Embed Size (px)
Citation preview
Structural Macroeconometrics
Chapter 3. Removing Trends and Isolating Cycles
David N. DeJong Chetan Dave
Just as DSGE models must be primed for empirical analysis, so too must the corre-
sponding data. Broadly speaking, data preparation involves three steps. A guiding principle
behind all three involves the symmetric treatment of the actual data and their theoretical
counterparts. First, correspondence must be established between what is being characterized
by the model and what is being measured in the data. For example, if the focus is on a
business cycle model that does not include a government sector, it would not be appropriate
to align the model�s characterization of output with the measure of aggregate GDP reported
in the National Income and Product Accounts. The collection of papers in Cooley (1995)
pay careful attention to this issue, and do so for a broad range of models.
The second and third steps involve the removal of trends and the isolation of cycles.
Regarding the former, model solutions are in terms of stationary versions of variables: the
stochastic behavior of the variables is in the form of temporary departures from steady
state values. Corresponding data are represented analogously. So again using a business
cycle model as an example, if the model is designed to characterize the cyclical behavior
of a set of time series, and the time series exhibit both trends and cycles, the trends are
eliminated prior to analysis. In such cases, it is often useful to build both trend and cyclical
behavior into the model, and eliminate trends from the model and actual data in parallel
fashion. Indeed, a typical objective in the business cycle literature is to determine whether
models capable of capturing salient features of economic growth can also account for observed
patterns of business cycle activity. Under this objective, the speci�cation of the model is
subject to the constraint that it must successfully characterize trend behavior. Having
satis�ed the constraint, trends are eliminated appropriately and the analysis proceeds with
an investigation of cyclical behavior. Steady states in this case are interpretable as the
1
relative heights of trend lines.
Regarding the isolation of cycles, this is closely related to the removal of trends. Indeed,
for a time series exhibiting cyclical deviations about a trend, the identi�cation of the trend
automatically serves to identify the cyclical deviations as well. However, even after the
separation of trend from cycle is accomplished, additional steps may be necessary to isolate
cycles by the frequency of their recurrence. Return again to the example of a business cycle
model. By design, the model is intended to characterize patterns of �uctuations in the data
that recur at business cycle frequencies: between approximately six and 40 quarters. It is
not intended to characterize seasonal �uctuations. Yet unless additional steps are taken,
the removal of the trend will leave such �uctuations intact, and their presence can have a
detrimental impact on inferences involving business cycle behavior.1
The isolation of cycles is also related to the task of aligning models with appropriate
data, because the frequency with which data are measured in part determines their cyclical
characteristics. For example, empirical analyses of economic growth typically involve mea-
surements of variables averaged over long time spans (e.g., over half-decade intervals). This
is because the models in question are not designed to characterize business cycle activity,
and time aggregation at the �ve-year level is typically su¢ cient to eliminate the in�uence
of cyclical variations while retaining relevant information regarding long-term growth. For
related reasons, analyses of aggregate asset-pricing behavior are typically conducted using
annual data, which mitigates the need to control, e.g., for seasonal �uctuations. Analyses
of business cycle behavior are typically conducted using quarterly data. Measurement at
1For an example of a model designed to jointly characterize both cyclical and seasonal variations inaggregate economic activity, see Wen (2002).
2
this frequency is not ideal, since it introduces the in�uence of seasonal �uctuations into the
analysis; but on the other hand, aggregation to an annual frequency would entail an impor-
tant loss of information regarding �uctuations observed at business cycle frequencies. Thus
an alternative to time aggregation is needed to isolate cycles in this case.
This chapter presents alternative approaches available for eliminating trends and isolating
cycles. Supplements to the brief coverage of these topics provided here are available from
any number of texts devoted to time series analysis (e.g., Harvey, 1993; Hamilton, 1994).
Speci�c coverage of cycle isolation in the context of business cycle analysis is provided by
Kaiser and Maravall (2001).
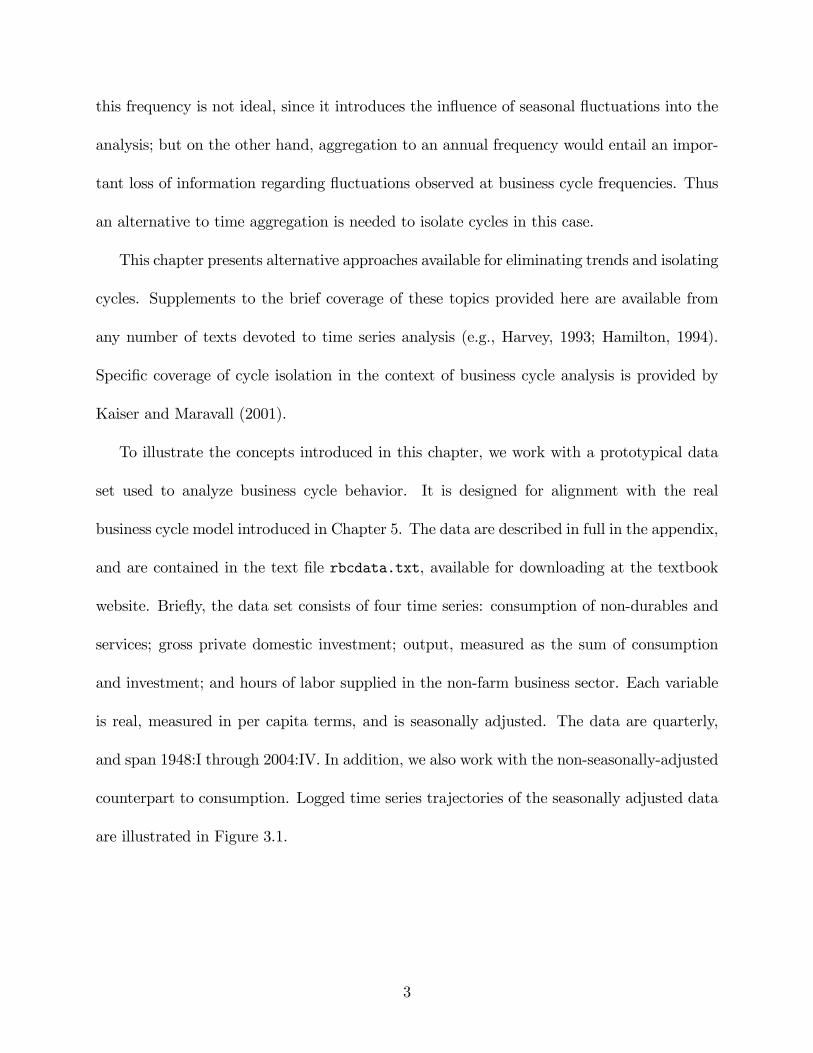
To illustrate the concepts introduced in this chapter, we work with a prototypical data
set used to analyze business cycle behavior. It is designed for alignment with the real
business cycle model introduced in Chapter 5. The data are described in full in the appendix,
and are contained in the text �le rbcdata.txt, available for downloading at the textbook
website. Brie�y, the data set consists of four time series: consumption of non-durables and
services; gross private domestic investment; output, measured as the sum of consumption
and investment; and hours of labor supplied in the non-farm business sector. Each variable
is real, measured in per capita terms, and is seasonally adjusted. The data are quarterly,
and span 1948:I through 2004:IV. In addition, we also work with the non-seasonally-adjusted
counterpart to consumption. Logged time series trajectories of the seasonally adjusted data
are illustrated in Figure 3.1.
3
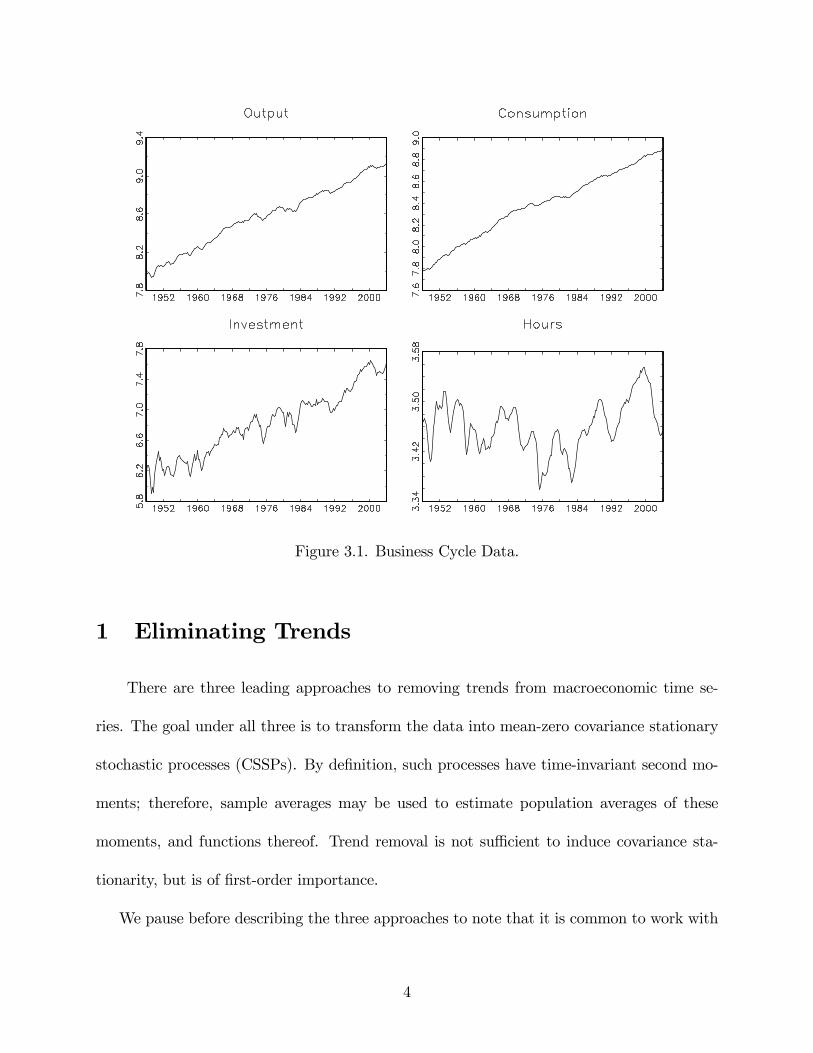
Figure 3.1. Business Cycle Data.
1 Eliminating Trends
There are three leading approaches to removing trends from macroeconomic time se-
ries. The goal under all three is to transform the data into mean-zero covariance stationary
stochastic processes (CSSPs). By de�nition, such processes have time-invariant second mo-
ments; therefore, sample averages may be used to estimate population averages of these
moments, and functions thereof. Trend removal is not su¢ cient to induce covariance sta-
tionarity, but is of �rst-order importance.
We pause before describing the three approaches to note that it is common to work with
4

logged versions of data represented in levels (e.g., as in Figure 3.1). This is because changes
in the log of a variable yt over time represent the growth rate of the variable:
@
@tlog yt =
@@tyt
yt�
�ytyt� gyt ; (1)
where�yt =
@@tyt. In addition, when using log-linear approximations to represent the cor-
responding structural model, working with logged versions of levels of the data provides
symmetric treatment of both sets of variables.
The �rst two approaches to trend removal, detrending and di¤erencing, are conducted un-
der the implicit assumption that the data follow roughly constant growth rates. Detrending
proceeds under the assumption that the level of yt obeys
yt = y0(1 + gy)teut ; ut � CSSP: (2)
Then taking logs,
log yt = log y0 + gyt+ ut; (3)
where log(1 + gy) is approximated as gy. Trend removal is accomplished by �tting a lin-
ear trend to log yt using an ordinary least squares (OLS) regression, and subtracting the
estimated trend:
eyt = log yt �c�0 �c�1 � t = but; (4)
where the b�0s are coe¢ cient estimates. In this case, log yt is said to be trend stationary.In working with a set ofm variables characterized by the corresponding model as sharing a
5

common trend component (i.e., exhibiting balanced growth), symmetry dictates the removal
of a common trend from all variables. De�ning �j1 as the trend coe¢ cient associated with
variable j, this is accomplished via the imposition of the linear restrictions
�11 � �j1 = 0; j = 2; :::;m;
easily imposed in an OLS estimation framework.2
Di¤erencing proceeds under the assumption that yt obeys
yt = y0e"t ; (5)
"t = + "t�1 + ut; ut � CSSP: (6)
Note from (6) that iterative substitution for "t�1; "t�2; :::, yields an expression for "t of the
form
"t = � t+t�1Xj=0
ut�j + "0; (7)
and thus the growth rate of yt is given by . From (5),
log yt = log y0 + "t: (8)
Thus the �rst di¤erence of log yt, given by log yt � log yt�1 � (1 � L) log yt, where the lag
2The GAUSS procedure ct.prc, available at the textbook website, serves this purpose.
6
operator L is de�ned such that Lpyt = yt�p, is stationary:
log yt � log yt�1 = "t � "t�1 (9)
= + ut:
In this case, log yt is said to be di¤erence stationary. Estimating using the sample average
of log yt � log yt�1 yields the desired transformation of yt:
eyt = log yt � log yt�1 � b = but: (10)
Once again, a common growth rate may be imposed across a set of variables via restricted
OLS by estimating b j subject to the restrictionb 1 � b j = 0; j = 2; :::;m; (11)
ct.prc is also available for this purpose.
The choice between detrending versus di¤erencing hinges on assumptions regarding whether
(3) or (9) provides a more appropriate representation for log yt. Nelson and Plosser (1982)
initiated an intense debate regarding this issue, and despite the large literature that followed,
the issue has proven di¢ cult to resolve.3 A remedy for this di¢ culty is to work with both
speci�cations in turn, and evaluate the sensitivity of results on the chosen speci�cation.
As Figure 3.2 illustrates, the choice of either speci�cation is problematic in the present em-
3For an overview of this literature, see, e.g., DeJong and Whiteman (1993) and Stock (1994).
7
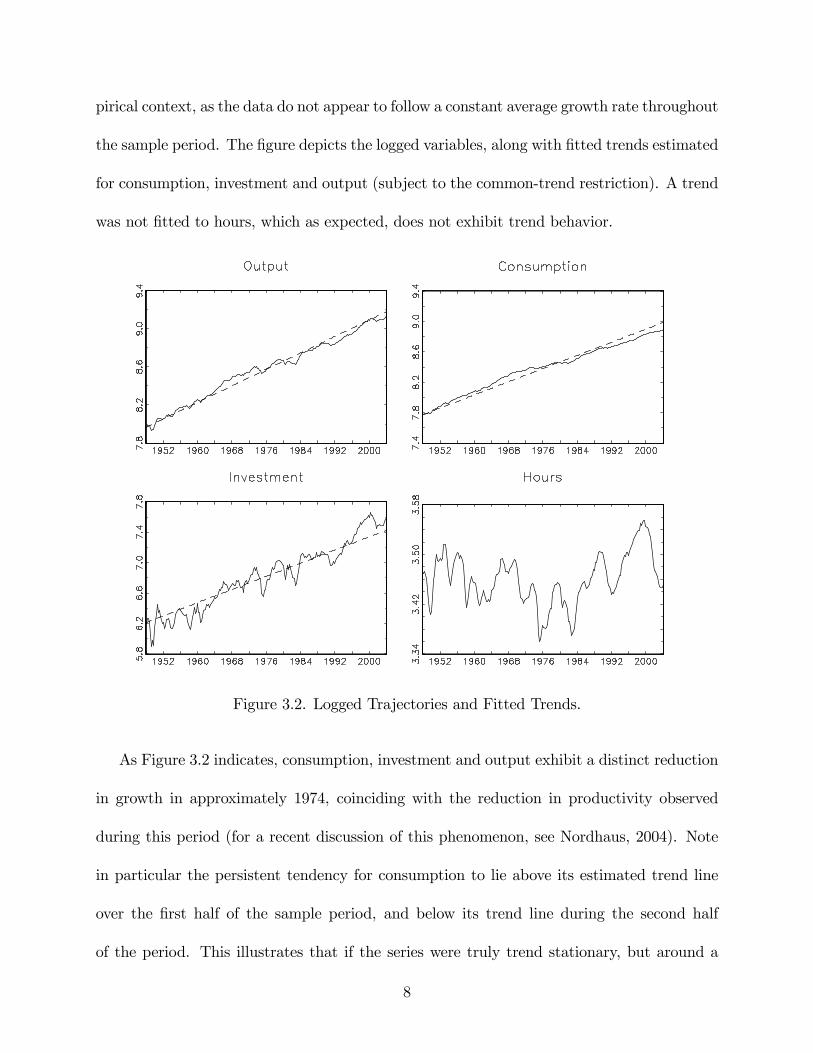
pirical context, as the data do not appear to follow a constant average growth rate throughout
the sample period. The �gure depicts the logged variables, along with �tted trends estimated
for consumption, investment and output (subject to the common-trend restriction). A trend
was not �tted to hours, which as expected, does not exhibit trend behavior.
Figure 3.2. Logged Trajectories and Fitted Trends.
As Figure 3.2 indicates, consumption, investment and output exhibit a distinct reduction
in growth in approximately 1974, coinciding with the reduction in productivity observed
during this period (for a recent discussion of this phenomenon, see Nordhaus, 2004). Note
in particular the persistent tendency for consumption to lie above its estimated trend line
over the �rst half of the sample period, and below its trend line during the second half
of the period. This illustrates that if the series were truly trend stationary, but around a
8

broken trend line, the detrended series will exhibit a spurious degree of persistence, tainting
inferences regarding their cyclical behavior (see Perron, 1989 for a discussion of this issue).
Likewise, the removal of a constant from �rst di¤erences of the data will result in series
that persistently lie above and below zero, also threatening to taint inferences regarding
cyclicality.
The third approach to detrending involves the use of �lters designed to separate trend
from cycle, but given the admission of a slowly evolving trend. In this section we introduce
the Hodrick-Prescott (H-P) �lter, which has proven popular in business cycle applications.
In Section 3.2, we introduce a leading alternative to the H-P �lter: band pass �lters.
Decomposing log yt as
log yt = gt + ct; (12)
where gt denotes the growth component of log yt and ct denotes the cyclical component, the
H-P �lter estimates gt and ct in order to minimize
TXt=1
c2t + �TXt=3
�(1� L)2 gt
�2; (13)
taking � as given.4 Trend removal is accomplished simply as
eyt = log yt � bgt = bct: (14)
The parameter � in (13) determines the importance of having a smoothly evolving growth
component: the smoother is gt, the smaller will be its second di¤erence. With � = 0, smooth-
4The GAUSS procedure hpfilter.prc is available for this purpose.
9
ness receives no value, and all variation in log yt will be assigned to the trend component.
With �!1, the trend is assigned to be maximally smooth, i.e., linear.
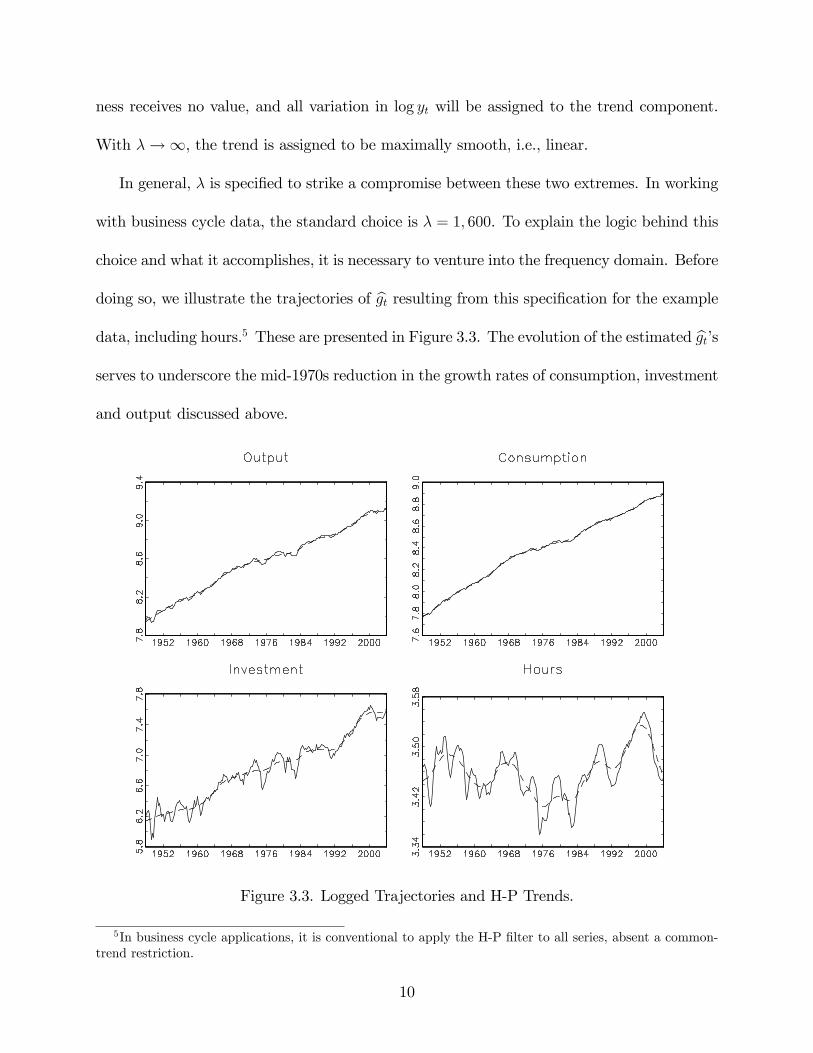
In general, � is speci�ed to strike a compromise between these two extremes. In working
with business cycle data, the standard choice is � = 1; 600. To explain the logic behind this
choice and what it accomplishes, it is necessary to venture into the frequency domain. Before
doing so, we illustrate the trajectories of bgt resulting from this speci�cation for the example
data, including hours.5 These are presented in Figure 3.3. The evolution of the estimated bgt�sserves to underscore the mid-1970s reduction in the growth rates of consumption, investment
and output discussed above.
Figure 3.3. Logged Trajectories and H-P Trends.
5In business cycle applications, it is conventional to apply the H-P �lter to all series, absent a common-trend restriction.
10
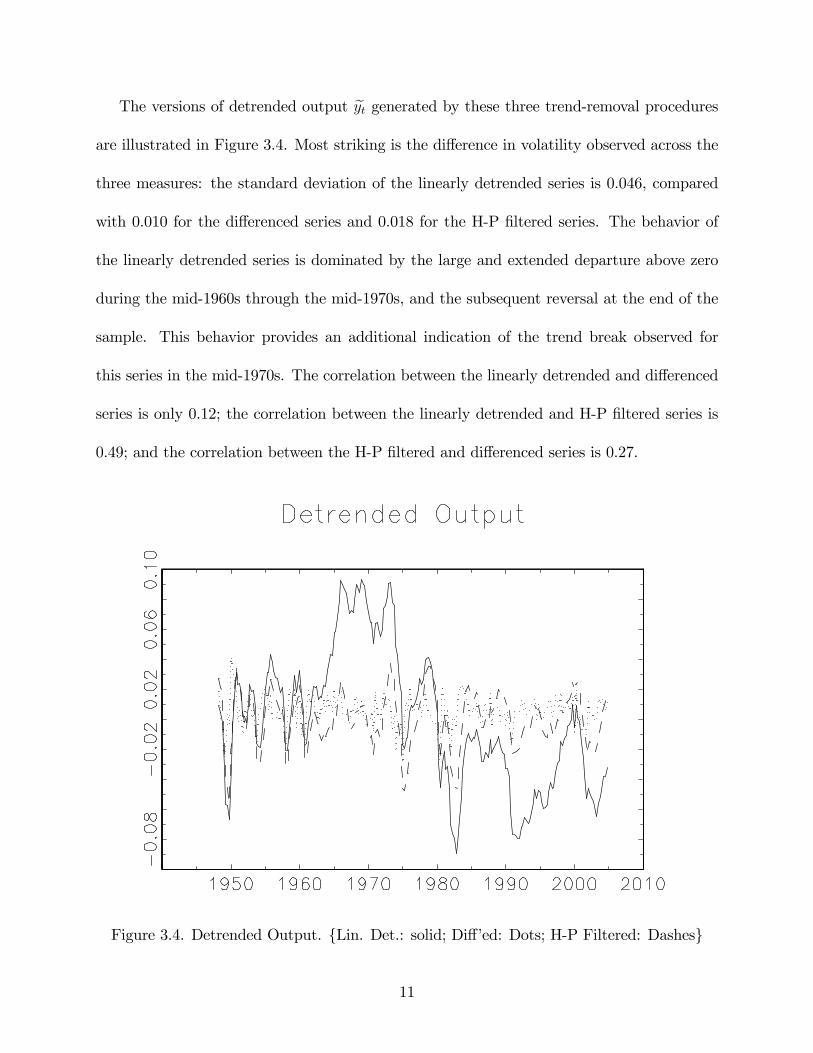
The versions of detrended output eyt generated by these three trend-removal proceduresare illustrated in Figure 3.4. Most striking is the di¤erence in volatility observed across the
three measures: the standard deviation of the linearly detrended series is 0.046, compared
with 0.010 for the di¤erenced series and 0.018 for the H-P �ltered series. The behavior of
the linearly detrended series is dominated by the large and extended departure above zero
during the mid-1960s through the mid-1970s, and the subsequent reversal at the end of the
sample. This behavior provides an additional indication of the trend break observed for
this series in the mid-1970s. The correlation between the linearly detrended and di¤erenced
series is only 0.12; the correlation between the linearly detrended and H-P �ltered series is
0.49; and the correlation between the H-P �ltered and di¤erenced series is 0.27.
Figure 3.4. Detrended Output. {Lin. Det.: solid; Di¤�ed: Dots; H-P Filtered: Dashes}
11

2 Isolating Cycles
Consider the behavior of a time series y!t given by
y!t = �(!) cos(!t) + �(!) sin(!t); (15)
where �(!) and �(!) are uncorrelated zero-mean random variables with equal variances. The
parameter !, measured in radians, determines the frequency with which cos(!t) completes
a cycle relative to cos(t) as t evolves from 0 to 2�, 2� to 4�, etc. (the frequency for cos(t)
being 1). The upper panels of Figure 3.5 depict cos(!t) and sin(!t) as t evolves from 0 to
2� for ! = 1 and ! = 2. Accordingly, given realizations for �(!) and �(!), y!t follows a
deterministic cycle that is completed ! times as t ranges from 0 to 2�, etc. This is depicted
in the lower panels of Figure 3.5, using �(!) = �(!) = 1, ! = 1 and ! = 2.
12
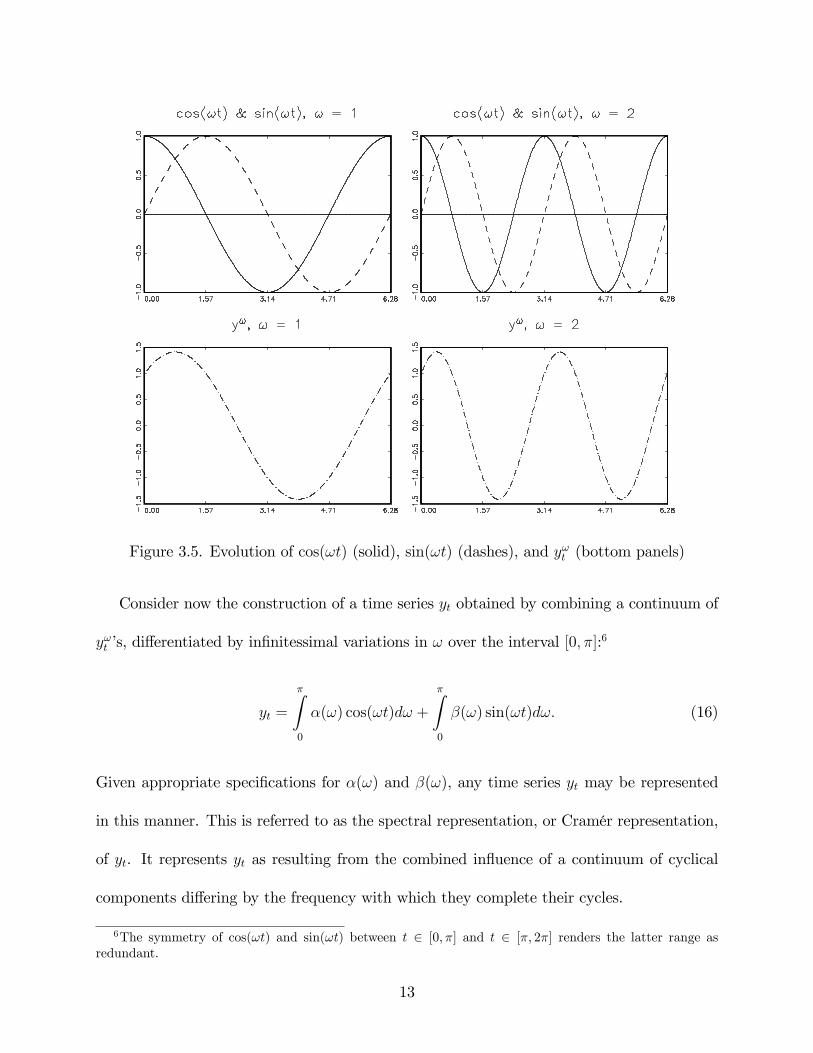
Figure 3.5. Evolution of cos(!t) (solid), sin(!t) (dashes), and y!t (bottom panels)
Consider now the construction of a time series yt obtained by combining a continuum of
y!t �s, di¤erentiated by in�nitessimal variations in ! over the interval [0; �]:6
yt =
�Z0
�(!) cos(!t)d! +
�Z0
�(!) sin(!t)d!: (16)
Given appropriate speci�cations for �(!) and �(!), any time series yt may be represented
in this manner. This is referred to as the spectral representation, or Cramér representation,
of yt. It represents yt as resulting from the combined in�uence of a continuum of cyclical
components di¤ering by the frequency with which they complete their cycles.
6The symmetry of cos(!t) and sin(!t) between t 2 [0; �] and t 2 [�; 2�] renders the latter range asredundant.
13
Closely related to the spectral representation of yt is its power spectrum, or spectrum.
This is a tool that measures the contribution to the overall variance of yt made by the cyclical
components y!t over the continuum [0; �]. Speci�cally, the spectrum is a decomposition of the
variance of yt by frequency. The foundation of the spectrum is the autocovariance function
of yt. Letting (�) denote the autocovariance between yt and yt+� (or equivalently, between
yt and yt�� ), with (0) denoting the variance of yt, the autocovariance function is simply a
plot of (�) against � . Having de�ned the autocovariance function, the spectrum of yt is
given by
sy(!) =
�1
2�
�" (0) + 2
1X�=1
(�) cos(!�)
#: (17)
The integral of sy(!) over the range [��; �] yields (0), and comparisons of the height of
sy(!) for alternative values of ! indicate the relative importance of �uctuations at the chosen
frequencies in in�uencing variations in yt. Since cos(!�) is symmetric over [��; 0] and [0; �],
so too is s(!); it is customary to represent sy(!) over [0; �].
To obtain an interpretation for frequency in terms of units of time rather than radians,
it is useful to relate ! to its associated period p, de�ned as the number of units of time
necessary for y!t to complete a cycle: p = 2�=!. In turn, 1=p = !=2� indicates the number
of cycles completed by y!t per period. For example, with a period representing a quarter, a
ten-year or 40-quarter cycle has an associated value of ! of 2�=40 = 0:157. For a 6-quarter
cycle, ! = 2�=6 = 1:047. Thus values for ! in the range [0:157; 1:047] are of central interest
in analyzing business cycle behavior.
Returning to the problem of trend removal, it is useful to think of a slowly evolving
trend as a cycle with very low frequency; in the case of a constant trend, the associated
14

frequency is zero. Filters are tools designed to eliminate the in�uence of cyclical variation
at various frequencies. Detrending �lters such as the �rst-di¤erence and H-P �lters target
low frequencies; seasonal �lters target seasonal frequencies; etc. The general form of a linear
�lter applied to yt, producing yft , is given by
yft =sX
j=�rcjyt�j � C(L)yt: (18)
In the frequency domain, the counterpart to C(L) is obtained by replacing Lj with e�i!j =
cos(!j) � i sin(!j), wherepi = �1; i.e., i is imaginary. This replacement is known as a
Fourier transformation. The result is the frequency response function: C(e�i!).
With the introduction of an additional tool, we can describe how �lters are used to
manipulate of the in�uence of cyclical variation at various frequencies. This is the gain
function:
G(!) = jC(e�i!)j; (19)
where jC(e�i!)j denotes the modulus of C(e�i!):
jC(e�i!)j =pC(e�i!)C(ei!): (20)
For example, for the �rst-di¤erence �lter (1� L), the gain function is given by
G(!) =p(1� e�i!)(1� ei!) (21)
=p2p1� cos(!);
15

where the second equality follows from the identity
e�i! + ei! = 2 cos(!): (22)
The importance of the gain function is seen through its role in de�ning the relationship
between syf (!) and sy(!). This is given by
syf (!) = jC(e�i!)j2sy(!) (23)
� G(!)2sy(!);
where G(!)2 is referred to as the squared gain of the �lter. This relationship illustrates
how �lters serve to isolate cycles: they attenuate or amplify the spectrum of the original
series. For example, note from (21) that the �rst-di¤erence �lter (1� L) shuts down cycles
of frequency zero. Regarding the H-P �lter, the speci�cation of � determines the division of
the in�uence of y!t on yt between gt and ct in (12). Following Kaiser and Maravall (1991),
its gain function is given by
G(!) =
"1 +
�sin(!=2)
sin(!0=2)
�4#�1; (24)
where
!0 = 2arcsin
�1
2�1=4
�: (25)
The parameter !0, selected through the speci�cation of �, determines the frequency at
which G(!) = 0:5, or at which 50% of the �lter gain has been completed. The speci�cation
16
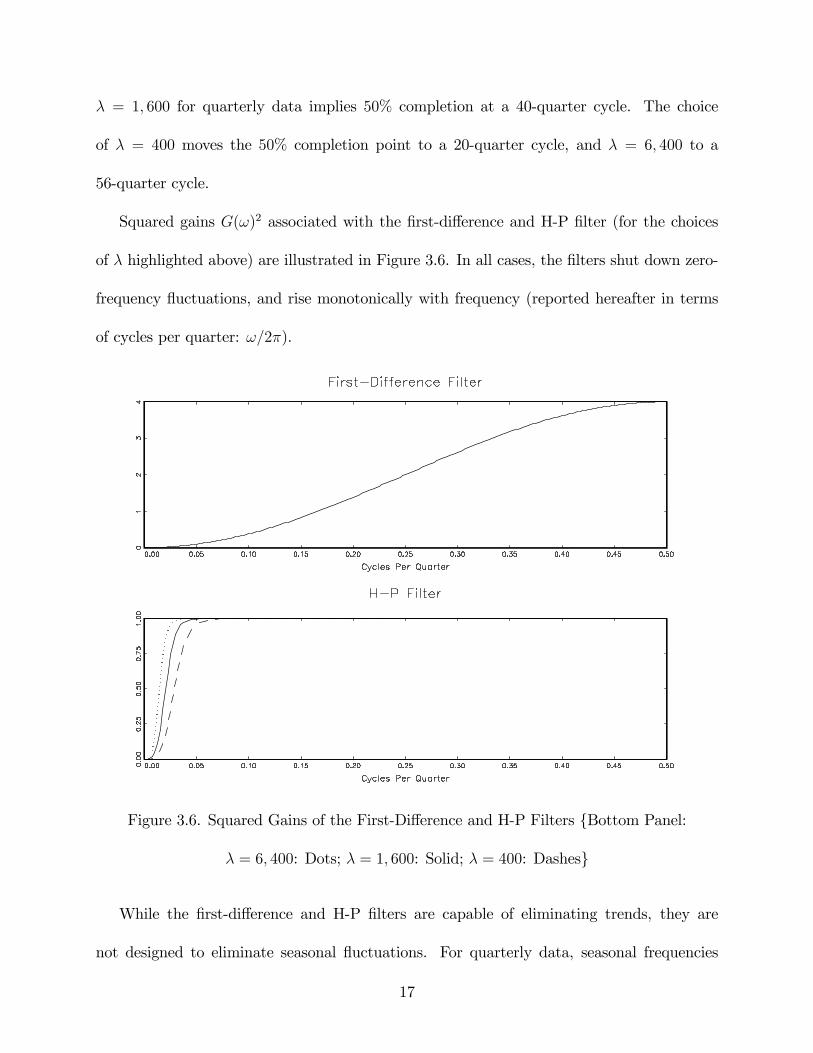
� = 1; 600 for quarterly data implies 50% completion at a 40-quarter cycle. The choice
of � = 400 moves the 50% completion point to a 20-quarter cycle, and � = 6; 400 to a
56-quarter cycle.
Squared gains G(!)2 associated with the �rst-di¤erence and H-P �lter (for the choices
of � highlighted above) are illustrated in Figure 3.6. In all cases, the �lters shut down zero-
frequency �uctuations, and rise monotonically with frequency (reported hereafter in terms
of cycles per quarter: !=2�).
Figure 3.6. Squared Gains of the First-Di¤erence and H-P Filters {Bottom Panel:
� = 6; 400: Dots; � = 1; 600: Solid; � = 400: Dashes}
While the �rst-di¤erence and H-P �lters are capable of eliminating trends, they are
not designed to eliminate seasonal �uctuations. For quarterly data, seasonal frequencies
17
correspond with 1=4 and 1=2 cycles per quarter, and the squared gains associated with each
of these �lters are positive at these values. As noted, business cycle models are not typically
designed to explain seasonal variation, thus it is desirable to work with variables that have
had seasonal variations eliminated.
As with the example analyzed above, it is most often the case that aggregate variables are
reported in seasonally adjusted (SA) form. Seasonal adjustment is typically achieved using
the so-called X-11 �lter (as characterized, e.g., by Bell and Monsell, 1992). So typically,
seasonal adjustment is not an issue of concern in the preliminary stages of an empirical
analysis. However, it is useful to consider this issue in order to appreciate the importance
of the seasonal adjustment step; the issue also serves to motive the introduction of the band
pass �lter, which provides an important alternative to the H-P �lter.
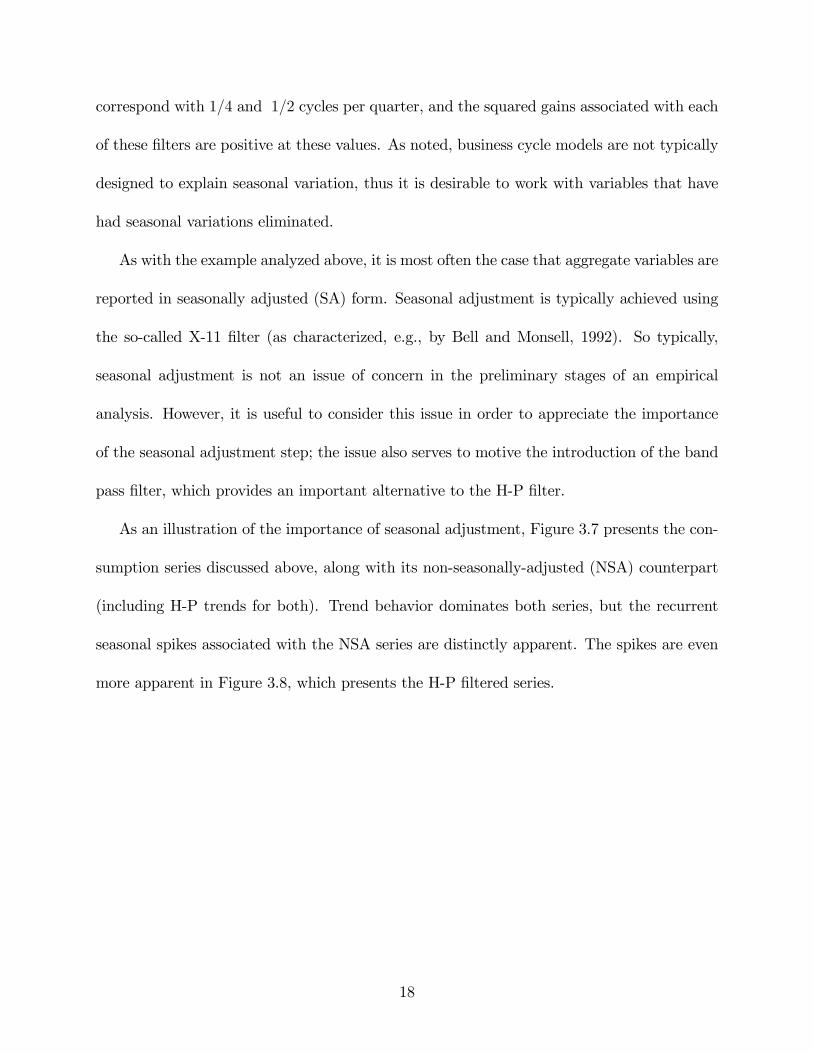
As an illustration of the importance of seasonal adjustment, Figure 3.7 presents the con-
sumption series discussed above, along with its non-seasonally-adjusted (NSA) counterpart
(including H-P trends for both). Trend behavior dominates both series, but the recurrent
seasonal spikes associated with the NSA series are distinctly apparent. The spikes are even
more apparent in Figure 3.8, which presents the H-P �ltered series.
18
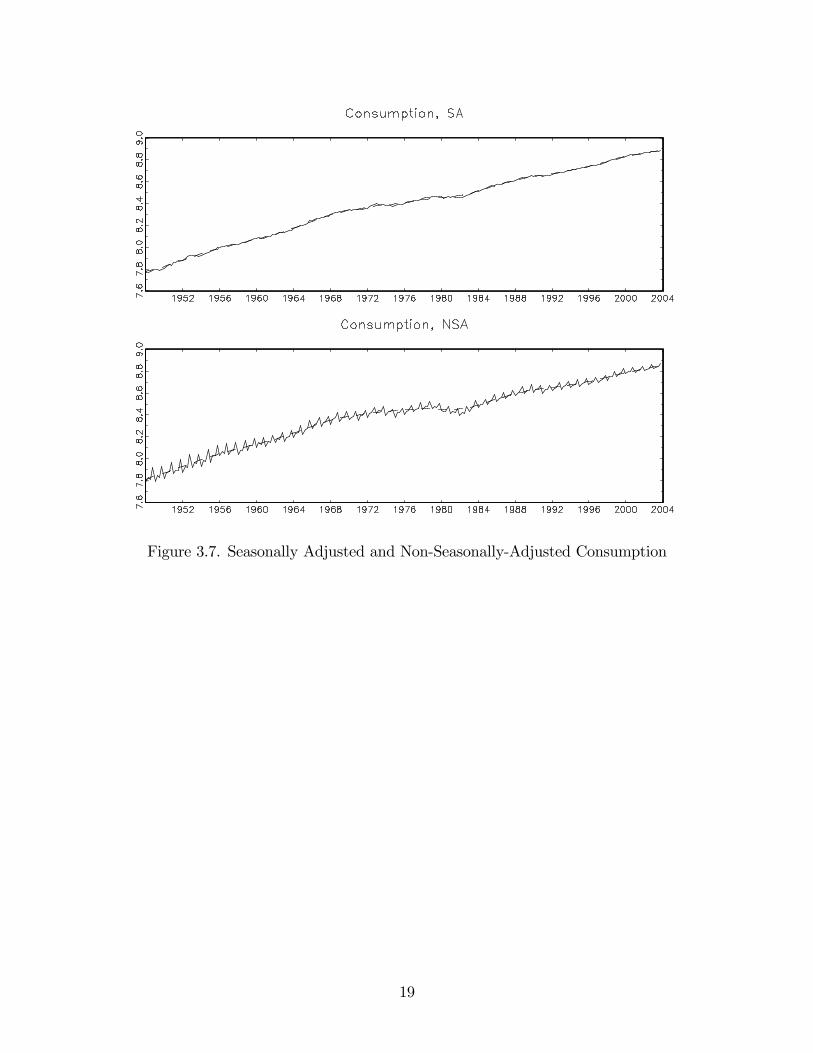
Figure 3.7. Seasonally Adjusted and Non-Seasonally-Adjusted Consumption
19
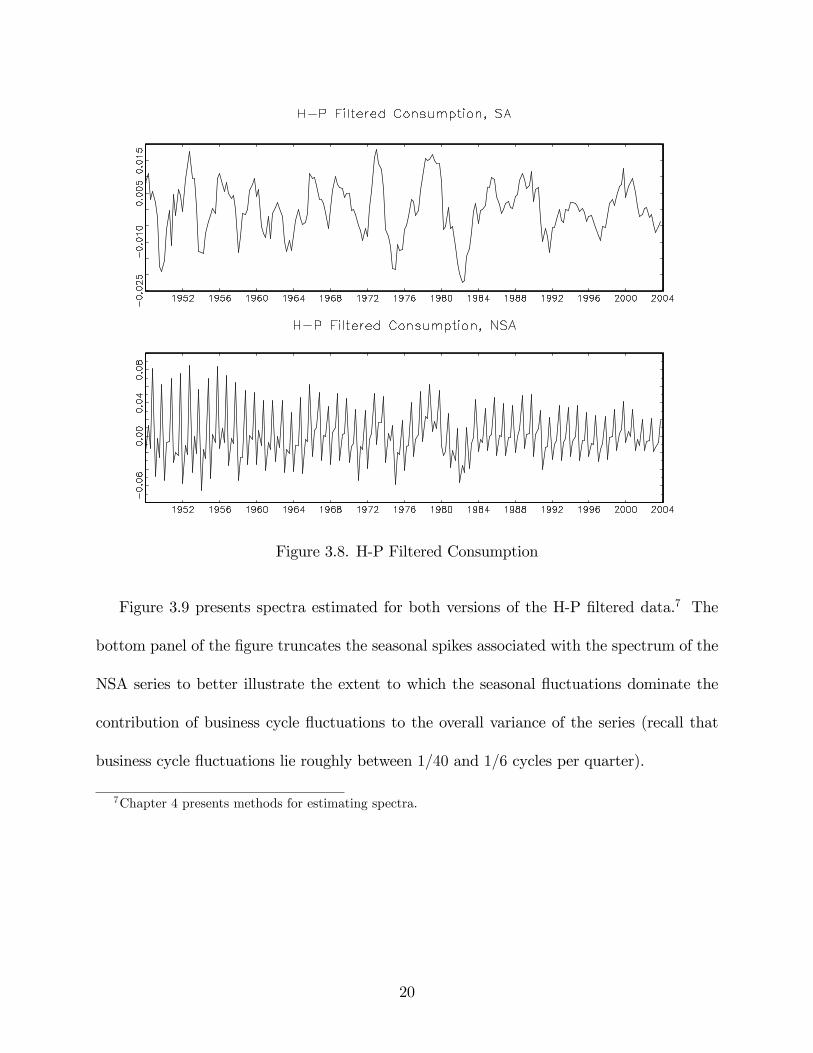
Figure 3.8. H-P Filtered Consumption
Figure 3.9 presents spectra estimated for both versions of the H-P �ltered data.7 The
bottom panel of the �gure truncates the seasonal spikes associated with the spectrum of the
NSA series to better illustrate the extent to which the seasonal �uctuations dominate the
contribution of business cycle �uctuations to the overall variance of the series (recall that
business cycle �uctuations lie roughly between 1=40 and 1=6 cycles per quarter).
7Chapter 4 presents methods for estimating spectra.
20
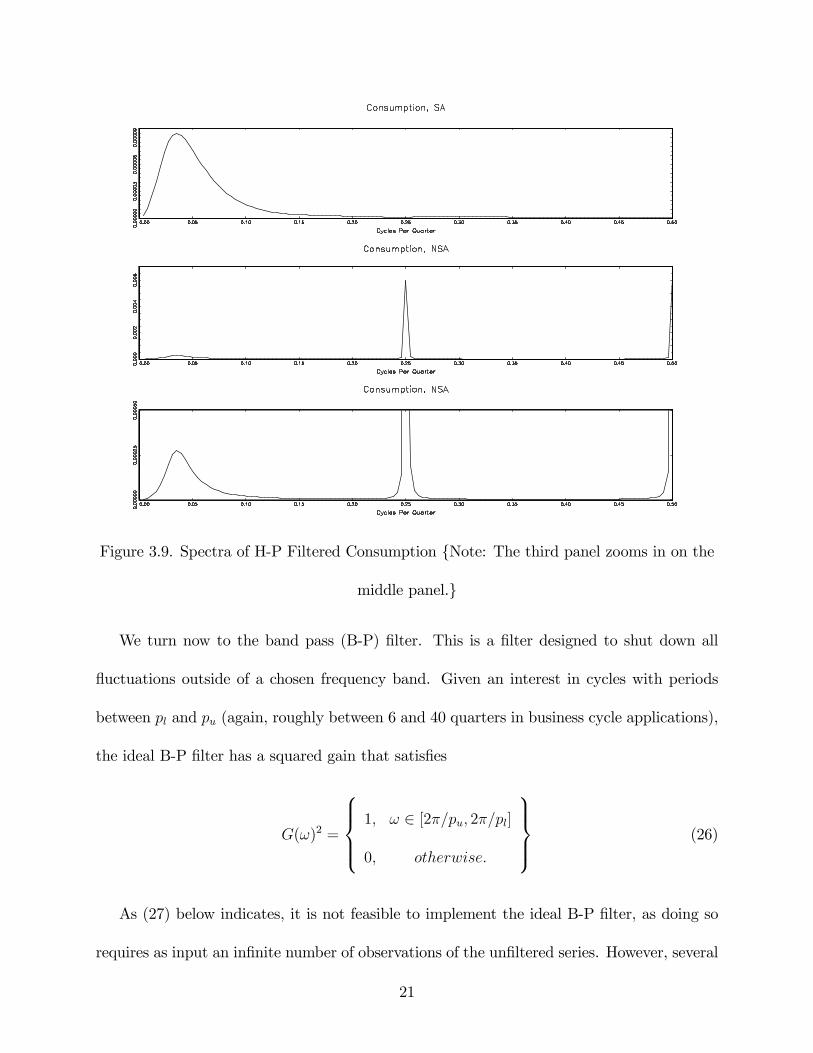
Figure 3.9. Spectra of H-P Filtered Consumption {Note: The third panel zooms in on the
middle panel.}
We turn now to the band pass (B-P) �lter. This is a �lter designed to shut down all
�uctuations outside of a chosen frequency band. Given an interest in cycles with periods
between pl and pu (again, roughly between 6 and 40 quarters in business cycle applications),
the ideal B-P �lter has a squared gain that satis�es
G(!)2 =
8>><>>:1; ! 2 [2�=pu; 2�=pl]
0; otherwise:
9>>=>>; (26)
As (27) below indicates, it is not feasible to implement the ideal B-P �lter, as doing so
requires as input an in�nite number of observations of the un�ltered series. However, several
21

approaches to estimating approximate B-P �lters have been proposed. Here, we present the
approach developed by Baxter and King (1999); for alternatives, e.g., see Woitek (1998) and
Christiano and Fitzgerald (1999).8
Let the ideal symmetric B-P �lter for a chosen frequency range be given by
�(L) =1X
j=�1�jL
j; (27)
where symmetry implies ��j = �j 8 j. This is an important property for �lters because it
avoids inducing what is known as a phase e¤ect. Under a phase e¤ect, the timing of events
between the un�ltered and �ltered series, such as the timing of business cycle turning points,
will be altered. The Fourier transformation of a symmetric �lter has a very simple form. In
the present case,
��e�i!
�� � (!) =
1Xj=�1
�je�i!j
= �0 +1Xj=1
�j�e�i!j + ei!j
�(28)
= �0 + 21Xj=1
�j cos(!);
where the second equality follows from symmetry and the last equality results from (22).
Baxter and King�s approximation to � (!) is given by the symmetric, �nite-ordered �lter
A(!) = a0 + 2
KXj=1
aj cos(!); (29)
8The collection of GAUSS procedures contained in bp.src are available for constructing Baxter andKing�s B-P �lter.
22

where A(0) =KP
j=�Kaj = 0, insuring that A(!) is capable of removing a trend from the
un�ltered series (see their Appendix A for details). A(!) is chosen to solve
minaj
�Z��
j� (!)� A (!) j2d! subject to A(0) = 0; (30)
i.e., A (!) minimizes departures from � (!) (measured in squared-error sense) accumulated
over frequencies. The solution to this objective is given by
aj = �j + �; j = �K; :::;K;
�j =
8>><>>:!u�!l�; j = 0
sin(!2j)�sin(!1j)�j
j = �1; :::; K;
9>>=>>; (31)
� =
�KP
j=�K�j
2K + 1;
where !l = 2�=pu and !u = 2�=pl.
Baxter and King propose the selection ofK = 12 in working with quarterly data, entailing
the loss of 12 �ltered observations at the beginning and end of the sample period. Figure
3.10 illustrates the squared gains associated with the ideal and approximated B-P �lters
constructed over the 1=40 and 1=6 cycles per quarter range.
23
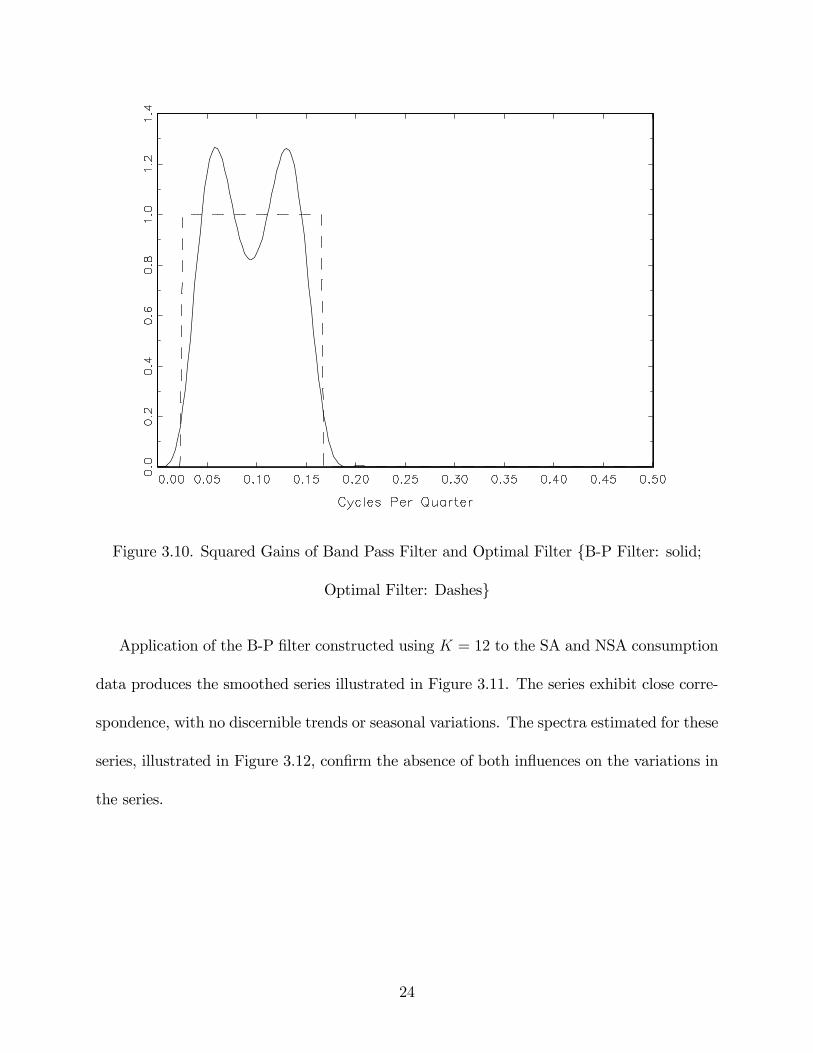
Figure 3.10. Squared Gains of Band Pass Filter and Optimal Filter {B-P Filter: solid;
Optimal Filter: Dashes}
Application of the B-P �lter constructed using K = 12 to the SA and NSA consumption
data produces the smoothed series illustrated in Figure 3.11. The series exhibit close corre-
spondence, with no discernible trends or seasonal variations. The spectra estimated for these
series, illustrated in Figure 3.12, con�rm the absence of both in�uences on the variations in
the series.
24
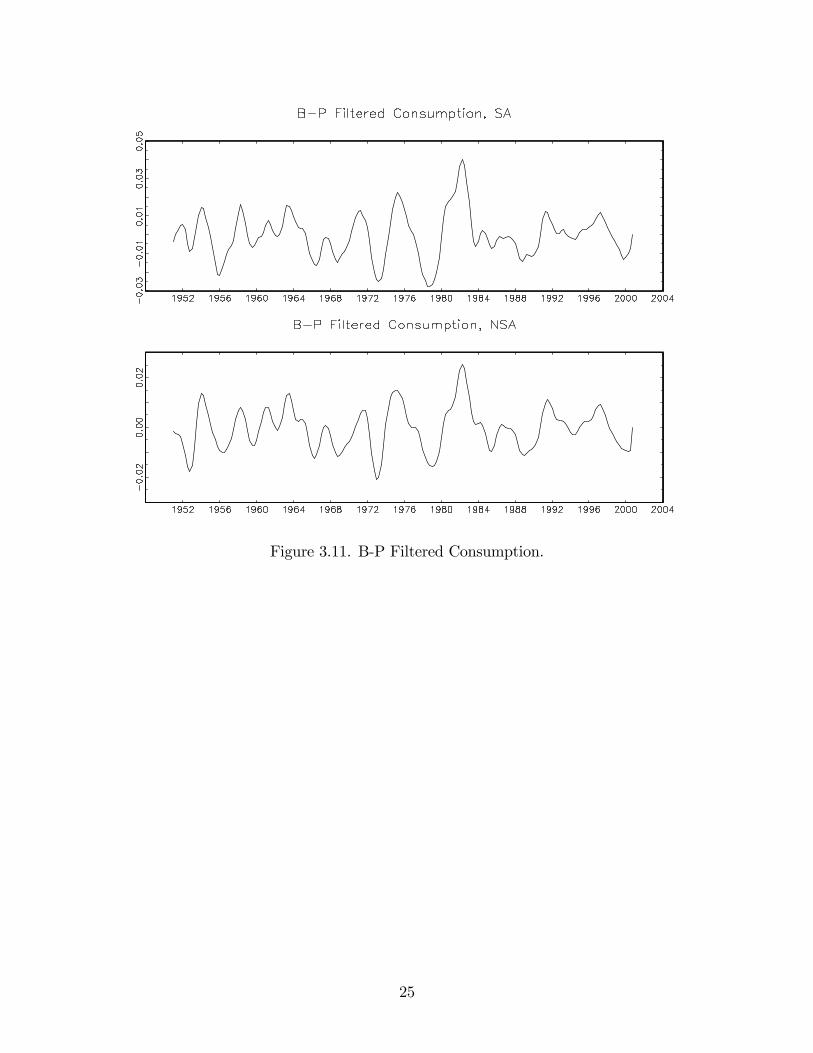
Figure 3.11. B-P Filtered Consumption.
25
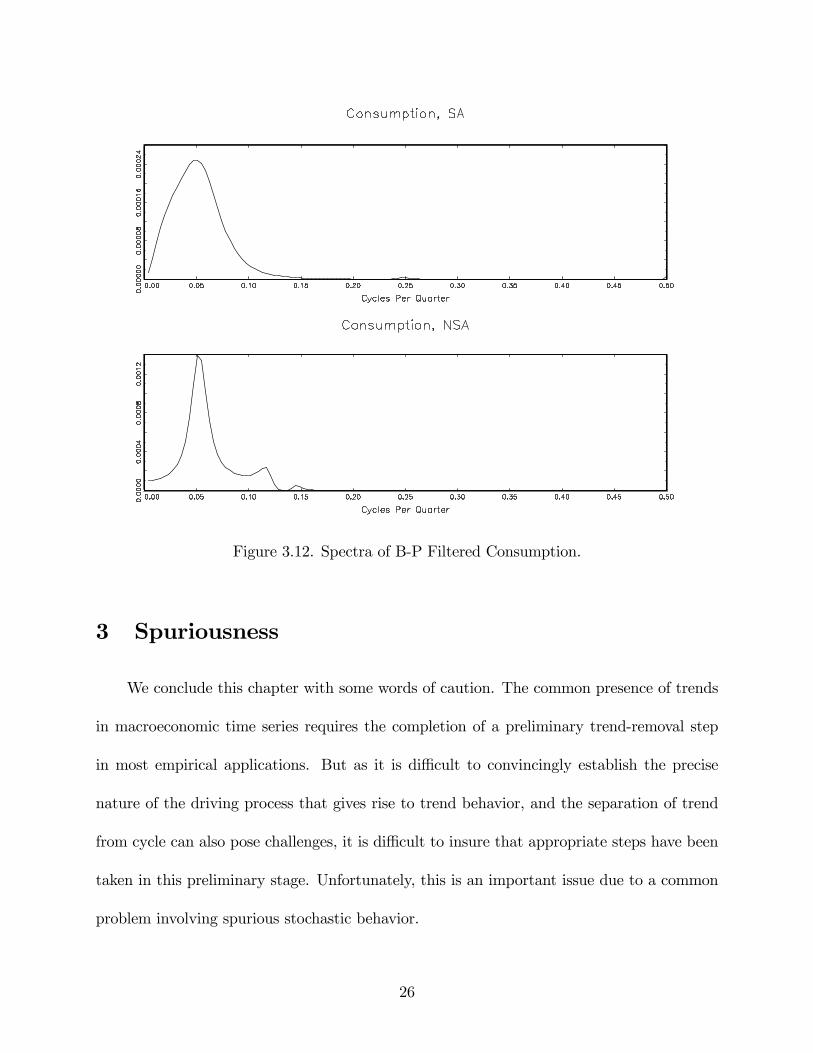
Figure 3.12. Spectra of B-P Filtered Consumption.
3 Spuriousness
We conclude this chapter with some words of caution. The common presence of trends
in macroeconomic time series requires the completion of a preliminary trend-removal step
in most empirical applications. But as it is di¢ cult to convincingly establish the precise
nature of the driving process that gives rise to trend behavior, and the separation of trend
from cycle can also pose challenges, it is di¢ cult to insure that appropriate steps have been
taken in this preliminary stage. Unfortunately, this is an important issue due to a common
problem involving spurious stochastic behavior.
26
In general, spuriousness is used to characterize situations in which the stochastic behavior
of a �ltered variable di¤ers systematically from its un�ltered counterpart along the dimension
of original interest in the empirical analysis. Of course, the stochastic behavior of the two
series will di¤er in general, but e.g., if the removal of a trend induces systematic di¤erences in
the business cycle properties of �ltered variables, spuriousness is said to have been induced.
Spuriousness can arise both in removing trends and isolating cycles. Regarding the
latter, consider the extreme but illustrative case in which an H-P or B-P �lter is applied to
a collection of zero-mean serially uncorrelated CSSPs. Such CSSPs are referred to as white
noise: their spectra are uniform. In this case, spectra of the �ltered series will identically
assume the shape of the squared gains of the �lters, and thus the �ltered series will exhibit
spurious cyclical behavior. Harvey and Jaeger (1993) provide an analysis of spurious behavior
arising from H-P �ltered data.
Regarding trend removal, we have seen that the removal of �xed trends from the levels of
series that have evidently undergone trend breaks can induce considerable persistence in the
detrended series. So even if the underlying data were trend-stationary, the application of a
�xed trend speci�cation in this case would induce undue persistence in the detrended series.
Moreover, as noted, it is di¢ cult to distinguish between trend- and di¤erence-stationary
speci�cations even given the ideal case of constant average growth over the sample period.
And as shown by Chan, Hayya and Ord (1977) and Nelson and Kang (1981), both the removal
of a deterministic trend from a di¤erence-stationary speci�cation and the application of the
di¤erence operator (1 � L) to a trend-stationary process induces spurious autocorrelation
in the resulting series. Similarly, Cogley and Nason (1995) and Murray (2003) illustrate
spuriousness arising from the application of the H-P and B-P �lters to non-stationary data.
27

Having painted this bleak picture, we conclude by noting that steps are available for
helping to mitigate these problems. For example, regarding the trend- versus di¤erence-
stationarity issue, while it is typically di¢ cult to reject either speci�cation in applications of
classical hypothesis tests to macroeconomic time series, it is possible to obtain conditional
inferences regarding their relative plausibility using Bayesian methods. Such inferences can
be informative in many instances.9 And the use of alternative �ltering methods in a given
application is a useful way to investigate the robustness of inferences to steps taken in this
preliminary stage.
9See DeJong and Whiteman (1991a,b) for examples in macroeconomic applications, and Phillips (1991)for skepticism. Tools for implementing Bayesian methods in general are presented in Chapter 9.
28
References
[1] Baxter, M. and R. G. King. 1999. �Measuring Business Cycles: Approximate Band-Pass
Filters for Economic Time Series.�Review of Economics and Statistics 81:575-593.
[2] Bell, W. R. and B. C. Monsell. 1992. �X-11 Symmetric Linear Filters and their Transfer
Functions.�Bureau of the Census Statistical Research Division Report Series No. RR-
92/15.
[3] Chan, K. J. C. Hayya, and K. Ord. 1977. �A Note on Trend Removal Methods: The
Case of Polynomial Versus Variate Di¤erencing.�Econometrica 45:737-744.
[4] Christiano, L. J. and T. J. Fitzgerald. 1999. �The Band Pass Filter.�Federal Reserve
Bank of Cleveland working paper.
[5] Cogley, T. and J. M. Nason. 1995. �E¤ects of the Hodrick-Prescott Filter on Trend and
Di¤erence Stationary Time Series: Implications for Business Cycle Research.�Journal
of Economic Dynamics and Control 19:253-278.
[6] DeJong, D. N. and C. H. Whiteman. 1991a. �The Temporal Stability of Dividends and
Prices: Evidence from the Likelihood Function.�Americal Economic Review 81:600-617.
[7] DeJong, D. N. and C. H. Whiteman. 1991b. �Trends and Random Walks in Macroeco-
nomic Time Series: A Reconsideration Based on the Likelihood Principle.�Journal of
Monetary Economics 28:221-254.
29
[8] DeJong, D. N. and C. H. Whiteman. 2003. �Unit Roots in U.S. Macroeconomic Time
Series: A Survey of Classical and Bayesian Methods.�In D. Brillinger et al., Eds. New
Directions in Time Series Analysis, Part II. Berlin: Springer-Verlag.
[9] Hamilton, J. D. 1994. Time Series Analysis. Princeton: Princeton University Press.
[10] Harvey, A. C. 1993. Time Series Models. Cambridge: MIT Press.
[11] Harvey, A. C. and A. Jaeger. 1993. �Detrending, Stylized Facts and the Business Cycle.�
Journal of Econometrics 8:231-247.
[12] Kaiser, R. and A. Maravall. 2001.Measuring Business Cycles in Economic Time Series.
Berlin: Springer-Verlag.
[13] Murray, C. J. 2003. �Cyclical Properties of Baxter-King Filtered Time Series.�Review
of Economics and Statistics 85:472-476.
[14] Nelson, C. and H. Kang. 1981. �Spurious Periodicity in Inappropriately Detrended Time
Series.�Econometrica 49:741-751.
[15] Nelson, C. and C. I. Plosser. 1982. �Trends and RandomWalks in Macroeconomic Time
Series.�Journal of Monetary Economics 10:139-162.
[16] Nordhaus, W. 2004. �Retrospective on the 1970s Productivity Slowdown.�NBERWork-
ing Paper 10950. Cambridge: NBER.
[17] Perron, P. 1989. �The Great Crash, the Oil Shock, and the Unit Root Hypothesis.�
Econometrica 57:1361-1401.
30
[18] Phillips, P. C. B. 1991. �To Criticize the Critics: An Objective Bayesian Analysis of
Stochastic Trends.�Journal of Applied Econometrics 6:333-364.
[19] Stock, J. H. 2004. �Unit Roots, Structural Breaks, and Trends.�In R. F. Engle and D.
L. McFadden, Eds. Handbook of Econometrics, Vol. 4. Amsterdam: North Holland.
[20] Wen, Y. 2002. �The Business Cycle E¤ects of Christmas.�Journal of Monetary Eco-
nomics 49:1289-1314.
[21] Woitek, Ulrich. 1998. �A Note on the Baxter-King Filter.�University of Glasgow work-
ing paper.
31