Embed Size (px)
Citation preview

Ing. Luigi Biagiottie-mail: [email protected]
http://www.dii.unimore.it/~lbiagiotti
FONDAMENTI DI CONTROLLI AUTOMATICIIngegneria Meccanica
http://web.ing.unimo.it/~lbiagiotti/FondamentiControlli1415.html
SISTEMI ELEMENTARI DEL 1o E 2o ORDINE
Sistemi Elementari -- 2Fondamenti di Controlli AutomaticiLuigi Biagiotti
Rappresentazioni di una funzione di trasferimento
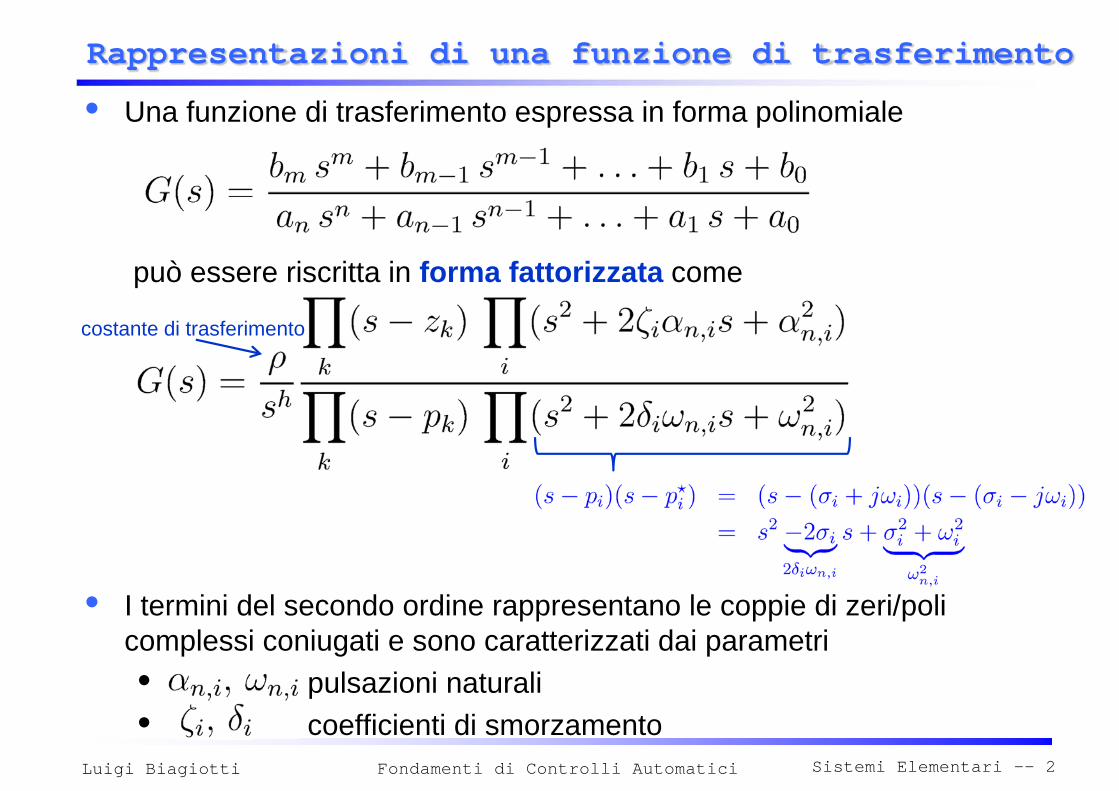
• Una funzione di trasferimento espressa in forma polinomiale
può essere riscritta in forma fattorizzata come
• I termini del secondo ordine rappresentano le coppie di zeri/poli complessi coniugati e sono caratterizzati dai parametri• pulsazioni naturali• coefficienti di smorzamento
costante di trasferimento
Sistemi Elementari -- 3Fondamenti di Controlli AutomaticiLuigi Biagiotti
Rappresentazioni di una funzione di trasferimento
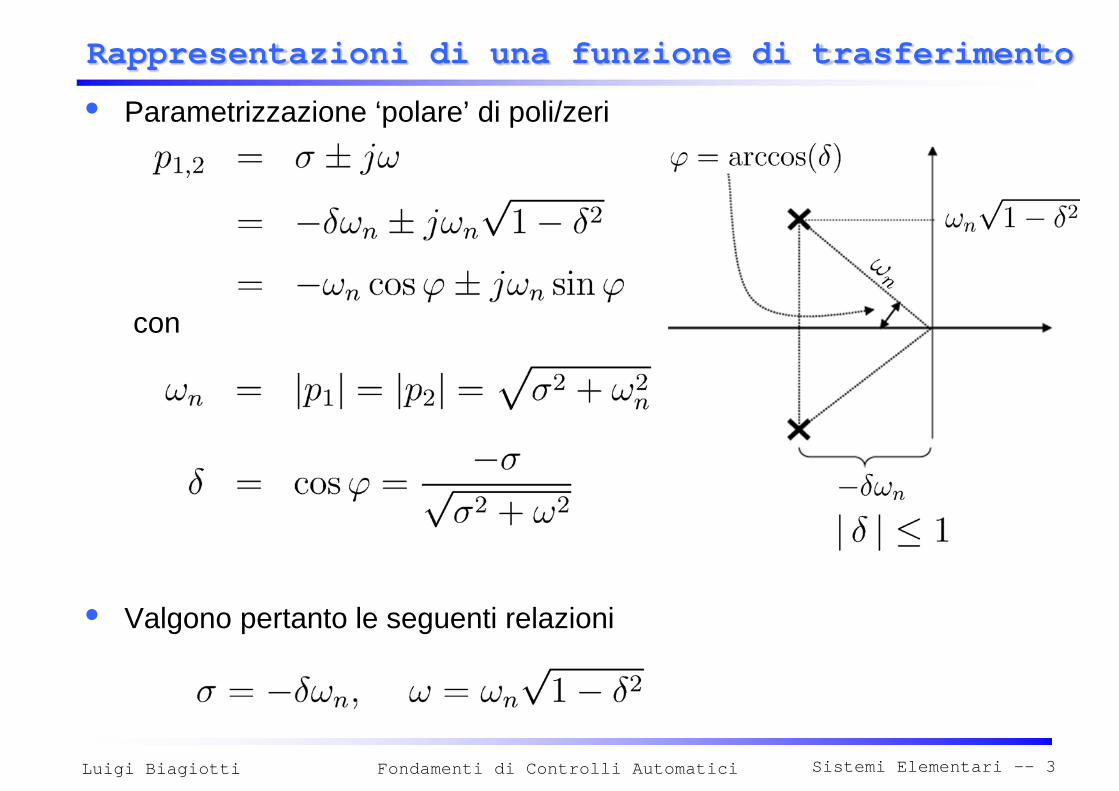
• Parametrizzazione ‘polare’ di poli/zeri
con
• Valgono pertanto le seguenti relazioni
Sistemi Elementari -- 4Fondamenti di Controlli AutomaticiLuigi Biagiotti
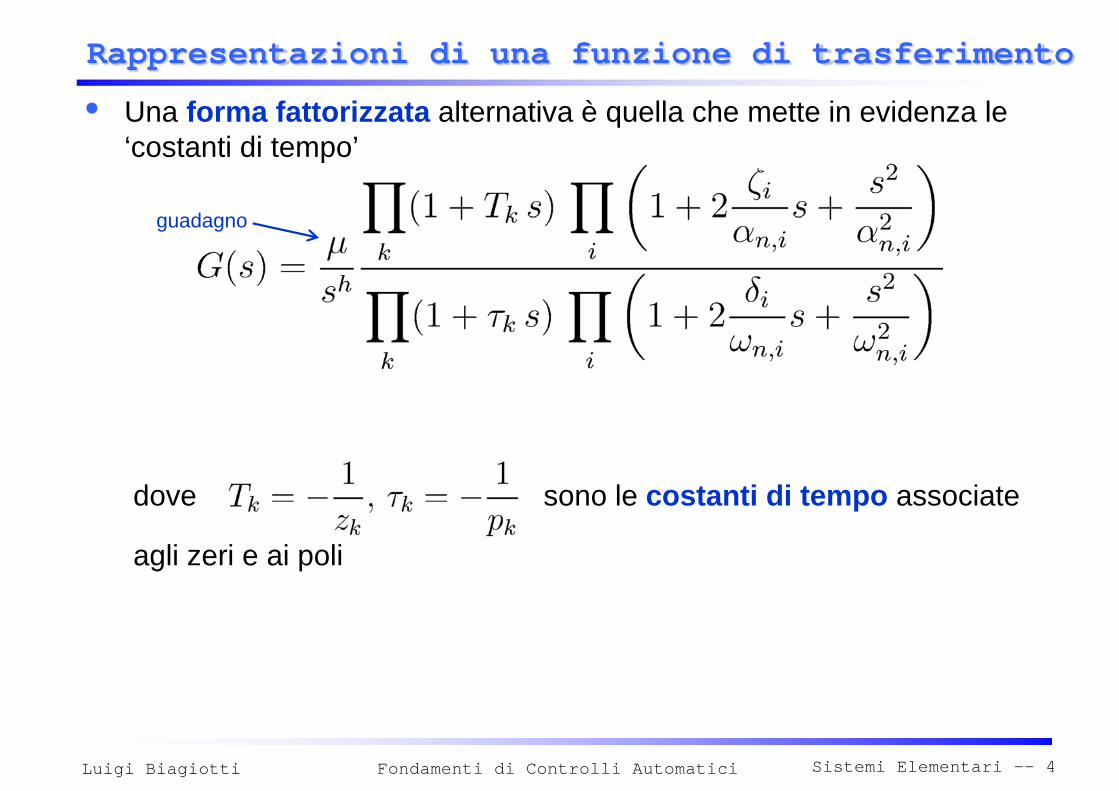
• Una forma fattorizzata alternativa è quella che mette in evidenza le ‘costanti di tempo’
dove sono le costanti di tempo associate
agli zeri e ai poli
Rappresentazioni di una funzione di trasferimento
guadagno
Sistemi Elementari -- 5Fondamenti di Controlli AutomaticiLuigi Biagiotti
Sistemi elementari
• Come evidenziato discutendo l’antitrasformazione di una generica funzione risposta forzata di un sistema dinamico con fdt arbitrariamente complessa può essere ottenuta sommando le risposte di sistemi elementari del primo e secondo ordine. Ha quindi senso analizzare l’andamento temporale di sistemi elementari a fronte di ingressi tipici (gradino) e identificare la relazione esistente tra i parametri della fdt e l’andamento temporale della risposta.
• Sistemi del primo ordine
• Sistemi del secondo ordine
• Effetto degli zeri
• Luoghi a sovraelongazione e tempo di assestamento costante
Sistemi Elementari -- 6Fondamenti di Controlli AutomaticiLuigi Biagiotti
Sistemi elementari
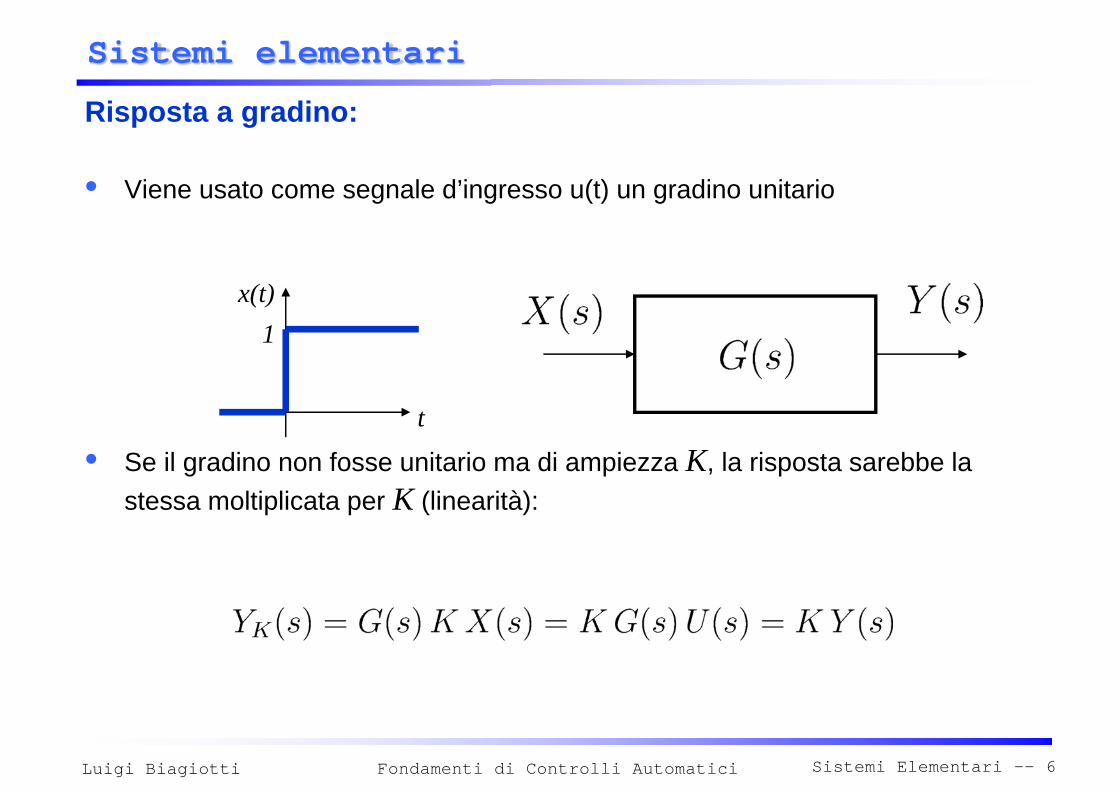
Risposta a gradino:
• Viene usato come segnale d’ingresso u(t) un gradino unitario
• Se il gradino non fosse unitario ma di ampiezza K, la risposta sarebbe la stessa moltiplicata per K (linearità):
t
1x(t)
G(s)U(s) Y(s)
Sistemi Elementari -- 7Fondamenti di Controlli AutomaticiLuigi Biagiotti
Sistemi elementari – Primo ordine
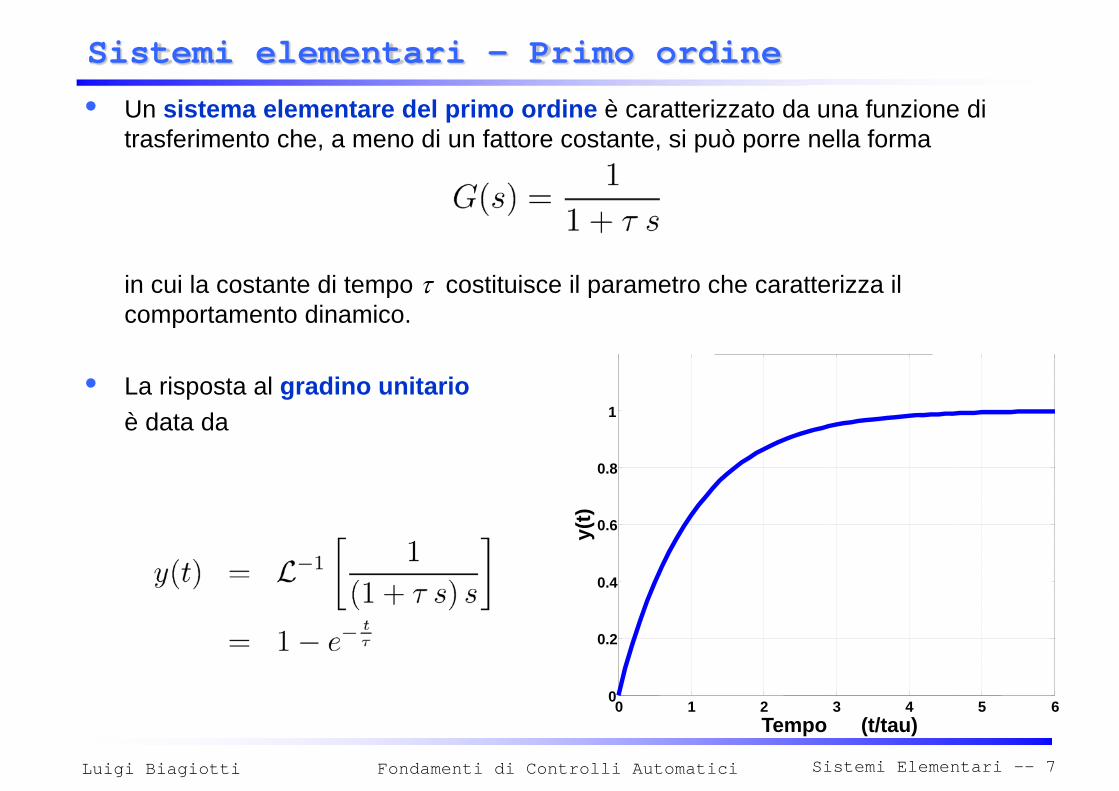
• Un sistema elementare del primo ordine è caratterizzato da una funzione di trasferimento che, a meno di un fattore costante, si può porre nella forma
in cui la costante di tempo costituisce il parametro che caratterizza il comportamento dinamico.
• La risposta al gradino unitario è data da
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
Tempo (t/tau)
y(t)
Sistemi Elementari -- 8Fondamenti di Controlli AutomaticiLuigi Biagiotti
Sistemi elementari – Primo ordine
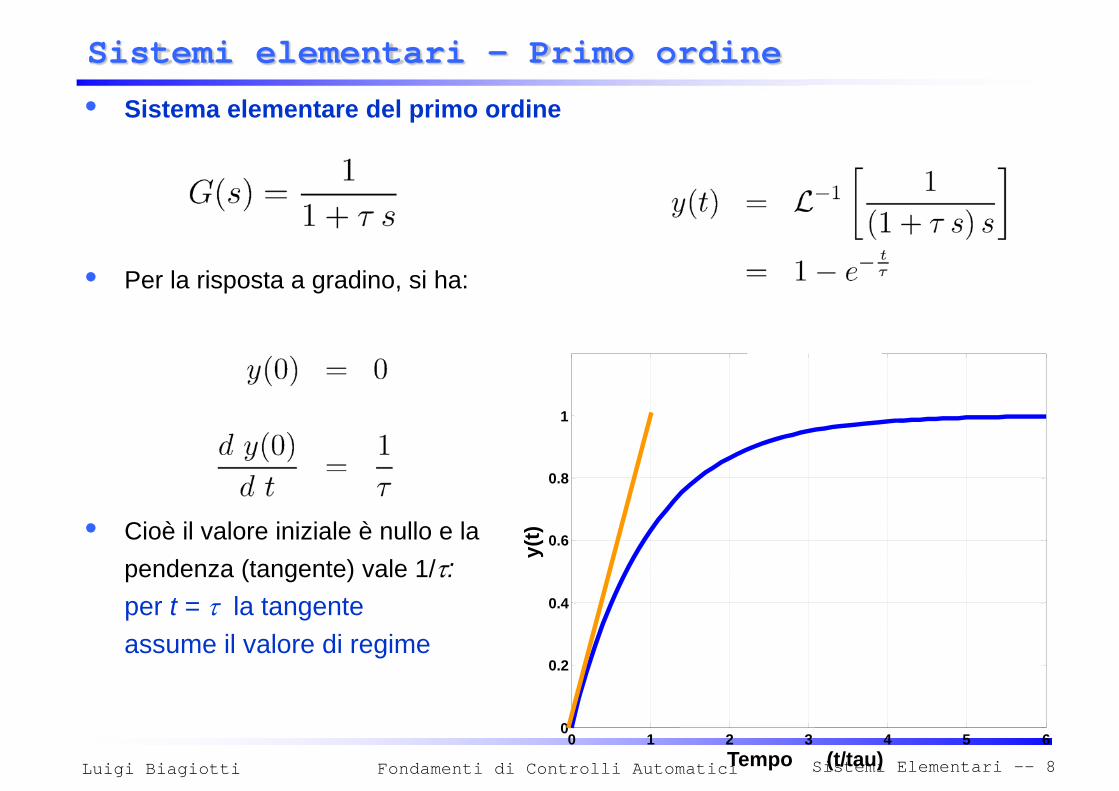
• Sistema elementare del primo ordine
• Per la risposta a gradino, si ha:
• Cioè il valore iniziale è nullo e lapendenza (tangente) vale 1/:per t = la tangente assume il valore di regime
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
Tempo (t/tau)
y(t)
Sistemi Elementari -- 9Fondamenti di Controlli AutomaticiLuigi Biagiotti
Sistemi elementari – Primo ordine
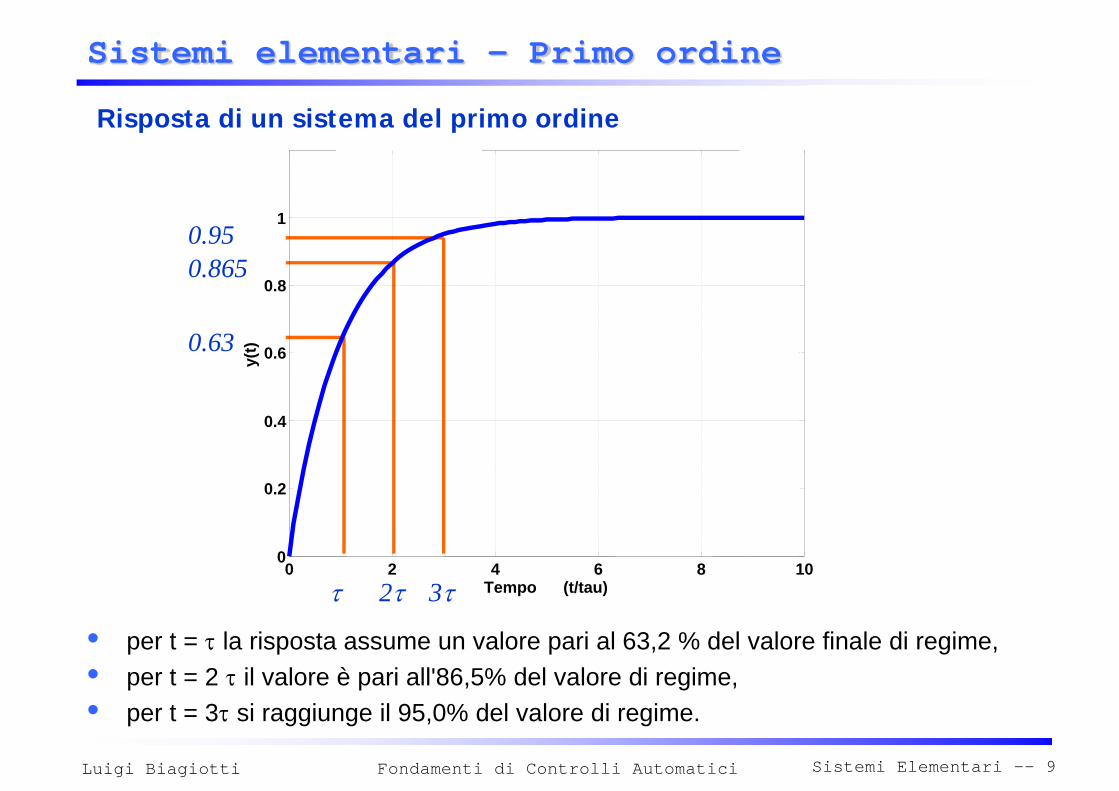
• per t = la risposta assume un valore pari al 63,2 % del valore finale di regime,• per t = 2 il valore è pari all'86,5% del valore di regime,• per t = 3 si raggiunge il 95,0% del valore di regime.
0.63
0.8650.95
2 3
Risposta di un sistema del primo ordine
0 2 4 6 8 100
0.2
0.4
0.6
0.8
1
Tempo (t/tau)
y(t)
Sistemi Elementari -- 10Fondamenti di Controlli AutomaticiLuigi Biagiotti
Sistemi elementari – Primo ordine
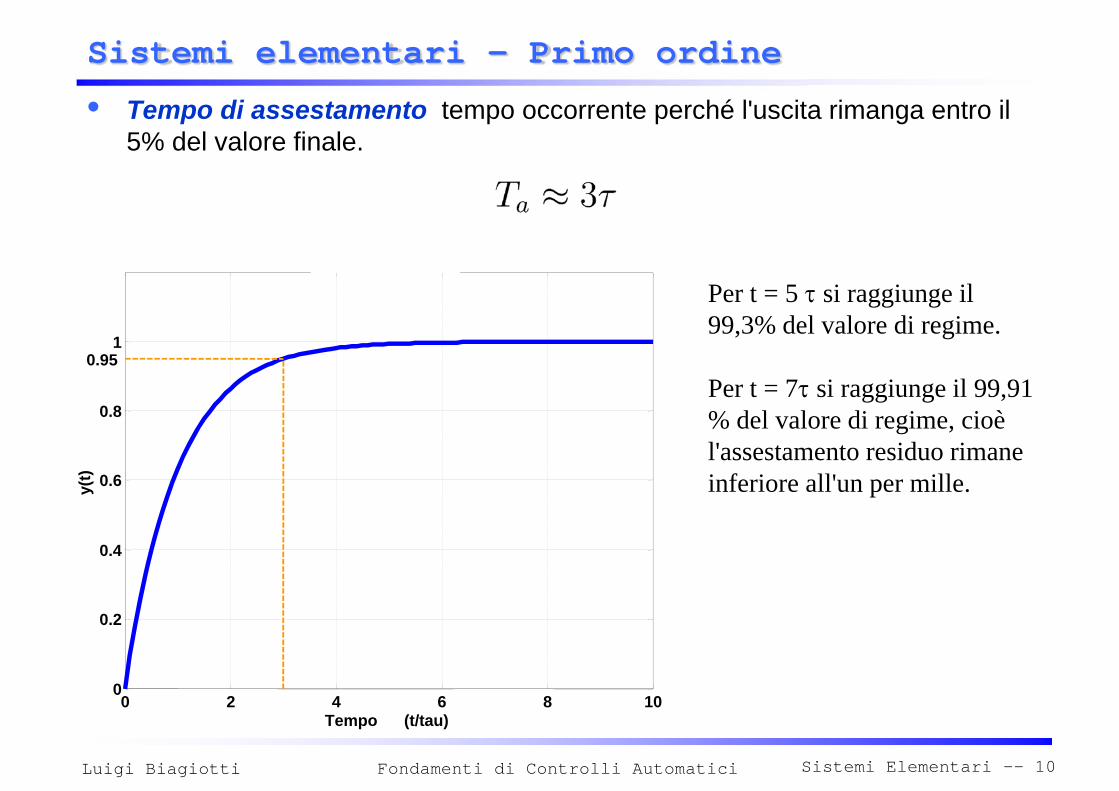
• Tempo di assestamento tempo occorrente perché l'uscita rimanga entro il 5% del valore finale.
Per t = 5 si raggiunge il 99,3% del valore di regime.
Per t = 7 si raggiunge il 99,91 % del valore di regime, cioè l'assestamento residuo rimane inferiore all'un per mille.
0 2 4 6 8 100
0.2
0.4
0.6
0.8
1
Tempo (t/tau)
y(t)
0.95
Sistemi Elementari -- 11Fondamenti di Controlli AutomaticiLuigi Biagiotti
Sistemi elementari – Primo ordine
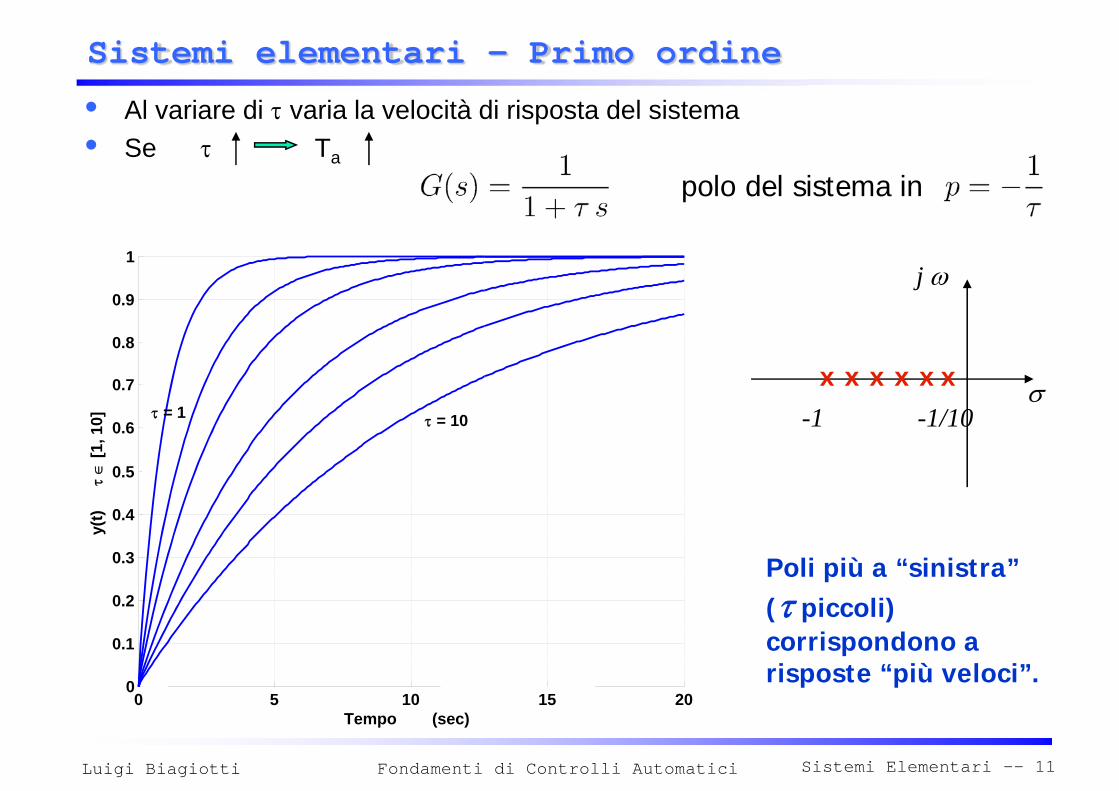
• Al variare di varia la velocità di risposta del sistema• Se Ta
0 5 10 15 200
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Tempo (sec)
y(t)
[1
, 10] = 10 = 1
xxxxxx-1 -1/10
j
Poli più a “sinistra” ( piccoli)corrispondono a risposte “più veloci”.
polo del sistema in
Sistemi Elementari -- 12Fondamenti di Controlli AutomaticiLuigi Biagiotti
Sistemi elementari – Primo ordine con zero
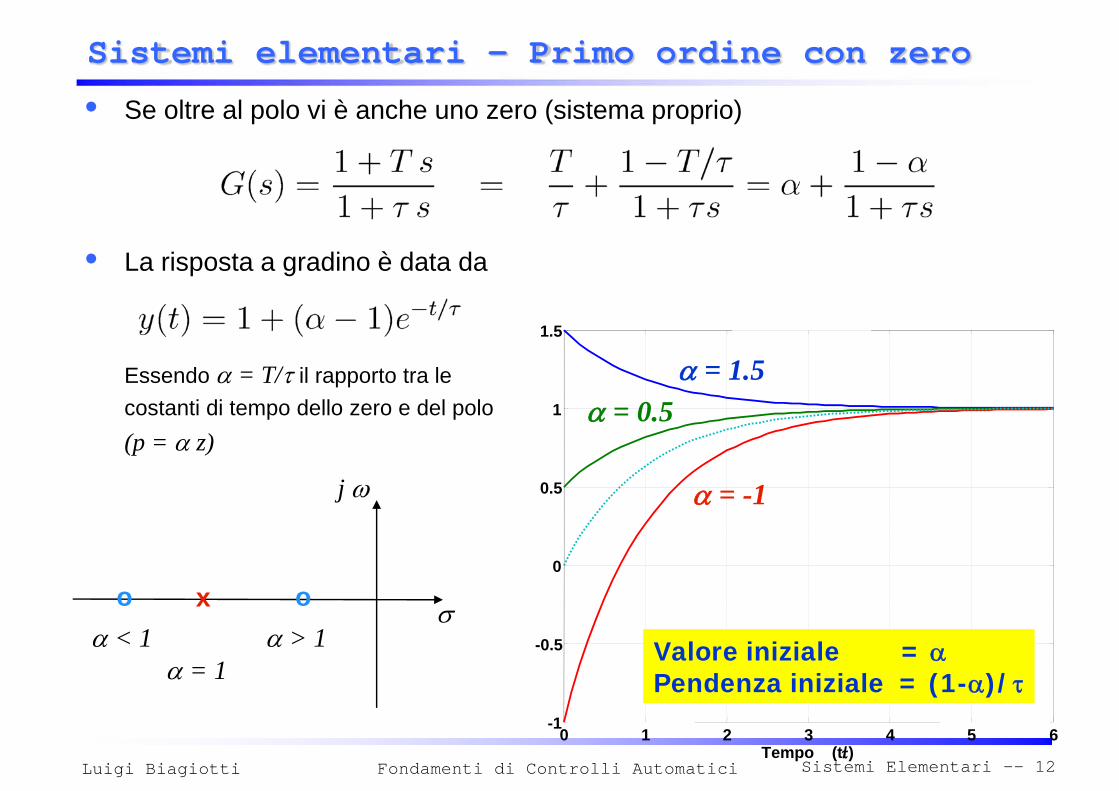
• Se oltre al polo vi è anche uno zero (sistema proprio)
• La risposta a gradino è data da
Essendo = T/ il rapporto tra le costanti di tempo dello zero e del polo(p = z)
= -1
= 1.5 = 0.5
x
= 1
j
< 1 > 1oo
0 1 2 3 4 5 6-1
-0.5
0
0.5
1
1.5
Tempo (t/)
Valore iniziale = Pendenza iniziale = (1-)/
Sistemi Elementari -- 13Fondamenti di Controlli AutomaticiLuigi Biagiotti
Sistemi elementari – Secondo ordine
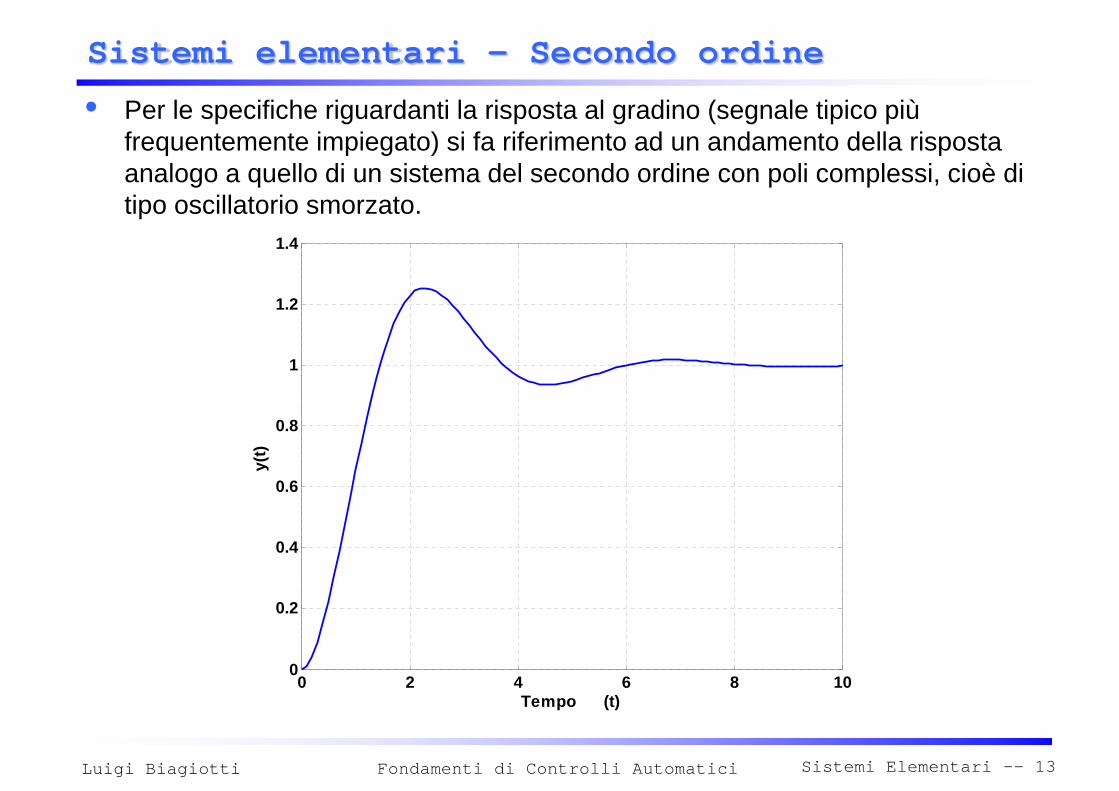
• Per le specifiche riguardanti la risposta al gradino (segnale tipico più frequentemente impiegato) si fa riferimento ad un andamento della risposta analogo a quello di un sistema del secondo ordine con poli complessi, cioè di tipo oscillatorio smorzato.
0 2 4 6 8 100
0.2
0.4
0.6
0.8
1
1.2
1.4
Tempo (t)
y(t)
Sistemi Elementari -- 14Fondamenti di Controlli AutomaticiLuigi Biagiotti
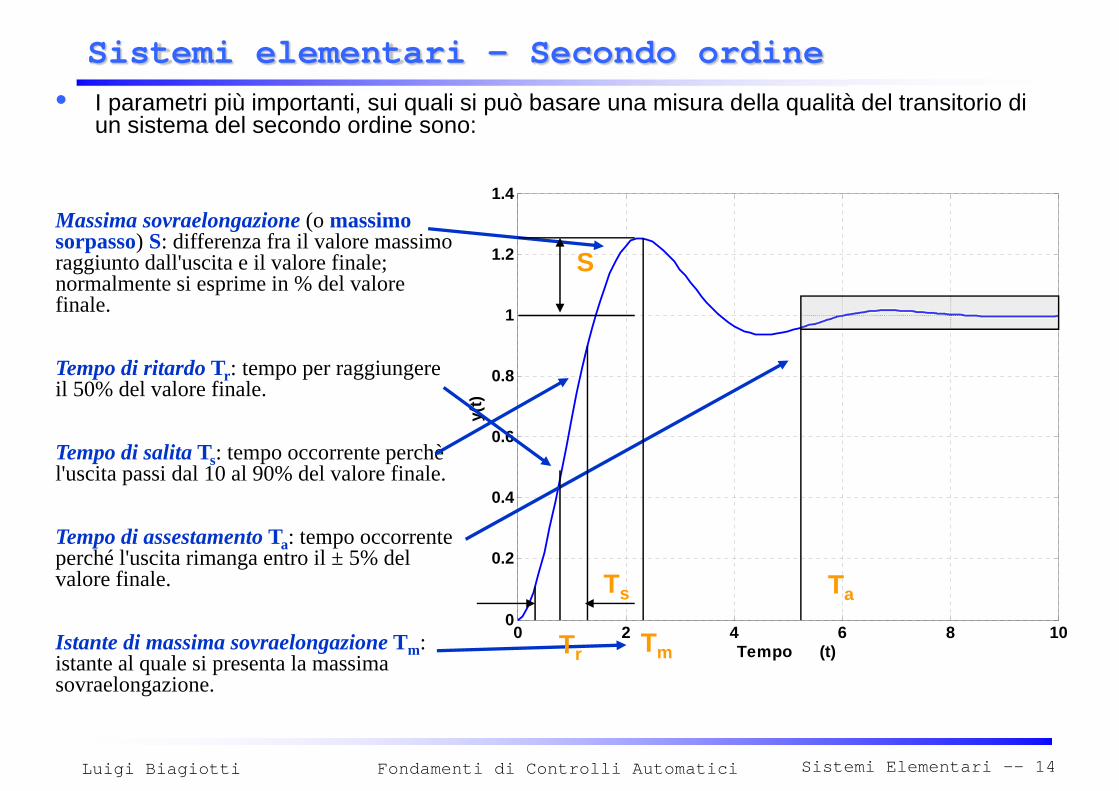
Sistemi elementari – Secondo ordine• I parametri più importanti, sui quali si può basare una misura della qualità del transitorio di
un sistema del secondo ordine sono:
0 2 4 6 8 100
0.2
0.4
0.6
0.8
1
1.2
1.4
Tempo (t)
y(t)
Massima sovraelongazione (o massimo sorpasso) S: differenza fra il valore massimo raggiunto dall'uscita e il valore finale; normalmente si esprime in % del valore finale.
Tempo di ritardo Tr: tempo per raggiungere il 50% del valore finale.
Tempo di salita Ts: tempo occorrente perchè l'uscita passi dal 10 al 90% del valore finale.
Tempo di assestamento Ta: tempo occorrente perché l'uscita rimanga entro il ± 5% del valore finale.
Istante di massima sovraelongazione Tm: istante al quale si presenta la massima sovraelongazione.
S
Tr
Ts Ta
Tm
Sistemi Elementari -- 15Fondamenti di Controlli AutomaticiLuigi Biagiotti
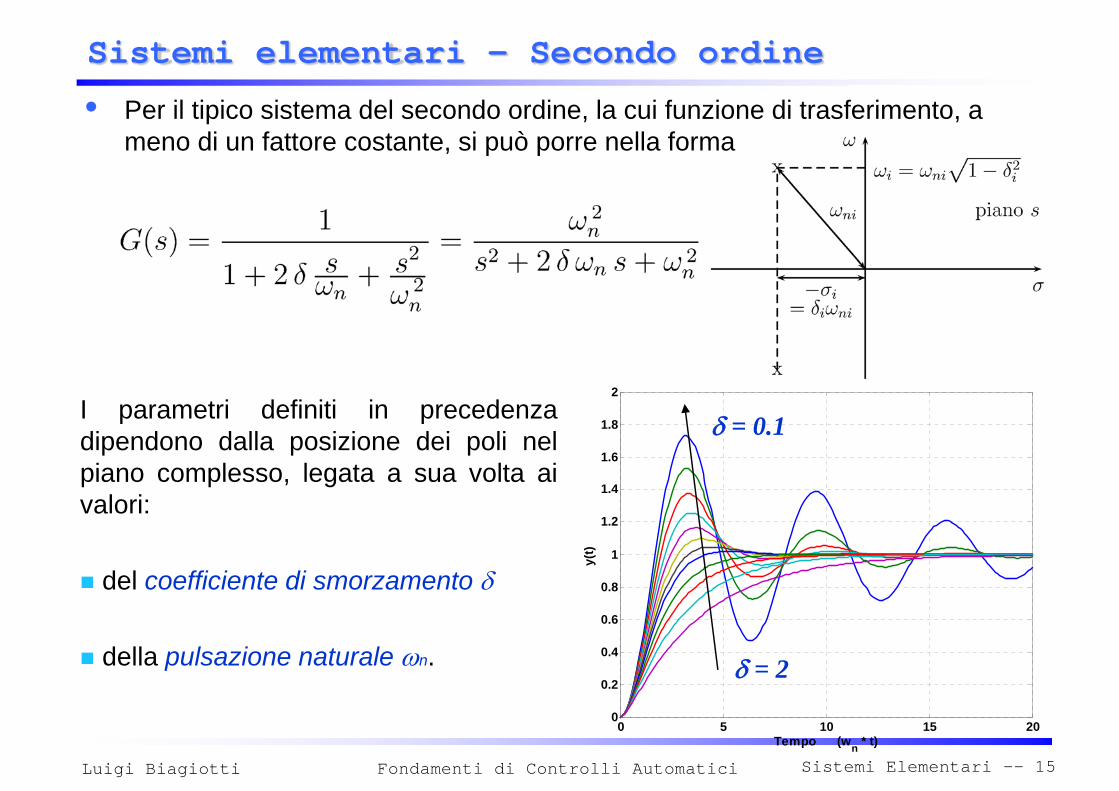
Sistemi elementari – Secondo ordine
• Per il tipico sistema del secondo ordine, la cui funzione di trasferimento, a meno di un fattore costante, si può porre nella forma
0 5 10 15 200
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Tempo (wn * t)
y(t)
I parametri definiti in precedenzadipendono dalla posizione dei poli nelpiano complesso, legata a sua volta aivalori:
del coefficiente di smorzamento
della pulsazione naturale n. = 2
= 0.1
Sistemi Elementari -- 16Fondamenti di Controlli AutomaticiLuigi Biagiotti
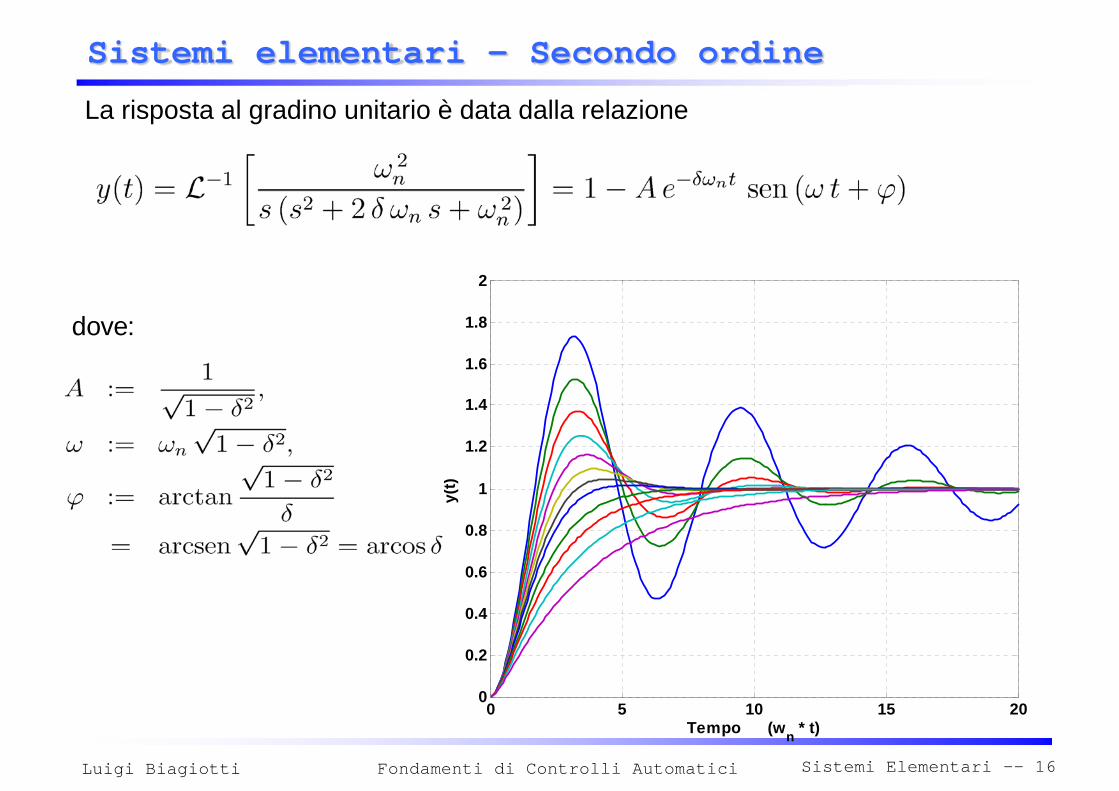
Sistemi elementari – Secondo ordine
La risposta al gradino unitario è data dalla relazione
0 5 10 15 200
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Tempo (wn * t)
y(t)
dove:
Sistemi Elementari -- 17Fondamenti di Controlli AutomaticiLuigi Biagiotti
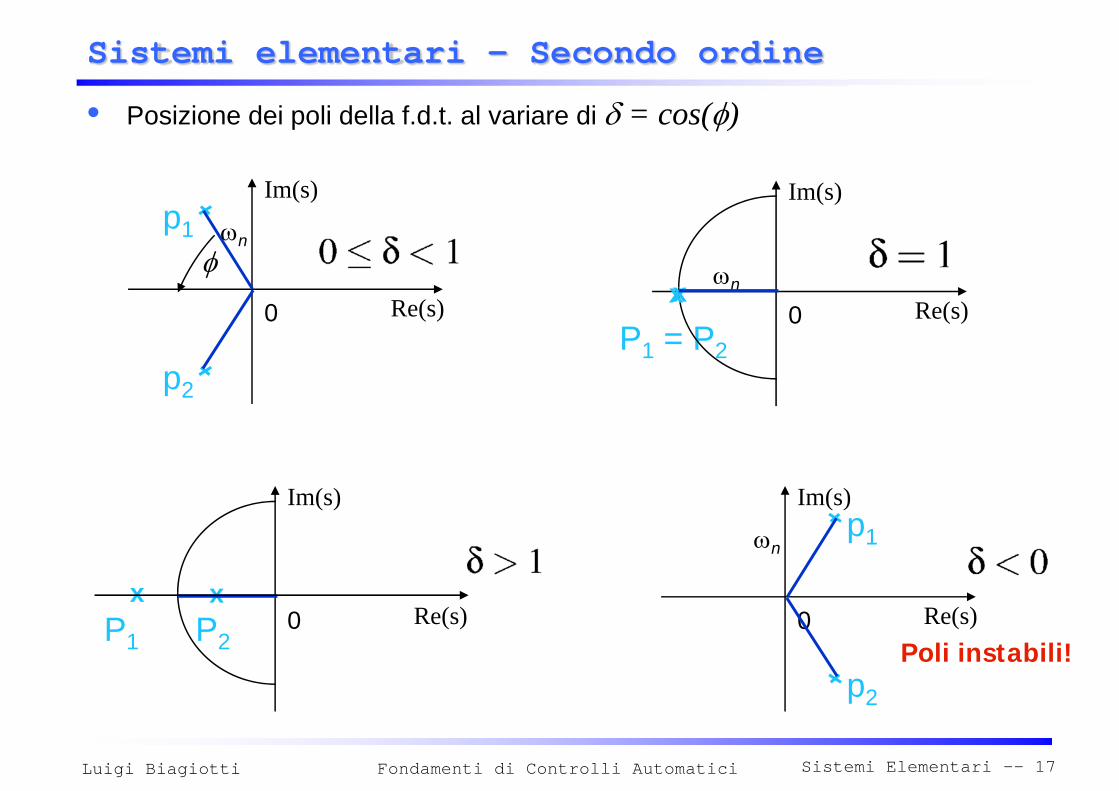
Sistemi elementari – Secondo ordine
• Posizione dei poli della f.d.t. al variare di = cos()
Re(s)
Im(s)
0P1
xxP2
Re(s)
Im(s)
0P1 = P2
nxx
Re(s)
Im(s)
0
p1
p2
n
Poli instabili!
Re(s)
Im(s)
0
p1
p2
n
Sistemi Elementari -- 18Fondamenti di Controlli AutomaticiLuigi Biagiotti
Sistemi elementari – Secondo ordine
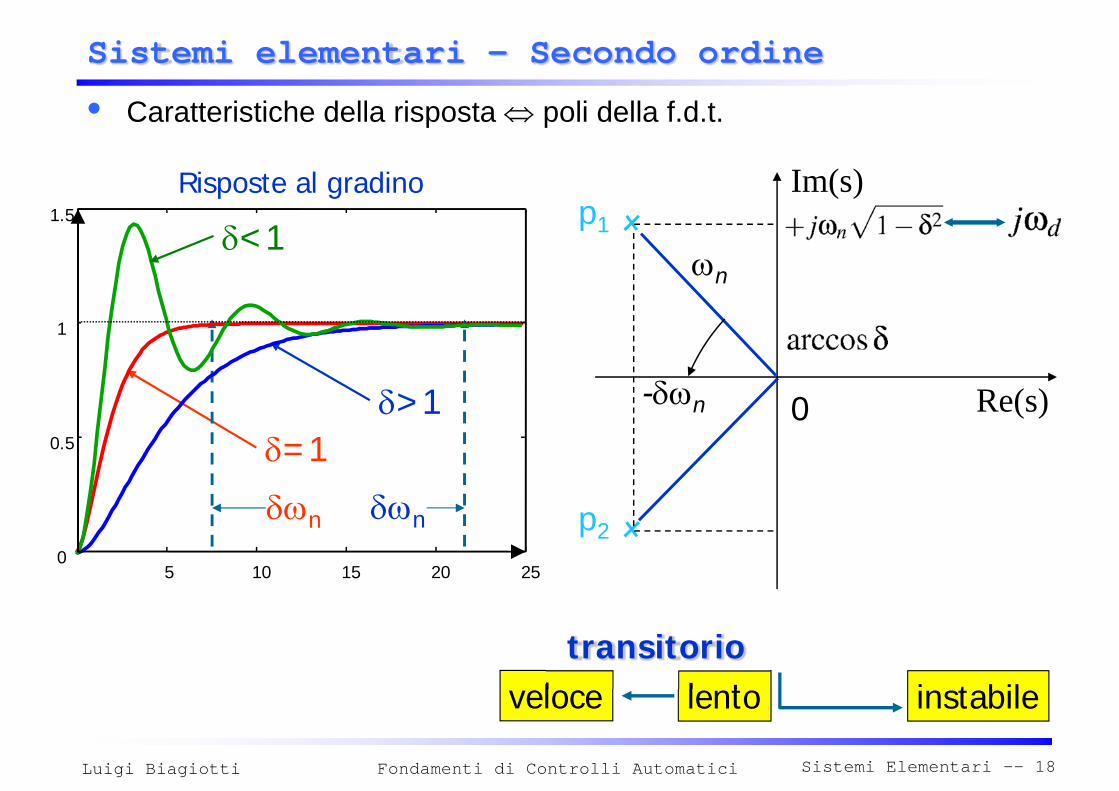
• Caratteristiche della risposta poli della f.d.t.
Re(s)
Im(s)
0
p1
p2
n
-n
instabileveloce lentotransitorio
=1
n
>1
n
<1
5 10 15 20 250
0.5
1
1.5
Risposte al gradino
Sistemi Elementari -- 19Fondamenti di Controlli AutomaticiLuigi Biagiotti
Sistemi elementari – Secondo ordine
• Può interessare la relazione esatta fra il valore del coefficiente di smorzamento e quello della massima sovraelongazione. Per ricavarla, sideriva rispetto al tempo la
Si ottiene
Ponendo la derivata uguale a zero, si ha
da cui
Sistemi Elementari -- 20Fondamenti di Controlli AutomaticiLuigi Biagiotti
Sistemi elementari – Secondo ordine
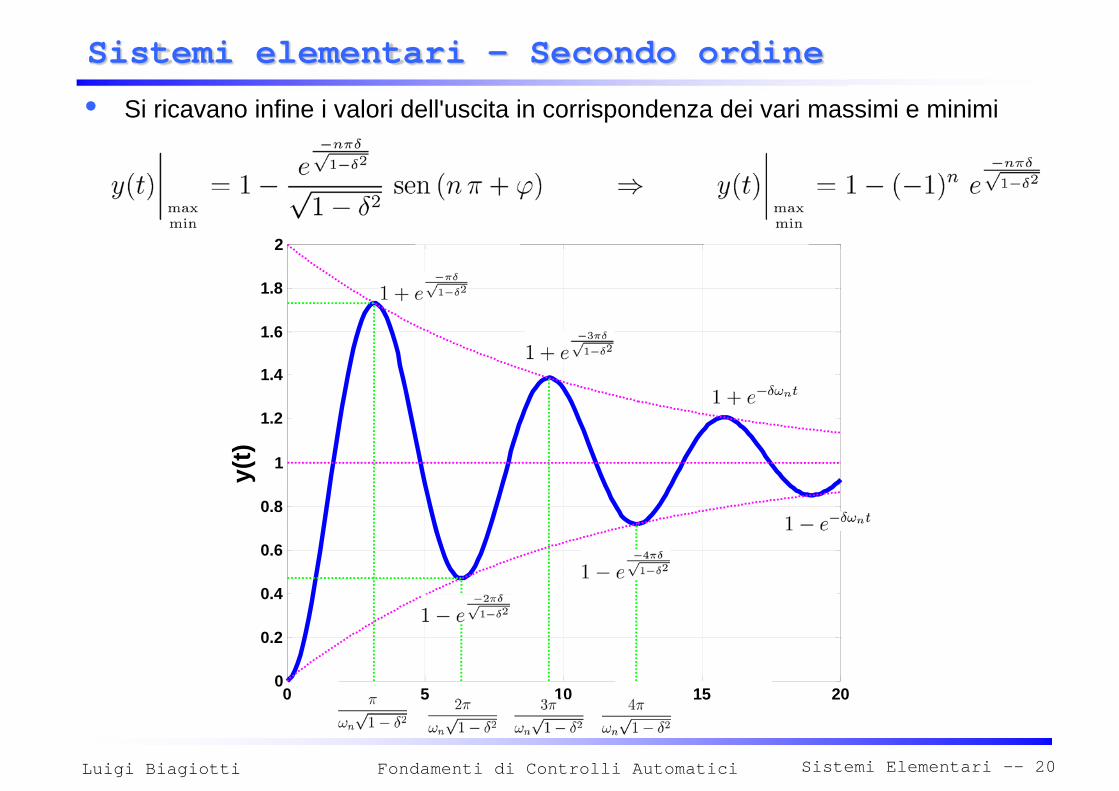
• Si ricavano infine i valori dell'uscita in corrispondenza dei vari massimi e minimi
0 5 10 15 200
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2y(
t)
Sistemi Elementari -- 21Fondamenti di Controlli AutomaticiLuigi Biagiotti
Sistemi elementari – Secondo ordine
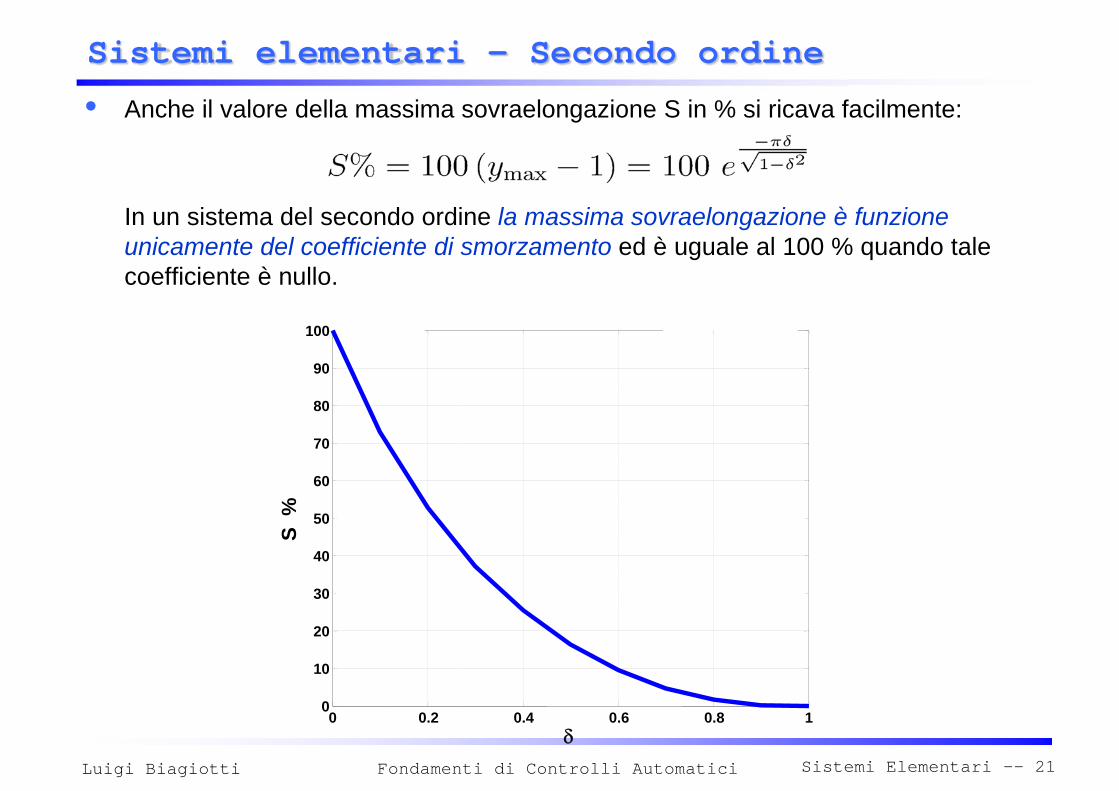
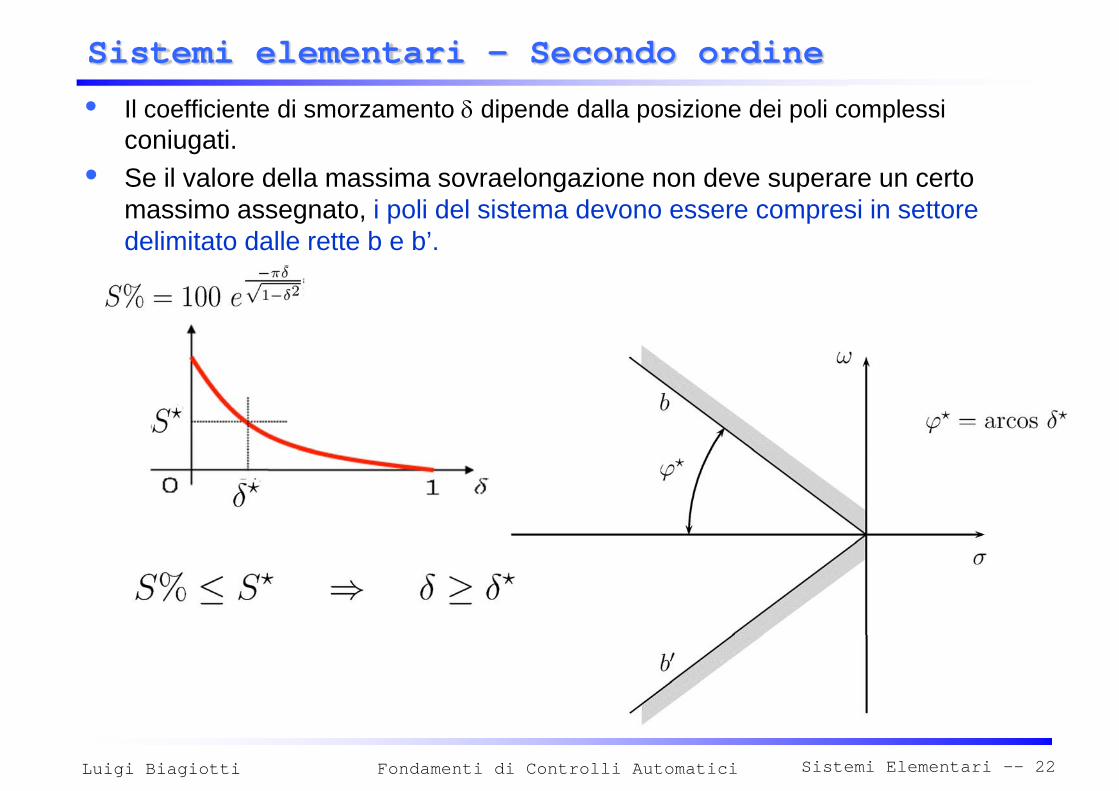
• Anche il valore della massima sovraelongazione S in % si ricava facilmente:
In un sistema del secondo ordine la massima sovraelongazione è funzione unicamente del coefficiente di smorzamento ed è uguale al 100 % quando tale coefficiente è nullo.
0 0.2 0.4 0.6 0.8 10
10
20
30
40
50
60
70
80
90
100
S %
Sistemi Elementari -- 22Fondamenti di Controlli AutomaticiLuigi Biagiotti
Sistemi elementari – Secondo ordine
• Il coefficiente di smorzamento dipende dalla posizione dei poli complessi coniugati.
• Se il valore della massima sovraelongazione non deve superare un certo massimo assegnato, i poli del sistema devono essere compresi in settore delimitato dalle rette b e b’.
Sistemi Elementari -- 23Fondamenti di Controlli AutomaticiLuigi Biagiotti
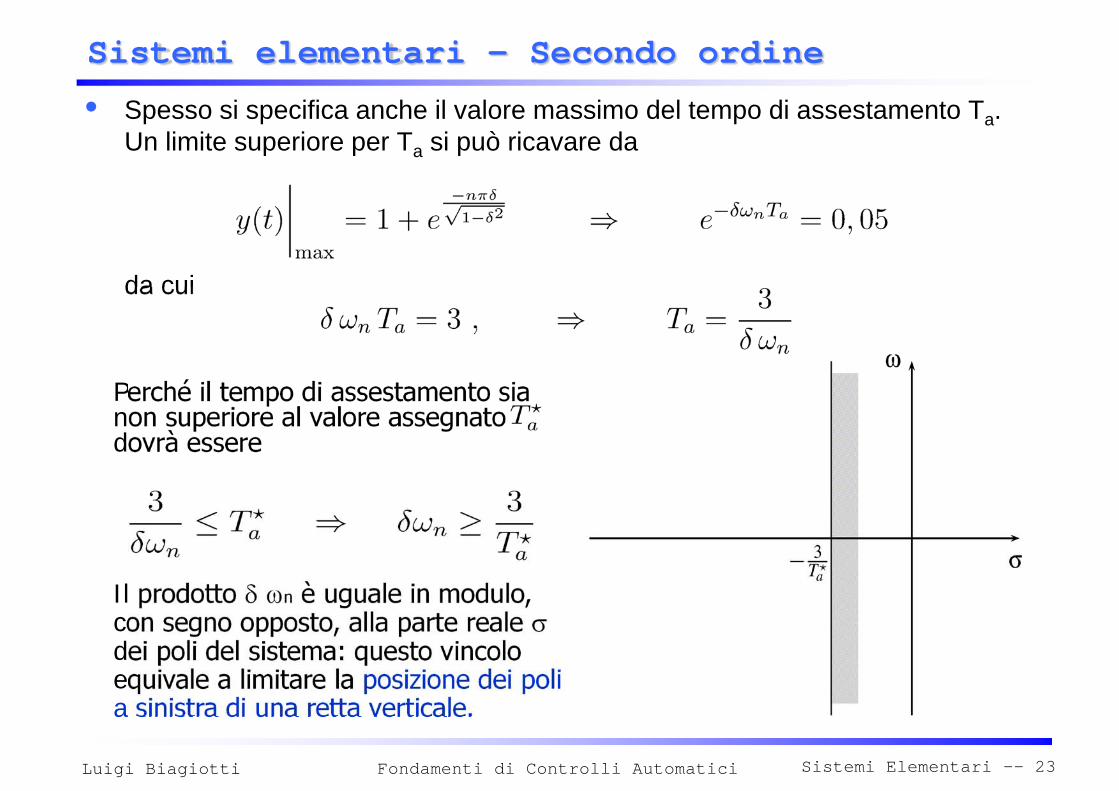
Sistemi elementari – Secondo ordine
• Spesso si specifica anche il valore massimo del tempo di assestamento Ta. Un limite superiore per Ta si può ricavare da
da cui
Il prodotto n è uguale in modulo, con segno opposto, alla parte reale dei poli del sistema: questo vincolo equivale a limitare la posizione dei poli a sinistra di una retta verticale.
Perché il tempo di assestamento sia non superiore al valore assegnato dovrà essere
Sistemi Elementari -- 24Fondamenti di Controlli AutomaticiLuigi Biagiotti
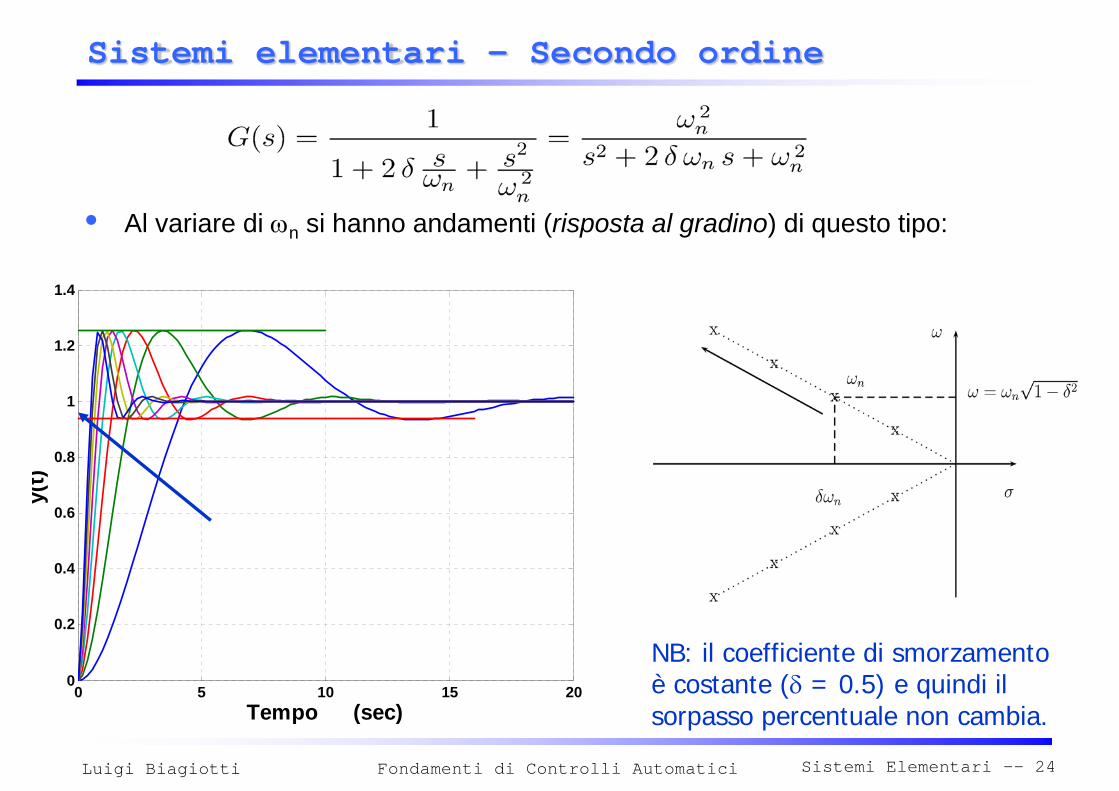
Sistemi elementari – Secondo ordine
• Al variare di n si hanno andamenti (risposta al gradino) di questo tipo:
0 5 10 15 200
0.2
0.4
0.6
0.8
1
1.2
1.4
Tempo (sec)
y(t)
Risposta al variare di n (0.5 - 5)
NB: il coefficiente di smorzamentoè costante ( = 0.5) e quindi il sorpasso percentuale non cambia.
Sistemi Elementari -- 25Fondamenti di Controlli AutomaticiLuigi Biagiotti
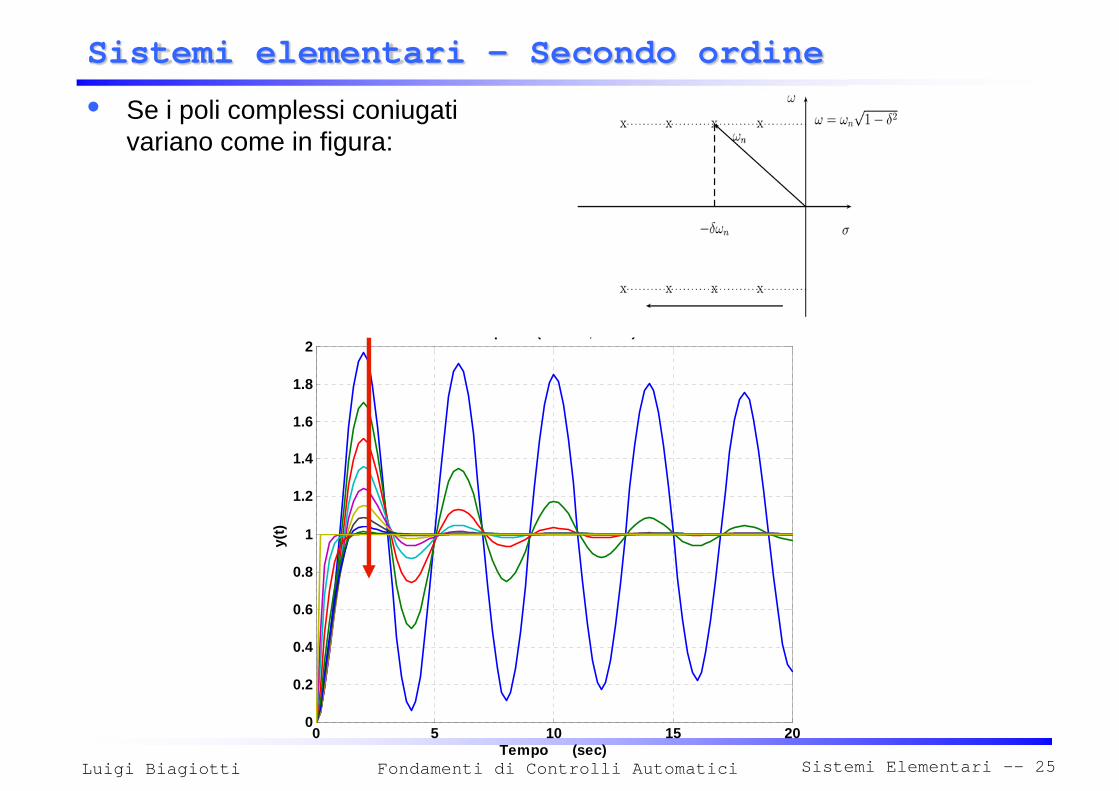
Sistemi elementari – Secondo ordine
• Se i poli complessi coniugati variano come in figura:
0 5 10 15 200
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Tempo (sec)
y(t)
Risposta ( = /2; T = 4)
Sistemi Elementari -- 26Fondamenti di Controlli AutomaticiLuigi Biagiotti
Sistemi elementari – Secondo ordine
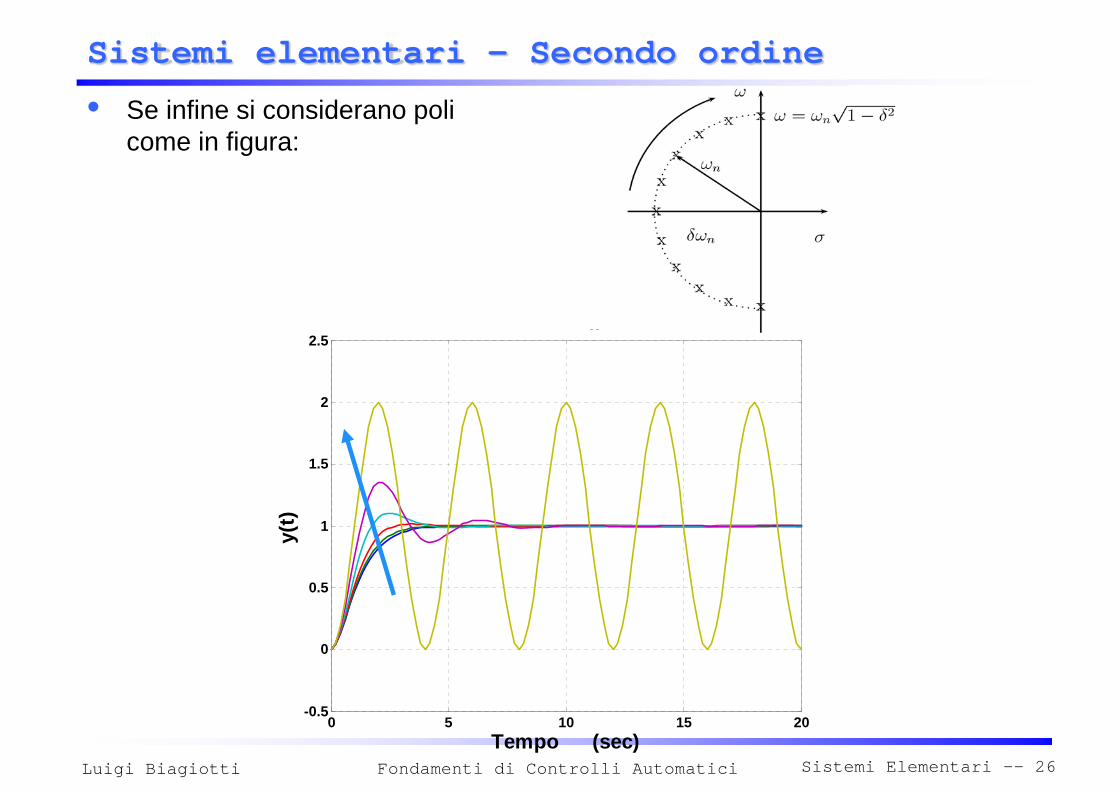
• Se infine si considerano poli come in figura:
0 5 10 15 20-0.5
0
0.5
1
1.5
2
2.5
Tempo (sec)
y(t)
Risposta (n = /2)
Sistemi Elementari -- 27Fondamenti di Controlli AutomaticiLuigi Biagiotti
Sistemi elementari – Secondo ordine
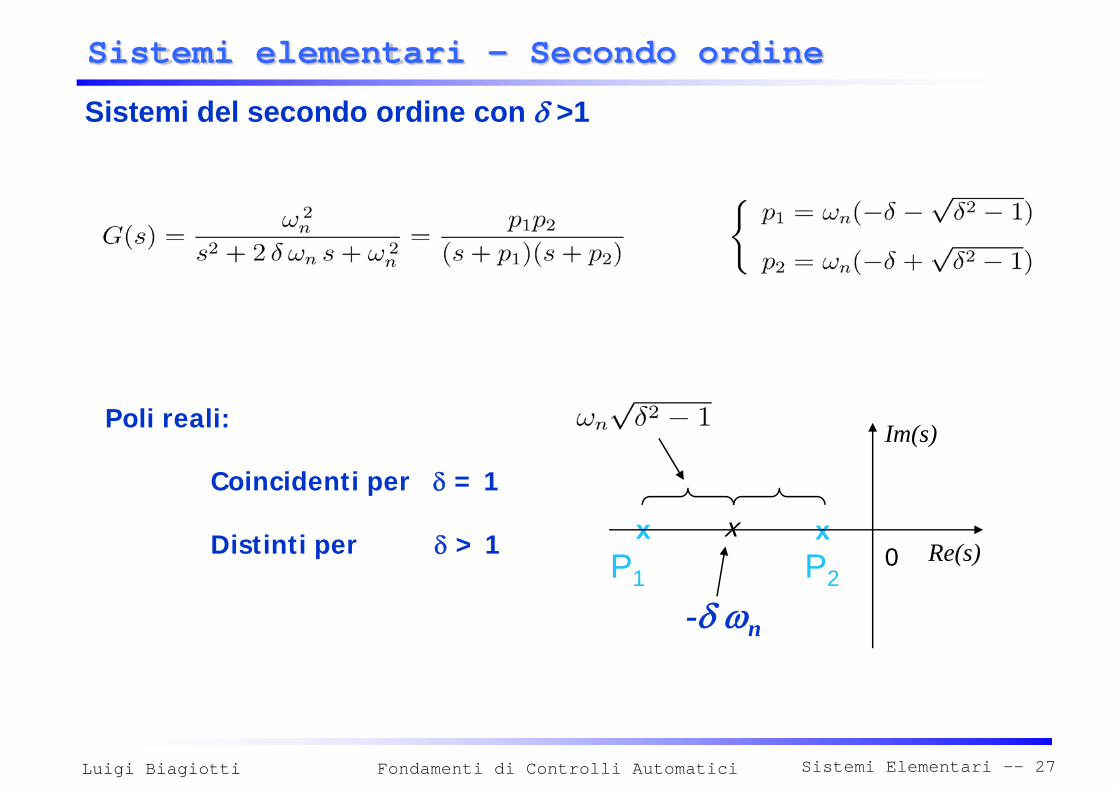
Sistemi del secondo ordine con >1
Re(s)
Im(s)
0P1
xxP2
x
- n
Poli reali:
Coincidenti per = 1
Distinti per > 1
Sistemi Elementari -- 28Fondamenti di Controlli AutomaticiLuigi Biagiotti
Sistemi elementari – Secondo ordine
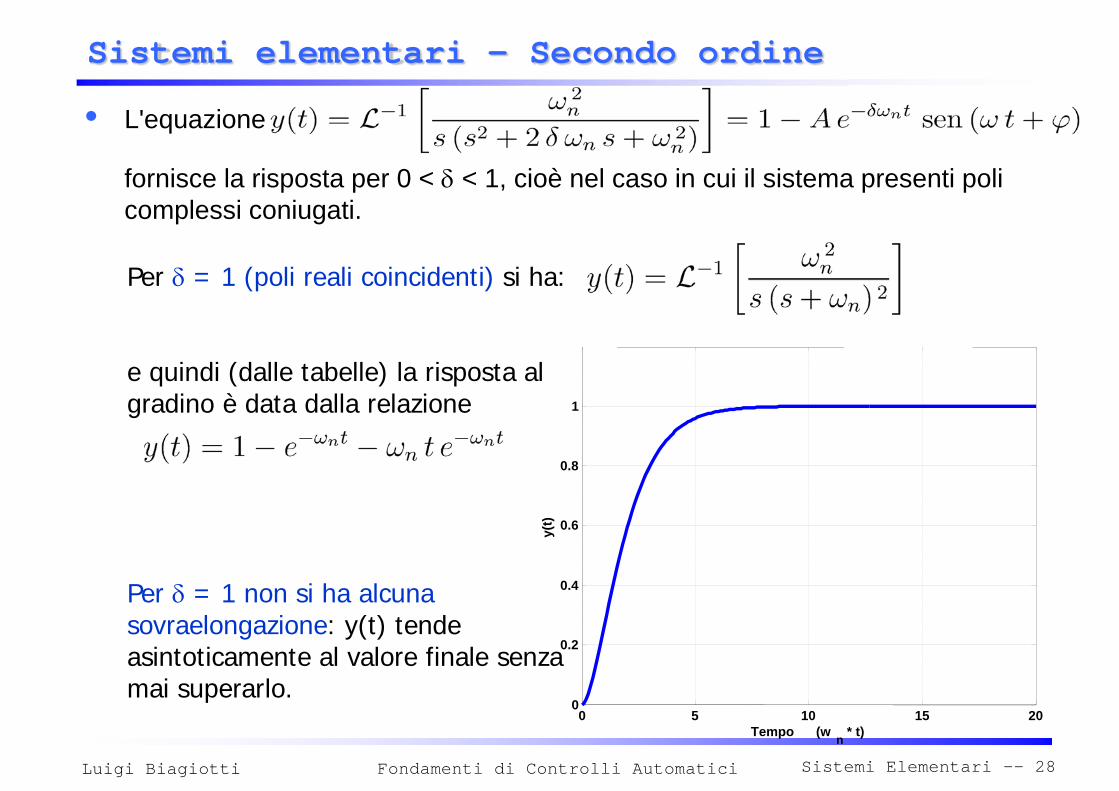
• L'equazione
fornisce la risposta per 0 < < 1, cioè nel caso in cui il sistema presenti poli complessi coniugati.
Per = 1 (poli reali coincidenti) si ha:
e quindi (dalle tabelle) la risposta al gradino è data dalla relazione
Per = 1 non si ha alcuna sovraelongazione: y(t) tende asintoticamente al valore finale senza mai superarlo.
0 5 10 15 200
0.2
0.4
0.6
0.8
1
Tempo (w n * t)
y(t)
Sistemi Elementari -- 29Fondamenti di Controlli AutomaticiLuigi Biagiotti
Sistemi elementari – Secondo ordine
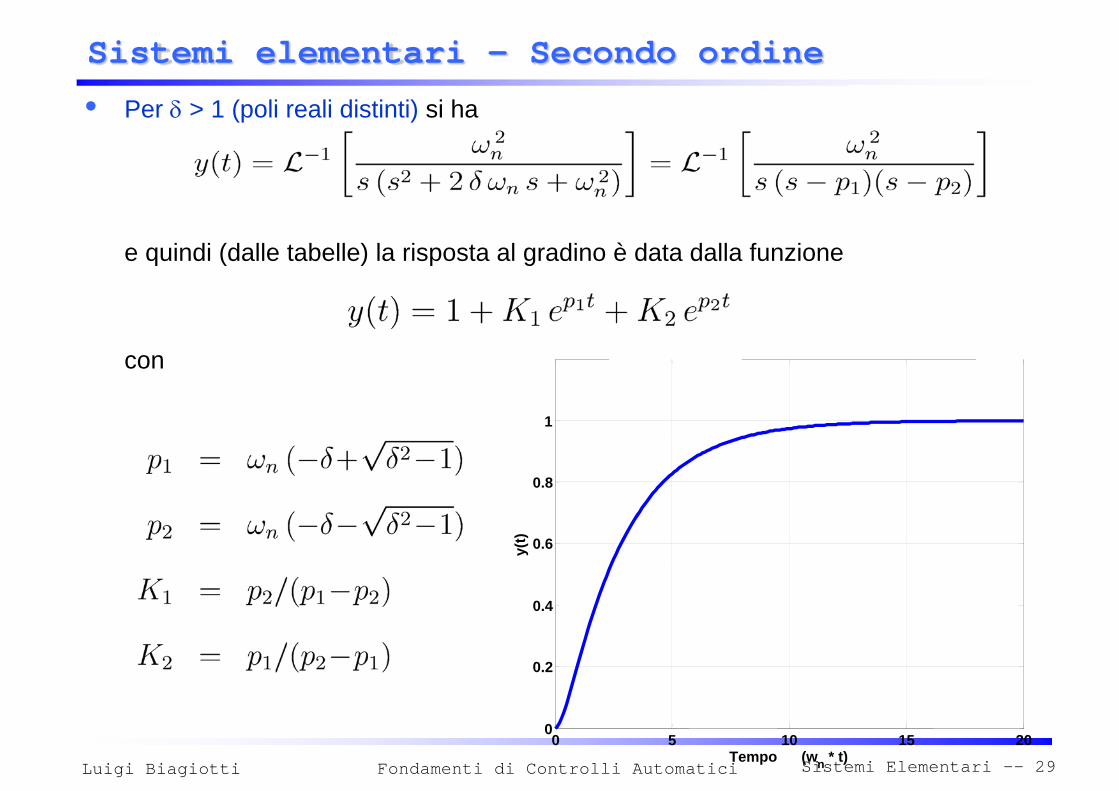
• Per > 1 (poli reali distinti) si ha
e quindi (dalle tabelle) la risposta al gradino è data dalla funzione
con
0 5 10 15 200
0.2
0.4
0.6
0.8
1
Tempo (wn * t)
y(t)
Sistemi Elementari -- 30Fondamenti di Controlli AutomaticiLuigi Biagiotti
Sistemi elementari – Secondo ordine
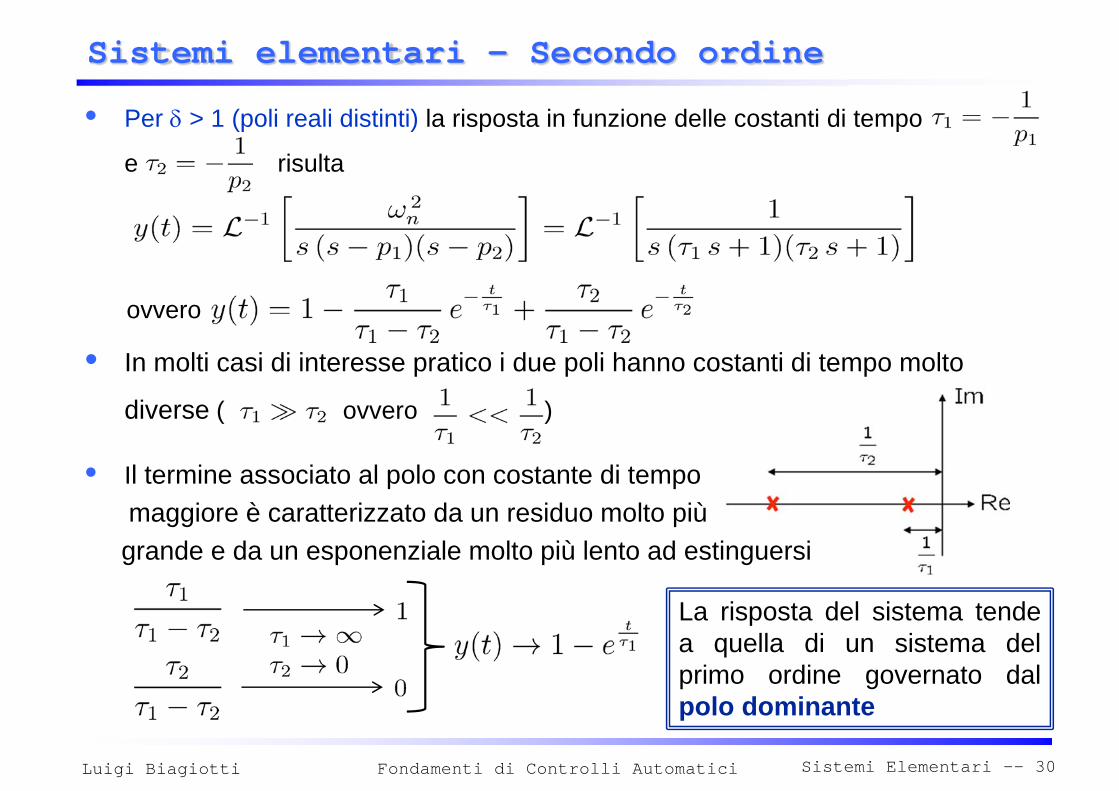
• Per > 1 (poli reali distinti) la risposta in funzione delle costanti di tempo
e risulta
ovvero
• In molti casi di interesse pratico i due poli hanno costanti di tempo molto
diverse ( ovvero ) )
• Il termine associato al polo con costante di tempo maggiore è caratterizzato da un residuo molto più grande e da un esponenziale molto più lento ad estinguersi
La risposta del sistema tendea quella di un sistema delprimo ordine governato dalpolo dominante
Sistemi Elementari -- 31Fondamenti di Controlli AutomaticiLuigi Biagiotti
Sistemi elementari – Secondo ordine con zero
Sia data la funzione
Si può scrivere:
Da cui
Sistemi Elementari -- 32Fondamenti di Controlli AutomaticiLuigi Biagiotti
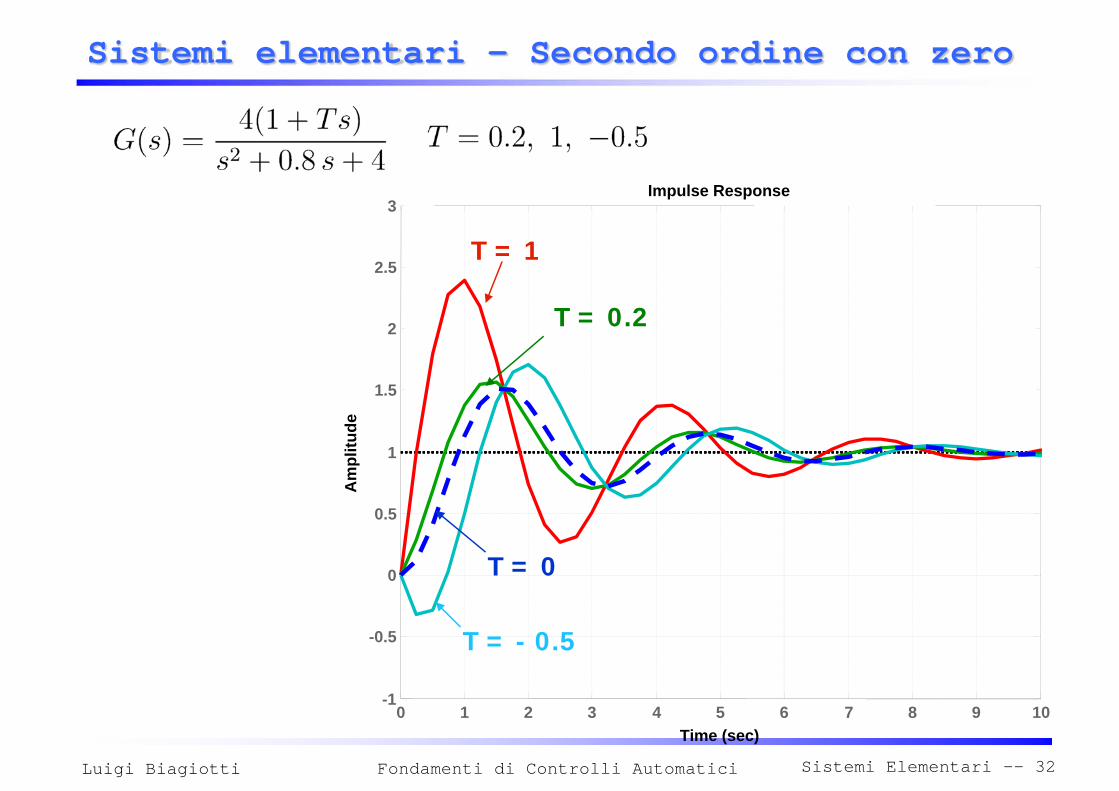
Sistemi elementari – Secondo ordine con zero
0 1 2 3 4 5 6 7 8 9 10-1
-0.5
0
0.5
1
1.5
2
2.5
3Impulse Response
Time (sec)
Am
plitu
de
T = 0.2
T = 0
T = - 0.5
T = 1
Sistemi Elementari -- 33Fondamenti di Controlli AutomaticiLuigi Biagiotti
Sistemi elementari – Secondo ordine con zero
• Nel caso di un sistema con 2 poli reali + zero reale
da cui antitrasformando si ottiene
• Proprietà della risposta per
• L’analisi della risposta temporale, e in particolare il valore dei residui associati ai poli, dipende fortemente dalla posizione dello zero.
Sistemi Elementari -- 34Fondamenti di Controlli AutomaticiLuigi Biagiotti
Sistemi elementari – Secondo ordine con zero
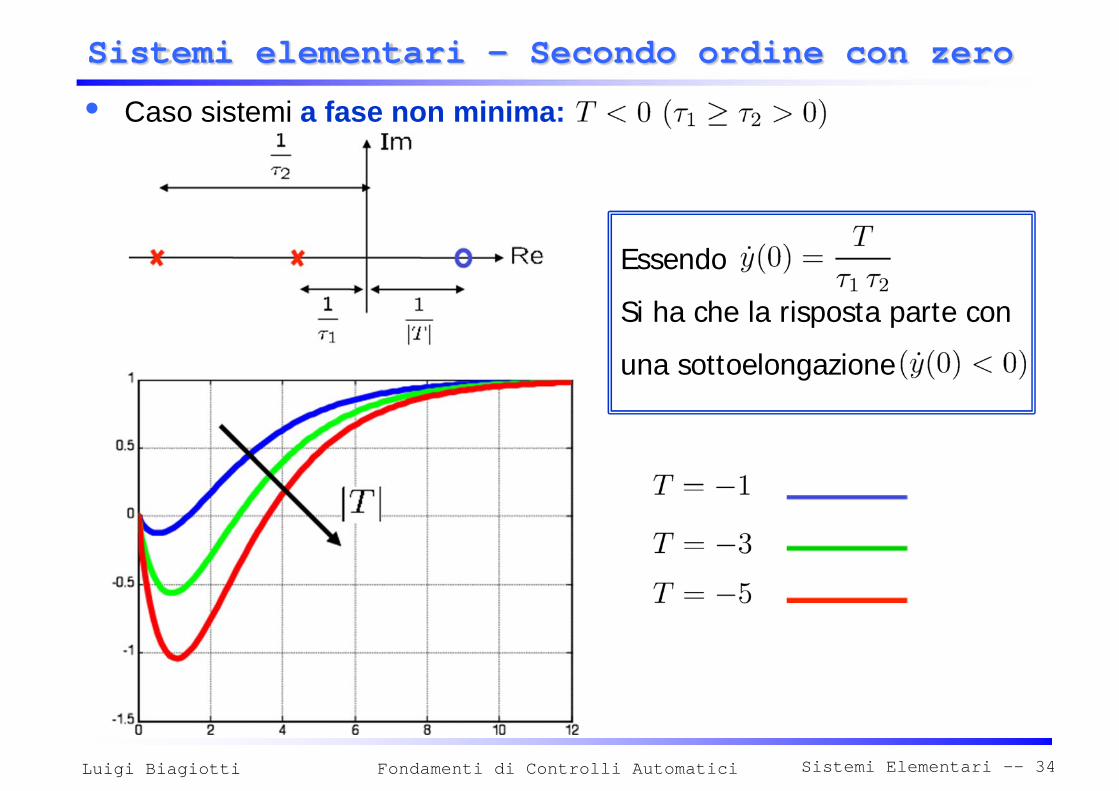
• Caso sistemi a fase non minima:
Essendo
Si ha che la risposta parte con
una sottoelongazione
Sistemi Elementari -- 35Fondamenti di Controlli AutomaticiLuigi Biagiotti
Sistemi elementari – Secondo ordine con zero
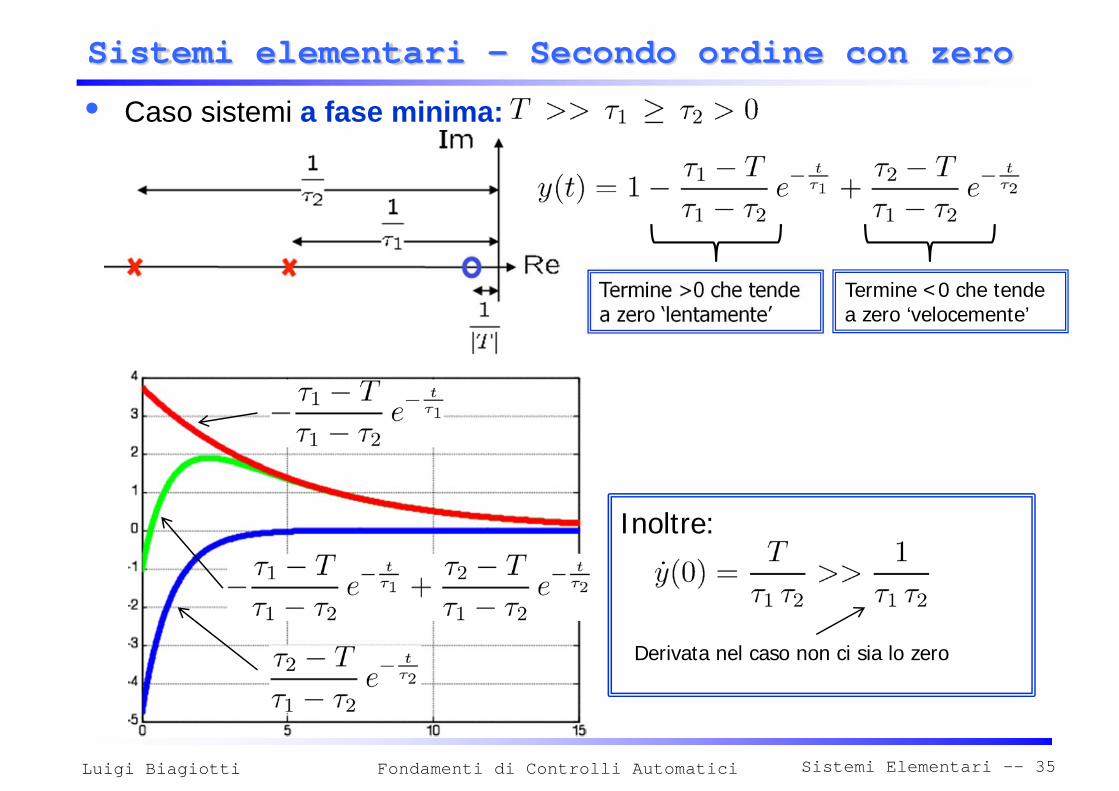
• Caso sistemi a fase minima:
Termine >0 che tende a zero ‘lentamente’
Termine <0 che tende a zero ‘velocemente’
Inoltre:
Derivata nel caso non ci sia lo zero
Sistemi Elementari -- 36Fondamenti di Controlli AutomaticiLuigi Biagiotti
Sistemi elementari – Secondo ordine con zero
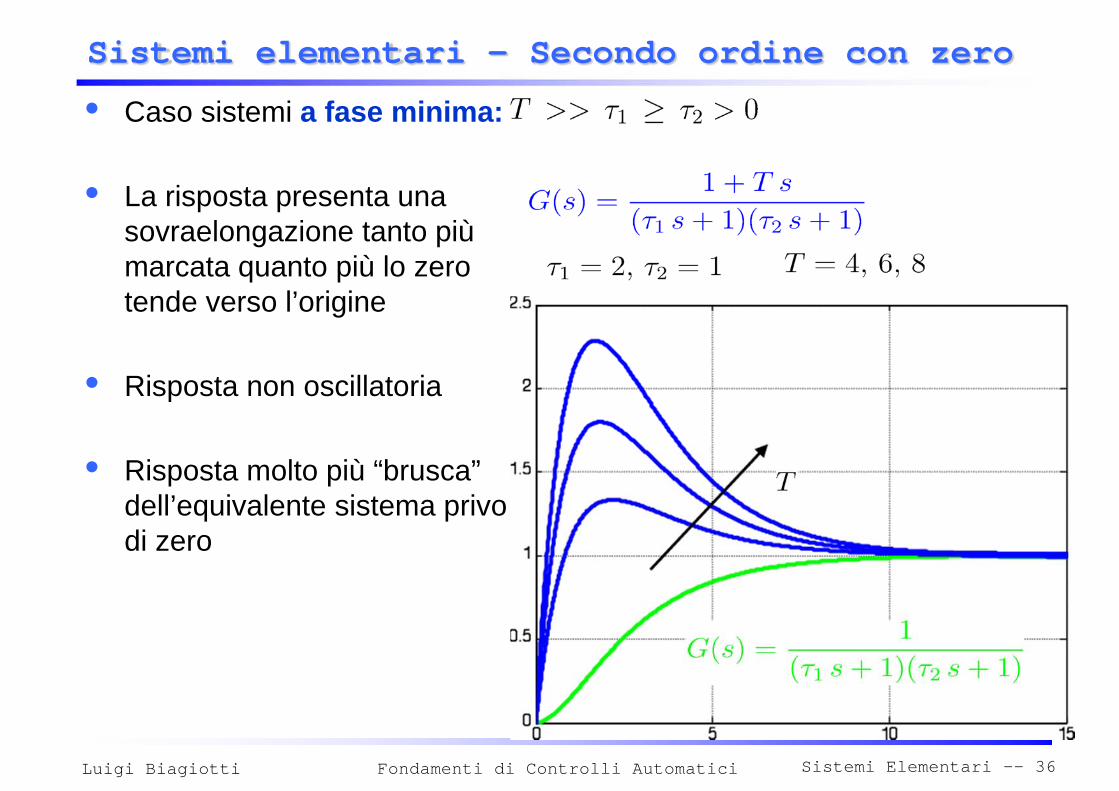
• Caso sistemi a fase minima:
• La risposta presenta una sovraelongazione tanto più marcata quanto più lo zero tende verso l’origine
• Risposta non oscillatoria
• Risposta molto più “brusca” dell’equivalente sistema privo di zero
Sistemi Elementari -- 37Fondamenti di Controlli AutomaticiLuigi Biagiotti
Sistemi elementari – Secondo ordine con zero
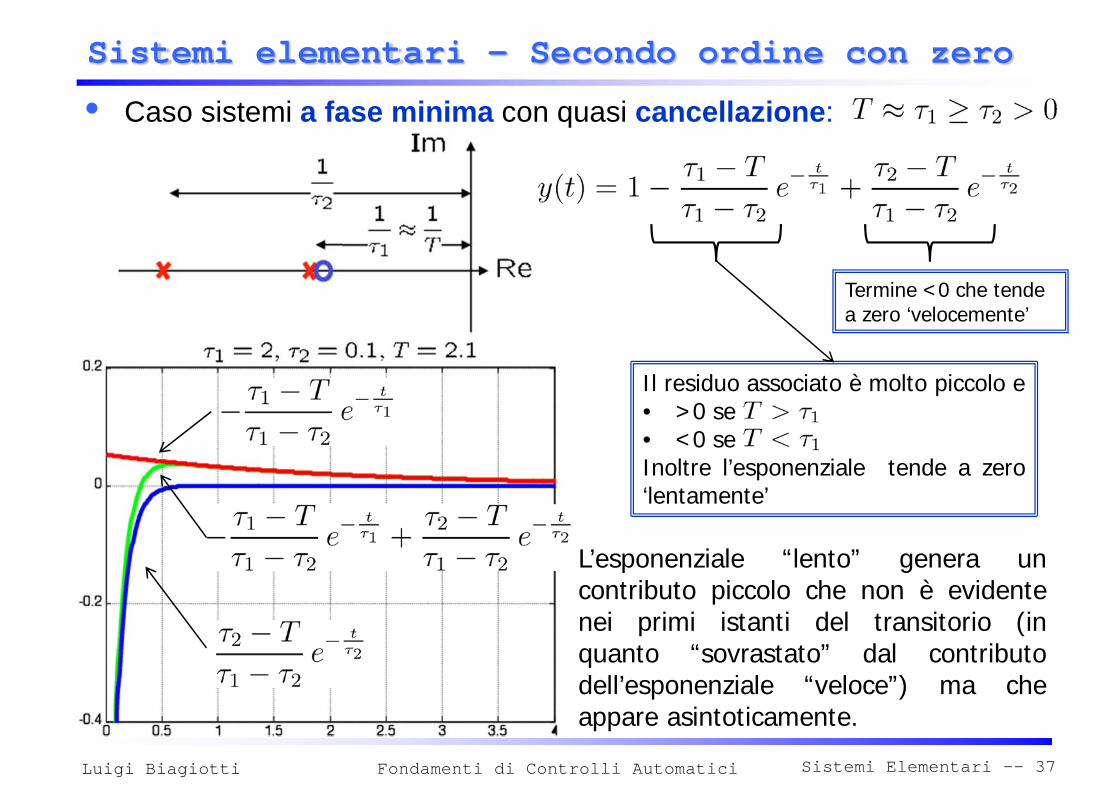
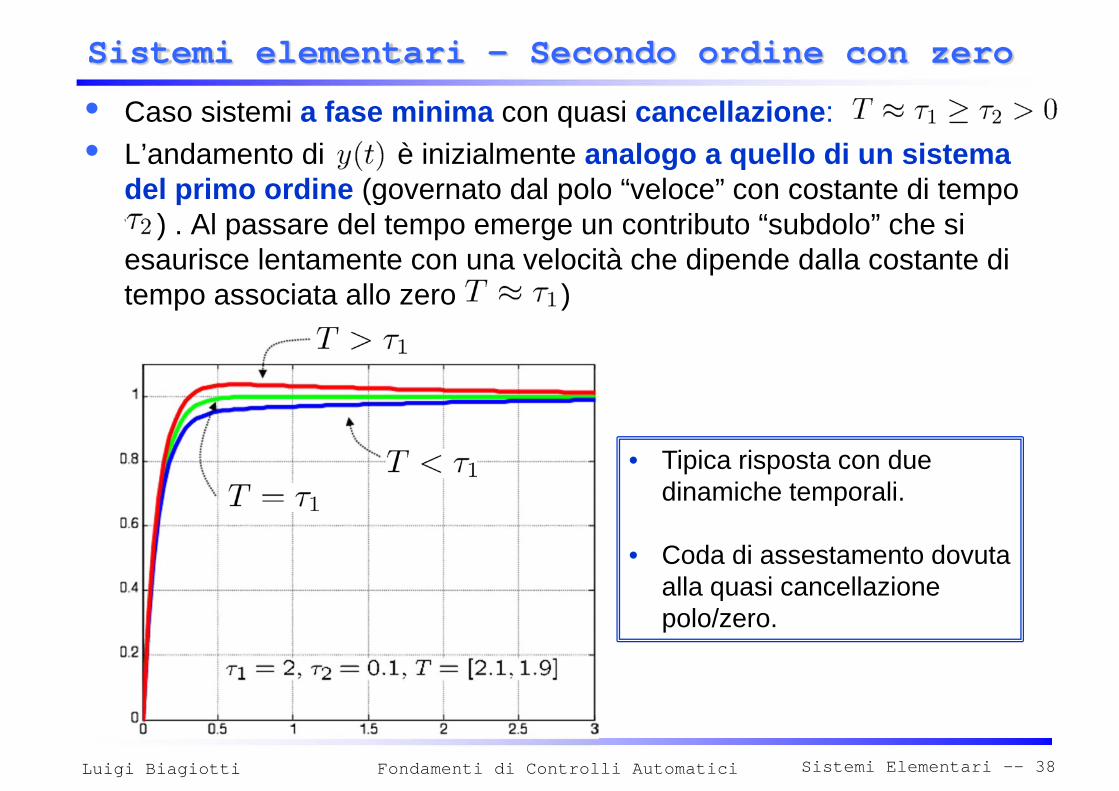
• Caso sistemi a fase minima con quasi cancellazione:
Il residuo associato è molto piccolo e• >0 se• <0 seInoltre l’esponenziale tende a zero‘lentamente’
Termine <0 che tende a zero ‘velocemente’
L’esponenziale “lento” genera uncontributo piccolo che non è evidentenei primi istanti del transitorio (inquanto “sovrastato” dal contributodell’esponenziale “veloce”) ma cheappare asintoticamente.
Sistemi Elementari -- 38Fondamenti di Controlli AutomaticiLuigi Biagiotti
Sistemi elementari – Secondo ordine con zero
• Caso sistemi a fase minima con quasi cancellazione:• L’andamento di è inizialmente analogo a quello di un sistema
del primo ordine (governato dal polo “veloce” con costante di tempo t2 ) . Al passare del tempo emerge un contributo “subdolo” che si esaurisce lentamente con una velocità che dipende dalla costante di tempo associata allo zero )
• Tipica risposta con due dinamiche temporali.
• Coda di assestamento dovuta alla quasi cancellazione polo/zero.
Sistemi Elementari -- 39Fondamenti di Controlli AutomaticiLuigi Biagiotti
Sistemi di ordine superiore al secondo
• Nel caso di un sistema con due poli reali e uno zero, si è visto che se la costante di tempo dello zero è simile a quella di uno dei due poli, la risposta è assimilabile a quella di un sistema del primo ordine (ottenuto eliminando le due singolarità prossime tra loro)
• Nel caso di sistemi di ordine superiore è possibile ottenere un modello approssimato di ordine ridotto (con una risposta al gradino simile al sistema di partenza) cancellando coppie di poli/zeri vicini tra loro nel piano complesso e con parte reale negativa.
Sistemi Elementari -- 40Fondamenti di Controlli AutomaticiLuigi Biagiotti
Sistemi di ordine superiore al secondo
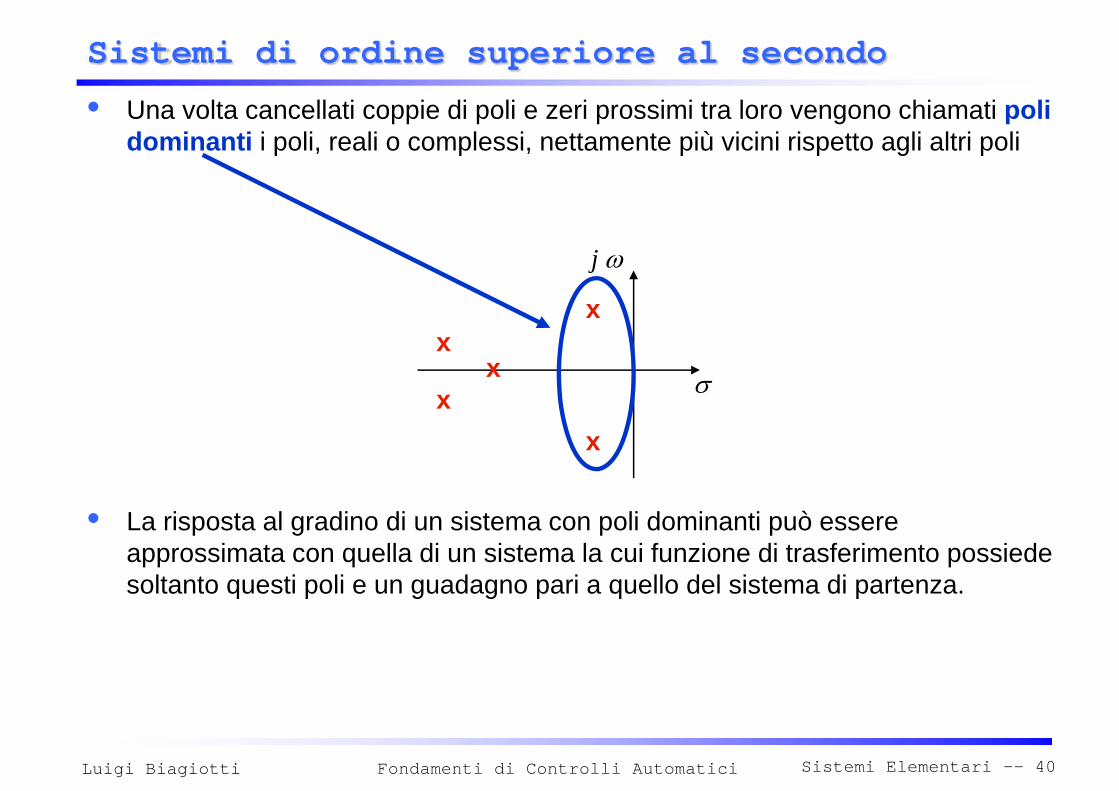
• Una volta cancellati coppie di poli e zeri prossimi tra loro vengono chiamati poli dominanti i poli, reali o complessi, nettamente più vicini rispetto agli altri poli
• La risposta al gradino di un sistema con poli dominanti può essere approssimata con quella di un sistema la cui funzione di trasferimento possiede soltanto questi poli e un guadagno pari a quello del sistema di partenza.
x
x
x
xx
j
Sistemi Elementari -- 41Fondamenti di Controlli AutomaticiLuigi Biagiotti
Sistemi di ordine superiore al secondo
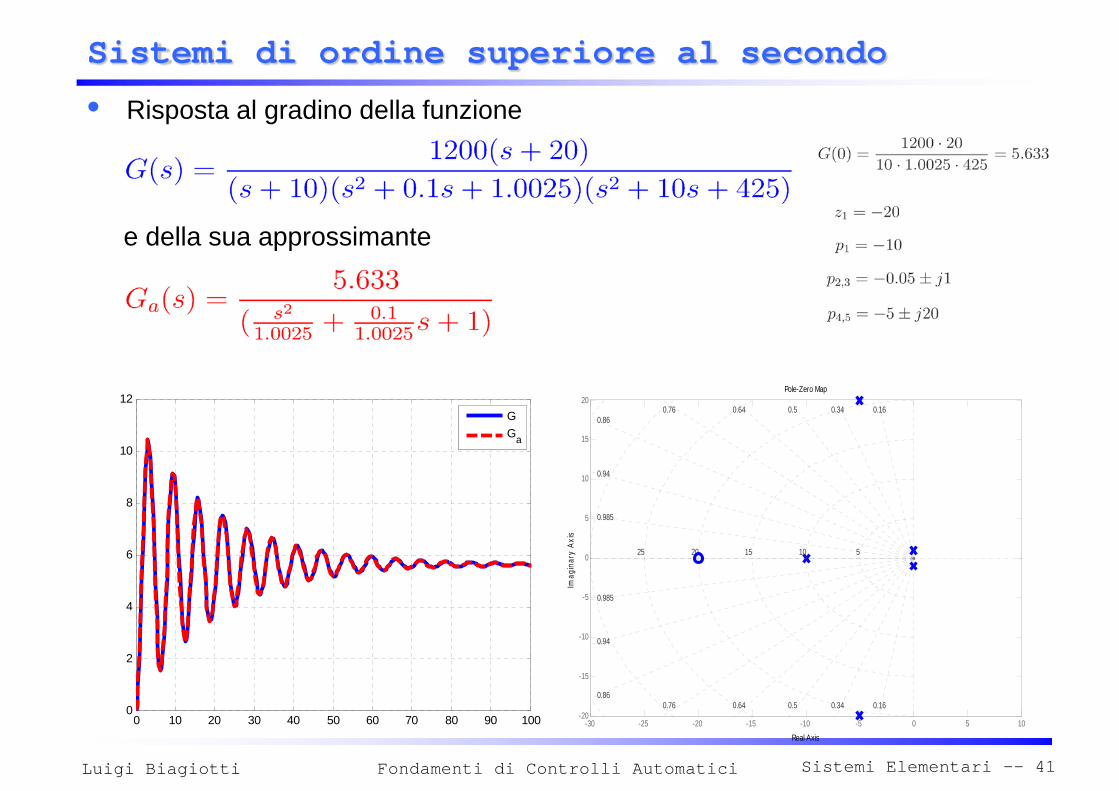
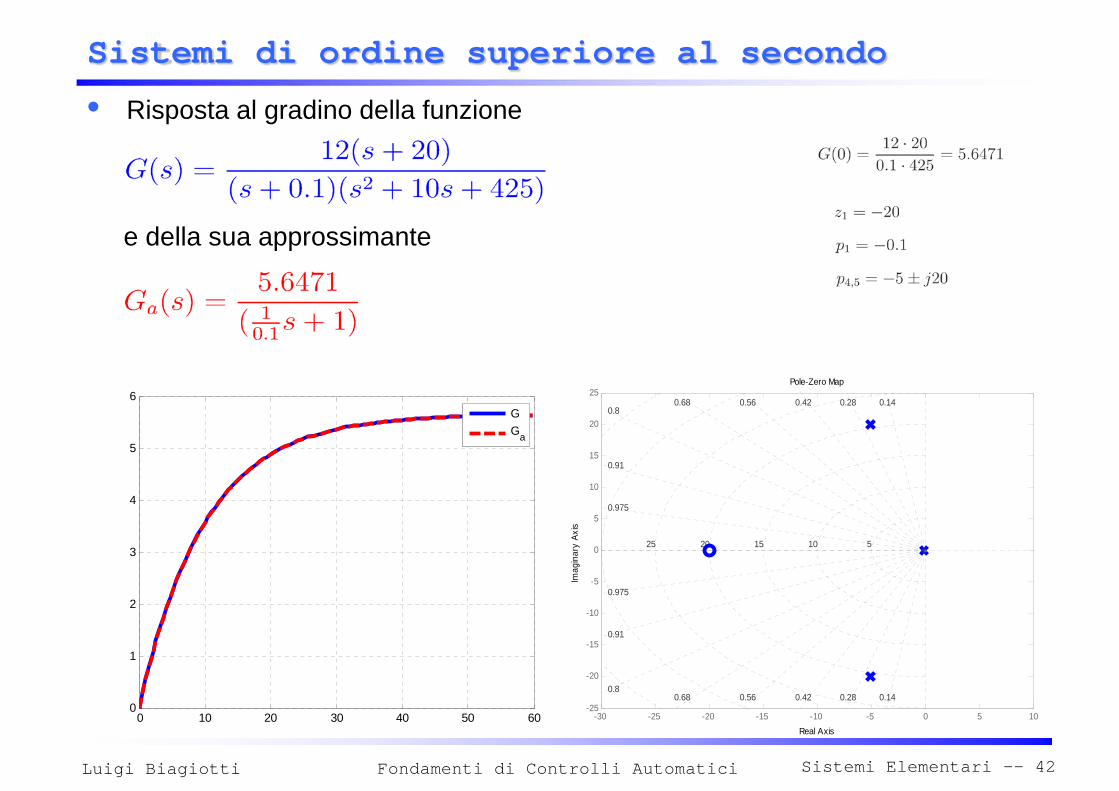
• Risposta al gradino della funzione
e della sua approssimante
0 10 20 30 40 50 60 70 80 90 1000
2
4
6
8
10
12
GGa
Pole-Zero Map
Real Axis
Imag
inar
y Ax
is
-30 -25 -20 -15 -10 -5 0 5 10-20
-15
-10
-5
0
5
10
15
200.160.340.50.640.76
0.86
0.94
0.985
0.160.340.50.640.760.86
0.94
0.985
510152025
Sistemi Elementari -- 42Fondamenti di Controlli AutomaticiLuigi Biagiotti
Sistemi di ordine superiore al secondo
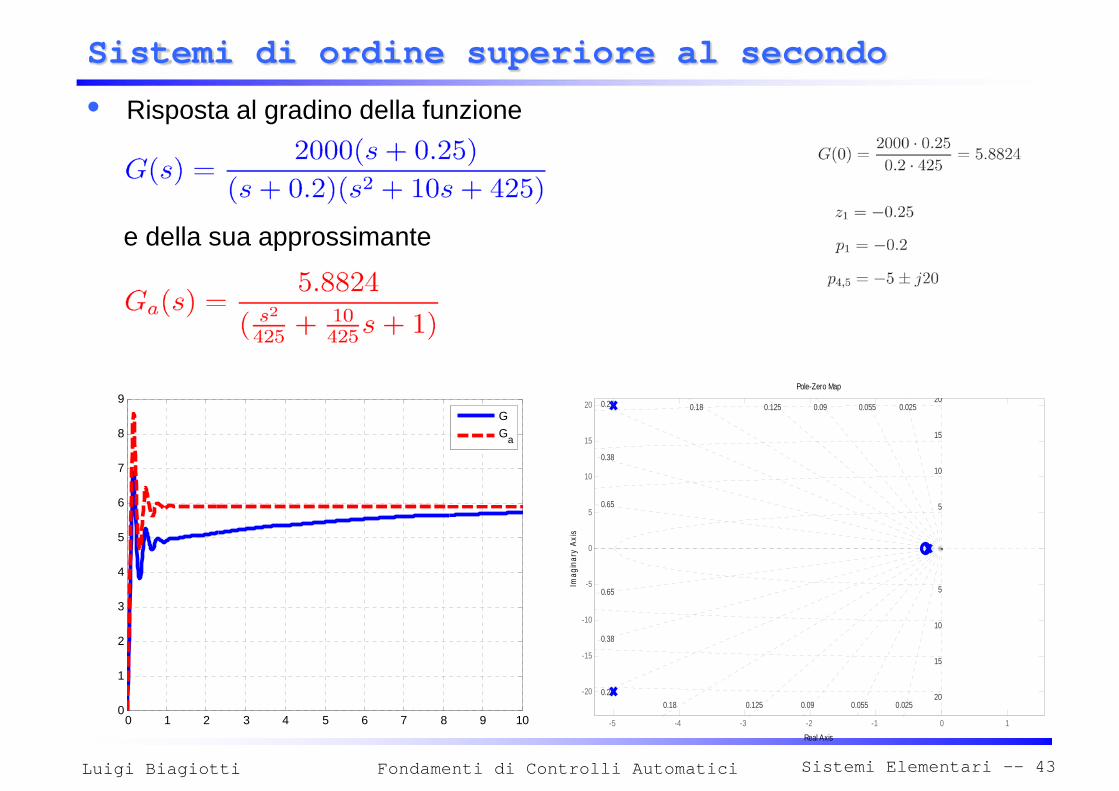
• Risposta al gradino della funzione
e della sua approssimante
0 10 20 30 40 50 600
1
2
3
4
5
6
GGa
-30 -25 -20 -15 -10 -5 0 5 10-25
-20
-15
-10
-5
0
5
10
15
20
250.140.280.420.560.68
0.8
0.91
0.975
0.140.280.420.560.680.8
0.91
0.975
510152025
Pole-Zero Map
Real Axis
Imag
inar
y Ax
is
Sistemi Elementari -- 43Fondamenti di Controlli AutomaticiLuigi Biagiotti
Sistemi di ordine superiore al secondo
• Risposta al gradino della funzione
e della sua approssimante
-5 -4 -3 -2 -1 0 1
-20
-15
-10
-5
0
5
10
15
20 0.0250.0550.090.1250.180.25
0.38
0.65
0.0250.0550.090.1250.180.25
0.38
0.65
5
10
15
20
5
10
15
20
Pole-Zero Map
Real Axis
Imag
inar
y Ax
is
0 1 2 3 4 5 6 7 8 9 100
1
2
3
4
5
6
7
8
9
GGa
Sistemi Elementari -- 44Fondamenti di Controlli AutomaticiLuigi Biagiotti
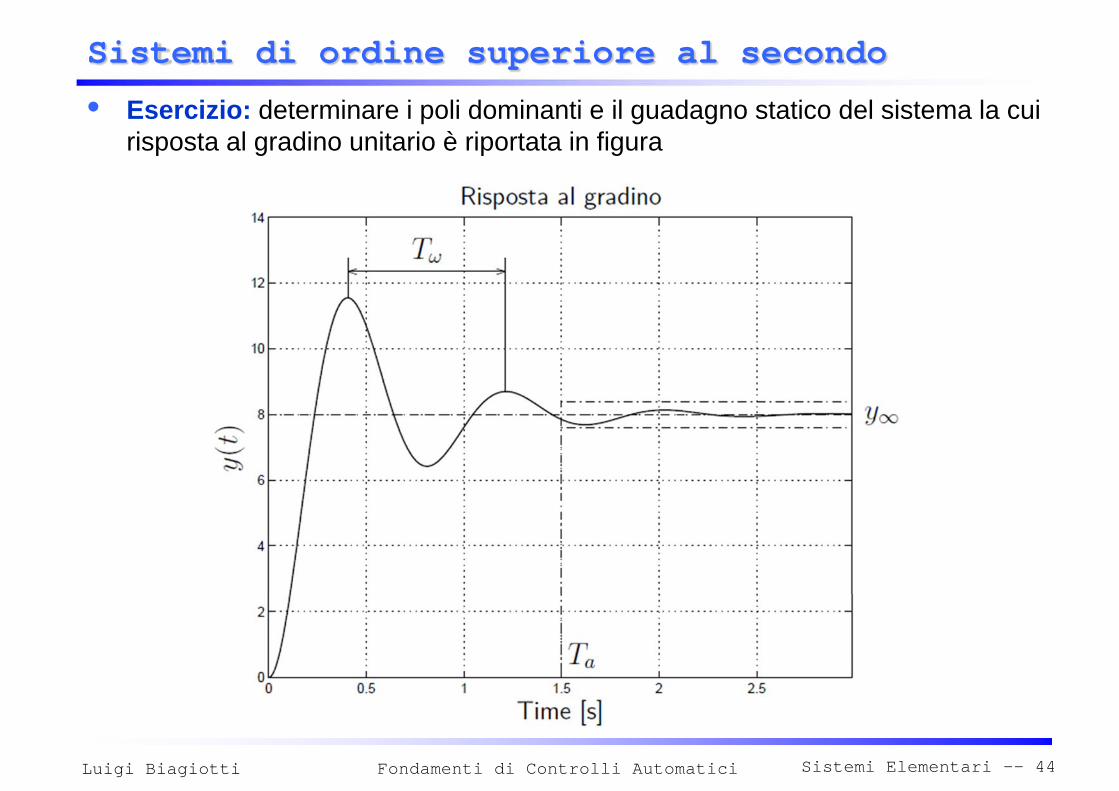
Sistemi di ordine superiore al secondo
• Esercizio: determinare i poli dominanti e il guadagno statico del sistema la cui risposta al gradino unitario è riportata in figura
Sistemi Elementari -- 45Fondamenti di Controlli AutomaticiLuigi Biagiotti
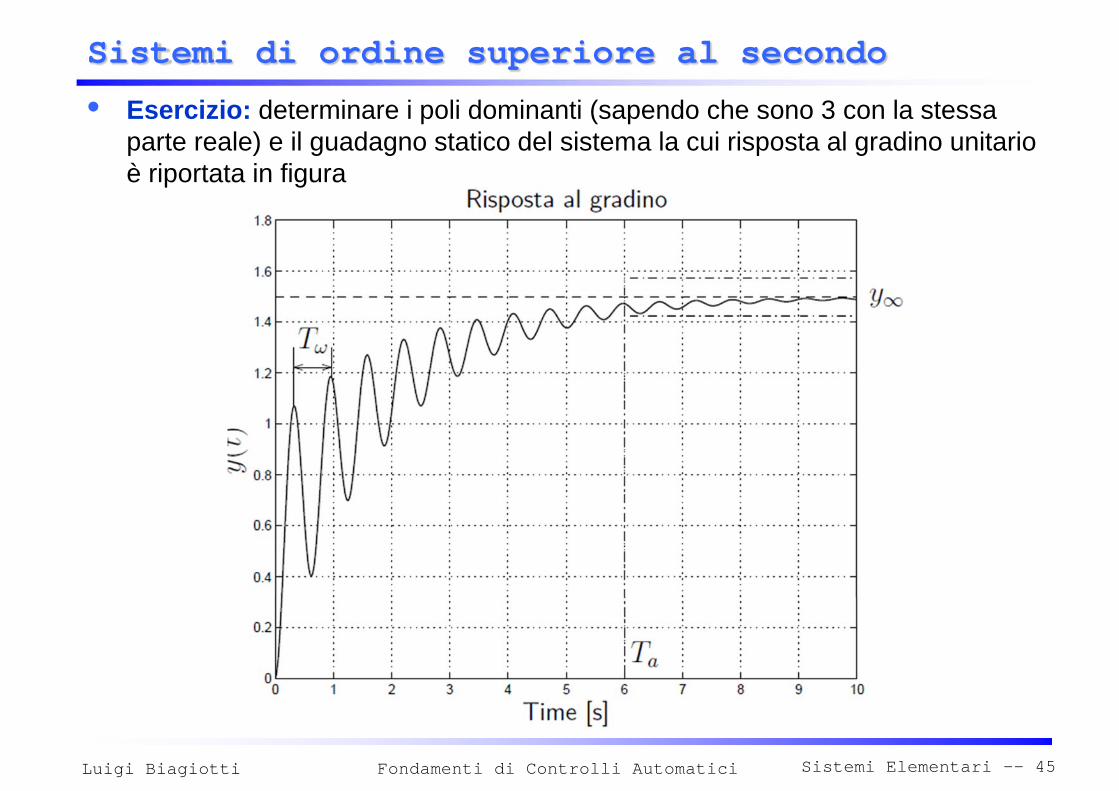
Sistemi di ordine superiore al secondo
• Esercizio: determinare i poli dominanti (sapendo che sono 3 con la stessa parte reale) e il guadagno statico del sistema la cui risposta al gradino unitario è riportata in figura

Ing. Luigi Biagiottie-mail: [email protected]
http://www.dii.unimore.it/~lbiagiotti
FONDAMENTI DI CONTROLLI AUTOMATICIIngegneria Meccanica
http://web.ing.unimo.it/~lbiagiotti/FondamentiControlli1415.html
Sistemi elementari del 1o e 2o ordineFINE

![Calcolo 1 [ 40213 ] - UniTrento · di una funzione e di una successione. Funzioni continue e discontinue. Regole di calcolo per i limiti. ... (numeri, operazioni elementari, potenze,](https://img.pdfslide.net/doc/110x75/5c68da9409d3f2e4258c019d/calcolo-1-40213-di-una-funzione-e-di-una-successione-funzioni-continue.jpg)



























