Embed Size (px)
Citation preview

ic aperture radar imaging from phase-
T. lsernia V. Pascazio R. Pierri G.Schirinzi
Indexing terms: Plzuse retrieval, 2-0 phase errors, Coherent mzuging
Abstract: A new method lo accurately reconstruct a synthetic aperture radar complex image starting from raw received data whose phase is affected by propagation in the turbulent atmosphere and/or by motion instability of the platform carrying out the antenna is presented. It is based on the inversion of the, nonlinear relationship between the raw data square amplitude distribution and the unknown complex reflectivity of the scenario. The unknown complex reflectivity is found by minimising a proper functional using the partial phase information carried out by the phase- corrupted raw data as the initial guess of an iterative procedure. The method, which is capable of compensating for both 1-D and 2-D phase errors, has been validated on both simulated data and real data whose phase has been corrupted by a simulated phase error. The considerable accuracy of the final images proves the effectiveness of the proposed procedure.
i Introduction
Coherent systems are widely used in microwave and radio astronomical imaging [ 11. At microwave frequen- cies, fine-resolution two-dimensional images can be remotely collected with synthetic aperture radar (SAR) systems [2]. These microwave coherent imaging systems record a scaled-down replica of the backscattered wavefront emanating from the target. Coherent processing is then required to obtain high-resolution images of the irradiated scene.
0 IEE, 1996 IfiE Proceedings online no. 19960458 Paper first received 4th October 1995 and in revised form 21st March 1996 T. Isernia is with the Dipartimento di Ingegneria Elettronica, Universita di Napoli ‘Fcderico II’, via Claudio, 21 - 80125 Napoli, Italy and also with the Istituto di Ricerca per 1’E~ettromagnetismo e i Componenti Elet- tronici, Consiglio Nazionale delle Ricerche, via Diocleziano, 328 ~ 80124 Napoli, Italy V. Pascazio is with the Istituto di Teoria e Tecnica delle Onde Elettro- magnetiche, Istituto Universitario Navale, via Acton, 38 ~ 801 33 Napoli, Italy R. Piem is with the Dipartimento di Ingegnena dell’lnformazione, Sec- onda Universiti di Napoli, via Roma, 29 ~ 81031 Avena, Italy G. Schirinzi is with the Istituto di Ricerca per I’Elettromagnetismo e i Coniponenti Elettronici, Consiglio Nazionale delle Ricerche, via Dio- cleziano, 328 ~ 80124 Napoli, Italy
All coherent imaging techniques require extreme phase stability. Phase fluctuations can be induced by propagation in turbulent media or by aberration in the imaging system. In SAR systems phase fluctuations are mainly due to two factors: propagation at GHz fre- quencies in turbulent atmosphere and/or troposphere [3] , and unwanted deviations from the nominal trajec- tory of the platform carrying the antenna [4, 51. The first error source is dominant in the spaceborne case, while in airborne applications the loss of synchronisa- tion is mainly due to, but not limited to, random devia- tions of the platform from the nominal trajectory. These phase distortions cause a degradation in per- formance of the system, producing a blurred image.
Several methods have been developed to compensate for these effects. They can mainly be grouped into two classes. In the first it is assumed that phase errors are a priori known by means of onboard instrumentation [6]. These methods, requiring the accurate tracking of the antenna phase centre, introduce very stringent specifi- cations on the precision of the inertial measurement system. Moreover, they do not allow compensation of the phase perturbation due to other factors, such as propagation effects, that can still impair the accurate focusing of the image, even with perfect motion com- pensation [7]. The second class includes the methods assuming that the phase errors are not a priori known, but they have to be determined by investigating some properties of the raw data (data-driven methods) [4, 8, 91. They are, in principle, independent of the source of phase errors, but they are often unable to compensate well for high-frequency errors (turbulence induced phase errors), while giving good performance for low- frequency ones (low-order polynomial-like motion errors, or low-frequency components of turbulence induced phase errors). Another important drawback of these techniques is that they are able to compensate for only one-dimensional (1D) phase errors, so that they are applied to compensate for phase errors induced by motion instability, that are commonly assumed [4] to be dependent only on the azimuth co-ordinate. In [5] instead, it has been shown that, by a more accurate estimation, the motion instability phase error is two- dimensional (2D), and therefore cannot be fully com- pensated by the above-mentioned techniques. A useful comparison of such methods is presented in [lo]. Alter- native methods able to compensate for 2D phase errors, based on the use of phase retrieval (PR) meth- ods, have recently been introduced [5, 11, 121. The methods described in [5] and [ l l ] are postprocessing
IEE Proc.-Radar, Sonar Navig., Vol. 143, No. 4, August 1996 268

techniques operating on intensity images, and the one in [I21 presents a SAR signal phase reconstruction from amplitude, that seems to have good performance only for images with low dynamic range.
In this paper we present a new method to estimate accurately a complex scene imaged by a SAR system starting from phase error affected received data. The method is based on the inversion of the nonlinear rela- tionship between the raw square amplitude data and the unknown complex reflectivity of the scene, using the partial phase information carried by the phase-cor- rupted raw data. The use of intensity information makes the problem to be solved nonlinear and ill- posed, so that its solution has to be found by minimis- ing a proper functional. The proposed procedure is independent of the source of phase errors, allowing to compensate for effects that low- and high-frequency errors on the data induces in the complex image, do not require the presence of strong scatterers in the image, is able to compensate for 1D and 2D phase errors, and acts directly on SAR raw data. These fea- tures are not contemporarily presented by any of the methods discussed above. Note that the overall proce- dure acts as an image processing technique.
Starting from the property of bandlimitedness of SAR raw data, this problem is intimately related to the PR of a bandlimited signal from its magnitude distribu- tion [13]. However, a key difference exists which can be usefully exploited. In fact, as explained in Section 2, the raw data signal whose phase has to be restored belongs indeed to a subset of the set of bandlimited functions. This circumstance allows us to considerably narrow the set wherein the solution has to be found, or, in other words, to reduce the number of unknowns to be searched for. As far as data are concerned, while many customary PR methods [11-141 use the amplitude dis- tribution as data, the method applied here exploits square amplitude data, thus allowing us to deal with a weaker nonlinearity [ 151. These choices of unknowns and data, in view of theory and experiments presented in [ 1 5-1 71, significantly reduce the possible occurrence of false solutions (the local minima of the functional), which is indeed the real question in solving nonlinear problems [ 1 51.
As a matter of fact, in SAR imaging from phase cor- rupted data under common phase errors, which are quite large (Section 4) the quadratic nature of the model, and a proper choice of data and unknown, allow the initial guess representing the blurred image to fall in the attraction region of the global minimum rep- resenting the focused final image. Without such a guess it is worth noting that the use of other a priori informa- tion, such as the knowledge of the image support, fur- ther enlarges the attraction region of the global minimum [5].
2
We consider the problem of an extended object of com- plex-amplitude reflectance (or transmittance), imaged with a coherent imaging system with known point spread function (PSF). In the following, we refer to SAR systems to establish results that will serve as a basis for other coherent imaging systems.
The complex signal received by the SAR antenna can be expressed [ 181 by
SAR imaging from phase corrupted raw data
where (x, r ) and (x', r') are the azimuth and range co- ordinates on the ground and onboard, respectively, y is the complex reflectivity coefficient of the imaged scene, and g is the system space-variant PSF (SVPSF), depending on the electronic, geometrical, and kine- matic parameters of the SAR system, whose Fourier transform (the system transfer function needed for the image computing) can be analytically evaluated [ 181. The space variance of the PSF takes into account the required variation of the focusing parameters when moving from the near-to the far-range image points. Due to the nature of the system transfer function, the space variance can be efficiently implemented by oper- ating a simple shift operation in the frequency domain [19]. If the scene dimension is sufficiently small [19], the space variance of g can be neglected and the imaging system acts like a linear filter with a space-invariant PSF (SIPSF); in this case eqn. 1 reduces to a convolu- tion. Note that the above-mentioned assumption is analogous to the well known isoplanatic approximation adopted in optical systems when the object dimensions are so small that they fall within the isoplanatic region [20]. In the following, for the sake of simplicity, we consider the SIPSF case:
h ( z , r ) = [7@'.91(z,d =Gy (2) where 0 indicates two dimensional convolution, and G is the linear operator [21] linking the ground reflectivity function to the received data. The extension of the treatment to the SVPSF case is straightforward and requires only a marginal increase in computational complexity [19]. In this ideal case, SAR imaging is a linear inverse problem and consists in inverting eqn. 1 (or eqn. 2) to find the unknown object function. Unfor- tunately, phase errors on the received signal, due, for instance, to unwanted deviation of the platform carry- ing the SAR antenna from the nominal trajectory, or to turbulence effects affecting the propagation in the troposphere, or to phase instability in the receiver apparatus, can greatly affect the accurate focusing of the final image. In particular, it can be shown that if the motion instability of the flying platform is not very large [4, 51, only the phase of the received signal is affected, so that the phase perturbed received signal is given by
where 6 represents the phase term induced by motion instability andlor turbulence effects. According to eqn. 3 the amplitudes of the ideal received signal h and of the phase corrupted received signal h, are the same, while their phases are different [Note 11. For this rea- son, an image focusing technique properly exploiting the magnitude information present in the phase error affected received data is highly desirable. In fact, denoting by the operator performing the square amplitude of Gy
where * denotes complex conjugation, it can be stated that
The link between the unknown function y and the data lh,/* is nonlinear, in other words, no linear transfer function exists between the image intensity and any property (complex amplitude or intensity) of the object.
Note 1 By virtue of the phase term exp tp!+], h,, has a bandwdth larger than that of h
h,(z', T ' ) = h(d, T ' ) exp[jt9(d, T ' ) ] ( 3 )
(4)
(5)
2 - By = (Gr)(Gy)" = 1 %
- By = Ih12 =
IEE ProcRudar. Sonur Navg , Vol 14.7, NO. 4, A u p s t I996 269

SAR image focusing amounts to finding an estimate of the reflectivity function of the observed scene. In fact, even il‘ the actual reflectivity function y has an infinite bandwidth (i.e. it does not belong to a finite- dimensional space), the finite extension received signal h, by virtue of the nature of G, has an essentially finite bandwidth, so that it belongs to a finite-dimensional space. Consequently, starting from 17, we can get at most a finite-dimensional (i.e. a finite resolution) esti- mate of y satisfying eqn. 5 . 4 s the full knowledge of lz = - Gy would allow conventional SAR processing. the problem of eqn. 5 is analogous to a PR problem for a bandlimited function h from its intensity distribution 11zI2 = Ih,,l2. In that case, properties of bandlimited sig- nals allow one to prove that, apart from a phase con- stant, the only solutions of the problem are the unknown signal and its complex coiljugate [13]. In the present case, however, h belongs to the range of C. which is a subset of the set of bandlimited functions, so that, thanks to the nature of g , this latter ambiguity can be removed [22, 231. However. actual received data are affected by measurement errors. Under this condi- tion, a solution to eqn. 7 could not exist at all: so that the problem is intrinsically ill-posed. This implies that the inversion has to be performed in a generalised sense, that is, by finding the global minimum of a proper functional. If the best fitting concept is used [24], the problem can be recast as finding 7 such that
wherein l l . I / denotes the quadratic norm in the space of the data. To minimise the functional of eqn. 6 , iterative schemes have to be used. This is a nonquadratic opti- misation problem so that in the general case. the func- tion $ can exhibit, in addition to the desired global minimum that provides the required solution, a number of local minima providing false solutions (traps). The farther from the correct solution the minimisation process starts, the higher the possibility of local minima occurring.
Note that, even assuming the lack of local minima, ill-conditioning problems, i.e. the possible presence of regions of slow slope in the functional to be minimised. must be dealt with. Moreover, in the applications we are concerned with, millions of variables are involved so that the overall computational burden has to be carefully considered.
3 Solution algorithm
The sampling of raw data is usually accomplished according to its bandwidth whose upper bound is given by the known bandwidth of the system unit response g (eqn. 2). However, the phase error affected raw data h,,, has a larger bandwidth so that its reliable sampling iniplies a finer grid to avoid aliasing effects. An esti- mate of the proper sampling frequency can be found in [12]. By virtue of eqns. 4 and 5, the available data have twice the bandwidth of phase error free raw data 11 = - Gy. If the complex phase error affected data are sam- pled at the appropriate frequency (i.e. they are well represented by their samples), it is possible to get the intensity data samples at the required sampling fre- quency through interpolation. Now, define /h,,,12 the dis- cretised version of /lz,,j2. Moreover, let 7 be a pointwise representation of y E r, sampled, as usual, at the same
270
rate as h. 7 will have a finite number A4 x N of com- plex samples, where M and N are the extensions along the two dimensions of the image. On the other hand, the system PSF g is an essentially bandlimited function of finite extension and can be accordingly approxi- mated by P x Q discrete complex samples. Conse- quently, lh,ll12, the data of the inverse problem, can be represenIed in a space of real dimension 2(M + P) x 2(!V + Q).
As a consequence, the entire problem can be accu- rately approximated in finite-dimensional spaces. In particular, operator B can be evaluated in the finite- dimensional space of the data as
where Bq = IGqI2 (7 )
(8) G(s) = FplZ{FZ(g) 8 FZ(.)} and wherein G is the discretised version of G, F and Z denote the discrete Fourier transform and the zero- padding operators, respectively. It has to be noted that FZ(g) is just the Fourier transform of g, whose analyti- cal expression is given in [18], so that its numerical computation is not needed. While Z operations inside the brackets are needed to correctly compute the con- volution between g and y , which have indeed different extensions, the external zero-padding operation is just needed for data interpolation before taking the inten- sity data. Due to the different dimensions of the signals involved, the operators Z act on and furnish sequences of different dimensions.
Note that no similar accurate finite-dimensional approximation of the problem is possible when using amplitude [14] (rather than intensity) data. In fact, even assuming bandlimited G y, 1G yI is not bandlimited, so that it cannot be represented with a finite number of samples.
The discretised problem amounts lo finding ?such that
2 >(iW+P) 2 ( N + Q )
4 5 ) t: c ( p l l s - lh(b)12) (9) [=I s = l
is globally minimised with respect to 7. Thanks to the chosen formulation, several conse-
quences relevant to an accurate minimisation of q? can be drawn. First, thanks to the quadratic nature of B, whenever the ratio between the essential dimension of the space of data (related to the bandwidth of lhl2) and the essential dimension of the unknowns (related to the bandwidth of 9 ) is sufficiently large, it can be argued [ 151 that local minima problems can be overcome, so that local (nonrandom) minimisation schemes can be herein utilised with global effectiveness. In fact, as q5 is the square distance between the range of and the data point lh112/2, the possible occurrence of local minima is related to the flatness of the range of B. The flatter this range is (tending to a plane in the most favourable case), the less likely is the occurrence of local minima. Now, it has been proved in [25] that for quadratic operators of this kind the larger is the dimen- sion of the space of data with respect to the dimension of the unknowns, the flatter the manifold representing the range of B in such a space, with beneficial effects on the local minima problem. In our case, as G is a convolution operator, the essential dimension of data Ih,,,12 is more than doubled with respect to the dimen- sion of y so that the occurrence of local minima is not very likely.
IEE Proc.-Kadas. Sonar Nuvig., Vol. 143, No. 4, Augus1 1996

Moreover, partial information about the phase is available in our case. In fact, the ideal complex received signal is known but for the multiplicative phase term exp[i*]. Starting from the knowledge of phase-corrupted received raw data fi,, one can deter- mine the initial guess of the iterative procedure by the linear inversion of eqn. 2:
where G ' can be analytically evaluated [18]. Processing eqn. 10 will provide defocused or blurred images, which, on the basis of the experiments presented in the following Section, will belong, under common condi- tions, to the attraction region of the global minimum of eqn. 9 so that the occurrence of local niiniina is avoided.
The above-mentioned considerations have a twofold effect. On the one hand, the quadratic nature of B allows one to deal with a large attraction region of the global minimum (representing the desired focused image). On the other hand, the linear inversion eqn. 10 allows one to increase the possibility that the initial guess will be in this attraction region, so further increasing the possibility of the success of the method.
Finally, iinprovcd accuracy can be obtained in the neighbourhood of the solution by modifying the func- tional q5 through the introduction of weights enhancing the low data values [15], i.e. through the minimisation of the functional
2(n/i+P) 2 ( N + Q ) .
(11) To overcome possible overflow problems, when val-
ues ( I , ,s)i2 are lower than a threshold p, they are replaced by ,u (a fixed amount depending on the numerical precision of the used computer) in the corre- sponding denominators.
For the minimisation of eqn. 9, resort can be made to an iterative scheme of the kind
p+J) = ̂ j ( k ) + XkA -k TOk
C@ = G+[G(T) . (lG(T)12 - I T L , , ~ ~ ~ ~ ) ]
(12) wherein k and (k + 1) denote respectively the kth and (k + 1)th iteration, V@ is given by
(13) where G+ is the adjoint matrix operator of G, and A,< is a scalar factor whose value has to be chosen, at each step, to guarantee the maximum decrease along the direction defined by 4 Vq5. The matrix 4, finally, determines the kind of minimisation scheme which is in order. We adopt the Polak-Ribiere scheme, a suitable compromise between accuracy and computational com- plexity [21]. In all cases Vq5 can be efficiently computed through FFT and zero-padding operations. Further- more, the quadratic nature of B allows the step hk to be chosen analytically by solving a third-degree equation [15] so that the whole minimisation procedure can be efficiently realised. Only slight modifications occur when eqn. 11 is used in place of eqn. 9.
4 SAR imaging experiments
Typical numerical results on simulated and actual data are now presented. All the experiments have been obtained by sequentially minimising the fuiictionals of eqns. 9 and 11. In agreement with the arguments in [15], this choice exhibited the best performance from the point of view of the reconstructions.
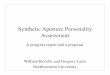
We considered an hypothetical SAR system with an impulse response function represented by 200 x 225 complex samples. The raw data corresponding to an image of 256 x 256 coinplex samples were numerically simulated. Then to correctly represent the square amplitude data we have to use 1024 x 1024 samples. The ideal complex image (intensity and phase) obtained in the absence of phase errors is presented in Fig. la.
2 Fig. 1 SAR sznnduted cmngec Top intensity Bottom Dhasc
b c
U Ideal cimplex image Dynamic range is about 40dB. image dimension is N x N = 256 x 256. b Simulated image obtained by corrupting raw data of image of Fig. l o \+ith random pliasc tiniformi). distributed between - 2 d 3 and 2n/3. c Simulated image rccoiistructed from phase-corrupted raw data of image of Fig. I h
IEE Pvoc.-Raclur, Sonar Novifi, Vol. 143, Nu. 4, August 1996 271

Note that the image phase is not randomly distributed between -x and n (as happens in ‘realis1.k’ S 4 K images), since we want to point out the effect of the phase errors imposed on the data on the iinaye phase that would not be clearly distinguislible on totally ran- dom phases. The image that is obtained starting from raw data corrupted by a random plia3e error unifortiilj distributed between -2d3 and 2n/3 is s l i o n ~ ~ in Fig. lh . while the image reconstructed starting from the same phase error affected data by using the above przsented method is shown in Fig. IC. The quality of the recol-- ered image is the same as the ideal one. both as regards amplitude and phase. As the effect of this kind of phase error in the grey-level pictorial representation of Fig. I i s more evident in the intensity than i n the phase. a typical cut across the phase images is shon-n in Fig. 3, where solid, dashed, and dotted lines represent the ideal, corrupted, and reconstructed phase. respec- tively. Note that while the phase of the corrupted sig- nal is significantly different from the phase of the ideal signal, the (almost invisible) dotted line indicates a n almost perfect reconstruction.
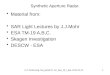
a Fig. 2 S A R .siniulutd irnyyes Top: intensity Bottom: phase U Simulated image obtained by col-l-tipting !-a\+ data oi‘ SAR \imul,iteii iiii.ige of Fig. lu with polynomial phase of Fig. 4 h Simulated image recomtructsd from phawcorl-upted !-an data of 1171age iir‘ Fig. 2u
ll
n12
3 0
-Tt 12
-Tt 57 2 00
samples Fig. 3
- - ~ corrupted
Slice cut of phase irnu~~es slioivn iii I-?,?. I ideal ~-
reconstrucled
212
Consider now a one-dimensional (1-D) polynomial- like phase error. This kind of phase error might be expected i n the azimuth direction as a result of unwanted deviations from the nominal straight trajec- tor) of the platrorm carrying the SAK antenna. In Fig. 2u The image obtained by corrupting the raw data with the 10th-order polynomial phase error depicted in Fig. 4 is shown. Thc image recovered by applying the presented method is presented in Fig. 217. The focusing of the recovered image of Fig, 2h is very accurate. even if the corrupted initial phase or Fig. 2a is significantly different from the ideal one of Fig. l a .
1 I
4
3 0
- 4
- 8
a i c
Fig. 5 h i r i i i ~ v i r j . a f ’ i i SAR h7a~c5 o Rciatnc to Gcl-iiim 1--S4K iiiissioii I I K iniagc diiiiciision i ? N x M h i m a ~ e obi.iined hq coi-l-up!iiig ~ a \ v data of iniagc of. Fig S u with a random phase uiir!b?iiily di\tributed between --2n/3 and 2x13 < Ima.re ~ e c o i i ~ i i - t i c t c d fi-om i-m‘ datn of imagc of Fig. S h
1550 x 768.
Other experiments have been performed on raw data from the German airborne Experimental-SAK (E- SAR). 411 image of 1550 x 768 saniples, obtained by processing the available actual data is shown in Fig. 5rr. Since the system impulse response finction is represented by 450 x 256 samples. 2048 x 1024 raw data samples and 4096 x 2048 intensity data samples, are required. The image obtained by processing the same data corrupted by a simulatcd random phase error, uniformly distributed between --2n/3 and 2 d 3 is showii in Fig. 5h , while the recovered image is pre- sented in Fig. 5c.
I E E Pi.oc.-Riiikif, Sonai. iVmig , Viil 143, No. 4, A u g i ~ s t 1996

lines, i espectively. The dotted line is hardly visible thus indicating dn alnioct perfect reconstruction As far ns p h n ~ 1' concerned, note t h a t in both cases the presence of phdse eirors in h causcs significant deviations in the ph'i\e d the blurred linages that totally disappear in ~ l i c recbvered image5 The lack of compensation of
critical for those applications knowledge of the phase (as for
inrt'inu 111 iiiteifeionieuic applicntlons)
For both k i i i d df pli,isc eiioi-5 iandoni Ld polyno- mial, the iecon5ti Lietion\ exhibit cvcellent qun l i ty Note that the dcgi-adntion el'fech due to the ctiftereirt kind of phase errors m.! very differcrit ! iowl enc11 otlw As far as the nniplitiide 14 concei ned while rnntloin errors do not significdnlly nttcci tlrc ihcu\ing of- rhc in lag but strongly rcduce ikir eoIitr<ist ('1s evdent 111 di\tribhted target aieas), p('l~iic)iiiial-iikc eriors p i i m r i l y 011 the contra1 y, cnu4u iningc deihwvng I n the last 1nentioncd cnse, it is I I ~ C ~ L I I 10 tocu\ t i c aitention 0 1 1 one of the point targc(s p i ewi t i i i the i r n q e The zuoin of this particular ca\e ~ I J I thc idtal dtfocused and iecon- stiucted iiiingc a i r prewnt in the left, L e r i t i , d and light part of Fig X. ic\pccti\ely 1 hr cicfoc~i \ i i~g ettect aions the azimuth cliicction is eviclcnt C iits sums the same part of the thiet: iiiiagcj ot 1 ig 8 <tie piesented in Fig 9, where ideal dclocuwd. and I econstructed point tar- gets are representcd with wlid J ~ s h e d and dotted
166 / I O < /<flu'(/, h l l l ~ l , \ f i l i i ' I U / 14 1 0 i l l l ? L l \ l I Y Y l
In ail the simulated and real cases, reconstructions aic rery good even if the rnagnitude of the phase errors is consideidble.
5 Conclusions
W e h a ~ c presented ii method allowing reconstructing a cumplex SAK image starting fi-om raw data affected by phase errors. 'The proposed PR-based processing tech- nique ahis LO invert the nonlinear relatioiiship between the unknown reflectivity of the scene and the raw intensity data. Unlike other PR-based approaches pre- seutcxl i n [ S . 111. that can be considered as postprocess- ing techniques. the proposed procedure acts directly on SAK raw data. The approach is capable of compensat- ing for different kinds of phase errors, both 1-D and 2- L), unlike othcr tcchniques that are bascd on the assumplion that the phase errors depend only on the azim uth co-ordinate. Moreover, uniqueness of a solu- tion can be desumed [22, 231 and important considera- tions on the local minima problem can be made. Finally, it has also becn shown that the initial informa- tion carried by the phase corrupted data can be use- fully employed to profitably start the minimisation procedure. In fact, under common conditions, this point belongs to the attraction region of the required so 1 u t ion.
273

The main limitations of the method are a slight increase in the required sampling frequency, to well represent the phase corrupted data that have a slightly increased bandwidth respect to the nominal one; and the computer time which is anyway dependent on the amount of phase errors which is present on the data.
The reconstructed images exhibit very high quality when compared with the corresponding ideal ones, and the iterative processing, although we deal with millions of data and unknowns, can be performed efficiently via FFT and zero-padding operations.
The ability of the presented method to deal with operators different from simple Fourier transforms makes this kind of approach particularly suited to any coherent imaging problem. As such, it can easily be extended to the case of coherent imaging of a complex object through turbulent media [26, 271.
In view of the arguments presented in [5], it can be argued that the use of U priori information about, for instance, the support of the function to be imaged. or knowledge of part of the scene to be imaged, can allow an accurate final image to be achieved starting from a completely random initial guess of the reflectivity. Under appropriate conditions, accurate SAR images could therefore be obtained starting from raw data whose phase is corrupted by a completely random error.
6 Acknowledgments
The authors express their sincere thanks to Dr. M. Materazzi for his contribution to the development of the software codes. This work has been partly spon- sored by the Italian National Council of Research (CNR), and by the Italian Ministry of University and of Technological and Scientific Research (MURST).
References
BLACKLEDGE, J.M: ‘Quantitative coherent imaging’ (Aca- demic Press. 1989) HARGER, R.O.: ‘Synthetic aperture radar systems’ (Academic Press, 1970) FANTE, R. L.: ‘Turbulence-induced distortion of synthetic aper- ture radar images’, IEEE Tmns., 1994. GE-32, pp. 958-961 BLACKNELL, D., FREEMAN. A., QUEGAN, S., WARD, I., FINLEY; 1.; OLIVER, C., WHITE. R. , and WOOD, J.: ‘Geo- metric accuracy in airborue SAR images‘. IEEE Trczizs., 1989. AES-25, pp. 241-258 ISERNIA, T., PASCAZIO, V., PIERRI. R.. and SCHIRIN- ZI, G.: ‘Image reconstruction from Fourier transform magnitude with application to SAR imaging’, J. Opf . Soc. Am. ’4. . 1996. 13. pp. 922-934
6 KIRK. J.C.: ‘Motion compensation for synthetic aperture radar’,
7 WHAL, D.E.; EICHEL, P.H., GHIGLIA, D.C., and JAKO- VATZ. C.V.: ‘Phase gradient autofocus - A robust tool for high resolution SAR phase correction’, IEEE Truns., 1994, AES-30, pp. 827-835 MOREIRA. J.R.: ‘A new method of aircraft motion error extrac- tion from radar raw data for real time motion compensation’, IEEE Trcms., 1990, GE-28, pp. 620-626
9 BROWN, W.D.. and GHIGLIA, D.C.: ‘Some methods for reducing propagation-induced phase errors in coherent imaging systems. 1. Formalism’, J. Opt. Soc. Am. A, 1988, 5, pp. 924-941
10 BELCHER. D., BLAKE, A.P., OLIVER, C.J., and WHITE, R.G.: ‘Algorithms for focussed linear SAR imaging’. Presented at SPIE Conference on Algorithms for SAR imagery, Orlando, FL, USA, 1994, Vol. 2230
11 WACKERMAN, C.C.: ‘Retrieval of select SAR images without any phase information’. Proceedings of IGARSS’91, Helsinki, Finland, 1991, pp. 1425-1428
12 SOUMEKH, M., and CHOI; J.E.: ‘Phase and amplitude phase restoration in synthetic aperture radar imaging’, IEEE Truns.,
13 SABBA STEFANESCU, 1.: ‘On the phase retrieval problem in two dimensions’, J. Math. Plzys., 1985, 26, pp. 2141-2160
14 FIENUP, J.R.: ‘Phase retrieval algorithm: a comparison’, Appl. Opt.. 1982. 21, pp. 2758-2769
15 ISERNIA, T., LEONE, G.; and PIERRI, R.: ‘Phase retrieval of radiated fields’, Inverse Problems, 1995, 11, pp. 183-203
16 ISERNIA. T., LEONE, G., and PIERRI, R.: ‘On the local minima question in phase retrieval problems’. Proceedings of URSI Comm. B symposium, St. Petersburg, Russia, 1995, (Selected for the special issue on Radio Sci.)
17 ISERNIA, T.. LEONE, G., and PIERRI, R.: ‘A new approach to antenna testing with near-field phaseless data: the cylindrical scanning’, IEE Proc. H , 1992, 139, pp. 363-368
18 FRANCESCHETTI, G., and SCHIRINZT, G.: ‘A SAR proces- sor based on two-dimensional FFT codes’, IEEE Truns., 1990, AES-26, pp. 356-366
19 FRANCESCHETTI, G., LANARI, R., PASCAZIO, V., and SCHIRINZI, G.: ‘WASAR: a wide angle SAR processor’, IEE Proc. F. 1992, 139, pp. 107-114
20 BORN. M., and WOLF, E.: ‘Principles of optics’ (Pergamon, 1980. 6th edn.)
21 LUENBERGER, D.G.: ‘Linear and non linear programming’ (Addison-Wesley, 1989)
22 PIERRI, R., ISERNIA, T.; and LEONE, G.: ‘Antenna testing from near field phaseless data: the planar scanning’. ESA final report. ESTEC Activity n. 110583, 1992
23 ISERNIA, T., LEONE, G., and PIERRI, R.: ‘Phaseless near- field techniques: uniqueness conditions and attainment of the solution’. J , Electr. Wuves Api~l. , 1994, 8, pp. 889-908
IEEE T~o,w., 1975, AES-11, pp. 338-348
8
1992. IP-1. pp. 229-242
24 TARANTOLA, A.: ‘Inverse problem theory’ (Elsevier, 1987) 25 ISERNIA, T., LEONE, G., and PIERRI, R.: ‘Far field recon-
struction from near field intensities on planes’, IEEE Trans., May 1996, A P 4 4 , pp. 701-710
26 NAKAJIMA, N., and SALEH, B.E.A.: ‘Reconstruction of a complex-valued object in coherent imaging through a random- phase screen’, Appl. Opt., 1994, 33, pp. 821-828
27 MAVROIDIS, T., DAINTY, J.C., and NORTHCOTT, M.J.: ‘Imaging of coherently illuminated objects through turbulence: plane-wave ill~unination’, J . Opt. Soc. Am. A, 1990, 7, pp. 348- 355
274 IEE Proc.-Radur, Sonar Navig., Vol 143, No. 4, August 1996