Embed Size (px)
Citation preview

MANIPULATOARE SI ROBOTI INDUSTRIALI 1
Sisteme de actionare pentru
conducerea robotilor industriali
Forma finala a modelului dinamic:
)q(G)q,q(Vq)q(M ••••
M - matricea maselor elementelor robotului
V – vectorul termenilor centrifugali si Coriolis
G – matricea termenilor gravitatiei
q - vectorul variabilelor articulatie
τ – vectorul cuplurilor articulatie

Exemplu – robot PUMA
MANIPULATOARE SI ROBOTI INDUSTRIALI 2
Actionare in
articulatia 1

Exemplu – robot PUMA
MANIPULATOARE SI ROBOTI INDUSTRIALI 3
Actionare in
articulatia 2

Exemplu – robot PUMA
MANIPULATOARE SI ROBOTI INDUSTRIALI 4
Actionare in
articulatia 3

Exemplu – robot PUMA
MANIPULATOARE SI ROBOTI INDUSTRIALI 5
Actionare in
articulatia
apucatorului
MANIPULATOARE SI ROBOTI INDUSTRIALI 6
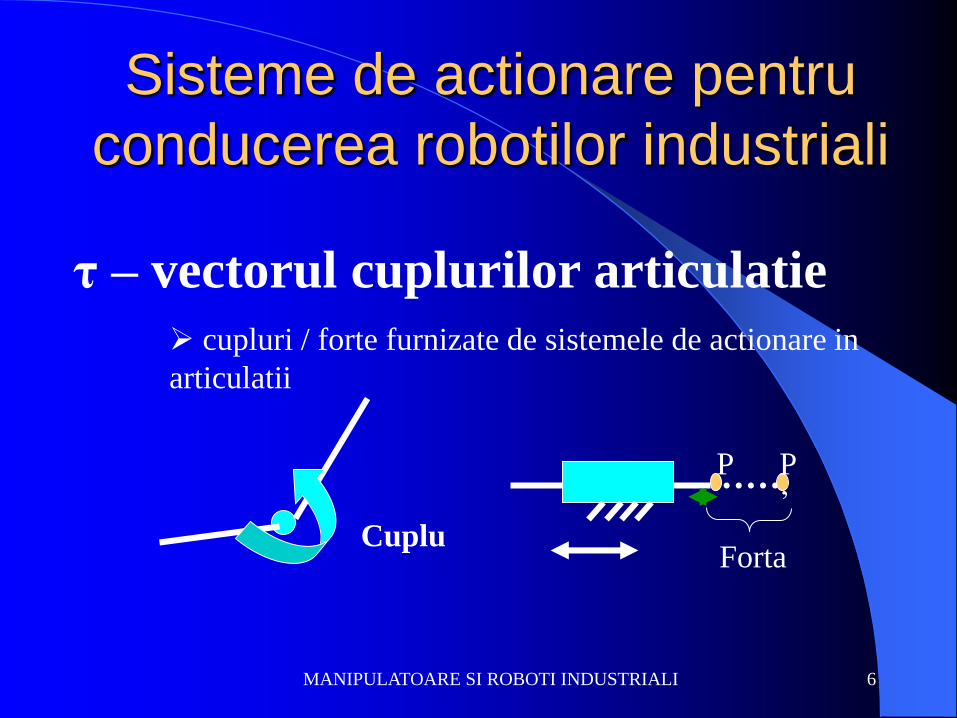
Sisteme de actionare pentru
conducerea robotilor industriali
τ – vectorul cuplurilor articulatie
➢ cupluri / forte furnizate de sistemele de actionare in
articulatii
P P
’
FortaCuplu

7
Sisteme de actionare
➢ cuprind sursele de alimentare ale robotului si sistemele de
control.
➢ Sistem de actionare: motoare + control care furnizeaza
energia pentru miscarea robotului.
Motor cu actionare
liniara, hidraulic
Actionare
pneumatica

MANIPULATOARE SI ROBOTI INDUSTRIALI 8
Structura sistemelor de actionare
SURSA PRIMARA DE
ENERGIE
CONVERSIE
SISTEM DE
TRANSMISIE
ROBOT
SISTEM DE
CONTROL
Energie primara
Energie mecanica

MANIPULATOARE SI ROBOTI INDUSTRIALI 9
Surse primare de energie• hidraulica – procentual, in cele mai
multe sisteme de actionare a RI datorita
unor caracterisitici deosebite legate de
raportul forta/greutate.
• electrica – performante deosebite in
control
• pneumatica – pondere redusa ;
indeosebi in sisteme de comanda ale
dispozitivelor auxiliare sau pentru RI la
care nu se cere o precizie deosebita de
pozitionare (exp. roboti de vopsire)

MANIPULATOARE SI ROBOTI INDUSTRIALI 10
Sursa de energie electrica
Transfor-
mator
CA
Convertor
CA
in
CC
Diferite
tensiuni
in
CC
Tensiuni
in CA
Motoare de
mare
putere
- utilizare – roboti de talie mica (sarcini manipulate 0-5daN) si medie
(sarcini 5-160 daN).

MANIPULATOARE SI ROBOTI INDUSTRIALI 11
Sisteme de actionare cu
motoare de CCAVANTAJE:
-cupluri cvasiindependente de pozitia si viteza rotorului
- cuplurile depind numai de curentii in indus si inductor.
Daca se inlocuieste inductorul prin magneti permanenti,
cuplul este aproximativ proportional cu curentul indus, iar
viteza de rotatie nu depinde decat de tensiunea de
alimentare.

MANIPULATOARE SI ROBOTI INDUSTRIALI 12
Sisteme de actionare
cu motoare de CCDEZAVANTAJE:
- constante de timp mari
- capacitate mica de suprasarcina
- fiabilitate redusa datorita
comutatiei mecanice
- caracteristici neliniare

13
Motor CC – principiu
functionare

MANIPULATOARE SI ROBOTI INDUSTRIALI 16
Tipuri de motoare de CC
utilizate in robotica
- motor de CC cu rotor disc
- motor de CC cu rotor pahar
Elimina dezavantajul
constantelor de timp
mari
- motor de CC fara perii, cu
indusul pe stator si comutatie
electronica
Cresterea fiabilitatii prin
eliminarea comutatiei
mecanice

MANIPULATOARE SI ROBOTI INDUSTRIALI 17
Motor CC cu
rotor disc

MANIPULATOARE SI ROBOTI INDUSTRIALI 18
Motor CC cu
rotor pahar

MANIPULATOARE SI ROBOTI INDUSTRIALI 19
Motor CC cu comutatie
inversata - exemplu
infasurari
Rotor cu magneti
permanenti
Stator

MANIPULATOARE SI ROBOTI INDUSTRIALI 20
Motor de CC fara perii
unipolar, cu trei spire

MANIPULATOARE SI ROBOTI INDUSTRIALI 21
Controlul reversarii sensului
de rotatie

MANIPULATOARE SI ROBOTI INDUSTRIALI 22
Accesorii utilizate in cadrul
servomecanismelor de pozitionare
cu motor de CC pentru MRI- tahogenerator
- traductor de pozitie
- reductor de viteza
- sistem de blocare a rotorului in
stare de repaus
Frine cu arc, frine la intreruperea alimentarii …
http://www.ogura-clutch.com/products/industrial/

MANIPULATOARE SI ROBOTI INDUSTRIALI 23
Schema bloc de actionare a
motorului de CC
Elaborare
semnal
comanda
Amplificator
de putere Mcomanda
Reactie de viteza
Reactie dupa pozitie
Reactie de curentTaho-
generatorTraductor
de pozitie

24
Exemple: traductoare
pozitie

MANIPULATOARE SI ROBOTI INDUSTRIALI 25
Exemplu servomotor si
traductoare de pozitie
Servomotor GWS S03N 2BB
• Dimensiuni :
39.5x20.0x39.6mm
• Greutate: 41g
• Cuplu (@4.8V) 2.4kg*cm

MANIPULATOARE SI ROBOTI INDUSTRIALI 26
Alimentarea motoarelor de CC
cu impulsuri modulate in durata
Un ciclu Un ciclu
Un ciclu
30%
50%

MANIPULATOARE SI ROBOTI INDUSTRIALI 27
Alimentarea motoarelor de CC
cu impulsuri modulate in durata
- avantaj – posibilitatea comenzii regimurilor de
lucru cu ajutorul calculatorului => prescrierea unei
viteze maxime de deplasare intre doua puncte ale
traiectoriei.
- profilurile de viteza si acceleratie sunt memorate in
calculator
- algoritmul de conducere va calcula viteza maxima
de deplasare si continuu, distanta pana la pozitia de
la care se incepe franarea.

MANIPULATOARE SI ROBOTI INDUSTRIALI 28
Expresia matematica a transferului energetic in
articulatii dotate cu motor de CC cu magneti
permanenti
+
-U(t)
Ub(t)+
-
L R ia(t) τm θm τs
Φ
MANIPULATOARE SI ROBOTI INDUSTRIALI 29
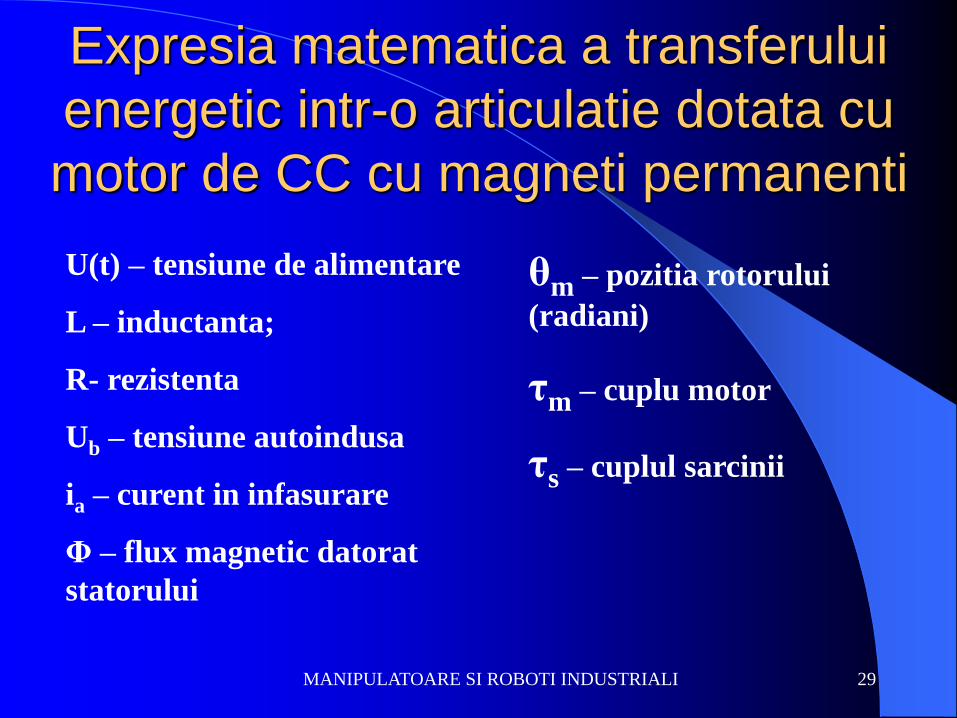
Expresia matematica a transferului
energetic intr-o articulatie dotata cu
motor de CC cu magneti permanenti
U(t) – tensiune de alimentare
L – inductanta;
R- rezistenta
Ub – tensiune autoindusa
ia – curent in infasurare
Φ – flux magnetic datorat
statorului
θm – pozitia rotorului
(radiani)
τm – cuplu motor
τs – cuplul sarcinii

MANIPULATOARE SI ROBOTI INDUSTRIALI 30
Expresia matematica a transferului
energetic intr-o articulatie dotata cu
motor de CC cu magneti permanenti
ba
a UURidt
diL
ama1m ikik
dt
dkkkU m
bmbm2b
Km – constanta de
cuplu [Nm/A]
Kb – constanta

MANIPULATOARE SI ROBOTI INDUSTRIALI 31
Momentele de inertie
JmotorJreductor
Jsarcina
M
τm
θm= r θs
θs
τs
Jtot=Jm + Jr
smm
m2
m
2
tot rdt
dB
dt
dJ
dt
dB m
m
-cuplul frecarilor
vascoase

MANIPULATOARE SI ROBOTI INDUSTRIALI 32
Functiile de transfer
Transferul direct U(s) --> θm(s) (τs =0)
mbmtot
mm
kkBsJRsLs
k
)s(U
)s(
Transferul τs (s) --> θm(s) (U = 0); τs – sunt cupluri articulatie
mbmtots
m
kkBsJRsLs
RsLr
)s(
)s(
33
Sisteme electromecanice cu reductoare
• Cele mai multe dintre motoare (cu injectie,
electrice) genereaza putere mecanica la viteze
mari si cupluri reduse, ceea ce nu este
intotdeauna util.
• Sistemele electromecanice cu reductoare
indeplinesc functia de a reduce viteza si de a
creste cuplul astfel incat marimile de iesire din
sistem sa se afle intr-un domeniu de valori dorit.

34
Sisteme electromecanice cu reductoare
r1
r21 T1
2 T2
N1
N2
T1, T2 – cupluri (torque)
G-raport de transformare
Intr-un reductor ideal puterea se conserva si deci:

35
Sisteme electromecanice cu reductoare
Prin intermediul reductorului, inertia este afectata cu
un termen reprezentand patratul raportului de
transformare. Daca J2 este inertia unei sarcini
conectata la iesirea reductorului atunci inertia
aparenta la intrarea acestuia va fi:G2J2 .
Amortizarea (damping) si rigiditatea (stiffness)
definite prin coeficientii lor D2 respectiv K2, sunt
afectate in acelasi mod prin intermediul unui reductor.
Astfel amortizarea aparenta va fi G2D2 iar rigiditatea
aparenta G2K2 .

36
Sisteme electromecanice cu reductoare
In multe aplicatii legate de controlul unor sisteme
electromecanice, pentru a obtine performantele
dorite, dorim a maximiza rata transferului de putere
sursa-consumator. Aceasta poate fi echivalent cu a
maximiza acceleratia sistemului condus. Obiectivul
se realizeaza prin asa-numita potrivire a
impedantelor, si este important in momentul cand
este ceruta proiectarea unui sistem electromecanic si
alegerea raportului de transmisie.
37
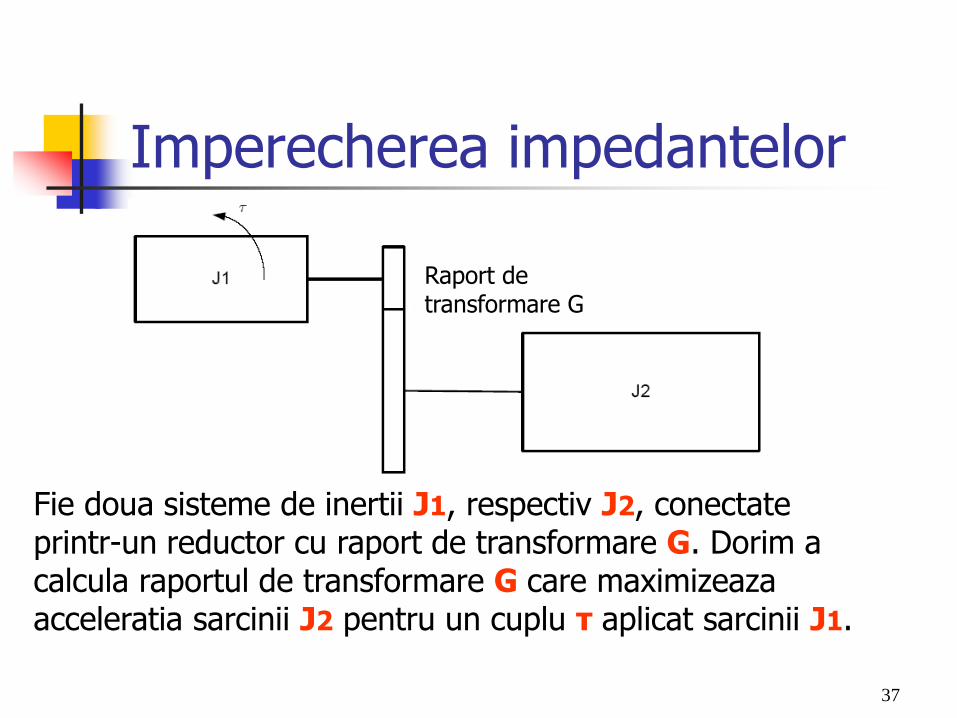
Imperecherea impedantelor
Raport de transformare G
Fie doua sisteme de inertii J1, respectiv J2, conectate printr-un reductor cu raport de transformare G. Dorim a calcula raportul de transformare G care maximizeaza acceleratia sarcinii J2 pentru un cuplu τ aplicat sarcinii J1.

38
Imperecherea impedantelorEcuatiile de miscare pentru cele doua sisteme luate separat sunt:
si prin intermediul reductorului
Ecuatiile de miscare pentru sistemul al doilea devin
de unde rezulta:

39
Imperecherea impedantelor
Cautam sa maximizam acceleratia sistemului 2 relativ la raportul de transformare G:
Concluzie: se alege raportul
de transformare al reductorului ca radacina patrata din raportul inertie sistem conducator –inertie sistem condus. Procedura e denumita imperecherea impedantelor.

40
Etape dimensionare - Servo-control
• In aplicatiile tip servo-control performantele in
accelerare/decelerare sunt esentiale in obtinerea unor
performante dorite.
• Imperecherea impedantelor asigura maximizarea
acceleratiei sarcinii, sugerand ca raportul de transformare al
reductorului trebuie ales astfel incat inertia reflectata a
sarcinii (ceea ce dorim a controla) sa se potriveasca cu
inertia rotorului motorului (partea in miscare a motorului).
Astfel se maximizeaza rata de cedare/(extragere) a puterii
catre/(de la) sarcina.

41
Etape dimensionare - Servo-control
Etapele procesului de alegere a motorului pentru aplicatiile in care performantele in accelerare sunt importante:
1. Determinarea momentului de inertie al sarcinii de condus.
2. Pentru a maximiza acceleratia, momentul de inertie al rotorului raportat la punctul de aplicatie al sarcinii trebuie sa egaleze momentul de inertie al sarcinii. In baza aceastei afirmatii se va dubla Minertie sarcina pentru a obtine Minertie efectiv, al sarcinii si rotorului, raportat la punctul de aplicatie al sarcinii.

42
Etape dimensionare - Servo-control
3. Se face o aproximare a acceleratiei maxime, ceruta in sarcina, pe baza datelor aplicatiei.
4. Se determina cuplul maxim necesar a fi livrat la nivelul sarciniiprin multiplicarea Minertie efectiv cu acceleratia maxima.
5. Se adauga actiunea unor forte disipative (exp. Forte de frecarivascoase) pentru a determina cuplul total.
6. Se determina viteza de rotatie nominala in sarcina pe bazacunostintelor specifice aplicatiei.
7. Se calculeaza produsul viteza de rotatie nominala * cuplu (pct 5) pentru a estima puterea maxima pe care motorul trebuie sa o furnizeze.

43
Etape dimensionare - Servo-control
8. Din cataloage se selecteaza motorul capabil a furniza puterea ceruta. Daca aceasta nu este data in catalog, se poate calcula ca produs intre cuplul static (stall torque) si viteza la mers in gol de impartit la 4.
9. Odata identificat motorul pe baza puterii dorite, se calculeaza raportul de transformare al reductorului G necesar pentru a maximiza acceleratia (imperechere impedante).
10. Cu valoarea raportului G determinata se verifica daca la viteza
nominala specificata la pct.6, motorul este capabil sa furnizeze
cuplul cerut (pct.5).
Etapele se pot parcurge de 2 –3 ori pana la obtinerea motorului care satisface din punct de vedere al performantelor cerute de aplicatie.
44
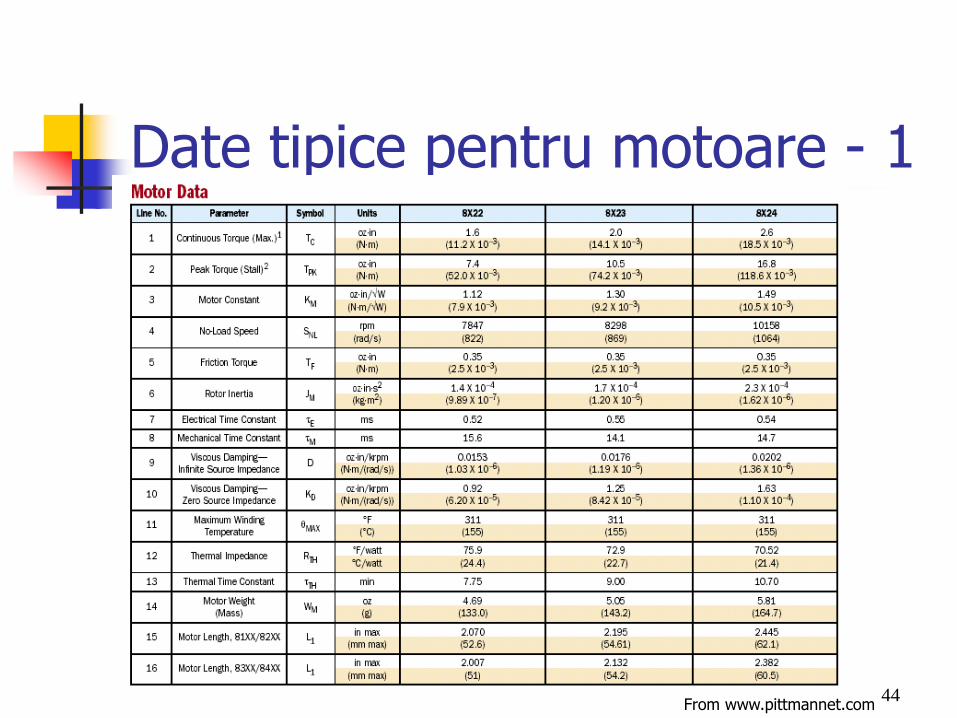
Date tipice pentru motoare - 1
From www.pittmannet.com

45
Date tipice pentru motoare -2
From www.pittmannet.com

MANIPULATOARE SI ROBOTI INDUSTRIALI 46
Sisteme de
actionare cu
motoare pas cu pas
AVANTAJE:
- Nu necesita reactie pentru controlul unghiului de rotatie sau al
vitezei
- timpul de raspuns al MPP este cel mai scurt
- fiabilitate ridicata
- asociate cu amplificatoare hidraulice de cuplu, al caror distribuitor
este comandat de MPP, se pot obtine valori mari ale cuplului.
-Motorul are cuplu maxim la pornire – cand faza este alimentata

MANIPULATOARE SI ROBOTI INDUSTRIALI 47
Sisteme de actionare cu
motoare pas cu pas
DEZAVANTAJE:
- Probleme de stabilitate in
regimurile accelerare-decelerare
(in special la viteze mari)
- cuplul este functie de pozitia
rotorului
- pasul nu poate fi reglat, fiind
cel realizat prin constructie. Ta - cuplul sarcinii
Th – cuplul maxim dezvoltat
de motor

MANIPULATOARE SI ROBOTI INDUSTRIALI 48
Tipuri de MPPa) MPP cu magneti permanenti
N
S
A
A’
B’ B-rotorul tinde sa ocupe pozitia in care
ΦAA’ sa fie maxim
- alimentand ambele faze AA’ si BB’,
rotorul se va pozitiona la mijloc

MANIPULATOARE SI ROBOTI INDUSTRIALI 49
Tipuri de MPPa) MPP cu magneti permanenti
- In general au cost redus
- Rezolutie redusa cu unghiuri
de pas in intervalul 7.50 – 150
(48-24 pasi/rotatie);
-cuplu mai bun decat MPP cu
reluctanta variabila (polii
magnetizati ai rotorului
furnizeaza o intensitate mai
mare a fluxului magnetic ->
cuplu mai bun). MPP cu rotor disc tip Portescap

MANIPULATOARE SI ROBOTI INDUSTRIALI 50
Tipuri de MPPa) MPP cu magneti permanenti – comanda pe faze
Dinte stator

51
Tipuri de MPP
b) Cu reluctanta variabila
Sectiune MPP cu
reluctanta variabilaContine rotor cu dinti din otel
si stator cu infasurari.
Cind infasurarile statorului sint
alimentate in CC polii sint
magnetizati. Rotatia apare prin
atractia exercitata asupra
dintilor rotorului de catre polii
statorului.

MANIPULATOARE SI ROBOTI INDUSTRIALI 52
Tipuri de MPPb) MPP cu reluctanta variabila

MANIPULATOARE SI ROBOTI INDUSTRIALI 53
MPP cu reluctanta variabila
POL
DINTI
-60 pasi
-Pas unghiular 6o

54
Motoare pas cu pasb) Hibrid (HB)
SectiuneMai scump, dar ofera
performante mai bune in privinta
rezolutiei pasului, cuplu si viteza.
Unghiuri de pas tipice 3.6° la
0.9° (100 – 400 pasi /rotatie).

MANIPULATOARE SI ROBOTI INDUSTRIALI 55
Tipuri de MPPc) MPP hibride

MANIPULATOARE SI ROBOTI INDUSTRIALI 57
MPP – reducerea pasului
Stator 1 Stator 2 Stator 3

MANIPULATOARE SI ROBOTI INDUSTRIALI 58
MPP liniare
x
Armatura pasiva
Armatura activa
Material nemagnetic
Bobine de excitatie
MPP liniare – cu o singura armatura pasiva

59
MPP liniare

MANIPULATOARE SI ROBOTI INDUSTRIALI 60
MPP liniare
Material nemagnetic
Bobine de excitatie
MPP liniare – cu doua armaturi pasive
Armatura activa
Armatura pasiva
Armatura pasiva

61
MPP liniare pe doua axe
http://www.techno-isel.com/tic/Catdas/xytable2.htm

MANIPULATOARE SI ROBOTI INDUSTRIALI 62
MPP liniar cu doua armaturi
pasive
AVANTAJ
- compensare reciproca a fortelor de atractie dintre armatura
activa si cele pasive.
Simplificarea dispozitivelor de sustinere

MANIPULATOARE SI ROBOTI INDUSTRIALI 63
MPP liniar cu deplasare pe
doua axe
Armatura 1 Dinti din material magnetic
Armatura 2
Armaturi
active
Armatura 1 contine linii
si coloane ale zonelor
discrete interconectate
magnetic si acoperite cu
material nemagnetic
intre zonele discrete.
MPP de acest tip –
utilizat la pozitionarea
intr-un sistem de
coordonate
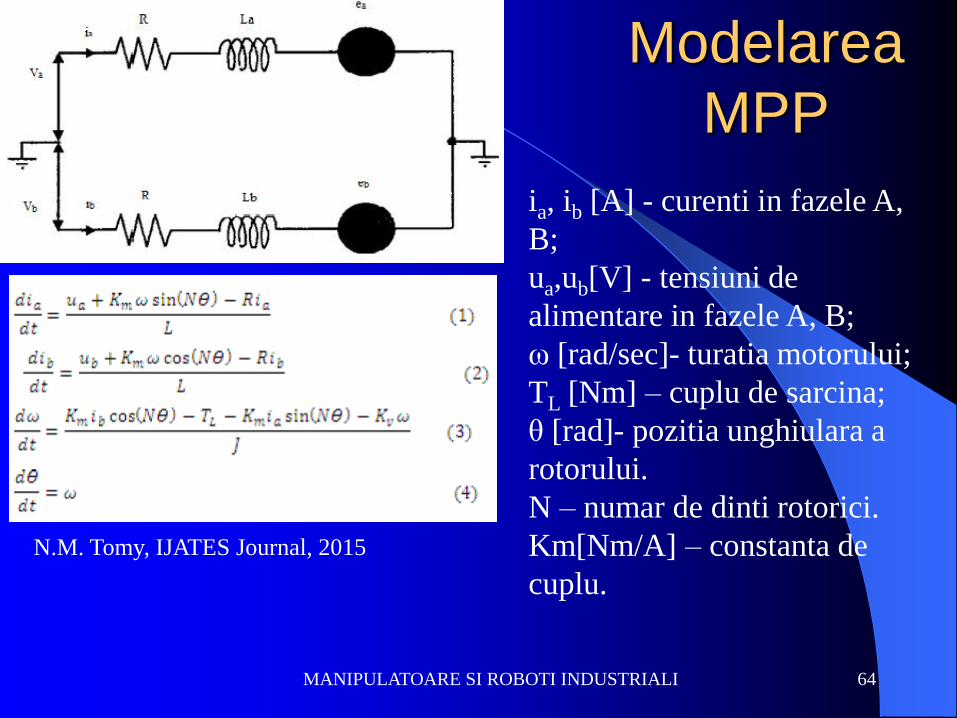
Modelarea
MPP
MANIPULATOARE SI ROBOTI INDUSTRIALI 64
N.M. Tomy, IJATES Journal, 2015
ia, ib [A] - curenti in fazele A,
B;
ua,ub[V] - tensiuni de
alimentare in fazele A, B;
ω [rad/sec]- turatia motorului;
TL [Nm] – cuplu de sarcina;
θ [rad]- pozitia unghiulara a
rotorului.
N – numar de dinti rotorici.
Km[Nm/A] – constanta de
cuplu.

Modelarea
MPP
MANIPULATOARE SI ROBOTI INDUSTRIALI 65
N.M. Tomy, IJATES Journal, 2015
Exemplu parametri pentru un
MPP hybrid:

Modelarea MPP
MANIPULATOARE SI ROBOTI INDUSTRIALI 66
N.M. Tomy, IJATES Journal, 2015
Model
subsistem
curenti din
ecuatiile
(1) si (2).
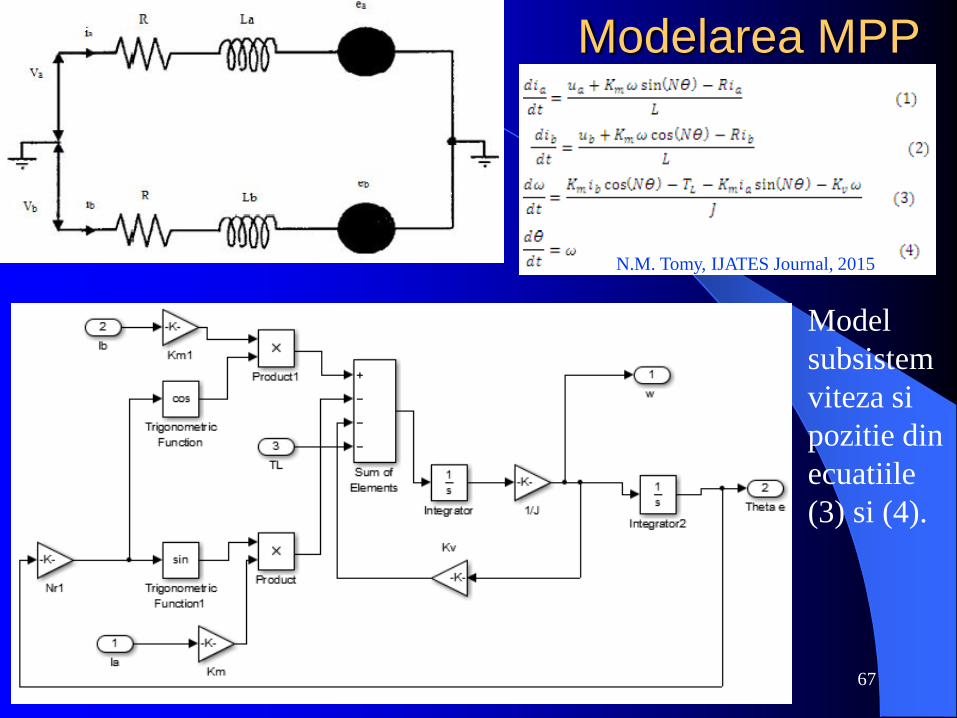
Modelarea MPP
MANIPULATOARE SI ROBOTI INDUSTRIALI 67
N.M. Tomy, IJATES Journal, 2015
Model
subsistem
viteza si
pozitie din
ecuatiile
(3) si (4).
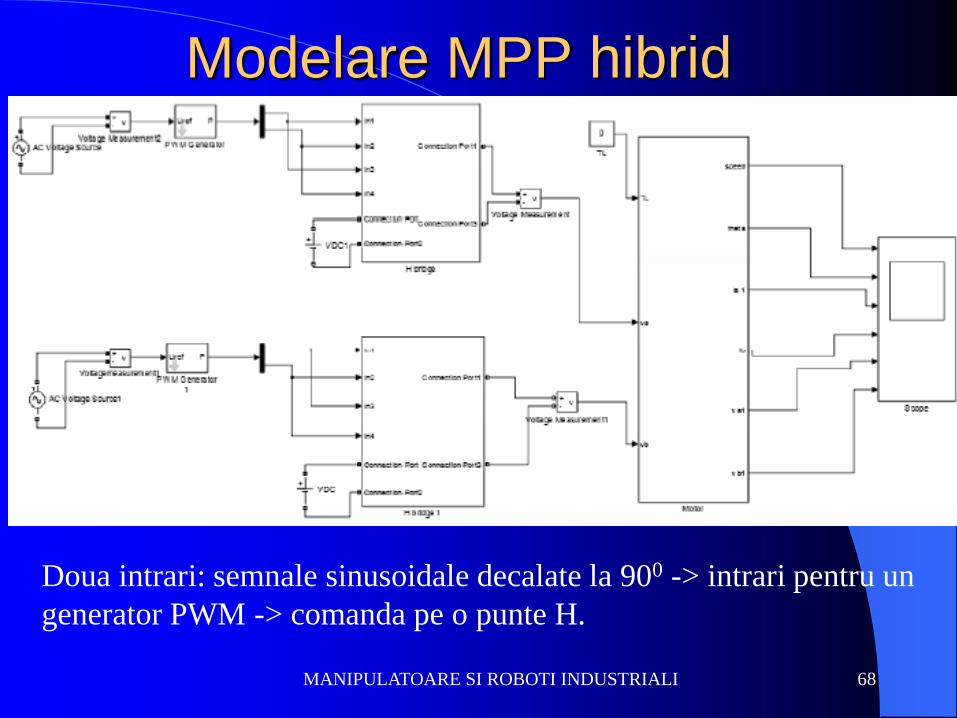
Modelare MPP hibrid
MANIPULATOARE SI ROBOTI INDUSTRIALI 68
Doua intrari: semnale sinusoidale decalate la 900 -> intrari pentru un
generator PWM -> comanda pe o punte H.

Modelare punte H
MANIPULATOARE SI ROBOTI INDUSTRIALI 69

Forme de unda
MANIPULATOARE SI ROBOTI INDUSTRIALI 70
Curenti pe faze
Tensiuni pe faze

Forme de unda
MANIPULATOARE SI ROBOTI INDUSTRIALI 71
Pozitie:
Turatie:

MANIPULATOARE SI ROBOTI INDUSTRIALI 72
Schema de comanda a MPP
Logica
pentru sens
Generator
impulsuri
Numarator
reversibil
Distribuitor
impulsuri
MPP
Amplificator
de putere
Semnal
sens
Frecv.
Nr. pasi
stop
inainte
inapoi
Energie
M, φ
t
φ
12
345
6
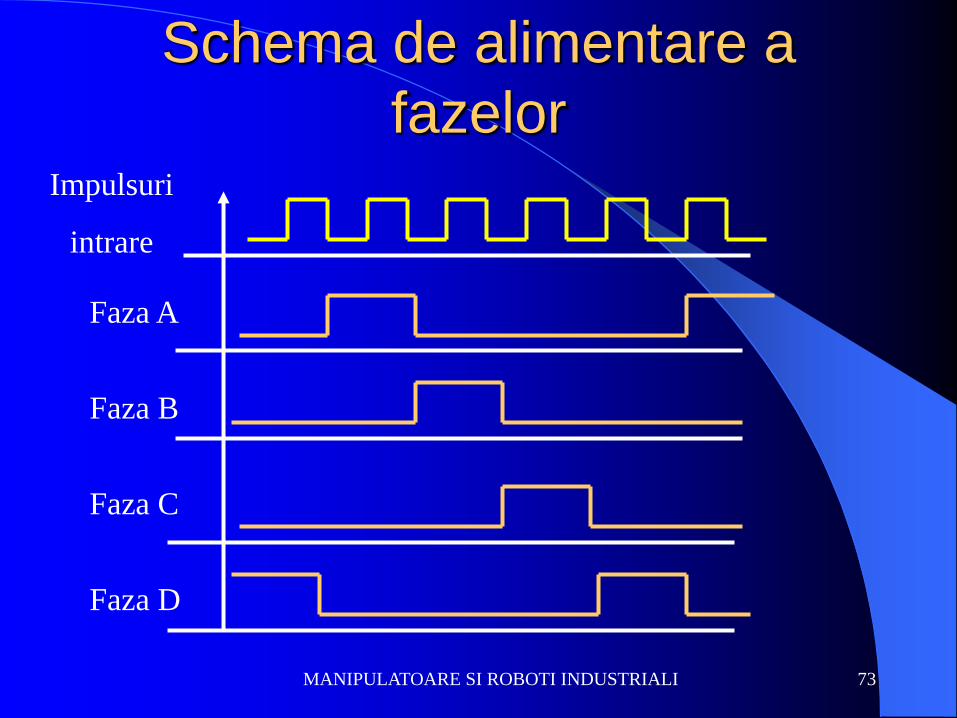
MANIPULATOARE SI ROBOTI INDUSTRIALI 73
Schema de alimentare a
fazelorImpulsuri
intrare
Faza A
Faza B
Faza C
Faza D

Aplicatie – robot cu MPP
MANIPULATOARE SI ROBOTI INDUSTRIALI 74
Schema de principiu a unui
manipulator cu 4 DOF

Caracteristici MPP
MANIPULATOARE SI ROBOTI INDUSTRIALI 75
• Dotare: MPP cu magnet permanent in
rotor
• Tensiune alimentare = 24 V
• Nr faze =4
• Pas unghiular = 18 grade;
• Nr pasi /1 rotatie = 20;
• Curent pe faza = 70mA;
•Rezistenta unei faze = 342 ohmi;
• Frecventa limita de pornire = 180
pasi/sec;
• Cuplu maxim de lucru = 120 gfcm

Dispozitivul de prehensiune cu
2 degete
MANIPULATOARE SI ROBOTI INDUSTRIALI 76

Modul de conectare a fazelor
motorului MPP
MANIPULATOARE SI ROBOTI INDUSTRIALI 77
Alimentare faze in
secventa dubla
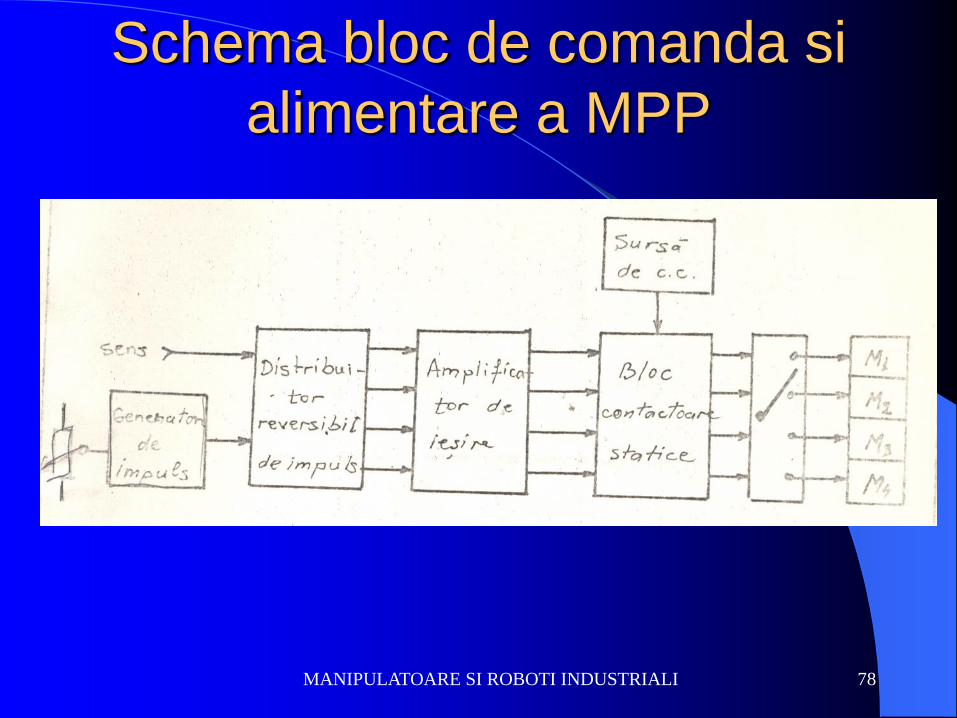
Schema bloc de comanda si
alimentare a MPP
MANIPULATOARE SI ROBOTI INDUSTRIALI 78

Schema generatorului de impulsuri si forma de unda
a tensiunii pe condensatorul C
MANIPULATOARE SI ROBOTI INDUSTRIALI 79

Schema electrica a distribuitorului reversibil
de impulsuri, secventa dubla 12-23-34
MANIPULATOARE SI ROBOTI INDUSTRIALI 80
sens
impulsuri

Circuit JK (Flip-flop)
MANIPULATOARE SI ROBOTI INDUSTRIALI 81
Intrari IesiriDescriere
J K Q -Q
0 0 0 0Memory
no change0 0 0 1
0 1 1 0Reset Q » 0
0 1 0 1
1 0 0 1Set Q » 1
1 0 1 0
Actiune de
comutare1 1 0 1 Basculare

Schema electrica a distribuitorului reversibil
de impulsuri, secventa dubla 12-23-34
MANIPULATOARE SI ROBOTI INDUSTRIALI 82
sens
impulsuri
1
0
Stare actuala: Faza A si D activate; Ce
se intimpla la urmatorul puls ?
1
0 1
0
1
1
0
1
0

Blocul comutatoarelor statice
si amplificatoarelor de iesire
MANIPULATOARE SI ROBOTI INDUSTRIALI 83

Schema elementelor de comutatie
MANIPULATOARE SI ROBOTI INDUSTRIALI 84

Schema electrica a numaratorului de impulsuri
MANIPULATOARE SI ROBOTI INDUSTRIALI 85

Schema blocului de
alimentare
MANIPULATOARE SI ROBOTI INDUSTRIALI 86

Schema generala a robotului cu 4 DOF actionat
cu MPP
MANIPULATOARE SI ROBOTI INDUSTRIALI 87

MANIPULATOARE SI ROBOTI INDUSTRIALI 88
Sisteme de actionare cu motoare
hidraulice
Utile in actionarea robotilor care lucreaza in medii
explozive si/sau trebuie sa manipuleze sarcini
mari.
Avantaje:
– Robustete mare;
– Raport putere/greutate mare;
– Timp de raspuns bun;
– Siguranta in functionare;
– Comportare buna in medii umede, cu praf, etc.

MANIPULATOARE SI ROBOTI INDUSTRIALI 89
Sisteme de actionare cu motoare
hidraulice
Dezavantaje:
– La scaderea temperaturii creste viscozitatea
fluidului;
– Pot exista pierderi de fluid prin neetanseitati;
– Echipamentul de comanda are constructie
complicata.

MANIPULATOARE SI ROBOTI INDUSTRIALI 90
Sisteme de actionare cu motoare
hidraulice
Actionare hidraulica
secventiala cu viteza
maxima in ambele
sensuri:
– 1 rezervor
– 2 filtre
– 3 pompa
– 4 supapa de siguranta
– 5 distribuitor cu sertare
(SD 4/3 – 4 cai si 3
pozitii)

MANIPULATOARE SI ROBOTI INDUSTRIALI 91
Sisteme de actionare cu motoare
hidraulice Actionare hidraulica
secventiala cu viteza reglabila in ambele sensuri:
– 1 rezervor
– 2 filtre
– 3 pompa
– 4 supapa de siguranta
– 5 electromagneti pentru distribuitor cu sertare (SD 4/3 –4 cai si 3 pozitii)
– 6- drosel
– 7 distribuitor SD 2/2

MANIPULATOARE SI ROBOTI INDUSTRIALI 92
Sisteme de actionare electrohidraulice
(amplificare cuplu)
Actionare electrohidraulica in circuit deschis
cu comanda numerica

MANIPULATOARE SI ROBOTI INDUSTRIALI 93
Sisteme de actionare cu motoare
pneumatice
Utile in actionarea robotilor care lucreaza in medii
explozive sau la operatii care nu necesita grad
ridicat de precizie.
Avantaje:
– Ieftine, fiabile, greutate redusa, suporta suprasarcini;
– Posibilitati largi de reglaj;
– Nu au influenta poluanta asupra mediului;
– Se reduce din echipamentul de comanda.
MANIPULATOARE SI ROBOTI INDUSTRIALI 94
Sisteme de actionare cu motoare
pneumatice
Dezavantaje:
– Precizie redusa – compresibilitate agent;
– Viteza scazuta propagare semnale;
– Coroziune cilindri pneumatici;
– Randament redus.

MANIPULATOARE SI ROBOTI INDUSTRIALI 95
Sisteme de actionare cu motoare
pneumatice
Exemplu – modul
de rotatie actionat
pneumatic

MANIPULATOARE SI ROBOTI INDUSTRIALI 96
Sisteme de actionare cu motoare
pneumatice
Exemplu – schema de
actionare pneumatica
cu pozitionare
incrementala, frinare si
blocaj pneumatic

MANIPULATOARE SI ROBOTI INDUSTRIALI 97
Sisteme pneumohidraulice de actionare
Exemplu – sistem pneumohidraulic de actionare cu pozitionare incrementala (K-coeficient de transformare, n- numar de incrementi, X1 -increment).