BAB I
PENDAHULUAN
1.1
Latar Belakang
Perkembangan ilmu pengetahuan dan teknologi khususnya dalam
bidang elektronika berjalan semakin lama semakin cepat. Ruang
lingkup penerapan teknologi elektronika sangatlah luas mencakup
berbagai bidang kehidupan manusia. Hal ini dalam upaya pemenuhan
kebutuhan manusia yang semakin meningkat, sehingga dapat menaikkan
kualitas kehidupan dan kesejahteraan bagi manusia. Salah satunya
dalam bidang sistem instrumentasi elektronika yaitu penerapan
sistem gerakan.
Sistem gerakan banyak dijumpai dalam kehidupan sehari-hari,
seperti perpindahan suatu benda dari suatu posisi ke posisi lain,
kecepatan mobil di jalan raya, dongrak mobil yang dapat mengangkat
mobil seberat 10 ton, debit air didalam pipa pesat, tinggi
permukaan air dalam tanki.
Gerak disebabkan oleh adanya gaya aksi yang dapat menimbulkan
gaya reaksi. Banyak cara dilakukan untuk mengetahui atau mengukur
gerak mekanis misalnya mengukur jarak atau posisi dengan meter,
mengukur kecepatan dengan tachometer, mengukur debit air dengan
rotameter. Tetapi jika ditemui gerakan mekanis yang berada dalam
suatu sistem yang kompleks maka diperlukan sebuah sensor untuk
mendeteksi atau mengimformasikan nilai yang akan diukur.
Dengan latar belakang diatas, makalah ini dibuat untuk membahas
bagaimana merancang tachometer optik. Rancangan ini terdiri atas
rangkaian sensor Opto switch, rangkaian pengkondisi sinyal,
mikrokontroler, transfer data serial dan LCD.1.2Rumusan Masalah
Mengacu pada permasalahan yang diuraikan dalam latar belakang,
maka rumusan masalah perancangan ini adalah:
1. Bagaimana cara mengaplikasikan sensor H21A3 dalam rangkaian
Tachometer Optik ?
2. Bagaimana prinsip kerja Tachometer Optik ?
3. Bagaimana rangkaian keseluruhan Tachometer Optik ?
1.3Tujuan
Tujuan perancangan tachometer optik ini adalah:
1. Memahami cara mengaplikasikan sensor H21A3 dalam rangkaian
Tachometer Optik .
2. Mengetahui prinsip kerja Tachometer Optik.
3. Merancang rangkaian keseluruhan Tachometer Optik.
1.4Batasan Masalah
Pembahasan pada perancangan ini dibatasi hanya dalam prinsip
kerja Tachometer Optik dan perancangan rangkaian keseluruhan
Tachometer Optik.
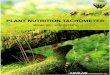
1.5Manfaat
Manfaat yang diharapkan dalam perancangan tachometer optik ini
adalah menambah pengetahuan tentang prinsip kerja Tachometer Optik
dan dapat merancang rangkaian keseluruhan Tachometer Optik.BAB
II
TINJAUAN PUSTAKA
2.1. Trigger Schmitt 74HC14P
Trigger Schmitt merupakan komparator yang mempunyai umpan balik
positif. Bila masukan lebih tinggi dari batas tertentu dipilih,
output berlogika tinggi, bila input berada di bawah ambang batas
rendah yang dipilih, output berlogika rendah; ketika input adalah
antara dua, output tetap nilainya. Gambar 2.1 menunjukkan simbol
dan konfigurasi pin Trigger Schmitt 74HC14P.
Gambar 2.1 Simbol dan Konfigurasi Pin Trigger Schmitt
74HC14P.Dinamakan Trigger karena keluaran menahan nilainya sampai
perubahan nilai masukan cukup untuk memicu perubahan berikutnya.
Peristiwa seperti ini disebut histerisis dan ini menunjukkan bahwa
Trigger Schmitt memiliki memori. Keuntungan dari Trigger Schmitt
pada rangkaian jika dibandingkan dengan komparator biasa yang hanya
memiliki satu nilai tegangan referensi yang mengakibatkan cacatnya
sinyal keluaran akibat noise yang sama, keluaran dari Trigger
Schmitt lebih stabil dan lebih tahan terhadap noise. Gambar 2.2
menunjukkan perbedaan respon antara komparator biasa dengan Trigger
Schmitt.
Gambar 2.2 Perbedaan respon komparator biasa (A) dan Trigger
Schmitt dengan sinyal masukan yang sama.2.2. LCD (Liquid Cristal
Display)
LCD adalah suatu jenis media tampilan yang menggunakan kristal
cair sebagai penampil utama. Pada LCD berwarna semacam monitor
terdapat banyak sekali titik cahaya (pixel) yang terdiri dari satu
buah kristal cair sebagai sebuah titik cahaya. Walau disebut
sebagai titik cahaya, namun kristal cair ini tidak memancarkan
cahaya sendiri. Sumber cahaya di dalam sebuah perangkat LCD adalah
lampu neon berwarna putih di bagian belakang susunan kristal cair
tadi.
LCD (Liquid Crystal Display) yang dipakai 16 karakter x 2 baris
(type LMB1632A). LCD module ini bisa dipakai untuk interface dengan
mikrokontroler / mikroprosesor dengan lebar data 8 bit atau 4 bit.
Setiap baris dan kolom karakter di LCD mempunyai alamatnya
sendiri-sendiri.
Pengiriman data ke LCD ada dua macam yaitu data sebagai
instruksi dan data sebagai character yang kita tampilkan di layer.
Keduanya dibedakan oleh sebuah kaki yang diberi nama RS (Register
Select) dimana bila logika = 1 (high) maka data yang diterima LCD
adalah data character sedangkan bila RS = 0 (low) maka data yang
diterima LCD adalah data instruksi bagi LCD. Tabel 1 menunjukkan
konfigurasi pin-pin LCD.
Tabel 2.1 Konfigurasi Pin-Pin LCD
No. KakiSimbolLevelFungsi
1VSS-Ground
2VDD-Power supply for logic (+5Volt)
3VO-Power Supply for LCD
4RSH/LRegister Selection
H : Display data L : Instruksi code
5R/WH/LRead/Write Selection
H : Read operation L : Write operation
6EH,LEnable Signal
7DB0H/LIn 8-bit mode, used as low order bidirectional data
bus.
In 4-bit mode, open these terminals.
8DB1H/L
9DB2H/L
10DB3H/L
11DB4H/LIn 8-bit mode, used as high order bidirectional data
bus.
In 4-bit mode, used as both high and low order data bus.
12DB5H/L
13DB6H/L
14DB7H/L
15LED A-LED Power Supply (+5 Volt)
16LED K-LED Power Supply (0 Volt)
LCD yang dipergunakan mempunyai spesifikasi sebagai berikut
1) Terdiri atas 32 karakter yang tersusun dalam dua baris
(masing-masing 16 karakter) dengan display dot matrik 5 x 7
2) Display data RAM ukuran 80 x 8 bit
3) Catu daya + 5 volt
4) Reset pada saat power onBentuk fisik sebuah LCD (Liquid
Cristal Display) ditunjukkan dalam Gambar 2.3.
Gambar 2.3 Skema dan Bentuk Fisik LCD (Liquid Cristal
Display)
2.3. Opto SwitchH21A3 terdiri atas LED inframerah gallium
arsenide dan fototransistor silicon dalam wadah plastik. Sistem
paket ini didesain untuk mengoptimalkan resolusi mekanik, efisiensi
kopling, meniadakan hamburan cahaya, dan mengurangi biaya. Celah
yang disediakan dimaksudkan sebagai sinyal interrupt dengan
memberikan opaque material di dalamnya yang dapat men-switch sinyal
keluaran dari keadaan ON ke OFF.
Gambar 2.4 Bentuk fisik Opto Switch.2.4. Mikrokontroler ATMega
8
Mikrokontroler AVR memiliki arsitektur RISC 8 bit, dimana semua
intruksi dikemas dalam kode 16-bit (16 bit words) dan sebagian
besar intruksi dieksekusi dalam 1 (satu) siklus clock. AVR
berteknologi RISC (Reduced Instruction Set Computting). Secara
umum, AVR dapat dikelompokan menjadi 4 kelas, yaitu keluarga
ATtiny, keluarga AT90Sxx,keluarga ATmega, dan AT86RFxx. Pada
dasarnya yang membedakan masing-masing kelas adalah memori,
peripheral, dan fungsinya.
Gambar 2.5 Konfigurasi Pin Mikrokontroler ATMega 8Fungsi dari
pin-pin ATmega 8 :
1) Pin 7 adalah pin Vcc
Berfungsi sebagai pin masukkan catu daya.
2) Pin 8 adalah pin GND
Yaitu pin ground (pertanahan) sumber tegangan.
3) Pin 23-28 dan pin 1 adalah pin port C
Merupakan pin I/O dua arah dan pin masukkan ADC.
4) Pin 14-19 dan pin 9,10 adalah pin port B
Merupakan pin I/O dua arah dan pin fungsi khusus, yaitu timer
oscillator dan SPI. Dalam perancangan kali ini PORT B digunakan
sebagai port LCD.
5) Pin 2-6 dan pin 11-13 adalah pin port D
Merupakan pin I/O dua arah dan pin fungsi khusus, yaitu
komparator analog, interupsi eksternal.
6) Pin 2 dan 3 merupakan pin Tx dan Rx
Pin ini berguna untuk komunikasi secara serial dengan
komputer.
7) Reset
Merupakan pin no. 1 yang digunakan untuk me-reset
mikrokontroler.
8) XTAL1 dan XTAL2
Merupakan pin masukan clock eksternal.
9) AVCC
Merupakan pin masukan tegangan untuk ADC.
10) AREF
Merupakan pin masukan tegangan referensi ADC.
Gambar 2.6 Blok Diagram Mikrokontroler ATMega8
2.5. Komunikasi Serial
Ada 2 macam cara komunikasi data serial yaitu Sinkron dan
Asinkron. Pada komunikasi data serial sinkron, clock dikirimkan
bersama sama dengan data serial,tetapi clock tersebut dibangkitkan
sendiri sendiri baik pada sisi pengirim maupunpenerima. Sedangkan
pada komunikasi serial asinkron tidak diperlukan clock karena data
dikirimkan dengan kecepatan tertentu yang sama baik pada pengirim /
penerima.
Pada UART, kecepatan pengiriman data ( atau yang sering disebut
dengan Baud Rate ) dan fase clock pada sisi transmitter dan sisi
receiver harus sinkron. Untuk itu diperlukan sinkronisasi antara
Transmitter dan Receiver. Hal ini dilakukan oleh bit Start dan bit
Stop. Ketika saluran transmisi dalam keadaan idle, output UART
adalah dalam keadaan logika 1. Ketika Transmitter ingin mengirimkan
data, output UART akan diset dulu ke logika 0 untuk waktu satu bit.
Sinyal ini pada receiver akan dikenali sebagai sinyal Start yang
digunakan untuk menyinkronkan fase clocknya sehingga sinkron dengan
fase clock transmitter.
Selanjutnya data akan dikirimkan secara serial dari bit yang
paling rendah (bit0) sampai bit tertinggi.Selanjutnya akan
dikirimkan sinyal Stop sebagai akhir dari pengiriman data
serial.
Sebagai contoh misalnya akan dikirimkan data huruf A dalam
format ASCII (atau sama dengan 41 heksa atau 0100 0001).
Gambar 2.7 Pengirriman Huruf A Tanpa bit Paritas
Kecepatan transmisi (baud rate) dapat dipilih bebas dalam
rentang tertentu.Baud rate yang umum dipakai adalah 110, 135, 150,
300, 600, 1200, 2400, dan 9600 (bit/perdertik). Dalam komunikasi
data serial, baud rate dari kedua alat yang berhubungan harus
diatur pada kecepatan yang sama. Selanjutnya harus ditentukan
panjang data (6,7 atau 8 bit), paritas (genap, ganjil, atau tanpa
paritas), dan jumlah bit Stop (1, 1 , atau 2 bit).
Konfigurasi Port SerialKonektor DB-9 pada bagian belakang
komputer adalah port serial RS232 yang biasa dinamai dengan COM1
dan COM2.
Gambar 2.8 Konfigurasi Port Serial
Tabel 2.2 Keterangan Pin-Pin Port Serial
BAB III
PERANCANGAN
3.1 Prinsip Kerja
Tachometer Optik pada perancangan ini merupakan sebuah alat yang
digunakan untuk mengukur kecepatan sudut benda berputar. Pada benda
yang akan diukur kecepatannya terlebih dahulu diberi satu penanda
dari bahan yang tidak tembus cahaya yang dibuat menyerupai roda
gigi dengan jumlah gigi sebanyak 6 buah (rotari). Hasil pengukuran
kecepatan sudut ditampilkan dalam LCD dalam satuan rpm.
3.2 Blok Diagram
Rancangan Tachometer Optik ini terdiri atas rangkaian sensor
Opto switch, rangkaian pengkondisi sinyal, mikrokontroler,
antarmuka serial dan terakhir yaitu LCD seperti yang terlihat pada
Gambar 3.1 yang menunjukkan blok diagram rancangan.
Gambar 3.1 Blok Diagram RancanganSensor yang digunakan dalam
perancangan ini terdiri atas transmitter dan receiver. Transmitter
terdiri atas LED inframerah dan receiver berupa fototransistor.
Keduanya dikemas dalam satu komponen yang dinamakan Opto Switch.
Saat sinar tidak terhalang oleh rotari, tegangan keluaran sensor
akan bernilai Vo, sedangkan saat sinar terhalang oleh rotari maka
tegangan keluaran sensor sama dengan nol, sehingga sinyal keluaran
sensor berupa sinyal pulsa.Kemudian hasil keluaran dari sensor yang
berupa sinyal pulsa digunakan sebagai masukan Rangkaian Pengkondisi
Sinyal (RPS). Rangkaian pengkondisi sinyal terdiri atas rangkaian
komparator histerisis dan inverter yang dikemas dalam satu komponen
yang dinamakan Trigger Schmitt. Tujuan dari rangkaian pengkondisi
sinyal ini agar tegangan keluaran sensor sesuai dengan level
tegangan yang dapat diproses mikrokontroler.
Dalam mikrokontroler terdapat suatu program yang berfungsi untuk
menghitung jumlah pulsa keluaran rangkaian pengkondisi sinyal
setiap menit. Jumlah pulsa merepresentasikan jumlah putaran yang
kemudian akan ditampilkan pada LCD atau dikirim ke computer secara
serial. Proses penampilan data tersebut tergantung dari mode yang
dipilih.
3.3 Perancangan Rangkaian
Gambar 3.2 Rangkaian Tachometer Digital
Gambar 3.2 Perancangan Rangkaian
3.4Perancangan Pengolah data
Perhitungan nilai resistor
Perhitungan nilai resistor yang digunakan dalam perancangan ini
adalah sebagai berikut:
Gambar 3.3 Rangkaian Sensor
Gambar 3.4 Grafik Kecepatan Switching H21A3 terhadap RL.
Perhitungan Kecepatan Maksimum:
Pada saat RL=R2=2500 , maka tON1 = 1 turn-on time = 8 s dan
tOFF1 = 1 turn-off time = 50 s. Turn-on time adalah waktu yang
dibutuhkan untuk perubahan dari logika 0 ke logika 1, sedangkan
turn-off time adalah waktu yang dibutuhkan untuk perubahan logika
dari 1 ke 0. Gambar 13 menunjukkan turn-on time dan turn-off
time.
Gambar 3.5 Turn-on time dan turn-off time H21A3 dengan RL 2500
.
Untuk mengetahui kecepatan maksimum maka turn-on time dan
turn-off time sinyal masukan tidak boleh kurang dari 8 s dan 50 s.
Maka grafik sinyal masukan yang masih dapat direspon oleh sensor
ditunjukkan oleh Gambar 3.6
Gambar 3.6 Sinyal Masukan yang masih dapat direspon H21A3 dengan
RL 2500 .Sehingga :
; T= 58 s
f= 17241,4 Hz
= 17241,4 pulsa/detik
= 17241,4: 6 rps
; 6 adalah jumlah gigi pada rotari
= 2873,6 rps
= 2873,6 60 (detik) rpm
= 172.416 rpm3.5Perancangan Program
Perancangan program sebagai pengontrol sistem utama pada
mikrokontroller ATmega8 dengan menggunakan perencanaan ditunjukkan
flowchart dalam Gambar 15.
Gambar 3.7 Diagram Alir Program Tachometer Optik
Pada program terdapat tiga fungsi yaitu satu fungsi utama dan
dua interrupt. Interrupt yang pertama merupakan interrupt dari
timer0, timer0 merupakan timer yang berfungsi sebagai pencacah
jumlah pulsa yang masuk dari rangkaian pengkondisi sinyal ke pin T0
pada mikrokontroler. Interrupt ini akan dieksekusi saat nilai timer
overflow, karena nilai timer maksimum adalah FFh dan nilai timer
diisi FFh maka pada saat terjadi perubahan nilai tegangan dari 0 ke
1 (rising edge) pada pin T0 interrupt ini akan dijalankan. Perintah
pada interrupt ini merupakan perintah untuk menambahkan nilai 1
pada variabel jumlahpulsa. Sedangkan untuk interrupt yang kedua
merupakan interrupt timer1. Timer1 merupakan timer yang berfungsi
untuk menentukan waktu satu detik. Apabila timer menghitung 1 detik
maka interrupt ini akan dijalankan. Pada interrupt yang kedua ini
berisi perintah yang fungsinya mengambil nilai variabel jumlahpulsa
pada saat itu juga dan mengkonversinya menjadi kecepatan sudut
dalam satuan rpm kemudian apabila PINC.0 berlogika 1 maka data akan
ditampilkan dalam LCD, apabila PINC.0 berlogika 0 data akan dikirim
ke PC secara serial. Setelah itu variabel jumlahpulsa akan dinolkan
kembali.
BAB IV
PENUTUP
4.1 Kesimpulan
Tachometer optik pada perancangan ini merupakan sebuah alat yang
digunakan untuk mengukur kecepatan sudut benda berputar. Pada benda
yang akan diukur kecepatannya terlebih dahulu diberi satu penanda
dari bahan yang tidak tembus cahaya yang dibuat menyerupai roda
gigi dengan jumlah gigi sebanyak enam buah (rotari). Hasil
pengukuran kecepatan sudut ditampilkan dalam satuan rpm. Secara
teori maksimum putaran yang dapat diukur oleh alat ini sebesar
172.416 rpm.
Tachometer Optik dapat dibentuk dari rangkaian yang terdiri atas
Opto switch, rangkaian pengkondisi sinyal, mikrokontroler,
antarmuka serial dan LCD sebagai media penampil keluaran tachometer
optik.
4.2 Saran
a. Pada pembacaan kecepatan oleh tachometer ini masih terdapat
kesalahan, hal ini disebabkan oleh ketidaksinkronan antara waktu
awal pembacaan dan pulsa awal yang diterima. Pada penelitian
selanjutnya diharapkan kesalahan tersebut dapat diminimalisir.
b. Resolusi pembacaan masih relatif besar, yakni 10 rpm, hal ini
disebabkan karena jumlah gigi pada rotary hanya enam buah.
Diharapkan pada penelitian selanjutnya resolusi pengukuran dapat
lebih baik lagi.
1
_1433580428.unknown
_1433580432.unknown
_1433580434.unknown
_1433580435.unknown
_1433580436.vsdSTART
int jmlpulsa,pulsa[4],rpm;
Interrupt0
Interrupt1
Fungsi utama
Ya
Interrupt0
jmlpulsa++;
RET
Interrupt1
Tampilkan ke LCD
RET
PINC.0=0 ?
Kirim Ke PC Secara Serial
Tidak
_1433580433.unknown
_1433580430.unknown
_1433580431.unknown
_1433580429.unknown
_1433580426.unknown
_1433580427.unknown
_1433580425.unknown