Embed Size (px)
Citation preview

Stability analysis of delayed prey-predator
modelwith disease in the prey
M. Senthilkumaran1 and C. Gunasundari
2
1Assistant Professor, PG and Research Department of Mathematics, Thiagarajar College, Madurai.
2Research Scholar, PG and Research Department of Mathematics, Thiagarajar College, Madurai.
Abstract
A non linear mathematical model for a Predator-Prey community is proposedand
analysed. The system consisting of two competitive prey populations and one
predatorpopulation with disease in the prey and two delays. We investigate the positivity
andboundedness of the system. Local stability of the positive equilibrium of thesystem and
the existence of local Hopf bifurcation are investigated by choosing differentcombinations of
the two delay as bifurcation parameters. The direction and the stabilityof Hopf bifurcation are
determined by using the normal form method and center manifoldtheorem. Finally, we
present some numerical examples to illustrate our analytical works.
Keywords: Epidemics, time delay,Hopf bifurcation, Stability.
1. Introduction
The mathematical modelling of epidemics has become a very important subject of
research after the pioneering work of Kermac and Mckendrick (1927) on SIRS systems, in
which the evolution of a disease which gets transmitted upon contact is described. Important
studies in the next decades have been carried out with the aim of controlling the effects of
diseases and of developing suitable vaccination strategies (Hethcode[1], Wang and Ma [2],
Liu et al [3]., Bhunu and Garira[4]. After the seminal models of Vito Volterra and Alfred
James lotka in the mid 1920's for predator prey interactions, mutualist and competitive
mechanisms have been studied extensively studied in the recent years by researchers
(Hsuetal.[5]; Hwang [6]) Mathematical biology, namely predator prey systems and models
fortransmissible diseases are major fields of study in their own right. In order to study the
influence of disease on an environment two or more interacting species should be presented.
Recently Chaudhuri et.al. studied the following eco epidemiologicalsystem consisting of four
species namely sound prey, infected prey, sound predator,infected predators.
𝑑𝑋1(𝜏)
𝑑𝜏= 𝑋1(𝑟1 −
𝑋1 + 𝑋2
𝑘 − 𝛾𝑋2 − 𝛽𝑋4 − 𝑏1𝑋3 − 𝑏3𝑋4)
𝑑𝑋2(𝜏)
𝑑𝜏= 𝑋2 𝑟2 − 𝜈 + 𝛾𝑋1 −
𝑋1+𝑋2
𝑘 − 𝑏2𝑋3 − 𝑏4𝑋4 + 𝛽𝑋1𝑋4
𝑑𝑋3(𝜏)
𝑑𝜏= 𝑋3(−𝑚 − 𝛼𝑋2 − 𝜂𝑋4 + 𝑒 𝑏1𝑋1 + 𝑏2𝑋2 ) (1.1)
𝑑𝑋4(𝜏)
𝑑𝜏= 𝑋4(−𝑚 − 𝜇 + 𝜂𝑋3 + 𝑒 𝑏3𝑋1 + 𝑏4𝑋2 + 𝛼𝑋2𝑋3)
In this paper we shall modify system (1.1) into a three dimensional eco epidemiologicalmodel
as sound prey, infected prey and predator population. It is reasonable to incorporate two time
International Journal of Computational and Applied Mathematics. ISSN 1819-4966 Volume 12, Number 1 (2017) © Research India Publications http://www.ripublication.com
356

delays 𝜏1 and 𝜏2, where 𝜏1is the time delay due to susceptibleprey which becomes the
infected prey and 𝜏2 is the delay due to the gestation of the predator into the system (1.1). The
modified system is
𝑑𝑋1(𝜏)
𝑑𝜏= 𝑋1𝑟1 − 𝑋1
𝑋1 + 𝑋2
𝑘 − 𝛾𝑋1𝑋2(𝑡 − 𝜏1) − 𝑏1𝑋1𝑋3)
𝑑𝑋2(𝜏)
𝑑𝜏= 𝑋2𝑟2 − 𝜈𝑋2 + 𝛾𝑋1𝑋2 𝑡 − 𝜏1 − 𝑋2
𝑋1+𝑋2
𝑘 − 𝑏2𝑋2𝑋3)
𝑑𝑋3(𝜏)
𝑑𝜏= −𝑋3𝑚 − 𝛼𝑋3𝑋2 + 𝑒𝑏1𝑋1 𝑡 − 𝜏2 𝑋3 + 𝑒𝑏2𝑋2𝑋3 (1.2)
The initial conditions for the system (1.2) takes the form
X1 (θ) = υ1 (θ) ≥ 0, X2 (θ) = υ2 (θ) ≥ 0, X3 (θ) = υ3 (θ) ≥ 0, υ1 (0) > 0, υ2 (0) > 0, υ3 (0) > 0
(1.3)
where τ = max {τ1, τ2}, (υ1 (θ), υ2 (θ), υ3 (θ)) ∈ C([−τ, 0], 𝑅+03 ), the banach space of
continuous functions mapping the interval [−𝜏, 0] into 𝑅+03 , where 𝑅+0
3 = { 𝑥1, 𝑥2, 𝑥3 : 𝑥𝑖 ≥0, 𝑖 = 1,2,3} as the interior of 𝑅+0
3 . It is well known by the fundamental theorem of functional
differential equations that the system (1.2) has a unique solution (X1 (τ),X2 (τ),X3 (τ))
satisfying initial conditions (1.3).
For sake of simplicity, we put in dimensionless form the model equation (1.2) byrescaling
the variables x1 (t) = θX1 (τ ), x2 (t) = ψX2 (τ ), x3 (t) = ψX3 (τ ), t = τ σ whereσ = m, υ = 𝛾
𝑚 , ω
= 𝛽
𝑚 , θ =
𝑒𝑏1
𝑚 , ψ =
𝑏1
𝑚. Let A =
𝛾
𝑒𝑏1 , B =
1
𝐾 𝛾 , C =
𝑏3
𝛽 , E =
𝛼
𝛾 , F =
𝜂
𝛽 , G =
𝑏3
𝑏1 , X =
𝑒𝑏2
𝛾 , R1 =
𝑟1
𝑚 ,
R2=𝑟2−𝜈
𝑚, M=
𝜇
𝑚. We obtain
\
𝑥1 = x1 R1 − ABx12 − Bx1 x2 − x2 (t − τ1)x1 − x1 x3
𝑥2 = x2 R2 − x2 ABx1 − Bx22+ Ax2 (t − τ1)x1 − AXx2 x3 (1.4)
𝑥3 = −x3 + x3 x1 (t − τ2) + (X − E)x2 x3
The rest of this paper is organised as follows. In the next section results on positivityand
boundedness of the system are presented. Section 3 shows the equilibrium analysis of the
system. Analysis of the model in the absence of delay is discussed in section4. In Section 5
analysis of the model with delay is given. Section 6 with discussionscompletes the paper.
2. Positivity and boundedness
Positivity implies that the population survive and boundedness may be interpreted as a
natural restriction to a growth as a consequence of limited sources. The system can be put
into the matrix form X = G(X) where X = (x1, x2, x3)T R
3 and G(X) is given by G(X)=
2
1 1 1 1 2 2 1 1 1 3
2
2 2 2 1 2 2 1 1 2 3
3 3 1 2 2 3
(t )
( )
( ) ( )
x R ABx Bx x x x x xx R x ABx Bx Ax t x AXx x
x x x t X E x x
Let 3R= [0,+] be the non negative octant in R3
. The function G :3 1R
R
3 is locally
Lipschitz and satisfy the condition G1(X) = Xi(i) = 0, X 3R 0 where X1 = x1, X2 = x2, X3 =
x3. Due to lemma in [7] and theorem A4 in [8] an solutions of (1.2) with positive initial
International Journal of Computational and Applied Mathematics. ISSN 1819-4966 Volume 12, Number 1 (2017) © Research India Publications http://www.ripublication.com
357

conditions exist uniquely and each component of X remains the interval [0,b) for some b > 0.
Furthermore if b < + , then lim sup[x1() + x3()] = + .
Next we present the boundedness of solutions, 𝑑𝑥1(𝜏)
𝑑𝑡x1(R1-AB).
By a standard comparison theorem we have
lim supt+x1() R1
Therefore there exists x1() <R1 + = M1,t 0, > 0. Choosing a function
(t) = x2 + x3,
2 3( )t x x ,
( )t x2R2 – x2ABx1 - B 2
2x + Ax2(t-1) x1 – AXx2x3 – x3 + x3x1 (t-2) + (X-E)x2x3
Then
( )t +(t)x2R2-x2ABx1–B2
2x +Ax2(t-1)x1-AXx2x3-x3+x3x1(t-2) + (X-E)x2x3 + x2 + x3
where is a positive constant. Thus there exists a positive constant c such that ( )t + (t) c.
Then
(t) <c
+ ((t*) - c
)e-(t-t*)
Choose a positive constant M2>c
sufficiently close to c
and let
1 = {(x1, x2,x3) 3R
/x1 (t) M1,x2(t) M2,x3 (t) M2}
2.1. Permanence
Theorem 2.1
System (1.4) is permanent provided that R1–BM2 – M2> 0. Proof :
(1.4) x (R1 - (B+1) M2) for t > T
According to R1 – (B+1)M2> 0, choose > 0 sufficiently small such that R1-(B+1) M2 - > 0.
t1>T such that x(t) >R1 – (B + 1) M2 - = m1.
From the third equation of system 1.4, we have for t>t1 + T2.
3x (t) m1x3 – x3 + (X – E)x2x3 (2.6)
= x3(m1-1 + (X - E)x2)
Consider the comparison equation,
( )u t = u(t) (m11 + (X E)x2)
( )v t = v(t) R2-v (t) m1AB – Bv(t)2 + Am1v(t) – AXv(t)u(t) (2.7)
Let (u(t), v(t)) be the solution of the system (2.7) with initial conditions (u(0), v(0)), 0 <u (0)
< (0), 0 <v (0) <(0). According to comparison theorem, u(t) <x3(t), v(t) <x2(t) for t> t2 +2
and
lim u(t) =
2
2 1
2 2 22
AB R A AXR A XBABX ABE B AE A X B A XBE
(2.8)
lim v(t) = R1 – AB(1XU + EU) – BU – U,
Hence there exists t3> t2 + 2 such that
International Journal of Computational and Applied Mathematics. ISSN 1819-4966 Volume 12, Number 1 (2017) © Research India Publications http://www.ripublication.com
358

x3(t) >
2
2 1
2 2 22
AB R A AXR A XBABX ABE B AE A X B A XBE
-= m3
x2(t) >R1 – AB(1-XU + EU) – BU – U – = m2 (2.9)
Therefore
0 = {(x1,x2,x3) 3R/m1x1(t) M1,m2x2(t) M2,m3x3(t) M3}
(2.10)
3. Equilibria analysis
The Jacobian matrix of (1.4) at E* is
1
1
2
* * * * * * *
1 1 2 2 3 1 1 1
* * * * * * *
2 2 2 1 2 1 3 2
3 3 1 2
2
2
( ) 1 ( )
R ABx Bx x x Bx x e xx AB Ax R x AB Bx Ax e AXx AXx
x e X E x x X E x
(3.1)
The characteristic equation of the Jacobian matrix is
3 + A
2 + B + C + (D
2 + E + F)e
-1 + (G + H)e
-2 + I𝑒−𝜆(𝜏1+𝜏2)= 0
(3.2)
where
A = 1-*
1x + 3AB*
1x +*
3x R1 – R2 + *
2x + 3B*
2x + e*
2x + A*
3x X*
2x X
B = 3AB *
1x 3AB *2
1x +2A2B2 *2
1x +*
3x *
1x *
3x +AB *
3x *
1x R1 + x1R1 + AB*
1x R1-R2+*
1xR22AB
*
1x R2R2*
3x +R1R2+*
2x +3B*
2x - *
2x *
1x -3B*
1x *
2x + 2AB*
1x *
2x + 4AB2 *
1x *
2x + 3ABe
*
1x *
2x + 2B*
2x *
3x + e*
2x *
3x 2BR1*
2x eR1*
2x R2*
2x -BR2*
2x eR2*
2x + 2B*2
2x +2B2 *2
2x + e
*2
2x +3Be*2
2x + A*
3x X - A*
1x *
3x X+2A2B
*
1x *
3x +A*2
3x X A*
3x R1X3AB*
1x *
2x *
2x *
3x X+A
*
2x *
3x X +AB*
2x *
3x X+R1*
2x X+R2*
2x X -*2
2x X- 3B*
2x 2X
C = 2A2B
2 *2
1x 2A2B
2 *3
1x + AB*
1x *
3x AB*2
1x *
3x AB*
1x R1 + AB*2
1x R1-2AB*
1x R2+2AB
*2
1x R2 – *
3x R2 +*
1x *
3x R2+R1R2*
1x R1R2 + 2AB*
1x *
2x + 4AB2 *
1x *
2x 2AB*2
1x *
2x -4AB2 *2
1x*
2x +2A2B
2e
*2
1x *
2x +2B*
2x *
3x -2B*
1x *
2x *
3x -Ae*
1x *
2x *
3x +2ABE*
1x *
2x *
3x -2BR1*
2x +2B*
1x *
2xR1-ABeR1
*
1x *
2x -R2*
2x -BR2*
2x +*
1x *
2x R2+B*
1x *
2x R2-2ABE*
1x *
2x R2-e*
2x *
3x R2+eR1R2*
2x+2B
*
2x 2 +2B
2 *
2x 2 -2B
*
1x *
2x 2 -2B
2 *
1x *
2x 2 +2ABe
*
1x *
2x 2 4AB
2e
*
1x *
2x 2+2Be
*
3x *2
2x -2BeR1*2
2x-eR2
*2
2x -BeR2*2
2x + 2Be*3
2x +2B2e
3
2x +2A2B
*
1x *
3x X 2A2B
*2
1x *
3x X + A*2
3x X + AB*
2x *
3x X
– 3AB*
1x *
2x *
3x +AB*
1x *
2x R1X- 4AB2 *
1x *
2x 2X2B
*2
2x *
3x X+2BR1*2
2x X+R2*
2x 2X+BR2
*
2x2X-2B
*3
2x X -2B2 *3
2x X,
D = A*
1x , E = A*
1x *
2x X Ae*
1x *
2x 2AB*
1x *
2x + A*
1x R1-A*
1x *
3x 2A2B
*2
1x + A*
1x 2-A
*
1x
F = 2A2B
*3
1x 2A2B
*2
1x - A*
1x *
3x + A*2
1x *
3x + A*
1x R1A*
1x 2R1-2AB
*
1x *
2x X+2AB*
1x 2 *
2x -
2A2Be
*2
1x *
2x -Ae*
1x *
2x *
3x +Ae*
1x *
2x R1-2ABe*
1x *
2x 2 +2A
2B
*
1x 2 *
2x X+A*
1x *
2x *
3x X-AR1*
2x X
International Journal of Computational and Applied Mathematics. ISSN 1819-4966 Volume 12, Number 1 (2017) © Research India Publications http://www.ripublication.com
359

*
1x -2AB*
1x *2
2x X, G = *
1x *
3x , H = AB*
1x *
2x *
3x + A*
1x *2
3x X + 2B*
1x *
2x *
3x -*
1x *
3x R2 + AB
*2
1x *
3x , I = A*
1x *
2x *
3x X A*2
1x *
3x
4. Analysis of model in the absence of delay
In this section we find the possible non negative equilibrium points to the system (1.4)
and then we analyse stability criterion (both local as well as global) of those points. The
possible equilibrium points to the system (1.4) are
i. The trivial equilibrium point E0(0,0,0)
ii. The predator free and disease free equilibrium E1(R1/AB,0,0)
iii. The disease free equilibrium E2(1,0,R1-AB)
iv. The interior equilibrium E* (*
1x ,*
2x ,*
3x ) where
*
1x = 1(𝐴𝐵−𝑅2−𝐴+𝐴𝑋𝑅1−𝐴2𝑋𝐵)𝑋
2𝐴𝐵𝑋 −𝐴𝐵𝐸−𝐵+𝐴𝐸−𝐴2𝑋2𝐵+𝐴2𝑋𝐵𝐸+
𝐸(𝐴𝐵−𝑅2−𝐴+𝐴𝑋𝑅1−𝐴2𝑋𝐵)
2𝐴𝐵𝑋 −𝐴𝐵𝐸−𝐵+𝐴𝐸−𝐴2𝑋2𝐵+𝐴2𝑋𝐵𝐸 ,
*
2x =(𝐴𝐵−𝑅2−𝐴+𝐴𝑋𝑅1−𝐴2𝑋𝐵 )
2𝐴𝐵𝑋 −𝐴𝐵𝐸−𝐵+𝐴𝐸−𝐴2𝑋2𝐵+𝐴2𝑋𝐵𝐸 ,
*
3x = R1– AB((𝐴𝐵−𝑅2−𝐴+𝐴𝑋𝑅1−𝐴2𝑋𝐵)𝑋
2𝐴𝐵𝑋 −𝐴𝐵𝐸−𝐵+𝐴𝐸−𝐴2𝑋2𝐵+𝐴2𝑋𝐵𝐸+
𝐸(𝐴𝐵−𝑅2−𝐴+𝐴𝑋𝑅1−𝐴2𝑋𝐵)
2𝐴𝐵𝑋 −𝐴𝐵𝐸−𝐵+𝐴𝐸−𝐴2𝑋2𝐵+𝐴2𝑋𝐵𝐸)-
(B+1)(𝐴𝐵−𝑅2−𝐴+𝐴𝑋𝑅1−𝐴2𝑋𝐵)
2𝐴𝐵𝑋 −𝐴𝐵𝐸−𝐵+𝐴𝐸−𝐴2𝑋2𝐵+𝐴2𝑋𝐵𝐸
The system may have a prey free equilibrium. But in ecological sense, this
equilibrium has no impact, since we have assumed that in our model, the prey population is
the only source of food for the predator and so without prey the predator always extinct.
Theorem 4.1The system (1.4) is always unstable around the trivial equilibrium E0 (0,0,0). Proof :
The root of the characteristic equation of the system at E0(0,0,0) is R1, R2,– 1. Here
two roots of the characteristic equation are positive and one is negative, the system is
unstable in the neighbourhood of E0(0,0,0).
Theorem 4.2The system (1.4) is locally asymptotically stable around the equilibrium
E1(R1/AB,0,0) if B > max 1 1
1 2
,R R
R R A
Proof :
The roots of the characteristic equation are – R1,2 1 1 1( )
,B R R R R AB
B AB
. Now
we have if B > max 1 1
1 2
,R R
R R A
then all 1,2,3 are negative and so the system (1.4) is
locally asymptotically stable.
Theorem 4.3The system (1.4) is locally asymptotically stable around the equilibrium
E2(1,0,R1-AB) if X > 2
1( )
A R ABA R AB
Proof
The roots of the characteristic equation are 0,0, R2-AB + A – AX(R1-AB). If X>
2
1( )
A R ABA R AB
the system (1.4) is locally asymptotically stable.
International Journal of Computational and Applied Mathematics. ISSN 1819-4966 Volume 12, Number 1 (2017) © Research India Publications http://www.ripublication.com
360

Now for 1=2 = 0, the characteristic equation of the model around its interior equilibrium E*(
*
1x *
2x *
3x ) reduce to
3 + (A+D)
2 + (B+E+G) + (C+F+H+1) = 0. (4.1)
Now we state and prove a sufficient condition for the system to be locally
asymptotically stable around its interior equilibrium point E*(*
1x ,*
2x ,*
3x ) in the following
theorem.
Theorem 4.4.Assume that hi(i=1,2,3) and h1h2 – h3> 0 where h1 = A + D, h2 = B + E + G, h3 = C + F + H + I, then the positive interior equilibrium E*( *
1x *
2x *
3x ) is locally asymptotically stable. Proof :
If h1> 0, h2> 0, h3> 0 and h1h2-h3> 0 then by Routh Hurwitz criterion we may
conclude all the eigen values of the system around the interior equilibrium E*(
*
1x ,*
2x ,*
3x )
have negative real parts. Consequently the system will be locally asymptotically stable.
4.1. Global Stability
Theorem 4.5The system (1.4) is globally asymptotically stable around its interior equilibrium E*( *
1x *
2x *
3x ) Proof :
To show the global stability of the model (1.4) about its interior equilibrium E*(
*
1x *
2x*
3x ), let us construct a Lyapunov function as
V(x1,x2,x3)=v1
1 2 3
* * *1 2 3
* * *
1 1 2 2 3 31 2 2 3 3
1 2 3
x x x
x x x
x x x x x xdx v dx v dxx x x
(4.2)
* * *1 2 31 1 1 2 2 2 3 3 3
1 2 3
( ) ( ) ( ) dV x x xv x x v x x v x x
dt x x x (4.3)
=
*21 1
1 1 1 1 2 1 2 1 3 1
1
*22 2
2 2 2 1 2 1 2 2 3
2
*
3 33 3 1 3 2 3 2 3
3
( )
( 2 )
v ( )
x xv x R ABx Bx x x x x xx
x xv x R x x AB Bx Ax x AXx xxx x x x x Xx x Ex x
x
= * * * * *
1 1 1 1 1 2 2 2 2 3 3( )( ( ) B(x ) (x x ) ( ) v x x AB x x x x x )
+* * * * *
2 2 2 1 1 2 2 1 1 3 3( )( ( ) B( ) ( ) ( ) v x x AB x x x x A x x AX x x )
+* * *
3 3 3 1 1 2 2( )(( ) ( )( ) v x x x x X E x x )
Let us choose v1 = 2 3
1 1 1, ,
v v
X E AX X E then
* 2 * 2 * *
1 1 1 2 2 2 1 1 2 2 1 1 2 2( ) ( ) ( )( )( ) dV v AB x x Bv x x x x x x v B v v AB Avdt
International Journal of Computational and Applied Mathematics. ISSN 1819-4966 Volume 12, Number 1 (2017) © Research India Publications http://www.ripublication.com
361

* * 2
1 1 2 2 2 2 2(x x ) ( ) v AB Bv x x
* 2
1 1 2(x x ) v AB
0
The system (1.4) is globally asymptotically stable around its interior equilibrium E*(
*
1x ,*
2x ,
*
3x )
5. Analysis of model in the presence of delay In previous section we havediscussed the
system in the absence of delay. In this section, we analyze our model when delay is present.
Case 1 : 1> 0, 2 = 0
On substituting 2 = 0, (3.2) becomes
3 + p2
+ q + r + (s2 + t + u) 1e
=0 (5.1)
Where
P = A, q = B + G, r = C + H,s = D, t = E, u = F+1 (5.2)
Let = i1(1>0) be a root of the equation (5.1), then
t1sin11 + (u-2
1s )cos11 = 2
1p - r (5.3)
t1cos11 + (u-2
1s )sin11 = 3
1 - q1 (5.4)
which implies that
6 4 2
1 22 1 21 1 20 0 g g g (5.5)
where
g20 = r2 – u2
, g21 = q2 – t2
– 2rp + 2us, g22 = p2 – s2
– 2q (5.6)
denote 2
1 = v1, then (5.5) becomes
v13+g22v1
2+g21v1+g20 =0
(5.7)
Let
f1(v1) = 3 2 2
1 22 1 21 1 20 v g v g v g (5.8)
In [9] Song et al. obtained the following results on the distribution of roots of (5.7).
Lemma 5.1
For (5.7)
1. If g20< 0, then (5.7) has atleast one positive root.
2. If g20 0 and 2
22 213g g 0, then (5.7) has no positive roots.
3. If g20 0 and 2
22 213g g <0 then (5.7) has positive root iff v1*−𝑔20 + 𝑔22
2+3𝑔21
3> 0
(H1) Suppose that (5.7) has atleast one positive root. Without loss of generality, we
assume that (5.7) has three positive roots which are denoted by v11, v12 and v13.Then (5.5) has
three positive roots 1k = 𝑣1𝑘 = 1,2,3 For every fixed 1k one can get.
sin(1k1) = (s1k5+(pt-qs-u) 1k
3+(qu-rt) 1k)×(s
21k
4+(t
2-2us) 1k
2+u
2)
-1
1 1( ) kT s
cos(1k1) =((t-ps)1k4+(rs+pu-qt)×1k
2-ru)×(s
21k
4+(t
2-2us) 1k
2+u
2)
-1≅T1C(1k)
(5.9)
Thus
International Journal of Computational and Applied Mathematics. ISSN 1819-4966 Volume 12, Number 1 (2017) © Research India Publications http://www.ripublication.com
362

1 1k 1 1
1( )
1
1 1 1 1k
1
1ccost(Tc( )) 2 j , ( ) 0
1(2 arccos( ( )) 2 j ),Ts( ) 0
kkj
k
kk
ar T s
T c
(5.10)
With k = 1,2, 3, j = 0,1,2.
Let
10 = 0
0
1 10 1min , 1,2,3, k kk (5.11)
Differentiating both sides of (5.1) with respect to 1, we can get
12
1
3 2 2
1
3 2 2
( ) ( )
d p q s td p q r s t u
(5.12)
Thus we have
Re
10
1'
1 1*
2 4 2 2 2
1 10 10
( )
( 2 )
d f vd s t us u
(5.13)
where v1* = 2
10 obviously if (H2)'
1f (v1*0) holds, then Re =
10
1
1
dd
0. By the hopf
bifurcation theorem in [10], we have the following results.
Theorem 5.1
Suppose the conditions (H1) and (H2) hold. The positive equilibrium E* = ( * * *
1 2 3, ,x x x ) of system (1.4) is asymptotically stable for 1[0,10) and system (1.4) undergoes a Hopf bifurcation at E* = ( * * *
1 2 3, ,x x x ) when 1 = 10 Case 2 : 2> 0,1 = 0
Substitute 1 = 0 into (3.2) it becomes
3 + p1
2 + q1 + r1 + (s1+t1)
2e = 0 (5.14)
Where
p1 = A + D, q1 = B + E,r1=C + F, s1 = G, t1 = H+I (5.15)
Let = i2(2> 0) be a root of the equation (5.14), then
s12sin22+t1cos22 = p12
2 -r1 (5.16)
s12cos22+t1sin22 = 3
2 -q12 (5.17)
which implies that
6 4 2
2 32 2 31 2 30 0 g g g (5.18)
Where
g32 = 2 2 2 2 2
1 1 31 1 1 1 1 30 1 12 , 2 , p q g q r p s g r t (5.19)
Denote 2
2 = v2, then (5.18) becomes
3 2
2 32 2 31 2 30 0 v g v g v g (5.20)
Let
f2(v2) = 3 2
2 32 2 31 2 30 v g v g v g (5.21)
International Journal of Computational and Applied Mathematics. ISSN 1819-4966 Volume 12, Number 1 (2017) © Research India Publications http://www.ripublication.com
363

We suppose that (H3), (5.20) has atleast one positive root. Without loss of generality, we
assume that (5.20) has three positive roots which are denoted by v21, v22 and v23. Then (5.18)
has three positive roots 2k = 2kv , k = 1,2,3. For every fixed 2k, one get
sin (2k2) =
3
1 1 1 2 1 1 1 1 2
2 2 2
1 2 1
( ) ( ) k
k
k
p s t q t ss t
T2s(2k)
cos (2k2) =
4 2
1 2 1 1 1 1 2 1 1
2 2 2
1 2 1
(p ) k r t
k
k
s t q ss t
(5.22)
T2c(2k)
Thus
𝜏2𝑘𝑗 =
1
𝜔2𝑘arccos 𝑇2𝐶 𝜔2𝑘 + 2𝑗𝜋, 𝑇2𝑠(𝜔2𝑘) ≥ 0
1
𝜔2𝑘(2π − arccos 𝑇2𝐶 𝜔2𝑘 + 2𝑗𝜋), 𝑇2𝑠 𝜔2𝑘 < 0
(5.23)
with k = 1, 2, 3., j = 0,1,2
Let
20 = 0
2 20 2 0min , 1,2,3, k kk (5.24)
Differentiating both sides of (5.14) with respect to 2, we can get
12
1 1 1
3 2 2
1 1 1 1 1 1
3 2
( ) ( )
d p q sd p q r s t
- 𝜏2
𝜆(5.25)
Then we can get
Re
20
1'
2 2*
2 2 2
2 1 20 1
( )
d f vd s t
(5.26)
where v2* =𝜔202. Obviously if (H4)
'
2 2*( 0)f v holds, then Re 𝑑𝜆
𝑑𝜏2 −1
𝜏=𝜏20
0 . By the hopf
bifurcation theorem in [10], we have the following results.
Theorem 5.2Suppose the conditions (H3) and (H4) hold. The positive equilibrium E* = (* * *
1 2 3, ,x x x ) of system (1.4) is asymptotically stable for 1 [0,10] and system (1.4) undergoes
a Hopf bifurcation at E* = ( * * *
1 2 3, ,x x x ) when 2 = 20.
Case 3 : 1 = 2 = > 0
Let 1 = 2 = > 0, then (3.2), it becomes
3 + p22 + q2 + r2 + (s22 + t2 + u2)e−λτ + m2e−2λτ = 0 (5.27)
where
p2 = A, q2 = B, r2 = C, s2 = D, t2 = E + G, u2 = F + H, m2 = I (5.28)
Multiplying (5.27) by e, (5.27) becomes
s22 + t2 + u2 + (
3 + p2
2 + q2 + r
2)e
r + m2e
-2 = 0 (5.29)
Let = i(>0) be a root of the equation (5.29), then
(r2 + m2 - p22)cos + (
3-q2)sin = s2
2 – u2 (5.30)
(r2-m2-p22)sin+ (
3-q2)cos = -t2 (5.31)
International Journal of Computational and Applied Mathematics. ISSN 1819-4966 Volume 12, Number 1 (2017) © Research India Publications http://www.ripublication.com
364

which follows that
sin() = g55 + g3
3 + g1
6 + h4
4 + h3
2 + h0
T3s()
cos() = g44 + g2
2 + g0
6 + h4
4 + h2
2 + h0
T3c() (5.32)
where
g0 = u2m2r2u2
g1 = q2u2 r2t2 t2m2
g2 = r2s2q2t2 + p2u2 s2m2
g3 = p2t2 – q2s2 – u2
g4 = t2 – p2s2,g5 – s2, h0 = 2 2
2 2r m
h2 = 2
2q -2r2p2,h4=2
2 22p q (5.33)
Thus we can obtain
12 + g45
10 + g44
8 + g43
6 + g42
4 + g41
2 + g40 = 0 (5.34)
Where,
2 2 2
40 0 0 41 0 2 0 2 1
2 2
42 2 0 4 2 0 4 1 3
2
43 0 2 4 3 1 5 2 4
2 2 2
44 4 2 4 3 5 45 4 5
, 2 2
2 2 2
2 2 2 2
2 2 , 2
g h g g h h g g g
g h h h g g g g g
g h h h g g g g g
g h h g g g g h g
(5.35)
Let 2 = 3 then (5.34) becomes
6 5 4 3 2
3 45 3 44 3 43 3 42 3 41 3 40 0v g v g v g v g v g v g (5.36)
(H5) Suppose that (5.36) has atleast one positive root. Without loss of generality, we assume
that (5.36) has six positive roots which are donoted by v31, v32,……..v36 respectively. Then
(5.36) has six positive roots k= 3kv , k = 1, 2,……..,6 for every fixed k,
𝜏𝑘𝑗 =
1
𝜔2𝑘arccos 𝑇3𝐶 𝜔𝑘 + 2𝑗𝜋, 𝑇3𝑠(𝜔𝑘) ≥ 0
1
𝜔2𝑘(2π − arccos 𝑇3𝐶 𝜔𝑘 + 2𝑗𝜋), 𝑇3𝑠 𝜔𝑘 < 0
(5.37)
with k =1, 2,….6, j = 0,1,2,……
Let,
200
0 0min , 1,2,........6k kk (5.38)
Taking the derivative of with respect to in (5.29) we have,
International Journal of Computational and Applied Mathematics. ISSN 1819-4966 Volume 12, Number 1 (2017) © Research India Publications http://www.ripublication.com
365

1
2
2 2 2 2
2
(2s t (3 2p ) )x - 4 3 2 -12 2 2 2
d q e (m e - ( + p + q + r )e ) -d
(5.39)
Then we can get
0
1
1 1
2 2
1
R R
r r R
d P Q PQRedr Q Q
(5.40)
where
2
2 0 0 0 2 0 0 0 2
2
1 2 0 0 0 2 0 0 0 2 0
2 4
2 0 0 0 0 2 2 0 2 0 0 0
2 4
1 2 0 0 0 0 2 2 0 2 0 0 0
( 3 )cos 2 sin
( 3 )sin 2 cos 2
( )cos ( 3 )sin
( )sin ( 3 )cos
R
R
P q p t
P q p s
Q q p r m
Q q p r m
(5.41)
Obviously if condition (H6) PRQR + PIQI 0, Holds the positive equilibrium of system (1.4) is
as stable for 1 [0, 0] and system undergoes a Hopf bifurcation at * * *
1 2 3*( , , )E x x x when
= 0.
Theorem 5.3
Suppose the conditions (H5) and (H6) hold. The positive Equilibrium * * *
1 2 3*( , , )E x x x of system (1.4) is asymptotically for 1[0, 0) and system (1.4) undergoes a Hopf bifurcation at
* * *
1 2 3*( , , )E x x x when = 0.
Case 4: (2 >0 and (0, 10))
Let =* *
2 2( )i be the root of (3.2). then we get,
* *
2 3 2 2 3
* *
3 2 2 3 2 2 3
cos
cos sin
3 2p sin q r
p q s
(5.42)
where,
* * *
2 1 2 3 1 2sin , cos3p G I q H I (5.43)
*2 *2 * * *
3 2 2 1 2 2 1 2( ) ,cos sinr A G F D E (5.44)
International Journal of Computational and Applied Mathematics. ISSN 1819-4966 Volume 12, Number 1 (2017) © Research India Publications http://www.ripublication.com
366

*3 * *2 * * *
3 2 2 2 1 2 2 1 2( ),sin coss B F D E (5.45)
Then we can have
* *6 2 2 *4 2 2 2 *2 2 2 2 2
51 2 2 2 2( 2 ) ( 2 2 )g A D B B E G CA FD C F H I
(5.46)
* *4 *2
52 2 2 2( ) ( )g AD E BE CD AF CF HI (5.47)
* *5 *3 *
53 2 2 2 2( ( )g D F - AE + BD) CE BF GI (5.48)
We Suppose that (H7), (5.46) has atleast finite positive root. And we denote the positive roots
of (5.46) by * * *
21 22 2, ,....... k respectively. Then for every fixed 2i (i= 1,2,…k),
*2
*2
* * *3 3 3 32 2 22 2 4 ( )
3 3
* * *3 3 3 32 2 22 2 4 ( )
3 3
) |
) |
i
i
2 i i s
2 i i c
p r q ssin ( Tp q
p s q rcos ( Tp q
(5.49)
Thus
𝜏2𝑖𝑗 =
1
𝜔2𝑖arccos 𝑇4𝐶 𝜔2𝑖 + 2𝑗𝜋, 𝑇4𝑠(𝜔2𝑖 ) ≥ 0
1
𝜔2𝑖(2π − arccos 𝑇4𝐶 𝜔2𝑖 + 2𝑗𝜋), 𝑇4𝑠 𝜔2𝑖 < 0
(5.50)
With k = 1, 2, …..k, j = 0,1,2…..
Let *
20 = min*10
20 |i=1,2,……k, when *
2 20 , (3.2) has a pair of purely imaginary roots Let
*
2i for 1 10(0, ) . Next in order to give the main results with respect to 2>0,
1 10(0, ) we give the following assumption. (H8) Re
20*
1
0.ddr
Through the
analysis and Hopf bifurcation theorem in [10] we have the following results.
Theorem 5.4
If conditions (H7) and (H8) hold and 1 (0, 10), then the positive equilibrium E* = (x1* , x2
*, x3
*) of system (1.4) undergoes a Hopf bifurcation at E* = (x1* , x2
*, x3*)when𝜏2 = 𝜏20
5.1. Direction and Stability of Hopf bifurcation:
In this section we shall study the nature of this Hopf Bifurcation at the criticalvalue of
τ = τ10. For this objective we use the normal form method and the centermanifold reduction
theorem to find the direction of Hopf bifurcation and the stabilityof the bifurcating periodic
solutions of system (1.4) at τ = τ10. Without loss of generality, we assume that 𝜏2
∗<τ10 where
𝜏2∗𝜖 (0,𝜏20
∗) and 𝜏1= τ10+ μ.
International Journal of Computational and Applied Mathematics. ISSN 1819-4966 Volume 12, Number 1 (2017) © Research India Publications http://www.ripublication.com
367

Let x11 = x1− x1*, x21 = x2− x2
*, x31 = x3− x3
*, x𝑖1 = μi (τ t), i= 1, 2, 3. Here μ = 0 is the
bifurcation parameter and dropping the bars, the system becomes a functional differential equation
in C = C ( [-1, 0], R3 ) as
𝑑𝑋
𝑑𝑡= 𝐿𝜇 𝑋𝑡 + 𝑓 𝜇, 𝑋𝑡 (5.51)
where x(t) = (x11, x22, x33)T ∈ R3 and 𝐿𝜇 ∶ 𝐶 → 𝑅3, 𝑓: 𝑅 × 𝐶 → 𝑅3 are respectively given by
𝐿𝜇 (𝜙) = (𝜏1∗ + 𝜇)𝐵
𝜙1(0)
𝜙2(0)
𝜙3(0) + (𝜏1
∗ + 𝜇)𝐶
𝜙1 −𝜏2
∗
𝜏1
𝜙2 −𝜏2
∗
𝜏1
𝜙3 −𝜏2
∗
𝜏1
+ (𝜏1∗ + 𝜇)𝐷
𝜙1(−1)
𝜙2(−1)
𝜙3(−1) (5.52)
and
𝑓 𝜇, 𝜑 = (τ10+ 𝜇)𝑃 (5.53)
where 𝑃 =
−𝐴𝐵𝜙1
2 0 − 𝐵𝜙1 0 𝜙
2 0 − 𝜙
1 0 𝜙
2 −1 − 𝜙
1 0 𝜙
3 0
−𝐴𝐵𝜙1 0 𝜙
2 0 − 𝐵𝜙
22 0 + 𝐴𝜙
1 0 𝜙
2 −1 − 𝐴𝑋𝜙
2 0 𝜙
3 0
𝜙3 0 𝜙
1
−𝜏2
𝜏1 + 𝑋 − 𝐸 𝜙
2 0 𝜙
3 0
respectively where 𝜙(𝜃) = 𝜙1 𝜃 , 𝜙2 𝜃 , 𝜙3 𝜃 𝑇
∈ 𝐶,
𝐵 = 𝑅1 − 𝐴𝐵𝑥1 − 𝐵𝑥2 − 𝑥2 − 𝑥3 −𝐵𝑥1 −𝑥1
−𝑥2𝐴𝐵 + 𝐴𝑥2 𝑅2 − 𝐴𝐵𝑥1 − 2𝐵𝑥2 − 𝐴𝑋𝑥3 −𝐴𝑋𝑥2
0 (𝑋 − 𝐸)𝑥3 −1 + 𝑥1 + 𝑋𝑥2 − 𝐸𝑥2
𝐶 = 0 0 00 0 0𝑥3 0 0
, 𝐷 = 0 −𝑥1 00 A𝑥1 00 0 0
By the Riesz representation theorem, we claim about the existence of a function 𝜂( 𝜃, µ) of
bounded variation for 𝜃𝜖[−1, 0) such that
𝐿𝜇 𝜙 = 𝑑𝜂 𝜃, 𝜇 𝜙0
−1(𝜃) for 𝜙𝜖 𝐶 (5.54)
Now let us choose,
𝜂 𝜃, 𝜇 =
(τ10
+ 𝜇) 𝐵 + 𝐶 + 𝐷 , 𝜃 = 0
(τ10
+ 𝜇) 𝐶 + 𝐷 , 𝜃𝜖 [−𝜏2
∗
𝜏1 )
(τ10
+ 𝜇) 𝐷 , 𝜃𝜖 (−1,−𝜏2
∗
𝜏1 )
0, 𝜃 = −1
For 𝜙𝜖C ([-1, 0], R3 ), we define
International Journal of Computational and Applied Mathematics. ISSN 1819-4966 Volume 12, Number 1 (2017) © Research India Publications http://www.ripublication.com
368

𝐴 𝜇 𝜙 =
𝑑𝜙(𝜃)
𝑑𝜃, 𝜃𝜖[−1,0)
𝑑𝜂 𝑠, 𝜇 𝜙(𝑠)
0
−1
, 𝜃 = 0
and
𝑅 𝜇 𝜙 = 0, 𝜃𝜖[−1,0)
𝑓 𝜇, 𝜙 , 𝜃 = 0
Then the system is equivalent to
𝑑𝑋
𝑑𝑡= 𝐴(𝜇) 𝑋𝑡 + 𝑅(𝜇) 𝑋𝑡 (5.55)
where Xt(𝜃) = X(t + 𝜃) for 𝜃 ∈ [−1,0].
Now for 𝜓𝜖𝐶 ( [-1, 0], 𝑅3∗), we define
𝐴∗𝜓 𝑠 =
−𝑑𝜓(𝑠)
𝑑𝑠, 𝑠𝜖[−1,0)
𝑑𝜂𝑇 𝑡, 0 𝜓(−𝑡)
0
−1
, 𝑠 = 0
Further we define a bilinear inner product
𝜓 𝑠 , 𝜙(0) = 𝜓 0 𝜙 0 − 𝜓 𝜍 − 𝜃 𝑑𝜂 𝜃 𝜙(𝜍)𝑑𝜍𝜃
𝜍=0
0
−1 (5.56)
where 𝜂 𝜃 = 𝜂(𝜃, 0). Clearly here A and 𝐴∗are adjoint operators and ±𝑖𝜔0τ10 are eigen values of
A(0) and so they are also eigen values of 𝐴∗.
Let q(𝜃)= (1 𝛼 𝛽)𝑇𝑒𝑖𝜔0τ10𝜃
be the eigen vector of A(0) corresponding to 𝑖𝜔0τ10where
𝛼 = 𝑅1−𝐴𝐵 𝑥1−𝐵 𝑥2−𝑥2−𝑥3−𝑖𝜔0 𝐴𝑋𝑥2+𝑥1𝑥2𝐴𝐵−𝑥1𝑥2𝐴
[ 𝐵𝑥1+𝑥1𝑒−𝑖𝜔0τ10 𝐴𝑋𝑥2 +( 𝑅2−𝐴𝐵𝑥1−2𝐵𝑥2−𝐴𝑋𝑥3+𝐴𝑥1𝑒
−𝑖𝜔0τ10 −𝑖𝜔0 𝑥1)
, 𝛽 = −𝑥2𝐴𝐵+𝐴𝑥2+ 𝑅2−𝐴𝐵𝑥1−2𝐵𝑥2−𝐴𝑋𝑥3+𝐴𝑥1𝑒
−𝑖𝜔0τ10 −𝑖𝜔0 𝛼
𝐴𝑋𝑥2
Similarly if 𝑞∗ 𝑠 = 𝑀(1 𝛼∗𝛽∗)𝑒𝑖𝜔0τ10 be the eigen vector of𝐴∗where
𝛼∗ =
−𝑥1 + (−1 + 𝑥1 + 𝑋𝑥2 − 𝐸𝑥2 + 𝑖𝜔0) (𝑅1−2𝐴𝐵𝑥1−𝐵 𝑥2−𝑥2−𝑥3+𝑖𝜔0)+𝑥1𝑥2𝐴𝐵−𝑥1𝑥2𝐴
−1+𝑥1+𝑋𝑥2−𝐸𝑥2+𝑖𝜔0 −𝑥2𝐴𝐵+𝐴𝑥2 −𝐴𝑋𝑥3𝑥2𝑒𝑖𝜔0
−𝜏2∗
𝜏1
𝐴𝑋𝑥2
𝛽∗ =(𝑅
1− 2𝐴𝐵𝑥1 − 𝐵 𝑥2 − 𝑥2 − 𝑥3 + 𝑖𝜔0)𝐴𝑋𝑥2 + 𝑥1𝑥2𝐴𝐵 − 𝑥1𝑥2𝐴
− −1 + 𝑥1 + 𝑋𝑥2 − 𝐸𝑥2 + 𝑖𝜔0 −𝑥2𝐴𝐵 + 𝐴𝑥2 − 𝐴𝑋𝑥3𝑥2𝑒𝑖𝜔0
−𝜏2∗
𝜏1
International Journal of Computational and Applied Mathematics. ISSN 1819-4966 Volume 12, Number 1 (2017) © Research India Publications http://www.ripublication.com
369

Then we have to determine M from 𝑞∗ 𝑠 , 𝑞 𝜃 = 1
𝑞∗ 𝑠 , 𝑞 𝜃 = 𝑀 1 𝛼∗ 𝛽∗ 1 𝛼𝛽 𝑇 − 𝑀 1 𝛼∗ 𝛽∗ 𝑒−𝑖𝜔0τ10 𝜍−𝜃
𝜃
0
0
−1
𝑑𝜂 𝜃 1 𝛼𝛽 𝑇𝑒𝑖𝜔0τ10𝜍𝑑𝜍
= 𝑀 1 𝛼∗ 𝛽∗ (1 𝛼𝛽)𝑇 − 𝑀 1 𝛼∗ 𝛽∗
0
−1
𝜃𝑒𝑖𝜔0τ10𝜃𝑑𝜂 𝜃 1 𝛼𝛽 𝑇
= 𝑀 1 + 𝛼𝛼∗ + 𝛽𝛽∗ + τ10(−𝑥1𝛼𝑒−𝑖𝜔0τ10 + 𝐴𝑥1𝛼𝛼∗𝑒−𝑖𝜔0τ10 +
𝜏2∗
τ10
𝛽∗𝑥3𝑒−𝑖𝜔0
𝜏2∗
τ10
Thus we can take
𝑀 =1
1+𝛼𝛼∗ +𝛽𝛽∗ +τ10 (−𝑥1𝛼𝑒−𝑖𝜔0τ10 +𝐴𝑥1𝛼𝛼∗𝑒
−𝑖𝜔0τ10 +𝜏2
∗
τ10𝛽∗
𝑥3𝑒−𝑖𝜔0
𝜏2∗
τ10
(3.32)
We first compute the coordinate to describe the center manifold C0 at 𝜇 = 0. Let Xt be the
solution of the system (5.55) when 𝜇 = 0. Define Z(t) = 𝑞∗, 𝑋𝑡
𝑊 𝑡, 𝜃 = 𝑋𝑡 𝜃 − 2 𝑅𝑒𝑧(𝑡) 𝑞 𝜃 (5.57)
On the center manifold C0, we have 𝑊 𝑡, 𝜃 = 𝑊 𝑧 𝑡 , 𝑧 𝑡 , 𝜃 where
𝑊 𝑧, 𝑧 , 𝜃 = 𝑊20 𝜃 𝑧2
2+ 𝑊11 𝜃 𝑧𝑧 + 𝑊02 𝜃
𝑧 2
2+ ⋯(5.58)
and z and 𝑧 are local coordinates for center manifold C0 in the direction of q*and 𝑞∗ .
Note that W is real if Xt is real. We consider only real solutions. For solution Xt ∈C0 of
equation (5.55), since 𝜇 = 0 we have
𝑧 𝑡 = 𝑖𝜔0τ10𝑧 + 𝑞∗ 0 f 0, 𝑊 𝑧, 𝑧 , 0 + 2 𝑅𝑒𝑧𝑞 𝜃
≅ 𝑖𝜔0τ10𝑧 + 𝑞∗ 0 f0(z, 𝑧 )
≅ 𝑖𝜔0τ10𝑧 + 𝑔(z, 𝑧 ) (5.59)
where 𝑔 z, 𝑧 = 𝑞∗ 0 f0(z, 𝑧 )
= 𝑔20𝑧2
2+ 𝑔11𝑧𝑧 + 𝑔02𝑧2 + 𝑔21
𝑧2𝑧
2+ ⋯ (5.60)
From (5.57) and (5.58) we get
𝑋𝑡 𝜃 = 𝑊 𝑡, 𝜃 + 2 𝑅𝑒𝑧(𝑡) 𝑞 𝜃
International Journal of Computational and Applied Mathematics. ISSN 1819-4966 Volume 12, Number 1 (2017) © Research India Publications http://www.ripublication.com
370

= 𝑊20 𝜃 𝑧2
2+ 𝑊11 𝜃 𝑧𝑧 + 𝑊02 𝜃
𝑧 2
2+ 𝑧𝑞 + 𝑧 𝑞 + ⋯ = 𝑊20 𝜃
𝑧2
2+ 𝑊11 𝜃 𝑧𝑧 +
𝑊02 𝜃 𝑧 2
2+ (1 𝛼𝛽)𝑇𝑒𝑖𝜔0τ10𝑧 + (1 𝛼 𝛽 )𝑇𝑒𝑖𝜔0τ10𝑧 + ⋯
(5.61)
Hence we have
𝑔 z, 𝑧 = 𝑞∗ 0 f0(z, 𝑧 )
= 𝑞∗ 0 f(0, 𝑋𝑡)
= τ10𝑀 1 𝛼∗ 𝛽∗ S = τ10
𝑀 𝑝1𝑧2 + 2𝑝
2𝑧𝑧 +
𝑝3𝑧 2 + 𝑝
4𝑧2𝑧 + 𝐻. 𝑂. 𝑇 (5.62)
where S =
−𝐴𝐵𝑥1𝑡2 0 − 𝐵𝑥1𝑡 0 𝑥2𝑡 0 − 𝑥1𝑡 0 𝑥2𝑡 −1 − 𝑥1𝑡 0 𝑥3𝑡 0
−𝐴𝐵𝑥1𝑡 0 𝑥2𝑡 0 − 𝐵𝑥2𝑡2 0 + 𝐴𝑥1𝑡 0 𝑥2𝑡 −1 − 𝐴𝑋𝑥2𝑡 0 𝑥3𝑡 0
𝑥3𝑡 0 𝑥1𝑡 −𝜏2
𝜏1 + 𝑋 − 𝐸 𝑥2𝑡 0 𝑥3𝑡 0
,
p1 = −AB − Bα − α𝑒−𝑖𝜔0τ1− β − AB 𝛼∗ α − B 𝛼∗ α2+ 𝛼∗ α𝑒−𝑖𝜔0τ1 A − AX 𝛼∗ αβ +
𝛽∗ β𝑒−𝑖𝜔0τ2 + αβ 𝛽∗ (X − E),
p2 = −AB − BRe α − 𝛼 𝑒−𝑖𝜔0τ1
2− α
𝑒−𝑖𝜔0τ1
2− 𝑅𝑒 β − 𝛼∗ 𝐴𝐵Re α − 𝛼∗ 𝐵αα
+𝛼∗ 𝐴
2 α𝑒−𝑖𝜔0τ1 + α 𝑒𝑖𝜔0τ1 −
𝛼∗ 𝐴𝑋
2 α𝛽 + α β +
𝛽∗
2 β 𝑒𝑖𝜔0τ2 + 𝛽 𝑒−𝑖𝜔0τ2
+(𝑋 − 𝐸)𝛽∗
2 α𝛽 + α β
p3 = −AB − B𝛼 − 𝛼 𝑒−𝑖𝜔0τ1 − 𝛽 − AB 𝛼∗ 𝛼 − B 𝛼∗ 𝛼 2+ 𝛼∗ 𝛼 𝑒−𝑖𝜔0τ1 A − AX 𝛼∗ 𝛼 𝛽 +
𝛽∗ 𝛽 𝑒−𝑖𝜔0τ2 + 𝛼 𝛽 𝛽∗ (X − E),
p4 =
−AB 𝑊20 1 0 + 2𝑊11
1 0 − 𝐵(𝑊11 2 0 +
𝑊20(2) 0
2+
𝛼 𝑊20(1) 0
2+ α𝑊11
1 0 ) −
(𝑊11 2 −1 +
𝑊20(2) −1
2+ 𝛼 𝑒𝑖𝜔0τ1
𝑊20(1) 0
2+ α𝑒−𝑖𝜔0τ1𝑊11
1 0 ) − 𝑊11 3 0 +
𝑊20 3 0
2+
𝛽 𝑊20 1 0
2+ β𝑊11
1 0 − 𝐴𝐵𝛼∗ (𝑊11 2 0 +
𝑊20(2) 0
2 + 𝛼
𝑊20(1) 0
2+ 𝑊11
1 0 α)-B
𝛼∗ (α𝑊11 2 0 + 𝛼
𝑊20(2) 0
2 +
𝛼 𝑊20
(2) 0
2+ 𝑊11
2 0 α)+A𝛼∗ (α𝑊11 2 −1 + 𝛼
𝑊20(2) −1
2+ 𝛼 𝑒𝑖𝜔0τ1
𝑊20(1) 0
2+
α𝑒−𝑖𝜔0τ1𝑊11 1 0 ) −AX𝛼∗ (α𝑊11
3 0 +𝛼 𝑊20
(3) 0
2+ 𝛽 𝑊20
2 0
2+
International Journal of Computational and Applied Mathematics. ISSN 1819-4966 Volume 12, Number 1 (2017) © Research India Publications http://www.ripublication.com
371

β𝑊11 20 0 )+𝛽∗ (β𝑊11
1 −𝜏2
𝜏1 +𝛽
𝑊20 1
−𝜏2𝜏1
2+ 𝑒𝑖𝜔0τ2
𝑊20(3) 0
2+ 𝑊11
3 0 𝑒−𝑖𝜔0τ2 ) + 𝛽∗ (X
− E)( α𝑊11 3 0 + 𝛼
𝑊20(3) 0
2+ 𝛽 𝑊20
2 0
2+ β𝑊11
20 0 ).
𝑔20 = 2τ10𝑀 𝑝1𝑔11 = 2τ10
𝑀 𝑝2𝑔02 = 2τ10𝑀 𝑝3𝑔21 = 2τ10
𝑀 𝑝4
For unknown𝑊20(𝑖) 𝜃 , 𝑊11
(𝑖) 𝜃 , i= 1, 2 in g21, we still have to compute them.
From (5.55) and (5.57)
𝑊 = 𝑋𝑡 − 𝑧 𝑞 − 𝑧 𝑞
= 𝐴𝑊 − 2 𝑅𝑒 𝑞∗ 0 f0q θ , −1 ≤ 𝜃 ≤ 0
𝐴𝑊 − 2 𝑅𝑒 𝑞∗ 0 f0q θ + f0, 𝜃 = 0 (5.63)
𝑊 = 𝐴𝑊 + 𝐻(𝑧, 𝑧 , 𝜃)
where 𝐻(𝑧, 𝑧 , 𝜃) = 𝐻20 𝜃 𝑧2
2+ 𝐻11 𝜃 𝑧𝑧 + 𝐻02 𝜃
𝑧 2
2+ ⋯ (5.64)
From (5.63) and (5.64)
𝐴 0 − 2𝑖𝜔0τ10𝐼 𝑊20 𝜃 = −𝐻20 𝜃 (5.65)
𝐴(0)𝑊11 𝜃 = −𝐻11 𝜃 (5.66)
From (5.63) we have for 𝜃𝜖[−1,0)
𝐻 𝑧, 𝑧 , 𝜃 = −𝑔 𝑧, 𝑧 𝑞 𝜃 − 𝑔 𝑧, 𝑧 𝑞 𝜃 (5.67)
Comparing (5.64) and (5.67)
𝐻20 𝜃 = −𝑔20𝑞 𝜃 − 𝑔 20𝑞 𝜃 (5.68)
𝐻11 𝜃 = −𝑔11𝑞 𝜃 − 𝑔 11𝑞 𝜃 (5.69)
Using definitions of A( 𝜃) and from the above equations
𝑊20 𝜃 =𝑖𝑔20
𝜔0τ10
𝑞 0 𝑒𝑖𝜔0τ10𝜃 +
𝑖𝑔 02
3𝜔0τ10
𝑞 0 𝑒−𝑖𝜔0τ10𝜃 + 𝐸1𝑒
2𝑖𝜔0τ10𝜃
(5.70)
and
𝑊11 𝜃 =−𝑖𝑔11
𝜔0τ10
𝑞 0 𝑒𝑖𝜔0τ10𝜃 +
𝑖𝑔 11
𝜔0τ10
𝑞 0 𝑒−𝑖𝜔0τ10𝜃 + 𝐸2(5.71)
where 𝑞 𝜃 = (1 𝛼𝛽)𝑇𝑒𝑖𝜔0τ10𝜃
, 𝐸1= (𝐸1(1), 𝐸1
(2), 𝐸1(3)) ∈ 𝑅3 , 𝐸2= (𝐸2
(1), 𝐸2(2), 𝐸2
(3)) ∈ 𝑅3 are
constant vectors.
From (5.63) and (5.64)
International Journal of Computational and Applied Mathematics. ISSN 1819-4966 Volume 12, Number 1 (2017) © Research India Publications http://www.ripublication.com
372

𝐻20 0 = −𝑔20𝑞 0 − 𝑔 20𝑞 0 + 2τ10(𝑐1𝑐2𝑐3)𝑇 (5.72)
𝐻11 0 = −𝑔11𝑞 0 − 𝑔 11𝑞 0 + 2τ10(𝑑1𝑑2 𝑑3)𝑇 (5.73)
where (𝑐1𝑐2𝑐3)𝑇 = 𝐶1 , (𝑑1𝑑2 𝑑3)𝑇 = 𝐷1 are respective coefficients of z2 and z 𝑧 of f0(z 𝑧 )
and they are 𝐶1 =
𝑐1
𝑐2
𝑐3
=
−𝐴𝐵 − 𝐵𝛼 − 𝛼𝑒−𝑖𝜔0τ1 − 𝛽
−𝐴𝐵𝛼 − 𝐵𝛼2 + 𝛼𝑒−𝑖𝜔0τ1𝐴 − 𝐴𝑋𝛼𝛽
𝛽𝑒−𝑖𝜔0τ2 + 𝛼𝛽(𝑋 − 𝐸)
and 𝐷1 = 𝑑1
𝑑2
𝑑3
=
2
−𝐴𝐵 − 𝐵𝑅𝑒 𝛼 − 𝛼 𝑒𝑖𝜔0τ1
2− 𝛼
𝑒−𝑖𝜔0τ1
2− 𝑅𝑒{𝛽}
−𝐴𝐵𝑅𝑒 𝛼 − 𝐵𝛼𝛼 +𝐴
2 𝛼𝑒−𝑖𝜔0τ1 + 𝛼 𝑒𝑖𝜔0τ1 −
𝐴𝑋
2 𝛼𝛽 + 𝛼 𝛽
𝛽𝑒−𝑖𝜔0τ2+𝛽 𝑒𝑖𝜔0τ2
2+
(𝑋−𝐸)
2 𝛼𝛽 + 𝛼 𝛽
Finally we have 2𝑖𝜔0τ10𝐼 − 𝑒2𝑖𝜔0τ10 𝜃𝑑𝜂(𝜃)
0
−1 𝐸1 = 2τ10
𝐶1 or 𝐶∗𝐸1 = 2𝐶1 where𝐶∗ =
2𝑖𝜔0 − 𝑅1 + 2𝐴𝐵𝑥1 + 𝐵𝑥2 + 𝑥2 + 𝑥3 𝐵𝑥1 + 𝑥1𝑒−2𝑖𝜔0τ10 𝑥1
𝑥2𝐴𝐵 − 𝐴𝑥2 2𝑖𝜔0 − 𝑅2 + 𝐴𝐵𝑥1 + 2𝐵𝑥2 − 𝐴𝑥1𝑒−2𝑖𝜔0τ10 − 𝐴𝑋𝑥3 𝐴𝑋𝑥2
−𝑥3𝑒−2𝑖𝜔0τ2 −(𝑋 − 𝐸)𝑥3 2𝑖𝜔0 + 1 − 𝑥1 − 𝑋𝑥2 + 𝐸𝑥2
(5.74)
Thus E1i =
2∆𝑖
∆ where ∆= 𝐷𝑒𝑡(𝐶∗) and ∆𝑖 be the value of the determinant Ui , where Ui
formed by replacing ith
column vector of 𝐶∗by another column vector (𝑐1𝑐2𝑐3)𝑇 , i = 1, 2, 3.
Similarly 𝐷∗𝐸2 = 2𝐷1 where
𝐷∗ =
−𝑅1 + 2𝐴𝐵𝑥1 + 𝐵𝑥2 + 𝑥2 + 𝑥3 𝐵𝑥1 + 𝑥1 𝑥1
𝑥2𝐴𝐵 − 𝐴𝑥2 2𝑖𝜔0 − 𝑅2 + 𝐴𝐵𝑥1 + 2𝐵𝑥2 − 𝐴𝑥1 − 𝐴𝑋𝑥3 𝐴𝑋𝑥2
−𝑥3 −(𝑋 − 𝐸)𝑥3 1 − 𝑥1 − 𝑋𝑥2 + 𝐸𝑥2
(5.75)
Thus E2i =
2∆ 𝑖
∆ where ∆= 𝐷𝑒𝑡(𝐷∗) and ∆𝑖 be the value of the determinant Vi, where Vi formed
by replacing ith
column vector of 𝐷∗by another column vector(𝑑1𝑑2 𝑑)𝑇 , i = 1, 2, 3.Thus we
can determine 𝑊20 𝜃 and 𝑊11 𝜃 from (5.73), (5.74) and (5.75). Furthermore using them
we can compute 𝑔21 and derive the following values.
𝐶1 0 =i
2𝜔0τ10
𝑔20𝑔21 − 2|𝑔11|2 −|𝑔02 |3
3 +
𝑔21
2,𝜇2 =
−Re {𝐶1 0 }
Re dλ (τ10
∗)
d𝜏 ,
𝛽2 = 2 Re{𝐶1 0 ,
𝑇2 =−Im 𝐶1 0 +𝜇2𝐼𝑚
dλ (τ10 )
d𝜏
𝜔0τ10
.
These formulas give a description of the Hopf bifurcation periodic solutions of (3.2) at 𝜏 =𝜏0
∗on the center manifold. Hence we have the following result.
Theorem 3.7
The periodic solutions is supercritical (resp. subcritical) if µ2 > 0(𝑟𝑒𝑠𝑝. µ2 < 0). The
International Journal of Computational and Applied Mathematics. ISSN 1819-4966 Volume 12, Number 1 (2017) © Research India Publications http://www.ripublication.com
373

bifurcating periodic solutions are orbitally asymptotically stable with an asymptotical phase
(resp. unstable) if 𝛽< 0 (resp. 𝛽> 0). The period of bifurcating periodic solutions increases
(resp. decreases) if 𝜏2 > 0(resp. 𝜏2 < 0).
6. Numerical Simulation
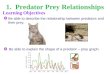
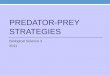
In this section, we give a numerical example tosupport the theoretical results in previous
sections. The coefficients are r1 = 3, k =15, r2 = 1.5, ν = 0.24, b2 = 0.08, m = 0.09, e = 0.4, γ =
0.7, β = 0.3, b1 = 0.06, b3 =0.02, b4 = 0.04, α = 0.002, η = 0.0034, µ = 0.08.
For τ1 = τ2 = 0, the sound prey are wiped out from the system (Fig 1). Nowfor τ1> 0, τ2 = 0,
from Theorem 5.1, the system shows stable dynamics towards thepositive equilibrium as
illustrated by Fig 2. For τ1 = 0, τ2> 0 and for τ1 = τ2 = τ > 0,the sound prey become extinct .
The corresponding waveforms are shown in Fig 3and 4. For τ2 > 0 and τ1∈ (0, τ10), the
system become disease free, see Fig 5.
International Journal of Computational and Applied Mathematics. ISSN 1819-4966 Volume 12, Number 1 (2017) © Research India Publications http://www.ripublication.com
374

International Journal of Computational and Applied Mathematics. ISSN 1819-4966 Volume 12, Number 1 (2017) © Research India Publications http://www.ripublication.com
375

International Journal of Computational and Applied Mathematics. ISSN 1819-4966 Volume 12, Number 1 (2017) © Research India Publications http://www.ripublication.com
376

7. Discussions
In this paper we have considered a prey predator system withtwo time delays, where
the prey population is divided into two groups, sound andinfected prey. The main purpose of
this paper is to investigate the eff ects of two timedelays on the system. By choosing the
possible combinations of the two delays asbifurcation parameters, sufficient conditions for
local stability and existence of localhopf bifurcation are obtained. When the time delay is
below the critical value, weget that the system is locally stable. Otherwise a local Hopf
bifurcation occurs at thepositive equilibrium. Further the properties of the bifurcated periodic
solutions suchas the direction and the stability are determined.
References
1. . H.W.Hethcote. The mathematics of infectious disease. SIAM Review, 42, 599-653.
2. H.W.Hethcote, W. Wang, L. Han and Ma Zhein. A predator-prey model with
infected prey., Theor. Pop. Biol., 66: (2004) 259-268.
3. W.M.Liu, H.W.Hethcote and S.A.Levin. Dynamical behavior of epidemiological
models with non linear incidence rates , J. Math. Biol. 25 (1987) 359-380.
4. C.P.Bhunu and W.Garira. A two strain tuberculosis transmission model with
therepy and quarantine, Math. Model. Anal.,14(3) (2009) 291- 312.
5. . S.B.Hsu, T.W.Hwang and Y.Kuang, Global analysis of the Michaelis- Menten
type ratio dependent predator-prey system.,J.Math.Biol. 42 (2001) 489-506.
6. . T.W. Huang, Uniqueness of limit cycle for Gause type predator prey sys-
tems, ,J.Math.Anal. Appl., 238 (1999) 179- 195.
7. X.Yang, L.S.Chen and J.F.Chen, Permanence and positive periodic solution for
the single species non autonomous delay diff usive models,Comp. Math. Appl. 32 (1996) 109-116.
8. H.R.Thieme, Mathematics in population biology, Princeton series in theoretical and computational biology, Princeton University press, Princeton. (2003).
9. Y.L.Song, M.Han and J.Wei, Stability and hopf bifurcation analysis on a sim-
plified BAM neural network with delays, Physica D.200 (2005) 185-204.
10. B.D.Hassard, N.D Kazarinoff and Y.H.Wan, Theory and Applications of Hopf
Bifurcation, Cambridge University Press, Cambridge, UK. (1981).
International Journal of Computational and Applied Mathematics. ISSN 1819-4966 Volume 12, Number 1 (2017) © Research India Publications http://www.ripublication.com
377