Embed Size (px)
Citation preview

Computers & Industrial Engineering 59 (2010) 458–462
Contents lists available at ScienceDirect
Computers & Industrial Engineering
journal homepage: www.elsevier .com/ locate/caie
Single-machine scheduling with learning effect and resource-dependentprocessing times q
Dan Wang a, Ming-Zheng Wang b, Ji-Bo Wang a,c,*
a Operations Research and Cybernetics Institute, School of Science, Shenyang Aerospace University, Shenyang 110136, Chinab School of Management, Dalian University of Technology, Dalian 116024, Chinac Knowledge Management and Innovation Research Centre, Xi’an Jiaotong University, Xi’an 710049, China
a r t i c l e i n f o a b s t r a c t
Article history:Received 6 January 2010Received in revised form 2 June 2010Accepted 3 June 2010Available online 11 June 2010
Keywords:SchedulingSingle-machineLearning effectResource allocation
0360-8352/$ - see front matter � 2010 Elsevier Ltd. Adoi:10.1016/j.cie.2010.06.002
q This manuscript was processed by Area Editor T.C* Corresponding author at: Operations Research
School of Science, Shenyang Aerospace UniversityTel./fax: +86 24 89723548.
E-mail address: [email protected] (J.-B. W
We consider resource allocation scheduling with learning effect in which the processing time of a job is afunction of its position in a sequence and its resource allocation. The objective is to find the optimalsequence of jobs and the optimal resource allocation separately. We concentrate on two goals separately,namely, minimizing a cost function containing makespan, total completion time, total absolute differ-ences in completion times and total resource cost; minimizing a cost function containing makespan, totalwaiting time, total absolute differences in waiting times and total resource cost. We analyse the problemwith two different processing time functions. For each combination of these, we provide a polynomialtime algorithm to find the optimal job sequence and resource allocation.
� 2010 Elsevier Ltd. All rights reserved.
1. Introduction
In classical scheduling theory, it is assumed that the job process-ing times fixed and constant values (Pinedo, 2002). In practice, how-ever, we often encounter settings in which job processing times maybe subject to change due to the phenomenon of learning and/orcontrollable processing time (resource allocation). Job learningappears in, e.g., repeated processing of similar tasks improvesworker skills; workers are able to perform setup, to deal with ma-chine operations and software, or to handle raw materials andcomponents at a greater pace (Biskup, 1999). Job-processing timesare controllable by allocating a common limited resource suchas financial budget, overtime, energy, fuel, subcontracting ormanpower.
Biskup (1999) and Cheng and Wang (2000) were among thepioneers that brought the concept of learning into the field ofscheduling. Biskup (1999) assumed that the processing time of ajob is a log-linear learning curve, i.e., if job Jj is scheduled in posi-tion r in a sequence, its actual processing time is
pj ¼ �pjra;
where �pj is the normal processing time of job Jj, a 6 0 is a constantlearning effect. He proved that single machine scheduling problems
ll rights reserved.
. Edwin Cheng.and Cybernetics Institute,
, Shenyang 110136, China.
ang).
to minimize the sum of job flow times and the total deviations ofjob completion times from a common due date are polynomial solv-able. Cheng and Wang (2000) considered a single machine schedul-ing problem in which the job processing times decrease as a resultof learning. A volume-dependent piecewise linear processing timefunction was used to model the learning effect. The objective is tominimize the maximum lateness. They showed that the problemis NP-hard in the strong sense and then identified two special casesthat are polynomially solvable. They also proposed two heuristicsand analysed their worst-case performance. A survey on this lineof the scheduling problems with learning effects could be foundin Biskup (2008). More recent papers that have considered schedul-ing problems with learning effects include Eren and Guner (2007a,2007b), Cheng, Wu, and Lee (2008a, 2008b), Toksar and Guner(2008), Wu and Lee (2009), Lee and Wu (2009), Eren (2009a,2009b) and Zhu et al. (2010). Eren and Guner (2007a) considereda bicriteria single machine scheduling problem with a learningeffect to minimize a weighted sum of total completion time andtotal tardiness. To solve this scheduling problem, they developeda mathematical programming model. Eren and Guner (2007b) con-sidered the single machine total tardiness problem with a learningeffect. They developed an integer programming model for theproblem. Cheng et al. (2008a, 2008b) considered some schedulingproblems with the actual job processing time is a function of jobsalready processed. Toksar and Guner (2008) considered the parallelmachine scheduling with learning effects and deteriorating jobs.They introduced a mixed nonlinear integer programming formula-tion for parallel machine earliness/tardiness (ET) scheduling

D. Wang et al. / Computers & Industrial Engineering 59 (2010) 458–462 459
scheduling problems. Wu and Lee (2009) and Lee and Wu (2009)some single machine and flowshop scheduling with a general learn-ing effect. Eren (2009a) considered a bicriteria parallel machinescheduling problems with a learning effect of setup times and re-moval times. The objective function of the problem is minimizationof the weighted sum of total completion time and total tardiness.He developed a mathematical programming model for the problemwhich belongs to NP-hard class. Eren (2009b) considered the m-par-allel machine with maximum lateness consideration of the learningeffect. He developed a mathematical programming model for theproblem which belongs to NP-hard classes. Zhu, Sun, Sun, and Li(2010) considered two single machine scheduling problems withproportional linear deterioration of job processing times. For theseresource constrained problems, i.e., the total resource resource con-sumption minimization problem under the constraint that themakespan does not exceed a given limit, and the makespan minimi-zation problem under the constraint that the total resource con-sumption does not exceed a given limit, they proved that theseproblems can be solved in polynomial time.
On the other hand, sequencing problems with controllable pro-cessing times have been studied extensively by researchers since1980 (e.g., Alidaee & Ahmadian, 1993; Biskup & Jahnke, 2001;Cheng, Ogaz, & Qi, 1996; Daniels, 1990; Hoogeveen & Woeginger,2002; Janiak, 1987; Ng, Cheng, Kovalyov, & Lam, 2003; Panwalkar& Rajagopalan, 1992; Shabtay & Steiner, 2008; Van Wassenhove &Baker, 1982; Vickson, 1980; Wan, Yen, & Li, 2001; Wang & Cheng,2005; Wang & Xia, 2007Yedidsion et al., Yedidsion, Shabtay, &Moshe, 2007 ). A survey of results up to 1990 can be found inNowicki and Zdrzalka (1990). A more recent survey was given byShabtay and Steiner (2007). In most of the above mentioned stud-ies of scheduling with controllable processing times, researchersassumed that the job processing time is a bounded linear functionof the amount of resource allocated to the processing of the job, i.e.,the resource consumption function is of the form
pj ¼ �pj � ajuj; j ¼ 1;2; . . . ;n; 0 6 uj 6 �uj <�pj
aj;
where n is the number of non-preemptive jobs, uj is the amount ofresource allocated to job Jj; �pj is the non-compressed (normal) pro-cessing time for job Jj; �uj is the upper bound on the amount of re-source that can be allocated to job Jj and aj is the positivecompression rate of job Jj. For many resource allocation problemsin physical or economic systems, however, they do not use a linearresource consumption function, since it fails to reflect the law ofdiminishing marginal returns. This law states that productivity in-creases at a decreasing rate with the amount of resource employed.In order to model this, other studies on scheduling with resourceallocation assumed that the job processing time is a convexdecreasing function of the amount of resource allocated to theprocessing of the job (e.g., Monma, Schrijver, Todd, & Wei, 1990;Shabtay, 2004; Shabtay & Kaspi, 2004). For a convex resource con-sumption function, we assume the following relationship betweenthe job processing time and the resource allocated to the job:
pj ¼�pj
uj
� �k
; uj > 0;
where k is a positive constant. This resource consumption functionhas been used extensively in continuous resource allocation theory(e.g., Armstrong, Gu, & Lei, 1995, 1997; Monma et al., 1990; Scott &Jefferson, 1995; Shabtay, 2004; Shabtay & Kaspi, 2004; Shabtay &Steiner, 2008). In fact, Monma et al. (1990) were among the firstto proposed this model, He also pointed out that k = 1 correspondsto many actual government and industrial operations and thek = 0.5 case arises from VLSI (very large scale integration) circuit de-sign, where the product of the silicon area (resource) and the squareof time spent equals a constant value (the workload) for an individ-ual job.
However, it is surprising that the effects of learning and re-source allocation have never been considered concurrently. Thephenomena of resource allocation and learning effects occurringsimultaneously can be found in many real-life situations. Forexample, in the chemical industry, the processing time of a chem-ical compound can be changed by increasing the amount of cata-lysts, which entails some extra costs (Wang & Cheng, 2005).Clearly, compressing jobs would be rational and possible only ifthe additional cost is compensated by the gains from job comple-tion at an earlier time. The scheduling problem with controllableprocessing times is concerned with determining not only the jobsequence but also the amount of compression for each job so asto minimize the total cost. On the other hand, the learning effectsreflect that the workers become more skilled to operate the ma-chines through experience accumulation. For this situation, consid-ering these the job learning effects and resource allocation in jobscheduling is both necessary and reasonable. In this paper, westudy single machine scheduling problem with position and re-source-dependent processing times at the same time.
The rest of this paper is organized as follows. In Section 2 wewill give a formal description of the model under study. In Sections3, we obtain optimal resource allocation for any given sequence. InSection 4, we show that the problem can be formulated as anassignment problem. In Section 5, conclusions are presented.
2. Problem formulation
The focus of this paper is to study the learning effects and re-source allocation simultaneously. The new model is described asfollows.
There are given a single machine and a set J = {J1, J2, . . ., Jn} of nindependent and non-preemptive jobs immediately available forprocessing. The machine can handle one job at a time and job pre-emption is not allowed. Let pj be the actual processing time of job Jj.In this paper, we consider the following models:
A linear resource consumption function:
pj ¼ �pjra � ajuj; ð1Þ
where �pj is the basic (normal) processing time of job Jj, r is the posi-tion of job Jj is scheduled in a sequence, a 6 0 is a learning index,and uj is the amount of resource that can be allocated to job Jj, with
0 6 uj 6 �uj <�pjn
a
aj; �uj is the upper bound on the amount of resource
that can be allocated to job Jj and aj is the positive compression rateof job Jj.
A convex resource consumption function:
pj ¼�pjra
uj
� �k
; uj > 0; ð2Þ
where k is a positive constant.For a given sequence p = [J1, J2, . . ., Jn], Cj = Cj(p) represents
the completion time for job Jj. Let Cmax ¼maxfCjjj ¼ 1;2; . . . ;ng;TC ¼
Pnj¼1Cj, TW¼
Pnj¼1Wj; TADC¼
Pni¼1
Pnj¼ijCi�Cjj and TADW ¼Pn
i¼1
Pnj¼ijWi �Wjj be the makespan of all jobs, the total comple-
tion times, the total waiting times, the total absolute differencesin completion times, and the total absolute differences in waitingtimes, where Wj = Cj � pj be the waiting time of job Jj. The objectiveis to determine the optimal resource allocations and the optimalsequence of jobs in the machine so that the corresponding valueof the following cost functions be optimal:
f ðp;uÞ ¼ d1Cmax þ d2TCþ d3TADCþ d4
Xn
j¼1
Gjuj; ð3Þ
f ðp;uÞ ¼ d1Cmax þ d2TWþ d3TADWþ d4
Xn
j¼1
Gjuj; ð4Þ

460 D. Wang et al. / Computers & Industrial Engineering 59 (2010) 458–462
where weights d1 P 0,d2 P 0, d3 P 0, and d4 P 0 are given con-stants (the decision-maker selects the weights d1, d2, d3, d4), andGj is the per time unit cost associated with the resource allocation.In the remaining part of the paper, all the problems considered willbe denoted using the three-field notation schema introduced byGraham, Lawler, Lenstra, and Rinnooy Kan (1979).
3. Solution with a linear resource consumption function
In this section, we will show that with a linear resource con-sumption function the optimal schedule for both these objectivefunctions can be obtained in O(n3) time.
For the model (3), if we substitute, C½j� ¼Pj
l¼1p½l�; Cmax ¼Pn
j¼1p½j�,TC ¼
Pnj¼1C½j�; TADC ¼
Pnj¼1ðj� 1Þðn� jþ 1Þp½j� (Kanet, 1981) and
pj ¼ �pjra � ajuj into (3) and simplify, we have
f ðp;uÞ ¼ d1
Xn
j¼1
p½j� þ d2
Xn
j¼1
ðn� jþ 1Þp½j� þ d3
Xn
j¼1
ðj� 1Þðn� jþ1Þp½j�
þ d4
Xn
j¼1
G½j�u½j�;
¼Xn
j¼1
½d1 þ d2ðnþ1� jÞþ d3ðj� 1Þðn� jþ 1Þ�p½j� þ d4
Xn
j¼1
G½j�u½j�;
¼Xn
j¼1
xjp½j� þ d4
Xn
j¼1
G½j�u½j�;
¼Xn
j¼1
xjð�p½j�ja � a½j�u½j�Þ þ d4
Xn
j¼1
G½j�u½j�;
¼Xn
j¼1
xj�p½j�ja þXn
j¼1
ðd4G½j� �xja½j�Þu½j�; ð5Þ
where xj = d1 + d2 (n + 1 � j) + d3(j � 1)(n � j + 1).From (5), for any sequence, the optimal resource allocation of a
job in a position with a negative d4G[j] � wja[j] should be its upperbound on the amount of resource �u½j�, and the optimal resourceallocation of a job in a position with a positive d4G[j] � wja[j] shouldbe 0. If d4G[j] � wj a[j] = 0, then the optimal resource allocation ofthe job in this position may be any value between 0 and �u½j�. Thesecan be written in the notational form as follows:
u�½j� ¼�u½j�; if d4G½j� �wja½j� < 0;u½j� 2 ½0; �u½j��; if d4G½j� �wja½j� ¼ 0;0; if d4G½j� �wja½j� > 0;
8><>: ð6Þ
where u�½j�;1 6 j 6 n, represents the optimal resource allocation ofthe job in position j.
For the model (4), if we substitute, W ½j� ¼Pj�1
l¼1p½l�; Cmax ¼Pn
j¼1
p½j�, TW ¼Pn
j¼1W ½j�; TADW ¼Pn
j¼1jðn� jÞp½j� (Bagchi, 1989) and pj
¼ �pjra � ajuj into (4) and simplify, we have
f ðp;uÞ ¼ d1
Xn
j¼1
p½j� þ d2
Xn
j¼1
ðn� jÞp½j� þ d3
Xn
j¼1
jðn� jÞp½j� þ d4
Xn
j¼1
G½j�u½j�;
¼Xn
j¼1
mjp½j� þ d4
Xn
j¼1
G½j�u½j�;
¼Xn
j¼1
mj�pjja þ
Xn
j¼1
ðd4G½j� � mja½j�Þu½j�; ð7Þ
where mj = d1 + d2(n � j) + d3j(n � j).From (7), for any sequence, the optimal resource allocation of a
job in a position with a negative d4G[j] � mja[j] should be its upperbound on the amount of resource �u½j�, and the optimal resourceallocation of a job in a position with a positive d4G[j] � mja[j] shouldbe 0. If d4G[j] � mja[j] = 0, then the optimal resource allocation of thejob in this position may be any value between 0 and �u½j�. These canbe written in the notational form as follows:
u�½j� ¼�u; if d4G½j� � mja½j� < 0;u½j� 2 ½0; �u½j��; if d4G½j� � mja½j� ¼ 0;0; if d4G½j� � mja½j� > 0;
8><>: ð8Þ
where u�½j�; 1 6 j 6 n, represents the optimal resource allocation ofthe job in position j.
Lemma 1. Given a sequence, for the model (3), the optimal resourceallocation can be determined by (6), and for the model (4), the optimalresource allocation can be determined by (8).
Proof. For the model (3), substituting (1) for p[j] into (3) and takingthe derivative by u[j], we have df ðp;uÞ
u½j�¼ d4G½j� �xja½j� for j = 1,2,. . .,n.
Hence, if d4G[j] � wja[j] > 0, we should not allocate any resource tojob J[j]; if d4G[j] � wja[j] < 0, we will allocate the maximal feasibleamount of resource to job J[j]; and if d4G[j] � wja[j] = 0, any feasibleresource allocation can be optimal. For the model (4), the result canbe obtained by the similar method. h
Now we discuss the determination of optimal sequences for thetwo models. In view of the analysis in the previous sections, wherewe provided the expressions for computing the optimal optimalresource allocation for any given optimal sequence, the problemreduces to a pure sequencing problem. In order to obtain the opti-mal sequence, we formulate the models (3) and (4) as an assign-ment problem, respectively.
For the model (3), let
kij ¼xj�pij
a; if d4Gi �xjai P 0;
xj�pija þ ðd4Gi �xjaiÞ�ui; if d4Gi �xjai < 0:
(ð9Þ
Furthermore, let zij be a 0/1 variable such that zij = 1 if job Ji isscheduled in position j, and zij = 0, otherwise. As in Panwalkarand Rajagopalan (1992), the optimal matching of jobs to positionsrequires a solution for the following assignment problem:
minXn
i¼1
Xn
j¼1
kijzij; ð10Þ
s:t: Xn
i¼1
zij ¼ 1; i ¼ 1;2; . . . ;n;
Xn
j¼1
zij ¼ 1; j ¼ 1;2; . . . ;n;
zij ¼ 0 or 1; i; j ¼ 1;2; . . . ;n:
The first set of constraints in the formulation assures that eachjob will be assigned only to one position, the second set assuresthat each position will be assigned only once, and the penalty foreach assignment under an optimal resource allocation appears inthe objective.
For the model (4), let
hij ¼mj�pij
a; if d4Gi � mjai P 0;
mj�pija þ ðd4Gi � mjaiÞ�ui; if d4Gi � mjai < 0:
(ð11Þ
The optimal sequence is obtained, as the following assignmentproblem
minXn
i¼1
Xn
j¼1
hijzij; ð12Þ
s:t: Xn
i¼1
zij ¼ 1; i ¼ 1;2; . . . ;n;
Xn
j¼1
zij ¼ 1; j ¼ 1;2; . . . ;n;
zij ¼ 0 or 1; i; j ¼ 1;2; . . . ;n:
D. Wang et al. / Computers & Industrial Engineering 59 (2010) 458–462 461
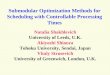
Recall that solving an assignment problem of size n requires aneffort of O(n3) (using the well-known Hungarian method), hencethe optimal sequence can be found in polynomial time.
Lemma 2. The optimal sequence, for the models (3) and (4), can bedetermined by solving a linear assignment problem requiring O(n3)time.
Proof. The proof follows from the analysis above. h
The results of our analysis are summarized in the followingoptimization algorithm that solves our problem, for these bothobjective functions, with a linear resource consumption.
Algorithm 1. (The optimization algorithm for the linear resourceconsumption function)
Step 1. Calculate the kij by using Eq. (9) for the model (3) and cal-culate the hij by using Eq. (11) for the model (4).
Step 2. For the models (3) and (4), solve the assignment problems(10) and (12) to determine the optimal job sequence,respectively, and for each assignment problem denotethe resulting optimal sequence by p* = [J[1], J[2], . . ., J[n]].
Step 3. Calculate the optimal resources by using Eq. (6) for themodel (3) and Eq. (8) for the model (4).
Step 4. Calculate the optimal processing times by using Eq. (1) forthe models (3) and (4).
Theorem 1. Algorithm 1 solves the scheduling problems 1jpj ¼�pjra � ajujjd1Cmax þ d2TCþ d3TADCþ d4
Pnj¼1Gjuj and 1jpj ¼ �pjra�
ajujjd1Cmax þ d2TWþ d3TADWþ d4Pn
j¼1Gjuj in O(n3) time.
Proof. The correctness of the algorithm follows from Lemmas 1and 2. Step 1 requires O(n2) and Step 2 O(n3) time; Steps 3 and 4can be performed in linear time. Thus the overall computationalcomplexity of the algorithm is O(n3), which is equal to the compu-tational complexity of Step 2. h
4. Solution with a convex resource consumption function
By substituting (2) into (3) and (4), we obtain the followingexpressions:
f ðp;uÞ ¼ d1Cmax þ d2TCþ d3TADCþ d4
Xn
j¼1
Gjuj
¼Xn
j¼1
xj�p½j�j
a
u½j�
� �k
þ d4
Xn
j¼1
G½j�u½j�; ð13Þ
where xj = d1 + d2(n + 1 � j) + d3(j � 1)(n � j + 1).
f ðp;uÞ ¼ d1Cmax þ d2TWþ d3TADWþ d4
Xn
j¼1
Gjuj
¼Xn
j¼1
mj
�p½j�ja
u½j�
� �k
þ d4
Xn
j¼1
G½j�u½j�; ð14Þ
where mj = d1 + d2(n � j) + d3j(n � j).In the following lemma, we determine the optimal resource
allocation, denoted by u*(p), as a function of the job sequence foreach of the objective functions.
Lemma 3. The optimal resource allocation as a function of the jobsequence, u*(p), is:
u�½j� ¼kxj
d4G½j�
� � 1kþ1
� ð�p½j�jaÞk
kþ1; ð15Þ
for the objective function d1Cmax þ d2TCþ d3TADCþ d4Pn
j¼1Gjuj,where xj = d1 + d2(n + 1 � j) + d3(j � 1)(n � j + 1);
u�½j� ¼kmj
d4G½j�
� � 1kþ1
� ð�p½j�jaÞk
kþ1; ð16Þ
for the objective function d1Cmax þ d2TWþ d3TADWþ d4Pn
j¼1Gjuj,where mj = d1 + d2(n � j) + d3j(n � j).
Proof. By taking the derivative of each of the objectives given by(13) and (14) with respect to u[j], j = 1,2, . . .,n, equating it to zeroand solving it for u[j], we obtain (15) and (16). Since each of theobjectives is a convex function, (15) and (16) provide necessaryand sufficient conditions for optimality. h
By substituting (15) into (13) and (16) into (14), we obtain anew unified expression for the cost function for the these bothobjective functions under an optimal resource allocation and as afunction of the job sequence:
f ðp;u�ðpÞÞ ¼ k�k
kþ1 þ k1
kþ1
� �� ðd4Þ
kkþ1 �
Xn
j¼1
h½j�/j; ð17Þ
where
h½j� ¼ ðG½j�p½j�Þk
kþ1 ð18Þ
and
/j ¼ ðxjjakÞ
1kþ1 ð19Þ
for the objective function d1Cmax þ d2TCþ d3TADCþ d4Pn
j¼1Gjuj,where xj = d1 + d2(n + 1 � j) + d3(j � 1)(n � j + 1); and
/j ¼ ðmjjakÞ
1kþ1 ð20Þ
for the objective function d1Cmax þ d2TWþ d3TADWþ d4Pn
j¼1Gjuj,where mj = d1 + d2(n � j) + d3j(n � j).
In order to find the job sequence that minimizes f(p,u*(p)), wehave to optimally match the positional penalties /j with the job-dependent costs hj. The optimal matching is obtained by applyingthe following lemma.
Lemma 4. The optimal job sequence is obtained by matching thesmallest /j value to the job with the largest hj value, the secondsmallest /j value to the job with the second largest hj value, and so on.The index of the /j matched with hj specifies the position of job j in theoptimal sequence for j = 1,2, . . .,n.
Proof. This follows from a well-known result in linear algebraabout the minimization of a scalar product of two vectors (seeHardy, Littlewood, & Polya, 1934). h
The results of our analysis are summarized in the following opti-mization algorithm that solves our problem for these both objectivefunctions with the convex resource consumption given in (2).
Algorithm 2. (The optimization algorithm for all three duedate assignment methods with a convex resource consumptionfunction).
Step 1. For each objective function, calculate /j and hj forj = 1,2,. . .,n by (18)–(20).
Step 2. Sequence the jobs according to Lemma 4, and for eachmethod denote the resulting optimal sequence by p* =[J[1], J[2], . . ., J[n]].
Step 3. Calculate the optimal resources by using Eq. (15) for themodel (3) and Eq. (16) for the model (4).
Step 4. Calculate the optimal processing times by using Eq. (2) forthe models (3) and (4).

462 D. Wang et al. / Computers & Industrial Engineering 59 (2010) 458–462
Theorem 2. Algorithm 2 solves the scheduling problems 1jpj ¼�pjr
a
uj
� �kjd1Cmax þ d2TCþ d3TADCþ d4
Pnj¼1Gjuj and 1jpj ¼
�pjra
uj
� �kj
d1Cmax þ d2TWþ d3TADWþ d4Pn
j¼1Gjuj in O(nlogn) time.
Proof. The correctness of the algorithm follows from Lemmas 3and 4. Steps 1, 3, and 4 can be performed in linear time and Step2 requires O(nlogn) time. Thus the overall computational complex-ity of the algorithm is O(nlogn), which is equal to the computa-tional complexity of Step 2. h
5. Conclusions
The resource allocation problem of scheduling n jobs withlearning effect has been studied. The objective function is to min-imize a cost function containing makespan, total completion (wait-ing) time, total absolute differences in completion (waiting) timesand total resource cost. We have presented polynomial time algo-rithms for linear and convex resource consumption functions. Infuture research, we plan to explore more general position-re-source-dependent processing times models, consider different re-source consumption functions and extend the problems tomultiple machine settings.
Acknowledgements
We are grateful to the editor and an anonymous referee for his/her helpful comments on an earlier version of this paper. This re-search was supported by the National High Technology Researchand Development Program of China (2008AA04Z107).
References
Alidaee, B., & Ahmadian, A. (1993). Two parallel machine sequencing problemsinvolving controllable job processing times. European Journal of OperationalResearch, 70, 335–341.
Armstrong, R., Gu, S., & Lei, L. (1995). An algorithm for the two-resource allocationproblem with a non-differentiable convex objective function. Journal of theOperational Research Society, 46, 116–122.
Armstrong, R., Gu, S., & Lei, L. (1997). Solving a class of two-resource allocationproblem by equivalent load method. Journal of the Operational Research Society,48, 818–825.
Bagchi, U. B. (1989). Simultaneous minimization of mean and variation of flow-timeand waiting time in single machine systems. Operations Research, 37, 118–125.
Biskup, D. (1999). Single-machine scheduling with learning considerations.European Journal of Operational Research, 115, 173–178.
Biskup, D. (2008). A state-of-the-art review on scheduling with learning effects.European Journal of Operational Research, 188, 315–329.
Biskup, D., & Jahnke, H. (2001). Common due date assignment for scheduling on asingle machine with jointly reducible processing times. International Journal ofProduction Economics, 69, 317–322.
Cheng, T. C. E., Ogaz, C., & Qi, X. D. (1996). Due-date assignment and single machinescheduling with compressible processing times. International Journal ofProduction Economics, 43, 29–35.
Cheng, T. C. E., & Wang, G. (2000). Single machine scheduling with learning effectconsiderations. Annals of Operations Research, 98, 273–290.
Cheng, T. C. E., Wu, C. C., & Lee, W.-C. (2008a). Some scheduling problems with sum-of-processing-times-based and job-position-based learning effects. InformationSciences, 178(11), 2476–2487.
Cheng, T. C. E., Wu, C. C., & Lee, W.-C. (2008b). Some scheduling problems withdeteriorating jobs and learning effects. Computers and Industrial Engineering, 54,972–982.
Daniels, R. L. (1990). A multi-objective approach to resource allocation in singlemachine scheduling. European Journal of Operational Research, 48, 226–241.
Eren, T. (2009a). A bicriteria parallel machine scheduling with a learning effect ofsetup and removal times. Applied Mathematical Modelling, 33, 1141–1150.
Eren, T. (2009b). A note on minimizing maximum lateness in an m-machinescheduling problem with a learning effect. Applied Mathematics andComputation, 209, 186–190.
Eren, T., & Guner, E. (2007a). A bicriteria scheduling with a learning effect: Totalcompletion time and total tardiness. INFOR: Information Systems and OperationalResearch, 45, 75–81.
Eren, T., & Guner, E. (2007b). Minimizing total tardiness in a scheduling problemwith a learning effect. Applied Mathematical Modelling, 31, 1351–1361.
Graham, R. L., Lawler, E. L., Lenstra, J. K., & Rinnooy Kan, A. H. G. (1979).Optimization and approximation in deterministic sequencing and scheduling: Asurvey. Annals of Discrete Mathematics, 5, 287–326.
Hardy, G. H., Littlewood, J. E., & Polya, G. (1934). Inequalities. Cambridge: CambridgeUniversity Press.
Hoogeveen, H., & Woeginger, G. J. (2002). Some comments on sequencing withcontrollable processing times. Computing, 68, 181–192.
Janiak, A. (1987). One-machine scheduling with allocation of continuously-divisibleresource and with no precedence constraints. Kybernetika, 23(4), 289–293.
Kanet, J. J. (1981). Minimizing variation of flow time in single machine systems.Management Science, 27(12), 1453–1459.
Lee, W. C., & Wu, C. C. (2009). Some single-machine and m-machine flowshopscheduling problems with learning considerations. Information Sciences, 179,3885–3892.
Monma, C. L., Schrijver, A., Todd, M. J., & Wei, V. K. (1990). Convex resourceallocation problems on directed acyclic graphs: Duality, complexity, specialcases, and extensions. Mathematics of Operations Research, 15, 736–748.
Ng, C. T. D., Cheng, T. C. E., Kovalyov, M. Y., & Lam, S. S. (2003). Single machinescheduling with a variable common due date and resource-dependentprocessing times. Computers and Operations Research, 30, 1173–1185.
Nowicki, E., & Zdrzalka, S. (1990). A survey of results for sequencing problems withcontrollable processing times. Discrete Applied Mathematics, 26, 271–287.
Panwalkar, S. S., & Rajagopalan, R. (1992). Single-machine sequencing withcontrollable processing times. European Journal of Operational Research, 59,298–302.
Pinedo, M. (2002). Scheduling: Theory, algorithms, and systems. Upper Saddle River,NJ: Prentice-Hall.
Scott, S. C., & Jefferson, T. R. (1995). Allocation of resources in project management.International Journal of Systems Science, 26(2), 413–420.
Shabtay, D. (2004). Single and two-resource allocation algorithms for minimizingthe maximal lateness in a single machine-scheduling problem. Computers andOperations Research, 31(8), 1303–1315.
Shabtay, D., & Kaspi, M. (2004). Minimizing the total weighted flow time in a singlemachine with controllable processing times. Computers and Operations Research,31(13), 2279–2289.
Shabtay, D., & Steiner, G. (2007). A survey of scheduling with controllableprocessing times. Discrete Applied Mathematics, 155(13), 1643–1666.
Shabtay, D., & Steiner, G. (2008). The single-machine earliness–tardiness schedulingproblem with due date assignment and resource-dependent processing times.Annals of Operations and Research, 159, 25–40.
Toksar, M. D., & Guner, E. (2008). Minimizing the earliness/tardiness costs onparallel machine with learning effects and deteriorating jobs: A mixednonlinear integer programming approach. International Journal of AdvancedManufacturing Technology, 38, 801–808.
Van Wassenhove, L., & Baker, K. R. (1982). A bicriterion approach to time/cost trade-offs in sequencing. European Journal of Operational Research, 11, 48–54.
Vickson, R. G. (1980). Two single machine sequencing problems involvingcontrollable job processing times. AIIE Transactions, 12(3), 258–262.
Wan, G., Yen, B. P. C., & Li, C. L. (2001). Single machine scheduling to minimize totalcompression plus weighted flow cost is NP-hard. Information Processing Letters,79, 273–280.
Wang, X., & Cheng, T. C. E. (2005). Single machine scheduling with resourcedependent release times and processing times. European Journal of OperationalResearch, 162, 727–739.
Wang, J.-B., & Xia, Z.-Q. (2007). Single machine scheduling problems withcontrollable processing times and total absolute differences penalties.European Journal of Operational Research, 177(1), 638–645.
Wu, C.-C., & Lee, W.-C. (2009). Single-machine and flowshop scheduling with ageneral learning effect model. Computer and Industrial Engineering, 56,1553–1558.
Yedidsion, L., Shabtay, D., & Moshe, K. (2007). A bicriteria approach to minimizemaximal lateness and resource consumption for scheduling a single machine.Journal of Scheduling, 10, 341–352.
Zhu, V. C. Y., Sun, L., Sun, L., & Li, X. (2010). Single machine scheduling time-dependent jobs with resource-dependent ready times. Computers and IndustrialEngineering, 58, 84–87.



![Pamukkale University Journal of Engineering Sciencesdynamic job-shop scheduling problem ... [41] Sequence-dependent setup times SRs Flowtime and tardiness, makespan, tardy jobs and](https://img.pdfslide.net/doc/110x75/60df2e28b666e81ebd71dfaa/pamukkale-university-journal-of-engineering-sciences-dynamic-job-shop-scheduling.jpg)