Embed Size (px)
Citation preview

Review Article phys. stat. sol. (b) 93, 11 (1979)
Subject classification: 10; 12
Physico-Technical Institute of Low Temperatures, Academy of Sciences of the Ukrainian SSR, Kharkovl)
Stress Relaxation in Crystals BY V. I. DOTSENEO
Contents 1. Introduction
2. Stress relaxation equations
2.1 General stress relaxation equations 2.2 Stress relaxation equations based on the thermofluctuational dislocation motion
2.3 Stress relaxation equations based on empirical relations for the dislocation
2.4 Stress relaxation equations based on the viscous dislocation motion mechanism 2.5 Choice of stress relaxation equations for experimental data analysis
mechanism
mobility
3. Separation of the flow stress components
3.1 Thermal and athermal components of the flow stress 3.2 Flow stress component separation methods which are not based on the stress
3.3 Stress relaxation method applied to flow stress component separation 3.4 Difficulties of flow stress component separation a t low temperatures
relaxation
4. Application of the stress relaxation method to the estimation of activation parameters
4.1 Principles of the thermal activation analysis 4.2 Activation volume determination 4.3 Activation enthalpy determination
by the stress relaxation method
5.1 Physical sense of the parameters m and m* 5.2 m and m* determination techniques
6. Consideration of possible changes in the internal stresses and mobile dislocation densities during stress relaxation
6.1 Work hardening during stress relaxation and its consideration in the relaxation
6.2 Consideration of work hardening in the experiment 6.3 “Reversible work hardening” during stress relaxation 6.4 Consideration of possible changes in the mobile dislocation density
5. Determination of parameters in the empirical equations for the dislocation mobility
equations
7. Conclusion
References
l ) Lenins Prospekt 47, Kharkov-164, USSR.

12 V. I. DOTSENKO
1. Introduction Till recently, experiments aimed at studying plastic and strength properties of materials used two main kinds of niechanical tests: active deforniation a t constant rate and creep. In the last few years, one inore method has become increasinglypop- ular, namely the plastic stress relaxation. This method is as follows: the saniple is deformed at constant rate i and then the deformation is stopped, the total length of the sample and of elastic elements of the testing machine being fixed. On such condi- tions, however, the sample continues to be deformed owing to the reduction of the elastic strains in the machine elements as well as in the sample. This leads to a reduc- tion of the applied stress u with time, the kinetics of this reduction being entirely governed by dislocation processes in the sample (if we consider the case of not very high teniperatures). Therefore, the investigation of the stress relaxation was supposed to be helpful in revealing elenientary dislocation processes responsible for the plastic deformation in general and the stress relaxation in particular.
The application of the stress relaxat ion technique iinplies the successive realization of the following three operations:
( i ) determination of the dependence of the stress or the plastic deformation rate on the time during relaxation;
(i i) calculation of the parameters of these dependences which are related to the parameters of elementary dislocation processes (e.g. to paraineters of the dislocation- local obstacle interaction);
( i i i ) adequate interpretation of these parameters, i.e. deterniination of this relation. I t should be emphasized that the information mentioned in the first two items
may be obtained by other niethods, however, the Atress relaxation method offers certain advantages. Firstly, the stress relaxation technique is highly informative with fair simplicity. Indeed, as will he seen below, a single relaxation curve, which is relatively simple to obtain for any temperature, the strain rate and the strain value itself can provide information on the flow stress components, on plastic deforniation activation parameters, and also on parameters of enipirical relations for the dis- location niobility, m* and D.
However, the potential advantages of the stress relaxation method can only be realized with the use of correct calculations based on a realistic microscopic model brought into a forni convenient for cxperiniental data processing. Till now, the phenomenon of stress relaxation has been neither reviewed in sufficient detail, nor described theoretically in literature. Calculations dealing with the processing of the experimental relaxation curves, essential for the most! efficient application of the stress relaxation met hod, hare not been considered crit ically.
The present review is an iLttetiipt, even if only partly, to fill up the gap. It should be noted that the stress relaxation is also interesting froiii the viewpoint of appli- cat ion. It is known that not infrequently construction units experience stress relaxa- tion in their service and the relaxation resistance is therefore one of the essential characteristics of structural niaterials. However, we are not going to approach the stress relaxation from this aspect, restricting ourselves to its analysis as a method of studying the mechanism of plastic deformation and thus following the above items ( i ) to ( i i i ) .
2. Stress Relaxation Equations 2.1 General stress relaxation eqttatioiis
Since during relaxation the total length of the sample and the elastic machine elements is constant, the sum of the plastic deformation rate iPl, the elastic deformation rate

Stress Relaxation in Crystals 13
2,1 of the sample, and the elastic deformation rate 5 of the machine is zero [l]:
i,, + iel + z = o . (1) The elastic deforniation z of the machine is related to the machine stiffness S by
the following expression:
d P s=-, dz
where P is the load.
variation rate can be written as follows: The relation between the elastic deformation rate i of the niachine and the stress
Here a, is the cross-section area of the sample. Siniilarlj-, for Ze1, using the elastic niodulris E of the saniple we obtain
where I , is the sample length.
deformation rate: By substituting (3) and (4) into (l), we have the following equation for the plastic
1 1,ir a,& P I - E S ’
Dividing this expression by I,, and designating
1 1 a, 10s
jj-zf-, -
we can relate the-plastic strain rate during relaxation rate 6 by
= ZP$, to the stress variation
iT 31 - & = - - (7)
The quantity JI is called the effective niodulus of the sample-machine system All theoretical approaches to the stress relaxation process are based on equation (7) which therefore is the general (differential) equation of the stress relaxation.
Henceforth we shall apply the name “stress relaxation equation” to the expression relating the stress to the time during relaxation, i.e. the equation describing the relaxation curve scheinatically represented in Fig. 1. Such equations are obtained by integration of (7) with substitution of a particular stress dependence of .k. From
6 1 c’!
56itJ bill
$.;- l - 0 t - Fig. 1. Scheme of the relaxation curve

14 V. 1. DOTSENEO
Orowan’s equation [2] k = ebG ,
where e is the mobile dislocation density, b the Burgers vector, G the average dis- location velocity, i t follows that the stress dependence of k can he related to the stress dependences of e and G. The analysis of the stress relaxation as well as the active deformation and the creep most cominonly used the approximation of a constant mobile dislocation density p. For the case of stress relaxation this approxirnation seems to be most justified. Therefore, in the following we shall treat the stress relaxa- tion process mainly in ternis of this approximation (the only exception being Section 6.4). Below we shall consider stress relaxation equations for a variety of stress depend- ences of the average dislocation velocity.
The most common equations used in describing the average dislocation velocity as a function of effective stress fall into three groups:
1. Equations that imply the thermally activated character of dislocation move- ment. I n this case, the average dislocation velocity can be written in the Arrhenius form 131:
where vo is the pre-exponential factor containing the average distance covered by the dislocation in every act,ivation act, the frequency, and the geometric factor; 4G(a*) is the change in the free energy depending on the effective stress u*, k the Boltzniann constant, T the absolute teniperature.
Wit,hin this group, there can be variations fitting the form of AG(a*). 2. Empirical equations derived as a result of direct studies of the dependence of
the dislocation velocity on the stress. We shall examine two equations most frequenctly used in descriptions of the V-u* relation. One of them was obt,ained by Johnston and Gilman [4]:
and the other by Gilman [5]:
v = vo exp [ -$] In (10) and ( l l ) , vo, a:, WL*, and D are certain parameters. The separation of equations (10) and (11) into a special group is somewhat artificial, because the usual experimental temperature dependences of the parameters of these equations are such that they can be represented in the form of (9) with the adequate 4G(a*) relations. The relation between (10) and (9) will be considered in Section 5.1.
3. Equation of the average dislocation velocity versus effective stress in the case of viscous movement [6 ] :
where B is the viscous drag constant, b the Burgers vector. BG = a*b , (12)
2.2 Stress relaxation equations based on the therrnoflirctuatioiial dislocation motion mechanisrn
It follows from (8) and (9) that the plastic strain rate during therniofluctuational dislocation motion can be written as
i: = i, exp [ --kT-]. AG(a*)

Stress Relaxation in Crystals 15
Within this group, there may be a difference concerning t,he form of relation AG(a*); however, normally the simplest form is chosen, namely t,he linear one:
AG(a*) = AGO - V*O* , (14) where V * is the activation volume.
By combining (12)) (13)) and (14), we have
Taking the logarithm of this equation we get
AGO V*a* In (- iT) = In (MEO) - -+- k T k T a
This differential relaxation equation was obtained in [ l , 71. In [8, 91, it was integrated and resulted in the relation between the stress and the relaxation time:
(17) Aa(t) = a(0) - a(t) = a In (Bt + 1) , where o(0) is the stress at, the beginning of relaxation (at t = 0),
where E(0) is the plastic strain rate a t the beginning which is equal to Eact, the rate of active strain preceding the stress relaxation.
rate can be described by the expression In [lo] relaxation equations were obtained for the case in which the plastic strain
(18)
(19)
of the relaxation (at t = 0),
. . AGO V*a* E = c0 exp [ --I sinh- k T '
By combining (20) and (7) and integrating, we arrive a t
In [ l l ] this integration was performed in the general form and it was shown that Aa(t) = a In tanh (Bt + 1) (22)
for all values of V*a*/kT. It should be emphasized that the integration of (15) and (20), as well as that to be
done below of (23) and (28), did not take into account the work hardening during relaxation, therefore permitting to assume 6 = 8*. In Section 6.1, the relaxation equations are modified to allow for the work hardening.
2.3 Stress rela.mtiotr equations based 011 empirical relatioiis for the dislocation mobility
Equation (10) is used in [12 to 141 to derive stress relaxation relations. By combining (lo), (7)) and (8), we obtain
-6 = A ( U * ) " ' , (23)

16 V. I. DOTSENKO
0 100 ZOO 300
I - 8 9 e-
4
2
0 1 10 10' 10'
t (5) - t (5) - Fig. 2 Fig. 3
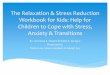
Fig. 2. Calculated relaxation curves [20] based on equation (27) compared with experimental data (dots)
Fig. 3. Calculated relaxation curves [21] based on equation (27) in semilogarithmic coordinates coinpared with experimental data (dots)
where A = Jfpbzo/(u!)nk' = const if e does not, change during relaxation. Inte- gration of (23) yields
a*@) = o(t) - o, = K ( t + u)-'h , where
1 m * - 1 '
'1L =
K = [(??a* - 1) A l p , (26) u being the integration constant, o, the internal stress. An equation analogous to (24) was derived in [15 to 171 using the applied stress instead of the effective one.
Several authors [18 to [21] attempted to use (11) to describe the stress relaxation, but this situation is milch more involved. From (ll), (7 ) , and (8), it follows that
-6(t) = J febv , exp - i Unfortunately, this differential equation cannot be integrated. Therefore, the time
dependence of the stress during relnxat ion cannot be presented analytically. However, the above differential form is still suitable for nieasurenient of D (by the relaxation curve law in the coordinates In (-6) against l /o [IS]) and flow stress component separation [19] (this technique is considered in Section 3.3).
In [ Z O ] , this equation is applied to tlhe description of the relaxation from the stress level below the yield stress. Eniploying rat her complicated mathematics relaxation curves were obtained which were well consistent with the experiment (Fig. 2).
In [21] equation (27) was integrated using a computer. Fig. 3 presents the inte- gration results in comparison with the experiment in the load-logarithm of tiiiie coordinates. At t --+ 0, o tends to o(O), while a t t + co, u tends to o,. For intermediate times. there is an inflection point near which the curves slope is nearly constant over a fairly large range of time.
2.4 Stress relu.~at ion insckunistn
Combination of (12), (7), and
eqrtatiotts bused oat the viscous dislocatioii motion
(8) yields
Meb2 B
- 6 ( t ) = u*(t)

Stress Relaxation in Crystals 17
This relation if integrated leads to an exponential time dependence of the effective stress in the process of stress relaxation:
o*(t) = o*(0) exp ( -~ M$z t ) ,
where o*(O) is the effective stress a t t = 0, i.e. a t the relaxation start moment. Naturally, only the earliest portion of the relaxation curve can agree with (29).
Starting from a certain moment t’ of time determined from equation o*(O) x Xexp (- Mebzt’/B) = a:, og being the maximum effective stress in terms of the therino- fluctional mechanism of surmounting the local obstacles, the relaxation curve can be described by an equation based on the thermofluctuational obstacle surmounting.
2.5 Choke of stress relaxation equations for experimental data analysis
One of the major difficulties which arises when investigating the stress relaxation (as of any macroscopic plastic deformation process, in general) is the correct choice of the equations describing this process. The reason is that experimental data process- ing based on a wrong equation can bring about serious errors in the determination of different parameters of the interaction of dislocations with local obstacles.
The correct choice of the stress relaxation equation, that is item (i) in the Intro- duction, is necessary to be realized for condition (ii) to be met. However, as will be seen later, this condition is by far not sufficient.
We can supply the following example of the problenis mentioned. Of all the stress relaxation equations enumerated the most often used ones are (17) and (24), and we shall designate them as the first and the second model, respectively. The difference between them is seen when the curve slope is considered for In (- 6) versus In t. From (17) it follows that
and from (24) that -& = nK(t + a ) ( - f i - l ) , In (-6) = In (nK) - (n + 1) In ( t + a ) .
(32) (33)
From (31) it follows that a t sufficiently large t the curve slope for the first model in such coordinates should be
X I = - 1 , (34)
(35)
and similarly for the second model, (33) leads to
Thus, the absolute value of the slope in the first model should be equal to unity, while for the second model larger than unity (ISII/ > 1). From (35) it is seen that as m* rises, IXIl/ tends to unity rather rapidly, therefore the differentiation between the two models becomes difficult and for m* > 10, i.e. jSI~l 1.1, even impossible. For ]XI = 1, the first model is valid, which can be checked with a plot in Ao-ln t coordi- nates. Such a plot has to be used in every case of 1x1 = 1, because it shows minor deviations better than the In (-&)-ln t plot where they can be unnoticed [22].
As we have shown, to choose between the two equations is difficult, especially a t low temperatures, because m * usually increases as the temperature drops. Mean- 2 physica (b) 93/1

18 V. I. DOTSENKO
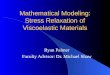
Fig. 4. Temperature dependence of the ratio of the S2-criteria for relaxation equations (17): Si and (24): S?, [40] .
while, these equations are based on different microscopic models, since the force- distance curve describing the dislocation-obstacle interaction is a rectangle for the first model (the activation volume V* being therefore independent of the effective stress o* ) and a hyperbola for the second model ( V * in this case, as will be shown below, is proportional to l/o* i.e. depends fairly strongly on a*).
The second model has been successfully applied mostly to alkali halide crystals [13, 23 to 271 and b.c.c. metals [14, 281, while the first one is more often used to treat f.c.c. [7, 291 and h.c.p. metals [30, 311. However, there is an uncertainty for f.c.c. and h.c.p. metals, namely the slope, /SI, may be both larger [22, 32 to 341 and smaller than unity [28], or take both values alternatively, according to the amount of strain [22 , 351.
This uncertainty of the relaxation curve slope might be explained as follows. The slope, as is seen from (31) and (33), can estimated exactly only when plotting In( -&) against In(@ + 1 ) for the first model and ln(-6) against ln(t + a) for the second model. I f the plot In(-6) versus In t is used, the slope can be correctly found only for sufficiently large t (where unity or a may be neglected for the first or the second models, respectively). I n this case, an error can appear, if we deal with insufficiently large t. This observation refers first of all to f.c.c. and h.c.p. metals, since the effective stresses in them are markedly lower than those in b.c.c. metals or alkali halide crystals, i.e. stress relaxation attenuates much faster. Besides, the situation may become worse because of work hardening during relaxation [36, 371 which can also add to the error.
Therefore, it seems suitable to employ electronic computers in the model selection, because it enables the worker, firstly, to use the initial relaxation equations (17) and (24) without recourse to finding the derivatives of 6, and, secondly, to preserve unity in equation (17) and a in (24). Some recent works used computer processing of relaxa- tion curves in terms of (17) [38] and (24) [39]. In [40], the two models were compared with the S2-criterion in an investigation of the stress relaxation in copper. The quantity a2 is the sum of the square deviations between the calculated and experimental points. The sum Sq for the first model a t high temperatures was found to be markedly larger than the sum S;I for the second model; as the temperature drops, they become equal. This is illustrated in Fig. 4 showing the temperature dependence of the ratio S?jS&. This result is caused by the increase of rn* with decreasing temperature and, as follows from (35 ) , lX11l + 1, reducing the difference between the models t o nothing.
3. Separation of the Flow Stress Components 3.1 Thermal and athermal components of the flow stress
The force exerted on a dislocation by obstacles as it moves in the slip plane can be divided into two components [41]:
(i) the long-range force Pi, little changing with the dislocation in the slip plane; i t is due to large obstacles, as second phase particles, dislocations in parallel slip planes, etc. ;

Stress Relaxation in Crystals 19
Fig. 5. Scheme of forces (a = F/Lb) acting on a dis- location as it moves in a slip plane. a = o*(T, i) + ai;
0 0
AG(o*) = Lb J (a - xl) da 0
X-
(ii) the short-range force F* which is nonzero only in case of short distances from the dislocation to local obstacles responsible for it : point defects, forest dislocations, etc.
These forces are schematically shown in Fig. 5. The energy required for the dis- location to overcome an obstacle is roughly equal to the area under the curve of the obstacle-dislocation interaction force as a function of the distance to the obstacle [42]. Therefore, the surmounting of long-range obstacles requires an essentially higher energy than in the case of short-range ones.
In principle, the movement of dislocations can be supported by thermal fluctua- tions [43]. However, their effective energy is relatively low. Therefore the energy to be applied mechanically (and also therefore the flow stress [44]) can be appreciably decreased only for low-energy obstacles (with barrier height & 50 kT). Thus, the short-range obstacle overcoming stress depends on temperature, while that for long- range obstacles depends on temperature only indirectly, namely via the temperature dependence of the elastic moduli [45, 461. With obstacles of both types present in the lattice, the applied stress 0 consists of two coniponents:
0 = (Ti + (T* , (36)
where ui is the athermal component of the stress (internal stress), (T* the temperature- dependent component (effective stress).
Naturally, all this reasoning is in principle valid only for a single act of overconiing one thermally surmountable obstacle by a single dislocation (illustrated in Fig. 5). Macroscopic plastic deformation involves an assembly of moving dislocations, which leads to an averaging of all the parameters controlling the strain rate. Accordingly, an average effective internal stress (oi)eff may be referred to.
There have been quite a number of works where the average velocity of a single dislocation in the internal stress field was calculated, that is (aJeff for one dislocation was determined [3, 6,47 to 511. However, if we assume that the ergodic hypothesis holds for the dislocation assembly, i.e. the average velocity of a single dislocation equals the instantaneous velocity of all dislocations in the assembly, then the SO
found value of (uJeff can be considered equal to the average internal stress of the dislocation assembly. It seems that the validity of the ergodic hypothesis for a dis- location assembly is tacitly taken to hold, since the results of [3, 6, 47 to 511 are often referred to in discussing the macroscopic experimental data.
In [3, 6,47,48] using a sinusoidal dependence of the internal stresses on the coordi- nate x,
o ~ ( x ) = (oJmax sin (2?) , (37)

20 V. 1. DOTSENKO
Fig. 6. Effective internal stress versus applied stress [3]
it was shown that (cri)eff depends in the general case on the applied stress and ranges from zero (if the applied stress cr tends to infinity) to the amplitude value of (crJmaX (when cr tends to Fig. 6 presents (@Jeff as a function of cr for different m* [3] (m* is the exponent in (10)). The temperature dependence of (cr&ff in terms of the models discussed is very weak, and the usually acting stresses cr are such that (ci)eff can be referred to as equal to (crJInax to a good accuracy.
Quite a different result was obtained in [50, 511 where the internal stress field was thought to be a Gaussian one. It appeared that
where V* is the activation volume, the distribution dispersion, k the Boltzmann constant, T the absolute temperature. I t is seen that in contrast to the above models, (cJeff is obviously temperature dependent.
Below we shall consider methods for studying the internal stress field, based on the flow stress component separation, i.e. on the determination of the average effective internal stress (cri)eff. For the sake of simplicity, we shall call it the internal stress cri.
We shall ignore the internal stress measurement techniques based on dealing with phenomena other than plastic deformation (e.g., magnetostriction measurements, X-ray and polarization-optical methods). Besides, methods considering individual dislocations offering information concerning the characteristics of the internal stress field distribution rather than the average internal stress will be not considered (including electronic microscopy and topographic measurements of the curvature of individual dislocations and the start stress method).
3.2 Plow stress roinponent sepuration methods which are not bused on the stress relaxation
3.2.1 Temperature dependence of the yield stress
This method consists in an investigation of the temperature dependence of the yield stress or the flow stress a t constant strain rates in order to find the temperature To a t which c* = 0, i.e. the applied stress cr = cri. Values of cr* and cri a t T < To are estimated by an extrapolation of cr for T = To to lower temperatures, taking into
Fig. 7 . Method of flow stress component separation according t o the temperature dependence of the yield stress
T-

Stress Relaxation in Crystals 21
account the temperature dependence of the Young modulus (Fig. 7 ) . This method is not perfect. Firstly it needs quite a lot of measurements over a wide temperature range to find the athermal region. Secondly, the existence of the temperature To and the athermal region is physically questionable. The point is that a t high temperatures and low effective stresses cr*, dislocation jumping against applied stresses becomes important [52 to 541. Therefore, it is inipossible that deformation should proceed merely by virtue of thermal fluctuations a t cr* = 0. This observation is qualitatively fair; it should be mentioned, however, that the formulae in the form of a hyperbolic sine obtained in 152 t o 541 are not quite correct for the plastic deformation rate with inclusion of the back fluctuations, because the contributions of direct and back fluctuations to the plastic deformation are not equivalent. I n particular, this was pointed out in [ 5 5 ] .
Despite the difficulties mentioned, this technique has been employed rather widely, and successfully, too, in particular when dealing with b.c.c. metals [56 to 581, display- ing a strong temperature dependence of the flow stress, because in this case an error in the estimate of cri cannot appreciably affect a* at low temperatures.
3.2.2 Xtraiia rate dependence of the flow stress 1591
The principle of this method is the measurement of the flow stress as a function of the strain rate in a wide range of flow rates and the determination of the rate below which the stress is constant (Fig. 8). This stress is ai. This method is based on the same as- sumptions as the preceding one and shares all its shortcomings.
3.2.3 Xingle cycling of the strain rate [SO, 611
By combining (8) and (lo), taking the logarithm of and differentiating the relation obtained, the following is found:
If m* is independent of the stress and the mobile dislocation density p is invariable through the cycling, then
Proceeding from this relation, Michalak [BO, 611 proposed two methods to find the effective stress, o*. If ACT is much smaller than CT* during the cycling, then
where 0: is the effective stress for the strain rate i1.
In E' - Fig. 8. Method of flow stress component separation according to the strain rate dependence of the yield stress

22
Equation (40) leads also to
1'. I. DOTSENKO
(42)
from which it follows that the AaiA i: versus A012 plot, if extrapolated to Aa = 0, allows to obtain uf and the slope gives m*.
It is proper to emphasize that these relations are valid only provided that the assumptions of constant mobile dislocation density and constant, athermal compo- nent through the cycling are justified.
I n this method, depending on fewer assumptions, it is very important to measure wccurately a,, o;, and a,, because even a small error can cause a severe error in ui.
3.2.5 Dependence of the flow stress on the grain size [62, 631 According to the empirical Hall-patch equation, the flow stress versus grain size relation is as follows:
Q = a@) + k(d)- l /Z . (45) I n [62, 631 it was proposed to estimate the thermal component of the flow stress by do), i.e. by virtue of an extrapolation of the a-(d)-1/2 dependence to (d)- lI2 = 0 (Fig. 9).
3.2.6 Dependence of the flow stress on the dislocation density [63 to 651 All the work hardening theories predict the same dependence of the internal stress a a n the total dislocation density eo:
oi = aGb(p,)1/2 , (46)
Fig. 9 Fig. 10
.Fig. 9. Method of component separation according to flow stress vs. grain size
Eig. 10. Method of component separation according to flow stress vs. dislocation density

Stress Relaxation in Crystals 23
where a is a certain constant, G the shear modulus, b the Burgers vector. Thus the plot of o versus (eo)112 allows to determine gi and o* by extrapolating it to (eo)1/2 = 0 (Fig. 10). A weak point of this method is the assumption that o* is independent of dislocation density go.
3.3 Stress relaxation method applied to flow stress component separation
3.3.1 Relaxation curve saturation method As has been stated, plastic strain of a sample during stress relaxation is due to a reduction of the elastic strain of the test machine and the sample itself. However, the stress decrease during the relaxation (Fig. 1 ) cannot be infinite, since the external stress o cannot be smaller than the internal one oi. This is the basis of the “direct” method of estimating the thermal and athermal stress components [59, 66, 671. The relaxation curve is plotted to saturation, i.e. till the stress decrease rate becomes zero, and the stress a t this point is taken equal to the athermal component, and the total stress drops (Aa in Fig. 1) equal to o*.
3.3.2 Unloading method The same principle (zero value of the plastic strain rate a t a* = 0) is the basis of methods involving continuous unloading [68] (Fig. 11) and incremental unloading [66, 68, 691 (Fig. 12) used to estimate ui and 5*.
Other techniques using the stress relaxation involve extrapolation of the stress reduced to zero rate which can be realized by reaching the internal stress level.
3.3.3 Li’s method [12] This method is based on the relaxation equation (24). I f it describes adequately the relaxation curve, then the dependence of dold lg t on a is linear (for large t ) , the slope of the curve giving m* and its extrapolation to the o-axis intersecting this axis a t point oi. This follows from equation
- 2.3 (a - ~ i ) - do d lg (t + a )
- rn* - 1 (47 )
readily obtainable from (24). I n Fig. 13, an example of such an analysis is supplied for brass [34].
Snother variant of this method [12] involves plotting In (-5) against In t. The slope of this graph is m*/(l - m*) proceeding from (33)) (35), from which m* (Fig. 14) is found, and the nonlinear part gives a. Then oi can be found from the following relation using any two points of the relaxation curve:
t b
& - E - C D t - Fig. 11 Fig. 12
Fig. 11. Component separation by continuous unloading Fig. 12. Component separation by incremental unloading test

24
D . 9
P [arb units1 -+ f 15)-
Fig. 13 Fig. 14
Fig. 13. Li’s method [la] of component separation. Data of [34]
Fig. 14. Relaxation rate vs. time in titanium [14]
V. I. DOTSENKO
t h
c - o t-
Fig. 15
Fig. 15. Li’s method of component separation [12] using three points of the relaxation curve
One more technique may be proposed based on equations (24) and (44). Three points are to be found on the relaxation curve where the stress reduction rate satisfies the condition = h3/6,. Then either oi can be obtained from (44), or o* at the first point from the following relation:
the sense of Aol,, and Aul,, being clear from Fig. 15.
3.3.4 Kelly and Round’s method (191 This method has two variants, one based on the empirical equation (lo), the other on (11). By differentiating the logarithmic forms of (23) (following from (10)) and ( 2 7 ) (following from (11)) , we arrive a t the following equations, respectively:
The relation In(-&) versus o is plotted, the slope yields d In(-6)/do. This parameter against (T is linear suggesting the validity of (50); the linear shape of its square root versus (T evidences that (51) is valid. In both the eases, the curve is extrapolated to its intersection with the o-axis a t point ui and its slope gives m* or @.
3.3.5 Estrin- Urusovskaya-Knab’s method (‘701 As follows from equation (13) and the commonly used dependences of the activation energy on the effective stressAG(o*) (for exaniple, (14)), if u* tends to zero the plastic strain rate i approaches a certain finite value (if i, = const). Therefore, it becomes difficult to extrapolate the relaxation curves to the internal stress level in terms of the thermal activation equation. As was indicated above, elimination of this defect, of (13) by including the hack fluctuations, which leads to the o* dependence of i: in the form of a hyperbolic sine, is not quite valid. The following method allows to overcome this difficulty by taking the &,-s* relation of [71] into account. In this

St.ress Relaxation in Crystals 25
case, (13) takes the following form:
E = i,($)exp AG(o*) (52 )
where 08 is the effective stress a t 0 K. It is seen from ( 5 2 ) that a t o* = 0, i is zero. Therefore, the equation permits to extrapolate the internal stress level. As o* decreases during the relaxation, starting from a certain stress and the corresponding stress reduction rate, the latter would exhibit a linear dependence on o* (Fig. 16). The rate c?l a t which the transition to the linear dependence occurs can be estimated by nieans of the following formula :
where 111 is the effective niodulus of (6), e the mobile dislocation density, b the Burgers vector, c the velocity of sound, AGO the energy barrier height, and G the shear iiiodulus. Into equation (53) a value of o*/oz of the order of magnitude of kTjAGO is to be sub- stituted, which corresponds to the stress a t which the exponential dependence $@*) changes to a linear one. Then, by extrapolating the linear region to 6 = 0, we obtain hi (Fig. 16).
3.4 Difficulties of flow stress component separatiots at low temperatures
The separation of flow stress components a t low temperatures presents some difficul- ties whose cause, in the final analysis, is the sharp decrease of the plastic deformation rate with decreasing temperature (provided the effective stress o* is constant).
The methods based on the strain rate dependence (Section 3.2.2.), single (Section 3.2.3), and double (Section 3.2.4) cycling of the strain rate are inapplicable a t low temperatures because of negligible sensitivity of the flow stress to the strain rate in this case [72].
Recently the method using the relaxation saturation (Section 3.3.1) has been increasingly criticized [73 to 761. From equation (13) it follows that in experiments nsing constant strain rate, i, O* should rise as the temperature drops, because dG(o*) is a decreasing function of cr*, regardless of the form of AG(o*).~) Consequently, if the relaxation is AO = o* it should rise with falling temperature. However, a stndy of the stress relaxation a t sufficiently low temperatures showed that with decreasing temperature the relaxation Ao (Fig. 1) reduces 167, 76 to 791, sometimes even reaching zero [79 to 811. Hence, the determination of the athermal component of the flow stress as ci = o - Ao leads to an increase of oi with decreasing teniperature [67, 73, 771. Thus, a t least a t low temperatures, the relaxation Ao is not equal to o*.
z, The possible dependence of the pre-exponential factor i0 on stress [71] and temperature [71, 821 (via the temperature dependence of the viscous drag coefficient, 6) cannot lead to a de- crease of G* when lowering the temperature. This does not relate to the specific case of the expo- nential temperature dependence of B a t the superconducting transition [82].

V. I. DOTSENKO 26
At present two explanations of this fact are being discussed. The first one was indicated in [67, 731 assuming that the zero experimental relaxation rate is not a t all an evidence of the zero value of the true plastic strain rate, since the latter might be too small to be measurable within a finite time. This hypothesis was analysed in [76] in terms of equation (13) in detail.
From (7) and (13) it follows that the stress decrease rate during the relaxation depends on effective stress and temperature by the following law :
This expression suggests that, firstly, if the effective stress a* is constant, the relaxa- tion rate sharply decreases with decreasing temperature and, secondly, an equal reduction of the effective stress, Ao*, causes a decrease inthe relaxation rate, A In( - 6) , which is significantly larger a t low temperatures. It represents the fact that the sensitivity of the stress to the relaxationrate, AalA In i, tends to zero, as the temper- ature is lowered. For example, in the case of a linear AG-a* dependence (14), the relation between Ao* and A In( -6) is givenby the expression A In (- 6) = Aa* V*IkT. An identical relation would be observed for any other form of AG(o*) on the condi- tion that ha* is small.
If a* in (54) tends to zero, the stress reduction rate as it approaches ai (call the rate 6') tends either to zero or to a value decreasing exponentially with temperature:
as conditioned by the form of AG(a*).
AG(a*). If the a* dependence of io is allowed for, then 13' becomes zero for any form of
It is easily seen that the complete relaxation time t , is 0
(56)
where o*(O) is the effective stress in the start of relaxation (at t = 0) , and &(a*) the dependence of the stress reduction rate during the relaxation on the effective stress given by (54).
From (56) the complete relaxation time can be calculated for different forms of AC(o*), e.g., for AG(a*) from (14), t , can be estimated by the following relation:
t,+ do * 6(a*) '
o'(0)
The substitution of the common experimental values V*, M , io, iact, and AGO into (57) yields the relaxation termination time a t 300 K to about lo1 to lo3 s, while a t 4.2 K to about 101600 s.
If i: and 6 tend to zero as well as a* (i.e. a t 6' = 0) , the integral of (56) has a singular- ity, since the integrand f (o*) = [6(0*)]-l goes to infinity a t one of the limits. I n this
case, the integral converges if the limit lim I da*/;(o*) exists. An analysis of (20), V
v+o O ' ( 0 )

Stress Relaxation in Crystals 27
(23), (27), and (52 ) having 2' = 0 for the plastic strain rate shows that for all of them the integral of (56) diverges, i.e. the complete relaxation time is equal to infinity for all temperatures.
It is reasonable that the situation with 5' = 0 is physically real (equations yielding 6' + 0 a t a* = 0 are not valid). Therefore, the internal stress level ai cannot be attained during relaxation in principle and the above estimate of the time t , is to be thought of as an estimate of the relaxation time of the applied stress a from below to near the ai stress, from which it follows that an applied stress a t moderately low temperatures can relax fairly close to ai within a reasonable time. This conclusion is easy to check if the upper limit is replaced by a finite small value and any expression yielding 5' = 0 for 6(a*) is used.
The observed termination of the relaxation according to [76] is due to the finite sensitivity of the measuring equipment to the stress reduction rate. I n [76] a certain critical stress reduction rate (- &in) is introduced which is the minimum rate sensible t o the equipment. Clearly, this rate does not depend on temperature and is a constant of the test machine. From the standpoint of this assumption, the registered amount of relaxation A a obviously is
A 0 = u*(&ct) - O*(&in) 3 (58)
where u*(EaCt) and a*(imin) are the effective stresses for strain rates EaCt and &,in,
respectively; i a c t is the strain rate during preceding relaxation of the plastic strain and imin = - irmin/M.
From (58) it is easy to find Aa for various fornis of AG(o*). Table 1 contains the results for a few forms of AG(a*). An analysis of the expressions tabulated shows
Tab le 1
Temperature dependence of the relaxation amount for different forms of AG(o*) [76]

28 V. I. DOTSENKO
that A o is an increasing function of temperature a t all tenlperatures for (59), (60), (61), and for (62), (63), (64) at least a t low temperatures. Thus the temperature dependences of Ao find their explanation.
The above model permits also to account for the absence of the stress relaxation a t low temperatures reported by some authors. This result requires an explanation because the relaxation rate at zero time, as is readily seen, must be independent of temperature, but should be a function of the preceding active strain rate. Since the test machine practically cannot be stopped instantly, a certain portion in the end of the relaxation curve is lost, i.e. the relaxation starts a t somewhat lower effective stress. As has been mentioned, any equal effective stress decrease a t low temperatures leads to an essentially larger decrease in the strain rate, and if it is below critical, no relaxation will be registered.
The second hypothesis leading to the inequality Ao < o* was proposed in [75]. Since the mobile dislocation lifetime can be shorter than the experiment lasts, a relaxation termination may be due to dislocation immobilization (as a result of dis- location capture or stopping a t a thermally unsurmountable obstacle). An analysis of linear dislocation motion in a long-range internal stress field during relaxation [75] yields the following relation between the complete relaxation Ao and the effective modulus iW, the average internal stress gradient (dai/dx) and the contribution to the strain 8,:
where 5 is a certain constant, a. the sample cross-section area, 1, the saniple length. It is seen from (65) that Ao can be only determined by the characteristics of the sample-machine system, the internal stress gradient, and in the case of a small modulus M , can be less than the effective stress corresponding to the starting of the relaxation. On the other hand, the relaxation termination stress in terms of this model is the “internal stress” a t the relaxation termination time, end the quantity (do,/dx) in this case may be viewed as the work hardening effective coefficient O@) during stress relaxation. It should be noted that the recourse to this theory in an attempt to explain the relaxation decrease a t dropping temperature implies the necessity of an extremely sharp increase in the work hardening coefficient O@) with decreasing temperature. The latter condition does not seem to be the case ; however, the dependence of O(r) on T in principle can be related to the T dependence of the mobile dislocation density e. Moreover, equation (65) was based on some particular assuniptions concerning the distribution of an assembly of mobile dislocations in the periodic field of internal stresses. These assumptions can be realized only under peculiar and rare experimental conditions.
Other methods based on stress relaxation and involving the extrapolation of the relaxation curve to the internal stress level (Sections 3.3.3, 3.3.4, and 3.3.5) are also difficult to employ in the low temperature range. As to the methods based on Li’s relaxation equation (24), there are two reasons for the difficulties. First m* rises as the temperature drops, and therefore, either it cannot be measured precisely, or that straight lines extrapolated to oi have only a very small slope. Secondly, the most important one in these methods is the terminal part of the relaxation curve, which cannot be attained a t low temperatures, as has been shown. The second observation relates to the techniques described in Section 3.3.5 as well, where the extrapolation can be realized only if the stress reduction rate ( - ~ ) is lower than the one given by (53), which decreases exponentially with decreasing temperature.

Stress Relaxation in Crystals 29
4. Application of the Stress Relaxation Method to the Estimation of Activation Parameters 4.1 Principles of the thermal activation analysis
The determination of activation parameters is connected with the use of equation (13). According to [3, 12, 831 the activation volunie V* is
V* = -(-) 8AG , aa*
and the activation enthalpy A H is given by the thermodynamic relation
A H = AG +- T A # , (67) where A S is the entropy
Taking the logarithm of (13) and differentiating the relation arrived a t with respect to u*, we have
If we differentiate the same equation with respect to temperature and use (67) and (68), we obtain
which can he written otherwise
If we assume that
(2) = o , T
then in all these equations, the derivatives with respect t o u* can be substituted by those with respect to 0.
4.2 Activation volume determination
As follows from (69), to determine the activation volume V * it is sufficient to know the strain rate dependence of the stress if io = const (what happens if this equality, as well as (72), is not observed, will be considered in Section 6). As the relation between the strain rate and the stress reduction rate during relaxation is linear (equation (7)), the following holds:
This suggests that, by plotting the logarithm of the relaxation rate as a function of the stress, one can obtain from the slope information both on the activation volume and on its dependence on the stress. However, because of the mentioned difficulties of

30 V. I. DOTSENKO
determining the derivative, and also because the stress range during relaxation is rather narrow, the V*-a* relation is generally difficult to obtain. As a rule, therefore, V* is determined with the use of one of the above two models (equations (17) and (24)). From (17) it follows that by plotting Ao against In t for sufficiently large t , we obtain a straight line with the slope k T / V * , from which V* can readily be obtained. The other method is related tjo the differential form of (17) by (16), from which follows that I n ( -6) versus a is a straight line of slope V * / k T .
The use of equation (24) is based on (73). Taking the logarithm of equation (23), which is the input for (24), we have
In (-G) = In A + m* In o* , (74)
then, as was shown by [12], it follows from (73) that
The second model, in contrast to the first one, is seen to yield an explicit dependence of V * on a*. It is worth mentioning that this relation, as is evident from (75), is resulting from the experiment in most cases [84, 851.
It is easy to find which form the V*-o* relation will have in terms of the third model (equation (27)). Taking the logarithm of (27) and using (73) yields
D a *2
V * = k T - .
4.3 Activation enthalpy determination
From equations (70) and (71) it follows that the determination of the activation en- thalpy AH requires the knowledge either of the temperature dependence of the strain rate for constant o* or, if V* is known, of the temperature dependence of the stress for constant strain rate.
The first variant was first realized, when dealing with the stress relaxation method in [86, 871. As follows from equations (12) and (70) ,
AH = , ~ C T ~ [ ( - ~ ~ ) a In ( - 6 ) -'GI. au
(77)
All the quantities used in this equation may be found as follows (Fig. 17). The sample is deformed a t temperature TI to a certain stress o(0) and the relaxation curve is plotted. Then the sample is unloaded, the temperature is decreased to T, < TI, the sample is again loaded to the same stress and another relaxation curve is recorded. As is shown in [86] 8 In MjaT = a 111 mj8T, where m is the slope of the elastic part of the deformation curve. To avoid the necessity of finding the derivatives of (-c?), the authors of [87] proposed to use the logarithmic stress relaxation equation
Fig. 17. Experimental arrangement for determining the activation enthalpy by the method proposed in [86] and [87]
t-

Stress Relaxation in Crystals 31
(17) leading to equation (30)) that is to say, a t t = 0
--;r = a/4. (78) Substituting finite increments for the differentials in (77)) we have
subscripts 1 and 2 a t a, /4, m indicating the temperatures Tl and T,, respectively. Since (18) and (19) lead to
@ = M i a c t 9 (80)
where i ac t is the plastic strain rate preceding the stress relaxation, it might seem that &dl = ad2. However, that is not so, because as the temperature decreases, the maintenance of a constant strain rate requires a higher stress to be applied, while in the experiment described these stresses are equal and therefore EL?! -+ EFit. This observation dictates that the temperature should be decreased in the experiment, because, if the temperature rises, a repeated loading cannot result in the same stress o(0) without plastic deformation of the sample, i.e. without changes in the internal stresses. Therefore, for equal applied stresses in the beginning of relaxation, o(O), the effective stresses should not be equal ; however, the effective stress equality is required to determine AH. In [87] it was noted that such a temperature succession is caused by the attempt to prevent the recovery in the experiment, but this is unessential against what has been said.
In [70] a technique for estimating the activation energy has been proposed allowing for a possible dependence of the pre-exponential factor Eo, on stress [71] and temper- ature [71, 821. The first step in this method is the determination of the internal stresses by the means proposed in [70] (considered in Section 3.3.5); it consists in plotting the In (- +*)-u* relation for different temperatures by points corresponding to different relaxation curves. As was shown in [70],
-&* = Aa-3(T) f - 1 (5) q(o*) exp [ A;:*)].
Hence it follows that the slope of the In [( - 3*) a3f] versus l / kT curve determines AH(o*) with a* fixed, and the segment cut off in the ordinate axis gives the value of In [Ap(o*)]. The function q(a*) may be found from equation (4) of [71], if the force- distance curve of the dislocation-obstacle interaction is derived from relation AH(o*). In (81) a3( T ) describes the temperature dependenee of the mobile dislocation density, and f(TI0) describes the temperature dependence of the viscous drag coefficient (0 is the Debye temperature).
To find the total activation energy, AGO, one can use either the general expression [3] a*
AGO = AG + J Ti*(a*) do* 0
or the method proposed in [7] which is as follows. As appears from (16)) plotting In ( -5) versus a* and extrapolating the straight line to a* = 0 gives the segment 6 = In ( M i , ) - AGo/kT. Having 6 for two different temperatures and assuming that In (MEO) is temperature independent, it is easy to determine AGO. However, it is important to bear in mind that this method is only applicable if a* is known, whereas the finding of V* from the slope of the same curve does not require the knowledge of a*.

32 V. I. DOTSENKO
5. Determination of Parameters in the Empirical Equations for the Dislocation Nobility by the Stress Relaxation Method
5.1 Physical sense of the parameters m and m*
The question of the relation of the Gilman-Johnston empirical equation (10) to the Arrhenius equation for the dislocation velocity (9) has been widely discussed in literature [88 to 981, and filially there was an explanation of the physical sense of m* and even on whether i t is reasonable to use equation (10). As follows from the formal comparison of (9) and (lo),
8 In V 8 In V o*V* = (a*),. = O* ( 2' = k T '
The easily measurable amount m' is
and is related to r)h in the following way:
where m = ( 8 In --) V .
a l n o ~
These relations lead to
m'a* 8 In i,, m* = o* - (~ ~ -)
8lno* ,. if ao* = 80. If p and the other values entering into Fo are constant, then
mfo* mo* - rn*---- ~ - ~. - o* + o i o
Since the product a*B* (Fig. 18) entering into (83) is a work of external forces [91] or an activation work [95] and the activation energy, i.e. the thermal energy contri- buting to the obstacle overcoming, is proportional to k T , then m* is a characteristic of the relation between them.
The temperature dependence of rn* has raised the most intense discussion. The product rn*kT, i.e. the activation work is
t G X L
Fig. 18. Scheme of the force-distance curve characterizing the dislo- cation interaction with an obstacle. The hatched area is Fl(z$ - z2) = = o*V*; G* = PI/bL, V * = (xl - x 2 ) bL
XI X l x+

Stress Relaxation in Crystals 33
This seem to suggest [92,96] that the temperature dependence of W may be due to the stress dependence of the entropy Ah'. It is seen from (89) that W is independent of temperature, if Ah' is proportional to In u*.
Christian [97] remarked that the power law (i.e. m* being independent of a*) and W = const, when experimentally observed, can serve as a proof of the absence of entropy terms, and also of the peculiar forms of AG(o*) and-V*(o*)
AG(a*) - In a* ,
1 a* V*(o*) - -.
If W is a function of temperature, so is also V*. Hence m* must be a function of u*. However, this is not usually observed, because plots of the logarithm of the dislocation velocity or of the stress reduction rate during relaxation versus the logarithm of the stress are linear over large stress ranges. Of course, the functional relation (a*).'* with m* = /(a*) carries no sense [97]. If the power law is valid, m* is only dependent on temperature. Evans [93] ignores the importance of entropy, but asserts that W should decrease a t rising temperature because of the stress dependence of a*V*. He assumed that a t a* = 0, m* should be zero, too. However, in Balasubranianian's opinion [94], equation (83) describes m* correctly for high o* only, i.e. a t low temper- atures, whereas a t low a* and high T %(a*) should be treated as a hyperbolic sine.
Then
u*V* coth --, u*V* m* - -
k T k T (93)
i.e. m* should tend to unity a t high temperatures. As was mentioned above, applica- tion of the hyperbolic sine is not quite warranted either. Moreover, the above discus- sion shows that the power law can fit the Arrhenius equation for ii only if the activation energy is determined by equation (91) [97]. Then V* is determined via (92) and V*a* = const, the activation energy being AG = co at u* = 0 which leads t o V = 0 at a* = 0. This result is quite reasonable physically as far as V must naturally be zero if a* = 0. Therefore, the hyperbolic sine need not be applied to have this result. On the other hand, however, the activation energy as inferred in [3] is
which cannot be a reflection of the force-distance curve of a single local obstacle (at least for small o*), since AG = co when a* = 0.
This contradiction should arise always then, if we try to write A G so that V should be zero for a* = 0. An alternative is to include a a*-dependent multiplier into the pre-exponential factor q,. However, it is practically very difticult to separate the pre- exponential and exponential dependences of ii on u* , because the pre-exponential factor can formally be written in the exponent via a logarithm.
Therefore, the empirical relation (10) for the dislocation velocity often holding also in macroscopic experiments is perhaps to be treated as no more than a good fit, as well as ensuring relations AG(a*), V*(a*), etc.
What we mean by the macroscopic experiments supporting the validity of (10) is: the stress relaxation equation (24) obtained froni (10) describes the relaxation in many 3 pbysica (b) 93/1

34 V. I. DOTSEKKO
materials well ; the activation volume V * i s hyperbolically dependent on o* always, except in a few cases [84, 851, the activation energy AG for many materials is propor- tional to In o* [40, 99, 1001.
5.2 m and m* determination techniques
Equation (87) clearly suggests the difficulties of the determination of m* by indirect methods: (i) the components of the flow stress are to be known; (ii) i, nlay be depend- ent on a*, this dependence possibly being related to the mobile dislocation density and entropy AS; (iii) the question whether the condition aa = ao* is met, i.e. the question of the internal stress constancy during the test.
From (85) it follows that, if k, is constant, then rn' = m. I n this case, m' can readily be determined experimentally (equation (84)). On the other hand, (88) suggests that m' = m*, if oi = 0. Upon this the method of the determination of m* is based by extrapolating the deformation dependence of m' to zero deformation. However, this method is sometimes very inaccurate [91, 1011, especially if oi is comparable to o* a t & = 0.
Other methods of the determination of m* are associated with methods for deter- mining a* in some or other way (because of item (i)), including those based on equation (lo), i.e. single (Section 3.2.3) and double strain rate cycling (Section 3.2.4), relaxation curve analysis niethtds (Sections 3.3.3, 3.3.4).
An analysis of the experimental determination of m* shows that the results obtained by the different indirect methods disagree. Neither they do agree with the direct method of the E(o*) determination. This was indicated, e.g. in [lo1 to 1031. It can be due to the above-mentioned difficulties in the indirect determination methods for m*. On the other hand, the direct method is neither free of shortcomings [97, 1011, since it assumes that there are no internalstresses in the crystal, i.e. a = o*. This can cause an overestimation of the measured m*, as it is suggested by (88), which can be partic- ularly pronounced a t high temperatures. It seems, this accounts for the increased product m*T with temperature, usually observed when a direct m* determination method is used. Fig. 19 sunimarizes the data of [92] for the temperature dependence of m*T for some nietals obtained by the direct method. For all metals except Mo [I071 (for which a correction was made for the internal stresses)m*T is seen to rise with temperature. Moreover, in [lo?] is was shown that the corrected m* values coincide with values of m* found by cycling of the strain rate.
Balasubramanian [92, 961 maintains, proceeding from (89) and (90) that the tem- perature dependence of m*T is associated with the activation entropy AS. Christian's arguments [97] on this issue have been cited above. Besides, the indirect experimental measurements of m* suggest that, if the internal stresses are allowed for correctly and the rest of the assumptions are observed, then m*T is practically independent of temperature.
Fe -S/
Fig. 19. Summarized data of [92] on the temperature dependence of m*T: 0 [104]; [105]; 0 [lOS]; 0 [107]; A [I081
0 TOO ZOO 300 400 TlKI -

Stress Relaxation in Crystals 35
6. Consideration of Possible Changes in the Internal Stresses and Mobile Dislocation Densities during Stress Relaxation
From what has been said it is obvious that all the techniques for determining the flow stress components, ai and a* the activation parameters V* and AH and the empirical parameters m and m*, are based on the assumption of constant internal stresses ui and niobile dislocation density during the experiment. This assumption is not valid in the general case, which can lead to a considerable error in the deterniina- tion of these parameters. In some cases, however, there is a way to take into account changes in ui and p permitting to correct the measured parameters and thus to obtain true or feasible values. Below we shall consider the sources of changes in ai and p, describe the most correct experimental conditions in this respect and the methods to allow for changes in ui and Q.
6.1 Work hardeiiiny ditriny stress reluxation and its consideration in the relaxatioii equations
As was indicated in Section 2, during relaxation, plastic strain of the sample occurs due to the reduction of the elastic deformations of the mechanical elements of the machine and of the sample; and the plastic deformation of the sample leads to a reduc- tion of the applied stress. The equation relating the plastic strain rate i to the stress reduction rate 2 permits to find the dependence of the strain Ae(t) during relaxation on the value of the relaxation Ao(t):
If we assume that the work hardening during relaxation deformation 8oi(t) depends on Ae(t) in a linear way, i.e.
where O @ ) is the work hardening coefficient during stress relaxation, then it is easily seen that 8ai(t) is proportional to Aa(t) :
8ai = O @ ) Ae(t) , (96)
t
l -0 t - t-
Fig. 20
t 45 q-
F 30 F P 2 15
0 40 80 720 160 t l s ) -
Fig. 21
Fig. 20. Changing flow stress components during relaxation in the linear work hardening approx- imation
Fig. 21. Post-relaxation effect vs. relaxation time. Data of [18]
3'

36 V. I. DOTSENKO
Fig. 20 presents the time dependences of a, o*, and ai during relaxation in terms of a siiiiple approach as follows. For the sake of simplicity, the case of strain-independent o* is considered.
The validity of (97) was checked in [18] against the relaxation time dependence of the post-relaxation effect 6a. This dependence appeared to be a curve with saturation (Fig. 21) occurring at the same times as the saturation in the relaxation curve.
Allowance for the work hardening during relaxation does not change the functional form of the relaxation curve, according to equations (96), (97), but leads to the renor- malization of its parameters. Indeed,
Ao*(t) == Ao(t) + Soi(t) = Au(t) 1 + -- . ( T) Hence
Thus, the logarithmic relaxation equation (17) will be k T M
Au(t) = _ _ - - ~ ~ h ( B t + 1) , V* M + W
and equation (24), with the experimental value of Ao substituted, will be
The factor M / ( M + W ) ) is usually neglected as believed to be approximately unity, because the usually observable work hardening coefficients for active defor- mation are 0(") <&I. However, as will be shown in the next chapter, in the general case, Wr) += I n this case, neglection of the factor M / ( M + W ) can cause considerable errors in the estimation of the stress relaxation equation parameters.
Thus, the activation volume V * if defined in terms of the logarithmic relaxation equation as k T / a , will be higher than the true V* by a factor of ( M + W ) / M . A simi- lar error in the estimation of V * would result in general always, whatever relaxation equation being used. This follows from the general equation for the determination of the activation volume (73), since it is clear that 8 In (-&) = a In (-&*) and
and even W) >
a@ = a@* M / ( M + w)). Hence in turn a curious equation follows:
V* Ao*(t) = V * Au(t) , (102) where F* is the activation volume neglecting the work hardening, i.e. being equal t o V * ( M + W ) / M ; Ao*(t) and Au(t) are the drops of the effective and applied stresses respectively, during any equal periods of time, or their total drops, Ao* and Ao (Fig. 20).
It can be deduced easily that for equation (24) the parameter n, and therefore also m*, remain constant. However, in this case the estimation of oi and o* leads to an error, with 6*(0) being
O*(O) = u(0) -
Here 6*(0) is the measured value of a*(O), ai the measured internal stress value, and o*(O) the true value of the effective stress a t t = 0.
The parameter m, unlike m*, does change in the case of work hardening. This is seen f ron equation (88). Since m* and CT are constant, and u* according to (103) is

Stress Relaxation in Crystals 37
estimated with an error, then an analogous error will be present also in the estimation of m, while the product mo* must remain constant.
6.2 Consideration of work hardening in the experiment From the above discussion it is obvious that for the finding of the true flow stress components, activation volume, etc., if relaxation is attended by work hardening, it is sufficient to know the factor M/(&' + W). Theauthors of [38, 401 used the follow- ing method to estimate the relative work hardening coefficient W / M . As Soi = So (Fig. 20), then according to equation (97),
theref ore So
M Ao = 1 +-. M + e ( r )
While investigating the temperature dependence of the stress relaxation in copper [40], it was found that the post-relaxation effect So is appreciable only a t temperatures below 77.3 K, and that So/Ao N 1/T in this case. To illustrate this statement, Fig. 22 shows the dependence of SolAa on 1/T. This sort of relation evidences that, firstly, the work hardening coefficient during relaxation @*) depends on temperature and, secondly at low temperatures 19@) can be much higher than the active deformation work hard- ening Coefficient @"). This temperature dependence of work hardening and its differ- ence from that in the case of active deformation can be explained as follows.
Work hardening accompanying active deformation is mainly related to an increas- ing total dislocation density and interdislocation reactions, the work hardening coeffi- cient being almost temperature independent. On the other hand, the work harden- ing resulting froni relaxation may be associated mainly with ininiobilisation and re- arrangeiiient of mobile dislocations, which can give rise to inhomogeneous internal stress fields. As was shown in [50, 511 (see Section 3.1), if the distribution of this field can he described by a Gauss function, then the effective internal stress is V*@/2kT. Therefore, if the work hardening during relaxation if iiiainly associated with the development of inhomogeneous internal stress fields, it should rise with falling tem- perature as 1/T, and this fact was confirmed by the experiment (Fig. 22) . Another reasonable explanation of the anomalously large work hardening coefficients during relaxation will be proposed in Section 6.3.
The authors of [lo91 proposed another technique to estimate not only the relative work hardening coefficient 6 ( r ) / X , but also the absolute value of e@). This is clearly
t- i- t-) t+ c-t-
4K.7, T
Fig. 22 Fig. 23
Fig. 22. Temperature dependence of the post-relaxation effect So normalized to the relaxation value An in copper [40] Fig. 23. Method of the consideration of work hardening proposed in [log]: O(a) = h c / k O(") = Ao(r)/As(r)

38 V. 1. DOTSENBO
illustrated by Fig. 23. I n [lo91 it was also found that W = being determined from the deformation curve. These measurements were made on Ti a t 300 K.
There is one more method to determine M / ( M + W ) [36, 1101 involving the meas- urement of M as a function of l / M ; cy is the parameter of the logarithmic relaxation equation which, in the case of work hardening, is ( k T / V * ) M / ( M + W ) ) according to equation (100). Clearly, the slope of this relation can give M / ( M + W)) and its extrapolation to 1/M = 0 gives k T / V * . The authors of [36] and [110] who investigated the stress relaxation with the help of variable stiffness machines also concluded that tYr) can be much larger than
It should be noted that the situation would he much more complicated in the case of a nonlinear work hardening law during relaxation, because the relaxation describing equation would be variable. The first attempt to analyse this case was reported in [37] which showed that neglection of the relaxation work hardening can cause not only a quantitative error in the activation volume V* but also a misdetermination of the V*-a* relation.
6.3 “Reversible work hardenirig” during stress relaxation
I n this section, we shall mention a phenomenon which has nothing to do with the true work hardening, but stfill can cause errors in the estimation of the flow stress components by the stress relaxation method. This method as well as other ones based on macroscopic plastic strain, naturally is good only to determine the average effective internal stress (&ff (see Section 3.1). As the definition indicates, this stress has dynam- ic nature and therefore is determined not only by the internal stress field but also by the nature of the niotion of the dislocation or dislocation assembly which it causes. Therefore, (ai)eff is a function of the applied stress a. Fig. 6 shows (oJeff against a [3] calculated for the case of a single dislocation moving in the internal stress field with a sinusoidal dependence on the coordinate (equation ( 3 7 ) ) , the local dislocation veloc- ity being a power-like function of the effective stress (qOc = q, ( o * / & ) ~ * ) . It is seen that (o&ff rises as o decreases. This nwms that the ratio t*(o - u?)/[t*(a - a?)] of the times of dislocation rests a t sites with the different local internal stresses acting, a{’) and a(:), increases as a decreases, if oil) > Certainly, this regularity will be valid for any physically realistic (i.e. narrowing a t top) force-distance law charac- teristic of the dislocation interaction with a local obstacle. For a mobile dislocation assenibly to be ergodic, i.e. the average instantaneous velocity of a dislocation in an assenibly to be equal to the time-average single dislocation velocity (or period average, if q(x) is periodical), with the ergodicity retained throughout the deformation, it is necessary that the relative number N-l dN/do, of mobile dislocations a t sites with local internal stress ai should be proportional to’ the time of the dislocation rest a t this site t*(o - q) [ l l l ] :
1 dN N do,
- t*(o - ai) . -__
If we assunie that the mobile dislocation assenibly manages to redistribute within the time of stress reduction during stress relaxation in accordance with (106), i.e. that it is ergodic for every o(t), then increases during relaxation, and the estima- tion of the coefficient of such a “reversible work hardening” can use calculations for a single dislocation. For example, for sinusoidal ai(z) and power-like cloc(a*) depend- ences,
as follows from Fig. 6 and equation (97).

Stress Relaxation in Crystals 39
Fig. 24. Schematic representation of the yield point during stress relaxation (a) and strain rate cycling (b)
However, the estiination of Ohf?: showed that it can be comparable to M , that is much larger than Wa).
The true termination of relaxation would mean, within this model, that the applied stress a has reduced to the maximum internal stress level, (a Jmau , since lini (a&ff =
= IT^)^^^. On the other hand, it would mean that all mobile dislocations stick to maximum internal stress sites.
The hypothesis proposed can be also used to treat the experimentally observed yield point during repeated loading after relaxation and during strain rate cycling. As the strain rate is varied in these experiments much more rapidly than during stress relaxation, dislocation redistribution should lag behind the applied stress changes, and therefore the average internal stress (ai)eff for the new deformation rate a t the starting moment of time should correspond to the preceding strain rate. However, later a t the new strain rate, this redistribution will take place leading to changes in (ai)eff and therefore in the applied stress, because the difference a - (Gi)eff should remain unchanged. Since an increase in a should cause (ai)eff to lower, it seems quite reasonable that the stress-strain curve develops a yield point, if repeated loading fol- lows relaxation or if the deformation rate is cycled to higher rates (Fig. 24).
t+m
6.4 Consideration of possible changes in the mobile dislocation derisity
Decrease in the mobile dislocation density during relaxation can lead to errors in the processing of relaxation curves for two reasons. The first one is an increase of the inter - nal stress due to stopped dislocations. The second one is as follows. Changing the mobile dislocation density causes changes in the pre-exponential factor E,, in equation (13) (whose constancy, as is shown by equations (69), (87), is necessary for the accurate estimation of the activation volume V* and parameter m*), as is indicated by meas- urements of a In Elao, even though aa* = aa, i.e. if there is no work hardening.
Allowing for the expected variation of the mobile dislocation density involves more difficulties than the allowance for the internal stress changes, because in this case there is not a macroscopic evidence as was the post-relaxation effect. If the mobile dislocation density decreases as a result of dislocation pinning by impurity atonis in impurity-containing or alloyed crystals, a repeated loading can result in a yield point [112]. Unfortunately, a t present there are no calculations to relate the yield point magnitude to the mobile dislocation density decrease rate. Besides, as was shown in Section 6.3, the yield point can result from different causes.
Another source of reduction of the mobile dislocation density during relaxation may be the dependence of Q on the effective stress o*. If E, N (o*)"., n being a certain con- stant, the activation volume V*, according to (69), is [113]

V. I. DOTSENKO 40
The second term in (108) can be neglected only for low temperatures. Inananalogous way, equation (87) leads to
7. Conclusion As has been shown, the stress relaxation method in principle permits to realize the “program” formulated in the three items in the Introduction. In conclusion, it seems appropriate to summarize in brief the difficulties involved, which, if overlooked, can lead to contradictory results.
The difficulties encountered while choosing the stress relaxation equations were analysed in Section 2.5. Here we are going only the mention the effect of these diffi- culties on activation volume and effective stress calculations at different temperatures. The fact, that at reducing temperature the true relaxation equation becomes practi- cally impossible to find, turns our even convenient for the calculation of V*, since this calculation by any equation would give practically the same result. The deter- mination of a* for very low temperatures would require, in addition to finding the true relaxation equation, a knowledge of its parameters to a very high accuracy, whirh in this case is practically impossible because of the smallness of the relaxation rate.
The situation is contrary at high temperatures. To estimate V*, it is necessary to know exactly the relaxation equation, because in the general case V* is a function of o*, and the total registered stress drop ho is in this case cornparable to (r* at the relaxation onset. The latter fact, on the other hand, facilitates a a* determination.
Since the identification of local obstacles controlling the dislocation velocity needs that the V*-a* relation should be known, that is to say, V* and a* are to be exactly estimated, then it is clear that we deal with a complicated situation, because these difficulties are a matter of principle.
In this sense, difficulties associated with internal stress and niobile dislocation density changes which can take place during relaxation are less important, because their overcoming depends on the development of correct met hods of accounting for these changes. One can expect to have this problem solved conipletely, since rewntly several works have appeared on this point [114 to 1161, in addition to those mentioned in Section 6.
Finally we shall touch upon a question related to the interpretation of the activation parameters obtained, i.e. item (iii) in the list. It is often believed that the V*-a* rela- tion obtained in macroscopic experiments is related to the form of the force-distance law of the dislocation interaction with the local obstacle only via a scale factor bL ( L is the dislocation segment length, b the Burgers vector),
where F* is the interaction force, x, - x2 the activation length (Fig. 18). Such an approximation is exactly valid only for a single act of local obstacle overcoming by a dislocation. Actually, however, we deal with a total of individual unit overcoming acts. Even for similar obstacles, the forces P* are different because of different internal stresses near local obstacles and different segment lengths. Allowing for oi and L essentially complicated the intermediate formulae. Therefore, a macroscopic experi- mentally found V*-a* relation cannot be a reflection of the force-distance ciirve. The force-distance curve, as found from (110), maybe called in this case the “statisti-

Stress Relaxation in Crystals 41
cal” force-distance curve from which is not easy to deduce the true force-distance curve. Thus, e.g. [117] shows that different true force-distance curves can lead to the same “statistical” one, the latter giving a (T* dependence of the average dislocation velocity V close to equation (10) with m* - 1/T. This fact could be used, as it seems, to account for the universal character of (10) mentioned in Section 5.1, as well as of the u* dependences of V* and AG (91, 92), but is a serious handicap in finding the true force-distance curve.
The above difficulties encountered when using the stress relaxation method cannot deteriorate the high appraisal which the technique deserves as one of the major phys- ical instruments to study plastic deformation mechanisms, thanks to some essential advantages which the author hopes to have convincingly demonstrated in the present review.
Acknowledgements
The author wishes to express his gratitude to Prof. V. V. Pustovalov who proposed this topic for a review article and Dr. A. I. Landau for useful remarks that helped to improve the contents of the paper. Besides, the author thanks T. P. Kokina and R. I. Tsapenko for their help in the preparation of the paper.
References
[I] F. GUIU and P. L. PRATT, phys. stat. sol. 6, 111 (1964). [2] E. O ~ o w a a , Proc. Phys. Soc. 52, 8 (1940). [3] J. C. I f . LI, Dislocation Dynamics, Ed. A. R. ROYENFIELD, G. T. HAHN, A. L. BEMENT,
JR., and R. I. JAFFEE, McGram-Hill, Kew York 1968 (p. 87). [4] W. G. JOHNSTOX and J. J. GILMAN, J. appl. Phys. 30, 129 (1959). [5] J. J. G I L M ~ N , Austral. J. Phys. 13, 327 (1960). [6] D. KLAHN, A. K. MUKHERJEE, and J. E. DORX, Rep. 11. lnternat. Conf. Strength of Xetals
[7] R . I. KUZXETSOV, V. A. PAVLOV, and V. T. SIraraTov, Fiz. l\.letallov i Metallovedenie 21, 265
[8 ] P. FELTHAM, J. Inst. Metals 89, 210 (1961). [9] G. A. SARGENT, Acta metall. 13, 663 (1965).
and Alloys, American Society for Metals, Metals Park/Ohio. Asilornar 1970.
(1966).
1101 R. I. KUZXETSOV and V. A. PAVLOV, Fiz. Metallov i Metallovedenie 25, 934 (1968). 1111 A . 8. K R ~ U S Z , Mater. Sci. Engng. 4, 193 (1969). [12] J . C. M. LI, Canad. J. Phys. 45, 493 (1967). [13] 1. GVPTA and J. C. 11. LI, Mater. Sci. Engnp. 6, 20 (1970). 1141 1. GUPTA and J. C. XI. LI, &Ietallnrg. Trans. I , 23 (1970). [15] F. IT. KOBLE and D. HULL, Acta metall. 12, 1089 (1964). [16] D. HULL and F. W. KOBLE, Disc. Faraday SOC. 6, 251 (1964). 1171 C. W. REID, A. GILBERT, and G. T. HAHN, Trans. MS A1ME 239, 467 (1967). [I81 8. A. BLISTAEOV,V. F. GAYDUCHEKYA, and 3f. P. SHASKOLSKAYA, ~zv.Vnzov (Tomsk). Fizika
[19] P. M. KELLY and J. M. ROUXD, Scripta metall. 5, 85 (1969). 1201 P. P. GILLIS and G. A. SARGENT, Mater. Res. Bull. 6, 451 (1971). 1211 R. E. MEDRANO, Scripta metall. 6, 771 (1972). [22] R. DE BATIST and A. CALLENS, phys. stat. sol. (a) 21, 591 (1974). 1231 A. A. BLISTAXOY, V. F. GA4YDUCHENYA, and hl. P. SHASKOLSKAYA, Fiz. tverd. Tela 11, 474
1241 P. L u K ~ ~ : and I. HASLINGEROV~, phys. stat. sol. (a) 22, K109 (1974). [25] M. STJSZYNSKA, Bull. Acad. Polon. Sci. (Ser. Sci. Techn.) 22, 13 (1974). 1261 M. R. SPRACKLING, Phil. Mag. 27, 165 (1973). 1271 K. TANGRI and D. J. LLOYD, J. appl. Phys. 45,4268 (1974). 1281 C. C. LAW and D. N. BECRERS, Scripta metall. 6, 635 (1972). [29] P. FELTHAM, G. LEHMANN, and R. MOISEL, Acta metall. 17, 1305 (1969).
No. 5, 76 (1969).
(1969).

42 V. I. DOTSENKO
[30] P. FELTHAM, phys. stat. sol. 3, 1340 (1963). [31] F. F. LAVRENTEV, 0. P. SALITA, and G. V. Z Y ~ B R E V , Fiz. Metallov i Metallovedenie 2‘3,
[32] 0. BUCK, phys. stat. sol. 3, 1903 (1963). [33] R. W. ROHDE and T. V. NORDSTROM, Mater. Sci. Engng. 12, 179 (1973). 1341 N. RALASUBRAMANIAN, J. C. M. LI, and &I. GENSAMER, Mater. Sci. Engng. 14, 37 (1974). 1351 P. RODREGUEZ, P. DASGUPTA, 6 . L. MANNAN, S. S. VAGARALI, and K. G. SanruEL, Scripta
[36] R. W. ROHDE and T. V. NORDSTROM, Scripta metall. 7 , 317 (1973). [37] M. G. WHITE and I. 0. SMITH, Scripta metall. 8, 1153 (1974). [38] V. I. DOTSENKO, A. I. LANDAU, and V. V. PUSTOVALOV, phys. stat. sol. (lo) 66, 279 (1974). 1391 W. R. THORPE and I. 0. SNITXI, Scripta metall. 5 , 123 (1973). [40] V. I. DOTSENKO and A. 1. LANDAU, Mater. sci. Engng. 22, 101 (1976). [41] A. SEEGER, Z. Naturf. ‘3a, 758, 819, 856 (1954). [42] Z. S. BASINSKI, Phil. Mag. 4, 393 (1959). [43] ZH. FRIDEL, Dislokatsii, Izd. Mir, Moscow 1967 (in Russian). [44] J. E. DORN, Energetics in Metallurgical Phenomena, Gordon and Breach, New York 1965. [45] A. ZEGER, Collection of Papers: Dislokatsii i Mekhanicheskie Svoistva Kristallov, Izd.
Inostrannaya Literatura, Moscow 1960. [46] H. CONRAD, J. Iron Steel Inst. 198, 364 (1961). [47] A. S. ARGON, Mater. Sci. Engng. 3, 24 (1968). [48] F. GUIU, phys. stat. sol. 33, 785 (1969). [491 H. CONRAD, Mater. Sci. Engng. 6, 2G5 (1970). [SO] A. 1. LANDAU, phys. stat. sol. (a) 20, K95 (1973). [51] V. Z. BENCUS, S. N. KOHNIK, and S. N. SNIRNOV, Mater. Sci. Engng. 14, 223 (1974). [52] E. OROWAN, 2. Phys. 98, 386 (1936). [53) G. ALEFELD, Z. Naturf. lia, 899 (1962). [54] Yu. V. MILMAN and V. I. TREFILOV, Collection of Papers: Mekhanizm Razrusheniya
Metallov, Naukova Dumka, Kiev 1966. 1551 B. L. INDENBOM and A. PI’. ORLOV, Introduction to Collection of Papers: Termicheski
Aktivirovnanye Protsessy v Kristallakh, Izd. Mir, Moscow 1973. [56\ H. CONRAD and M’. HAYES, Trans. ASM 56,249 (1963).% [57] P. WYNBLATT, A. ROSEN, and J. E. DORN, Trans. MS AIME 233, 651 (1965). [58] J. W. CHRISTIAN and B. C. MASTERS, Proc. Roy. Soc. A281, 233 (1964). [69] D. T. PETERSON and R. L. SKAGGS, Trans. MS AIME 242, 922 (1968). [ G O ] I. 1. MICHALAK, Acta metall. 13, 213 (1965). [ G l ] I. 1. MICHALAK, Acta metall. 14, 1864 (1966). [62] G. SARGENT and H. CONRAD, Scripta metall. 3,43 (1969). [631 H. CONRAD and K. OKAZAKI, Scripta metall. 4, 259 (1970). [641 H. CONRAD, S. FEUERSTEIN, and L. RICE, 1Vlater. Sci. Engng. 2, 157 (1967). [65] K. L. JONES and H. CONRAD, Trans. &IS ,41ME 245, 779 (1969). L661 G. B. GIBBS, Phil. Mag. 13, 317 (1966). [67] P. RODRIGUEZ, J. Mater. Sci. 3, 98 (1968). [68] B. VLACH, Czech. J. Phys. B16, 255 (1966). [GY] S. R. bfacEw~N, 0. 9. KUPCIS, and B. RAMASWAMI, Scripta metall. 3, 441 (1969). [YO] Yu. Z. ESTRIN, A. A. GRUSOVSKAYA, and C . G. KNAB, Kristallografiya li, 176 (1972). [711 V. L. INDENBOM and Yu. Z. ESTRIN. phys. stat. sol. (a) 4, K37 (1971). [73] V. D. YAROSHEVICH, Fiz. Metallov i Metallovedenie 30, 886 (1970). [73] F. GUIU, Scripta metall. 3, 753 (1969). [74] V. 1. DOTSENKO, V. V. l’UST01 ALOV, and V. S. FOMENKO, Fiz. tverd. Tela 14, 201 (1972). [75] V. Z. BENGUS, E. D. TABACHNIKOVA, and V. N. OSTROVERKH, Fiz. tverd. Tela 15,3452 (1973). [76] V. I. DOTSENKO, Probl. Prochnosti, KO. 11, 91 (1974). [77] V. z. BENGUS, 8. N. KOMNIK, and E. 1). TaBaCHNIKovA, Fiz. kondens. Sost. 5, 137 (1969). [78] T. A. PARKHOBIENKO and V. V. PUSTOVALOV, Fiz. Metallov i Metallovedenie 36, 849 (1973). [79] D. A. DIDENKO, V. V. PUSTOVALOV, V. S. FOMENKO, V. F. STATINOVA, and V. 1. DOTSENKO,
[SO] v. V. 1’uSTOvALOv and V. S. FOMENKO, Fiz. Metallov i Metallovedenie 26, 716 (1968).
1088 (1970).
metall. i, 671 (1973).
Fiz. kondens. Sost. 10, 26 (1970).

Stress Relaxation in Crystals 43
1811 J. 31. GALLIGAN and T. OKU, Bcta metall. 19, 223 (1971). [82] V. D. NITSIK, Zh. eksper. teor. Fiz. 62, 2540 (1971). [83] G. SCHOECK, phys. stat. sol. 8, 499 (1965). [84] X. BALASUBRAJfANI4X and J. C. M. LI, J. Mater. Sci. 6, 434 (1970). [85] N. BALZSUBRAMANIBN and J. c. M. LI, J. Mater. Sci. 6, 839 (1970). [86] R. B. CLOUGH, phys. stat. sol. 17 , K175 (1966). [87] R. B. CLOUGH and L. J. DEMER, phys. stat. sol. 36, 221 (1969). [SSl J. C. 31. Lr, Trans. MS AIME 233, 219 (1965). [89] J. W. CHRISTIAN, Canad. J. Phys. 46, 508 (1967).
1911 K. R. EVANS, D. J. BAILEY, and W. F. FLANAGAN, phys. stat. sol. 22, 607 (1967). [92] N. BALASUBRANANIBN, Scripta metall. 3, 21 (1969). [93] K. R. E v a ~ s , Scripta metall. 3, 627 (1969).
[95] U. F. KOCKS, Scripta metall. 4, 29 (1970). 1961 PJ. BALASUBRAIVIANIAX, Scripta metall. 4, 409 (1970). [97] J. TV. CHRISTIAN, Scripta metall. 4, 811 (1970). [98] J. C. 11. LI, Scripta metall. 4, 991 (1970). [99] V. D. YAROSHEVICH and D. G. RYVKINA, Fiz. tverd. Tela 12, 464 (1970). 1001 V. D. YAROSIIEVICH and D. G. RYVK~NA, Fiz. Metallov i Metallovedenie 35, 618 (1973). 1011 K. R. EVANS and E. B. SCHWENK, Acta metall. 18, 1 (1970). 1021 E. Yu. G U T M ~ N A S and E. 31. XADGORNY. Flz. tverd. Tela 12, 2076 (1970). 1031 31. SRIKIVASAK, H. L. FOTEDAR, and T. G. STOEBE, phys. stat. sol. (a) 17, 257 (1973). 1041 D. F. STEIX and J. R. LOW, J. appl. Phys. 31, 862 (1960). 1051 H. D. GUBERMAN, Acta metall. 16, 713 (1968). 1061 G. C. Das, Ph. D. Thesis, London University, 1967. 1071 A. L. PREXEL, A. LAWLEY, and H. CONRAD, Acta metall. 16, 337 (1968). 1081 H. W. SCHADLER, Acta metall. 12, 861 (1964). 1091 G. SAKGENT, G. JOKES, and H. COXRAD, Scripta metall. 3, 481 (1969). 1101 V. Z. BENCUS and E. D. T ~ ~ a c a ~ I K o v ~ 4 , Fiz. tverd. Tela 18, 872 (1976). 1111 A. 1. LAKDAU, phys. stat. sol. (a) 15, 343 (1973). 1121 D. MUKZ, Z. Metallk. S!1, 289 (1968). 1131 V. D. YAROSHEVICH, Fiz. Metallov i illetallovedenie 31, 666 (1971). 1141 A. 6 . KRANSZ, G. B. KRAIG, and B. FAUCHER, Scripta metall. 10, 393 (1976). 1151 J. HAUSSELT, Scripta metall. 10, 565 (1976). 1161 K. OKAZAKI, Y. AOSO, and M. KAGAWA, Acta metall. 24, 1121 (1976). 1171 A. I. LAXDAU and V. I. DOTSEXKO, phys. stat. sol. (a) 37, 709 (1976).
[go] J. IT. CHRISTI.4S, Acta metall. 15, 1257 (1967).
1941 N. BAL-ZSUBRAMANIA4N, SCripta metall. 3, 751 (1969).
(Received Srptember 8, 1978)