........................................................22
2.5 Zusammenfassung und Ergebnisse der Modellbildung...............................................26
3 Regelkonzepte einer WEA mit doppelt gespeister ASM (DFIM) ..................................27
3.1 Überblick .....................................................................................................................27
3.2 Drehzahlvariable WEA mit DFIM-Modell 5. Ordnung ..............................................29
3.2.1 Regelstruktur der DFIM ..................................................................................30
Inhaltsverzeichnis
ii
3.2.1.1 Läuferseitiger Regelkreis ................................................................. 32
3.2.1.2 Netzseitiger Regelkreis .................................................................... 34
3.2.2 Auswirkungen der Crowbar-Schutzmaßnahme .............................................. 36
3.3 Drehzahlvariable WEA mit DFIM-Modell 3. Ordnung.............................................. 40
3.3.1 Systematischer multivariabler Entwurf des inneren Regelkreises .................. 41
3.3.2 Erweiterung des äußeren Regelkreises............................................................ 44
3.3.3 Drehzahlregelung und Rotorblattwinkelverstellung ....................................... 46
3.3.4 Simulationen zum Reglerverhalten der drehzahlvariablen WEA ................... 47
3.4 Zusammenfassung und Ergebnisse der Reglernachbildung........................................ 50
4 Modell zur Generierung synthetischer Windgeschwindigkeitszeitreihen .................... 52
4.1 Überblick..................................................................................................................... 52
4.2 Synthetische Windgeschwindigkeitsanregungen ........................................................ 53
4.3 Flächenbezogene Windgeschwindigkeitsanregungen................................................. 57
5 Modellierung der Nachlaufströmungen (Wakes) in Windparks ................................... 60
5.1 Überblick..................................................................................................................... 60
5.2 Mittelung der Windgeschwindigkeit über die Rotorfläche......................................... 60
5.3 Windströmungen am Rotor ......................................................................................... 61
5.3.1 Bestimmung der reduzierten Windgeschwindigkeit in der Wake................... 62
5.3.2 Bestimmung der unmittelbar leeseitigen Windgeschwindigkeit..................... 64
5.3.3 Aerodynamische Vorgänge am Rotorblattprofil............................................. 66
5.4 Bewertung der Modellierung des Wake-Effekts......................................................... 69
5.5 Auswirkungen des Wake-Effekts in Windparks ......................................................... 70
5.5.1 Auswirkungen des Wake-Effekts auf die Leistungsabgabe............................ 71
5.5.2 Diskussion der Ergebnisse .............................................................................. 73
6 Simulationen der Netzdynamik in Übertragungsnetzen ................................................ 75
6.1 Auswirkungen von Offshore-Windparks auf die Netzdynamik.................................. 75
6.1.1 Transiente Stabilität ........................................................................................ 76
6.1.2 Spannungsstabilität ......................................................................................... 78
6.1.3 Frequenzstabilität ............................................................................................ 80
6.1.4 Diskussion der Ergebnisse .............................................................................. 83
6.2 Auswirkungen von WEA auf den stationären Betrieb................................................ 84
Inhaltsverzeichnis
iii
6.2.1 Simulation der Windenergieeinspeisung in einem Testnetz ...........................84
6.2.1.1 Verhalten der Netzfrequenz..............................................................86
6.2.1.2 WEA mit Frequenzregelung.............................................................88
6.2.1.3 Einfluss der Spannungsregelung der WEA ......................................90
6.2.2 Simulation der Windenergieeinspeisung in einem Verbundnetz ....................91
6.2.2.1 Annahmen und Ausgangszustand der Simulation............................92
6.2.2.2 Simulation des komplettierten Hochspannungsnetzes .....................95
6.2.2.3 Auswirkungen der Windenergie auf die Netzfrequenz ....................98
6.2.3 Diskussion der Ergebnisse.............................................................................101
6.3 Zusammenfassung zur Simulation der Netzdynamik................................................102
7 Zusammenfassung und Ausblick ....................................................................................104
8 Anhang ..............................................................................................................................106
8.1 Anhang A ..................................................................................................................106
9 Literaturverzeichnis .........................................................................................................108
10 Formelzeichen, Indizes und Abkürzungen ....................................................................114
10.1 Formelzeichen ...........................................................................................................114
10.2 Indizes .......................................................................................................................118
10.3 Abkürzungen (zum Teil auch als Indizes verwendet) ...............................................119
Bilderverzeichnis
Bild 1.1: Darstellung der dynamischen Einflüsse am Beispiel einer Offshore-WEA....... 3
Bild 2.1: Zwei-Massen-Modell mit den Komponenten Rotor und Generator................. 10
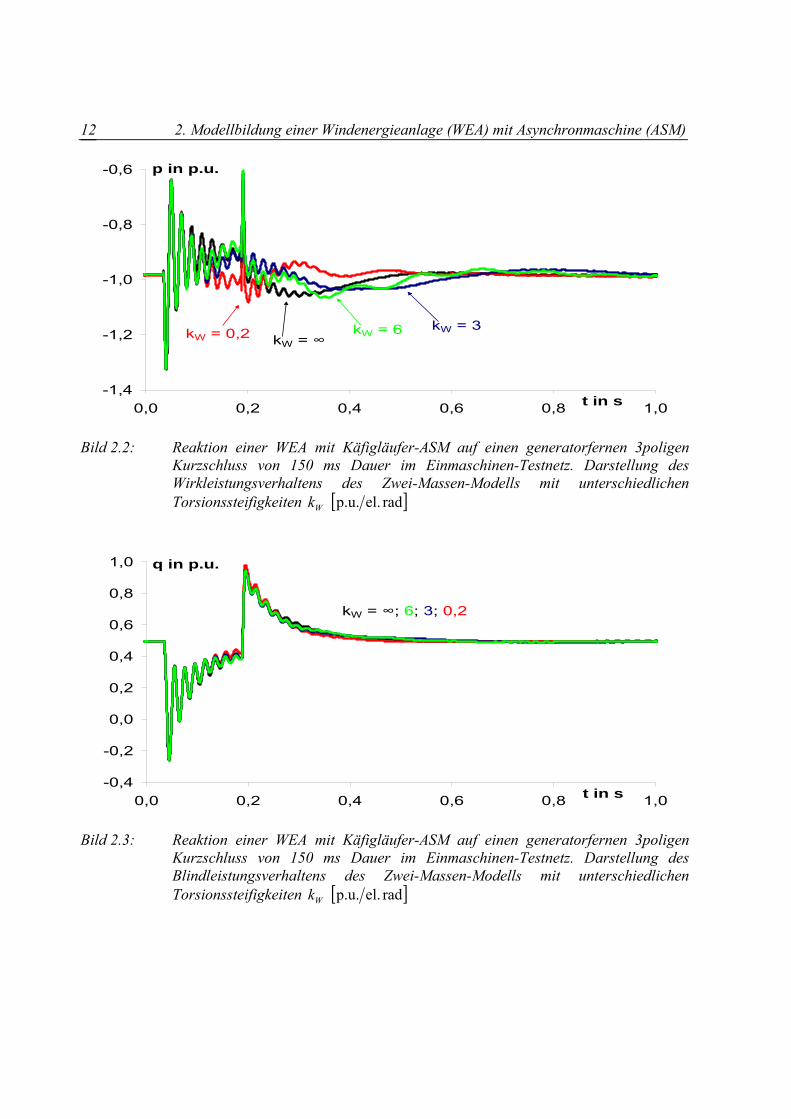
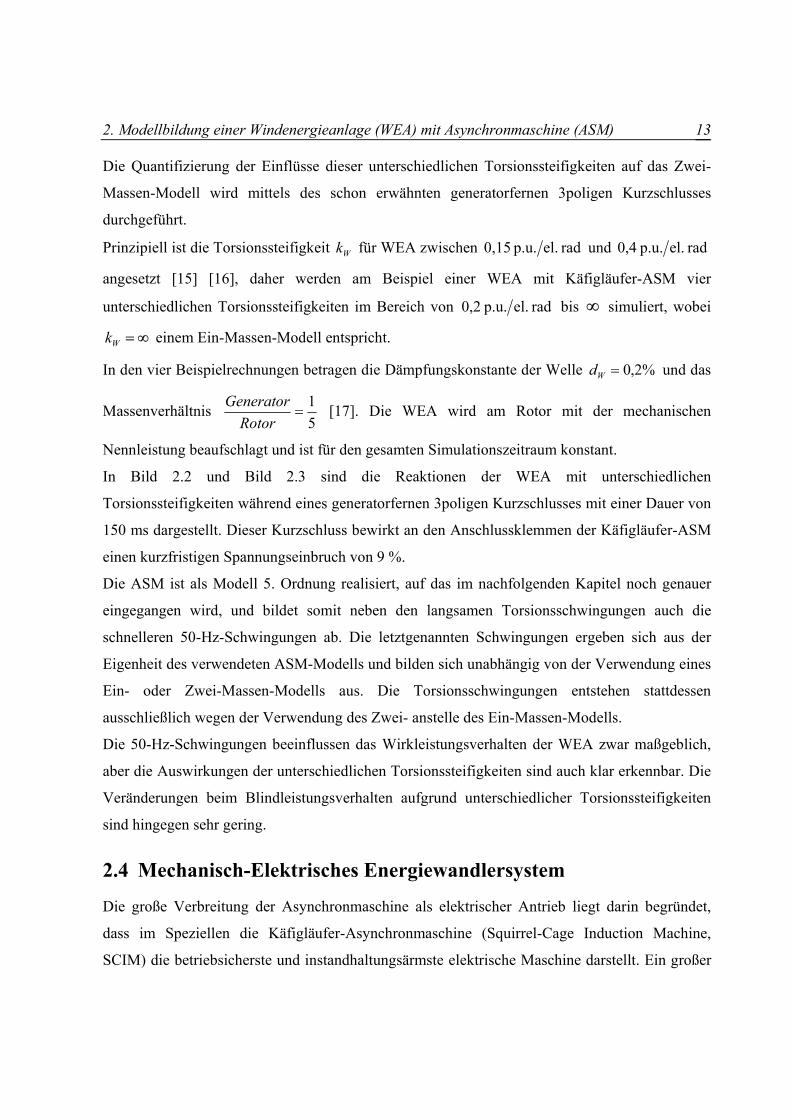
Bild 2.2: Reaktion einer WEA mit Käfigläufer-ASM auf einen generatorfernen 3poligen Kurzschluss von 150 ms Dauer im Einmaschinen-Testnetz. Darstellung des Wirkleistungsverhaltens des Zwei-Massen-Modells mit unterschiedlichen Torsionssteifigkeiten Wk [ ]rad el.p.u. ................................ 12
Bild 2.3: Reaktion einer WEA mit Käfigläufer-ASM auf einen generatorfernen 3poligen Kurzschluss von 150 ms Dauer im Einmaschinen-Testnetz. Darstellung des Blindleistungsverhaltens des Zwei-Massen-Modells mit unterschiedlichen Torsionssteifigkeiten Wk [ ]rad el.p.u. ................................ 12
Bild 2.4: Quasistationäres Ersatzschaltbild der ASM...................................................... 17
Bild 2.5: Ersatzschaltbild der ASM für den stationären Zustand .................................... 19
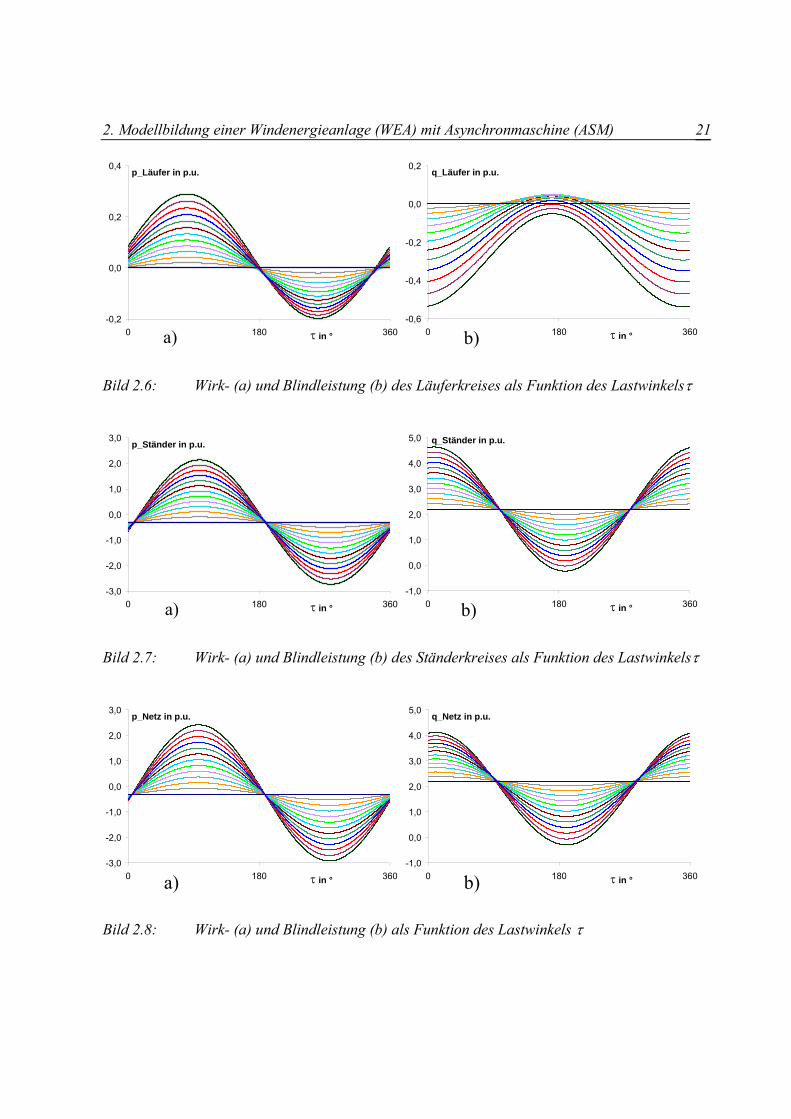
Bild 2.6: Wirk- (a) und Blindleistung (b) des Läuferkreises als Funktion des Lastwinkelsτ .................................................................................................... 21
Bild 2.7: Wirk- (a) und Blindleistung (b) des Ständerkreises als Funktion des Lastwinkelsτ .................................................................................................... 21
Bild 2.8: Wirk- (a) und Blindleistung (b) als Funktion des Lastwinkels τ .................... 21
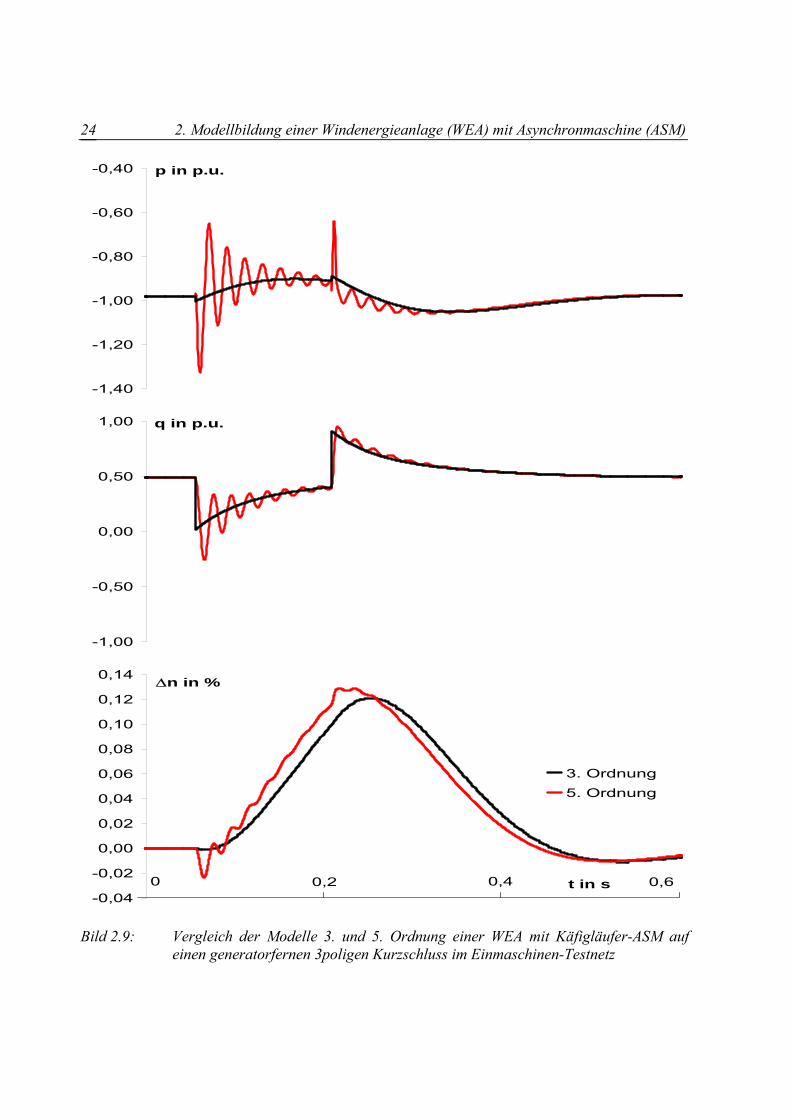
Bild 2.9: Vergleich der Modelle 3. und 5. Ordnung einer WEA mit Käfigläufer-ASM auf einen generatorfernen 3poligen Kurzschluss im Einmaschinen-Testnetz .. 24
Bild 2.10: Vergleich der Modelle 3. und 5. Ordnung einer WEA mit DFIM auf einen generatorfernen 3poligen Kurzschluss im Einmaschinen-Testnetz.................. 25
Bild 3.1: Stallgeregelte WEA mit SCIM ......................................................................... 27
Bild 3.2: WEA mit SCIM, Leistungs- und Pitchregelung .............................................. 28
Bild 3.3: DFIM-Modell mit gesondertem IGBT-Modell für den Frequenzumrichter..... 30
Bild 3.4: Läuferseitige Stromregelkreis des DFIM-Modells ........................................... 32
Bild 3.5: Bestimmung der Läuferstromsollgröße aus den Sollgrößen der Wirk- und Blindleistung..................................................................................................... 33
Bild 3.6: Netzseitiger Stromregelkreis des DFIM-Modells............................................. 34
Bild 3.7: Bestimmung der Stromsollgröße aus den Sollgrößen Zwischenkreisspannung und Blindleistung.............................................................................................. 36
Bild 3.8: Einmaschinen-Testnetz zur Simulation der Crowbar-Schutzmaßnahme ......... 37
Bilderverzeichnis
v
Bild 3.9: Vergleich der Wirkleistungen ohne und mit Crowbar bei einem dreipoligen Kurzschluss .......................................................................................................38
Bild 3.10: Vergleich der Blindleistungen ohne und mit Crowbar bei einem dreipoligen Kurzschluss .......................................................................................................38
Bild 3.11: Vergleich der Läuferströme ohne und mit Crowbar bei einem dreipoligen Kurzschluss .......................................................................................................39
Bild 3.12: Erweitertes Reglermodell der drehzahlvariablen WEA mit DFIM 3. Ordnung40
Bild 3.13: Innerer Regelkreis .............................................................................................42
Bild 3.14: Erweiterung des äußeren Regelkreises..............................................................45
Bild 3.15: Regelstrecke Rotor ............................................................................................46
Bild 3.16: Auswirkung des Windgeschwindigkeitssprungs auf die Ständerspannung uS und die Gesamtblindleistung qGes als Reaktion des Spannungsreglers.............48
Bild 3.17: Auswirkungen des Windgeschwindigkeitssprungs auf Gesamtwirkleistung pGes, Läuferdrehzahl n und Anstellwinkel des Rotorblattes α ..........................49
Bild 4.1: Verhältnis SpektrumV des theoretischen Gesamtspektrums zu den berechneten Spektren als Funktion der oberen Grenzfrequenzen Oω mit F = 600 m, NK = 0,005 und Gv = 15 m/s in Gz = 10 m..................................................................57
Bild 4.2: Standorte der 16 WEA innerhalb des Windpark der Fläche 1950m x 1950m..59
Bild 4.3: Synthetisch erzeugte Referenzwindgeschwindigkeit bestehend aus einer Rampe ...............................................................................................................59
Bild 4.4: Windgeschwindigkeiten an sechs der 16 WEA im Windpark bei einem Anströmungswinkel von 30° und der Referenzwindgeschwindigkeit aus Bild 4.3......................................................................................................................59
Bild 5.1: Teilabschattung, die Rotorfläche einer WEA_2 wird von der reduzierten Windgeschwindigkeit ( )xvW der luvseitigen WEA_1 teilweise angeströmt....62
Bild 5.2: Flächenberechnung für die quasi Voll- und Teilabschattung ...........................64
Bild 5.3: Vergleich der beiden Windgeschwindigkeiten 0Wv , die einerseits mit den Schubbeiwerten tc (Risø-Modell) und andererseits mit den Leistungsbeiwerten pc einer Multi-MW-WEA bestimmt wurden...................69
Bild 5.4: Testnetz besteht aus 18 stallgeregelten WEA, einem 33/150-kV-Netztransformator und einer Synchronmaschine als Netzäquivalent ...............70
Bild 5.5: Wake-Koeffizient Wakec in Abhängigkeit von der Windrichtung γ bei unterschiedlichen Windgeschwindigkeiten.......................................................71
Bilderverzeichnis
vi
Bild 5.6: Gesamtleistungsabgabe des Windparks mit und ohne Wake-Effekt bei einer zufällig variierenden Windgeschwindigkeitszeitreihe und konstanter Windrichtung .................................................................................................... 72
Bild 5.7: Gesamtleistungsabgabe des Windparks mit und ohne Wake-Effekt bei einer rampenförmigen Windgeschwindigkeitszeitreihe und konstanter Windrichtung .................................................................................................... 72
Bild 6.1: Ausschnitt des relevanten Sektors aus dem modellhaften Verbundnetz mit den einzelnen Messpunkten. ............................................................................. 76
Bild 6.2: Verlauf der Winkeldifferenz vom Polradwinkel δ der in Messpunkt 7 betrachteten Synchronmaschine zum Mittelwert aller Polradwinkel CoAδ ....... 77
Bild 6.3: Spannungsverläufe in ausgewählten Messpunkten (Bild 6.1) für die drei Generatortypen DFIM, SM und SCIM............................................................. 79
Bild 6.4: Reaktion der Netzfrequenz auf den abrupten Ausfall einer Einspeiseleistung von 900 MW (Varianten A-E siehe Tabelle 6.1.)............................................. 81
Bild 6.5: Veränderung der Leistungseinspeisung nach dem abrupten Ausfall einer Einspeiseleistung von 900 MW (Varianten A-E siehe Tabelle 6.1)................. 81
Bild 6.6: Reaktion der Spannung an einem Netzknoten auf den abrupten Ausfall einer Einspeiseleistung von 900 MW (Varianten A-E siehe Tabelle 6.1)................. 83
Bild 6.7: Testnetz PST 16 bestehend aus 16 Synchrongeneratoren, 16 Zweiwickler- und 12 Dreiwickler-Transformatoren, 51 Übertragungsleitungen sowie 66 Knoten............................................................................................................... 85
Bild 6.8: Frequenzveränderungen im Netz bei unterschiedlichen Anfangsleistungen der Windparks )0(0 =tP von 1 GW, 3 GW und 5 GW.......................................... 87
Bild 6.9: Veränderung der Leistungsabgabe (Hub) eines der konventionellen Kraftwerke zur Glättung der Leistungsdiskrepanzen aus der Windeinspeisung............................................................................................... 88
Bild 6.10: Frequenzveränderungen im Netz bei einer Anfangsabgabeleistungen der Windparks )0(0 =tP von 5 GW mit und ohne Frequenzregelung (FR) der DFIM ................................................................................................................ 89
Bild 6.11: Veränderung der Leistungsabgabe (Hub) eines der konventionellen Kraftwerke zur Glättung der Leistungsdiskrepanzen aus der Windeinspeisung, bei einer Anfangsabgabeleistungen der Windparks
)0(0 =tP von 5 GW mit und ohne Frequenzregelung (FR) der DFIM ............ 89
Bild 6.12: Spannungsprofile in zwei Netzpunkten, direkt an einem Windpark (A1) und an einer Zwischenposition (A5)........................................................................ 91
Bild 6.13: Jede der 100 simulierten Windgeschwindigkeitszeitreihen repräsentiert einen WEA-Standorten innerhalb eines OWF ........................................................... 94
Bilderverzeichnis
vii
Bild 6.14: Simulierte Leistungsverläufe der Onshore-WEA an den 41 Hochspannungsknoten ......................................................................................95
Bild 6.15: Windleistung als absolute Größen und aufgeteilt nach Regionen ....................96
Bild 6.16: Kumulierte Einspeiseleistungen aller Onshore-WEA in den einzelnen Regionen Mitte, Norden, Südosten, Westen und Südwesten............................97
Bild 6.17: Einspeiseleistungen der fünf geplanten OWF...................................................97
Bild 6.18: Verlauf der Netzfrequenz bei drei unterschiedlichen Simulationsvarianten.....98
Bild 6.19: Verlauf der Einspeisefluktuation der drei unterschiedlichen Simulationsvarianten.........................................................................................99
Bild 6.20: Gesamteinspeiseleistung der beiden Simulationsvarianten Onshore-WEA und OWF mit bzw. ohne Frequenzregelung (FR)..................................................101
Tabellenverzeichnis
Tabelle 3.1: Indize, Zielfunktion und Matrix R für die drei unterschiedlichen Verhaltensmuster Dead-Beat, EEZ-2 und EEZ-3............................................. 44
Tabelle 4.1: Rauhigkeitsexponent Rα für diverse Erdoberflächenstrukturen [39]............... 53
Tabelle 4.2: Oberflächenrauhigkeit NK für diverse Erdoberflächenstrukturen [39] [40].... 56
Tabelle 5.1: Vergleich zwischen den Berechnungen des Leistungsbeiwert optpc _ mittels Lösung des Integrals aus Gleichung (5.18) oder der Nährung aus Gleichung (5.19) [49] ......................................................................................................... 68
Tabelle 6.1: Simulationskombinationen, die in Bezug auf ihr Frequenzverhalten untersucht werden............................................................................................. 80
Tabelle 6.2: Teilsimulationen, die für die einzelnen WEA-Typen untersucht werden. ....... 84
Tabelle 6.3: Maximale Frequenzabweichungen bei Windenergieeinspeisung von 1 GW, 3 GW und 5 GW über 2,5 Minuten. .................................................................... 86
Tabelle 6.4: Installierte WEA-Leistung in MW aufgeteilt nach geographischen Bereichen des untersuchten Verbundnetz-Modells............................................................ 92
1 Einleitung Die Bundesrepublik Deutschland hat ihre energiepolitischen Ziele durch das am 1. August 2004
in Kraft getreten Gesetzt zur Neuregelung des Rechts der Erneuerbaren Energien im
Strombereich (EEG) klar zum Ausdruck gebracht. Die Intentionen sind im Interesse des Klima-,
Natur- und Umweltschutzes die Förderung der Weiterentwicklung von Technologien zur
Erzeugung von Strom aus Erneuerbaren Energien und deren dauerhafte Etablierung in der
elektrischen Stromversorgung. Das EEG besagt schließlich, das der Zweck dieses Gesetzes ist,
„dazu beizutragen, den Anteil Erneuerbarer Energien an der Stromversorgung bis zum Jahr 2010
auf mindestens 12.5 Prozent und bis zum Jahr 2020 auf mindestens 20 Prozent zu erhöhen“ [1].
Die Windenergie wird zweifelsfrei einen der vorderen Plätze zur Erreichung dieser Zielsetzung
einnehmen [1]. Jedoch führt diese angedachte intensive Windenergienutzung bereits heute zu
einer Verknappung an geeigneten Onshore-Standorten und daher wird zukünftig die Steigerung
der Windenergienutzung an Land zunehmend durch das Repowering gekennzeichnet werden [2].
Zusätzlich wird der Neubau von Windenergieanlagen (WEA) im Offshore-Bereich, wo jährlich
3000 bis 4000 Volllaststunden erwartet werden, in den nächsten Jahren rapide voranschreiten,
denn bereits heute werden schon vom Bundesamt für Seeschifffahrt und Hydrographie mehr als
dreißig Anträge zu Offshore-Windparks (OWF) in der ausschließlichen Wirtschaftszone der
Nord- und Ostsee ordnungsgemäß anerkannt [3].
1.1 Ziele der Arbeit
Vornehmlich sind in der Vergangenheit die WEA vereinzelt errichtet und auf Grund ihrer
Leistungsgröße am Mittelspannungsnetz angeschlossen worden. Gegenwärtig ist jedoch die
Tendenz zur Errichtung von WEA in Windparks mit gemeinsamer Netzanbindung an die
Hochspannungsebene zu beobachten. Die geplanten Offshore-Windparks mit einer summarischen
Leistungsgröße von mehreren hundert MW werden letztendlich direkt an das
Höchstspannungsnetz angebunden.
Diese konzentrierten Leistungseinspeisungen werden schließlich zu einem diametralen
Anforderungswechsel der Übertragungsnetz- an die Windenergieanlagenbetreiber führen. Dieser
1. Einleitung
2
Wechsel wird gesonderte Ansprüche an die Betriebsführung bis hin zur Gleichstellung eben
dieser Windparks mit konventionellen Kraftwerken einfordern.
Während in der Vergangenheit die Forderungen darin bestanden, dass bei netzseitigen
Havariesituationen wie Kurzschlüsse, Spannungs- und Frequenzabsenkungen eine sofortige
Trennung der WEA zu erfolgen hatte, so muss zukünftig gelten, dass die WEA in einem breiten
Spannungs- und Frequenzband am Netz bleiben.
Eines der Ziele dieser Arbeit ist die Quantifizierung der Auswirkungen dieser neuen technischen
Anforderungen auf die Netzdynamik. Es werden daher diverse Untersuchungen durchgeführt, die
sowohl die Spannungs- und Frequenzstabilität als auch die Beeinflussung der transienten
Stabilität behandeln. Im Speziellen werden die Auswirkungen von unterschiedlichen
Regelungskonzepten der WEA auf die Netzdynamik untersucht.
Zur Gewährleistung eines sicheren Betriebes trägt der Übertragungsnetzbetreiber Sorge dafür,
dass ein Ausgleich zwischen allen Transaktionen in seinem Netz erfolgt. Die natürlichen
Abweichungen der Last vom prognostizierten Zeitverlauf werden vom Dispatcher mit Hilfe eines
freigehaltenen Regelbandes in kürzester Zeit ausgeregelt. Die Auswirkungen der
Windenergieeinspeisung sind im Wesentlichen von der insgesamt installierten Nennleistung der
WEA abhängig. Bei einem geringen Anteil der Windenergie ist die fluktuierende
Einspeiseleistung kaum von der ohnehin auftretenden stochastischen Schwankung der
Summennetzlast separierbar. Bei einer intensiven Windenergienutzung können die
Anforderungen an die Netzregelung und das freizuhaltende Regelband jedoch stark steigen.
Ein weiteres Ziel dieser Arbeit ist die Untersuchung der Auswirkungen der Windenergie auf die
Größen Frequenz und Spannung unter normalen Betriebsbedingungen. Um ausschließlich die
Auswirkungen der stochastischen Windfluktuationen bestimmen zu können, wird in den
jeweiligen Simulationen ein stationärer Ausgangszustand bzw. Betrieb realisiert. Die für die
quantitative Analyse benötigten zeitlich hoch aufgelösten Windgeschwindigkeitszeitreihen, aus
denen sich die Fluktuationen der Leistungseinspeisungen ergeben, werden synthetisch generiert.
Im Weiteren werden die Auswirkungen der WEA im Normalbetrieb bei einer Betriebsführung
mit „Leistungsandrosselung“ auf die Netzfrequenz mit der gegenwärtig üblichen Betriebsführung
verglichen, die ausschließlich auf die Umsetzung der maximalen Leistungseinspeisung in das
Elektroenergiesystem (EES) ausgerichtet ist.
1. Einleitung
3
Die konzentrierte Leistungseinspeisung durch die geplanten OWF in das Höchstspannungsnetz
wird die Netzdynamik nachhaltig beeinflussen. Die räumliche Nähe der WEA innerhalb des
OWF bewirken jedoch zusätzliche aerodynamische Effekte, die sich schließlich in einer
windgeschwindigkeits- und windrichtungsabhängigen Minderung der Einspeiseleistung äußern
und somit die Interaktionen zwischen OWF und übergeordnetem EES beeinflussen.
Drittes Ziel dieser Arbeit ist somit die Quantifizierung dieser Windgeschwindigkeitsreduktion in
den Nachlaufströmungen der einzelnen WEA und schließlich die sich daraus ergebenden
Auswirkungen auf die Gesamtleistungseinspeisung des OWF ins EES.
1.2 Einordnung und Gliederung der Arbeit
WEA und im speziellen Offshore-WEA sind unterschiedlichsten dynamischen Einflüssen
unterworfen, deren Ursprung sowohl in den standortabhängigen Umfeldfaktoren, wie
beispielsweise Wind und Wellengang, als auch in den einzelnen Komponenten der WEA selbst
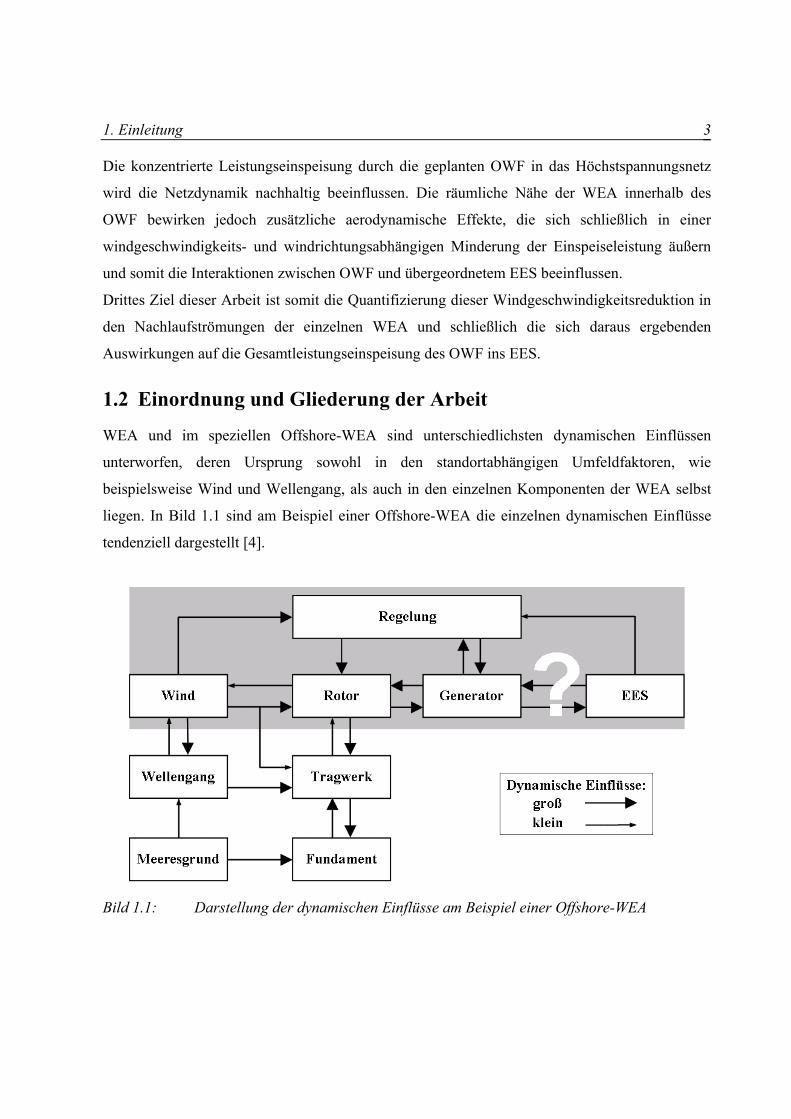
liegen. In Bild 1.1 sind am Beispiel einer Offshore-WEA die einzelnen dynamischen Einflüsse
tendenziell dargestellt [4].
Bild 1.1: Darstellung der dynamischen Einflüsse am Beispiel einer Offshore-WEA
1. Einleitung
4
Diese dynamischen Einflüsse bzw. die assoziierenden Reaktionen einzelner Komponenten auf
extreme Belastungsänderungen spielen in der Entwicklung und Auslegung von WEA eine
bedeutende Rolle.
Zur rechnergestützten Untersuchung der elektromechanischen Ausgleichsvorgänge zwischen
WEA und EES hingegen, ist eine Beschränkung der Modellbildung auf die relevanten Effekte
notwendig, um einerseits den Rechenaufwand der Simulation in akzeptablen Grenzen zu halten
und andererseits die Reduzierung der notwendigen Parameter auf eine überschaubare Anzahl zu
ermöglichen [5]. Daher liegt das Hauptaugenmerk auf den Komponenten Wind, Rotor,
Generator, Regelung und dem angebundenen EES, die in Bild 1.1 grau unterlegt sind.
Die übrigen Wechselwirkungen werden zusammengefasst oder sind vernachlässigbar gering. Die
Auswirkungen des Wellengangs und indirekt auch des Meeresgrundes auf den Wind lassen sich
zusammenfassen und durch die Parameter Bodenrauhigkeit und Turbulenzintensität hinreichend
charakterisieren. Die dynamischen Einflüsse des Tragwerks auf Rotor und Gondel sind als
vernachlässigbar klein zu bewerten, denn entsprechende Studien zeigen, dass Materialermüdung
und extreme Lastwechsel am Rotor vom Wind dominiert werden und so gut wie unbeeinflusst
bleiben von den Lastwechseln des Wellengangs an der Tragwerkkonstruktion [6].
Folglich ist daher eine Komponentenreduktion möglich, bei gleichzeitiger Beibehaltung des
Verhaltensmusters der WEA. Im Weiteren erübrigt diese Komponentenreduktion eine
Modelldifferenzierung in Onshore- und Offshore-WEA.
Die für die Simulationen benötigten Teilmodelle einer WEA werden in Kapitel 2 hergeleitet und
diskutiert. Die Prozesse der Energieumwandlung von der Aerodynamik am Rotorblatt in ein
Drehmoment an der Welle und die anschließende Wandlung des Drehmoments im Generator in
elektrische Arbeit bilden zwei eigenständige Teilmodelle, die über das Teilmodell Triebstrang
gekoppelt werden. Das Teilmodell des mechanischen Triebstrangs wird als Ein- und Zwei-
Massen-Modell vorgestellt. Die verwendeten Generator-Modelle sind Käfigläufer- (SCIM) und
doppelt gespeiste Asynchronmaschine (DFIM), wobei die Modelle 5.-, 3.- und 1. Ordnung
hergeleitet werden.
Die möglichen Regelungskonzepte einer WEA sind mannigfaltig und erlauben daher eine
Beeinflussung des dynamischen Verhaltens der WEA auf verschiedenste Weise. In Kapitel 3
werden die verwendeten Konzepte behandelt. Dabei werden für die untergeordnete
Stromregelung, neben dem Reglerentwurf nach dem Prinzip der feld- bzw. spannungsorientierten
1. Einleitung
5
Regelung, ein systematischer multivariabler Entwurf eines Mehrgrößenreglers vorgestellt. Die
übergeordneten Konzepte der Wirk- und Blindleistungs- bzw. Frequenz- und Spannungsregelung
sowie die Veränderung von Läuferdrehzahl und Anstellwinkels des Rotorblattes werden ebenfalls
aufgezeigt.
Bei Netzkurzschlüssen können im Läuferkreis der DFIM Ströme auftreten, die weitaus größer
sind als der Nennstrom, und schließlich die Umrichter im Läuferkreis zerstören. Moderne WEA
mit DFIM sind daher zunehmend mit der Crowbar-Schutzmaßnahme ausgerüstet, die vorrangig
mögliche Zerstörungen der Umrichtertechnik verhindern soll. Diese Crowbar-Schutzmaßnahme
und die Auswirkungen auf das Generatorverhalten werden ebenfalls vorgestellt.
In Kapitel 4 wird die Generierung von stochastisch variierenden Windgeschwindigkeitszeitreihen
aufgezeigt, die zur Quantifizierung der Auswirkungen von unterschiedlich starken
Windgeschwindigkeiten bzw. -fluktuationen auf das Leistungsverhalten einer WEA benötigt
werden. Für die Untersuchung der Auswirkungen auf das Leistungsverhalten eines Windparks ist
jedoch zu beachten, dass aufgrund der räumlichen Distanzen der einzelnen WEA zueinander, die
generierte Windgeschwindigkeitszeitreihe zeitversetzt auf die Rotoren der unterschiedlichen
WEA einwirkt. Diese Erweiterung des Windmodells zur Generierung von zweidimensionalen
Windgeschwindigkeitszeitreihen wird ebenfalls beschrieben.
WEA bilden leeseitig ihres Rotors Nachlaufströmungen aus, die innerhalb eines Windparks zu
einer Beeinflussung des Leistungsverhaltens anderer WEA führen können. Die Vorgehensweise
zur Ermittlung dieser windrichtungs- und windgeschwindigkeitsabhängigen Beeinflussung der
Leistungseinspeisung von Windparks wird in Kapitel 5 vorgestellt. Anhand eines Beispiels wird
diese Beeinflussung des Leistungsverhaltens und die daraus resultierende Reduktion der
Gesamtleistungseinspeisung des OWF in das EES aufgezeigt.
In Kapitel 6 werden schließlich die Ergebnisse der durchgeführten Untersuchungen präsentiert
und diskutiert. Den Schwerpunkt dieser Arbeit bilden die Untersuchungen zu den
unterschiedlichen Aspekten der elektromechanischen Ausgleichsvorgänge zwischen WEA und
EES in einem Frequenzspektrum von ca. 0.1 bis 10 Hz. Die aufgezeigten Untersuchungen zu den
netzdynamischen Vorgängen quantifizieren die Auswirkungen der Windenergienutzung auf die
Frequenz- und Spannungs- sowie transienten Stabilität. Die durchgeführten Untersuchungen im
Normalbetrieb eines EES verdeutlichen einerseits die Einflussnahme einer stetig steigenden
Windenergienutzung auf das Frequenz- und Spannungsverhalten des EES. Andererseits zeigen
1. Einleitung
6
diese Untersuchungen auf, dass eine Minderung dieser Einflussnahme durch WEA-eigne
Erweiterungen der Regelungskonzepte mittels Frequenz- und Spannungsregelung möglich sind.
1.3 Verwendete Programmsysteme
In der vorliegenden Arbeit wurde vorrangig das im Zeitbereich arbeitende Programmsystem
Power System Dynamics (PSD) verwendet.
Die gesamte Leistungscharakteristik des Rotors und die unterschiedlichen Regelungskonzepte
sind mittels der blockorientierten Reglerprogrammierung realisiert worden. Lediglich die
Umsetzung der Modellierung von Nachlaufströmungen in Windparks erforderte eine Erweiterung
des PSD-Quellcodes.
Die Generierung der zweidimensionalen Windgeschwindigkeitszeitreihen und die Berechnungen
zu den SCIM- und DFIM-Modellen fünfter Ordnung wurden mit MATLAB- bzw.
SimPowerSystems-basierten Programmen durchgeführt.
2 Modellbildung einer Windenergieanlage (WEA) mit
Asynchronmaschine (ASM)
2.1 Überblick
In diesem Kapitel werden die einzelnen Teilmodelle einer Windenergieanlage hergeleitet. Zu
Beginn werden die Funktionen zur Umsetzung der Windleistung am Rotor beschrieben, wobei
branchenübliche Begriffe wie z.B. Leistungsbeiwert pc oder Schnelllaufzahl λ eingeführt und
erklärt werden.
Die Kopplung der Aerodynamisch-mechanischen (primären) Energiewandlung mit der
Mechanisch-elektrischen (sekundären) Wandlung erfolgt über den mechanischen Triebstrang.
Dieser setzt sich zumeist aus den Komponenten Rotor, Welle, Getriebe und Generator
zusammen. Für die Nachbildung dieses Teilmodells wird die Herleitung des Zwei-Massen-
Modells beschrieben und die Besonderheiten im Vergleich zum Ein-Massen-Modell dargestellt.
Das Teilmodell der mechanisch-elektrischen Energiewandlung besteht aus den
Gleichungssystemen der ASM unterschiedlicher Ordnung. Es werden sowohl für die doppelt
gespeiste ASM als auch für die Käfigläufer-ASM Modelle 5.-, 3.- und 1.-Ordnung hergeleitet und
deren Vor- und Nachteile diskutiert.
Zur Quantifizierung der Unterschiede zwischen den einzelnen Teilmodellen ist ein
generatorferner 3poliger Fehler von 150 ms Dauer in einem Einmaschinen-Testnetz simuliert
worden. Dieses netzseitige Ereignis bewirkt an den Anschlussklemmen der ASM einen
kurzfristigen Spannungseinbruch von 9 %.
2.2 Leistungscharakteristik des Windrotors
Die Leistungscharakteristik des Windrotors wird durch den Leistungsbeiwert pc beschrieben.
Der Leistungsbeiwert ist das Verhältnis vom Leistungsanteil, der in der WEA umgesetzt wird, zu
der Leistung, die in der Luftbewegung enthalten ist.
2. Modellbildung einer Windenergieanlage (WEA) mit Asynchronmaschine (ASM)
8
2.2.1 Bestimmung der Windrotorleistung
Die Bestimmung der Windrotorleistung erfolgt mit der vom Wind überstrichenen Rotorfläche
rotA und der Luftdichte ρ nach der Gleichung:
3),(21
WprotT vcAP ⋅⋅⋅= αλρ (2.1)
wobei TP die aus dem Wind bzw. der Windgeschwindigkeit Wv gewonnene mechanische
Leistung ist, die am Triebstrang ein Drehmoment TM in Abhängigkeit von dessen
Winkelgeschwindigkeit T ω erzeugt.
T
TT
PM ω
= (2.2)
Der Leistungsbeiwert ),( αλpc ist abhängig vom Anstellwinkel α und der Schnelllaufzahl λ, dem
Quotient der Umfangsgeschwindigkeit Uv des Rotors zur axialen Windgeschwindigkeit Wv .
W
TR
W
U
vr
vv ωλ ⋅
== (2.3)
Die pc -Kennlinie wird vom Hersteller bestimmt. Für die quantitative Untersuchung konkreter
Anlagen sind deshalb pc -Tabellen in Abhängigkeit von λ und α zu empfehlen. Für qualitative
Untersuchungen kann pc durch folgende Gleichung approximiert werden:
( ) ),(54321
6),( αλαααλ cxp ecccccc ⋅−⋅−⋅−⋅= (2.4)
Die Nachbildung einer herstellerspezifischen pc -Tabelle durch die Gleichung 2.4 erfordert einen
nicht zu unterschätzenden Zeitaufwand aufgrund der Parameterbestimmung 1c bis 6c [7].
2.2.2 Leistungsbegrenzung durch Stallbetrieb
Im Stallbetrieb wird die übertragene Leistung durch die Aerodynamik des Windrotors gesteuert.
Im Bereich unterhalb der Nennleistung herrscht an den Flügelblättern eine laminare Strömung
vor, die gute Auftriebswerte bei relativ geringem Widerstandsanteil und somit große
aerodynamische Wirkungsgrade ermöglicht. Wird schließlich die Nennleistung erreicht, ist eine
weitere Erhöhung des Drehmoments zu verhindern. Die Rotorblattprofile sind deshalb so
2. Modellbildung einer Windenergieanlage (WEA) mit Asynchronmaschine (ASM)
9
konstruiert, dass sich, in Abhängigkeit von der Windgeschwindigkeit, kontrollierte Turbulenzen
ausbilden und folglich zu einem Strömungsabriss (Stall) führen. Das Resultat ist eine
Reduzierung des Drehmoments bei Windgeschwindigkeiten jenseits des Nennbereichs und dem
zufolge auch eine geringere Leistungsausbeute [7].
Eine Abhängigkeit des Leistungsbeiwert ),( αλpc vom Anstellwinkel α liegt somit nur bedingt
vor, da bei der Montage der Windrotoren der Anstellwinkel einmalig festgelegt wird.
Sofern in den Simulationen keine herstellerspezifischen )(λpc -Kennlinien verwendet werden,
wird der Leistungsbeiwert für die Windrotorleistung im Stallbetrieb mittels folgender
Approximation nachgebildet [8].
⎟⎠⎞
⎜⎝⎛ −−
⋅⎥⎦
⎤⎢⎣
⎡−⎟
⎠⎞
⎜⎝⎛ −⋅=
165,06,15
201,014,46)( λ
λλ ecp (2.5)
2.2.3 Leistungsanpassung durch Rotorblattverstellung
Da der Energieertrag einer WEA primär durch die Performance ihres Leistungsbeiwertes
bestimmt wird, werden die WEA zumeist mit einer Rotorblattverstellung ausgerüstet, mit deren
Hilfe sich die Anströmungsverhältnisse am Rotor beeinflussen lassen.
Diese so genannte Pitchregelung ermöglicht durch die Blattwinkelverstellung einerseits eine
maximale Leistungsumsetzung im Teillastbereich und andererseits eine Begrenzung der Leistung
auf den Nennwert bei großen Windgeschwindigkeiten.
Ein weiteres Einsatzgebiet, neben der Ausregelung auf die maximale Leistungsausbeute, ist die
„Androsselung“ der Leistungsabgabe. Diese „Androsselung“ bzw. Leistungsreduzierung wird
durch eine Erhöhung des Blattwinkels α realisiert. Eine derartige Leistungsreduktion kann z.B.
infolge von Netzengpässen erforderlich werden.
Die verwendete Funktion zur Bestimmung des Leistungsbeiwertes bei WEA mit
Rotorblattverstellung lautet [8]:
( )⎥⎥⎦
⎤
⎢⎢⎣
⎡⋅⎟⎟
⎠
⎞⎜⎜⎝
⎛−⋅−⋅=
−
ieci
pλα
λαλ
5,12
54,011622,0, (2.6)
mit 1
035,008,0
113 +
−⋅+
=ααλλi
(2.7)
2. Modellbildung einer Windenergieanlage (WEA) mit Asynchronmaschine (ASM)
10
Jedoch gilt auch für die Simulation von WEA mit Rotorblattverstellung, dass diese
Approximation lediglich nur dann angewendet wird, wenn herstellerspezifische ),( αλpc -
Kennlinien nicht vorhanden sind.
2.3 Modell des mechanischen Triebstrangs
Der Triebstrang einer WEA bildet ein sehr komplexes schwingungsfähiges Gebilde. Jedoch sind
die einzelnen Komponenten des Triebstrangs in ihren Abmessungen, Massenverteilungen und
Werkstoffen so unterschiedlich, dass bedingt durch die Dominanz einzelner Komponenten, die
Nachbildung des aus Netzsicht relevanten Verhaltens mittels stark vereinfachter Ersatzmodelle
möglich ist.
2.3.1 Bewegungsgleichungen des Zwei-Massenschwingers
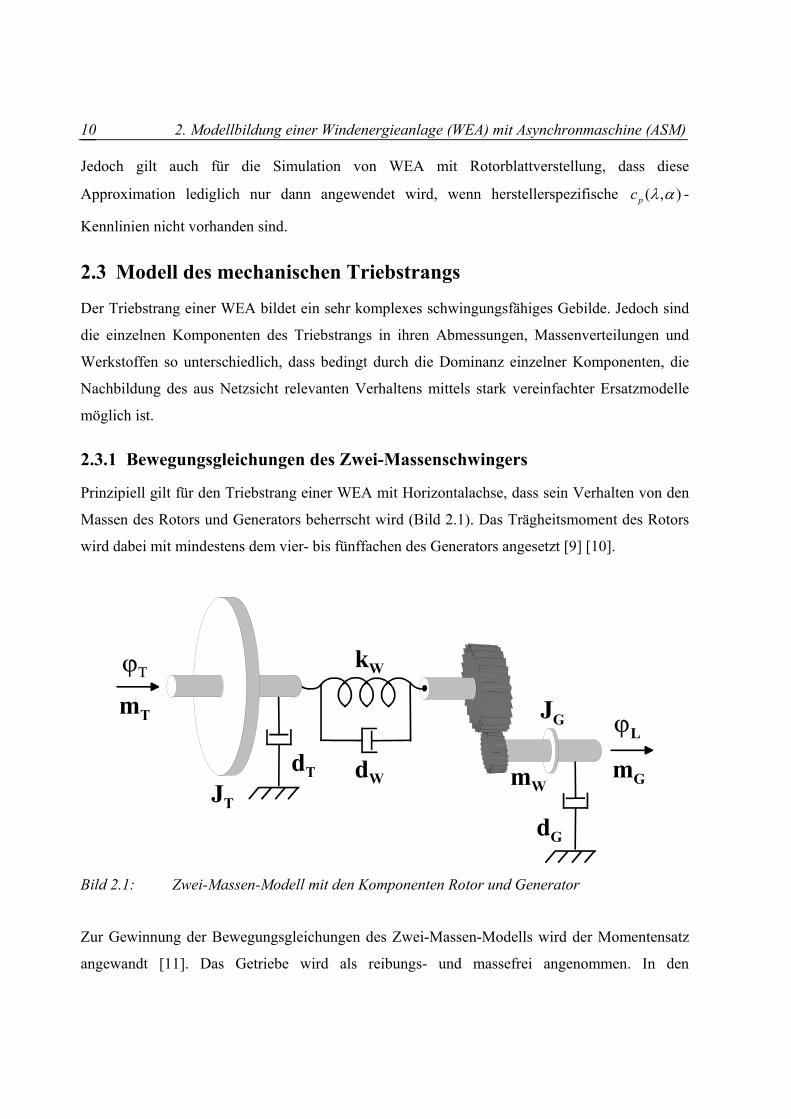
Prinzipiell gilt für den Triebstrang einer WEA mit Horizontalachse, dass sein Verhalten von den
Massen des Rotors und Generators beherrscht wird (Bild 2.1). Das Trägheitsmoment des Rotors
wird dabei mit mindestens dem vier- bis fünffachen des Generators angesetzt [9] [10].
Bild 2.1: Zwei-Massen-Modell mit den Komponenten Rotor und Generator
Zur Gewinnung der Bewegungsgleichungen des Zwei-Massen-Modells wird der Momentensatz
angewandt [11]. Das Getriebe wird als reibungs- und massefrei angenommen. In den
kW
dWJT
JG
mG
mT
mW
dG
ϕG
dT
ϕΤ
ϕL
2. Modellbildung einer Windenergieanlage (WEA) mit Asynchronmaschine (ASM)
11
nachfolgenden Bewegungsgleichungen sind das Übersetzungsverhältnis des Getriebes in der Art
berücksichtigt, dass alle betroffenen Größen auf die Generatorseite transformiert sind. Da es sich
in den Gleichungen um bezogene größen handelt, werden anstelle der Massenträgheitsmomente
TJ und GJ die entsprechenden Anlaufzeitkonstanten TmT _ und GmT _ verwendet.
( ) ( )[ ]TTLTWLTWTTm
T ddkmTdt
d ωωωϕϕω−−−−−=
_
1 (2.8)
( ) ( )[ ]LGLTWLTWGGm
L ddkmTdt
d ωωωϕϕω−−+−+=
_
1 (2.9)
LTdtd ωωϕ
−=∆ (2.10)
mit den Drehmomenten des Rotors Tm und Generators Gm , den entsprechenden
Winkelgeschwindigkeiten des Rotors T ω und des Generatorläufers Lω , sowie der
Drehwinkeldifferenz LT ϕϕϕ −=∆ . Die Konstanten Td und Gd stellen die
geschwindigkeitsproportionalen Reibungsverluste an den einzelnen Komponenten dar. Die
Dämpfungskonstante Wd der Welle wird maßgeblich durch die so genannte werkstoffspezifische
innere Reibung festgesetzt. Bei der Steifigkeit Wk hingegen besteht zusätzlich noch eine
umgekehrt proportionale Abhängigkeit zur Wellen- bzw. Torsionsstabslänge [12].
2.3.2 Vergleich der unterschiedlichen Massen-Modelle
Die Geschwindigkeit der meisten Multi-Megawatt-WEA liegt rotorseitig im Bereich von -1min. 5
bis -1min. 20 . Generatorseitig sind jedoch Drehzahlen im Bereich von -1min. 700 bis -1min. 2000
üblich, sofern ASM verwendet werden. Der Triebstrang besteht daher für gewöhnlich aus
Rotornabe, Rotorwelle, Getriebe, Generatorwelle, Generator und ggf. Kupplungen [13]. Auf
Grund technischer Entwicklungen bzw. herstellerspezifischen Eigenheiten, wie z.B. die
Eliminierung der Rotorwelle durch direkte Ankopplung der Rotornabe an das Getriebe, ergeben
sich unterschiedliche Torsionssteifigkeiten des Triebstrangs [14].
2. Modellbildung einer Windenergieanlage (WEA) mit Asynchronmaschine (ASM)
12
-1,4
-1,2
-1,0
-0,8
-0,6
0,0 0,2 0,4 0,6 0,8 1,0t in s
p in p.u.
kW = 0,2 kW = 3kW = 6kW = ∞
Bild 2.2: Reaktion einer WEA mit Käfigläufer-ASM auf einen generatorfernen 3poligen Kurzschluss von 150 ms Dauer im Einmaschinen-Testnetz. Darstellung des Wirkleistungsverhaltens des Zwei-Massen-Modells mit unterschiedlichen Torsionssteifigkeiten Wk [ ]rad el.p.u.
-0,4
-0,2
0,0
0,2
0,4
0,6
0,8
1,0
0,0 0,2 0,4 0,6 0,8 1,0t in s
q in p.u.
kW = ∞; 6; 3; 0,2
Bild 2.3: Reaktion einer WEA mit Käfigläufer-ASM auf einen generatorfernen 3poligen Kurzschluss von 150 ms Dauer im Einmaschinen-Testnetz. Darstellung des Blindleistungsverhaltens des Zwei-Massen-Modells mit unterschiedlichen Torsionssteifigkeiten Wk [ ]rad el.p.u.
2. Modellbildung einer Windenergieanlage (WEA) mit Asynchronmaschine (ASM)
13
Die Quantifizierung der Einflüsse dieser unterschiedlichen Torsionssteifigkeiten auf das Zwei-
Massen-Modell wird mittels des schon erwähnten generatorfernen 3poligen Kurzschlusses
durchgeführt.
Prinzipiell ist die Torsionssteifigkeit Wk für WEA zwischen rad el.p.u. 0,15 und rad el.p.u. 0,4
angesetzt [15] [16], daher werden am Beispiel einer WEA mit Käfigläufer-ASM vier
unterschiedlichen Torsionssteifigkeiten im Bereich von rad el.p.u. 0,2 bis ∞ simuliert, wobei
∞=Wk einem Ein-Massen-Modell entspricht.
In den vier Beispielrechnungen betragen die Dämpfungskonstante der Welle %2,0=Wd und das
Massenverhältnis 51
=Rotor
Generator [17]. Die WEA wird am Rotor mit der mechanischen
Nennleistung beaufschlagt und ist für den gesamten Simulationszeitraum konstant.
In Bild 2.2 und Bild 2.3 sind die Reaktionen der WEA mit unterschiedlichen
Torsionssteifigkeiten während eines generatorfernen 3poligen Kurzschlusses mit einer Dauer von
150 ms dargestellt. Dieser Kurzschluss bewirkt an den Anschlussklemmen der Käfigläufer-ASM
einen kurzfristigen Spannungseinbruch von 9 %.
Die ASM ist als Modell 5. Ordnung realisiert, auf das im nachfolgenden Kapitel noch genauer
eingegangen wird, und bildet somit neben den langsamen Torsionsschwingungen auch die
schnelleren 50-Hz-Schwingungen ab. Die letztgenannten Schwingungen ergeben sich aus der
Eigenheit des verwendeten ASM-Modells und bilden sich unabhängig von der Verwendung eines
Ein- oder Zwei-Massen-Modells aus. Die Torsionsschwingungen entstehen stattdessen
ausschließlich wegen der Verwendung des Zwei- anstelle des Ein-Massen-Modells.
Die 50-Hz-Schwingungen beeinflussen das Wirkleistungsverhalten der WEA zwar maßgeblich,
aber die Auswirkungen der unterschiedlichen Torsionssteifigkeiten sind auch klar erkennbar. Die
Veränderungen beim Blindleistungsverhalten aufgrund unterschiedlicher Torsionssteifigkeiten
sind hingegen sehr gering.
2.4 Mechanisch-Elektrisches Energiewandlersystem
Die große Verbreitung der Asynchronmaschine als elektrischer Antrieb liegt darin begründet,
dass im Speziellen die Käfigläufer-Asynchronmaschine (Squirrel-Cage Induction Machine,
SCIM) die betriebsicherste und instandhaltungsärmste elektrische Maschine darstellt. Ein großer
2. Modellbildung einer Windenergieanlage (WEA) mit Asynchronmaschine (ASM)
14
Nachteil der ASM ist jedoch, dass eine freizügige Drehzahlverstellung nur mit erheblichem
Aufwand zu realisieren ist.
Das Leistungsverhalten einer WEA ist primär von der Aerodynamik des Rotors geprägt und die
maximale Leistung wird der Windströmung nur dann entzogen, wenn die WEA bei einer
bestimmten Schnelllaufzahl betrieben wird, was jedoch eine windgeschwindigkeitsabhängige
Drehzahlvariabilität voraussetzt. Die somit benötigte Drehzahlveränderung ist mittels einer
asynchronen Schleifringläufermaschine (Slip-Ring Induction Machine, SRIM) möglich.
Eine Variante der Drehzahlbeeinflussung ist das Einfügen eines variablen Zwischenwiderstandes
in den Läuferkreis, was aber mit einem Anstieg der Verluste verbunden ist. Die gängigere
Lösung ist die Drehzahlveränderung durch Speisung des Läuferwicklungssystems über einen
Frequenzumrichter mit Spannungszwischenkreis. Diese Kombination wird als doppelt gespeiste
Asynchronmaschine (Doubly-Fed Induction Machine, DFIM) bezeichnet.
2.4.1 Ausführliches Gleichungssystem der ASM
Die ASM ist ebenso wie die Synchronmaschine (SM) eine Drehfeldmaschine. Der Aufbau des
Ständers ist grundsätzlich bei beiden identisch. Läuferseitig liegt der Hauptunterschied darin,
dass die SM nur eine von Gleichstrom durchflossenen Erreger- oder Feldwicklung besitzt. Der
Läufer der ASM hingegen hat eine ähnliche Drehstromwicklung wie der Ständer. Bei der SRIM
werden die drei Anschlüsse, der in Stern geschalteten Wicklungen, zusätzlich zu Schleifringen
auf der Welle geführt.
Die Wirkungsweise der ASM beruht darauf, dass ein von den Ständerströmen erregtes Drehfeld
in den Läuferwicklungen eine Spannung induziert. Die daraufhin fließenden Läuferströme
erzeugen zusammen mit dem durch die Netzfrequenz vorgegebenen Drehfeld das Drehmoment
der Maschine. Voraussetzung für diese Spannungsinduktion und den daraus resultierenden
Läuferstrom ist die Existenz einer Relativdrehzahl des Läufers zum Drehfeld, oder anders
ausgedrückt, wenn der Läufer asynchron zum Ständerdrehfeld umläuft.
2.4.1.1 Mathematisches Modell der ASM fünfter Ordnung
Bei Berechnungen von Vorgängen in elektrischen Maschinen werden vorrangig die Zweiachsen-,
Parksche - oder auch dq-Komponenten benutzt [18]. Dabei gilt es alle zeitabhängigen Ständer-
und Läufergrößen in ein kartesisches Synchron-Koordinatensystem zu transformieren, wobei zu
2. Modellbildung einer Windenergieanlage (WEA) mit Asynchronmaschine (ASM)
15
beachten ist, dass die Winkelgeschwindigkeiten des Ständerfeldes und des Läufers für
gewöhnlich unterschiedlich sind.
Im Weiteren werden alle Läufer- auf die Ständergrößen umgerechnet.
Die Anwendung der Park-Transformation auf die Spannungsgleichungen des ursprünglichen
einphasigen Wicklungsmodells ergeben schließlich die Gleichungen (2.11) bis (2.14), die das
vollständige Modell der ASM mit Raumzeigern beschreiben [19].
Der hochgestellte Index K∠ beschreibt das gewählte Bezugskoordinatensystem, dass mit der
Winkelgeschwindigkeit Kω rotiert. Wird Kω durch die netz- oder ständerbezogene
Winkelgeschwindigkeit 0ω ersetzt, so liegt eine Übereinstimmung der Spannungs- Strom- und
Flussverkettungsraumzeiger mit den komplexen Zeitzeigern bis auf einen konstanten Winkel vor.
• Spannungsgleichungen:
K
SK
K
SKSS
KS j
dtd
iru ∠∠
∠∠ ⋅⋅++⋅= ψωψ
(2.11)
( ) K
LLK
K
LKLL
KL j
dtd
iru ∠∠
∠∠ ⋅−⋅++⋅= ψωωψ
(2.12)
• Flussverkettungsgleichungen:
KLh
KSS
KS
ilil ∠∠∠ ⋅+⋅=ψ (2.13)
KLL
KSh
KL
ilil ∠∠∠ ⋅+⋅=ψ (2.14)
Die Induktivitäten Sl und Ll setzen sich aus einem Streuanteil (Index σ) und dem
Hauptfeldanteil (Index h) zusammen.
ShS lll σ+= und LhL lll σ+= (2.15)
• Bewegungsgleichung:
Diese Gleichung des Ein-Massenmodells steht stellvertretend für alle Mehr-
Massenmodelle, so kann an dieser Stelle ebenso Gleichungen (2.9) eingebunden werden.
( ) { } ⎟⎠⎞
⎜⎝⎛ +⋅⋅⋅=+⋅= TLS
L
mTG
m
L mlk
Tmm
Tdtd * Im
´11 ψψω (2.16)
Mit der Anlaufzeitkonstanten mT . Die transiente Induktivität l′ und dem Koppelfaktor Lk
setzen sich im Weiteren wie folgt zusammen:
2. Modellbildung einer Windenergieanlage (WEA) mit Asynchronmaschine (ASM)
16
L
hS l
lll2
−=′ und L
hL l
lk = (2.17)
Die in den Gleichungen (2.11) bis (2.14) verwendeten Raumzeiger des mit Kω rotierenden
Koordinatensystems werden gemäß der folgenden Gleichung definiert:
qdK j υυυ ⋅+=∠ (2.18)
wobei der Platzhalter υ für u , i und ψ steht.
Die Gleichungen (2.19) bis (2.22) resultieren aus der Aufteilung der beiden Gleichungen (2.11)
und (2.12) in Real- und Imaginäranteil und ergeben mit der Bewegungsgleichung (2.16) das
Modell 5. Ordnung der ASM.
SqKSd
SdSSd dtdiru ψωψ
⋅−+⋅= (2.19)
SdKSq
SqSSq dtd
iru ψωψ
⋅++⋅= (2.20)
( ) LqLKLd
LdLLd dtdiru ψωωψ
⋅−−+⋅= (2.21)
( ) LdLKLq
LqLLq dtd
iru ψωωψ
⋅−++⋅= (2.22)
2.4.1.2 Quasistationäres Modell der ASM dritter Ordnung
Das quasistationäre Modell dritter Ordnung basiert auf der Vernachlässigung der
transformatorischen Glieder dt
d Sdψ und dt
d Sqψ in den Ständerspannungsgleichungen (2.19) und
(2.20), denn sie sind wesentlich kleiner als die rotatorischen Spannungsglieder SdK ψω ⋅ und
SqK ψω ⋅ .
Somit geht die Differenzialgleichung (2.11) in eine algebraische Gleichung über. Für diese
Modellvereinfachung wird als Bezugskoordinatensystem die mit der Winkelgeschwindigkeit 0ω
rotierenden Netzkoordinaten gewählt [20]. Aus diesem Grund wird auch im Weiteren die übliche
komplexe Schreibweise für Spannungs- und Strom-Zeitzeiger verwendet. So ergibt sich
schließlich aus Gleichung (2.11) für die Ständerflussverkettung:

2. Modellbildung einer Windenergieanlage (WEA) mit Asynchronmaschine (ASM)
17
0ωψ
⋅⋅−
=j
iru SSSS
(2.23)
Durch Einsetzen der Gleichung (2.14) in Gleichung (2.13) wird der Läuferstrom in der
Ständerflussverkettungsgleichung eliminiert.
( )ShLL
hSSS
illlil ⋅−⋅+⋅= ψψ (2.24)
Durch Gleichsetzen der Gleichungen (2.23) und (2.24) ergibt sich Gleichung (2.25), nach
Eliminierung der Ständerflussverkettung.
( )LLSSSS kjiljruizu ψωω 00´ ´ +⋅′+=+⋅= (2.25)
Bild 2.4: Quasistationäres Ersatzschaltbild der ASM
Zu Gleichung (2.25) lässt sich die in Bild 2.4 dargestellte Ersatzschaltung angeben.
Setzt man Gleichung (2.14) nun in (2.12) ein, ergibt sich die Differentialgleichung:
( ) LSLLLLL
LL uirkjlr
dtd
+⋅⋅+⋅⎟⎟⎠
⎞⎜⎜⎝
⎛−⋅+−= ψωω
ψ0 (2.26)
Wenn in (2.26) zum einen der Ständerstrom Si unter Verwendung der reduzierten
Ständerspannungsgleichung (2.25) eliminiert und zum anderen die Läuferzeitkonstante 10
−LT
eingeführt wird, so ergibt sich Gleichung (2.27).
LSLL
LLL
LL uu
zkr
zrkjT
dtd
+⋅⋅
+⋅⎟⎟⎠
⎞⎜⎜⎝
⎛ ⋅⋅⋅+−= −
´´
201
0 ψωψ (2.27)
Die Läuferzeitkonstante wird wie folgt definiert:
LLkju ψω0'=
ljrz S ′+= 0' ω
~ Si
Su
2. Modellbildung einer Windenergieanlage (WEA) mit Asynchronmaschine (ASM)
18
( )LL
LL j
lrT ωω −⋅+=−
010 (2.28)
In die mechanische Zustandsgleichung (2.16) wird mit Gleichung (2.24) eine Abhängigkeit zum
Ständerstrom Si hergestellt, wobei die Ständerflussverkettung S
ψ eliminiert wird.
Die resultierende Bewegungsgleichung (2.29) komplettiert schließlich das quasistationäre Modell
dritter Ordnung der ASM.
{ }( )TLSLm
L mikTdt
d+⋅⋅⋅= *Im1 ψω (2.29)
Zur Bestimmung der Läuferflussverkettung L
ψ und folglich des Ständerstromes Si wird in
einem alternierenden Prozess neben der numerischen Integration der Gleichungen (2.27) und
(2.29), die Lösung der Lastflussberechnung im übergeordneten EES notwendig, in dem die ASM
eingebunden ist.
Anzumerken ist, dass das obige mathematische Gleichungssystem sowohl für die Käfigläufer- als
auch für die Schleifringläufer-ASM gilt. Die einzige Modifizierung besteht darin, dass bei der
erstgenannten ASM die Läuferspannung 0=Lu gesetzt wird.
2.4.1.3 Stationäres Modell der ASM
Die Darstellung des Wirk- und Blindleistungsverhaltens der DFIM im theoretisch möglichen
Vier-Quadranten-Betrieb im stationären Zustand bedingt vorab eine Beschreibung eben dieses
stationären DFIM-Modells. Der Grund dieser Modellerwähnung ist, dass es mit seinem stark
reduzierten Gleichungssystem besonders geeignet ist, die unterschiedlichen Möglichkeiten der
Beeinflussung des Betriebsverhaltens aufzuzeigen.
Das stationäre Modell ergibt sich schließlich, wenn neben der Ständer- auch die
Läuferflussverkettung als trägheitsfrei angenommen ⎟⎠⎞
⎜⎝⎛ = 0
Ldtd ψ wird. Somit ergibt sich aus
Gleichung (2.26) nach Einführung des Schlupfes 0
0
ωωω Ls −
= .
⎟⎠⎞
⎜⎝⎛ +
⋅⋅⋅
⋅⎟⎠⎞
⎜⎝⎛ +
=s
us
irk
jxsr
x LSLL
LL
LL
0ωψ (2.30)
2. Modellbildung einer Windenergieanlage (WEA) mit Asynchronmaschine (ASM)
19
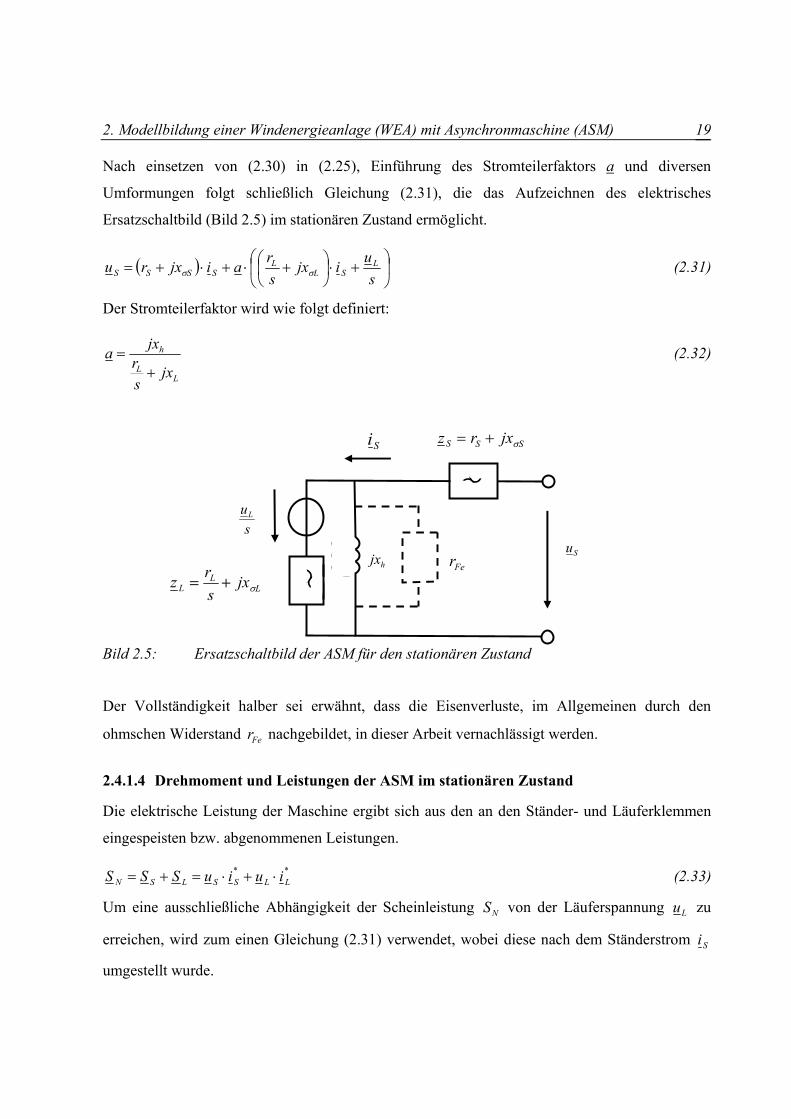
Nach einsetzen von (2.30) in (2.25), Einführung des Stromteilerfaktors a und diversen
Umformungen folgt schließlich Gleichung (2.31), die das Aufzeichnen des elektrisches
Ersatzschaltbild (Bild 2.5) im stationären Zustand ermöglicht.
( ) ⎟⎠
⎞⎜⎝
⎛+⋅⎟
⎠⎞
⎜⎝⎛ +⋅+⋅+=
suijx
sraijxru L
SLL
SSSS σσ (2.31)
Der Stromteilerfaktor wird wie folgt definiert:
LL
h
jxsr
jxa+
= (2.32)
Bild 2.5: Ersatzschaltbild der ASM für den stationären Zustand
Der Vollständigkeit halber sei erwähnt, dass die Eisenverluste, im Allgemeinen durch den
ohmschen Widerstand Fer nachgebildet, in dieser Arbeit vernachlässigt werden.
2.4.1.4 Drehmoment und Leistungen der ASM im stationären Zustand
Die elektrische Leistung der Maschine ergibt sich aus den an den Ständer- und Läuferklemmen
eingespeisten bzw. abgenommenen Leistungen.
**LLSSLSN iuiuSSS ⋅+⋅=+= (2.33)
Um eine ausschließliche Abhängigkeit der Scheinleistung NS von der Läuferspannung Lu zu
erreichen, wird zum einen Gleichung (2.31) verwendet, wobei diese nach dem Ständerstrom Si
umgestellt wurde.
hjx
SSS jxrz σ+=
Su
LL
L jxsrz σ+=
suL
Fer
Si

2. Modellbildung einer Windenergieanlage (WEA) mit Asynchronmaschine (ASM)
20
( )LSLS
LS
S
xaxjrsar
usau
iσσ ⋅++⋅+
⋅−= (2.34)
Eine ausschließliche Abhängigkeit bedeutet in diesem Fall, dass die Ständerspannung Su und die
Maschinenparameter als konstant angenommen werden. Der Läuferstrom Li wird aus den
Gleichungen (2.12) und (2.30) ermittelt.
SL
L
LL ia
ru
kai ⋅−⋅⎟⎟
⎠
⎞⎜⎜⎝
⎛−= 1 (2.35)
Werden nun Gleichung (2.34) und (2.35) in (2.33) eingebunden, so lässt sich die
Gesamtscheinleistung der DFIM in ausschließlicher Abhängigkeit von den veränderbaren Größen
Läuferspannung und Schlupf darstellen. Der Lastwinkel τ stellt dabei die Differenz zwischen
Ständer- und Läuferspannungswinkel dar.
[ ]
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛+−+
+⋅−
⋅+
⎟⎟⎠
⎞⎜⎜⎝
⎛+−+
+⋅⋅
+
⎟⎟⎠
⎞⎜⎜⎝
⎛+−+
=
−
LSLSLL
LL
LSLS
jjLS
LSLS
S
N
xaxj
sr
ar
arkaku
xaxj
sr
ar
sees
uu
xaxj
sr
ar
au
S
σσ
σσ
ττ
σσ
**
**2
****
*
2
(2.36)
Ein Ergebnis der Läuferspannungsvorgabe ist die Möglichkeit der Drehzahlvariation vom unter-
in den übersynchronen Maschinenbetrieb.
Das Wirk- und Blindleistungsverhalten in Abhängigkeit vom Lastwinkel τ mit der Amplitude
der Läuferspannung als Parameter ist in Bild 2.6 bis Bild 2.8 dargestellt. Sie zeigen den
theoretischen Betrieb der Maschine in allen vier Quadranten.
Bei der Simulation sind die Maschinenparameter ..00779,0 uprS = , ..07937,0 upx S =σ ,
..1039,4 upxh = , ..4,0 upx L =σ und ..0082,0 uprL = verwendet und ein Schlupf ..1,0 ups −=
angesetzt worden [21].
2. Modellbildung einer Windenergieanlage (WEA) mit Asynchronmaschine (ASM)
21
Bild 2.6: Wirk- (a) und Blindleistung (b) des Läuferkreises als Funktion des Lastwinkelsτ
Bild 2.7: Wirk- (a) und Blindleistung (b) des Ständerkreises als Funktion des Lastwinkelsτ
Bild 2.8: Wirk- (a) und Blindleistung (b) als Funktion des Lastwinkels τ
-0,2
0,0
0,2
0,4
0 180 360 τ in °
p_Läufer in p.u.
a) -0,6
-0,4
-0,2
0,0
0,2
0 180 360 τ in °
q_Läufer in p.u.
b)
-3,0
-2,0
-1,0 0,0
1,0
2,0
3,0
0 180 360 τ in °
p_Ständer in p.u.
a) -1,0
0,0
1,0
2,0
3,0
4,0
5,0
0 180 360 τ in °
q_Ständer in p.u.
b)
-3,0
-2,0
-1,0 0,0
1,0
2,0 3,0
0 180 360 τ in °
p_Netz in p.u.
a) -1,0
0,0
1,0
2,0
3,0
4,0
5,0
0 180 360 τ in °
q_Netz in p.u.
b)
2. Modellbildung einer Windenergieanlage (WEA) mit Asynchronmaschine (ASM)
22
Im Weiteren seien zwei Sonderfälle aufgezeigt:
• Wird die Läuferspannung 0=Lu gesetzt, ergibt sich das Modell der Käfigläufer-ASM.
Durch die Einführung des Stromteilerfaktors in Gleichung (2.35) lässt sich der
Läuferstrom direkt aus dem Ständerstrom berechnen.
SL iai ⋅−= (2.37)
Für die Scheinleistung ergibt sich aus Gleichung (2.36).
( )LSLS
SN
xaxjrs
ar
uS
σσ*
*
2
+−+= (2.38)
• Bei synchroner Drehzahl der ASM (Schlupf 0⇒s ) reduzieren sich die Gleichungen
(2.34) und (2.35) zu:
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅−⋅
+= L
L
hS
SSS u
rxju
jxri 1 (2.39)
L
LL r
ui = (2.40)
Die Scheinleistung ergibt sich wiederum aus Gleichung (2.36).
( ) L
LjLS
LSS
h
SS
SN r
ueuu
rjxrjx
jxru
S22
+⋅⋅⋅⋅−
−−
= τ (2.41)
2.4.2 Vergleich der unterschiedlichen Modelle
Es ist eine gängige Praxis bei der Simulation von elektromechanischen Vorgängen im EES, die
ASM mit dem quasistationären Model 3. Ordnung zu beschreiben. Die Ergebnisse sind für die
meisten Aufgabenstellungen ausreichend genau. Eine erneute Diskussion zur Angemessenheit
des quasistationären Modells der ASM ist hervorgerufen worden durch die in WEA zum
Eigenschutz installierten Maßnahmen, die während eines netzseitigen Fehlers aktiv werden
können.
Die DFIM besteht bekanntlich aus den Hauptkomponenten SRIM und den beiden Umrichtern im
Läuferkreis, die mittels Steuerung eine Veränderung des Betrages und des Winkels der
Läuferspannung ermöglichen. Wenn die DFIM während einer Störung nicht vom Netz getrennt
2. Modellbildung einer Windenergieanlage (WEA) mit Asynchronmaschine (ASM)
23
wird, kann es zu Stromüberhöhungen im Läuferkreis kommen, die zur Zerstörung der
Umrichtertechnik führen. Daher gilt es entsprechende Schutzmaßnahmen zu implementieren, um
eben diese Zerstörung zu vermeiden. Eine dieser möglichen Schutzeinrichtungen ist die Crowbar,
die bei Überschreitung eines vordefinierten Strommaximums im Läuferkreis den läuferseitigen
Umrichter sperrt und den Läuferstromkreis über externe Widerstände kurz schließt.
Die Hauptzielsetzung des Vergleichs zwischen den Modellen 3. und 5. Ordnung ist die
Untersuchung der Auswirkungen auf die Ströme, Leistungen, usw. insbesondere unter dem
Aspekt der Crowbarzündung.
Zum direkten Vergleich werden die Reaktionen der Modelle 3. und 5. Ordnung auf einen
3poligen generatorfernen Kurzschluss berechnet, der an den Anschlussklemmen der ASM einen
Spannungseinbruch von 9 % bewirkt.
Die erste Simulation zeigt die grundsätzlichen Unterschiede der Modelle am Beispiel der
Käfigläufer-ASM. Sie wird der DFIM vorgezogen, da sie keine Regeleinrichtungen benötigt, die
das Maschinenverhalten zusätzlich beeinflussen könnten. Die in Bild 2.9 dargestellten Verläufe
der Wirk- und Blindleistung des Modells 5. Ordnung enthalten 50-Hz-Schwingungen. Das
quasistationäre Modell erfasst diesen schnellen Teilvorgang nicht und bildet lediglich den
Mittelwert des Vorgangs ab.
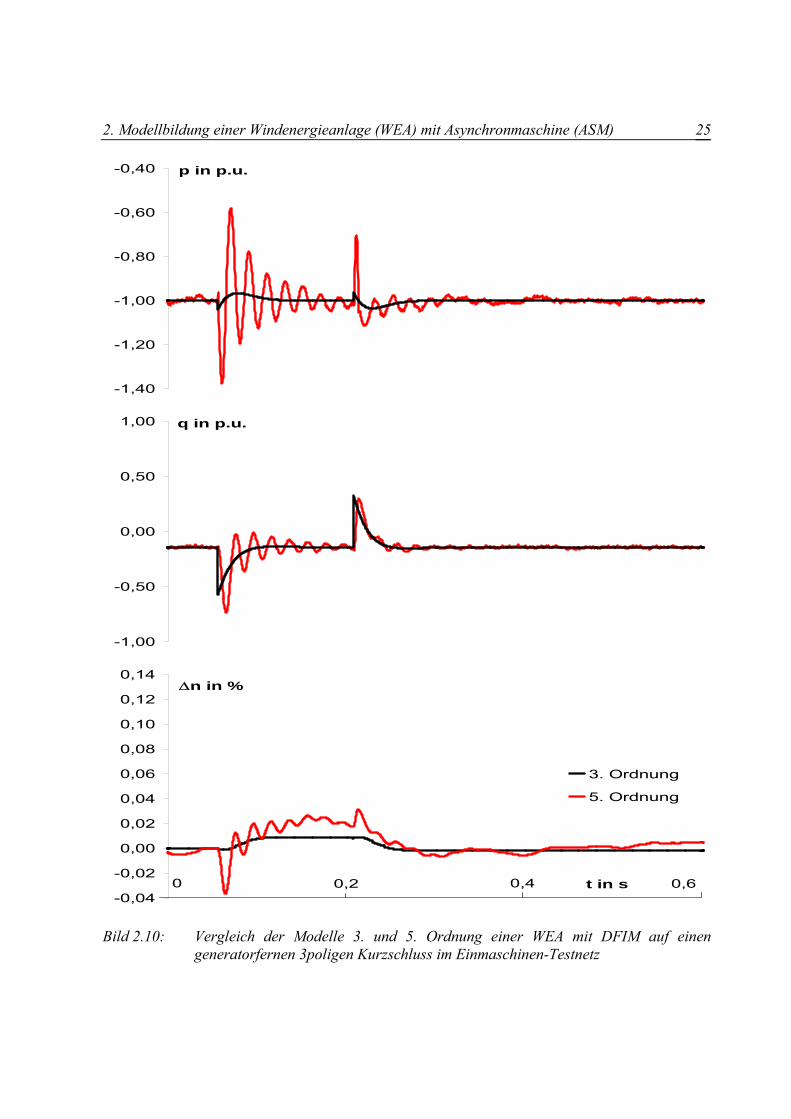
Die zweite Simulation zeigt das Verhalten einer leistungsgeregelten DFIM. Die
Schutzeinrichtung Crowbar ist in dieser Simulation jedoch nicht aktiv, da aufgrund des
generatorfernen Kurzschlusses die Läuferströme den kritischen Grenzwert nicht überschreiten. In
Bild 2.10 ist ebenfalls zu erkennen, dass das quasistationäre Modell mit guter Genauigkeit den
Mittelwert der Leistungen und der Drehzahl abbildet.
Der Aktivierungszeitpunkt der Schutzeinrichtung Crowbar steht in direkter Abhängigkeit zur
Grenzwertüberschreitung des Läuferstroms. Der Vergleich zwischen den Modellen 3. und 5.
Ordnung zeigt, dass der Aktivierungszeitpunkt direkt mittels der simulierten Momentanwerte des
Modells 5. Ordnung bestimmt werden kann. Die Mittelwerte des Modells 3. Ordnung hingegen
erlauben keine direkte Bestimmung des Aktivierungszeitpunkts, was die Bewertung des
Maschinenverhaltens im Fehlerfall deutlich erschwert.
2. Modellbildung einer Windenergieanlage (WEA) mit Asynchronmaschine (ASM)
24
-1,40
-1,20
-1,00
-0,80
-0,60
-0,40 p in p.u.
-1,00
-0,50
0,00
0,50
1,00 q in p.u.
-0,04
-0,02
0,00
0,02
0,04
0,06
0,08
0,10
0,12
0,14
t in s
3. Ordnung5. Ordnung
∆n in %
0,40,20 0,6
Bild 2.9: Vergleich der Modelle 3. und 5. Ordnung einer WEA mit Käfigläufer-ASM auf einen generatorfernen 3poligen Kurzschluss im Einmaschinen-Testnetz
2. Modellbildung einer Windenergieanlage (WEA) mit Asynchronmaschine (ASM)
25
-1,40
-1,20
-1,00
-0,80
-0,60
-0,40 p in p.u.
-1,00
-0,50
0,00
0,50
1,00 q in p.u.
-0,04
-0,02
0,00
0,02
0,04
0,06
0,08
0,10
0,12
0,14
t in s
3. Ordnung
5. Ordnung
∆n in %
0,40,20 0,6
Bild 2.10: Vergleich der Modelle 3. und 5. Ordnung einer WEA mit DFIM auf einen generatorfernen 3poligen Kurzschluss im Einmaschinen-Testnetz
2. Modellbildung einer Windenergieanlage (WEA) mit Asynchronmaschine (ASM)
26
2.5 Zusammenfassung und Ergebnisse der Modellbildung
Grundsätzlich wird bei der aerodynamischen Regelung der Antriebsleistung zwischen Stall- und
Pitchregelung unterschieden. Die Pitchregelung bietet den Vorteil der gezielten mechanischen
Regelung. Die Stallanlage hingegen ist im Aufbau einfacher und folglich auch robuster [7].
Die Leistungsbeiwerte können für die Simulation mittels der beschriebenen Funktionen oder
durch herstellereigene ),( αλpc -Referenzkennlinien nachgebildet werden.
Die ausnahmslose Nachbildung des Triebstrangs einer WEA als Ein-Massen-Modell ist nicht
statthaft, da die Eigenfrequenz der Torsionsschwingung sich in einem Bereich von wenigen Hertz
bewegt und somit sich Wechselwirkungen mit der Regelung ergeben können. Grundsätzlich gilt,
dass bei einer relativ großen Torsionssteifigkeit das Ein-Massen-Model ausreichend ist für die
Untersuchung von transienten Vorgängen. Wird die Torsionssteifigkeit jedoch als klein
eingestuft (gezeigt bei SCIM: rad el.p.u. 3<Wk ), wird das Zwei-Massen-Model empfohlen, da
die Auswirkungen nicht generell zu vernachlässigen sind.
Die nachfolgenden Untersuchungen der WEA mit DFIM werden mit dem Ein-Massen-Modell
durchgeführt, jedoch wird diese Entscheidung nicht mit den üblichen Aussagen der
Drehzahlvariabilität oder der regelungstechnischen Beeinflussung des Maschinenverhaltens
begründet [17], sondern geschieht ausschließlich mit der Begründung der Ausgrenzung von
möglichen ungewollten Effekten.
Der Modellvergleich anhand eines generatorfernen 3poligen Kurzschlusses zeigt, dass das
quasistationäre Modell 3. Ordnung der ASM, im Gegensatz zum Modell 5.Ordnung, die 50-Hz-
Schwingungen nicht abbildet, sondern sich lediglich auf den Mittelwert dieses Vorgangs
beschränkt. Dieser Umstand kann somit zu einer unkorrekten Schlussfolgerung bezüglich der
Schutzreaktion der Maschine führen.
3 Regelkonzepte einer WEA mit doppelt gespeister ASM
(DFIM)
3.1 Überblick
Resultierend aus der Tatsache, dass die Windgeschwindigkeit, mit der der Rotor der WEA
beaufschlagt wird, stochastisch schwankt, unterliegt die ungeregelt erzeugte elektrische Leistung
eben diesen zufälligen Fluktuationen über der Zeit.
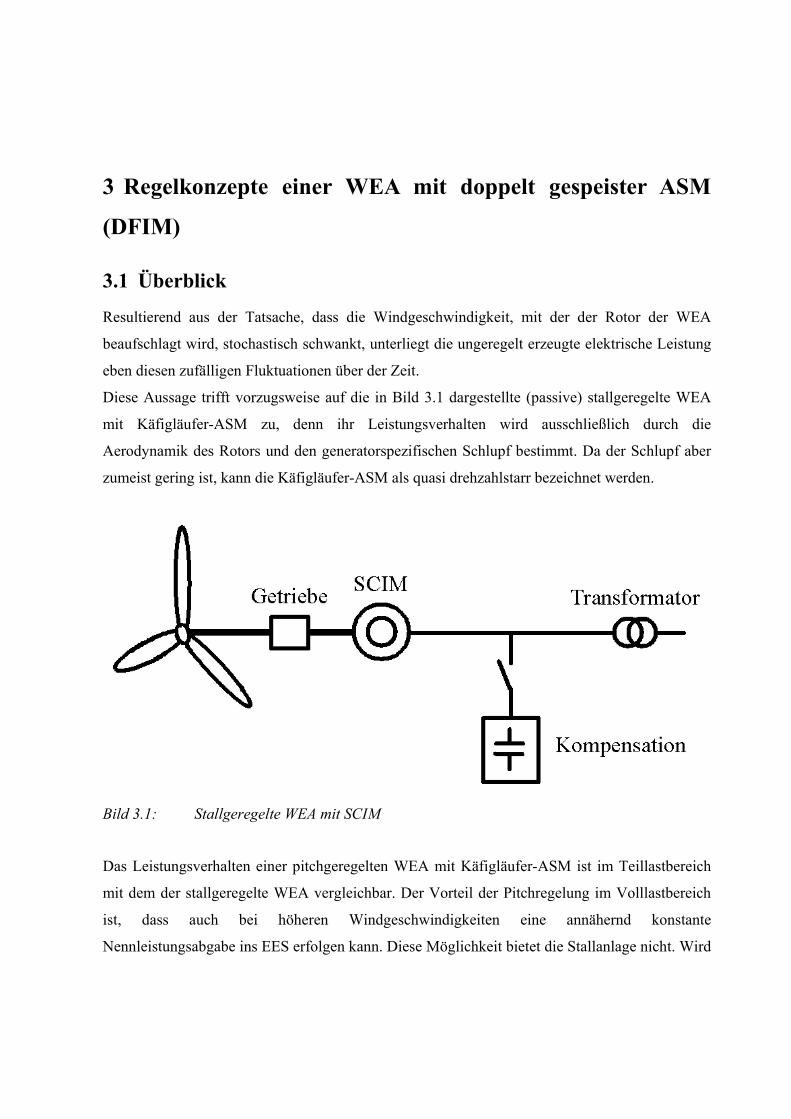
Diese Aussage trifft vorzugsweise auf die in Bild 3.1 dargestellte (passive) stallgeregelte WEA
mit Käfigläufer-ASM zu, denn ihr Leistungsverhalten wird ausschließlich durch die
Aerodynamik des Rotors und den generatorspezifischen Schlupf bestimmt. Da der Schlupf aber
zumeist gering ist, kann die Käfigläufer-ASM als quasi drehzahlstarr bezeichnet werden.
Bild 3.1: Stallgeregelte WEA mit SCIM
Das Leistungsverhalten einer pitchgeregelten WEA mit Käfigläufer-ASM ist im Teillastbereich
mit dem der stallgeregelte WEA vergleichbar. Der Vorteil der Pitchregelung im Volllastbereich
ist, dass auch bei höheren Windgeschwindigkeiten eine annähernd konstante
Nennleistungsabgabe ins EES erfolgen kann. Diese Möglichkeit bietet die Stallanlage nicht. Wird
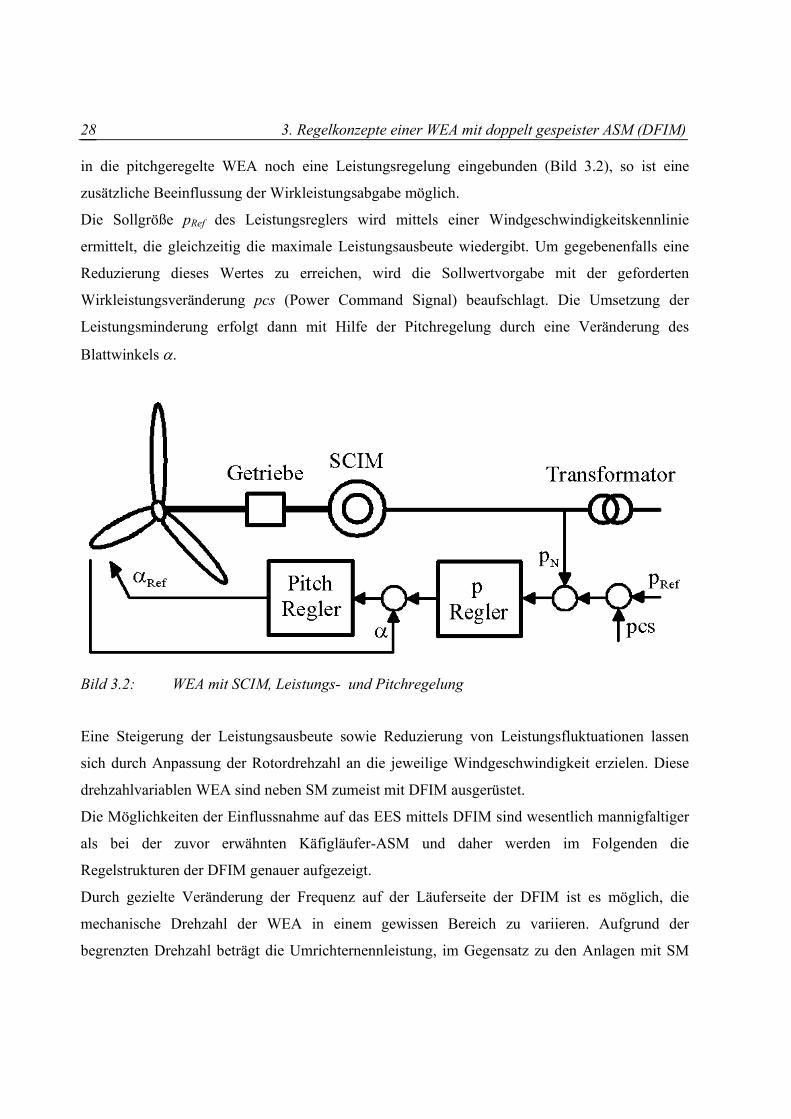
3. Regelkonzepte einer WEA mit doppelt gespeister ASM (DFIM)
28
in die pitchgeregelte WEA noch eine Leistungsregelung eingebunden (Bild 3.2), so ist eine
zusätzliche Beeinflussung der Wirkleistungsabgabe möglich.
Die Sollgröße pRef des Leistungsreglers wird mittels einer Windgeschwindigkeitskennlinie
ermittelt, die gleichzeitig die maximale Leistungsausbeute wiedergibt. Um gegebenenfalls eine
Reduzierung dieses Wertes zu erreichen, wird die Sollwertvorgabe mit der geforderten
Wirkleistungsveränderung pcs (Power Command Signal) beaufschlagt. Die Umsetzung der
Leistungsminderung erfolgt dann mit Hilfe der Pitchregelung durch eine Veränderung des
Blattwinkels α.
Bild 3.2: WEA mit SCIM, Leistungs- und Pitchregelung
Eine Steigerung der Leistungsausbeute sowie Reduzierung von Leistungsfluktuationen lassen
sich durch Anpassung der Rotordrehzahl an die jeweilige Windgeschwindigkeit erzielen. Diese
drehzahlvariablen WEA sind neben SM zumeist mit DFIM ausgerüstet.
Die Möglichkeiten der Einflussnahme auf das EES mittels DFIM sind wesentlich mannigfaltiger
als bei der zuvor erwähnten Käfigläufer-ASM und daher werden im Folgenden die
Regelstrukturen der DFIM genauer aufgezeigt.
Durch gezielte Veränderung der Frequenz auf der Läuferseite der DFIM ist es möglich, die
mechanische Drehzahl der WEA in einem gewissen Bereich zu variieren. Aufgrund der
begrenzten Drehzahl beträgt die Umrichternennleistung, im Gegensatz zu den Anlagen mit SM
3. Regelkonzepte einer WEA mit doppelt gespeister ASM (DFIM)
29
und Vollumrichtern, nur einen Teil der Maschinennennleistung. Trotzdem besteht, wie bei der
SM auch, die Möglichkeit Wirk- und Blindleistung bzw. andere mit ihnen korrelierende Größen,
wie Frequenz und Spannung, elektronisch über den Umrichter zu regeln. Während die
Blindleistung auf diese Weise dauerhaft verstellt werden kann, geht eine Wirkleistungsänderung
zunächst zu Lasten der kinetischen Energie der rotierenden Massen und hat somit nur eine
temporäre Wirkung. Eine bleibende Wirkleistungsveränderung ist nur über eine Verstellung der
Rotorblätter, d.h. über die Pitchregelung zu realisieren.
3.2 Drehzahlvariable WEA mit DFIM-Modell 5. Ordnung
Die Schutzsysteme der WEA unterlagen in der Vergangenheit ausschließlich dem Eigenschutz.
Im Falle eines Netzfehlers beispielsweise wurden die WEA vom Netz getrennt und stillgesetzt.
Aufgrund der rasant ansteigenden Windenergieeinspeisung werden die Schutzsysteme in dem
Sinne erweitert, dass im Netzfehlerfall unterstützende Funktionen bereitgestellt werden können.
Die Folge sind neue Regelungsstrukturen und/oder Modifikationen an der WEA selber, wie z.B.
die Crowbar.
Wie schon in Kapitel 2 erwähnt, ist diese Diskussion der Gleichwertigkeit der Modelle 3.- und 5.-
Ordnung eben durch diese Erweiterung der Schutzsysteme von WEA erneut aufgeflammt, denn
der im Läuferkreis befindliche Frequenzumrichter ist vor Zerstörung durch Stromüberhöhungen
während eines Netzfehlers zu schützen. Ein mögliches Schutzkonzept ist die Crowbar, die bei
Überschreitung eines vordefinierten Rotorstroms aktiv wird. Dabei wird gleichzeitig der
läuferseitige Umrichter gesperrt und die offenen Läuferwicklungen über eine Impedanz
verschaltet [23]. Folglich besteht eine direkte Abhängigkeit zwischen den Aktivitäten der
Crowbar und den Rotorströmen.
Der Hauptgrund für die Erstellung dieses DFIM-Modells 5. Ordnung ist daher die Simulation der
Rotorströme während eines Netzfehlers, um die Signifikanz der reduzierten Genauigkeit als
Folge der Verwendung des quasistationären DFIM-Modells in Modelstrukturen des EES zu
quantifizieren.
3. Regelkonzepte einer WEA mit doppelt gespeister ASM (DFIM)
30
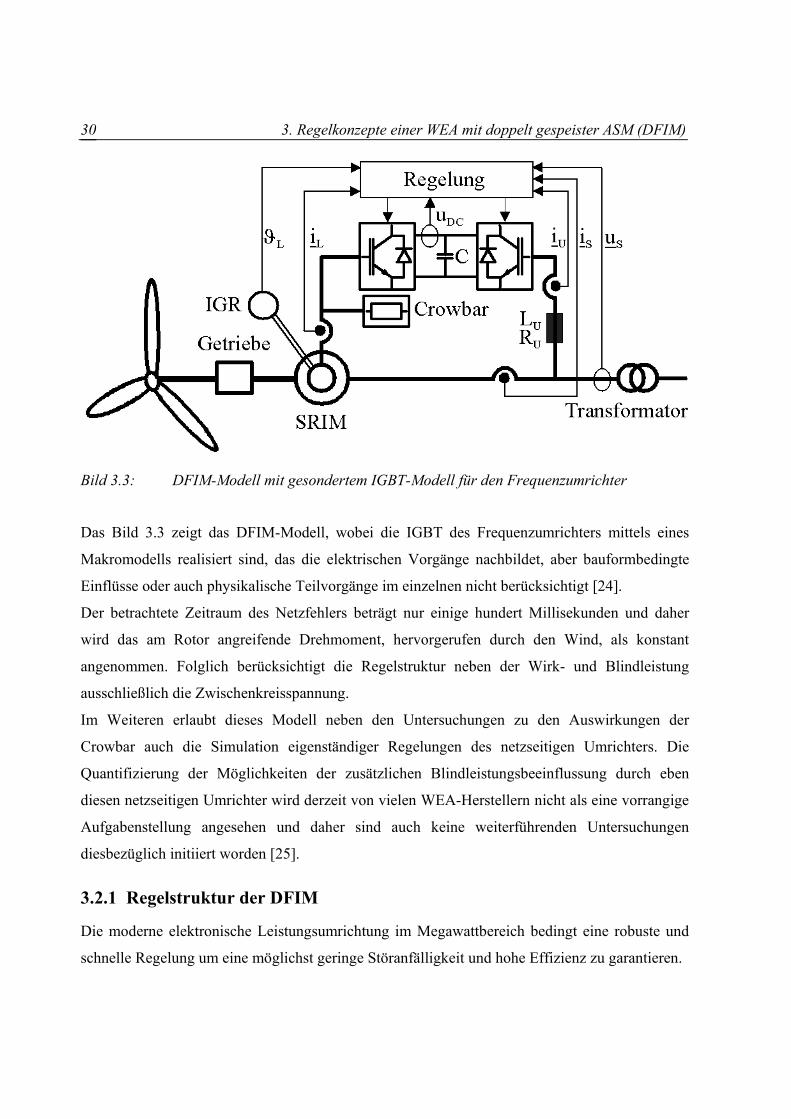
Bild 3.3: DFIM-Modell mit gesondertem IGBT-Modell für den Frequenzumrichter
Das Bild 3.3 zeigt das DFIM-Modell, wobei die IGBT des Frequenzumrichters mittels eines
Makromodells realisiert sind, das die elektrischen Vorgänge nachbildet, aber bauformbedingte
Einflüsse oder auch physikalische Teilvorgänge im einzelnen nicht berücksichtigt [24].
Der betrachtete Zeitraum des Netzfehlers beträgt nur einige hundert Millisekunden und daher
wird das am Rotor angreifende Drehmoment, hervorgerufen durch den Wind, als konstant
angenommen. Folglich berücksichtigt die Regelstruktur neben der Wirk- und Blindleistung
ausschließlich die Zwischenkreisspannung.
Im Weiteren erlaubt dieses Modell neben den Untersuchungen zu den Auswirkungen der
Crowbar auch die Simulation eigenständiger Regelungen des netzseitigen Umrichters. Die
Quantifizierung der Möglichkeiten der zusätzlichen Blindleistungsbeeinflussung durch eben
diesen netzseitigen Umrichter wird derzeit von vielen WEA-Herstellern nicht als eine vorrangige
Aufgabenstellung angesehen und daher sind auch keine weiterführenden Untersuchungen
diesbezüglich initiiert worden [25].
3.2.1 Regelstruktur der DFIM
Die moderne elektronische Leistungsumrichtung im Megawattbereich bedingt eine robuste und
schnelle Regelung um eine möglichst geringe Störanfälligkeit und hohe Effizienz zu garantieren.
3. Regelkonzepte einer WEA mit doppelt gespeister ASM (DFIM)
31
Entsprechend Bild 3.3 besteht die Regelstruktur der DFIM aus zwei Teilstrukturen, dem
läuferseitigen - und dem netzseitigen Regelkreis. Der läuferseitige Regelkreis ist für das
entkoppelte Wirk- und Blindleistungsverhalten des Generators verantwortlich. Im Gegensatz
dazu ist der netzseitige Regelkreis für die entkoppelte Regelung der Zwischenkreisspannung und
der Blindleistung konzipiert. Ermöglicht werden diese Vorgaben durch eine entkoppelte
Regelung der Wirk- und Blindstromanteile.
Basis für die Entwicklung dieser Regelstruktur ist die Definition des Bezugskoordinatensystems.
Im verwendeten Ständerspannungsbezugssystem werden alle zeitabhängigen Größen in ein
kartesisches Synchron-Koordinatensystem, bei dem die Ständerspannung in der reellen Achse
liegt, transformiert. Die Position bzw. der Winkel 0ϑ zwischen dem ortsfesten - und dem mit 0ω
rotierendem kartesischem Synchron-Koordinatensystem wird bei den Matlab-Simulationen mit
Momentanwerten durch einen Phasenregelkreis (PLL, engl. Phase Locked Loop) bestimmt. Im
PSD Programmsystem hingegen stehen die Winkel direkt zur Verfügung, da die Spannungen als
komplexe Zeiger repräsentiert sind. Die Winkelgeschwindigkeit des Ständerfeldes 0ω und des
Läufers sind bei der drehzahlvariablen DFIM zumeist nicht identisch und somit sind die
Läuferwinkelgeschwindigkeit Lω und der daraus resultierende Läuferwinkel Lϑ in der
Entwicklung der Reglerstruktur ebenfalls zu berücksichtigen.
Die Festsetzung des Bezugskoordinatensystems bewirkt als Konsequenz für die dq-Komponenten
der Ständerspannung, das 0=Squ und SSd uu = werden. Angemerkt sei, dass der
Spannungsabfall am Ständerwiderstand Sr gegenüber dem an den Induktivitäten hl und Sl
vernachlässigbar ist und somit eine Vereinfachung von Gleichung (2.11) erlaubt.
SS ju ψω ⋅⋅≈ 0 (3.42)
Damit gilt, dass die Ständerflussverkettung S
ψ der Ständerspannung Su um 90° nacheilt und
somit ist ein dq-System mit der Ständerspannung als Bezugsgröße im erweiterten Sinne auch ein
Ständerflussbezugssystem [26]. Der Unterschied ist lediglich, dass im
• Ständerflussbezugssystem 0=Sdu und 0=Sqψ ,
• Ständerspannungsbezugssystem 0=Squ und 0=Sdψ .
3. Regelkonzepte einer WEA mit doppelt gespeister ASM (DFIM)
32
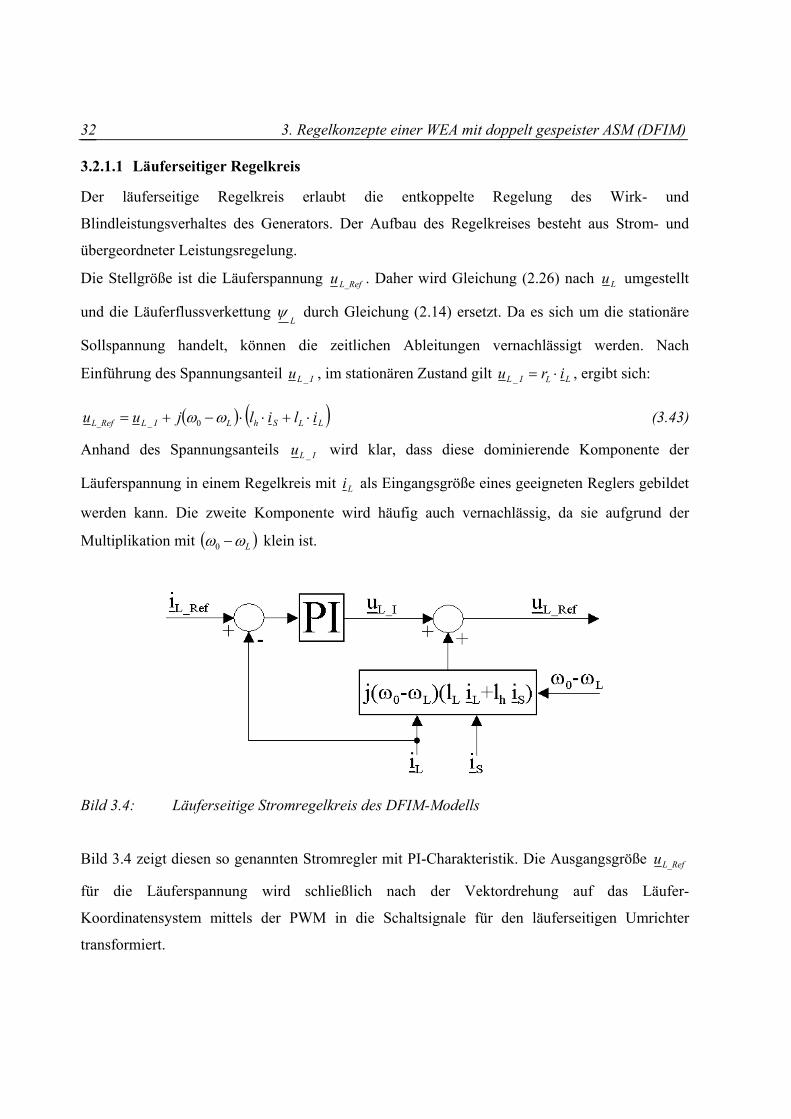
3.2.1.1 Läuferseitiger Regelkreis
Der läuferseitige Regelkreis erlaubt die entkoppelte Regelung des Wirk- und
Blindleistungsverhaltes des Generators. Der Aufbau des Regelkreises besteht aus Strom- und
übergeordneter Leistungsregelung.
Die Stellgröße ist die Läuferspannung L_Refu . Daher wird Gleichung (2.26) nach Lu umgestellt
und die Läuferflussverkettung L
ψ durch Gleichung (2.14) ersetzt. Da es sich um die stationäre
Sollspannung handelt, können die zeitlichen Ableitungen vernachlässigt werden. Nach
Einführung des Spannungsanteil ILu _ , im stationären Zustand gilt LLIL iru ⋅=_ , ergibt sich:
( ) ( )LLShLILL_Ref ililjuu ⋅+⋅⋅−+= ωω0_ (3.43)
Anhand des Spannungsanteils ILu _ wird klar, dass diese dominierende Komponente der
Läuferspannung in einem Regelkreis mit Li als Eingangsgröße eines geeigneten Reglers gebildet
werden kann. Die zweite Komponente wird häufig auch vernachlässig, da sie aufgrund der
Multiplikation mit ( )Lωω −0 klein ist.
Bild 3.4: Läuferseitige Stromregelkreis des DFIM-Modells
Bild 3.4 zeigt diesen so genannten Stromregler mit PI-Charakteristik. Die Ausgangsgröße L_Refu
für die Läuferspannung wird schließlich nach der Vektordrehung auf das Läufer-
Koordinatensystem mittels der PWM in die Schaltsignale für den läuferseitigen Umrichter
transformiert.
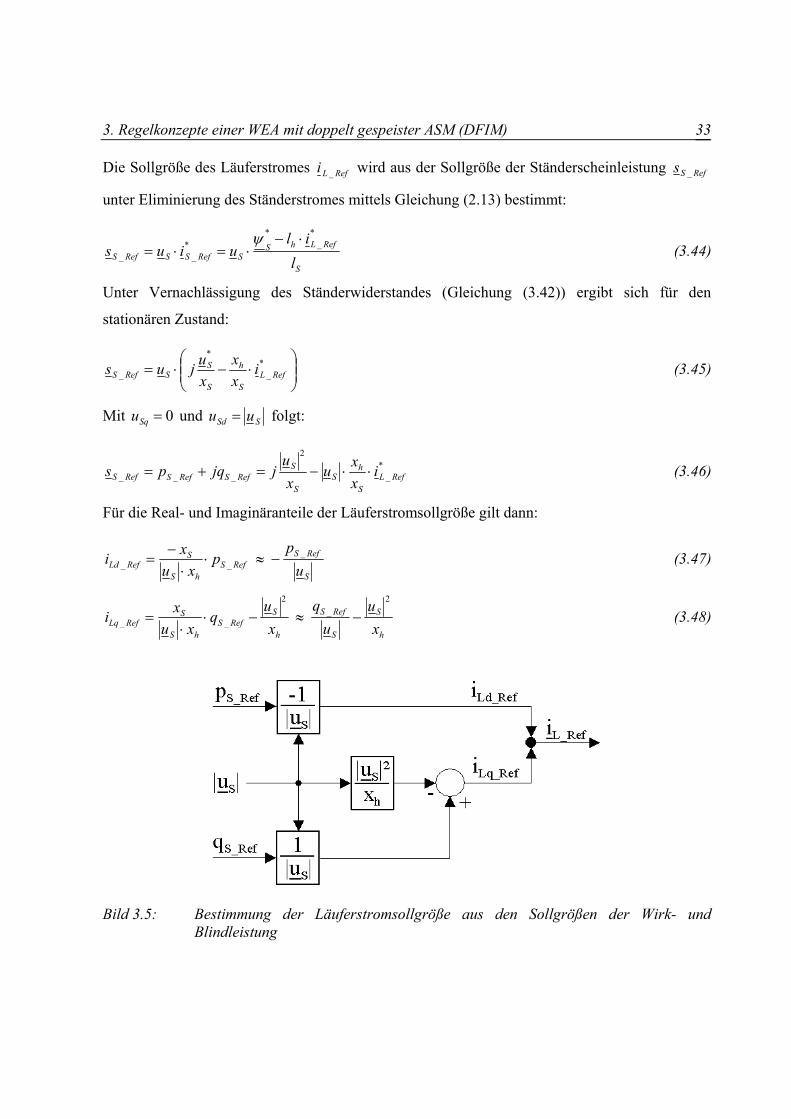
3. Regelkonzepte einer WEA mit doppelt gespeister ASM (DFIM)
33
Die Sollgröße des Läuferstromes RefLi _ wird aus der Sollgröße der Ständerscheinleistung RefSs _
unter Eliminierung des Ständerstromes mittels Gleichung (2.13) bestimmt:
S
RefLhSSRefSSRefS l
iluius
*_
**
__
⋅−⋅=⋅=ψ
(3.44)
Unter Vernachlässigung des Ständerwiderstandes (Gleichung (3.42)) ergibt sich für den
stationären Zustand:
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅−⋅= *
_
*
_ RefLS
h
S
SSRefS i
xx
xujus (3.45)
Mit 0=Squ und SSd uu = folgt:
*_
2
___ RefLS
hS
S
SRefSRefSRefS i
xxu
xu
jjqps ⋅⋅−=+= (3.46)
Für die Real- und Imaginäranteile der Läuferstromsollgröße gilt dann:
S
RefSRefS
hS
SRefLd u
pp
xuxi _
__ −≈⋅⋅
−= (3.47)
h
S
S
RefS
h
SRefS
hS
SRefLq x
uu
qx
uq
xuxi
2_
2
__ −≈−⋅⋅
= (3.48)
Bild 3.5: Bestimmung der Läuferstromsollgröße aus den Sollgrößen der Wirk- und Blindleistung
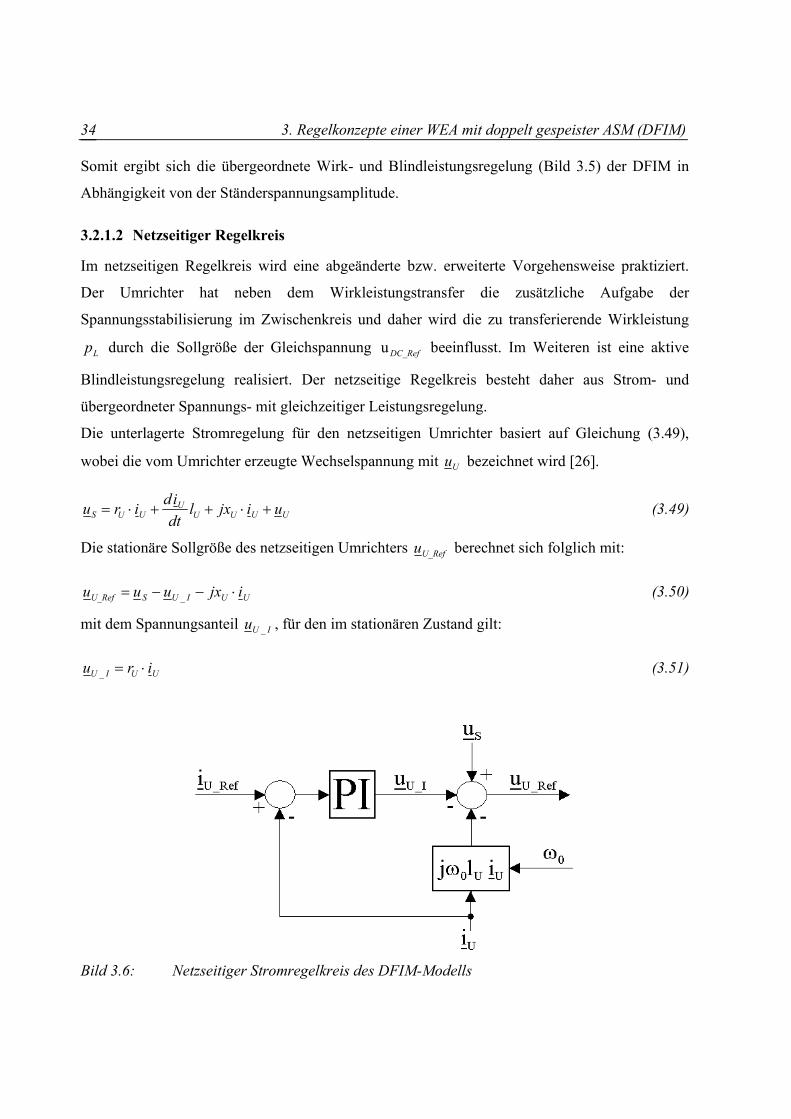
3. Regelkonzepte einer WEA mit doppelt gespeister ASM (DFIM)
34
Somit ergibt sich die übergeordnete Wirk- und Blindleistungsregelung (Bild 3.5) der DFIM in
Abhängigkeit von der Ständerspannungsamplitude.
3.2.1.2 Netzseitiger Regelkreis
Im netzseitigen Regelkreis wird eine abgeänderte bzw. erweiterte Vorgehensweise praktiziert.
Der Umrichter hat neben dem Wirkleistungstransfer die zusätzliche Aufgabe der
Spannungsstabilisierung im Zwischenkreis und daher wird die zu transferierende Wirkleistung
Lp durch die Sollgröße der Gleichspannung DC_Refu beeinflusst. Im Weiteren ist eine aktive
Blindleistungsregelung realisiert. Der netzseitige Regelkreis besteht daher aus Strom- und
übergeordneter Spannungs- mit gleichzeitiger Leistungsregelung.
Die unterlagerte Stromregelung für den netzseitigen Umrichter basiert auf Gleichung (3.49),
wobei die vom Umrichter erzeugte Wechselspannung mit Uu bezeichnet wird [26].
UUUUU
UUS uijxldtidiru +⋅++⋅= (3.49)
Die stationäre Sollgröße des netzseitigen Umrichters U_Refu berechnet sich folglich mit:
UUIUSU_Ref ijxuuu ⋅−−= _ (3.50)
mit dem Spannungsanteil IUu _ , für den im stationären Zustand gilt:
UUIU iru ⋅=_ (3.51)
Bild 3.6: Netzseitiger Stromregelkreis des DFIM-Modells
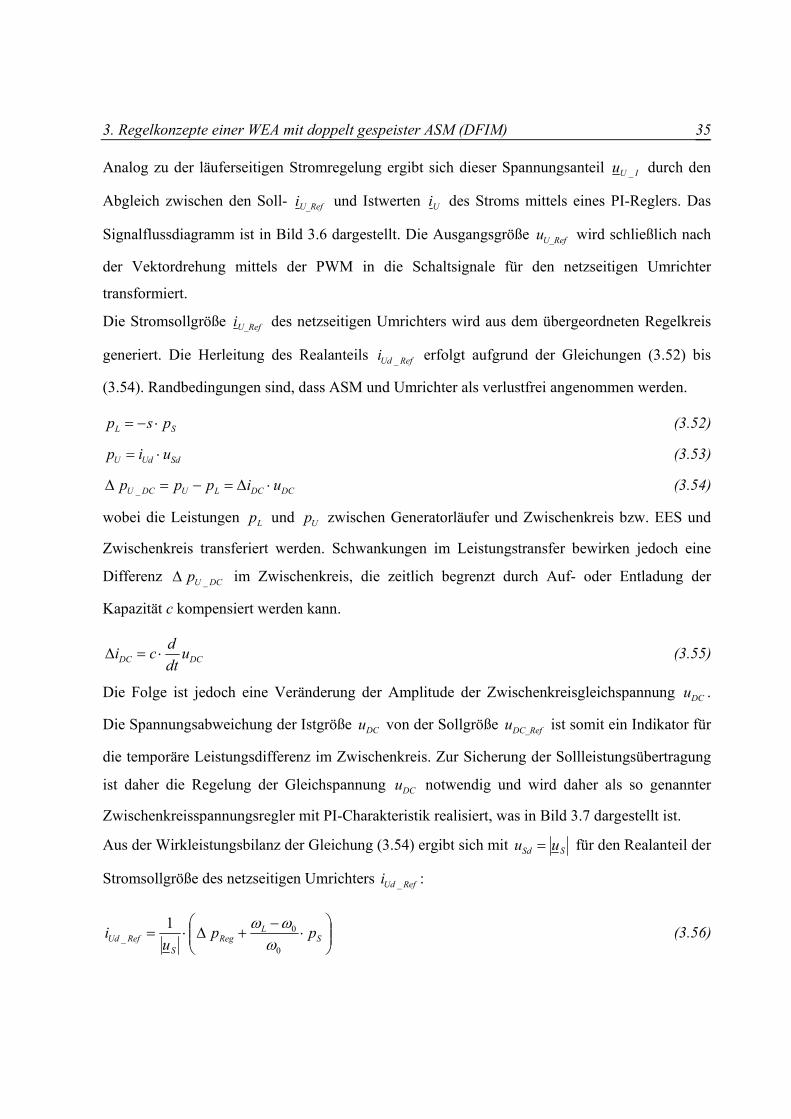
3. Regelkonzepte einer WEA mit doppelt gespeister ASM (DFIM)
35
Analog zu der läuferseitigen Stromregelung ergibt sich dieser Spannungsanteil IUu _ durch den
Abgleich zwischen den Soll- U_Refi und Istwerten Ui des Stroms mittels eines PI-Reglers. Das
Signalflussdiagramm ist in Bild 3.6 dargestellt. Die Ausgangsgröße U_Refu wird schließlich nach
der Vektordrehung mittels der PWM in die Schaltsignale für den netzseitigen Umrichter
transformiert.
Die Stromsollgröße U_Refi des netzseitigen Umrichters wird aus dem übergeordneten Regelkreis
generiert. Die Herleitung des Realanteils RefUdi _ erfolgt aufgrund der Gleichungen (3.52) bis
(3.54). Randbedingungen sind, dass ASM und Umrichter als verlustfrei angenommen werden.
SL psp ⋅−= (3.52)
SdUdU uip ⋅= (3.53)
DCDCLUDCU uippp ⋅∆=−=∆ _ (3.54)
wobei die Leistungen Lp und Up zwischen Generatorläufer und Zwischenkreis bzw. EES und
Zwischenkreis transferiert werden. Schwankungen im Leistungstransfer bewirken jedoch eine
Differenz DCUp _ ∆ im Zwischenkreis, die zeitlich begrenzt durch Auf- oder Entladung der
Kapazität c kompensiert werden kann.
DCDC udtdci ⋅=∆ (3.55)
Die Folge ist jedoch eine Veränderung der Amplitude der Zwischenkreisgleichspannung DCu .
Die Spannungsabweichung der Istgröße DCu von der Sollgröße DC_Refu ist somit ein Indikator für
die temporäre Leistungsdifferenz im Zwischenkreis. Zur Sicherung der Sollleistungsübertragung
ist daher die Regelung der Gleichspannung DCu notwendig und wird daher als so genannter
Zwischenkreisspannungsregler mit PI-Charakteristik realisiert, was in Bild 3.7 dargestellt ist.
Aus der Wirkleistungsbilanz der Gleichung (3.54) ergibt sich mit SSd uu = für den Realanteil der
Stromsollgröße des netzseitigen Umrichters RefUdi _ :
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅
−+∆⋅= S
LReg
SRefUd pp
ui
0
0_ 1
ωωω (3.56)
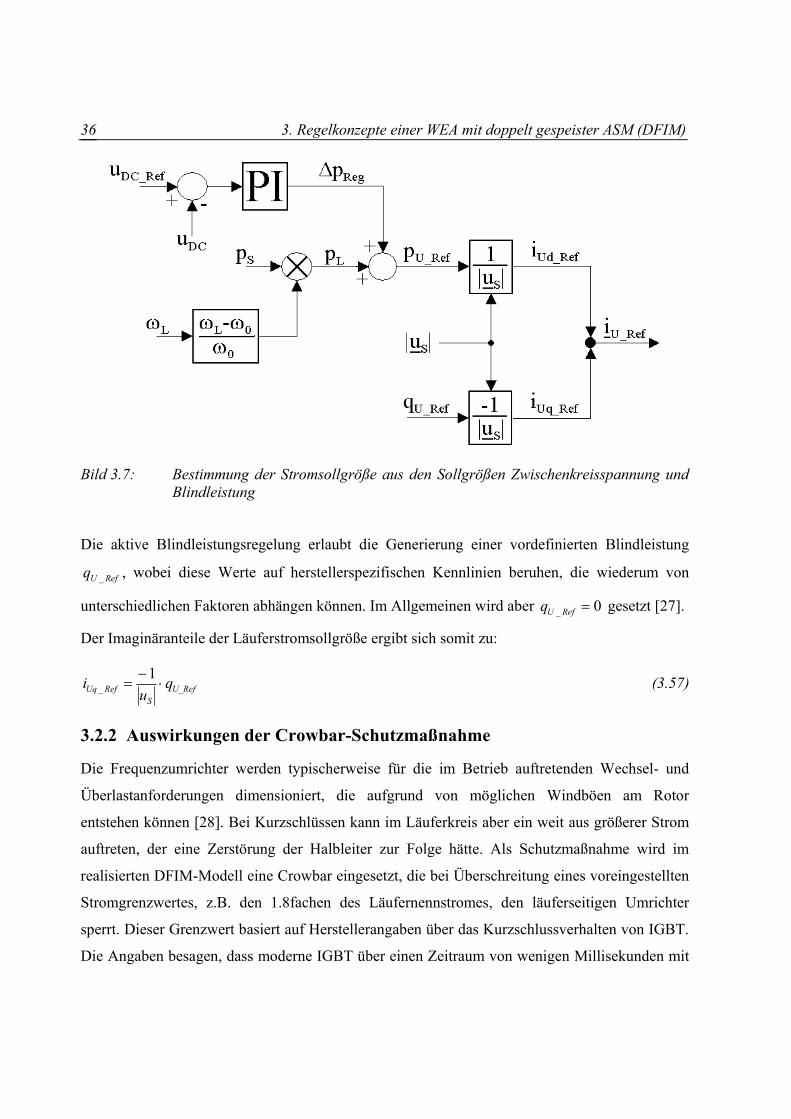
3. Regelkonzepte einer WEA mit doppelt gespeister ASM (DFIM)
36
Bild 3.7: Bestimmung der Stromsollgröße aus den Sollgrößen Zwischenkreisspannung und Blindleistung
Die aktive Blindleistungsregelung erlaubt die Generierung einer vordefinierten Blindleistung
RefUq _ , wobei diese Werte auf herstellerspezifischen Kennlinien beruhen, die wiederum von
unterschiedlichen Faktoren abhängen können. Im Allgemeinen wird aber 0_ =RefUq gesetzt [27].
Der Imaginäranteile der Läuferstromsollgröße ergibt sich somit zu:
U_RefS
RefUq qu
i ⋅−
=1
_ (3.57)
3.2.2 Auswirkungen der Crowbar-Schutzmaßnahme
Die Frequenzumrichter werden typischerweise für die im Betrieb auftretenden Wechsel- und
Überlastanforderungen dimensioniert, die aufgrund von möglichen Windböen am Rotor
entstehen können [28]. Bei Kurzschlüssen kann im Läuferkreis aber ein weit aus größerer Strom
auftreten, der eine Zerstörung der Halbleiter zur Folge hätte. Als Schutzmaßnahme wird im
realisierten DFIM-Modell eine Crowbar eingesetzt, die bei Überschreitung eines voreingestellten
Stromgrenzwertes, z.B. den 1.8fachen des Läufernennstromes, den läuferseitigen Umrichter
sperrt. Dieser Grenzwert basiert auf Herstellerangaben über das Kurzschlussverhalten von IGBT.
Die Angaben besagen, dass moderne IGBT über einen Zeitraum von wenigen Millisekunden mit
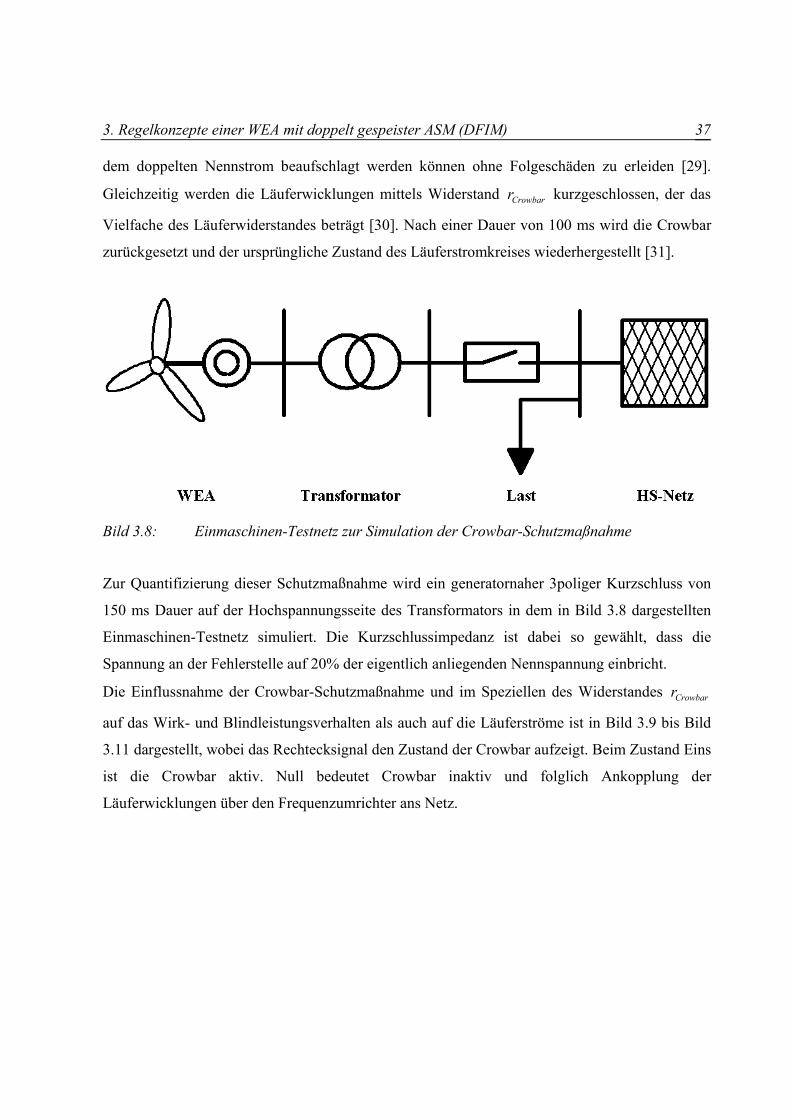
3. Regelkonzepte einer WEA mit doppelt gespeister ASM (DFIM)
37
dem doppelten Nennstrom beaufschlagt werden können ohne Folgeschäden zu erleiden [29].
Gleichzeitig werden die Läuferwicklungen mittels Widerstand Crowbarr kurzgeschlossen, der das
Vielfache des Läuferwiderstandes beträgt [30]. Nach einer Dauer von 100 ms wird die Crowbar
zurückgesetzt und der ursprüngliche Zustand des Läuferstromkreises wiederhergestellt [31].
Bild 3.8: Einmaschinen-Testnetz zur Simulation der Crowbar-Schutzmaßnahme
Zur Quantifizierung dieser Schutzmaßnahme wird ein generatornaher 3poliger Kurzschluss von
150 ms Dauer auf der Hochspannungsseite des Transformators in dem in Bild 3.8 dargestellten
Einmaschinen-Testnetz simuliert. Die Kurzschlussimpedanz ist dabei so gewählt, dass die
Spannung an der Fehlerstelle auf 20% der eigentlich anliegenden Nennspannung einbricht.
Die Einflussnahme der Crowbar-Schutzmaßnahme und im Speziellen des Widerstandes Crowbarr
auf das Wirk- und Blindleistungsverhalten als auch auf die Läuferströme ist in Bild 3.9 bis Bild
3.11 dargestellt, wobei das Rechtecksignal den Zustand der Crowbar aufzeigt. Beim Zustand Eins
ist die Crowbar aktiv. Null bedeutet Crowbar inaktiv und folglich Ankopplung der
Läuferwicklungen über den Frequenzumrichter ans Netz.
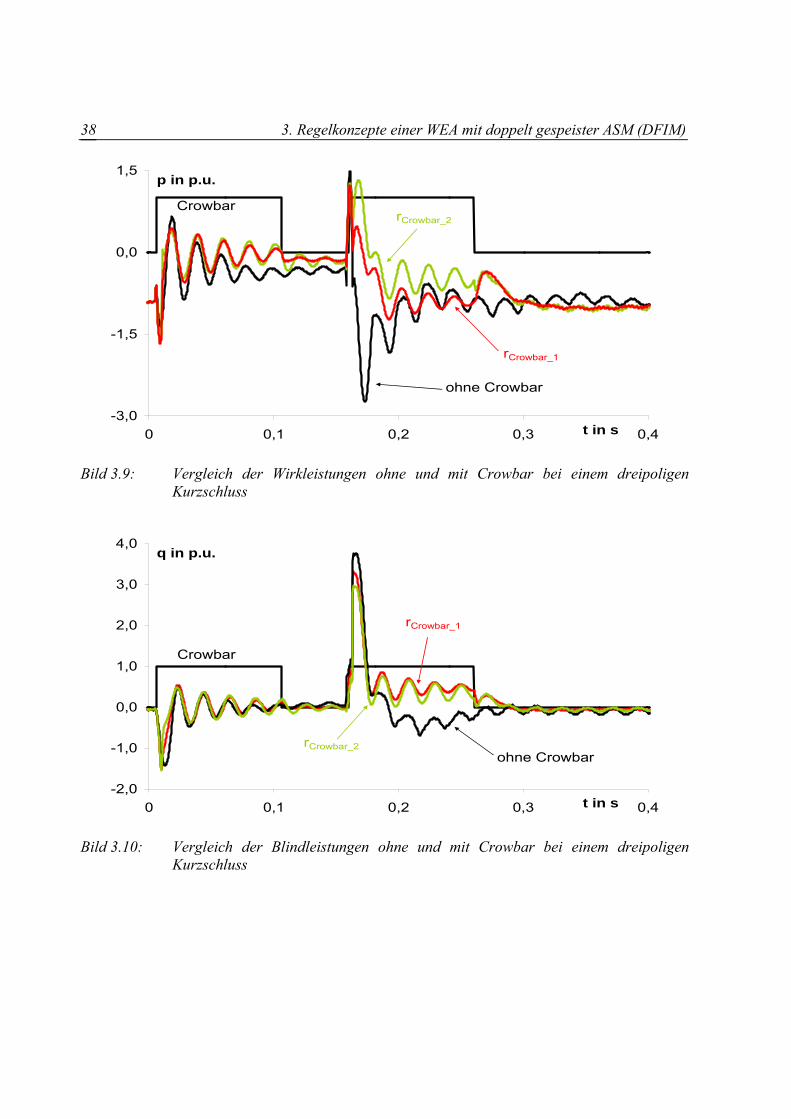
3. Regelkonzepte einer WEA mit doppelt gespeister ASM (DFIM)
38
-3,0
-1,5
0,0
1,5
0 0,1 0,2 0,3 0,4t in s
p in p.u.
Crowbar
ohne Crowbar
rCrowbar_1
rCrowbar_2
Bild 3.9: Vergleich der Wirkleistungen ohne und mit Crowbar bei einem dreipoligen Kurzschluss
-2,0
-1,0
0,0
1,0
2,0
3,0
4,0
0 0,1 0,2 0,3 0,4t in s
q in p.u.
Crowbar
rCrowbar_1
ohne CrowbarrCrowbar_2
Bild 3.10: Vergleich der Blindleistungen ohne und mit Crowbar bei einem dreipoligen Kurzschluss
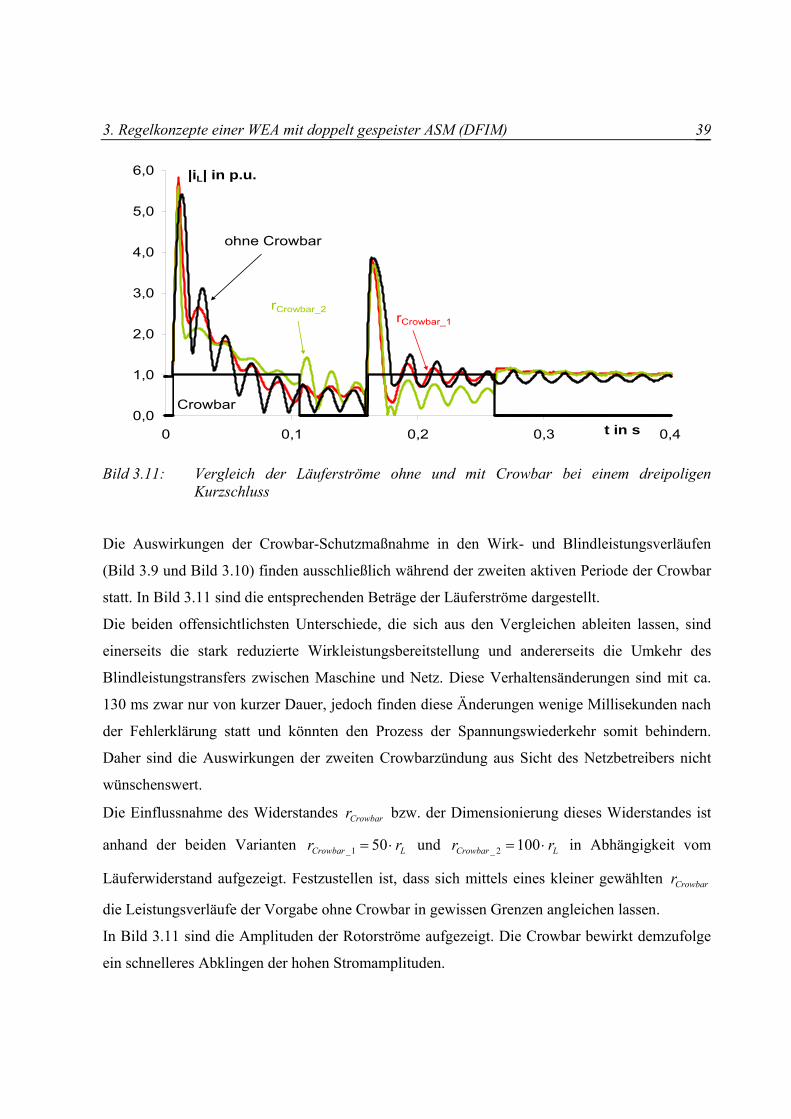
3. Regelkonzepte einer WEA mit doppelt gespeister ASM (DFIM)
39
0,0
1,0
2,0
3,0
4,0
5,0
6,0
0 0,1 0,2 0,3 0,4t in s
|iL| in p.u.
Crowbar
ohne Crowbar
rCrowbar_1
rCrowbar_2
Bild 3.11: Vergleich der Läuferströme ohne und mit Crowbar bei einem dreipoligen Kurzschluss
Die Auswirkungen der Crowbar-Schutzmaßnahme in den Wirk- und Blindleistungsverläufen
(Bild 3.9 und Bild 3.10) finden ausschließlich während der zweiten aktiven Periode der Crowbar
statt. In Bild 3.11 sind die entsprechenden Beträge der Läuferströme dargestellt.
Die beiden offensichtlichsten Unterschiede, die sich aus den Vergleichen ableiten lassen, sind
einerseits die stark reduzierte Wirkleistungsbereitstellung und andererseits die Umkehr des
Blindleistungstransfers zwischen Maschine und Netz. Diese Verhaltensänderungen sind mit ca.
130 ms zwar nur von kurzer Dauer, jedoch finden diese Änderungen wenige Millisekunden nach
der Fehlerklärung statt und könnten den Prozess der Spannungswiederkehr somit behindern.
Daher sind die Auswirkungen der zweiten Crowbarzündung aus Sicht des Netzbetreibers nicht
wünschenswert.
Die Einflussnahme des Widerstandes Crowbarr bzw. der Dimensionierung dieses Widerstandes ist
anhand der beiden Varianten LCrowbar rr ⋅= 501_ und LCrowbar rr ⋅= 1002_ in Abhängigkeit vom
Läuferwiderstand aufgezeigt. Festzustellen ist, dass sich mittels eines kleiner gewählten Crowbarr
die Leistungsverläufe der Vorgabe ohne Crowbar in gewissen Grenzen angleichen lassen.
In Bild 3.11 sind die Amplituden der Rotorströme aufgezeigt. Die Crowbar bewirkt demzufolge
ein schnelleres Abklingen der hohen Stromamplituden.
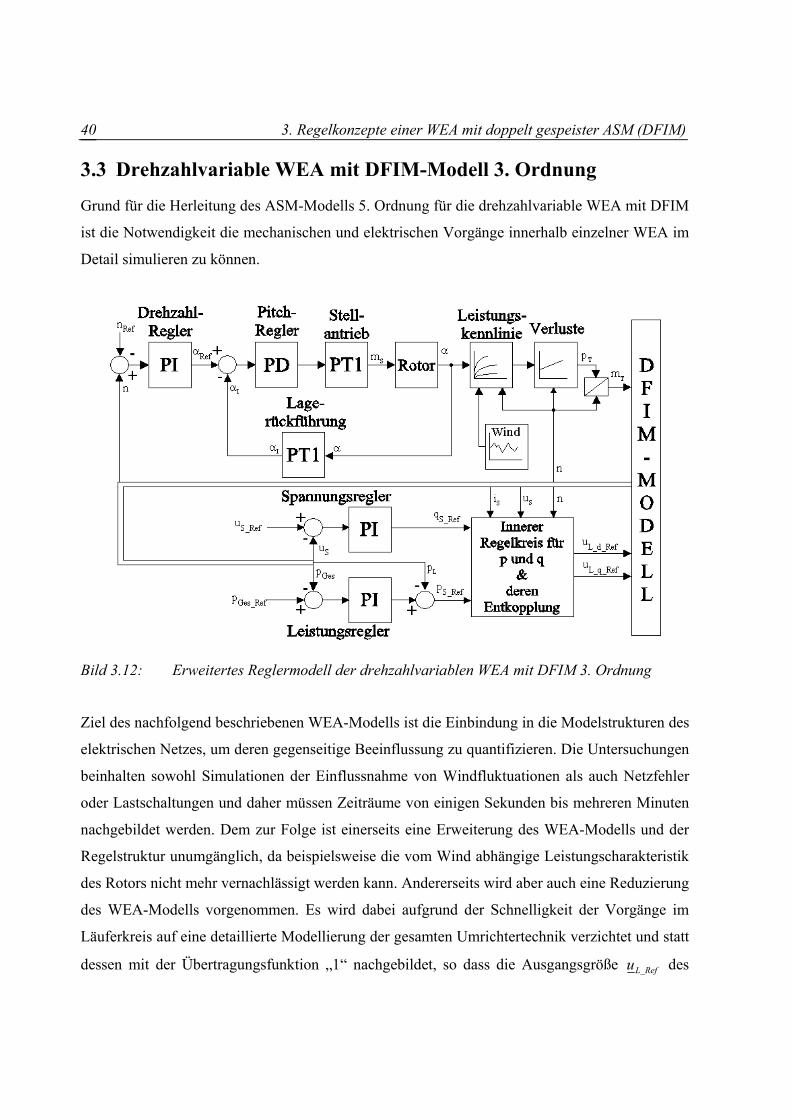
3. Regelkonzepte einer WEA mit doppelt gespeister ASM (DFIM)
40
3.3 Drehzahlvariable WEA mit DFIM-Modell 3. Ordnung
Grund für die Herleitung des ASM-Modells 5. Ordnung für die drehzahlvariable WEA mit DFIM
ist die Notwendigkeit die mechanischen und elektrischen Vorgänge innerhalb einzelner WEA im
Detail simulieren zu können.
Bild 3.12: Erweitertes Reglermodell der drehzahlvariablen WEA mit DFIM 3. Ordnung
Ziel des nachfolgend beschriebenen WEA-Modells ist die Einbindung in die Modelstrukturen des
elektrischen Netzes, um deren gegenseitige Beeinflussung zu quantifizieren. Die Untersuchungen
beinhalten sowohl Simulationen der Einflussnahme von Windfluktuationen als auch Netzfehler
oder Lastschaltungen und daher müssen Zeiträume von einigen Sekunden bis mehreren Minuten
nachgebildet werden. Dem zur Folge ist einerseits eine Erweiterung des WEA-Modells und der
Regelstruktur unumgänglich, da beispielsweise die vom Wind abhängige Leistungscharakteristik
des Rotors nicht mehr vernachlässigt werden kann. Andererseits wird aber auch eine Reduzierung
des WEA-Modells vorgenommen. Es wird dabei aufgrund der Schnelligkeit der Vorgänge im
Läuferkreis auf eine detaillierte Modellierung der gesamten Umrichtertechnik verzichtet und statt
dessen mit der Übertragungsfunktion „1“ nachgebildet, so dass die Ausgangsgröße L_Refu des
3. Regelkonzepte einer WEA mit doppelt gespeister ASM (DFIM)
41
inneren Regelkreises direkt als Stellgröße an den Generator übergeben wird. Im Weiteren entfällt
aufgrund dieser Modell-Reduzierung der netzseitige Regelkreis für die Zwischenkreisspannung.
Die vom Netz bezogene bzw. eingespeiste Wirkleistung der Umrichter ist daher mit der
Läuferwirkleistung identisch.
In Bild 3.12 ist das Signalflussdiagramm des erweiterten Reglermodells des rotorseitigen
Umrichters mit dem die geforderte Zeitspanne ausreichend genau simuliert werden kann
dargestellt. Es soll betont werden, dass dieses Reglermodell nicht auf das DFIM-Modell 3.
Ordnung begrenzt ist. Vielmehr kann es auch beim Modell 5. Ordnung zum Einsatz kommen.
Wie schon erwähnt, lassen sich mittels des läuferseitig eingebundenen Umrichters die
Läuferdrehzahl und die -spannungsamplitude unabhängig voneinander beeinflussen. Mit Hilfe
dieser beiden Größen ist eine entkoppelte Regelung der Wirk- und Blindleistungsabgabe
realisierbar, die als innerer Regelkreis bezeichnet wird. Seine Eingangsgrößen sind die Sollwerte
für Wirk- und Blindleistung des Ständerkreises, die vom äußeren Regelkreis zur Verfügung
gestellt werden. Ausgangsgröße ist die komplexe Läuferspannung. Der äußere Regelkreis besteht
in diesem Modell aus Spannungs- und Wirkleistungsreglern. Additiv zu diesen beiden schnellen
elektronischen Regelkreisen beinhaltet die gesamte Regelstruktur noch die mechanische
Drehzahl- und Pitchregelung. Diese unterschiedlichen Regelungskonzepte werden in den
nachfolgenden Kapiteln beschrieben.
In den verbleibenden Blöcken „Leistungskennlinie“ und „Verluste“ wird lediglich die an der
Welle anliegende mechanischen Leistung unter Berücksichtigung der Leistungscharakteristik des
Rotors und der mechanischen Verluste berechnet, wobei sich diese Verluste aus leistungs- und
drehzahlabhängigen Anteilen zusammensetzen [32].
3.3.1 Systematischer multivariabler Entwurf des inneren Regelkreises
Die Eingangsgrößen des inneren Regelkreises sind die Sollwerte der Wirk- und Blindleistung des
Ständerkreises, die vom äußeren Regelkreis zur Verfügung gestellt werden. Ausgangsgröße ist
die komplexe Läuferspannung für das Maschinenmodell.
Die Frequenzvariation der Läuferspannung bewirkt eine Veränderung der Läuferdrehzahl und
somit den Wirkleistungstransfer über den Läuferkreis. Die Auswirkungen der zusätzlichen
Möglichkeit, die Verstellung der Läuferspannungsamplitude, sind in Bild 2.6 bis Bild 2.8
aufgezeigt.
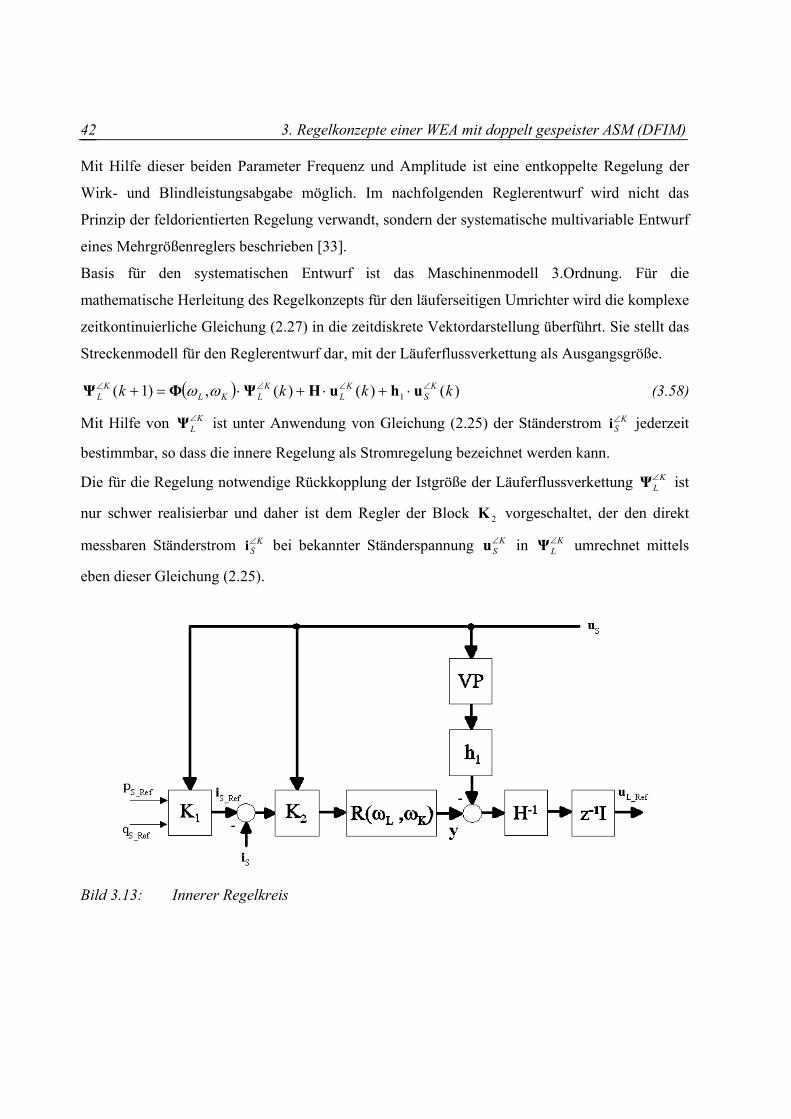
3. Regelkonzepte einer WEA mit doppelt gespeister ASM (DFIM)
42
Mit Hilfe dieser beiden Parameter Frequenz und Amplitude ist eine entkoppelte Regelung der
Wirk- und Blindleistungsabgabe möglich. Im nachfolgenden Reglerentwurf wird nicht das
Prinzip der feldorientierten Regelung verwandt, sondern der systematische multivariable Entwurf
eines Mehrgrößenreglers beschrieben [33].
Basis für den systematischen Entwurf ist das Maschinenmodell 3.Ordnung. Für die
mathematische Herleitung des Regelkonzepts für den läuferseitigen Umrichter wird die komplexe
zeitkontinuierliche Gleichung (2.27) in die zeitdiskrete Vektordarstellung überführt. Sie stellt das
Streckenmodell für den Reglerentwurf dar, mit der Läuferflussverkettung als Ausgangsgröße.
( ) )()()(,)1( 1 kkkk KS
KL
KLKL
KL
∠∠∠∠ ⋅+⋅+⋅=+ uhuHΨΦΨ ωω (3.58)
Mit Hilfe von KL∠Ψ ist unter Anwendung von Gleichung (2.25) der Ständerstrom K
S∠i jederzeit
bestimmbar, so dass die innere Regelung als Stromregelung bezeichnet werden kann.
Die für die Regelung notwendige Rückkopplung der Istgröße der Läuferflussverkettung KL∠Ψ ist
nur schwer realisierbar und daher ist dem Regler der Block 2K vorgeschaltet, der den direkt
messbaren Ständerstrom KS∠i bei bekannter Ständerspannung K
S∠u in K
L∠Ψ umrechnet mittels
eben dieser Gleichung (2.25).
Bild 3.13: Innerer Regelkreis
3. Regelkonzepte einer WEA mit doppelt gespeister ASM (DFIM)
43
Der benötigte Sollwert der Läuferflussverkettung KL_Ref∠Ψ bzw. des Ständerstroms K
S_Ref∠i wird aus
den beiden Ausgangsgrößen S_Refp und S_Refq der übergeordneten Regelungen durch Block 1K
berechnet. Das Signalflussdiagramm des inneren Regelkreises ist in Bild 3.13 dargestellt. Die
Blöcke 1K und 2K , Fundamentalmatrix ( )KL ωω ,Φ , Eingangsmatrix H und Störmatrix 1h
werden im Anhang A beschrieben.
Für den allgemeinen Regleransatz gilt:
( ))()1()( 11 kkk K
SKK
L∠∠−∠ ⋅−−⋅= uhyHu (3.59)
mit K∠y als Ausgangsgröße des Reglers. Die in Gleichung (3.59) beschriebene Struktur erlaubt
die vollständige Kompensation der Störgröße )(kKS∠u , was durch Einsetzen eben dieser
Gleichung (3.59) in Gleichung (3.58) bewiesen wird.
Es ergibt sich Gleichung (3.60) bzw. unter Anwendung der z-Transformation Gleichung (3.61).
( ) )1()(,)1( −=⋅−+ ∠∠∠ kkk KKLKL
KL yΨΦΨ ωω (3.60)
( )( ) 1)()(, −∠∠ ⋅=⋅− zzzz KKLKL yΨΦI ωω (3.61)
Die Ständerspannung )(kKS∠u wird dabei als Störgröße betrachtet, da sie in einem EES variieren
kann. Jedoch ist eine exakte Eliminierung von )(kKS∠u nur möglich, wenn der Wert )1( +∠ kK
Su
für den nächsten Zeitschritt bekannt ist, was aber bei veränderlicher Netzspannung nicht möglich
ist. Als Lösung ist eine lineare Extrapolation der Ständerspannung eingeführt worden, die eine
ausreichende Genauigkeit liefert [34]. Dieses Schätzverfahren zur Ständerspannungsvorhersage
ist in Bild 3.13 als VP bezeichnet.
Die Funktion zur Bestimmung der Reglerausgangsgröße K∠y ist in Gleichung (3.62) dargestellt.
RΨΨy ⋅−= ∠∠∠ ))()(()( zzz KL
KL_Ref
K (3.62)
Die Matrix R definiert das eigentliche Sollübertragungsverhalten des Reglers, denn sie
beinhaltet die Informationen der ausgewählten Zielfunktion. Generelles Ziel einer Regelung ist
die möglichst genaue Nachführung der Systemsausgangsgröße nach einer vorgegebenen
Führungsgröße. Bei konventionellen Reglern, wie beispielsweise PI- oder PID-Reglern, ist diese
Nachführung ohne einen gewissen Über- bzw. Einschwingvorgang nicht möglich.

3. Regelkonzepte einer WEA mit doppelt gespeister ASM (DFIM)
44
Hingegen offeriert das ausschließlich auf digitale Regler anwendbare Entwurfsverfahren auf
endliche Einstellzeit (EEZ) die Möglichkeit, die Ausgangsgröße mittels sprungförmiger
Änderung der Führungsgröße innerhalb der vordefinierten Einstellzeit Et ohne Überschwingen
nachzuführen [35]. Für die kleinstmögliche Einstelldauer Et , bei einer Abtastzeit von AT , gilt:
( ) ASE Tnt ⋅+= 1 (3.63)
Das Dead-Beat-Verhalten (Indize Sn = 1) beispielsweise bewirkt, dass der Istwert des Systems
nach zwei Abtastschritten ohne Überschwingen wieder auf den Sollwert gebracht wird. In
Tabelle 3.1 sind neben der entsprechenden Dead-Beat-Matrix DBR auch die Matrizen 2−EEZR und
3−EEZR der Verhaltensmuster auf endliche Einstellzeit für drei - (EEZ-2) und vier Abtastschritte
(EEZ-3) aufgelistet. Die beiden letztgenannten Reglervariationen sind zwar komplexer, aber
technische leichter zu realisieren, da die benötigte Stellenergie, dessen physikalischen Grenzen
durch das Stellglied Umrichter vorgegeben werden, mit dem Anstieg der Einstelldauer sinkt.
Tabelle 3.1: Indize, Zielfunktion und Matrix R für die drei unterschiedlichen Verhaltensmuster Dead-Beat, EEZ-2 und EEZ-3
Sn Zielfunktion Matrix R
1 )()( 2 zzz KL_Ref
KL
∠−∠ ⋅= ΨΨ ( )( )KLDB zz
ωω ,1
1 12 ΦIR ⋅−⋅
−= −
−
2 )()(21)( 32 zzzz K
L_RefK
L∠−−∠ ⋅+⋅= ΨΨ ( )( )KLEEZ z
zzz ωω ,
21 1
32
1
2 ΦIR ⋅−⋅−−
+= −
−−
−
−
3 )()(31)( 432 zzzzz K
L_RefK
L∠−−−∠ ⋅++⋅= ΨΨ
( )( )KLEEZ zzzz
zz ωω ,3
1 1432
21
3 ΦIR ⋅−⋅−−−
++= −
−−−
−−
−
3.3.2 Erweiterung des äußeren Regelkreises
Die Basis des äußeren Regelkreises besteht aus den Spannungs- und Wirkleistungsreglern. Die
Gesamtwirkleistungssollgröße Ges_Refp wird bei der pitchgeregelten WEA, sowohl mit SCIM als
auch mit DFIM, durch eine Windgeschwindigkeitskennlinie vorgegeben und kann gegebenenfalls
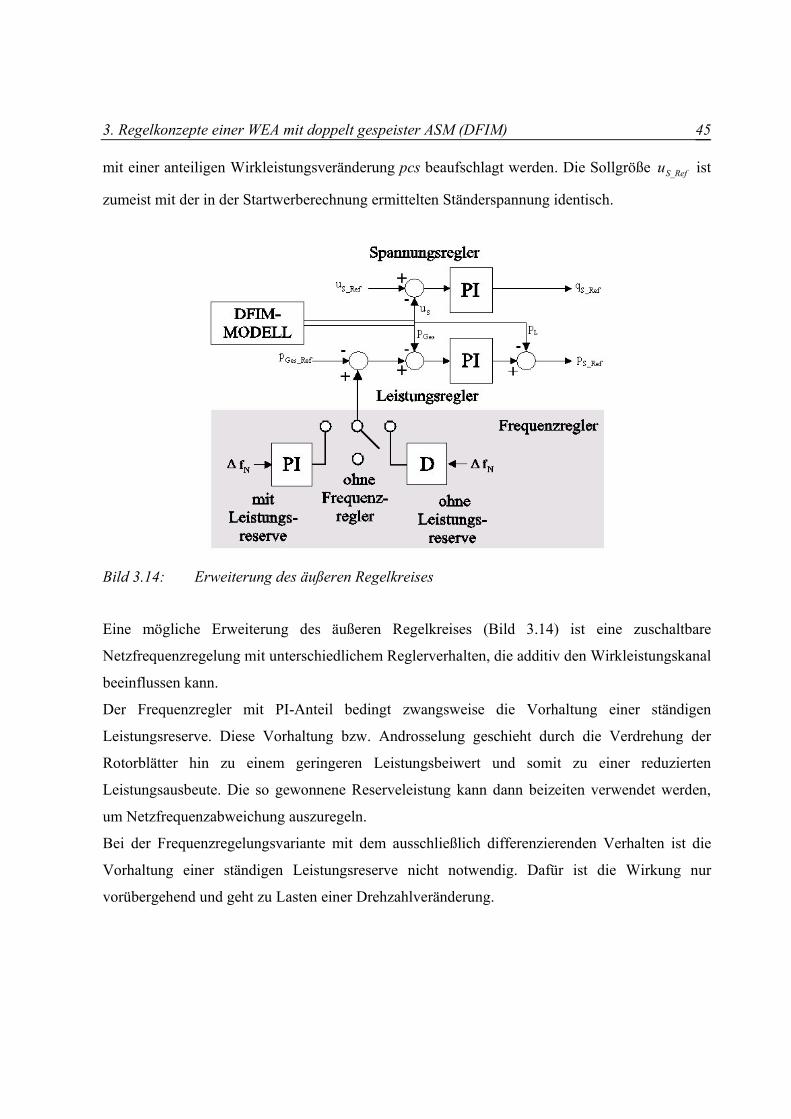
3. Regelkonzepte einer WEA mit doppelt gespeister ASM (DFIM)
45
mit einer anteiligen Wirkleistungsveränderung pcs beaufschlagt werden. Die Sollgröße S_Refu ist
zumeist mit der in der Startwerberechnung ermittelten Ständerspannung identisch.
Bild 3.14: Erweiterung des äußeren Regelkreises
Eine mögliche Erweiterung des äußeren Regelkreises (Bild 3.14) ist eine zuschaltbare
Netzfrequenzregelung mit unterschiedlichem Reglerverhalten, die additiv den Wirkleistungskanal
beeinflussen kann.
Der Frequenzregler mit PI-Anteil bedingt zwangsweise die Vorhaltung einer ständigen
Leistungsreserve. Diese Vorhaltung bzw. Androsselung geschieht durch die Verdrehung der
Rotorblätter hin zu einem geringeren Leistungsbeiwert und somit zu einer reduzierten
Leistungsausbeute. Die so gewonnene Reserveleistung kann dann beizeiten verwendet werden,
um Netzfrequenzabweichung auszuregeln.
Bei der Frequenzregelungsvariante mit dem ausschließlich differenzierenden Verhalten ist die
Vorhaltung einer ständigen Leistungsreserve nicht notwendig. Dafür ist die Wirkung nur
vorübergehend und geht zu Lasten einer Drehzahlveränderung.
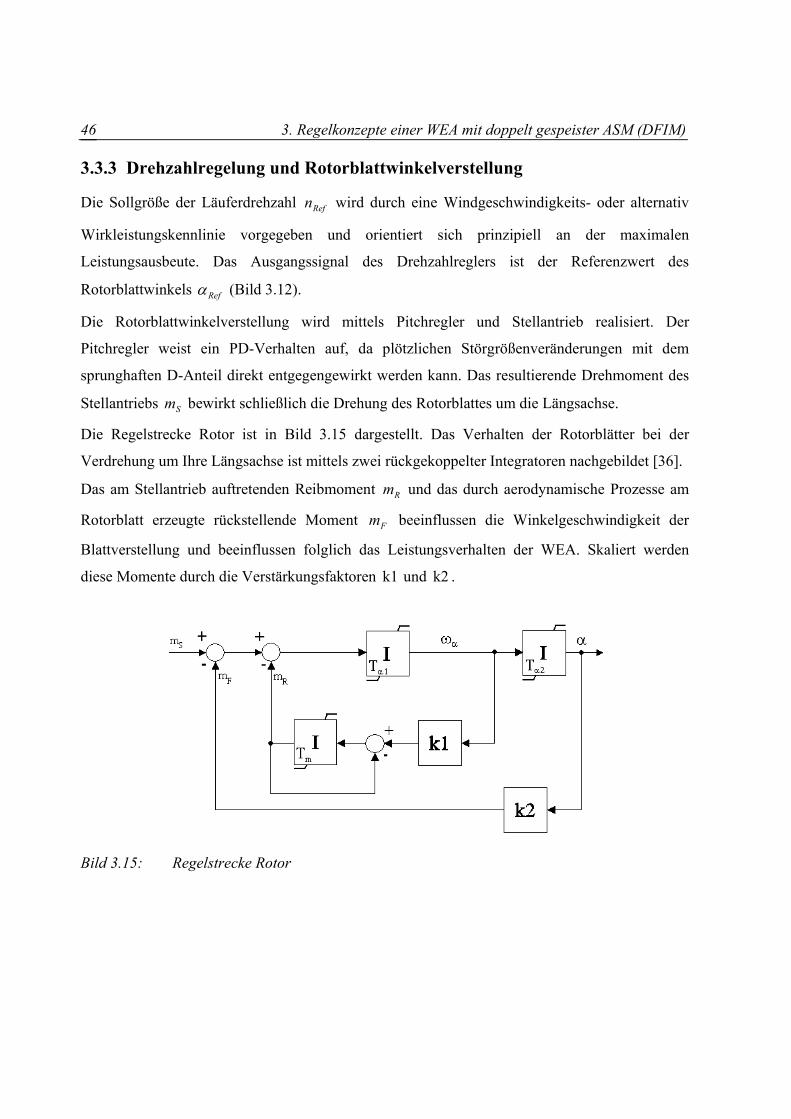
3. Regelkonzepte einer WEA mit doppelt gespeister ASM (DFIM)
46
3.3.3 Drehzahlregelung und Rotorblattwinkelverstellung
Die Sollgröße der Läuferdrehzahl Refn wird durch eine Windgeschwindigkeits- oder alternativ
Wirkleistungskennlinie vorgegeben und orientiert sich prinzipiell an der maximalen
Leistungsausbeute. Das Ausgangssignal des Drehzahlreglers ist der Referenzwert des
Rotorblattwinkels Refα (Bild 3.12).
Die Rotorblattwinkelverstellung wird mittels Pitchregler und Stellantrieb realisiert. Der
Pitchregler weist ein PD-Verhalten auf, da plötzlichen Störgrößenveränderungen mit dem
sprunghaften D-Anteil direkt entgegengewirkt werden kann. Das resultierende Drehmoment des
Stellantriebs Sm bewirkt schließlich die Drehung des Rotorblattes um die Längsachse.
Die Regelstrecke Rotor ist in Bild 3.15 dargestellt. Das Verhalten der Rotorblätter bei der
Verdrehung um Ihre Längsachse ist mittels zwei rückgekoppelter Integratoren nachgebildet [36].
Das am Stellantrieb auftretenden Reibmoment Rm und das durch aerodynamische Prozesse am
Rotorblatt erzeugte rückstellende Moment Fm beeinflussen die Winkelgeschwindigkeit der
Blattverstellung und beeinflussen folglich das Leistungsverhalten der WEA. Skaliert werden
diese Momente durch die Verstärkungsfaktoren k1 und k2 .
Bild 3.15: Regelstrecke Rotor
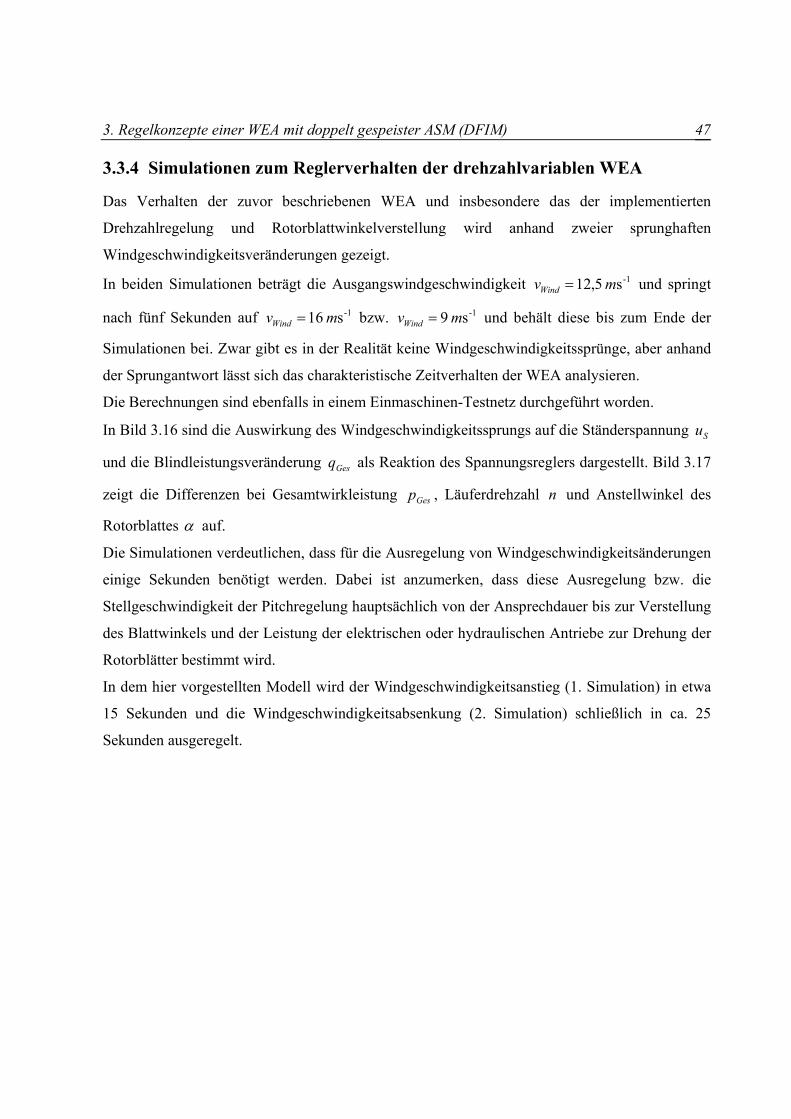
3. Regelkonzepte einer WEA mit doppelt gespeister ASM (DFIM)
47
3.3.4 Simulationen zum Reglerverhalten der drehzahlvariablen WEA
Das Verhalten der zuvor beschriebenen WEA und insbesondere das der implementierten
Drehzahlregelung und Rotorblattwinkelverstellung wird anhand zweier sprunghaften
Windgeschwindigkeitsveränderungen gezeigt.
In beiden Simulationen beträgt die Ausgangswindgeschwindigkeit -1s 5,12 mvWind = und springt
nach fünf Sekunden auf -1s 16 mvWind = bzw. -1s 9 mvWind = und behält diese bis zum Ende der
Simulationen bei. Zwar gibt es in der Realität keine Windgeschwindigkeitssprünge, aber anhand
der Sprungantwort lässt sich das charakteristische Zeitverhalten der WEA analysieren.
Die Berechnungen sind ebenfalls in einem Einmaschinen-Testnetz durchgeführt worden.
In Bild 3.16 sind die Auswirkung des Windgeschwindigkeitssprungs auf die Ständerspannung Su
und die Blindleistungsveränderung Gesq als Reaktion des Spannungsreglers dargestellt. Bild 3.17
zeigt die Differenzen bei Gesamtwirkleistung Gesp , Läuferdrehzahl n und Anstellwinkel des
Rotorblattes α auf.
Die Simulationen verdeutlichen, dass für die Ausregelung von Windgeschwindigkeitsänderungen
einige Sekunden benötigt werden. Dabei ist anzumerken, dass diese Ausregelung bzw. die
Stellgeschwindigkeit der Pitchregelung hauptsächlich von der Ansprechdauer bis zur Verstellung
des Blattwinkels und der Leistung der elektrischen oder hydraulischen Antriebe zur Drehung der
Rotorblätter bestimmt wird.
In dem hier vorgestellten Modell wird der Windgeschwindigkeitsanstieg (1. Simulation) in etwa
15 Sekunden und die Windgeschwindigkeitsabsenkung (2. Simulation) schließlich in ca. 25
Sekunden ausgeregelt.
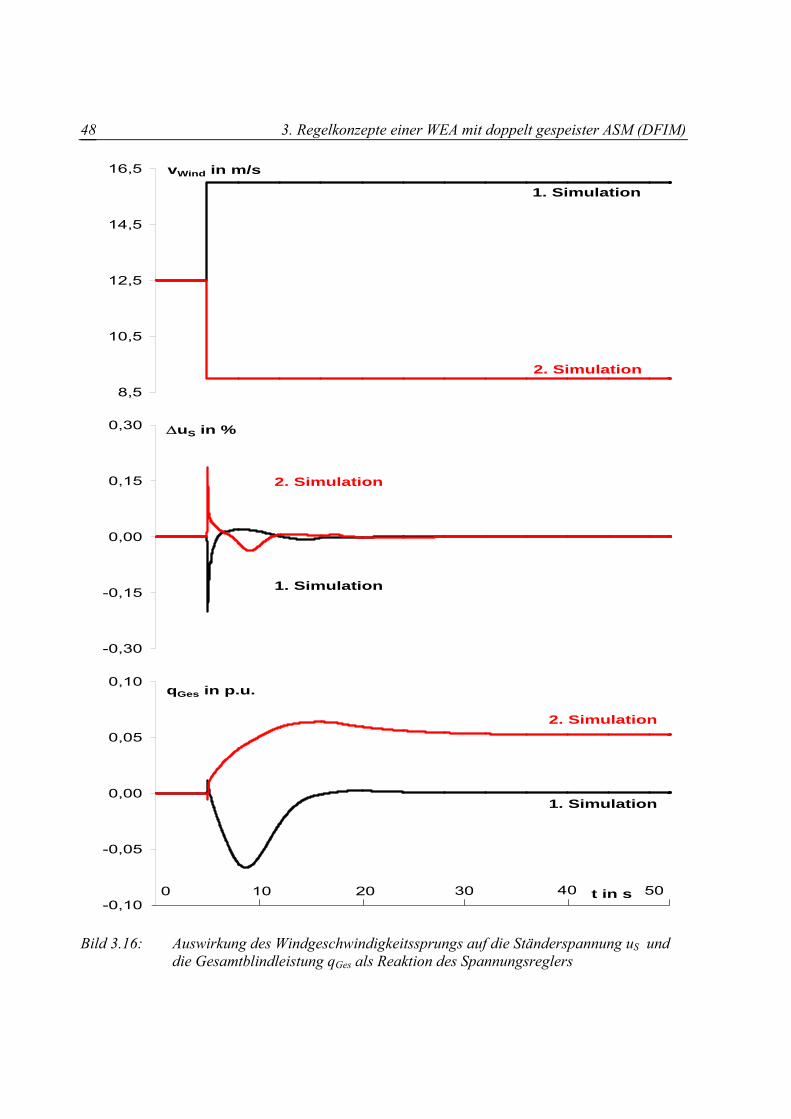
3. Regelkonzepte einer WEA mit doppelt gespeister ASM (DFIM)
48
8,5
10,5
12,5
14,5
16,5
1. Simulation
vWind in m/s
2. Simulation
-0,30
-0,15
0,00
0,15
0,30 ∆uS in %
1. Simulation
2. Simulation
-0,10
-0,05
0,00
0,05
0,10
t in s
qGes in p.u.
1. Simulation
2. Simulation
30 4020100 50
Bild 3.16: Auswirkung des Windgeschwindigkeitssprungs auf die Ständerspannung uS und die Gesamtblindleistung qGes als Reaktion des Spannungsreglers
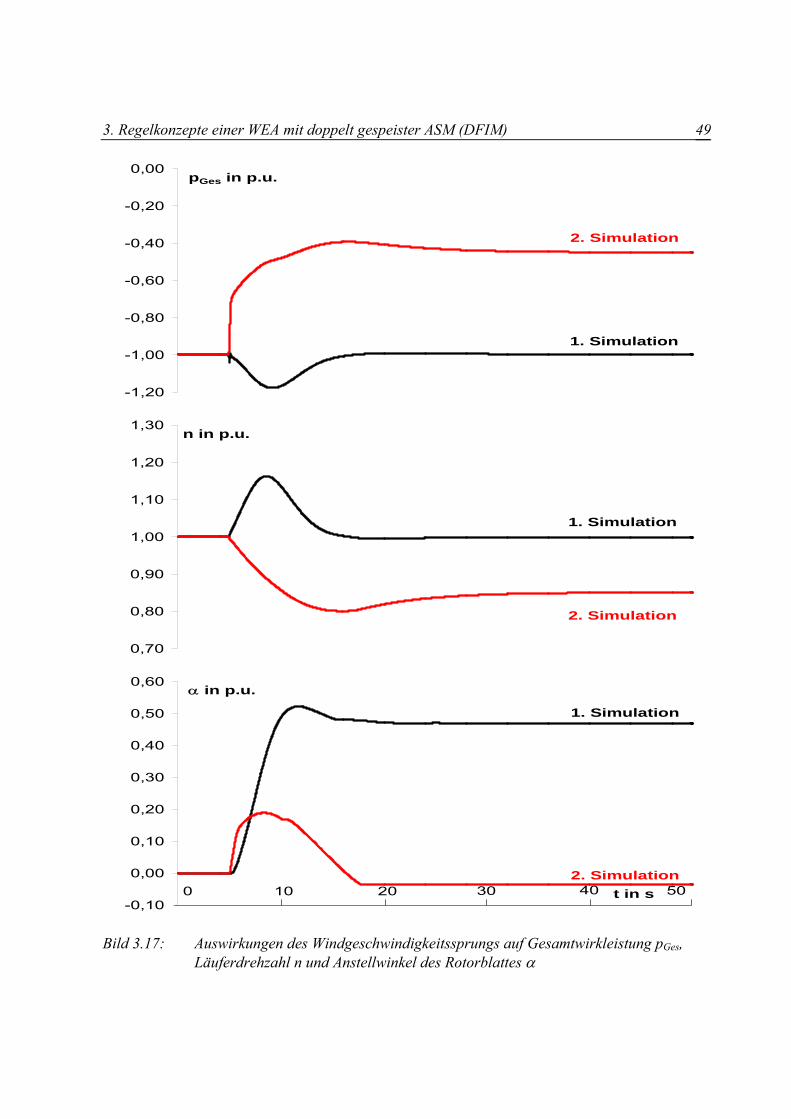
3. Regelkonzepte einer WEA mit doppelt gespeister ASM (DFIM)
49
-1,20
-1,00
-0,80
-0,60
-0,40
-0,20
0,00pGes in p.u.
1. Simulation
2. Simulation
0,70
0,80
0,90
1,00
1,10
1,20
1,30n in p.u.
1. Simulation
2. Simulation
-0,10
0,00
0,10
0,20
0,30
0,40
0,50
0,60
t in s2. Simulation
30 4020100 50
α in p.u.
1. Simulation
Bild 3.17: Auswirkungen des Windgeschwindigkeitssprungs auf Gesamtwirkleistung pGes, Läuferdrehzahl n und Anstellwinkel des Rotorblattes α
3. Regelkonzepte einer WEA mit doppelt gespeister ASM (DFIM)
50
3.4 Zusammenfassung und Ergebnisse der Reglernachbildung
Die Reglerstruktur einer WEA mit DFIM besteht prinzipiell aus den schnellen elektronischen
Regelkreisen, innerer Strom- und äußerer Spannungs- und Wirkleistungsregelkreis, sowie der
eher langsamen mechanischen Drehzahl- und Pitchregelung (Bild 3.12).
Diese Regelungsstruktur ermöglicht Simulationen im Millisekunden- bis Minutenbereich und
daher lassen sich sowohl Kurzschlüsse als auch langsamere Vorgänge nachbilden, wie
beispielsweise Windgeschwindigkeitsänderungen.
Generell anzumerken ist, dass Untersuchungen zu den Auswirkungen von Kurzschlüssen im EES
sich auf einen Zeitraum von einigen 100 ms beschränken. Folglich ist eine Vereinfachung der
Reglernachbildung möglich, denn mit der Annahme einer konstanten Windleistung an der Welle
über diesen kurzen Zeitraum erübrigt sich eine Drehzahl- und Pitchregelung.
Werden jedoch Kurzschlussuntersuchungen unter Berücksichtigung der stromabhängigen
Crowbar-Schutzmaßnahme gefordert, führen diese wiederum zu einer Erweiterung der
Reglerstruktur. Im Weiteren ist aber auch die Wahl des ASM-Modells zu beachten, denn die
Reduktion des ASM-Modells 5. Ordnung auf das Modell 3. Ordnung bewirkt eine
ausschließliche Berücksichtigung der Grundschwingungen aller elektrischen und magnetischen
Größen. Infolgedessen ist eine vollständige Abbildung der Stromverläufe in den Umrichtern nicht
gewährleistet und kann somit zu inkorrekten Sequenzvorhersagen der Crowbar-Schutzmaßnahme
führen.
Indessen sind mit dem Modell 3. Ordnung netzdynamische Untersuchungen relativ zeitunkritisch
durchführbar, was bei der Verwendung des Modells 5. Ordnung für große Netze trotz
leistungsfähiger Computer nicht möglich ist.
Folglich sollte die Verwendung des ASM-Modells von der Aufgabenstellung abhängig gemacht
werden. Ist beispielsweise die Hauptzielsetzung die Entwicklung oder die Prüfung von einzelnen
Maschinenkomponenten, so ist das detaillierte DFIM-Modell und eine vereinfachte Nachbildung
des übergeordneten Hochspannungsnetzes als Ein-Maschinen-Netz zu verwenden. Für
Untersuchungen, die sich jedoch auf die Interaktionen der DFIM mit einem größeren
übergeordneten Netz konzentrieren, erscheint das quasistationäre Modell als ausreichend.
Die Simulationen der Reglerstruktur mit Crowbar-Schutzmaßnahme haben aufgezeigt, dass die
zweite aktive Schaltsequenz der Crowbar-Schutzmaßnahme das Leistungsverhalten der DFIM
3. Regelkonzepte einer WEA mit doppelt gespeister ASM (DFIM)
51
erheblich beeinflusst. Ohne eine Gegenmaßnahme kann diese Verhaltensänderung die
Netzspannungswiederkehr nach Fehlerklärung behindern. Um jedoch den vollen Umfang dieses
nachteiligen Verhaltens festzusetzen und möglicherweise entsprechende Abhilfemaßnahmen
vorzuschlagen, sind weitere Studien notwendig.
4 Modell zur Generierung synthetischer
Windgeschwindigkeitszeitreihen
4.1 Überblick
Im Vordergrund der Simulation steht die Untersuchung der kurzfristigen Variabilität des Wirk-
und Blindleistungsertrages einer oder mehrer WEA bzw. Windparks und die daraus resultierende
elektromechanischen Interaktionen mit dem EES. Da jedoch auch weitere Aspekte der
Netzrückwirkungen eines Windparks untersucht werden, gilt es ein Modell zu verwenden, das
Windgeschwindigkeitszeitreihen für einen Simulationszeitbereich von einigen Millisekunden bis
wenigen Minuten generiert.
Im Folgenden wird zunächst eine Methodik zur Generierung der Zeitreihen für die
unterschiedlichen Windgeschwindigkeiten an der einzelnen WEA erläutert. Das Verfahren für die
numerische Nachbildung einer Windgeschwindigkeitszeitreihe einzelner WEA wird anschließend
erweitert und berücksichtigt nun eine zweidimensionale Struktur der
Windgeschwindigkeitsfluktuationen. Diese für ungestörte Windfelder gültige Methodik basiert
auf der Anregung einer Windgeschwindigkeit in einem luvseitigen Punkt des Windparks, die sich
abhängig von Anströmungswinkel und Windgeschwindigkeit zeitverzögert über den gesamten
Windpark verteilt. Durch die implementierten Laufzeitverzögerungen und -verzerrungen ergeben
sich schließlich die unterschiedlichen Windgeschwindigkeitsverläufe an den einzelnen WEA [32]
[37].
Für die spätere Simulation der Leistungsfluktuation von Windparks und den daraus
resultierenden Interaktionen eben dieser mit dem angebundenen EES ist die Anregung mittels
einer realistischen Windgeschwindigkeitszeitreihe unerlässlich. Im Allgemeinen werden folgende
Kriterien für die Windgenerierung als zwingend betrachtet:
• Die Windgeschwindigkeitszeitreihen müssen reproduzierbar sein,
• Nachbildung von geographischen und meteorologischen Besonderheiten,
• Gesonderte und/oder kontrollierte Einbindung von künstlichen Anregungsfunktionen, die
eine Simulation des Betriebsverhaltens unter extremen Bedingungen ermöglicht [32].

4. Modell zur Generierung synthetischer Windgeschwindigkeitszeitreihen
53
4.2 Synthetische Windgeschwindigkeitsanregungen
Bei der Generierung der statistischen Windgeschwindigkeiten sind neben den rein zeitlichen
Fluktuationen auch die räumlichen Eigenschaften der nachzubildenden Landschaft zu
berücksichtigen.
Die realisierte synthetische Windanregung setzt sich aus den vier einzelnen Komponenten, der
mittleren Windgeschwindigkeit WBv sowie den böenartigen - WGv , rampenförmigen - WRv und
stochastischen Anregung WSv zusammen [32] [37].
WSWRWGWBW vvvvv +++= (4.1)
Der Basisanteil WBv repräsentiert die mittlere Windgeschwindigkeit und wird konstant für die
gesamte Zeitreihe angesetzt. Sie bildet prinzipiell die Zuggeschwindigkeit der Großwetterlagen
ab, die durch jahreszeitliche Schwankungen verursachten werden und generell mehrere Tage
andauern können [38]. Jedoch ist bei der Bestimmung der benötigten Windgeschwindigkeit WBv
in Nabenhöhe z der WEA zu beachten, dass die Beschaffenheit der Erdoberfläche einen sehr
großen Einfluss nimmt. Die Windgeschwindigkeit WBv wird nach folgender Formel berechnen:
R
GGWB z
zvvα
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅= (4.2)
In den Wetterkarten werden zumeist Referenzwindgeschwindigkeiten Gv ausgewiesen, die sich
auf die standardisierte Referenzhöhe Gz von zumeist zehn Metern bezieht.
Tabelle 4.1: Rauhigkeitsexponent Rα für diverse Erdoberflächenstrukturen [39]
Erdoberflächenstrukturen Rauhigkeitsexponent Rα
Offenes Terrain mit sehr wenigen Erhebungen,
wie z. B. offenes Grasland oder Ackerflächen. 0,16
Terrain mit einheitlichen Erhebungen von bis zu 20 m,
wie z. B. kleine Städte oder Wälder. 0,28
Terrain mit hohen und ungleichmäßigen Objekten,
wie z, B. große Stadtzentren oder Felslandschaften. 0,4
4. Modell zur Generierung synthetischer Windgeschwindigkeitszeitreihen
54
Grundsätzlich gilt für die Windverhältnisse in Erdoberflächennähe, dass der Wind durch die
Oberflächenreibung verzögert und ein Teil seiner kinetischen Energie in Turbulenzen umgesetzt
wird, was der Rauhigkeitsexponent Rα charakterisiert (Tabelle 4.1).
Die Böenanregung WGv spiegelt die durch lokales Wettergeschehen verursachten, über einige
Sekunden bis wenigen Minuten gehenden, diskontinuierlichen Vorgänge wieder. Diese
Windgeschwindigkeit wird wie folgt erzeugt:
⎪⎪⎩
⎪⎪⎨
⎧
+>
+<<⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛ −−⋅
<
=
WGWG
WGWGWGWG
WGWG
WG
WG
TTt
TTtTTTtv
Tt
tv
1
111max
1
für0
für cos12
für0
)( (4.3)
wobei die Zeitbedingungen durch die Dauer TWG und den Startzeitpunkt T1WG bestimmt werden.
Das Windgeschwindigkeitsmaximum wird durch vmaxWG vorgegeben.
Die dritte Windkomponente, die rampenförmige Windgeschwindigkeitsanregung WRv , dient der
Nachbildung eines kontinuierlichen Windgeschwindigkeitsanstiegs. Im Extremfall ermöglicht
diese Windkomponente eine Sprungfunktion zu erzeugen, sofern der Zeitpunkt T2WR des
Erreichens des Maximalwertes vmaxWR nur geringfügig größer gewählt wird als der Startzeitpunkt
T1WR. Die Anwendung dieser Option wäre dann relevant, wenn eine regelungstechnische
Untersuchung der Regelstrecke WEA angestrebt wird.
Bei sehr schwach ansteigender (fallender bei negativem vmaxWR) Rampenfunktion ließe sich das
direkte Verhältnis zwischen Windgeschwindigkeit und der tatsächlichen Energieausbeute einer
WEA darstellen. Für diese Veränderung gilt:
⎪⎪⎩
⎪⎪⎨
⎧
>
<<⎟⎟⎠
⎞⎜⎜⎝
⎛−
−−⋅
<
=
WR
WRWRWRWR
WRWR
WR
WR
Tt
TtTTT
Ttv
Tt
tv
2
2112
1max
1
für0
für1
für0
)( (4.4)
Die stochastische Anregung WSv stellt schließlich die vierte Windkomponente dar, die
turbulenzbedingt nur lokal begrenzt existiert.
Ebenso wie bei den Messungen der unterschiedlichsten Zeitreihen in der Atmosphäre, gilt bei der
Generierung synthetischer Windgeschwindigkeitszeitreihen das Interesse den Windfluktuationen,
die einen Beitrag zur gesamten Turbulenz liefern.
4. Modell zur Generierung synthetischer Windgeschwindigkeitszeitreihen
55
Grundsätzlich bestehen Turbulenzspektren aus den unterschiedlichsten Windfluktuationen. Daher
ist sowohl bei Messung wie auch bei der synthetischen Generierung von Windspektren, die
Mittelungs- und Abtastintervalle oder Dauer und Schrittweite der Simulation mit besonderer
Sorgfalt zu bestimmen. Einerseits ist die Dauer so groß zu wählen, dass sämtliche Einwirkungen
erfasst werden. Andererseits muss die maximale Schrittweite noch die Erfassung von
Turbulenzen höherer Frequenz erlauben.
Zugrunde gelegt wird ein stationärer Zufallsprozess )(tvWS mit der Spektraldichtefunktion
)( iVS ω in den Grenzen ∞<≤ Oi ωω .
∑=
Φ+⋅⋅∆⋅⋅⋅=N
iiiiVWS tStv
1
2/1 )cos(])(2[2)( ωωω (4.5)
wobei für ( ) ωω ∆⋅−= 5.0ii und NO /ωω =∆ angenommen und die stochastische
Gleichverteilung über den Winkel iΦ im Intervall [ ]2π 0; realisiert wird [40].
Stationärer Prozess bedeutet in diesem Fall, dass die statistischen Eigenschaften des Windes
konstant angesetzt werden. In Bezug auf die Modellierung von Windgeschwindigkeitszeitreihen
gilt diese Bedingung als erfüllt, sofern keine Simulationsdauer von mehreren Stunden angestrebt
wird, da spätestens durch den Tagesgang einzelner Größen diese stationären Bedingungen
aufgehoben werden.
Die verwendete Spektraldichtefunktion )( iVS ω für atmosphärische Turbulenzen lautet:
3/422
2
1
2)(
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛⋅
⋅+⋅
⋅⋅⋅=
πωπ
ωω
G
i
iNiV
vF
FKS (4.6)
mit F als Turbulenzmaßstab und NK als Oberflächenrauhigkeit, welche der Höhe entspricht, auf
der die Windgeschwindigkeit zu Null wird. Somit charakterisiert diese Konstante NK die
umliegende Landschaft, was in Tabelle 4.2 für typische Terrains ausgewiesen ist. Nach [40] wird
für den Turbulenzmaßstab mF 600≈ angesetzt.
Die Dauer der Windgeschwindigkeitszeitreihe wird grundsätzlich durch das Zeitfenster der
durchzuführenden Simulation bestimmt. Um jedoch Effekte der Windfluktuationen auf das
4. Modell zur Generierung synthetischer Windgeschwindigkeitszeitreihen
56
elektromechanische Verhalten einer WEA darzustellen, sollte eine Simulationsdauer von
zumindest einigen Minuten gewählt werden.
Tabelle 4.2: Oberflächenrauhigkeit NK für diverse Erdoberflächenstrukturen [39] [40]
Erdoberflächenstrukturen Oberflächenrauhigkeit NK
Meer, Ozean 0,001
Offenes Terrain mit sehr wenigen Erhebungen,
wie z. B. offenes Grasland oder Ackerflächen. 0,005
Terrain mit einheitlichen Erhebungen von bis zu 20 m,
wie z. B. kleine Städte oder Wälder. 0,015
Terrain mit hohen und ungleichmäßigen Objekten,
wie z, B. große Stadtzentren oder Felslandschaften. 0,05
Bei der Bestimmung der oberen Grenzfrequenz Oω ist anzumerken, dass die spektrale Dichte
einer festgelegten Frequenz iω durch )( iVS ω berechnet wird. Um jedoch die spektrale Dichte
eines bestimmten Frequenzbandes zu bestimmen, muss das folgende Integral gelöst werden [41].
)(12)( )(34
2
02
2
0ii
Gi
NiiV d
vFFKdS
OO
ωωπ
ωπ
ωωωω
−
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛⋅
⋅+⋅⋅
⋅⋅= ∫∫ (4.7)
Das Verhältnis SpektrumV des theoretischen Gesamtspektrums zu den berechneten Spektren in
Abhängigkeit von den variierenden oberen Grenzfrequenzen Oω ist in Bild 4.1 dargestellt.
Daraus wird ersichtlich, dass bei einer NK = 0.005, einem F = 600 m und einer Gv = 15 m/s in
Gz = 10 m, die Oω = 30 rad/s betragen muss, um 98 % des theoretischen Spektrums abzubilden.
Das Frequenzinkrement NO /ωω =∆ sollte laut Untersuchungen im Bereich von [0,5; 2] liegen
[37]. Somit ergibt sich direkt ein Intervall für die mögliche Anzahl N der einzelnen
Spektralkomponenten.
Anzumerken ist, dass die Angleichung des rechnerisch ermittelten Ergebnisses an die Realität
nicht garantiert wird durch die Verwendung einer möglichst großen Anzahl N, dies ist vielmehr
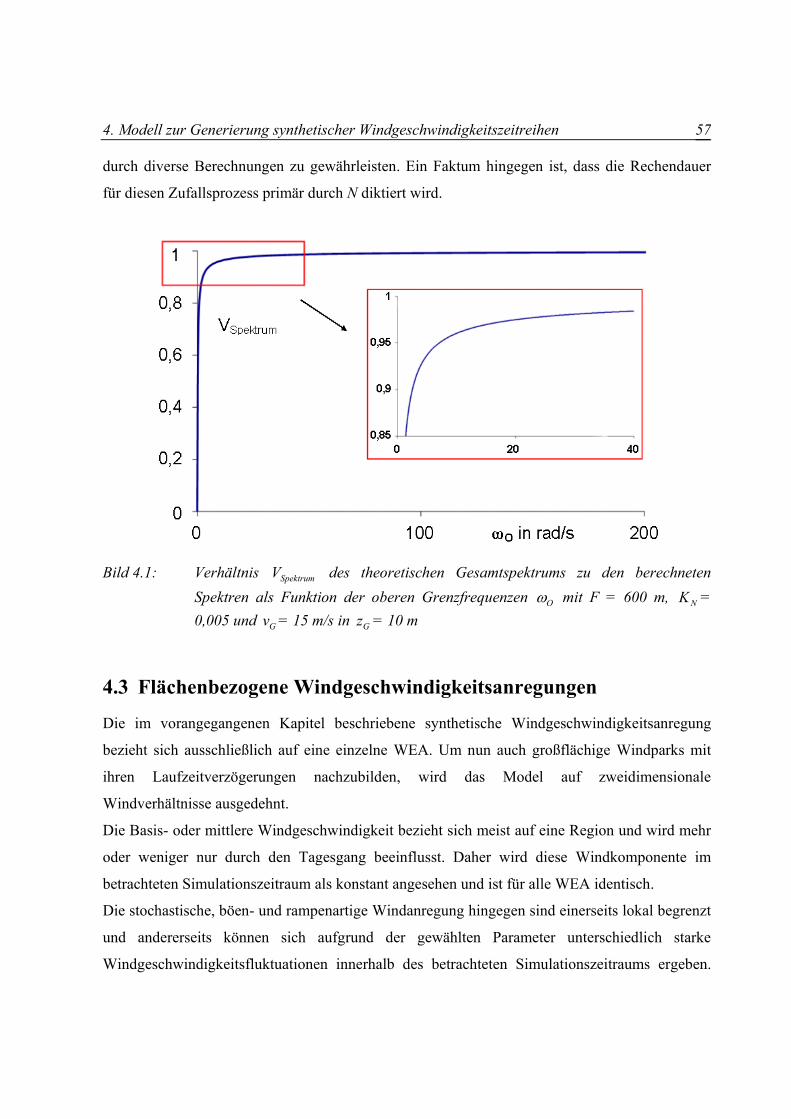
4. Modell zur Generierung synthetischer Windgeschwindigkeitszeitreihen
57
durch diverse Berechnungen zu gewährleisten. Ein Faktum hingegen ist, dass die Rechendauer
für diesen Zufallsprozess primär durch N diktiert wird.
Bild 4.1: Verhältnis SpektrumV des theoretischen Gesamtspektrums zu den berechneten Spektren als Funktion der oberen Grenzfrequenzen Oω mit F = 600 m, NK = 0,005 und Gv = 15 m/s in Gz = 10 m
4.3 Flächenbezogene Windgeschwindigkeitsanregungen
Die im vorangegangenen Kapitel beschriebene synthetische Windgeschwindigkeitsanregung
bezieht sich ausschließlich auf eine einzelne WEA. Um nun auch großflächige Windparks mit
ihren Laufzeitverzögerungen nachzubilden, wird das Model auf zweidimensionale
Windverhältnisse ausgedehnt.
Die Basis- oder mittlere Windgeschwindigkeit bezieht sich meist auf eine Region und wird mehr
oder weniger nur durch den Tagesgang beeinflusst. Daher wird diese Windkomponente im
betrachteten Simulationszeitraum als konstant angesehen und ist für alle WEA identisch.
Die stochastische, böen- und rampenartige Windanregung hingegen sind einerseits lokal begrenzt
und andererseits können sich aufgrund der gewählten Parameter unterschiedlich starke
Windgeschwindigkeitsfluktuationen innerhalb des betrachteten Simulationszeitraums ergeben.
4. Modell zur Generierung synthetischer Windgeschwindigkeitszeitreihen
58
Somit unterliegen diese Windkomponenten einer flächenbezogenen Laufzeitverzögerung, die
mittels einer linearen und nicht linearen Komponente realisiert werden.
Grundsätzlich gilt, dass die synthetische Windgeschwindigkeitsanregung für einen bestimmten
Bezugspunkt generiert wird, der sich luvseitig des Windparks befindet und sich schließlich in
Abhängigkeit von Anströmungswinkel und Windgeschwindigkeit zeitverzögert über den
gesamten Windpark ausdehnt.
Die flächenabhängige böen- und rampenartige Windanregung wird ausschließlich durch eine
zeitlich lineare Verzögerung ermöglicht, die sich direkt aus der Distanz zwischen dem
Bezugspunkt und der betrachteten WEA ergibt.
Bei der stochastischen Windanregung wird additiv zur linearen Komponente eine nicht lineare
Laufzeitverzerrung implementiert, um den stochastischen Aspekt auch in der Fläche zu
garantieren. Dazu wurde die Funktion wie folgt erweitert:
∑=
+++⋅⋅⋅⋅⋅=N
iqdiiiVWS tStv
1
2/1 )cos(])(2[2)( ββωωω Φ∆ (4.8)
mit ⎟⎟
⎠
⎞
⎜⎜
⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛⋅+⋅=
2
WB
id
WB
idd vv
d ωαωβ und 2
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅⋅=
WB
iqqq v
d ωαβ (4.9)
Die Distanz d zwischen dem Bezugspunkt und dem beobachteten Punkt wird dabei in eine
Längs- dd und eine Querkomponente qd zur Windrichtung unterteilt. Die nicht lineare
Laufzeitverzerrung wird schließlich mittels der beiden Koeffizienten dα und qα für beide
mögliche Richtungen getrennt voneinander eingestellt.
Die Auswirkungen der Laufzeitverzögerung werden beispielhaft an einem fiktiven Windpark mit
16 Einzelanlagen (Bild 4.2) dargestellt. Die Seitenlängen des quadratisch aufgebauten Windparks
betragen 1950 m und der Anströmungswinkel des Windes beträgt 30° zur Horizontalachse.
Um die Auswirkungen der Laufzeitverzögerung eindeutig herauszustellen, wird ausschließlich
eine Rampenfunktion mit einer Anfangswindgeschwindigkeit von 0 m/s simuliert (Bild 4.3).
Bild 4.4 zeigt die so erzeugten Windgeschwindigkeitsverläufe an den 16 WEA im Windpark. Die
Ähnlichkeiten der Verläufe zur Referenzwindgeschwindigkeit (Bild 4.3) sind zwingend.
Der Laufzeiteffekt in den unterschiedlichen Amplituden ist klar zu erkennen, wobei
erwartungsgemäß mit steigender Distanz zum Ursprung die Windgeschwindigkeiten abnehmen.
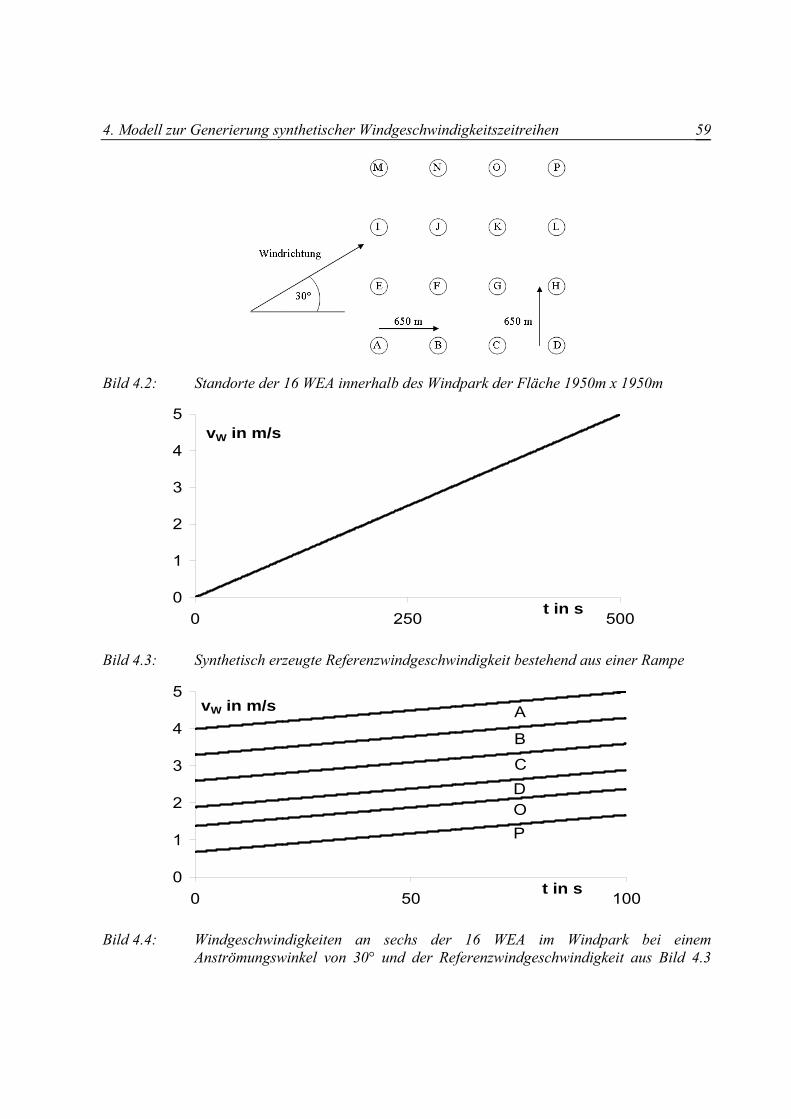
4. Modell zur Generierung synthetischer Windgeschwindigkeitszeitreihen
59
Bild 4.2: Standorte der 16 WEA innerhalb des Windpark der Fläche 1950m x 1950m
0
1
2
3
4
5
0 250 500t in s
vW in m/s
Bild 4.3: Synthetisch erzeugte Referenzwindgeschwindigkeit bestehend aus einer Rampe
0
1
2
3
4
5
0 50 100t in s
vW in m/s
P
B
CDO
A
Bild 4.4: Windgeschwindigkeiten an sechs der 16 WEA im Windpark bei einem Anströmungswinkel von 30° und der Referenzwindgeschwindigkeit aus Bild 4.3
5 Modellierung der Nachlaufströmungen (Wakes) in
Windparks
5.1 Überblick
Die Gruppierung von WEA in Windparks bewirkt im Vergleich zur frei aufgestellten WEA
zusätzliche aerodynamische Effekte.
WEA entziehen der Windströmung einen gewissen Leistungsanteil und bilden leeseitig ihres
Rotors eine Zone verminderter Windgeschwindigkeit und größerer Turbulenzintensität aus.
Befindet sich innerhalb dieser Zone, besser bekannt als Nachlaufströmung oder Wake, eine
weitere WEA, so ist deren Leistungsausbeute aufgrund der Windgeschwindigkeitsreduktion
zwangsläufig geringer.
Die Folge ist, dass bedingt durch die Aufstellungsgeometrie der einzelnen WEA in einem
Windpark zueinander, sich der Wake-Effekt zwischen mehreren WEA ausbilden und schließlich
zu einer bedeutenden Minderung der Gesamtleistungsabgabe gegenüber frei aufgestellten WEA
führen kann.
Die Charakteristik der Gesamtleistungsabgabe von Windparks weist dementsprechend eine
deutliche Abhängigkeit von Windrichtung, Aufstellungsgeometrie und Windgeschwindigkeit auf.
5.2 Mittelung der Windgeschwindigkeit über die Rotorfläche
Die Bestimmung des Arbeitspunktes der WEA bzw. der elektrischen Ausgangsleistung basiert
auf eine Windgeschwindigkeit in Nabenhöhe, die als homogen über die gesamte Rotorfläche
angesetzt wird.
Eine WEA in der Nachlaufströmung hat jedoch, die gesamte Rotorfläche betrachtend, eine
inhomogene Windanströmung aufgrund des Wakeprofils der luvseitigen WEA und daher ist eine
Mittelung der unterschiedlichen Windströmungen über die Rotorfläche unumgänglich.
Die Berechnung dieser mittleren Anströmgeschwindigkeit ( )tv basiert auf der Addition von
Impulsdefiziten [42]. Dabei wird die gesamte Rotorfläche der abgeschatteten WEA rotA anteilig
von der ungebremsten Windgeschwindigkeit ( )tv0 und der reduzierten Windgeschwindigkeit in
5. Modellierung der Nachlaufströmungen (Wakes) in Windparks
61
der Wake ( )txvW , angeströmt. Unter der Annahme, dass ( )txvW , die abgeschattete
Teilrotorfläche AbschA homogen anströmt, ist die Differenz ( ) ( )tvtxvW 0, − über eben diese
Fläche AbschA konstant und es gilt:
( ) 2 0
0 )(),()()( tvtxv
AAtvtv W
rot
Absch −⋅−= (5. 1)
In größeren Windparks wird die mittlere Anströmgeschwindigkeit ( )tv j der j-WEA gewöhnlich
durch mehrere Nachlaufströmungen beeinflusst und daher sind diese in geeigneter Weise zu
überlagern. Für jede einzelne WEA in einem Windpark erfolgt diese Überlagerung durch die
Summation über alle die Rotorfläche rotA beeinflussenden Nachlaufströmungen k.
( ) ( ) ( )∑≠=
−⋅−=n
jkk
jjkkWjrot
jkAbschjj tvtxv
AA
tvtv1
2 0_
_
_ 0 )(),( (5.2)
5.3 Windströmungen am Rotor
Das Grundprinzip der Windausnutzung nach Betz besagt, dass der Energieentzug aus der
Luftbewegung innerhalb einer imaginären Strömungsröhre nur durch Minderung der
Geschwindigkeit möglich ist [43].
Die Modellierung der reduzierten Windgeschwindigkeit ),(_ txv jkkW bzw. )(xvW in der Wake
wird im Weiteren mit dem wohl meist verbreitetem Ansatz nach Jensen und Katic realisiert [42].
Dieser Ansatz, dass die Nachlaufströmung und nicht die Windgeschwindigkeit als homogener
Bereich mit linearer Aufweitung für alle Abstände vom Rotor betrachtet wird, basiert auf den im
Folgenden beschriebenen Vorgängen am Rotor.
Es existiert eine Windgeschwindigkeit 0v bei Atmosphärendruck weit vor dem Rotor. Im
unmittelbaren Bereich vor dem Rotor jedoch staut sich die Luft und folglich verringert sich die
Windgeschwindigkeit und der Staudruck steigt an. Die Energieentnahme am Rotor geschieht
durch Reduzierung des Staudrucks, wobei dieser unter den Atmosphärendruck absinkt. Hinter
dem Rotor erfolgt eine verzögerte Druckanhebung auf den ursprünglichen Atmosphärendruck,
was wiederum eine Verringerung der Windgeschwindigkeit bewirkt.
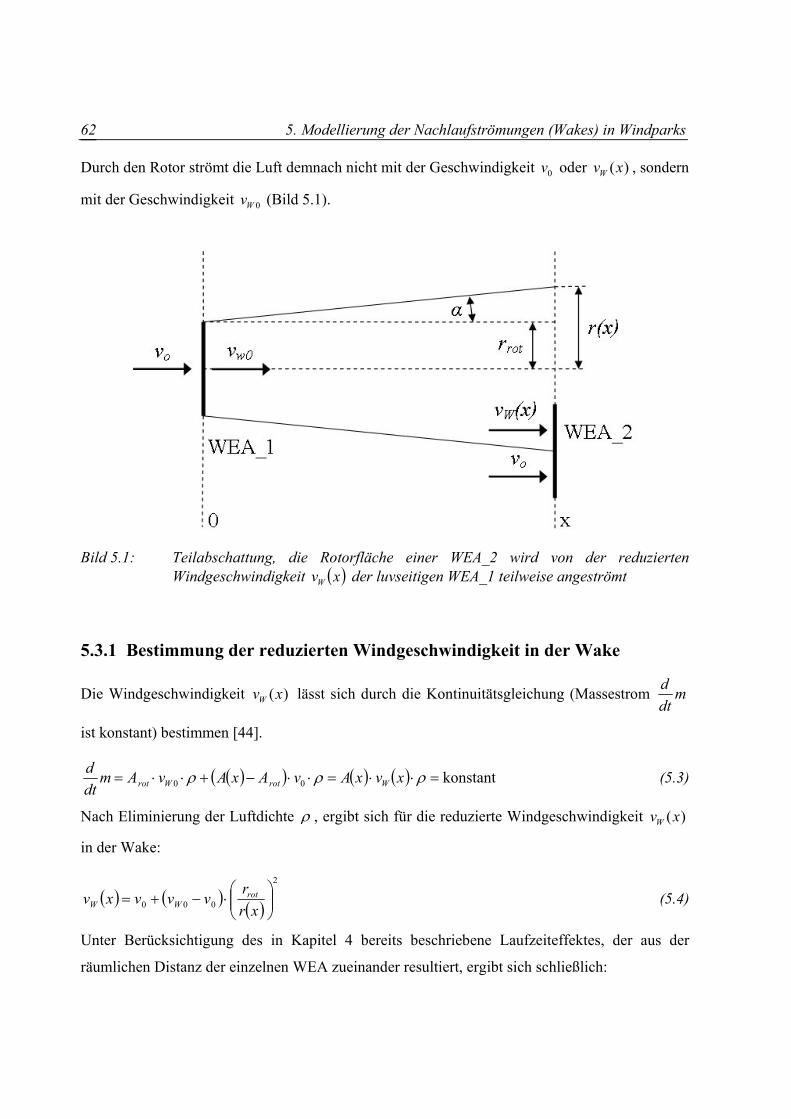
5. Modellierung der Nachlaufströmungen (Wakes) in Windparks
62
Durch den Rotor strömt die Luft demnach nicht mit der Geschwindigkeit 0v oder )(xvW , sondern
mit der Geschwindigkeit 0Wv (Bild 5.1).
Bild 5.1: Teilabschattung, die Rotorfläche einer WEA_2 wird von der reduzierten Windgeschwindigkeit ( )xvW der luvseitigen WEA_1 teilweise angeströmt
5.3.1 Bestimmung der reduzierten Windgeschwindigkeit in der Wake
Die Windgeschwindigkeit )(xvW lässt sich durch die Kontinuitätsgleichung (Massestrom mdtd
ist konstant) bestimmen [44].
( )( ) ( ) ( ) konstant0 0 =⋅⋅=⋅⋅−+⋅⋅= ρρρ xvxAvAxAvAmdtd
WrotWrot (5.3)
Nach Eliminierung der Luftdichte ρ , ergibt sich für die reduzierte Windgeschwindigkeit )(xvW
in der Wake:
( ) ( ) ( )
2
000 ⎟⎟⎠
⎞⎜⎜⎝
⎛⋅−+=
xrrvvvxv rot
WW (5.4)
Unter Berücksichtigung des in Kapitel 4 bereits beschriebene Laufzeiteffektes, der aus der
räumlichen Distanz der einzelnen WEA zueinander resultiert, ergibt sich schließlich:
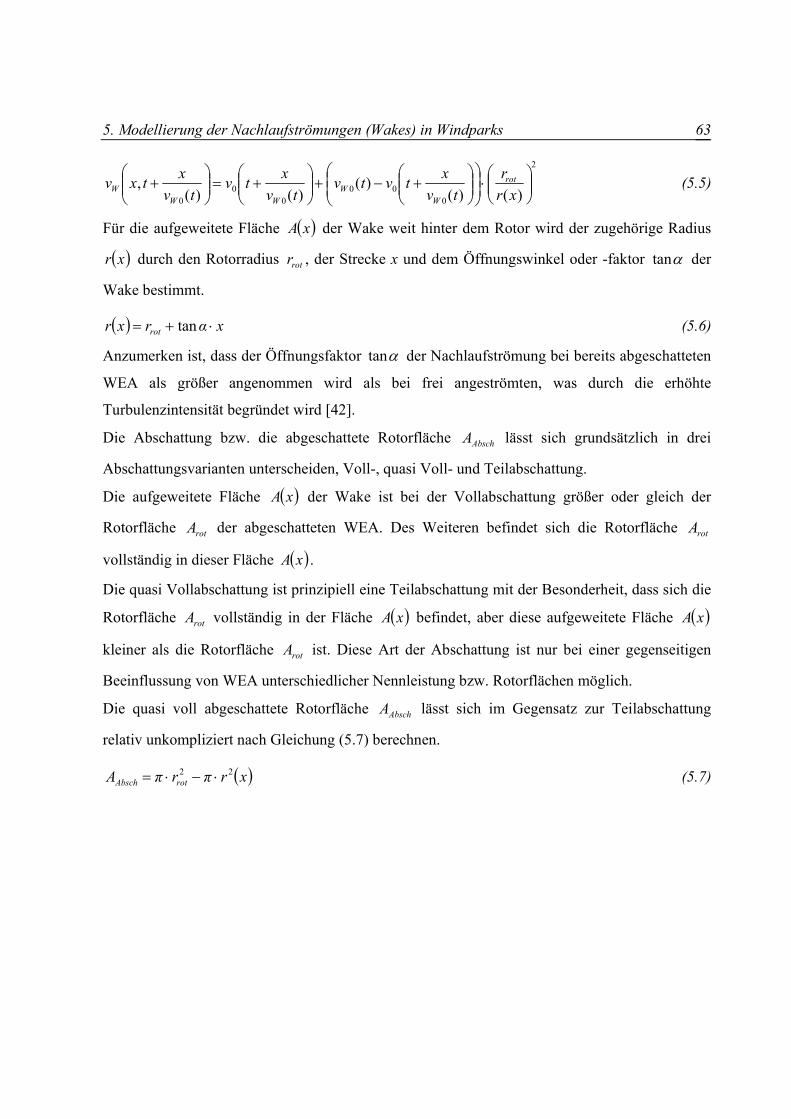
5. Modellierung der Nachlaufströmungen (Wakes) in Windparks
63
2
000
00
0 )()()(
)()(, ⎟⎟
⎠
⎞⎜⎜⎝
⎛⋅⎟⎟
⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛+−+⎟⎟
⎠
⎞⎜⎜⎝
⎛+=⎟⎟
⎠
⎞⎜⎜⎝
⎛+
xrr
tvxtvtv
tvxtv
tvxtxv rot
WW
WWW (5.5)
Für die aufgeweitete Fläche ( )xA der Wake weit hinter dem Rotor wird der zugehörige Radius
( )xr durch den Rotorradius rotr , der Strecke x und dem Öffnungswinkel oder -faktor αtan der
Wake bestimmt.
( ) xαrxr rot ⋅+= tan (5.6)
Anzumerken ist, dass der Öffnungsfaktor αtan der Nachlaufströmung bei bereits abgeschatteten
WEA als größer angenommen wird als bei frei angeströmten, was durch die erhöhte
Turbulenzintensität begründet wird [42].
Die Abschattung bzw. die abgeschattete Rotorfläche AbschA lässt sich grundsätzlich in drei
Abschattungsvarianten unterscheiden, Voll-, quasi Voll- und Teilabschattung.
Die aufgeweitete Fläche ( )xA der Wake ist bei der Vollabschattung größer oder gleich der
Rotorfläche rotA der abgeschatteten WEA. Des Weiteren befindet sich die Rotorfläche rotA
vollständig in dieser Fläche ( )xA .
Die quasi Vollabschattung ist prinzipiell eine Teilabschattung mit der Besonderheit, dass sich die
Rotorfläche rotA vollständig in der Fläche ( )xA befindet, aber diese aufgeweitete Fläche ( )xA
kleiner als die Rotorfläche rotA ist. Diese Art der Abschattung ist nur bei einer gegenseitigen
Beeinflussung von WEA unterschiedlicher Nennleistung bzw. Rotorflächen möglich.
Die quasi voll abgeschattete Rotorfläche AbschA lässt sich im Gegensatz zur Teilabschattung
relativ unkompliziert nach Gleichung (5.7) berechnen.
( )xrπrπA rotAbsch22 ⋅−⋅= (5.7)
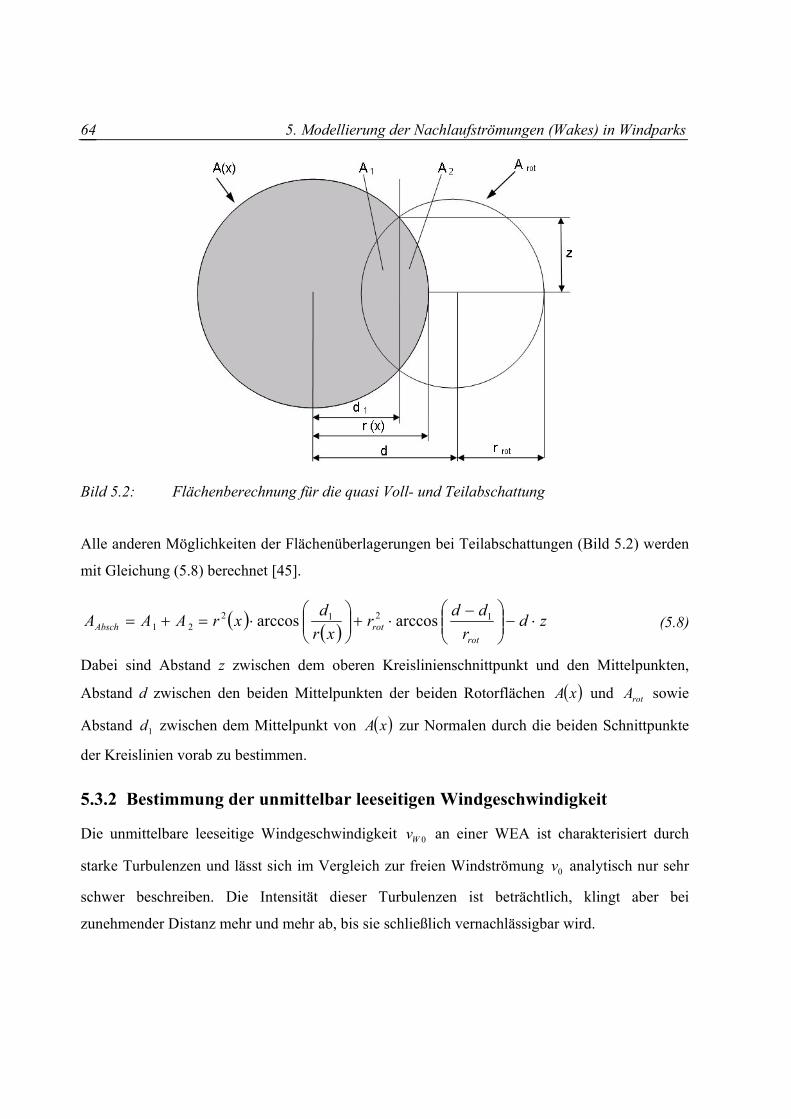
5. Modellierung der Nachlaufströmungen (Wakes) in Windparks
64
Bild 5.2: Flächenberechnung für die quasi Voll- und Teilabschattung
Alle anderen Möglichkeiten der Flächenüberlagerungen bei Teilabschattungen (Bild 5.2) werden
mit Gleichung (5.8) berechnet [45].
( ) ( ) zdr
ddrxr
dxrAAArot
rotAbsch ⋅−⎟⎟⎠
⎞⎜⎜⎝
⎛ −⋅+⎟⎟
⎠
⎞⎜⎜⎝
⎛⋅=+= 1212
2 1 arccosarccos (5.8)
Dabei sind Abstand z zwischen dem oberen Kreislinienschnittpunkt und den Mittelpunkten,
Abstand d zwischen den beiden Mittelpunkten der beiden Rotorflächen ( )xA und rotA sowie
Abstand 1d zwischen dem Mittelpunkt von ( )xA zur Normalen durch die beiden Schnittpunkte
der Kreislinien vorab zu bestimmen.
5.3.2 Bestimmung der unmittelbar leeseitigen Windgeschwindigkeit
Die unmittelbare leeseitige Windgeschwindigkeit 0Wv an einer WEA ist charakterisiert durch
starke Turbulenzen und lässt sich im Vergleich zur freien Windströmung 0v analytisch nur sehr
schwer beschreiben. Die Intensität dieser Turbulenzen ist beträchtlich, klingt aber bei
zunehmender Distanz mehr und mehr ab, bis sie schließlich vernachlässigbar wird.

5. Modellierung der Nachlaufströmungen (Wakes) in Windparks
65
Konkret gilt, dass daher Abstände von fünf Rotordurchmessern zwischen den einzelnen WEA
nicht unterschritten werden sollten [46].
Die leeseitige Windgeschwindigkeit 0Wv lässt sich durch das Verhältnis von der dem Wind zu
entziehenden Leistung EntzugP und der in ihm enthaltenden Leistung WindP berechnen [32].
⎟⎟⎠
⎞⎜⎜⎝
⎛−⋅⎟⎟
⎠
⎞⎜⎜⎝
⎛+⋅== 2
0
20
0
0_ 11
21
vv
vv
PP
c WW
Wind
Entzugthp (5.9)
Der Leistungsbeiwert pc unterscheidet sich vom theoretische Leistungsbeiwert thpc _ in der
Form, dass in pc der Verlust bzw. Wirkungsgrad η der primären Energiewandlung
berücksichtigt ist.
ηcc thpp ⋅= _ (5.10)
Ziel ist es nun, den Leistungsbeiwert thpc _ aus bekannten WEA-Parametern zu bestimmen, so
dass mittels Gleichung (5.9) und der Windgeschwindigkeit 0v die gesuchte Größe 0Wv ermittelt
werden kann.
Im ersten Schritt gilt es die Grenzen für den theoretischen Leistungsbeiwert thpc _ zu definieren.
Der Minimalwert ist 0_ =thpc . Der Maximalwert ergibt sich durch Ableitung der Gleichung (5.9)
nach 0Wv und Gleichsetzung zu Null.
031
32 2
0002
0 =−+ vvvv WW (5.11)
Das resultierende Verhältnis lautet:
00 31 vvW = (5.12)
Der maximal mögliche Leistungsbeiwert thpc _ , bekannt als Betzpc _ , wird durch Einsetzten von
Gleichung (5.12) in (5.9) bestimmt:
% 592716
_ ≈=Betzpc (5.13)
Hieraus folgt, dass der theoretische Leistungsbeiwert im Intervall [0; Betzpc _ ] liegt.
5. Modellierung der Nachlaufströmungen (Wakes) in Windparks
66
Unter Berücksichtigung der Grenzen für thpc _ , ergeben sich nach Auflösung der Gleichung (5.9)
folgende zwei Lösungen:
278
_ ≥thpc ⎟⎠
⎞⎜⎝
⎛⎟⎠⎞
⎜⎝⎛ +
⋅+⋅−=32 cos41
30
0πϕvvW mit ⎟
⎠⎞
⎜⎝⎛ −= 1
827 arccos _ thpcϕ (5.14)
278
_ <thpc ⎟⎠
⎞⎜⎝
⎛⎟⎠⎞
⎜⎝⎛⋅−⋅−=
3 cos41
30
0ϕvvW mit ⎟
⎠⎞
⎜⎝⎛ −= thpc _8
271arccosϕ (5.15)
Der theoretische Leistungsbeiwert thpc _ gibt jedoch nur das Leistungsverhältnis eines Rotors in
Bezug auf die axialen Ein- 0v und Austrittsgeschwindigkeiten 0Wv an. Um nun von dem zur
Verfügung stehenden verlustbehafteten Leistungsbeiwert pc auf den in der Berechnung zu
verwendenden thpc _ zu schließen, gilt es eben diese Verlustquellen zu lokalisieren und zu
berücksichtigen.
5.3.3 Aerodynamische Vorgänge am Rotorblattprofil
Ausgehend von der Theorie für ideale Strömung am Rotorblatt werden Strömungsverluste nach
den verschiedenen Ansätzen von Betz oder Schmitz unterschiedlich berücksichtigt. Die
Genauigkeit der Ergebnisse hängt naturgemäß von der Qualität und der Anzahl der zur
Verfügung stehenden Parameter ab. Da der Schwerpunkt dieser Arbeit nicht die Untersuchung
der primären Energieumwandlung am Rotor ist, wird demzufolge versucht, die erforderliche
Genauigkeit mit einer möglichst geringen Anzahl an rotorblattspezifischen Parametern zu
erzielen. Daher werden die drei hauptsächlichen Verlustquellen im Folgenden kurz beschrieben
und deren Berücksichtigung aufgezeigt.
Bei der Anströmung des Rotorblattes wirkt in axialer Richtung der profileigene Widerstand, der
bei einer reibungsfreien Strömung gleich Null wäre. Die Profilverluste werden also vom
Widerstand des Rotorblattprofils hervorgerufen und lassen sich durch die Schnelllaufzahl im
Auslegungspunkt Aλ und der Gleitzahl ε bestimmen, wobei ein einziger Profiltyp über die
gesamte Länge des Rotorblattes bei festem Anstellwinkel angenommen wird. Die Profilverluste
bzw. der Wirkungsgrad Profilη wird letztendlich durch den Vergleich mit einem idealen Rotorblatt
ohne Verluste wie folgt ermittelt [47]:

5. Modellierung der Nachlaufströmungen (Wakes) in Windparks
67
ελη A−= 1Profil (5.16)
Das Rotorblatt im zweidimensionalen Profilschnitt wird zumeist verwendet um die Kraftwirkung
der beiden Axial- und Umfangskomponenten des Windes auf den Rotor zu bestimmen. Wird
jedoch das gesamte Rotorblatt zu Grunde gelegt, so ergibt sich eine dritte
Geschwindigkeitskomponente in Spannweitenrichtung [43].
Grundsätzlich führen der Unterdruck auf der Oberseite des Rotorblattes und der Überdruck auf
der Unterseite zu einer Umströmung der Rotorblattspitzen, die im Nachlauf einen Wirbel bilden.
Daraus resultiert eine Reduzierung des Auftriebes zur Rotorblattspitze hin. Die Bestimmung
dieser Wirbelverluste bzw. des Wirkungsgrades Wirbelη erfolgt durch:
An λη
⋅−=
84,11Wirbel (5.17)
mit n als Anzahl der Rotorblätter [47] [48].
Die Drallverluste entstehen bei der teilweisen Umsetzung der im Wind enthaltenen Kraft in ein
Drehmoment. Es wird bekanntermaßen davon ausgegangen, dass weit vor dem Rotor
ausschließlich eine axiale Strömung vorhanden ist. Hinter dem Rotor jedoch stellt sich nicht nur
eine verzögerte Windgeschwindigkeit durch den Leistungsentzug in der Rotorebene ein, sondern
auch eine überlagerte Drallkomponente, aufgrund der rotatorischen Bewegung des Rotors.
Da die Betzsche Theorie davon ausgeht, dass sowohl vor als auch hinter dem Rotor axiale
Strömungen existieren, wird die Auslegung nach Schmitz verwendet [49].
Nach Berücksichtigung des Dralls lässt sich der Leistungsbeiwert unter Optimalbedingungen wie
folgt bestimmen:
( ) rr
rroptp dc λλ
λλλ
λ
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛⋅+⋅= ∫
1arctan32sin14 3
0
222 _ (5.18)
Die Integration liefert eine etwas umständliche Lösung und daher wird an dieser Stelle
ausschließlich die Nährungsformel aufgeführt.
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅−−−= 2
2
4 2 _ln
92106,0219,01
2716
λλ
λλoptpc (5.19)
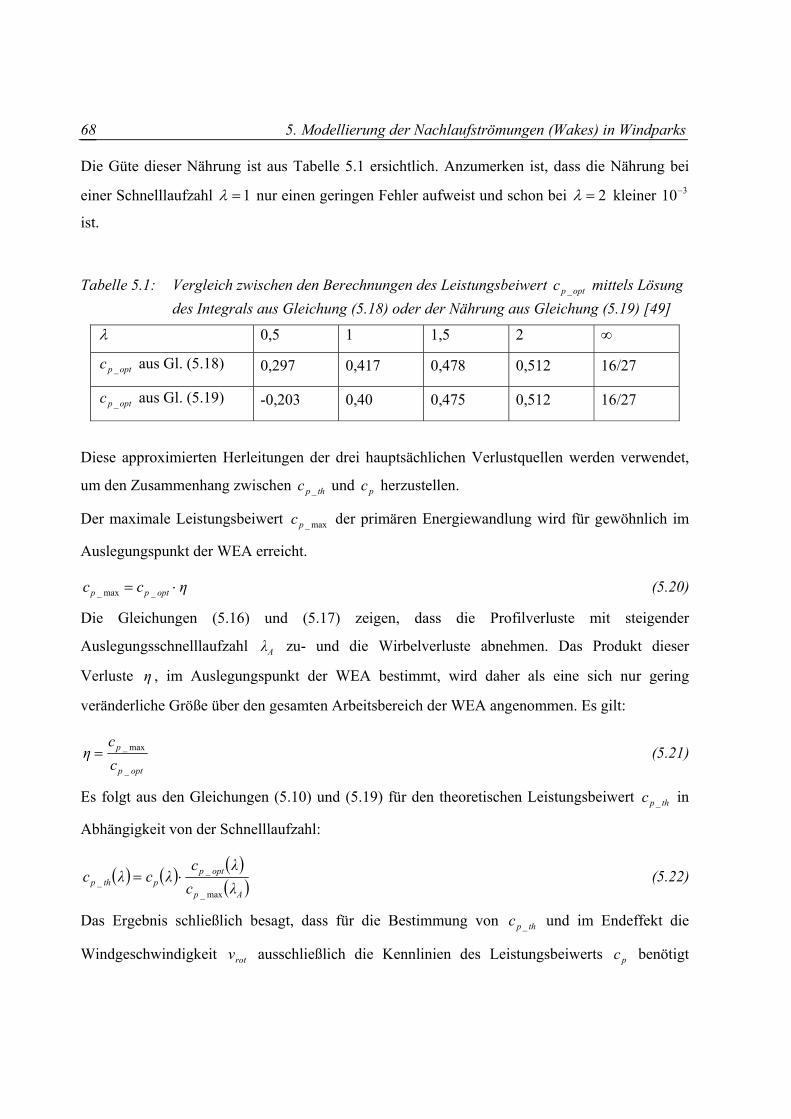
5. Modellierung der Nachlaufströmungen (Wakes) in Windparks
68
Die Güte dieser Nährung ist aus Tabelle 5.1 ersichtlich. Anzumerken ist, dass die Nährung bei
einer Schnelllaufzahl 1=λ nur einen geringen Fehler aufweist und schon bei 2=λ kleiner 310−
ist.
Tabelle 5.1: Vergleich zwischen den Berechnungen des Leistungsbeiwert optpc _ mittels Lösung des Integrals aus Gleichung (5.18) oder der Nährung aus Gleichung (5.19) [49]
λ 0,5 1 1,5 2 ∞
optpc _ aus Gl. (5.18) 0,297 0,417 0,478 0,512 16/27
optpc _ aus Gl. (5.19) -0,203 0,40 0,475 0,512 16/27
Diese approximierten Herleitungen der drei hauptsächlichen Verlustquellen werden verwendet,
um den Zusammenhang zwischen thpc _ und pc herzustellen.
Der maximale Leistungsbeiwert max_pc der primären Energiewandlung wird für gewöhnlich im
Auslegungspunkt der WEA erreicht.
ηcc optpp ⋅= _max_ (5.20)
Die Gleichungen (5.16) und (5.17) zeigen, dass die Profilverluste mit steigender
Auslegungsschnelllaufzahl Aλ zu- und die Wirbelverluste abnehmen. Das Produkt dieser
Verluste η , im Auslegungspunkt der WEA bestimmt, wird daher als eine sich nur gering
veränderliche Größe über den gesamten Arbeitsbereich der WEA angenommen. Es gilt:
optp
p
cc
η_
max_= (5.21)
Es folgt aus den Gleichungen (5.10) und (5.19) für den theoretischen Leistungsbeiwert thpc _ in
Abhängigkeit von der Schnelllaufzahl:
( ) ( ) ( )( )Ap
optppthp λc
λcλcλc
max_
__ ⋅= (5.22)
Das Ergebnis schließlich besagt, dass für die Bestimmung von thpc _ und im Endeffekt die
Windgeschwindigkeit rotv ausschließlich die Kennlinien des Leistungsbeiwerts pc benötigt
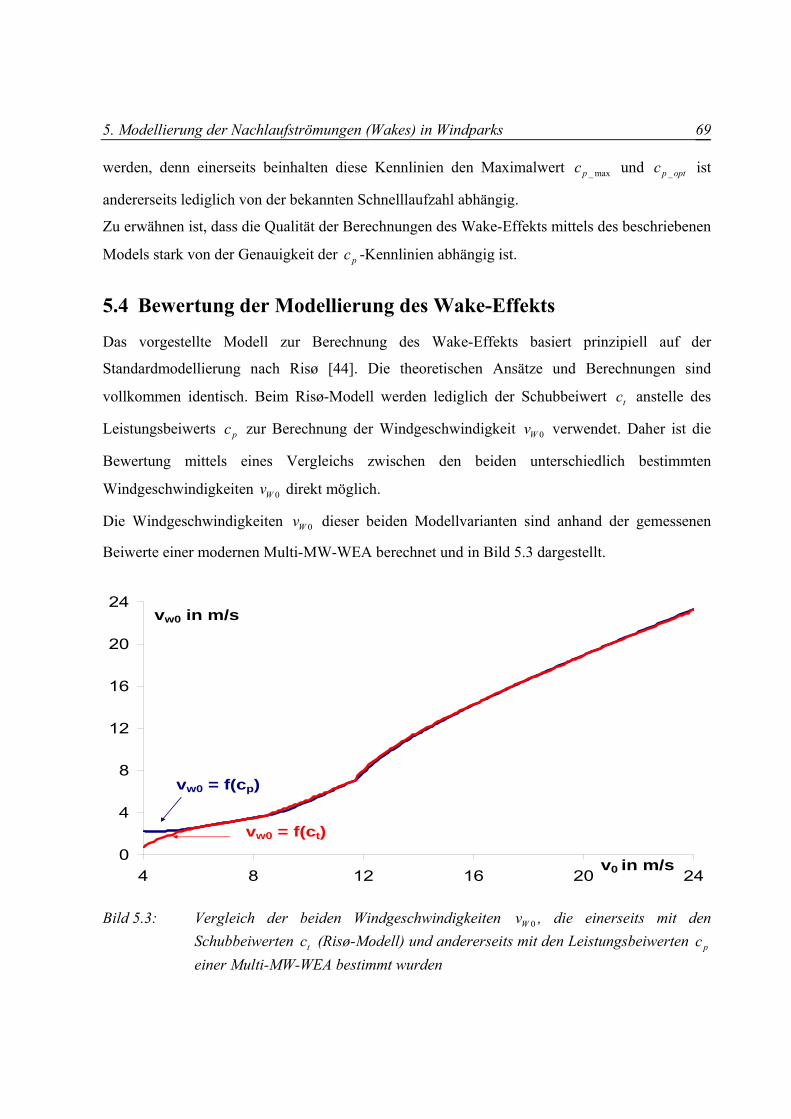
5. Modellierung der Nachlaufströmungen (Wakes) in Windparks
69
werden, denn einerseits beinhalten diese Kennlinien den Maximalwert max_pc und optpc _ ist
andererseits lediglich von der bekannten Schnelllaufzahl abhängig.
Zu erwähnen ist, dass die Qualität der Berechnungen des Wake-Effekts mittels des beschriebenen
Models stark von der Genauigkeit der pc -Kennlinien abhängig ist.
5.4 Bewertung der Modellierung des Wake-Effekts
Das vorgestellte Modell zur Berechnung des Wake-Effekts basiert prinzipiell auf der
Standardmodellierung nach Risø [44]. Die theoretischen Ansätze und Berechnungen sind
vollkommen identisch. Beim Risø-Modell werden lediglich der Schubbeiwert tc anstelle des
Leistungsbeiwerts pc zur Berechnung der Windgeschwindigkeit 0Wv verwendet. Daher ist die
Bewertung mittels eines Vergleichs zwischen den beiden unterschiedlich bestimmten
Windgeschwindigkeiten 0Wv direkt möglich.
Die Windgeschwindigkeiten 0Wv dieser beiden Modellvarianten sind anhand der gemessenen
Beiwerte einer modernen Multi-MW-WEA berechnet und in Bild 5.3 dargestellt.
0
4
8
12
16
20
24
4 8 12 16 20 24v0 in m/s
vw0 in m/s
vw0 = f(cp)
vw0 = f(ct)
Bild 5.3: Vergleich der beiden Windgeschwindigkeiten 0Wv , die einerseits mit den Schubbeiwerten tc (Risø-Modell) und andererseits mit den Leistungsbeiwerten pc einer Multi-MW-WEA bestimmt wurden
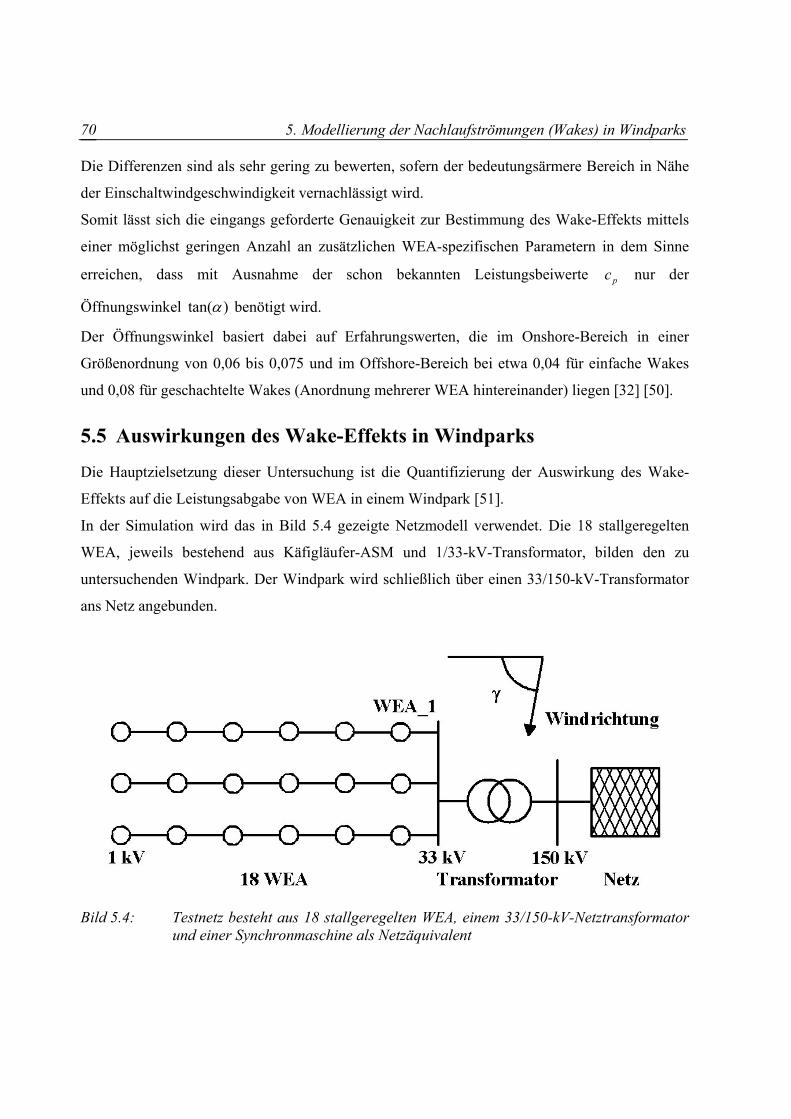
5. Modellierung der Nachlaufströmungen (Wakes) in Windparks
70
Die Differenzen sind als sehr gering zu bewerten, sofern der bedeutungsärmere Bereich in Nähe
der Einschaltwindgeschwindigkeit vernachlässigt wird.
Somit lässt sich die eingangs geforderte Genauigkeit zur Bestimmung des Wake-Effekts mittels
einer möglichst geringen Anzahl an zusätzlichen WEA-spezifischen Parametern in dem Sinne
erreichen, dass mit Ausnahme der schon bekannten Leistungsbeiwerte pc nur der
Öffnungswinkel )tan(α benötigt wird.
Der Öffnungswinkel basiert dabei auf Erfahrungswerten, die im Onshore-Bereich in einer
Größenordnung von 0,06 bis 0,075 und im Offshore-Bereich bei etwa 0,04 für einfache Wakes
und 0,08 für geschachtelte Wakes (Anordnung mehrerer WEA hintereinander) liegen [32] [50].
5.5 Auswirkungen des Wake-Effekts in Windparks
Die Hauptzielsetzung dieser Untersuchung ist die Quantifizierung der Auswirkung des Wake-
Effekts auf die Leistungsabgabe von WEA in einem Windpark [51].
In der Simulation wird das in Bild 5.4 gezeigte Netzmodell verwendet. Die 18 stallgeregelten
WEA, jeweils bestehend aus Käfigläufer-ASM und 1/33-kV-Transformator, bilden den zu
untersuchenden Windpark. Der Windpark wird schließlich über einen 33/150-kV-Transformator
ans Netz angebunden.
Bild 5.4: Testnetz besteht aus 18 stallgeregelten WEA, einem 33/150-kV-Netztransformator und einer Synchronmaschine als Netzäquivalent
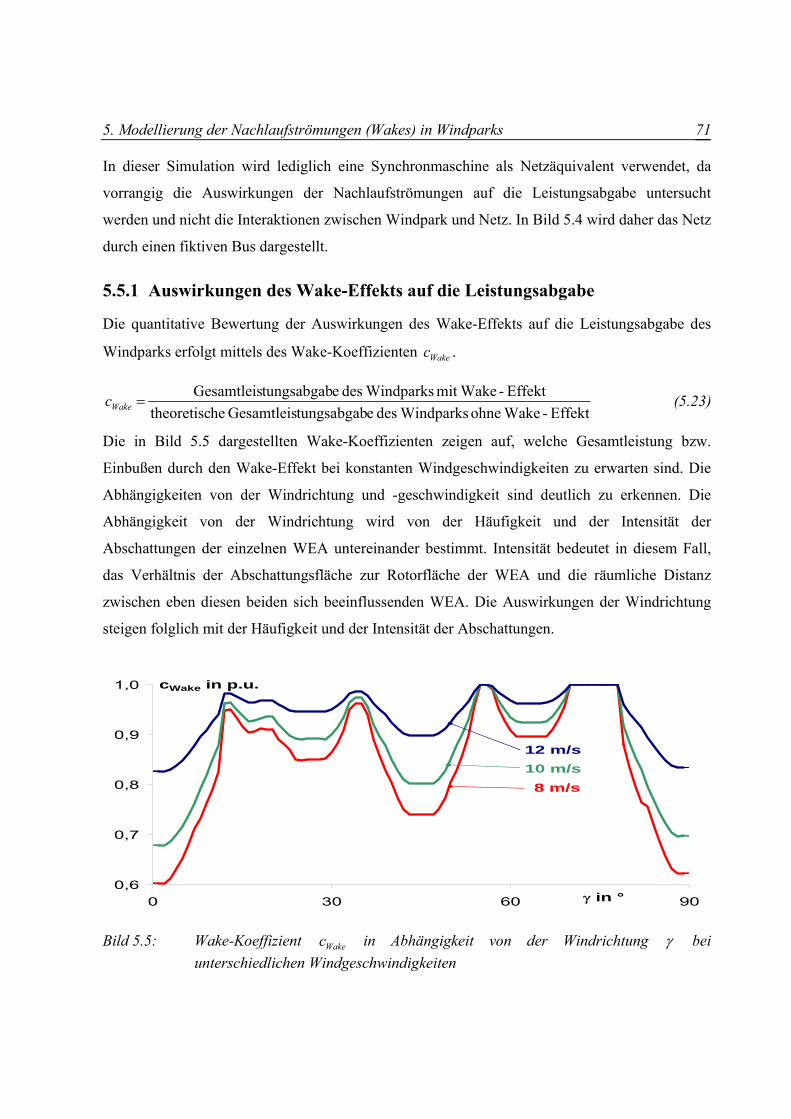
5. Modellierung der Nachlaufströmungen (Wakes) in Windparks
71
In dieser Simulation wird lediglich eine Synchronmaschine als Netzäquivalent verwendet, da
vorrangig die Auswirkungen der Nachlaufströmungen auf die Leistungsabgabe untersucht
werden und nicht die Interaktionen zwischen Windpark und Netz. In Bild 5.4 wird daher das Netz
durch einen fiktiven Bus dargestellt.
5.5.1 Auswirkungen des Wake-Effekts auf die Leistungsabgabe
Die quantitative Bewertung der Auswirkungen des Wake-Effekts auf die Leistungsabgabe des
Windparks erfolgt mittels des Wake-Koeffizienten Wakec .
Effekt-Wake ohne Windparks des etungsabgabGesamtleis hetheoretiscEffekt-Wakemit Windparks des etungsabgabGesamtleis
=Wakec (5.23)
Die in Bild 5.5 dargestellten Wake-Koeffizienten zeigen auf, welche Gesamtleistung bzw.
Einbußen durch den Wake-Effekt bei konstanten Windgeschwindigkeiten zu erwarten sind. Die
Abhängigkeiten von der Windrichtung und -geschwindigkeit sind deutlich zu erkennen. Die
Abhängigkeit von der Windrichtung wird von der Häufigkeit und der Intensität der
Abschattungen der einzelnen WEA untereinander bestimmt. Intensität bedeutet in diesem Fall,
das Verhältnis der Abschattungsfläche zur Rotorfläche der WEA und die räumliche Distanz
zwischen eben diesen beiden sich beeinflussenden WEA. Die Auswirkungen der Windrichtung
steigen folglich mit der Häufigkeit und der Intensität der Abschattungen.
0,6
0,7
0,8
0,9
1,0
0 30 60 90γ in °
cWake in p.u.
12 m/s
8 m/s10 m/s
Bild 5.5: Wake-Koeffizient Wakec in Abhängigkeit von der Windrichtung γ bei unterschiedlichen Windgeschwindigkeiten
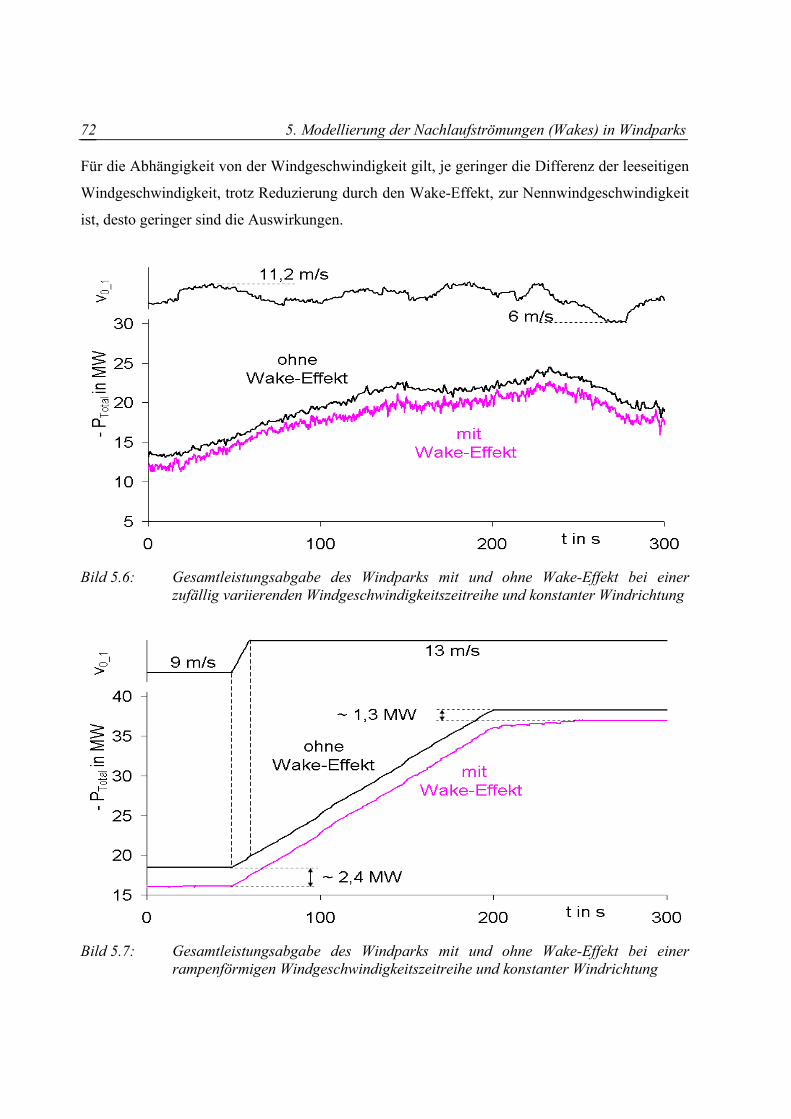
5. Modellierung der Nachlaufströmungen (Wakes) in Windparks
72
Für die Abhängigkeit von der Windgeschwindigkeit gilt, je geringer die Differenz der leeseitigen
Windgeschwindigkeit, trotz Reduzierung durch den Wake-Effekt, zur Nennwindgeschwindigkeit
ist, desto geringer sind die Auswirkungen.
Bild 5.6: Gesamtleistungsabgabe des Windparks mit und ohne Wake-Effekt bei einer zufällig variierenden Windgeschwindigkeitszeitreihe und konstanter Windrichtung
Bild 5.7: Gesamtleistungsabgabe des Windparks mit und ohne Wake-Effekt bei einer rampenförmigen Windgeschwindigkeitszeitreihe und konstanter Windrichtung
5. Modellierung der Nachlaufströmungen (Wakes) in Windparks
73
In Bild 5.6 ist die Gesamtleistungsabgabe des Windparks (Bild 5.4) über einen Zeitraum von fünf
Minuten dargestellt. Die Windgeschwindigkeitszeitreihe der frei angeströmte WEA_1, die
oberhalb der Gesamtleistungsabgabe abgebildet ist, variiert zufällig. Die Windrichtung hingegen
beträgt durchgehend °= 80γ . Erwartungsgemäß wird die Gesamtleistungsabgabe des Windparks
durch den Wake-Effekt reduziert.
Jede luvseitige Windgeschwindigkeitsänderung nimmt zeitverzögert Einfluss auf die einzelnen
leeseitigen WEA Standorte. Die Folge ist, dass die Einflussnahme des Wake-Effekts auf die
Gesamtleistungsabgabe zeitversetzt geschieht.
In Bild 5.7 ist die Veränderung der Gesamtleistungsabgabe ohne und mit Berücksichtigung des
Wake-Effekts als Folge einer rampenförmigen Windgeschwindigkeitsänderung dargestellt.
Auffällig an dieser Simulation ist die Tatsache, dass auf eine relativ schnelle Änderung der
Windgeschwindigkeit die erwartete Leistungsveränderung des gesamten Windpark erst nach
einer wesentlich längeren Zeitspanne erfolgt. Im Weiteren bewirkt der Wake-Effekt eine
zusätzliche Verzögerung bzw. Anstieg dieser Zeitspanne, was in Bild 5.7 erkennbar ist.
Dargestellt sind ebenfalls die Reduzierungen der Gesamtleistungsabgabe des Windparks vor und
nach der Windgeschwindigkeitsänderung. Die anfängliche Minderung von 2,4 MW bei 9 m/s
wird auf 1,3 MW bei 13 m/s abgeschwächt, was auf das nicht lineare Verhältnis zwischen
Windgeschwindigkeit und Leistungsbeiwert der WEA zurückzuführen ist.
5.5.2 Diskussion der Ergebnisse
Die detaillierte Simulation des Wake-Effekts zeigt, dass deren Einflussnahme von
vernachlässigbar gering bis gravierend schwanken kann. Von daher ist es umso wichtiger zu
wissen, wann der Wake-Effekt zu berücksichtigen ist und wann nicht.
In dieser Untersuchung sind die Ergebnisse für einen Windpark aufgezeigt, der lediglich aus
stallgeregelten WEA mit ASM besteht. Anhand dieser WEA lassen sich die Auswirkungen des
Wake-Effekts am klarsten darstellen, da keinerlei Regelungskonzepte involviert sind.
Kommen jedoch pitchgeregelte und drehzahlvariable WEA zum Einsatz, so ergeben sich
mannigfaltigste Beeinflussungsmöglichkeiten der Leistungsabgabe des Windparks durch WEA-
spezifische und übergeordnete Regelungsstrukturen.
Primäres Ziel dieser übergeordneten Reglerstruktur ist den Windpark als eine leistungsstarke
Energieerzeugungseinheit und nicht als eine Vielzahl von unkoordinierten WEA zu betreiben
5. Modellierung der Nachlaufströmungen (Wakes) in Windparks
74
[52]. Für die Wirkleistungsregelung des Windparks würde dies beispielsweise bedeuten, dass
eine Begrenzung der Leistungsabgabe oder des Leistungsgradienten des Windparks möglich
wäre. Diese Begrenzungen werden schließlich durch Anpassung bzw. Änderung der dem Wind
zu entziehenden Leistung mittels der zentral koordinierten Drehzahl- und Rotorblattverstellung
an den WEA erreicht. Das Ergebnis ist eine Änderung der leeseitigen Windgeschwindigkeit an
der WEA und folglich eine Verstärkung oder Schwächung des Wake-Effekts.
Welchen Einfluss schließlich der Wake-Effekt auf das Leistungsverhalten eines Windparks hat
oder ob sich dieser Einfluss durch den Einsatz von WEA-spezifischen und übergeordneten
Regelungsstrukturen verändern lässt, ist wahrscheinlich nicht pauschal zu beantworten. Ein
Grund für diese Annahme ist, dass der Wake-Effekt stark durch die Windparkgeometrie
beeinflusst wird, die sich aufgrund der Örtlichkeiten wiederum von Windpark zu Windpark sehr
unterscheiden kann.
6 Simulationen der Netzdynamik in Übertragungsnetzen Der stetige Anstieg der Einspeiseleistung aus Windenergieanlagen hat neben ökonomischen auch
technische Auswirkungen. Um eben diese technischen Auswirkungen auf die Netzdynamik
quantifizieren zu können, werden diverse Simulationen durchgeführt. Dabei wird neben der
transienten Stabilität auch die Beeinflussung der Spannungs- und Frequenzstabilität behandelt.
Des Weiteren werden die Auswirkungen der Windenergie auf die Größen Frequenz und
Spannung unter normalen Betriebsbedingungen untersucht. Es wird in den Simulationen ein
stationärer Ausgangszustand bzw. Betrieb realisiert, der eine Bestimmung der ausschließlichen
Auswirkungen durch stochastische Windfluktuationen erlaubt.
Schließlich werden auch diverse Möglichkeiten von aktiver Frequenz- und Spannungsregelung
durch WEA aufgezeigt und die damit verbundenen Konsequenzen für die im EES befindlichen
konventionellen Kraftwerke dargestellt
6.1 Auswirkungen von Offshore-Windparks auf die Netzdynamik
Ziel dieser Untersuchung ist die Analyse und der Vergleich des dynamischen Verhaltens von
WEA mit unterschiedlichen Generatortypen während eines 3poligen Netzkurzschlusses. Zu
diesem Zweck sind fünf Offshore-Windparks (OWF) mit einer installierten Leistung von 1500
MW an ein modellhaftes Verbundnetz angeschlossen worden.
Für die Untersuchungen wurden die OWF mit folgenden WEA-Typen ausgerüstet:
• Stallgeregelte 2 MW-WEA mit Käfigläufer-ASM (SCIM)
• Pitchgeregelte 2 MW-WEA mit doppelt gespeister ASM und elektronischer Regelung der
Wirkleistung und Netzspannung über Umrichter (DFIM)
Verglichen werden die Simulationsergebnisse der beiden WEA-Generatortypen mit dem
Verhalten einer gewöhnlichen Synchronmaschine (SM), die im gleichen küstennahen
Netzanschlusspunkt anstelle der fünf OWF angeschlossen wird.
Grundlage für die Dynamiksimulationen von Störungen ist ein modellhaftes Verbundnetz,
bestehend aus 73 Synchrongeneratoren, 128 Transformatoren, 282 Knotenpunkten und
200 Leitungen. Die Gesamtnennleistung des Verbundnetzes beträgt 55000 MW
[53].
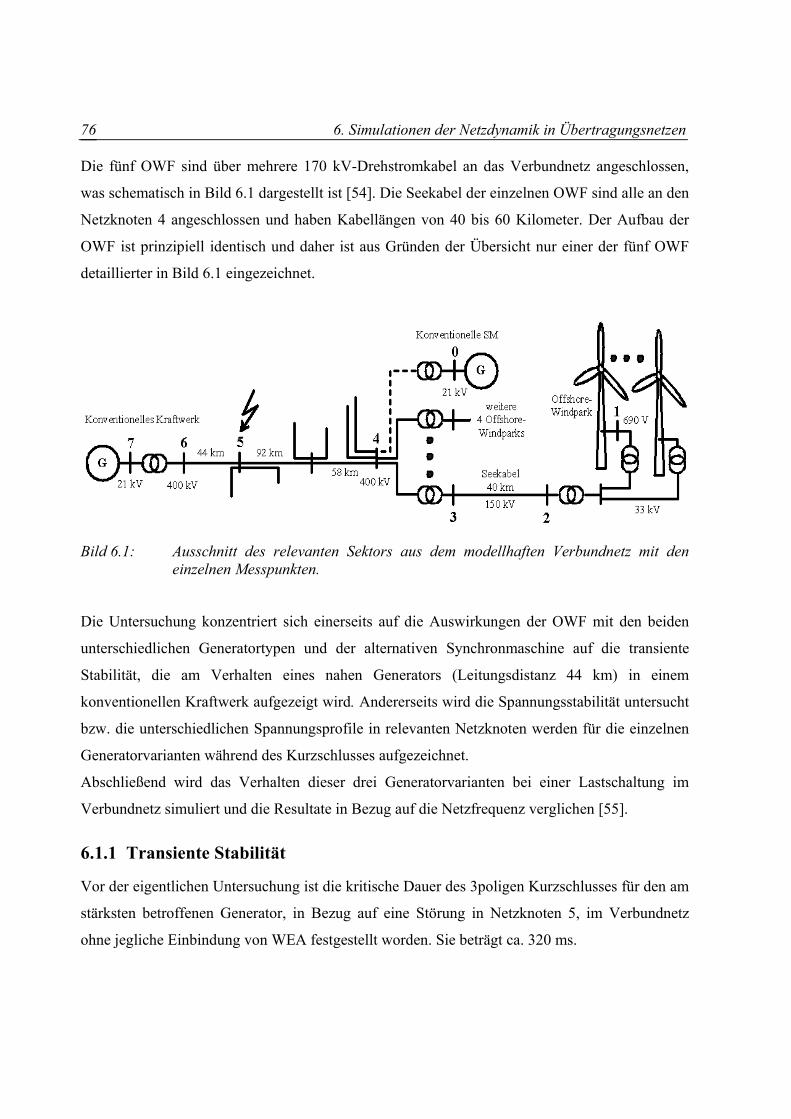
6. Simulationen der Netzdynamik in Übertragungsnetzen
76
Die fünf OWF sind über mehrere 170 kV-Drehstromkabel an das Verbundnetz angeschlossen,
was schematisch in Bild 6.1 dargestellt ist [54]. Die Seekabel der einzelnen OWF sind alle an den
Netzknoten 4 angeschlossen und haben Kabellängen von 40 bis 60 Kilometer. Der Aufbau der
OWF ist prinzipiell identisch und daher ist aus Gründen der Übersicht nur einer der fünf OWF
detaillierter in Bild 6.1 eingezeichnet.
Bild 6.1: Ausschnitt des relevanten Sektors aus dem modellhaften Verbundnetz mit den einzelnen Messpunkten.
Die Untersuchung konzentriert sich einerseits auf die Auswirkungen der OWF mit den beiden
unterschiedlichen Generatortypen und der alternativen Synchronmaschine auf die transiente
Stabilität, die am Verhalten eines nahen Generators (Leitungsdistanz 44 km) in einem
konventionellen Kraftwerk aufgezeigt wird. Andererseits wird die Spannungsstabilität untersucht
bzw. die unterschiedlichen Spannungsprofile in relevanten Netzknoten werden für die einzelnen
Generatorvarianten während des Kurzschlusses aufgezeichnet.
Abschließend wird das Verhalten dieser drei Generatorvarianten bei einer Lastschaltung im
Verbundnetz simuliert und die Resultate in Bezug auf die Netzfrequenz verglichen [55].
6.1.1 Transiente Stabilität
Vor der eigentlichen Untersuchung ist die kritische Dauer des 3poligen Kurzschlusses für den am
stärksten betroffenen Generator, in Bezug auf eine Störung in Netzknoten 5, im Verbundnetz
ohne jegliche Einbindung von WEA festgestellt worden. Sie beträgt ca. 320 ms.
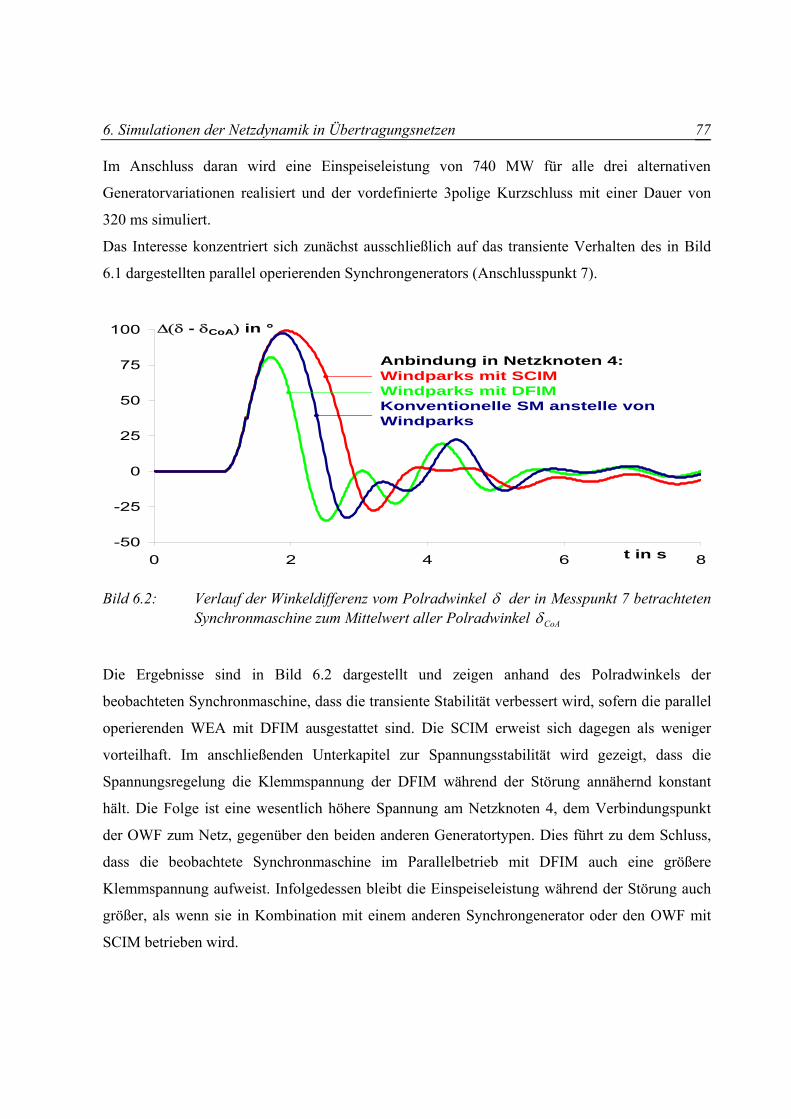
6. Simulationen der Netzdynamik in Übertragungsnetzen
77
Im Anschluss daran wird eine Einspeiseleistung von 740 MW für alle drei alternativen
Generatorvariationen realisiert und der vordefinierte 3polige Kurzschluss mit einer Dauer von
320 ms simuliert.
Das Interesse konzentriert sich zunächst ausschließlich auf das transiente Verhalten des in Bild
6.1 dargestellten parallel operierenden Synchrongenerators (Anschlusspunkt 7).
-50
-25
0
25
50
75
100
0 2 4 6 8t in s
∆(δ - δCoA) in °
Anbindung in Netzknoten 4:Windparks mit SCIMWindparks mit DFIMKonventionelle SM anstelle von Windparks
Bild 6.2: Verlauf der Winkeldifferenz vom Polradwinkel δ der in Messpunkt 7 betrachteten Synchronmaschine zum Mittelwert aller Polradwinkel CoAδ
Die Ergebnisse sind in Bild 6.2 dargestellt und zeigen anhand des Polradwinkels der
beobachteten Synchronmaschine, dass die transiente Stabilität verbessert wird, sofern die parallel
operierenden WEA mit DFIM ausgestattet sind. Die SCIM erweist sich dagegen als weniger
vorteilhaft. Im anschließenden Unterkapitel zur Spannungsstabilität wird gezeigt, dass die
Spannungsregelung die Klemmspannung der DFIM während der Störung annähernd konstant
hält. Die Folge ist eine wesentlich höhere Spannung am Netzknoten 4, dem Verbindungspunkt
der OWF zum Netz, gegenüber den beiden anderen Generatortypen. Dies führt zu dem Schluss,
dass die beobachtete Synchronmaschine im Parallelbetrieb mit DFIM auch eine größere
Klemmspannung aufweist. Infolgedessen bleibt die Einspeiseleistung während der Störung auch
größer, als wenn sie in Kombination mit einem anderen Synchrongenerator oder den OWF mit
SCIM betrieben wird.
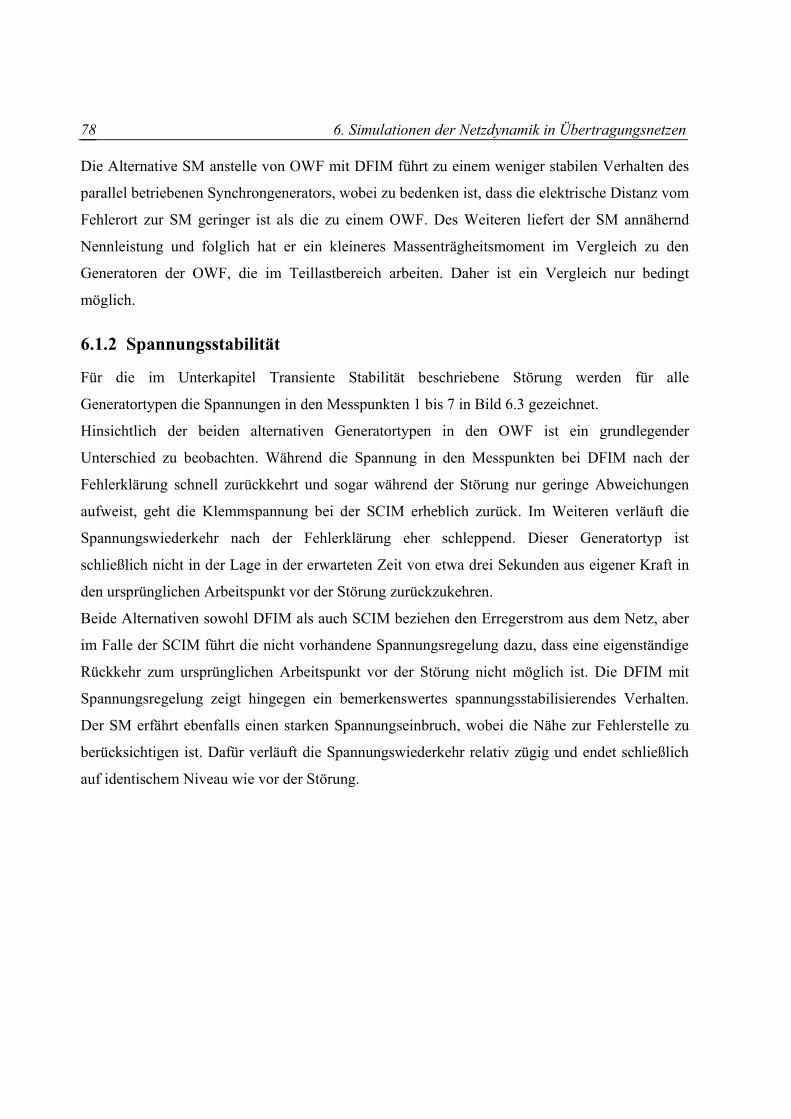
6. Simulationen der Netzdynamik in Übertragungsnetzen
78
Die Alternative SM anstelle von OWF mit DFIM führt zu einem weniger stabilen Verhalten des
parallel betriebenen Synchrongenerators, wobei zu bedenken ist, dass die elektrische Distanz vom
Fehlerort zur SM geringer ist als die zu einem OWF. Des Weiteren liefert der SM annähernd
Nennleistung und folglich hat er ein kleineres Massenträgheitsmoment im Vergleich zu den
Generatoren der OWF, die im Teillastbereich arbeiten. Daher ist ein Vergleich nur bedingt
möglich.
6.1.2 Spannungsstabilität
Für die im Unterkapitel Transiente Stabilität beschriebene Störung werden für alle
Generatortypen die Spannungen in den Messpunkten 1 bis 7 in Bild 6.3 gezeichnet.
Hinsichtlich der beiden alternativen Generatortypen in den OWF ist ein grundlegender
Unterschied zu beobachten. Während die Spannung in den Messpunkten bei DFIM nach der
Fehlerklärung schnell zurückkehrt und sogar während der Störung nur geringe Abweichungen
aufweist, geht die Klemmspannung bei der SCIM erheblich zurück. Im Weiteren verläuft die
Spannungswiederkehr nach der Fehlerklärung eher schleppend. Dieser Generatortyp ist
schließlich nicht in der Lage in der erwarteten Zeit von etwa drei Sekunden aus eigener Kraft in
den ursprünglichen Arbeitspunkt vor der Störung zurückzukehren.
Beide Alternativen sowohl DFIM als auch SCIM beziehen den Erregerstrom aus dem Netz, aber
im Falle der SCIM führt die nicht vorhandene Spannungsregelung dazu, dass eine eigenständige
Rückkehr zum ursprünglichen Arbeitspunkt vor der Störung nicht möglich ist. Die DFIM mit
Spannungsregelung zeigt hingegen ein bemerkenswertes spannungsstabilisierendes Verhalten.
Der SM erfährt ebenfalls einen starken Spannungseinbruch, wobei die Nähe zur Fehlerstelle zu
berücksichtigen ist. Dafür verläuft die Spannungswiederkehr relativ zügig und endet schließlich
auf identischem Niveau wie vor der Störung.
6. Simulationen der Netzdynamik in Übertragungsnetzen
79
0,0
0,2
0,4
0,6
0,8
1,0
1,2 u in p.u.
Windparks mit DFIM
1
65
3
4
2
7
0,0
0,2
0,4
0,6
0,8
1,0
1,2 u in p.u.
Konventionelle SM anstelle von Windparks
65
0
47
0,0
0,2
0,4
0,6
0,8
1,0
1,2
t in s
u in p.u.
Windparks mit SCIM
1
2 3 1 0 65
3
4
2
7
Bild 6.3: Spannungsverläufe in ausgewählten Messpunkten (Bild 6.1) für die drei
Generatortypen DFIM, SM und SCIM
6. Simulationen der Netzdynamik in Übertragungsnetzen
80
6.1.3 Frequenzstabilität
In dieser Untersuchung wird als Fehlerfall ein abrupter Verlust von 900 MW Einspeiseleistung
im Modellnetz simuliert. Der daraus resultierende Einbruch der Netzfrequenz und die Reaktionen
der Generatoren stehen dabei im Mittelpunkt des Interesses. Insbesondere die Fähigkeiten der
unterschiedlichen Generatortypen, dem Frequenzeinbruch entgegenzuwirken, werden untersucht.
Aus diesem Grund wird die DFIM wahlweise um zwei unterschiedliche Frequenzregelungen
erweitert (Bild 3.14). Die sich daraus ergebenden Simulationskombinationen sind in Tabelle 6.1
zusammengefasst.
Tabelle 6.1: Simulationskombinationen, die in Bezug auf ihr Frequenzverhalten untersucht werden
Mögliche Simulationskombinationen
DFIM ohne Frequenzregler A
DFIM mit differenzierendem Frequenzregler B
DFIM mit PI Frequenzregler und einer 4% Leistungsreserve C
SCIM D
Konventioneller Synchrongenerator anstelle der fünf OWF E
Die Realisierung einer Leistungsreserve (C) würde in der Praxis eine anhaltende Verringerung
der Einspeiseleistung der OWF im Normalbetrieb bedeuten. Für die Simulation wird trotzdem
eine „Androsselung“ der WEA von 4%, ähnlich zu konventionellen thermischen Kraftwerken,
angenommen, die ausschließlich als Reserve für die Frequenzregelung zur Verfügung steht.
Die Reaktion des Netzes in Form eines Einbruchs der Netzfrequenz auf den abrupten Ausfall der
Einspeiseleistung ist in Bild 6.4 dargestellt. Die unterschiedlichen Leistungseinspeisungen der
einzelnen Simulationskombinationen sind in Bild 6.5 dargestellt. Die entsprechenden
Spannungsprofile eines zentralen aber eher willkürlich gewählten Netzknoten werden in Bild 6.6
gezeigt.
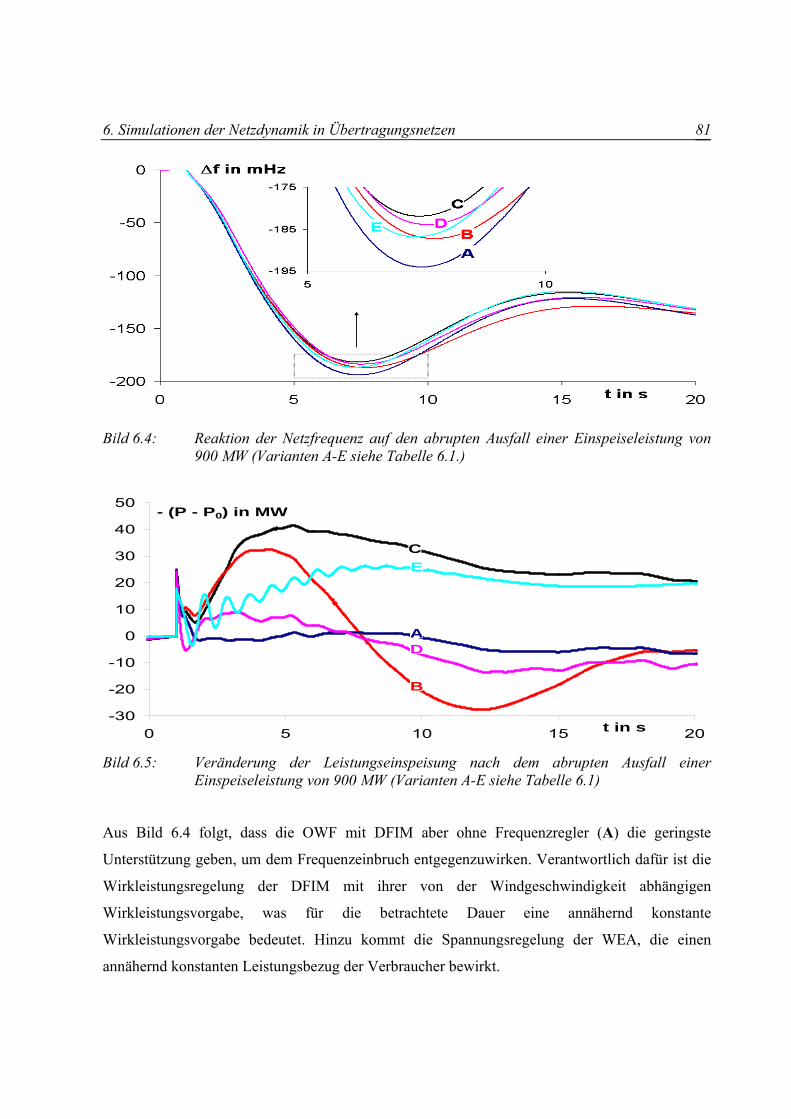
6. Simulationen der Netzdynamik in Übertragungsnetzen
81
Bild 6.4: Reaktion der Netzfrequenz auf den abrupten Ausfall einer Einspeiseleistung von 900 MW (Varianten A-E siehe Tabelle 6.1.)
-30
-20
-10
0
10
20
30
40
50
0 5 10 15 20t in s
- (P - P0) in MW
C
B
DA
E
Bild 6.5: Veränderung der Leistungseinspeisung nach dem abrupten Ausfall einer
Einspeiseleistung von 900 MW (Varianten A-E siehe Tabelle 6.1)
Aus Bild 6.4 folgt, dass die OWF mit DFIM aber ohne Frequenzregler (A) die geringste
Unterstützung geben, um dem Frequenzeinbruch entgegenzuwirken. Verantwortlich dafür ist die
Wirkleistungsregelung der DFIM mit ihrer von der Windgeschwindigkeit abhängigen
Wirkleistungsvorgabe, was für die betrachtete Dauer eine annähernd konstante
Wirkleistungsvorgabe bedeutet. Hinzu kommt die Spannungsregelung der WEA, die einen
annähernd konstanten Leistungsbezug der Verbraucher bewirkt.
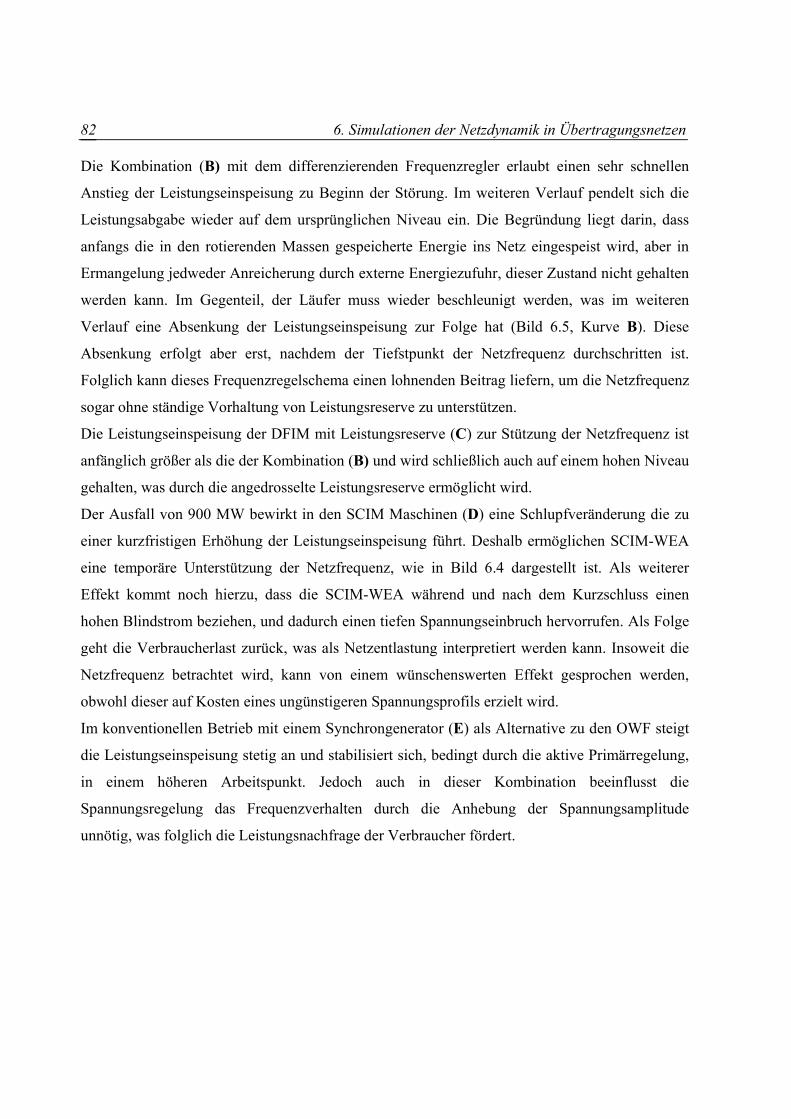
6. Simulationen der Netzdynamik in Übertragungsnetzen
82
Die Kombination (B) mit dem differenzierenden Frequenzregler erlaubt einen sehr schnellen
Anstieg der Leistungseinspeisung zu Beginn der Störung. Im weiteren Verlauf pendelt sich die
Leistungsabgabe wieder auf dem ursprünglichen Niveau ein. Die Begründung liegt darin, dass
anfangs die in den rotierenden Massen gespeicherte Energie ins Netz eingespeist wird, aber in
Ermangelung jedweder Anreicherung durch externe Energiezufuhr, dieser Zustand nicht gehalten
werden kann. Im Gegenteil, der Läufer muss wieder beschleunigt werden, was im weiteren
Verlauf eine Absenkung der Leistungseinspeisung zur Folge hat (Bild 6.5, Kurve B). Diese
Absenkung erfolgt aber erst, nachdem der Tiefstpunkt der Netzfrequenz durchschritten ist.
Folglich kann dieses Frequenzregelschema einen lohnenden Beitrag liefern, um die Netzfrequenz
sogar ohne ständige Vorhaltung von Leistungsreserve zu unterstützen.
Die Leistungseinspeisung der DFIM mit Leistungsreserve (C) zur Stützung der Netzfrequenz ist
anfänglich größer als die der Kombination (B) und wird schließlich auch auf einem hohen Niveau
gehalten, was durch die angedrosselte Leistungsreserve ermöglicht wird.
Der Ausfall von 900 MW bewirkt in den SCIM Maschinen (D) eine Schlupfveränderung die zu
einer kurzfristigen Erhöhung der Leistungseinspeisung führt. Deshalb ermöglichen SCIM-WEA
eine temporäre Unterstützung der Netzfrequenz, wie in Bild 6.4 dargestellt ist. Als weiterer
Effekt kommt noch hierzu, dass die SCIM-WEA während und nach dem Kurzschluss einen
hohen Blindstrom beziehen, und dadurch einen tiefen Spannungseinbruch hervorrufen. Als Folge
geht die Verbraucherlast zurück, was als Netzentlastung interpretiert werden kann. Insoweit die
Netzfrequenz betrachtet wird, kann von einem wünschenswerten Effekt gesprochen werden,
obwohl dieser auf Kosten eines ungünstigeren Spannungsprofils erzielt wird.
Im konventionellen Betrieb mit einem Synchrongenerator (E) als Alternative zu den OWF steigt
die Leistungseinspeisung stetig an und stabilisiert sich, bedingt durch die aktive Primärregelung,
in einem höheren Arbeitspunkt. Jedoch auch in dieser Kombination beeinflusst die
Spannungsregelung das Frequenzverhalten durch die Anhebung der Spannungsamplitude
unnötig, was folglich die Leistungsnachfrage der Verbraucher fördert.
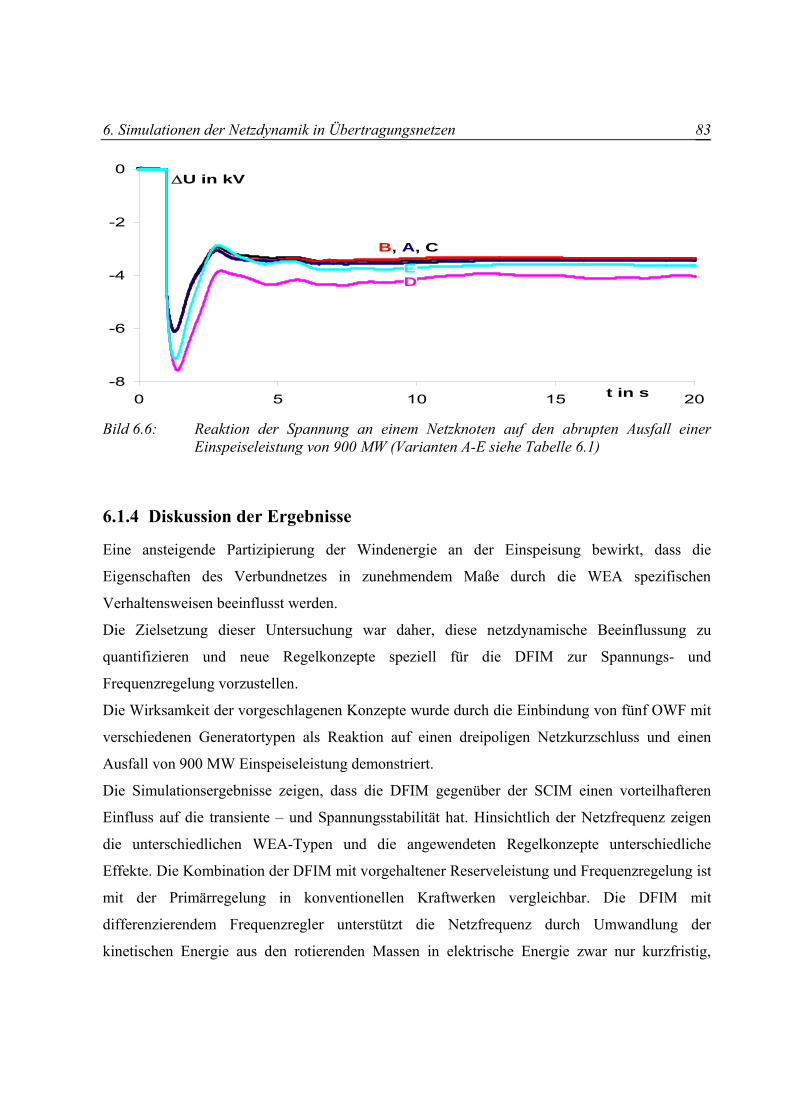
6. Simulationen der Netzdynamik in Übertragungsnetzen
83
-8
-6
-4
-2
0
0 5 10 15 20t in s
∆U in kV
B, A, C
DE
Bild 6.6: Reaktion der Spannung an einem Netzknoten auf den abrupten Ausfall einer
Einspeiseleistung von 900 MW (Varianten A-E siehe Tabelle 6.1)
6.1.4 Diskussion der Ergebnisse
Eine ansteigende Partizipierung der Windenergie an der Einspeisung bewirkt, dass die
Eigenschaften des Verbundnetzes in zunehmendem Maße durch die WEA spezifischen
Verhaltensweisen beeinflusst werden.
Die Zielsetzung dieser Untersuchung war daher, diese netzdynamische Beeinflussung zu
quantifizieren und neue Regelkonzepte speziell für die DFIM zur Spannungs- und
Frequenzregelung vorzustellen.
Die Wirksamkeit der vorgeschlagenen Konzepte wurde durch die Einbindung von fünf OWF mit
verschiedenen Generatortypen als Reaktion auf einen dreipoligen Netzkurzschluss und einen
Ausfall von 900 MW Einspeiseleistung demonstriert.
Die Simulationsergebnisse zeigen, dass die DFIM gegenüber der SCIM einen vorteilhafteren
Einfluss auf die transiente – und Spannungsstabilität hat. Hinsichtlich der Netzfrequenz zeigen
die unterschiedlichen WEA-Typen und die angewendeten Regelkonzepte unterschiedliche
Effekte. Die Kombination der DFIM mit vorgehaltener Reserveleistung und Frequenzregelung ist
mit der Primärregelung in konventionellen Kraftwerken vergleichbar. Die DFIM mit
differenzierendem Frequenzregler unterstützt die Netzfrequenz durch Umwandlung der
kinetischen Energie aus den rotierenden Massen in elektrische Energie zwar nur kurzfristig,
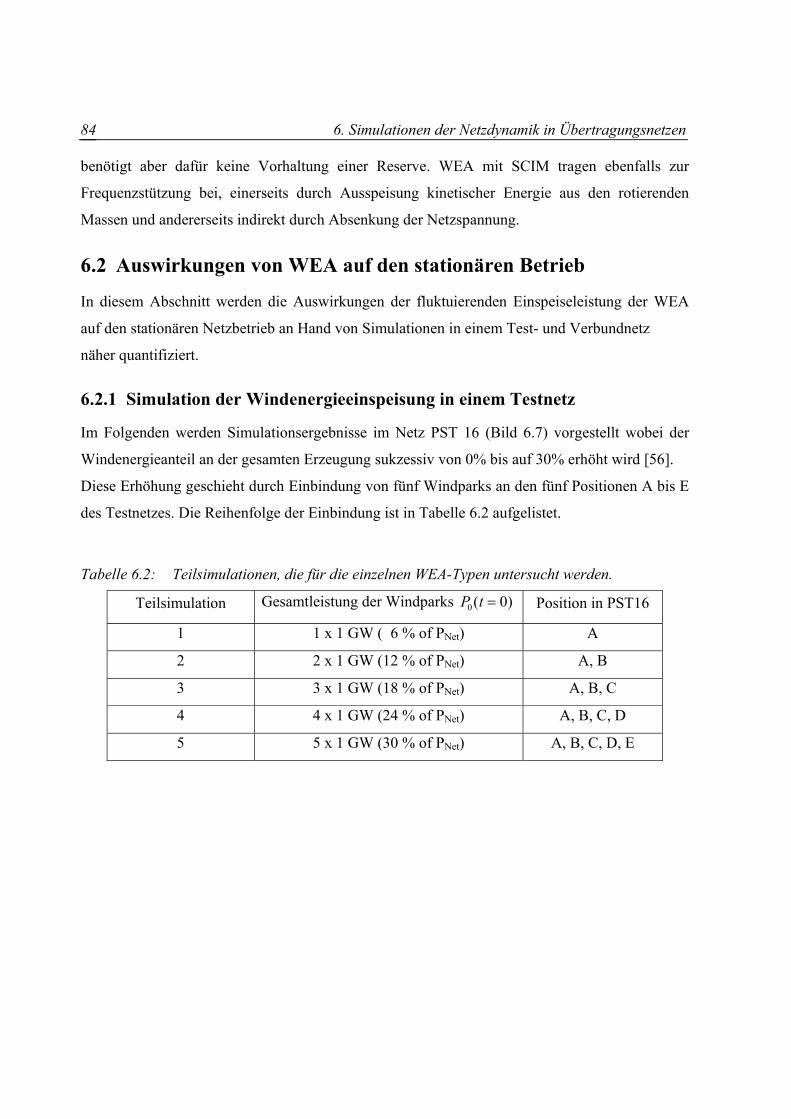
6. Simulationen der Netzdynamik in Übertragungsnetzen
84
benötigt aber dafür keine Vorhaltung einer Reserve. WEA mit SCIM tragen ebenfalls zur
Frequenzstützung bei, einerseits durch Ausspeisung kinetischer Energie aus den rotierenden
Massen und andererseits indirekt durch Absenkung der Netzspannung.
6.2 Auswirkungen von WEA auf den stationären Betrieb
In diesem Abschnitt werden die Auswirkungen der fluktuierenden Einspeiseleistung der WEA
auf den stationären Netzbetrieb an Hand von Simulationen in einem Test- und Verbundnetz
näher quantifiziert.
6.2.1 Simulation der Windenergieeinspeisung in einem Testnetz
Im Folgenden werden Simulationsergebnisse im Netz PST 16 (Bild 6.7) vorgestellt wobei der
Windenergieanteil an der gesamten Erzeugung sukzessiv von 0% bis auf 30% erhöht wird [56].
Diese Erhöhung geschieht durch Einbindung von fünf Windparks an den fünf Positionen A bis E
des Testnetzes. Die Reihenfolge der Einbindung ist in Tabelle 6.2 aufgelistet.
Tabelle 6.2: Teilsimulationen, die für die einzelnen WEA-Typen untersucht werden.
Teilsimulation Gesamtleistung der Windparks )0(0 =tP Position in PST16
1 1 x 1 GW ( 6 % of PNet) A
2 2 x 1 GW (12 % of PNet) A, B
3 3 x 1 GW (18 % of PNet) A, B, C
4 4 x 1 GW (24 % of PNet) A, B, C, D
5 5 x 1 GW (30 % of PNet) A, B, C, D, E
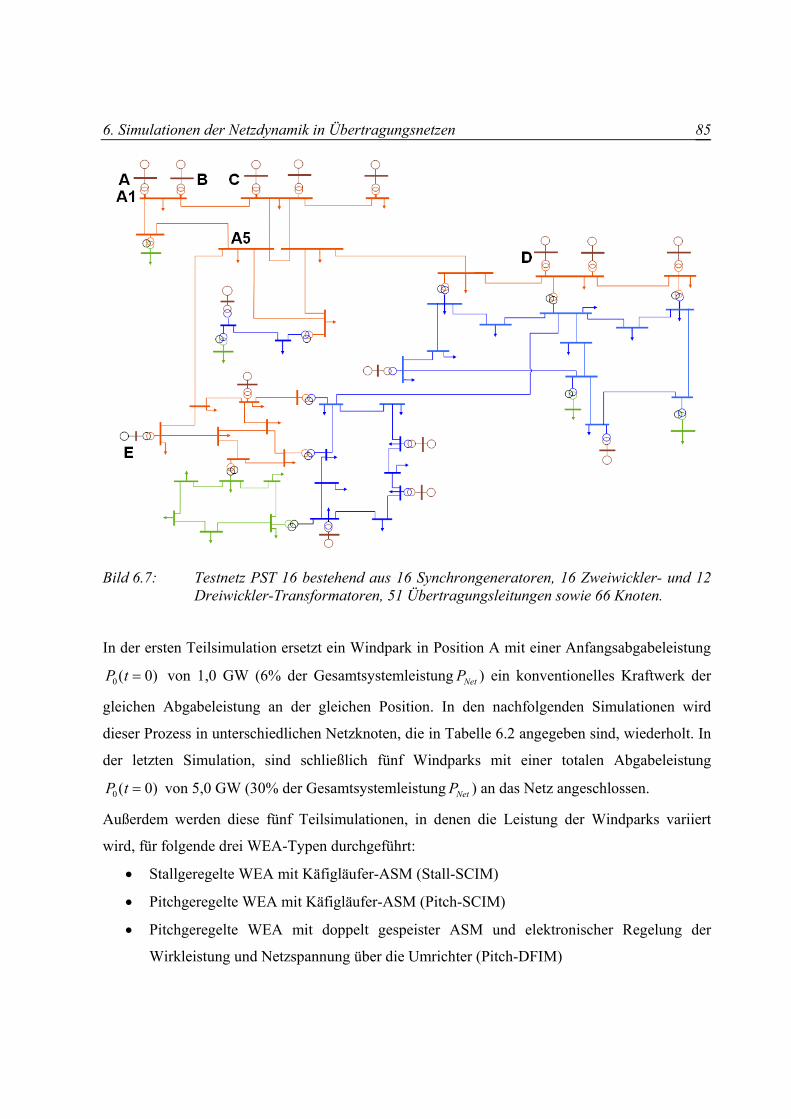
6. Simulationen der Netzdynamik in Übertragungsnetzen
85
Bild 6.7: Testnetz PST 16 bestehend aus 16 Synchrongeneratoren, 16 Zweiwickler- und 12 Dreiwickler-Transformatoren, 51 Übertragungsleitungen sowie 66 Knoten.
In der ersten Teilsimulation ersetzt ein Windpark in Position A mit einer Anfangsabgabeleistung
)0(0 =tP von 1,0 GW (6% der Gesamtsystemleistung NetP ) ein konventionelles Kraftwerk der
gleichen Abgabeleistung an der gleichen Position. In den nachfolgenden Simulationen wird
dieser Prozess in unterschiedlichen Netzknoten, die in Tabelle 6.2 angegeben sind, wiederholt. In
der letzten Simulation, sind schließlich fünf Windparks mit einer totalen Abgabeleistung
)0(0 =tP von 5,0 GW (30% der Gesamtsystemleistung NetP ) an das Netz angeschlossen.
Außerdem werden diese fünf Teilsimulationen, in denen die Leistung der Windparks variiert
wird, für folgende drei WEA-Typen durchgeführt:
• Stallgeregelte WEA mit Käfigläufer-ASM (Stall-SCIM)
• Pitchgeregelte WEA mit Käfigläufer-ASM (Pitch-SCIM)
• Pitchgeregelte WEA mit doppelt gespeister ASM und elektronischer Regelung der
Wirkleistung und Netzspannung über die Umrichter (Pitch-DFIM)
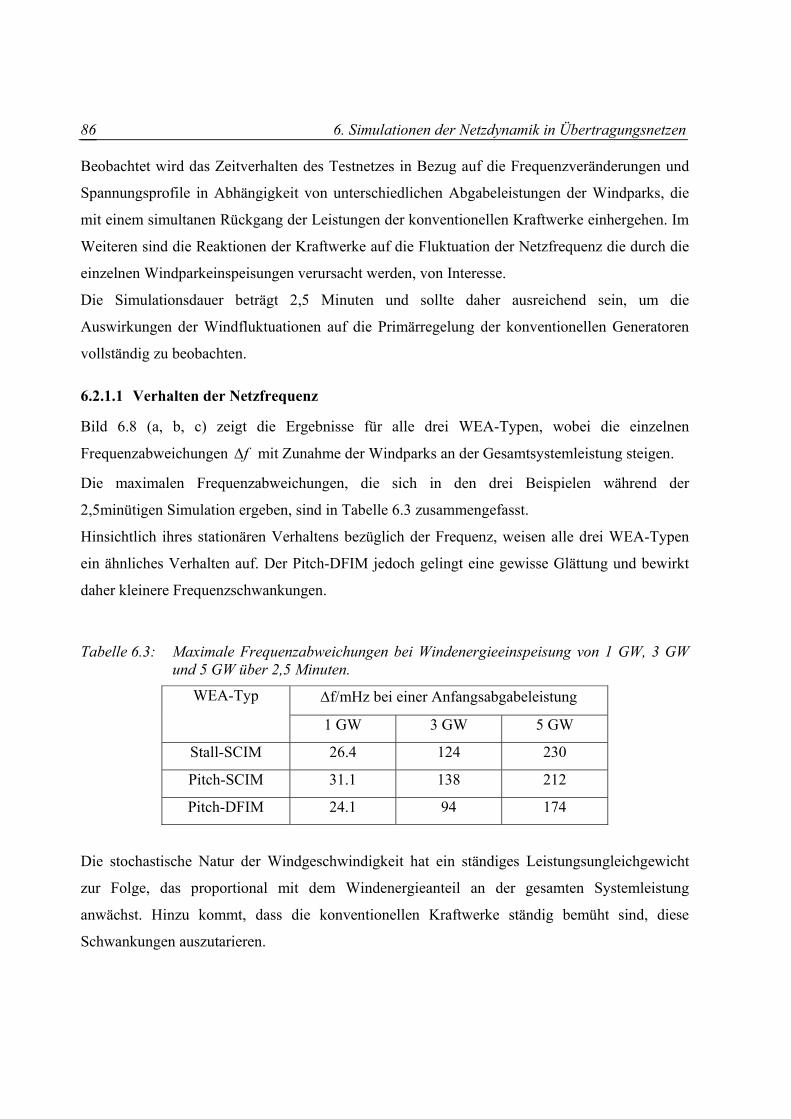
6. Simulationen der Netzdynamik in Übertragungsnetzen
86
Beobachtet wird das Zeitverhalten des Testnetzes in Bezug auf die Frequenzveränderungen und
Spannungsprofile in Abhängigkeit von unterschiedlichen Abgabeleistungen der Windparks, die
mit einem simultanen Rückgang der Leistungen der konventionellen Kraftwerke einhergehen. Im
Weiteren sind die Reaktionen der Kraftwerke auf die Fluktuation der Netzfrequenz die durch die
einzelnen Windparkeinspeisungen verursacht werden, von Interesse.
Die Simulationsdauer beträgt 2,5 Minuten und sollte daher ausreichend sein, um die
Auswirkungen der Windfluktuationen auf die Primärregelung der konventionellen Generatoren
vollständig zu beobachten.
6.2.1.1 Verhalten der Netzfrequenz
Bild 6.8 (a, b, c) zeigt die Ergebnisse für alle drei WEA-Typen, wobei die einzelnen
Frequenzabweichungen f∆ mit Zunahme der Windparks an der Gesamtsystemleistung steigen.
Die maximalen Frequenzabweichungen, die sich in den drei Beispielen während der
2,5minütigen Simulation ergeben, sind in Tabelle 6.3 zusammengefasst.
Hinsichtlich ihres stationären Verhaltens bezüglich der Frequenz, weisen alle drei WEA-Typen
ein ähnliches Verhalten auf. Der Pitch-DFIM jedoch gelingt eine gewisse Glättung und bewirkt
daher kleinere Frequenzschwankungen.
Tabelle 6.3: Maximale Frequenzabweichungen bei Windenergieeinspeisung von 1 GW, 3 GW und 5 GW über 2,5 Minuten.
∆f/mHz bei einer Anfangsabgabeleistung WEA-Typ
1 GW 3 GW 5 GW
Stall-SCIM 26.4 124 230
Pitch-SCIM 31.1 138 212
Pitch-DFIM 24.1 94 174
Die stochastische Natur der Windgeschwindigkeit hat ein ständiges Leistungsungleichgewicht
zur Folge, das proportional mit dem Windenergieanteil an der gesamten Systemleistung
anwächst. Hinzu kommt, dass die konventionellen Kraftwerke ständig bemüht sind, diese
Schwankungen auszutarieren.
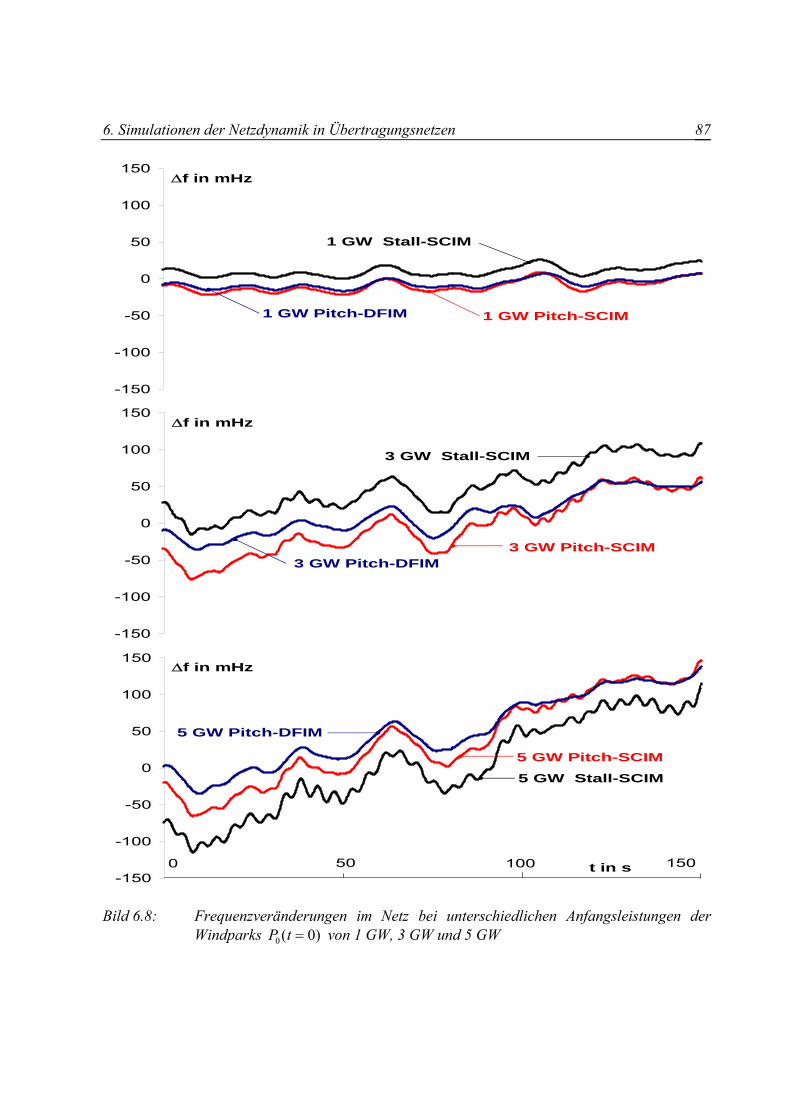
6. Simulationen der Netzdynamik in Übertragungsnetzen
87
-150
-100
-50
0
50
100
150∆f in mHz
1 GW Stall-SCIM
1 GW Pitch-SCIM1 GW Pitch-DFIM
-150
-100
-50
0
50
100
150∆f in mHz
3 GW Stall-SCIM
3 GW Pitch-SCIM3 GW Pitch-DFIM
-150
-100
-50
0
50
100
150
t in s
∆f in mHz
5 GW Stall-SCIM
5 GW Pitch-SCIM
100 150500
5 GW Pitch-DFIM
Bild 6.8: Frequenzveränderungen im Netz bei unterschiedlichen Anfangsleistungen der Windparks )0(0 =tP von 1 GW, 3 GW und 5 GW
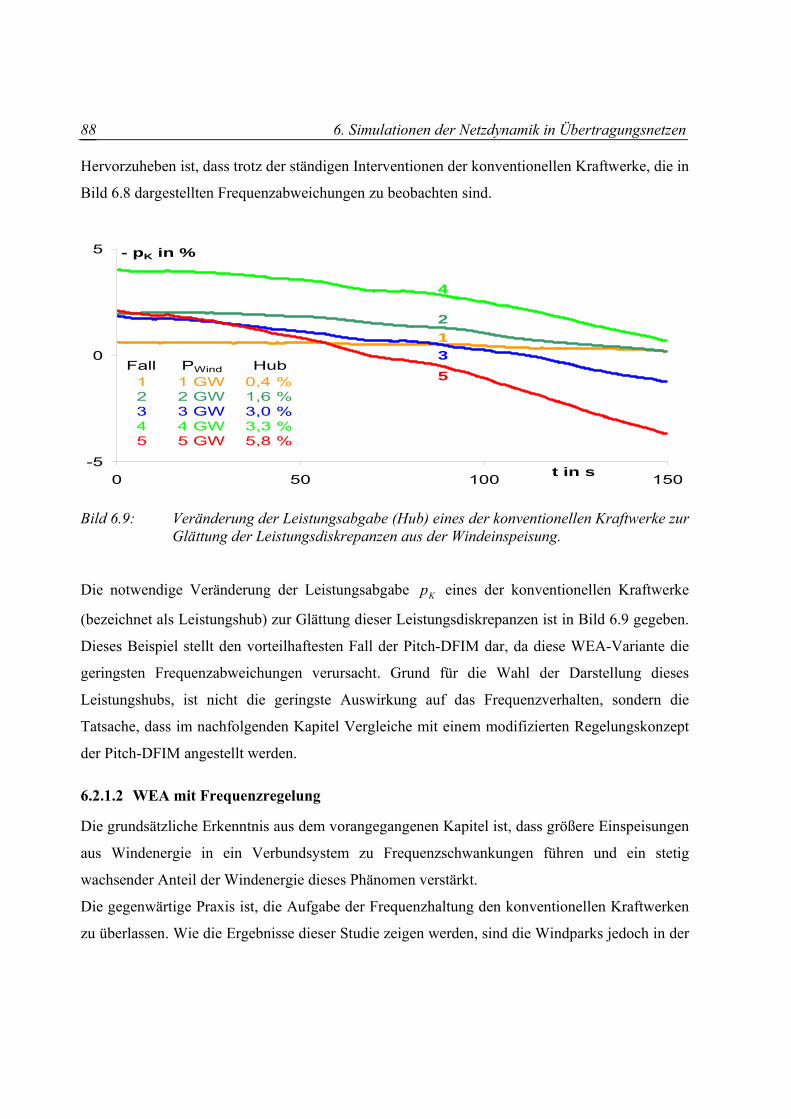
6. Simulationen der Netzdynamik in Übertragungsnetzen
88
Hervorzuheben ist, dass trotz der ständigen Interventionen der konventionellen Kraftwerke, die in
Bild 6.8 dargestellten Frequenzabweichungen zu beobachten sind.
-5
0
5
0 50 100 150t in s
- pK in %
4
5 Fall PWind Hub 1 1 GW 0,4 % 2 2 GW 1,6 % 3 3 GW 3,0 % 4 4 GW 3,3 % 5 5 GW 5,8 %
312
Bild 6.9: Veränderung der Leistungsabgabe (Hub) eines der konventionellen Kraftwerke zur Glättung der Leistungsdiskrepanzen aus der Windeinspeisung.
Die notwendige Veränderung der Leistungsabgabe Kp eines der konventionellen Kraftwerke
(bezeichnet als Leistungshub) zur Glättung dieser Leistungsdiskrepanzen ist in Bild 6.9 gegeben.
Dieses Beispiel stellt den vorteilhaftesten Fall der Pitch-DFIM dar, da diese WEA-Variante die
geringsten Frequenzabweichungen verursacht. Grund für die Wahl der Darstellung dieses
Leistungshubs, ist nicht die geringste Auswirkung auf das Frequenzverhalten, sondern die
Tatsache, dass im nachfolgenden Kapitel Vergleiche mit einem modifizierten Regelungskonzept
der Pitch-DFIM angestellt werden.
6.2.1.2 WEA mit Frequenzregelung
Die grundsätzliche Erkenntnis aus dem vorangegangenen Kapitel ist, dass größere Einspeisungen
aus Windenergie in ein Verbundsystem zu Frequenzschwankungen führen und ein stetig
wachsender Anteil der Windenergie dieses Phänomen verstärkt.
Die gegenwärtige Praxis ist, die Aufgabe der Frequenzhaltung den konventionellen Kraftwerken
zu überlassen. Wie die Ergebnisse dieser Studie zeigen werden, sind die Windparks jedoch in der
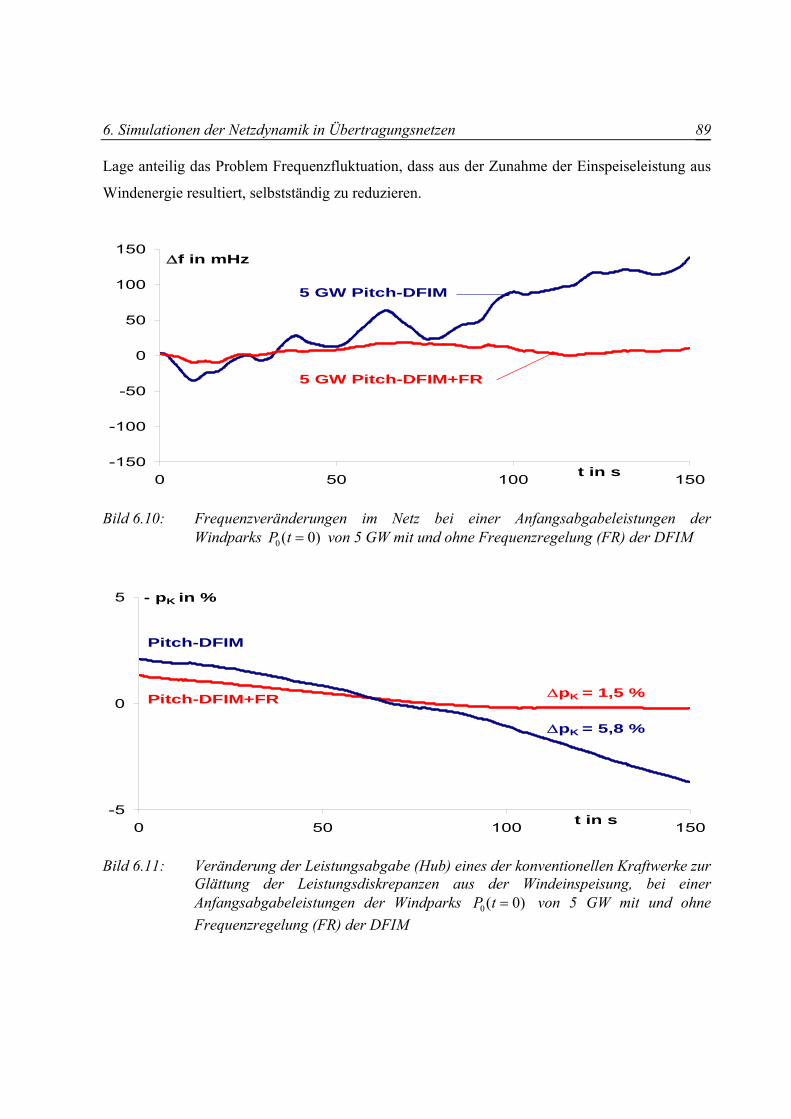
6. Simulationen der Netzdynamik in Übertragungsnetzen
89
Lage anteilig das Problem Frequenzfluktuation, dass aus der Zunahme der Einspeiseleistung aus
Windenergie resultiert, selbstständig zu reduzieren.
-150
-100
-50
0
50
100
150
0 50 100 150t in s
5 GW Pitch-DFIM+FR
∆f in mHz
5 GW Pitch-DFIM
Bild 6.10: Frequenzveränderungen im Netz bei einer Anfangsabgabeleistungen der Windparks )0(0 =tP von 5 GW mit und ohne Frequenzregelung (FR) der DFIM
-5
0
5
0 50 100 150t in s
- pK in %
∆pK = 1,5 %
∆pK = 5,8 %
Pitch-DFIM
Pitch-DFIM+FR
Bild 6.11: Veränderung der Leistungsabgabe (Hub) eines der konventionellen Kraftwerke zur Glättung der Leistungsdiskrepanzen aus der Windeinspeisung, bei einer Anfangsabgabeleistungen der Windparks )0(0 =tP von 5 GW mit und ohne Frequenzregelung (FR) der DFIM
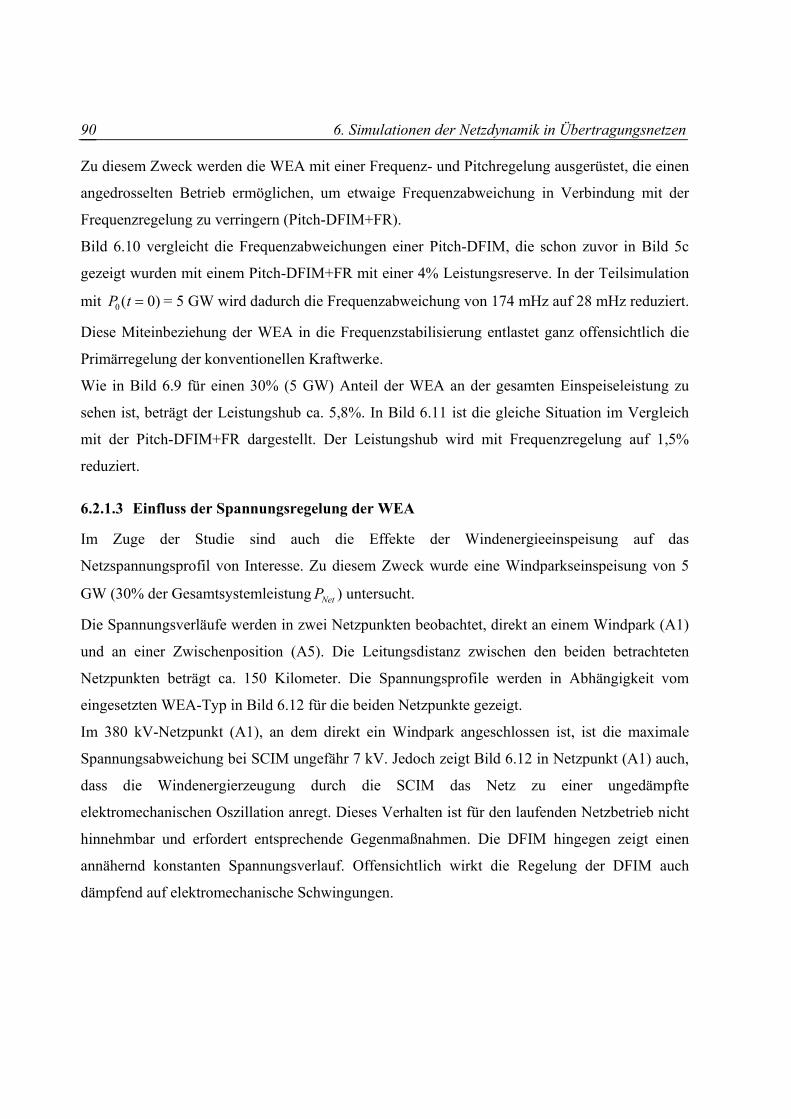
6. Simulationen der Netzdynamik in Übertragungsnetzen
90
Zu diesem Zweck werden die WEA mit einer Frequenz- und Pitchregelung ausgerüstet, die einen
angedrosselten Betrieb ermöglichen, um etwaige Frequenzabweichung in Verbindung mit der
Frequenzregelung zu verringern (Pitch-DFIM+FR).
Bild 6.10 vergleicht die Frequenzabweichungen einer Pitch-DFIM, die schon zuvor in Bild 5c
gezeigt wurden mit einem Pitch-DFIM+FR mit einer 4% Leistungsreserve. In der Teilsimulation
mit )0(0 =tP = 5 GW wird dadurch die Frequenzabweichung von 174 mHz auf 28 mHz reduziert.
Diese Miteinbeziehung der WEA in die Frequenzstabilisierung entlastet ganz offensichtlich die
Primärregelung der konventionellen Kraftwerke.
Wie in Bild 6.9 für einen 30% (5 GW) Anteil der WEA an der gesamten Einspeiseleistung zu
sehen ist, beträgt der Leistungshub ca. 5,8%. In Bild 6.11 ist die gleiche Situation im Vergleich
mit der Pitch-DFIM+FR dargestellt. Der Leistungshub wird mit Frequenzregelung auf 1,5%
reduziert.
6.2.1.3 Einfluss der Spannungsregelung der WEA
Im Zuge der Studie sind auch die Effekte der Windenergieeinspeisung auf das
Netzspannungsprofil von Interesse. Zu diesem Zweck wurde eine Windparkseinspeisung von 5
GW (30% der Gesamtsystemleistung NetP ) untersucht.
Die Spannungsverläufe werden in zwei Netzpunkten beobachtet, direkt an einem Windpark (A1)
und an einer Zwischenposition (A5). Die Leitungsdistanz zwischen den beiden betrachteten
Netzpunkten beträgt ca. 150 Kilometer. Die Spannungsprofile werden in Abhängigkeit vom
eingesetzten WEA-Typ in Bild 6.12 für die beiden Netzpunkte gezeigt.
Im 380 kV-Netzpunkt (A1), an dem direkt ein Windpark angeschlossen ist, ist die maximale
Spannungsabweichung bei SCIM ungefähr 7 kV. Jedoch zeigt Bild 6.12 in Netzpunkt (A1) auch,
dass die Windenergierzeugung durch die SCIM das Netz zu einer ungedämpfte
elektromechanischen Oszillation anregt. Dieses Verhalten ist für den laufenden Netzbetrieb nicht
hinnehmbar und erfordert entsprechende Gegenmaßnahmen. Die DFIM hingegen zeigt einen
annähernd konstanten Spannungsverlauf. Offensichtlich wirkt die Regelung der DFIM auch
dämpfend auf elektromechanische Schwingungen.
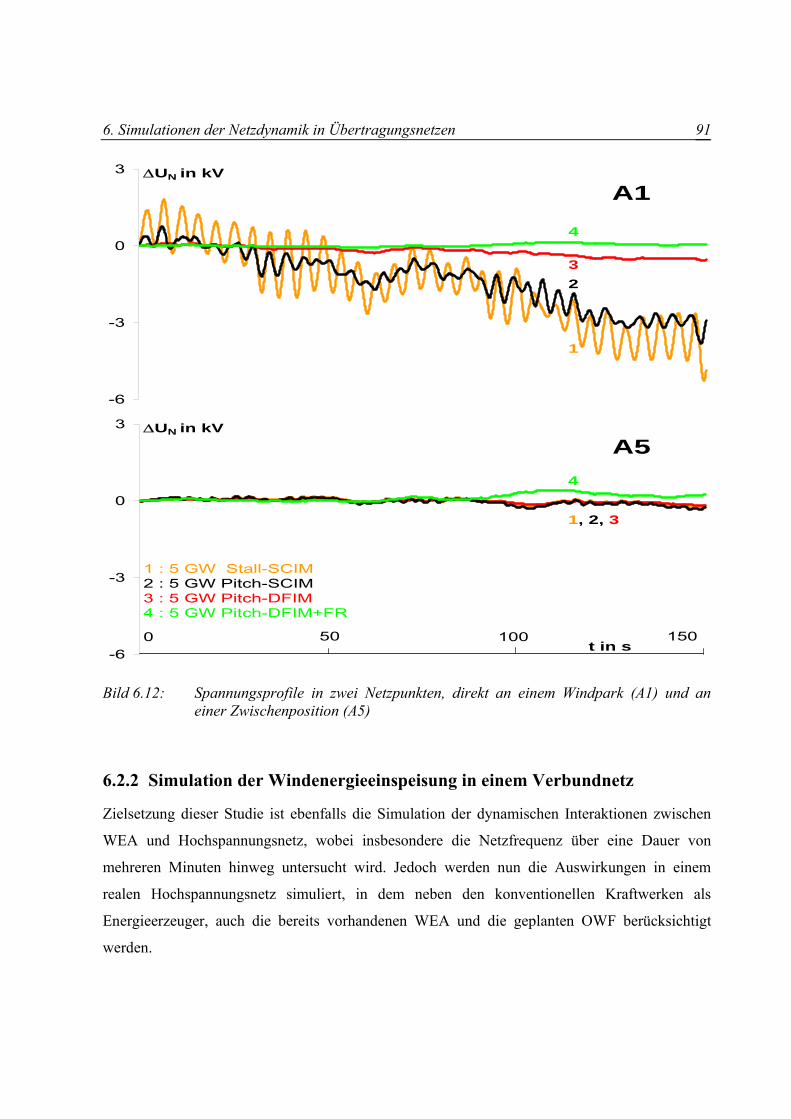
6. Simulationen der Netzdynamik in Übertragungsnetzen
91
-6
-3
0
3 ∆UN in kV
4
3
1
2
A1
-6
-3
0
3
t in s
∆UN in kV
4
1, 2, 3
1 : 5 GW Stall-SCIM2 : 5 GW Pitch-SCIM3 : 5 GW Pitch-DFIM4 : 5 GW Pitch-DFIM+FR
100 150500
A5
Bild 6.12: Spannungsprofile in zwei Netzpunkten, direkt an einem Windpark (A1) und an einer Zwischenposition (A5)
6.2.2 Simulation der Windenergieeinspeisung in einem Verbundnetz
Zielsetzung dieser Studie ist ebenfalls die Simulation der dynamischen Interaktionen zwischen
WEA und Hochspannungsnetz, wobei insbesondere die Netzfrequenz über eine Dauer von
mehreren Minuten hinweg untersucht wird. Jedoch werden nun die Auswirkungen in einem
realen Hochspannungsnetz simuliert, in dem neben den konventionellen Kraftwerken als
Energieerzeuger, auch die bereits vorhandenen WEA und die geplanten OWF berücksichtigt
werden.
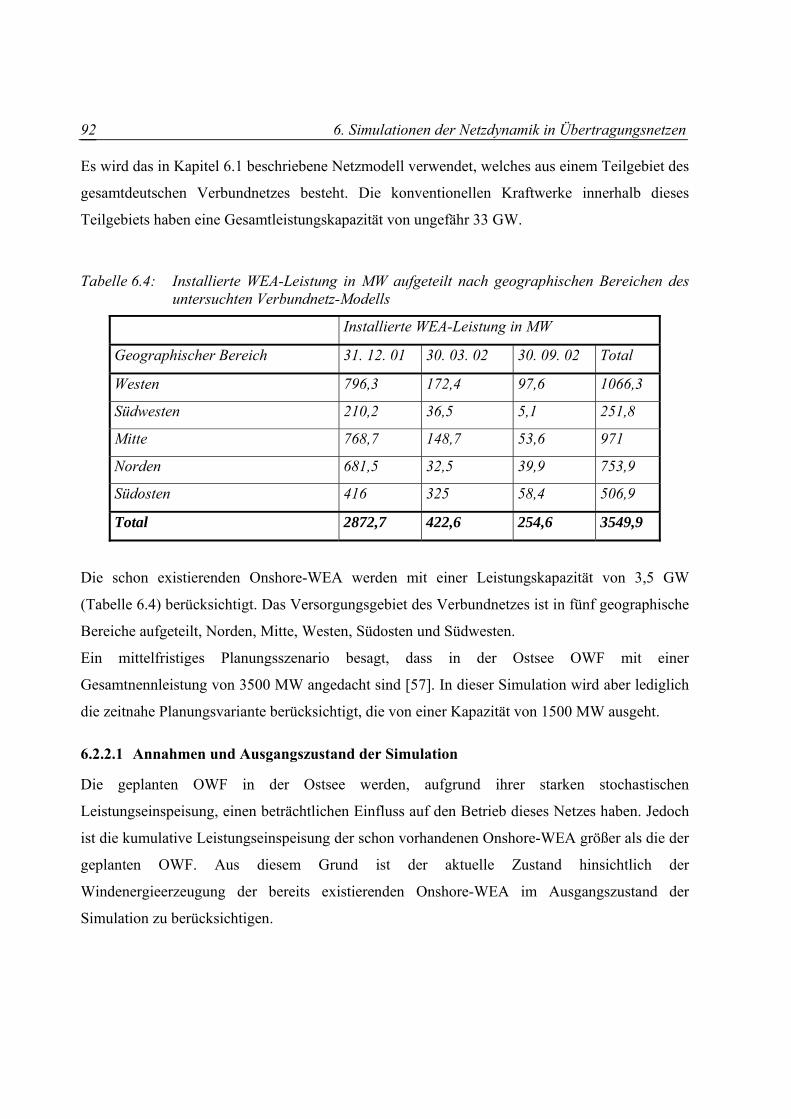
6. Simulationen der Netzdynamik in Übertragungsnetzen
92
Es wird das in Kapitel 6.1 beschriebene Netzmodell verwendet, welches aus einem Teilgebiet des
gesamtdeutschen Verbundnetzes besteht. Die konventionellen Kraftwerke innerhalb dieses
Teilgebiets haben eine Gesamtleistungskapazität von ungefähr 33 GW.
Tabelle 6.4: Installierte WEA-Leistung in MW aufgeteilt nach geographischen Bereichen des untersuchten Verbundnetz-Modells
Installierte WEA-Leistung in MW
Geographischer Bereich 31. 12. 01 30. 03. 02 30. 09. 02 Total
Westen 796,3 172,4 97,6 1066,3
Südwesten 210,2 36,5 5,1 251,8
Mitte 768,7 148,7 53,6 971
Norden 681,5 32,5 39,9 753,9
Südosten 416 325 58,4 506,9
Total 2872,7 422,6 254,6 3549,9
Die schon existierenden Onshore-WEA werden mit einer Leistungskapazität von 3,5 GW
(Tabelle 6.4) berücksichtigt. Das Versorgungsgebiet des Verbundnetzes ist in fünf geographische
Bereiche aufgeteilt, Norden, Mitte, Westen, Südosten und Südwesten.
Ein mittelfristiges Planungsszenario besagt, dass in der Ostsee OWF mit einer
Gesamtnennleistung von 3500 MW angedacht sind [57]. In dieser Simulation wird aber lediglich
die zeitnahe Planungsvariante berücksichtigt, die von einer Kapazität von 1500 MW ausgeht.
6.2.2.1 Annahmen und Ausgangszustand der Simulation
Die geplanten OWF in der Ostsee werden, aufgrund ihrer starken stochastischen
Leistungseinspeisung, einen beträchtlichen Einfluss auf den Betrieb dieses Netzes haben. Jedoch
ist die kumulative Leistungseinspeisung der schon vorhandenen Onshore-WEA größer als die der
geplanten OWF. Aus diesem Grund ist der aktuelle Zustand hinsichtlich der
Windenergieerzeugung der bereits existierenden Onshore-WEA im Ausgangszustand der
Simulation zu berücksichtigen.
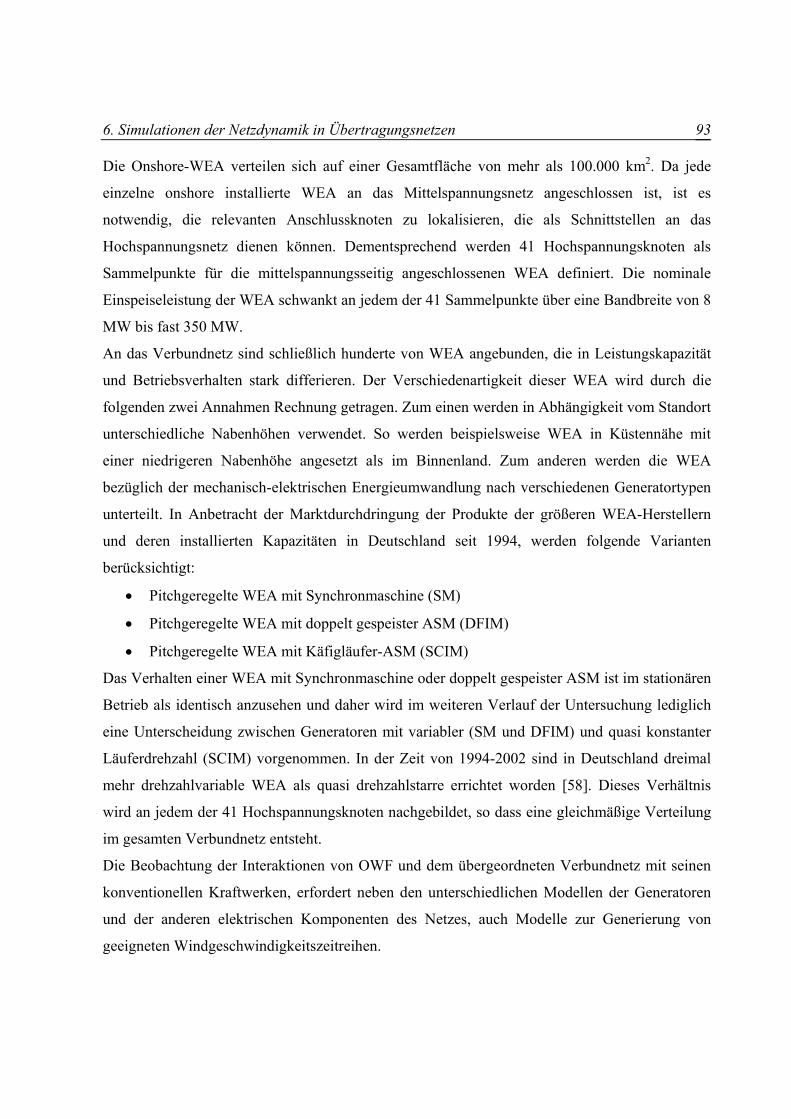
6. Simulationen der Netzdynamik in Übertragungsnetzen
93
Die Onshore-WEA verteilen sich auf einer Gesamtfläche von mehr als 100.000 km2. Da jede
einzelne onshore installierte WEA an das Mittelspannungsnetz angeschlossen ist, ist es
notwendig, die relevanten Anschlussknoten zu lokalisieren, die als Schnittstellen an das
Hochspannungsnetz dienen können. Dementsprechend werden 41 Hochspannungsknoten als
Sammelpunkte für die mittelspannungsseitig angeschlossenen WEA definiert. Die nominale
Einspeiseleistung der WEA schwankt an jedem der 41 Sammelpunkte über eine Bandbreite von 8
MW bis fast 350 MW.
An das Verbundnetz sind schließlich hunderte von WEA angebunden, die in Leistungskapazität
und Betriebsverhalten stark differieren. Der Verschiedenartigkeit dieser WEA wird durch die
folgenden zwei Annahmen Rechnung getragen. Zum einen werden in Abhängigkeit vom Standort
unterschiedliche Nabenhöhen verwendet. So werden beispielsweise WEA in Küstennähe mit
einer niedrigeren Nabenhöhe angesetzt als im Binnenland. Zum anderen werden die WEA
bezüglich der mechanisch-elektrischen Energieumwandlung nach verschiedenen Generatortypen
unterteilt. In Anbetracht der Marktdurchdringung der Produkte der größeren WEA-Herstellern
und deren installierten Kapazitäten in Deutschland seit 1994, werden folgende Varianten
berücksichtigt:
• Pitchgeregelte WEA mit Synchronmaschine (SM)
• Pitchgeregelte WEA mit doppelt gespeister ASM (DFIM)
• Pitchgeregelte WEA mit Käfigläufer-ASM (SCIM)
Das Verhalten einer WEA mit Synchronmaschine oder doppelt gespeister ASM ist im stationären
Betrieb als identisch anzusehen und daher wird im weiteren Verlauf der Untersuchung lediglich
eine Unterscheidung zwischen Generatoren mit variabler (SM und DFIM) und quasi konstanter
Läuferdrehzahl (SCIM) vorgenommen. In der Zeit von 1994-2002 sind in Deutschland dreimal
mehr drehzahlvariable WEA als quasi drehzahlstarre errichtet worden [58]. Dieses Verhältnis
wird an jedem der 41 Hochspannungsknoten nachgebildet, so dass eine gleichmäßige Verteilung
im gesamten Verbundnetz entsteht.
Die Beobachtung der Interaktionen von OWF und dem übergeordneten Verbundnetz mit seinen
konventionellen Kraftwerken, erfordert neben den unterschiedlichen Modellen der Generatoren
und der anderen elektrischen Komponenten des Netzes, auch Modelle zur Generierung von
geeigneten Windgeschwindigkeitszeitreihen.
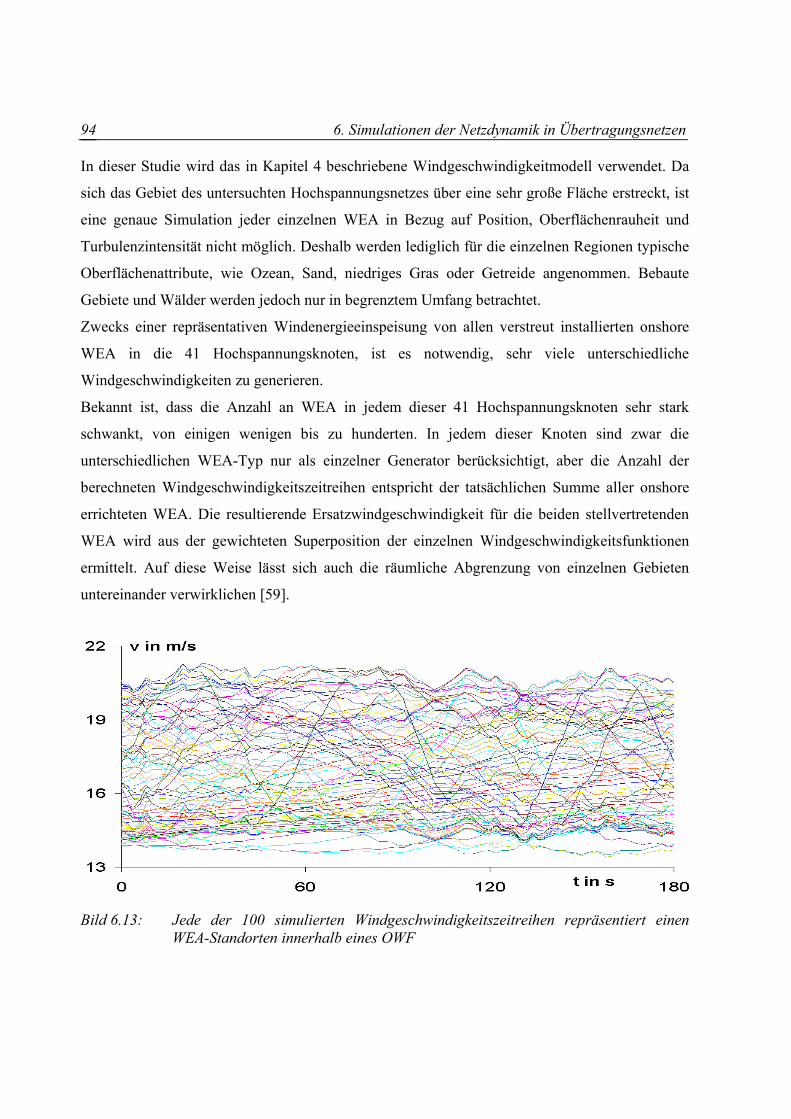
6. Simulationen der Netzdynamik in Übertragungsnetzen
94
In dieser Studie wird das in Kapitel 4 beschriebene Windgeschwindigkeitmodell verwendet. Da
sich das Gebiet des untersuchten Hochspannungsnetzes über eine sehr große Fläche erstreckt, ist
eine genaue Simulation jeder einzelnen WEA in Bezug auf Position, Oberflächenrauheit und
Turbulenzintensität nicht möglich. Deshalb werden lediglich für die einzelnen Regionen typische
Oberflächenattribute, wie Ozean, Sand, niedriges Gras oder Getreide angenommen. Bebaute
Gebiete und Wälder werden jedoch nur in begrenztem Umfang betrachtet.
Zwecks einer repräsentativen Windenergieeinspeisung von allen verstreut installierten onshore
WEA in die 41 Hochspannungsknoten, ist es notwendig, sehr viele unterschiedliche
Windgeschwindigkeiten zu generieren.
Bekannt ist, dass die Anzahl an WEA in jedem dieser 41 Hochspannungsknoten sehr stark
schwankt, von einigen wenigen bis zu hunderten. In jedem dieser Knoten sind zwar die
unterschiedlichen WEA-Typ nur als einzelner Generator berücksichtigt, aber die Anzahl der
berechneten Windgeschwindigkeitszeitreihen entspricht der tatsächlichen Summe aller onshore
errichteten WEA. Die resultierende Ersatzwindgeschwindigkeit für die beiden stellvertretenden
WEA wird aus der gewichteten Superposition der einzelnen Windgeschwindigkeitsfunktionen
ermittelt. Auf diese Weise lässt sich auch die räumliche Abgrenzung von einzelnen Gebieten
untereinander verwirklichen [59].
Bild 6.13: Jede der 100 simulierten Windgeschwindigkeitszeitreihen repräsentiert einen WEA-Standorten innerhalb eines OWF
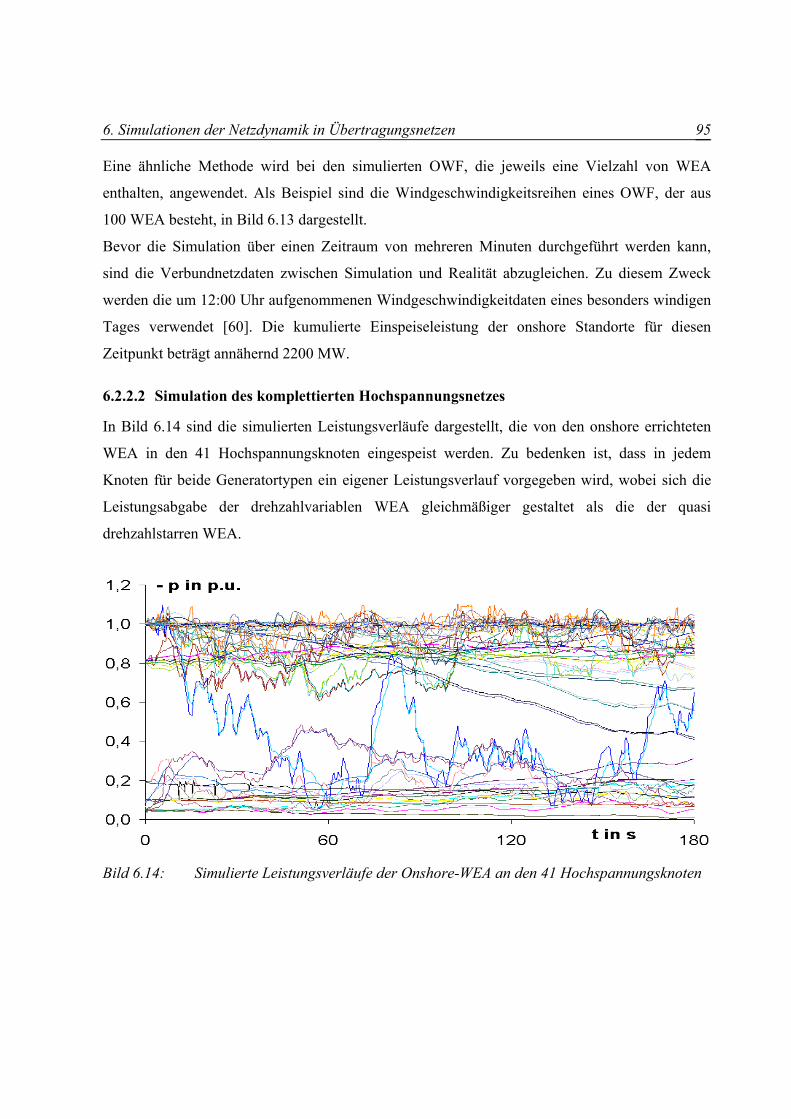
6. Simulationen der Netzdynamik in Übertragungsnetzen
95
Eine ähnliche Methode wird bei den simulierten OWF, die jeweils eine Vielzahl von WEA
enthalten, angewendet. Als Beispiel sind die Windgeschwindigkeitsreihen eines OWF, der aus
100 WEA besteht, in Bild 6.13 dargestellt.
Bevor die Simulation über einen Zeitraum von mehreren Minuten durchgeführt werden kann,
sind die Verbundnetzdaten zwischen Simulation und Realität abzugleichen. Zu diesem Zweck
werden die um 12:00 Uhr aufgenommenen Windgeschwindigkeitdaten eines besonders windigen
Tages verwendet [60]. Die kumulierte Einspeiseleistung der onshore Standorte für diesen
Zeitpunkt beträgt annähernd 2200 MW.
6.2.2.2 Simulation des komplettierten Hochspannungsnetzes
In Bild 6.14 sind die simulierten Leistungsverläufe dargestellt, die von den onshore errichteten
WEA in den 41 Hochspannungsknoten eingespeist werden. Zu bedenken ist, dass in jedem
Knoten für beide Generatortypen ein eigener Leistungsverlauf vorgegeben wird, wobei sich die
Leistungsabgabe der drehzahlvariablen WEA gleichmäßiger gestaltet als die der quasi
drehzahlstarren WEA.
Bild 6.14: Simulierte Leistungsverläufe der Onshore-WEA an den 41 Hochspannungsknoten
6. Simulationen der Netzdynamik in Übertragungsnetzen
96
Bild 6.15: Windleistung als absolute Größen und aufgeteilt nach Regionen
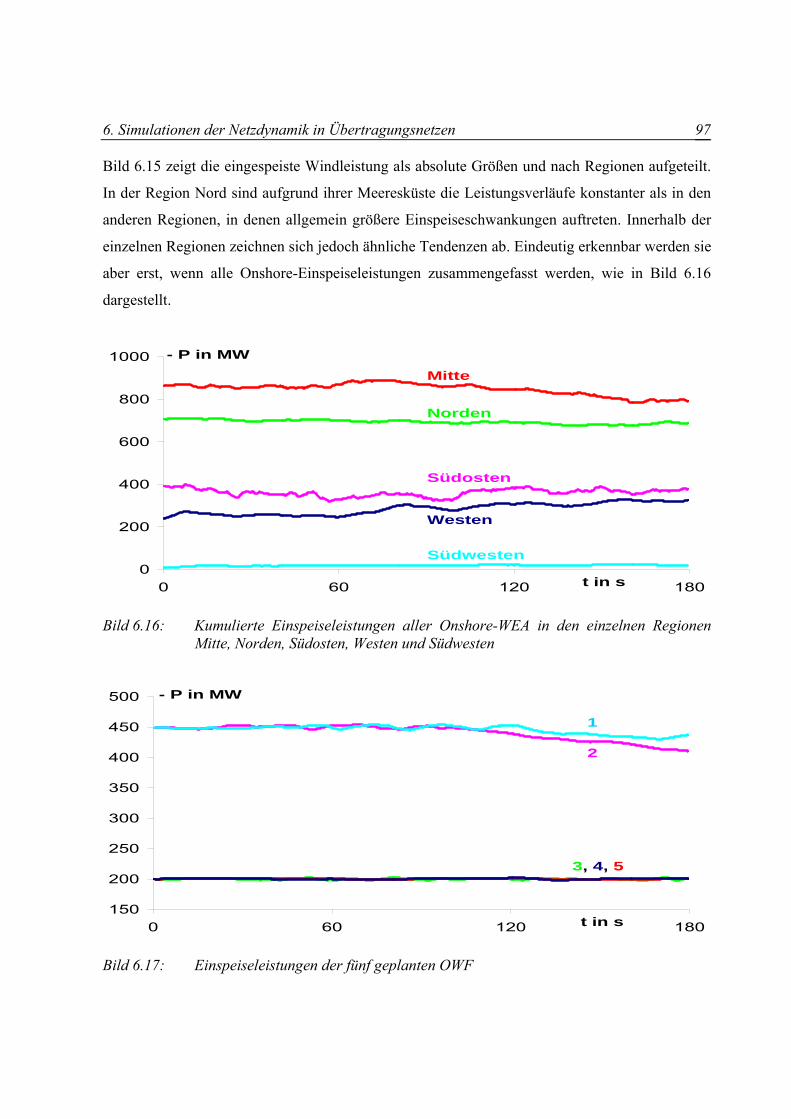
6. Simulationen der Netzdynamik in Übertragungsnetzen
97
Bild 6.15 zeigt die eingespeiste Windleistung als absolute Größen und nach Regionen aufgeteilt.
In der Region Nord sind aufgrund ihrer Meeresküste die Leistungsverläufe konstanter als in den
anderen Regionen, in denen allgemein größere Einspeiseschwankungen auftreten. Innerhalb der
einzelnen Regionen zeichnen sich jedoch ähnliche Tendenzen ab. Eindeutig erkennbar werden sie
aber erst, wenn alle Onshore-Einspeiseleistungen zusammengefasst werden, wie in Bild 6.16
dargestellt.
0
200
400
600
800
1000
0 60 120 180t in s
- P in MW
Westen
Mitte
Norden
Südosten
Südwesten
Bild 6.16: Kumulierte Einspeiseleistungen aller Onshore-WEA in den einzelnen Regionen Mitte, Norden, Südosten, Westen und Südwesten
150
200
250
300
350
400
450
500
0 60 120 180t in s
- P in MW
2
3, 4, 5
1
Bild 6.17: Einspeiseleistungen der fünf geplanten OWF
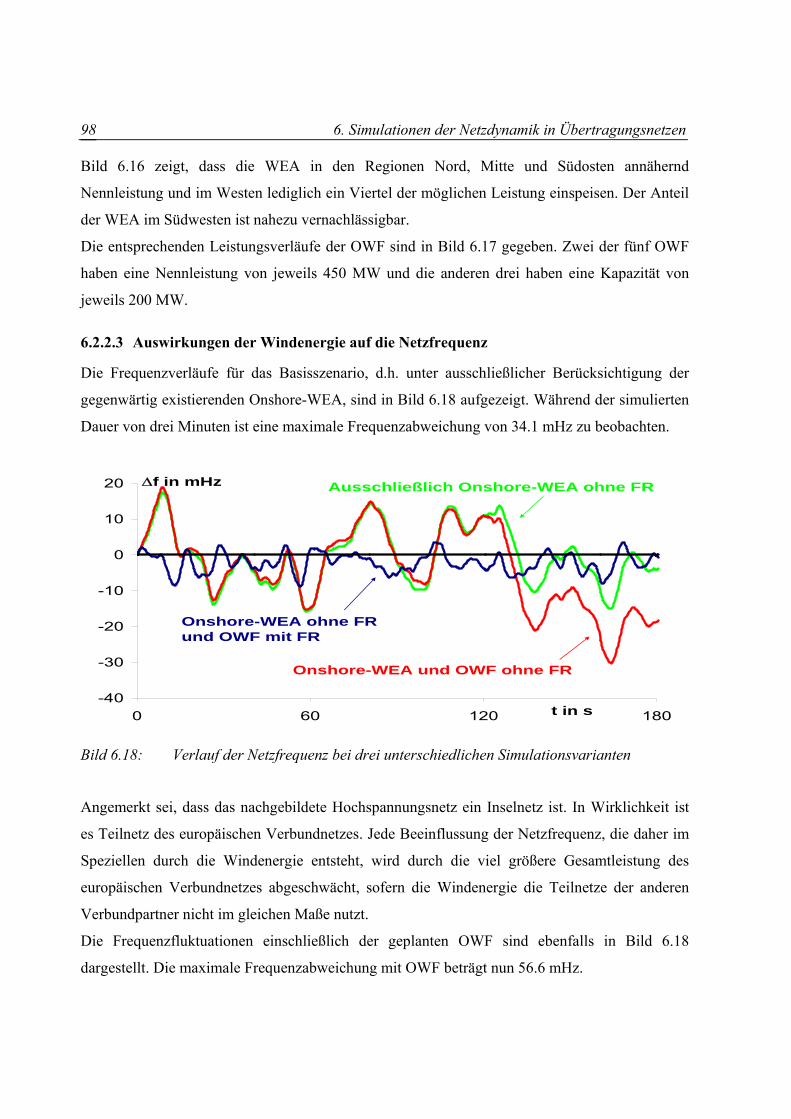
6. Simulationen der Netzdynamik in Übertragungsnetzen
98
Bild 6.16 zeigt, dass die WEA in den Regionen Nord, Mitte und Südosten annähernd
Nennleistung und im Westen lediglich ein Viertel der möglichen Leistung einspeisen. Der Anteil
der WEA im Südwesten ist nahezu vernachlässigbar.
Die entsprechenden Leistungsverläufe der OWF sind in Bild 6.17 gegeben. Zwei der fünf OWF
haben eine Nennleistung von jeweils 450 MW und die anderen drei haben eine Kapazität von
jeweils 200 MW.
6.2.2.3 Auswirkungen der Windenergie auf die Netzfrequenz
Die Frequenzverläufe für das Basisszenario, d.h. unter ausschließlicher Berücksichtigung der
gegenwärtig existierenden Onshore-WEA, sind in Bild 6.18 aufgezeigt. Während der simulierten
Dauer von drei Minuten ist eine maximale Frequenzabweichung von 34.1 mHz zu beobachten.
-40
-30
-20
-10
0
10
20
0 60 120 180t in s
∆f in mHz
Onshore-WEA ohne FRund OWF mit FR
Onshore-WEA und OWF ohne FR
Ausschließlich Onshore-WEA ohne FR
Bild 6.18: Verlauf der Netzfrequenz bei drei unterschiedlichen Simulationsvarianten
Angemerkt sei, dass das nachgebildete Hochspannungsnetz ein Inselnetz ist. In Wirklichkeit ist
es Teilnetz des europäischen Verbundnetzes. Jede Beeinflussung der Netzfrequenz, die daher im
Speziellen durch die Windenergie entsteht, wird durch die viel größere Gesamtleistung des
europäischen Verbundnetzes abgeschwächt, sofern die Windenergie die Teilnetze der anderen
Verbundpartner nicht im gleichen Maße nutzt.
Die Frequenzfluktuationen einschließlich der geplanten OWF sind ebenfalls in Bild 6.18
dargestellt. Die maximale Frequenzabweichung mit OWF beträgt nun 56.6 mHz.
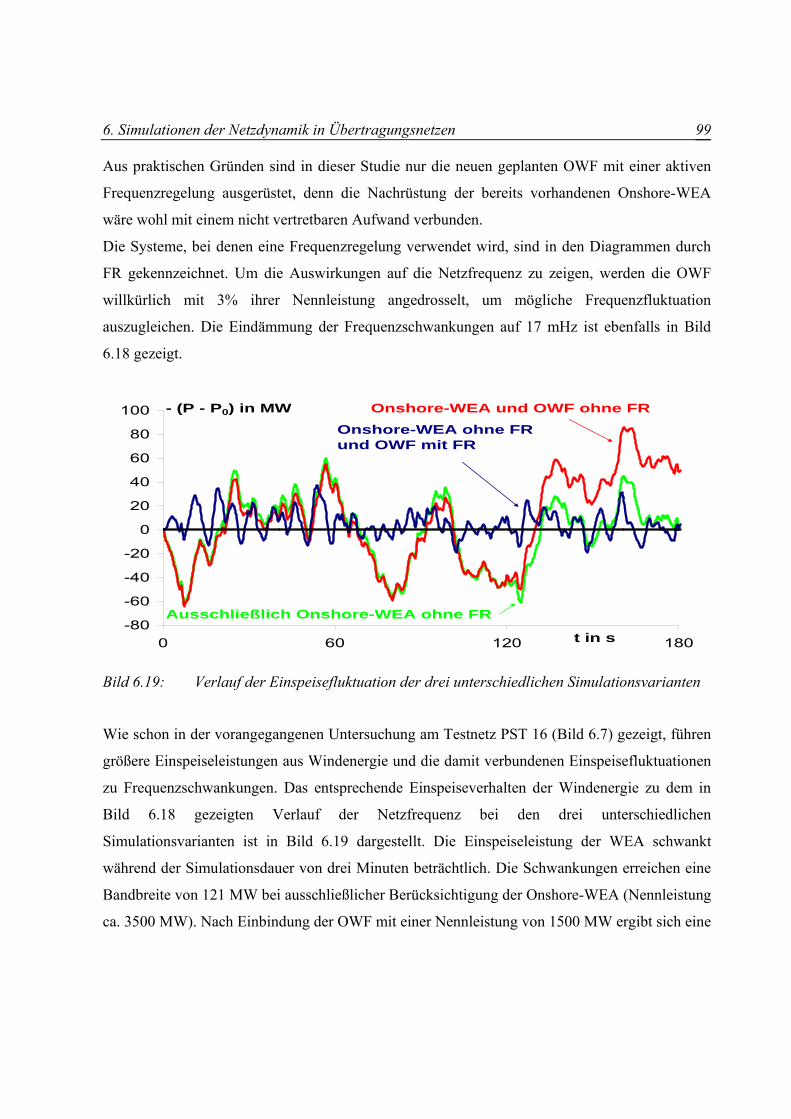
6. Simulationen der Netzdynamik in Übertragungsnetzen
99
Aus praktischen Gründen sind in dieser Studie nur die neuen geplanten OWF mit einer aktiven
Frequenzregelung ausgerüstet, denn die Nachrüstung der bereits vorhandenen Onshore-WEA
wäre wohl mit einem nicht vertretbaren Aufwand verbunden.
Die Systeme, bei denen eine Frequenzregelung verwendet wird, sind in den Diagrammen durch
FR gekennzeichnet. Um die Auswirkungen auf die Netzfrequenz zu zeigen, werden die OWF
willkürlich mit 3% ihrer Nennleistung angedrosselt, um mögliche Frequenzfluktuation
auszugleichen. Die Eindämmung der Frequenzschwankungen auf 17 mHz ist ebenfalls in Bild
6.18 gezeigt.
-80
-60
-40
-20
0
20
40
60
80
100
0 60 120 180t in s
- (P - P0) in MWOnshore-WEA ohne FRund OWF mit FR
Onshore-WEA und OWF ohne FR
Ausschließlich Onshore-WEA ohne FR
Bild 6.19: Verlauf der Einspeisefluktuation der drei unterschiedlichen Simulationsvarianten
Wie schon in der vorangegangenen Untersuchung am Testnetz PST 16 (Bild 6.7) gezeigt, führen
größere Einspeiseleistungen aus Windenergie und die damit verbundenen Einspeisefluktuationen
zu Frequenzschwankungen. Das entsprechende Einspeiseverhalten der Windenergie zu dem in
Bild 6.18 gezeigten Verlauf der Netzfrequenz bei den drei unterschiedlichen
Simulationsvarianten ist in Bild 6.19 dargestellt. Die Einspeiseleistung der WEA schwankt
während der Simulationsdauer von drei Minuten beträchtlich. Die Schwankungen erreichen eine
Bandbreite von 121 MW bei ausschließlicher Berücksichtigung der Onshore-WEA (Nennleistung
ca. 3500 MW). Nach Einbindung der OWF mit einer Nennleistung von 1500 MW ergibt sich eine
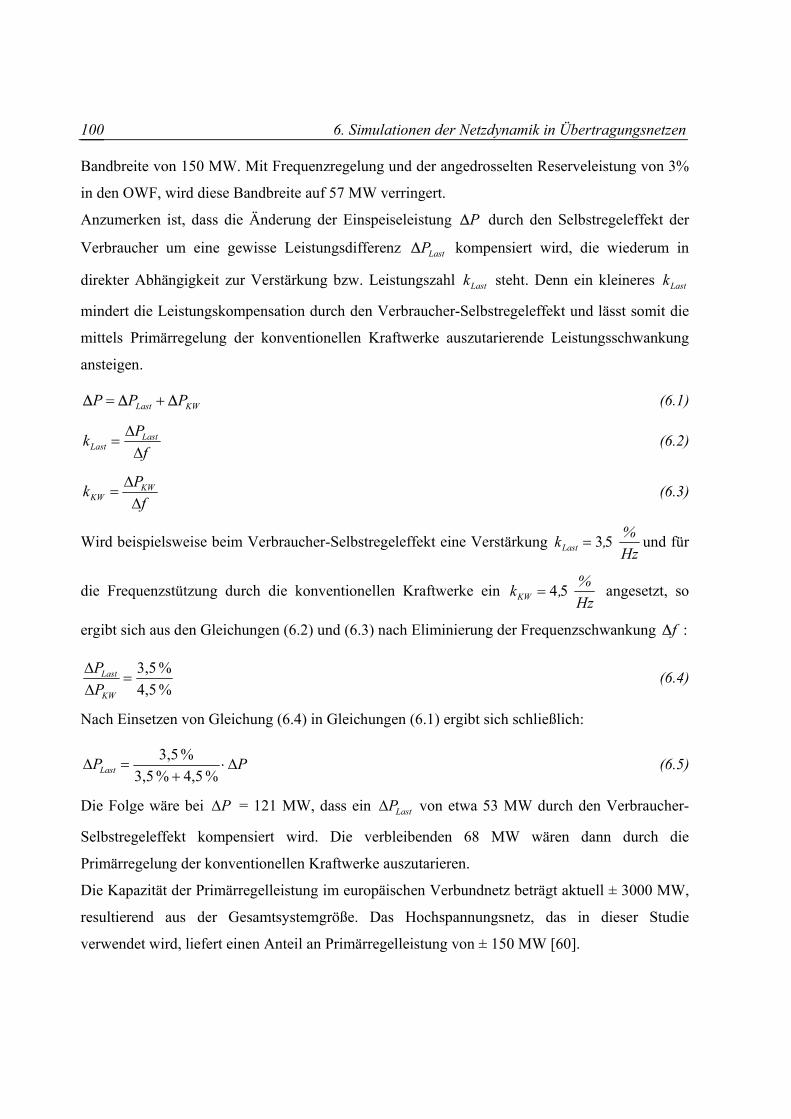
6. Simulationen der Netzdynamik in Übertragungsnetzen
100
Bandbreite von 150 MW. Mit Frequenzregelung und der angedrosselten Reserveleistung von 3%
in den OWF, wird diese Bandbreite auf 57 MW verringert.
Anzumerken ist, dass die Änderung der Einspeiseleistung P∆ durch den Selbstregeleffekt der
Verbraucher um eine gewisse Leistungsdifferenz LastP∆ kompensiert wird, die wiederum in
direkter Abhängigkeit zur Verstärkung bzw. Leistungszahl Lastk steht. Denn ein kleineres Lastk
mindert die Leistungskompensation durch den Verbraucher-Selbstregeleffekt und lässt somit die
mittels Primärregelung der konventionellen Kraftwerke auszutarierende Leistungsschwankung
ansteigen.
KWLast PPP ∆∆∆ += (6.1)
fPk Last
Last ∆∆
= (6.2)
fPk KW
KW ∆∆
= (6.3)
Wird beispielsweise beim Verbraucher-Selbstregeleffekt eine Verstärkung Hz% ,kLast 53= und für
die Frequenzstützung durch die konventionellen Kraftwerke ein Hz% ,kKW 54= angesetzt, so
ergibt sich aus den Gleichungen (6.2) und (6.3) nach Eliminierung der Frequenzschwankung f∆ :
% 4,5% 3,5
=∆∆
KW
Last
PP (6.4)
Nach Einsetzen von Gleichung (6.4) in Gleichungen (6.1) ergibt sich schließlich:
PPLast ∆⋅+
=∆% 4,5% 3,5
% 3,5 (6.5)
Die Folge wäre bei P∆ = 121 MW, dass ein LastP∆ von etwa 53 MW durch den Verbraucher-
Selbstregeleffekt kompensiert wird. Die verbleibenden 68 MW wären dann durch die
Primärregelung der konventionellen Kraftwerke auszutarieren.
Die Kapazität der Primärregelleistung im europäischen Verbundnetz beträgt aktuell ± 3000 MW,
resultierend aus der Gesamtsystemgröße. Das Hochspannungsnetz, das in dieser Studie
verwendet wird, liefert einen Anteil an Primärregelleistung von ± 150 MW [60].
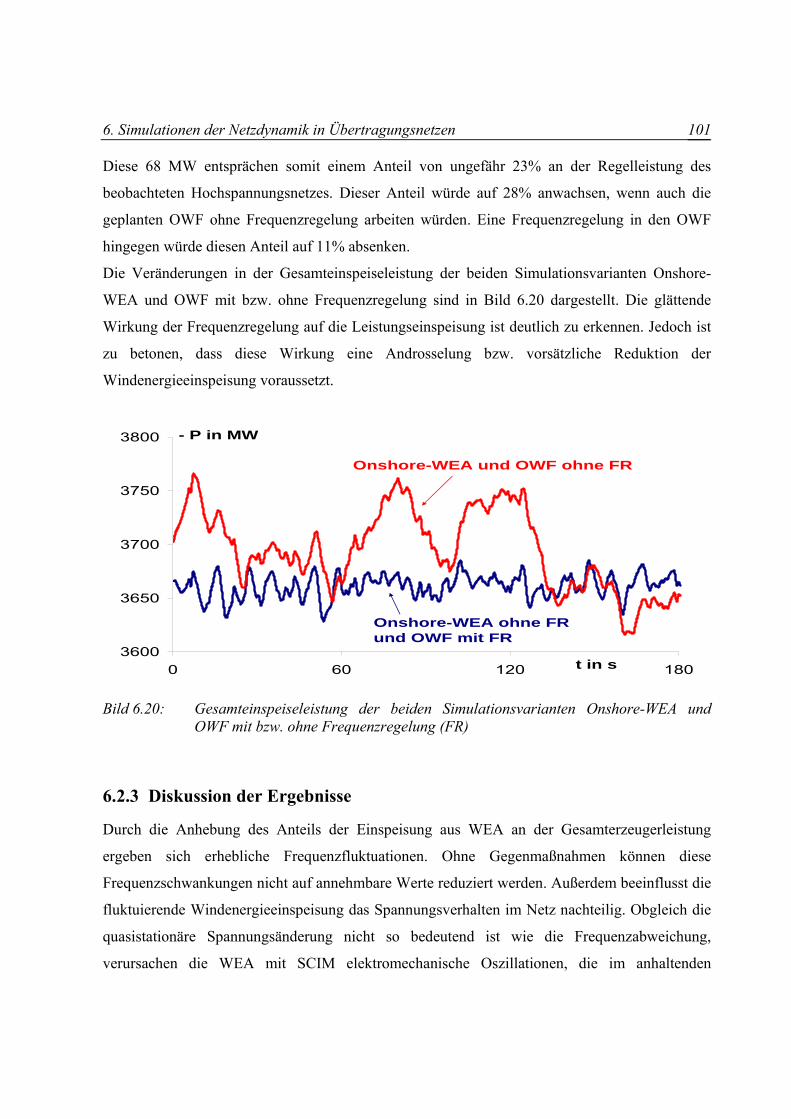
6. Simulationen der Netzdynamik in Übertragungsnetzen
101
Diese 68 MW entsprächen somit einem Anteil von ungefähr 23% an der Regelleistung des
beobachteten Hochspannungsnetzes. Dieser Anteil würde auf 28% anwachsen, wenn auch die
geplanten OWF ohne Frequenzregelung arbeiten würden. Eine Frequenzregelung in den OWF
hingegen würde diesen Anteil auf 11% absenken.
Die Veränderungen in der Gesamteinspeiseleistung der beiden Simulationsvarianten Onshore-
WEA und OWF mit bzw. ohne Frequenzregelung sind in Bild 6.20 dargestellt. Die glättende
Wirkung der Frequenzregelung auf die Leistungseinspeisung ist deutlich zu erkennen. Jedoch ist
zu betonen, dass diese Wirkung eine Androsselung bzw. vorsätzliche Reduktion der
Windenergieeinspeisung voraussetzt.
3600
3650
3700
3750
3800
0 60 120 180t in s
- P in MW
Onshore-WEA ohne FRund OWF mit FR
Onshore-WEA und OWF ohne FR
Bild 6.20: Gesamteinspeiseleistung der beiden Simulationsvarianten Onshore-WEA und OWF mit bzw. ohne Frequenzregelung (FR)
6.2.3 Diskussion der Ergebnisse
Durch die Anhebung des Anteils der Einspeisung aus WEA an der Gesamterzeugerleistung
ergeben sich erhebliche Frequenzfluktuationen. Ohne Gegenmaßnahmen können diese
Frequenzschwankungen nicht auf annehmbare Werte reduziert werden. Außerdem beeinflusst die
fluktuierende Windenergieeinspeisung das Spannungsverhalten im Netz nachteilig. Obgleich die
quasistationäre Spannungsänderung nicht so bedeutend ist wie die Frequenzabweichung,
verursachen die WEA mit SCIM elektromechanische Oszillationen, die im anhaltenden
6. Simulationen der Netzdynamik in Übertragungsnetzen
102
Netzbetrieb nicht wünschenswert sind. WEA mit DFIM und den vorgestellten
Regelungskonzepten hingegen, weisen ein besseres Verhalten auf.
Die Primärregelung in den konventionellen Kraftwerken wird ständig gefordert, um auf die
schwankenden Windenergieeinspeisungen zu reagieren. Folglich ist die vorzuhaltende
Regelenergie zu erhöhen oder aber die Regelreserve ist nicht immer verfügbar, da sie zeitweise
für die Ausregelung der windbedingten Schwankungen eingesetzt wird.
Die Resultate in beiden Hochspannungsnetzen zeigen, dass die negativen Auswirkungen der
fluktuierenden Windenergieeinspeisung auf das Verbundnetz erheblich verringert werden
können, wenn die WEA bzw. Windparks in die Frequenzregelung mit einbezogen werden, was
anhand der vorgestellten Regelungskonzepte möglich ist.
6.3 Zusammenfassung zur Simulation der Netzdynamik
Die Dynamik des Verbundnetzes wird durch die WEA-spezifischen Verhaltensweisen wesentlich
beeinflusst.
Im Normalbetrieb können sich zusätzliche Frequenz- und Spannungsschwankungen aufgrund der
stochastischen Windgeschwindigkeiten ergeben. Offenkundig ist, dass die Intensität dieser
Beeinflussungen mit der eingespeisten Gesamtleistung der WEA zunimmt. In den Simulationen
ist aber im Weiteren gezeigt und quantifiziert worden, das sich die Intensität durch den Einsatz
von drehzahlvariablen - gegenüber quasi drehzahlstarren WEA mindern und im Weiteren durch
WEA-eigene Frequenz- und Spannungsregelungen spürbar senken lässt. Diese
regelungstechnischen Lösungen gehen zwar zu Lasten der Gesamteinspeisung, aber die WEA
könnten somit, nach dem Kostenverursacherprinzip, selbst dazu beitragen, die
Leistungsschwankungen zu reduzieren.
Die im Speziellen vorgestellten Frequenzregelungskonzepte sind ausschließlich bei WEA mit
DFIM durchführbar. Bei diesen Konzepten handelt es sich einerseits um eine Kombination aus
Frequenzregler mit PI-Anteil und vorgehaltener Reserveleistung, die eine vergleichbare
Verhaltensweise der WEA bei der Netzfrequenzstützung mit konventionellen Kraftwerken
bewirkt. Das Konzept mit differenzierendem Frequenzregler andererseits, unterstützt die
Netzfrequenz zwar nur kurzfristig durch die Umwandlung der kinetischen Energie aus den
rotierenden Massen in elektrische Energie, benötigt aber dafür keine Reservevorhaltung.
6. Simulationen der Netzdynamik in Übertragungsnetzen
103
Die WEA mit DFIM bietet somit im Vergleich zur Synchronmaschine in konventionellen
Kraftwerken zwei wirkungsvolle Alternativen der Frequenzregelung an.
In Bezug auf die Frequenzstabilität, bei der die kurzfristige Frequenzstützung im Vordergrund
steht, liefert die WEA mit SCIM teils bessere Ergebnisse als die WEA mit DFIM, was durch die
Ausspeisung von kinetischer Energie aus den rotierenden Massen und einer Absenkung der
Netzspannung gelingt.
Die Simulationen zur Einflussnahme von WEA mit ASM auf die transiente Stabilität durch
Aufzeichnung des Polradwinkels einer im Netz befindlichen Synchronmaschine zeigen, dass
parallel operierenden WEA mit DFIM diesbezüglich eine deutliche Verbesserung im Vergleich
zu WEA mit SCIM bewirken.
Die Spannungsstabilität ist bei den WEA mit DFIM wesentlich besser als bei WEA mit SCIM.
Geringe Abweichung während der Störung und schnelle Rückkehr nach Fehlerklärung werden
durch die DFIM ermöglicht, wohingegen die SCIM im Störungsfall einen starken
Spannungseinbruch bewirkt, die Spannungswiederkehr nach der Fehlerklärung eher schleppend
verläuft und schließlich nicht fähig ist, eigenständig in den ursprünglichen Arbeitspunkt
zurückzukehren.
7 Zusammenfassung und Ausblick Die vorliegende Arbeit befasst sich mit den Auswirkungen der Windenergienutzung auf das
dynamische Verhalten von EES. Dabei werden sowohl die Auswirkungen während des
Normalbetriebes als auch im netzseitigen Fehlerfall untersucht.
Zu Beginn der Arbeit sind die unterschiedlichen Teilmodelle einer WEA behandelt worden, die
für die Simulation derartiger Vorgänge relevant sind. Es wurde dabei die Leistungscharakteristik
des Rotors und die Möglichkeiten der Veränderung der Leistungsumsetzung am Rotorblatt
aufgezeigt. Die Modellbildung des mechanischen Triebstrangs und des mechanisch-elektrischen
Energiewandlersystems bzw. deren Modellreduktion und die daraus resultierenden Vor- und
Nachteile sind beschrieben worden. Im Weiteren wurden Empfehlungen über die Verwendung
eben dieser unterschiedlichen Modelle ausgesprochen.
Im Anschluss daran folgt die detaillierte Vorstellung zweier Regelungskonzepte für die DFIM.
Prinzipiell beinhaltet das erste Konzept eine schnelle elektrische Regelung und die Crowbar-
Schutzmaßnahme. Das zweite hingegen besteht aus der schnellen elektrischen - und einer
übergeordneten langsameren mechanischen Regelung. Die Realisierung dieser beiden Konzepte
wurde aufgrund der unterschiedlichen Fragestellungen respektive Simulationsdauern notwendig.
Die Generierung der Windgeschwindigkeitszeitreihen war unerlässlich um mittels des WEA-
Modells eine realitätsnahe stochastische Schwankung der Leistungseinspeisung zu erzeugen, die
wohl das grundsätzlichste Unterscheidungsmerkmal zu konventionellen Kraftwerken darstellt.
Diese Generierung berücksichtigte die Einflussnahme lokaler und flächenabhängiger
Besonderheiten durch Einbindung von Parametern, die diesen Landschaftsabschnitt
charakterisieren.
In einem eigenen Kapitel wird die Modellbildung des Wake-Effekts in Windparks beschrieben.
Diese Modellbildung war erforderlich um die Einflussnahme von etwaigen Abschwächungen der
Windgeschwindigkeit durch Nachlaufströmungen an den WEA auf die elektromechanischen
Wechselwirkungen zwischen OWF und EES zu simulieren.
Das sechste Kapitel dieser Arbeit beinhaltet die Ergebnisse zu den netzdynamischen
Untersuchungen mittels der entwickelten Modelle. Es wurden dabei Dynamiksimulationen in
unterschiedlichen Übertragungsnetzmodellen durchgeführt. Bei den simulierten Großstörungen
7. Zusammenfassung und Ausblick
105
im EES waren die Auswirkungen auf die transiente -, Spannungs- und Frequenzstabilität
Gegenstand der Untersuchung. Der störungsfreie Normalbetrieb ist auf die Auswirkungen der
stochastischen Schwankungen der Leistungseinspeisung durch WEA auf Frequenz und Spannung
hin analysiert worden. Ein besonderes Augenmerk lag in den Simulationen dabei auf den
konzentrierten Einspeisungen der an das Hoch- oder Höchstspannungsnetz angeschlossen
leistungsstarken OWF.
Die Arbeit bietet dabei eine ausführliche Darstellung der regelungstechnischen Möglichkeiten
einer pitchgeregelten WEA mit doppelt gespeister ASM als Generator im Vergleich zu stall- oder
pitchgeregelten WEA mit Käfigläufer-ASM und konventionellen Kraftwerken.
Der Ausbau der erneuerbaren Energien wurde in der Vergangenheit und wird voraussichtlich
auch in den nächsten Jahren vorrangig durch die Windenergie geprägt sein [61]. Dieser ständig
wachsende Anteil der Windenergie an der Stromerzeugung wird letztendlich die Anforderungen
der Stromnetz- an die WEA- bzw. Windparkbetreiber verändern [62]. Diese Veränderungen, wie
beispielsweise die Glättung der Leistungseinspeisung der WEA im störungsfreien Netzbetrieb,
werden auch zu Modifikationen oder Erweiterungen der aktuell existierenden Regelungskonzepte
führen. Die Auswirkungen von etwaigen Veränderungen der WEA-spezifischen Regelung oder
übergeordneten Regelung des Windparks auf die Wechselwirkungen mit dem Verbundnetz lassen
sich durch Simulationen mit einem Netzberechnungsprogramm, das über die geeigneten Modelle
verfügt, vorherbestimmen. Die Simulation erlaubt somit auch die beschleunigte Entwicklung und
den Test von neuen WEA-Regelalgorithmen.
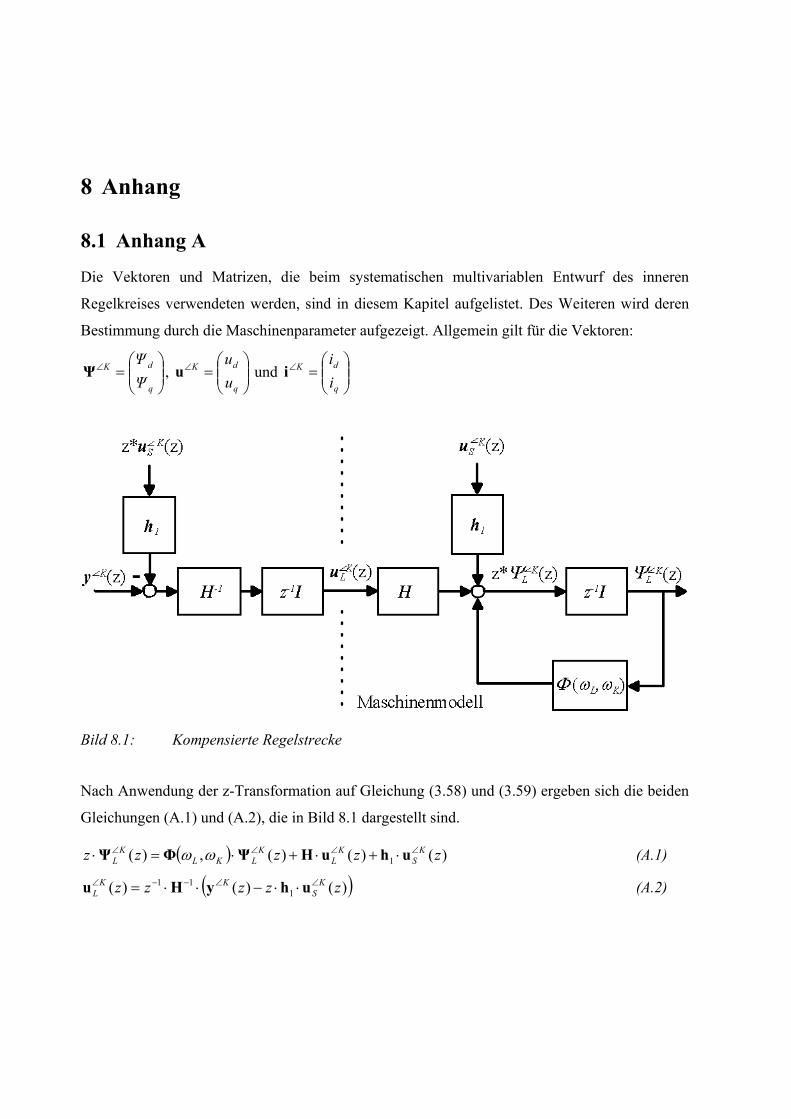
8 Anhang
8.1 Anhang A
Die Vektoren und Matrizen, die beim systematischen multivariablen Entwurf des inneren
Regelkreises verwendeten werden, sind in diesem Kapitel aufgelistet. Des Weiteren wird deren
Bestimmung durch die Maschinenparameter aufgezeigt. Allgemein gilt für die Vektoren:
⎟⎟⎠
⎞⎜⎜⎝
⎛=∠
q
dK
ΨΨ
Ψ , ⎟⎟⎠
⎞⎜⎜⎝
⎛=∠
q
dK
uu
u und ⎟⎟⎠
⎞⎜⎜⎝
⎛=∠
q
dK
ii
i
Bild 8.1: Kompensierte Regelstrecke
Nach Anwendung der z-Transformation auf Gleichung (3.58) und (3.59) ergeben sich die beiden
Gleichungen (A.1) und (A.2), die in Bild 8.1 dargestellt sind.
( ) )()()(,)( 1 zzzzz KS
KL
KLKL
KL
∠∠∠∠ ⋅+⋅+⋅=⋅ uhuHΨΦΨ ωω (A.1)
( ))()()( 111 zzzzz K
SKK
L∠∠−−∠ ⋅⋅−⋅⋅= uhyHu (A.2)

8. Anhang
107
Die Komponenten der 2x2-Fundamentalmatrix ( )KL ωω ,Φ :
Tlr
lrklrΦΦ
kS
LLk
L
L ⋅⎟⎟⎠
⎞⎜⎜⎝
⎛′⋅+
′⋅⋅⋅+−== 22
2
22
2211 1ω
ω und Tlr
rrkΦΦ LKkS
SLLk ⋅⎟⎟⎠
⎞⎜⎜⎝
⎛−+
′⋅+⋅⋅⋅
=−= ωωω
ω22
2
2
2112 (A.3)
Die Komponenten der 2x2-Eingangsmatrix H:
THH == 2211 und 01212 == HH (A.4)
Die Komponenten der 2x2-Eingangsmatrix H-1:
THH /12211 == und 01212 == HH (A.5)
Die Komponenten der 2x2-Störmatrix 1h :
Tlr
rrkhhkS
SLL ⋅′⋅+
⋅⋅== 22 2
2
2211 ω und T
lrlrkhh
kS
LLk ⋅′⋅+
′⋅⋅⋅== 22
2
2112 ωω (A.6)
Für den inneren Regelkreis gilt im Speziellen:
Block 1K : Generierung der Ständerstromsollgröße KS_Ref∠i aus den Sollgrößen Ständerwirkleistung
S_Refp , Ständerblindleistung S_Refq und dem Istwert der Ständerspannung KS_Ref∠u (Bild 3.13).
22SqSd
SqS_RefSdS_RefSd_Ref uu
uqupi
+
⋅+⋅= und 2
Sq2
Sd
SdS_RefSqS_RefSq_Ref uu
uqupi
+
⋅−⋅= (A.7)
Block 2K bzw. 2x4-Matrix:
⎟⎟⎠
⎞⎜⎜⎝
⎛′⋅−−
−′⋅−⋅
⋅=
lrrl
k kS
Sk
Lk
2 01
101ω
ωω
K (A.8)
Für die Sollgröße der Läuferflussverkettung gilt:
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅=
∠
∠∠
KS
KSK
L_Ref iu
KΨ 2 (A.9)
9 Literaturverzeichnis
[1] Bundesanzeiger: „Gesetzt zur Neuregelung des Rechts der Erneuerbaren Energien im
Strombereich“ Gesetzestext EEG, BGB l. Teil I, Nr. 40, S. 1918-1930, 31 Juli 2004
[2] J. Nitsch: „Ökologisch optimierter Ausbau der Nutzung erneuerbarer Energien in
Deutschland“ Forschungsvorhaben im Auftrag des Bundesministeriums für Umwelt,
Naturschutz und Reaktorsicherheit, FKZ 901 41 803, 2004
[3] Bundesamt für Seeschifffahrt und Hydrographie: „BSH gibt grünes Licht für achtes
Windpark-Projekt in der Nordsee“ Pressemitteilung, 11 Februar 2005
[4] M. Kühn: „Methods Assisting the Design of OWECS Part D: Overall Dynamics of
Offshore Wind Energy Converters“ Opti-OWECS Final Report Vol.2, LOR3-CT95-
0087, Institute for Wind Energy, Delft University of Technology, 1998
[5] B. R. Oswald: „Zeitskalierte Modellierung von Netzen der elektrischen
Energieversorgung“ Elektrie Nr. 48, S.59-67, 1994
[6] Commission of the European Communities: „Study of Offshore Wind Energy in the
EC“ Framework JOULE I, JOUR-0072, 1995
[7] S. Heier: „Windkraftanlagen im Netzbetrieb“ B. G. Teubner Verlag, 1996
[8] J. G. Slootweg, H. Polinder und W. L. Kling: „Initialization of Wind Turbine Models in
Power System Dynamics Simulations“ IEEE Power Tech Conference, Porto, 10-13
September 2001
[9] H. Øverseth Røstøen, T. M. Undeland und T. Gjengedal: „Doubly Fed Induction
Generator in a Wind Turbine“ IEEE Norway Section, Workshop on Wind Power, Oslo,
17-18 June 2002
[10] S. A. Papathanassiou und M. P. Papadopoullos: „Dynamic Behavior of Variable Speed
Wind Turbines under Stochastic Wind“ IEEE Transactions on Energy Conversion, Vol.
14, No. 4, pp. 1617-1623, 1999.
[11] E. Krämer: „Maschinendynamik“ Springer Verlag , 1984
[12] R. Jürgler: „Maschinendynamik“ VDI Verlag GmbH, 1996
9. Literaturverzeichnis
109
[13] VEM Sachsenwerk GmbH: „Windkraft Generatoren für Windkraftanlagen“ www.vem-
group.com, 2004
[14] E. Poulsen: „The New Generation of Wind Turbines from Vestas V90-3.0 MW”
European Seminar Offshore Wind Energy in Mediterranean and other European Seas,
10-12 April 2003, Naples
[15] E. Hinrichsen und P. Nolan: „Dynamics and Stability of Wind Turbine Generators“
IEEE Transactions on Power Apparatus and Systems, Vol. PAS-101, No. 8, pp. 2640-
2648, 1982
[16] V. Akhmatov, H. Knudsen, und A, Nielsen: „Advanced Simulation of Windmills in the
Electric Power Supply“ Electrical Power & Energy Systems, Vol. 22, pp. 421-434, 2000
[17] V. Akhmatov: „Analysis of Dynamic Behaviour of Electric Power Systems with Large
Amount of Wind Power” PhD Thesis, Technical University of Denmark, Section of
Electric Power Engineering, 2003
[18] K.-D. Weßnigk: „Kraftwerkselektrotechnik“ vde Verlag, 1993
[19] P. Kundur: „Power System Stability and Control” McGraw-Hill Verlag, 1994
[20] I. Erlich: „Analyse und Simulation des dynamischen Verhaltens von
Elektroenergiesystemen“ Habilitationsschrift, Technische Universität Dresden, Fakultät
Elektrotechnik, 1995
[21] V. Akhmatov: „Variable-speed Wind Turbines with Doubly-fed Induction Generators;
Part I: Modelling in Dynamic Simulation Tools“ Wind Engineering, Vol. 26, No. 2, pp.
85-108, 2002
[22] D. Dietrich und W. Konhäuser: „Mikrocomputergeregelte Asynchronmaschinen“
Oldenbourg Verlag, 1986
[23] E. Hartmann: „Umsetzung von Netzanschlussregeln für Windenergieanlagen Neu, aber
technisch beherrschbar“ Erneuerbare Energien, Nr. 5, S. 34-36, 2002
[24] The Math Works: „SimPowerSystems; For Use with Matlab“ User´s Guide, Version 3,
2003
[25] J. Ehrenberg, B. Andresen, A. Rebsdorf: „Windkraftanlagen für den Megawatt-Bereich
Digitale Steuerung eines doppelt gespeisten Asynchrongenerators ohne Lagegeber, Teil
1“ Elektronik; Nr. 18, S. 60-67, 2001
9. Literaturverzeichnis
110
[26] N. P. Quang, A. Dittrich und A. Thieme: „Doubly-fed induction machine as generator:
control algorithms with decoupling of torque and power factor“ Electrical Engineering,
No. 80, pp. 325-335, 1997
[27] A. Lindberg und T. Larsson: “PWM and Control of Three Level Voltage Source
Converters in a HVDC Back-to-Back Station” IEE 6th International Conference on AC
and DC Power Transmission, 29 April-3 May, London
[28] Ch. Keller: „Stromrichter für Windkraftanlagen; Bauelemente der Leistungselektronik
und ihre Anwendungen“ VDE-ETG-Fachtagung, 23-24 April 2002, Bad Nauheim
[29] SEMIKRON: “IGBT Power Electronics teaching System: Principe for sizing power
converters” Application note
[30] V. Akhmatov: “Variable-speed Wind Turbines with Doubly-fed Induction Generators;
Part II: Power System Stability” Wind Engineering, Vol. 26, No.3, pp. 171-188, 2002
[31] W. Winter: „Integration hoher Windleistung in das Übertragungsnetz der E.ON Netz
GmbH“ ETG/GMA-Fachausschuss-Sitzung, 20 Januar 2004, Erlangen
[32] B. Amlang, D. Arsudis und W. Leonhard: „Elektrische Energieversorgung mit
Windkraftanlagen“ BMFT 032-8265-B, Technische Universität Braunschweig, Institut
für Regelungstechnik, 1992
[33] I. Erlich und U. Bachmann: „Dynamic Behavior of Variable Speed Pump Storage Units
in the German Electric Power System” IFAC 15th Triennial World Congress, 21-26
July 2002, Barcelona
[34] K. Grotenburg, F. Koch, I. Erlich und U. Bachmann: „Modelling and Dynamic
Simulation of Variable Speed Pump Storage Units Incorporated into the German
Electric Power System” 9th European Conference on Power Electronics and
Applications, 27-29 August 2001, Graz
[35] N. P. Quang und J. A. Dittrich: „Praxis der feldorientierten
Drehstromantriebsregelungen, expert Verlag, 1999
[36] P. Albrecht, G. Cramer, P. Drews, M. Grawunder et al.: „Betriebsverhalten von
Windenergieanlagen“ BMFT-FB-T 84-154(1), Technische Universität Braunschweig,
Institut für Regelungstechnik, 1984
9. Literaturverzeichnis
111
[37] P. M. Anderson und A. Bose: „Stability simulation of wind turbine systems, IEEE
Transactions on Power Apparatus and Systems“ Vol. PAS-102, No. 12, pp. 3791-3795,
1983
[38] J.-P. Molly: „Windenergie in Theorie und Praxis“ Verlag C.F. Müller, 1978
[39] A. G. Davenport: „The Application of Statistical Concepts to The Wind Loading of
Structures“ Proceedings of the Institution of Civil Engineers, Vol. 19, pp. 449-472,
1961
[40] R. Vaicaitis, M. Shinozuka und M. Takeno: „Parametric Study of Wind Loading on
Structures” Journal of the Structural Division, Proceedings of the American Society of
Civil Engineers, pp. 453-468, March 1973
[41] R. Mazzoni: „Turbulenzstruktur im gestörten Nachlauf einer künstlichen
Oberflächenmodifikation. Ein Feldexperiment“ Dissertationsschrift, Eidgenössischen
Technischen Hochschule Zürich, Geographisches Institut, 1996
[42] H. Beyer, H.-P. Wadl und C. Ossietzky: „Modellierung des Leistungsverhaltens von
Windparks“ Abschlussbericht BMFT 0329165A, Universität Oldenburg, 1995
[43] A. Betz: „Wind-Energie und ihre Ausnutzung durch Windmühlen“ Vanderhoek &
Ruprecht, 1926, Nachdruck Öko-Buchverlag, 1982
[44] I. Katic, J. Hojstrup und N. Jensen: „A simple model for cluster efficiency” European
Wind Energy Association, Rome, 1986
[45] M. Gresch: „Modellierung der windrichtungs- und windgeschwindigkeitsabhängigen
Abschattungseffekte in Windparks und Einbindung in das Netzberechnungsprogramm
PSD (Power System Dynamics)“ Diplomarbeit, Universität Duisburg-Essen,
Fachbereich Elektrische Anlagen und Netze, 2004
[46] A. P. Schaffarczyk, M. Pawlak und F. Richert: „Turbulenzintensität im Nachlauf von
Windturbinen“ Erneuerbare Energien, Nr. 2, S.36-38, 2003
[47] R. Gasch,: „Windkraftanlagen“ B. G. Teubner, 1993
[48] H. Oertel jr.: „Prandtl-Führer durch die Strömungslehre, Vieweg Verlag, 2001
[49] G. Schmitz: „Theorie und Entwurf von Windrädern optimaler Leistung“
Wissenschaftliche Zeitschrift der Universität Rostock, Sonderheft, 5. Jahrgang, 1955/56
[50] H. Beyer, B. Lange und H.-P. Wadl: „Detaillierte Modellierung der Leistungsabgabe
einzelner Windkraftanlagen in Windparks - Vergleich der Abschattungseffekte bei
9. Literaturverzeichnis
112
höhengestaffelter Onshore- und Offshore-Aufstellung“ Deutsche Windenergie-
Konferenz, 23-24 Oktober 1996, Wilhelmshaven
[51] F. Koch, M. Gresch, I. Erlich, F. Shewarega und U. Bachmann: „Consideration of Wind
Farm Wake Effect in Power System Dynamic Simulation” IEEE PowerTech, June 27-
30 2005, St. Petersburg
[52] J. R. Kristoffersen und P. Christiansen: “Horns Rev Offshore Wind Farm: Its Main
Controller and Remote Control System” Wind Engineering; Volume 27, No. 5, pp. 351-
359, 2003
[53] F. Koch und I. Erlich: „Dynamische Wechselwirkung zwischen Windparks und
elektrischem Verbundnetz“ Energiewirtschaft Nr. 20, S. 60-65, 2002
[54] E. Braun und K. Abel: „Lange Leitung: Wie Offshore ans Netz geht.“ Erneuerbare
Energien, Nr. 12, S. 36-39, 2001
[55] F. Koch, I. Erlich, F. Shewarega und U. Bachmann: „Dynamic Interaction of Large
Offshore Wind Farms with the Electric Power System” IEEE PowerTech, June 23-26
2003, Bologna
[56] F. Koch, I. Erlich und F. Shewarega: „Dynamic Simulation of Large Wind Farms
Integrated in a Multi Machine Network” IEEE PES General Meeting, 13-17 July 2003,
Toronto
[57] N. Paul: „Offshore-Projekte in Nord- und Ostsee“ Sonne, Wind & Wärme, Nr. 7, S. 64-
66, 2002
[58] F. Koch, I. Erlich, F. Shewarega und U. Bachmann: „Simulation of the Dynamic
Interaction of Large Offshore Wind Farms with the Electric Power System” European
Seminar Offshore Wind Energy in Mediterranean and other European Seas, 10-12 April
2003, Naples
[59] S. Persad, B. Fox und D. Flynn: “Effects of Large Scale Wind Power on Total System
Variability and Operation: Case Study of Northern Ireland” Wind Engineering, Vol. 27
No. 1, pp. 3-20, 2003
[60] F. Koch, I. Erlich, F. Shewarega und U. Bachmann: „The effect of large offshore and
onshore wind farms on the frequency of a national power supply system; simulation
modelled on Germany” Wind Engineering, Vol. 27, No. 5, pp. 393- 404, 2003
[61] Bundesverband WindEnergie: Presseinformation, 24 Januar, 2005

9. Literaturverzeichnis
113
[62] VDN Leitfaden: “EEG-Erzeugungsanlagen am Hoch- und Höchstspannungsnetz”,
August, 2004
10 Formelzeichen, Indizes und Abkürzungen
10.1 Formelzeichen
Großbuchstaben
AbschA abgeschattete Teilrotorfläche
rotA Rotorfläche
)(xA aufgeweitete Fläche der Wake an der Stelle x
F Turbulenzmaßstab
H Eingangsmatrix
J Massenträgheitsmoment
KN Oberflächenrauhigkeit
LKW Statik der konventionellen Kraftwerke
LLast Statik der Verbraucher
M Drehmoment
P Wirkleistung
PNet Gesamtsystemleistung
PTotal Gesamtleistungsabgabe
P0 Anfangsleistung der Windparks
Q Blindleistung
R Reglerübertragungsfunktion als Matrix
S komplexe Scheinleistung
TA Abtastzeit 10
−LT Läuferzeitkonstante
mT Anlaufzeitkonstante
TWG Dauer der Böe
T1WG Startzeitpunkt der Böe
T1WR Startzeitpunkt der Rampe
10. Formelzeichen, Indizes und Abkürzungen
115
T2WR Zeitpunkt des Erreichens des Maximalwertes der Rampe
SpektrumV Verhältnis des theoretischen Gesamtspektrums zu den berechneten Spektren
Kleinbuchstaben
a Stromteilerfaktor
pc Leistungsbeiwert
max_pc maximaler Leistungsbeiwert
optpc _ optimaler Leistungsbeiwert
thpc _ theoretischer Leistungsbeiwert
Wakec Wake-Koeffizient
6...1c frei wählbare Parameter zur Bestimmung des Leistungsbeiwertes
d geschwindigkeitsproportionale Reibungsverluste
dd Distanz längs zur Windrichtung zwischen Bezugspunkt und WEA
dq Distanz quer zur Windrichtung zwischen Bezugspunkt und WEA
dW Dämpfungskonstante der Welle
df Frequenz der gedämpften Schwingung
h1 Störmatrix
i bezogener Strom
i Raumzeiger des bezogenen Stroms
i komplexer bezogener Strom
Lk Koppelfaktor
Wk Steifigkeit der Welle
l bezogene Induktivität
m bezogenes Drehmoment
mF rückstellendes Moment am Rotorblatt
mR Reibmoment am Stellantrieb
mS Drehmoment des Stellantriebs
n Läuferdrehzahl
10. Formelzeichen, Indizes und Abkürzungen
116
p bezogene Wirkleistung
pk Leistungsabgabe der Kraftwerke (Hub)
q bezogene Blindleistung
r bezogener Widerstand
rRot Rotorradius
)(xr Radius der aufgeweiteten Fläche der Wake an der Stelle x
s Schlupf
Et Einstellzeit
u bezogene Spannung
u Raumzeiger der Spannung
u komplexe bezogene Spannung
Gv Referenzwindgeschwindigkeit
vmaxWG Windgeschwindigkeitsmaximum der Böenanregung
vmaxWR Windgeschwindigkeitsmaximum der Rampenanregung
Wv Windgeschwindigkeit
)(xvW reduzierte Windgeschwindigkeit in der Wake an der Stelle x
WBv mittlere Windgeschwindigkeit
WGv Böenanregung
WSv stochastische Anregung
0Wv reduzierte Windgeschwindigkeit unmittelbar leeseitig des Rotors
0v ungebremste Windgeschwindigkeit
x bezogene Reaktanz
z Nabenhöhe
z komplexer bezogener Scheinwiderstand
Gz Referenzhöhe
10. Formelzeichen, Indizes und Abkürzungen
117
Griechische Buchstaben
α Anstellwinkel des Rotorblattes
αd laufzeitverzerrende Längskomponente
αq laufzeitverzerrende Querkomponente
αtan Öffnungswinkel oder -faktor der Wake
γ Windrichtung
P∆ Einspeiseleistungsbandbreite
LastP∆ Leistungsanteil kompensiert durch Verbraucher-Selbstregeleffekt
Profilη Wirkungsgradbeeinflussung durch Profilverluste
Wirbelη Wirkungsgradbeeinflussung durch Auftriebsreduzierung zur Rotorblattspitze hin
ϑ Positionswinkel des rotierenden Koordinatensystems
λ Schnelllaufzahl
ρ Luftdichte
σ Abklingkoeffizient
τ Lastwinkel
Φ Fundamentalmatrix
ϕ Drehwinkel
Ψ Raumzeiger der Flussverkettung
ψ bezogene Flussverkettung
ψ komplexe bezogene Flussverkettung
ω Winkelgeschwindigkeit
dω Eigenkreisfrequenz der gedämpften Schwingung
Eω Eigenkreisfrequenz der ungedämpften Schwingung
iω festgelegte Frequenz
Oω obere Grenzfrequenz
0ω ständerbezogene Winkelgeschwindigkeit
10. Formelzeichen, Indizes und Abkürzungen
118
10.2 Indizes
Hochgestellte Indizes K∠ Kennzeichnung eines beliebig gewählten Bezugskoordinatensystem
* konjugiert komplexe Größe
’ transiente Größe
Tiefgestellte Indizes abc Dreiphasensystem
d Längskomponente im rotierenden Koordinatensystem
G Generatorläufer
h Haupt-
K Kennzeichnung einer beliebigen Winkelgeschwindigkeit
L Läufergröße
N Netzgröße
q Querkomponente im rotierenden Koordinatensystem
Ref Sollgröße
S Ständergröße
T Rotor der Windturbine
σ magnetische Streuverluste
10. Formelzeichen, Indizes und Abkürzungen
119
10.3 Abkürzungen (zum Teil auch als Indizes verwendet)
ASM Asynchronmaschine Induction Machine
DC Gleichspannung Direct Current
DFIM doppelt gespeiste Asynchronmaschine Doubly-Fed Induction Machine
EES Endliche Einstellzeit Finite Step Response Time
FR Frequenzregelung Frequency Control
HS Hochspannung High Voltage
IGBT Bipolartransistor mit isoliertem Gate Insulated Gate Bipolar Transistor
IGR Inkrementalgeber Encoder
OWF Offshore-Windpark Offshore-Windfarm
pcs geforderte Wirkleistungsveränderung Power Command Signal
PLL Phasenregelkreis Phase Locked Loop
p. u. bezogene Größe Per Unit
PWM Pulsbreitenmodulation Pulse Width Modulation
SCIM Käfigläufer-Asynchronmaschine Squirrel-Cage Induction Machine
SM Synchronmaschine Synchronous Machine
SRIM Schleifringläuferasynchronmaschine Slip-Ring Induction Machine
VP Ständerspannungsvorhersage Voltage Prediction
WEA Windenergieanlage Wind Turbine
Curriculum Vitae: Friedrich W. Koch 1. Persönliche Daten
Geboren am 04.04.1969 in Kevelaer
Familienstand: Verheiratet, 1 Kind
Staatsangehörigkeit: Deutsch
2. Schule und Berufsausbildung
1975 - 1979 Grundschule Kevelaer
1979 - 1986 Gymnasium Kevelaer; Mittlere Reife
1986 - 1990 Ausbildung zum Fernmeldehandwerker bei der DBP in Krefeld
1990 - 1991 Besuch der Fachoberschule für Technik in Geldern, Fachabitur
3. Studium
1991 - 1998 Elektrotechnik an der Universität - GHS Siegen, Deutschland
Studienrichtung Elektrische Energietechnik
1995 - 1996 Power Engineering and Management an der University of Dundee,
Großbritannien
4. Berufliche Tätigkeit
1990 Anstellung als Fernmeldehandwerker bei der DBP in München
1998 - 2001 Anstellung bei der SAG mbH als
07/1998 Sachbearbeiter für Kraftwerks- und Industrieanlagentechnik,
09/1998 Projektleiter für die Niederlande,
02/1999 Key-Account-Manager für Koninklijke Hoogovens (CORUS)
seit 03/2001 Wissenschaftlicher Mitarbeiter im Fachgebiet Elektrische Anlagen und
Netze der Universität Duisburg-Essen






























